Pnömatik Devre Elemanları
24
YTÜMAKiNE * A305teyim.com PNÖMATĐK KONTROL DEVRELERĐ Pnömatik kontrol devresi, bir görevi yerine getirmek amacıyla birbiriyle bağlantılı pnömatik denetim ve çalışma elemanının bütünleşik bir düzenidir. Genel anlamda pnömatik sözcüğü, hava ile denetimin ve çalışmanın tüm alanlarını belirgin olarak tanımlamaya yetmez.Yeni tekniklerin ortaya çıkması, ortak uygulama alanlarını bölmüştür.Pnömatiğin değişik sektörleri için birçok tanımlama varsa da, basınç kriterini esas alarak uygulama alanlarını gruplara ayırmak pratikte kabul görmüş bir yaklaşım olmuştur.Bu yaklaşıma göre: 1) Negatif basınç (vakum) pnömatiği.Basınç aralığı (mmHg): 0≤ Pg ≤ 760 2) Düşük basınç pnömatiği.Basınç aralığı (bar) : 0 ≤ Pg ≤ 1,5 Sadece kumanda sistemlerini kapsar.Kullanılan elemanların statik veya dinamik olması önemli değil. 3) Normal basınç pnömatiği.Basınç aralığı(bar) : 1,5 ≤ Pg ≤ 16 Çalışma ve denetim elemanlarını içeren geleneksel pnömatik. 4)Yüksek basınç pnömatiği.Basınç aralığı(bar) : Pg> 16 Devre Diyagramının Hazırlanması ve Geliştirilmesi: Öncelikle çizilen devrenin taslağı kontrol akış diyagramına uymalıdır.Aşağıdan yukarıya doğru bir sinyal akışı olmalıdır.Devre diyagramı için enerji girişi gerektiren tüm elemanlar aşağıya çizilmeli ve enerji aşağıdan yukarıya doğru dağıtılmalıdır.Devre diyagramı elemanların fiziksel yerleri dikkate alınmaksızın ve tüm silindirlerle yön valflerinin yatay çizilmesi tavsiye edilir. Pnömatik denetim sistemi; bir hava silindiri ile sinyal girdisi, sinyal işleme ve sinyal çıktısı gibi işlevleri bir bütün halinde yerine getiren bir adet denetim valfinden oluşabilir. Denetim işlevi birden fazla değişkeni gerektiriyorsa çalışma döngüsü; sinyal girdisi, sinyal işleme ve sinyal çıktısı için ayrı elemanlardan oluşmak zorundadır.Birden fazla değişkenin var olduğu nispeten büyük ve karmaşık pnömatik devrelerde, devre: 1) Veri toplama ve veri işleme işlevlerinin yerine getirildiği sinyal girdi ve sinyal işleme elemanlarının birlikte bulunduğu kumanda devresi, 2) Çalışma elemanlarının ve bu elemanlara yön veren ana yön denetim valflerinin bulunduğu güç devresi olmak üzere iki ayrı kısımda incelenir. Karmaşık sistemlerde kumanda devresi düşük basınçlarda çalıştırılabilir.Nispeten küçük ve basit sistemlerde güç ve kumanda devrelerine farklı basınçlarda hava temin eden iki ayrı şartlandırıcı grubun kullanımı ekonomik olmaz.Bunun yerine, maliyet unsurunun müsaade ettiği
Transcript of Pnömatik Devre Elemanları
YTÜMAKiNE * A305teyim.com
PNÖMATĐK KONTROL DEVRELERĐ
Pnömatik kontrol devresi, bir görevi yerine getirmek amacıyla birbiriyle bağlantılı pnömatik denetim ve çalışma elemanının bütünleşik bir düzenidir. Genel anlamda pnömatik sözcüğü, hava ile denetimin ve çalışmanın tüm alanlarını belirgin olarak tanımlamaya yetmez.Yeni tekniklerin ortaya çıkması, ortak uygulama alanlarını bölmüştür.Pnömatiğin değişik sektörleri için birçok tanımlama varsa da, basınç kriterini esas alarak uygulama alanlarını gruplara ayırmak pratikte kabul görmüş bir yaklaşım olmuştur.Bu yaklaşıma göre: 1) Negatif basınç (vakum) pnömatiği.Basınç aralığı (mmHg): 0≤ Pg ≤ 760 2) Düşük basınç pnömatiği.Basınç aralığı (bar) : 0 ≤ Pg ≤ 1,5 Sadece kumanda sistemlerini kapsar.Kullanılan elemanların statik veya dinamik olması önemli değil. 3) Normal basınç pnömatiği.Basınç aralığı(bar) : 1,5 ≤ Pg ≤ 16 Çalışma ve denetim elemanlarını içeren geleneksel pnömatik. 4)Yüksek basınç pnömatiği.Basınç aralığı(bar) : Pg> 16 Devre Diyagramının Hazırlanması ve Geliştirilmesi: Öncelikle çizilen devrenin taslağı kontrol akış diyagramına uymalıdır.Aşağıdan yukarıya doğru bir sinyal akışı olmalıdır.Devre diyagramı için enerji girişi gerektiren tüm elemanlar aşağıya çizilmeli ve enerji aşağıdan yukarıya doğru dağıtılmalıdır.Devre diyagramı elemanların fiziksel yerleri dikkate alınmaksızın ve tüm silindirlerle yön valflerinin yatay çizilmesi tavsiye edilir. Pnömatik denetim sistemi; bir hava silindiri ile sinyal girdisi, sinyal işleme ve sinyal çıktısı gibi işlevleri bir bütün halinde yerine getiren bir adet denetim valfinden oluşabilir. Denetim işlevi birden fazla değişkeni gerektiriyorsa çalışma döngüsü; sinyal girdisi, sinyal işleme ve sinyal çıktısı için ayrı elemanlardan oluşmak zorundadır.Birden fazla değişkenin var olduğu nispeten büyük ve karmaşık pnömatik devrelerde, devre: 1) Veri toplama ve veri işleme işlevlerinin yerine getirildiği sinyal girdi ve
sinyal işleme elemanlarının birlikte bulunduğu kumanda devresi, 2) Çalışma elemanlarının ve bu elemanlara yön veren ana yön denetim
valflerinin bulunduğu güç devresi olmak üzere iki ayrı kısımda incelenir. Karmaşık sistemlerde kumanda devresi düşük basınçlarda çalıştırılabilir.Nispeten küçük ve basit sistemlerde güç ve kumanda devrelerine farklı basınçlarda hava temin eden iki ayrı şartlandırıcı grubun kullanımı ekonomik olmaz.Bunun yerine, maliyet unsurunun müsaade ettiği
oranda güç devresine paralel bir hat çekilerek basınç regülatörü bu hata seri bağlanır ve kumanda devresine yönlendirilir.
Kumanda devresi güç devresinden uzak bir yerde bulundurulabilir ancak, enerji tasarrufu ve yüksek çevrim hızları için bu mesafe mümkün mertebe kısa tutulmalıdır.Devre diyagramını geliştirirken öncelikle devre taslağı denetim akış diyagramına uymalı, aşağıdan yukarı doğru bir sinyal akışı sağlanmalıdır.Devre diyagramı, elemanların fiziksel yerleri dikkate alınmaksızın çizilmeli, silindirler ve yön denetim valfleri yatay yerleştirilmelidir.
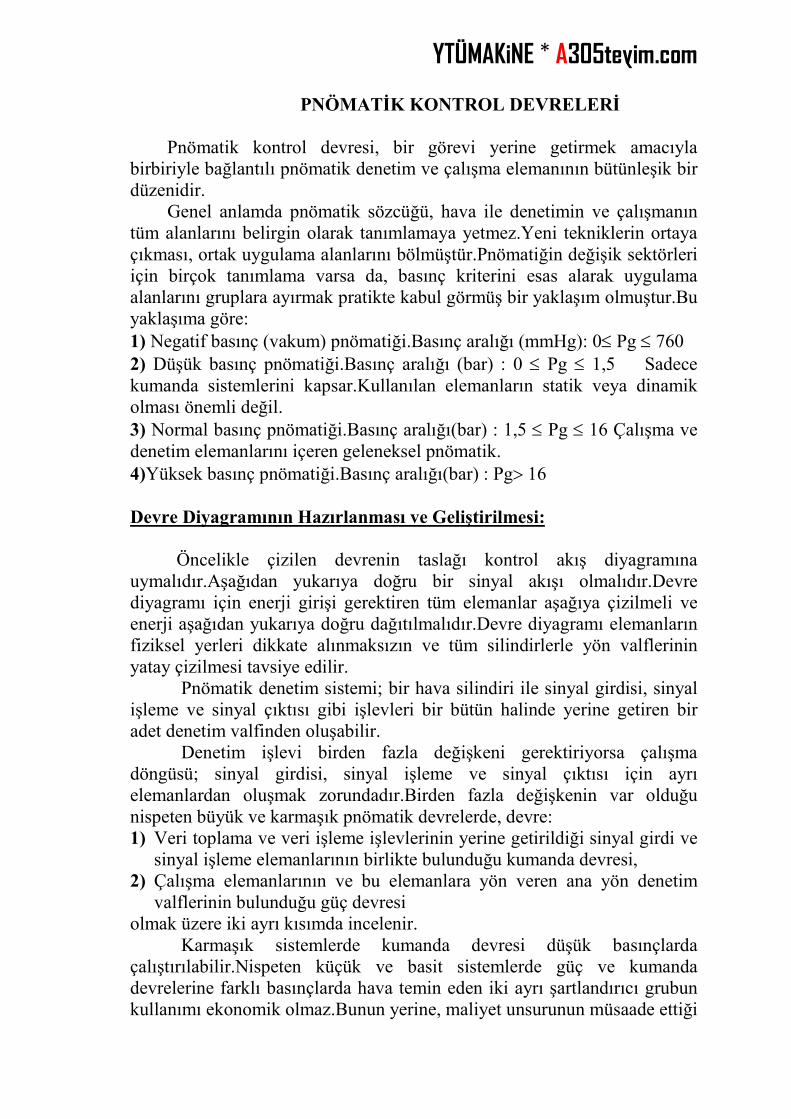
Örnek: Bir çift etkili silindirin bir düğmeli veya pedallı valfe basıldığında ileri hareket etmesi strokunu tamamladığında geri dönmesi isteniyor.
Grup 1.0
1.01
1.1
1.6
1.41.21.3
1.3
1
Çalışma(iş) elemanı
Yardımcı eleman
Yön denetim valfi(sinyal çıktı)
Đşlem elemanı
Sinyal elemanıG
üç d
evre
siKum
anda
dev
resi
Kullanılan malzemelerinin gerçek konumlarının şekilde çizilen yerlerinden farklı olduğu görülmektedir.Uygulamada 1.3 valfi, silindirin strokunun sonuna yerleştirilir.Bu valf bir sinyal elemanı olduğu için devre şemasının alt bölümüne çizilmiştir.Elemanın gerçek fiziksel konumunu tanımlamak için gerçek konum bir çizgi ile gösterilir. Sinyal elemanının mafsal makaralı olması halinde çizginin üzerinde sinyalin akış yönünü gösteren bir ok yerleştirilir.Kontrol, karmaşık ve birkaç çalışma elemanını içeriyorsa; her bir çalışma elemanı bir grup oluşturacak şekilde bölümlere ayrılır.Mümkünse bu bölümler hareket sırasına göre yanyana çizilmelidir.
Elemanların Adlandırılması: Sıklıkla karşılaşılan iki adlandırma şekli vardır.
• Numara kullanarak adlandırma • Harf kullanarak adlandırma • Numara ve harf kullanarak adlandırma
Rakam Kullanarak Adlandırma: Rakamlarla adlandırmanın birkaç yolu vardır.Sıklıkla kullanılan iki sistem,
a) Seri numaralama: Bu sistem, karmaşık kontrol ve özellikle çalışma söz konusu olan durumlarda tavsiye edilir.
b) Grup sayıları ve gruptaki seri numaralardan oluşur.Örnek: 4.12; 4. gruptaki 12. eleman
Grupların Sınıflandırılması: Grup 0: Tüm enerji tedarik elemanları. Grup 1,2,3....:Her bir bağımsız kontrol çizgisinin gösterilmesi (her bir silindir normal olarak bir grup sayısı alır.) Seri Numaralama Sistemi: *0 :Çalışma elemanları *1 :Kontrol elemanları *.2..4 :Đlgili çalışma elemanlarının ileri hareketinde etkisi olan tüm elmanlar (çift sayılar) *.3..5 :Dönüş hareketinde etkisi olan tüm elemanlar. *.01,.02 :Kontrol elemanı ile çalışma elemanı arasındaki elemanlar. Örnek: Kısma valfi Alfabetik Harfleri Kullanarak Adlandırma: Bu tip adlandırma genellikle devre diyagramının metodik olarak hazırlanmasında kullanılır.Bir dereceye kadar, harf kullanıldığında listeleme ve hesaplar daha kolay ve daha açık yapılabilir.Çalışma elemanları büyük harflerle adlandırılır.Sinyal elemanları, sınır anahtarları küçük harfler ile gösterilir.Daha önceki adlandırmadan farklı olarak sınır anahtarları ve sinyal elemanları etkiledikleri gruba değil olanlara kumanda veren (konum değiştiren) silindirlere atanırlar. A,B,C.... Çalışma elemanlarının adlandırılması a0,b0,c0.....A,B,C silindirlerinin geri konumlarında çalışan sınır anahtarlarının adlandırılması.
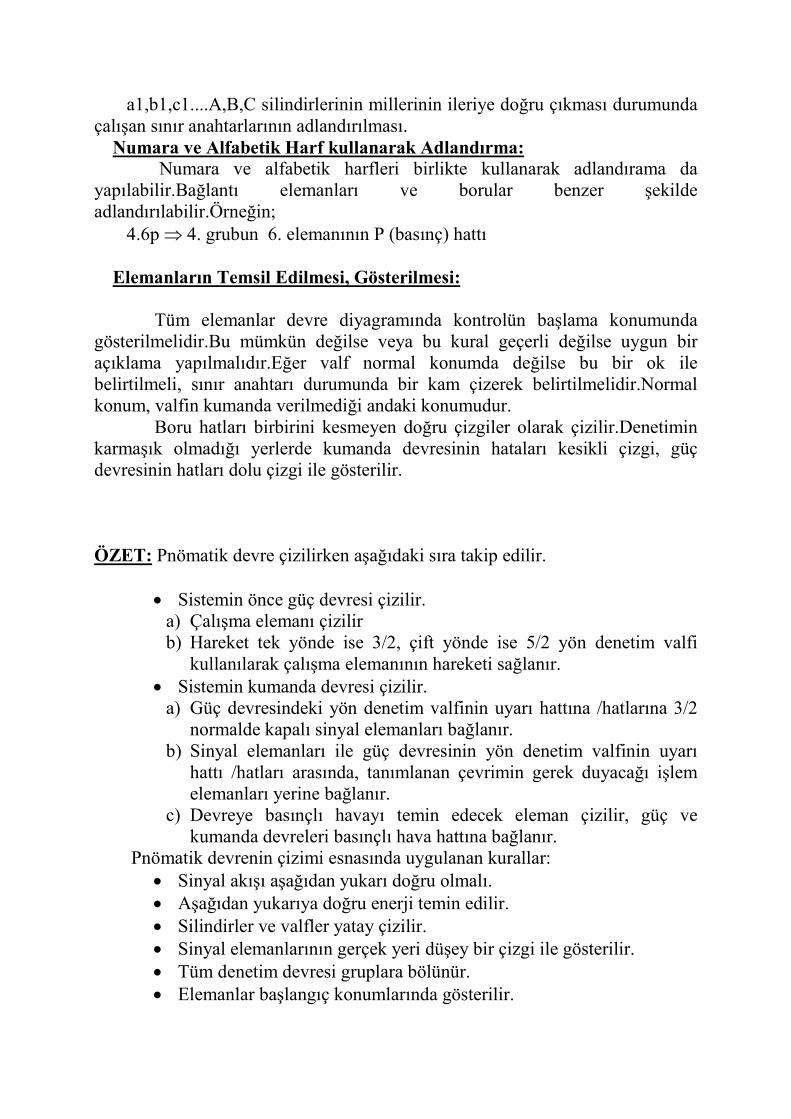
a1,b1,c1....A,B,C silindirlerinin millerinin ileriye doğru çıkması durumunda çalışan sınır anahtarlarının adlandırılması. Numara ve Alfabetik Harf kullanarak Adlandırma: Numara ve alfabetik harfleri birlikte kullanarak adlandırama da yapılabilir.Bağlantı elemanları ve borular benzer şekilde adlandırılabilir.Örneğin; 4.6p ⇒ 4. grubun 6. elemanının P (basınç) hattı Elemanların Temsil Edilmesi, Gösterilmesi: Tüm elemanlar devre diyagramında kontrolün başlama konumunda gösterilmelidir.Bu mümkün değilse veya bu kural geçerli değilse uygun bir açıklama yapılmalıdır.Eğer valf normal konumda değilse bu bir ok ile belirtilmeli, sınır anahtarı durumunda bir kam çizerek belirtilmelidir.Normal konum, valfin kumanda verilmediği andaki konumudur. Boru hatları birbirini kesmeyen doğru çizgiler olarak çizilir.Denetimin karmaşık olmadığı yerlerde kumanda devresinin hataları kesikli çizgi, güç devresinin hatları dolu çizgi ile gösterilir. ÖZET: Pnömatik devre çizilirken aşağıdaki sıra takip edilir.
• Sistemin önce güç devresi çizilir.
a) Çalışma elemanı çizilir b) Hareket tek yönde ise 3/2, çift yönde ise 5/2 yön denetim valfi
kullanılarak çalışma elemanının hareketi sağlanır. • Sistemin kumanda devresi çizilir.
a) Güç devresindeki yön denetim valfinin uyarı hattına /hatlarına 3/2 normalde kapalı sinyal elemanları bağlanır.
b) Sinyal elemanları ile güç devresinin yön denetim valfinin uyarı hattı /hatları arasında, tanımlanan çevrimin gerek duyacağı işlem elemanları yerine bağlanır.
c) Devreye basınçlı havayı temin edecek eleman çizilir, güç ve kumanda devreleri basınçlı hava hattına bağlanır.
Pnömatik devrenin çizimi esnasında uygulanan kurallar: • Sinyal akışı aşağıdan yukarı doğru olmalı. • Aşağıdan yukarıya doğru enerji temin edilir. • Silindirler ve valfler yatay çizilir. • Sinyal elemanlarının gerçek yeri düşey bir çizgi ile gösterilir. • Tüm denetim devresi gruplara bölünür. • Elemanlar başlangıç konumlarında gösterilir.
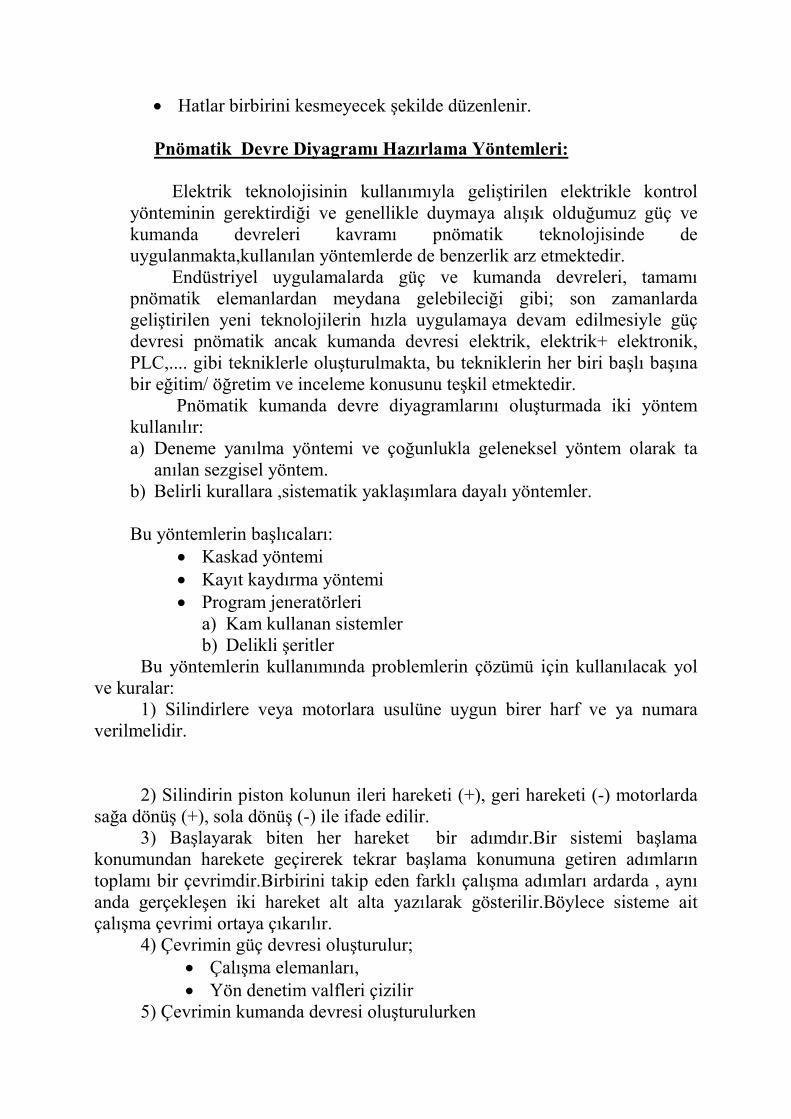
• Hatlar birbirini kesmeyecek şekilde düzenlenir.
Pnömatik Devre Diyagramı Hazırlama Yöntemleri: Elektrik teknolojisinin kullanımıyla geliştirilen elektrikle kontrol yönteminin gerektirdiği ve genellikle duymaya alışık olduğumuz güç ve kumanda devreleri kavramı pnömatik teknolojisinde de uygulanmakta,kullanılan yöntemlerde de benzerlik arz etmektedir. Endüstriyel uygulamalarda güç ve kumanda devreleri, tamamı pnömatik elemanlardan meydana gelebileciği gibi; son zamanlarda geliştirilen yeni teknolojilerin hızla uygulamaya devam edilmesiyle güç devresi pnömatik ancak kumanda devresi elektrik, elektrik+ elektronik, PLC,.... gibi tekniklerle oluşturulmakta, bu tekniklerin her biri başlı başına bir eğitim/ öğretim ve inceleme konusunu teşkil etmektedir. Pnömatik kumanda devre diyagramlarını oluşturmada iki yöntem kullanılır: a) Deneme yanılma yöntemi ve çoğunlukla geleneksel yöntem olarak ta
anılan sezgisel yöntem. b) Belirli kurallara ,sistematik yaklaşımlara dayalı yöntemler. Bu yöntemlerin başlıcaları:
• Kaskad yöntemi • Kayıt kaydırma yöntemi • Program jeneratörleri
a) Kam kullanan sistemler b) Delikli şeritler
Bu yöntemlerin kullanımında problemlerin çözümü için kullanılacak yol ve kuralar: 1) Silindirlere veya motorlara usulüne uygun birer harf ve ya numara verilmelidir. 2) Silindirin piston kolunun ileri hareketi (+), geri hareketi (-) motorlarda sağa dönüş (+), sola dönüş (-) ile ifade edilir. 3) Başlayarak biten her hareket bir adımdır.Bir sistemi başlama konumundan harekete geçirerek tekrar başlama konumuna getiren adımların toplamı bir çevrimdir.Birbirini takip eden farklı çalışma adımları ardarda , aynı anda gerçekleşen iki hareket alt alta yazılarak gösterilir.Böylece sisteme ait çalışma çevrimi ortaya çıkarılır. 4) Çevrimin güç devresi oluşturulur;
• Çalışma elemanları, • Yön denetim valfleri çizilir
5) Çevrimin kumanda devresi oluşturulurken
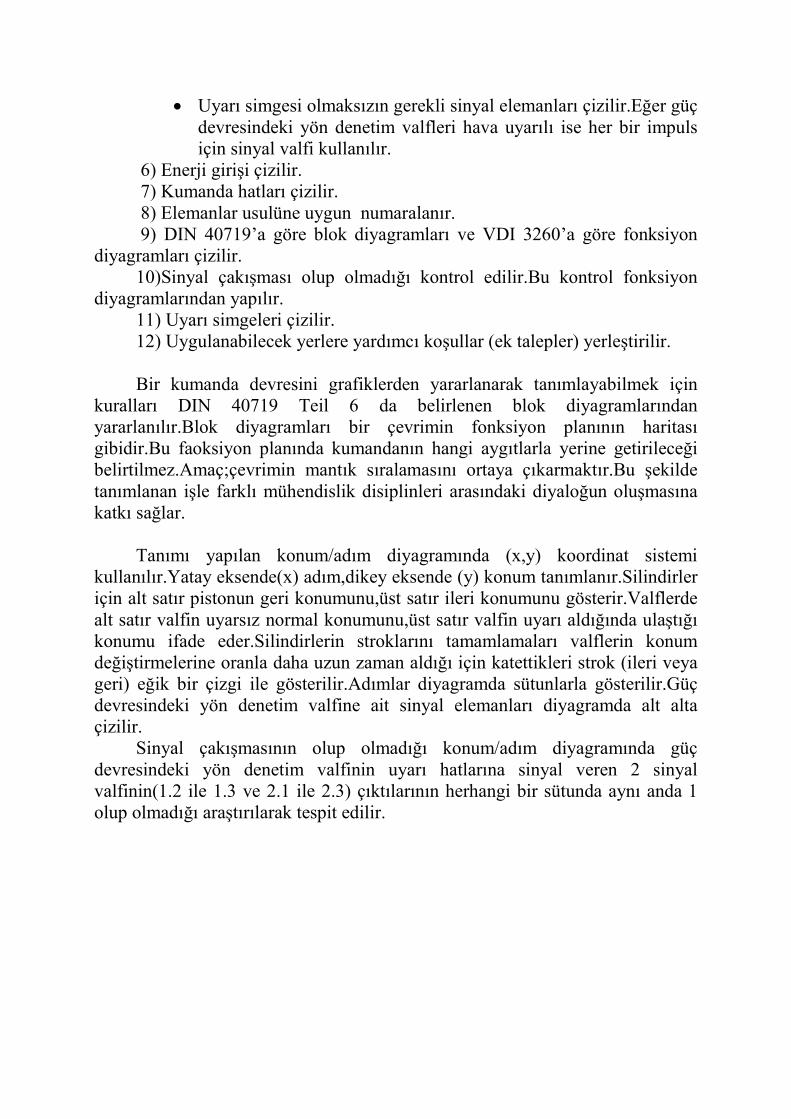
• Uyarı simgesi olmaksızın gerekli sinyal elemanları çizilir.Eğer güç devresindeki yön denetim valfleri hava uyarılı ise her bir impuls için sinyal valfi kullanılır.
6) Enerji girişi çizilir. 7) Kumanda hatları çizilir. 8) Elemanlar usulüne uygun numaralanır. 9) DIN 40719’a göre blok diyagramları ve VDI 3260’a göre fonksiyon diyagramları çizilir. 10)Sinyal çakışması olup olmadığı kontrol edilir.Bu kontrol fonksiyon diyagramlarından yapılır. 11) Uyarı simgeleri çizilir. 12) Uygulanabilecek yerlere yardımcı koşullar (ek talepler) yerleştirilir. Bir kumanda devresini grafiklerden yararlanarak tanımlayabilmek için kuralları DIN 40719 Teil 6 da belirlenen blok diyagramlarından yararlanılır.Blok diyagramları bir çevrimin fonksiyon planının haritası gibidir.Bu faoksiyon planında kumandanın hangi aygıtlarla yerine getirileceği belirtilmez.Amaç;çevrimin mantık sıralamasını ortaya çıkarmaktır.Bu şekilde tanımlanan işle farklı mühendislik disiplinleri arasındaki diyaloğun oluşmasına katkı sağlar. Tanımı yapılan konum/adım diyagramında (x,y) koordinat sistemi kullanılır.Yatay eksende(x) adım,dikey eksende (y) konum tanımlanır.Silindirler için alt satır pistonun geri konumunu,üst satır ileri konumunu gösterir.Valflerde alt satır valfin uyarsız normal konumunu,üst satır valfin uyarı aldığında ulaştığı konumu ifade eder.Silindirlerin stroklarını tamamlamaları valflerin konum değiştirmelerine oranla daha uzun zaman aldığı için katettikleri strok (ileri veya geri) eğik bir çizgi ile gösterilir.Adımlar diyagramda sütunlarla gösterilir.Güç devresindeki yön denetim valfine ait sinyal elemanları diyagramda alt alta çizilir. Sinyal çakışmasının olup olmadığı konum/adım diyagramında güç devresindeki yön denetim valfinin uyarı hatlarına sinyal veren 2 sinyal valfinin(1.2 ile 1.3 ve 2.1 ile 2.3) çıktılarının herhangi bir sütunda aynı anda 1 olup olmadığı araştırılarak tespit edilir.
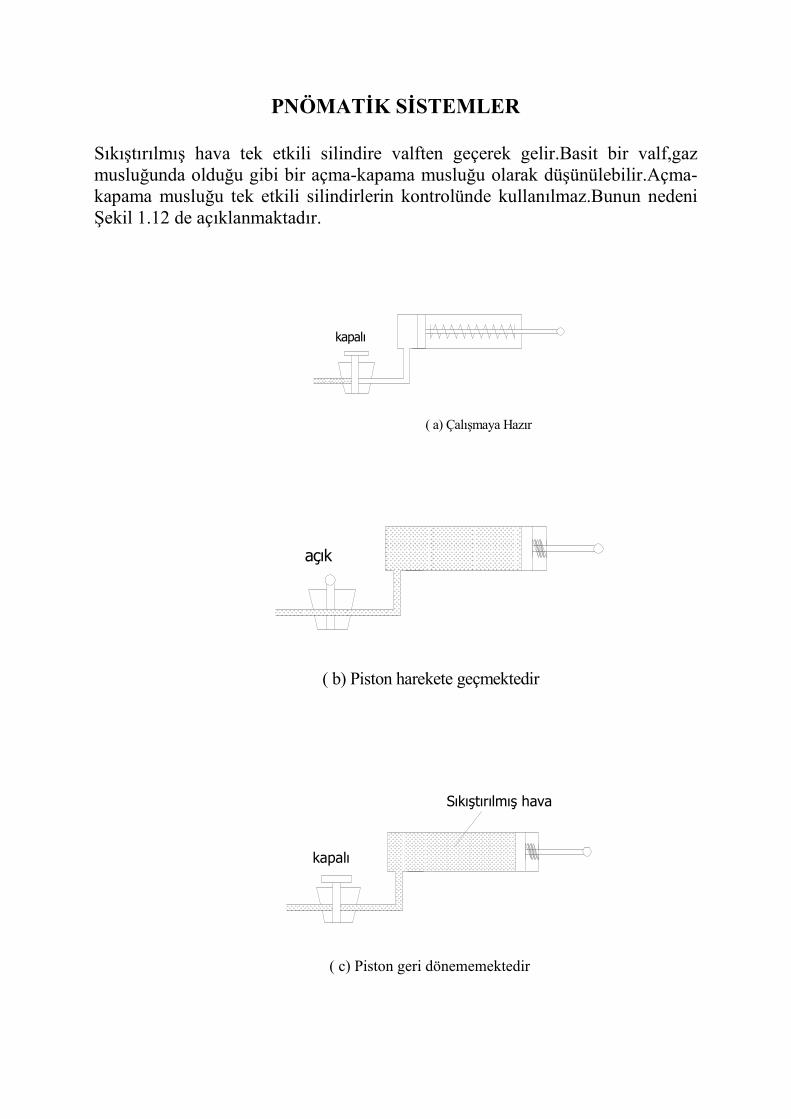
PNÖMATĐK SĐSTEMLER Sıkıştırılmış hava tek etkili silindire valften geçerek gelir.Basit bir valf,gaz musluğunda olduğu gibi bir açma-kapama musluğu olarak düşünülebilir.Açma-kapama musluğu tek etkili silindirlerin kontrolünde kullanılmaz.Bunun nedeni Şekil 1.12 de açıklanmaktadır.
( a) Çalışmaya Hazır
kapalı
( b) Piston harekete geçmektedir
açık
( c) Piston geri dönememektedir
kapalı
Sıkıştırılmış hava

Musluk tekrar kapatılınca(Şekil 1.12 c)sıkıştırılmış hava piston gerisinde hapsedilir.Hapsedilen bu hava ar kapatılınca alınmadıkça yay pistonu geri itemez.Dolayısıyla kapandığı zaman tutulan bu havayı atmosfere atacak özel bir valfe ihtiyaç vardır.Bu valfe 3- yollu valf denir.Yollardan birincisi ana hava girişine,ikincisi silindire bağlantılıdır,üçüncüsü ise valf kapandığında atmosfere atılacak havayı içinden geçirmektedir. Daha önce ele alınan 3-yollu valfler sürgülüdür.Kullanılan 5-yollu valf ise pistonludur.5-yollu valfin içinde piston veya makara bulunur.Bu makara hafif alaşımdan yapılmıştır.Bu makara 4 tane sentetik O-ring le donatılmıştır ve çalıştırma mekanizmasına bağlanmıştır.5-yollu valfin çalıştırma kolu makarayı 2 konumdan birisine kaydırabilir.
2 4
3 5
1
5-yollu valf " kapalı" , silindir pistonu negatif
4
3 5
1
5-yollu valf " Açık" , silindir pistonu pozitif
2
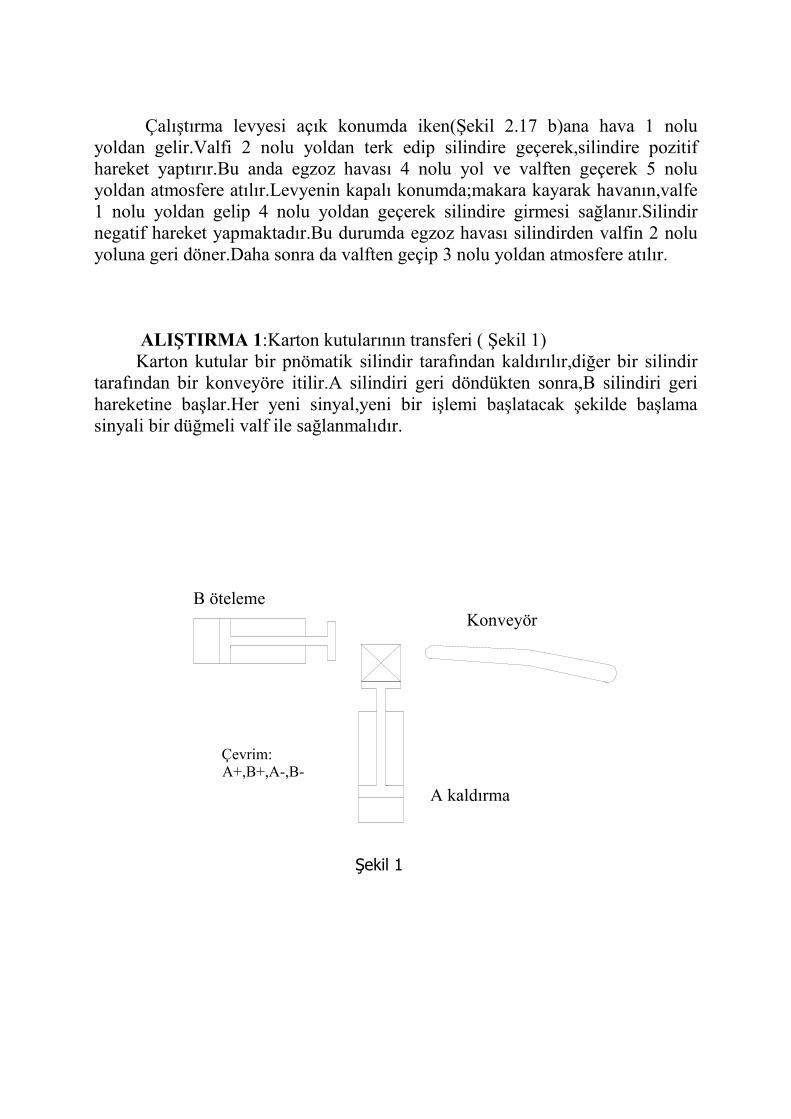
Çalıştırma levyesi açık konumda iken(Şekil 2.17 b)ana hava 1 nolu yoldan gelir.Valfi 2 nolu yoldan terk edip silindire geçerek,silindire pozitif hareket yaptırır.Bu anda egzoz havası 4 nolu yol ve valften geçerek 5 nolu yoldan atmosfere atılır.Levyenin kapalı konumda;makara kayarak havanın,valfe 1 nolu yoldan gelip 4 nolu yoldan geçerek silindire girmesi sağlanır.Silindir negatif hareket yapmaktadır.Bu durumda egzoz havası silindirden valfin 2 nolu yoluna geri döner.Daha sonra da valften geçip 3 nolu yoldan atmosfere atılır. ALIŞTIRMA 1:Karton kutularının transferi ( Şekil 1) Karton kutular bir pnömatik silindir tarafından kaldırılır,diğer bir silindir tarafından bir konveyöre itilir.A silindiri geri döndükten sonra,B silindiri geri hareketine başlar.Her yeni sinyal,yeni bir işlemi başlatacak şekilde başlama sinyali bir düğmeli valf ile sağlanmalıdır.
Şekil 1
Çevrim:A+,B+,A-,B-
B ötelemeKonveyör
A kaldırma
0,1
1.2
&
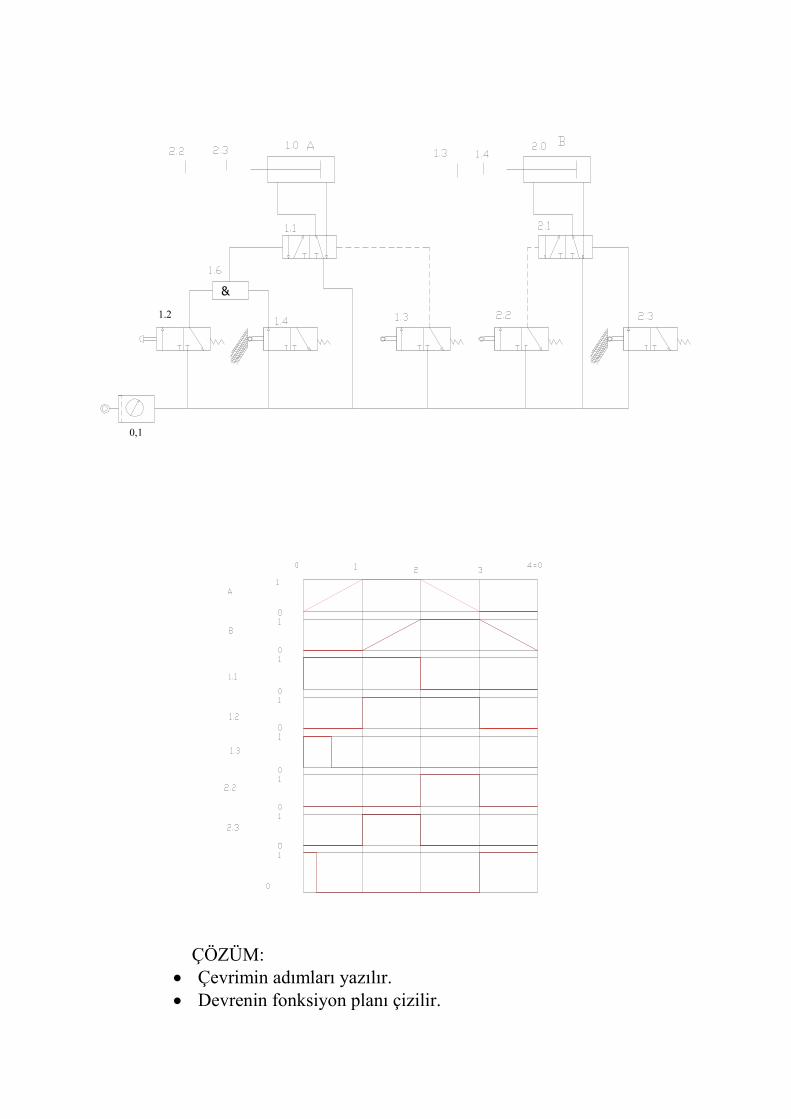
ÇÖZÜM:
• Çevrimin adımları yazılır. • Devrenin fonksiyon planı çizilir.
• Devre çiziminde önce çalışma elemanları olan çift etkili silindirler çizilir.
• Çift etkili silindiri ileri/geri hareket ettiren 5/2 hava-hava uyarılı valfler çizilir.Güç devresinin hatları yön denetim valflerinin çıkışından silindirlere bağlanır.
• Güç devresinin yön denetim valflerinin uyarı hatlarının3/2 N.K. sinyal elemanları çizilir, hava bağlantıları sağlanır.
• Çalışma elemanları silindirlere ve silindirleri çalıştıran güç ve kumanda devrelerinin devre elemanlarına usulüne uygun birer numara verilerek adlandırılır.Buna göre bir grup teşkil eden ve her silindiri çalıştıran sinyal elemanları ,silindirin piston kolunu ileri hareket ettiren elemana aynı grubun içinde çift (1.2,1.4) , geri hareket ettiren elemana tek sayı verilir (1.3,1.5).
• Çevrimin adımları takip edilerek sinyal elemanlarının gerçek yerleri tespit edilir.
Buna göre : 1 adım A+. A silindirini piston kolunu ileri hareket ettiren 1.1 nolu valfin sol tarafındaki uyarı hattına 1.2 butonlu valf vasıtasıyla basınçlı hava iletildiği taktirde valfin sürgüsü sola kayar A silindiri konum değiştirir.1.2 nolu valfin butonuna 1 kez basılıp bırakılır.
• 2. adımın gerçekleşmesi , 1. adımın tamamlanmasına bağlıdır.1. adımın tamamlandığı noktada 2.2 sınır anahtarı A silindirinin piston kolu tarafından uyarılır,güç devresinin 2.1 yön denetim valfinin sol tarafındaki uyarı hattına basınçlı hava gönderir,2.1 nolu valfin sürgüsü sola hareket ederek B silindirinin piston kolu ileri hareket alır.B+ tamamlanır.
• 3. adımının gerçekleşmesi, 2. adımın tamamlanmasına bağlıdır.2. adımın tamamlandığı noktada 1.3 sınır anahtarı B silindirinin piston kolu tarafından uyarılır, güç devresinin 1.1 nolu yön denetim valfinin sağ tarafındaki uyarı hattına basınçlı hava gönderir.1.1 nolu valfin sürgüsü sağa hareket ederek A silindirinin piston kolu geri hareket alır,A- tamamlanır.
• 4. adımın gerçekleşmesi 3.adımın tamamlanmasına bağlıdır.3. adımın tamamlandığı noktada 2.3 sınır anahtarı A silindirinin piston kolu tarafından uyarılır,güç devresinin 2.1 yön denetim valfinin sağ tarafındaki uyarı hattına basınçlı hava gönderir, 2.1 nolu valfin sürgüsü sağa hareket ederek B silindirinin piston kolu geri hareket alır.,B- tamamlanır.
• Devredeki silindirlerin piston kollarının son konumu dikkate alınarak sınır anahtarlarının son durumu(uyarılmış veya
uyarılmamış) gözden geçirilir devre bağlantılarında gerekirse düzeltmeler yapılır.
• Sinyal çakışmasının var olup olmadığı kontrol edilmek üzere konum/adım diyagramı çizilir.Güç devresinin yön denetim valflerini çalıştıran sinyal elemanları 1 adım süresince aynı anda uyarılmadığı için sinyal çakışmasının olmadığı anlaşılır.
• Ek talepler varsa devreye ilave edilir.Örneğin çevrim . B silindirinin geri konuma geldiği olduktan sonra çalışsın koşulu aranıyorsa, B silindirinin geri konumuna 1.4 sınır anahtarı ilave edilir ve start konumuna koşul gösterilir.Devreye VE işlem elemanı ilave edilerek son talepte gerçekleştirilir.
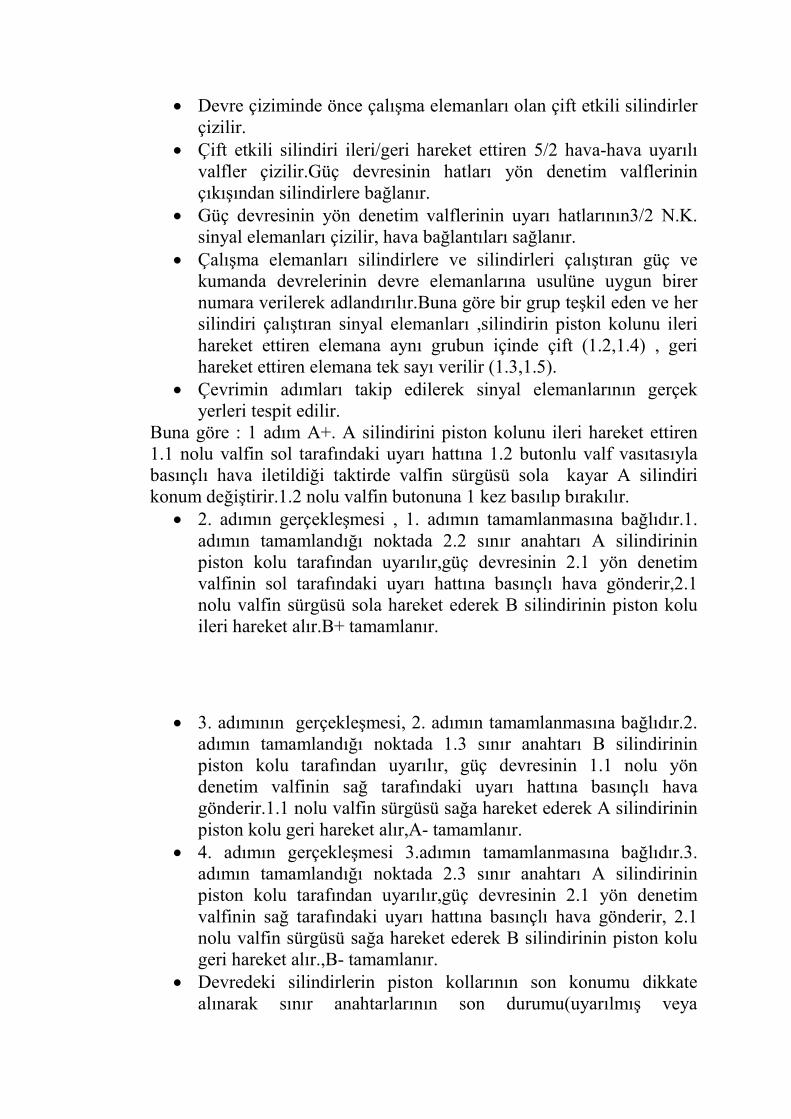
SIRALI KONTROL Çok sayıda silindirin önceden belirlenmiş sırada çalışmasına “sıralı çalışma”denir.Böyle bir çalışma sistemine ise “sıralı kontrol sistemi”denir.Sıralı kontrol birçok endüstriyel uygulamada kullanılabilir.Şekil 8.1 de çiftli plastik pres işleminde uygulanan pnömatik sistem gösterilmiştir.Sıcak plastik levhayı şekillendirmede kullanılan A ve B silindirleri ayrı ayrı iki basma kalıbı taşır.Plastik levha iki küvet hücreli şekillendiriciye sıkılır.Silindirler önceden belirlenmiş sırada çalışır.
sıkma
sıcak plastik levha
B silindiri A silindiri
kalıpkalıp
Sıralı kontrol uygulaması A+,B+,A-,B-
kalıplayıcı
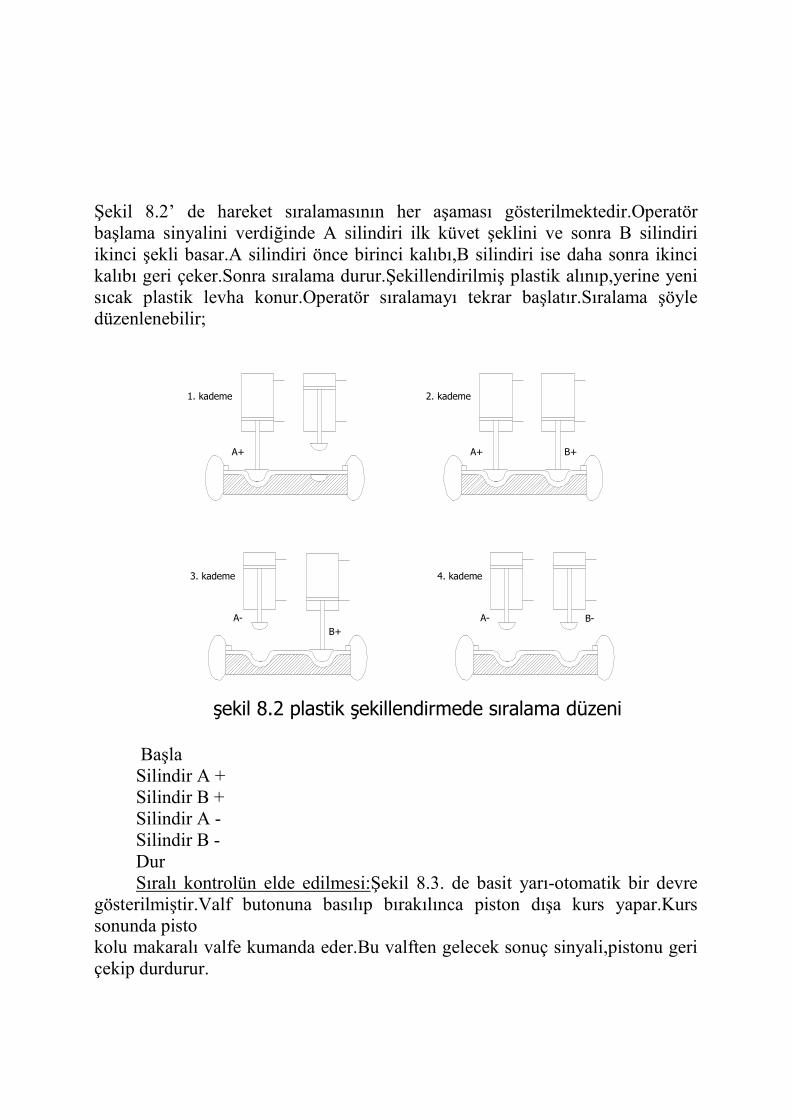
Şekil 8.2’ de hareket sıralamasının her aşaması gösterilmektedir.Operatör başlama sinyalini verdiğinde A silindiri ilk küvet şeklini ve sonra B silindiri ikinci şekli basar.A silindiri önce birinci kalıbı,B silindiri ise daha sonra ikinci kalıbı geri çeker.Sonra sıralama durur.Şekillendirilmiş plastik alınıp,yerine yeni sıcak plastik levha konur.Operatör sıralamayı tekrar başlatır.Sıralama şöyle düzenlenebilir;
1. kademe
A+
2. kademe
A+ B+
3. kademe
B+
A-
4. kademe
A- B-
şekil 8.2 plastik şekillendirmede sıralama düzeni Başla Silindir A + Silindir B + Silindir A - Silindir B - Dur Sıralı kontrolün elde edilmesi:Şekil 8.3. de basit yarı-otomatik bir devre gösterilmiştir.Valf butonuna basılıp bırakılınca piston dışa kurs yapar.Kurs sonunda pisto kolu makaralı valfe kumanda eder.Bu valften gelecek sonuç sinyali,pistonu geri çekip durdurur.
1 - 4
1
1
3
32
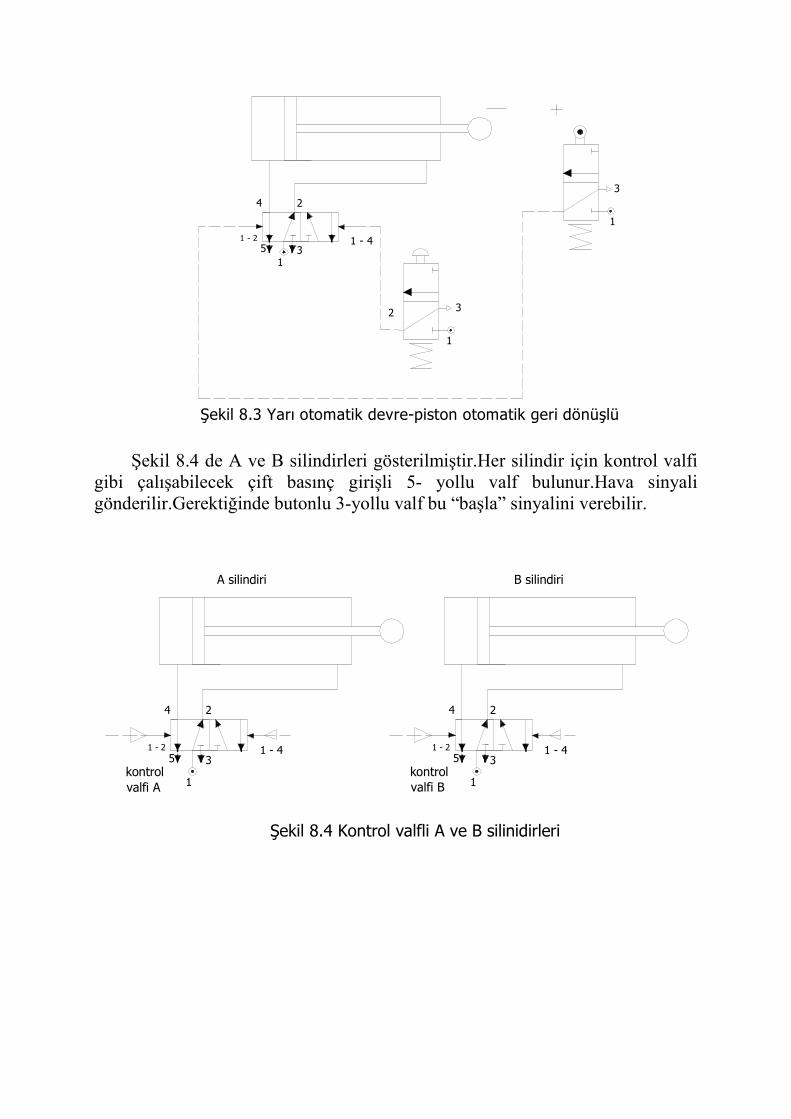
Şekil 8.3 Yarı otomatik devre-piston otomatik geri dönüşlü
1 - 2
15 3
4 2
Şekil 8.4 de A ve B silindirleri gösterilmiştir.Her silindir için kontrol valfi gibi çalışabilecek çift basınç girişli 5- yollu valf bulunur.Hava sinyali gönderilir.Gerektiğinde butonlu 3-yollu valf bu “başla” sinyalini verebilir.
1 - 4
kontrolvalfi A
35kontrolvalfi B 1
1 - 2
4 2
1 - 4
A silindiri B silindiri
Şekil 8.4 Kontrol valfli A ve B silinidirleri
1 - 2
1
5 3
4 2
1 - 4
kontrolvalfi A
35kontrolvalfi B 1
1 - 2
4 2
1 - 4
A silindiri B silindiri
1
2 3
başlama
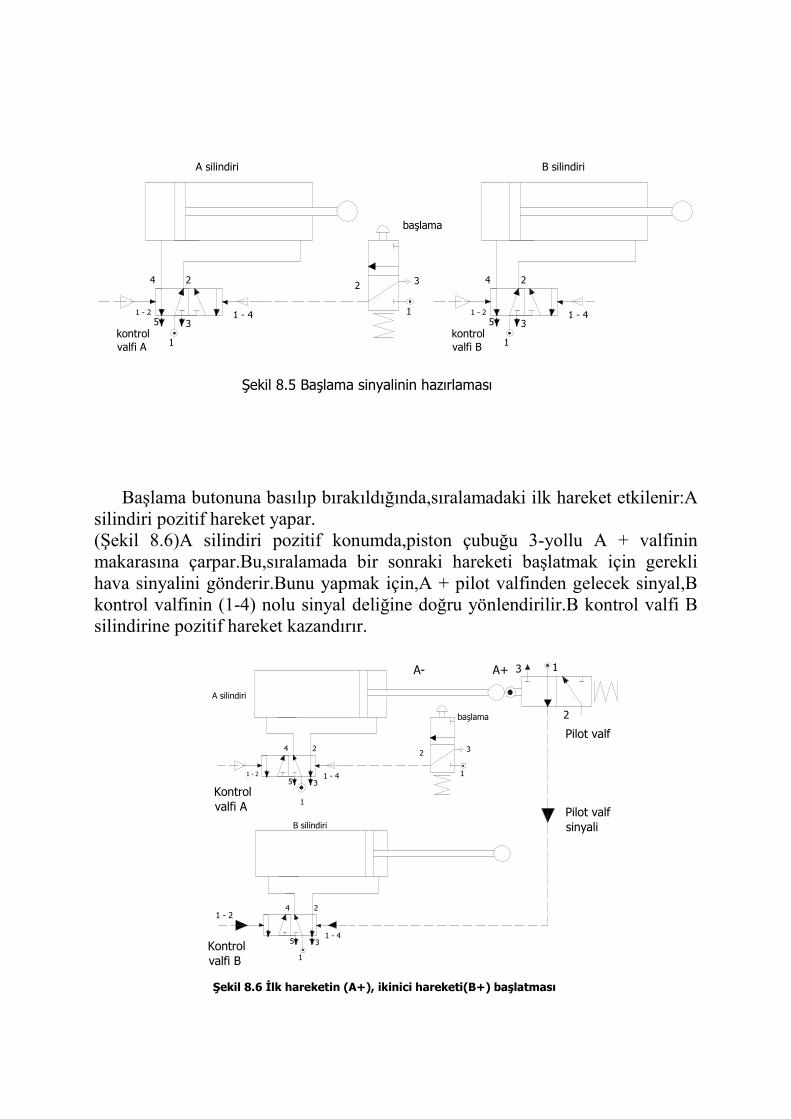
Şekil 8.5 Başlama sinyalinin hazırlaması
1 - 2
1
5 3
4 2
Başlama butonuna basılıp bırakıldığında,sıralamadaki ilk hareket etkilenir:A silindiri pozitif hareket yapar. (Şekil 8.6)A silindiri pozitif konumda,piston çubuğu 3-yollu A + valfinin makarasına çarpar.Bu,sıralamada bir sonraki hareketi başlatmak için gerekli hava sinyalini gönderir.Bunu yapmak için,A + pilot valfinden gelecek sinyal,B kontrol valfinin (1-4) nolu sinyal deliğine doğru yönlendirilir.B kontrol valfi B silindirine pozitif hareket kazandırır.
2
1 - 4
B silindiri
1
2 3
başlama
13
2
A+
1 - 2
1 - 25
4
1 - 43
2
A silindiri
1
A-
Pilot valf
Kontrol valfi A
Kontrol valfi B
Pilot valfsinyali
Şekil 8.6 Đlk hareketin (A+), ikinici hareketi(B+) başlatması
35
1
4

B silindiri pozitif konuma gelince,piston çubuğu 3-yollu hava sinyali A valfinin (1-2) nolu sinyal deliğine yönelir.B + valfinin makarasına çarpar.Böylece benzer şekilde sıralamada bir sonraki hareketi başlatmak için kullanılacak hava sinyali üretilmiş olur.A kontrol valfi konum değiştirir,A silindiri negatif konuma geçer(şekil 8.7)
2
1 - 4
B silindiri
1
2 3
başlama
13
2
A+
1 - 2
1 - 25
4
1 - 43
2
A silindiri
1
B+ 2
3 1
A-
Şekil 8.7 Đkinci hareketin (B+), üçüncü hareketi(A-) başlatması
35
1
4
Şekil 8.8 de A silindiri negatif konuma gelince,piston çubuğu 3-yollu valfin makarasına çarpar.Bu,sıralamanın son hareketini başlatmak üzere kullanılacak hava sinyalini üretecektir.Hava sinyali B kontrol valfinin(1-2) nolu sinyal deliğine yönlendirilir.B kontrol valfi konum değiştirir ve B silindiri negatif konuma geçer.Böylece hareketi tamamlanır. Başla Silindir A + Silindir B + Silindir A - Silindir B - Dur
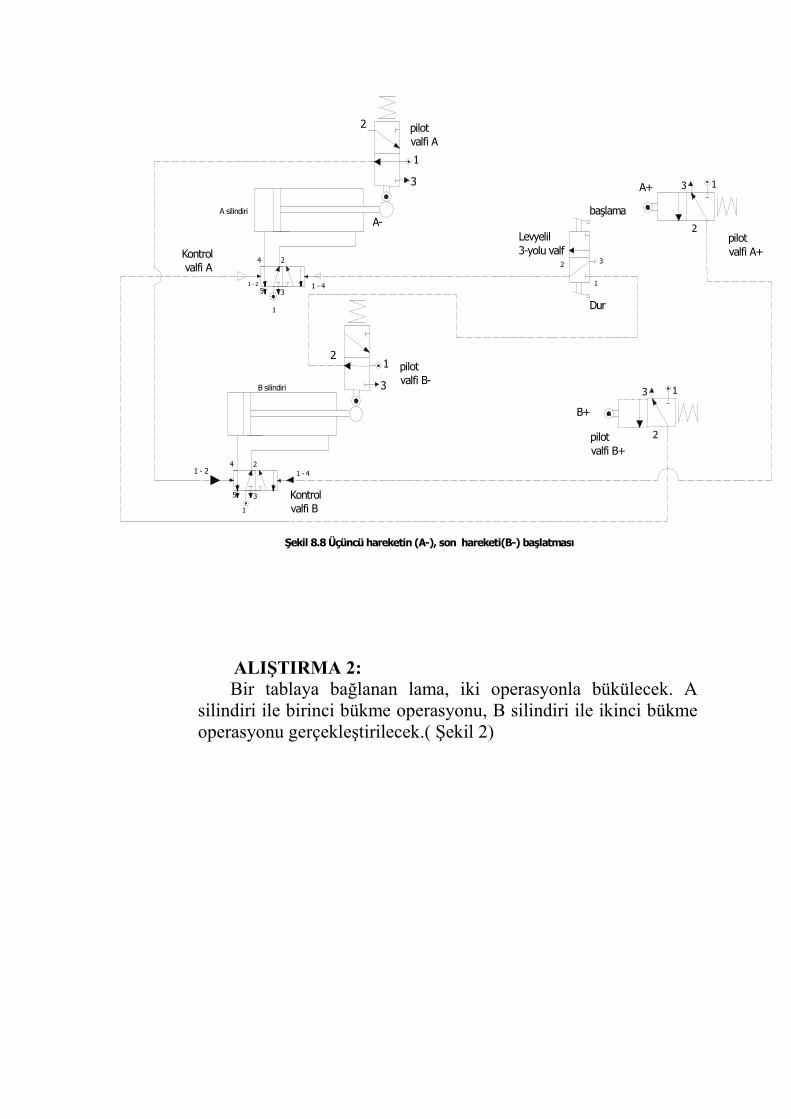
Şekil 8.8 Üçüncü hareketin (A-), son hareketi(B-) başlatması
35
1
4 2 1 - 4
B silindiri
1
2 3
başlama
A+
1 - 2
1 - 25
4
1 - 43
2
A silindiri
1
B+
A-
2
3 1
1
3
2
3
21
2
3 1
pilotvalfi A+
pilotvalfi A
pilotvalfi B+
pilotvalfi B-
Kontrolvalfi B
Kontrol valfi A
Dur
Levyelil 3-yolu valf
ALIŞTIRMA 2:
Bir tablaya bağlanan lama, iki operasyonla bükülecek. A silindiri ile birinci bükme operasyonu, B silindiri ile ikinci bükme operasyonu gerçekleştirilecek.( Şekil 2)
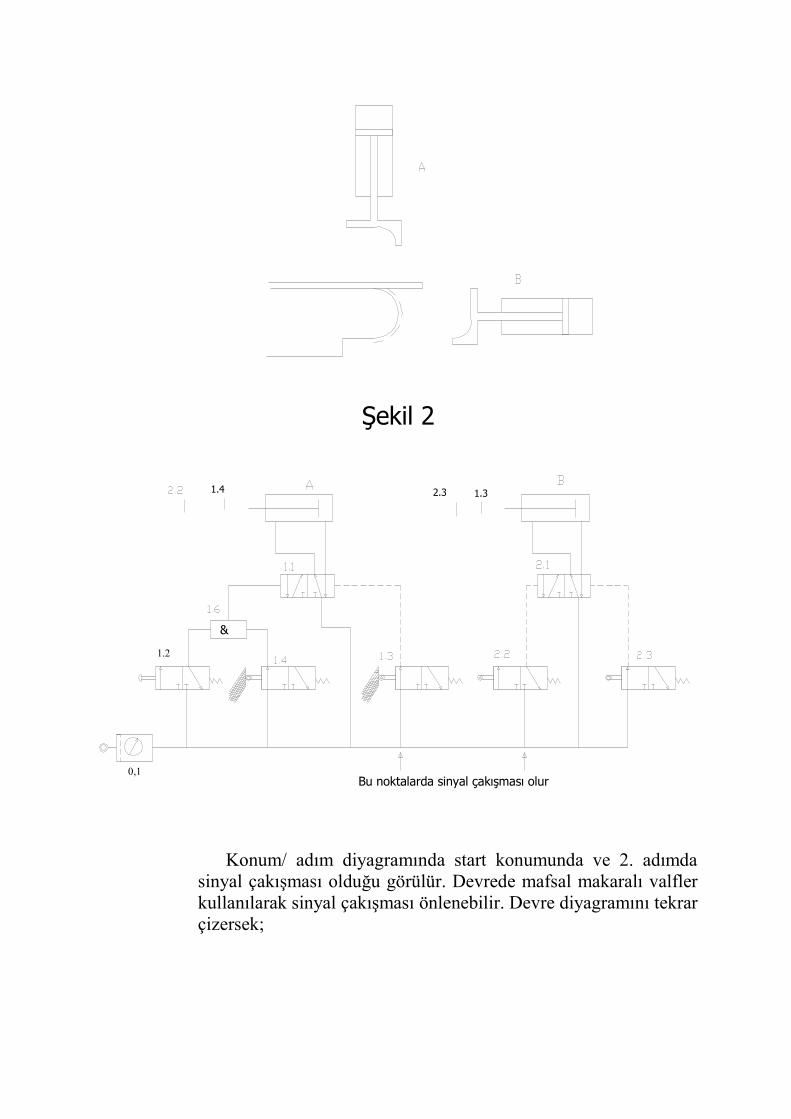
Şekil 2
0,1
1.2
1.4 2.3 1.3
&
Bu noktalarda sinyal çakışması olur
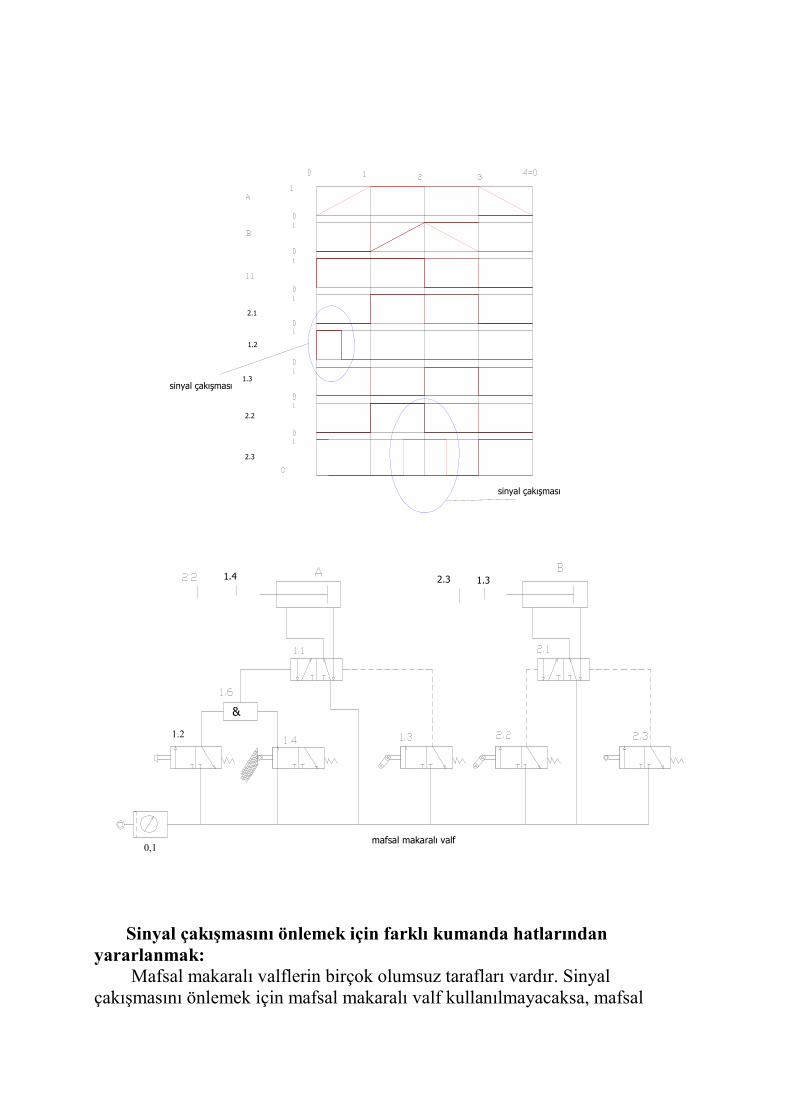
Konum/ adım diyagramında start konumunda ve 2. adımda sinyal çakışması olduğu görülür. Devrede mafsal makaralı valfler kullanılarak sinyal çakışması önlenebilir. Devre diyagramını tekrar çizersek;
2.1
1.2
1.3
2.2
2.3
sinyal çakışması
sinyal çakışması
0,1
1.2
1.4 2.3 1.3
&
mafsal makaralı valf
Sinyal çakışmasını önlemek için farklı kumanda hatlarından yararlanmak: Mafsal makaralı valflerin birçok olumsuz tarafları vardır. Sinyal çakışmasını önlemek için mafsal makaralı valf kullanılmayacaksa, mafsal
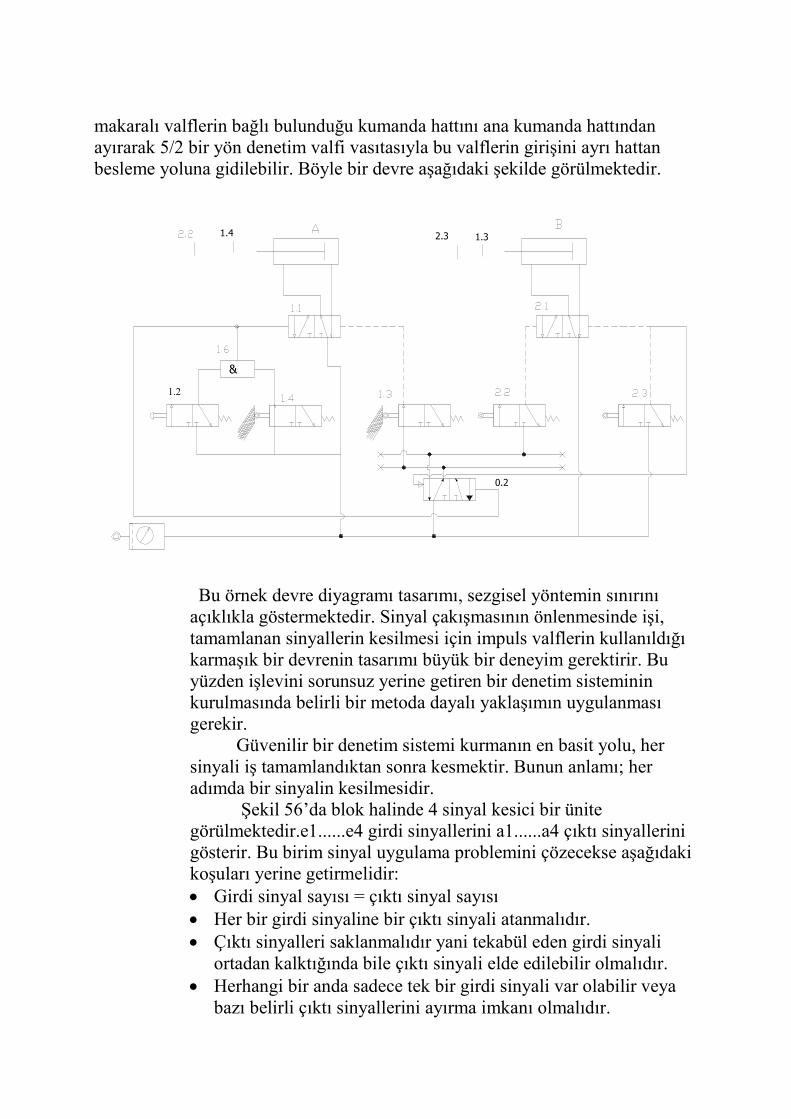
makaralı valflerin bağlı bulunduğu kumanda hattını ana kumanda hattından ayırarak 5/2 bir yön denetim valfi vasıtasıyla bu valflerin girişini ayrı hattan besleme yoluna gidilebilir. Böyle bir devre aşağıdaki şekilde görülmektedir.
1.2
1.4 2.3 1.3
&
0.2
Bu örnek devre diyagramı tasarımı, sezgisel yöntemin sınırını açıklıkla göstermektedir. Sinyal çakışmasının önlenmesinde işi, tamamlanan sinyallerin kesilmesi için impuls valflerin kullanıldığı karmaşık bir devrenin tasarımı büyük bir deneyim gerektirir. Bu yüzden işlevini sorunsuz yerine getiren bir denetim sisteminin kurulmasında belirli bir metoda dayalı yaklaşımın uygulanması gerekir. Güvenilir bir denetim sistemi kurmanın en basit yolu, her sinyali iş tamamlandıktan sonra kesmektir. Bunun anlamı; her adımda bir sinyalin kesilmesidir. Şekil 56’da blok halinde 4 sinyal kesici bir ünite görülmektedir.e1......e4 girdi sinyallerini a1......a4 çıktı sinyallerini gösterir. Bu birim sinyal uygulama problemini çözecekse aşağıdaki koşuları yerine getirmelidir: • Girdi sinyal sayısı = çıktı sinyal sayısı • Her bir girdi sinyaline bir çıktı sinyali atanmalıdır. • Çıktı sinyalleri saklanmalıdır yani tekabül eden girdi sinyali
ortadan kalktığında bile çıktı sinyali elde edilebilir olmalıdır. • Herhangi bir anda sadece tek bir girdi sinyali var olabilir veya
bazı belirli çıktı sinyallerini ayırma imkanı olmalıdır.

• Girdi sinyalleri her zaman aynı sırayla etkili olmalıdır yani 1-2-3-4-1-2-3-4-1.........
Bundan sonraki problem, ortaya konan koşulların tamamını gerçekleştiren blok için uygun bir devre bulmaktadır. Bu devre için kullanılan iki tasarım: • Kaskad yöntemi • Kayıt kaydırma yöntemi
Kayıt Kaydırma (Sıralama Zinciri) Yöntemi Bu yöntemde 3/2 valfler kullanılır. Bağlantı seri değildir. Valflerin P girişleri doğrudan hava girişine bağlanmıştır. Çok sayıda kademe olduğunda yukarıda hatırlatılan basınç düşünümü burada olmaz fakat kaskad ile mukayese edildiğinde bir fazla valf gereklidir. Kayıt kaydırmada da herhangi bir an bir çıktı verilir ve her( kademe) onu takip eden kat tarafından reset edilir.
Şekil 63/1
Burada da girdi sinyalini kilitlemek için en ile an-1 sinyali VE valfi ile birleştirilir veya mümkünse an-1 çıktısı ile en-1 girdisi için kullanılan sinyal valfi seri bağlanır. Şekil 63’ de bu olasılıklar görülmektedir. 4- kademeli bir düzenleme için muhtemel kontrol konumları aşağıda gösterilmektedir.

Bu yapı istenen ölçüde büyültülebilir. Dikkat edilecek nokta; başlama anında son valfin çalışıyor halde olmasıdır. Böylece ilk kademe çalıştırılabilir.
Kademeli bir kayıt kaydırma için muhtemel kontrol konumları Koordine hareket kontrol sistemlerini kaskad veya kayıt kaydırma (sıralama zinciri) ile tasarlama yöntemi
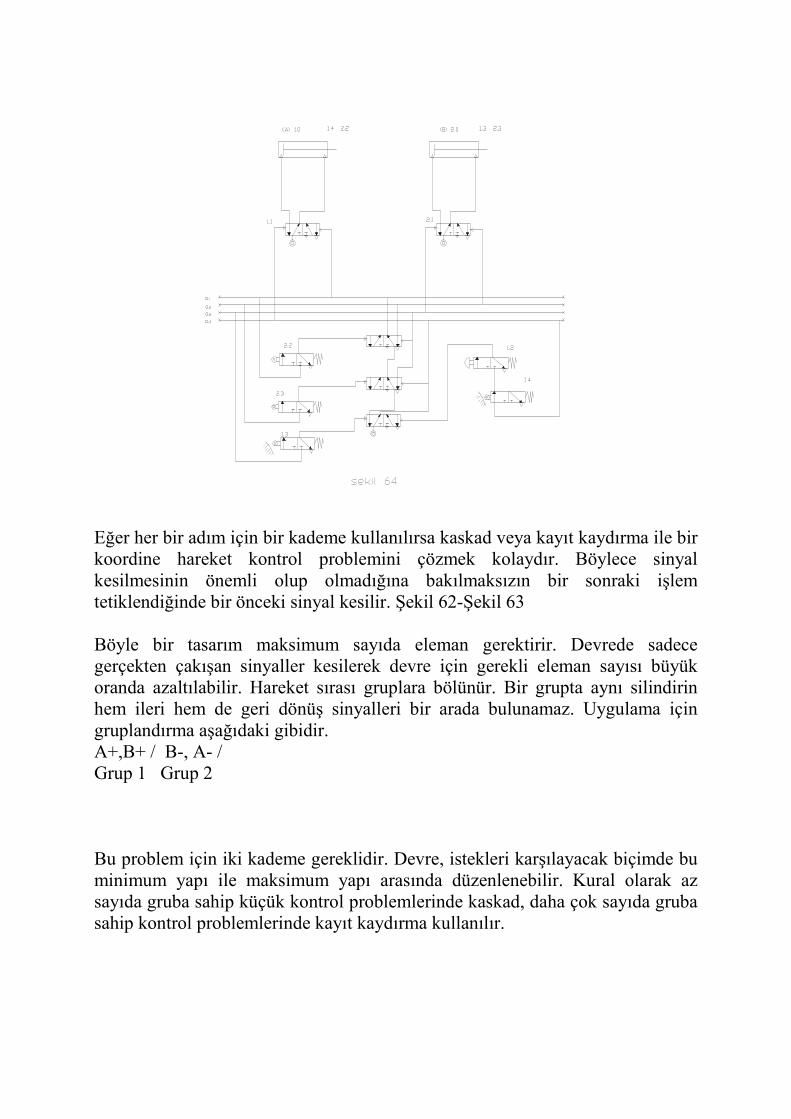
Eğer her bir adım için bir kademe kullanılırsa kaskad veya kayıt kaydırma ile bir koordine hareket kontrol problemini çözmek kolaydır. Böylece sinyal kesilmesinin önemli olup olmadığına bakılmaksızın bir sonraki işlem tetiklendiğinde bir önceki sinyal kesilir. Şekil 62-Şekil 63 Böyle bir tasarım maksimum sayıda eleman gerektirir. Devrede sadece gerçekten çakışan sinyaller kesilerek devre için gerekli eleman sayısı büyük oranda azaltılabilir. Hareket sırası gruplara bölünür. Bir grupta aynı silindirin hem ileri hem de geri dönüş sinyalleri bir arada bulunamaz. Uygulama için gruplandırma aşağıdaki gibidir. A+,B+ / B-, A- / Grup 1 Grup 2 Bu problem için iki kademe gereklidir. Devre, istekleri karşılayacak biçimde bu minimum yapı ile maksimum yapı arasında düzenlenebilir. Kural olarak az sayıda gruba sahip küçük kontrol problemlerinde kaskad, daha çok sayıda gruba sahip kontrol problemlerinde kayıt kaydırma kullanılır.
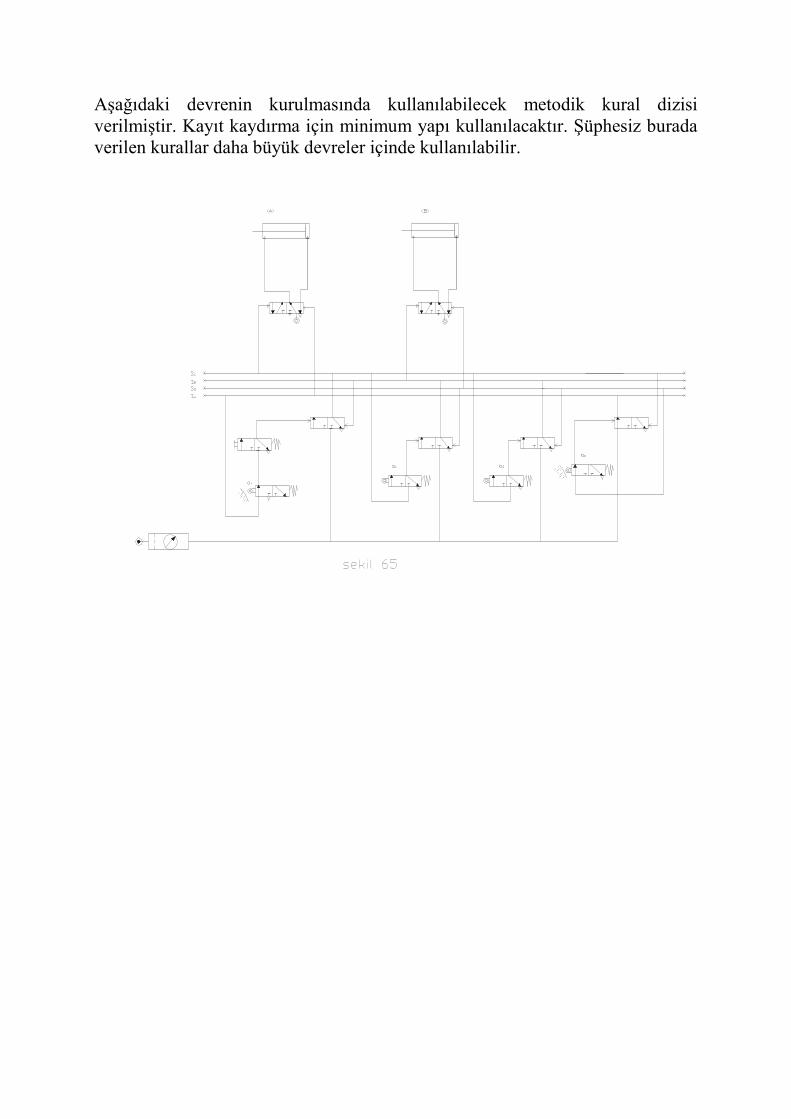
Aşağıdaki devrenin kurulmasında kullanılabilecek metodik kural dizisi verilmiştir. Kayıt kaydırma için minimum yapı kullanılacaktır. Şüphesiz burada verilen kurallar daha büyük devreler içinde kullanılabilir.





![MİL-GÖBEK MONTAJ TERTİBATI PNÖMATİK DEVRE TASARIMI ve ... · güç iletimini cazip hale getirmektedir [1-2]. Pnömatik, çok eskilerden beri bilinmesine rağmen, tam anlamıyla](https://static.fdocument.pub/doc/165x107/5e05eded371f94306a056097/ml-gbek-montaj-tertbati-pnmatk-devre-tasarimi-ve-g-iletimini-cazip.jpg)