Remote Sensing - MIT OpenCourseWare...Remote Sensing D1 Remote sensing is a quasi-linear estimation...
21
Remote Sensing D1 Remote sensing is a quasi-linear estimation problem Equation of radiative transfer: o o L B B ( z ) 0 ) T e T(z) (z)e −τ −τ ° = + α ∫ temperature profile nepers m -1 L z (z) = (z) ∆ τ α ∫ ∆ τ τ o ) L 0 T(z),α(z) z ° B ) o B T τ(z) z Lec22.5-1 3/27/01 T( K dz dz = (0 T( K
Transcript of Remote Sensing - MIT OpenCourseWare...Remote Sensing D1 Remote sensing is a quasi-linear estimation...

Remote Sensing
D1
Remote sensing is a quasi-linear estimation problem
Equation of radiative transfer:
o o
L
B B (z)
0
) T e T(z) (z)e −τ−τ° = + α∫
temperature profile
nepers m-1L
z
(z) = (z)∆
τ α∫
∆ τ τo )
L
0
T(z),α(z)
z ° B )
oBT
τ(z)
z
Lec22.5-1 3/27/01
T ( K dz
dz
= (0
T ( K

Radiation from Sky-Illuminated Reflective Surfaces
° = B )
L
zTB
TS
TG 0
R = 1 - ε
2
2− α−τ ∫+ α∫ z
o 0 L
(z)
0
Re T(z) (
reflectivity
emissivity (specular surface)
4
− α∫
−τ
+ α
≅ α τ⎡ ⎤⎣ ⎦
∫
∫
L z
L (z)
0
L (z)
o 0
) (z)e
T(z) (z)e dz for 1 4
+1
1
− τo2 s
sky temperature
3
3
−τ+ε +o GT e
ground temperature
D2 Lec22.5-2 3/27/01
T ( K
dz z)e dz
>>
dz T(z dz
RT e
terms
4

Temperature Weighting Function W(z,f,T)
( )≅ + ∫ L
B o 0
) T T(z)W (z)o
Terms: , ,
D3
↔B ) T(z)�Note: we have ~linear relation:
(not Fourier)
( ) ( )′≅ + −∫ L
B o o o 0
T (f ) T ) ) )
( ) ∂ = ∂
o
B o
)
T(z) )Incremental weighting function:
Alternatively,
Lec22.5-3 3/27/01
T (f z,f,T dz τ >> For 1:
T (f
T(z T (z W ' z,f,T (z dz
T (zW ' z,f,T T(z
1 2 3 4

Atmospheric Temperature T(z) Retrievals from Space
D4
α(ω) (single P)
f
∆ω ∝
∝ 2l l
αo
ωo α ≠o f(P)�
0
altitudes where intrinsic & doppler broadening dominate
z
α(z)
W(z,f) ωo ± ∆
ω ≅ ωo pressure dominates ∆ω
−τ≅ α τ⎡ ⎤⎣ ⎦∫ L
(z)B o
0
T T(z) (z)e 1
ωo ± 2∆ Lec22.5-4 3/27/01
pressure P
area # mo ecu es m
Therefore for P-broadening trace constituents
>> dz for

Atmospheric Temperature T(z) Retrievals from Space z
0 α(z)
W(z,f) ωo ± ∆
ω ≅ ωo
altitudes where intrinsic & doppler broadening dominate
pressure dominates ∆ω
−τ≅ ⎡ ⎤⎣ ⎦∫ L
(z)B o
0
T ) )e 1
W(f,z)
τ ≅ 1
z
ωo ω f
α(ω) increasing P∆ω
D5
ωo ± 2∆
scale height
Lec22.5-5 3/27/01
τ >> T(z d(z dz for

Atmospheric Temperature T(z) Retrievals from Below L
0 α(z)
W(f,z)
ωo
ωo ± ∆
ωo
− α∫= α ω L 0 (z)
oW( ) (z)e i l i
(1/α) >> λ:
0
z
L
transparency, frequency dependentIf α(z) ≅
W(f,z) D6 Lec22.5-6 3/27/01
dz f, z ~decay ng exponentia s, rate s fastest for
Temperature profile retrievals in semi-transparent solids or liquids where
constant:

Atmospheric Composition Profiles
D7
[ ]− α∫ ρ
α ′≅ ρ • = ρρ ⎡ ⎤ ⎢ ⎥⎣ ⎦∫ ∫
L z
o
L L(z)
B B o 0 0
(z)T (z) T( T (z) ( ( )(z)
W(z,f) if viewed from space
Because α(z) and W(z,f) are strong functions of the unknown ρ(z), this retrieval problem is quite non-linear and can be singular (e.g. if T(z) = constant). In this case, good statistics can be helpful. Incremental weighting functions defined relative to a nearly normal ρ(z) can help linearize the problem.
Lec22.5-7 3/27/01
+ ρ −dz z)e dz z) W z, f dz

Optimum Linear Estimates (Linear Regression)
=ˆParameter vector estimate
“determination matrix” data vector
[ ]( )∆
1 Nd =
( ) ( )− −⎡ ⎤⎣ ⎦
tˆ ˆi p p p p
( ) ( ){
( )( )
∂ − − = = ∂
∂= − − = −∂
⎡ ⎤⎣ ⎦
⎡ ⎤ ⎡ ⎤⎣ ⎦⎣ ⎦
t
ij
tt t jj j i
ij
ˆ ˆE p p p p 0D
E p Dd pD
THi
[ ] [ ]
∆
=
= =⎡ ⎤⎣ ⎦
d
i j i j
t tt t t d
= C
;�
F1 Lec22.5-8 3/27/01
p Dd 1,d ,..., d
Choose D to min mize E
Derive D :
d D E 2d D d 2d p
row of D
⎡ ⎤ ⎡ ⎤ ⎣ ⎦ ⎣ ⎦
Therefore D E dd E p d
DE dd E pd C D E dp

Optimum Linear Estimates (Linear Regression)
[ ] [ ]
∆
=
= =⎡ ⎤⎣ ⎦
d
i j i j
t tt t t d
= C
;�
F2
1t t dˆi i l C − ⎡ ⎤= =
⎣ ⎦
Lec22.5-9 3/27/01
⎡ ⎤ ⎡ ⎤ ⎣ ⎦ ⎣ ⎦
Therefore D E dd E p d
DE dd E pd C D E dp
The l near regress on so ution is p Dd where D E dp ⎡ ⎤ ⎣ ⎦

is Least-Square-Error Optimum if:D 1) Jointly Gaussian process (physics + instrument):
( )( )
( ) ( )−⎡ ⎤− ⎢ ⎥⎣ ⎦= π Λ
11 r m r m2 r N 2
1p r e 2
( )( )∆ ⎡ ⎤Λ − −⎣ ⎦
t t= E r m r m
∆ =⎡ ⎤⎣ ⎦ 1 2 Nm =
2) Problem is linear:
= + + odata d n d
parameter vector noise (JGRVZM)
F3 Lec22.5-10 3/27/01
− Λ −
1 2
E r , where r r ,r ,...,r
Mr

Examples of Linear Regression
0 d
D11
p̂
slope = D12
[ ]− = ⎡ ⎤ ⎢ ⎥⎣ ⎦
11 12ˆ D D 1
d
F4
Equivalently:
( )
[ ]( ) = + −12p̂ p D d d
E
slope = D12
p̂
d1
regression plane
D11
note change in slope
d2
slope = D13
Lec22.5-11 3/27/01
1 D : p
• ≡ •

Regression Information
G1
but which is correlated with properties the instrument does see; i
uncorrelated with visible information); it is lost.
Lec22.5-12 3/27/01
1) The instrument alone (via weighting functions)
2) “Uncovered information (to which the instrument is blind,
D retr eves this too.)
3) “Hidden information (invisible in instrument and

Nature of Instrument-Provided Information
Assume linear physics: =
[ ] [ ]
1 2 N
1 2 M
thi
d T le
W ix
W i
=
=
=
=
Where
( )
N ii
i 1 ˆ i l i i=
= =
= =
∑
Claim:
G2 Lec22.5-13 3/27/01
d WT
data vector 1,d ,d ,...,d temperature profi T ,T ,...,T
weighting function matr
row of W
If T a W and noise n 0,
then T Dd T, perfect retr eva f W not s ngular

Proof for Continuous Variables
G3
( )
N ii
i 1 ˆ i l i i=
= =
= =
∑
Claim:
1
2
3
) = b (h)
W (h) = b (h) b (h)
W (h) = b (n) b (h) b (h)
∆
∆
∆
φ
φ + φ
φ + φ + φ
i j ij 0
i ij j j 0
0(h) (
1
;b i i ( i ). d = T( (
∞
∞∆
⎧φ = ⎨⎩
φ
∫
∫
Let:
Lec22.5-14 3/27/01
If T a W and noise n 0,
then T Dd T, perfect retr eva f W not s ngular
11 1
21 1 22 2
31 1 32 2 33 3
W (h
Where: h)dh
are known a pr or from phys cs Then: h)W h)dh
• φ = δ

Proof for Continuous Variables
G4
1
2
) = b (h)
W (h) = b (h) b (h)
∆
∆
φ
φ + φ
j j 0
d = T( (∞∆ ∫
N j j
i 1 = (h)∆
= ∑
( ) N tt t t
j i i ji 0 0 N i N N
i im m jn n i jii 1 m 1 n 1 i 10
d ( ( d
k b (h) b (h) ( ) =
∞
=
∞ ∆
= = = =
= ⇒ = =
⎛ ⎞ = φ φ⎜ ⎟
⎝ ⎠
∑ ∫
∑ ∑ ∑ ∑∫
1 d i ix
k̂ Q d k i i−
=
= = Lec22.5-15 3/27/01
11 1
21 1 22 2
W (hThen: h)W h)dh
If we force T(h) k W
Then: k W h) W h)dh k W W k Q
dh k Q ⎞⎛ ⎟⎜ ⎠⎝
Therefore Qk where Q s a known square matr
So let where Q s non-s ngular

Proof for Continuous Variables
G5
1k̂ Q d k i i− = =
( )
N ii
i 1 ˆ i l i i=
= =
= =
∑Claim:
N N i i i i
i 1 i 1 ˆ ˆT(h) = ) (h) T(h)
∆
= = = =∑ ∑Then:
Equivalently: ( ) ( )∆ − − = = =
1 1d d
So: ∆− =
= =
1D = "mini i l
i 0 Lec22.5-16 3/27/01
So let where Q s non-s ngular
If T a W and noise n 0,
then T Dd T, perfect retr eva f W not s ngular
k W (h k W (exact) Q.E.D.
T = Wk W Q WQ Dd
WQ mum nformation" so ution
Wh ch is exact if T Wk, n

To what is an instrument blind?
1
2
) = b (h)
W (h) = b (h) b (h)
∆
∆
φ
φ + φ
An instrument is blind to T(h) components outside the space spanned by φ1,φ2,…,φN or, equivalently, by its W1, W2,…,Wn.
By definition, the instrument is blind to any φj ⊥ Wi, for all i.
H1 Lec22.5-17 3/27/01
11 1
21 1 22 2
W (h

Statistical Methods Can Reveal “Hidden” Components ∞
= + = + φ∑ ∑
N i i i i
i 1 N 1 (h) a (h)
seen by N
instrument channels all hidden
components
+φ φ1 1(h) (h).2
Thus hidden components can be “uncovered” if correlated with visible ones.
= = = = φ∑ ∑
N N i i i i
i 1 i 1 ˆl T(h) (h) a (h)
( )+ =
= + φ∑ N
1 1 i i i 2
1T̂(h) a a2 shrinks with decorrelation
H2 Lec22.5-18 3/27/01
In general, T(h) k W ��� ���
N 1 Extreme case: suppose always accompanied by
Then our present so ution: k W
φ + φ N 1 Would become:

General Linear Estimate
H3
∆β
∞−
= +
⎡ ⎤= = + φ⎢ ⎥⎣ ⎦ ∑
i=
1 i ij j
i T̂ a
�
� � minimum
information “uncovered” information
Thus retrieval can be drawn only from the space spanned by
=
⎛ ⎞φ φ β =⎜ ⎟
⎝ ⎠ ∑ N
i1 2 N 1 2 N i i 1
ˆ, ; , ionali i ; T
That is, N channels contribute N orthogonal basis functions to the minimum-information solution, plus N more basis functions which are orthogonal but correlated with the first N.
Lec22.5-19 3/27/01
j N 1 Dd where D WQ
���
�� ��
φ β β ,..., ,..., dimens ty s N d D

General Linear Estimate
H4
As N increases, the fraction of the hidden space which is “uncovered” by statistics is therefore likely to increase, even as the hidden space shrinks.
In general:
a priori variance = observed + uncovered + variance lost
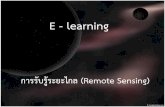
AMSU and MSU are passive microwave spectrometers in earth orbit sounding atmospheric temperature profiles from above with ~10-km wide weighting functions peaking at altitudes from 3 to 26 km. Note the larger ratio of uncovered/lost power for AMSU.
Example: 8 channels of AMSU versus 4 channels of MSU
Lec22.5-20 3/27/01
due to noise and decorrelation.

Example: 8-Channel AMSU vs 4-Channel MSU
H5
MID-LATITUDES (TOTAL POWER = 1222 K2, 15 LEVELS)
TROPICS (TOTAL POWER = 184 K2)
0 PERCENT POWER
LOST
3 km WEIGTHING FUNCTION 1610
(WINDOW)
OBSERVED POWER LOST POWER
Lec22.5-21 3/27/01
10 20 30 40 50 60 70 80 90 100
MSU – NADIR, LAND
AMSU - NADIR
UNCOVERED
MSU - 55° INCIDENCE ANGLE, LAND
MSU - 0° ANGLE, NADIR
AMSU - NADIR
AMSU - NADIR 26 22 12 6
UNCOVERED POWER