PRACA DYPLOMOWA INŻYNIERSKA - Gracjan...
72
POLITECHNIKA WARSZAWSKA Rok akad. 2010/2011 Wydział Elektroniki i Technik Informacyjnych Instytut Radioelektroniki PRACA DYPLOMOWA – INŻYNIERSKA Gracjan Szczęch Redukcja hałasu z wykorzystaniem aktywnego ustroju dźwiękochłonno-izolacyjnego Kierownik pracy dr inż. Maria Tajchert Opiekun naukowy mgr inż. Paweł Górski Ocena: ............................................ ............................................ Podpis Przewodniczącego Komisji Egzaminu Dyplomowego
Transcript of PRACA DYPLOMOWA INŻYNIERSKA - Gracjan...
POLITECHNIKA WARSZAWSKA Rok akad. 2010/2011
Wydział Elektroniki i Technik Informacyjnych
Instytut Radioelektroniki
PRACA DYPLOMOWA – INŻYNIERSKA
Gracjan Szczęch
Redukcja hałasu z wykorzystaniem aktywnego
ustroju dźwiękochłonno-izolacyjnego
Kierownik pracy
dr inż. Maria Tajchert
Opiekun naukowy mgr inż. Paweł Górski
Ocena: ............................................
............................................
Podpis Przewodniczącego
Komisji Egzaminu Dyplomowego

Składam serdeczne podziękowania dr inż. Marii Tajchert
za udzieloną pomoc i życzliwość podczas pisania niniejszej pracy.
Wyrazy wdzięczności kieruję również do mgr inż. Pawła Górskiego,
za pomoc w doborze tematu pracy, dzielenie się wiedzą,
poświęcony czas oraz wsparcie podczas pisania pracy
2
STRESZCZENIE
W obecnej pracy opisano układ aktywnej redukcji hałasu składający się z aktywnego
ustroju dźwiękochłonno-izolacyjnego jako elementu wykonawczego oraz części nim
sterującej.
W ramach realizacji pracy zbudowano stanowisko badawcze złożone z falowodu
akustycznego, aktywnego ustroju dźwiękochłonno-izolacyjnego i systemu pomiarowego.
Skuteczność aktywnej redukcji hałasu wyznaczono poprzez badanie izolacyjności
akustycznej aktywnego ustroju dźwiękochłonno-izolacyjnego przy wykorzystaniu pomiaru
natężenia dźwięku metodą bezpośredniego pomiaru prędkości akustycznej oraz pomiaru
ciśnienia akustycznego.
Przeprowadzone badania wykazały, że zastosowanie materiałów piezoelektrycznych
jako źródła wtórnego w systemach aktywnej redukcji hałasu daje pożądane efekty.
Skuteczność redukcji hałasu daje globalne wyniki. Poprzez wykorzystanie ustroju o zmiennej
izolacyjności i układu sterującego możliwe jest osiągnięcie poprawy izolacyjności płyty
metalowej do ok.16 dB.
Ustrój może być wykorzystywany do zwiększenia izolacyjności akustycznej obudów
dźwiękochłonno-izolacyjnych maszyn przemysłowych czy transformatorów o znacznie
większej możliwości odprowadzania ciepła.
SUMMARY
Active noise reduction system consisting of an active sound-absorbing and isolating
system
The present study describes an active noise reduction system consisting of an active sound-
absorbing and insulating system, as part of the executive and its controlling unit.
In pursuit of work a test stand was built consisting of an acoustic waveguide, the active
sound-absorbing and insulating and measuring system.
The effectiveness of active noise reduction was determined by examining the active sound
insulation of the sound-absorbing and insulating system using sound intensity measurement method
for direct measurement of acoustic velocity and acoustic pressure.
The study showed that the use of piezoelectric materials as a secondary source of the active
noise reduction system makes a difference. The effectiveness of noise reduction gives global
results. By developing the system with variable insulation using active elements and the control
system it is possible to achieve improved insulation of the metal plate to about 16 dB.
The system can be used to improve the sound insulation of sound-absorbing industrial
machines and transformers’ covers with much higher capacity of heat dissipation.
3
Specjalność: Radiokomunikacja i Techniki Multimedialne
Data urodzenia: 5 sierpień 1987 r.
Data rozpoczęcia studiów: 20 lutego 2007r.
ŻYCIORYS
Urodziłem się 5 sierpnia 1987 roku w Lublinie. Tam też rozpocząłem swoją edukację. W
latach 1994-2000 uczęszczałem do Szkoły Podstawowej nr 35, następnie od 2000 do 2003
roku do Gimnazjum nr 11. W roku 2003 zostałem laureatem Olimpiady Informatycznej,
organizowanej przez Ministerstwo Edukacji Narodowej. W latach 2003-2006
uczęszczałem do II Liceum Ogólnokształcącego im. Hetmana Jana Zamoyskiego.
Po otrzymaniu świadectwa dojrzałości rozpocząłem naukę na Wydziale Elektroniki i
Technik Informacyjnych Politechniki Warszawskiej, specjalizując się w radiokomunikacji i
technikach multimedialnych.
Rozpoczynając studia zacząłem aktywnie działać w Studenckiej Telewizji Internetowej
TVPW powstałej z ramienia Samorządu Studentów Politechniki Warszawskiej, gdzie
byłem operatorem i koordynatorem operatorów. Od 2009 do 2010 roku piastowałem tam
stanowisko kierownika Działu Techniki i Realizacji TVPW.
W trakcie studiów odbyłem praktyki długoterminowe w TVP S.A. Zajmowałem się tam
głównie pomocą techniczną podczas transmisji i realizacji programów telewizyjnych.
Następnie rozpocząłem pracę jako administrator IT systemu produkcyjno-emisyjnego w
telewizji OrangeSport.
EGZAMIN DYPLOMOWY
Złożył egzamin dyplomowy w dniu ..........................................
z wynikiem ..........................................
Ogólny wynik studiów ..........................................
Dodatkowe uwagi i wnioski Komisji ..........................................
....................................................................................................
4
Spis treści
1. Cel i zakres pracy ...................................................................................................... 5
2. Wstęp ........................................................................................................................ 7
3. Metody redukcji hałasu .............................................................................................. 9
4. Aktywne metody redukcji hałasu ............................................................................. 11
5. Schemat i zasada działania aktywnego ustroju dźwiękochłonno-izolacyjnego .......... 18
6. Metody pomiaru skuteczności działania systemów aktywnej redukcji hałasu ........... 25
7. Stanowisko do pomiaru skuteczności działania systemu ARH w ustroju
dźwiękochłonno-izolacyjnym .......................................................................................... 31
8. Wyniki pomiarów .................................................................................................... 35
9. Analiza wyników ..................................................................................................... 46
10. Podsumowanie ...................................................................................................... 49
Bibliografia ..................................................................................................................... 50
Załącznik 1 Wybrane kody programów napisane i wykorzystywane w pracy ................... 52
Załącznik 2. Wyniki pomiarów. ....................................................................................... 57
5
1. Cel i zakres pracy
Aktywne metody redukcji hałasu coraz częściej wykorzystywane są do redukcji
hałasu niskoczęstotliwościowego. Idea ARH (aktywnej redukcji hałasu) polega na
kompensacji fal akustycznych źródła hałasu przez odpowiednio wysterowane, dodatkowe
źródło kompensujące. Istotnym ograniczeniem aktywnych metod redukcji hałasu jest
zastosowanie jako elementu wykonawczego przetworników elektroakustycznych. Ze
względu na dość duże rozmiary, głośniki nie zawsze można ustawić w pobliżu źródła
hałasu. Zwiększenie odległości źródła wtórnego od źródła hałasu w znacznym stopniu
przekłada się na zmniejszenie skuteczności działania systemu ARH oraz ograniczenie go
tylko do obszarów lokalnych. Alternatywą przetworników elektroakustycznych jest
zastosowanie jako elementów wykonawczych inteligentnych postaci przetworników
piezoceramicznych MFC. Wykonane z nich przetworniki mogą być umieszczone
bezpośrednio na powierzchni elementu drgającego tworząc razem z układem sterującym
aktywny ustrój dźwiękochłonno-izolacyjny.
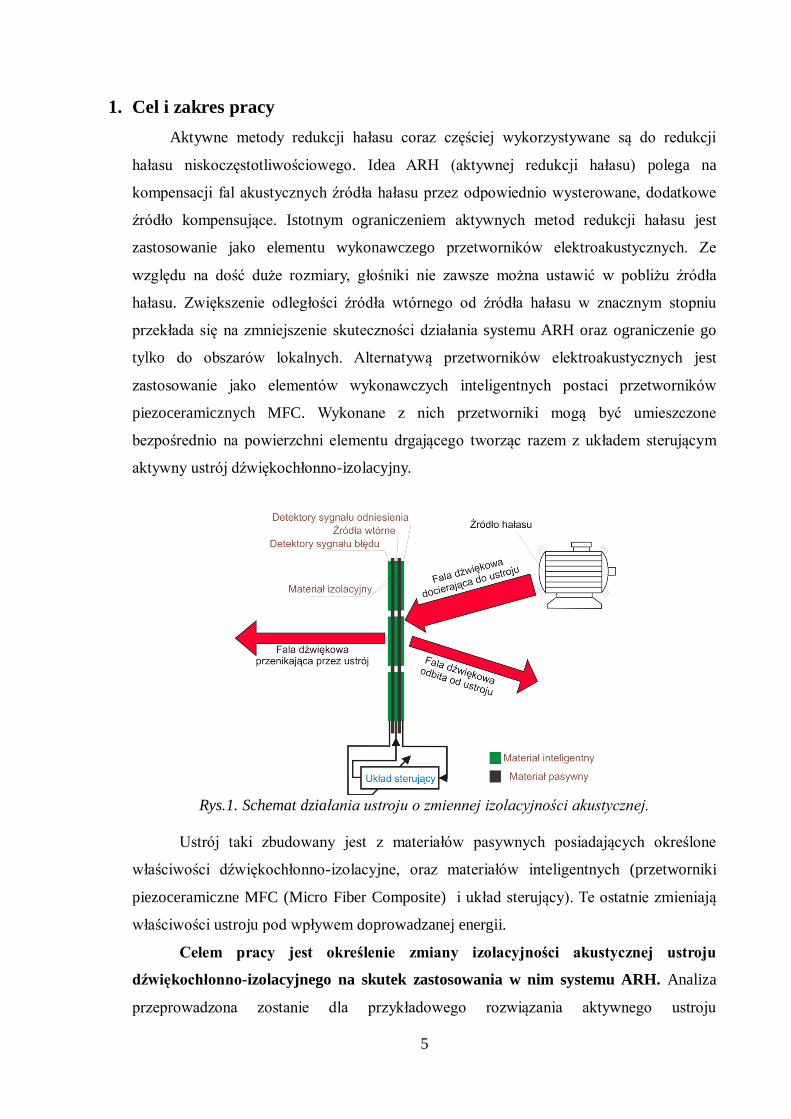
Rys.1. Schemat działania ustroju o zmiennej izolacyjności akustycznej.
Ustrój taki zbudowany jest z materiałów pasywnych posiadających określone
właściwości dźwiękochłonno-izolacyjne, oraz materiałów inteligentnych (przetworniki
piezoceramiczne MFC (Micro Fiber Composite) i układ sterujący). Te ostatnie zmieniają
właściwości ustroju pod wpływem doprowadzanej energii.
Celem pracy jest określenie zmiany izolacyjności akustycznej ustroju
dźwiękochłonno-izolacyjnego na skutek zastosowania w nim systemu ARH. Analiza
przeprowadzona zostanie dla przykładowego rozwiązania aktywnego ustroju

6
dźwiękochłonno-izolacyjnego. Badana będzie izolacyjność akustyczna ustroju przy
wykorzystaniu pomiaru natężenia dźwięku metodą bezpośredniego pomiaru prędkości
akustycznej.
Ustrój może być wykorzystywany między innymi do zwiększenia izolacyjności
akustycznej obudów dźwiękochłonno-izolacyjnych maszyn przemysłowych czy
transformatorów. W celu zapewnienia wymaganej izolacyjności obudów dźwiękochłonno-
izolacyjnych zastępowałby on rozwiązania oparte na grubej obudowie, w której bardzo
duże koszty pochłaniają układy odprowadzające ciepło.
7
2. Wstęp
Hałasem nazywamy dźwięki nieprzyjemne bądź niepożądane, dokuczliwe,
utrudniające pracę, wypoczynek i szkodliwe dla zdrowia [3]. Wywołują one u ludzi
postawę niezadowolenia wobec panujących warunków akustycznych. Hałas określany jest
subiektywnie przez każdą osobę. Dla słuchaczy koncertu muzyka może być formą relaksu
i spędzania wolnego czasu, zaś dla osób nią niezainteresowanych – hałasem.
Wpływ hałasu na organizm ludzki jest różny. Przede wszystkim działa on
niekorzystnie na słuch. Powoduje czasowe lub trwałe przesunięcie progu słyszenia. Hałas
również niekorzystnie wpływa na stan psychofizyczny człowieka. Już przy 55dB dają o
sobie znać zakłócenia snu i wzrost nadpobudliwości nerwowej (na hałas o takim poziomie
narażonych jest ponad 60% Europejczyków). Przy natężeniu 60-75 dB (norma akustyczna
w polskich miastach) występują zróżnicowane anomalia u ludzi w postaci
niezauważalnych zmian akcji serca, ciśnienia krwi czy rytmu oddychania. Przy 70 dB
zaczynają się niekorzystne zmiany wegetatywne w organizmie. Taki poziom ma również
istotny wpływ na wydajność pracy i zdolność do koncentracji. Przyczynia się do
pogorszenia zrozumiałości mowy i percepcji sygnałów ostrzegawczych, a długotrwały - do
narastania zmęczenia, bólów głowy, bezsenności, oraz zaburzeń widzenia. Powyżej 75 dB
mogą wystąpić rozmaite uszkodzenia organiczne i choroby, m.in. nadciśnienie tętnicze,
zaburzenia pracy żołądka, wzrost wydzielania adrenaliny, wrzody żołądka, przyspieszenie
procesu starzenia. Przyjmuje się, że długotrwałe narażenie na hałas o wartościach powyżej
85 dB powoduje trwałe ubytki słuchu. Hałas przewyższający 120 dB jest szczególnie
niebezpieczny, gdyż istnieje zagrożenie natychmiastowego, mechanicznego i
nieodwracalnego uszkodzenia słuchu. Może to nastąpić szczególnie w przypadku
narażenia na hałas impulsowy. W okolicach 130 dB występuje granica bólu.[4]
Hałas w warunkach rzeczywistych jest praktycznie nie do uniknięcia. Zjawisko to
związane jest z rozwojem przemysłu, komunikacji i urbanizacją. W miastach wzrostowi
natężenia ruchu, oraz szybkości pojazdów towarzyszy systematyczne narastanie głośności
hałasu komunikacyjnego. Wg badań przeprowadzonych przez firmę proGEO Sp. z o.o.
średnio co 10 lat hałas w środowisku wzrasta o 2dB. Na 21% powierzchni Polski hałas
przekracza dopuszczalne normy. Na jego działanie narażona jest około jedna trzecia
wszystkich Polaków. Szczególnie odczuwalne jest to w Warszawie, która jest jednym z
najgłośniejszych miejsc w Polsce. W centrum tego miasta bezpieczny dla zdrowia poziom
hałasu przekroczony jest aż o jedną trzecią wartości dopuszczalnej [8]. Na Górnym Śląsku,
8
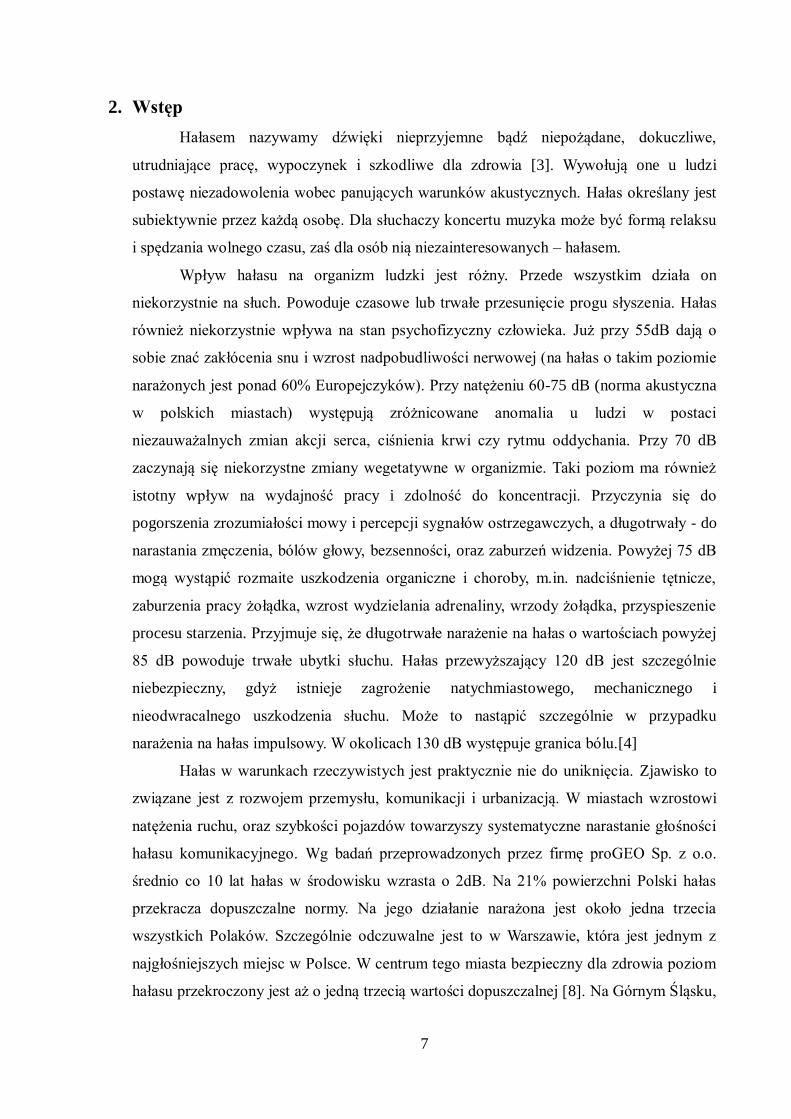
gdzie uprzemysłowienie jest najwyższe w Polsce, notuje się aż 13% ze wszystkich
notowanych w Polsce przypadków upośledzenia słuchu.
Rys.2. Hałas w środowisku [1]
Zagrożone hałasem obejmuje również w dużym stopniu osoby w środowisku pracy.
Każde urządzenie, czy środek transportu mogą stanowić zagrożenie. Jest ono jeszcze
większe, gdy hałas występuje na przestrzeni zamkniętej. W takim przypadku hałas zostaje
odbity od ścian i obiektów, a jego poziom nie maleje wraz ze spadkiem odległości w takim
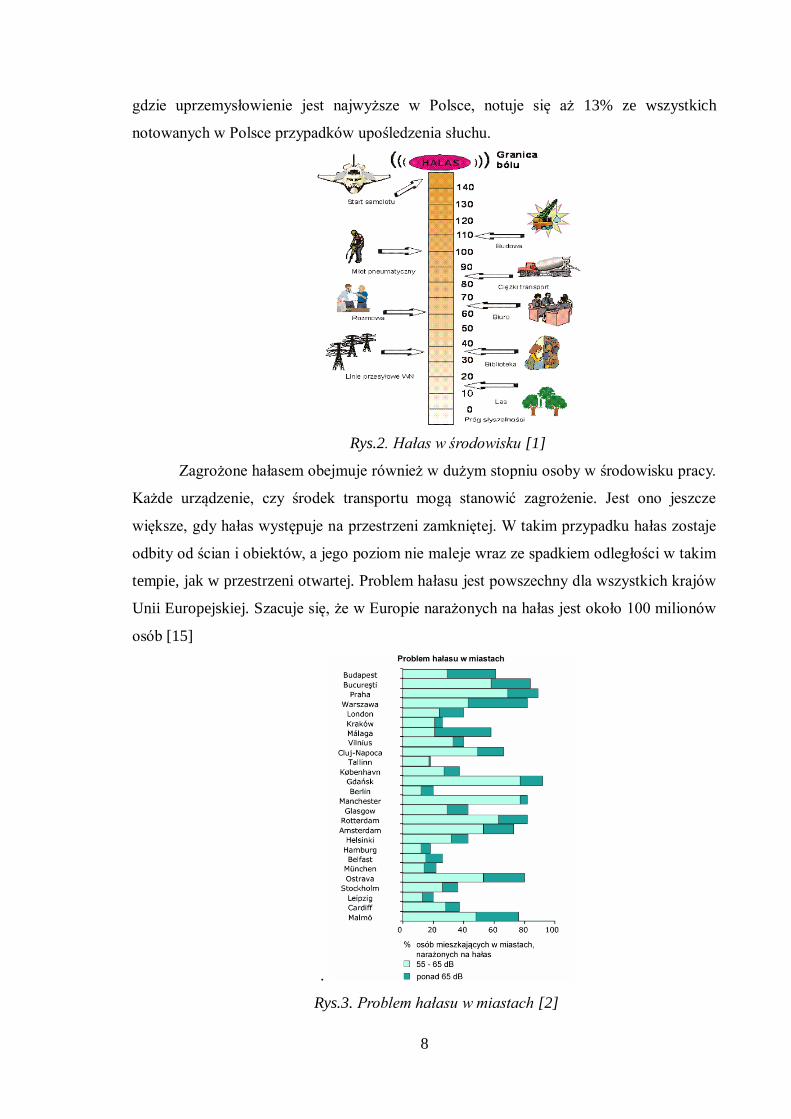
tempie, jak w przestrzeni otwartej. Problem hałasu jest powszechny dla wszystkich krajów
Unii Europejskiej. Szacuje się, że w Europie narażonych na hałas jest około 100 milionów
osób [15]
.
Rys.3. Problem hałasu w miastach [2]
9
3. Metody redukcji hałasu
Coraz powszechniej zaczyna się rozumieć potrzebę zwalczania hałasu. Opiera się
ona na dwóch metodach [12]. Pierwszą są środki administracyjno-prawne zawierające
wszelkie uregulowania prawne - uchwały Rady Ministrów, ustawy sejmowe,
rozporządzenia, zarządzenia oraz pozostałe przepisy i normy techniczne, ograniczające
zagrożenie hałasem. Zalicza się do nich również ograniczenie ekspozycji na szkodliwe
dźwięki poprzez przerwy w pracy lub rotację pracowników, a także stosowanie
profilaktyki lekarskiej (kontrola słuchu) określającej ubytek słuchu.
Drugą metodą redukcji hałasu jest zastosowanie niezbędnych do tego celu środków
technicznych. Zaliczamy do nich:
ograniczenie i minimalizację emisji hałasu ze źródła,
ograniczanie transmisji hałasu
ograniczanie oddziaływania hałasu na określone obszary
aktywną redukcję hałasu
Ograniczanie emisji hałasu u źródła jest najskuteczniejszym sposobem pozbycia się
niechcianych dźwięków mającym ponadto charakter globalny. Polega na unikaniu
procesów powodujących narażenie na hałas i zastępowanie ich innymi. Może to być
zamiana procesu technologicznego na bardziej cichy, stosowanie maszyn generujących
dźwięk o mniejszym natężeniu, czy wymiana i konserwacja zużytych części (np.
dziurawego tłumika w samochodzie).
Na ograniczenie hałasu na drodze jego transmisji składają się przede wszystkim
środki ochrony zbiorowej oraz organizacyjne. W przypadku drugich, najważniejszą
praktyką jest poprawne rozmieszczenie źródeł hałasu oraz oddzielenie obszarów o
zróżnicowanym poziomie emisji. Do środków ochrony zbiorowej zaliczamy zastosowanie
obudów dźwiękochłonno-izolacyjnych, tłumików akustycznych, ekranów akustycznych i
kabin dźwiękoizolacyjnych oraz zastosowanie adaptacji akustycznej. Ich celem jest
odizolowanie źródła hałasu od reszty środowiska.
Ograniczanie oddziaływania hałasu na określone obszary możliwe jest w
przypadku zastosowania rozwiązań technologicznych opartych na odsunięciu człowieka od
głośnych procesów. Przykładem może być tutaj zastosowanie automatyki w procesie
produkcyjnym. Gdy niemożliwe jest zastosowanie powyższych środków ochrony przed
hałasem, w grę wchodzić może zastosowanie indywidualnych ochron słuchu.[12]
10
Powyższe metody nie zawsze gwarantują dostateczną redukcję hałasu
niskoczęstotliwościowego. Dzieje się tak, gdyż współczynnik pochłaniania rośnie wraz z
grubością i masą przypadającej na 1 m2 powierzchni materiału dźwiękochłonnego, a także
ze wzrostem częstotliwości padającej na niego fali akustycznej. Przy niskich
częstotliwościach długość fal jest duża i ulegają one ugięciu na brzegach materiału
izolacyjnego. To z kolei nie wpływa prawie w ogóle na zmianę poziomu hałasu.
Zastosowanie bardzo grubych materiałów dźwiękochłonnych zazwyczaj nie jest możliwe,
lub całkowicie nieopłacalne. Inaczej sytuacja przedstawia się w przypadku dynamicznie
rozwijających się aktywnych metod redukcji hałasu. Są one skuteczne dla częstotliwości
poniżej 500Hz, oraz dla wąskopasmowych, powtarzalnych sygnałów.

11
4. Aktywne metody redukcji hałasu
Aktywne metody redukcji hałasu opierają się na zjawisku nakładania się fal, które
w pewnych warunkach ulegają wzajemnej kompensacji.
Rys.4. Zasada działania aktywnej redukcji hałasu.[3]
Idea aktywnej redukcji hałasu opiera się na wykorzystaniu dwóch sygnałów.
Jednym z nich jest sygnał kompensowany, na Rys. 4 oznaczony jako x(t). Drugi sygnał -
y(t) wytwarzany jest na podstawie pierwszego. Ma taką samą amplitudę, różni się jedynie
fazą przesuniętą o 180°. Podawany jest on na wejście dodatkowego źródła, zwanego
wtórnym. W wyniku superpozycji tych dwóch sygnałów powstaje skompensowany sygnał
e(t). Teoretycznie może on przybrać postać ciszy. W praktyce jest to nieosiągalne, ale
amplituda sygnału e(t) może być znacznie mniejsza w stosunku do amplitudy sygnału x(t).
Rys. 5. Schemat układu aktywnej redukcji hałasu.[3]
12
Istotnym blokiem systemu ARH jest układ sterujący. Jego zadaniem jest
przekształcenie sygnału odniesienia na sygnał wyjściowy, aby po wysterowaniu nim źródła
wtórnego poziom hałasu w punkcie obserwacji był jak najmniejszy. Układ sterujący
zawiera analogowe układy wejścia i wyjścia, zasilacz i część cyfrową wraz z
zaimplementowanym algorytmem. W części cyfrowej realizowane są obliczenia
wykonywane na podstawie sygnałów błędu i odniesienia, w oparciu o zadany algorytm.
Moc obliczeniowa układów liczących powinna być jak największa, ponieważ cykl
obliczeń musi być wykonany w czasie rzeczywistym, np. dla sygnału o częstotliwości
1000Hz, opóźnienie układu o 0,0001 sekundy powoduje 60% spadek skuteczności [3].
Wymaganie bardzo dużej mocy obliczeniowej było powodem, że systemy ARH długo nie
przynosiły oczekiwanych wyników.
Pobieranie sygnałów błędu i odniesienia odbywa się za pomocą elementów
pomiarowych. Jeden z nich dostarcza informacje o hałasie, który chcemy skompensować
(detektor sygnału odniesienia), natomiast drugi, detektor sygnału błędu informuje o
poziomie hałasu w punkcie obserwacji, w którym ma on być skompensowany (detektor
sygnału błędu).
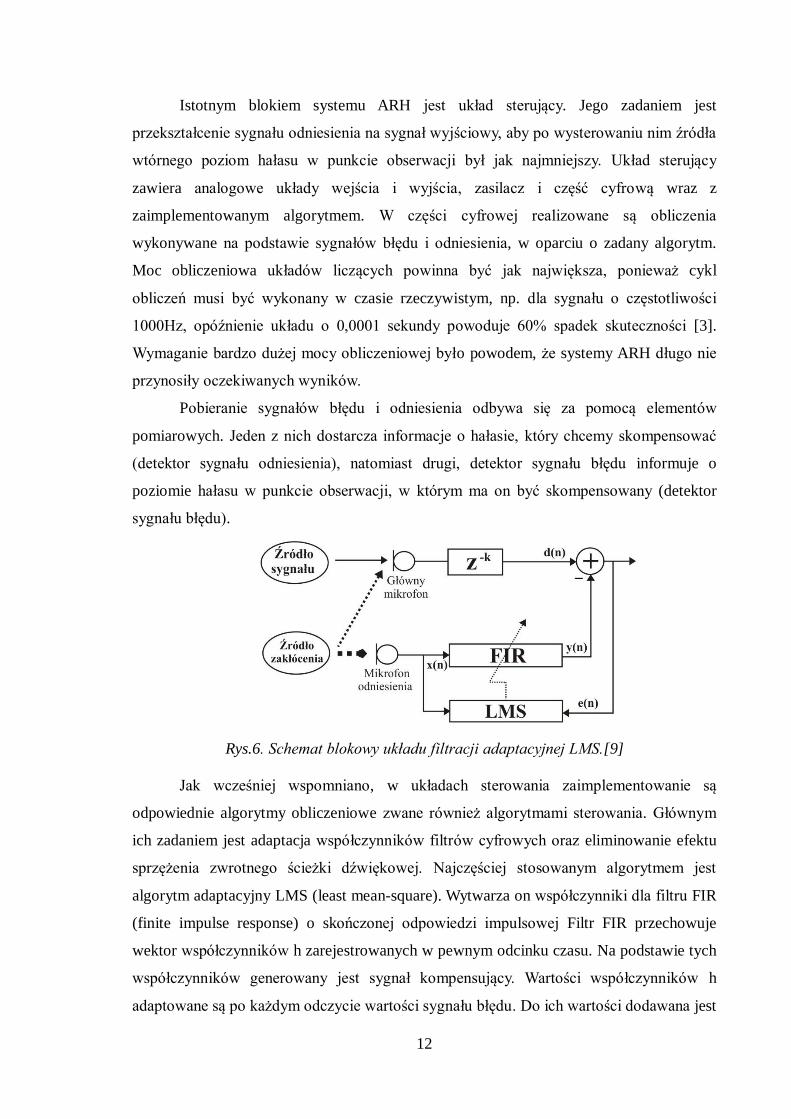
Rys.6. Schemat blokowy układu filtracji adaptacyjnej LMS.[9]
Jak wcześniej wspomniano, w układach sterowania zaimplementowanie są
odpowiednie algorytmy obliczeniowe zwane również algorytmami sterowania. Głównym
ich zadaniem jest adaptacja współczynników filtrów cyfrowych oraz eliminowanie efektu
sprzężenia zwrotnego ścieżki dźwiękowej. Najczęściej stosowanym algorytmem jest
algorytm adaptacyjny LMS (least mean-square). Wytwarza on współczynniki dla filtru FIR
(finite impulse response) o skończonej odpowiedzi impulsowej Filtr FIR przechowuje
wektor współczynników h zarejestrowanych w pewnym odcinku czasu. Na podstawie tych
współczynników generowany jest sygnał kompensujący. Wartości współczynników h
adaptowane są po każdym odczycie wartości sygnału błędu. Do ich wartości dodawana jest
13
korekta obliczona przez algorytm LMS. Dzięki temu sygnał y(n) upodabnia się do sygnału
hałasu i może zostać odjęty od sygnału zakłóconego. W efekcie powinniśmy uzyskać sam
sygnał użyteczny.
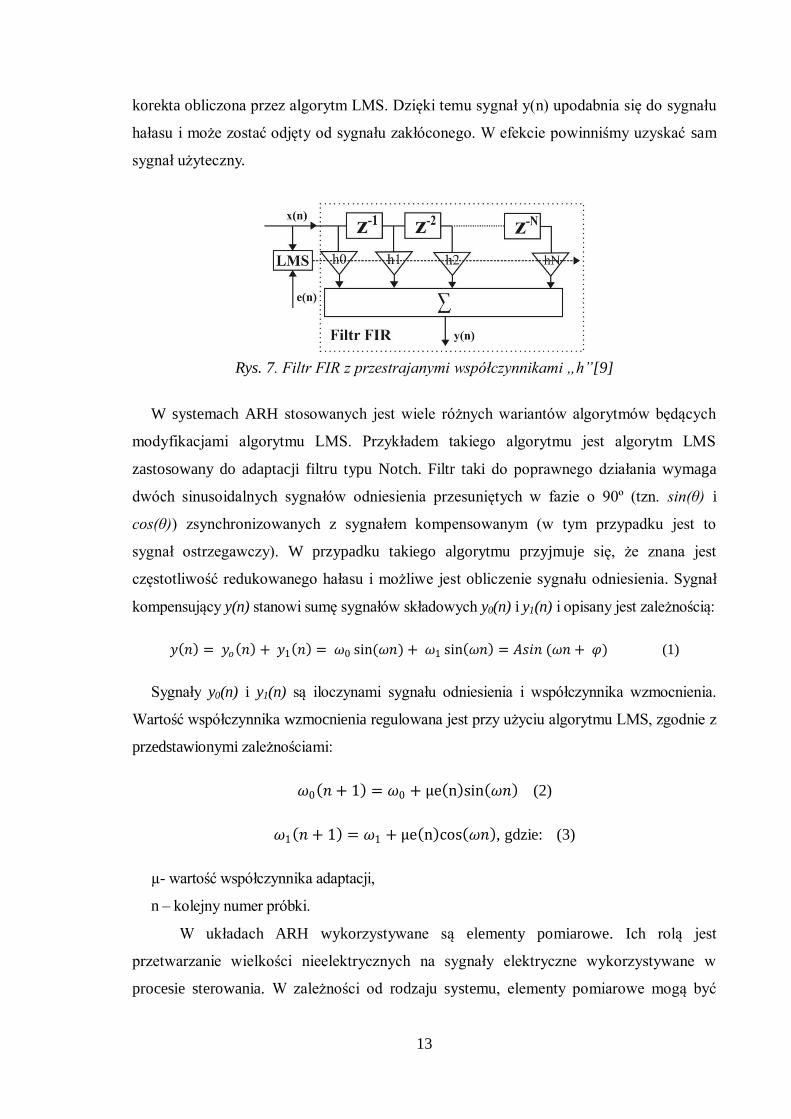
Rys. 7. Filtr FIR z przestrajanymi współczynnikami „h”[9]
W systemach ARH stosowanych jest wiele różnych wariantów algorytmów będących
modyfikacjami algorytmu LMS. Przykładem takiego algorytmu jest algorytm LMS
zastosowany do adaptacji filtru typu Notch. Filtr taki do poprawnego działania wymaga
dwóch sinusoidalnych sygnałów odniesienia przesuniętych w fazie o 90º (tzn. sin(θ) i
cos(θ)) zsynchronizowanych z sygnałem kompensowanym (w tym przypadku jest to
sygnał ostrzegawczy). W przypadku takiego algorytmu przyjmuje się, że znana jest
częstotliwość redukowanego hałasu i możliwe jest obliczenie sygnału odniesienia. Sygnał
kompensujący y(n) stanowi sumę sygnałów składowych y0(n) i y1(n) i opisany jest zależnością:
𝑦 𝑛 = 𝑦𝑜 𝑛 + 𝑦1 𝑛 = 𝜔0 sin(𝜔𝑛) + 𝜔1 sin 𝜔𝑛 = 𝐴𝑠𝑖𝑛 (𝜔𝑛 + 𝜑) (1)
Sygnały y0(n) i y1(n) są iloczynami sygnału odniesienia i współczynnika wzmocnienia.
Wartość współczynnika wzmocnienia regulowana jest przy użyciu algorytmu LMS, zgodnie z
przedstawionymi zależnościami:
𝜔0 𝑛 + 1 = 𝜔0 + μe n sin 𝜔𝑛 (2)
𝜔1 𝑛 + 1 = 𝜔1 + μe n cos 𝜔𝑛 , gdzie: (3)
µ- wartość współczynnika adaptacji,
n – kolejny numer próbki.
W układach ARH wykorzystywane są elementy pomiarowe. Ich rolą jest
przetwarzanie wielkości nieelektrycznych na sygnały elektryczne wykorzystywane w
procesie sterowania. W zależności od rodzaju systemu, elementy pomiarowe mogą być
14
różnego typu, np. mikrofony, obrotomierze, akcelerometry, przetworniki prędkości i
przemieszczenia, czujniki odkształcenia, czy synchronizowane przetworniki
częstotliwości. Z uwagi na uniwersalne zastosowanie, najczęściej używanym elementem
pomiarowym są mikrofony. Ważnymi ich parametrami są maksymalny poziom ciśnienia
akustycznego oraz stosunek sygnał szum. Maksymalny poziom ciśnienia akustycznego
ogranicza zastosowanie mikrofonu tylko do takich miejsc, w których wartość ciśnienia
akustycznego nie przekracza tej wartości. Od stosunku sygnał szum zależy skuteczność
całego systemu. Cechy stosowanych algorytmów w procesie sterowania nie wymagają, by
mikrofony miały one płaską charakterystykę fazową i amplitudową. Z powodzeniem więc
można stosować tanie modele pojemnościowe czy elektretowe. Jedynie w przypadku
zastosowania układu ze sterowaniem z wyprzedzeniem, pojawia się problem negatywnego
wpływu sprzężenia zwrotnego pomiędzy źródłem wtórnym, a przetwornikiem sygnału
odniesienia. W takiej sytuacji istnieje możliwość ograniczenia wpływu sprzężenia
zwrotnego poprzez zastosowanie mikrofonu o silnie kierunkowej charakterystyce.
Do najczęściej spotykanych elementów wykonawczych w aktywnych systemach
redukcji hałasu należą głośniki. Powinny one charakteryzować się odpowiednim pasmem
przenoszenia, dużą wytrzymałością i żywotnością. Zastosowanie modeli o wysokiej
efektywności wpływa na zmniejszenie kosztów eksploatacji takiego systemu. Ważną cechą
jest również duża prędkość objętościowa q [m3/s] w zakresie niskich częstotliwości, gdyż
umożliwia uzyskanie dużej wartości emitowanej mocy akustycznej. Stosowanie jako
element wykonawczy głośników wprowadza jednak niekiedy pewne ograniczenia. Nie
mogą one zostać zamocowane na źródle hałasu, a czasem nawet w jego pobliżu. To z kolei
powoduje, że efekt aktywnej redukcji wystąpi na obszarze ograniczonym. Im bliżej więc
źródła hałasu znajduje się element wykonawczy, tym redukcja hałasu obejmuje większy
obszar. Wyeliminowane zostaje przy tym opóźnienie występujące w torze pomiarowym.
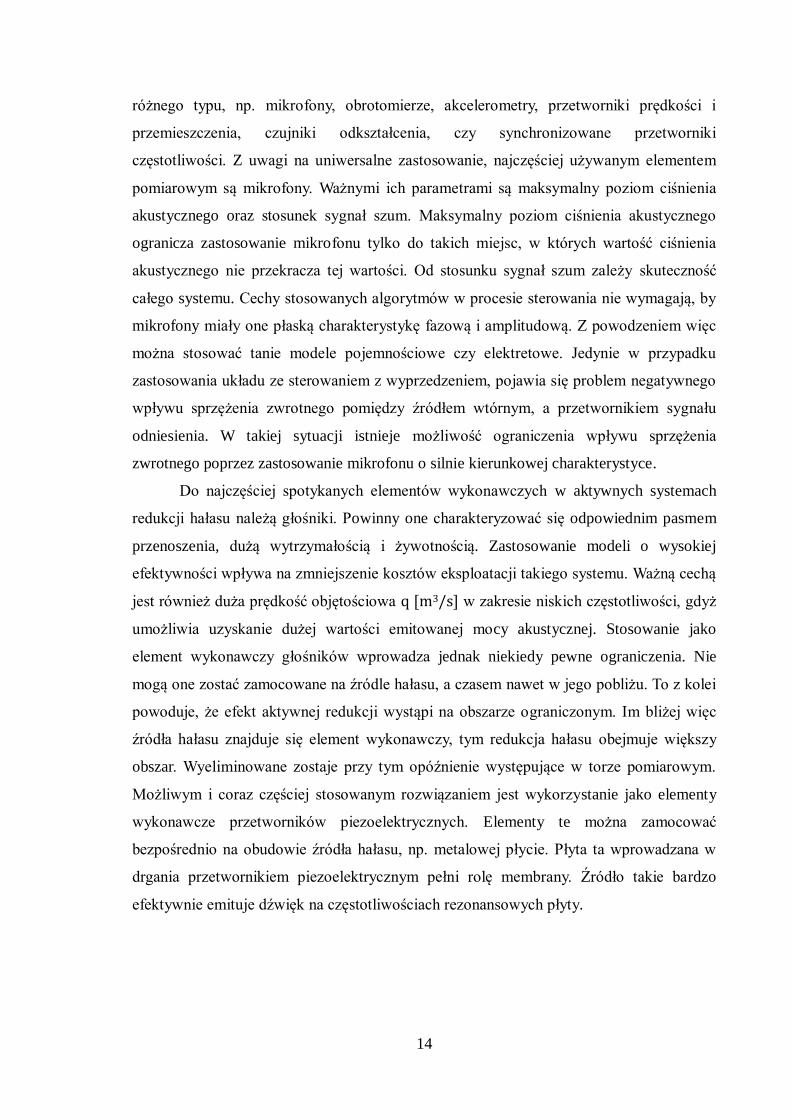
Możliwym i coraz częściej stosowanym rozwiązaniem jest wykorzystanie jako elementy
wykonawcze przetworników piezoelektrycznych. Elementy te można zamocować
bezpośrednio na obudowie źródła hałasu, np. metalowej płycie. Płyta ta wprowadzana w
drgania przetwornikiem piezoelektrycznym pełni rolę membrany. Źródło takie bardzo
efektywnie emituje dźwięk na częstotliwościach rezonansowych płyty.
15
Rys. 8. Element wykonawczy z elementem piezoelektrycznym
Przetworniki piezoelektryczne służące do redukcji dźwięku
niskoczęstotliwościowego mogą być połączone z materiałem pasywnym o określonej
charakterystyce tłumienia i izolacyjności. Dzięki temu zakres częstotliwości
redukowanego hałasu zostanie zwiększony. Po doprowadzeniu układu sterującego do
elementów piezoelektrycznych, układ taki możemy nazwać aktywnym ustrojem
dźwiękochłonno-izolacyjnym, gdyż zmienia on swoje właściwości pod wpływem
doprowadzanej energii. Badania właściwości akustycznych przykładowego rozwiązania
takiego ustroju będą prowadzone w dalszej części tej pracy.
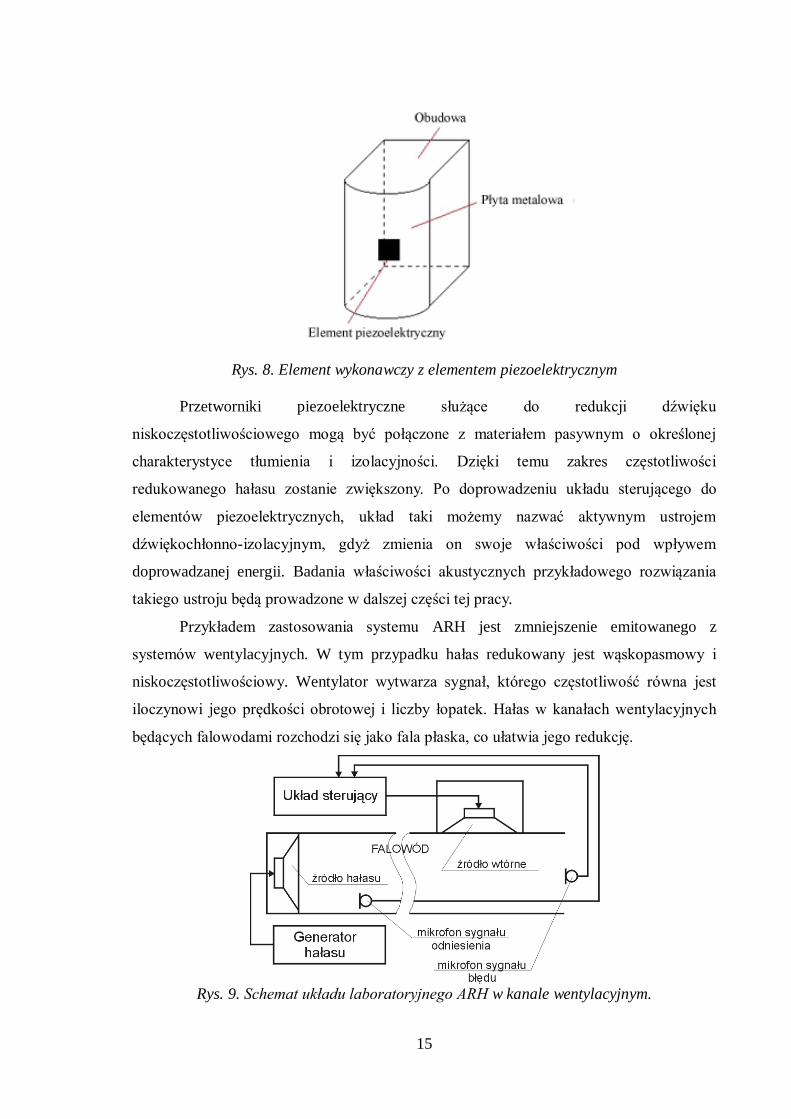
Przykładem zastosowania systemu ARH jest zmniejszenie emitowanego z
systemów wentylacyjnych. W tym przypadku hałas redukowany jest wąskopasmowy i
niskoczęstotliwościowy. Wentylator wytwarza sygnał, którego częstotliwość równa jest
iloczynowi jego prędkości obrotowej i liczby łopatek. Hałas w kanałach wentylacyjnych
będących falowodami rozchodzi się jako fala płaska, co ułatwia jego redukcję.
Rys. 9. Schemat układu laboratoryjnego ARH w kanale wentylacyjnym.
16
Na Rys. 9 przedstawiono schemat układu laboratoryjnego służącego do badania
systemów ARH w układach wentylacyjnych. Na końcu falowodu, będącego
odpowiednikiem przewodów wentylacyjnych, zamocowany jest głośnik
niskoczęstotliwościowy pełniący rolę źródła hałasu (wentylatora) W odległości około 60
cm od drugiego końca falowodu umieszczono drugi głośnik będący źródłem wtórnym.
Mikrofony odniesienia i błędu zamocowano kolejno wewnątrz i u wylotu falowodu.
Wychodzące z nich sygnały są wzmacniane, a następnie dostarczane do układu
sterującego, generującego sygnał sterujący źródłem wtórnym. Redukcja hałasu następuje w
całym pomieszczeniu, gdyż źródło hałasu zostało skompensowane w płaszczyźnie wylotu
falowodu. .
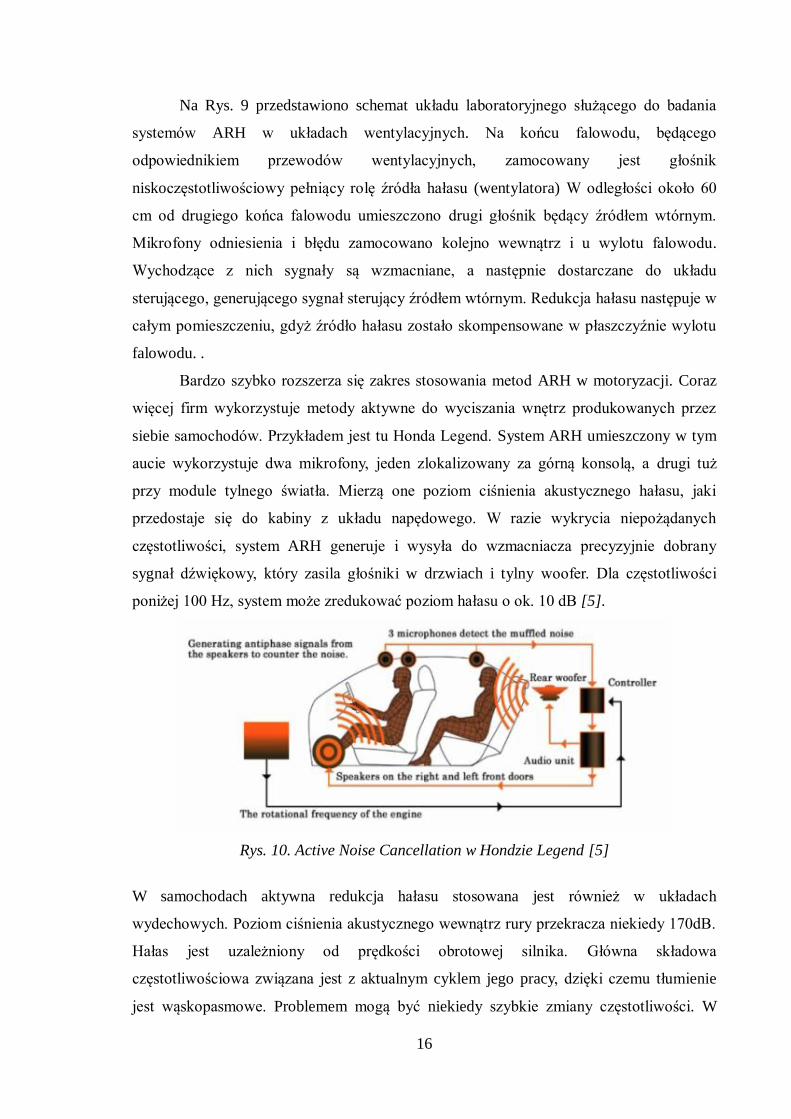
Bardzo szybko rozszerza się zakres stosowania metod ARH w motoryzacji. Coraz
więcej firm wykorzystuje metody aktywne do wyciszania wnętrz produkowanych przez
siebie samochodów. Przykładem jest tu Honda Legend. System ARH umieszczony w tym
aucie wykorzystuje dwa mikrofony, jeden zlokalizowany za górną konsolą, a drugi tuż
przy module tylnego światła. Mierzą one poziom ciśnienia akustycznego hałasu, jaki
przedostaje się do kabiny z układu napędowego. W razie wykrycia niepożądanych
częstotliwości, system ARH generuje i wysyła do wzmacniacza precyzyjnie dobrany
sygnał dźwiękowy, który zasila głośniki w drzwiach i tylny woofer. Dla częstotliwości
poniżej 100 Hz, system może zredukować poziom hałasu o ok. 10 dB [5].
Rys. 10. Active Noise Cancellation w Hondzie Legend [5]
W samochodach aktywna redukcja hałasu stosowana jest również w układach
wydechowych. Poziom ciśnienia akustycznego wewnątrz rury przekracza niekiedy 170dB.
Hałas jest uzależniony od prędkości obrotowej silnika. Główna składowa
częstotliwościowa związana jest z aktualnym cyklem jego pracy, dzięki czemu tłumienie
jest wąskopasmowe. Problemem mogą być niekiedy szybkie zmiany częstotliwości. W
17
nowych rozwiązaniach tłumienie następuje poza układem wydechowym. Mikrofon jest
umieszczony na zderzaku w odległości ok.20 cm od wylotu rury wydechowej. Głośniki
niskoczęstotliwościowe mają specjalną konstrukcję zapewniającą odporność na wysoką
temperaturę, dochodzącą niekiedy do 550 C. Układ rezonatorowy pasywnie wspomaga
układ aktywny poprzez wyciszenie wyższych harmonicznych i składowych losowych. W
zakresie 90-360Hz uzyskano skuteczność 16 dB. Przy pracy ciągłej silnika z
częstotliwością podstawową 90Hz wzrosła ona do 26dB.[14]
Rys. 11. Słuchawki z aktywną redukcją hałasu dla pilotów.[7]
Innym zastosowaniem ARH są słuchawki. Możemy je podzielić na dwie grupy:
niezależne, zasilane bateryjnie oraz dołączane kablem do pulpitów. Słuchawki niezależne
zawierają w sobie układ sterujący i mikrofony. Dzięki temu mogą być używane niezależnie
od miejsca. Słuchawki dołączane do pulpitów są układami bardziej skomplikowanymi i
dedykowanymi do konkretnych zastosowań. Współpracują z mikrofonami błędu i
odniesienia rozmieszczonymi w pożądanych punktach pomiarowych. Układy takie
wykorzystywane są między innymi w lotnictwie. Wewnątrz kabiny pilotów poziom
ciśnienia akustycznego dochodzi nawet do 95dB. Słuchawki dają możliwość redukcji
hałasu nawet o 30dB [7].
Nowym obszarem zastosowań metod ARH jest zwiększanie izolacyjności
akustycznej przegród i obudów dźwiękochłonno-izolacyjnych. Do zmiany izolacyjności
akustycznej stosowane są tzw. materiały inteligentne umieszczane bezpośrednio na
powierzchni przegród czy obudów. Rozwiązania takie mają szanse zastąpić rozwiązania
oparte na grubej obudowie, w której bardzo duże koszty pochłaniają układy
odprowadzające ciepło.
18
5. Schemat i zasada działania aktywnego ustroju dźwiękochłonno-
izolacyjnego
Ustrój o zmiennej izolacyjności akustycznej zbudowany jest z materiałów
pasywnych oraz. z materiałów inteligentnych, zmieniających izolacyjność akustyczną
ustroju pod wpływem doprowadzanej energii. Na skutek połączenia ustroju z układem
sterującego ARH, całość tworzy system redukcji hałasu w postaci aktywnego ustroju
dźwiękochłonno-izolacyjnego.
Elementem wykonawczym jest przetwornik piezoelektryczny MFC M-8528-P2,
sterowany przez układ systemu ARH. Sterowanie to odbywa się w oparciu o sygnał błędu
uzyskany przez mikrofon pomiarowy.
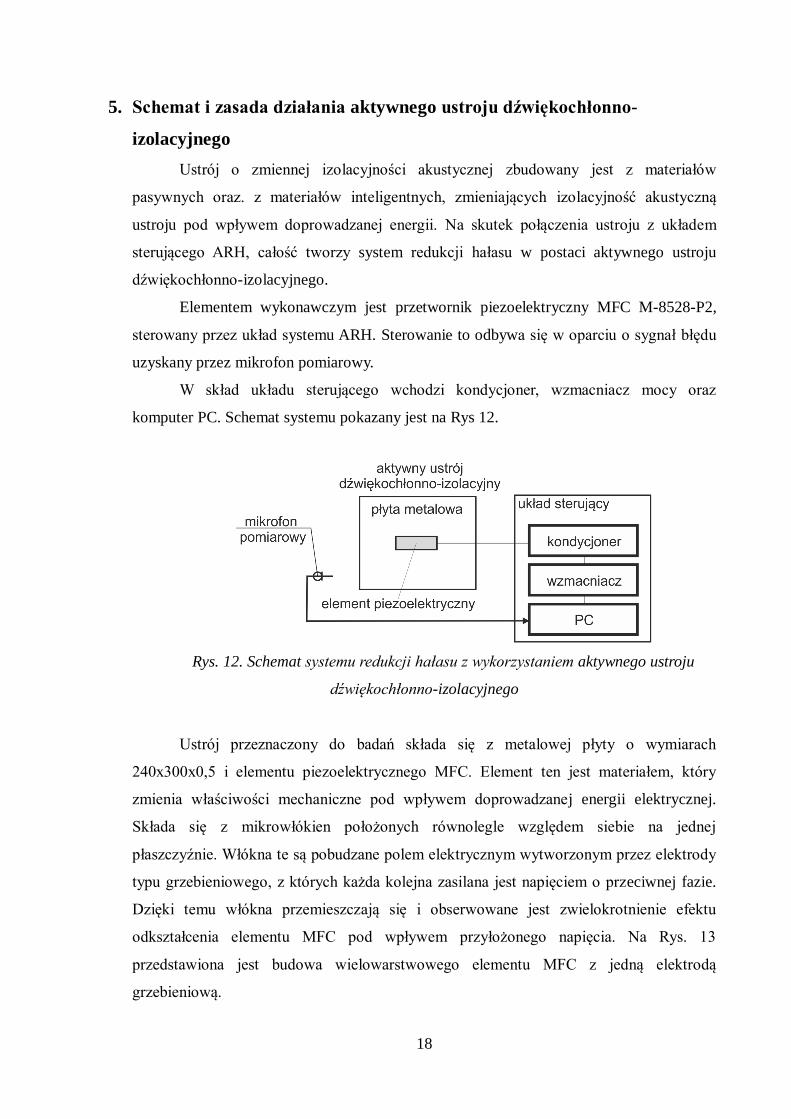
W skład układu sterującego wchodzi kondycjoner, wzmacniacz mocy oraz
komputer PC. Schemat systemu pokazany jest na Rys 12.
Rys. 12. Schemat systemu redukcji hałasu z wykorzystaniem aktywnego ustroju
dźwiękochłonno-izolacyjnego
Ustrój przeznaczony do badań składa się z metalowej płyty o wymiarach
240x300x0,5 i elementu piezoelektrycznego MFC. Element ten jest materiałem, który
zmienia właściwości mechaniczne pod wpływem doprowadzanej energii elektrycznej.
Składa się z mikrowłókien położonych równolegle względem siebie na jednej
płaszczyźnie. Włókna te są pobudzane polem elektrycznym wytworzonym przez elektrody
typu grzebieniowego, z których każda kolejna zasilana jest napięciem o przeciwnej fazie.
Dzięki temu włókna przemieszczają się i obserwowane jest zwielokrotnienie efektu
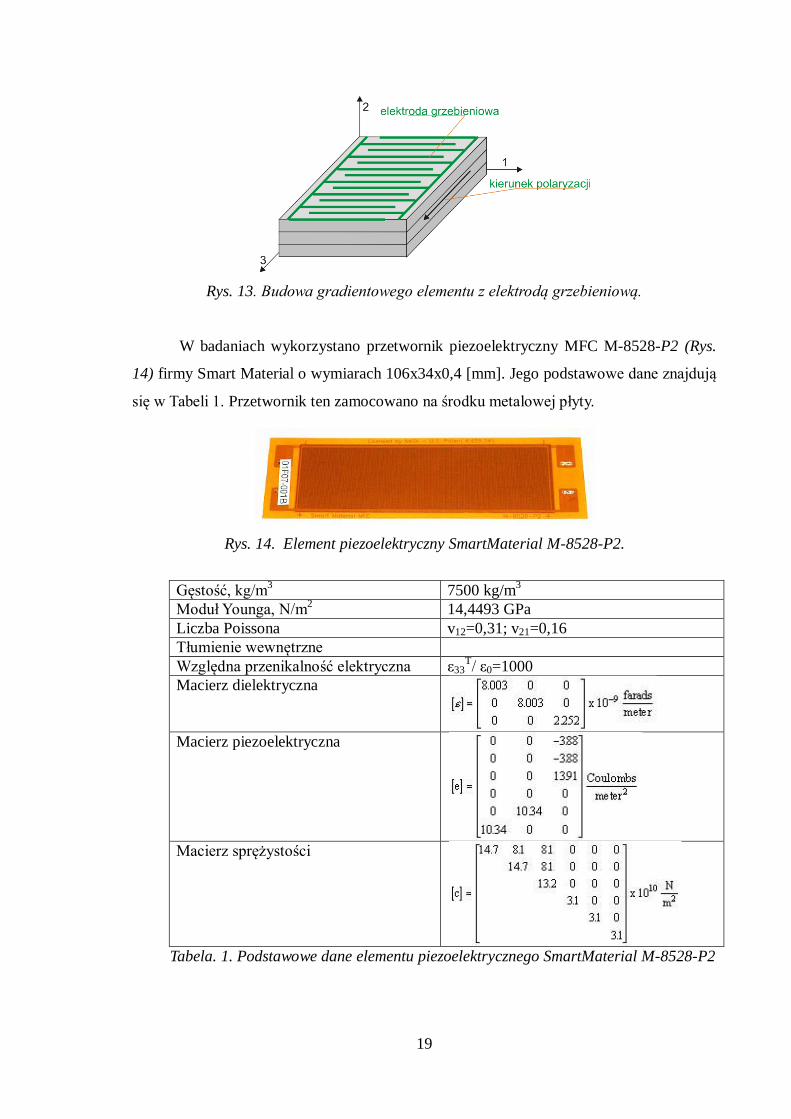
odkształcenia elementu MFC pod wpływem przyłożonego napięcia. Na Rys. 13
przedstawiona jest budowa wielowarstwowego elementu MFC z jedną elektrodą
grzebieniową.
19
Rys. 13. Budowa gradientowego elementu z elektrodą grzebieniową.
W badaniach wykorzystano przetwornik piezoelektryczny MFC M-8528-P2 (Rys.
14) firmy Smart Material o wymiarach 106x34x0,4 [mm]. Jego podstawowe dane znajdują
się w Tabeli 1. Przetwornik ten zamocowano na środku metalowej płyty.
Rys. 14. Element piezoelektryczny SmartMaterial M-8528-P2.
Gęstość, kg/m3
7500 kg/m3
Moduł Younga, N/m2
14,4493 GPa
Liczba Poissona v12=0,31; v21=0,16
Tłumienie wewnętrzne
Względna przenikalność elektryczna ε33T/ ε0=1000
Macierz dielektryczna
Macierz piezoelektryczna
Macierz sprężystości
Tabela. 1. Podstawowe dane elementu piezoelektrycznego SmartMaterial M-8528-P2
20
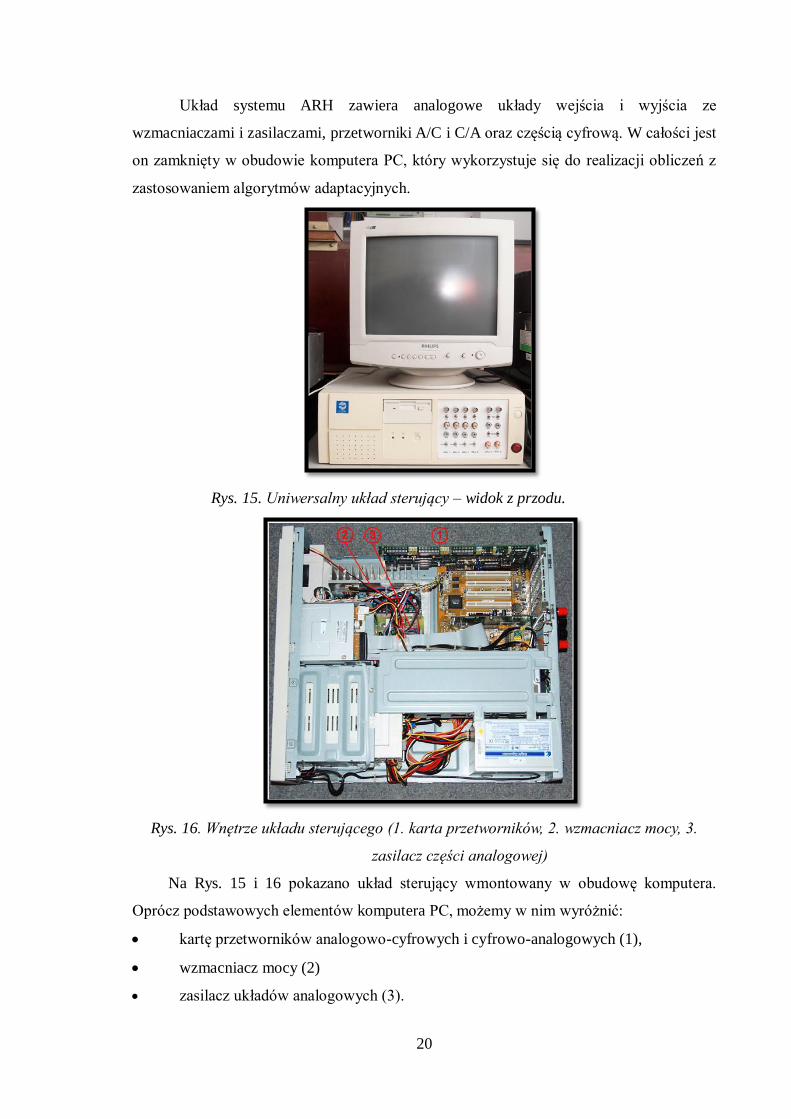
Układ systemu ARH zawiera analogowe układy wejścia i wyjścia ze
wzmacniaczami i zasilaczami, przetworniki A/C i C/A oraz częścią cyfrową. W całości jest
on zamknięty w obudowie komputera PC, który wykorzystuje się do realizacji obliczeń z
zastosowaniem algorytmów adaptacyjnych.
Rys. 15. Uniwersalny układ sterujący – widok z przodu.
Rys. 16. Wnętrze układu sterującego (1. karta przetworników, 2. wzmacniacz mocy, 3.
zasilacz części analogowej)
Na Rys. 15 i 16 pokazano układ sterujący wmontowany w obudowę komputera.
Oprócz podstawowych elementów komputera PC, możemy w nim wyróżnić:
kartę przetworników analogowo-cyfrowych i cyfrowo-analogowych (1),
wzmacniacz mocy (2)
zasilacz układów analogowych (3).
21
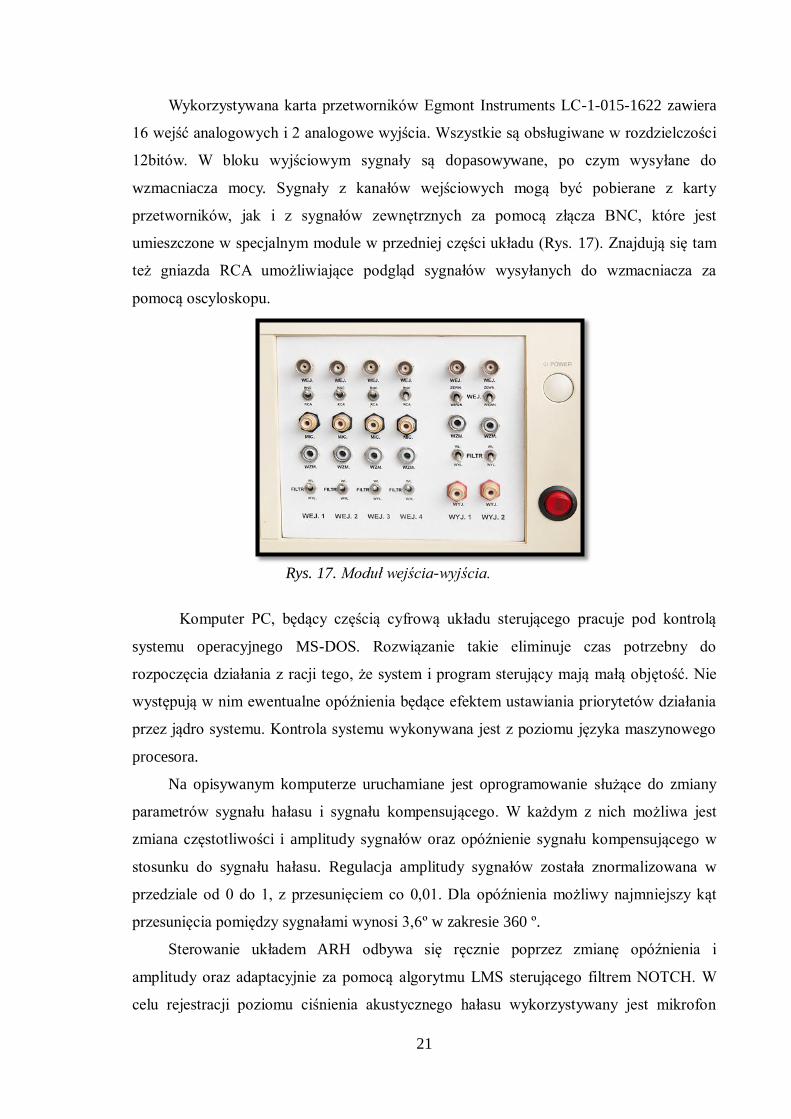
Wykorzystywana karta przetworników Egmont Instruments LC-1-015-1622 zawiera
16 wejść analogowych i 2 analogowe wyjścia. Wszystkie są obsługiwane w rozdzielczości
12bitów. W bloku wyjściowym sygnały są dopasowywane, po czym wysyłane do
wzmacniacza mocy. Sygnały z kanałów wejściowych mogą być pobierane z karty
przetworników, jak i z sygnałów zewnętrznych za pomocą złącza BNC, które jest
umieszczone w specjalnym module w przedniej części układu (Rys. 17). Znajdują się tam
też gniazda RCA umożliwiające podgląd sygnałów wysyłanych do wzmacniacza za
pomocą oscyloskopu.
Rys. 17. Moduł wejścia-wyjścia.
Komputer PC, będący częścią cyfrową układu sterującego pracuje pod kontrolą
systemu operacyjnego MS-DOS. Rozwiązanie takie eliminuje czas potrzebny do
rozpoczęcia działania z racji tego, że system i program sterujący mają małą objętość. Nie
występują w nim ewentualne opóźnienia będące efektem ustawiania priorytetów działania
przez jądro systemu. Kontrola systemu wykonywana jest z poziomu języka maszynowego
procesora.
Na opisywanym komputerze uruchamiane jest oprogramowanie służące do zmiany
parametrów sygnału hałasu i sygnału kompensującego. W każdym z nich możliwa jest
zmiana częstotliwości i amplitudy sygnałów oraz opóźnienie sygnału kompensującego w
stosunku do sygnału hałasu. Regulacja amplitudy sygnałów została znormalizowana w
przedziale od 0 do 1, z przesunięciem co 0,01. Dla opóźnienia możliwy najmniejszy kąt
przesunięcia pomiędzy sygnałami wynosi 3,6º w zakresie 360 º.
Sterowanie układem ARH odbywa się ręcznie poprzez zmianę opóźnienia i
amplitudy oraz adaptacyjnie za pomocą algorytmu LMS sterującego filtrem NOTCH. W
celu rejestracji poziomu ciśnienia akustycznego hałasu wykorzystywany jest mikrofon

22
B&K 4135 ze wzmacniaczem podłączony do układu sterującego. W przypadku trybu
ręcznego do regulacji sygnału kompensującego wykorzystywane są elementy systemu
pomiarowego: oscyloskop Tektronix TDS 3014B oraz miernik poziomu ciśnienia
akustycznego Svan 948. Mikrofon błędu (B&K 4135) oraz mikrofon pomiarowy miernika
poziomu ciśnienia akustycznego Svan 948 zamontowane są w odległości 20cm od ustroju
dźwiękochłonno-izolacyjnego, naprzeciw jego geometrycznego środka. Opóźnienie i
amplituda sygnału wysyłanego do elementu piezoelektrycznego ustawiane są tak, by
poziom ciśnienia akustycznego pokazywany przez miernik Svan i oscyloskop Tektronix
był jak najmniejszy. W trybie adaptacyjnym wykorzystywany jest jedynie mikrofon błędu.
Niezbędnym elementem układu sterującego jest kondycjoner sygnału
kompensującego. Zastosowanie kondycjonera jest niezbędne, ponieważ przetwornik MFC
wymaga, by amplitudy napięcia sygnału kompensującego dochodziły do 200 V, oraz
zostały wstępnie spolaryzowane napięciem dodatnim w zakresie od 0 do 100 V.
Niespełnienie powyższych warunków wpływa na zniekształcanie sygnału wtórnego.
Wynika to z faktu, że zmiany rozmiaru elementu piezoelektrycznego pod wpływem
przyłożonego napięcia ujemnego podlegają silniejszym odgraniczeniom niż zmiany
rozmiaru wywołane napięciem dodatnim. Kondycjonowanie przebiega dwufazowo.
Pierwsza faza polega na wzmocnieniu sygnału wyjściowego z układu sterującego systemu
ARH. Do tego celu wykorzystywany będzie wzmacniacz mocy STA-1508. Następnie
sygnał trafia do kondycjonera, gdzie następuje zwiększenie jego amplitudy napięcia i
dodanie napięcia polaryzującego.
Rys. 18. Wzmacniacz mocy STA-1508 (na dole) i kondycjoner sygnałów sterujących (na
górze).
23
Parametry wzmacniacza mocy STA-1508 przedstawione są w Tabeli 2.
Moc wyjściowa (RMS)
normalny tryb pracy przy obciążeniu 4Ω
normalny tryb pracy przy obciążeniu 8Ω
mostkowy tryb pracy przy obciążeniu 8Ω
8x160W
8x100W
4x320W
Czułość wejściowa dla mocy znamionowej przy
obciążeniu 4 Ω
0,7V
Impedancja wejściowa 20kΩ
Pasmo przenoszenia 12Hz-60kHz, -1.5dB
Częstotliwość podziału zwrotnicy 240Hz
Stosunek sygnał/szum >80dB
Separacja kanałów >60dB, 1kHz
Współczynnik zniekształceń harmonicznych (THD) <0.1%
Dopuszczalna temperatura pracy 0-40°C
Zasilanie 230V~/50Hz
Pobór mocy max. 2400VA
Wymiary (Sz. x Wys. Dł.) 482 x 132 x 310 mm
Ciężar 19kg
Tabela 2. Parametry wzmacniacza STA-1508
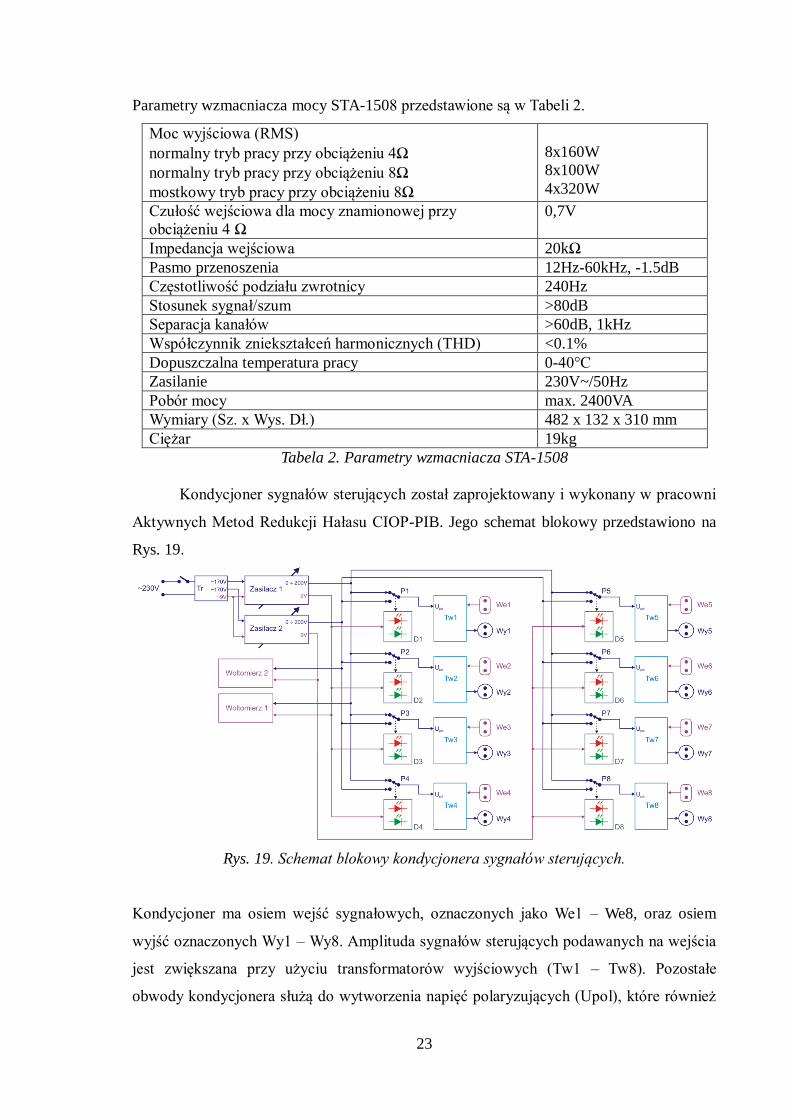
Kondycjoner sygnałów sterujących został zaprojektowany i wykonany w pracowni
Aktywnych Metod Redukcji Hałasu CIOP-PIB. Jego schemat blokowy przedstawiono na
Rys. 19.
Rys. 19. Schemat blokowy kondycjonera sygnałów sterujących.
Kondycjoner ma osiem wejść sygnałowych, oznaczonych jako We1 – We8, oraz osiem
wyjść oznaczonych Wy1 – Wy8. Amplituda sygnałów sterujących podawanych na wejścia
jest zwiększana przy użyciu transformatorów wyjściowych (Tw1 – Tw8). Pozostałe
obwody kondycjonera służą do wytworzenia napięć polaryzujących (Upol), które również
24
są podawane na wyjścia sygnałowe. Obwody polaryzujące są sprzęgnięte z
transformatorami wyjściowymi. Na Rys. 19 elementy obwodów wysokonapięciowych
oznaczono kolorem granatowym, natomiast elementy obwodów niskonapięciowych
kolorem fioletowym. Do wytworzenia napięć polaryzujących służą zasilacze oznaczone na
schemacie z Rys. 19 jako „Zasilacz1” i „Zasilacz2”. Każdy z zasilaczy umożliwia
wytworzenie napięcia polaryzującego z zakresu od 0 do 200V uzyskiwanego z
transformatora sieciowego oznaczonego jako „Tr”. Wybór napięcia polaryzującego dla
danego wyjścia sygnałowego jest ustalany za pomocą przełączników P1 – P8.
W przeprowadzonych badaniach układ sterujący wykorzystywany jest również jako
źródło hałasu. Działa on niezależnie od systemu ARH. Sygnał wyjściowy podany jest na
głośnik umieszczony w falowodzie.
25
6. Metody pomiaru skuteczności działania systemów aktywnej redukcji
hałasu
Najprostszym sposobem pomiaru dźwięku jest określenie wartości ciśnienia
akustycznego, wyrażanego w Pascalach (Pa). Pomiar ciśnienia akustycznego jako
wielkości skalarnej nie przynosi żadnej informacji o wektorowym charakterze pola
akustycznego, tzn. o kierunkach przepływu energii. W badanym przypadku zbadanie
promieniowania płyty z osadzonym elementem piezoelektrycznym w ściśle określonych
punktach wymaga dokonania pomiaru z bliskiej odległości.. Ze względu na te
uwarunkowania, zdecydowanie bardziej użyteczne jest wyznaczenie natężenia dźwięku i
rozkładu energetycznego. Pomiar taki daje informacje o zjawiskach wektorowych
zachodzących w polu akustycznym i będzie realizowany w niniejszej pracy.
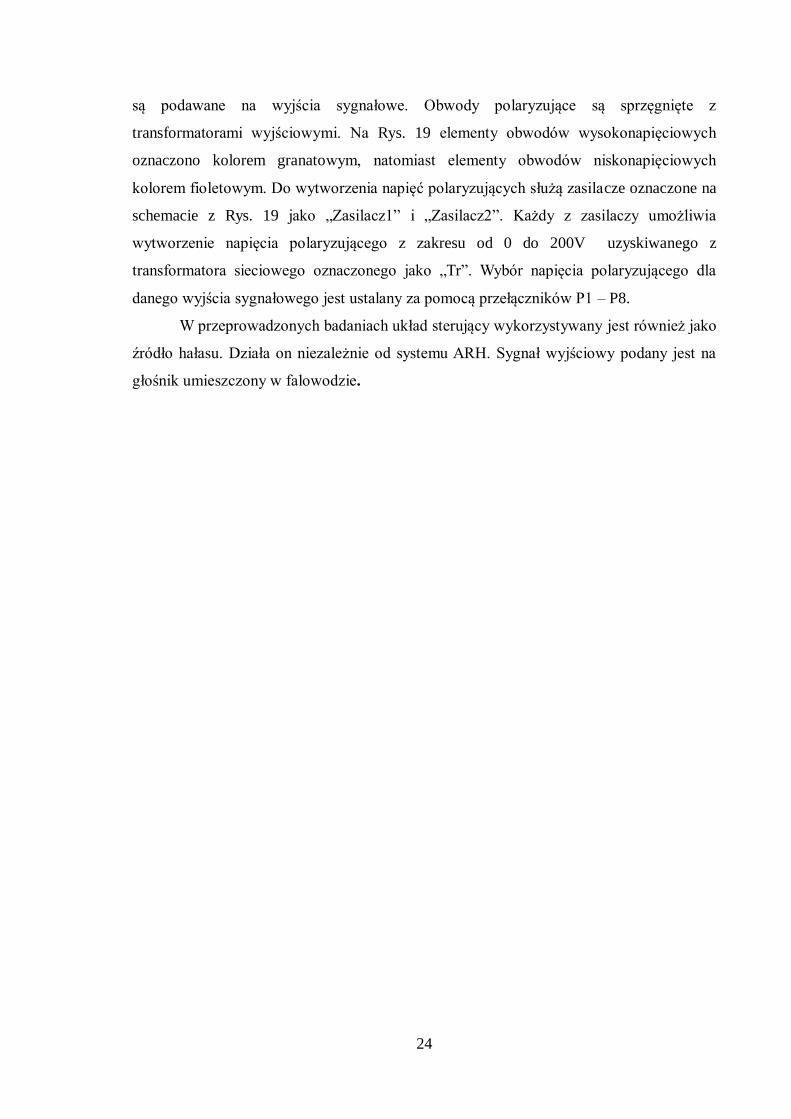
Natężeniem fali kulistej określamy energię przepływającą przez jednostkę
powierzchni w jednostce czasu. Całkowita energia przepływająca przez powierzchnię
zamkniętą otaczającą źródło jest stała i nie zależy od odległości. Wyraża się iloczynem
E = 4 πr2I, gdzie: (4)
I - natężenie dźwięku jako strumień energii przepływający przez jednostkę powierzchni
prostopadłą do kierunku propagacji fali.
Przekształcając powyższą zależność otrzymamy wzór na natężenie w powiązaniu z mocą
akustyczną źródła:
𝐼 = 𝑁𝑎
4𝜋𝑟2, gdzie: (5)
𝑁𝑎 − 𝑚𝑜𝑐 𝑓𝑎𝑙𝑖 𝑎𝑘𝑢𝑠𝑡𝑦𝑐𝑧𝑛𝑒𝑗
Wynika z niego, że natężenie w konkretnym punkcie pola akustycznego maleje odwrotnie
proporcjonalnie do kwadratu odległości od źródła.
26
Rys. 20. Rozkład natężenia dźwięku źródła kulistego [16]
Bezpośrednie pomiary natężenia są trudne ze względu na konieczność pomiaru
prędkości cząstki akustycznej. Użyteczna metoda powstała dopiero w 1977 roku. Do jej
realizacji wykorzystano dwa mikrofony. Polegała ona na pomiarze gradientu ciśnienia fali
płaskiej na drodze między dwoma mikrofonami skierowanymi czołowo. Wartość prędkości
uzyskiwano na podstawie obliczeń teoretycznych. Taka metoda pomiaru nazwana została
klasyczną. Niestety nie jest pozbawiona wad. Główną ich przyczyną jest błąd fazy
wynikający z różnic charakterystyk fazowych mikrofonów. Dodatkowo do badań, które
będą prowadzone sonda ta jest za duża. Nie ma możliwości zamontowania jej w taki
sposób, by dokonywała pomiaru bardzo małych części powierzchni. Jej rozmiary
wpływają ponadto na zakłócenie pola akustycznego. Innym sposobem zbadania natężenia
dźwięku jest pomiar bezpośredni. Polega on na pomiarze prędkość cząstki akustycznej i
wartość ciśnienia akustycznego, a tym samym amplitudy i fazy wektora natężenia
dźwięku, zgodnie ze wzorem:
𝐼 = 𝑝𝑣 , gdzie: (6)
p - wartość ciśnienia akustycznego,
𝑣 – prędkość akustyczna cząstki.
Prędkość akustyczna w powyższym wzorze określa prędkość drgań cząstki w polu fali
akustycznej. Jest ona pochodną przesunięcia x cząstki po czasie:
𝑥 𝑡 = 𝑋 sin 𝜔𝑡 (7)
𝑣 𝑡 = 𝑑𝑥 (𝑡)
𝑑𝑡= 𝜔𝑋𝑝 cos 𝜔𝑡 (8)
Przy sinusoidalnych przesunięciach cząstki prędkość wyraża się wzorem:
27
𝑣𝑎 𝑡 = 𝐴𝑚𝑎𝑥 𝜔 cos(𝜔𝑡) = 𝑣𝑎 𝑚𝑎𝑥 cos(𝜔𝑡), (9)
gdzie 𝜔 – pulsacja (𝜔 = 2𝜋𝑓)
𝐴𝑚𝑎𝑥 – amplituda przesunięcia cząstki [m]
𝑣𝑚𝑎𝑥 - amplituda prędkości cząstki [m/s], 𝑣 𝑚𝑎𝑥 = 𝜔𝑥𝑚𝑎𝑥 = 2𝜋𝑓𝐴𝑚𝑎𝑥
Prędkość akustyczna rośnie ze wzrostem głośności i częstotliwości tonu. Jej wartość w
porównaniu z prędkością rozchodzenia się dźwięku c jest niewielka, dochodzi do 0,1 m/s
Sonda Microflown USP (Ultimate Sound Probe) [10] umożliwia bezpośredni
pomiar ciśnienia akustycznego i prędkości cząstek w trzech kierunkach. Zbudowana jest z
trzech czujników prędkości cząstki akustycznej i jednego miniaturowego mikrofonu
ciśnieniowego 1/10˝ umieszczonego w środku geometrycznym.
Rys. 21. Sonda Microflown USP
Wymiary czujnika bez obudowy są mniejsze niż 5×5×5mm, dzięki czemu pole nie jest
zakłócane aż do częstotliwości 11333 Hz. Sonda posiada szeroki zakres częstotliwości
pomiarowych (~2Hz-20kHz) oraz umożliwia pomiary z bardzo bliskich odległości.
Wykorzystuje cztery kanały do pełnego, trójwymiarowego opisu pola akustycznego. Do
sondy dołączony jest moduł zasilający i kondycjoner sygnału. Podstawowe parametry
przedstawione są w Tabeli 3.
28
Elementy sondy 3 czujniki prędkości z tytanowym
elementem sensorycznym zintegrowane
w jednej obudowie z miniaturowym
mikrofonem ciśnieniowym o średnicy
1/10’’
Wymiary samego czujnika (czujniki prędkości
oraz mikrofon ciśnieniowy) bez obudowy
<= 5×5×5mm
Średnica czujnika z obudową 1/2''
Długość sondy 62mm
Masa sondy 30g
Zakres częstotliwości mikrofonu/czujnika
prędkości cząstek
20Hz - 20 kHz / 1Hz – 20kHz
Górna granica poziomu dźwięku
mikrofonu/czujnika prędkości cząstek
110 dB [SPL re.20µPa] / 135 dB [PVL
re.50nm/s]
Czułość mikrofonu/czujnika prędkości cząstek 20[mV/Pa] / 100m[V/Pa]
Kierunkowość mikrofonu/czujnika prędkości
cząstek
Wszechkierunkowy / ósemkowa
Odstęp sygnału od szumu mikrofonu/czujnika
prędkości cząstek
(dla 1kHz w paśmie 1Hz): 105dB /(dla
1kHz w paśmie 1Hz): 96dB
Tabela. 3. Parametry sondy Microflown USP
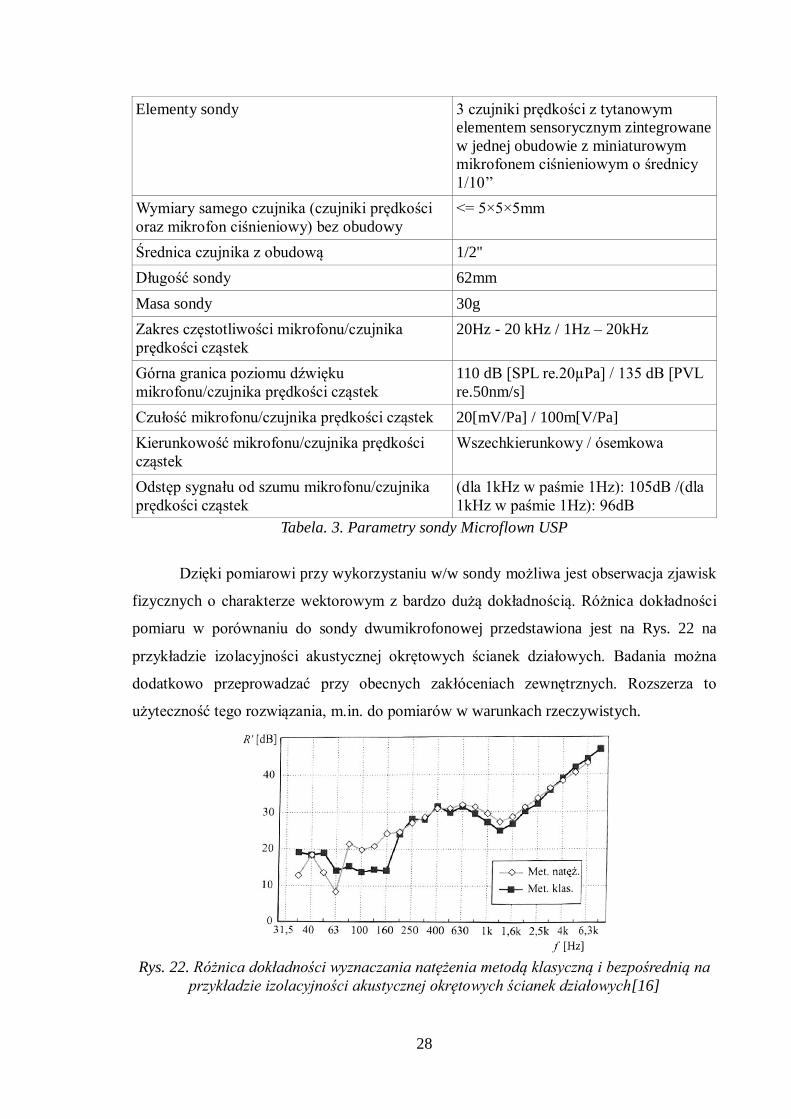
Dzięki pomiarowi przy wykorzystaniu w/w sondy możliwa jest obserwacja zjawisk
fizycznych o charakterze wektorowym z bardzo dużą dokładnością. Różnica dokładności
pomiaru w porównaniu do sondy dwumikrofonowej przedstawiona jest na Rys. 22 na
przykładzie izolacyjności akustycznej okrętowych ścianek działowych. Badania można
dodatkowo przeprowadzać przy obecnych zakłóceniach zewnętrznych. Rozszerza to
użyteczność tego rozwiązania, m.in. do pomiarów w warunkach rzeczywistych.
Rys. 22. Różnica dokładności wyznaczania natężenia metodą klasyczną i bezpośrednią na
przykładzie izolacyjności akustycznej okrętowych ścianek działowych[16]

29
Poprzez pomiar ciśnienia i prędkości akustycznej oraz wyznaczenie natężenia
dźwięku przeprowadzone będą badania skuteczności aktywnej redukcji hałasu.
Skuteczność definiowana jest jako różnica poziomów (natężenia lub ciśnienia
akustycznego) zmierzona dla ustroju dźwiękochłonno-izolacyjnego z włączonym i
wyłączonym systemem ARH.
Do realizacji badań wykorzystano metodę stałych punktów. Rama pomiarowa z
systemem sterowania, napędzana silnikiem krokowym umieszcza sondę w stałych
punktach pomiarowych rozmieszczonych na płaszczyźnie równoległej do badanej płyty.
Proces przesuwania sondy i pobierania danych
odbywa się automatycznie. Metoda pomiaru
umożliwia graficzną analizę wektorowego opisu
pola akustycznego. Na tej podstawie
przeprowadzono analizę zachodzących zjawiskach
wibroakustycznych oraz sprawdzenie
niejednorodności pola - obszarów o
zróżnicowanych poziomach promieniowania
energii akustycznej. W badaniach wykorzystano
układ pozycjonowania sondy przedstawiony na
Rys. 24. W jego skład wchodzą elementy
mechaniczne zamontowane na wylocie falowodu i sterownik do komunikacji z
komputerem PC. Całość ma na celu zautomatyzować proces przesuwania sondy po
punktach pomiarowych.
Rys. 24. Układ pozycjonowania sondy natężeniowej
Rysunek 23. Metoda stałych
punktów[16]

30
Elementy mechaniczne składają się z dwóch silników krokowych. Mogą one przesuwać
sondę w płaszczyznach x i y z dokładnością pozycjonowania do 0,1mm. Łączny obszar
pomiarowy obejmuje pole o wymiarach 240 na 300 mm. Sonda może być na stałe
mocowana w określonej odległości od aktywnego ustroju dźwiękochłonno-izolacyjnego, w
zakresie od 1 do 20mm. Układ sterowania silnikami krokowymi połączony jest interfejsem
LPT z komputerem PC.
31
7. Stanowisko do pomiaru skuteczności działania systemu ARH w ustroju
dźwiękochłonno-izolacyjnym
W ramach pomiarów ARH ustroju dźwiękochłonno-izolacyjnego przeprowadzone
będą pomiary poziomu ciśnienia akustycznego i poziomu natężenia dźwięku u wylotu
falowodu. Sprawdzona będzie izolacyjność metalowej płyty oraz skuteczność redukcji
hałasu całego ustroju dźwiękochłonno-izolacyjnego.
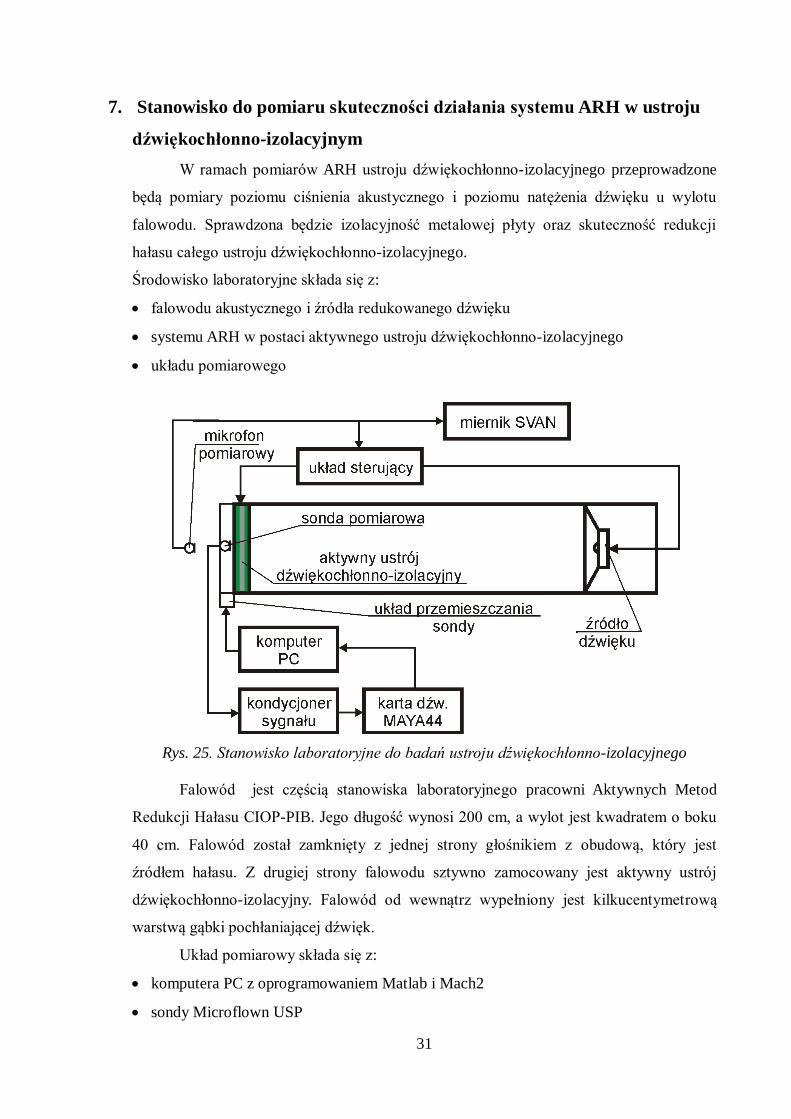
Środowisko laboratoryjne składa się z:
falowodu akustycznego i źródła redukowanego dźwięku
systemu ARH w postaci aktywnego ustroju dźwiękochłonno-izolacyjnego
układu pomiarowego
Rys. 25. Stanowisko laboratoryjne do badań ustroju dźwiękochłonno-izolacyjnego
Falowód jest częścią stanowiska laboratoryjnego pracowni Aktywnych Metod
Redukcji Hałasu CIOP-PIB. Jego długość wynosi 200 cm, a wylot jest kwadratem o boku
40 cm. Falowód został zamknięty z jednej strony głośnikiem z obudową, który jest
źródłem hałasu. Z drugiej strony falowodu sztywno zamocowany jest aktywny ustrój
dźwiękochłonno-izolacyjny. Falowód od wewnątrz wypełniony jest kilkucentymetrową
warstwą gąbki pochłaniającej dźwięk.
Układ pomiarowy składa się z:
komputera PC z oprogramowaniem Matlab i Mach2
sondy Microflown USP
32
ramy pomiarowej z systemem sterowania
karty dźwiękowej ESI Maya 44 USB
oscyloskopu Tektronix TDS 3014B
miernika poziomu ciśnienia akustycznego Svan 948
Głównym blokiem systemu pomiarowego jest komputer PC z zainstalowanym
systemem Windows XP. Umożliwia on sterowanie ramą pomiarową oraz przetwarzanie
wyników uzyskanych przez sondę Microflown, a przede wszystkim zsynchronizowanie
czasów pomiaru i przesuwu sondy pomiarowej.
Podczas badań sonda pomiarowa przesuwana jest automatycznie tak, aby
zatrzymała się w punktach oddalonych od siebie o 2 cm. W każdym z nich sonda
zatrzymywana jest na około 5 sekund, po czym przesuwana do kolejnego punktu. Dla
powierzchni 720 cm2 daje to łącznie 130 jednostkowych punktów pomiarowych.
Powierzchnia pomiarowa oddalona była od powierzchni płyty o 5 cm. Do automatycznego
przesuwu sondy wykorzystano opisaną wcześniej ramę pomiarową. Do sterowania ramą
służy program Mach2. Wykorzystywany w nim kod sterujący (załącznik 1) został
wygenerowany w programie Matlab. Ustalamy w nim współrzędne punktów krańcowych
powierzchni pomiarowej, odległość pomiędzy punktami pomiarowymi, oraz czas
przejścia. Na tej podstawie generowany jest plik tekstowy, w oparciu o który program
Mach2 wykonuje instrukcje sterujące pracą układu pozycjonowania.
Karta dźwiękowa ESI Maya 44 USB pobiera sygnał wychodzący z kondycjonera
sygnału sondy Microflown czterema wyjściami analogowymi. Jej zadaniem jest
przetworzenie sygnału analogowego na cyfrowy. Połączona jest z komputerem PC za
pomocą interfejsu USB. Karta korzysta ze sterowników ASIO, co wpływa na poprawę
jakości rejestrowanego sygnału.
Dalsze przetwarzanie wyników zarejestrowanych przez sondę i zmienionych na
postać cyfrową przez kartę dźwiękową odbywa się za pomocą programu Matlab.
Standardowo program ten obsługuje tylko 2 wejścia audio. W przypadku pobierania
danych z sondy niezbędne jest dostarczenie sygnału z 4 wejść naraz. Konieczne jest więc
rozszerzenie funkcjonalności programu o dodatkowe narzędzie pa-wavplay. Umożliwia
ono obsługę dźwięku wielokanałowego przez Matlab, oraz wspiera sterowniki ASIO. Kod
wykorzystywany do pobierania danych znajduje się w Załączniku 1.
33
Systemy pobierania wyników z sondy do Matlaba i sterowania jej przesuwaniem
działają niezależnie od siebie. Niezbędne jest wprowadzenie pomiędzy nimi
synchronizacji. Odbyło się to na zasadzie dopasowania czasowego pobierania wyników w
Matlabie do czasów przejazdu sondy. Oba systemy muszą być włączone ręcznie w tym
samym czasie. Pomyłka w granicach jednej sekundy nie ma wpływu na wynik końcowy.
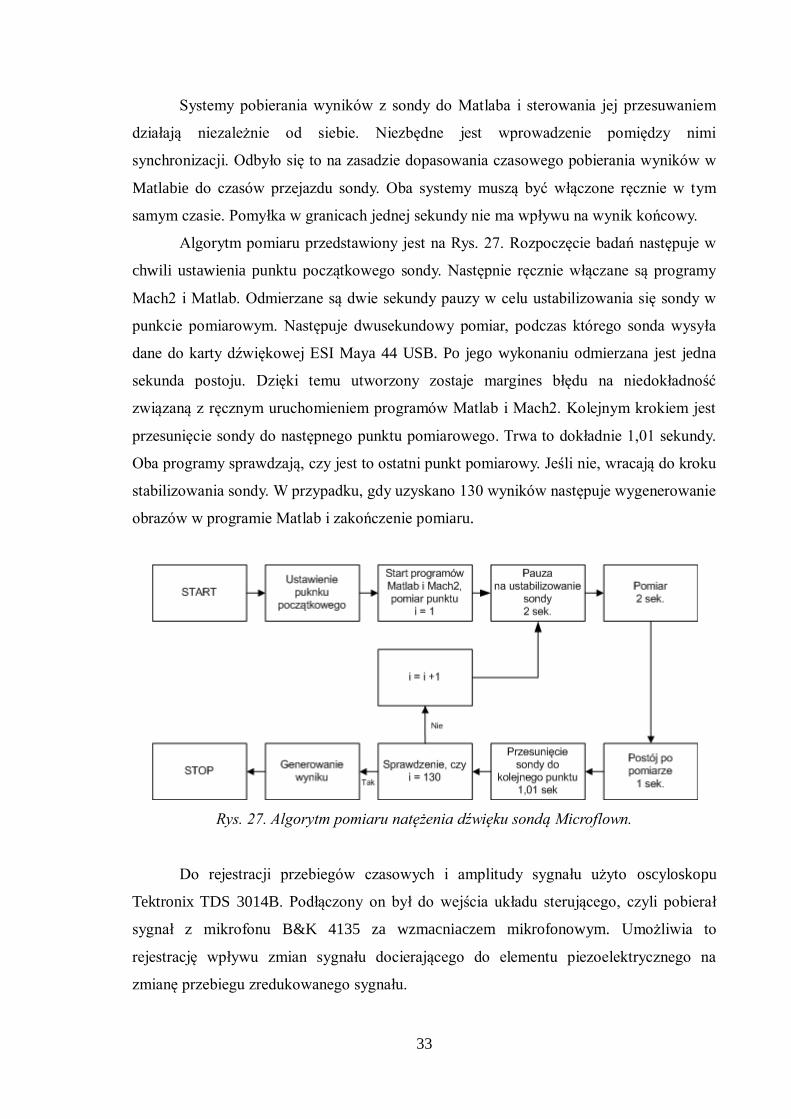
Algorytm pomiaru przedstawiony jest na Rys. 27. Rozpoczęcie badań następuje w
chwili ustawienia punktu początkowego sondy. Następnie ręcznie włączane są programy
Mach2 i Matlab. Odmierzane są dwie sekundy pauzy w celu ustabilizowania się sondy w
punkcie pomiarowym. Następuje dwusekundowy pomiar, podczas którego sonda wysyła
dane do karty dźwiękowej ESI Maya 44 USB. Po jego wykonaniu odmierzana jest jedna
sekunda postoju. Dzięki temu utworzony zostaje margines błędu na niedokładność
związaną z ręcznym uruchomieniem programów Matlab i Mach2. Kolejnym krokiem jest
przesunięcie sondy do następnego punktu pomiarowego. Trwa to dokładnie 1,01 sekundy.
Oba programy sprawdzają, czy jest to ostatni punkt pomiarowy. Jeśli nie, wracają do kroku
stabilizowania sondy. W przypadku, gdy uzyskano 130 wyników następuje wygenerowanie
obrazów w programie Matlab i zakończenie pomiaru.
Rys. 27. Algorytm pomiaru natężenia dźwięku sondą Microflown.
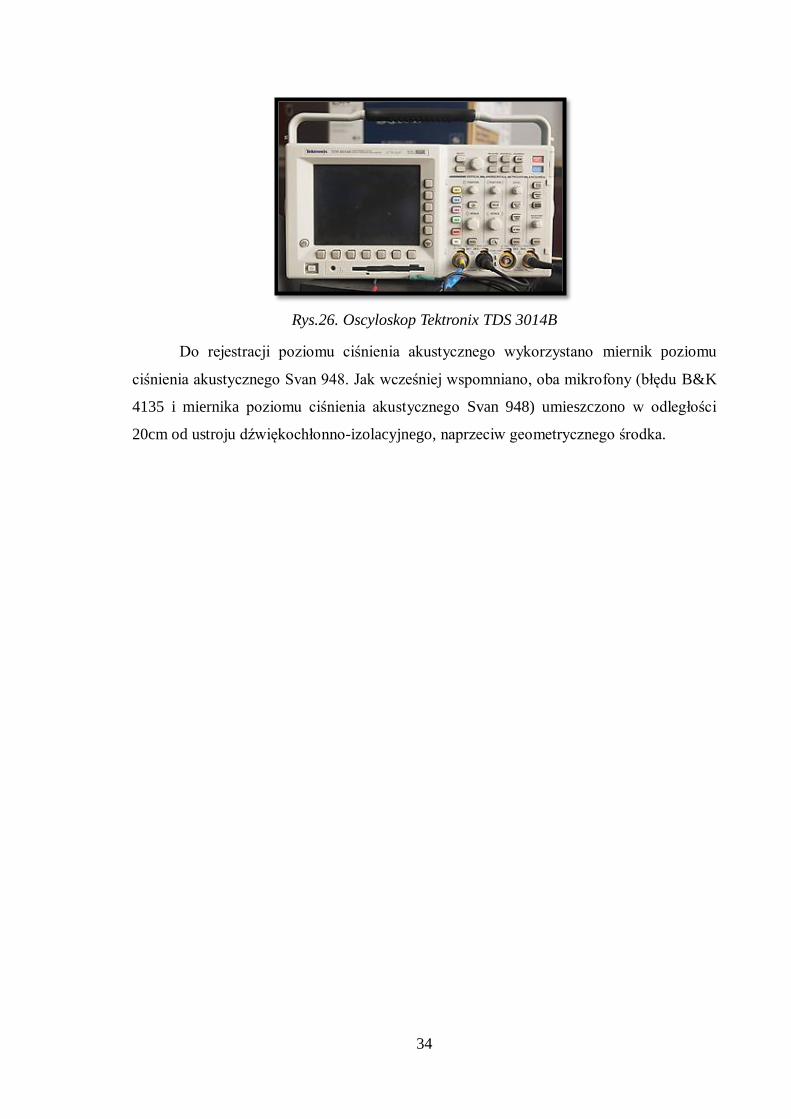
Do rejestracji przebiegów czasowych i amplitudy sygnału użyto oscyloskopu
Tektronix TDS 3014B. Podłączony on był do wejścia układu sterującego, czyli pobierał
sygnał z mikrofonu B&K 4135 za wzmacniaczem mikrofonowym. Umożliwia to
rejestrację wpływu zmian sygnału docierającego do elementu piezoelektrycznego na
zmianę przebiegu zredukowanego sygnału.
34
Rys.26. Oscyloskop Tektronix TDS 3014B
Do rejestracji poziomu ciśnienia akustycznego wykorzystano miernik poziomu
ciśnienia akustycznego Svan 948. Jak wcześniej wspomniano, oba mikrofony (błędu B&K
4135 i miernika poziomu ciśnienia akustycznego Svan 948) umieszczono w odległości
20cm od ustroju dźwiękochłonno-izolacyjnego, naprzeciw geometrycznego środka.
35
8. Wyniki pomiarów
W ramach pomiarów izolacyjności akustycznej aktywnego ustroju dźwiękochłonno-
izolacyjnego oraz skuteczności ARH przeprowadzono pomiary poziomu ciśnienia
akustycznego w odległości 20 cm od falowodu oraz poziomu natężenia dźwięku w
odległości kilku milimetrów od wylotu falowodu:
bez zamontowanego ustroju,
z zamontowanym ustrojem i wyłączonym systemem ARH
z zamontowanym ustrojem i włączonym systemem ARH
Pomiary przeprowadzono dla sygnałów o czterech częstotliwościach: 100 Hz, 150 Hz, 200
Hz, 250 Hz oraz trzech wzmocnieniach: 0,04, 0,08, 0,16 (ułamek maksymalnej mocy
wyjściowej wzmacniacza). Wszystkie wyniki zostały zamieszczone w Załączniku 2.
Na początku wyznaczono izolacyjność akustyczną metalowej płyty będącej częścią
aktywnego ustroju dźwiękochłonno-izolacyjnego. W tym celu przeprowadzono pomiary
ciśnienia akustycznego i natężenia dźwięku u wylotu falowodu bez założonej metalowej
płyty (Rys 28) oraz po jej założeniu (Rys. 29).
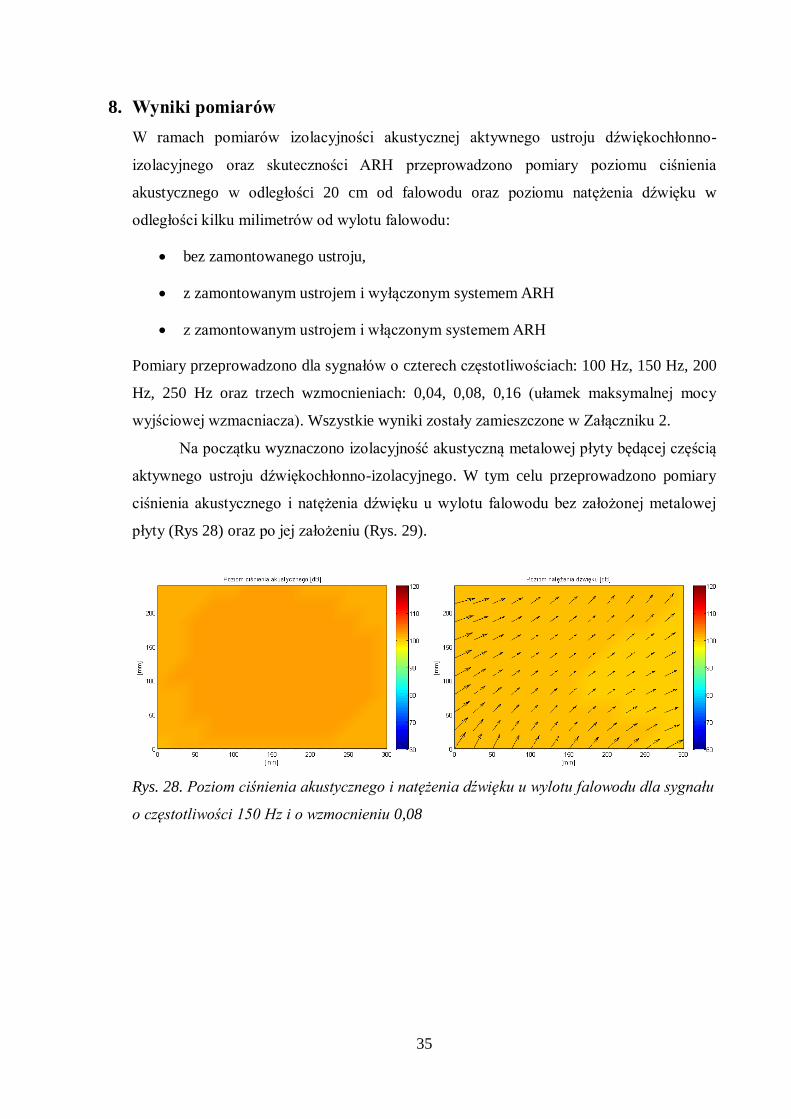
Rys. 28. Poziom ciśnienia akustycznego i natężenia dźwięku u wylotu falowodu dla sygnału
o częstotliwości 150 Hz i o wzmocnieniu 0,08
36
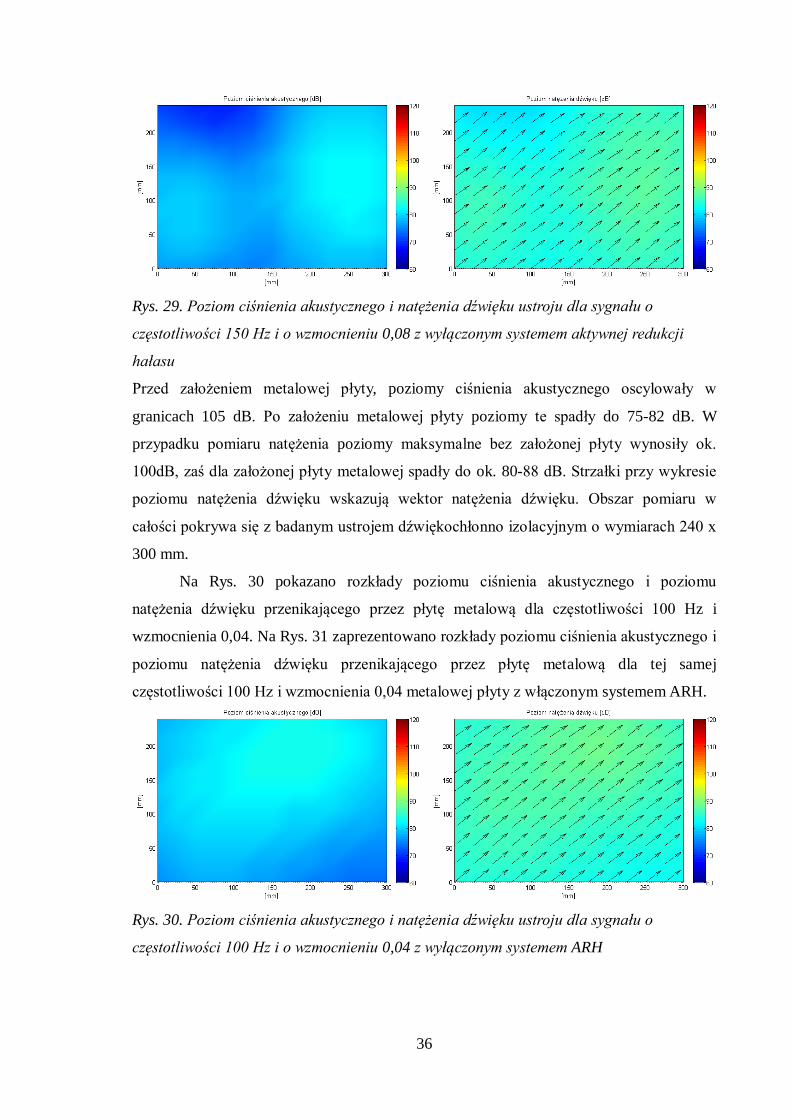
Rys. 29. Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o
częstotliwości 150 Hz i o wzmocnieniu 0,08 z wyłączonym systemem aktywnej redukcji
hałasu
Przed założeniem metalowej płyty, poziomy ciśnienia akustycznego oscylowały w
granicach 105 dB. Po założeniu metalowej płyty poziomy te spadły do 75-82 dB. W
przypadku pomiaru natężenia poziomy maksymalne bez założonej płyty wynosiły ok.
100dB, zaś dla założonej płyty metalowej spadły do ok. 80-88 dB. Strzałki przy wykresie
poziomu natężenia dźwięku wskazują wektor natężenia dźwięku. Obszar pomiaru w
całości pokrywa się z badanym ustrojem dźwiękochłonno izolacyjnym o wymiarach 240 x
300 mm.
Na Rys. 30 pokazano rozkłady poziomu ciśnienia akustycznego i poziomu
natężenia dźwięku przenikającego przez płytę metalową dla częstotliwości 100 Hz i
wzmocnienia 0,04. Na Rys. 31 zaprezentowano rozkłady poziomu ciśnienia akustycznego i
poziomu natężenia dźwięku przenikającego przez płytę metalową dla tej samej
częstotliwości 100 Hz i wzmocnienia 0,04 metalowej płyty z włączonym systemem ARH.
Rys. 30. Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o
częstotliwości 100 Hz i o wzmocnieniu 0,04 z wyłączonym systemem ARH
37
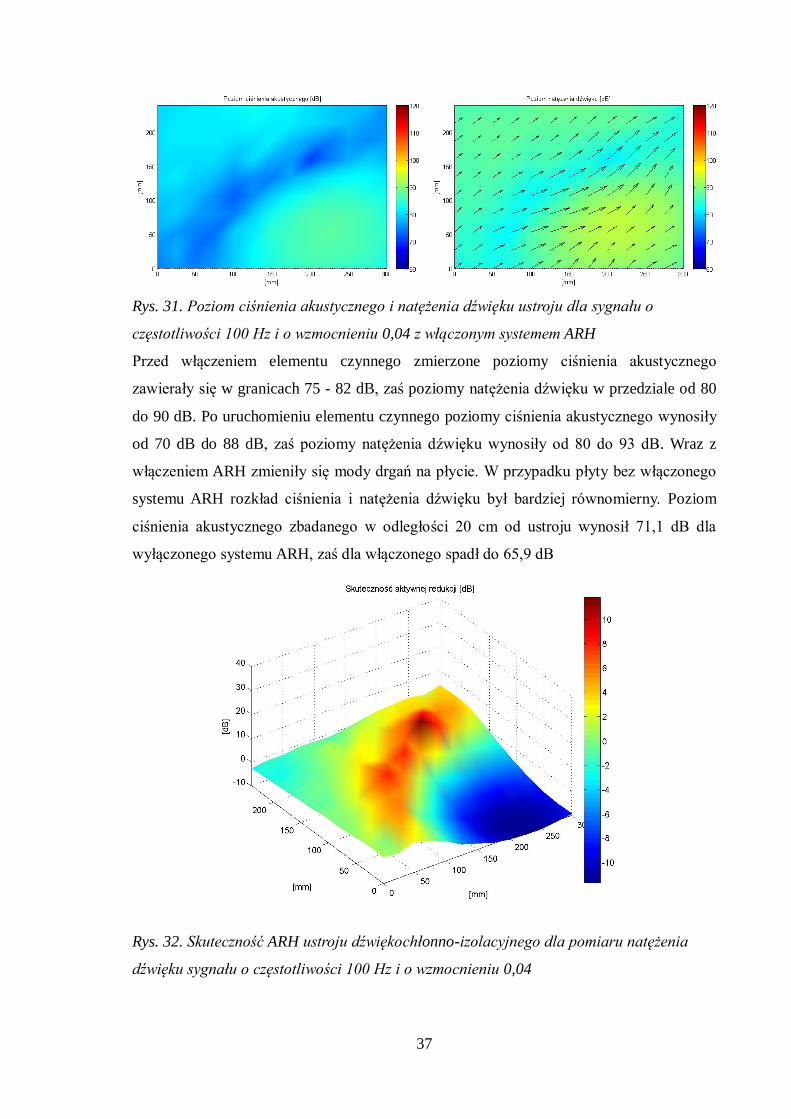
Rys. 31. Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o
częstotliwości 100 Hz i o wzmocnieniu 0,04 z włączonym systemem ARH
Przed włączeniem elementu czynnego zmierzone poziomy ciśnienia akustycznego
zawierały się w granicach 75 - 82 dB, zaś poziomy natężenia dźwięku w przedziale od 80
do 90 dB. Po uruchomieniu elementu czynnego poziomy ciśnienia akustycznego wynosiły
od 70 dB do 88 dB, zaś poziomy natężenia dźwięku wynosiły od 80 do 93 dB. Wraz z
włączeniem ARH zmieniły się mody drgań na płycie. W przypadku płyty bez włączonego
systemu ARH rozkład ciśnienia i natężenia dźwięku był bardziej równomierny. Poziom
ciśnienia akustycznego zbadanego w odległości 20 cm od ustroju wynosił 71,1 dB dla
wyłączonego systemu ARH, zaś dla włączonego spadł do 65,9 dB
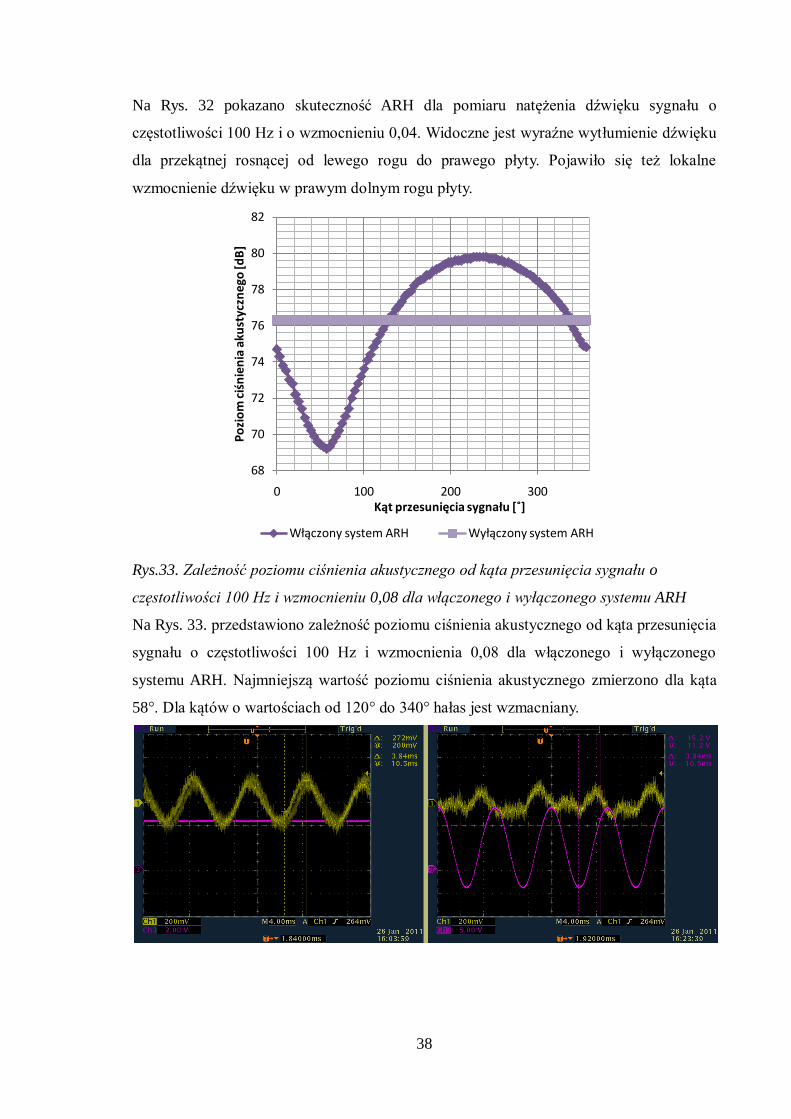
Rys. 32. Skuteczność ARH ustroju dźwiękochłonno-izolacyjnego dla pomiaru natężenia
dźwięku sygnału o częstotliwości 100 Hz i o wzmocnieniu 0,04
38
Na Rys. 32 pokazano skuteczność ARH dla pomiaru natężenia dźwięku sygnału o
częstotliwości 100 Hz i o wzmocnieniu 0,04. Widoczne jest wyraźne wytłumienie dźwięku
dla przekątnej rosnącej od lewego rogu do prawego płyty. Pojawiło się też lokalne
wzmocnienie dźwięku w prawym dolnym rogu płyty.
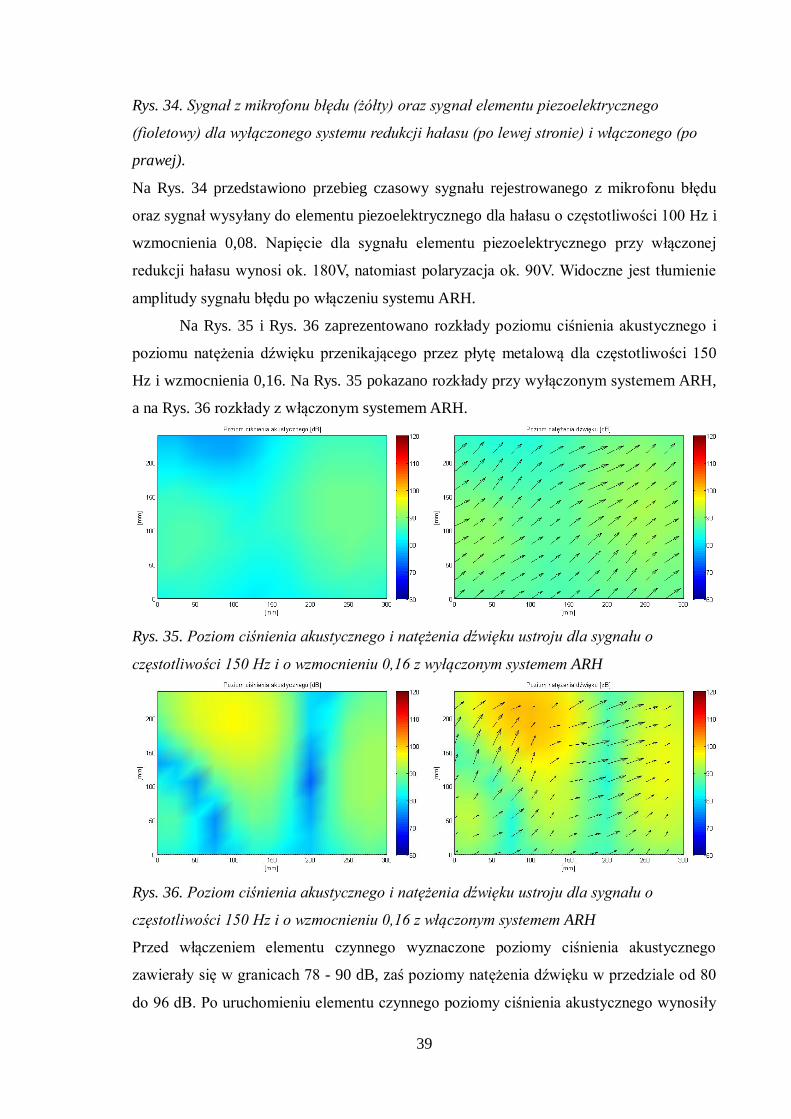
Rys.33. Zależność poziomu ciśnienia akustycznego od kąta przesunięcia sygnału o
częstotliwości 100 Hz i wzmocnieniu 0,08 dla włączonego i wyłączonego systemu ARH
Na Rys. 33. przedstawiono zależność poziomu ciśnienia akustycznego od kąta przesunięcia
sygnału o częstotliwości 100 Hz i wzmocnienia 0,08 dla włączonego i wyłączonego
systemu ARH. Najmniejszą wartość poziomu ciśnienia akustycznego zmierzono dla kąta
58°. Dla kątów o wartościach od 120° do 340° hałas jest wzmacniany.
68
70
72
74
76
78
80
82
0 100 200 300
Po
zio
m c
iśn
ien
ia a
kust
yczn
ego
[dB
]
Kąt przesunięcia sygnału [˚]
Włączony system ARH Wyłączony system ARH
39
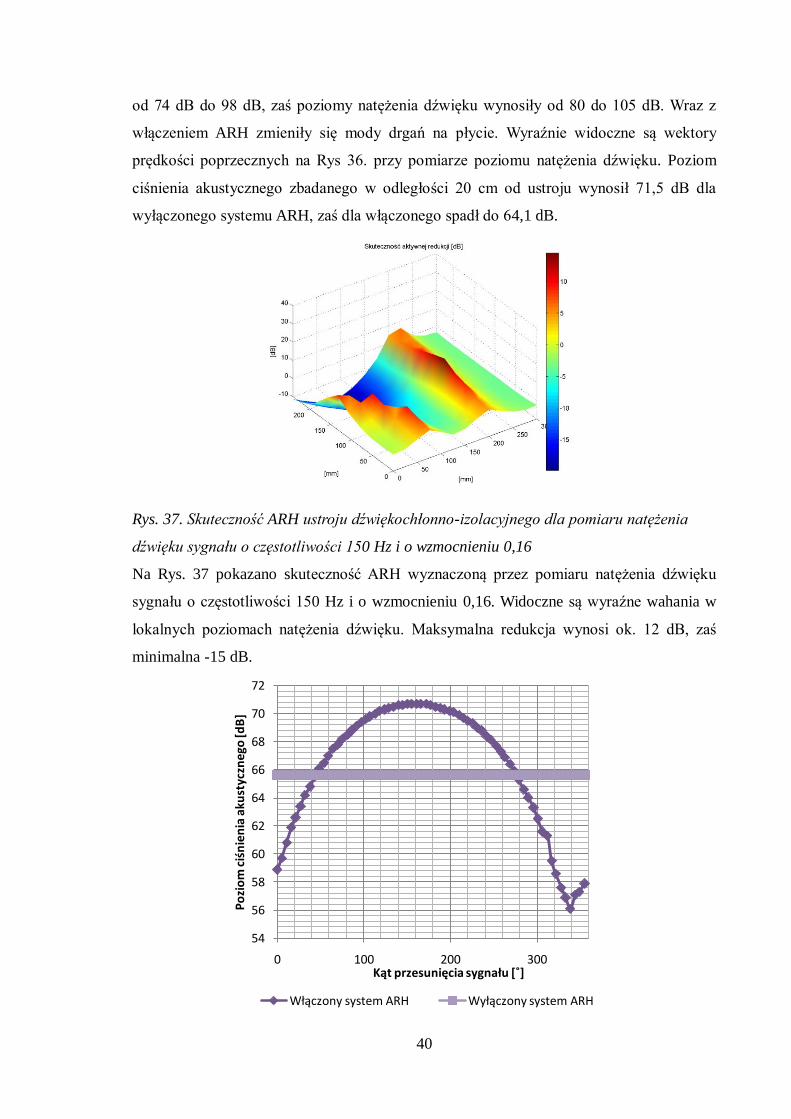
Rys. 34. Sygnał z mikrofonu błędu (żółty) oraz sygnał elementu piezoelektrycznego
(fioletowy) dla wyłączonego systemu redukcji hałasu (po lewej stronie) i włączonego (po
prawej).
Na Rys. 34 przedstawiono przebieg czasowy sygnału rejestrowanego z mikrofonu błędu
oraz sygnał wysyłany do elementu piezoelektrycznego dla hałasu o częstotliwości 100 Hz i
wzmocnienia 0,08. Napięcie dla sygnału elementu piezoelektrycznego przy włączonej
redukcji hałasu wynosi ok. 180V, natomiast polaryzacja ok. 90V. Widoczne jest tłumienie
amplitudy sygnału błędu po włączeniu systemu ARH.
Na Rys. 35 i Rys. 36 zaprezentowano rozkłady poziomu ciśnienia akustycznego i
poziomu natężenia dźwięku przenikającego przez płytę metalową dla częstotliwości 150
Hz i wzmocnienia 0,16. Na Rys. 35 pokazano rozkłady przy wyłączonym systemem ARH,
a na Rys. 36 rozkłady z włączonym systemem ARH.
Rys. 35. Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o
częstotliwości 150 Hz i o wzmocnieniu 0,16 z wyłączonym systemem ARH
Rys. 36. Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o
częstotliwości 150 Hz i o wzmocnieniu 0,16 z włączonym systemem ARH
Przed włączeniem elementu czynnego wyznaczone poziomy ciśnienia akustycznego
zawierały się w granicach 78 - 90 dB, zaś poziomy natężenia dźwięku w przedziale od 80
do 96 dB. Po uruchomieniu elementu czynnego poziomy ciśnienia akustycznego wynosiły
40
od 74 dB do 98 dB, zaś poziomy natężenia dźwięku wynosiły od 80 do 105 dB. Wraz z
włączeniem ARH zmieniły się mody drgań na płycie. Wyraźnie widoczne są wektory
prędkości poprzecznych na Rys 36. przy pomiarze poziomu natężenia dźwięku. Poziom
ciśnienia akustycznego zbadanego w odległości 20 cm od ustroju wynosił 71,5 dB dla
wyłączonego systemu ARH, zaś dla włączonego spadł do 64,1 dB.
Rys. 37. Skuteczność ARH ustroju dźwiękochłonno-izolacyjnego dla pomiaru natężenia
dźwięku sygnału o częstotliwości 150 Hz i o wzmocnieniu 0,16
Na Rys. 37 pokazano skuteczność ARH wyznaczoną przez pomiaru natężenia dźwięku
sygnału o częstotliwości 150 Hz i o wzmocnieniu 0,16. Widoczne są wyraźne wahania w
lokalnych poziomach natężenia dźwięku. Maksymalna redukcja wynosi ok. 12 dB, zaś
minimalna -15 dB.
54
56
58
60
62
64
66
68
70
72
0 100 200 300
Po
zio
m c
iśn
ien
ia a
kust
yczn
ego
[dB
]
Kąt przesunięcia sygnału [˚]
Włączony system ARH Wyłączony system ARH
41
Rys. 38. Zależność poziomu ciśnienia akustycznego od kąta przesunięcia sygnału o
częstotliwości 150 Hz i wzmocnieniu 0,16 dla włączonego i wyłączonego systemu ARH
Na Rys. 38. przedstawiono zależność poziomu ciśnienia akustycznego od kąta przesunięcia
sygnału o częstotliwości 150 Hz i wzmocnieniu 0,16 dla włączonego i wyłączonego
systemu ARH. Najmniejszą wartość poziomu ciśnienia akustycznego przypada dla kąta
339°. Dla kątów o wartościach od 40° do 280° hałas jest wzmacniany.
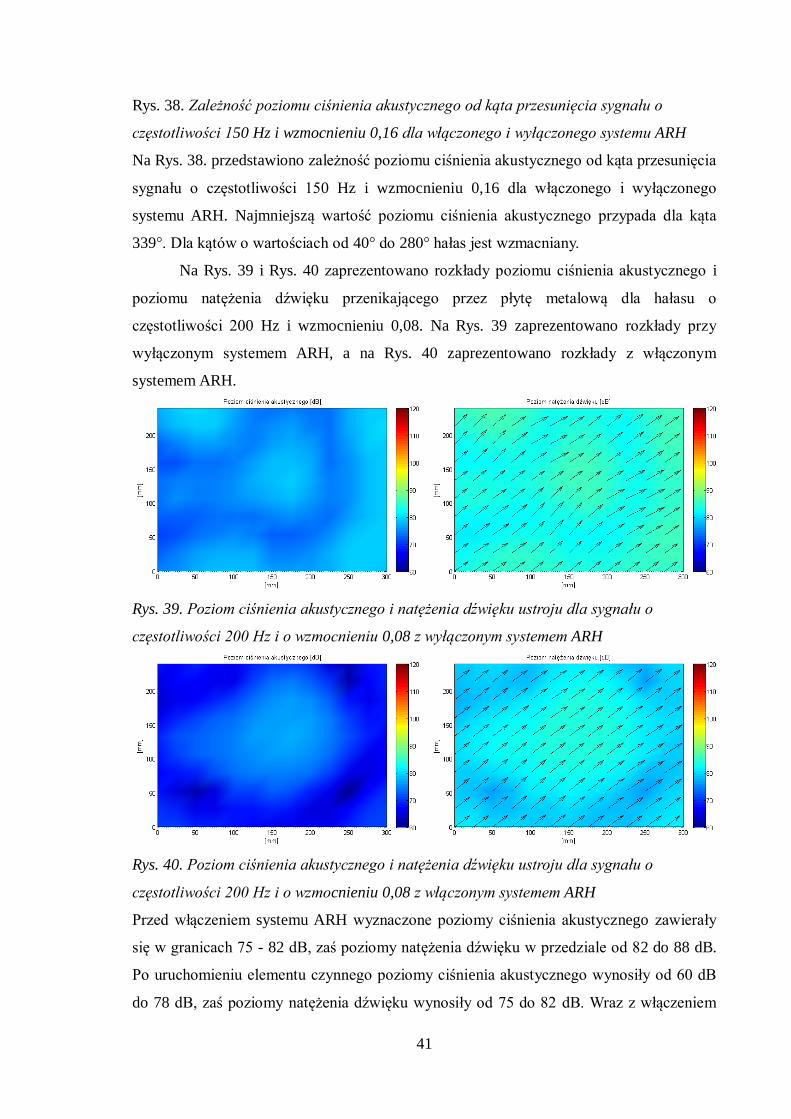
Na Rys. 39 i Rys. 40 zaprezentowano rozkłady poziomu ciśnienia akustycznego i
poziomu natężenia dźwięku przenikającego przez płytę metalową dla hałasu o
częstotliwości 200 Hz i wzmocnieniu 0,08. Na Rys. 39 zaprezentowano rozkłady przy
wyłączonym systemem ARH, a na Rys. 40 zaprezentowano rozkłady z włączonym
systemem ARH.
Rys. 39. Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o
częstotliwości 200 Hz i o wzmocnieniu 0,08 z wyłączonym systemem ARH
Rys. 40. Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o
częstotliwości 200 Hz i o wzmocnieniu 0,08 z włączonym systemem ARH
Przed włączeniem systemu ARH wyznaczone poziomy ciśnienia akustycznego zawierały
się w granicach 75 - 82 dB, zaś poziomy natężenia dźwięku w przedziale od 82 do 88 dB.
Po uruchomieniu elementu czynnego poziomy ciśnienia akustycznego wynosiły od 60 dB
do 78 dB, zaś poziomy natężenia dźwięku wynosiły od 75 do 82 dB. Wraz z włączeniem
42
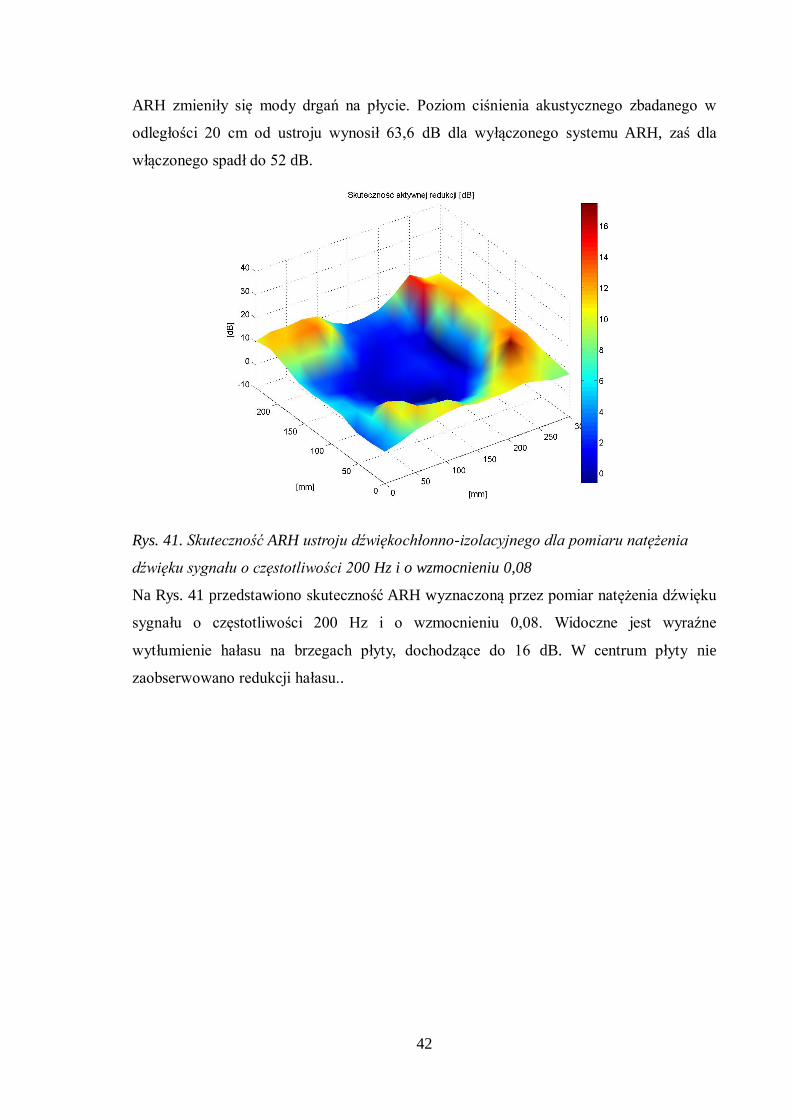
ARH zmieniły się mody drgań na płycie. Poziom ciśnienia akustycznego zbadanego w
odległości 20 cm od ustroju wynosił 63,6 dB dla wyłączonego systemu ARH, zaś dla
włączonego spadł do 52 dB.
Rys. 41. Skuteczność ARH ustroju dźwiękochłonno-izolacyjnego dla pomiaru natężenia
dźwięku sygnału o częstotliwości 200 Hz i o wzmocnieniu 0,08
Na Rys. 41 przedstawiono skuteczność ARH wyznaczoną przez pomiar natężenia dźwięku
sygnału o częstotliwości 200 Hz i o wzmocnieniu 0,08. Widoczne jest wyraźne
wytłumienie hałasu na brzegach płyty, dochodzące do 16 dB. W centrum płyty nie
zaobserwowano redukcji hałasu..
43
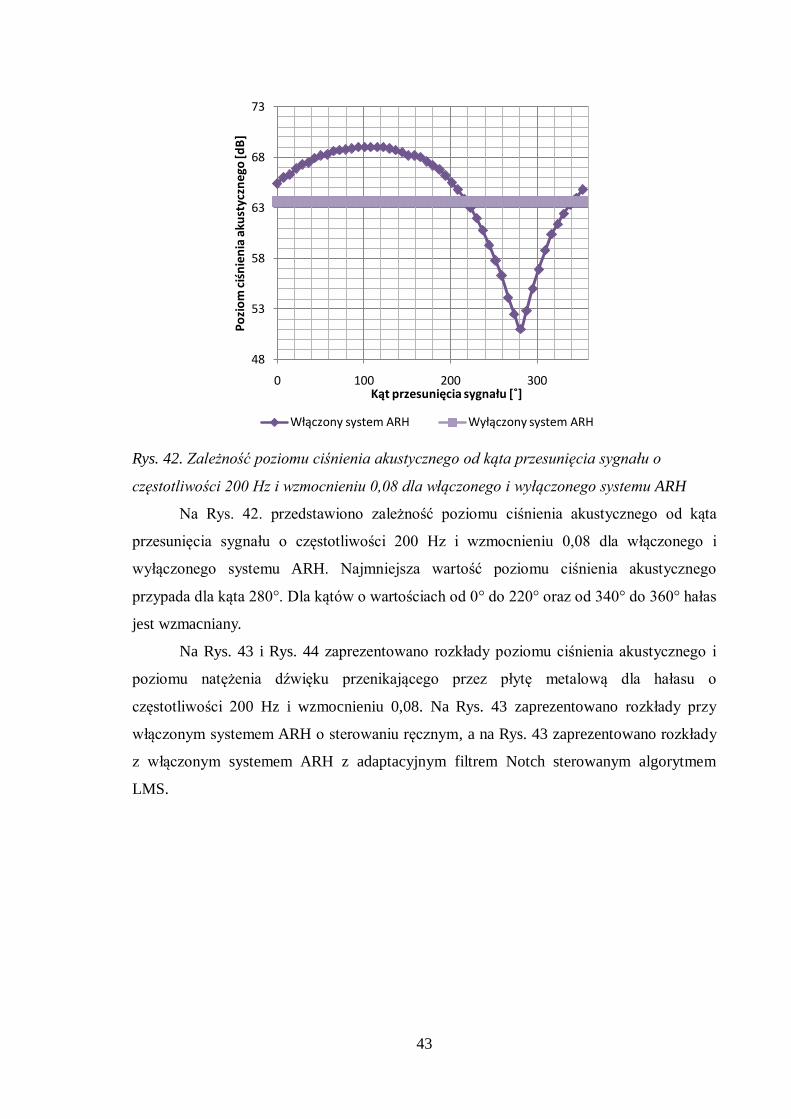
Rys. 42. Zależność poziomu ciśnienia akustycznego od kąta przesunięcia sygnału o
częstotliwości 200 Hz i wzmocnieniu 0,08 dla włączonego i wyłączonego systemu ARH
Na Rys. 42. przedstawiono zależność poziomu ciśnienia akustycznego od kąta
przesunięcia sygnału o częstotliwości 200 Hz i wzmocnieniu 0,08 dla włączonego i
wyłączonego systemu ARH. Najmniejsza wartość poziomu ciśnienia akustycznego
przypada dla kąta 280°. Dla kątów o wartościach od 0° do 220° oraz od 340° do 360° hałas
jest wzmacniany.
Na Rys. 43 i Rys. 44 zaprezentowano rozkłady poziomu ciśnienia akustycznego i
poziomu natężenia dźwięku przenikającego przez płytę metalową dla hałasu o
częstotliwości 200 Hz i wzmocnieniu 0,08. Na Rys. 43 zaprezentowano rozkłady przy
włączonym systemem ARH o sterowaniu ręcznym, a na Rys. 43 zaprezentowano rozkłady
z włączonym systemem ARH z adaptacyjnym filtrem Notch sterowanym algorytmem
LMS.
48
53
58
63
68
73
0 100 200 300
Po
zio
m c
iśn
ien
ia a
kust
yczn
ego
[dB
]
Kąt przesunięcia sygnału [˚]
Włączony system ARH Wyłączony system ARH
44
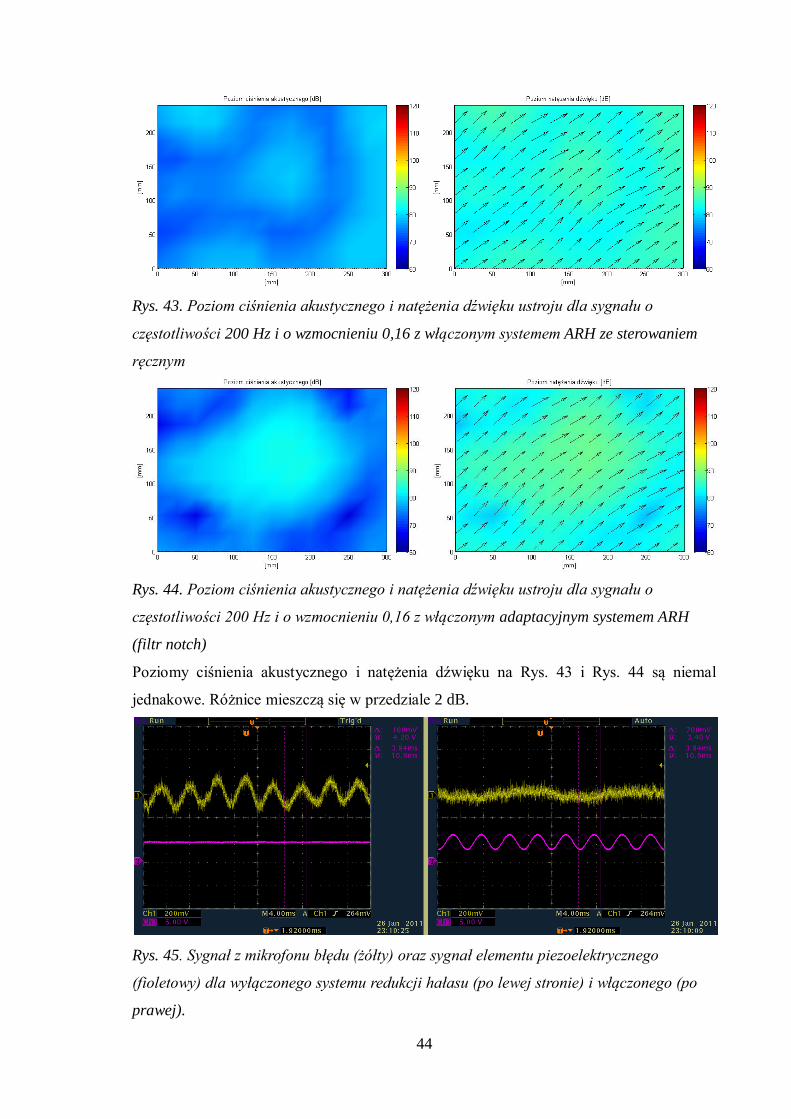
Rys. 43. Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o
częstotliwości 200 Hz i o wzmocnieniu 0,16 z włączonym systemem ARH ze sterowaniem
ręcznym
Rys. 44. Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o
częstotliwości 200 Hz i o wzmocnieniu 0,16 z włączonym adaptacyjnym systemem ARH
(filtr notch)
Poziomy ciśnienia akustycznego i natężenia dźwięku na Rys. 43 i Rys. 44 są niemal
jednakowe. Różnice mieszczą się w przedziale 2 dB.
Rys. 45. Sygnał z mikrofonu błędu (żółty) oraz sygnał elementu piezoelektrycznego
(fioletowy) dla wyłączonego systemu redukcji hałasu (po lewej stronie) i włączonego (po
prawej).

45
Na Rys. 45 przedstawiono przebieg czasowy z oscyloskopu sygnału z mikrofonu błędu
oraz sygnału elementu piezoelektrycznego dla częstotliwości 200 Hz i wzmocnieniu 0,16.
Napięcie dla sygnału elementu piezoelektrycznego przy włączonej redukcji hałasu wynosi
ok. 50V, natomiast polaryzacja ok. 100V. Widoczne jest wyraźne tłumienie amplitudy
sygnału błędu po włączeniu systemu ARH.
46
9. Analiza wyników
Pomiary poziomu ciśnienia akustycznego w odległości 20 cm od falowodu oraz
poziomu natężenia dźwięku w odległości kilku milimetrów od wylotu falowodu bez
ustroju dźwiękochłonno-izolacyjnego wykazały, że można przyjąć że fala akustyczna
pobudzająca ustrój jest falą płaską. Na całej powierzchni badanego ustroju poziom
ciśnienia akustycznego jest stały. Prędkości akustyczne zmierzone w kierunkach x i y
(kierunki prostopadłe do osi falowodu) są wielokrotnie niższe niż w kierunku z
(równoległym do osi falowodu).
Założenie ustroju dźwiękochłonno-izolacyjnego na wylocie falowodu
spowodowało obniżenie poziomu ciśnienia akustycznego o ok. 30 dB (Rys. 28 i Rys. 29).
Zatem można przyjąć, że taka jest izolacyjność ustroju. Pomiary wykazały znaczne różnice
poziomu ciśnienia akustycznego i natężenia dźwięku emitowanego przez ustrój.
Włączenie systemu ARH w każdym pomiarze wpłynęło na obniżenie poziomu
ciśnienia akustycznego emitowanego przez ustrój osiągając skuteczności ARH od 3 do 16
dB. Poziom mierzony był w jednym punkcie (w miejscu umieszczenia mikrofonu błędu) w
odległości 20 cm od aktywnego ustroju dźwiękochłonno-izolacyjnego.
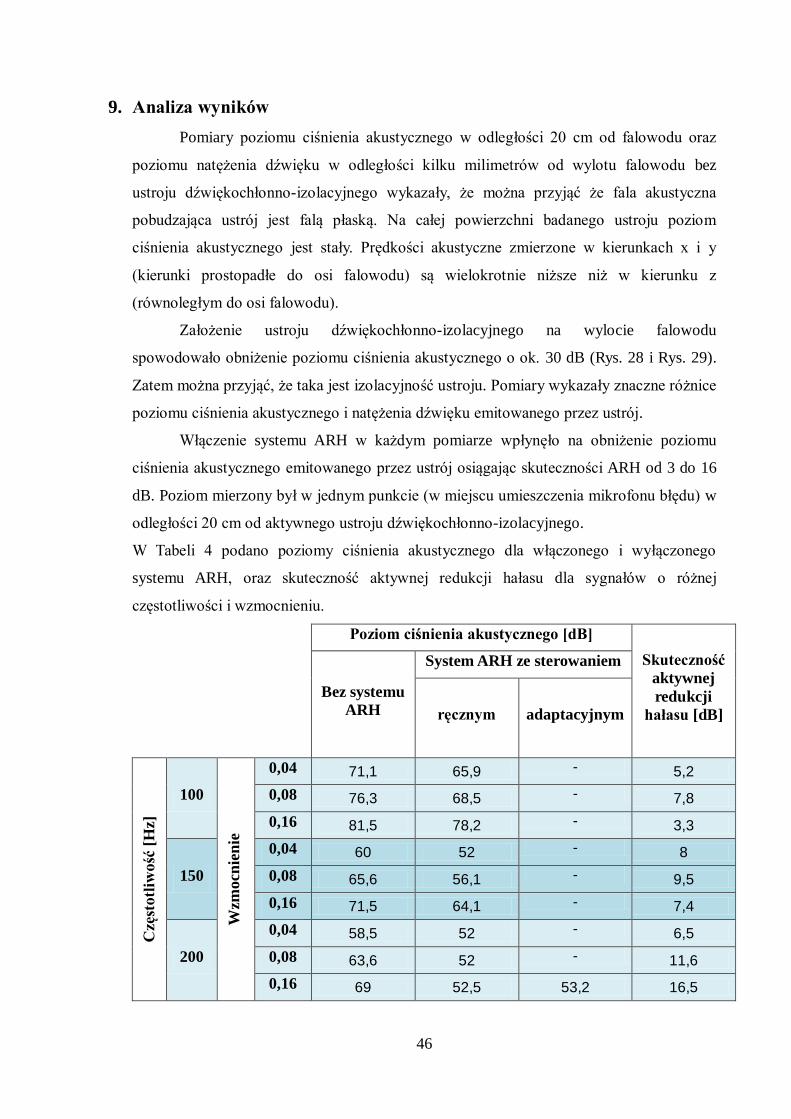
W Tabeli 4 podano poziomy ciśnienia akustycznego dla włączonego i wyłączonego
systemu ARH, oraz skuteczność aktywnej redukcji hałasu dla sygnałów o różnej
częstotliwości i wzmocnieniu.
Poziom ciśnienia akustycznego [dB]
Skuteczność
aktywnej
redukcji
hałasu [dB]
Bez systemu
ARH
System ARH ze sterowaniem
ręcznym adaptacyjnym
Czę
stotl
iwość
[H
z]
100
Wzm
ocn
ien
ie
0,04 71,1 65,9 - 5,2
0,08 76,3 68,5 - 7,8
0,16 81,5 78,2 - 3,3
150
0,04 60 52 - 8
0,08 65,6 56,1 - 9,5
0,16 71,5 64,1 - 7,4
200
0,04 58,5 52 - 6,5
0,08 63,6 52 - 11,6
0,16 69 52,5 53,2 16,5
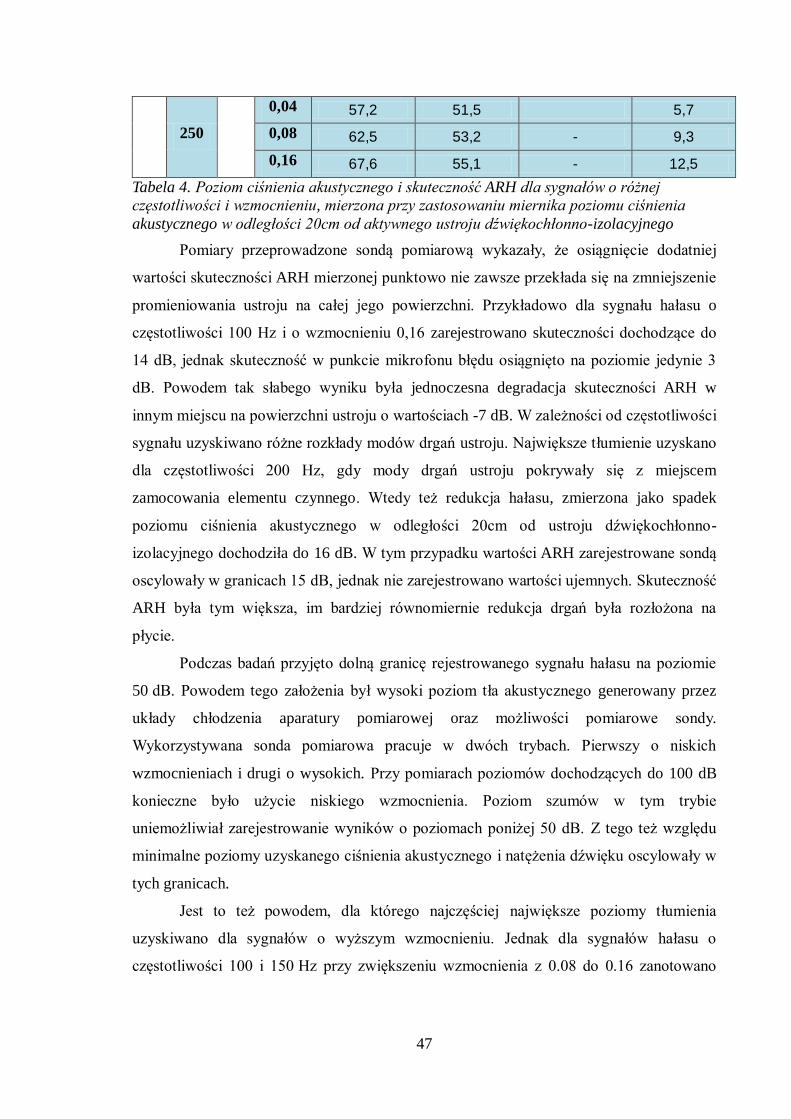
47
250
0,04 57,2 51,5 5,7
0,08 62,5 53,2 - 9,3
0,16 67,6 55,1 - 12,5
Tabela 4. Poziom ciśnienia akustycznego i skuteczność ARH dla sygnałów o różnej
częstotliwości i wzmocnieniu, mierzona przy zastosowaniu miernika poziomu ciśnienia
akustycznego w odległości 20cm od aktywnego ustroju dźwiękochłonno-izolacyjnego
Pomiary przeprowadzone sondą pomiarową wykazały, że osiągnięcie dodatniej
wartości skuteczności ARH mierzonej punktowo nie zawsze przekłada się na zmniejszenie
promieniowania ustroju na całej jego powierzchni. Przykładowo dla sygnału hałasu o
częstotliwości 100 Hz i o wzmocnieniu 0,16 zarejestrowano skuteczności dochodzące do
14 dB, jednak skuteczność w punkcie mikrofonu błędu osiągnięto na poziomie jedynie 3
dB. Powodem tak słabego wyniku była jednoczesna degradacja skuteczności ARH w
innym miejscu na powierzchni ustroju o wartościach -7 dB. W zależności od częstotliwości
sygnału uzyskiwano różne rozkłady modów drgań ustroju. Największe tłumienie uzyskano
dla częstotliwości 200 Hz, gdy mody drgań ustroju pokrywały się z miejscem
zamocowania elementu czynnego. Wtedy też redukcja hałasu, zmierzona jako spadek
poziomu ciśnienia akustycznego w odległości 20cm od ustroju dźwiękochłonno-
izolacyjnego dochodziła do 16 dB. W tym przypadku wartości ARH zarejestrowane sondą
oscylowały w granicach 15 dB, jednak nie zarejestrowano wartości ujemnych. Skuteczność
ARH była tym większa, im bardziej równomiernie redukcja drgań była rozłożona na
płycie.
Podczas badań przyjęto dolną granicę rejestrowanego sygnału hałasu na poziomie
50 dB. Powodem tego założenia był wysoki poziom tła akustycznego generowany przez
układy chłodzenia aparatury pomiarowej oraz możliwości pomiarowe sondy.
Wykorzystywana sonda pomiarowa pracuje w dwóch trybach. Pierwszy o niskich
wzmocnieniach i drugi o wysokich. Przy pomiarach poziomów dochodzących do 100 dB
konieczne było użycie niskiego wzmocnienia. Poziom szumów w tym trybie
uniemożliwiał zarejestrowanie wyników o poziomach poniżej 50 dB. Z tego też względu
minimalne poziomy uzyskanego ciśnienia akustycznego i natężenia dźwięku oscylowały w
tych granicach.
Jest to też powodem, dla którego najczęściej największe poziomy tłumienia
uzyskiwano dla sygnałów o wyższym wzmocnieniu. Jednak dla sygnałów hałasu o
częstotliwości 100 i 150 Hz przy zwiększeniu wzmocnienia z 0.08 do 0.16 zanotowano
48
spadek skuteczności. Powodem tego stanu rzeczy może być niewystarczająca moc
zastosowanego elementu czynnego w tym zakresie częstotliwości.
Dokonane pomiary zależności ciśnienia akustycznego od kąta przesunięcia sygnału
elementu piezoelektrycznego w stosunku do sygnału hałasu z włączonym i wyłączonym
systemem ARH umożliwiły zbadanie wpływu błędu kąta przesunięcia sygnału na
skuteczność ARH. Dla każdej częstotliwości kąt przesunięcia sygnału dla uzyskania
najwyższego tłumienia był inny. Dla 100 Hz wynosił on 58°, dla 150 Hz - 339°, a dla
200Hz - 280°. Przebieg sygnału osiągał globalne minimum w znacznie węższym zakresie
kątów, niż globalne maksimum. Przez ten fakt trudniej było dobrać odpowiednią wartość
opóźnienia dla sygnałów o wyższych częstotliwościach, gdyż zwiększało się próbkowanie
sygnału, a tym samym zmniejszał się możliwy krok przesunięcia kąta sygnału opóźnienia.
Weryfikacja sygnału oscyloskopem wskazuje na znaczną liczbę zakłóceń w torze
pomiarowym. Różnice amplitudy przed włączeniem elementu piezoelektrycznego i po
włączeniu są niemal dwukrotnie większe.
Pomiar poziomu ciśnienia akustycznego i poziomu natężenia dla częstotliwości 200
Hz i wzmocnienia 0,16 z włączonym systemem ARH wykonano w dwóch wariantach. W
pierwszym standardowo wartość sygnału kompensującego została określona ręcznie. W
drugim przypadku użyto adaptacyjnego algorytmu wykorzystującego filtr Notch.
Tłumienie uzyskane w drugim przypadku było o ok. 0,7 dB niższe. Powodem tego mógł
być hałas od układu pozycjonowania sondy, który wpływał na minimalne pogorszenie
sprawności algorytmu.
49
10. Podsumowanie
Wykorzystując zrealizowane stanowisko badawcze wykonano pomiary
skuteczności aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego. Mierzono
poziom ciśnienia akustycznego w odległości 20 cm od wylotu falowodu oraz poziom
natężenia dźwięku w odległości kilku milimetrów od wylotu falowodu. Pomiary
zrealizowano bez zamontowanego ustroju oraz po zamontowaniu ustroju z wyłączonym i
włączonym systemem ARH. Przeprowadzono je dla sygnałów hałasu o czterech
częstotliwościach: 100 Hz, 150 Hz, 200 Hz, 250 Hz oraz trzech wzmocnieniach: 0,04,
0,08, 0,16. W efekcie włączenia systemu ARH osiągnięto skuteczność ARH przekraczającą
16 dB (Rys. 43), co oznacza analogiczne zwiększenie izolacyjności akustycznej ustroju w
stosunku do wersji bez systemu ARH. W pobliżu ustroju skuteczność osiągała 16 dB (Rys.
41), natomiast na krańcach obszaru pomiarowego ok. 0 dB. Rozkład skuteczności ARH na
powierzchni płyty jest nierównomierny. W niektórych przypadkach obserwowana była
degradacja skuteczności ARH dochodząca do -7 dB (Rys. 32). W miejscu mikrofonu błędu
we wszystkich przypadkach osiągnięto wartości dodatnie, jednak oscylowały one od 3 do
16 dB (Tabela 4).
Dla wariantu o najwyższej skuteczności aktywnej redukcji hałasu uruchomiono
system ARH z adaptacyjnym algorytmem LMS z cyfrowymi filtrami wycinającymi Notch.
Tłumienie uzyskane było o ok. 0,7 dB niższe niż w przypadku sterowania ręcznego.
Powodem tego mógł być hałas od układu pozycjonowania sondy, który wpływał na
minimalne pogorszenie sprawności algorytmu.
Celem pracy było określenie zmiany izolacyjności akustycznej ustroju
dźwiękochłonno-izolacyjnego na skutek zastosowania w nim systemu ARH. Można zatem
uznać, że podstawowy cel pracy został zrealizowany.
Wyniki realizacji zadania badawczego będą wykorzystane do wykonania ustroju
dźwiękochłonno-izolacyjnego, a tym samym umożliwią konstruowanie systemów ARH w
zastosowaniach dotąd niedostępnych dla metod aktywnych
50
Bibliografia
1. BTM Cordah Sp. z o.o., Mapa akustyczna Miasta Gdańska,
http://mapaakustyczna.bmtcordah.pl/hlp/MAPA%20AKUSTYCZNA%20MIASTA%20G
DA%C5%83SKA_portal2_pliki/image010.gif, 3.01.2011
2. EEA, Perception of noise as a problem in European cities compared to road noise,
http://www.eea.europa.eu/data-and-maps/figures/perception-of-noise-all-sources-1,
4.01.2011
3. Engel Z. i inni; Metody aktywne redukcji hałasu, CIOP, Warszawa 2001.
4. Górski P., Redukcja hałasu w środowisku z wykorzystaniem metod aktywnych, XXX
Międzynarodowa Konferencja Ekologiczna” HAŁAS A ŚRODOWISKO”, Fundacja
Edukacji Ekologicznej i Zrównoważonego Rozwoju Zielonych RP, Łódź, Wrzesień 2008
str. 81-86
5. Honda Legend Review,
http://www.drive.com.au/Editorial/ArticleDetail.aspx?ArticleID=49966&vf=24,
25.01.2011
6. Jacobsen Finn, “A comparison of two different sound intensity measurement principles”,
The Jounal of the Acoustical Society of America Vol. 118, No. 3, str. 1510-1517, 2005
7. Lightspeed Technologies, ANR 101: A tutorial on Active Noise Reduction Headsets, 1998
8. Prezydent Miasta Stołecznego Warszawy, Mapy Akustyczne Warszawy,
http://mapaakustyczna.um.warszawa.pl, 6.01.2011
9. Makarewicz G., Wybrane cyfrowe systemy aktywnej redukcji hałasu, CIOP-PIB,
Warszawa 2002.
10. Microflown Technologies, USP Regular, http://www.microflown.com/products/standard-
probes/usp-regular.html, 10.01.2011.
11. Microflown Technologies, Sound Intensity Measurments,
http://www.microflown.com/files/media/library/books/microflown_ebook/ebook_5_intensi
ty.pdf, 11.01.2011
12. Morzyński L., Puto D., Hałas w środowisku pracy, PIP, Warszawa 2005
13. Nelson P. A., Elliott S. J.: Active Control of Sound. London, Academic Press 1992.
14. Politechnika Śląska, Zakład Pomiarów i Systemów Sterowania, Instytut Automatyki,
Przykłady zastosowań metod aktywnego tłumienia hałasu,
http://www.zpss.aei.polsl.pl/content/dydaktyka/ATD/W_10.pdf, 8.01.2011.
51
15. proGEO Sp. z o.o. Wrocław, Obliczenia oddziaływania na środowisko w zakresie
uciążliwości akustycznej, http://www.siskom.waw.pl/dw/724/halas_tekst.pdf, 5.01.2011.
16. Weyna S. Rozpływ energii akustycznych źródeł rzeczywistych, Warszawa, 2005
52
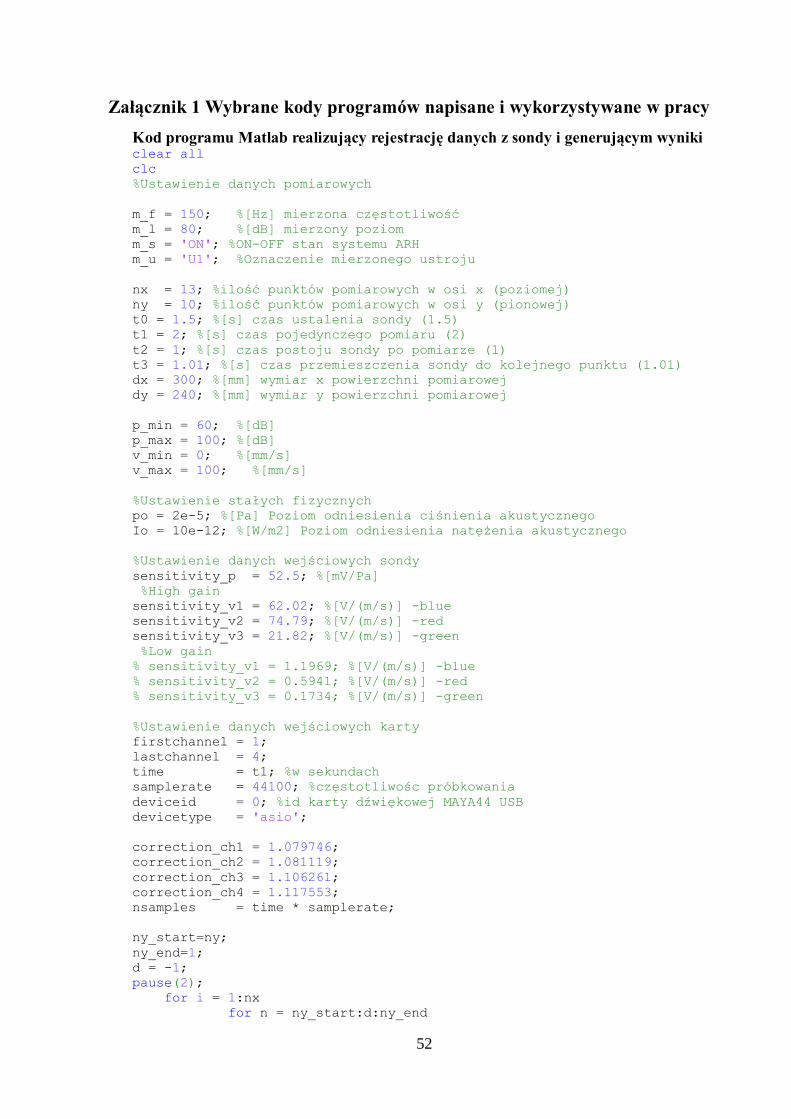
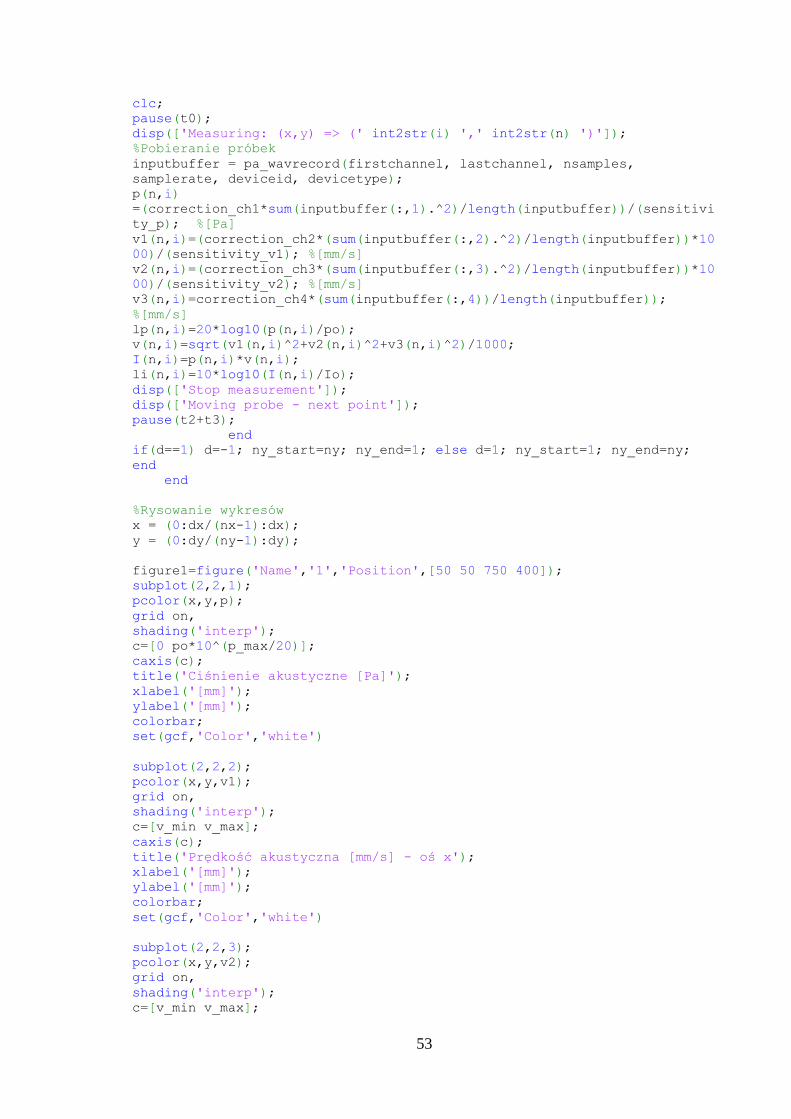
Załącznik 1 Wybrane kody programów napisane i wykorzystywane w pracy
Kod programu Matlab realizujący rejestrację danych z sondy i generującym wyniki clear all
clc
%Ustawienie danych pomiarowych
m_f = 150; %[Hz] mierzona częstotliwość
m_l = 80; %[dB] mierzony poziom
m_s = 'ON'; %ON-OFF stan systemu ARH
m_u = 'U1'; %Oznaczenie mierzonego ustroju
nx = 13; %ilość punktów pomiarowych w osi x (poziomej)
ny = 10; %ilość punktów pomiarowych w osi y (pionowej)
t0 = 1.5; %[s] czas ustalenia sondy (1.5)
t1 = 2; %[s] czas pojedynczego pomiaru (2)
t2 = 1; %[s] czas postoju sondy po pomiarze (1)
t3 = 1.01; %[s] czas przemieszczenia sondy do kolejnego punktu (1.01)
dx = 300; %[mm] wymiar x powierzchni pomiarowej
dy = 240; %[mm] wymiar y powierzchni pomiarowej
p_min = 60; %[dB]
p_max = 100; %[dB]
v_min = 0; %[mm/s]
v_max = 100; %[mm/s]
%Ustawienie stałych fizycznych
po = 2e-5; %[Pa] Poziom odniesienia ciśnienia akustycznego
Io = 10e-12; %[W/m2] Poziom odniesienia natężenia akustycznego
%Ustawienie danych wejściowych sondy
sensitivity_p = 52.5; %[mV/Pa]
%High gain
sensitivity_v1 = 62.02; %[V/(m/s)] -blue
sensitivity_v2 = 74.79; %[V/(m/s)] -red
sensitivity_v3 = 21.82; %[V/(m/s)] -green
%Low gain
% sensitivity_v1 = 1.1969; %[V/(m/s)] -blue
% sensitivity_v2 = 0.5941; %[V/(m/s)] -red
% sensitivity_v3 = 0.1734; %[V/(m/s)] -green
%Ustawienie danych wejściowych karty
firstchannel = 1;
lastchannel = 4;
time = t1; %w sekundach
samplerate = 44100; %częstotliwośc próbkowania
deviceid = 0; %id karty dźwiękowej MAYA44 USB
devicetype = 'asio';
correction_ch1 = 1.079746;
correction_ch2 = 1.081119;
correction_ch3 = 1.106261;
correction_ch4 = 1.117553;
nsamples = time * samplerate;
ny_start=ny;
ny_end=1;
d = -1;
pause(2);
for i = 1:nx
for n = ny_start:d:ny_end
53
clc;
pause(t0);
disp(['Measuring: (x,y) => (' int2str(i) ',' int2str(n) ')']);
%Pobieranie próbek
inputbuffer = pa_wavrecord(firstchannel, lastchannel, nsamples,
samplerate, deviceid, devicetype);
p(n,i)
=(correction_ch1*sum(inputbuffer(:,1).^2)/length(inputbuffer))/(sensitivi
ty_p); %[Pa]
v1(n,i)=(correction_ch2*(sum(inputbuffer(:,2).^2)/length(inputbuffer))*10
00)/(sensitivity_v1); %[mm/s]
v2(n,i)=(correction_ch3*(sum(inputbuffer(:,3).^2)/length(inputbuffer))*10
00)/(sensitivity_v2); %[mm/s]
v3(n,i)=correction_ch4*(sum(inputbuffer(:,4))/length(inputbuffer));
%[mm/s]
lp(n,i)=20*log10(p(n,i)/po);
v(n,i)=sqrt(v1(n,i)^2+v2(n,i)^2+v3(n,i)^2)/1000;
I(n,i)=p(n,i)*v(n,i);
li(n,i)=10*log10(I(n,i)/Io);
disp(['Stop measurement']);
disp(['Moving probe - next point']);
pause(t2+t3);
end
if(d==1) d=-1; ny_start=ny; ny_end=1; else d=1; ny_start=1; ny_end=ny;
end
end
%Rysowanie wykresów
x = (0:dx/(nx-1):dx);
y = (0:dy/(ny-1):dy);
figure1=figure('Name','1','Position',[50 50 750 400]);
subplot(2,2,1);
pcolor(x,y,p);
grid on,
shading('interp');
c=[0 po*10^(p_max/20)];
caxis(c);
title('Ciśnienie akustyczne [Pa]');
xlabel('[mm]');
ylabel('[mm]');
colorbar;
set(gcf,'Color','white')
subplot(2,2,2);
pcolor(x,y,v1);
grid on,
shading('interp');
c=[v_min v_max];
caxis(c);
title('Prędkość akustyczna [mm/s] - oś x');
xlabel('[mm]');
ylabel('[mm]');
colorbar;
set(gcf,'Color','white')
subplot(2,2,3);
pcolor(x,y,v2);
grid on,
shading('interp');
c=[v_min v_max];
54
caxis(c);
title('Prędkość akustyczna [mm/s] - oś y');
xlabel('[mm]');
ylabel('[mm]');
colorbar;
set(gcf,'Color','white')
subplot(2,2,4);
pcolor(x,y,v3);
grid on,
shading('interp');
c=[v_min v_max];
caxis(c);
title('Prędkość akustyczna [mm/s] - oś z');
xlabel('[mm]');
ylabel('[mm]');
colorbar;
set(gcf,'Color','white')
figure2=figure('Name','2','Position',[50 50 750 400]);
subplot(2,2,1);
pcolor(x,y,lp);
grid on,
shading('interp');
c=[p_min p_max];
caxis(c);
title('Poziom ciśnienia akustycznego [dB]');
xlabel('[mm]');
ylabel('[mm]');
colorbar;
set(gcf,'Color','white')
subplot(2,2,2);
pcolor(x,y,li);
grid on;
shading('interp');
hold on;
quiver(x,y,v1,v2,'r');
hold off;
c=[p_min p_max];
caxis(c);
title('Poziom natężenia dźwięku [dB]');
xlabel('[mm]');
ylabel('[mm]');
colorbar;
set(gcf,'Color','white')
subplot(2,2,3);
pcolor(x,y,v3);
grid on,
shading('interp');
c=[v_min v_max];
caxis(c);
title('Prędkość akustyczna [mm/s] - oś z');
xlabel('[mm]');
ylabel('[mm]');
colorbar;
set(gcf,'Color','white')
subplot(2,2,4);
pcolor(x,y,v*1000);
55
grid on,
shading('interp');
c=[v_min v_max];
caxis(c);
title('Prędkość akustyczna [mm/s]');
xlabel('[mm]');
ylabel('[mm]');
colorbar;
set(gcf,'Color','white')
%Zapisywanie danych
save( [m_u '_' int2str(m_f) 'Hz_' int2str(m_l) 'dB_' m_s '_p.txt'], 'x',
'p', '-ASCII');
save( [m_u '_' int2str(m_f) 'Hz_' int2str(m_l) 'dB_' m_s '_v1.txt'],
'x', 'v1', '-ASCII');
save( [m_u '_' int2str(m_f) 'Hz_' int2str(m_l) 'dB_' m_s '_v2.txt'],
'x', 'v2', '-ASCII');
save( [m_u '_' int2str(m_f) 'Hz_' int2str(m_l) 'dB_' m_s '_v3.txt'],
'x', 'v3', '-ASCII');
56
Kod programu Matlab generujący kod sterujący w programie Mach2
clear all
clc
%współrzędne punktów krańcowych powierzchni pomiarowej (10mm margines)
dx_start = 10;
dx_stop = 210;
dy_start = 10;
dy_stop = 270;
%odległość pomiędzy punktami pomiarowymi
nx = 20;
ny = 20;
x_line = 0;
x_start = ((dx_stop - dx_start)-nx*fix((dx_stop - dx_start)/nx))/2
y_start = ((dy_stop - dy_start)-ny*fix((dy_stop - dy_start)/ny))/2
x = x_start;
y = y_start;
line = 0;
d = 1;
while y<=(dy_stop-ny)
y = y + ny;
y_line = y;
while x<=(dx_stop-nx) && x>=0
line=line+1;
if(d==1) x = x + nx; x_line = x; else x = x - nx; x_line = x + 2*nx;
end
v1(line) = ['G1 x' int2str(fix(y_line)) ' y' int2str(fix(x_line)) '
G4 P10'];
end
d=d*(-1);
if(d==1) x = x_start; else x = x - nx; end
end
v1=v1';
%save( 'mach2_kod.txt', '', 'v1', '-ASCII');
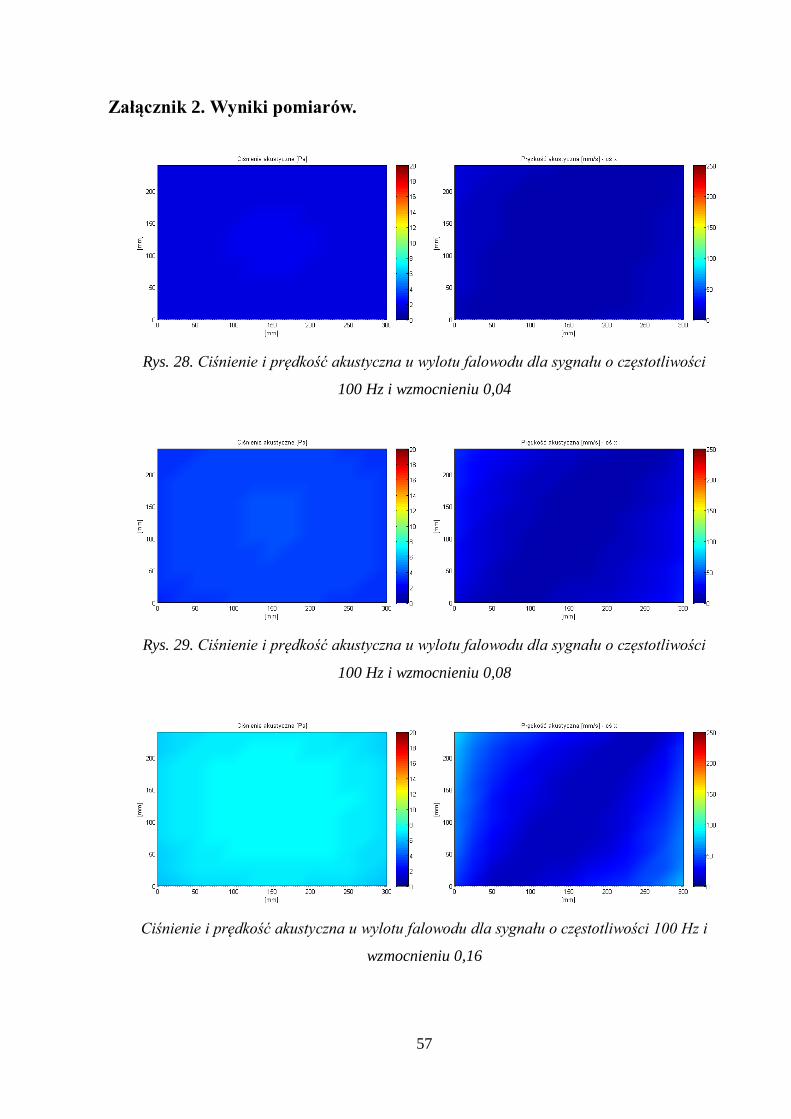
57
Załącznik 2. Wyniki pomiarów.
Rys. 28. Ciśnienie i prędkość akustyczna u wylotu falowodu dla sygnału o częstotliwości
100 Hz i wzmocnieniu 0,04
Rys. 29. Ciśnienie i prędkość akustyczna u wylotu falowodu dla sygnału o częstotliwości
100 Hz i wzmocnieniu 0,08
Ciśnienie i prędkość akustyczna u wylotu falowodu dla sygnału o częstotliwości 100 Hz i
wzmocnieniu 0,16
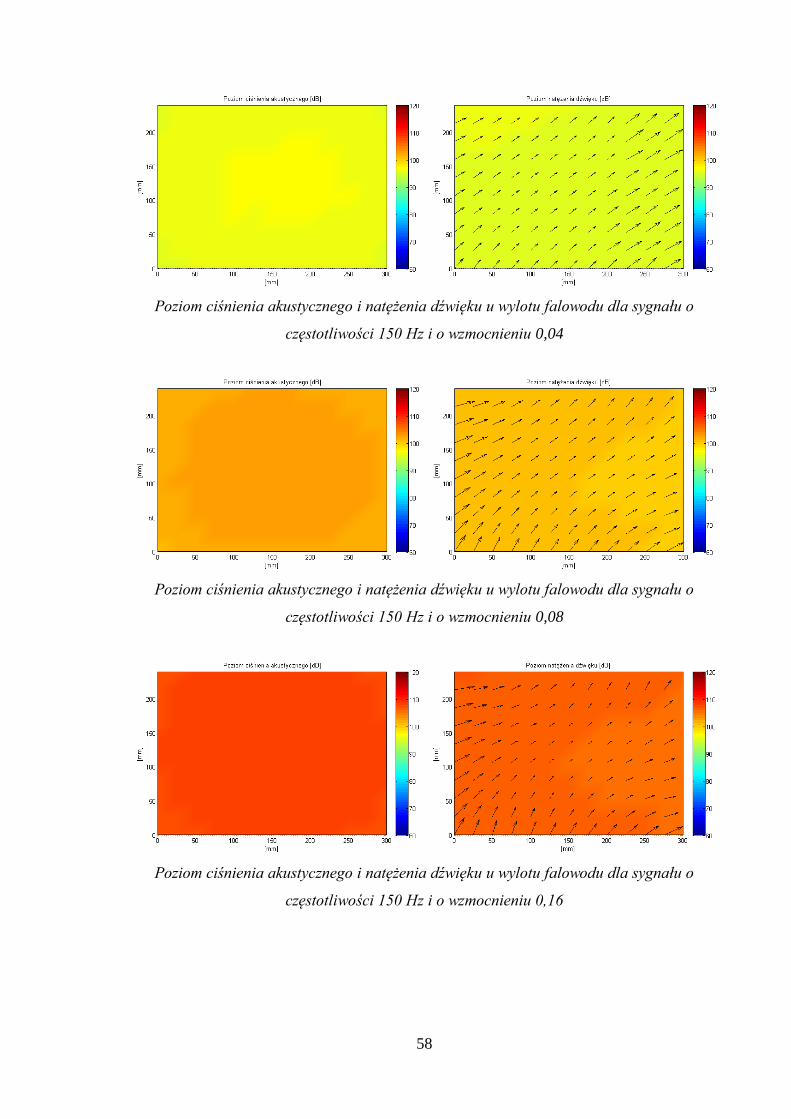
58
Poziom ciśnienia akustycznego i natężenia dźwięku u wylotu falowodu dla sygnału o
częstotliwości 150 Hz i o wzmocnieniu 0,04
Poziom ciśnienia akustycznego i natężenia dźwięku u wylotu falowodu dla sygnału o
częstotliwości 150 Hz i o wzmocnieniu 0,08
Poziom ciśnienia akustycznego i natężenia dźwięku u wylotu falowodu dla sygnału o
częstotliwości 150 Hz i o wzmocnieniu 0,16
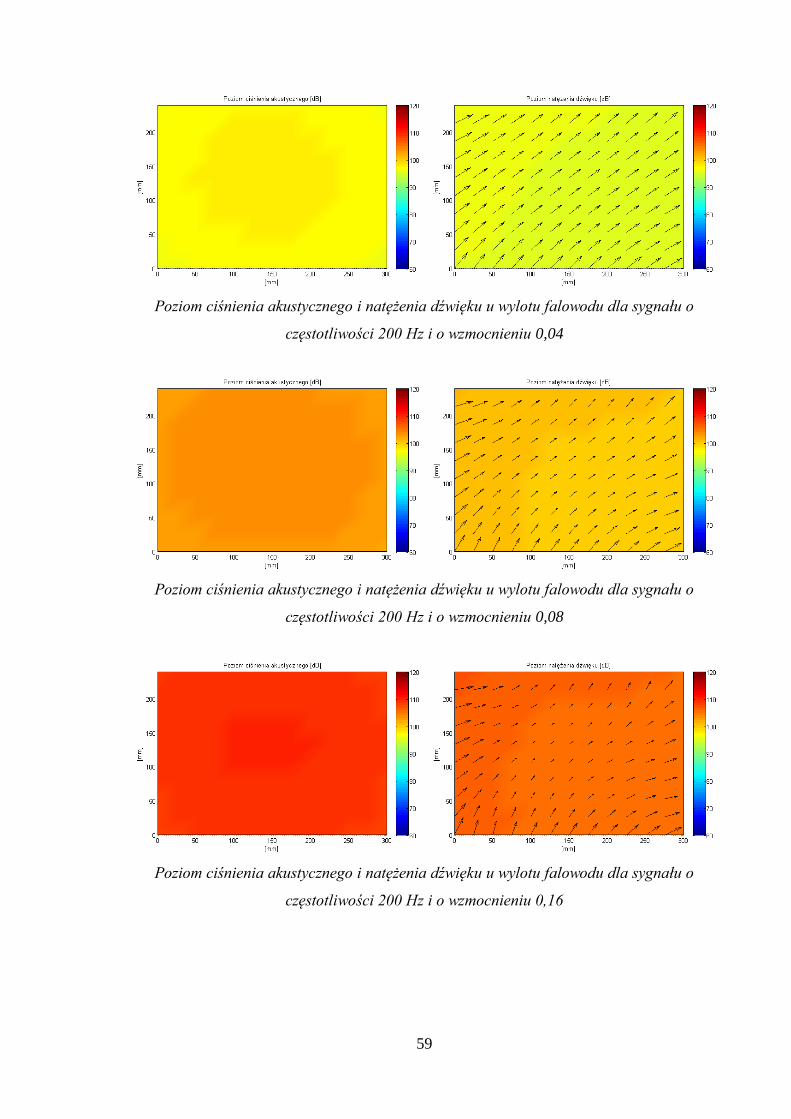
59
Poziom ciśnienia akustycznego i natężenia dźwięku u wylotu falowodu dla sygnału o
częstotliwości 200 Hz i o wzmocnieniu 0,04
Poziom ciśnienia akustycznego i natężenia dźwięku u wylotu falowodu dla sygnału o
częstotliwości 200 Hz i o wzmocnieniu 0,08
Poziom ciśnienia akustycznego i natężenia dźwięku u wylotu falowodu dla sygnału o
częstotliwości 200 Hz i o wzmocnieniu 0,16
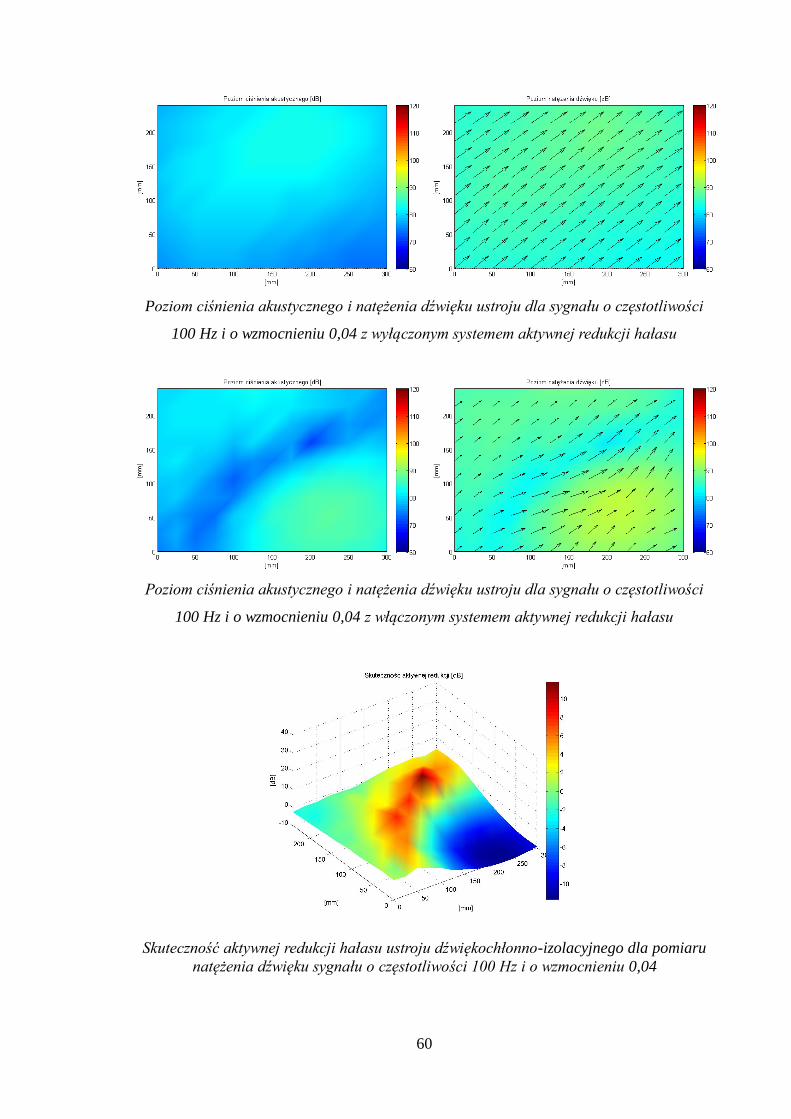
60
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
100 Hz i o wzmocnieniu 0,04 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
100 Hz i o wzmocnieniu 0,04 z włączonym systemem aktywnej redukcji hałasu
Skuteczność aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego dla pomiaru
natężenia dźwięku sygnału o częstotliwości 100 Hz i o wzmocnieniu 0,04
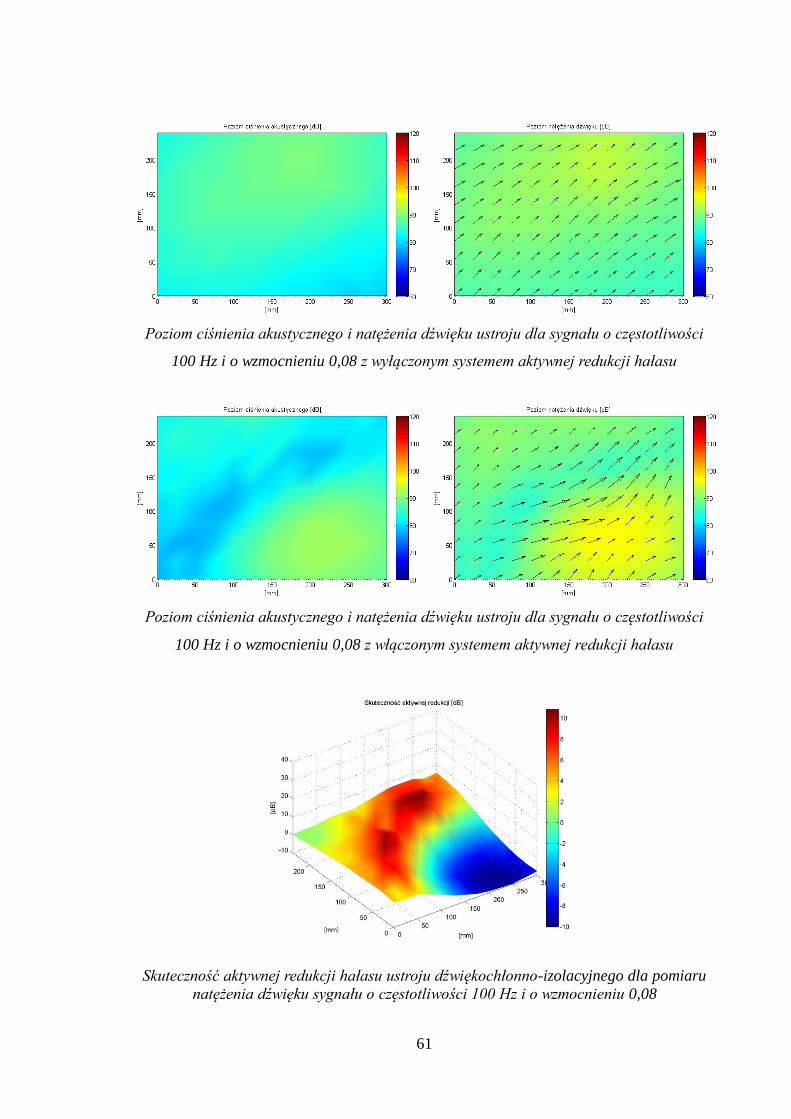
61
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
100 Hz i o wzmocnieniu 0,08 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
100 Hz i o wzmocnieniu 0,08 z włączonym systemem aktywnej redukcji hałasu
Skuteczność aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego dla pomiaru
natężenia dźwięku sygnału o częstotliwości 100 Hz i o wzmocnieniu 0,08
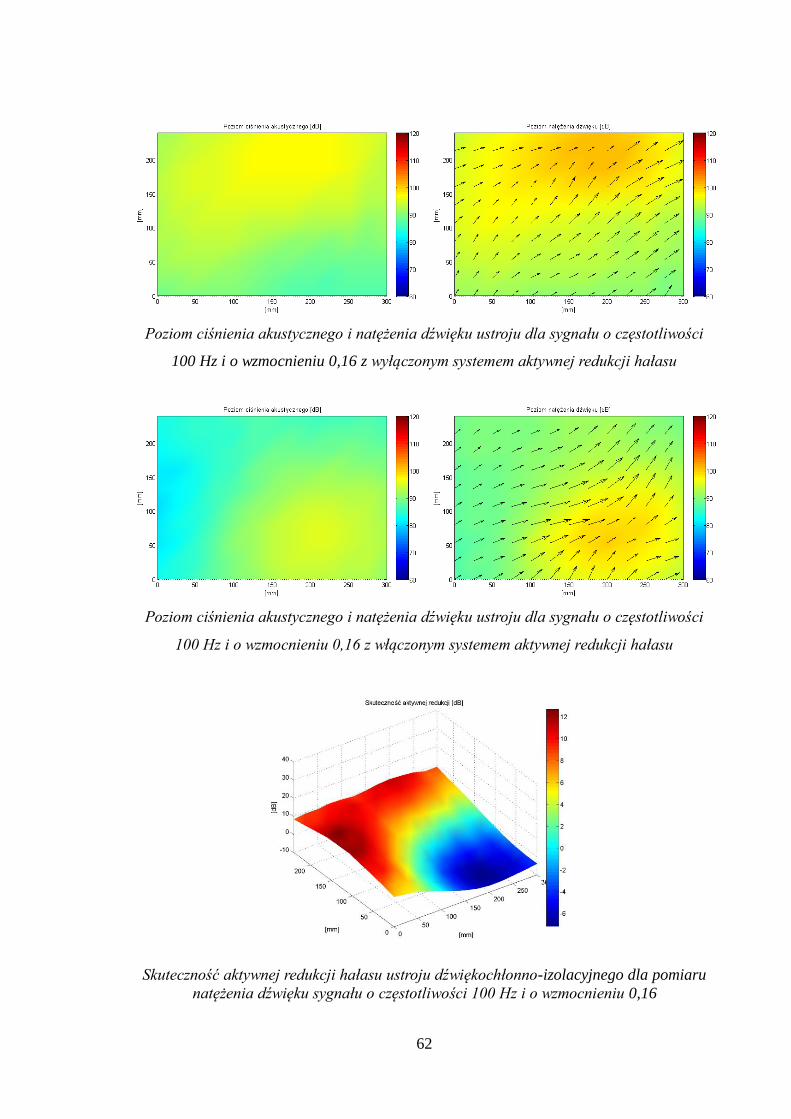
62
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
100 Hz i o wzmocnieniu 0,16 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
100 Hz i o wzmocnieniu 0,16 z włączonym systemem aktywnej redukcji hałasu
Skuteczność aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego dla pomiaru
natężenia dźwięku sygnału o częstotliwości 100 Hz i o wzmocnieniu 0,16
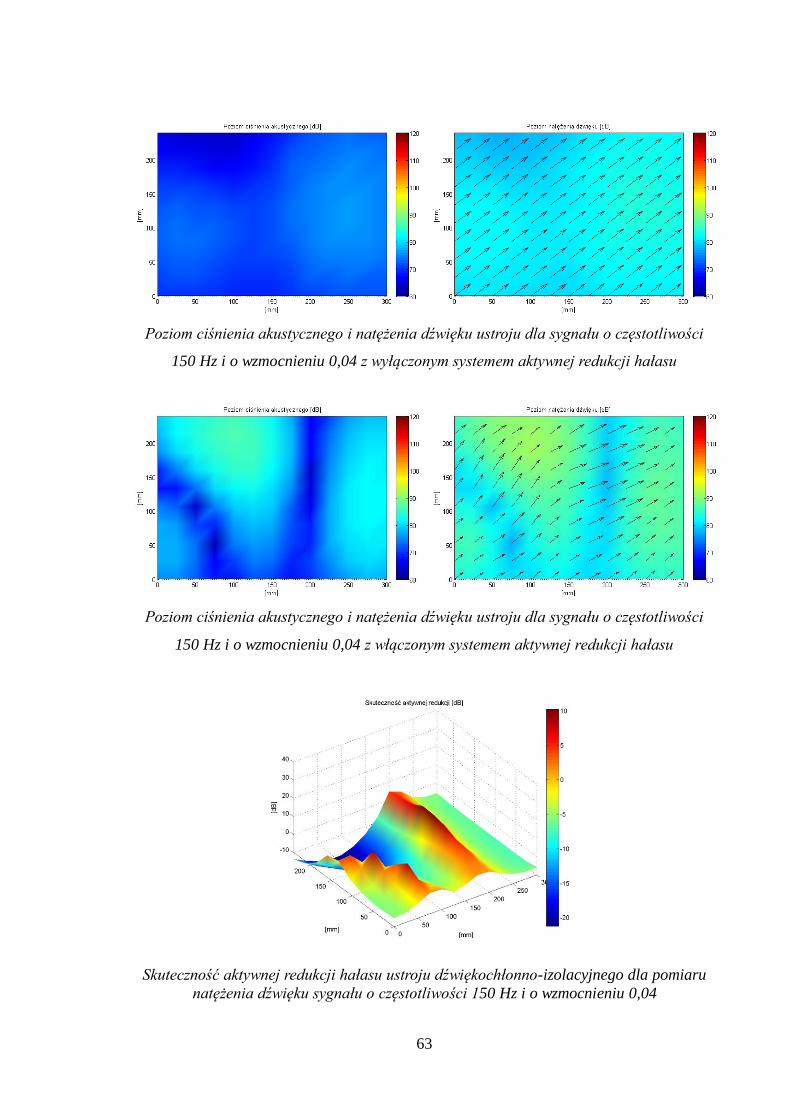
63
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
150 Hz i o wzmocnieniu 0,04 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
150 Hz i o wzmocnieniu 0,04 z włączonym systemem aktywnej redukcji hałasu
Skuteczność aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego dla pomiaru
natężenia dźwięku sygnału o częstotliwości 150 Hz i o wzmocnieniu 0,04
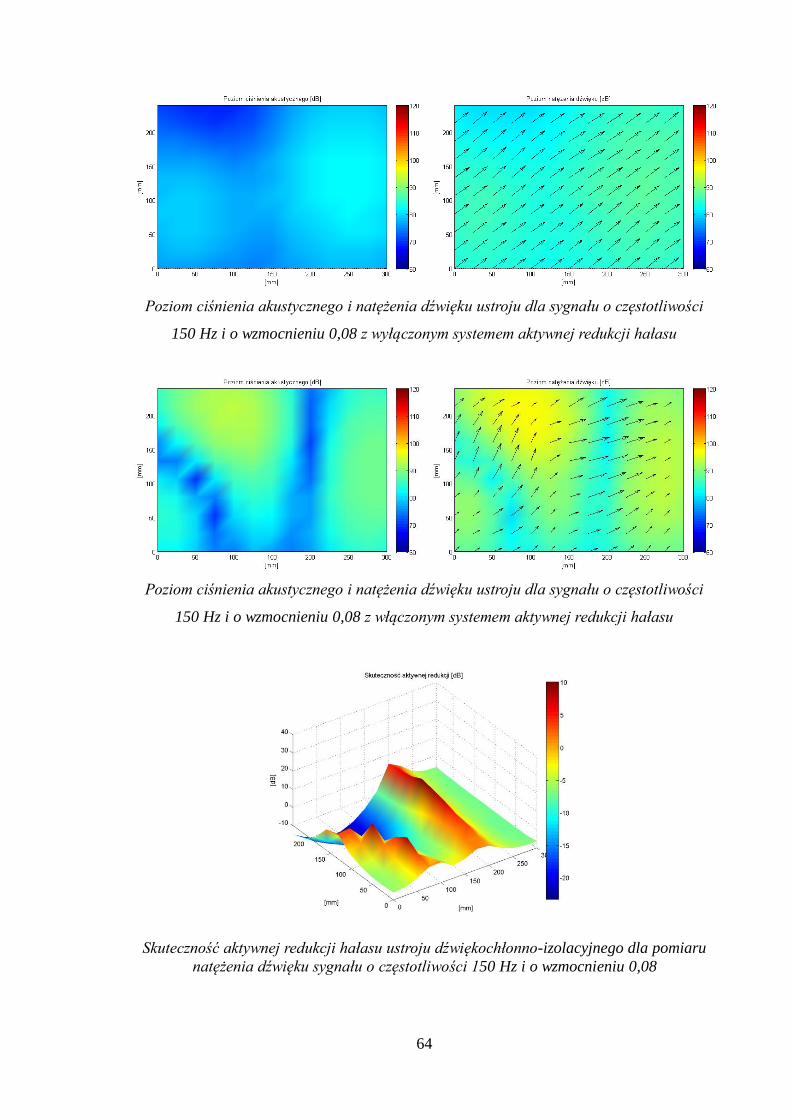
64
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
150 Hz i o wzmocnieniu 0,08 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
150 Hz i o wzmocnieniu 0,08 z włączonym systemem aktywnej redukcji hałasu
Skuteczność aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego dla pomiaru
natężenia dźwięku sygnału o częstotliwości 150 Hz i o wzmocnieniu 0,08
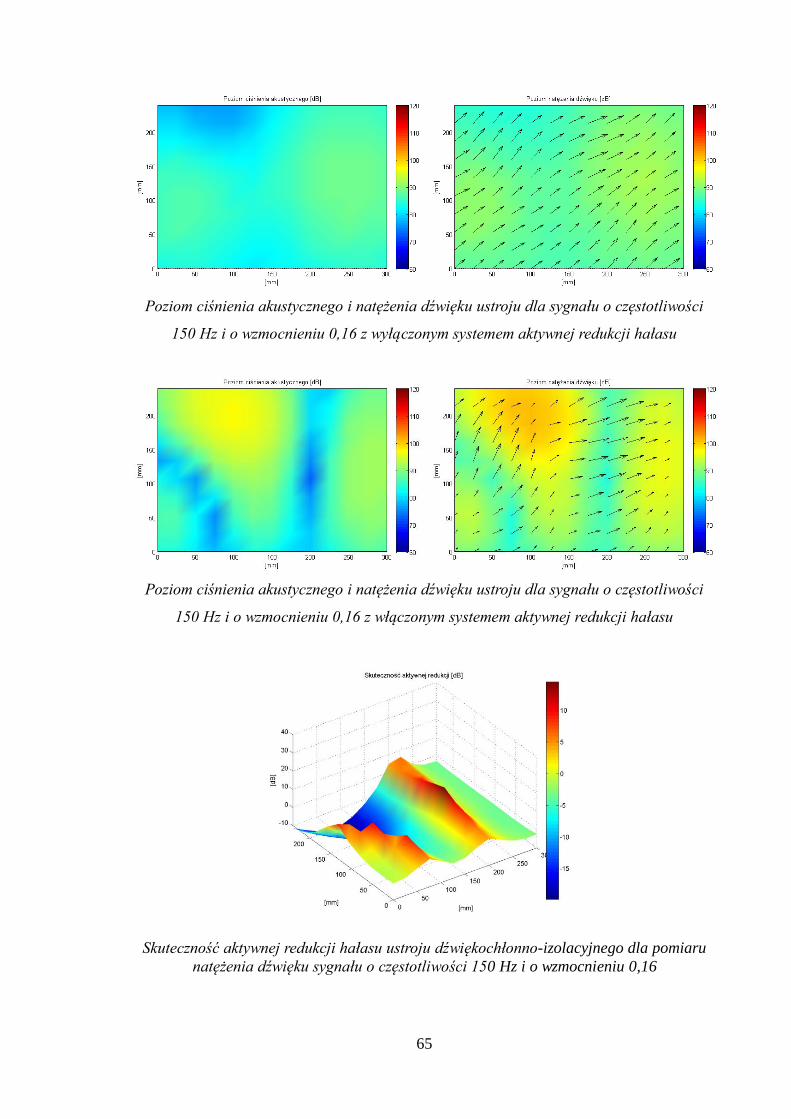
65
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
150 Hz i o wzmocnieniu 0,16 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
150 Hz i o wzmocnieniu 0,16 z włączonym systemem aktywnej redukcji hałasu
Skuteczność aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego dla pomiaru
natężenia dźwięku sygnału o częstotliwości 150 Hz i o wzmocnieniu 0,16
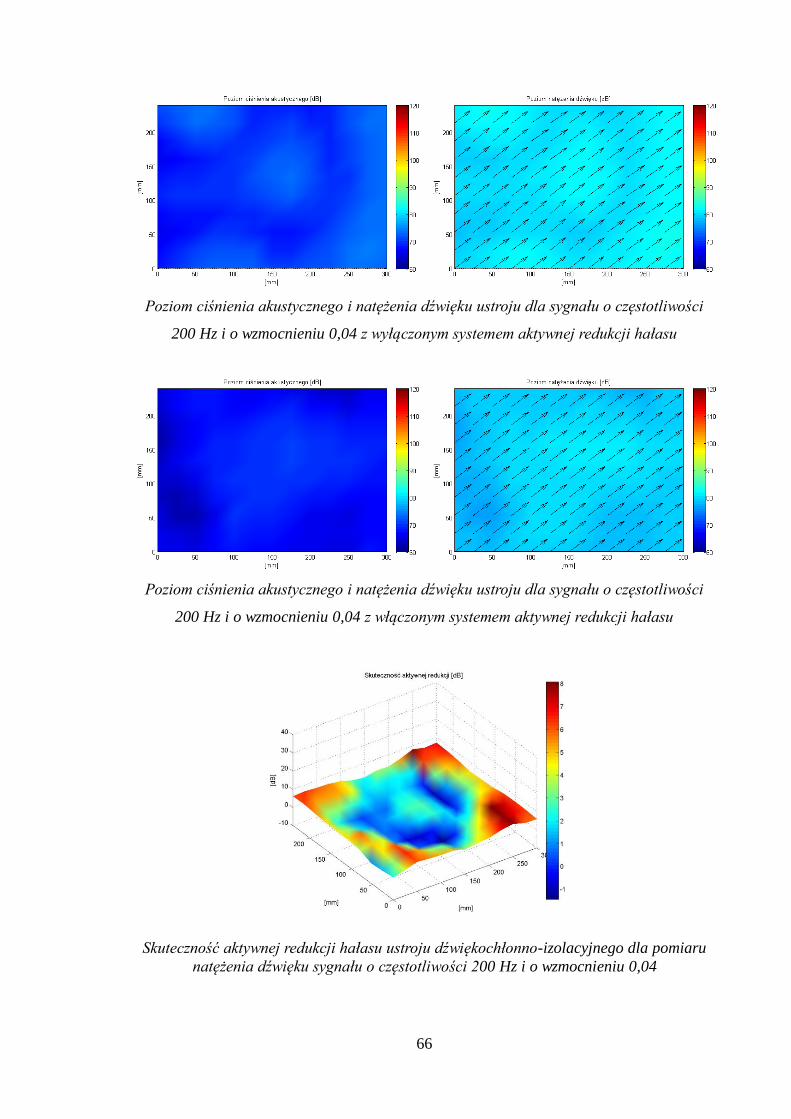
66
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
200 Hz i o wzmocnieniu 0,04 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
200 Hz i o wzmocnieniu 0,04 z włączonym systemem aktywnej redukcji hałasu
Skuteczność aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego dla pomiaru
natężenia dźwięku sygnału o częstotliwości 200 Hz i o wzmocnieniu 0,04
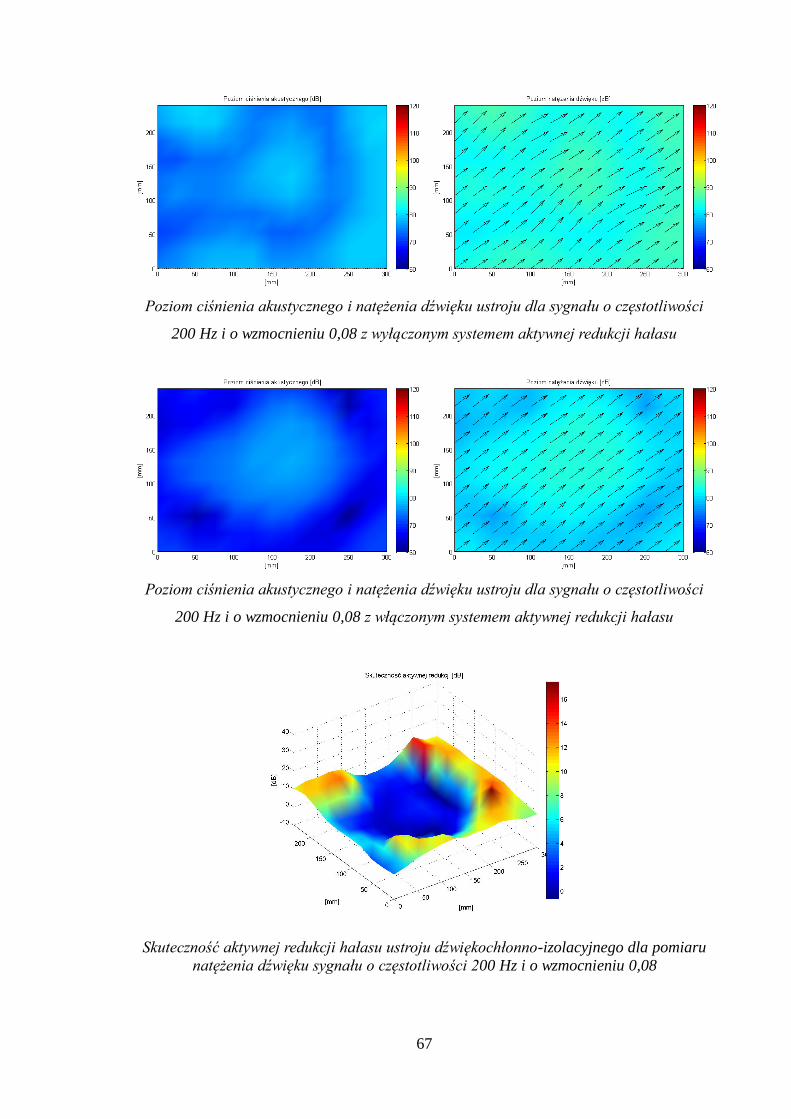
67
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
200 Hz i o wzmocnieniu 0,08 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
200 Hz i o wzmocnieniu 0,08 z włączonym systemem aktywnej redukcji hałasu
Skuteczność aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego dla pomiaru
natężenia dźwięku sygnału o częstotliwości 200 Hz i o wzmocnieniu 0,08
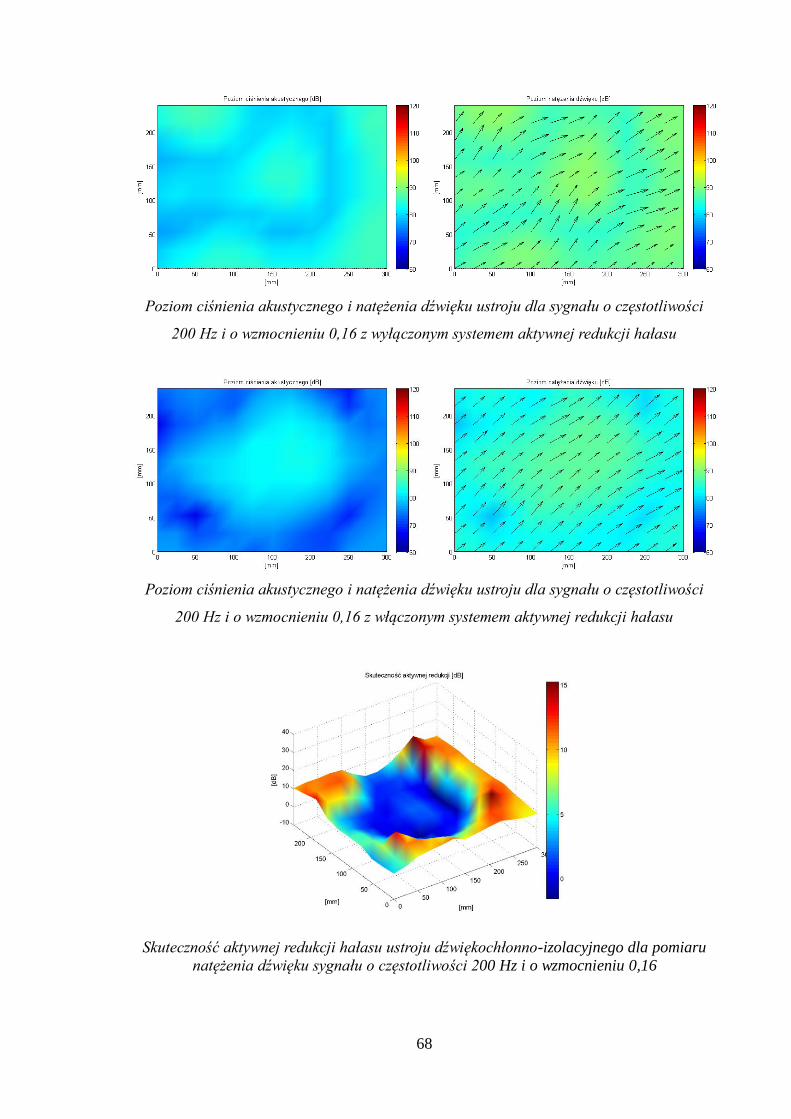
68
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
200 Hz i o wzmocnieniu 0,16 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
200 Hz i o wzmocnieniu 0,16 z włączonym systemem aktywnej redukcji hałasu
Skuteczność aktywnej redukcji hałasu ustroju dźwiękochłonno-izolacyjnego dla pomiaru
natężenia dźwięku sygnału o częstotliwości 200 Hz i o wzmocnieniu 0,16
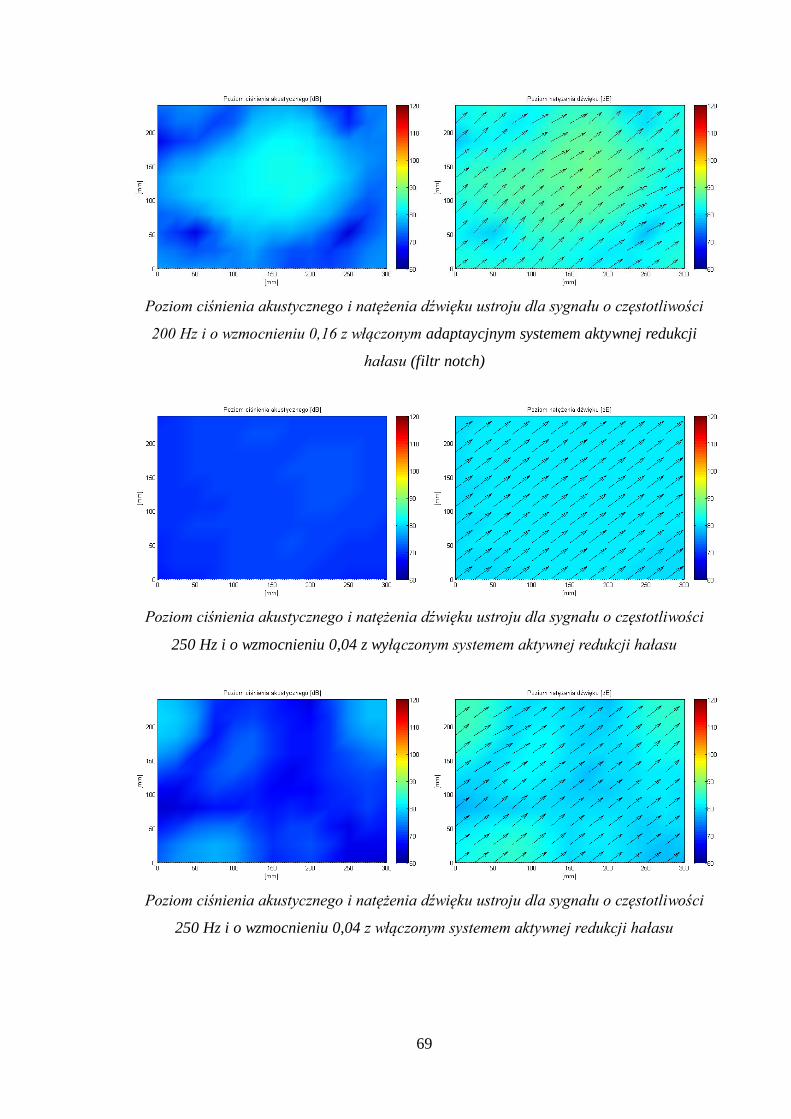
69
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
200 Hz i o wzmocnieniu 0,16 z włączonym adaptaycjnym systemem aktywnej redukcji
hałasu (filtr notch)
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
250 Hz i o wzmocnieniu 0,04 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
250 Hz i o wzmocnieniu 0,04 z włączonym systemem aktywnej redukcji hałasu
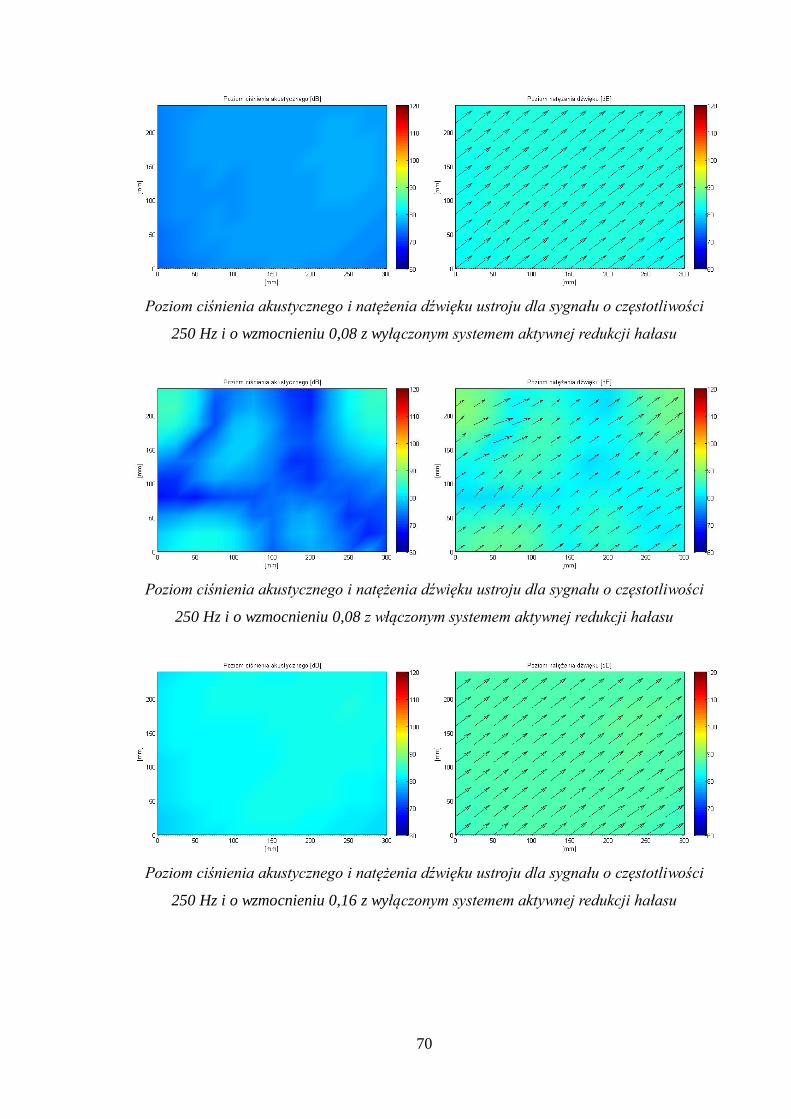
70
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
250 Hz i o wzmocnieniu 0,08 z wyłączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
250 Hz i o wzmocnieniu 0,08 z włączonym systemem aktywnej redukcji hałasu
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
250 Hz i o wzmocnieniu 0,16 z wyłączonym systemem aktywnej redukcji hałasu
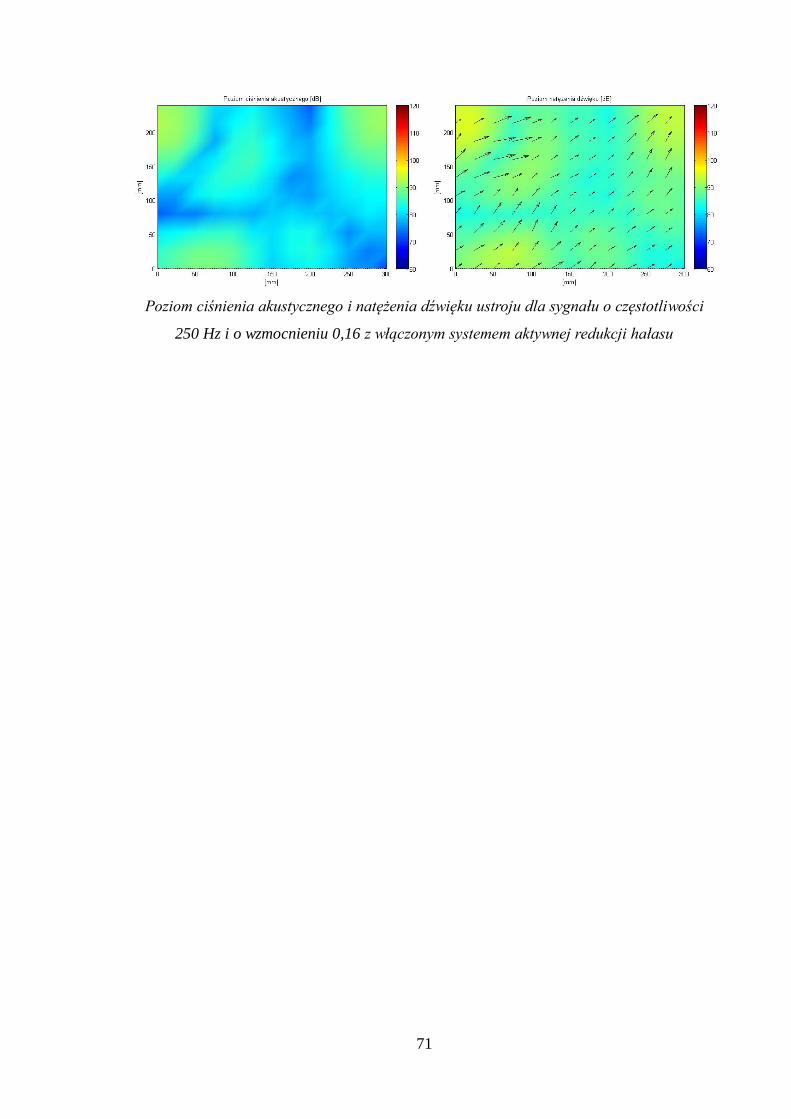
71
Poziom ciśnienia akustycznego i natężenia dźwięku ustroju dla sygnału o częstotliwości
250 Hz i o wzmocnieniu 0,16 z włączonym systemem aktywnej redukcji hałasu




![Praca dyplomowa - Zespół Przetwarzania Sygnałów [DSP AGH]dydaktyka:wersja_demonstracyjna... · Zaświadczam także, że niniejsza inżynierska praca dyplomowa nie była wcześniej](https://static.fdocument.pub/doc/165x107/5c78f93a09d3f2c9458bba5a/praca-dyplomowa-zespol-przetwarzania-sygnalow-dsp-agh-dydaktykawersjademonstracyjna.jpg)