PAST
21
21CMA/PAST data analysis Ue-Li Pen 彭彭彭 Chris Hirata Xiang-Ping Wu 彭彭彭 , Jeff Peterson
-
Upload
fordlovers -
Category
Documents
-
view
195 -
download
1
description
Transcript of PAST

21CMA/PAST data analysis
Ue-Li Pen 彭威礼Chris Hirata
Xiang-Ping Wu 武向平 , Jeff Peterson

Reionization
• First objects: • 21cm @ z>6• 50-200 Mhz• ΔT = 23 mK, ~0.3
mJy• Angular scale 5’<Θ<2
0’, freq res 500 khz
z=10 simulation, Furlanetto et al, 2004

Foreground: Synchrotron
408 MHz Haslam Much brighter than signal, but no spectral structure

Detectability
• Luminosity proportional to object volume: bigger structures easier to find
• Noise dominated by galaxy: T=300(f/150 Mhz)-2.5, higher frequency (lower redshift) much easier
• Mean emission very hard to discern (Gnedin and Shaver 2004).
• First targets: Stromgren spheres around bright quasars (Wyithe and Loeb 2004).

21CMA/PAST Site

21CMA/PAST Strategy
• Fast track to data: avoid custom design, off-the-shelf only.
• Use existing TV technology, commodity PC’s for correlations
• Learn as you build: fast turnaround, flexibility

Antenna Design
• Noise dominated by galaxy: Tgal=280 (150Mhz/f)2.5 K @ NCP
• sensitivity: 104 m2 effective area• Resolution: aperture synthesis, 80 elements,
3km baselines• Receiver noise: NF < 2 dB (T<200K)• Pointing at north celestial pole, elevation 43o
• simple, fast。 Currently 23 hexagonal pods, 12 correlating

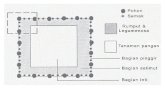
Ulastai
Ustir station
42º 55’N 86º 45’ E
elev 2600m
Urumqi 150 km
Ground shield: 5000m mountains on all sides



Software correlator

U-V map data
Almost no interference, excellent u-v coverage

Protype data, Feb, 2005
12 working pods of 127 antenna each
100-200 Mhz, 10o FOV
3C061.1
NCP

CMB Analogy
• Searching for very low surface brightness sources
• Potentially severe foregrounds• Fully sampled u-v planes: different from CLEANing
• Statistics of noise and foregrounds can be described very accurately
• Large Field of view: planar assumption breaks. WMAP: 120 deg difference map

CMB map making
• Linear algebra approach to map making
• Used by most experiments, including WMAP, Planck, Boomerang, DASI, CBI
• Exactly solvable for Gaussian random fields
• Noise properties fully characterized
• Computationally expensive
• Fast workarounds: CG, multigrid, etc.

Data Flow
• raw time stream
• Optimal map construction to reduce data size: Deconvolution, Wiener, etc
• Foreground removal
• Noise covariance matrix
• Power spectrum
• Window functions

Analysis procedure
• Calibrate system from celestial sources
• Determine beam from sky
• Generalized BEAM contains all processes between source and data: ISM, ionosphere, antenna, polarization, transmission line, etc.
• Wiener filtered map


Same for polarization: consider all polarization to be noise, solve for I map.
One needs to know the beam accurately! Varies with time, frequency, position on sky, position of antenna, ionosphere, instrument.
Calibration from bright point sources (Hirata)

Computational Complexity
• O(N3): not tractable for all sky, workable for small fields at low resolution, up to 105 pixels
• Accelerated plans in development: Conjugate gradient, multigrid (e.g. Pen 2004) as used in lensing and CMB analysis

Conclusions
• Linear map making theory well understood from CMB analysis, optimal algorithms for Gaussian fields, even full sky.
• Minimum signal-to-noise deconvolved foreground subtraction with Wiener filters, implementation on real data in progress