Sea Surface Current Measurement With Ku-Band SAR Along-Track Interferometry Nobuo Kumagae, Kazuo...
15
Sea Surface Current Measurement Wit h Ku-Band SAR Along-Track Interferometry Nobuo Kumagae, Kazuo Kawamura, Kenji Tatsumi, Masatada Furuhata, Masayoshi Tsuchida, Masao Tsuji, Tomoya Yamaoka, Kei Suwa Japan Resources Observation System and Utilization Organization Mitsubishi Electric Corporation
-
Upload
jemimah-norman -
Category
Documents
-
view
216 -
download
0
Transcript of Sea Surface Current Measurement With Ku-Band SAR Along-Track Interferometry Nobuo Kumagae, Kazuo...

Sea Surface Current Measurement WithKu-Band SAR
Along-Track Interferometry
Nobuo Kumagae, Kazuo Kawamura, Kenji Tatsumi, Masatada Furuhata,
Masayoshi Tsuchida, Masao Tsuji, Tomoya Yamaoka, Kei Suwa
Japan Resources Observation System and Utilization OrganizationMitsubishi Electric Corporation

Outline
• Introduction• SAR-ATI• The SAR System• Test Site & The Ground Truth• Results and Discussion• Conclusion

Introduction
• Applications of sea surface current map– Ecological studies– Coastal surveillance– Validation of coastal tide and current models
• SAR-ATI (Along Track Interferometry) for sea surface current map– SAR-ATI measures the line-of-sight component of the surface
velocity.– Two-dimensional sea surface current map can be obtained by
combing two perpendicular ATI data sets in rapid succession.

SAR ATI (Along Track Interferometry)
2nd pulse1st pulse
Antenna aperture
1R t
1 0
10
exp
4
s a j
R t
2 1R t R t R
Antenna position at the 1st pulse
Antenna position at the 2nd pulseTrx Phase
Center
Tx PhaseCenter
Rx PhaseCenter
Fore antennaAft antenna
: wavelengtha: signal amplitude
0
10
exp
4 4
ss a j
R t R
Signal phase difference in the fore and aft antenna corresponds tothe target cross track velocity
Signal phase difference in the fore and aft antenna corresponds tothe target cross track velocity
• Two receive antennas are aligned along track (fore and aft antennas). • At the first pulse the signal is received by the fore antenna, and at the second pulse the signal is
received by the aft antenna.• By the time aft antenna observes, the moving target would move and cause the phase
difference.

SAR System
SAR Acquisition parameters
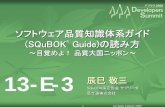
The 10cm resolution Ku-band airborne SAR system (by Mitsubishi Electric Co.)The 10cm resolution Ku-band airborne SAR system (by Mitsubishi Electric Co.)
40cm
parameters value
Center frequency 16.45GHz
Transmitted signal bandwidth 600MHz
Peak transmitted power 300W
Pulse Repetition Frequency 4500Hz
Polarization VV
Effective baseline 0.2m
Incidence angle 60deg

© Japan Coast Guard (W1064)
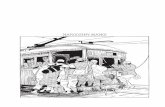
Test Site
Tidal Current
Flight path A
Flight path B
Flight path C
Asahi Reef
Test site : Asahi Reef near Cape Irago, Aichi Prefecture, JapanTest site : Asahi Reef near Cape Irago, Aichi Prefecture, Japan

Ground Truth
We used a GPS-equipped handmade float to observe the “ground truth.” We used a GPS-equipped handmade float to observe the “ground truth.”
Sinker
Pole
FloatGPS Logger (DG-100)

Ground Truth
Sea surface current speed was 0.7m/s ~ 0.9m/s during the flight testSea surface current speed was 0.7m/s ~ 0.9m/s during the flight test
N
1st trial
2nd trial
3rd trial
Time Sea surface current speed
1st trial 12:37:18~ 12:38:23 0.5 m/s = 0.9 knot
2nd trial 14:02:18~ 14:03:18 0.7 m/s = 1.4 knot
3rd trial 15:01:48~ 15:02:53 0.9 m/s = 1.7 knot
Flight test was conducted during this period

Ground Truth
The “ground truth” acquired by the handmade float is valid. The “ground truth” acquired by the handmade float is valid.
12: 00 13: 00 14: 00 15: 00
© Japan Coast Guard
• The “ground truth” acquired by the handmade float is consistent with the sea surface current data published by the Japan coast guard.
1st trial 2nd trial 3rd trial

Results
Flight Path A : speed of the current has been measured using the flight pathperpendicular to the current
Flight Path A : speed of the current has been measured using the flight pathperpendicular to the current
SAR image (Resolution: 0.6m)
rad
Azimuth (1.4km)R
ange (340m
)
ATI interferogram (Resolution: 35m)
N
Tidal Current
AB
C
Tidal Current
• Flight Path A is perpendicular to the sea surface current.
• The phase error has been corrected using the pixels in the ground area.
• Average ATI phase is 1.15 rad.

Results
Flight Path A : average cross range velocity was estimated to be 0.95m/sFlight Path A : average cross range velocity was estimated to be 0.95m/s
Radial velocity map (Resolution: 35m)
SAR image (Resolution: 0.6m)
m/s
Azimuth (1.4km)R
ange (340m
)
N AB
C
Tidal Current
sin
1
4
baseline
pATIGND B
Vv
vGND = 0.95[m/s]
parameters value
platform velocity 100 m/s
Effective baseline
0.2 m
wavelength 0.018 m
off-nadir angle 60°
ATI phase 1.15 rad
pV
baselineB
ATI

Results
Flight Path B & C : Two perpendicular ATI data sets have been acquiredin rapid succession (10 minutes interval).
Flight Path B & C : Two perpendicular ATI data sets have been acquiredin rapid succession (10 minutes interval).
Flight Path Bazimuth
range
Flight Path C
azimuth
range
AB
C
Tidal Current
• Two ATI data have been acquired from two perpendicular flight paths.
• Time interval between Flight Path B and C are 10 minutes.
• A buoy is included in the both images for the image registration.

Results
Flight Path B & C : the two images have been registered using the buoy signal.Flight Path B & C : the two images have been registered using the buoy signal.
Flight Path C: SAR image (0.6m res.)
rad rad
N
Flight Path C: Interferogram ( 10m res. )
azimuth
range azimuth
range
Flight Path B: SAR image (0.6m res.)
Flight Path B: Interferogram ( 10m res. )

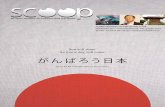
Results
V_N = 0 . 51 [m/s]
V_E = -0 . 64m/s]
Mean velocity
Estimated sea surface current speed : 0.82m/s
Matches well with the ground truth (0.7m/s ~ 0.9m/s ).
N
Spatial resolution : 10m x 10m
Flight Path B & C : Two-dimensional sea surface current map can be obtained by combing two perpendicular ATI data sets in rapid succession.
Flight Path B & C : Two-dimensional sea surface current map can be obtained by combing two perpendicular ATI data sets in rapid succession.

Conclusion
• We have successfully demonstrated that the along track interferometry SAR is a valuable tool for the sea surface current mapping.
• The correspondence with the GPS record of sea surface current proves the validity of ATI SAR technique for the sea surface current mapping.