
(Robotvision LAB) - jbnu.ac.krhopeit.jbnu.ac.kr/files/research/res_12.pdf• 실내용 이동로봇...
8
전북대학교 공과대학 전자공학부 로봇비젼 연구실 (Robotvision LAB) 2010. 12. 연구실 지도 교수 : 김 형 석
Transcript of (Robotvision LAB) - jbnu.ac.krhopeit.jbnu.ac.kr/files/research/res_12.pdf• 실내용 이동로봇...

전북대학교 공과대학 전자공학부 로봇비젼 연구실
(Robotvision LAB)
2010. 12.
연구실 지도 교수 : 김 형 석
연구실 연혁 : 1990년부터 운영 시작, 현재까지 33명의 석·박사 배출
연구실 구성 : 지도교수(김형석), 박사과정 4명, 석사과정 1명, 학부과정 4명
연구 분야 : 로봇 영상 처리 / 신경망 병렬처리 회로 / Memristor 기반 회로 설계
- 영상 처리 그룹 : 도로위 보행자 검출 기법을 이용한 차량 제어 기술 개발,
천정 반복무늬 패턴을 이용한 실내용 청소로봇 개발,
멀티비젼 기반 골프공 회수로봇 개발
- 회로 설계 그룹 : DVD용 비터비디코더 회로 설계, Memristor 기반 아날로그 메모리 회로설계
논문 실적 등
- 국제저널(SCI/SCIE) 34편, 국내저널 50편의 논문 발표
- 국내외 학술대회를 통해 150여 편의 학술 논문 발표
- 21건의 국내외 특허 보유
졸업생 취업 현황
- 국내 주요기업 : 삼성전자, LG전자, 현대자동차, 쌍용정보통신, 매그나칩 반도체, 특허정보원,
한국수력원자력, 한국전력공사, (주)MJL, (주)대우정보시스템, (주)시스웍 등
- 국외 주요기업 : Earthmine (영상기술전문회사)
- 국책 연구소 : 한국전자통신연구원(ETRI)
연구실 소개
연구 실적
최근 5년간 수행한 연구과제 실적
• 차량용 보행자 검출 시스템 알고리듬 소프트웨어 개발
• 로봇 작업장 천정의 규칙적 반복 무늬패턴을 이용한 간편형 Localization 시스템 및
이를 이용한 심부름 로봇시스템 개발
• 실내 골프장용 골프 공 자율 수거 로봇시스템 개발
• 실내용 로봇위치인식 기술
• 실내용 이동로봇 및 자기위치 인식장치 개발
• 인터넷을 이용한 원격 농 작업용 소프트웨어 기술개발
• 고배속 DVD의 Read Channel을 위한 아날로그 PRML 개발
사무실 천정의 영상 특징을 이용한 위치/방향 인식장치 및 이를 이용한 청소로봇 개발
- 기관 : 중소기업청 / 기간: 2010.6.~2011.5. / 연구비: 0.5억원
Memristor 기반 다단계 메모리 시스템 개발
- 기관 : 한국연구재단 / 기간: 2010.5.~2013.4. / 연구비: 1.3억원
현재 까지 28건의 정부 및 산학공동과제 연구를 수행함
연구 현황
현재 진행중인 연구 과제
연구 현황
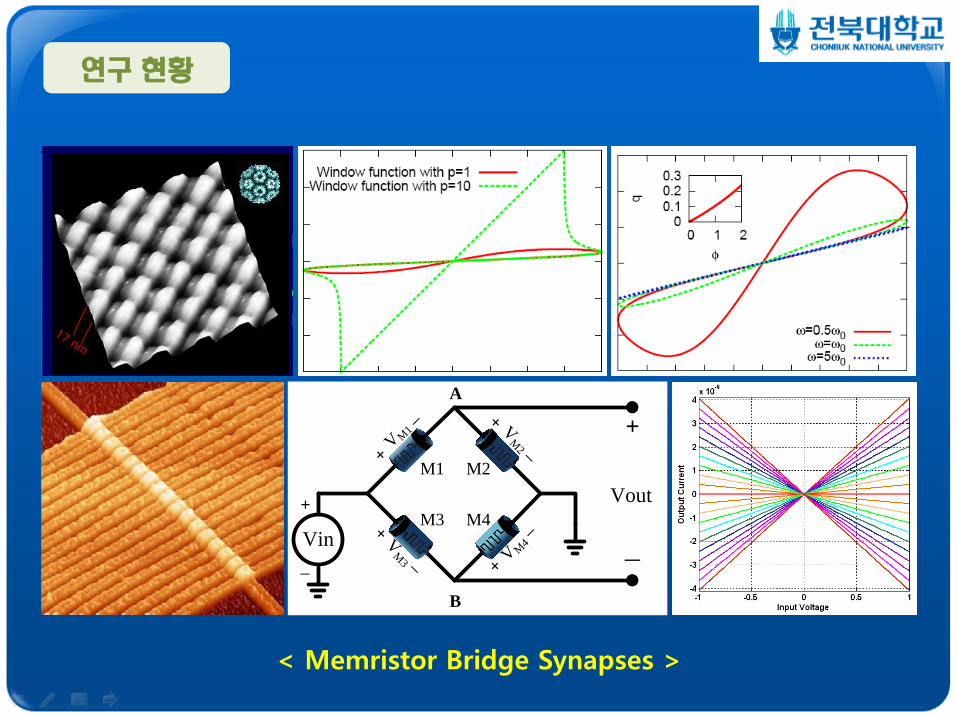
< Memristor Bridge Synapses >
Vin
Vout
+
−
A
B
M1 M2
M3 M4
+
-
VM
2
+
-
VM4
+
-
VM1
+
-
VM
3
+
-
연구 현황
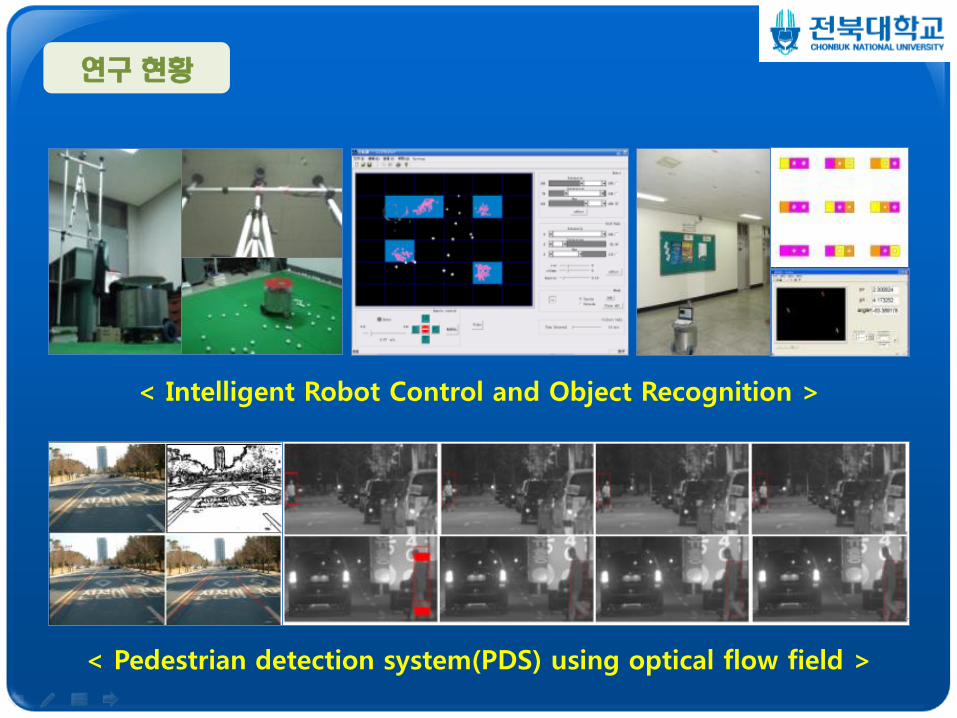
< Intelligent Robot Control and Object Recognition >
< Pedestrian detection system(PDS) using optical flow field >

연구 현황
< 3-D Depth Measurement & Pattern Recognition >
< Analog Parallel Processing Circuit Design >

개발된 장치 및 시제품
3차원 거리 측정 시스템 비터비 디코더 Chip 농업용 원격 제초작업 로봇 시스템
3차원 거리 측정 시스템 천정 영상 인식 실내 로봇 골프 공 회수 로봇
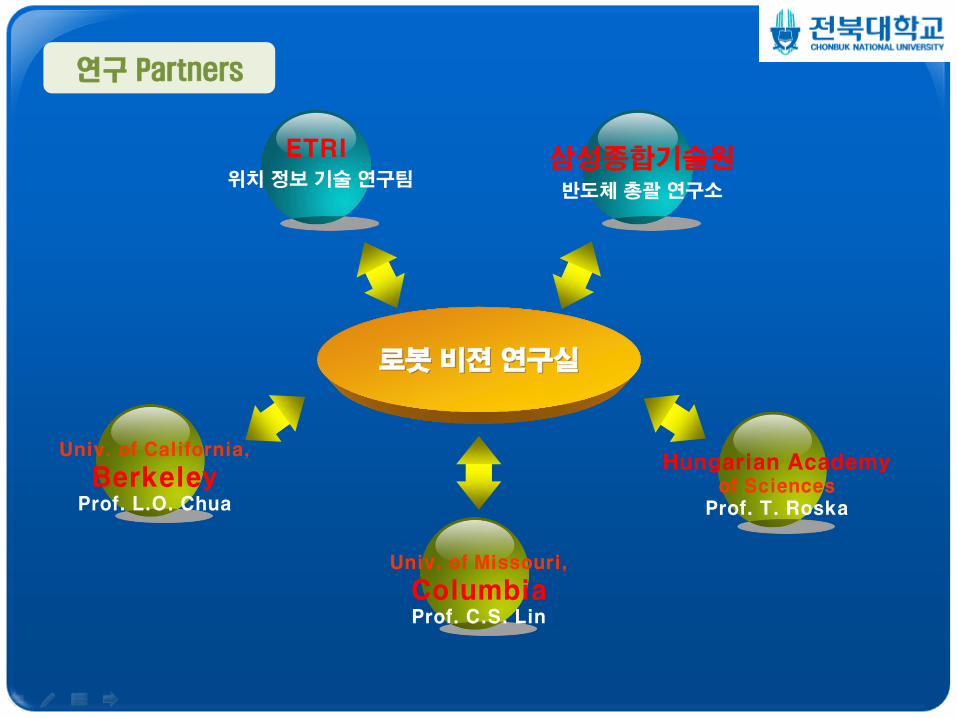
연구 Partners
Univ. of Missouri,
Columbia Prof. C.S. Lin
Univ. of California,
Berkeley Prof. L.O. Chua
ETRI 위치 정보 기술 연구팀
삼성종합기술원 반도체 총괄 연구소
로봇 비젼 연구실
Hungarian Academy of Sciences
Prof. T. Roska


















