Ort Vj 09 Stabilnost
43
Osnove regulacijske tehnike prof. dr.sc. Dario Matika mr.sc. Dalibor Brnobić Vježba: Stabilnost sustava Analitički i grafoanalitički postupci za provjeru stabilnosti sustava
-
Upload
mateo-brnic -
Category
Documents
-
view
28 -
download
2
description
Stabilnost
Transcript of Ort Vj 09 Stabilnost

Osnove regulacijske tehnike
prof. dr.sc. Dario Matika
mr.sc. Dalibor Brnobić
Vježba:
Stabilnost sustavaAnalitički i grafoanalitički postupci
za provjeru stabilnosti sustava

Stabilnost - uvod
Osnovne definicije:
o asimptotska stabilnost: sustav na koji ne djeluje
vanjaska pobuda teži nuli kada vrijeme teži prema
beskonačnosti
BIBO stablilnost (engl. bounded input bounded
Stabilnost - najvažniji pokazatelj regulacijskih sustava
Osnove regulacijske tehnike – Stabilnost 2
o BIBO stablilnost (engl. bounded input bounded
output) – ograničena pobuda na sustavu daje
ograničen izlaz
o potpuna stabilnost: sustav je potpuno stabilan ako
je funckija prijenosa svih ulazno-izlaznih parova
stabilnaPrimjer: ako sustav ima kraćenje nestabilnog pola i neminimalno fazne nule on će biti BIBO stabilan, ali tehnički neprihvatljiv

Stabilnost - uvod
Sustav (LTI) s prijenosnom funkcijom G(s) je:
o stabilan ako svi njegovi polovi leže u lijevoj s
poluravnini
o granično stabilan ako ima jednostruki pol u ishodištu ili
Osnove regulacijske tehnike – Stabilnost 3
o granično stabilan ako ima jednostruki pol u ishodištu ili
jednostruke konjugirano-kompleksne parove polova na
ordinati
o u suprotnom je sustav nestabilan

Stabilnost – postupci ispitivanja stabilnosti
Grafoanalitički
Bode, Nyquist
Algebarski
Hurwitz, Routh
JNPV
Zaključak:
da li je sustav stabilan
Osnove regulacijske tehnike – Stabilnost 4
Analiza: prijenosna funkcija otvorenog sustava
Analiza: položaj polova zatvorenog sustava
amplitudno i fazno osiguranje ima li nestabilnih polova
Zaključak:
koliko je sustav daleko od
granice stabilnosti

Stabilnost – algebarski postupci
Hurwitzov postupak
efikasan do sustava 4. reda –unaprijed izračunane formule
Routhov postupak
nema ograničenja u redu sustava, računski nešto zahtjevniji
Za oba postupka: karakteristični polinom zatvorenog sustava A (s)
Osnove regulacijske tehnike – Stabilnost 5
Za oba postupka: karakteristični polinom zatvorenog sustava AZ(s)
( ))()(
)(
)()(1
)()(
)(1
)()(
)(
)(
sBsA
sB
sAsB
sAsB
sG
sGsG
sA
sBsG
O
OZO
+=
+=
+==
)()()( sBsAsAZ += Za poznatu GO(s) nije nužno računati GZ(s)!

Stabilnost – Hurwitzov kriterij stabilnosti
Primjenjuje se za sustave čiji je red manji od 5
0)( 0
1
1
0
=+++== −
−
=
∑ asasasasAn
n
n
n
n
i
i
iZ L
Iz karakterističnog polinoma zatvorenog kruga
aaa 0...
Osnove regulacijske tehnike – Stabilnost 6
nxnaaa
aa
aa
aaa
aa
aaa
aaa
nn
nn
nnn
nnn
n
024
13
02
12
31
42
531
...0
0...0
0....
00.0
....0
0...
0...
−
−−
−−
−−−
=∆

Stabilnost – Hurwitzov kriterij stabilnosti
Glavne subdeterminante su
Uvjet stabilnosti:
...
0 31
42
531
3
2
31
211
−−
−−
−−−
−
−−
− =∆=∆=∆
nn
nnn
nnn
nn
nn
n
aa
aaa
aaa
aa
aaa
Osnove regulacijske tehnike – Stabilnost 7
Uvjet stabilnosti:
o svi koeficijenti ai > 0
o sve glavne subdeterminante uključujući i ∆n
moraju biti pozitivne

Stabilnost – Hurwitzov kriterij stabilnosti
n=1 Karakteristična jednadžba
Uvjet stabilnosti:
001 =+ asa
0, 01 >aa 011 >=∆ a
n=2 Karakteristična jednadžba
Uvjet stabilnosti: 0,, 012 >aaa
001
2
2 =++ asasa
0
011 >=∆
a
a
0
0
0
0
00 20
02
13
02
30312221 >∆==∆>−=∆>=∆ a
aa
aa
aa
aaaaa
Osnove regulacijske tehnike – Stabilnost 8
00
01
02
1
2 >==∆ aaaa
a
n=3 Karakteristična jednadžba
Uvjet stabilnosti: 0,, 012 >aaa
001
2
2
3
3 =+++ asasasa

Stabilnost – Hurwitzov kriterij stabilnosti
n=4 Karakteristična jednadžba
Uvjet stabilnosti:
001
2
2
3
3
4
4 =++++ asasasasa
0,,,, 01234 >aaaaa
2
14232
31
0
0
>−−=∆
>−=∆
>=∆
aaaa
a
Osnove regulacijske tehnike – Stabilnost 9
30
024
13
124
13
4
0
2
3412313
0
00
0
00
0)(
∆==∆
>−−=∆
a
aaa
aa
aaa
aa
aaaaaaa

Stabilnost – primjer 1
Primjer 1:
Pomoću Hurwitzovog kriterija odredi za koje je vrijednosti pojačanja K sustav na slici stabilan.
Osnove regulacijske tehnike – Stabilnost 10
( )( )( ) )(
)(
271,1333,01,123,01 2sA
sB
ss
K
ss
KsGO =
++=
++=
KsssBsAsAZ +++=+= 271,1333,0)()()( 2
Prijenosna f-ja otvorenog kruga
Karakteristični polinom zatvorenog kruga

Stabilnost – primjer 1
Hurwitzov postupak za red sustava n=20
0
1
1
2
2
2 271,1333,0)( sasasaKsssAZ ++=+++=
Kaaa +=== 271,1333,0 012
1. Nužan uvjet: svi koeficijenti an veći (manji) od 0
ispunjen za 2−>K
Osnove regulacijske tehnike – Stabilnost 11
ispunjen za 2−>K
1. dodatni uvjeti: sve glavne poddeterminante pozitivne
a) 02 >= aanispunjen
b) 011 >=∆ a ispunjen
c) 00 0012 >⇒>=∆ aaa ispunjen
Sustav će biti stabilan za 2−>K

Stabilnost – primjer 2
Primjer 2:
Za sustav na slici odredi parametar K da sustav bude stabilan.
( )K
Pitanje:
da li je pomoću P regulatora moguće stabilizirati ovaj nestabilni proces
Osnove regulacijske tehnike – Stabilnost 12
( )( )( )
KsTsATsTs
KsG ZO ++−=⇒
−+= 1)(
11
22
KsTsAZ −−= 1)( 22
Odgovor:
korištenje samo P regulatora ne može stabilizirati ovaj proces.
Pravilo –množenje polinoma sa -1)
02
2 >= Ta
001 >=a
010 >−−= Ka
ispunjen
nije moguće ispuniti
ispunjen za 1−<K

Primjenjuje se za sustave čiji je red veći od 4
Stabilnost – Routhov kriterij stabilnosti
0)( 0
1
1
0
=+++== −
−
=
∑ asasasasAn
n
n
n
n
i
i
iZ L
Iz karakterističnog polinoma zatvorenog kruga
tvori se Routhov raspored321
1a
aaaab nnnn
−
−−− −=
Osnove regulacijske tehnike – Stabilnost 13
1
13512
1
12311
1
5412
1
b
ababc
b
ababc
a
aaaab
a
nn
nn
n
nnnn
n
−−
−−
−
−−−
−
−=
−=
−=
321
4321
7531
642
2
1
... ccc
bbbb
aaaa
aaaa
s
s
s
nnnn
nnnn
n
n
n
−−−−
−−−
−
−

Uvjet stabilnosti:
o svi koeficijenti ai > 0
o svi elementi u prvom stupcu R rasporeda
moraju biti pozitivni
Stabilnost – Routhov kriterij stabilnosti
Otkriva:
o broj “nestabilnih” polova odgovara broju
promjena predznaka u 1. stupcu R- rasporeda
Osnove regulacijske tehnike – Stabilnost 14

Dodatna pravila pri računanju s Routhovim rasporedom:
1. cijeli red možemo pomnožiti pozitivnim brojem
radi lakšeg računanja
2. ukoliko je 1. element nekog reda jednak 0,
mijenjamo ga varijablom ε i računamo preostale
elemente R rasporeda. Na na kraju postupka
Stabilnost – Routhov kriterij stabilnosti
elemente R rasporeda. Na na kraju postupka
limesom provjeravamo da li dolazi do promjene
predznaka u prvom stupcu
3. ukoliko su svi elementi nekog reda jednaki 0,
nove elemente tog reda dobivamo deriviranjem
polinoma kojeg kreiramo iz predhodnog reda.
Osnove regulacijske tehnike – Stabilnost 15

Stabilnost – primjer 3
Primjer 3:
Dana je karateristnična jednadžba sustava. Pomoću Routhovog kriterija provjeri stabilnost sustava.
01242)( 23 =+++= ssssAZ
3s 1 4 2
4128:1 −=−=
−s
Osnove regulacijske tehnike – Stabilnost 16
0
1
2
s
s
s
s
12
2
2
1
−
12
4
2 promjene predznaka:sustav ima 2 nestabilna pola.
22
4
2
128:1 −=−=
−s

Stabilnost – primjer 4
Primjer 4:
Pomoću Routhovog kriterija provjeri stabilnost sustava:
06575 234 =++++ ssss
5
13
4
s
s 6
5
7
Osnove regulacijske tehnike – Stabilnost 17
6
0
6
5
ε
0
1
2
3
s
s
s
s
6
5
⇒→
6
6
lim0
εε
Ne dolazi do promjene predznaka. Stabilan sustav.
pravilo 2

Stabilnost – primjer 5
Primjer 5:
Odredi broj nestabilnih polova u sustavu:
502548242)(
2345 −−+++=
sssss
KsGZ
Osnove regulacijske tehnike – Stabilnost 18
Red sustava 5 + traži se broj polova → Routhov postupak
Zatvoreni sustav. Nestabilan.
502548242)( 2345 −−+++= ssssssAZ

Stabilnost – primjer 5
121
000
25241
50482
25241
2
3
3
4
4
5
−
−
−
−
s
s
s
s
s
pravilo 1: množenje s pozitivnim brojem
pravilo 3: polinom nula.
red uz s3 se izračunava iz polinoma uz s4
Osnove regulacijske tehnike – Stabilnost 19
2524)(25241 24
4
3 pravilo4 −+=⇒− ssSPs
13
3
1 pravilo134
3 12)(484)(
)( sssPssds
sdPsP +=⇒+==
izračun u redu s3:
25
12/13
25122
0
1
2
−
−
s
s
s
jedna promjena predznaka: 1 nestabilan pol

Stabilnost – primjer 6
Primjer 6:
Analizom regulacijskog kruga dobiven je karakterstični polinom. Odredi za koje je vrijednosti K sustav stabilan.
uvjet: svi ai>0 2222 <−><−> KKTT
( ) ( ) ( ) RRiiZ KsKsTsTsA −++++−++= 2222)( 23
Osnove regulacijske tehnike – Stabilnost 20
uvjet: svi ai>0 2222 <−><−> RRii KKTT
uvjeti za n=3
⇒>+−⇒>⇒>∆ 0200 21 iTa 2<iT
( )( ) ( )( ) 0222200 30212 >−+−++−⇒>−⇒>∆ RiRi KTKTaaaa
0,00 02203 >>∆⇒>∆=∆ aa
već ispunjen
2<RK već ispunjen

Stabilnost – primjer 6
Analiza uvjeta
RI KT <
svi uvjeti
02 >∆
⇒>−
>++−−+−+−
044
0242422
iR
RiRiiRRi
TK
KTKTTKKT
T −> 2
Ti
2 Ti<2
Ti<KR
Primjena Ruthovog i Hurwitzovog
postupka daje jednako rješenje
područja stabilnosti koje je
prikazano
Osnove regulacijske tehnike – Stabilnost 21
RI
R
R
i
i
KT
K
K
T
T
<
<
−>
<
−>
2
2
2
2
21-1-2 KR
1
-1
-2
KR>-2
Ti>-2
KR<2
prikazano
u KR-Ti ravnini

Stabilnost – primjer 7
Primjer 7:
Na slici je prikazana prijenosna funkcija otvorenog sustava G0(s). Odredi pojačanja K1 i K2 za koje je sustav zatvoren jediničnom povratnom vezom stabilan.
1,0
05,01
=
=
T
T
Osnove regulacijske tehnike – Stabilnost 22
1,02 =T
)(sGO
( ) ( ) 221
2
21
3
21
21
2
2
2
2
1
10
11)(
KsKTsTTsTT
KK
KssT
K
sT
KsG
+++++
⋅=
++⋅
+=

Stabilnost – primjer 7
( ) ( )
( ) ( ) 200/105,0115,0005,00
1)(
122
23
21221
2
21
3
21
⋅+++++=
⋅++++++=
KKsKss
KKKsKTsTTsTTsAZ
( ) ( ) 012001020030 122
23 =+++++ KKsKss
20010200: −>⇒>+ KKa 1
Osnove regulacijske tehnike – Stabilnost 23
20010200: 221 −>⇒>+ KKa
( )
10
1001:
12
12120
−<<⇒
−>>⇒>+
KK
KKKKa
1
2a
2b
2

Stabilnost – primjer 7
2)1()1(203
)21(60
30
)1(2030600
)1(20030
102001
1212
0
121221
12
2
2
3
KKKKs
KKKKKs
KKs
Ks
+=+
−+=
+−+
+
+
identičan s
Osnove regulacijske tehnike – Stabilnost 24
2)1()1(20 1212 KKKKs +=+
60)21(
03
)21(60
12
12
−>−
>−+
KK
KK
2
130
6012
0
2
1
2
1
2
+<
<−
>
KK
KK
K
60)12( 12 <−KK 32
130
6012
0
2
1
2
1
2
+>
>−
<
KK
KK
K
3a 3b

Stabilnost – primjer 7
1202 −>K
10
10
12
12
−<<
−>>
KK
KK 2a
2b 2
1300
2
12 +<>K
KK 3a
2
1300
2
12 +><K
KK 3b
Osnove regulacijske tehnike – Stabilnost 25
Područje stabilnosti je omeđeno uvjetima 1, 2 i 3.

Stabilnost – primjer 7
1 2( ) 0112 >+KK 3
clear all
[X,Y] = meshgrid(-30:.1:30,-30:.1:30); %kreiraj X-Y mrezu.X=K2, Y=K1
Z3=60+X.*(1-2*Y); %izracunaj vrijednosti za
%uvjet 3
p=find(Z3<0);Z3(p)=0; %odbaci rezultate za Z3<0
Z2=X.*(Y+1); %izracunaj vrijednosti za
%uvjet 2
202 −>K 0)21(60 12 >−+ KK
Osnove regulacijske tehnike – Stabilnost 26
%uvjet 2
p=find(Z2<0);Z3(p)=0; %iz Z3 odbaci dio Z2<0
p=find(X<-20);Z3(p)=0; %iz Z3 odbaci uvjet 1: K2>-20
Z3=sign(Z3); %tocke koje zadovoljavaju sve
%uvjete postavi na 1
contourf(X,Y,Z3) %iscrtaj rezultat
colormap([1 1 1;0 0 0]) %pojacaj kontrast
line([-20,-20],[-30 30],'color',[0 0 0])%ucrtaj ogranicenje 1
line([-30,30],[-1 -1],'color',[0 0 0]) %ucrtaj ogranicenje 2
xlabel('K2')
ylabel('K1')

Stabilnost – primjer 8
Primjer 8:
Odredi koliko mora biti pojačanje K dodano u povratnoj vezi da sustav postane granično stabilan. Odredi periodu trajnih oscilacija koje pritom nastaju.
Osnove regulacijske tehnike – Stabilnost 27
)(sGZ
Određivanje GO(s) iz GO(s):
petlju prekidamo na bilo kojem dijelu i izmnožimo pojačanja po konturi petlje od početka do kraja prekida.

Stabilnost – primjer 8
ssss
KKsK
ssss
ssGO
443
3010
)2)(2(
)3(10)(
2342 +++
+=
+++
+=
Zaključak: pri razmatranju problema stabilnosti, položaj pojačanja K (glavna ili povratna grana) ne utječe na rezultat. Stabilnost ovisi samo o iznosu pojačanja!
Osnove regulacijske tehnike – Stabilnost 28
KsKssssAZ 30)410(43)( 234 +++++=
Osnovni uvjeti za osiguranje stabilnosti ai>0:
4,0
0410
−>
>+
K
K
0
030
>
>
K
K
1

Stabilnost – primjer 8
KKKKK
KKs
KK
s
Ks
Ks
)32,03,2(100270)108)(410(
90108
3/303
108
4103
3041
2
2
2
3
4
−+−−−+
−
⋅−
+
Osnove regulacijske tehnike – Stabilnost 29
Ks
K
KK
K
KKKs
90
)8,0(10
)32,03,2(100
108
270)108)(410(
0
21
−−
−+−=
−
−−+
8,00108 <⇒>− KK 2

Stabilnost – primjer 8
0)8,0(10
)32,03,2(100 2
>−−
−+−
K
KK
416,2
132,0
2
32,043,23,2 12
2,1−=
=⇒
⋅+±−=
K
KK
Analiza posljednjeg uvjeta:
Iz uvjeta 1 i 2 proizlazi da je (K-0,8) manji od 0! Stoga mora biti
032,03,22 <−+ KK
Osnove regulacijske tehnike – Stabilnost 30
416,22 2
2,1−=
⇒=K
K
3
032,03,2 <−+ KK
0)416.2)(132,0())((32,03,2 21
2 <−+=++=−+ KKKKKKKK
Parabola. Nejednakost zadovoljena za 132,0416,2 <<− K
Sustav je stabilan za 132,00 << K , a granično stabilan za 132,0=K

Stabilnost – primjer 8
Sustav je stabilan za 132,00 << K , a granično stabilan za 132,0=K
Osnove regulacijske tehnike – Stabilnost 31

Stabilnost – primjer 8
Kolika je perioda trajnih oscilacija?
Trajne oscilacije → granično stabilan sustav!
Postupak 1: pomoću Routhovog rasporeda.
Iz reda uz s2 dobivamo:
Osnove regulacijske tehnike – Stabilnost 32
88,1168,690)108()(90108 22
2
2 +=+−=⇒− sKKssPKKs
Dodatno pravilo Routhovog postupka: red uz sm će biti nula ako su korijeni jednadžbe uz sm simetrični na realnu ili imaginarnu os.
Pitanje: da li sustav ima simetrične polove?
Iz reda uz s2 dobivamo:

Stabilnost – primjer 8
221
1)()(
ω+⋅=s
sGsG ZZ
Trajne oscilacije: GZ(s) mora sadržavati barem jednu oscilatornu komponentu bez prigušenja:
sadrži polovi koji su simetrični na y-os
Osnove regulacijske tehnike – Stabilnost 33
1,3336 s
1,7784s
088,1168,6
088,1168,6)(
22
2
2
2
2
=⇒+=
+=
=+=
=+=
n
s
ssP
ωω

Stabilnost – primjer 8
Postupak 2: pomoću analize prijenosne funkcije GO(ω)
)(1
)()(
sG
sGsG
O
OZ
+= Nestabilnost: odaziv ide preko svih granica.
→ nazivnik je jednak nuli
Univerzalniji postupak, razumljiv, lakše dokaziv.
Osnove regulacijske tehnike – Stabilnost 34
−=
=−=
πωϕ
ωω
)(
1)(1)(
AGO
0)(10)(1 =+⇒=+ ωOO GsG
Točka -1+j0 je ključna točka za ispitivanje stabilnosti pomoću GO(s)
Temelj za grafoanalitičke postupke – granična stabilnost

Stabilnost – primjer 8
Pomoću promjene K možemo mijenjati samo A(ω)!!!
Za određivanje granice stabilnosti treba :
1. odrediti frekvenciju kritične faze ωπ pri kojoj je faza -180°
2. odrediti pojačanje prijenosne funkcije A(ωπ) – bez K
3. izračunati K da vrijedi A(ωπ)·K=1
Osnove regulacijske tehnike – Stabilnost 35
3. izračunati K da vrijedi A(ωπ)·K=1
KsGKssss
ssGO )(
)2)(2(
)3(10)(
2=
+++
+=
[ ]2)()2(
)3(10)(
2 +++
+=
ωωωω
ωω
jjjj
jG

Stabilnost – primjer 8
2
2
)2)(4(
)362(10
2
2
)2)(2(
3
1
10
)2)(2(
)3(10)(
2
2
22
2
2
2
ωω
ωω
ωωω
ωωω
ω
ω
ω
ωωωω
ω
ωωωω
ωω
−−
−−⋅
+−+
−−−=
−
−⋅
+−+
−
−=
⋅+−+
+=
j
j
j
jj
j
j
jj
j
j
j
jjj
jG
Osnove regulacijske tehnike – Stabilnost 36
)34)(4(
)125(10
)34)(4(
80
)34)(4(
128510
)34)(4(
)2)(6(10
2)2)(4(
422
24
422
422
24
422
22
222
ωωωω
ωω
ωωωω
ω
ωωω
ωωω
ω
ωωω
ωωωω
ω
ωωωωωω
+−+
+++
+−+
−=
+−+
++−−−=
+−+
−−++−=
−−+−+
j
jjj
jjj
jj

Stabilnost – primjer 8
)()()()(
)34)(4(
)125(10
)34)(4(
80)(
422
24
422
ωωωω
ωωωω
ωω
ωωωω
ωω
jVUimGreG
jG
+=+=
+−+
+++
+−+
−=
Za kut od 180°vrijedi 0)( =πωjV
Osnove regulacijske tehnike – Stabilnost 37
22240125125 πππ ωωω ==++=++ zzz
772,1772,62
48255212,1 =−=
+±−= zzz
sradz /331,12 ==πω

Stabilnost – primjer 8
)()()()(0)(
22
π
ω
πππ ωωωωπ
UVUAV =
=+=
Kako izračunati K?
6,7)( −=πωU
Osnove regulacijske tehnike – Stabilnost 38
6,7)( =πωA
1316,0)(
11)( ==⇒=⋅
π
πω
ωA
KAK

Grafoanalitički postupci -Bodeov dijagram
L
(ω)
20logk( ) 0
( ) 180 ( ) 0
AO
r C C
C
L L π
π
ω
ϕ ω ϕ ω
ω ω
⋅ =− >
= °+ >
<
STABILAN SUSTAV
log(ω)πωC
ωLω
2
π−
π−
( )r C
ϕ ω
( )AO
L Lπ
ω= −

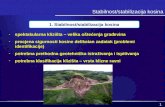
Stabilnost – primjer 9
Primjer 10: 2. kolokvij 2005.
Skiciraj Bodeov dijagram za sustav )2)(1(
10)(
++
+=
sss
ssGO
F(s) �� ����� ±1 � Nagib
Odredi fazno i amplitudno osiguranje. Koliko je pojačanje K potrebno dodati u sustav da se postigne LA0=10 dB i ϕr=45°.
10)(
ssG
+=
Osnove regulacijske tehnike – Stabilnost 40
F(s) �� ����� ±1 � Nagib
G1(s) - - - −�2 −1
G2(s) ��� 0 −1 1�
0 �2�
0 +1�
G3(s) ��� 0,3 −0.70 1.30�
0−�2� 0 −1�
G4(s) ��� 1 0 2�
0 �� 0 −2�
)5,01)(1(
1,015
)2)(1(
10)(
sss
sss
ssGO
++
+=
++
+=
dB145log20 =

Stabilnost – primjer 9
)2)(1(
10)(
++
+=
sss
ssGO
L=0
Sustav vrlo blizu granice
Osnove regulacijske tehnike – Stabilnost 41
φ=π
Sustav vrlo blizu granice stabilnosti – neprecizno očitanje

Stabilnost – primjer 9
°−=−= 22 rAO dBL ϕ
ωπ<ωC
L=0
ωπ ωC
nestabilan sustav
Osnove regulacijske tehnike – Stabilnost 42
φ=-π
Traži se (I):
251,012dB 12 za spustiti )(10 1 ==⇒⇒= dB-KLdBLAO ω 1

Stabilnost – primjer 9
Odabrati K2 jer
2
K=-21dB
089,0212 =−= dBK
°=⇒°= -135 pri dB 0 bude da takospustiti )(45 ϕωϕ Lr
Traži se (II):
Osnove regulacijske tehnike – Stabilnost 43
Odabrati K2 jer njime obuhvaćamo oba zahtjeva!!!
dBLAO
r
19
45
=
°=ϕ
φ=-135°
ωC - novi
K=-21dB
Konačno:Traži se (I):