premo Servoattuatori rotativi - wittenstein.de · 4 Prestazioni nettamente superiori La nuova...
40
premo – Servoattuatori rotativi Più flessibili Più efficienti Più produttivi
Transcript of premo Servoattuatori rotativi - wittenstein.de · 4 Prestazioni nettamente superiori La nuova...

premo – Servoattuatori rotativi
Più flessibili
Più efficienti
Più produttivi
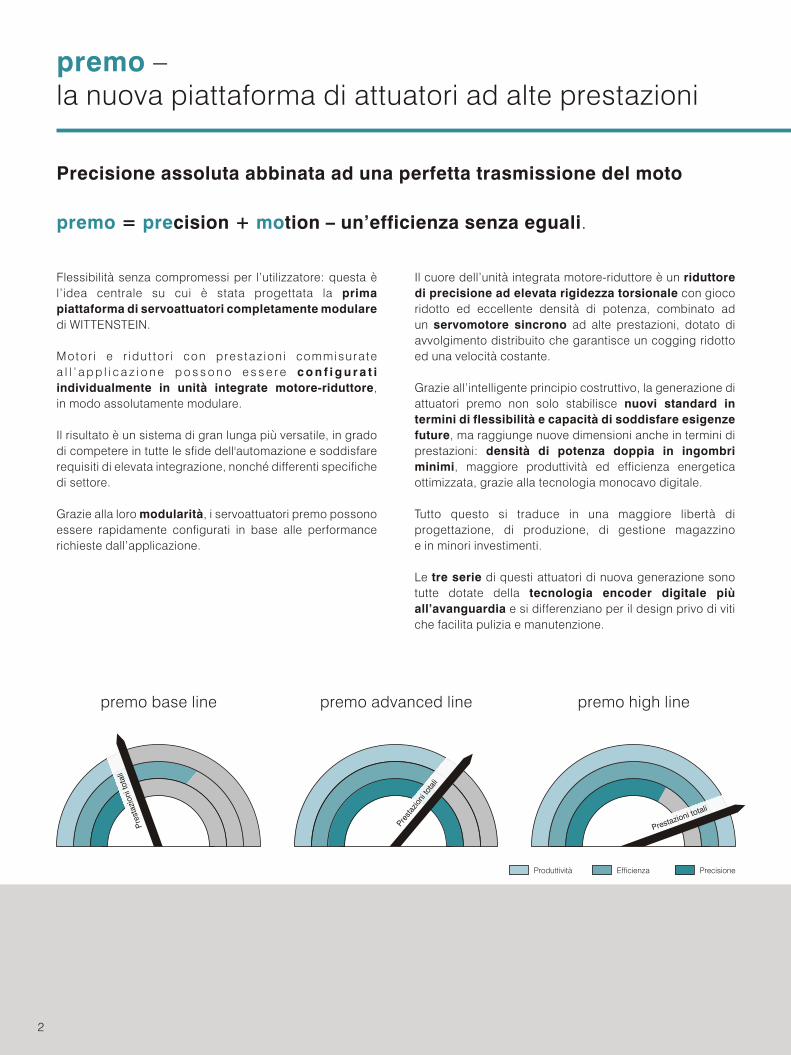
premo base line premo advanced line premo high line
2
premo – la nuova piattaforma di attuatori ad alte prestazioni
Flessibilità senza compromessi per l’utilizzatore: questa è
l’idea centrale su cui è stata progettata la prima
piattaforma di servoattuatori completamente modulare
di WITTENSTEIN.
Motor i e r idut to r i con pres taz ion i commisura te
a l l ’ a p p l i c a z i o n e p o s s o n o e s s e r e c o n f i g u r a t i
individualmente in unità integrate motore-riduttore,
in modo assolutamente modulare.
Il risultato è un sistema di gran lunga più versatile, in grado
di competere in tutte le sfide dell'automazione e soddisfare
requisiti di elevata integrazione, nonché differenti specifiche
di settore.
Grazie alla loro modularità, i servoattuatori premo possono
essere rapidamente configurati in base alle performance
richieste dall’applicazione.
Il cuore dell’unità integrata motore-riduttore è un riduttore
di precisione ad elevata rigidezza torsionale con gioco
ridotto ed eccellente densità di potenza, combinato ad
un servomotore sincrono ad alte prestazioni, dotato di
avvolgimento distribuito che garantisce un cogging ridotto
ed una velocità costante.
Grazie all’intelligente principio costruttivo, la generazione di
attuatori premo non solo stabilisce nuovi standard in
termini di flessibilità e capacità di soddisfare esigenze
future, ma raggiunge nuove dimensioni anche in termini di
prestazioni: densità di potenza doppia in ingombri
minimi, maggiore produttività ed efficienza energetica
ottimizzata, grazie alla tecnologia monocavo digitale.
Tutto questo si traduce in una maggiore libertà di
progettazione, di produzione, di gestione magazzino
e in minori investimenti.
Le tre serie di questi attuatori di nuova generazione sono
tutte dotate della tecnologia encoder digitale più
all’avanguardia e si differenziano per il design privo di viti
che facilita pulizia e manutenzione.
Precisione assoluta abbinata ad una perfetta trasmissione del moto
= cision + tion – un’efficienza senza eguali. premo pre mo
Prestazioni totali
Pres
tazion
i tot
ali
Pre
stazi
oni t
ota
li
Produttività PrecisioneEfficienza

3
Interfacce meccaniche ed elettriche flessibili per un’alta scalabilità
premo base line – serie base
Prestazioni ottimali per tutte le applicazioni
di posizionamento
• Tempi di ciclo ridotti, grazie al gioco torsionale ridotto
e all’elevata rigidezza
• Ottima precisione di posizionamento
• Esecuzione base con albero in uscita liscio e resolver
premo high line –
serie dalle prestazioni estreme
Grande versatilità in tutti i settori
• Massima densità di potenza in abbinamento
ad estrema rigidezza torsionale ed elevate
forze radiali
• Esecuzione base con albero in uscita liscio ®ed encoder assoluto HIPERFACE DSL
singleturn, SIL 2
premo advanced line –
serie ad alta dinamica
Precisione per applicazioni di posizionamento
e di lavorazione
• Elevata rigidezza torsionale e gioco torsionale ridotto
per garantire alte accelerazioni e ottima controllabilità
• Esecuzione base con flangia in uscita ed encoder ® assoluto HIPERFACE singleturn, SIL 2
Possibilità di equipaggiamento di tutte le serie con numerose opzioni:
• sistemi di feedback analogici e digitali,
così come encoder secondo SIL 2
versione a uno o due connettori
•
•
• freno di stazionamento a magneti permanenti
• gioco torsionale ridotto
• diverse varianti di uscita
4
Prestazioni nettamente superiori
La nuova classe di efficienza
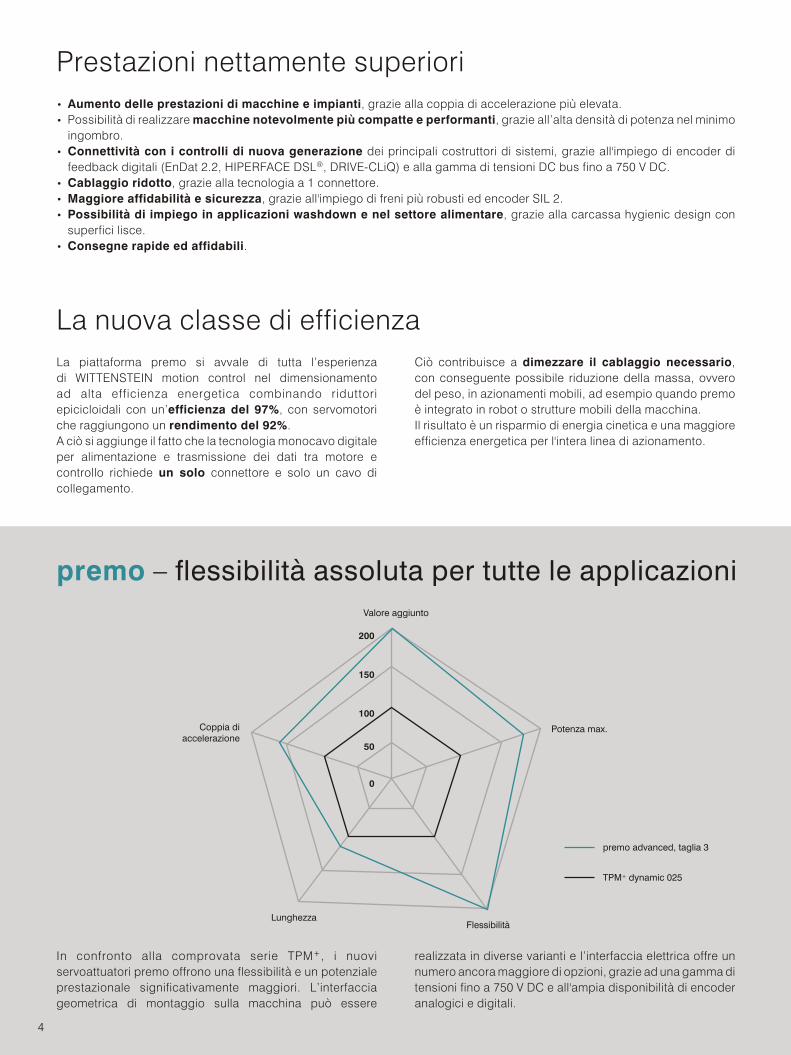
premo – flessibilità assoluta per tutte le applicazioni
• Aumento delle prestazioni di macchine e impianti, grazie alla coppia di accelerazione più elevata.
ossibilità di realizzare macchine notevolmente più compatte e performanti, grazie all’alta densità di potenza nel minimo
ingombro.
Connettività con i controlli di nuova generazione dei principali costruttori di sistemi, grazie all'impiego di encoder di ®feedback digitali (EnDat 2.2, HIPERFACE DSL , DRIVE-CLiQ) e alla gamma di tensioni DC bus fino a 750 V DC.
Cablaggio ridotto, grazie alla tecnologia a 1 connettore.
Maggiore affidabilità e sicurezza, grazie all'impiego di freni più robusti ed encoder SIL 2.
Possibilità di impiego in applicazioni washdown e nel settore alimentare, grazie alla carcassa hygienic design con
superfici lisce.
Consegne rapide ed affidabili.
• P
•
•
•
•
•
La piattaforma premo si avvale di tutta l’esperienza
di WITTENSTEIN motion control nel dimensionamento
ad alta efficienza energetica combinando riduttori
epicicloidali con un’efficienza del 97%, con servomotori
che raggiungono un rendimento del 92%.
A ciò si aggiunge il fatto che la tecnologia monocavo digitale
per alimentazione e trasmissione dei dati tra motore e
controllo richiede un solo connettore e solo un cavo di
collegamento.
+In confronto alla comprovata serie TPM , i nuovi
servoattuatori premo offrono una flessibilità e un potenziale
prestazionale significativamente maggiori. L’interfaccia
geometrica di montaggio sulla macchina può essere
Ciò contribuisce a dimezzare il cablaggio necessario,
con conseguente possibile riduzione della massa, ovvero
del peso, in azionamenti mobili, ad esempio quando premo
è integrato in robot o strutture mobili della macchina.
Il risultato è un risparmio di energia cinetica e una maggiore
efficienza energetica per l'intera linea di azionamento.
realizzata in diverse varianti e l’interfaccia elettrica offre un
numero ancora maggiore di opzioni, grazie ad una gamma di
tensioni fino a 750 V DC e all'ampia disponibilità di encoder
analogici e digitali.
Valore aggiunto
200
150
100
50
0
Potenza max.
Flessibilità
Coppia diaccelerazione
Lunghezza
premo advanced, taglia 3
+TPM dynamic 025

5
Campi di applicazione
premo – altissime prestazioni per settori specifici
• Robot Delta (assi 1-3, asse di brandeggio)
Portali di manipolazione (asse Z, assi di brandeggio/rotazione)
Macchine utensili - fresatrici (assi di rotazione A-C, cambio utensili)
Packaging - confezionatrici per sacchetti tubolari (es. pinze di chiusura e sigillatura, taglierina)
Packaging - cartonatrici (es. asse di assemblaggio/piegatura, valvola di riempimento)
Termoformatura di materie plastiche (asse utensile)
Intralogistica (veicoli a guida automatica)
•
•
•
•
•
•
I servoattuatori della piattaforma premo sono stati
specificatamente progettati per ottimizzare gli spazi.
Gli ingombri ridotti ne semplificano considerevolmente
l’integrazione in situazioni in cui si presentano spazi di
montaggio ristretti, come nel caso di robot, manipolatori
Il sistema modulare per esigenze applicative individuali
Grazie alla modularità della piattaforma premo, è possibile
configurare in un’unica unità integrata le caratteristiche
di motori e riduttori, in funzione dei differenti livelli di
performance richiesti dall’applicazione.
Le diverse linee progettate permettono, inoltre, di adattare
i servoattuatori a specifici campi d’impiego. Applicazioni in
ambito alimentare e nel settore del riempimento e del
packaging possono trarre vantaggio, ad esempio, dalla
versione opzionale Corrosion Resistant, perché in questi
campi sono richiesti servoattuatori particolarmente robusti,
ad es. con carcassa anticorrosione e senza spigoli o con il più
alto grado di protezione IP, per resistere a lavaggi e
disinfezione ad alta pressione con sostanze chimiche.
Per i veicoli a guida automatica (AGV) è disponibile
un pacchetto con unità di azionamento plug&play
caratterizzata da un design estremamente piatto e
dall’integrazione diretta nelle ruote condotte. Si potranno
sviluppare in futuro ulteriori pacchetti di settore, per
soddisfare le esigenze di altre applicazioni specifiche, ad es.
per robot e sistemi di manipolazione, per macchine utensili
o di confezionamento e per molte altre applicazioni.
automatici, macchine utensili, linee di riempimento e
confezionamento sempre più compatti.
L’interfaccia geometrica di montaggio registra un
incremento delle prestazioni, con un conseguente aumento
della produttività in ingombri minimi.
Industriafarmaceutica
Alimentari ebevande
Intralogistica (AGV)
Macchine utensili
Automotive eproduzione industriale
Robotica

6
premo –la vostra esigenza, la nostra soluzione
BB
A
A
A
A
C
C
C
CD
D
Interfaccia riduttore flessibile, idonea per qualsiasi applicazione
Tutte le superfici esterne presentano una finitura liscia, conforme ai più alti requisiti igienici
Cablaggio ridotto, grazie alla tecnologia monocavo con encoder digitale
Freno con coppia frenante maggiorata
Cuscinetti robusti, di lunga durata
Connettori ad innesto rapido per una facile installazione
Coperchio conico privo di viti
La vostra esigenza La nostra soluzione
Design ottimizzato privo di viti per una pulizia accurata e un’alta stabilità del
valore nel tempo.
Aumento delle prestazioni, grazie a una gamma di tensione DC bus fino a 750 V, ®interfacce per EnDat 2.2, HIPERFACE DSL , DRIVE-CLiQ, anche con tecnologia
monocavo per la massima flessibilità di adattamento a controlli di terze parti e la
più alta produttività.
Configurazione modulare intelligente con una varietà di opzioni di uscita per il
riduttore, ingombri ridotti per un'integrazione ottimale anche in spazi ristretti,
design semplificato per un profilo d’interferenza minimo anche in macchine più
piccole, risparmio nella catena cinematica grazie alla migliore efficienza
energetica e collegamento monocavo, massima libertà progettuale grazie alla
ampia scelta di encoder di diverse applicazioni, rapida disponibilità e consegna.
Principio costruttivo intelligente ed efficienza energetica: ad es. riduzione del
numero di componenti con eliminazione del giunto, minore investimento grazie
a sistemi di controllo più piccoli con un minore fabbisogno di corrente, riduzione
del numero di cablaggi e catene portacavo più piccole grazie al collegamento
monocavo, coppia frenante maggiorata per tempi di arresto più brevi e una
maggiore sicurezza negli assi verticali, minore rischio di malfunzionamenti grazie
alla sicurezza funzionale integrata nell’encoder.
Superficie degli attuatori
resistente e facile da pulire
Elevata tensione DC bus
e connettività con i più diffusi
sistemi di controllo
Massima libertà individuale
di progettazione
Massima sicurezza della macchina
e dell'investimento
A
B
C
D
Maggiore produttività / più alto OEE** Overall Equipment Effectiveness (efficienza totale di un impianto)
Affidabilità / Durata
Progettazione della macchina semplificata Sicurezza
7
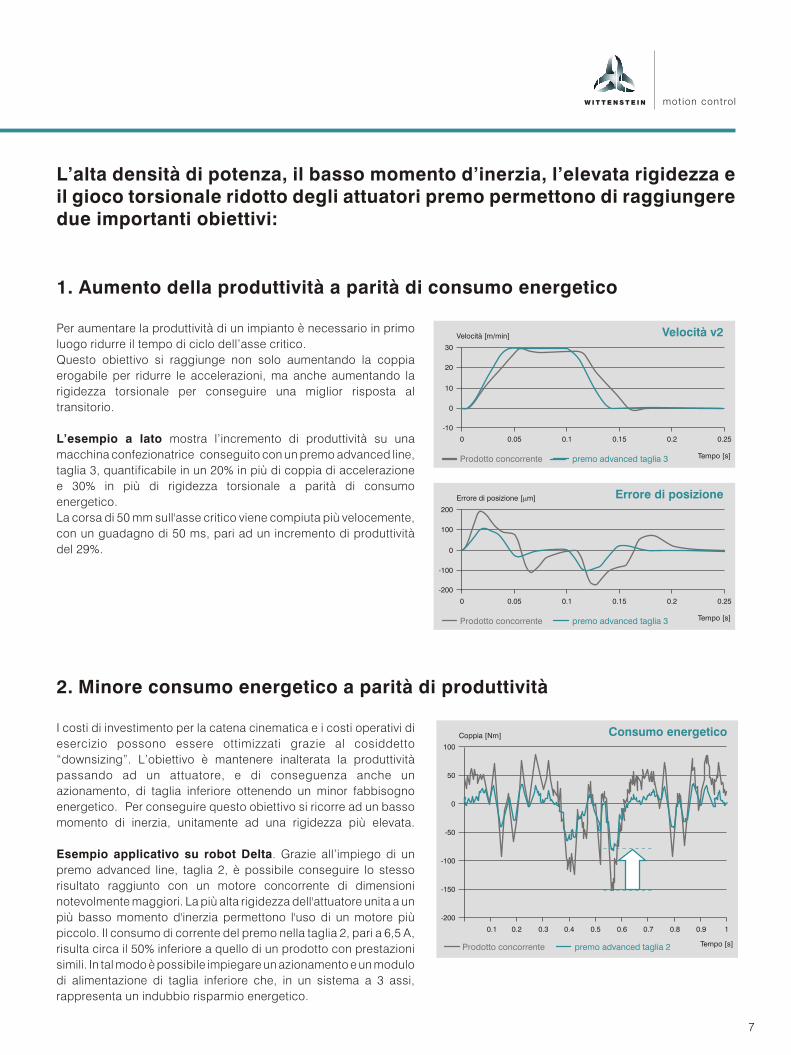
L’alta densità di potenza, il basso momento d’inerzia, l’elevata rigidezza e il gioco torsionale ridotto degli attuatori premo permettono di raggiungeredue importanti obiettivi:
1. Aumento della produttività a parità di consumo energetico
2. Minore consumo energetico a parità di produttività
Per aumentare la produttività di un impianto è necessario in primo
luogo ridurre il tempo di ciclo dell’asse critico.
Questo obiettivo si raggiunge non solo aumentando la coppia
erogabile per ridurre le accelerazioni, ma anche aumentando la
rigidezza torsionale per conseguire una miglior risposta al
transitorio.
L’esempio a lato mostra l’incremento di produttività su una
macchina confezionatrice conseguito con un premo advanced line,
taglia 3, quantificabile in un 20% in più di coppia di accelerazione
e 30% in più di rigidezza torsionale a parità di consumo
energetico.
La corsa di 50 mm sull'asse critico viene compiuta più velocemente,
con un guadagno di 50 ms, pari ad un incremento di produttività
del 29%.
I costi di investimento per la catena cinematica e i costi operativi di
esercizio possono essere ottimizzati grazie al cosiddetto
“downsizing”. L’obiettivo è mantenere inalterata la produttività
passando ad un attuatore, e di conseguenza anche un
azionamento, di taglia inferiore ottenendo un minor fabbisogno
energetico. Per conseguire questo obiettivo si ricorre ad un basso
momento di inerzia, unitamente ad una rigidezza più elevata.
Esempio applicativo su robot Delta. Grazie all’impiego di un
premo advanced line, taglia 2, è possibile conseguire lo stesso
risultato raggiunto con un motore concorrente di dimensioni
notevolmente maggiori. La più alta rigidezza dell'attuatore unita a un
più basso momento d'inerzia permettono l'uso di un motore più
piccolo. Il consumo di corrente del premo nella taglia 2, pari a 6,5 A,
risulta circa il 50% inferiore a quello di un prodotto con prestazioni
simili. In tal modo è possibile impiegare un azionamento e un modulo
di alimentazione di taglia inferiore che, in un sistema a 3 assi,
rappresenta un indubbio risparmio energetico.
Prodotto concorrente premo advanced taglia 2
0.1
0
-50
-100
-150
-200
100
Coppia [Nm]
Tempo [s]
50
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Consumo energetico
Velocità [m/min] Velocità v2
Prodotto concorrente premo advanced taglia 3 Tempo [s]
0.250.20.150.10.050
-10
0
10
20
30
Errore di posizione [mm] Errore di posizione
Prodotto concorrente premo advanced taglia 3 Tempo [s]
0.250.20.150.10.050
-200
-100
0
100
200

8
premo – base line
Pre
stazi
oni t
ota
li
Produttività PrecisioneEfficienza
La serie base
• Indicata soprattutto per applicazioni di
posizionamento
Tempi di ciclo minimizzati
Peso e ingombro ridotti – un vantaggio
importante con assi in movimento
Interfaccia meccanica con albero di uscita
Ideale per la connessione di giunti, pulegge
o pignoni
•
•
•
•
• Oltre all'albero liscio sono disponibili anche
le varianti con chiavetta e ad evolvente
Interfaccia elettrica con resolver
Livello di precisione adeguato per la
maggior parte delle applicazioni
Possibilità di estensione con tutti gli encoder
e le varianti di connettore disponibili
•
•
•

9
Esempio applicativo
I portali di manipolazione sono un aiuto
instancabile quando si devono trasportare
pallet, casse, lamiere o similari da A a B
il più velocemente possibile.
premo base line assolve questo
compito, grazie al suo elevato
rapporto peso/potenza e all’eccellente
dinamica.
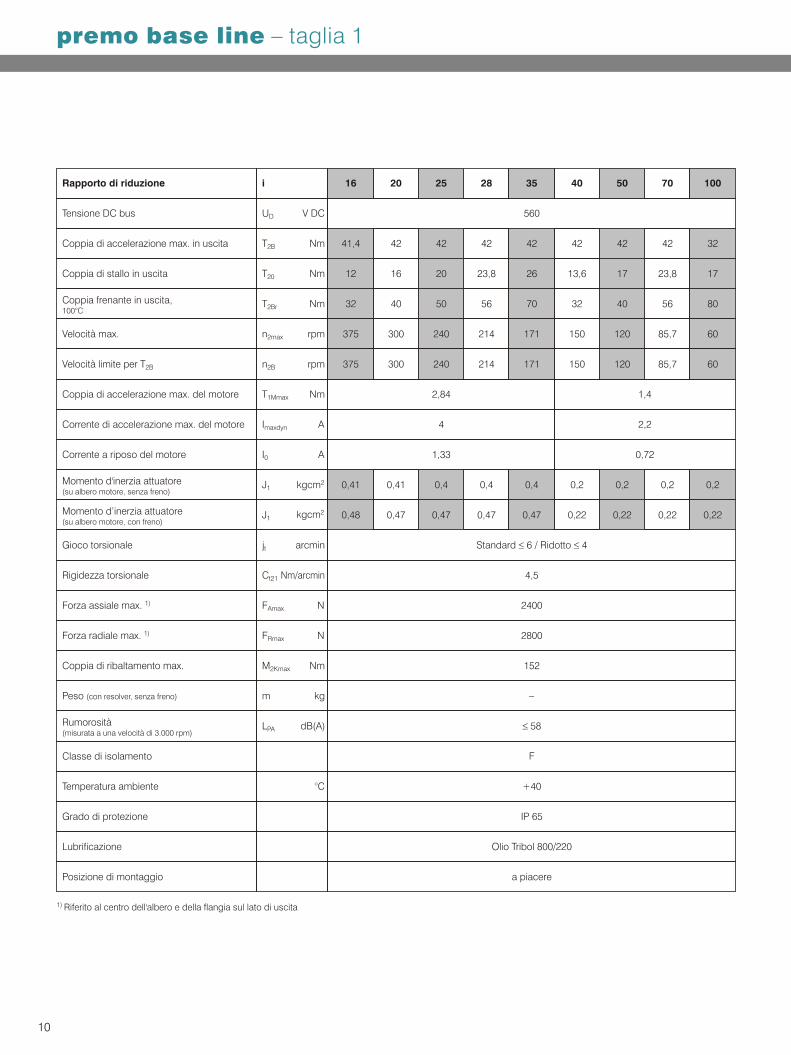
premo base line – taglia 1
10
1) Riferito al centro dell'albero e della flangia sul lato di uscita
Rapporto di riduzione i
Tensione DC bus
Coppia di stallo in uscita
Coppia di accelerazione max. in uscita
Coppia frenante in uscita, 100°C
Velocità max.
Velocità limite per T2B
Coppia di accelerazione max. del motore
Corrente di accelerazione max. del motore
Corrente a riposo del motore
Gioco torsionale
Rigidezza torsionale
Forza assiale max. 1)
Forza radiale max. 1)
Momento d'inerzia attuatore (su albero motore, senza freno)
Momento d’inerzia attuatore (su albero motore, con freno)
Rumorosità(misurata a una velocità di 3.000 rpm)
Classe di isolamento
Temperatura ambiente
Coppia di ribaltamento max.
Peso (con resolver, senza freno)
Grado di protezione
Posizione di montaggio
Lubrificazione
UD
T2B
T20
T2Br
Ct21
J1
J1
Imaxdyn
I0
jt
FAmax
FRmax
M2Kmax
T1Mmax
n2max
n2B
m
LPA
V DC
Nm
Nm
Nm
Nm
rpm
rpm
N
A
2kgcm
2kgcm
A
N
Nm/arcmin
arcmin
Nm
kg
dB(A)
°C
16 25 35 50 100
41,4
12
32
375
0,41
375
0,48
20 28 40 70
42 42 42 42
560
42 42 42 32
16
40
300
0,41
300
0,47
20
50
240
0,4
240
0,47
2,84
4
1,33
23,8
56
214
0,4
214
0,47
26
70
171
0,4
171
0,47
13,6
32
150
0,2
150
0,22
17
40
120
0,2
120
0,22
1,4
2,2
0,72
23,8
56
85,7
0,2
85,7
0,22
17
80
60
0,2
60
0,22
Standard £ 6 / Ridotto £ 4
4,5
2400
2800
152
–
£ 58
F
+40
IP 65
Olio Tribol 800/220
a piacere
11
Rapporto di riduzione
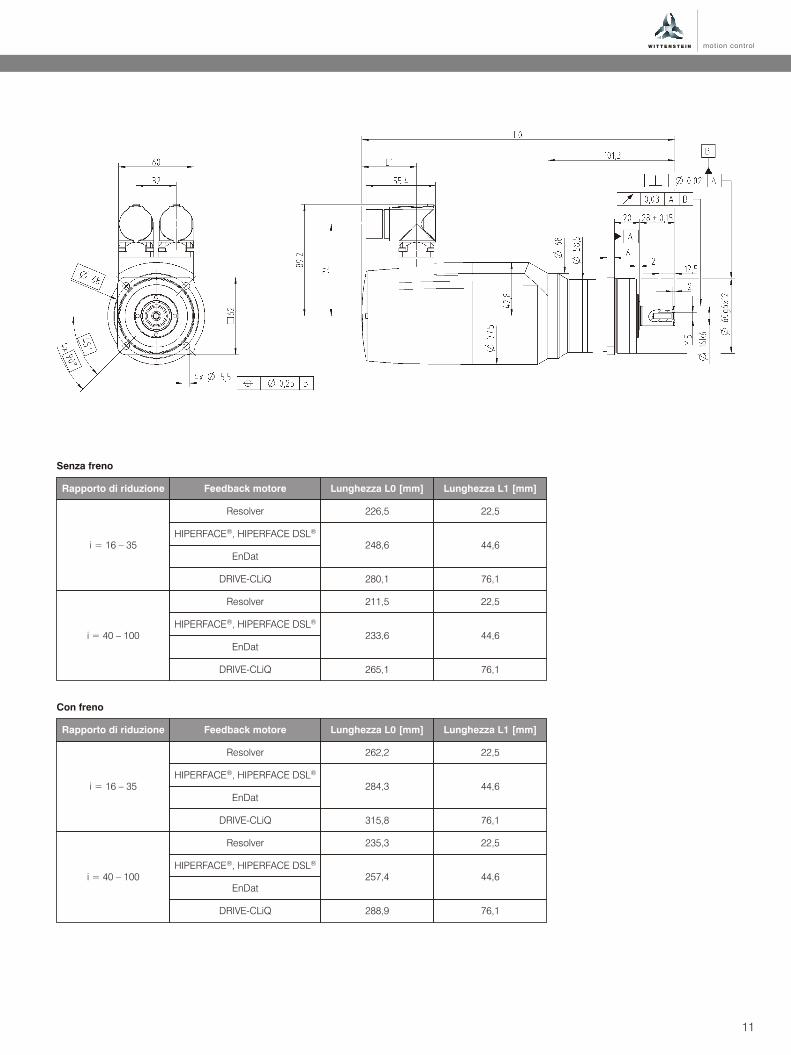
Senza freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
226,5
211,5
248,6
233,6
280,1
265,1
22,5
22,5
44,6
44,6
76,1
76,1
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
Rapporto di riduzione
Con freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
262,2
235,3
284,3
257,4
315,8
288,9
22,5
22,5
44,6
44,6
76,1
76,1
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
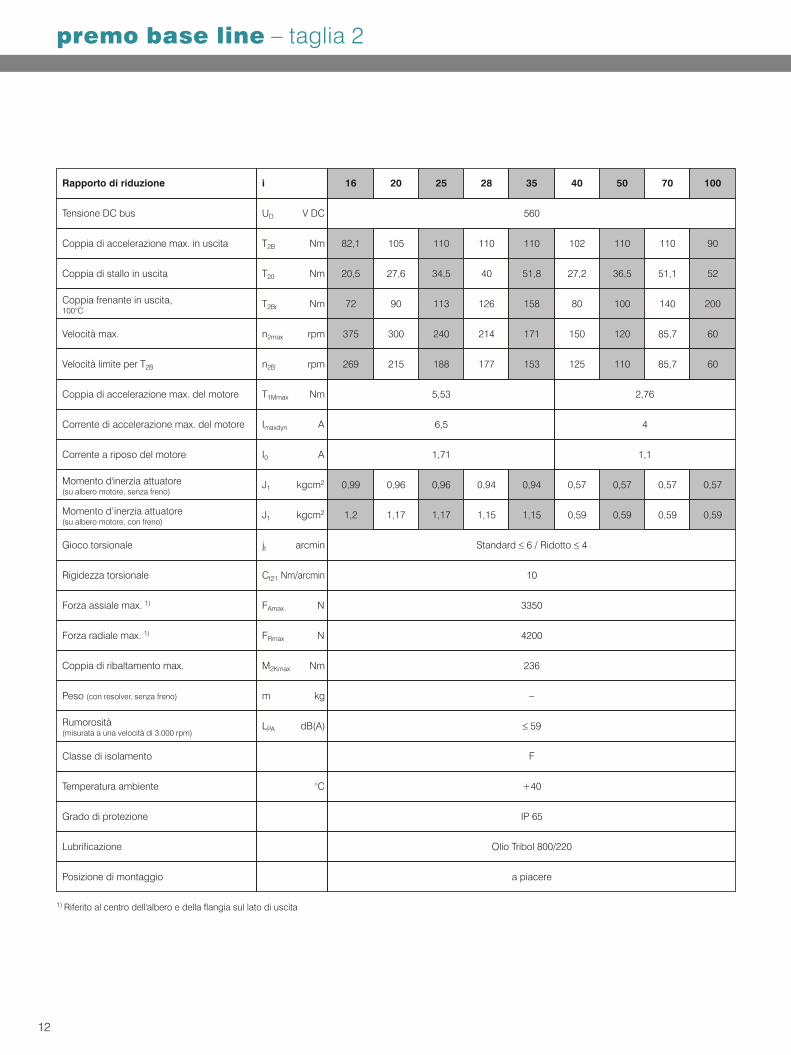
premo base line – taglia 2
12
1) Riferito al centro dell'albero e della flangia sul lato di uscita
Rapporto di riduzione i
Tensione DC bus
Coppia di stallo in uscita
Coppia di accelerazione max. in uscita
Coppia frenante in uscita, 100°C
Velocità max.
Velocità limite per T2B
Coppia di accelerazione max. del motore
Corrente di accelerazione max. del motore
Corrente a riposo del motore
Gioco torsionale
Rigidezza torsionale
Forza assiale max. 1)
Forza radiale max. 1)
Momento d'inerzia attuatore (su albero motore, senza freno)
Momento d’inerzia attuatore (su albero motore, con freno)
Rumorosità(misurata a una velocità di 3.000 rpm)
Classe di isolamento
Temperatura ambiente
Coppia di ribaltamento max.
Peso (con resolver, senza freno)
Grado di protezione
Posizione di montaggio
Lubrificazione
UD
T2B
T20
T2Br
Ct21
J1
J1
Imaxdyn
I0
jt
FAmax
FRmax
M2Kmax
T1Mmax
n2max
n2B
m
LPA
V DC
Nm
Nm
Nm
Nm
rpm
rpm
N
A
2kgcm
2kgcm
A
N
Nm/arcmin
arcmin
Nm
kg
dB(A)
°C
16 25 35 50 100
82,1
20,5
72
375
0,99
269
1,2
20 28 40 70
105 110 110 110
560
102 110 110 90
27,6
90
300
0,96
215
1,17
34,5
113
240
0,96
188
1,17
5,53
6,5
1,71
40
126
214
0,94
177
1,15
51,8
158
171
0,94
153
1,15
27,2
80
150
0,57
125
0,59
36,5
100
120
0,57
110
0,59
2,76
4
1,1
51,1
140
85,7
0,57
85,7
0,59
52
200
60
0,57
60
0,59
Standard £ 6 / Ridotto £ 4
10
3350
4200
236
–
£ 59
F
+40
IP 65
Olio Tribol 800/220
a piacere
13
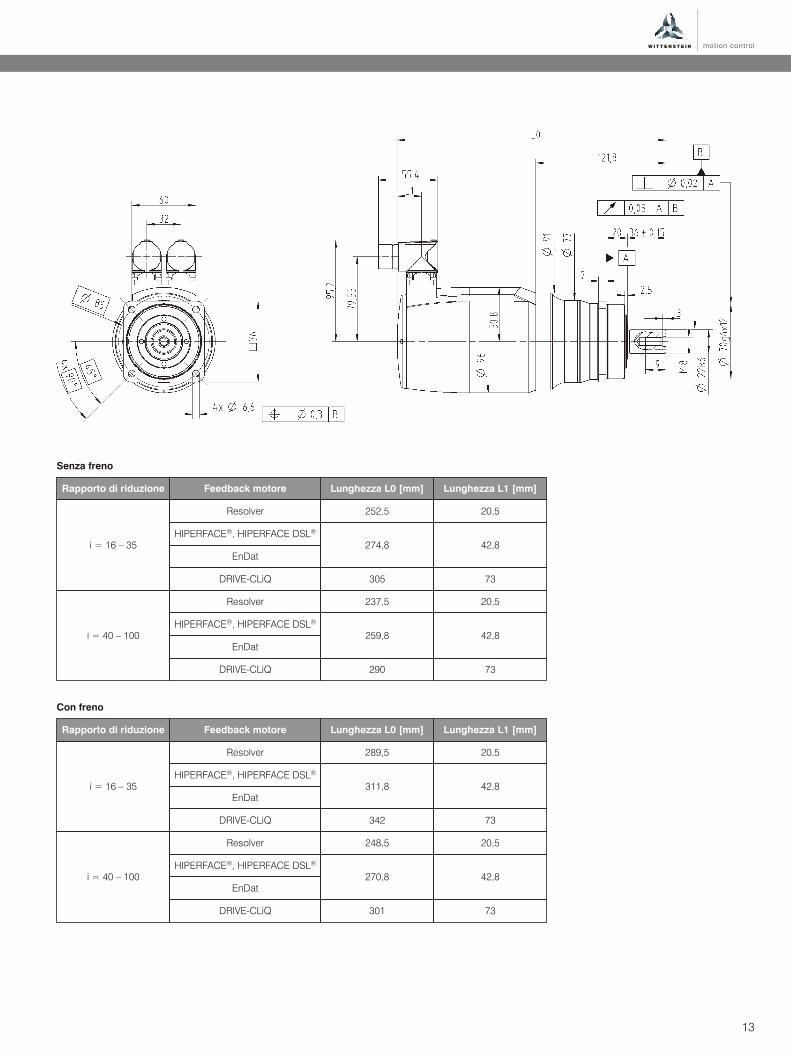
Rapporto di riduzione
Senza freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
252,5
237,5
274,8
259,8
305
290
20,5
20,5
42,8
42,8
73
73
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
Rapporto di riduzione
Con freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
289,5
248,5
311,8
270,8
342
301
20,5
20,5
42,8
42,8
73
73
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
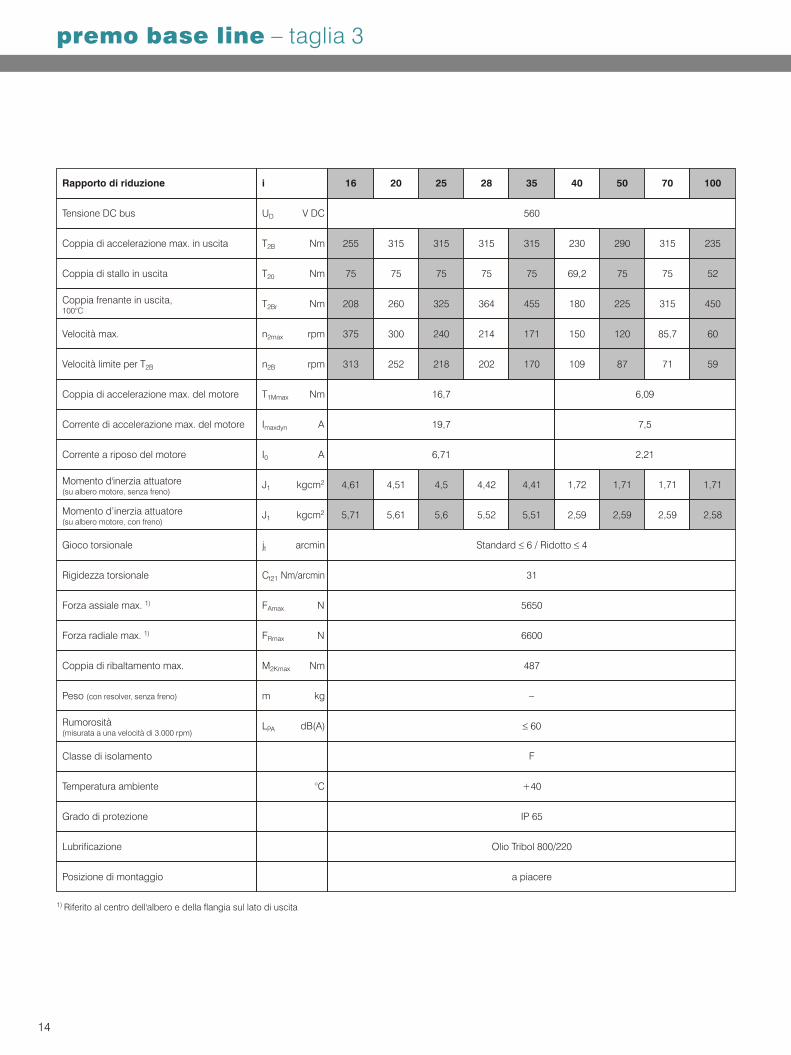
premo base line – taglia 3
14
1) Riferito al centro dell'albero e della flangia sul lato di uscita
Rapporto di riduzione i
Tensione DC bus
Coppia di stallo in uscita
Coppia di accelerazione max. in uscita
Coppia frenante in uscita, 100°C
Velocità max.
Velocità limite per T2B
Coppia di accelerazione max. del motore
Corrente di accelerazione max. del motore
Corrente a riposo del motore
Gioco torsionale
Rigidezza torsionale
Forza assiale max. 1)
Forza radiale max. 1)
Momento d'inerzia attuatore (su albero motore, senza freno)
Momento d’inerzia attuatore (su albero motore, con freno)
Rumorosità(misurata a una velocità di 3.000 rpm)
Classe di isolamento
Temperatura ambiente
Coppia di ribaltamento max.
Peso (con resolver, senza freno)
Grado di protezione
Posizione di montaggio
Lubrificazione
UD
T2B
T20
T2Br
Ct21
J1
J1
Imaxdyn
I0
jt
FAmax
FRmax
M2Kmax
T1Mmax
n2max
n2B
m
LPA
V DC
Nm
Nm
Nm
Nm
rpm
rpm
N
A
2kgcm
2kgcm
A
N
Nm/arcmin
arcmin
Nm
kg
dB(A)
°C
16 25 35 50 100
255
75
208
375
4,61
313
5,71
20 28 40 70
315 315 315 315
560
230 290 315 235
75
260
300
4,51
252
5,61
75
325
240
4,5
218
5,6
16,7
19,7
6,71
75
364
214
4,42
202
5,52
75
455
171
4,41
170
5,51
69,2
180
150
1,72
109
2,59
75
225
120
1,71
87
2,59
6,09
7,5
2,21
75
315
85,7
1,71
71
2,59
52
450
60
1,71
59
2,58
Standard £ 6 / Ridotto £ 4
31
5650
6600
487
–
£ 60
F
+40
IP 65
Olio Tribol 800/220
a piacere
15
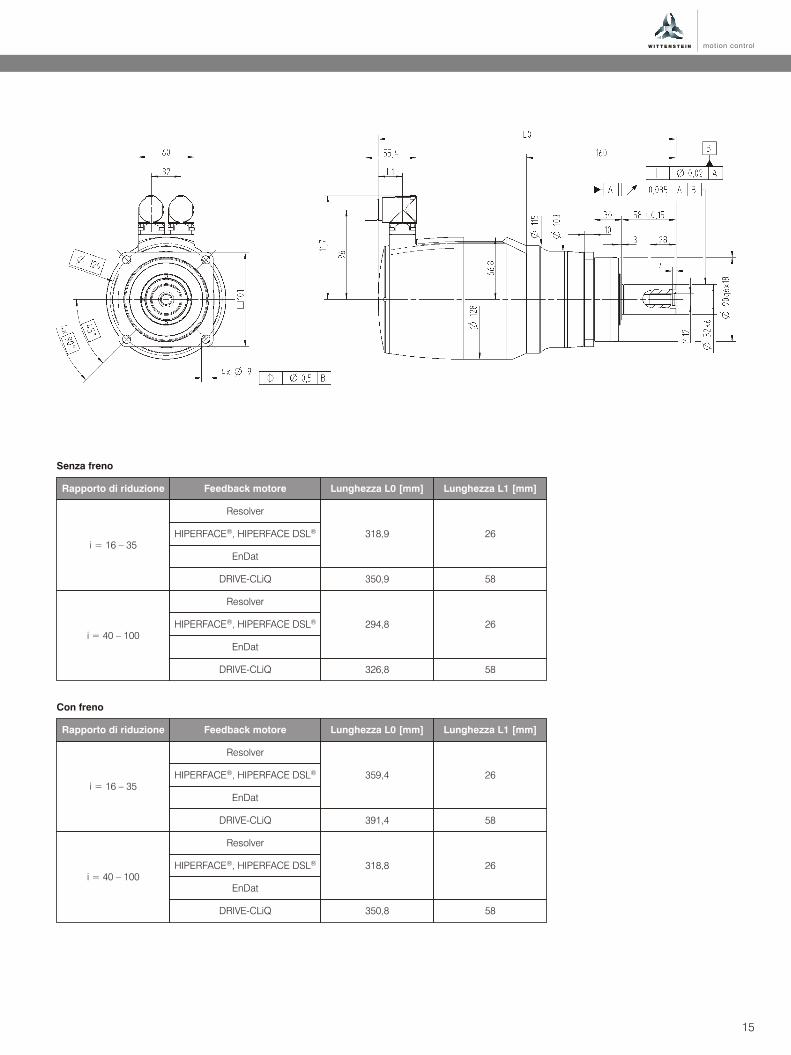
Rapporto di riduzione
Senza freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
318,9
294,8
350,9
326,8
26
26
58
58
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
Rapporto di riduzione
Con freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
359,4
318,8
391,4
350,8
26
26
58
58
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]

16
premo – advanced line
Produttività PrecisioneEfficienza
La serie ad alta dinamica
• Soluzione ottimale per applicazioni di
posizionamento e lavorazione avanzate
Gioco torsionale ridotto e massima rigidezza
torsionale per tempi di ciclo minimi e
un’elevata qualità delle lavorazioni
Interfaccia meccanica con flangia di uscita
•
•
• Ideale per la connessione di braccio di leva
o pignone
Interfaccia elettrica con encoder assoluto ®HIPERFACE singleturn per un’alta precisione
di posizionamento
Possibilità di comunicazione con tutti gli
encoder e le varianti di connettore disponibili
•
•
Pres
tazion
i tot
ali

17
Esempio applicativo
Le macchine flow pack confezionano
ininterrottamente in buste o sacchetti
materiale sfuso di qualsiasi tipo, compresi
generi al imentari , qual i patat ine o
caramelle gommose.
In queste applicazioni si deve raggiungere
la più alta velocità di produzione possibile.
Un aspetto particolarmente importante è
che tutti i sacchetti siano puliti e ben
sigillati.
premo advanced line permette di
vincere questa sfida, grazie agli
eccezionali livelli di precisione e
densità di potenza.
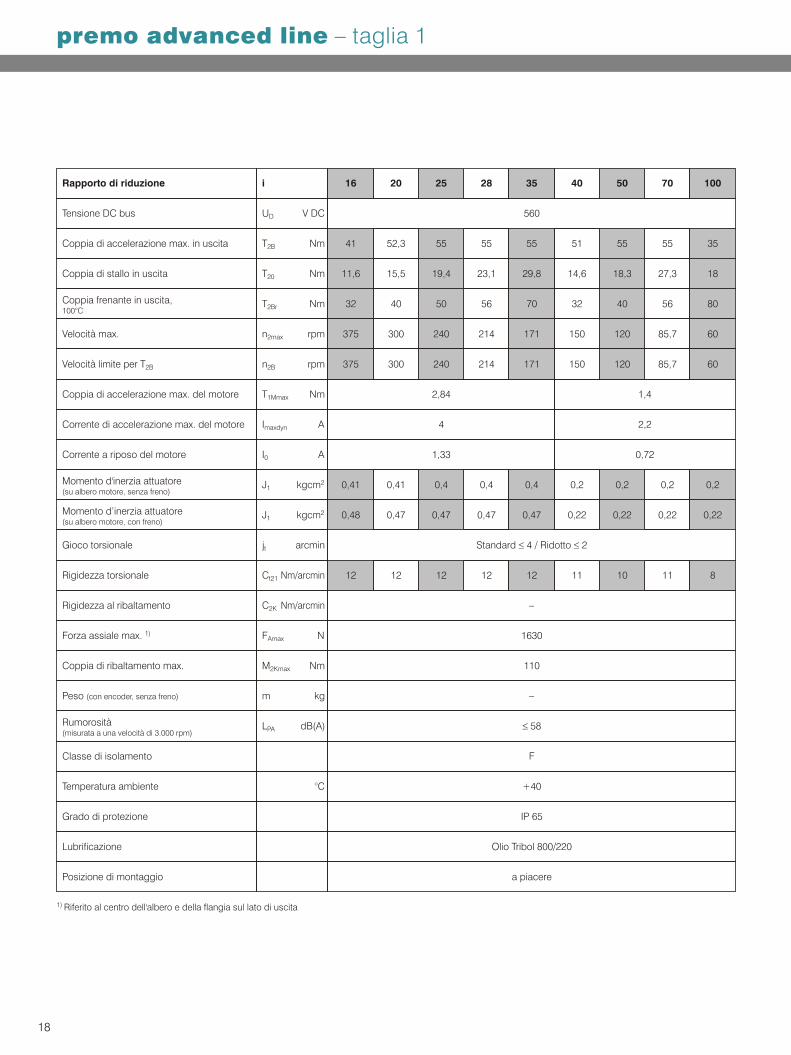
premo advanced line – taglia 1
18
1) Riferito al centro dell'albero e della flangia sul lato di uscita
Rapporto di riduzione i
Tensione DC bus
Coppia di stallo in uscita
Coppia di accelerazione max. in uscita
Coppia frenante in uscita, 100°C
Velocità max.
Velocità limite per T2B
Coppia di accelerazione max. del motore
Corrente di accelerazione max. del motore
Corrente a riposo del motore
Gioco torsionale
Rigidezza torsionale
Forza assiale max. 1)
Momento d'inerzia attuatore (su albero motore, senza freno)
Momento d’inerzia attuatore (su albero motore, con freno)
Rumorosità(misurata a una velocità di 3.000 rpm)
Classe di isolamento
Temperatura ambiente
Coppia di ribaltamento max.
Peso (con encoder, senza freno)
Rigidezza al ribaltamento
Grado di protezione
Posizione di montaggio
Lubrificazione
UD
T2B
T20
T2Br
Ct21
C2K
J1
J1
Imaxdyn
I0
jt
FAmax
M2Kmax
T1Mmax
n2max
n2B
m
LPA
V DC
Nm
Nm
Nm
Nm
rpm
rpm
N
A
2kgcm
2kgcm
A
Nm/arcmin
Nm/arcmin
arcmin
Nm
kg
dB(A)
°C
16 25 35 50 100
41
11,6
32
375
0,41
375
0,48
12
20 28 40 70
52,3 55 55 55
560
51 55 55 35
15,5
40
300
0,41
300
0,47
12
19,4
50
240
0,4
240
0,47
12
2,84
4
1,33
23,1
56
214
0,4
214
0,47
12
29,8
70
171
0,4
171
0,47
12
14,6
32
150
0,2
150
0,22
11
18,3
40
120
0,2
120
0,22
10
1,4
2,2
0,72
27,3
56
85,7
0,2
85,7
0,22
11
18
80
60
0,2
60
0,22
8
Standard £ 4 / Ridotto £ 2
1630
110
–
–
£ 58
F
+40
IP 65
Olio Tribol 800/220
a piacere
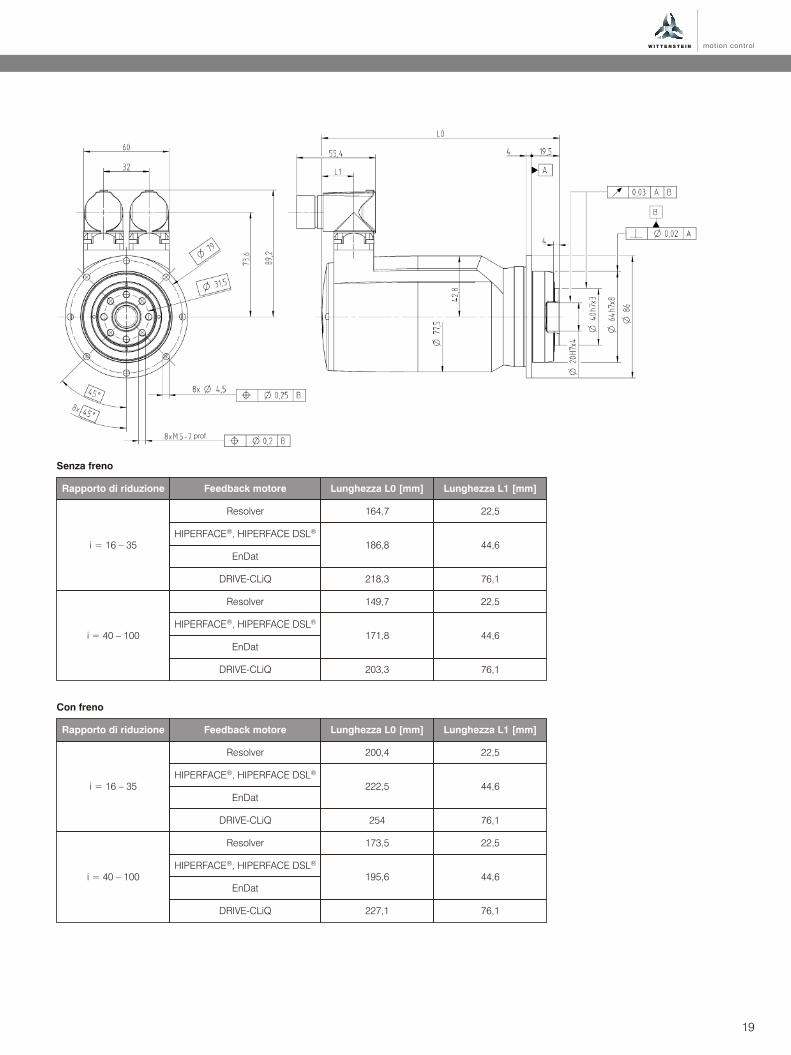
19
prof.
Rapporto di riduzione
Senza freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
164,7
149,7
186,8
171,8
218,3
203,3
22,5
22,5
44,6
44,6
76,1
76,1
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
Rapporto di riduzione
Con freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
200,4
173,5
222,5
195,6
254
227,1
22,5
22,5
44,6
44,6
76,1
76,1
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
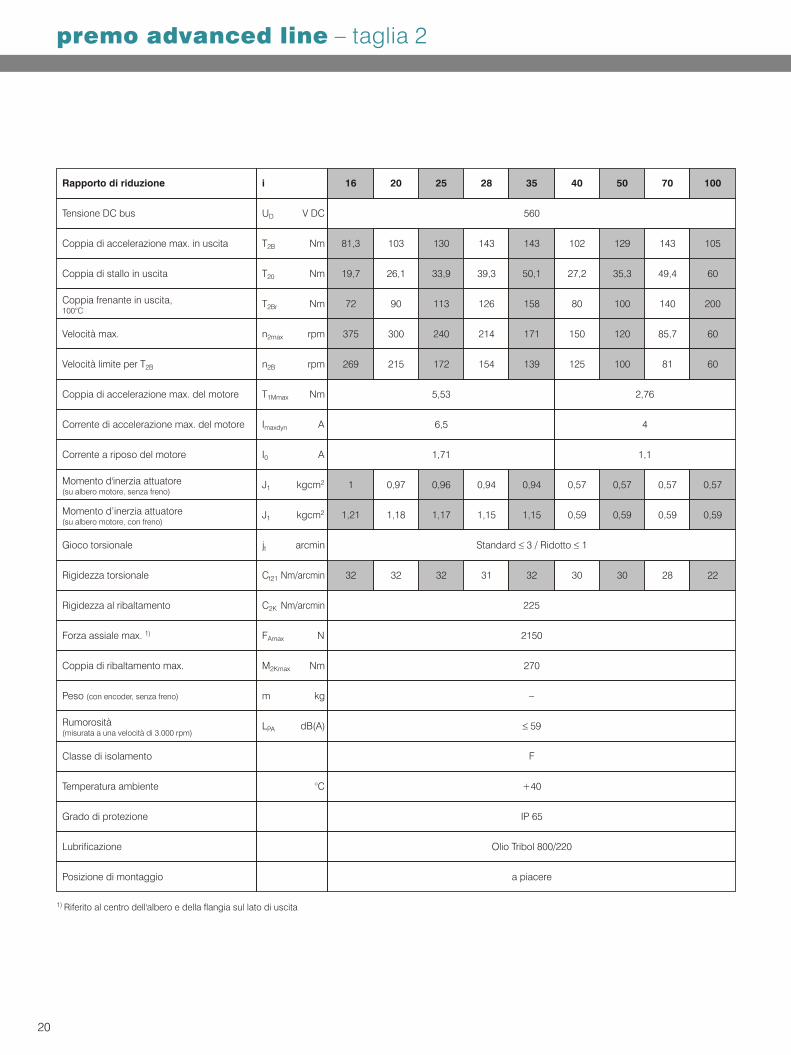
premo advanced line – taglia 2
20
1) Riferito al centro dell'albero e della flangia sul lato di uscita
Rapporto di riduzione i
Tensione DC bus
Coppia di stallo in uscita
Coppia di accelerazione max. in uscita
Coppia frenante in uscita, 100°C
Velocità max.
Velocità limite per T2B
Coppia di accelerazione max. del motore
Corrente di accelerazione max. del motore
Corrente a riposo del motore
Momento d'inerzia attuatore (su albero motore, senza freno)
Momento d’inerzia attuatore (su albero motore, con freno)
UD
T2B
T20
T2Br
J1
J1
Imaxdyn
I0
T1Mmax
n2max
n2B
V DC
Nm
Nm
Nm
Nm
rpm
rpm
A
2kgcm
2kgcm
A
16 25 35 50 100
81,3
19,7
72
375
1
269
1,21
20 28 40 70
103 130 143 143
560
102 129 143 105
26,1
90
300
0,97
215
1,18
33,9
113
240
0,96
172
1,17
5,53
6,5
1,71
39,3
126
214
0,94
154
1,15
50,1
158
171
0,94
139
1,15
27,2
80
150
0,57
125
0,59
35,3
100
120
0,57
100
0,59
2,76
4
1,1
49,4
140
85,7
0,57
81
0,59
60
200
60
0,57
60
0,59
Gioco torsionale
Rigidezza torsionale
Forza assiale max. 1)
Rumorosità(misurata a una velocità di 3.000 rpm)
Classe di isolamento
Temperatura ambiente
Coppia di ribaltamento max.
Peso (con encoder, senza freno)
Rigidezza al ribaltamento
Grado di protezione
Posizione di montaggio
Lubrificazione
Ct21
C2K
jt
FAmax
M2Kmax
m
LPA
N
Nm/arcmin
Nm/arcmin
arcmin
Nm
kg
dB(A)
°C
32 32 32 31 32 30 30 28 22
Standard £ 3 / Ridotto £ 1
2150
270
–
225
£ 59
F
+40
IP 65
Olio Tribol 800/220
a piacere
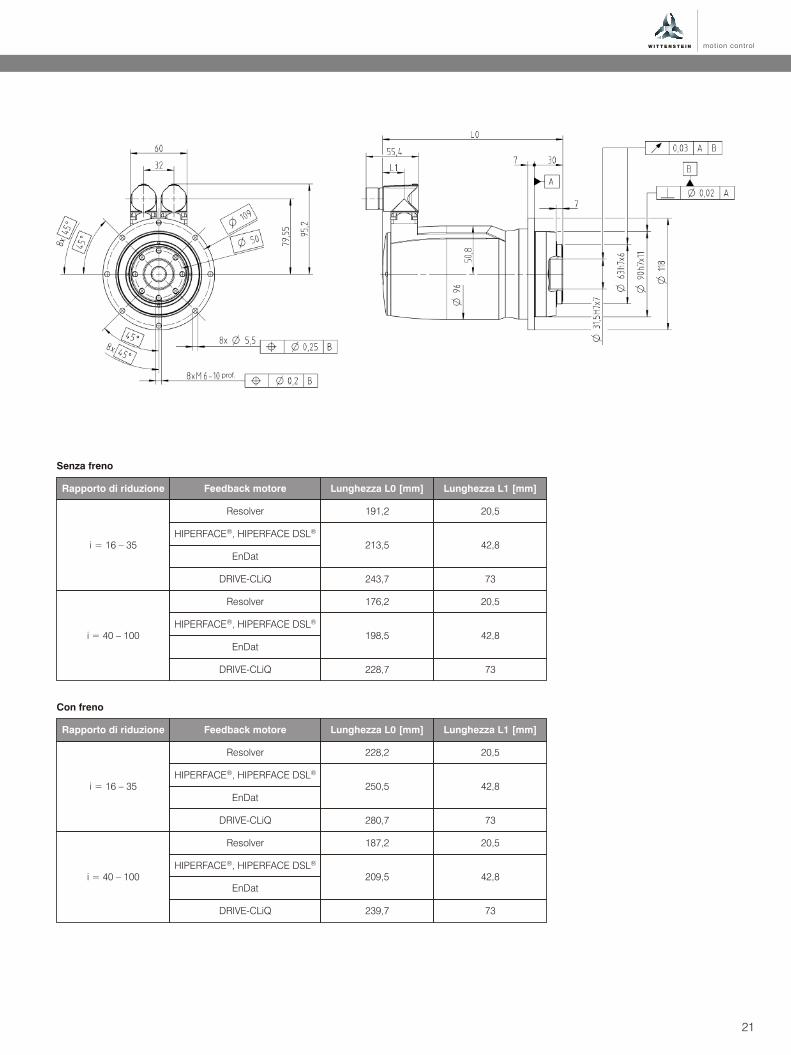
21
prof.
Rapporto di riduzione
Senza freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
191,2
176,2
213,5
198,5
243,7
228,7
20,5
20,5
42,8
42,8
73
73
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
Rapporto di riduzione
Con freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
228,2
187,2
250,5
209,5
280,7
239,7
20,5
20,5
42,8
42,8
73
73
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
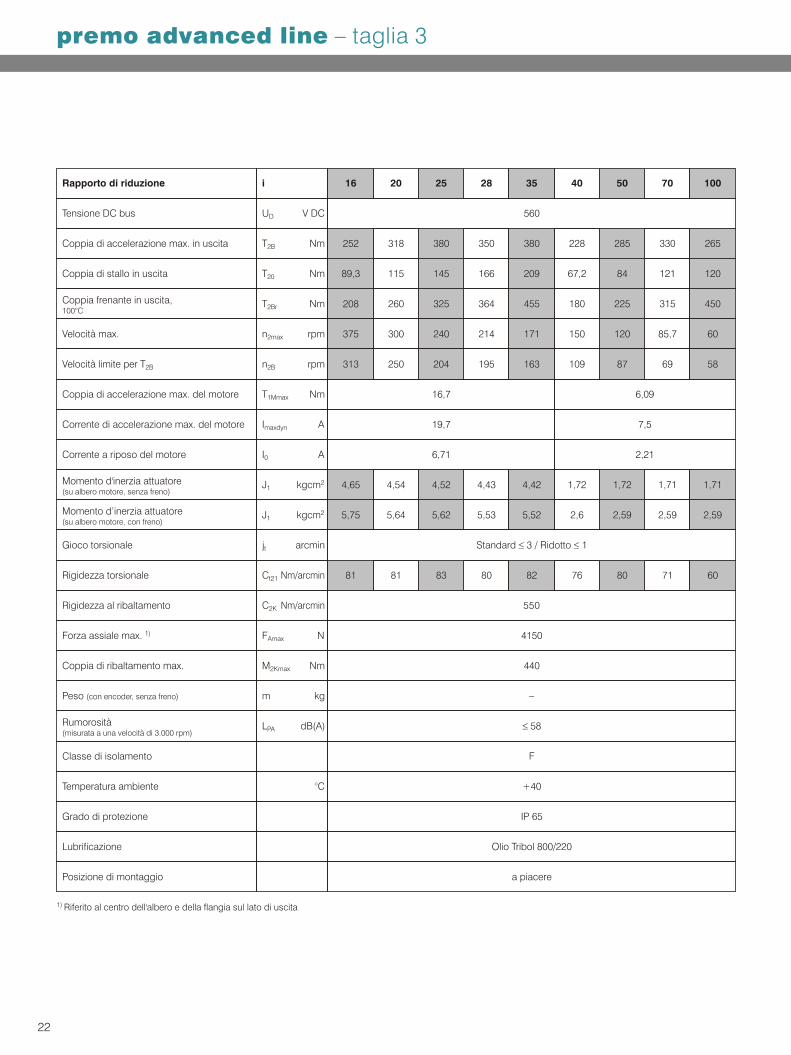
premo advanced line – taglia 3
22
1) Riferito al centro dell'albero e della flangia sul lato di uscita
Rapporto di riduzione i
Tensione DC bus
Coppia di stallo in uscita
Coppia di accelerazione max. in uscita
Coppia frenante in uscita, 100°C
Velocità max.
Velocità limite per T2B
Coppia di accelerazione max. del motore
Corrente di accelerazione max. del motore
Corrente a riposo del motore
Momento d'inerzia attuatore (su albero motore, senza freno)
Momento d’inerzia attuatore (su albero motore, con freno)
UD
T2B
T20
T2Br
J1
J1
Imaxdyn
I0
T1Mmax
n2max
n2B
V DC
Nm
Nm
Nm
Nm
rpm
rpm
A
2kgcm
2kgcm
A
16 25 35 50 100
252
89,3
208
375
4,65
313
5,75
20 28 40 70
318 380 350 380
560
228 285 330 265
115
260
300
4,54
250
5,64
145
325
240
4,52
204
5,62
16,7
19,7
6,71
166
364
214
4,43
195
5,53
209
455
171
4,42
163
5,52
67,2
180
150
1,72
109
2,6
84
225
120
1,72
87
2,59
6,09
7,5
2,21
121
315
85,7
1,71
69
2,59
120
450
60
1,71
58
2,59
Gioco torsionale
Rigidezza torsionale
Forza assiale max. 1)
Rumorosità(misurata a una velocità di 3.000 rpm)
Classe di isolamento
Temperatura ambiente
Coppia di ribaltamento max.
Peso (con encoder, senza freno)
Rigidezza al ribaltamento
Grado di protezione
Posizione di montaggio
Lubrificazione
Ct21
C2K
jt
FAmax
M2Kmax
m
LPA
N
Nm/arcmin
Nm/arcmin
arcmin
Nm
kg
dB(A)
°C
81 81 83 80 82 76 80 71 60
Standard £ 3 / Ridotto £ 1
4150
440
–
550
£ 58
F
+40
IP 65
Olio Tribol 800/220
a piacere
23
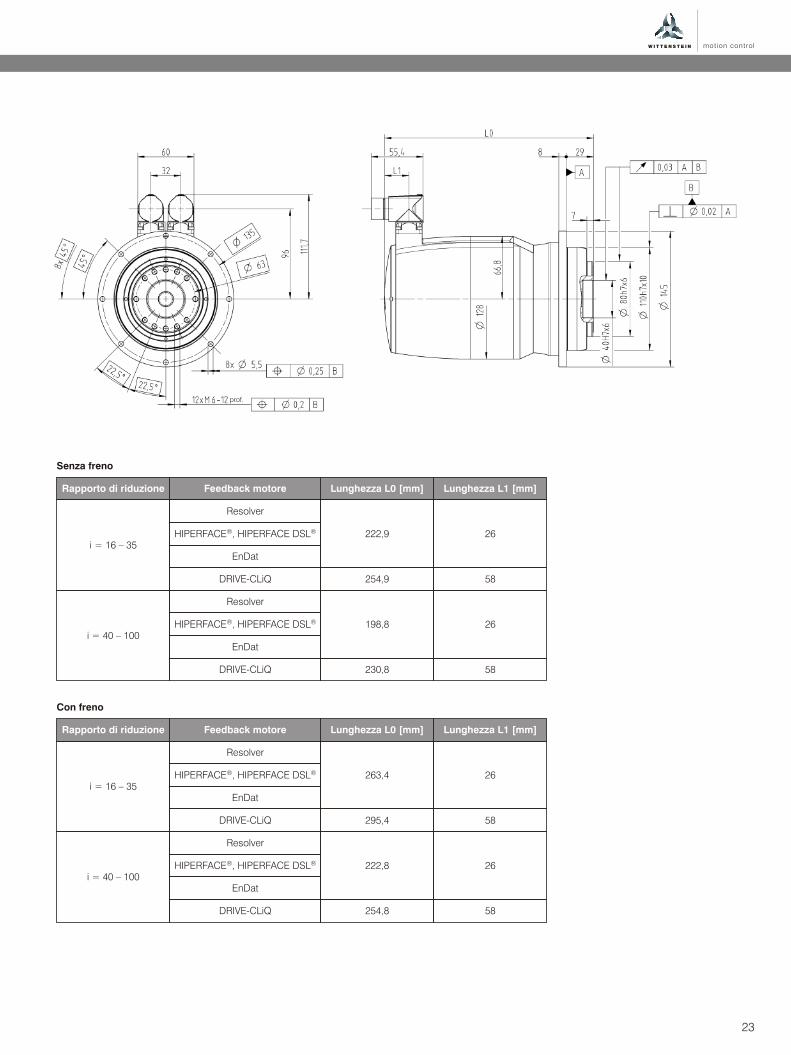
prof.
Rapporto di riduzione
Senza freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
222,9
198,8
254,9
230,8
26
26
58
58
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]
Rapporto di riduzione
Con freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
263,4
222,8
295,4
254,8
26
26
58
58
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm] Lunghezza L1 [mm]

24
premo – high line
Produttività PrecisioneEfficienza
La serie dalle prestazioni estreme
• Densità di potenza e capacità di carico
particolarmente elevate
Gioco torsionale estremamente ridotto,
elevata rigidezza torsionale e massima
capacità di carico dei cuscinetti in uscita
permettono di offrire attuatori molto compatti
per aumentare le prestazioni della vostra
macchina
Interfaccia meccanica con albero in uscita,
ideale per la connessione di giunti o pignoni
•
•
• Oltre all’albero liscio è disponibile anche una
variante ad evolvente
• Interfaccia elettrica con encoder assoluto ®HIPERFACE DSL singleturn, con sicurezza
funzionale e collegamento monocavo
• Conformità a requisiti di sicurezza elevati unita
alla più avanzata tecnologia di connessione
• Possibilità di comunicazione con tutti gli
encoder e le varianti di connettore disponibili
Prestazioni totali

25
Esempio applicativo
Nei centri di lavoro CNC, la testa di
fresatura è sottoposta a forze di disturbo
particolarmente elevate durante i processi
di lavorazione dei materiali.
Per queste applicazioni sono richiesti
attuatori con il minimo ingombro e con
la massima densità di potenza e
capacità di carico.
La serie premo high line è la soluzione
ottimale.
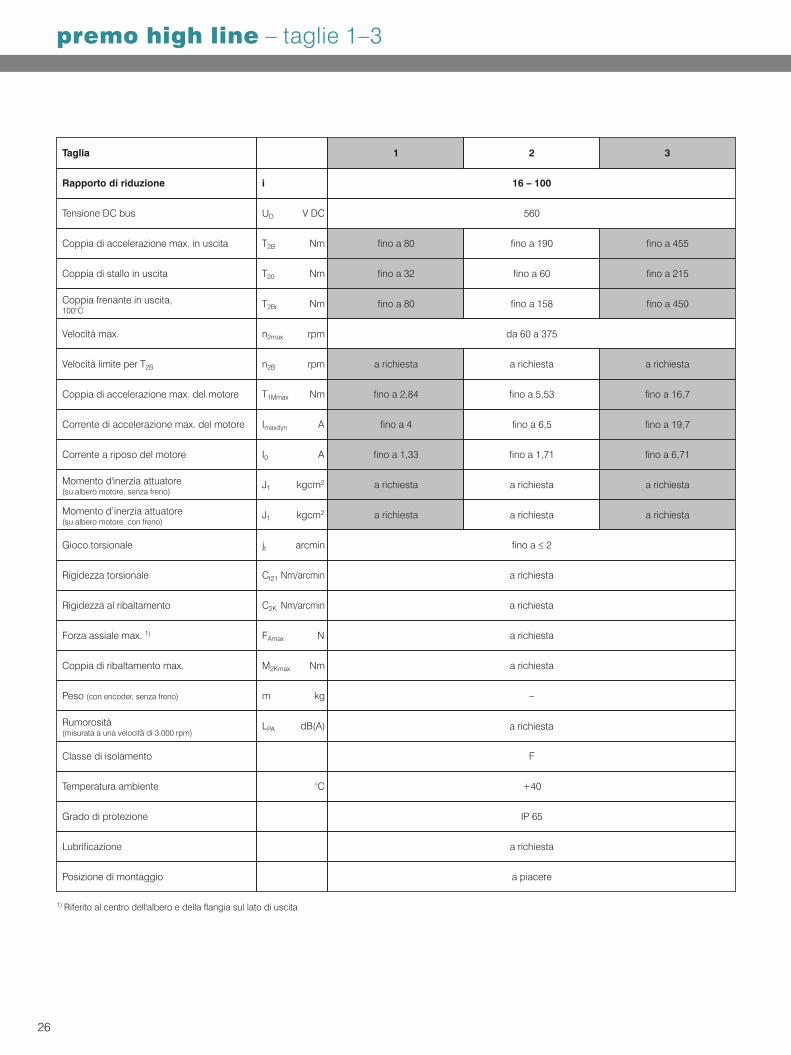
premo high line – taglie 1–3
26
1) Riferito al centro dell'albero e della flangia sul lato di uscita
Taglia
Rapporto di riduzione i
Tensione DC bus
Coppia di stallo in uscita
Coppia di accelerazione max. in uscita
Coppia frenante in uscita, 100°C
Velocità max.
Velocità limite per T2B
Coppia di accelerazione max. del motore
Corrente di accelerazione max. del motore
Corrente a riposo del motore
Momento d'inerzia attuatore (su albero motore, senza freno)
Momento d’inerzia attuatore (su albero motore, con freno)
UD
T20
T2B
T2Br
J1
J1
Imaxdyn
I0
T1Mmax
n2max
n2B
V DC
Nm
Nm
Nm
Nm
rpm
rpm
A
2kgcm
2kgcm
A
1 2
16 – 100
3
fino a 32
fino a 80
fino a 60
fino a 190
fino a 215
fino a 455
fino a 2,84 fino a 5,53 fino a 16,7
a richiesta a richiesta a richiesta
fino a 80 fino a 158 fino a 450
fino a 4 fino a 6,5 fino a 19,7
a richiesta a richiesta a richiesta
a richiesta a richiesta a richiesta
fino a 1,33 fino a 1,71 fino a 6,71
560
Gioco torsionale
Rigidezza torsionale
Forza assiale max. 1)
Rumorosità(misurata a una velocità di 3.000 rpm)
Classe di isolamento
Temperatura ambiente
Coppia di ribaltamento max.
Peso (con encoder, senza freno)
Rigidezza al ribaltamento
Grado di protezione
Posizione di montaggio
Lubrificazione
Ct21
C2K
jt
FAmax
M2Kmax
m
LPA
N
Nm/arcmin
Nm/arcmin
arcmin
Nm
kg
dB(A)
°C
fino a £ 2
a richiesta
a richiesta
–
a richiesta
a richiesta
a richiesta
F
+40
IP 65
a richiesta
a piacere
da 60 a 375
27
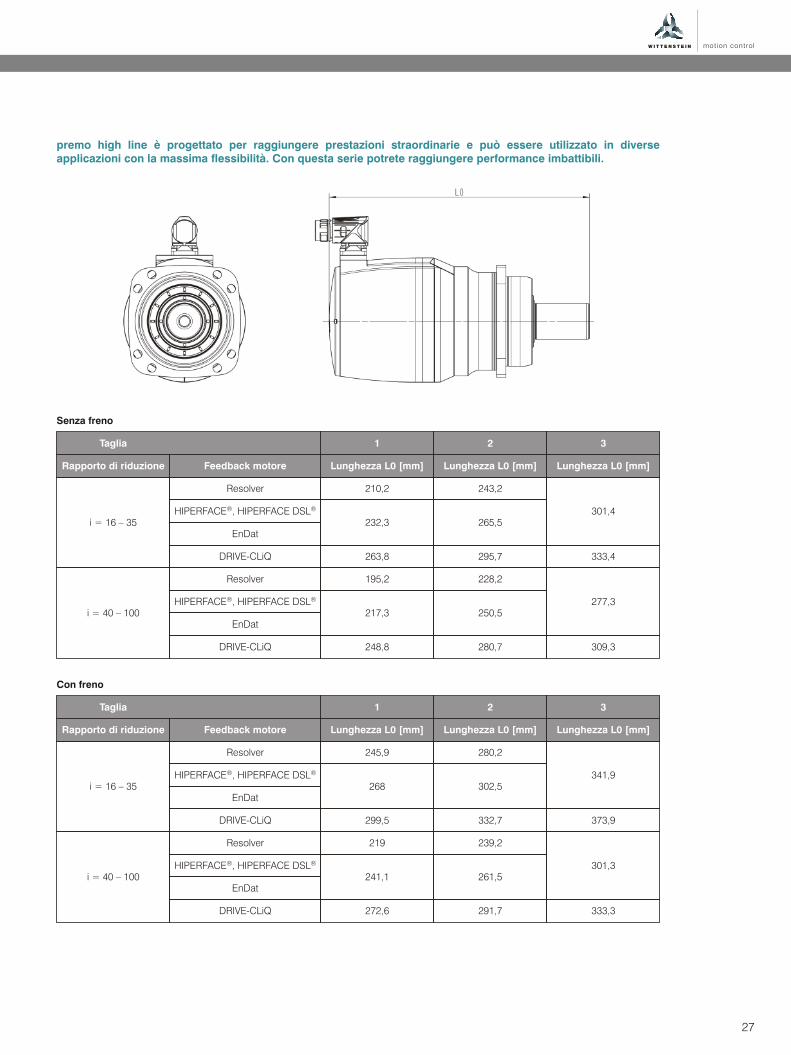
Rapporto di riduzione
Taglia
Senza freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
210,2
195,2
232,3
217,3
263,8
248,8
243,2
228,2
265,5
250,5
295,7
280,7
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm]
1
Lunghezza L0 [mm]
2
301,4
277,3
333,4
309,3
Lunghezza L0 [mm]
3
Rapporto di riduzione
Taglia
Con freno
Resolver
Resolver
® ®HIPERFACE , HIPERFACE DSL
® ®HIPERFACE , HIPERFACE DSL
EnDat
EnDat
DRIVE-CLiQ
DRIVE-CLiQ
245,9
219
268
241,1
299,5
272,6
280,2
239,2
302,5
261,5
332,7
291,7
i = 16 – 35
i = 40 – 100
Feedback motore Lunghezza L0 [mm]
1
Lunghezza L0 [mm]
2
341,9
301,3
373,9
333,3
Lunghezza L0 [mm]
3
premo high line è progettato per raggiungere prestazioni straordinarie e può essere utilizzato in diverse applicazioni con la massima flessibilità. Con questa serie potrete raggiungere performance imbattibili.

28
Opzioni
Collegamento elettricoConnettori diritti o angolari orientabili rispetto alla flangia del riduttore (solo per versione high line) e collegamento monocavo per protocollo DSL.
PiedinaturaPer numerosi servocontrolli offriamo piedinature speciali per potenza e segnale.
Sistemi di feedbackOltre alla versione standard inclusa nella rispettiva serie, sono disponibili sistemi encoder opzionali con i protocolli EnDat 2.1,
® ®EnDat 2.2, HIPERFACE , HIPERFACE DSL , DRIVE-CLiQ.
Sensore di temperaturaÈ possibile scegliere tra PTC e PT1000.
Freno di stazionamentoFreno di stazionamento a magneti permanenti, commisurato alla potenza del motore.
Tensione di esercizioIn base all’applicazione e all’azionamento sono disponibili avvolgimenti per 24, 48, 320 e 560 V DC.
LubrificazioneSono disponibili diverse opzioni, dalla lubrificazione standard con olio a quella a grasso, fino alla lubrificazione con olio o grasso specifici per il settore alimentare.
Versione riduttoreAll’interno di ciascuna serie sono disponibili diverse opzioni geometriche in uscita e differenti flange di montaggio.
Gioco torsionale ridottoPer aumentare la precisione è possibile richiedere l’opzione a gioco ridotto.
29
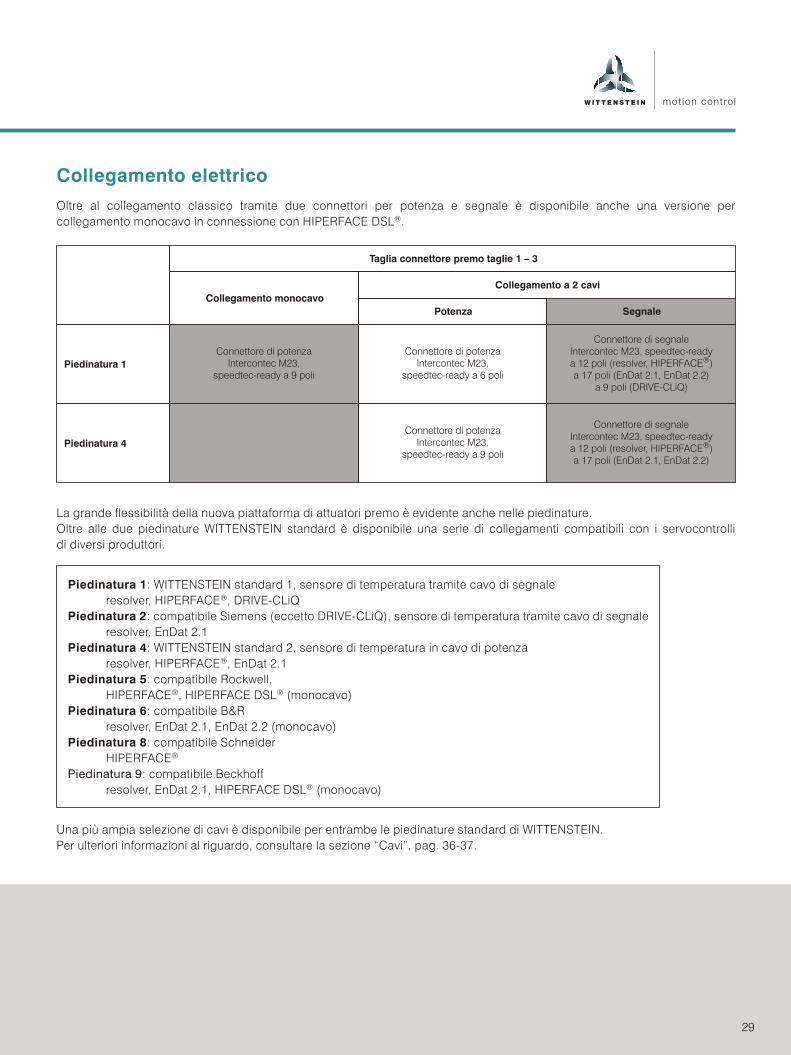
Oltre al collegamento classico tramite due connettori per potenza e segnale è disponibile anche una versione per ®collegamento monocavo in connessione con HIPERFACE DSL .
La grande flessibilità della nuova piattaforma di attuatori premo è evidente anche nelle piedinature.
Oltre alle due piedinature WITTENSTEIN standard è disponibile una serie di collegamenti compatibili con i servocontrolli
di diversi produttori.
Una più ampia selezione di cavi è disponibile per entrambe le piedinature standard di WITTENSTEIN.
Per ulteriori informazioni al riguardo, consultare la sezione “Cavi”, pag. 36-37.
Collegamento elettrico
Connettore di segnale Intercontec M23, speedtec-ready
®a 12 poli (resolver, HIPERFACE ) a 17 poli (EnDat 2.1, EnDat 2.2)
a 9 poli (DRIVE-CLiQ)
Connettore di potenza Intercontec M23,
speedtec-ready a 6 poli
Connettore di potenza Intercontec M23,
speedtec-ready a 9 poli
Connettore di potenza Intercontec M23,
speedtec-ready a 9 poli
Connettore di segnale Intercontec M23, speedtec-ready a 12 poli (resolver, HIPERFACE ) a 17 poli (EnDat 2.1, EnDat 2.2)
®
Piedinatura 1
Segnale
Collegamento a 2 cavi
Taglia connettore premo taglie 1 – 3
Potenza
Collegamento monocavo
Piedinatura 4
Piedinatura 1: WITTENSTEIN standard 1, sensore di temperatura tramite cavo di segnale ®resolver, HIPERFACE , DRIVE-CLiQ
Piedinatura 2: compatibile Siemens (eccetto DRIVE-CLiQ), sensore di temperatura tramite cavo di segnale
resolver, EnDat 2.1
Piedinatura 4: WITTENSTEIN standard 2, sensore di temperatura in cavo di potenza ®resolver, HIPERFACE , EnDat 2.1
Piedinatura 5: compatibile Rockwell, ® ®HIPERFACE , HIPERFACE DSL (monocavo)
Piedinatura 6: compatibile B&R
resolver, EnDat 2.1, EnDat 2.2 (monocavo)
Piedinatura 8: compatibile Schneider®HIPERFACE
Piedinatura 9: compatibile Beckhoff®resolver, EnDat 2.1, HIPERFACE DSL (monocavo)
30
Opzioni
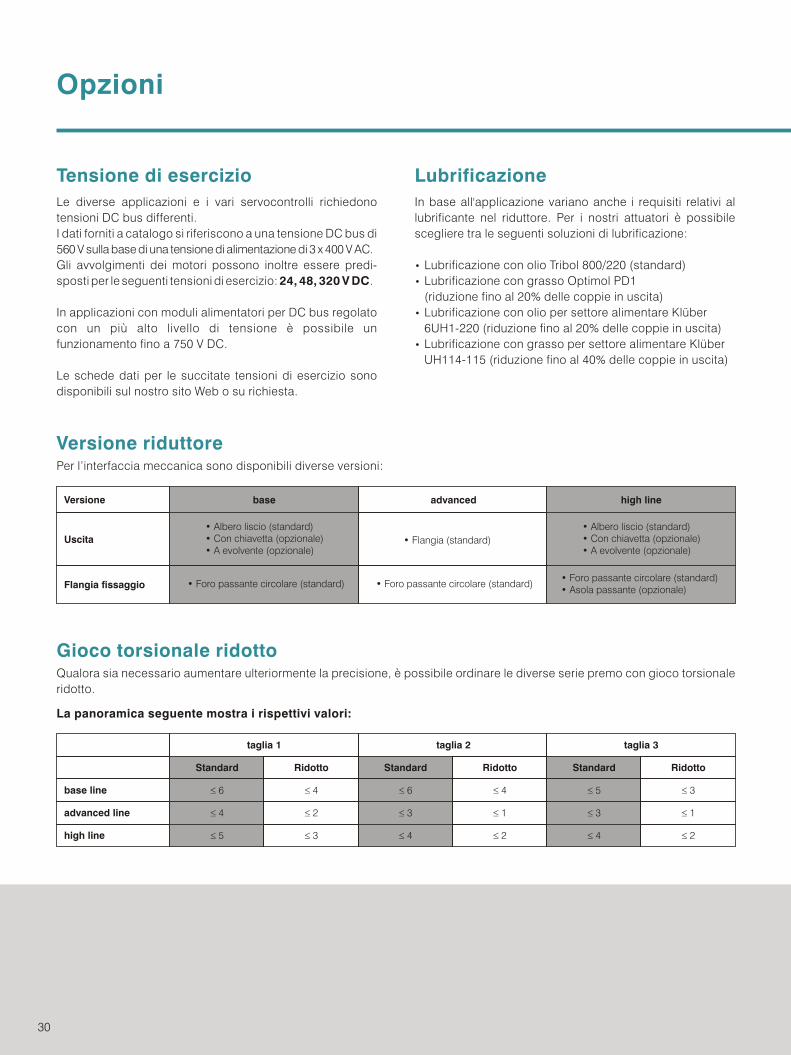
Le diverse applicazioni e i vari servocontrolli richiedono
tensioni DC bus differenti.
I dati forniti a catalogo si riferiscono a una tensione DC bus di
560 V sulla base di una tensione di alimentazione di 3 x 400 V AC.
Gli avvolgimenti dei motori possono inoltre essere predi-
sposti per le seguenti tensioni di esercizio: 24, 48, 320 V DC.
In applicazioni con moduli alimentatori per DC bus regolato
con un più alto livello di tensione è possibile un
funzionamento fino a 750 V DC.
Le schede dati per le succitate tensioni di esercizio sono
disponibili sul nostro sito Web o su richiesta.
Per l’interfaccia meccanica sono disponibili diverse versioni:
Qualora sia necessario aumentare ulteriormente la precisione, è possibile ordinare le diverse serie premo con gioco torsionale
ridotto.
La panoramica seguente mostra i rispettivi valori:
In base all'applicazione variano anche i requisiti relativi al
lubrificante nel riduttore. Per i nostri attuatori è possibile
scegliere tra le seguenti soluzioni di lubrificazione:
• Lubrificazione con olio Tribol 800/220 (standard)
• Lubrificazione con grasso Optimol PD1
(riduzione fino al 20% delle coppie in uscita)
• Lubrificazione con olio per settore alimentare Klüber
6UH1-220 (riduzione fino al 20% delle coppie in uscita)
• Lubrificazione con grasso per settore alimentare Klüber
UH114-115 (riduzione fino al 40% delle coppie in uscita)
Tensione di esercizio
Versione riduttore
Gioco torsionale ridotto
Lubrificazione
• Albero liscio (standard)• Con chiavetta (opzionale)• A evolvente (opzionale)
• Albero liscio (standard)• Con chiavetta (opzionale)• A evolvente (opzionale)
• Foro passante circolare (standard)• Asola passante (opzionale)
• Foro passante circolare (standard) • Foro passante circolare (standard)
• Flangia (standard)
Flangia fissaggio
Versione
Uscita
advanced high linebase
base line
advanced line
high line
taglia 2 taglia 3taglia 1
Standard
£ 6
£ 4
£ 5
Standard
£ 6
£ 3
£ 4
Standard
£ 5
£ 3
£ 4
Ridotto
£ 4
£ 2
£ 3
Ridotto
£ 4
£ 1
£ 2
Ridotto
£ 3
£ 1
£ 2
31
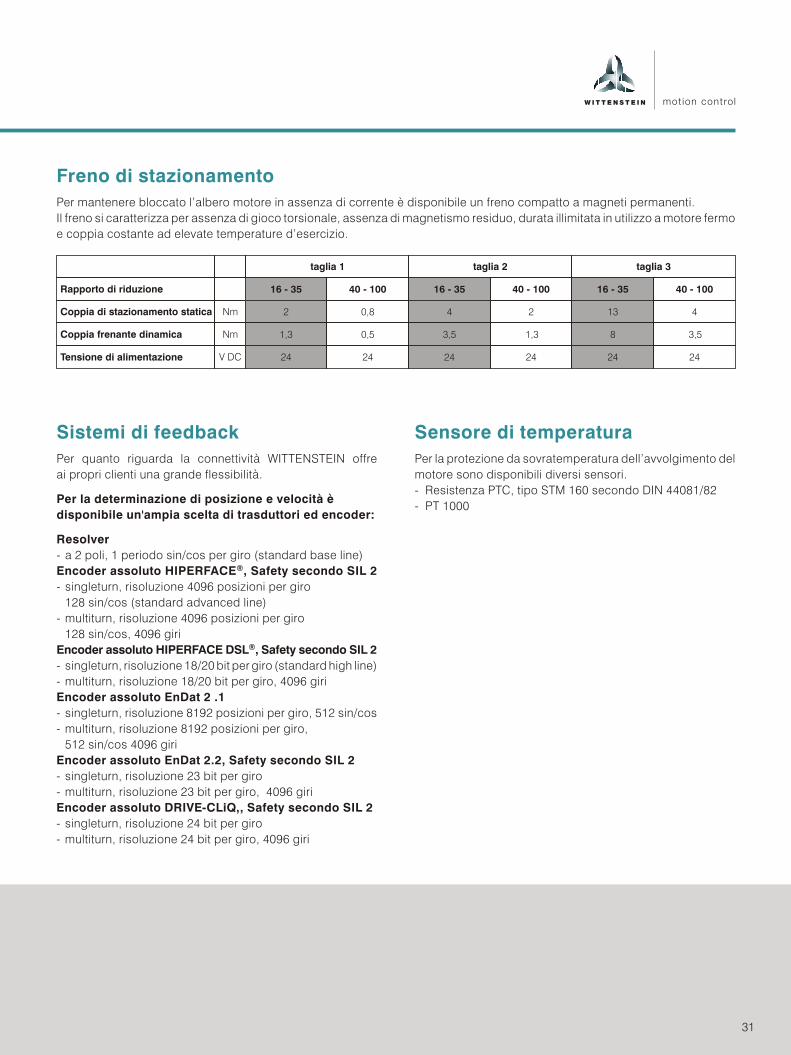
Per mantenere bloccato l’albero motore in assenza di corrente è disponibile un freno compatto a magneti permanenti.
Il freno si caratterizza per assenza di gioco torsionale, assenza di magnetismo residuo, durata illimitata in utilizzo a motore fermo
e coppia costante ad elevate temperature d’esercizio.
Per quanto riguarda la connettività WITTENSTEIN offre
ai propri clienti una grande flessibilità.
Per la determinazione di posizione e velocità è
disponibile un'ampia scelta di trasduttori ed encoder:
Resolver
- a 2 poli, 1 periodo sin/cos per giro (standard base line)®Encoder assoluto HIPERFACE , Safety secondo SIL 2
- singleturn, risoluzione 4096 posizioni per giro
128 sin/cos (standard advanced line)
- multiturn, risoluzione 4096 posizioni per giro
128 sin/cos, 4096 giri®Encoder assoluto HIPERFACE DSL , Safety secondo SIL 2
- singleturn, risoluzione 18/20 bit per giro (standard high line)
- multiturn, risoluzione 18/20 bit per giro, 4096 giri
Encoder assoluto EnDat 2 .1
- singleturn, risoluzione 8192 posizioni per giro, 512 sin/cos
- multiturn, risoluzione 8192 posizioni per giro,
512 sin/cos 4096 giri
Encoder assoluto EnDat 2.2, Safety secondo SIL 2
- singleturn, risoluzione 23 bit per giro
- multiturn, risoluzione 23 bit per giro, 4096 giri
Encoder assoluto DRIVE-CLiQ,, Safety secondo SIL 2
- singleturn, risoluzione 24 bit per giro
- multiturn, risoluzione 24 bit per giro, 4096 giri
Per la protezione da sovratemperatura dell’avvolgimento del
motore sono disponibili diversi sensori.
- Resistenza PTC, tipo STM 160 secondo DIN 44081/82
- PT 1000
Freno di stazionamento
Sistemi di feedback Sensore di temperatura
Coppia di stazionamento statica
Rapporto di riduzione
Nm
Nm
V DC
Coppia frenante dinamica
Tensione di alimentazione
taglia 2 taglia 3taglia 1
16 - 35
2
1,3
24
16 - 35
4
3,5
24
16 - 35
13
8
24
40 - 100
0,8
0,5
24
40 - 100
2
1,3
24
40 - 100
4
3,5
24
32
premo
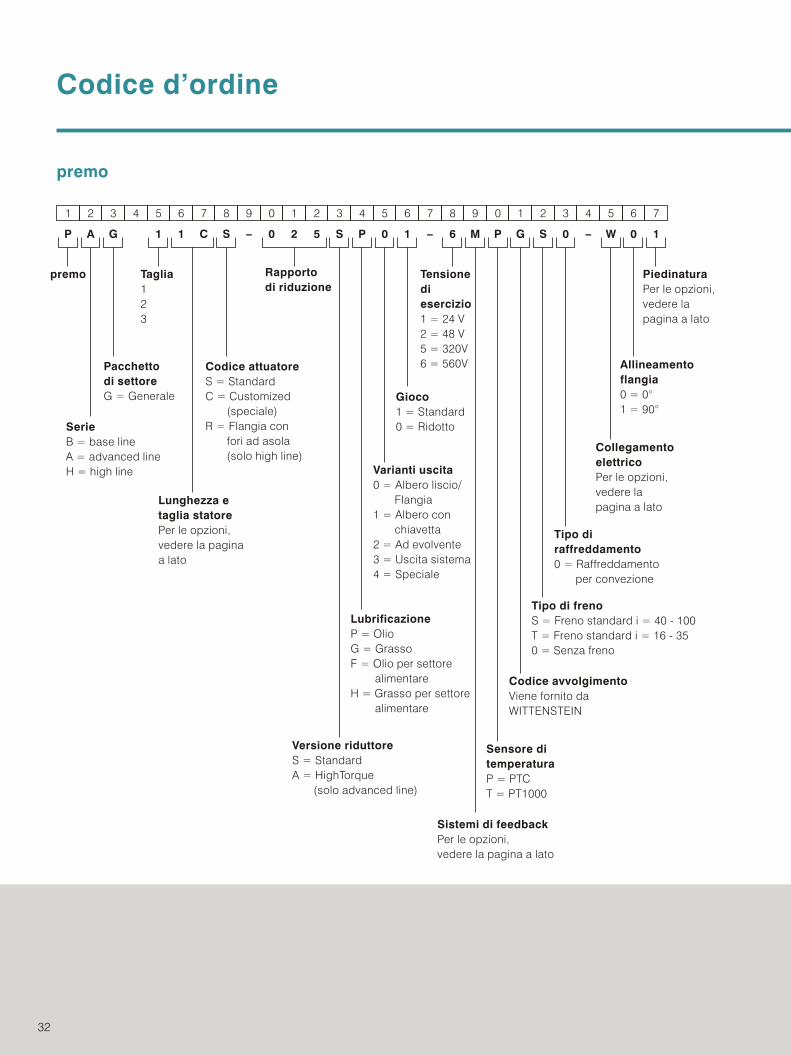
Codice d’ordine
1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7
P A G 1 1 C S – 0 2 5 S P 0 1 – 6 M P G S 0 – W 0 1
premo Rapporto
di riduzioneTaglia
1
2
3
Pacchetto
di settore
G = Generale
Codice attuatore
S = Standard
C = Customized
(speciale)
R = Flangia con
fori ad asola
(solo high line)
Allineamento
flangia
0 = 0°
1 = 90°
Lunghezza e
taglia statore
Per le opzioni,
vedere la pagina
a lato
Tensione
di
esercizio
1 = 24 V
2 = 48 V
5 = 320V
6 = 560V
Piedinatura
Per le opzioni,
vedere la
pagina a lato
Tipo di
raffreddamento
0 = Raffreddamento
per convezione
Serie
B = base line
A = advanced line
H = high line Varianti uscita
Flangia
1 = Albero con
chiavetta
2 = Ad evolvente
3 = Uscita sistema
4 = Speciale
0 = Albero liscio/
Collegamento
elettrico
Per le opzioni,
vedere la
pagina a lato
Lubrificazione
P = Olio
G = Grasso
F = Olio per settore
alimentare
H = Grasso per settore
alimentare
Tipo di freno
S = Freno standard i = 40 - 100
T = Freno standard i = 16 - 35
0 = Senza freno
Codice avvolgimento
Viene fornito da
WITTENSTEIN
Sistemi di feedback
Per le opzioni,
vedere la pagina a lato
Sensore di
temperatura
P = PTC
T = PT1000
Gioco
1 = Standard
0 = Ridotto
Versione riduttore
S = Standard
A = HighTorque
(solo advanced line)
33
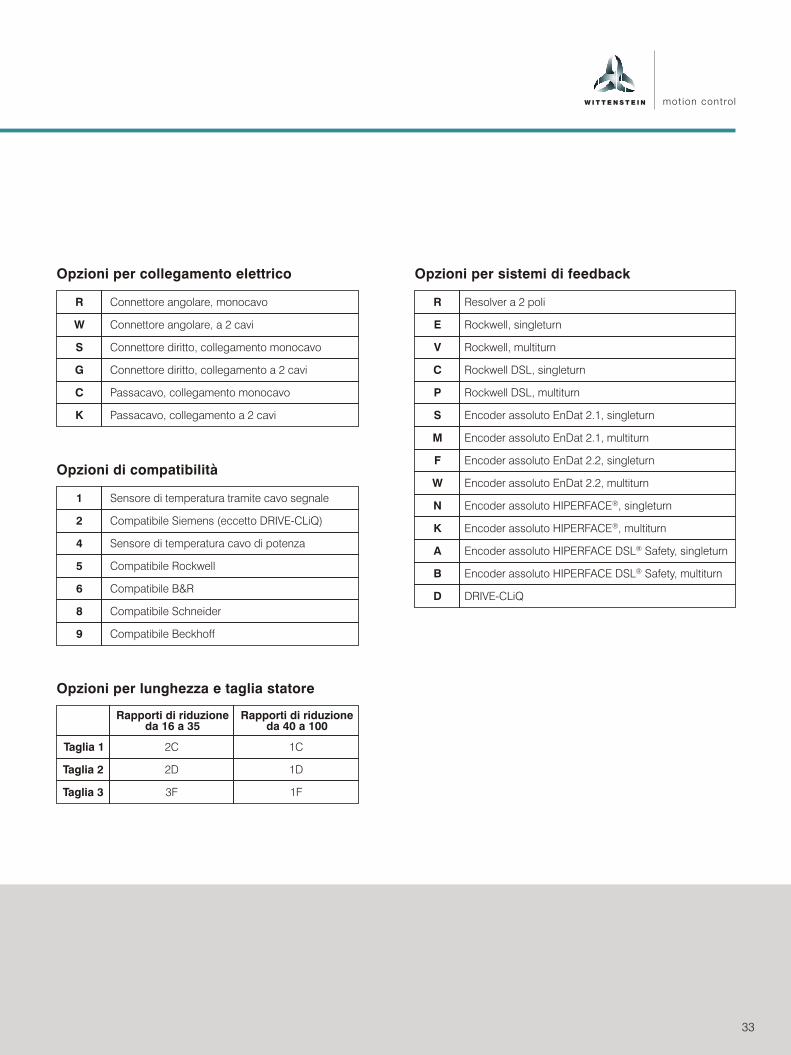
R
E
V
C
P
S
Resolver a 2 poli
Rockwell, singleturn
Rockwell, multiturn
Rockwell DSL, singleturn
Rockwell DSL, multiturn
Encoder assoluto EnDat 2.1, singleturn
M
F
W
N
K
A
B
D
Encoder assoluto EnDat 2.1, multiturn
Encoder assoluto EnDat 2.2, singleturn
Encoder assoluto EnDat 2.2, multiturn
®Encoder assoluto HIPERFACE , singleturn
Encoder assoluto HIPERFACE , multiturn®
Encoder assoluto HIPERFACE DSL Safety, singleturn®
Encoder assoluto HIPERFACE DSL Safety, multiturn®
DRIVE-CLiQ
Opzioni per sistemi di feedback
Opzioni per lunghezza e taglia statore
Taglia 1
Rapporti di riduzione da 16 a 35
Rapporti di riduzione da 40 a 100
Taglia 2
Taglia 3
2C 1C
2D 1D
3F 1F
Opzioni per collegamento elettrico
R
W
S
G
C
K
Connettore angolare, monocavo
Connettore angolare, a 2 cavi
Connettore diritto, collegamento monocavo
Connettore diritto, collegamento a 2 cavi
Passacavo, collegamento monocavo
Passacavo, collegamento a 2 cavi
Opzioni di compatibilità
1
2
4
5
6
8
9
Sensore di temperatura tramite cavo segnale
Compatibile Siemens (eccetto DRIVE-CLiQ)
Sensore di temperatura cavo di potenza
Compatibile Rockwell
Compatibile B&R
Compatibile Schneider
Compatibile Beckhoff

34
Sistemi pignone-cremagliera alpha
Combinazioni possibili
I sistemi lineari di WITTENSTEIN alpha consentono
l’abbinamento più efficace di riduttore, motore, pignone e
cremagliera. Più di trent’anni di esperienza nella costruzione
di riduttori, nella tecnologia degli ingranaggi e nel
dimensionamento dell'intera catena cinematica rendono
questi sistemi una soluzione assolutamente all’avanguardia.
35
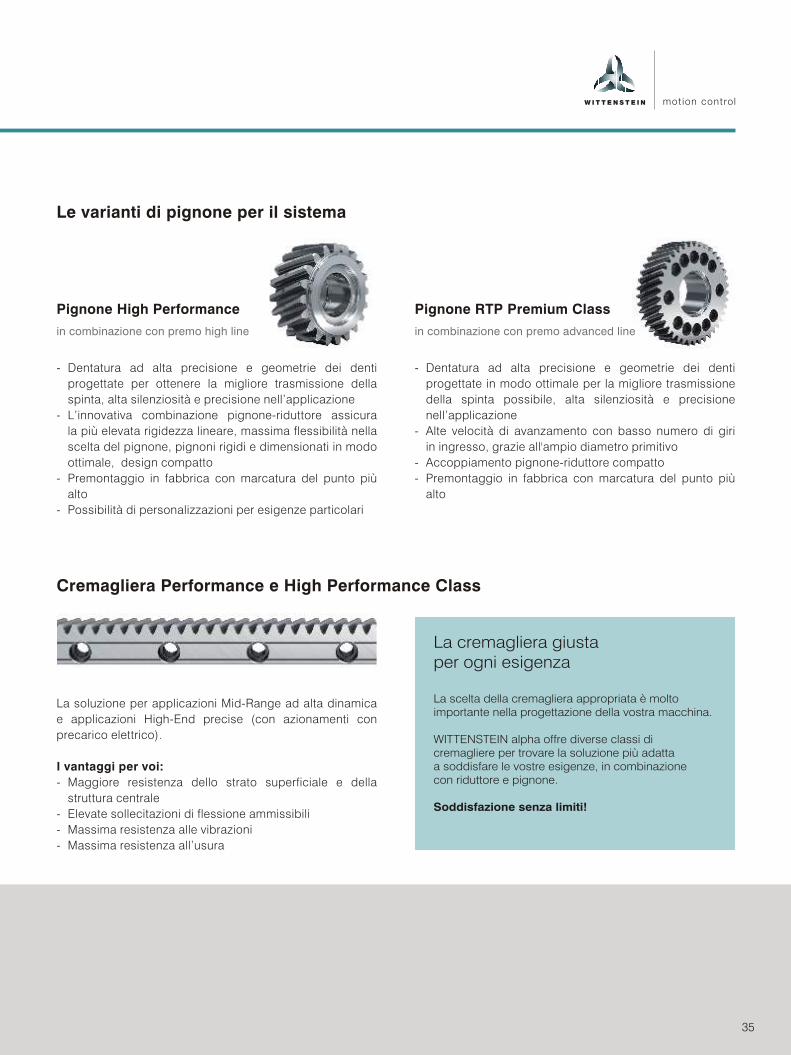
Le varianti di pignone per il sistema
Cremagliera Performance e High Performance Class
- Dentatura ad alta precisione e geometrie dei denti
progettate per ottenere la migliore trasmissione della
spinta, alta silenziosità e precisione nell’applicazione
- L’innovativa combinazione pignone-riduttore assicura
la più elevata rigidezza lineare, massima flessibilità nella
scelta del pignone, pignoni rigidi e dimensionati in modo
ottimale, design compatto
- Premontaggio in fabbrica con marcatura del punto più
alto
- Possibilità di personalizzazioni per esigenze particolari
La soluzione per applicazioni Mid-Range ad alta dinamica
e applicazioni High-End precise (con azionamenti con
precarico elettrico).
I vantaggi per voi:
- Maggiore resistenza dello strato superficiale e della
struttura centrale
- Elevate sollecitazioni di flessione ammissibili
- Massima resistenza alle vibrazioni
- Massima resistenza all’usura
- Dentatura ad alta precisione e geometrie dei denti
progettate in modo ottimale per la migliore trasmissione
della spinta possibile, alta silenziosità e precisione
nell’applicazione
- Alte velocità di avanzamento con basso numero di giri
in ingresso, grazie all'ampio diametro primitivo
- Accoppiamento pignone-riduttore compatto
- Premontaggio in fabbrica con marcatura del punto più
alto
Pignone High Performance
in combinazione con premo high line
Pignone RTP Premium Class
in combinazione con premo advanced line
La cremagliera giusta per ogni esigenza
La scelta della cremagliera appropriata è molto importante nella progettazione della vostra macchina.
WITTENSTEIN alpha offre diverse classi di cremagliere per trovare la soluzione più adatta a soddisfare le vostre esigenze, in combinazione con riduttore e pignone.
Soddisfazione senza limiti!
36
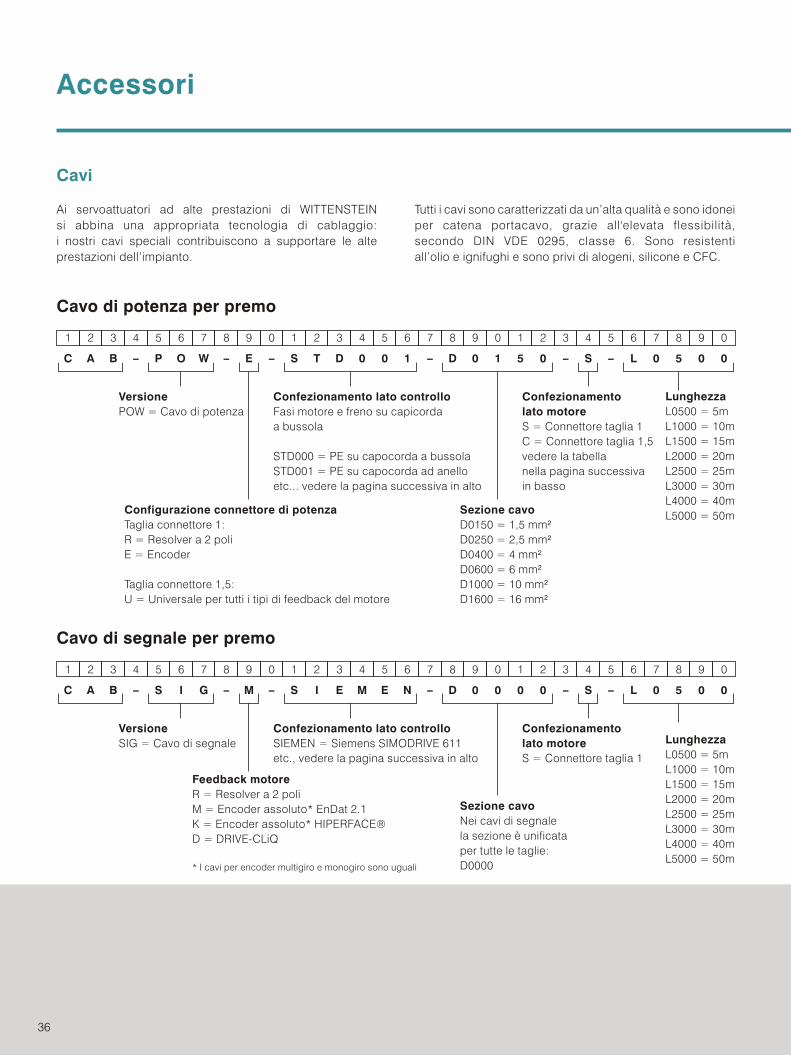
Cavi
Accessori
Ai servoattuatori ad alte prestazioni di WITTENSTEIN
si abbina una appropriata tecnologia di cablaggio:
i nostri cavi speciali contribuiscono a supportare le alte
prestazioni dell’impianto.
Tutti i cavi sono caratterizzati da un’alta qualità e sono idonei
per catena portacavo, grazie all'elevata flessibilità,
secondo DIN VDE 0295, classe 6. Sono resistenti
all’olio e ignifughi e sono privi di alogeni, silicone e CFC.
Cavo di potenza per premo
1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 90 01 2 3 4 5 6 7 8
C A B – P O W – E – S T D 0 0 1 – D 0 1 5 0 – S – L 0 5 0 0
Confezionamento lato controllo
Fasi motore e freno su capicorda
a bussola
STD000 = PE su capocorda a bussola
STD001 = PE su capocorda ad anello
etc... vedere la pagina successiva in alto
Lunghezza
L0500 = 5m
L1000 = 10m
L1500 = 15m
L2000 = 20m
L2500 = 25m
L3000 = 30m
L4000 = 40m
L5000 = 50m
Versione
POW = Cavo di potenza
Confezionamento
lato motore
S = Connettore taglia 1
C = Connettore taglia 1,5
vedere la tabella
nella pagina successiva
in basso
Configurazione connettore di potenza
Taglia connettore 1:
R = Resolver a 2 poli
E = Encoder
Taglia connettore 1,5:
U = Universale per tutti i tipi di feedback del motore
Sezione cavo2D0150 = 1,5 mm2D0250 = 2,5 mm
2D0400 = 4 mm2D0600 = 6 mm
2D1000 = 10 mm2D1600 = 16 mm
Cavo di segnale per premo
1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 90 01 2 3 4 5 6 7 8
C A B – S I G – M – S I E M E N – D 0 0 0 0 – S – L 0 5 0 0
Confezionamento lato controllo
SIEMEN = Siemens SIMODRIVE 611
etc., vedere la pagina successiva in alto
Lunghezza
L0500 = 5m
L1000 = 10m
L1500 = 15m
L2000 = 20m
L2500 = 25m
L3000 = 30m
L4000 = 40m
L5000 = 50m
Versione
SIG = Cavo di segnale
Confezionamento
lato motore
S = Connettore taglia 1
Feedback motore
R = Resolver a 2 poli
M = Encoder assoluto* EnDat 2.1
K = Encoder assoluto* HIPERFACE®
D = DRIVE-CLiQ
* I cavi per encoder multigiro e monogiro sono uguali
Sezione cavo
Nei cavi di segnale
la sezione è unificata
per tutte le taglie:
D0000
37
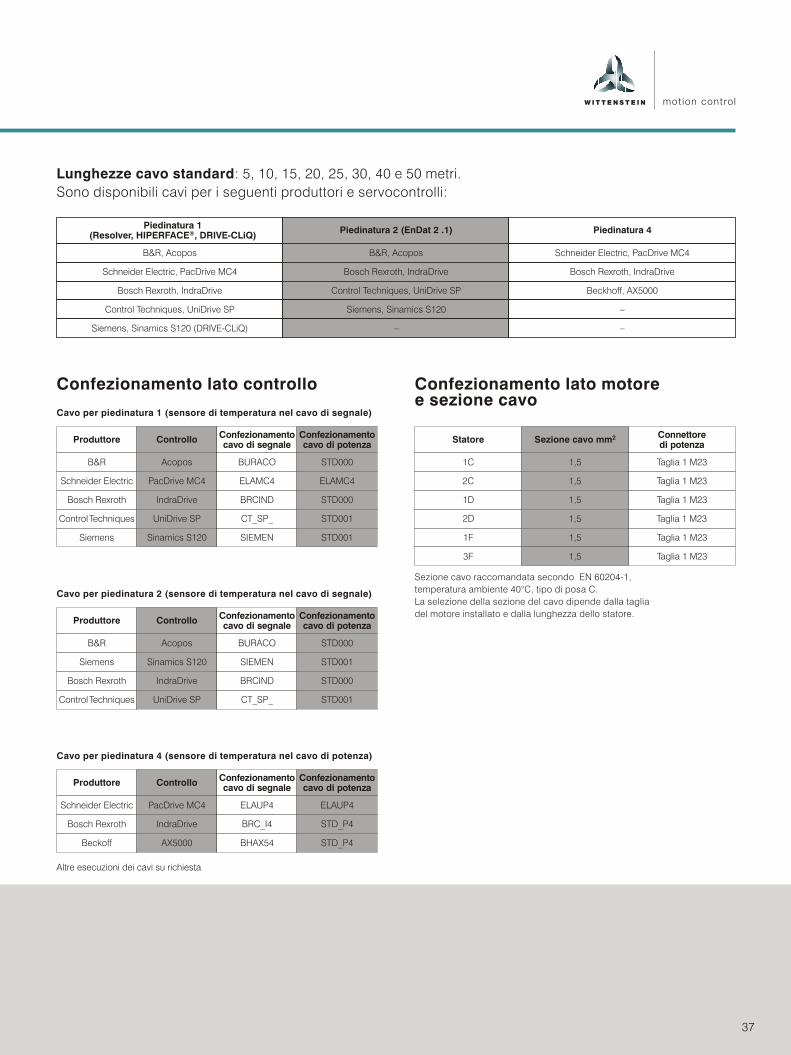
Confezionamento lato controllo Confezionamento lato motore e sezione cavo
Lunghezze cavo standard: 5, 10, 15, 20, 25, 30, 40 e 50 metri.
Sono disponibili cavi per i seguenti produttori e servocontrolli:
Piedinatura 1 ®(Resolver, HIPERFACE , DRIVE-CLiQ)
Piedinatura 2 (EnDat 2 .1) Piedinatura 4
B&R, Acopos B&R, Acopos
Schneider Electric, PacDrive MC4
Bosch Rexroth, IndraDrive
Bosch Rexroth, IndraDrive
Control Techniques, UniDrive SP
Control Techniques, UniDrive SP
Siemens, Sinamics S120 (DRIVE-CLiQ)
Siemens, Sinamics S120
Schneider Electric, PacDrive MC4
Bosch Rexroth, IndraDrive
Beckhoff, AX5000
–
––
Cavo per piedinatura 1 (sensore di temperatura nel cavo di segnale)
Confezionamentocavo di segnale
Confezionamentocavo di potenza
Produttore Controllo
B&R
Schneider Electric
Bosch Rexroth
Control Techniques
Siemens
Acopos
PacDrive MC4
IndraDrive
UniDrive SP
Sinamics S120
BURACO
ELAMC4
BRCIND
CT_SP_
SIEMEN
STD000
ELAMC4
STD000
STD001
STD001
Cavo per piedinatura 2 (sensore di temperatura nel cavo di segnale)
Confezionamentocavo di segnale
Confezionamentocavo di potenza
Produttore Controllo
B&R
Bosch Rexroth
Control Techniques
Siemens
Acopos
IndraDrive
UniDrive SP
Sinamics S120
BURACO
BRCIND
CT_SP_
STD000
STD001
STD000
STD001
SIEMEN
Cavo per piedinatura 4 (sensore di temperatura nel cavo di potenza)
Confezionamentocavo di segnale
Confezionamentocavo di potenza
Produttore Controllo
Beckoff AX5000 BHAX54 STD_P4
Schneider Electric
Bosch Rexroth
PacDrive MC4
IndraDrive
ELAUP4
BRC_I4
ELAUP4
STD_P4
Altre esecuzioni dei cavi su richiesta
Connettoredi potenza
Statore
1C
2C
1D
2D
1F
3F
Taglia 1 M23
Taglia 1 M23
Taglia 1 M23
Taglia 1 M23
Taglia 1 M23
Taglia 1 M23
2Sezione cavo mm
1,5
1,5
1,5
1,5
1,5
1,5
Sezione cavo raccomandata secondo EN 60204-1,
temperatura ambiente 40°C, tipo di posa C.
La selezione della sezione del cavo dipende dalla taglia
del motore installato e dalla lunghezza dello statore.
38
Servocontrolli
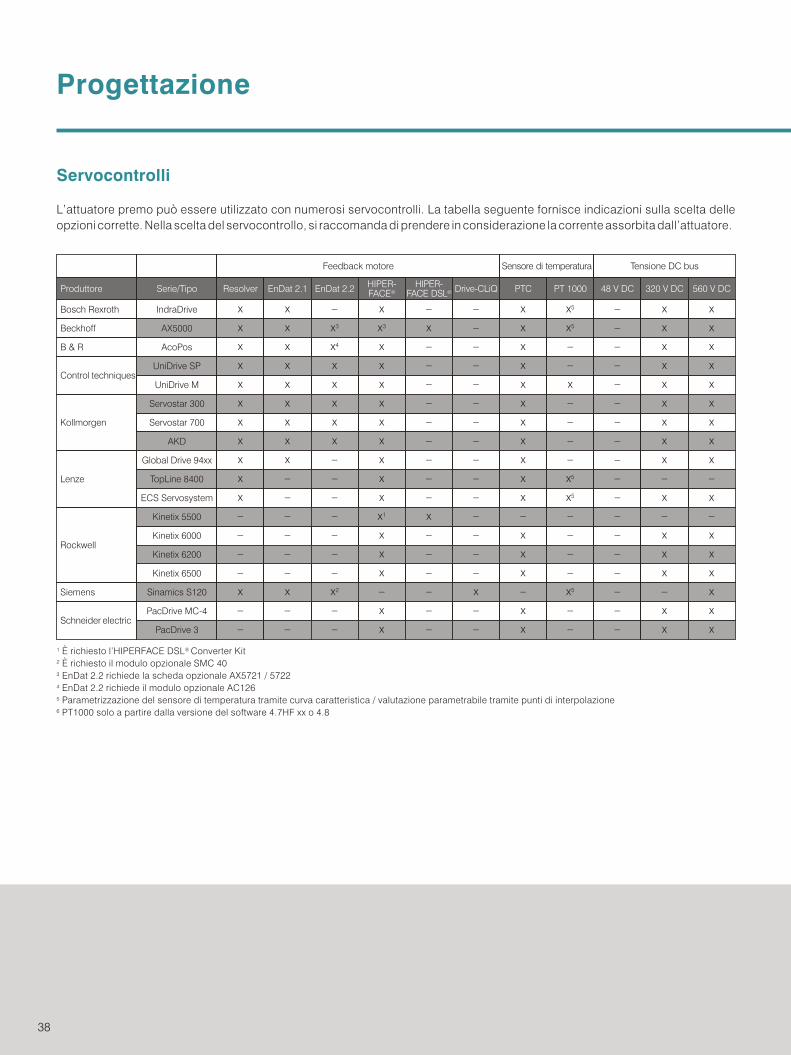
Progettazione
L’attuatore premo può essere utilizzato con numerosi servocontrolli. La tabella seguente fornisce indicazioni sulla scelta delle
opzioni corrette. Nella scelta del servocontrollo, si raccomanda di prendere in considerazione la corrente assorbita dall’attuatore.
x
x
x
x
x
x
–
–
–
x
x
x
x
x
–
–
x
–
x
x
x
x
x
–
–
–
–
x
x
x
x
–
–
–
x
–
–
4x
x
x
–
–
–
–
–
3x
x
x
x
–
–
–
2x
–
x
x
x
x
x
x
x
x
x
3x
x
x
x
x
1x
x
–
x
–
–
–
–
–
–
–
–
–
x
–
–
–
–
x
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
x
–
x
x
x
x
x
x
x
x
x
x
x
x
x
x
–
x
–
x
5x
–
x
–
–
5x
–
–
–
5x
–
–
–
5x
–
–
5x
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
x
x
x
x
x
x
x
x
x
x
x
x
x
–
–
x
–
x
x
x
x
x
x
x
x
x
x
x
x
x
x
–
–
x
x
x
Produttore Serie/Tipo Resolver EnDat 2.1 EnDat 2.2
Feedback motore
Bosch Rexroth IndraDrive
Beckhoff AX5000
B & R AcoPos
Control techniquesUniDrive SP
UniDrive M
Servostar 300
Kollmorgen Servostar 700
AKD
Global Drive 94xx
Lenze TopLine 8400
ECS Servosystem
Kinetix 5500
Kinetix 6000Rockwell
Kinetix 6200
Kinetix 6500
Siemens Sinamics S120
PacDrive MC-4Schneider electric
PacDrive 3
HIPER-®FACE
HIPER-FACE DSL® Drive-CLiQ PTC
Sensore di temperatura
PT 1000 48 V DC 320 V DC
Tensione DC bus
560 V DC
1 È richiesto l’HIPERFACE DSL Converter Kit2 È richiesto il modulo opzionale SMC 403 EnDat 2.2 richiede la scheda opzionale AX5721 / 57224 EnDat 2.2 richiede il modulo opzionale AC1265 Parametrizzazione del sensore di temperatura tramite curva caratteristica / valutazione parametrabile tramite punti di interpolazione6 PT1000 solo a partire dalla versione del software 4.7HF xx o 4.8
®
39
Note di progettazione sul freno
I freni di stazionamento installati negli attuatori sono soggetti
a diversi fattori che ne influenzano le prestazioni, quali
l ’oss idaz ione d i par t ice l le dovuta a l l 'abras ione,
l’appiattimento delle superfici di attrito in caso di frequente
innesto del freno nella stessa posizione o la variazione del
gioco a causa dell’usura.
Tutto ciò può determinare una riduzione delle coppie frenanti
disponibili. Tutti i valori di coppia frenante dichiarati si
riferiscono pertanto allo stato ideale, con condizioni ottimali
senza influenze negative.
Per contrastare i suddetti influssi si possono eseguire cicli
periodici di rigenerazione dei freni.
Al riguardo, consultare le informazioni dettagliate relative ai
cicli di rigenerazione raccomandati nel manuale operativo.
Per applicazioni critiche, al fine di considerare i fattori di
incertezza sopra menzionati, si consiglia di dimensionare il
freno con un sufficiente margine di sicurezza per quanto
concerne la coppia frenante.
Il nostro Team di Engineering sarà lieto di offrirvi tutto il
supporto necessario per un corretto dimensionamento.
WITTENSTEIN S.P.A.
Via Giosuè Carducci 125
20099 Sesto San Giovanni (MI) - Italy
Tel. (+39) 02 24 13 57 1
Fax (+39) 02 700 462 39
E-mail: [email protected]
WITTENSTEIN – tutt’ con il futurouno
www.wittenstein.it / www.wittensteincubesolutions.com WIT
TE
NS
TE
IN_p
rem
o_I
t_2
01
6_I
Da
ti so
gg
ett
i a m
od
ifich
e s
en
za p
rea
vvis
o