
OPTIMALISASI KELEMBABAN UDARA PADA...
12
OPTIMALISASI KELEMBABAN UDARA PADA TABUNG BABY INCUBATOR MELALUI INTEGRASI PENGENDALIAN TEMPERATUR DAN KELEMBABAN (CATUR DARMAYANTO, FITRI ADI ISKANDARIANTO, ST, MT, Ir. YA’UMAR, MT) Jurusan Teknik Fisika-Fakultas Teknologi Industri Institut Teknologi Sepulu Nopember Kampus ITS Keputih Sukolilo, Surabaya 60111 ABSTRAK Baby Incubator adalah sebuah wadah tertutup yang kehangatan lingkungannya dapat diatur dengan cara memanaskan udara dengan suhu tertentu yang berfungsi untuk menghangatkan bayi. Baby Incubator membutuhkan kelembaban yang stabil agar kondisi dalam incubator tetap terjaga sesuai dengan set point. Menurut data statisitik pengukuran dan kalibrasi yang dilakukan oleh BPFK Surabaya th 2006-2007, terjadi kecenderungan masalah pada kelembaban dan Over Heat pada matras. Untuk mengatasi masalah tersebut maka perlu dirancang sistem yang dapat mengoptimalkan kelembaban udara tabung baby incubator melalui integrasi pengendalian temperatur dan kelembaban. Dari hasil pengukuran diperoleh tingkat ketelitian pembacaan kelembapan ± 1.498 %RH dan tingkat ketelitian pembacaan temperatur + 1.642 . Dari hasil uji sistem kontrol diperoleh respon kontrol untuk trakcing setpoint pada 60%, 70% dan 75 %. . Kata Kunci : Kalibrasi, Baby incubator, incubator analyzer Keywords: calibration, Baby incubator, incubator analyzer 1. PENDAHULUAN Peralatan Kesehatan sebagai fungsi diagnostik dan terapi sangat berkaitan dengan dua aspek, yaitu aspek keselamatan dan aspek keamanan .Kedua aspek inilah yang mengharuskan alat kesehatan harus tetap terjaga tingkat acuracy dan presisinya .Kedua hal inilah yang membedakan bahwa peralatan kesehatan di golongkan sebagai peralatan yang sangat ketat . Pengujian baby Incubator meliputi bebarapa parameter yaitu temperatur, kelembaban, air flow dan noise Dengan tingkat kelayakan kebocoran suhu luar ±1 0 C , Tingkat kelembaban antara ≥70 % ,Laju aliran udara <0,35 ms%, dan tingkat kebisingan didalam Incubator < 60 dBA . Dalam artian bahwa persyaratan tersebut harus terpenuhi untuk mendapatkan kriteria keselamatan dan keamanan dalam penggunaannya. Menurut data statisitik pengukuran dan kalibrasi yang dilakukan untuk wilayah Jawa – kalimantan, bali dan lombok oleh BPFK Surabaya terjadi kecenderungan masalah pada kelembaban, dimana untuk setting temperatur dari 32 s/d 36 0 C , kelembabannnya kurang dari 70% RH. Pada baby incubator sistem kelembabannya hanya mengandalkan penguapan air pada humidity reservoir. Permasalahan Pengendali kelembaban pada Baby Incubator masih sulit mempertahankan kelembaban pada nilai setting yang diinginkan. Pengendali kelembaban yang ada hanya memanfaatkan penguapan air pada reservoir yang kecenderungan penguapannya masih belum mencukupi pada batas kelayakan penggunaan baby incubator. Tujuan Akan dilakukan perancangan dan pembuatan sistem untuk mengoptimalkan kelembaban udara dalam tabung baby incubator berdasarkan besaran temperatur dan besaran kelembaban yang terukur. Batasan Masalah Dalam hal ini penulis hanya membatasi pada : 1. Sistem pengendalian Temperetur mempergunakan yang telah ada di baby incubator, sedangkan system pengendalian kelembaban mempergunakan hasil karya Tugas Akhir Tridedy Setyawan. 2. Bahasa pemrograman yang dipergunakan adalah Visual Basic 6.0. Metedologi Metode yang ditempuh untuk menyelesaikan tugas akhir ini adalah sebagai berikut : 1. Mempelajari sistem pengendalian temperatur dan sistem pengendalian kelembaban pada baby incubator yang telah ada. 2. Merancang fungsi yang menghubungkan antara kelembaban dan temperatur. 3. Membuat program optimasi kelembaban berdasarkan temperatur yang terukur dan kelembaban yang terukur. 4. Mengimplementasikan pada kelembaban dan pemanas dalam tabung baby incubator.
Transcript of OPTIMALISASI KELEMBABAN UDARA PADA...
OPTIMALISASI KELEMBABAN UDARA PADA TABUNG BABY INCU BATOR MELALUI INTEGRASI PENGENDALIAN TEMPERATUR DAN KELEMBABAN
(CATUR DARMAYANTO, FITRI ADI ISKANDARIANTO, ST, MT, Ir. YA’UMAR, MT)
Jurusan Teknik Fisika-Fakultas Teknologi Industri Institut Teknologi Sepulu Nopember
Kampus ITS Keputih Sukolilo, Surabaya 60111
ABSTRAK Baby Incubator adalah sebuah wadah tertutup yang kehangatan lingkungannya dapat diatur dengan cara memanaskan udara dengan suhu tertentu yang berfungsi untuk menghangatkan bayi. Baby Incubator membutuhkan kelembaban yang stabil agar kondisi dalam incubator tetap terjaga sesuai dengan set point. Menurut data statisitik pengukuran dan kalibrasi yang dilakukan oleh BPFK Surabaya th 2006-2007, terjadi kecenderungan masalah pada kelembaban dan Over Heat pada matras. Untuk mengatasi masalah tersebut maka perlu dirancang sistem yang dapat mengoptimalkan kelembaban udara tabung baby incubator melalui integrasi pengendalian temperatur dan kelembaban. Dari hasil pengukuran diperoleh tingkat ketelitian pembacaan kelembapan ± 1.498 %RH dan tingkat ketelitian pembacaan temperatur + 1.642 . Dari hasil uji sistem kontrol diperoleh respon kontrol untuk trakcing setpoint pada 60%, 70% dan 75 %. . Kata Kunci : Kalibrasi, Baby incubator, incubator analyzer Keywords: calibration, Baby incubator, incubator analyzer
1. PENDAHULUAN Peralatan Kesehatan sebagai fungsi diagnostik dan terapi sangat berkaitan dengan dua aspek, yaitu aspek keselamatan dan aspek keamanan .Kedua aspek inilah yang mengharuskan alat kesehatan harus tetap terjaga tingkat acuracy dan presisinya .Kedua hal inilah yang membedakan bahwa peralatan kesehatan di golongkan sebagai peralatan yang sangat ketat . Pengujian baby Incubator meliputi bebarapa parameter yaitu temperatur, kelembaban, air flow dan noise Dengan tingkat kelayakan kebocoran suhu luar ±10C , Tingkat kelembaban antara ≥70 % ,Laju aliran udara <0,35 ms%, dan tingkat kebisingan didalam Incubator < 60 dBA . Dalam artian bahwa persyaratan tersebut harus terpenuhi untuk mendapatkan kriteria keselamatan dan keamanan dalam penggunaannya. Menurut data statisitik pengukuran dan kalibrasi yang dilakukan untuk wilayah Jawa –kalimantan, bali dan lombok oleh BPFK Surabaya terjadi kecenderungan masalah pada kelembaban, dimana untuk setting temperatur dari 32 s/d 36 0C , kelembabannnya kurang dari 70% RH. Pada baby incubator sistem kelembabannya hanya mengandalkan penguapan air pada humidity reservoir. Permasalahan
Pengendali kelembaban pada Baby Incubator masih sulit mempertahankan kelembaban pada nilai setting yang diinginkan. Pengendali kelembaban yang ada hanya memanfaatkan penguapan air pada reservoir yang kecenderungan
penguapannya masih belum mencukupi pada batas kelayakan penggunaan baby incubator.
Tujuan Akan dilakukan perancangan dan pembuatan
sistem untuk mengoptimalkan kelembaban udara dalam tabung baby incubator berdasarkan besaran temperatur dan besaran kelembaban yang terukur.
Batasan Masalah Dalam hal ini penulis hanya membatasi pada : 1. Sistem pengendalian Temperetur
mempergunakan yang telah ada di baby incubator, sedangkan system pengendalian kelembaban mempergunakan hasil karya Tugas Akhir Tridedy Setyawan.
2. Bahasa pemrograman yang dipergunakan adalah Visual Basic 6.0.
Metedologi
Metode yang ditempuh untuk menyelesaikan tugas akhir ini adalah sebagai berikut : 1. Mempelajari sistem pengendalian temperatur
dan sistem pengendalian kelembaban pada baby incubator yang telah ada.
2. Merancang fungsi yang menghubungkan antara kelembaban dan temperatur.
3. Membuat program optimasi kelembaban berdasarkan temperatur yang terukur dan kelembaban yang terukur.
4. Mengimplementasikan pada kelembaban dan pemanas dalam tabung baby incubator.

2
2. DASAR TEORI Besaran Suhu
a. Definisi Suhu Suhu merupakan parameter/besaran yang
menjelaskan kondisi termal suatu benda. Suhu sering kali disalah artikan dengan panas. Suhu adalah kondisi termal sebuah benda, sementara panas adalah suatu bentuk energi yang sifatnya mengalir, dan aliran panas ini disebabkan dari adanya perbedaan suhu dari suatu benda
b. Skala Suhu Internasional komunitas pengukuran internasional
sepakat untuk membuat sebuah sekala suhu empiris yang dapat direalisasikan secara berulang dan memenuhi keperluan ilmu pengetahuan dan perdagangan. Skala suhu ini direvisi secara berkala untuk memastikan cakupan yang seluas mungkin dan juga memastikan kedekatannya dengan skala suhu termodinamika. Revisi terakhir skala suhu empirik ini dilakukan pada tahun 1990.Oleh karena itu dinamakan ITS-90 ( International Temperature Scale 1990). Menurut ITS-90, Standard acuan fisikal (Physical Reference Standard ) suhu adalah titik Triple of Water. Simbol besara suhu adalah T. Satuan suhu adalah K tanpa derajat ( 0 ) . Titik Triple of Water didefinisikan mempunyai nilai TTPW = 273,16 K. sehingga satu satuan Kelvin adalah :
TPWTx16,273
11 =Κ
Satuan lain suhu adalah Derajat Celcius dengan simbol 0C. Untuk satuan ini symbol besaran suhu yang dipakai adalah t. Hubungan antara T dan t adalah sebagai berikut :
t = T – 273,15 0C
ANSI/AAMI American National Standards
Institute/Association For The Advancement Of Medical Instrumentation (ANSI/AAMI 1136-1997). Adalah sebuah lembaga riset dan pengembangan yang berada di Amerika yang telah tersirtifikasi secara internasional ICC ( International sertifikat Comision for Clinical Enginering and Biomedical technology ) dan BMETs ( Biomedical Equipment Technician ). Lembaga ini telah mengeluarkan banyak metode, salah satu diantaranya yang berhubungan dengan clinical engginering dan biomedical standard adalah ANSI/AAMI seri 1136 terbitan tahun 1997 yang mengatur tentang batasan Temperatur Standard dan Sound Pressure Standard dalam Baby Incubator .
Bayi Prematur Adalah bayi yang lahir dalam kondisi yang
tidak normal, dengan disebabkan karena umur kandungan yang belum mencapai masa kelahiran atau berat badan saat kelahiran dibawah rata-rata bayi normal. Sehingga diperlukan proses adaptasi lingkungan diluar rahim dalam kondisi yang terkontrol. Kondisi yang serba terbatas, baik asupan gizi dan kebutuhan lainnya yang sangat diperlukan dalam tumbuh kembangnya bayi, perlu perawatan yang intensif.
Pada proses kelahiran premature, temperatur kulit bayi dan suhu badan cenderung mengalami penurunan, yang disebabkan karena : • Heat Loss from Conduction :Hilangnya
panas karena permukaan yang berhubungan langsung dengan bayi lebih dingin
• Convection : Hilangnya panas diudara karna pergerakan bayi.
• Radiation : Hilangnya panas ke obyek yang lebih dingin yang bukan kontak langsung dengan bayi.
• Water evaporation : Hilangnya panas dari permukaan kulit dan paru-paru.
Baby Incubator
Baby Incubator adalah sebuah wadah tertutup yang kehangatan lingkungannya dapat diatur dengan cara memanaskan udara dengan suhu tertentu yang berfungsi untuk menghangatkan bayi. Kondisi panas akan diserap melalui perantara jaringan kulit kealiran darah.
Gambar 4 baby incubator
Blok Diagram Baby incubator Incubator

3
Kalibrasi
Baby Incubator merupakan salah satu dari alat kesehatan yang harus dikalibrasi setiap tahun sekali. Karena kalibrasi merupakan serangkaian kegiatan yang membentuk hubungan antara nilai yang ditunjuk oleh instrumen pengukur atau sistem pengukuran atau nilai yang diwakili oleh bahan ukur dengan nilai-nilai yang sudah diketahui yang berkaitan dari besaran yang diukur dalam kondisi tertentu.
Ketidakpastian
Terdapat dua jenis evaluasi yaitu tipe A dan tipe B. Evaluasi ketidakpastian pengukuran tipe A dilakukan dengan menggunakan metode statistik untuk menganalisa satu set pengukuran yang berulang. Sedangkan evaluasi ketidakpastian pengukuran tipe B menggunakan suatu cara selain analisis statistik.
Untuk lebih jelasnya dibawah ini adalah evaluasi ketidakpastian pengukuran tipe A dan tipe B beserta rumus yang digunakan :
TIPE A
- UA1
• Mencari nilai rata-rata (mean) dari data yang didapatkan pada kalibrasi dengan menggunakan rumus:
dimana : xi = nilai sampling n = banyaknya sampling
• Menghitung standart deviasi dengan menggunakan rumus :
.
dimana S(xi) = standart deviasi
• Menghitung standart uncertainty tipe
A1 (Ua1) atau ESDM (Experimental Standart Deviation of the Mean) dengan menggunakan rumus :
- UA2
• Nilai SSR ( Sum Square of the Residual) dapat dinyatakan dengan persamaan : SSR = Σ (yi – a – b.xi )
2
Dimana :
SSR = Sum Square of Residual yi = data pengukuran a,b = konstanta xi = setting
• Untuk menghitung nilai a dan b dapat menggunakan persamaan dibawah ini :
xbya .−=
=
=
−
∑∑ −
∑∑=
=
==∑
n
i
n
i
n
i
i
n
i
n
i
iiii
xxin
yxyxn
b
1
11
1
2
1
.
• Sebaran data disekitar kurva dapat
dijelaskan dengan suatu variasi (Var) yang dapat dihitung dengan menggunakan persamaan :
Var = v
SSR
dimana : v = bilangan derajat kebebasan = n-2
• Perkiraan deviasi standart dari kurva dapat dihitung dengan menggunakan persamaan :
S = √Var • Ketidakpastian standartnya adalah :
UA2 = S
• TIPE B Evaluasi ketidakpastian pengukuran tipe B
diperoleh dengan cara selain analisa statiastik, umumnya diperoleh dari pertimbangan pengetahuan dengan menggunakan informasi yang berhubungan antara lain :
Data dari spesifikasi alat (diambil dari buku panduan alat)
Data dari hasil kalibrasi (diambil dari sertifikat kalibrasi)
Resolusi pembacaan dari alat ukur.
Sebagai contoh bila diambil nilai ketidakpastian alat ukur atau kalibrator atau sertifikat kalibrasi maka ketidakpastian standart tipe B dapat dihitung dengan menggunakan rumus :
U =k
a
dimana : U = ketidakpastian dari sertifikat kalibrasi k = bernilai 2 untuk tingkat kepercayaan 95 % dari U
Setelah diperoleh nilai ketidakpastian standart tipe A dan tipe B maka selanjutnya dicari nilai
)(1
1∑
=
=n
iix
nx
2
1
)(1
1)( ∑
=−
−=
n
iii xx
nxS
n
xSxSESDMSBRE i )()(/ ==

4
ketidakpastian gabungan (kombinasi) yang dapat dihitung dengan menggunakan rumus :
∑=
=n
ic UiU
1
2
dimana : Uc = ketidakpastian gabungan (kombinasi) Ui = ketidakpastian standart tipe A atau tipe B Untuk memperoleh nilai k, maka dicari nilai dari derajat efektifitas dengan menggunakan persamaan :
−−−−−+++==
∑ =2
42
1
41
4
4
1
44
4
)(
)(
B
B
B
B
A
A
c
n
ii
ii
yeff
v
U
v
U
v
U
U
v
xUc
yUv
dimana : Veff = Derajat kebebasan efektif UAI = Ketidakpastian tipe A = ESDM UA2= Ketidakpastian tipe A dari metode kuadrat terkecil Ubi, Ub2 = ketidakpastian tipe B vAi, vA2 = Derajat kebebasan tipe A
vBi, vB2 = Derajat kebebasan tipe B
Setelah dihitung nilai derajat kebebasan efekttifnya (Veff) maka faktor pembaginya (k) dapat dicari dari tabel T-student dengan kepercayaan 95 %.
Tabel 1 hubungan antara (k) dan (P)
Ketidakpastian bentangan merupakan hasil akhir dari ketidakpastian pengukuran, nilai tersebut dapat dihitung dengan menggunakan rumus :
U = k x Uc
Gambar 5 Bagan ketidakpastian
3. PERANCANGAN DAN PEMBUATAN ALAT Blok Diagram Pengatur Kelembaban dan Monitoring Temperatur Baby Incubator.
Blok diagram dari perancangan sistem pengatur kelembapan dan monitoring temperatur terlihat pada gambar 6
Gambar 6 Rancangan Blok Diagram Sistem
Sistem Kontrol Kelembapan
Pada sistem pengaturan kelembapan kita dapatkan sistem kontrol sebagai berikut :
Gambar 7 sistem kontrol baby incubator
Blok diagram sistem kontrol terdiri dari beberapa bagian blok antara lain : Set Point (RH) Kelembapan
Set point kelembapan merupakan setting kelembapan yang diinginkan pada

incubator bayi. Besarnya diinginkan diset melalui komputer.
Kontroller (On-Off) Mode kontrol yang digunakan dalam sistem pengaturan ini adalah modon-off. Logika kontrol dibuat program visual basic 6.0 yang ada di komputer PC.
Actuator Kelembapan (Chamber) Actuator kelembapan yang digunakan adalah humidity chamber.
Plant Incubator Plant incubator yang digunakan adalah tipe Ameda – Amecare buatan Swedia.
Sensor – Instrument (Data Acquisition)Sensor yang digunakan HSMDengan mikro-AVR ATMega16 sebagai sistem akuisisi datanya.
Plant Baby Incubator.
Plant kontrol yang digunakan dalam penelitian ini adalah Incubator bayi pada Gambar 8
Gambar 8 Plant Incubator bayi
Gambar 9 Proses Siskulasi uap air pada incubator bayi.
Pada gambar 9 terlihat proses sirkulasi uap air yang ada pada incubator bayi. Uap air disini digunakan untuk menjaga kelembaban pada ruang incubator. Sensor Kelembapan dan Temperatur
incubator bayi. Besarnya nilai yang komputer.
Mode kontrol yang digunakan dalam sistem pengaturan ini adalah mode kontrol
off. Logika kontrol dibuat oleh program visual basic 6.0 yang ada di
Actuator Kelembapan (Humidity
Actuator kelembapan yang digunakan
Plant incubator yang digunakan adalah Amecare buatan Swedia.
Instrument (Data Acquisition) Sensor yang digunakan HSM-20G.
AVR ATMega16 sebagai
Plant kontrol yang digunakan dalam penelitian ini adalah Incubator bayi seperti terlihat
Plant Incubator bayi
9 Proses Siskulasi uap air pada
terlihat proses sirkulasi uap air yang ada pada incubator bayi. Uap air disini digunakan untuk menjaga kelembaban pada ruang incubator.
Sensor Kelembapan dan Temperatur
Sensor kelembapan dan temperatur yang digunakan adalah HSM-20G. Pada sensor ini terdapat 2 keluaran yaitu sinyal kelembapan dan temperatur.
Gambar 9 Sensor Kelembapan dan Temperatur HSM-20G
Sensor kelembaban yang digunakan HSM Sensor Module yaitu modul sensor berbasis sensor suhu dan kelembaban relatif yang memiliki oanalog dengan keluaran 0~3V mewakili 10~90 %RH dan 158.02~11.69 KΩ mewakili 0~60
Tabel 2 Karakteristik Sensor dan Temperatur HSM
Rangkaian Elektronik Mikro -
Rangkaian elektronik yang digunakan untuk modul mikro-system adalah sebagai berikut :
Gambar 10 Rangkaian Elektronik Mikro
Sensor kelembapan dan temperatur yang 20G. Pada sensor ini
terdapat 2 keluaran yaitu sinyal kelembapan dan
Sensor Kelembapan dan Temperatur
Sensor kelembaban yang digunakan HSM -20 G Sensor Module yaitu modul sensor berbasis sensor suhu dan kelembaban relatif yang memiliki output analog dengan keluaran 0~3V mewakili 10~90
mewakili 0~60 0C
Karakteristik Sensor Kelembapan dan Temperatur HSM-20G
-Sistem Rangkaian elektronik yang digunakan
system adalah sebagai berikut :
Rangkaian Elektronik Mikro -AVR.

6
Pada gambar terlihat micro-chip ATMega 16 sebagai pusat sistem akuisisi data (dari sensor HSM-20G) kemudian dikirimkan lewat RS-232 ke Komputer PC.
Table 3 Spesifikasi micro-chip ATMega 16
Gambar 11 Blok diagram ATMega 16
Selain itu mikro-chip juga menerima sinyal kontrol dari komputer PC untuk menggerakkan Kipas pada Humidity Chamber.
Gambar 12 Rangkaian dalam PCB
Rancangan Mekanik Humidity Chamber
Humidity chamber yang digunakan adalah seperti terlihat pada gambar 13
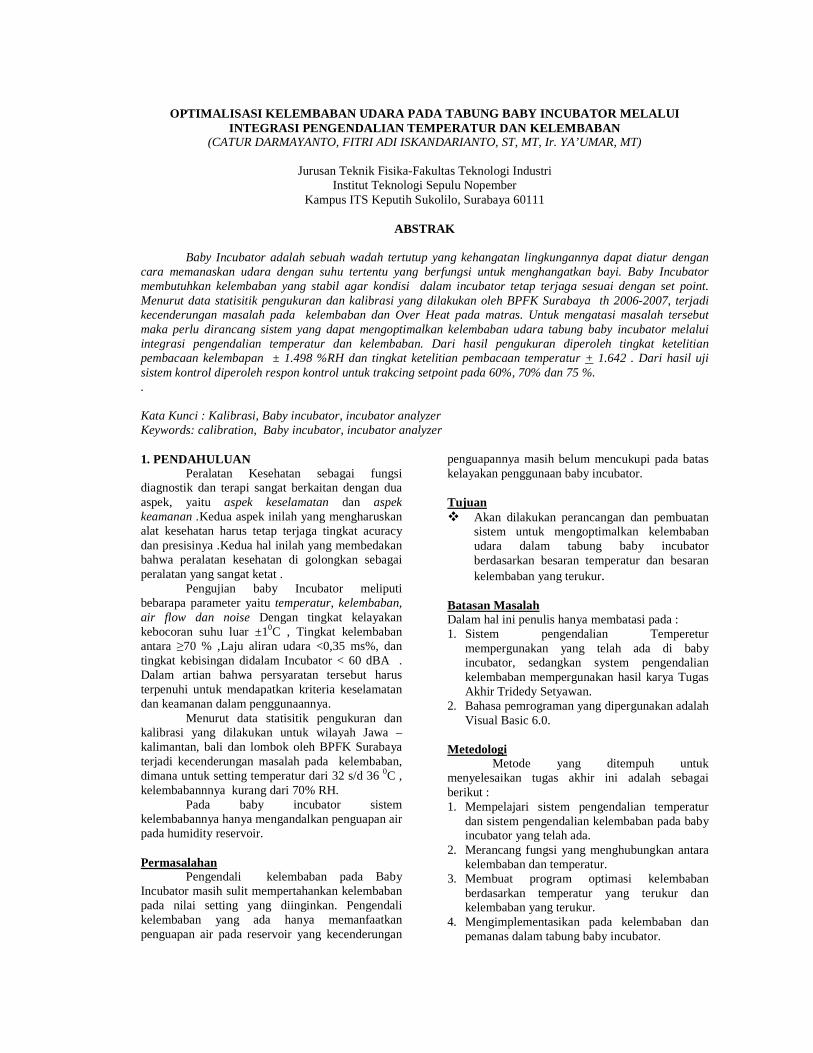
Gambar 13 Humidity Chamber
3.1. Program Code-Vision AVR Untuk mengaktifkan micro
sistem akuisisi data, penerima sinyal control dan sistem transmisi data maka terlebih dahulu mikrokontroller tersebut diberi program dengan cara mendownload program yang terlebih dahulu kita buat dengan bahasa C pada CodeVisionAVR.
Gambar 14 Form pembuatan program micro chip (CodeVisionAVR).
Software CodeVision AVR merupakan C
Compiler untuk mikrokontroler AVR. Pada CodeVision telah disediakan editor yang berfungsi untuk membuat program dalam bahasa C, setelamelakukan proses kompilasi kita dapat mengisikan program yang telah dibuat ke dalam memory pada mikrokontroler menggunakan programmer yang telah disediakan oleh CodeVision AVR. Programmer yang didukung oleh CodeVision
Programmer Cable dapat diintegrasikdengan CodeVision AVR, terlebih dahulu harus dilakukan konfigurasi sebagai berikut: -Jalankan Software CodeVision AVR. -Pilih menu Setting . Programmer. -Pilih tipe programmer -Lalu klik tombol OK. Setelah CodeVision dikonfigurasi, uji de KITS AVR ISP Programmer Cable dengan cara
Humidity Chamber
Untuk mengaktifkan micro-chip sebagai sistem akuisisi data, penerima sinyal control dan sistem transmisi data maka terlebih dahulu mikrokontroller tersebut diberi program dengan cara mendownload program yang terlebih dahulu
odeVisionAVR.
Form pembuatan program micro- chip (CodeVisionAVR).
Software CodeVision AVR merupakan C Compiler untuk mikrokontroler AVR. Pada CodeVision telah disediakan editor yang berfungsi untuk membuat program dalam bahasa C, setelah melakukan proses kompilasi kita dapat mengisikan program yang telah dibuat ke dalam memory pada mikrokontroler menggunakan programmer yang telah disediakan oleh CodeVision AVR. Programmer yang didukung oleh CodeVision
Programmer Cable dapat diintegrasikan dengan CodeVision AVR, terlebih dahulu harus dilakukan konfigurasi sebagai berikut: Jalankan Software CodeVision AVR.
Setelah CodeVision dikonfigurasi, uji de KITS AVR ISP Programmer Cable dengan cara
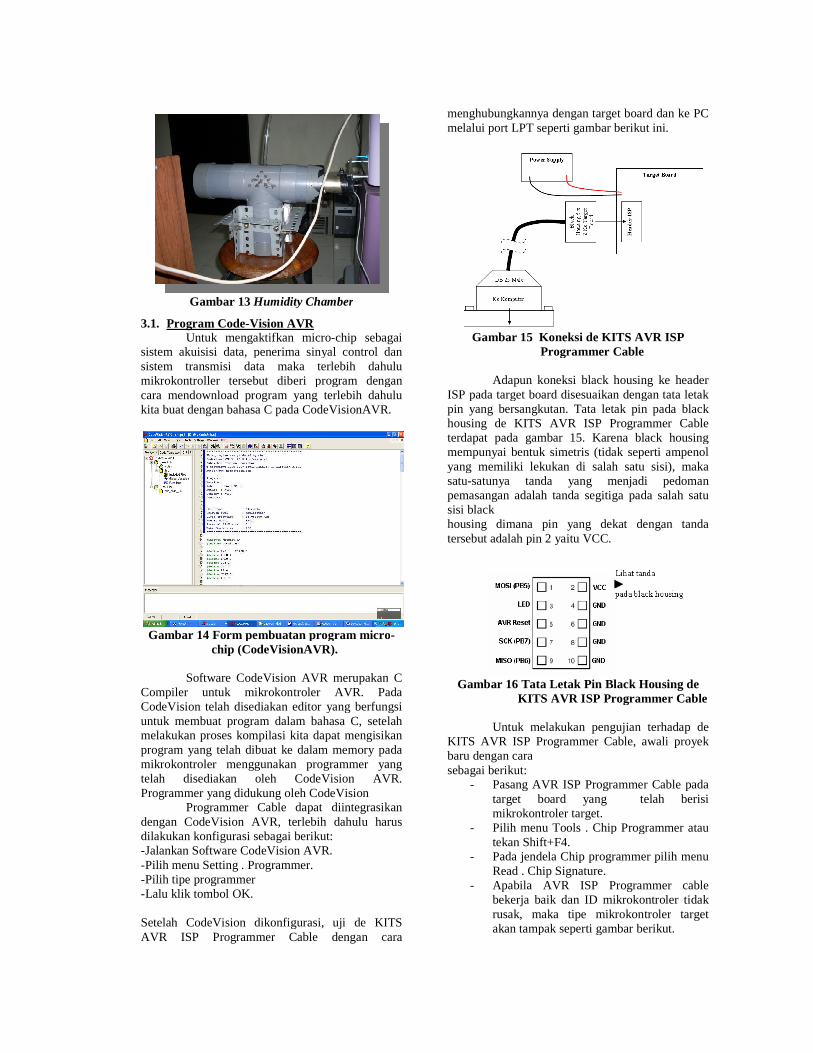
menghubungkannya dengan target board dan ke PC melalui port LPT seperti gambar berikut ini.
Gambar 15 Koneksi de KITS AVR ISP Programmer Cable
Adapun koneksi black housing ke header
ISP pada target board disesuaikan dengan tata letak pin yang bersangkutan. Tata letak pin pada black housing de KITS AVR ISP Programmer Cable terdapat pada gambar 15. Karena black housing mempunyai bentuk simetris (tidak seperti ampenol yang memiliki lekukan di salah satu sisi), maka satu-satunya tanda yang menjadi pedoman pemasangan adalah tanda segitiga pada salah satu sisi black housing dimana pin yang dekat dengan tanda tersebut adalah pin 2 yaitu VCC.
Gambar 16 Tata Letak Pin Black Housing de KITS AVR ISP Programmer Cable
Untuk melakukan pengujian terhadap de KITS AVR ISP Programmer Cable, awali proyek baru dengan cara sebagai berikut:
- Pasang AVR ISP Programmer Cable pada target board yang telah berisi mikrokontroler target.
- Pilih menu Tools . Chip Programmer atau tekan Shift+F4.
- Pada jendela Chip programmer pilih menu Read . Chip Signature.
- Apabila AVR ISP Programmer cable bekerja baik dan ID mikrokontroler tidak rusak, maka tipe mikrokontrolerakan tampak seperti gambar berikut.
menghubungkannya dengan target board dan ke PC melalui port LPT seperti gambar berikut ini.
Koneksi de KITS AVR ISP Programmer Cable
Adapun koneksi black housing ke header ISP pada target board disesuaikan dengan tata letak pin yang bersangkutan. Tata letak pin pada black housing de KITS AVR ISP Programmer Cable
Karena black housing dak seperti ampenol
yang memiliki lekukan di salah satu sisi), maka satunya tanda yang menjadi pedoman
pemasangan adalah tanda segitiga pada salah satu
housing dimana pin yang dekat dengan tanda tersebut adalah pin 2 yaitu VCC.
Tata Letak Pin Black Housing de
KITS AVR ISP Programmer Cable
Untuk melakukan pengujian terhadap de KITS AVR ISP Programmer Cable, awali proyek
Pasang AVR ISP Programmer Cable pada target board yang telah berisi
Pilih menu Tools . Chip Programmer atau
Pada jendela Chip programmer pilih menu Read . Chip Signature. Apabila AVR ISP Programmer cable
aik dan ID mikrokontroler tidak rusak, maka tipe mikrokontroler target akan tampak seperti gambar berikut.

8
Apabila ID dari mikrokontroler rusak maka tipe yang muncul adalah “Chip: Unknown” .Setelah melakukan pemeriksaan pada de KITS AVR ISP Programmer cable, hal selanjutnya adalah membuat proyek menggunakan CodeVision AVR.
Untuk memudahkan pemrograman, CodeVision harus dikonfigurasi terlebih dahulu. Caranya sebagai berikut:
• Pilih menu Project . Configure. • Pilih tab After Make, • kemudian centang pada kotak dengan label
Program the Chip. Penjelasan lebih jelasnya terdapat gambar berikut ini.
• Klik pada tombol OK. Catatan: Proses ini hanya dapat dilakukan pada saat ada project yang telah dibuat atau dibuka. Tekan Shift+F9, download ke target board dengan cara klik pada tombol Program. Flow-Chart Program Micro-AVR
FlowChart dari program pada micro-chip adalah sebagai berikut :
Gambar 11 FlowChart progam micro-AVR Pada Flowchar program diatas terlihat bahwa mikro tidak melakukan proses pengendalian, mikro hanya melakukan proses akuisisi data baik temperatur atau kelembapan sesuai dengan kode yang diberikan oleh PC. Program Monitoring (Visual Basic 6.0)
Pada Komputer PC program yang digunakan adalah visual basic 6.0.
Program digunakan untuk melakukan monitoring temperatur dan kelembapan, sistem kontrol kelembapan dan sistem database temperatur dan kelembapan. Flow-Chart Program Visual Basic 6.0
Flowchar dari program monitoring dan kontrol pada computer PC adalah sebagai berikut :
Gambar 18 FlowChart Program Visual Basic 6.0
di Komputer.
Terlihat pada gambar 18 komputer melekukan monitoring data temperature dan kelembapan dengan mengirim kode perintah ke mikro-modul dan computer juga melakukan kontrol terhadap kelembapan. Selain itu computer juga melakukan penyimpanan data dalam database.
Sistem Database (Ms-Access) Sistem database yang digunakan untuk menyimpan data – data pengukuran adalah dengan menggunakan Ms-Acces seperti terlihat pada gambar Pengujian Pengatur Kelembaban danMonitoring Temperatur Baby Incubator.
Untuk mengetahui seberapa besar deviasi dari Design Pengatur Kelembaban dan Monitoring Temperatur Baby Incubator. Diperlukan alat ukur standar yang telah terkoreksi . Dalam hal ini menggunakan alat standar suhu dengan Merk Fluke Type INCU yang salah satu parameternya mampu mengukur kelembaban dan temperatur dengan resolusi 0.1oC

Gambar 19 Alat Ukur Standar
Pengujian dan pendataan • Sebelum pengujian dan pendataan
dilakukan, pasang Incubator analyzer untuk semua sensor pada tempat yang telah ditentukan , dengan meletakan sensor T1 dan T2 pada Temperature Probe Holder dan Sensor T3 pada Asembly
• Tempatkan sensor Temperatur dan kelembaban pada Baby Incubatorterlihat dalam gambar 20
• Masukan selang uap air pada Baby Incubator seperti terlihat dalam gambar
Gambar 20 Penempatan Temperatur dan
kelembaban pada Baby Incubator
Gambar 21 Penempatan pada Baby Incubator
Sensor
Alat Ukur Standar
dan pendataan pasang Incubator analyzer
untuk semua sensor pada tempat yang telah ditentukan , dengan meletakan sensor
Temperature Probe dan Sensor T3 pada Radiant Baby
Tempatkan sensor Temperatur dan kelembaban pada Baby Incubator seperti
Masukan selang uap air pada Baby seperti terlihat dalam gambar 21
enempatan sensor
Temperatur dan kelembaban pada Baby Incubator
enempatan selang uap air
pada Baby Incubator
4. ANALISIS SISTEM KALIBRASI BABY INCUBATOR Pengujian tanggapan sensor kelembaban dan temperatur. • Sensor Kelembapan
Dalam pengujian sensor kelembapan dilakukan pada kondisi temperatur ruangan yaitu pada temperatur 25 oC. Dari hasil pengujian dengan menaikkan kondisi kelembapan udara incubator didapat data sebagai berikut.
Pada pengujian dilakukan kenaikan kelembapan dari 10 - 90 % RH Sinyal output keluaran dari sensor sebagai respon dari perubahan nilai kelembapan berupa tegangan dc pada range 03 V.
Tabel 4 Tanggapan Sensor terhadap Kelembapan
Pada 10 %RH tegangan keluaran sensor 0.74 V, 20%RH tengangan keluaran sensor 0.95 V, hal tersebut terus berlangsung hingga sampai pengujian 90%. Grafik respon sensor terhadap perubahan kelembapan adalah seperti terlihat pada gambar 22.
Gambar 22 Grafik Tanggapan Sensor terhadap kenaikan kelembapan.
Pada grafik diatas terlihat bahwa
perubahan keluaran tegangan output sensor yang merupakan respon dari perubahan kelembapan mempunyai grafik yang cukupperubahan kelembapan yang terjadi.• Sensor Temperatur
Dalam pengujian sensor termperatur dilakukan dalam range pengujian temperatur 0 oC. Dalam pengujian tersebut didapatkan respon keluaran sensor terhadap perubahan temperatur adalah berupa nilai perubahan resistansi. Untuk pengujian dalam range temperatur temperatur tersebut diperoleh range keluaran respon resistansi sensor adalah dari 158.02 – 11.69 Kohm, seperti terlihat pada tabel 5 dibawah ini.
HumidityChamber
ANALISIS SISTEM KALIBRASI
Pengujian tanggapan sensor kelembaban
Dalam pengujian sensor kelembapan dilakukan pada kondisi temperatur ruangan yaitu
C. Dari hasil pengujian dengan menaikkan kondisi kelembapan udara dalam ruang incubator didapat data sebagai berikut.
Pada pengujian dilakukan kenaikan 90 % RH Sinyal output
keluaran dari sensor sebagai respon dari perubahan nilai kelembapan berupa tegangan dc pada range 0-
Tanggapan Sensor terhadap
Pada 10 %RH tegangan keluaran sensor 0.74 V, 20%RH tengangan keluaran sensor 0.95 V, hal tersebut terus berlangsung hingga sampai pengujian 90%. Grafik respon sensor terhadap
ah seperti terlihat pada
Grafik Tanggapan Sensor terhadap kenaikan kelembapan.
Pada grafik diatas terlihat bahwa perubahan keluaran tegangan output sensor yang merupakan respon dari perubahan kelembapan mempunyai grafik yang cukup linier terhapap perubahan kelembapan yang terjadi.
Dalam pengujian sensor termperatur dilakukan dalam range pengujian temperatur 0 – 60 C. Dalam pengujian tersebut didapatkan respon
keluaran sensor terhadap perubahan temperatur erupa nilai perubahan resistansi. Untuk
pengujian dalam range temperatur temperatur tersebut diperoleh range keluaran respon resistansi
11.69 Kohm, seperti dibawah ini.

Tabel 5 Tanggapan Sensor terhadap Kelembapan
Dari respon sensor terhadap kenaikan
temperatur yang berupa resistansi pada nilai uji temperatur 0 oC – resistansi 158.02, 10 oC – resistansi 94.82, hal tersebut berlangsung untuk sampai perubahan temperatur 60 oC. Grafik perubahan respon sensor terhadap perubahan kenaikan temperatur bisa terlihat pada grafik gambar 23
Dari hasil pengujian juga didapatkan bahwa sensor HSM-20G juga dapat merespon nilai temperatur dibawah 0 oC. Terlihat pada temperatur -55 oC, -40 oC, -25 oC sensor memberikan respon perubahan nilai resistansi juga.
Gambar 23 Grafik Tanggapan Sensor terhadap
Kelembapan Analisis Data Hasil Pengukuran Temperatu dan Kelembapan.
Dari Pengukuran dan kalibrasi yang telah dilakukan, maka didapatkan data-data seperti berikut : Nama alat : Kontrol Kelembaban Merk : - Model/tipe : - No.Seri : - Resolusi : 0.1
Rentang Ukur : 0-90 %RH Setelah dilakukan proses kalibrasi
terhadap Control Kelembaban, maka didapatkan data-data sebagai berikut :
Tabel 6 Data hasil pengukuran kondisi
lingkungan
PA KOREKSI DATA TERKOREKSI
°C % °C % °C % 27,5 41,1 0,31 0,26 27,8 41,36 27,5 41,1 0,31 0,26 27,8 41,36 27,6 41,1 0,31 0,26 27,9 41,36
Rata -rata 27,8 41,4 Selisih terbesar 0,1 0,0
Pengukukuran kondisi lingkungan menggunakan Thermohygrometer ETI 8711 yang telah terkalibrasi. Dan hasil kalibrasi mendapatkan nilai koreksi sehingga didapatkan nilai pengukuran
• Nilai terukur + Nilai koreksi dari sertifikat kalibrasi alat ukur standar 27.5 + 0.31 = 27.8
• Selisih terbesar didapat dari fariasi nilai maksimum dikurangi nilai minimum 27.9 – 27.8 = 0.1
Evaluasi Ketidakpastian Kalibrasi Baby Incubator
Untuk setting 60% RH Nilai Rata – Rata
nx
xxxxxxx 654321 +++++
=
x = 58 + 60.175 + 61.63 + 62.35 + 61.625 +62.35 6 = 61.02 Standar Deviasi
= (58-61.02)2 +(60.2-61.02)2 +…….
5 = 1.68 Evaluasi ketidak - pastian Type A
n
UESDM i= =
6
68.1 = 0.69
Sumber-sumber ketidak-pastian Type B Ketidakpastian Resolusi Baby Incubator
Besar pernyataan dari kemampuan peralatan untuk membedakan arti dari dua tanda harga/skala yang paling berdekatan dari besaran yang ditunjukkan. Sehingga resolusinya adalah :
=35.0
1.0
= 0.02 Ketidakpastian Sertifikat NICU
Sesuai Ketidakpastian sertifikat Infant Incubator Analyzer untuk kelembaban, sebesar ± 3%RH sehingga
= =2
03.0 0.015
Ketidakpastian Baku Gabungan
)()( 2
1
2i
n
i ic xU
xyU ∑
=
∂∫∂=
2
22
12
BBAc UUUU ++=
222 015.002.069.0 ++=
= 0.68
2
1
)(1
1)( ∑
=
−−
=n
iii xx
nxS

11
Ketidakpastian pengukuran atau ketidakpastian bentangan adalah perkalian ketidakpastian dengan factor k. Untuk tingkat kepercayaan 95% maka faktor k=2. U = k * Uc = 2 * 0,68 = 1.37 Hasil Kalibrasi
Pengujian Sistem Kontrol.
Perancangan sistem kontrol kelembapan bertujuan untuk menjaga kondisi kelembapan dari ruang incubator bayi tetap terjaga sesuai setpoint yang kita inginkan. • Mode/Strategi Kontrol
Dalam tugas akhir ini sistem kontrol yang digunakan adalah dengan menggunakan mode kontrol On – Off. Sistem kontrol On-Off mempunyai strategi kontrol yang cukup sederhana yaitu :
• Sistem akan mengeleluarkan sinyal ON (100 %)
putaran kipas saat : Nilai PV(kelembapan yang terukur) <= Nilai SV Setpoint.
• Sistem akan mengeleluarkan sinyal OFF (0 %) putaran kipas saat :
Nilai PV(kelembapan yang terukur) >= Nilai SV Setpoint.
• Aktuator Sistem Kontrol Kelembapan. Aktuator yang digunakan dalam sistem kontrol kelembapan ini adalah dengan menggunakan Humidity Chamber seperti terlihat pada Bab III gambar 3.9. Humidity Chamber terdiri dari 3 bagian utama yaitu :
• Kipas Jenis kipas yang digunakan berupa kipas dc dengan ukuran diameter 5 cm. Dengan kecepatan putaran 100 rpm.
• Tempat Air Tempat air yang digunakan berupa pipa pvc dengan diameter 10 cm. Uap air dari permukaan tempat air nantinya akan ditiupkan oleh udara kipas agar bergerak melalui saluran pipa uap air menuju ruang incubator bayi.
• Saluran Pipa uap air. Saluran pipa air berfungsi sebagai saluran uap air yang akan menuju ruang incubator bayi. Ukuran dari saluran pipa ini adalah 1 cm.
Dari ukuran – ukuran Humidity chamber yang ada kita dapatkan spesifikasi sebagai berikut :
• Kecepatan Kipas 100 rpm dengan diameter kipas 10cm dan pipa humidity chamber 10 cm. Kita dapatkan perbandingan kecepatan udara adalah : Kec. Udara = (Dkps/Dch) * rpm * (keliling Chamber)/60. Kec. udara = (5/10) x 100 (3.14 x 10 )/60 = 0.261 m/s.
• Dari keluaran Humidity chamber melewati saluran pipa plastik dengan diameter 1 cm. Kec.udara =(Dch/Dsl) * Kec.Udara Chamber. Kec.udara =(10/1) * 0.26 = 2.61 m/s
Volume Incubator bayi adalah = 0,775 x 0,465 x 0,45 = 0.162 m3. Dengan volume incubator bayi tersebut dan Kec. Udara =2.61 m/s. Luasan keluaran pipa saluran = 3.14 x (0.005)^2 = 0.0157 m2 Maka debit udara yang masuk ke incubator adalah : = Kec. Udara Saluran x Luasan Saluran. = 2.61 m/s x 0.0157 m2 = 0.0409 m3/s. Jadi respon Humidity Chamber mengeluarkan uap air dalam memenuhi ruang incubator adalah : = Volume Incubator/Debit Saluran. = 0.162 / 0.0409 = 3.95 detik.
Untuk tiap perubahan 1 % RH. Dalam aplikasi respon uji sistem waktu yang dibutuhkan adalah : 5 detik untuk tiap perubahan 1 % RH. Hal tersebut disebabkan karena :
• Panjang pipa plastik saluran uap air • Sirkulasi dari incubator bayi. • Uap air dalam Humidity Chamber
• Respon Uji Sistem Kontrol Kelembapan
untuk perubahan Setpoint.

Dalam pengujian Sistem kontrol kelembapan yang dirancang Pada pengujian sistem control dilakukan dengan melakukan pengujian dengan mengubah setpoint kelembapan pada nilai : Setpoint 60 % RH
Pada setpoint 60 % RH didapatkan : Maksimum Overshoot : 63.75 %RH Setling Time : 100 detik
Setpoint 70 % RH Pada setpoint 70% RH didapatkan : Maksimum Overshoot : 74.67%RH Setling Time : 250 detik
Setpoint 75 % RH Pada setpoint 75% RH didapatkan : Maksimum Overshoot : 78.30%RH Setling Time : 275 detik
Pada perubahan setpoint dari 60,70, dan 75
respon dari sistem kontrol pada Komputer PC adalah sebagai berikut :
Gambar 23 Respon Sistem Kontrol pada
perubahan Kelembapan 60,70 dan 75% RH. 5. KESIMPULAN DAN SARAN 5.1.Kesimpulan
Dari hasil Perancangan Sistem Pengendali Kelembaban dan monitoring temperatur berbasis PC ini telah berhasil mengkondisikan kelembaban pada nilai setting yang diinginkan, dan sekaligus membaca temperatur pada saat pengkondisian kelembaban dilakukan
Nilai koreksi yang didapatkan saat pengkondisian kelembaban sebesar + 1.79 %RH dengan responsibility 5 detik / 1%RH, dan pembacaan temperatur sebesar + 0.22 oC pada setting 60, 70, dan 75% RH
Spesifikasi dari hasil perancangan dan pembuatan Sistem Alat ukur pada tugas akhir ini adalah : • Sistem Alat Ukur Kelembapan.
Range : 0 – 90 % RH Span : 90 % RH
Sensitivitas : 0.044 V/%RH Akurasi : 1.27 % Koreksi Peng. : + 1.79 %RH
• Sistem Alat Ukur Temperatur. Range : 0 – 60 oC Span : 60 oC Sensitivitas : 2.474 KOhm/ oC Akurasi : 0.81 % Koreksi Peng. : + 0.22 o
Setling Time kontrol : 250 detik dan Setpoint 75% RH, MOV:78.30% RH, Setling Time:275 detik.
Pada tracking setpoint 60,70, dan 75 % RH sistem bisa mengikuti perubahan setpoint yang diberikan.
5.2 Saran Sistem Kontrol kelembapan yang dibuat sebisa
mungkin menjadi satu dengan Sistem Incubator Bayi. Hal ini untuk mengurangi penurunan uap air yang terjadi jika dialirkan melewati pipa dari luar.
Pengembangan dari tugas akhir ini nantinya diharapkan untuk menjadi suatu produk. Hal ini dikarenakan produk-produk yang ada masih sulit mencapai kondisi kelembapan yang diharapkan oleh bayi.
DAFTAR PUSTAKA
1. ---------- “Prosedur Pengujian Kalibrasi Alat
Kesehatan Dep Kes Kes Sos RI Tahun 2000” 2. Operators Manual “Incubator Analyzer” ,
[2002] Bio-tek Instruments, Inc 3. ---------- “Pelatihan Pengukuran Dan
Kalibrasi Suhu” [2002] PUSLIT KIM-LIPI 4. ---------- “ Accuracy and Precision”
Flatirons Surveying, inc. Boulder, Colorado. 5. ---------- “ Incubator, Infant” Health Care
Comparison System [Augst 2004] ECRI. 6. ---------- “ Pemrograman bahasa C untuk
mikrokontroler ATMEGA 8535” M. Ary Heryanto, ST & Ir. Wisnu Adi P.
Biodata Mahasiswa Nama : Catur Darmayanto TTL : Pamekasan, 11 Mei 1982 Alamat : Manyar Dukuh 96 A, surabaya


















