Respuesta Transitoria
26
1 R E S P UE S TA T R AN SI TO R I A D e f i n i c i ones d e la s e s p e c i f i c a c i ones d e Re s p ue s ta T r a n s i to r i a Las características de desempeño de un sistema de control en el mayor de los casos se especifica en el dominio del tiempo, en términos de la frecuencia transitoria para una entrada escalón La respuesta transitoria de un sistema para una entrada escalón depende de las condiciones iniciales (por conveniencia se usa condición inicial en estado de resposo) y muestra con frecuencia oscilaciones amortiguadas antes de alcanzar el estado estacionario. La respuesta transitoria de un sistema de control para una entrada escalón se muestra en fig1. Fig1. Curva de respuesta a escalón unitario Donde: 1. Ti em p o d e Ret a rd o (Td): Tiempo requerido para que la respuesta alcance por primera vez la mitad de su valor inicial 2. Ti em p o d e Su bi d a (Tr): Tiempo requerido para que la respuesta pase del 10 – 90 %, 5 – 95 % ó 0 -100% de su valor final
Transcript of Respuesta Transitoria

1
R ES PUES TA TRANSI TORI A
D efi ni ci ones de la s especi fi ca ci ones de Resp uesta Tra nsi tori a
Las características de desempeño de un sistema de control en el mayor de los casos se especifica en el dominio del tiempo, en términos de la frecuencia transitoria para una entrada escalón
La respuesta transitoria de un sistema para una entrada escalón depende de las condiciones iniciales (por conveniencia se usa condición inicial en estado de resposo) y muestra con frecuencia oscilaciones amortiguadas antes de alcanzar el estado estacionario.
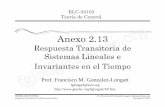
La respuesta transitoria de un sistema de control para una entrada escalón se muestra en fig1.
Fig1. Curva de respuesta a
escalón unitario
Donde:
1. Ti em p o d e Ret a rd o (Td): Tiempo requerido para que la respuesta alcance por primera vez la mitad de su valor inicial
2. Ti em p o d e Su bi d a (Tr): Tiempo requerido para que la respuesta pase del
10 – 90 %, 5 – 95 % ó 0 -100% de su valor final
- Sistema amortiguado 2do orden 0-100%- Sistema sobre amortiguado 10-90%

2
3. Ti em p o Pi c o (Tp) Tiempo requerido para que la respuesta alcance el primer pico de sobreelongación máxima.

Wn
3
4. So b r ee l on ga c i ón (Mp) Es el máximo valor pico de la curva de respuesta medido a partir de la unidad, es frecuente expresar esta magnitud en %.El porcentaje de sobreelongación máxima nos indica de manera directa la estabilidad del sistema.
5. Ti em p o d e A s ent a m i e nto ( Ts): Tiempo que se requiere para que la curva de respuesta alcance un rango alrededor del valor final (2-5%), se puede observar que Ts es la mayor constante de tiempo del sistema de control
Ob serva ci ones:
Todas las especificaciones anteriores no se aplican en cualquier caso (en sistemas sobre amortiguados no se aplican Tp, Mp).
Es conveniente que la respuesta transitoria en sistemas de segundo orden sea lo suficientemente rápida y amortiguada, es decir el factor de amortiguamiento debe estar en el rango de 04 - 0.8.
ξ menor a 0.4 Mp excesivo en respuesta transitoria ξ mayor a 0.8 Responde con lentitud.
Existe un conflicto entre el Tr y Mp, lo que ocasiona que ambos no puedan hacerse pequeños de manera simultánea.
Si stema s de s eg undo or den y esp eci fi ca ci ones de res puesta tra nsi tori a
A continuación se brindará las expresiones matemáticas para Tr, Tp, Mp, Ts en un sistema de segundo orden (Suponer que se trabaja con un sistema sub amortiguado)
R(s)+
-k C(s) La FT esta dada por:
s( Js B)C (s)
R(s)
k
Js 2 Bs kFig2. Sistema
desegundo
orden
R(s)
s(s
Wn
2 Wn )
C(s)La FT esta dada por:
C (s) 2

4
Fig2. Sistema de n n
segundo orden

WW
2
W
Donde:
Wn : Frecuencia natural no amortiguada
: Factor de amortiguamiento relativo
: Amortiguamiento Real
Wd : Frecuencia Natural amortiguada
: Atenuación
A continuación se presentan las fórmulas para el cálculo matemático:
1 . Ti em p o d e Su bi d a (
tr ) 2 . Ti empo Pi co
(
t p )
t rd
t pd
3 . So b r ee l on ga c i ón (
M p ) 4 . Ti em p o A s ent a m i en t o (
ts )
4 4
M e 1 ts W
Criterio 2%
P n
3 3t s
nCriterio 5%
Como formulas adicionales se presentan las siguientes:
tan
W W
1 Wd
1 2d n
Wn
# grados

# radianes180

Ing. Giuliana Viera RiveraRespuesta Transitoria
Control IIUniversidad Nacional de Piura
4 4 4
Wn 3
d
d
1
Ej erci ci os1 : Para el siguiente circuito que se muestra a continuación
R(s)+
-
s(s
Wn
2 Wn )
C(s)
Fig2. Sistema de segundo
orden
Hallar y tr ;t p ;ts ; M p
dibujar la gráfica correspondiente; los datos que se
proporcionan son los siguientes (factor de amortiguamiento 0.6 y
frecuencia natural no amortiguada 5 rad/seg.
So l u c i ón
tr Calculando en tiempo de subida Wd
Se observa que primero es necesario hallar los valores de:
Wn (0.6)(5rad / seg ) 3rad / seg
Wd Wn 1 2
Wd
(5rad / seg )( 1
4
0.6 2 4rad / seg
tan 1 tan 1 53.13 0.93rad 3
Por lo cual:
t 3.1416
r W 4rtad
0.93
/ seg0.55seg
Calculando en tiempo pico
t 3.1416 rad
pW 4rad / seg
0.7854
Calculando Sobre elongación Máxima
2
M P e 0 .6
e
1 0 .6 2 3 .1416
0.095 9.5%
Calculando el tiempo de asentamiento( se hallará para ambos criterios)
t s (2%) 1.33seg

Ing. Giuliana Viera RiveraRespuesta Transitoria
Control IIUniversidad Nacional de Piura
3t s (5%) 3 3
Wn 31seg

Ing. Giuliana Viera RiveraRespuesta Transitoria
Control IIUniversidad Nacional de Piura
Graficando la curva tendríamos:
Desarrollando este ejercicio con MATLAB.
FA=0.6; Wn=5; num=Wn^2;den=[1 2*FA*Wn Wn^2];s1=tf(num,den); t=[0:0.01:3]; step(s1,t)grid

Ing. Giuliana Viera RiveraRespuesta Transitoria
Control IIUniversidad Nacional de Piura
WB n
Ej erci ci o 2
Para el sistema de la figura, determine las velocidades de K y Kh para que la sobreelongaión máxima en respuesta al escalón unitario sea 0.2 y el tiempo pico sea de 1 seg; con los valores de K y K h hallar el tiempo de subida y tiempo se asentamiento. Suponer J= 1kg – m2 y B= 1 N- m rad/seg.
Sol uci ón
Hallamos la FT del circuito, se puede hacer por partes:
X (s)
E ( s)
( Js
k
B) k h kEntonces
C (s)
R(s) s 2 J
k
s( B k h k ) k
Acomodando la FT y comparando con la ecuación de 2do orden:
kC (s) J C (s) 2
R( s) 2 s s
k h k
kR(s) s 2 2 W W 2
J J n n
Se tiene:
W
n
W
k J
B k h k
…………. (1)
Bk
h k …………(2)
2 n

Ing. Giuliana Viera RiveraRespuesta Transitoria
Control IIUniversidad Nacional de Piura
J 2 kJ
Partiendo de los datos :
1 2
ln( 0.2) ln( e ) 0.4056

4 4 4
Wn 1.43
3 3 3
Wn 1.43
n
W
W
kk
t
1 Wd d
Wd 3.1416 rad/ seg
Wd 3.1416rad / segn Wn 3.53rad / seg
1 2 1 0.6 2
Reemplazando estos datos en las ecuaciones (1) y (2) del ejercicio se tiene:
k W 2 J
kJ
k 12.5
2 1 h
k h 0.15
Finalmente se hallará los valores del tiempo se subida y del tiempo se asentamiento
Para el tiempo de subida:
Wn (0.4056)(3.53rad / seg ) 1.43rad / seg
Wd 3.1416 tan 1
tan 1
1.43
65.52 1.14rad
3.1416r
1.14t r 0.64 seg
Wd 3.1416
Para el tiempo de asentamiento:
t s (2%) 2.79seg t s (5%) 2.09seg
AN ÁLI SI S D E RESPU EST A T RAN SI TO RI A Y EST ACION ARIA
La respuesta de un sistema de control consta de dos partes tal como lo indica la siguiente ecuación.
C (t ) Transit
oria (Que va del estado inicial al final)

C tr C SS
Estacionaria (Manera como se comporta el sistema cuandoT

E sta bili da d ab sol uta , rela tiv a y error e n esta do esta ci ona ri o
Estabilidad absolutaSe refiere a la condición de si el sistema es estable o inestable. Así tenemos:
Un sistema de control esta en e q u i lib r i o , si en ausencia de perturbaciones la salida permanece en el mismo estado.
Un sistema LTI es e s t abl e , si la salida regresa a su estado de equilibrio
cuando el sistema está sujeto a una condición inicial. Un sistema LTI es cr í t i c a mente e s t abl e , si las oscilaciones
continúan en forma indefinida. Un sistema LTI es i n e s t abl e , si la salida diverge sin límite a
partir de su estado en equilibrio cuando está sujeta a una condición inicial.
Estabilidad relativaUna vez identificado si el sistema es estable, es importante determinar que tan estable es y este grado de estabilidad se le conoce como estabilidad relativa
Error en estado estacionarioLa respuesta transitoria de un sistema de control con frecuencia muestra oscilaciones amortiguadas antes de alcanzar el estado estacionario, si la salida de un sistema en estado estacionario no coincide exactamente con la entrada se diceque tiene un ess (nos indica la precisión del sistema).
A pli ca ci ón del cri teri o de e sta bili da d Routh a l a náli si s de un si stema de cont rol
Este criterio tiene una utilidad limitada en el análisis del sistema de control lineal porque no sugiere como mejorar la estabilidad relativa ni como estabilizar un sistema inestable.
Este criterio solo nos permite determinar los efectos de cambiar uno o dos parámetros de un sistema, si se examinan los valores que producen inestabilidad.
E j em p l o Considérese el siguiente sistema de control. Determinar si el sistema es estable o inestable.
R(s)+
-s s 2
K
s 1 s 2
C(s)

Solución
Hallamos la función de transferenciaC (s) K
R(s) s s 2 s 1 s 2 K

Ing. Giuliana Viera RiveraRespuesta Transitoria
Control IIUniversidad Nacional de Piura
3
Determinamos la ecuación característica.
s(s2 + s + 1)(s+2) + K = 0 (s3 + s2 + s)(s + 2) + K = 0 s4 + 3s3 + 3s2
+ 2s + K =0
Escribimos la tabla de
Routh. s4 1 3 Ks3 3 20s2 b1 b2 s c1K d1
b1 (3x3)
3(2x1) 7
3
b2(2xK )
2(3x0)
K
(7 x2)c1
73
(3xK ) (14 9K )7
((14 9K )xK ) (0)
d1 7 K(14 9K )
7
Para la estabilidad K debe ser positivo al igual que los coeficientes de la primera columna.
14/9 > K > 0
Si K = 14/9 será un sistema oscilatorio y esto se mantiene en una amplitud constante.

10
Errores en estado estacionario en los sistemas de control con realimentación unitaria.
Los errores en estado estacionario ess se pueden atribuir a muchos factores (cambios en la entrada, imperfección o deterioro de los componentes); se estudiará los ess provocados por la incapacidad del sistema a seguir determinadas tipos de entrada.
El que un sistema presenta ess para un tipo especifico de entrada, depende del tipo de función de transferencia en lazo abierto del sistema.
Clasificación de los sistemas de controlSe clasifican de acuerdo a su capacidad para seguir entradas escalón, rampa, parábola (la combinación de estas señales con frecuencia se asemeja a situaciones reales).
Considérese un sistema con realimentación unitaria como el que se muestra en la figura
R(s)+
-
G(s)C(s)
Donde:
G(s)K (Ta
sN
1)(Tb
s1).....(Tm s 1)
s (T1s 1)(T2
s1)......(Tp s 1) Función de transferencia en lazo abierto
El termino sN en el denominador representa un polo de multiplicidad “N” en el origen. Un sistema se denomina “tipo 0”, “tipo 1”, “tipo 2”,…, si N =0,1,2,….,
respectivamente. Esta clasificación es diferente de la que se basa en el orden del sistema. A medida que aumenta el tipo del sistema se mejora la precisión pero se agrava el
problema de estabilidad por lo que es difícil encontrar sistemas mayores o iguales que el tipo 3.
Errores en estado estacionario ess
C(s) G(s)R(s)
+
-
G(s)C(s)
R(s)
E(s)
1
R(s)
G(s)
C(s)
E(s) E(s)

11
R(s)R(s) G(s)E(s)
1 G(s)

e
Teorema del valor final
ess lime(t) limsE(s)t s 0
Reemplazando la ecuación anterior tenemos en el teorema del valor final.
ess lims 1
R(s)
( )s 0 G s
a) Con sta nte de er ror de po si ci ón está ti ca K p
El ess de un sistema de control ante una entrada en escalón está dada por
es 1 1
ss lim1x
G(s) sess
1 G(0)s 0
La constante de error de posición estática Kp se define
Kp limG(s) Kp G(0)s 0
ess en función de la constante de error de posición estática Kp se da por
ess
1
1 Kp
Ahora hallando Kp para los diferentes tipos de sistemas tenemos:
Sistema de tipo 0
K (T sKp im
a1)(Tb s 1).....(Tm s 1)
Kp Kls 0 (T1 s 1)(T2 s 1)......(Tp s 1)
Sistema de tipo 1 o mayor
K (T sKp im
a1)(Tb s 1).....(Tm s 1)
Kpls 0 s(T1 s 1)(T2 s 1)......(Tp s 1)
Se puede concluir
1ss
Sistema de tipo 0, su valor dependerá de K

1 KPara K muy grandes es difícil obtener la estabilidad relativa.
ess 0 Sistema de tipo 1 o mayores

Ing. Giuliana Viera RiveraRespuesta Transitoria
b) Co n s t a nte d e e r r or d e v e l o c i d a d e s t á t i c a K v
Control IIUniversidad Nacional de Piura
s
x
s
El ess de un sistema de control ante una entrada en rampa está dada por
ess lim1
s 1
( ) 2 ess
1lim ( )s 0 G s s s 0 sG s
La constante de error de velocidad estática Kv se define
Kv limsG(s)s 0
ess en función de la constante de error de velocidad estática Kv se da por
1ess Kv
Ahora hallando Kv para los diferentes tipos de sistemas tenemos:
Sistema de tipo 0
K (T sKv ms a
1)(Tb s 1).....(Tm s 1)Kv 0li (T1 s 1)(T2 s 1)......(Tp s 1)
Sistema de tipo 1
K (T sKv ims a
1)(Tb s 1).....(Tm s 1)Kv Kl
s 0 s(T1 s 1)(T2 s 1)......(Tp s 1)
Sistema de tipo 2 o mayor
Kv limK (Ta s
2
1)(Tb s 1).....(Tm s 1)Kv
s 0 s (T1 s 1)(T2 s 1)......(Tp s 1)
Se puede concluir
ess
1ess K
Sistema de tipo 0, es incapaz de seguir una entrada rampa en
Estado estacionario.
Sistema de tipo 1, sigue a la entrada con un pequeño error
Que dependerá de K
ess 0 Sistema de tipo 2 o mayor

Ing. Giuliana Viera RiveraRespuesta Transitoria
Control IIUniversidad Nacional de Piura
1
s
c) Con sta nte de er ror de a cel era ci ón está ti ca K a
El ess de un sistema de control ante una entrada en parábola está dada por
ess lims 0
sx
1
G(s) s 3 ess lims 0
1
s 2G(s)
La constante de error de velocidad estática Kv se define
Ka lims 2 G(s)s 0
ess en función de la constante de error de aceleración estática Kv se da por
1ess Ka
Ahora hallando Ka para los diferentes tipos de sistemas tenemos:
Sistema de tipo 0
K (T sKa ms 2 a
1)(Tb s 1).....(Tm s 1)Ka 0li (T1 s 1)(T2 s 1)......(Tp s 1)
Sistema de tipo 1
K (T sKa ms 2 a
1)(Tb s 1).....(Tm s 1)Ka 0li s(T1 s 1)(T2 s 1)......(Tp s 1)
Sistema de tipo 2
Ka lims 2 K (Ta
s2
1)(Tb s 1).....(Tm s 1)Kv K
s 0 s (T1 s 1)(T2 s 1)......(Tp s 1)
Sistema de tipo 3 o mayor
Ka lims 2 K (Ta
s3
1)(Tb s 1).....(Tm s 1)Kv
s 0 s (T1 s 1)(T2 s 1)......(Tp s 1)
Se puede concluir
ess 1ess K

Ing. Giuliana Viera RiveraRespuesta Transitoria
Control IIUniversidad Nacional de Piura
Siste
ma de
tipo 0
y tipo 1, (incapaces de seguir a la función parábola en
estado estacionario
Sistema de tipo 2, produce un error finito
ess 0 Sistema de tipo 3 o mayor

A continuación se presenta una tabla donde se resumen los errores en estado estacionario para sistemas tipo 0, tipo 1 y tipo 2.
Los valores finitos para ess aparecen en la línea diagonal, sobre la diagonal son infinitos y bajo la diagonal son cero:
Entrada escalónR(t) =
Entrada rampaR(t) =
t
Entrada ParábolaR(t) = t2/2
Sistema de tipo 01
1 K
Sistema de tipo 1 01
K
Sistema de tipo 2 0 0 1
K
Tabla 1 Error en estado estacionario en función de la ganancia K
Los términos de error de velocidad, error de posición, error de aceleración, significan desviaciones en estado estacionario en la posición de salida.
Por ejemplo un error de velocidad finito implica que después que han desaparecido los transitorios, la entrada y la salida se mueven a la misma velocidad pero tienen una diferencia de posición finita.
Las constantes Kp, Kv, Ka, describen la capacidad de un sistema de realimentación unitaria de reducir o de eliminar el error en estado estacionario, indicando su comportamiento.

s