Ruby関西76 gr citrusの使い方#2
34
Wakayama.rb たろサ (山本三七男) RubyボードGR- CITRUSの紹介 #2
-
Upload
- -
Category
Devices & Hardware
-
view
191 -
download
3
Transcript of Ruby関西76 gr citrusの使い方#2

Wakayama.rbたろサ(山本三七男)
RubyボードGR-CITRUSの紹介 #2

2
自己紹介
たちうお
和歌山県 有田市 在住
みかん
3
自己紹介
今月 1月 28日 和歌山市内で開催します。
毎月1回ハードとソフトの勉強会
Ruby勉強会@和歌山の主催
4
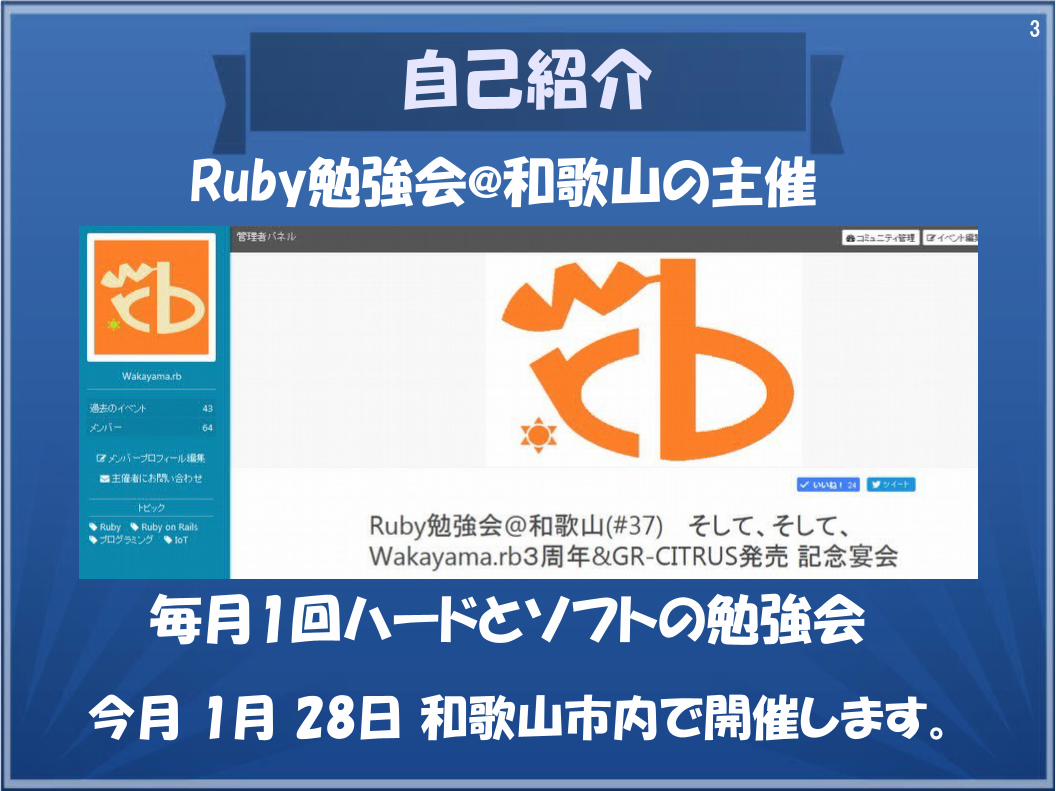
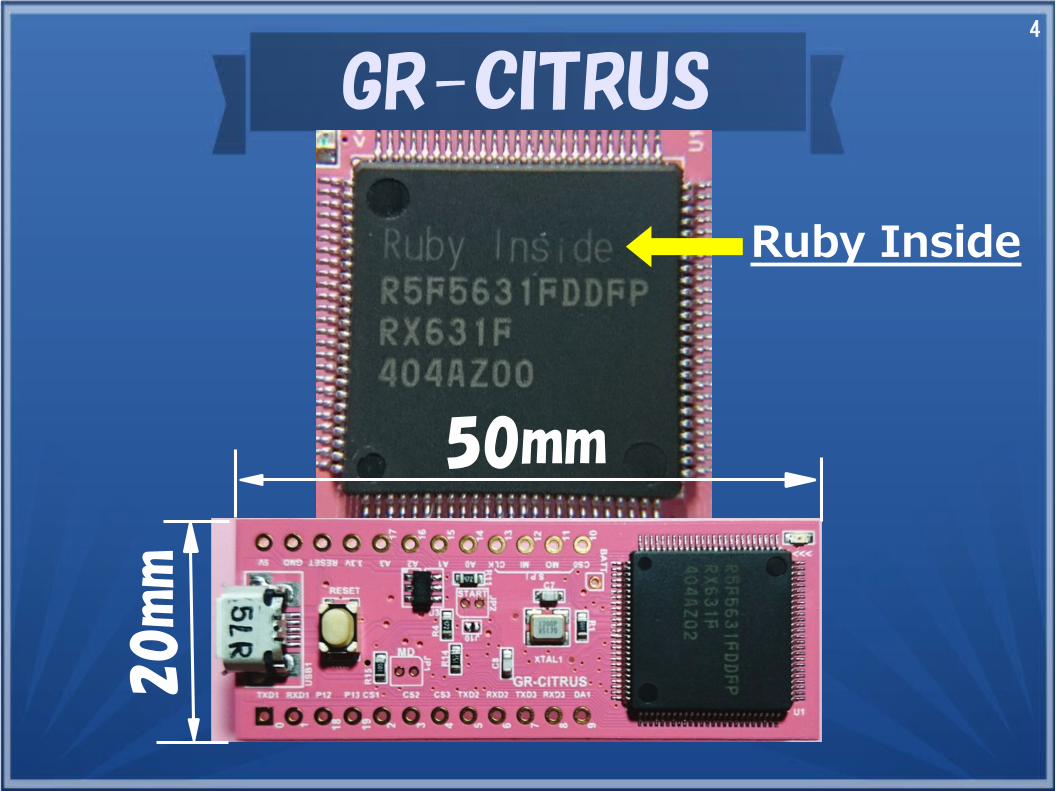
50mm
20m
mGR-CITRUS
Ruby Inside

5
Rubyファミリー
消費メモリ プラットホーム
Ruby(CRuby) 数MB パソコンなど OS上で走る
mruby 数百kB 32ビットマイコンなど
mruby/c 数十kB 16ビットマイコンなど
今年発表!mrubyを更に小型化して省電力化の実現

6
入手方法
秋月電子さんで発売中
http://akizukidenshi.com/catalog/top.aspx
2,200円
1,300円CITRUS用WiFiボード
WA-MIKAN
7
入手方法
大阪では共立電子さんで発売中
本題です実装について
9
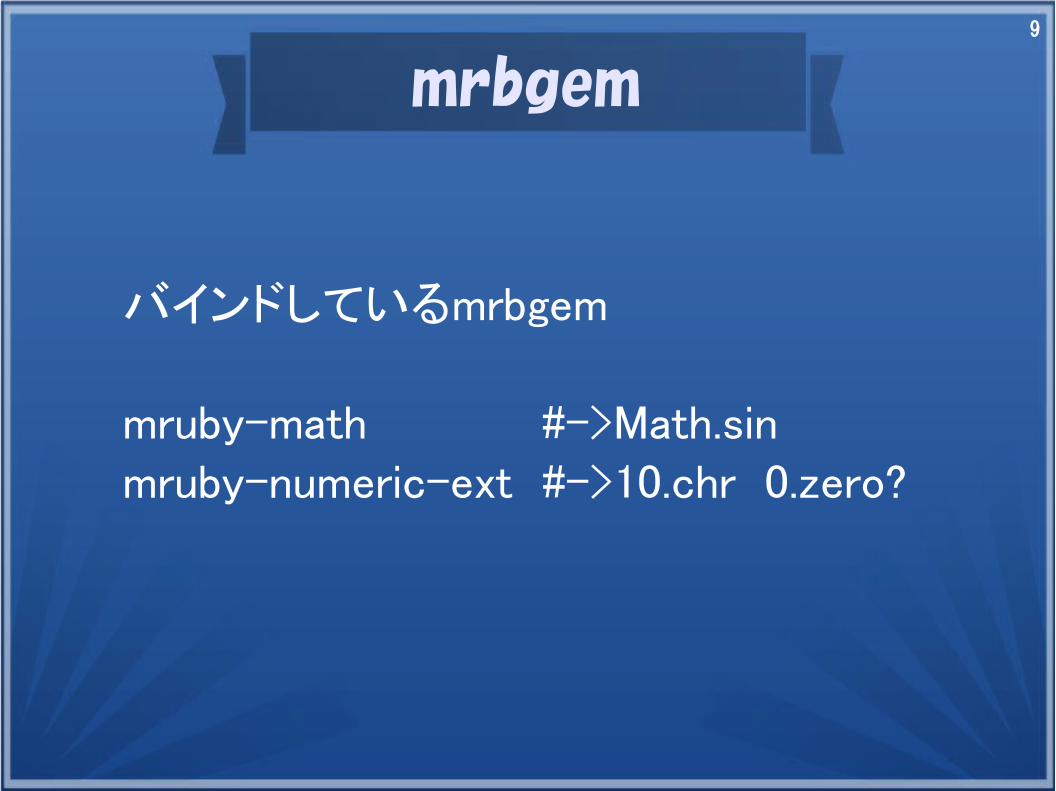
mrbgem
バインドしているmrbgem
mruby-math #->Math.sinmruby-numeric-ext #->10.chr 0.zero?

10
Ruby Class
GR-CITRUS単体 ・カーネルクラス (Arduino互換) ・システムクラス ・ファイルクラス (Flash用) ・シリアルクラス ・I2Cクラス ・サーボクラス ・RTCクラス
WA-MIKAN装着 ・SDカードクラス ・WiFiクラス ・MP3クラス
独自実装です
11
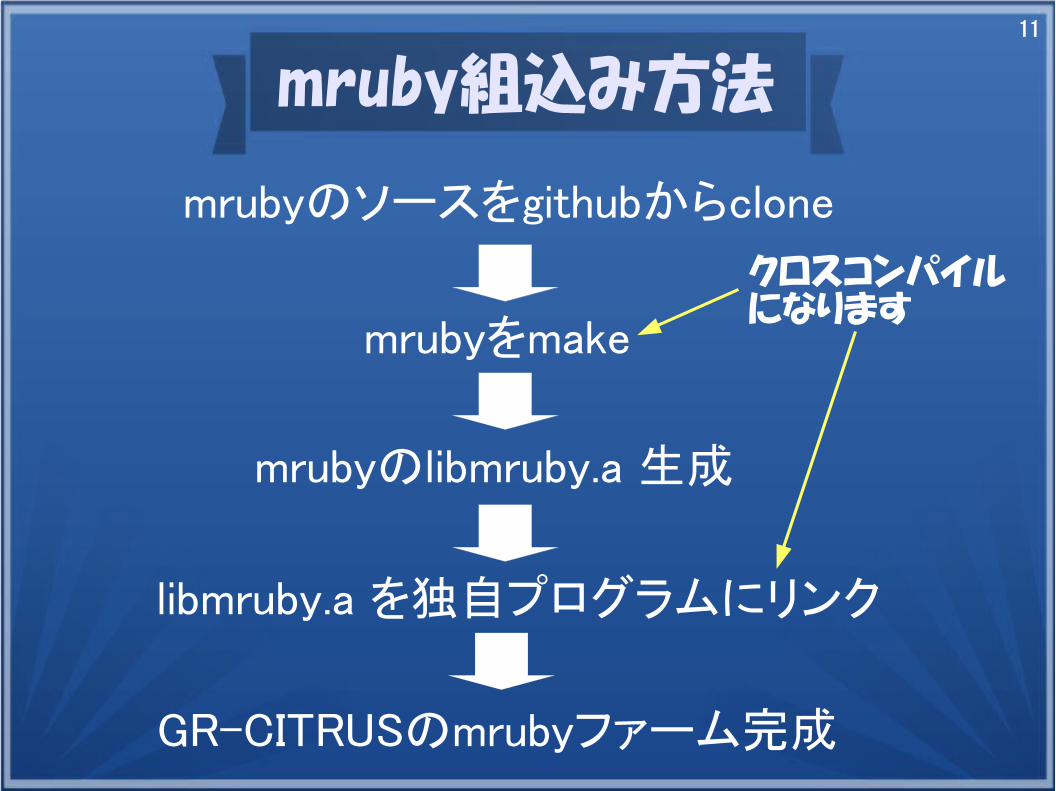
mruby組込み方法
mrubyをmake
mrubyのソースをgithubからclone
mrubyのlibmruby.a 生成
クロスコンパイルになります
libmruby.a を独自プログラムにリンク
GR-CITRUSのmrubyファーム完成

12
mrbgemの独自追加
mrubyのソースをgithubからclone
githubのwrbb-v2lib-firmにある build_config.rbをmrubyのbuild_config.rbに上書きコピーする
build_config.rbを書き換える。欲しいmrbgemのコメントアウトを外す。
mrubyをmake以下同じです。
13
クロスコンパイル方法
macの場合:
GR-CITRUSのFirmwareをビルドする方法 for macOS
GR-CITRUSに組み込むmrubyをビルドする方法 for macOShttp://qiita.com/takjn/items/0ef3d46107ac8faaf621
http://qiita.com/takjn/items/f25251f355fba49245b4
WIndowsの場合:
GR-CITRUSのFirmwareをビルドする方法 for Windowshttp://qiita.com/takjn/items/4838dc0c3f879a0e3291
Linuxの場合:
x64 Ubuntu でスケッチをビルドしてみました
http://japan.renesasrulz.com/gr_user_forum_japanese/f/gr-citrus/3447/x64-ubuntu?pi5348=2
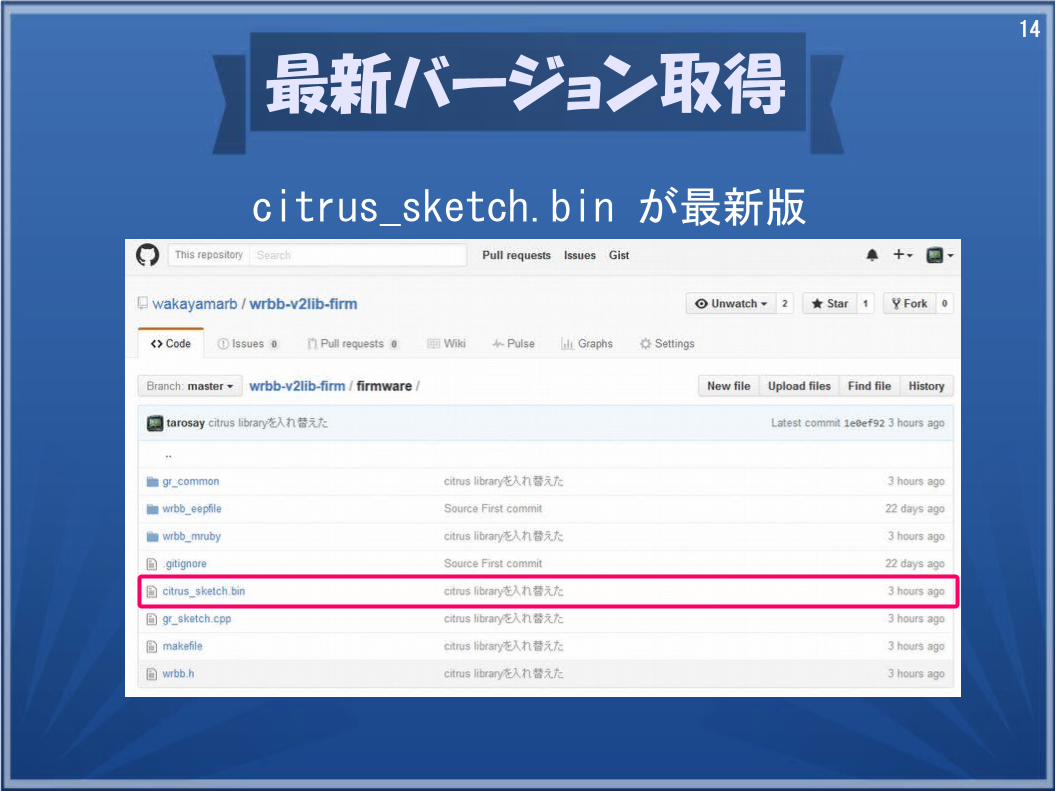
14
citrus_sketch.bin が最新版
最新バージョン取得
コードを読みます
16
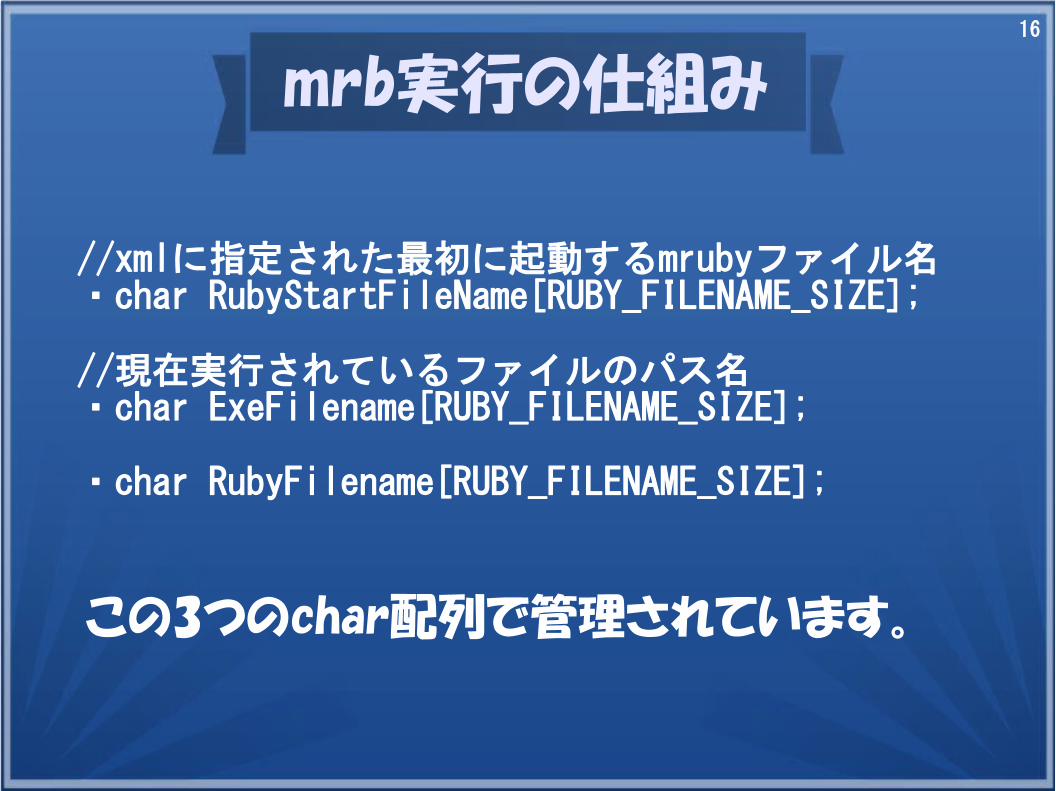
mrb実行の仕組み
//xmlに指定された最初に起動するmrubyファイル名・char RubyStartFileName[RUBY_FILENAME_SIZE];
//現在実行されているファイルのパス名・char ExeFilename[RUBY_FILENAME_SIZE];
・char RubyFilename[RUBY_FILENAME_SIZE];
この3つのchar配列で管理されています。
17
起 動 時
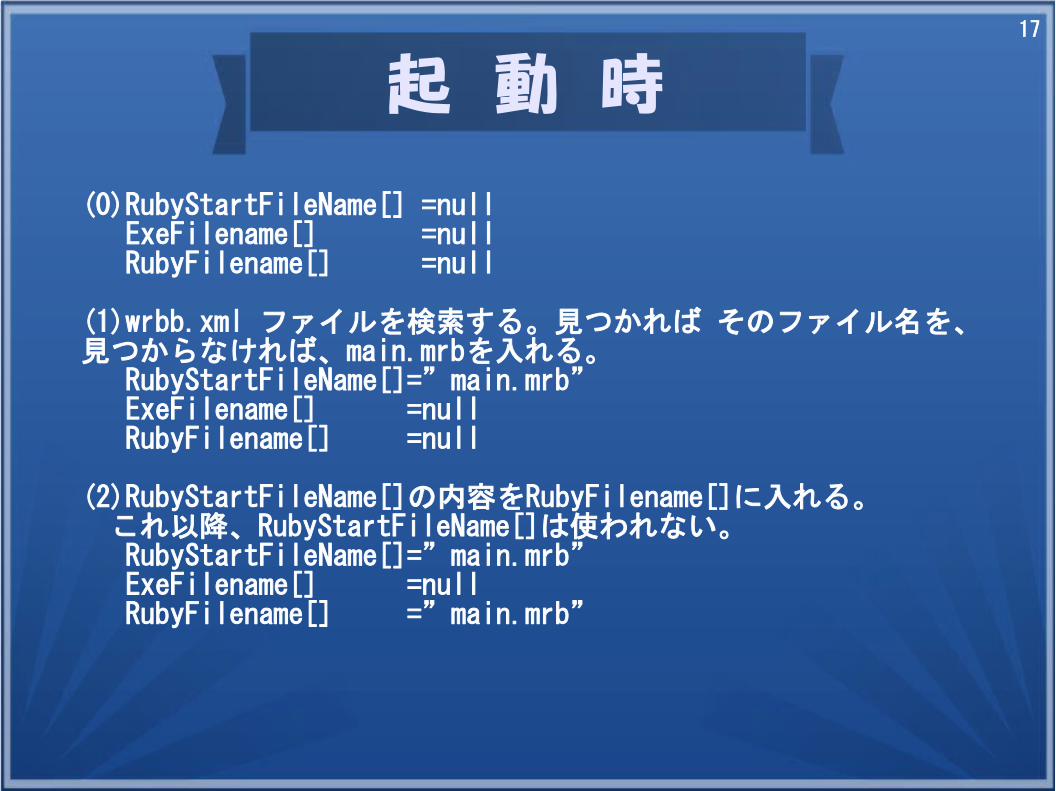
(0)RubyStartFileName[] =null ExeFilename[] =null RubyFilename[] =null
(1)wrbb.xml ファイルを検索する。見つかれば そのファイル名を、見つからなければ、main.mrbを入れる。 RubyStartFileName[]=”main.mrb” ExeFilename[] =null RubyFilename[] =null
(2)RubyStartFileName[]の内容をRubyFilename[]に入れる。 これ以降、RubyStartFileName[]は使われない。 RubyStartFileName[]=”main.mrb” ExeFilename[] =null RubyFilename[] =”main.mrb”

18
起 動 ~ 実 行
(3)Rubyプログラムの実行モードになったとき、RubyFilename[]をExeFilename[]に入れる。 RubyStartFileName[]=”main.mrb” ExeFilename[] =”main.mrb” RubyFilename[] =”main.mrb”
(4)RubyFilename[]を nullにする。 RubyStartFileName[]=”main.mrb” ExeFilename[] =”main.mrb” RubyFilename[] =null
(5)ExeFilename[]のファイル内容をメモリに読み込む。 RubyStartFileName[]=”main.mrb” ExeFilename[] =”main.mrb” RubyFilename[] =null
(6)メモリに読み込んだプログラムを、 mrb_load_irep(mrb,(const uint8_t *)RubyCode);に渡す。
(7)プログラムが終了したら(3)に戻る
これで、rubyスクリプトをCプログラムから実行できます。
19
一巡時
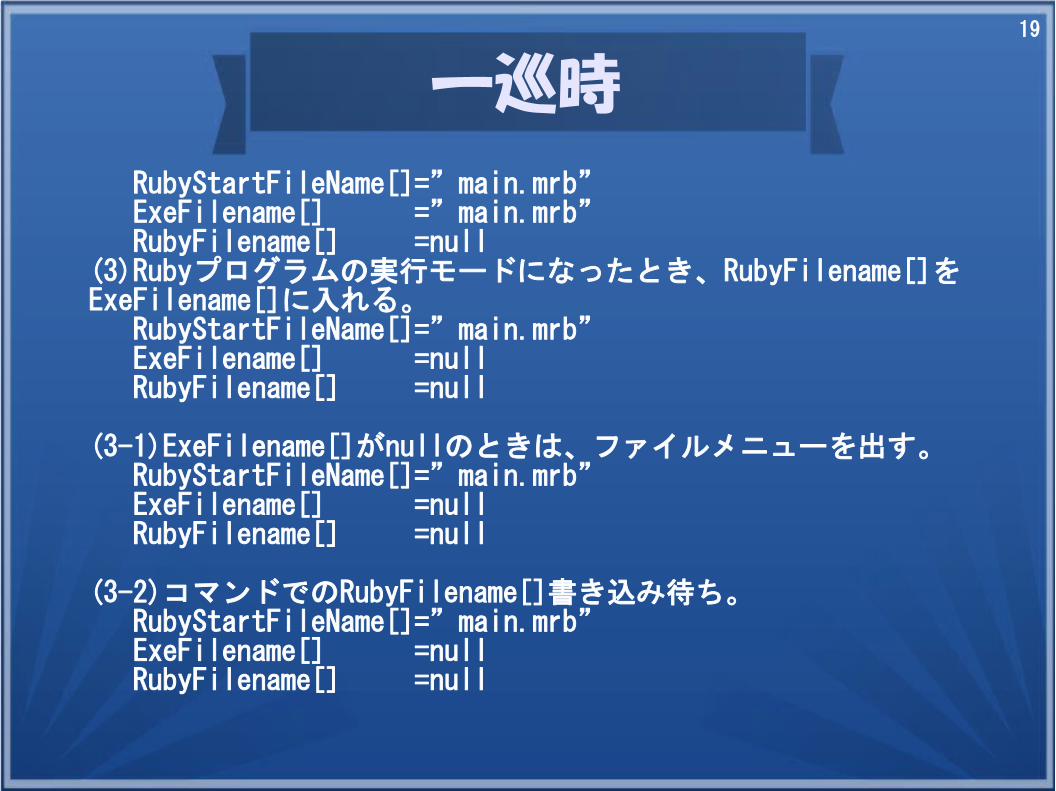
RubyStartFileName[]=”main.mrb” ExeFilename[] =”main.mrb” RubyFilename[] =null(3)Rubyプログラムの実行モードになったとき、RubyFilename[]をExeFilename[]に入れる。 RubyStartFileName[]=”main.mrb” ExeFilename[] =null RubyFilename[] =null
(3-1)ExeFilename[]がnullのときは、ファイルメニューを出す。 RubyStartFileName[]=”main.mrb” ExeFilename[] =null RubyFilename[] =null
(3-2)コマンドでのRubyFilename[]書き込み待ち。 RubyStartFileName[]=”main.mrb” ExeFilename[] =null RubyFilename[] =null
20
一巡時
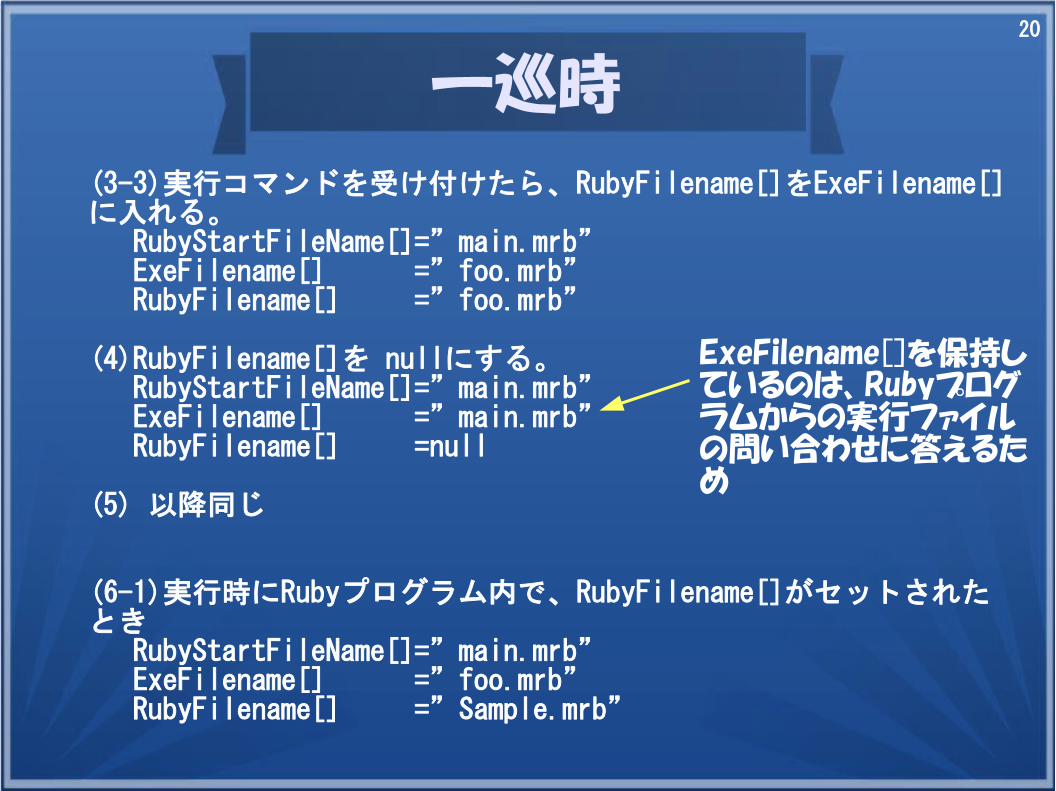
(3-3)実行コマンドを受け付けたら、RubyFilename[]をExeFilename[]に入れる。 RubyStartFileName[]=”main.mrb” ExeFilename[] =”foo.mrb” RubyFilename[] =”foo.mrb”
(4)RubyFilename[]を nullにする。 RubyStartFileName[]=”main.mrb” ExeFilename[] =”main.mrb” RubyFilename[] =null
(5) 以降同じ
(6-1)実行時にRubyプログラム内で、RubyFilename[]がセットされたとき RubyStartFileName[]=”main.mrb” ExeFilename[] =”foo.mrb” RubyFilename[] =”Sample.mrb”
ExeFilename[]を保持しているのは、Rubyプログラムからの実行ファイルの問い合わせに答えるため
21
一巡時
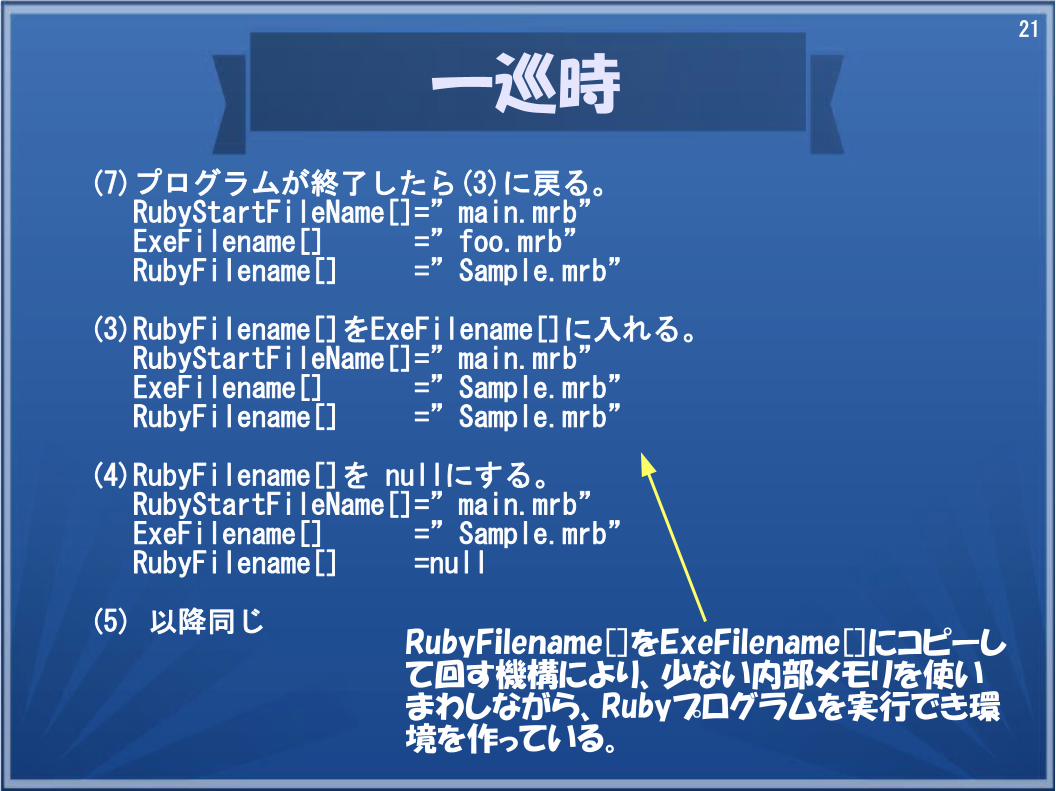
(7)プログラムが終了したら(3)に戻る。 RubyStartFileName[]=”main.mrb” ExeFilename[] =”foo.mrb” RubyFilename[] =”Sample.mrb”
(3)RubyFilename[]をExeFilename[]に入れる。 RubyStartFileName[]=”main.mrb” ExeFilename[] =”Sample.mrb” RubyFilename[] =”Sample.mrb”
(4)RubyFilename[]を nullにする。 RubyStartFileName[]=”main.mrb” ExeFilename[] =”Sample.mrb” RubyFilename[] =null
(5) 以降同じRubyFilename[]をExeFilename[]にコピーして回す機構により、少ない内部メモリを使いまわしながら、Rubyプログラムを実行でき環境を作っている。
22
クラスの書き方
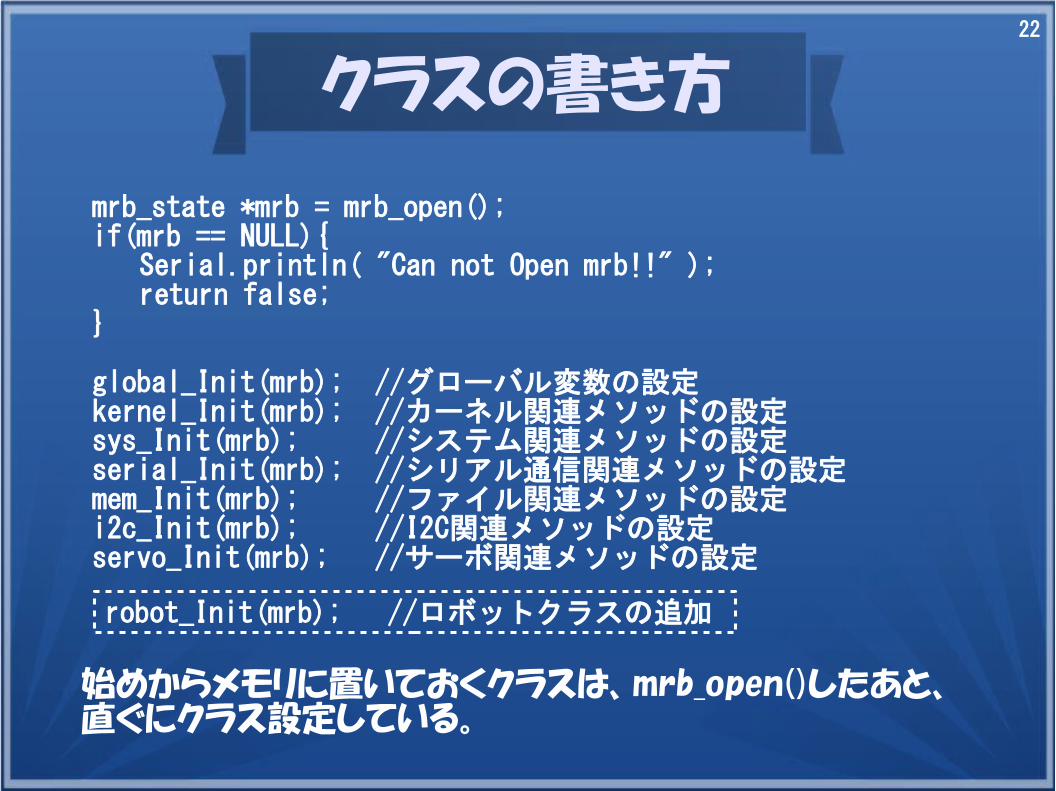
mrb_state *mrb = mrb_open();if(mrb == NULL){
Serial.println( "Can not Open mrb!!" );return false;
}
global_Init(mrb); //グローバル変数の設定kernel_Init(mrb); //カーネル関連メソッドの設定sys_Init(mrb); //システム関連メソッドの設定serial_Init(mrb); //シリアル通信関連メソッドの設定mem_Init(mrb); //ファイル関連メソッドの設定i2c_Init(mrb); //I2C関連メソッドの設定servo_Init(mrb); //サーボ関連メソッドの設定
始めからメモリに置いておくクラスは、mrb_open()したあと、直ぐにクラス設定している。
robot_Init(mrb); //ロボットクラスの追加

23
クラスの書き方
void global_Init(mrb_state *mrb){
mrb_define_global_const(mrb, "ON", mrb_fixnum_value(1));mrb_define_global_const(mrb, "OFF", mrb_fixnum_value(0));mrb_define_global_const(mrb, "HIGH", mrb_fixnum_value(1));mrb_define_global_const(mrb, "LOW", mrb_fixnum_value(0));mrb_define_global_const(mrb, "INPUT", mrb_fixnum_value(0));mrb_define_global_const(mrb, "OUTPUT", mrb_fixnum_value(1));
}
Rubyで使うグローバル変数の設定です。
24
クラスの書き方
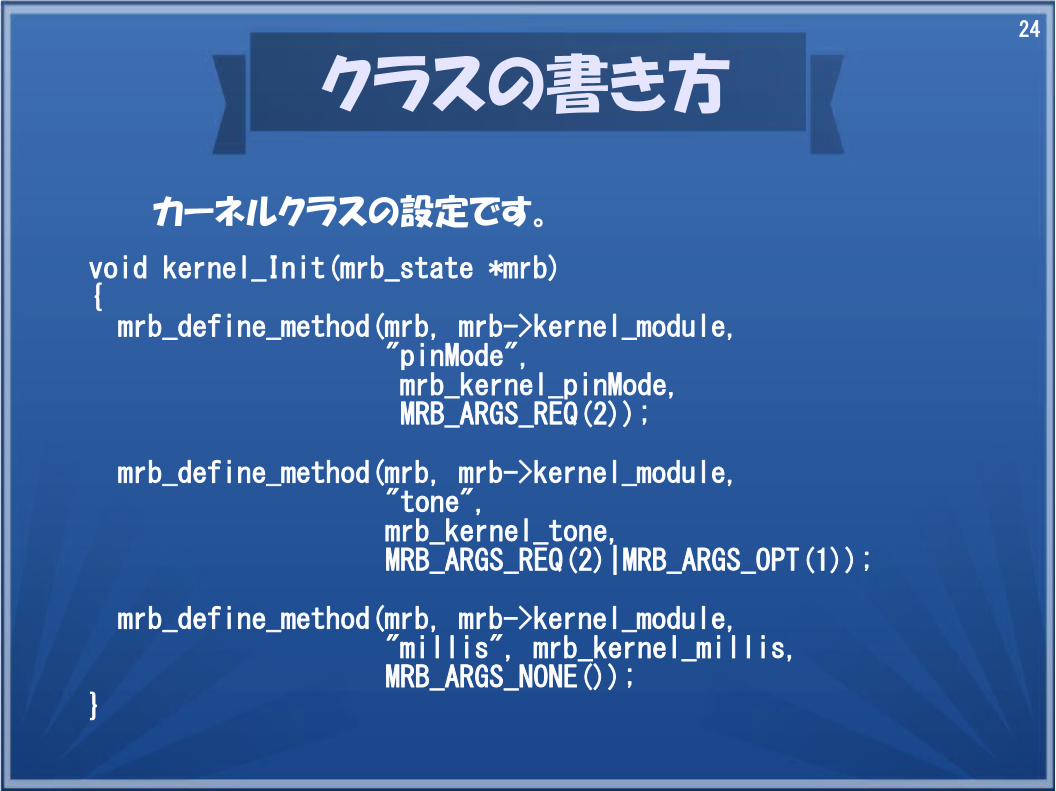
void kernel_Init(mrb_state *mrb){ mrb_define_method(mrb, mrb->kernel_module, "pinMode", mrb_kernel_pinMode, MRB_ARGS_REQ(2));
mrb_define_method(mrb, mrb->kernel_module, "tone", mrb_kernel_tone, MRB_ARGS_REQ(2)|MRB_ARGS_OPT(1));
mrb_define_method(mrb, mrb->kernel_module, "millis", mrb_kernel_millis, MRB_ARGS_NONE());}
カーネルクラスの設定です。
25
クラスの書き方
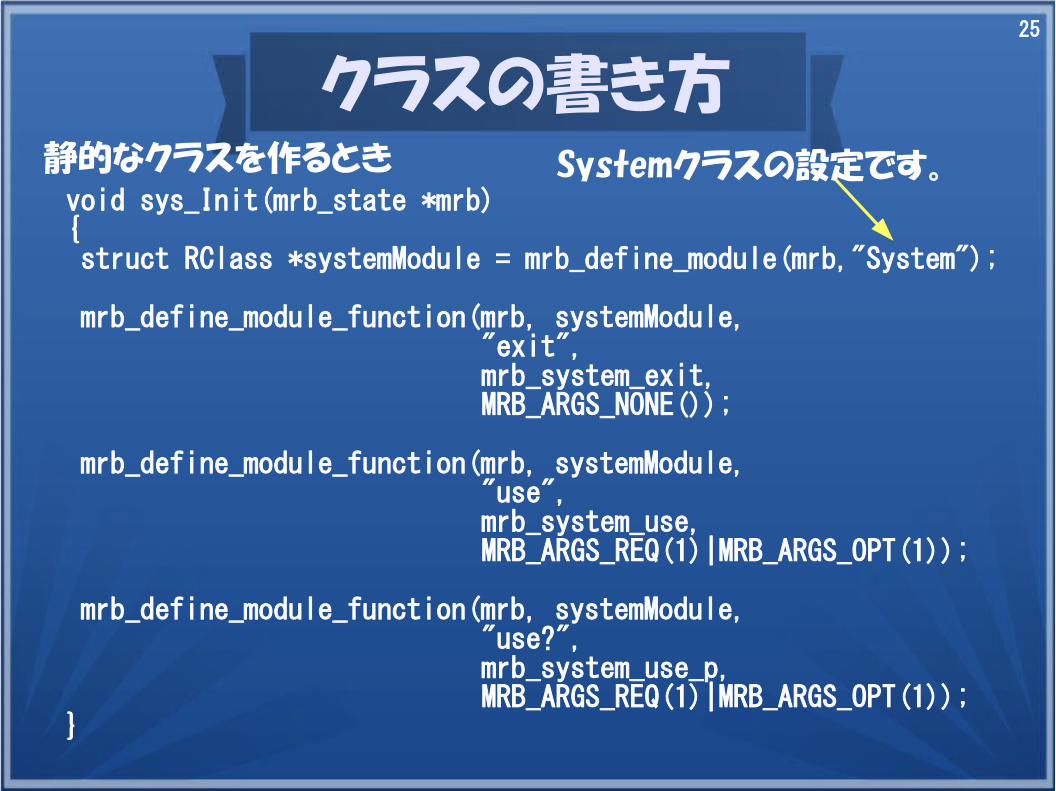
void sys_Init(mrb_state *mrb){ struct RClass *systemModule = mrb_define_module(mrb,"System");
mrb_define_module_function(mrb, systemModule, "exit", mrb_system_exit, MRB_ARGS_NONE());
mrb_define_module_function(mrb, systemModule, "use", mrb_system_use, MRB_ARGS_REQ(1)|MRB_ARGS_OPT(1));
mrb_define_module_function(mrb, systemModule, "use?", mrb_system_use_p, MRB_ARGS_REQ(1)|MRB_ARGS_OPT(1));}
Systemクラスの設定です。静的なクラスを作るとき

26
クラスの書き方
struct RClass *serialModule = mrb_define_class(mrb, "Serial", mrb->object_class);
MRB_SET_INSTANCE_TT(serialModule, MRB_TT_DATA);
mrb_define_method(mrb, serialModule, "initialize", mrb_serial_initialize, MRB_ARGS_REQ(1)|MRB_ARGS_OPT(1));
mrb_define_method(mrb, serialModule, "print", mrb_serial_print, MRB_ARGS_OPT(1));
Serialクラスの設定です。動的なクラスを作るとき
27
クラスの書き方
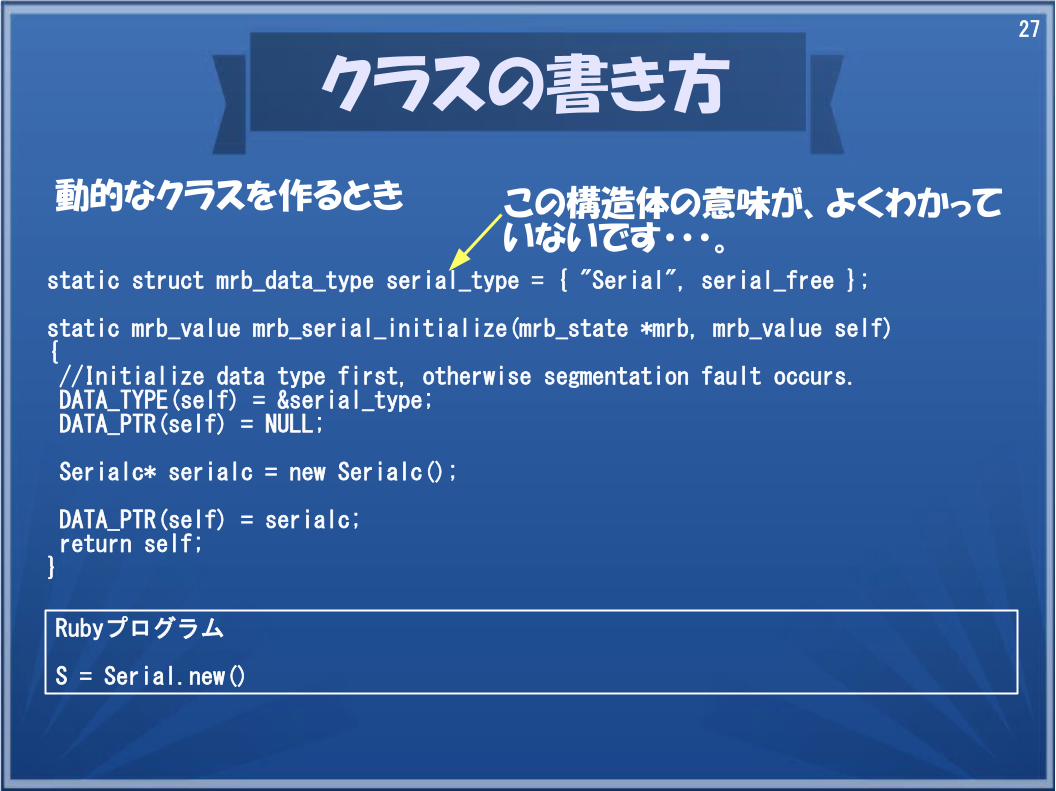
static struct mrb_data_type serial_type = { "Serial", serial_free };
static mrb_value mrb_serial_initialize(mrb_state *mrb, mrb_value self){ //Initialize data type first, otherwise segmentation fault occurs. DATA_TYPE(self) = &serial_type; DATA_PTR(self) = NULL;
Serialc* serialc = new Serialc();
DATA_PTR(self) = serialc; return self;}
この構造体の意味が、よくわかっていないです・・・。
動的なクラスを作るとき
Rubyプログラム
S = Serial.new()

28
クラスの書き方
mrb_value mrb_serial_print(mrb_state *mrb, mrb_value self){mrb_value text;
Serialc* serialc = static_cast<Serialc*>(mrb_get_datatype(mrb, self, &serial_type)); mrb_get_args(mrb, "S", &text);
serialc->write((const unsigned char *)RSTRING_PTR(text), RSTRING_LEN(text));
return mrb_nil_value();}
printメソッド動的なクラスを作るとき
Rubyプログラム
S = Serial.new()S.print 'Hello'

29
クラスの書き方
自作のuse()メソッドから、クラス設定した xxxx_Init(mrb_state *mrb)を呼び出すことにより、クラスをメモリに展開する。
mrb_define_module_function(mrb, systemModule, "use", mrb_system_use, MRB_ARGS_REQ(1)|MRB_ARGS_OPT(1)); mrb_define_module_function(mrb, systemModule, "use?", mrb_system_use_p, MRB_ARGS_REQ(1)|MRB_ARGS_OPT(1));
mrb_value mrb_system_use_p(mrb_state *mrb, mrb_value self){
return Is_use(mrb, self, 1);}
メモリ上に、
クラスを展開するRubyプログラムから、クラスを読み込ませる
Rubyプログラムif(System.use?("WiFi") == false)then System.exit() end

30
クラスの書き方
mrb_value Is_use(mrb_state *mrb, mrb_value self, int mode){mrb_value vName, vOptions;char *strName;int ret = 0;
int n = mrb_get_args(mrb, "S|A", &vName, &vOptions);
strName = RSTRING_PTR(vName);
if(strcmp(strName, WIFI_CLASS) == 0){ if(mode == 0){ return Is_useWiFi(mrb, self, 0); } else{ return Is_useWiFi(mrb, self, 1); } }
メモリ上に、
クラスを展開するRubyプログラムから、クラスを読み込ませる

31
クラスの書き方
//**************************************************// WiFiモジュールESP8266ボードを使えるようにします//**************************************************mrb_value Is_useWiFi(mrb_state *mrb, mrb_value self, int mode){int ret = 0;
ret = esp8266_Init(mrb); //ESP8266ボード関連メソッドの設定
return (mode == 0?mrb_fixnum_value(ret):mrb_bool_value(ret == 1));}
メモリ上に、
クラスを展開するRubyプログラムから、クラスを読み込ませる
Rubyプログラムif(System.use?("WiFi") == false)then System.exit() end
32
引数の展開
時間が無いので、またの機会に・・・
ソースを見てね!
ソースを見たら、直ぐわかります。https://github.com/wakayamarb/wrbb-v2lib-firm/tree/master/firmware_develop/wrbb_mruby

33
戻り値の生成方法
時間が無いので、またの機会に・・・
ソースを見てね!
ソースを見たら、直ぐわかります。https://github.com/wakayamarb/wrbb-v2lib-firm/tree/master/firmware_develop/wrbb_mruby

34
ご清聴ありがとうございました
CITRUS号です。