
電気自動車EVのワイヤレス給電...電気自動車EVのワイヤレス給電 本書で取り上げる技術対象 本書では電気自動車EVのワイヤレス給電技術を取り上げます。EVではバ
「電気自動車工学(第 2 版)」
サンプルページ
この本の定価・判型などは,以下の URL からご覧いただけます.
http://www.morikita.co.jp/books/mid/074312
※このサンプルページの内容は,第 2版 1刷発行時のものです.


i
第2版まえがき
初版が発行されたのは電気自動車がエコカーとして日本で発売された直後で,まだその評価が定まらない時期であった.それから数年経過した現在では,世界各国で次々に電気自動車が発売されるようになり,エコカーの本命と考えられるようになってきた.この背景として,•世界的に燃費規制と,排ガスゼロ車両(ZEV: Zero Emission Vehicle)規制が年々強化され,従来のエンジン車では対応が困難または不可能となってきたこと
•燃料電池車では新たな水素インフラを必要とするのに対し,電気自動車は既存の電力インフラに充電スタンドを整備すればよく,投資額も桁違いに小さいこと
•暖機が不要で走りが力強く滑らかであるなど,エンジン車と違う商品性がユーザに評価されたこと
•暗黙知とされるエンジンと異なり,電動モータは形式知で設計可能で,新規参入の障壁が小さく,特に超小型車や高性能車のセグメントが活性化していること
•架線の要らない電車やドローンなど,電気自動車と同様に搭載した電池とモータで動くバッテリ電動移動体(Battery Electric Vehicle)が多数出現していること
•バッテリ,モータおよびコントローラの基本要素に大きな変化はないものの,世界的な研究開発競争によりこれらの高性能化と低コスト化が同時進行していること
などが挙げられる.第 2版では,このような状況の変化に合わせた加筆修正と,説明が不足したところを補足した.具体的には,ZEV規制の動向やバッテリの将来展望,バッテリ電動移動体の全体像,摩擦ブレーキと回生ブレーキの関係,モータ軸受での火花放電によるノイズ発生などを追記した.初版と同様に,諸賢のご叱正やご助言を賜れば幸いである.2017年 4月
編著者 廣田幸嗣,小笠原悟司

ii
まえがき
電気自動車をとりまくグローバルな動き環境エネルギー問題の解決が人類の大きな課題となり,電気自動車が究極のクリー
ンカーとして期待されている.また完全電動化,Power-by-Wireにより,従来の内燃機関を使ったクルマでは実現が不可能であった,まったく新しいコンセプトの自動車も設計できるようになってきた.先進国では顧客の環境エネルギー問題に対する認識が深まり,車に対する価値観が
大きく変化しつつある.新興国では,いままでのエンジン車の常識をもたない新しい顧客層が増えている.いままで自転車やバイクだけ乗っていた人たちから見れば,小型電池と小型モータを樹脂製の車体に取り付けただけの簡易 EVでも,安全で快適で航続距離も満足できる乗り物なのである.電気自動車の本格的な普及を前に,世界の自動車市場の景色が大きく変わろうとし
ている.
電気自動車におけるアーキテクチャ設計自動車の設計では,動力源の配置と駆動輪の選択が,車両の基本構造や運動性能を
大きく左右する.内燃機関の自動車では通常はエンジンを,フロントあるいはリア部,まれにミッドシップにマウントする.内燃機関の出力と駆動輪の間に,変速機とドライブトレインが必要で,レイアウト自由度を損ねている.電気自動車のようにモータを動力源とすると,レイアウト自由度がはるかに高くなる.変速機やドライブトレインは必ずしも必要ではない.いわゆるインホイール方式のように,モータをハブ部に搭載したり,複数のモータを搭載したりすることも可能である.またモータは,ゼロ回転を含めた正および負の全回転領域で,自在にトルク制御が
できる.負のトルク制御によって,車両の運動エネルギーや位置エネルギーを二次電池に回収する回生制動ができる.モータの伝達関数はエンジンよりもはるかに単純である.トルク制御の応答性は内燃機関より 2桁以上もよいので,駆動力と制動力を連続的にきめ細かく制御でき,路面とタイヤの粘着制御や車両の姿勢制御が可能になる.このように電気自動車は,従来の概念を超えた設計が必要となる.そうした車を作
るには,エンジン車と違う技術体系が求められる.従来の自動車の走行性能はメカトロニクス技術によって支えられてきたが,電気自動車では,これにモータを中心にしたパワーエレクトロニクス技術と,電池の基本である電気化学が加わることになる.

まえがき iii
設計におけるシステムインテグレーションの大切さシステムのアーキテクチャ(概念)設計するときに,多くの専門家の総知をインテグレートする必要があるが,お互いの考えをすり合わせるときに,未知の技術や用語に触れて困惑することが多い.たとえば,電気化学で過電圧(over voltage)とは,充放電のとき電解質と電極の界面電位が平衡点からずれる分極による電圧降下のことである.一方,電気化学を知らないメカトロエンジニアが過電圧という言葉を聞くと,電池から過大なサージ電圧が出てくるのかと一瞬当惑するだろう.また電池の起電力も,電磁気学で定義された電界を負極から正極まで積分した電位差ではない.起電力は静電ポテンシャル(真空準位)の差ではなく,電気化学ポテンシャル(フェルミ準位)の差だからである.システムインテグレーションとは,多くの専門家が考え方や用語の違いを乗り越えて,組織的,計画的に共通の目的を達成する集団行動:mass actionである.全員が,電気自動車の主要技術のポイントを正しく把握し,目標の車両イメージを共有しなければ,バランスの取れたよいシステムができない.本書は,電気自動車を支える主要な技術を体系化し,cross-disciplinary engineering
(複合工学)としての電気自動車工学論を展開するものである.
本書の構成第 0章では,電気自動車の歴史や課題などを簡単に述べ,第 1章でアーキテクチャ設計(概念設計)の概要について説明する.第 2章では,電気自動車の構造アーキテクチャについて,第 3章では機能アーキテクチャについて概観する.第 4章以降では,アーキテクチャ設計で不可欠となる主要技術について,個別に解説する.すなわち第 4章では,各種モータの構造と機能を説明する.第 5章では,交流モータの機能を左右する制御技術について解説する.第 6章では,電気自動車に使われる電力変換技術を説明する.第 7章では,蓄電デバイスの構造と機能を述べる.第 8章では,二次電池を長期にわたり安定に機能させるマネジメント技術と,二次電池の寿命予測について解説する.本書が,日本発の新しい電気自動車の創造の一助になることを願うとともに,広い技術分野を一冊にまとめることに編集力の不足を感じたことも事実である.諸賢よりいろいろなご叱正やご助言を賜れば幸いである.最後に本書の執筆にあたりご支援および読者視点からの貴重なアドバイスをいただいた森北出版(株)のみなさまに感謝申し上げます.
2010年 12月編著者 廣田幸嗣,小笠原悟司
iv
目 次
第0 章 電気自動車の歴史と将来展望 1
0.1 電気自動車の歴史 ······································································· 10.2 環境問題とエコカー ···································································· 30.3 電気自動車の特徴と課題 ······························································ 40.4 電気自動車の将来展望 ································································· 6参考文献 ·························································································· 7
第1 章 電気自動車のアーキテクチャ設計 8
1.1 製品開発の流れとアーキテクチャ設計 ············································ 81.2 電気自動車の開発の特徴 ······························································ 91.3 電気自動車の開発プロセス ························································· 111.4 CAD-embedded CAE ······························································· 161.5 信頼性・安全性のアーキテクチャ設計 ·········································· 18
1.5.1 電子制御システムの信頼性設計 181.5.2 電子部品の調和的共存性 191.5.3 衝突安全設計 22
参考文献 ························································································· 22
第2 章 電気自動車の構造 24
2.1 電気自動車の基本構造 ······························································· 242.1.1 電気自動車の基本レイアウト 242.1.2 電源系のシステム構成 262.1.3 駆動系の基本構造 282.1.4 制動系のシステム構成 302.1.5 冷暖房系のシステム構成 312.1.6 電装系のシステム構成 32
2.2 電源系のシステム構成 ······························································· 33
目 次 v
2.2.1 電源系の基本構成 332.2.2 電池と充電システム 372.2.3 パワーコントロールモジュール 42
2.3 ハイブリッド車のシステム構成 ··················································· 432.3.1 ハイブリッド車の基本構成 432.3.2 ハイブリッド車の原理 452.3.3 プラグインハイブリッド車の構成 462.3.4 燃料電池ハイブリッド車の構成 47
参考文献 ························································································· 47
第3 章 電気自動車の機能 48
3.1 電気自動車の基本諸元 ······························································· 483.1.1 自動車の走行抵抗 483.1.2 駆動系の設計 533.1.3 回生ブレーキと協調制御 573.1.4 バッテリ容量の決めかた 573.1.5 電気自動車の諸元(まとめ) 59
3.2 電気自動車の運動制御 ······························································· 603.2.1 モータの長所 603.2.2 制駆動力制御 603.2.3 4輪独立モータ走行システム 623.2.4 モデルベース制御 64
3.3 ハイブリッド車の走行制御 ························································· 673.3.1 ハイブリッド車に特徴的な動作モード 683.3.2 パワーマネジメント 693.3.3 エネルギーマネジメント 703.3.4 走行制御システムの機能分担と協調 713.3.5 プラグインハイブリッド車の動作モード 723.3.6 燃料電池ハイブリッド車の動作モード 74
参考文献 ························································································· 74

vi 目 次
第4 章 駆動モータ 75
4.1 電気自動車の駆動システム ························································· 754.2 モータの基本原理 ····································································· 77
4.2.1 トルク発生原理 774.2.2 交流モータ駆動システムの構成と基本特性 79
4.3 各種モータ ·············································································· 844.3.1 モータの種類と特徴 844.3.2 モータの開発動向 87
4.4 誘導モータ ·············································································· 884.4.1 誘導モータの動作原理 894.4.2 誘導モータの等価回路 904.4.3 誘導モータの数学モデル 91
4.5 同期モータのマグネットトルクとリラクタンストルク ····················· 944.5.1 マグネットトルク 944.5.2 リラクタンストルク 95
4.6 表面永久磁石同期モータ ···························································· 964.7 内部永久磁石同期モータ ···························································· 974.8 スイッチトリラクタンスモータ ··················································· 994.9 インホイールモータ ································································· 102参考文献 ······················································································· 104
第5 章 モータコントロール 105
5.1 電気自動車のモータ制御 ··························································· 1055.2 可変速制御の基礎 ···································································· 1075.3 スカラー制御 ·········································································· 1095.4 ベクトル制御 ·········································································· 111
5.4.1 誘導モータのベクトル制御 1125.4.2 表面永久磁石同期モータのベクトル制御 1185.4.3 内部永久磁石同期モータのベクトル制御 119
参考文献 ······················································································· 124

目 次 vii
第6 章 電力変換 125
6.1 電気自動車の電力変換 ······························································ 1256.2 電力変換の基礎 ······································································· 127
6.2.1 スイッチングによる電力の変換 1276.2.2 スイッチングデバイス 1306.2.3 スイッチにおける損失 1316.2.4 スイッチング時におけるサージ 136
6.3 チョッパ回路 ·········································································· 1406.3.1 インダクタンスとキャパシタンスのはたらき 1406.3.2 実用的な LC回路付き降圧チョッパ 1426.3.3 昇圧チョッパ 1456.3.4 双方向チョッパ 147
6.4 インバータ ············································································· 1486.4.1 インバータの基礎 1496.4.2 フルブリッジ・インバータ 1526.4.3 三相インバータ 1546.4.4 インバータ実装上の注意点 155
6.5 三相インバータの PWM制御 ··················································· 1596.5.1 三相インバータの PWM制御の特徴 1606.5.2 中性点電圧注入 1616.5.3 空間ベクトル制御 163
6.6 パワーエレクトロニクスの EMC ··············································· 1666.6.1 スイッチによるノイズ発生の原理 1666.6.2 ノイズ抑制法 1686.6.3 モータのベアリング電食 169
参考文献 ······················································································· 170
第7 章 蓄電デバイス 172
7.1 電気自動車用蓄電デバイス ························································ 1727.1.1 蓄電デバイスとその原理 1727.1.2 蓄電デバイスの出力特性 175
7.2 二次電池の基本 ······································································· 176

viii 目 次
7.2.1 化学電池 1767.2.2 二次電池と EV 177
7.3 リチウムイオン二次電池 ··························································· 1797.3.1 リチウムイオンのロッキングチェア機構 1797.3.2 電池の基本構造と安全動作領域 1817.3.3 製造工程 183
7.4 水素酸素燃料電池 ···································································· 1857.4.1 固体高分子型燃料電池 185
7.5 金属空気電池 ·········································································· 1867.5.1 金属電極 1877.5.2 空気電極 1877.5.3 亜鉛空気電池 1877.5.4 リチウム空気電池 188
7.6 電気二重層キャパシタ ······························································ 1897.7 蓄電デバイスの発熱と放熱 ························································ 190
7.7.1 セルの発熱 1907.7.2 セル内部温度の計算 191
参考文献 ······················································································· 193
第8 章 バッテリマネジメントと電池の寿命 195
8.1 二次電池の長寿命化 ································································· 1958.1.1 二次電池の寿命 1958.1.2 バッテリの管理 196
8.2 二次電池の状態を表すパラメータ ·············································· 1978.2.1 二次電池のモデル 1978.2.2 バッテリの容量 1988.2.3 燃料タンクモデル 2018.2.4 等価回路モデル 204
8.3 バッテリマネジメントシステム ················································· 2068.3.1 バッテリマネジメントシステムの基本機能 2068.3.2 バッテリマネジメントシステムの基本構成 207
8.4 二次電池の状態推定 ································································· 2088.4.1 セルとバッテリの状態推定 208

目 次 ix
8.4.2 充放電試験による SOC や SOH の計測 2088.4.3 bookkeeping法による SOC,SOH の推定 2098.4.4 直接計測法 2108.4.5 状態推定器を使った SOC,SOH の推定 2128.4.6 組み合わせ法(センサフュージョン) 214
8.5 充放電制御 ············································································· 2148.5.1 急速充電とプラグイン充電 2148.5.2 走行中の充放電制御 2158.5.3 セルバランス制御 216
8.6 二次電池の寿命予測 ································································· 2178.6.1 二次電池の劣化モード 2178.6.2 カレンダー寿命 2188.6.3 サイクル寿命 2218.6.4 実寿命の予測と評価 224
参考文献 ······················································································· 226
索 引 ······························································································· 227

x
記号表記号 意味 SI 単位または(慣用単位)
B 磁束密度 Wb/m2
C キャパシタンス F
Cd 空気抵抗係数 —
d デューティ比 —
D ダイオード —
DOD 放電深度 —
E 電源電圧 V
e 電磁誘導の起電力 V
Ea 活性化エネルギー J
Eemf 電気化学の起電力 V
F ファラデー定数 96 485C/mol
F CC 満充電容量 C または Ah(慣用単位)
fs スイッチング周波数 Hz
g 重力加速度 9.80665 m/s2
G ギブスエネルギー J
H エンタルピー J
h 熱伝達係数 W/(m2K)
L インダクタンス H
M 車両重量 kg
M 変調率 —
N サイクル数 —
Nt タイヤ回転速度 /s
OCV 開放電圧 V
P 機械出力 W
P 放電パワー W
Q IGBT —
Q 電荷 C
Q 熱エネルギー J
Q̇ 熱流量 W

記号表 xi
Q̇ 発熱密度 W/m3
R 気体定数 8.31447 m2kg/(s2K mol)
s ラプラス演算子 —
s すべり —
S エントロピー J/K
SOC 充電率 —
SOH 健全度 —
S スイッチ —
T 絶対温度 K
T スイッチング周期 s
Tdis 放電時間 s または hr(慣用単位)
Toff スイッチオフ時間 s
Ton スイッチオン時間 s
u, v, w 三相の各相 —
W 仕事 J
Wdis 放電エネルギー J またはWhr(慣用単位)
Wst 蓄電エネルギー J またはWhr(慣用単位)
α 加速度 m/s2
θ 回転子位相角 rad
θ 坂路勾配 rad
λ 熱伝導率 W/(mK)
τ トルク Nm
τm モータ最大トルク Nm
φ 磁束 Wb
ψ 電流位相角 rad
ω 回転角速度 rad/s
ω 交流の角周波数 rad/s

1
電気自動車の歴史と将来展望第0章
0.1 電気自動車の歴史
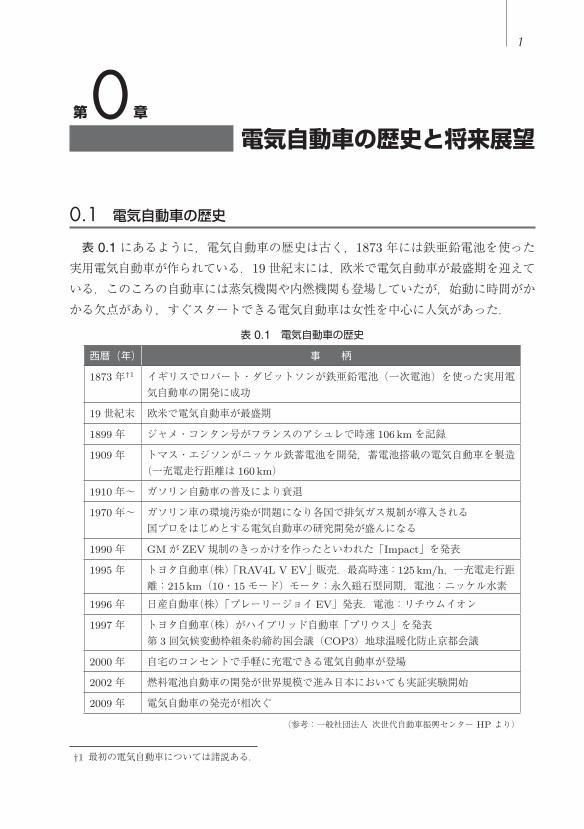
表 0.1にあるように,電気自動車の歴史は古く,1873年には鉄亜鉛電池を使った実用電気自動車が作られている.19世紀末には,欧米で電気自動車が最盛期を迎えている.このころの自動車には蒸気機関や内燃機関も登場していたが,始動に時間がかかる欠点があり,すぐスタートできる電気自動車は女性を中心に人気があった.
表 0.1 電気自動車の歴史
西暦(年) 事 柄
1873年†1 イギリスでロバート・ダビットソンが鉄亜鉛電池(一次電池)を使った実用電気自動車の開発に成功
19世紀末 欧米で電気自動車が最盛期
1899年 ジャメ・コンタン号がフランスのアシュレで時速 106 kmを記録
1909年 トマス・エジソンがニッケル鉄蓄電池を開発,蓄電池搭載の電気自動車を製造(一充電走行距離は 160 km)
1910年~ ガソリン自動車の普及により衰退
1970年~ ガソリン車の環境汚染が問題になり各国で排気ガス規制が導入される国プロをはじめとする電気自動車の研究開発が盛んになる
1990年 GMが ZEV規制のきっかけを作ったといわれた「Impact」を発表
1995年 トヨタ自動車(株)「RAV4L V EV」販売.最高時速:125 km/h,一充電走行距離:215 km(10・15モード)モータ:永久磁石型同期,電池:ニッケル水素
1996年 日産自動車(株)「プレーリージョイ EV」発表.電池:リチウムイオン
1997年 トヨタ自動車(株)がハイブリッド自動車「プリウス」を発表第 3回気候変動枠組条約締約国会議(COP3)地球温暖化防止京都会議
2000年 自宅のコンセントで手軽に充電できる電気自動車が登場
2002年 燃料電池自動車の開発が世界規模で進み日本においても実証実験開始
2009年 電気自動車の発売が相次ぐ
(参考:一般社団法人 次世代自動車振興センター HP より)
†1 最初の電気自動車については諸説ある.

2 第 0 章 電気自動車の歴史と将来展望
1899年には,フランスでジャメ・コンタン(Jamais Contant)号が時速 106 kmというスピードの記録を出している.ちなみに同じ年にアメリカで販売された車は,電気自動車が 1575台,蒸気自動車が 1681台,ガソリン車が 936台であった.
1909年には,ニッケル鉄蓄電池を使って 1回の充電で 160 km走行できる電気自動車が,トマス・エジソンにより製造されている.とはいえ当時は電池の性能が低かったため,車体の重量のほとんどをバッテリが占めていた.また,バッテリの交換や充電のインフラも整っていなかった.図 0.1にこれら初期の電気自動車の例を示す.
図 0.1 初期の電気自動車(一般社団法人 次世代自動車振興センター 提供)
20世紀に入ると,1908年にヘンリー・フォードがベルトコンベアによる大量生産方式を開発して,安価なガソリン自動車(T型フォード)が広く普及し,電気自動車は急速に衰退していった.電気自動車が再び注目を集めるようになるのは,1970年以降になってからである.
それまでのガソリン車の急速な普及にともない,都市部を中心に排気ガスによる環境汚染が問題になり,各国で排気ガス規制が導入されるようになった.そのため,排気ガスをまったく出さない電気自動車が環境汚染の解決策の一つとして着目され,電気自動車の開発が盛んになった.その後,電池やモータ,パワーエレクトロニクス技術の発展とともに電気自動車の技術も年々進歩していった.
20世紀後半になると,CO2 をはじめとする人為的な温室効果ガスによる地球温暖化が顕在化し,人類共通の大きな課題となった.自動車でも CO2 削減のための取り組みが最大の課題になり,駆動モータを使ったハイブリッド車や燃料電池自動車,電気自動車(図 0.2)が相次いで発売され注目を集めた.

0.2 環境問題とエコカー 3
図 0.2 普及を目指した電気自動車
0.2 環境問題とエコカー
IPCC†2 第 5 次報告書(2013~2014 年)によると,地球の年間平均気温は産業革命以降ずっと上昇を続けている.特にこの 100年間で約 0.74 ℃も上昇し,世界各地で気候異常や生態系への影響が顕在化している.膨大な観測データと気象シミュレーションの結果から,化石燃料消費にともなう人為的な温室効果ガス(CO2 など)の大気圏蓄積が温暖化の原因であるという説が有力視されている.地球温暖化がこのまま進めば,海面水位の上昇による国土の消失や農地や森林の砂漠化,生態系の破壊が進み,やがては人類の生存が危ぶまれる事態になると警鐘が鳴らされている.同報告書によれば,地球環境の保全と経済発展を地球規模で両立するためには,平均気温の上昇を産業革命以降で 2 ℃以内に抑える必要があるといわれている.運輸部門から排出される CO2 の割合は,全産業のおよそ 25% と大きく,なかでも自動車は主要排出源の一つである.このため日米欧などの先進国を中心に,化石燃料(ガソリンや軽油など)の消費量の少ない,または化石燃料を使わないエコカー(表 0.2)への切り替えが進みつつある.電気自動車は環境問題の切り札の一つとして,おおいに期待されている.米国では,カリフォルニア州の大気資源局(CARB:California Air Resources
Board)が排ガスゼロに向けて ZEV(Zero Emission Vehicle)構想を段階的に推進している.1990年には,同州法により低公害車導入プログラム(Low Emission Vehicle
†2 Intergovernmental Panel on Climate Change:気候変動に関する政府間パネル.地球温暖化防止のための国連の下部組織.

4 第 0 章 電気自動車の歴史と将来展望
表 0.2 エコカーの種類
名 称 動力源 エネルギー源
ハイブリッドカー エンジンと駆動モータ ガソリン,軽油
燃料電池自動車 燃料電池と駆動モータ 水素,メタノールなど
電気自動車 バッテリと駆動モータ 電気
バイオ燃料自動車 エンジン バイオ燃料
次世代ディーゼル車 エンジン 軽油
Regulations)により低公害車の販売を義務づけた.2012年の ZEV規制では,同州内で年 6 万台以上を販売する自動車メーカーが規制対象となり,その販売台数の一定比率を ZEVとする義務を課している.プラグインハイブリッドカー,ハイブリッドカー,天然ガス車など,排ガスが極めてクリーンな車両が ZEVとして認められている.2018 年には ZEV 規制が強化される計画であり,販売台数が中規模の自動車メーカーにも ZEV規制が拡大適用されるだけでなく,車両もプラグインハイブリッドカー,燃料電池自動車,電気自動車に限定されていく.カリフォルニア州の ZEV規制は,同州に限らず米国内他州(ニューヨーク州,マサチューセッツ州など)でも適用されている.欧州でも,CAFE(Corporate Average Fuel Economy)規制とよばれる乗用車の
CO2 排出規制を導入している.EU域内にて一定以上の販売を行った自動車メーカーは,その年に販売したすべての車両の CO2 排出量を加重平均した値が,規制値を下回らなければならないという規制である.EU では,2014 年の全メーカーの乗用車の平均排出量が 127 g/km であったが,2020年までに新車からの CO2 排出量を 95 g/kmまでに削減することが決定されている.こうした欧米の規制に同期して,電気自動車は増加してゆくであろう.
0.3 電気自動車の特徴と課題
電気自動車の長所と短所を表 0.3に示す.電気自動車の長所は静かで排出ガスを一切出さないことはもちろんであるが,そのほかにも電気代が安いのでランニングコストがあまりかからない,保守コストもガソリン車に比べ安いなどの特徴がある.短所としては航続距離が短く充電時間が長い,車両価格がまだ高いことである.電気自動車の主な課題を表 0.4に示す.これらの課題の多くは,航続距離とコスト
の問題に関係しているものといってよい.ガソリン車のように長距離を走ることができるようにするには,電池の性能を改善して 1回の充電で走れる距離を伸ばすことと

0.3 電気自動車の特徴と課題 5
表 0.3 電気自動車の長所と短所
長 所
•走行中に排出ガスを出さない(CO2 は発電所から排出)•発進がスムーズで静か(アイドリング運転がない)•ランニングコストが数分の 1(高効率で低消費電力)•保守コストが安い(点検交換する部品が少ない)
短 所
•航続距離が短い(バッテリのエネルギー容量が小さい)•充電に時間がかかる(バッテリの急速充電能力が低い)•車両価格がまだ高い(バッテリのコストが車体より高い)•充電インフラが未整備(卵と鶏の関係を破る政策が必要)
表 0.4 電気自動車の課題
電池の性能改善
2次電池 電極材料,構造の改良
1次電池 電極材料,構造の改良,資源リサイクル
燃料電池 電極材料,構造の改良,水素貯蔵,バイオ燃料改質
インフラ整備
電力 電力網(グリッド),充電ステーション,バッテリ交換
水素 FCV,安価な水素製造方法,供給ステーション
車両
安全設計,航続距離,コスト低減
規格の統一
車両設計,部品,インフラなど
合わせて,ガソリンスタンド網に替わる充電スタンド網の整備が不可欠である.車両では高電圧システムの安全設計とコスト低減,さらに航続距離を伸ばすための車両の軽量化や省電力制御なども課題である.電気自動車は,新しい産業としてこれから立ち上がっていく段階にあるので,車両設計,部品,インフラのそれぞれで標準化や規格が未整備であるが,電気自動車を各社各様の特殊な車にしたのでは,コストばかりがかかって普及の障害になる.共通事項については世界規模で規格の統一を進め,量産効果を発揮しやすい環境を作ってゆくことが重要である.

24
電気自動車の構造第2章
電気自動車はエンジン車に比べて構造と機能の設計自由度が高い.たとえば,超小型で居住性に優れ高速走行も安定した車や,車輪が横向きに旋回して狭いスペースに楽々と駐車できる車などが設計できる.本章では,このような電気自動車の基本構造を解説する.はじめに全体構造と各部の構造,および電気自動車固有のポイントについて述べる.つぎに,中核である電源系について述べ,最後に,ハイブリッド車の構造について解説する.
2.1 電気自動車の基本構造
2.1.1 電気自動車の基本レイアウト・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
電気自動車とハイブリッド車,燃料電池車の基本レイアウトを,図 2.1~2.3にそれぞれ示す.電気自動車にあってハイブリッド車にないのは車載充電装置であり,反対に電気自動車にはエンジンと発電機がない.プラグインハイブリッド車は両者の基本コンポーネントをすべて含む複雑な構造となる.燃料電池車は,燃料電池と二次電池を組み合わせたハイブリッド車とするのが通例である.電気自動車では,主要コンポーネントのうち形状が大きく重量の重いバッテリと,
それに連なる電源系統の構成,および駆動モータの数量とレイアウトが概念設計の段
図 2.1 電気自動車の基本レイアウト電気自動車の基本コンポーネントはバッテリと車載充電装置,駆動モータおよびモータコントローラである.

2.1 電気自動車の基本構造 25
図 2.2 ハイブリッド車の基本レイアウトハイブリッド車の基本コンポーネントは,エンジンと発電機,駆動モータおよびモータコントローラ,バッテリである.
図 2.3 燃料電池車の基本レイアウト燃料電池車の基本コンポーネントは,高圧水素タンク,燃料電池スタック,電動モータおよびモータコントローラである.瞬時パワーとエネルギー効率を高めるため,通常はバッテリを組み込んだハイブリッド車とする.
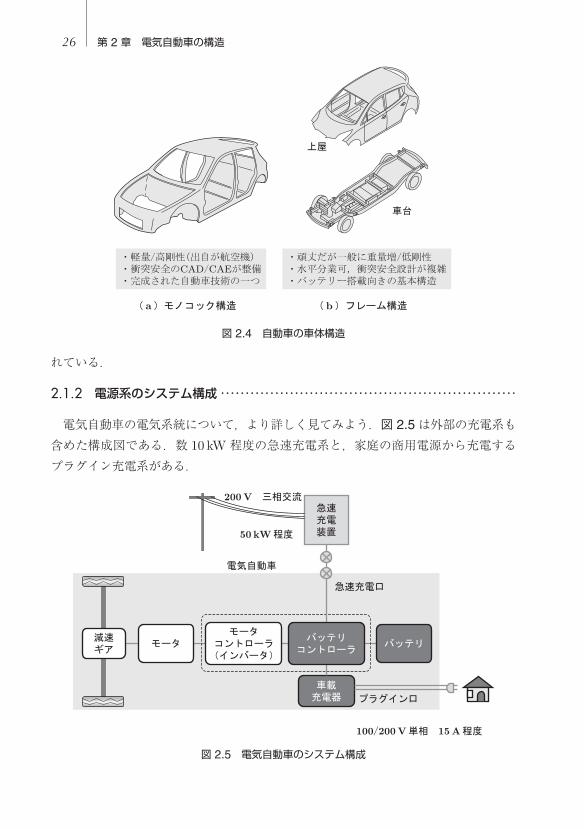
階で重要なテーマであり,完成度の高い車を目指すには広い分野の専門家の工学知識を上手に結集する必要がある.いまの乗用車は,一部の本格的な SUV(スポーツユーティリティビークル)を除くと,いわゆるモノコック(monocoque)構造(図 2.4(a))が主流である.モノコック構造は,ボディパネル全体で強度を確保する設計思想で,CAD/CAEの普及で 1960年代から自動車産業に導入されたものである.もともとは航空機で使われてきた基本構造で,軽量で車両剛性も高いため,乗り心地や操縦安定性を重視する乗用車に普及した.また,衝突時に適切にボディを変形して衝撃を吸収することができ,安全を確保しやすいのも長所である.トラックなどに使われるフレーム構造(図 2.4(b))は,頑丈なこと,上屋と車台が分離でき派生車を作りやすいことなどが長所である.フレーム部に重い電池を搭載できることや,水平分業が可能になることから,電気自動車の基本構造としても注目さ
26 第 2 章 電気自動車の構造
図 2.4 自動車の車体構造
れている.
2.1.2 電源系のシステム構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
電気自動車の電気系統について,より詳しく見てみよう.図 2.5は外部の充電系も含めた構成図である.数 10 kW程度の急速充電系と,家庭の商用電源から充電するプラグイン充電系がある.
図 2.5 電気自動車のシステム構成
2.1 電気自動車の基本構造 27
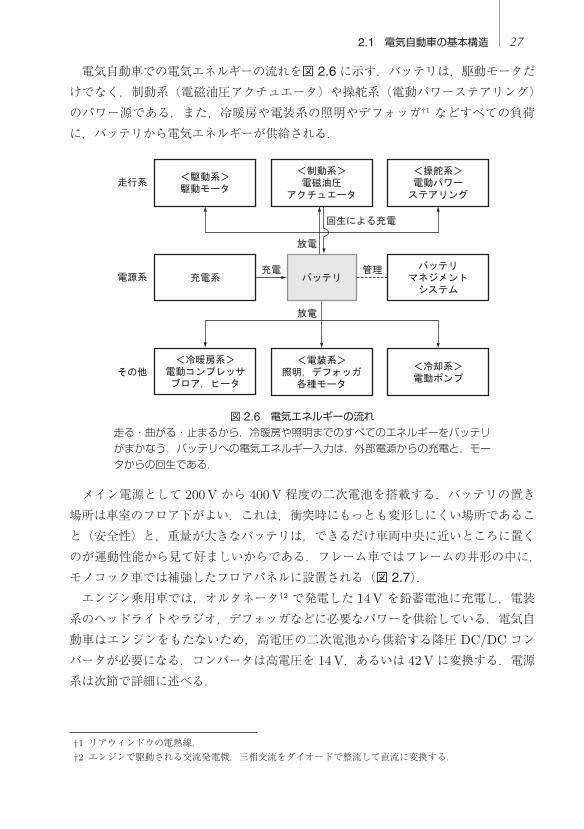
電気自動車での電気エネルギーの流れを図 2.6に示す.バッテリは,駆動モータだけでなく,制動系(電磁油圧アクチュエータ)や操舵系(電動パワーステアリング)のパワー源である.また,冷暖房や電装系の照明やデフォッガ†1 などすべての負荷に,バッテリから電気エネルギーが供給される.
図 2.6 電気エネルギーの流れ走る・曲がる・止まるから,冷暖房や照明までのすべてのエネルギーをバッテリがまかなう.バッテリへの電気エネルギー入力は,外部電源からの充電と,モータからの回生である.
メイン電源として 200 V から 400 V 程度の二次電池を搭載する.バッテリの置き場所は車室のフロア下がよい.これは,衝突時にもっとも変形しにくい場所であること(安全性)と,重量が大きなバッテリは,できるだけ車両中央に近いところに置くのが運動性能から見て好ましいからである.フレーム車ではフレームの井形の中に,モノコック車では補強したフロアパネルに設置される(図 2.7).エンジン乗用車では,オルタネータ†2 で発電した 14 V を鉛蓄電池に充電し,電装系のヘッドライトやラジオ,デフォッガなどに必要なパワーを供給している.電気自動車はエンジンをもたないため,高電圧の二次電池から供給する降圧 DC/DC コンバータが必要になる.コンバータは高電圧を 14 V,あるいは 42 Vに変換する.電源系は次節で詳細に述べる.
†1 リアウィンドウの電熱線.†2 エンジンで駆動される交流発電機.三相交流をダイオードで整流して直流に変換する.

28 第 2 章 電気自動車の構造
図 2.7 電池のレイアウト
2.1.3 駆動系の基本構造・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
限られた電気エネルギーを使って自在に移動する電気自動車用のモータは,小型軽量かつ高効率で高速応答であることが要求される.低速走行が多い都市交通を考えると,低回転時の効率が高いことも重要で,界磁電流が不要の永久磁石を使ったモータが有利である.寿命の点でブラシのない交流モータが望ましい.このため,希土類磁石を用いた永久磁石式同期モータ(permanent magnet synchronous motor)を採用し,ベクトル制御で高速の応答を実現させた設計例が多い.乗用車用モータの出力は,ハイブリッド車向けも含めると 10 kW から 150 kWを
超えるものまで商品化されている.エンジン乗用車では,一つの駆動源であるエンジンの機械出力を,ギヤなどを介し
て前輪や後輪,あるいは前後輪に供給していて,各輪の駆動力を自由に高速で配分できない.これに対して,電気自動車では,モータの個数や搭載位置には非常に多くの選択肢
がある(図 2.8).エンジン車と同様に,一つのモータをドライブシャフトを介して左右輪につなぐ構成と,インホイールモータを左右輪それぞれに配置する構成があり,これらに前輪駆動,後輪駆動,さらに全輪駆動を組み合わせることができる.インホイールに使われるモータは小型である必要がある.減速ギヤを内蔵するもの
と,直結モータのタイプがあるが,後者では低速トルクが大きいモータを必要とする.そこで,アウターロータ型モータやパンケーキ型モータが使われる(図 2.9).インホイールモータの構造を図 2.10に示す.インホイールモータの長所は,車体からモータの置き場が消えることで広い車室空

105
モータコントロール第5章
マイクロプロセッサや DSP などの性能の向上や低価格化により,複雑な制御が容易に実現できるようになり,かご形誘導モータや永久磁石同期モータをベクトル制御する方式が,電気自動車の主役として広く普及しつつある.本章では,永久磁石同期モータとかご形誘導モータの可変速制御について説明する.
5.1 電気自動車のモータ制御
電気自動車の駆動源に要求される項目については,4.1節(p.75)で述べた.モータと組み合わされるモータ制御の基本要件は四象限運転であり,これに①トルク制御可能なこと,低回転で定トルク特性,高回転で定出力特性であること,②ゼロ回転からのトルク発生ができること,③減速時の負トルク発生とエネルギー回生,などが加わることになる(図 5.1).モータ制御の上位に,ドライバーとのインターフェイスをつかさどる制駆動制御がある.従来のエンジン車に慣れているドライバーとのインターフェイスを考えると,前進方向と後退方向への制御を別個に分ける必要があること,またアクセルペダル操作に対して自然な制御特性をもたせなければならないことがわかる.つまり,
図 5.1 トルクデマンドと速度トルク特性

106 第 5 章 モータコントロール
①アクセル操作に対する適正な負のトルク制御特性②エンジンブレーキに似た違和感のないフィーリングをもつ回生制動特性③適切なクリープトルク発生の実現
などが必要である.直流モータの基本特性は,図 5.2に示すように電流とトルクの関係が単純である†1.
簡単なコントローラにより,駆動から制動までの広い範囲でトルクを自在に制御でき,上記の要求の多くを容易に満たすことができるので,電気自動車でよく使われてきた.バッテリフォークリフトのような簡易 EVではいまでも広く使われている.しかし,直流モータには,ブラシと整流子の摩耗にともなう保守点検が必要であること,整流に起因する出力容量の限界があることなどの問題点がある.
図 5.2 直流モータの基本特性直流モータは制御則が単純で,電流制御によりトルクを自在に制御できる長所がある.
本章で解説するベクトル制御でコントロールされた交流モータを外部から見ると,あたかも直流モータと同じような速度トルク特性にすることができる.交流モータ,特に完全ブラシレス構造でメンテナンスフリーのかご形誘導モータや永久磁石同期モータが広く使われるようになっている.
†1 図 5.2は基本特性の図でありコントローラの図面ではない.

5.2 可変速制御の基礎 107
5.2 可変速制御の基礎
交流モータの回転速度は同期速度,すなわち,三相モータ巻線に三相交流電流を流した際にモータ内部に発生する回転磁界の回転角速度により決定される.同期モータの場合には回転速度は同期速度と等しく,誘導モータの場合にはすべり周波数だけわずかに遅れて回転する.このため,商用電源のような定周波数電源を用いて交流モータを駆動した場合には,モータ回転数はほとんど一定で速度を変化させることは難しかった.電圧形 PWMインバータの普及により,交流モータの可変速駆動が一般的に行われるようになった.電圧形 PWMインバータは,電圧の振幅ならびに周波数を自由に変えられる可変電圧可変周波数(VVVF)の特性をもつ交流電源と考えることができる.このため,交流モータの回転数を自在に変化させることができるからである.図4.6の交流モータ駆動システムの基本特性(p.81)で示したように,モータ内部の磁束を調整して駆動可能な回転領域を拡大する界磁弱め制御も,この電圧形 PWMインバータを用いて実現することが可能である.以下では,直流モータとの対比から,交流モータの可変速制御の基礎について述べる.直流モータの原理図を図 5.3に示す.固定子に巻かれた界磁巻線には直流の界磁電流 if が,回転子の電機子巻線にはブラシと整流子を介して電機子電流 ia がそれぞれ供給されている.個々の電機子巻線には回転数で決まる周波数の交流電流が流れているが,ブラシと整流子の整流作用により電機子巻線全体で作られる起磁力は界磁磁束に対して,つねに一定方向に向いている.ブラシと整流子は,機械的な回転座標変換器と考えることもできる.このため,界磁電流の作る磁束 φf と電機子電流の角度とは,整流作用により 90◦ に固定されて,直流モータの発生する瞬時トルクは,次式で
図 5.3 直流モータの原理
108 第 5 章 モータコントロール
示される.
τ = pMif · ia (5.1)
ここで,p は極対数,M は構造により定まる定数である.トルクの方向はフレミングの左手の法則から反時計方向になる.式 (5.1)より,界磁電流を一定に保ち,電機子電流の瞬時値を制御することで,瞬時トルクを時間遅れなく制御できる.これが直流モータの制御性のよい理由である.直流モータにおいては,界磁電流 if により電機子に鎖交する磁束 φf を制御する
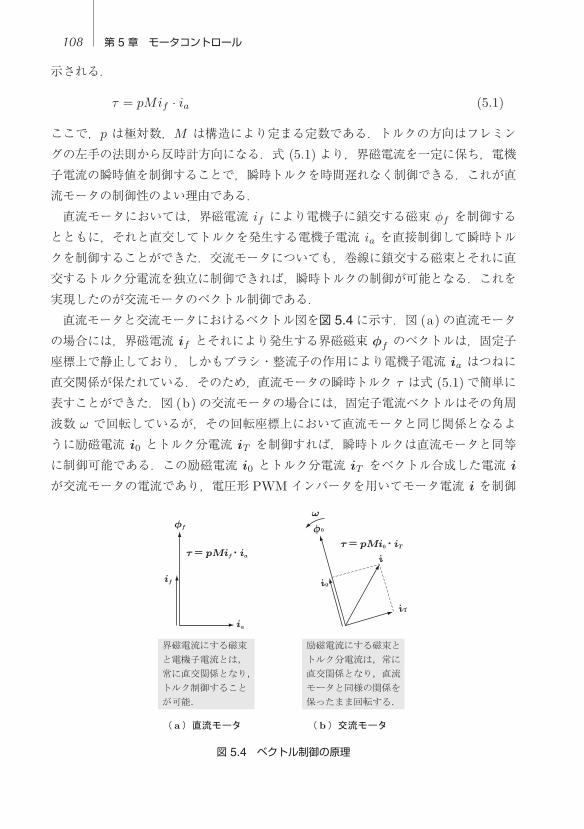
とともに,それと直交してトルクを発生する電機子電流 ia を直接制御して瞬時トルクを制御することができた.交流モータについても,巻線に鎖交する磁束とそれに直交するトルク分電流を独立に制御できれば,瞬時トルクの制御が可能となる.これを実現したのが交流モータのベクトル制御である.直流モータと交流モータにおけるベクトル図を図 5.4に示す.図 (a)の直流モータ
の場合には,界磁電流 if とそれにより発生する界磁磁束 φf のベクトルは,固定子座標上で静止しており,しかもブラシ・整流子の作用により電機子電流 ia はつねに直交関係が保たれている.そのため,直流モータの瞬時トルク τ は式 (5.1)で簡単に表すことができた.図 (b)の交流モータの場合には,固定子電流ベクトルはその角周波数 ω で回転しているが,その回転座標上において直流モータと同じ関係となるように励磁電流 i0 とトルク分電流 iT を制御すれば,瞬時トルクは直流モータと同等に制御可能である.この励磁電流 i0 とトルク分電流 iT をベクトル合成した電流 i
が交流モータの電流であり,電圧形 PWMインバータを用いてモータ電流 i を制御
図 5.4 ベクトル制御の原理

5.3 スカラー制御 109
して瞬時トルクを制御する.かご形誘導モータの場合には永久磁石がないので,励磁電流を流して磁束を発生する必要がある.永久磁石同期モータの場合には,永久磁石による磁束があるので,励磁電流を流さなくても瞬時トルクが制御可能であり,このため一般には誘導モータよりも効率が高い.しかし,誘導モータでは励磁電流の大きさを調整することにより磁束 φ0 の大きさを自由に調整して界磁弱め制御を実現することができる.永久磁石同期モータでは,電機子巻線から電機子反作用を利用して永久磁石を弱める方向に電流を流し,同様な効果を得る磁束弱め制御が行われている.ベクトル制御された交流モータを図 5.5に示す.ベクトル制御回路では,与えられたトルク指令 τ∗ に応じた瞬時トルクを出力できるように,PWMインバータの電圧指令 v∗ を操作してモータの鎖交磁束とトルク分電流を制御する.したがって,ベクトル制御された交流モータは,一種のトルクアンプと考えることができる.実際にはこの外側に,速度制御系や位置制御系を構成して利用する場合が多い.以下では交流モータのベクトル制御の代表例として,かご形誘導モータと永久磁石同期モータの場合について説明する.
図 5.5 ベクトル制御された交流モータ
5.3 スカラー制御
新興国の LEV(Light EV)などの低速車両では,高速の応答が要求されないので,工場などの一般産業用で使われている誘導モータをスカラー制御する簡便な方式が使える.スカラー制御の代表である誘導モータの V/f 一定制御は,インバータなどの可変周波数電源を用いて誘導モータの回転速度を可変する簡易な方法として広く用いられており,ベクトル制御に対比してスカラー制御と称されることもある.変圧器との類似性から,すべりを sとしたとき誘電モータの電圧電流方程式は次式で表すことができる.[
V1
0
]=[
r1 + jωL1 jωM
jωM r2/s + jωL2
][I1
I2
](5.2)


227
索 引
【欧文・数字】2自由度制御 664輪駆動力配分制御例 634輪独立モータ 624輪独立モータ走行システム 62bookkeeping法 209CAD-embedded CAE 16CCV 11Magnitude Rule 161power-by-wire 11PWMインバータ 42, 79, 107THIPWM 161USP 12
【あ行】アウターロータ型モータ 28, 102亜鉛空気電池 187アキシャルギャップ型モータ 102アーキテクチャ設計 8アレニウスの式 219アレニウスモデル 223一次電池 177インターカレーション 180インナーロータ型モータ 102インバータ 148インホイールモータ 28, 102動く技術情報 198運動制御 60エアギャップ 78永久磁石同期モータ 84エコカー 3エネルギーマネジメント 70エントロピー項 190オリビン型構造 183温室効果ガス 3
【か行】開回路電圧 211界磁弱め制御 81, 122回生運転 90回生制動 68回生ブレーキ 57階層化 71回転磁界 89外乱推定オブザーバ 66化学電池 172, 174かご形誘導モータ 89加速抵抗 52過電圧 177可変速比 82過変調領域 125可変電圧可変周波数 107カレンダー寿命 195, 218基底速度 81キャリアベース方式 160急速充電 38, 214協調制御システム 57極対数 93金属空気電池 174, 186空間ベクトル制御 163空間ベクトル変調 115空気抵抗 49空気電極 187駆動系設計 53クーロンカウント法 209健全度 203減速機諸元 55降圧チョッパ 128, 142合剤電極 184公称容量 198構造化 71勾配抵抗 51固体高分子形燃料電池 185
228 索 引
固体電解質界面層 211, 217コモンモードチョーク 169転がり(転動)抵抗 50
【さ行】サイクル寿命 195, 221再構成制御 64再充電 218最大トルク制御 120酸化還元反応 172, 176三角波正弦波比較方式 115三角搬送波 149三相インバータ 154残存容量 203自己放電 218支持塩 180四象限運転 59, 82四象限動作 61システムインテグレーション iiiシステム故障 18磁束弱め制御 87シート暖房 32車両諸元 53充電率 202充放電可能電力 203充放電効率 209昇圧チョッパ 145状態空間モデル 205状態推定器 212衝突安全設計 22初期容量 202ショットキーバリアダイオード 130シリーズハイブリッド 43, 44シリーズパラレルハイブリッド 43–45シンクロナスリラクタンスモータ 84水素酸素燃料電池 172, 185スイッチトリラクタンスモータ 84, 99スイッチングデバイス 130スカラー制御 109ストロングハイブリッド 45, 46スピネル型構造 183すべり 89すべり角周波数 89
スリップ率制御 62制駆動力制御 60セパレータ 181セルバランス制御 216センサフュージョン 214走行制御 67走行抵抗 48層状岩塩型構造 183双方向チョッパ 147速度起電力の項 93
【た行】脱溶媒和過程 179蓄電デバイス 172中性点電圧注入 161中性点バイアス電圧 125調和的共存性 19チョッパ回路 140定格容量 198定出力領域 82定電流定電圧充電 199, 215定トルク領域 82鉄心トルク 78デッドタイム 158デバイ長 204デューティ比 d 128電荷移動過程 179電気化学キャパシタ 189電機子反作用 97電気二重層キャパシタ 189電磁気的調和 22電池の寿命 195電動コンプレッサ 31電流制御形電力変換器 114トポタクティック反応 178, 223トラクション制御 62, 63, 65, 66トリクル充電 195トルク ̶回転速度特性 57トルクデマンド 105トルク密度 79
【な行】内部永久磁石同期モータ 84, 97

索 引 229
鉛電池 178二次電池 177ニッケル水素電池 178熱応力的調和 21熱的調和 21燃料タンクモデル 202燃料電池 185燃料電池車 47燃料電池ハイブリッド 47
【は行】配線のインダクタンス 137ハイブリッド車 43ハイブリッド車統合制御 72バッテリマネジメントシステム 206バッテリ容量 57ハーフブリッジ・インバータ 150パラレルハイブリッド 43, 44パルス幅制御 128パワーコントロールモジュール 42パワーマネジメント 69パワー密度 79パンケーキ型モータ 28ヒステリシスコンパレータ 115表面永久磁石同期モータ 84, 96品質機能展開 9フィードフォワード 66部分障害 18プラグイン充電 214プラグインハイブリッド 46ブラシモデル 66フルブリッジ・インバータ 152フレミングの法則 77
フレーム構造 25分 極 177平滑コンデンサ 139ベクトル制御 111放電深度 203
【ま行】マイルドハイブリッド 45マグネットトルク 87, 94メカニカル充電 214モータ諸元 55モデルフリー制御 64モデルベース制御 64モノコック構造 25
【や行】誘電緩和時間 204誘導モータ 84, 89, 91溶媒和過程 179
【ら行】ラゴーニプロット 175ラジアルギャップ型モータ 102ランニングコスト 4リアクタンス定理 205力行運転 90リザーブ型二次電池 178リチウムイオン二次電池 179リチウム空気電池 189リラクタンストルク 87, 94, 95ロッキングチェア型(シャトルコック型)二次電池 178

著 者 略 歴船渡 寛人(ふなと・ひろひと)
1989年 横浜国立大学大学院工学研究科博士課程前期修了(電子情報工学専攻)1989年~1991年 東京電力(株)1995年 横浜国立大学大学院工学研究科博士課程後期修了(電子情報工学専攻)1995年 宇都宮大学助手2001年 宇都宮大学助教授2007年 宇都宮大学准教授2012年 宇都宮大学大学院工学研究科教授
現在に至る(博士(工学))
三原 輝儀(みはら・てるよし)1974年 国立都城工業高等専門学校工業化学科卒業1974年 日産自動車(株)総合研究所1984年~1985年 東京大学電気電子工学科研究生1991年 日産自動車(株)総合研究所電子情報研究所主任研究員1995年~1998年 (株)ユニシアジェックス出向1998年 日産自動車(株)総合研究所電子情報研究所主管研究員2000年 日産自動車(株)総合研究所電子情報研究所所長2005年 日産自動車(株)総合研究所研究実験試作部部長2010年 カルソニックカンセイ(株)テクノロジーオフィサー
現在に至る
出口 欣高(でぐち・よしたか)1992年 東京大学大学院工学系研究科電気工学専攻修士課程修了1992年 日産自動車(株)総合研究所2005年 日産自動車(株)総合研究所主任研究員
現在に至る
初田 匡之(はつだ・ただゆき)1992年 東京理科大学理工学研究科電気電子工学専攻修士課程修了1992年 日産自動車(株)総合研究所電子情報研究所2006年 日産自動車(株)総合研究所電動駆動研究所主任研究員2009年 日産自動車(株)EV技術開発本部 EVシステム開発部主担2010年 日産自動車(株)企画・先行技術開発本部先行車両開発部主担
現在に至る
編 著 者 略 歴廣田 幸嗣(ひろた・ゆきつぐ)
1971年 東京大学工学系研究科電子工学修士課程修了1971年 日産自動車(株)中央研究所電子機器研究部1979年 商品開発本部ニューヨーク事務所所員1984年 日産自動車(株)総合研究所電子情報研究所主任研究員1992年 日産自動車(株)総合研究所電子情報研究所所長1999年 日産自動車(株)総合研究所研究推進部長2000年 カルソニックカンセイ(株)に入社,理事2006年 カルソニックカンセイ(株)テクノロジーオフィサー
(~2015年まで)2010年 日産自動車(株)EV技術開発本部技術顧問兼任(~2015年まで)
現在に至る
小笠原 悟司(おがさわら・さとし)1983年 長岡技術科学大学大学院工学研究科修士課程修了1983年 長岡技術科学大学工学部電気系助手1992年 岡山大学工学部助手1993年 岡山大学工学部助教授2003年 宇都宮大学工学部教授2007年 北海道大学大学院情報科学研究科教授
現在に至る(工学博士)
編集担当 富井 晃(森北出版)編集責任 石田昇司(森北出版)組 版 ウルス印 刷 ワコープラネット製 本 ブックアート
電気自動車工学(第 2版)© 廣田幸嗣・小笠原悟司・船渡寛人・三原輝儀・出口欣高・初田匡之 2017
【本書の無断転載を禁ず】2010 年 12月 30日 第 1版第 1刷発行2014 年 8 月 29日 第 1版第 4刷発行2017 年 7 月 3 日 第 2版第 1刷発行
編 著 者 廣田幸嗣・小笠原悟司著 者 船渡寛人・三原輝儀・出口欣高・初田匡之発 行 者 森北博巳発 行 所 森北出版株式会社
東京都千代田区富士見 1–4–11(〒102–0071)電話 03–3265–8341/ FAX 03–3264–8709http://www.morikita.co.jp/日本書籍出版協会・自然科学書協会 会員
<(社)出版者著作権管理機構 委託出版物>
落丁・乱丁本はお取替えいたします.
Printed in Japan/ISBN978–4–627–74312–0


















