
Caractéristiques des ondes mécaniques Ondes progressives Ondes périodiques.
DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 1 sur 12
OSCILLATEURS COUPLÉS ET PHÉNOMÈNES DE PROPAGATION UNIDIMENSIONNELS.
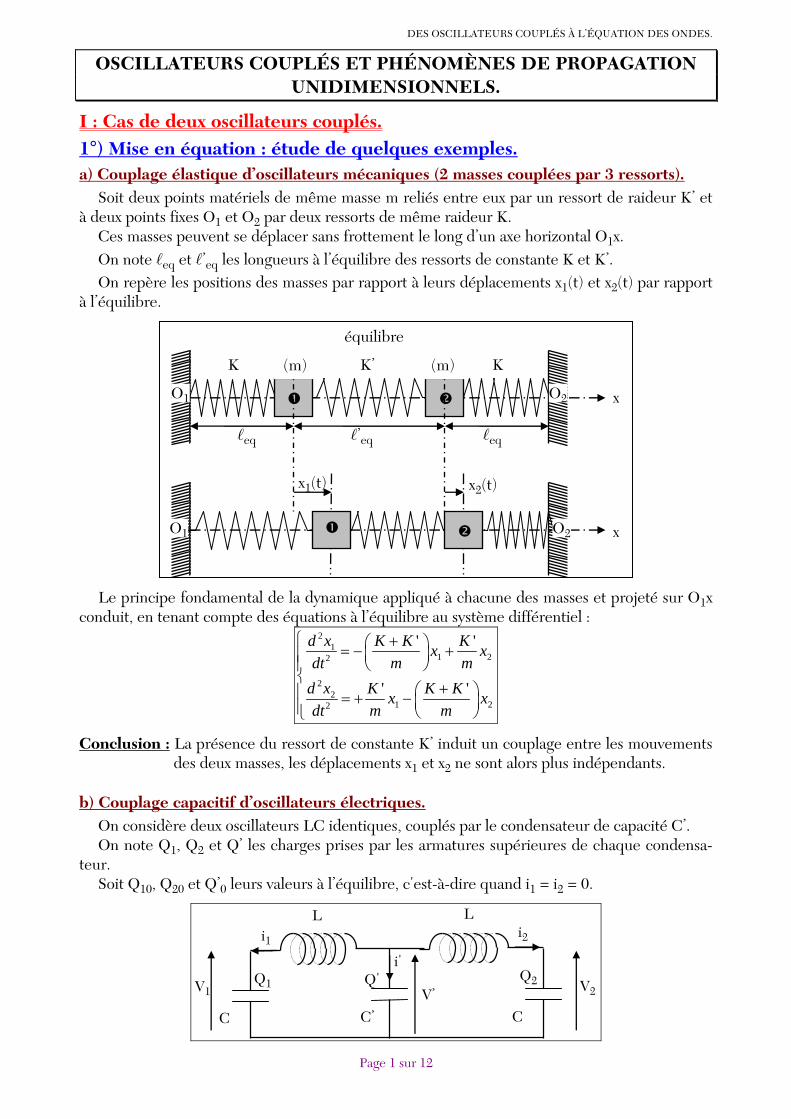
I : Cas de deux oscillateurs couplés. 1°) Mise en équation : étude de quelques exemples. a) Couplage élastique d’oscillateurs mécaniques (2 masses couplées par 3 ressorts). Soit deux points matériels de même masse m reliés entre eux par un ressort de raideur K’ et à deux points fixes O1 et O2 par deux ressorts de même raideur K. Ces masses peuvent se déplacer sans frottement le long d’un axe horizontal O1x. On note eq et ’eq les longueurs à l’équilibre des ressorts de constante K et K’. On repère les positions des masses par rapport à leurs déplacements x1(t) et x2(t) par rapport à l’équilibre.
équilibre
eq eq ’eq
K K’ K
x O2 O1
x O1 O2
x1(t) x2(t)
(m) (m)
Le principe fondamental de la dynamique appliqué à chacune des masses et projeté sur O1x conduit, en tenant compte des équations à l’équilibre au système différentiel :
21
1 22
22
1 22
' '
' '
d x K K Kx xdt m m
d x K K Kx xdt m m
⎧ +⎛ ⎞= − +⎜ ⎟⎪⎪ ⎝ ⎠⎨
+⎛ ⎞⎪ = + − ⎜ ⎟⎪ ⎝ ⎠⎩
Conclusion : La présence du ressort de constante K’ induit un couplage entre les mouvements des deux masses, les déplacements x1 et x2 ne sont alors plus indépendants.
b) Couplage capacitif d’oscillateurs électriques. On considère deux oscillateurs LC identiques, couplés par le condensateur de capacité C’. On note Q1, Q2 et Q’ les charges prises par les armatures supérieures de chaque condensa-teur. Soit Q10, Q20 et Q’0 leurs valeurs à l’équilibre, c'est-à-dire quand i1 = i2 = 0.
C’
V1
C C
L L i2 i1
Q1 Q2 Q' V’ V2
i'

DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 2 sur 12
0
0
)
On note en lettres minuscules les écarts par rapport aux valeurs à l’équilibre : . 1 1 1
2 2 2
0' ' '
q Q Qq Q Qq Q Q
= −⎧⎪ = −⎨⎪ = −⎩
La conservation de la charge électrique conduit à : 1 2' (q q q= − + tandis que q1(t) et q2(t) véri-
fient le système différentiel couplé :
21
1 22
22
1 22
1 1 1 1' '
1 1 1 1' '
d q q qdt L C C LC
d q q qdt LC L C C
⎧ ⎛ ⎞= − + −⎜ ⎟⎪⎪ ⎝ ⎠⎨
⎛ ⎞⎪ = − − +⎜ ⎟⎪ ⎝ ⎠⎩
.
c) Couplage inductif d’oscillateurs électriques. Le couplage est cette fois réalisé par inductance mutuelle entre deux bobines de même auto-inductance L.
V1
C C
L L
i2 i1
q1 q2 M'
V2
On a les relations suivantes : 1 21 1 2 2 1 2
dq dqq CV q CV i idt dt
= = = − = −
Du fait de la présence de la mutuelle M, la tension aux bornes de la bobine de gauche s’écrit,
en convention récepteur : 11
di diU L Mdt dt
= + 2 . On aura 22
di diU L Mdt dt
= + 1 pour la bobine de
droite (à condition toujours d’utiliser la convention récepteur).
On a par ailleurs compte tenu du circuit étudié : V1 = U1 et V2 = U2
Le système différentiel couplé s’écrit ici :
2 21 2
1 2 2
2 21 2
2 2 2
d V d VV LC MCdt dtd V d VV MC LCdt dt
⎧= − −⎪⎪
⎨⎪ = − −⎪⎩
.
2°) Oscillations libres ; modes propres. a) Découplage du système linéaire différentiel. Reprenons l’exemple des deux masses reliées par les trois ressorts.
On cherche des solutions sinusoïdales en x1(t) et x2(t). Pour cela, on cherche à découpler le système différentiel initial.
La simplicité et la symétrie du système suggère de poser : 1 2
1 2
S x xA x x
= +⎧⎨ = −⎩
.
On aboutit à :
22
2
22
2
0
0
S
A
d S Sdtd A Adt
ω
ω
⎧+ =⎪⎪
⎨⎪ + =⎪⎩
, avec : 2 2 2 'S A
K Ketm m
ω ω K+= = .

DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 3 sur 12
b) Modes propres.
Les pulsations ωS et ωA sont appelées pulsations propres du système.
( )( )
( ) cos( ) cos
mS S S
mA A A
S t X tA t X t
ω ϕ Les solutions sinusoïdales en S(t) et A(t) s’écrivent :
ω ϕ= +⎧
⎨ = +⎩.
En revenant aux variables initiales 1( ) ( )( )
2S t A tx t +
= et 2( ) ( )( )
2S t A tx t −
= , il vient :
( ) ( )
( ) ( )
1
2
1 1( ) cos cos2 21 1( ) cos cos2 2
mS S S mA A A
mS S S mA A A
x t X t X t
x t X t X t
ω ϕ ω ϕ
ω ϕ ω
⎧ = + +⎪⎪⎨⎪ = + −⎪⎩
ϕ
+
+.
Ces expressions montrent que le système peut osciller à la pulsation :
ωS si XmA = 0. D’où : 1 2( ) ( )x t x t= : mode propre ωS dit symétrique.
ωA si XmS = 0. D’où: 1( ) ( )2x t x t= − : mode propre ωA dit antisymétrique.
Conclusion : La solution générale du système différentiel couplé linéaire est une combi-
naison linéaire des deux modes propres d’oscillations. Si de plus, le système est excité initialement suivant l’un de ses modes pro-
pres, il y reste par la suite.
c) Cas d’un couplage faible (ou lâche) : battements. Dans le cas où le couplage entre les deux oscillateurs est faible, les deux pulsations propres sont voisines.
Partons des conditions initiales suivantes : 1 0 2
1 2
( 0) ( 0)( 0) 0 ( 0)
x t X x tx t x t
00
= = = == = = =
(Seul l’oscillateur n°1
est écarté sans vitesse initiale de sa position d’équilibre).
Les CI donnent : ( ) ( )
( ) ( )
01 1cos cos2 2
1 10 cos cos2 2
mS S mA A
mS S mA A
X X X
X X
ϕ ϕ
ϕ ϕ
⎧ = +⎪⎪⎨⎪ = −⎪⎩
et ( ) ( )
( ) ( )
1 10 sin sin2 21 10 sin sin2 2
mS S mA A
mS S mA A
X X
X X
ϕ ϕ
ϕ ϕ
⎧ = − −⎪⎪⎨⎪ = − +⎪⎩
qui imposent 0cos( ) cos( )sin( ) sin( ) 0
mS S mA A
mS S mA A
X X XX X
ϕ ϕϕ ϕ
= =⎧⎨ = =⎩
. On écarte la solution triviale XmS = XmA = 0.
Il reste : 0S A
mS mAX Xϕ ϕ= =⎧
⎨ =⎩. La réponse temporelle est alors :
( ) ( )
( ) ( )
1 0
2 0
1( ) cos cos21( ) cos cos2
S A
S A
x t X t t
x t X t t
ω ω
ω ω
⎧ = +⎡ ⎤⎣ ⎦⎪⎪⎨⎪ = −⎡ ⎤⎣ ⎦⎪⎩
Ce qu’on écrit sous la forme : 1 0
2 0
( ) cos cos2 2
( ) sin sin2 2
S A S A
A S S A
x t X t t
x t X t t
ω ω ω ω
ω ω ω ω
− +⎧ ⎛ ⎞ ⎛= ⎜ ⎟ ⎜⎪⎪ ⎝ ⎠ ⎝⎨
− +⎛ ⎞ ⎛ ⎞⎪ = ⎜ ⎟ ⎜ ⎟⎪ ⎝ ⎠ ⎝ ⎠⎩
⎞⎟⎠
.
Il apparaît ainsi deux pulsations, de valeurs très différentes : 0
0
2
2
S AS A
A SB
ω ωω ω ω
ω ωω ω
+⎧ =⎪⎪⎨ −⎪ =⎪⎩
.
DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 4 sur 12
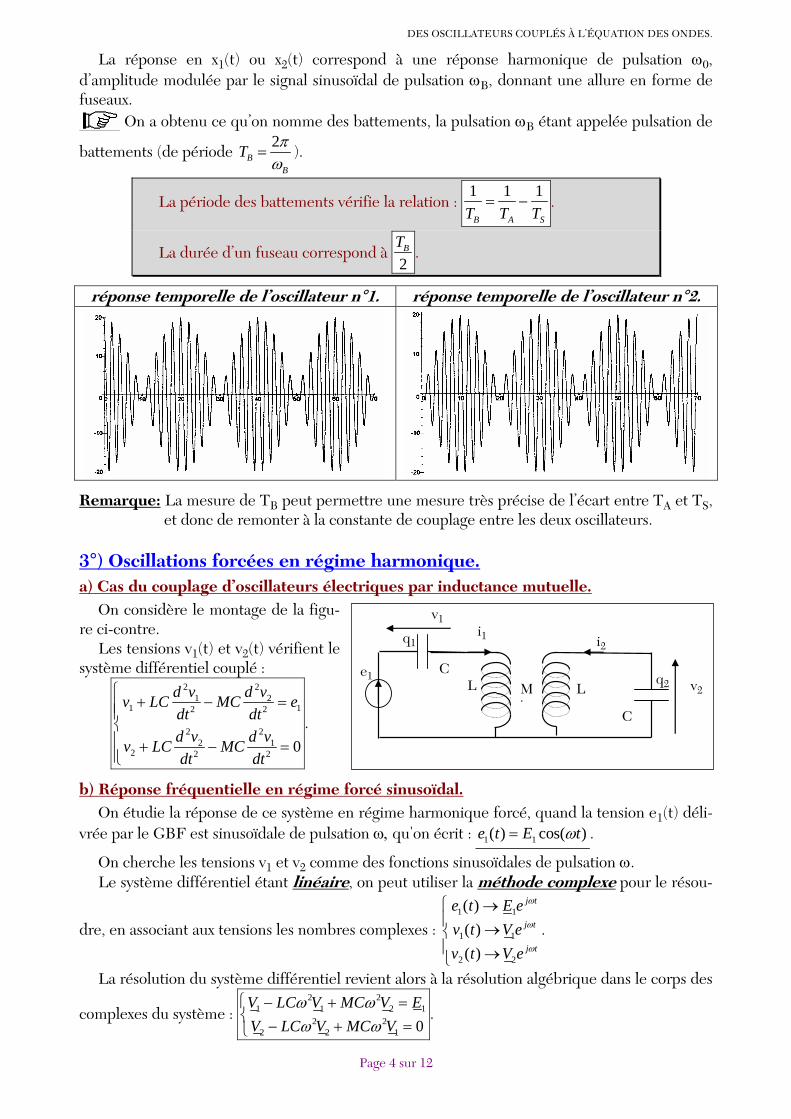
La réponse en x1(t) ou x2(t) correspond à une réponse harmonique de pulsation ω0, d’amplitude modulée par le signal sinusoïdal de pulsation ωB, donnant une allure en forme de fuseaux.
On a obtenu ce qu’on nomme des battements, la pulsation ωB étant appelée pulsation de
battements (de période 2
BB
T πω
= ).
La période des battements vérifie la relation : 1 1 1
B AT T TS
= − .
La durée d’un fuseau correspond à 2BT
.
réponse temporelle de l’oscillateur n°1. réponse temporelle de l’oscillateur n°2.
Remarque: La mesure de TB peut permettre une mesure très précise de l’écart entre TA et TS, et donc de remonter à la constante de couplage entre les deux oscillateurs.
3°) Oscillations forcées en régime harmonique. a) Cas du couplage d’oscillateurs électriques par inductance mutuelle. On considère le montage de la figu-re ci-contre. Les tensions v1(t) et v2(t) vérifient le système différentiel couplé :
2 21 2
2 2
2 22 1
2 2 2
d v d vv LC MCdt dtd v d vv LC MCdt dt
⎧+ −⎪⎪
⎨⎪ + −⎪⎩
1 1
0
e=
=.
e1
v1
C
C
L L
i2 i1 q1
q2 M'
v2
b) Réponse fréquentielle en régime forcé sinusoïdal. On étudie la réponse de ce système en régime harmonique forcé, quand la tension e1(t) déli-vrée par le GBF est sinusoïdale de pulsation ω, qu'on écrit : 1 1( ) cos( )e t E tω= .
On cherche les tensions v1 et v2 comme des fonctions sinusoïdales de pulsation ω. Le système différentiel étant linéaire, on peut utiliser la méthode complexe pour le résou-
dre, en associant aux tensions les nombres complexes : 1 1
1 1
2 2
( )( )( )
j t
j t
j t
e t E ev t V ev t V e
⎧ →⎪ →⎨⎪ →⎩
ω
ω . ω
La résolution du système différentiel revient alors à la résolution algébrique dans le corps des
complexes du système : 2 2
1 1 22 2
2 2 1 0V LC V MC V EV LC V MC V
ω ωω ω
⎧ − + =⎨
− +⎩1
=.
DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 5 sur 12
On revient ensuite aux tensions v1(t) et v2(t) en prenant les parties réelles (si on a écrit e1(t) ;avec un cosinus) des solutions complexes V1 et V2. On obtient :
( ) ( )
( ) ( )
2
1 12 22 2
2
2 12 22 2
1( ) cos( )1
( ) cos( )1
LCv t E tLC MC
MCv t E tLC MC
ω ωω ω
ω ωω ω
⎧ −=⎪
− −⎪⎨⎪ =⎪ − −⎩
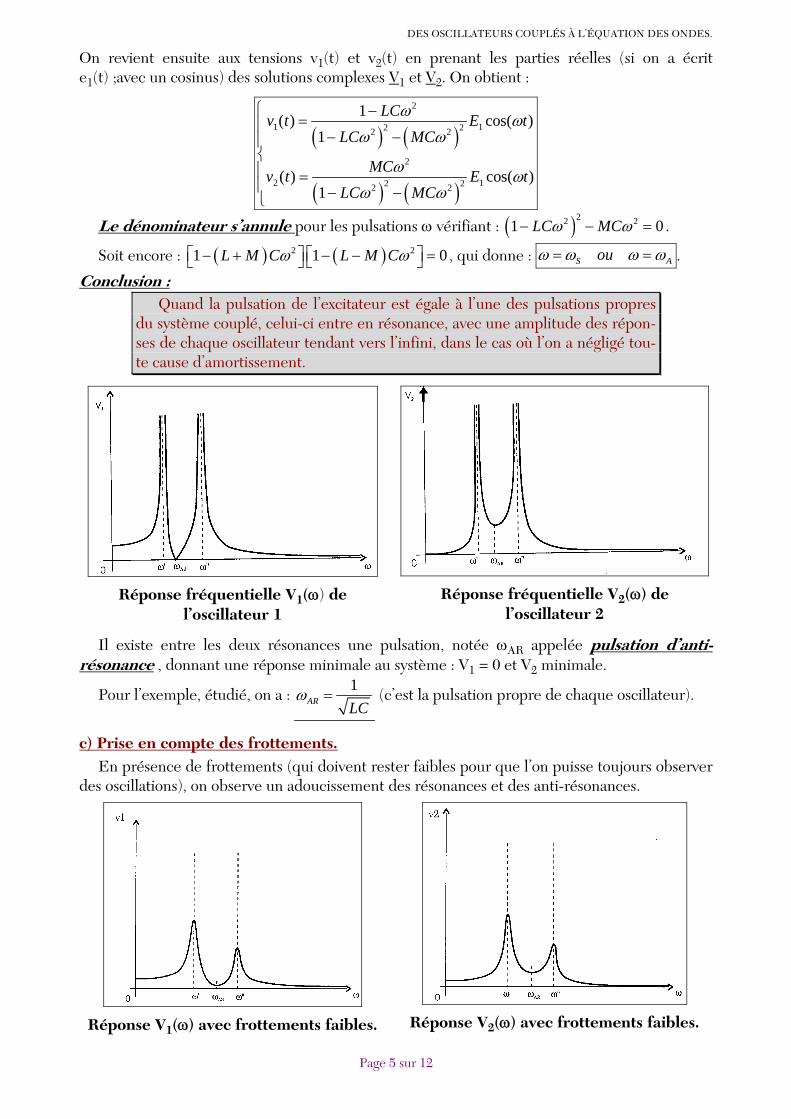
Le dénominateur s’annule pour les pulsations ω vérifiant : ( )22 21 0LC MCω ω− − = .
Soit encore : ( ) ( )21 1L M C L M Cω⎡ ⎤ ⎡− + − − =⎣ ⎦ ⎣2 0ω ⎤⎦ , qui donne : S Aouω ω ω ω= = .
Conclusion : Quand la pulsation de l’excitateur est égale à l’une des pulsations propres
du système couplé, celui-ci entre en résonance, avec une amplitude des répon-ses de chaque oscillateur tendant vers l’infini, dans le cas où l’on a négligé tou-te cause d’amortissement.
Réponse fréquentielle V1(ω) de
l’oscillateur 1
Réponse fréquentielle V2(ω) de
l’oscillateur 2
Il existe entre les deux résonances une pulsation, notée ωAR appelée pulsation d’anti-résonance , donnant une réponse minimale au système : V1 = 0 et V2 minimale.
Pour l’exemple, étudié, on a : 1
AR LCω = (c’est la pulsation propre de chaque oscillateur).
c) Prise en compte des frottements. En présence de frottements (qui doivent rester faibles pour que l’on puisse toujours observer des oscillations), on observe un adoucissement des résonances et des anti-résonances.
Réponse V1(ω) avec frottements faibles.
Réponse V2(ω) avec frottements faibles.

DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 6 sur 12
II : Cas d’une chaîne infinie d’oscillateurs couplés. 1°) Étude d’un système unidimensionnel discret. a) Mise en équations. Le modèle que nous allons étudier peut décrire la propagation d’une onde sonore dans un solide. Le solide est constitué d’une chaîne comportant une infinité d’atomes, assimilés à des points matériels de même masse m, reliés par des ressorts identiques de longueur à vide a et de raideur K, et susceptibles de se déplacer sans frottement le long de l’axe Ox. Ces ressorts fictifs modélisent, dans l’approximation linéaire, les actions subies par les atomes lorsqu’ils se déplacent au voisinage de leurs position d’équilibre d’abscisses .éq
nx n a= . C’est ce couplage entre les différents oscillateurs qui permet la propagation d’un signal (en l’occurrence ici une onde sonore).
On repère les positions des atomes hors équilibre par leurs abscisses : ( ) . ( )n nx t n a tψ= + , où les déplacements ψn(t) sont supposés faibles devant a. Le principe fondamental de la dynamique appliqué à l’atome de numéro xn s’écrit, en projec-tion sur l’axe Ox (on ne tient pas compte du poids ici) :
1 1( ) (n n n n nmx K x x a K x x a+ −= − − − − − )
n
ou encore : 1 1(2 )n n nm Kψ ψ ψ ψ+ −= − − − . b) Approximation d’un milieu continu.
Dans un réseau cristallin, la distance a entre deux atomes est typiquement de l’ordre de 10-10 m, distance très inférieure aux dimensions caractéristiques des phénomènes de propagation à étudier (qui sont plutôt de l’ordre de grandeur du mm à quelques mètres). Ceci suggère de considérer la chaîne d’atomes comme un milieu continu, décrit par une fonction ψ(x,t), de classe C 2, prenant les valeurs ψn(t) aux points d’abscisses xn = n.a :
( , ) n ( )x na t tψ ψ= =
Alors, on peut écrire : 1
1
( ) ( , ) ( , )( ) ( , ) ( , )
n
n
t na a t x at na a t x a
tt
ψ ψ ψψ ψ ψ
+
−
= + = += − = −
.
Un développement de Taylor à l’ordre 2 de la fonction ψ par rapport à la variable x donne :
2 2
2
2 2
2
( , ) ( , ) .2
( , ) ( , ) .2
ax a t x t ax x
ax a t x t ax x
ψ ψψ ψ
ψ ψψ ψ
∂ ∂+ + +
∂ ∂∂ ∂
− − +∂ ∂
Par ailleurs, dans cette description continue, 2
2n tψψ ∂
=∂
L’équation discrétisée du mouvement ψn(t) s’écrit maintenant : 2 2
22 2m Ka
t xψ ψ∂ ∂
=∂ ∂
.

DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 7 sur 12
2°) L’équation des ondes à une dimension. L’équation d’évolution spatio temporelle précédente peut s’écrire sous la forme canonique :
2 2
2 2 2
1 0f fx c t
∂ ∂−
∂ ∂= , connue sous le nom d’équation des ondes à une dimension.
On cherche la solution générale de cette équation différentielles aux dérivées partielles (en
abrégé EDP) en effectuant le changement de variables : x p x ct q x
tct
⎧ = −⎧→⎨ ⎨ = +⎩⎩
.
Alors f f p f qx p x q x
∂ ∂ ∂ ∂ ∂= +
∂ ∂ ∂ ∂ ∂, soit : ( , )f f f g p q
x p q∂ ∂ ∂
= + =∂ ∂ ∂
Et 2
2 ( , )f g p qxx
∂ ∂=
∂∂=
g gp q
∂ ∂+
∂ ∂ soit :
2 2 2 2
2 2 2 2f f f
p qf
x p q∂ ∂ ∂ ∂
= + +∂ ∂∂ ∂ ∂
De même, f f p f qt p t q
∂ ∂ ∂ ∂ ∂= +
t∂ ∂ ∂ ∂ ∂ soit : . (f f fc h
t p q⎡ ⎤∂ ∂ ∂
= − + =⎢ ⎥∂ ∂ ∂⎣ ⎦, )p q
2
2 ( , ) .f h hh p q ct pt
⎡ ⎤∂ ∂ ∂ ∂= = − +⎢ ⎥∂ ∂∂ ⎣ ⎦q∂
. D’où : 2 2 2
22 2. 2
2
2f f fc
p qt pf
q
⎡ ⎤∂ ∂ ∂ ∂= − +⎢ ⎥
∂ ∂∂ ∂ ∂⎢ ⎥⎣ ⎦.
Ainsi, l’équation des ondes en variables p, q s’écrit sous la forme : 2
0fp q
∂=
∂ ∂
Par intégration, on obtient : 0 (p
f f G qp q q
⎛ ⎞ ⎛ ⎞∂ ∂ ∂= ⇒ =⎜ ⎟ ⎜ ⎟∂ ∂ ∂⎝ ⎠ ⎝ ⎠
) ,
( , ) ( )f p q G q dq= ∫ soit : 1 2( , ) ( ) ( )f x t f x ct f x ct= − + + .
Les fonctions f1 et f2 sont arbitraires, au moins de classe C2 (pour pouvoir appliquer le théo-rème de Schwarz). Elles ne sont pas données par l’équation des ondes elle même, mais déterminées par les conditions aux limites (tout comme les constantes d’intégration d’une équation différentielle).
Interprétation de la solution générale de l’équation des ondes à une dimension.
HYP : c > 0. L’invariance dimensionnelle montre que c est homogène à une vitesse.
On peut écrire la fonction quelconque f2(x + ct) sous la forme f2(-[(-x) – ct)]), c’est-à-dire sous la forme d’une fonction d’une fonction quelconque de la variable (-x) – ct. On voit donc ici que l’interprétation de la fonction f2(x + ct) est la même que celle de la fonction f1(x - ct), à un changement d’orientation de l’axe des x près.
Une fonction de la forme f(x - ct) représente une onde progressive se propageant sans déformation à la célérité c suivant la direction de l’axe Ox, dans le sens des x croissants.
Il est remarquable que la fonction f(x, t) d’une onde progressive ne dépende des deux varia-bles x et t que par l’intermédiaire de l’unique variable x – ct.
Il est équivalent d’écrire la solution de l’équation des ondes sous la forme :
( , ) ( ) ( )x xf x t f t f tc c+ −= − + + .
La solution générale de l’équation des ondes à une dimension peut s’exprimer comme la superposition de deux ondes progressives de même célérité c et de sens de propagation opposés.

DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 8 sur 12
Surfaces d'onde. L’onde plane.
On appelle surface d'onde associée à une onde f(M,t) le lieu des points M tels que f(M,t) = Cste à t donné.
Ainsi, dans l’exemple étudié précédemment, les surfaces d’onde sont des plans perpendicu-laires à l’axe Ox, et l’onde ψ associée est appelée onde plane.
Une onde plane progressive , de célérité c est caractérisée par sa direc-
tion de propagation, définie par le vecteur unitaire u . Les surfaces d’ondes
sont alors les plans perpendiculaires à u . L’onde en un point M de l’espace
repéré par le rayon vecteur r et à l’instant t, est décrite par une dépendance
spatio-temporelle du type : .( )r utc
ψ −
3°) L’onde plane progressive harmonique. Les ondes étudiées représentent des phénomènes périodiques, de période temporelle T (ou de pulsation ω ou de fréquence ν). En vertu du théorème de Fourier sur les fonctions T-périodiques, on peut décomposer l’onde en une série de fonctions sinusoïdales de pulsations n.ω, avec n entier :
En particulier, toute onde plane progressive se propageant suivant u , peut s’écrire :
01 1
. .( , ) cos sinn nn n
r u r uf r t a a n t b n tc c
ω ω∞ ∞
= =
⎡ ⎤ ⎡⎛ ⎞ ⎛ ⎞= + − + −⎜ ⎟ ⎜ ⎟⎤
⎢ ⎥ ⎢⎝ ⎠ ⎝ ⎠⎥⎣ ⎦ ⎣∑ ∑
⎦.
La fonction particulière 0.( , ) cos r us r t S tc
ω⎡ ⎤⎛ ⎞= −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦ définit une onde plane
progressive sinusoïdale (ou harmonique, ou monochromatique), en abrégé, O.P.P.H. ou O.P.P.M.
On peut indifféremment utiliser une représentation en cosinus ou en
sinus, ou même la représentation complexe : 0.exp r us S j tc
ω⎡ ⎤⎛ ⎞= −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦.
Longueur d’onde : La longueur d’onde, notée λ d’une O.P.P.H. est la distance parcourue par l’onde pendant
une période du signal : . cc Tλν
= = .
Nombre d’onde :
Le nombre d’onde, noté σ, est défini comme l’inverse de la longueur d’onde : 1σλ
= .
Vecteur d’onde :
On appelle vecteur d’onde associé à une O.P.P.H. se propageant suivant u , le vecteur k : 2k u
cuω π
λ= = . (Le module de k est parfois appelé nombre d’onde angulaire).
En résumé : Une onde plane progressive harmonique de pulsation ω se propageant
dans le sens défini par le vecteur d’onde k s’écrit en représentation complexe :
( )( , ) exp .r t A j t k r⎡ψ ω ⎤= −⎣ ⎦ . La quantité .t k rω − est la phase de l’onde.
DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 9 sur 12
III : Milieu continu à une dimension : ondes sur une corde tendue. 1°) L’équation de propagation en l’absence d’amortissement.
Le modèle.
On considère une corde sans raideur, homogène de masse linéique μ constante, de lon-gueur L constante, tendue horizontalement sous une tension F0. Les effets de la pesanteur sont négligés devant la tension de la corde.
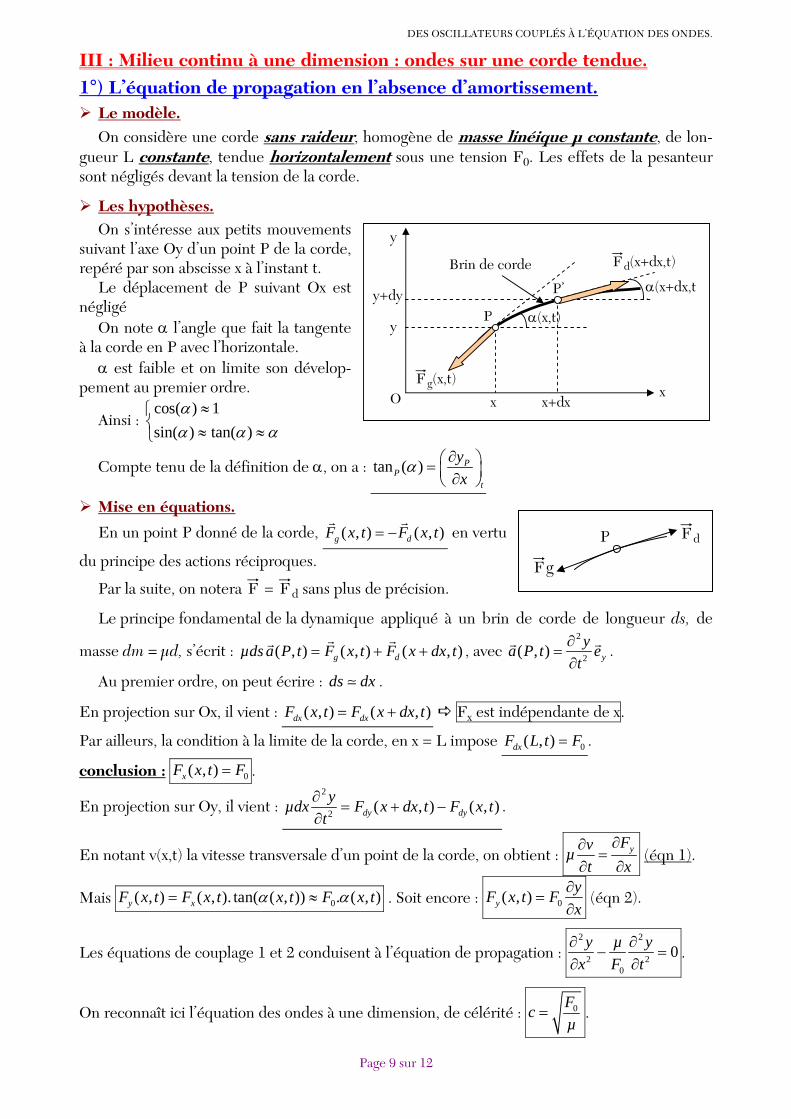
Les hypothèses. On s’intéresse aux petits mouvements suivant l’axe Oy d’un point P de la corde, repéré par son abscisse x à l’instant t.
P
P’
x x+dx x
y
Brin de corde
F g(x,t)
F d(x+dx,t)
α(x,t)
α(x+dx,t) y+dy
y
O
Le déplacement de P suivant Ox est négligé On note α l’angle que fait la tangente à la corde en P avec l’horizontale. α est faible et on limite son dévelop-pement au premier ordre.
Ainsi : cos( ) 1sin( ) tan( )
αα α α
≈⎧⎨ ≈ ≈⎩
Compte tenu de la définition de α, on a : tan ( ) PP
t
yx
α ∂⎛ ⎞= ⎜ ⎟∂⎝ ⎠
Mise en équations.
En un point P donné de la corde, ( , ) ( , )g dF x t F x t= − en vertu
du principe des actions réciproques.
P
Fg
F d
Par la suite, on notera F = F d sans plus de précision.
Le principe fondamental de la dynamique appliqué à un brin de corde de longueur ds, de
masse dm = μd, s’écrit : ( , ) ( , ) ( , )g dµds a P t F x t F x dx t= + + , avec 2
2( , ) yya P t e
t∂
=∂
.
Au premier ordre, on peut écrire : . ds dx
En projection sur Ox, il vient : ( , ) ( , )dx dxF x t F x dx t= + Fx est indépendante de x.
Par ailleurs, la condition à la limite de la corde, en x = L impose 0( , )dxF L t F= .
conclusion : 0( , )xF x t F= .
En projection sur Oy, il vient : 2
2 ( , ) ( ,dy dyy )µdx F x dx t F x t
t∂
= + −∂
.
En notant v(x,t) la vitesse transversale d’un point de la corde, on obtient : yFvµt x
∂∂=
∂ ∂ (éqn 1).
Mais 0( , ) ( , ). tan( ( , )) . ( , )y xF x t F x t x t F x tα α= ≈ . Soit encore : 0( , )yyF x t Fx
∂=
∂ (éqn 2).
Les équations de couplage 1 et 2 conduisent à l’équation de propagation : 2 2
2 20
0y µ yx F t
∂ ∂− =
∂ ∂.
On reconnaît ici l’équation des ondes à une dimension, de célérité : 0Fcµ
= .
DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 10 sur 12
Ondes longitudinales et transversales.
Dans le cas de la propagation d’une onde sonore le long d’une chaîne infinie d’atomes, la déformation du milieu se faisait parallèlement à la direction de la propagation. Une telle onde est dite longitudinale : elle est décrite par une fonction scalaire du type ( , )x tψ .
Pour la corde, la déformation s’effectue perpendiculairement à la direction de propaga-tion. Une description complète nécessite une représentation vectorielle de cette onde, le vecteur traduisant la déformation étant contenu dans le plan yz perpendiculaire à Ox. Une telle onde est dite transversale.
Polarisation d’une O.P.P.H. transversale.
La direction prise au cours du temps par le vecteur ( , )x tψ décrivant l’onde détermine sa po-larisation.
Quand ( , )x tψ conserve au cours du temps une direction fixe, on dit que l’onde est polarisée rectilignement.
Montrons que l’état de polarisation le plus général d’une O.P.P.H. transversale est la polari-sation elliptique. Soit une onde, décrite par le vecteur ( , )x tψ se propageant suivant l’axe Ox, suivant les x . ( , )x tψ est contenu dans le plan (y,z) et peut toujours s’écrire, moyennant un choix convena-
ble de l’origine des dates suivant : 0
( , ) .cos( ).cos( )
x t a t kxb t kx
ψ ωω φ
⎧⎪= −⎨⎪ − −⎩
.
ψy et ψz vérifient alors l'équation : 2 2
22 2
.2 cos sin (
.y y zz
a b a bψ ψ ψψ )φ φ+ − = : équation d'une ellipse.
Cette expression montre que la polarisation la plus générale d'une O.P.P.H. est elliptique (notée alors OPPHE ou OPPME).
Polarisation circulaire.
En superposant deux ondes polarisées selon Oy et Oz, il est possible d'obtenir une onde bien particulière, dont la polarisation est dite circulaire : l'extrémité du vecteur ( , )x tψ décrit alors un cercle dans le plan yOz. Remarquons que la symétrie de cette onde est celle d'un tire-bouchon ou d'une hélice, qu'elle se propage dans la direction Ox et qu'elle tourne soit de Oy vers Oz, soit de Oz vers Oy.
La polarisation circulaire correspond à φ = ± π/2 avec la condition supplé-mentaire a = b.
Une O.P.P.H. polarisée circulairement sera notée O.P.P.H.C. (ou O.P.P.M.C.). On précisera s'il s'agit d'une polarisation circulaire gauche (φ = π/2) ou droite (φ = −π/2).
Pour une O.P.P.H.C., ||ψ || = Cste mais ψ ne conserve pas une direction fixe au cours du temps.
Valeurs particulières du déphasage.
πφφ = ou 0 = Si : z
y
Csteψψ
= et ψ garde une direction fixe au cours du temps.
L'O.P.P.H. est dite polarisée rectilignement (O.P.P.H.R.).

DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 11 sur 12
2°) Oscillations libres d’une corde fixée à ses extrémités. Ondes stationnaires.
Il existe d’autres solutions à l’équation des ondes que les ondes progressives : ce sont les on-des stationnaires. On cherche des solutions stationnaires à l'équation des ondes, par la méthode dite de sépa-ration des variables sous la forme : ψ(x, t) = f(x).g(t) (découplage des variables d'espace et de temps). On montre que les solutions physiquement acceptables conduisent à des solutions ondulatoi-res de la forme :
ψ(x, t) = [a1cos(ωt) + a2sin(ωt)] . [b1cos(kx) + b2sin(kx)], les constantes a1, a2, b1 et b2 dépendant des "conditions aux limites" (l'analogue des conditions initiales pour une équation différentielle ordinaire).
Dans une onde stationnaire, les dépendances spatiales et temporelles inter-viennent séparément : la dépendance spatiale intervient dans l’amplitude de l’oscillation temporelle et non plus dans la phase, de sorte que tous les points du milieu vibrent en phase ou en opposition de phase.
Certains points peuvent ainsi être toujours fixes et constituent les nœuds de vibration. Ceux qui ont une amplitude de vibration maximale sont appelés ventres de vibration.
Modes propres de la corde. Reprenons la déformation transversale polarisée rectilignement suivant Oy se propageant le
long de la corde de longueur L, fixée en x = 0 et en x = L, de sorte que : (0, ) 0( , ) 0
y ty L t
=⎧⎨ =⎩
.
On abandonne la corde avec des conditions initiales données, en fixant : ( ,0) ( )
( ,0) ( )
y x xy x xt
α
β
=⎧⎪
∂⎨=⎪ ∂⎩
.
(Les fonctions α(x) et β(x) sont supposées connues).
On s’intéresse aux mouvements ultérieurs de la corde, abandonnée à elle-même : on étudie donc ses oscillations libres.
Les conditions aux limites sont incompatibles avec une onde progressive, mais particulière-ment bien adaptées à une onde stationnaire, pour laquelle les extrémité seraient des nœuds. Cherchons la solution sous la forme générale : [ ]( , ) cos( ) sin( ) .cos( )y x t A t B t kxω ω θ= + +
Les conditions aux limites imposent : cos( ) 0θ = et cos( ) 0kL θ− = .
D’où : 2πθ = et c'est-à-dire sin( ) 0kL = kL nπ= , avec n entier.
Ainsi, la norme du vecteur d’onde est quantifiée.
Avec la relation : kcω
= , il en résulte que les pulsations sont quantifiées : .cnL
πω = .
En faisant apparaître la longueur d’onde 2 cπλω
= , il vient : 2
L n λ= .
Ces solutions quantifiées obtenues en (ωn, kn) définissent les modes pro-
pres de la corde, vérifiant : ( , ) cos( ) sin( ) .sin( )n n nct ct xy x t A n B n nL L
π π⎡ ⎤= +⎢ ⎥⎣ ⎦ Lπ .

DES OSCILLATEURS COUPLÉS À L’ÉQUATION DES ONDES.
Page 12 sur 12
Construction de la solution par superposition de modes propres. L’équation des ondes étant linéaire, la superposition de tous les modes propres est solution
de l’équation. Soit 1
( , ) cos( ) sin( ) .sin( )n nn
ct ct xy x t A n B n nL L
π π∞
=
⎡ ⎤= +⎢ ⎥⎣ ⎦∑ L
π .
De même, cette solution y(x,t) satisfait aux conditions aux limites en x = 0 et x = L. Il s’agit de trouver An et Bn, pour que y(x,t) soit la solution du problème posé.
Nous constatons que y(x,0) ainsi que ( ,0)y xt
∂∂
se présentent comme des développements en
série de Fourier (en abrégé D.S.F.) de la variable x : 1
1
( ,0) sin( )
( ,0) sin( )
nn
nn
xy x A nL
y n cx B nt L
π
π π
∞
=
∞
=
⎧=⎪⎪
⎨∂ ⎛ ⎞⎪ = ⎜ ⎟⎪ ∂ ⎝ ⎠⎩
∑
∑ xL
.
Étendus à l’intervalle ]-∞ ; ∞[, ces développements en SDF sont ceux d’une fonction impaire (absence de termes en cosinus), de période 2L. Connaissant les fonctions α(x) et β(x) sur l’intervalle physique [0 ; L], on peut en faire des fonctions impaires et périodiques de période double 2L, puis les développer en série de Fou-
rier, suivant : 1 1
( ) sin( ) ( ) sin( )n nn n
x xx n et xL L
α α π β β π∞ ∞
= =
⎧= =⎨
⎩∑ ∑ n .
L’identification des DSF (le DSF est unique) fournit alors : n n nLA et B
n c nα βπ
⎧ = =⎨⎩
.
En conclusion : On peut construire la solution générale en régime libre de l’équation des
ondes pour une corde fixée à ses deux extrémités par superposition de modes propres, en utilisant les D.S.F. des conditions initiales.
3°) Oscillations forcées d’une corde fixée à ses extrémités. Soit le dispositif de la corde de Melde : L’extrémité x = L de la corde est fixée et un opérateur impose en x = 0 un mou-vement transversal : (0, ) cos( )y t a tω= .
Ce problème correspond à des oscilla-tions forcées : après un régime transitoire où se superposent les oscillations libres amorties (cf § précédent) et les oscilla-tions forcées à la pulsation ω, seul le régime forcé subsiste. Pour déterminer ce régime, on cherche une vibration y(x,t), fonction sinusoïdale du temps, de pulsation ω et vérifiant la condition aux limites y(L,t) = 0. On peut à priori chercher y(x,t) comme onde stationnaire de la forme : [ ]( , ) cos( ) sin( ) .cos( )y x t A t B t kxω ω θ= + + .
Les conditions aux limites en x = 0 et x = L conduisent à : [ ]sin ( )
( , ) cos( )sin( )k L x
y x t a tkL
ω−
= ,
avec k = ω/c.
L’amplitude maximale des vibrations vaut sin( )
akL
. Elle est donc infinie si kL = nπ.
On observe un phénomène de résonance quand la fréquence de l’excitateur correspond à l’une des fréquences propres de la corde.


















