rész I Kinematika - VIK Wiki
25
t v(t)=4 + ( 2 2 ) t - 3 3 t 2 t =0 x =8 x(t = 0) = 8 . x(t) v(t)= t x(t) x(t)= x 0 + ´ t 0 v(τ ) τ x(t)=8m + ˆ t 0 h 4 + ( 2 2 ) τ - 3 3 τ 2 i τ ˆ x α x = x α+1 α +1 x(t) = 8m + 4 τ + ( 2 2 ) τ 2 2 - 3 3 τ 3 3 t 0 x(t) = 8m +4 t + 1 2 t 2 - 1 3 t 3 f (x * )= f max x f (x) x=x * =0 2 x 2 f (x) x=x * < 0 x x α = αx α-1 t v(t)= ( 2 2 ) - 2 3 3 t t v(t) t=t * = ( 2 2 ) - 2 3 3 t * =0 t * = 1 3
Transcript of rész I Kinematika - VIK Wiki

rész I
Kinematika
2B-40Adott egy részecske egy adott t pillanatban
v(t) = 4ms +(2ms2)t−(
3ms3
)t2 (1)
sebességgel halad továbbá tudjuk hogy t = 0 ban az x = 8mhelyen tartózkodott:
x(t = 0) = 8m. (2)
Határozzuk meg a részecske elmozdulás id® x(t) függvényét, továbbá a sebesség maximális értékét!Megoldás
v(t) = ddtx(t)
x(t) = x0 +´ t
0v(τ)dτ
2pt
x(t) = 8m+
ˆ t
0
[4ms
+(2ms2)τ −
(3ms3
)τ2]dτ (3)
Felhasználva hogy ˆxαdx =
xα+1
α+ 1(4)
illetve az integraciós konstanst (2) segítségével rögzítve kapjuk hogy
x(t) = 8m+
[4msτ +
(2ms2) τ2
2−(
3ms3
) τ3
3
]t0
(5)
x(t) = 8m+ 4mst+(
1ms2
)t2 −
(1ms3
)t3 (6)
1pt
ha
f(x∗) = fmax
akkor (ddxf(x)
)∣∣∣x=x∗
= 0
és (d2
dx2f(x)
)∣∣∣x=x∗
< 0
1pt
Felhasználva hogyddxxα = αxα−1 (7)
ddtv(t) =
(2ms2)− 2
(3ms3
)t (8)
ddtv(t)
∣∣∣∣t=t∗
=(2ms2)− 2
(3ms3
)t∗ = 0 (9)
amib®l
t∗ =1
3s (10)
1

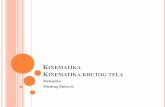
1. ábra. Hajítások geometriai és kinematikai paramétereinek de�níciói.
vissza helyettesítve (1)-be kapjuk hogy
vmax = 4ms +(2ms2)(1
3s
)−(
3ms3
)(1
3s
)2
≈ 4.33ms (11)
1pt
3C-29A kinematikai egyenletekb®l kiindulva határozzuk meg egy a vízszintes síkhoz képest θ szög alatt v0kezd® sebességgel kil®t
lövedék röppályáját és az R l®távolságot! A hajítások geometriai és kinematikai paramétereit az 1 ábra alapján de�niáljuk.Megoldás
s(t) = s0 + v0t+ a2 t
2
1pt
feltéve hogy a lövedék az origóból indul, a mozgás vízszintesen egy egyenletesen haladó függ®legesen pedig egy egyenletesengyorsuló mozgás kapjuk hogy
x(t) = v0 cos(θ)t, (12)
y(t) = v0 sin(θ)t− g
2t2. (13)
2pt
Ez a két egyenlet paraméteresen határozza meg a pályát! A pálya egyenletének meghatározásához (Egy y(x) függvénytkeresünk!) felyezzük ki az els®b®l t-t és helyettesítsük be a másodikba!
t =x
v0 cos(θ)(14)
y = v0 sin(θ)
[x
v0 cos(θ)
]− g
2
[x
v0 cos(θ)
]2
(15)
amib®l némi algebrával kapjuk hogy
y(x) = tg(θ)x− g
2v20 cos2(θ)
x2. (16)
1pt
A l®távolság meghatározásához döbbenjünk rá hogy a pálya egyenlete zérus x = R értékre! tehát (16) zérus helyeit kellkeresni. Kiemelve x-et (16)-b®l kapjuk hogy
y(x) = x
[tg(θ)− gx
2v20 cos2(θ)
]. (17)
2

ennek a másodfokú egyenletnek két zérus helye van! Egy az x = 0 (még jó.. ezt rögzítettük a peremfeltétellel.) a másik pedig R:
R = tg(θ)2v2
0 cos2(θ)
g=
sin(θ)
cos(θ)
2v20 cos2(θ)
g(18)
R =v2
0
gsin(2θ) (19)
ahol felhasználtuk a sin(2θ) = 2 sin(θ) cos(θ) trigonometrikus azonosságot.
1pt
3C-30Diferenciál számítás segítségével mutassuk meg hogy a l®távolság θ = 45◦ra veszi fel a maximális értékét!Megoldás
ha
f(x∗) = fmax
akkor (ddxf(x)
)∣∣∣x=x∗
= 0
és (d2
dx2f(x)
)∣∣∣x=x∗
< 0
2pt
Di�erenciálva (19)-t θ szerint kapjuk hogyd
dθR(θ) =
v20
g2 cos(2θ), (20)
illetved2
dθ2R(θ) = −v
20
g4 sin(2θ). (21)
Az els® kifejezés zérus hacos(2θ) = 0 (22)
tehát2θ =
π
2+ (2k + 1)π, k ∈ Z. (23)
Mivel a �zikailag releváns szögek a [0, π/2] zárt intervallumban keresend®ek ebb®l
θ =π
4= 45◦. (24)
2pt
Ellen®rzés képpen vizsgáljukl meg hogy a második derivált negatív!
−v20
g4 sin(2θ) = −v
20
g4 sin(π/2) = −4
v20
g(25)
1pt
3C-32Határozzuk meg hogy milyen θ∗ kilövési szög mellett lesz a H emelkedési magasság egyenl® az R l®távolsággal!MegoldásMivel a röppálya egy parabola ezért a maximumát a l®távolság felénél fogja felvenni!
H = yMAX = y(R/2) (26)
3pt
3

Behelyettesítve a (16) pálya egyenletbe a (19) l®távolság felét kapjuk hogy
H = tg(θ)
[1
2
v20
gsin(2θ)
]− g
2v20 cos2(θ)
[1
2
v20
gsin(2θ)
]2
(27)
=sin(θ)
cos(θ)
[v2
0
gsin(θ) cos(θ)
]− g
2v20 cos2(θ)
[v2
0
gsin(θ) cos(θ)
]2
(28)
=v2
0
gsin2(θ)− 1
2
v20
gsin2(θ) (29)
H =1
2
v20
gsin2(θ) (30)
1pt
A keresett θ∗ meghatározásához tegyük egyenl®vé a (30) és (19) kifejezéseket!
R(θ∗) = H(θ∗) (31)
v20
gsin(2θ∗) =
1
2
v20
gsin2(θ) (32)
2 sin(θ∗) cos(θ∗) =1
2sin2(θ) (33)
tg(θ∗) = 4 (34)
ez teljesül ha θ∗ ≈ 75.96◦.
1pt
4C-28Fejezzük ki a röppálya r görbületi sugarát abban a pillanatban amikor a lövedék a pálya leg magasabb pontjában van!MegoldásAmikor a lövedék a pálya legmagasabb pontjában van akkor sebességének csak xirányú komponense lehet melynek értéke
vx = v0 cos(θ) (35)
továbbá ebben a pillanatban a lövedék gyorsulása mer®leges sebességének irányára és nagysága g! tekinthetünk ebben a pil-lanatban a részecskére tehát úgy mintha vt = vxtangenciális sebességgel és acp = g centripetális gyorsulással haladó részecskelenne.
4pt
Ebben az esetben alkalmazhatjuk az ismert
acp =v2t
r(36)
összefüggést! Tehát
r =v2
0 cos2(θ)
g(37)
1pt
3C-38Egy szöcske vízszintes irányban legfeljebb 1mtávolsága tud elugrani. Mekkora a maximális vízszintes irányú sebességre képes
a szöcske ha az ugráshoz szükséges id®t elhanyagoljuk?MegoldásAhogy már beláttuk feljebb az R l®távolság (amilyen messzire a szöcske ugrik) akkor maximális ha az elrugaszkodás pillana-
tábanθ = π/4. (38)
Ekkor
Rmax =v2
0
g. (39)
Figyelembe véve hogy a sebesség vízszintes komponense
vx = v0 cos(θ) (40)
kapjuk hogyv0 =
√Rmaxg (41)
vx =√Rmaxg cos(π/4) =
√Rmaxg
2≈ 2.2147
m
s(42)
4

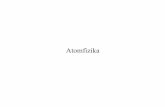
2. ábra. Korpalyan gyorsulo autó a 4C-26 feladathoz.
5pt
4C-26Egy R = 300m-es állandó görbületi sugarú úton haladó autó at = 1, 2m/s2állandó gyorsulással fékezni kezd. a) Határozzuk
meg a gyorsulás irányát és nagyságát abban a pillanatban amikor a kerületi sebesség v = 15m/s.Megoldás
acp =v2
R(43)
tg(α) =acpat
(44)
a =√a2cp + a2
t =
√(v2
R
)2
+ a2t (45)
5pt
2C-54Szakaszosan egyenletesen gyorsuló mozgás minden szakaszában alkalmazhatjuk az egyenletes gyorsulás kinematikáját!Megoldás
s(t) = s0 + v0t+ a2 t
2
v(t) = v0 + at
a(t) = a
2pt
Szakasz I.:Mivel az origóból indulunk zérus gyorsulással zérus kezd®sebességgel ezért a szakasz egész ideje alatt az origóban maradunk:
x(0) = 0m, x(2) = 0mv(0) = 0m/s, v(2) = 0m/sa(0) = 0m/s2, a(2) = 0m/s2
Szakasz II.:
5

egyenletes gyorsulás a = 2m/s2-al dt = 4s
x(6) = x(2) + v(2)dt+ a2 (dt)
2= 0 + 0 + 16 = 16m
v(6) = v(2) + a (dt) = 0 + 2 ∗ 4 = 8m/sSzakasz III.:egyenletes gyorsulás a = −1m/s2-al dt = 2s
x(8) = x(6) + v(6)dt+ a2 (dt)
2= 16 + 8 ∗ 2− 1
2 ∗ 4 = 30mv(8) = v(6) + a (dt) = 8− 1 ∗ 2 = 6m/sSzakasz IV.:egyenletes gyorsulás a = 1m/s2-al dt = 2s
x(10) = x(8) + v(8)dt+ a2 (dt)
2= 30 + 6 ∗ 2 + 1
2 ∗ 4 = 44mv(10) = v(8) + a (dt) = 6 + 1 ∗ 2 = 8m/sSzakasz V.:nincs gyorsulás a = 0m/s2, dt = 2sx(12) = x(10) + v(10)dt = 44 + 8 ∗ 2 = 60mv(12) = v(10) = 8m/s
3pt
rész II
Dinamika
5B-20Egy gépkocsi 18m sugarú függ®leges síkú kör alakú domboldalon mozog felfelé. A domb tetején a vezet® azt tapasztalja hogy
épp csak érinti az ülést. Mekkora sebességgel haladt a kocsi.Megoldás
∑i~Fi = m~a
acp =v2tR
1pt
er® mérleg:mg + Ft = macp (46)
mivel a kocsi �épp csak érinti�: Ft = 0A körmozgás kinematikai centripetális gyorsulásának kinematikai összefüggését felhasználva kapjuk hogy
mg = macp = mv2
R. (47)
3pt
A sebesség ebb®l
v =√gR ≈ 13.288m/s. (48)
1pt
5B-32Egy1.4m hosszú fonálinga függ®leges síkban mozog. Amikor az ingatest sebessége 2.2m/s. akkor a fonal 20◦-os szöget alkot
afügg®legessel. Határozzuk meg ebben a pillanatbana) az ingatest centripetális gyorsulását!b) az ingatest tangenciális gyorsulását!c) a fonalat feszít® er®t. ha az ingatest tömege 600 g!Megoldás
∑i~Fi = m~a
acp =v2tR
1pt
6

2 4 6 8 10 12t
- 2
- 1
0
1
2
3a
0 2 4 6 8 10 12t0
2
4
6
8
10v
0 2 4 6 8 10 12t0
10
20
30
40
50
60x
3. ábra. Gyorsulás sebesség és megtett út gra�konok a 2C-54 feladathoz.
7

acp =v2
L= 3.457m/s
2 (49)
. Newton törvénye a tangenciális irányban
mat = mg sin(α)→ at = 3.35m/s2 (50)
. Newton törvénye a centripetális irányban
macp = FK −mg cos(α) (51)
FK = mv2
L+mg cos(α) = 0.6kg[3.457m/s
2+ 9.218m/s
2] = 7.605N (52)
.
4pt
5B-52Egy 4kg tömeg¶ testet az ÁBRÁNAK megfelel®en F = 20N er®vel húzunk. Mekkora a test gyorsulása ha a lest és a talaj
közötti csúszó súrlódási együttható 0.2?Megoldás
∑i~Fi = m~a
1pt
Az er®mérleg a függ®leges irányban:F sin(α) + Ft = mg. (53)
Az er®mérleg a vízszintes iránybanF cos(α)− Fs = max. (54)
A csúszó surlódási er® és a tartó er® kapcsolataFs = µFt (55)
3pt
Ebb®l a gyorsulás:
ax =F
m[cos(α) + µ sin(α)]− µg = 2.868m/s2 (56)
1pt
5B-58Egy gépkocsi 80m sugarú vízszintes körpályán mozog. Az ÁBRA azt a pillanatot mutatja, amikor sebessége éppen 10m/s és
a gyorsulása a.a) Mekkora a gépkocsi centripetális gyorsulása?b) Mekkora a tangenciális gyorsulás?c) Mekkora utat tesz meg a gépkocsi megállásig, ha érint® menti gyorsulása állandó?d) Az úttest vízszintes - azaz a kanyarban nem túlemelt a pálya. Mekkora minimális nyugalmi súrlódási együttható szükséges
ahhoz, hogy az ÁBRÁN mutatott pillanatban a gépkocsi ne csússzon meg?Megoldás
∑i~Fi = m~a
acp =v2tR
1pt
A centripetális gyorsulás tehát a szokásos
acp =v2
0
R(57)
8

alakot ölti. A tangenciális gyorsulás és a centripetális gyorsulás geometriai kapcsolata
tg(α) =acpat. (58)
Ebb®l
at =v2
0
Rctg(α). (59)
A gyorsulás abszolult értékének és a centripetális gyorsulás nagyságának geometriai kapcsolata
sin(α) =acpa. (60)
Ebb®l
a =v2
0
R sin(α). (61)
2pt
A tangenciális irányban megtett útra alkalmazva az egyenletesen lassuló mozgás összefüggését
s = v0t ∗ −at2
(t∗)2. (62)
Itt t∗-ot abból határozzuk meg hogy ennyi id® kell ahhoz hogy az autó megálljon, azaz
v0 = att ∗ . (63)
Vissza helyettesítve (62)-be kapjuk hogy
s =v2
0
at− at
2
(v0
at
)2
=v2
0
2at=
v20
2v20R ctg(α)
=R
2tg(α). (64)
1pt
A tapadó surlódási er® maximális értékeFs = µFt = µmg. (65)
Mivel csak ez az er® hat a pálya síkjában a járm¶ dinamikáját a síkban ez az er® határozza meg! Tehát ennek az er®nek kellfedeznie a teljes gyorsulást! Ebb®l kapjuk hogy:
µmg ≥ ma =mv2
0
R sin(α). (66)
az az:
µ ≥ v20
Rg sin(α)= (67)
1pt
6B-10Egy rugó által kifejlett er® a Hooke-törvény helyett az F = −kx3 törvény szerint változik, Ahol k = 200N/m3. Mennyi
munkát végzünk, míg 0 m-ról 0.3 m re nyújtjuk?Megoldás
W =´Fds
1pt
FR = −kx3 (68)
Mivel én a rugó ellen dolgozokFEn = −FR. (69)
2pt
Az el®jel a végzett munkában is negatív marad!
9

WEn =
ˆ x1
x0
FEn(x)dx = −ˆ x1
x0
FR(x)dx (70)
.
1pt
Kiértékelve az integrált egyszer¶en kapjuk hogy
WEn =
ˆ x1
x0
kx3dx =k
4
[x4
1 − x40
]. (71)
.
1pt
6B-28Az ÁBRÁN látható ember nyugalmi helyzetb®l indulva 2.4m távolságba húz el egy 23kg-os ládát az érdes (µ = 0.5) padlón. A
láda végsebessége v = 0.6m/s. A munkatétel átfogalmazott változatának alkalmazásával határozzuk meg, hogy mekkora állandóer®t fejtett ki az ember!
Megoldás
∑i~Fi = m~a
W =´Fds
1pt
Az
er®mérleg függ®leges irányban
F sin(α) + Ft = mg. (72)
A surlódási er® és a tartó er® kapcsolataFs = µFt (73)
0.5pt
A munka tétel értelmében a befektetett munka a test kinetikus energiájának növelésére fordítódik. A testre ható er®kvízszintes minden id® pillanatban állandóak tehát a végzett munka egyszer¶en W = (
∑F ) s ! Az energia mérleg tehát:
(F cos(α)− Fs)s =1
2mv2 (74)
2.5pt
Ebb®l
(F cos(α) + µF sin(α)− µmg)s =1
2mv2. (75)
Amib®l
F =12mv
2 + µmgs
(cos(α) + µ sin(α)). (76)
1pt
6C-58Egy �ú a 3 kg tömeg¶. 2m hosszúságú hajlékony láncot egyik végénél fogva úgy tartja, hogy másik vége éppen leér a földre.a) Határozzuk meg, hogy hogyan változik a gyerek álal kifejtett er®, ha a láncot egyenletes sebességgel s távolsággal lejjebb
ereszti!b) Az W =
´Fds összefüggés felhasználásával számitsuk ki azt a munkát, amit a gyerek végez míg a teljes láncot a földre
erszti!Megoldás
∑i~Fi = m~a
W =´Fds
1pt
10

Mivel egyenletes sebességgel mozog a lánc ezért gyorsulás nincs tehát kezdetben a teljes kötél súlyát tartja a gyerek
F (0) = mg. (77)
Ha már egy s hosszúságú darab a földön van akkor azt a darabot már nem kell tartani tehát
F (s) = mg −mg sL. (78)
3pt
Mivel a gyerek által kifejtett er® ellenkez® irányú az elmozduláshoz képest
W = −ˆ L
0
F (s)ds. (79)
Amit kiértékelve kapjuk hogy
W = −ˆ L
0
[mg −mg s
L
]ds =
[mgL−mgL
2
2L
]=mgL
2. (80)
1pt
rész III
Energia, munka és lendület
7A-10MegoldásAz energia megmaradás törvényét alkalmazva a kezdeti helyzeti energia
E1 = mgh, (81)
az alsó pozícióban teljes mértékben kinetikus energiává alakul:
E2 =1
2kh2 (82)
Az energia mérleg tehát
mgh =1
2kh2. (83)
4pt
Amib®l
h =2mg
k(84)
1pt
7B-18MegoldásEnergia a kezdeti pozícióban
E1 = mgR (85)
Energia az elválás pillanatában
E2 = mgR cos(θ) +1
2mv2 (86)
Az elválás pillanatában a gravitációs er® felületre vett normális komponense fedezi a centripetális gyorsulást, tehát
cos(θ) =acpg. (87)
körmozgás kinematikájából:
acp =v2
R. (88)
3pt
11

Az energia mérleg:1
2mv2 =
1
2macpR =
1
2mRg cos(θ) (89)
mgR = mgR cos(θ) +1
2mRg cos(θ) (90)
cos(θ) =2
3(91)
2pt
7B-21MegoldásA helyzeti energiát a pecek magasságához igazítva kezdetben a potenciális energia
E1 = mg2
3l. (92)
A végs® helyzetben a teljes energia
E2 = mg1
3l +
1
2mv2. (93)
Mivel a végs® helyzetben a körmozgás sugara l/3 a centripetális gyorsulás ezen a ponton.
acp = 3v2
l(94)
Mivel a kötél mer®leges ezért a centripetális gyorsulást a kötél er® és a nehézségi er® összege adja
macp = mg +K. (95)
3pt
Az energia mérlegb®l
mg2
3l = mg
1
3l +
1
2mv2 (96)
a sebesség
v2 =2gl
3(97)
1pt
Ezt felhasználva a kötéler®
K = macp −mg = m
[3v2
l− g]
= m
[3
2 gl3l− g
]= mg (98)
1pt
8A-4MegoldásKezdeti és vég állapotban az energia és a lendület
Ekin0 =1
2mv2
0 , I0 = mv0, (99)
Ekin1 = mv2, I1 = 2mv. (100)
Mivel a testek össze ragadva közlekednek tovább csak az energia megmaradás érvényesül
I0 = I1 (101)
3pt
Ebb®l
mv0 = 2mv (102)
v =v0
2(103)
12

1pt
A kinetikus energia relatív megváltozása pedig
(K −K0)/K0 =122m( v02 )2 − 1
2mv20
12mv
20
= 2(1
2)2 − 1 = −1/2 (104)
1pt
8A-34MegoldásEgy bejöv® kis térfogat elem inpulzusa kezdetben:
I1 = ∆mv = µ∆t · v (105)
Miután a turbina lapátjáról vissza ver®dött:I2 = −∆mv (106)
Newton 3. törvényének értelmében a turbina lapátra ható er® tehát:
F = ∆I/∆t = µ∆t2v/∆t = 2µv (107)
5pt
8A-40Megoldásadott M µ ghold
F = Mghold = ∆I/∆t = mv/∆t = µ∆tv/∆t = µv (108)
v =Mgholdµ
(109)
5pt
8C-48MegoldásMivel a kötelet egyenletes sebességgel engedjük le
s = vt. (110)
A kötél tartásához szükséges er® minden adott pillanatban ellensúlyozza a gravitációs er®t
Ft = mgs/l = mgvt/l (111)
2pt
Ezen kívül minden pillanatban meg kell állítani a beérkez® kis darab köteleket
Fl = ∆I/∆t (112)
az inpulzus megváltozása∆I = ∆mv = (m∆s/l)v (113)
tehátFl =
m
lv2 (114)
2pt
Az asztalra gyakorolt teljes er® tehát
F =m
l
[gvt+ v2
](115)
1pt
13

9C-32Megoldásenergia mérleg-I
E1 = E(1)pot = mgR = mgR (116)
E2 = E(1)kin =
mv20
2(117)
v0 =√
2gR (118)
mivel rugalmas az ütközés ezért az energia és a lendület is megmarad!energia mérleg-II
mv20
2=mv2
1
2+
3mv22
2(119)
impulzus mérleg-IImv0 = −mv1 + 3mv2 (120)
2pt
a tömegekkel egyszer¶sítve
v0 = −v1 + 3v2 (121)
v20 = v2
1 + 3v22 (122)
v0 + v1 = 3v2 (123)
v20 − v2
1 = (v0 + v1)(v0 − v1) = 3v22 (124)
(v0 − v1)3v2 = 3v22 (125)
v0 ismeretében ennek 2 megoldása van vagy v2 = 0 vagy
v0 − v1 = v2 (126)
A �zikai megoldás a második! Kihasználva ezt és hogy
v0 + v1 = 3v2 (127)
2pt
kapjuk hogy
v2 = v0/2 =√gR/2. (128)
v1 = v0/2 =√gR/2. (129)
Ezen kinetikus energiák fognak potenciális energiává alakulni! Vegyük észre hogy mivel ugyan olyan sebességgel mozognak atestek ezért ugyan olyan magasságba fognak emelkedni!
energia mérleg-III
mgh1 =1
2mv2
1 =1
4mgR→ h1 = R/4 (130)
3mgh2 =1
23mv2
2 =1
43mgR→ h2 = R/4 (131)
1pt
rész IV
Forgó mozgás dinamikája
10C-48MegoldásMivel a test nyugalomban van ezért se gyorsulás se szöggyorsulás nincs
14

Rα = a = 0 (132)
Er® mérleg függ®leges iránybaF + S2 +N1 −W = 0 (133)
Er® mérleg vízszintes iránybaS1 −N2 = 0 (134)
Forgatónyomaték mérleg(F − S1 − S2)R = 0 (135)
Tabadó surlódás és tartó er® viszonya ha �épp hogy nem mozdul� a test
µN1 = S1 (136)
µN2 = S2 (137)
3pt
A surlódási er®ket vissza írva a mérleg egyenletekbe:
F + µN2 +N1 −W = 0 (138)
µN1 −N2 = 0 (139)
(F − µN1 − µN2) = 0 (140)
N2-t kifejezve
F + µ2N1 +N1 −W = 0 (141)
F − µN1 − µ2N1 = 0 (142)
(141)-b®l kivonva (142)-tµN1 + 2µ2N1 +N1 −W = 0 (143)
N1 =W
2µ2 + µ+ 1(144)
Vissza helyettesítve (142)-ba
F =µ+ µ2
2µ2 + µ+ 1W = 0.375 W (145)
2pt
11C-14Megoldás�csúszas mentesen gördül� tehát az érintkezési pont a talajhoz képest mindig nyugalomban van! Ez akkor lehet ha
|vt| = |vTKP | (146)
A kerék els®pontjában a ~vTKP és ~vt vektorosan adódik össze tehát a sebesség abszolult értéke:
|v| =√
2vTKP (147)
5pt
12B-19Megoldás�csúszás nélkül� a kötél együtt mozog a csigával
a = Rα (148)
A testek dinamikai egyenleteiT1 −m1g = m1a (149)
m2g − T2 = m2a (150)
A csiga dinamika egyenlete
R (T2 − T1) =1
2MR2α (151)
15

2pt
a)
T1 = m1g +m1a (152)
T2 = m2g −m2a (153)
(T2 − T1) =1
2Ma (154)
Be helyettesítve a kötél er®k fenni kifejezését:
m2g −m2a−m1g −m1a =1
2Ma (155)
a gyorsulás tehát:
(m2 −m1) g =
(1
2M +m1 +m2
)a (156)
a =m2 −m1
M/2 +m1 +m2g (157)
Vissza írva a kötél er®k kiifejezésébe
T1 = m1g +m1m2 −m1
M/2 +m1 +m2g (158)
T2 = m2g −m2m2 −m1
M/2 +m1 +m2g (159)
2pt
Egyenletesen gyorsuló mozgás !
s1 =a
2t21 (160)
v1 = at1 (161)
v1 = a√
2s1/a =√
2s1a =
√2s1
m2 −m1
M/2 +m1 +m2g ≈ 4.33ms (162)
1pt
12B-28Megoldás
∑iIiωi = const.
Alkalmazhatjuk a perdület megmaradás törvényét!
1
23mR2ω0 =
1
23mR2ω +
1
2mR2ω (163)
2pt
3ω0 = 4ω (164)
ω =3
4ω0 (165)
0.5pt
Az energia mérleg a keletkezett h® �gyelembe vételével:
1
2
(1
23mR2
)ω2
0 = Q+1
2
(1
23mR2
)ω2 +
1
2
(1
2mR2
)ω2 (166)
2pt
16

1
2
(1
23mR2
)ω2
0 = Q+1
2
(1
23mR2
)(3
4ω0
)2
+1
2
(1
2mR2
)(3
4ω0
)2
(167)
1
2
(1
23mR2
)ω2
0 −1
2
(1
23mR2
)(3
4ω0
)2
− 1
2
(1
2mR2
)(3
4ω0
)2
= Q (168)[(3
16mR2
)ω2
0
]= Q (169)
0.5pt
12B-48MegoldásPerdület nem marad meg energia megmarad. Az er® mindíg mer®leges az elmozdulásra tehát nem tud munkát végezni. Az
er®nek van olyan komponense amely véges forgatónyomatékot okoz mivel az er® nem a pecek középpnotjába mutat!
1
2mv2
1 =1
2mv2
2 → v1 = v2 (170)
5pt
12B-50-52Megoldásmivel az er® mindíg a középpontba mutat a perdület megmarad! (fontos hogy súrlódás mentes a felület.. tehát nincs más er®
csak a kötél er®..)általában a sebesség nem lesz mer®leges az er®re tehát az energia nem marad meg!kezdetben a perdület:
mr20ω0 = mr0v0 = const. (171)
v =r0
rv0 (172)
Akarmilyen ugyesen is rancibáljuk a golyót a lyukon keresztül a lendület mindig megmarad! (12B-52...)
2pt
A mozgási energia megváltozása ha r0 ról r0/2 -re húzzuk a testet:
1
2mv2 − 1
2mv2
0 =1
2m(
r0
rv0)2 − 1
2mv2
0 =1
2m(2v0)2 − 1
2mv2
0 =3
2mv2
0 (173)
1pt
Feltéve hogy
F = mv2
r= m
( r0r v0)2
r= m
r20v
20
r3(174)
W =
ˆ r0
r0/2
[mr20v
20
r3
]dr =
mr20v
20
−2
[1
r2
]r0r0/2
=mr2
0v20
−2
[1
r20
− 4
r20
]r0r0/2
=3
2mv2
0 (175)
2pt
13B-7Megoldás�csúszás nélkül gördül�
a = Rα (176)
a leejt®re mer®legesen nincs gyorsulás:
Mg cos θ − Ft = 0 (177)
A leejt®vel párhuzamosan a gyorsulást a súrlódás és a nehézségi er® leejt®vel párhuzamos komponense szabja meg:
Mg sin θ − Fs = Ma (178)
Csak a súrlódásnak van forgatónyomatéka:
FsR =1
2MR2α (179)
mivel nem csúszik meg ezért a surlódási er® a kritikus érték alatt van
Fs ≤ µFt (180)
17

3pt
Fs =1
2Ma (181)
Ezt vissza helyettesítve (178)-be kapjuk hogy:Mg sin θ/3 = Fs. (182)
Mg cos θ = Ft (183)
Tehát (180)-be vissza írve Fs és Ft kifejezéseit kapjuk hogy
Mg sin θ/3 ≤ µMg cos θ (184)
tgθ/3 ≤ µ (185)
2pt
13B-20MegoldásA forgó tárcsa által gyakorolt forgatónyomaték
~M = ~r × ~F (186)
A precesszió és a forgató nyomaték kapcsolata
~M = ~ωp × ~L = ~ωp × I~ω (187)
| ~M | = ωp1
2R2mω (188)
mgd/2 = ωp1
2R2mω (189)
4pt
gd
R2ω= ωp (190)
ν = 2πωp ≈ 0.2 fordulatmin (191)
1pt
13B-31MegoldásVizsgáljuk az érintkezési pontra vonatkoztatott forgatónyomatékot! Erre a pontra se a surlódási se a tartó er®nek sem pedig a
nehézségi er®nek nincs forgatónyomatéka! Egyedül a szalag által gyakorolt er®nek lehet forgatónyomatéka!Ez a forgatónyomatékelt¶nik ha az er® iránya a támadási pontján keresztül az érintkezési pontba mutat! Tehát
sin θ =r
R(192)
rész V
Inercia er®k és Relativitás elmélet
14C-30Megoldás
~Fcf = −m~ω × (~ω × ~r)
~FCor = −2m~ω × ~v
3pt
Mivel
a Corriolis er® mer®leges a sebességre ezért ~ω-csavarodási irányával ellenkez® módon kell körbe járni a ringlispilt! Tehát a forgó
18

koordinátarendszer szemszögéb®l körmozgást kell végezni! A Corrilois er® és a centrifugális er® abszolult értékének megeggyezé-séb®l kapjuk hogy
mω2r = 2mωv, (193)
1pt
ebb®lv =
ωr
2. (194)
1pt
14C-39MegoldásA ringlispil koordináta rendszerében a dinamikai egyenlet:
m~a = m~g −m~ω × (~ω × ~r)− 2m~ω × ~v, (195)
ahol
~g =
00−g
~r =
xyz
~ω =
00ω
. (196)
A kétszeres kereszt szorzat a fennti de�niíciókkal
~ω × (~ω × ~r) = −ω2
xy0
. (197)
2pt
Tehát a mozgás gyenletek szétesnek függ®leges és radiális komponensekre!
az = −g (198)
ebb®l a függ®leges elmozdulás:
z = h− 1
2gt2 (199)
amib®l a földetérésig eltelt id®t =
√2h/g. (200)
A radiális mozgás leírásakor élhetünk azzal a közelítéssel hogy a Coriolis er®t elhayagoljuk ha a sebesség a mozgás során, amintkezdetben is, kicsi (kezdetben nulla..)! Ebb®l kapjuk hogy (ha kezdetben nem volt y koorinátás komponens.. ezt egy megfelel®forgstással mindíg megtehetjük..)
ax = ω2x (201)
Feltéve továbbá hogy a kérdéses radiális elmozdulás kicsi, a fenti �namikai egyenletben élhetünk az x ≈ r0 közelítéssel.
ax = ω2r0. (202)
Ebb®l a megtett út megkapható az egyenletesen gyorsuló test kinematikájából azaz kapjuk hogy:
∆s ≈ axt2/2 = ω2r0t2/2 (203)
behelyetesítve (200)-t kapjuk hogy
∆s ≈ ω2r0h
g(204)
2pt
Ez a bizonyítandó kifejezés.Ez akkor áll fenn ha
|~Fcor| � |~Fcf | (205)
azaz2mωv � mω2r0 (206)
behelyettesítve ide a földetérés pillanatában a gravitációs gyorsulás hatására keletkezett sebességet v ≈ gt
2mωg√
2h/g � mω2r0 (207)
8gh
ω2r20
� 1 (208)
19

1pt
41B-7MegoldásA labor rendszerben megtett út és sebesség meghatározza a labor rendszerben mért id®t.
vL =sLtL→ tL =
sLvL
(209)
A részecske saját ideje a relativisztikus id®dilatációs összefüggésb®l
tR = tL
√1− v2
L/c2 =
sLvL
√1− v2
L/c2 ≈ 75ns (210)
5pt
41A-15MegoldásA relativisztikus sebesség összeadás szerint
v =v1 + v2
1 + v1v2c2
=0.9 + 0.9
1 + 0.92c ≈ 0.994475c (211)
5pt
41A-22MegoldásAz energia megmaradás törvényét a relativisztikus részecskék nyugalmi energiájának �gyelembevételével kell felírni!
MHe3c2 + Emin = MH2c2 +Mpc
2 (212)
Emin = (MH2 +Mp −MHe3)c2 ≈ 5.472MeV (213)
5pt
41B-33MegoldásLegyenek x1, t1 illetve x2, t2 az ¶rhajó elejének illetve végének hely koordinátái és a hozzájuk tartozó helyen lév® órák állása
a Föld koordináta rendszerében. Legyen továbbá x′1, t′1 illetve x′2, t
′2 az ¶rhajó koordináta rendszerében ugyen ezen helyek és
id®k!A Föld koordináta rendszeréb®l az ¶rhajó rendszerébe a Lorentz transzformáció adja meg a megfelel® váltást:
t′ = γ(t− v
c2x), (214)
x′ = γ(x− vt) (215)
γ = 1/√
1− v2/c2 (216)
A Földi koordinátákat az ¶rhajó rendszeréb®l inverz Lorentz transzformációval kapjuk:
t = γ(t′ +
v
c2x′), (217)
x = γ(x′ + vt′) (218)
3pt
Tehát a Földi rendszerben az els® és a hátsó órák állásának különbsége:
t1 − t2 = γ(t′1 − t′2 +
v
c2(x′1 − x′2)
)(219)
Mivel az ¶rhajó rendszerében az órák szinkronban mozognak t′1 − t′2 = 0 továbbá az ¶rhajó rendszerében az ¶rhajó hosszaL = x′1 − x′2 kapjuk hogy
t1 − t2 = γ( vc2L)≈ 2.0µs (220)
Tehát a Földi rendszerben az ¶rhajó orrában lév® óra siet a hátsóhoz képest.
2pt
20

rész VI
Rezg® mozgás, gravitációs er®
15B-28Megoldás
x(t) = A(t) cos(ωt+ ϕ0) = A0e−b
2m t cos(ωt+ ϕ0)
ω =
√km −
(b
2m
)21pt
Adott k, m, A0, A1 = A(t1) , t1b meghatározása:
A1 = A0e− b
2m t1 (221)
Osztva A0-al és véve az egyenlet mindkét oldalának természetes logaritmusát:
lnA1
A0= − b
2mt1 (222)
amib®l b már kifejezhet®
b =2m
t1lnA0
A1≈ 0.148kgs . (223)
3pt
A csillapított rezg®mozgás sajátfrekvenciája b, k és a tömeg m ismeretében már kifejezhet®:
ω =
√k
m−(
b
2m
)2
≈ 9.99 1s (224)
1pt
15C-45Megoldás
Fizikai inga lengés ideje
T = 2π√
I2mgr
Steiner tétel
I2 = I1 +mr2
1pt
A
tömörhenger tehetetlenségi nyomatéka a tömegközéppontra vonatkoztatva:
I1 =1
2mR2 (225)
Ha a középponttól r távolságra rögzítjük a forgás tengelyt és a testet mint �zikai ingát vizsgáljuk, a rendszer periódus ideje:
T (r) = 2π
√12mR
2 +mr2
mgr= 2π
√12R
2 + r2
gr(226)
T0 a henger pereméhez rögzítés esetén mért periódus id®:
T0 = T (R) = 2π
√12R
2 +R2
gR= 2π
√3
2
R
g. (227)
21

3pt
Némi algebrával:
T (r)/T0 =
√2
3
12R
2 + r2
rR=
√2
3
12 + (r/R)2
(r/R)=
√2
3
12 + x2
x(228)
ahol bevezettük az x = r/R változót. Ennek a kifejezésnek minimuma van ha az x szerinti derivált elt¶nik. Ahhoz hogy aminimum helyét meghatározzuk elég a gyök jel alatti kifejezést deriválni!
ddx
( 12 + x2
x
)= 0 (229)
azaz2x2 − x2 − 1/2
x2= 0 (230)
ez a kifelyezés akkor zérus ha a számláló zérus azaz ha
x2 =1
2x =
r
R=
1√2
(231)
ami a keresett
r =R√2
(232)
kifejezés.
1pt
15C-46Megoldás
Kényszer rezgést végz® csillapított oszcillátor amplitúdója
A = F0/m√(ω2
0−ω2)2+( ωb
2m )2
1pt
Adott m, A1 ha a kényszer frekvencia f1 illetve A2 ha a kényszer frekvencia f2, a rezgés csillapítatlan tehát b = 0. KeressükF0 -t és ω0-t továbbá A3-at ha f3 a kényszer frekvencia.
ω = 2πf (233)
segítségével frekvenciák helyett körfrekvenciákra térünk át. A1 és ω1 illetve A2 és ω2 között tehát fenn áll hogy
A1 =F0/m√
(ω20 − ω2
1)2
(234)
A2 =F0/m√
(ω20 − ω2
2)2
(235)
Fontos mejegyezni hogy jelen esetben nem szabad a négyzetgyököt és a négyzetre emelést diszkutálás nélkül egyszer¶síteni! Afennti kifejezések hányadosa két alakot ölthet attól függ®en hogy ω1 és ω2 közre fogja ω0-t vagy nem.
2pt
Ha közre fogják akkorA1
A2= −
(ω2
0 − ω22
)(ω2
0 − ω21)
(236)
Ekkor ω0 kifejezhet® mintA1
(ω2
0 − ω21
)+A2
(ω2
0 − ω22
)= 0 (237)
ω0 =
√A1ω2
1 +A2ω22
A1 +A2f0 =
ω0
2π≈ 401.793 1
s (238)
ekkor F0meghatározható például(234)-b®l
F0 = A1m
√(ω2
0 − ω21)
2 ≈ 0.0064N (239)
illetve A3 ≈ 2.39mm.
22

1pt
Ellenkez® esetben azaz ha nem fogja közreω1 és ω2 a rendszer rezonanci frekvenciájátω0-t
A1
A2=
(ω2
0 − ω22
)(ω2
0 − ω21)
(240)
A1
(ω2
0 − ω21
)−A2
(ω2
0 − ω22
)= 0 (241)
ω0 =
√A1ω2
1 −A2ω22
A1 −A2f0 =
ω0
2π≈ 393.661 1
s (242)
az el®z®ekhez hasonlóan F0 ≈ 0.226N, és A3 ≈ 42.86mm
1pt
16B-16Megoldás A gravitációs er® a Föld (M tömeg) középpontjától R távolságra kering® m tömeg¶ m¶holdra
Fg = γMm
R2
1pt
a) ahhoz hogy szinkron pályán nem az egyenlít® síkjában keringjen m¶hold állandóan ellensúlyozni kellene a gravitációser®nek a pályára mer®leges komponensét ezért nem lenne gazdaságos.
b) kiindúlva a gravitációs er®
Fg = γMm
R2(243)
és a körmozgás fenntartásához szükséges centripetális er®
macp = mv2
R(244)
összefüggéseib®l, továbbá felhasználva hogy egy teljes kör s = 2πR megtételéhez szükséges id® T = 1nap azaz
v =2πR
T(245)
3pt
kapjuk hogy
m
(2πRT
)2R
= γMm
R2(246)
R =3
√γM
(T
2π
)2
≈ 42000km (247)
0.5pt
c) egszer¶ geometriai megfontolásból és a Föld sugarát R⊕
cos(α) =R⊕R→ α ≈ 81◦ (248)
0.5pt
16B-34Megoldás A gravitációs potenciális energia a Föld (M tömeg) középpontjától R távolságra kering® m tömeg¶ m¶holdra
Eg = −γMm
R
1pt
a) Kezdetben a test rendelkezik kinetikus energiával illetve gravitációs potenciális energiával a csúcs ponton már csak ponten-ciális energia van. Az energia mérleg
1
2mv2
0 − γMm
R⊕= −γMm
3R⊕(249)
23

1pt
v0 =
√γ
4M
3R⊕(250)
1pt
b) Figyelembe véve a Föld forgását a kezdeti kinetikus energia 12mv
2T -al több ahol vT = 2πR⊕
T a Föld egy felületi pontjánaksebessége az egyenlít®n. A 3R⊕ magasságú pontban még mindig lesz kinetikus energia az el®z® szituációval ellentétben. avégpont tangenciális sebességét az inpulzus momentum megmaradásából kapkjuk:
R⊕vT = 3R⊕v′T → v′T = vT /3 (251)
Az energia mérleg tehát1
2m(v2
0 + v2T
)− γMm
R⊕=
1
2m(v2T /9
)− γMm
3R⊕(252)
v0 =
√γ
4M
3R⊕− 8 (v2
T /9). (253)
Azaz kapjuk hogy kisebb kezdeti sebesség elég ha a Föld forgását is �gyelembe vesszük.
2pt
16C-58MegoldásFeltéve hogy a feladatban szerepl® ember a föld sugarához képest kicsit tud ugrani a szerzett potenciális energia
Epot = megh (254)
ahol me az ember tömege. A gravitációs gyorsulás a Föld felszínén pedig (M⊕ a Föld tömege, R⊕ pedig a sugara)
g = γM⊕R2⊕
(255)
2pt
Ahhoz hogy a kisbolygót elhagyhassuk a szükséges potenciális energia
Eszokes = γmemb
r(256)
1pt
ahol r a kisbolygó sugara mb = M⊕r3
R3⊕pedig a tömege (mivel a kisbolygó s¶r¶sége azonos a Föld s¶r¶ségével). A két energia
kifejezést egymással egyenl®vé téve kapjuk
me
(γM⊕R2⊕
)h = γ
me
rM⊕
r3
R3⊕
(257)
azazr =
√R⊕h (258)
2pt
18B-8MegoldásAdott A,f ,v,ρ
v =λ
T= λf (259)
k =2π
λ=
2π
vf ≈ 16.029 1
m (260)
ω = 2πf = 3141.6 1s (261)
A = 10−4m (262)
24

v =
√F
ρ→ F = ρv2 = 157.51N (263)
18B-18MegoldásHa az amplitúdó másfélszeresére n®, azaz
A1 =3
2A0 (264)
Akkor az intenzitás vátozása
I1 =9
4I0, (265)
Ami decibel skálán
β = 10dB× lg
(I1I0
)≈ 3.5. (266)
5pt
18A-38Megoldása Mach kúp nyílásszöge
sin θ =vHangvrepulo
=1
1.2→ θ ≈ 56.4427◦ (267)
5pt
rész VII
Termodinamika
25