PERBAIKAN POLA BERJALANAMPUTEE BAWAH LUTUT
153
perpustakaan.uns.ac.id digilib.uns.ac.id commit to user PERBAIKAN POLA BERJALANAMPUTEE BAWAH LUTUT DENGAN MENGGUNAKANALIGNMENT ADAPTER FOR PROSTHETIC FOOT BERDASARKANSTATIKA BIOMEKANIKA Skripsi SebagaiPersyaratanMendapatGelarSarjanaTeknik MUCHAMMAD WENDY DARMAWAN I1308519 JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK UNIVERSITAS SEBELAS MARET SURAKARTA 2011
Transcript of PERBAIKAN POLA BERJALANAMPUTEE BAWAH LUTUT

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
PERBAIKAN POLA BERJALANAMPUTEE BAWAH LUTUT DENGAN MENGGUNAKANALIGNMENT ADAPTER FOR
PROSTHETIC FOOT BERDASARKANSTATIKA BIOMEKANIKA
Skripsi
SebagaiPersyaratanMendapatGelarSarjanaTeknik
MUCHAMMAD WENDY DARMAWAN I1308519
JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK UNIVERSITAS SEBELAS MARET
SURAKARTA 2011
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
LEMBAR PENGESAHAN Judul Skripsi : PERBAIKAN POLA BERJALANAMPUTEE BAWAH LUTUT DENGAN MENGGUNAKAN ALIGNMENT ADAPTER FOR
PROSTHETIC FOOT BERDASARKAN STATIKA BIOMEKANIKA
Ditulis oleh:
MUCHAMMAD WENDY DARMAWAN I1308519
Mengetahui, Dosen Pembimbing I Dosen Pembimbing II IlhamPriadythama, ST, MTRetnoWulanDamayanti, ST, MT NIP.19801103 200812 1 002NIP. 198003062005012 002 Pembantu Dekan I Ketua JurusanTeknikIndustri Fakultas Teknik UNS FakultasTeknik UNS KusnoAdiSambowo, ST ,Ph.D Dr. CucukNurRosyidi, ST, MT NIP. 19691026 199503 1002 NIP. 19711104 199903 1 001

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
KATA PENGANTAR
Assalamu ‘alaikum Wr.Wb
Alhamdulillah, puji syukur penulis ucapkan ke hadirat Allah SWT yang
telah memberikan rahmat dan hidayah-Nya sehingga penulis dapat menyelesaikan
skripsi ini. Shalawat serta salam kepada Rasulullah Muhammad SAW, Al Amin
suri tauladan kita.
Pada kesempatan yang sangat baik ini, dengan segenap kerendahan hati
dan rasa yang setulus-tulusnya, penulis ingin mengucapkan terima kasih yang
sebesar-besarnya kepada :
1. Kedua orang tua tercinta, H. Darmanto dan Hj. S. Sunarti Konsepsi yang telah
memberikan doa, kasih sayang dan dukungan. Semoga kelak kita bertemu di
Surga-Nya
2. Kusno Adi Sambowo, ST , Ph.D selaku Pembantu Dekan I Fakultas Teknik
Universitas Sebelas Maret Surakarta.
3. Bapak Dr. Cucuk Nur Rosyidi, ST, MT. selaku Ketua Jurusan Teknik Industri
Universitas Sebelas Maret Surakarta.
4. Bapak Ilham Priadythama , ST, MT dan Ibu Retno Wulan Damayanti, ST, MT
selaku dosen pembimbing yang telah sabar dalam memberikan pengarahan
dan bimbingan sehingga penulis dapat menyelesaikan skripsi ini dengan
lancar.
5. Ibu Ir. Ir. Susy Susmartini, MSIE selaku dosen penguji skripsi I dan Bapak Ir.
Lobes Herdiman, MT selaku dosen penguji skripsi II yang berkenan
memberikan saran dan perbaikan terhadap skripsi ini.
6. Bapak Bambang Suhardi, ST, MT. selaku pembimbing akademis. Terima
kasih atas bimbinganya selama ini.
7. Dosen-dosen Teknik Industri yang memberikan ilmu dan nilai yang obyektif
selama ini.
8. Para staf dan karyawan Jurusan Teknik Industri (mba’ Yayuk, mba’ Rina, pak
Agus, mba’Tutik), atas segala kesabaran dan pengertiannya dalam
memberikan bantuan demi kelancaran penyelesaian skripsi ini.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
9. Dek Retno Kumoro yang tak bosan dan tak lelah menyemangati saya untuk
menyelesaikan TA ini.
10. Mbak Avi Meilawati dan Mas Trisna Tirtana. Terimakasih motivasinya.
11. Teman-teman Teknik Industri Transfer 2008: Hadi dulur dan Ridho dulur
(makasih sudah mau menampung saya waktu saya terpuruk), Sandy, Vembi -
Istri, Ayiek - Markiyem, Komandan, Arli Gajah, Simbah Romi, , Bpk/Ibu
Camat , Topix - Rifka, Galih, Henry, Faris, Rika, Agarika, Desty, Anand-Ulo,
Putri, Cici, Gambrenx, Yohanez Krisna - Natalia, Agung , Safi’i-istri, Inul,
Restu, Fuad, Altona, Ridwan. Semoga persahabatan kita berlanjut sampai
kakek nenek. Amin
12. Seluruh pihak yang tidak dapat penulis sebutkan dalam kata pengantar ini.
Semoga skripsi ini dapat bermanfaat bagi rekan-rekan mahasiswa maupun
siapa saja yang membutuhkannya. Penulis menyadari bahwa laporan tugas akhir
ini masih jauh dari sempurna, dengan senang hati dan terbuka penulis menerima
segala saran dan kritik yang membangun.
Surakarta, Juli 2011
Penulis
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
DAFTAR ISI HALAMAN JUDUL ................................................................................ i LEMBAR PENGESAHAN ..................................................................... ii LEMBAR VALIDASI .............................................................................. iii SURAT PERNYATAAN ORISINALITAS KARYA ILMIAH ........... iv SURAT PERNYATAAN PUBLIKASI KARYA ILMIAH .................. v KATA PENGANTAR .............................................................................. vi ABSTRAK ................................................................................................ viii ABSTRACT .............................................................................................. ix DAFTAR ISI ............................................................................................. x DAFTAR TABEL .................................................................................... xiii DAFTAR GAMBAR ................................................................................ xiv DAFTAR ISTILAH ................................................................................. xviii DAFTAR LAMPIRAN ............................................................................ xxii BAB I PENDAHULUAN ......................................................................... I-1
1.1 Latar Belakang .................................................................... I-1
1.2 Perumusan Masalah ............................................................ I-4
1.3 Tujuan Penelitian ................................................................ I-4
1.4 Manfaat Penelitian .............................................................. I-4
1.5 Batasan Masalah ................................................................. I-4
1.6 Asumsi Penelitian ............................................................... I-5
1.7 Sistematika Penulisan ......................................................... I-5
BAB II TINJAUAN PUSTAKA ................................................................ II-1
2.1 ........................................................................................ Amputas
i ............................................................................................................. II-1
2.2 ........................................................................................ Prostheti
c KakiBawahLutut ............................................................................... II-2
2.2.1 Prosthetic kaki bawahlutut ...................................... II-2
2.3 ........................................................................................ Alignme
nt Below Knee Prosthetic ..................................................................... II-5
2.3.1 Bench alignment/ alignment plumb line ................. II-5
2.3.2 Static alignment ...................................................... II-6
2.3.3 Dynamic alignment ................................................. II-6
2.4 ........................................................................................ PrinsipBi
omekanik Below Knee Prosthetic ........................................................ II-8

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
2.4.1 Prinsip-prinsipmekanik ........................................... II-8
2.4.2 Tingkat berjalan normal .......................................... II-10
2.5 ........................................................................................ Analisis
GerakanSaatBerjalan ............................................................................ II-16
2.6 ........................................................................................ Momen
GerakanTubuh ...................................................................................... II-19
2.7 ........................................................................................ Penelitia
nSebelumnya ........................................................................................ II-20
BAB III METODOLOGIPENELITIAN ................................................... III-1
3.1 Identifikasi Permasalahan ................................................... III-2
3.1.1 Latarbelakangmasalah ............................................ III-2
3.1.2 Perumusanmasalah ................................................. III-3
3.1.3 Tujuandanmanfaatpenelitian .................................. III-3
3.1.4 Studiliteraturdanstudiobservasi .............................. III-3
3.1.5 IdentifikasiAwalPerancangan ................................. III-4
3.2 TahapPengumpulandanPengolahan Data ........................... III-4
3.2.1 PerancanganKomponenAligment Adapter
DenganSolidwork 2004 .......................................... III-5
3.2.2 Proses ManufakturRancanganAlignment Adapter
ProstheticDalamProdukNyata ................................ III-5
3.2.3 FabrikasiRancanganAlignment Adapter Prosthetic III-6
3.2.4 PengukuranAnthropometriPengguna Prosthetic .... III-6
3.2.5 EksperimenPengamatanGerakBerjalanPenggunaProsthetic
PadaBidangDatar .................................................... III-6
3.2.6 PermodelanBiomekanikaPengguna Prosthetic ....... III-8
3.3 TahapAnalisis ..................................................................... III-9
3.4 Kesimpulandan Saran ......................................................... III-10
BAB IV PENGUMPULAN DAN PENGOLAHAN DATA ................... IV-1
4.1 Pengumpulan Data.............................................................. IV-1
4.1.1 IdentifikasiAwalPerancanganProsthetic ................. IV-1
4.1.2 PengukuranAnthropometriPengguna Prosthetic ..... IV-12

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
4.2 Permodelan Biomekanika Pengguna Prosthetic Bawah
Lutut ................................................................................... IV-21
4.4.1 Capture gerakan berjalan pengguna prosthetic
Pada bidang datar .................................................... IV-21 4.4.2 Penentuan free body diagram dan sudut sendi
pada capture gerakan berjalan penggunaprosthetic di bidang datar ........................................................ IV-23
4.4.3 Model formulasi gaya dan momen pada ankle
joint pengguna prosthetic ........................................ IV-24 4.3 Pengolahan Data ................................................................. IV-64
4.3.1 Perhitungan Nilai Keseimbangan
GayaPadaKomponen Alignment Adapter yang
MengalamiPensejajaran .......................................... IV-64
4.3.2 Perhitungan Nilai Keseimbangan
MomenpadaKomponen Alignment Adapter yang
MengalamiPensejajaran .......................................... IV-68
4.3.3 Perhitungan Nilai Keseimbangan
GayaPadaKomponen Alignment Adapter
yangTidakMengalamiPensejajaran ......................... IV-72
4.3.4 Perhitungan Nilai Keseimbangan
MomenpadaKomponen Alignment Adapter yang
MengalamiPensejajaran .......................................... IV-76
BAB V ANALISIS DAN INTERPRETASI HASIL ................................. V-1 5.1 AnalisisRancanganKomponen Alignment Adapter For
Prosthetic Foot .................................................................... V-1
5.2 AnalisisBiomekanikaPadaAktivitasBerjalanPengguna
Prosthetic ............................................................................ V-12
5.3 Interprestasihasil ................................................................. V-18
BAB VI KESIMPULAN DAN SARAN ................................................... VI-1
DAFTAR PUSTAKA

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
DAFTAR TABEL Tabel 4.1 Komponen-komponen alignment adapter prosthetic ............. IV-8 Tabel 4.2 Data anthropometri pengguna prosthetic ............................... IV-14 Tabel 4.3 Dimensi Prosthetic endoskeletaldenganalignment adapter .... IV-15 Tabel 4.4 Massa segmen tubuh pengguna prosthetic ............................. IV-17 Tabel 4.5 Proporsi massa individual segmen tubuh ............................... IV-18 Tabel 4.6 Panjang titik berat segmen tubuh pengguna prosthetic .......... IV-20 Tabel 4.7 Rekapitulasi sudut kaki pengguna prosthetic pada gait cycle
bidang datar……………………………………………….. IV-24 Tabel 4.8 Lengan momen perhitungangaya ankle joint kaki normal fase
initial contact …………………………………………….. IV-65
Tabel 4.9 Gaya beratsegmentubuhpengguna prosthetic ......................... IV-65 Tabel 4.10 Lengan momenperhitungangaya ankle joint kaki prosthetic fase initial contact………………………………………….. IV-66 Tabel 4.11 Rekapitulasi perhitungan nilai gaya pada ankle joint .............. IV-67 Tabel 4.12 Lengan momen perhitunganmomen ankle joint kaki normal fase initial contact .................................................................. IV-69 Tabel 4.13 Lengan momenperhitunganmomen ankle joint kaki prostheticfase initial contact ..................................................... IV-70 Tabel 4.14 Rekapitulasi perhitungan nilai momen pada ankle joint .......... IV-71 Tabel 4.15 Lengan momen perhitungangaya ankle joint kaki normal fase
initial contact …………………………………………….. IV-72
Tabel 4.16 Gaya beratsegmentubuhpengguna prosthetic ......................... IV-73 Tabel 4.17 Lengan momenperhitungangaya ankle joint kaki prosthetic fase initial contact………………………………………….. IV-74 Tabel 4.18 Rekapitulasi perhitungan nilai gaya pada ankle joint .............. IV-75 Tabel 4.19 Lengan momen perhitunganmomen ankle joint kaki normal fase initial contact .................................................................. IV-76 Tabel 4.20 Lengan momenperhitunganmomen ankle joint kaki prostheticfase initial contact ..................................................... IV-77

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
DAFTAR ISTILAH
A
Add on = Komponenataubagiandarisesuatu yang
dapatdipasangkanpadasuatuproduk yang
berfungsimelengkapiataumeningkatkankemampu
andariproduktersebut.
Amputasi = Pemotongan anggota tubuh.
Ankle Circumreference = Nilai lingkar terkecil pada segmen betis.
Ankle joint = Sendi yang menghubungkantelapak kaki
denganbetis yang terbentukdariartikulasitulang
tibia dan fibula sertatulang talus.
Anterior = Bagian depan dari anggota tubuh.
Anteroposterior = Arah depan dan belakang tubuh.
C
Calf Circumreference = Nilai dari lingkar terbesar pada segmen betis.
Capture = Potongangambar yang di perolehdari video.
Center of mass = Titikkonsentrasimassasuatuobjek.
D
Deformitas =
Perubahandanposisisuatuobjekdalamjangkawaktu
tertentu.
Distal = Ujung segmen tubuh yang terjauh dari pusat
tubuh.
Dorsi flexion = Gerak pergelangan kaki yang memungkinkan
telapak kaki bergerak mendekati bagian betis.
Duralumin alloy = Salah satupaduanaluminium (93,5%)
dengantembaga (4,4%), magnesium (1,5%)
danmangan ( 0,6%).
E
Eksoskeletal = Prosthetic dengan rangka luar menjadi penumpu.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
Endoskeletal =Prosthetic dengan rangka dalam menjadi penumpu.
Equilibrium = Kondisi suatu sitem dimana suatu faktor yang
mempengaruhinya dalam keadaan seimbang.
F
Flexion = Gerakansendi yang
menghasilkanpengurangansudutantaraduatulanga
taupermukaantubuh.
Free body diagram = Gambar diagram yang
seringdigunakanahlifisikauntukmenganalisasuatu
objek.
Foot-flat = Kondisi saat fase berdiri dimana keseluruhan
telapak kontak dengan lantai, telapak dalam
posisi mendatar.
G
Gait cycle = Istilah yang menggambarkanpolagerak yang
membentukgayaberjalan.
H
Heel contact = Kondisi saat fase berdiri pada siklus berjalan,
dimana posisi tumit menyentuh lantai.
Heel-off = Konsisi saat fase berdiri pada siklus berjalan,
dimana posisi tumit mulai terangkat dari lantai.
Helicoil = Pirantipenggantiulirdalam.
Hip = Bagian tubuh yang berada pada pangkal paha,
yang menghubungkan kedua kaki ke batang
tubuh.
Hip joint = Sendi pinggul.
I
Initial contact = Periodeawaldari gait cycle atauberjalan.
Initial swing = Periode 60-70% dari gait cycle.
Ischial tuberosity = Jarak antara telapak kaki dengan tulang duduk,
diukur saat keadaan berdiri.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
L
Loading respon = Periode 10% dari gait cycle.
K
Kinematika = Studi yang menjelaskan karakteristik gerakan dari
segi ruangan tanpa melihat gaya yang
menyebabkan gerakan tersebut.
M
Midstance = Fase berdiri pada siklus berjalan dimana telapak
dalam posisi setengah menahan bobot tubuh.
Mid swing = Periode 75%-85% dari gait cycle.
P
Patellar-tendon bearing = Jenis prothese bawah lutut dimana beban tubuh
diakomodasi oleh tendon patellar pada lutut.
Pelvis = Pinggul.
Plantar flexion = Gerak pergelangan kaki yang memungkinkan
telapak kaki bergerak menjauhi bagian betis.
Pre swing = Periode 50-60% dari gait cycle.
Prosthetic = Perangkattiruansebagaipenggantianggotagerak
yang hilang
Posterior = Bagian belakang dari anggota tubuh.
Q
Quadriceps = Otot yang terletak pada paha kaki.
S
Sliding = Pergeseran.
Socket = Penghubungantara prosthetic dengantubuh.
Stance phase = Fase berdiri pada siklus berjalan.
Stump = Bagian segmen tubuh sisa dari amputasi, dihitung
dari pangkal segmen tubuh itu sendiri.
Swing phase = Fase melayang pada siklus berjalan.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
SACH foot = Jenis telapak alat ganti anggota gerak bawah
(telapak prothese kaki) dengan bahan kayu
dilapisi karet dan bersifat statis.
T
Tibia = Tulang kering.
Tilting = Pergeseransudutataurotasi.
Toe-off = Bagian dari fase berdiri pada siklus berjalan
dimana ujung kaki mulai off atau terangkat dari
lantai.
Trochanter = Ujung penonjolan tulang lateral di akhir tulang
paha.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
DAFTAR GAMBAR Gambar 2.1 Kontraktur stump ................................................................ II-2 Gambar 2.2 Cakupangerakpadatungkai kaki normal .............................. II-2 Gambar 2.3 Below knee prosthetic ......................................................... II-3 Gambar 2.4 Bench alignment ................................................................. II-6 Gambar 2.5 Static alignment ................................................................... II-7 Gambar 2.6 Dynamic alignment ............................................................. II-8 Gambar 2.7 Kekuatan momen ................................................................ II-10 Gambar 2.8 Siklus berjalan normal......................................................... II-11 Gambar 2.9 Faseberdiridanberayun ........................................................ II-12 Gambar 2.10 Mekanisme otot-otot kaki ................................................... II-12 Gambar 2.11 Tubuhsebagai system enam link dan joint .......................... II-17 Gambar 2.12 Permodelantitikpusatmassadempter .................................... II-18 Gambar 2.14 Sebuah momen .................................................................... II-20 Gambar 3.1 Metodologi penelitian ......................................................... III-1 Gambar 4.1 Kontraktur stump ................................................................ IV-2 Gambar 4.2 Cakupangerakpadatungkai kaki normal .............................. IV-2 Gambar 4.3 Rancangan komponen tilting atas ....................................... IV-4 Gambar 4.4 Rancangan komponen tilting bawah ................................... IV-5 Gambar 4.5 Rancangan komponen sliding ............................................. IV-6 Gambar 4.6 Rancangan komponen sliding bawah…………………. IV-7 Gambar 4.7 Rancangan alignment adapter prosthetic ............................ IV-8 Gambar 4.8 Produk alignment adapter prosthetic ................................... IV-9 Gambar 4.9 Prostheticbawahlutut dengan komponen alignment adapter
prosthetic ............................................................................. IV-10 Gambar 4.10 Prosthetic bawah lutut dengan komponen alignment
adapter prostheticyang dipasangkan pada pengguna prosthetic ............................................................................. IV-11
Gambar 4.11 Prosthetic endoskeletaldenganalignment adapter ............... IV-15 Gambar 4.12 Persebaran titik pusat massa................................................ IV-19 Gambar 4.13 Periode cycle gait ................................................................ IV-20 Gambar 4.14 Capture gerakan berjalan pengguna prosthetic di bidang datar .................................................................................... IV-21 Gambar 4.15 Free body diagram gait cycle pada bidang datar ................. IV-22 Gambar 4.16 Fase initial contact gerakan berjalan pada bidang datar...... IV-26 Gambar 4.17 Stick diagram perhitungan gaya ankle kaki normal fase initial contact ............................................................... IV-27 Gambar 4.18 Stick diagram perhitungan gaya ankle kaki prosthetic fase initial contact ............................................................... IV-28 Gambar 4.19 Stick diagram perhitungan momen ankle kaki normal fase initial contact ............................................................... IV-29 Gambar 4.20 Stick diagram perhitungan momen ankle kaki prosthetic fase initial contact ............................................................... IV-30 Gambar 4.21 Fase loading response gerakan berjalan bidang datar ......... IV-31 Gambar 4.22 Stick diagram perhitungan gaya ankle kaki normal

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
fase loading response .......................................................... IV-32 Gambar 4.23 Stick diagram perhitungan gaya ankle kaki prosthetic fase loading response .......................................................... IV-33 Gambar 4.24 Stick diagram perhitungan momen ankle kaki normal fase loading response .......................................................... IV-35 Gambar 4.25 Stick diagram perhitungan momen ankle kaki prosthetic fase loading response .......................................................... IV-36 Gambar 4.26 Fase midstance gerakan berjalan bidang datar .................... IV-37 Gambar 4.27 Stick diagram perhitungan gaya ankle kaki prosthetic fase mid stance .................................................................... IV-38 Gambar 4.28 Stick diagram perhitungan momen ankle kaki prosthetic fase mid stance .................................................................... IV-39 Gambar 4.29 Fase terminal stance gerakan berjalan bidang datar ............ IV-40 Gambar 4.30 Stick diagram perhitungan gaya ankle kaki normal fase terminal stance ............................................................. IV-41 Gambar 4.31 Stick diagram perhitungan gaya ankle kaki prosthetic fase terminal stance ............................................................. IV-42 Gambar 4.32 Stick diagram perhitungan momen ankle kaki normal fase terminal stance ............................................................. IV-44 Gambar 4.33 Stick diagram perhitungan momen ankle kaki prosthetic fase terminal stance ............................................................. IV-45 Gambar 4.34 Fase pre swing gerakan berjalan bidang datar .................... IV-46 Gambar 4.35 Stick diagram perhitungan gaya ankle kaki normal fase pre swing ...................................................................... IV-47 Gambar 4.36 Stick diagram perhitungan gaya ankle kaki prosthetic fase pre swing ...................................................................... IV-48 Gambar 4.37 Stick diagram perhitungan momen ankle kaki normal fase pre swing ...................................................................... IV-49 Gambar 4.38 Stick diagram perhitungan momen ankle kaki prosthetic fase pre swing ...................................................................... IV-50 Gambar 4.39 Fase initial swing gerakan berjalan naik bidang datar ........ IV-51 Gambar 4.40 Stick diagram perhitungan gaya ankle kaki normal fase initial swing ................................................................. IV-52 Gambar 4.41 Stick diagram perhitungan momen ankle kaki normal fase initial swing ................................................................. IV-53 Gambar 4.42 Fase mid swing gerakan berjalan bidang datar…………… IV-54 Gambar 4.43 Stick diagram perhitungan gaya ankle kaki normal fase mid swing .................................................................... IV-55 Gambar 4.44 Stick diagram perhitungan momen ankle kaki normal fase mid swing .................................................................... IV-56 Gambar 4.45 Fase terminal swing gerakan berjalan bidang datar ............ IV-57 Gambar 4.46 Stick diagram perhitungan gaya ankle kaki normal fase terminal swing ............................................................. IV-58 Gambar 4.47 Stick diagram perhitungan gaya ankle kaki prosthetic fase terminal swing ............................................................. IV-59 Gambar 4.48 Stick diagram perhitungan momen ankle kaki normal

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
fase terminal swing ............................................................. IV-61 Gambar 4.49 Stick diagram perhitungan momen ankle kaki prosthetic fase terminal swing ............................................................. IV-62 Gambar 4.50 Komparasi nilai gaya pada ankle joint dengankomponen
alignmentadaptermengalamipensejajaran…………… IV-68 Gambar 4.51 Komparasi nilai momen pada ankle joint dengan
komponenalignment adaptermengalami pensejajaran ………………………………….…………. IV-71
Gambar 4.52 Komparasi nilai gaya pada ankle joint dengankomponen alignment adapter yang tidakmengalamipensejajaran IV-75
Gambar 4.53 Komparasi nilai momen pada ankle joint dengan komponenalignment adapter tanpamengalami pensejajaran ……………………………………..……. IV-79
Gambar 5.1 Ulirdalam ............................................................................ V-3 Gambar 5.2 Helicoil ................................................................................ V-3 Gambar 5.3 Komparasinilaigayadan moment ........................................ V-6 Gambar 5.4 Komparasinilaigayadan moment ........................................ V-8 Gambar 5.5 Komparasinilaigayadan moment ........................................ V-10 Gambar 5.6 Komparasinilaigayadan moment ........................................ V-12 Gambar 5.7 Komparasinilaigayadan moment ........................................ V-14 Gambar 5.8 Komparasinilaigayadan moment ........................................ V-16

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
I-1
BAB I PENDAHULUAN
Pada bab ini dikemukakan uraian tentang latar belakang penelitian,
perumusan masalah, tujuan penelitian, manfaat penelitian, pembatasan masalah,
asumsi, serta sistematika penulisan penelitian.
1.1 LATAR BELAKANG
Gerak kaki manusia termasuk dalam pergerakan anggota gerak bawah.
Pergerakan anggota gerak bawah merupakan bagian dari anggota gerak tubuh
untuk aktivitas sehari-hari seperti untuk menopang dan sebagai penyeimbang
tubuh saat berdiri, berjalan, berlari, dan melompat. Apabila salah satu atau kedua
anggota gerak bawah mengalami gangguan hingga mengalami amputasi,maka hal
tersebut dapat mengganggu aktivitas atau kegiatan sehari-hari. Ketiadaan alat
gerak bawah atau tungkai kaki masih dibagi menjadi enam bagian meliputi
ketiadaan pada tungkai kaki tepat panggul (hip amputation) ketiadaan tungkai
kaki atas lutut (above-knee amputation), ketiadaan tungkai kaki tengah lutut (knee
disarticulation amputation), ketiadaan tungkai kaki bawah lutut (below-knee
amputation), ketiadaan tungkai tepat ankle (ankle disarticulation amputation) dan
ketiadaan foot (syme amutation) (Handicap International, 2006).Kasus ketiadaan
alat gerak bawah yang sering terjadi di Indonesia adalah kasus ketiadaan tungkai
kaki bawah lutut dengan persentase sebesar 55% dari keseluruhan kasus ketiadaan
alat gerak bawah (Data: Rumah Sakit RSO Orthopedi “Prof. Dr. Soeharso”
Surakarta, 2007).
Ketiadaan tungkai kaki bawah lutut (below-knee amputation) merupakan
amputasi sepanjang area tulangtranstibial. Batas perpotongan amputasi bawah
lutut di awali dari tonjolan tulang tibial plateau hingga batas tonjolan tulang
malleolus (Radcliffe, 1961). Tingkat amputasi tungkai bawah lutut dapat dibagi
menjadi 3 tingkatan amputasi yaitu short stump, medium stump dan long
stump(Handicap International, 2006).
Tingkatan amputasi mempengaruhi sudut cakupan gerak/ROM (ring of
motion) dan kontraktur stump. Kontraktur stump terjadi akibat pemendekan salah
satu otot pada stump (muscle shortening), kondisi ini mengakibatkan sudut

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
I-2
cakupan gerakstump tidak sesuai dengan sudut cakupan gerak kaki normal yang
tidak mengalami amputasi. Perbedaan sudut cakupan gerak stump dengan sudut
cakupan gerak kaki normal yang tidak mengalami amputasimengakibatkan
perbedaan letak garis beban tubuh pada masing-masing tungkai.
Setiap penderita amputasi bawah lutut memiliki sudut kontraktur stump
yang berbeda-beda. Pemendekan salah satu otot mengakibatkan sudut stump
berubah dan mengikuti otot yang memendek sehingga semakin pendek level
amputasi semakin besar sudut kontraktur. Level amputasi yang mengalami
kontraktur sebagian besar pada short stump dan medium stump. Kontraktur stump
dapat diukur dengan mengukur sudut antara garis tengah paha (mid-line of the
thigh) dengan garis tengah stump (mid line-of the stump) menggunakan alat
goniometer (Handicap International, 2006).
Prosthetic kaki bawah lutut merupakan alat pengganti anggota gerak
tungkai bawah yang tiada. Prosthetic dibuat untuk menunjang fungsi dari anggota
gerak tungkai bawah bagi penderita amputasi bawah lutut (May, 1996).
Penggunaan prosthetic kaki bawah lutut adalah untuk menyeimbangkan tubuh
amputee saat berjalan. Pengguna prosthetic pada umumnya tidak dapat berjalan
normal, sehingga aspek biomekanika berperan dalam mengkaji pola berjalan
pengguna telah menyerupai pola berjalan normalnya (Radcliffe, 1961).
Perbedaan letak garis beban tubuh pada tungkai kaki normal dengan
tungkai kaki prostheticberpengaruh terhadap kestabilan berjalan. Gangguan
kestabilan berjalan terjadi akibat gaya reaksi lantai yang menimbulkan gaya atau
dorong kearah mediolateral dan anteroposterior. Gaya dorong mengakibatkan
pola berjalan pengguna prosthetic terdapat gap dengan kaki normal. Sedangkan
keseimbangan berjalan pengguna prosthetic dikatakan baik apabila resultan gaya
pada kaki mendekati nol atau tidak terdapat gap dengan kaki normal. Gap
terhadap kaki normal terjadi akibat prosthetic belum mampu menyeimbangkan
beban tubuh (Radcliffe, 1961).
Keseimbangan beban tubuh amputee merupakan bagian terpenting pada
gerakan berjalan dari pengguna prosthetic. Sehingga prosthetic yang baik harus
mampu memberikan keseimbangan beban tubuh. Gerakan berjalan pada orang
normal, memperlihatkan bagaimana kedua kaki saling menyeimbangkan beban

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
I-3
tubuh dalam pergerakan berpindah. Pada saat berjalan dan kaki menyentuh lantai,
beban tubuh yang dihasilkan dari efek tekanan gravitasi bumi menimbulkan gaya
reaksi ke atas. Pada amputee, pemindahan gaya pada prosthetic dan kaki yang lain
dikatakan baik apabila selama proses berjalan pengguna prosthetic melangkah
secara normal agar tidak terjadi gap dengan kaki yang normal.
Alignment/ pensejajaran komponen prostheticberpengaruh besar pada
kualitas fungsional prostheticsaat digunakan berjalan.Alignment prosthetic
memberikan keseimbangan saat berjalan. Pencapaian alignment prosthetic dicapai
melaluipensejajaran prosthetic sebelum di pakai pada tungkai yang
teramputasi(bench alignment/ alignment plumb line), pensejajaran pada
pemakaian prosthetic saat berdiri (statis alignment optimasi) dan optimalisasi
pensejajaran pada pemakaian prosthetic saat berjalan (dynamic alignment
optimasi)(Handicap International, 2006).
Prosthetic bawah lututeksoskeletalyang ada saat ini merupakan prosthetic
yang dibuat secara konventionalsehingga sambungan penghubung komponen
prosthetic bersifatpermanen.Prosthetic bawah lututeksoskeletal tidak dilengkapi
adanya komponen yang mengatur penjajaran komponen pada berbagai sudut
kontraktur. Ketiadaan komponen alignment/ penjajaran mengakibatkan pola jalan
pada pemakai prosthetic eksoskeletaltidak seimbang.
Berdasarkan uraian permasalahan di atas, penelitian ini diperlukan sebuah
komponen penjajaran pada prosthetic bawah lutut. Penjajaran diharap mampu
memperbaiki pola jalan pengguna prostheticyang memiliki kondisi sudut
kontraktur stump yang beragam. Mewujudkan ini perlu dirancang alat penjajaran
yang memiliki kemampuan menjajarkan kontraktur stump. Diharapkan komponen
aligment adapterfor prosthetic foot bawah lutut dapat memperbaiki keseimbangan
berjalan ketika dipakai. Pada penelitian ini juga dilakukan kajian biomekanika
gerak berjalan pengguna prosthetic untuk mengetahui kontribusi rancangan
komponen alignmentadapter for prosthetic foot dalam mengakomodasi gerakan
berjalan dengan melihat perbandingan nilai gaya dan momen pada bagian tersebut
baik pada kaki normal maupun kaki prosthetic.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
I-4
1.2 PERUMUSAN MASALAH
Berdasarkan latar belakang permasalahan tersebut, maka perumusan
masalah pada penelitian adalah bagaimana memperbaiki pola berjalan pengguna
prosthetic bawah lutut dengan merancang komponen alignment adapter for
prosthetic foot bawah lutut dan menentukan pengaruhnyaterhadap pola jalan pada
pengguna prosthetic bawah lutut.
1.3 TUJUAN PENELITIAN
Tujuan dilakukannya penelitian,adalah memperbaiki pola berjalan
pengguna prosthetic bawah lutut denganmerancang komponen alignment adapter
for prosthetic foot bawah lutut dan mengkaji pengaruh komponen alignment
adapter for prosthetic foot bawah lutut terhadap pola jalan pada pengguna
prosthetic bawah lutut.
Memperjelas tahapan pencapaian tujuan tersebut maka ditentukan tujuan
khusus, sebagai berikut:
1. Merancang alignment adapter for prosthetic foot bawah lutut dengan system
adjustablepada komponen pensejajaran.
2. Menguji desain rancangan alignment adapter for prosthetic foot bawah lutut
tersebut terhadap siklus berjalan(gait cycle)amputee.
1.4 MANFAAT PENELITIAN
Manfaat dari penelitian,sebagai berikut:
1. Menghasilkan komponen alignment adapter for prosthetic foot bawah lutut
dengan system adjustable.
2. Mengetahui tingkat keseimbangan berjalan pengguna prosthetic bawah lutut
dengan pemakaian komponenalignment adapter.
3. Memperoleh perbandingan nilai gaya dan moment pada bagian anklejoint
selama satu siklus berjalan (gait cycle) agar diketahui kontribusi dari rancangan
alignment adapter terhadap karakteristik berjalan pengguna prosthetic.
1.5 BATASAN MASALAH
Batasan masalah dalam penyusunan penelitian ini, sebagai berikut:
1. Arah sudut kontraktur flexi-exstensi dan abduction-adduction.
2. Dilakukan pada endoskeletal prosthetic shank.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
I-5
3. Pengujian pada level amputasi short stump.
4. Pengujian keseimbangan berjalan menggunakan pendekatan biomekanik statis.
5. Pengamatan gerak berjalan pengguna prosthetic atas lutut dilakukan pada
bidang sagital tubuh manusia.
6. Kajian biomekanika yang dilakukan hanya fokus pada perhitungan gaya dan
momen pada ankle joint dalam satu siklus berjalan normal.
7. Kondisi level amputasi yang di uji mewakili dari kondisi amputasi pada semua
level.
1.6 ASUMSI PENELITIAN
Asumsi penelitian dalam penyusunan penelitian ini, sebagai berikut:
1. Niilai gaya dan momen pada bagian anklejointdapatmewakili perhitungan nilai
gaya dan momen pada pola berjalan.
2. Posisi pengaturan alignment tidak mempengaruhi titik pusat massa prosthetic.
3. Pada kajian biomekanika, anggota gerak atas dan tubuh (kepala, leher, tangan,
dan batang tubuh) pengguna prosthetic menjadi satu kesatuan dan dianggap
sebagai beban.
1.7 SISTEMATIKA PENULISAN
Penyusunan skripsi ini terbagi menjadi beberapa bab yang berisi uraian
penjelasan dan dibagi dalam beberapa topik subbab. Secara garis besar uraian
pada bab-bab dalam sistematika penulisan dijelaskan pada uraian dibawah ini.
BAB I PENDAHULUAN
Bab ini menguraikan tentang latar belakang masalah, perumusan
masalah, tujuan penelitian, manfaat penelitian, batasan masalah, asumsi
dan sistematika penulisan. Uraian bab ini dimaksudkan menjelaskan
latar belakang penelitian yang dilakukan sehingga memberikan manfaat
sesuai dengan tujuan penelitian dengan batasan dan asumsi yang
digunakan pada penelitian ini.
BAB II TINJAUAN PUSTAKA
Bab ini berisikan tentang uraian teori, landasan konseptual dan
informasi dari literatur yang ada. Pada bagian ini diuraikan mengenai

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
I-6
gambaran umumprosthetic componen dan stump kaki, gaint
analysisperhitungan yang digunakan dalam pengumpulan dan
pengolahan data.
BAB III METODE PENELITIAN
Bab ini berisikan uraian-uraian tahapan yang dilakukan dalam
melakukan penelitian mulai dari identifikasi masalah hingga penarikan
kesimpulan pada penelitian perancangan alignment adapter for
prosthetic.
BAB IV PENGUMPULAN DAN PENGOLAHAN DATA
Bab ini berisikan uraian mengenai data-data penelitian yang digunakan
dalam proses pengolahan data dan hasil pengolahan sebagai
rekomendasi dari hasil penelitian ini.
BAB V ANALISIS DAN INTERPRETASI HASIL
Bab ini berisi tentang analisis dan interpretasi hasil daripengumpulan
dan pengolahan data dari hasil rekomendasi.
BAB VI KESIMPULAN DAN SARAN
Bab ini menguraikan target pencapaian dari tujuan penelitian dan
kesimpulan yang diperoleh dari pembahasan sebelumnya berupa
pembahasankesimpulan hasil yang diperoleh dan memberikan saran
perbaikan yang dilakukan untuk penelitian selanjutnya.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
BAB II TINJAUAN PUSTAKA
Bab ini menguraikan teori-teori yang diperlukan dalam mendukung penelitian, sehingga
pelaksanaan eksperimen, pengolahan data dan analisis permasalahan dapat dilakukan secara
teoritis.
2.1 AMPUTASI
Amputasi dapat diartikan sebagai tindakan memisahkan bagian tubuh sebagian atau
seluruh bagian ekstremitas. Tindakan ini merupakan tindakan yang dilakukan dalam kondisi
pilihan terakhir manakala masalah organ yang terjadi pada ekstremitas sudah tidak mungkin
dapat diperbaiki dengan menggunakan teknik lain, atau manakala kondisi organ dapat
membahayakan keselamatan tubuh klien secara utuh atau merusak organ tubuh yang lain seperti
dapat menimbulkan komplikasi infeksi(Handicap International, 2006).
Amputasi tungkai kaki bawah lutut (below-knee amputation) merupakan amputasi
sepanjang area tulang tran tibial. Batas perpotongan amputasi bawah lutut di awali dari tonjolan
tulang tibial plateau hingga batas tonjolan tulang malleolus (Radcliffe, 1961). Tingkat amputasi
tungkai bawah lutut dapat dibagi menjadi 3 tingkatan amputasi yaitu short stump, medium stump
dan long stump(Handicap International, 2006).
Tingkatan amputasi mempengaruhi sudut cakupan gerak atau ROM (ring of motion) dan
kontraktur stump. Kontraktur stump terjadi akibat pemendekan salah satu otot pada stump
(muscle shortening). Kontraktur stump mengakibatkan sendi lutut pada tungkai yang teramputasi
tidak mampu melakukan gerakan ekstension sepenuhnya.Berikut ini adalah gambar sudut
kontraktur pada tungkai kaki yang mengalami amputasi seperti ditunjukan pada gambar 2.1.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
Gambar 2.1 Kontraktur stump Sumber: Handicap International, 2006
Cakupan gerak sendi lutut pada tungkai kaki normal mampu melakukan gerakan
flexiondengan besaran 0° - 130° dan gerakan Extensiondengan besaran 0 - 5° - 10°, seperti pada
gambar 2.2.
Gambar 2.2Cakupan gerak pada tungkai kaki normal Sumber: Handicap International, 2006
2.2 PROSTHETIC KAKI BAWAH LUTUT
Prosthetic merupakan alat ganti anggota gerak tubuh yang tidak ada.Anggota gerak
tubuh terdiri dari anggota gerak atas yaitu lengan dan tangan serta anggota gerak bawah yaitu
tungkai dan kaki (May, 1996).Prosthetic anggota gerak bawah memiliki fungsi utama sebagai
mobilisasi atau berjalan.Ketiadaan anggota gerak bawah tubuh dapat dibagi menjadi enam
meliputi ketiadaan kaki bagian tepat panggul (hip disarticulation) ketiadaan kaki bagian atas
lutut (above- knee amputation) dan ketiadaan kaki bagian bawah lutut (below- knee), ketiadaan
bagian tengah lutut (middle-knee disarticulation) ketiadaan pergelangan kaki (ankle
disarticulation) dan ketiadaan telapak kaki (syme amputation).
2.2.1 Prosthetic Kaki Bawah Lutut
Komponen dasar dari prosthetic bawah lutut (below-knee) terdiri dari foot, ankle, shank,
socket.Bentuk prosthetic bawah lutut terlihat pada gambar 2.3.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
Gambar 2.3 Below knee prosthetic
Sumber: Handicap International, 2006
a. Foot – Ankle
Kaki prosthetic harus terlihat baik dan dapat bergerak semirip mungkin seperti kaki
sesungguhnya. Ada banyak desain kaki, ada yang sederhana dan ada pula yang
kompleks.Komponen telapak kaki prosthetic mempunyai beberapa tipe, antara lain adalah
sebagai berikut:
1. SACH (Solid Ankle Cushioned Heel) Foot.
SACH adalah kaki yang paling banyak digunakan di dunia. Kaki ini berfungsi baik,
ringan dan sangat kuat. Bagian-bagiannya tidak ada yang bergerak dan awet. Kaki yang dipakai
oleh Handicap International di Kamboja adalah SACH foot. Kaki seperti ini cukup baik
kualitasnya, murah dan dapat dibuat dari karet pada negara-negara berkembang.
2. Single axis foot
Desain lama single axis foot kini jarang digunakan. Sendi pergelangan kaki terbuat dari
logam, meniru gerak pergelangan kaki sesunggunhnya, meski tidak dapat melakukan gerak
inversion/eversion.Plantarflexion bumper meredam goncangan akibat gerak tumit. Jari-jari
elastis memungkinkan gerakan mendorong. Gerak pergelangan kaki memungkinkan
perputaran/roll over menjadi semakin mudah.
3. Multi-axis foot
Seperti namanya, multi-axis foot dapat digerakkan secara bebas. Multi-axis foot dapat
bergerak dengan mudah secara plantar flexion. Gerak kaki ini dikendalikan oleh ring karet /
rubber ring di sekitar sendi bola / ball joint. Saat kaki bergerak, ring ditekan. Resistensi kaki

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
untuk bergerak juga dapat disesuaikan dengan kondisi pasien dengan kelenturan bumper karet
yang sesuai. Kaki ini banyak digunakan pada kaki endoskeletal. Kaki ini bergerak seperti kaki
asli, tapi tidak stabil pada posisi berdiri. Kelemahan lainnya adalah bahwa kaki ini berat.Buffer
ring dari karet dapat rusak dengan cepat, sehingga kaki ini kurang cocok untuk kondisi basah
maupun kering dan berdebu.
4. Energy recovery foot
Kaki jenis ini lebih tepat untuk pasien amputasi yang mampu berjalan/berlari sangat
cepat.Beban pada kaki bertambah tiga kali lipat ketika berlari. Kaki memiliki tumit elastis yang
kuat untuk meredam beban waktu berlari dan jari elastis yang kuat yang memberi energi dorong
yang dibutuhkan untuk berlari. Pada tipe ini, energi yang diserap dari tekanan tumit dilepaskan
melalui gerak jari kaki, untuk menciptakan energi dorong.
b. Shank
Shank memiliki fungsi menjaga kaki. Socket pada posisi seharusnyamentransfer berat
badan pasien dari socket ke kaki, membuat kaki terlihat lebih baik (cosmetik).Komponen betis
(body shank) dapat terbuat dari berbagai bahan, tergantung dari metode yang digunakan dalam
pembuatan suatu prosthetic, apakah menggunakan metode endoskeletal atau metode
eksoskeletal.
Apabila pembuatan prosthetic tersebut menggunakan metode eksoskeletal maka bahan
yang digunakan adalah kayu dan aluminium, sedangkan metode endoskeletal maka bahan yang
dapat digunakan adalah pylon tube.
c. Socket
Socket merupakan bagian dari prostheticberfungsi menahan stumppengguna.Socket
didesain untuk mentransfer berat badan pasien melalui prosthetic ke tanah dengan nyaman.
Socket transtibial memiliki beberapa tipe. Beberapa di antaranya memiliki nama yang berbeda
meski mempunyai arti yang sama,seperti beberapa contoh sebagaiberikut.
1. Socket patellar tendon-bearing disebut sebagai socket PTB.
2. Socket supracondylar disebut socket PTB-SC. Juga, disebut singkatan bahasa Jermannya
yaitu socket KBM (Kondylen-Bettung Munster).
3. Socket supracondylar suprapatellar disebut sebagai PTB-SCSP socket. Sering disebut dalam
singkatan bahasa Prancisnya yaitu socket PTS (Prostesis Tibiale Supracondylienen).
2.3 ALIGNMENTBELOW KNEE PROSTHETIC

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
Pensejajaran (Alignment)adalah mekanisme yang digunakan untuk mengubah hubungan
antar komponen prostetic agar mendapat gaya berjalan yang terbaik bagi amputee secara
individual(Handicap International, 2006). Alignment berfungsi mengoptimalisasi pola jalan
amputee dengan mengatur arah garis beban pada komponen prosthetic.Alignmentmemberikan
peranan penting pada kualitas sebuah prosthetic.Optimalisasi alignment prosthetic melalui tiga
tahapan yaitu bench alignment, static aligmen dan dynamic alignment.
2.3.1 Bench Alignment/ AlignmentPlumb Line
Bench alignment/ alignment plumb line adalah alat bantu yang digunakan untuk
mensejajarkan komponen prosthetic dalam bidang pandangan sagital dan frontal, pensejajaran
dilakukan pada tiga garis pandangan medial, lateral dan anterior(Handicap International,
2006).Tiga garis pandangan berperan sebagai garis referensi alignment/ pensejajaran
prosthetic.Bench alignment bertujuan memposisikan titik tengah komponen prosthetic yang
meliputi socket, body shank dan foot agar bertepatan dengan garis referensi sebelum prothetic di
pakai.
Gambar 2.4 Bench alignment Sumber: Handicap International, 2006
2.3.2 Static Alignment (Pemeriksaan sebelum dicoba)
Static alignment adalah pensejajaran komponen prosthetic saat prosedur fitting
yangdigunakan untuk memvisualisasikan posisi pusat garis gravitasi tubuh atau garis beban

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
ketika berdiri(Handicap International, 2006).Pensejajaran komponen prosthetic dilakukan agar
pusat garis gravitasi tubuh atau garis beban jatuh berada pada komponen prosthetic.
Alignment harus memenuhi prinsip kerja prosthetic dimana socket dalam keadaan flexi
dan adduction dengan ukuran derajat sesuai kontraktur amputee.Telapak kaki dengan body
shankdorsi flexi 20–30 dan external rotasi 50 – 70.
Gambar 2.5 Static alignment
Sumber: Handicap International, 2006
2.3.3 Dynamic Alignment(Pemeriksaan saat dicoba)
Dynamic alignment merupakan pensejajaran yang dilakukan pada prosthetic setelah
melakukan uji berjalan. Dynamic alignment bergantung pada keterampilan pengamatan dan
analisis dari prosthetic pada saat digunakan berjalan.Acuan dynamicprosthetic adalah prosthetic
mampu bergerak selaras terhadap salah satu kaki yang masih ada(Handicap International, 2006).
Tahap pengamatan pada dynamic alignment diawali dengan pemeriksaan keadaan
prosthetic.Prosthetic saat dicobakan harus dalam keadaan nyaman, baik saat memakai maupun
pada saat melepaskannya, dengan tidak meninggalkan prinsip kerja prosthetic secara fungsional
maupun dari segi kosmetiknya. Tepi socket dan tempat penguncinya harus meyakinkan dan
berfungsi baik.Hal ini, dapat di test dengan caraprosthetic dalam keadaan extensi penuh
kemudian ditarik atau dengan ayunan yang kuat prosthetic tidak lepas dari stump. Pada saat
berdiri tegak dengan memakai prosthetic, tubuh dalam posisi normal dimana kedua SIAS (Spina

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
Illiaca Anterior Superior) kanan dan kiri dalam keadaan simetris, shoulder joint kanan dan kiri
dalam keadaan simetris (dalam keadaan satu level). Bila SIAS dan shoulder joint tersebut
terdapat peninggian sepihak perlu diperhatikan, maka perlu mengukur kembali prosthetic
tersebut sesuai dengan ukuran individu. Sendi lutut dalam posisi simetris dalam keadaan valgum
atau varum.Bila belum memenuhi syarat tersebut diatas maka pemeriksaan dynamic alignment
belum dapat dilakukan.
Pemeriksaan dynamic alignment pada prosthetic, pengamat harus memperhatikan setiap
pola jalan yang dilakukan amputee, menanyakan kepada amputee, mengenai keluhan yang
dialaminya, seperti adanya rasa nyeri sehingga membuat rasa yang tidak nyaman dan pola jalan
yang menyimpang. Penyimpangan pola jalan yang terjadi terdiri dari penyimpangan pada saat
heel strike, terdapat fleksi lutut berlebihan yang disebabkan karena chusion heel yang terlalu
kaku, bagian anterior socket terlalu panjang, rasa tidak nyaman pada bagian distal tibia sehingga
tidak dapat menahan gerakan fleksi lutut, penyimpangan pada saat midstance, penyimpangan
biasanya berupa dorongan ke medial dari lutut karena penempatan kaki prostesis yang tidak tepat
terhadap socket, serta fleksi lutut yang berlebih karena dorsofleksi pergelangan kaki,
penyimpangan pada saat push off, adanya fleksi lutut tiba-tiba karena lutut miring ke anterior
atau telapak kaki terlalu dorsofleksi, adanya ekstensi lutut tiba-tiba pada saat toe off karena
telapak kaki terlalu plantar fleksi (Quirinus, 1996).
Gambar 2.6 Dynamic alignment
Sumber: Handicap International, 2006

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
2.4 PRINSIP BIOMEKANIKBELOW KNEE PROSTHETIC
Prinsip-prinsip biomekanika pada below kneeprosthetic meliputi beberapa bagian, yaitu:
2.4.1 Prinsip-Prinsip Mekanik
Mekanik itu sendiri berhubungan dengan tindakan dari tekanan pada bodi. Biomekanik
berhubungan dengan tindakan dari kekuatan fisik pada tubuh manusia dan yang digunakan.
Biomekanik berhubungan juga dengan banyak faktor yang mempengaruhi sistem otot kerangka
seperti aktivitas elektronik dalam otot, tekanan dari luar yang menghasilkan perubahan kulit,
jumlah energi, untuk daya gerak, dan pola gerakan yang ektrim dari analisa kinematik atau
gerak. Kekuatan adalah tindakan atau gerakan dari bagian tubuh atau lainnya yang cenderung
merubah bentuk gerak dari bagian tubuh berikutnya. Lebih dari satu bagian tubuh selalu terlibat
setiap membicarakan kekuatan. Kekuatan antara bagian-bagian tubuh selalu dalam bentuk
berpasangan. Merupakan hukum gerak Newton ketiga. “Untuk tiap kekuatan gerakan ada
kesamaan dan reaksi kekuatan yang bertolak belakang”.
Beberapa kasus gerakan lebih disadari misal ketika menarik beban berupa kereta barang.
Kasus lain, reaksi lebih berupa bukti sama dengan reaksi dorongan pada mesin jet. Hal ini sering
terasa nyaman dalam menganalisa kekuatan untuk mengamati gerakan dan reaksi secara terpisah.
Bagian tubuh sangat banyak digunakan dalam analisa teknik seperti menunjukkan efek-efek dari
gerakan dan reaksi secara terpisah. Mempertimbangkan situsasi dimana tubuh menarik beban.
Teknik mengisolasi bagian tubuh dari tiap-tiap hal disekitarnya dan menunjukkan kekuatan yang
digunakan untuk mendorong dari bagian-bagian tubuh yang lain disebut diagram bagian tubuh
bebas. Teknik ini digunakan untuk analisa kekuatan kontak dari socket pada stump. Vektor-
vektor merupakan kuantitas yang diukur besarannya dan arah yang bisa disajikan secara grafik
dengan anak panah. Besaran dari kuantitas vektor seperti kekuatan ditunjukkan secara skala
arbitrasi dengan panjang oleh anak panah. Arah ditunjukkan dengan garis dari batang dan kepala
dari anak panah.
Jika konsep dari kekuatan vektor dari diagram bagian tubuh bebas dikombinasikan,
hubungan kuantitatif dari beberapa kekuatan bertindak secara simultan. Berat dalam bagian
tubuh adalah sepasang kekuatan tarik menarik antara tubuh dan bumi. Manusia menarik bumi
dengan kekuatan yang sama dengan besarnya berat tubuh. Analisis masalah prosthetic kebalikan
dari prinsip ini sering digunakan. Jika tubuh diketahui dalam keadaan equilibrium, poligon

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
kekuatan
diketahui
dari tiga
memprod
kekuatan
batang ke
kearah ja
meningk
ditunjukk
M
Tambahk
kebalikan
untuk me
2.4.2 Tin
K
yang me
panggul
Melalui
faktor–fa
dua fase
merupak
heel cont
lantai (he
n yang terd
i. Kekuatan
a kekuatan
duksi rotasi d
n dikali jarak
eseimbangan
arum jam. J
at secara pro
kan dalam lb
Menjaga rota
kan sedetik k
n arah jarum
enjaga rotasi
ngkat Berja
Kekomplekan
empengaruhi
poros vertik
daya pengg
aktor bentuk
e saat kaki
an bagian s
tact, foot fla
eel contact)
ekat bisa s
yang memi
yang berger
dari tubuh m
k tegak lurus
n dari jungka
Jika baik ke
oporsional. J
b-ft searah ja
G
asi selama
kekuatan P d
m jam yang
i, produk dar
alan Normal
n proses day
i bentuk ge
kal, kemirin
gerak, tubuh
gerakan sej
berjalan ya
iklus diman
at, midstance
, kemudian
sangat mem
liki efek yan
rak secara
mengenai poi
s dari garis a
at jungkit. Ji
ekuatan F a
Jika kekuata
arum jam.
Gambar 2.7Sumber: Rad
gerakan d
dengan lenga
mana mome
ri F kali d ha
l
ya gerak terb
erakan yaitu
ngan lateral
manusia m
umlah otot u
itu fase ber
na tungkai ac
e point, dan
dilanjutkan
mbantu dalam
ng sama pad
simultan. M
in referensi.
arah kekuata
ika kekuatan
atau jarak d
an diukur den
7 Kekuatan dcliffe dan Foo
dari kekuata
an pengungk
en produk d
arus sama de
bukti ketika
u interaksi s
dari panggu
melibatkan p
utama dari b
rdiri dan fa
cuan berkon
n heel off.Fa
dengan kak
m menyeles
da kotak seb
Momen dari
Tiap-tiap be
an menuju po
n F diterapka
dari d menin
ngan pons d
momen
ort, 1961
an F, aksi
kit b. Kekuat
dari P kali b
engan P kali
mempertim
sendi lutut,
ul dan perg
engaruh dar
bagian tubuh
ase berayun.
ntak dengan
se berdiri di
ki yang men
saikan keku
bagai keselu
kekuatan c
esarannya ad
oin referens
an pada jarak
ngkat, kecen
dan jarak den
berbalik h
tan P sekara
b [lb-ft]. Mo
b.
mbangkan en
flexi lutut,
geseran later
ri total pola
h yang lebih
Fase berdir
lantai, terb
imulai saat t
napak penuh
uatan yang
uruhan komb
cenderung u
dalah produk
i. Pertimban
k d, rotasi ba
nderungan r
ngan feet, mo
harus diterap
ang menghas
omen equilib
nam faktor u
flexi hip, r
ral dari pan
a pergeseran
rendah. Terd
ri (stance ph
bagi menjadi
tumit menye
h ke lantai (
tidak
binasi
untuk
k dari
ngkan
atang
rotasi
omen
pkan.
silkan
brium
utama
rotasi
nggul.
n dari
dapat
hase)
i fase
entuh
(foot-

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
flat).Midstance dimulai saat posisi foot-flat dan berakhir saat heel-off. Push-off dimulai saat heel-
off dan berakhir saat toe-off bergerak. Fase berayun (swing phase) merupakan bagian siklus
dimana tungkai acuan tidak menyentuh lantai. Fase ini dimulai dengan tidak tersentuhnya kaki
ke lantai dan berakhir saat tumit menempel ke lantai (heel contact).Gambar 2.6 menunjukkan
siklus berjalan manusia normal.Gambar 2.7 menunjukkan fase berdiri dan berayun secara
keseluruhan.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
Gambar 2.8 Siklus berjalan normal
Sumber: C.W. Radcliffe dan Foort, 1961
Gambar 2.9 Fase berdiri dan berayun Sumber: Staff Prosthetics and Orthotics, 1990

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-1
gerakan otot dari keseluruhan sendi yang menyebabkan fleksibilitas plantarflexion
atau dorsiflexion. Mekanisme dari kelompok otot-otot utama dari extremity-lower
ditunjukkan pada gambar 2.10.
Gambar 2.10Mekanisme otot-otot kaki Sumber: C.W. Radcliffe dan Foort, 1961
Tahap-tahap dalam siklus berjalan dijelaskan dengan beberapa bagian.
Mulai dari saat belum bergerak, melangkah, dan saat kedua kaki kembali seperti
posisi semula. Beberapa bagian tersebut dijelaskan, sebagai berikut:
a. Kejadian-kejadian awal sebelum kontak tumit pertama,
Referensi pada gambar 2.6 khususnya pada kurva di bagian yang
berhubungan dengan akhir dari tahapan mengayun (sekitar 95% siklus lengkap)
dapat dicatat bahwa gerakan sendi lutut mencapai extensi maksimal ketika
sebelum kontak tumit dan periode dari fleksibilitas lutut yang telah terjadi dimana
berlanjut menjadi tahap cara berdiri. Penurunan pada tingkat extensi lutut ini di
akhir tahap mengayun, persiapan pada kaki sebelum membuat kontak dengan
lantai, tergantung pada gerakan dari kelompok otot-otot hamstring seperti yang
terlihat pada kurva aktivitas otot. Kelompok otot hamstring mengikat sampai
panggul bagian belakang pada persendian dan sampai tibia dan fibula di bawah
sendi lutut. Tensi atau tekanan dalam kelompok hamstring dapat menyebabkan
ekstensi pangkal paha, fleksibilitas lutut atau keduanya secara berurutan.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-2
b. Tahap kontak tumit,
Ketika tumit membuat kontak, gerakan otot hamstring cenderung
memberikan kekuatan ke belakang sehingga terjadi kontak dengan lantai. Lutut
bergerak dengan cepat selama tahap ini. Aktivitas dalam kelompok otot hamstring
ini terus berlanjut tetapi dengan besaran yang terus menurun sedangkan gerakan
otot quadriceps mulai terjadi dengan cepat. Kelompok otot quadriceps bergerak
ke depan sendi otot dan kelompok otot pretibial bergerak sekitar persendian,
menjalankan fungsi interaksi lutut dan menjadi efek dari gerakan lembut dari kaki
depan ke lantai. Fungsi utama dari lutut dan sendi selama kontak tumit adalah
penyerapan goncangan kontak tumit dan menjaga langkah lembut dari pusat
gravitasi dari keseluruhan tubuh. Studi energi menunjukkan bahwa lutut dan sendi
memberikan kontribuisi yang sama dalam fungsi kontak tumit. Fungsi dari lutut
sama dengan penyerapan goncangan yang seringkali diabaikan.
c. Tahap tengah berdiri atau midstance point,
Gerakan fleksibel lutut yang terkendali dari tahap kontak tumit menjadi
tahap midstance (antara kaki datar dan tumit lepas). Sudut maksimal dari flexi
lutut sekitar 20 derajat dan muncul dalam bagian pertama tahap midstance. Ketika
tubuh bergerak melewati lutut yang stabil, bagian atas daya tolak dari reaksi lantai
bergerak ke depan pada sol dari kaki, kemudian meningkat ke gerakan
dorsifleksion pergelangan kaki dan menyebabkan lutut memulai periode gerak
extensi. Pada periode ini, kendali pada kaki dilakukan melalui interaksi sendi
lutut, dengan aktivitas otot minimal dalam kelompok yang berfungsi pada pangkal
paha dan lutut. Lutut mencapai posisi gerak extensi maksimalnya ketika tumit
meninggalkan tanah, dengan kelompok otot calf yang memberikan ketahanan
pada ekstensi lutut dan gerakan dorsifleksi sendi. Ketika tumit menginggalkan
tanah, lutut memulai kembali periode flexinya, menghasilkan gerakan otot utama
dari sendi pangkal paha atau panggul. Urutsan dari kendali gerakan fleksibel pada
kontak tumit, menghasilkan perluasan sedikit demi sedikit dalam tahap midstance
dan gerakan flexi yang terkendali sebagai persiapan untuk mengayun dalam
menyelesaikan gerakan lutut atau cara berjalan yang menghemat energi pada
orang normal.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-3
d. Fase push-off,
Selama tahap push-off, lutut terbawa ke depan oleh gerakan sendi panggul
dan keseimbangan sensitif sehingga harus dijaga agar terjadi interaksi pangkal
paha, lutut, dan sendi pergelangan kaki. Kombinasi gerak ini memiliki dua tujuan
yaitu menjaga gerakan halus ke depan dari tubuh secara keseluruhan dan
mengawali gerakan angular dalam mengayun.
Ketika lutut memulai gerak flexi, (sesaat sebelum tumit meninggalkan
tanah), otot lutut pertama harus menahan efek eksternal dari kekuatan bola kaki
yang melewati ruang di bagian sendi lutut. Jadi, ketika lutut digerakkan ke depan
oleh gerakan sendi pangkal paha, lutut harus membalik tiap gerakan untuk
meberikan ketahanan yang terkendali pada fleksibilitas dengan meningkatkan
aktivitas otot quadriceps. Beberapa hal yang bersifat tidak tetap pada aktivitas
otot hamstring dicatat sebagai antagonistik. Kelompok otot calf berlanjut
memberikan plantarlexion aktif selama tahap push-off. Pada waktu jari kaki
meninggalkan lantai, lutut telah bergerak secara flexi dengan sudut 40° sampai
45° pada maksimum 65° yang mana tercapai pada tahap ayunan.
Perbaikan kaki prosthetic ke dalam fungsi yang normal pada fase push-off
sangat sulit dilakukan. Posisi lutut sangat penting, sama seperti sumber aktif dari
energi pergelangan kaki. Karena kurangnya sumber aktif dari energi pergelangan
kaki, awalan dari gerak fleksi pada lutut pasien amputasi yang memakai prosthetic
harus berasal dari gerakan flexi pangkal paha.
e. Fase mengayun gerakan quadriceps,
Tujuan keseluruhan dari fase mengayun adalah mendapatkan kaki dari satu
posisi ke posisi berikutnya dengan gerakan yang lembut. Pada awal tahap ayunan,
kaki harus menyelesaikan periode peningkatan kecepatan dalam energi geraknya
yang disebabkan oleh gerakan ekstensi aktif dari pergelangan kaki dan flexi dari
pangkal paha selama tahap push-off. Lutut melakukan gerakan flexi dan berlanjut
menjadi menegang setelah jari kaki lepas dari pijakan. Selama melakukan jalan
cepat, dihasilkan gerakan flexi lutut yang berlebih dan tumit meningkat tetapi hal
ini tidak berlaku untuk gerakan kelompok otot quadriceps dalam membatasi sudut
flexi lutut sekitar 65°dan kemudian memulai gerakan extensi lutut. Gerakan
extensi lutut berlanjut sebagai hasil dari kombinasi efek pendulum, dimana

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-4
kecenderungan gerak terdapat pada bagian shank, kaki dan otot. Gerakan kecil
otot quadricepsperlu karena faktor-faktor lainnya juga sama pentingnya. Otot
iliopsoa memberikan kontribusi dalam mengembangkanflexi pangkal paha secara
aktif yang mana mendorong akselerasi lutut ke depan dan ke belakang.
f. Midswing,
Selama midswing, terdapat periode dimana aktivitas otot minimal dan
akselerasi kaki ke belakang dan ke depan seperti pendulum dengan kekuatan
gerakan yang disebut pivot point.
g. Terminal deceleration-hamstring action,
Pada akhir ayunan, tingkat dari extensi gerakan lutut harus dikurangi
dalam rangka untuk menurunkan kaki pada awal kontak tumit. Penurunan
akselerasi terminal ini pada kaki normal untuk menahan gerakan extensi dari
kelompok otot hamstring.
h. Gerakan lutut dalam gaya berjalan pasien amputasi,
Penyebab kesulitan dalam penggunaan prosthetic muley (bawah lutut tanpa
ada sendi bantu sisi) adalah kerusakan stump, khususnya sendi lutut. Penyebab
dari kesulitan karena tegangan yang berlebih pada struktur ligamen dari lutut oleh
extensi berlebih dari lutut yang menerima beban. Melindungi struktur ligamen
pada sisi yang teramputasi, penting untuk menjaga dimana batas keamanan dari
kekuatan dan momen dari lutut yang cenderung menekan lutut sampai posisi
extensi yang berlebihan. Pada orang normal, rasa yang nyaman akan posisi lutut
membatasi momen gerak yang berlebih dengan menjaga pusat lutut pada garis
dimana kekuatan di kirim melalui tungkai kaki. Cara ini lutut untuk bergerak
lebih terkendali.
2.1 ANTHROPOMETRI DATA BIOMEKANIKA
Menurut Frankel dan Nordin (1980), biomekanika secara umum
didefinisikan sebagai ilmu yang menggunakan konsep fisika dan teknik untuk
menjelaskan gerakan pada tubuh manusia dan gaya yang bekerja pada bagian
tubuh tersebut pada aktivitas sehari-hari.
Anatomi tubuh manusia terdiri dari segmen tubuh yang dihubungkan oleh
persendian. Analisis biomekanika digunakan untuk memodelkan manusia dalam
suatu sistem benda jamak yang tersusun dari link (penghubung) dan

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-5
joint(sambungan). Link mewakili segmen tubuh dan joint menggambarkan sendi
sebagai penghubung tiap segmen tubuh. Menurut Chaffin dkk. (1999), tubuh
manusia terdiri dari enam link, sebagai berikut:
1. Link lengan bawah yang dibatasi oleh joint telapak tangan dan siku.
2. Link lengan atas yang dibatasi oleh joint siku dan bahu.
3. Link punggung yang dibatasi oleh joint bahu dan pinggul.
4. Link paha yang dibatasi oleh joint pinggul dan lutut.
5. Link betis yang dibatasi oleh joint lutut dan mata kaki.
6. Link kaki yang dibatasi oleh joint mata kaki dan telapak kaki.
Gambar 2.11 Tubuh sebagai sistem enam link dan joint Sumber: Chaffin et al, 1999
Menurut Chaffin et al. (1999), anthropometri merupakan ilmu yang
berhubungan dengan pengukuran massa, bentuk, ukuran dan inersial tubuh
manusia. Hasil dari pengukuran ini berupa data statistik yang menggambarkan
ukuran, massa dan bentuk tubuh manusia. Data anthropometri merupakan
fundamen dasar biomekanika yang digunakan untuk membangun model
biomekanika yang mengkaji kekuatan dan gaya pada tubuh manusia.
Pengukuran anthropometri segmen tubuh manusia disetarakan dengan
model benda jamak. Panjang setiap link diukur berdasarkan persentase tertentu
dari tinggi badan, sedangkan beratnya diukur berdasarkan persentase dari berat
badan. Penentuan center of mass tiap link didasarkan pada persentase standar yang
diadaptasi dari penelitian Dempster (1955) seperti digambarkan pada gambar
2.11. Panjang link tiap segmen berotasi di sekitar sambungan dan mekanika terjadi
mengikuti hukum Newton. Prinsip-prinsip ini digunakan untuk menyatakan gaya

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-6
mekanik pada tubuh dan gaya otot yang diperlukan untuk mengimbangi gaya-
gaya yang terjadi.
Gambar 2.12 Permodelan titik-titik pusat massa dempster Sumber: Chaffin DB, et al, 1999
Pada penetuan massa tiap segmen, tubuh manusia digambarkan sebagai
stick diagram seperti pada pemodelan Dempters (1955). Persentase massa segmen
tubuh ditentukan berdasarkan pemodelan distribusi berat tubuh (Webb
Associaties, 1978).
Tabel 2.1 Pemodelan distribusi berat badan
Sumber: Webb Associaties, 1978
a. Head 73.80%b. Neck 26.20%a.Thorax 43.80%b. Lumbar 29.40%c. Pelvis 26.80%a. Upper arm 54.90%b. Forearm 33.30%c. Hand 11.80%a. Thigh 63.70%b. Shank 27.40%c. Foot 8.90%
Group Segment (%) of Total Body Weight
Individual Segment (%) of Group Segment Weight Tubuh
Head and Neck 8.40%
Total Leg 15.70%
Torso 50.00%
Total Arm 10.20%
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-7
2.2 ANALISIS GERAK BIOMEKANIKA
Pada pengguna prosthetic, analisis biomekanika digunakan untuk
mengetahui pola berjalan pengguna prosthetic apakah telah sesuai dengan pola
berjalan manusia normal (Radcliffe and Foort, 1961). Hal tesebut diketahui
dengan keseimbangan gaya dan momen pada kaki normal maupun kaki prosthetic
selama pengguna prosthetic berjalan dalam satu periode waktu.
2.6.1 Keseimbangan gerakan manusia
Susan J. Hall (1999) menyebutkan bahwa keseimbangan (equilibrium)
merupakan karakteristik keadaan dimana terjadi keseimbangan gaya dan torsi
(momen gaya) pada tubuh manusia. Berdasarkan hukum Newton pertama, tubuh
dalam kondisi equilibrium ketika dalam keadaan diam (motionless) atau bergerak
dengan kecepatan konstan. Ketika tubuh dalam keadaan diam (sewaktu berdiri
dengan satu kaki atau berdiri di atas papan keseimbangan) hal ini disebut sebagai
static equilibrium. Tiga kondisi yang harus dipenuhi tubuh untuk mencapai
kondisi static equilibrium, sebagai berikut:
1. Jumlah total gaya vertikal yang terjadi pada tubuh sama dengan nol.
2. Jumlah total gaya horisontal yang terjadi pada tubuh sama dengan nol.
3. Jumlah total torsi/momen harus sama dengan nol.
∑Fx = 0
∑Fy = 0
∑t = 0.............................................................................. 2.1
dengan, Fx = Gaya Vertikal (N)
Fy = Gaya Horisontal (N)
t = Torsi (Nm)
2.6.2 Gaya
Gaya dapat diartikan sebagai sebuah dorongan atau tarikan pada suatu
benda. Gaya dapat menyebabkan suatu benda bergerak dengan arah dan
percepatan tertentu. Setiap gaya mempunyai karakteristik berupa besaran dan arah
tertentu. Gaya didefinisikan sebagai hasil perkalian antara massa dengan
percepatan (Hall, 1999). Satuan dasar dari gaya berdasarkan sistem metric adalah
Newton (N).
F = m x a.............................................................................. 2.2
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-8
2.6.3 Torsi (Momen)
Selain bergerak sesuai arah bekerjanya, benda cenderung untuk memutar
dalam suatu sumbu. Perputaran benda tersebut dikarenakan adanya gaya yang
menyebabkan perpindahan, atau disebut torsi. Torsi yang juga dikenal sebagai
puntiran (momen gaya) merupakan hasil kali antara gaya dan lengan gaya.
t = F x d............................................................................... 2.3
dengan, F = Gaya pada suatu benda(N)
d = Lengan momen (m)
Gambar 2.13 Sebuah momen Sumber: Gudang Ilmu Fisika, 2010
Torsi merupakan besaran vektor, sehingga selain mempunyai besar, torsi
juga mempunyai arah. Suatu vektor t mempunyai arah tegak lurus terhadap
bidang benda. Arah t adalah tergantung pada arah berputarnya benda akibat gaya
F dan d yang merupakan jarak gaya dari titik acuan (sumbu 0). Apabila arah rotasi
berlawanan dengan putaran jarum jam, maka torsi bernilai positif. Sebaliknya,
apabila arah rotasi searah dengan putaran jarum jam, maka arah torsi bernilai
negatif. Penentuan nilai momen positif atau negatif bisa saja berlainan, namun
yang terpenting harus selalu konsisten dari awal. Untuk menentukan arah torsi,
kita menggunakan kaidah aturan tangan kanan.
Dalam tubuh manusia, torsi dibangkitkan oleh otot di persendian yang
merupakan hasil dari gaya yang bereaksi di otot dengan jarak garis gaya otot
dengan pusat persendian tersebut. Saat joint bergerak pada suatu jarak tertentu,
terjadi perubahan momen gaya pada otot yang melintasi persendian.Perubahan
pada momen secara langsung akan menyebabkan jointtorque yang dibangkitkan
oleh otot.Satuan dasar dari momen dalam satuan SI adalah Newton-meter (N.m).

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-9
2.7 PENELITIAN SEBELUMNYA
Retno Wulan Damayanti pada tahun 2003 melakukan kajian mengenai
Perancangan Dan Pengembangan Prosthetic Kaki Bagian Bawah Lutut
Dengan Menggunakan Quality Function Deployment (QFD) diperoleh hasil
yang menyatakan bahwa prosthetic kaki bagian bawah lutut dengan komponen
insert socket silicone, sistem suspensi cuff rubber, ankle jenis adaptor rotator,
foot jenis Jaipur dan penguat pylonstainless steel. Prosthetic kaki bagian bawah
lutut hasil pengembangan dapat lebih mengakomodasi keinginan pengguna.
Fabianus Adi Suryono pada tahun 2007 melakukan kajian mengenai
Kajian Dalam Pengembangan Rancangan SACH Foot Untuk Pengguna
Prosthetic Jenis Below Knee Amputation Berdasar Pendekatan Biomekanika
diperoleh hasil yang menyatakan bahwa gaya normal untuk fase 1 yang terbesar
terjadi pada bagian hip yaitu sebesar 459,326 N dan yang terkecil terjadi pada
ankle baik kaki normal dan kaki prosthetic sebesar 327,49 N. Gaya normal untuk
fase 2 yang terbesar terjadi pada bagian ankle kaki normal yaitu sebesar 495,48 N
dan yang terkecil terjadi pada ankle kaki prosthetic sebesar 165,43 N. Gaya
normal untuk fase 3 yang terbesar terjadi pada bagian ankle kaki normal yaitu
sebesar 583,194 N dan yang terkecil terjadi pada bagian hip sebesar 476,563 N.
Gaya normal untuk fase 4 yang terbesar terjadi pada bagian ankle kaki normal
yaitu sebesar 623,32 N dan yang terkecil terjadi pada bagian hip sebesar 519,881
N. Gaya normal untuk fase 5 yang terbesar terjadi pada bagian hip yaitu sebesar
523,9 N dan yang terkecil terjadi pada ankle kaki normal sebesar 464,737 N. Gaya
normal untuk fase 6 yang terbesar terjadi pada bagian hip yaitu sebesar 459,326 N
dan yang terkecil terjadi pada ankle kaki normal sebesar 330,661 N. Gaya normal
untuk fase 7 yang terbesar terjadi pada bagian knee prosthetic yaitu sebesar
528,985 N dan yang terkecil terjadi pada ankle kaki normal sebesar 172,14 N.
Gaya normal untuk fase 8 yang terbesar terjadi pada bagian ankle prosthetic yaitu
sebesar 633,883 N dan yang terkecil terjadi pada hip sebesar 538,97 N. Gaya
normal untuk fase 9 yang terbesar terjadi pada bagian knee prosthetic yaitu
sebesar 481,183 N dan yang terkecil terjadi pada knee kaki normal sebesar
253,485 N. Pengembangan rancangan dititikberatkan pada berat SACH foot.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
II-10
Yulie Khrisna pada tahun 2006 melakukan kajian mengenai Usulan
Perbaikan Pada Prosthetic Anggota Gerak Bawah Jenis Socket
Quardrilateral Berdasarkan pendekatan Biomekanika diperoleh hasil yang
menyatakan bahwa usulan perbaikan gaya dan momen lebih stabil daripada
perhitungan gaya dan memen awal. Perbaikan prosthetic dilakukan dengan
merubah berat dan dimensi prosthetic. Sehingga diperoleh keseimbangan gaya
dan momen pada prosthetic usulan dari setiap fase berjalan.
Agus. S pada tahun 2010 melakukan Kajian Mengenai Biomekanika
Pada Pengguna Prosthetic Bawah Lutut Dengan Memperhatikan Fungsi
Ankle Joint dapat disimpulkan sebagai berikut:
Gaya yang dihasilkan prosthetic endoskeletal model pengembangan, untuk
segmen hip, knee dan ankle pada kaki normal maupun prosthetic, memiliki
keseimbangan gaya yang terbaik bagi amputee dibandingkan prosthetic
eksoskeletal dan endoskeletal merk Regal. Momen yang dihasilkan prosthetic
endoskeletal model pengembangan, untuk segmen hip, knee dan ankle pada kaki
normal maupun prosthetic, memiliki keseimbangan momen yang terbaik bagi
amputee dibandingkan prosthetic eksoskeletal dan endoskeletal merk Regal.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-1
BAB III METODOLOGI PENELITIAN
Metodologi penelitian merupakan gambaran mengenai langkah-langkah
sistematis yang dilakukan dalam tugas akhir berdasarkan tahapan yang
ditunjukkan pada gambar3.1.
Gambar 3.1 Metodologi Penelitian

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-2
Gambar 3.1 Metodologi Penelitian
Gambar 3.1 menjelaskan langkah dalam penelitian tugas akhir mengenai
perancangan dan kajian biomekanika rancangan alignment adapter for prosthetic
footpada pengguna prosthetic bawah lutut endoskeletal. Uraian penjelasan
metodologipenelitian di atas dijelaskan tahap demi tahap dalam sub bab di bawah
ini.
3.1 TAHAP IDENTIFIKASI MASALAH
Alignment/ penjajar adalah mekanisme yang digunakan untuk mengubah
hubungan antar komponen kakiprostetic agar mendapat gaya berjalan yang
terbaik bagi amputee. Adanya komponen yang mampu mengoptimalkan
alignment pada prosthetic diharapkan proses penjajaran mudah dilakukan.
Langkah-langkah yang ada pada tahap identifikasi masalahpenelitian tersebut
dijelaskan,sebagai berikut:
1. Latar belakang.
Penelitian yang diangkat dilatarbelakangi perlunya sebuah penjajaran pada
prosthetic bawah lutut. Pensejajaran dirancang agar mampu menangani berbagai
sudut kontraktur stump dengan level amputasi yang beragam. Mewujudkan hal
ini, perlu dirancang alat pensejajaran pada areasudut kontraktur stumpdengan
menyeimbangkan garis beban. Alat ini diharapkan pemakai prosthetickaki bawah
lutut mampu memberikan keseimbangan beban ketika dipakai.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-3
2. Perumusan masalah.
Perumusan masalah dalam membahas permasalahan pada penelitian ini
adalah bagaimana merancang komponen alignment adaptor pada prosthetic
bawah lutut sebagai alat menyesuaikan pensejajaran/ alignment dan pengaruhnya
terhadap pola jalan amputee.
3. Tujuan dan manfaat penelitian.
Tujuan dan manfaat penelitian merupakan gambaran dari sasaran yang
diharapkan dapat dicapai.Tujuan penelitian ditetapkan agar penelitian yang
dilakukan dapat menjawab dan menyelesaikan rumusan masalah.Penelitian ini
bertujuan untuk menghasilkan komponenalignment adapter for prosthetic
footbawah lutut dengan system adjustabledan mengetahui sejauh mana pengaruh
rancangan komponen alignment adapter for prosthetic foot bawah lutut terhadap
pola jalan. Adapun tujuan yang secara khusus dalam penelitian ini adalah
merancang alignment adapter for prosthetic foot bawah lutut dengan system
adjustable pada komponen pensejajaran kemudian menguji desain rancangan
alignment adapter for prosthetic foot bawah lutut tersebut terhadap siklus berjalan
(gait cycle)amputee.
Dengan ditetapkannya tujuan tersebut diharapkan bahwa hasil penelitian
yang diperoleh nantinya dapat bermanfaat mengetahui tingkat keseimbangan jalan
pengguna prosthetic bawah lutut dengan pemakaian alignment adapter untuk
menentukan alignmentpada prosthetic.
4. Studi literatur dan studi lapangan.
Studi pustaka dilakukan untuk mendukung proses identifikasi perancangan
alignment adapter pada prosthetic dengan system adjustablesebagai alat bantu
untuk mengkondisikan alignment pada komponen kakiprosthetic. Informasi
pendukung dalam studi ini meliputi teori mengenai tingkatan amputasi
mempengaruhi sudut cakupan gerak/ROM (ring of motion) dan kontraktur stump.
Kontraktur stump terjadi akibat pemendekan salah satu otot pada stump
(muscle shortening). Sumber dari studidiketahui bahwa pada beberapa kasus
amputasi bawah lutut sudut kontraktur stump yang dihasilkan bervariasi sesuai
dengan tingkat amputasi. Sudut kontraktur stump terjadi antara 5° sampai dengan
7° (Handicap International, 2006). Berdasarkan informasi tersebut dapat diketahui

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-4
karakteristik kebutuhan yang menjadi dasar perancangan alignment adapter for
prosthetic foot.
Studi lapanganatau studi aplikatif digunakan untuk mengetahui dan
mempelajari keadaan kontraktur stump dan alignmentpada pengguna
kakiprostheticdengan maksudmendapatkan informasi awal yang lengkap serta
menentukan detail masalah yang diangkat dalam penelitian. Informasi pendukung
dalam studi ini meliputi jenis prosthetic kaki endoskeletal danprosthetic.Yang
berkembang saat ini kaki jenis eksoskeletalkaki jenis eksoskeletal tidak memiliki
komponen alignment adapter for prosthetic foot sehinggapengkondisian pada
pensejajaran pada prosthetic eksoskeletaltidak dapat maksimal.Identifikasi
mengenai kelemahan dari prosthetic eksoskeletal selanjutnya dijadikan
pertimbangan dalam mengembangkan rancangan alignment adapter for prosthetic
footpada penelitian ini.
5. Identifikasi awal perancangan.
Berdasarkan studi literatur dan studi lapanganrancangan
komponenalignment diharapkan mampu mengatasi sekaligus menyeimbangkan
kelainan sudut kontraktur stump terhadap kaki yang tidak mengalami amputasi.
Mengatasi dan menyeimbangkan sudut kontraktur, komponen yang dirancang
mampu bergerak mengoreksi kelainan sudut kontraktur stump (tilting)sebesar
5°sampai 7° dan bergeser menyesuaikan garis beban (sliding).
3.2 TAHAP PENGUMPULAN DAN PENGOLAHAN DATA
Pada tahap ini dilakukan pengumpulan dan pengolahan data yang
digunakan untuk perancangan alignment adapter for prosthetic footbawah lutut
dengan system adjustable. Pengolahan data dilakukan mengacu pada konsep
proses pengembangan produk generik yang dipilih untuk menghasilkan rancangan
produk yang baik dengan tahapannya yang dapat disederhanakan. Adapun
langkah-langkah pengumpulan data dijelaskan, pada sub bab ini.
3.2.1 Perancangan Komponen Aligment Adapter Dengan Solidwork 2004
Kontraktur stump terjadi akibat pemendekan salah satu otot pada stump
(muscle shortening), kondisi tersebut mengakibatkan sudut cakupan gerak stump

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-5
tidak sesuai dengan sudut cakupan gerak kaki normal yang tidak mengalami
amputasi. Perbedaan sudut cakupan gerak stump dengan sudut cakupan gerak kaki
normal yang tidak mengalami amputasi mengakibatkan perbedaan letak garis
beban tubuh pada masing-masing tungkai kaki. Perbedaan letak garis beban tubuh
pada tungkai kaki normal dengan tungkai kaki yang teramputasi akan berpengaruh
terhadap keseimbangan berjalan.
Rancangan komponen alignment diharapkandapat mengatasi sekaligus
menyeimbangkan kelainan sudut kontraktur stump terhadap beban kaki yang tidak
mengalami amputasi. Komponen yang di rancang dapat bergerak mengoreksi
kelainan sudut kontraktur stump (tilting) dan bergeser menyesuaikan garis beban
(sliding). Konsep kebutuhan rancangan tersebut kemudian di visualisasi kedalam
bentuk rancangan 3D menggunakan software solidwork 2004.
Proses perancangan komponen alignment adapter dilakukan dengan
menggunakan SolidWork 2004. Software ini digunakan untuk merepresentasikan
konsep sketsa gambar ke dalam bentuk visualisasi desain 3D, sehingga secara
langsung dapat diketahui bentuk nyata dari rancangan produk.
3.2.2 Proses Manufaktur Rancangan Alignment adapter for prosthetic footDalamProduk Nyata
Setelah dilakukan perancangan alignment adapter for prosthetic
footmenggunakan SolidWork 2004 selanjutnya rancangan tersebut diwujudkan
dalam bentuk produk nyata (real). Pembuatan produk alignment adapter for
prosthetic foot menggunakan proses permesinan. Material yang digunakan dalam
membuat produk ini adalah durallium alloy (AA2024). Pemilihan material ini
dikarenakan mempunyai karakteristik yang kuat dan ringan serta memiliki
ketahanan yang baik. Proses fabrikasi rancangan alignment adapter for prosthetic
foot bekerjasama dengan mitra pengembang mesin Mitra Sentosa Surakarta.
Adapun produk alignment adapter for prosthetic foot hasil permesinan dari
rancangan ini.
3.2.3 Fabrikasi Rancangan Alignment adapter for prosthetic foot
Produk alignment adapter for prosthetic foot tersebut kemudian digabung
dengan komponen lain dari prostheticbawah lutut endoskeletal. Prostheticbawah

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-6
lutut dengan komponen alignment adapter for prosthetic footuntuk langkah
selanjutnya diujicobakan kepada pengguna prosthetic. Pengujian tersebut
dilakukan untuk mengetahui sejauhmana kontribusi desain produk alignment
adapter for prosthetic foot dalam mendukung kestabilan gerak pengguna
prosthetic saat berjalan.
3.2.4 Pengukuran Anthropometri Pengguna Prosthetic
Pengambilan data anthropometri pengguna prosthetic dan pengukuran
dimensi prosthetic digunakan untuk menghitung letak titik pusat massa dan massa
tiap segmen tubuh pengguna prosthetic sebagai input permodelan biomekanika.
Penjelasan tentang pengambilan data yang dilakukan, sebagai berikut:
1. Penentuan massa tiap segmen,
Persentase massa segmen tubuh thigh,shank,foot dan stumpditentukan
berdasarkan pemodelan distribusi berat tubuh Webb Associaties (1978) dalam
Chaffin etal, (1999) pada tabel 2.1. Bagian atas tubuh yang terdiri dari head,
neck, torso, dan arms, diasumsikan sebagai satu kesatuan massa, yang ditopang
kedua kaki pengguna prosthetic saat berjalan.
2. Penentuan letak titik pusat massa.
Penentuan letak titik pusat massa dilakukan berdasarkan permodelan titik-titik
pusat massa Dempster (gambar 2.26). Titik pusat massa ditentukan pada
segmen kaki (foot, shank dan thigh) baik kaki normal maupun kaki prosthetic.
3.2.5 Eksperimen Pengamatan Gerak Berjalan Pengguna KakiProsthetic PadaBidang Datar
Pengamatan gerak berjalan pengguna kaki prosthetic dilaksanakan bidang
datar yang dilakukan pada:
• Hari/tanggal : Selasa, 20November 2010
• Tempat :Laboratorium Perancangan Sistem Kerja dan Ergonomi
Area penelitian dipersiapkan sedemikian rupa untuk memberikan
kemudahan dalam pengambilan data. Adapun prosedur dan protokol penelitian
pengamatan aktifitas berjalan pengguna kaki prosthetic, sebagai berikut:
1. Mempersiapkan seluruh peralatan yang digunakan dalam pengujian
biomekanik.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-7
a. Handycam sebagai alat dokumentasi gerakan berjalan. Hasil dokumentasi
video ini digunakan untuk menentukan capture gambar sesuai fase gerakan
kaki dalam gait cycle.
b. Meteranyang dipakai untuk mengukur dimensi tubuh pengguna kaki
prosthetic yang diteliti.
c. Plumb line merupakan alat yang berfungsi sebagai pedoman pensejajaran
padabagian kakiprosthetic.
d. Tool box berisi beberapa perkakas yang digunakan untuk mematikan dan
membuka baut penghubung bagian-bagian penyusun komponen
kakiprosthetic.
e. Sticker sebagai markers pada tubuh pengguna prosthetic yaitu pada bagian
joint (ankle, knee dan hip joint) untuk memberi tanda titik kajian dalam
pengujian biomekanik dan memudahkan dalam mengenali titik segmen
tubuh.
2. Setting lingkungan pada area penelitian, dalam mengakomodasi kemudahan
pengambilan data. Lokasi pengambilan data diharapkan berupa bidang datar
yang cukup luas agar memudahkan dalam pengambilan gambar pengamatan
berjalan pengguna prosthetic.
3. Pengguna kaki prosthetic memakai kakiprosthetic endoskeletal dengan
komponen alignment adapter for prosthetic foot. Selama pemasangan
kakiprostheticterlebih dahulu dilakukan penyesuaian terhadap kakiprosthetic
yang dipakai selama beberapa saat sebelum pengambilan data.
4. Pemasangan sticker sebagai markers pada tubuh pengguna kaki prosthetic pada
bagian joint (ankle, knee dan hip joint) untuk memberi tanda titik kajian dalam
pengujian biomekanik dan memudahkan dalam mengenali titik segmen tubuh.
5. Selanjutnya pengujian dilakukan melalui dua tahap pengujian.Pengujian
pertama, komponen alignment adapter for prosthetic footdi setting sedemikian
rupa agar dicapai keseimbangan.Pengujian kedua,alignment adapter for
prosthetic foottidak mengalami pensejajaran atau tidak mengalami setting agar
menyerupai komponen konvensional yang tidak dilengkapi dengan alignment
setting.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-8
6. Selama aktivitas berjalan, video shooting merekam pengambilan gambar. Hasil
dokumentasi video ini digunakan untuk menentukan capture gambar sesuai
fase gerakan kaki dalam gait cycle.
7. Pengukuran dilanjutkan sampai mendapatkan data yang selanjutnya dilakukan
proses pengolahan data.
Hasil penelitian pengamatan berjalan pada bidang datar digunakan
dalammemperoleh data yang dijadikan input dalam kajian biomekanika untuk
menghitung gaya dan momen pada bagian ankle joint baik kaki prosthetic dan
kaki normal.
3.2.6 Permodelan Biomekanika Pengguna Prosthetic
Konsep biomekanik digunakan untuk memodelkan manusia dalam suatu
sistem benda jamak yang tersusun dari link dan segment yang saling terhubung
membentuk satu kesatuan. Formulasi matematik dibangun berdasarkan pola
berjalan sesuai kaidah gait cycle dengan memfokuskan kajian pada bagian ankle
joint menggunakan pendekatan static equilibrium. Pendekatan static equilibrium
yang digunakan pada penelitian ini mencakup kondisi, yaitu jumlah seluruh nilai
momen sama dengan nol (ΣM = 0).
Berikut tahapan formulasi model pengujian biomekanika dengan
pendekatan static equilibrium, yaitu:
1. Buffering data
Buffering data merupakan proses pengumpulan data. Data yang telah
terkumpul berupa capture gambar yang diperoleh dari hasil pemotongan video
recorder. Buffering data membantu peneliti dalam memilih capture yang tepat
sesuai fase berjalan agar di dapat posisicapturesesuai fase yang di inginkan.
2. Pembuatan free body diagram (FBD) berdasarkan pola gait cycle.
Langkah kedua yang dilakukan sebelum masuk kedalam perumusan model
adalah membuat free body diagram yang merepresentasikan gerakan kaki
sesuai dengan capture pola delapan fase gerakan gait cycledari hasil
eksperimen dari pengujian biomekanik. Proses pembuatan free body diagram
pada tiap fase gait cycle menggunakan softwareAutoCad 2004.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-9
3. Penentuan notasi (simbol) yang digunakan dalam persamaan.
Langkah kedua dalam permodelan static equilibrium adalah menentukan notasi
(simbol) pada free body diagram. Penentuan notasi ini dimaksudkan untuk
memberi nama variabel-variabel pengukuran sehingga menghindari kesalahan
input data dalam perumusan biomekanika. Notasi yang digunakan terdiri dari
gaya berat tiap segmen tubuh (foot, shank dan tight), gaya normal pada tiap
ankle joint (kaki prosthetic& kaki normal), panjang tiap segmen tubuh (kaki
prosthetic& kaki normal) dan jarak tiap gaya (gaya di ankle dan gaya berat
segmen tubuh) ke titik pusat momen. Penempatan notasi gaya berat pada tiap
segmen tubuh dilakukan pada center of mass(COM) tiap segmen tubuh
sedangkan gaya normal pada foot ditempatkan pada ankle joint.
4. Penentuan formulasi lengan momen pada tiap segmen tubuh.
Penentuan jarak dari titik segmen tubuh ke titik pusat momen dilakukan
dengan menggunakan konsep trigonometr.Penentuan panjang dan sudut
segmen tubuh serta rumus dasar dari sinus, maka dapat diketahui besar lengan
momen pada tiap segmen tubuh.
Tahapan permodelan berjalan di atas dilakukan dalam delapan fase
gerakan yang terdiri dariinitial contact, loading response, mid stance, terminal
stance, pre swing, initial swing, mid swing dan terminal swing.Permodelan
dilakukan baik pada kaki normal maupun kaki prostheticdisaat berjalan normal
menggunakan kakiprosthetic endoskeletal dengan alignment adapter for
prosthetic footpada bidang datar.
3.3 TAHAP ANALISIS DAN INTEPRESENTASI HASIL
Pada tahap ini dilakukan analisis dan interpretasi hasil terhadap
pengumpulan dan pengolahan data dan terhadap hasil rancangan
komponenalignment adapter for prosthetic foot yang dilakukan.Proses analisis
dilakukan untuk memperkuat hasil penelitian. Analisis hasil perhitungan dan
konsep yang dipilih sehingga dampak, manfaat, dan output penelitian dapat
semakin jelas dan dipahami.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
III-10
3.4 TAHAP KESIMPULAN DAN SARAN
Pada langkah terakhir inimembuat kesimpulan dari semua hasil proses
yang dilaksanakan pada penelitian dengan memperhatikan tujuan yang dicapai
dari penelitian. Kemudian memberi masukan berupa saran perbaikan yang dapat
dilakukan untuk penelitian selanjutnya.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-1
BAB IV PENGUMPULAN DAN PENGOLAHAN DATA
Pada bab ini diuraikan mengenai proses perancangan alignment adapter
prosthetic, pengumpulan dan pengolahan data kajian biomekanika pada tungkai
bawah untuk mengetahui kontribusi rancangan alignment adapter for prosthetic
footdalam mendukung aktivitas berjalan pengguna prosthetic.
4.1 PENGUMPULAN DATA
Pada tahap awal dijelaskan mengenai proses perancanganalignment
adapter for prosthetic footdilanjutkan dengan pengumpulan dataterkait dengan
kajian biomekanika pada pengguna prostheticbawah lutut endoskeletal.
Selanjutnya dilakukan pengolahan data sebagai dasar dalam memberikan analisis
terhadap hasil rancangan.
4.1.1 Identifikasi Perancangan Kaki Prosthetic Bawah Lutut
Tahap awal perancangan dilakukan dengan melakukan studi literatur
berkaitan dengan obyek penelitian yang dikaji. Studi literatur yang dilakukan
berupa kajian mengenai kebutuhan alignment/ pensejajaran untuk mencapai
keseimbangan berjalan.Hasil dari studi literatur menghasilkan suatu kesimpulan
bahwa anggota gerak yang mengalami amputasi memerlukan alat bantu jalan yang
dapat menyeimbangkan atau mensejajarkan perbedaan sudut kontraktur stump
pada tungkai kaki yang teramputasi terhadap tungkai kaki normalagar dicapai
keseimbangan saat berjalan. Hasil studiini menjadi dasar dalam melakukan
perancangan alignment adapter dalam menyeimbangkangerakan berjalan.
A. Kebutuhan Alignment Adapter Kaki Prosthetic
Tingkatan amputasi mempengaruhi sudut cakupan gerak/ROM (ring of
motion) dan kontraktur stump. Kontraktur stump terjadi akibat pemendekan salah
satu otot pada stump (muscle shortening). Kontraktur stump mengakibatkan sendi
lutut pada tungkai yang teramputasi mampu melakukan gerakan ekstension
sepenuhnya. Pada beberapa kasus amputasi kaki bawah lutut sudut
kontrakturstump yang dihasilkan bervariasi sesuai dengan tingkat amputasi. Sudut
kontraktur stumpterjadi antara5° sampai dengan 10°.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-2
Gambar 4.1Sudut kontraktur stump
Sumber: Handicap International, 2006
Cakupan gerak sendi lutut pada tungkai kaki normal mampu melakukan
gerakan flexion dengan besaran 0° - 130° dan gerakan Extension dengan
besaran 0° - 5° - 10°, yang dijelaskan pada gambar 2.2.
Gambar 4.2 Cakupan gerak pada tungkai kaki normal Sumber: Handicap International, 2006
Rancangan komponenalignment diharapkan dapat mengatasi dan
menyeimbangkan kelainan sudut kontraktur stump terhadap kaki yang tidak
mengalami amputasi. Dalam mengatasi dan menyeimbangkan sudut kontraktur,
komponen yang dirancang dapat bergerak mengoreksi kelainan sudut kontraktur
stump (tilting) dan bergeser menyesuaikan garis beban (sliding).
Berdasarkan latar belakang masalah mengenai kebutuhan alat pensejajar
bagi ampute dapat dimunculkan kebutuhan (needs)rancanganalignment adapter
prosthetic. Penentuan kebutuhan rancanganyangdapat menyeimbangkan pola jalan
pada ampute. Adapun kebutuhan dalamrancangan yang dimunculkan untuk
menjawab pensejajaran pada kaki yang di amputasi, yaitu:
1. Menyesuaikan garis beban(sliding).
Mid-line of the shank
Mid-line of the thigh
Mid-line of the stump
Mid-line of the shank

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-3
Stabilitas merupakan salah satu kunci keberhasilan suatu rancangan
kakiprosthetic. Rancangan kakiprosthetickaki yang baik dapat memberikan
stabilitas gerak bagi pengguna prosthetickaki pada saat melakukan berbagai
aktivitas sehingga pengguna kaki prosthetic merasa nyaman dan aman saat
menggunakannya. Rancangan alignment adapter for prosthetic footpada bagian
sliding mampu bergeser kearah medial-lateral dan anterior-posteriordengan
menghasilkan kestabilan dan mensejajarkan komponen sesuai keseimbangan
yang diinginkan sehingga memberikan kemudahan dan kenyamanan gerak saat
digunakan untuk berjalan.
2. Mengoreksi kelainan sudut kontraktur stump (tilting).
Rancangan alignment adapter for prosthetic footpada bagian tilting atau ball
mampu berotasi kearah medial-lateral dan anterior-posterior dengan sudut
terbatasmenghasilkan kestabilan dengan mensejajarkan komponen sesuai sudut
kontraktur sendi sehingga memberikan kemudahan dan kenyamanan gerak saat
digunakan untuk berjalan.
B. Perancangan Alignment Adapter Prosthetic
Berdasarkan penentuan konsep rancangan dan kebutuhan pengembangan
yang dijelaskan sebelumnya. Langkah selanjutnya melakukan perancangan
alignment adapter prosthetic.Perancanganprodukalignment adapter for prosthetic
footpada penelitian ini mempergunakansoftware SolidWork 2004 yang
mempunyai kemampuan visualisasi rancangan dalam bentuk 3D sehingga dapat
langsung diketahui gambaran nyata rancangan tersebut. Adapun
tahapanperancangan alignment adapter for prosthetic footakan dijelaskan pada
sub bab selanjutnya.
1. RancanganAlignment Adapter Prosthetic
Rancangan pertama alignment adapter for prosthetic footmasih berupa
gambar sketsa. Rancangan dalam bentuk sketsa tersebut menerapkan prinsip
kerjasliding dan tilting. Prinsip kerja sliding dan tilting dalam rancangan ini dapat
memberikan pergeseranpada sudut kontraktur sendi dalammensejajarkan
menghasilkan keseimbangan beban.
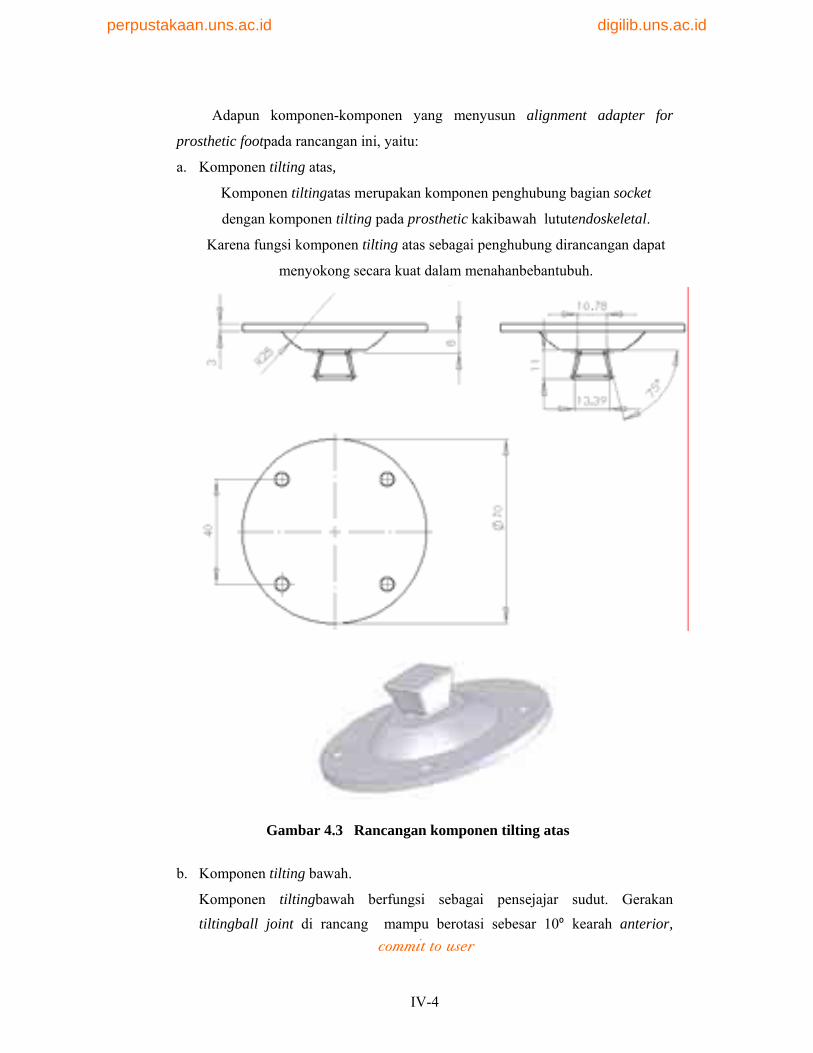
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-4
Adapun komponen-komponen yang menyusun alignment adapter for
prosthetic footpada rancangan ini, yaitu:
a. Komponen tilting atas,
Komponen tiltingatas merupakan komponen penghubung bagian socket
dengan komponen tilting pada prosthetic kakibawah lututendoskeletal.
Karena fungsi komponen tilting atas sebagai penghubung dirancangan dapat
menyokong secara kuat dalam menahanbebantubuh.
Gambar 4.3 Rancangan komponen tilting atas
b. Komponen tilting bawah.
Komponen tiltingbawah berfungsi sebagai pensejajar sudut. Gerakan tiltingball joint di rancang mampu berotasi sebesar 10º kearah anterior,

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-5
posterior, medial dan lateral.Pada bagian sisi bawah komponen dirancang
sebagai alur sliding dengan gerakan anterior dan posterior.
Gambar 4.4 Rancangan komponen tilting bawah
c. Komponen sliding.
Komponen sliding ini berfungsi sebagai tempat pemasangan delapan baut
yang digunakan sebagai penghubung, pengancing dan sekaligus jalur sliding
antara komponen tilting bawah dengan komponen sliding bawah. Delapan
baut tersebut terbagi dua di sisi bagian atas terdapat empat baut sebagai
pengancing sliding atas dengan mekanisme gerakan anterior dan
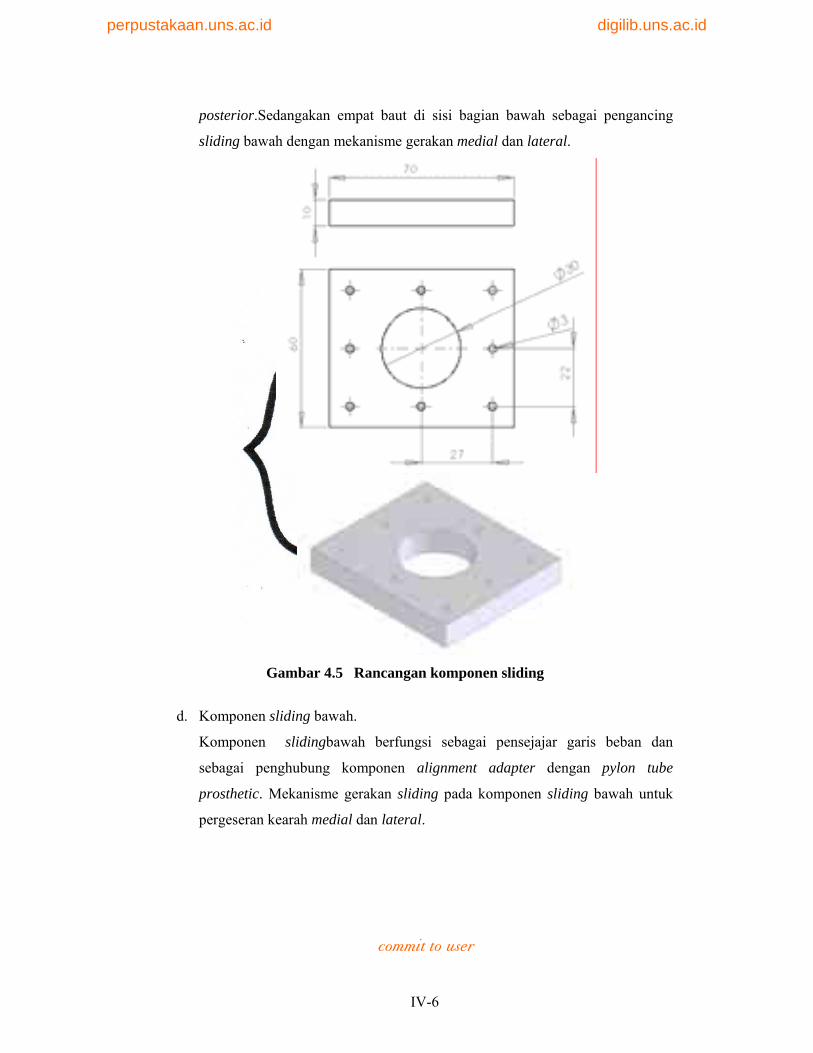
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-6
posterior.Sedangakan empat baut di sisi bagian bawah sebagai pengancing
sliding bawah dengan mekanisme gerakan medial dan lateral.
Gambar 4.5 Rancangan komponen sliding
d. Komponen sliding bawah.
Komponen slidingbawah berfungsi sebagai pensejajar garis beban dan
sebagai penghubung komponen alignment adapter dengan pylon tube
prosthetic. Mekanisme gerakan sliding pada komponen sliding bawah untuk
pergeseran kearah medial dan lateral.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-7
Gambar 4.6 Rancangan komponen sliding bawah
e. Komponen baut vertikal.
Komponen ini befungsi sebagai penghubung dan pengunci antar bagian
komponen.
Hasil assembling komponen alignment adapter for prosthetic
footditunjukkan pada gambar 4.7.
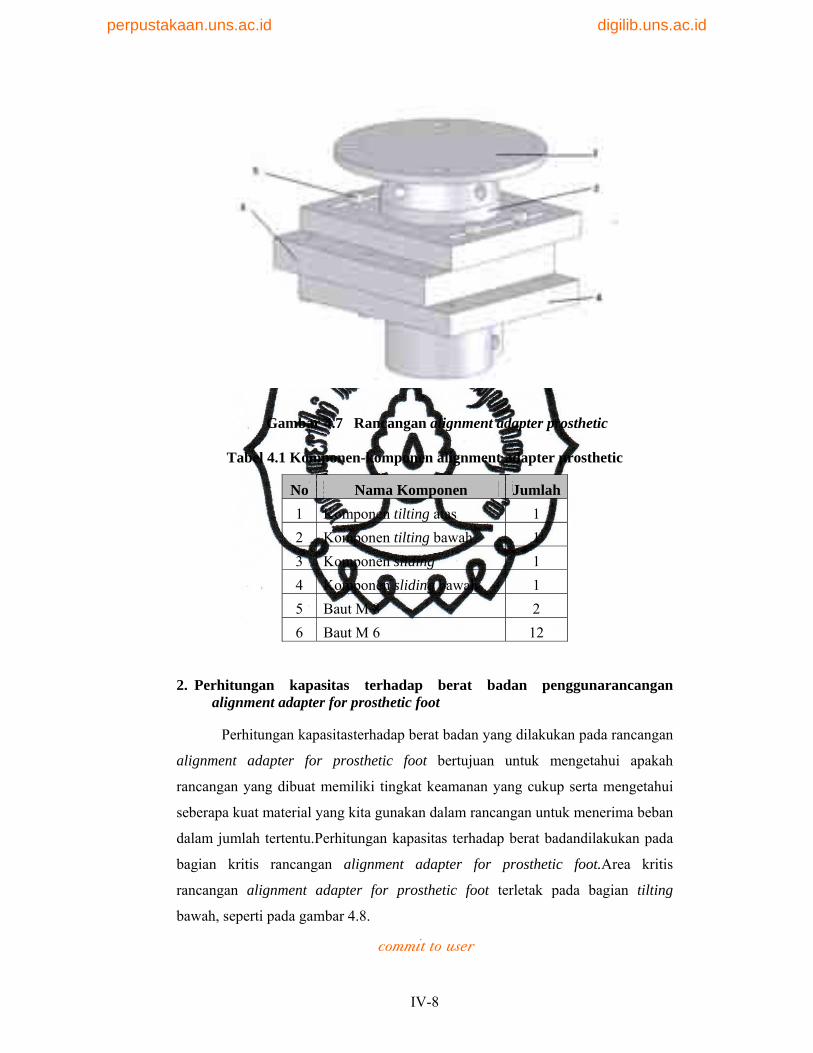
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-8
Gambar 4.7 Rancangan alignment adapter prosthetic
Tabel 4.1 Komponen-komponen alignment adapter prosthetic
No Nama Komponen Jumlah1 Komponen tilting atas 1 2 Komponen tilting bawah 1 3 Komponen sliding 1 4 Komponen sliding bawah 1 5 Baut M 8 2 6 Baut M 6 12
2. Perhitungan kapasitas terhadap berat badan penggunarancangan alignment adapter for prosthetic foot
Perhitungan kapasitasterhadap berat badan yang dilakukan pada rancangan
alignment adapter for prosthetic foot bertujuan untuk mengetahui apakah
rancangan yang dibuat memiliki tingkat keamanan yang cukup serta mengetahui
seberapa kuat material yang kita gunakan dalam rancangan untuk menerima beban
dalam jumlah tertentu.Perhitungan kapasitas terhadap berat badandilakukan pada
bagian kritis rancangan alignment adapter for prosthetic foot.Area kritis
rancangan alignment adapter for prosthetic foot terletak pada bagian tilting
bawah, seperti pada gambar 4.8.
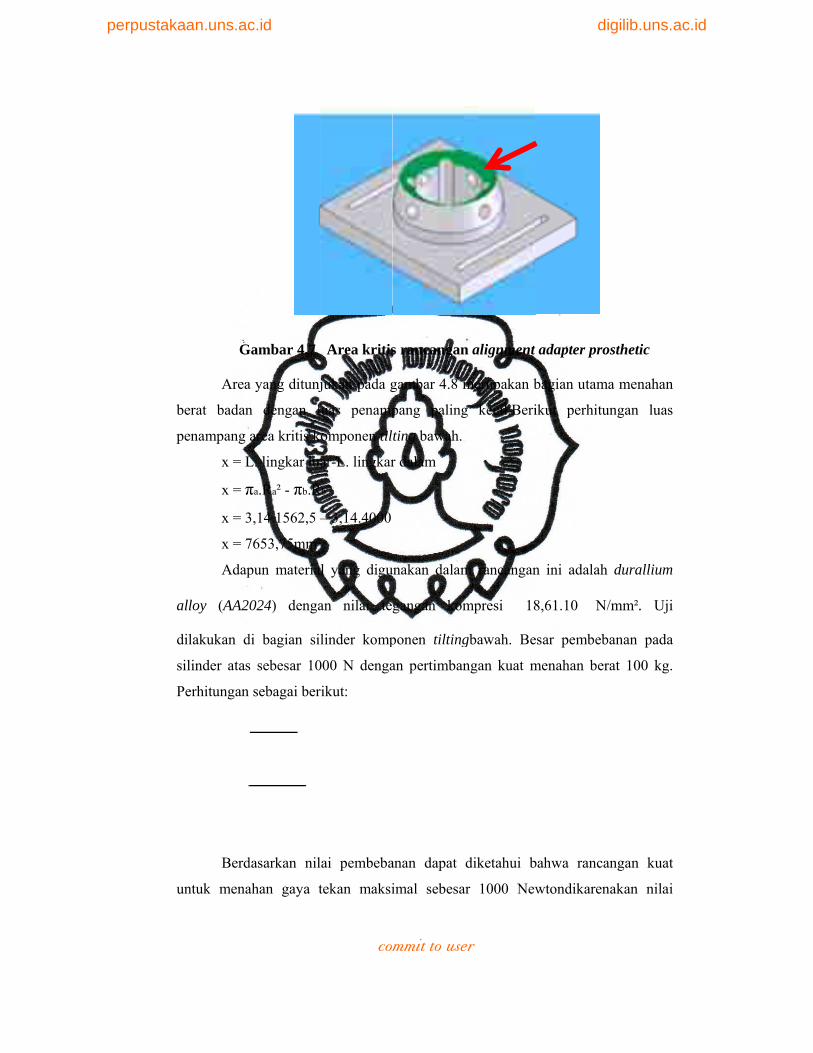
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
b
p
a
d
s
P
u
G
Area
berat badan
penampang
x = L
x = πx = 3
x = 7
Adap
alloy (AA2
dilakukan d
silinder atas
Perhitungan
Berd
untuk mena
Gambar 4.7
a yang ditunj
n dengan l
area kritis k
L. lingkar lua
πa.Ra² - πb.R
3,14.1562,5 –
7653,75mm²
pun material
024) denga
di bagian sil
s sebesar 10
sebagai ber
dasarkan nil
ahan gaya t
Area kritis
jukan pada g
uas penamp
omponen til
ar-L. lingkar
Rb²
– 3,14.4000
²
l yang digu
an nilai te
linder komp
000 N denga
ikut:
ai pembeba
tekan maksi
s rancangan
gambar 4.8 m
pang paling
lting bawah.
r dalam
unakan dalam
gangan kom
ponen tilting
an pertimban
anan dapat
imal sebesa
n alignment
merupakan b
g kecil.Beri
m rancangan
mpresi 18
gbawah. Be
ngan kuat m
diketahui b
ar 1000 New
adapter pro
bagian utam
ikut perhitu
n ini adalah
8,61.10 N/
esar pembeb
menahan ber
bahwa ranca
wtondikaren
osthetic
ma menahan
ungan luas
h durallium
/mm². Uji
banan pada
rat 100 kg.
angan kuat
nakan nilai

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-10
σlebih kecil dibandingkan dengan nilai tegangan kompresi material durallium
alloy (AA2024) sebesarσy 18,61.10⁸ N/mm².
3. Perwujudan Rancangan Alignment adapter for prosthetic footDalam Bentuk Produk Nyata
Pembuatan produk alignment adapter for prosthetic footmenggunakan
proses permesinan. Material yang digunakan dalam membuat produk ini adalah
durallium alloy (AA2024). Kelebihan material ini mempunyai karakteristik bahan
yang kuat, ulet dan ringan serta memiliki ketahanan beban yang baik.
Gambar 4.8 Produk alignment adapter prosthetic
Proses fabrikasi rancangan alignment adapter for prosthetic
footbekerjasama dengan mitra pengembang mesin Mitra SentosaSurakarta.
Adapun produk alignment adapter for prosthetic foothasil permesinan dari
rancangan tersebut ditunjukkan pada gambar 4.8.
4. Perakitan Produk Alignment adapter for prosthetic footDengan
Komponen Prosthetic Bawah Lutut Endoskeletal
Produk alignment adapter for prosthetic foothasil fabrikasi kemudian
dirakit dengan komponen dari prosthetickaki bawah lutut endoskeletal.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-11
Komponen prosthetickaki bawah lutut yang terdiri dari socket sebagai tempat
puntung kaki (stump), pylon shank, sebagai pengganti tulang tibia dan fibula pada
segmen betis, SACH foot sebagai pengganti segmen kaki.
Gambar 4.9 Prostheticbawah lutut dengan komponen alignment adapter prosthetic
Selanjutnya prosthetickaki bawah lutut dengan komponen alignment
adapter for prosthetic footdiujicobakan kepada pengguna prosthetic. Pengujian
yang dilakukan berupa pengamatan aktivitas berjalan pengguna prosthetic di
bidang datar.Pengujian melalui dua tahap pengujian.Pengujian pertama,
komponen alignment adapter for prosthetic footdi setting sedemikian rupa agar
dicapai keseimbangan.
Gerakan yang diakomodasi dalam rancangan tersebut yaitu gerakan tilting
sebesar maximal 10° kearah anteroposterior dan kearah mediolateral.Dengan
gerakan sliding dengan pergeseran maximal sebesar 23 mm kearah mediolateral
dan 27 mm kearah anteroposterior.Perhitungan sederhana pergeseran sudut tilting
sebagai berikut.
Y = R. tan
Y = 25 .tan 10°
Y = 25. 0,648
Y = 16, 2 mm

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-12
Kemampuan dari komponen alignment adapter for prosthetic foot mampu
mengatasi perubahan sudut kontraktur sendi lutut yang berubah dalam periode
waktu tertentu tanpa harus mengganti bagian-bagian komponen penyusun kaki
prosthetic seperti pada kaki prosthetic konvensional.Pengujian kedua,alignment
adapter for prosthetic foottidak mengalami pensejajaran atau tidak mengalami
setting agar menyerupai komponen konvensional yang tidak dilengkapi dengan
alignment setting. Pengujian dilakukan untuk mengetahui sejauhmana
fungsialignment adapter for prosthetic footdapat mendukung kestabilan gerak
pengguna prosthetickaki saat berjalan.
Gambar 4.10 Prosthetic bawah lutut dengan komponenalignment adapter for prosthetic footyang dipasangkan pada pengguna prosthetic
Pada aplikasi penerapan komponen alignment adapter for prosthetic foot
terhadap amputee kebutuhan gerakan tilting sebesar 7° untuk menyesuaikan
kontraktur stump sebesar 7° flexion dengan sliding kearah anterior sejauh 5mm
untuk menyeimbangkan garis beban. Sedangkan komponen alignment adapter
for prosthetic foot pada gerakan sliding dan tilting dari sisi lateral tidak
mengalami pergeseran dikarenakan stump dari sisi lateral terposisi normal.
4.1.2 Pengukuran Anthropometri Pengguna Prosthetic
Pengumpulan data diperoleh melalui dokumentasi penelitian dan wawancara
terhadap pengguna kakiprosthetic yang menjadi responden dalam penelitian.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-13
Pengambilan data dilakukan di Laboratorium Perancangan Sistem Kerja dan
Ergonomi UNS, Surakarta. Adapun data yang diambil dalam penelitian terdiri dari
data responden pengguna prosthetic dan data dimensi prosthetic.
1. Data Responden Pengguna Kaki Prosthetic.
Pemilihan pengguna prosthetic yang digunakan sebagai responden dalam
penelitian didasarkan pada kondisi tubuh responden yang disesuaikan dengan
kondisi penelitian. Wawancara dilakukan agar mendapatkan data diri dan data
riwayat amputasi kaki responden. Data diri dan riwayat amputasi responden
pengguna prostheticberdasarkan hasil wawancara, sebagai berikut:
Nama : Sugeng
Umur :30 tahun
Jenis kelamin :Laki-laki
Riwayat amputasi : Penderita kaki gajah
Kaki amputasi :Kaki kanan
Tipe amputasi :Bawah lutut (below knee amputation)
Kondisi stump :Baik dan masih bisa digerakkan
Jenis prosthetic yang pernah digunakan : Eksoskeletal
Pengukuran anthropometri pengguna kaki prosthetic dilaksanakan di
Laboratorium Ergonomi Jurusan Teknik Industri UNS. Pengukuran dilakukan
untuk memperoleh data panjang segmen tubuh pengguna kakiprosthetic.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-14
Tabel 4.2 Data anthropometri pengguna prosthetic
Body
Body weight (without prosthetic) 52 kg Pengguna prosthetic height 164 cm Head length 20 cm Neck length 10 cm Torso or body length 55 cm Upper arm length 31 cm Lower arm length 26 cm Hand length 18 cm Pelvis circumference 79 cm Tronchanter ke anterior midline circumference 66 cm
Thight Ischial tuberosity (SB saat berdiri) 80 cm Thight length 34 cm Stump length 11 cm
Knee Knee width (sitting) 10 cm Top of knee (sitting) 45 cm
Shank Tibial plateau (KB saat berdiri) 45 cm Calf circumference 36 cm Calf circumference length 32 cm Shank length 38 cm
Foot Ankle circumference 36 cm Ankle circumference length 8 cm Foot width 24 cm Shoe size 41
Data anthropometri tubuh yang diambilmerupakan data pengukuran tinggi
badan dan berat badan pengguna kaki prosthetic, Kemudian dilakukan
pengukuran terhadap segmen tubuh diantaranya pengukuran panjang torso,
panjang stump, lebar knee, panjang betis (shank) dan panjang telapak kaki (foot).
Adapun pengambilan data anthropometri pengguna kaki prosthetic digunakan
untuk menghitung letak titik pusat massa (COM) dan massa tiap segmen tubuh
pengguna prosthetic.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-15
2. Data Dimensi Prosthetic Endoskeletal.
Model prosthetic endoskeletal dengan alignment adapter dalam penelitian
ini secara keseluruhan terdiri dari bagian komponen socket, alignment adapter,
pylon shank, foot adapter dan SACH foot, seperti pada gambar 4.9.
Gambar 4.11 Prosthetic endoskeletal denganalignment adapter
Pengukuran terhadapat dimensi kakiprosthetic dilakukan untuk
mengetahuiukuran berat dan panjang kakiprosthetic.Adapun tinggi dan berat
prosthetic diukur pada masing-masing komponen (part)penyusun kakiprosthetic.
Rekapitulasi data pengukuran dimensi kakiprosthetic yang digunakan dalam
penelitian, sebagai berikut:
Tabel 4.3 Dimensi prosthetic endoskeletal denganalignment adapter
No. Keterangan Prosthetic bawah lutut
1. Total prosthetic weight 1,35 kg a. Socket weight 0,15 kg b. Prosthetic shank weight 0,7 kg c. Prosthetic foot weight 0,5 kg
2 Total prosthetic height 48 cm a. Prosthetic shank height 40cm b. Foot width 8 cm
Socket
alignment adapter
Foot adapter
SACH foot
Pylon

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-16
Seperti halnya dengan pengukuran anthropometri pada pengguna
prosthetic, pengukuran dimensi prosthetic kaki bawah lutut endoskeletaldengan
penggunaan komponen alignment adapter for prosthetic footdigunakan untuk
mengetahui letak pusat massa (COM) dan massa tiap segmen tubuh pengguna
prosthetic.
3. Penentuan Massa Tiap Segmen TubuhPenggunaProsthetic
Pengukuran anthropometri tubuh pengguna kaki prosthetic dan dimensi kaki
prosthetic digunakan sebagai input dalam penentuan massa segmen tubuh
pengguna prosthetic.Penentuan variabel tersebut digunakan sebagai inputdalam
permodelan matematis gerakan berjalan pengguna kaki prosthetic di bidang datar
dengan pendekatan static equilibrium.
Perbandingan panjang segmenstump terhadap thigh dan shank dilakukan
pada segmen kaki normal dan kaki amputasi (stump), agar diperoleh nilai
persentase massa stump dari leg. Permodelan distribusi berat tubuh Webb
Associaties (1978),diperoleh persamaan persentase massa tubuh pengguna
prosthetic tanpa prosthetic, sebagai berikut:
% stump dari shank = Panjang stumpPanjang shank
x %shank dari total body
=11,738 x27,4%
= 8.43%
% stump dari leg= %stump dari shank x berat leg
= 8.43% x 9.81 = 0.83%
% tubuh amputasi dari leg = % leg dari total body – % stump dari leg
= 15,7% - 0,83%
= 14,87%
Persentase (%)massa tubuh pengguna kaki prosthetic tanpa prosthetic,sebagai
berikut:
Persentase massa tubuh pengguna prosthetic = 22.65 %+68.6%= 91.25%
Selanjutnya, hasil perhitungan persentase massa tubuh pengguna
prosthetic digunakan untuk mengetahui nilai massa setiap segmen tubuh dari
pengguna kaki prosthetic. Berikut contoh perhitungan massa segmen tubuh, yaitu:

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-17
• Massa stump kaki
Mstump = % stump
% massa tubuh pengguna prosthetic x massa tubuh pengguna prosthetic
= 0,83%91,25%
x 57.0113 kg
= 0.52kg
Perhitungan segmen tubuh lainnya dilakukan dengan menggunakan
metode yang sama. Hasil pengukuran massa segmen tubuh pengguna
prostheticditunjukkan pada tabel 4.3. Massa bagian atas tubuh (upper body), head,
neck, body, upper arm dan lower armmenjadi satu kesatuan dan diasumsikan
sebagai beban dari tubuh yang harus ditopang oleh kaki normal dan prosthetic.
Tabel 4.4 Massa segmen tubuh pengguna kaki prosthetic
Massa keseluruhan segmen tubuh pengguna kaki prosthetic dihitung
dengan pendekatan yang sama seperti perhitungan sebelumnya.Proporsi antara
tubuh bagian kanan seimbang dengan tubuh bagian kiri, terkecuali pada bagian
kaki amputasi. Pada bagian kaki amputasi, massa tubuh merupakan massa
kakiprosthetic sebagai bagian pengganti anggota tubuh yang hilang yang nilainya
ditetapkan seperti saat pengukuran dimensi prosthetic. Berikut contoh perhitungan
individual segmen tubuh pengguna prosthetic.
a. Massa head and neck.
Mhead & neck =% head and neck
% massa tubuh pengguna prosthetic x massa tubuh pengguna prosthetic
Berat segmen Kiri (kg) Kanan(kg)Head 73.80% 3.87Neck 26.20% 1.38Thorax 43.80% 13.68Lumbar 29.40% 9.18Pelvis 26.80% 8.37
Upper arm 54.90% 3.50 1.75 1.75Forearm 33.30% 2.12 1.06 1.06Hand 11.80% 0.75 0.38 0.38
Upper body 68.60% 42.86Thigh 63.70% 6.25 6.25 6.25
Shank 27.40% 2.69 2.69 0.85
Foot 8.90% 0.87 0.87 0.5
0.83% 0.52 stump 0.83% 0.52 ‐ 0.52stump‐prost 1.46
Proporsi Massa Tubuh (kg)Segmen Tubuh Individual Segmen Tubuh (kg)
Head and Neck
8.40% 5.25 5.25
Torso 50.00% 31.24 31.24
Arm 10.20% 6.37
Leg 15.70% 9.81
Right Leg

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-18
=8,4%
87,08%x 57 kg
= 5,25kg
b. Massa head.
Mhead = % head
% head and neckx massa head and neck
= 73,8%100%
x 57kg
= 3,87 kg
Rekapitulasi proporsi massa keseluruhan segmen tubuh pengguna
prostheticditunjukkan pada tabel 4.5.
Tabel 4.5 Proporsi massa individual segmen tubuh
Proporsi pembagian berat tubuh bagian kanan dan kiri berdasarkan
distribusi berat tubuh Webb Associaties (1978), diasumsikan seimbang, artinya
tubuh bagian kiri akan mendapat distribusi berat sebesar 50% dari total berat
segmen pengguna kaki prostheticbawah lutut. Keseimbangan proporsi berat tubuh
ini berlaku pada upper body, karena sebagian kaki dari thigh sampai foot pada
kaki kiri pengguna prosthetic merupakan bagian yang digantikan fungsinya oleh
kaki prosthetic dengan pengukuran berat tersendiri seperti yang terdapat dalam
tabel 4.5.
4. Penentuan letak Titik Pusat Massa (Center of Mass)
Penentuan letak titik pusat massa dilakukan denganmermodelkan titik-titik
pusat massa Dempster. Titik pusat massa ditentukan pada segmen foot,
Kiri (kg) Kanan (kg)Head 73.80% 3.87Neck 26.20% 1.38Thorax 43.80% 13.68Lumbar 29.40% 9.18Pelvis 26.80% 8.37Upper arm 54.90% 3.50 1.75 1.75Forearm 33.30% 2.12 1.06 1.06Hand 11.80% 0.75 0.38 0.38Thigh 63.70% 6.25 6.25 6.25Shank 27.40% 2.69 2.69 1.37Foot 8.90% 0.87 0.87 0.5
Right Leg 0.83% Stump 41.08% 0.52 - 0.52
31.24
5.25
Individual Segmen Tubuh (kg)
Head and Neck 8.40%
Proporsi Massa Tubuh (kg)
Leg 15.70%
Segmen Tubuh
Torso 50.00%
Arm left/right 10.20%

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-19
shank,thigh dan upper body. Penjelasan mengenai sebaran titik berat pada segmen
tubuh pengguna kaki prosthetic ditunjukkan pada gambar 4.12.
Gambar 4.12 Persebaran titik pusat massa
Persebaran titik pusat massa berdasarkan persebaran Dempster pada gambar
4.12 di atas, selain melibatkan keseluruhan segmen kaki normal dan melibatkan
segmen stump. Stump merupakan bagian kaki yang diamputasi. Bagian stump
pada penderita amputasi bawah lutut, diukur dari pangkal knee joint sampai pada
bagian ujung kaki yang diamputasi. Wshank-prosthetic adalah gaya berat yang bekerja
pada segmen betis pengguna kaki prosthetic yang merupakan gaya berat
gabungan antara bagian stump dan prosthetic. Shank-prosthetic L2 adalah panjang
segmen betis dari knee joint ke pusat titik berat segmen betis kaki
prosthetic.Shank-prosthetic L2 merupakan pajang yang diukur dari pusat titik
berat segmen betis kaki prosthetic sampai bagian ankleprosthetic.
Wshank merupakan gaya berat yang bekerja pada segmen betis. ShankL1
merupakan panjang segmen betis dari knee joint ke pusat titik berat segmen betis
kaki normal, sedangkan shank L2adalah panjang segmen dari pusat titik berat
segmen betis ke ankle. WThighmerupakan gaya berat yang bekerja pada segmen
paha. Thigh L1 adalah panjang dari pelvic sampai ke titik pusat massa segmen
paha kaki normal. Panjang dari titik pusat massa ke lutut dinamakan Thigh L2.
Wfoot adalah gaya berat yang bekerja pada telapak kaki.
Kaki normal
Kaki prosthetic
Shank Prosthetic L1
Wfoot
Wfoot
Wshank
Shank L1
Shank L2
Thigh L1
Thigh L2 Thigh Prosthetic L2
Shank Prosthetic L2
Thigh Prosthetic L1
Wupper body
Wthigh Wthigh prosthetic
Wshank prosthetic

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-20
Pada bagian telapak kaki persebaran titik pusat massa berbeda dengan
konsep dari Dempster karena bentuk kaki digambarkan dalam bentuk segitiga
sembarang. Penentuan titik pusat massa pada kaki dilakukan berdasarkan titik
tengah dari segitiga tersebut. Pengukuran panjang persebaran titik pusat massa
dilakukan dengan menggunakan skala perbandingan gambar di AutoCad. Berikut
contoh perhitungan panjang segmen tubuh pengguna kaki prosthetic.
Shank L2 kaki normal,
L2 pada segmen betis adalah panjang dari titik pusat massa segmen betis ke
ujung mata kaki.
Shank L2 = 56,7 % x 38 = 21,55 cm
Shank L1 kaki prosthetic,
L1 pada segmen betis adalah panjang dari lutut sampai ke titik pusat massa
segmen betis.
Shank L1 = 43,3 % x 38 = 14,00cm
Penentuan lokasi titik pusat massa ini berlaku pada keseluruhan tubuh
pengguna kaki prosthetic.Pengukuran lokasi titik pusat massa kaki prosthetic pada
segmen shank dan foot, yang merupakan bagian kaki amputasi yang digantikan
fungsinya oleh kaki prosthetic, dilakukan dengan pendekatan yang sama dengan
kaki normal (ShankL1,ShankL2).Pada bagian segmen foot penentuan titik pusat
massa menggunakan titik tengah dari segitiga sembarang. Segitiga sembarang
tersebut merepresentasikan bentuk dari kaki manusia.Penentuan panjang segmen
pada kaki dilakukan dengan pendekatan skala perbandingan gambar di AutoCad.
Rekapitulasi data panjang titik berat segmen tubuh pengguna prosthetic
ditunjukkan pada tabel 4.6.
Tabel 4.6 Panjang titik berat segmen tubuh pengguna kaki prosthetic
Kaki Kiri (Normal)
Kaki Kanan (Prosthetic)
Kaki Kiri (Normal)
Kaki Kanan (Prosthetic)
Thigh L1 43.30% 34 34 14.72 14.72
Thigh L2 56.70% 34 34 19.28 19.28
Shank L1 43.30% 38 38 16.45 14.00
Shank L2 56.70% 38 38 21.55 24.00
SegmenPersentase Segmen (cm)
Panjang Segmen (cm) Panjang Titik Berat (cm)

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-21
Berdasarkan tabel 4.6 di atas dapat diketahui lokasi titik pusat massa yang
terdapat pada masing-masing segmen tubuh. Misalnya untuk segmen betis kaki
normal, titik pusat massanya terletak di 21,55 cm dari pangkal betis (distal end)
atau 16,45 cm dari lutut (proximal end)
4.2 PERMODELAN BIOMEKANIKA PENGGUNA KAKI PROSTHETICBAWAH LUTUT
Formulasi matematik dibangun dalam kajian biomekanika ankle joint
dengan menggunakan pendekatan static equilibrium. Kajian yang dilakukan
berupa penghitungan nilai gaya dan momen pada bagian ankle joint untuk
mengetahui tingkat keseimbangan berjalan pengguna kaki prosthetic pada segmen
tubuh tersebut.
4.2.1 Capture Gerakan BerjalanPengguna Prosthetic Pada Bidang Datar
Berjalan diartikan sebagai gerakan tubuh untuk berpindah dari satu tempat
ke tempat yang lain. Berjalan adalah suatu rangkaian dari gait cycle.Periode gait
cycle terdiri dari dua fase berdiri (stance fase) dan fase mengayun (swing fase).
Fase berdiri merupakan periode saat kaki bersentuhan dengan permukaan
landasan, sedangkan fase mengayun adalah periode saat kaki mengayun dan tidak
bersentuhan langsung permukaan landasan.
Gambar 4.13 Periode cycle gait
Fase gerakan yang diamati dalam penelitian aktifitas berjalan pengguna
prostheticbawah lutut dengan komponen alignment adapter for prosthetic
footterdiri dari delapan fase gerakan yaitu initial contact, loading response, mid
stance, terminal stance, pre swing, initial swing, mid swing dan terminal swing.
Pengamatan gerak berjalan pengguna prosthetic pada bidang datar difokuskan

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-22
hanya pada bagian ankle joint untuk mengetahui kontribusi rancangan alignment
adapter for prosthetic footdalam mendukung aktivitas berjalan di bidang datar.
Langkah pertama yang dilakukan sebelum pengambilan capture gerakan
ialah melakukan buffering data pada video capture dalam menentukan ke delapan
fase berjalan agar di dapat posisi capture sesuai fase yang di inginkan.
Dokumentasi aktifitas gerakan berjalan pengguna prosthetic pada bidang
datar dilakukan di Laboratorium Perancangan Sistem Kerja dan Ergonomi.
Pengambilan capturegerakan dilakukan untuk menetapkan fase gerakan dalam
satu siklus berjalan pada bidang datar, berdasarkan dokumentasi video penelitian.
Hasil capturegerakan berjalan pengguna prostheticditunjukkan pada gambar 4.13.
Fase Initial Contact Fase Loading Respone Fase Mid Stance Fase Terminal Stance
Fase Pre Swing Fase Initial Swing Fase Mid Swing Fase Terminal Swing
c
Gambar 4.14Gerakan berjalan pengguna kaki prosthetic di bidang datar
Berdasarakan capture hasil pengamatan aktivitas berjalan pengguna
prosthetic di bidang datar, selanjutnya dilakukan pemodelan biomekanika gerakan
berjalan tersebut menggunakan free body diagrams (FBD). FBD tersebut
merupakan representasi pola gerakan kaki pengguna prostheticsaat melakukan
aktivitas berjalan. Penggunaan free body diagrams dimaksudkan untuk

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-23
mempermudahdalam perumusan formulasi perhitungangaya dan momen pada
ankle joint dengan pendekatan static equilibrium.
4.2.2 Penentuan Free Body Diagram dan Sudut Sendi Pada Capture
Gerakan Berjalan Pengguna KakiProsthetic di Bidang Datar Pemodelan menggunakan free body diagrams dilakukan pada hasil capture
gerakan berjalan pengguna prosthetic di bidang datar. Tujuan pemodelan ini
dalam membantu menggambarkan tubuh manusia dan memudahkan dalam
penguraian gaya pada tiap segmen tubuh yang digunakan dalam menyusun
formulasi model biomekanika. Adapun model free body diagramdari capture
gerakan berjalan pengguna kaki prosthetic pada bidang datarditunjukkan pada
gambar 4.13.
Fase Initial Contact Fase Loading Respone Fase Mid Stance Fase Terminal Stance
Fase Pre Swing Fase Initial Swing Fase Mid Swing Fase Terminal Swing
Gambar 4.15 Free body diagram gait cycle pada bidang datar
Pada tahap ini selain dilakukan pemodelan terhadap capturegait cycle pada
bidang datar, juga dilakukan penentuan sudut yang terbentuk pada sendi kaki.
2θ
1θ
3θ2θ
1θ
3θ 2θ1θ
3θ
2θ
1θ
3θ
2θ
1θ
3θ 2θ1θ
3θ
2θ1θ 2θ
1θ
3θ

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-24
� 1 26� 2 11� 3 18� 1 29� 2 10� 3 13� 1 7� 2 33� 3 9� 1 18� 2 17� 3 22� 1 36� 2 8� 3 15� 1 3� 2 16� 3 23� 1 12� 2 15� 3 ‐� 1 24� 2 16� 3 18
8Terminal Swing
5 Pre Swing
6 Initial Swing
7 Mid Swing
2Loading Respone
3 Mid Stance
4Terminal Stance
Heel Strike1
Dengan Pensejajaranrekapitulasi sudut
Data sudut sendi kaki digunakan sebagai inputdata dalam model formulasi
penghitungan gaya dan momen pada ankle joint. Penentuan sudut kaki
berdasarkan data dari goniometer. Adapun data sudut sendi kaki pengguna kaki
prosthetic dalam satu siklus berjalan normal (gait cycle) di bidang datar
ditunjukkan pada tabel 4.7.
Tabel 4.7Rekapitulasi sudut kaki pengguna prosthetic pada gait cycle bidang datar
4.2.3 Model Formulasi Gaya dan Momen Pada Ankle Joint PenggunaKaki
Prosthetic
Pengamatan gerakan berjalan pada bidang datar difokuskan pada bagian
ankle joint. Gerakan berjalan pada bidang datar ditinjau dari delapan fase gerakan
kaki yang disesuaikan dengan pola gait cycle.Kajian biomekanika melalui
perhitungan nilai gaya dan momen pada bagian ankle joint, baik kaki normal
maupun kakiprosthetic.
� 1 20� 2 11� 3 12� 1 26� 2 12� 3 7� 1 11� 2 26� 3 6� 1 19� 2 16� 3 20� 1 41� 2 10� 3 14� 1 7� 2 14� 3 28� 1 9� 2 15� 3 ‐� 1 23� 2 22� 3 14
Heel Strike1
Rekapitulasi SudutTanpa Pensejajaran
2Loading Respone
3 Mid Stance
4Terminal Stance
8Terminal Swing
5 Pre Swing
6 Initial Swing
7 Mid Swing

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-25
Kajian biomekanikauntuk memperhitungkan nilai gaya dan momen pada
setiap gerakan berjalan dalam menentukan tingkat keseimbangan pengguna kaki
prosthetic.Nomenklatur symbol pengukuran ynag digunakan dalam penyusunan
model formulasi bioemkanika, sebagai berikut:
A1 = Ankle joint kaki normal
A2 = Ankle joint kaki prosthetic
K2 = Knee joint kaki prosthetic
MA1 = Momen di ankle joint kaki normal
MA2 = Momen di ankle joint kaki prosthetic
MK2 = Momen di knee joint kaki prosthetic
FNA1 = Gaya pada ankle joint kaki normal
FNA2 = Gaya pada ankle joint kaki prosthetic
WF1 = Gaya berat segmen telapak kaki (foot) kaki normal
WS1 = Gaya berat segmen betis (shank) kaki normal
WT1 = Gaya berat segmen paha (thigh) kaki normal
WB = Gaya berat segmen tubuh bagian atas
WT2 = Gaya berat segmen paha (thigh) kaki prosthetic
WS2 = Gaya berat segmen betis (shank) kaki prosthetic
WF2 = Gaya berat segmen telapak kaki (foot) kaki prosthetic
Ra1 = Jarak gaya pada ankle joint kaki normal ke pusat momen
Ra2 = Jarak gaya pada ankle joint kaki prosthetic ke pusat momen
Rs1 = Jarak gaya berat segmen betis (shank) kaki normal kepusat momen
Rs2 = Jarak gaya berat segmen betis (shank) kaki prosthetic ke pusat momen
Rb = Jarak gaya berat segmen tubuh bagian atas ke pusat momen
Rt1 = Jarak gaya berat segmen paha (thigh) kaki normal ke pusat momen
Rt2 = Jarak gaya berat segmen paha (thigh) kaki prosthetic ke pusatmomen
Rf1 = Jarak gaya berat segmen telapak kaki (foot) kaki normal ke titik ankle joint
Rf2 = Jarak gaya berat segmen telapak kaki (foot) kaki prosthetic ke titik ankle joint
Ra1’ = Jarak titik ankle joint kaki normal ke ujung jari kaki normal
Ra2’ = Jarak titik ankle joint kaki prosthetic ke ujung jari kaki prosthetic
Ra1” = Jarak titik ankle joint kaki normal ke titik tumit kaki normal
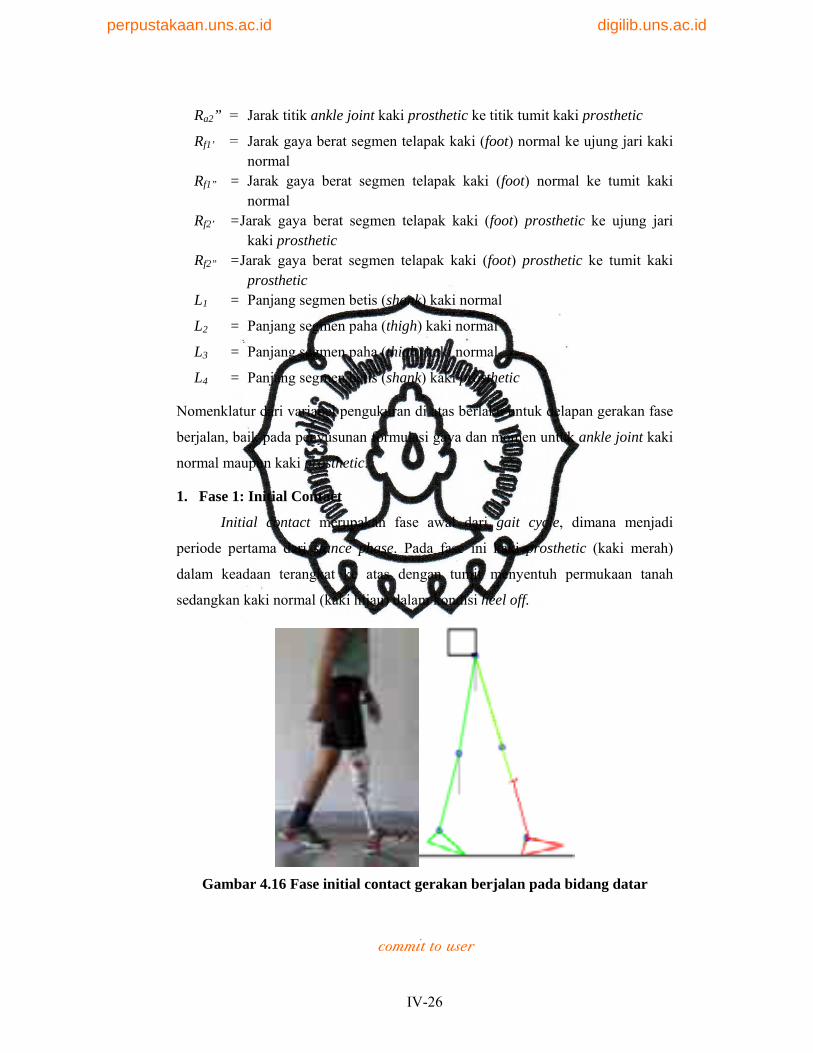
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-26
Ra2” = Jarak titik ankle joint kaki prosthetic ke titik tumit kaki prosthetic
Rf1’ = Jarak gaya berat segmen telapak kaki (foot) normal ke ujung jari kaki normal
Rf1” = Jarak gaya berat segmen telapak kaki (foot) normal ke tumit kaki normal
Rf2’ =Jarak gaya berat segmen telapak kaki (foot) prosthetic ke ujung jari kaki prosthetic
Rf2” =Jarak gaya berat segmen telapak kaki (foot) prosthetic ke tumit kaki prosthetic
L1 = Panjang segmen betis (shank) kaki normal
L2 = Panjang segmen paha (thigh) kaki normal
L3 = Panjang segmen paha (thigh) kaki normal
L4 = Panjang segmen betis (shank) kaki prosthetic
Nomenklatur dari variabel pengukuran di atas berlaku untuk delapan gerakan fase
berjalan, baik pada penyusunan formulasi gaya dan momen untuk ankle joint kaki
normal maupun kaki prosthetic.
1. Fase 1: Initial Contact
Initial contact merupakan fase awal dari gait cycle, dimana menjadi
periode pertama dari stance phase. Pada fase ini kaki prosthetic (kaki merah)
dalam keadaan terangkat ke atas dengan tumit menyentuh permukaan tanah
sedangkan kaki normal (kaki hijau) dalam kondisi heel off.
Gambar 4.16 Fase initial contact gerakan berjalan pada bidang datar
θ
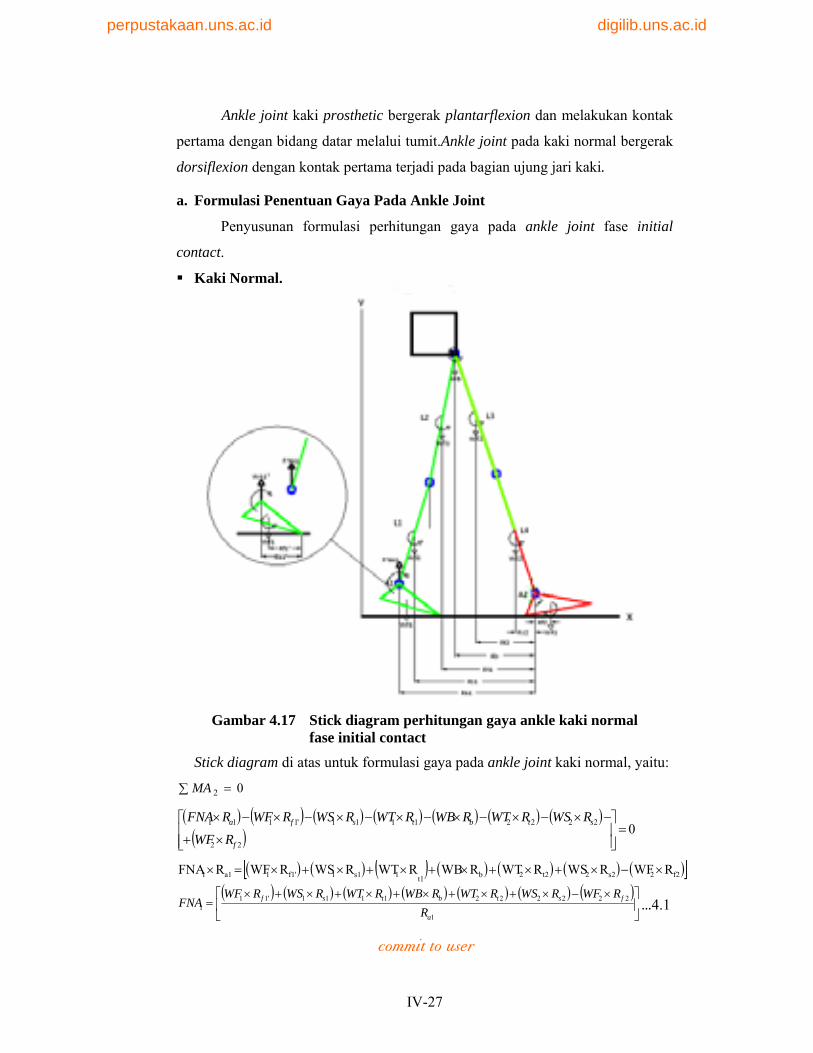
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-27
Ankle joint kaki prosthetic bergerak plantarflexion dan melakukan kontak
pertama dengan bidang datar melalui tumit.Ankle joint pada kaki normal bergerak
dorsiflexion dengan kontak pertama terjadi pada bagian ujung jari kaki.
a. Formulasi Penentuan Gaya Pada Ankle Joint
Penyusunan formulasi perhitungan gaya pada ankle joint fase initial
contact.
Kaki Normal.
Gambar 4.17 Stick diagram perhitungan gaya ankle kaki normal
fase initial contact
Stick diagram di atas untuk formulasi gaya pada ankle joint kaki normal, yaitu:
02 =∑ MA
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) 0
22
22221111'1111=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
×+
−×−×−×−×−×−×−×
f
stbtsfa
RWF
RWSRWTRWBRWTRWSRWFRFNA
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ]f22s22t22bt11s11f1'1a11 RWFRWS RWTRWBRWTRWSRWFRFNA ×−×+×+×+×+×+×=×
( ) ( ) ( ) ( ) ( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡ ×−×+×+×+×+×+×=
1
2222221111'111
a
fstbtsf
RRWFRWSRWTRWBRWTRWSRWF
FNA …4.1

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-28
dengan,
[ ]34322111 )( )( )( θθθ SinLLSinLSinLRa +++=
[ ]34322111 )())()"( θθθ SinLLSinLSinLRs +++=
[ ]343221 )()"( θθ SinLLSinLRt ++=
343 )( θSinLLRb +=
3432 )'( θSinLLRt +=
342 )'( θSinLRs =
Rf1’= jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Kaki Prosthetic.
Gambar 4.18 Stick diagram perhitungan gaya ankle kaki prosthetic
fase initial contact

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-29
Stick diagram di atas untuk formulasi gaya pada ankle joint kaki prosthetic,
yaitu:
01 =∑ MA
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) 0
2211
11112222"22=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
×−×
+×+×+×+×+×+×
af
stbtsf
RFNARWF
RWSRWTRWBRWTRWSRWF
( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×+×
+×+×+×+×+×=×
1111
112222"2222
fs
tbtsf
RWFRWS
RWTRWBRWTRWSRWFRaFNA ...4.2
dengan, [ ]34322112 )( )( )( θθθ SinLLSinLSinLRa +++=
[ ]334''
22112 )( )( )( θθθ SinLLSinLSinLR s +++=
[ ]33"
22112 )( )( )( θθθ SinLSinLSinLRt ++=
[ ]21 )()( θθ Sin L Sin LR 21b +=
[ ]22111 )()( ' θθ SinLSinLRt +=
11'
1 )( θSinLRs =
Rf1 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2= jarak sesuai dimensi AutoCad dengan perbandingan skala real
b. Formulasi Penentuan Momen Pada Ankle Joint
Penyusunan formulasi perhitungan momen pada ankle joint fase initial
contact.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-30
Kaki Normal.
Gambar 4.19 Stick diagram perhitungan momen ankle kaki normal
fase initial contact
Stick diagram di atas untuk formulasi momen pada ankle joint kaki normal,
yaitu:
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×−×
+×+×+×+×+×+×=
22"22
22221111111M
af
stbtsf
RFNARWFRWSRWTRWBRWTRWSRWF
A....4.3
dengan,
111 )( ' θ Sin LRs =
[ ]2'
11 )()( θθ Sin L Sin LR 21t +=
[ ]2211 )( )( θθ SinLSinLRb +=
[ ]3322112 )( )( )( '' θθθ SinLSinLSinLRt ++=
[ ]34322112 )( )( )( '' θθθ SinLLSinLSinLRs +++=
( )[ ]34322112 )( )( θθθ SinLLSinLSinLRa +++=
Rf1 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2”= jarak sesuai dimensi AutoCad dengan perbandingan skala real

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-31
Kaki Prosthetic.
Gambar 4.20 Stick diagram perhitungan momen ankle kaki prosthetic
fase initial contact
Stick diagram di atas untuk formulasi momen pada ankle joint kaki prosthetic,
yaitu:
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ⎥
⎦
⎤⎢⎣
⎡
×−×−×
−×−×−×−×+×=
2222
1111'1122112MA
stb
tsffa
RWSRWTRWB
RWTRWSRWFRWFRFNA
....4.4 dengan,
( )[ ]34322111 )( )( θθθ SinLLSinLSinLRa +++=
( )[ ]34322111 )( )( '' θθθ SinLLSinLSinLRs +++=
( )[ ]343221 )( '' θθ SinLL Sin LRt ++=
( ) 343 θ SinLLRb +=
332 )( ' θ Sin LLR 4t +=
342 )( ' θ Sin LRs =
Rf1’= jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
θ

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-32
2. Fase 2: Loading Response
Pada fase loading response, kaki melakukan kontak sepenuhnya dengan
bidang berjalan dan berat badan sebagian dipindahkan kepada kaki prosthetic
(kaki merah). Kaki prosthetic dalam keadaan rata (foot flat) dengan bidang datar
sedangkan kaki normal berada pada fase pre swing.
Gambar 4.21 Fase loading response gerakan berjalan bidang datar
Ankle joint kaki prosthetic bergerak plantarflexion dan melakukan kontak
penuh dengan permukaan bidang datar. Ankle joint pada kaki normal juga
bergerak plantarflexion ditandai dengan gerakan tumit ke atas (heel off).
a. Formulasi Penentuan Gaya Pada Ankle Joint
Penyusunan formulasi untuk perhitungan gaya pada ankle joint fase
loading response.
θθ

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-33
Kaki Normal.
Gambar 4.22 Stick diagram perhitungan gaya ankle kaki normal
fase loading response
Stick diagram di atas untuk formulasi gaya pada ankle joint kaki normal, yaitu:
02 =∑MA
( ) ( ) ( ) ( ) ( ) ( )( )
022
221111'1111 =⎥⎦
⎤⎢⎣
⎡
×
−×−×−×−×−×−×
s
tbtsfa
RWS
RWTRWBRWTRWSRWFRFNA
( ) ( ) ( ) ( ) ( )( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×
+×+×+×+×+×=×
22
221111'1111
s
tbtsfa
RWS
RWTRWBRWTRWSRWFRFNA
( ) ( ) ( ) ( ) ( )( )
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
×
+×+×+×+×+×
=1
22
221111'11
1a
s
tbtsf
RRWS
RWTRWBRWTRWSRWF
FNA …..4.5
dengan,
[ ]34322111 )( )( )( θθθ SinLLSinLSinLRa +++=
⎥⎦⎤
⎢⎣⎡ +++= 34322111 )())()"( θθθ SinLLSinLSinLRs

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-34
⎥⎦⎤
⎢⎣⎡ ++= 343221 )()"( θθ SinLLSinLRt
343 )( θ SinLLRb +=
3432 )'( θ SinLLRt +=
342 )'( θSinLRs =
Rf1’= jarak sesuai dimensi AutoCad dengan perbandingan skala real
Kaki Prosthetic.
Gambar 4.23 Stick diagram perhitungan gaya ankle kaki prosthetic
fase loading response
Stick diagram di atas untuk formulasi gaya pada ankle joint kaki prosthetic,
yaitu:
01 =∑ MA
( ) ( ) ( ) ( ) ( ) ( )( )
022
2222111111 =⎥⎦
⎤⎢⎣
⎡
×
−×+×+×+×+×+×
a
stbtsf
RFNA
RWSRWTRWBRWTRWSRWF

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-35
( ) ( ) ( ) ( ) ( )( ) ⎥
⎦
⎤⎢⎣
⎡
×+
×+×+×+×+×=×
22
2211111122
s
tbtsf
RWS
RWTRWBRWTRWSRWFRaFNA
( ) ( ) ( ) ( ) ( )( )
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
×
+×+×+×+×+×
=2
22
22111111
2a
s
tbtsf
RRWS
RWTRWBRWTRWSRWF
FNA …..4.6
dengan,
[ ]34322112 )( )( )( θθθ SinLLSinLSinLRa +++=
⎥⎦⎤
⎢⎣⎡ +++= 34322112 )"( )( )( θθθ SinLLSinLSinLRs
⎥⎦⎤
⎢⎣⎡ ++= 3322112 )"( )( )( θθθ SinLSinLSinLRt
[ ]2211 )( )( θθ SinLSinLRb +=
⎥⎦⎤
⎢⎣⎡ += 2211 )'()( θθ Sin L Sin LR 1t
111 )'( θSinLRs =
Rf1= jarak sesuai dimensi AutoCad dengan perbandingan skala real
b. Formulasi Penentuan Momen Pada Ankle Joint
Penyusunan formulasi perhitungan momen pada ankle joint fase loading
response.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-36
Kaki Normal.
Gambar 4.24 Stick diagram perhitungan momen ankle kaki normal
fase loading response
Stick diagram di atas untuk formulasi momen pada ankle joint kaki normal,
yaitu:
( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎦
⎤⎢⎣
⎡
×−×
+×+×+×+×+×=
2222
221111111M
as
tbtsf
RFNARWS
RWTRWBRWTRWSRWFA
..4.7
dengan,
111 )( ' θ Sin LRs =
[ ]2'
11 )()( θθ Sin L Sin LR 21t +=
[ ]21 )()( θθ Sin L Sin LR 21b +=
[ ]3322112 )( )( )( '' θθθ SinLSinLSinLRt ++=
[ ]34322112 )( )( )( '' θθθ SinLLSinLSinLRs +++=
[ ]34322112 )( )( )( θθθ SinLLSinLSinLRa +++=
Rf1 = jarak sesuai dimensi AutoCad dengan perbandingan skala real

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-37
Kaki Prosthetic.
Gambar 4.25 Stick diagram perhitungan momen ankle kaki prostheticfase loading response
Stick diagram di atas formulasi momen pada ankle joint kaki prosthetic, yaitu:
( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎦
⎤⎢⎣
⎡
×−×
−×−×−×−×−×=
2222
1111'11112M
st
btsfa
RWSRWT
RWBRWTRWSRWFRFNAA
…..4.8 dengan,
[ ]34322111 )( )( )( θθθ SinLLSinLSinLRa +++=
[ ]34322111 )( )( )( '' θθθ SinLLSinLSinLRs +++= [ ]343221 )()( '' θθ SinLL Sin LRt ++=
[ ]343 )( θ SinLLRb +=
[ ]332 )( ' θ Sin LLR 4t +=
[ ]342 )( ' θ Sin LRs =
Rf1’= jarak sesuai dimensi AutoCad dengan perbandingan skala real

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-38
3. Fase 3: Midstance
Fase midstance merupakan periode dari siklus berjalan antara fase loading
respone dengan heel rise. Dimulai pada saat heel sesaat sebelum meninggalkan
landasan. Pada fase midstance berat tertumpu pada kaki prosthetic yang berada
dalam kondisi stance, sedangkan kaki normal berada dalam kondisi mengayun.
Gambar 4.26Fase midstance gerakan berjalan bidang datar
Ankle joint pada fase mid stance berperan sebagai weight bearing untuk
menahan berat tubuh dan sekaligus membantu pergerakan (progression) kaki
untuk fase selanjutnya. Gerakan pergelangan kaki pada periode ini berubah dari
gerakan plantarflexion ke dorsiflexion.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-39
a. Formulasi Penentuanan Gaya Pada Ankle Joint
Penyusunan formulasi perhitungan gaya pada ankle joint kaki prosthetic
fase initial contact.
Gambar 4.27 Stick diagram perhitungan gaya ankle kaki prosthetic fase mid stance
Stick diagram di atas untuk formulasi gaya pada ankle joint kaki prosthetic, yaitu:
01 =∑ MA
( ) ( ) ( ) ( ) ( ) ( )( ) 0
11
1111222222 =⎥⎦
⎤⎢⎣
⎡×
+×+×−×−×−×−×
f
stbtsa
RWFRWSRWTRWBRWTRWSRFNA
( ) ( ) ( ) ( ) ( )( ) ⎥
⎦
⎤⎢⎣
⎡×
−×−×+×+×+×=×
11
1111222222
f
stbts
RWFRWSRWTRWBRWTRWS
RaFNA
( ) ( ) ( ) ( ) ( )( )
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡×
−×−×+×+×+×
=2
11
11112222
2a
f
stbts
RRWF
RWSRWTRWBRWTRWS
FNA …..4.9

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-40
Dengan, [ ]321432 θθθ Sin )L( Sin )L( Sin) L L(R 12a −++=
[ ]321342 θθθ Sin )L( Sin )L( Sin)LL(R 12"
s −++= [ ]3212 θθθ Sin )L( Sin )L( Sin )L(R 123
"t −+=
[ ]32 θθ Sin )L( Sin )L(R 12b −=
[ ]321 θθ Sin )L( Sin )L(R 12'
t −=
311 θSin)'L(Rs =
Rf1 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
b. Formulasi Penentuan Momen Pada Ankle Joint
Tahapan penyusunan formulasi perhitungan momen pada ankle joint kaki
prosthetic fase mid stance, sebagai berikut:
Gambar 4.28 Stick diagram perhitungan momen ankle kaki prosthetic
fase mid stance

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-41
Berdasarkan stick diagram di atas formulasi momen pada ankle joint kaki
prosthetic, yaitu:
( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×+×
+×+×+×+×+×=
2111
112222
2Mfas
tbtspcw
RWFRWSRWTRWBRWTRWSRFP
A…..4.10
dengan,
( )[ ]1312212 f43fa R Sin)L( Sin)L Sin )LL(R +−++= θθθ
( )[ ]312211 θθθ Sin)L( Sin)L Sin )LL(R "43s −++=
( )[ ]13221 θθ Sin)LL Sin )"L(R 4t ++=
13 θ Sin)LL(R 4b +=
132 θ Sin)L'L(R 4t +=
142 θ Sin )'L(Rs =
Rf1 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
4. Fase 4: Terminal stance (heel off)
Fase terminal stance disebut fase heel off atau heel rise. Periode ini
merupakan waktu dimana tumit mulai terangkat dari landasan dan bersiap untuk
masuk fase swing dalam gait cycle.
Gambar 4.29 Fase terminal stance gerakan berjalan bidang datar
Pada fase ini berat tubuh berpindah ke bagian jari kaki (forefoot)
prosthetic, sehingga bagian ini menjadi tumpuan kaki untuk bergerak. Bagian

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-42
heelpada kaki prosthetic bergerak meninggi menghasilkan gerakan
dorsiflexionpada ankle joint.
a. Formulasi Penentuan Gaya Pada Ankle Joint
Penyusunan formulasi perhitungan gaya pada ankle joint fase terminal
stance, sebagai berikut:
Kaki Normal.
Gambar 4.30 Stick diagram perhitungan gaya ankle kaki normal fase terminal stance
Stick diagram di atas formulasi gaya pada ankle joint kaki normal, yaitu:
02 =∑ MA
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) 0
11"1111
11222222=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
×−×+×
+×+×+×+×+×
afs
tbtsf
RFNARWFRWS
RWTRWBRWTRWSRWF
( ) ( ) ( ) ( )( ) ( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×+×+×
+×+×+×+×=×
"111111
22222211 fst
btsfa RWFRWSRWT
RWBRWTRWSRWFRFNA

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-43
( ) ( ) ( ) ( ) ( )( ) ( )
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
×+×
+×+×+×+×+×
=1
"1111
11222222
1a
fs
tbtsf
RRWFRWS
RWTRWBRWTRWSRWF
FNA …4.11
Dengan,
[ ]32123141 θθθ Sin)LL(Sin)L(Sin)L(Ra +++=
⎥⎦⎤
⎢⎣⎡ +++= 14233211 θθθ Sin)L()Sin)L(Sin)L"L(Rs
⎥⎦⎤
⎢⎣⎡ ++= 3223141 θθθ Sin)"L()Sin)L(Sin)L(Rt
[ ]2314 θθ Sin)L(Sin)L(Rb += [ ]23142 θθ Sin)L(Sin)L(R '
t +=
142 θSin)'L(Rs =
Rf1” = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Kakiprosthetic.
Gambar 4.31 Stick diagram perhitungan gaya ankle kaki prosthetic fase terminal stance
θ

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-44
Berdasarkan stick diagram di atas formulasi gaya pada ankle joint kaki
prosthetic, yaitu:
01 =∑ MA
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) 0
1111
112222'2222=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
×+×
−×−×−×−×−×−×
fs
tbtsfa
RWFRWS
RWTRWBRWTRWSRWFRFNA
( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×−×
+×+×+×+×+×=×
1111
112222'2222
fs
tbtsf
RWFRWS
RWTRWBRWTRWSRWFRaFNA
( ) ( ) ( ) ( ) ( )( ) ( )
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
×−×
+×+×+×+×+×
=2
1111
112222'22
2a
fs
tbtsf
RRWFRWS
RWTRWBRWTRWSRWF
FNA ....4.12
Dengan,
[ ]321212 θθθ Sin )LL( Sin )L( Sin )L(R 34a +++=
[ ]321212 θθθ Sin )LL( Sin )L( Sin )L(R 34"
s +++=
[ ]32122 θθ Sin )LL( Sin )L(R 3"
t ++=
321 θ Sin )LL(Rb +=
3211 θ Sin )'LL(Rt +=
311 θSin)L(R 's =
Rf1 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2’ = jarak sesuai dimensi AutoCad dengan perbandingan skala real
b. Formulasi Perhitungan Momen Pada Ankle Joint
Tahapan penyusunan formulasi perhitungan momen pada ankle joint fase
terminal stance, sebagai berikut:

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-45
Kaki Normal
Gambar 4.32 Stick diagram perhitungan momenankle kaki normal
fase terminal stance
Stick diagram di atas untuk formulasi momen pada ankle joint kaki normal,
yaitu:
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×+×−×−×
−×−×−×−×=
111111
2222'22221M
ftsb
tsfa
RWFRWTRWSRWB
RWTRWSRWFRFNAA ...4.13
Dengan,
311 θ Sin )L(R '
s =
31 θ Sin )'LL(R 21t +=
3θ Sin )LL(R 11b +=
[ ]322 θθ Sin )LL( Sin )L(R 213"
t ++=
[ ]3212 θθθ Sin )LL( Sin )L( Sin )L(R 2134"
s +++=
( )[ ]321212 θθθ SinLL Sin )L( Sin )L(R 34a +++=
Rf1 = jarak sesuai dimensi AutoCad dengan perbandingan skala real

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-46
Rf2’ = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rp = jarak real polyurethane dari titik pusat ankle joint kaki prosthetic
Kaki Prosthetic.
Gambar 4.33 Stick diagram perhitungan momenankle kaki prosthetic
fase terminal stance
Stick diagram di atas formulasi momen pada ankle joint kaki prosthetic, yaitu:
( ) ( ) ( ) ( )( ) ( ) ( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡
×+×−×+×
+×+×+×+×=
"11111111
2222222M
fast
btsf
RWFRFNARWSRWT
RWBRWTRWSRWFA ...4.14
Dengan,
142 θ Sin )'L(Rs =
( )[ ]23142 θθ Sin )'L( SinLRt +=
( )[ ]2314 θθ Sin )L( SinLRb +=
( )[ ]3223141 θθθ Sin )"L( Sin )L( SinLRt ++=
( )[ ]32123141 θθθ Sin )L"L( Sin )L( SinLRs +++=

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-47
( )[ ]321211 θθθ SinLL Sin )L( Sin )L(R 34a +++=
Rf1” = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2 = jaraksesuai dimensi AutoCad dengan perbandingan skala real
5. Fase 5: Pre Swing
Fase pre-swing merupakan periode dimana kaki akan mulai meninggalkan
permukaan landasan. Fase ini merupakan akhir dari periode berdiri (stance phase)
untuk mulai masuk ke periode mengayun (swing phase). Fase pre swing dimulai
gerakanfoot flat pada kaki normal, sedangkan kaki prosthetic berada pada posisi
akan meninggalkan landasan untuk melakukan gerakan mengayun (heel off).
Gambar 4.34 Fase pre swing gerakan berjalan bidang datar
Pada fase inianklejointberada dalam puncak gerakan plantarflexion dengan
tumpuan pada bagian jari kaki (toe).
a. Formulasi Penentuan Gaya Pada Ankle Joint
Penyusunan formulasi perhitungan gaya pada ankle joint fase pre swing.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-48
Kaki Normal.
Gambar 4.35 Stick diagram perhitungan gaya ankle kaki normal
fase pre swing
Stick diagram di atas formulasi gaya pada ankle joint kaki normal, yaitu:
02 =∑ MA
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ] 0111111222222 =×−×+×+×+×+×+× astbtsf RFNARWSRWTRWBRWTRWSRWF
( ) ( ) ( ) ( ) ( ) ( )[ ]111122222211 stbtsfa RWSRWTRWBRWTRWSRWFRFNA ×+×+×+×+×+×=×
( ) ( ) ( ) ( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡ ×+×+×+×+×+×=
1
11112222221
a
stbtsf
RRWSRWTRWBRWTRWSRWF
FNA …4.15
dengan,
12 θ Sin )'L(R 4s =
[ ]212 θθ Sin )'L( Sin )L(R 34t +=
[ ]21 θθ Sin )L( Sin )L(R 34b +=
[ ]32211 θθθ Sin)"L( Sin )L( Sin )L(R 34t ++=
[ ]312211 θθθ Sin)"LL( Sin )L( Sin )L(R 34s +++=

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-49
[ ]312211 θθθ Sin)LL( Sin )L( Sin )L(R 34a +++=
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Kaki Prosthetic.
Gambar 4.36 Stick diagram perhitungan gaya ankle kaki prosthetic
fase pre swing
Stick diagram di atas formulasi gaya pada ankle joint kaki prosthetic, yaitu:
01 =∑ MA
( ) ( ) ( ) ( ) ( )( ) ( )
01111
2222'2222 =⎥⎦
⎤⎢⎣
⎡
×−×
−×−×−×−×−×
st
btsfa
RWSRWT
RWBRWTRWSRWFRFNA
( ) ( ) ( ) ( )( ) ( )
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
×+×
+×+×+×+×
=2
1111
2222'22
2a
st
btsf
RRWSRWT
RWBRWTRWSRWF
FNA
( ) ( ) ( ) ( )( ) ( ) ⎥
⎦
⎤⎢⎣
⎡
×+×
+×+×+×+×+=×
1111
2222'2222
st
btsfa RWSRWT
RWBRWTRWSRWFRFNA …4.16
Dengan,
[ ]3212 θθθ Sin )LL( Sin )L( Sin )L(R 2134a +++=
[ ]3212312 θθθ Sin)LL(Sin)L( Sin )L(R 4"
s +++=

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-50
[ ]32122 θθ Sin)LL( Sin )L(R 3"
t ++=
[ ]32 θ Sin )LL(R 1b += [ ]311 θ Sin )LL(R 2
't +=
31 θ Sin )L(R 1
's =
Rf2’ = jarak sesuai dimensi AutoCad dengan perbandingan skala real
b. Formulasi Perhitungan Momen Pada Ankle Joint
Penyusunan formulasi perhitungan momen pada ankle joint fase pre swing,
sebagai berikut:
Kaki Normal.
Gambar 4.37 Stick diagram perhitungan momen ankle kaki normal
fase pre swing Stick diagram di atas formulasi momenpada ankle joint kaki normal, yaitu:
( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×−×
−×−×−×−×−×=
1111
2222'22221M
ft
btsfa
RWSRWT
RWBRWTRWSRWFRFNAA …4.17
Dengan,

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-51
[ ]3212 θθθ Sin )LL( Sin )L( Sin )L(R 2134a +++=
[ ]3212312 θθθ Sin)LL(Sin)L( Sin )L(R 4"
s +++= [ ]32122 θθ Sin)LL( Sin )L(R 3
"t ++=
[ ]32 θ Sin )LL(R 1b +=
[ ]311 θ Sin )LL(R 2'
t +=
31 θ Sin )L(R 1'
s =
Rf2’ = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Kaki Prosthetic.
Gambar 4.38 Stick diagram perhitungan momenankle kaki prosthetic
fase pre swing
Stick diagram di atas formulasi momenpada ankle joint kaki prosthetic, yaitu:
( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎦
⎤⎢⎣
⎡
×−×
+×+×+×+×+×=
1111
112222222MA
as
tbtsf
RFNARWS
RWTRWBRWTRWSRWF…4.18
Dengan,
142 θ Sin )'L(Rs =
( ) ( )[ ]23142 θθ SinL SinLR 't +=
θ

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-52
( ) ( )[ ]2314 θθ SinL SinLRb +=
( ) ( )[ ]3223141 θθθ Sin )"L( SinL SinLRt ++=
( ) ( )[ ]31223141 θθθ Sin )"LL( SinL SinLRs +++=
( ) ( )[ ]32123141 θθθ Sin )LL( SinL SinLRa +++=
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
6. Fase 6: Initial swing
Fase keenam merupakan fase initial swing, dimana merupakan periode
awal swing phase. Kaki mulai melakukan ayunan untuk pergerakan kaki ke depan.
Fase initial swing dimulai pada saat telapak kaki prosthetic mulai diangkat dari
permukaan landasan (toe off), sedangkan kaki normal menahan tubuh dengan
berada dalam kondisi kaki rata (foot flat) terhadap bidang datar.
Gambar 4.39 Fase initial swing gerakan berjalan naik bidang datar
Gerakan yang terjadi pada ankle jointkaki prostheticselama periode initial
swing bertujuan untuk membantu pergerakan kaki ke depan. Pada periode ini
anklejointmasih bergerak plantarflexion dan diikuti oleh jari kaki yang bergerak
dorsiflexion ke atas (foot clearance) sehingga kakiprosthetic pada posisi melayang
di atas landasan.
a. Formulasi Perhitungan Gaya Pada Ankle Joint
Tahapan penyusunan formulasi perhitungan gaya pada ankle joint kaki
normal fase initial swing, sebagai berikut:

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-53
Gambar 4.40 Stick diagram perhitungan gaya ankle kaki normal
fase initial swing
Berdasarkan stick diagram di atas formulasi gaya pada ankle joint kaki normal,
yaitu:
0=∑ MK
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ] 0222222111111 =×+×−×−×−×−×−× ftsbtsa RWFRWTRWSRWBRWTRWSRFNA
( ) ( ) ( ) ( ) ( ) ( )[ ]222222111111 ftsbtsa RWFRWTRWSRWBRWTRWSRFNA ×−×+×+×+×+×=×
( ) ( ) ( ) ( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡ ×−×+×+×+×+×=
1
22222211111
a
ftsbts
RRWFRWTRWSRWBRWTRWS
FNA …4.19
Dengan, [ ]231211 )( )( θθ SinLSinLLRa ++= [ ]21
"1 )()( θθ Sin L Sin LLR 321s ++=
⎥⎦⎤
⎢⎣⎡ += 23121 )()"( θθ SinLSinLRt
23)( θSinLRb =
342 )"( θSinLRs =
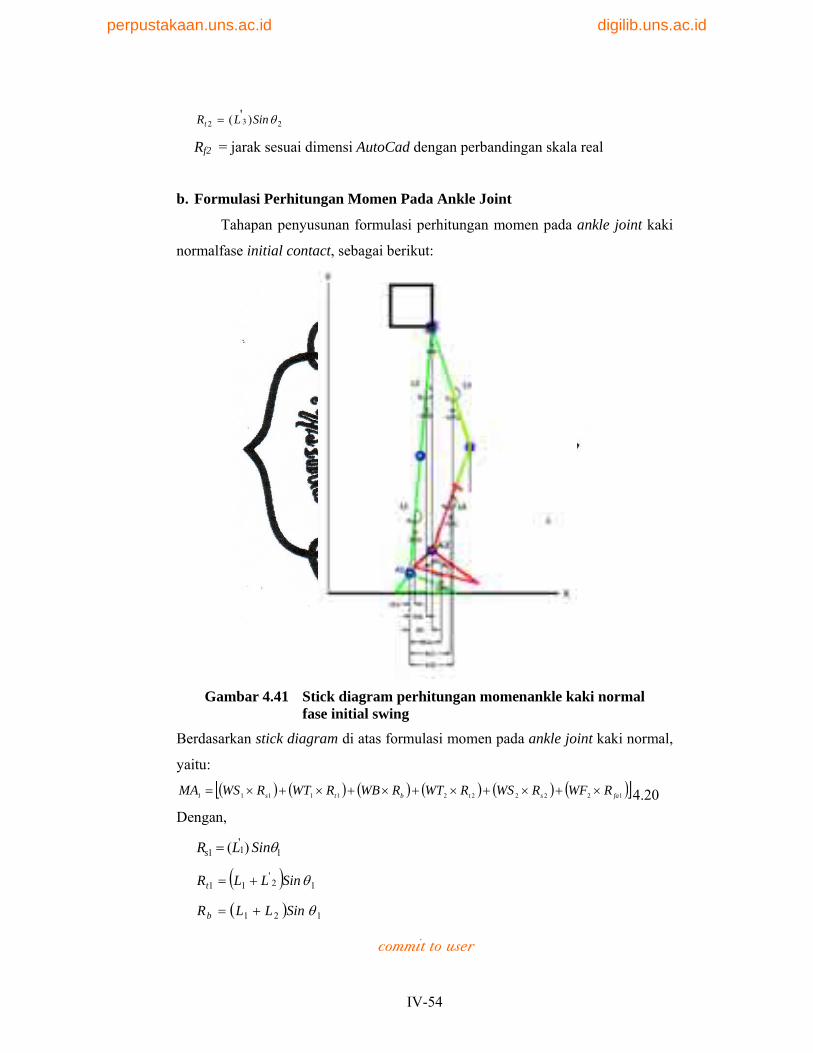
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-54
232 )'( θSinLRt =
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
b. Formulasi Perhitungan Momen Pada Ankle Joint
Tahapan penyusunan formulasi perhitungan momen pada ankle joint kaki
normalfase initial contact, sebagai berikut:
Gambar 4.41 Stick diagram perhitungan momenankle kaki normal
fase initial swing
Berdasarkan stick diagram di atas formulasi momen pada ankle joint kaki normal,
yaitu:
( ) ( ) ( ) ( ) ( ) ( )[ ]1222221111 fastbts1 RWFRWSRWTRWBRWTRWSAM ×+×+×+×+×+×= 4.20 Dengan,
111 )( ' θ Sin LRs =
( ) 12'
11 θ SinLLRt +=
( ) 121 θ SinLLRb +=

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-55
[ ]23211 f4321fa R Sin )L( Sin )L( Sin )LL(R +−++= θθθ
( ) ( )[ ]3421212 θθθ Sin"L Sin )L( SinLLR 3s −++=
( ) ( )[ ]23"
1212 θθ SinL SinLLRt ++=
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
7. Fase 7: Mid swing
Fase mid swing dimulai dengan gerakan flexion pada lutut dan diakhiri
dengan tungkai kaki yang bergerak hingga berada pada posisi vertikal dengan
permukaan landasan. Pada fase ini terjadi gerak perpanjangan tungkai kaki dalam
persiapan melakukan fase heel strike.
Gambar 4.42 Fase mid swing gerakan berjalan bidang datar
Pada posisi ini bagian anklejointkaki prosthetic dalam posisi dorsiflexion
dan mulai bergerak ke posisi netral (0°). Gerakan tersebut bertujuan untuk
menghindari gerakan menyeret kaki karena lutut mulai melakukan gerakan
extension.
a. Formulasi Perhitungan Gaya Pada Ankle Joint
Tahapan penyusunan formulasi perhitungan gaya pada ankle joint kaki
normal fase mid swing, sebagai berikut:
θ

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-56
Gambar 4.43 Stick diagram perhitungan gaya ankle kaki normal
fase mid swing
Stick diagram di atas formulasi gaya pada ankle joint kaki normal, yaitu:
02 =∑ MA
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ] 0222222111111 =×+×−×−×−×−×−× fstbtsa RWFRWSRWTRWBRWTRWSRFNA
( ) ( ) ( ) ( ) ( ) ( )[ ]222222111111 fstbtsa RWFRWSRWTRWBRWTRWSRFNA ×−×+×+×+×+×=×
( ) ( ) ( ) ( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡ ×−×+×+×+×+×=
1
22222211111
a
fstbts
RRWFRWSRWTRWBRWTRWS
FNA …4.21
dengan,
[ ]211 )()( θθ Sin LL Sin LLR 4321a +++=
⎥⎦⎤
⎢⎣⎡ +++= 21211 )()"( θθ SinLLSinLLR 43s
⎥⎦⎤
⎢⎣⎡ ++= 2121 )()"( θθ SinLLSinLR 43t
2)( θSinLLR 43b +=
⎥⎦⎤
⎢⎣⎡ += 2432 )'( θSinLLRt
⎥⎦⎤
⎢⎣⎡= 242 θSin)'L(Rs
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
θ

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-57
b. Formulasi Perhitungan Momen Pada Ankle Joint
Tahapan penyusunan formulasi perhitungan momen pada ankle joint kaki
normal fase mid swing, sebagai berikut:
Gambar 4.44 Stick diagram perhitungan momenankle kaki normal
fase mid swing
Berdasarkan stick diagram di atas formulasi momen pada ankle joint kaki normal,
yaitu:
( ) ( ) ( ) ( ) ( ) ( )[ ]12222211111 fastbts RWFRWSRWTRWBRWTRWSAM ×+×+×+×+×+×= 4.22 Dengan,
111 )( ' θ Sin LRs =
( ) 12'
11 θ SinLLRt +=
( ) 121 θ SinLLRb +=
( )[ ]23"
1212 )( θθ Sin L SinLLRt ++=
( )[ ]24"
31212 )( θθ Sin LL SinLLRs +++=
( )[ ]22431211 )( ffa RSinLLSinLLR +++= + θθ
θ
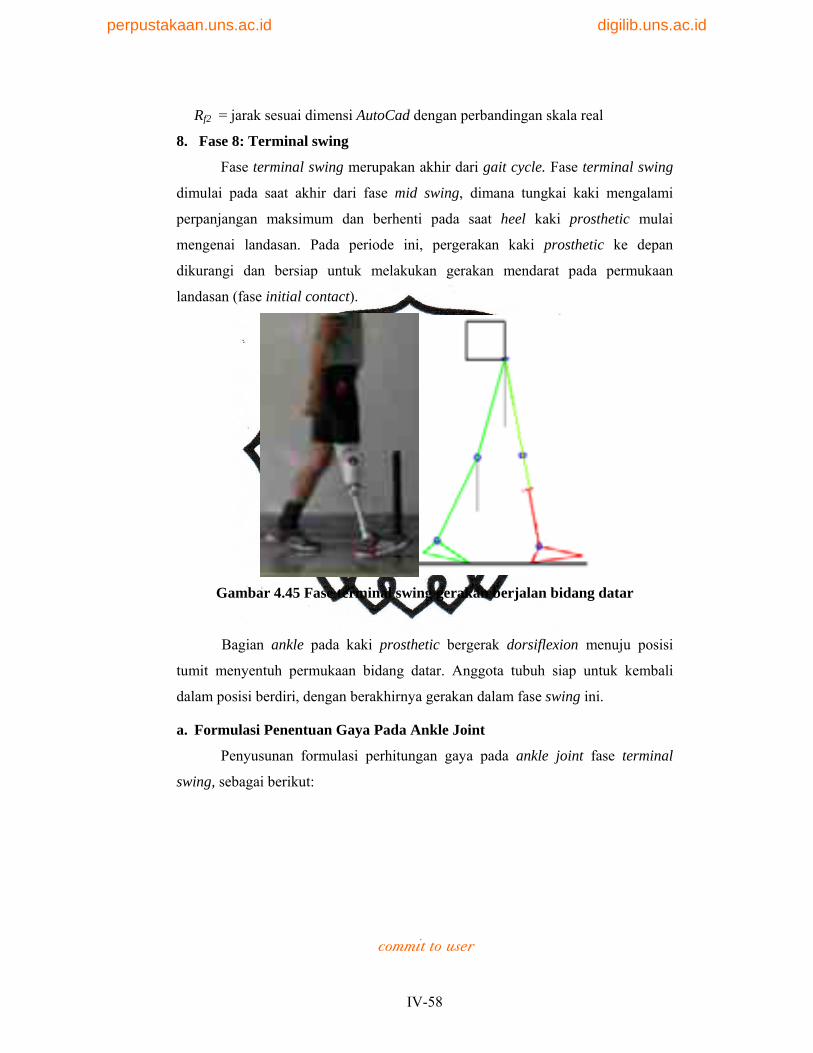
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-58
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
8. Fase 8: Terminal swing
Fase terminal swing merupakan akhir dari gait cycle. Fase terminal swing
dimulai pada saat akhir dari fase mid swing, dimana tungkai kaki mengalami
perpanjangan maksimum dan berhenti pada saat heel kaki prosthetic mulai
mengenai landasan. Pada periode ini, pergerakan kaki prosthetic ke depan
dikurangi dan bersiap untuk melakukan gerakan mendarat pada permukaan
landasan (fase initial contact).
Gambar 4.45 Fase terminal swing gerakan berjalan bidang datar
Bagian ankle pada kaki prosthetic bergerak dorsiflexion menuju posisi
tumit menyentuh permukaan bidang datar. Anggota tubuh siap untuk kembali
dalam posisi berdiri, dengan berakhirnya gerakan dalam fase swing ini.
a. Formulasi Penentuan Gaya Pada Ankle Joint
Penyusunan formulasi perhitungan gaya pada ankle joint fase terminal
swing, sebagai berikut:

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-59
Kaki Normal.
Gambar 4.46 Stick diagram perhitungan gaya ankle kaki normal
fase terminal swing
Stick diagram di atas formulasi gaya pada ankle joint kaki normal, yaitu:
02 =∑ MA
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )[ ] 02222221111'1111 =×+×−×−×−×−×−×−× fstbtsfa RWFRWSRWTRWBRWTRWSRWFRFNA
( ) ( ) ( ) ( ) ( ) ( )( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×−
×+×+×+×+×+×=×
22
22221111'11
11f
stbtsf
a RWF
RWSRWTRWBRWTRWSRWFRFNA
( ) ( ) ( ) ( ) ( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡ ×−×+×+×+×+×+×=
1
2222221111'111
a
fstbtsf
RRWFRWSRWTRWBRWTRWSRWF
FNA 4.23
Dengan,
( )[ ]34322111 )( )( θθθ SinLLSinLSinLRa +++=
( )[ ]34322111 )( )( '' θθθ SinLLSinLSinLRs +++=
( )[ ]343221 )( '' θθ SinLL Sin LRt ++=
( ) 343 θ SinLLRb +=

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-60
( ) 343'
2 θ SinLLRt +=
342 )( ' θ Sin LRs =
Rf1’ = jarak sesuai dimensi AutoCad dengan perbandingan skala real Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Kaki Prosthetic.
Gambar 4.47 Stick diagram perhitungan gaya ankle kaki prosthetic
fase terminal swing
Stick diagram di atas formulasi gaya pada ankle joint kaki prosthetic, yaitu:
01 =∑ MA
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) 0
22"22
2222111111=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
×−×
+×+×+×+×+×+×
af
stbtsf
RFNARWF
RWSRWTRWBRWTRWSRWF
( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×+×
+×+×+×+×+×=×
"2222
2211111122
fs
tbtsf
RWFRWS
RWTRWBRWTRWSRWFRaFNA

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-61
( ) ( ) ( ) ( ) ( )( ) ( )
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
×+×
+×+×+×+×+×
=2
"2222
22111111
2a
fs
tbtsf
RRWFRWS
RWTRWBRWTRWSRWF
FNA …4.24
Dengan,
[ ]34322112 )( )( )( θθθ SinLLSinLSinLRa +++=
[ ]34"
322112 )( )( )( θθθ SinLLSinLSinLRs +++=
[ ]33"
22112 )( )( )( θθθ SinLSinLSinLRt ++=
[ ]21 )()( θθ Sin L Sin LR 21b +=
[ ]2'
11 )()( θθ Sin L Sin LR 21t +=
11'
1 )( θSinLR s =
Rf1 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2” = jarak sesuai dimensi AutoCad dengan perbandingan skala real
b. Formulasi Perhitungan Momen Pada Ankle Joint
Penyusunan formulasi perhitungan momen pada ankle joint fase terminal
swing, sebagai berikut:

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-62
Kaki Normal.
Gambar 4.48 Stick diagram perhitungan momenankle kaki normal
fase terminal swing
Stick diagram di atas formulasi momen pada ankle joint kaki normal, yaitu:
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×−×+×
+×+×+×+×+×=
22"2222
221111111MA
afs
tbtsf
RFNARWFRWS
RWTRWBRWTRWSRWF…4.25
Dengan,
111 )( ' θ Sin LRs =
[ ]2'
11 )()( θθ Sin L Sin LR 21t +=
[ ]21 )()( θθ Sin L Sin LR 21b +=
[ ]33212 θθθ Sin )"L( Sin )L( Sin )L(R 21t ++=
[ ]343212 θθθ Sin )"LL( Sin )L( Sin )L(R 21s +++=
( )[ ]34322112 )( )( θθθ SinLLSinLSinLRa +++=
Rf1 = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2” = jarak sesuai dimensi AutoCad dengan perbandingan skala real
θ

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-63
Kaki Prosthetic.
Gambar 4.49 Stick diagram perhitungan momenankle kaki prosthetic
fase terminal swing
Stick diagram di atas formulasi momen pada ankle joint kaki prosthetic, yaitu:
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ⎥
⎦
⎤⎢⎣
⎡
×−×−×
−×−×−×−×+×=
2222
1111'1122112M
stb
tsffa
RWSRWTRWB
RWTRWSRWFRWFRFNAA …4.26
Dengan,
( )[ ]34322111 )( )( θθθ SinLLSinLSinLRa +++=
( )[ ]3432111 θθθ SinLL Sin )L( Sin )"L(R 2s +++=
( )[ ]343221 )( '' θθ SinLL Sin LRt ++=
( ) 343 θ SinLLRb +=
332 )( ' θ Sin LLR 4t +=
342 )( ' θ Sin LRs =
Rf1’ = jarak sesuai dimensi AutoCad dengan perbandingan skala real
Rf2 = jarak sesuai dimensi AutoCad dengan perbandingan skala real

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-64
4.3 PENGOLAHAN DATA
Pengujianbiomekanika menggunakan pendekatan static equilibrium
dilakukan berdasarkan formulasi yang dilakukan pada sub bab 4.2dari
perhitungan diperoleh nilai gaya dan momen pada ankle jointpengguna
prostheticdalam aktivitas berjalan di bidang datar. Kondisi static equilibrium
didapat melalui keseimbangan nilai gaya dan momen pada ankle joint baik kaki
normal maupun kaki prosthetic.Nilai gaya dan momen pada ankle joint kaki
normal maupunkaki prostheticdikomparasikan untuk melihat kontribusi dari
rancangan alignment adapter for prosthetic footdalam mengakomodasi gerak
berjalan pengguna kakiprosthetic.
4.3.1 Penentuan Nilai Keseimbangan GayaPada Komponen Alignment Adapter yang Mengalami Pensejajaran.
Nilai keseimbangan gaya dihitung pada delapan fase gerakan berjalan
berdasarkan formulasi model biomekanika pada kaki normal maupun kaki
prosthetic.Berikut contoh perhitungan nilai keseimbangan gaya pada komponen
yang mengalami pensejajaran, yaitu:
1. Fase 1
Perhitungan nilai gaya pada gerakan berjalan fase initial contact,
dilakukan baik pada kaki normal maupun kaki prosthetic.
Kaki normal.
Gaya berat pada tiap segmen dan panjang lengan momen merupakan variabel
yang digunakan dalam menentukan besarnya gaya yang terjadi pada ankle
joint saat aktivitas berjalan. Contoh perhitungan lengan momen kaki normal
pada fase initial contact.
[ ]34322112 )( )( )( θθθ SinLLSinLSinLRa +++=
= [(0,38x sin 260) + (0,34x sin 110) + (0,720 x sin 180)]
= 0,454 m
Rekapitulasi lengan momen dalam perhitungan gaya ankle jointkaki normal
pada fase initial contact ditunjukkan pada tabel 4.8.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-65
Tabel 4.8Lengan momen perhitungan gaya ankle joint kaki normal fase initial contact
Sedangkan untuk contoh perhitungan gaya berat pada tiap segmen tubuh
pengguna prosthetic, sebagai berikut:
Ws1 = ms1 x g
= (2.69 x 9,8) N
= 26,36 Newton
Rekapitulasi perhitungan gaya berat pada tiap segmen tubuh pengguna
prostheticditunjukkan pada tabel 4.9.
Tabel 4.9Gaya berat segmen tubuh pengguna prosthetic
Besargaya berat segmen tubuh pengguna prosthetic digunakan dalam
penentuan gaya dan momen pada ankle joint untuk delapan fase gerakan
berjalan. Hasil tabulasi lengan momen (tabel 4.7)dan gaya berat segmen tubuh
(tabel 4.8) menjadi input dalam perhitungan gaya pada ankle joint kaki normal
fase initial contact. Hasil perhitungan gaya pada ankle joint kaki normal,
sebagai berikut:
No Jarak Moment (d) Panjang (m)
1 Ra1 0.454
2 Rs1 0.359
3 Rt1 0.251
4 Rb 0.222
5 Rt2 0.203
6 Rs2 0.060
7 Rf1' 0.132
8 Rf2 0.055
No Segmen Massa (kg) Gaya Berat (W)1 Body (B) 42.86 420.028
2 Tight Normal (T1) 6.25 61.250
3 Tight Prosthetic (T2) 6.25 61.250
4 Shank Normal (S1) 2.69 26.362
5 Shank Prosthetic (S2) 1.46 14.261
6 Foot Normal (F1) 0.88 8.624
7 Foot Prosthetic (F2) 0.50 4.900

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-66
( ) ( ) ( ) ( ) ( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡ ×−×+×+×+×+×+×=
1
2222221111'111
a
fstbtsf
RRWFRWSRWTRWBRWTRWSRWF
FNA
454,0272.0850,0441,12453,93348,15477,9135,1 −+++++
=
= 291,734 Newton
Kaki prosthetic.
Panjang lengan momen digunakan sebagai salah satu variabel dalam
menentukan besarnya gaya yang terjadi pada anklejointsaat aktivitas berjalan.
Berikut contoh perhitungan lengan momen kaki prosthetic pada fase initial
contact.
[ ]33"
22112 )( )( )( θθθ SinLSinLSinLRt ++=
= [(0,38x sin26) + (0,34 x sin 110)+ (0,063 x sin 180)]
= 0,251 m
Rekapitulasi lengan momen dalam perhitungan gayaankle jointkaki prosthetic
pada fase initial contact ditunjukkanpada tabel 4.10.
Tabel 4.10 Lengan momen perhitungan gaya ankle joint kaki prosthetic fase initial contact
Hasil tabulasi lengan momen (tabel 4.10) dan gaya berat segmen tubuh (tabel
4.9) menjadi input dalam perhitungan gaya pada ankle joint kaki prosthetic
fase initial contact. Hasil perhitungan gayapada ankle joint kaki prosthetic,
sebagai berikut:
No Jarak Moment (d) Panjang (m)
1 Ra2 0.454
2 Rs2 0.394
3 Rt2 0.251
4 Rb 0.231
5 Rt1 0.203
6 Rs1 0.094
7 Rf1 0.036
8 Rf2" 0.10

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-67
( ) ( ) ( ) ( ) ( ) ( )( )
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
×+
×+×+×+×+×+×
=2
11
11112222"22
2a
f
stbtsf
RRWF
RWSRWTRWBRWTRWSRWF
FNA
454.0
306.0490,2456,12218,97363,15624,5477,0 ++++++=
= 295,044 Newton
Rekapitulasi perhitungan nilai gaya padaanklejointdalam aktivitas berjalan
pengguna prostheticdi didang datar pada delapan fase gerakan berjalan
ditampilkan pada tabel 4.11.
Tabel 4.11 Rekapitulasi perhitungan nilai gaya pada ankle joint
no FASE Gait Gaya
Ankle Normal Ankle Prosthetic
1 Heel Strike Fase 1 292 295 2 Loading Respone Fase 2 242 344 3 Mid Stance Fase 3 0 303 4 Terminal Stance Fase 4 273 313 5 Pre Swing Fase 5 343 241 6 Initial Swing Fase 6 285 0 7 Mid Swing Fase 7 327 0 8 Terminal Swing Fase 8 284 302
erdasarkan tabel4.11 komparasi nilai gaya pada ankle joint kaki normal dan kaki
prosthetic pada setiap fase gerakan berjalan dapat digambarkan dalam grafik pada
gambar 4.50.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
j
b
k
k
s
m
4
b
B
a
1
d
•
Gambar
Grafi
joint yang d
bidang data
komponen y
kaki prosth
sedangkansa
mempunyai
4.3.2 Perhit
Adapt
Nilai
berdasarkan
Berikut con
alignment ad
1. Fase 1
Perhi
dilakukan ba
• Kaki no
Panjang
menentu
r 4.50 Kompalignm
fik pada gam
dihasilkan k
ar mengguna
yang mengal
hetic memp
aat kondisi s
nilai yang le
tungan Nila
ter yang Me
i keseimban
formulasi m
ntoh perhit
dapter for pr
itungan nila
aik pada kak
ormal.
lengan m
ukan besarn
parasi nilai ment adapte
mbar 4.50men
kaki normal
akan prosth
lami setting.
punyai nilai
swing phase
ebih kecil da
ai Keseimba
engalami Pe
gan momen
model biome
tungan nila
rosthetic foo
ai momen
ki normal ma
momen digu
nya momen
gaya pada aer mengalam
nunjukkan p
l maupun k
hetic endosk
. Pada fase s
i yang lebi
e nilai gaya
aripada kaki
angan Mom
ensejajaran
n dihitung pa
ekanika pada
ai keseimba
otyang meng
pada gerak
aupun kaki p
unakan seba
yang terja
ankle joint dmi pensejaja
perbandingan
kaki prosthe
keletal deng
stance phase
ih besar da
a pada ankle
normal.
men pada K
ada delapan
a kaki norm
angan mom
galami pense
kan berjalan
prosthetic.
agai salah
adi pada a
dengan komaran
n nilai gaya
tic saat berj
gan alignme
e gayapada
aripada kak
e joint kaki
Komponen A
n fase geraka
mal dan kaki
men pada
ejajaran, yait
n fase initia
satu variab
anklejointsaa
mponen
pada ankle
rjalan pada
nt adapter
ankle joint
ki normal,
prosthetic
Alignment
an berjalan
prosthetic.
komponen
tu:
al contact,
bel dalam
at aktivitas

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-69
berjalan. Berikut contoh perhitungan lengan momen kaki normal pada fase
initial contact.
[ ]2'
11 )()( θθ Sin L Sin LR 21t += = [(0,38x sin 260) + (0,34 sin 110)]
= 0,203 m
Rekapitulasi lengan momen dalam perhitungan momen ankle jointkaki normal
pada fase initial contactditunjukkanpada tabel 4.12.
Tabel 4.12 Lengan momen perhitungan momen ankle joint kaki normal fase initial contact
Hasil tabulasi lengan momen (tabel 4.12),gaya berat segmen tubuh (tabel 4.8)
dan gaya pada ankle joint (tabel 4.11) menjadi inputdalam perhitungan momen
ankle joint kaki normal fase initial contact. Hasil perhitungan momen pada
ankle joint kaki normal, sebagai berikut:
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×−×
+×+×+×+×+×+×=
22"22
22221111111M
af
stbtsf
RFNARWFRWSRWTRWBRWTRWSRWF
A
[ ] 935,1334910604,536315218974561249022840 += , + +, + , + , + , + , = -0,028N.m
• Kaki prosthetic.
Panjang lengan momen digunakan sebagai salah satu variabel dalam
menentukan besarnya momen yang terjadi pada ankle joint saat aktivitas
berjalan. Berikut contoh perhitungan lengan momen kaki prosthetic pada fase
initial contact.
( )[ ]343221 )( '' θθ SinLL Sin LRt ++=
No Jarak Moment (d) Panjang (m)
1 Rs1 0.094
2 Rt1 0.203
3 Rb 0.231
4 Rt2 0.251
5 Rs2 0.394
6 Ra2 0.454
7 Rf1 0.033
8 Rf2" 0.100

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-70
= [(0,147x sin 110) + (0.720x sin 180)]
= 0,251 m
Rekapitulasi lengan momen dalam perhitungan momen ankle jointkaki
prosthetic pada fase initial contactditunjukkanpada tabel 4.13.
Tabel 4.13 Lengan momen perhitungan momen ankle joint kaki prosthetic fase initial contact
Hasil tabulasi lengan momen (tabel 4.13), gaya berat segmen tubuh (tabel 4.8)
dan gaya pada ankle joint (tabel 4.11) menjadi input dalam perhitungan
momen ankle joint kaki prosthetic fase initial contact. Hasil perhitungan
momen pada ankle joint kaki prosthetic, sebagai berikut:
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ⎥
⎦
⎤⎢⎣
⎡
×−×−×
−×−×−×−×+×=
2222
1111'1122112MA
stb
tsffa
RWSRWTRWB
RWTRWSRWFRWFRFNA
[ ]847,0441,12453,93348,15477,9153,1282,0432,132 −−−−−−= +
= -0,003 N.m
Rekapitulasi nilai keseimbangan momen pada ankle yang dihasilkan
pengguna prosthetic pada 8 fase gerakan berjalan ditampilkan pada tabel 4.14
No Jarak Moment (d) Panjang (m)
1 Ra1 0.454
2 Rs1 0.359
3 Rt1 0.251
4 Rb 0.222
5 Rt2 0.203
6 Rs2 0.060
7 Rf1' 0.134
8 Rf2 0.058

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
B
k
p
j
m
m
s
k
n
Tabel
Berdasarkan
kaki prosthe
pada gambar
Gambar 4
Grafi
jointkaki no
menggunaka
mengalami
stabil pada a
kembali me
nilai momen
1 He2 Lo3 M4 Te5 Pr6 In7 M8 Te
No
4.14 Rekap
n tabel4.14 k
etic pada set
r 4.51.
4.51 Kompaalignm
fik pada gam
ormal maup
an prosthetic
pensejajaran
awal fase be
nurun dan n
n pada ankl
eek Strikeoading RespoMid Stanceerminal Stancre Swingnitial SwingMid Swingerminal Swin
FASE Gait
pitulasi perh
komparasi n
iap fase gera
arasi nilai mment adapte
mbar 4.51 me
pun kaki p
c endoskelet
n. Nilai mom
erdiri dan mu
nilainya stab
le joint kaki
Fase 1one Fase 2
Fase 3ce Fase 4
Fase 5Fase 6Fase 7
ng Fase 8
hitungan nil
nilai momen
akan berjala
momen padaer mengalam
enunjukkan k
prosthetic s
tal dengan k
menpada an
ulai meningk
bil hingga a
i normal me
lai momen p
n pada ankl
an dapat diga
a ankle jointmi pensejaja
komparasi n
saat berjalan
komponenal
nkle jointkak
kat tajam pa
akhir siklus
empunyai n
Ankle Norma‐0.028‐0.0310.000‐0.208‐0.18722.70287.404‐0.055
M
pada ankle
lejointkaki n
ambarkan da
t dengan koaran
nilai momen
n pada bid
lignment ada
ki prosthetic
ada fase ke ti
gait cycle.
nilai yang cu
al Ankle Pro‐0.00‐0.2662.7‐0.49‐0.020.000.00‐0.51
Moment
joint
normal dan
alam grafik
omponen
pada ankle
dang datar
dapter yang
ccenderung
iga, namun
Sedangkan
ukup stabil
sthetic0360359629000018

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-72
pada fase berdiri (stance phase) dan mulai meningkat pada fase mengayun (swing
phase).
4.3.3 Penentuan Nilai Keseimbangan Gaya Pada Komponen Alignment Adapter Tidak Mengalami Pensejajaran.
Nilai keseimbangan gaya dihitung pada delapan fase gerakan berjalan
berdasarkan formulasi model biomekanika pada kaki normal maupun kaki
prosthetic. Berikut perhitungan nilai keseimbangan gaya pada
komponenalignment adapteryang tidak mengalami pensejajaran
1. Fase 1
Perhitungan nilai gaya pada gerakan berjalan fase initial contact,
dilakukan baik pada kaki normal maupun kaki prosthetic.
Kaki normal.
Gaya berat pada tiap segmen dan panjang lengan momen merupakan variabel
yang digunakan dalam menentukan besarnya gaya yang terjadi pada ankle
joint saat aktivitas berjalan. Contoh perhitungan lengan momen kaki normal
pada fase initial contact.
[ ]34322112 )( )( )( θθθ SinLLSinLSinLRa +++=
= [(0,38 x sin 200) + (0,34 x sin 110) + (0,720 x sin 120)]
= 0,345 m
Rekapitulasi lengan momen dalam perhitungan gaya ankle jointkaki normal
pada fase initial contact ditunjukkan pada tabel 4.15.
Tabel 4.15Lengan momen perhitungan gaya ankle joint kaki normal fase initial contact
No Jarak Moment (d) Panjang (m)
1 Ra1 0.345
2 Rs1 0.271
3 Rt1 0.178
4 Rb 0.150
5 Rt2 0.137
6 Rs2 0.040
7 Rf1' 0.134
8 Rf2 0.058

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-73
Sedangkan untuk contoh perhitungan gaya berat pada tiap segmen tubuh
pengguna prosthetic, sebagai berikut:
Ws1 = ms1 x g
= (2.69 x 9,8) N
= 26,36 Newton
Rekapitulasi perhitungan gaya berat pada tiap segmen tubuh pengguna
prostheticditunjukkan pada tabel 4.16.
Tabel 4.16 Gaya berat segmen tubuh pengguna prosthetic
Besargaya berat segmen tubuh pengguna prosthetic digunakan dalam
penentuan gaya dan momen pada ankle joint untuk delapan fase gerakan
berjalan.
Hasil tabulasi lengan momen (tabel 4.15) dan gaya berat segmen tubuh (tabel
4.16) menjadi input dalam perhitungan gaya pada ankle joint kaki normal fase
initial contact. Hasil perhitungan gaya pada ankle joint kaki normal, sebagai
berikut:
( ) ( ) ( ) ( ) ( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡ ×−×+×+×+×+×+×=
1
2222221111'111
a
fstbtsf
RRWFRWSRWTRWBRWTRWSRWF
FNA
345,0283.0449,0991,6515,62889,10140,7153,1 −+++++
=
= 263,206 Newton
Kaki prosthetic.
Panjang lengan momen digunakan sebagai salah satu variabel dalam
menentukan besarnya gaya yang terjadi pada anklejoint saat aktivitas berjalan.
No Segmen Massa (kg) Gaya Berat (W)1 Body (B) 42.86 420.028
2 Tight Normal (T1) 6.25 61.250
3 Tight Prosthetic (T2) 6.25 61.250
4 Shank Normal (S1) 2.69 26.362
5 Shank Prosthetic (S2) 1.37 13.426
6 Foot Normal (F1) 0.88 8.624
7 Foot Prosthetic (F2) 0.50 4.900

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-74
Berikut contoh perhitungan lengan momen kaki prosthetic pada fase initial
contact.
[ ]33"
22112 )( )( )( θθθ SinLSinLSinLRt ++=
= [(0,38 x sin20) + (0,34 x sin 110)+ (0,063 x sin 120)]
= 0,208 m
Rekapitulasi lengan momen dalam perhitungan gayaankle jointkaki prosthetic
pada fase initial contact ditunjukkan pada tabel 4.17.
Tabel 4.17 Lengan momen perhitungan gaya ankle joint kaki prosthetic fase initial contact
Hasil tabulasi lengan momen (tabel 4.17) dan gaya berat segmen tubuh (tabel
4.16) menjadi inputdalam perhitungan gaya pada ankle joint kaki prosthetic
fase initial contact. Hasil perhitungan gaya pada ankle joint kaki
prostheticberdasarkan persamaan 4.2, sebagai berikut:
( ) ( ) ( ) ( ) ( ) ( )( )
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
×+
×+×+×+×+×+×
=2
11
11112222"22
2a
f
stbtsf
RRWF
RWSRWTRWBRWTRWSRWF
FNA
345.0
284.0943,1214,10839,81733,12088,4491,0 ++++++=
= 323,885 Newton
No Jarak Moment (d) Panjang (m)
1 Ra2 0.345
2 Rs2 0.304
3 Rt2 0.208
4 Rb 0.195
5 Rt1 0.167
6 Rs1 0.074
7 Rf1 0.033
8 Rf2" 0.10023

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
b
d
B
p
g
j
b
a
g
Reka
berjalan pen
ditampilkan
Tabe
Berdasarkan
prosthetic pa
gambar 4.52
Gambar
Grafi
joint yang d
bidang datar
adapter yan
gayapada an
HeeLoaMidTerPreInitMidTer
apitulasi pe
ngguna pros
pada tabel 4
el 4.18 Reka
n tabel4.18 k
ada setiap fa
2.
r 4.52 Kompalignment a
fik pada gam
dihasilkan k
r mengguna
ng mengala
nkle joint ka
ek Strikeding Responed Stanceminal Stance Swingtial Swingd Swingminal Swing
FASE Gait
rhitungan n
stheticdi dida
4.18.
apitulasi per
komparasi ni
ase gerakan b
parasi nilai adapter yan
mbar 4.52men
kaki normal
akan prosthe
amisetting a
aki prostheti
Fase 1e Fase 2
Fase 3Fase 4Fase 5Fase 6Fase 7Fase 8
nilai gaya
ang datar pa
rhitungan n
ilai gaya pad
berjalan dap
gaya pada ang tidak men
nunjukkan p
l maupun k
etic endoskel
atau pensej
ic mempuny
Ank
pada anklej
ada delapan
nilai gaya pa
da ankle join
pat digambar
ankle joint dngalami pen
perbandingan
kaki prosthe
letal dengan
ajaran. Pad
yai nilai yan
le Normal An2631740284369252365240
Gay
ejoint dalam
n fase geraka
ada ankle jo
nt kaki norm
rkan dalam g
dengan komnsejajaran
n nilai gaya
tic saat berj
n komponen
da fase sta
ng lebih besa
nkle Prostheti32441225030121400346
a
m aktivitas
an berjalan
oint
al dan kaki
grafik pada
mponen
pada ankle
rjalan pada
n alignment
nce phase
ar daripada
ic

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-76
kaki normal, sedangkansaat kondisi swing phase nilai gaya pada ankle joint kaki
prosthetic mempunyai nilai yang lebih kecil daripada kaki normal.
4.3.4 Perhitungan Nilai Keseimbangan Momenpada Komponen Alignment
Adapter yang tidak Mengalami Pensejajaran
Nilai keseimbangan momen dihitung pada delapan fase gerakan berjalan
berdasarkan formulasi model biomekanika pada kaki normal dan kaki prosthetic.
Berikut perhitungan nilai keseimbangan gaya pada komponen alignment adapter
yang tidak mengalami pensejajaran
1. Fase 1
Perhitungan nilai momen pada gerakan berjalan fase initial contact,
dilakukan baik pada kaki normal maupun kaki prosthetic.
• Kaki normal
Panjang lengan momen digunakan sebagai salah satu variabel dalam
menentukan besarnya momen yang terjadi pada anklejointsaat aktivitas
berjalan. Berikut contoh perhitungan lengan momen kaki normal pada fase
initial contact.
[ ]2'
11 )()( θθ Sin L Sin LR 21t += = [(0,38x sin 200) + (0,34 sin 110)]
= 0,167 m
Rekapitulasi lengan momen dalam perhitungan momen ankle jointkaki normal
pada fase initial contactditunjukkanpada tabel 4.19.
Tabel 4.19 Lengan momen perhitungan momen ankle joint kaki normal fase initial contact
No Jarak Moment (d) Panjang (m)
1 Rs1 0.074
2 Rt1 0.167
3 Rb 0.195
4 Rt2 0.208
5 Rs2 0.304
6 Ra2 0.345
7 Rf1 0.032942
8 Rf2" 0.10023

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-77
Hasil tabulasi lengan momen (tabel 4.19), gaya berat segmen tubuh (tabel
4.16) dan gaya pada ankle joint (tabel 4.18) menjadi input dalam perhitungan
momen ankle joint kaki normal fase initial contact. Hasil perhitungan momen
pada ankle joint kaki normal berdasarkanpersamaan 4.3, sebagai berikut:
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
×−×
+×+×+×+×+×+×=
22"22
22221111111M
af
stbtsf
RFNARWF
RWSRWTRWBRWTRWSRWFA
[ ] 591,1114910326,473312839812141094312840 += ,+ +, + , +, + , + ,
= 0.239N.m
• Kaki prosthetic
Panjang lengan momen digunakan sebagai salah satu variabel dalam
menentukan besarnya momen yang terjadi pada ankle joint saat aktivitas
berjalan. Berikut contoh perhitungan lengan momen kaki prosthetic pada fase
initial contact.
( )[ ]343221 )( '' θθ SinLL Sin LRt ++= = [(0,147x sin 110) + (0.720x sin 120)]
= 0,178 m
Rekapitulasi lengan momen dalam perhitungan momen ankle jointkaki
prosthetic pada fase initial contactditunjukkanpada tabel 4.20.
Tabel 4.20 Lengan momen perhitungan momen ankle joint kaki prosthetic fase initial contact
Hasil tabulasi lengan momen (tabel 4.20), gaya berat segmen tubuh (tabel
4.16) dan gaya pada ankle joint (tabel 4.18) menjadi input dalam perhitungan
momen ankle joint kaki prosthetic fase initial contact. Hasil perhitungan
No Jarak Moment (d) Panjang (m)
1 Ra1 0.345
2 Rs1 0.271
3 Rt1 0.178
4 Rb 0.150
5 Rt2 0.137
6 Rs2 0.040
7 Rf1' 0.13
8 Rf2 0.057694

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
IV-78
momen pada ankle joint kaki prostheticberdasarkanpersamaan 4.4, sebagai
berikut:
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ⎥
⎦
⎤⎢⎣
⎡
×−×−×
−×−×−×−×+×=
2222
1111'1122112MA
stb
tsffa
RWSRWTRWB
RWTRWSRWFRWFRFNA
⎥⎦
⎤⎢⎣
⎡ −−−−−−=
570,0370,8877,62889,10140,7153,1283,0685,90 +
= -0.031 N.m
Rekapitulasi nilai keseimbangan momen pada ankle yang dihasilkan
pengguna prosthetic pada 8 fase gerakan berjalan ditampilkan pada tabel 4.21
Tabel 4.21 Rekapitulasi perhitungan nilai momen pada ankle joint dengan
komponen alignment adapter tanpa mengalami pensejajaran
Berdasarkan tabel4.21 komparasi nilai momen pada anklejointkaki normal dan
kaki prosthetic pada setiap fase gerakan berjalan dapat digambarkan dalam grafik
pada gambar 4.53.
Ankle Normal Ankle Prosthetic1 Heek Strike Fase 1 0.239 ‐0.0312 Loading Respone Fase 2 0.236 ‐0.0183 Mid Stance Fase 3 0.000 89.5684 Terminal Stance Fase 4 ‐0.313 0.0495 Pre Swing Fase 5 ‐0.554 0.0996 Initial Swing Fase 6 49.918 0.0007 Mid Swing Fase 7 66.760 0.0008 Terminal Swing Fase 8 0.316 ‐0.566
No FASE GaitMoment

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
j
m
t
p
f
c
y
m
Gambar 4
Grafi
jointkaki no
menggunaka
tidak men
prostheticce
fase ke tiga,
cycle. Sedan
yang cukup
mengayun (s
4.53 Kompaalignmen
fik pada gam
ormal maup
an prosthetic
ngalami p
enderung stab
, namun kem
ngkan nilai
stabil pada f
swing phase
arasi nilai mnt adapterta
mbar 4.53 me
pun kaki p
c endoskelet
pensejajaran
bil pada awa
mbali menur
momen pad
fase berdiri
e).
momen padaanpa menga
enunjukkan k
prosthetic s
tal dengan k
. Nilai
al fase berdir
run dan nilai
da ankle jo
(stance phas
a ankle jointalami pensej
komparasi n
saat berjalan
komponenal
momenpad
ri dan mulai
inya stabil h
int kaki nor
se) dan mula
t dengan kojajaran
nilai momen
n pada bid
lignment ada
da ankle
i meningkat
hingga akhir
rmal mempu
ai meningka
omponen
pada ankle
dang datar
dapter yang
jointkaki
tajam pada
siklus gait
unyai nilai
at pada fase

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-1
BAB V ANALISIS DAN INTERPRETASI HASIL
Analisis dan interpretasi hasil penelitian bertujuan untuk menjelaskan hasil
pengolahan data pada bab sebelumnya, sehingga hasil penelitian dapat diketahui
dengan lebih jelas. Analisis yang dilakukan menitikberatkan pada hasil rancangan
alignment adapter for prosthetic foot dan kajian biomekanika aktivitas berjalan
pengguna prosthetic kaki. Analisis pada hasil rancangan dilakukan untuk
mengetahui sejauh mana pengaruh komponen alignment adapter for prosthetic
foot dalam memberikan keseimbangan berjalan pada pemakai kaki prosthetic
bawah lutut. Analisis biomekanika dilakukan untuk mengetahui kontribusi dari
rancangan alignment adapter for prosthetic footdalam mendukung aktivitas
berjalan pengguna prosthetic.
5.1 ANALISIS RANCANGAN KOMPONEN ALIGNMENT ADAPTER FOR PROSTHETIC FOOT
Analisis yang dilakukan terhadap rancangan komponen alignment adapter
for prosthetic foot mencakup analisis terhadap desainmekanisme rancangandan
material kemudian analisis pengujian jalan komponen alignment adapter for
prosthetic foot.Analisis tersebut dimaksudkan untuk melihat seberapa jauh
keberhasilan dan kekurangan rancangan komponen alignment adapter for
prosthetic foot dalam mendukung aktifitas berjalan pengguna prosthetic kaki
bawah lutut.
5.1.1 Analisis Desain dan Material
Rancangankomponen alignment adapter for prosthetic foot merupakan
perwujudanterhadap kebutuhan pensejajaran sudut kontraktur sendi lutut pada
penderita amputasi bawah lutut. Rancangan alignment adapter for prosthetic foot
pada penelitian ini mengadaptasi sistim adjustment dalam mensejajarkan
komponen prosthetic terhadap sudut kontraktur kaki amputee.Penerapan gerakan
tilting dan sliding dikarenakan kedua gerak tersebut mampu mensejajarkan sudut
kontraktur kaki amputee agar sesuai dengan kaki normal.
Gerakan yang diakomodasi dalam rancangan tersebut yaitu gerakan tilting
sebesar maximal 10° kearah anteroposterior dan kearah mediolateral.Dengan

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
g
d
f
b
k
G
t
k
u
p
p
s
p
m
P
a
m
k
s
y
b
gerakan slid
dan 27 mm k
for prostheti
berubah dal
komponen p
Gambar 5.1
Pada
terhadap am
kontraktur
untuk menye
prosthetic fo
pergeseran d
Hasi
software so
proses perm
menghasilka
Penggunaan
adapter for p
merupakan
ketahanan y
streght yang
yang baik d
berjalan. Si
ding dengan
kearah anter
ic footmamp
lam periode
penyusun kak
1Aplikasi pfoot
a aplikasi pe
mputee kebu
stump sebes
eimbangkan
ootpada gera
dikarenakan
l rancangan
lidwork 200
mesinan CNC
an desain
n material du
prosthetic fo
perpaduan
yang baik da
g cukup ting
dalam mene
ifat materia
pergeseran
roposteriorK
pu mengatas
e waktu ter
ki prosthetic
enerapan k
nerapan ko
utuhan gera
sar 7° flexio
n garis beban
akan sliding
stump dari s
n 3D alignm
04 yang tel
C dengan t
n rancangan
uralium alloy
oot memberi
antara bebe
alam mener
ggi menyeba
erima tekan
al yang rin
V-2
maximal se
Kemampuan
si perubahan
rtentu tanpa
c seperti pad
komponen a
omponen alig
akan tilting
ondengan sli
n. Sedangkan
g dan tilting
sisi lateral te
ment adapter
lah diwujud
toleransi pro
n sesuai d
y sebagai bah
ikan keuntun
erapa logam
rima beban.
abkan materi
nan sehingga
ganmemberi
ebesar 23mm
dari kompo
n sudut kontr
a harus men
a kaki prosth
alignment a
gnment adap
sebesar 7°
iding kearah
n komponen
g dari sisi la
erposisi norm
r for prosthe
dkan dalam
oses permes
dengan dim
han pembuat
ngan bagi am
m yang mem
Sifat logam
ial tersebut
a aman dig
ikan keuntu
m kearah m
onen alignme
raktur sendi
ngganti bag
hetic konven
adapter for
pter for pros
untuk men
h anterior se
n alignment a
ateral tidak m
mal.
etic foot me
bentuk nya
sinan 0.1mm
mensi ranca
t komponen
mputee. Dura
mpunyai kek
m yang mem
mempunyai
gunakan pad
ungan bagi
ediolateral
ent adapter
lutut yang
gian-bagian
nsional.
prosthetic
sthetic foot
nyesuaikan
ejauh 5mm
adapter for
mengalami
nggunakan
ata dengan
m sehingga
angan 3D.
alignment
alium alloy
kuatan dan
miliki yield
ketahanan
da aktifitas
pengguna

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-3
prosthetickarena dengan berat prosthetic yang ringan memudahkan dalam
penggunaanya.
Penggunaan material duralium alloy juga tidak terlepas dari permasalahan.
Sifat logam yang lunak mudah sekali mengalami keausan ketika di lakukan
adjustment yang dilakukan berulang ulang sehingga mengakibatkan penguncian
tidak maksimal. Hal tersebut menimbulkan bunyi akibat adanya kelonggaran,
Gambar 5.2Ulir dalam terkikis pada komponen alignment adapter for prosthetic foot
Ulir dalam yang terkikis mengakibatkan baut pengunci mengalami
pergeseran atau kelonggaran meskipun sudah dikencangkan dengan kuat. Hal
tersebut berpengaruh terhadap kestabilan socket adapter saat dipakai pengguna
prosthetic baik berjalan atau hanya berdiri. Ketika di pakai pada bagian socket
adapterprosthetic menimbulkan bunyi dan terdapat kelonggaran akibat baut
pengunci yang bergeser.
Alternatif untuk mengatasi permasalahan tentang keausan ulir dalam
dengan mempertahankan pemakaian material duralium alloy adalah dengan
pemasangan helicoil.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-4
Gambar 5.3Helicoil
Helicoilmerupakan piranti terbuat dari baja berfungsi sebagai pengganti
ulir yang aus atau terkikis. Dengan adanya piranti ini pengikisan ulir dalam akibat
proses adjustment yang dilakukan secara berulang ulang bisa dikurangi.
5.1.2 Analisis Uji Jalan Komponen Alignment Adapter for Prosthetic Foot
Tahap pengujian komponenalignment adapter for prosthetic foot dengan
analisis biomekanika diawali dengan pengambilan gambar pada delapan fase
gerakan. Tahap pengambilan gambar bertujuan untuk mendapatkan penentuan
free body diagram yang merupakan representasi pola gerakan kaki saat
melakukan aktifitas berjalan. Pengambilan data pada satu fase gerakan terdiri
dari beberapa capture atau gambar.
Pemilihan data atau capture sangat mempengaruhi hasil dari penelitian.
Hasil pemilihan capture merupakan data pedoman dalam menentukan nilai gaya
dan moment. Kesalahan dalam menentuan capture sangat mungkin terjadi karena
pengambilan data dilakukan dengan video recorder pada posisi diam.
Keterbatasan alat dalam pengambilan gambar capture atau video jalan
pengguna prosthetic mempengaruhi hasil penelitian. Fitur video recorder yang
digunakan dalam pengambilan data tidak dilengkapi dengan sensor
gerarak.Proses recording dilakukan secara static sehingga sudut yang terbentuk
pada sendi kaki tidak terekam dengan benar.
Resolusi video recorder yang digunakan dalam penelitian hanya mampu
mengambil 10 frame dalam 1 detik. Keterbatasan video recorder mengakibatkan
terjadi efek slow motion saat fase mengayun. Gambar terlihat kurang jelas

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-5
sehingga mempersulit dalam penentuan free body diagramatau sudut yang
terbentuk dari sendi kaki.
5.2 ANALISIS BIOMEKANIKA PADA AKTIVITAS BERJALAN
PENGGUNA PROSTHETIC
Penelitian dilakukan pada aktifitas berjalan pengguna prosthetic. Kajian
biomekanika melalui konsep static equilibrium diturunkan dalam tiap fase
gerakan dalam gait cycle. Penentuan fase gerakan didasarkan dari karakteristik
yang terbentuk dari setiap gerakan berjalan, mengacu pada siklus gerakan berjalan
(gait cycle) dari Whittle (2007). Berdasarkan hal tersebut diperoleh delapan fase
gerakan yang terbentuk dalam satu gait cycle. Analisis yang dilakukan pada
gerakan berjalan pada bidang datar hanya difokuskan pada komparasi nilai gaya
dan momenyang terjadi di ankle joint kaki normal maupun kaki prosthetic pada
komponen alignment adapter yang mengalami pensejajaran dan komponen
alignment adapteryang tidak mengalami pensejajaran. Tujuannya untuk lebih
mengetahui kontribusi alignment adapter for prosthetic footdalam menunjang
aktifitas berjalan pengguna prosthetic. Analisis terhadap kemampuan alignment
adapter for prosthetic foot pada gerakan berjalandilakukan dengan
membandingkan gerakan kaki antar fase yang menunjukkan karakteristik gerakan
yang samapada komponen alignment adapter yang mengalami pensejajran dan
tidak mengalami pensejajaran.
5.2.1 Analisis Biomekanik pada Komponen Alignment Adapter Mengalami Pensejajaran
Hasil komparasi nilai gaya dan momenyang terjadi di ankle joint kaki
normal maupun kaki prosthetic pada komponen alignment adapter for prosthetic
foot dengan mengalami pensejajaran sebagai perbandingan sejauhmana kontribusi
komponen alignment adapter for prosthetic foot dalam menunjang aktifitas
berjalan di bandingkan dengan komponen alignment adapter for prosthetic foot
tanpa mengalami pensejajaran. Komparasi nilai gaya dan momen antar fase
berjalan, sebagai berikut:

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-6
1. Fase 1: Initial Contact dengan Fase 4: Terminal stance pada komponen
alignment adapter mengalami pensejajaran
Gerakan kaki normal pada fase terminal stance mempunyai kemiripan
pola gerakan dengan kaki prosthetic pada fase initial contact.Ankle joint pada kaki
normal maupun prosthetic di kedua fase tersebut berada dalam posisi
plantarflexion dan berperan sebagai tumpuan kaki untuk memulai pergerakan kaki
ke depan. Begitu pula pola gerakan kaki normal pada fase initial contact
mempunyai kemiripan dengan gerak kaki prosthetic pada fase terminal stance.
Ankle joint pada kaki normal dan kaki prosthetic di kedua fase tersebut berada
dalam posisi dorsiflexion sebagai usaha untuk membantu pergerakan kaki ke
depan.
Berdasarkan hasil perhitungan kajian biomekanika static equilibrium pada
aktivitas berjalan pengguna prosthetic diperoleh nilai gaya dan momen pada ankle
joint kaki normal maupun prosthetic di setiap fase gerakan berjalan. Komparasi
nilai gaya dan momen pada ankle joint digunakan untuk mengetahui
keseimbangan antara kaki normal dengan kaki prosthetic. Adapun komparasi nilai
gaya dan momen pada ankle joint antara fase initial contact dan terminal
stance, terdapat dalam gambar 5.4.
Gambar 5.4 Komparasi nilai gaya dan momen antara fase initial contact dan terminal stance pada komponen alignment adapter mengalami pensejajaran
Gaya yang terjadi pada bagian ankle joint merupakan gaya reaksi akibat
aksi pembebanan pada ankle joint yang berasal dari gaya berat segmen
tubuh..Dari hasil komparasi pada gambar 5.4 dapat dilihat bahwa gaya yang

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-7
terjadi pada ankle joint kaki prosthetic di fase initial contact lebih besar
dibandingkan ankle joint kaki normal di fase terminal stance. Gaya yang ditopang
oleh ankle joint kaki prostheticsebesar 295 N sedangkan pada ankle joint kaki
normal sebesar 273 N. Gaya yang ditopang ankle joint kaki prosthetic lebih besar
dikarenakan sudut yang terbentuk antara kaki normal dan prosthetic pada fase
initial contact lebih besar dibanding sudut yang terbentuk pada fase terminal
stance. Sudut gerakan kaki tersebut menyebabkan nilai lengan momen gaya berat
segmen tubuh menjadi lebih besar yang akhirnya mempengaruhi besarnya gaya
yang terjadi pada ankle joint.
Selanjutnya untuk gerakan kaki normal pada fase initial contact yang
memiliki kesamaan gerak dengan kaki prosthetic fase terminal stance, besar gaya
yang terjadi pada ankle joint kaki prostheticjauh lebih besar dibandingkan gaya
pada kaki normal. Gaya yang ditopang oleh ankle joint kaki prosthetic sebesar
313N sedangkan pada ankle joint kaki normal sebesar 293N. Pada fase terminal
stance, gaya yang harus ditopang ankle joint lebih besar dikarenakan gerakan kaki
prosthetic lebih menjauhi sumbu tubuh dibandingkan kaki normal sehingga sudut
gerakan kaki yang dihasilkan juga besar. Besar sudut mempengaruhi panjang
lengan momen yang dihasilkan gaya berat segmen tubuh.
Pada gambar 5.4 terlihat pula komparasi nilai momen pada ankle joint.
Pada kaki prosthetic fase initial contact nilai momen yang dihasilkan ankle joint
hampir sama dengan nilai momen yang dihasilkan ankle joint pada kaki normal
fase terminal stance. Nilai momen pada ankle joint kaki prosthetic sebesar -0.003
N.m sedangkan nilai momen pada ankle joint kaki normal sebesar -0.208
N.m.Nilai momen sebesar -0,003 N.m pada ankle joint kaki prosthetic
mengindikasikan bahwa pada faseinitial contact,ankle joint tidak melakukan
pergerakanuntuk mendukung gerakan tumit kaki yang menjadi tumpuan tubuh
untuk mulai melangkah pada permukaan landasan. Hal serupa juga terjadi pada
kaki normal fase terminal stance, nilai momen tidak berbeda jauh dengan ankle
joint kaki prosthetic karena pada fase tersebutgerak ankle joint dibatasi untuk
mendukung tumit yang menjadi tumpuan.
Komparasi nilai momen pada kaki normal fase initial contact dengan kaki
prosthetic fase terminal stance menunjukkan perbedaan yang terlalu

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-8
signifikan.Nilai momen pada ankle joint kaki prosthetic sebesar -0,496 N.m
sedangkan nilai momen pada ankle joint kaki normal sebesar -0.028 N.m.
Berdasarkan nilai momenankle joint kaki normal fase initial contact dapat
diindikasikan bahwa ankle joint pada fase tersebut tidak melakukan pergerakan
dan berada pada posisi netral untuk membantu menopang berat tubuh akibat
pengguna prosthetic yangbelum mampu beradaptasi secara baik dengan prosthetic
kaki yang digunakannya.Sementara itu pada kaki prosthetic fase terminal stance,
pergerakan dari tubuh pengguna yang sedikit condong ke depan mengakibatkan
ankle joint melakukan sedikit gerak dorsiflexion dengan nilai momen sebesar -
0.496 N.m.
2. Fase 2: Loading Respone dengan Fase 5: Pre Swing
Gerakan kaki normal pada fase loading respone mempunyai kemiripan
pola gerakan dengan kaki prosthetic pada fase pre swing.Ankle joint pada kaki
normal maupun prosthetic di kedua fase tersebut berada dalam posisi
plantarflexion dan tumpuan kaki berada di jari kaki (toe). Begitu pula pola
gerakan kaki normal pada fase pre swing mempunyai kemiripan dengan gerak
kaki prosthetic pada fase loading respone. Ankle joint pada kaki normal dan kaki
prosthetic di kedua fase tersebut berada dalam posisi flat atau melakukan kontak
penuh dengan permukaan bidang datar sebagai tumpuan tubuh sebagai akibat
pergerakan kaki ke depan.
Berdasarkan hasil perhitungan kajian biomekanika static equilibrium pada
aktivitas berjalan pengguna prosthetic diperoleh nilai gaya dan momen pada ankle
joint kaki normal maupun prosthetic di setiap fase gerakan berjalan. Komparasi
nilai gaya dan momen pada ankle joint digunakan untuk mengetahui
keseimbangan antara kaki normal dengan kaki prosthetic. Adapun komparasi nilai
gaya dan momen pada ankle joint antara faseloading respone dan pre swing,
terdapat dalam gambar 5.5.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-9
Gambar 5.5Komparasi nilai gaya dan momen antara fase Loading Responedengan Pre Swing
Gaya yang terjadi pada bagian ankle joint merupakan gaya reaksi akibat
aksi pembebanan pada ankle joint yang berasal dari gaya berat segmen tubuh..
Dari hasil komparasi pada gambar 5.5 dapat dilihat bahwa gaya yang terjadi pada
ankle joint kaki prosthetic di fase loading responetidak jauh berbeda dengan nilai
gaya pada ankle joint kaki normal di fase pre swing. Gaya yang ditopang oleh
ankle joint kaki prosthetic sebesar 344N sedangkan pada ankle joint kaki normal
sebesar 343N.Gayapada kaki prosthetic fase loading respone besar dikarenakan
kakiprosthetic mendorong sebagian berat tubuhnya pada kaki prosthetic.
Sementara itu yang ditopang ankle joint kaki normalpada fase pre swing lebih
kecildikarenakan pada fase tersebut kaki normal memberikan peran menjadi
tumpuan akibat tubuh yang akanbergerak ke depan. Selain itu, kaki prosthetic
pada fase pre swing dalam posisi memberikan dorongan sehingga beban kaki
dipindahkan ke kaki normal sebagai tumpuan gerak.
Selanjutnya untuk gerakan kaki normal pada fase loading respone yang
memiliki kesamaan gerak dengan kaki prosthetic fase pre swing, besar gaya yang
terjadi pada ankle joint kaki prosthetic jauh lebih besar dibandingkan gaya pada
kaki normal. Gaya yang ditopang oleh ankle joint kaki prosthetic sebesar 241 N
sedangkan pada ankle joint kaki normal sebesar242N. Pada fase loading respone,
gaya yang harus ditopang ankle jointkaki prostheticlebih besar dikarenakan
gerakan kaki prosthetic lebih menjauhi sumbu tubuh dibandingkan kaki normal
sehingga sudut gerakan kaki yang dihasilkan juga besar. Besar sudut
mempengaruhi panjang lengan momen yang dihasilkan gaya berat segmen tubuh.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-10
Pada gambar 5.5 terlihat pula komparasi nilai momen pada ankle joint.
Pada kaki prosthetic fase initial contact nilai momen yang dihasilkan ankle joint
hampir sama dengan nilai momen yang dihasilkan ankle joint pada kaki normal
fase terminal stance. Nilai momen pada ankle joint kaki prosthetic sebesar -0,260
N.m sedangkan nilai momen pada ankle joint kaki normal sebesar -0,187N.m.
Nilai momen sebesar -0,260 N.m pada ankle joint kaki prosthetic
mengindikasikan bahwa pada fase initial contact, ankle joint tidak melakukan
pergerakan untuk mendukung gerakan tumit kaki yang menjadi tumpuan tubuh
untuk mulai melangkah pada permukaan landasan. Hal serupa juga terjadi pada
kaki normal fase terminal stance, nilai momen tidak berbeda jauh dengan ankle
joint kaki prosthetic karena pada fase tersebut gerak ankle joint dibatasi untuk
mendukung tumit yang menjadi tumpuan kaki sekaligus sebagai peredam
guncangan (shock absorption) akibat gerakan extension dari lutut kaki.
Komparasi nilai momen pada kaki normal fase loading respon dengan kaki
prosthetic fase pre swingmenunjukkan perbedaan yang tidak terlalu signifikan.
Nilai momen pada ankle joint kaki prosthetic sebesar -0,029 N.m sedangkan nilai
momen pada ankle joint kaki normal sebesar -0,031 N.m. Berdasarkan nilai
momen ankle joint kaki normal fase loading respondapat diindikasikan bahwa
ankle joint pada fase tersebut tidak melakukan pergerakan untuk membantu
menopang berat tubuh akibat pengguna prosthetic yang belum mampu beradaptasi
secara baik dengan prosthetic kaki yang digunakannya.
3. Fase 3: Mid Stance dengan Fase 7: Mid Swing
Gerakan kaki normal pada fase mid stance mempunyai kemiripan pola
gerakan dengan kaki prosthetic pada fase mid swing.Ankle joint pada kaki normal
maupun prosthetic di kedua fase tersebut berada dalam posisi mengayun dan tidak
memiliki peran sebagai tumpuan kaki. Begitu pula pola gerakan kaki normal pada
fase mid stance mempunyai kemiripan dengan gerak kaki prosthetic pada fase mid
swing. Ankle joint pada kaki normal dan kaki prosthetic di kedua fase tersebut
berada dalam posisi flat sebagai tumpuan utama beban tubuh.
Berdasarkan hasil perhitungan kajian biomekanika static equilibrium pada
aktivitas berjalan pengguna prosthetic diperoleh nilai gaya dan momen pada ankle
joint kaki normal maupun prosthetic di setiap fase gerakan berjalan. Komparasi

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-11
nilai gaya dan momen pada ankle joint digunakan untuk mengetahui
keseimbangan antara kaki normal dengan kaki prosthetic. Adapun komparasi nilai
gaya dan momen pada ankle joint antara fase mid stancedan mid swing, terdapat
dalam gambar 5.6.
Gambar 5.6Komparasi nilai gaya dan momen antara fase midstance dan midswing
Gaya yang terjadi pada bagian ankle joint merupakan gaya reaksi akibat
aksi pembebanan pada ankle joint yang berasal dari gaya berat segmen tubuh.
Nilai gaya pada ankle joint dipengaruhi oleh gaya berat segmen tubuh (W), sudut
gerakan kaki (θ) dan lengan momen (r) dari gaya berat tiap segmen tubuh. Dari
hasil komparasi pada gambar 5.6 dapat dilihat bahwa gaya yang terjadi pada ankle
joint kaki prosthetic di fase mid stance lebih besar dibandingkan ankle joint kaki
normal di fase mid swing. Gaya yang ditopang oleh ankle joint kaki prosthetic
sebesar 303 N sedangkan pada ankle joint kaki normal sebesar 285 N. Gaya yang
ditopang ankle joint kaki prosthetic lebih besar dikarenakan beban tubuh ditopang
sepenuhnya oleh kakiprosthetic pada fase mid stancejauh lebih besar dibanding
gaya yang terbentuk pada fase mid swing.
Selanjutnya untuk gerakan kaki normal pada fase mid stanceyang memiliki
kesamaan gerak dengan kaki prosthetic fase mid swing, besar gaya yang terjadi
pada ankle joint kaki normal adalah sama. Gaya yang ditopang oleh ankle joint
kaki prostheticdanankle joint kaki normal sebesar 0 N dikarenakan pada kedua
fase ini posisi ankle joint mengayun sehinngga terbebas dari tumpuan beban
tubuh.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-12
Pada gambar 5.6 terlihat pula komparasi nilai momen pada ankle
joint.Pada kaki prosthetic fase midstance nilai momen yang dihasilkan ankle joint
lebih besar dengan nilai momen yang dihasilkan ankle joint pada kaki normal fase
mid swing yaitu memiliki nilai momen besar. Nilai momen pada ankle joint kaki
prosthetic sebesar 62,7 N.m sedangkan nilai momen pada ankle joint kaki normal
sebesar 22,7N.m. Nilai momen pada ankle joint kaki prostheticdan ankle normal
mengindikasikan bahwa pada fase mid stance dan fase mid swing, ankle joint
berperan tunggal melakukan pergerakan untuk mendukung gerakan tumit kaki
yang menjadi tumpuan tubuh. Hal serupa tidak terjadi pada kaki normal fase mid
swing danankle joint kaki prosthetic pada fase mid stance dikarenakan ankle pada
posisi mengayun dengan nilai momen 0Nm. Nilai gaya tersebut mengindikasikan
bahwa ankle joint tidak menopang beban tubuh karena posisi kaki berada di atas
permukaan bidang datar dan dalam keadaan mengayun.
5.2.2 Analisis Biomekanik pada Komponen Alignment Adapter tanpa mengalami Pensejajaran Hasil komparasi nilai gaya dan momenyang terjadi di ankle joint kaki
normal maupun kaki prosthetic pada komponen alignment adapter for prosthetic
foot tanpa mengalami pensejajaran sebagai perbandingan sejauh mana kontribusi
komponen alignment adapter for prosthetic foot dengan mengalami pensejajaran
dalam menunjang aktifitas berjalan. komponenalignment adapter for prosthetic
foot tanpa mengalami pensejajaran di asumsikan mewakili prosthetic konventional
yang tidak memiliki komponen alignment.Komparasi nilai gaya dan momen antar
fase berjalan, sebagai berikut:
1. Fase 1: Initial Contact dengan Fase 4: Terminal stance pada komponen alignment adapter mengalami pensejajaran
Berdasarkan hasil perhitungan kajian biomekanika static equilibrium pada
aktivitas berjalan pengguna prosthetic diperoleh nilai gaya dan momen pada ankle
joint kaki normal maupun prosthetic di setiap fase gerakan berjalan. Komparasi
nilai gaya dan momen pada ankle joint digunakan untuk mengetahui
keseimbangan antara kaki normal dengan kaki prosthetic. Adapun komparasi nilai
gaya dan momen pada ankle joint antara fase initial contact dan terminal
stance, terdapat dalam gambar 5.7.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-13
Gambar 5.7 Komparasi nilai gaya dan momen antara fase initial contact dan terminal stance pada komponen alignment adapter tanpa mengalami pensejajaran
Gaya yang terjadi pada bagian ankle joint merupakan gaya reaksi akibat
aksi pembebanan pada ankle joint yang berasal dari gaya berat segmen tubuh..
Dari hasil komparasi pada gambar 5.7 dapat dilihat bahwa gaya yang terjadi pada
ankle joint kaki prosthetic di fase initial contact lebih besar dibandingkan ankle
joint kaki normal di fase terminal stance. Gaya yang ditopang oleh ankle joint
kaki prosthetic sebesar 324 N sedangkan pada ankle joint kaki normal sebesar 284
N. Gaya yang ditopang ankle joint kaki prosthetic lebih besar dikarenakan sudut
yang terbentuk antara kaki normal dan prosthetic pada fase initial contact lebih
besar dibanding sudut yang terbentuk pada fase terminal stance. Sudut gerakan
kaki tersebut menyebabkan nilai lengan momen gaya berat segmen tubuh menjadi
lebih besar yang akhirnya mempengaruhi besarnya gaya yang terjadi pada ankle
joint.
Selanjutnya untuk gerakan kaki normal pada fase initial contact yang
memiliki kesamaan gerak dengan kaki prosthetic fase terminal stance, besar gaya
yang terjadi pada ankle joint kaki prosthetic jauh lebih besar dibandingkan gaya
pada kaki normal. Gaya yang ditopang oleh ankle joint kaki prosthetic sebesar
301N sedangkan pada ankle joint kaki normal sebesar 263N. Pada fase terminal
stance, gaya yang harus ditopang ankle joint lebih besar dikarenakan gerakan kaki
prosthetic lebih menjauhi sumbu tubuh dibandingkan kaki normal sehingga sudut
gerakan kaki yang dihasilkan juga besar. Besar sudut mempengaruhi panjang
lengan momen yang dihasilkan gaya berat segmen tubuh.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-14
Pada gambar 5.7 terlihat pula komparasi nilai momen pada ankle joint.
Pada kaki prosthetic fase initial contact nilai momen yang dihasilkan ankle joint
hampir sama dengan nilai momen yang dihasilkan ankle joint pada kaki normal
fase terminal stance. Nilai momen pada ankle joint kaki prosthetic sebesar -0.031
N.m sedangkan nilai momen pada ankle joint kaki normal sebesar -0.313 N.m.
Nilai momen sebesar -0,031 N.m pada ankle joint kaki prosthetic
mengindikasikan bahwa pada fase initial contact, ankle joint tidak melakukan
pergerakan untuk mendukung gerakan tumit kaki yang menjadi tumpuan tubuh
untuk mulai melangkah pada permukaan landasan. Hal serupa juga terjadi pada
kaki normal fase terminal stance, nilai momen tidak berbeda jauh dengan ankle
joint kaki prosthetic karena pada fase tersebut gerak ankle joint dibatasi untuk
mendukung tumit yang menjadi tumpuan kaki sekaligus sebagai peredam
guncangan (shock absorption).
Komparasi nilai momen pada kaki normal fase initial contact dengan kaki
prosthetic fase terminal stance menunjukkan perbedaan yang tidak terlalu
signifikan. Nilai momen pada ankle joint kaki prosthetic sebesar 0,049 N.m
sedangkan nilai momen pada ankle joint kaki normal sebesar 0.239 N.m.
Berdasarkan nilai momen ankle joint kaki normal fase initial contact dapat
diindikasikan bahwa ankle joint pada fase tersebut melakukan pergerakan dan
membantu menopang berat tubuh. Sementara itu pada kaki prosthetic fase
terminal stance, pergerakan dari tubuh pengguna yang sedikit condong ke depan
mengakibatkan ankle joint melakukan sedikit gerak dorsiflexion dengan nilai
momen sebesar 0,049 N.m.
2. Fase 2: Loading Respone dengan Fase 5: Pre Swing
Berdasarkan hasil perhitungan kajian biomekanika static equilibrium pada
aktivitas berjalan pengguna prosthetic diperoleh nilai gaya dan momen pada ankle
joint kaki normal maupun prosthetic di setiap fase gerakan berjalan. Komparasi
nilai gaya dan momen pada ankle joint digunakan untuk mengetahui
keseimbangan antara kaki normal dengan kaki prosthetic. Adapun komparasi nilai
gaya dan momen pada ankle joint antara faseloading respone dan pre swing,
terdapat dalam gambar 5.8.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-15
Gambar 5.8 Komparasi nilai gaya dan momen antara fase loading respone dan pre swing
Gaya yang terjadi pada bagian ankle joint merupakan gaya reaksi akibat
aksi pembebanan pada ankle joint yang berasal dari gaya berat segmen tubuh..
Dari hasil komparasi pada gambar 5.8 dapat dilihat bahwa gaya yang terjadi pada
ankle joint kaki prosthetic di fase loading respone tidak jauh berbeda dengan
nilai gaya pada ankle joint kaki normal di fase pre swing. Gaya yang ditopang
oleh ankle joint kaki prosthetic sebesar 412N sedangkan pada ankle joint kaki
normal sebesar 369N.Gayapada kaki prosthetic fase loading respone besar
dikarenakan kaki prosthetic mendorong sebagian berat tubuhnya pada kaki
prosthetic. Sementara itu yang ditopang ankle joint kaki normal pada fase pre
swing lebih kecil dikarenakan pada fase tersebut kaki normal memberikan peran
menjadi tumpuan akibat tubuh yang akan bergerak ke depan. Selain itu, kaki
prosthetic pada fase pre swing dalam posisi memberikan dorongan sehingga
beban kaki dipindahkan ke kaki normal sebagai tumpuan gerak.
Selanjutnya untuk gerakan kaki normal pada fase loading respone yang
memiliki kesamaan gerak dengan kaki prosthetic fase pre swing, besar gaya yang
terjadi pada ankle joint kaki prosthetic jauh lebih besar dibandingkan gaya pada
kaki normal. Gaya yang ditopang oleh ankle joint kaki prosthetic sebesar 214 N
sedangkan pada ankle joint kaki normal sebesar 174 N. Pada fase loading
respone, gaya yang harus ditopang ankle joint kaki prosthetic lebih besar
dikarenakan gerakan kaki prosthetic lebih menjauhi sumbu tubuh dibandingkan
kaki normal sehingga sudut gerakan kaki yang dihasilkan juga besar. Besar sudut
mempengaruhi panjang lengan momen yang dihasilkan gaya berat segmen tubuh.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-16
Pada gambar 5.8 terlihat pula komparasi nilai momen pada ankle joint.
Pada kaki prosthetic fase loading responet nilai momen yang dihasilkan ankle
joint hampir sama dengan nilai momen yang dihasilkan ankle joint pada kaki
normal fase pre swing. Nilai momen pada ankle joint kaki prosthetic sebesar
-0,018 N.m sedangkan nilai momen pada ankle joint kaki normal sebesar -
0,554N.m. Nilai momen sebesar -0,018 N.m pada ankle joint kaki prosthetic
mengindikasikan bahwa pada fase loading respon, ankle joint tidak melakukan
pergerakan untuk mendukung gerakan tumit kaki yang menjadi tumpuan tubuh
untuk mulai melangkah pada permukaan landasan. Hal serupa juga terjadi pada
kaki normal fase pre swing, nilai momen tidak berbeda jauh dengan ankle joint
kaki prosthetic karena pada fase tersebut gerak ankle joint dibatasi untuk
mendukung tumit yang menjadi tumpuan kaki sekaligus sebagai peredam
guncangan (shock absorption).
Komparasi nilai momen pada kaki normal fase loading respon dengan kaki
prosthetic fase pre swing menunjukkan perbedaan yang tidak terlalu signifikan.
Nilai momen pada ankle joint kaki prosthetic sebesar 0,099 N.m sedangkan nilai
momen pada ankle joint kaki normal sebesar 0,236 N.m. Berdasarkan nilai
momen ankle joint kaki normal fase loading respon dapat diindikasikan bahwa
ankle joint pada fase tersebut tidak melakukan pergerakan untuk membantu
menopang berat tubuh akibat pengguna prosthetic yang belum mampu beradaptasi
secara baik dengan prosthetic kaki yang digunakannya. Sementara itu pada kaki
prosthetic fase pre swing, pergerakan dari tubuh pengguna yang sedikit condong
ke depan mengakibatkan ankle joint melakukan sedikit gerak dorsiflexion dengan
nilai momen sebesar 0,099N.m untuk mengimbangi berat tubuh pengguna
prosthetic.
3. Fase 3: Mid Stance dengan Fase 6: Mid Swing
Berdasarkan hasil perhitungan kajian biomekanika static equilibrium pada
aktivitas berjalan pengguna prosthetic diperoleh nilai gaya dan momen pada ankle
joint kaki normal maupun prosthetic di setiap fase gerakan berjalan. Komparasi
nilai gaya dan momen pada ankle joint digunakan untuk mengetahui
keseimbangan antara kaki normal dengan kaki prosthetic. Adapun komparasi nilai

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-17
gaya dan momen pada ankle joint antara fase mid stance dan mid swing, terdapat
dalam gambar 5.9.
Gambar 5.9 Komparasi nilai gaya dan momen antara fase midstance dan midswing
Gaya yang terjadi pada bagian ankle joint merupakan gaya reaksi akibat
aksi pembebanan pada ankle joint yang berasal dari gaya berat segmen tubuh.
Nilai gaya pada ankle joint dipengaruhi oleh gaya berat segmen tubuh (W), sudut
gerakan kaki (θ) dan lengan momen (r) dari gaya berat tiap segmen tubuh. Dari
hasil komparasi pada gambar 5.9 dapat dilihat bahwa gaya yang terjadi pada ankle
joint kaki prosthetic di fase mid stancesama besar denganankle joint kaki normal
di fase mid swing. Gaya yang ditopang oleh ankle joint kaki prosthetic sebesar
250 N sedangkan pada ankle joint kaki normal sebesar 252 N. Gaya yang
ditopang ankle joint kaki prostheticsama besar dikarenakan beban tubuh ditopang
sepenuhnya pada kakiprostheticpada fase mid stancedan kaki normalpada fase
mid swing.
Selanjutnya untuk gerakan kaki normal pada fase mid stance yang
memiliki kesamaan gerak dengan kaki prosthetic fase mid swing, besar gaya yang
terjadi pada ankle joint kaki normal jauh lebih besar dibandingkan gaya pada kaki
prosthetic. Gaya yang ditopang oleh ankle joint kaki prosthetic sebesar 0 N
sedangkan pada ankle joint kaki normal sebesar 0 N.
Pada gambar 5.9 terlihat pula komparasi nilai momen pada ankle joint.
Pada kaki prosthetic fase midstance nilai momen yang dihasilkan ankle joint
hampir sama dengan nilai momen yang dihasilkan ankle joint pada kaki normal
fase mid swing yaitu memiliki nilai momen besar. Nilai momen pada ankle

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-18
jointkaki prosthetic sebesar 89,6 N.m sedangkan nilai momen pada ankle joint
kaki normal sebesar 49,9 N.m. Nilai momen pada ankle joint kaki prosthetic dan
ankle normal mengindikasikan bahwa pada fase mid stance dan fase mid swing,
ankle joint berperan tunggal melakukan pergerakan untuk mendukung gerakan
tumit kaki yang menjadi tumpuan tubuh. Hal serupa tidak terjadi pada kaki normal
fase mid swing dan ankle joint kaki prosthetic pada fase mid stance dikarenakan
ankle pada posisi mengayun dengan nilai momen 0Nm.
5.3 INTEPRESTASI HASIL
Rancangan alignment adapter for prosthetic foot pada penelitian ini
menerapkan mekanisme gerakan sliding dan tilting untuk mengatasi sudut
kontraktur sendi lutut. Gerakan yang diakomodasi dalam rancangan tersebut yaitu
gerakan tilting sebesar 10° kearah anteroposterior dan kearahmediolateral dengan
gerakan sliding dengan pergeseran sebesar 23mm kearah mediolateral dan 27mm
kearah anteroposterior. Kemampuan dari komponen alignment adapter for
prosthetic footmampu mengatasi perubahan sudut kontraktur sendi lutut yang
berubah dalam periode waktu tertentu tanpa harus mengganti bagian-bagian
komponen penyusun kaki prosthetic seperti pada kaki prosthetic konventional.
Masih terdapat kelemahan pada perancangan komponen alignment adapter
for prosthetic foot pada penelitian ini seperti sifat material durallium alloy yang
lunak mudah sekali mengalami goresan ketika di lakukan adjustment pada
pemakaiannya, adjustment yang dilakukan berulang ulang menimbulkan
pengikisan di ulir dalam mengakibatkan penguncian tidak maksimal. Hal tersebut
menimbulkan bunyi akibat baut yang kelonggaran.Ulir dalam yang terkikis
mengakibatkan baut pengunci mengalami pergeseran atau kelonggaran meskipun
sudah dikencangkan dengan kuat. Hal tersebut berpengaruh terhadap kestabilan
socket adapter saat dipakai pengguna prosthetic baik berjalan atau hanya berdiri.
Ketika di pakai pada bagian socket adapterprosthetic menimbulkan bunyi dan
terdapat kelonggaran akibat baut pengunci yang bergeser.
Kajian biomekanik diwujudkan melalui penentuan formulasi nilai gaya
dan momen. Komparasi nilai gaya dan momen menjadi tolak ukur komponen
alignment adapter dalam memperbaiki pola berjalan pengguna prosthetic kaki
bawah lutut. Perbedaan yang tidak terlalu besar tersebut mengindikasikan bahwa

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
V-19
komponen mampu mengimbangi gaya reaksi akibat pembebanan dari segmen
tubuh yang dihasilkan ankle joint kaki normal pada pergerakan kaki yang sama.
Hal tersebut menunjukan bahwa pada gerakan kaki yang sama pengguna
prosthetic mulai percaya pada kemampuan rancangan komponen alignment
adapter for prosthetic footdan berani menumpukan beban tubuh pada kaki
prosthetic.Hasil komparasi menunjukan bahwa antara ankle joint kaki normal dan
ankle joint kaki prosthetic dengan pensejajaran rata-rata perbedaan nilai keduanya
1,86N sedangkan hasil komparasi ankle joint kaki normal dan kaki prosthetic
tanpa pensejajaran rata-rataperbadaan nilai kedua gayaadalah 5,87N.
Pembebanan yang tidak terlalu besar pada komponen alignment adapter
for prosthetic footmengindikasikan bahwa prostheticdengan alignment adapter
for prosthetic foot mampu mengimbangi nilai moment dan gaya yang di hasilkan
ankle joint kaki normal dengan gerakan kaki yang sama. Hal tersebut menunjukan
pada gerakan kaki yang sama pengguna prosthetic mulai percaya dengan
kemampuan rancangan alignment adapter for prosthetic footdan berani
menumpukan beban tubuh pada kaki prosthetic.
Hasil komparasi nilai momen menunjukan bahwa antara ankle joint kaki
normal dan ankle joint kaki prosthetic dengan pensejajaran rata-rata perbedaan
nilai momen keduanya 5,6 Nm sedangkan hasil komparasi ankle joint kaki normal
dan kaki prosthetic tanpa pensejajaran rata-rata perbedaan nilai kedua momen
adalah 5,7Nm.
Pembebanan yang tidak terlalu besar pada komponen alignment adapter
for prosthetic foot mengindikasikan bahwa prosthetic dengan alignment adapter
for prosthetic foot mampu mengimbangi nilai moment yang di hasilkan ankle
joint kaki normal dengan gerakan kaki yang sama. Hal tersebut menunjukan pada
gerakan kaki yang sama pengguna prosthetic mampu menghasilkan gerakan yang
sama seperti yang dilakukan ankle joint kaki normal dalam mendukung gerakan
kaki saat aktifitas berjalan.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
VI-1
BAB VI KESIMPULAN DAN SARAN
Bab ini membahas mengenai kesimpulan yang diperoleh dari hasil
penelitian dan saran untuk pengembangan penelitian lebih lanjut. Kesimpulan dan
saran dijelaskan pada sub bab berikut ini.
6.1 KESIMPULAN
Bagian kesimpulan merupakan jawaban atas tujuan dari penelitian yang
telah ditetapkan sebelumnya. Berdasarkan hasil pengolahan dan pengumpulan
data yang telah dilakukan maka dapat ditarik kesimpulan, sebagai berikut:
1. Alignment adapter for prosthetic footmengatasi sudut kontrakturstump
yangterjadi antara5° sampai dengan 10° flexion, 0° sampai dengan
5°abduction dan 5° sampai dengan 7°adduction besaran sudut kontraktur
diakomodasi komponen dalam penelitian ini dengan gerakan tilting sebesar
10° dan pensejajran komponen bagian-bagian prosthetic di akomodasi gerakan
sliding sebesar 27mm kearah anteroposterior dan 23mm kearah mediolateral.
Mekanisme pensejajaran dengan pergerakan sliding dan tiltingmampu
menjawab kebutuhan mensejajarkan sudut kontraktur.
2. Hasil kajian biomekanik pada ankle joint, baik kaki normal maupun kaki
prosthetic dapat diketahui bahwa rancangan alignment adapter for prosthetic
foot mampumengimbangi fungsi dari kaki normal terlihat pada nilai gaya dan
momenankle joint yang hampir seimbang padarancangan alignment adapter
for prosthetic footdengankomponen alignment mengalami pensejajaran dan
rata-rata nilai gaya dan momen sebesar 1,86 N dan 5,6 Nm.
6.2 SARAN
Saran perbaikan yang dapat diberikan dari hasil penelitian, sebagai berikut:
1. Penggunaan SACHfoot (solid ankle cushion heel) mempengaruhi besarnya
nilai komparasi gaya dan momen pada stance phasekhususnya fase initial
contact, fase loading respond dan terminal stance. Hilangnya fungsi plantar
flexion dan dorsi flexion pada akle jointmenyebabkan telapak kaki tidak dapat
kontak penuh dengan lantai saat fase initial contact, fase loading respond dan

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
VI-2
terminal stance. Untuk meningkatkan hasil perbaikan berjalan penelitian
selanjutnya diharapkan komponen Alignment adapter for prosthetic foot di
padukan dengan single axis ankle foot.
2. Penggunaan material duralium alloy juga tidak terlepas dari permasalahan.
Sifat logam yang lunak mudah sekali mengalami keausan ketika di lakukan
adjustment yang dilakukan berulang ulang sehingga mengakibatkan
penguncian tidak maksimal. Alternatif untuk mengatasi permasalahan
tentang keausan ulir dalam dengan mempertahankan pemakaian material
duralium alloy adalah dengan pemasangan helicoil.
.

perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
DAFTAR PUSTAKA
Amputee Coalition of America.2008.Prosthetic feet [online].Tersedia di
www.amputee-coalition.org [1 Maret 2010]
Andrian, Marlene and John Cooper, 1981, Biomechanics of Human Movement,
Brown and Benchmark, Iowa.
Ariesta A.B. 2011. PengembanganRancangandanKajianBiomekanika Ankle Joint
Sistem Double Axis PadaPenggunaan Prosthetic
AtasLututEndoskeletal.Skripsi Strata 1.JurusanTeknikIndustri,
Fakultasteknik, UniversitasSebelasMaret Surakarta.
Chaffin, D.B., and Anderson G.B.J., 1991, Occupational Biomechanics, John
Wiley and Sons Inc, New York.
Hall SJ, 1999, Basic Biomechanic 3rd Edition. India: McGraw Hill
Handicap International,
2006,PetunjukdanPelaksanaanPraktikKlinikBagiMahasiswa Prodi OP
Poltekkes Surakarta, Poltekkes Surakarta, Surakarta.
Herdiman L, Susmartini S, Damayanti RW, Aisyati A. 2008.
PengembanganKarakteristikProthese Kaki JenisAbove Knee Prothese
(AKP) denganBerbantu Computer Aided Engineering (CAE). Proceeding
National Conference on applied Ergonomic 2008.Halaman 54-59. ISBN:
(978-979-18304-0-9.
Lohat AS. 2009. GudangIlmuFisikaDasar-Torsi Alias Momen Gaya [online], 12
paragraf. Tersedia di www.gurumuda.com [17 Maret 2010].
May J. B. EdD.PT. FAPTA., 1996, Amputation and Prosthetic, Department of
Physical Therapy, Georgia.
Radcliffe C. W and Foort J., 1961, The Patelar Tendon Bearing Below Knee
Prosthesis, School of Medicine University of California, San Francisco.
Staff Prosthetics and Orthotics, 1990, Lower Limb Prosthetics, New York
University Medical Center, New York.


















