![ZZZ OLQWLQ GH...PP PP PP PP PP PP PP PP PP PP PP PP PP PP PP PP PP PP FP +LQZHLV ]XU %HQXW]XQJ %LWWH GUXFNHQ 6LH GLHVH 6HLWH LQ 2ULJLQDOJU| H DXI ',1 $ 3DSLHU DXV :lKOHQ 6LH EHL GHQ](https://static.fdocument.pub/doc/165x107/5f053ec37e708231d41200db/zzz-olqwlq-gh-pp-pp-pp-pp-pp-pp-pp-pp-pp-pp-pp-pp-pp-pp-pp-pp-pp-pp-fp-lqzhlv.jpg)
PP 9 Robusni i Aksiom
12
Robusni i aksiomatski dizajn prenosnika
-
Upload
vlada-janosevic -
Category
Documents
-
view
22 -
download
5
description
Pouzdanost prenosnika prof Miroslav Ognjanovic predavanja
Transcript of PP 9 Robusni i Aksiom

Robusni i aksiomatski dizajn prenosnika
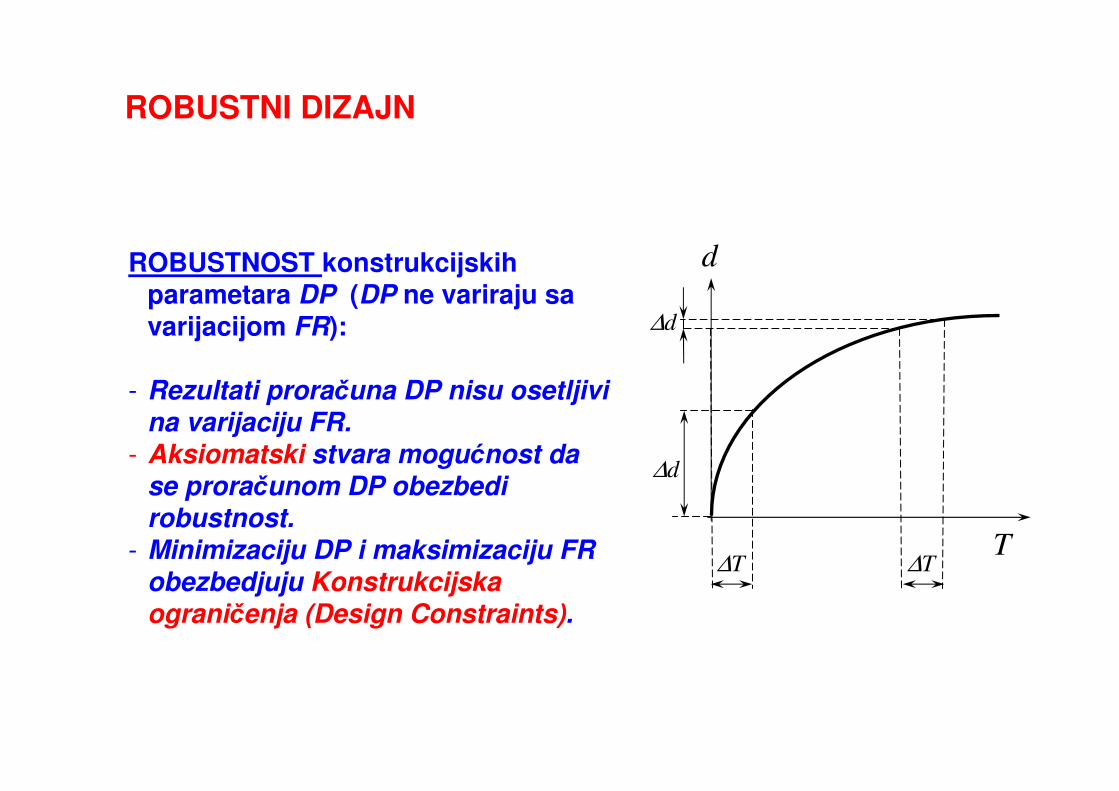
ROBUSTNI DIZAJN
ROBUSTNOST konstrukcijskih parametara DP (DP ne variraju sa varijacijom FR):
- Rezultati proračuna DP nisu osetljivi na varijaciju FR.
- Aksiomatski stvara mogućnost da se proračunom DP obezbedi robustnost.
- Minimizaciju DP i maksimizaciju FR obezbedjuju Konstrukcijska ograničenja (Design Constraints).
T
d
∆T
∆d
∆T
∆d

PRAVILA za definisanje DP:
1) Aksiom nezavisnosti,
2) Aksiom minimuma informacija
AKSIOM NEZAVISNOSTI
-Matrica A može biti spregnuta, nespregnuta i raspregnuta
-Idealno bi bilo kada bi za svaki FR bio odgovoran jedan DP
{ } [ ]{ }DPAFR =
=
4
3
2
1
4
3
2
1
44434241
34333231
24232221
14131211
DP
DP
DP
DP
AAAA
AAAA
AAAA
AAAA
FR
FR
FR
FR
=
4
3
2
1
000
000
000
000
4
3
2
1
44
33
22
11
DP
DP
DP
DP
A
A
A
A
FR
FR
FR
FR

b
d
dshT
=
1000
000
000
000 31
44
33
22
11
T
T
T
c
c
c
c
SE
C
d
d
sh
( )111 Rfc =
( )222 , Rdfc =
( )333 ,,, Rnddfc sh Σ=
( )444 ,, Rndfc sh Σ=
{ } [ ] { } [ ]{ }FRCFRADP == −1
Za zupčane prenosnike matrica se može raspregnuti i uraditi inverzija tj. za odgovarajuće funkcionalne potrebe odrediti odgovarajuće konstrukcijske parametre

AKSIOM MINIMUMA INFORMACIJA (minimum DP dependent of FR):
-Minimizirati broj konstrukcijskih parametara DP koji zavise od funkcionalnih potreba FR
-Konstrukcijski parametri komponenata prenosnika su parametarski tj. veći broj parametara može se izraziti preko nekoliko izabranih da budu DP
b
d
dshT
Parametrizacija dimenzija

Funkcionalne potrebe FR
Parametri konstrukcije
DP
OGRANIČENJA
Radni uslovi (okolina)
{ } [ ] { }FRADP1−
=
Model za proračun
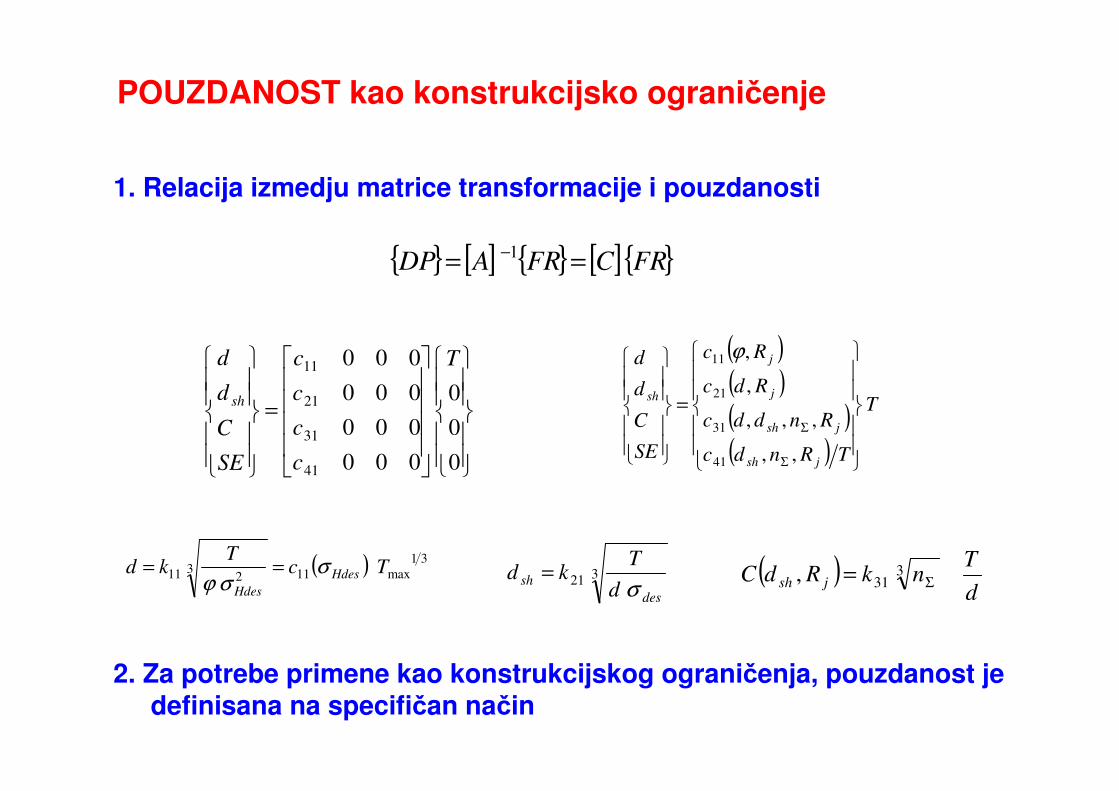
POUZDANOST kao konstrukcijsko ograničenje
( )( )( )( )
T
TRndc
Rnddc
Rdc
Rc
SE
C
d
d
jsh
jsh
j
j
sh
=
Σ
Σ
,,
,,,
,
,
41
31
21
11 ϕ
=
0
0
0
000
000
000
000
41
31
21
11 T
c
c
c
c
SE
C
d
d
sh
321
des
shd
Tkd
σ= ( )
d
TnkRdC jsh
331, Σ=
{ } [ ] { } [ ]{ }FRCFRADP == −1
1. Relacija izmedju matrice transformacije i pouzdanosti
2. Za potrebe primene kao konstrukcijskog ograničenja, pouzdanost je definisana na specifičan način
( ) 31
max113211 Tc
Tkd Hdes
Hdes
σσϕ
==

logn
T1
nΣ1
T2
T3nΣ2 nΣ3nΣ
Identifikacija spektra opterećenja
I II III IV V VI R
100%2000
1000
0I II III IV V VI R
Nm
Torque in Nm
Speed participation in %
I0 IIIIIIV
V
R
VI

Verovatnoća habanja zupčanika
( )
β
η
−
−=
N
F eNP 1
Svojstva habanja zubaca:
- Složen proces razaranja kombinovan od determinističkih i stohastičkih komponentnih razaranja
- Odgovaraju broju sprezanja zubaca do stanja pri kojem dalje korišćenje tupčanika nije moguće
PF=0,9PF=0,1
PF
0,3mn

σH1
nΣ1
σH2
σH3
logn
nΣ2
nΣ3
nΣ
nΣ1 nΣ2 nΣ3 logN
logσH
PF=0.9
PF=0.1
PF(σ
H)
PF(σ
H)
PF(σ
H)
logσH
∑=
=3
1iFiip PpF
Σ
Σ=n
np i
i
i
i
Hi
ePFi
β
η
σ
−
−=1
F1
nΣ1
F2
F3
logn
nΣ2 nΣ3
nΣ
nΣ1nΣ2
nΣ3 logN
logF PF=0.9
PF=0.1
PF(F1)
PF(F2)
PF(F3)
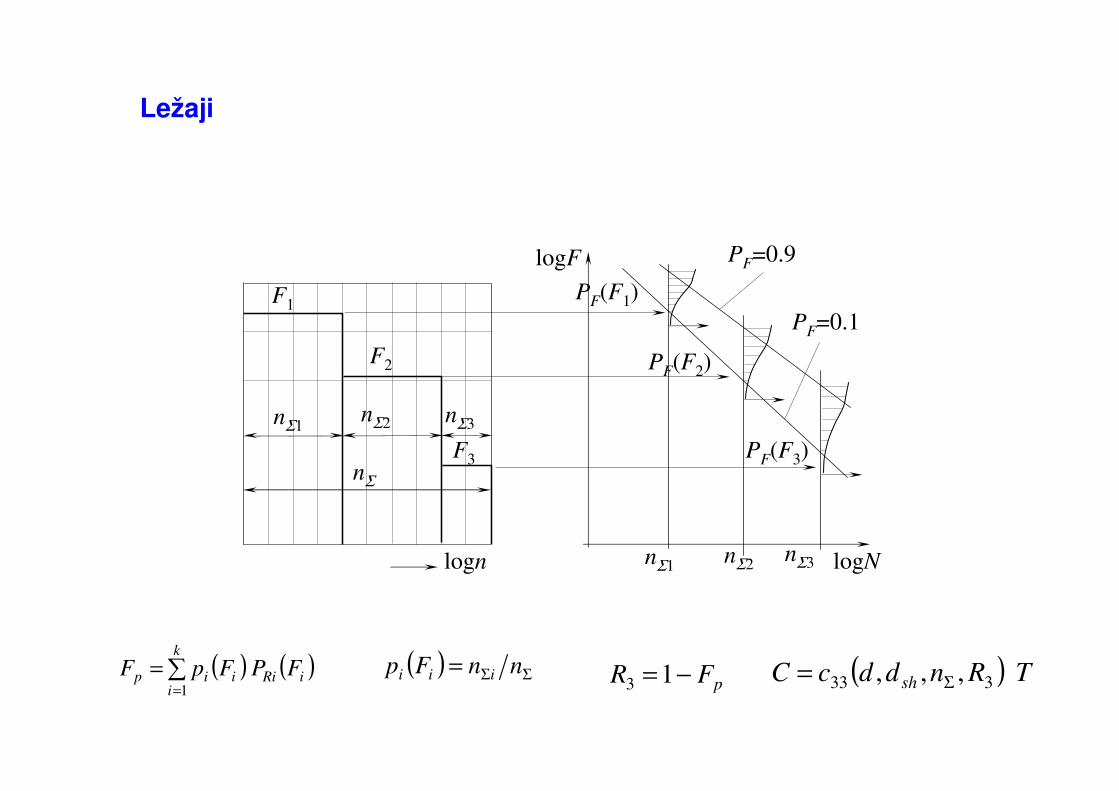
Ležaji
( ) ( )iRi
k
iiip FPFpF ∑
=
=1
( ) ΣΣ= nnFp iii ( ) TRnddcC sh 333 ,,, Σ=pFR −=13

Koncepcioni modul
DPDModul
Modul svojstava
LAHPModul
KONSTRUKCIJSKA OGRANIČENJAPouzdanost, Vibracije, Buka, Cena,…
FUNKCIONALNE POTREBESnaga, Brzina, Zapremina, Izgled,….
BAZA KONCEPCIJA
Izvršioci funkcija, Koncepcione
varijante,
BAZA KONSTRUKC.
REŠENJA


















