On the interface boundary conditions between two interacting incompressible viscous fluid flows
24
J. Differential Equations 255 (2013) 881–904 Contents lists available at SciVerse ScienceDirect Journal of Differential Equations www.elsevier.com/locate/jde On the interface boundary conditions between two interacting incompressible viscous fluid flows Alain Brillard a,∗ , Mustapha El Jarroudi b a Université de Haute-Alsace, Laboratoire de Gestion des Risques et Environnement, 3bis rue A. Werner, 68093 Mulhouse, France b Université Abdelmalek Essaâdi, FST Tanger, Département de Mathématiques, B.P.416, Tanger, Morocco article info abstract Article history: Received 11 April 2012 Available online 21 May 2013 Keywords: Navier–Stokes system Thin non-Newtonian boundary layers Γ -convergence Interfacial boundary conditions We consider two incompressible viscous fluid flows interacting through thin non-Newtonian boundary layers of higher Reynolds’ number. We study the asymptotic behaviour of the problem, with respect to the vanishing thickness of the layers, using Γ -convergence methods. We derive general interfacial boundary conditions between the two fluid flows. These boundary conditions are specified for some particular cases including periodic or fractal structures of layers. © 2013 Elsevier Inc. All rights reserved. 1. Introduction The interaction between two viscous fluid flows is a dynamical problem of long-standing interest with several application fields as diverse as chemical engineering, combustion and geophysics which include the exchange through straits connecting wide and deep seas and the large scale atmosphere– ocean interaction. This interaction generates thin boundary layers concentrated in the regions near the interface between the two fluids. The thickness of the boundary layers depends on the Reynolds number: the higher the Reynolds number is, the thinner is the thickness of the boundary layers ([19] and [23]). Surface tension gradients along a fluid–fluid interface provoke strong convective activity, called Marangoni effect. The Marangoni effect may be induced by heat or mass transfer. In both cases, shear flow instabilities take place within boundary layers. Shear flow instabilities play an important role in the control of the exchange between interacting fluid flows. For instance the appearance of waves at the sea surface under the wind action is ascribed to these instabilities (see [16] for example). Such instabilities are also responsible of the mixing and transport phenomena between the Mediterranean sea and the Atlantic ocean through the strait of Gibraltar (see [5]). * Corresponding author. E-mail addresses: [email protected] (A. Brillard), [email protected] (M. El Jarroudi). 0022-0396/$ – see front matter © 2013 Elsevier Inc. All rights reserved. http://dx.doi.org/10.1016/j.jde.2013.04.038
Transcript of On the interface boundary conditions between two interacting incompressible viscous fluid flows

J. Differential Equations 255 (2013) 881–904
Contents lists available at SciVerse ScienceDirect
Journal of Differential Equations
www.elsevier.com/locate/jde
On the interface boundary conditions between twointeracting incompressible viscous fluid flows
Alain Brillard a,∗, Mustapha El Jarroudi b
a Université de Haute-Alsace, Laboratoire de Gestion des Risques et Environnement, 3bis rue A. Werner, 68093 Mulhouse, Franceb Université Abdelmalek Essaâdi, FST Tanger, Département de Mathématiques, B.P.416, Tanger, Morocco
a r t i c l e i n f o a b s t r a c t
Article history:Received 11 April 2012Available online 21 May 2013
Keywords:Navier–Stokes systemThin non-Newtonian boundary layersΓ -convergenceInterfacial boundary conditions
We consider two incompressible viscous fluid flows interactingthrough thin non-Newtonian boundary layers of higher Reynolds’number. We study the asymptotic behaviour of the problem,with respect to the vanishing thickness of the layers, usingΓ -convergence methods. We derive general interfacial boundaryconditions between the two fluid flows. These boundary conditionsare specified for some particular cases including periodic or fractalstructures of layers.
© 2013 Elsevier Inc. All rights reserved.
1. Introduction
The interaction between two viscous fluid flows is a dynamical problem of long-standing interestwith several application fields as diverse as chemical engineering, combustion and geophysics whichinclude the exchange through straits connecting wide and deep seas and the large scale atmosphere–ocean interaction. This interaction generates thin boundary layers concentrated in the regions nearthe interface between the two fluids. The thickness of the boundary layers depends on the Reynoldsnumber: the higher the Reynolds number is, the thinner is the thickness of the boundary layers ([19]and [23]).
Surface tension gradients along a fluid–fluid interface provoke strong convective activity, calledMarangoni effect. The Marangoni effect may be induced by heat or mass transfer. In both cases, shearflow instabilities take place within boundary layers. Shear flow instabilities play an important role inthe control of the exchange between interacting fluid flows. For instance the appearance of waves atthe sea surface under the wind action is ascribed to these instabilities (see [16] for example). Suchinstabilities are also responsible of the mixing and transport phenomena between the Mediterraneansea and the Atlantic ocean through the strait of Gibraltar (see [5]).
* Corresponding author.E-mail addresses: [email protected] (A. Brillard), [email protected] (M. El Jarroudi).
0022-0396/$ – see front matter © 2013 Elsevier Inc. All rights reserved.http://dx.doi.org/10.1016/j.jde.2013.04.038

882 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
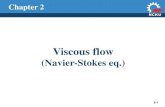
Fig. 1. The domains Ω = Ω1 ∪ Σ ∪ Ω2 and Ω1ε ∪ Σε ∪ Ω2
ε .
The main purpose of this work is to describe the asymptotic behaviour of boundary layers gener-ated by two interacting incompressible viscous fluid flows, with respect to the vanishing thickness ofthe layers.
We consider a bounded open subset Ω ⊂ R3 with Lipschitz continuous boundary ∂Ω , such that
Ω = Ω1 ∪ Σ ∪ Ω2 (see Fig. 1, left), where Ω1 and Ω2 are two non-empty open subsets separatedby the smooth surface Σ , that we suppose to be contained in the plane {x3 = 0}, for simplicity. Forevery ε ∈ (0,1), we denote Σε the thin layer surrounding Σ defined by
Σε = {x ∈R3∣∣∣ x′ = (x1, x2) ∈ Σ, −εh1
ε
(x′)< x3 < εh2
ε
(x′)},
where h1ε and h2
ε are positive and locally Lipschitz continuous functions satisfying
supε
∥∥hαε
∥∥L∞(Σ)
� 1; supε
(ε
∥∥∥∥∂hαε
∂xα
∥∥∥∥L∞(Σ)
)< +∞, α = 1,2. (1)
We set (see Fig. 1, right)
Ω1ε = Ω1\Σε, Ω2
ε = Ω2\Σε, Γ 1ε = ∂Ω1
ε ∩ ∂Σε,
Γ 2ε = ∂Ω2
ε ∩ ∂Σε, Γε = Γ 1ε ∪ Γ 2
ε . (2)
We suppose that the boundary ∂Ω1ε \ ∂Σε (resp. ∂Ω2
ε \ ∂Σε) can be represented by a smooth andnegative (resp. positive) function x′ → −h1(x′) (resp. x′ → h2(x′)). Throughout the rest of the paper,we will assume that h1 = h2 =: h and h1
ε = h2ε =: hε , for sake of simplicity. We suppose that Ω1
ε andΩ2
ε are filled in with incompressible viscous Newtonian fluids of respective positive and constant vis-cosity ν1 and ν2. We suppose that thin non-Newtonian boundary layers, of higher Reynolds’ number,take place in the set Σε between Ω1
ε and Ω2ε . More specifically, we suppose that Σε is filled in with
an incompressible viscous non-Newtonian fluid described by the power-law constitutive equation,known as the Oswald–de Waele law
σε = −pε IdR3 + εr−1ν0∣∣∇uε∣∣r−2∇uε, (3)
with r ∈ ]1,2], where σε is the Cauchy stress, pε is the pressure, IdR3 is the identity matrix on R3,
uε is the fluid velocity and ν0 is the zero-shear-rate viscosity or Newtonian viscosity of the fluid(for r = 2 one gets the constitutive equation of the classical Newtonian fluid). This law, which isclassically used in polymeric fluid flows (see for example [3]), is here introduced in order to take intoaccount the possible shear-rate-dependent viscosity within the thin layer Σε . The parameter r maydepend on the temperature (see [2]) or on the pressure (see [21]) in the fluid flows. The importanceof nonlinearity in the momentum equations has been emphasized in traditional models for two layersof water flowing in opposite directions through straits connecting two wide and deep basins (see forinstance [4]).

A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 883
For a given f ∈ L∞(Ω;R3), we consider the stationary fluid flow problem posed in Ω
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩−ν1uε + (uε · ∇)uε + ∇pε = f in Ω1
ε ,
−ν2uε + (uε · ∇)uε + ∇pε = f in Ω2ε ,
−εr−1ν0 div(∣∣∇uε
∣∣r−2∇uε)+ (uε · ∇)uε + ∇pε = f in Σε,
div(uε)= 0 in Ω,
(4)
with the transmission and boundary conditions⎧⎪⎪⎪⎨⎪⎪⎪⎩[uε]Γε
= 0 on Γ 1ε ∪ Γ 2
ε ,
να ∂uε
∂n− εr−1ν0
∣∣∇uε∣∣r−2 ∂uε
∂n= 0 on Γ α
ε , α = 1,2,
uε = 0 on ∂Ω,
where [u]Γε is the jump either [u]Γ 1ε
or [u]Γ 2ε
of u across Γ 1ε or Γ 2
ε , that is the difference of the two
traces of u on the smooth surface Γ 1ε or Γ 2
ε[uε]Γ 1
ε
(x′,−εhε
(x′))= uε
(x′,(−εhε
(x′))+)− uε
(x′,(−εhε
(x′))−),[
uε]Γ 2
ε
(x′, εhε
(x′))= uε
(x′,(εhε
(x′))+)− uε
(x′,(εhε
(x′))−)
and n is the unit outer normal on Γ αε , α = 1,2.
The problem (4) has a unique solution (uε, pε) ∈ Hε(Ω;R3) × L2(Ω;R)/R (see for example [20]and [24]), where
Hε
(Ω;R3)= {u ∈ H1(Ω1
ε ∪ Ω2ε ;R3)∩ W 1,r(Σε;R3) ∣∣
div(u) = 0 in Ω, [u]Γε = 0, u = 0 on ∂Ω}. (5)
Our purpose is to describe the asymptotic behaviour of the solution (uε, pε) of (4) as ε tends tozero, using Γ -convergence methods (see for instance [8] and [12] for the definition and the propertiesof this variational convergence). Our approach is based on the tools developed in [1,6,9–11]. We willprove that the limit problem reads as follows (α,β = 1,2, i = 1,2,3)⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
−ναu0 + (u0 · ∇)u0 + ∇p0α = f in Ωα,
div(u0)= 0 in Ωα,
u0 = 0 on ∂Ωα \ Σ,[(u0)
3
]Σ
= 0 on Σ,
ν2(
∂(u0)3
∂x3
)+∣∣∣∣Σ
− ν1(
∂(u0)3
∂x3
)−∣∣∣∣Σ
= p01 − p0
2 on Σ,
ν2(
∂(u0)β
∂x3
)+∣∣∣∣Σ
= ν1(
∂(u0)β
∂x3
)−∣∣∣∣Σ
= ν0∣∣[u0]
Σ
∣∣r−2[(u0)
i
]Σμβi on Σ,
(6)
where μ• = (μi j)i, j=1,2,3 is a symmetric matrix of Borel measures which have the same supportcontained in Σ , which do not charge the polar subsets of Σ and which satisfy μi j(B)ζiζ j � 0, ∀ζ ∈R
3,∀B ∈ B(Σ), where B(Σ) denotes the set of Borel subsets of Σ . Here we have used the summation

884 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
convention with respect to repeated indices. We will use this summation convention throughout thewhole paper. Greek (resp. Latin) indices are supposed to take their values in {1,2} (resp. {1,2,3}).
We give in (29) the boundary conditions for fluid flows in a couple of general open and boundedsets Ωα
ε , α = 1,2, separated by thin layers.The boundary condition (6)4 represents the continuity of the normal velocity through the inter-
face Σ . The relation (6)5 means that the difference of the normal fluxes on the two sides of theinterface Σ is equal to the difference of the pressures. The interfacial law (6)6, which connects thetangential fluxes to the jump of the tangential velocities across the interface Σ , means that the in-teractions between the two fluid flows occur in the tangential directions. This law determines theimportance of friction in the control of the exchange between the two interacting fluid flows. A sim-ilar tangential boundary condition (for r = 2) has been introduced and discussed in [25] and [26] forsome geophysical fluid flows. This condition has been considered in [7] for Navier–Stokes flows ina composite two-layer thin domain. Classical models for the air–sea interface (see for example [18])assume that the fluxes are proportional to the magnitude of the wind velocity.
The generation of boundary layers in a fluid flowing near a rigid wall is known since the pioneeringjoint works of Prandtl and Schlichting (see [23]). Many works have been devoted to the study of theseboundary layers, among which the work by the present authors [13] who used the Γ -convergencemethod. These studies leaded to the so-called Navier’s wall law (or boundary conditions) which assertthat the tangential velocities are proportional to the tangential fluxes.
As a first special case, we will consider the case where Σ has the periodic structure given by
Σε ={
x ∈R3∣∣∣ x′ = (x1, x2) ∈ Σ, −εh
(x′
ε
)< x3 < εh
(x′
ε
)},
where h is a given smooth and Y -periodic function, Y being the 2D unit cell Y = (−1/2,1/2)2. Theasymptotic matrix μ• is here proved to be a diagonal matrix of measures, with μ33 = 0 and μββ =cβ dx′ , β = 1,2, where the cβ , β = 1,2, are constants which depend on the solution of appropriatelocal thin layer problems, see (23).
As a second example, we will consider the case where
Σε = {x ∈R3∣∣∣ x′ = (x1, x2) ∈ Σ, −εh
(x′)< x3 < εh
(x′)},
where h is a continuous and positive function on Σ . We here get a diagonal matrix μ• of measures,with μββ = 2
hr−1 dx′ , β = 1,2 and μ33 = 0.In the third example, we will consider a layer Σε defined along a self-similar fractal Σ of Haus-
dorff dimension d. We here prove that μββ = cβ
Hd(Σ)dHd|Σ , β = 1,2, where cβ is given in (28) and
Hd is the d-Hausdorff measure.
2. Functional framework
2.1. Capacity
The Sobolev space W1s ,r(Σ), s = r
r−1 , r > 1, consisting of the functions u ∈ Lr(Σ) satisfying∫Σ×Σ
|u(x) − u(y)|r|x − y|1+r
dx dy < +∞,
is a reflexive Banach space when equipped with the norm
‖u‖r
W1s ,r(Σ)
= ‖u‖rLr(Σ) +
∫ |u(x) − u(y)|r|x − y|1+r
dx dy.
Σ×Σ

A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 885
We define the capacity Cap of every compact subset K ⊂ Σ as
Cap(K ) := inf{‖ϕ‖r
W1s ,r(Σ)
∣∣ ϕ ∈ C0c (Σ), ϕ � 0 on Σ and ϕ � 1 on K
}.
For every open subset O ⊂ Σ , then
Cap(O ) := sup{
Cap(K )∣∣ K ⊂ O , K compact
}.
For every Lebesgue measurable subset B ⊂ Σ , then
Cap(B) := inf{
Cap(O )∣∣ B ⊂ O , O ⊂ Σ open
}.
Cap is a Choquet capacity (see [14]).
Definition 1. Let B(Σ) be the σ -field of Lebesgue measurable subsets of Σ .
(1) A property is said to be true Cap-quasi-everywhere (Cap q.e.) on B ∈ B(Σ) if it is true except ona subset of B of capacity Cap equal to 0.
(2) A function U : B → R, with B ∈ B(Σ), is Cap-quasi-continuous on B if, for every ε > 0, thereexists an open subset O ε ⊂ B with Cap(O ε) < ε and such that the restriction of U on B \ O ε iscontinuous.
It is known that every function U ∈ W1s ,r(Σ) has a Cap-quasi-continuous representant U , which
is unique Cap-quasi-everywhere in Σ (see [14], for example).We now define some notions concerning particular families of subsets of Σ and functionals on
these families.
Definition 2.
(1) A subset D ⊂ B(Σ) is a dense family in B(Σ) if, for every A, B ∈ B(Σ) with A ⊂ oB , there exists
D ∈D such that: A ⊂ oD ⊂ D ⊂ o
B , whereoA (resp. A) denotes the interior (resp. the closure) of A.
(2) A subset R⊂ B(Σ) is a rich family if, for every family (At)t∈]0,1[ ⊂ B(Σ) such that As ⊂ oAt , for
every s < t , the set {t ∈ ]0,1[ | At /∈R} is at most countable.(3) Let O(Σ) be the set of all open subsets of Σ . We consider the class F of functionals F from
W1s ,r(Σ) ×O(Σ) to [0,+∞] satisfying:
(a) (Lower semi-continuity): for every open subset ω ∈O(Σ), the functional U → F (U ,ω) is lower
semi-continuous with respect to the strong topology of the space W1s ,r(Σ);
(b) (Measure property): for every U ∈ W1s ,r(Σ), ω → F (U ,ω) is the restriction to O(Σ) of a Borel
measure still denoted F (U ,ω);(c) (Localization): for every ω ∈O(Σ) and every U , V ∈ W
1s ,r(Σ):
U |ω = V |ω ⇒ F (U ,ω) = F (V ,ω);
(d) (C1-convexity): for every ω ∈ O(Σ), the functional U → F (U ,ω) is convex on W1s ,r(Σ) and
for every ϕ ∈ C10(Σ) satisfying 0 � ϕ � 1 and every U , V ∈ W
1s ,r(Σ):
F(ϕU + (1 − ϕ)V ,ω
)� F (U ,ω) + F (V ,ω).

886 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
Example 3.
(1) Let F be the functional defined on W1s ,r(Σ) ×O(Σ) through
F (U ,ω) =∫Σ
aij(x′)|Ui|r−2Ui U j dx′,
where (aij)i, j=1,2,3 is a symmetric and positive definite matrix of Borel functions aij from Σ to R.Then F belongs to F.
(2) Let Vε(Ω;R3) be the space deduced from the space Hε(Ω;R3) defined in (5) when omitting theconstraint [u]Γε = 0 (observing that the constraint div(u) = 0 in Ω implies u · n = 0 on ∂Ω), thatis the space defined through
Vε
(Ω;R3)= {u ∈ H1(Ω1
ε ∪ Ω2ε ;R3)∩ W 1,r(Σε;R3) ∣∣
div(u) = 0 in Ω, u = 0 on ∂Ω1ε ∪ Ω2
ε
}. (7)
We consider the functional Fε defined on Vε(Ω;R3) ×O(Σ) through
Fε
([u]Γε ,ω)= {0 if [u]Γε = 0, Cap q.e. on Γε ∩ (ω × {±εhε(x′)}),
+∞ otherwise,(8)
where Γε is given in (2). Then Fε is the restriction of a functional, still denoted by Fε , defined
on W1s ,r(Σ × {±εhε(x′)};R3) ×O(Σ) by
Fε(U ,ω) ={
0 if U = 0, Cap q.e. on Γε ∩ (ω × {±εhε(x′)}),+∞ otherwise,
which satisfies hypotheses similar to (a)–(d), replacing W1s ,r(Σ;R3) by the space W
1s ,r(Σ ×
{±εhε(x′)};R3).
Let us set the following definitions.
Definition 4.
(1) Let Cap be the above-defined capacity. A Borel measure λ is absolutely continuous with respectto the capacity Cap if
∀B ∈ B(Σ): Cap(B) = 0 ⇒ λ(B) = 0.
(2) M0(Σ) is the set of nonnegative Borel measures which are absolutely continuous with respectto the capacity Cap.
We have the following example.
Example 5. For every E ⊂ Σ such that Cap(E) > 0, we define the measure ∞E through
∞E(B) ={
0 if Cap(B ∩ E) = 0,
+∞ otherwise.

A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 887
Then ∞E belongs to M0(Σ).Notice that, for every u ∈ Vε(Ω;R3) and every ω ∈O(Σ), the functional Fε defined in (8) is given
through
Fε
([u]Σ,ω)= ∫
ω
∣∣[u]Σ∣∣2 d∞Γε =
∫ω
∣∣[u]Σ∣∣2 d∞Γε .
One has the following representation of the functionals belonging to F, which is proved in [11,Theorem 7.5] in the case of the space W 1,p(Ω;Rn) ×O(Ω) but which can be extended as follows.
Theorem 6. For every F ∈ F, there exist a finite measure μ ∈ M0(Σ), a nonnegative Borel measure ν and aBorel function g : Σ ×R
3 → [0,+∞] with ζ → g(x, ζ ) convex and lower semi-continuous on R3 , such that
∀U ∈ W1s ,r(Σ;R3), ∀ω ∈ O(Σ): F (U ,ω) =
∫ω
g(x′, U(x′))dμ + ν(ω).
3. A priori estimates and convergence
The solution (uε, pε) of (4) satisfies the following estimates.
Lemma 7. One has:
supε
(∫Ω1
ε
∣∣∇uε∣∣2 dx +
∫Ω2
ε
∣∣∇uε∣∣2 dx + εr−1
∫Σε
∣∣∇uε∣∣r dx
)< +∞,
supε
( ∫Ω1
ε ∪Ω2ε
∣∣uε∣∣2 dx
)< +∞,
supε
(1
|Σε|∫Σε
∣∣uε∣∣r dx
)< +∞. (9)
Proof. We write, for every x′ ∈ Σ and every x3 ∈ (−εhε(x′), εhε(x′))
uε(x′, x3)= uε
(x′,0)+ x3∫
0
∂uε
∂x3
(x′, s)
ds.
As 0 � hε(x′) � 1, we derive, using Young’s inequality
∣∣uε(x′, x3)∣∣r � C
(∣∣uε(x′,0)∣∣r + εr−1
εhε(x′)∫−εhε(x′)
∣∣∣∣∂uε
∂x3
∣∣∣∣r ds
),
from which we deduce∫Σ
∣∣uε(x)∣∣r dx � C
(ε
∫Σ
∣∣uε(x′,0)∣∣r dx′ + εr
∫Σ
∣∣∇uε(x)∣∣r dx
). (10)
ε ε

888 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
As uε = 0 on ∂Ω , there exists a positive constant C independent of ε such that
∫Σ
∣∣uε(x′,0)∣∣r dx′ � C
∫Ωα
ε
∣∣∇uε(x)∣∣r dx � C
( ∫Ωα
ε
∣∣∇uε(x)∣∣2 dx
)r/2
, α = 1,2,
which implies together with (10) that
∫Σε
∣∣uε(x)∣∣r dx � C
(ε
( ∫Ωα
ε
∣∣∇uε(x)∣∣2 dx
)r/2
+ εr∫Σε
∣∣∇uε(x)∣∣r dx
)(11)
and ∫Σε
∣∣uε(x)∣∣r dx
|Σε| � C
(( ∫Ωα
ε
∣∣∇uε(x)∣∣2 dx
)r/2
+ εr−1∫Σε
∣∣∇uε(x)∣∣r dx
). (12)
Now multiplying (4)1,2,3 by uε and using Green’s formula, we get, using Cauchy–Schwarz’ orYoung’s inequalities
ν1∫
Ω1ε
∣∣∇uε∣∣2 dx + ν2
∫Ω2
ε
∣∣∇uε∣∣2 dx + εr−1ν0
∫Σε
∣∣∇uε∣∣r dx
=∫Ω
f · uε dx � C
((∫Ω1
ε
∣∣uε∣∣2 dx
)1/2
+(∫
Ω2ε
∣∣uε∣∣2 dx
)1/2
+ εr−1
r
(∫Σε
∣∣uε∣∣r dx
)1/r).
Using Poincaré’s inequality in Ω1ε and Ω2
ε and (11), we obtain, observing that εεr−1
r � εr−1
r ,
ν1∫
Ω1ε
∣∣∇uε∣∣2 dx + ν2
∫Ω2
ε
∣∣∇uε∣∣2 dx + εr−1ν0
∫Σε
∣∣∇uε∣∣r dx
� C
((∫Ω1
ε
∣∣∇uε∣∣2 dx
)1/2
+(∫
Ω2ε
∣∣∇uε∣∣2 dx
)1/2
+ εr−1
r
(ε
( ∫Ωα
ε
∣∣∇uε(x)∣∣2 dx
)r/2
+ εr∫Σε
∣∣∇uε(x)∣∣r dx
)1/r). (13)
Let x, y and z be nonnegative real numbers satisfying
x2 + y2 + zr � c1(x + y + z), (14)
for some positive constant c1. There exists a positive constant c2 such that x2 + y2 + zr � c2. Otherwisex2+y2+zr
x+y+z indeed tends to ∞ when x, y or z tends to ∞, which contradicts (14). Thus, (13) im-plies (9)1.
Using Poincaré’s inequality, we deduce (9)2. Using (12), we deduce (9)3. �

A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 889
In order to get estimates on the pressure pε , let us first define the zero mean value pressures
pεα = pε − 1
|Ωαε |∫
Ωαε
pε dx, α = 1,2.
We have the following estimate.
Lemma 8. One has supε ‖pεα‖L2(Ωαε ) < ∞.
Proof. Let ψεα ∈ H10(Ωα
ε ;R3), α = 1,2, be the solution of the following problem (see [24])
{div(ψεα)= pεα in Ωα
ε ,
ψεα = 0 on ∂Ωαε .
There exists a constant C(Ω) only depending of Ω such that ‖∇ψεα‖L2(Ωαε ;R9) � C(Ω)‖pεα‖L2(Ωα
ε ) .Multiplying (4)1,2 by ψεα and using Green’s formula, we obtain
να
∫Ωα
ε
∇uε · ∇ψεα dx +∫
Ωαε
(uε · ∇)uε · ψεα dx =
∫Ωα
ε
f · ψεα dx +∫
Ωαε
(pεα)2
dx.
As ∣∣∣∣ ∫Ωα
ε
f · ψεα dx
∣∣∣∣� C∥∥pεα∥∥
L2(Ωαε )
,
∣∣∣∣ ∫Ωα
ε
(uε · ∇)uε · ψεα dx
∣∣∣∣� C∥∥div(ψεα)∥∥
L2(Ωαε )
∥∥uε∥∥2
L4(Ωαε ;R3)
� C∥∥∇ψεα
∥∥L2(Ωα
ε ;R3)
∥∥∇uε∥∥2
L2(Ωαε ;R9)
� C∥∥pεα∥∥
L2(Ωαε )
∥∥∇uε∥∥2
L2(Ωαε ;R9)
,∣∣∣∣ ∫Ωα
ε
∇uε · ∇ψεα dx
∣∣∣∣� C∥∥pεα∥∥
L2(Ωαε )
∥∥∇uε∥∥
L2(Ωαε ;R3)
,
we get the desired estimate. �From the hypothesis (1), we deduce the following property.
Lemma 9. There exists an invertible map T ε from Ω1 (resp. Ω2) into Ω1ε (resp. Ω2
ε ) which maps Σ into Γ 1ε
(resp. Γ 2ε ) such that
∃C, ∀u ∈ H10
(Ω1
ε ∪ Ω2ε ;R3): ∥∥u ◦ T ε
∥∥H1
∂Ω (Ω\Σ;R3)� C‖u‖H1
∂Ω (Ω1ε ∪Ω2
ε ;R3). (15)

890 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
Proof. Thanks to the construction (2) of Ω1ε , for every x′ ∈ Σ the points (x′,−εhε(x′)) and (x′,−h(x′))
are respectively located on Γ 1ε and on ∂Ω1. We define
∀(x′, x3) ∈ Ω1: T ε
(x′, x3)= (x′,
(h(x′)− εhε
(x′)) x3
h(x′)− εhε
(x′)),
so that
T ε(x′,0)= (x′,−εhε
(x′)); T ε
(x′,−h
(x′))= (x′,−h
(x′)).
We compute the Jacobian of T ε , that is the determinant of the gradient of T ε: Jac(T ε) =h(x′)−εhε(x′)
h(x′) . We have a quite similar expression of T ε in Ω2:
T ε(x′, x3)= (x′,
(h(x′)− εhε
(x′)) x3
h(x′)+ εhε
(x′)).
Thanks to the properties (1) of h and hε , we deduce Jac(T ε) = 1 + o(ε) →ε→0 1.This proves that T ε is invertible. The estimate (15) is then a direct consequence of the definition
of T ε . �We have the following compactness result.
Proposition 10. There exists a subsequence of (uε)ε , still denoted in the same way, such that:
(1) one has the following convergences
uε ◦ T ε ⇀ε→0
u0 in H1(Ω\Σ;R3)-weak,
uε →ε→0
u0 in Lr(Ω;R3)-strong.
(2) u0 belongs to the space V 0(Ω\Σ;R3) defined through
V 0(Ω\Σ;R3)= {u ∈ H1(Ω\Σ;R3) ∣∣ div(u) = 0 in Ω, u = 0 on ∂Ω
}.
Proof. 1. From the estimates (9) and Lemma 9, we deduce that the sequence (uε ◦ T ε)ε is boundedin H1(Ω\Σ;R3). Up to some subsequence, the sequence (uε ◦ T ε)ε converges to some u0 inH1(Ω\Σ;R3)-weak. From (9)1,2, it follows that u0 belongs to L2(Ω;R3) and, up to some subse-quence
χΩα∇(uε ◦ T ε)
⇀ε→0
∇u0 in L2(Ωα;R9)-weak, α = 1,2,
where χΩα is the characteristic function of Ωα .Now we write ∫
Ω
∣∣uε − u0∣∣r dx =
∫Ω1
ε ∪Ω2ε
∣∣uε − u0∣∣r dx +
∫Σε
∣∣uε − u0∣∣r dx.
Using the above convergences, a Sobolev embedding and (9)3, we prove that (uε)ε converges tou0 in Lr(Ω;R3)-strong.

A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 891
2. Let (u0)+ (resp. (u0)−) be the trace of u0 ∈ H1(Ω2;R3) (resp. H1(Ω1;R3)) on Σ . Using thetrace theorem, we have, up to some subsequence
limε→0
∫Γ 1
ε
∣∣uε − (u0 ◦ (T ε)−1)−∣∣ds = lim
ε→0
∫Σ
∣∣uε ◦ T ε − (u0)−∣∣ Jac(T ε)
dx′ = 0,
limε→0
∫Γ 2
ε
∣∣uε − (u0 ◦ (T ε)−1)+∣∣ds = lim
ε→0
∫Σ
∣∣uε ◦ T ε − (u0)+∣∣ Jac(T ε)
dx′ = 0. (16)
Since div(uε) = 0 in Ω , we get div(u0) = 0 in Ωα , α = 1,2.For every ϕ ∈ C∞
c (Ω), we write
0 =∫
Ωαε
div(uε)ϕ dx = −
∫Ωα
ε
uε · ∇ϕ dx +∫
Γ αε
uε · nεϕ ds.
Passing to the limit, we get div(u0) = 0 and [(u0)3]Σ = 0, using (16). Thus u0 belongs toV 0(Ω\Σ;R3). �
We deduce from the preceding convergences the topology τ which is adapted to the study of theproblem (4).
Definition 11. A sequence (uε)ε , with uε ∈ Vε(Ω;R3) for every ε, where Vε(Ω;R3) is the spacedefined in (7), converges to u0 in the topology τ if it satisfies the estimates (9) and the convergences
uε →ε→0
u0 in Lr(Ω;R3)-strong,
uε ◦ T ε ⇀ε→0
u0 in H1(Ω\Σ;R3)-weak.
In order to describe the asymptotic behaviour of the solution of (4), through Γ -convergence meth-ods, we first define on L2(Ω;R3) the functional Φε through
Φε(u) ={
ν1∫Ω1
ε|∇u|2 dx + ν2
∫Ω2
ε|∇u|2 dx if u ∈ Vε(Ω;R3),
+∞ otherwise
and study its Γ -convergence, with respect to the topology τ .
Proposition 12. The sequence (Φε)ε Γ -converges, with respect to the topology τ , to the functional Φ0 givenby
Φ0(u) ={
ν1∫Ω1 |∇u|2 dx + ν2
∫Ω2 |∇u|2 dx if u ∈ V 0(Ω\Σ;R3),
+∞ otherwise.(17)
Proof. 1. For every u ∈ V 0(Ω\Σ;R3), we define the function u0ε through
u0ε(x) =
{u(x) if x ∈ Ω1
ε ∪ Ω2ε ,
0 if x ∈ Σε.

892 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
We easily observe that u0ε ∈ Vε(Ω;R3), that (u0
ε)ε converges to u in the topology τ andlim supε→0 Φε(u0
ε)� Φ0(u), because
limε→0
να
∫Ωα
ε
∣∣∇u0ε
∣∣2 dx = limε→0
να
∫Ωα
|∇u|2 dx, α = 1,2.
2. For every u ∈ V 0(Ω\Σ;R3), let uε be any element of Vε(Ω;R3) such that (uε)ε converges tou in the topology τ . We compute, for α = 1,2
lim infε→0
να
∫Ωα
ε
|∇uε|2 dx = lim infε→0
να
∫Ωα
∣∣∇uε ◦ T ε∣∣2Jac(T ε)
dx � να
∫Ωα
|∇u|2 dx,
thanks to the definition of the τ -convergence and to the properties of T ε (see Lemma 9). Hencelim infε→0 Φε(uε)� Φ0(u). �
We introduce the functional Gε associated to the “Stokes part” of the problem (4), that is thefunctional defined on L2(Ω;R3) ×O(Σ) through
Gε(u,ω) ={
Φε(u) + Jε(u) + Fε([u]Γε ,ω) if u ∈ Vε(Ω;R3),
+∞ otherwise,
where Fε is defined in (8) and Jε is defined as
∀u ∈ Vε
(Ω;R3): Jε(u) = εr−1ν0
∫Σε
|∇u|r dx.
Our main result in this section is the following.
Theorem 13. There exist a rich family R ⊂ B(Σ) and a symmetric matrix μ• = (μi j)i, j=1,2,3 of Borel mea-sures μi j , which belong to the space M0(Σ) of measures on Σ , which are absolutely continuous with respectto the capacity Cap, and which satisfy μi j(B)ζiζ j � 0, for every ζ ∈ R
3 , and for every B ∈ B(Σ), such that, forevery u ∈ V 0(Ω\Σ;R3) and every ω ∈R∩O(Σ)
(Γ - limε→0
Gε
)(u,ω) =
∑α=1,2
να
∫Ωα
|∇u|2 dx + ν0∫ω
∣∣[u]Σ∣∣r−2[ui]Σ [u j]Σ dμi j,
where the Γ -limit is taken with respect to the topology τ .
Proof. The upper and lower Γ -limits, with respect to the topology τ , exist, which are respectivelydefined on V 0(Ω\Σ;R3) ×B(Σ) through
⎧⎪⎨⎪⎩Gs
0(u, B) = inf{
lim supε→0
Gε(uε, B)
∣∣∣ uετ→
ε→0u},
Gi0(u, B) = inf
{lim inf Gε(uε, B)
∣∣∣ uετ→ u}.
(18)
ε→0 ε→0

A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 893
We observe that, for every B ∈ B(Σ), we have Ga0(., B)� Φ0(.) with a = s, i, for the above-defined
functional Φ0 (see (17)). Let us introduce the nonnegative functionals F s0 and F i
0 defined, for everyB ∈ B(Σ), through
F a0(u, B) =
{Ga
0(u, B) − Φ0(u) if u ∈ V 0(Ω\Σ;R3),
+∞ otherwise.
Let u ∈ V 0(Ω\Σ;R3) and uε ∈ Vε(Ω;R3), for every ε > 0, be such that (uε)ε τ -converges to u.We define the function zε through zε(x) = uε(x) − u(x) in Ω1
ε ∪ Ω2ε and in Σε by
(zε)α(x) = (uε)α(x) − 1
2
(uα
(x′, εhε
(x′))+ uα
(x′,−εhε
(x′)))
− x3
2εhε(x′)(uα
(x′, εhε
(x′))− uα
(x′,−εhε
(x′))+ [uα](x′)),
for α = 1,2, and
(zε)3(x) = (uε)3(x) − x3
2εhε(x′)(u3(x′, εhε(x′)
)− u3(x′,−εhε
(x′))+ [u3]
(x′))
− 1
2
(u3(x′, εhε
(x′))+ u3
(x′,−εhε
(x′)))
− (x3)2
4ε(hε(x′))2
∑α=1,2
∂hε
∂xα
(x′)(uα
(x′, εhε
(x′))− uα
(x′,−εhε
(x′))+ [uα](x′))
− (x3)2
4εhε(x′)∑
α=1,2
(∂uα
∂xα
(x′, εhε
(x′))+ ∂uα
∂x3
(x′, εhε
(x′))ε ∂hε
∂xα
(x′)
− ∂uα
∂xα
(x′,−εhε
(x′))+ ∂uα
∂x3
(x′, εhε
(x′))ε ∂hε
∂xα
(x′)− [∂uα
∂xα
](x′))
+ x3
2
∑α=1,2
(∂uα
∂xα
(x′, εhε
(x′))+ ∂uα
∂x3
(x′, εhε
(x′))ε ∂hε
∂xα
(x′)
+ ∂uα
∂xα
(x′,−εhε
(x′))− ∂uα
∂x3
(x′, εhε
(x′))ε ∂hε
∂xα
(x′)).
We immediately prove that div(zε) = 0 in Ω and that (zε)ε τ -converges to 0. We observe that[zε]Γε = [uε]Γε + [u]Σ/2 + oε , where the residual term oε goes to 0 in the strong topology ofLr(Σ;R3). Let us observe that, for every positive η, there exists a constant C(r, η) such that, forevery x, y ∈R
9
∣∣|x + y|r − |x|r − |y|r∣∣� η|x|r + C(r, η)|y|r . (19)
We indeed observe that lim|x|→∞(|x + 1|r − |x|r − 1)/|x|r = 0, which proves this inequality (19).Using this result, we obtain, according to the arbitrariness of η
limε→0
Jε(uε) = limε→0
εr−1ν0∫Σ
|∇uε|r dx = limε→0
εr−1ν0∫Σ
|∇zε|r dx = limε→0
Jε(zε).
ε ε

894 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
On the other hand, using the construction of zε , we can replace [uε]Γε by [zε]Γε + 12 [u]Σ in (18).
One can thus write
F s0(u, B) = inf
{lim sup
ε→0
(Jε(zε) + Fε
([zε]Γε + 1
2[u]Σ, B
)) ∣∣∣ zετ→
ε→00
},
F i0(u, B) = inf
{lim infε→0
(Jε(zε) + Fε
([zε]Γε + 1
2[u]Σ, B
)) ∣∣∣ zετ→
ε→00
}.
We observe that the functionals F s0 and F i
0 depend only on [u]Σ . We thus define F s0 and F i
0 on
W1s ,r(Σ;R3) ×O(Σ) through
F s0(U , B) = inf
{lim sup
ε→0
(Jε(zε) + Fε
([zε]Γε + 1
2U , B
)) ∣∣∣ zετ→
ε→00
},
F i0(U , B) = inf
{lim infε→0
(Jε(zε) + Fε
([zε]Γε + 1
2U , B
)) ∣∣∣ zετ→
ε→00
}.
We have, for every u ∈ V 0(Ω\Σ;R3) and every B ∈ B(Σ)
F s0(u, B) = F s
0
([u]Σ, B), F i
0(u, B) = F i0
([u]Σ, B).
The functionals F s0 and F i
0 satisfy the following properties.
(1) For every U ∈ W1s ,r(Σ;R3), F s
0(U , .) and F i0(U , .) are nonnegative measures, because
Fε([zε]Σ0×{±ε} + 12 U , ·) is a measure for every ε > 0.
(2) F s0(., B) (resp. F i
0(., B)) is lower semi-continuous on W1s ,r(Σ;R3), when equipped with its
strong topology, as the upper (resp. lower) envelope of lower semi-continuous functionals.
(3) Let ω ∈ O(Σ) and U , V ∈ W1s ,r(Σ;R3) be such that U |ω = V |ω . Then Fε([zε]Γε + 1
2 U ,ω) =Fε([zε]ε + 1
2 V ,ω) for every sequence zε ⊂ Vε(Ω;R3), for every ε > 0, such that (zε)ε τ -convergesto 0. This implies F s
0(U ,ω) = F s0(V ,ω).
(4) Take any ϕ ∈ C10(Σ) such that 0 � ϕ � 1, U , V ∈ W
1s ,r(Σ;R3) and B ∈ B(Σ). One has, for
every sequence (zε)ε , with zε ∈ Vε(Ω;R3) for every ε, τ -converging to 0
Fε
([zε]Γε + ϕ
1
2U + (1 − ϕ)
1
2V , B
)= Fε
(ϕ
([zε]Γε + 1
2U
)+ (1 − ϕ)
([zε]Γε + 1
2V
), B
)� Fε
([zε]Γε + 1
2U , B
)+ Fε
([zε]Γε + 1
2V , B
),
because Fε is C1-convex. Because Jε is nonnegative for every ε > 0, we have
lim supε→0
(Jε(zε) + Fε
([zε]Γε + ϕ
1
2U + (1 − ϕ)
1
2V , B
))� lim sup
(Jε(zε) + Fε
([zε]Γε + 1
2U , B
)+ Jε(zε) + Fε
([zε]Γε + 1
2V , B
))
ε→0
A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 895
� lim supε→0
(Jε(zε) + Fε
([zε]Γε + 1
2U , B
))
+ lim supε→0
(Jε(zε) + Fε
([zε]Γε + 1
2V , B
)).
Taking the infimum over all sequences (zε)ε , with zε ∈ Vε(Ω;R3) for every ε, which τ -converge to 0,we obtain
F s0
(ϕU + (1 − ϕ)V , B
)� F s
0(U , B) + F s0(V , B).
We prove in a similar way that F s0 is convex. Thus F s
0 is C1-convex.Thanks to the compactness theorem of [12], there exist a subsequence (εk)k and a dense and
countable family D ⊂ B(Σ) such that, for every u ∈ V 0(Ω\Σ;R3) and every B ∈D
(Γ - limk→+∞
Gεk
)(u, B) = G0(u, B),
where the Γ -limit is taken with respect to the topology τ . We thus have F s0 = F i
0 on W1s ,r(Σ;R3)×D.
We define the functional F0 on W1s ,r(Σ;R3) ×B(Σ) through
F0(U , B) = supD∈D,D⊂ o
B
F s0(U , D) = sup
D∈D,D⊂ oB
F i0(U , D).
We define the family R(F0) through
R(F0) ={
B ∈ B(Ω)
∣∣∣ F s0,+(U , B) := sup
D∈D,D⊂ oB
F s0(U , D) = inf
D∈D,B⊂ oD
F s0(U , D) =: F s
0,−(U , B),
∀U ∈ W1s ,r(Σ;R3)}.
Then (see [8, Proposition 14.14]), we prove that R(F0) is a rich family in B(Σ) and F0 = F s0 =
F s0,+ = F s
0,− = F i0,+ = F i
0,− = F i0 on R(F0). One obtains, for every U ∈ W
1s ,r(Σ;R3) and every
B ∈R(F0)
F0(u, B) = inf
{lim supk→+∞
(Jε(zε) + Fε
([zε]Γε + 1
2U , B
)) ∣∣∣ zετ→
ε→00
}
= inf
{lim infk→+∞
(Jε(zε) + Fε
([zε]Γε + 1
2U , B
)) ∣∣∣ zετ→
ε→00
}.
Repeating the above process for the subsequence (εk)k , we can prove the existence of somefurther subsequence, of a functional F ∗ and of a rich family R(F ∗) such that F ∗
0 = F s0 = F i
0 on
W1s ,r(Σ;R3) × R(F ∗). We deduce that F ∗
0 = F0 on the family R(F0) ∩ R(F ∗) which is still a richfamily. The countable intersection of rich families is a rich family too, we can thus repeat the abovereasoning for every extracted subsequence and deduce the existence of a rich family R in B(Σ) on
which the above limits coincide. One thus obtains, for every U ∈ W1s ,r(Σ;R3) and every B ∈R

896 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
F0(u, B) = inf
{lim supk→+∞
(Jε(zε) + Fε
([zε]Γε + 1
2U , B
)) ∣∣∣ zετ→
ε→00
}= inf
{lim infk→+∞
(Jε(zε) + Fε
([zε]Γε + 1
2U , B
)) ∣∣∣ zετ→
ε→00
}. (20)
Thanks to the above properties (1), (2), (3) and (4) and to the relation (20), F0 belongs to F.Now according to Theorem 6, there exist a finite measure λ ∈ M0(Σ), a nonnegative Borel
measure ν and a Borel function g : Σ × R3 → [0,+∞] with ζ → g(x, ζ ) convex and lower semi-
continuous on R3, such that
∀U ∈ W1s ,r(Σ;R3), ∀ω ∈ R∩O(Σ): F0(U ,ω) =
∫ω
g(x, U (x)
)dλ + ν(ω).
As F0(0, B) = 0, for every B ∈ B(Σ), and g is nonnegative, we get ν(ω) = 0 for every ω ∈R∩O(Σ), thus ν ≡ 0. Observing that Fε and Jε are r-homogeneous, we can write g(s, ζ )λ =|ζ |r−2ζiζ jμi j , where μi j = aijλ + ∞R3\Λ , (aij)i, j=1,2,3 being a symmetric matrix of Borel functions
from Σ to R with aij(x)ζiζ j � 0, ∀ζ ∈R3 and for q.e. x ∈ Σ . We thus obtain
F0(U ,ω) =∫ω
∣∣U(x′)∣∣r−2Ui(x′)U j(x′)dμi j
(x′),
for every ω ∈R∩O(Σ) and every U ∈ W1s ,r(Σ;R3). This ends the proof. �
Let us come back to the description of the asymptotic behaviour of the solution of (4). The solutionuε of (4) is also the solution of the minimization problem
infv∈Vε(Ω;R3)
(Gε(v) + 2
∫Ωε
(uε · ∇)uε · v dx − 2
∫Ωε
f · v dx
).
From Theorem 13 and the properties of the Γ -convergence, we deduce the following limit prob-lem.
Corollary 14. The sequence (uε, pε)ε , where (uε, pε) is the solution of (4), is such that (uε)ε τ -convergesto u0 , and ∫
Ωαε
∣∣pε∣∣2 dx →
ε→0
∫Ωα
∣∣p0α
∣∣2 dx, α = 1,2,
where
(u0, p0 =
{p0
1 in Ω1
p02 in Ω2
)belongs to V 0(Ω\Σ;R3) × L2(Ω)/R and is the solution of the limit prob-
lem (6).Moreover
limε→0
Gε
(uε,Σ)= G0
(u0)
=∑
α=1,2
να
∫Ωα
∣∣∇u0∣∣2 dx + ν0
∫Σ
∣∣[u0]Σ
∣∣r−2[(u0)
i
]Σ
[(u0)
j
]Σ
dμi j(x′).

A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 897
Proof. We first observe that for every sequence (vε)ε τ -converging to v
limε→0
∫Ωα
ε
f · vε dx =∫
Ωα
f · v dx, α = 1,2,
limε→0
∫Ωα
ε
(uε · ∇)uε · vε dx =
∫Ωα
(u0 · ∇)u0 · v dx, α = 1,2.
Thus u0 ∈ V 0(Ω\Σ;R3) is the solution of the problem
infv∈V 0(Ω\Σ;R3)
(G0(v) + 2
∑α=1,2
∫Ωα
(u0 · ∇)u0 · v dx − 2
∫Ω
f · v dx
). (21)
The variational formulation of (21) can be written as
∀v ∈ V 0(Ω\Σ;R3): ∑
α=1,2
∫Ωα
(−ναu0 + (u0 · ∇)u0 − f) · v dx
+∫Σ
ν1(
∂u0
∂x3
)−· v− dx′ −
∫Σ
ν2(
∂u0
∂x3
)+· v+ dx′
+ ν0∫Σ
∣∣[u0]Σ
∣∣r−2[(u0)
i
]Σ
[v j]Σ dμi j(x′)= 0,
where the superscript + (resp. −) corresponds to the trace on Σ seen from Ω2 (resp. Ω1). Makingexplicit the last term of the above equality and equating to 0 all the remaining terms implies the limitproblem (6). The second assertion is a direct consequence of the properties of the Γ -convergence. �4. Special cases
4.1. Periodic case
We define the unit square Y = (−1/2,1/2)2 of R2 and consider a smooth function h ∈ C2c (Y ;R+).
For every k ∈ Z2, we define Y k
ε = (−ε/2, ε/2)2 + (k1ε,k2ε) and let Iε = {k ∈ Z2 | Y k
ε ⊂ Σ}. We definehε on Σ through
hε
(x′)= {h( x′
ε ) if there exists k ∈ Iε such that x′ ∈ Y kε,
0 otherwise
and Σε through
Σε ={
x ∈ Ω
∣∣∣ x′ = (x1, x2) ∈ Σ, −εh
(x′
ε
)< x3 < εh
(x′
ε
)}.
Since the boundaries Γ 1ε and Γ 2
ε of Σε , defined through the equalities Γ 1ε = {x3 = −εh(x′/ε)}
and Γ 2ε = {x3 = εh(x′/ε)}, have a periodic structure, the measures μi j , i, j = 1,2,3, which appear in
Theorem 13 are invariant under translations on Σ . This implies μi j = Kij dx′ , where Kij , i, j = 1,2,3,are constants in R satisfying Kijζiζ j � 0, ∀ζ ∈ R
3. Our purpose is to identify these constants Kij ,

898 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
i, j = 1,2,3. We observe that we do not have to determine Ki3, i = 1,2,3, because [u3]Σ = 0, forevery u ∈ V 0(Ω\Σ;R3). In order to compute the constants Kαβ , we define Zh = {y | y′ ∈ Y , −h(y′) <
y3 < h(y′)} and consider the Y -periodic solution (wβ,qβ) of the local problems (β = 1,2)
⎧⎪⎨⎪⎩−divy
(∣∣∇wβ∣∣r−2∇wβ
)+ ∇yqβ = eβ in Zh,
divy(
wβ)= 0 in Zh,
wβ = eβ on Γ ±h,
(22)
where Γ ±h = Σ × {y3 = ±h(y′)} and eβ is the β-th vector of the canonical basis of R3. Problem (22)has a unique solution (wβ,qβ) ∈ Vr(Zh;R3) × L2(Zh)/R, with
wβ ∈ Vr(
Zh;R3)= {w ∈ W 1,r(Zh;R3) ∣∣ divy(w) = 0 in Zh, w = eβ on Γ ±h, w Y -periodic},
qβ ∈ L2(Zh)/R, qβ Y -periodic.
We have the following main result of this subsection.
Theorem 15. For every α,β = 1,2, we have Kαβ = cβδαβ , where the constant cβ is defined through
cβ =∫Zh
∣∣∇wβ(y)∣∣r dy, (23)
wβ being the solution of (22).
Proof. We define the functions wβε , qβ
ε through wβε (x) = wβ(x/ε), qβ
ε (x) = qβ(x/ε), in the cell {x | x′ ∈εY , −εh(x′) < x3 < εh(x′)}, then using an ε-periodicity process.
Let u ∈ W1s ,r(Σ;R3) be such that u(x′,0) = 2eβ on Σ . We define the function z0β
ε through
z0βε (x) =
{0 if x ∈ Ω1
ε ∪ Ω2ε ,
wβε (x) if x ∈ Σε.
It is easily checked that (z0βε )ε τ -converges to 0. Moreover
limε→0
Jε(z0βε
)= limε→0
εr−1ν0∫Σε
∣∣∇x wβε
∣∣r dx
= ν0 limε→0
∑ε2
k∈Iε
∫Y
h(y′)∫−h(y′)
∣∣∇y wβ(y)∣∣r dy
= ν0|Σ |cβ .
We thus have
ν0 Kββ |Σ | � lim Jε(z0βε
)= ν0cβ |Σ |. (24)
ε→0
A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 899
Take any sequence (zε)ε , with zε ∈ Vε(Ω;R3), for every ε > 0, such that [zε]Σ = −eβ on Γε , and(zε)ε τ -converges to 0. We write the subdifferential inequality
Jε(zε) � Jε(z0βε
)+ rεr−1ν0∫Σε
∣∣∇z0βε
∣∣r−2∇z0βε · ∇(zε − z0β
ε
)dx. (25)
We observe that curl(∇(zε − z0βε )) = 0. Using the regularity of wβ , we have the convergence
εr−1 div(εr−1∣∣∇z0β
ε
∣∣r−2∇z0βε
)⇀
ε→0χΣ
∫Zh
divy(∣∣∇wβ
∣∣r−2∇wβ)
dy,
in the weak topology of Lr(R3;R3), where χΣ denotes the characteristic function of Σ . Using thecompensated compactness result of [22], we thus prove that
limε→0
rεr−1ν0∫Σε
∣∣∇z0βε
∣∣r−2∇z0βε · ∇(zε − z0β
ε
)dx = 0.
Taking the lim inf in (25), we obtain
lim infε→0
Jε(zε) � lim infε→0
Jε(z0βε
)= ν0cβ |Σ |.
In this last inequality, taking the infimum with respect to all sequences (zε)ε satisfying the im-posed conditions, we obtain Kββ |Σ | � cβ |Σ |. This inequality and (24) imply Kββ = cβ . Considering
now a function U ∈ W1s ,r(Σ;R3) which satisfies U = 2(e1 + e2) on Σ , we obtain
ν0(K11 + 2K12 + K22)|Σ |
= inf
{lim infε→0
Jε(zε)∣∣ [zε]Σ = −(e1 + e2) on Σ ×
{x3 = ±εh
(x′
ε
)}, zε
τ⇀
ε→00
}� lim
ε→0Jε(z01ε + z02
ε
).
We observe that∫
Zh|∇w1|r−2∇w1 · ∇w2 dz = 0, and coupling with the previous computations, we
get limε→0 Jε(z01ε + z02
ε ) = ν0|Σ |(c1 + c2). This implies K12 � 0, through the above expression of Kββ .Using the subdifferential inequality as in (25), we obtain K12 � 0, which implies K12 = 0. �4.2. The case where hε is independent of ε
We here suppose that hε(x′) = h(x′), where h is a C1-function which satisfies 0 < h(x′) � 1,∀x′ ∈ Σ . We have the following result.
Theorem 16. For every α,β = 1,2, we have μαβ = 2δαβ
hr−1 dx′ where δαβ is equal to 1 if α = β and to 0otherwise.
Proof. Thanks to Theorem 13, there exist a rich family R ⊂ B(Ω), a symmetric matrix (μi j)i, j=1,2,3of Borel measures which are absolutely continuous with respect to the capacity Cap and which

900 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
satisfy μi j(B)ζiζ j � 0, ∀ζ ∈ R3, ∀B ∈ B(Ω), such that, for every U ∈ W
1s ,r(Σ;R3) and every ω ∈
R∩O(Ω)
inf
{lim infε→0
Jε(zε)
∣∣∣ [zε]Σ = −1
2U on(Σ × {x3 = ±εh
(x′)})∩ ω, zε
τ⇀
ε→00
}=∫
Σ∩ω
|U |r−2Ui U j dμi j .
Taking U = 2e1 on Σ × {x3 = ±εh(x′)}, we have
2rμ11(ω) = inf
{lim infε→0
Φε(zε)
∣∣∣ [zε]Σ = −e1 on(Σ × {x3 = ±εh
(x′)})∩ ω, zε
τ⇀
ε→00
}.
Choose ω ∈R∩O(Σ), an open subset ωε of R2 such that
ωε \ ω = {x′ ∈ R2∣∣ 0 < d
(x′, ∂ω)< ε}
and ϕε ∈ C1(R2) with 0 � ϕε � 1 such that ϕε = 1 in ω and ϕε = 0 on ∂ωε . We define the functionw1ε in Σε through
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
(w1ε)
1(x) = x3
εh(x′)ϕε(x′),(
w1ε)
2(x) = 0,(w1ε)
3(x) =(
− 1
2ε
(x3
h(x′)
)2
+ ε
2
)(∂h
∂x1
(x′)ϕε(x′)− h
(x′)∂ϕε
∂x1
(x′)).
One has div(w1ε) = 0, in Σε , for every ε > 0, w1ε|{x′∈ω, x3=εh(x′)} = e1 and w1ε|{′∈ω, x3=−εh(x′)} =−e1. We define the function z0,1
ε through
z0,1ε (x) =
{0 if x ∈ Ω1
ε ∪ Ω2ε ,
w1ε(x) if x ∈ Σε.
One immediately verifies that z0,1ε ∈ Vε(Ω;R3), [z0,1
ε ]Σ + 12 U = 0 on Γε , (z0,1
ε )ε τ -converges to 0and
limε→0
Jε(z0,1ε
)= limε→0
εr−1ν0∫
ωε×]−εh(x′),εh(x′)[
∣∣∇w1ε∣∣r dx = 2ν0
∫ω
dx′
hr−1(x′).
We thus obtain
μ11(ω) � 2∫ω
dx′
hr−1(x′).
Furthermore, taking any sequence (zε)ε , such that zε ∈ Vε(Ω;R3), [zε]Σ = −e1 on Γε , for every ε,and (zε)ε τ -converges to 0, and using the subdifferential inequality

A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 901
Jε(zε) � Jε(z0,1ε
)+ rεr−1ν0∫Σε
∣∣∇z0,1ε
∣∣r−2∇z0,1ε · ∇(zε − z0,1
ε
)dx
we prove that 2rμ11(ω) � 2∫ω dx′/hr−1(x′). This implies the equality: μ11(ω) = 1
2r−1
∫ω
dx′hr−1(x′) and,
since this equality is true for every ω ∈R∩O(Σ), we obtain μ11 = dx′/(2h)r−1(x′).We proceed in a similar way, building a function z0,2
ε , in order to prove that μ22 = dx′/(2h)r−1(x′).Finally, taking U = 2(e1 + e2), we consider the function z0
ε = z0,1ε + z0,2
ε . One deduces from theabove computations
limε→0
Jε(z0ε
)= limε→0
Jε(z0,1ε + z0,2
ε
)= 2∫ω
dx′
hr−1(x′)
and, as in the periodic case, μ12 = 0. This gives the result. �4.3. A fractal case
We suppose that {ψ1, . . . ,ψN } is a given set of similitudes: ψi : R2 → R2, i = 1, . . . , N , that is
|ψi(x) − ψi(y)| = |x − y|/ρ , with ρ > 1. The map ψ(A) =⋃Ni=1 ψi(A) is a contraction in the space of
non-empty sets of R2, endowed with the Hausdorff metric. Therefore, there exists a unique compactset Σ in R
2, such that Σ =⋃Ni=1 ψi(Σ). Σ is the invariant set associated to the family {ψi}i=1,...,N .
The real number d > 0, uniquely defined by the relation Nρ−d = 1, is the fractal dimension of Σ .Hutchinson has proved in [17] the existence of a unique Borel regular measure μ with unit mass,
which is invariant for {ψi}i=1,...,N , that is
∫Σ
ϕ dμ =N∑
i=1
ρ−d∫Σ
ϕ ◦ ψi dμ,
for every integrable ϕ : Σ → R, such that μ has its support in Σ .Following [17], we suppose that the family {ψi}i=1,...,N further satisfies the following open set
condition
N⋃i=1
ψi(Σ) ⊂ U , ψi(U ) ∩ ψ j(U ) �= ∅ if i �= j, (26)
where U is a given non-empty bounded open subset of R2 (this condition prevents distinct copies
ψi(Σ) to have overlapping interiors).Under the assumption (26), the fractal dimension is found to be equal to the Hausdorff dimension
of Σ . Moreover 0 <Hd(Σ) < ∞ and μ = Hd
Hd(Σ)|Σ .
Let n be a positive integer. The set Σi1,...,in = ψi1 ◦ · · · ◦ ψin (Σ), with i1, . . . , in ∈ {1, . . . , N}, is acopy of Σ and Σ =⋃N
i1,...,in=1 Σi1,...,in , with
Hd(Σi1,...,in ∩ Σ j1,..., jn ) = 0, if (i1, . . . , in) �= ( j1, . . . , jn),
hence∑N
i1,...,in=1 Hd(Σi1,...,in ) =Hd(Σ) and the number of these copies is Nn = ρdn .
As in the previous subsections, we suppose that Ω1 ⊂ {x3 < 0}, Ω2 ⊂ {x3 > 0}, and set Σ0 =∂Ω ∩ {x3 = 0}. We suppose that the fractal set Σ is contained in Σ0. Let h be a Lipschitz continuous

902 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
function from Σ0 into (0,1], x′0 = ((x0)1, (x0)2) be a fixed point in Σ and set x′
i1,...,in= ψi1 ◦ · · · ◦
ψin (x′0). Then x′
i1,...,in∈ Σi1,...,in . Let εn = √
1/Nn . We define the layer Σεn through
Σεn ={
x ∈ Ω
∣∣∣ x′ ∈ Σ ∩ B(x′
i1,...,in, εn), −εnh
( x′ − x′i1,...,in
εn
)< x3 < εnh
( x′ − x′i1,...,in
εn
),
∀i1, . . . , in ∈ {1, . . . , N}}
and set Zh = {y ∈ R3 | y′ ∈ B(0,1), −h(y′) < y3 < y(x′)}.
We consider the local problems, where β = 1,2,⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩−div(∣∣∇wβ
∣∣r−2∇wβ)+ ∇qβ = eβ in Zh,
div(
wβ)= 0 in Zh,
wβ = eβ on Γ,
wβ = 0 on ∂ Zh\Γ,
(27)
where Γ = Σ × {x3 = ±h(x′)}. Let U ∈ W1s ,r(Σ;R3) be such that U = 2eβ on Σ . We define the
function z0βεn through
z0βεn (x) =
{0 for x ∈ Ω1
εn∪ Ω2
εn,
wβ( xεn
) for x ∈ Σεn ,
where ν is here the outer unit normal on Γε directed from Ω1 to Ω2. It is then easily seen that(z0β
εn )n τ -converges to 0. Moreover, using an ergodic theorem (for example [15]), we have, for everyϕ ∈ C1(Ω)
limn→∞(εn)
r−1∫
Σεn
∣∣∇z0βεn
∣∣rϕ dx = limn→∞
N∑i1,...,in=1
(εn)2ϕ(x′
i1,...,in
) ∫Zh
∣∣∇wβ∣∣r dy
=∫Zh
∣∣∇wβ∣∣r dy lim
n→∞
N∑i1,...,in=1
1
Nnϕ(x′
i1,...,in
)= cβ
Hd(Σ)
∫Σ
ϕ(s)dHd(s),
where
cβ =∫Zh
∣∣∇wβ(y)∣∣r dy. (28)
Using now the same methods as in the previous subsections, we deduce that μββ = cβ
Hd(Σ)dHd|Σ ,
β = 1,2. This can be gathered in the following result.
Theorem 17. For every α,β = 1,2, we have μαβ = cβ
Hd(Σ)dHd|Σδαβ , where the constants cβ are defined
in (28), wβ being now the solution of (27).

A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904 903
Remark 18 (A general contact interface). Let Ω be a bounded open subset of R3 with Lipschitz contin-uous boundary ∂Ω . We suppose that Ω = Ω1 ∪ Σ ∪ Ω2, where Ω1 and Ω2 are two non-empty opensubsets separated by the smooth surface Σ . For ε ∈ (0,1), we denote Σε the thin layer surroundingΣ defined by
Σε = {s + tn(s)∣∣ s ∈ Σ, −εh1
ε(s) < t < εh2ε(s)},
where h1ε and h2
ε are positive and Lipschitz continuous functions satisfying (1), and where n(s) isthe unit normal to Σ on s directed from Σ to Ω2. We suppose that there exists ε0 < 1 such thatfor every ε ∈ ]0, ε0], the mapping (s, t) → s + tn(s) is invertible, that is ∀ε ∈ ]0, ε0], ∀x ∈ Σε thereexist s(x) ∈ Σ and t(x) ∈ ]−εh1
ε(s(x)), εh2ε(s(x))[ such that x = s(x) + t(x)n(s(x)). The above-described
methods lead to the following general contact law on the interface Σ
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
[u0 · n]Σ
= 0 on Σ,
n ⊗ n
(ν2(
∂u0
∂n
)+
|Σ− ν1(
∂u0
∂n
)−
|Σ
)= [p0]
Σon Σ,
ν2(I − n ⊗ n)
(∂u0
∂n
)+
Σ
= ν1(I − n ⊗ n)
(∂u0
∂n
)−
Σ
+ μ•ν0∣∣[u0]
Σ
∣∣r−2[u0]
Σon Σ.
(29)
References
[1] E. Acerbi, G. Buttazzo, Reinforcement problem in the calculus of variations, Ann. Inst. H. Poincaré Anal. Non Linéaire 3(1986) 273–284.
[2] S.N. Antontsev, J.F. Rodrigues, On stationary thermo-rheological viscous flows, Ann. Univ. Ferrara 52 (2006) 19–36.[3] R.B. Bard, R.C. Armstrong, O. Hassager, Dynamics of Polymeric Liquid, vol. 1: Fluid Mechanics, J. Wiley and Sons, Chichester,
1987.[4] G. Assaf, A. Hecht, Sea straits: a dynamical model, Deep-Sea Res. 21 (1974) 947–958.[5] H.L. Bryden, H.M. Stommel, Limiting processes that determine basic features of the circulation in the Mediterranean sea,
Oceanol. Acta 7 (1984) 289–296.[6] G. Buttazzo, G. Dal Maso, U. Mosco, Asymptotic behavior for Dirichlet problems in domains bounded by thin layers, in:
Partial Differential Equations and the Calculus of Variations. Essays in Honor of Ennio De Giorgi, Birkhäuser, Boston, 1989,pp. 193–249.
[7] I.D. Chueshov, G. Raugel, A.M. Rekalo, Interface boundary value problem for the Navier–Stokes equations in thin two-layerdomains, J. Differential Equations 208 (2005) 449–493.
[8] G. Dal Maso, An Introduction to Γ -Convergence, Progr. Nonlinear Differential Equations Appl., vol. 8, Birkhäuser, Basel,1993.
[9] G. Dal Maso, U. Mosco, Wiener criteria and energy decay for relaxed Dirichlet problems, Arch. Ration. Mech. Anal. 95(1986) 345–387.
[10] G. Dal Maso, U. Mosco, Wiener’s criterion and Γ -convergence, Appl. Math. Optim. 15 (1987) 15–63.[11] G. Dal Maso, A. Defranceschi, E. Vitali, Integral representation for a class of C1-convex functionals, J. Math. Pures Appl.
(9) 73 (1) (1994) 1–46.[12] E. De Giorgi, T. Franzoni, Su un tipo di convergenza variationale, Atti Accad. Naz. Lincei Cl. Sci. Fis. Mat. Natur. Rend.
(VIII) 58 (1975) 842–850.[13] M. El Jarroudi, A. Brillard, Boundary asymptotic analysis for an incompressible viscous flow: Navier wall law, Appl. Math.
Optim. 57 (2008) 371–400.[14] M. El Jarroudi, A. Brillard, Asymptotic behaviour of contact problems between two elastic materials through a fractal inter-
face, J. Math. Pures Appl. 89 (2008) 505–521.[15] K. Falconer, Techniques in Fractal Geometry, J. Wiley and Sons, Chichester, 1997.[16] P. Gondret, M. Rabaud, Shear instability of two-fluid parallel flow in a Hele–Shaw cell, Phys. Fluids 9 (11) (1997)
3267–3274.[17] J.E. Hutchinson, Fractals and self-similarity, Indiana Univ. Math. J. 30 (5) (1981) 713–747.[18] E.B. Krauss, J.A. Businger, Atmosphere–Ocean Interaction, 2nd edition, Clarendon Press, Oxford, 1994.[19] L.D. Landau, E.M. Lifschitz, Physique théorique, Tome 6: Mécanique des fluides, 2nd edition, Editions Mir, Moscou, 1989.[20] J.L. Lions, Quelques méthodes de résolution des problèmes aux limites non linéaires, Dunod, Gauthier-Villars, Paris, 1969.[21] J. Málek, J. Necas, K.R. Rajagopal, Global analysis of the flows of fluids with pressure-dependent viscosities, Arch. Ration.
Mech. Anal. 165 (2002) 243–269.

904 A. Brillard, M. El Jarroudi / J. Differential Equations 255 (2013) 881–904
[22] F. Murat, Compacité par compensation, Ann. Sc. Norm. Super. Pisa Cl. Sci. (4) 5 (3) (1978) 489–507.[23] H. Schlichting, Boundary Layer Theory, 7th edition, McGraw–Hill, New York, 1979.[24] R. Temam, Navier–Stokes Equations. Theory and Numerical Analysis, Stud. Math. Appl., vol. 2, North-Holland, Amsterdam,
1984.[25] R. Temam, Some mathematical aspects of the GCMs, in: Progr. Probab., vol. 49, 2001, pp. 117–138.[26] R. Temam, Some mathematical aspects of geophysical fluid dynamic equations, Milan J. Math. 71 (2003) 175–198.