Receptor Transmisor TELEMANIPULACIÓN ASISTIDAwebdiis.unizar.es/~neira/docs/JAmat CEDI2007.pdf6...
6
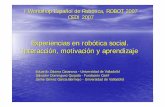
TELEMANIPULACIÓN ASISTIDA UPC Josep Amat Universitat Politècnica de Catalunya [email protected] Ordenador remoto BRAZO ROBOT (Esclavo) CONCEPTO DE TELEOPERACIÓN Interfaz de Mando Ordenador local Transmisor Receptor F Γ OPERADOR (Maestro) TELEOPERACIÓN REMOTA Ordenador remoto BRAZO ROBOT (Esclavo) Interfaz de Mando Ordenador local Transmisor Receptor F Γ OPERADOR (Maestro) Ordenador remoto BRAZO ROBOT (Esclavo) Interfaz de Mando Ordenador local Transmisor Receptor F Γ OPERADOR (Maestro) TELEOPERACIÓN LEJANA BRAZO ROBOT (Esclavo) F Γ OPERADOR (Maestro) TELEOPERACIÓN CERCANA Ordenador remoto BRAZO ROBOT (Esclavo) Interfaz de Mando Ordenador local Transmisor Receptor F Γ OPERADOR (Maestro) Ordenador remoto Interfaz de Mando Ordenador local F Γ TELEOPERACIÓN PRÓXIMA
Transcript of Receptor Transmisor TELEMANIPULACIÓN ASISTIDAwebdiis.unizar.es/~neira/docs/JAmat CEDI2007.pdf6...

1
TELEMANIPULACIÓN ASISTIDA
UPC
Josep Amat
Universitat Politècnica de [email protected]
Ordenador remoto
BRAZO ROBOT (Esclavo)
CONCEPTO DE TELEOPERACIÓN
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro)
TELEOPERACIÓN REMOTA
Ordenador remoto
BRAZO ROBOT (Esclavo)
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro)
Ordenador remoto
BRAZO ROBOT (Esclavo)
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro)
TELEOPERACIÓN LEJANA
Ordenador remoto
BRAZO ROBOT (Esclavo)
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro)
TELEOPERACIÓN CERCANA
Ordenador remoto
BRAZO ROBOT (Esclavo)
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro)
F ΓOrdenador
remotoInterfaz
de Mando
Ordenador local
TransmisorReceptor
F Γ
TELEOPERACIÓN PRÓXIMA

2
TELEOPERACIÓN PRÓXIMA
Ordenador Control
BRAZO ROBOT (Maestro y Esclavo)
Ordenador InterfazF Γ
Ordenador remoto
BRAZO ROBOT (Esclavo)
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro) Funciones básicas
Geometrias dispares Cambios de escala
Objetos en movimiento Tracking
Visión remota Visión 3DGuiado por interfaz Retorno sensorial
Imprecisión manual Filtrado. Guiado asistido
Velocidad de operación Tiempo real
Limitaciones Teleoperación asistida
LA TELEOPERACIÓN ASISTIDA
Retardos de transmisiónLimitaciones Teleoperación asistidaTeleoperación
Lejana
Cercana
Próxima
Remota Predicción + Realidad virtual
Dificultad de transmisión Planificación automática
Maniobrabilidad limitada Estructuras redundantes
Pérdida de percepción Impedancia controlablePérdida de percepción Retorno sensorial
Realidad aumentada
Visibilidad reducida Realidad aumentada
Arquitecturas flexibles Compensación dinámica osc.
Funciones más específicas
Ordenador remoto
BRAZO ROBOT (Esclavo)
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro)
LA TELEOPERACIÓN ASISTIDA
Trabajos realizados por el grupo
Retardos de transmisiónLimitaciones Teleoperación asistidaTeleoperación
Lejana
Cercana
Próxima
Remota Predicción + Realidad virtual
Dificultad de transmisión Planificación automática
Maniobrabilidad limitada Estructuras redundantes
Pérdida de percepción Impedancia controlablePérdida de percepción Retorno sensorial
Realidad aumentada
Visibilidad reducida Realidad aumentada
Arquitecturas flexibles Compensación dinámica osc.
Ordenador remoto
BRAZO ROBOT (Esclavo)
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro)
LA TELEOPERACIÓN ASISTIDA
Proyecto GARBÍ Proyecto GARBÍ

3
Proyecto GARBÍ (Teleoperación) Proyecto GARBÍ (Imágenes potenciadas)
IMÁGENES POTENCIADAS
Imágenes potenciadas
TRANSFORMACIÓNPRESPECTIVA Y
ZOOM
DETECCIÓN CARACTERÍSTICAS
ADQUISICIÓN DE IMÁGENES
CORRELACIÓN
GENERACIÓNIMÁGENES
POTENCIADAS
Visualización escena
MODELO CAD
Imagen degradada (Turbidez)Proyección modelo CAD
Imagen potenciada
+
Modificación geométrica del espacio de trabajo
Ordenador remoto
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
Espacio de trabajo
Espacio de control
1 : 1 N : 1
Ordenador remoto
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
Espacio de trabajo
Espacio de control
Modificación geométrica del espacio de trabajo

4
1 : N
Ordenador remoto
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
Espacio de trabajo
Espacio de control
Modificación geométrica del espacio de trabajo
1 : F (x,y,z)
Ordenador remoto
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
Espacio de trabajo
Espacio de control
Modificación geométrica del espacio de trabajo
Realización de una trayectoria mediante teleoperación
Sin modificación del espacio de trabajo
Con ampliación progresiva del espacio de trabajo
Realización de una trayectoria mediante teleoperación
Sin modificación del espacio de trabajo
Con ampliación progresiva del espacio de trabajo
Funciones específicas
Retardos de transmisiónLimitaciones Teleoperación asistidaTeleoperación
Lejana
Cercana
Próxima
Remota Predicción + Realidad virtual
Dificultad de transmisión Planificación automática
Maniobrabilidad limitada Estructuras redundantes
Pérdida de percepción Impedancia controlablePérdida de percepción Retorno sensorial
Realidad aumentada
Visibilidad reducida Realidad aumentada
Arquitecturas flexibles Compensación dinámica osc.
Impedancia variable Realidad aumentada
Ordenador remoto
BRAZO ROBOT (Esclavo)
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro)
CONFIGURATION DE UN SISTEMA DE IMPEDANCIA VARIABLE
RECUBRIMIENTO PIEL SENSORA
EVALUACIÓN DEL CONTACTO SOBRE LA PIEL
PoseTarea
Robot
CALCULO DE TRAYECTORIAS
CONTROL ROBOT
MEDICIÓN DE FUERZAS Y PARES
MODELO CINEMÁTICO
MODELO ENTORNO

5
TELEOPERACIÓN PRÓXIMA
Ordenador Control
BRAZO ROBOT (Maestro y Esclavo)
Ordenador Interfaz
F Γ
Teleoperación asistida:
- Impedancia variable
- Impedancia ∞f = F ( x,y,z )
Modelo entorno
F(x,y,z)
Definición gráfica de restricciones geométricas
RECUBRIMIENTO PIEL SENSORA
MODELO CINEMÁTICO
EVALUACIÓN DEL CONTACTO SOBRE LA PIEL
PoseTareaRobot
CALCULO DE TRAYECTORIAS
CONTROL ROBOT
MEDICIÓN DE FUERZAS Y PARES
CONFIGURATION DE UN SISTEMA DE IMPEDANCIA VARIABLE
MODELO ENTORNO
DETECCIÓN DE
REFERENCIAS
REGISTRO DE IMÁGENES
Calcula el centro de aplicación de la fuerza F en función de las señales de los sensores
CONTROL RECTIVO BASADO EN EL CONTACTO
Calcula el centro de curvatura de la trayectoria provocada por F
RECUBRIMIENTO PIEL SENSORA
EVALUACIÓN DEL CONTACTO SOBRE LA PIEL
PoseTareaRobot
CALCULO DE TRAYECTORIAS
CONTROL ROBOT
MEDICIÓN DE FUERZAS Y PARES
Recubrimiento táctilRecubrimiento táctil
MODELO CINEMÁTICO
MODELO ENTORNO
FP
CONTROL RECTIVO BASADO EN EL CONTACTO
F
P
CONTROL RECTIVO BASADO EN EL CONTACTO

6
CONTROL RECTIVO BASADO EN EL CONTACTO
TELEOPERACIÓN PRÓXIMA
Formas de teleoperación asistida:
- Impedancia variable f = F ( x,y,z )f = F ( F, Γ )
- Proyección de imágenes
BRAZO ROBOT (Maestro y Esclavo)
Ordenador Interfaz
Visualizaciónde
fuerzas y pares
Ordenador control
Retardos de transmisiónLimitaciones Teleoperación asistidaTeleoperación
Lejana
Cercana
Próxima
Remota Predicción + Realidad virtual
Dificultad de transmisión Planificación automática
Maniobrabilidad limitada Estructuras redundantes
Pérdida de percepción Impedancia controlablePérdida de percepción Retorno sensorial
Realidad aumentada
Visibilidad reducida Realidad aumentada
Arquitecturas flexibles Compensación dinámica osc.
Funciones específicas
Imágenes potenciadasModificación del espacio
Ordenador remoto
BRAZO ROBOT (Esclavo)
Interfaz de
MandoOrdenador
local
TransmisorReceptor
F Γ
OPERADOR (Maestro)
Impedancia variable Realidad aumentada
RESUMEN DEL TRABAJO REALIZADO EN TELEMANIPULACIÓN ASISTIDA
Zaragoza, setiembre de 2007