Γεωγραφικά Συστήματα Συντεταγμένων - Εισαγωγή στις κύριες έννοιες και εφαρμογές

ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΝΑΥΠΗΓΩΝ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΔΥΝΑΜΙΚΗ ΠΛΟΙΟΥ
Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ ΚΑΘΗΓΗΤΗΣ Ε.Μ.Π.
Κ.Α. ΜΠΕΛΙΜΠΑΣΑΚΗΣ ΑΝ. ΚΑΘΗΓΗΤΗΣ Ε.Μ.Π.
ΑΘΗΝΑ 2012


ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΝΑΥΠΗΓΩΝ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΔΥΝΑΜΙΚΗ ΠΛΟΙΟΥ
ΣΥΝΟΠΤΙΚΑ ΠΕΡΙΕΧΟΜΕΝΑ
ΚΕΦΑΛΑΙΟ 1 Δυναμική επιπλεόντων στερεών σωμάτων
ΚΕΦΑΛΑΙΟ 2 Αλληλεπίδραση επιπλεόντων στερεών σωμάτων και κυματισμών: Μελέτη στο πεδίο συχνοτήτων
ΚΕΦΑΛΑΙΟ 3 Αλληλεπίδραση πλοίου κινούμενου με σταθερή πρόσω ταχύτητα και κυματισμών
ΚΕΦΑΛΑΙΟ 5 Ευστάθεια κινήσεως και πηδαλιουχία πλοίου


ΔΥΝΑΜΙΚΗ ΣΥΜΠΕΡΙΦΟΡΑ ΠΛΟΙΟΥ ΣΕ
ΚΥΜΑΤΙΣΜΟΥΣ
Κεφάλαιο 1
ΔΥΝΑΜΙΚΗ ΕΠΙΠΛΕΟΝΤΩΝ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ ΠΕΡΙΕΧΟΜΕΝΑ
σελ. 1.1
Γενική μορφή των εξισώσεων κίνησης ελεύθερα επιπλέοντος στερεού σώματος
3
1.2
Συστήματα συντεταγμένων: Ι. Ορισμοί
10
1.3
Συστήματα συντεταγμενών: ΙΙ. Μετασχηματισμοί
13
1.4
Βαθμοί ελευθερίας στερεού σώματος. Γωνίες στροφής επιπλέοντος σώματος
20
1.5
Αδρανειακός ρυθμός μεταβολής διανύσματος ως προς κινούμενο σύστημα συντεταγμένων
22
1.6
Εξισώσεις κίνησης επιπλέοντος στερεού σώματος: Ι. Αδρανειακοί συντελεστές
25
1.7
Εξισώσεις κίνησης επιπλέοντος στερεού σώματος: ΙΙ. Φορτίσεις 34
1.8
Βασικές έννοιες και απλά μαθηματικά εργαλεία για την ταξινόμηση, μελέτη και επίλυση ταλαντωτικών συστημάτων και κυματικών φαινομένων
37
1.9 Ασκήσεις και Εφαρμογές Βιβλιογραφία Κεφαλαίου 1
- 1 -

- 2 -

1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
Κεφάλαιο 1. ΔΥΝΑΜΙΚΗ ΕΠΙΠΛΕΟΝΤΩΝ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ 1.1 Γενική μορφή των εξισώσεων κίνησης ελεύθερα επιπλέοντος στερεού
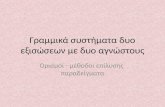
σώματος Για την μελέτη των δυναμικών φαινομένων αλληλεπίδρασης επιπλεόντων σωμάτων και του περιρρέοντος υγρού (νερού), τα επιπλέοντα σώματα μπορούν, σε πολλές περιπτώσεις, να θεωρηθούν ως απαραμόρφωτα στερεά(1). Από την άλλη μεριά, ένα ελεύθερα επιπλέον σώμα κινείται πάνω στην επιφάνεια της θάλασσας (συνήθως) χωρίς να υπόκειται σε εξωτερικούς κινηματικούς συνδέσμους με συνέπεια να μπορεί να κινηθεί προς όλες τις κατευθύνσεις στο χώρο. Με άλλα λόγια, οι βαθμοί ελευθερίας ενός ελεύθερα επιπλέοντος στερεού σώματος είναι έξι, π.χ. τρεις γραμμικές μετακινήσεις ενός σημείου αναφοράς, και τρεις περιστροφές γύρω από ισάριθμους μη παράλληλους άξονες στο χώρο. Βέβαια, ένα επιπλέον σώμα, σε αντίθεση με ένα υποβρύχιο ή ένα αεροπλάνο, κινείται έτσι ώστε να παραμένει πάντοτε κοντά στην επιφάνεια της θάλασσας (εφ’ όσον βέβαια δεν ... βυθίζεται!!), πράγμα που συνεπάγεται ότι οι κατακόρυφες μετακινήσεις των σημείων του είναι σχετικά μικρές. Είναι προφανές ότι η μελέτη των δυναμικών αποκρίσεων ενός επιπλέοντος σώματος στη θάλασσα πρέπει να αρχίσει από την κατάστρωση των εξισώσεων κίνησής του. Οι εξισώσεις αυτές δεν είναι τίποτε άλλο παρά τα θεωρήματα μεταβολής της ορμής και της στροφορμής, καταλλήλως διατυπωμένα. Πριν προχωρήσουμε στην ακριβή διατύπωσή τους θα εισαγάγουμε τους απαιτούμενους συμβολισμούς. Ας θεωρήσουμε ένα στερεό σώμα [Β], το οποίο επιπλέει ελεύθερα πάνω στην επιφάνεια της θάλασσας ∂DF
r
. Βλ. Σχήμα 1. Ας συμβολίσουμε με το κέντρο μάζας του σώματος, με O ένα σωματοπαγές σημείο αναφοράς, και με τη διανυσματική ακτίνα από το στο . Έστω ακόμη η διανυσματική ακτίνα από το σημείο προς ένα (οποιοδήποτε) στοιχείο μάζας του σώματος, και η διανυσματική ακτίνα από το κέντρο μάζας
G
GR O GO
dm rG G προς το ίδιο στοιχείο dm του σώματος. Η (απόλυτη) ταχύτητα του στοιχείου ( tbb ,rUU = ) ( ),rdmdm = σε μια ορισμένη χρονική στιγμή , δίδεται από τη σχέση: t
( ),b t = + ×U r U Ω r,
(1) όπου είναι η ταχύτητα του σημείου αναφοράς , και είναι η γωνιακή ταχύτητα του σώματος στην ίδια χρονική στιγμή(
( )tUU = O ( )t=Ω Ω2).
(1) Στη συνέχεια, θα λέμε απλά “στερεό σώμα”, εννοώντας πάντοτε «απαραμόρφωτο στερεό σώμα». (2) Στην περίπτωση αυτή θα λέμε ότι το σώμα [ ]B κινείται ελεύθερα στο χώρο με ταχύτητα ( ) ( )( ),t tU Ω . Η
γραμμική ταχύτητα αναφέρεται πάντοτε σε κάποιο συγκεκριμένο σωματοπαγές σημείο (κέντρο) αναφοράς , εκ των προτέρων καθορισμένο, ενώ η γωνιακή ταχύτητα
UO ( )tΩ είναι ελεύθερο διάνυσμα και
δεν εξαρτάται από κάποιο σημείο αναφοράς.
- 3 -

2
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
Σχήμα 1: Ελεύθερα επιπλέον στερεό σώμα Άρα, η ορμή του στοιχείου δίδεται από το γινόμενο dm ( ) dm+ ×U Ω r , ενώ η στροφορμή
του ίδιου στοιχείου ως προς το σημείο εκφράζεται από το γινόμενο .
Κατά συνέπεια η συνολική ορμή και η συνολική στροφορμή του σώματος
O ( )dm× + ×r U Ω r
[ ]B δίδονται από τις σχέσεις: Ορμή σώματος [ ] ( ) ( )
B
B Bdm V
B dm dVρ= + × = + ×∑ ∫U Ω r U Ω r , (2)
και Στροφορμή σώματος [ ]B ως προς 0
( ) ( )B
B Bdm V
dm dVρ= × + × = × + ×∑ ∫r U Ω r r U Ω r , (3)
όπου ρB η πυκνότητα, το στοιχείο όγκου dvB ( )B Bdm p dV= , και V ο συνολικός όγκος του
σώματος B
[ ]B . Στο σημείο αυτό πρέπει να παρατηρήσουμε ότι το σωματοπαγές κέντρο αναφοράς δεν είναι ακίνητο, αλλά κινείται μαζί με το σώμα, και μάλιστα με ταχύτητα
. Άρα η στροφορμή (3) αναφέρεται σε κινούμενο κέντρο. Το γεγονός αυτό πρέπει να ληφθεί υπ’ όψιν για τη σωστή διατύπωση του θεωρήματος της στροφορμής. Βλ. σχετικό συμπλήρωμα στο τέλος του παρόντος εδαφίου, όπου παράγεται η γενική μορφή του θεωρήματος της στροφορμής ως προς κινούμενο κέντρο.
O(tU )
Με την βοήθεια των ανωτέρω σχέσεων (2) και (3), και της σχέσεως (7) του συμπληρώματος, τα θεωρήματα μεταβολής της ορμής και στροφορμής για το σώμα [ ]B , γράφονται στη μορφή:
( )B
B BV
d dVdt ρ⎛ ⎞
+ × =⎜⎜⎝ ⎠∫ U Ω r ⎟⎟ F , (4)
- 4 -

3
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
( )B
B BV
d dV Mdt ρ⎛ ⎞
× + × + × =⎜ ⎟⎜ ⎟⎝ ⎠∫ r U Ω r U UG K , (5)
όπου και είναι οι συνολικές εξωτερικές φορτίσεις (δύναμη, και ροπή ως προς , αντίστοιχα), που ασκούνται πάνω στο σώμα,
F K OM ε
είναίναι η συνολική μάζα του σώματος, και GU
ι η ταχύτητα του κέντρου μάζας αυτού. Ο «ασυνήθης» όρος GM ×U U , που ίζεται στο αριστερά μέλος της εξίσωσης (5), οφείλεται στο ότι το κέντρο αναφοράς των ροπών κινείται με ταχύτητα U .
εμφαν
)
Οι ανωτέρω σχέσεις (4) και (5) αποτελούν μια πρώτη γενική μορφή των εξισώσεων κίνησης του ελεύθερα επιπλέοντος στερεού σώματος (π.χ. πλοίου). Στο σημείο αυτό είναι σκόπιμο να σχολιάσουμε για λίγο τις ανωτέρω εξισώσεις, προκείμενου να αρχίσουμε να κατανοούμε τις δυσκολίες και τα προβλήματα που πρέπει να αντιμετωπισθούν. Κατ’ αρχήν οι εξισώσεις (4) και (5) είναι δύο διανυσματικές διαφορικές εξισώσεις, οι οποίες, αναλυόμενες σε συνιστώσες, αντιστοιχούν σε έξι βαθμωτές διαφορικές εξισώσεις, ως προς χρόνο. Οι εξισώσεις αυτές περιέχουν δύο άγνωστες διανυσματικές συναρτήσεις του χρόνου, τις ταχύτητες και
, οι οποίες μπορούν να εκφρασθούν με τη βοήθεια των συνιστωσών τους ή, ακόμη καλύτερα, με τη βοήθεια έξι συναρτήσεων θέσεως, δηλαδή των έξι βαθμών ελευθερίας του στερεού σώματος (βλ. εδάφιο 1.4). Έτσι, εκ πρώτης όψεως, στα πλαίσια της υπόθεσης του απολύτως απαραμόρφωτου για το στερεό σώμα, φαίνεται ότι το σύστημα των εξισώσεων (4) και (5) είναι «κλειστό» (έξι διαφορετικές εξισώσεις, έξι άγνωστες συναρτήσεις), και άρα μπορεί να επιλυθεί-εύκολα ή δύσκολα, αναλυτικά ή αριθμητικά - ώστε να μπορέσουμε να υπολογίσουμε τις ταχύτητες και τις κινήσεις του σώματος. Όμως τα πράγματα δεν είναι ακριβώς έτσι λόγω της επίδρασης του περιρρέοντος ρευστού. Πράγματι, στους «αθώους» δεξιά όρους των εξισώσεων κίνησης, δηλαδή στις φορτίσεις και , περιέχονται οι επιδράσεις του περιρρέοντος ρευστού, οι οποίες εξαρτώνται από τη θέση και την ταχύτητα
του στερεού σώματος. Με άλλα λόγια οι δεξιά όροι των εξισώσεων κίνησης (4) και (5) δεν περιέχουν μόνο γνωστές ποσότητες, αλλά εξαρτώνται και από τις (άγνωστες) προσδιοριστέες συναρτήσεις του αριστερού μέλους. Κατά συνέπεια, οι φορτίσεις και του σώματος [
( )tU
F
( )tΩ
( )U
F K
( )( ,t tΩ
K]B πρέπει να νοούνται ως συναρτήσεις (τελεστές (3)):
, (6) ( ) ( )( , t , t=F F U ΩG ) ( ) ( )( , t , t=K K U ΩG )
)
, (7) όπου το σύμβολο εκφράζει τη γεωμετρία του όλου υδρομηχανικού συστήματος. Άρα, για να μπορέσουμε να χειριστούμε τις εξισώσεις κίνησης (4) και (5), θα πρέπει πρώτα να προσδιορίσουμε τον τρόπο εξάρτησης των φορτίσεων και από τη θέση και την ταχύτητα του επιπλέοντος σώματος. Κάτι τέτοιο προϋποθέτει την κατάλληλη μοντελοποίηση και μελέτη του πεδίου ροής που αναπτύσσεται γύρω από το κινούμενο σώμα.
G
( )ΩF K
( )( ,t tU
(3) Οι φορτίσεις και εξαρτώνται όχι μόνο από τη στιγμιαία τιμή της ταχύτητας του
σώματος, αλλά από την όλη χρονική ιστορία των κινήσεων του σώματος, από την έναρξη της κίνησης F K ( ) ( )( ),t tU Ω
0τ = έως την τρέχουσα χρονική στιγμή tτ = . Είναι δηλαδή οι φορτίσεις και τελεστές επί των F K
( )τU και . ( ) , 0 t≤Ω τ τ≤
- 5 -

4
Σύμφωνα με τις παραπάνω παρατηρήσεις, πολλά πρέπει να γίνουν ακόμη ώστε οι εξισώσεις (4) και (5) να εξειδικευθούν (και απλοποιηθούν) κατάλληλα, προκειμένου να καταστούν χρήσιμες για την μελέτη των διαφόρων δυναμικών φαινομένων που μας ενδιαφέρουν στα πλαίσια του παρόντος μαθήματος (π.χ. ευστάθεια κατευθύνσεως και ελικτικές ικανότητες πλοίου, αποκρίσεις επιπλεόντων σωμάτων σε θαλάσσιους κυματισμούς κλπ.). Η απαιτούμενη επεξεργασία των εξισώσεων κίνησης (4) και (5) μπορεί να χωρισθεί σε πέντε στάδια ως εξής:
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
α. Περαιτέρω επεξεργασία του αριστερά μέλους των εξισώσεων. β. Επεξεργασία του δεξιά μέλους των εξισώσεων, δηλαδή περιγραφή και μοντελοποίηση
των φορτίσεων που ασκούνται πάνω στο πλοίο. Όπως αναφέρουμε ήδη ανωτέρω, το στάδιο αυτό προϋποθέτει τη μοντελοποίηση και μελέτη του πεδίου ροής γύρω από το σώμα.
γ. Παραγωγή απλοποιημένων μορφών των εξισώσεων (4) και (5), κατάλληλα «σχεδια-σμένων» για την μελέτη συγκεκριμένων δυναμικών προβλημάτων αλληλεπίδρασης επιπλεόντων σωμάτων και του περιρρέοντος υγρού.
δ. Επίλυση και διερεύνηση των απλοποιημένων εξισώσεων. ε. Εφαρμογές στη μελέτη και στη σχεδίαση του πλοίου.
Θα κλείσουμε το εδάφιο αυτό με ορισμένες γενικές παρατηρήσεις επί των τεσσάρων σταδίων α., β, γ, και δ.
α. Η περαιτέρω επεξεργασία του αριστερά μέλος των εξισώσεων κίνησης γίνεται με την εισαγωγή κατάλληλων συστημάτων συντεταγμένων, με τη βοήθεια των οπoίων οι δύο διανυσματικές εξισώσεις (4) και (5) αναλύονται σε έξι βαθμωτές εξισώσεις, ως προς τους έξι βαθμούς ελευθερίας του σώματος (τρεις μετατοπίσεις και τρεις περιστροφές).
β. Η περιγραφή και η μοντελοποίηση των φορτίσεων είναι, όσον αφορά τα φαινόμενα που
εξετάζουμε, το δυσκολότερο τμήμα του όλου προβλήματος, και αποτελεί το κεντρικό αντικείμενο του παρόντος μαθήματος. Σε πολύ γενικές γραμμές οι φορτίσεις και που αναπτύσσονται πάνω σε ένα πλοίο μπορούν να αναλυθούν ως εξής:
F K
Π Ε Ν Α= + + + +F F F F F FΔ
Δ
))
(8)
Π Ε Ν Α= + + + +K K K K K K (9) ↑ ↑ ↑ ↑ ↑
(Φόρτιση από: Πηδάλιο, Ελικα, Νερό, Αέρα, Διάφορα άλλα αίτια)
Ο ανωτέρω διαχωρισμός σε φορτίσεις οφειλόμενες στο Πηδάλιο , στην
Έλικα , στο Νερό , στον Αέρα ( ,Π ΠF K
( ,E EF K ( ),N NF K ( ),A AF K , και σε διάφορα άλλα
αίτια , αν και δεν είναι απολύτως σωστός (δεδομένου ότι υπάρχουν και φαινόμενα αλληλεπίδρασης), εν τούτοις είναι χαρακτηριστικός και χρήσιμος.
( ,Δ ΔF K )
γ. Η κατασκευή κατάλληλα απλουστευμένων εξισώσεων (mode equations) για την μελέτη
συγκεκριμένων δυναμικών φαινομένων περιλαμβάνει κυρίως τη χρήση καταλλήλων μοντέλων για τις φορτίσεις και τη γραμμικοποίηση των εξισώσεων, την απαλοιφή όρων που δεν είναι σημαντικοί για τα εξεταζόμενα φαινόμενα και τέλος, την εισαγωγή πρόσθετων (καμιά φορά εμπειρικής προέλευσης όρων οι οποίοι εκφράζουν ειδικές επιδράσεις ιδιαίτερα σημαντικές για τα εξεταζόμενα φαινόμενα).
- 6 -

5
δ. Η επίλυση και διερεύνηση των απλοποιημένων (γραμμικοποιημένων) εξισώσεων
γίνεται άλλοτε στο πεδίο συχνοτήτων και άλλοτε στο πεδίο του χρόνου, και βασίζεται στη χρήση εννοιών και τεχνικών από την θεωρία των γραμμικών συστημάτων, των ολοκληρωτικών μετασχηματισμών (Laplace και Fourier), και των γραμμικών διαφορικών εξισώσεων. Το σχετικό μαθηματικό υπόβαθρο, αν και σε γενικές γραμμές είναι γνωστό από άλλα υποχρεωτικά μαθήματα του προγράμματος σπουδών, παρουσιάζεται συνοπτικά στα Κεφάλαια 2 και 3, που ακολουθούν.
Συμπλήρωμα εδαφίου 1.1: Το θεώρημα της στροφορμής ως προς κινούμενο κέντρο
αναφοράς. Το θεώρημα της στροφορμής στη συνήθη του μορφή ισχύει ως προς ακίνητο κέντρο αναφοράς. Εν τούτοις, σε ορισμένες περιπτώσεις είναι ιδιαίτερα βολικό να αναφέρουμε τις ροπές (τόσο των ορμών των στοιχείων του εξεταζόμενου συστήματος, όσο και των δυνάμεων που ασκούνται σ’ αυτό), ως προς ένα κινούμενο κέντρο, οπότε το θεώρημα της στροφορμής πρέπει να τροποποιηθεί καταλλήλως. Στο συμπλήρωμα αυτό θα δώσουμε την ακριβή μορφή του θεωρήματος της στροφορμής, στην περίπτωση κινούμενου κέντρου αναφοράς. Ας θεωρήσουμε ένα σύστημα υλικών στοιχείων , 1, 2,...,im i I=
0U
, με (απόλυτες) ταχύτητες . Έστω η δύναμη που ασκείται στο στοιχείο . Έστω ακόμη ένα
κέντρο αναφοράς (των ροπών) κινούμενο με ταχύτητα , και , 1, 2, ...,i i I=U iF mi O
Σ ένα ακίνητο κέντρο αναφοράς (Βλ. και Σχήμα 2).
Σχήμα 2: Το θεώρημα της στροφορμής ως προς κινούμενο κέντρο Τέλος, ας συμβολίσουμε με τη διανυσματική ακτίνα από το OΣR Σ στο , με τη διανυσματική ακτίνα από το ακίνητο κέντρο
O iRΣ στο στοιχείο , και με τη διανυσματική
ακτίνα από το κινούμενο κέντρο στο στοιχείο . im ir
O im
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 7 -

6
Οι στροφορμές και του συστήματος
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
ΣH OH mi ως προς Σ και O αντιστοίχως, ορίζονται από τις σχέσεις , (1α) i i i
imΣ = ×∑H R U
iU . (1β) O i ii
m= ×∑H r
(Τονίζεται ότι εργαζόμαστε πάντοτε με τις απόλυτες ταχύτητες). Οι ροπές και των δυνάμεων ως προς
ΣK OK
iF Σ και , αντιστοίχως, ορίζονται από τις σχέσεις O , (2α) i
iΣ = ×∑K R iF
iF . (2β) O ii
= ×∑K r
Το θεώρημα της στροφορμής ως προς ακίνητο κέντρο γράφεται στη μορφή:
ddt
ΣΣ=
H K . (3)
Ας εξετάσουμε τώρα την αδρανειακή χρονική παράγωγο Od dH t της στροφορμής του συστήματος im ως προς το κινούμενο κέντρο O :
O ii i i i
i i
d dm mdt dt dt
= × + ×∑ ∑H r U r idU . (4)
Χρησιμοποιώντας τις γεωμετρικές σχέσεις
0, i ii i O i
d d ddt dt dt
ΣΣ= − = − = −
r R Rr R R U UO ,
το νόμο του Newton
ii idmdt
=U F ,
και τον ορισμό της στροφορμής ως προς το κινούμενο κέντρο (βλ. εξίσωση (2β) ανωτέρω) το δεξιά μέλος της (4) γράφεται στη μορφή
0
( )Oi i O i i i O i i
i i i
d m mdt
= − × + × = − × +∑ ∑ ∑H U U U r F U U KO . (5)
Όμως, ως γνωστόν
, (6) i i Gi
m M=∑ U U
όπου iM m= ∑ , είναι η συνολική μάζα του συστήματος im , και είναι η ταχύτητα του κέντρου μάζας αυτού. Συνδυάζοντας τις εξισώσεις (5) και (6) παίρνουμε τη σχέση
GU
0O
O Gd Mdt
+ × =H U U K , (7)
- 8 -

7
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
η οποία αποτελεί το Θεώρημα Μεταβολής της Ορμής στην περίπτωση κινητού κέντρου αναφοράς. Η ανωτέρω σχέση (7) έχει χρησιμοποιηθεί στο εδάφιο 1.1 ανωτέρω, για την παραγωγή της εξίσωσης κίνησης (5) ενός ελεύθερα επιπλέοντος στερεού σώματος.
- 9 -

1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
1.2 Συστήματα συντεταγμένων: Ι. Ορισμοί Για την ανάλυση των κινηματικών και δυναμικών μεγεθών που υπεισέρχονται στις εξισώσεις κίνησης ελεύθερα επιπλέοντος στερεού σώματος, χρησιμοποιούμε διάφορα συστήματα συντεταγμένων. Τα σημαντικότερα από αυτά είναι: ένα ακίνητο (ως προς την επιφάνεια της γης) σύστημα αναφοράς, το οποίο θα αναφέρεται συνοπτικά ως Α.Σ.(1), (axes fixed relative to the earth, or fixed axes, or earth system), και ένα σωματοπαγές σύστημα (συνοπτικά, Σ.Σ.), το οποίο είναι σταθερά προσδεδεμένο στο επιπλέον σώμα και παρακολουθεί όλες τις κινήσεις αυτού (axes fixed in the body, or body axes, or stability system). Σε ορισμένες περιπτώσεις χρησιμοποιούμε επίσης κινούμενα συστήματα αναφοράς τα οποία δεν είναι σωματοπαγή. Μια τέτοια περίπτωση είναι η μελέτη της δυναμικής συμπεριφοράς πλοίου το οποίο κινείται με μη-μηδενική μέση ταχύτητα, ενώ ταυτόχρονα εκτελεί ταλαντωτικές κινήσεις γύρω από τη μέση θέση του, π.χ. λόγω της επίδρασης των κυματισμών. Τότε, εκτός από τα δύο συστήματα Α.Σ και Σ.Σ., που αναφέραμε ανωτέρω, χρησιμοποιούμε και ένα κινούμενο σύστημα (συνοπτικά, Κ.Σ.), το οποίο παρακολουθεί τη μέση κίνηση του πλοίου. Το σύστημα αυτό μπορεί να είναι αδρανειακό (αν το πλοίο κινείται με σταθερή μέση ταχύτητα και μηδενική μέση γωνιακή ταχύτητα) ή μη-αδρανειακό, στη γενική περίπτωση (π.χ. όταν το πλοίο εκτελεί ελιγμούς). Μια άλλη ενδιαφέρουσα περίπτωση στην οποία χρησιμοποιούμε κινούμενο μη-σωματοπαγές σύστημα είναι η μελέτη της δυναμικής συμπεριφοράς δύο (ή περισσοτέρων) επιπλεόντων σωμάτων. Στην περίπτωση αυτή η κίνηση αναφέρεται συνήθως σε σωματοπαγές σύστημα επί του ενός σώματος, το οποίο είναι κινούμενο, μη-αδρανειακό και μη-σωματοπαγές, ως προς το άλλο σώμα.
U
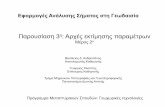
Τα τρία συστήματα Α.Σ., Σ.Σ., Κ.Σ., με τους αντίστοιχους συμβολισμούς για τα μοναδιαία διανύσματα και το διάνυσμα θέσης στο χώρο παρουσιάζονται στον Πίνακα 1. Βλ. επίσης Σχήμα 1.
ΠΙΝΑΚΑΣ 1 ΣΥΣΤΗΜΑΤΑ ΑΝΑΦΟΡΑΣ ΧΡΗΣΙΜΟΠΟΙΟΥΜΕΝΑ ΣΤΗ ΜΕΛΕΤΗ ΤΗΣ
ΔΥΝΑΜΙΚΗΣ ΣΥΜΠΕΡΙΦΟΡΑΣ ΕΠΙΠΛΕΟΝΤΩΝ ΣΩΜΑΤΩΝ Ονομασία Συστήματος Συμβολισμοί Παρατηρήσεις
Ακίνητο Αδρανεικό Σύστημα (Α.Σ.) (Earth System)
10 20 30, ,x x x
10 20 30, ,i i i
0r
Το επίπεδο συμπίπτει με την αδιατάρακτη ελεύθερη επιφάνεια. Ο άξονας
λαμβάνεται θετικός προς τα άνω.
x x10 20
x30
Κινούμενο με τη μέση ταχύτητα Συστημα (Κ.Σ.)
1 2, , 3x x x
1 2 3, ,i i i r
Σύστημα κινούμενο με τη μέση οριζόντια ταχύτητα του επιπλέοντος σώματος. Εάν η μέση ταχύτητα του σώματος είναι μηδενική, το Κ.Σ. ταυτίζεται με το Α.Σ.
Σωματοπαγές Σύστημα (Σ.Σ.) (Stability System)
1 2 3, ,B B Bx x x
1 2 3, ,B Bi i i B
Br
Σύστημα σταθερά προσδεδεμένο στο επιπλέον σώμα, που παρακολουθεί όλες τις κινήσεις του. Στην περίπτωση όπου το επιπλέον σώμα έχει επίπεδα συμμετρίας (π.χ. πλοίο), τα επίπεδα των αξόνων επιλέγονται έτσι ώστε να συμπίπτουν με τα επίπεδα συμμετρίας.
(1) Για τις εφαρμογές που εξετάζουμε στα πλαίσια του παρόντος μαθήματος, το σύστημα αυτό μπορεί να
θεωρηθεί, κατά προσέγγιση, αδρανειακό.
- 10 -

9
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
Σχήμα 1: Συστήματα συντεταγμένων - Συμβολισμοί Στο σημείο αυτό πρέπει να τονίσουμε ότι, ακόμη και όταν χρησιμοποιούμε μη-αδρανειακό (δηλαδή επιταχυνόμενο) σύστημα συντεταγμένων, εργαζόμαστε πάντοτε με τις απόλυτες (αδρανειακές) ταχύτητες και επιταχύνσεις των στοιχείων του στερεού σώματος και του περιρρέοντος υγρού. Δηλαδή τα συστήματα συντεταγμένων (αδρανειακά ή μη-αδρανειακά) χρησιμοποιούνται για να αναλύσουμε σε συνιστώσες τα διάφορα διανυσματικά μεγέθη (κινηματικά και δυναμικά) και όχι για να αποσυνθέτουμε τις ταχύτητες σε απόλυτες και σχετικές. Κατά συνέπεια, τα θεωρήματα της ορμής και της στροφορμής χρησιμοποιούνται πάντοτε με την απλή αδρανειακή μορφή τους. (Πρβλ. εξισώσεις 1.1 (4) και 1.1 (5)). Το σωματοπαγές σύστημα είναι ιδιαίτερα βολικό για την επεξεργασία του αριστερά μέλους των εξισώσεων 1.1 (4) και 1.1 (5), διότι ως προς αυτό η γεωμετρία και η πυκνότητα (και άρα και τα αδρανειακά χαρακτηριστικά) του στερεού σώματος είναι ανεξάρτητα των κινήσεων του σώματος (και άρα ανεξάρτητα του χρόνου). (Σκεφθείτε ότι ως προς ένα ακίνητο σύστημα, ο όγκος V του σώματος αλλάζει διαρκώς θέση εν’ όσω το σώμα κινείται, και άρα
. Για τον ίδιο λόγο B
( )V V tB B= ( ) ( ),G G G Gt= =R R r r t κ.λ.π.). Περαιτέρω, πρέπει να σημειωθεί ότι, στην περίπτωση σωμάτων που έχουν επίπεδα συμμετρίας, το Σ.Σ. επιλέγεται έτσι ώστε επίπεδά του να συμπίπτουν με τα επίπεδα συμμετρίας του σώματος. Για παράδειγμα, στην περίπτωση του πλοίου, το επίπεδο [ ]10 ,B 30 Bx x
0 λαμβάνεται να συμπίπτει με
το διάμηκες επίπεδο συμμετρίας του πλοίου, όπου ο άξονας 1Bx κατευθύνεται προς την πλώρη, και ο άξονας κατευθύνεται προς τα επάνω. (Βλ. Σχήμα 1). 0 3x B
Βέβαια, προκειμένου να επεξεργασθούμε τις εξισώσεις κίνησης 1.1 (4) και 1.1 (5) με τη βοήθεια του σωματοπαγούς συστήματος συντεταγμένων, απαιτείται να υπολογίσουμε τον
αδρανειακό ρυθμό μεταβολής ddt
⎛⎜⎝ ⎠
⎞⎟ των συνιστωσών ενός διανυσματικού μεγέθους το οποίο
αναλύεται ως προς τους άξονες του Σ.Σ.. Αν και το σχετικό αποτέλεσμα είναι γνωστό από την Μηχανική (Βλ., π.χ., Θεοχάρης, 1978, ή Golstein 1980), εν τούτοις το θέμα θα αναπτυχθεί
- 11 -

10
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
διεξοδικά στη συνέχεια (στο εδάφιο 1.5), λόγω της μεγάλης σημασίας του για την σωστή κατανόηση των εξισώσεων κίνησης που προκύπτουν μετά την επεξεργασία των εξισώσεων 1.1 (4) και 1.1 (5).
- 12 -

1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
1.3 Συστήματα συντεταγμένων: ΙΙ. Μετασχηματισμοί Ας θεωρήσουμε ένα αδρανειακό διάνυσμα ( )t=a a και ένα ορθογώνιο καρτεσιανό σύστημα συντεταγμένων . Η θέση του συστήματος τη χρονική στιγμή θα συμβολίζεται με .
1 2 3:S Ox x x S t( )S t
Η κινητική κατάσταση του συστήματος S κατά τη χρονική στιγμή ορίζεται πλήρως από την ταχύτητα
t( )t=U U της αρχής του συστήματος και από τη γωνιακή ταχύτητα
του συστήματος. Το διάνυσμα
O
( )t=Ω Ω ( )t=a a μπορεί να παριστά ένα οποιοδήποτε διανυσματικό φυσικό μέγεθος (ταχύτητα, δύναμη, κλπ.) και είναι εντελώς ανεξάρτητο από το σύστημα S(1).
Σχήμα 1: Ανάλυση διανύσματος ως προς κινούμενο σύστημα συντεταγμένων. Το διάνυσμα αναλύεται σε συνιστώσες ως προς το σύστημα ( )1ta ( )1S t ,
ενώ το διάνυσμα ( )2ta αναλύεται σε συνιστώσες ως προς το σύστημα
. ( )2S t Βέβαια, το διάνυσμα μπορεί, σε κάθε χρονική στιγμή , να αναλυθεί σε συνιστώσες ως προς το σύστημα οπότε έχουμε την εναλλακτική αναπαράστασή του
a)
t(S t ( ) ( ) ( )( )a t a t a t1 2 3, , ,
η οποία εξαρτάται από το σύστημα ( )S t . Η ανωτέρω διευκρίνιση είναι θεμελιώδους
σημασίας και πρέπει πάντοτε να λαμβάνεται υπ’ όψιν όταν διατυπώνουμε ή επεξεργαζόμαστε φυσικούς νόμους στους οποίους υπεισέρχονται οι συνιστώσες του
διανύσματος ως προς κινούμενο σύστημα αναφοράς. ( ) , 1, 2,3,a t k =k
(ta )
(1) Δηλαδή το διάνυσμα ( )ta
( )S t
παριστά το απόλυτο (αδρανειακό) μέγεθος και όχι το αντίστοιχο σχετικό μέγεθος
ως προς το κινούμενο σύστημα .
- 13 -

12
Στη συνέχεια, και με σκοπό να διακρίνουμε με σαφήνεια μεταξύ των δύο αναπαραστάσεων του διανύσματος , θα χρησιμοποιήσουμε το σύμβολο
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
a ( )t=a a για να δηλώνουμε τη γεωμετρική αναπαράσταση του διανύσματος, η οποία είναι ανεξάρτητη από το σύστημα συντεταγμένων, και το σύμβολο ( ) ( )S t
ta για να δηλώνουμε τη αναλυτική αναπαράσταση του
διανύσματος μέσω των συνιστωσών του ως προς το σύστημα ( )S t (οι οποίες εξαρτώνται από
το σύστημα ). Δηλαδή η έκφραση ( )S t ( ) ( )S tta θα χρησιμοποιείται ως συντομογραφία του
συνόλου των τριών συνιστωσών του διανύσματος a :
( ) ( )
( )( )( ) ( )
1
2
3
def
S t
S t
a t
t a t
a t
⎛ ⎞⎜ ⎟
= ⎜ ⎟⎜ ⎟⎝ ⎠
a .
Περαιτέρω, ο συμβολισμός ( ) ( )12S t
ta θα χρησιμοποιείται για να δηλώσει την αναπαράσταση
του διανύσματος μέσω των συνιστωσών του ως προς το σύστημα , ακόμη και όταν . Βλ. Σχήμα 1.
( )1ta ( )2S t
1t t≠ 2
Είναι φανερό ότι, αν δύο συστήματα και δεν έχουν παράλληλους άξονες, τότε aS bS
( ) ( )Sa
t t≠a aSb
, εφ’ όσον οι συνιστώσες του ( )ta στα δύο συστήματα είναι διαφορετικές.
Έτσι με σκοπό να καταστήσουμε σαφή τη διάκριση ανάμεσα στη γεωμετρική ισότητα δύο διανυσμάτων και στην ισότητα των συνιστωσών τους (θεωρούμενων ως διατεταγμένων τριάδων), εισάγουμε τα ακόλουθα δύο σύμβολα ισότητας
=a bi : Γεωμετρική ισότητα, 1,2,3
Sa=a b
Sb: Ισότητα συνιστωσών ως προς τα συστήματα και αντίστοιχα. aS Sb
Περαιτέρω, οι σχέσεις
,S S
= =a b a bi i ,
θα νοούνται γεωμετρικά, δηλαδή το διάνυσμα συντίθεται από τις συνιστώσες του ως προς το σύστημα
bS , και στη συνέχεια συγκρίνεται με το διάνυσμα a .
Θα προχωρήσουμε τώρα στον προσδιορισμό της σχέσεως μετασχηματισμού των συνιστωσών ενός διανύσματος όταν το σύστημα αναφοράς στρέφεται περί έναν άξονα ( e είναι το μοναδιαίο διάνυσμα επί του άξονα περιστροφής) κατά γωνία
a S eθ . (Η φορά περιστροφής και το
διάνυσμα συνδέονται δεξιόστροφα. Βλ. Σχήμα 2). Ας συμβολίσουμε με e ( , )S S θ′ ′= e το σύστημα το οποίο προκύπτει από τη στροφή του συστήματος S . Τότε ισχύει το ακόλουθο Θεώρημα:
- 14 -

13
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
Σχήμα 2: Περιστροφή συστήματος περί άξονα.
Θεώρημα 1: Μεταξύ των συνιστωσών S S
≡a a και S ′
a ενός και του αυτού διανύσματος
ως προς τα συστήματα
a
S και ( ),S S θ′ ′= e ισχύει η σχέση:
( )( ) ( )1,2,3
cos 1 cos sinS S S S S SSθ θ′ = + ⋅ − + ×a a e e a a e θ , (1)
όπου S S≡e e είναι οι συνιστώσες του μοναδιαίου διανύσματος επί του άξονος περιστροφής
ως προς το αρχικό σύστημα S . (Η απόδειξη της σχέσεως (1) παρατίθεται στο τέλος του παρόντος εδαφίου). Η ανωτέρω σχέση (1) θα δοθεί και σε μητρωική μορφή. Αν θέσουμε
1
2
3
S
aa aa
⎛ ⎞⎜ ⎟= =⎜ ⎟⎜ ⎟⎝ ⎠
a , 1
2
3
S
aa aa
′
′⎛ ⎞⎜ ⎟′ ′= =⎜ ⎟⎜ ⎟′⎝ ⎠
a , 1
2
3
S
eee
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
e ,
τότε η σχέση (1) γράφεται στη μορφή (1') a R′ = ⋅aόπου είναι ο ακόλουθος 3 3 πίνακας: R
~×
( )
21 1 2 1 3 3 2
21 2 2 2 3 3 1
21 3 2 3 3 2 1
1 0 0 0cos 0 1 0 1 cos 0
0 0 1 0
e e e e e e eR e e e e e e e
e e e e e e eθ θ
⎛ ⎞ −⎛ ⎞ ⎛⎜ ⎟⎜ ⎟ ⎜= + − + −⎜ ⎟⎜ ⎟ ⎜
⎜ ⎟ ⎜⎜ ⎟ −⎝ ⎠ ⎝⎝ ⎠
⎞⎟⎟⎟⎠
. (2)
Ο πίνακας R θα λέγεται πίνακας στροφής (rotation matrix). (Η μετατροπή της διανυσματικής σχέσεως (1) στη μητρωική σχέση (1') γίνεται εύκολα με απ’ ευθείας εκτέλεση αλγεβρικών πράξεων).
- 15 -

14
Ας θεωρήσουμε τώρα δύο διαδοχικές περιστροφές του συστήματος αναφοράς με πίνακες στροφής
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
R και R′ αντίστοιχα: R RS S ′′ S ′′⎯⎯→ ⎯⎯→
Το σύστημα . (3)
S μπορεί να περάσει απ’ ευθείας στη θέση S ′′ μέσω μιας κατάλληλης περιστροφής ως προς ένα (τρίτο) άξονα. Έστω R′′ ο πίνακας περιστροφής αυτής: RS ′′ ′′S⎯⎯→ . (4) Θεωρούμε τώρα ένα αδρανειακό διάνυσμα , και συμβολίζουμε με και a ,a a′ a′′ , τις συνιστώσες του ως προς τα συστήματα ,S S ′ και S ′′ . Τότε, εφαρμόζοντας τη σχέση (1') παίρνουμε (5) a R a′′ ′ ′= ⋅και , (5') a R′ = ⋅a
a⋅και άρα, εισάγοντας τη δεύτερη στην πρώτη
( )a R R′′ ′= . (6) Εξ άλλου, σύμφωνα με τον ορισμό (4) του πίνακα R′′ , ισχύει η σχέση . (7) a R′′ ′′= ⋅a Επειδή οι δύο ανωτέρω σχέσεις ισχύουν για κάθε διάνυσμα a , συμπεραίνουμε ότι: R R R′′ ′= ⋅ . (8) Δηλαδή ισχύει το ακόλουθο Θεώρημα 2: Ο πίνακας στροφής της σύνθεσης δύο διαδοχικών περιστροφών ισούται με το γινόμενο των πινάκων στροφής των δύο περιστροφών ( το οποίο σχηματίζεται κατά την τάξη εκτέλεσης των περιστροφών). Εφαρμογές των σχέσεων (1) και (1') Α. Ας θεωρήσουμε ότι το σύστημα περιστρέφεται περί τον άξονα κατά
γωνία 1 2 3:S Ox x x 1Ox
θ1 . Τότε έχουμε: και ( )1 1, ,a a= ⋅ = ⋅ =e i e a e e a i1 1 3 2 2 3a a× = −a e i i , οπότε η σχέση (1) γίνεται: ( ) ( )1 1 1 1 3 2 2 3 1cos 1 cos sin
S Sa a aθ θ θ
′= + − + −a a i i i ,
από την οποία βρίσκουμε
1 1
2 2 1 3 1
3 3 1 2 1
cos sincos sin
a aa a aa a a
θ θθ θ
′ = ⎫⎪′ = + ⎬⎪′ = − ⎭
(9)
Το αποτέλεσμα αυτό είναι απλό και προκύπτει εύκολα και με απ’ ευθείας γεωμετρική θεώρηση στο επίπεδο (Βλ. Σχήμα 3). Αντίστοιχες σχέσεις προκύπτουν και για τις περιστροφές περί τους άξονες
2 3Ox x
20x και 30x .
- 16 -

15
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
Β. Ας θεωρήσουμε ότι η γωνία περιστροφής είναι μικρή (απειροστή), και ας τη συμβολίσουμε με δθ αντί για θ . Στην περίπτωση αυτή μπορούμε να γραμμικοποιήσουμε τη σχέση (1) (ή την (1')) ως προς δθ . Προς τούτο θα χρησιμοποιήσουμε τις αναπτύξεις:
Σχήμα 3: Στροφή περί τον άξονα 10x . , ( ) ( )2cos 1 1Oδθ δθ= + ≈
( ) ( )3sin Oδθ δθ δθ δ= + ≈ θ
)
. Εισάγοντας τις ανωτέρω σχέσεις στις (1) και (2) βρίσκουμε: ( 2Oδθ δθ′ = + × +a a a e (10) και ( )2a R a O δθ′ = ⋅ + (10') όπου
3 2
3
2 1
11
1
e e
1R ee e
δθ δθδθ δθδθ δθ
−⎛ ⎞⎜= −⎜⎜ ⎟−⎝ ⎠
e ⎟⎟ . (11)
Με τη βοήθεια της σχέσεως (10) η (10') μπορούμε να αποδείξουμε ότι όταν οι γωνίες περιστροφής είναι μικρές (απειροστές), τότε οι περιστροφές μπορούν να αναπαρασταθούν διανυσματικά. Πράγματι, αν εισάγουμε το διάνυσμα στροφής
, 1
1,2,32
3 S
δθδθ δθ
δθ
⎛ ⎞⎜ ⎟= = ⎜ ⎟⎜ ⎟⎝ ⎠
δθ e
τότε οι σχέσεις (5) και (5') παίρνουν τη μορφή ( )2
S SS SO δθ′ ′= = + × +a a a a δθ (12)
- 17 -

16
και
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( )2a R a O δθ′ = ⋅ +δθ (12') όπου
( )3 2
3
2 1
11
1R 1
δθ δθδθ δδθ δθ
−⎛ ⎞⎜= −⎜⎜ ⎟−⎝ ⎠
δθ θ ⎟⎟ . (13)
Αν θεωρήσουμε τώρα δύο διαδοχικές περιστροφές του συστήματος αναφοράς
( ) ( )
SR R
S S′
′′ ′
′′⎯⎯⎯⎯→ ⎯⎯⎯⎯→δθ δθδθ δθ
,
και εφαρμόσουμε τη σχέση (13) βρίσκουμε ( ) ( ) ( ) ( )( )22 , ,R R R O δθ δθ δθδθ′ ′ ′ ′ ′⋅ = + +δθ δθ δθ δθ . (14)
Η τελευταία σχέση, η οποία ισχύει μόνο για μικρές (απειροστές) περιστροφές, εκφράζει το ακόλουθο: Θεώρημα 3: Το διάνυσμα στροφής της σύνθεσης δύο διαδοχικών απειροστών περιστροφών ισούται (σε πρώτη τάξη) με το άθροισμα των διανυσμάτων στροφής των δύο περιστροφών. Συμπλήρωμα εδαφίου 1.3: Απόδειξη της σχέσεως (1). Η σχέση (1) του παρόντος εδαφίου αποδεικνύεται ως εξής: Κατ’ αρχήν μεταφέρουμε παράλληλα το διάνυσμα έτσι ώστε η αρχή του να συμπέσει με την αρχή των συστημάτων συντεταγμένων
a OS και S' . Προφανώς η μεταφορά αυτή δεν μεταβάλλει τις
συνιστώσες του . Στη συνέχεια παρατηρούμε ότι οι συνιστώσες του διανύσματος ως προς το σύστημα
a aS' ταυτίζονται με τις συνιστώσες του διανύσματος ′a , που προκύπτει από
το μετά από στροφή a θ κατά την αντίθετη φορά(2) περί τον άξονα , ως προς το σύστημα eS . Έτσι, το πρόβλημα ανάγεται στο να εκφρασθούν οι συνιστώσες (ως προς το σύστημα S ) του διανύσματος συναρτήσει των συνιστωσών του (ως προς το ίδιο σύστημα), της γωνίας στροφής
′a aθ ′ , και του άξονα περιστροφής e .
Έστω το πέρας του διανύσματος (δηλαδή Γ a =a OΓ ), η προβολή του στον άξονα περιστροφής , το πέρας του
A Γe ′Γ ′a (δηλαδή ′ ′=a OΓ ), και Δ η προβολή του στην
ευθεία ′Γ
AΓ . Βλ. Σχήμα 4. (Προφανώς τα σημεία , ,A ,′Γ Γ Δ ανήκουν σε ένα επίπεδο κάθετο στον άξονα ). eΘεωρούμε τώρα την ακόλουθη ανάλυση του διανύσματος ′ ′=a OΓ : . (15) ′ = + +a OA AΔ ΔΓ′
)
Όμως (βλ. και Σχήμα 4) , (16) (= ⋅OA e e a
S(2) Σε σχέση με τη φορά περιστροφής του συστήματος .
- 18 -

17
( )( )cos cos cosθ θ′= = = − ⋅AΓAΔ AΓ AΓ a e e aAΔ
θ , (17)
διότι ′=AΓ AΓ (λόγω της περιστροφής), και ( )= − = − ⋅AΓ OΓ OA a e e a , και
( )sin sinθ θ×′ ′= = ××
a eΔΓ AΓ a ea e
, (18)
διότι ′× = =a e AΓ ΑΓ . Εισάγοντας τώρα τις εκφράσεις (16), (17) και (18) στην (11) βρίσκουμε: ( ) ( ) ( )cos sinθ θ′ = ⋅ + − ⋅ + ×⎡ ⎤⎣ ⎦a e e a a e e a a e , ή ( )( ) ( )cos 1 cos sinθ θ θ′ = + ⋅ − + ×a a e e a a e , η οποία δεν είναι άλλη από την αποδεικτέα σχέση (1).
Σχήμα 4: Απόδειξη σχέσεως (1).
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 19 -

1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
1.4 Βαθμοί ελευθερίας στερεού σώματος. Γωνίες στροφής επιπλέοντος σώματος. Όπως κάθε (απολύτως) στερεό σώμα ελεύθερα κινούμενο στο χώρο, έτσι και ένα ελεύθερα επιπλέον στερεό σώμα, έχει έξι βαθμούς ελευθερίας. Δηλαδή, η θέση του στο χώρο καθορίζεται πλήρως με τη βοήθεια έξι ανεξαρτήτων γενικευμένων συντεταγμένων. Οι έξι γενικευμένες συντεταγμένες μπορεί να επιλεγούν κατά διάφορους τρόπους. Μια συνήθης επιλογή, είναι η ακόλουθη: Οι τρεις πρώτες γενικευμένες συντεταγμένες, επιλέγονται να είναι οι καρτεσιανές συντεταγμένες του κέντρου αναφοράς των ταχυτήτων(
q q q1 2 3, , ,O
1), ως προς ένα ακίνητο (χωροπαγές) σύστημα. Οι υπόλοιπες γενικευμένες συντεταγμένες, ( ) ( ) ( )6 5, ,q q 4qψ θ ϕ= = = , λαμβάνονται να είναι, κατά σειράν, οι γωνίες στροφής περί τους τρεις σωματοπαγείς άξονες , αντίστοιχα. Υπενθυμίζεται ότι, γενικά, η σειρά (τάξη) με την οποία νοούνται οι περιστροφές έχει σημασία, εκτός από την περίπτωση των απειροστών περιστροφών. Βλ. σχετικά και εδάφιο 1.3.
3 2 1, ,B BOx Ox Ox B
6
Στα πλαίσια του παρόντος μαθήματος θα ασχοληθούμε κυρίως με την περίπτωση μικρών («απειροστών») κινήσεων (μετατοπίσεων και περιστροφών) επιπλεόντων σωμάτων. Επίσης, θα ασχοληθούμε με τη μελέτη της δυναμικής συμπεριφοράς πλοίου που κινείται με σταθερή μέση ταχύτητα, δια μέσου κυματισμών. Στις περιπτώσεις αυτές θα εργαζόμαστε με τις εξής γενικευμένες συντεταγμένες, οι οποίες προκύπτουν άμεσα από τις : ( ), 1 1jq j = ξ ξ ξ1 2 3, , : Καρτεσιανές συντεταγμένες του σωματοπαγούς κέντρου αναφοράς των
ταχυτήτων, ως προς το σύστημα το κινούμενο με τη μέση ταχυτήτα του επιπλέοντος σώματος (Κ.Σ.).
O
θ θ θ1 2 3, , : (Απειροστές) περιστροφές γύρω από τους σωματοπαγείς άξονες
, αντίστοιχα, οι οποίες, σε πρώτη τάξη, ταυτίζονται με τις αντίστοιχες περιστροφές γύρω από τους τρεις άξονες του Κ.Σ.
3 2 1, ,B BOx Ox Ox B
31 2, ,Ox Ox Ox Στις περιπτώσεις αυτές όχι μόνον η μετατόπιση ( )1 2 3, ,ξ ξ ξ=ξ , αλλά και η περιστροφή
( 1 2 3, , )θ θ θ=θ έχει ιδιότητες διανύσματος, και άρα μπορούμε να την χειριζόμαστε ως διάνυσμα. (Βλ. και εδάφιο 1.3). Οι περιστροφές θ θ θ1 2 3, , θα συμβολίζονται επίσης και ως εξής: 1 4 2 5 3, , 6θ ξ θ ξ θ ξ= = = . Οι βαθμοί ελευθερίας ( ) ( ), 1 1j j t jξ ξ= = 6 , από κοινού, θα ονομάζονται κινήσεις του
επιπλέοντος σώματος, οι παραγωγοί τους ως προς χρόνο, ( ) ( ), 1 1j t jξ = 6
6
, θα ονομάζονται ταχύτητες του επιπλέοντος σώματος και, τέλος, οι δεύτερες παράγωγοι τους ως προς χρόνο,
, θα ονομάζονται επιταχύνσεις του επιπλέοντος σώματος. Όταν υπάρχει
λόγος να διακρίνουμε μεταξύ των γραμμικών ( ) ( ), 1 1j t jξ =
( )ξ ξ ξ1 2 3, , και των περιστροφικών κινήσεων (ταχυτήτων, επιταχύνσεων), τότε θα χρησιμοποιούμε τα αντίστοιχα επίθετα. Π.χ., γραμμικές επιταχύνσεις
( )ξ ξ ξ4 5 6, ,
1 2 3, ,ξ ξ ξ , η περιστροφικές ταχύτητες 4 5 6, ,ξ ξ ξ .
(1) Το ίδιο σημείο 0 λαμβάνεται και ως αρχή του σωματοπαγούς συστήματος συντεταγμένων.
- 20 -

19
Ειδικά στην περίπτωση του πλοίου, οι κινήσεις ( ), 1 1j jξ = 6 , έχουν συγκεκριμένα ονόματα (ελληνικά και αγγλικά), τα οποία παρουσιάζονται στον Πίνακα 1 και στο Σχήμα 1. ΠΙΝΑΚΑΣ 1
ΟΝΟΜΑΤΟΛΟΓΙΑ ΤΩΝ ΚΙΝΗΣΕΩΝ ΤΟΥ ΠΛΟΙΟΥ Κίνηση Ελληνική Ονομασία Αγγλική Ονομασία
ξ1 Διαμήκης οριζόντια ταλάντωση surge ξ2 Εγκάρσια οριζόντια ταλάντωση sway ξ3 Κατακόρυφη ταλάντωση heave
ξ θ4 1= Διατοιχισμός roll ξ θ5 2= Προνευτασμός ή πρόνευση pitch ξ θ6 =
3 Στροφική οριζόντια ταλάντωση yaw
Σχήμα 1: Ονοματολογία κινήσεων πλοίου.
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 21 -

1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
1.5 Αδρανειακός ρυθμός μεταβολής διανύσματος ( )t=a a , αναλυμένου στους στιγμιαίους άξονες κινούμενου συστήματος συντεταγμένων.
Ας θεωρήσουμε ένα (αδρανειακό) διάνυσμα ( )t=a a . Ο ρυθμός μεταβολής του ως προς
χρόνο, ο οποίος στη συνέχεια θα λέγεται και αδρανειακός ρυθμός μεταβολής του και θα
συμβολίζεται με
( )ta
( )d tdta
, ορίζεται από τη σχέση
( ) ( ) ((0
1limt
d tt t t
dt tΔ →= + Δ −
Δa
a ))a . (1)
Προφανώς ο αδρανειακός ρυθμός μεταβολής ενός διανύσματος είναι ένα νέο διάνυσμα ανεξάρτητο από το τυχόν σύστημα συντεταγμένων ( )S t που χρησιμοποιούμε για να αναλύσουμε το σε συνιστώσες. ( )ta Ας θεωρήσουμε τώρα το ρυθμό μεταβολής των συνιστωσών του ως προς ένα κινούμενο σύστημα συντεταγμένων , το οποίο έχει γωνιακή ταχύτητα . Αυτός ο ρυθμός
μεταβολής θα συμβολίζεται με
a=( )S t ( )tΩ Ω
( ) ( )t S tt∂ a και ορίζεται από τη σχέση:
( ) ( ) ( ) ( ) ( ) ( )( )1,2,3
0
1limt S t S t t S ttt t t
t +ΔΔ →∂ = +Δ −
Δa a ta (2)
Είναι φανερό ότι το μέγεθος ( ) ( )t S t
t∂ a εξαρτάται από το σύστημα ( )S t και την κινητική του
κατάσταση. Πράγματι, ας υποθέσουμε, κατ’ αρχήν, ότι το διάνυσμα a είναι ανεξάρτητο του χρόνου. Τότε προφανώς . Εξ άλλου, εφαρμόζοντας τη σχέση 1.3 (12), βρίσκουμε /d dt =a 0
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1,2,3 1,2,3 2S t t S t t S t S t
t t t t t t O t+Δ +Δ
+Δ = = + × Δ + Δa a a a Ω ,
εφ’ όσον το διάνυσμα στροφής του συστήματος ( )S t μετά χρόνο Δt δίνεται, σε πρώτη τάξη, από τη σχέση . Εισάγοντας την τελευταία σχέση στη σχέση ορισμού (2) βρίσκουμε:
t= Δδθ Ω
( ) ( ) ( )1,2,3 1,2,3
0t S tS tt∂ = ×a a Ω ≠
(εκτός εάν a Ω , οπότε 0 ). Από τα ανωτέρω προκύπτει ότι, γενικά, × =a Ω
( )t S t
ddt
≠ ∂a a .
Τίθεται λοιπόν το ερώτημα να προσδιορισθεί η σχέση μεταξύ του αδρανειακού ρυθμού μεταβολής ενός διανύσματος και του ρυθμού μεταβολής των συνιστωσών του ως προς κινούμενο (περιστρεφόμενο) σύστημα συντεταγμένων.
- 22 -

21
Θεώρημα 1:
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
Έστω ένα (αδρανειακό) διάνυσμα και ( )ta ( )S t ένα κινούμενο σύστημα
συντεταγμένων. Εάν το σύστημα περιστρέφεται με γωνιακή ταχύτητα , τότε: ( )S t ( )tΩ
( ) ( ) ( ) ( ) ( )t S t
d tt t
dt= ∂ + ×
aa Ω a t . (3)
Πριν προχωρήσουμε στην απόδειξη του ανωτέρω θεωρήματος θα δώσουμε δύο χρήσιμες εφαρμογές (ειδικές περιπτώσεις) της σχέσης (3). Ας θεωρήσουμε ένα στερεό σώμα [ ]B κινούμενο ελεύθερα στο χώρο με ταχύτητα
και το καρτεσιανό σύστημα ( ) ( ) ( )(, ,t t=U Ω U Ω ) ( )S t σταθερά προσδεδεμένο στο σώμα
[ ]B . Προφανώς, στην περίπτωση αυτή η γωνιακή ταχύτητα του συστήματος συμπίπτει με την
γωνιακή ταχύτητα του σώματος Ω [ ]B . Θα εφαρμόσουμε τώρα τη σχέση (3) για να υπολογίσουμε τον αδρανειακό ρυθμό μεταβολής: α) ενός σωματοπαγούς διανύσματος θέσης
, και β) της γωνιακής ταχύτητας του σώματος ( )t=r r Ω [ ]B .
α) Εφ’ όσον το διάνυσμα είναι σωματοπαγές, οι συνιστώσες του ως προς το επίσης σωματοπαγές σύστημα δεν μεταβάλλονται. Άρα,
( )r t( )S t
( ) ( )0t S t
r t∂ = ,
οπότε, εφαρμόζοντας τη σχέση (3) παίρνουμε
( ) ( ) ( )d tt
dt= ×
rΩ r t , (4)
β) Στην περίπτωση της γωνιακής ταχύτητας ( )tΩ η σχέση (3) μας δίνει αμέσως
( ) ( ) ( )t S t
d tt
dt= ∂ Ω
Ω, (5)
εφ’ όσον ( ) ( ) 0t t× =Ω Ω
( )
. Το φυσικό νόημα της σχέσης (5) είναι ότι οι συνιστώσες
( ) ( ) ( )3, ,t tt∂ = ∂Ω Ω( 1 2t tt t∂ ∂Ω Ω )t του διανύσματος ( )tt
∂∂Ω
πάνω στους άξονες
του Σ.Σ., μπορούν να θεωρηθούν ως οι συνιστώσες της απόλυτης (αδρανειακής) επιτάχυνσης του επιπλέοντος σώματος.
Απόδειξη: Ας θεωρήσουμε τη μεταβολή ( ) ( ) ( )t t tΔ = + Δ −a a a t , καθώς και τις
συνιστώσες της ( ) ( )S ttΔa στο σύστημα ( )S t . Τότε έχουμε:
( ) ( ) ( ) ( ) ( ) ( ) ( )
1,2,3
S t S t S tt t t t tΔ = Δ = + Δ −a a a a . (6)
Προσθέτοντας και αφαιρώντας την ποσότητα ( ) (S t tt t
)+ Δ+ Δa στο δεξιά μέλος της (6)
παίρνουμε:
( ) ( ) ( ) ( ) ( ) ( ) ( )1,2,3
S t S t t S tt t t t t
+ ΔΔ = Δ = + Δ −a a a a +
( ) ( ) ( ) ( )S t S t tt t t t
+ Δ+ + Δ − + Δa a . (7)
- 23 -

22
Όμως οι δύο τελευταίοι όροι της ανωτέρω σχέσης είναι οι συνιστώσες του ίδιου διανύσματος ως προς τα δύο συστήματα (t t+ Δa ) ( )S t και ( )S t t+ Δ . Η διαφορά των δύο αυτών όρων
υπολογίζεται αμέσως βοήθεια της σχέσεως 1.3 (12), αν λάβουμε υπ’ όψιν μας ότι το σύστημα προκύπτει από το σύστημα (S t t+ Δ ) ( )S t μετά από μία παράλληλη μεταφορά tΔU (η
οποία δεν ενδιαφέρει εν προκειμένω) και μια περιστροφή περί τον άξονα /=e Ω Ω κατά
γωνία tδθ = ΔΩ . Τότε, εφαρμόζοντας τη σχέση 1.3 (12) παίρνουμε:
( ) ( ) ( ) ( ) ( ) ( ) ( )1,2,3 2S t t S t S t
t t t t t t Oδθ δθ+ Δ
+ Δ = + Δ + + Δ × +a a a e
( ) ( ) ( ) ( ) ( ) ( )1,2,3 2S t S t
t t t t t O t= + Δ + × Δ + Δa a Ω ,
απ’ όπου προκύπτει
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1,2,3 2S t S t t S t
t t t t t t t O t+ Δ
+ Δ − + Δ = − × Δ + Δa a a Ω
( ) ( ) ( ) ( )1,2,3 2S t
t t t O t= × Δ + ΔΩ a . (8)
Εισάγοντας την (8) στην (7) και διαιρώντας δια Δt βρίσκουμε: ( ) ( ) ( ) ( ) ( ) ( ) ( )( )1,2,31 1
S t S t t S t
tt t t t
t t t +Δ
Δ= Δ = +Δ −
Δ Δ Δa
a a a +
( ) ( ) ( ) ( )S t
t t O+ × + ΔΩ a t .
Παίρνοντας τώρα το όριο για 0 , και λαμβάνοντας υπ’ όψιν τους ορισμούς (1) και (2), βρίσκουμε
tΔ →
( ) ( ) ( ) ( ) ( ) ( )t S t S t
d tt t t
dt= ∂ + ×
aa Ω a ,
η οποία είναι ακριβώς η αποδεικτέα σχέση.
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 24 -

1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
1.6 Εξισώσεις κίνησης επιπλέοντος στερεού σώματος: Ι. Αδρανειακοί συντελεστές
Ένα σημαντικό βήμα προς την κατεύθυνση της ανάλυσης και εξειδίκευσης των διανυσματικών εξισώσεων κίνησης 1.1 (4) και 1.1 (5) του ελεύθερα επιπλέοντος σώματος, αποτελεί η επεξεργασία (μετασχηματισμός) και η ανάλυση σε συνιστώσες του αριστερά μέλους αυτών. Αυτό ακριβώς είναι το αντικείμενο του παρόντος εδαφίου. Το πρώτο βήμα προς την κατεύθυνση αυτή είναι η εισαγωγή κατάλληλου συστήματος συντεταγμένων, με τη βοήθεια του οποίου οι δύο διανυσματικές διαφορικές εξισώσεις 1.1 (4) και 1.1 (5) μετατρέπονται σε έξι βαθμωτές διαφορικές εξισώσεις ως προς τις συνιστώσες
και , ( ) ( ) ( )( )1 2 3, ,U t U t U t ( ) ( ) ( )( )1 2 3, ,t t tΩ Ω Ω
της γραμμικής και γωνιακής ταχύτητας ( )tU και ( )tΩ , αντίστοιχα.
Μια πρώτη προφανής επιλογή είναι να χρησιμοποιηθεί ένα ακίνητο (χωροπαγές) σύστημα συντεταγμένων. Όπως όμως συχνά συμβαίνει στην επιστημονική πράξη, η προφανής λύση παρουσιάζει σημαντικά μειονεκτήματα. Στην προκειμένη περίπτωση τα κύρια μειονεκτήματα είναι:
i) Τα γεωμετρικά και αδρανειακά χαρακτηριστικά του επιπλέοντος σώματος (πλοίου) ως προς ακίνητο (χωροπαγές) σύστημα συντεταγμένων καθίστανται συναρτήσεις του χρόνου, οι οποίες μάλιστα εξαρτώνται έμμεσα και περίπλοκα από τις άγνωστες ταχύτητες ( )tU
και του σώματος, και ( )tΩii) Κατά τη διεξαγωγή μετρήσεων (τόσο σε πειραματικό επίπεδο όσο και στο φυσικό
σύστημα) τα συνηθέστερα χρησιμοποιούμενα όργανα μέτρησης είναι επιταχυνσιόμετρα τα οποία τοποθετούνται επί του επιπλέοντος σώματος (μοντέλου ή πλοίου), και δίδουν απ’ ευθείας συνιστώσες αδρανειακών επιταχύνσεων (και εξ αυτών, δι’ ολοκληρώσεως, ταχυτήτων και κινήσεων) ως προς κατευθύνσεις σωματοπαγώς καθορισμένες.
Με βάση τις ανωτέρω παρατηρήσεις οδηγούμαστε να χρησιμοποιήσουμε σωματοπαγές σύστημα (Σ.Σ.) αναφοράς. Το χρησιμοποιούμενο σύστημα επιλέγεται έτσι ώστε να έχει ως αρχή το σωματοπαγές σημείο αναφοράς των ταχυτήτων. Προφανώς η γωνιακή ταχύτητα
του Σ.Σ. είναι η ίδια με τη γωνιακή ταχύτητα του σώματος. ( )tΩ
Δεδομένου ότι τα γεωμετρικά και αδρανειακά χαρακτηριστικά του σώματος είναι χρονικώς αμετάβλητα ως προς το σωματοπαγές συντεταγμένων (βλ. και εδάφιο 1.2), έχουμε:
( ) (B B
)B B B B B
V V
d ddV dVdt dt
ρ ρ⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ + × = + ×⎟⎜ ⎟⎜ ⎟⎟⎜⎝ ⎠∫ ∫U Ω r U Ω r B , (1)
και
( ) ( )B B
B B B B B B B BV V
d ddV dVdt dt
ρ ρ⎛ ⎞
× + × = × + ×⎜ ⎟⎜ ⎟⎝ ⎠∫ ∫r U Ω r r U Ω r . (2)
Κατά συνέπεια, η ανάλυση του αριστερά μέλους των εξισώσεων κίνησης του ελεύθερα επιπλέοντος σώματος σε συνιστώσες ως προς το Σ.Σ., απαιτεί την ανάλυση σε συνιστώσες ως προς το Σ.Σ. των αδρανειακών παραγώγων
- 25 -

24
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) B Bddt
× + ×r U Ω r και ( Bddt
+ ×U Ω r ) . (3)
Η ανάλυση των παραγώγων (3) ως προς το Σ.Σ. γίνεται με τη βοήθεια του θεωρήματος 1 του εδαφίου 1.5 και, ειδικότερα, με τη βοήθεια των σχέσεων (3), (4) και (5) του εδαφίου αυτού. Τα προκύπτοντα αποτελέσματα έχουν ως εξής:
( ) ( ) (' ' ' '
B t B t B Bddt
γραμμικοι οροι μη γραμμικοι οροι−
+ × = ∂ − × ∂ + × + ⋅ − ⋅U Ω r U r Ω Ω U Ω Ω r r Ω Ω) (4)
και
( ) ( ) ( )' '
B B B t B B t B B tddt
γραμμικοι οροι
× + × = × ∂ + ⋅ ∂ − ⋅∂ +r U Ω r r U r r Ω r r Ω
( ) ( ) ( )( )' '
B B B
μη γραμμικοι οροι−
+ ⋅ − ⋅ + × ⋅r U Ω U r Ω r Ω r ΩB . (5)
Η υποσημειούμενη γραμμικότητα /μη-γραμμικότητα αναφέρεται στις ταχύτητες U και . Δηλαδή, οι υποσημειούμενοι ως μη-γραμμικοί όροι είναι αυτοί ακριβώς οι όροι οι οποίοι περιέχουν γινόμενα των συνιστωσών των ταχυτήτων της μορφής
Ω
k mU Ω ή . (Όπως θα δούμε στο τέλος αυτού του εδαφίου, οι μη-γραμμικοί όροι δεν είναι πάντοτε ανωτέρας τάξεως, από την άποψη της τάξεως μεγέθους).
kΩ Ωm
Ας σχολιάσουμε για λίγο το φυσικό νόημα των ανωτέρω σχέσεων (4) και (5). (Βλ. επίσης εδάφιο 1.5, καθώς και σχετικά σχόλια στο εδάφιο 1.2). Τα αριστερά μέλη των εξισώσεων αυτών είναι αδρανειακές παράγωγοι αδρανειακών ποσοτήτων, και άρα έχουν “απόλυτο” νόημα. Δηλαδή είναι μεγέθη ανεξάρτητα από το χρησιμοποιούμενο σύστημα συντεταγμένων. Τα δεξιά μέλη των εξισώσεων (4) και (5) είναι διανύσματα τα οποία εξ υποθέσεως νοούνται αναλελυμένα ως προς τους άξονες του σωματοπαγούς συστήματος. Στην περίπτωση αυτή, δηλαδή, η διανυσματική γραφή δεν έχει «απόλυτο» νόημα (ανεξάρτητο από το σύστημα συντεταγμένων), αλλά αποτελεί μια συντομογραφία των αντιστοίχων συνιστωσών ως προς το Σ.Σ., οι οποίες θα ονομάζονται, για λόγους σαφήνειας, και Σ-συνιστώσες.
Όπως έχει ήδη υποσημειωθεί, τα δεξιά μέλη των σχέσεων (4) και (5) περιέχουν όρους γραμμικούς και όρους μη-γραμμικούς ως προς ( )tU και ( )tΩ . Κατά συνέπεια, στις περιπτώσεις όπου οι συνιστώσες της γραμμικής και γωνιακής ταχύτητας του επιπλέοντος σώματος (ή, έστω, μερικές από αυτές), είναι «μικρές», μπορούμε να προχωρήσουμε σε γραμμικοποίηση, απλουστεύοντας σημαντικά την ανάλυση. Δύο τέτοιες περιπτώσεις θα εξετασθούν στη συνέχεια αυτού του εδαφίου.
- Γραμμικοποίηση του αριστερά μέλους των εξισώσεων κίνησης γύρω από θέση ευσταθούς ισορροπίας
Ας υποθέσουμε κατ’ αρχήν ότι όλες οι συνιστώσες ( ) ( ), , 1, 2k kU t t kΩ = ,3
t
, είναι «μικρές», δηλαδή όλοι οι μη-γραμμικοί όροι είναι δευτέρας τάξεως και αμελούνται. Στην περίπτωση αυτή θέτουμε:
, (6α) ( ) ( )k kU t u t= 1,2,3k =και , (6β) ( ) ( )k kt ωΩ =
- 26 -

25
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
σε συμφωνία με την εξής γενική σύμβαση, που θα χρησιμοποιούμε συχνά στη συνέχεια:
Με μικρά (πεζά) γράμματα θα υποδηλώνονται οι «μικρές» ποσότητες, δηλαδή αυτές των οποίων τα τετράγωνα και τα μεταξύ τους γινόμενα αμελούνται, και με κεφαλαία γράμματα θα υποδηλώνονται ποσότητες τάξεως μεγέθους μονάδας, δηλαδή αυτές των οποίων τα τετράγωνα και γενικά οι δυνάμεις είναι όλες της ίδιας τάξεως μεγέθους και δεν μπορούν να αγνοηθούν.
Εισάγοντας τώρα τις σχέσεις (6) στα δεξιά μέλη των (4) και (5) και γραμμικοποιώντας (πράγμα που, στην προκειμένη περίπτωση, σημαίνει ότι παραλείπουμε τους υποσημειούμε-νους μη-γραμμικούς όρους), παίρνουμε:
( )B t B tddt
+ × = ∂ − × ∂U Ω r u r ω , (7α)
και
( ) ( ) (B B B t B B t B Bddt
× + × = ×∂ + ⋅ ∂ − ⋅∂r U Ω r r u r r ω r r ω)t
=
. (7β)
Εισάγοντας τις σχέσεις (7) στις 1.1 (4) και 1.1 (5), και αμελώντας το δευτεροτάξιο όρο που εμφανίζεται στο αριστερά μέλος της εξισώσεως 1.1 (5), παίρνουμε την
ακόλουθη γραμμικοποιημένη μορφή των εξισώσεων κίνησης του ελεύθερα επιπλέοντος σώματος:
GM ×U U
, (8α) B B
B B t B B tV V
dV dVρ ρ⎛ ⎞ ⎛ ⎞
∂ − × ∂ =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠∫ ∫u r ω F
και
( ) ( )B B
B B B t B B B t B B t BV V
dV dVρ ρ⎛ ⎞
× ∂ + ⋅ ∂ − ⋅∂ =⎜ ⎟⎜ ⎟⎝ ⎠∫ ∫r u r r ω r r ω K . (8β)
Οι εξισώσεις αυτές θα μεταγραφούν σε μητρωική μορφή, η οποία θα χρησιμοποιηθεί εκτενώς στη συνέχεια. Πρώτα όμως θα εισαγάγουμε τον αναγκαίο συμβολισμό ο οποίος θα μας επιτρέψει να εκφράσουμε κατά μητρωικό τρόπο τα αδρανειακά χαρακτηριστικά του σώματος που υπεισέρχονται στα αριστερά μέλη των εξισώσεων (8):
μάζα του σώματος (9) B
B BV
dV Mρ =∫και
( ) ( )1 2 31 2 3, , , ,B
B B B G G G GV
dV J J J M M R R Rρ = = = =∫ r J R . (10)
Ο δεύτερος όρος του αριστερά μέλους της (8β) είναι αρκετά περίπλοκος και απαιτεί περισσότερη προσοχή. Αν θέσουμε ( )1 2 3, ,B r r r=r (1) και ( )1 2 3, ,tω ω ω ω∂ = , παίρνουμε:
( ) ( ) 3 3 3 3
2
1 1 1 1B B
B B B t B B t B B k m m k k m m Bk m k mV V
dV r r r dVρ ρ ω= = = =
⎧ ⎫⋅ ∂ − ⋅∂ = − =⎨ ⎬
⎩ ⎭∑ ∑ ∑ ∑∫ ∫r r ω r r ω i i ω
(1) Παραλείπουμε το δείκτη ( από τις συνιστώσες του σωματοπαγούς διανύσματος )B Br ως προς το Σ.Σ. για να
μην επιβαρύνουμε υπερβολικά το συμβολισμό.
- 27 -

26
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) 2 22 3 1 1 2 2 1 3 3 1
B
B BV
r r r r r r dVρ ω ω ω= + − − ⋅∫ i +
( ) 2 22 1 1 1 3 2 2 3 3 2
B
B BV
r r r r r r dVρ ω ω ω+ − + + − ⋅∫ i +
( ) 2 23 1 1 3 2 2 1 2 3 3
B
B BV
r r r r r r dVρ ω ω ω+ − − + + ⋅∫ i =
3ω⎞⎟⎠
i
. (11) 3 3 3
1 1 2 2 31 1 1
k k k k k kk k k
I I Iω ω= = =
⎛ ⎞ ⎛ ⎞ ⎛= + +⎜ ⎟ ⎜ ⎟ ⎜⎝ ⎠ ⎝ ⎠ ⎝∑ ∑ ∑i i
Στην ανωτέρω σχέση kmI είναι ο τανυστής αδράνειας του σώματος ως προς τους άξονες του Σ.Σ., οριζόμενος ως εξής:
3
2 2
1B
kk B m k BmV
I r r dVρ=
⎛ ⎞= −⎜ ⎟
⎝ ⎠∑∫ , 1, 2, 3k = , (12α)
B
km B k m BV
I r r dVρ= − ∫ , k m≠ , 1, 2, 3k = . (12β)
Οι όροι kkI ονομάζονται ροπές αδράνειας και οι όροι ,kmI k m≠ , γινόμενα αδράνειας του εξεταζόμενου σώματος ως προς το Σ.Σ..
Χρησιμοποιώντας τις σχέσεις (9)-(12) και αναλύοντας σε συνιστώσες ως προς τους άξονες του σωματοπαγούς συστήματος, οι εξισώσεις (8) μετασχηματίζονται στις ακόλουθες έξι βαθμωτές διαφορικές εξισώσεις:
, (13)
1 3 2 2 3
2 3 1 1 3 2
3 2 1 1 2 3
3 2 2 3 11 1 12 2 13 3 1
3 1 1 3 21 1 22 2 23 3 2
3 1 1 3 21 1 22 2 23 3 3
0 0 00 0 00 0 00
00
Mu J J FMu J J F
Mu J J FJ u J u I I I K
J u J u I I I KJ u J u I I I K
ω ωω ωω ωω ω ωω ω ωω ω ω
+ + + + − = ⎫⎪+ + − + + = ⎪⎪+ + + − + = ⎪⎬− + + + + = ⎪⎪+ − + + + =⎪
+ − + + + = ⎪⎭
1
όπου:
1 2 3, ,u u u είναι οι ρυθμοί μεταβολής των Σ-συνιστωσών της αδρανειακής ταχύτητας (συνοπτικότερα, οι Σ-συνιστώσες του
u
t∂ u ),
1 2 3, ,ω ω ω είναι οι ρυθμοί μεταβολής των Σ-συνιστωσών της αδρανειακής γωνιακής ταχύτητας (συνοπτικότερα, οι Σ-συνιστώσες του ω t∂ ω ),
F F F1 2 3, , είναι οι Σ-συνιστώσες της δύναμης F , και K K K1 2 3, , είναι οι Σ-συνιστώσες της ροπής . K
Οι έξι βαθμωτές εξισώσεις που περιέχονται στη σχέση (13) μπορούν εύκολα να γραφούν σε μητρωική μορφή. Ομαδοποιώντας τις εξισώσεις αυτές ανά τρεις (τρεις πρώτες –«εξισώσεις δυνάμεων», τρεις επόμενες –«εξισώσεις ροπών»), μπορούμε να τις γράψουμε στη μορφή:
Fu FM u M Fωω+ = , (14α)
Ku KM u M Kωω+ = , (14β)
- 28 -

27
όπου
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
, ,u Fω και είναι η 3 1 μητρωική αναπαράσταση των διανυσμάτων και
K × , ,t t∂ ∂u ω FK , αντίστοιχα, δηλαδή
, 1
2
3
uu u
u
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
1
2
3
ωω ω
ω
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
, , , (15) 1
2
3
FF F
F
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
1
2
3
KK K
K
⎛ ⎞⎜= ⎜⎜ ⎟⎝ ⎠
⎟⎟
και , ,Fu K FM M Mω ω και KuM είναι 3 3× πίνακες αδρανειακών χαρακτηριστικών οι οποίοι, σύμφωνα με τις εξισώσεις (13), έχουν τη μορφή:
0 0
0 00 0
Fu
MM M
M
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
, 11 12 13
21 22 23
31 32 33
K
I I IM I I I
I I Iω
⎛ ⎞⎜= ⎜⎜ ⎟⎝ ⎠
⎟⎟
1
, (16)
3 2
3
2 1
00
0F Ku
J JM M J
J Jω
−⎛ ⎞⎜= − = −⎜⎜ ⎟−⎝ ⎠
J ⎟⎟ , (17)
Θα σχολιάσουμε τώρα το φυσικό νόημα των διαφόρων όρων που υπεισέρχονται στις εξισώσεις (14α,β). Κατ’ αρχήν, στην εξεταζόμενη περίπτωση όπου όλες οι συνιστώσες ( )u tk και , , είναι μικρές (και άρα το επιπλέον σώμα εκτελεί ταλαντωτικές κινήσεις μικρού πάτους γύρω από μια σταθερή μέση θέση), οι Σ-συνιστώσες εκφράζουν (σε πρωτοτάξια προσέγγιση) τις αδρανειακές επιταχύνσεις του σώματος ως προς τους αντίστοιχους Σ-άξονες (δηλαδή τους αντίστοιχους άξονες του Σ.Σ. συντεταγμένων). Αυτό προκύπτει άμεσα από τη σχέση:
( )k tω 1,2,3k =
1 2 3, ,u u u
( )1t t kd O udt
ω= ∂ + × = ∂ + ≈ ∂u u ω u u tu . (18)
Υπενθυμίζεται ότι οι συνιστώσες 1 2 3, ,ω ω ω εκφράζουν πάντοτε αδρανειακές γωνιακές επιταχύνσεις, εφ’ όσον η σχέση
tddtΩ
= ∂ + × = ∂ω ω ω ωt (19)
ισχύει πάντοτε, ανεξαρτήτως γραμμικοποίησης. Βλ. και εδάφιο 1.5. Περαιτέρω παρατηρούμε ότι στην εξίσωση (14α) («εξίσωση των δυνάμεων») υπεισέρχονται όχι μόνον οι γραμμικές επιταχύνσεις αλλά και οι γωνιακές επιταχύνσεις u ω . Αντίστοιχα, στην εξίσωση (14β) («εξίσωση των ροπών») υπεισέρχονται όχι μόνον οι γωνιακές επιταχύνσεις ω αλλά και οι γραμμικές επιταχύνσειςu . Δηλαδή οι εξισώσεις των δυνάμεων και των ροπών είναι συζευγμένες μεταξύ τους. Η σύζευξη αυτή πραγματοποιείται μέσω των πινάκων FM ω και KuM , οι οποίοι εξαρτώνται από την ποσότητα . Με τη βοήθεια της σχέσεως (17) βλέπουμε ότι
OGM M= =J RG
0F KuM Mω = = αν και μόνον αν OG 0M= =J .
- 29 -

28
Δηλαδή, στην περίπτωση ελεύθερα επιπλέοντος σώματος, οι εξισώσεις των δυνάμεων (14α) αποσυζεύγνυνται από τις εξισώσεις των ροπών (14β), αν και μόνον αν το σημείο αναφοράς των ταχυτήτων συμπίπτει με το κέντρο μάζας του σώματος. Στην περίπτωση αυτή οι εξισώσεις (14α,β) παίρνουν την μορφή
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
O( )tU G
FuM u F= , (14α') KM Kωω = . (14β')
Μια άλλη ειδική περίπτωση η οποία παρουσιάζει εννοιολογικό ενδιαφέρον (αλλά δεν είναι πρακτικά σημαντική, στα πλαίσια του παρόντος μαθήματος) έχουμε όταν το σημείο κρατείται ακίνητο και το σώμα εκτελεί ταλαντώσεις μικρού πλάτους, περιστρεφόμενο ελεύθερα γύρω από το σημείο αυτό(
O
2).Τότε 0u = , και οι εξισώσεις (14α) και (14β) παίρνουν τη μορφή:
FM Fω ω = , (14α'') KM Kω ω = . (14β'')
Στην περίπτωση αυτή οι εξισώσεις (14β'') αρκούν για τον προσδιορισμό των ω , οπότε οι εξισώσεις (14α'') μας δίνουν τις αντιδράσεις που αναπτύσσονται στο σημείο στηρίξεως O . F
Πριν προχωρήσουμε θα δώσουμε μία ακόμη (ισοδύναμη) μητρωική αναπαράσταση των εξισώσεων (14α, 14β), η οποία θα χρησιμοποιηθεί εκτενώς στη συνέχεια. Ορίζουμε κατ’ αρχήν τον 6 6 πίνακα ×
3 2
3 1
2 1
3 2 11 12 13
3 1 21 22 23
2 1 31 32 33
0 0 00 0 00 0 0.................. ...................0
00
Fu F
Ku K
M J JM J J
M J JM M
MM M
J J I I IJ J I I I
J J I I I
ω
ω
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟− ⎟⎜ ⎟⎜⎛ ⎞ ⎟⎜⎟⎜ ⎟⎜⎟= =⎜ ⎟⎟ ⎜ ⎟⎜ ⎟⎜ ⎜⎝ ⎠ ⎟⎜ ⎟− ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ − ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜−⎝ ⎠
(20)
ο οποίος θα ονομάζεται και γενικευμένος αδρανειακός τανυστής του σώματος. Με τη βοήθεια του πίνακα , οι δύο εξισώσεις (14α) και (14β) ενοποιούνται στην ( )6 6kmM M
×=
Mu F= ή , (21α,β) ( )6
1
, 1 1km m km
M u F k=
= =∑ 6
όπου και u F είναι 6 1× πίνακες (6-διάστατα διανύσματα) οριζόμενοι ως εξής:
1 1
2 2
3 3
4 1
5 2
36
def
u uu uu u
uuuu
ωωω
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
= =⎜ ⎟ ⎜⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠
⎟
, (22)
1 1
2 2
3 3
4 1
5 2
36
def
F FF FF F
FF KF K
KF
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
= =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠
(2) Είναι προφανές ότι η περίπτωση αυτή δεν μπορεί να αντιστοιχεί σε ελεύθερα επιπλέον σώμα.
- 30 -

29
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
δηλαδή, ορίζουμε 3k ku ω+ = , , και 1, 2,3k = 3k kF K+ = , 1, 2,3k = . Το 6-διάστατο διάνυσμα , το οποίο συμπεριλαμβάνει τα διανύσματα της συνολικής δύναμης και της συνολικής
ροπής , που ασκούνται στο σώμα, θα ονομάζεται και γενικευμένη δύναμη ή –καλύτερα- γενικευμένη φόρτιση. Αντίστοιχα, το 6-διάστατο διάνυσμα u , το οποίο συμπεριλαμβάνει τις Σ-συνιστώσες της γραμμικής και της γωνιακής επιτάχυνσης του σώματος (δηλαδή τα διανύσματα και
F FK
t∂ u t∂ ωF
), θα ονομάζεται και γενικευμένη επιτάχυνση. Ας σημειωθεί ότι τα ίδια σύμβολα, και , χρησιμοποιούνται για να δηλώσουν τόσο τους 3 1 πίνακες που αντιστοιχούν στα διανύσματα και , όσο και τους 6 1
u ×
t∂ u F × πίνακες της γενικευμένης επιτάχυνσης και της γενικευμένης φόρτισης. Αυτό δεν αναμένεται να φέρει σύγχυση, δεδομένου ότι η ακριβής εκάστοτε έννοια των u και προκύπτει από τα συμφραζόμενα. F
Τέλος, χρησιμοποιώντας τις σχέσεις
u ξ= , u ξ= , (23)
οι οποίες ισχύουν στα πλαίσια της γραμμικής θεωρίας, μπορούμε να γράψουμε την εξίσωση κίνησης (21) και στη μορφή
M Fξ = ή . (24) ( )6
1
, 1km m km
M F kξ=
= =∑ 1 6
- Γραμμικοποίηση των εξισώσεων στην περίπτωση όπου το επιπλέον σώμα
κινείται μεγάλη μέση ταχύτητα.
Ας υποθέσουμε τώρα ότι το επιπλέον σώμα (πλοίο) κινείται με «μεγάλη» (τάξης μεγέθους μονάδος) μέση ταχύτητα U κατά τον άξονα (Ux B1 =σταθερή = ανεξάρτητη του χρόνου), εκτελώντας ταυτόχρονα «μικρές» ταλαντωτικές (παρασιτικές) κινήσεις ως προς όλους τους βαθμούς ελευθερίας του. Τότε, μπορούμε να θέσουμε:
( ) ( )1 1U t U u t= + , ( ) ( )k kU t u t= , 2,3k = (25α)
, ( ) ( ) ( )3k k kt t uω +Ω = = t 1,2,3k = . (25β)
Στην περίπτωση αυτή τα γινόμενα , k lu u , 1, 2,...,6k l = μπορούν να θεωρηθούν αμελητέα
(δευτέρας τάξεως) ως προς τους γραμμικούς όρους (που περιέχουν τις συνιστώσες ή u ), και να παραλειφθούν. Όμως, τα γινόμενα της μορφής είναι συγκρίσιμα με τους γραμμικούς όρους και δεν επιτρέπεται να αγνοηθούν. Σύμφωνα με τα παραπάνω, οι μη-γραμμικοί όροι των δεξιά μελών των εξισώσεων (4) και (5) γραμμικοποιούνται ως εξής:
um m⋅
Uuk
, (26α) ( )3 2 2 3 1kU U O uΩ U i iω ω× = − + ω
( ) ( ) ( )1B B kO ω ω⋅ − ⋅ =Ω Ω r r Ω Ω , (26β)
( ) (1 1B BU O u )kω ω⋅ = +r U Ω r , (26γ)
( ) ( ) ( )1 1B BU O ku ω− ⋅ = − ⋅ +U r Ω r ω i , (26δ)
( )( ) ( 1B B kO )ω ω× ⋅ =r Ω r Ω . (26ε)
Επίσης, γραμμικοποιώντας τον όρο GM ×U U βρίσκουμε
- 31 -

30
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) ( )1 2 2 1 2 1 3 3 1 3 10G kM U J J U J J uω ω ω ω× = − + − +U U i i ω . (26στ)
Εισάγοντας τις σχέσεις (26α-στ) στις εξισώσεις κίνησης του ελεύθερα επιπλέοντος στερεού σώματος 1.1(4) και 1.1(5), και γράφοντας τις τελευταίες σε μητρωική μορφή (χρησιμοποιώντας και τις σχέσεις (14)) βρίσκουμε
Fu F FM u M UM Fω ωω ω+ + = , (27α) Ku K KM u M UM Kω ωω ω+ + = , (27β)
όπου οι καινούργιοι πίνακες MFω και MKω δίνονται από τις σχέσεις:
0 0 00 00 0
FM MM
ω
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟−⎝ ⎠
, (28) 2 3
1
1
000 0
K
J JM J
Jω
− −⎛ ⎞⎜= ⎜⎜ ⎟⎝ ⎠
0 ⎟⎟
και εκφράζουν την επίδραση της μόνιμης μεταφορικής κίνησης στις μη-μόνιμες περιστροφικές κινήσεις του επιπλέοντος σώματος (πλοίου).
Οι εξισώσεις (27α) και (27β) μπορούν επίσης να γραφούν σε ενοποιημένη μορφή (κατ’ αναλογία με την εξίσωση (21)) ως εξής:
Mu UNu F+ = , ή ( )6
1km km m k
mM u UN u F
=
+ =∑ , (29) ( )1 1 6k =
όπου ο νέος 6 6 πίνακας δίνεται από τη σχέση: × N
( )6 62 3
1
1
0 0 0 0 0 00 0 0 0 0
0 0 0 0 00 0 0 0 0
0 0 0 0 00 0 0 0 0
Fkm
K
MM M
N N0
M J JJ
J
ω
ω×
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎛ ⎞ ⎜ ⎟− ⎟⎜⎟⎜ ⎟⎟ ⎜= = =⎜ ⎟⎟ ⎜⎜ ⎟ ⎟⎜ − −⎜⎝ ⎠ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜⎝ ⎠
. (30)
Χρησιμοποιώντας τις σχέσεις (23) η εξίσωση (29) γράφεται και στη μορφή
M UN Fξ ξ+ = ή ( )6
1km m km m k
mM UN Fξ ξ
=
+ =∑ , . (31) ( )1 1 6k =
- Επιπλέον σώμα με κατακόρυφο επίπεδο συμμετρίας
Μια πολύ ενδιαφέρουσα ειδική περίπτωση έχουμε όταν το επίπεδο [ ]1 30 , 0B Bx x αποτελεί επίπεδο γεωμετρικής και αδρανειακής συμμετρίας του ελεύθερα επιπλέοντος στερεού σώματος (π.χ. περίπτωση πλοίου χωρίς μόνιμη κλίση). Τότε ισχύουν οι σχέσεις
και , (32) 22 0GJ R= = 21 23 0I I= =
- 32 -

31
και άρα οι πίνακες M και γίνονται: N
3
3 1
1
3 11
3 1 22
1 31
0 0 0 00 0 00 0 0 00 0 0
0 00 0 0
M J
13
33
0
M J JM J
MJ I
J J IJ I
⎛ ⎞⎜ ⎟−⎜ ⎟⎜ ⎟−
= ⎜−⎜ ⎟
⎜ ⎟−⎜ ⎟⎜ ⎟⎝ ⎠
I
I
⎟ , (33)
και
3
1
1
0 0 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 0
MM
NJ
JJ
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟−
= ⎜−⎜ ⎟
⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
⎟
(35β)
B
. (34)
Από τις σχέσεις (33) και (34) βλέπουμε ότι
, , (35α) 2 1,2 0k lM − = 2 ,2 1 0k lM − =και , . 2 1,2 0k lN − = 2 ,2 1 0k lN − =
Εξ αυτών προκύπτει εύκολα ότι, στην προκειμένη περίπτωση (όπου το επίπεδο [ ] είναι επίπεδο γεωμετρικής και αδρανειακής συμμετρίας), οι εξισώσεις που περιγράφουν την κίνηση κατά τους άξονες και την περιστροφή περί τον είναι ασύζευκτες (όσον αφορά το αριστερά μέλος τους) ως προς τις υπόλοιπες τρεις εξισώσεις, δηλαδή εκείνες που περιγράφουν την κίνηση κατά τον άξονα , και τις περιστροφές περί τους και
.
Ox OxB B1 3,
Ox B1
Ox OxB1 3, Ox B2
Ox B2
Ox B3
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 33 -

1.7 Εξισώσεις κίνηση επιπλέοντος σώματος: IΙ. Φορτίσεις Πάνω σ’ ένα επιπλέον σώμα (πλοίο, ρυμουλκούμενη κατασκευή, πλωτός γερανός, πλωτήρας με όργανα μέτρησης, κλπ.) αναπτύσσονται φορτίσεις (δυνάμεις και ροπές) από διάφορες αιτίες. Από φαινομενολογική άποψη μπορούμε να κατατάξουμε τα αίτια φόρτισης ως εξής:
i) Φορτίσεις από το νερό, ii) Φορτίσεις από τον αέρα/άνεμο, iii) Φορτίσεις από επιφάνειες ελέγχου που συνεργάζονται με το επιπλέον σώμα (π.χ.
πηδάλιο, αντιδιατοιχιστικά πτερύγια, κ.λ.π.), iv) Φορτίσεις από το σύστημα πρόωσης, v) Φορτίσεις από συνδέσμους με άλλα επιπλέοντα ή ακίνητα σώματα (π.χ. αγκύρωση,
ρυμούλκηση, κ.λ.π.).
Συχνά τα περισσότερα από τα ανωτέρω αίτια φόρτισης συνυπάρχουν, καθιστώντας ιδιαίτερα περίπλοκο τον ακριβή προσδιορισμό των φορτίσεων που αναπτύσσονται πάνω στο σώμα. Από την άλλη μεριά, σε ορισμένες περιπτώσεις, διάφορα αίτια φόρτισης μπορούν να παραλειφθούν, λόγω μικρής ποσοστιαίας συμβολής στην ολική φόρτιση του σώματος. Επί παραδείγματι, οι φορτίσεις από αέρα/άνεμο συχνά αμελούνται σε σχέση με τις φορτίσεις από το νερό.
Οι φορτίσεις από το νερό (υδροδυναμικές φορτίσεις) είναι πάντοτε σημαντικές, τόσο για επιπλέοντα όσο και για βυθισμένα σώματα, και δεν μπορούν να αμεληθούν. Οι φορτίσεις αυτές μπορούν να ταξινομηθούν περαιτέρω ως εξής:
α) Φορτίσεις λόγω αδρανειακής αντίδρασης του περιρρέοντος ρευστού, β) Φορτίσεις λόγω δημιουργίας (από την κίνηση του σώματος) επιφανειακών
κυματισμών που αλληλεπιδρούν με το σώμα. Στις φορτίσεις αυτές συμπεριλαμβάνεται και η απόσβεση ακτινοβολίας –η οποία υπάρχει και στην περίπτωση όπου παραλείπουμε τις συνεκτικές τάσεις- και η οποία οφείλεται στην απομάκρυνση ενέργειας από το σώμα μέσω των απομακρυνόμενων κυματισμών,
γ) Φορτίσεις λόγω ανάπτυξης κυκλοφορίας γύρω από το επιπλέον σώμα ή από επί μέρους στοιχεία (παρελκόμενα, επιφάνειες ελέγχου, π.χ. πηδάλιο πλοίου),
δ) Φορτίσεις λόγω συνεκτικών τάσεων (αντίσταση/απόσβεση λόγω συνεκτικότητας), ε) Υδροστατικές φορτίσεις.
Στο εδάφιο αυτό θα εκφράσουμε αναλυτικά τις υδροστατικές φορτίσεις για την περίπτωση μικρών (“απειροστών”) κινήσεων. Οι υδροδυναμικές φορτίσεις θα μελετηθούν στο επόμενο κεφάλαιο. - Υδροστατικές φορτίσεις
Με τον όρο υδροστατικές φορτίσεις εννοούμε τις δυνάμεις και τις ροπές που αναπτύσσονται από τις υδροστατικές πιέσεις πάνω στη βρεχόμενη επιφάνεια του επιπλέοντος σώματος. Η συνολική μόνιμη δύναμη και ροπή (ως προς κάποιο κέντρο αναφοράς) που αναπτύσσεται λόγω του μόνιμου μέρους των υδροστατικών πιέσεων, εξισορροπείται από το βάρος του επιπλέοντος σώματος. Περαιτέρω, όταν το επιπλέον σώμα εκτελεί μικρές κινήσεις
γύρω από μια θέση ευσταθούς υδροστατικής ισορροπίας, τότε αναπτύσσονται ( )6 1jξ ξ×
=
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 34 -

33
πρόσθετες υδροστατικές φορτίσεις
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( )( )6 1
Y YjF FΣ Σ
×= , οι οποίες έχουν χαρακτήρα δυνάμεων
επαναφοράς και δίνονται από τη σχέση
( )YF C ξΣ = − ⋅ , , (1)
όπου είναι ένας 6 6 πίνακας της μορφής C ×
2 1
1
2
00
0
0
0
0 0
C
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪
⎪⎬
⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
33 34 35
243 44 45
1 153 54 552
0 0 0 0 00 0 0 0 0
0 0
0 0
0 0
0 0 0 0
C C CC
C C C
C C
⎪= ⎨ , (2)
με
33
34 43 2
35 53 1
44 22
45 54 12
55 11
C gAC C gAC C gA
C MgGB gAC C gA
C MgGB gA
ρρρ
ρρ
ρ
= ⎫⎪= = ⎪⎪= = − ⎪⎬= + ⎪⎪= = −⎪
= + ⎭⎪
, (3)
όπου M είναι ή μάζα του επιπλέοντος σώματος, είναι το εμβαδόν της ισάλου του σώματος, , , είναι οι πρώτες και οι δεύτερες ροπές του εμβαδού της ισάλου, αντιστοίχως, οριζόμενες από τις σχέσεις
A,k kmA A , 1,k m = 2
k kA
A x dA= ∫ , km k mA
A x x dA= ∫ , (4)
και GB είναι η κατακόρυφη απόσταση μεταξύ του κέντρου βάρους G και του κέντρου άντωσης B του επιπλέοντος σώματος, θεωρούμενη θετική όταν το B βρίσκεται ψηλότερα από το G . Τα στοιχεία του πίνακα ονομάζονται υδροστατικοί συντελεστές του επιπλέοντος σώματος. Περαιτέρω, οι συμβολισμοί
C1
kmC , (αντιστοίχως, 1
2pqC ), χρησιμοποιούνται για να
δηλώσουν ότι οι υδροστατικοί συντελεστές (αντιστοίχως, ) μηδενίζονται όταν το
επίπεδο (αντιστοίχως, τα επίπεδα και ) είναι επίπεδο(α) συμμετρίας του σώματος.
kmC
1xpqC
[ 2Bx =[ 1 0Bx = ] ][ ]0B = 0
Η απόδειξη των γραμμικοποιημένων σχέσεων (3) είναι σχετικά απλή και μπορεί να γίνει με διάφορους τρόπους (π.χ. ολοκλήρωση πιέσεων ή εφαρμογή θεωρήματος Green). Βλ. σχετικά στα βιβλία Λουκάκης, Πέρρας και Τζαμπίρας (1993), Semyonov et al., (1978), Newman, (1977).
- 35 -

34
Η μορφή του πίνακα , και ειδικότερα το ότι η πρώτη, η δεύτερη και η έκτη γραμμή του είναι μηδενικές, αντανακλά το φυσικό γεγονός ότι οι οριζόντιες κινήσεις,
Cξ ξ ξ1 2 6, , , δεν
επάγουν υδροστατικές αντιδράσεις. Λαμβάνοντας υπ’ όψιν τη σχέση (1), ή εξίσωση κίνησης (24, εδάφιο 1.6) επιπλέοντος σώματος το οποίο ταλαντεύεται γύρω από θέση ευσταθούς υδροστατικής ισορροπίας, παίρνει τη μορφή
( ) ( )EM C F Fξ ξ Ξ+ = + YΔ , (5)
όπου ( )YF Δ είναι οι υδροδυναμικές φορτίσεις (οι οποίες, γενικά, εξαρτώνται από τις ταχύτητες ξ και τις επιταχύνσεις ξ του επιπλέοντος σώματος), και ( )EF Ξ είναι οι υπόλοιπες εξωτερικές φορτίσεις.
Περαιτέρω, η εξίσωση κίνησης (31, εδάφιο 1.6), επιπλέοντος σώματος το οποίο ταλαντεύεται γύρω από μόνιμη κίνηση με σταθερή μέση ταχύτητα U , παίρνει τη μορφή
( ) ( )EM UN C F Fξ ξ ξ Ξ+ + = + YΔ . (6)
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 36 -

1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
1.8 Βασικές έννοιες και απλά μαθηματικά εργαλεία για την ταξινόμηση, μελέτη και επίλυση ταλαντωτικών συστημάτων και κυματικών φαινομένων
Η μελέτη και πρόβλεψη της δυναμικής συμπεριφοράς επιπλεόντων σωμάτων (π.χ. πλοίου) σε κυματισμούς περιλαμβάνει:
i) Tη διατύπωση των εξισώσεων κίνησης αυτών, θεωρουμένων ως στερεών σωμάτων σε αλληλεπίδραση με το κυματικό πεδίο του περιρρέοντος νερού, και
ii) Την επίλυση των λαμβανομένων εξισώσεων, με σκοπό τον προσδιορισμό των (ταλαντωτικών) αποκρίσεων των επιπλεόντων σωμάτων.
Σκοπός του παρόντος εδαφίου είναι η υπενθύμιση ορισμένων βασικών εννοιών και εργαλείων τα οποία είναι ιδιαιτέρως χρήσιμα για την ταξινόμηση, μελέτη και επίλυση ταλαντωτικών συστημάτων, όπως αυτών που προκύπτουν στα πλαίσια της μελέτης της δυναμικής συμπεριφοράς επιπλεόντων σωμάτων. Δεδομένου ότι στα επόμενα κεφάλαια θα ασχοληθούμε διεξοδικά και με τους επιφανειακούς κυματισμούς βαρύτητας (οι οποίοι διεγείρουν τα επιπλέοντα σώματα και αλληλεπιδρούν δυναμικά με αυτούς), οι έννοιες και τα μαθηματικά εργαλεία που θα παρουσιάσουμε (υπενθυμίσουμε) θα διατυπωθούν έτσι ώστε να καλύπτουν και κυματικά φαινόμενα.
Λόγω του μερικού και εργαλειακού χαρακτήρα των υπομνήσεων αυτών, θα τις παρουσιάσουμε υπό τη μορφή Ερωτήσεων-Απαντήσεων. Με τον τρόπο αυτό επιτυγχάνεται η εστίαση στα σημεία ενδιαφέροντος, χωρίς πλατυασμούς και γενικολογίες. Ερώτηση 1: Τα ταλαντωτικά συστήματα και τα κυματικά φαινόμενα(1) διακρίνονται σε γραμμικά και μη-γραμμικά. Ποιό είναι το κριτήριο μέσω του οποίου γίνεται αυτή η διάκριση;
Απάντηση: Ας συμβολίσουμε με f τη διέγερση του συστήματος (διεγείρον αίτιο του φαινομένου) και με ( )fL την απόκριση του συστήματος (δηλ., την προκύπτουσα ταλαντωτική κίνηση ή κυματική διαταραχή). Το κριτήριο (συνθήκη) γραμμικότητας μπορεί τότε να διατυπωθεί ως εξής: Ας υποθέσουμε ότι κάθε μια από τις διεγέρσεις 1f , 2f (όταν δρα μόνη της) δημιουργεί την απόκριση (κυματική διαταραχή, κυματικό πεδίο)
( ) (n ny ,t fLx = ) , 1 2n ,= .
Εάν επιδράσουν ταυτόχρονα (και αθροιστικά) οι διεγέρσεις 1f και 2f , δηλαδή εάν η διέγερση γίνει 1 2f f f= + , προκύπτει τότε η απόκριση (κυματική διαταραχή)
( ) ( ) ( 1 2y ,t f f fL L= = +x ) .
Εάν ισχύει η σχέση
( ) ( ) ( ) ( ) ( ) ( )1 2 1 2 1y ,t y ,t y ,t f f f fL L L= + + = + 2⇔x x x , (1)
(1) Όπως και κάθε άλλου είδους συστήματα και φαινόμενα.
- 37 -

36
για κάθε ζεύγος δυνατών διεγέρσεων
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
1f , 2f , τότε το σύστημα (φαινόμενο) θα λέγεται γραμμικό. Εάν η σχέση (1) δεν ισχύει, τότε το σύστημα (φαινόμενο) θα λέγεται μη-γραμμικό. Η συνθήκη (1) αναφέρεται επίσης ως Αρχή της (γραμμικής) υπέρθεσης.
Ερώτηση 2: Πώς μπορούν να ταξινομηθούν περαιτέρω τα μη-γραμμικά ταλαντωτικά συστήματα (κυματικά φαινόμενα); Απάντηση: Ο χαρακτηρισμός ενός συστήματος ή φαινομένου ως μη-γραμμικού είναι
αποφατικός (αρνητικός). Δεν προσδιορίζει κατ' ουσίαν τί ιδιότητες έχει το σύστημα (φαινόμενο). Απλώς μας λέει ότι δεν έχει τη συγκεκριμένη ιδιότητα της γραμμικότητας. Με αυτήν την έννοια είναι ιδιαίτερα σημαντικό να προχωρήσουμε σε μια θετικού χαρακτήρα ταξινόμηση των μη-γραμμικών συστημάτων και φαινομένων, με βάση συγκεκριμένες χαρακτηριστικές ιδιότητές τους. Ας σημειωθεί ότι αυτό το ερώτημα ταξινόμησης είναι ιδιαιτέρως περίπλοκο και -στη γενικότητά του- δεν έχει απαντηθεί πλήρως.
Παρ' όλα αυτά, μπορούμε να αναφέρουμε μια κατηγορία μη-γραμμικών συστημάτων
(φαινομένων), η οποία χαρακτηρίζεται κατά θετικό τρόπο, από συγκεκριμένες ιδιότητες. Αυτή είναι η κατηγορία των πολυωνυμικώς μη-γραμμικών συστημάτων (φαινομένων)(2) (polynomially non-linear systems/phenomena). Στη συνέχεια, για λόγους απλότητας, θα διατυπώσουμε τον χαρακτηρισμό μόνον των τετραγωνικώς μη-γραμμικών φαινομένων. Έστω ότι κάθε μια διέγερση nf (όταν δρα μόνη της) δημιουργεί την απόκριση (κυματική διαταραχή, κυματικό πεδίο) ( ) ( )n ny ,t Q f=x , 1 2 3n , ,= . Εάν επιδράσουν ταυτόχρονα (και αθροιστικά) και οι τρεις διεγέρσεις 1f , 2f , 3f , δηλαδή εάν η διέγερση γίνει 1 2 3f f f f= + +
( )t Q f= Q f= +
, τότε προκύπτει η απόκριση (κυματική διαταραχή) . ( )y ,x ( )1 2f f+ 3
Το σύστημα (φαινόμενο) θα λέγεται τετραγωνικώς μη-γραμμικό (ή τετραγωνικό) εάν ισχύει η σχέση
( ) ( ) ( ) ( ) ( ) ( ) (1 2 3 1 2 2 3 3 1 1 2 3Q f f f Q f f Q f f Q f f Q f Q f Q f+ + = + + + + + − − − ) , (1)
για κάθε τριάδα δυνατών διεγέρσεων 1f , 2f , 3f . Με παρόμοιο, αν και πιο πολύπλοκο, τρόπο διατυπώνονται συνθήκες για την κυβική μη-γραμμικότητα και, γενικώς, για την πολυωνυμική μη-γραμμικότητα τάξεως . Η συνθήκη της πολυωνυμικής μη-γραμμικότητας τάξεως
n1n + εμπλέκει την ταυτόχρονη
(και αθροιστική) δράση ανεξαρτήτων διεγέρσεων. n
Ερώτηση 3: Πώς ταξινομούνται τα (ντετερμινιστικά) ταλαντωτικά/κυματικά φαινόμενα ως προς τη χρονική εξάρτησή τους;
(2) Το επίθετο "πολυωνυμικός", εν προκειμένω, έλκει την καταγωγή του από την συνήθη έννοια του πολυωνύμου, αλλά εδώ νοείται κατά πολύ γενικώτερο τρόπο.
- 38 -

37
Απάντηση: Χωρίς την απαίτηση να καλύψουμε κάθε δυνατή περίπτωση, μπορούμε να διακρίνουμε τρεις γενικές (και σημαντικές) κατηγορίες ταλαντωτικών/κυματικών φαινομένων, ως προς το είδος της χρονικής εξάρτησης της διαταραχής:
- Τα μεταβατικά (transient) φαινόμενα, - Τα χρονικώς περιοδικά (time periodic) φαινόμενα, με ιδιαίτερα σημαντική
κατηγορία τα χρονικώς αρμονικά (time harmonic) φαινόμενα, και - Τα μόνιμα (steady) κυματικά φαινόμενα.
Ως μεταβατικά φαινόμενα θεωρούμε αυτά που ξεκινούν από μια αρχική κατάσταση (συνήθως ηρεμία), εξελίσσονται κατά γενικό τρόπο στο χρόνο, και τέλος αποσβεννύονται ή μεταπίπτουν σε μια από τις δύο άλλες κατηγορίες (περιοδικά ή μόνιμα).
Τα (χρονικώς) περιοδικά φαινόμενα έχουν κι αυτά ένα χαρακτήρα μονιμότητας. Στην περίπτωση αυτή, υποτίθεται ότι η αιτία (πηγή) της διαταραχής έχει χρονικώς περιοδική υφή και δρα διαρκώς (δηλαδή για μεγάλο χρονικό διάστημα), οπότε και το αποτέλεσμα (ταλάντωση, κυματική διαταραχή) είναι –έχει πλέον καταστεί- χρονικώς περιοδικό. Η περίπτωση χρονικώς αρμονικής (time harmonic) διέγερσης είναι ιδιαιτέρως σημαντική για τα γραμμικά και τα πολυωνυμικώς μη-γραμμικά συστήματα. Ειδικώς για τα γραμμικά συστήματα, η (μόνιμη) απόκριση είναι και αυτή χρονικώς αρμονική, με την ιδια συχνότητα.
Τέλος, ως μόνιμα κυματικά φαινόμενα θεωρούμε αυτά τα οποία καθίστανται ανεξάρτητα του χρόνου ως προς κατάλληλο σύστημα αναφοράς (παρατηρητή). Ως ένα παράδειγμα αυτής της (κάπως ιδιότυπης) κατηγορίας κυματικών φαινομένων αναφέρουμε το σύστημα των κυματισμών που παράγει ένα πλοίο, λόγω της κίνησής του με σταθερή ταχύτητα σε ήρεμη θάλασσα (Kelvin ship wave pattern). Αυτό το σύστημα κυματισμών είναι μόνιμο (ανεξάρτητο του χρόνου) ως προς παρατηρητή επί του πλοίου. Βέβαια, το ίδιο σύστημα κυματισμών είναι μεταβατικό ως προς παρατηρητή ακίνητο ως προς τη Γη. Σχόλιο 1: Η δεύτερη και η τρίτη κατηγορία αποτελούν συχνά εξιδανικεύσεις των πραγματικών φαινομένων. Είναι όμως πολύ χρήσιμες όσον αφορά το μαθηματικό χειρισμό των αντιστοίχων προβλημάτων. Σχόλιο 2: Τα πραγματικά ταλαντωτικά και κυματικά φαινόμενα εμφανίζουν συνήθως και τους τρεις χαρακτήρες, αν και σε διαφορετικές κλίμακες χώρου-χρόνου. Σχόλιο 3: Συχνά χρησιμοποιείται η ακόλουθη ορολογία. Στην περίπτωση μεταβατικής χρονικής εξάρτησης, λέμε ότι μελετάμε το φαινόμενο (πρόβλημα) στο πεδίο του χρόνου, ενώ στην περίπτωση (χρονικώς) αρμονικής εξάρτησης, λέμε ότι μελετάμε το φαινόμενο (πρόβλημα) στο πεδίο συχνοτήτων. Η ορολογία αυτή θα χρησιμοποιηθεί συστηματικά στη συνέχεια.
Ερώτηση 4: Πώς διαφοροποιείται η μαθηματική μοντελοποίηση και μελέτη των ταλαντωτικών και κυματικών προβλημάτων, αναλόγως με το είδος της χρονικής εξάρτησης της διαταραχής;
Απάντηση: Στην περίπτωση των μεταβατικών φαινομένων, η μαθηματική μοντελοποίηση οδηγεί σε προβλήματα αρχικών τιμών. Απαιτείται, δηλαδή, η γνώση της αρχικής κατάστασης του εξεταζομένου συστήματος (ή κυματικού πεδίου), η οποία,
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 39 -

38
σε συνδυασμό με τους νόμους που διέπουν τα φαινόμενα (π.χ., διαφορικές ή ολοκληροδιαφορικές εξισώσεις), μας επιτρέπει να μελετήσουμε (προβλέψουμε) την εξέλιξή του στο χρόνο. Στην περίπτωση ταλαντώσεων συγκεντρωμένων συστημάτων (lumped systems), τα αντίστοιχα μαθηματικά προβλήματα είναι προβλήματα αρχικών τιμών συνήθων διαφορικών εξισώσεων. Μια γενική μέθοδος επίλυσης
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
γραμμικών προβλημάτων αρχικών τιμών μας παρέχει η εφαρμογή του μετασχηματισμού Laplace:
( ) ( ) ( )0
ˆ ;stf s e f t dt f t t sL∞
−= = →⎡ ⎤⎣ ⎦∫ , , ,s j IRσ ω σ ω= + ∈ (1)
Ως γνωστόν, με τη βοήθεια του μετασχηματισμού αυτού οι χρονικές παράγωγοι αλγεβρικοποιούνται λόγω της βασικής τελεστικής ιδιότητας
( ) ( ) ( ) ( ) (ˆ0 0f t s f t f s f s fL L′ = ⋅ − + = ⋅ −⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ )+ , (2)
εκ της οποίας προκύπτει
( ) ( ) ( ) ( ) ( )1 2ˆ 0 0 ...n n n nf t s f s s f s f− −⎡ ⎤ ′= − + − + −⎣ ⎦L
( ) ( ) ( ) ( )2 10 0n nsf f− −− + − + , . (3) 0n >
Στη συνέχεια επιλύεται το μετασχηματισμένο πρόβλημα, και η λύση του αρχικού προβλήματος λαμβάνεται με εφαρμογή του Θεωρήματος αντιστροφής. Βλ. και στο Κεφάλαιο ??, όπου παρουσιάζεται συνοπτικά αλλά με πληρότητα η βασική θεωρία του μετασχηματισμού Laplace και δίδονται διάφορες χρήσιμες εφαρμογές. Όσον αφορά τα κυματικά φαινόμενα, και εφόσον αυτά εκτείνονται στο χώρο, πρέπει να ληφθεί υπ’ όψιν και η επίδραση των συνοριακών επιφανειών, οι οποίες περιορίζουν το χωρικό πεδίο, καθώς και των διεπιφανειών, οι οποίες προσδιορίζουν ασυνέχειες παραμέτρων μέσα στο πεδίο. Κατά συνέπεια, τα μαθηματικά προβλήματα μέσω των οποίων μοντελοποιείται η κυματική κίνηση είναι, γενικώς, προβλήματα αρχικών-συνοριακών τιμών (initial-boundary value problems) μερικών διαφορικών (ή άλλων) εξισώσεων, στα οποία (ενδεχομένως) υπεισέρχονται και συνθήκες συναρμογής (matching conditions) στις διεπιφάνειες. Η εφαρμογή του μετασχηματισμού Laplace βοηθά στην επίλυση και αυτών των προβλημάτων –εφ’ όσον είναι ή μπορούν να θεωρηθούν γραμμικά- απαλείφοντας τις χρονικές παραγώγους και απλοποιώντας τα προβλήματα σε προβλήματα συνοριακών τιμών. Στην περίπτωση (χρονικώς) περιοδικής ταλαντωτικής (κυματικής) κίνησης δεν τίθεται ζήτημα αρχικών τιμών. Ειδικά στην περίπτωση γραμμικών και χρονικώς αρμονικών συστημάτων (φαινομένων), η χρονική εξάρτηση είναι τελείως συγκεκριμένης μορφής και μπορεί εύκολα να απαλειφθεί (αλγεβρικοποιηθεί) με τη βοήθεια μιγαδικών αναπαραστάσεων (παραστατικών μιγάδων. Βλ. κατωτέρω, Ερώτηση ΧΧ). Έτσι, στην περίπτωση αυτή, οι μεν γραμμικές ταλαντώσεις ανάγονται σε αλγεβρικά συστήματα, τα δε γραμμικά κυματικά προβλήματα ανάγονται σε προβλήματα συνοριακών τιμών (ενδεχομένως, και με συνθήκες συναρμογής, εάν υπάρχουν διεπιφάνειες).
Ερώτηση 5: Πώς μπορούμε να απαλείψουμε τη χρονική εξάρτηση από τα γραμμικά (χρονικώς) αρμονικά προβλήματα;
Απάντηση: Αυτό γίνεται εύκολα, με τη βοήθεια των αρμονικών συναρτήσεων sin tω και cos tω ή, κατά πιο συστηματικό τρόπο, με τη βοήθεια του μιγαδικού εκθετικού
- 40 -

39
(exp j t
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
)ω−
η η=
(3). Λόγω της μεγάλης χρησιμότητάς της, η όλη μεθοδολογία της απαλοιφής (αλγεβρικοποίησης) του χρόνου, στην περίπτωση αρμονικών κυμάτων, περιγράφεται αναλυτικά στη συνέχεια.
Έστω ( ,t )x το (οποιοδήποτε) θεμελιώδες πεδιακό μέγεθος το οποίο αναπαριστά την κυματική διαταραχή. Εφ' όσον η χρονική εξάρτηση υποτίθεται αρμονική, μιας ορισμένης συχνότητας ω (μονοχρωματικό κύμα), η κυματική διαταραχή θα γράφεται στη μορφή
( ) ( ) ( ) ( ) oj t
C S,t cos t sin t Re e ωη η ω η ω η −= ⋅ + ⋅ = ⋅x x x x , (1)
όπου
(2) ( ) ( ) ( )C Sjη η η= +x xo
x
είναι το μιγαδικό πλάτος του χρονικά αρμονικού κύματος. Το μέγεθος ( )oη x θα
αναφέρεται επίσης και ως μιγαδικό πεδίο. Η χρήση του μιγαδικού πεδίου δεν έχει κάποια ιδιαίτερη φυσική σημασία. Αποτελεί απλώς ένα βολικό τρόπο μαθηματικού χειρισμού της χρονικά αρμονικής εξάρτησης. Η μαθηματική ευκολία που προκύπτει με
τη χρήση του μιγαδικού πεδίου καθίσταται φανερή από τις ακόλουθες σχέσεις:
( )oη x
( )oη x
( ) ( ) ( ) oj t,t Re j e ωη ω η −= − ⋅ ⋅x,t x , (3α)
( ) ( ) ( ) 2 oj t,t Re j e ωη ω η −= − ⋅ ⋅x,tt x , (3β)
. . . ( ) ( ) ( ) n on j t
n
,tRe j e
tωη
ω η −= − ⋅ ⋅∂
xx
∂, για κάθε n IN∈ , (3γ)
οι οποίες δείχνουν την αντιστοιχία:
Αν είναι το μιγαδικό πλάτος του ( )oη x ( )x,tη ,
Τότε είναι το μιγαδικό πλάτος του ( ) (onjω η− ⋅ x) ( )n
n
,tt
η∂∂
x. (4)
Με αυτόν τον τρόπο, στην περίπτωση (χρονικώς) αρμονικών κυματικών διαταραχών, η χρονική παράγωγος αλγεβρικοποιείται κατά πολύ απλό και συστηματικό τρόπο.
Ερώτηση 6: Να προσδιορίσετε την ιδιοσυχνότητα του απλού γραμμικού ταλαντωτή,
( ) ( ) ( )2t bX t X tκ′′ ′ 0mX + + = , (1)
( είναι η ταλαντευόμενη μάζα, ο συντελεστής απόσβεσης, και m 2b κ η σταθερά ελατηρίου) με τη βοήθεια της μιγαδικής αναπαράστασης των χρονικώς αρμονικών μεγεθών. (3) Το πρόσημο (-) που εμφανίζεται στο όρισμα του εκθετικού είναι συμβατικό. Μπορούμε, εξίσου καλά, να επιλέξουμε το πρόσημο (+). Το μόνο που έχει σημασία είναι η συνέπεια των χειρισμών.
- 41 -

40
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
Απάντηση: Υποθέτοντας αρμονική χρονική εξάρτηση για την άγνωστη συνάρτηση (κίνηση του ταλαντωτή) ( )X t , θέτουμε
( ) oj tX t Re X e ϖ−= ⋅ , (2)
όπου είναι μια (άγνωστη, προς το παρόν) κυκλική συχνότητα, και ωoX είναι το
μιγαδικό πλάτος (σταθερά). Αναπαραστάσεις όπως η (2), ανωτέρω, χρησιμοποιούνται σε πολλές εφαρμογές μηχανικού, όπως π.χ. στην Ηλεκτροτεχνία. Το μιγαδικό πλάτος
oX αναφέρεται συνήθως ως ο παραστατικός μιγάς του (χρονικώς αρμονικού) μεγέθους ( )X t .
Εισάγοντας την αναπαράσταση (2) στη διαφορική εξίσωση (1), παίρνουμε
( ) ( ) 2 2 0o o o
j t j t j tm Re j X e b Re j X e Re X eω ωω ω κ− −⋅ − ⋅ ⋅ + ⋅ − ⋅ ⋅ + ⋅ ⋅ =ω−
( ) ( ) 2 2 0o
j tRe m j b j X e ωω ω κ −⎡ ⎤⇔ − + − + ⋅ ⋅ =⎣ ⎦ . (3)
Η ανωτέρω σχέση είναι ισοδύναμη(4) με την
. (4) ( ) ( )2 2o
j tm j b j X e ωω ω κ −⎡ ⎤− + − + ⋅ ⋅ =⎣ ⎦ 0
Ο παράγοντας j te ω− μπορεί να απλοποιηθεί διότι 1 0j te ω− = ≠ . Υποθέτοντας,
περαιτέρω, ότι 0 (πράγμα αναγκαίο προκειμένου να οδηγηθούμε σε μη τετριμμένη λύση), η (4) παίρνει τη μορφή αλγεβρικής εξισώσεως ως προς την κυκλική συχνότητα
oX ≠
ω (χαρακτηριστική εξίσωση της (1)):
. (5) 2 2m bjω ω κ⋅ + ⋅ − = 0
Οι δύο ρίζες της (5) δίδονται από τη σχέση: 2
1 2 2,b b j
m m mκω = ± − − . (6)
Εάν (μηδενική απόσβεση), τότε 0b = 1 2 0, / mω κ ω= ± = ± , Στην περίπτωση αυτή οι δύο συναρτήσεις
( ) 0101
oj tX t Re X e ω−= ⋅ και ( ) 0202
oj tX t Re X e ω= ⋅ , (7α)
είναι γραμμικά ανεξάρτητες και ικανοποιούν τη διαφορική εξίσωση (1). (Να το αποδείξετε!). Κατά συνέπεια η γενική κίνηση του ταλαντωτή θα δίδεται ως υπέρθεση των δύο αυτών λύσεων:
( ) 0 010 20
o oj t j tX t Re X e Re X eω ω−= ⋅ + ⋅ =
(4) Να αποδείξετε την ισοδυναμία (3) (4). Η κατεύθυνση (4)⇒ (3) είναι τετριμμένη. Για την απόδειξη της (3) (4) απαιτείται να αξιοποιήσετε το γεγονός ότι η (3) ισχύει για κάθε .
⇔⇒
0t t>
- 42 -

41
( )
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
( )0 0Acos t B sin tω ω= + . (7β)
Η σταθερά 0ω είναι η (κυκλική) ιδιοσυχνότητα στην περίπτωση αυτή.
Εάν (ασθενής απόσβεση), τότε 2b κ< m 21ω ω≠ , και η (γενική) κίνηση του ταλαντωτή θα είναι υπέρθεση των ακόλουθων δύο συναρτήσεων:
( ) 1101
o j tX t Re X e ω−= ⋅ και ( ) 2202
o j tX t Re X e ω−= ⋅ . (8)
(Να αποδείξετε ότι οι δύο ανωτέρω συναρτήσεις ικανοποιούν τη διαφορική εξίσωση (1) και είναι γραμμικά ανεξάρτητες). Κατά συνέπεια, η γενική λύση της εξισώσεως (1) (οφείλει να) γράφεται στη μορφή
( ) 110 20
o oj t j tX t Re X e X eω−= ⋅ + ⋅ 2ω− . (9)
Στην περίπτωση αυτή οι δύο ρίζες 1 2,ω , βλ. εξίσωση (6), γράφονται στη μορφή
( )1 2 0,bbm
ω ω= ± − j , όπου ( )2
20 0ω ω 0 2
bbm
ω≡ = − . Η γενική λύση (9) παίρνει
τότε τη μορφή
( ) ( )( ) ( )( ) 0 010 20
o oj b bj / m t j b bj / m tX t Re X e X eω ω− − − − −= ⋅ + ⋅ =
( ) ( ) 0 010 20
bo o tj b t j b t mRe X e X e eω ω −−= ⋅ + ⋅ ⋅ =
)
( )( ) ( )( )( 0 0
b tmAcos b t B sin b t eω ω
−= + ⋅ . (10)
Η σταθερά παίζει τώρα το ρόλο της (κυκλικής) ( )0 bω ιδιοσυχνότητας με την οποία μπορεί να ταλαντεύεται το σύστημά μας.
Εάν (κρίσιμη απόσβεση), τότε 2b κ= m 1 2b jm
ω ω= = − . Δύο γραμμικά ανεξάρτητες
λύσεις της (1) είναι τώρα οι
( ) 101
bo tmX t Re X e
−⎧ ⎫= ⋅⎨
⎩ ⎭⎬ και ( ) 202
bo tmX t Re X t e
−⎧ ⎫= ⋅ ⋅⎨ ⎬
⎩ ⎭. (11)
(Να το αποδείξετε!). Τέλος, όταν 2b mκ>1 2,
(υπερκρίσιμη απόσβεση), η λύση είναι και πάλι της μορφής (9), με ρίζες ω καθαρά φανταστικούς αριθμούς. Θέτοντας
1 2 1 2, ,jω β= − , η λύση (9) γίνεται
( ) 110 20
o otX t Re X e X eβ−= ⋅ + ⋅ 2 tβ− . (12)
Από τη μορφή των λύσεων (11) και (12) είναι φανερό ότι το σύστημα δεν έχει ταλαντωτικές λύσεις. Κατά συνέπεια, στις δύο τελευταίες περιπτώσεις δεν έχει ιδιαίτερο νόημα να μιλάμε για ιδιοσυχνότητα, παρά το ότι η γενική λύση της διαφορικής εξίσωσης είναι καλώς ορισμένη.
- 43 -

42
Ερώτηση 7: Να μελετήσετε την εξαναγκασμένη ταλάντωση απλού γραμμικού ταλαντωτή, με τη βοήθεια των παραστατικών μιγάδων.
Απάντηση: Το πρόβλημα της εξαναγκασμένης ταλάντωσης του απλού γραμμικού ταλαντωτή διατυπώνεται ως μη-ομογενής (συνήθης) διαφορική εξίσωση, στη μορφή
( ) ( ) ( ) ( )2mX t bX t X t F tκ′′ ′+ + = . (1)
Υποθέτοντας ότι τόσο η διέγερση όσο και η απόκριση είναι αρμονικές, μπορούμε να γράψουμε
( ) oj tF t Re F e ω−= ⋅ και ( ) o
j tX t Re X e ϖ−= ⋅ . (2)
Εισάγοντας τις αναπαραστάσεις (2) στη διαφορική εξίσωση (1), και εργαζόμενοι ως ανωτέρω, Ερώτηση 6, εύκολα βρίσκουμε ότι θα πρέπει να ισχύει η αλγεβρική εξίσωση
. (3) ( ) ( )2 2o o
m j b j X Fω ω κ⎡ − + − + ⋅ =⎣⎤⎦
Από την τελευταία υπολογίζεται αμέσως το μιγαδικό πλάτος της εξαναγκασμένης ταλάντωσης:
2 2
oo FX
m j bω κ ω= −
− +. (4)
Εισάγοντας την (4) στην (2), βρίσκουμε την απόκριση ( )X t .
1/2/2012 Γ. Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 44 -

ΔΥΝΑΜΙΚΗ ΣΥΜΠΕΡΙΦΟΡΑ ΠΛΟΙΟΥ ΣΕ ΚΥΜΑΤΙΣΜΟΥΣ
Κεφάλαιο 2
ΑΛΛΗΛΕΠΙΔΡΑΣΗ ΕΠΙΠΛΕΟΝΤΩΝ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ ΚΑΙ ΚΥΜΑΤΙΣΜΩΝ:
ΜΕΛΕΤΗ ΣΤΟ ΠΕΔΙΟ ΣΥΧΝΟΤΗΤΩΝ ΠΕΡΙΕΧΟΜΕΝΑ σελ. 2.1
Γενικά
47
2.2
Διατύπωση του γενικού υδρομηχανικού προβλήματος αλληλεπίδρασης επιπλεόντων σωμάτων και κυματισμών. Προβλήματα περίθλασης και ακτινοβολίας
50
2.3
Υδροδυναμικές φορτίσεις: Φορτίσεις Froude-Krylov, φορτίσεις περίθλασης και φορτίσεις ακτινοβολίας. Γενικευμένες πρόσθετες μάζες και αποσβέσεις ακτινοβολίας
60
2.4
Εξισώσεις κίνησης επιπλέοντος στερεού σώματος 64
2.5
Η έπ’ άπειρον συμπεριφορά των δυναμικών ακτινοβολίας και περίθλασης 66
2.6
Αναλυτικές ιδιότητες των γενικευμένων πρόσθετων μαζών, των αποσβέσεων και των υδροδυναμικών φορτίσεων 76
2.7
Μέθοδοι επίλυσης των υδροδυναμικών προβλημάτων ακτινοβολίας και περίθλασης
86
2.8
Υπολογισμοί πρόσθετων μαζών, αποσβέσεων και φορτίσεων απλών τρισδιάστατων γεωμετρικών σωμάτων
106
2.9
Απλοποιημένος υπολογισμός των κατακόρυφων δυνάμεων Froude-Krylov και περίθλασης. Η προσέγγιση μεγάλου μήκους κύματος (long-wave approximation) και η υπόθεση της «σχετικής ταχύτητας» του Korvin-Kroukovsky
122
2.10
Πρόσθετες μάζες, αποσβέσεις και φορτίσεις επιμήκων σωμάτων. Αναγωγή στο δισδιάστατο πρόβλημα. Θεωρία λωρίδων
134
- 45 -

2.11 Ταλαντώσεις διδιαστάτου πλωτού σώματος
144
2.12
Παράρτημα Κεφαλαίου 2: Γενική αναπαράσταση των δυναμικών ακτινοβολίας και περίθλασης στο κυλινδρικό χωρίο
N FR RD
160
2.13
Ασκήσεις και Εφαρμογές
2.14
Βιβλιογραφία Κεφαλαίου 2
- 46 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Κεφάλαιο 2
ΑΛΛΗΛΕΠΙΔΡΑΣΗ ΕΠΙΠΛΕΟΝΤΩΝ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ ΚΑΙ ΚΥΜΑΤΙΣΜΩΝ: ΜΕΛΕΤΗ ΣΤΟ ΠΕΔΙΟ ΣΥΧΝΟΤΗΤΩΝ 2.1 Γενικά Στα πλαίσια της προσπάθειας της κατανόησης των διαφόρων φαινομένων και διαδικασιών, ο ανθρώπινος νους συχνά (συνήθως) λειτουργεί αναγωγικά. Δηλαδή, επιδιώκει να αναγνωρίσει επί μέρους στοιχεία που συνθέτουν το εξεταζόμενο φαινόμενο (διαδικασία), να τα απομονώσει και να τα μελετήσει, ανάγοντας την πολυπλοκότητα του αρχικού συστήματος σε απλούστερα στοιχεία. Η τάση αυτή (ανάλυση στα επί μέρους, αναγωγή στα στοιχεία)(1) είναι προφανώς απαραίτητη, τουλάχιστον στη φάση ανάλυσης και κατανόησης. Βέβαια, στη συνέχεια, απαιτείται η φάση της σύνθεσης, όπου εξετάζεται, κατανοείται και μοντελοποιείται ο τρόπος αλληλεπίδρασης των στοιχείων, έτσι ώστε να ερμηνευθεί (αναπαραχθεί) η λειτουργία του αρχικού συστήματος. Η επιστήμη και η Τεχνολογία αναπτύσσονται κατά κανόνα μέσα από την αλληλουχία τέτοιων φάσεων ανάλυσης και σύνθεσης, διεισδύοντας σε ολοένα πιο περίπλοκα φαινόμενα και δημιουργώντας ολοένα πιο σύνθετα συστήματα. Παρά τον αναπόδραστο χαρακτήρα των φάσεων της ανάλυσης και της σύνθεσης, υπάρχουν ορισμένα κρίσιμα ερωτήματα σχετικά με τη «νομιμότητα» (εφαρμοσιμότητα) αυτής της μεθοδολογίας, τουλάχιστον σε μερικές περιπτώσεις. Ιστορικά, η πρώτη σοβαρή αντίρρηση όσον αφορά τη «νομιμότητα» του αναγωγισμού αναφύεται σε σχέση με τη μελέτη βιολογικών συστημάτων (έμβιων όντων): Είναι δυνατόν να κατανοηθούν οι λειτουργίες της ζωής, από τη μελέτη των κυττάρων, όταν εξετάζουμε τα τελευταία αποκομμένα από το όλο έμβιο όν; Σήμερα μπορούμε να θέσουμε αντίστοιχα ερωτήματα και σε σχέση με διάφορα πολύπλοκα τεχνολογικά και τεχνοκοινωνικά συστήματα, όπως είναι τα δίκτυα διανομής ηλεκτρικής ενέργειας (που εκτείνονται σε πολλές χώρες), ή το διαδύκτιο (internet), που λειτουργεί σε παγκόσμια κλίμακα. Δεν επιθυμούμε να εμπλακούμε εδώ στη φιλοσοφική συζήτηση εάν η λειτουργία ενός περίπλοκου συστήματος είναι ή δεν είναι δυνατόν (ανεξαρτήτως κόπου και χρόνου) να αναχθεί με σαφή τρόπο στις ιδιότητες και τις επί μέρους λειτουργίες των συστατικών του στοιχείων. Ανεξαρτήτως της σημασίας και της βαθύτητας του ερωτήματος αυτού, μπορούμε να προσεγγίσουμε το ζήτημα από μια άλλη σκοπιά, θέτοντας το ακόλουθο «πρακτικό» ερώτημα. Υπάρχει, μήπως, κάποια άλλη μεθοδολογία προσέγγισης και μελέτης των φαινομένων και των διαδικασιών, η οποία αποφεύγει – σε κάποιο βαθμό – τον αναγωγισμό; Η Γενική Θεωρία Συστημάτων, που αναπτύχθηκε θεαματικά το δεύτερο ήμισυ του 20ου αιώνα, μπορεί να θεωρηθεί ως μια προσπάθεια υπέρβασης του αναγωγισμού, και ανάπτυξης «ολιστικών» θεωρήσεων και μεθοδολογιών(2), που δίδουν έμφαση στη συνολική συγκρότηση και στη λειτουργική ενότητα των εξεταζόμενων συστημάτων.
(1) Η τάση αυτή, θεωρούμενη στη γενικότητά της, ονομάζεται «αναγωγισμός» (αγγλικά, reductionism). (2) Χωρίς βεβαίως, να εγκαταλείπεται η κλασσική διαδικασία της ανάλυσης.
- 47 -

2
Ας θεωρήσουμε ένα (απολύτως απαραμόρφωτο) στερεό σώμα
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
[ ]Σ που επιπλέει(3) στην
ελεύθερη επιφάνεια FD∂ υγρού (βλ. Σχήμα 1). Θεωρούμε ότι το σώμα [ ]Σ ούτε ρυμουλκείται ούτε αυτοπροωθείται, με συνέπεια η μέση θέση του να είναι σταθερή στο χώρο. Υποθέτουμε, περαιτέρω, ότι αυτή η μέση θέση είναι μία θέση ευσταθούς υδροστατικής ισορροπίας, και ότι το σώμα [ ]Σ εκτελεί κινήσεις μικρού πλάτους γύρω από αυτήν, οι οποίες διεγείρονται είτε από ένα προσπίπτοντα απλό αρμονικό κυματισμό, είτε από άλλες εξωτερικές δυνάμεις, είτε και από τις δύο αυτές αιτίες ταυτόχρονα. Το υγρό που περιρρέει το σώμα [ ]Σ θεωρείται, ως συνήθως, ατριβές και ασυμπίεστο, και η κίνηση του αστρόβιλη, άκυκλη(4) και μικρού πλάτους. Η υπόθεση του ατριβούς (μη-συνεκτικού) υγρού αποτελεί μια σοβαρή απλοποίηση του προβλήματος, εφ’ όσον μας επιτρέπει να αποφύγουμε τη χρήση των εξισώσεων Navier-Stokes και, αντ’ αυτών, να χρησιμοποιήσουμε την κατά πολύ απλούστερη θεωρία δυναμικού (potential flow). Από την άποψη της ορθότητας των λαμβανομένων αποτελεσμάτων, η απλοποίηση αυτή είναι ικανοποιητική σε πολλές περιπτώσεις χρονικώς μεταβαλλόμενων (π.χ. ταλαντευόμενων) ροών με ελεύθερη επιφάνεια. Εδικά στην περίπτωση της δυναμικής συμπεριφοράς του πλοίου σε κυματισμούς, η ανωτέρω υπόθεση οδηγεί σε ικανοποιητικά αποτελέσματα για όλες τις κινήσεις του πλοίου πλην του διατοιχισμού (roll). Όσον αφορά τη γεωμετρική μορφολογία του εξεταζόμενου υδρομηχανικού συστήματος [ ]Y EEΣ + +
FD∂
(5), σημειώνουμε ότι το σχήμα του στερεού σώματος μπορεί να είναι εντελώς γενικό, ενώ το πεδίο ροής υποτίθεται ότι περιορίζεται από την ελεύθερη επιφάνεια του νερού , τη βρεχόμενη επιφάνεια του στερεού
DBD∂ , και τον πυθμένα , ενώ
επεκτείνεται στο άπειρο προς όλες τις οριζόντιες κατευθύνσεις. Ο πυθμένας θεωρείται οριζόντιος και ταυτίζεται με το επίπεδο
DΠ∂
[ ]3x h= − . Σε περιπτώσεις όπου το βάθος είναι
μεγαλύτερο του ημίσεως (και πλέον) του μήκος κύματος
h
( )/ 2h λ> , μπορούμε να θεωρήσουμε ότι , δηλαδή ότι το βάθος του υγρού είναι άπειρο (γιατί;). Η υπόθεση αυτή χρησιμοποιείται εκτενώς στην ανάλυση της δυναμικής συμπεριφοράς πλοίων και πλωτών κατασκευών στην ανοικτή θάλασσα, η οποία σχεδόν πάντοτε θεωρείται απείρου βάθους (χωρίς αυτό να συνεπάγεται κάποιο σφάλμα, όσον αφορά τις αποκρίσεις σε επιφανειακούς κυματισμούς).
h = ∞
Στη πλαίσια του παρόντος κεφαλαίου θα μελετήσουμε διεξοδικά τις (χρονικά) αρμονικές φορτίσεις (δυνάμεις και ροπές) που αναπτύσσονται επί ταλαντευόμενου επιπλέοντος σώματος από το περιρρέον υγρό, και θα διατυπώσουμε τις εξισώσεις κίνησης του σώματος στο πεδίο συχνοτήτων. Θα εξετάσουμε την περίπτωση όπου το πλάτος των κινήσεων και των ταχυτήτων είναι αρκετά μικρό, έτσι ώστε να είναι επιτρεπτή η γραμμικοποίηση των εξισώσεων κίνησης του στερεού και του περιρρέοντος υγρού. Υπό αυτούς τους όρους ισχύει η αρχή της γραμμικής υπέρθεσης, η οποία μας επιτρέπει να αποσυνθέσουμε το δυναμικό ταχύτητας σε δυναμικό περίθλασης και δυναμικό ακτινοβολίας. Για τα επί μέρους αυτά (3) Η ανάλυση που ακολουθεί εφαρμόζεται και σε σώματα βυθισμένα, υπό την προϋπόθεση ότι η μέση θέση
τους είναι θέση ευσταθούς ισορροπίας. (4) Η υπόθεση αυτή χρειάζεται όταν το πεδίο ροής δεν είναι απλά συνεκτικό σημειοσύνολο. (5) Με το σύμβολο [ ]Σ + Υ + ΕΕ υποδηλώνουμε το πλήρες υδρομηχανικό σύστημα, που αποτελείται από το
σώμα [ ]Σ ( )Y και το περιρρέον υγρό με την ελεύθερη επιφάνεια ( )EE .
- 48 -

3
δυναμικά διατυπώνονται προβλήματα συνοριακών τιμών, τα οποία επιλυόμενα οδηγούν στον προσδιορισμό των υδροδυναμικών δυνάμεων. Τα προβλήματα αυτά δυστυχώς δεν επιλύονται αναλυτικά (δηλαδή με τη βοήθεια απλών κλειστών τύπων) ούτε για τις απλούστερες δυνατές γεωμετρίες επιπλεόντων σωμάτων (π.χ. σφαίρα), και άρα – για να παράγουμε αριθμητικά αποτελέσματα- απαιτείται χρήση αριθμητικών μεθόδων επίλυσης των αντίστοιχων προβλημάτων συνοριακών τιμών. Επίσης, θα διατυπώσουμε και θα αποδείξουμε ορισμένες σημαντικές αναλυτικές ιδιότητες των υδροδυναμικών δυνάμεων, και θα παρουσιάσουμε την ενεργειακή ερμηνεία τους. Οι εξισώσεις κίνησης του υδρομηχανικού συστήματος [ ]Y EEΣ + + , που παράγονται στο κεφάλαιο αυτό, αποτελούν τη βάση για την αναλυτική πρόβλεψη των δυναμικών αποκρίσεων πλοίων και άλλων πλωτών θαλάσσιων κατασκευών (συστημάτων) σε πραγματικούς θαλάσσιους κυματισμούς, οι οποίοι, όπως γνωρίζουμε, προσομοιώνονται με στοχαστικές διαδικασίες.
Σχήμα 1: Γεωμετρική μορφολογία του υδρομηχανικού συστήματος – Συμβολισμοί
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 49 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
2.2 Διατύπωση του γενικού υδρομηχανικού προβλήματος αλληλεπίδρασης επιπλεόντων σωμάτων και κυματισμών. Προβλήματα περίθλασης και ακτινοβολίας
Σκοπός αυτού του εδαφίου είναι να μελετήσουμε τις υδροδυναμικές δυνάμεις που αναπτύσσονται πάνω σ’ ένα στερεό σώμα το οποίο ταλαντεύεται γύρω από μια σταθερή μέση θέση, πάνω (ή κοντά) στην ελεύθερη επιφάνεια, σε αλληλεπίδραση με απλούς αρμονικούς κυματισμούς. Προς τούτο, πρέπει να μελετήσουμε το πεδίο ροής του περιρρέοντος υγρού. Αγνοώντας τη συνεκτικότητα και υποθέτοντας αστρόβιλη ροή (potential flow), το πεδίο ταχύτητας (( ,tv x ) 1) εκφράζεται με τη βοήθεια ενός δυναμικού ταχύτητας ( ), txΦ από τη σχέση
( ) ( ), , ,t tv x x x= ∇Φ ∈ D
)
, (1) όπου είναι το γεωμετρικό χωρίο που καταλαμβάνεται από το υγρό. D Εάν ( ) ( ) ( ,p p xΥΔ ΥΔ= t είναι η υδροδυναμική πίεση που ασκείται πάνω στη βρεχόμενη επιφάνεια του σώματος , οι αναπτυσσόμενες υδροδυναμικές φορτίσεις (δυνάμεις και ροπές) δίδονται από τις σχέσεις:
BD∂
( ) ( ) ( ),B
B
D
p t dS∂
ΥΔ ΥΔ= ∫∫F x n , (2α)
( ) ( ) ( ),B
B
D
p t dS∂
ΥΔ ΥΔ= ∫∫K x ×r n
2
3
1
. (2β)
(Εφ’ όσον το πεδίο ροής υποτίθεται μη-συνεκτικό, η παρούσα μοντελοποίηση μας επιτρέπει να υπολογίσουμε φορτίσεις οφειλόμενες σε ορθές τάσεις -την πίεση, δηλαδή- αλλά όχι φορτίσεις που οφείλονται σε διατμητικές τάσεις, δηλαδή δυνάμεις τριβής.)
Οι δύο ανωτέρω σχέσεις μπορούν να γραφούν σε ενιαία μορφή (πρβλ. εξισώσεις (21,22, εδάφιο 1.6)) με τη βοήθεια του γενικευμένου (εξαδιάστατου) «καθέτου» διανύσματος
, το οποίο ορίζεται ως εξής: , , είναι οι τρείς συνιστώσες του (συνήθους)
καθέτου διανύσματος , και , , είναι οι τρείς συνιστώσες του διανύσματος , δηλαδή
( ) ( )1 1 6k kn n=
= 1n 2n 3n
n 4n 5n 6n r n×
, 4 2 3 3n r n r n= − , (3) 5 3 1 1n r n r n= − . 6 1 2 2n r n r n= −
Με τη βοήθεια του ( )kn , , οι σχέσεις (2α,β) ενοποιούνται στη μορφή: 1, 2, ,6k …=
, . (2γ) ( ) ( ) ( ),B
k k
D
F p t∂
ΥΔ ΥΔ= ∫∫ x B 1,2,...,6k =n dS
(1) Στη συνέχεια θα χρησιμοποιούμε το σύμβολο για να δηλώσουμε το γενικό πεδιακό σημείο μέσα στο πεδίο
ροής. Δηλαδή x
( )1 2 3, ,x x x=x .
- 50 -

4
Περαιτέρω, δεδομένου ότι οι κινήσεις και οι ταχύτητες όλων των σημείων του συστήματος
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
[ ]Y EEΣ + + υποτίθενται μικρού πλάτους, προχωρούμε στη γραμμικοποίηση και των υδροδυναμικών εξισώσεων, σε συμφωνία με την αντίστοιχη γραμμικοποίηση των εξισώσεων κίνησης του στερεού σώματος (εδάφιο 1.6). Υπό αυτές τις προϋποθέσεις, η υδροδυναμική πίεση ( ) ( ) ( ),p p xΥΔ ΥΔ= t εκφράζεται μέσω του δυναμικού ταχύτητας από τη σχέση
( )pt
ρϒΔ ∂Φ= − ≡ − Φ
∂ρ , (2) (4)
οπότε οι υδροδυναμικές φορτίσεις (2γ), που ασκούνται πάνω στο επιπλέον σώμα από το περιρρέον υγρό, δίνονται από τη σχέση:
, , (5) ( )
B
k k
D
F n∂
ρΥΔ = − Φ∫∫ BdS 1,2,...,6k =
όπου –λόγω της γραμμικοποίησης- BD∂ είναι πλέον η μέση θέση της βρεχόμενης επιφάνειας του σώματος.
Θα δώσουμε τώρα την ακριβή μαθηματική διατύπωση του υδροδυναμικού προβλήματος από το οποίο προκύπτει το δυναμικό ταχύτητας , και άρα και οι υδροδυναμικές φορτίσεις (5). Ας σημειωθεί ότι στο πρόβλημα αυτό υπεισέρχονται δύο άγνωστα πεδία: εφ’ ενός το δυναμικό ταχύτητας και, αφ’ ετέρου, η ανύψωση της ελεύθερης επιφάνειας
( ), txΦ
( , txΦ ))( 1 2, ,x x tη . Επίσης στο πρόβλημα αυτό υπεισέρχονται και άγνωστες θέσεις και ταχύτητες του
επιπλέοντος σώματος.
Τα δύο άγνωστα πεδία ( ), txΦ και ( 1 2, , )x x tη ικανοποιούν τις ακόλουθες εξισώσεις:
- Στο εσωτερικό του πεδίου ροής , το δυναμικό ( )D D η= ( ), txΦ ικανοποιεί την εξίσωση Laplace, η οποία εκφράζει τη συνέχεια (διατήρηση μάζας) και το αστρόβιλο του πεδίου ροής:
, . (6α) 0ΔΦ = Dx∈
- Στην βρεχόμενη επιφάνεια BD∂ του επιπλέοντος σώματος ισχύει η συνθήκη συνέχειας των κάθετων ταχυτήτων υγρού-στερεού σώματος (συνθήκη μη-εισχώρησης):
( ) ( )6
1k k
k
nn
ξ=
∂Φ= + × ⋅ ≡ ⋅ + ⋅ × =
∂ ∑u ω r n u n ω r n , BDx∈∂ . (6β)
- Στην ελεύθερη επιφάνεια FD∂ , εφαρμόζονται δύο οριακές συνθήκες: η δυναμική συνθήκη (πίεση = σταθερή), η οποία μετά τη γραμμικοποίησή της γράφεται στη μορφή
, , (6γ') 0gηΦ + = 3:FD x∈∂ =x 0
(2) Γενικότερα έχουμε ( ) 21
2p ρ ρ
ΥΔ
= − Φ + ∇Φ , αλλά ο τετραγωνικός όρος παραλείπεται λόγω γραμμικοποίησης.
- 51 -

5
και η κινηματική συνθήκη (κάθετη ταχύτητα της επιφάνειας = κάθετη ταχύτητα των επιφανειακών στοιχείων του ρευστού), η οποία μετά τη γραμμικοποίησή της παίρνει τη μορφή
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
3x
η∂Φ
=∂
, . (3: 0FD x∈∂ =x 3) (6γ'')
Απαλείφοντας την ανύψωση ( 1 2, , )x x tη από τις (6γ') και (6γ'') παίρνουμε την
. (6γ) 3,gΦ + Φ = 0 03:FD x∈∂ =x
- Στον πυθμένα DΠ∂ , το δυναμικό ( ), txΦ ικανοποιεί τη συνθήκη μη-εισχώρησης
0n
∂Φ=
∂. (6δ)
Οι παραπάνω συνθήκες πρέπει να συμπληρωθούν και από μία κατάλληλη «έπ’ άπειρον συνθήκη», η οποία περιγράφει τη συμπεριφορά του δυναμικού , σε μεγάλες
αποστάσεις από το σώμα, δηλαδή όταν ( , txΦ )
→∞x . Η συνθήκη αυτή εξαρτάται από τη φύση του προβλήματος που εξετάζουμε, και είναι ποιοτικού χαρακτήρα. Όπως θα δούμε στη συνέχεια, η έπ’ άπειρον συμπεριφορά του δυναμικού ( ), txΦ είναι καθοριστικής σημασίας
για τις υδροδυναμικές φορτίσεις που ασκούνται πάνω στο σώμα [ ]Σ . Όπως έχουμε ήδη αναφέρει ανωτέρω, στο κεφάλαιο αυτό ασχολούμαστε με το χρονικά αρμονικό πρόβλημα, όπου το όλο υδρομηχανικό σύστημα [ ]Y EEΣ + + ταλαντεύεται αρμονικά με συχνότητα . Στην περίπτωση αυτή θέτουμε ω
, (7) ( ) ( ), Re j tjtx x ω⎧ ⎫⎪⎪Φ = Φ⎨⎪⎪ ⎪⎩ ⎭
e ⎪⎪⎬⎪
όπου η συνάρτηση παίζει το ρόλο του μιγαδικού πλάτους του χρονικά αρμονικού
μεγέθους, εδώ του δυναμικού ταχύτητας
( )xΦ
( ), txΦ
( ), tΦ x
. Υπενθυμίζεται ότι το μέγεθος είθισται παραδοσιακά (σε συγκεκριμένες περιοχές των επιστημών μηχανικού) να ονομάζεται παραστατικός μιγάδας της ποσότητας . Ας σημειωθεί ότι η (7) δεν είναι παρά μία (πολύ βολική) συντομογραφία της σχέσης
( )xΦ
. (8) ( ) ( ) ( ), cosC St tx x xωΦ = Φ + Φ sin tω
⎪⎪⎬⎪
Παρόμοιες αναπαραστάσεις, μέσω παραστατικών μιγάδων, θα χρησιμοποιήσουμε και για όλα τα άλλα μεγέθη που μεταβάλλονται αρμονικά με το χρόνο, π.χ.
, (9α) ( ) ( ), Re j tjp t p ex x ω⎧ ⎫⎪⎪= ⎨⎪⎪ ⎪⎩ ⎭
(3) Οι οριακές συνθήκες ελεύθερης επιφάνειας εφαρμόζονται κατ’ αρχήν πάνω στην ελεύθερη επιφάνεια, δηλαδή στα σημεία ( )3 1 2: ,FD x x x tη∈ ∂ =x , . Μετά τη γραμμικοποίηση, όμως, οι συνθήκες αυτές
αναφέρονται –κατά προσέγγιση– στη μέση θέση της ελεύθερης επιφάνειας . 3: 0FD x∈ ∂ =x
- 52 -

6
, (9β)
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( )1 2 1 2, , Re , j tjx x t x x e ωη η⎧ ⎫⎪⎪= ⎨⎪⎪ ⎪⎩ ⎭
⎪⎪⎬⎪
0
, , (9γ) ( ) Re j tkk t e ωξ ξ
⎧ ⎫⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭1,2,...,6k =
κ.λπ. Εισάγοντας τις αναπαραστάσεις (7) και (9) στις εξισώσεις (6α) έως (6δ) βρίσκουμε τις
ακόλουθες εξισώσεις για το δυναμικό : ( )xΦ
, , (10α) 11 22 33, , ,Φ + Φ + Φ = Dx∈
6
1k k
k
j nn
ω ξ=
∂Φ=
∂ ∑ , BDx∈∂ , (10β)
, , , (10γ) 3, 0μΦ − Φ = 2 / gμ ω= 3: 0FD x∈∂ =x
0n
∂Φ=
∂, . (10δ) Dx Π∈∂
Οι συνθήκες αυτές πρέπει να συμπληρωθούν από την κατάλληλη έπ’ άπειρον συμπεριφορά
του , πράγμα που θα γίνει στη συνέχεια. ( )xΦ
Από τη συνθήκη γάστρας (10β) φαίνεται ότι το πεδιακό δυναμικό είναι συζευγμένο με
τις κινήσεις του επιπλέοντος σώματος. Από την άλλη μεριά, οι δυναμικές εξισώσεις κίνησης (5, εδάφιο 1.7) του σώματος
( )xΦ
kξ
[ ]Σ , οι οποίες με τη βοήθεια των παραστατικών μιγάδων παίρνουν τη μορφή
, (11) ( )( )2 ˆ Y
j M C F Fω ξ ξΔ
⋅ + = +
( )xΦείναι συζευγμένες με το πεδιακό δυναμικό μέσω των υδροδυναμικών δυνάμεων , εξίσωση (5).
( )YF
Δ
Οι εξισώσεις (10) και (11), από κοινού, αποτελούν ένα πλήρες σύστημα συζευγμένων
εξισώσεων ως προς το δυναμικό και τις κινήσεις , το οποίο μπορεί να χρησιμοποιηθεί για τον προσδιορισμό της χρονικά αρμονικής ταλαντωτικής κίνησης του υδρομηχανικού συστήματος
( )xΦ kξ
[ ]YΣ + EE+ . Στη συνέχεια θα δείξουμε ότι, με τη βοήθεια
μιας κατάλληλης γραμμικής αποσύνθεσης του δυναμικού , είναι δυνατόν να αποσυζεύξουμε την εξίσωση κίνησης του σώματος (11) από τις υδροδυναμικές εξισώσεις (10), εκφράζοντας την υδροδυναμική αλληλεπίδραση μέσω υδροδυναμικών συντελεστών που είναι ανεξάρτητοι της κίνησης του σώματος. Η κατανόηση της αποσύζευξης αυτής και ο ακριβής ορισμός (και τελικώς, ο υπολογισμός) των υδροδυναμικών συντελεστών είναι ο κύριος σκοπός του παρόντος κεφαλαίου.
(Φ )x
- 53 -

7
Η γραμμικότητα των εξισώσεων (10) και η μορφή της συνθήκης γάστρας (10β) μας οδηγούν
να εισάγουμε την ακόλουθη γραμμική αποσύνθεση για το δυναμικό :
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( )xΦ
. (12) ( ) ( ) ( )6
*
1k k
k
jx x ωξ=
Φ = Φ + Φ∑ x
Το (ανεξάρτητο των κινήσεων ) δυναμικό kξ ( )* xΦ περιλαμβάνεται στην αποσύνθεση (12) διότι η ύπαρξη της ελεύθερης επιφάνειας δίδει τη δυνατότητα να διαδίδονται κυματισμοί
ακόμη και όταν το σώμα [ ]Σ είναι («κρατείται») ακίνητο! Έτσι, το δυναμικό ( )* xΦ περιλαμβάνει το δυναμικό του προσπίπτοντος (αδιατάρακτου) κυματισμού, καθώς και το δυναμικό περίθλασης (diffraction or scattering potential), το οποίο περιγράφει την «αλλοίωση» του προσπίπτοντος κυματισμού λόγω της παρουσίας του ακίνητου («κρατημένου» στη μέση θέση του) σώματος. Για να γίνουν καλύτερα κατανοητά, από φυσική σκοπιά, τα διάφορα κυματικά πεδία που αναπτύσσονται και εμπλέκονται στο φαινόμενο της αλληλεπίδρασης επιπλέοντος σώματος και επιφανειακών κυματισμών, θα εξετάσουμε ξεχωριστά τις ακόλουθες δύο ειδικές περιπτώσεις αλληλεπίδρασης:
1) Περίθλαση απλού, προοδευτικού, αρμονικού κυματισμού από το σώμα [ ]Σ όταν το τελευταίο «κρατείται» ακίνητο στη μέση θέση του (το πρόβλημα της περίθλασης), και
2) Εξαναγκασμένη ταλάντωση του σώματος [ ]Σ πάνω σε μία αδιατάρακτη -από άλλη αιτία- ελεύθερη επιφάνειας (το πρόβλημα της ακτινοβολίας).
- Το πρόβλημα της περίθλασης (diffraction problem)
Ας θεωρήσουμε κατ’ αρχήν ότι έχουμε μόνο το υγρό, χωρίς επιπλέον σώμα μέσα σ’ αυτό, και ότι δια μέσου του υγρού διαδίδεται ένας απλός, αρμονικός, προοδευτικός κυματισμός. Εάν η γωνία της φασικής ταχύτητας c του κυματισμού και του μοναδιαίου διανύσματος είναι 1i β (βλ. Σχήμα 1), τότε το δυναμικό ( ,I )x tΦ του κυματισμού δίνεται από τη σχέση:
( ) ( ), Re j tII jtx ω⎧ ⎫⎪⎪Φ = Φ⎨⎪⎪ ⎪⎩ ⎭
ex ⎪⎪⎬⎪, (13)
όπου
( )( )
( )0 30 1 0
0
coshexp cos sin
coshIk x hjgA
2j k x k xk h
x β βω
⎡ ⎤+⎣ ⎦ ⎡ ⎤Φ = ⋅ − ⋅ + ⋅ ⋅⎣ ⎦ ,
ή, θέτοντας ( )0 0 1cos ink sk iβ β= + 2i i, και , (14) 1 1 2 2 30x xR i i= + +
( )( ) (0 3
00
coshexp
coshIk x hjgA j
k hx
ω+
Φ = ⋅ − ⋅ )k R , (15)
- 54 -

8
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Σχήμα 1: Προσπίπτων αρμονικός κυματισμός. Γεωμετρική μορφολογία και συμβολισμοί όπου είναι το πλάτος του κυματισμού(A 4), είναι το βάθος του υγρού, και είναι ο αριθμός κύματος (κυματικός αριθμός)(
h 0k5), που ορίζεται ως (η μοναδική) θετική ρίζα της
εξίσωσης
. (16) (20 0gk tahn k hω = )
Το μέγεθος (βλ. εξίσωση (14)) ονομάζεται διανυσματικός αριθμός κύματος. Το διάνυσμα έχει (εξ ορισμού) κατεύθυνση και φορά τις ίδιες με αυτές της φασικής ταχύτητας c του κυματισμού, και μέτρο ίσο με .
0k
0k
0k
Στην περίπτωση του βαθιού νερού ( 2h λ> ) η έκφραση (15) απλουστεύεται στην
( ) ( 0 3 0expIjgA k x jω
Φ = ⋅ − ⋅x )k R (17)
όπου . 20 /k gω=
Ας υποθέσουμε τώρα ότι εισάγουμε το σώμα [ ]Σ στο υγρό και το «κρατάμε» ακίνητο στη
μέση θέση του . Είναι φανερό ότι η παρουσία του σώματος θα
προκαλέσει μία «παραμόρφωση» των κυματισμών, στην περιλαμβάνεται, μεταξύ άλλων,
, 0, 1, 2,...,6kBD kξ⎛ ⎞⎟⎜∂ = = ⎟⎜ ⎟⎜⎝ ⎠
(4) Ακριβέστερα το μέτρο του A είναι το πλάτος του κυματισμού. Γενικά μπορεί να έχουμε ( )expA A jδ= ⋅ ,
οπότε η ποσότητα δ αλλάζει απλώς τη φάση του κυματισμού. (5) Υπενθυμίζεται ότι ο κυματικός αριθμός συνδέεται με το μήκος κύματος με τη σχέση: 0k 0 2 /k π λ=
- 55 -

9
και μια μερική «ανάκλαση» τους. Βέβαια, ανάκλαση, με την έννοια της γεωμετρικής κυματικής, θα έχουμε μόνο όταν το μήκος κύματος του προσπίπτοντος κυματισμού είναι μικρό σε σχέση με τις διαστάσεις του σώματος
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
[ ]Σ και την καμπυλότητα της ισάλου. Στην περίπτωση όπου το μήκος κύματος και οι διαστάσεις του σώματος είναι συγκρίσιμες (και η οποία κυρίως μας ενδιαφέρει) το φαινόμενο είναι πιο περίπλοκο και ονομάζεται περίθλαση (diffraction). Το δυναμικό αυτού του δευτερογενούς πεδίου, των περιθλώμενων κυματισμών, ονομάζεται δυναμικό περίθλασης (diffraction potential) και θα συμβολίζεται με ( ),D txΦ . Αρκετό χρόνο μετά την εισαγωγή του σώματος στο υγρό, οπότε τα μεταβατικά φαινόμενα θα έχουν αποσβεσθεί, το δυναμικό περίθλασης μπορεί να θεωρηθεί ως μία χρονικά αρμονική συνάρτηση, της ίδιας συχνότητας με τον προσπίπτοντα κυματισμό (λόγω της γραμμικότητας):
. (18) ( ) ( ), Re j tDD jtx ω⎧ ⎫⎪⎪Φ = Φ⎨⎪⎪ ⎪⎩ ⎭
ex ⎪⎪⎬⎪
x
Τότε, το συνολικό πεδιακό δυναμικό θα δίνεται από την σχέση:
. (19) ( ) ( ) ( )*I Dx xΦ = Φ + Φ
Δεδομένου ότι το δυναμικό ( )* xΦ πρέπει να ικανοποιεί τις συνθήκες (10) με
0, 1, 2,...6k kξ = = , και ότι το δυναμικό του προσπίπτοντος κυματισμού ( )I xΦ ικανοποιεί
τις (10α,γ,δ), προκύπτει αμέσως ότι το δυναμικό περίθλασης οφείλει να ικανοποιεί τις ακόλουθες συνθήκες:
( )D xΦ
, , (20α) ,11 ,22 ,33 0D D DΦ + Φ + Φ = Dx∈
0DIn⎛ ⎞∂ ⎟⎜Φ +Φ =⎟⎜ ⎟⎜⎝ ⎠∂
, ήτοι D I
n n∂Φ
∂ ∂∂Φ
= − , BDx∈∂ , (20β)
, , , (20γ) ,3 0D DμΦ − Φ = 2 / gμ ω= 3:FD x∈∂ =x 0
0D
n∂Φ
=∂
, . (20δ) Dx Π∈∂
Η έπ’ άπειρον συμπεριφορά του ( )D xΦ υποβάλλεται από τον τρόπο παραγωγής των περιθλώμενων κυματισμών:
Σε μεγάλες αποστάσεις από το σώμα το πρέπει να έχει τη μορφή απομακρυνόμενων κυλινδρικών κυματισμών, συχνότητας (
( )D xΦ
ω 6).
(20ε)
Η ακριβής ασυμπτωτική έκφραση του σε μεγάλες αποστάσεις από το σώμα ( )D xΦ [ ]Σ θα δοθεί στο εδάφιο ??. - Το πρόβλημα ακτινοβολίας (radiation problem) (6) Το γεγονός ότι αυτή η, φυσικής προέλευσης, έπ’ άπειρον συνθήκη είναι συμβιβαστή με τις (20α,γ,δ) δεν
είναι κατά κάποια έννοια αναλυτικά προφανές, και πρέπει να αποδειχτεί (βλ. εδάφιο ??).
- 56 -

10
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Ας υποθέσουμε τώρα ότι το επιπλέον σώμα [ ]Σ εκτελεί εξαναγκασμένες ταλαντώσεις συχνότητας ω και (μιγαδικού) πλάτους
( )expk k kjξ ξ ε= , k =1,2,...6, (21)
πάνω στην ελεύθερη επιφάνεια ενός αδιατάρακτου – από άλλη αιτία – υγρού. Αρκετό χρόνο μετά την έναρξη της κίνησης του σώματος, οπότε τα μεταβατικά φαινόμενα θα έχουν αποσβεσθεί, το περιρρέον υγρό θα εκτελεί μία ταλαντωτική κίνηση με την ίδια συχνότητα ω (λόγω της γραμμικότητας). Το συνολικό δυναμικό ( ),R tΦ x της προκύπτουσας ροή (διεγειρόμενης αποκλειστικά από τις κινήσεις του σώ θα είναι τότε μία χρονικά αρμονική συνάρτηση της μορφής
⎧⎪ ⎪
ςματος)
⎫⎪⎪⎭
, (22)
όπου ο παραστατικός μιγάδας του μεγέθους .
με τα όσα ελέχθησαν ανωτέρω, το δυναμικό θα πρέπει να ικανοποιεί τις
( ) ( ), Re j tRR jt ex x ω⎪ ⎪Φ = Φ⎨ ⎬⎪⎪⎩
( )R xΦ ( ),R tΦ x
Σύμφωνα ( )R xΦ έχεισυνθήκες (10), ενώ σε μεγάλες αποστάσεις από το σώμα θα τη μορφή απομακρυνόμενων
κυλινδρικών αρμονικών κυματισμών. Όπως θα δούμε στη συνέχεια, μέσω των κυματισμών αυτών απάγεται προς το άπειρο («ακτινοβολείται») ενέργεια. Γι’ αυτό το λόγο το δυναμικό
( )xΦ λέγεται (συνολικό) R δυναμικό ακτινοβολίας (radiation potential).
μορφή της συνθήκης γάστρας (10β), σε συνδυασμό με την υπόθεση ότι το υγρό δεν Ηδιεγείρεται σε κίνηση από καμιά άλλη αιτία εκτός από την ταλάντωση του σώματος [ ]Σ ,
6
υποβάλλουν την ακόλουθη γραμμική αποσύνθεση του δυναμικού ακτινοβολίας :
. (23)
Εισάγοντας την (23) στην (10β) βρίσκουμε
( )R xΦ
( ) ( )1
R kkk
jx xωξ=
Φ = Φ∑
6
1
0kk k
k
nn
⎛ ⎞∂
ξ∂
=
⎟⎜ Φ ⎟⎜ ⎟− =⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎝ ⎠∑ ,
η οποία, εφαρμοζόμενη για και , , οδηγεί στις
1kξ = 0ξ = k≠
kkn
n∂Φ
=∂
, 1, 2,....6,k = BDx ∈ ∂ .
Κατά συνέπεια, τα δυναμικά τα οποία θα ονομάζονταν (επί μέρους) δυναμικά( )k xΦ , ακτινοβολίας θα πρέπει να ικανοποιούν τις συνθήκες:
- 57 -

11
, , (24α)
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
,11 ,22 ,33 0k k kΦ + Φ + Φ = Dx∈
kkn
n∂Φ
=∂
, BDx∈∂ , (24β)
, , , (24γ) ,3 0k kμΦ − Φ = 2 / gμ ω= 3: 0FD x∈∂ =x
0k
n∂Φ
=∂
, , (24δ) Dx Π∈∂
και
Σε μεγάλες αποστάσεις από το σώμα το παίρνει τη μορφή απομακρυνόμενων κυλινδρικών κυματισμών, συχνότητας .
( )kΦ xω
(24ε)
- Το γενικό πρόβλημα
Ας επανέλθουμε τώρα στη γενική περίπτωση όπου έχουμε ένα ελεύθερα επιπλέον σώμα [ ]Σ πάνω στο οποίο προσπίπτει ένας απλός, προοδευτικός, αρμονικός κυματισμός. Τότε, θα συμβούν ταυτόχρονα τα φαινόμενα της περίθλασης του προσπίπτοντος κυματισμού λόγω της παρουσίας του σώματος, και της ακτινοβολίας πρόσθετων κυματισμών λόγω των ταλαντωτικών κινήσεων που θα εκτελέσει το σώμα. Κατά συνέπεια, και σύμφωνα με τα όσα ελέχθησαν προηγουμένως για τα προβλήματα περίθλασης και ακτινοβολίας, το συνολικό
δυναμικό του αναπτυσσόμενου γύρω από το σώμα πεδίου ροής θα είναι της μορφής: ( )xΦ
. (25) ( ) ( ) ( ) ( )6
1
kI D kk
jx x x ω ξ=
Φ = Φ + Φ + Φ∑ x
k xξ
Πριν προχωρήσουμε εισάγουμε την ακόλουθη τροποποίηση του συμβολισμού. Θέτουμε:
, (26α) ( ) ( )0I j Ax xωΦ = Φ
, (26β) ( ) ( )D dj Ax xωΦ = Φ
και παραλείπουμε (όταν δεν υπάρχει κίνδυνος σύγχυσης) τους μικρούς κύκλους πάνω από τα σύμβολα των παραστατικών μιγάδων των δυναμικών, των κινήσεων του σώματος, και των άλλων χρονικά αρμονικών ποσοτήτων. Τότε η σχέση (25) γράφεται στη μορφή
(27α) ( ) ( ) ( )( ) ( )6
01
d kk
j A jx x xω ω=
Φ = Φ + Φ + Φ∑ή , ( ) ( )jx xλ λ
λ
ωξΦ = Φ∑ 0, , 1, 2, ..., 6dλ ∈ , (27β)
όπου . 0 d Aξ ξ= = Με βάση τον παραπάνω συμβολισμό, η διατύπωση των εξισώσεων (20) και (24), που ικανοποιούν τα δυναμικά περίθλασης και ακτινοβολίας, ενοποιείται ως εξής:
- 58 -

12
, , (28α) ,11 ,22 ,33 0Φ + Φ + Φ = Dx∈
nn
∂Φ=
∂, BDx∈∂ , (28β)
, (28γ) ,3 0μΦ − Φ = 3: 0FD x∈∂ =x
0n
∂Φ=
∂, . (28δ) Dx Π∈∂
Σε μεγάλες αποστάσεις από το σώμα ( )R →∞ το δυναμικό ( )Φ x συμπεριφέρεται ως απομακρυνόμενος, αρμονικός, κυλινδρικός κυμα-τισμός συχνότητας ω ,
(28ε)
όπου , , 1, 2, ..., 6d∈
και , 0,1 1 0,2 2 0,3 3dn n n= − Φ − Φ − Φ n BDx∈∂ , (28στ)
Η ακριβής μορφή της έπ’ άπειρον συνθήκης (28ε) θα δοθεί στο εδάφιο ??.
Από τις εξισώσεις (28) προκύπτουν τα ακόλουθα χρήσιμα συμπεράσματα για τα δυναμικά ακτινοβολίας και περίθλασης:
Σ1) Τα δυναμικά ( )Φ x , , είναι ανεξάρτητα από τις κινήσεις του επιπλέοντος σώματος.
, 1, 2, ..., 6d∈ kξ
Σ2) Τα δυναμικά ( )Φ x , εξαρτώνται από: , 1, 2, ..., 6d∈ 1) τη γεωμετρική μορφολογία της βρεχόμενης επιφάνειας του επιπλέοντος σώματος
BD∂ , 2) το βάθος του υγρού , h3) τη συχνότητα ταλάντωσης ω .
Επί πλέον, το δυναμικό περίθλασης εξαρτάται και από: dΦ
4) την κατεύθυνση του προσπίπτοντος κυματισμού, ήτοι τη γωνία ( )1,i cβ ≠
dΦ
(που υπεισέρχεται στην ποσότητα ). Ας σημειωθεί ότι το δυναμικό σε αντίθεση με το
dn
DΦ δεν εξαρτάται από το πλάτος του προσπίπτοντος κυματισμού.
A
Σύμφωνα με τα Σ1) και Σ2) έχουμε:
, (29α) ( ) ( ); , ,k k BD hx x ωΦ = Φ ∂ 1,2,...,6,k =
. (29β) ( ) ( ); , , ,d d BD hx x ω βΦ = Φ ∂
Το γεγονός ότι τα δυναμικά είναι ανεξάρτητα από τα πλάτη των κινήσεων του σώματος έχει πολύ μεγάλη σημασία. Αυτό ακριβώς το γεγονός μας επιτρέπει να αποσυζεύξουμε τελικά τις εξισώσεις κίνησης του επιπλέοντος σώματος (11) από τις εξισώσεις κίνησης του περιρρέοντος υγρού (10). Οι αποσυζευγμένες (έξι) εξισώσεις κίνησης του επιπλέοντος σώματος περιέχουν υδροδυναμικούς όρους (υδροδυναμικούς συντελεστές), οι οποίοι υπολογίζονται από τα δυναμικά
Φ kξ
( )Φ x και, άρα, είναι ανεξάρτητοι των κινήσεων.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 59 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
2.3 Υδροδυναμικές φορτίσεις: Φορτίσεις Froude-Krylov, φορτίσεις περίθλασης και φορτίσεις ακτινοβολίας. Γενικευμένες πρόσθετες μάζες και αποσβέσεις ακτινοβολίας
Ας δούμε τώρα τις επιπτώσεις της προηγούμενης ανάλυσης του δυναμικού στον
υπολογισμό των υδροδυναμικών φορτίσεων, που ασκούνται πάνω στο στερεό σώμα ( )Φ x
[ ]Σ . Σύμφωνα με τις σχέσεις (5, εδάφιο 2.2) και (27, εδάφιο 2.2), έχουμε
( ) ( ) ( ) ( )6
2 2 20
1B B B
k k B d k B
D D D
F j A n dS j A n dS j n dSω ρ ω ρ ω ρ ξΥΔ
=∂ ∂ ∂
= − Φ − Φ − Φ ≡∑∫∫ ∫∫ ∫∫ k B
k 6
01
k d kX X X=
≡ + + ∑ . (1)
Σύμφωνα με τα ανωτέρω, η συνολική υδροδυναμική φόρτιση (επί του σώματος [ ]Σ ) αποτελείται από τις εξής επί μέρους φορτίσεις:
1) Τις φορτίσεις (δυνάμεις και ροπές) Froude-Krylov,
( )20
B
k
D
0 k BX j A n dSω ρ∂
= − Φ∫∫ , (2α)
που οφείλονται αποκλειστικά στον αδιατάρακτο προσπίπτοντα κυματισμό. Οι φορτίσεις αυτές υπολογίζονται άμεσα(1), ολοκληρώνοντας την πίεση του πεδίου ροής του αδιατάρακτου κυματισμού (επί το κατάλληλο γενικευμένο συνημίτονο κατεύθυνσης) πάνω στη βρεχόμενη επιφάνεια του [ ]Σ . Η ονομασία Froude-Krylov, των φορτίσεων αυτών, έχει δοθεί προς τιμή των Ναυπηγών William Froude (1810-1879) και Aleksei Nikolayevich Krylov (1863-1945), Άγγλου και Ρώσου αντιστοίχως, οι οποίοι έθεσαν τις βάσεις της μελέτης της δυναμικής συμπεριφοράς του πλοίου.
2) Τις φορτίσεις (δυνάμεις και ροπές) περίθλασης (diffraction forces and moments),
( )2
B
d k d k B
D
X j A n dω ρ∂
= − Φ∫∫ S , (2β)
που οφείλονται στο πεδίο πιέσεων των περιθλώμενων (από το σώμα [ ]Σ ) κυματισμών. Για τον προσδιορισμό των φορτίσεων αυτών απαιτείται να υπολογισθεί πρώτα το δυναμικό περίθλασης , πράγμα που γίνεται με λύση του προβλήματος συνοριακών τιμών (28, εδάφιο 2.2), για (
dΦd= 2).
Σύμφωνα με τις σχέσεις (2α,β), οι φορτίσεις Froude-Krylo 0kv, X , και περίθλασ d kης, X , είναι ανάλογες προς το π άτος A του διεγείροντος (προσπίπτοντος) κυματισμού. Οι λ
(1) Δεν απαιτείται δηλαδή λύση υδροδυναμικού προβλήματος για τον υπολογισμό τους. (2) Στη συνέχεια θα δούμε πως οι δυνάμεις d kX μπορούν να υπολογισθούν και με τη βοήθεια των δυναμικών
ακτινοβολίας . Κατά συνέπεια, είναι δυνατόν να αποφευχθεί η επίλυση του προβλήματος περίθλασης, υπό την προϋπόθεση ότι έχουν λυθεί τα προβλήματα ακτινοβολίας (28, εδάφιο 2.2), για
kΦ
1, 2, ..., 6λ = .
- 60 -

14
φορτίσεις αυτές, από κοινού θεωρούμενες, αποτελούν τις (υδροδυναμικές) διεγείρουσες φορτίσεις (exciting forces and moments or excitin
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
g loads).
3) Τις φορτίσεις (δυνάμεις και ροπές) ακτινοβολίας (radiation forces and moments),
( )2
B
lk l l k B
D
X j nω ρ ξ∂
= − Φ∫∫ dS , 1, 2,...,6k l, = , (2γ)
που οφείλονται στο πεδίο πιέσεων των «ακτινοβολούμενων» από το ταλαντευόμενο σώμα κυματισμών. Η φόρτιση lkX προκύπτει από την ολοκλήρωση του πεδίου πιέσεων που παράγεται όταν το σώμα [ ]Σ
k εκτελεί εξαναγκασμένη ταλάντωση πλάτους , κατά τη
(γενικευμένη) κατεύθυνση , πάνω στην αδιατάρακτη –από άλλη αιτία– ελεύθερη επιφάνεια. Για τον προσδιορισμό των φορτίσεων ακτινοβολίας
lξ
lkX απαιτείται η λύση των προβλημάτων συνοριακών τιμών (28, εδάφιο 2.2), για 1, 2,...6.=
Θα αναλύσουμε τώρα περαιτέρω τις δυνάμεις ακτινοβολίας. Θέτοντας
, (3) B
l k l k B
D
n dSρ∂
Π = Φ∫∫η (2γ) γίνεται
. (4) ( )2l k l l kX jω ξ= − Π
Βάσει της σχέσης ορισμού (3), τα μεγέθη (υδροδυναμικοί συντελεστές) φαίνεται να είναι πλήρως αντίστοιχα με τους πρόσθετους αδρανειακούς συντελεστές (γενικευμένες πρόσθετες μάζες) στερεού σώματος κινούμενου σε (αστρόβιλο, ασυμπίεστο) υγρό χωρίς ελεύθερη επιφάνεια(
l kΠ
3). Υπάρχουν όμως ορισμένες σημαντικές διαφορές σε σύγκριση με τη χωρίς ελεύθερη επιφάνεια περίπτωση. Κατ’ αρχήν, τα μεγέθη εξαρτώνται όχι μόνο από τη γεωμετρία του στερεού σώματος (και του όλου πεδίου, γενικώτερα), αλλά και από τη συχνότητα της κίνησης, εφ’ όσον το δυναμικό ακτινοβολίας εξαρτάται τόσο από τη γεωμετρία, όσο και από τη συχνότητα (μέσω της συνθήκης ελεύθερης επιφάνειας)(
l kΠ
ω lΦ4).
Υπάρχει ακόμη μια σημαντική –πλην όμως «αφανής»- διαφορά μεταξύ των δύο περιπτώσεων (με και χωρίς ελεύθερη επιφάνεια). Στην παρούσα περίπτωση (ύπαρξη ελεύθερης επιφάνειας και υγρό εκτεινόμενο στο άπειρο κατά την οριζόντια κατεύθυνση), το δυναμικό και άρα και οι ποσότητες , λαμβάνουν (γενικώς) μιγαδικές τιμές. Αυτή τη στιγμή δεν μπορούμε να αποδείξουμε (ή να «πείσουμε») ότι τα δυναμικά παίρνουν πράγματι μιγαδικές τιμές. Πρέπει όμως να σημειώσουμε ότι το γεγονός αυτό σχετίζεται άμεσα με την έπ’ άπειρον συμπεριφορά των δυναμικών ακτινοβολίας (Βλ. σχετικά στο Παράρτημα αυτού του Κεφαλαίου).
lΦ
l kΠ
lΦ
lΦ
(3) Ο αναγνώστης που δεν γνωρίζει τη θεωρία των πρόσθετων αδρανειακών συντελεστών στερεού σώματος που κινείται μέσα σε αστρόβιλο, ασυμπίεστο υγρό χωρίς ελεύθερη επιφάνεια, μπορεί να αγνοήσει αυτή τη σύγκριση. Η όλη παρουσίαση των υδροδυναμικών συντελεστών , και η μελέτη των ιδιοτήτων τους, θα γίνει
εδώ αυτοτελώς, χωρίς καμιά ουσιαστική αναγωγή στη χωρίς ελεύθερη επιφάνεια περίπτωση. l kΠ
(4) Στη χωρίς ελεύθερη επιφάνεια περίπτωση, και όταν το περιρρέον υγρό δεν φράσσεται από κανένα άλλο σύνορο (δηλαδή, το μοναδικό σύνορο του πεδίου ροής είναι η βρεχόμενη επιφάνεια του στερεού σώματος [Σ]), οι πρόσθετοι αδρανειακοί συντελεστές του [Σ] ορίζονται κατά μονοσήμαντο τρόπο, και είναι παντελώς ανεξάρτητοι της κινητικής κατάστασης του σώματος.
- 61 -

15
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Σύμφωνα με τα ανωτέρω, θέτουμε
( ) ( ) ( )1l k l k l k l kA B
jω ω
ωΠ = Π = + ω
ω
, (5)
όπου οι ποσότητες και είναι πλέον πραγματικές. Συνδυάζοντας τις σχέσεις (4) και (5), ανωτέρω, παίρνουμε
( )l kA ω ( )l kB ω
. (6α) ( ) ( ) ( ) ( ) ( )2l k l k l l k l l kX X j A j Bω ω ξ ω ω ξ≡ = − −
Εισάγοντας ρητά τη χρονική εξάρτηση με τη βοήθεια των σχέσεων ( ) Re j tl lt e ωξ ω ξ=
και ( ) Re j tl k l kX t X e ωω = (5), η (6α) γράφεται ισοδυνάμως στη μορφή
( ) ( ) ( ) ( ) ( )l k l l k l l kX t t A t Bω ξ ω ω ξ ω= − − ω . (6β)
Βλέπουμε, λοιπόν, ότι η δύναμη ακτινοβολίας στο πεδίο συχνοτήτων, ( )l k l kX X ω= , αναλύεται (ανά συχνότητα) σε δύο μέρη:
Ένα ανάλογο με την επιτάχυνση ( ) ( )l lt tξ ξ ω≡ του στερεού σώματος [ ]Σ , με
συντελεστή αναλογίας ( )l kA ω , οποίος ονομάζεται πρόσθετος αδρανειακός
συντελεστής του σώματος [ ]Σ (πρόσθετη μάζα ή πρόσθετη μαζική ροπή ή πρόσθετη ροπή αδράνειας, ανάλογα με τις μονάδες που τον χαρακτηρίζουν), και
Ένα άλλο ανάλογο με την ταχύτητα ( ) ( )l tl tξ ξ ω του σώματος [≡ ]Σ , με συντελεστή
αναλογίας ( )l kB ω , ο όποίος ονομάζεται συντελεστής απόσβεσης (ακτινοβολίας) του
σώματος [ ]Σ (6). Οι πρόσθετοι αδρανειακοί συντελεστές ονομάζονται επίσης γενικευμένες πρόσθετες μάζες, ή απλά πρόσθετες μάζες, αν δεν υπάρχει κίνδυνος παρανόησης ή σύγχυσης. Σύμφωνα με τις σχέσεις (6) και (1), η συνολική δύναμη ακτινοβολίας που ασκείται στο ταλαντευόμενο με συχνότητα σώμα [
( )l kA ω
ω ]Σ , κατά τη γενικευμένη κατεύθυνση , δίδεται από τη σχέση k
( ) ( ) ( ) ( ) ( ) (6 6 6
1 1 1Rk l k l k l l k l
l l lX t X t A t B t )ω ω ω ξ ω ω ξ
= = =
≡ = − −∑ ∑ ∑ ω
. (7α)
Η σχέση (7α), γράφεται επίσης στην ακόλουθη μητρωική μορφή:
( ) ( ) ( )l k l l k l l k
(5) Δεν πρέπει να ξεχνάμε ότι εργαζόμεθα στο πεδίο συχνοτήτων –δηλαδή η χρονική εξάρτηση όλων των χρονομεταβλητών μεγεθών είναι πάντοτε αρμονική, αδιαφόρως του είδους της αναλυτικής αναπαράστασης που χρησιμοποιούμε. Έτσι, οι σχέσεις (6α) και (6β) είναι δύο ισοδύναμες γραφές του ιδίου αποτελέσματος, και ισχύουν στο πεδίο συχνοτήτων. Ας σημειωθεί ότι, στην προκειμένη περίπτωση, οι σχέσεις (6β), οι οποίες συχνά γράφονται στην απλούστερη μορφή X t t A t Bξ ξ= − − , δεν ισχύουν στο πεδίο του χρόνου.
(6) Η απόσβεση ακτινοβολίας δεν σχετίζεται με απόσβεση λόγω τριβών ή συνεκτικότητας. Προκύπτει ως φαινόμενη απόσβεση της μηχανικής ενέργειας του επιπλέοντος σώματος, λόγω απομάκρυνσης («ακτινοβολίας») αυτής μέσω των απομακρυνόμενων κυματισμών που παράγει η κίνηση του σώματος.
- 62 -

16
( ) ( ) ( ) ( ) ( )RX t A t B tω ω ξ ω ω ξ ω= − ⋅ − ⋅ . (7β)
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 63 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
2.4 Εξισώσεις Κίνησης Επιπλέοντος Στερεού Σώματος Συνδυάζοντας τώρα τις σχέσεις (1 και 7, εδάφιο 2.3), παίρνουμε την ακόλουθη έκφραση για τις συνολικές υδροδυναμικές φορτίσεις που ασκούνται πάνω στο επιπλέον σώμα[ ]Σ :
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )6 6
01 1
k k d k l k l l kl l
F t X t X t A t B tω ω ω ω ξ ω ω ξΥΔ
= =
= + − −∑ ∑ l ω . (1)
Η ανωτέρω σχέση, σε συνδυασμό με την (11, εδάφιο 2.2), μας οδηγεί στην ακόλουθη μορφή της εξίσωσης κίνησης του επιπλέοντος σώματος:
( )( ) ( ) ( ) ( ) ( ) ( ) ( ) (0ˆ
d )M A t B t C t F t X t X tω ξ ω ω ξ ω ξ ω ω ω ω+ ⋅ + ⋅ + ⋅ = + + , (2α) ή , (2β) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )2
0ˆ
dj M A j B C F X Xω ω ξ ω ω ξ ξ ω ω+ ⋅ + ⋅ + ⋅ = + + ω
όπου τα μεγέθη είναι οι παραστατικοί μιγάδες των χρονικά
αρμονικών μεγεθών
( ) ( ) ( )0ˆ, , , dF X Xξ ω ω ω
( ) ( ) ( ) (0ˆ, , , dt F t X t X tξ ω ω ω ω) , αντιστοίχως.
Οι συντελεστέςM , A , BF
και , του αριστερά μέλους των εξισώσεων (2), καθώς και οι διεγείρουσες φορτίσεις, ,
C
0X , dX , που εμφανίζονται στο δεξιά μέλος των εξισώσεων (2), είναι ανεξάρτητοι(ες) από τις κινήσεις του σώματος lξ [ ]Σ . Τα ανωτέρω μεγέθη εξαρτώνται
από διάφορα χαρακτηριστικά του σώματος [ ]Σ και του πεδίου ροής, ως εξής:
( , )B BM M ρ= G , (3α)
, (3β) ( , , ,BA A D hω= ∂ )ρ)ρ
))ρρ
, (3γ) ( , , ,BB B D hω= ∂
, (3δ) ( ,BC C ρ= G
, (3ε) (0 0 , , , ,BX X D hω β= ∂
, (3στ) ( ), , , ,d d BX X D hω β= ∂
όπου BG παριστάνει τη γεωμετρική μορφολογία του επιπλέοντος σώματος, Bρ και ρ είναι η πυκνότητα του σώματος και του περιρρέοντος υγρού, αντιστοίχως, είναι η συχνότητα του προσπίπτοντος κυματισμού και της κίνησης του σώματος, το βάθος του νερού, και η γωνία πρόσπτωσης του διεγείροντος κυματισμού.
ωh β
Σύμφωνα με τη μέχρι τώρα ανάλυση του προβλήματος, το σύστημα των συζευγμένων εξισώσεων (10,11, εδάφιο 2.2), οι οποίες διέπουν τη χρονικά αρμονική κίνηση του υδρομηχανικού συστήματος [ , είναι ισοδύναμο με το σύστημα των εξισώσεων (προβλημάτων συνοριακών τιμών) (28, εδάφιο 2.2) και (2), ανωτέρω. Στο τελευταίο σύστημα εξισώσεων [(28/2.2)+(2)] οι εξισώσεις κίνησης του υγρού και του στερεού είναι
]Y EEΣ + +
αποσυζευγμένες. Έτσι, από τη λύση των προβλημάτων συνοριακών τιμών (28, εδάφιο 2.2) προσδιορίζουμε τις υδροδυναμικές ποσότητες A , B , 0X , dX , με τη βοήθεια των οποίων διατυπώνονται οι δυναμικές εξισώσεις του επιπλέοντος σώματος (2). Στη συνέχεια,
- 64 -

18
επιλύοντας τις εξισώσεις (2), βρίσκουμε τις κινήσεις του επιπλέοντος σώματος. Τέλος, το πεδίο ροής σε κάθε σημείο
lξx D∈ , υπολογίζεται με τη βοήθεια της σχέσης (27, εδάφιο 2.2).
Κλείνουμε το εδάφιο αυτό με την παρατήρηση ότι οι εξισώσεις κίνησης (2) ισχύουν μόνο για την περίπτωση της χρονικά αρμονικής ταλάντωσης του υδρομηχανικού συστήματος
(πεδίο συχνοτήτων). Εάν η χρονική εξάρτηση είναι γενική, τότε η εξίσωση κίνησης του επιπλέοντος σώματος έχει την ακόλουθη, ουσιωδώς διαφορετική, μορφή (βλ., π.χ., Wehausen 1967, 1971):
[ ]Y EEΣ + +
( )( ) ( ) ( ) ( ) ( ) ( )0 d( )ˆ
0
t
M A t L t d t F t F tξ τ ξ τ+ ∞ − = + +Fτ+ ∫
limω ω
ω→∞
=
( )l k ω
, (4)
όπου είναι 6x6-πίνακας με στοιχεία τις υψίσυχνες
( ) ασυμπτωτικές τιμές των (γενικευμένων) πρόσθετων μαζών , και
είναι 6x6-πίνακας με στοιχεία εξαρτώμενα από το χρόνο. Μπορεί να
αποδειχθεί ότι οι συνελικτικοί πυρήνες σχετίζονται με τους υδροδυναμικούς
συντελεστές και ως εξής:
( ) ( ) ( )(6 6
lim l kA A A→∞ ×
∞ =
( )( )6 6l kL t×
=
( )l kA ω B
)ω
ω→∞
( )L t
( )l kA ω
( )klL t
( )( )
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) ( )( ) ( )0 0
sin2 2cosl k l k l k l kt
L t A A t d B dω
ω ω ω ω ωπ π ω
∞ ∞
∞ =∫ ∫ . (5) = −
(l kB ω
Η ανωτέρω σχέση (ταυτότητα) υποδηλώνει ότι υπάρχουν σχέσεις μεταξύ των υδροδυναμικών συντελεστών και . Αυτές είναι γνωστές ως σχέσεις Kramers-Kronig, και έχουν τη μορφή
( )l kA ω )
( ) ( ) ( ) 2
0
2l k l k l k
dA A B ωσ 2π ω σ
∞
− ∞ =−∫ ω , (6α)
( ) ( ) ( )( )22 2
0
2l k l k l k
dB A A ωσ σ ω
π ω σ
∞
= − −−∫ . (6β) ∞
Οι υδροδυναμικές φορτίσεις, ( )0F t και , που εμφανίζονται στο δεξιά μέλος της εξίσωσης (4), προκύπτουν από τη δράση του προσπίπτοντος και του περιθλώμενου κυματισμού, αντιστοίχως, στο πεδίο του χρόνου. Στην περίπτωση αυτή δεν υπάρχει κανένας περιορισμός όσον αφορά το είδος της χρονικής εξάρτησης (του προσπίπτοντος κυματισμού, η των εξωτερικών δυνάμεων ή των κινήσεων του σώματος). Ο αναγνώστης που ενδιαφέρεται για τη δυναμική επιπλεόντων σωμάτων στο πεδίο του χρόνου, παραπέμπεται στις εργασίες των Cummins (1962), Wehausen (1967, 1971), Beck and Liapis (1987).
( )dF t
- 65 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
2.5 Η έπ’ άπειρον συμπεριφορά των δυναμικών ακτινοβολίας και περίθλασης Ο καθορισμός της έπ’ άπειρον συμπεριφοράς του πεδίου ροής γύρω (μακριά) από ένα επιπλέον σώμα είναι ένα ουσιώδες προαπαιτούμενο για την επίλυση των προβλημάτων αλληλεπίδρασης κύματος σώματος (wave-body interaction problems) στην ανοικτή θάλασσα. Όταν εργαζόμεθα στο πεδίο του χρόνου, δηλαδή όταν μελετάμε κυματικές διαταραχές που έχουν ξεκινήσει από την ηρεμία πριν από πεπερασμένο χρόνο, ο καθορισμός της έπ’ άπειρον συμπεριφοράς του πεδίου είναι τετριμμένος: για κάθε πεπερασμένο, το πεδίο είναι (ή τείνει «γρήγορα») στο μηδέν, καθώς . Η συνθήκη αυτή είναι άμεση συνέπεια του φυσικού γεγονότος ότι η κυματική διαταραχή ταξιδεύει με πεπερασμένη ταχύτητα και άρα (σε πεπερασμένο χρόνο) δεν μπορεί να έχει διαδοθεί σε οσοδήποτε μεγάλες αποστάσεις. Η κατάσταση είναι πολύ διαφορετική στο πεδίο συχνοτήτων, όπου η υπόθεση της αρμονικής χρονικής εξάρτησης σ’ ολόκληρη την έκταση του πεδίου, ισοδυναμεί με την υπόθεση μιας χρονικά αρμονικής διέγερσης που δρά άπειρο χρόνο. Έτσι, η κυματική διαταραχή «έχει προλάβει» να διαδοθεί σε οσοδήποτε μεγάλες αποστάσεις («στο άπειρο»), και έχει λάβει μια συγκεκριμένη μορφή μακριά από το επιπλέον σώμα. Η γνώση της μορφής αυτής είναι απαραίτητη για τον πλήρη προσδιορισμό των δυναμικών ακτινοβολίας και περίθλασης.
t
( )1/ 22 2
1 2x x+ → ∞
Αν και συχνά χρησιμοποιούμε τις εκφράσεις «επ’ άπειρον συνθήκη» ή «συνθήκη ακτινοβολίας» ή «συνθήκη Sommerfeld» όταν αναφερόμαστε στην έπ’ άπειρον συμπεριφορά των δυναμικών ( )Φ x , , στο πεδίο συχνοτήτων, θα πρέπει να έχουμε κατά νού ότι η «συνθήκη» αυτή είναι πολύ διαφορετικού χαρακτήρα από τις άλλες συνθήκες (ελεύθερης επιφάνειας, στερεού συνόρου, κλπ.) που ικανοποιούν τα δυναμικά
,1, 2,...,6d=
( )Φ x . Κατ’ αρχήν, η «επ’ άπειρον συνθήκη» δεν εφαρμόζεται σε κάποιο συγκεκριμένο σύνορο, δεν προκύπτει με απλές θεωρήσεις, όπως οι άλλες συνθήκες, ούτε είναι «καθολικής» ισχύος, με την έννοια ότι η ακριβής μορφή της εξαρτάται από το είδος του εξεταζόμενου προβλήματος. Όπως θα δούμε στη συνέχεια του εδαφίου αυτού, ο προσδιορισμός της έπ’ άπειρον συμπεριφοράς των δυναμικών ( )Φ x
t =
μακριά από το επιπλέον σώμα(1) είναι ένα ενδιαφέρον, ειδικό, μαθηματικό πρόβλημα, που λύνεται με την κατασκευή κατάλληλων αναπαραστά-σεων που ισχύουν σε μια «γειτονιά» του απείρου, και την ασυμπτωτική μελέτη αυτών. Η πρώτη συστηματική ανάλυση ενός τέτοιου προβλήματος έγινε από το Γερμανό Φυσικό Arnold Sommerfeld, για το μακρινό πεδίο γύρω από σφαιρικό σκεδαστή (βλ., π.χ., Sommerfeld, Partial Differential Equations in Physics, Academic Press, 1949). Αυτός είναι ο λόγος για τον οποίον η επ’ άπειρον συμπεριφορά («επ’ άπειρον συνθήκη») φέρει συχνά το όνομα του Sommerfeld, ακόμη και σε προβλήματα τα οποία ουδέποτε μελέτησε ο ίδιος. Το πρόβλημα της έπ’ άπειρον συμπεριφοράς των πεδίων περίθλασης και ακτινοβολίας υδατίνων κυμάτων (στο πεδίο συχνοτήτων), που μας ενδιαφέρει εδώ, μελετήθηκε για πρώτη φορά από τον Αμερικανό Μαθηματικό Fritz John (1950). Ένας εναλλακτικός τρόπος μελέτης του ιδίου προβλήματος, αρχίζοντας από το πεδίο του χρόνου όπου μια εξωτερική, χρονικά αρμονική διέγερση τίθεται σε λειτουργία σε , θεωρώντας τη λύση του προβλήματος για , και παίρνοντας τα όρια αυτής, πρώτα για (ώστε η εξαναγκασμένη, χρονικά αρμονική διαταραχή να έχει διαδοθεί σε ολόκληρο το πεδίο) και ύστερα για , αναπτύχθηκε από τον Stoker (1953). Βλ. επίσης το εδάφιο 6.7 του κλασσικού βιβλίου Water Waves του ιδίου συγγραφέα (Stoker 1957).
0t
0t >
( )1/ 22 2
1 2+ →
→∞
x x ∞
(1) Και, γενικώτερα, ο προσδιορισμός της έπ’ άπειρον συμπεριφοράς οποιουδήποτε (απέρατου) κυματικού πεδίου μακριά από (φραγμένους) σκεδαστές ή άλλες ανομοιογένειες.
- 66 -

20
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Στο παρόν εδάφιο θα παράγουμε και θα παρουσιάσουμε τα αποτελέσματα του John, από τα οποία προκύπτουν –μεταξύ άλλων- και πολλές σπουδαίες ιδιότητες των υδροδυναμικών συντελεστών (προσθέτων μαζών και αποσβέσεων) των επιπλεόντων στερεών σωμάτων. Οι τελευταίες θα παρουσιασθούν σε επόμενο εδάφιο. - Γενική μορφή των δυναμικών ακτινοβολίας και περίθλασης μακριά από το σώμα [ ]Σ Ενδιαφερόμεθα για την «επ’ άπειρον» συμπεριφορά του πεδίου ροής, δηλαδή ενδιαφερόμεθα για τη γενική μορφή των δυναμικών ακτινοβολίας και περίθλασης στο εξωτερικό ενός οποιουδήποτε φραγμένου χωρίου, το οποίο περικλείει το σώμα [ ]Σ . Προκειμένου να αποφύγουμε «λήψη του ζητουμένου», η μελέτη μας πρέπει να γίνει, κατ΄ αρχήν, σε κατάλληλο φραγμένο χωρίο, το οποίο να μπορεί κατά ομαλό και συνεχή τρόπο να επεκταθεί μέχρι το άπειρο. Το «σχέδιο» είναι να βρούμε τη γενική μορφή του δυναμικού σ’ αυτό το κατάλληλο φραγμένο χωρίο και, στη συνέχεια, να εξετάσουμε το όριο της λύσης όταν το χωρίο διευρύνεται απεριόριστα και 2 2
1 2r x x= + →∞ . Με σκοπό να διευκολύνουμε τη μαθηματική ανάλυση του προβλήματος, επιλέγουμε –κατά περίπτωση– το απλούστερο δυνατό χωρίο. Εν προκειμένω, η καλύτερη επιλογή είναι το χωρίο μορφής κυλινδρικού δακτυλίου
( ) ( ) 2 21 2 3 3 1 2, , , , : 0,
N FR R N FD x x x r z h z x R r x xθ= = ≡ − ≤ ≡ ≤ ≤ ≡ + ≤x R , (1)
υπό την προϋπόθεση ότι το σώμα [ ]Σ κείται εξ ολοκλήρου στο εσωτερικό του μικρότερου κυλίνδρου
Σχήμα 1: Το κυλινδρικό χωρίο N FR RD .
- 67 -

21
( ) , , : 0,N
29/03/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
R ND r z h z rθ= = − ≤ ≤ <x R .
Είμαστε πλέον σε θέση να διατυπώσουμε και να λύσουμε το «γενικό πρόβλημα αναπαρά-στασης των δυναμικών ( )Φ x στο ενδιάμεσο χωρίο
N FR RD
(
». Δεδομένου ότι η ανάλυση είναι
γενική και αφορά σε όλα τα επί μέρους δυναμικά )Φ x ∈, , στη συνέχεια θα
παραλείπουμε το δείκτη ( . , 1, 2, ..., 6d
) Να βρεθούν όλα τα δυνατά πεδία δυναμικού , ( )Φ x
N FR RD∈x
N F
, τα οποία ικανοποιούν τις
ακόλουθες συνθήκες μέσα στον κυλινδρικό δακτύλιο R RD :
2 2
2 2 21 1 0rr r r r zθ
⎛ ⎞∂ ∂Φ ∂ Φ ∂ Φ⎟⎜ΔΦ ≡ ⋅ + + =⎟⎜ ⎟⎜⎝ ⎠∂ ∂ ∂ ∂,
N FR RD∈x ( )N FR r R≤ ≤ (2α)
, , 0zμΦ − Φ = FD∈∂x ( (2β) )0z =
, 0zn∂Φ
≡ Φ =∂
, ( . (2γ) DΠ∈∂x )
F
z h=−
Ουδεμία συνθήκη επιβάλλεται στα παράπλευρα κυλινδρικά σύνορα
( ) ( ) ( ) , , : 0,N F
I IR R ND ή D r z h z r R ή Rx θ⎡ ⎤ ⎡ ⎤∂ ∂ = = − ≤ ≤ = ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦
και (3)
πράγμα που οδηγεί σε πρόβλημα που έχει ως λύση μια άπειρη οικογένεια συναρτήσεων δυναμικού. Σκοπός μας εδώ είναι να προσδιορίσουμε αυτή την άπειρη οικογένεια λύσεων του προβλήματος (2) και να μελετήσουμε τη συμπεριφορά της όταν 2 2
1 2r x x= + →∞ . Όπως αποδεικνύεται αναλυτικά στο Παράρτημα αυτού του Κεφαλαίου, ισχύει το ακόλουθο Θεώρημα Αναπαράστασης του μακρινού πεδίου: Κάθε συνάρτηση δυναμικού που ικανοποιεί τις εξισώσεις (2α,β,γ) και είναι δύο φορές παραγωγίσιμη στο χωρίο
( )Φ x
N FR RD , γράφεται στη μορφή:
( ) ( ) ( ) ( )( )
( )( ) ( )
( )
( )( )
1 21 2
0 01 20 0
cos cos, ,
sin sinm m
m mm mm m
a m a mr z H k r H k r g z
b m b m
θ θθ
θ θ
∞ ∞
= =
+ +
+ +
⎛ ⎞⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎟⎜ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎟⎜ ⎟Φ ≡Φ = + ⋅ +⎨ ⎬ ⎨ ⎬⎜ ⎟⎜ ⎪ ⎪ ⎪ ⎪⎟⎟⎜ ⎪ ⎪ ⎪ ⎪⎝ ⎠⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭∑ ∑x 0
⋅
, (4) ( )( )
( )( )
( )
( )( )
1 0 0
cos cos
sin sin
K Imn mn
m n m n nK In m mmn mn
a m a mK k r I k r g z
b m b m
θ θ
θ θ
∞ ∞ ∞
= = =
+ +
+ +
⎛ ⎞⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎟⎜ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎟⎜ ⎟+ +⎨ ⎬ ⎨ ⎬⎜ ⎟⎜ ⎪ ⎪ ⎪ ⎪⎟⎟⎜ ⎪ ⎪ ⎪ ⎪⎝ ⎠⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭∑ ∑ ∑
όπου
( ) ( )( )
00
0
coshcosh
k z hg z
k h+⎡ ⎤⎣ ⎦= , ( ) ( )
( )cos
cosn
nn
k z hg z
k h+⎡ ⎤⎣ ⎦= , 1, 2,...n= , (5α,β)
( )1mH και είναι οι συναρτήσεις Hankel πρώτου και δεύτερου είδους, και ( )2
mH mI και είναι οι τροποποιημένες συναρτήσεις Bessel πρώτου και δεύτερου είδους, αντιστοίχως,
είναι η μοναδική θετική ρίζα της εξίσωσης (σχέσης διασποράς, dispersion relation)
mK
0k
, (5γ)
( )tanhh kh khμ =
- 68 -

22
nk πειρες) θετικές ρίζες της εξίσωσης
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
, 1,2,3, ...n = είναι οι (ά
(5δ) τις οποίες ισχύει ότι
( )tankh kh , 2 / gμ ω= hμ− =
(για nk nπ→ →+∞ ), , καθώςκαι
n
( )1,2 ma , ( )1,2 ( ),K I και ελεύθερmb , mna ( ),K Imnb είναι οι (απροσδιόριστοι) συντελεστές, για τους
οποίους η μόνη –κ χήν– που ε ανί νται σ ωτέρ
Από άρτημα αυτού του Κεφαλαίου, αθίσταται φανερό ότι το ανωτέρω Θεώρημα Αναπαράστασης (4) ισχύει για κάθε ζεύγος
ατ’ αρ απαίτηση είναι να συγκλίνουν οι διάφορες άπειρες σειρές, μφ ζο την αν ω σχέση (4).
την ανάλυση που παρουσιάζεται διεξοδικά στο Παρκακτίνων N FR R< , υπό την προϋπόθεση ότι το επιπλέον σώμα [ ]Σ κείται εξ ολοκλήρου στο εσωτερικ νδρου με τη μικρότερη ακτίνα ό του κυλί NR . Άρα, η ασυμπτωτική συμπεριφορά του πεδίου ( )Φ x , όταν r →∞ , μπορεί να προκύψει απ η μελέτη της ασυμπτωτικής συμπερι-
φοράς των σ τήσεων m
ό τ
υναρ ( )1,2m , H I και mK , οι οποίες υπεισέρχονται στην αναπαράσταση
(4). Η μελέτη της ασυμπτωτικής σ ιφ άς τω υναρτήσεων ( )1,2mH , mυμπ ορ ν σερ I και mK ,
αποτελεί κεντρικό αντικείμενο των περισσοτέρων από τα βιβλία που μελετούν τι Συναρτήσεις της Μαθηματικής Φυσικής (Special Functions of Mathematical Ph )( Στη νέχεια θα παρουσιάσουμε και θα αξιοποιήσουμε ασυμπτωτικά αποτελέσματα (για μεγάλες τιμές του ορίσματος u ) για τις συναρτήσεις ( )1,2
mH , m
ς ysics
συ
Ειδικές2).
I και mK , παραπέμποντας τον αναγνώστη που ενδιαφέρεται για τη μεθοδολογία παραγωγής ους, στην ειδική βιβλιογραφία που δίδεται στο τέλος του εδαφίου αυτού, κ ι ειδικότερα στο βιβ το(1965/1972).
Η ασυμπτωτική συμπερ ( )1,2
τ α λίο υ Lebedev
ιφορά των συναρτήσεων Hankel καθώς ∞ίδεται από τις ακόλουθες εκφράσεις:
( )mH u 0u k r= → + , δ
( ) ( ) ( )(1 4 22 1mi u
mH u eπ π⎛ ⎞− −⎜ ⎟
⎝ ⎠= + )1O uuπ
− , (6α)
( ) ( ) ( )( )2 14 22 1mi u
mH u e O uu
π π
π
⎛ ⎞− − −⎜ ⎟ −⎝ ⎠= + . (6β)
ηλαδή, για μεγάλες τιμές του ορίσματος οι σ
Δ υναρτήσεις Hankel ( ) u , αργά
( ) ταλαντωτική συμπεριφορά, με μειούμενο πλάτος, το τείνει στο μηδέν
τική συμπεριφορά των τροποποιημένων συναρτήσεων Bessel
1,2mH u παρουσιάζουν
φθίνουσα οποίο με ρυθμό ( )1/ 2uO − .
Η ασυμπτω ( )mI u και ( )mK u , : αντίστοιχα, καθώς nu k r , δίδεται από τις ακόλουθες
( )
= → +∞ , 1,2,n = … εκφράσεις
( )( )112
u
mI u = , ( )e O uuπ
−+ ( )( )11ueu O u
−−= + . (
2 /mKu π
7α,β)
(2) Βλ. βιβλιογραφικά σχόλια στο τέλος του εδαφίου.
- 69 -

23
Δ
29/03/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
ηλαδή, για μεγάλες τιμές του ορίσματος οι συναρτήσεις u , ( )mI u απει οντ
ενώ οι συναρτήσεις μηδενίζονται .
παρου των συναρτήσεων ,
ρίζ αι εκθετικά,
( )mK u εκθετικά
Στα Σχήματα 2 και 3 σιάζονται τα γραφήματα ( )2 mH mI
τις ο
και για τάξης 2 παρουσιάζονται γραφήματα των
σχέσειςασυμπτωτική
τα
mK ,
, 10
περιπτώσεις
διάφορες τιμές της . Ειδικότερα, στο Σχήμαm
γρ
δείχνεται
τα ια m
ς του
συναρτήσεων Hankel ( ) ( ) ( ) ( )1,2m m mH u J u iY u= ± , για 0 40u< < και γ 0, 1, 5 , 15=
και 20 . Με τη συνεχή αμμή δείχνεται το πραγματικό μέρος ( )mJ u , ενώ με τη
διακεκομμένη γραμμή μέρος . Σε όλε ι καθαρά η «επ’ άπειρον» (δηλαδή, για μεγάλες τιμές ρίσματος u )
συμπεριφορά, η οποία δίδεται αναλυτικά από τις ασυμπτ (6). Από το Σχήμα 2 παρατηρούμε επίσης ότι, καθώς η τάξη m μεγαλών (ταλαντωτική) συμπεριφορά του γραφήματος της ( )1,2
mH αρχίζει από μεγαλύτερες τιμές του ορίσματος u . Στο Σχήμα 3 παρουσιάζονται τα γραφήμα των τροποποιημένων συναρτήσεων Bessel
( )m
το φανταστικό ( )mY u−
ωτικές ει, η
φαίνετα
I u και ( )mK u , για 0 4u< < 0, 1, 2, 3, 5m = . Η ασυμπτωτική συμπεριφορά (
τιμές
και 7)
μεγαλύτερεςείναι εμφανής για τις τάξεις 0,1,2m = . Για μεγαλύτερες τάξεις η ασυμπτωτική συμπεριφορά
ίζεται του ορ
εμφαν για ίσματος u .
Σχήμα 2. Γραφήματα των συναρτήσεων Hankel ( ) ( )1,2mH u για 0,1,5,10,15,20m = .
0 10 20 30 40-1
-0.5 0
0.5 1
0 10 20 30 40 -1
-0.5
0
0.5
1
0 10 20 30 40-1
-0.5 0
0.5 1
0 10 20 30 40 -1
-0.5
0
0.5
1
0 10 20 30 40-1
-0.5 0
0.5 1
0 10 20 30 40 -1
-0.5
0
0.5
1
( ) ( )1,20H u ( ) ( )1,2
1H u
( ) ( )1, 25H u ( ) ( )1, 2
10H u
( ) ( )1, 215H u ( ) ( )1, 2
20H u
- 70 -

24
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
3
4
5
6
7
8
9
10
Σχήμα 3. Γραφήματα των τροποποιημένων συναρτήσεων Bessel ( )mI u και για
Από τα ανωτέρω ασυμπτωτικά αποτελέσματα για ις συναρτήσεις
( )mK u 0,1,2,3,5m = .
τ ( )1,2mH , mI και
ροκύπτει ότι οι όροι που περιέχουν τις συναρτήσεις mK ,
π ( )m nI k r οδηγούνάπτυγ
ισχυ σε . Ε
ρούςυμ(εκθετικούς) απειρισμούς, και άρα πρέπει να «απαλειφθούν» από το αν μα πιλέγο ε
λοιπόν ( ) ( ) 0I Imn mna b= = . Περαιτέρω, εφ’ όσον οι συναρτήσεις ( )m n μηδενίζονται εκθετικά,
όταν nk r → +∞ , ενώ οι συναρτήσεις Hankel ( )
K k r
( )1,2m nH k r μηδενίζονται πολύ αργά (με ρυθμό
( ) 1 2nk rO φανερό ότι η διπλή σειρά που τις − ), είναι περιέχει ( )m nK k r , δεν αναμένεται να
συμβάλλει της βασικής επ μορφής του πεδίου. Οδηγούμεθα, ν ακόλουθη ασυμπτωτική μορφή του πεδίου ( )Φ ≡x :
( )( )
( )1
1 2cosma mθ∞ ∞+
⎛ ⎞⎧ ⎫⎪ ⎪ ⎟⎜ ⎪ ⎪⎪ ⎪ ⎟⎜
στη , στη
διαμόρφωση
0
δηλαδή
’ άπειρον λοιπόν (r θΦ )z, ,
( ) ( )( )
( ) ( )( )
( )( ) ( )( )( )
21
0 0 0 01 20 0
cos1
sin sinm
m mm mm m
a mH k r g z H k r g z O k r
b m b m
θ
θ θ
−
= =
+
+ +
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪ ⎟+ ⋅ +⎨ ⎬ ⎨ ⎬⎜ ⎟⎜ ⎪ ⎪ ⎪ ⎪ ⎟⎟⎜ ⎪ ⎪ ⎪ ⎪⎝ ⎠⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭∑ ∑xΦ =
( ) ( ) ( )( )
( )( ) ( ) ( )
( )
( )( )
1 21 2
0 0 01 20 0
cos cos
sin sinm m
m mm mm m
a m a mz H k r 0, ,r g z H k r g z
b m b m
θ θθ
θ θ
∞ ∞
= =
+ +
+ +
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪+⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭∑ ∑∼ Φ (8)
με σχετικό σφάλμα .
( )( )10O k r −
( )5K x ( )3K x
( )2K x
( )1K x
( )0K x
( )2I x
( )1 I x
( )0I x
( )3I x
( )5I x
- 71 -

25
29/03/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Οι δύο συναρτήσεις ( ) ( )10mH k r και ( ) ( )2
0mH k r ,
r – μόνο κ
διαφέρουν –ως προς την ασυμπτωτική συμπε-
ριφορά τους για μεγά του ατά το πρόσημο της φάσης λες τιμές 0 4 2e
⎜ ⎟⎝ ⎠⎜ ⎟⎜ ⎟ . Το
φυσικό νόημα αυτής της διαφορά καθίσταται φανερό αν «επιστρέψο ήθη χρονική εξάρτηση, με τη βοήθεια παραστατικών μιγάδων. Πράγματι τα πραγματικά μέρη ( ) ( )
mi k r π π⎛ ⎞± − −⎛ ⎞
⎝ ⎠υμε» στη συν, λαμβάνοντας
ςτων
1,20Re i t
mH k r e ω , βρίσκουμε
( ) ( ) ( ) ( ) 0 01 1 4Re Remi k r t
m mR t H k eπ πω1
20 0
0 0
2 2 cos4 2
k ri t mr e k r t
k r k rω π πω
π π
⎞>> ⎟⎠⎫⎪ ⎛ ⎞= + − −⎬ ⎜ ⎟
⎝ ⎠⎪ ⎪⎩ ⎭∼
(9α και
⎛ + − −⎜⎝
⎧⎪= ⎨
)
( ) ) ( ) ( ) (0 01
2 2 4 22 2Re Re cosmk r i k r t
i t mt H k r e e k r tπ πω
ω0 0
0 0 4 2m k r k rmR π πω⎛ ⎞>> − − − −⎜ ⎟⎝ ⎠
⎧ ⎫⎪ ⎪ ⎛ ⎞= = − − −⎨ ⎬∼ , π π ⎜ ⎟
⎝ ⎠⎪ ⎪⎩ ⎭ (9β
)
εκ των οποίων διαπιστώνουμε τα ακόλουθα: Έχοντας επιλέξει τον phasor στη μορφή e i tω , οι ροι της αναπαράστασης (8) που περιέχουν τη συνάρτηση ό ( ) ( )1 αντιστοιχούν σε 0mH k r
ου περιέχοεισερχόμενα κύματα, δηλαδή σε κύματα τα οποία κινούνται (συγκλίνουν) από το ιρο προς το σώμα, ενώ αντίθετα οι όροι της αναπαράστασης (8) π υν τη συνάρτηση
(
άπε
) ( )20mH k r αντιστοιχούν σε εξερχόμενα κύματα, δηλαδή σε κύματα τα οποία κινούνται
(αποκλίνουν) από το σώμα προς το άπειρο. Αν επιλέξουμε τον phasor στη μορφή i te ω− , τότε ο (ρόλος των ) ( )1
0mH k r και ( ) ( )20mH k r εναλλάσσεται.
Στην περίπ δυνα τινοβολίας και περίθλασηςτωση των μικών ακ , η φυσική του προβλήματος επιβάλλει να αποκλείσουμε (μηδενίσουμε) τα εισερχόμενα κύματα. Αυτό επιτυγχάνεται επιλέγοντας ( ) ( )1 1 0m ma b= = , οπότε η ασυμπτωτική μορφή (8) του πεδίου ( ) ( ), ,r zθΦ ≡Φx απλοποιείται περαιτέρω ως εξής:
( ) ( ) ( )( )
( )( )
20
cos
sinm
m m
a m22
0, , mr z H k r 0g zb m
θ
θ
∞
=
+
+⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭θ
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪Φ ⎨ ⎬∑∼ (10)
Αυτή είναι λοιπόν η γενική μορφή των δυναμικών ακτινοβολίας και περίθλασης στην περιοχή
Nr R> . Εισάγοντας στην αναπαράσταση (10), ανωτέρω, την ασυμπτωτική συμπεριφορά (6β)
της συνάρτησης Hankel ( ) ( )20mH k r , και τη μορφή (5α) της κατακόρυφης συνάρτησης ( )0g z ,
υμε
(
παίρνο
)( )
( ) ( )( )0 3/ 200
0 0
cosh2, ,r zθcosh
j k r k z hjg e k rk r k h
Oθω π
−−⎡ ⎤
Φ+⎣ ⎦= − ⋅ ⋅ ⋅ +H , (11α)
- 72 -

όπου η συνάρτηση περιγράφει την αζιμουθιακή
συμπεριφορά του μακρινού πεδίου (far field), και αναφέρεται ως συνάρτηση Kochin (Kochin’s H-function), προς τιμή του σημαντικού Ρώσου Φυσικού και μαθηματικού Nikolai Ye. Kochin (1901-1944). [Βλ. βιογραφικά στοιχεία για τον N. Ye. Kochin στο τέλος του εδαφίου]. Παραγωγίζοντας την (11α) βρίσκουμε
( ) ( ) ( )( 2 2
0
cos sinm mm
a m b mθ θ∞
=
+= ∑H )θ
( ) ( ) ( ) ( )(0
3/ 2000
0
cosh, , 2cosh
j k r k z hr z g k e kr r k h
Oθθ
ω π−− +⎡ ⎤∂Φ ⎣ ⎦= ⋅ ⋅ ⋅ +
∂H )r , (11β)
Στην περίπτωση που έχουμε υγρό απείρου βάθους ( )h = ∞ οι σχέσεις (11α,β) παίρνουν τη μορφή
( ) ( ) ( ) ( )(03/ 2
00
2, , expj k rjgr z e k z k rk r
Oθ θω π
−−Φ = − ⋅ ⋅ ⋅ +H )0 , (12α)
και ( ) ( ) ( ) ( )( )0
3/ 200
, , 2 expj k rr z g k e k z k rr r
Oθθ
ω π−−∂Φ
= ⋅ ⋅ ⋅ +∂
H 0 . (12β)
όπου τώρα . 20 /k gω=
Από τις σχέσεις (11) [ή (12), για νερό απείρου βάθους] βλέπουμε ότι για μεγάλες τιμές του (αδιάστατου) αριθμού ισχύει η ασυμπτωτική εκτίμηση 0k r
( )( )3/20 0jk k r
rO −⎛ ⎞∂Φ
+ Φ =⎜ ⎟∂⎝ ⎠, (13α)
η οποία παρουσιάζεται ενίοτε και στην (ατελή) μορφή
0lim 0r
r jkr→∞
⎛ ⎞∂Φ+ Φ =⎜ ⎟∂⎝ ⎠
. (13β)
Η σχέση (13α) [ή (13β)], η οποία εμφανίζει μια φορμαλιστική (και μόνο!) αναλογία με τη συνοριακή συνθήκη Robin [ / 0r σ∂Φ ∂ + Φ = ], είναι γνωστή ως «συνθήκη ακτινοβολίας του Sommerfeld» (Sommerfld’s radiation condition)(3). Η ποσότητα της πληροφορίας για το μακρινό πεδίο ροής που παρέχεται από τη συνθήκη (13α) [ή (13β)] είναι, τουλάχιστον εκ πρώτης όψεως, μικρότερη αυτήν που παρέχεται μέσω των αναπαραστάσεων (11) και (12). Σε ορισμένες όμως περιπτώσεις αυτή η «μειωμένη» πληροφορία είναι αρκετή για το χειρισμό των προβλημάτων ακτινοβολίας και περίθλασης, και γι’ αυτόν ακριβώς το λόγο η απλουστευμένη «έπ’ άπειρον συνθήκη» (13) έχει μεγάλη χρήση στη μελέτη της δυναμικής συμπεριφοράς του υδρομηχανικού συστήματος [ ]Y EEΣ+ + .
(3) Η συνθήκη αυτή εισήχθη από τον Sommerfld στα πλαίσια της μελέτης της περίθλασης των ακουστικών
κυμάτων. Βλ. σχετικά Sommerfld (1949, σελ. 188). Η φυσική σημασία της συνθήκης Sommerfld σχολιάζεται εκτενώς στο βιβλίο του Stoker (1957).
- 73 -

27
Κλείνοντας το παρόν εδάφιο θεωρούμε σκόπιμο να τονίσουμε ότι η «έπ’ άπειρον συνθήκη» (13), σε αντίθεση με όλες τις υπόλοιπες συνοριακές συνθήκες για τα λΦ (βλ. σχέσεις (10β,γ,δ) του εδαφίου 2.2), δεν μπορεί να διατυπωθεί a priori, ως μια φυσική απαίτηση της βασικής μαθηματικής μοντελοποίησης, αλλά προκύπτει μετά από μια προσεκτική προκαταρκτική ανάλυση του (όχι συμπληρωμένου) προβλήματος που ορίζουν οι εξισώσεις (10α,γ,δ) του εδαφίου 2.2. Βιβλιογραφικά σχόλια: Ο αναγνώστης που ενδιαφέρεται για βαθύτερη και πληρέστερη μελέτη των Ειδικών Συναρτήσεων της Μαθηματικής Φυσικής (συμπεριλαμβανομένων, βεβαίως, και των συναρτήσεων , ( ) ( )1,2
mH u ( )mI u , ( )mK u ), μπορεί να συμβουλευτεί τα εξαιρετικά –και βατά- βιβλία των Lebedev (1963/1965/1972), Nikiforov and Ouvarov (1974/1976) ή Hochstadt (1971/1986). Αναφέρουμε επίσης τα δύο “Standard” Handbooks of Special Functions (Αμερικανικό και Ρωσσικό): Abramowitz and Stegun (1964/1972) και Gradshteyn and Ryzhik (1965). Ενδιαφέρον παρουσιάζει επίσης το βιβλίο των Zhang and Jin (1996), το οποίο παρουσιάζει σύνοψη θεωρητικών αποτελεσμάτων και προγράμματα (subroutines) σε FORTRAN-77 για τον υπολογισμό πολλών ειδικών συναρτήσεων. Τα τρία τελευταία βιβλία (Handbooks) παρουσιάζουν ένα τεράστιο αριθμό από μαθηματικά αποτε-λέσματα (π.χ. αναπτύγματα των ειδικών συναρτήσεων σε σειρές, ολοκληρωτικές αναπαρα-στάσεις, ασυμπτωτικές αναπτύξεις για μεγάλες τιμές του ορίσματος και της τάξης , γραφήματα, υπολογισμούς ορισμένων ολοκληρωμάτων των ειδικών συναρτήσεων, κ.ά. χρήσιμα αποτελέσματα), χωρίς αποδείξεις, αλλά με παραπομπές στις πηγές.
( )u ( )m
Τέλος, θα ήταν παράλειψη να μην αναφέρουμε ότι σήμερα όλες οι ευρέως χρησιμοποι-ούμενες ειδικές συναρτήσεις υπολογίζονται άμεσα με τη βοήθεια υπολογιστικών περιβαλλόντων όπως το MATLAB, το MATHEMATICA ή το MAPLE. Τα δύο τελευταία είναι περιβάλλοντα «συμβολικών υπολογισμών» (symbolic calculations), και άρα είναι σε θέση να αναπαράγουν και αναλυτικές μαθηματικές ιδιότητες (μαθηματικά αποτελέσματα) των Ειδικών Συναρτήσεων, όπως π.χ. (τους περισσότερους από ) τους τύπους που δίδονται στα θεωρητικά βιβλία και στα Handbooks. Abramowitz, M. and Stegun, I.A., Handbook of Mathematical Function with Formulas,
Graphs and Mathematical Tables, National Bureau of Standards, 1964, republished by Dover Publications, Inc., 1972
Hochstadt, H., The Functions of Mathematical Physics, Wiley-Interscience, 1971, republished by Dover Publications, Inc., 1986
Lebedev, N.N., Special Functions & Their Applications, Prentice-Hall, 1965 (translated from the 2nd Russian Edition of 1963), republished by Dover Publications, Inc., 1972
Nikiforov, A. and Ouvarov, V., Elements de la Theorie des Fonctions Speciales, Nauka (in Russian) 1974, MIR Editions (traduction française), 1976
Gradshteyn, I.S. and Ryzhik, M.I., Table of Integrals Series and Products, Academic Press, Inc., 1965
Zhang, S. and Jin, J., Computation of Special Functions, John Wiley & Sons, Inc., 1996
29/03/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 74 -

28
Nikolai Yevgrafovich Kochin
Born: 1901 in St Petersburg, Russia Died: 31 Dec 1944 in Moscow, USSR
Show birthplace location
Previous (Chronologically) Next Biographies Index
Previous (Alphabetically) Next Main index
Kochin graduated from Petrograd University (St Petersburg changed its name to Petrograd in 1914 and then to Leningrad in 1924) in 1923. He was appointed to Leningrad State University in 1924 and taught mathematics and mechanics there until 1934.
As an undergraduate he had already met Pelageia Polubarinova and the two found that they had much in common, for Kochin's research was on meteorology, gas dynamics and shock waves in compressible fluids. In 1925 Pelageia Polubarinova and Kochin married by simply registering the event. This was all that was necessary in Russia following the revolution.
Kochin moved Moscow University in 1934 and worked there for the rest of his life. In addition he was head of the mechanics section of the Mechanics Institute of the USSR Academy of Sciences from 1939 to 1944.
The German armies reached the outskirts of Moscow in late 1941 and his wife and two daughters were evacuated to Kazan. Kochin, however, remained in Moscow carrying out military research. By 1943 the German army had suffered defeats by Soviet troops and Moscow was safe enough for Kochina to return. This she did, but Kochin became ill and died before the end of the war. At the time of his death he had been in the middle of lecture courses and Kochina took over the courses and completed delivering them.
Kochin's research was on meteorology, gas dynamics and shock waves in compressible fluids. He gave the solution to the problem of small amplitude waves on the surface of an uncompressed liquid in Towards a Theory of Cauchy-Poisson Waves in 1935.
He also worked on the pitch and roll of ships. In aerodynamics he introduced formulae for aerodynamic force and for the distribution of pressure.
He wrote textbooks on hydromechanics and vector analysis.
Article by: J J O'Connor and E F Robertson
The URL of this page is: http://www-history.mcs.st-andrews.ac.uk/Mathematicians/Kochin.html
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 75 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
2.6 Αναλυτικές ιδιότητες των γενικευμένων πρόσθετων μαζών, των αποσβέσεων και των φορτίσεων περίθλασης
Στο εδάφιο αυτό θα διατυπώσουμε και θα αποδείξουμε ορισμένες θεμελιώδεις ιδιότητες των
- (Γενικευμένων) προσθέτων μαζών ( )l kA ω και αποσβέσεων ( )l kB ω , και
- Διεγειρουσών φορτίσεων περίθλασης ( )d kX ω , οι οποίες είναι ιδιαίτερα σημαντικές τόσο από εννοιολογική όσο και από υπολογιστική σκοπιά. Οι ιδιότητες αυτές είναι:
Ι.1) Οι πίνακες και ( )( )6 6l kA ω×
( )( )6 6l kB ω×
είναι συμμετρικοί, δηλαδή
και . (1α,β) ( ) ( )l k k lA Aω = ω ( ) ( )l k k lB Bω ω=
Ι.2) Οι συντελεστές απόσβεσης μπορούν να εκφρασθούν μέσω της επ’ άπειρον μορφής των πεδίων ακτινοβολίας (δηλαδή της ασυμπτωτικής μορφής των εξερχόμενων κυματισμών μακριά από το σώμα [ ]Σ ) με τη βοήθεια της σχέσεως
( ) ( ) ( )2
0
0 0
( ) ; ;l k l k
k hB dk
π
ω ρω θ ω θ ωπ
σ= ∫ H H θ
)
, (2α)
όπου η σταθερά δίδεται από τη σχέση (21β) στη συνέχεια, και η συνάρτηση ορίζει την αζιμουθιακή κατανομή του μακρινού πεδίου των εξερχόμενων
κυματισμών του προβλήματος ακτινοβολίας , σύμφωνα με τη σχέση
0( )k hσ( ;l θ ωH
lΦ
( )( )
( ) ( )( )0 3 / 200
0 0
cosh2, , ; ;cosh
j k rk k
k z hr z e k r
k r k hOθ ω θ ω
π−−
⎡ ⎤+⎣ ⎦Φ = − ⋅ ⋅ ⋅ +H . (2β)
Η συνάρτηση αναφέρεται και ως συνάρτηση Kochin του προβλήματος ακτινοβολίας . Εφαρμόζοντας τη σχέση (2α) για , βρίσκουμε ότι
( ;l θ ωH
lΦ
)l k=
( ) 0k kB ω ≥ .
Ι.3) Οι φορτίσεις (δυνάμεις και ροπές) περίθλασης μπορούν να εκφρασθούν με τη βοήθεια των δυναμικών ακτινοβολίας και προσπίπτοντος κυματισμού , από τη σχέση
kΦ 0Φ
( ) ( )2 0
B
d k k B
D
X j A dSn
ω ω ρ∂
∂Φ= Φ
∂∫∫ . (3)
Κατά συνέπεια, οι φορτίσεις περίθλασης μπορούν να υπολογισθούν χωρίς να λύσουμε το πρόβλημα περίθλασης.
Ι.4) Οι συνολικές (Froude-Krylov και περίθλασης) διεγείρουσες φορτίσεις στην κατεύθυνση του σώματος 1,2,...,6k ∈ [ ]Σ , μπορούν να εκφρασθούν μέσω του επ’ άπειρον (ασυμπτωτικού) πλάτους κύματος του πεδίου ακτινοβολίας στην (οριζόντια) κατεύθυνση , όπου είναι η γωνία που σχηματίζει ο
προσπίπτων κυματισμός με τον άξονα
kΦ
*θ π β= + β
1x [ ], τη βοήθεια της σχέσεως ( 1,k)β = i
- 76 -

2
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) ( )00
0
( ) ;k d k k
k hX X gAk
ω ω ρ π βσ
+ = +H ω , (4)
όπου ( ) 0 00
0
sin 2 2cosh 1
k h k hc hk h
σ +=
+. [ ( )* ;
kθ ω H ίναι η συνάρτηση Kochin που εμφα-
νίζεται στην ασυμπτωτική αναπαράσταση (2β) του δυναμικού ακτινοβολίας kΦ ].
ε
ο βασικό εργαλείο για την απόδειξη των ανωτέρω σημαντικών ιδιοτήτων των υδροδυνα-
- Ολοκληρωτικοί τύποι Green. Γενικά
την οποίαν παράγονται όλα τα ολοκληρωτικά
, (5)
όπου είναι βαθμωτό πεδίο, ορισμένο στο φραγμένο
Τμικών χαρακτηριστικών επιπλέοντος σώματος (καθώς και άλλων παρόμοιων αποτελεσμάτων, σημαντικών σε άλλες εφαρμογές) είναι το, γνωστό από τη διανυσματική ανάλυση, Θεώρημα Green (βλ., π.χ., Παντελίδη, Μαθηματική Ανάλυση, τόμος ΙΙΙ, 1994, Καφάλαιο XV, Ολοκληρωτικοί τύποι, §3 Θεώρημα Gauss και ολοκληρωτικοί τύποι Green). Λόγω της μεγάλης σημασίας τους για τη μελέτη των υδροδυναμικών πεδίων, θα υπενθυμίσουμε τους ολοκληρωτικούς τύπους Green και ορισμένα συναφή αποτελέσματα, με τη βοήθεια των οποίων θα αποδείξουμε στη συνέχεια τις ιδιότητες Ι.1) – Ι.4).
θεμελιώδης ολοκληρωτική ταυτότητα, απόΗθεωρήματα (Green, Gauss, Stokes) είναι η ακόλουθη (Παντελίδης, ό.α., σελ. 530):
, k k
D D
dV n dS∂
Ψ = Ψ∫∫∫ ∫∫( ) ( )1 2 3, ,t x ,x ,x tΨ = Ψ = Ψx χωρίο D ,
με συνεχείς στο D , και συνεχές στο κλειστό πρώτες παραγώγους D D D= ∂∪ , όπου είναι το σύνορο του D . Το σύνορο υποτίθεται κατά τμήματ
( )1 2 3, ,n n nn = , μοναδιαίο κάθετο διάνυσμα στο D∂ (με φορά προς τα έξω σε σχέση με καλά ορισμένο σχεδόν παντού στο . Εφαρμόζοντας την ταυτότητα (5) για
1 2, kΨ = Ψ Ψ , βρίσκουμε
D∂ τοD∂ α λείο, με συνέπεια
. (6α)
θροίζοντας τώρα ως προς , για παίρνουμε
τοD
) να είναι D∂
1 2, 1, 2, 1 2,kk k k k k
D D D
dV dV n dS∂
Ψ ⋅ Ψ + Ψ Ψ = Ψ ⋅Ψ∫∫∫ ∫∫∫ ∫∫Α k 1, 2,3,k =
21 2 1 2 1
D D D
dV dV dSn
∂
∂ΨΨ ⋅ΔΨ + ∇Ψ ∇Ψ = Ψ ⋅
∂∫∫∫ ∫∫∫ ∫∫ . (6β)
ναλλάσσοντας τους ρόλους των και , βρίσκουμε Ε 1Ψ 2Ψ
12 1 2 1 2
D D D
dV dV dSn
∂
∂ΨΨ ⋅ΔΨ + ∇Ψ ⋅ ∇Ψ = Ψ ⋅
∂∫∫∫ ∫∫∫ ∫∫ , (6γ)
αι αφαιρώντας κατά μέλη τις (6β) και (6γ) παίρνουμε την κ
( ) 2 11 2 2 1 1 2
D D
dV dSn n
∂
⎛ ∂Ψ ⎞∂Ψ ⎟⎜Ψ ⋅ ΔΨ − Ψ ⋅ΔΨ = Ψ ⋅ − Ψ ⋅ ⎟⎜ ⎟⎜⎝ ⎠∂ ∂∫∫∫ ∫∫ , (7α)
- 77 -

3
που είναι γνωστή σαν δεύτερη ταυτότητα του Green. Στην περίπτωση όπου οι συναρτήσεις και είναι αρμονικές, δηλαδή αν ικανοποιούν την εξίσωση Laplace στο χωρίο D ,
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
1Ψ
2Ψ
, , (8)
1 20, 0ΔΨ = ΔΨ = D∈x
η (7α) παίρνει τη μορφή
2 11 2 0
D
dSn n
∂
⎛ ⎞∂Ψ ∂Ψ ⎟⎜Ψ ⋅ − Ψ =⎟⎜ ⎟⎟⎜⎝ ∂ ∂∫∫ ⎠. (7β)
- Ολοκληρωτικοί τύποι Green. Εφαρμογή σε κυματικές συναρτήσεις Η ταυτότητα (7β) ισχύει για δύο οποιεσδήποτε συναρτήσεις ικανοποιούν την εξίσωση Laplace στο (αυθαίρετο αλλά) φραγμένο χωρίο D , με σύνορο D∂ φραγμένο και κατά τμήματα λείο. Στην περίπτωση των υδροδυναμικών πεδίων που αναπτύσσονται γύρω από επιπλέοντα σώματα (η οποία μας ενδιαφέρει εδώ) το πεδίο (χωρίο) ροής D εκτείνεται στο άπειρο (τουλάχιστον κατά την οριζόντια έννοια) γεγονός που δεν επιτρέπει την απ’ ευθείας εφαρμογή της ταυτότητας (7β). Η δυσκολία αυτή αντιμετωπίζεται εφαρμόζοντας [κατ’ αρχήν] την (7β) στο φραγμένο τμήμα του πεδίου ροής RD , που περιλαμβάνεται στο εσωτερικό ενός κατακόρυφου κυκλικού κυλίνδρου RC με άξονα 30x και ακτίνα R . Η ακτίνα R λαμβάνεται αρκετά μεγάλη ώστε το σώμα [ ]Σ να βρίσκεται εξ ολοκλήρου μέσα στον κύλινδρο RC (βλ., π.χ., Σχήμα 1 του εδαφίου 5). Το σύνορο RD∂ του φραγμένου πεδίου RD αποτελείται από τα ακόλουθα τμήματα:
- Τη βρεχόμενη επιφάνεια του επιπλέοντος σώματος BD∂ (ολόκληρη!), - Το τμήμα της ελεύθερης επιφάνειας που βρίσκεται στο εσωτερικό του RC , το οποίο θα
συμβολίζεται με ,F RD∂ (1)
- Την κατακόρυφη παράπλευρη επιφάνεια του κυλίνδρου , και ,Vert RD∂ - Το τμήμα του πυθμένα που βρίσκεται μέσα στον κύλινδρο RC , το οποίο θα συμβολίζεται
με , RDΠ∂ . Έχουμε δηλαδή
, , ,R B F R Vert RD D D D DΠ∂ = ∂ ∂ ∂ ∂∪ ∪ ∪ R . (9)
Βάσει της (9), η δεύτερη ταυτότητα Green για αρμονικές συναρτήσεις, εφαρμοσμένη στο RD γίνεται
, , ,
2 11 2 0
F RB Vert R RDD D D
dSn n
Π∂∂ ∂ ∂
⎛ ⎞⎟⎜ ⎟ ⎛ ⎞⎜ ∂Ψ ∂Ψ⎟ ⎟⎜ ⎜⎟+ + + + Ψ ⋅ − Ψ ⋅ =⎟⎜ ⎜⎟ ⎟⎜⎜ ⎟ ⎝ ∂ ∂⎜ ⎟⎟⎜⎝ ⎠∫∫ ∫∫ ∫∫ ∫∫ ⎠
. (10)
Εάν υποθέσουμε, επί πλέον, ότι οι συναρτήσεις , ικανοποιούν τη συνθήκη ελεύθερης επιφάνειας
1Ψ 2Ψ
3
0kk x
μ∂Ψ
Ψ − =∂
, FD∈ ∂x , , (11α)
2 / gμ ω= 1,2k= ,
(1) Αναφερόμαστε πάντοτε στις μέσες θέσεις των συνόρων του υγρού.
- 78 -

4
τ
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
ότε
( ), ,
2 11 2 1 2 2 1 0
F R F RD D
dS dSn n
μ μ
∂ ∂
⎛ ⎞∂Ψ ∂Ψ ⎟⎜Ψ ⋅ − Ψ ⋅ = Ψ ⋅ Ψ − Ψ ⋅ Ψ =⎟⎜ ⎟⎜⎝ ⎠∂ ∂∫∫ ∫∫ , (11β)
’ όσον πάνω στην (μέση) ελεύθερη επιφάνεια. Περαιτέρω πυθμένα
εφ , εάν οι 3/ /k kn x∂Ψ ∂ = ∂Ψ ∂ ικανοποιούν και τη συνθήκη1 2,Ψ Ψ
0k
n∂Ψ
=∂
, DΠ∈ ∂x , 1, 2k = , (12α)
ότε θα ισχύει προφανώς και η σχ
τ έση
,
2 11 2 dS
n n⎟⎜Ψ ⋅ − Ψ ⋅ ⎟⎜ ⎟⎜⎝ ⎠∂ ∂∫∫ 0
RDΠ∂
⎛ ⎞∂Ψ ∂Ψ= . (12β)
Οι αρμονικές συναρτήσεις που ικανοποιούν τις συνθήκες (11α) και (12α) λέγονται κυματικές συναρτήσεις (wave functions). Σύμφωνα με την ανωτέρω ανάλυση, ισχύει το ακόλουθο
θεώρημα: Θεώρημα: [Η δεύτερη ταυτότητα Green για κυματικές συναρτήσεις]: Εάν οι συναρτήσεις
και Ψ1 ικανοποιούν τις εξισώσεις (8), (11α) και (12α), είναι δηλαδή κυματικές Ψ 2 συναρτήσεις, τότε θα ικανοποιούν και την ταυτότητα
,
2 11 2 1dS
n n⎛ ⎞ ⎛ ⎞∂Ψ ∂Ψ ∂Ψ ∂Ψ⎟⎜ ⎜Ψ ⋅ − Ψ ⋅ = Ψ ⋅⎟⎜ ⎜⎟⎜ ⎜⎝ ⎠ ⎝∂ ∂ ∂ ∂∫∫ ∫∫ 2 1
2
Vert RB DD
dSn n
∂∂
⎟− Ψ ⋅ ⎟⎟⎠. (13)
(Πάνω στον κύλινδρο έχουμε ).
νέπεια τ ηρωτικής ταυτότη είναι ότι το
,Vert RD∂ / /n R∂Ψ ∂ = ∂Ψ ∂ Μια πρώτη, άμεση, συ ης ολοκλ τας (13) Πόρισμα: Για κυματικές συναρτήσεις το ολοκλήρωμα
( )
,
2 1, 1 2 1 2,Vert RI dS
n n⎟⎜Ψ Ψ = Ψ − Ψ ⎟⎜ ⎟⎜⎝ ⎠∂ ∂∫∫
Vert RD
όσταθερ
∂
⎛ ⎞∂Ψ ∂Ψ= , (14)
ίναι ανεξάρτητο από την ακτίνα
ε R του κυλίνδρου RC (βεβαίως, υπό την προϋπόθεση ότι ο
RC δεν τέμνει το επιπλέον σώμα
- Ε ακτιν βολία , και απόδειξη της ιδιότητας Ι.1)
κτινοβολίας είναι κυματικές ολοκλήρωμα
).
φαρμογή της (13) για τα δυναμικά ο ς Φ ,k Φ
Ας εφαρμόσουμε τώρα την (13) για ( ) ( )1 2, ,kΨ Ψ = Φ k≠ . (Προφανώς τα δυναμικά Φ ,
συναρτήσεις). Το «μακρινόοσθαφαιρώντας στην
α Φ k ,rt R k
υπολογίζεται εύκολα ως εξής: Πρ κληρωτέα την ποσότητα 0 kj k Φ Φ παίρνουμε:
» ολο
( ),VeI Φ Φ
- 79 -

5
( )
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
,
, 0,
Vert R
kVert R k k k
D
0I jk jk dSR R
∂
⎧ ⎫⎛ ⎞⎛ ⎞ ∂Φ⎪ ⎪∂Φ⎪ ⎪⎟⎟ ⎜⎜Φ Φ = Φ − Φ −Φ − Φ =⎟⎟⎨ ⎬⎜⎜ ⎟⎟⎜ ⎜⎪ ⎪⎝ ⎠ ⎝ ⎠∂ ∂⎪ ⎪⎩ ⎭∫∫
0 2
3 0
0
kk k
h
dx Rd jk jkR R
π
θ−
⎧ ⎫⎛ ⎞⎛ ⎞ ∂Φ⎪ ⎪∂Φ⎪ ⎪⎟⎟ ⎜⎜= Φ − Φ −Φ − Φ =⎟⎟⎨ ⎬⎜⎜ ⎟⎟⎜ ⎜⎪ ⎪⎝ ⎠ ⎝ ⎠∂ ∂⎪ ⎪⎩ ⎭∫ ∫ 0
( ) ( ) ( ) ( ) ( )11/ 2 3 / 2 1/ 2 3/ 2R O R O R O R O R O R −− − − −= ⋅ ⋅ − ⋅ = . (15α)
Οι εκτιμήσεις για τις τάξεις μεγέθους των διαφόρων όρων, που εμφανίζονται ανωτέρω, είναι άμεσες συνέπειες των ακόλουθων εκτιμήσεων (όταν R → ∞ ) για τα δυναμικά ακτινοβολίας
( )1/ 2k O R −Φ = , και (16α)
( )3/ 20
kkjk O R
R−∂Φ
− Φ =∂
, (16β)
οι οποίες παράγονται στο εδάφιο 2.5. (Βλ. σχέσεις (12α) και (13α) του εδαφίου 2.5). Όμως, όπως έχουμε ήδη αποδείξει, το ολοκλήρωμα ( ) είναι ανεξάρτητο από την ακτίνα , ,Vert R kI Φ Φ
R του κυλίνδρου RC και άρα, βάσει και της (15α), βρίσκουμε
. (15β) ( ) ( ), ,, lim ,Vert R k Vert R kR
I I→∞
Φ Φ = Φ Φ = 0
Κατά συνέπεια, η ταυτότητα (13), εφαρμοσμένη για τα , παίρνει τη μορφή
, ,k kΦ Φ ≠
B B
kk
D D
dS dSR
∂ ∂
∂Φ∂ΦΦ = Φ
∂∫∫ ∫∫ R∂. (16)
Η (16), σε συνδυασμό με τη σχέση ορισμού των γενικευμένων (μιγαδικών) πρόσθετων αδρανειακών συντελεστών , σχέση (3) του εδαφίου 2.3, μας δίδει
( )k ωΠ
. (17α)
( ) ( )k kω ωΠ = Π
Τέλος, λαμβάνοντας υπ’ όψιν ότι ( ) ( ) Rek j kA ω ω= Π και , σύμφωνα με τη σχέση (5) του εδαφίου 2.3, βρίσκουμε ότι
( ) ( ) Rek jB ω ω ω=− Π k
k
( ) ( )kA Aω ω= και . (17β) ( ) ( )k kB Bω ω=
Αποδείχτηκε έτσι η ιδιότητα Ι.1). - Εφαρμογή της (13) για τα δυναμικά ,kΦ Φ , και απόδειξη της ιδιότητας Ι.2). Ροή της ενέργειας στο άπειρο. Διαφορετικά, και επίσης πολύ ενδιαφέροντα, αποτελέσματα παίρνουμε αν εφαρμόσουμε την ταυτότητα (13) για ( ) (1 2, kΨ Ψ = Φ Φ ), , όπου Φ είναι η μιγαδική συζυγής συνάρτηση της
, που είναι και αυτή μια κυματική συνάρτηση. Στην περίπτωση αυτή το «μακρινό»
ολοκλήρωμα
Φ
( ), ,Vert R kI Φ Φ δεν μηδενίζεται αλλά παίρνει μια συγκεκριμένη μορφή (τιμή), η οποία σχετίζεται με τη ροή της ενέργειας από το επιπλέον σώμα προς το άπειρο.
- 80 -

6
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Για να υπολογίσουμε το (, ,Vert R kI Φ Φ ) χρειαζόμαστε την ασυμπτωτική συμπεριφορά των
δυναμικών και kΦ Φ , όταν . Για τα δυναμικά ισχύουν οι εκτιμήσεις (16α,β). Λαμβάνοντας το μιγαδικό συζυγή βρίσκουμε τις ακόλουθες εκτιμήσεις για τα δυναμικά
R → ∞ kΦ
Φ :
( )1/ 2k O R −Φ = , και (18α)
( )3/ 20
kkjk O R
R−∂Φ
+ Φ =∂
. (18β)
Χρησιμοποιώντας τώρα τις παραπάνω σχέσεις βρίσκουμε ότι
( ), ,
, ,
Vert R Vert R
k kVert R k k k
D D
I dS dSn n R R
∂ ∂
⎛ ⎞ ⎛ ⎞∂Φ ∂Φ∂Φ ∂Φ⎟ ⎟⎜ ⎜⎟ ⎟Φ Φ = Φ −Φ = Φ −Φ⎜ ⎜⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠∫∫ ∫∫ =
( ) ( ) ( ) ,
20 0
Vert R
k k
D
jk jk O R−
∂
= Φ ⋅ − Φ −Φ ⋅ Φ +∫∫ dS =
( ) 0 2
20 3
0
2 k
h
jk dx R d O Rπ
θ −
−
=− Φ Φ + =∫ ∫
( )( )
0
0 2
10 3
0
2 k
h O R
jk dx d R O Rπ
θ −
−
= − Φ Φ +∫ ∫ ,
εκ της οποίας προκύπτει
( ) ( )0 2
, 0 3
0
, 2 limVert R k kR
h
I jk dx R dπ
θ→ ∞
−
Φ Φ = − Φ Φ∫ ∫ , (19)
εφ’ όσον το ολοκλήρωμα ( ), ,Vert R kI Φ Φ είναι ανεξάρτητο τουR , σύμφωνα με το Πόρισμα, ανωτέρω. Για να προχωρήσουμε ένα ακόμη βήμα στον υπολογισμό του ολοκληρώματος (19) χρειαζόμαστε την ακριβή ασυμπτωτική έκφραση των δυναμικών και kΦ Φ , όπως έχει παραχθεί στο Παράρτημα του Κεφαλαίου 2, δίδεται στη σχέση (11α) του εδαφίου 2.5 (2), και επαναλαμβάνεται χάριν ευκολίας στη σχέση (2β) του παρόντος εδαφίου. Βάσει αυτής βρίσκουμε,
( )( )
( ) ( ) ( )2
0 3 12
0 0
cosh2 ; ;coshk k l
k x hR O
k k hθ ω θ ω
π−
⎡ ⎤+⎣ ⎦Φ Φ = +H H R . (20)
Εισάγοντας την (20) στην (19), υπολογίζοντας το ολοκλήρωμα
( )( )
0
020 3 3
0
sinh 21cosh2 2
h
k hk x h dx h
k−
⎛ ⎞⎟⎜⎡ ⎤ ⎟+ = +⎜ ⎟⎣ ⎦ ⎜ ⎟⎜⎝ ⎠∫ ,
(2) Δηλαδή, στην περίπτωση αυτή η «συνοπτική» επ’ άπειρον συνθήκη [η συνθήκη ακτινοβολίας του
Sommerfeld, σχέση (13) του εδαφίου 2.5] δεν επαρκεί, αλλά απαιτείται να καταφύγουμε στην ακριβή έπ’ άπειρον συμπεριφορά του δυναμικού, η οποία δίδεται από τη σχέση (11) του εδαφίου 2.5.
- 81 -

7
και θεωρώντας ότι το
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
R τείνει στο άπειρο, βρίσκουμε
( ) ( )( ) ( )
2
0,
0 0
2, ;Vert R k k l
j c h;I d
k
π
θ ω θ ω θπσ
Φ Φ = − ∫ H H , (21α)
όπου
( ) 0 00
0
sin 2 2cosh 1
k h k hc hk h
σ +=
+. (21β)
Όμως, σύμφωνα με την (13), το «μακρινό» ολοκλήρωμα (far-field integral) ( ), ,Vert R kI Φ Φ ισούται και με το «κοντινό» (επί του σώματος) ολοκλήρωμα (near-field integral)
( ),
B
kk kB
D
I dn n
∂
⎛ ⎞∂Φ∂Φ ⎟⎜ ⎟Φ Φ = Φ −Φ =⎜ ⎟⎜ ⎟⎜ ∂ ∂⎝ ⎠∫∫ BS [οριακές συνθήκες στερεού σώματος]
( )BB B
k k B k B k k B
DD D
n n dS n dS n dS∂∂ ∂
= Φ −Φ = Φ − Φ =∫∫ ∫∫ ∫∫
2 Im
B
j k
D
Bj n dS∂
⎧ ⎫⎪ ⎪⎪ ⎪⎪= Φ⎨⎪⎪ ⎪⎪ ⎪⎩ ⎭∫∫ ⎪⎬⎪
. (22)
Επί πλέον, σύμφωνα με τη σχέση (3β) του εδαφίου 2.3, έχουμε
( )1Im
B
j k B k
D
n dS B ωρω
∂
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪Φ = −⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭∫∫ ,
οπότε η (22) γίνεται
( ) ( )2,kBjI ω
ρωΦ Φ = − kB . (23)
Αξιοποιώντας τώρα την ταυτότητα ( ) (,,k Vert R kBI IΦ Φ = Φ Φ ), [σχέση (13)], σε συνδυασμό με τις (21α) και (23), παίρνουμε τη σπουδαία ισότητα
( )( )
( ) ( )2
0
0 0
; ;k k l
c hB d
k
π
ω ρω θ ω θ ωπσ
= ∫ H H θ . (24)
Η σχέση (24) αποτελεί, μεταξύ άλλων, απόδειξη του γεγονότος ότι, γενικά, ,
πράγμα που ισοδυναμεί με το ότι οι ποσότητες ( ) 0kB ω ≠
( )k ωΠ
=
και παίρνουν γενικά
μιγαδικές τιμές. Περαιτέρω, εφαρμόζοντας την (24) για k , βλέπουμε ότι , και
άρα οι δυνάμεις είναι πάντοτε αντίρροπες ως προς την ταχύτητα , αντιπροσωπεύουν δηλαδή πράγματι
( ,k ωΦ x )( ) 0ω ≥
( );k tξ ωkkB
( ) ( );k kkt Bξ ω ω−δυνάμεις απόσβεσης. Ολοκληρώνεται, έτσι, η απόδειξη
της ιδιότητας Ι.2). Τα παραπάνω συμπεράσματα για τους συντελεστές απόσβεσης προέκυψαν με τη βοήθεια της έπ’ άπειρον συμπεριφοράς των δυναμικών ακτινοβολίας. Η σχέση των συντελεστών απόσβε-
- 82 -

8
σης με την ασυμπτωτική μορφή των δυναμικών ακτινοβολίας στο άπειρο έχει μια πολύ ενδιαφέρουσα ενεργειακή εξήγηση: Το ταλαντευόμενο επιπλέον σώμα, μέσω των δυνάμεων απόσβεσης, διαβιβάζει ενέργεια στο νερό. Η ενέργεια αυτή ακτινοβολείται εξ ολοκλήρου στο άπειρο εφ’ όσον:
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 1) δεν μπορεί να απαχθεί δια μέσου της ελεύθερης επιφάνειας ή του πυθμένα, - 2) δεν μπορεί να καταναλωθεί στο εσωτερικό του υγρού, το οποίο έχει υποτεθεί ατριβές, - 3) δεν μπορεί να αυξάνει το μέσο ενεργειακό περιεχόμενο του νερού, το οποίο είναι στα-θερό. Κατά συνέπεια, η μέση (ανά περίοδο) ισχύς των δυνάμεων απόσβεσης θα πρέπει να ισούται με τη μέση ισχύ που ακτινοβολείται στο άπειρο από τους απομακρινόμενους κυματισμούς. Έτσι, αν θεωρήσουμε ότι το σώμα [ ]Σ εκτελεί την εξαναγκασμένη κίνηση
, (25) ( ) ( ) (0; cosk ktξ ω ξ ω ω ε= )kt +
τότε θα έχουμε
από την οποία, μετά την εκτέλεση των πράξεων, ξαναπαίρνουμε τη σχέση (24) για . Ο αναγνώστης καλείται να εκτελέσει τους παραπάνω υπολογισμούς και να επαληθεύσει έτσι τη σχέση (24) για .
k=
k= - Εφαρμογή της (13) για τα δυναμικά ακτινοβολίας και περίθλασης , και απόδειξη των ιδιοτήτων Ι.3) και Ι.4)
,k dΦ Φ
Θα εφαρμόσουμε τώρα τη συναρτησιακή ταυτότητα (13) (δεύτερη ταυτότητα Green για κυματικές συναρτήσεις) για το ζεύγος των κυματικών δυναμικών . Επειδή τα δυναμικά ακτινοβολίας και περίθλασης ικανοποιούν τη συνθήκη ακτινοβολίας (16), προκύπτει, όπως ακριβώς και στην πρώτη περίπτωση που εξετάσαμε στο παρόν εδάφιο [( ) ], ότι . Άρα η (13) μας δίδει
( ) ( )1 2, ,k dΨ Ψ = Φ Φ
kΦ dΦ
01 2,Ψ Ψ = ( ),k= Φ Φ ( ), ,Vert R k dI Φ Φ =
BB
kd B k
DD
dS dSn n
∂∂
∂Φ ∂ΦΦ = Φ
∂ ∂∫∫ ∫∫ dB . (26)
Λαμβάνοντας τώρα υπ’ όψιν τις συνοριακές συνθήκες που ικανοποιούν τα δυναμικά ακτινοβολίας και περίθλασης πάνω στο στερεό σύνορο kΦ dΦ BD∂ του επιπλέοντος σώματος
⎧⎪⎨⎪⎩
⎫⎪⎬⎪⎭
( ) ( )0
, ; ;
B
T
k k B
D
dt p t t n dSx ω ξ ω∂
≡ − =∫ ∫∫
( ) ( )20k kkBπωξ ω ω= − =
⎧⎪= ⎨⎪⎩
( ) ( )
,0
, ;, ;
Vert R
Tk
k
D
tdt t dS
Rx
xω
ρ ω∂
⎫∂Φ⎪ ≡ Φ⎬
∂⎪⎭
∫ ∫∫ , Ενέργεια διαβιβαζόμενη από το σώμα στο υγρό δια μέσου του D∂ σε μια περίοδο T 22 /π ω=
Ενέργεια που ακρινοβολείται στο άπειρο από τους απομακρινόμενους κυματισμούς σε μία περίοδο
- 83 -

9
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
kkn
n∂Φ
=∂
και 0d
n n∂Φ ∂Φ
= −∂ ∂
, (27)
και τη σχέση ορισμού της δύναμης περίθλασης, σχέση (2β) του εδαφίου 2.3, η (26) μας δίδει
( ) ( )2 2 0
B B
d k d k B k B
D D
X j A n dS j A dSn
ω ρ ω ρ
∂ ∂
∂Φ≡− Φ = Φ
∂∫∫ ∫∫ . (28)
Αποδεικνύεται έτσι και η ιδιότητα Ι.3).
Ας θεωρήσουμε τώρα τις συνολικές υδροδυναμικές διεγείρουσες δυνάμεις (Froude-Krylov και περίθλασης) , 0exc k k d kX X X= + . Σύμφωνα με τις σχέσεις (28) και (2α) του εδαφίου 2.3, έχουμε
2 0, 0
B
kexc k k B
D
X j A dSn n
ω ρ
∂
⎛ ⎞∂Φ ∂Φ ⎟⎜=− Φ −Φ ⎟⎜ ⎟⎜⎝ ⎠∂ ∂∫∫ . (29α)
Δεδομένου ότι τα δυναμικά και είναι κυματικές συναρτήσεις, η (29), σε συνδυασμό με την ταυτότητα (13), μας δίδει
0Φ kΦ
( ),
2 0, 0
Vert R
kexc k k B
D
X j A dSR R
ω ρ
∂
⎛ ⎞∂Φ ∂Φ ⎟⎜= − Φ −Φ ⎟⎜ ⎟⎜⎝ ⎠∂ ∂∫∫ . (29β)
Συγκρίνοντας τις (ισοδύναμες) σχέσεις (29α) και (29β) για τις συνολικές υδροδυναμικές διεγείρουσες δυνάμεις παρατηρούμε ότι αυτές μπορούν να εκφρασθούν είτε
α) μέσω ενός ολοκληρώματος πάνω στη βρεχόμενη επιφάνεια του σώματος [ ]Σ [σχέση (29α), ολοκλήρωση των πιέσεων πάνω στη γάστρα, near-field integration], είτε
β) μέσω ενός ολοκληρώματος πάνω σ’ ένα μακρινό (κυλινδρικό ή άλλου σχήματος) σύνορο, όπου η ολοκληρωτέα ποσότητα εξαρτάται μόνο από την έπ’ άπειρον συμπε-ριφορά των αντίστοιχων δυναμικών [σχέση (29β), ολοκλήρωση των εξερχόμενων κυματισμών στο άπειρο, far-field integration].
Οι σχέσεις (28) και (29β) εισήχθησαν και αποδείχθηκαν για πρώτη φορά από το σημαντικό Ρώσο φυσικό και εφαρμοσμένο μαθηματικό Haskind (Khaskind)(3) το 1957 («The Exciting Forces and Wetting of Ships in Waves», Izvestia Akademii Nauk, No.7). Στη δύση αγνοήθηκαν για αρκετά χρόνια, πρακτικά μέχρι το 1962, οπότε ο καθηγητής του MIT N. Newman δημοσίευσε την εργασία του «Exciting Forces on Fixed Bodies in Waves” (Journal of Ship Research, Vol. 3, No.6). Στην εργασία αυτή αναπαράγεται το αποτέλεσμα του Haskind και σχολιάζεται η χρησιμότητά του. Έκτοτε οι σχέσεις αυτές αναφέρονται ως σχέσεις Haskind-Newman (Haskind-Newman’s relations), και αποτελούν ένα σημαντικό εργαλείο της Ναυτικής Υδροδυναμικής. Με τη βοήθεια της σχέσης (29β) μπορούμε να αποδείξουμε την ιδιότητα Ι.4). Η απόδειξη αυτή δεν θα δοθεί εδώ. Ο ενδιαφερόμενος αναγνώστης παραπέμπεται στην εξαιρετική
(3) Maks Danilovich KHASKIND (1913-1963)
- 84 -

10
εργασία επισκόπησης του J.V. Wehausen(4) («The Motion of Floating Bodies», Annual Review of Fluid Mechanics, 1971). Άσκηση 1: Να υπολογίσετε την κατακόρυφη και την οριζόντια δύναμη περίθλασης που ασκούνται πάνω σε πλωτή δεξαμενή σφαιρικού σχήματος, ακτίνας , η οποία βρίσκεται αγκυρωμένη σε βαθύ νερό και δέχεται την επίδραση απλών αρμονικών κυματισμών μήκους κύματος , συναρτήσει του πλάτους κύματος ακτινοβολίας μακριά από τη σφαίρα σε κατακόρυφη και οριζόντια ταλάντωση. Στη συνέχεια, να περιγράψετε μια πειραματική διαδικασία μέσω της οποίας μπορείτε να εκτιμήσετε τις ανωτέρω δυνάμεις περίθλασης μέσω πειραμάτων εξαναγκασμένης ταλάντωσης της σφαίρας σε ήρεμο νερό.
a
λ
(4) John Vrooman Wehausen (1913-2005), Professor of Engineering Sciences at the Univercity of California, Berkely. Σπουδαίος μαθηματικός και υδροδυναμικός, ο θεμελιωτής της αυστηρής και ταυτόχρονα δημιουργικής επιστημονικής προσέγγισης της υδροδυναμικής ελεύθερης επιφάνειας στις ΗΠΑ και ένας από τους μεγαλύ-τερους υδροδυναμικούς διεθνώς. Στο μνημειώδες άρθρο του, 350 σελίδων, “Surface Waves” (με τον Edmund Laitone, 1960), που περιλαμβάνεται στο Handbuch der Physik (Springer) δίδει μια πλήρη επισκόπηση του πεδίου της υδροδυναμικής ελεύθερης επιφάνειας και των εφαρμογών της μέχρι το 1960, κάνοντας γνωστά για πρώτη φορά στη δύση και τα σημαντικά αποτελέσματα των μεγάλων Ρώσων υδροδυναμικών και μαθηματικών στον τομέα αυτό. Το έργο αυτό παραμένει μέχρι σήμερα σημαντική πηγή αναφοράς και είναι διαθέσιμο (από το 2002) στο διαδίκτυο. Η online version αυτού μπορεί να βρεθεί στη διεύθυνση http://www.coe.berkeley.edu/SurfaceWaves. Δύο άλλα σπουδαία άρθρα επισκόπησης μεγάλης αξίας και κλασσικές πηγές αναφοράς είναι τα: "The Wave Resistance of Ships", in Advances in Applied Mechanics, 1974, και αναφερθέν ανωτέρω "The Motion of Floating Bodies", in Annual Review of Fluid Mechanics, 1971.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 85 -

2.7 Γενικές μέθοδοι αριθμητικής επίλυσης των υδροδυναμικών προβλημάτων ακτινοβο-λίας και περίθλασης.
Από την ανάλυση της παραγράφου 2.3 και ειδικότερα από τις σχέσεις (2β) και (2γ) για τις δυνάμεις περίθλασης και ακτινοβολίας αντίστοιχα, καθίσταται σαφές ότι για τον προσδιορισμό τους πρέπει να επιλυθούν τα προβλήματα συνοριακών τιμών 6.2(25) που προσδιορίζουν τα δυναμικά περίθλασης και ακτινοβολίας. Όπως γνωρίζουμε από τα μαθήματα Μερικών Διαφορικών εξισώσεων, αναλυτικές (ή «σχεδόν» αναλυτικές) μέθοδοι επίλυσης προβλημάτων συνοριακών τιμών είναι διαθέσιμες μόνο για σώματα απλών γεωμετρικών μορφών (σφαίρες, κύλινδροι, ελλειψοειδή, κ.α.). Στην περίπτωση των προ-βλημάτων ακτινοβολίας και περίθλασης, η παρουσία της ελεύθερης επιφάνειας και του πυθμένα (όταν υπάρχει) εισάγουν πρόσθετες δυσκολίες, που καθιστούν τις αναλυτικές λύσεις εξαιρετικά δυσεύρετες και, άρα, πολύ μικρής πρακτικής χρησιμότητας. Ακόμη και τα (γεωμετρικώς) απλούστερα προβλήματα, αυτά που αντιστοιχούν σε επιπλέον ημισφαίριο και σε επιπλέοντα κατακόρυφο κύλινδρο, δεν έχουν κλειστή αναλυτική λύση. Επιλύονται όμως σχετικά εύκολα, με τη βοήθεια ημι-αναλυτικών τεχνικών (ειδικών αρμονικών συναρτήσεων σε τμήματα του πεδίου ροής και συναρμογής στις διεπιφά-νειες) και θα παρουσιασθούν διεξοδικά στο επόμενο εδάφιο. Στο παρόν εδάφιο θα περιγράψουμε δύο γενικές μεθόδους αριθμητικής επίλυσης των υδροδυνα-μικών προβλημάτων ακτινοβολίας και περίθλασης, οι οποίες εφαρμόζονται σε σώματα γενικής γεωμετρίας και οδηγούν σε λύσεις με τη βοήθεια προγραμμάτων Η/Υ. Οι μέθοδοι αυτές βασίζον-ται στην αναδιατύπωση των προβλημάτων συνοριακών τιμών σε ολοκληρωτικές εξισώσεις ή σε μεταβολικές εξισώσεις. 2.7.1 Η μέθοδος των συνοριακών ολοκληρωτικών εξισώσεων Η μέθοδος αυτή βασίζεται στην αναδιατύπωση του πλήρους προβλήματος συνοριακών τιμών στη μορφή ολοκληρωτικής εξίσωσης ως προς τις τιμές του άγνωστου πεδίου του δυναμικού ταχύτητας πάνω στο σύνορο του πεδίου ροής (ή σε τμήμα του συνόρου του πεδίου ροής). Θα παρουσιάσουμε μία από τις πολλές παραλλαγές με την οποίες εμφανίζεται η μέθοδος των συνοριακών ολοκληρωτικών εξισώσεων, αυτή που προκύπτει με εφαρμογή της δεύτερης ταυτότητας Green,
( )D D
GG G dV G dSn n
∂
⎛ ⎞∂ ∂Φ⎟⎜Φ⋅ Δ − ⋅ΔΦ = Φ⋅ − ⋅ ⎟⎜ ⎟⎜⎝ ⎠∂ ∂∫∫∫ ∫∫ , (1)
όπου είναι το άγνωστο (ζητούμενο) δυναμικό ταχύτητας, και είναι το πεδίο μιας κατάλληλης συνάρτησης Green του υδροδυναμικού προβλήματος. Αρχίζουμε με την εισαγωγή της έννοιας της συνάρτησης Green, η οποία –με τη σειρά της– βασίζεται στην έννοια της θεμελιώδους λύσης (fundamental solution) της αντίστοιχης πεδιακής εξίσωσης (εν προκειμένω, τηε εξίσωσης Laplace). ιδιόμορφης λύσης (singular solution)
Φ G
2.7.1.α Θεμελιώδης λύση και ιδιόμορφες λύσεις της εξίσωσης Laplace Έστω ένα σταθερό σημείο του πεδίου ροής , και ( )1 2 3, , Dξ ξ ξ ∈ξ = D ( )1 2 3, ,x x x D= ∈x το γενικό πεδιακό σημείο στο . Εύκολα επαληθεύουμε ότι η συνάρτηση (πεδίο) D
29.3.12
- 86 -

2
( ) ( )( ) ( ) ( )2 2
1 1 2 2 1 2
1 1F Fx x xξ ξ ξ
= = =− − + − + −
x xxξ ξ
ξ 2 (2)
ικανοποιεί την εξίσωση Laplace
( ) ( ) ( ) ( )2 2 2
2 2 21 2 3
0F F F
Fx x x
∂ ∂ ∂Δ = + +
∂ ∂ ∂x
x x xx
ξ ξ ξξ = , για D∈ −x ξ . (3)
Άσκηση 1: Να αποδείξετε ότι συνάρτηση ( ) 1 /F = −x xξ ξ ικανοποιεί την εξίσωση Lapla-
ce ( ) 0FΔ x x ξ = για κάθε ≠x ξ . Η συνάρτηση ( ) 1 /F = −x xξ ξ είναι η απλούστερη ιδιόμορφη λύση (singular solution) της εξίσωσης Laplace, η οποία ονομάζεται και θεμελιώδης λύση (fundamental solution). Η λύση αυτή αναφέρεται και ως σημειακή πηγή (source function), διότι εισάγει μια σταθερή παροχή όγκου στο πεδίο. Αυτό προκύπτει εύκολα, αν υπολογίσουμε το επιφανειακό ολοκλήρωμα της ροής
( ),
1
S
d sn
ε∂
⎛ ⎞∂⎜ ⎟⎜ ⎟∂ −⎝ ⎠
∫∫ xξ
ξ, (4)
πάνω στην επιφάνεια ( ,S )ε∂ ξ σφαίρας ( ),S εξ , κέντρου ξ και ακτίνας ε . [ είναι το μοναδιαίο κάθετο διάνυσμα στη σφαιρική επιφάνεια, κατευθυνόμενο προς το εξωτερικό της σφαίρας, και είναι η αντίστοιχη κάθετη παράγωγος.] Χρησιμοποιώντας σφαιρικές συντεταγμένες
n
/ n∂ ∂i( , ,r )θ ϕ (1), με κέντρο το σημείο ξ , έχουμε
21 1 1 1, rr n r r
−⎛ ⎞∂ ∂ ⎛ ⎞= =⎜ ⎟ ⎜ ⎟⎜ ⎟∂ ∂− − ⎝ ⎠⎝ ⎠x xξ ξ= − , (5α,β)
ενώ το εμβαδικό στοιχείο 2 sind s r d dθ θ ϕ= . Άρα το επιφανειακό ολοκλήρωμα (4) ισούται με
( )( )
22 2
0 0 0
,
1 sin 2 sin 4
S
d s r r d d dn
θ π ϕ π θ π
θ ϕ θ
ε
θ θ ϕ π θ θ π= = =
−
= = =
∂
⎛ ⎞∂= − ⋅ = − =⎜ ⎟⎜ ⎟∂ −⎝ ⎠
∫∫ ∫ ∫ ∫xξ
ξ−
.
(5γ)
(1) θ είναι η πολική γωνία, που παίρνει τιμές 0 θ π≤ ≤ , και ϕ είναι η αζιμουθιακή γωνία, που παίρνει τιμές 0 2ϕ π≤ ≤ .
29.3.12
- 87 -

3
Δηλαδή, από το ιδιόμορφο σημείο
29.3.12
ξ «αναβλύζει» μια σταθερή παροχή (όγκου) ίση με 4π− . (Το αρνητικό πρόσημα σημαίνει ότι το σημείο ξ λειτουργεί ως καταβόθρα δια της οποίας απάγεται παροχή. Η διάκριση σε πηγή ή καταβόθρα ρυθμίζεται από το πρόσημο και δεν θα μας απασχο-λήσει περαιτέρω). Προκειμένου να κανονικοποιήσουμε την παροχή διαιρούμε τη θεμελιώδης λύση ( ) (F F=x xξ )ξ με τον παράγοντα ( )41 / π− , ώστε να αντιστοιχεί σε μοναδιαία παροχή:
( ) ( )( ) ( ) ( )2 2
1 1 2 2 1 2
1 1 1 14 4
F Fx x x
π πξ ξ ξ
= = − = −− − + − + −
x xxξ ξ
ξ 2. (6)
πως βλέπουμε από τη σχέση ορισμού της [εξ. (1) ή (6)] η θεμελιώδης λύση εμφανίζει σφαιρική Ό
συμμετρία γύρω από το σημείο ξ . Βλ. επίσης την εξ. (5α). Κάθε (μερική ή κατευθυντική) παράγωγος της ( ) ( )F F=x x ξ είναι επίσης μια ιδιόμορφη λύ-
μελιώδους λύσης
ση της εξίσωσης Laplace. Οι παράγωγοι της θε τάξεως k , δηλαδή οι συναρτη-σεις της μορφής
( ) ( ), ,
1 2 3
a b c
a b c a b c
FM
x x x
+ +∂=
∂ ∂ ∂
xx
ξξ , όπου a b c k+ + = , (7)
οι γραμμικοί συνδυασμοί τους) είναι επίσης ιδιόμορφες λύσεις της εξίσωσης Laplace, και
(καιονομάζονται πολύπολα (multipoles) τάξεως k (της εξίσωσης Laplace). Ειδικότερα, οι πρώτες παράγωγοι ονομάζονται δίπολα (dipoles). Σε αντίθεση με την πηγή, που εμφανίζει σφαιρική συμμετρία, τα πολύπολα είναι κατευθυντικές συναρτήσεις (πεδία). Δίδουμε, ως παράδειγμα, τις μορφές των διπόλων:
( ) ( ) 1 11 0 0 3
1
14
F xM
xξ
π∂ −
= =∂ −
xx
x
ξ
ξ είναι δίπολο κατά τον άξονα
1O x
( ) ( ) 2 20 1 0 3
2
14
F xM
xξ
π∂ −
= =∂ −
xx
x
ξ
ξ είναι δίπολο κατά τον άξονα
2O x
( ) ( ) 3 30 0 1 3
3
14
F xM
xξ
π∂ −
= =∂ −
xx
x
ξ
ξ είναι δίπολο κατά τον άξονα
και
3O x
( ) ( ) ( ) ( ) ( )1 2 3 3
1 2 3111
1;4
F F FM p p p
x x x π∂ ∂ ∂ ⋅ −
= + + =∂ ∂ ∂ −
x x x p xx p
x
ξ ξ ξ ξ
ξ
είναι δίπολο κατά την κατεύθυνση του διανύσματος ( )1 2 3, ,p p p=p .
σκηση 2: Να αποδείξετε ότι κάθε (μερική ή κατευθυντική) παράγωγος της θεμελιώδους λύσης της εξίσωσης Laplace ικανοποιεί και αυτή την εξίσωση Laplace για κάθε
Ά
≠x ξ .
- 88 -

4
- Η θεμελιώδης λύση ως γενικευμένη συνάρτηση
29.3.12
Μια σημαντική ιδιότητα της θεμελιώδους λύσεως είναι ότι επαληθεύει την εξίσωση
( ) ( ) ( ) ( ) ( )2 2 2F F F
F δ∂ ∂ ∂
Δ = + + = −x x x
x xξ ξ ξ
2 2 21 2 3x x x∂ ∂ ∂x ξ ξ , 3∈x , (8)
όπου
( ) ( ) ( ) ( )1 1 2 2 3 3x x xδ δ ξ δ ξ δ ξ− ≡ − − −x ξ
(ή συνάρτηση Dirac). Υπενθυμίζουμε ότι η
είναι η γνωστή μας (γενικευμένη) συνάρτηση
δέλτα συνάρτηση Dirac ( )δ→ −x x ξ , με πεδίο
ορισμού ένα χωρίο 3Ω⊆ , όπου ξ ένα σταθερό σημείο στο εσωτερικό ται από τη σχέση
του Ω , ορίζε
( ) ( ) ( )dσ δ σΩ
− =∫ x x xξ ξ , ( )0Cσ ∞∀ ∈ Ω . (9)
Η συνθήκη δηλώνει ότι η ισότητα (9) πρέπει να ισχύει για κάθε λεία (άπειρες ορές νάρτηση
( )0Cσ ∞∀ ∈ Ω
παραγωγίσιμη) συφ σ , η οποία (όπως και οι παράγωγοι κάθε τάξεως αυτής) τείνει επαρκώς γρή δέν, όταν το x τείνει στο σύνορο του γορα στο μη Ω . Γνωρίζουμε επίσης ότι η συνάρτηση Dirac ( )δ −x ξ είναι ηδενική για κάθε μ ≠x ξ . Λέμε συνήθως ότι, στο σημείο
=x ξ , η ( )δ −x ξ απειρίζεται. Σωστότερο ακόμη είναι ότι στο σημείο =x ξ η ( )δ −x ξ δεν έχει τιμή.
Αυστηρά μήσεων, την
ιλώντας, η εξίσωση (8) νοείται στο πλαίσιο της θεωρίας των γενικευμένων συναρ- οποία δεν θα αναπτύξουμε εδώ. Θα εισαγάγουμε μόνο εκείνα τα στοιχεία της τ
θεωρίας (και μάλιστα με απλουστευμένο τρόπο) τα οποία θα μας επιτρέψουν να καταλάβουμε και να αποδείξουμε την ισότητα (8), την οποίαν και θα χρησιμοποιήσουμε σε επόμενα εδάφια. Αρχίζουμε σημειώνοντας ότι οι γενικευμένες συναρτήσεις δεν ορίζονται μέσω των («σημει-ακών») τιμών τους, αλλά μέσω της ολοκληρωτικής δράσης τους πάνω σε λείες συναρτήσεις. Ως συνέπεια αυτού, η ισότητα δύο γενικευμένων συναρτήσεων, έστω των 1 2,f f , με πεδίο ορισμού ένα χωρίο Ω (2), σημαίνει (εξ ορισμού) ότι ισχύει η σχέση 1 2) ( ) ( ) ( )( f d f dσ σ=∫ ∫x x x x x x ,
Ω Ω
( )0∞Cσ∀ ∈ Ω . (10)
(2) Μια γενικευμένη συνάρτηση «δεν υπάρχει» (δεν είναι καλά ορισμένη) αν δεν προκαθορίσουμε το πεδίο ορισμού της. Αυτό γίνεται εύκολα κατανοητό από τις εξισώσεις (9) και (10). Σημειώνουμε επίσης ότι τα ολοκληρώματα που εμφανίζονται στις σχέσεις (9) και (10), γενικώς, δεν υπάρχουν με την κλασσική έννοια του ολοκληρώματος (κατά Riemann ή κατά Lebesque). Ο αναγνώστης που ενδιαφέρεται για τέτοιες «λεπτομέρειες» θα πρέπει να ανατρέξει στην ειδική βιβλιογραφία.
- 89 -

5
Η
29.3.12
οικογένεια των γενικευμένων συναρτήσεων περιλαμβάνει και τις συνήθεις συναρτήσεις, ως
ι γενικευμένες συναρτήσεις παραγωγίζονται οσεσδήποτε φορές. Η παράγωγος
ειδικές περιπτώσεις. Επίσης, μια γενικευμένη συνάρτηση μπορεί να ταυτίζεται με μια συνήθη συνάρτηση σε ένα τμήμα του πεδίου ορισμού της (όπως η συνάρτηση Dirac). Στην περίπτωση αυτή μπορούμε να την χειριζόμαστε κατά τα γνωστά (των συνήθων συναρτήσεων) στο τμήμα αυτό. Ο / if x∂ ∂ ,
1,2,3i = , της γενικευμένης συνάρτησης f , ορίζεται από τη σχέση
( ) ( )( ) ( )i i
f d fx x
dσσΩ Ω
∂ ∂= −
∂ ∂∫ ∫x xx x x x , ( )0Cσ ∞∀ ∈ Ω . (11α)
! Η σχέση (11α) δεν είναι ολοκλήρωση κατά παράγοντες. Είναι σχέση ορισμού της [Προσοχή
/ if x∂ ∂ , η οποία είναι συμβατή με την ολοκλήρωση κατά παράγοντες, που ισχύει για τις συνή-ρτήσεις.] Παρόμοια ορίζονται οι παράγωγοι κάθε τάξεως της θεις συνα f . Π.χ., η παράγωγος
1 2 3
a b c
a b c fx x x
+ +∂∂ ∂ ∂
ρίζεται από τη σχέση ο
( )1 2 3 1 2 3
( ) ( )( ) 1 ( )a b c a b c
a b ca b c a b c
f d fx x x x x x
σσ+ + + +
+ +
Ω Ω
∂ ∂= −
∂ ∂ ∂ ∂ ∂ ∂∫ ∫x xx x x xd , ( )0Cσ ∞∀ ∈ Ω , (11β)
αι, άρα, η Laplacian κ ( )FΔ x x ξ της θεμελιώδους λύσης ορίζεται, στο πλαίσιο της θεωρίας των
σεων, από γενικευμένων συναρτή τη σχέση
( ) ( )( ) ( )F d Fσ σΩ Ω
Δ = Δ∫ ∫xx x x x xξ ξ d x , ( )0Cσ ∞∀ ∈ Ω . (11γ)
ε τη βοήθεια των ανωτέρω παρατηρήσεων μπορούμε να αποδείξουμε την ισχύ της εξίσωσης Μ
(8), στο πλαίσιο της θεωρίας των γενικευμένων συναρτήσεων. Σύμφωνα με τον ορισμό (10), της ισότητας των γενικευμένων συναρτήσεων, πρέπει να αποδείξουμε ότι ( ) ( )
33
( ) ( ) ( )F d dσ σ δ σΔ = − ≡∫ ∫xx x x x x xξ ξ ξ , . (12α)
όγω της (11γ), η αποδεικτέα (12α) γίνεται
( )30Cσ ∞∀ ∈
Λ ( )
3
( ) ( )F dσ σΔ =∫ x x xξ ξ , ( )30Cσ ∞∀ ∈ . (12β)
- 90 -

6
29.3.12
Επειδή το χωρίο είναι άπειρο και οι 3 ( )F x ξ και ( )FΔ x x ξ δεν ορίζονται (απειρίζονται, ν προτιμάτε!) στο ίοα σημε =x ξ , θα εργασθούμε κατ’ αρχήν στο χωρίο
( ) ( ) ), , ,D R S R (Sε ε= −ξ ξ ,
δηλαδή στο χωρίο μεταξύ δύο σφαιρών με κέντρο το σημείο ξ , μιας «μεγάλης», με ακτίνα R , και μιας «μικρής», με ακτίνα ε , και στη συνέχεια θα πάρουμε όριο για και το R →∞ 0ε → . Ας σημειωθεί ότι στο χωρίο ( ),D R ε όλες οι συναρτήσεις ταυτίζονται με συνήθεις συναρτήσεις, κ ι άρα τα αντίστοιχα ολοκληρώματα μπορούμε να τα χειρισθούμε κατά τα γνω Αρχίζουμε εφαρμόζοντας τη δεύτερη ταυτότητα Green, εξ. (1), στις συναρτήσει
αστά.
ς ( )F x ξ και ( )σ x :
( ) ( )( )( )
( ) ( )( ),,
( )( ) ( ) ( ) .
D RD R
FF F dV F
n nεε
σσ σ σx
x
x xx x x x x x
∂
⎛ ⎞∂ ∂ ⎟⎜ ⎟⎜⋅ Δ − ⋅Δ = ⋅ − ⋅ ⎟⎜ ⎟⎜ ∂ ∂ ⎟⎜⎝ ⎠dS∫∫
ξξ ξ ξ
Στο χωρίο
∫∫∫
( ),D R ε η ( )F x ξ ταυτίζεται με την κλασσική συνάρτηση 1 14π
−−x ξ
και
Άρα η ανωτέρω ολο ρφή ισχύει η (3). κληρωτική ταυτότητα απλουστεύεται στη μο
( )( )
( ) ( )
( ),, D RD Rn n
εεx
∂⎟⎜ ∂ ∂ ⎟⎜⎝ ⎠
(13α)
Επειδή η λεία συνάρτηση και οι παράγωγοι αυτής
( )( ) ( )F
F dV F dSσσ σ
xxx x x x⎛ ⎞∂∂ ⎟⎜ ⎟⎜⋅Δ = ⋅ − ⋅ ⎟⎜∫∫∫ ∫∫
ξξ ξ .
( )σ x ( ) / ixσ x∂ ∂ και τείνουν γρήγο-
α στο μηδέν όταν
( )σ xΔ
ρ x →∞ , το όριο του χωρικού ολοκληρώματος
( )( )
( )lim ( ) ( )dV Fσ σx x xΔ = ⋅Δ∫∫∫ ∫∫∫( )3, ,
RD R S
F dV
ε ε
x→∞
−
⋅
ξ
ξ ξ
και το όριο του επιφανειακού ολοκληρώματος πάνω στη «μεγάλη» σφαίρα μηδενίζεται: υπάρχει
( ) ( )
( ),R
S Rn n x→∞
∂
⎜ ⎟⎜ ∂ ∂ ⎟⎜⎝ ⎠ξ
Άρα η (13α) απλουστεύεται στην
( )lim ( ) 0F
F dSσσ
xxx x⎛ ⎞∂∂ ⎟⎜ ⎟⎜ ⋅ − ⋅ =⎟∫∫
ξξ .
- 91 -

7
29.3.12
( )
( )
( ) ( )
( )3 ,,
( )( ) ( )
SS
FF dV F
n nεε
σσ σ
x
xxx x x x
∂−
⎛ ⎞∂∂ ⎟⎜ ⎟⎜⋅Δ = ⋅ − ⋅ ⎟⎜ ⎟⎜ ∂ ∂ ⎟⎜⎝ ⎠∫∫∫ ∫∫ξξ
ξξ ξ dS (13β)
εραιτέρω, επειδή η ιδιόμορφη συνάρτησηΠ ( ) 1 14
Fπ
xx
= −−
ξξ
είναι ολοκληρώσιμη σε
χωρία που περιέχουν το σημείο ιδιομορφίας =x ξ (REF [ ]), το όριο
( )
( )30
,
lim ( )
S
F dVσx x⋅Δξ ε
ε→
−
∫∫∫ξ
υπάρχει και
( )
( )
( )3 3
0,
lim ( ) ( )
S
F dV F dVε
ε
σ σx x x x→
−
⋅Δ = ⋅Δ∫∫∫ ∫∫∫ξ
ξ ξ . (14)
Υπολείπεται τώρα ο υπολογισμός των επιφανειακών ολοκληρωμάτων πάνω στη επιφάνεια
( ),S ε∂ ξ της «μικρής» σφαίρας, και η εύρεση του ορίου τους για 0ε → .
- 92 -

8
2.7.1.β Συναρτήσεις Green και ολοκληρωτικές αναπαραστάσεις των λύσεων προβλημάτων
29.3.12
συνοριακών τιμών Η συνάρτηση Green είναι ένα πολύ χρήσιμο μαθηματικό εργαλείο για την επίλυση προβλημάτων συνοριακών τιμών σε ένα χωρίο , με σύνορα. Η συνάρτηση Green (της εξίσωσης Laplace) στο χωρίο ικανοποιεί, εξ ορισμού, την εξίσωση
DD
( ) ( ) ( ) (
2 2 2
2 2 21 2 3
G G Gx x x
δ∂ ∂ ∂
+ + =∂ ∂ ∂
x x xx
ξ ξ ξ)−ξ , , (1α) D∈x
και ομογενείς συνοριακές συνθήκες στο σύνορο D∂ χωρίου . Έτσι, αν το χωρίο δεν έχει σύνορα (δηλαδή αν ), η συνάρτηση Green ταυτίζεται με τη θεμελιώδη λύση της εξίσω-σης Laplace. [Βλ. εξίσωση (.) του εδαφίου 2.7.1.α].
D D3D =
Σύμφωνα με τα όσα αναπτύχθηκαν στο εδάφιο 2.7.1.α, η γενική μορφή της συνάρτησης Green της εξίσωσης Laplace σε ένα χωρίο είναι D
( ) ( ) ( ) ( )1 14
G F H Hπ
x x x xx
= + = − +−
ξ ξ ξξ
ξ , (1β)
όπου ( )H x ξ είναι μια αρμονική συνάρτηση, ομαλή σε ολόκληρο το χωρίο . Η ομαλή αυτή
συνάρτηση εισάγεται προκειμένου η συνάρτηση Green
D
(G x )ξ να ικανοποιεί τις (ομογενείς) συνοριακές συνθήκες του προβλήματος συνοριακών τιμών που θέλουμε να επιλύσουμε στο χωρίο . D Θα αναπτύξουμε τη μέθοδο επίλυσης (ή αναγωγής σε ολοκληρωτική εξίσωση) προβλημάτων συνοριακών τιμών με τη βοήθεια της συνάρτησης Green, εργαζόμενοι με το ακόλουθο πρόβλημα συνοριακών τιμών, στο φραγμένο χωρίο (D 3):
Πρόβλημα : Να βρεθεί το δυναμικό P ( ) ( )1 2 3, ,x x xΦ = Φ = Φx , το οποίο ικανοποιεί την εξίσωση Poisson (Laplace με διέγερση στο δεξιά μέλος)
2 2 2
02 2 21 2 3
gx x x
∂ Φ ∂ Φ ∂ Φ+ + =
∂ ∂ ∂, στο χωρίο , (2α) D
και τις συνοριακές συνθήκες
1gα∂Φ+ Φ =
∂n, στο τμήμα 1D∂ του συνόρου του , (2β) D
, στο τμήμα του συνόρου του D , (2γ) 2gΦ = 2D∂
3g∂Φ=
∂n, στο τμήμα του συνόρου του , (2δ) 3D∂ D
(3) Εργαζόμεθα, κατ’ αρχήν, σε φραγμένο χωρίο χάριν απλότητας. Στη συνέχεια θα επεκτείνουμε τη μέθοδο σε μη φραγμένα χωρία, όπως αυτά που εμφανίζονται στα υδροδυναμικά προβλήματα ακτινοβολίας και περίθλασης.
- 93 -

9
όπου
29.3.12
α είναι μια σταθερά και , , είναι γνωστές συναρτήσεις, ορισμένες επί των συνόρων , , , αντιστοίχως.
1g 2g 3g
1D∂ 2D∂ 3D∂ Σχόλιο: Συνοριακές συνθήκες του τύπου gΦ = ονομάζονται συνθήκες Dirichlet, συνοριακές συνθήκες του τύπου ονομάζονται συνθήκες Neumann, και συνοριακές συνθήκες του τύπου
/ g∂Φ ∂ =ng/ α∂Φ ∂ +n Φ = ονομάζονται συνθήκες Robin.
Ορισμός: Κάθε συνάρτηση (G x )ξ που ικανοποιεί την εξίσωση
( ) ( ) ( ) (
2 2 2
2 2 21 2 3
G G Gx x x
δ∂ ∂ ∂
+ + =∂ ∂ ∂
x x xx
ξ ξ ξ)−ξ , , (3α) D∈x
όπου ( 1 2 3, , )ξ ξ ξξ = είναι ένα σταθερό σημείο του πεδίου , και D μια τουλάχιστον από τις
συνοριακές συνθήκες του Προβλήματος P με μηδενικό δεξιά μέλος, δηλαδή μια τουλάχιστον από τις συνθήκες
( ) ( ) 0
GGα
∂+ =
∂
xx
nξ
ξ , 1D∈∂x , (3β)
( ) 0G =x ξ , , 2D∈∂x (3γ)
( )
0G∂
=∂
xnξ
, , (3δ) 3D∈∂x
θα λέγεται συνάρτηση Green του Προβλήματος P . Η συνάρτηση Green που ικανοποιεί όλες τις συνοριακές συνθήκες του Προβλήματος P (στην ομογενή παραλλαγή τους) θα αναφέρεται ως πλήρης συνάρτηση Green του Προβλήματος P .
2 2 2
02 2 21 2 3
gx x x
D
∂ Φ ∂ Φ ∂ Φ+ + =
∂ ∂ ∂
1
1
gD
α∂Φ+ Φ =
∂∂ n
2
2
gD
Φ =∂
3
3
D∂
g∂Φ=
∂n
n
n
n
iξ
- 94 -

10
Η θεμελιώδης λύση της εξίσωσης Laplace, δηλαδή η συνάρτηση
29.3.12
( )F x ξ που ικανοποιεί μόνο
την εξίσωση (3α), θεωρείται και αυτή ως μια συνάρτηση Green του Προβλήματος P . Η συνάρ-τηση αυτή θα αναφέρεται και ως απλή πηγή ή free-space Green function.
Με άλλα λόγια, η πλήρης συνάρτηση Green του Προβλήματος ικανοποιεί το ίδιο πρόβλημα συνοριακών τιμών με απλουστευμένες διεγέρσεις (τη συνάρτηση Dirac
P(δ −x )ξ στη διαφορική
εξίσωση και μηδενικές διεγέρσεις στις συνοριακές συνθήκες), ενώ μια οποιαδήποτε (μερική) συνάρτηση Green του Προβλήματος P ικανοποιεί τη διαφορική εξίσωση του αρχικού προβλή-ματος με διέγερση (δ −x )ξ και ένα υποσύνολο των συνοριακών συνθηκών (στην ομογενή παραλλαγή τους). Είναι φανερό ότι ο προσδιορισμός της πλήρους συναρτήσεως Green είναι πρακτικά το ίδιο δύσκολος με την επίλυση του αρχικού προβλήματος συνοριακών τιμών. Ως εκ τούτου δεν είναι παράξενο το ότι (όπως θα δούμε στη συνέχεια), η γνώση της πλήρους συναρτήσεως Green μας επιτρέπει να προσδιορίσουμε πλήρως τη λύση αρχικού Προβλήματος P . Όσο λιγότερες συνορι-ακές συνθήκες απαιτήσουμε να ικανοποιεί μια συνάρτηση Green τόσο ευκολότερα μπορούμε να την προσδιορίσουμε. Στην ακραία περίπτωση όπου δεν επιβάλουμε καμιά συνοριακή συνθήκη, έχουμε τη θεμελιώδη λύση της εξίσωσης Laplace, η οποία είναι ήδη γνωστή. Η μεγάλη σημασία των συναρτήσεων Green προκύπτει από το γεγονός ότι μια οποιαδήποτε (μερική) συνάρτηση Green του Προβλήματος μας επιτρέπει να αναγάγουμε το αρχικό πρόβλημα συνοριακών τιμών σε ολοκληρωτική εξίσωση, η οποία είναι ιδιαίτερα βολική για την αριθμητική επίλυση του προβλήματος. Αυτό προκύπτει ως εξής:
P
Εφαρμόζουμε τη δεύτερη ταυτότητα Green,
( ) ( )( ) ( ) ( ) ( )( ) ( ) ( )
D D
GG G d G dx x
x
x xx x x x x x x
n n∂
∂ ∂ΦΦ ⋅ Δ − ⋅ΔΦ = Φ ⋅ − ⋅
∂ ∂
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎝ ⎠∫∫∫ ∫∫ξ
ξ ξ ξ S ,
(4) όπου είναι το (άγνωστο) δυναμικό ταχύτητας που επιλύει το πρόβλημα (2), και είναι η (πλήρης) συνάρτηση Green του ιδίου προβλήματος, που ικανοποιεί τις εξισώσεις (3). Λόγω των (2α) και (3α), το αριστερά μέλος της (4) γράφεται
Φ G
( ) ( )( ) ( )0 0( ) ( ) ( )( )D D
G g d G gδx x x x x x xΦ ⋅ − − ⋅ = ⋅Φ −∫∫∫ ∫∫∫ξ ξ ξξ d x . (5α)
Το δεξιά μέλος της εξίσωσης (4) αναλύεται σε άθροισμα πάνω στα τρία τμήματα , 1D∂ 2D∂ , του συνόρου (εφ’ όσον ). Εξετάζουμε τους τρεις όρους ξεχω-
ριστά. Στο ολοκλήρωμα πάνω στο εργαζόμεθα ως εξής: 3D∂ D∂ 1 2D D D D∂ = ∂ ∂ ∂∪ ∪
1D∂3
( ) ( )1
( )( )
D
GG d x
x
x xx x
n n∂
∂ ∂ΦΦ ⋅ − ⋅
∂ ∂
⎛ ⎞⎟⎜ ⎟⎜ =⎟⎜ ⎟⎟⎜⎝ ⎠∫∫ξ
ξ S [προσθαφαιρούμε τον όρο ( )( ) Gα x xΦ ξ ]
- 95 -

11
29.3.12
( ) ( ) ( ) ( )1
( )( ) ( ) ( )
D
GG G Gα α x
x
x xx x x x x x
n n∂
∂ ∂ΦΦ ⋅ + Φ Φ − ⋅
∂ ∂
⎛ ⎞⎟⎜ ⎟⎜= − ⎟⎜ ⎟⎟⎜⎝ ⎠∫∫ξ
ξ ξ ξ d S =
( ) ( ) ( )1
( )( )( )
D
GG G d Sα α x
x
xx x x
nxx
n∂
∂Φ ⋅ + ⋅
∂
⎛ ⎞⎛ ⎞ ⎛ ⎞∂Φ ⎟⎟⎜ ⎜ ⎟⎜ ⎟⎟⎜ ⎜= − Φ + ⎟⎟⎟ ⎜⎜ ⎜ ⎟⎜ ⎟⎟ ⎝ ⎠⎟⎜⎜ ⎟∂⎝ ⎠⎝ ⎠∫∫ξ
ξ ξ =
( ) ( ) ( )1
1( ) ( )
D
GG G gα x
x
xx x x
n∂
∂Φ ⋅ + ⋅
∂
⎛ ⎞⎛ ⎞ ⎟⎟⎜ ⎜ ⎟⎟⎜ ⎜= − ⎟⎟⎜ ⎜ ⎟⎟⎟⎜⎜ ⎟⎝ ⎠⎝ ⎠∫∫ξ
ξ ξ d Sx . (4) (5β)
Τα ολοκληρώματα στα τμήματα και 2D∂ 3D∂ εκφράζονται άμεσα μέσω της συνάρτησης Green και των διεγέρσεων : 2 3,g g
( ) ( ) ( ) ( )
2 2
2( ) ( )
( ) ( )
D D
G GG d S g Gx x
x x
x xx xx x x x
n n n∂ ∂
∂ ∂∂Φ ∂ΦΦ ⋅ − ⋅ ⋅ − ⋅
∂ ∂ ∂ ∂
⎛ ⎞ ⎛⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜=⎟ ⎟⎜ ⎜⎟ ⎟⎟ ⎟⎜ ⎜⎝ ⎠ ⎝∫∫ ∫∫ξ ξ
ξ ξ d Sn
⎞
⎠, (5)
(5γ)
( ) ( ) ( ) ( )
3 3
3( )
( ) ( ) ( )
D D
G GG d S g Gx x
x x
x xxx x x x x
n n n∂ ∂
∂ ∂∂ΦΦ ⋅ − ⋅ Φ ⋅ − ⋅
∂ ∂ ∂
⎛ ⎞ ⎛⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜=⎟ ⎟⎜ ⎜⎟ ⎟⎟ ⎟⎜ ⎜⎝ ⎠ ⎝∫∫ ∫∫ξ ξ
ξ ξ d S⎞
⎠. (6)
(5δ) Συνδυάζοντας τις εξισώσεις (5α), (5β), (5γ) και (5δ) βρίσκουμε
( )
( ) ( ) ( )
( ) ( )
( ) ( )
1
2
3
0
1
2
3
( )
( ) ( )
( )
( )
( )
( )
( )
.
D
D
D
D
G g d
GG G g d S
Gg G d S
Gg G d S
α xx
xx
xx
x x x
xx x x x
n
xx x
n
xx x x
n
xn
∂
∂
∂
= ⋅ +
∂+ Φ ⋅ + ⋅
∂
∂⋅ − ⋅
∂
∂Φ ⋅ − ⋅
∂Φ
∂
∂
Φ
⎛ ⎞⎛ ⎞ ⎟⎟⎜ ⎜ ⎟⎟⎜ ⎜ − +⎟⎟⎜ ⎜ ⎟⎟⎟⎜⎜ ⎟⎝ ⎠⎝ ⎠
⎛ ⎞⎟⎜ ⎟⎜+ +⎟⎜ ⎟⎟⎜⎝ ⎠
⎛ ⎞⎟⎜ ⎟⎜+ ⎟⎜ ⎟⎟⎜⎝ ⎠
∫∫∫
∫∫
∫∫
∫∫
ξ
ξξ ξ
ξξ
ξξ
ξ
(6)
Θα μελετήσουμε τώρα τη σημασία και τις συνέπειες της ανωτέρω ολοκληρωτικής αναπαράστα-σης (6).
(4) Εάν η συνάρτηση Green ικανοποιεί τη συνοριακή συνθήκη (3β), τότε ο πρώτος όρος του ολοκληρώματος μηδενίζεται. (5) Εάν η συνάρτηση Green ικανοποιεί τη συνοριακή συνθήκη (3γ), τότε ο δεύτερος όρος του ολοκληρώματος μηδενίζεται. (6) Εάν η συνάρτηση Green ικανοποιεί τη συνοριακή συνθήκη (3δ), τότε ο πρώτος όρος του ολοκληρώματος μηδενίζεται.
- 96 -

12
1. Η ανωτέρω σχέση ισχύει για κάθε συνάρτηση Green του Προβλήματος (και για τη θεμελιώδη λύση), δεδομένου ότι δεν έχουμε (μέχρις εδώ) χρησιμοποιήσει συνοριακές συνθήκες για την
29.3.12
P
( )G x ξ .
2. Η σχέση (6) εκφράζει το πεδιακό δυναμικό ( )Φ ξ , σε κάθε σημείο ξ , εσωτερικό του πεδίου ροής, μέσω ολοκληρωμάτων της συνάρτησης Green (και της κάθετης παραγώγου της
( ) /G xx∂ ξ n∂ στο σύνορο ) και των συνοριακών τιμών ( ) και του ζητού-μενου δυναμικού. Κατά συνέπεια, η σχέση (6), σε συνδυασμό με την επιλογή
D∂ xΦ ( ) /x n∂Φ ∂
( ) (G Fx x= )ξ ξ , αποδεικνύει ότι το δυναμικό σε κάθε εσωτερικό σημείο του πεδίου ροής ορίζεται πλήρως από τις συνοριακές τιμές του ( )xΦ και τις συνοριακές τιμές της κάθετης (στο σύνορο) παραγώγου ( ) /x n∂∂Φ , . Dx ∈∂3. Εάν το δεξιά μέλος της πεδιακής εξίσωσης (2α) είναι μηδέν ( , ), όπως συμβαίνει στα υδροδυναμικά προβλήματα ακτινοβολίας και περίθλασης τα οποία πρωτίστως μας
ενδιαφέρουν, τότε το χωρικό ολοκλήρωμα
0 ( ) 0g =x Dx ∈
( ) 0 ( )G gx x⋅ d x∫∫∫ ξ μηδενίζεται.
4. Αν επιλέξουμε για (G x )ξ τη συνάρτηση Green που ικανοποιεί τη συνθήκη (3γ) (δηλαδή τη
συνθήκη ( ) 0G =x ξ , ), τότε ο όρος που περιέχει την κάθετη παράγωγο του (ζητου-
μενου) δυναμικού, , στο τμήμα του συνόρου 2D∈∂x
) /x n∂(∂Φ 2D∂ , μηδενίζεται. Κατά συνέπεια, υπό
τις προϋποθέσεις , , και 0 ( )g x 0= x ∈ D ( ) 0G =x ξ , 2D∈∂x , η σχέση (6) γράφεται στη μορφή
( ) ( ) ( )
( ) ( ) ( )
1
2 3
1
2 3
( )
( ) ( )
( )
( )
)
.
(
D
D D
GG G g d S
G Gg d S g G d S
α xx
x xx x
xx x x
n
x xx x
nx
n
x
∂
∂ ∂
∂= ⋅ + ⋅
∂
∂ ∂⋅ ⋅
∂
Φ
Φ − ⋅∂
⎛ ⎞⎛ ⎞ ⎟⎟⎜ ⎜ ⎟⎟⎜ ⎜ − +⎟⎟⎜ ⎜ ⎟⎟⎟⎜⎜ ⎟⎝ ⎠⎝ ⎠
⎛ ⎞⎟⎜ ⎟⎜+ + ⎟⎜ ⎟
Φ
⎟⎜⎝ ⎠
∫∫
∫∫ ∫∫
ξξ ξ
ξ ξξ
ξ
x
(7)
Η σχέση (7) αποδεικνύει ότι, με τη βοήθεια μιας συνάρτησης Green που ικανοποιεί την ομογενή συνθήκη Dirichlet στα τμήματα του συνόρου όπου το (ζητούμενο) δυναμικό ικανοποιεί συνθήκη Dirichlet (όχι κατ’ ανάγκην ομογενή), η τιμή του πεδιακού δυναμικού ( )Φ ξ , σε κάθε σημείο ξ εσωτερικό του πεδίου ροής, εκφράζεται μέσω επιφανειακών (συνοριακών) ολοκληρωμάτων της συνάρτησης Green (και της κάθετης παραγώγου της, ( ) /G xx n∂ ∂ξ , στο σύνορο ), και των συνοριακών τιμών
D∂( )xΦ του ζητούμενου δυναμικού.
5. Αν επιλέξουμε για (G x )ξ τη συνάρτηση Green που ικανοποιεί τις συνθήκες (3β) και (3γ)
(δηλαδή, ( ) ( )/ 0G Gα∂ ∂ + =ξ 1Dx n xξ , ∈∂x , και ( ) 0G =x ξ , 2D∈∂x ), τότε και ο πρώ-τος όρος του πρώτου ολοκληρώματος στο δεξιά μέλος της (7) μηδενίζεται, οπότε παίρνουμε
- 97 -

13
29.3.12
( ) ( )
( ) ( )
1 2
3
1 2
3( )
( ) ( )
( )
(
.
)
D D
D
GG g d S g d S
Gg G d S
x xx
xx
xx x x
n
xx xx
n
∂ ∂
∂
∂= ⋅ ⋅
∂
∂⋅ − ⋅
∂Φ
− +
⎛ ⎞⎟⎜ ⎟⎜+ ⎟⎜ ⎟
Φ
⎟⎜⎝ ⎠
∫∫ ∫∫
∫∫
ξξ
ξξ
ξ +
(8)
6. Αν επιλέξουμε για (G x )ξ την πλήρη συνάρτηση Green (δηλαδή τη συνάρτηση Green που
ικανοποιεί όλες τις συνοριακές συνθήκες του Προβλήματος , τότε και ο πρώτος όρος του ολοκληρώματος πάνω στο σύνορο μηδενίζεται, οπότε παίρνουμε τη σχέση
P3D∂
( ) ( ) ( )1 2 3
1 2 3( ) ( ) ( )( )
D D D
GG g d S g d S g G dx x
x
xx x x x x
n∂ ∂ ∂
∂= ⋅ ⋅ ⋅
∂− + −Φ ∫∫ ∫∫ ∫∫
ξξ ξξ S x . (9)
Η σχέση (9) μας δίδει τη λύση του Προβλήματος , μέσω της πλήρους συνάρτησης Green. Όπως ήδη αναφέραμε, όμως, ο προσδιορισμός της πλήρους συνάρτησης Green είναι γενικά το ίδιο δύσκολος με τη λύση του αρχικού Προβλήματος . Άρα η σχέση (9) δεν έχει πρακτική αξία παρά μόνο σε πολύ ειδικές περιπτώσεις.
P
P
Οι σχέσεις (7) και (8) θα αποτελέσουν τη βάση για την αναγωγή του Προβλήματος συνοριακών τιμών (με , ) σε συνοριακή ολοκληρωτική εξίσωση. Για να γίνει αυτό, όμως, θα πρέπει να δούμε πώς διαμορφώνονται αυτές οι σχέσεις όταν το σημείο
P 0 ( ) 0g =x Dx ∈
ξ τοποθετηθεί στο σύνορο του πεδίου . D∂ D 2.7.1.γ Αναγωγή του Προβλήματος συνοριακών τιμών P σε συνοριακή ολοκληρωτική εξίσωση Θα εργασθούμε με την εξίσωση (7) του προηγουμένου υποεδαφίου, την οποίαν επαναλαμβά-νουμε εδώ για ευκολία:
( ) ( ) ( )
( ) ( ) ( )
1
2 3
1
2 3
( )
( ) ( )
( )
( )
)
.
(
D
D D
GG G g d S
G Gg d S g G d S
α xx
x xx x
xx x x
n
x xx x
nx
n
x
∂
∂ ∂
∂= ⋅ + ⋅
∂
∂ ∂⋅ ⋅
∂
Φ
Φ − ⋅∂
⎛ ⎞⎛ ⎞ ⎟⎟⎜ ⎜ ⎟⎟⎜ ⎜ − +⎟⎟⎜ ⎜ ⎟⎟⎟⎜⎜ ⎟⎝ ⎠⎝ ⎠
⎛ ⎞⎟⎜ ⎟⎜+ + ⎟⎜ ⎟
Φ
⎟⎜⎝ ⎠
∫∫
∫∫ ∫∫
ξξ ξ
ξ ξξ
ξ
x
(1)
Ο στόχος μας τώρα είναι να δούμε πώς διαμορφώνεται η ανωτέρω εξίσωση όταν το σημείο ξ βρίσκεται στο σύνορο . Θα εξετάσουμε επίσης το όριο των διαφόρων όρων της (1) όταν D∂
Dx→ ∈∂ξ .
- 98 -

14
2.7.1.β Συναρτήσεις Green για το γραμμικοποιημένο πρόβλημα ελεύθερης επιφάνειας
29.3.12
Η συνάρτηση Green ( )0G x x ορίζεται να είναι το δυναμικό που παράγεται σε κάθε σημείο του
πεδίου , εξαιτίας μιας «παλλόμενης» πηγής που βρίσκεται σε ένα σημείο έστω . Οι συνθήκες που πρέπει να ικανοποιεί λοιπόν η συνάρτηση Green είναι οι ακόλουθες:
D∈x 0x
( ) ( ) (2 2 2
0 01 1 2 2 3 32 2 2
1 2 3
G x x x x x xx x x
δ δ δ⎛ ⎞∂ ∂ ∂
− + + = − − −⎜ ⎟∂ ∂ ∂⎝ ⎠)0 , (εντός του ρευστού) (2α)
3
3
0G Gx g
ω∂− =
∂, 3 0x = , (2β)
3
0Gx∂
=∂
, 3x h=− , (επίπεδο πυθμένα) (2γ)
+ radiation condition , (2δ) r→∞
( )1/ 2 0Gkr ikGr
⎡ ∂⎛ ⎞− →⎜ ⎟⎢ ⎥∂⎝ ⎠⎣ ⎦
⎤ .
Στην περίπτωση που επιλύουμε τα αντίστοιχα διδιάστατα προβλήματα όπου όπως θα δούμε παρακάτω θα χρησιμοποιηθούν σε συνδυασμό με την θεωρία λωρίδων για τον προσδιορισμό των ζητούμενων μεγεθών, η συνάρτηση Green ικανοποιεί τις ίδιες συνθήκες με μόνες διαφορές τις ακόλουθες
( ) (2 2
0 01 1 2 22 2
1 2
G x x x xx x
δ δ⎛ ⎞∂ ∂
− + = − −⎜ ⎟∂ ∂⎝ ⎠) , (2'α)
1
2G kGx∂
=∂
∓ 0 , 01 1k x x− →+∞ .
Εφαρμόζοντας τώρα, την δεύτερη ταυτότητα του Green για κάποιο από τα δυναμικά (σκέδασης ή ακτινοβολίας) και για την συνάρτηση Green, δηλ. 1Ψ =Φ και 2 GΨ = , λαβαίνουμε:
( )*
, ,
2 2
F R B R RD D D D D
GG G dV G dSn n
Π∂ ∂ ∂ ∂
⎧ ⎫ ∂ ∂Φ⎪ ⎪⎛ ⎞ΦΔ − Δ Φ = + + + Φ −⎨ ⎬⎜ ⎟∂ ∂⎝ ⎠⎪ ⎪⎩ ⎭∫∫∫ ∫∫ ∫∫ ∫∫ ∫∫ , (3)
όπου και πάλι δουλεύουμε εντός του χωρίου που περιγράφεται στο 6x5.1 της παραγράφου 2.5 (διατηρώντας τον ίδιο συμβολισμό). Επειδή τα δυναμικά και η συνάρτηση Green ικανοποιούν την εξίσωση Laplace και δεδομένης της θεμελιώδους ιδιότητας της συνάρτησης
Φδ του Dirac, το αριστερά μέλος της (3) είναι ίσο με
. Επίσης επειδή τα και η ικανοποιούν τις συνοριακές συνθήκες, τα επιφανειακά ολοκληρώματα πάνω στα και ( )0Φ x Φ G
RDΠ∂, ,F RD∂ , *RD∂ μηδενίζονται. Καταλήγουμε, λοιπόν, στην
ακόλουθη ολοκληρωτική εξίσωση
( )0
BD
G G dn n∂
∂ ∂Φ⎛ ⎞Φ = Φ −⎜ ⎟∂ ∂⎝ ⎠∫∫x S , 0 BD D∈ ∉ ∂x . (4)
- 99 -

15
Μια πολύ σημαντική ιδιότητα της συνάρτησης Green, η οποία μπορεί να αποδειχθεί εύκολα, είναι η συμμετρία της στην εναλλαγή της σειράς των ορισμάτων της δηλ.
29.3.12
(1 0GΨ = x x ) και ( )2 G ′Ψ = x x . (5)
Εναλλάσσοντας λοιπόν τη σειρά των ορισμάτων της συνάρτησης Green στην (4) καταλήγουμε στην ακόλουθη
( ) ( ) ( )00
BD
G G dn n∂
∂Φ⎛ ⎞∂Φ = Φ −⎜ ⎟∂ ∂⎝ ⎠
∫∫x
x x S , , BD D∈ ∉∂x . (6)
Η σπουδαιότητα της τελευταίας σχέσης έγκειται στο γεγονός ότι συνδέει τις τιμές του δυναμικού
και της παραγώγου του Φn
∂Φ∂
πάνω στην επιφάνεια του σώματος ( )0 BD∈∂x με τις τιμές του
δυναμικού σε όλο το πεδίο ( )Φ x ( )D D∈x . (Βεβαίως στην πράξη γνωστές είναι μόνο οι
κάθετες ταχύτητες n
∂Φ∂
πάνω στην επιφάνεια BD∂ ).
- Ολοκληρωτικές εξισώσεις Στην (4) μπορεί να βασισθεί ένα πολύ αποδοτικό αριθμητικό σχήμα επίλυσης το οποίο περιγράφουμε παρακάτω. Έχουμε
( )0
BD
G G dSn n∂
∂ ∂Φ⎛ ⎞Φ = Φ −⎜ ⎟∂ ∂⎝ ⎠∫∫x , αν 0 D∈x αλλά 0 BD∉∂x .
Αλλά τι συμβαίνει αν το ; Τότε μπορούμε να προχωρήσουμε μόνο αν απ’ όλο το εξαιρέσουμε ένα μικρό ημισφαίριο
0 BS∈x DDε κεντραρισμένο στο όπως φαίνεται στο σχήμα 1. 0x
Σχήμα 1
Dε∂
,F RD∂
0x BD∂
D
- 100 -

16
Έστω
29.3.12
Dε∂ η επιφάνεια της μικρής ε − σφαίρας. Εφαρμόζονται το θεώρημα Green (σχ. 1) για και στο 1Ψ =Φ 2 GΨ = /D Dε έχουμε:
0BD D
G G dSn n
ε∂ ∂
∂ ∂Φ⎛ ⎞Φ − =⎜ ⎟∂ ∂⎝ ⎠∫∫∪
. (7)
Πάνω στο Dε , το δυναμικό είναι περίπου σταθερό και ίσο με Φ ( )0Φ x , επίσης η παράγωγος Gn
∂∂
είναι «πολύ μεγαλύτερη» από την ίδια την τιμή της , οπότε ολοκληρώνοντας την πολική
μορφή της σχέσεως (2α) για «μικρό» r , όπου
G
0r = −x x , έχουμε
2
14
Gn rπ
∂∂∼ , . (8) 0r→
Συνεπώς το ολοκλήρωμα πάνω από το ημισφαίριο Dε είναι
( ) ( )0 00 0
1lim lim2D D
G GG dS dSn r
ε εε ε→ →
∂ ∂
∂ ∂Φ ∂⎛ ⎞Φ − = − Φ = − Φ⎜ ⎟∂ ∂ ∂⎝ ⎠∫∫ ∫∫x x . (9)
Τελικά, η (7) χρησιμοποιώντας την (9), γίνεται:
( )012
BD
G G dn∂
∂ ∂Φ⎛ ⎞Φ = Φ −⎜ ⎟∂ ∂⎝ ⎠∫∫x S , 0 BD∈∂x . (10)
Δεδομένου ότι η τιμή της ∂Φ∂
(ταχύτητες στην επιφάνεια του σώματος) δίδονται από τις
διατυπώσεις των προβλημάτων συνοριακών τιμών (είναι περίθλασης είτε ακτινοβολίας) η εξίσωση 10 είναι μια ολοκληρωτική εξίσωση Fredholm δευτέρου είδους για το ( )0Φ x
. ( )0 BD∈∂x Παρατηρήσεις:
1) Για να λυθεί η (10) πρέπει η συνάρτηση Green να είναι γνωστή ( )0G =x x ……….. (σελ. 310 Mei).
2) Στο διακριτό επίπεδο μπορούμε να χωρίσουμε το σύνορο BD∂ σε N διακριτά ευθύγραμμα τμήματα (μέθοδος συνοριακών στοιχείων BEM) και να προσεγγίσουμε το δυναμικό Φ σε κάθε στοιχείο, έστω i , με μία σταθερά iΦ . Εκτελώντας τις προκύπτουσες ολοκληρώσεις, καταλήγουμε σε αλγεβρικό σύστημα πάνω στα άγνωστα
iΦ , 1,..., N= το οποίο επιλυόμενο δίδει την ζητούμενη προσέγγιση του δυναμικού i Φ .
Βιβλία: C.C. Mei, 1983. The applied dynamics of ocean surface waves. John Wiley & Sons. (2nd Reprint,
1994, World Scientific), chap. 7 C. Zinton, ch. 4 P. McIver, ch. 4
- 101 -

17
Άρθρα: R.W. Yeung, “Numerical Methods in free-surface flows”, Ann. Rev. J. Fl. Mech., 1982 J.V. Wehausen, “The motion of floating bodies”, Ann. Rev. J. Fl. Mech., 1971 N. Drimer, Y. Agnon, “A hydrid B.I.E.M. for second order wave-body interaction”, Applied Ocean Research Vol. 16, 1994. - Επίλυση με τη βοήθεια Μεταβολικών διατυπώσεων Η επόμενη κατηγορία μεθόδων επίλυσης των προβλημάτων συνοριακών τιμών 2.2 (25) στηρίζεται στην λεγόμενη μεταβολική διατύπωσή τους, η οποία είναι μια ενεργειακού χαρακτήρα θεώρηση των προβλημάτων αυτών και οδηγεί κατά κύριο λόγο σε αριθμητικά σχήματα επίλυσης με Πεπερασμένα Στοιχεία αλλά και σε υβριδικές μεθόδους που θα δούμε σε επόμενη υποενότητα. Η βάση για την ανάπτυξη των μεταβολικών μεθόδων, σε όλες τις παραλλαγές της, έγκειται στην θεώρηση ενός συναρτησιακού ορισμένου επί του αγνώστου πεδίου F Φ (είτε αυτό αφορά τη σκέδαση, είτε την ακτινοβολία) και με την βοήθεια του Λογισμού των Μεταβολών αποδεικνύεται ότι η συνθήκη στασιμοποίησης του 0δ =F ισοδυναμεί με την πλήρη διαφορική διατύπωση (όπως την είδαμε στις σχ. 2.2 (25)) του προβλήματος (πεδιακή εξίσωση, συνοριακές συνθήκες και συνθήκη ακτινοβολίας). [Ο ενδιαφερόμενος αναγνώστης παραπέμπεται στο κλασσικό βιβλίο του Λογισμού των Μεταβολών των Gelfant & Fomin]. Περαιτέρω, εισάγοντας στη συνθήκη στασιμοποίησης του συναρτησιακού, μια «κατάλληλη» αναπαράσταση του αγνώστου πεδίου Φ οδηγούμαστε σε σύστημα εξισώσεων πάνω στους αγνώστους συντελεστές (αλγεβρικό, διαφορικών εξισώσεων ή κ.α. ανάλογα με την χρησιμοποιούμενη αναπαράσταση) το οποίο επιλυόμενο οδηγεί στην ζητούμενη προσεγγιστική λύση. Για να καταστούν τα ανωτέρω σαφή θα εξετάσουμε την περίπτωση του προβλήματος της ακτινοβολίας από ένα σώμα τυχαίας γεωμετρίας με την βοήθεια της μεθόδου των πεπερασμένων στοιχείων. Έστω ότι βρισκόμαστε σ’ ένα θαλάσσιο περιβάλλον όπως το επιπλέον σώμα καθώς και ανομοιομορφίες του πυθμένα (μεταβλητή βαθυμετρία) εντοπίζονται εντός πεπερασμένου κατακόρυφου κυλίνδρου . Έξω από αυτόν υποτίθεται ότι το βάθος του νερού είναι σταθερό παντού. Βλ. σχ. 2.
C
Σχήμα 2
Με άνω δείκτη , π.χ. ext ( )extΦ θα συμβολίζουμε τα μεγέθη εκτός κυλίνδρου και χωρίς δείκτη π.χ.
τα μεγέθη εντός του. Σκοπός μας είναι για το άγνωστο πεδίο Φ Φ εντός του κυλίνδρου να χρησιμοποιήσουμε μια αναπαράσταση τύπου πεπερασμένων στοιχείων και για το επίσης άγνωστο πεδίο
C
( )extΦ μια γνωστή (εφ’ όσον η γεωμετρία είναι απλή και μας το επιτρέπει) αναπαράσταση από σειρά ιδιοσυναρτήσεων που είναι η ακόλουθη: ( ) ( ) ( )0 0
next Kikn n
nA e f z A e f xΦ = + ∑ xx . (11)
29.3.12
- 102 -

18
29.3.12
Έστω το εξής συναρτησιακό
( ) ( )2
2 21 1,2 2
F
ext
D D
dV dSgω
∂
⎡ ⎤Φ Φ = ∇Φ − Φ −⎣ ⎦ ∫∫∫ ∫∫F
( )( )1
2B
extext
D C
V dS dSn∂
∂Φ⎛ ⎞− Φ + Φ −Φ⎜ ⎟ ∂⎝ ⎠∫∫ ∫∫ , (12)
όπου BD
Vn ∂
∂Φ=∂
η ταχύτητα δηλ. όπου επάγεται από την κίνηση (μία από τις έξι για κάποιο
πρόβλημα ακτινοβολίας) του σώματος στο ρευστό (βλ. συνοριακή συνθήκη 2.2(25β)). Η πρώτη μεταβολή του συναρτησιακού , δίδει S
( )2
0FD D
dV dSgωδ δ
∂
⇔ ∇Φ∇ Φ − Φ Φ∫∫∫ ∫∫S = δ −
( )( ) ( )
B
ext ext
D C
V dS dSn
δ δ∂
∂− Φ + Φ − Φ Φ
∂∫∫ ∫∫ +
( )( )
( ) ( )12
extext ext ext
C
dSn n
δ δ⎛ ⎞∂Φ ∂
+ Φ − Φ Φ⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠∫∫ −
( )ext
C
dSn
δ δ∂− Φ Φ
∂∫∫ , δ∀ Φ και ( )extδ∀ Φ . (12α)
Η τελευταία μετά από αναδιάταξη των όρων ης και με εφαρμογή του θεωρήματος Green, οδηγεί στην ακόλουθη:
2
,30FD D
dV dSgωδ δ
∂
⎛ ⎞⇔ − ∇Φ Φ + Φ − Φ Φ +⎜ ⎟
⎝ ⎠∫∫∫ ∫∫S = δ
BD D
dS V dSn nδ δ
Π∂ ∂
∂Φ ∂Φ⎛ ⎞+ Φ + − Φ⎜ ⎟∂ ∂⎝ ⎠∫∫ ∫∫ +
( )( ) ( )ext ext
C
dSnδ∂
+ Φ − Φ Φ∂∫∫ +
( )
( ) 0ext
ext
C
dSn n
δ⎛ ⎞∂Φ ∂Φ
+ − Φ =⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠∫∫ , δ∀ Φ και ( )extδ∀ Φ . (13)
Εφόσον η σχ. (13) οφείλει να ισχύει για κάθε δυνατή μεταβολή δΦ και ( )extδΦ και εξετάζοντάς την όρο προς όρο βλέπουμε ότι εντός του κυλίνδρου C και για μεταβολές δΦ πρέπει να ισχύει η εξίσωση Laplace, η συνθήκη ελεύθερης επιφάνειας στο FD∂ , η συνθήκη μη-εισχώρησης στον πυθμένα καθώς και η συνθήκη εξίσωσης των ταχυτήτων πάνω στην επιφάνεια του σώματος
, μ’ άλλα λόγια η διαφορική διατύπωση όπως περιγράφεται στις σχέσεις 2.2 (25α-δ). Για
μεταβολές
DΠ∂
(BD∂
)extδΦ παρατηρούμε από τους δύο τελευταίου όρους της (13) ότι πρέπει να ισχύουνε οι ακόλουθες συνθήκες συναρμογής
- 103 -

19
29.3.12
( )extΦ = Φ και ( )ext∂Φ ∂Φ
=∂ ∂
πάνω στην επιφάνεια συναρμογής του κυλίνδρου . Οι συνθήκες συναρμογής έχουν το εξής ξεκάθαρο φυσικό νόημα, εξασφαλίζουν την συνέχεια τιμής και κάθετης παραγώγου (δηλ. πιέσεων και ταχυτήτων αντίστοιχα) του συνολικού πεδίου. Η ικανοποίηση της πεδιακής εξίσωσης καθώς και των συνοριακών συνθηκών αλλά και της συνθήκης ακτινοβολίας είναι εξασφαλισμένη για το πεδίο
C
( )extΦ , εκτός του κυλίνδρου , στην (11), η οποία προκύπτει εύκολα από χωρισμό των μεταβλητών στο
C( )extD (γι’ αυτό και απαιτείται η γεωμετρία στο ( )extD
να είναι απλή). - Η μέθοδος των Πεπερασμένων Στοιχείων Για να προχωρήσουμε πλέον σε αριθμητική επίλυση του προβλήματος θα πρέπει να χρησιμοποιήσουμε μια αναπαράσταση για το άγνωστο πεδίο Φ στο εσωτερικό του κυλίνδρου. Χωρίζουμε λοιπόν την περιοχή σε τετραεδρικά «στοιχεία» κατασκευάζοντας ένα πλέγμα (το πλέγμα των πεπερασμένων στοιχείων), το οποίο έστω ότι έχει κόμβους. Εισάγουμε τις συναρτήσεις βάσης , οι οποίες είναι γραμμικές ως προς
D
3
N( 1 2, ,iF x x x ) 1 2,x x και 3x μέσα σε κάθε
στοιχείο, έχουν τιμή 1 στον κόμβο ( 1 2 3, ,i i i )x x x και μηδέν σε όλους τους άλλους, δηλ.
( )1 2 3, ,i j j j iF x x x jδ= , , 1,...,i j N= . Το άγνωστο δυναμικό μπορεί πλέον να αναπαρασταθεί ως εξής:
( )1 2 31
, ,N
j ij
F x x x=
Φ = Φ∑
καθώς και οι «δυνατές» μεταβολές του . ( )1 2 31
, ,N
i ij
F x x xδ δ=
Φ = Φ∑ Εισάγοντας τις ανωτέρω στη σχέση (12α), έχουμε για παράδειγμα για τους τρεις πρώτους όρους τα εξής:
( )2
F
j i j ii jD D
dV F F dV dSgωδ δ
∂
⎛ ⎞∇Φ∇ Φ = Φ ∇ ∇ Φ − Φ Φ =⎜ ⎟
⎝ ⎠∑∑∫∫∫ ∫∫∫ ∫∫
D
δ
2
F B B
j i j i ii j iD D D
F F dS V dS V F dSgω
iδ δ δ∂ ∂ ∂
⎛ ⎞ ⎛ ⎞= − Φ Φ − Φ = − Φ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠∑∑ ∑∫∫ ∫∫ ∫∫ .
Εφόσον η (12α) οφείλει να ισχύει για κάθε δυνατή δ Φ , δηλ. για κάθε , 1,...,i i Nδ Φ = μπορούμε να την ελέγξουμε για 1iδ Φ = . Τότε λόγω του ότι οι είναι γνωστές τα ολοκληρώματα μπορούν να υπολογισθούν οπότε καταλήγουμε σε γραμμικό σύστημα το οποίο σε μητρωϊκή μορφή μπορεί να γραφτεί ως εξής:
iF
. (14) 0
0j
n
KF
M A
Φ⎛ ⎞⎛ ⎞=⎜ ⎟⎜ ⎟
⎝ ⎠ ⎝ ⎠
- 104 -

20
Ο υποπίνακας περιέχει ως εισόδους του τα εσωτερικά γινόμενα που προέρχονται από τις μεταβολές
Kδ Φ , ενώ ο υποπίνακας M τα εσωτερικά γινόμενα που προέρχονται από όρους που
περιέχουν τις μεταβολές ( )extδ Φ . Το δεξί μέλος του γραμμικού συστήματος (14) προέρχεται από τον τρίτο όρο της (12α) δηλ. τον όρο που σχετίζεται με τη διέγερση (forcing) του υδρομηχανικού μας συστήματος. Επιλύοντας το γραμμικό σύστημα (14) προσδιορίζονται οι άγνωστοι συντελεστές , τόσο του πεδίου jΦ Φ στο εσωτερικό του , όσο και του εξωτερικού πεδίου C
( ) ,extnAΦ .
29.3.12
- 105 -

2.8α Κατακόρυφη ταλάντωση πλωτού κυλίνδρου Στο συμπλήρωμα αυτό θα παρουσιάσουμε την εφαρμογή της θεωρίας που αναπτύχθηκε στο Κεφ.2 στο πρόβλημα της κατακόρυφης ταλάντωσης (heave) πλωτού κυλίνδρου (βλ. Σχήμα 2α.1). Στην περίπτωση αυτή, όπως θα δούμε παρακάτω, η συμμετρία του σώματος επιτρέπει την σημαντική απλούστευση τόσο των δυναμικών εξισώσεων (2.4.2β) όσο και του προβλήματος ακτινοβολίας που αφορά τον προσδιορισμό του δυναμικού ( )3 xΦ το οποίο σχετίζεται με την κατακόρυφη ταλάντωση . Παρά την σχετική του απλότητα, το πρόβλημα αυτό παρουσιάζει ενδιαφέρον και έχει διεξοδικά μελετηθεί από διάφορους ερευνητές στο παρελθόν, μια και κυλινδρικά σώματα χρησιμοποιούνται συχνά στη πράξη ως πλωτές κατασκευές ή στοιχεία πλωτών κατασκευών και βρίσκουν εφαρμογές τόσο στην ανοικτή θάλασσα όσο και κοντά στην ακτή όπου οι επιδράσεις του πυθμένα έιναι σημαντικές.
3ξ
Θεωρούμε πλωτό κύλινδρο διαμέτρου 2a και βυθίσματος Τ σε λωρίδα νερού σταθερού βάθους h, ο οποίος δέχεται την επίδραση αρμονικών κυματισμών συχνότητας ω. Το διάκενο μεταξύ κυλίδρου και θαλάσσιου πυθμένα είναι . Λόγω της αξονικής συμμετρίας του σώματος η απόκριση του θα είναι η ίδια ανεξάρτητα από την γωνία πρόσπτωσης των κυματισμών, και έτσι λαμβάνουμε, χωρίς βλάβη της γενικότητας, τη διεύθυνση του προσπίπτοντος κυματισμού παράλληλη προς τον άξονα
d h T= −
1x .
Στην περίπτωση που εξετάζουμε, από την υδροστατική ισορροπία προκύπτει ότι η μάζα του σώματος είναι 2M Tρπα= (όπου ρ η σταθερή πυκνότητα του νερού) και, εφ’όσον αρχικά (χωρίς την επίδραση του κύματος) υποθέτουμε το κύλινδρο ισοβύθιστο, το κέντρο βάρους του θα βρίσκεται στην ίδια κατακόρυφη με το κέντρο αντώσεως. Επομένως οι εμπλεκόμενοι συντελεστές μάζας στην εξίσωση της κατακόρυφης ταλάντωσης είναι 33M M= , 35 1 0M J= = , και οι αντίστοιχοι υδροστατικοί συντελεστές είναι 2g33C aρ π= , 34 35 0C C= = (λόγω συμμετρίας της ισάλου).
3x
2a
1x
Σχήμα 2α.1: Κατακόρυφη ταλάντωση πλωτού κυλίνδρου
3x h= −iDeD 3x T= − d
1- 106 -

Επίσης, λόγω της συμμετρίας του σώματος τα δυναμικά ακτινοβολίας που σχετίζονται με τις κινήσεις (surge,
sway, roll και pitch) είναι αντισυμμετρικά, και η ολοκλήρωση τους σε συνδυασμό με την αντίστοιχη συνιστώσα του γενικευμένου καθέτου διανύσματος στην βρεχόμενη επιφάνεια του σώματος
( ) ( ) ( ) ( )1 2 4 5, , ,x x xΦ Φ Φ Φ x 51 2 4, , ,ξ ξ ξ ξ
nk
BDx∈∂ , η οποία είναι συμμετρικά κατανεμημένη, δίνει μηδενική συνεισφορά. Επομένως,
. (
Περαιτ
3 3 0, 1, 2, 4,5,B
l l B
D
n dS lρ∂
Π = Φ = =∫∫ 2α.1)
έρω, το δυναμικό αντινοβολίας ( )6 xΦ
η αντ
που σχετίζεται με τη κίνηση (yaw) 6ξ
είναι μηδενικό, ( ) 0xΦ = , μιά και ίστοιχη συνιστώσα του γενικευμένου καθέτου διανύσμ νίζεται 6 0n
6
ατος μηδε = παντού πάνω στην βρεχόμενη επιφάνεια του κυλίδρου, BDx∈∂ . Από τα ανω προκύπτει ότι από τα στοιχεία των πινάκων πρόσθετης μά απόσβεσης που μετέχουν στην εξίσωση κατακόρυφης ταλάντωσης μόνο τα στοιχεία 33A και 33
τέρω ζας και
B (βλ. κατωτ. Εξ. 2.α3) που συνδέονται αποκλειστικά με τη κίνηση 3ξ (heave) αμένουν μη μηδενικά. Επομένως, στην εξεταζόμενη περίπτωση η εξίσωση δυναμικής ισορροπίας που αφορά τη κατακόρυφη ταλάντωση απλουστεύεται σημαντικά (καθίσταται αποσυζευγμένη από τις υπόλοιπες εξισώσεις), και παίρνει την ακόλουθη μορφή
παρ
ω , (2α.2)
που και τα μιγαδικά πλάτη των δυνάμεων Froude-Krylov και αντίστοιχα
α παρουσιάσουμε στη συνέχεια την εφαρμογή της μεθόδου των συζευγμένων
( )( ) ( )( ) ( ) ( ) ( )233 33 33 3 03 3dM A j B C X Xω ω ω ω ξ ω ω− + + + = +
ό ( )03X ω
ασης ( )3dX ω
. Υπεπερίθλ υθυμίζουμε εδώ ότι σε περίπτωση ύπαρξης και θεώρησης και άλλων εξωτερικών δυνάμεων ( )F ω , π.χ. λόγω αγκύρωσης, ανέμου κλπ, οι οποίες αμελούνται στην εφαρμογή που παρουσιάζουμε εδώ, αυτές θα πρέπει να προστεθούν στο δεξί μέλος της Εξ. (2.α.2). Θιδιομορφών (coupled modes) για τον προσδιορισμό του δυναμικού ( )3 xΦ μέσω του οποίου υπολογίζονται οι συντελεστές πρόσθετης μάζας και απόκριση εφαρμογή της γνωστής σχέσης
ς από
( )2
33 33 3 3 3 30 0
1 ,B
r a
BD r
A B n dS d r r x Tj
π
θ
ρ ρ θω
=
∂ = =
+ = Φ = Φ = −∫∫ ∫ ∫ dr . (2α.3)
παραγωγή του τελευταίου δεξιά μέρους χρησιμοποιήθηκε η ιδιότητα ότι το
υναμικό ακτινοβολίαςΓια τηνδ ( )3
τη γωνία αζιμουθίου
xΦ θα είναι αξονικά συμμετρικό (και άρα ανεξάρτητο από
( )12 1tan x / xθ −= ), και επομένως, ( ) ( )3 3 3,r xxΦ =Φ , όπου
( ) ( )2 21 2r x x= + από άξονα συμμετρίας ( του σταση από τον κατακόρυφο άξονα
2- 107 -

κυλίνδρου). Σημεω
ιώνουμε ότι οι δυνάμεις Froude-Krylov ( )03X ω υπολογίζονται εύκολα με απευθείας ολοκλήρ ση του δυναμικού του προσπίπτοντος κυματισμού στην βρεχόμενη επιφάνεια του κυλίνδρου BD∂
( )( )
[ ]0 3coshexp
k x hg0 02
0cosh 1jk xx⎡ ⎤+⎣ ⎦Φ = ⋅ −
k hωόπου , (2α.4)
και Α το πλάτος ανύψωσης του κυματισμού ελεύθερη Λαμβάνοντας
στην παράπλευρη βρεχό επιφάνεια κυλίνδρου και
,
στηνμενη
( )20 0k hω = gk tahn
επιφάνεια. του πλωτού υπόψη ότι n =3
3 1n = στον πυθμένα του ( 3
0 x T=− ), στην εξεταζόμενη περίπτωση οι δυνάμεις
Froude-Krylov δίνονται από τησχέση
2
( )2 203 0 3 0 3,
B
B
D r0 0
r a
A n dS A d r x Tπ
θ
ρω ρω θ∂ = =
= Φ = Φ∫∫ ∫ r=
∫
σης Φ
dr=−
του οποίου
X . (2α.5)
και υπολογίζονται αναλυτικά παρακάτω.
μέσω μπορούν να ο ης
B
( )d x , Ο προσδιορισμός του δυναμικού περίθλα
υπ λογιστούν οι αντίστοιχες δυναμεις περίθλασ
23 3
B
d d
D
A n dSρω= Φ∫∫ X∂
(2α.6)
παρουσιάζει αυξημένες δυσκολίες, ότι το πεδίο είναι πλέον αξονικά συμμετρικό και εξαρτάται και από τρείς χωρικές . Εν τούτοις,
ω
αυτό δεν διαστάσεις
μεων
δεδομένου τις
η μέθοδος των συζευγμενων ιδομορφών εφαρμόζεται και σε αυτή τη περίπτωση, σε συνδυασμό με τις γενικές αναπαραστάσεις του πεδίου, και παρέχει τη λύση του προβλήματος. Ο ενδιαφερόμενος αναγνώστης παραπέμπεται στις σχετικές εργασίες των Black, Mei & Bray (1971) και Garrett (1971), όπου παρουσιάζονται λεπτομέρειες εφαρμογής της τεχνικής αυτής στο συγκεκριμένο πρόβλημα. Είναι όμως γνωστό ότι οι συνολικές υδροδυναμικές δυνάμεις ( )03X ω + ( )3dX
ewman μέσω αυτών μπορεί
μπορούν να υπολογισθούν από την εφαρμογή των σχέσεων Haskind-Nτου δυναμικού ακτινοβολίας ( )3 3,r xΦ Επίσης, το μέτρο των δυνά να υπολογιστεί μέσω του συντελεστή υδροδυναμικής απόσβεσης 33B που επίσης βασίζεται μόνο στην επίλυση του δυναμικού ακτινοβολίας ( )3 3,r xΦ . Η εφαρμογή των σχέσεων αυτών είναι πολύ χρήσιμη γιατί μας επιτρέπει να αποφύγουμε το φορτίο προσδιορισμού του δυναμικού περίθλασης όταν εξετάζου ποκρίσεις του πλωτού σώματος και θα παρουσιασθεί αναλυτικά παρακάτω. 1. Προσδιορισμός του δυναμικού ακτινοβολίας (
με τις α
)3 xΦ πλωτού κυλίνδρου
πίλυση φης
ταλάντωσης του, αποτελεί μια γενική τεχνική επίλυσης και αριθμητικής
Η μέθοδος των συζευγμένων ιδιομορφών, που θα παρουσιασθεί εδώ για την ε προβλήματος ακτινοβολίας του πλωτού κυλίνδρου λόγω της κατακόρυτου
3- 108 -

προσομοίωσης προβλημάτων κυματικής διάδοσης, η οποία βρίσκει πλούσιες εφαρμογές, πέραν της περιοχής της υδροδυναμικής πλωτού σώματος, όπως στη διάδοση κυματισμ ν ελεύθερης πιφάνει ς με τη παρουσί ανομοιογενειών (μεταβολή βαθυμετρίας, ύπαρξη βυθισμένων σωμάτων κλπ), διάδοση και σκέδαση ακουστικών κυμάτων στη θάλασσα, αλλά και γενικότερα προβλήματα κυματοδήγησης (π.χ. λεκτρομαγνητικοί κυματοδηγοί κλπ). Μια αναλυτικότερη παρουσίαση της μεθόδου επικέντρωμένη στην μελέτη κυματικών φαινομένων στο θαλάσσιο περιβάλλον παρέχεται στο ντίστο χο μ θημα (Αθανασούλης & Μπελιμπασάκης 2002). Η μέθοδος βασίζεται στη σύζευξη διαφορετικών γενικών αναπαραστάσεων του κυματικού πεδίου σε υπο
ώ ε α α
η
α ι ά
περιοχές, οι οποίες μπορούν να κατασκευασθούν αναλυτικά πό την εξέταση και επίλυση των εξισώσεων του προβλήματος (διαφορική εξίσωση
i
ακαι συνοριακές συνθήκες) σε αυτές. Οι ανωτέρω αναπαραστάσεις περιλαμβάνουν ενα πλήθος άγνωστων αρχικά συντελεστών, διαφορετικών σε κάθε υποπεριοχή. Η σύζευξη επιτυγχάνεται με την απαίτηση της συνέχειας του κυματικού πεδίου και της κατάλληλης κάθετης παραγώγου του στις διαχωριστικές επιφάνειες των υποπεριοχών, και οδηγεί σε ένα σύστημα εξισώσεων ως προς τους άγνωστους συντελεστές, όπως θα παρουσιασθεί στη συνέχεια για το εξεταζόμενο πρόβλημα. Με τη βοήθεια της κατακόρυφης διαχωριστικής επιφάνειας που εικονίζεται με διακεκομμένες γραμμές στο Σχ. 2α.1 το συνολικό πεδίο ροής eD D= ∪D
η είναι η
(
διαχωρίζεται σε δύο τμήματα το εσωτερικό κάτωθεν του κυλίνδρου iD και το εξωτερικό eD . Η διαχωριστική επιφάνεια στη παρούσα περίπτωσ
παράπλευρη επιφάνεια του κατακόρυφου κυλίνδρου ( ) )2 21 2r x ax= + = ,
3h x− < < − Εξωτερική περιοχή: Η αναπαράσταση της λύσεως του μελετώμενου
T .
προβλήματοςακτινοβολίας στο εξωτερικό χωρίο παρέχεται από το γενικό θεώρημα eD αναπαράστασης του Κεφ.2, λαμβάνοντας υπόψη τις απαιτήσεις κατάλληλης συμπεριφοράς του πεδίου στο άπειρο ( )r →∞ το οποίο πρέπει να έχει τη μορφή εξερχομένων κυμάτων που εξασθενούν. Στη συγκεκριμένη περίπτωση το πεδίο είναι αξονικά συμμετρικό και άρα ανεξάρτητο της ωνίας αζιμουθίου. Επομένως, όλοι οι όροι που εμπλέκουν τριγωνομετρικέ τήσεις πλήν του πρώτου (m=0) μηδενίζονται, και λαμβάνουμε
( )
γς συναρ
( ) ( ) ( ) , ,
(2α.6) όπου
( ) ( ( )23 3 0 0 0 0 3,e e er x a H k r Z x
∞
Φ = ) ( ) ( )0 31
n n nn
a K k r Z x=
+∑ ,r a≥ 3h x T− < < −
( ) ( ) ( ) 1/20 3 0cosh /e
0 3Z x k x h⎡ ⎤= +⎣ ⎦ N και n ( ) ( ) ( ) 1/23 3cos /e
n nZ x k x h N⎡ ⎤= +⎣ ⎦ , n=1,2.., (2α.7)
00
0
sinh1 12 2
k hNk h
⎛ ⎞⎟⎜ ⎟= +⎜ ⎟⎜ ⎟⎜⎝ ⎠, s1
⎛ ⎞⎜⎜⎜⎜ (2α.8) in1 , 1, 2,3....
2 2n
nn
k hN nk h
⎟⎟= + =⎟⎟⎝ ⎠,
4- 109 -

και τα , n=1,2.., ως ρίζες των εξισώσεων
και
0k , nk προκύπτουν (διασποράς)
( )0 0tanhh k h k hμ = ( )tann nh k h k hμ = − , n=1,2.. , (2α.9)
ντίστοιχα. Στην τελευταία εξίσωση είναι η παράμετρος συχνότητας του προβλήματος. Υπεν ώ ότι α αρε εφαρμογή της τεχνικής χωρισμού στη εξίσωση Laplace σε χωρία με
ν εσωτερική πίσ η Laplace
2 / gμ ω=
οι ανωτέρω μεταβλητώνβάθους)
αθυμίζουμε εδ ναπ αστάσεις κατασκευάζονται
μοριζόντια σύνορα (λόγω σταθερού και στις συνοριακές συνθήκες του προβλήματος. Οι μιγαδικοί συντελεστές , 0,1, 2..na n = είναι οι άγνωστοι του προβλήματος στο εξωτερικό χωρίο eD . Εσωτερική περιοχή: Το δυναμικό στη εριοχή iD κάτωθεν του κυλίνδρου ικανοποιεί τη εξίσωση εξ ωσ
23
3 23
1 0rr r r x
⎛ ⎞∂Φ∂ ∂ Φ⎟⎜ΔΦ ≡ ⋅ + =⎟⎜ ⎟⎜⎝ ⎠∂ ∂ ∂, (2α 10) .
έχει χρησιμοποιηθεί η ιδιότητα της αξονικής συμμετρίας του πεδίου (
όπου 3 0θ∂
∂Φ= ),
την ομογενή εξίσωση στον πυθμένα
33 0,, 3x x h
n∂Φ
≡ −Φ = =−∂
, ) (2α.11
αι την μη ομογενή εξίσωση στο πυθμένα του κυλίνδρου
κ
3, 3 31,x n x T≡ Φ = = =− , (2α.12)
ου αποτελεί και τη διεγείρουσα συνθήκη του κατα τα άλλα ομογενούς εξεταζόμενου προβλήματος. Η γενική λύση τουερική λύση του μη ομογενούς προβλήματος, έστω και τη γενική λύση
ιά απλή μορφή (πολυωνυμική) για τη μερική λύση του μη ομογενούς προβλήματος είναι η ακόλουθη
∂Φn∂
π
παραπάνω προβλήματος απαρτίζεται από μια μ ( )3 3,NH r xΦ ,
του αντίστοιχου ομογενούς προβλήματος, έστω ( )3 3,H r xΦ . Δηλαδή,
( ) ( ) ( )3 3 3 3 3 3, , ,NH Hr x r x r xΦ =Φ +Φ . (2α.13) Μ
( ) ( )2
21NH r⎛ ⎞⎟⎜
η οποία, όπως είναι εύκολο να διαπιστωθεί, ικανοποιεί όλες τις παραπάνω εξισώσεις. Η γενική αναπαράσταση της λπεριοχή κάτωθεν του κυλίνδρου
3 3 3,2 2
r x x hd
⎟Φ = + −⎜ ⎟⎜ ⎟⎜⎝ ⎠ , (2α.14)
ύσης του ομογενούς προβλήματος στην εσωτερική μπορεί να κατασκευασθεί με αντίστοιχο τρόπο iD
5- 110 -

και πάλι με εφαρμογή της τεχνικής χωρισμού μεταβλητών στο χωρίο iD , και έχει την ακόλουθη μορφή
( ) ( ) ( )3 30
,Hn n
n
nr x b π∞
=
Φ =∑ 0 3cos , , 0,1,2,...n nI r x nd
λ λ λ = = α.15)
Συνεπώς, η γενική αναπαράσταση του δυναμικού ) σ ως ακολούθως
. (2
(3 3,r xΦ το εσωτερικό χωρίο iD
γράφεται
( ) ( ) ( ) ( ) ( ) ( )0 302 n n n n
n
xλ λ=
− +⎟⎟⎠ ∑ , 2
23 3 3
1,2
i rr x x h b I r Zd
∞⎛ ⎞⎟⎜ ⎟Φ = +⎜⎜⎜⎝με ( )i )3 3cosn n( ) (iZ x xλ=
(2α.16) όπου, οι συντελεστές . αποτελούν τους μιγαδικούς αγνώστους του
ς στο
παραστάσεις (β ματος, εκτός από
, 0,1, 2.nb n = προβλήματο
iD .
Με τις ανωτερω ανα 2α.6) και (2α.16) έχουν καλυφθεί όλες οι απαιτήσεις του προ λή (i) την ικανοποίηση της συνοριακής συνθήκης στη παράπλευρη βρεχόμενη επιφάνεια
( ), 0 ,r r a
n≡ −Φ = =
∂, 3 0T x∂Φ e − < < , (2α.17)
καθ
ώς και
i) τη συναρμογή (matching) των αναπαραστάσεων στη κοινή διαχωριστική ια, πράγμα που ισοδύναμα απαιτεί τη συνέχεια του και της
παραγώγου του
(i δυναμικούεπιφάνε
οριζόντιας
( ) ( ) ( ) ( ), , και ,i ei er r r aΦ =Φ Φ =Φ = , 3h x T− < < − . (2α.18)
Στα πλαίσια εφαρμογής της μεθόδου συζευγμένων ιδιομορφών (coupled mode
od) αξιοποιείται η ιδιότητα τκαι να αποτελούν ορθογώνιες
meth ων συνόλων των ιδιοσυναρτήσεων ( ) ( 3e
nZ x ), 0,1, 2.....n =
συναρτήσεων
( ) ( ) 3 , 0,1, 2.....inZ x n =
βάσεις (που μπορεί εύκολα να κανονικοποιηθούν), και άρα αποτελούν πλήρη σύνολα συναρτήσεων τα οποία μπορεί να χρησιμοποιηθούν για την ανάπτυξη τετραγωνικά ολοκληρώσιμων ( )3f x οριζόμενων στα
, οι εξισώσεις (2α.17) και
ρυφη
3 0d x− < < και
3 Ετσι πρώτη από τις που αφορούν στην οριζόντια παράγωγο μπορεί να ικανοποιηθούν ισοδύναμα με την προβολή τους πάνω στην κατακό βάση ( ) (
διαστήματα. ηh x T− < < − , αντίστοιχα (2α.18)
) 3 , 0,1, 2.....ekZ x k =
6- 111 -

( ) ( ) ( ) ) 3e
,1,2,… , (2α.19)
και η δεύτερη τις Εξ. (2α.18) που αφορά τη συνέχεια τωδιαχωριστική άνεια από την προβολή της πάνω σ
3 3 k
Η αντικατάσταση των σχέσεων (2α.6) και (2α.16) στις ανωτέρω εξισώσεις και η εκτέλεση των ολοκληρώσεων ως προς
((3
, 3 , 3, ; , ;x T
i er n r nr a x a r a x b
=−
Φ = −Φ =∫ ) ( ) ( )3
3kZ x dx=−x h
( ) ( ) ( ) ( )3
3
0
, 3 3 3, ;x
e er n k
x T
r a x b Z x dx=−
=−
− Φ = =∫ 0 , k=0
από ν τιμών του πεδίου στη επιφ την κατακόρυφη βάση
( ) ( )3 , 0,1, 2.....ikZ x k =
( ) ( ) ( )3x T
i e i
=−
, =0,1,2,… . (2α.20) ( ) ( )( ) ( )3
3 3, ; , ; 0n n k
x h
r a x a r a x b Z x dx=−
Φ = −Φ = =∫
3x , που επιτυγχάνεττελικά σε αλγεβρικό σύστημα ως προς τους άγνωστους συντελεστές .
κό σύστημα 2Κώσεων με 2Κ αγν σ οδους. Η περικοπή ω
αι αναλυτικά, οδηγεί , 0,1, 2.na n =
και , 0,1, 2..nb n = . Στη πράξη οι απειροσειρές που εμπλέκονται στις αναπαραστάσεις (2α.6) και (2α.16) περικόπτονται κρατώντας μόνο τους πρώτους Κ όρους. Ετσι οι ανωτέρω σχέσεις καταλήγουν τελικά σε ένα αλγεβρι εξισ ώ τους, το οποί μπορεί να επιλυθεί αριθμητικά με γνωστές μεθό τ ν σειρών, σε συνδυασμό με τη αρκετά γρήγορη σύγκλιση τους, εισάγει ένα σφάλμα, το οποίο όμως εξασθενεί γρήγορα καθώς το Κ αυξάνεται. Σημειώνουμε εδώ ότι η περικοπή των απειροσειρών σε συνδυασμο με τις ορθογώνιες προβολές των εξισώσεων (2α.17) και (2α.18) στις αντίστοιχες βάσεις αποτελεί εφαρμογή στη περίπτωση του προβλήματος που εξετάζουμε της γενικότερης μεθόδου Galerkin (βλ. π.χ. Prenter 1999).
Μετά την εύρεση των συντελεστών των αναπτυγμάτων οι υδροδυναμικοί συντελεστές υπολογίζονται από τη σχέση (2α.3) όπου προφανώς για το δυναμικό ακτινοβολίας ισχύει
( )3 3,r x TΦ = − = ( ) ( )3 3, ;inr x T bΦ = − . (2α.21)
Χρησιμοποιώντας το ( ) ( )0 1xI x dx xI x=∫ , αόριστο ολοκλήρωμα το τελικό
αποτέλεσμα για τους υδροδυναμικ ταλάντωση κυλίνδρου προκύπτει σε αδιάστατη μορφή, ως ακολούθως
ούς συντελεστές που σχετίζονται με τη κατακόρυφη
( )33 3333 33 3
1 1ˆ ˆ 24 16
d aA j Ba a d aρπ/A j Bω− Λ⎛ ⎞− = = − +⎜ ⎟
⎝ ⎠, (2α.22)
που ό
( ) ( )2 10
1
12
nn
n
ab d ba n
λπ
∞
=
ΙΛ = + −∑ , n=1,2,... .
Παραθέτουμε στη συνέχεια ενδεικτικά αποτελέσματα στα Σχήματα 2α.2 και 2α.3.
(2α.23)
7- 112 -

d/h=0.999
d/h=0.1
d/h=0.1
d/h=0.999
d/h=0.25
d/h=0.75
d/h=0.10
d/h=0.999
d/h=0.25
d/h=0.999
d/h=0.90 0.1
Σχήμα 2α.2: Υδροδυναμικοί συντελεστές κυλίνδρου σε κατακόρυφη ταλάντωση για a/h=0.5 (πάνω) και a/h=0.2 (κάτω), και διάφορες τιμές του λόγου διακένου πυθμένα προς βάθος d/h=0.1, 0.25, 0.75, 0.9 και 0.999. Τα αποτελέσματα παρουσιάζονται για διάφορες τιμές του αδιάστατου κυματαριθμού 0 2 /k a aπ λ=
8- 113 -

Σχήμα 2α.3: Αδιάστατοι υδροδυναμικοί συντελεστές κυλίνδρου για a/h=0.116 και d/h=0.79, για διάφορες τιμές του αδιάστατου κυματαριθμού 0 2 /k a aπ λ=
33A / M
( )332 B / Mπ ω
Σχήμα 2α.4: Υδροδυναμικοί συντελεστές κυλίνδρου για a/h=0.116 και d/h=0.79, για διάφορες τιμές της αδιάστατης συχνότητας /a gω
9- 114 -

Ειδικότερα, στο Σχήμα 2α.2 παρουσιάζονται οι αδιάστατοι συντελεστές πρόσθετης μάζας και απόσβεσης για λόγο ακτίνας κυλίνδρου προς βάθος νερού a/h=0.5 (δηλαδή διάμετρο του κυλίνδρου ίση με το βάθος) και διάφορες τιμές του λόγου διακένου πυθμένα προς βάθος d/h=0.1, 0.25, 0.75, 0.9 και 0.99. Στο Σχήμα 2α.2 παρουσιάζονται επίσης αντίστοιχα αποτελέσματα για a/h=0.2. Για τα αποτελέσματα έχει γίνει αποκοπή των απειροσειρών χρησιμοποιώντας Κ=5 όρους. Σημειώνεται επίσης ότι από την μέθοδο που παρουσιάσαμε μπορούμε να πάρουμε και εκτιμήσεις των διαφόρων ποσοτήτων και για βαθύ νερό. Στη πράξη αρκεί να θέσουμε στη περίπτωση αυτή για την εξεταζόμενη συχνότητα πεπερασμένο βάθος που να είναι αρκετά μεγαλύτερο από το μέγιστο των a, T και 02 / kλ π= . Μια άλλη περίπτωση υπολογισμού υδροδυναμικών συντελεστών που θα επεξεργασθούμε και στη συνέχεια για τον υπολογισμό των υδροδυναμικών δυνάμεων και αποκρίσεων παρουσιάζεται στα Σχήματα 2α.3 και 2α.4. Στην περίπτωση αυτή (που έχει ληφθεί από την εργασία Yu & Falnes, 1995) η ακτίνα του κυλίνδρου είναι a=0.35m και το βύθισμα T=0.63m, και επομένως ο όγκος εκτοπίσματος είναι
. Το βάθος του νερού είναι h=3m και επομένως οι λόγοι a/h=0.116 και d/h=0.79.
μού
30 242. m∇ =
Τα αποτελέσματα που αφορούν τους (αδιάστατους) υδροδυναμικούς συντελεστές για διάφορες τιμές του αδιάστατου κυματαριθ 0 2 /k a aπ λ=
, στο Σχήμα 2.παρουσιάζονται στη
ερίπτωση αυτή στο Σχήμα 2.α3. Αντίστοιχα α.4 παρουσιάζονται πυδροδυναμικοί συνελεστές στην ίδια όπως προηγουμένως περίπτωση, για διάφορες τιμές της αδιάστατης συχνότητας /a gω . Εδώ χρησιμοποιούμε μια διαφορετική αδιαστατοποίηση και παρουσιάζουμε τα μεγέθη 33A / M και ( )332 B / Mπ ω προκειμένου να τη σημαντικότητα των μεγεθών αυτών ως προς τη μάζα του πλωτού κυλίνδρου. 2. Υπολογισμός δυναμεων Froude-Krylov ( )03X ω στην κατακόρυφη διεύθυνση ντικαθιστώντας την έκφραση (2.4α) στην σχέση
δείξουμε
(2.4β), και λαμβάνοντας υπόψη τη Απαρακάτω αναλυτική έκφραση της συνάρτησης ( ) ( )1exp exp cosjkx jk θ− = −
( ) ( ) ( )1 00
exp cosmm m
m
jx e j J k r mθ∞
=
− = −∑ , με me =1, για m=1 και me =2, για m=2,3,....
(2α.24)
λαμβάνουμε
( ) ( )2 003 02
0 00 0
coscosh
mm m
mr
2cosh
r ak dgX A d r e j J k r m drk h
θ
ρω θ θω
== =
= ⋅ −∑∫ ∫ . (2α.25)
Από τους όρους του αθροίσματος στην ολοκληρωτέα ποσότητα, λόγω της ολοκλήρωσης ως προς θ, μόνο ο όρος m=0 έχει μη μηδενική συνεισφορά, και επομένως
π = ∞
10- 115 -

( ) ( )0
0 0 00 0 1 02
0 00
2cosh cosh
r
03cosh cosh2
r ak d k d k aX gAπρ
=
= r J k r dr gA J k ak h k h k
πρ=
=∫ . (2α.26)
όπου χρησιμοποιήθηκε το αόριστο ολοκλήρωμα ( ) ( )0 1xJ x dx xJ x=∫ . Το τελικό
αποτέλεσμα παρουσιάζεται σε αδιάστατη μορφή ως ακολούθως
( )03 003 1 02
0 0
cosh2cosh
X k dX J k ak a k hg a Aρ π
= = . (2α.27)
Από την παραπάνω σχέση διαπιστώνουμε ότι στην εξεταζόμενη περίπτ
de-Krylov έχουν μηδενική διαφορά φάσεως ως προς την ανύψωση του ροσπίπτοντος κυματισμού στο κέντρο r=0 του κυλίνδρου, πράγμα που είναι φυσική συνέπεια της συμμετρίας του σώματος. Επίσης, για πολύ αργή κίνηση, δηλαδή ω και
οι δυνάμεις αυτές τείνουν στην υδροστατική πρόσθετη δύν ω της του κύματος
ωση οι δυνάμεις Frouπ
0 0k a → αμη λόγανύψωσης 03 1X → ,
δηλαδή ω καιόπως είναι φυσικά αναμενόμενο. Τέλος, για πολύ
ταλάντωση, οι δυνάμεις αυτές τείνουν στο μηδέν. 0k a →∞ γρήγορη
03X
3X
3arg X / π
Σχήμα 2α.5: Υδροδυναμικοί συντελεστές κυλίνδρου για a/h=0.116 και d/h=0.79, για διάφορες τιμές της αδιάστατης συχνότητας /a gω
11- 116 -

Αυτό εξηγείται φυσικά λόγω του γεγονότος ότι καθώς η συχνότητα αυξάνει το μήκος κύματος τείνει στο μηδέν, και επομένως, η συνεισφορά πολλών μηκών κύματος στις δυνάμεις πίεσης στο πυθμένα του κυλίδρου αλληλοαναιρείται. Αριθμητικά αποτελέσματα για τη περίπτωση του κυλίνδρου με a/h=0.116 και d/h=0.79 παρουσιάζουμε στο Σχήμα 2α.5, στα οποία παρατηρείται πολύ καλή συμφωνία με τη παραπάνω ασυμπτωτική συμπεριφορά. 3. Υπολογισμός των συνολικών υδροδυναμικών δυνάμεων Σύμφωνα με τα αποτελέσματα του Κεφ. 2, η συνολική υδροδυναμική δύναμη
ω μπορεί να υπολογισθεί με ολοκλήρωση στην παράπλευρη
κυλίνδρου
( ) ( ) ( )3 03 3dX X Xω ω= +
επιφάνεια του κυκλικού *RD∂ αρκετά μεγάλης ακτίνας R →∞ , του
προσπίπτοντος και του δυναμικού ακτινοβολίας ως ακολούθως
( )3
*3
0 22 23 0
3 0 3 3
0
, ,
R
x
B
x hD
3X A dS A dx dR R
θ π
θ
ρω ρω θ θ
= =
=− =∂
⎛ ⎞∂Φ ∂Φ ⎟⎜=− Φ −Φ =−⎟⎜ ⎟⎜⎝ ⎠∂ ∂∫∫ ∫ ∫ ER R x ,
(2α.28)
όπου ( )*
3 03 0 3, ,
RD
r R xR R
θ∂
⎟⎜= = Φ − Φ ⎟⎜ ⎟⎜⎝ ⎠∂ ∂E . Σύμφωνα με τα προηγούμενα, Εξ.
(2α.24), το δυναμικό του προσπίπτοντος κύμ
⎛ ⎞∂Φ ∂Φ
ατος γράφεται στη μορφή
( )( )
( ) ( )0 30 3 02
0 0
cosh, , cos
coshm
m mm
k x hgr R x e j J k R mk h
θ θω
=
+⎣ ⎦Φ = = −∑ (2α.29)
Μετά από αντικατάσταση του αναπτύγματος (2α.6) ια ο δυναμικό ακτινοβολίας
( )
∞⎡ ⎤
γ τ( )
οι συναρτήσεις εξασθενούν εκθετικά σε μεγάλες αποστάσεις και
οι όροι που εμπλέκουν μηδενίζονται κατά την
ται
3 3,e r xΦ στην εξωτερική περιοχή eD και λαμβάνοντας υπόψη
( )0 nK k r (i)μπορεί να παραληφθούν σε μεγάλη απόσταση R και
cos , 1,2,3....,m mθ = (ii)ολοκλήρωση ως προς θ
η συνολική υδροδυναμική δύναμη γίνε
( )( )( ) ( ) ( )
( )( )3 0 22 2x π= ⎛⎡ ⎤
3
0 3 20 0 0 03 3 0 0 0 01/2
0 0 0
coshcosh
x h
k x h H k R J k Rx rd J k R H k R
R RN k hθ
θ=− =
⎞+ ∂ ∂ ⎟⎜⎣ ⎦ ⎟⎜= − ⎟⎜ ⎟⎜ ∂ ∂ ⎟⎜⎝ ⎠∫ ∫ ,
(2α.30)
που υπενθυμίζεται ότι
X d
00
0
sinh1 12 2
k hNk h
⎛ ⎞⎟⎜ ⎟= +⎜ ⎟⎜ ⎟⎜⎝ ⎠. ό
12- 117 -

Το κατακόρυφο σχέση υπολογίζεται αναλυτικά ως ακολο
ολοκλήρωμα στην τελευταία ύθως
( )3 0 2 1/2x = ⎡ ⎤
3
0 3 031/2
00 0
coshcoshcosh
x h
k x h hNdxk hN k h
=−
+⎣ ⎦ =∫ . (2α.31)
εραιτέρω, η ποσότητα στην αγκύλη της r-ολοκλήρωσης εύκολα διαπιστώνεται ότι
Πείναι ίση με
( ) ( ) ( ) ( )( )0 0 0 1 0 0 0 1 02 jjk Y k R J k R J k R Y k RRπ
υ
− = , (2α.32)
όπως υναρτήσεων ( )0 0J k R και
(
πολογίζεται από την ορίζουσα Wronski των σ
)0 0Y k R . Με αντικατάσταση όλων των ανωτέρω αποτελεσμάτων στην .30) τελικά
Εξ. (2απαίρνουμε
( )
1/23 0
3 2 20
4cosh/
X ajXk hg a A a h
0Nπρ π
≡ = , (2α.33)
όπου υπευθυμίζουμε ότι είναι ο πρώτος συντελεστής του αναπτύγματος
ξωτερικού δυναμικού και επομένως, εξαρτάται από τη συχνότητα του
αντιστοιχεί στις πρόσθετες γω του πλάτους Α του προσπίπτοντος κυματισμού.
μενη περίπτωση πλωτού κατακόρυφα ταλαντώμενου κυλίνδρου οι υνολικές δυνάμεις τείνουν στην τιμή των δυνάμεων Froude-Krylov για ω και
, πράγμα που οφείλεται στο ότι στην πολύ αργή κίνηση του πλωτού σώματος περίθλασης καθίσταται αμελητέο. Επίσης, για τους ίδιους λ
περίπτωση των δυνάμεων Froude-Krylov, καθώς η συχνότητα αυξάνει και κύματος τείνει στο μηδέν η συνεισφορά στις δυνάμεις πίεσης στο πυθμένα
Σε αντίθεση όμως με τις δυνάμεις Froude-Krτης κατακόρυφης ταλάντωσης πλωτού κυλίνάσης από την ανύψωση του προσπίπτοντος κυματισμού στο κέντρο r=0 του
υν γενικώςμηδενική διαφορά φάσης, η οποία για μικρές συχνότητες τείνει στο μηδέν και σε μεγάλες
, για (2α.34) Τα αποτελέσματα εφαρμογής της ανωτέρω τελικής σχέσεως στο εξεταζόμενοπαράδειγμα, για τη περίπτωση του πλωτού κυλίνδρου a/h=0.116 και d/h=0.79,
0a ( )e
του
( )3 3,r xΦ ,
αδιαστατοποιητής
ε
προβλήματος, και ο gυδροστατικές δυνάμεις λό
2a Aρ π
Στην εξεταζόσ
0 0k a →το δυναμικόκαι στην
μήκος
όγους όπως
τοτου κυλίδρου από πολλά μήκη κύματος αλληλοαναιρείται και επομένως 3 0X → , για
0k a →∞ .
ylov που στην εξεταζόμενη περίπτωση δρου παρουσιάζουν μηδενική διαφορά
φκυλίνδρου (για όλες τις συχνότητες), οι συνολικές δυνάμεις παρουσιάζο μη
συχνότητες έχει την ασυμπτωτική συμπεριφoρά (βλ. π.χ. Garrett 1971):
3rg / 4X ka π→ − 0k a →∞ a
13- 118 -

παρουσιάζονται επίσης στο Σχήμα 2α.5, όπου διαπιστώνουμε πλήρη συμφωνία με τις τη
ματα τουτικά και
με τους
παραπάνω προβλέψεις για ν ασυμπτωτική συμπεριφορά. Τέλος, από τα αποτελέσ Κεφ. 2 γνωρίζουμε ότι το μέτρο των συνολικών δυνάμεων μπορεί να υπολογισθεί εναλλακ μέσω της συναρτήσεως Kochin του προβλήματος (ιδιότητα Ι4). Η συνάρτηση Kochin συνδέεται επίσης και υντελεστές απόσβεσης (ιδιότητα Ι2), από όπου για τη περίπτωση που εξετάζουμεσλαμβάνουμε
( )2H =
ιδιότητπαίρνουμ ελικά (βλ. και Yeung, 1981):
0 333
0
2k BD k hρω
, (2α.35)
όπου λόγω αξονικής συμμετρίας η συνάρτηση Kochin είναι ανεξάρτητη της γωνίας αζιμουθίου (θ). Χρησιμοποιώντας το τελευταίο αποτέλεσμα στην α Ι4
ε τ
( ) ( )( )20 0 0 333
3 20
2 tanh 1 tanhk h k h k h BXX
k ag a A πρ π
⎡ ⎤+ −⎢ ⎥⎣ ⎦≡ = . (2α.36)
Aριθμητικά αποτελέσματα για τη περίπτωση του κυλίνδρου a/h=0.116 και d/h=0.79 παρουσιάζονται επίσης στο Σχήμα 2α.5, με διακεκομμένη γραμή). Παρατηρούμε ρκετά καλή συμφωνία των υπολογισμών μας για το μέτρο της συνολικήαυδροδυναμι
ς κής δύναμης από εφαρμογή των Ε α.33) και (2α.36)
παρουσιαζόμενες διαφορές λονται στην αρι ητική προσέγγιση ρατώντας λίγους μόνο όρους (υπενθυμίζουμε ότι έχει ληφθεί Κ=5), και οι δύο
την ξ. (2 . Οι μικρές οφεί θμ της λύσης
κπροβλέψεις τείνουν να συμπέσουν καθώς το Κ αυξάνεται. 4. Υπολογισμός απόκρισης ( )3ξ ω του πλωτού κυλίνδρου στη κατακόρυφη κίνηση Με βάση όλα τα προηγούμενα το μιγαδικό πλάτος της απόκρισης του πλωτού κυλίδρου στη κατακόρυφη ταλάντωση υπολογίζεται με αντικατάσταση των διαφόρων ποσοτήτων στην Εξ. (2α.2), και σε αδιάστατη μορφή (ως προς το πλάτος ανύψωσης της ελεύθερης επιφάνειας του προσπίπτοντος κυματισμού) είναι
( )(
( ) ( ))
( )( ) ( )( )3
33 33 33
1heave
X XRAO
Aξ ω 03 3
2d
A M A j B Cω ω ω ω=
− + + + . (2α.37)
ω ωω
+=
α.6, για διάφορες τιμές του αδιάστατου υματαριθμού
Αριθμητικά αποτελέσματα για τη περίπτωση του κυλίνδρου με a/h=0.116 και d/h=0.79 παρουσιάζονται στα Σχήμα 2
0 2 /k a aπ λ=κ , και στο Σχήμα 2α.7, αντίστοιχα, για διάφορες τιμές της
αδιάστατης συχνότητας /a gω . Στα σχήματα αυτά εικονίζεται με διακεκομμένη γραμμή η θέση του συντονισμού στη κατακόρυφη ταλάντωσ νδρου. η του πλωτού κυλί
14- 119 -

Σχήμα 2α.6: Υδροδυναμικοί συντελεστές κυλίνδρου για a/h=0.116 και d/h=0.79, για διάφορες τιμές του αδιάστατου κυματαριθμού 0 2 /k a aπ λ=
Σχήμα 2α.7: Υδροδυναμικοί συντελεστές κυλίνδρου για a/h=0.116 και d/h=0.79, για διάφορες τιμές της αδιάστατης συχνότητας /a gω
15- 120 -

16
λουθώντας τη κατακόρυφη ανύψωση του κύματος, με την ίδια φάση (
Παρατηρούμε χαρακτηριστικά στα ανωτέρω σχήματα ότι σε μικρές συχνότητες ο κύλινδρος ταλαντώνεται υδροστατικά παρακο
( )3 / 1Aξ ω → , 0ω → ), όπως είναι φυσικά αναμενόμενο. Αντίθετα, καθώς η συχνότητα αυξάνει αρκετά πάνω από τη τιμή της συχνότητας συντονισμού η κατακόρυφη ταλάντωση του κυλίνδρου διαρκώς εξασθενεί, και η διαφορά φάσης της κίνησης από την ανύψωση του κύματος αυξάνεται διαρκώς. Και οι διαπιστώσεις αυτές κρίνονται φυσικές και αναμενόμενες στα πλαίσια ισχύος της γραμμικής θεωρίας, δηλαδή όσο οι κυματισμοί που διεγείρουν τη κίνηση έχουν μικρό πλάτος και η κλίση ανύψωσης της ελεύθερης επιφάνειας είναι μικρή. Κλείνοντας το συπλήρωμα αυτό σημειώνουμε ότι το πρόγραμμα σε Matlab για τους παραπάνω υπολογισμούς είναι διαθέσιμο από την ιστοσελίδα του μαθήματος. 5. Βιβλιογραφικές αναφορές Αθανασούλης Γ.Α. & Μπελιμπασάκης Κ.Α., 2002, Κυματικά φαινόμενα στο θαλάσσιο περιβάλλον, Σημειώσεις του αντιστοίχου μαθήματος, ΣΝΜΜ-ΕΜΠ
Black J.L., Mei C.C. & Bray M., 1971, Radiation and scattering of water waves by rigid bodies, Journal of Fluid Mechanics, Vol. 46, pp. 151-164.
Garrett C.J.R., 1971, Wave forces on a circular dock, Journal of Fluid Mechanics, Vol. 46, pp. 129-139.
mic coircular clinders in finite depth, Ocean Engineering, Vol.8, pp. 25-63.
ss and dam
e ng of a v tical cy
Prenter P.M., 1975, Splines and variational methods, Wiley.
Sabunku T. & Calisal S., 1981, Hydrodyna efficients for vertical radiation of c
Young R.W., 1981, Added ma ping of a vertical cylinder in finite-depth waters, Applied Ocean Research Vol. 3, pp. 119-133.
Yu Z. & Falnes J., 1995, State-space mod li er linder in heave, Applied Ocean Research Vol. 17, pp. 265-275.
- 121 -

29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
2.9 Απλοποιημένος υπολογισμός των κατακόρυφων δυνάμεων Froude-Krylov και περίθλασης. Η προσέγγιση για κύματα μεγάλου μήκους (long-wave approximation) και η υπόθεση της «σχετικής ταχύτητας» του Korvin-Kroukovsky Στο εδάφιο αυτό θα παρουσιάσουμε μια μέθοδο απλοποιημένου (προσεγγιστικού) υπολογι-σμού της κατακόρυφης υδροδυναμικής διέγερσης (δηλ., της δύναμης Froude-Krylov και της δύναμης περίθλασης) που αναπτύσσεται σε επιπλέοντα σώματα με κατά-κόρυφα πλευρικά τοιχώματα. Η προσέγγιση αυτή ισχύει με ικανοποιητική ακρίβεια όταν το μήκος κύματος λ του προσπίπτοντος κυματισμού είναι αρκετά μεγαλύτερο από την οριζόντια διάσταση Β του επιπλέοντος σώματος. Αρχίζουμε τη μελέτη μας με την παραγωγή (υπενθύμιση, κατ’ ουσίαν) ορισμένων απλών σχέσεων για το δυναμικό, την πίεση και την ανύψωση της ελεύθερης επιφάνειας στην περίπτωση απλού αρμονικού κυματισμού.
Έστω, λοιπόν, απλός αρμονικός κυματισμός διαδιδόμενος παράλληλα προς τον άξονα 1x , με κατεύθυνση από το στο −∞ , μήκους κύματος και πλάτους . Εάν h είναι το βάθος του νερού, η κυκλική συχνότητα , ο κυματαριθμός και το βάθος σχετίζονται με τη σχέση διασποράς , την οποία γράφουμε σε αδιάστατη μορφή ως
+∞ 02 / kλ π=
( )0k h
Aω
0 tahn0k h
2 gkω =
( ) (2
0h k h tahn k h
gω
= )0
))
. (1)
Υπενθυμίζουμε επίσης ότι το δυναμικό ταχύτητας , η επαγόμενη υδροδυναμική πίεση ( ,tΦ x
(p ,tx και η επαγόμενη ανύψωση της ελεύθερης επιφάνειας ( ),tη =R ( )1 2,x x ,tη συνδέονται, στα πλαίσια της γραμμικής θεωρίας, μέσω των σχέσεων
( )( ),t
p ,tt
ρ∂Φ
= −∂
xx και ( )
( )3, 0,1 x t,t
g tη
∂Φ == −
∂
RR . (2α,β)
Θα εισαγάγουμε επίσης, και θα χρησιμοποιήσουμε στη συνέχεια, την έννοια της ανύψωσης μιας υλικής επιφάνειας ρευστού που βρίσκεται σε (αδιατάρακτο) βάθος (
3( )x ,tη R ) 3x . Αυτή
ορίζεται, κατ’ αναλογίαν προς την (2β), από τη σχέση
( )( )
3
3( )
, ,1x
x t,t
g tη
∂Φ= −
∂
RR . (2γ)
Συνδυάζοντας τις σχέσεις (2α) και (2γ) παίρνουμε
. (2δ) ( ) (3( )xp ,t g ,tρ η=x )R
Βλέπουμε δηλαδή ότι η (γραμμικοποιημένη) υδροδυναμική πίεση στο σημείο =x1 2 3 3( , , ) ( , )x x x x= R [οριζόντια θέση R , βάθος 3x ] είναι ανάλογη με την ανύψωση
της υλικής επιφάνειας που αντιστοιχεί στο ίδιο βάθος, με συντελεστή αναλογίας
. Αυτή η απλή σχέση θα μας επιτρέψει να δώσουμε μια απλή και ενδιαφέρουσα ερμηνεία των υδροδυναμικών δυνάμεων Froude-Krylov και περίθλασης. Η παρατήρηση αυτή εξηγεί και το λόγο της εισαγωγής της έννοιας της ανύψωσης μιας υλικής επιφάνειας του νερού που βρίσκεται σε (αδιατάρακτο) βάθος
( )3( )x ,tη R
gρ
3x .
- 122 -

2
Δεδομένου ότι όλες οι χρονικές εξαρτήσεις είναι αρμονικές, συχνότητας , τα χρονο-εξαρτώμενα μεγέθη θα αναπαρίστανται μέσω των παραστατικών τους μιγάδων, π.χ.
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
ω
( ) ( ), Re ;jj tt e ωω
⎧ ⎫⎪ ⎪⎪ ⎪Φ = Φ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭x x , κ.ο.κ.
Το δυναμικό ταχύτητας του προσπίπτοντος αρμονικού κυματισμού (αδιατάρακτο πεδίο) γράφεται στη μορφή
, (3α) ( ) (0;Ij te j Aωω ωΦ = ⋅Φx );ωx
όπου (βλ. και σχέση (15) εδαφίου 2.2)
( )
( )
( )( )
0 3
00 0 12
0 3
cosh
cosh; exp
exp
k x hg k h j k x
k x
ωω
+⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪Φ = ⋅ ⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
x ⎪⎪⎬⎪, . (3β)
ό ό
ύ ό
ρηχ νερ
βαθ νερ
⎧ ⎫⎪⎪⎨⎪⎪ ⎪⎩ ⎭
Η επαγόμενη υδροδυναμική πίεση (Froude-Krylov) δίδεται από τη σχέση (βλ. (2α), ανωτέρω)
( ) ( ) ( )
( )
( )( )
20
0 3
0 0 1
0 3
; ;
coshcosh exp , ,
exp
I
ό ό
ύ ό
p j A
k x hk hgA j k x
k x
ρηχ νερ
βαθ νερ
ω ρ ω ω
ρ
= − ⋅Φ =
+⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪ ⎧ ⎫⎪ ⎪⎪ ⎪ ⎪ ⎪= ⋅ ⎨ ⎬ ⎨⎪ ⎪ ⎪⎪ ⎪⎩ ⎭⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
x x
⎬⎪
, (4)
και η επαγόμενη ανύψωση της ελεύθερης επιφάνειας (ο αδιατάρακτος κυματισμός), δίδεται από τη σχέση (βλ. (2β), ανωτέρω)
( ) ( ) ( ) ( )20 3 0
1; , 0;I 1expj A x A j k
gη ω ω ω= − ⋅Φ = =R R x
)ω
. (5)
Τέλος, η επαγόμενη ανύψωση μιας υλικής επιφάνειας που βρίσκεται σε
(αδιατάρακτο) βάθος
(3 1 2, ( ) , ;I x x xη
3x συνδέεται με την πίεση με τη σχέση (βλ. (2δ))
( ) ( 1 2 3; , , ;I I
p p x x xω ω≡x )
)ω
3 BdS
( ) ( ) (31 2 3 1 2, ( ); , , ; , ;II I xp p x x x g x xω ω ρ η≡ =x , (6)
η οποία θα χρησιμοποιηθεί εκτενώς στη συνέχεια. - Υπολογισμός της κατακόρυφης δύναμης Froude-Krylov Η κατακόρυφη δύναμη Froude-Krylov που ασκείται πάνω σε επιπλέον σώμα δίδεται από τη σχέση:
( ) ( ) ( )( )
;
B
FK3 I
D
F p n∂
ω ω= ∫∫ x x . (7)
- 123 -

3
Υπενθυμίζουμε ότι
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
( )3n x είναι η συνιστώσα του μοναδιαίου κάθετου διανύσματος στην βρεχόμενη επιφάνεια του επιπλέοντος σώματος. BD∂ Θα εξετάσουμε κατ’ αρχήν την περίπτωση επιπλέοντος σώματος με κατακόρυφα πλευρικά τοιχώματα και σταθερό βύθισμα (βλ. Σχήμα 1). Ας συμβολίσουμε την ίσαλο επιφάνεια του σώματος με και την οριζόντια τομή του σώματος σε βάθος με . Εφ’ όσον τα πλευρικά τοιχώματα είναι κατακόρυφα, η προβολή κάθε τομής στο επίπεδο της ισάλου ] ταυτίζεται με την ίσαλο . Επί πλέον, πάνω στα
κατακόρυφα πλευρικά τοιχώματα ισχύει , ενώ πάνω στον οριζόντιο πυθμένα
του σώματος έχουμε
d( )0Ω=Ω
[ 1 2 3(x x x =
a−(−Ω
( )a−Ω)a
0)
)
( )0Ω=Ω
( ) 03n =x( d−Ω ( ) 13n =x . Άρα το ολοκλήρωμα στο δεξιά μέλος της σχέσης (7)
περιορίζεται μόνο πάνω στον οριζόντιο πυθμένα , και παίρνει τη μορφή ( d−Ω )
) BdSω
BdS
( ) (( )
( )3, ;
FK3 I
d
F p x dω
−Ω
= =−∫∫ R . (8α)
Συνδυάζοντας τώρα τις σχέσεις (8α) και (6), παίρνουμε
( ) ( )( )
( )
( ) ;FK
3 I d
d
F gω ρ η ω−
−Ω
= ∫∫ R , (8β)
ή
( ) ( ) ( )( ),33
FK3 I dF C ηω Ω −= ⋅ ω , (8γ)
όπου
( ) ( )( )
( )( )
, 1 2( )
1 ;I d I d
d
dx dxS
η ω η ωΩ − −
−Ω
=Ω ∫∫ R , (8δ)
Σχήμα 1 Γενική μορφολογία επιπλέοντος σώματος με κατακόρυφα πλευρικά τοιχώματα
- 124 -

4
1 2
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
Bdx dx dS= είναι το εμβαδικό στοιχείο της επιφάνειας , είναι το εμβαδόν της
ισάλου του επιπλέοντος κατακόρυφου κυλίνδρου, είναι ο υδροστατικός
συντελεστής σε κατακόρυφη ταλάντωση (TPI), και
( )d−Ω
C gρ=
( ) ( )
( )S Ω
( )S Ω33
,ηΩ −I d ω
)
, όπως ορίζεται από τη σχέση
(8δ), είναι η μέση τιμή της ανύψωσης πάνω στην επιφάνεια του
πυθμένα του επιπλέοντος σώματος. (( ) ;I dη ω
−R ( )d−Ω
Η σχέση (8γ) είναι ακριβής για επιπλέοντα σώματα με κατακόρυφα πλευρικά τοιχώματα και σταθερό βύθισμα, και ισχύει για κάθε μήκος κύματος του προσπίπτοντος κυματισμού. Τα πλεονεκτήματά της είναι ότι, αφ’ ενός είναι απλή και ευκολομνημόνευτη και, αφ’ ετέρου, αποτελεί τη βάση για διάφορες προσεγγιστικές σχέσεις που έχουν χρησιμοποιηθεί κατά καιρούς στο ναυπηγικό επάγγελμα για την απλοποίηση των υδροδυναμικών υπολογισμών. Θα συζητήσουμε τώρα ορισμένες εφαρμογές και γενικεύσεις της (8γ). Εφαρμογή 1. Ασυμπτωτική τιμή της δύναμης Froude-Krylov για την περίπτωση κυμάτων μικρού μήκους ως προς την 1x −οριζόντια χαρακτηριστική διάσταση, έστω
1xB , του
επιπλέοντος σώματος (short-wave approximation). Στην περίπτωση αυτή , οπότε θα έχουμε πολλά μήκη κύματος πάνω στην έκταση
. Τότε όμως η μέση τιμή της ανύψωσης θα είναι πρακτικά μηδενική.
Άρα,
1/xB λ >> 1
) )ω( d−Ω (, ( ) ;I dη−
R
( ) ( ) ( )1
( ),33 / 1
0FK
3 I d xBF C
λη ωω Ω − >>
= ⋅ ⎯⎯⎯⎯⎯→ . (9)
Το ανωτέρω αποτέλεσμα είναι τετριμμένο εάν (γιατί;). Η ανωτέρω ανάλυση μας δείχνει όμως ότι ισχύει για κάθε τιμή του λόγου .
/ 1/d λ >/d λ
2
Εφαρμογή 2. Ασυμπτωτική τιμή της δύναμης Froude-Krylov για την περίπτωση κυμάτων μεγάλου μήκους ως προς την 1x −οριζόντια χαρακτηριστική διάσταση, έστω
1xB , του
επιπλέοντος σώματος (long-wave approximation). Στην περίπτωση αυτή , πράγμα που σημαίνει ότι σε κάθε χρονική στιγμή μικρό
μόνο τμήμα της κυματομορφής θα αλληλεπιδρά με την επιφάνεια .
Κατά συνέπεια, η μεταβολή της τιμής της ποσότητας όταν η τετμημένη
1/xB λ << 1
)ω
)ω
(, ( ) ;I dη−
R ( )d−Ω
1(, ( ) ;I dη−
R x
κινείται κατά μήκος του πυθμένα , θα είναι αμελητέα. Μπορούμε λοιπόν στην περίπτωση αυτή ( ) να θέσουμε
( )d−Ω
1xB / 1λ <<
( )( )
( )( ) ( ); =I d I dd
όη ω σταθερ η−
∈ −Ω≈ ≈ 0
RR ;ω
−R , (10α)
οπότε η σχέση (8γ) απλουστεύεται στην
- 125 -

5
( ) ( )( )
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
1
( ) 033 33( )/ 01
cosh= ;
coshx
FK3 I dB
k d hF C A
k hλω η ω
−<<
− +⋅ =≈ 0R C⋅
d C⋅d C⋅
[ρηχό νερό] (10β) [ρηχό νερό] (10β)
ή ή
( ) ( ) ( )1
( )33 0 33( )/ 1
= ; expx
FK3 I dB
F C A kλ
ω η ω−
<<⋅ = −≈ 0R( ) ( ) ( )
1
( )33 0 33( )/ 1
= ; expx
FK3 I dB
F C A kλ
ω η ω−
<<⋅ = −≈ 0R . [βαθύ νερό] (10γ) . [βαθύ νερό] (10γ)
Το προφανές πλεονέκτημα των ανωτέρω προσεγγιστικών (ασυμπτωτικών) σχέσεων είναι ότι μας δίδουν τη δύναμη Froude-Krylov (για μακρά κύματα) χωρίς να χρειάζεται ολοκλήρωση πάνω στον πυθμένα του επιπλέοντος σώματος. Στην Άσκηση 1 ζητείται να διερευνήσετε την ακρίβεια των σχέσεων (10β,γ) για σώμα απλής γεωμετρίας.
Το προφανές πλεονέκτημα των ανωτέρω προσεγγιστικών (ασυμπτωτικών) σχέσεων είναι ότι μας δίδουν τη δύναμη Froude-Krylov (για μακρά κύματα) χωρίς να χρειάζεται ολοκλήρωση πάνω στον πυθμένα του επιπλέοντος σώματος. Στην Άσκηση 1 ζητείται να διερευνήσετε την ακρίβεια των σχέσεων (10β,γ) για σώμα απλής γεωμετρίας. Άσκηση 1: Φορτηγίδα (μπάρτζα) ορθογωνικής διατομής μεγάλου μήκους , πλάτους Άσκηση 1: Φορτηγίδα (μπάρτζα) ορθογωνικής διατομής μεγάλου μήκους , πλάτους LL
1212B m= και βυθίσματος βρίσκεται αγκυροβολημένη σε νερά βάθους . Να υπολογισθούν οι κατακόρυφες δυνάμεις Froude-Krylov από πλευρικούς κυματισμούς (ανά μονάδα μήκους της φορτηγίδας) συναρτήσει του μήκους κύματος α) με τη βοήθεια της προσεγγιστικής σχέσης (10), β) με τη βοήθεια ολοκλήρωσης των πιέσεων πάνω στη γάστρα, και να συγκριθούν τα αποτελέσματα.
6d = m m18h =
Άσκηση 2: Να υπολογίσετε την κατακόρυφη και την οριζόντια δύναμη Froude-Krylov που ασκούνται πάνω σε πλωτή δεξαμενή σφαιρικού σχήματος, ακτίνας , η οποία βρίσκεται αγκυρωμένη σε βαθύ νερό και δέχεται την επίδραση απλών αρμονικών κυματισμών μήκους κύματος . Να συγκρίνετε την κατακόρυφη δύναμη Froude-Krylov με το βάρος της δεξαμενής.
10a m=
5 , 10 , 15 , 20m m m mλ=
Εφαρμογή 3 [Γενίκευση της σχέσεως (8γ)]. Όπως αναφέραμε ήδη ανωτέρω, η σχέση (8γ) είναι ακριβής για επιπλέοντα σώματα με κατακόρυφα πλευρικά τοιχώματα. Ας υποθέσουμε
BΩ
( )xn
1x
3x
Σχήμα 2: Κατακόρυφη τομή του επιπλέοντος σώματος, με κατακόρυφα πλευρικά τοιχώματα και μεταβαλλόμενο (τοπικό) βύθισμα . 1 2( , )d x x
1 2( , )d x x−
τώρα ότι εξετάζουμε ένα επιπλέον σώμα με κατακό-ρυφα πλευρικά τοιχώματα και πυθμένα
3 1 2: ( ,B x d x xΩ = =−x
1 2( , )d x x
1 2( , )
) ,
όπου είναι το το-πικό βύθισμα στο σημείο
x x . Βλ. Σχήμα 2. Η κατακόρυφη δύναμη Froude Krylov δίδεται από τη σχέση (7), όπου τώρα η ολοκλή-ρωση εκτείνεται πάνω στο μη-κατακόρυφο τμήμα της βρεχόμενης επιφάνειας του επιπλέοντος σώματος, δηλα-δή πάνω στην επιφάνεια
3 1: ( ,B B 2 )x T x xΩ = =−x :
- 126 -

6
( ) ( ) ( )( )
;FK
3 3I
B
F p nω ω
Ω
= ∫∫ x x
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
BdS
2 )
. (11α)
Χρησιμοποιώντας τη σχέση (6), και τη γεωμετρική ταυτότητα , η σχέση (11α) για την κατακόρυφη δύναμη Froude-Krylov γράφεται στη μορφή
( ) 1 23 Bn dS dx dx=x
( ) ( )( )( )
1 2
( )1 2 1 2, ( , )
0
, ;FK
3 d x xIF g x x dx dxω ρ η ω−
Ω
= ∫∫ , (11β)
όπου είναι η προβολή του πυθμένα ( )0Ω 3 1: ( ,B x d x xΩ = =−x
3, ( )I xη
πάνω στο οριζόντιο
επίπεδο [ . Εισάγοντας τη μέση τιμή της ανύψωσης πάνω στον
πυθμένα ,
]) )ω1 2 3( 0x =x x
BΩ
( 1 2, ;x x
( )( )( ) ( )( )
( )1 2, 1 2 1 2, ( , )0
0
1 , ;BI dI x x x x dx dx
Sη ω η ω−Ω
Ω
=Ω ∫∫ , (11γ)
η (11β) γράφεται στη μορφή
( ) ( )( ),33 B
FK3 IF C η ωω Ω= ⋅ , (11δ)
όπου . Η (11δ) αποτελεί γενίκευση της (8γ), για την περίπτωση επιπλέοντος σώματος με γενικό (όχι κατ’ ανάγκην επίπεδο) πυθμένα. Τώρα όμως η ολοκλήρωση για τον
υπολογισμό της μέσης τιμής
( )(33 0C g Sρ= Ω )
( ), BIη ωΩ είναι πιο περίπλοκη, εφ’ όσον λαμβάνει υπ’ όψιν την
ακριβή μορφή του πυθμένα 3 1: ( ,B 2 )x d x xΩ = =−x , μέσω του τοπικού βυθίσματος
. Σημειώνεται ότι η σχέση (11δ) είναι ακριβής όταν η ολοκλήρωση (11γ) εκτελείται με ακρίβεια.
1 2 )x( ,d x
- Υπολογισμός της κατακόρυφης δύναμης περίθλασης που ασκείται σε επιπλέον σώμα, στα πλαίσια της προσέγγισης των μακρών κυματισμών (long wave approximation)
Προχωράμε τώρα στον υπολογισμό της κατακόρυφης δύναμης περίθλασης , που ασκείται από μακρούς προσπίπτοντες κυματισμούς πάνω σε επιπλέον σώμα με κατακόρυφα πλευρικά τοιχώματα και βύθισμα , είτε σταθερό, είτε (γενικότερα) ασθενώς μεταβαλλόμενο, , έτσι ώστε στον πυθμένα να ισχύει η προσέγγιση
( )( )Diff3F ω
d1 2( , )d d x x= BΩ
( )( ) ( ) ( )( )
2 2, 1 1 2 , 2 1 2 , 1 1 2 , 2 1 2
1 2 1 2
( ) ( , ), ( , ), 1 / 1 ( , ) ( , )
1 , 1 , 1 1 , ( , , ( , )) ,B
d x x d x x d x x d x x
o o o x x d x x
= − − + + ≈
≈ − −
n x
∈Ω (12)
όπου ( )1o συμβολίζει ποσότητα πολύ μικρότερη της μονάδας. Η δύναμη ( )( )Diff3F ω
(
προκύπτει με ολοκλήρωση της πίεσης του πεδίου περίθλασης ( );D ωΦ =x );dω ωΦ xj A πάνω στη βρεχόμενη επιφάνεια : BD∂
- 127 -

7
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) ( )( )3 ;
B
Diff3D
D
F p n∂
ω ω= ∫∫ x x BdS
;ωx
, (13α)
όπου
( ) ( ) ( ) ( ) ( )2; ; dDDp j j Aω ρ ω ω ρ ω= − Φ = − ⋅Φx x , (13β)
και ( )3n x είναι η συνιστώσα του μοναδιαίου κάθετου διανύσματος πάνω στο σύνορο . Για τους ίδιους ως ανωτέρω (περίπτωση δύναμης Froude-Krylov) λόγους, η ολοκλήρωση μπορεί να περιορισθεί μόνο πάνω στον πυθμένα του σώματος :
BD∂
BΩ
( ) ( ) ( )( )3 3 1 2, ( , ) ;Diff
3 BD
B
F p x d x x nω ω
Ω
= =−∫∫ R x dS =
.B
( ) ( ) ( )23 1 2, ( , ) ;d 3
B
j A x d x x nρ ω ω
Ω
= − ⋅ Φ =−∫∫ R x dS
)
)
(14)
Εν προκειμένω, σε αντίθεση με την περίπτωση της δύναμης Froude-Krylov, το δυναμικό
περίθλασης δεν είναι δεδομένο(( ;d ωΦ x 1). Γνωρίζουμε όμως τις συνθήκες που αυτό ικανοποιεί: σχέσεις (28α-στ) [ ] του εδαφίου 2.2. Απλή παρατήρηση των σχέσεων
αυτών αρκεί για να διαπιστώσουμε ότι το δυναμικό περίθλασης ικανοποιεί τις ίδιες
εξισώσεις και συνθήκες με το δυναμικό ακτινοβολίας , εκτός από μια, τη συνοριακή συνθήκη πάνω στη βρεχόμενη επιφάνεια , όπου ισχύουν τα εξής:
d=
( ;d ωΦ x
( );ωx3Φ
BD∂
( )( ) ( )
( )
( )
( ),,
0, 1 0, 2 0, 31 2
;;
;; ( ) ; ( ) ; (
n VERn HOR
d
VV
n nn
ωω
ωω ω
∂Φ= −Φ −Φ −Φ
∂ 3 )nω
xx
xx x x x x x , (15α)
και
( )3
3;
( )nn
ω∂Φ=
∂
xx . (15β)
Από τη μορφή της συνθήκης (15α) διαπιστώνουμε αμέσως ότι το δυναμικό περίθλασης αντιστοιχεί στο δυναμικό ενός πεδίου ροής που παράγεται αν υποθέσουμε ότι το επιπλέον σώμα κρατείται ακίνητο στη μέση θέση του σε ήρεμο νερό, και κάθε σημείο του συνόρου
πάλλεται με επιβεβλημένη (τοπική) κάθετη ταχύτητα x
BD∂
, ( ) ( ) (,,; ;;n n HORV Vω ωω= +x xx )nV VER BD∈∂x (16)
(1) Μπορούμε βέβαια να υπολογίσουμε αριθμητικά το δυναμικό περίθλασης ( );d ωΦ x εάν επιλύσουμε το αντίστοιχο πρόβλημα συνοριακών τιμών, που ορίζεται από τις σχέσεις (28α-στ) του εδαφίου 2.2. Μπορούμε επίσης να υπολογίσουμε τη δύναμη περίθλασης χωρίς να λύσουμε το πρόβλημα περίθλασης, με χρήση των σχέσεων Haskind-Newman, αν γνωρίζουμε το κατακόρυφο δυναμικό ακτινοβολίας. Στο παρόν εδάφιο επιθυμούμε όμως να παρουσιάσουμε έναν αυτοτελή απλοποιημένο (προσεγγιστικό) υπολογισμό της κατακόρυφης δύναμης περίθλασης.
- 128 -

8
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
(η ταχύτητα αυτή δεν αντιστοιχεί σε κίνηση στερεού σώματος.) Λόγω της γραμμικότητας του
προβλήματος συνοριακών τιμών που ικανοποιεί το δυναμικό περίθλασης , μπορούμε να το διασπάσουμε σε πεδία
( );d ωΦ x
( ) ( ) ( ), ,; ;d d HOR d VERω ωΦ = Φ + Φx x ;ωx
)
, (17α)
όπου το («οριζόντιο» δυναμικό περίθλασης) παράγεται από την ταλάντωση του συνόρου
(, ;d HOR ωΦ x
BD∂ με επιβαλλόμενη (τοπική) κάθετη ταχύτητα
( )( ),
,;
;d HORn HORV
nω
ω∂Φ
=∂
xx , BD∈∂x (17β)
ενώ το («κατακόρυφο» δυναμικό περίθλασης) παράγεται από την ταλάντωση του συνόρου
(, ;d VER ωΦ x )
BD∂ με επιβαλλόμενη (τοπική) κάθετη ταχύτητα
( )(,
,;
;d VERn VERV
nω
ω∂Φ
=∂
xx ) , BD∈∂x . (17γ)
Η υπόθεση των μικρών κλίσεων της επιφάνειας BΩ , σε συνδυασμό με την υπόθεση μακρών κυμάτων ( ) την οποίαν επικαλούμεθα εκ νέου στο σημείο αυτό, μας επιτρέπουν
να θεωρήσουμε ότι 1/xB λ << 1
0≈
( ) ( )0, 1 0, 21 2; ( ) ; ( )n nω ωΦ +Φx x x x , B∈Ωx , (18α)
εκ της οποίας λαμβάνουμε
( ) ( ) ( )0, 1 0, 21 2,
; ( ) ; ( ), \;( ) 0, .
,B Bn HOR
B
n nV ω ωω⎧⎪⎪ −Φ −Φ ∈∂ Ω⎪= ⎨⎪⎪ ≈ ∈⎪⎩
x x x x xxx
D
Ω
,
(18β)
Εξ άλλου, δεδομένου ότι στα κατακόρυφα πλευρικά τοιχώματα έχουμε , και λαμβάνοντας υπ’ όψιν τη σχέση (3), εύκολα βρίσκουμε ότι
3( ) 0n =x
( ) ( ) ( )0, 3 03 0 3, (3)
; ( ) ; ( ),;
0, \ .
Bn VER
B B
έn k n
VD
σχ σηω ω
ω⎧⎪⎪ −Φ − Φ ∈Ω⎪= ⎨⎪⎪ ∈∂ Ω⎪⎩
=x x x x xx
x (18γ)
Στη συνέχεια υποθέτουμε ότι το πεδίο , του «οριζόντιου» δυναμικού περίθλασης (το οποίο διεγείρεται μόνον από τις οριζόντιες ταλαντωτικές κινήσεις των πλευρικών τοιχωμάτων
(, ;d HOR ωΦ x )
\B BD∂ Ω ), δεν επάγει σημαντικές υδροδυναμικές πιέσεις στον πυθμένα BΩ του επιπλέοντος σώματος, και άρα δεν συνεισφέρει στην κατακόρυφη δύναμη περίθλασης(2). Κατά συνέπεια, μπορούμε να προχωρήσουμε στον υπολογισμό της συνολικής
(2) Αυτό είναι μόνο προσεγγιστικά ακριβές, αλλά δίδει ικανοποιητική προσέγγιση σε πολλές περιπτώσεις.
- 129 -

9
κατακόρυφης δύναμης περίθλασης αγνοώντας το και λαμβάνοντας υπ’ όψιν
μόνο το «κατακόρυφο» δυναμικό περίθλασης . Κατά συνέπεια, η σχέση (14) γράφεται στη μορφή:
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
(, ;d HOR ωΦ x
( ), ;VER ωx
) ( ); 3 Bnωx x
)
.dS
) )
dΦ
( ) ( ) (( ) 2
,3Diff
d VER
B
F j Aω ρ ω
Ω
= − ⋅ Φ∫∫ (19)
Συγκρίνοντας τώρα τα (γραμμικά) προβλήματα συνοριακών τιμών που ικανοποιούν τα
δυναμικά και , διαπιστώνουμε ότι αυτά ικανοποιούν ακριβώς τις ίδιες ομογενείς συνθήκες (συνθήκη ελεύθερης επιφάνειας στο επίπεδο , συνθήκη
ακτινοβολίας στο άπειρο
(3 ;ωΦ x (, ;d VER ωΦ x
3 0x =
→∞R , συνθήκη μη-εισχώρησης στον πυθμένα της θάλασσας
3x h=− , και εξίσωση Laplace σ’ ολόκληρη τη μάζα του νερού), αλλά διαφορετικές μη-ομογενείς συνθήκες πάνω στη βρεχόμενη επιφάνεια του επιπλέοντος σώματος [συνθήκες (15β) και (17γ)/(18γ)], οι οποίες γράφονται συνοπτικά ως εξής (γιατί;):
BD∂
( )3 3( ), ,
0 \;
,B
B BD∈Ω
Ω
x xnn
ω ⎧∂Φ ⎪⎪= ⎨⎪∂ ⎪⎩
xx ∈∂
, (20α)
( ) ( ), 00 3; ; ( ), ,
0 \ ,d VER B
B BD
∈Ω
∈∂ Ω
x
(, ;d VER ωΦ x
k nn
ω ω⎧⎪∂Φ ⎪ − Φ ⋅⎪= ⎨⎪∂ ⎪⎪⎩
x
)
x x
x
)
, (20β)
Όπως βλέπουμε, τα δεξιά μέλη των σχέσεων (20α,β) περιέχουν και τα δύο το συνημίτονο κατεύθυνσης . Λόγω της γραμμικότητας των συνοριακών προβλημάτων, εάν τα δεξιά μέλη των μη-ομογενών συνθηκών ήταν ανάλογα, τότε και οι λύσεις των αντιστοίχων
προβλημάτων, δηλαδή τα δυναμικά και , θα ήταν επίσης ανάλογα, και μάλιστα με τον ίδιο συντελεστή αναλογίας. Η επιθυμητή αναλογία των καθέτων ταχυτήτων (σε κάθε σημείο της επιφάνειας
3 ( )n x
(3 ;ωΦ x
BΩ
(0 ;ωΦ x
του πυθμένα του επιπλέοντος σώματος) δεν
επιτυγχάνεται στο βαθμό που ο όρος μεταβάλλεται από θέση σε θέση πάνω στο σύνορο
)
BΩ . Έτσι, προκειμένου να εφαρμόσουμε το επιχείρημα της γραμμικότητας (αναλογίας), προχωράμε εισάγοντας την ακόλουθη απλουστευτική παραδοχή:
αντικαθιστούμε στο δεξιά μέλος της συνοριακής συνθήκης (20β) τη
(μεταβλητή) ποσότητα ( )0 ;ωΦ x , B∈Ωx , από τη (σταθερή) μέση τιμή της
( )( )( )
( )1 2( , ) ;
( )
,0 1 200
0
1B 1 2, ,x x d x x ω− dx dx
SωΩ
Ω
Φ = ΦΩ ∫∫
)
. (21)
Το σφάλμα που εισάγεται από αυτήν την αντικατάσταση είναι μικρό, εάν η συνάρτηση
μεταβάλλεται αργά (κατά μικρό ποσοστό) όταν το διατρέχει το σύνορο (0 ;ωΦ x x BΩ . Αυτό συμβαίνει όταν ισχύει η υπόθεση των μακρών κυμάτων ( ), την οποίαν
1/xB λ << 1
- 130 -

10
έχουμε ήδη χρησιμοποιήσει στην ανάλυσή μας για τον προσεγγιστικό υπολογισμό της κατακόρυφης δύναμης περίθλασης.
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
Χρησιμοποιώντας τώρα την παραπάνω απλουστευτική παραδοχή και τη σχέση (21), γράφουμε τη συνοριακή συνθήκη (20β) στη μορφή
( ) ( ),, 00 3; ( ), ,
0 \
Bd VER
.
B
B B
k nn D
ωω Ω⎧⎪⎪ Φ∂Φ − ⋅⎪= ⎨⎪∂ ⎪ ∈∂ Ω⎪⎩
x x x
x
∈Ω (20γ)
Συγκρίνοντας τώρα τις συνθήκες (20α) και (20γ), και εφαρμόζοντας την αρχή της αναλογίας (γραμμικότητα), καταλήγουμε στη σχέση
( ) ( ) (,0, 30; ;Bd VER k ωω ωΩΦΦ = − ⋅Φx x )
)
. (22)
Εισάγοντας το ανωτέρω αποτέλεσμα για το στη σχέση (19), λαμβάνουμε (, ;d VER ωΦ x
( ) ( ) ( ) ( ) ( )( ) 2
,0 33 0 ;B
Diff3
B
F k j A nωω ρ ω ωΩ
Ω
Φ= ⋅ ⋅ Φ BdS∫∫ xx . (23)
Όμως, το ολοκλήρωμα εκφράζεται μέσω των συντελεστών πρόσθετης
μάζας και απόσβεσης σε κατακόρυφη ταλάντωση του ιδίου σώματος:
( ) ( )3 ;
B
3n dSω
Ω
Φ∫∫ xx B
( ) ( )3 33 33 331( ) ( ) ( ); 3 B
B
n dS A Bj
ρ ωωω
Ω
= Π = +Φ∫∫ xx ω ω , (24)
ενώ η μέση τιμή ( ),0 B ωΩΦ του δυναμικού πάνω στην επιφάνεια (0 ;ωΦ x ) BΩ μπορεί να
εκφρασθεί (βλ. σχέση (2γ)) με τη βοήθεια της αντίστοιχης μέσης τιμής της ανύψωσης της
υλικής επιφάνειας , ως εξής: (3 1 2, ( ) , ;I x x xη ω)
( ) ( ) ( ), ,0 ,(2 )
B B BI I
έ gj Aj
σχ ση
γω ω ηω
ωΩ Ω ΩΦ Φ⋅ = = − ⋅ ω , (25α)
όπου, υπενθυμίζουμε,
( )( )( ) ( )( )
( )1 2, 1 2 1 2, ( , )0
0
1 , ;BI dI x x x x dx dx
Sη ω η ω−Ω
Ω
=Ω ∫∫ . (25β)
Με τη βοήθεια των (24) και (25α), η (23) γράφεται στη μορφή
( ) ( )( ),3 0 33 33
1( ) ( )B
DiffIF g k A B
jη ωω ω
ωΩ ω⎡ ⎤⎢ ⎥= − ⋅ ⋅ +⎢ ⎥⎣ ⎦
, (26α)
ή
( ) ( ) ( )( ) 20,3 332
1( ) ( )B
DiffI
g kF j A
jη ωω ω ω
ωω Ω 33B ω⎡ ⎤⎢ ⎥= ⋅ ⋅ +⎢ ⎥⎣ ⎦
. (26β)
- 131 -

11
Ειδικότερα, στην περίπτωση που έχουμε βαθύ νερό ισχύει
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
02 1
g kω
= (σχέση διασποράς
βαθιού νερού), οπότε η (26β) απλουστεύεται στην
( ) ( ) ( )( ) 2,3 33
1( ) ( )B
DiffIF j A B
jη ωω ω ω ω
ωΩ 33
⎡ ⎤⎢ ⎥= ⋅ ⋅ +⎢ ⎥⎣ ⎦
, [βαθύ νερό]. (26γ)
Άρα, η δύναμη περίθλασης , όπως εκφράζεται από τις προσεγγιστικές σχέσεις (26), αποτελείται από δύο τμήματα, ένα ανάλογο προς τη μέση τιμή της επιτάχυνσης
( )( )3
DiffF ω
( ) ( )2, BIj η ωω Ω⋅ με συντελεστή αναλογίας , και ένα ανάλογο προς τη μέση τιμή της
ταχύτητας ( )
33( )A ω
( ), BIj ηω Ω⋅ ω με συντελεστή αναλογίας , όπου και είναι
οι συντελεστές πρόσθετης μάζας και απόσβεσης του ιδίου σώματος σε κατακόρυφη ταλάντωση.
33( )B ω 33( )A ω 33( )B ω
Οι ανωτέρω σχέσεις μας επιτρέπουν τον προσεγγιστικό υπολογισμό της κατακόρυφης δύναμη
περίθλασης χωρίς να επιλύσουμε το πρόβλημα περίθλασης, αρκεί να γνωρίζουμε τους υδροδυναμικούς συντελεστές ακτινοβολίας και .
( )( )3
DiffF ω
33( )A ω 33( )B ω - Εφαρμογές και ασκήσεις
1. Η συνολική κατακόρυφη διεγείρουσα υδροδυναμική δύναμη (vertical exciting force) δίδεται, στα πλαίσια της προσέγγισης των μακρών κυματισμών, από τη σχέση
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )3
2, ,33 33 33( ) ( ) .
B B
FK Diff3 3
I I I
ExcF F F
, Bj A j B
ω ω ω
η ω η ω η ωω ω ω ωΩ Ω
= + =
= ⋅ ⋅ + ⋅ ⋅ + ⋅CΩ
(27)
2. Υποθέτοντας ότι έχουμε βαθύ νερό, εισάγοντας την εύλογη απλούστευση
( ) ( ) ( ) ( ), 0, ( ) ( ); expBI dI
defA k dη ω η ω η−Ω = = − =0 d ω− , (28α)
όταν έχουμε σταθερό βύθισμα, ή
( ) ( ) ( ) ( )* **
, 0, ( ) ( ); expBI d dI
defA k dη ω η ω η− −Ω = = − =0 ω , (28β)
όταν έχουμε μεταβαλλόμενο βύθισμα, όπου είναι ένα κατάλληλο «υδροδυναμικό μέσο βύθισμα» (να το υπολογίσετε με τη βοήθεια της σχέσης ορισμού (28β)), οπότε, γυρνώντας στο πεδίο του χρόνου, βρίσκουμε
*d
( ) ( ) ( )
( ) ( )( )
* *
*
( ) ( ) ( )3
2( ) ( )
33 33 33( )2
; ; ;
; ;( ) ( ) ; .
FK Diff3 3
d dd
ExcF t F t F t
t tA B
tt
ω ω ω
η ω η ωω ω η
− −
−
= + =
∂ ∂= ⋅ + ⋅ +
∂∂t Cω ⋅
(29)
- 132 -

12
3. Η συνολική κατακόρυφη υδροδυναμική δύναμη (δύναμη ακτινοβολίας συν διεγείρουσα δύναμη συν υδροστατική, χρονικά μεταβαλλόμενη, δύναμη) δίδεται, στα πλαίσια της προσέγγισης των μακρών κυματισμών, από τη σχέση
( ) ( ) ( ) ( ) ( )
( ) ( )( )
( ) ( )( )
* *
*
( ) ( )( ) ( ) ( ). .3 3
2( ) ( )
33 33 33( )2
23 3
33 33 3 332
. .; ; ; ; ;
; ;( ) ( ) ;
; ;( ) ( ) ;
FK Diff3 3 3
d dd
RadF t F t F t F t F t
t tA B t
ttt t
A B ttt
ω ω ω ω ω
η ω η ωω ω η
ξ ω ξ ωω ω ξ
Υ Σ
− −
−
Υ Δ= + + + =
∂ ∂= ⋅ + ⋅ + ⋅
∂∂∂ ∂
− ⋅ − ⋅ − ⋅∂∂
C
C
ω
ω =
ή
( )( ) ( )
( )2
( ) 3, 3,33 33 3, 332
. . ; ;; ( ) ( )REL REL
3 REL
t tF t A B t C
ttξ ω ξ ω
ω ω ω ξΥ Δ ∂ ∂
= − ⋅ − ⋅ − ⋅∂∂
;ω
;t ω
, (30α)
όπου ( ) ( ) ( )*3, 3 ( ); ;REL dt tξ ω ξ ω η −= − (30β)
είναι η σχετική κατακόρυφη κίνηση του επιπλέοντος σώματος ως προς την ανύψωση της «μέσης» υλικής επιφάνειας του κυματισμού σε βάθος . *d Η έκφραση (30α) για τη συνολική κατακόρυφη υδροδυναμική δύναμη είναι γνωστή ως η υπόθεση της «σχετικής ταχύτητας» του Korvin-Kroukovsky. Η υπόθεση αυτή, που όπως είδαμε στο παρόν εδάφιο ισχύει στα πλαίσια της προσέγγισης των μακρών κυματισμών, χρησιμοποιήθηκε εκτενώς, ιδιαίτερα στα πρώτα χρόνια της ανάπτυξης των θεωριών δυναμικής συμπεριφοράς του πλοίου σε κυματισμούς (δεκαετίες του 1960 και 1970), για την παραγωγή διαφόρων παραλλαγών της θεωρίας λωρίδων. Στο επόμενο εδάφιο θα εφαρμόσουμε την ανωτέρω σχέση για την παραγωγή των εξισώσεων των κατακόρυφων κινήσεων (heave and pitch) πλοίου παρουσία κυματισμών, με μηδενική μέση ταχύτητα. Το πρόβλημα της δυναμικής συμπεριφοράς πλοίου που κινείται με σταθερή μέση ταχύτητα δια μέσου αρμονικών κυματισμών εξετάζεται στο επόμενο κεφάλαιο.
U
Άσκηση 3: Να υπολογίσετε το «υδροδυναμικό μέσο βύθισμα» στην περίπτωση επιμήκους επιπλέοντος σώματος σταθερής διατομής που υφίσταται την επίδραση πλευρικών κυματισμών. Στην περίπτωση αυτή μπορούμε να δεχθούμε ότι το πεδίο ροής είναι (κατά προσέγγιση) διδιάστατο και να απλοποιήσουμε τους υπολογισμούς εργαζόμενοι στο επίπεδο ενός νομέα. Άσκηση 4: Να υπολογίσετε την κατακόρυφη δύναμη περίθλασης (ανά μονάδα μήκους) λόγω πλευρικών κυματισμών, η οποία ασκείται πάνω στη φορτηγίδα (μπάρτζα) που περιγράφεται στην Άσκηση 1. Το πλάτος και η φάση της δύναμης περίθλασης να παρασταθούν γραφικά συναρτήσει του μήκους κύματος του προσπίπτοντος κυματισμού, και να συγκριθούν με τα αντίστοιχα αποτελέσματα για τη δύναμη Froude-Krylov, που υπολογίσατε στην Άσκηση 1. Άσκηση 5: Να υπολογίσετε την κατακόρυφη δύναμη περίθλασης που ασκείται πάνω στην πλωτή δεξαμενή της Άσκησης 2, συναρτήσει του μήκους κύματος, χρησιμοποιώντας την προσεγγιστική σχέση (26), και να συγκρίνετε τα αποτελέσματα που θα βρείτε με τις ακριβείς τιμές που υπάρχουν σε διάφορα άρθρα στη διεθνή βιβλιογραφία. Να παρουσιάσετε τα αποτελέσματα γραφικά, συγκρίνοντας επίσης και με την αντίστοιχη δύναμη Froude-Krylov, που υπολογίσθηκε στην Άσκηση 2.
29/3/2012 Γ.Α.ΑΘΑΝΑΣΟΥΛΗΣ
- 133 -

2.10 Πρόσθετες μάζες, αποσβέσεις και φορτίσεις επιμήκων σωμάτων. Αναγωγή στο δισδιάστατο πρόβλημα. Θεωρία λωρίδων
Στο εδάφιο αυτό θα παρουσιάσουμε μια προσεγγιστική μέθοδο, γνωστή ως θεωρία λωρίδων (strip theory), για τον υπολογισμό των προσθέτων μαζών, αποσβέσεων και φορτίσεων πλωτών επιμήκων σωμάτων, τα οποία διαθέτουν κατακόρυφο επίπεδο συμμετρίας. Η μέθοδος αυτή αναπτύχθηκε σε διάφορες παραλλαγές από την δεκαετία του 60, και για μια σύντομη βιβλιογραφική και ιστορική επισκόπηση παραπέμπουμε στο σύγγραμμα Principles of Naval Architecture (Lewis, Ed., 1989, vol.III, sec.3.4). Στο εδάφιο αυτό θα κινηθούμε στα βήματα της εργασίας που παρουσιάσθηκε από τους Salvesen, Tuck & Faltinsen (1970), στην ειδική περίπτωση που μας απασχολεί εδώ πλωτών σωμάτων χωρίς πρόσω μέση ταχύτητα. Το θεωρούμενο πλωτό σώμα (βλ. Σχ.1) δεν παρουσιάζει εγκάρσια κλίση (στη μέση κατάσταση ισορροπίας) και δέχεται την επίδραση κυματισμών ταλαντούμενο στην επιφάνεια του νερού, ενώ η μέση ταχύτητα του είναι μηδενική. Θα θεωρήσουμε ότι το πλάτος (Β) και το βύθισμα (Τ) του πλωτού σώματος είναι πολύ μικρότερα από το μήκος του (L), δηλαδή ότι το σώμα είναι μακρύ και λεπτόγραμμο (slender body). Σημειώνουμε εδώ ότι οι συνηθισμένες γάστρες των πλοίων ικανοποιούν τις ανωτέρω υποθέσεις (π.χ. 5.5<L/B<9, 2<B/T<4), φυσικά με εξαιρέσεις που αφορούν ειδικούς τύπους κατασκευών.
διδιάστατη εγκαρσια τομή
Σχήμα 1. Εγκάρσιες τομές επιμήκους λεπτόγραμμου σώματος που ταλαντώνεται λόγω προσπίπτοντος κυματισμού στην επιφάνεια του νερού.
(N2, N3)
1x 3x
2x(N2, N3)
kn
παραγόμενα κύματα παραγόμενα κύματα
1- 134 -

1. Υπολογισμός υδροδυναμικών συντελεστών Σύμφωνα με τα προηγούμενα, για τον υπολογισμό των υδροδυναμικών συντελεστών του επιμήκους σώματος, μπορούμε να χρησιμοποιήσουμε την παρακάτω σχέση
( )1
1 , , 1,6B
k l k l
D L C x
n dS dx n ds k lρ ρ∂
Φ = Φ =∫∫ ∫ ∫ , (1)
όπου με συμβολίζουμε την βρεχόμενη περίμετρο της εγκάρσιας τομής σε κάθε θέση
( )1C x
1x κατά το μήκος του σώματος (η οποία διαφοροποιείται από θέση σε θέση), και το διάμηκες ολοκλήρωμα στο τελευταίο δεξιά μέλος της σχέσης (1) διατρέχει όλο το μήκος του πλοίου. Στην ανωτέρω εξίσωση είναι το επιφανειακό διαφορικό στη γάστρα και το επικαμπυλιο διαφορικό κατά μήκος της περιμέτρου της κάθε εγκάρσιας τομής. Υπενθυμίζουμε ότι , , είναι τα τριδιάστατα δυναμικά ακτινοβολίας λόγω των 6 δυνατών ταλαντωτικών κινήσεων του σώματος, τα οποία ικανοποιούν τις Εξ. (10) του Εδαφ.2. Λόγω της υποθέσεως του λεπτόγραμμου σχήματος του πλωτού σώματος, μπορούμε να δεχθούμε προσεγγιστικά ότι στη γειτονιά της βρεχόμενης επιφάνειας της γάστρας οι μεταβολές της γεωμετρίας της, αλλά και οι παράγωγοι των κυματικών πεδίων ακτινοβολίας ως προς την
dS
l =ds
( )l xΦ 1,6
1x -διεύθυνση (δηλαδή η οριζόντια συνιστώσα της ταχύτητας), είναι πολύ μικρότερες από τα αντίστοιχα μεγέθη (μεταβολές γεωμετρίας και συνιστώσες ταχύτητας) ως προς τις άλλες διευθύνσεις, και επομένως, θα μπορούσαν προσεγγιστικά να παραληφθούν. Κατά την ανωτέρω έννοια, ισχύει η ακόλουθη σχέση όσον αφορά τις συνιστώσες του καθέτου διανύσματος στη βρεχόμενη επιφάνεια του θεωρούμενου επιμήκους, λεπτόγραμμου σώματος
1 2 καιn n n<< 3
)
, (2) και επομένως μπορούμε να θέσουμε προσεγγιστικά
( ) ( )1 2 3 2 3 1, , , ;k kn x x x N x x x≈ , , (3α) 2,3, 4k =
( ) (5 1 2 3 1 3 2 3 1, , , ;n x x x x N x x x≈− και (3β)
( ) ( )6 1 2 3 1 2 2 3 1, , , ;n x x x x N x x x≈ , (3γ) όπου , είναι οι συνιστώσες του αντίστοιχου καθέτου διανύσματος στο βρεχόμενο τμήμα της κάθε διδιάστατης εγκάρσιας τομής, που εξαρτώνται κατά συνέπεια από τη μορφή της και επομένως εξαρτώνται παραμετρικά από την
( )2 3 1, ;kN x x x
1
2,3,k =
x -μεταβλητή (βλ. Σχήμα 1). Επιπροσθέτως, έχουμε
( ) ( ) (4 2 3 1 3 2 2 3 1 2 3 2 3 1, ; , ; , ;N x x x x N x x x x N x x x= − ) . (4) Επίσης, κατ’αντιστοιχία, μπορούμε να θέσουμε προσεγγιστικά για τα δυναμικά
( ) ( )1 2 3 2 3 1, , , ; , 2,3, 4l lx x x x x x lϕΦ ≈ = , (5)
2- 135 -

δηλώνοντας και εδώ την παραμετρική τους εξάρτηση από την 1x -μεταβλητή. Τέλος, από τις προσεγγίσεις των και (βλ. Εξ. 3) που αποτελούν και τους μη ομογενείς όρους των προβλημάτων που αφορούν τα δυναμικά , (pitch και yaw), αντίστοιχα, λαμβάνουμε τις ακόλουθες εκφράσεις
5n 6n( )l xΦ 5,= 6l
( ) ( ) ( ) (5 1 2 3 1 3 2 3 1 6 1 2 3 1 2 2 3 1, , , ; , , , , ; )x x x x x x x x x x x x x xϕΦ ≈− Φ ≈ ϕ . (6)
Με βάση όλα τα ανωτέρω, οι υδροδυναμικοί συντελεστές του πλωτού επιμήκους σώματος προσεγίζονται από
( )
( )( )1 1
1 1 1 , 2,3, 4kl k l k l kl
C x L C x L
n ds dx N ds x dx k lρ ρ ϕ ϖΠ ≡ Φ ≈ ≡ =∫ ∫ ∫ ∫ , (7)
όπου ( )1kl xϖ οι υδροδυναμικοί συντελεστές κάθε διδιάστατης εγκάρσιας τομής
( )( )
( )( )
1
11 1
klkl k l kl
C x
xx N ds x
jβ
ϖ ϕ αω
= = +∫ . (8)
και , οι συντελεστές πρόσθετης μάζας και απόσβεσης της, αντίστοιχα. klα klβ Λόγω της συμμετρίας του σώματος ως προς το κατακόρυφο επίπεδο το είναι συμμετρικό, ενώ τα , είναι αντισυμμετρικά. Επομένως, το δυναμικό είναι επίσης συμμετρικό, ενώ τα δυναμικά , είναι αντισυμμετρικά. Η παρατήρηση αυτή σε συνδυασμό με την ανωτέρω σχέση συνεπάγεται ότι και
(καθώς και και ).
3N
3ϕ
0=
2N 4N
23
2ϕ 4ϕ
23
32 34a a=
32 34 0b b= = 43 0a a= = 43 0b b= = Περαιτέρω, χρησιμοποιώντας τις σχέσεις (6) στην Εξ.(1) λαμβάνουμε
( ) ( ) ( )226 1 22 1 1 66 1 22 1 1, ,
L L
x x dx x x dxϖΠ ≈ Π ≈ −∫ ∫ ϖ (9)
( ) ( ) ( )235 1 33 1 1 55 1 33 1 1, ,
L L
x x dx x x dxϖΠ ≈ − Π ≈∫ ∫ ϖ (10)
( )46 1 24 1 1
L
x x dxϖΠ ≈ ∫ . (11)
Οι σχέσεις (7) και (9), (10), (11) μας επιτρέπουν να υπολογίσουμε, στα πλαίσια της ανωτέρω προσεγγισης, τους (πρακτικά μη μηδενικούς) υδροδυναμικούς συντελεστές του τριδιαστάτου λεπτόγραμμου σώματος, οι οποίοι συμμετέχουν στις εξισώσεις κίνησης, από ολοκλήρωση των αντιστοίχων διδιαστάτων κατά μήκος του σώματος. Οι τελευταίοι συντελεστές καθορίζονται από την επίλυση διδιάστατων προβλημάτων για τα δυναμικά , που ικανοποιούν την εξίσωση Laplace ( )2 3 1, ; , 2,3, 4l x x x lϕ =
3- 136 -

( ) ( )2 22 3 1 2 3 1
2 22 3
, ; , ;0,l lx x x x x x
x xϕ ϕ∂ ∂
+ =∂ ∂
(12)
την συνθήκη στην ελέυθερη επιφάνεια
( )( )
22 3 1
2 3 13
, ;, ; 0,l
lx x x
x x xgx
ϕ ωϕ
∂− =
∂ (13)
την συνθήκη στον οριζόντιο πυθμένα
( )2 3 1
3
, ;0,l x x h x
xϕ∂ =−
=∂
(14)
και τη συνθήκη στη βρεχόμενη περίμετρο της κάθε εγκάρσιας τομής,
( )( )2 3 1
2 3, ;
, ,ll
x x h xN x x
Nϕ∂ =−
=∂
(15)
και κατάλληλες συνθήκες στο άπειρο, οι οποίες απαιτούν σε μεγάλες αποστάσεις από το σ μα ώ ( )x υ αμικ ( )2 3,2 →∞ τα δ ν ά x xϕ ιφ ρον αι ως απομακρυνόμενα
επίπεδα κύματα συχνότητας
να συμπερ έ τ
ω . Η επίλυση των ανωτέρω δ διαστάτων προβλημάτων είναι πολύ ευκολότερη από τα αντίστοιχα τριδιάστατα προβλήματα. Πολλές και εξαιρετικά αξιόπιστες μέθοδοι έχουν αναπτυχθεί σε μεγάλο βαθμό για το σκοπό αυτό (βλ., π.χ., Salvesen et al 1970, Lewandowski 2004). ενώ μιά σχετική μέθοδο που χρησιμοποιεί τη τεχνική των συνοριακών στοιχείων (ΒΕΜ) θα παρουσιάσουμε αναλυτικά σε επόμενο εδάφιο. Ενδεικτικά, παρουσιάζεται στο Σχ. 2 σύγκριση των θεωρητικών προβλέψεων, για εγκάρσια τομή που αντιστοιχεί σε μέση τομή δεξα-μενοπλοίου (περίπου ορθογωνική μορφής και λόγου B/T=2), με πειραματικες μετρήσεις από την εργασία του Vughts (1968).
ι
ς
d k B
2. Υπολογισμός υδροδυναμικών δυνάμεων Οι συνολικές υδροδυναμικές δυνάμεις παρέχονται, ως γνωστόν, από τη σχέση
( )20
B
k
D
X Aρω∂
= Φ +Φ∫∫ n dS , (16)
όπου Α το πλάτος ανύψωσης του κυματισμού στην ελεύθερη επιφάνεια και το δυναμικό περίθλασης, ενώ το δυναμικό του προσπίπτοντος κυματισμού είναι
( )d xΦ
( )( )
(0 30 02
0
coshexp cos sin
coshk x hg j k x x
k hx β
ω
⎡ ⎤+⎣ ⎦ )1 2 β⎡ ⎤Φ = ⋅ − +⎣ ⎦ . (17)
Ο κυματαριθμός δίδεται από τη σχέση διασποράς 0k
(20 0gk tahn k hω = ) . (18)
4- 137 -

Σχήμα 2. Υδροδυναμικοί συντελεστές, για εγκάρσια τομή που αντιστοιχεί σε μέση τομή δεξαμενοπλοίου (περίπου ορθογωνικής μορφής) με λογο B/T=2, και σύγκριση με πειραματικες μετρήσεις από την εργασία του Vughts (1968). Αξιοποιώντας τις υποθέσεις περί λεπτόγραμμου σχήματος για το επίμηκες σώμα η δυναμη 1X κατά τη 1x -διεύθυνση αμελείται (βλ. και Εξ.2, ). 1 , 2,..6kX X k<< = Δυνάμεις Froude-Krylov: Περαιτέρω, οι δυνάμεις Froude-Krylov μπορούν να υπολογισθούν με διαμήκη ολοκλήρωση
( )1
2 20 0 1
B
k k B
D L C x
0 kX A n dS A dx nρω ρω∂
= Φ = Φ∫∫ ∫ ∫ ds
4 =
,
και χρησιμοποιώντας τις σχέσεις (3,4) παίρνουμε
( )1
20 1 0 , 2,3,k k
L C x
X A dx N ds kρω≈ Φ =∫ ∫ , 0kX ≈
( )1
21 1 0 3 , 5
L C x
A x dx N ds kρω− Φ∫ ∫
5- 138 -

( )1
20 1 1 0 2 ,k
L C x
X A x dx N ds kρω≈ Φ∫ ∫ 6= . (19)
Χρησιμοποιώντας τώρα και την έκφραση του δυναμικού (17) λαμβάνουμε για
2 3 4k , ,=
( )( )
( )( )1
0 30 0 1 1 0
0
coshexp cos exp sin
coshk k
L C x
k x h2X gA j k x dx N j k x ds
k hρ β β
⎡ ⎤+⎣ ⎦⎡ ⎤ ⎡= − − ⎤⎣ ⎦ ⎣∫ ∫ ⎦
1 1
.
(20) Η ανωτέρω σχέση γράφεται ισοδύναμα
( )0k k
L
X A f x dxρ= ∫ , (21)
όπου ( )1 2 3 4kf x ,k , ,= ορίζονται οι δυνάμεις Froude-Krylov της κάθε διδιάστατης εγκάρσιας τομής του σώματος
( ) ( )( )
( )( )1
0 31 0 1 0 2
0
coshexp cos exp sin
coshk k
C x
k x hf x g j k x N j k x ds
k hβ β
⎡ ⎤+⎣ ⎦⎡ ⎤ ⎡= − −⎣ ⎦ ⎣∫ ⎤⎦
k
. (22)
Παρόμοια, χρησιμοποιώντας τις σχέσεις (3β), (3γ) στην Εξ. (19) παίρνουμε για k=5,6
( ) ( )05 1 1 1 06 1 1 1,k
L L
X A x f x dx X A x f x dxρ ρ=− =∫ ∫ . (23)
Δυνάμεις περίθλασης: Για τον υπολογισμό των δυνάμεων περίθλασης θα χρησιμοποιήσουμε τη παρακάτω σχέση (βλ. Εξ. 27, Εδαφ.6 παρόντος Κεφαλαίου)
2 2 0
B B
d k d k B k B
D D
X A n dS An
ρω ρω∂ ∂
∂Φ≡ Φ = − Φ
∂∫∫ ∫∫ dS , (24)
Χρησιμοποιώντας τη Εξισ. (17) για το δυναμικό προσπίπτοντος κύματος στην ανωτέρω σχέση, και αναλύοντας το ολοκλήρωμα στην επιφάνεια σε επαναλληπτική μορφή, λαμβάνουμε για 2 3 4 k , ,=
( ) ( )2 01 0 1exp cos
B
d k k B k
D L
1X A dS gA H x j k xn
ρω ρ β∂
∂Φ dx⎡ ⎤≡ − Φ ≈ −⎣ ⎦∂∫∫ ∫ , (25α)
όπου
( ) ( ) ( )( )1
1 0 2 3 0 2, exp sink k
C x
H x k W x x j k x dsβ⎡= −⎣∫ ⎤⎦ , (25β)
6- 139 -

και ( ) ( )
(0 3 0 32 3
0 0
cosh sinhsin , ,
cosh coshk k
k x h k x hW j N N x x x
k h k hβ
⎛ ⎞⎡ ⎤ ⎡ ⎤+ + ⎟⎜ ⎣ ⎦ ⎣ ⎦ ⎟⎜= − ⎟⎜ ⎟⎜ ⎟⎜⎝ ⎠)1 2 3Φ
1
. (25γ)
Η ανωτέρω σχέση για 2 3 4 γράφεται, εισάγοντας και τη προσέγγιση (3α), ως k , ,=
( )1dk k
L
X A h x dxρ= ∫ , (26)
όπου , οι αντίστοιχες δυνάμεις περίθλασης της κάθε διδιάστατης εγκάρσιας τομής του σώματος, που ορίζονται ως ακολούθως
( )1kh x
( ) ( ) ( )( )1
1 0 0 1 0 2exp cos exp sin , 2,3,4k k
C x
h x g k j k x W j k x ds kβ β⎡ ⎤ ⎡ ⎤= − − =⎣ ⎦ ⎣ ⎦∫ . (27)
Τέλος, χρησιμοποιώντας τις σχέσεις (3β), (3γ) στην Εξ. (19) παίρνουμε για k=5,6
( ) ( )5 1 3 1 1 6 1 2,d d
L L
1 1X A x h x dx X A x h x dxρ ρ=− =∫ ∫ . (28)
Εχοντας διαθέσιμα τα ανωτέρω αποτελέσματα οι εξισώσεις κίνησης του λεπτόγραμμου σώματος μπορούν να επιλυθούν ως προς k ,ξ και να υπολογισθούν οι αντίστοιχοι συντελεστές απόκρισης και άλλα χρησιμα μεγέθη. 3. Παράδειγμα εφαρμογής Ως παράδειγμα εφαρμογής εξετεζουμε τη περίπτωση μιας φορτηγίδας μήκους L=36m, σταθερής ορθογωνικής διατομής L/B=4, που επιπλέει ισοβύθιστη B/T=3, σε νερό σταθερού βάθους h/T=2, και δέχεται την επίδραση αρμονικών κυματισμών. Στην περίπτωση αυτή οι αδιάστατοι υδροδυναμικοί συντελεστές , της (κάθε) εγκάρσιας τομής εικονίζονται στο Σχήμα 3. Σχετικές μέθοδοι υπολογισμού αυτών παρουσιάζονται και σχολιάζονται σε επόμενο εδάφιο. Η αδιαστατοποίηση που έχει χρησιμοποιηθεί στο Σχήμα 3 είναι η ακόλουθη
klα klβ
2/ , , 2,3kl h k lα ρ = , 3
24 / ,hα ρ 444 / hα ρ , και (29)
( )2/ / , , 2,3,kl h h g k lβ ρ = ( )324 / /h h gβ ρ , ( )4
44 / h hβ ρ / g . (30) Στο εξεταζόμενο παράδειγμα o όγκος εκτοπίσματος είναι και, λαμβάνοντας τη θέση του κέντου βάρους στο κέντρο της ισάλου, τα μετακεντρικά ύψη προκύπτουν και
3972m∇ =
0 75GM . m= 34 5LGM . m= (για εγκάρσιες και διαμήκεις κλίσεις, αντίστοιχα). Για τον υπολογισμό των μαζικών ροπών αδράνειας για
7- 140 -

περιστροφές ως προς το 1x και το 2x -άξονα έχουν ληφθεί ακτίνες αδράνειας ίσες προς 20% Β και 30% L, αντίστοιχα. Οι αποκρίσεις heave ( 3 / Aξ ) και pitch ( 5 0/ k Aξ ) του πλωτού σώματος ορθογωνικής διατομής, όπως προκύπτουν από εφαρμογή της θεωρίας λωρίδων, που παρουσιάσαμε στο εδάφιο αυτό, εικονίζονται το Σχήμα 4, για διάφορες τιμές του αδιάστατου μήκους κύματος λ/L και για διάφορες κατευθύνσεις προσπίπτοντος κυματισμού: (μετωπικοί), (πρωραίοι) και (πλάγιοι). Λόγω συμμετρίας του σώματος (
180oβ = 150 120o , oβ = 90oβ =και της υπόθεσης μηδενικής μέσης πρόσω
ταχύτητας), τα αποτελέσματα για ακολουθούντες και πρυμναίους κυματισμούς είναι αντίστοιχα.
Σχήμα 3. Πρόσθετες μάζες (συνεχείς γραμμές) και αποσβέσεις (διακεκομμένες) πλωτού σώματος ορθογωνικής διατομής, L/B=4, B/T=3, σε λωρίδα ρευστού βάθους h/T=2, για διάφορες τιμές της αδιάστατης συχνότητας / 2B gω .
8- 141 -

120oβ =
90oβ =
180oβ =
150oβ =
180oβ =
150oβ =
120oβ =
90oβ =
Σχήμα 4. Αποκρίσεις heave ( 3 / Aξ ) και pitch ( 5 0/ k Aξ ) πλωτού σώματος ορθογωνικής διατομής, L/B=4, B/T=3, σε λωρίδα ρευστού βάθους h/T=2, για διάφορες τιμές του αδιάστατου μήκους κύματος λ/L και για διάφορες κατευθύνσεις προσπίπτοντος κυματισμού ( ) . 180 150 120 90o o o o, , ,β =
Στον υπολογισμό των αποκρίσεων που παρουσιάζονται στο Σχήμα 4 έχει ληφθεί προσεγγιστικά μόνο η συμμετοχή των δυνάμεων Froude-Krylov στις συνολικές υδροδυναμικές φορτίσεις και οι δυνάμεις περίθλασης έχουν αμεληθεί. Επίσης, έχουν υποτεθεί πολύ μικρές (πρακτικά μηδενικές) κινήσεις sway ( 2 0ξ ≈ ) και yaw ( 6 0ξ ≈ ). Η υπόθεση αυτή είναι σχετικά ρεαλιστική, γιατί στη πραγματικότητα οι κινήσεις αυτές ελέγχονται στο μεγαλύτερο βαθμό από τα συστήματα αγκύρωσης που χρησιμοποιούνται για την κράτηση της πλωτής κατασκευής σε μιά συγκεκριμένη θέση. Επομένως, αν θέλουμε να διατηρήσουμε τις αντίστοιχες εξισώσεις στο τελικό σύστημα θα πρέπει να προσθέσουμε στο σύνολο των εξωτερικών δυνάμεων τις δυνάμεις και ροπές αγκύρωσης και ένας πρακτικός τρόπος είναι μέσω της εισαγωγής καταλλήλων ελαστικών σταθερών που παράγουν πρόσθετες δυνάμεις επαναφοράς στις εξισώσεις των κινήσεων αυτών. Η επέκταση της θεωρίας λωρίδων που αναπτύξαμε εδώ για πλωτό λεπτόγραμμο σώμα που κινείται με μη μηδενική μέση ταχύτητα (δηλαδή για λεπτόγραμμο πλοίο) θα παρουσιασθεί σε αντίστοιχο εδάφιο του επομένου κεφαλαίου. 4. Βιβλιογραφικές αναφορές
Lewis, E.V., (Editor), 1989, Principles of naval architecture, vol. 3. Society of Naval Architects and Marine Engineers (SNAME), New Jersey.
Salvesen, N., Tuck, E.O., Faltinsen, O., 1970, Ship motions and sea loads, Transactions SNAME, vol. 78.
Lewandowski, E., 204, The dynamics of marine craft, World Scientific.
9- 142 -

10
Vughts, J., 1968, The hydrodynamic coefficients for swaying, heaving and rolling cylinders in a free surface, Rep.No.194, TH Delft.
- 143 -

2.11 Ταλαντώσεις διδιαστάτου πλωτού σώματος Στο συμπλήρωμα αυτό θα παρουσιάσουμε μια παραλλαγή των συνοριακών ολοκληρωτικών μεθόδων στο πρόβλημα υπολογισμού των δυναμικών που συνδέονται με τις ταλαντώσεις (sway, heave, roll) πλωτού διδιαστάτου σώματος. H μέθοδος βασίζεται στις συνοριακές ολοκληρωτικές αναπαραστάσεις του δυναμικού στις 2 διαστάσεις ( 2 3, )x x και μας επιτρέπει να υπολογίσουμε τα δυναμικά
( )2 3,k x xϕ
( )2 3,k
, , καθώς και τους αντίστοιχους υδροδυναμικούς συντελεστές 2,3,k = 4
x xϖ
( )2 3,
, , που απαιτούνται στην εφαρμογή της θεωρίας λωρίδων όπως αναπτύχθηκε στα προηγούμενα. Χωρίς κίνδυνο σύγχισης με τις τρείς διαστάσεις θα χρησιμοποιήσουμε στη συνέχεια παρόμοια διανυσματική γραφή,
, 2k = ,3, 4
x xx = , ( )k xϕ , , κλπ. 2,3,k = 4
Σημειώνουμε εξαρχής ότι για την αριθμητική επίλυση τέτοιων προβλημάτων υπάρχουν πολλές δυνατές μεθόδοι. Μερικές από αυτές είναι (i) μέθοδοι διαχωρισμού των χωρίου (domain decomposition) σε συνδυασμό με
(ia) ολοκληρωτικές αναπάραστάσεις στη φραγμένη περιοχή που χρησιμοποιούν τη θεμελιώδη λύση της εξίσωσης Laplace η οποία στις 2 διαστάσεις είναι
( ) ( ) (11 12 2
F ln lnπ π
−= = −x )ξ x - ξ x - ξ , (1)
(όπως αυτή που θα παρουσιάσουμε εδώ), (ib) μεθόδους πεπερασμένων στοιχείων, πεπερασμένων διαφορών, φασματικών
αναπαραστάσεων στη φραγμενη περιοχή, (ii) ολοκληρωτικές αναπάραστάσεις που χρησιμοποιούν τη συνάρτηση Green της
εξίσωσης Laplace, η οποία εκτός από την πεδιακή εξίσωση ικανοποιεί και μερικές από τις συνοριακές συνθήκες του προβλήματος και τη συνθήκη στο άπειρο, και οδηγεί σε ολοκληρωτική εξίσωση πάνω στη βρεχόμενη επιφάνεια του σώματος,
(iii) μέθοδοι μιγαδικών συναρτήσων και συμμορφης απεικόνισης κ.α. Παρά την σχετική του απλότητα το εξεταζόμενο διδιάστατο πρόβλημα παρουσιάζει ενδιαφέρον λόγω της αξιοποίησης της πληροφορίας που παρέχει στην δυναμική ανάλυση επιμήκων τριδιαστάτων σωμάτων, και διότι τέτοιες κατασκευές χρησιμοποιούνται στη πράξη ως πλωτές κατασκευές, πλωτοί κυματοθραύστες και βρίσκουν τεχνολογικές εφαρμογές ιδιαίτερα κοντά στην ακτή, όπου επιπροσθέτως οι επιδράσεις του πυθμένα έιναι σημαντικές. Θεωρούμε πλωτό επίμηκες σώμα με εγκάρσιες τομές πλάτους B και βυθίσματος σε λωρίδα νερού σταθερού βάθους , το οποίο δέχεται την επίδραση αρμονικών κυματισμών συχνότητας , όπως φαίνεται στο Σχήμα 1. Θα εξετάσουμε το πρόβλημα των οριζοντίων, κατακορύφων, και περιστροφικών ταλαντώσεων του σώματος ως προς τον το διαμήκη άξονα
Th
ω
1x . Στην περίπτωση που εξετάζουμε, από την υδροστατική ισορροπία προκύπτει ότι η μάζα ανά μονάδα μήκους του σώματος είναι m Aρπ= (όπου η σταθερή πυκνότητα του νερού και ρ A το εμβαδόν εγκαρσιας τομής). Το σώμα θεωρείται συμμετρικό (ως προς το κατακόρυφο άξονα) και, εφ’όσον αρχικά (χωρίς την επίδραση του κύματος) το υποθέτουμε ισοβύθιστο, το κέντρο βάρους του θα βρίσκεται στην ίδια κατακόρυφη με το κέντρο αντώσεως. Επομένως
1- 144 -

3x
B
Σχήμα 1: Ταλαντώσεις πλωτού επιμήκους σώματος οι εμπλεκόμενοι συντελεστές μάζας στην εξίσωση της κατακόρυφης ταλάντωσης είναι , (ανά μονάδα μήκους) και οι αντίστοιχοι υδροστατικοί
συντελεστές είναι 22 33m m= = m 44 11m i=
33c gBρ= , 44c mgGM= , ενώ οι άλλοι μηδενίζονται (λόγω συμμετρίας της ισάλου). Οι υδροδυναμικοί συντελεστές ανά μονάδα μήκους του σώματος θα δίνονται από
( )( )1 0B
l k l k l k l k B
D
a j b N dSϖ ω ρ ϕ−
∂
= + = =∫∫ , . (2α) 2,3,4l =
BD∂ η βρεχόμενη επιφάνεια ο σώματος και , , το γενικευμένο κάθετο διάνυσμα στην εγκάρσια τομή
kN 2,3,4k =
k kN n= , k , . (2β) 2,3= 4 3 2 2N x N x N= − 3
ω
ω
Λόγω συμμετρίας του σώματος και του περιβάλλοντος ως προς τον κατακόρυφο άξονα το είναι συμμετρικό, ενώ τα , , είναι αντισυμμετρικά, και επομένως, το δυναμικό είναι επίσης συμμετρικό, ενώ τα αντίστοιχα , , είναι αντισυμμετρικά. Η παρατήρηση αυτή σε συνδυασμό με την ανωτέρω σχέση (2α) συνεπάγεται ότι και (καθώς και και
). Επομένως, στην εξεταζόμενη περίπτωση οι εξισώσεις δυναμικής ισοροπίας που αφορούν τις ταλάντωσεις του επιμήκους σώματος απλουστεύονται στην ακόλουθη μορφή
3N
0=
kN
32
2,4k =
34 0= =
3ϕ
32
kϕ
43a a=
2,4k =
0=34 0a a= = b b 23
23 43b b=
( ) , (3α) ( ) ( ) ( ) ( ) ( )2 2
22 22 22 2 24 24 4 2m a j b c a j b Xω ω ξ ω ω ω ξ ω− + + + + − + =
( )( ) ( ) ( )233 33 33 3 3m a j b c Xω ω ξ ω− + + + = , (3β)
( )( ) ( ) ( ) ( ) ( )2 244 44 44 44 2 24 24 4 4m a j b c a j b Xω ω ξ ω ω ω ξ ω ω− + + + + − + = , (3γ)
2x
3x h= −
iDeLD
T eRD
3x a= −3x a=
2- 145 -

όπου οι συνολικές δυνάμεις , , (Froude-Krylov και περίθλασης) νοούνται επίσης ανά μονάδα μήκους. Παρατηρούμε ότι η εξίσωση της κατακόρυφης ταλάντωσης (heave, ) είναι απόσυζευγμένη από τις εξισώσεις sway και roll ( ).
( )X ω 2,3,4=
3ξ 2 4,ξ ξ Θα παρουσιάσουμε στη συνέχεια την εφαρμογή της μεθόδου (ia) που αναφέραμε πιό πάνω για τον προσδιορισμό των δυναμικών , , μέσω του οποίων υπολογίζονται οι συντελεστές πρόσθετης μάζας και απόκρισης από την εφαρμογή της σχέσης (2). Το πλεονέκτημα της μεθόδου έγκειται στη σχετική απλότητα της θεμελιώδους λύσης που χρησιμοποιεί, η οποία επιτρέπει υπό κατάλληλες υποθέσεις τον αναλυτικό υπολογισμό των εμπλεκομένων ολοκληρωμάτων. Επιπροσθέτως, μας επιτρέπει να μοντελοποιήσουμε αριθμητικά προβλήματα υδροδυναμικής συμπεριφοράς πλωτών σωμάτων πάνω από πυθμένα που δεν είναι οριζόντιος όπως εδώ και να μελετήσουμε τις επιδράσεις πυθμένα γενικής μορφολογίας (βλ. Belibassakis 2008), κάτι που είναι σημαντικό όταν τέτοια σώματα χρησιμοποιούνται σε περιοχές κοντά στην ακτή. Το βασικό μειονέκτημα σε σχέση με ολοκληρωτικές μεθόδους που εμπλέκουν την συνάρτηση Green που ικανοποιεί όλες τις συνοριακές συνθήκες πλήν της συνθήκης μη εισχώρησης στο σώμα έγκειται στην έκταση της συνοριακής αναπαράστασης (όπως θα δούμε αναλυτικά κατωτέρω), η οποία στη περίπτωση της συνάρτησης Green περιορίζεται μόνο στη βρεχόμενη επιφάνεια του σώματος. Από την άλλη μεριά, ο υπολογισμος των αντιστοίχων ολοκληρωμάτων που εμπλέκουν τη συνάρτηση Green είναι δύσκολος (λόγω της πολυπλοκότητάς της), και γενικώς απαιτεί την εφαρμογή αριθμητικών προσεγγίσεων. Η μέθοδοι της μιγαδικής ανάλυσης παρουσιάζουν πολλά πλεονεκτήματα. Εμπλέκουν την κατασκευή της σύμμορφης απεικόνισης των εγκαρσίων τομών σε απλά σχήματα (κύκλος κλπ), αλλά λόγω της χρησιμότητάς τους έχουν αναπτυχθεί σε μεγάλο βαθμό στο παρελθόν και διαθέτουμε σήμερα εκφράσεις μετασχηματισμού ευρυτάτων οικογενειών εγκαρσίων τομών πλοίου και πλωτών κατασκευών όπως οι μορφές Lewis και οι extended Lewis forms (βλ. Athanassoulis & Loukakis 1985) που καλύπτουν όλες σχεδόν τις απαιτήσεις.
( )xϕ 2,3,4=
1. Αναπαράσταση των δυναμικών ακτινοβολίας πλωτού διδιάστατου σώματος
Η μέθοδος που θα παρουσιάσουμε εδώ βασίζεται στη σύζευξη διαφορετικών γενικών αναπαραστάσεων του κυματικού πεδίου σε υποπεριοχές, οι οποίες μπορούν να κατασκευασθούν αναλυτικά από την εξέταση και επίλυση των εξισώσεων του προβλήματος (διαφορική εξίσωση και συνοριακές συνθήκες) σε αυτές. Οι ανωτέρω αναπαραστάσεις περιλαμβάνουν ενα πλήθος άγνωστων αρχικά συντελεστών, διαφορετικών σε κάθε υποπεριοχή. Η σύζευξη επιτυγχάνεται με την απαίτηση της συνέχειας του κυματικού πεδίου και της κάθετης παραγώγου του στις διαχωριστικές επιφάνειες των υποπεριοχών, και οδηγεί σε ένα σύστημα εξισώσεων ως προς τους άγνωστους συντελεστές, όπως θα παρουσιασθεί στη συνέχεια για το εξεταζόμενο πρόβλημα. Με τη βοήθεια των κατακορύφων διεπιφανειών στις θέσεις 2x a= ±
eL,RD
(βλ. Σχήμα 1) η διδιαστατη λωρίδα ρευστού διαχωρίζεται στα εξωτερικά ( )2 2καιx a x a< − >
και στο φραγμένο iD ( 2 )x a< χωρίο, το οποίο περιέχει καθαρά στο εσωτερικό του το πλωτό σώμα.
3- 146 -

Εσωτερική περιοχή: Στα πλαίσια εφαρμογών τη θεωρίας δυναμικού (βλ., π.χ., Günter 1967, Kress 1989) η αναπαράσταση των αγνώστων δυναμικών στο εσωτερικό χωρίο λαμβάνεται από επιφανειακή κατανομή πηγών-καταβοθρών (η οποία αναφέρεται και ως κατανομή απλού στρωματος), με άγνωστες επιφανειακές εντάσεις
( )ξσ , , σε όλο το σύνορο 2,3,4= i i i iB LD D D D DΠ
iR∂ = ∂ ∂ ∂ ∂∪ ∪ ∪ του φραγμένου
χωρίου, ως ακολούθως
( ) ( ) ( )iD
F dx ξ x ξϕ σ∂
= ∫ S , , , (4) 2,3, 4= eD∈ξ
όπου η βρεχόμενη επιφάνεια του σώματος, i
BD∂ iDΠ∂ ο πυθμένας, σε βάθος εντός του εσωτερικού χωρίου, και ,
hiLD∂ i
RD∂ η αριστερή και δεξιά, αντίστοιχα, κατακόρυφη διαχωριστική επιφάνεια (που εικονίζεται με διακεκομμενες γραμμές στο Σχήμα 1). Από τη σχέση (4) προκύπτουν με παραγώγιση ως προς τη μεταβλητή πεδίου οι αντίστοιχες πεδιακές ταχύτητες σε κάθε καθαρά εσωτερικό σημείο του φραγμένου χωρίου δίνονται από
xiDx∈
( ) ( ) ( ) ( ) ( )i
i
x
D D
F dS F du x ξ x ξ ξ x ξσ σ∂ ∂
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜=∇ = ∇⎟⎜ ⎟⎜ ⎟⎟⎜⎝ ⎠∫ ∫ x S , , (5α) 2,3, 4=
όπου
( ) 2 ,2xF r
rx ξx ξ x ξπ−
∇ =− = − . (5β)
Όμως, για σημεία πάνω στο σύνορο iD∈∂x (καθώς το προσεγγίζουμε από τα εσωτερικά του χωρίου), και με την υπενθύμιση ότι η θεμελιώσης λύση ( )F x ξ αντιστοιχεί στο πεδίο από καταβόθρα τοποθετημένη στη θέση ξ , η προηγούμενη σχέση διαφοροποιείται ως ακολούθως
( )( ) ( )
( ) ( )2
i
x
D
F dx n x
u x ξ x ξσ
σ∂
= + ∇∫ S , , , (6) iDx∈∂ 2,3,4=
όπου , , το μοναδιαίο κάθετο διάνυσμα σε κάθε σημείο του συνόρου, με διεύθυνση προς τα εξωτερικά του χωρίου. Το ιδιόμορφο ολοκλήρωμα στην ανωτέρω Εξισ. (6) νοείται με τη κύρια κατά Cauchy τιμή του (βλ., π.χ., Mikhlin 1965, 1970). Σύμφωνα με τα παραπάνω η κάθετη συνιστώσα της ταχύτητας στο σύνορο δίνεται από τη σχέση
( ) ( )2 3,N Nn x = iDx∈∂
( ) ( )( )
( ) ( ) ( )2
i
x
D
F dSn
xu x n x n x ξ x ξ
σϕσ
∂
∂≡ = + ∇
∂ ∫ , , . (7) iDx∈∂ 2,3,4=
4- 147 -

Εξωτερική περιοχή: Οι αναπαράστασεις της λύσεως του μελετώμενου προβλήματος ακτινοβολίας στα εξωτερικά χωρία παράγονται στις ημιάπειρες λωρίδες με εφαρμογή της μεθόδου χωρισμού μεταβλητών στην εξίσωση Laplace και στις συνοριακές συνθήκες στην ελεύθερη επιφάνεια
eL,RD
3 0x = και στον πυθμένα 3x h= −
2,3,4
(με αντίστοιχο τρόπο όπως παρουσιάσθηκε στο Κεφ.2 για την εξωτερική κυλινδρική περιοχή), λαμβάνοντας υπόψη τις απαιτήσεις κατάλληλης συμπεριφοράς του πεδίου στο άπειρο, το οποίο πρέπει να έχει τη μορφή εξερχομένων κυμάτων. Στη συγκεκριμένη περίπτωση οι αναπαραστάσεις των δυναμικών , στην εξωτερική περιοχή έχουν τη ακόλουθη μορφή, για
( )xϕ =
3 0h x− ≤ ≤ ,
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2 3 ,0 0 2 0 3 , 2 30
, exp expe e e e en n n
n
x x A k x Z x A k x Z xϕ∞
=
= +∑ , 2x a≤− , (8α)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2 3 ,0 0 2 0 3 , 2 30
, exp expe e e e en n n
n
x x B k x Z x B k x Z xϕ∞
=
= − + −∑ , 2x a≥ , (8β)
όπου ( ) ( ) ( ) 1/20 3 0 3 0cosh /eZ x k x h⎡ ⎤= +⎣ ⎦ N , ( ) ( ) ( ) 1/2
3 3cos /en n nZ x k x h N⎡ ⎤= +⎣ ⎦ , , (8α) 1,2,n …=
00
0
sinh1 12 2
k hNk h
⎛ ⎞⎟⎜ ⎟= +⎜ ⎟⎜ ⎟⎜⎝ ⎠, sin1 1
2 2n
nn
k hNk h
⎛ ⎞⎟⎜ ⎟= +⎜ ⎟⎜ ⎟⎜⎝ ⎠, (8β) 1,2,n …=
και τα , , , προκύπτουν ως ρίζες των εξισώσεων (διασποράς) 0k nk 1,2,n …=
(0 tanhh k h k hμ = )0 και ( )tann nh k h k hμ = − , , (9) 1, 2,n …=
αντίστοιχα. Στην τελευταία εξίσωση είναι η παράμετρος συχνότητας του
προβλήματος. Οι μιγαδικοί συντελεστές και ,
είναι οι άγνωστοι του προβλήματος στα εξωτερικά χωρία , αντίστοιχα. Υπό τη προυπόθεση της γρήγορης σύγκλισης των απειροσειρών (7), κάτι που είναι άμεσα συνδεδεμένο με τη γρήγορη εξασθένηση των συντελεστών και που επαληθεύεται στην εξεταζόμενη περίπτωση, η αναπαράσταση του πεδίου ταχύτητας
, στις ημιάπειρες λωρίδες , λαμβάνεται εύκολα με απευθείας
παραγώγιση των Εξισ. (7) ως προς τις χωρικές μεταβλητές ( )
2 / gμ ω=( ),enA n
eD
, 0,1, 2..= ( ) , , 0,1, 2..enB n =
eLD e
RD2,3,4,=
( )u x = 2,3,4,
2 3,x x . Με τις ανωτερω αναπαραστάσεις (4) και (7) έχουν καλυφθεί οι απαιτήσεις του προβλήματος, εκτός από τις ακόλουθες:
(i) την ικανοποίηση της συνοριακής συνθήκης στη βρεχόμενη επιφάνεια του
σώματος, η οποία με τη βοήθεια της σχέσης (5) γράφεται στη μορφή
( )( ) ( ) ( ) ( )
2i
x
D
F dS Nx
n x ξ x ξ xσ
σ∂
+ ∇ =∫ , BDx∈∂ , 2,3,4,= (10α)
5- 148 -

(ii) την ικανοποίηση της συνοριακής συνθήκης στο πυθμένα στην εσωτερική περιοχή, η οποία αντίστοιχα γράφεται στη ρφή
μο
( )( ) ( ) ( ) 0
2i
x
D
F dSn x ξ x ξσ∂
+ ∇ =∫ , iDx Π∈∂ , 2,3,4= , (10β) xσ
(iii) την συνοριακή συνθήκη στην ελεύθερη , στην εσωτερική περιο
οποία είναι
επιφάνεια χή, η
( )( ) ( ) ( ) ( ) ( ) 0
2i
x
D
F dS F dSn x ξ x ξ ξ x ξσ μ σ∂
+ ∇ − =∫ ∫ , iD
x
∂
σ
iFDx∈∂ , 2,3, 4= , (10γ)
και (iv) τη συναρμογή (matching) των αναπαραστάσεων στην κοινή κατακόρυφη διαχωριστική επιφάνεια, δηλαδή για 3 0h x− < <
οριζόντιας παραγώγου, πράγμα που ισοδύναμα απαιτεί την
συνέχεια του δυναμικού και της του. , για Επομένως 2,3,4=
( ) ( )( )
2 2, ,
ie ix x n
ϕϕ ϕ
∂= ≡−
∂ και ( )iϕ= , 2
( )eϕ x a=− , (11α)
( ) ( )
( )
2 2, ,
ie ix x n
ϕϕ ϕ
∂= ≡
∂ και , ( ) ( )e iϕ ϕ= 2x a= . (11
ι ανωτέρω εξισώσεις (10α,β,γ) εμπλέκουν μόνο την άγνωστη κατανομή
β)
Ο ( )ξσ ,
iDξ∈∂ σε όλο σύ του ύ χωρίου κ αποτελούν ολοξισώσεις τύπου Fredholm 2ου είδους (βλ., π.χ., Kress 1989).
Εξισ
νορο εσωτερικο αι κληρωτικές ε Για την επίτευξη της συναρμογής, . (11), θα αξιοποιηθεί η ιδιότητα των συνόλων των ιδιοσυναρτήσεων ( ) ( ) 3 , 0,1, 2.....e
nZ x n = να αποτελούν ορθογώνιες βάσεις (που
μπορεί εύκολα να άρα αποτελούν πλήρη σύνολα κανονικοποιηθούν), και
τήσεων συναρτήσεων τα οποία μπορεί να χρησιμοποιηθούν για την ανάπτυξη τετραγωνικά ολοκληρώσιμων συναρ ( )3f x στο διάστημα 3 0h x− < < . Ετσι οι σχέσεις (11) μπορεί ικανοποιηθούν ισοδύναμα με την προβολή στην κατακόρυφη βάση ( ) (
να τους πάνω) 3 , 0,1, 2.....e
kZ x k = , και οδηγούν στις παρακάτω εξισώσεις
( ) ( )
( ) ( )3
32 2
ekZ x
x x=−
⎟+ ⎟⎟⎟∂ ∂ (12α)
= ,
3 0
3 0x e i
dxϕ ϕ= ⎛ ⎞∂ ∂ ⎟⎜⎜ =⎜⎜⎝ ⎠∫ , k=0,1,2,… , 2,3, 4= ,
x h
( ) ( )( ) ( ) ( )3
3
0
3 3 0x
e i ek
x h
Z x dxϕ ϕ
=
=−
−∫ k=0,1,2,… , 4 , (12β) 2,3,=
6- 149 -

2x a=− και 2x a=
( ), ,enA n
στες iD∂ ∪
στις θέσεις . Ο ανωτέρω εξισώσεις (12) εμπλέκουν τους
άγνωστους
ωρίδες, αλ 4 σε όλο το
ώσεις και η εκ
ώσεων ως προς
συντελετές
λά και τις
D= ∂
άγνω επιφανειακές
L R∂∪ ∪
0,1, 2..= και ( ) ..eB στις ημιάπειρες , , 0,1, 2n n =
εντάσεις ( ), 2ξσ =λ ,3, ,
σύνορο i i i iD D DΠ∂ ∂ του εσωτερικού χωρίου, και επομένως είναι μη-τοπικού χαρακτήρα.
Η αντικατάσταση των σχέσεων (7) στις ανωτέρω εξισ τέλεση των ολοκληρ
B
3x ,
προς
που
τους άγνωστους συντελεστές και
σεις (7) περικόπτοκρατώντας μόνο τους πρώτους όρους. Επίσης, στα πλαίσια εφαρμογών των συνοριακών στοιχείων (Βoundary lement Μethods, ΒΕΜ, βλ. π.χ., Paris & Canas
997) οι αναπαράστασεις (4), (5) αποδίδονται με τον μερισμό και προσέγγιση του
επιτυγχάνεται αναλυτικά, οδηγεί τελικά σε
αλγεβρικό σύστημα ως ( ) , , 0,1, 2..enA n =
( ) , , 0,1, 2..enB n = , 2,3, 4= .
Στη πράξη οι απειροσειρές που εμπλέκονται στις αναπαραστά νται
K Ε
1συνόρου από τμήματα (χρησιμοποιώντας απλά πολυώνυμα, B-splines, NURBS κλπ) και την ταυτόχρονη εισαγωγή του ιδίου τύπου τοπικών συναρτήσεων για την κατανομή της άγνωστης συνάρτησης (εδώ τις επιφανειακές εντάσεις πηγών-καταβοθρών ( ), 2,3, 4ξσ = ). Στην απλούστερη εκδοχή (low-order panel methods) το σύνορο προσεγγίζεται από πολυγωνική γραμμή που απαρτίζεται από M ευθύγραμμα τμήματα και η κατανομή των επιφανειακών εντάσεων πηγών-καταβοθρών προσεγγίζεται ως τμηματικά σταθερή σε κάθε τμήμα. Με βάση όλα τα παραπάνω, οι εις (10) και (11) καταλήγουν τελικά σε ένα γραμμικό αλγεβρικό σύστημα 2K M+ εξισώσεων προς ως τους αντίστοιχους αγνώστους
( ) , , 0,1 2.., 1enA n K= − , ( ) , , 0,1, 2.., 1e
nB n K= − και , , , 2..,n nσ = Μ , για κάθε
εξεταζόμενο πρόβλημα ( ( )xϕ , 2,3,4= ).
αν τακόρυφες απ σώμα αρκετό να
λάβουμε το a (βλ. Σχ ι μεγαλύτερο
ανωτέρω εξισώσ
, 1
Οι εξισώσεις (12) μπορεί να απλουστευθούν λάβουμε τις καδιεπιφάνειες σε μεγάλη όσταση από το πλωτό . Στη πράξη είναι
ήμα 1) να είνα από μερικά μήκη κύματος το τελευταίο υπολογίζεται από την Εξισ. (9α), συναρτήσει του
02 / kλ π= , όπως
βάθους ( h ) και της συχνότητας ταλάντωσης (ω ). Πράγματι, από τις Εξισ. (7) παρατηρούμε ότι σε μεγάλες οριζόντιες αποστάσεις 2x λ>> οι όροι στα αθροίσματα εξασθενούν θετικά και ουσιαστικά παραμένουν μόνο οι πρώτοι όροι των
των
( )
εκαναπτυγμά
( ) ( ) ( ) ( ) ( )2 3 ,0 0 2 0 3, expe e ex x A k x Z xϕ ≈ , 2x <<− 3 0h x< < (13α) ( )
λ , −
( ) ( ) ( ) ( ) ( )2 3 ,0 0, expe e e2 0 3x x B k x Z xϕ ≈ − , 2x λ>> , 3 0h x− < < . (13β)
Από τις ανωτέρω σχέσεις υπολογίζουμε την ασυμπτωτική συμπεριφοριζοντίων παραγώγων των πεδίων
ορά και των
7- 150 -

e( ) ( ) ( ) ( ) ( ) ( )
2 2 3 ,0 0 0 2 0 3, , expe ex x x A k k x Z x≈ , , (14α)
e
2x λ<<− 3 0h x− < < , ϕ
( ) ( ) ( ) ( ), expe e
x( ) ( )
2 2 3 ,0 0 0 2 0 3, x x B k k x Zϕ ≈ − − x , (14β)
Μπορούμε τώρα να χρησιμοποιήσο σχέσεις (13α) και (παλείψουμε τον συντελεστή
, 2x λ>> 3 0h x− < < .
υμε τις 14α) για να ( )
,0eAα , και τις σχέσεις (13β) και (14β) αντίστοιχα για τον
( ),0eBσυντελεστή , λαμβάνοντας τις ακόλουθες συνθήκες ακτινοβολίας έτσι στο άπειρο
( ) ( ) ( ) ( )
2 22 3 0 2 3, ,, , 0e ex xx x j k x xϕ ϕ− ≈ 2x λ<<− , 3 0h x− < < , (15α)
( ) ( ) ( ) ( )2 22 3 0 2 3, ,
,
, , 0e ex xx x
, εισάγοντας τις σχέσ χειας (11) για οριζόντια πδυναμικών στις διεπιφάνειες που ίζουν το εσωτερικό από τα εξω εοι ανωτέρω εξισώσεις γράφονται ακάτω (ενιαία) μορφή
j k x xϕ ϕ+ ≈ , 2x λ>> , 3 0h x− < < . (15β) Περαιτέρω εις συνέ την αράγωγο των
διαχωρ τ ρικά χωρία στη παρ
( ) ( ) ( ) ( )
2
2 30 2 3,
,, 0
iex
x xj k x x
nϕ
ϕ∂
+ ≈∂
, 2x λ>> , 3 0h x− < < , (16α)
η οποία είναι τοπικού χαρακτήρα, και κάνοντας χρήση των αναπαραστάσεων των πεδίων στην εσωτερική περιοχή από τις Εξ. (4),(5), η ανωτέρω σχέση γράφεται ως ακολούθως ( )
( ) ( ) ( ) ( ) ( )0 0, , 2,3,42
i i
L Rx i i
D D
F dS j k F dS D Dx
n x ξ x ξ ξ x ξ x ∪σ
σ σ∂ ∂
+ ∇ + ≈ ∈∂ ∂ =∫ ∫ .
(16β) πως αναφέραμε πιο πάνω, στη πράξη η ανωτέρω προσέγγιση μπορεί να
χρησιμοποιηθεί ως πρόσθετη ομογενής ολοκληρωτική εξίσωση στις κατακόρυφεδιεπιφάνειες και να συμπληρώσει το σύνολο των εξισώσεων (10), αρκεί να λάβουμε Σχήμα 1) να είναι μεγαλύτερο από μερικά μήκη κύματος.
ιτοποίηση
ασίζεται στο διαχωρισμό του συνόρου της εσωτερικής περιοχής τμημάτων, και έστω
Ός
i iL RD D∪∂ ∂ ,
το a (βλ. Τότε, οι εξισώσεις (10α), (10β), (10γ) και (16β) μπορούν να λυθούν ανεξάρτητα ως προς τις ζητούμενες κατανομές πηγών-καταβοθρών, και να βρούμε τα , , 1, 2..,n nσ = Μ , μετά τη διακρ του προβλήματος την οποία θα περιγράψουμε στη συνέχεια. 2. Εφαρμογή της μεθόδου των συνοριακών στοιχείων πως αναφέραμε στα προηγούμενα, η μέθοδος στην απλούστερη της εκδοχή, Ό
βi i i i i
B L RD D D D DΠ∂ = ∂ ∂ ∂ ∂∪ ∪ ∪ σε αριθμό ευθυγράμμων sM , , στο1, ,6… , ο αριθμός των s = τμημάτων στη βρεχόμενη επιφάνεια του σώματος
α δ ι δε εαριστερό μέρος της ελεύθερης επιφάνειας, στη αριστερή κατακόρυφη διεπιφάνεια, στο πυθμέν , στη εξιά κατακόρυφη διεπιφάνεια κα στο ξί τμήμα της λεύθερης
8- 151 -

επιφάνειας, αντίστοιχα (βλ. και
στοιχείων
Σχήμα 2). Ο συνολικός αριθμός των επιφανειακών
είναι 6
1i
iM M
=
= ∑ . Προφανώς, όσο μεγαλύτερος είναι ο αριθμός των
στοιχείων τόσο καλύτερα προσεγγίζεται η γεωμετρία του σώματος αλλά και η κατανομή πηγών-καταβοθρών σε όλο το σύνορο iD∂ .
Σχήμα 2: συνόρουΜερ σ ός τουι μ iD∂ του χωρίου σε τμήματα
απλή συνόρου σε υνδυασμό με τμήματα σταθερή προσέγγιση της έντασης πηγών-ατα κών τοιχ ί τ σε
εσωτερικού Η προσέγγιση τύπου
την κατά ευθυγράμμων τμημάτ τη γεωμετρίαων για του
σκ βοθρών φέρει το μειονέκτημα, σε σύγκριση με τις μεθόδους συνορια
είων ανώτερης τάξης, να απαιτε ην διακριτοποίηση του προβλήματοςσμεγάλο αριθμό στοιχείων (μεγάλο sM ) προκειμένου να έχουμε καλή ακρίβεια. Βασικό κριτ για την επιλογή του μεγέθους του πλέγματος (δηλαδή του μεγέθους των στοιχείων) έρχεται από τις ακόλουθες απαιτήσεις: (i) να αποδίδονται ικανοποιητικά τα γεωμετρικά χαρακτηριστικά του σώματος (και
επομένως χρειάζεται πύκνωση πλέγματος στις περιοχές μεγάλης καμπυλότητας της βρεχόμενης επιφάνειας) και
(ii) να είναι επαρκής ο αριθμός στοιχείων ανά μήκος κύματος (το οποίο εξαρτάται
ήριο
του
κληυποεξ του συστήματος.
από τη συχνότητα) ώστε να μπορεί να αποδοθεί ικανοποιητικά η ταλαντωτικότητα της λύσεως. Ως κανόνας χρησιμοποιούνται τουλάχιστον 15 στοιχεία ανά μήκος κύματος.
Ταυτόχρονα όμως η παρούσα μέθοδος πλεονεκτεί επειδή τα εμπλεκόμενα ολο-
ρώματα να μπορούν να υπολογιστούν αναλυτικά, πράγμα που οδηγεί σε γρήγορο λογισμό και κατάρτιση του πίνακα των αλγεβρικών εξισώσεων καθώς και του ιού μέλουςδ διακριτού
Βασικό στοιχείο είναι η λοιπόν η χρήση των παρακάτω αναλυτικών εκφράσεων των ολοκληρωμάτων για το επαγόμενο δυναμικό και ταχύτητα σε οποιοδήποτε σημείο P με συντεταγμένες ( )2 3,x x από κατανομή πηγών-καταβοθρών σταθερής εντάσεως σ
σε ευθύγραμμο στοιχείο με άκρα τα σημεία A με συντεταγμένες ( )A A2 3,x x και B με
συντεταγμένες ( )2 3,B Bx x . Εισάγοντας σύστημα τοπικών συντεταγμένων με τον άξον αζ στην ευθεία AB και τον άξονα η κάθετο προς αυτόν, βλ. Σχήμα 3, κ ι α
……
…… ……
…… Μ
Μ2 Μ6
.
.
.
.
.
1
Μ3 Μ5
. Μ4
9- 152 -

ονομάζοντας ( ),0Bζ τις συντεταγμένες των σημείων A και ) και ,0Aζ ( B ,
τίστοιχα, και ( )αν ,ζ η τις συντεταγμένες ου P , τα αποτελέσματα είναι
( )
τ
( ) ( ) ) ( ) 2 2(2 2
2, ln lnσϕ ζ η ζ ζ ζ η ζ ζ ζ ζ η
π Α Α Β Β⎡ ⎤ ⎡ ⎤= − − + − − − +⎣ ⎦ ⎣ ⎦ζ − +
1 12 tan tanη ηηζ ζ ζ ζ
− −
Β Α
⎫⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎪+ −⎜ ⎟⎬⎜ ⎟ ⎜ ⎟⎜ ⎟− −⎝ ⎠ ⎝ ⎠ ⎪⎝ ⎠⎭, (17)
( ) ( )( )
2 2
2 22u ,ζ ln
ζ ζ ησπ
ζ ηζ ζ η
⎛ ⎞− +⎜ ⎟⎜ ⎟− +⎝ ⎠
, Α
Β
= −
(18α)
( ) 1 1
2u , tan
αποτελέσματα
tζ
⎛ ⎛ ⎞−⎜ ⎟
⎝ ⎠
για τη
anησ η ηζ ηπ ζ ζ
− − ⎞⎛ ⎞= − ⎜ ⎟− −⎝ ⎠
, (18
και τα τελικά ταχύτητα τ σύστημα συ
ζΒ Α⎜ ⎟⎜ ⎟⎝ ⎠
σ
β)
ο γενικό τεταγμένων ν( )2 3,x x προκύπτουν με στροφή
) ( ) ( )( ( ) ( )2 2xu x , , sin3x u , cos uζ ηζ η θ= − ζ η θ , (19α)
( ) (( ) ) ( ) ( )3 2 3x x ,x sin , cosu u , uζ ηζ η θ ζ η θ , = + (19
όπου
β)
3 3
2 2
B A
B Ax x1tanx x
ό
θ⎛ ⎞
= ⎜ ⎟⎝ ⎠
. παράδειγμα των ωτέρ
Σχήμα σ συνοριακό
− −−
3: Τοπικ
Ως
θε
στοιχείο
εφαρμογής αν σχέσεων ω
ζ
η
Α
Β
x2
x3
P
θ
( )AB ε κά και γενικό
σύστημασυντεταγμένων
10- 153 -

3xu 3xu
φ
φ 2xu
2xu
3xu 3xu
Σχήμα 4: Κατανομές ( ) ( )2 3 2 3καιx ,x x ,xϕ u κατά τη μεσοκάθετο (αριστερά) και
κατά τη κάθετο που περνά από σημείο ( ) ( )0.2,=2 3,x x
)0 ( )0 ευθύγραμμου στοιχείου με
άκρα και ( ) (2 3, 0,A Ax x = ( )2 3, 1,0B Bx x = , για 1σ = σταθερό σε όλο το μήκος . AB παρουσιάζουμε στο Σχήμα 4 τις κατανομές των ανωτέρω ποσοτήτων κατά τη μεσοκάθετο (αριστερό γράφημα) ενός στοιχείου με άκρα ( ) (2 3, 0,A Ax x =
( )2 3, 0x x =
)0
)0 0
και
και κατά την κάθετο που περνά από το σημείο
(δεξί γράφημα). Παρατηρούμε χαρακτηριστικά την ασυνέχεια στην συνιστώσα ( ) (2 3, 1,B Bx x = ( ).2,
3xu (η οποία έχει διεύθυνση κατά την κάθετο του επιφανειακού στοιχείου AB ). Η χαμηλοτάξια μέθοδος συνοριακών στοιχείων που περιγράφουμε εδώ ολοκληρώνεται με την ικανοποίηση των εξισώσεων (10α), (10β), (10γ) και (16β) σε ένα σύνολο σημείων που χάριν συμμετρίας του αριθμητικού σχήματος επιλέγεται να είναι τα κέντρα ( )2 3,m mx x , , των αντιστοίχων ευθυγράμμων στοιχείων. Η τεχνική αυτή είναι γνωστή και ως collocation method και οδηγεί στην άμεση αλγεβρικοποίηση του συστήματος. Σημειώνουμε πάντως πως και άλλες τεχνικές είναι δυνατές, όπως π.χ. η μέθοδος Galerkin (βλ. π.χ., Kress 1989), η οποία όμως απαιτεί πρόσθετες επιφανειακές ολοκλήρωσεις για την υλοποίηση των απαιτούμενων προβολών των εξισώσεων σε κατάλληλα σχεδιασμένο υπόχωρο συναρτήσεων.
1,m M=
Ας συμβολίσουμε για τη συνέχεια με ( )2 3,k k
km x xϕ ϕ= , ( )2 3k k
km x ,x=U u τα επαγόμενα
δυναμικά και ταχύτητες στο κέντρο του k − στοιχείου από επιφανειακή κατανομή
11- 154 -

σταθερής εντάσεως mσ στο k − στοιχείο (ευθύγραμμο τμήμα) μερισμού του συνόρου. Ας θέσουμε επίσης , , το μοναδιαίο κάθετο διάνυσμα στο
στοιχείο. Κατά συνέπεια, οι εξισώσεις (10α, β, γ) και (16β) γράφονται στην ακόλουθη διακριτή μορφή, αντιστοίχως, για τα επιμέρους προβλήματα ( ),
kn 1,k M=k −
2,3,4=
( ) ( 212
Mkk
m k kmm
,σ σ=
+ =∑ n U )3kN x x 11k ,M=, , (20α)
( ) 012
Mk
m k kmm
σ σ=
+ =∑ n U , 3 4
1 1
1i ii i
, M= =
= +k M∑ ∑ , (20β)
( )km1
02
Mk
m k kmm
σ σ μϕ=
+ −∑ n U 2=5 6
1 1i i
i i
, M= =
1k M= +∑ ∑, k M1 1, M1 M+ και (20γ) = +
( )0jkσ ϕ1
02
Mk
m k km kmm
σ
=
+ +∑ n U = , 3
1 21
1 ii
M , M=
+ ∑ k M= +
(20δ) το οποίο αποτελεί το τελικό γραμμικό σύστημα από την επίλυση του οποίου λαμβάνουμε τις εντάσεις πηγών-καταβοθρών στα στοιχεία του συνόρου. Ακολούθως, με εφαρμογή των ολοκληρωτικών αναπαραστάσεων σχέσεων (4) και (5) μπορούμε να υπολογίσουμε τα δυναμικά και τις ταχύτητες σε κάθε σημείο στο εσωτερικό χωρίο, και από τις σχέσεις απαλοιφής των
, 1,k k Mσ =
( ),0eA και ( )
,0eB στις
εξισώσειςεις (13) και (14) παίρνουμε τις αντίστοιχες τιμές των συντελεστών αυτών για την αναπαράσταση του μακρινού (εξωτερικού) πεδίου. Μετά την επίλυση οι υδροδυναμικοί συντελεστές υπολογίζονται από τη σχέση (2α) με επιπρόσθετα ολοκληρώματα των κατανομών των υπολογισθέντων δυναμικών ακτινοβολίας ( 2 , )3x xϕ πάνω στη βρεχόμενη επιφάνεια του σώματος . BD∂
3. Αποτελέσματα Παραθέτουμε στη συνέχεια στο Σχήμα 5 ενδεικτικά αποτελέσματα υπολογισμού του συντελεστή πρόσθετης μάζας και αποσβέσεως πλωτού σώματος ορθογωνικής διατομής λόγου B/T=3, σε λωρίδα ρευστού βάθους h/T=2, για διάφορες τιμές του αδιάστατου μήκους κύματος λ/h. Για τα αποτελέσματα έχει ληφθεί ακτίνα μαζικής ροπής αδράνειας περιστροφής ως προς το διαμήκη άξονα 1x ίση με 0.2Β, οπότε,
(ανά μονάδα μήκους), και κατακόρυφη θέση του κέντρου βάρους
στην ίσαλο, οπότε
( 244 0 2m m . B= )
2
2 12T BGM B
T= + = − +K BM .
12- 155 -

Σχήμα 5: Πρόσθετες μάζες (συνεχείς γραμμές) και αποσβέσεις (διακεκομμένες) πλωτού σώματος ορθογωνικής διατομής λόγου B/T=3, σε λωρίδα ρευστού βάθους h/T=2, για διάφορες τιμές του αδιάστατου μήκους κύματος λ/h.
Σχήμα 6: Αποκρίσεις πλωτού σώματος ορθογωνικής διατομής λόγου B/T=3, σε λωρίδα ρευστού βάθους h/T=2, συναρτήσει του αδιάστατου μήκους κύματος λ/h.
13- 156 -

Η αδιαστατοποίηση που χρησιμοποιείται εδώ για τη παρουσίαση των υδροδυναμικών συντελεστών είναι
2/kla hρ , , 2,3,k l = 324 /a hρ , 4
44 /a hρ , και
( )2/ /klb h hρ g 3, , , 2,k l = ( )324 / /b h hρ g , ( )4
44 / /b h hρ g . Με την ίδια μεθοδολογία που αναπτύξαμε παραπάνω μπορεί να επιλυθεί αριθμητικά και το πρόβλημα περίθλασης και να υπολογισθούν οι υδροδυναμικές δυνάμεις με ολοκλήρωση των κατάλληλων δυναμικών πάνω στη βρεχόμενη επιφάνεια. Με βάση αυτά οι εξισώσεις κίνησης μπορεί να επιλυθούν και να υπολογισθούν οι αποκρίσεις (sway, heave και roll). Στο Σχήμα 6 παρουσιάζονται αντίστοιχα αποτελέσματα υπολογισμού των ταλαντωτικών αποκρίσεων του ιδίου (όπως παραπάνω) πλωτού σώματος, για διάφορες τιμές του αδιάστατου μήκους κύματος λ/h. Η αδιαστατοποίηση που χρησιμοποιείται για τις αποκρίσεις είναι
/k Aξ , και 2,3k = 4 / kAξ . Στο σχήμα αυτό παρατηρούμε τη μεγάλη τιμή της απόκρισης σε διατοιχισμό (roll) λόγω φαινομένων συντονισμού στην αντίστοιχη συχνότητα, και δείχνουμε με βέλος τη σχετική τιμή του μήκους κύματος προς το βάθος του νερού όταν συμβαίνει συντονισμός. Ο υπολογισμός της λύσης του προβλήματος που εξετάσαμε εδώ μας επιτρέπει να πάρουμε πλούσια πληροφορία και για διάφορα άλλα χαρακτηριστικά πλήν των αποκρίσεων. Για παράδειγμα μπορούμε να θεωρήσουμε κύμα που διαδίδεται προς τη
2x -διεύθυνση και προσπίπτει σε επίμηκες σώμα ορθογωνικής διατομής, το οποίο χρησιμοποιείται ως πλωτός κυματοθραύστης, και να εκτιμήσουμε το μέρος της ενέργειας του κύματος που διαπερνά και μεταδίδεται πίσω από το πλωτό σώμα. Ένα τέτοιο αποτέλεσμα παρουσιάζουμε στο Σχήμα 7 όπου εικονίζεται η τιμή του συντελεστή κυματικής μετάδοσης για διάφορες τιμές του αδιάστατου μήκους κύματος λ/h, όταν χρησιμοποιείται επίμηκες σώμα ορθογωνικής διατομής ίδιων χαρακτηριστικών όπως προηγουμένως, σε λωρίδα ρευστού βάθους h/T=2. Μπορούμε μάλιστα να εκτιμήσουμε το συντελεστή αυτό όταν (i) το σώμα είναι δεσμευμένο (ακίνητο π.χ. με πασσάλωση) οπότε στη διαμόρφωση του συνολικού πεδίου λαμβάνονται υπόψη μόνο τα δυναμικά του προσπίπτοντος κύματος και της περίθλασης (τα αποτελέσματα δείχνονται με συνεχή γραμμή στο Σχ. 7), καθώς και όταν (ii) το σώμα είναι ελεύθερο να ταλαντώνεται χωρίς την επίδραση άλλων εξωτερικών δυνάμεων (όπως παρουσιάζεται στο Σχ.7 με διακεκομμένη γραμμή) ή και με την επίδραση πρόσθετων, π.χ. δυνάμεων αγκύρωσης οι οποίες μπορούν σε πρώτη φάση να προσεγγισθούν με τη προσθήκη πρόσθετης ελαστικής σταθεράς (π.χ. στην οριζόντια κίνηση). Οι ολοκληρωτικές αναπαραστάσεις που χρησιμοποιήσαμε επιτρέπουν τον υπολογισμό των πεδίων σε όλο το χωρίο και παρέχουν πληροφορία και εκτός του χωρίου (που δεν μας είναι χρήσιμη). Ένα τέτοιο αποτέλεσμα για το πλωτό σώμα που εξετάσαμε προηγουμένως εικονίζεται στο Σχ.8, ενδεικτικά, για το πεδίο περίθλασης (diffraction) και το πεδίο ακτινοβολίας σε κατακόρυφη ταλάντωση (heave), χρησιμοποιώντας ισοδυναμικές γραμμές.
14- 157 -

Σχήμα 7: Συντελεστής μετάδοσης κύματος που προσπίπτει σε επίμηκες σώμα ορθογωνικής διατομής λόγου B/T=3, σε λωρίδα ρευστού βάθους h/T=2, για διάφορες τιμές του αδιάστατου μήκους κύματος λ/h. Ένα ενδιαφέρον χαρακτηριστικό της υβριδικής μεθοδολογίας που αναπτύξαμε εδώ για τον αριθμητικό υπολογισμό των διδιαστάτων προβλημάτων που εξετάσαμε είναι ότι μπορεί πέραν της γενικής γεωμετρίας του σώματος, να χειρισθεί άλλα στερεά σύνορα όπως ο πυθμένας που δεν είναι κατ’ανάγκην επίπεδα. Ενδεικτικά, παρουσιάζουμε ένα τέτοιο αποτέλεσμα στο Σχήμα 9. Κλείνοντας το συμπλήρωμα αυτό σημειώνουμε ότι το πρόγραμμα σε Matlab για τους παραπάνω υπολογισμούς είναι διαθέσιμο από την ιστοσελίδα του μαθήματος. 5. Βιβλιογραφικές αναφορές Athanassoulis G.A., Loukakis, 1985, An extended-Lewis form family of ship-sections
and its application to seakeeping calculations, International Shipbuilding Progress vol.32, No 366, pp. 33-43
Belibassakis, K.A., 2008, A boundary element method for the hydrodynamic analysis of floating bodies in general bathymetry regions, Engineering Analysis with Boundary Elements, vol.32 (2008), pp. 796-810.
Günter, N.M., 1967, Potential Theory and its Applications to Basic Problems of Mathematical Physics. Fr. Urgan Publ.
Kress, R., 1989, Linear Integral Equations. Springer Verlag.
Mikhlin, S.G., 1965, Multi Dimensional Singular Integrals and Integral Equations. Pergamon Press.
Mikhlin, S.G., 1970, Mathematical Physics. An Advanced Course. North Holland Paris F. , Canas J., 1997. Boundary Element Methods. Oxford University Press.
15- 158 -

Σχήμα 8: Πεδίο περίθλασης (πάνω) και ακτινοβολίας (κάτω) πλωτού σώματος. Επίμηκες σώμα ορθογωνικής διατομής B/T=3, σε λωρίδα ρευστού σταθερού βάθους h/T=2, για συχνότητα ω=1.3rad/s (λ/h=14.7, / 2 0.36B gω = ). Εικονίζεται μόνο το πραγματικό μέρος των πεδίων αυτών.
Σχήμα 9: Πεδίο περίθλασης (πάνω) και ακτινοβολίας (κάτω) πλωτού σώματος. Επίμηκες σώμα ορθογωνικής διατομής B/T=3, σε λωρίδα ρευστού με μεταβαλλόμενη βαθυμετρία (λόγος μέσου βάθους h/T=2), και για συχνότητα ω=1.3rad/s (λ/h=14.7,
/ 2 0.36B gω = ). Εικονίζεται μόνο το πραγματικό μέρος των πεδίων αυτών.
16- 159 -

2.12 Γενική αναπαράσταση των δυναμικών ακτινοβολίας και περίθλασης σε κυλινδρικό χωρίο. Γενική μορφή του πεδίου των «εξερχόμενων» αρμονικών κυματισμών σε νερό σταθερού βάθους (τρισδιάστατο πρόβλημα) Στο Παράρτημα αυτό θα λύσουμε το «γενικό πρόβλημα αναπαράστασης των δυναμικών
στο ενδιάμεσο κυλινδρικό χωρίο ( )xΦN FR RD » και, με τη βοήθεια της λύσης αυτού του
προβλήματος, θα προσδιορίσουμε το πλήρες ανάπτυγμα του πεδίου των «εξερχόμενων» κυματισμών σε τρισδιάστατο υδάτινο πεδίο σταθερού βάθους. Δεδομένου ότι η ανάλυση είναι γενική και αφορά σε όλα τα επί μέρους δυναμικά , , στη
συνέχεια θα παραλείπουμε το δείκτη ( )xΦ , 1, 2, ..., 6d∈
( ) . Η διατύπωση του προβλήματος αυτού έχει δοθεί στο εδάφιο 2.5 (σχέσεις (2α,β,γ)), και επαναλαμβάνεται και εδώ για λόγους αυτονομίας της παρουσίασης:
Να βρεθούν όλα τα δυνατά πεδία δυναμικού , ( )xΦN FR RDx ∈ , τα οποία ικανοποιούν τις ακό-
λουθες συνθήκες μέσα στον κυλινδρικό δακτύλιο N FR RD :
2 2
2 2 21 1 0rr r r r zθ
⎛ ⎞∂ ∂Φ ∂ Φ ∂ Φ⎟⎜ΔΦ ≡ ⋅ + + =⎟⎜ ⎟⎜⎝ ⎠∂ ∂ ∂ ∂,
N FR RDx ∈ ( )N FR r R≤ ≤ (1α)
, , 0zμΦ − Φ = 2 / gμ ω= FDx ∈∂ ( (1β) )0z =
, 0zn∂Φ
≡ Φ =∂
, ( . (1γ) Dx Π∈∂ )z h=−
Ουδεμία συνθήκη επιβάλλεται στα παράπλευρα κυλινδρικά σύνορα NRD∂ ,
FRD∂ .
Η επιλογή του κυλινδρικού δακτυλίου
F NR RD γίνεται ώστε να μπορούμε να εφαρμόσουμε τη μέθοδο του χωρισμού των μεταβλητών για τη λύση της εξίσωσης Laplace (1α). Σε πρώτη φάση, αναζητούμε λύσεις του προβλήματος (1α,β,γ), της μορφής
( ) ( ) ( ), , ,r z f r g zθ θΦ = . (2)
Χωρίζουμε, δηλαδή, κατ’ αρχήν την οριζόντια ( ),r θ από την κατακόρυφη εξάρτηση. Εισάγοντας την αναπαράσταση (2) στον διαφορικό τελεστή (1α) παίρνουμε:
( )z
( ) ( ) ( ) ( ) ( )2 2
, ,1 1 , 0f r f r
r g z f rr r r r
θ θθ
θ⎡ ⎤∂ ∂⎛ ⎞∂ ′′+ +⎢ ⎥⎜ ⎟∂ ∂ ∂⎢ ⎥⎝ ⎠⎣ ⎦
g z = , (3)
[ ] ( ), 0,2 , ,N F 0R r R z hθ π≤ ≤ ∈ ∈ − .
Διαιρώντας την (3) με το γινόμενο ( ) ( ),f r g zθ βρίσκουμε:
( ) ( )
( )( )( )
2
2 2
, ,1 1
0,
f r f rr
r r r r g zf r g z
θ θθ
θ
∂ ∂⎛ ⎞∂+⎜ ⎟ ′′∂ ∂ ∂⎝ ⎠ + = . (4)
- 160 -

34
Όπως βλέπουμε, ο πρώτος όρος είναι μια συνάρτηση των ορισμάτων
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ),r θ , ενώ ο δεύτερος όρος είναι συνάρτηση του ορίσματος . Κατά συνέπεια, κάθε ένας όρος μεταβάλλεται ανεξαρτήτως του άλλου και, άρα, το άθροισμά τους μπορεί να είναι ταυτοτικά μηδενικό,
z
μόνον εάν κάθε ένας από αυτούς ισούται με μία σταθερά, και αυτές οι δύο σταθερές είναι αντίθετες. Υποθέτοντας ότι ο δεύτερος όρος της (4) ισούται με (σταθερά διαχωρισμού), οδηγούμαστε στο ακόλουθο σύστημα:
2k ∈
( )( )
2g zk
g z′′
= , (5α)
( )
( ), 2,
,r f r
kf rθ θ
θΔ
= − , (5β)
όπου
, 2
1 1r r
r r r riiθ 2
iθ
∂ ∂ ∂⎛ ⎞Δ = +⎜ ⎟∂ ∂ ∂⎝ ⎠. (5γ)
Εφαρμόζοντας τις συνοριακές συνθήκες (1β) και (1γ) στο δυναμικό (2), βρίσκουμε , ( ) ( ) ( ), 0 0f r g gθ μ ′− =⎡ ⎤⎣ ⎦ 0 ( ) ( ), 0f r g hθ ′ − = , ( ) [ ], , 0,N Ff r R R 2θ π⎡ ⎤∈ ×⎣ ⎦ , εκ της οποί-
ας συμπεραίνουμε ότι και ( )μ ( )0 0 0g g′− = ( ) 0g h′ − = . Η εξίσωση (5α), συνεπικουρού-
μενη από τις ανωτέρω συνοριακές συνθήκες για τη συνάρτηση ( )g z , οδηγεί στο ακόλουθο ομαλό πρόβλημα ιδιοτιμών (κατακόρυφο πρόβλημα Sturm-Liouville):
Να βρεθούν όλες οι μη τετριμμένες συναρτήσεις ( )g z , οι οποίες ικανοποιούν τις εξισώσεις:
, ( ) ( )2 0g z k g z′′ − = 0h z− ≤ ≤ , (6α)
, ( ) ( ) 0g z g zμ ′− = 0z = , (6β)
, ( ) 0g z′ = z h= − . (6γ)
Η γενική λύση της διαφορικής εξίσωσης (6α) είναι, ως γνωστόν, η ακόλουθη:
( ) ( ) ( )cosh sinhg z C k z h D k z h= + + +⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ . (7)
Από την εφαρμογή της συνθήκης πυθμένα (6γ) προκύπτει ότι η σταθερά μηδενίζεται, ενώ από την εφαρμογή της γραμμικοποιημένης συνθήκης ελεύθερης επιφάνειας (6β), βρίσκουμε:
D
. ( ) ( )cosh sinh 0C kh kC khμ − =
Δεδομένου ότι αναζητάμε μη τετριμμένη λύση, θα πρέπει 0C ≠ , οπότε η ανωτέρω γίνεται
. (8) ( )tanhh kh khμ =
Η τελευταία ονομάζεται σχέση (ή εξίσωση) διασποράς (dispersion relation) και είναι εξαιρετικά σημαντική, διότι, «περικλείει» κατ’ ουσίαν όλη τη δυναμική των γραμμικών υδάτινων κυματισμών. Η σχέση διασποράς (8) περιέχει τις γνωστές σταθερές και
(= βάθος νερού), καθώς και την άγνωστη –προς το παρόν– σταθερά διαχωρισμού . Έτσι, η σχέση διασποράς αποτελεί μία εξίσωση, η οποία επιλυόμενη μας δίδει τις επι-τρεπτές τιμές της σταθεράς διαχωρισμού.
2 / gμ ω=h 2k
- 161 -

35
Κατ’ αρχήν, η σταθερά διαχωρισμού μπορεί να πάρει μιγαδικές τιμές. Εν προκειμένω, αποδεικνύεται ότι η σταθερά πρέπει να είναι πραγματική (
29/03/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
2k2k 1). Άρα, το θα είναι είτε
πραγματικός αριθμός ( ), είτε καθαρά φανταστικός αριθμός (k
k∈ k i∈ ). Η εξίσωση διασποράς (8) επιλύεται εύκολα (και εποπτικά) με χρήση της γραφικής μεθόδου. Όταν είναι πραγματικός αριθμός οι λύσεις προκύπτουν ως τομές των γραφημάτων των συναρτήσεων
k
( )1hkh
khμ
Λ = και ( ) ( )2 tanhkh khΛ = . (9α)
Όπως φαίνεται και από το Σχήμα 1, υπάρχουν δύο (συμμετρικές) τομές των γραφημάτων αυτών, που οδηγούν στις συμμετρικές ρίζες 0k± . Δεδομένου ότι στις εξισώσεις (5) και (6) υπεισέρχεται μόνο το , τα δύο πρόσημα δεν ενδιαφέρουν και μπορούμε να περιοριστούμε στη θετική τιμή, .
2k00k >
Όταν η σταθερά διαχωρισμού είναι καθαρά φανταστικός αριθμός, τη συμβολίζουμε με ,
. Τότε η σχέση διασποράς γίνεται ik
k∈
( ) ( )tanh tanh ikh ikh h kh khμ μ= ⇔ − = . (8')
Στην περίπτωση αυτή (βλ. Σχήμα 2), προκύπτει ένα άπειρο πλήθος διακριτών καθαρά φαντα-
στικών ριζών, έστω 1n n
ik+ ∞
=, όπου τα δίδονται ως τομή των γραφημάτων των nk
( )3hkh
khμ
Λ = − και ( ) ( )4 tankh khΛ = . (9β)
Σχήμα 1: Γραφική λύση της εξίσωσης διασποράς (8)
(1) Αυτό προκύπτει εύκολα από το ότι το πρόβλημα Sturm-Liouville (6) είναι αυτοσυζυγές.
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-1.5
-1
-0.5
0
0.5
1
1.5
0k h
0k h−
- 162 -

36
Από αυτές τις λύσεις μας ενδιαφέρουν και πάλι μόνον οι θετικές (για τον ίδιο λόγο όπως πριν), ενώ η περίπτωση να υπάρχει ιδιοτιμή με πραγματικό και φανταστικό μέρος διαφορε-τικό του μηδενός ταυτόχρονα αποκλείεται από το γεγονός ότι το πρόβλημα ιδιοτιμών είναι αυτοσυζυγές. Επίσης πρέπει να σημειώσουμε ότι για κάθε τιμή της παραμέτρου
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
μ , ισχύει η παρακάτω «διάταξη»:
1 23, 2 , ...,
2 2 2 nk k n k nπ π ππ π π< < < < − < < π , n∈ ,
καθώς επίσης και ότι kn nπ→ , καθώς . n→+∞
Το σύνολο, λοιπόν, 0 1, n n
k i k +∞
= αποτελεί το σύνολο των ιδιοτιμών του κατακόρυφου προ-
βλήματος (6α,β,γ). Οι αντίστοιχες κανονικοποιημένες ιδιοσυναρτήσεις, έτσι ώστε να έχουν μοναδιαία τιμή στην ελεύθερη επιφάνεια, ( )0 1ng = , 0,1, 2,...n= , είναι οι ακόλουθες:
( ) ( )( )
00
0
coshcosh
k z hg z
k h+⎡ ⎤⎣ ⎦= , ( ) ( )
( )cos
cosn
nn
k z hg z
k h+⎡ ⎤⎣ ⎦= , . (10) 1, 2,...n=
Από την γενική θεωρία των ομαλών προβλημάτων Sturm-Liouville γνωρίζουμε ότι το σύνολο των ιδιοσυναρτήσεων , συνιστά ένα πλήρες ορθογώνιο σύστημα (δηλαδή μια ορθο-
γώνια βάση) στο χώρο Hilbert των τετραγωνικά ολοκληρωσίμων συναρτήσεων . Η ανωτέρω δήλωση σημαίνει, κατ’ ουσίαν, τα εξής:
0n ng +∞
=
( )2 ,0L h−
Σχήμα 2: Γραφική λύση της εξίσωσης διασποράς (8')
1. Οι συναρτήσεις ng είναι ορθογώνιες μεταξύ τους, δηλαδή,
-9.42 -6.28 -3.14 0 3.14 6.28 9.42 12.56 15.7-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
1k h 2k h 3k h
1k h−
- 163 -

37
29/03/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) 2
02
z
n m m Lz h
g z g z dz g n mδ=
= −
=∫ . (2) (11α)
2. Κάθε συνάρτηση ( ) [ ], ,G z z h∈ −
∈ −
0 , η οποία είναι τετραγωνικά ολοκληρώσιμη (συμ-
βολικά γράφουμε ( )2 ,0G L h ), μπορεί να αναπτυχθεί σε σειρά της μορφής
( ) ( )0
n nn
G z A g z∞
=
= ∑ . (11β)
Η σύγκλιση της σειράς και η ισότητα (11β) νοούνται κατά μέση τετραγωνική έννοια, δηλαδή
( ) ( ) ( ) ( )2
1/ 220
0 00
N Ndef Nn n n n
n nhL
G z A g z G z A g z dz → ∞
= =−
⎛ ⎞⎜ ⎟− = − ⎯ →⎜ ⎟⎝ ⎠
∑ ∑∫ ⎯⎯ .
Η μέση τετραγωνική σύγκλιση δεν εξασφαλίζει γενικώς σύγκλιση κατά σημείο. Ισχύει όμως το ακόλουθο ισχυρότερο αποτέλεσμα:
Εάν η ανάπτυξη συνάρτηση είναι ( )G zα. επαρκώς λεία (ας υποθέσουμε εδώ, σε συμφωνία με την εξίσωση Laplace, ότι
η είναι δύο φορές παραγωγίσιμη, συμβολικά ( )G z [ ](2 ,0G C h∈ − ) ), και β. ικανοποιεί τις οριακές συνθήκες (6β) και (6γ), όπως ακριβώς και οι
συναρτήσεις βάσης ( )ng z , τότε
3. η σύγκλιση της σειράς (11β) είναι ομοιόμορφη και, επιπλέον, η σειρά παραγωγίζεται κατά όρους.
Σύμφωνα με τα ανωτέρω, από την επίλυση του προβλήματος Sturm-Liouville (6), βρήκαμε μια κατάλληλη βάση «κατακορύφων», συναρτήσεων, ως προς την οποία μπορούμε να αναπτύξουμε οποιαδήποτε συνάρτηση ( )G z , 0h z− ≤ ≤ .
Με βάση τα ανωτέρω το πεδίο , μπορεί να αναπτυχθεί/αναπαρασταθεί σε σειρά, ως εξής:
( , ,r zθΦ )
) . (12) ( ) ( ) (0
, , ,n nn
r z f r g zθ θ∞
=
Φ = ⋅∑
Εισάγοντας την αναπαράσταση (12) στην πεδιακή εξίσωση (1α), και παραγωγίζοντας κατά όρους, βρίσκουμε:
( ) ( ) ( ) ( ),0
, ,r n n n nn
f r g z f r g zθ θ θ∞
=
′′⎡ ⎤Δ ⋅ + ⋅ =⎣ ⎦∑ 0 ⇒
0⎤⎦ , (13α) ( ) ( ) ( )2,
0, ,r n n n n
nf r k f r g zθ θ θ
∞
=
⎡⇒ Δ + ⋅ =⎣∑
όπου η συνάρτηση ( )ng z′′ αντικαταστάθηκε από ( )2k g z , σύμφωνα με τη σχέση (6α).
(2) Υπενθυμίζεται ο ορισμός της -νόρμας: 2L ( )( ) 1 / 2
2
2b
aLf f x= ∫ dx .
- 164 -

38
Πολλαπλασιάζοντας την σχέση (13α) με ,
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
mg 0,1,2,...m= , ολοκληρώνοντας από έως , και εκμεταλλευόμενοι την ορθογωνιότητα (11α) του συνόλου των ιδιοσυναρτήσεων, βρίσκουμε:
h− 0
( ) ( ) ( ) 2
22,
0, , 0 0,1,2,...mr n n n m n mL
nf r k f r g zθ θ θ δ
∞
=
⎡ ⎤Δ + ⋅ =⎣ ⎦∑ , = , (13β)
, ⇒ ( ) ( )2, , ,r n n nf r k f rθ θ θΔ + 0= 0,1,2,...n= . (13γ)
Σύμφωνα, λοιπόν, με την (13γ), κάθε μια συνάρτηση πλάτους ( ),nf r θ ικανοποιεί μία εξίσω-ση Helmholtz στις δύο (οριζόντιες) χωρικές διαστάσεις. Κάθε μια από τις εξισώσεις (13γ) νοείται στον κυκλικό δακτύλιο
( ) ( ) 1/ 22 2 2, :N FR R N FD x y R r x y= ∈ < = + < R .
Σε συμφωνία με το αρχικό μας «σχέδιο», να βρούμε δηλαδή όλες τις δυνατές λύσεις του προβλήματος (1α,β,γ), στο χωρίο
NRD ∞ , δηλαδή την αναπαράσταση του πεδίου όταν
και , ουδεμία συνοριακή ή άλλη βοηθητική συνθήκη εισάγουμε κατά την οριζόντια έννοια. Συνεχίζουμε, δηλαδή, αναζητώντας όλες τις δυνατές λύσεις κάθε μιας από τις εξισώσεις (13γ).
FR →∞ r →∞
Προς αποφυγή περιττής πολυπλοκότητας στο συμβολισμό, στη διάρκεια των αναλυτικών χειρισμών που ακολουθούν, θα αγνοήσουμε το δείκτη ( )n , δηλαδή οι συναρτήσεις ( ),nf r θ
και οι ιδιοτιμές θα γράφονται ως nk ( ),f r θ , , αντιστοίχως. Στην χρήση του πλήρους συμβολισμού θα επιστρέψουμε αργότερα, προκειμένου να παρουσιάσουμε τα τελικά αποτελέσματα.
k
Προφανώς, η συνάρτηση ( , )f r θ (κάθε συνάρτηση ( ), , 0,1,..nf r nθ = . ) είναι περιοδική ως προς θ . Κατά συνέπεια μπορούμε να την αναπτύξουμε σε σειρά Fourier ως προς το δεύτερο όρισμά της:
( ) ( ) ( ), ,C S ,f r f r f rθ θ= + θ , (14α) όπου
( ) ( ) ( )0
1
, cos2
CC
C mm
F rf r F r mθ θ
∞
=
= + ∑ in και ( ) ( )1
, sSS m
mf r F r mθ θ
∞
=
= ∑ . (14β)
Οι συντελεστές Fourier δίδονται από τις σχέσεις: ( ) ( ),C Sm mF r F r
( ) ( )0
2 , cosCm CF r f r m d
π
θ θ θπ
= ∫ , ( ) ( )0
2 , sinSm SF r f r m d
π
θ θ θπ
= ∫ , (14γ) 0,1, 2, ....m =
Μια πιο συνοπτική μορφή της ανωτέρω ανάπτυξης της ( ),f r θ , σχέσεις (14α,β), η οποία διευκολύνει σημαντικά τη διαδικασία των περαιτέρω υπολογισμών, είναι η εξής:
( ) ( ) (, m mm
f r F r )θ ϕ θ= ∑ , (15α)
όπου
- 165 -

39
( )
29/03/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
1 ,cos , sin , 1,2,...2m m m mϕ θ θ θ⎧ ⎫= =⎨ ⎬
⎩ ⎭. (15β)
Η χαρακτηριστική ιδιότητα των περιοδικών συναρτήσεων ( )mϕ θ , η οποία επαληθεύεται άμεσα με εκτέλεση της διαφόρισης, είναι η ακόλουθη:
( ) ( )2
22 0m
m
dm
dϕ θ
ϕ θθ
+ = . (15γ)
Εισάγοντας την αναπαράσταση (15α) της ( ),f r θ στην εξίσωση (13γ) λαμβάνουμε:
, ή ( ) ( ) ( ) ( )2, 0r m m m m
m m
F r k F rθ ϕ θ ϕ θ⎡ ⎤Δ +⎢ ⎥⎣ ⎦∑ ∑ =
( ) ( ) ( ) ( ) ( ) ( )2
22 2
1 1 0m mm m m m
m
F rr F r k F
r r r rϕ θ
ϕ θ ϕ θθ
⎡ ⎤∂ ∂⎛ ⎞∂+ +⎢ ⎥⎜ ⎟∂ ∂ ∂⎢ ⎥⎝ ⎠⎣ ⎦
∑ r = . (16α)
Τέλος, ορίζοντας τον τελεστή 1r r
r r r∂ ∂⎛Δ ⎜
⎞⎟∂ ∂⎝ ⎠ii , και χρησιμοποιώντας τη σχέση (15γ), οδη-
γούμαστε στην
( ) ( ) ( )2
22 0r m m m
m
mF r k F rr
ϕ θ⎡ ⎤⎛ ⎞Δ + −⎢ ⎥⎜ ⎟
⎝ ⎠⎣ ⎦∑ = . (16β)
Πολλαπλασιάζοντας και τα δύο μέλη της ανωτέρω ισότητας με ( )ϕ θ , ολοκληρώνοντας από π− έως π , και χρησιμοποιώντας τις σχέσεις ορθογωνιότητας
( ) ( ) ( ) ( ) ( )2
,m m mdπ
π
ϕ θ ϕ θ ϕ θ ϕ θ θ δ ϕ θ−
=∫ , (16γ)
λαμβάνουμε:
( ) ( ) ( ) ( )2
22 0r m m m
m
mF r k F r dr
π
π
ϕ θ ϕ θ θ−
⎧ ⎫⎛ ⎞⎪ ⎪Δ + − =⎨ ⎬⎜ ⎟⎪ ⎪⎝ ⎠⎩ ⎭
∑ ∫ , ή
( ) ( ) ( )22
2
11 0r m mF r k F rr
ϕ θ⎧ ⎫⎛ ⎞Δ + − =⎨ ⎬⎜ ⎟⎝ ⎠⎩ ⎭
,
και εφόσον ( ) 0,ϕ θ ≠ ∀ ∈ ,
( ) ( )2
22 0r m m
mF r k F rr
⎛ ⎞Δ + −⎜ ⎟
⎝ ⎠= , ή αναλυτικότερα
( ) ( ) ( )
2 22
2 2
1 0m mm
d F r d F r mk F rd r r d r r
⎛ ⎞+ + −⎜ ⎟
⎝ ⎠= . (16δ)
Χρησιμοποιώντας τον μετασχηματισμό u kr= , βρίσκουμε ότι οι συναρτήσεις ( ),mF r θ ικανοποιούν την ακόλουθη εξίσωση:
- 166 -

40
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) ( )2 2
2 2
1 1 0m mm
d F u d F u m F udu u du u
⎛ ⎞+ + −⎜ ⎟
⎝ ⎠= , u kr= . (17α)
Στο σημείο αυτό, επειδή το σύνολο των ιδιοτιμών του προβλήματος αποτελείται από μια πραγματική ιδιοτιμή και από (άπειρες) άλλες καθαρά μιγαδικές ιδιοτιμές , πρέπει
να εξετάσουμε πως διαφοροποιείται η εξίσωση (17α) ανάλογα με το αν το είναι πραγματι-κό ή καθαρά φανταστικό. Στην περίπτωση, λοιπόν, όπου το είναι πραγματικός αριθμός, η εξίσωση (17α) (ως έχει) είναι μια εξίσωση Bessel τάξεως . Όταν το είναι καθαρά φανταστικός αριθμός, τότε λόγω του όρου στον τελευταίο προσθετέο της εξίσωσης (17α), σημειώνεται εναλλαγή πρόσημου, και παίρνουμε:
0k 1n nik +∞
=
k
kk
m( ) 22u i kr=
( ) ( ) ( )
2 2
2 2
1 1 0m mm
d F u d F u m F udu u du u
⎛ ⎞+ + +⎜ ⎟
⎝ ⎠= , u kr= . (17β)
Η εξίσωση (17β) είναι μια τροποποιημένη εξίσωση Bessel (modified Bessel) τάξεως . Τόσο η (συνήθης) εξίσωση Bessel, όσο και η τροποποιημένη εμφανίζονται πολύ συχνά (σχεδόν πάντοτε!) όταν λύνουμε με χωρισμό μεταβλητών τις εξισώσεις Laplace, Helmholtz ή Poisson (καθώς και άλλες εξισώσεις), σε κυλινδρικές συντεταγμένες. Γι’ αυτόν ακριβώς το λόγο οι εξισώσεις Bessel (17α) και (17β),
m
0, 1, 2, ...m = , έχουν μελετηθεί διεξοδικά. Οι συναρτήσεις που επιλύουν τις εξισώσεις αυτές ανήκουν στην οικογένεια των ειδικών συναρ-τήσεων (special functions) της μαθηματικής φυσικής, και είναι γνωστές με τα ονόματα «συναρτήσεις Bessel» ή «συναρτήσεις Hankel». (Οι δύο οικογένειες δεν ταυτίζονται, προ-κύπτουν όμως οι μεν από τις δε). Η εξίσωση Bessel (17α) έχει λύσεις της μορφής
( ) ( ) ( ) ( )1m m m mC H u D H u+ 2
m
, (18)
όπου , κατάλληλες σταθερές, και mC D ( )1mH και ( )2
mH οι συναρτήσεις Hankel 1ου και 2ου είδους αντίστοιχα. Η ασυμπτωτική συμπεριφορά των συναρτήσεων Hankel καθώς
έχει μελετηθεί διεξοδικά και δίδεται από τις ακόλουθες εκφράσεις 0 r= →u k +∞
( ) ( ) ( ) ( )1 24 2 4 22 2,m m
m mi u i uH u H u
u ue e
π π π
π π
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜⎝ ⎠ ⎝
− − − − −∼ ∼
π⎟⎠ . (19α,β)
Έτσι, στην περίπτωση της πραγματικής ιδιοτιμής , και επειδή 0k 0u k r= , βλέπουμε ότι οι λύσεις της εξίσωσης (17α) έχουν ταλαντωτική μορφή, με ασθενώς μειούμενο πλάτος, ανάλο-γο προς . Περαιτέρω, οι δύο λύσεις 1/ 2r − ( ) ( )0 r1
mH k και ( ) ( )0k r2mH
r, διαφέρουν –ως προς
την ασυμπτωτική συμπεριφορά τους για μεγάλες τιμές του – μόνο ως προς το πρόσημο της
φάσης: 0exp4 4
mi k r π π⎛ ⎞⎛ ⎞± − −⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠.
Η τροποποιημένη εξίσωση Bessel (17β) έχει λύσεις της μορφής
, (20) ( ) ( )m m m mE I u F K u+
- 167 -

41
όπου , κατάλληλες σταθερές, και
29/03/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
m mE F mI και οι τροποποιημένες συναρτήσεις Bessel 1ου και 2ου είδους αντίστοιχα. Η ασυμπτωτική συμπεριφορά των συναρτήσεων αυτών καθώς
δίδεται από τις ακόλουθες εκφράσεις
mK
n r= →u k +∞
( )2
u
meI u
uπ∼ , ( )
2
u
meK u
uπ
−
∼ . (21,αβ)
Βλέπουμε δηλαδή ότι στην περίπτωση των φανταστικών ιδιοτιμών ( ), οι οριζόντιες λύσεις (της τροποποιημένης εξίσωσης Bessel) αντιστοιχούν, για μεν τη λύση
nu k r=
mI σε εκθετικά αυξανόμενου πλάτους κύματα, για δε τη λύση σε εκθετικώς μειούμενου πλάτους κύματα. mK Στο σημείο αυτό επαναφέρουμε το δείκτη στο συμβολισμό των n ( ),f r θ και . Έτσι, οι
συναρτήσεις
k
( , )f r θ θα αναφέρονται στη συνέχεια ως ( ),nf r θ και οι ιδιοτιμές ως , , ενθυμούμενοι πάντοτε ότι η πρώτη ιδιοτιμή είναι πραγματική (και μας οδηγεί
στην εξίσωση Bessel (17α)), ενώ οι υπόλοιπες,
k nk0,1,...n= 0k
2,...,nk n 1,= , είναι καθαρά φανταστικές (και μας οδηγούν στην τροποποιημένη Bessel (17β)). Διατρέχοντας όλα τα ανωτέρω κατά την αντίστροφη κατεύθυνση και συνοψίζοντας (ενοποι-ώντας) τα αποτελέσματα, έχουμε –μετά την επαναφορά του δείκτη – τα ακόλουθα: οι συναρτήσεις
n( )mF u γίνονται και δίνονται από τις σχέσεις: ( )n m nF u
, ( ) ( ) ( ) ( ) ( ) ( ) ( )1 1 2 20 0 0 0
0 0m m m m m
m m
F k r C H k r D H k r∞ ∞
= =
= +∑ ∑ 0n= , (22α)
, ( ) ( ) ( ) ( ) ( )0 0
I Kn m n n m m n n m m n
m m
F k r E I k r F K k r∞ ∞
= =
= +∑ ∑ 1,2,...n= . (22β)
Οι σχέσεις (14α,β), με την εισαγωγή του δείκτη n , γίνονται
( ) ( ) (,n n mm
f r F r )mθ ϕ θ= ∑ , 0, 1, 2, ...n = .
Εισάγοντας στην τελευταία τις σχέσεις (22α,β), παίρνουμε την γενική μορφή της λύσης ως προς ,r θ :
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1 1 2 20 0
0 0, m m m m m m
m m0f r C H k r D Hθ ϕ θ ϕ θ
∞ ∞
= =
= ⋅ + ⋅∑ ∑ k r 0n=, , (23α)
( ) ( ) ( ) ( ) ( ) ( ) ( )0 0
, I Kn n m m m n n m m m
m mnf r E I k r F Kθ ϕ θ ϕ θ
∞ ∞
= =
= ⋅ + ⋅∑ ∑ k r
) )
. . (23β) 1, 2,...n=
Τέλος, το συνολικό πεδίο είναι, από τη σχέση (12), ,
οπότε εισάγοντας τις εκφράσεις (23α,β) για τις συναρτήσεις
( , ,r zθΦ ( ) ( ) (0
, , ,n nn
r z f r g zθ θ∞
=
Φ = ∑( ),nf r θ έχουμε:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1 1 2 20 0
0 0, , m m m m m m
m mr z C H k r D H k r g zθ ϕ θ ϕ θ
∞ ∞
= =
⎛ ⎞Φ = ⋅ + ⋅ ⋅⎜ ⎟
⎝ ⎠∑ ∑ 0 +
- 168 -

42
. (24)
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) ( ) ( ) ( ) ( ) ( )1 0 0
I Kn m m m n n m m m n n
n m mE I k r F K k r gϕ θ ϕ θ
∞ ∞ ∞
= = =
⎛ ⎞+ ⋅ + ⋅⎜ ⎟
⎝ ⎠∑ ∑ ∑ z⋅
Χρησιμοποιώντας τώρα την εξίσωση (15β), σύμφωνα με την οποίαν
( ) 1 ,cos , sin , 1,2,...2m m m mϕ θ θ θ⎧ ⎫= =⎨ ⎬
⎩ ⎭,
καταλήγουμε στο ακόλουθο:
Θεώρημα Αναπαράστασης του μακρινού πεδίου: Κάθε συνάρτηση δυναμικού ( )xΦ
( , ,r zθ= Φ ) , που ικανοποιεί τις εξισώσεις (1α,β,γ) και είναι δύο φορές παραγωγίσιμη στο χωρίο
N FR RD , γράφεται στη μορφή:
( ) ( )( )( )
( )( )( )
( )
( )( )
1 21 2
0 01 20 0
cos cos, ,
sin sin
m mm m
m mm m
a m a mr z H k r H k r g z
b m b m
θ θθ
θ θ
∞ ∞
= =
+ +
+ +
⎛ ⎞⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎟⎜ ⎪ ⎪ ⎪ ⎪⎟⎜ ⎪ ⎪ ⎪ ⎪⎟Φ = ⋅ + ⋅⎜ ⎨ ⎬ ⎨ ⎬⎟⎜ ⎟⎪ ⎪ ⎪ ⎪⎜ ⎟⎪ ⎪ ⎪ ⎪⎟⎜⎝ ⎠⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭∑ ∑ 0 +
, ( )( )
( ) ( )( )
( )( )
1 0 0
cos cos
sin sin
K Inm nm
m n m n nK In m mnm nm
a m a mK k r I k r g z
b m b m
θ θ
θ θ
∞ ∞ ∞
= = =
+ +
+ +
⎛ ⎞⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎟⎜ ⎪ ⎪ ⎪ ⎪⎟⎜ ⎪ ⎪ ⎪ ⎪⎟+ ⋅ + ⋅⎜ ⎨ ⎬ ⎨ ⎬⎟⎜ ⎟⎪ ⎪ ⎪ ⎪⎜ ⎟⎪ ⎪ ⎪ ⎪⎟⎜⎝ ⎠⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭∑ ∑ ∑ ⋅
(25)
όπου είναι οι συναρτήσεις Hankel πρώτου και δεύτερου είδους αντιστοίχως, ( )(1,20mH k )r
( )m n rK k και (m n )I k r είναι οι τροποποιημένες συναρτήσεις Bessel πρώτου και δεύτερου
είδους αντιστοίχως, και και είναι οι ιδιοσυναρτήσεις του κατακόρυφου προβλή-( )0g z ( )ng z
ματος Sturm - Liouville, που δίδονται από τις σχέσεις (10). Οι συντελεστές , , ( )1,2ma ( )1,2
mb( ,K In ma ) ( ),K I
nmb και είναι ελεύθερες σταθερές, οι οποίες μπορούν να προσδιορισθούν αν δοθούν κατάλληλες συνοριακές συνθήκες στα πλευρικά κυλινδρικά σύνορα, Nr R= και r . FR=
Βιβλιογραφικά σχόλια: Τα προβλήματα Sturm-Liouville, που προκύπτουν από το χωρισμό μεταβλητών διαφόρων Μερικών Διαφορικών Εξισώσεων, εξετάζονται σε πολλά βιβλία Διαφορικών Εξισώσεων, καθώς και σε βιβλία με θεματολογία (ή τίτλο) Methods of Mathe-matical Physics. Καλά εισαγωγικά βιβλία που πραγματεύονται τα ανωτέρω θέματα είναι, π.χ., τα βιβλία των Birkhoff and Rota (1959/1989), Ince (1926/1956), Hochstadt (1964/1975), Churchill and Brown (1963/1987), Mathews and Walker (1964/1970) και Lebedev (1963/1965/1972). Βιβλία που πραγματεύονται τα προβλήματα Sturm-Liouville με μαθημα-τική πληρότητα και σε υψηλό επίπεδο είναι, μεταξύ άλλων, τα βιβλία των Coddington and Levinson (1955/1972) και Yosida (1960/1991). Birkhoff, G. and Rota, G.C., Ordinary Differential Equations, John Wiley & Sons, Inc. 1st
Edition 1959, 6th Edition 1989 Churchill, R.V. and Brown, J.W., Fourier Series and Boundary Value Problems, McGraw-
Hill Book Co., 2nd Edition 1963, 4th Edition 1987
- 169 -

43
29/03/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Coddington, E.A. and Lenvinson, N., Theory of Ordinary Differential Equations, McGraw-Hill Book Co., 1955, TATA McGraw-Hill Publishing Co. 1972
Hochstadt, H., Differential Equations: A Modern Approach, Holt, Rinehart and Winston, 1964, republished by Dover Publications, Inc., 1975
Ince, E.L., Ordinary Differential Equations, Longmans, Green and Co., 1st Edition 1926, republished by Dover Publications, Inc., 1956
Lebedev, N.N., Special Functions & Their Applications, Prentice-Hall, 1965 (translated from the 2nd Russian Edition of 1963), republished by Dover Publications, Inc., 1972
Mathews, J. and Walker, R.L., Mathematical Methods of Physics, W.A. Benjamin, Inc., 1st Edition 1964, W.A. Benjamin/Addison-Wesley, 2nd Edition 1970
Yosida, K., Lectures on Differential and Integral Equations, Interscience Publishers, 1960, republished by Dover Publications, Inc., 1991
- 170 -

Βιβλιογραφία Κεφαλαίου 2 Λουκάκη, Θ.Α., Πέρρα, Π.Τ., Υδροστατική και Ευστάθεια Πλοίου, Αθήνα 1982. John, F., On the motion of floating bodies. II, Communications on Pure nad Applied
Mathematics, Vol. 3, 1950 Newman, J.N., The exciting forces on fixed bodies in waves, Journal of Ship Research, Vol.
6, 1962. Newman, J.N., Marine Hydrodynamics, The MIT Press, 1977. Semyonov-Tyan-Shansky, V., Statics and Dynamics of the Ship, MIR Publishers, Moscow,
1978. Sommerfeld, A., Partial Differential Equations in Physics, Lectures on Theoretical Physics,
Vol. VI, Academic Press, 1949. Stoker, J.J., Water Waves, Interscience, 1957. Wehausen J.V., Laitone, E.V., Surface Waves, in Encyclopedia of Physics, Vol. 9, Springer-
Verlag, 1960. Wehausen, J.V., The Motion of Folatong Bodies, Annual Rev. Fluid Mech., Vol. 3, 1971.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 171 -

26
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 172 -

ΔΥΝΑΜΙΚΗ ΣΥΜΠΕΡΙΦΟΡΑ ΠΛΟΙΟΥ ΣΕ ΚΥΜΑΤΙΣΜΟΥΣ
Κεφάλαιο 3
ΑΛΛΗΛΕΠΙΔΡΑΣΗ ΠΛΟΙΟΥ ΚΙΝΟΥΜΕΝΟΥ ΜΕ ΣΤΑΘΕΡΗ ΠΡΟΣΩ ΤΑΧΥΤΗΤΑ ΚΑΙ ΚΥΜΑΤΙΣΜΩΝ
ΠΕΡΙΕΧΟΜΕΝΑ
σελ. 3.1
Γενικά. Το πρόβλημα ( ) ,U ω
175
3.2
Αδρανειακός ρυθμός μεταβολής πεδιακών μεγεθών, όταν το σύστημα συντεταγμένων έχει ιδίαν κίνηση
176
3.3
Οι εξισώσεις της Υδροδυναμικής όταν το σύστημα συντεταγμένων έχει ιδίαν κίνηση
184
3.4
Κινηματικές σχέσεις μεταξύ των αναπαραστάσεων ενός και του αυτού βαθμωτού πεδιακού μεγέθους ροής θεωρούμενης από διαφορετικά συστήματα συντεταγμένων
192
3.5
Συνθήκες ελεύθερης επιφάνειας, σε κινούμενο σύστημα συντεταγμένων. Ι: Παραγωγή των γενικών μη-γραμμικών συνθηκών
201
3.6
Συνθήκες ελεύθερης επιφάνειας, σε κινούμενο σύστημα συντεταγμένων. ΙΙ: Γραμμικοποίηση και απλές κυματικές λύσεις
208
3.7
Θεμελιώδης λύση του γραμμικοποιημένου ( ),U ω -προβλήματος
216
Παράρτημα: Πρόσθετες μάζες, αποσβέσεις και φορτίσεις επιμήκων σωμάτων κινουμένων με σταθερή ταχύτητα. Θεωρία λωρίδων
240
- 173 -

- 174 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
3.1 Γενικά. Το πρόβλημα ( ),U ω Σκοπός αυτού του εδαφίου είναι να μελετήσουμε τις υδροδυναμικές δυνάμεις που αναπτύσσονται πάνω σ’ ένα στερεό σώμα το οποίο ταλαντεύεται γύρω από μια σταθερή μέση θέση, πάνω (ή κοντά) στην ελεύθερη επιφάνεια, σε αλληλεπίδραση με απλούς αρμονικούς κυματισμούς. Προς τούτο, πρέπει να μελετήσουμε το πεδίο ροής του περιρρέοντος υγρού. Αγνοώντας τη συνεκτικότητα και υποθέτοντας αστρόβιλη ροή (potential flow), το πεδίο ταχύτητας (( ,tv x ) 1) εκφράζεται με τη βοήθεια ενός δυναμικού ταχύτητας ( ), txΦ από τη σχέση
( ) ( ), , ,t tv x x x= ∇Φ ∈ D
, (1) όπου είναι το γεωμετρικό χωρίο που καταλαμβάνεται από το υγρό. D
x
( )1 2 3, ,(1) Στη συνέχεια θα χρησιμοποιούμε το σύμβολο για να δηλώσουμε το γενικό πεδιακό σημείο μέσα στο πεδίο
ροής. Δηλαδή x x x=x .
- 175 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
3.2 Αδρανειακός ρυθμός μεταβολής πεδιακών μεγεθών, όταν το σύστημα συντεταγμένων έχει ιδίαν κίνηση
Όπως εξηγήσαμε στο εδάφιο 1.2, για τη μοντελοποίηση και μελέτη της δυναμικής συμπεριφοράς πλοίου, κινούμενου με μέση πρόσω ταχύτητα 0 δια μέσου κυματισμών, διευκολύνει να χρησιμοποιούμε κινούμενα συστήματα συντεταγμένων. Προκειμένου να προχωρήσουμε στην παραγωγή των εξισώσεων της Υδροδυναμικής και των συνθηκών Ελεύθερης Επιφάνειας όταν το σύστημα συντεταγμένων κινείται, χρειαζόμαστε εκφράσεις του αδρανειακού ρυθμού μεταβολής βαθμωτών και διανυσματικών πεδιακών μεγεθών στην περίπτωση αυτή (δηλ. όταν ο χώρος (το πεδίο) περιγράφεται μέσω κινούμενου συστήματος συντεταγμένων). Υπενθυμίζουμε και πάλι ότι, ανεξαρτήτως του εάν το σύστημα συντεταγ-μένων (σ.σ.) κινείται ή όχι, η μοντελοποίηση που ακολουθούμε βασίζεται στις
sU >
απόλυτες(1) ταχύτητες και επιταχύνσεις του πλοίου και του περιρρέοντος υγρού. Η κίνηση του σ.σ. υπεισέρχεται στην ανάλυση μας κατά δύο τρόπους:
i) Οι συντεταγμένες )1 2 3, ,(x x x ενός υλικού στοιχείου [ ]σ του υγρού μεταβάλλονται
όχι μόνον λόγω της ταχύτητας ( )[ ]; tσu του υλικού στοιχείου, αλλά και λόγω της κίνησης του σ.σ., και
ii) Οι συνιστώσες ενός (οποιουδήποτε) αδρανειακού διανυσματικού πεδιακού μεγέθους ( )[ ] ; t νοούνται επί των στιγμιαίων αξόνων. Άρα, οι ρυθμοί μεταβολής των
συνιστωσών ( )[ ] ;n tσ του διανυσματικού πεδίου
b b σ=
b ( )[ ] ; t επηρεάζονται από την κίνηση (περιστροφή) του σ.σ..
b b σ=
Στο παρόν εδάφιο θα παράγουμε τις εκφράσεις του αδρανειακού ρυθμού μεταβολής βαθμωτών και διανυσματικών πεδιακών μεγεθών, όταν το σύστημα συντεταγμένων κινείται με ταχύτητα ( (),U Ω 2). Στην περίπτωση βαθμωτών μεγεθών έχουμε να χειριστούμε μόνο την επίδραση i) της κίνησης του σ.σ., ενώ στην περίπτωση διανυσματικών μεγεθών έχουμε και τις δύο επιδράσεις i) και ii), ανωτέρω. - Ουσιώδης παράγωγος βαθμωτού πεδιακού μεγέθους
Ως γνωστόν, η ουσιώδης (ή ολική ή υλική) παράγωγος(3) βαθμωτού πεδιακού μεγέθους (π.χ., της πίεσης ή του δυναμικού) είναι ο απόλυτος χρονικός ρυθμός μεταβολής του μεγέθους αυτού, αναφερόμενου σε συγκεκριμένο υλικό στοιχείο. Η ακριβής φυσική σημασία της ανωτέρω διατύπωσης και οι μαθηματικές της συνέπειες αναλύονται διεξοδικά στη συνέχεια. Έστω υλικό στοιχείο [ ]σ μάζας , το οποίο στη χρονική στιγμή κατέχει τη θέση mδ t
( 1 2 3, , )x x xr = και κινείται με απόλυτη ταχύτητα . Έστω βαθμωτό ( ; t=u u r ) )
([ ] ; tσ=a a
(1) Εν προκειμένω νοούνται συμβατικά ως απόλυτες οι ταχύτητες και επιταχύνσεις ως προς τον στερεό φλοιό της Γης. Άλλες επιλογές, που λαμβάνουν υπ’ όψιν και την κίνηση του στερεού φλοιού της Γης, είναι επίσης δυνατές, και χρησιμοποιούνται σε προβλήματα Ναυσιπλοΐας καθώς και σε προβλήματα Γεωφυσικών ροών μεγάλης κλίμακας. (2) Δηλαδή σ.σ. του οποίου η αρχή κινείται με ταχύτητα O ( )1 2 3, ,U U UU = , και το οποίο περιστρέφεται (ως
στερεό σώμα) με γωνιακή ταχύτητα . ( )1 2 3, ,= Ω Ω ΩΩ(3) Στα αγγλικά, material or essential or total derivative.
- 176 -

4
πεδιακό μέγεθος (φυσική ιδιότητα), αναφερόμενο(η) στο υλικό στοιχείο
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
[ ]σ . Ακολουθώντας το συνήθη πεδιακό συμβολισμό (με χρήση Eulerian χωρικών μεταβλητών), γράφουμε επίσης
, χωρίς όμως να ξεχνάμε ότι η φυσική ιδιότητα αναφέρεται στο
υλικό στοιχείο ( ) ( 1 2 3; , ,a a t a x x x tr= =
[ ]
); a
σ που κατέχει τη θέση ( )1 2 3, ,x x xr = στη χρονική στιγμή . Το φυσικό
αυτό γεγονός αποδίδεται εναργέστερα αν γράψουμε
t
( )( );a a t t= r , όπου είναι η
(τοπική) εξίσωση της τροχιάς του υλικού σημείου
( )tr
[ ]σ . Μετά από χρόνο το υλικό στοιχείο tδ
[ ]σ θα βρίσκεται στη θέση (t tr )δ+ , οπότε το μέγεθος ( )t[ ] ;a a σ t δ= + , θα έχει την
πεδιακή γραφή ( )a tr( )t t;tδ δ+ + . Προφανώς, ( ) ( )t t tr+ −r δO
]
, είναι η μεταβολή της διανυσματικής ακτίνας που ξεκινά από την αρχή του χρησιμοποιούμενου Καρτεσιανού σ.σ. και καταλήγει στο υλικό στοιχείο [σ . Βλέπε και Σχήμα 1. Ας σημειωθεί ότι δεν έχουμε κάμει –προς το παρόν– καμιά υπόθεση σχετικά με το εάν το σ.σ. κινείται ή είναι ακίνητο. Εάν το σύστημα συντεταγμένων κινείται, τότε και –γενικότερα–
, πράγμα το οποίο επιδρά, και πρέπει να ληφθεί υπ’ όψιν, στον υπολογισμό
της μεταβολής r r .
[ 1 2S Ox x≡
( )t
]x3 ( )O t t Oδ+ ≠ ( )t( ) ( )S t t S tδ+ ≠
( )t tδ+ − Ο απόλυτος χρονικός ρυθμός μεταβολής του μεγέθους ( )t[ ] ;a a σ= ή, ισοδυνάμως, η
ουσιώδης παράγωγος του πεδιακού μεγέθους /Di Dt ( ) (;a a tr= = );1 2x 3, x, ta x , δίδεται, σύμφωνα με τα παραπάνω, από την έκφραση
( ) ( ) ( )( ) ( )0 0
limt t
a tδ δ→ →
[ ]a tt
δ+ − [ ]; ;t aσ σ ; ;limDa
Dtt t t a
tr rδ δ
δ δ+ + − tt
= = = ,
( ) ( );r;a t
t tra t
r δδ
∂= + ∇ ⋅
∂, (1)
όπου 1 21 2
33x x
∂ ∂+
∂ ∂i ii i
x∂
+∂i
]
∇ =i i
[O σ
, και , είναι η
μεταβολή της διανυσματικής ακτίνας
( )t tδ δ ( )tr− = ( )3xδ1 2, ,xδdef
xr r= + δ
/ tr
. Όπως ήδη εξηγήθηκε ανωτέρω, η μέχρις εδώ ανάλυση είναι ανεξάρτητη από την κινητική κατάσταση του σ.σ., η οποία επεμβαίνει μόνο στη φυσική ερμηνεία (και στη μαθηματική διατύπωση) του ρυθμού μεταβολής δ δ της διανυσματικής ακτίνας . Πράγματι, [ ]σO=rεάν το σ.σ. είναι ακίνητο, τότε προφανώς
tu rδ
δ= , (2)
οπότε προκύπτει η συνηθισμένη έκφραση της ουσιώδους πεδιακής παραγώγου:
Da a aDt t
u∂= + ⋅∇
∂. ……..[ακίνητο σ.σ.]…….. (3)
Εάν το σ.σ. κινείται, τότε είναι φανερό πως η σχέση (2) δεν ισχύει, εφ’ όσον ο ρυθμός μεταβολής / trδ δ της διανυσματικής ακτίνας [ ]Or σ= οφείλεται εν μέρει στην κίνηση του
- 177 -

5
στοιχείου του ρευστού, και εν μέρει στην κίνηση του σ.σ.. Για να βρούμε τη σωστή έκφραση για το συνολικό ρυθμό μεταβολής
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
/ trδ δ στην περίπτωση αυτή, ξεχωρίζουμε τους δύο ρυθμούς, έστω ( )1/ trδ δ και ( / tr )2
δ δ , και γράφουμε
1 2trδδ
⎞⎟t t
r rδ δδ δ
⎛ ⎞ ⎛= +⎜ ⎟ ⎜⎝ ⎠ ⎝ ⎠
, (4)
όπου
1t
rδδ
⎛ ⎞ =⎜ ⎟⎝ ⎠
ρυθμός μεταβολής που οφείλεται αποκλειστικά στην κίνηση του υλικού στοιχείου [ ]σ ,
και
2t
rδδ
⎛ ⎞ =⎜ ⎟⎝ ⎠
ρυθμός μεταβολής που οφείλεται αποκλειστικά στην κίνηση του σ.σ..
Προφανώς, ( )1/ trδ δ u= . Για τον υπολογισμό του ρυθμού μεταβολής ( 2/ tr )δ δ αγνοούμε
την κίνηση του υλικού στοιχείου [ ]σ (θεωρούμε, δηλαδή, προς στιγμήν ) και σκεπτόμεθα ως εξής: Η κατάσταση στην οποία τα πεδιακά σημεία είναι ακίνητα ενώ το σ.σ. κινείται με ταχύτητα είναι κινηματικά ισοδύναμη με την κατάσταση όπου τα πεδιακά σημεία κινούνται με ταχύτητα
0=u
( ,U )ΩU Ω r− − × ενώ το σ.σ. είναι ακίνητο. Στην
κατάσταση αυτή, ο ρυθμός μεταβολής της διανυσματικής ακτίνας , ο οποίος ταυτίζεται τώρα με
r( )2
/ trδ δ , εκφράζεται μέσω της ταχύτητας του άκρου της . Έχουμε δηλαδή
U Ω r− − ×
2tr U Ω rδδ
⎛ ⎞ = − − ×⎜ ⎟⎝ ⎠
.
Τα ανωτέρω αποτελέσματα, σε συνδυασμό με την (4) μας δίδουν
Σχήμα 1: Ο ρυθμός μεταβολής r / tδ δ της
της διανυσματικής ακτίνας εξαρτάται
από την αρχής και του πέρατος [ ]O σ=r [ ]κίνηση και O σ .
( )S t
( )S t tδ+
[ ]( ), t tσ δ+
( )tU ( )tr
( )t tδ+r
tδu
( )tΩ
[ ]( ), tσ
- 178 -

6
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
tr u U Ω rδδ
= − (5)
(5) αποτελεί την αναζη συντεταγμένων.
− × .
Η τούμενη γενίκευση της (2), για την περίπτωση κινούμενου συστήματος Συνδυάζοντας την (5) με την (1) βρίσκουμε
( )Da a aDt t
u U Ω r∂= + − − × ⋅∇
∂, …...[σ.σ. κινούμενο με ταχύτητα ( ),U Ω ]…… (6α)
ή, α
ναλυτικότερα,
( ) ( ) ( ) ( ) ( ) ( ); ;; ;
Da t a tt t t a t
tr r
u r U Ω r r∂
+ − − × ⋅∇⎡ ⎤⎣ ⎦∂. (6β)
ανωτέρω σχέση αποτελεί την κατάλληλη γενίκευση της (3) η οποί του βαθμωτού πεδιακού μεγέθους
Dt=
Η α εκφράζει την ουσιώδη παράγωγο ( ) ( )1 2 3; , ,a t a x x x tr = ,
και (6) θα πρέπει να μ
; όταν το σ.σ. στο
οποίο μετράται και αναλύεται η διανυσματική ακτίνα r , κινείται με ταχύτητα ( ),U Ω . Για τη σωστή κατανόηση και χρήση των σχέσεων (5) ην ξεχνούμε ότι οι ταχύτητες , ,u U Ω είναι αδρανειακές ταχύτητες, με υνιστώσες πάνω στους ιαίους) άξονες 1 2 3, ,Ox Ox Ox . - Ουσιτιγμια
σ (στιγμ
ώδης παράγωγος διανυσματικού πεδιακού μεγέθους, με συνιστώσες πάνω στους ίους άξονες του κινούμενου σ.σ. σ
Έστω ( ) ( )[ ] ; ;t tb b b rσ= ≡ διανυσματικό πεδιακό μέγεθος (φυσική ιδιότητα), αναφερό-ενο(η) στο υλικό στοιχείο [ ]μ σ , μάζας mδ , το οποίο στη χρονική στιγμή κατέχει τη θέση t
( )1 2 3, ,x x x , και κινείται μr = ε απόλυτη ταχύτητα ( ); t=u u r . Σε πλήρη συμφωνία με την ανωτέρω ανάλυση, ο απόλυτος χρονικό υθμός μεταβολής του διανυσματικού μεγέθους
ή, ισοδυνάμως, η ουσιώδης παράγω t του διανυσματικού πεδίου
( ) ( )1 2 3; , , ;t x x x tb r b= , δίδεται από την έκφραση
ς ρ( )[ ] ; tσ b b=
γος /D Di
( ) ( ) ( )0 0
[ ] [ ]; ;lim
t t tt tσ σ + −
=[ ] ;
limt t
tDDt
b b bbδ δ
σδ δδ δ→ →
= . (7)
Στο σημείο αυτό πρέπει να λάβουμε υπ’ όψιν μας ότι το . κινείται, ι μάλ
εριστρέφεται με γωνιακή ταχύτητα
σ.σ κα ιστα ( )S t
π ( )tΩ . Άρα το διάνυσμα ( )t t[ ] ;b σ δ+
νιστώσε
αναλύεται σε
συνιστώσες πάνω στους (στιγμιαίους) άξονες του ( )S t tδ+ , οι ο δεν είναι παράλληλοι
με τους άξονες του συστήματος ( )S t , ων οποίων αναλύεται ς το διάνυσμα
( )[ ] ; tb σ . Η κατάσταση είναι τελείως αντίστοιχη με που αντιμετωπίσαμε στο εδάφιο
1.5, όπου μελετήσαμε τον αδρανειακό (ουσιώδη) ρυθμό μεταβολής διανύσματος
ποίοι
σε συεπί τ
αυτήν
( )t=a a , ου στους στιγμιαίους άξονες κινούμενου συστήματος συντεταγμένων. Αν και
μπορούμε να προχωρήσουμε γρήγορα χρησιμοποιώντας τα αποτελέσματα του εδα 5 (βλέπε Σχόλιο 1, κατωτέρω), κατ’ αρχήν θα προτιμήσουμε να επαναλάβουμε τα επιχειρήματα και να μελετήσουμε/αναλύσουμε τη σχέση (7) αυτοτελώς, χωρίς να παραπέμψουμε τον αναγνώστη στο εδάφιο 1.5.
αναλυμένφίου 1.
- 179 -

7
Κατ’ αρχήν επαναφέρουμε(4) το συμβολισμό
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) ( )( ) ( )[ ] [ ]; ; S tS tt tb bσ σ≡ για να
δηλώνουμε την αναλυτική αναπαράσταση του διανύσματος ( )[ ] ; tb σ μέσω των συνιστωσών
του ω προς ο σύστημα ς τ ( )S t . Δηλαδή η έκφραση ( ) ( )[ ] ;
S ttb σ θα χρησιμοπ ε
ύσματος
οι ίται ως
συντομογραφία του συνόλου των τριών συνιστωσών του διαν b :
( ) ( )
( )( )[ ] [ ]
;
; ;def
b t
t b tb σ σ
⎛ ⎞⎜ ⎟
= ⎜ ⎟ .
( )( )
1
2
3
[ ]
[ ] ;S t
S tb t
σ
σ⎜ ⎟⎜ ⎟⎝ ⎠
(8)
Περαιτέρω, ο συμβολισμός
( ) ( )21[ ] ;
S ttb σ θα χρησιμοποιείται για να δηλώσει την
ναπαράσταση του διανύσματοςα ( )1[ ] ; tb σ μέσω των συνιστωσών του ως προς το σύστημα
η
Είναι συστήματα
( )S t , ακόμ και όταν t t≠ .
φανερό ότι,
2 1 2
αν δύο aS και δεν έχουν παράλληλους άξονες bS , τότε για ένα
αι το αυτό διάνυσμα θα κ ( )[ ] ; tb σ έχουμε ( ) ( )[ ] [ ]; ;S Sa b
t tb bσ σ≠ , εφ’ όσον οι
Σχήμα 2: Ο αδρανειακός ρυθμός μεταβολής του διανύσματος
συνιστώσες του στα δύο συστήματα είναι διαφορετικές. Η διαφορά μεταξύ της γεωμετρικής
( )[ ] ; tb σ εξαρτάται και
το ρυθμό μεταβολής των συνιστωσών τουαπό ( )[ ] ;nb tσ επί τω ν αξόνων του
κινούμενου σ.σ.
ν στιγμιαίω
( )S t , και από
την περιστροφή του σ.σ..
(4) Ο συμβολισμός αυτός εισήχθη για πρώτη φορά στο εδάφιο 1.3.
[ ]( ); tσ
( )S t
( ); tb σ⎡ ⎤⎣ ⎦
( )S t tδ+
( ), t tb σ δ⎡ ⎤⎣ ⎦ +
[ ]( ), t tσ δ+
( )tU
( )tΩ [ ]( );nb tσ
[ ]( );nb t tσ δ+
- 180 -

8
ον
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
τότητας ( )[ ] ; tb σ και της αναλυτικής οντότητας ( ) ( )[ ] ;
S ttb σ , που στάνει το σύνολο
των τριών συνιστωσών του ( )[ ] ; tb σ , καθίσταται συγκρίνουμε τη σχέση (8) με την
3
παρι
σαφής αν
)t . (9)
, δεν «π
( ) ( ) ([ ] [ ]; ;t b tb iσ σ= ∑1
n nn=
Η αναλυτική οντότητα (8) εριέχει» (δεν «βλέπει») τα διανύσματα βάσης ( )n ti ,
1,2,3n = , (ενώ η γεωμετρική οντότητα ( )[ ] ; tb σ τα «βλέπει») πράγμα που προβλήματα μόνον όταν τα διανύσματ
αι (9)γεννάται το να νοηθεί η
δημιουργεία αυτά μεταβάλλονται.
Κατόπιν των ανωτέρω διευκρινήσεων, και έχοντας προ οφθαλμών τις σχέσεις (8) κ ,
ερώτημα πώς ακριβώς πρέπει διαφορά ( )[ ] ; tb σδ , εμφανίζεται στο δεξιά μέλος της (7), προκειμένου ο υπολογιζόμενος ρυθμός μεταβολής να είναι πράγματι ο αδρανειακός ρυθμός μεταβολής, παρά το ότι το σ.σ. αλλάζε
που
ι ) με το χρόνο. (περιστρέφεταιΚάνοντας την εύλογη επιλογή το διάνυσμα ( )[ ] ; /D t Dtb σ να νοείται αναλυμένο στους
στιγμιαίους άξονες του σ.σ. ( )S t , οδηγούμεθα στην ακόλουθη ιμενοποίηση» της σχέσης (7):
( )
«συγκεκρ
( )
( )( ) ( ) ( )( ) ( )0
[ ] t−
ηλαδή, τα (απόλυτα, αδρανειακά) διανύσματα
[ ][ ] ; ;;lim S t S t
tS t
t tD tDt t
b bbδ
σ σσ δ
δ→
+⎛ ⎞=⎜ ⎟
⎝ ⎠. (10)
Δ ( )[ ] ; t tb σ δ+
στιγμιαίο σ.σ., «απόφαση» διαφόρων μεγεθών
Το τελευταίο
και του δεξιά
μέλους της (7), νοούνται αναλυμένα στο ίδιο αναλυμένο και το αριστερά μέλος της (7). Η αυτή νοηθεί και ατανοηθεί στη βάση της φυσικής σημασίας των αναγκαία
( )[ ] ; tb σ ,
πρέπει να όχι ως μιααίνει πρά
την
( )S t , στο οποίο νοείται
, και
Προσθαφαιρώντας
κ(φορμαλιστική) συνέπεια μαθηματικών ιδιοτήτων. συμβ γματι στην από εδώ και κάτω επεξεργασία της σχέσης (10). έκφραση
( )( ) ( )[ ] ;
S t tt tb
δσ δ
++ στον αριθμητή του δεξιά μέλους της (10) και υάζοντας κατάλληλα
τους όρους παίρνουμε
( )( ) ( )( ) ( )
συνδ
( ) ( )( ) ( ) ( )( ) ( )0
lim S t
tδ
δ δ→ 0
[ ] [ ] [ ] [ ]; ; ; ;limS t S t t S t
t
t t t t t t
t t
b b b bδ
δ
σ σ σ σ
δ δ+
→
+ − + −= +
( )( ) ( ) ( )( ) ( )
0
[ ] [ ]; ;lim S t S t t
t
t t t t
t
b bδ
δ
σ σδ δ
δ+
→
+ − ++ . (11)
Βάσει της (8), το πρώτο όριο στο δεξιά μέλος της ανωτέρω σχέσεως γράφεται
- 181 -

9
( )( ) ( ) ( )( ) ( )
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( )
( ) ( )
( ) ( )
( )
( )
( )
11 1
0
2 2 2
0 0
3 3 30
[ ][ ] [ ]
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ]
;; ;lim
; ; ; ;lim lim
; ; ;lim
t
defS t t S t
t t
t
Db tb t t b tDtt
t t t b t t b t Db tt t
b t t b t Db tt Dt
b bδ
δ
δ δ
δ
σσ σ
σ σ σ σ
σ σ σ
δδ
δ δδ δ
δδ
→
+
→ →
→
⎛ ⎞+ −⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟+ − ⎜ ⎟+ −⎜ ⎟= =⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟+ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
;Dtσ
t
Οι παράγωγοι υπολογίζονται ως εάν οι συνιστώσες να ήταν βαθμωτές ποσότητες, με τη βοήθεια της σχέσεως (6).
( )[ ] ; /nDb t Dtσ ( )[ ] ;nb σ
Το δεύτερο όριο στο δεξιά μέλος της σχέσεως (11) περιέχει στον αριθμητή τη διαφορά των συνιστωσών του ίδιου διανύσματος ( )[ ] ; t tb σ δ+ ως προς τα δύο συστήματα και ( )S t
(S t t )δ+
(S t t
. Η διαφορά αυτή υπολογίζεται εύκολα αν λάβουμε υπ’ όψιν μας ότι το σύστημα
)δ+ προκύπτει από το σύστημα ( )S t μετά από μία παράλληλη μεταφορά ( )t tU δ (η
οποία δεν ενδιαφέρει εν προκειμένω) και μια περιστροφή περί τον άξονα ( ) ( ) ( )/t tΩ Ω t=e
κατά γωνία ( ) ( )t tΩ tδθ = δ . Τότε, εφαρμόζοντας τη σχέση (12) του εδαφίου 1.3, παίρνουμε:
( ) ( ) ( ) ( ) ( ) ( ) ( )2[ ] [ ] [ ]; ; ;S t t S t S t
t t t t t t Ob b b eσ σ σδ δ δ δθ+ Δ
+ = + + + × + δθ =
( ) ( ) ( ) ( ) ( ) ( )2[ ] [ ]; ;S t S t
t t t t t O tb b Ωσ σδ δ δ= + + × + ,
απ’ όπου προκύπτει
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2[ ] [ ] [ ]; ; ;S t S t t S t
t t t t t t t O tb b b Ωσ σ σδ δ δ+ Δ
+ − + = − × + δ
( ) ( ) ( ) ( )2[ ] ;S t
t t t OΩ b σ tδ δ= × + .
Εισάγοντας τα ανωτέρω αποτελέσματα στο δεξιά μέλος της σχέσεως (11), παίρνουμε:
( )
( )( )
( )
( )
( )
( ) ( )( ) ( )
1
2
3
[ ] ;
[ ]
[ ][ ][ ]
[ ]
;
;;;
;
S tS t
ό ό
ή
ύ t
Db tDt
Db tD tt t
Dt DtDb t
Dt
b
bΩ b
σ
αδρανειακ ς ρυθμ ς
μεταβολ ς του
διαν σματος
σ
σσσ
σ
⎛ ⎞⎜ ⎟⎜ ⎟⎫ ⎜ ⎟⎛ ⎞⎪ ⎜ ⎟= = + ×⎬ ⎜ ⎟⎜ ⎟⎝ ⎠⎪
⎭ ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
.
(12) Η ανωτέρω σχέση (12), σε συνδυασμό με την (6), επιλύει το πρόβλημα του υπολογισμού του αδρανειακού χρονικού ρυθμού μεταβολής διανυσματικού πεδιακού μεγέθους
ως προς σύστημα συντεταγμένων κινούμενο με ταχύτητα ( ) . ( )[ ] ; tb b σ=
,U Ω
- 182 -

10
Σχόλιο 1: Τα αποτελέσματα του εδαφίου 1.5, σε συνδυασμό με τη σχέση (6), ανωτέρω, που εκφράζει την ουσιώδη παράγωγο βαθμωτού πεδιακού μεγέθους, μπορούν να αξιοποιηθούν για τον «γρήγορο» υπολογισμό της ουσιώδους παράγωγου του διανυσματικού πεδίου , ως εξής:
/D Dtb( ; tb r )
( ) ( ) ( ) ( )( )3 3
1 1; ;n n n n
n n
D D Db t t b t tDt Dt Dt
b r i r i= =
⎛ ⎞= =⎜ ⎟
⎝ ⎠∑ ∑ =
( ) ( ) ( ) ( )3 3
1 1
;; nn
n nn n
D tDb tt b t
Dt Dtir
i r= =
= +∑ ∑ =
( ) ( ) ( ) ( ) ( )3 3
1 1
;;n
n n nn n
Db tt b t t t
Dtr
i r Ω i= =
= +∑ ∑ × =
( ) ( ) ( ) ( ) ( )3 3
1 1
;;n
n nn n
Db tt t b t
Dtr
i Ω r i= =
= + ×∑ ∑ n t ,
εκ της οποίας λαμβάνουμε
( ) ( ) ( ) ( )3
1
;;n
nn
Db tD t tDt Dt
rb i Ω b r=
= +∑ t× . (12´)
Η (12´) είναι φορμαλιστικά ταυτόσημη με την (12). Η αναλυτική παραγωγή είναι προφανώς πολύ πιο «απλή», αλλά η φυσική σημασία των χειρισμών είναι σαφώς πιο «σκοτεινή».
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 183 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
3.3 Οι εξισώσεις της Υδροδυναμικής, όταν το σύστημα συντεταγμένων έχει ιδίαν κίνηση
Έχοντας βρει τις κατάλληλες εκφράσεις για τον υπολογισμό του αδρανειακού ρυθμού μεταβολής βαθμωτών και διανυσματικών πεδιακών μεγεθών όταν ο χώρος (το πεδίο) περιγράφεται αναλυτικά μέσω συστήματος συντεταγμένων το οποίο κινείται με ταχύτητα
, μπορούμε πλέον να προχωρήσουμε εύκολα στην παραγωγή των εξισώσεων της Υδροδυναμικής ως προς το σύστημα αυτό. Στο παρόν εδάφιο θα παράγουμε τις εξισώσεις Euler, συνέχειας και Bernoulli.
( ,U Ω)
- Οι εξισώσεις Euler ως προς τους στιγμιαίους άξονες κινούμενου σ.σ.
Έστω πεδίο ροής ( ); t=u u r , μη-συνεκτικού (ατριβούς) ρευστού. Έστωσαν οι
κατάνεμημένες δυνάμεις, ανά μονάδα όγκου, και ( ; tX r )
( );p tr το πεδίο της πίεσης εντός του ρευστού. Ας θεωρήσουμε υλικό στοιχείο [ ]σ του ρευστού, όγκου Vδ και πυκνότητας ρ (άρα μάζας ), το οποίο στη χρονική στιγμή κατέχει τη θέση mδ = Vρδ t ( )1 2 3, ,x x xr = και
κινείται με (απόλυτη) ταχύτητα . Ο νόμος του Newton για το υλικό στοιχείο γράφεται στη μορφή:
( ;=u u r )tmδ ρδ= V
DV VDt
u X p Vρδ δ= − ∇ δ
)
. (1)
/D Dtu είναι η απόλυτη επιτάχυνση του στοιχείου , η οποία –όπως και τα διανύσματα του δεξιά μέλους της (1)- νοείται αναλυμένη σε συνιστώσες πάνω στους στιγμιαίους άξονες του (κινούμενου) σ.σ.. Εφ’ όσον το σύστημα συντεταγμένων κινείται με ταχύτητα , ο αδρανειακός ρυθμός μεταβολής δίδεται από τη σχέση (12) του εδαφίου 3.2:
m Vδ ρδ=
/D Dtu( ,U Ω
1 2 31 2 3
D Du Du DuDt Dt Dt Dt
u i i i Ω u= + + + × . (2)
Οι ουσιώδεις παράγωγοι των συνιστωσών /nDu Dt ( ) ( 1 2 3[ ] ; , ,n n nu u t u x x x tσ= = ); επί των στιγμιαίων αξόνων δίδονται από τη σχέση (6) του εδαφίου 3.2:
( )n nn
Du uu
Dt tu U Ω r
∂= + − − × ⋅∇
∂. (3)
Συνδυάζοντας τις (1), (2) και (3), ανωτέρω, παίρνουμε την ακόλουθη μορφή για τις εξισώσεις Euler ως προς τους στιγμιαίους άξονες κινούμενου σ.σ.:
( )
( )
( )
11 2 3 3 2 1
1
22 3 1 1 3 2
2
33 1 2 2 1 3
3
1 1
1 1
1 1
u pu u u Xt x
u pu u u Xt x
u pu u u Xt x
u U Ω r
u U Ω r
u U Ω r
ρ ρ
ρ ρ
ρ ρ
∂ ∂+ − − × ⋅∇ + Ω − Ω = −
∂ ∂
∂ ∂+ − − × ⋅∇ + Ω − Ω = −
∂ ∂
∂ ∂+ − − × ⋅∇ + Ω − Ω = −
∂ ∂
, (4α)
- 184 -

12
Οι παραγωγίσεις είναι μερικές παραγωγίσεις ως προς χρόνο των συνιστωσών
της πεδιακής ταχύτητας επί των στιγμιαίων αξόνων του κινούμενου σ.σ.. Οι σχέσεις (4α) μπορούν να ενοποιηθούν στην ακόλουθη διανυσματική γραφή:
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
/nu t u∂ ∂ ≡
)n
( 1 2 3, , ;nu x x x t
( ) 1 1 pu u U Ω r u Ω u Xρ ρ
+ − − × ⋅∇ + × = − ∇⎡ ⎤⎣ ⎦ . (4β)
Οι εξισώσεις (4α) δίδονται (με συνοπτική παραγωγή) από τον Lamb (1945, Article 12), με αναφορά στον Greenhill (1880). - Η εξίσωση συνέχειας (διατήρησης μάζας) ως προς κινούμενο σύστημα συντεταγμένων Ας θεωρήσουμε ένα απειροστό υλικό παραλληλεπίπεδο(1) ABCDEFKL, με την κορυφή Α στη θέση ( 1 2 3, , )x x x
( )
και με ακμές , ορθογώνιες στη χρονική στιγμή . Η πυκνότητα του ρευστού στο εσωτερικό του παραλληλεπιπέδου είναι
1 2 3, ,dx dx dx t
(1 2 3, , ; n )x x x t O dxρ + και η ταχύτητα του ( ) (1 2 3, , ; n )x x x t O dxu + . Λόγω του
απειροστού των ακμών, μπορούμε, χωρίς ουσιώδες σφάλμα, να αγνοήσουμε τις διαφορικές ποσότητες ( nO dx ) σε σχέση με τις πεπερασμένες, και να υποθέσουμε ότι η πυκνότητα και η
ταχύτητα είναι ομοιόμορφες στο εσωτερικό του απειροστού παραλληλεπιπέδου.
Η μάζα που περιέχεται στο παραλληλεπίπεδο ABCDEFKL τη χρονική στιγμή είναι t Vρδ , όπου 1 2 3V dx dx dxδ =
t
είναι ο όγκος αυτού. Εφ’ όσον οι επιφάνειες του παραλληλεπιπέδου παρακολουθούν τις κινήσεις των στοιχείων του ρευστού που τις αποτελούν, δεν υπάρχει ροή μάζας δι’ αυτών. Άρα, η μάζα που περιέχεται στο εσωτερικό του ABCDEFKL τη χρονική στιγμή θα είναι ίδια με τη μάζα που θα περιέχεται στο εσωτερικό του A´B´C´D´E´F´K´L´, στο οποίο μετασχηματίζεται το ABCDEFKL μετά πάροδο χρόνου tδ . Το φυσικό αυτό γεγονός εκφράζεται μαθηματικά με τη βοήθεια της ουσιώδους (υλικής) παραγώγου ως εξής:
Σχήμα 1: Υλικό παραλληλεπίπεδο σε πεδίο ροής
(1) Λέγοντας υλικό παραλληλεπίπεδο εννοούμε ένα παραλληλεπίπεδο του οποίου οι επιφάνειες κινούνται με τις ταχύτητες των στοιχείων ρευστού του βρίσκονται πάνω σ’ αυτές, και άρα αποτελούνται διαρκώς από τα ίδια στοιχεία ρευστού.
L K
C
B
D
A
E
E′
K
C
′
′
B′A′
D′ F ′
F
L
- 185 -

13
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) 0D V
Dtρδ
= ⇔ 1 1 0D D VDt V Dtρ δ
ρ δ+ = . (5)
Ο όρος 1 D VV Dt
δδ
εκφράζει το ρυθμό διόγκωσης του στοιχειώδους παραλληλεπιπέδου, και
υπολογίζεται ως εξής: Μετά πάροδο χρόνου tδ το αρχικό ορθογώνιο παραλληλεπίπεδο ABCDEFKL μετασχηματίζεται στο –κατά προσέγγιση– πλάγιο παραλληλεπίπεδο A´B´C´D´E´F´K´L´, του οποίου η βασική τρίεδρος αποκλίνει απειροστά της αντίστοιχης τρισορθογώνιας τριέδρου του αρχικού. Κατά συνέπεια, ο όγκος του πλάγιου παραλληλεπιπέδου μπορεί να εκφρασθεί, σε πρώτη τάξη προσέγγισης, από το γινόμενο των μηκών των ακμών του. Οι ακμές του παραλληλεπιπέδου A´B´C´D´E´F´K´L´ έχουν μήκη:
, ( )1n nn n nndx t dx t dxε δ ε δ+ = + n
όπου /nn n nu xε = ∂ ∂ είναι οι ρυθμοί γραμμικής παραμόρφωσης των υλικών ινών του πεδίου. Βάσει των ανωτέρω έχουμε ότι ο όγκος του πλάγιου παραλληλεπιπέδου A´B´C´D´E´F´K´L´ είναι, σε πρώτη τάξη προσέγγισης (δηλαδή παραλείποντας τα διαφορικά ανώτερης τάξης):
( )( )( ) ( )11 22 33 1 2 3 11 22 331 1 1 1t t t dx dx dx t Vε δ ε δ ε δ ε ε ε δ δ+ + + + + +⎡ ⎤⎣ ⎦ .
Η μεταβολή του όγκου είναι λοιπόν:
( ) ( )11 22 33 11 22 331 t V V t Vε ε ε δ δ δ ε ε ε δ δ+ + + − = + +⎡ ⎤⎣ ⎦ ,
και ο ρυθμός της διόγκωσης:
( )11 22 33 1 2 3
1 2 3
t V u u ut V x x x
uε ε ε δ δ
δ δ⎛ ⎞+ + ∂ ∂ ∂
= + + = ∇⎜ ⎟∂ ∂ ∂⎝ ⎠.
Άρα:
1 D VV Dt
uδδ
= ∇ . (6)
Συνδυάζοντας τις (5) και (6) παίρνουμε:
0DDt
uρ ρ+ ∇ = . (7)
Ο αναγνώστης μπορεί να έχει ήδη παρατηρήσει ότι όλη η ανωτέρω ανάλυση εμφανίζεται αυτούσια και στην περίπτωση όπου το σ.σ. θεωρείται ακίνητο. (Βλ. π.χ. Lamb 1945, Article 7.) Η ουσία αυτής της –σωστής- παρατήρησης είναι ότι η ανωτέρω ανάλυση είναι ανεξάρτητη από την κινηματική κατάσταση του συστήματος συντεταγμένων με το οποίο περιγράφουμε το χώρο, εφ’ όσον επιμένουμε να εργαζόμεθα με τα απόλυτα (αδρανειακά) μεγέθη. Η κινηματική κατάσταση του σ.σ. υπεισέρχεται μόνο στην ερμηνεία (στον υπολογισμό) της ουσιώδους παραγώγου /D Dtρ . Έτσι, σύμφωνα με την (6) του εδαφίου 3.2, η (7) γίνεται:
( ) 0t
u U Ω r uρ ρ ρ∂+ − − × ⋅∇ + ∇ =
∂. (8α)
Επειδή όμως , έχουμε ότι ( ) 0∇ + × =U Ω r ( )∇ = ∇ − − ×u u U Ω r , οπότε η (8α) γράφεται και στη μορφή
- 186 -

14
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) 0t
u U Ω rρ ρ∂+ ∇ − − × =⎡⎣∂
⎤⎦ . (8β)
Παρά το ότι δεν εργαζόμεθα με σχετικά –ως προς το σ.σ.- κινηματικά μεγέθη, στο σημείο αυτό αξίζει να δούμε την (8β) και με την οπτική της σχετικής ταχύτητας. Πράγματι, η διαφορά εκφράζει τη σχετική πεδιακή ταχύτητα του υλικού στοιχείου
ως προς το (κινούμενο) σύστημα συντεταγμένων. Έτσι, η (8β) γράφεται, ισοδυνάμως, και στη μορφή:
− − ×u U Ω r
)relu
( ; tσ⎡ ⎤⎣ ⎦r
( ) 0reltuρ ρ∂
+ ∇ =∂
. (8γ)
Από οποιαδήποτε από τις σχέσεις (7) ή (8), βλέπουμε ότι, στην περίπτωση ρ = σταθερό, η εξίσωση συνέχειας γίνεται:
0 , (9α) u∇ =
η οποία δεν διαφέρει σε τίποτα από την εξίσωση συνέχειας που βρίσκουμε όταν χρησιμοποι-ούμε ακίνητο σύστημα συντεταγμένων. Ειδικότερα, αν το πεδίο είναι και αστρόβιλο, οπότε
και , η εξίσωση συνέχειας γίνεται: 0∇× =u =∇Φu
. (9β) 2 0∇ Φ =
Ισχύει λοιπόν το εξής πολύ χρήσιμο αποτέλεσμα: «Η εξίσωση συνέχειας του ασυμπίεστου
και αστρόβιλου ρευστού έχει τη μορφή 2 2 2
22 21 2
23x x x
∂ Φ ∂ Φ ∂ Φ∇ Φ = + +
∂ ∂ ∂, ανεξαρτήτως του εάν
το σ.σ. κινείται ή όχι. Το δυναμικό ( )1 2 3, , ;x x x tΦ = Φ ορίζεται έτσι ώστε η κλίση του (gradient) να παρέχει την αδρανειακή πεδιακή ταχύτητα».
Το ανωτέρω αποτέλεσμα παράγεται κατά διαφορετικό τρόπο στο επόμενο εδάφιο. - Ολοκλήρωση των εξισώσεων Euler για αστρόβιλο και ασυμπίεστο ρευστό. Νόμος του
Bernoulli
Είναι γνωστό ότι σε ορισμένες περιπτώσεις οι εξισώσεις Euler μπορούν να ολοκληρωθούν (χωρικά) και να δώσουν μια έκφραση της πίεσης συναρτήσει των κινηματικών ποσοτήτων (και ενδεχομένως των εξωτερικών δυνάμεων). Μια τέτοια περίπτωση είναι και αυτή του αστρόβιλου, ασυμπίεστου ρευστού, εξεταζόμενου με τη βοήθεια κινούμενου σ.σ..
Υποθέτουμε, κατ’ αρχήν, ότι οι εξωτερικές δυνάμεις (ανά μονάδα όγκου) προέρχονται από δυναμικό (συντηρητικό) πεδίο (όπως συμβαίνει, π.χ., με τις δυνάμεις βαρύτητας), οπότε
, όπου X = −∇Ψ ( 1 2 3, , )x x xΨ = Ψ είναι κατάλληλη συνάρτηση δυναμικού. Στην περίπτωση ομογενούς πεδίου βαρύτητας (που μας ενδιαφέρει ιδιαίτερα εν προκειμένω
gh) έχουμε
ρΨ = ( h κατακόρυφη απόσταση από μια στάθμη αναφοράς). Υπό τις ανωτέρω προϋποθέσεις, η (4β) γράφεται στη μορφή
( )1 1 0p u u U Ω r u Ω uρ ρ∇ + ∇Ψ + + − − × ⋅∇ + × =⎡ ⎤⎣ ⎦ , (10)
- 187 -

15
η οποία ολοκληρωνόμενη κατά μήκος ενός (αυθαίρετου) δρόμου , με αρχή το σημείο και πέρας το σημείο , κείμενου εξ ολοκλήρου μέσα στο πεδίο ροής (βλ. Σχήμα 2), μας δίδει
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
γ 0rr
( ) ( ) ( ) ( ) ,
0 01 1
II
p p d d
u Uu
u S u U u U Sρ ρ
− + Ψ−Ψ + + − ⋅∇ −⎡ ⎤⎣ ⎦∫ ∫ −
( ) ,
0d
IΩ u
Ω r u Ω u S− × ⋅∇ − × =⎡ ⎤⎣ ⎦∫ . (11)
Γενικώς, όταν το πεδίο δεν είναι αστρόβιλο, δηλαδή όταν 0u∇× ≠ , τα ολοκληρώματα Iu ,
,Iu U και ,IΩ u εξαρτώνται από το δρόμο ολοκλήρωσης. Όταν όμως το πεδίο είναι αστρόβιλο,
δηλαδή όταν
0u∇× = οπότε , (12α,β) = ∇Φu τα τρία ανωτέρω ολοκληρώματα είναι ανεξάρτητα του δρόμου ολοκλήρωσης, και υπολογίζονται άμεσα. Το «κλειδί» γι’ αυτόν τον υπολογισμό είναι η μετατροπή των ολοκληρωτέων συναρτήσεων στη μορφή κλίσεων (gradients) βαθμωτών πεδίων. Η περίπτωση του ολοκληρώματος Iu είναι ιδιαίτερα απλή. Από τη σχέση (12β) παίρνουμε
, με τη βοήθεια της οποίας βρίσκουμε = ∇Φu
0I d d du u S S= = ∇Φ = Φ = Φ −∫ ∫ ∫ Φ . (α)
Σχήμα 2: Ολοκλήρωση των εξισώσεων Euler κατά μήκος δρόμου εντός του πεδίου
ροής γ
1x
ΩU
3x
O2x
u
r
0r
dS
γ
- 188 -

16
Για να επεξεργασθούμε ανάλογα τα δύο άλλα ολοκληρώματα,
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
,Iu U και ,IΩ u , χρειαζόμαστε
την ακόλουθη διανυσματική ταυτότητα, που δίδεται σε πολλά βιβλία διανυσματικής ανάλυσης (βλ. π.χ. Spiegel 1974, σελ. 58), και μπορεί να επαληθευθεί με απ’ ευθείας εκτέλεση των πράξεων:
( ) ( ) ( ) ( ) ( )a b b a a b b a a b∇ ⋅ = ⋅∇ + ⋅∇ + × ∇× + × ∇× . (13)
Εάν θέσουμε στην ανωτέρω ταυτότητα a b u U q= = − ≡
) 0U και λάβουμε υπ’ όψιν μας ότι,
λόγω του αστροβίλου, (u u∇× ≡ ∇× − = , παίρνουμε:
. ( ) ( )2∇ ⋅ = ⋅∇q q q q
Άρα, το δεύτερο ολοκλήρωμα στο δεξιά μέλος της (11) γράφεται ως εξής:
( ) ( ) ( 2 20,
1 12 2
d dIu U q q S q q S= ⋅∇ ⋅ = ∇ ⋅ ⋅ = −⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦∫ ∫ )q q . (β)
Για τον μετασχηματισμό της ολοκληρωτέας του ολοκληρώματος ,IΩ u , εφαρμόζουμε την ταυτότητα (13) θέτοντας και = ×a Ω r =b u , οπότε βρίσκουμε
( ) ( )( ) ( ) ( )( ) ( ) ( )u Ω r u Ω r Ω r u u Ω r Ω r∇ ⋅ × = ⋅∇ × + × ⋅∇ + × ∇× × + × × ∇×⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ u . (γ)
Λαμβάνοντας τώρα υπ’ όψιν μας ότι 0∇× =u και ( ) 2∇× × =Ω r Ω (η τελευταία προκύπτει αμέσως με απ’ ευθείας εκτέλεση των παραγωγίσεων), η (γ) γίνεται:
( ) ( )( ) ( ) ( )2u Ω r u Ω r Ω r u u Ω∇ ⋅ × = ⋅∇ × + × ⋅∇ + ×⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ . (δ)
Και πάλι με απ’ ευθείας εκτέλεση των παραγωγίσεων βρίσκουμε ότι
, (ε) ( )( )u Ω r Ω u⋅∇ × = ×
οπότε η (δ) γίνεται
( ) ( )Ω r u Ω u u Ω r× ⋅∇ − × = ∇ ⋅ ×⎡ ⎤ ⎡⎣ ⎦ ⎣ ⎤⎦ . (στ)
Η (στ) εκπληρώνει τον βασικό μας στόχο, δηλαδή το μετασχηματισμό της ολοκληρωτέας του ,IΩ u σε κλίση βαθμωτής συνάρτησης:
( ) ( ) ( ) ( ) (, 0 0I dΩ u u Ω r S u Ω r u Ω r Ω r Ω r= ∇ ⋅ × = ⋅ × − ⋅ × = ∇Φ ⋅ × −∇Φ ⋅ ×⎡ ⎤⎣ ⎦∫ )0 0 . (ζ)
Εισάγοντας τις (α), (β) και (ζ) στην (11), λαμβάνουμε
( )212
p q Ω rρ+Ψ
+ Φ + − ∇Φ ⋅ × = .
( ) (20 00 0 00
12
p q Ω rρ+Ψ
+ Φ + − ∇Φ ⋅ × = )c t
)
, (14)
όπου (0 0 0 ;p p tr= και ομοίως για τα 0Ψ , 0Φ , . Κατά συνέπεια η ανωτέρω ποσότητα αποτελεί ένα χωρικό ολοκλήρωμα των εξισώσεων Euler, εφ’ όσον το δεξιά μέλος της εξίσωσης (14) εξαρτάται μόνο από το χρόνο. Η (14) αποτελεί το νόμο του Bernoulli στην περίπτωση
( ) (2 220 00
q u U U= − = ∇Φ − )
αστρόβιλης και ασυμπίεστης ροής, όταν η γεωμετρία
- 189 -

17
του χώρου περιγράφεται με τη βοήθεια κινούμενου σ.σ., και τα (αδρανειακά) διανυσματικά μεγέθη του πεδίου ροής
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
αναλύονται πάνω στους στιγμιαίους άξονες. Στη συνέχεια παράγουμε μια εναλλακτική, πλην όμως ισοδύναμη, μορφή του νόμου του Bernoulli (14), η οποία εμφανίζεται πιο συχνά σε διάφορα συγκεκριμένα προβλήματα. Αναλύοντας την ποσότητα βρίσκουμε 2q
( ) ( ) ( )22 21 1 1 1 12 2 2 2 2
q Uq q U U U= ⋅ = ∇Φ − ⋅ ∇Φ − = ∇Φ − ∇Φ ⋅ + . (η)
Εισάγοντας την (η) στο αριστερά μέλος της (14), παίρνουμε:
( ) ( ) ( ) ( )2 21 12 2
p c t U tU Ω rρ+Ψ
+ Φ + ∇Φ − ∇Φ ⋅ − ∇Φ ⋅ × = −
ή, ισοδυνάμως,
( ) ( ) (21
12
p c tU Ω rρ+Ψ
+ Φ − + × ⋅∇Φ + ∇Φ = ) , (15α)
όπου η ποσότητα ( )2 / 2U t , ως συνάρτηση του χρόνου, ενσωματώνεται στη σταθερά του δεξιού μέλους. Η (15α) γράφεται επίσης στη μορφή
( ) ( ) (21
12
p c tt
U Ω rρ+Ψ ∂⎡ ⎤+ − + × ⋅∇ Φ + ∇Φ =⎢ ⎥∂⎣ ⎦
) . (15β)
Η εξίσωση (14) ή (15) επιτρέπει –σε πολλές περιπτώσεις– την αποσύζευξη του δυναμικού από το κινηματικό υποπρόβλημα, διευκολύνοντας σημαντικά τη μαθηματική επίλυση των αντίστοιχων υδροδυναμικών προβλημάτων. Αυτό συμβαίνει όταν η εξίσωση συνέχειας (9), σε συνδυασμό με τις συνοριακές συνθήκες του προς επίλυση προβλήματος, οδηγούν σε ένα «κλειστό» κινηματικό πρόβλημα συνοριακών τιμών (ή αρχικών-συνοριακών τιμών), το οποίο επιλυόμενο μας δίδει το κινηματικό πεδίο ή . Στη συνέχεια, χρησιμοποιώντας το νόμο του Bernoulli (15), βρίσκουμε το πεδίο της πίεσης
u Φ( );p tr , κατά προσέγγιση μιας
συνάρτησης του χρόνου . Η συνάρτηση ( )1c t ( )t1c προσδιορίζεται αν γνωρίζουμε την πίεση
( * ; )p tr σε ένα (οποιοδήποτε) σταθερό σημείο, , του πεδίου, για κάθε . *r t Αυτή αποσύζευξη, του δυναμικού υποπροβλήματος από το κινηματικό υποπρόβλημα, δεν «δουλεύει» γενικώς σε προβλήματα ελεύθερης επιφάνειας, επειδή το κινηματικό πρόβλημα συνοριακών τιμών δεν είναι «κλειστό» (η ελεύθερη επιφάνεια δεν είναι γνωστή!). Έτσι, για να λύσουμε προβλήματα συνοριακών τιμών με ελεύθερη επιφάνεια, πρέπει να εμπλέξουμε και τη δυναμική συνθήκη (15). Το γεγονός αυτό αποτελεί μια από τις αιτίες της μεγάλης δυσκολίας επίλυσης των προβλημάτων ελεύθερης επιφάνειας. Μια σημαντική εξαίρεση, όπου αυτή η περιπλοκή δεν εμφανίζεται τελικώς, έχουμε στο γραμμικό πρόβλημα στο πεδίο συχνοτήτων. Στην περίπτωση αυτή, όπως έχουμε ήδη δει στο Κεφάλαιο 2, η αποσύζευξη είναι εφικτή, αν και στη διατύπωση του «κινηματικού» υποπροβλήματος χρησιμοποιούμε και τη δυναμική συνθήκη προκειμένου να απαλείψουμε την ανύψωση της ελεύθερης επιφάνειας. Λόγω όμως της γραμμικοποίησης και της απαλοιφής της χρονικής παραγώγου, η «παρέμβαση» της δυναμικής συνθήκης ελεύθερης επιφάνειας περιορίζεται, από μαθηματική άποψη, στην διαφοροποίηση της συνοριακής συνθήκης, πάνω στην (επίπεδη) μέση ελεύθερη
- 190 -

18
επιφάνεια, από συνθήκη Neumann σε συνθήκη Robin, του τύπου 0vn
∂Φ− Φ =
∂. Η «μικρή»
αυτή μαθηματική διαφορά έχει όμως πολύ σημαντικές φυσικές συνέπειες –πράγμα αναμενόμενο εφ’ όσον, από φυσική άποψη, η διαφορά συνίσταται στην εισαγωγή της δυναμικής του προβλήματος!
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 191 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
3.4 Κινηματικές σχέσεις μεταξύ των αναπαραστάσεων ενός και του αυτού βαθμωτού πεδιακού μεγέθους ροής, θεωρούμενης από διαφορετικά συστήματα συντεταγ-μένων
- Σύνδεση με τα δύο προηγούμενα εδάφια. Αυτονομία του παρόντος
Στα δύο προηγούμενα εδάφια, 3.2 και 3.3, μελετήσαμε το πεδίο ροής χρησιμοποιώντας σύστημα συντεταγμένων (σ.σ.) το οποίο κινείται με ίδια κίνηση (ως στερεό σώμα), με ταχύτητα . Με τη βοήθεια του συστήματος αυτού υπολογίσαμε, στο εδάφιο 3.2, τον αδρανειακό ρυθμό μεταβολής πεδιακών μεγεθών, δηλ. ποσοτήτων που εκφράζουν υλικές ιδιότητες του ρευστού (και άρα αναφέρονται σε υλικά στοιχεία και όχι σε θέσεις στο χώρο) και, στη συνέχεια, στο εδάφιο 3.3, εφαρμόσαμε τα αποτελέσματα αυτά με σκοπό την παραγωγή των βασικών υδροδυναμικών εξισώσεων (Euler, συνέχειας και Bernoulli). Τονίζουμε για μια ακόμη φορά ότι πάντοτε εργαζόμεθα με τα απόλυτα (αδρανειακά) κινηματικά μεγέθη (ταχύτητα και επιτάχυνση)(
( ,U Ω)
)
1), ανεξαρτήτως της κινητικής κατάστασης του σ.σ.. Ο αναγνώστης παραπέμπεται στην εισαγωγική παράγραφο του εδαφίου 3.2, όπου εξηγείται διεξοδικά με ποιό τρόπο υπεισέρχεται στην υδροδυναμική ανάλυση η κίνηση του σ.σ.. Στο παρόν εδάφιο διαφοροποιούμε ελαφρά την οπτικής μας, και στρέφουμε την προσοχή μας στη μελέτη των σχέσεων μεταξύ των αναπαραστάσεων ενός και του αυτού (βαθμωτού, κατ’ αρχήν) πεδιακού μεγέθους της ροής, θεωρούμενης από δύο διαφορετικά σ.σ.. Δεδομένου ότι το ένα από τα δύο συστήματα συντεταγμένων θα ληφθεί ακίνητο και το άλλο κινούμενο, τα αποτελέσματα αυτού του εδαφίου μπορούν να χρησιμοποιηθούν για την (εναλλακτική) παραγωγή των εξισώσεων της Υδροδυναμικής όταν το σ.σ. κινείται, ανεξαρτήτως των δύο προηγουμένων εδαφίων. Γι’ αυτό το λόγο, η ανάπτυξη του παρόντος εδαφίου είναι αυτόνομη, χωρίς καμιά αναφορά στα εδάφια 3.2 και 3.3. - Συστήματα συντεταγμένων
Στο εδάφιο αυτό θα ασχοληθούμε με τη διερεύνηση των (καθαρώς κινηματικών) σχέσεων μεταξύ των αναπαραστάσεων ενός και του αυτού (βαθμωτού, κατ’ αρχήν) πεδιακού μεγέθους της ροής, θεωρούμενης από διάφορα συστήματα συντεταγμένων. Θα παράγουμε επίσης σχέσεις που συνδέουν τις χωρικές παραγώγους των μεγεθών αυτών, καθώς και σχέσεις που συνδέουν τις χρονικές παραγώγους αυτών. Το δυναμικό ταχύτητας και η ανύψωση της ελεύθερης επιφάνειας είναι δύο σημαντικά παραδείγματα τα οποία θα μας απασχολήσουν στη συνέχεια. Τέλος, με τη βοήθεια των αποτελεσμάτων αυτών, θα διατυπώσουμε τις συνοριακές συνθήκες της ελεύθερης επιφάνειας ως προς σύστημα συντεταγμένων κινούμενο με ταχύτητα
. Θα περιοριστούμε σε Καρτεσιανά συστήματα συντεταγμένων, αν και όλες οι θεωρήσεις μας μπορούν να επεκταθούν σε γενικά καμπυλόγραμμα συστήματα, με τη βοήθεια του Τανυστικού Λογισμού.
( ,U Ω
Θεωρούμε δύο συστήματα συντεταγμένων, ένα ακίνητο ( ) ( ) ( )1 2 3
f f ff fS O x x x⎡ ⎤≡ ⎢ ⎥⎣ ⎦ (f=fixed) και
ένα κινούμενο (m=moving), με ταχύτητα ( . (Τα περισσότερα από ( ) ( ) ( )1 2 3
m m mm mS O x x x⎡≡ ⎢⎣
⎤⎥⎦
),U Ω
(1) Και, άρα, δεν χρειαζόμε8α πρόσθετες υποθετικές φορτίσεις, όπως π.χ., οι δυνάμεις Coriolis, που υπεισέρχονται όταν εργαζόμεθα με τα σχετικά κινηματικά μεγέθη.
- 192 -

20
τα αποτελέσματα που θα παραχθούν ισχύουν, είτε αυτούσια είτε κατάλληλα διαμορφωμένα, και στην περίπτωση που θεωρούμε δύο κινούμενα συστήματα).
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Κάθε σημείο M του χώρου (του πεδίου ροής) περιγράφεται (αναπαρίσταται) με δύο τρόπους:
αφ’ ενός με το διάνυσμα θέσης ( ) ( ) ( )( )1 2 3, ,f f f
f fx x x O Mr = = , (1α)
αφ’ ετέρου δε με το διάνυσμα θέσης ( ) ( ) ( )( )1 2 3, ,m m m
m mx x x O Mr = . (1β) =
όπου f f= +r R rm (βλ. Σχήμα 1). Οι συντεταγμένες ενός και του αυτού σημείου M του
πεδίου ως προς τα δύο συστήματα, δηλαδή οι τριάδες ( ) ( ) ( )( )1 2 3, ,f f fx x x και ( ) ( )( )1 2 3m m( ), ,mx x x ,
είναι προφανώς διαφορετικές, και η σχέση τους αλλάζει με το χρόνο, εφ’ όσον το ένα από τα δύο συστήματα έχει ιδία κίνηση(2).
Κάθε βαθμωτό πεδιακό μέγεθος είναι μονότιμη συνάρτηση του πεδιακού σημείου M και του χρόνου t . Ας θεωρήσουμε, π.χ., το δυναμι ας ( );κό ταχύτητ M tΦ = Φ . Χρησιμοποιώντας τις δύο αναπαραστάσεις (1α) και (1β) ια το πεδιακό σημείο γ M , λαμβάνουμε τις ακόλουθες δύο αναπαραστάσεις του πεδιακού μεγέθους ( );M t : Φ
( ) ( ) ( ) ( ) ( )( )1 2 3; ; , ,f f f
f f f ;M t t x x x trΦ ≡ Φ = Φ = Φ , (2α) και ( ) ( ) ( ) ( ) ( )( )1 2 3; ; , ,m m m
m m m ;M t t x x xrΦ ≡ Φ = Φ = Φ t , (2β)
όπου f f= +r R rm . Τα ερωτήματα που θα εξετάσουμε εδώ είναι ποιά είναι η σχέση μεταξύ
των δύο συναρτήσεων και ( ;f f trΦ ) ( );m m trΦ , καθώς και μεταξύ των παραγώγων τους. - Σχέση μεταξύ των συναρτήσεων (π.χ. δυναμικών ταχύτητας) ( );f f trΦ και ( );m m trΦ
Σύμφωνα με τις σχέσεις (2) [που εκφράζουν το φυσικό «αξίωμα» ότι κάθε βαθμωτό μέγεθος, είναι αναλλοίωτος του πεδιακού σημείου M ως προς οποιαδήποτε αλλαγή του σ.σ.], έχουμε
ή ( ) (;m m f ft trΦ = Φ );r ( ) ( ) ( )( ) ( ) ( ) ( )( )1 2 3 1 2 3, , ; , , ;m m m f f f
m fx x x t x x x tΦ = Φ , (3)
εφ’ όσον οι συντεταγμένες ( ) ( ) ( )( )1 2 3, ,m m mx x x και ( ) ( ) ( )( )1 2 3, ,f f fx x x περιγράφουν ένα και το αυτό
πεδιακό σημείο M , δηλαδή εφ’ όσον ισχύει η σχέση f f m= +r R r
m
. Η απλή αυτή γεωμετρική σχέση (βλ. και Σχήμα 1), νοούμενη «αναλυτικά» (δηλ., ανά συνιστώσα), υλοποιεί την αλλαγή του τήματος των αξόνων. Πράγματι, λαμβάνοντας υπ’ όψιν ότι τα διανύσματα και νοούνται αναλυμένα σε συνιστώσες στους άξονες του
συστήματος , ενώ το διάνυσμα νοείται αναλυμένο σε συνιστώσες
στους (στιγμιαίους) άξονες του συστήματος
συO M
f fO≡
σ
f f mO O=R( ) ( )
1 2 3f fx x x ⎤⎥⎣ ⎦
f f=r
S ( )f⎡⎢ mr( ) ( ) ( )1 2 3
m mm mS O x x x⎡ ⎤≡ ⎢ ⎥⎣ ⎦ , γράφουμε
( )(2) Γενικώς, οι δείκτες f και χρησιμοποιούνται για να δηλώσουν ως προς ποιο σύστημα νοούνται οι
συντεταγμένες.
( )m
- 193 -

21
( ) ( ) ( ) ( ) ( ) ( ) ( )3 3 3
1 1 1
f f f f m m
i i i i i ii i i
tx R x= = =
= +∑ ∑ ∑e e ee
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
. (4α) . (4α)
Πολλαπλασιάζοντας εσωτερικά την τελευταία σχέση επί Πολλαπλασιάζοντας εσωτερικά την τελευταία σχέση επί ( )( )f
je , , βρίσκουμε 1,2,3j =
( ) ( ) ( ) ( ) ( ) ( )(( )
3
1
f f m m
ij
j j i ii
a t
tx R x=
= + ⋅∑ e e )f
j , (4β)
ή αναλυτικότερα:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
1 1 11 1 21 2 31 3
2 2 12 1 22 2 32 3
3 3 13 1 23 2 33 3
f f m m m
f f m m m
f f m m m
x R a x a x a x
x R a x a x a x
x R a x a x a x
⎫= + + +⎪⎪= + + + ⎬⎪
= + + + ⎪⎭
. (4γ)
Οι συντελεστές που εμφανίζονται στο δεξιά μέλος της (4γ) είναι τα συνημίτονα
κατεύθυνσης μεταξύ των αξόνων του συστήματος
( )i j i ja a t=( ) ( ) ( )1 2 3
f f ff fS O x x x⎡ ⎤≡ ⎢ ⎥⎣ ⎦ και του συστήματος
, και δίδονται από τις σχέσεις: ( ) (1 2
mm mS O x⎡≡ ⎢⎣
) ( )3
m mx x ⎤⎥⎦
( )
( )( ) ( )( ) ( ) ( )cos ,
f
f m
m
f mjf j mi j i j i
i
xa O x O x
x∂
= = = ⋅∂
e e . (5)
Σχήμα 1: Κάθε σημείο M του πεδίου ροής αναπαρίσταται με δύο τρόπους: αφ’ ενός με το διάνυσμα θέσης ( ) ( ) ( )( )1 2 3, ,f f f
f fx x x O Mr = = ,
αφ’ ετέρου με το διάνυσμα θέσης ( ) ( ) ( )( )1 2 3, ,m m m
m mx x x O Mr = = .
Σύμφωνα με τις εξισώσεις (4) και (5), ο πίνακας είναι ένας πίνακας στροφής, και
άρα είναι αντιστρέψιμος και μάλιστα ορθομοναδιαίος, δηλαδή ικανοποιεί τις σχέσεις: ( )
3 3i jA a×
=
( )1
fx
( )3
fx
( )fS ( )2
fx
f f mO O=R
fr
( )1
mx
( ) ( ) ( )
( ) ( ) ( )
1 2 3
1 2 3
, ,
, ,
f f f
m m m
x x xM
x x x
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
mΩ
2m
mr
( )x
mU ( )3
mx
( )mS fO mO
- 194 -

22
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
3 3
1 1i j i k j i k i jk
i i
AA A A I a a a a δΤ Τ
= =
= = ⇔ = =∑ ∑ . (6)
Σύμφωνα με τις σχέσεις (3) και (4), αν γνωρίζουμε τη συνάρτηση ( ) ( ) ( )( )1 2 3, , ;f f f
f x x x tΦ( ) ( ) ( )1 2 3, ,
του
δυναμικού ταχύτητας γραμμένου μέσω των συντεταγμένων f f fx x x του πεδιακού
σημείου M στους άξονες του ακίνητου σ.σ., τότε το δυναμικό ( ) ( ) ( )( )1 2 3, , ;m m m
m x x x t( ) ( )
1 2 3, ,m m m
Φ( )
, όπου το
πεδιακό σημείο αναπαρίσταται με τις συντεταγμένες του x x x ως προς τους στιγμιαίους άξονες του κινουμένου σ.σ., δίδεται από τη σχέση ( ) ( ) ( )( )1 2 3, , ;m m m
m x x x tΦ =
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( 1 11 1 21 2 31 3 2 12 1 22 2 32 3, ,m m m m mf ff R a x a x a x R a x a x a x= Φ + + + + + + m
( ) ( ) ( ) ( ) )3 13 1 23 2 33 3 ;m m mfR a x a x a x t+ + + . (7)
- Σχέση μεταξύ των χωρικών παραγώγων ( )/ m
m jx∂Φ ∂ και ( )/ f
f ix∂Φ ∂ των συναρτήσεων
(π.χ. δυναμικών ταχύτητας) ( );f f trΦ και ( );m m trΦ
Η σχέση μεταξύ των χωρικών παραγώγων ( )/ mm jx∂Φ ∂ και ( )/ f
f ix∂Φ ∂ των δύο
αναπαραστάσεων, ( );f f trΦ και ( );m m trΦ , ενός και του αυτού βαθμωτού πεδιακού μεγέ-
θους ( ; )M tΦ , προκύπτει αμέσως με τη βοήθεια των σχέσων (7) και (5), ανωτέρω:
( ) ( ) ( ) ( )
( )
( ) ( )
( )
( ) ( )
( )
( ) ( )
( )
( )
31 2 3
11 2 3
. (7)
f f f
m m f m f m f m f m
ff f f f
fpm
pj j j j j p
ά έx x x x
x x x x x x x x x xβλ δεξι μ λος
=
∂ ∂ ∂ ∂∂Φ ∂Φ ∂Φ ∂Φ∂Φ ∂= Φ = + + =
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∑j
=
( )( ) ( )( ) ( )
( ) ( )( ) ( )( ) ( )( )1 2
1 2 3
cos , cos , cos ,f m f m f m
f f f
f f ff m f m f mj j jO x O x O x O x O x O x
x x x∂Φ ∂Φ ∂Φ
= + + =∂ ∂ ∂ 3
( )( ) ( )( ) ( )
( ) ( )( ) ( )( ) ( )( ) ( )
1 2 31 2 3
f f f
f m f m f mf f f mj j jx x x
∂Φ ∂Φ ∂Φ= ⋅ + ⋅ + ⋅ = ∇ Φ
∂ ∂ ∂e e e e e e ef f j⋅ , (α)
όπου
( )( )
( )( )
( )( )
1 21 2 3
f f f 3f f ff f
f f x x xe e e
∂Φ ∂Φ ∂Φ∇ Φ = + +
∂ ∂ ∂f .
Περαιτέρω, δεδομένου ότι -εξ ορισμού- f f u∇ Φ = = αδρανειακή πεδιακή ταχύτητα, η (α) γίνεται
( )( ) ( ) ( )
(α)
m
m mf f
mj j
j
ux∂Φ
= ∇ Φ ⋅ = ⋅ =∂
e u e mj , (β)
όπου ( )mju είναι οι συνιστώσες της αδρανειακής πεδιακής ταχύτητας πάνω στους
στιγμιαίους άξονες του κινουμένου σ.σ.. u
- 195 -

23
Τα ανωτέρω αποτελέσματα συνοψίζονται στην ακόλουθη
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
---------------------------------- Πρόταση: Έστω ( ; )M tΦ = Φ βαθμωτό πεδιακό μέγεθος και ( ) ( ) ( )( )1 2 3, , ;f f f
f x x x tΦ , ( ) ( ) ( )( 1 2 3, ,m m m
m );x x xΦ t δύο αναλυτικές αναπαραστάσεις αυτού, γραμμένες αντιστοίχως με τη
βοήθεια των συντεταγμένων του πεδιακού σημείου M ως προς τα σ.σ.
(ακίνητο) και (κινούμενο). Τότε, οι χωρικές παράγωγοι
( ) ( ) ( )1 2 3
f f ff fS O x x x⎡ ⎤≡ ⎢ ⎥⎣ ⎦
( )/ m
m j( ) ( ) ( )1 2 3
m m mm mS O x x x⎡⎢⎣
⎤⎥⎦≡ x∂Φ ∂ και ( )/ f
f ix∂Φ ∂ των δύο αυτών αναπαραστάσεων του βαθμωτού μεγέθους ( );M tΦ = Φ , συνδέονται μεταξύ τους με τη σχέση
( ) ( )
( )
( ) ( )( )
3 3
1 1m f m f
ff f mpm
j p f f jp pj p j p
xa
x x x xe
= =
∂∂Φ ∂Φ∂Φ= = = ∇
∂ ∂ ∂ ∂∑ ∑ Φ ⋅
)
. (3) (8α)
Ειδικότερα, εάν ( ;M tΦ = Φ είναι το δυναμικό ταχύτητας και ( ) ( )/ f f
f i ix u∂Φ ∂ = είναι οι συνιστώσες της αδρανειακής πεδιακής ταχύτητας πάνω στους άξονες του (ακίνητου) σ.σ.
, τότε u
( ) ( )1 2
f ff fS O x x≡ ( )
3fx⎡ ⎤⎢ ⎥⎣ ⎦
( ) ( )/ m
m j jmx u∂ =∂Φ
u είναι οι συνιστώσες της ίδιας (αδρανειακής
πεδιακής) ταχύτητας πάνω στους στιγμιαίους άξονες του (κινουμένου) σ.σ.. Το τελευταίο συμπέρασμα γράφεται και ως εξής:
f f m mu u∇ Φ = ∇ Φ = = ∇ Φ⇒ f f . (8β)
---------------------------------------- - Σχέση μεταξύ των δεύτερων χωρικών παραγώγων ( ) ( )2 / m m
m jx x∂ Φ ∂ ∂ και ( ) ( )2 / f f
f p ix x∂ Φ ∂ ∂
των συναρτήσεων (π.χ. δυναμικών ταχύτητας) ( );f f trΦ και ( ); tm mrΦ
Εάν παραγωγίσουμε την (8α) ως προς ( )mx και λάβουμε υπ’ όψιν μας ότι ( )
( )
( ) 0f
m m
p
j
xx x
⎛ ⎞∂∂=⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠
,
(εφ’ όσον τα συστήματά μας είναι καρτεσιανά και άρα, για , οι συντεταγμένες σταθ.t = ( )f
px
και ( )m
jx συνδέονται μέσω των γραμμικών σχέσεων (4)), έχουμε
( ) ( ) ( ) ( )
( )
( ) ( ) ( )
( )
( )
3 3
1 1m m m f m m f m
f ff fp pm
p pj p j p
x xx x x x x x x x= =
⎛ ⎞⎛ ⎞ ⎛ ⎞∂ ∂∂Φ ∂Φ∂ ∂Φ ∂ ∂= = =⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠⎝ ⎠ ⎝ ⎠
∑ ∑j
( ) ( )
( )
( )
( )
( ) ( ) ( )
2 23 3 3 3
1 1 1 1f f m m f f
f ff fq p
q j pp q p qq p j q p
x xa a
x x x x x x= = = =
⎛ ⎞∂ ∂∂ Φ ∂ Φ= ==⎜ ⎟⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠∑ ∑ ∑ ∑ . (4) (9)
( ) ( )( )3
1 // fp(3) Στα πλαίσια της θεωρίας των Καρτεσιανών Τανυστών, η σχέση j pf p
mjm x ax =Φ = ∂Φ ∂∂ ∂ ∑
( )
δηλώνει ότι η τριάδα 1, 2, 3/ ,mjm jxΦ =∂ ∂
( )
είναι τανυστής πρώτης τάξεως. Το φυσικό νόημα της δήλωσης
αυτής αποδίδεται εναργέστερα από τη σχέση (8β): η τριάδα 1, 2, 3/ ,mjm jxΦ =∂ ∂ αναπαριστά ένα φυσικό
πεδιακό διάνυσμα, το οποίο παραμένει αναλλοίωτο σε αλλαγές Καρτεσιανών συντεταγμένων του τύπου (4).
- 196 -

24
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Με τη βοήθεια της (9) μπορούμε να βρούμε αμέσως τη σχέση μεταξύ των Laplacian τελεστών και 2
mΔ = ∇i im2
f fΔ = ∇i i :
( ) ( ) ( )( )( )( ) ( ) ( )
2 23 3 3
1 2 3 21 1 1
, , ;m m m
m mm
mm
mm j
j j jj
x x x tx xx
δ= = =
∂ Φ ∂ ΦΔ Φ = = =
∂ ∂∂∑ ∑ ∑
( ) ( ) ( )( )( ) ( ) ( ) ( )
2 23 3 3 3 3 3 3 31 2 3
1 1 1 1 1 1 1 1
, , ;f f f
f f f f
f fq j p j q j p j
j p q p q jq p q p
x x x ta a a a
x x x xδ δ
= = = = = = = =
∂ Φ ∂ Φ= =
∂ ∂ ∂ ∂∑∑∑∑ ∑∑ ∑∑ =
( ) ( )
( )
( ) ( )( ) ( ) ( )( )
62 23 3 3 3 3
1 2 31 1 1 1 1
, , ;έ
f f f
f f f f
f ff fj q j p q p
p q j p qq p q p
a a x x x tx x x x
σχ ση
δ= = = = =
∂ Φ ∂ Φ= = = Δ Φ
∂ ∂ ∂ ∂∑ ∑ ∑ ∑∑
ήτοι
( ) ( ) ( )( ) ( ) ( ) ( )( )1 2 3 1 2 3, , ; , , ;m m m f f f
m f fm x x x t x x x tΔ Φ = Δ Φ (10)
Με άλλα λόγια, ο τελεστής Laplace παραμένει αναλλοίωτος σε αλλαγές Καρτεσιανών συντεταγμένων του τύπου (4). Εξ αυτού προκύπτει το πολύ σημαντικό συμπέρασμα ότι
2 0f f f f m m m mΔ Φ ≡ ∇ Φ = Δ Φ ≡ ∇ Φ =⇒ 2 0
)
. (5) (11)
Παρατήρηση: Οι σχέσεις (8) και (10), ανωτέρω, μας επιτρέπουν να αναδιατυπώσουμε ως προς το δυναμικό ( ) ( ) ( )( 1 2 3, , ;m m m
m x x x tΦ διάφορα προβλήματα συνοριακών τιμών τα οποία
κατ’ αρχήν νοούνται και διατυπώνονται ως προς το δυναμικό ( ) ( ) ( )( )1 2 3, , ;f f f
f x x x tΦ . Η δυνατότητα αυτή θα χρησιμοποιηθεί εν εκτάσει στη συνέχεια. - Σχέση μεταξύ των χρονικών παραγώγων των συναρτήσεων (π.χ. δυναμικών
ταχύτητας) και ( ;f f trΦ ) ( );m m trΦ
Θα συμβολίσουμε με /f f ti∂ ∂ το χρονικό ρυθμό μεταβολής βαθμωτού μεγέθους ( );M tΦ
όταν τα ( ) ( ) ( )( 1 2 3, , )f f fx x x κρατούνται σταθερά, και με /m m ti∂ ∂ το χρονικό ρυθμό μεταβολής
του ιδίου βαθμωτού μεγέθους ( ; )M tΦ όταν τα κρατούνται σταθερά. Ο
πρώτος είναι χρονικός ρυθμός μεταβολής ως προς τον αδρανειακό χώρο, ο δεύτερος είναι η μερική χρονική παράγωγος του πεδιακού μεγέθους
( ) ( )( 1 2, ,m mx x x ( )3
m )
( );M tΦ , όταν κρατούνται σταθερές οι
συντεταγμένες ( )( 1 2m m( ) ( )
3, , m )x x x του σημείου M ως προς το κινούμενο σύστημα. Προφανώς,
( )3 3× ( ) ( )
(4) Αντίστοιχο είναι το νόημα της σχέσης (9), στα πλαίσια της θεωρίας των Καρτεσιανών Τανυστών: Ο
-πίνακας 2 / , , 1, 2, 3m mx x j∂ Φ ∂ ∂ =m j
(5) Πρβλ. το ανωτέρω αποτέλεσμα με τη σχέση (9β) του εδαφίου 3.3. Έχουμε κατ’ ουσίαν το ίδιο αποτέλεσμα, το οποίο εδώ προκύπτει με διαφορετικό τρόπο, εντελώς ανεξάρτητο από τις θεωρήσεις του εδαφίου 3.3.
είναι τανυστής δευτέρας τάξεως.
- 197 -

25
μέρος αυτού του χρονικού ρυθμού μεταβολής οφείλεται στην κίνηση του σ.σ., και όχι στην μεταβολή του πεδιακού μεγέθους
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( );M tΦ . Είναι προφανές ότι /f f ti∂ ∂
/ m t∂
είναι η μερική παράγωγος ως προς μεγεθών του τύπου
, ενώ είναι η μερική παράγωγος ως προς μεγεθών του τύπου . Έτσι, όταν εργαζόμεθα κατά συστηματικό και συνεπή τρόπο μόνο με τη μια από τις δύο αναπαραστάσεις του βαθμωτού μεγέθους
t
( ;f f tΦ r ) m i∂ t ( );m m trΦ
( );M tΦ , δεν απαιτείται ειδικός συμβολισμός προκειμένου να διακρίνουμε μεταξύ /f fi t∂ ∂ και / m tm i∂ ∂ . Χρησιμοποιούμε το συνηθισμένο σύμβολο , και εννοούμε πάντοτε την αντίστοιχη μερική παράγωγο. /i∂ t∂
Στο παρόν υποεδάφιο εισάγουμε και χρησιμοποιούμε τα σύμβολα /f f ti∂ ∂ και , προκειμένου να υπολογίσουμε τη σχέση μεταξύ των μερικών παραγώγων /
/m m ti∂ ∂
f f f t∂
( );
∂ Φ και
. Αφετηρία και πάλι θα είναι το αναλλοίωτο του βαθμωτού μεγέθους /m m m t∂ Φ ∂ M tΦ , σχέση (3):
( ) ( )( ; ;m m f t tr r );f f f f
f f
tt tr∂ Φ ∂
= Φ
( )( )
=∂ ∂
(chain rule)
( ) ( ) ( )3
1
; ;; m
m
m
t xr= ⋅
∂ ∂f mf m mm
f m
t t
x t tr r
=
∂ ∂ Φ∂Φ+
∂∑ . (12)
Προσοχή! Για την κατανόηση της χρήσης των τριών διαφορετικών συμβόλων μερικής παραγώγισης στο δεξιά μέλος της (12), δηλαδή των συμβόλων ( )/ mxi∂ ∂ , /f f ti∂ ∂ και
, απαιτείται η πλήρης κατανόηση του ποιό μέγεθος μεταβάλλεται και ποιό κρατείται σταθερό σε κάθε όρο.
/m m ti∂ ∂
Το όλο πρόβλημα έχει πλέον μετατοπισθεί στον υπολογισμό της παραγώγου ( ) ( );m
ff
f
txtr∂
∂. Η
σχέση f fm = − +r R r
x
, λαμβάνοντας υπ’ όψιν σε ποιό σύστημα αναλύεται το κάθε διάνυσμα, γράφεται ισοδυνάμως
( ) ( ) ( ) ( ) ( )3 3
1 1
m m f
j j j jj j
x= =
= −∑ ∑e e( ) ( )( )f f
jt tR +
( )
. (13α)
Πολλαπλασιάζοντας, εσωτερικά επί ( )m te
( ) ( )fR−
, παίρνουμε
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )3
1
;m m f f m
f j j jj
t t tx x x=
≡ = + ⋅∑r e e (13β)
Παραγωγίζοντας ως προς χρόνο την τελευταία, υπό την προϋπόθεση ότι ( ) .f
jx σταθ= και ( ) .f
je σταθ= , βρίσκουμε
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )3
1
;m
f f f f mf
f f
fj j j
j
tt t
xR x
t t =
∂ ∂ ⎡ ⎤= − − + ⋅ =⎢ ⎥∂ ∂ ⎣ ⎦
∑r
e e
- 198 -

26
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( )( ) ( )3 3
1 1
f f mf ff m f f f
f f
j jj j j j
j j
t tt t
R xR x
t t= =
∂ − + ⎛ ⎞∂= ⋅ + − + ⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠∑ ∑
ee e e ⋅ (γ
αναγνώστης μπορεί εύκολα να πεισθεί ότι ο ρυθμός μεταβολής
. )
Ο /f f ti∂ ∂ ,
( )1
εφαρμοζόμενος
σε διανύσματα εξαρτώμενα μόνο από το χρόνο (δηλ., ανεξάρτητα των fx , ( )2
fx , ( )3
fx ), δεν μπορεί να είναι τίποτε άλλο παρά ο αδρανειακός ρυθμός μεταβολής λόγω διανυσμάτων. Έτσι, έχουμε
/d di t των εν
( ) ( ) ( ) ( ) ( )f f
f f
f
j jj
t tR d RU
t dt∂
≡ =∂
και ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
m m
f m m
f
m
t tt t
dt t
t dt∂
≡ = × = ×∂e e
Ω e Ω e (6).
Άρα,
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( )( ) ( )3 3
1 1
;mx d f m
f f m f f ff
f
jj j j j
j j
t t tt t
R dR x
t dt dt= =
⎛ ⎞= − ⋅ + − + ⋅ =⎜ ⎟⎜ ⎟∂ ⎝ ⎠
∑ ∑r e
e e e
t
∂
( ) ( ) ( ) ( ) ( )( )( ) ( )
( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )( )3
1
3 3
1 1
f f m f f f m
mm m
m i ii
j j j j j mj j
U tt x t
t t t tU R x
=
= =
=
⎡ ⎤= − ⋅ + − + ⋅ × =⎢ ⎥
⎣ ⎦
∑
∑ ∑
r e
e e e Ω e
( ) ( ) ( ) ( ) ( ) ( )( )mmm m tU t t t= − + ⋅ × =r Ω e
[με χρήση της ιδιότητας ) ] ( ) (⋅ × = ⋅ ×a b c b c a
( ) ( ) ( ) ( ) ( )( ) ( ) ( )m m
m m mt tt t t= − ⋅ − × ⋅ =U e Ω r e
( ) ( ) ( )( ) ( ) ( )m
m m m tt t t⎡ ⎤= − − × ⋅⎣ ⎦U Ω r e ,
που είναι το διάνυσμα της απόλυτης ταχύτητας της αρχής του κινούμενου σ.σ., ενο αν
ό ( )m tU mO νοούμ αλυμένο στους στιγμιαίους άξονες του τελευταίου. Σύμφωνα με τις ανωτέρω παρατηρήσεις, έχουμε
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( );m tx r∂ f m mf
mf
m mt tt tt
U e Ω r e= − ⋅ − × ⋅∂
, (ε)
κ της οποίας προκύπτει αμέσως ότι ε
( ) ( ) ( ) ( ) ( ) ( )( )3 ;m tx r∂
1
f mfm
fm mt t t
te U Ω r
=
= − − ×∂∑ . (14)
(6) Βλ. εδάφιο 1.5, σύμφωνα με το οποίο ( ) ( ) ( )t S t
d tt
dt= ∂ Ω
Ω
( )
, δηλ., οι συνιστώσες του διανύσματος
t t∂ ∂Ω ( ) ( ) 0t t× =Ω Ω, εφ’ όσον , μπορούν να θεωρηθούν ως οι συνιστώσες της απόλυτης (αδρανειακής) επιτάχυνσης.
- 199 -

27
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Λαμβάνοντας υπ’ όψιν τη σχέση (14) και τον ορισμό ( )( )
( )( )
( )( )
1 2 3m m
m m m
mm m mm x x x
e e e∂
1 2 3m
Φ ∂Φ ∂Φ∇ Φ
ότι ο πρώτος όρος του δεξιά μέλους της (12), γράφεται στη μορφή
= + +∂ ∂ ∂
,
βλέπουμε
( ) ( ) ( )( ) ( ) ( )( )fm fm t tU Ω r⎡ ⎤
3 ;; m tt x rr ∂∂Φ
1m m m m
fm mx t=
⋅ = − + × ⋅∇ Φ∑ . (15)
Συνδυάζοντας τις (12) και (15), παίρνουμε
⎣ ⎦∂ ∂
( ) ( ) ( ) ( )( ) ( );
;;
m
m
f f f m mm m m
f mmt t
U⎡ ⎤= − ⎣∂ ∂ m
tt
tt t
rr
rΩ r
∂ Φ ∂ Φ+ × ⋅∇ Φ⎦ , (16α)
ή, ισοδυνάμως,
( ) ( ) ( )( ) ( );;
m
f f f mm m m
f t∂ mm m t
tt t
tr
rU Ω r
⎛ ⎞∂ Φ ∂⎡ ⎤= − + × ⋅∇ Φ⎜ ⎟⎣ ⎦⎜ ⎟∂⎝ ⎠
. (16β)
Η τελευταία εκφράζει τη ζητούμενη σχέση μεταξύ των χρονικών παραγώγωνσυναρτήσεων και .
των ( );f f trΦ ( );m m trΦ
Εργαζόμενοι αναλόγως μπορούμε να αποδείξουμε ότι
( ) ( ) ( )( ) ( )22
2 mf m
m mt tt t
⎡ ⎤= − + ×⎜ ⎣⎜∂ ∂⎝U Ω r ;
;m
f f f mm m t
t ⎛ ⎞∂ Φ ∂⋅∇ Φ⎟⎦ ⎟
⎠r
r, (17)
αι, γενικώς, κ
( ) ( ) ( )( ) ( );;
m
f f f mm m m
f m
nn
m mn tt
t tt t
⎛ ⎞∂ Φ ∂⎡ ⎤= − + × ⋅∇ Φ⎜ ⎟⎣ ⎦⎜ ⎟∂⎝ ⎠
rr
U Ω r , (18)
όπου .
ση 1: Να αποδειχθεί η σχέση (16) χρησιμοποιώντας την ανάλυση
ηλαδή θεωρώντας το διάνυσμα
∂
2,3,4,...n =
Άσκη f m m= +r R r ,
f mO O=R δ αναλυμένο στους στιγμιαίους
ις (17) και
άξονες τουκινούμενου σ.σ.. Άσκηση 2: Να αποδείξετε τις σχέσε (18).
- 200 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
3.5 Συνθήκες ελεύθερης επιφάνειας, σε κινούμενο σύστημα συντεταγμένων. Ι: Παραγωγή των γενικών μη-γραμμικών συνθηκών
Έστω ότι στην εξεταζόμενη περιοχή του θαλασσίου περιβάλλοντος έχει αναπτυχθεί (από διάφορες αιτίες, π.χ. επίδραση ανέμου ή/και ρευμάτων, αλληλεπίδραση με στερεά σύνορα, κλπ) ένα πεδίο ροής ) ( ,M tv , όπου M είναι το γενικό πεδιακό σημείο. Προετοιμαζόμενοι για τη μελέτη των υδροδυναμικών φαινομένων που σχετίζονται με την κίνηση πλοίου δια μέσου απλών αρμονικών κυματισμών, θα χρησιμοποιήσουμε για την γεωμετρική περιγραφή του πεδίου ροής κινούμενο σύστημα συντεταγμένων (σ.σ.). Η κίνηση του σ.σ. θα εισαχθεί τώρα αυθαιρέτως, και θα είναι ( ) ( ) ( )1 3 1,0,0,0,0, ,U 3, U= Ω = ΩU
1U
Ω . Αργότερα όταν θα εστιασθούμε στη μελέτη του προβλήματος του πλοίου, οι ταχύτητες και θα είναι, αντιστοίχως, η μέση οριζόντια (πρόσω) ταχύτητα του πλοίου και η μέση γωνιακή ταχύτητα στροφής. Η τελευταία είναι διάφορη της μηδενικής μόνον όταν το πλοίο εκτελεί ελιγμούς (στρίβει). Παραδοσιακά, το βασικό πρόβλημα της δυναμικής συμπεριφοράς πλοίου εξετάζεται ως ταλάντωση μικρού πλάτους γύρω από μια μέση θέση η οποία κινείται ευθύγραμμα και με σταθερή ταχύτητα. Στην περίπτωση αυτή
,
1U 3Ω
= σταθ. και . Ενδιαφέρον παρουσιάζει επίσης και η περίπτωση
3 0Ω =
1U = σταθ. και 3Ω = σταθ. (κυκλικός ελιγμός). Τίθεται λοιπόν το πρόβλημα να διατυπώσουμε και μελετήσουμε (απλοποιήσουμε) τις εξισώσεις και τις συνοριακές συνθήκες που διέπουν το υδρομηχανικό μας σύστημα. Οι εξισώσεις/συνθήκες αυτές είναι:
α) Οι υδροδυναμικές εξισώσεις, που διέπουν την κίνηση του υγρού (νερού), και ισχύουν μέσα στο πεδίο ροής . ( )D D t=
β) Οι συνοριακές συνθήκες (κινηματική και δυναμική), που ικανοποιούνται πάνω στην ελεύθερη επιφάνεια του νερού ( )F FD D∂ = ∂ t .
γ) Οι συνθήκες μη διείσδυσης του υγρού στα στερεά σύνορα. Όταν η θαλάσσια περιοχή που εξετάζουμε απέχει αρκετά από τις ακτές, το πεδίο ροής θεωρείται (για λόγους απλότητας, εφ’ όσον δεν εισάγεται σφάλμα εξ αυτού) μη-φραγμένο κατά την οριζόντια έννοια. Τίθεται έτσι το ερώτημα της κατάλληλης έπ’ άπειρον συμπεριφοράς του πεδίου, το οποίο συχνά διατυπώνεται ως «συνθήκη ακτινοβολίας». Τέλος, προκειμένου να ολοκληρωθεί η μαθηματική διατύπωση του ειδικότερου προβλήματος της δυναμικής συμπεριφορά του πλοίου σε κυματισμούς, απαιτούνται και οι εξισώσεις κίνησης του πλοίου ως στερεού σώματος με έξι βαθμούς ελευθερίας. Οι τελευταίες έχουν ήδη παραχθεί και γραμμικοποιηθεί στο Κεφάλαιο 1, και έτσι δεν θα μας απασχολήσουν εδώ. Απλώς θα χρησιμοποιηθούν όταν έρθει η ώρα. Στο παρόν εδάφιο θα δώσουμε τη μορφή των υδροδυναμικών εξισώσεων και των συνθηκών ελεύθερης επιφάνειας, στην περίπτωση όπου η γεωμετρία του χώρου ορίζεται και περιγράφεται με τη βοήθεια σ.σ. που κινείται με ίδια ταχύτητα ( ) ( )1 3, ,U= ΩU Ω .
- 201 -

29
Θα χρησιμοποιήσουμε δύο σ.σ.: ένα ακίνητο, το οποίο θα συμβολίζεται ως
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
[ ]0 0 10 20 30S O x x x= και ένα κινούμενο με ταχύτητα ( ) ( )1 3, ,U= ΩU Ω , το οποίο εδώ θα
συμβολίζεται απλά ως [ ]1 2 3S O x x x= . Δηλαδή, ο δείκτης ( )0 υποδηλώνει το ακίνητο σ.σ.,
το οποίο στο εδάφιο 3.4 συμβολίζεται με το δείκτη ( )f . Όσον αφορά τις βασικές φυσικές υποθέσεις (παραδοχές) για το υγρό (νερό) και το πεδίο ροής, θα θεωρήσουμε ότι το υγρό είναι ατριβές και ασυμπίεστο, και το πεδίο ταχύτητας είναι αστρόβιλο, χωρίς κυκλοφορία, και παράγεται από ένα βαθμωτό δυναμικό. Θα συμβολίσουμε το βαθμωτό δυναμικό ταχύτητας με ( )T ,M tΦ (γενικώς), ή ( )T0 0, tΦ x (όταν χρησιμοποιού-
με ακίνητο σ.σ.), ή ( )T , tΦ x (όταν χρησιμοποιούμε κινούμενο σ.σ.). Ο δείκτης ( χρησιμο-ποιείται για να δηλώσει το ολικό δυναμικό (
)Τ
Total potential), σε αντιδιαστολή με διάφορα επί μέρους δυναμικά τα οποία θα εισαχθούν και θα χρησιμοποιηθούν αργότερα. Οι υδροδυναμικές εξισώσεις που διέπουν την κίνηση του νερού όταν χρησιμοποιούμε κινούμενο σύστημα συντεταγμένων, έχουν ήδη παραχθεί διεξοδικά στο εδάφιο 3.3: Υπό τη μορφή των εξισώσεων Euler (Θεώρημα της Ορμής), δίδονται από τις εξισώσεις (4) του εδαφίου 3.3. Η εξίσωση συνέχειας στην περίπτωση , που μας ενδιαφέρει εδώ, δίδεται από την εξίσωση (9α) ή (9β) του εδαφίου 3.3. Τέλος, το ολοκλήρωμα Bernoulli δίδεται, για την περίπτωση κινούμενου συστήματος συντεταγμένων, από τη σχέση (15α) ή (15β) του εδαφίου 3.3. Υπό τις προϋποθέσεις που εργαζόμεθα εδώ (ατριβές, ασυμπίεστο, αστρόβιλο), ως πεδιακή εξίσωση θα χρησιμοποιήσουμε την (καθαρώς κινηματικού χαρακτή-ρα) εξίσωση Laplace για το δυναμικό ταχύτητας, η οποία ισχύει είτε χρησιμοποιούμε ακίνητο σύστημα σ.σ. είτε χρησιμοποιούμε κινούμενο σ.σ.:
όσταθερρ =
( ) (0 T0 0 T, 0 ,tΔ Φ = = ΔΦx )tx . (1)
Η παραγωγή των οριακών συνθηκών ελεύθερης επιφάνειας και των απλών κυματικών λύσεων όταν χρησιμοποιούμε κινούμενο σύστημα συντεταγμένων, που αποτελεί το κύριο αντικείμενο του παρόντος εδαφίου, μπορεί να γίνει με δύο διαφορετικούς τρόπους: Είτε
a) Εργαζόμενοι απ’ ευθείας στο κινούμενο σύστημα, οπότε –με τη βοήθεια των εννοιών και των εξισώσεων που αναπτύχθηκαν στα εδάφια 3.2 και 3.3– μπορούμε να παράγουμε πρωτογενώς τις συνθήκες και τις λύσεις που αναζητούμε,
Είτε b) Εργαζόμενοι κατ’ αρχήν στο ακίνητο σύστημα, στο οποίο οι συνθήκες και οι λύσεις
είναι ήδη γνωστές, και μετασχηματίζοντας αυτές –δηλ. τις γνωστές συνθήκες και λύσεις–στο κινούμενο σύστημα, με τη βοήθεια των εννοιών και των αποτελεσμάτων που παρήχθησαν στο εδάφιο 3.4.
Και οι δύο γραμμές σκέψης είναι ενδιαφέρουσες και παρουσιάζουν πλεονεκτήματα και μειονεκτήματα. Στη συνέχεια θα ακολουθήσουμε τη δεύτερη γραμμή δουλειάς, ενθαρρύ-νοντας παράλληλα τον αναγνώστη να παράγει τα αντίστοιχα (ίδια!) αποτελέσματα με τη βοήθεια της πρώτης. Αυτό θα είναι μια πρώτης τάξεως άσκηση για την πλήρη κατανόηση των υδροδυναμικών εξισώσεων και φυσικής σημασίας των χειρισμών και των λύσεων όταν χρησιμοποιούμε κινούμενα συστήματα συντεταγμένων.
- 202 -

30
- Οριακές συνθήκες ελεύθερης επιφάνειας, όταν χρησιμοποιούμε ακίνητο σύστημα σ.σ.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Θα υπενθυμίσουμε, κατ’ αρχήν, τη μορφή που λαμβάνουν οι οριακές συνθήκες ελεύθερης επιφάνειας όταν χρησιμοποιούμε το ακίνητο σ.σ. [ ]0 0 10 20 30S O x x x= . Στην περίπτωση αυτή, η ίδια η ελεύθερη επιφάνεια αναπαρίσταται με τη βοήθεια της συνάρτησης ανύψωσης
(0 10 20, ; )x x tη , ως εξής:
( ) ( ) ( ) 30 10 20 30 30 0 10 20, , : , ;FD t x x x IR x x x tη∂ = = ∈ =x (2α)
ή ( ) ( ) ( ) 30 0 30 30 0 0, :FD t x IR x tη∂ = = ∈ =x R R ;
)
. (2β)
όπου με συμβολίζουμε το οριζόντιο διάνυσμα (0 10 20, ,0x x=R 0O M (βλ. Σχήμα 1). Από φυσική άποψη, η ελεύθερη επιφάνεια είναι μια υλική επιφάνεια, δηλαδή, αποτελείται διαρκώς από τα ίδια υλικά στοιχεία. Το γεγονός αυτό αποδίδεται από (ισοδυναμεί με) την κινηματική συνθήκη ελεύθερης επιφάνειας, η μαθηματική μορφή της οποίας, όταν χρησιμοποιούμε το ακίνητο σ.σ., είναι, ως γνωστόν, η εξής:
( )( )0 30 0 0
0
;0
D x tD tη−
=R
. (3α)
Δεδομένου ότι ο διαφορικός τελεστής εκφράζει την υλική παράγωγο και δίδεται
από τη σχέση
0 0/D Di t
0 00 0 0 T0 0
0 0
DD t t
= + ⋅∇ Φ ⋅∇vi i i i
/
0
0 t∂ ∂
= + ∇∂ ∂
i , όπου είναι η
πεδιακή ταχύτητα, έχουμε
( )10 20 30, , ,v v v v=
0 30 0 0 T0 0 30/D x D t x≡ ∂ Φ ∂ , οπότε η (3α) γίνεται
( ) ( )0 T0 0 00 0 0
0 0 3
, ;; tD tD t x
ηη ∂ Φ=
∂
RR
0
)
. (3β)
Περαιτέρω, πάνω στην ελεύθερη επιφάνεια μπορεί να ασκείται μια οποιαδήποτε εξωτερικά επιβεβλημένη (γνωστή ή άγνωστη) πίεση ( 0,p tx . Η δυναμική συνθήκη ελεύθερης επιφά-νειας, αποδίδει αυτό ακριβώς το γεγονός, αξιοποιώντας και το ολοκλήρωμα Bernoulli:
( ) ( ) ( ) ( )20 T0 0 00 T0 0 0 0 0
0
, ,1 , ;2
t p t ( )0 FD t∈∂xt g t Ct
ηρ
∂ Φ+ ∇ Φ + + =⎡ ⎤⎣ ⎦∂
x xx R , , (4)
όπου είναι μια κατάλληλη σταθερά. Δεδομένου ότι η συνθήκη αυτή ισχύει πάνω σε μια υλική επιφάνεια, γράφεται ισοδυνάμως
0C
( ) ( ) ( ) ( )20 T0 0 000 T0 0 0 0
0 0
, ,1 , ;2
t pD t g tD t t
ηρ
⎛ ⎞∂ Φ+ ∇ Φ + + =⎡ ⎤⎜ ⎟⎣ ⎦⎜ ⎟∂⎝ ⎠
x xx R 0
t,
ή ( ) ( ) ( ) ( )20 T0 0 00 0
0 T0 0 0 00 0 0
, ,1 , ;2
t pD Dt g tD t t D t
ηρ
⎛ ⎞⎛ ⎞∂ Φ+ ∇ Φ + = −⎡ ⎤ ⎜⎜ ⎟⎣ ⎦ ⎜∂⎝ ⎠ ⎝ ⎠
x xx R
t⎟⎟ . (5)
- 203 -

31
Η ανωτέρω μορφή της δυναμικής συνθήκης δεν περιέχει τη σταθερά , πράγμα που ενίοτε διευκολύνει τους χειρισμούς. Στη συνέχεια θα εστιάσουμε την προσοχή μας στην περίπτωση
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
0C
όp σταθερ= , οπότε το δεξιά μέλος της σχέσεως (5) μηδενίζεται και έχουμε:
( ) ( ) ( )20 T0 000 T0 0 0 0
0 0
, 1 , ; 0 ( )0 FD t∈∂x2
tD t g tD t t
η⎛ ⎞∂ Φ
+ ∇ Φ + =⎡ ⎤⎜ ⎟⎣ ⎦∂⎝ ⎠
xx R
t
, , (6)
Δυνάμει της εξίσωσης (3β), αντικαθιστούμε στην (6) τον όρο 0 0 0/D Dη με 0 T0 0 30/ x∂ Φ ∂ , οπότε παίρνουμε
( )20 0 T0 0 0 T00 T0
0 0 0 0 30
1 02
D D gD t t D t x
⎛ ⎞∂ Φ ∂ Φ+ ∇ Φ + =⎜ ⎟∂ ∂⎝ ⎠
, , (7α) ( )0 FD t∈∂x
Εφαρμόζοντας τον τελεστή της υλικής παραγώγου 0 0 0 0 0 T0 0/ /D D t t= ∂ ∂ + ∇ Φ ⋅∇i i i , η συνθήκη (7α) παίρνει την μορφή:
( )2
20 T0 0 T0 0 T00 T0 0 0 T0 0 0 T02
0 0
12 02
gt t
⎞⎛∂ Φ ∂ Φ ∂ Φ+ ∇ Φ ⋅ ∇ + ∇ Φ ⋅ ∇ ∇ Φ + =⎟⎜∂ ∂⎝ ⎠ 0 30x∂
, (7β) ( )0 FD t∈∂x
Θα ονομάσουμε τη συνθήκη (7) «μικτή» συνθήκη ελεύθερης επιφάνειας, διότι προκύπτει ως συνδυασμός της κινηματικής και της δυναμικής συνθήκης. Πρέπει εδώ να τονισθεί ότι οι συνθήκες ελεύθερης επιφάνειας (κινηματική και δυναμική) εμπλέκουν δύο άγνωστα πεδία. Το πεδίο της ανύψωσης της ελεύθερης επιφάνειας
και το πεδίο του ολικού δυναμικού ( )0 0 ;tη R
( )T0 0, tΦ x
)t
. Οποιεσδήποτε δύο ανεξάρτητες από τις συνθήκες (3), (4) και (7), μπορούν να χρησιμοποιηθούν ως το βασικό ζεύγος των συνθηκών ελεύθερης επιφάνειας. Στη συνέχεια θα εργασθούμε με τις μορφές (4) και (7β). Και τούτο διότι η μεν (7β) περιέχει –κατά ρητό τρόπο– μόνο το δυναμικό ((T0 0, tΦ x )
)
1), ενώ η (4)
περιέχει την ίδια την ανύψωση , ελεύθερη από παραγωγίσεις. (0 0 ;η R - Σύνοψη των σχέσεων μετασχηματισμού βαθμωτού πεδιακού μέγεθους και των
παραγώγων αυτού Για τον μετασχηματισμό των συνθηκών (4) και (7β), όταν χρησιμοποιούμε σ.σ. κινούμενο με ταχύτητα , θα εφαρμόσουμε τα αποτελέσματα του εδαφίου 3.4.. Ειδικότερα, εάν ( ,U Ω
)( ;M tM είναι ένα βαθμωτό πεδιακό μέγεθος, και και είναι οι συναρτησιακές αναπαραστάσεις αυτού όταν χρησιμοποιούμε ακίνητο ή κινούμενο σ.σ., αντιστοίχως, τότε ισχύουν οι σχέσεις:
(0 0 ; txM ) )
); tx
); tx
( ; txM
, (8α) ( ) (0 0 ; t =xM M
( ) (0 0 0 ; t∇ = ∇xM M , (8β)
(1) Χωρίς, εν τούτοις, να είναι ανεξάρτητη από το πεδίο της ανύψωσης ( )0 0 ; tη R , εφ’ όσον η ίδια η συνθήκη
εφαρμόζεται πάνω στην ελεύθερη επιφάνεια, δηλαδή στα σημεία ( )( )0 t=0 0 0, ;ηx R R .
- 204 -

32
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) (00 0
0
;D DtD t Dt
=xM M ); tx , (8γ)
( ) [ ] (00 0
0
; tt t
∂ ∂⎛ ⎞= − + × ⋅∇⎜ ⎟∂ ∂⎝ ⎠x U Ω rM ); txM . (8δ)
Και, γενικότερα,
( ) [ ] ( )00 0
0
; ;nn
n t tt t∂ ∂⎛ ⎞= − + × ⋅∇⎜ ⎟∂ ∂⎝ ⎠
x U Ω r xM M 1,2,3,...n =, . (8ε)
Πέραν των ανωτέρων, στη συνθήκη (7β) εμφανίζεται και ο όρος ( )0 0 0 0 30; /x t x∂ Φ ∂ . Εργαζόμενοι ανάλογα, όπως για την παραγωγή της σχέσεως (α) του εδαφίου 3.4, βρίσκουμε
( ) ( ) ( ) ( )( ) ( )3 30 0 0
31 10 30
; ; m ft ta
x x x= =
∂ Φ ∂Φ ∂Φ= ⋅ =
∂ ∂ ∂∑ ∑x x x
e e 3
; t. (9α)
Εάν οι κατακόρυφοι άξονες των δύο σ.σ. είναι παράλληλοι, όπως επί παραδείγματι συμβαίνει στην περίπτωση όπου η ταχύτητα του κινούμενου σ.σ. είναι της μορφής ,
τότε
( ) ( )1 3, ,U= ΩU Ω( ) ( )
3m f
3δ⋅ =e e , και άρα η σχέση (9α) απλουστεύεται στην
( ) ( )0 0 0
0 30 3
; ;t tx x
∂ Φ ∂Φ=
∂x x
∂. (9β)
- Οριακές συνθήκες ελεύθερης επιφάνειας, όταν χρησιμοποιούμε σ.σ. κινούμενο με ιδία
κίνηση Όταν χρησιμοποιούμε το σύστημα συντεταγμένων [ ]1 2 3S O x x x= το οποίο κινείται με
ταχύτητα , η ελεύθερη επιφάνεια ( ) ( 1 3, ,U= ΩU Ω ) ( )FD t∂ αναπαρίσταται με τη βοήθεια της
συνάρτησης ανύψωσης ( 1 2, ; )x x tη , ως εξής:
( ) ( ) ( ) 31 2 3 3 1 2, , : , ;FD t x x x IR x x x tη∂ = = ∈ =x (10α)
ή ( ) ( ) ( ) 33 3, :FD t x IR x tη∂ = = ∈ =x R R ;
)
. (10β)
όπου με συμβολίζουμε το οριζόντιο διάνυσμα ( 1 2, ,0x x=R OM (βλ. Σχήμα 1). Το πεδίο
ανύψωσης ( 1 2, ; )x x tη
( ) (0 0η η=R R
είναι προφανώς μια βαθμωτή πεδιακή αναλλοίωτος, και άρα ισχύει η
σχέση . )
)
; ;t t Αξιοποιώντας τις σχέσεις μετασχηματισμού (8α), (8β) και (8δ), η δυναμική συνθήκη ελεύθερης επιφάνειας (4), στην περίπτωση σ.σ. κινούμενου με ταχύτητα , γράφεται στη μορφή
( ,U Ω
[ ] ( ) ( ) ( ) ( )2T T
;1; ; ;2
p tt t g t
tη
ρ∂⎛ ⎞− + × ⋅∇ Φ + ∇Φ + + =⎡ ⎤⎜ ⎟ ⎣ ⎦∂⎝ ⎠
xU Ω r x x R C , (11)
- 205 -

33
όπου είναι το οριζόντιο διάνυσμα OM
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( 1 2, ,0x x=R ) , ( )( ) ( ), ; Ft Dη= = ∈∂r x R R t είναι το
διάνυσμα θέσης του γενικού υλικού στοιχείου πάνω στην ελεύθερη επιφάνεια, και ( ); txTΦ ,
( );p tx είναι, αντιστοίχως, το ολικό δυναμικό ταχύτητας και η εξωτερικά επιβεβλημένη πίεση, γραμμένα με τη βοήθεια των συντεταγμένων του (κινούμενου) συστήματος
[ ]1 2 3S O x x x= . Περαιτέρω, η «μικτή» συνθήκη ελεύθερης επιφάνειας (7β) μετασχηματίζεται ως εξής:
[ ] ( ) [ ]2
T T; 2tt t∂ ⎡ ∂⎛ ⎞ ⎛ ⎞− + × ⋅∇ Φ + ∇Φ ⋅∇ − + × ⋅∇ Φ⎜ ⎟ ⎜ ⎟ T
⎤+⎢ ⎥∂ ∂⎝ ⎠ ⎝ ⎠⎣ ⎦
U Ω r x U Ω r
( )3
2T T 3
1
1 02
g axΤ
=
∂Φ+ ∇Φ ⋅∇ ∇Φ + =
∂∑ (12)
όπου και (T T ; tΦ = Φ x ) ( )( ) ( ), ; Ft Dη= = ∈∂r x R R t
)
, ως ανωτέρω. Περαιτέρω, εφ’ όσον έχουμε υποθέσει ότι η ταχύτητα του κινούμενου σ.σ. είναι της μορφής
, έχουμε ( ) ( 1 3, ,U= ΩU Ω
( )( ) ( )3 3 3 3 3 3 3 1 1 2 2 3 2 1 3 1 2;t R R Rη× = Ω × + = Ω × = Ω × + = − Ω + ΩΩ r e R R e e R e e e e R e ,
εκ της οποίας λαμβάνουμε
( ) ( )1 3 2 1 3 1 2 3 1 2 31 2 3
0U R Rx x x
⎡ ⎤∂ ∂ ∂+ × ⋅∇ = − Ω + Ω + ⋅ + + =⎡ ⎤ ⎢ ⎥⎣ ⎦ ∂ ∂ ∂⎣ ⎦
U Ω r e e e e ei i ii e
( )1 3 2 3 11 2
U R Rx x∂ ∂
= − Ω + Ω∂ ∂i i . (13)
Ο αναγνώστης μπορεί να χρησιμοποιήσει τη σχέση (13) για να μετασχηματίσει τις συνθήκες (11) και (12) στην ειδική μορφή που αντιστοιχεί στην περίπτωση όπου ( ) ( )1 3, ,U= ΩU Ω . Στην ειδικότερη περίπτωση όπου ( ) ( )1, U=U Ω ,0 , οι συνθήκες ελεύθερης επιφάνειας (11) και (12) παίρνουν τη μορφή:
( ) ( ) ( ) ( )21 T T
1
;1; ; ;2
p tU t t g t
t xη
ρ⎛ ⎞∂ ∂
− Φ + ∇Φ + + =⎡ ⎤⎜ ⎟ ⎣ ⎦∂ ∂⎝ ⎠
xx x R C , (14)
( )2
1 T T 1 T1 1
; 2U t Ut x t x
⎡ ⎤⎛ ⎞ ⎛ ⎞∂ ∂ ∂ ∂− Φ + ∇Φ ⋅∇ − Φ +⎢ ⎥⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎣ ⎦
x
( )2T T
3
1 02
gxΤ∂Φ
+ ∇Φ ⋅∇ ∇Φ + =∂
(15)
όπου και (T T ; tΦ = Φ x ) ( )( ) ( ), ; Ft Dη= ∈∂x R R t , ως ανωτέρω. Οι δύο ανωτέρω συνθήκες ελεύθερης επιφάνειας (14) και (15), όπως ακριβώς και οι αντίστοιχες μορφές τους (4) και (7β) στο ακίνητο σ.σ., είναι μη-γραμμικές, κατά δύο
- 206 -

34
διαφορετικούς τρόπους. Αφ’ ενός περιέχουν τετραγωνικούς και κυβικούς όρους (ρητή μη-γραμμικότητα), αφ’ ετέρου περιέχουν το πεδίο του δυναμικού ταχύτητας πάνω στην άγνωστη ελεύθερη επιφάνεια:
( ) ( )( )T T; , ;t tηΦ = Φx R R ; t ,
δηλαδή έχουμε και μια μη-γραμμικότητα υπό τη μορφή πεπλεγμένης συναρτησιακής εξάρτησης. Η μη-γραμμικότητα και ο πεπλεγμένος χαρακτήρας των συνθηκών ελεύθερης επιφάνειας (14) και (15), καθιστά την επίλυση των σχετικών προβλημάτων συνοριακών τιμών εξαιρετικά δυσχερή. Αν και σήμερα είναι εφικτή η αριθμητική επίλυση των προβλημάτων αυτών, θα προχωρήσουμε με τον πιο παραδοσιακό τρόπο, δηλαδή την απλούστευση των συνθηκών ελεύθερης επιφάνειας μέσω κατάλληλων γραμμικοποιήσεων. Ο τρόπος αυτός, αφ’ ενός μας επιτρέπει να κατασκευάσουμε ορισμένες απλές ειδικές λύσεις και να κατανοήσουμε καλύτερα τους φυσικούς χαρακτήρες των προβλημάτων που θέλουμε να επιλύσουμε και, αφ’ ετέρου, διευκολύνει σημαντικά την αριθμητική επίλυση των προβλημάτων αυτών. Βέβαια, η γραμμικοποίηση βασίζεται στην υπόθεση διαταραχών (κινήσεων και ταχυτήτων) μικρού πλάτους γύρω από μια ευσταθή κατάσταση του εξεταζόμενου συστήματος, πράγμα το οποίο περιορίζει –σε κάποιο βαθμό- την εφαρμοσιμότητα των γραμμικοποιημένων εξισώσεων.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 207 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
3.6 Συνθήκες ελεύθερης επιφάνειας, σε κινούμενο σύστημα συντεταγμένων. ΙΙ: Γραμμικοποίηση και απλές κυματικές λύσεις
Προκειμένου να επιτύχουμε την απλούστευση των συνθηκών ελεύθερης επιφάνειας, θα προχωρήσουμε τώρα σε (διάφορες) κατάλληλες γραμμικοποιήσεις. Αν και η τεχνική της γραμμικοποίησης που θα ακολουθήσουμε σε όλες τις περιπτώσεις είναι λίγο-πολύ η ίδια (ανάπτυξη του άγνωστου δυναμικού ταχύτητας κατά Taylor γύρω από τη στάθμη ηρεμίας
), το σημείο αφετηρίας, δηλαδή, οι αρχικές μορφές των άγνωστων πεδίων της ανύψωσης και του δυναμικού, οι οποίες αντανακλούν τη φυσική τοποθέτηση του εκάστοτε εξεταζόμενου προβλήματος, θα διαφέρουν κατά περίπτωση.
3 0x =
- Πρώτη γραμμικοποίηση: Μη-μόνιμη κυματική διαταραχή μικρού πλάτους.
Απλός αρμονικός κυματισμός σε κινούμενο σ.σ. Στην περίπτωση αυτή υποθέτουμε ότι η ανύψωση ( ); tη R , η ταχύτητα και οι
χρονικοί ρυθμοί μεταβολής , (T ; t∇Φ x )
( )T ; /t t∂Φ ∂x ( )T ; /t t∂∇Φ ∂x και ( ); /t tη∂ ∂R είναι όλα «μικρές» ποσότητες, των οποίων τα τετράγωνα και οι ανώτερες δυνάμεις είναι αμελητέα σε σχέση με τους πρωτοβάθμιους (γραμμικούς) όρους. Τότε έχουμε
( ) ( )( ) ( ) ( ) ( )TT T T
3
,0 ;; , ; ; ,0 ; ;
FD
tt t t t t
xη η
∈∂
∂ΦΦ = Φ = Φ +
∂x
Rx R R R R +
( ) ( )22 T
23
,0 ;; ...
tt
xη
∂ Φ+ +
∂R
R (1)
και οι συνθήκες (14) και (15) του προηγουμένου εδαφίου γραμμικοποιούνται ως εξής:
( ) ( ) ( )1 T
1
;,0 ; ;
p tU t g t
t xη
ρ⎛ ⎞∂ ∂
− Φ + + =⎜ ⎟∂ ∂⎝ ⎠
xR R C (2α)
ή, υποθέτοντας ότι ( ) 0;p t p= =x σταθερά,
( ) ( )1 T1
,0 ; ; 0U t g tt x
η⎛ ⎞∂ ∂
− Φ + =⎜ ⎟∂ ∂⎝ ⎠R R , (2β)
και
( ) ( )2T
1 T1 3
,0 ;,0 ; 0
tU t g
t x x∂Φ⎛ ⎞∂ ∂
− Φ + =⎜ ⎟∂ ∂ ∂⎝ ⎠
RR , (3α)
αντιστοίχως. Είμαστε πλέον σε θέση, με τη βοήθεια των γραμμικοποιημένων συνθηκών (2β) και (3α), να προχωρήσουμε σε ορισμένες απλές λύσεις. Ο πρώτος μας στόχος είναι να προσδιορίσουμε το πεδίο ενός απλού αρμονικού κυματισμού, όπως αυτό «φαίνεται» στο κινούμενο σύστημα . Στην περίπτωση νερού σταθερού βάθους , το γραμμικο-ποιημένο πρόβλημα οριακών τιμών έχει ως εξής:
( 1,0U ) h
( ) ( )2
11 3
,0 ;,0 ; 0
tU t g
t x x∂Φ⎛ ⎞∂ ∂
− Φ +⎜ ⎟∂ ∂ ∂⎝ ⎠
RR = , 2IR∈R , (3α)
- 208 -

36
,
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ); 0tΔΦ =x ( ) 31 2 3 3, , : 0D x x x IR h x∈ = ∈ − < <x , (3β)
( )3
, ;0
h tx
∂Φ −=
∂R
, 2IR∈R (3γ)
και
( ) ( )11
1; ,0t U tg t x
η⎛ ⎞∂ ∂
= − − Φ⎜ ⎟∂ ∂⎝ ⎠R R ; 2, IR∈R . (3δ)
Δεδομένου ότι αναζητούμε λύση της μορφής απλού αρμονικού κυματισμού, εισάγουμε τη χρονικά αρμονική εξάρτηση, γράφοντας το ζητούμενο δυναμικό και την αντίστοιχη ανύψωση ελεύθερης επιφάνειας στη μορφή
( ) ( ) ; Re ; j tt e ωΦ = Φx x ω , ( ) ( ) ; Re ; j tt e ωη η=R R ω . (4)
Παραλείποντας τη ρητή αναφορά στην ω − εξάρτηση των πεδίων ( ; )ωΦ x και ( );η ωR , το πρόβλημα (3) γράφεται πλέον ως εξής:
( ) ( )2
11 3
,0,0 0j U g
x xω
∂Φ⎛ ⎞∂− Φ +⎜ ⎟∂ ∂⎝ ⎠
RR = , 2IR∈R , (5α)
, ( ) 0ΔΦ =x D∈x , (5β)
( )3
,0
hx
∂Φ −=
∂R
, 2IR∈R , (5γ)
και
( ) ( )11
1 ,0j Ug x
η ω⎛ ⎞∂
= − − Φ⎜ ⎟∂⎝ ⎠R R 2, IR∈R . (5δ)
Έχοντας ως στόχο τον προσδιορισμό λύσης του προβλήματος (5), η οποία να προσομοιώνει έναν απλό αρμονικό κυματισμό, εισάγουμε το χωρισμό μεταβλητών
( ) ( ) ( )1 2 3,x xΦ = ⋅x H Z x . (6)
Τότε η εξίσωση Laplace παίρνει τη μορφή ( ) 0ΔΦ =x
( )( )
( )( )
2 1 2 3
1 2 3
,0
,x x Z x
x x Z x′′Δ
+ =HH
,
εκ της οποίας συνάγεται (με τη βοήθεια του θεμελιώδους επιχειρήματος της μεθόδου χωριζομένων μεταβλητών), ότι
( )( )
( )( )
22 1 2 3
1 2 3
,,x x Z x
kx x Z x
′′Δ= − = −
HH
, (7)
όπου είναι θετικός πραγματικός αριθμός. (Να σχολιάσετε την επιλογή του προσήμου στο τελευταίο μέλος της εξίσωσης (7). Είναι ή δεν είναι αποδεκτή άλλη επιλογή προσήμου και γιατί; Είναι αποδεκτή ή επιλογή ;) Σημειώνεται ότι ο τελεστής που
2k
2 \k ∈ IR 2Δ i
- 209 -

37
εμφανίζεται στις ανωτέρω εξισώσεις είναι ο τελεστής Laplace ως προς τις δύο οριζόντιες μεταβλητές
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
1 2,x x
( )
. Από την εξίσωση (7), ανωτέρω, βρίσκουμε
( )23 3 0k Z x′′ − =Z x , 3 0h x− < < . (8)
Η γενική λύση αυτής της συνήθους διαφορικής εξίσωσης είναι της μορφής
( ) ( ) ( )3 3cosh sinh 3Z x A k x h B k x h⎡ ⎤ ⎡= + +⎣ ⎦ ⎣ ⎤+ ⎦
)
. (9)
Λόγω της συνθήκης πυθμένα ,είμαστε αναγκασμένοι
να επιβάλουμε στη συνάρτηση )3
( ) ( ) (3 1 2, / 0 ,h x x x Z h′∂Φ − ∂ = = −R H
(Z x η την οριακή συνθήκ ( )Z h′ 0− = . Παραγωγίζοντας
την (9) βλέπουμε αμέσως ότι 0 , και άρα (εφ’ όσον ) ( ) 0Z h Bk′ − = ⇔ = 0k > 0B = . Οδηγούμεθα, λοιπόν, στην ακόλουθη μορφή για την κατακόρυφη δομή του ζητούμενου κυματικού πεδίου:
( ) ( )3 cosh 3Z x A k x h= ⎡⎣ + ⎤⎦ . (10)
Συνήθως η ανωτέρω έκφραση για την κατακόρυφη συνάρτηση ( )3Z x κανονικοποιείται, έτσι
ώστε ( )0Z A= =σταθερά ανεξάρτητη του βάθους. Αυτό επιτυγχάνεται εύκολα αντικαθιστών-
τας τη σταθερά A από την έκφραση (/ cos )A h kh , οπότε η (10) γίνεται
( ) ( )( )
33 =
( )3
3
coshcosh
k x hZ x A
kx+⎡ ⎤⎣ ⎦
)
. . (11α) 30, 0k h x> − < ≤
Σχόλιο: Στην περίπτωση απείρου βάθους , η αντίστοιχη κατακόρυφη δομή του πεδίου είναι
(h = ∞
3k xZ x =
2 1x xH
( )
Ae , . (11β) 30, 0k x> −∞ < ≤
Άσκηση: Να αποδείξετε τη σχέση (11β) με δύο τρόπους: i) Ως όριο της (11α) για , και ii) Επιλύοντας την (8) με .
h → ∞h = ∞
Στη συνέχεια, θα μελετήσουμε την οριζόντια εξίσωση
( ) ( )22 1 2, ,k x xΔ + H 0= , (12)
(εξίσωση Helmholtz στις δύο διαστάσεις), η οποία προκύπτει επίσης από τη σχέση χωρισμού μεταβλητών (7). Δεδομένου ότι αναζητούμε λύση της μορφής απλού αρμονικού κυματισμού, και άρα η χωρική εξάρτηση κατά την οριζόντια έννοια αναμένεται αρμονική, στο σημείο αυτό θα περιορίσουμε την αναζήτησή μας σε (πιθανές) λύσεις της μορφής
( ) ( )1 1 2 2j a x a x b j be e1 2,x x − + + − ⋅ += ≡ a RH , (13)
όπου και είναι σταθερές που πρέπει να προσδιορισθούν. Εισάγοντας τη μορφή (13) στη διαφορική εξίσωση Helmholtz (12), βρίσκουμε
1 1a= +a e 2 2a e b
- 210 -

38
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
⇔ ( ) ( )2 2 21 2 0j ba a k e− ⋅ +− − + =a R 2 2 2
1 2k a a= + . (14)
Η μέχρις εδώ διαδικασία επίλυσης του προβλήματος (5), μας έχει οδηγήσει –χωρίς ακόμα να έχει χρησιμοποιηθεί η συνθήκη ελεύθερης επιφάνειας– σε ένα δυναμικό ταχύτητας της μορφής:
( ) ( ) (-3
j bA Z x e )⋅ +Φ = a Rx , με ( )( )( )
3
33
3
3
cosh, 0
cosh
, 0k x
k x hA h
khZ x
A e x
⎧ +⎡ ⎤⎣ ⎦ − < ≤⎪= ⎨⎪ −∞ < ≤⎩
x
22
(15)
όπου είναι αυθαίρετη σταθερά (ανάλογη με το πλάτος της κυματικής διαταραχής), k είναι θετικός αριθμός , είναι πραγματικές σταθερές, τέτοιες ώστε και, τέλος, είναι αυθαίρετη σταθερά, η οποία όμως στη συνέχεια θα παραλείπεται, εφ’ όσον η συμβολή της απορροφάται από τον όρο του πλάτους
A
b( )0k > 1 2,a a 2 2
1k a a= +
A . Ερχόμεθα τώρα να εξετάσουμε κάτω από ποιές προϋποθέσεις το πεδίο δυναμικού (15) ικανοποιεί και τη συνθήκη ελεύθερης επιφάνειας (5α). Δεδομένου ότι ισχύει η σχέση
( ) ( )tanh ,0
,έAk kh h
ZAk h
πεπερασμ νο⎧⎪′ = ⎨= ∞⎪⎩
,
Σχήμα 1
1 1 2 2x x= +R e e
( )1 2,, 0IM x x=k
1e
2e
3eβ
- 211 -

39
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
έχουμε
( ) ( ) ( ) ( )1 2
3
tanh ,, 0, 0
1,j kh h
x x e Akx h
− ⋅ < ∞⎧∂Φ ⎪= ⋅ = ⋅ ⎨∂ = ∞⎪⎩′ a RR H Z .
Περαιτέρω, με απ’ ευθείας διαφόριση βρίσκουμε:
( ) ( )11
, 0 jA ja ex
− ⋅∂Φ= −
∂a RR
και ( ) ( )2
212
1
, 0 jA ja ex
− ⋅∂ Φ= −
∂a RR
.
Εισάγοντας τις ανωτέρω σχέσεις στην οριακή συνθήκη ελεύθερης επιφάνειας (5α), βρί-σκουμε
( )2 2 2
1 1 1 1tanh
2 01
jkhA a U a U gk eω ω − ⋅⎛ ⎞⎧ ⎫⎪ ⎪− − − + =⎜ ⎟⎨ ⎬⎜ ⎟⎪ ⎪⎩ ⎭⎝ ⎠
a R ,
ή, ισοδυνάμως,
. (16) ( ) ( )21 1
tanh0
1kh
a U gkω⎧ ⎫⎪ ⎪− + + =⎨ ⎬⎪ ⎪⎩ ⎭
Η ανωτέρω σχέση –η οποία εξασφαλίζει ότι η κυματομορφή (15) ικανοποιεί και τη συνθήκη ελεύθερης επιφάνειας (5α)– αναφέρεται ως σχέση διασποράς. Υπενθυμίζουμε εδώ ότι , και άρα το διάνυσμα a έχει μέτρο (μήκος) 2 2
1k a a= + 22 k=a . Επί
πλέον, από τα βασικά της αναλυτικής γεωμετρίας γνωρίζουμε ότι το διάνυσμα είναι κάθετο στην οικογένεια των παραλλήλων ευθειών 1 1 2 2a a= +a e e 1 1 2 2 .a x a x c σταθ+ = = .
Η παρατήρηση αυτή εξηγεί ότι (φαινόμενη) η καθετότητα του με τις γραμμές των κορυφών και των κοιλάδων του κύματος που δείχνεται στο Σχήμα 1, δεν είναι τυχαία! Το διάνυσμα , το οποίο εμφανίζεται στη λύση (15), είναι πράγματι κάθετο με τις γραμμές των κορυφών και των κοιλάδων του κύματος.
a
1 1a= + 2 2a ea e
Περαιτέρω, επιθυμούμε να συνδέσουμε τις σταθερές που εμφανίζονται στη λύση (15) με ένα σημαντικό γεωμετρικό χαρακτηριστικό του κυματικού πεδίου: το μήκος κύματος λ . Λαμβάνοντας υπ’ όψιν ότι το μήκος κύματος ορίζεται ως η απόσταση μεταξύ δύο διαδοχικών κορυφών (κατά την κατεύθυνση της διάδοσης του κύματος), σε συνδυασμό με την αρμονική εξάρτηση της κυματικής διαταραχής από τις οριζόντιες μεταβλητές (εξάρτηση του τύπου
( 1 1 2 2exp )j a x a x− +⎡⎣ ⎤⎦ ), συμπεραίνουμε ότι το μήκος κύματος λ ισούται με την απόσταση μεταξύ των δύο παραλλήλων ευθειών
, ( ) 1 1 2 2: a x a x cε + =και ( ) 1 1 2 2: 2a x a x cε π′ + = + .
Για να βρούμε την απόσταση αυτή θεωρούμε μια (οποιαδήποτε) ευθεία κάθετη στις ( )ε και
( )ε ′ , π.χ. την , και βρίσκουμε τα σημεία τομής της, 1 1 2 2 0a x a x− = 1Σ και , με τις δύο ανωτέρω ευθείες. Οι συντεταγμένες των σημείων
2Σ
1Σ και 2Σ δίδονται από τις εκφράσεις
- 212 -

40
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
1 21 2 2 2 2
1 2 1 2
,a c a ca a a a
⎛ ⎞Σ = ⎜ ⎟+ +⎝ ⎠
, ( ) ( )1 22 2 2 2 2
1 2 1 2
2 2,
a c a ca a a a
π π+ +⎛ ⎞Σ = ⎜ ⎟+ +⎝ ⎠
,
και άρα
( ) ( )( )
( )( )
2 21 2
1 2 2 2 2 22 2 2 21 21 2 1 2
2 2 1 2, 2a a
dka aa a a a
π π πλ π= Σ Σ = + = =++ +
. (17)
Βρίσκουμε, δηλαδή, και πάλι τη γνωστή(1) σχέση που συνδέει τον κυματαριθμό με το μήκος κύματος
kλ , ( 2k λ π⋅ = ), παρά τη διαφορετική αφετηρία που έχουμε εν προκειμένω,
εφ’ όσον μελετάμε το πρόβλημα με τη βοήθεια σ.σ. κινούμενου με (σταθερή) ταχύτητα . 1U Περαιτέρω, η σχέση k=a , μας οδηγεί στο να αλλάξουμε συμβολισμό, μετονομάζοντας το διάνυσμα σε . Με αυτόν τον τρόπο εισάγεται ο διανυσμα-τικός κυματικός αριθμός ως το διάνυσμα που έχει
1 1 2 2a a= +a e e 1 1 2 2k k= +k e ek
i) Διεύθυνση κάθετη προς το μέτωπο του κύματος, ii) Φορά αυτήν της κυματικής διάδοσης, iii) Μέτρο k=k ίσο προς 2 /π λ , όπου λ είναι το μήκος κύματος.
Κατόπιν των ανωτέρω, η σχέση διασποράς (16) γράφεται στη μορφή
, ( ) ( )21 1
tanh0
1kh
k U gkω⎧ ⎫⎪ ⎪− + + =⎨ ⎬⎪ ⎪⎩ ⎭
ή, ισοδυνάμως
( ) ( )21
tanhcos 0
1kh
kU gkω β⎧ ⎫⎪ ⎪− + + =⎨ ⎬⎪ ⎪⎩ ⎭
, (18)
(1) Η σχέση αυτή έχει ευρεθεί και πάλι στο εδάφιο 2.6, με χρήση ακίνητου συστήματος συντεταγμένων.
1Σ
2Σ
1 1 2 2 0a x a x− =
1 1 2 2a x a x+ = σταθ.
- 213 -

41
όπου , είναι η γωνία μεταξύ της κατεύθυνσης διάδοσης του κύματος και της κατεύθυνσης κίνησης του συστήματος συντεταγμένων.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ,β = k U)
Σχόλιο: Υπενθυμίζουμε ότι, όταν χρησιμοποιούμε ακίνητο σύστημα συντεταγμένων, η σχέση διασποράς απλού αρμονικού κυματισμού (ελεύθερης επιφάνειας), μήκους κύματος λ , είναι \
. (19) ( )2
0tanh
01
khgkω
⎧ ⎫⎪ ⎪− + =⎨ ⎬⎪ ⎪⎩ ⎭
(Βλ. π.χ., Κεφάλαιο 2, εδάφιο 2.6). Συγκρίνοντας τις δύο σχέσεις διασποράς (18) και (19), συμπεραίνουμε ότι
0 1 coskUω ω= + β . (20)
Δηλαδή, η κυκλική συχνότητα του κυματισμού μεταβάλλεται όταν το σ.σ. κινείται. Αυτό είναι ένα απλό φυσικό γεγονός, που οφείλεται στο ότι ο αριθμός των κορυφών κύματος ανά μονάδα χρόνου που διέρχονται από μια θέση ( )1 2, ,0M x x= , σταθερή στο κινούμενο σ.σ., είναι διαφορετικός από τον αριθμό των κορυφών κύματος ανά μονάδα χρόνου που διέρχονται από μια θέση , σταθερή στο κινούμενο σ.σ.. Με άλλα λόγια, η συχνότητα αυτή είναι η συχνότητα που αισθάνεται (μετράει) ένας παρατηρητής που στέκεται «ακίνητος» σε μια «σταθερή» θέση ως προς το κινούμενο σ.σ.. Το φαινόμενο αυτό παρατηρείται σε κάθε περίπτωση κυματικής διάδοσης, και είναι γνωστό ως φαινόμενο Doppler.
(0 10 20, ,0M x x=
M x=
)
)( 1 2, ,0x
Άσκηση: Να αποδείξετε τη σχέση (20) (φαινόμενο Doppler) αρχίζοντας από τη μορφή της κυματομορφής που παίρνουμε όταν χρησιμοποιούμε το ακίνητο σ.σ., και χρησιμοποιώντας τη σχέση αλλαγής μεταβλητών μεταξύ των δύο συστημάτων (του ακίνητου και του κινούμενου). Άσκηση: Να αποδείξεται τη σχέση (20) με φυσικά επιχειρήματα, χρησιμοποιώντας τον ορισμό
[ ]1 2
2 1
,
ό ώ έ ό
ί ό ά t tό ύ f
t t
ριθμ ς κορυφ ν που δι ρχονται απ το σταθερ
σημε ο Μ στο χρονικ δι στημασυχν τητα κ ματος
Α
≡ =−
ό
.
Υπενθυμίζεται ότι η συχνότητα f και η κυκλική συχνότητα ω συνδέονται με τη σχέση
2 fω π= .
- 214 -

42
- Δεύτερη γραμμικοποίηση: Μόνιμο πεδίο και μη-μόνιμη κυματική διαταραχή μικρού
πλάτους γύρω από αυτό Στην περίπτωση αυτή υποθέτουμε ότι η ανύψωση ( ); tηΤ R και το δυναμικό ταχύτητας
έχουν τη μορφή (T ; tΦ x )
( ) ( ) (;tη η ηΤ = +R R R );t , (1α) και ( ) ( ) (T ; tΦ = Φ + Φx x ); tx , (1β)
όπου ( )η R και ( )Φ x είναι μόνιμα πεδία στο σ.σ. που κινείται με ταχύτητα . Θα
υποθέσουμε, προς το παρόν, ότι τα μόνιμα πεδία ( 1,0U )
( )η R και ( )Φ x είναι γνωστά, ενώ τα μη-
μόνιμα πεδία και , και οι παράγωγοι αυτών είναι «μικρά», έτσι ώστε τα τετράγωνα και οι ανώτερες δυνάμεις αυτών να είναι αμελητέα σε σχέση με τους πρωτοβάθμιους (γραμμικούς) όρους. Τότε, αναπτύσσοντας το συνολικό πεδίο κατά Taylor γύρω από την (υποτιθέμενη γνωστή) μόνιμη ανύψωση
( ;tη R ) )( ; tΦ x
( )η R , έχουμε
( ) ( )( ) ( )( ) ( ) ( )( )TT T T
3
, ;; , ; ; , ; ; ....
FD
tt t t t t
xη
η η ηΤ∈∂
∂ΦΦ = Φ = Φ +
∂x
R Rx R R R R R +
( )( ) ( )( ), , tη η= Φ + Φ +R R R R ;
( ) ( )( ) ( )( )3 3
, , ;; ....
tt
x xη η
η⎛ ⎞∂Φ ∂Φ
+ +⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠
R R R RR + (2)
ελεύθερης πιφάνειας, εξισώσεις (14) και (15) του εδαφίου 3.5, γραμμικοποιούνται ως εξής:
Με τη βοήθεια των αναπαραστάσεων (1) και (2), οι μη-γραμμικές συνθήκες ε
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 215 -

29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
3.7 Θεμελιώδης λύση του γραμμικοποιημένου ( ),U ω -προβλήματος
- Γενικά. Διατύπωση του προβλήματος
Η θεμελιώδης λύση (συνάρτηση Green) του γραμμικοποιημένου ( ),U ω -προβλήματος αντι-στοιχεί στο πεδίο που παράγει μια σημειακή πηγή (ή σημειακή ιδιομορφία, point source or point singularity) κινούμενη παράλληλα προς την ελεύθερη επιφάνεια με σταθερή ταχύτητα U, με ένταση που πάλλεται με κυκλική συχνότητα ω. Το πρόβλημα θα διατυπωθεί και θα λυθεί με τη βοήθεια συστήματος συντεταγμένων που κινείται με σταθερή ταχύτητα (=με την ταχύτητα της σημειακής ιδιομορφίας). Ιστορικά και βιβλιογραφικά σχόλια για το παρόν και άλλα συναφή προβλήματα παρουσιάζονται στην υποσημείωση (
U
1) Η ανάπτυξη θα γίνει για νερό άπειρου βάθους, αλλά μπορεί να γενικευθεί κατά ανάλογο τρόπο και στην περίπτωση πεπερασμένου (σταθερού) βάθους νερού (βλ., π.χ., Wehausen & Laitone, 1960, εδάφιο 13). Έστω ( , , )ξ η ζ=ρ η θέση της σημειακής ιδιομορφίας (σταθερή ως προς το χρησιμοποι-
ούμενο σύστημα), και ( , , )x y z=r το γενικό πεδιακό σημείο, το οποίο διατρέχει τον ημίχωρο
( ) ( ) 2 20, , : , , ( ,0]x y z x y IR z IR IR −∈ ∈ −∞ = × .
Βλ. και Σχήμα 1. Συμβολίζουμε με ( ), ; ,G t U ωr ρ το κυματικό πεδίο (δυναμικό ταχύτητας) της θεμελιώδους λύσης. Στη συνέχεια θα χρησιμοποιούμε κατά κανόνα απλούστερους συμβολισμούς, π.χ., ( ,G r ρ )t , παραλείποντας τα ορίσματα που υποδηλώνουν την παραμετρική εξάρτηση από την ταχύτητα και την κυκλική συχνότητα ω. Δεδομένου ότι μέσα στο πεδίο ροής το δυναμικό ταχύτητας ικανοποιεί την εξίσωση Laplace, και ότι στη θέση υπάρχει σημειακή ιδιομορφία (πηγή), η θεμελιώδης λύση
U
=r ρ ( ,G r ρ )t θα πρέπει να ικανοποιεί την εξίσωση
( ) ( ) (2 2 2
22 2 2, , )4 δ -G t G t a t
x y zπ
⎛ ⎞∂ ∂ ∂∇ ≡ + + = −⎜ ⎟∂ ∂ ∂⎝ ⎠
r ρ r ρ r ρ( ) 20, IR IR −∈ ×r . (1)
(1) Ιστορικό: Τα πρώτα αποτελέσματα για το κυματικό πεδίο σημειακής πηγής (σταθερής έντασης) που κινείται με σταθερή ταχύτητα πάνω ή κοντά στην ελεύθερη επιφάνεια του νερού [το ( ), 0U
( )tq
-πρόβλημα με την δική μας ορολογία], οφείλονται στους Άγγλους φυσικούς Kelvin (1906) και Havelock (1908, 1927). Στη δεκαετία του 30, σημαντικές συμβολές προέκυψαν από τους Ρώσους Μαθηματικούς Keldysh & Lavrentiev (1937), Kochin (1937), Sretenskii (1938). Στο τέλος της δεκαετίας του 1940, ο Ρώσος Haskind (1946) και ο Γάλλος Brard (1948), παρήγαγαν αναλυτική λύση (υπό τη μορφή γενικευμένων ολοκληρωμάτων) για το κυματικό πεδίο σημειακής πηγής μεταβλητής έντασης η οποία κινείται σε γενική τροχιά , κάτω από την ελεύθερη επιφάνεια. Βλ. σχετικά Wehausen & Laitone (1960, εδάφιο 13), όπου δίδονται και ακριβείς παραπομπές για τις ανωτέρω αναφερόμενες εργασίες, και Stoker (1957).
( )a t
Τα τελευταία χρόνια έχει δημοσιευθεί ένας μεγάλος αριθμός σχετικών εργασιών σε ναυπηγικά και μαθηματικά περιοδικά, με έμφαση στον αξιόπιστο και γρήγορο αριθμητικό υπολογισμό του κυματικού πεδίου της ( ), 0U
και της ( ,U )ω πηγής. Εξ αυτών αναφέρουμε ιδιαιτέρως τις εργασίες των Noblesse (1977), Inglis & Price (1980), Wu & Eatok Taylor (1987), Newman (1987), καθώς και τη Διδακτορική Διατριβή του Ian Roger Hoff (1990, Norwigean University of Technology, NTNU, Trondheim).
- 216 -

48
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Σχήμα 1: Γεωμετρία του πεδίου της σημειακής πηγής. Πεδιακό σημείο ( , , )x y z=r , θέση
πηγής ( , , )ξ η ζ=ρ , θέση κατοπτρικής πηγής ( ), ,ρ ξ η ζ′ = − .
_________________________________________________________________________ Η παραμετρική εξάρτηση της ( ,G r ρ )t από την κυκλική συχνότητα εισάγεται θέτοντας ω
( ) cos( ) Re exp( )a t t j tω ω= = (παλλόμενη ένταση πηγής). Αναπαριστώντας την ( ),G tr ρ
με τη βοήθεια του παραστατικού μιγάδα (μιγαδικού πλάτους) ( ) ( )o o
; ,G G Ur ρ r ρ ω= , γράφουμε:
( ) ( ) ( ) o o, Re Re ; ,j t j tG t G e G U eω ω= ≡r ρ r ρ r ρ ω . (2α)
Χρησιμοποιώντας την ιδιότητα ( ) ( )oo*Re Rej t j tG e G eω ω−⎧ ⎫
= ⎨ ⎬⎩ ⎭
r ρ r ρ , όπου ( )o*G r ρ ο
μιγαδικός συζυγής της ( )o
G r ρ , θα προχωρήσουμε παρακάτω στη κατασκευή της
συναρτήσεως ( )o* ; ,G U ωr ρ , που αποδίδει το ίδιο αποτέλεσμα όπως η Εξ(2α) ως
ακολούθως
( ) ( ) ( )o o* *, Re Re ; ,j t j tG t G e G U eω ωω− −⎧ ⎫ ⎧
= ≡⎨ ⎬ ⎨⎩ ⎭ ⎩
r ρ r ρ r ρ ⎫⎬⎭
, (2β)
και η οποία είναι πιο βολική στην φυσική διερεύνηση και κατανόηση των αποτελεσμάτων, ιδιαίτερα σε ότι αφορά την ασυμπτωτική συμπεριφορά της συνάρτησης σε μακρινές αποστάσεις από τη πηγή.
x
y
yz
z
( ), ,ξ η ζ′ = −ρ
( ), ,ξ η ζ=ρ
−r ρ ( ), ,x y z=r
x ξ
ζ
η
- 217 -

49
Εισάγοντας την αναπαράσταση (2) στην πεδιακή εξίσωση (1), ανωτέρω, και στη συνθήκη ελεύθερης επιφάνειας (3α) του εδαφίου 3.6, βλέπουμε αμέσως ότι η συνάρτηση πλάτους
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
(o*G r ρ) , θα πρέπει να ικανοποιεί το ακόλουθο πρόβλημα συνοριακών τιμών:
( )2 2 2o o
2 * *2 2 2( | ) ( | ) 4 δ -G G
x y zπ
⎛ ⎞∂ ∂ ∂∇ ≡ + + = −⎜ ⎟∂ ∂ ∂⎝ ⎠
r ρ r ρ r ρ , 20IR IRr −∈ × , (3α)
o2 *o
* ( | )( | ) 0Gj U G gx z
ω ∂ ∂⎛ ⎞+ +⎜ ⎟∂ ∂⎝ ⎠R ρR ρ = , και ( ) 2, ,0 0x y IRR = ∈ × , (3β)
όπου χρησιμοποιήθηκε η ακόλουθη έκφραση του τελεστή Ut x∂ ∂⎛ −⎜
⎞⎟∂ ∂⎝ ⎠
στο πεδίο της
συχνότητας
U j Ut x
ω∂ ∂ ∂⎛ ⎞ ⎛− = − +⎜ ⎟ ⎜∂ ∂ ∂⎝ ⎠ ⎝ x⎞⎟⎠
.
Αποδεικνύεται ότι το πρόβλημα (3α,β) επιδέχεται πολλές (απείρου πλήθους) λύσεις, οι οποίες διαφέρουν –εκτός των άλλων- και ως προς την «επ’ άπειρον» συμπεριφορά, δηλαδή τη συμπεριφορά όταν r ρ− →∞ . Προσεκτική μαθηματική διερεύνηση του συνόλου των λύσεων του προβλήματος (3α,β) καταδεικνύει ότι υπάρχει μία μοναδική λύση με την ακόλουθη επ’ άπειρον συμπεριφορά του πεδίου ( )* ,G tr ρ :
Μακριά από το σημείο ιδιομορφίας ( ), ,ξ η ζ=ρ , δηλαδή όταν r ρ− →∞ ,
με 20, IR IRr ρ −∈ × , το πεδίο ( )* ,G tr ρ που παράγεται από τη συνάρτηση
( )o*G r ρ μέσω της σχέσης (2α), αντιστοιχεί σε σύστημα κυματισμών απομα-
κρυνόμενων από την πηγή (συνθήκη ακτινοβολίας), και, επί πλέον, το πεδίο ταχύτητας
(o*G∇ r ρ) παραμένει φραγμένο. (3γ)
Οι συνθήκες (3α,β,γ) από κοινού, ορίζουν το πρόβλημα της ( ),U ω -συνάρτησης Green (translating and pulsating free-surface Green function). Σχόλιο: Θεωρούμε ότι ο αναγνώστης διαθέτει κάποια εξοικείωση με τη γενικευμένη συνάρτηση Dirac που εμφανίζεται σε δεξί μέλος των εξισώσεων (1) και (3α). Η «συνάρτηση» αυτή έχει την ιδιότητα
(δ -r ρ)
,
, (4α) ( )0
δ -,, ,γιαγια
≠⎧= ⎨∞ =⎩
r ρr ρ
r ρ
(η οποία, βέβαια, δεν είναι ιδιαιτέρως διαφωτιστική!). Κατ’ ουσίαν, η συνάρτηση ( )δ -r ρ ,
αποκτά έννοια μέσα από τη «δράση» της πάνω σε συνεχείς συναρτήσεις ( )f r :
- 218 -

50
( ) ( ) (δ -D
f d fr ρ r ρ=∫ r
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
) , (4β)
όπου D είναι (οποιοδήποτε) χωρίο του 3IR που περιέχει το σημείο ( , , )ξ η ζ=ρ στο
εσωτερικό του. Η σχέση (4β) προσδίδει στη «συνάρτηση» ( )ρiδ − το χαρακτήρα μιας
απεικόνισης (συναρτησιακού), η οποία σε κάθε συνάρτηση ( )f Di (2), αντιστοιχίζει τη
συγκεκριμένη τιμή ( )f ρ , όπου είναι δεδομένο σημείο του . Αυτό ακριβώς είναι και το
μαθηματικό πλαίσιο στο οποίο η συνάρτηση
ρ D
( )ρiδ − , καθώς και πολλές «παρόμοιες» γενικευμένες συναρτήσεις, ορίζονται με σαφήνεια και «νομιμοποιούνται» ως μαθηματικά αντικείμενα, με σαφείς ιδιότητες, λογισμό, έννοιες σύγκλισης και μετασχηματισμών κττ. Ο ενδιαφερόμενος αναγνώστης παραπέμπεται στα βιβλία των Lighthill (1960) ή Hoskins (1979), για μια naïve εισαγωγή στις γενικευμένες συναρτήσεις (generalized functions), ή στο πεντάτομο έργο των Gelfand & Shilov et al. (Vol. 1, 2, 3, 4, 5; 1964-1966), για μια διεξοδική παρουσίαση της μαθηματικής θεμελίωσης και των εφαρμογών των γενικευμένων συναρτήσεων. Δύο είναι οι βασικοί λόγοι για τους οποίους μελετάμε τη θεμελιώδη λύση ( ),G tr ρ . Ο πρώτος λόγος είναι ότι έχει ιδιαίτερη φυσική σημασία και, μάλιστα περιγράφει ποιοτικά την επ’ άπειρον μορφή του πεδίου ροής που παράγεται από σώμα κινούμενο με μέση σταθερή ταχύτητα U και ταλαντευόμενο με κυκλική συχνότητα ω . Ο δεύτερος, και ίσως περισσότερο σημαντικός, λόγος είναι η δυνατότητα που προσφέρεται, σε συνδυασμό με τα κατάλληλα ολοκληρωτικά θεωρήματα (Green, Gauss, κττ), να
αξιοποιήσουμε το πεδίο (o* ; ,G U )ωr ρ για την κατασκευή ολοκληρωτικών
αναπαραστάσεων του κυματικού πεδίου που αναπτύσσεται σε άλλα, περισσότερο περίπλοκα και σημαντικά, προβλήματα, όπως, π.χ., το πρόβλημα του πλοίου που κινείται με σταθερή μέση ταχύτητα δια μέσω αρμονικών κυματισμών. Οι αναπαραστάσεις αυτές αποτελούν τη βάση της αναγωγής των αντίστοιχων προβλημάτων συνοριακών τιμών σε συνοριακές ολοκληρωτικές εξισώσεις, οι οποίες μελετώνται και επιλύονται (θεωρητικά και αριθμητικά) πολύ ευκολότερα από το αρχικό πρόβλημα συνοριακών τιμών. - Κατασκευή της συνάρτησης Green. Αποσύνθεση σε ιδιόμορφο και ομαλό μέρος
[Σχόλιο συμβολισμού: Στο υποεδάφιο αυτό, καθώς και σε όλη τη διάρκεια της κατασκευής
της ( ,U )ω -συνάρτησης Green o*( | )G =r ρ (
o* ; ,G U )ωr ρ , θα χρησιμοποιήσουμε γι αυτήν
τον ακόμη απλούστερο συμβολισμό ]. ( | )G r ρ Είναι γνωστόν ότι η συνάρτηση Green της εξίσωσης Laplace στον ελεύθερο τρισδιάστατο χώρο, δηλαδή η συνάρτηση που επιλύει το πρόβλημα
( )2 2 2 o
2 2 2 ( | ) 4 δ -Gx y z
π⎛ ⎞∂ ∂ ∂
+ + = −⎜ ⎟∂ ∂ ∂⎝ ⎠r ρ r ρ , 3IRr∈ , (5α)
(2) Το σύμβολο ( )f Di υποδηλώνει συνάρτηση f με πεδίο ορισμού . D
- 219 -

51
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
(G r ρ∇ ) παραμένει φραγμένο όταν r ρ− →∞ , (5β)
είναι η
( ) 1/ 22 2 23D 3D
1( | ) ( , , | , , ) ( ) ( ) ( )G G x y z x y zr ρr ρ
ξ η ζ ξ η ζ−
≡ = = − + − +−
−
)
. (5γ)
Στην περίπτωση του ( ,U ω -προβλήματος ενδιαφερόμεθα για μια διαμορφωμένη συνάρτηση
Green που (περι)ορίζεται στον ημίχωρο 20IR IR −× , και ικανοποιεί τις εξισώσεις (3α,β,γ). Η
κατασκευή μιας τέτοιας συνάρτησης Green, βολεύει να ξεκινήσει από την
1 1( | ) ( , , | , , )x y z ξ η ζ≡ = −′− −
r ρr ρ r ρ
G G , (6α)
όπου ( ), ,ξ η ζ′ = −ρ είναι το κατοπτρικό σημείο της πηγής ( ), ,ξ η ζ=ρ ως προς την αδιατάρακτη ελεύθερη επιφάνεια. Βλ. Σχήμα 1, ανωτέρω. Σημειώστε ότι η συνάρτηση
για σημεία r του πεδίου στο οριζόντιο επίπεδο z=0 ικανοποιεί την πρόσθετη συνθήκη
( |rG )ρ
( | ) ( , , 0 | , , ) 0x y z ξ η ζ= =R ρG G =
'
. (6β)
Στη συνέχεια, με τη βοήθεια της , διαχωρίζουμε την αναζητούμενη θεμελιώδη λύση σε ιδιόμορφο και ομαλό μέρος, ως ακολούθως:
( | )r ρG*( | )G r ρ
*
'' '
( , , | , , ) ( , , | , , ) ( , , | , , )G x y z x y z H x y zιδιομορφομερος ομαλο μερος
ξ η ζ ξ η ζ ξ η ζ= +G . (7)
Με βάση την αναπαράσταση (7), και λαμβάνοντας υπ’ όψιν την ιδιότητα (6β), το πρόβλημα (3α,β,γ), αναδιατυπώνεται ως προς την ομαλή (στο πεδίο ροής) συνάρτηση ( | )H r ρ =
( , , | , , )H x y z ξ η ζ , ως ακολούθως:
2 2 22
2 2 2( | ) ( | ) 0H Hx y z
r ρ r ρ⎛ ⎞∂ ∂ ∂
∇ ≡ + +⎜ ⎟∂ ∂ ∂⎝ ⎠= , 2
0IR IRr −∈ × , (8α)
( ) ( ) ( ) ( )2 2Hj U H g j U g
x z xω ω
∂ ∂∂ ∂⎛ ⎞ ⎛ ⎞+ + = − + −⎜ ⎟ ⎜ ⎟∂ ∂ ∂⎝ ⎠ ⎝ ⎠
R ρ R ρR ρ R ρ
GG
z=
∂
( )
gz
∂= −
∂
R ρG, (3) (8β)
Μακριά από το σημείο ιδιομορφίας ( ), ,ξ η ζ=ρ , δηλαδή όταν r ρ− →∞ ,
με 20, IR IRr ρ −∈ × , η συνάρτηση πρέπει να αντιστοιχεί σε σύστημα ( | )H r ρ
κυματισμών απομακρυνόμενων από την πηγή, και το πεδίο ταχύτητας ( | )H∇ r ρπρέπει να παραμένει φραγμένο. (8γ)
(3) Αυτός είναι ο λόγος για τον οποίον προτιμάμαι να πραγματοποιήσουμε το διαχωρισμό (7) με τη βοήθεια της
και όχι της . ( | )r ρG 3D ( | )G r ρ
- 220 -

52
Με αυτόν τον τρόπο, το πρόβλημα του προσδιορισμού της
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ),U ω -συνάρτησης Green, εξισώσεις (3α,β,γ), ανάγεται στο πρόβλημα του προσδιορισμού της αρμονικής συνάρτησης
( ) (| , , | ,H H x y z ),ξ η ζ≡r ρ , που ικανοποιεί μια μη-ομογενή συνθήκη πάνω στην αδιατάρακτη ελεύθερη επιφάνεια, καθώς και μια αντίστοιχη συνθήκη ακτινοβολίας [εξισώσεις (8α,β,γ)].
Στη συνέχεια επιλύουμε το πρόβλημα (8α,β,γ) με τη βοήθεια του μετασχηματισμού Fourier στο οριζόντιο επίπεδο.
- Μετασχηματισμός Fourier
Δοθείσης μιας συνάρτησης ( , )f x y , ( ) 2.x y IR∈ , ορίζουμε το (διδιάστατο) μετασχηματισμό
Fourier αυτής ( ) ( )ˆx y,
xy
x ky k
,f k k = f x y⎡ ⎤⎣ ⎦→→
F από τη σχέση:
( ) (1ˆ , ( , )2
x y )j k x k yx yf k k dxdy f x y e
π
∞ ∞− +
−∞−∞
= ∫ ∫ . (9α)
Ο μετασχηματισμός (9α) αντιστρέφεται με τη βοήθεια της σχέσης
( ) ( ) ( )cos sin
0
1 ˆ ˆ( , ) , ( , )2
x yj k x k y jk x yx y x yf x y dk dk f k k e d k dk f k e
πθ θ
π
θ θπ
∞ ∞ ∞+ +
−∞ −∞ −
= =∫ ∫ ∫ ∫ , (9β)
όπου cos , sinx yk k k kθ θ= = . (9γ)
(Βλ., π.χ., Sneddon (1951/1995) ή Churchill (1972). Εδώ θα εφαρμόσουμε το μετασχημα-τισμό Fourier ως προς x και y σε συναρτήσεις περισσοτέρων ορισμάτων, όπως π.χ. η συνάρτηση ( ), , , ,H x y z ξ η ζ :
( ) ( )ˆ , , , , , , , ,xy
x y x ky k
H k k z H x y zξ η ζ ξ η ζ→→
⎡ ⎤= ⎣ ⎦F .
Η μετασχηματισμένη (ˆ , , , ,x yH k k z )ξ η ζ θα γράφεται επίσης και ως ή – λόγω
των (9γ) - . Τα υπόλοιπα ορίσματα, εκτός των
(ˆ , ,x yH k k z ))(ˆ , ,H k zθ x και , μένουν αναλλοίωτα από
το μετασχηματισμό και λειτουργούν ως παράμετροι. y
Εφαρμόζοντας τον (ευθύ) μετασχηματισμό Fourier (9α) στην εξίσωση Laplace (8α) και στην συνθήκη ελεύθερης επιφάνειας (8β), και λαμβάνοντας υπ’ όψιν τη συνθήκη ακτινοβολίας (8γ), οδηγούμεθα στο ακόλουθο μετασχηματισμένο πρόβλημα:
( ) ( )2
22
ˆ , , ˆ , , 0d H k z
k H k zdz
θθ− = , 0z ≤ , (10α)
( ) ( ) ( ) ( )*ˆˆ , ,0 , ,0ˆcos , ,0
H k G kkU H k g g
z zθ θ
ω θ θ∂ ∂
− + + = −∂ ∂
, (10β)
( )ˆ , , /H k z zθ∂ ∂ παραμένει φραγμένη όταν , (10γ) z → −∞
- 221 -

53
όπου
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
2 2 2x yk k k= + , ( ) ( )ˆ ˆ, , , , , ,k z k zθ θ ξ η ζ=G G και ( ) ( )ˆ ˆ, , , , , ,H k z H k zθ θ ξ η ζ= . Η
γενική λύση της (10α) είναι της μορφής
( ) ( ) ( )ˆ , , , ,kz kzH k z A k e B k eθ θ θ −= + , 0z ≤ . (11α)
Ο δεύτερος όρος του δεξιά μέλους της ανωτέρω, για ( ),B k θ 0≠ , παραβιάζει την απαίτηση
του φραγμένου, συνθήκη (10γ), όταν . Επομένως επιλέγουμε , οπότε καταλήγουμε στη λύση
z → −∞ ( ),B k θ = 0
ˆ ( , , ) ( , ) , 0kzH k z A k e zθ θ= ≤ . (11β)
Η συνάρτηση ( , )A k θ θα υπολογιστεί με τη βοήθεια της συνθήκης (10β). Προς τούτο χρειαζόμαστε να υπολογίσουμε το δεξιά μέλος της (10β), δηλαδή το μετασχηματισμό Fourier
( ) (* )*ˆ ˆ, , , , , ,G k z G k zθ θ ξ η ζ= της συνάρτησης . Εφαρμόζοντας το γνωστό αποτέλεσμα
*( | )G r ρ
( ) ( ) ( ) ( ) ( )1/ 22 2 2 ( cos sin| |
0
1 2
jk x a y bk z cx a y b z c d dk e eπ
)θ θ
π
θπ
∞−− + −− −
−
⎡ ⎤− + − + − =⎣ ⎦ ∫ ∫ , (12α)
(βλ. π.χ., Wehausen & Laitone, 1960, Εξ. 13.12), εύκολα βρίσκουμε
( ) ( ) ( ) ( )( )
0
cos sin| | | |1ˆ , , , ,2
jk x yk z k zx y z d dk e e eπ
π
ξ θ η θζ ζξ η ζ θπ
∞ ⎡ ⎤⎣ ⎦
−
− + −− − − += −∫ ∫G . (12β)
Εφ’ όσον μας ενδιαφέρει η z − παράγωγος της ( )*ˆ , ,G k zθ για 0 , αρκεί να
εξειδικεύσουμε την (12β) στην περιοχή της ελεύθερης επιφάνειας. Στο εσωτερικό της λωρίδας
z =
( ) ( ),,z ζ ζ ζ ζ∈ − = − , η (12β) γράφεται
( ) ( ) ( )( ) ( ) ( )( )
0
cos sin1ˆ , , , ,2
z z jk x yk kx y z d dk e e eπ
ζ ζ
π
ξ θ η θξ η ζ θ
π
∞ ⎡ ⎤− + ⎣ ⎦
−
− + −−= −∫ ∫G , (12γ)
απ’ όπου, με τη βοήθεια της (9β), συμπεραίνουμε ότι
( ) ( ) ( ) ( )( ) ( )cos sinˆ ˆ 1, , , , , , 2
jkk z k zk z k z e e ek
ξ θ η θζ ζθ θ ξ η ζπ
− +− − +≡ = −G G , (12δ)
και άρα
( ) ( )cos sinˆ , ,0 1 k jkk
ez
eζ ξ θ η θθπ
− +∂= −
∂G
. (12ε)
Εισάγοντας την ανωτέρω στο δεξιά μέλος της (10β), σε συνδυασμό με τις σχέσεις ( ) (, ,0 ,H k A k )θ θ= και ( ) ( )ˆ , ,0 / ,H k z k A kθ θ∂ ∂ = (προφανείς συνέπειες της (11β)),
παίρνουμε
( ) ( ) (2 cos sin1cos , k jkkU kg A k g e eζ )ξ θ η θω θ θπ
− +⎡ ⎤− + + =⎣ ⎦ , (13α)
εκ της οποίας προκύπτουν οι σχέσεις
- 222 -

54
( )( )
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
1 ( cos si
2( , )cos
k jkge eA k
kg kU
ζ ξ θ η θπθ
ω θ
− − +
=− +
n )
, (13β)
και, λόγω της (11β),
( )
1 ( ) ( cos sin )
2ˆ ( , , )
cos
k z jkge eH k zkg kU
ζ ξ θ η θπθω θ
− + − +
=− +
. (13γ)
Πριν προχωρήσουμε, πρέπει να προσδιορίσουμε τα σημεία μηδενισμού του παρονομαστή των δεξιά μελών των σχέσεων (13β,γ), δηλαδή τα σημεία μηδενισμού της ποσότητας
( ) ( ) ( ) ( )2 2 2 2; cos cos 2 cosk kU kg U k U g k 2ϖ θ ω θ θ ω θ= − + + = − − − − ω
)
, (14α)
στο -επίπεδο. Η διακρίνουσα ( ,k θ ϖΔ του δευτεροβάθμιου τριωνύμου (14α) γράφεται στη μορφή
( )2 21 4 cos 1 4 cosUg ggϖω θ τ θ
⎛ ⎞Δ = − ≡ −⎜ ⎟
⎝ ⎠, (14β)
όπου /U gτ ω= , είναι θετική αδιάστατη παράμετρος (η οποία αντιστοιχεί προς το αντίστροφο του αριθμού Strouhal).
Άσκηση: Να αποδείξετε ότι η αδιάστατη παράμετρος τ ισούται με το λόγο της ταχύτητας
της σημειακής πηγής προς τη φασική ταχύτητα c του κύματος, δηλαδή ότι
UU Ug cωτ ≡ = .
Λόγω της μορφής της διακρίνουσας ϖΔ , σχέση (14β), καθοριστικό ρόλο για τη συμπεριφορά του ( ;k )ϖ θ παίζει η ποσότητα 1 4 cosτ θ− . Προφανώς, πρέπει να διακρίνουμε τις περιπτώσεις 1/ 4τ < (υποκριτική ροή, subcritical flow) και 1/ 4τ > (υπερκριτική ροή, supercritical flow). Εύκολα βλέπουμε ότι ⇒ (15) 4 1τ < 0ϖΔ > , οπότε έχουμε πάντοτε δύο σημεία μηδενισμού του ( );kϖ θ , ( )1, 2 1, 2k k θ≡ , τα οποία δίδονται από τη σχέση
( )2
1, 2 1, 2 2 2 2 2
2 cos 1 2 cos 1 4 cos;
2 cos 2 cosg U
k kgU
ϖω θ τ θ τ θωθ τθ τ θ
− ± Δ − ± −≡ = = =
( )2
2 2
1 1 4 cos 2 1 4 cos4 cosg
τ θ τ θτ θ
+ − ± −ω= ,
απ’ όπου αμέσως λαμβάνουμε ( )
221,2 ; 1 1 4 cos
2cosU k
gθ τ τ θ
θ⎛ ⎞± −
= ⎜ ⎟⎜ ⎟⎝ ⎠
,
ή
- 223 -

55
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( )11,2 21,2
1 2 cos 1 4 cos;
2cosk
τ θ τκ θ τ ν θ
θ− − ± −
= =θ
, (16)
όπου η χαρακτηριστική παράμετρος του προβλήματος Neumann-Kelvin που αντιστοιχεί σε μηδενική συχνότητα και αντιπροσωπεύει τον κυματαριθμό των εγκαρσίων κυματισμών πίσω από κινούμενη με σταθερή ταχύτητα αλλά μη ταλαντευόμενη πηγή. Εξ άλλου,
2/ν = g U
⇒ 4 1τ >
( )
0, cos 0 0 cos 1/ 4 ,
0, cos 1/ 4 0 arccos 1/ 4 .
ά ί
ά
ϖ
ϖ
ε ν θ ε τε θ τ
ε ν θ τ θ τ
⎧Δ > < < <⎪⎨⎪Δ < > ⇔ < < =⎩ γ
(17)
Στην περίπτωση αυτή ( 4 ), η γραφική παράσταση του τριωνύμου 1τ > ( ;k )ϖ θ (δηλαδή του παρονομαστή των σχέσεων (13β,γ)) δείχνεται σκαριφηματικά στο Σχήμα 2. Εν προκειμένω, καθοριστικό ρόλο παίζει η ποσότητα (γωνία στο Fourier επίπεδο ( ),k θ )
(cos 1/ 4arc )γ τ= , (18)
η οποία ορίζεται και βρίσκεται στο πρώτο τεταρτημόριο, εφ’ όσον 1/ 4 1τ < . Σύμφωνα με τη (17), σημεία μηδενισμού του παρονομαστή ( );kϖ θ υπάρχουν μόνον όταν γ θ π< < . Τα σημεία αυτά δίδονται από την ίδια σχέση (16), ως ανωτέρω.
Σχήμα 2: Σημεία μηδενισμού του τριωνύμου ( );kϖ θ , για τις διάφορες τιμές της γωνίας θ , όταν . Η παράμετρος (γωνία) 4τ > 1 γ δίδεται από τη σχέση (18).
__________________________________________________________________________ Οι οριακές τιμές (limiting values) των αδιάστατων ποσοτήτων ( )1,2κ θ , για ,
και θ , διδονται από τις σχέσεις: 0 ή γθ→
/ 2θ π→ π→
ϖ 0ϖΔ < θ γ<
k
ϖ 0ϖΔ = θ γ=
k1 2k k =
ϖ 0ϖΔ >θ γ>
1k 2kk
- 224 -

56
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) 21,2/ 2 / 22
( )1 2 cos 1 4 cos
lim lim2cos
( )θ π θ π
τ θ τ θκ θ
θτ
→ →
⎧ + +∞− ± − ⎪= ⎨
⎪ −⎩
=
(18α)
( ) 21,20
lim 4θ γ
κ θ τ→ >
= , (για 4τ > 1), (18β)
( )1,20
1 2 1 4lim
2θ
τ τκ θ
→
− ± −= , (για 4τ < 1), (18γ)
( )1,2
1 2 1 4lim
2θ π
τ τκ θ
→
+ ± += , (για κάθε τιμή του τ) .
(18δ) Οι σχέσεις (16), σε συνδυασμό με τις οριακές τιμές (18), μας επιτρέπουν να υπολογίσουμε και να κατασκευάσουμε το γεωμετρικό τόπο των (αδιάστατων) ριζών του
δευτεροβαθμίου τριωνύμου
( )1,2κ θ
( ;k )ϖ θ (παρονομαστή των δεξιά μελών των σχέσεων (13β,γ),
στο πολικό επίπεδο. Στο Σχήμα 3 παρουσιάζονται οι καμπύλες ( ) )1,2 1,2 (1,2 ;κ κ θ τ= = κ θ για διάφορες τιμές της παραμέτρου τ . Ειδικώτερα, εξετάζονται οι υποκριτικές περιπτώσεις ( 0.1, 0.2,0.249 1/ 4τ = < ) και οι υπερκριτικές περιπτώσεις ( 0.5, 1 1/ 4τ = > ). Όταν
1/ 4τ > παρατηρούμε ότι οι καμπύλες ( )1 ;κ θ τ και ( )2 ;κ θ τ έχουν κοινή αρχή το σημείο
( ) ( )24 ,τ=κ,θ γ
/ 2π
, επί της πολικής ευθείας , που εικονίζεται με διακεκομένη γραμμή (στη περίπτωση τ=0.5, γ=60ο). Στη συνέχεια, καθώς το αυξάνεται, τείνοντας προς την τιμή
, εξελίσσονται ως δύο ανεξάρτητοι κλάδοι, από τους οποίους ο ένας τείνει στο άπειρο ενώ ο άλλος τείνει στο σημείο ( )
θ γ=
θ
( )2 , / 2τ π=κ,θ
( )
. Στο δεύτερο τεταρτημόριο, , οι κλάδοι εμφανίζονται ως εξής: ο ένας «επιστρέφει» από το άπειρο ( /θ ) και τέμνει
τον άξονα στο σημείο
/ 2 θ≤ ≤
2π π
= π
θ π= (1 1θ = + )4 / 2 ,τ π
( )
( )τκ, + , ενώ ο άλλος συνεχίζει να
εξελίσσεται ομαλά από το σημείο ( ), / 22τ π=θκ, ως το σημείο
( ) ( )( )/ 2,1 2 1= + −κ,θ 4τ τ+ π .
Όταν 1/ 4τ <
( )
δεν ορίζεται η γωνία , και οι κλάδοι δεν έχουν κοινή αρχή. Ξεκινούν από τα
σημεία
γ
(( )1 2 1 4 2, 0τ τ= − ± −
4
) θ =/κ,θ του άξονα 0 , και εξελίσσονται αντίστοιχα,
όπως στην προηγούμενη περίπτωση. Με τη βοήθεια και του Σχ. 4 που αποτελεί μια μεγέθυνση του προηγούμενου στην αρχή των αξόνων, παρατηρούμε στην υποκριτική περίπτωση ( 1/τ < ) ότι, καθώς , ο εξωτερικός κλάδος τείνει να αποκτήσει συμμετρική μορφή στα δύο τεταρτημόρια ενώ ο εσωτερικός κλάδος τείνει σε κυκλική μορφή, η οποία εκφυλίζεται στο σημείο (0,0) όταν τ=0. Ετσι, στη περίπτωση της πηγής σε μόνιμη μεταφορική κίνηση χωρίς ταλάντωση ( ), που αντιστοιχεί στη τιμή τ=0, έχουμε μόνο τους δύο εξωτερικούς συμμετρικούς κλάδους που, όπως θα δούμε στη συνέχεια, αποδίδουν το κυματικό πεδίο της διαταραχής σε ευθύγραμμη ομαλή κίνηση, και
0→
0,>
τ
U 0ω=
- 225 -

57
αντιπροσωπεύουν την εικόνα του συστήματος εγκαρσίων και αποκλινόντων κυματισμών του πλοίου (Neumann-Kelvin) σε ήρεμο νερό και σε μακρινή απόσταση από το πλοίο.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Σχήμα 3: Γεωμετρία των ριζών ( )1,2 ;κ θ τ του δευτεροβάθμιου τριωνύμου ( ;k )ϖ θ στο
πολικό επίπεδο, για διάφορες τιμές της παραμέτρου τ . Οι εικονιζόμενες μορφές επεκτείνονται συμμετρικά (ως προς τον οριζόντιο άξονα) στο κάτω ημιεπίπεδο.
Σχήμα 4: Μεγέθυνση κοντά στη αρχή των αξόνων της περιοχής του Σχημ. 3
που εικονίζεται με διακεκομμένη γραμμή Περαιτέρω, καθώς η συχνότητα αρχίζει να αποκτά τιμές, ώστε η παράμετρος τ να λαμβάνει μικρές θετικές τιμές, έχουμε την εμφάνιση ενός περίπου κυκλικού κλάδου στην αρχή των αξόνων, ο οποίος σταδιακά μεγαλώνει σε ακτίνα και παραμορφώνεται, όπως φαίνεται στο
cosκ θ
sinκ θ
τ=0.245
τ=0.5
τ=0.245
τ=0.2 0.1
τ = 1 τ = 0
τ = 0
τ = 0.5, γ = 60ο
cosκ θ
sinκ θ
0.5
0.25
τ = 1 0.5
0.25
- 226 -

58
Σχ.4. Θα δούμε στην συνέχεια ότι ο κλάδος αυτός (ολόκληρος για τ<0.25 η μόνο το μέρος του δεύτερο τεταρτημόριο) αντιπροσωπεύει ένα πρόσθετο πεδίο δακτυλιοειδών κυματισμών εξερχόμενων από το σημείο της διαταραχής (πηγής) που υπερτίθενται στο προαναφερθέν Neumann-Kelvin κυματικό πεδίο.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Κλείνουμε το μέρος αυτό με την παρατήρηση ότι ο γεωμετρικός τόπος των ριζών ( ) ( )1,2 ; ;k 1,2θ τ ν κ θ τ= προκύπτει εύκολα με την διαστατοποίηση των αποτελεσμάτων που
ανωτέρω Σχήματα 3 και 4 (για συγκεκριμένες τιμές της παραμέτρου τ), και ισοδύναμα αποτελεί τη λύση της εξισώσεως διασποράς του εξεταζόμενου προβλήματος
(
παρουσιάσθησαν στα
( ) ) 2 2, ; 2k k U Uϖ ω ω ω 2 2 2, ; 2 0x yx y x x x yk k k k k k
g g g gω = = − − − + + =P ,
( ) ( ), cos ,sinx yk k k θ θ= , (19α)
οποία, για δεδομένη συχνότητα ω και ταχύτητα U, καθορίζει το μέγεθος και την διεύθυνση
( ή ), (19β)
ετρικά εξαρτώμενη από την ταχύτητα U. Μεγάλη σημασία για την περαιτέρω μελέτη ου προβλήματος και ιδιαίτερα τη παραγωγή αποτελεσμάτων που αφορούν την ασυμπτωτική
ητου κυματαριθμού των ελευθέρων διαδιδομένων κυμάτων σε κάθε σημείο του φυσικού χώρου. Ετσι η σχέση (19α) ισοδύναμα εννοείται ως σχέση που συνδέει τη συχνότητα με το διάνυσμα του κυματαριθμού ( ), ;ω ω= x yk k U ( ) ( ), ;ω≡ =x yk k Uk k παραμτσυμπεριφορά του πεδίου σε μακρινές οριζόντιες αποστάσεις από τη πηγή έχει η διεύθυνση
της κλίσης (gradient) ,⎛ ⎞∂ ∂ ⎟⎜ ⎟⎜∇ ⎟⎜ ⎟⎟⎜∂ ∂k⎝ ⎠x yk kP P
P = , όταν οι εξαρτημένες μεταβλητές ( ), ;x yk k ω
ικανοποιούν τη σχέση διασποράς Η κλίση ∇k P είναι εξ’όρισμού κ
και 5, σε διάφορα σημεία πάνω στις εικονιζόμεν μπύλες (που αντιπροσωπεύουν διάφορες τιμές της παραμέτρου τ), με μικρό βέλος.
(19β). γεωμετρικό τόπο των ριζών, και η διεύθυνση της παρουσιάζεται ενδεικτικά στα Σχήματα 4
ες κα
ντιστροφή του μετασχηματισμού Fourier
τισμό Fourier, σχέση (9β), στην ποσότητα
άθετη στο
Α
Εφαρμόζοντας τον αντίστροφο μετασχημαˆ ( , , )H k zθ που δίνεται από την σχέση (13γ), παίρνουμε
( ) ( cos sinˆ jk x yπ
)
0
, , , , ( , )H x y z d k dk H k e θ θ
π
ξ η ζ θ θ−
= ∫ ∫∞
+ ˆ ( , , )H k zθ =
( ) ( )
( )
( cos sin1 ( )
20
cos
jk x yk zg e ed k dkkg kU
π )ξ θ η θζ
π
πθω θ
∞ − + −− +
−
=− +∫ ∫ . (20)
Λαμβάνοντας υπ’ όψιν τη συμμετρία ως προς του τμήματος της ολοκληρωτέας ποσότητας ου εμπλέκει το και την αντισυμμετρία του τμήματος που εμπλέκει το οδηγούμαστε στο ακόλουθο αποτέλεσμα:
θ π cosθ , sin θ ,
- 227 -

59
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( )( )
( ) ((2( , , | , , ) k z jk xk egy z d dk
ζπ
ξ η ζ θ+ + −∞
= =)cos
20 0
cos ( )sing cos
k yk kU
ξ θ η θπ ω θ
−
− +∫ ∫
H x
( )0 0
2 g d dk f k,θπ
θπ
∞
= ∫ ∫ , (21α)
όπου
( ) ( )( ),
h k ,θf k ,θ
kϖ θ= και ( ) ( )( ) (( )cos cos ( )sink z jk xh k ,θ k e k yζ ξ θ η θ+ −= −+ . (21β)
(Πρβ εωρία του λ. Wehausen & Laitone, 1960, Εξ. 13.52). Όπως είναι γνωστό από τη θμετασχηματισμού Fourier, τα σημεία μηδενισμού του παρονομαστή της ολοκληρωτέας οσότητας (που δεν είναι άλλα από τα σημεία μηδενισμού του δευτεροβαθμίου π ( )f k,θ
τριωνύμου ( );kϖ θ , τα οποία μελετήθηκαν διεξοδικά ανωτέρω), ορίζουν τους πόλους της ολοκληρωτέ ν τύπο της αντιστροφής, εξίσωση (20), και είναι θεμελιώδους σημασίας για το σωστό και αριθμητική άποψη) υπολογισμό. Η σχέση (21), σε συνδυασμό με την (7), μας παρέχει την κλειστή, αναλυτική λύση του προβλήματος (3α,β,γ), δίδοντας μια ακριβή μαθηματική έκφραση
ας στο (από αναλυτική
για τη συνάρτηση Green ου γραμμικοποιημένου τ ( ),U ω -
το διπλ
προβλήματος. Εν τούτοις, η λύση αυτή παρουσιάζει ένα σημαντικό μειονέκτημα. Δίδεται στη μορφή ενός διπλού ολοκληρώματος, και μάλιστα με τη μία ολοκλήρωση να εκτείνεται σε άπειρο διάστημα. Είναι, λοιπόν, σημαντικό να μελετή-σουμε προσεκτικά αυτό ό ολοκλήρωμα με κύριο στόχο να το εξαπλουστεύσουμε, εκτελώντας αναλυτικά τουλάχιστον τη μια ολοκλήρωση, όπου αυτό είναι εφικτό. Περαιτέρω, και εφ’ όσον παραμένει το ζήτημα της αριθμητικής ολοκλήρωσης ως προς k , είναι απαραίτητο να εξετάσουμε τη συμπεριφορά της ολοκληρωτέας συνάρτησης ως προς k , και ενδεχομένως να μετασχηματίσουμε καταλλήλως αυτήν, ώστε να μπορούν να εκτελεστούν αποδοτικά οι αριθμητικές ολοκληρώσεις. Θα εξετάσουμε, κατ’ αρχήν, την υπερκριτική περίπτωση ( )1/ 4 cos 1/ 4arcτ γ τ> =⇔ .
Διαχωρίζοντας το διάστημα ολοκλήρωσης ως προς την (πολική) γωνία θ στις υποπεριοχές φεται ισοδύναμα στην μορφή 0 , / 2, / 2 ,γ γθ θ π π θ π< < < < < < η σχέση (21) γρά
( ) ( ) ( )/ 2
0 /2 0
2 2 2( , , | , , ) g g gH x y z d dk f θ,k d dk f k,θ d dk f k,θ
1 2
0 0
JJ
γ π π
γ π
ξ η ζ θ θ θπ π
∞ ∞ ∞
= + +∫ ∫ ∫ ∫ ∫ ∫ . (22) π
Στο δεύτερο και στο τρίτο από τα ολοκληρώματα που εμφανίζονται στο δεξιά μέλοςανωτέρω σχέσεως (22), η ολοκληρωτέα συνάρτηση
της ( )f k,θ
εκτείνετ
εμφανίζει, για κάθε τιμή της
γωνίας θ στα αντίστοιχα διαστήματα, δύο πόλους στις θέσεις ( )1, 2k θ , που δίδονται από τις σχέσεις (16). Δηλαδή, η k − ολοκλήρωση όχι μόνο αι σε άπειρο διάστημα, αλλά «διέρχεται» πάνω από πόλους και άρα δεν είναι μονοσήμαντα ορισμένη. Αυτό συμβαίνει
- 228 -

60
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
διότι ο πόλος πρέπει να π ακαμφθεί και υπάρχουν δύο δυνατότητες παράκαμψης, όπως φαίνεται στο Σχήμα 4.
αρ
Σχήμα 4: Τρόποι παράκαμψης ενός πόλου
ι κατάλληλοι δρόμοι , που πρέπει να κολουθηθούν για τον υπολογισμό των ολοκληρωμάτων, εικονίζονται στο Σχήμα 5 με έντονη
άκ κ
στο μιγαδικό k-επίπεδο, για και για .
ροχωρούμε τώρα στον υπολογισμό των συνεισφορών των πόλων στην ολοκλήρωση, τα ολοκληρώματα Το τριώνυμο
Ο ολοκλήρωσης L και L , στο μιγαδικό k-επίπεδο1 2
αγραμμή. Σημειώνεται ότι ο τρόπος παρ αμψης άθε ενός πόλου (ισοδυνάμως, ο τρόπος με τον οποίον θα πρέπει να λαμβάνεται η συνεισφορά εκάστου πόλου στον υπολογισμό του ολοκληρώματος) επιλέγεται έτσι ώστε το τελικό αποτέλεσμα της αντιστροφης, εξίσωση (22), να είναι συμβατό με την αρχή της αιτιότητας και τη συνθήκη στο άπειρο. (Ο ενδιαφερόμενος αναγνώστης παραπέμπεται σχετικά στην εργασία των Peters & Stoker 1957).
Σχήμα 5: Οι δρόμοι ολοκλήρωσης και και οι πόλοι 1L 2L 1k , 2k / 2γ θ π< < / 2π θ< <π
Π k −σ 1 2,J J . ( );kϖ θ ,
που εμφανίζεται στον παρανομαστή της
ολοκληρωτέας ποσότητας ( )f k ,θ , γράφεται ισοδύναμα στη μορφή.
( ) )( ( )21 2, cok U k k kϖ θ = − − , 2s kθ − (23)
όπου
( )1, 2 1, 2k k θ≡ οι ρίζες του τριωνύμου ( );kϖ θ , σχέσεις (16). Με την βοήθεια της ανωτέ εξ. (23), μπορούμε να αναλυτικά την συνεισφορά των ρω εκφράσεως,
στο ολοκλήρωυπολογίσουμε
(ότανπόλων μα 1J πάνω στο δρόμο 1L / 2γ θ π< < ), και πάνω στο δρόμο 2L
Re k
1k
2k
Im k
Re
Im k
1k 2k
Δρόμος ολοκλήρωσης 1L
Δρόμος ολοκλήρωσης 2L
k
- 229 -

61
στο ολοκλήρωμα 2J (ότα / 2π θ π< < ). Στη πρώτη / 2γ θ π< < ), το ολοκλρωμα πάνω στο δρόμο 1L μπ εί στη μορφή
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
ν ν περίπτωση ή-(ορεί να γραφ
( )1 2
1 10
k k
k k
θ− −
= +∫ ∫ ∫
στο
2 2
1 limk k
d f θ dkJδ δ
δ γ δ δ
∞
→ + +
⎧ ⎫⎪ ⎪+ + +⎨ ⎬⎪⎩
∫ ∫ ∫ (24)
συνεισφορά του ολοκληρώματος ημικύκλιο που παρακάμπτει ») τον πόλο
/ 2π
0
2gπ
k,⎪⎭
.
(«από κάτωΗ
1k (Σχήμα 5α) υπολογίζεται θέτοντας 1jk k e ψδ= + , 2π ψ π< < , ανάγοντας την
ολοκλήρωση σε ολοκλήρωση προς ψ όριο του αποτελέ-τος όταν 0δ→ :
k −σμ
ως
( )( )
και, τέλος, αναζητώντας τοα
( )( )
( )( )
1 1k k
συνεισφορά
12 2
1 2 2 1cos cosh k ,θ
f k,θ dk jk k U k k
πθ θ
=− =− − −
. (25)
ντίστοιχα, η στο ημικύκλιο που παρακάμπτει τον πόλο
2 2
h k,θ dkU k k
του ολοκληρώματος
0→ . Το τελικό
( )( )
∫ ∫
Α 2k
ιουπολογίζεται θέτοντας 2 , 0jk k e ψδ ψ π= + < < , και στη συνέχεια αναζητώντας το όρ του αποτελέσματος όταν σμα είναι ως ακολούθως
δ αποτέλε
( )( )
( )( )
2 2k k
υπ΄όψη
22 2
1 2 2 1co cosf k,θ dk j
k k U k kπ
θ θ=− =
−. (26)
αμβάνοντας ολοκλήρωμα πάνω στο δρόμο γράφεται στην μορφή
2 2sh k,θ dk
U k k− −
ανωτέρω το
h k ,θ∫ ∫
Λ τα 1L
( ) ( ) ( ) ( )( )
1
1 22 2
2 1
2cos
h k ,θ h k ,θ dkd f k,θ ,θ dk jg d
U k kγ
/ 2 / 2 / 2π π π
0L k
d PV f k2 2g g
γ γ
θ θ θπ π θ
+= +
−∫ ∫ ∫ . (27)
που PV δηλώνει τη τιμή του ιδιομόρφου ολοκληρώματος
∞
=∫ ∫
κατά Cauchy ό κύρια ( )0k
f k,θ dk∞
=∫ .
Αντίστοιχα αποτελέσματα λαμβάνουμε για το ολοκλήρωμα πάνω στο δρόμο L2 :
( ) ( ) ( ) ( )( )
1
1 22 2
2 1/ 2 /
g g
π π 2 / 2
2cos
h k ,θ h k ,θ dkd f k,θ ,θ dk jg d
U k kπ0L k
d PV f k2 2π π π
θ θ θπ π θ
−= +
−∫ ∫ ∫ . (28)
αρατηρώντας (πρβλ σχέση
∞
=∫ ∫
16) ότι: Π . 2 1 2 2
1 4 coscos
gk kU
τ θθ
−− = , και χρησιμοποιώντας τις
ίρνουμε τελικά σχέσεις (26) και (27) στην Εξίσωση (21) πα
( )/ 2π π
0 / 2 k
PVπ 0
2( , , | , , )y z f k,θ dkdgH x ξ η ζ θπ
+∫
∞
=
⎧ ⎫= +⎨ ⎬
⎩ ⎭∫ ∫
- 230 -

62
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
( ) ( ) ( ) ( )/ 21 2 1 2
/ 2
2 21 4 cos 1 4 cos
h k ,θ h k ,θ dk h k ,θ h k ,θ dkj d j dπ π
γ π
θ θτ θ τ θ
+ −+ +
− −∫ ∫ . (29)
πό τις προηγούμενες σχέσεις (π.χ. σχέση ορισμού της συνάρτησης f, Εξ. (20β), είναι Α
προφανές ότι το πεδίο της πηγής είναι συμμετρικό για y η> και y η< , δηλαδή εκατέρωθεν του άξονα (x) κίνησης της πηγής, όπως είναι αναμενόμε ό την κή του προβλήματος.
νο απ φυσι
αμβάνοντας υπόψη ότι η Λ 1 1( | ) ( , , | , , )x y z ξ η ζ≡ =′− −
r ρr ρ r ρ
G G
να γράψουμε το τελικό αποτέλεσμα και για τη
− είναι
πραγματική συνάρτηση, μπορούμε συνάρτηση
( )o
G r ρ , η οποία χρησιμοποιείται στην Εξ.(2α) σε συνδυασμό με την ( )ωexp j t αρμονική από το χρόνο, ως ακολούθως
εξάρτηση
( )o
G r ρ = . (30) που είναι η μιγαδική συζυγής της , όπως παρέχεται από την Εξ.(29) .
ριθμητικά αποτελέσματα
α ολοκλήρωμα για το ομαλό μέρος της συνάρτησης Green, Εξ. (18), έχει μετασχηματιστεί
τα Σχήματα 3.6.3, 3.6.4 και 3.6.5, απεικόνιζεται το πραγματικό μέρος του κυματικού
ημειώνεται ότι σύμφωνα με την Εξ. (3.δ) του Εδαφ.3.6, από την κατασκευή της Ο
*( | ) ( | )H+r ρ r ρG
ό *( | )H r ρ ( | )H r ρ Α Ταπό διάφορους ερευνητές σε ισοδύναμες μορφές, έτσι ώστε ο αριθμητικός του υπολογισμός να είναι γρήγορος και ακριβής. Στην συνέχεια παρουσιάζονται αποτελέσματα σε διάφορες ενδεικτικές περιπτώσεις, όπως έχουν υπολογιστεί με βάση την μέθοδο που προτείνεται στην εργασία των Inglish & Price (1980). Σπεδίου που παράγεται από κινούμενη-παλλόμενη πηγή στο οριζόντιο επίπεδο z=0, στην υποκριτική περίπτωση τ=1/5, στην κριτική περίπτωση τ=1/4, και στην υπερκριτική περίπτωση τ=1/2, αντίστοιχα. Η απεικόνιση επιτυγχάνεται μέσω ισοϋψών καμπυλών του κυματικού πεδίου στο οριζόντιο επίπεδο (z=0), που παρουσιάζονται στο πάνω μέρος των σχημάτων αυτών, και τρισδιαστάτων όψεων στο κάτω μέρος των σχημάτων. Σγραμμικοποιημένης συνθήκης ελεύθερης επιφάνειας ( .Σ.Ε.Ε.), η ανύψωση της ελεύθερης επιφάνειας που παράγεται από την κινούμενη-παλλόμενη πηγή προκύπτει ως συνδυασμός των τιμών και των οριζοντίων x-παραγώγων του κυματικού πεδίου στην θέση z=0, που αντιστοιχεί στην στάθμη ηρεμίας της ελεύθερης επιφάνειας. Με βάση την παρατήρηση αυτή, ο αναγνώστης μπορεί να αντιληφθεί σε πρώτο βαθμό (και με την βοήθεια των Σχημάτων 6.1, 6.2 και 6.3) τις αντίστοιχες εικόνες του πεδίου ανύψωσης της ελεύθερης επιφάνειας που δημιουργεί η κινούμενη-παλλόμενη πηγή.
- 231 -

63
Σχήμα 6.1: Απεικόνιση του πραγματικού μέρους του κυματικού πεδίου που παράγεται από κινούμενη-παλλόμενη πηγή στο οριζόντιο επίπεδο z=0, στην υποκριτική περίπτωση τ=1/5.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 232 -

64
Σχήμα 6.2: Απεικόνιση του πραγματικού μέρους του κυματικού πεδίου που παράγεται από κινούμενη-παλλόμενη πηγή στο οριζόντιο επίπεδο z=0, στην κριτική περίπτωση τ 1/4. →
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 233 -

65
Σχήμα 6.3: Απεικόνιση του πραγματικού μέρους του κυματικού πεδίου που παράγεται από κινούμενη-παλλόμενη πηγή στο οριζόντιο επίπεδο z=0, στην υπερκριτική περίπτωση τ=1/2.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 234 -

66
Μελέτη της ασυμπτωτικής συμπεριφοράς της συνάρτησης Green σε μακρινές αποστάσεις από τη πηγή
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Το ιδιόμορφο μέρος της συνάρτησης Green, Εξ.(6α), έχει μονότονη συμπεριφορά και εξασθενεί γρήγορα σε μακρινές αποστάσεις από την πηγή − →∞r ρ , με ρυθμό ανάλογο
( 2−−O r ρ ) . Η κυματική συμπεριφορά του πεδίου περιγράφεται αποκλειστικά από το ομαλό
μέρος της συνάρτησης Green, το οποίο παρέχεται από την Εξ. (20). Χωρίς βλάβη της γενικότητας, θα θεωρήσουμε ότι η πηγή να βρίσκεται στον κατακόρυφο άξονα ( )0, 0ξ η= =
( )( )
( ) cos
20 0
cos sin2( , , | 0, 0, ) g cos
k z jkxk e kygH x y z d dkk kU
ζ θπ θξ η ζ θ
π ω θ
+ +∞
= = =− +∫ ∫ =
( )
( )1 2 ,
jk z
x yee ζ
π ω
∞ ∞+
−∞ −∞
= ∫ ∫kR
kPdk dk ,
(31) όπου ( ) ( ) 2 2, cos , sin ,θ θ= = = = +x y xk yk k k k k k kk , ( ),x y=R . Για την παραγωγή της τελευταίας έκφρασης το ολοκλήρωμα Fourier στο πεδίο του κυματαριθμού ξαναγράφεται από πολικό σε καρτεσιανό σύστημα (βλ. Εξ.9) και χρησιμοποιείται και η Εξ. (19α), από όπου παρήχθη η σχέση διασποράς. Από τη δομή της ολοκληρωτέας ποσότητας παρατηρούμε την εκθετική εξασθένηση του πεδίου (31) με το βάθος (z<0). Επομένως αξίζει να εστιασθούμε στη διερεύνηση της ασυμπωτικής του συμπεριφοράς για σημεία ( , )x y=R πάνω στην
επιφάνεια z=0, σε μεγάλες οριζόντιες αποστάσεις = →∞R R . Ένα σημαντικό θεώρημα από τον Lighthill (1960b) μας επιτρέπει να υπολογίσουμε την ασυμπτωτική συμπεριφορά ολοκληρωμάτων Fourier όπως το ανωτέρω, Εξ.(31), με τη μέθοδο της στάσιμης φάσης (βλ. π.χ. Sidorov & Fedoryuk 1985) ως ακολούθως
( )
( cos , sin , 0),
j
s k
e fH R R zK R
φ φω
= ≈∇∑
kR
kP, (32)
όπου φ η πολική γωνία (διεύθυνση στο οριζόντιο επίπεδο) ως προς την οποία εξετάζουμε τη συμπεριφορά του κυματικού πεδίου σε μακρινή απόσταση από την αρχή (θέση πηγής) και το άθροισμα αναφέρεται σε όλα τα σημεία (s) πάνω στην καμπύλη ( ),ω =kP 0 (ή ισοδύναμα
) όπου η κάθετος είναι παράλληλη προς την διεύθυνση (k )ω ω= φ . Επίσης, K στην
Eξ.(32) είναι το μέτρο της καμπυλότητας στα σημεία (s) πάνω στη καμπύλη ( ), 0ω =kP
που αποτελούν σημεία στασιμότητας της φάσης ( sin cos 0x yk k
φ φ∂ ∂− =
∂ ∂P P ), και f είναι
κατάλληλος συντελεστής πλάτους. Η μέθοδος της στάσιμης φάσης μας επιτρέπει να λάβουμε αποτελέσματα σε πρώτης τάξεως προσέγγιση, όπως εκφράζονται από την Εξ. (32), από όπου παρατηρούμε ότι όπου προκύπτουν σημεία στασιμότητας της φάσης (s) η ασυμπτωτική συμπεριφορά του πεδίου είναι ( )1/ 2−O R . Όπως θα δούμε πιο αναλυτικά στη συνέχεια,
- 235 -

67
σημεία στασιμότητας της φάσης δεν υπάρχουν σε κάθε περίπτωση (δηλ. για κάθε τιμή του τ) και για όλες τις δυνατές διευθύνσεις. Σε αυτές τις καταστάσεις (όταν δεν υπάρχει σημείο στασιμότητας) το πεδίο εξασθενεί πολύ γρηγορότερα σε μεγάλες αποστάσεις από τη πηγή. Aρκετά πιο ισχυρά αποτελέσματα σε ότι αφορά τη τάξη της προσέγγισης μπορεί να ληφθούν χρησιμοποιώντας τεχνικές εκτίμησης των εμπλεκομένων Fourier ολοκληρωμάτων με ιδιομορφίες στο μιγαδικό επίπεδο (βλ. π.χ. Lighthill 1960, Wehause & Laitone 1960, Sec.13). Σχετικά αποτελέσματα που ελήφθησαν με τη τεχνική αυτή για το εξεταζόμενο πρόβλημα παρουσιάζονται στην πρόσφατη εργασία Noblesse & Yang (2004).
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
Η εξέταση της ασυμπτωτικής συμπεριφοράς της συνάρτησης Green του γραμμικοποιημένου ( ,U )ω -προβλήματος, για μακρινές αποστάσεις από την πηγή, πάνω στο οριζόντιο επίπεδο που αντιστοιχεί στην θέση ηρεμίας της ελεύθερης επιφάνειας, δείχνει ότι το μακρινό πεδίο συνίσταται ουσιαστικά από την υπέρθεση τριών συστημάτων κυματισμών, όπως εικονίζεται στα Σχήματα 7 και 8, μέσω των ισοφασικών επιφανειών (π.χ. των επιφανειών που αντιστοιχούν στις κορυφές του κάθε συστήματος κυματισμών). Το αριστερό σχήμα αντιστοιχεί στην υποκριτική περίπτωση, < 1/4τ , και εμφανίζονται δύο περιπτώσεις
1 2 < < 1/4τ τ , όπου σε κάθε περίπτωση εικονίζεται μόνο το συμμετρικό τμήμα του πεδίου ως προς τον άξονα κίνησης της πηγής. Το δεξιό σχήμα αντιστοιχεί στην υπερκριτική περίπτωση, > 1/4τ , όπου και πάλι εμφανίζονται τα συμμετρικά τμήματα του πεδίου σε δύο περιπτώσεις 4 3 > > 1/4τ τ . Παρατηρούμε ότι στην υποκριτική περίπτωση εκτός από συστήματα τύπου εγκαρσίων και αποκλινόντων κυματισμών, τα οποία περιορίζονται σε γωνιακούς τομείς πίσω από την κινούμενη πηγή (δηλαδή στα κατάντη της ροής), υπάρχει και σύστημα κυματισμών που διαδίδεται με φασική ταχύτητα μεγαλύτερη της ταχύτητας της πηγής, και επομένως υπάρχει και μπροστά από την κινούμενη πηγή (δηλαδή στα ανάντη της ροής). Με την σχετική αύξηση της ταχύτητας της πηγής, δηλαδή αύξηση της παραμέτρου τ έως του ορίου = 1/4τ , ο γωνιακός τομέας μέσα στον οποίο περιορίζονται τα συστήματα τύπου εγκαρσίων και αποκλινόντων κυματισμών πίσω από την πηγή διευρίνεται συνεχώς, έως του ορίου να καταστεί κάθετος στον άξονα κίνησης της πηγής.
4τ
3τ
2τ
1τ
- 236 -

68
Σχήμα 7: Ισοφασικές επιφάνειες των συστημάτων κυματισμών της κινούμενης-παλλόμενης πηγής στην υποκριτική (αριστερα) και υπερκριτική (δεξιά) περίπτωση.
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 237 -

69
Σχήμα 8: Ισοφασικές επιφάνειες των συστημάτων κυματισμών της κινούμενης-παλλόμενης πηγής σε μεγάλες οριζόντιες αποστάσεις από τη πηγή, σε διάφορες (υποκριτικές/υπερκριτικές) περιπτώσεις, όπως υπολογίζονται με τη μέθοδο της στάσιμης φάσης. Στην υπερκριτική περίπτωση ( > 1/4τ ) κανένα από τα συστήματα κυματισμών δεν διαθέτει μεγαλύτερη ταχύτητα διάδοσης από την ταχύτητα κίνησης της πηγής, και ως εκ τούτου, οι παραγόμενοι κυματισμοί περιορίζονται σε γωνιακό τομέα πίσω από την πηγή, ο οποίος στενεύει με σχετική αύξηση της ταχύτητας της πηγής, δηλαδή με αύξηση της παραμέτρου τ . Βιβλιογραφία Εδαφίου 3.7
• Churchill, R.V., “Operational Mathematics”, McGraw-Hill, Inc., Third Edition 1972 • Gelfand, I.M., Shilov, G.E., et al., “Generalised Functions”, Vol. 1-5, Academic
Press, 1964-1966 • Hoff, J.R., “Three-Dimensional Green Function of a Vessel with Forward Speed in
Waves”, PhD Thesis, Universitetet I Trondheim, Norway, 1990 • Hoskins, R.F., “Generalised Functions”, Ellis Horwood Limited, 1979 • Inglis, R.B., Price, W.G., “Calculation of the Velocity Potential of a Translating,
Pulsating Source”, The Royal Institution of Naval Architects, 1980 • Kostyukov, A.A., “Theory of Ship Waves and Wave Resistance”, Transl. from
Russian by Max Oppenheimer, Jr., Transl. edited by L. Landweber and J.N. Newman, Effective Communications Inc., Iowa City, 1968. (Orig. Russian edition published in 1959)
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
- 238 -

70
29/3/2012 Γ.Α. ΑΘΑΝΑΣΟΥΛΗΣ
• Lighthill, M., “Fourier Analysis and Generalised Functions”, Cambridge University Press, 1960
• Lighthill, M., “Studies on Magneto-Hydrodynamic Waves and other Anisotropic Waves” Philosophical Transactions of the Royal Society of London. Series A, Mathematical and Physical Sciences, Vol. 252, pp. 397-430, 1960
• Newman, J.N., “Evaluation of the Wave-Resitance Green Function. Part 1: The Double Integral, Part 2: The single Integral on the Centerplane”, J. Ship Research, Vol. 31, pp. 79-90 and 145-150, 1987
• Noblesse, F., “The Fundamental Solution on the Theory of Steady Motion of a Ship”, J. of Ship Res. Vol. 21, pp. 82-88, 1977
• Noblesse F., Yang C., “A Simple Green Function for Diffraction-Radiation of Time-Harmonic Waves with Forward Speed”, Ship Technology ResearchVol. 51, pp. 35-52, 2004
• Peters S, Stoker J.J., “The Motion of a Ship, as a Floating Rigid Body, in a Seaway” Communications Pure and Applied Mathematics, Vol.. X, 399-490, 1957
• Sidorov Y.V., Fedoryuk M.V, Shabunin M.I., Lectures on the Theory of Complex Functions, MIR, Moscow, 1985.
• Sneddon, I.N., “Fourier Transforms”, McGraw-Hill, Inc., 1951, Dover Editions, 1995 • Stoker, J.J., “Water Waves. The Mathematical Theory and Applications”,
Interscience 1957 • Wehausen, J.V., Laitone, E.V., “Surface Waves”, Handbuch der Physic, Vol. 9,
Springer Verlag, Berlin, 1960 • Wu, G.X., Taylor, R.E., “A Green’s Function Form for Ship Motions at Forward
Speed”, Int. Shipbuilding Progress, Vol. 34, No. 384, pp. 189-196, 1987
- 239 -

Παράρτημα: Πρόσθετες μάζες, αποσβέσεις και φορτίσεις επιμήκων σωμάτων κινουμένων με σταθερή ταχύτητα. Θεωρία λωρίδων Στο εδάφιο αυτό θα παρουσιάσουμε τη θεωρία λωρίδων (strip theory) για τον υπολογισμό των προσθέτων μαζών, αποσβέσεων και φορτίσεων πλωτών επιμήκων σωμάτων που διαθέτουν κατακόρυφο επίπεδο συμμετρίας, τα οποία κινούνται με σταθερή πρόσω ταχύτητα U. Η μέθοδος αυτή αναπτύχθηκε σε διάφορες παραλλαγές από την δεκαετία του 60, και για μια σύντομη βιβλιογραφική και ιστορική επισκόπηση παραπέμπουμε στο σύγγραμμα Principles of Naval Architecture (Lewis, Ed., 1989, vol.III, sec.3.4). Όπως και στο προηγούμενο Κεφάλαιο, θα κινηθούμε στα βήματα της εργασίας των Salvesen, Tuck & Faltinsen (1970). Το πλοίο (βλ. Σχ.1) δεν παρουσιάζει εγκάρσια κλίση (στη μέση κατάσταση ισορροπίας) και δέχεται την επίδραση κυματισμών ταλαντούμενο στην επιφάνεια του νερού. Ειδικά για τη περίπτωση του πλοίου στο εδάφιο αυτό θα θεωρήσουμε βαθύ νερό. Θα θεωρήσουμε επίσης ότι το πλάτος (Β) και το βύθισμα (Τ) του πλοίου είναι πολύ μικρότερα από το μήκος του (L), δηλαδή ότι το σώμα είναι μακρύ και λεπτόγραμμο (slender body). Σημειώνουμε εδώ ότι οι συνηθισμένες γάστρες των πλοίων ικανοποιούν τις ανωτέρω υποθέσεις (π.χ. 5.5<L/B<9, 2<B/T<4), φυσικά με εξαιρέσεις που αφορούν ειδικούς τύπους κατασκευών.
διδιάστατη εγκαρσια τομή
Σχήμα 1. Εγκάρσιες τομές πλοίου που ταλαντώνεται λόγω προσπίπτοντος κυματισμού στην επιφάνεια του νερού, ενώ κινείται με σταθερή πρόσω ταχύτητα U.
(N2, N3)
1x 3x
2x
παραγόμενα κύματα παραγόμενα κύματα
kn
(N2, N3)
U
1- 240 -

Στα πλαίσια του γραμμικού προβλήματος, το οποίο αναπτύχθηκε λεπτομερώς στα προηγούμενα εδάφια του παρόντος Κεφαλαίου, το συνολικό δυναμικό της ροής
στο σωματόδετο σύστημα συντεταγμένων που κινείται με τη μέση ταχύτητα U του πλοίου διαχωρίζεται σε δύο μέρη: ένα χρονικά ανεξάρτητο
, το οποίο σχετίζεται με τη ροή εξ’αιτίας της μέσης κίνησης του πλοίου,
και ένα αρμονικά εξαρτώμενο από το χρόνο, εξ’αιτίας των ταλαντώσεων του πλοίου από τη δράση του προσπίπτοντος κυματισμού, ως ακολούθως
(Φ 1 2 3, , ;x x x t
(Φ 1 2 3, ,S x x x
)
))
)
(Φ 1 2 3, , ;T x x x t
( ) ( )( ) ( )(1 2 3 1 1 2 3 1 2 3, , ; , , Re , , j t
S Ux x x t Ux x x x x x x e ωΦ = − +Φ + Φ , (1)
Ακολουθώντας παραπλήσια προσέγγιση με αυτή του Κεφαλαίου 2 για τις ταλαντώσεις πλωτού σώματος, το αρμονικά εξαρτώμενο δυναμικό αναλύεται στο δυναμικό του προσπίπτοντος κυματισμού, στο δυναμικό περίθλασης και στα δυναμικά ακτινοβολίας που σχετίζονται με τις δυνατές ταλαντωτικές κινήσεις
ως ( )0, 1, 2,...,6k kξ = =
( ) ( ) ( ) ( )6
1T I D k
k
jx x x ωξ=
Φ = Φ + Φ + Φ∑ k x
)x
, (2α)
όπου υπενθυμίζουμε ότι , και Α το πλάτος ανύψωσης της ελεύθερης επιφάνεια του προσπίπτοντος κυματισμού (βλ. Εδαφ.2.2). Στην παραπάνω σχέση ω είναι η συχνότητα συναντήσεως
( ) ( ) ( ) ( )( 0I D dj Ax x xωΦ + Φ = Φ + Φ
0 0 cosUkω ω β= − , (2β)
όπου ο κυματαριθμός, η γωνία που δηλώνει τη διεύθυνση διάδοσης
του κυματισμού, και είναι η απόλυτη συχνότητα.
20 0
/k ω= g β
0ω
Αντικαθιστώντας τις παραπάνω Εξ.(1) και (2) στις συνοριακές συνθήκες του προβλήματος προκύπτει ότι το χρονικά ανεξάρτητο δυναμικό ικανοποιεί στη μέση θέση της ελεύθερης επιφάνειας (
SΦ
FD∂ ) τη γραμμικοποιημένη συνθήκη
22
21 3
0S SUg x x
∂ Φ ∂Φ+ =
∂ ∂, , (3α) 3:FD x∈∂ =x 0
και για σημεία επάνω στη μέση θέση του βρεχόμενου τμήματος της γάστρας του πλοίου ( BD∂ )
1S Unn
∂Φ=
∂, BDx∈∂ , )
(3β
που το κάθετο διάνυσμα, με διεύθυνση προς το εσωτερικό της
γάστρας στοιχα, το δυναμικό περίθλασης ικανοποιεί τις συνθήκες ( )1 2 3, ,n n n=n
(βλ. Σχ.1). Αντί ΦD
ό
2- 241 -

2
1 3
0DDj U g
x xω
⎛ ⎞ ∂Φ⎜ ⎟− Φ + =⎜ ⎟⎜ ⎟⎜ ∂ ∂⎝ ⎠, 3: 0FD x∈∂ =x , α) ∂ ⎟ (4
και ∂Φ ∂Φ
= −∂n
, BDx∈∂∂D I
n. (4β)
Τέλος, τα δυναμικά
ακτινοβολίας k , = 1,2,..6k , ικανοποιούν τις συνθήκες Φ
2
1 3
0kkj U g
x xω
∂Φ∂ ⎟⎜ ⎟− Φ + =⎜ ⎟⎜ ⎟⎜ ∂ ∂0=x , = 1,2,..6k ,
⎛ ⎞
⎝ ⎠, (5α)
3:FD x∈∂
ω∂Φ
= +∂k
k k
Un m
n j, BDx∈∂ , . (5β)
ποσότητες που εμφανίζονται στην ανωτέρω συνθήκη ορίζονται επίσης συναρτήσει παραγώγων τ σχετικής ικά
προβλήματος, λόγω της μέσης κίνησης του πλοίου ( σταθερή πρόσω ητα U), σημεία πάνω στη μέση θέση του βρεχόμενου της γάστρας
= 1,2,..6k
Οι km
των
για
ης ταχύτητας ροής w του χρονανεξάρτητουταχύτ
με τμήματος
του πλοίου ( FD∂
( )
)
⎛ ⎞∂Φ ∂Φ ∂Φ ⎟⎜ ⎟= = − +⎜ ⎟⎜ ⎟⎜ ∂ ∂ ∂⎝ ⎠1 2 3
1 1 1
, , , ,S S Sw w w Ux x x
w , FDx∈∂ , (6)
και παρέχοντ ό αι απ τις σχέσεις
=
∂=−
∂∑3
1
kk
wUm n
x, για και = 1,2,3,k
( ) −
=
∂ ×= −
∂3k
x, για = 4,5,6k , ∑
3
1kUm n
r w
γίζοντας αναλυτικά τους ανωτέρω όρους έχουμε για
(7)
(βλ., π.χ. Ohkusu 1996). Υπολο= 1,2,3,k
⎛ ⎞∂ Φ ∂ Φ ∂ Φ ⎟⎜ ⎟= − + +⎜ ⎟⎜ ⎟⎜ ∂ ∂ ∂ ∂ ∂⎝ ⎠
2 2 2
1 1 2 321 1 2 1
S SUm n n nx x x x 3
S
x , (8α)
⎛ ⎞∂ Φ ∂ Φ ∂ Φ ⎟⎜ ⎟+ +⎜⎜⎜⎝ ⎠
2 2 2S S Sn , (8β) = − ⎟⎟∂ ∂ ∂ ∂ ∂2 1 2 32
1 2 2 1 2
Um n nx x x x x
⎛ ∂ Φ ∂ Φ ∂ Φ ⎟⎜ ⎟= − + +⎜ ⎟⎜ ⎟⎜ ∂ ∂ ∂ ∂ ∂⎝ ⎠
2 2
3 1 2 3 21 3 2 3 3
S SUm n n nx x x x x
⎞2S
και για
, (8γ)
= 4,5,6k
=
⎛ ⎞∂ ∂Φ ∂Φ ⎟⎜ ⎟= − −⎜ ⎟⎜ ⎟⎜∂ ∂ ∂⎝∑3
4 21 3
S SUm n x xx x x ⎠
32
, (9α)
=
⎛ ⎞⎛ ⎞∂ ∂Φ ∂Φ ⎟⎜ ⎟⎜ ⎟⎟= − − + − +⎜ ⎜ ⎟⎟⎜ ⎜ ⎟⎟⎜⎜∂ ∂ ∂⎝ ⎠⎝ ⎠∑3
5Um 1 31 3 1
S Sn x x Ux x x
, (9β)
3- 242 -

=
⎛ ⎞⎛ ⎞∂ ∂Φ ∂Φ ⎟⎟⎟⎜ ⎜ ⎟= − − − +⎜ ⎜ ⎟⎟⎜ ⎜⎜⎜∂ ∂ ∂⎝ ⎠⎝ ⎠∑3
6 1 21 2 1
SUm n x x Ux x x
Από τις παραπάνω σχέσεις παρατηρούμε ότι όλπεριλαμβάνουν αποκλειστικά ανώτερης τάξης παραγώγους του δυναμικο διαταραχής λόγω της κίνησης του πλοίου με σταθερή ταχύτητα , και εκ’ τούτου είναι απειροστοί ανώτερης τάξηλαίσια της γραμμικής προσέγγισης. Ετσι προκύπτει ότι μόνο και
ςή μη ομογενής εξίσωση των αντιστοίχων προβλημάτων, μπορούμε
α γράψουμε τις λύσεις των προβλημάτων αυτών στη μορφή
⎟⎟S . (9γ)
οι οι όροι, εκτός των 5m και 6m ,
( )
5m
ύ ως
6m
Φ
οι όροι
1 2 3, ,S x x x
ς και μπορεί να παραληφθούν στα π είναι σημαντικοί,
0, 1,2,3, 4km k≈ = , ≈5 3m n και ≈−6 2m n . (10)
Παρατηρώντας την συνοριακή συνθήκη (5β) για τα δυναμικά ακτινοβολία kΦ , που είναι και η μοναδικ
ν
0 Uk k kjω
όπου τα 0kΦ ικανοποιούν το πρώτο μέρος της συνθήκης:
U=Φ + Φ , , (11) Φ = 1,2,..6k
∂Φ=
∂
0k
nn
, και τα UΦ το k
δεύτερο ς:
k
μέρο∂Φ
=∂ kmn
, , αντίστοιχα. Με βάση τη προσέγγιση που Uk
δίνεται τη σχέση (10) στην ακόλουθη έκφραση για τα
U
ητι ν δυναμικών ακτινοβολίας (τα οποία δεν εξαρτώνται από τη χύτητα U του πλοίου). Οι συναρτήσεις αυτές ικανοποιούν επάνω στη μέση θέση
του βρεχόμενου τμήματος της γάστρας του π
= 1,2,..6k
καταλήγουμε από δυναμικάακτινοβολίας U
kΦ
20, 1, 2,Φ ≈ = −ΦU Uk k . (12)
Από τις παραπάνω σχέσεις προκύπτει ότι δυναμικά ακτινοβολίας εκφράζονται τελικά μέσω των βοηθ κώ
0 05 3 63, 4, ,Φ ≈Φ Φ ≈
0kΦ
ταλοίου ( FD∂ ) την ίδια συνθήκη, όπως
και στη περίπτωση του πλωτού ταλαντευόμενου σώματος χωρίς μέση ταχύτητα (βλ. Κεφ.2), ∂Φ
=∂
0k
knn, BDx∈∂ , = 1,2,..6k . (13α)
και πάνω στη μέση θέση της ελεύθερης επιφάνειας ( FD∂ ) τη συνοριακή συνθήκη
2 00
1 3
0kkj U g
x xω
⎛ ⎞ ∂Φ⎟⎟⎟⎝3: 0FD x∂ = , = 1,2,..6k . (1∂⎜ − Φ + =⎜⎜ ⎟⎜ ∂ ∂⎠
, 3β) ∈x
4- 243 -

1. Υπολογισμός υδροδυναμικών συντελεστών Υπενθυμίζουμε εδώ ότι, στην εξεταζόμενη περίπτωση πλοίου κινούμενου με σταθερή μέση ταχύτητα U, η εξίσωση Ber στη γραμμικοποιημένη της στην παρακάτω τροποποιημένη έκφραση υπολογισμού των υυντελεστών του πλοίου
noulli, εκδοχή, οδηγεί δροδυναμικών
σ
2 21 1ρω ρω⎛ ⎞ ⎛∂ ⎟⎜ ⎜⎟− Φ = −⎜ ⎜⎟⎜ ⎜∫∫ ∫∫l k l
U Un dS n 0
ω ω ω
⎞⎛ ⎞∂ ⎟ ⎟⎜⎟ Φ + Φ ⎟⎜⎟ ⎟⎜ ⎟⎜⎟ ⎟⎜ ⎜∂ ∂ ⎝ ⎠⎝ ⎠ ⎝ ⎠U
k kU dS
j j jx x,
στη πρύμνη (όπως π.χ. μπορεί να συμβεί στη περίπτωση
με transom stern που είναι βυθισμένο κάτω από τη ίσαλο), χρησιμοποιώντας κατάλληλα το θεώρημα Stokes μπορεί να δειχθεί ισχύει η ακόλουθη χρή η σχέση (βλ. και Salvesen, et al 1970)
1 1∂ ∂B BD D
, 1,6l k = , (14)
όπου τα UkΦ δίνονται από τη σχέση (12). Για λεπτόγραμμα πλοία που δεν διαθέτουν
επερασμένη εγκάρσια τομήππλοίου
σιμ
00
1
, 1, 2,....6∂ ∂
= Φ =∫∫ ∫∫B B
l l k
D D
nU dS U m dS k , (15)
με τη βοήθεια της οποίας οι δυνάμεις ακτινοβολίας (που εμπλέκουν τους υδροδυναμικους συντελεστές) γράφονται στη παρακάτω μορφή:
∂Φ∂
k
x
0 0
2
B
lklk l k
D
X n dSρω
∂
=Π = Φ∫∫ , ,, 1, 2,3,4=l k (16α)
0 03
0 02
0 0 , 6, 1, 2
lk klk
lk l kjX U m dSUj l k
ωρ
ωω
⎪⎪⎪=Π − Φ =⎨⎪⎪Π + Π = =∫∫ , (16β)
2
, 5, 1, 2,3,4
,3,4BD lk k
U l k
jω∂
⎧⎪⎪Π − Π = =
⎪⎪⎪⎩
0 03
0 02
0 02
, 1, 2,3,4, 5
, 1,2,3,4, 6B
lk llk
lk l k
D lk l
U l kjX U n dSUj l kj
ωρ
ωωω
∂
⎧⎪⎪Π + Π = =⎪⎪⎪=Π − Φ =⎨⎪⎪Π − Π = =⎪⎪⎪⎩
∫∫ , (16γ)
2
0 02 332
0 02 2 2
0 0222
, 5
, 6B
lklk
lk l k
D lk
U l kX U m dSU l k
ωρω ω
ω∂
⎧⎪⎪Π + Π = =⎪⎪⎪=Π + Φ =⎨⎪⎪⎪Π + Π = =⎪⎪⎩
∫∫
. (16δ)
έχουν χρησιμοποιηθεί και οι προσεγγίσεις (10), (12). Στις σχέσεις (16β,γ,δ) οι μφανιζόμενοι συντελεστές δίνονται από την ίδια σχέση ορισμού όπως στην Εξ.
(16α). Εκ των ανωτέρω σχέσεων συνάγουμε ότι όλοι οι υδροδυναμικοί συντελεστές
όπουε 0Πlk
5- 244 -

εκφράζονται συναρτήσει των αντιστοίχων ποσοτήτων που εμπλέκουν μόνο τα
δυναμικά ,
, . (17)
γά
, (18)
όπου με συμβολίζουμε την βρεχόμενη περίμετρο εγκάρσιας τομής σε κάθε
0lkΠ
της
0kΦ
∫∫
l k
( )1C x
0 0ρΠ = Φlk l kn dS , 1, 2,...,6=l k∂ BD
Για πλοία με λεπτόγραμμη στρα τα επιφανειακά ολοκληρώματα στην ανωτέρω σχέση γράφονται επίσης στη μορφή
nρ Φ =∫∫( )1
0 01 , , 1, 2...6
B
l k
D L C x
dS dx n ds k lρ∂
Φ =∫ ∫
θέση 1x κατά το μήκος του σώματος (η οποία διαφοροποιείται από θέση σε θέση), και το διάμηκες ολοκλήρωμα στο τελευταίο δεξιά μέλος σχέσης (18) διατρέχει λο πλοίου. Στην ανωτέρω εξίσωση επιφανειακό διαφορικό στη το επικαμπύλιο διαφορικό της περιμέτρου της κάθε εγκάρσιας Λόγω της υποθέσεως του λεμπορούμε προσεγγιστικά ότι στη βρεχόμενης επιφάνειας ης μεταβολές της γεωμετρίας της, και αράγωγοι των κυματικών
τηςείναι τομήκος
της οι π
ό το
γάστρας
μήκος και
τομής να
οι
τουγάστρα
dS κατά πτόγγειτονιά
αλλά
ds .
δεχθούμεραμμου σχήματος του πλοίου,
τπεδίων ακτινοβολίας ως προς την 1x -διεύθυνση (δηλαδή η οριζόντια συνιστώσα της ταχύτητας), είναι πολύ μικρότερες από τα αντίστοιχα μεγέθη (μεταβολές γεωμετρίας και συνιστώσες ταχύτητας) ως προς τις άλλες διευθύνσεις, και επομένως, θα μπορούσαν προσεγγιστικά να παραληφθούν. Κατά την ανωτέρ έννοια, ισχύει η ακόλουθη σχέση όσον αφορά τις συνιστώσες του καθέτου διανύσματος στη βρεχόμενη επιφάνεια του θεωρούμενου επιμήκους, λεπτόγραμμου σώματος
1 2 3καιn n n<< , (19) και επομένως μπορούμε να θέσουμε προσεγγιστικά
( ) ( )x x N x x x≈ , 2,3,4k = ,
ω
(20α)
) (20γ)
όπου εγκάρσιας τομής, που
ομέ εξαρτώνται παραμετρικά την
1 2 2 3 1, , , ;k kn x
νως
3
2kN x
1
( ) ( )5 1 2 3 1 3 2 3 1, , , ;n x x x x N x x x≈− και (20β)
( ) (6 1 2 3 1 2 2, , ,n x x x x N x x≈ 3 1; x ,
( 3, ;x
)1x , 2,3,k = είναι οι συνιστώσες του αντίστοιχου καθέτου διανύσματος στο βρεχόμενο τμήμα της κάθε διδιάστατηςεξαρτώνται κατά συνέπεια από τη μορφή της και επαπό x -
( )3 1, ;x x
μεταβλητή ( 1). Επιπροσθέτως έχ
) . πίσης, κατ’αντιστοιχία, μπορούμε να θέσουμε προσεγγιστικά για τα δυναμικά
βλ. Σχήμα , εουμ
( )4 2 3 2 2 3 1 3 1, ; , ;N x x N x x x x N x x= − (2 3 2x (21)
Ε
6- 245 -

( ) ( )01 2 3 2 3 1, , , ; , 2,3, 4l lx x x x x x lϕΦ ≈ = , (22)
δηλώνοντας και εδώ την παραμετρική τους εξάρτηση από την 1x -
αποτελούνμεταβλητή. Τέλος,
πό τις προσεγγίσεις των και βλ. Εξ. 20) που και τους μη
ομογενείς όρους των φορού5n
προβλημάτων6n (
που α
α
ν τα δυναμικά ( )0l xΦ , 5,6l = (pitch
και yaw), αντίστοιχα, λαμβάνουμε τις ακόλουθες εκφράσεις
( ) ( ) (0 05 1 2 3 1 3 2 3 1 6, , , ; , ) ( )1 2 3 1 2 2 3 1, , , ;x x x x x x xϕΦ ≈− Φ x x x x x x xϕ≈ . (23)
Επιπροσθέτως, θα θεωρήσουμε ότι λόγω του λεπτόγραμμου σχήματος της γάστρας του πλοίου όλα τα ανωτέρω διδιάστατα δυναμικά ( )2 3 1, ;ϕl x x x εταβάλλονται πολύ
αργά κατά την έννοια του μήκους του πλοίου 1/ 0ϕ∂ ∂ ≈l x μας επιτρέπει να απλουστεύσουμε την συνθήκη (13β) στην ελεύθερ υ αυτά ικανοποιούν, αμελώντας τις 1x -παραγώγους, και γράφοντας
η την
μ
πράγμα πουεπιφάνεια ποπροσεγγιστικά στην
κόλουθη μορφή
,
α
2
3
0ϕω ϕ
∂− + =
∂k
k gx
, 3: 0FD x∈∂ =x , 2,3,4k = . (24)
Με βάση όλα τα ανωτέρω, οι υδροδυναμικοί συντ πλωτού επιμήκους σώματος για , 2,3,4=k l , προσεγίζονται ως
0 0
ελεστές του
, (25α)
που
( )
( )1
1 1 1 , , 2,3,4ρ ρ ϕ ϖ∂
Π ≡ Φ ≡ =∫∫ ∫ ∫ ∫B
lk l k k l kl
D L C x L
n dS dx N ds x dx k l
( )1kl xϖ ό οι υδροδυναμικοί συντελεστές κάθε διδιάστατης εγκάρσιας τομής
( ) ( )( )
( )1
11 1
klkl klk l
C x
xx N x
jβ
ϖ ϕ αω
= = +∫ , ds (25β)
και οι συντελεστές πρόσθετης μάζας και απόσβεσης της, αντίστοι
της συμμετρίας του πλοίου ως προς το κατακόρυφο επίπεδο το είναι υμμετρικό, ενώ τα , είναι αντισυμμετρικά. Επομένως, το δυναμικό είναι
συμμε ηση αυτή σε συνδυασμό ανωτέρω
(καθώς
ιτ ω,
klα , klβ χα.
Λόγω 3N ϕσ 2 4 3
επίσης τρικό, ενώ τα δυναμικά ϕ , ϕ είναι αντισυμμετρικά. Η παρατήρN
με και
N
την 23
2
σ και
4
χ 23
έση συνεπάγεται ότι 32 34 0a a= = και ). 32 34 0b b= = 43 0a a= = 43 0b b= =
Περα έρ χρησιμοποιώντας τις σχέσεις (23) στην Εξ.(18) λαμβάνουμε
7- 246 -

( ) ( ) ( )20 026 1 22 1 1 66 1 22 1 1, ,ϖ ϖΠ ≈ Π ≈ −∫ ∫
L L
x x x x dx (26α)
( ) ( ) ( )20 01 33 1 1 1ϖ ϖΠ ≈ − Π ≈∫ ∫
dx
35 55 33 1 1, ,L L
x x dx x x dx (26β)
( )046 1 24 1 1ϖΠ ≈ ∫ x x dx .
L
(26γ)
Οι ανωτέρω σχέσεις μας επιτρέπουν να υπολογίσοακολουθούμενης προσέγγισης, τους (πρακτικά μη μηδενικούςσυντελεστές του τριδιαστάτου λεπτόγραμμου πλοίου, οι οποίοι συμμετέχουν στις εξισώσεις κίνησης, από ολοκλήρωση των αντιστοίχων διδσώματος. Οι τελευταίοι συντελεστές καθορίζονται από προβλημάτων για τα δυναμικά , που ικανοποιούν την εξίσωση Laplace, στο κα
υμε, στα πλαίσια της ) υδροδυναμικούς
ιαστάτων κατά μήκος του την επίλυση διδιάστατων
( )2 3 1, ; , 2,3, 4l x x x lϕ =
τακόρυφο επίπεδο κάθε εγκάρσιας τομής
( ) ( )2 2 x2 3 1 2 3 12 22 3
, ; , ;0,l lx x x x x
x xϕ ϕ∂ ∂
+ =∂ ∂
(27)
την απλουστευμένη συνθήκη στην ελεύθερη επιφάνεια (βλ. Εξ.24)
( )( )
22 3 1
2 3 13
, ;, ;l
lx x x
x x xgx
ϕ ωϕ
∂− =
∂ (28) 0,
που υπευθυμίζουμε ότι ω είναι η συχνότητα συνάντησης, τη συνθήκη στη βρεχόμενη περίμετρο της κάθε εγκάρσιας
ότομής ( )1BD x∂ ,
( )
( ) ( ) ( )2 3 12 3 2 3 1
, ;, , ,l
l Bx x h x
N x x x x D xN
ϕ −= ∈∂
∂
∂ = (29)
καθώς και κατάλληλες συνθήκες στο αποστάσεις από το σώμα
άπειρο, οι οποίες απαιτούν σε μεγάλες
( )2x →∞ τα δυναμικά ( )2 3,ϕl x x οριζόντιες να
συμπεριφέρονται ως απομακρυνόμενα κύματα συχνότητας ω , και να εξασθενούν εκθετικά με το βάθος ( )x →−∞ . Η επίλ ν 3
ευκολότερη
υση τω ανωτέρω
προβλημάτων είναι πολύ από τα αντίστοιχα τρ . Η ευρεία ανάπτυξη των υπολογιστών έχει οδηγήσει σή
μεθόδων συνοριακών στοιχείων (BEM) για το σκοπό αυτό, που έχουν το
, αι στη μορ ή ης Green
, και οδηγεί σε του συνόρο
διδιαστάτων
προβλήματαιδιάσταταμερα στην αποτελεσματική
εφαρμογήπλεονέκτημα να χειρίζονται με ακρίβεια τις γεωμετρικές λεπτομέρειες των εγκαρσίων τομών του πλοίου. Οι διάφορες παραλλαγές των μεθόδων αυτών, όπως εξειδικεύονται για βαθύ νερό συνίσταντ φ της συνάρτησ που χρησιμοποιείται, η οποία μπορεί να ικανοποιεί καμμιά ή κάποιες από συνοριακές συνθήκες του προβλήματος συνοριακές ολοκληρωτικές εξισώσεις με φορέα όλο σύνορο ή μέρος υ αντίστοιχα, όπως αναλύθηκε διεξοδικά στο αντίστοιχο εδάφιο του Κεφ.2; βλ. σχετ. και Vughts (1968), Lewandowski (2004). Στην πρώτη περίπτωση η μέθοδος εφαρμόζεται σε συνδυασμό με διαχωρισμό του
8- 247 -

χωρίου και τη χρήση των γενικών αναπαραστάσεων της λύσης στο μη φραγμένο τμήμα του χωρίου, όπως παρουσιάσθηκε αντίστοιχα στο εδάφιο 2.10 για το διδιάστατο πλωτό σώμα. Αξίζει περαιτέρω να αναφέρουμε εδώ και τη κατηγορία των μεθόδων που βασίζονται στη τεχνική της σύμμορφης απεικόνισης, η οποία ήταν ευρέως διαδεδομένη τεχνική στο παρελθόν, λόγω της απλούστευσης και ταχύτητας που προσφέρει στον υπολογισμό των αποτελεσμάτων. Στη κατηγορία αυτή εντάσσονται οι μορφές Lewis (βλ. Principles of Naval Architecture, vol.III, sec.3.5), όπου στη γενική μορφή του
αναπτύγματος Laurent της μορφής: ( ) 2
1
f z c zζ∞
−
=
= = ∑ , για τον ορισμό της
απεικόνισης της εγκάρσιας τομής (μαζί με το συμμετρικό της τμήμα πάνω από την
(30γ)
,
ίσαλο) σε κύκλο, διατηρούνται οι τρείς μόνο πρώτοι, περιττής τάξεως όροι
( ) 1 1 31 3 5f z c z c z c zζ − −= = + + . (30α)
Οι συντελεστές στην Εξ.(30) συνδέονται απευθείας με τα βασικά γεωμετρικά χαρακτηριστικά της (κάθε) εγκάρσιας τομής, ως ακολούθως
( )1 50.5 1c T c Tλ= + − , ( )3 0.5 1c Tλ= − , (30β)
( ) ( ) ( ) 1/225 0.25 1 0.25 1 8 1 4 /c Tλ λ λ σ π= − + + + + − ,
όπου ( ) ( )( )/x B x T , (( )10.5 /B x Tλ = 1 1xSσ = )1B x και ( )1x
είναι τοS x το πλάτο
ο εμς και
Τ βύθισμα του
ανωτέρω τεχνική χει απευθείας συντελεστών , συναρτήσει των συντελεστώντων γεωμετρικών χαρακτηριστικών της κάθε εγκάρσιας εθόδου αυτής είναι ότι στην ουσία προσεγγίζει την γεωμετρία του σχήματος και
ως, δεν αποδίδε τα γεωμετρικά χ τηριστ
oulis & Lou kis 8
ός
τ βαδόν της κάθε εγκάρσιας τομής, αντίστοιχα, και πλοίου. Ενδεικτικά, στο Σχήμα 2 παρουσιάζονται διάφορες παραλλαγές της οικογένειας μορφών Lewis, για διάφορες τιμές του λόγου Β/Τ και /S BTσ = . x
Η παρέ τις εκφράσεις των υδροδυναμικών
c της απεικόνισης και, άρα, klα klβ τομής. Μειονέκτημα της
μεπομέν ι ικανοποιητικά αρακ ικά εγκαρσίων τομών που παρουσιάζουν περίπλοκη μεταβολή (όπως, π.χ. συμβαίνει, στη περίπτωση των εγκαρσίων τομών στη πλώρη πλοίου με βολβό). Παρ’όλα αυτά έχουν αναπτυχθεί τεχνικές οι οποίες βελτιώνουν τη συμπεριφορά αυτή και οδηγούν σε επεκτεταμένες οικογένειες μορφών Lewis; βλ. σχετικά την εργασία Athanass ka(19 5). 2. Υπολογισμ υδροδυναμικών δυνάμεων Οι συνολικές υδροδυναμικές δυνάμεις παρέχονται από τη σχέση
( )1
B
k k I D B
D
X n j U dSx
ρ ω∂
⎛ ⎞∂ ⎟⎜ ⎟=− − Φ +Φ⎜ ⎟⎜ ⎟⎜ ∂⎝ ⎠∫∫ , (31)
όπου και ( ) ( )0 , dx xΦ Φ το δυναμικά προσπίπροντος κυματισμού και περίθλασης, αντίστοιχα.
9- 248 -

Σχήμα 2. Μορφές Lewis εγκαρσίων τομών πλοίου, για διάφορες τιμές του λόγου Β/Τ και Το δυναμικό του προσπίπτοντος κυματισμού δίνεται από τη γνωστή σχέση
/xS BTσ =
( ) ( ) ( )0 3 0 1 20
exp exp cos sinIjgA k x j k x xx β βω
⎡ ⎤Φ = ⋅ − +⎣ ⎦ , (32)
υτη συχνότητα και β είναι η γωνία διεύθυνσης του προσπίπτοντος κυματισμού. ια βαθύ νερό ο κυματαριθμός δίδεται από τη σχέση διασποράς .
γραμμου χήματος για το επίμηκες πλοίο, η δυναμη
όπου Α το πλάτος ανύψωσης του κυματισμού στην ελεύθερη επιφάνεια, 0ω είναι η απόλ
0k : = 20 0 /k gωΓ
υνάμεις Froude-Krylov: Αξιοποιώντας τις υποθέσεις περί λεπτόΔ
1X κατά τη 1x -σ διεύθυνση αμελείται ; βλ. και Εξ.19). , οι
μπορούν να υπολογισθούν με διαμήκη ολοκλήρωση ως ακολούθως ( 1 , 2,..6kX X k<< = Περαιτέρω δυνάμεις Froude-Krylov
( )0 01
cosρ ω ρ ω β∂ ∂
⎛ ⎞∂ ⎟⎜ ⎟= − − Φ =− + Φ⎜ ⎟⎜ ⎟⎜ ∂⎝ ⎠∫∫ ∫∫B B
k k I B k I B
D D
X n j U dS j n Uk dSx
=
( )( ) ( )1 1
1 0 0 1cosρ ω β ρ ω=− + Φ∫ ∫ ∫ ∫k I I k
L C x L C x
=− Φj dx n Uk ds j dx n ds . (33)
όπου χρησιμοποιήθηκε και η σχέση ορισμού της συχνότητας συναντήσεως
0 0cosUkω ω β= + . (34)
10- 249 -

Οι δυναμεις Froude-Krylov (33) προσεγγίζονται με την βοήθεια των σχέσεων (20) ως ακολούθως
4 =
(35)
( )1
0 0 1 , 2,3,k I k
L C x
X j dx N ds kρ ω≈− Φ =∫ ∫ , 0kX ≈( )1
0 1 1 3 , 5I
L C x
j x dx N ds kρ ω− Φ∫ ∫
( )1C x
0 0 1 1 2 , 6k IX j x dx N ds kρ ω≈ Φ =∫ ∫ .
L
Χρησιμοποιώντας τώρα και την έκφραση του δυναμικού (32) στη παραπάνω σχέση, λαμβάνουμε για 2 3 4k , ,=
( )0 1k k
L
1X A f x dxρ= ∫ , (36)
όπου ( )1 2 3 4kf x ,k , ,= ορίζονται οι δ εγκάρσιας τομής του σώματος
υνάμεις Froude-Krylov της κάθε διδιάστατης
( ) ( ) ( ) ( )1 exp cos exp exp sink
( )1
0 1 0 3 0 2k
C x
f x g j k x N k x j k x dsβ β⎡ ⎤ ⎡ ⎤= − −⎣ . (37) ⎦ ⎣∫ ⎦
Παρόμοια, χρησιμοποι ς
ώντας τι σχέσεις (3β), (3γ) στην Εξ. (35) παίρνουμε για k=5,6
( ) ( )1 1k05 1 06 1 1 1, k
L L
A x f x dx X A x f x dxρ ρ=− =∫X ∫
. (38)
υνάμεις περίθλασης: Για τον υπολογισμό των δυνάμεων περίθλασης θα χρησιμοποιήσουμε τη παρακάτω σχέση
Δ
( )1
B BD Dx
∂ ∂⎟⎜ ∂⎝ ⎠
dk k D B k k D Bj U dS j n Um dSρ ω ρ ω⎛ ⎞∂ ⎟⎜ ⎟= − − Φ =− − Φ =⎜ ⎟⎜∫∫ ∫∫
X n
0
0 U Ik k B
B B
Uk k
D B
D D
U Uj dS jn j n
ρ ω ρ ωω ω
∂ ∂
⎛ ⎞ ⎛ ⎞∂Φ ∂Φ ⎟⎜ ⎟=− − Φ =⎜ ⎟⎜ ⎟⎜ ∂ ∂⎝ ⎠∫∫ ∫∫που για τη μετάβαση στη τελευταία μορφή εγαρμόσθηκε το θεώρημα Green σε
θλασης. Στη συνέχεια αντικαθιστούμε την ξ. (12) για τα δυναμικά και η παραπάνω σχέση γράφεται στη μορφή
dSj n
∂Φ⎟⎜Φ − Φ ⎟⎜ ⎟⎜ ⎟⎜ ∂⎝ ⎠, (39)
όσυνδυασμό με τη συνοριακή συνθήκη στη βρεχομενη επιφάνεια της γάστρας του πλοίου που ικανοποιεί το δυναμικό περί
UkΦ Ε
0 , 1,2,3,4B
Idk k B
D
X j dS kn
ωρ∂
∂Φ= Φ =
∂∫∫ , (40α)
11- 250 -

0 03 , 5
B B
I IdkX = k B B
D D
j dS U dS kn n
ωρ ρ∂ ∂
∂Φ ∂ΦΦ − Φ =
∂ ∂∫∫ ∫∫ , (40β)
0 02 , 6
B B
dk k B B
D D
j dS U dS kn n
ωρ ρ∂ ∂
+ Φ =∂ ∂∫∫ ∫∫ . (40γ)
Χρησιμοποιώντας τώρα τη Εξισ. (32) για το δυναμικό προσπίπτοντος κ
I I∂Φ ∂Φ
ύματος τις ανωτέρω σχέσεις, και αναλύοντας τα ολοκληρώματα στην επιφάνεια σε παναλληπτική μορφή, λαμβάνουμε τελικά
X = Φ
IΦ σε
( )1 1dk k
L
X j A h x dxωρ= ∫ , 2 3 4k , ,= , (41)
όπου οι αντίστοιχες δυνάμεις περίθλασης της κάθε διδιάστατης εγκάρσιας τομής του σώματος,
=
όπου
( )1kh x ,
( ) ( )1 0 0 1exp coskh x j k xω β⎡ ⎤= − ×⎣ ⎦
( ) ( )3 2 0 3sin exp expjN N k x jβ ⎡ ⎤+ −⎣∫ , (42)( )( )1
0 2 sin , 2,3, 4k
C x
k x ds kβ ϕ⎦
( )2 3 1, ;k x x xϕ , 2 3 4k , ,= , τα διδιάστατα δυναμικά στο κατακόρυφο επίπεδο
( 2 3,x x ) που αντιστοιχούν ταλαντωτικές κινήσεις της κάθε στις , 2, 3, 4kk
εγάρσιας τομής, και τα οποία εξαρτώνται παραμετρικά από τη διαμήκη θέση
ξ = ,
1x . Τα υναμικά αυτά ικανοποιούνδ τις εξισώσεις (27),(28),(29). Τέλος, χρησιμοποιώντας τις χέσεις (20β,γ) στην Εξ. (40β,γ) λαμβάνουμε για k=5,6
σ
( ) ( )5 1d d1 3 1 1 6 1 2 1,L L
U UX j A x h x dx X j A x h x dxj j
ωρ ωρω ω
⎛ ⎞ ⎛ ⎞⎟ ⎟⎜ ⎜=− + ⎟ = + ⎟⎜ ⎜⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜⎝ ⎠ ⎝ ⎠∫ ∫ . (43)
χοντας διαθέσιμα τα ανωτέρω αποτελέσματα, οι εξισώσεις κίνησης του πλοίου
ύν να επιλυθούν ως προςΕμπορο τα άγνωστα ταλαντωτικά πλάτη 2 3 6k , k , ,...,ξ = , και ν λογισθούν οι αντίστοιχοι συντελεστές απόκρισης και μεγέθη. Πρόσθετη αντίσταση πλοίου λόγω κύματος: Θα ασχοληθούμε στη συνέχεια ένα ειδικό θέμα που συνδέεται με τις αποκρίσεις του πλοίου και αφορά την ανάπτυξη πρόσθετης αντίστασης ως συνέπεια της δράσης των κυματισμών και των επαγόμενων αλαντωτικών κινήσεων του πλοίου. Σε κατάσταση
α υπο άλλα χρησιμα
με
πλεύσης του πλοίου σε κυματισμένη θάλασσα η προωστήρια εγκατάσταση αντιμετωπίζει την αντίσταση του πλοίου σε ήρεμο νερό και τη πρόσθετη αντίσταση. Υπερβολική αύξπρόσθετης αντίστασης μπορεί να οδηγήσει σε μη επιθυμητή μείωση της ταχύτητας ου πλοίου. Χάριν απλότητας θα περιοριστούμε εδώ στη περίπτωση των μετωπικών
, που παρουσιάζει ιδιαίτερο ενδιαφέρον μια και στη περιοχή αυτή (των πρωραίων – πλαγίων κυματισμών) μεγιστοποιείται η πρόσθετη αντίσταση.
τ
ηση της
τκυματισμών ( )180οβ =
12- 251 -

Εχουν προταθεί διάφορες θεωρητικές προσεγγίσεις και αντίστοιχες μέθοδοι υπολογισμού για τη πρόσθετη αντίστασης πλοίου λόγω κυμα α μια συγκριτική παρουσίαση παραπέμπουμε στην στην πρόσφατη εργασία Arribas (200πό προηγούμενη εμπειρία έχει δειχθεί ότι η ενεργειακή μέθοδος που προτάθηκε
τισμών, και γι7).
ω της κατα
Ααρχικά από τους Gerritsma & Beukelman (1972), την οποία θα περιγράψουμε συνοπτικά παρακάτω, πέραν της σχετικής απλότητας της, παρέχει αρκετά ικανοποιητικά αποτελέσματα σε διάφορες πρακτικές εφαρμογές.
Σύμφωνα με την ανωτέρω θεώρηση, στην απλή περίπτωση των μετωπικών αρμονικών κυματισμών ( )180οβ = , η ενέργεια ( )AW AW AWE R U c T R λ= + = που συνδέεται με την εμφάνιση της πρόσθετης αντίστασης AWR στη διάρκεια μιάς περιόδου Τ, συσχετίζεται με την κυματική ενέργεια που ακτινοβολείται μακριά από το πλοίο λόγ κόρυφης ταλαντωτικής του ταχύτητας σχετικά ως προς τη ταλάντωση της ανύψωσης του νερού στην επιφάνεια εξ’αιτίας του προσπίπτοντος
ή τ η εγκυματισμού. Με την έννοια αυτή η σχετικ κατακόρυφη αχύτ τα σε κάθε κάρσια τομή κατά μήκος του πλοίου δίνεται από τη σχέση
( )( )1
1
,, ,R
R
d x tV x t
dt
ξ= όπου ( ) ( )( ) ( )
κ
0 ,
1 3 5 1, , expR x t x x t j tξ ξ ξ η ω= − − , (44α)
όπου 3 5,ξ ξ τα (μιγαδικά) πλάτη της κατακόρυφης ταλάντωσης (heave) αι του προνευτασμού (pitch), αντίστοιχα, και ( ) (, expx t A j k xη ) [ ]1 0 1 expt jk Utω⎡ ⎤+ −= ⎣ ⎦
Τέλος, υπενθυμίζουμε ότι, στητητα
η ανύψωση της ελεύθερης επιφάνειας λόγω του προσπίπτοντος κυματισμού στο πλοίο, όπως αυτή εκφράζεται το Κ.Α.Σ. ν εξεταζόμενη περίπτωση, 0 0k Uω ω= + είναι η συχνό συναντήσεως και
20 0 /k gω= ο κυματαριθμός. Για την υλοποίηση της χρονικής παραγώγου στη σχέση
(44α) ορισμού της ( )1,RV x t θα πρέπει να λάβουμε υπ’οψιν ότι η σχετική κίνηση
(
σ
)1,R x tξ έχει εκφραστεί πλήρως στο Κ.Α.Σ. και επομένως
( ) ( )( ) 1 11
1
, R RR t U
t x= − =
∂ ∂
t
, ,x t x tξ ξ∂ ∂V x
( ) ( ) ( )3 5 5 0 0 1 0exp expj x U j t j A j k xω ξ ξ ξ ω ω ω⎡ ⎤= − + − +⎣ ⎦ . (44β)
ν τομών του πλοίου δίνεται από τη σχέση
Η ενέργεια που ακτινοβολείται κατά τη διάρκεια μιάς περιόδου Τ λόγω των κατακόρυφων ταλαντώσεων των εγκαρσίω
( ) 233 1 1R
L
E x V dxπ
βω
= ∫ , (45)
( )1x είναι ο συντελεστής απόσβεσης της κάθε εγκάρσιας τομής σε κατακόρυφη ταλάν πως παρέχεται από την επίλυση των διδιαστάτων
άτων, βλ. Εξ.25.β), και
όπου τωση (ό
προβλη
33β
μ 2RV η μέση τετραγωνική τιμή της σχετικής
ατάκό ταχύτητας από την Εξ. (44β). Εξισώνοντας την ενέργεια αυτή με την αντίστοιχη την θεώρηση της πρόσ τίστασης , καταλήγουμε στην ακόλουθη για τη πρόσθετης αντίστασης πλοίου ματισμό
κ ρυφης από
σχέσηθετης αν AWE
σε κυ AWR
( ) 233 1 1AW R
L
R xπ
βλω
= ∫ V dx , (46)
13- 252 -

Σχήμα 3.α Εγκάρσιες τομές πλοίου (van der Stel, από Arribas 2007)
Σχήμα 3.β Συγκρίσεις υπολογισμών πρόσθετης αντίστασης για το πλοίο του Σχ.3α με πειραματικές μετρήσεις, συναρτήσει της παραμέτρου αδιάστατης συχνότητας ( /Lω λ ) και για δύο τιμές του αριθμού Froude (Fn=0.15,0.20). όπου . Ενδεικτικά αποτελέσματα για το πλοίο με τις εγκάρσιες τομές που εικονίζεται στο Σχ.3.α παρουσιάζονται στο Σχήμα 3.β. Σημειώνεται ότι η πρόσθετη αντίσταση για κύματα με μεγάλος ύψος μπορεί να γίνει (σε κατάσταση συντονισμού) συγκρίσιμη με την αντίσταση του πλοίου σε ήρεμο νερό. Η διαπίστωση αυτή καταδεικνύει τη σημασία του υπολογισμού και σωστής θεώρησης της πρόσθετης αντίστασης ιδιαίτερα σε ότι αφορά το σχεδιασμό και την εκτίμηση των επιχειρησιακών χαρακτηριστικών ενός πλοίου. 3. Παράδειγμα εφαρμογής
δ β αυτή εικονίζεται
χηματικά στο Σχήμα 4 και είναι πολύ παραπλήσια με τη γάστρα του μοντέλου του ειράματος που διεξάγεται στο Εργαστήριο του παρόντος μαθήματος.
20 02 / 2 /k gλ π π ω= =
Ως παράδειγμα εφαρμογής εξεταζουμε στη συνέχεια μια γάστρα της σειράς 60 με συντελεστή γάστρας BC 55% το οποίο ιαθέτει κλασσική γεωμετρία πλώρης (χωρίς ολβό) και πρύμνης (καμπύλη πρύμνη). Η γάστρα
=
σπ Οι ονομαστικές διαστάσεις του μοντέλου είναι L=3.04m, B=0.40m, D=0.30m. Στο βύθισμα T=0.17m η εξεταζόμενη γάστρα έχει μήκος ισάλου L=3m πλοίο. Παραθέτουμε στη συνέχεια τα βασικά αποτελέσματα υδροστατικών υπολογισμών για το συγκεκριμένο πλοίο:
14- 253 -

Σχήμα 4. Διάφορες όψεις της εξεταζόμενης γάστρας μοντέλου πλοίου μήκους 3m ****************************************************************************************** ****** EXAMPLE: 3m-model LBP=3m (L=3.04), B=0.400m, D=0.30m ****** ****************************************************************************************** ******** HYDROSTATICS *************************************************** DRAFT AREA LCF IMM.VOL. DISPL. I TRANS. I LONG. LCB BM KB W.S. BML 0.060 0.615 -0.00402 0.03018 0.03097 0.005 0.1935 -0.01030 0.16394 0.03339 0.78505 6.41053 0.080 0.645 -0.00009 0.04278 0.04368 0.005 0.2105 -0.00763 0.12811 0.04420 0.90150 4.92009 0.100 0.675 -0.00051 0.05599 0.05701 0.006 0.2306 -0.00584 0.10591 0.05502 1.01772 4.11778 0.120 0.702 -0.00707 0.06977 0.07090 0.006 0.2525 -0.00519 0.09037 0.06589 1.13423 3.61927 0.140 0.743 -0.03004 0.08420 0.08546 0.007 0.2929 -0.00724 0.08014 0.07690 1.25961 3.47804 0.160 0.788 -0.05841 0.09950 0.10089 0.007 0.3470 -0.01296 0.07242 0.08815 1.39427 3.48783 0.170 0.809 -0.06910 0.10748 0.10894 0.007 0.3730 -0.01674 0.06916 0.09386 1.46104 3.47021 DRAFT TP1 MCT1 CH.DISP. CB CWP CM CP CB* CWP* CM* CP* 0.060 0.307 0.001 -0.045 0.46248 0.56507 0.86378 0.53541 0.41917 0.51216 0.85082 0.49267 0.080 0.323 0.001 -0.001 0.48482 0.58519 0.89216 0.54342 0.44565 0.53791 0.88547 0.50329 0.100 0.337 0.001 -0.006 0.50184 0.60489 0.90965 0.55168 0.46661 0.56244 0.90737 0.51424
0.67394 0.94544 0.55726
ADTH AT LOAD W.L.)
0.120 0.351 0.001 -0.088 0.51646 0.62400 0.92270 0.55973 0.48451 0.58538 0.92270 0.52510 0.140 0.371 0.001 -0.389 0.52392 0.64692 0.93374 0.56110 0.50122 0.61888 0.93374 0.53679
0.160 0.394 0.001 -0.779 0.52627 0.66679 0.94202 0.55866 0.51821 0.65657 0.94203 0.55010 0.170 0.404 0.001 -0.939 0.53110 0.67937 0.94543 0.56176 0.52686 CB*,CWP*,CM*,CP* (IN CALCULATIONS LENGTH=L.P.P. AND BREADTH=BRE
15- 254 -

CB,CWP,CM,CP (IN CALCULATIONS LENGTH AND BREADTH = LENGTH AND BREADTH OF W.L.) δεδομένα εισόδου του
είναι διαθέσιμο στο
4 0.8000 0.2600 0.1700 0.8332 -0.0705 5 0.6000 0.3200 0.1700 0.9205 -0.0760
14 -1.4100 0.0600 0.0200 0.6296 -0.0068
CG=-0.0167m (πρύμνηθεν μέσου νομέα), KG=0.07m (από BL),
Με βάση τα ανωτέρω στοιχεία καταρτίσθηκαν τα ρογράμματος που υλοποιεί τη θεωρία λωρίδων, και το οποίοπΕργαστήριο Ναυτικής και Θαλάσσιας Υδροδυναμικής: STATION I XI(I) YM(I) ZM(I) SIGMA(I) ZCB(I) 1 1.4200 0.0360 0.1500 0.5370 -0.0551 2 1.2000 0.1080 0.1700 0.6581 -0.0662 3 1.0000 0.1860 0.1700 0.7608 -0.0705 6 0.3200 0.3600 0.1700 1.0214 -0.0800 7 0.0000 0.4000 0.1700 1.0505 -0.0810 8 -0.2800 0.3880 0.1700 1.0272 -0.0800 9 -0.6000 0.3660 0.1700 0.9029 -0.0762 10 -0.8000 0.3280 0.1700 0.7712 -0.0713 11 -1.0100 0.2620 0.1700 0.5817 -0.0653 12 -1.2100 0.1860 0.1700 0.3660 -0.0536 13 -1.3800 0.1180 0.0400 0.6050 -0.0140 15 -1.4500 0.0300 0.0100 0.5556 -0.0033 Στο εξεταζόμενο παράδειγμα και για βύθισμα T=0.17m o όγκος εκτοπίσματος είναι
30 1075. m∇ = και, λαμβάνοντας τη θέση του κέντρου βάρους L
και 3 5LGM . m= ( των μαζικών
τα μετακεντρικά ύψη προκύπτουν 0 093GM . m για εγκάρσιες και σμό ροπών αδράνειας
=διαμήκεις κλίσεις, αντίστοιχα). Για τον υπολογιγια περιστροφές ως προς το 1x και το 2x -άξονα
τον x ακτίνες αδράνειας
=0.07m (για
ν τις αποκρίσεις heave (
έχουν ληφθεί άξονα) και
1 1x xr =0.13m (για περιστροφή ως προς 1 − 2 2x x
r
περιστροφή ως προς τον x −άξονα). 1
3 / AξΤα αποτελέσματα υπολογισμού που αφορού ) και pitch
( 5 0/ k Aξ ) του πλοίου σε μετωπικούς αρμονικούς κυματισμούς ( ), ικονίζονται στα Σχήματα 5 και 6, αντίστοιχα, για διάφορες τιμές του
παρουσιάσαμε ερό το μήκος ) εξαρτάται από την απόλυτη συχνότητα ως και
ν Εξ πομένως υπάρχει η ακόλουθη σχέση μεταξή γραμμικής ς
ς κύματος
180oβ =αδιάστατου
κύματοςη απόλυτη. (2β), και
ταλάντωσης
εμήκους κύματος λ/L όπως προκύπτουν από εφαρμογή της θεωρίας λωρίδων που
στο εδάφιο αυτό. Υπενθυμίζουμε ότι στο βαθύ ν ( )0ω
της λ :
202 /gλ π ω= η
συχνότητα
(λσυχνότητα συνδέεται με τη συχνότητα συνάντησης σύμφωνα με τετου πλοίου f (σε Hz) και του μήκου
( )20 0
2 22 / cos cos
g Uf U g
ππ ω ω β β
λ λ= − = − . (47) π
ω =
16- 255 -

λ/L=0.78
λ/L=1.00
6
λ/L=1.54
λ/L=1.74
λ/L=1.2
Σχήμα 5. Συντελεστής απόκρισης πλοίου σε κατακόρυφη ταλάντωση λόγω
αρμονικών κυματισμών, για διάφορες τιμές του αριθμού Froude
( )3 /ξ Α
/V gL=Fn και του λόγου μήκους κύματος-μήκους πλοίου .
/Lλ
λ/L=0.78
λ/L=1.00
λ/L=1.26
λ/L=1.54
λ/L=1.74
Σχήμα 6. Συντελεστής απόκρισης πλοίου σε προνευτασμό λόγω αρμονικών
κυματισμών, για διάφορες τιμές του αριθμού Froude
( )5 0/kξ Α
/V gL=Fn και του λόγου μήκους κύματος-μήκους πλοίου .
/Lλ
17- 256 -

Σχήμα 7. Συντελεστής απόκρισης πλοίου σε κατακόρυφη ταλάντωση λόγω αρμονικών κυματισμών, για διάφορες τιμές της συχνότητας συνάντησης αριθμό Froude
( )3 /ξ Α και
/ 0Fn V gL= = .16 (ταχύτητα πλοίου V=0.87m/s).
Σχήμα 8. Συντελεστής απόκρισης πλοίου σε κατακόρυφη ταλάντωση λόγω αρμονικών κυματισμών, για διάφορες τιμές της συχνότητας συνάντησης αριθμό Froude
( )3 /ξ Α και
/ 0Fn V gL= = .26 (ταχύτητα πλοίου V=1.37m/s). Τέλος, στα Σχήματα 7 και 8 παρουσιάζεται σύγκριση των αποτελεσμάτων της θεωρίας λωρίδων που αναπτύχθηκε στο εδάφιο αυτό, όσον αφορά την απόκριση του πλοίου σε κατακόρυφη ταλάντωση (heave), λόγω αρμονικών .
π
μικρούς κύκλους ει ελήφθησαν από τη σχετικών πειραμάτων , στα πλαίσια του
εργαστηριακού μέρους του παρόντος μαθήματος. Από τα αποτελέσματα αυτά, αλλά και πληθώρα παρόμοιων αποτελεσμάτων σε εργασίες με εκτενείς συγκρίσεις που έχουν εκπονηθεί από διάφορους ερευνητές στο παρελθόν, διαπιστώνεται η πολύ καλή απόδοση της θεωρίας λωρίδων που αναπτύξαμε εδώ, στα πλαίσια των δυνατοτήτων πρόβλεψης που προσφέρει, πάντα
κυματισμώνΣυγκεκριμένα, εικονίζονται αποτελέσματα για δύο τιμές της ταχύτητας λοίου V=0.87m/s και V=1.37m/s, και για διάφορες τιμές της συχνότητας συνάντησης (f σε Hz). Με κονίζονται τα αποτελέσματα πουδιενέργεια στην ξαμενή του ΕΝΘΥδε
18- 257 -

19
υπό την προϋπόθεση πλήρωσης όλων των σχετικών περιορισμών για την εφαρμοσιμότητα της.
4. Βιβλιογραφικές αναφορές Arribas-Perez, F, 2007, Some methods to obtain the added resistance of a ship
advancing in waves, Ocean Engineering vol. 34, pp. 946–955. Athanassoulis G.A., Loukakis T.A., 1985, An extended-Lewis form family of ship-
sections and its application to seakeeping calculations, International Shipbuilding Progress, Vol. 32, No 366, pp. 33-43.
Gerritsma, J., Beukelman, W., 1972, Analysis of the resistance increase in waves of a
fast cargo ship, International Shipbuilding Progress 19, p. 217.
ions and sea loads, Transactions SNAME, vol. 78.
Lewis, E.V., (Editor), 1989, Principles of naval architecture, vol. 3. Society of Naval Architects and Marine Engineers (SNAME), New Jersey.
Salvesen, N., Tuck, E.O., Faltinsen, O., 1970, Ship mot
Lewandowski, E., 2004, The dynamics of marine craft, World Scientific.
Vughts, J., 1968, The hydrodynamic coefficients for swaying, heaving and rolling cylinders in a free surface, Rep.No.194, TH Delft.
Ohkusu, Μ., 1996, Advances in Marine Hydrodynamics, Computational Mechanics
Publications
- 258 -

ΕΥΣΤΑΘΕΙΑ ΚΙΝΗΣΕΩΣ ΚΑΙ ΠΗΔΑΛΙΟΥΧΙΑ ΠΛΟΙΟΥ ΠΕΡΙΕΧΟΜΕΝΑ Σελ. 1. Γενικά 2612.
Εξισώσεις οριζοντίων κινήσεων πλοίου σε ήρεμη θάλασσα: Ι. Αδρανειακοί συντελεστές 265
3.
Μοντελοποίηση υδροδυναμικών φορτίσεων. Υδροδυναμικές παράγωγοι γάστρας και πηδαλίου 268
4.
Εξισώσεις οριζοντίων κινήσεων πλοίου σε ήρεμη θάλασσα: ΙΙ. Γενική μορφή – Ευστάθεια 276
5. Πειραματικός προσδιορισμός· υδροδυναμικών παραγώγων 2806. Αναλυτικός προσδιορισμός υδροδυναμικών παραγώγων 2907.
Μελέτη της κίνησης στο οριζόντιο επίπεδο: Ι. Κίνηση κατά το διαμήκη άξονα 302
8. Μελέτη της κίνησης στο οριζόντιο επίπεδο: ΙΙ. Ευστάθεια 304
9.
Μελέτη της κίνησης στο οριζόντιο επίπεδο: ΙΙΙ. Πηδαλιουχία. Εξίσωση Nomoto 309
10. Δοκιμές πηδαλιουχίας και ελικτικές ικανότητες πλοίου 31511. Συστήματα αυτομάτου ελέγχου πηδαλίου 12. Ευστάθεια και πηδαλιουχία πλοίου με αυτόματο έλεγχο πηδαλίου 13. Σχεδίαση πηδαλίου 336 Βιβλιογραφία
- 259 -

- 260 -

ΕΥΣΤΑΘΕΙΑ ΚΙΝΗΣΕΩΣ ΚΑΙ ΠΗΔΑΛΙΟΥΧΙΑ ΠΛΟΙΟΥ
1. Γενικά Η ευστάθεια κινήσεως (motion stability) και η ικανότητα πηδαλιουχίας (maneuverability) του πλοίου είναι δύο επί μέρους ιδιότητες οι οποίες ανήκουν σε μια ευρύτερη κλάση ιδιοτήτων που αναφέρεται με το όνομα ελεγξιμότητα (controlability) του πλοίου. Η ελεγξιμότητα, στη γενικότητά της, είναι έννοια της θεωρίας συστημάτων και αναφέρεται στη δυνατότητα ελέγχου των τιμών ορισμένων από τις αποκρίσεις ενός ελέγχου. Ειδικότερα, στην περίπτωση πλοίου ή υποβρυχίου, η ελεγξιμότητα περιλαμβάνει τις εξής επί μέρους ιδιότητες: α) Διατήρηση πορείας – αλλαγή πορείας (course-keeping – course-changing or path-
keeping – path-changing). Η ιδιότητα διατήρησης πορείας (συνήθως ευθείας πορείας, οπότε αναφέρεται και ως ευστάθεια κατευθύνσεως), αναφέρεται στην ικανότητα ενός σκάφους να διατηρεί μια προκαθορισμένη (συνήθως κατά τμήματα ευθύγραμμη) τροχιά, παρά τις διάφορες εξωτερικές αιτίες (κύμα, ρεύμα, άνεμος κ.λπ.), οι οποίες επιδρούν σ’ αυτό και τείνουν να διαταράζουν την πορεία του. Η ιδιότητα αλλαγής πορείας (πηδαλιουχία) αναφέρεται στην ικανότητα του πλοίου να μεταβάλλει κατεύθυνση (να στρίβει), κατά ελεγχόμενο τρόπο, υπό την επίδραση του πηδαλίου ή/και άλλων επιφανειών (συστημάτων) ελέγχου. Στην περίπτωση αυτή ενδιαφέρον παρουσιάζουν διάφορα χαρακτηριστικά μεγέθη (μήκη και χρόνοι), όπως η διάμετρος του κύκλου στροφής (diameter of turning circle), ο χρόνος ολοκλήρωσης του κύκλου στροφής κ.λπ.. Τα θέματα που αναφέρονται στην ικανότητα του πλοίου να διατηρεί, αλλά και να αλλάζει την πορεία του, θα εξετασθούν διεξοδικά στη συνέχεια αυτού του κεφαλαίου. β) Διατήρηση ταχύτητας – αλλαγή ταχύτητας (speed-keeping – speed-changing) Η ικανότητα αλλαγής ταχύτητας, είτε στην ευθεία πορεία είτε κατά τη διάρκεια ελιγμών, αναφέρεται στην ευκολία και τη συντομία με την οποία πραγματοποιείται μια συγκεκριμένη αλλαγή της ταχύτητας του πλοίου. Στην περίπτωση αυτή ενδιαφέρουν επίσης διάφορα χαρακτηριστικά μεγέθη (μήκη και χρόνοι), όπως η απόσταση που διανύεται και ο χρόνος που μεσολαβεί μέχρις ότου ολοκληρωθεί η αλλαγή ταχύτητας. Η ικανότητα διατήρησης μιας συγκεκριμένης ταχύτητας χαρακτηρίζει την ευστάθεια της μόνιμης οριζόντιας κίνησης του πλοίου έναντι διαφόρων διαταραχών που τείνουν να αλλάξουν τη μέση ταχύτητά του. Τα θέματα αυτά θα μελετηθούν συνοπτικά στη συνέχεια αυτού του κεφαλαίου. γ) Διατήρηση θέσεως – αλλαγή θέσεως (position-keeping – position-changing)
Οι ιδιότητες αυτές είναι πολύ σημαντικές για διάφορες πλωτές ή βυθισμένες κατασκευές (εξέδρες, υποβρύχια, βαθυσκάφη κ.λπ.), οι οποίες εκτελούν λειτουργίες που απαιτούν διατήρηση σταθερής θέσεως ή αλλαγή (προσαρμογή) θέσεως, π.χ. προκειμένου να εξασφαλισθεί η ασφαλής λειτουργία γεωτρύπανου, ή η σωστή εκτέλεση εργασιών επισκευής βυθισμένου αντικειμένου από υποβρύχιο
Γ. Α. Αθανασούλης 29/3/2012 2:15 πμ 1 - 261 -

2 E:\koko_shmeiwseis\koko55\04_01_genika.doc
(βαθυσκάφος). Οι ιδιότητες αυτές, οι οποίες δεν είναι σημαντικές για συνήθη πλοία, εξασφαλίζονται με τη βοήθεια πρόσθετων συστημάτων ελέγχου (thrusters, jets κ.λπ.) και δεν θα μας απασχολήσουν εδώ. Ας σημειωθεί ότι, για ένα συγκεκριμένο σκάφος, τα ζεύγη των ιδιοτήτων που αναφέρονται ανωτέρω, στα (α), (β), (γ), συνήθως βρίσκονται σε αντίθεση μεταξύ τους. Επί παραδείγματι, ένα πλοίο με καλά χαρακτηριστικά διατήρησης ευθείας πορείας, συνήθως παρουσιάζει δυσκολία στην αλλαγή πορείας (πηδαλιουχίας) και, αντίθετα, ένα πλοίο με καλά χαρακτηριστικά πηδαλιουχίας (π.χ. μικρό κύκλο στροφής) μπορεί να έχει πρόβλημα όσον αφορά τη διατήρηση της ευθείας πορείας του. Ευτυχώς, στην πράξη, είναι δυνατόν να επιτευχθεί ένας ικανοποιητικός συμβιβασμός των ιδιοτήτων αυτών, κυρίως μέσω της χρήσης του πηδαλίου ή/και άλλων επιφανειών (ή συστημάτων) ελέγχου. Οι ικανότητες διατήρησης/αλλαγής πορείας και ταχύτητας ενός σκάφους εξαρτώνται κυρίως από τα γεωμετρικά, αδρανειακά και υδροδυναμικά χαρακτηριστικά του σκάφους, συμπεριλαμβανομένων και των αλληλεπιδράσεων της γάστρας με το πηδάλιο και άλλες, τυχόν υπάρχουσες, επιφάνειες ελέγχου. Εν τούτοις, είναι σημαντικό να γίνει αντιληπτό ότι η ελεγξιμότητα ενός πλοίου εξαρτάται επίσης ουσιαστικά και από ένα μεγάλο αριθμό άλλων παραγόντων, μεταξύ των οποίων περιλαμβάνονται: μηχανικά, ηλεκτρικά και ηλεκτρονικά υποσυστήματα του πλοίου που παρεμβάλλονται στη διαδικασία της πηδαλιουχίας, περιβαλλοντικοί παράγοντες, αλλά και ο ανθρώπινος παράγων, και μάλιστα με καθοριστική σημασία. Για να αντιληφθούμε καλύτερα την πολυπλοκότητα και τη διαπλοκή των διαφόρων υποσυστημάτων του συστήματος ΠΗΔΑΛΙΟΥΧΟΥΜΕΝΟ ΠΛΟΙΟ, θα εξετάσουμε τον κλειστό βρόχο ελέγχου αυτού, ο οποίος απεικονίζεται παραστατικά στο Σχήμα 1. (Segel 1960, Lewis 1989). Κοιτάζοντας ο ΤΙΜΟΝΙΕΡΗΣ (ΑΥΤΟΜΑΤΟΣ ΠΙΛΟΤΟΣ) στην ΟΘΟΝΗ ΠΛΗΡΟΦΟΡΙΩΝ, αντιλαμβάνεται διαφορά ανάμεσα στην επιθυμητή πορεία και στην πραγματική πορεία του πλοίου. Με σκοπό να διορθώσει αυτή τη διαφορά, ο τιμονιέρης (αυτόματος πιλότος), αφού διαβάσει τη γωνία εκτροπής του πηδαλίου, στρέφει το ΤΙΜΟΝΙ, δίνοντας έτσι σήμα για να εκτραπεί το ΠΗΔΑΛΙΟ σε διαφορετική γωνία (με τη μεσολάβηση ή όχι του ΜΗΧΑΝΗΜΑΤΟΣ ΠΗΔΑΛΙΟΥΧΙΑΣ). Με τον τρόπο αυτό δημιουργείται μια νέα φόρτιση ελέγχου στο ήδη υπάρχον σύστημα φορτίσεων που επενεργεί στο ΠΛΟΙΟ, η οποία, σε συνδυασμό με τυχόν εξωτερικές δυναμικές φορτίσεις, προκαλεί μια αλλαγή στην πορεία του πλοίου. Ο βρόχος ελέγχου του συστήματος κλείνει καθώς η νέα πορεία εμφανίζεται στην ΟΘΟΝΗ ΠΛΗΡΟΦΟΡΙΩΝ. Στην πραγματικότητα βέβαια σπάνια είναι γνωστή η πραγματική στιγμιαία πορεία του πλοίου. Στις περισσότερες περιπτώσεις είναι γνωστός μόνο ο προσανατολισμός του άξονα του πλοίου, από την πυξίδα, ενώ οι συντεταγμένες της θέσεως του πλοίου λαμβάνονται μόνό σποραδικά. Παρ’ όλα αυτά ο βρόχος ελέγχου εξακολουθεί να λειτουργεί όπως στο Σχήμα 1, αλλά με ατελείς πληροφορίες για την πραγματική πορεία του πλοίου.
- 262 -

ΚΕΤΕΥΘΥΝΣΗ ΠΛΟΙΟΥ ΠΟΡΕΙΑ ΣΗΜΑ ΓΙΑ
ΝΕΑ ΛΑΘΟΣ ΠΟΡΕΙΑΣ
ΦΟΡΤΙΣΗ ΕΛΕΓΧΟΥ
ΕΠΙΘΥΜΗΤΗ ΠΟΡΕΙΑ
ΣΤΡΕΠΤΙΚΗ ΡΟΠΗ
ΜΗΧΑΝΗ ΠΗΔΑΛΙΟΥ
ΤΙΜΟΝΙΕΡΗΣ ΠΛΟΙΟΥ ΟΘΟΝΗ ΠΛΗΡΟΦΟΡΙΩΝ
Ή ΠΛΟΙΟ ΤΙΜΟΝΙ και ΑΥΤΟΜΑΤΟΣ ΓΩΝΙΑ ΠΛΟΙΟΥ ΠΗΔΑΛΙΟ ΠΙΛΟΤΟΣ ΠΗΔΑΛΙΟΥ
ΕΞΩΤΕΡΙΚΕΣ
ΓΩΝΙΑ ΠΗΔΑΛΙΟΥ ΦΟΡΤΙΣΕΙΣ
Σχήμα 1: Βρόχος ελέγχου πορείας του πλοίου
Γ. Α. Αθανασούλης 29/3/2012 2:15 πμ 3 - 263 -

Όπως φαίνεται από το Σχήμα 1, κάθε στοιχείο (υποσύστημα) του βρόχου ελέγχου πορείας του πλοίου, διατεταγμένο καθώς είναι εν σειρά με τα υπόλοιπα, παίζει ζωτικό ρόλο στην ικανότητα πηδαλιουχίας του πλοίου. Ειδικά για το υποσύστημα του τιμονιέρη, τα κύρια χαρακτηριστικά του είναι α) Μυική δύναμη, β) Χρόνος αντιδράσεως, γ) Αντοχή στην κόπωση, δ) Ευαισθησία στην μετατόπιση των ορατών αντικειμένων (όπως ο δείκτης της πυξίδας). Πάντως, από τα στοιχεία του βρόχου ελέγχου, το Ναυπηγό αφορούν κυρίως τα δύο τελευταία, δηλαδή το ΠΗΔΑΛΙΟ και το ΠΛΟΙΟ. Θα πρέπει εδώ να αναφερθεί, ότι, παράλληλα με το βρόχο ελέγχου πορείας, στο πλοίο λειτουργεί και ο βρόχος ελέγχου ταχύτητας, ο οποίος συνδέεται με τον πρώτο μόνο μέσω του αξιωματικού γέφυρας. Οι δύο βρόχοι ελέγχου συντονίζονται έτσι ώστε το πλοίο να λειτουργεί σύμφωνα με τις οδηγίες/διατάξεις του πλοιάρχου.
4 E:\koko_shmeiwseis\koko55\04_01_genika.doc - 264 -

Γ. Α. Αθανασούλης 29/3/2012 2:15 πμ 5
2. Εξισώσεις οριζοντίων κινήσεων πλοίου σε ήρεμη θάλασσα: Ι. Αδρανειακοί συντελεστές
Στο εδάφιο αυτό θα εφαρμόσουμε τις γραμμικές εξισώσεις κίνησης του επιπλέοντος στερεού σώματος, οι οποίες αναπτύχθηκαν στο Κεφάλαιο 1, για την μελέτη της ευστάθειας και της πηδαλιουχίας πλοίου κινούμενου σε ήρεμη θάλασσα. Πρώτα όμως θα εισάγουμε την ορολογία που παραδοσιακά έχει επικρατήσει να χρησιμοποιείται στην περίπτωση αυτή. Στον Πίνακα 1 δίνεται η αντιστοίχιση των συμβολισμών των διαφόρων κινηματικών και δυναμικών μεγεθών που υπεισέρχονται στις εξισώσεις κίνησης.
ΠΙΝΑΚΑΣ 1 ΟΝΟΜΑΤΟΛΟΓΙΑ ΚΙΝΗΜΑΤΙΚΩΝ ΚΑΙ ΔΥΝΑΜΙΚΩΝ ΜΕΓΕΘΩΝ
Γενική περίπτωση Πηδαλιουχία Άξονες συντεταγμένων (Σωματοπαγή συστήματα) 1BOx 2BOx 3BOx Aξ Aη Aζ
Μετατοπίσεις 1ξ 2ξ 3ξ ξ η ζ Περιστροφές 4 1ξ θ= 5 2ξ θ= 6 3ξ θ= ϕ θ ψ
Γραμμικές ταχύτητες 1u 2u 3u u v w Γωνιακές ταχύτητες 4 1u ω= 5 2u ω= 6 3u ω= p q r Δυνάμεις 1F 2F 3F X Y Z Ροπές 1 4K F= 2 5K F= 3 6K F= K M N Το σωματοπαγές σύστημα Aξηζ που χρησιμοποιείται για τη μελέτη της ευστάθειας και της πηδαλιουχίας του πλοίου, προκύπτει από το σωματοπαγές σ τημα
(βλ. εδάφιο 1.2) με μετατόπιση της αρχής των αξόνων και περιστροφή περί τον διαμήκη άξονα κατά 180ο, έτσι ώστε ο κατακόρυφος θετικός ημιάξονας να κατευθύνεται προς τα κάτω. Στο νέο σωματοπαγές σύστημα το κέντρο βάρους βρίσκεται πάνω στον άξονα
ύσ
1 2 3B B BOx x x OA
1Ox
Aξ και άρα
Σχήμα 1: Τα σωματοπαγή συστήματα και 1 2 3B B BOx x x Aξηζ .
- 265 -

6 E:\koko_shmeiwseis\koko55\04_02_exiswseis_kinhshs_I_inertial_terms.doc
( ) ( )1 2 3 0 0G GJ J ,J ,J m R m , ,ξ= = ⋅ = (1) όπου Gξ η τετμημένη του κέντρου βάρους στο σύστημα G Aξηζ . Επιπλέον, επειδή το επίπεδο Aξζ (καθώς και το επίπεδο ) είναι επίπεδο συμμετρίας του πλοίού, ισχύουν οι σχέσεις
1 3B BxOx
, 12 0I Iξη= = 23 0I Iηζ= = , 34 45 0C C= = , (2) και οι υδροδυναμικοί συντελεστές (πίνακες) M και δίνονται από τις σχέσεις 1.6(33) και 1.6(34). Έτσι, αν συμβολίσουμε με τη (σταθερή) μέση ταχύτητα του πλοίου κατά τον άξονα
NU
Aξ , η κίνηση του πλοίου περιγράφεται από τις γραμμικές εξισώσεις 1.7(6). Χρησιμοποιώντας την ορολογία του Πίνακα 1, και λαμβάνοντας υπ’ όψιν τις εξισώσεις (1) και (2) ανωτέρω, προκύπτει το ακόλουθο σύστημα εξισώσεων κίνησης του πλοίου:
( )( )
( )( )
33 35
44
53 55
G
G
G
G
m u X ,m v rU r Y ,
m w qU q C C z,I p I r C K ,
I q m w qU C C M
I p I r m v rU N
ξξ ξζ
ηη
ζξ ζζ
ξ
ξ ζ θϕ
ξ ζ
ξ
=
+ + =
− − + + =
− + =
+ − + + + =
+ + + =
,θ
(3)
όπου και , είναι οι μη-μηδενικοί υδροστατικοί συντελεστές της γάστρας, οι οποίοι δίδονται από τις σχέσεις 1.7(3).
33 44 55C , C , C 35 53C C=
Όπως έχει ήδη αναφερθεί, το σύστημα των εξισώσεων (3) περιγράφει ικανοποιητικά την κίνηση του πλοίου όταν οι κινήσεις , ,ζ ϕ θ , οι ταχύτητες u U ,v, w, p, q, r− , και οι επιταχύνσεις είναι αρκετά μικρές. Ο προσδιορισμός των αποκρίσεων του πλοίου, δηλ. η επίλυση του συστήματος (3), απαιτεί επιπλέον τη γνώση των διεγειρουσών φορτίσεων (δυνάμεων και ροπών)
u,v, w, p, q, r
X , Y , Z , K , M , N . Για τη μελέτη της ευστάθειας κινήσεως και της πηδαλιουχίας πλοίου σε ήρεμη θάλασσα, λαμβάνονται υπ’ όψιν τα εξής αίτια φόρτισης: (i) το περιρρέον νερό, από το οποίο αναπτύσσονται αδρανειακές, συνεκτικές και ανωστικές φορτίσεις, και (ii) διάφορες επιφάνειες ελέγχου, με σημαντικότερη το πηδάλιο. (πρβλ. εδάφιο 1.7). Η μαθηματική μοντελοποίηση των φορτίσεων αυτών περιγράφεται στο επόμενο εδάφιο. Από τις έξι γραμμικές εξισώσεις κίνησης που περιέχονται στο σύστημα (3), αυτές που ενδιαφέρουν για τη μελέτη της ευστάθειας και της πηδαλιουχίας είναι αυτές που περιγράφουν τις κινήσεις του πλοίου στο οριζόντιο επίπεδο, δηλ. τις κινήσεις κατά τους οριζόντιους άξονες Aξ και Aη , και την περιστροφή περί κατακόρυφο άξονα Aζ . Οι κινήσεις αυτές θα ονομάζονται στη συνέχεια οριζόντιες κινήσεις, χάριν συντομίας. Περαιτέρω, θεωρούμε ότι οι μόνες μη-μηδενικές διαταραχές είναι αυτές που σχετίζονται με τις οριζόντιες κινήσεις, δηλ. οι διαταραχές και . Με βάση τα ανωτέρω, οι εξισώσεις που διέπουν τις οριζόντιες κινήσεις του πλοίου μπορούν να αποσυζευχθούν από τις υπόλοιπες, οπότε καταλήγουμε στο ακόλουθο σύστημα τριών γραμμικών διαφορικών εξισώσεων ως προς τις συναρτήσεις
:
u, u, v, v r , r
( ) ( )t , v v t , r= = ( )r t=u u
- 266 -

( )( )
G
G
mu X ,m v rU r Y ,
I r m v rU Nζζ
ξ
ξ
=
+ + =
+ ⋅ + = .
(4)
Πρέπει να σημειωθεί ότι οι τρεις ανωτέρω εξισώσεις είναι εκείνες ακριβώς από τις εξισώσεις του συστήματος (3), στις οποίες δεν υπεισέρχονται οι μετατοπίσεις της γάστρας, δεδομένου ότι από τις εξισώσεις αυτές απουσιάζουν οι υδροστατικοί όροι (όροι επαναφοράς, restoring terms). Το γεγονός αυτό έχει μεγάλη σημασία όσον αφορά την ευστάθεια και τον έλεγχο της πορείας του πλοίου κατά το οριζόντιο επίπεδο. Για τη χάραξη της τροχιάς του πλοίου χρησιμοποιείται ένας γεωπαγές (σταθερά συνδεδεμένο με το στερεό φλοιό της γης) σύστημα συντεταγμένων με οριζόντιους άξονες . Βλ. Σχήμα 2. Εάν παραστήσουμε με Oxy ( )x x t= και την τροχιά του πλοίου, τότε ισχύουν οι σχέσεις
( )y y t=
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
x t u t cos t v t sin t ,
y t u t sin t v t cos t .
ψ ψ
ψ ψ
= −
= + (5)
Οι ανωτέρω σχέσεις, σε συνδυασμό με την
( ) ( )0 0
tt r dψ ψ τ= + ∫ τ , (6)
μπορούν να χρησιμοποιηθούν για τον καθορισμό της τροχιάς του πλοίου, όταν έχουν βρεθεί οι συναρτήσεις των ταχυτήτων ( ) ( )u t , v t και ( )r t από τη λύση των δυναμικών εξισώσεων (4). Οι κινηματικές εξισώσεις (5) και (6) ισχύουν με την προϋπόθεση ότι το πλοίο κινείται πάνω στο επίπεδο Oxy . Εάν η τροχιά εκτείνεται σε μεγάλη έκταση, τότε θα πρέπει να ληφθεί υπ’ όψιν και η καμπυλότητα της επιφάνειας της θάλασσας.
Σχήμα 2: Το γεωπαγές σύστημα σύστημα Ox και η τροχιά του πλοίου y
Γ. Α. Αθανασούλης 29/3/2012 2:15 πμ 7 - 267 -

Γ. Α. Αθανασούλης 29/3/2012 2:15 πμ 9
3. Μοντελοποίηση υδροδυναμικών φορτίσεων. Υδροδυναμικές παράγωγοι γάστρας και πηδαλίου Στο εδάφιο αυτό θα μελετήσουμε τις φορτίσεις X ,Y και , που εμφανίζονται στα δεξιά μέλη των εξισώσεων κίνησης 2(4), υποθέτοντας ότι αυτές προέρχονται από την αλληλεπίδραση του πλοίου (και των παρελκομένων του) με το περιρρέον ήρεμο νερό (βλ. και εδάφιο 1.7). Κατά συνέπεια, οι φορτίσεις αυτές προέρχονται, κατά κύριο λόγο, από τα εξής φαινόμενα:
N
- Αδρανειακή αντίδραση του περιρρέοντος υγρού, - Συνεκτικότητα, - Κυκλοφορία (στο οριζόντιο επίπεδο) γύρω από τη γάστρα του πλοίου, που
αναπτύσσεται όταν υπάρχει εγκάρσια συνιστώσα v της ταχύτητας του πλοίου (βλ. Σχήμα 1).
Θα ασχοληθούμε πρώτα με τη μοντελοποίηση των υδροδυναμικών δυνάμεων που ασκούνται πάνω στη γυμνή γάστρα, και στη συνέχεια με τη μοντελοποίηση των υδροδυναμικών δυνάμεων που ασκούνται πάνω σε επιφάνειες ελέγχου (πηδάλιο), και οι οποίες μεταφέρονται στη γάστρα («στο πλοίο») ως πρόσθετες (εξωτερικές) φορτίσεις, μέσω των στοιχείων συνεργασίας με τη γάστρα. Λόγω του ότι οι κινήσεις διαταραχής του πλοίου που σχετίζονται με την πηδαλιουχία είναι αργές, θεωρούμε ότι δεν προκαλούν σημαντικούς κυματισμούς στην ελεύθερη επιφάνεια του νερού. Κατά συνέπεια, οι όροι που εμφανίζονται στη γενική μορφή των εξισώσεων κίνησης, και οι οποίοι μοντελοποιούν την επίδραση των κυμάτων που έχουν παραχθεί από την κίνηση του πλοίου (και που εκφράζονται ως ολοκληρώματα πάνω στη χρονική ιστορία των κινήσεων του πλοίου) συνήθως αμελούνται.
Σχήμα 1: Ανάπτυξη οριζόντιας κυκλοφορίας γύρω από τη γάστρα του πλοίου Οι φορτίσεις X ,Y και που ασκούνται στη γάστρα του πλοίου αναπαρίστανται ως εξής:
N
( ) ( )1 0X F u,v,r ,u,v,r X t= + ,
( ) ( )2Y F u,v,r ,u,v,r Y t= 0+ , (1)
( ) ( )6 0N F u,v,r ,u,v,r N t= + ,
η
v
A U ξ
- 268 -

10 E:\koko_shmeiwseis\koko55\04_03_modelling_of_hydrodynamic_forces.doc
όπου είναι κατάλληλες συναρτήσεις των έξι ορισμάτων
, και ( ) ( ) ( )1 2 6F ,F ,F⋅ ⋅
( ),u,v,r ( )⋅
u,v,r ( ) ( )0 0 0X t ,
(kF u,v,r ,u,v,r
Y t ,N t
)
είναι οι φορτίσεις που οφείλονται αφ’ ενός μεν στο πηδάλιο, αφ’ εταίρου δε σε διάφορους άλλους παράγοντες ανεξάρτητους από τις ταχύτητες και τις επιταχύνσεις του πλοίου. Θα πρέπει να σημειωθεί εδώ ότι η μοντελοποίηση των υδροδυναμικών φορτίσεων με τη βοήθεια συναρτήσεων της μορφής , αποτελεί μια απλουστευτική παραδοχή και όχι μια γενική αναπαράσταση των υδροδυναμικών φορτίσεων. Για παράδειγμα, η μοντελοποίηση αυτή δεν μπορεί να συμπεριλάβει «όρους μνήμης» (memory terms) οι οποίου προέρχονται από την ανάπτυξη κυματισμών λόγω των μη-μόνιμων κινήσεων του πλοίου. Εν τούτοις, η μοντελοποίηση (1) των υδροδυναμικών φορτίσεων είναι ικανοποιητική για την μελέτη της ευστάθειας και της πηδαλιουχίας στις περισσότερες περιπτώσεις πλοίων συμβατικού τύπου. Όσον αφορά τους όρους ( ) ( )0 0X t , Y t και ( )0N t των αναπτύξεων (1) πρέπει να
σημειώσουμε τα εξής: Η δύναμη ( )0X t περιλαμβάνει τη μέση ώση T της έλικας και
την υδροδυναμική αντίσταση του πηδαλίου υπό μηδενική γωνία εκτροπής rudR . Περαιτέρω, οι όροι ( ) ( )0 0X t , Y t και ( )t0N περιλαμβάνουν και τις μη-μόνιμες δυνάμεις που ασκούνται από το πηδάλιο στο πλοίο, οι οποίες θα συμβολίζονται
( ) ( )rud rud rud ( )X t , Y t , N t . Δηλαδή οι δυνάμεις ( ) ( )0 0X t , Y t και αναλύονται ως εξής:
( )0N t
( ) ( ) ( )0 1rud rudX t T R X t X t= + + + ,
( ) ( ) ( )0 rudY t Y t Y t= + 1 , (2)
( ) ( ) ( )0 1rudN t N t N t= + ,
όπου ( ) ( ) ( )1 1 1X t , Y t , N t είναι οι εξωτερικές (όχι υδροδυναμικές) φορτίσεις που οφείλονται σε οποιαδήποτε άλλη αιτία(1) (αέρας/άνεμος, φορτίσεις λόγω ρυμουλκήσεως, κ.λπ.). Για την μελέτη της ευστάθειας του πλοίου (εδάφια 7 και 8) θα θεωρήσουμε ότι οι δυνάμεις ( ) ( ) ( )1 1 1X t , Y t , N t είναι κρουστικές, δηλ. ότι η δράση τους περιορίζεται σε μια μόνο χρονική στιγμή 0t t= , οπότε μια εξωτερική αιτία διαταράσσει την ομαλή κίνηση του πλοίου. - Υδροδυναμικές παράγωγοι γάστρας Οι (άγνωστες) συναρτήσεις και , εξισώσεις (1), μπορούν να αναπτυχθούν κατά Taylor γύρω από μια κατάσταση αναφοράς. Αν επιπλέον θεωρήσουμε ότι οι διαταραχές του πλοίου γύρω από αυτήν την κατάσταση αναφοράς είναι αρκούντως μικρές (αργές), στα αναπτύγματα Taylor μπορεί να κρατηθούν μόνο οι πρωτοτάξιοι όροι. Ως κατάσταση αναφοράς λαμβάνουμε αυτή της ευθύγραμμης ομαλής κίνησης του πλοίου με ταχύτητα U . Επομένως, στην κατάσταση αναφοράς (δείκτης 1) ισχύει:
1 2F , F 6F
(1) Ας σημειωθεί όμως ότι οι δυνάμεις ( ) ( ) ( )1 1 1X t , Y t , N t πρέπει να είναι τέτοιες ώστε να μη
παραβιάζονται οι υποθέσεις επί των οποίων βασίζεται η μοντελοποίηση των εξισώσεων κίνησης του πλοίου. Υπενθυμίζεται ότι η βασικότερη τέτοια υπόθεση είναι η αργή μεταβολή των κινήσεων και των ταχυτήτων του πλοίου.
- 269 -

Γ. Α. Αθανασούλης 29/3/2012 2:15 πμ 11
. (3) 1u U= 1 1 1 1 1 0v r u v r= = = = = Λαμβάνοντας υπ’ όψιν τα ανωτέρω, οι δυνάμεις X , Y και η ροπή αναπτύσσονται ως εξής:
N
1 11
F F FX X u v ru v r
δ δ δ∂ ∂ ∂= + + + +
∂ ∂ ∂1
( )1 1 10
F F Fu v r X t ...u v r
δ δ δ∂ ∂ ∂+ + + + +
∂ ∂ ∂ (4a)
2 21
F F FY Y u v ru v r
δ δ δ∂ ∂ ∂= + + + +
∂ ∂ ∂2
( )2 2 20
F F Fu v r Y t ...u v r
δ δ δ∂ ∂ ∂+ + + +
∂ ∂ ∂+ (4b)
6 6 61
F F FN N u v ru v r
δ δ δ∂ ∂ ∂= + + + +
∂ ∂ ∂
( )6 6 60
F F Fu v r N t ...u v r
δ δ δ∂ ∂ ∂+ + + +
∂ ∂ ∂+ , (4c)
όπου 1 1 1X , Y , N είναι οι υδροδυναμικές φορτίσεις που αντιστοιχούν στην κατάσταση αναφοράς (3), και το σύμβολο … υποδηλώνει όρους ανώτερης τάξης, οι οποίοι αμελούνται στα πλαίσια της γραμμικής θεωρίας. Οι ποσότητες
1 1 1 1 1 1u v r u v r
F F F F F FX , X , X , X , X , Xu v r u v
∂ ∂ ∂ ∂ ∂ ∂= = = = = =∂ ∂ ∂ ∂ ∂ r∂
, (5a)
2 2 2 2 2u v r u v r
F F F F F FY , Y , Y , Y , Y , Yu v r u v
∂ ∂ ∂ ∂ ∂ ∂= = = = = =
∂ ∂ ∂ ∂ ∂2
r∂, (5b)
6 6 6 6 6u v r u v r
F F F F F FN , N , N , N , N , Nu v r u v
∂ ∂ ∂ ∂ ∂ ∂= = = = = =
∂ ∂ ∂ ∂ ∂6
r∂, (5c)
που εμφανίζονται στο δεξιό μέλος των εξισώσεων (4) ονομάζονται υδροδυναμικές παράγωγοι της εξεταζόμενης γάστρας, και εξαρτώνται από τη γεωμετρία αυτής. Οι ποσότητες αυτές μοντελοποιούν την υδροδυναμική συμπεριφορά της εξεταζόμενης γάστρας, και μπορούν να θεωρηθούν ως η υδροδυναμική ταυτότητά της. Το φυσικό νόημα των υδροδυναμικών παραγώγων γίνεται φανερό αν προσεγγίσουμε τις παραγωγίσεις με πεπερασμένες διαφορές. Για παράδειγμα, ο όρος uX γράφεται
1 1u
F X X XXu u u
δδ δ
∂ −= ≈ =∂
,
όπου uδ μικρή ( 0uδ → ) διαταραχή (ως προς την κατάσταση αναφοράς ) της ταχύτητας κατά τον άξονα
1u U=Aξ , και Xδ η αντίστοιχη μεταβολή που προκαλείται στη
δύναμη X αποκλειστικά και μόνο λόγω της μεταβολής uδ . Επομένως, η υδροδυναμική παράγωγος uX εκφράζει τον λόγο της μεταβολής Xδ που προκαλείται στη δύναμη X λόγω μικρής μεταβολής uδ στην ταχύτητα , δια της u
- 270 -

12 E:\koko_shmeiwseis\koko55\04_03_modelling_of_hydrodynamic_forces.doc
μεταβολής uδ . Αντίστοιχο είναι το φυσικό νόημα όλων των υδροδυναμικών παραγώγων, π.χ. η υδροδυναμική παράγωγος εκφράζει το λόγο της μεταβολής που υφίσταται η ροπή που ασκεί το περιρρέον υγρό στο πλοίο, λόγω μικρής μεταβολής
vNN
vδ στην εγκάρσια επιτάχυνση , δια της μεταβολής v vδ
u u
. Με άλλα λόγια, οι υδροδυναμικές παράγωγοι αποτελούν συντελεστές αναλογίας μεταξύ κινηματικών διαταραχών και των επαγομένων μεταβολών των φορτίσεων που αναπτύσσονται από το περιρρέον υγρό στο σώμα (πλοίο). Οι υδροδυναμικές παράγωγοι μπορούν να ταξινομηθούν στις κύριες ή διαγώνιες υδροδυναμικές παραγώγους, στις οποίες τόσο η κινηματική διαταραχή όσο και η επαγόμενη φόρτιση λαμβάνουν χώρα κατά την ίδια κατεύθυνση, και στις εκτός διαγωνίου, στις οποίες η επαγόμενη φόρτιση είναι διαφορετικής κατεύθυνσης από την κινηματική διαταραχή. Στην πρώτη κατηγορία ανήκουν οι v vX , X , Y, Y
r
και , r rN , Nενώ στη δεύτερη κατηγορία ανήκουν οι v v r r u u r u u v vX , X , X , Y , Y , Y ,N , N ,N , N, X , Y
u
. Εύκολα γίνεται αντιληπτό ότι οι κύριες υδροδυναμικές παράγωγοι είναι αρνητικοί αριθμοί, και μάλιστα έχουν, γενικά, μεγάλη απόλυτη τιμή, διότι η αδρανειακή αντίδραση του περιρρέοντος υγρού κατά την διεύθυνση της μεταβολής της κινηματικής κατάστασης του επιπλέοντος σώματος είναι μεγάλη (εκτός από τις
uX , X , οι οποίες μπορεί να έχουν μικρή απόλυτη τιμή λόγω της λεπτόγραμμης μορφής του πλοίου). Αντίθετα, οι εκτός διαγωνισμού υδροδυναμικές παράγωγοι είναι είτε μηδενικές (λόγω συμμετριών(2)) είτε μικροί κατ’ απόλυτη τιμή, θετικοί ή αρνητικοί αριθμοί (ανάλογα με τη γεωμετρική μορφολογία του σώματος). Για την καλύτερη κατανόηση των ανωτέρω θα εξετάσουμε πιο προσεκτικά ορισμένα παραδείγματα. - Οι υδροδυναμικές παράγωγοι vY και vN Θεωρούμε ότι επιβάλλουμε στο πλοίο, το οποίο κινείται με σταθερή ταχύτητα κατά τον άξονα
UAξ , εγκάρσιες μετατοπίσεις με διάφορες ταχύτητες , και
εξετάζουμε την επαγόμενη εγκάρσια δύναμη 1 2 3v ,v ,v ,...
( )Y Y v= και την επαγόμενη ροπή
. Βλ. Σχήμα 2α. Η συνολική δύναμη ( )N N v= ( )Y Y v= συντίθεται από τη δύναμη
, η οποία ασκείται επί του πρωραίου τμήματος της γάστρας, και από τη δύναμη
, η οποία ασκείται επί του πρυμναίου τμήματος της γάστρας. Προφανώς, λόγω
του είδους της επιβαλλόμενης διαταραχής, οι δυνάμεις
( )BY v
( )SY v
( )vBY και είναι μεταξύ τους ομόρροπες (και αντίρροπες ως προς την επιβαλλόμενη διαταραχή ). Άρα
( )vv
SY
( ) ( ) ( )SY vB v= +Y v Y και ( ) 0Y v / v< . Επιπλέον, το μέτρο ( )Y v / v θα έχει σχετικά μεγάλη τιμή, δεδομένου ότι η υδροδυναμική αντίδραση Y προκύπτει ως ολοκλήρωμα υπερπιέσεων πάνω στη μια πλευρά ολόκληρης της γάστρας του πλοίου. Η συνολική ροπή που αναπτύσσεται επί της γάστρας προκύπτει από τη
συνεισφορά
(N v
( ))
B Bd Y v−
του πρωραίου τμήματος της γάστρας, και τη συνεισφορά
r(2) Π.χ. στην περίπτωση του πλοίου, οι υδροδυναμικές παράγωγοι
είναι μηδενικές επειδή το επίπεδο u u u u v v rY ,Y ,N ,N , X , X , X , X
Aξζ είναι επίπεδο συμμετρίας.
- 271 -

Γ. Α. Αθανασούλης 29/3/2012 2:15 πμ 13
( )S Sd Y v+ του πρυμναίου τμήματος της γάστρας. Άρα
( ) ( ) ( )B B S SN v d Y v d Y v= − + . Κατά συνέπεια, το μέτρο ( )N v / v θα είναι γενικά
μικρό, και ή , ανάλογα με το αν υπερτερεί η επίδραση της πλώρης ή της πρύμνης.
( ) 0N v / v< ( ) 0N v / v>
Αν παραστήσουμε γραφικά τις συναρτήσεις ( )Y Y v= και ( )N N v= , παίρνουμε τις
καμπύλες του Σχήματος 2β. Οι υδροδυναμικές παράγωγοι 0vY
v
Ylimvδ
δδ→
= και
0v v
Nv
N limδ
δδ→
=
0
είναι οι κλίσεις των ανωτέρω καμπυλών στη θέση 0 . Σύμφωνα με
την ανωτέρω ανάλυση, ενώ
v=
0< vNvY < ή 0 , ανάλογα με το εάν υπερτερεί η επίδραση της πλώρης ή της πρύμνης.
vN >
Σχήμα 2: Τυπικές μορφές των συναρτήσεων ( )Y v και ( )N v
- Οι υδροδυναμικές παράγωγοι rY και rN Στην περίπτωση αυτή φανταζόμεθα ότι επιβάλλουμε στο πλοίο περιστροφές περί τον κατακόρυφο άξονα Aζ με διάφορες ταχύτητες περιστροφής , και εξετάζουμε την επαγόμενη εγκάρσια δύναμη
1 2 3r ,r ,r ,...
( )Y Y r= και την επαγόμενη ροπή
. Βλ. Σχήμα 3α. Και στην περίπτωση αυτή η συνολική δύναμη
συντίθεται από τη δύναμη , η οποία ασκείται επί του πρωραίου τμήματος της ( )N N r= ( )Y r
( )BY r
- 272 -

14 E:\koko_shmeiwseis\koko55\04_03_modelling_of_hydrodynamic_forces.doc
γάστρας, και από τη δύναμη ( )SY r , η οποία ασκείται επί του πρυμναίου τμήματος της γάστρας. Τώρα όμως, λόγω του είδους της επιβαλλόμενης διαταραχής, οι δυνάμεις και είναι αντίρροπες. Άρα ( )BY r ( )SY r ( ) ( ) (B SY r Y r Y r= − ) και
ή ( )Y r / r <0 ( )Y r / 0r > , ανάλογα με τη μορφολογία της γάστρας. Σε κάθε
περίπτωση όμως το μέτρο ( )Y r / r θα έχει μικρή τιμή.
Σχήμα 3: Τυπικές μορφές των συναρτήσεων Y( και r ) N( r )
Όσον αφορά τη ροπή , παρατηρούμε ότι οι συνεισφορές του πρωραίου και του
πρυμναίου τμήματος, και ( )N r
B Bd Y ( )r ( )S Sd Y r , αντιστοίχως, είναι πάντοτε ομόρροπες μεταξύ τους, αλλά αντίρροπες ως προς την επιβαλλόμενη διαταραχή . Κατά συνέπεια, η περίπτωση της είναι τελείως αντίστοιχη με την περίπτωση της
r( )N r
( ) :Y v ( ) ( ) ( ) ( ), N r / r 0B BY r= + S Sd Y rN r d < και ( )N r / r θα έχει σχετικά μεγάλη τιμή. Αν παραστήσουμε γραφικά τις συναρτήσεις ( )Y Y r= και ( )N N r= , παίρνουμε τις
καμπύλες του Σχήματος 3β. Οι υδροδυναμικές παράγωγοι 0rY
r
Ylimrδ
δδ→
= και
0r rN li
δ
Nmr
δδ→
= είναι οι κλίσεις των ανωτέρω καμπυλών στη θέση 0r = . Σύμφωνα με
- 273 -

Γ. Α. Αθανασούλης 29/3/2012 2:15 πμ 15
την ανωτέρω ανάλυση, ενώ 0rN < 0rY < ή 0 ανάλογα με το εάν υπερτερεί η επίδραση της πλώρης ή της πρύμνης.
rY >
- Η υδροδυναμική παράγωγος vX Η υδροδυναμική παράγωγος vX ενός πλοίου μπορεί να υπολογισθεί αν φαντασθούμε εγκάρσιες μετατοπίσεις του πλοίου (επιπροστιθέμενες στη μόνιμη κίνηση αναφοράς του πλοίου) με διάφορες ταχύτητες . Λόγω της συμμετρίας του πλοίου ως προς το επίπεδο
1 2v ,v ,v3 ,...Aξζ , η συνάρτηση vX θα είναι συμμετρική ως προς τον
κατακόρυφο άξονα (βλ. Σχήμα 4). Κατά συνέπεια εφ’ όσον 0v v
XX limvδ
δδ→
= είναι η
κλίση της ανωτέρω καμπύλης στη θέση 0v= , θα έχουμε 0vX = .
Σχήμα 4: Τυπική μορφή της συνάρτησης ( )X v
- Yδροδυναμικές παράγωγοι πηδαλίου Όταν το πηδάλιο τίθεται σε γωνία εκτροπής ( )tγ ως προς το κατακόρυφο επίπεδο συμμετρίας του πλοίου, αναπτύσσεται πάνω σ’ αυτό μια υδροδυναμική φόρτιση η οποία οφείλεται κυρίως σε φαινόμενα δυναμικής ανώσεως και αντιστάσεως. Η φόρτιση αυτή μεταφέρεται, μέσω του άξονος, επί του πλοίου (γάστρας). Στη συνέχεια θα συμβολίζουμε με ( )rudX t , ( )rudY t και ( )rudN t τις συνιστώσεις της φόρτισης που επάγεται επί του πλοίου. Οι συνιστώσες αυτές εξαρτώνται κυρίως από τη γωνία εκτροπής ( )tγ , αλλά και από τις παραγώγους αυτής. Έτσι θέτουμε
( ) ( )( ) ( )( ) ( )
rud X
rud Y
rud N
X t , , ... ,
Y t , , ... ,
N t , , ... .
Π γ γ
Π γ γ
Π γ γ
=
=
=
(6)
Αναπτύσσοντας κατά Taylor τις ( ) ( ) ( ) (rud rud Y )XX t , , ... , Y t , , ...γ Π γ γ= =
, , ...
Π γ ,
ως προς ( ) ( )rud NN t , , ... .Π γ γ= γ γ , και κρατώντας μόνο τους πρωτοτάξιους όρους παίρνουμε τις ακόλουθες εκφράσεις:
R
( )X v
v
vX = 0
( )X v
- 274 -

( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
rud
rud
rud
X t X t X t .
Y t Y t Y t ...
N t N t N t ..
γ γ
γ γ
γ γ
γ γ
γ γ
γ γ
= +
= +
= + +
..
.
+
+ (7)
Οι συντελεστές X ,X ,...γ γ ορίζονται από τις σχέσεις
0 0
X X X XX lim , X lim , ...γ γδγ δγ
Π δΠ Π δΠγ δγ γ δγ→ →
∂ ∂= = = =
∂ ∂
0 0
Y Y Y YY lim , Y lim , ...γ γδγ δγ
Π δΠ Π δΠγ δγ γ δγ→ →
∂ ∂= = = =
∂ ∂
0 0
N N N NN lim , N lim , ...γ γδγ δγ
Π δΠ Π δΠγ δγ γ δγ→ →
∂ ∂= = = =
∂ ∂
και ονομάζονται υδροδυναμικές παράγωγοι πηδαλίου. Συνήθως υποθέτουμε ότι οι δυνάμεις και οι ροπές που αναπτύσσονται λόγω του ρυθμού μεταβολής (των χρονικών παραγώγων) της γ είναι αμελητέες (γεγονός που δεν ισχύει κατά την εκτέλεση ελιγμών) οπότε οι εξισώσεις (7) απλοποιούνται στις:
( ) ( )( ) ( )( ) ( )
rud
rud
rud
X t X t
Y t Y t ,
N t N t
γ
γ
γ
γ
γ
γ
=
=
=
,
.
(8)
Λόγω της συμμετρίας του πηδαλίου ως προς το διάμηκες επίπεδό του, η συνάρτηση ( )X γ είναι άρτια και επομένως η υδροδυναμική παράγωγος Xγ είναι μηδενική
(πρβλ. Σχήμα 4): . (9) ( ) 0rudX t =
16 E:\koko_shmeiwseis\koko55\04_03_modelling_of_hydrodynamic_forces.doc - 275 -

Γ. Α. Αθανασούλης 29/3/2012 2:16 πμ 17
4. Εξισώσεις οριζοντίων κινήσεων πλοίου σε ήρεμη θάλασσα: ΙΙ. Γενική μορφή – Ευστάθεια Λαμβάνοντας υπ’ όψιν ότι, λόγω της συμμετρίας της γάστρας ως προς το διάμηκες κατακόρυφο επίπεδο Aξζ , οι υδροδυναμικές παράγωγοι είναι μηδενικές, καθώς και ότι στην κατάσταση αναφοράς έχουμε
u u u u v v rY ,Y ,N ,N ,X ,X ,X ,Xr
( )1 1 1 1 1 1 1 1X F u ,v ,r ,u ,v ,r R≡ = = αντίσταση πλοίου,
(1 2 1 1 1 1 1 1 0Y F u ,v ,r ,u ,v ,r≡ ) = , (1)
( )1 6 1 1 1 1 1 1 0N F u ,v ,r ,u ,v ,r≡ = ,
οι εκφράσεις 3(4) για τις υδροδυναμικές φορτίσεις X , Y και μπορούν να γραφούν στη μορφή:
N
( )0u uX R X u X u X tδ δ− = + + ,
( )0v v r rY Y v Y v Y r Y r Y t= + + + + , (2)
( )0v v r rN N v N v N r N r N t= + + + + .
Ας σημειωθεί ότι, εκτός της ταχύτητας , η οποία αποτελεί διαταραχή της «μεγάλης» ταχύτητας U , όλες οι άλλες ταχύτητες και επιταχύνσεις ( αλλά και η ) είναι «μικρές», ταυτίζονται δηλαδή με τις πρωτοτάξιες μεταβολές τους. Γι’ αυτό το λόγο, στις σχέσεις (2) ανωτέρω έχουμε θέσει v, αντί για
uv,v,r ,r
v, v, r
u
v,r ,r , rδ δ δ δ . Η μέση αντίσταση του πλοίου R και η μέση αντίσταση του πηδαλίου υπό μηδενική γωνία εκτροπής rudR τελικώς εξισορροπούνται από την ώση της έλικας. Δηλαδή ισχύει:
0rudT R R+ + = .
Επομένως, η δύναμη X μπορεί να γραφεί τελικά στη μορφή:
( )0u uX X u X u X tδ δ= + + , (3)
όπου τώρα ο όρος ( )0X t δεν συμπεριλαμβάνει ούτε την ώση της έλικας T , ούτε την
αντίσταση του πηδαλίου rudR , δηλαδή είναι:
( ) ( ) ( )0 rud 1X t X t X t= + . (4)
Εισάγοντας τις εκφράσεις (2b,c), (3), (4) και 3(2b,c), για τις υδροδυναμικές φορτίσεις που ασκούνται πάνω στη γάστρα, στις εξισώσεις κίνησης του πλοίου 2(4), παίρνουμε το ακόλουθο σύστημα εξισώσεων για τις οριζόντιες κινήσεις του πλοίου: ( ) ( ) ( )1u u rudX u m X u X t X tδ δ− + − = + ,
( ) ( ) ( ) ( ) (1v v r G r rudY v m Y v mU Y r m Y r Y t Y tξ− + − + − + − = + ) , (5)
( ) ( ) ( ) ( ) (1v G v G r r rudN v m N v m U N r I N r N t N tζζξ ξ− + − + − + − = + ) .
Οι ανωτέρω εξισώσεις αποτελούν ένα γραμμικό σύστημα διαφορικών εξισώσεων ως προς τις οριζόντιες ταχύτητες διαταραχής του πλοίου. Όπως έχουμε ήδη παρατηρήσει
- 276 -

18 E:\koko_shmeiwseis\koko55\04_04_exiswseis_kinhshs_II_gen_form_stability.doc
στο εδάφιο 2 (Βλ. σχόλια μετά την εξίσωση 2(4)), οι εξισώσεις αυτές δεν περιλαμβάνουν τις κινήσεις , ,ξ η ψ , αλλά μόνο τις αντίστοιχες ταχύτητες και τις επιταχύνσεις . Όπως θα δούμε στη συνέχεια, το γεγονός αυτό έχει σημαντικές επιπτώσεις στην ευστάθεια και τον έλεγχο των οριζόντιων κινήσεων του πλοίου.
u,v,ru,v,r
Το σύστημα (5) μπορεί να χρησιμοποιηθεί για τη μελέτη: - Της ευστάθειας του πλοίου στο οριζόντιο επίπεδο, καθώς και
- Της πηδαλιουχίας του πλοίου. Όταν το σύστημα (5) χρησιμοποιείται για την μελέτη της ευστάθειας του πλοίου, θεωρούμε ότι η μοναδική φόρτιση που ασκείται έπ’ αυτού είναι μια κρουστική φόρτιση τη χρονική στιγμή , δηλαδή 0t =
( ) ( )1 10X t X tδ= , ( ) ( )1 10Y t Y tδ= , ( ) ( )1 10N t N tδ= , (6a)
( ( )tδ είναι ένας παλμός Dirac) και
. (6b) ( ) ( ) ( ) 0rud rud rudX t Y t N t= = =
Στην περίπτωση αυτή ενδιαφερόμεθα για τη συμπεριφορά της προκαλούμενης ταχύτητας διαταραχής για μεγάλους χρόνους (ασυμπτωτική ευστάθεια). Αν η προκύπτουσα λύση (ταχύτητα διαταραχής) μηδενίζεται καθώς , το πλοίο θα λέγεται ευσταθές. Στην αντίθετη περίπτωση το πλοίο θα λέγεται ασταθές. Ιδιαίτερο ενδιαφέρον παρουσιάζει η ευστάθεια των εγκαρσίων κινήσεων
t→∞
η και ψ . Δεδομένου όμως ότι στις εξισώσεις των εγκαρσίων κινήσεων δεν περιέχονται οι μετακινήσεις η και ψ , δεν μπορούμε γενικά να εξασφαλίσουμε ότι ( ) 0tη → και , καθώς
. Γενικώς ισχύει ( ) 0→tψ
t→∞
, ( ) ( )0t
lim t r t dtψ ψ∞
∞ →∞= = ∫
ενώ για να βρούμε την ασυμπτωτική μετατόπιση η∞ κατά την κατεύθυνση πρέπει να ολοκληρώσουμε την οριζόντια ταχύτητα κατά την κατεύθυνση αυτή από
έως . (Αυτό μπορεί να γίνει χρησιμοποιώντας τις σχέσεις 2(5)). Ανάλογα με τις τιμές των
( )0tη =
0t = t =∞η∞ και ψ∞ , διακρίνουμε τα ακόλουθα είδη ευστάθειας εγκαρσίων
κινήσεων του πλοίου. α) Ευστάθεια ευθύγραμμης κίνησης ή δυναμική ευστάθεια (straight line stability or
dynamic stability). Θα λέμε ότι ένα πλοίο έχει ευστάθεια ευθύγραμμης κίνησης (δυναμική ευστάθεια) όταν τόσο η αρχική όσο και η τελική τροχιά του πλοίου είναι ευθύγραμμες (αλλά πιθανώς διαφορετικής κατευθύνσεως). Βλ. Σχήμα 1, περίπτωση Ι. Αυτή είναι η γενική περίπτωση, στην οποία 0η∞ ≠ , 0ψ∞ ≠ .
β) Ευστάθεια κατευθύνσεως (directional stability). Θα λέμε ότι ένα πλοίο έχει
ευστάθεια κατευθύνσεως όταν η αρχική και η τελική τροχιά είναι ευθύγραμμες και παράλληλες μεταξύ τους (αλλά πιθανώς διαφορετικές). Βλ. Σχήμα 1, περίπτωση ΙΙ. Στην περίπτωση αυτή έχουμε 0η∞ ≠ αλλά 0ψ∞ = .
- 277 -

γ) Ευστάθεια τροχιάς (path stability or positional motion stability). Θα λέμε ότι ένα πλοίο έχει ευστάθεια τροχιάς όταν η αρχική και η τελική τροχιά είναι ευθύγραμμες και αποτελούν η μια προέκταση της άλλης. Στην περίπτωση αυτή έχουμε δηλαδή
0η∞ = , 0ψ∞ = . Βλ. Σχήμα 1, περίπτωση ΙΙΙ. Ι. Ευστάθεια ευθύγραμμης κίνησης (straight line stability)
( 0η∞ ≠ , 0ψ∞ ≠ )
ΙΙ. Ευστάθεια κατευθύνσεως (directional stability)
( 0η∞ ≠ , 0ψ∞ = )
ΙΙ. Ευστάθεια τροχιάς (path stability)
( 0η∞ = , 0ψ∞ = )
Σχήμα 1: Είδη ευστάθειας πλοίου κινούμενου με σταθερή μέση ταχύτητα Από τα ανωτέρω είδη ευστάθειας, μόνο το πρώτο (το οποίο αντιστοιχεί στην ασυμπτωτική ευστάθεια του συστήματος (5)) μπορεί να επιτευχθεί χωρίς τη χρήση επιφανειών ελέγχου (π.χ. πηδαλίου) ή άλλων μέσων πηδαλιουχίας (bow thrusters), και μόνο αυτό θα μελετηθεί στη συνέχεια (εδάφιο 8).
Γ. Α. Αθανασούλης 29/3/2012 2:16 πμ 19 - 278 -

Εισάγοντας τις σχέσεις (6a,b) στα δεξιά μέλη των εξισώσεων του συστήματος (5) παίρνουμε ( ) ( )10u uX u m X u X tδ δ− + − = δ ,
( ) ( ) ( ) ( )10v v r G rY v m Y v mU Y r m Y r Y tξ− + − + − + − = δ , (7)
( ) ( ) ( ) ( )10v G v G r rN v m N v m U N r I N r N tζζξ ξ− + − + − + − = δ . Η πρώτη από τις ανωτέρω εξισώσεις είναι ανεξάρτητη από τις δύο άλλες, πράγμα που σημαίνει ότι η ευστάθεια κατά το διαμήκη άξονα μπορεί να μελετηθεί μόνη της (Βλ. εδάφιο 7). Αντίθετα, οι εξισώσεις (7b,c) αποτελούν ένα σύστημα συζευγμένων διαφορικών εξισώσεων, από τη λύση του οποίου συμπεραίνουμε σχετικά με την ευστάθεια των εγκάρσιων κινήσεων του πλοίου (βλ. εδάφιο 8). Ας επανέλθουμε τώρα στο σύστημα (5). Όταν το σύστημα αυτό χρησιμοποιείται για την μελέτη της πηδαλιουχίας του πλοίου, στο δεξιά μέλος των εξισώσεων κίνησης θεωρούμε μόνο τις φορτίσεις από το πηδάλιο ( ) ( ) ( )rud rud rudX t , Y t , N t , και θεωρούμε
( ) ( ) ( )1 1 1 0X t Y t N t= = = .
Εισάγοντας τις εκφράσεις 3(8b,c) και 3(9) στα δεξιά μέλη των εξισώσεων του συστήματος (5) παίρνουμε ( ) 0u uX u m X uδ δ− + − = ,
( ) ( ) ( ) ( )v v r G rY v m Y v mU Y r m Y r Y tγξ γ− + − + − + − = , (8)
( ) ( ) ( ) ( )v G v G r rN v m N v m U N r I N r N tζζ γξ ξ γ− + − + − + − = . Στην περίπτωση αυτή, η πρώτη εξίσωση επιλύεται αμέσως:
0uδ = , δηλαδή ( )u t U= . (9)
Από την επίλυση του συστήματος (8), για δεδομένη χρονική ιστορία εκτροπής πηδαλίου ( )tγ , μπορούμε να υπολογίσουμε τις ταχύτητες ( ) ( )u t ,v t και του πλοίου και, με τη βοήθεια αυτών και των σχέσεων 2(5) και 2(6), μπορούμε να χαράξουμε την τροχιά του.
( )r t
20 E:\koko_shmeiwseis\koko55\04_04_exiswseis_kinhshs_II_gen_form_stability.doc - 279 -

21
5. Πειραματικός προσδιορισμός υδροδυναμικών παραγώγων Στην παρούσα παράγραφο θα αναφερθούν οι πειραματικές μεθοδολογίες που χρησιμοποιούνται για τον υπολογισμό των υδροδυναμικών παραγώγων που εμφανίζονται στα συστήματα εξισώσεων 4(7) και 4(8). 5.1 Πείραμα ευθύγραμμης ρυμούλκησης (straight line towing experiment) Οι υδροδυναμικές παράγωγοι και πλοίου για οποιοδήποτε βύθισμα και διαγωγή μπορούν να καθορισθούν από μετρήσεις σε μοντέλο του πλοίου, ερματισμένο σε γεωμετρικά ανάλογο βύθισμα και διαγωγή. Το μοντέλο ρυμουλκείται σε μακρόστενη δεξαμενή με σταθερή ταχύτητα
vY vN
mV V= , που προκύπτει από ισότητα των αριθμών Froude μεταξύ πλοίου και μοντέλου, και με διάφορες γωνίες πρόσπτωσης της ροής β ως προς τον άξονα x του μοντέλου. Στο Σχήμα 1 φαίνεται ο προσανατολισμός του μοντέλου στην δεξαμενή. Για μικρές γωνίες εκτροπής β η πρόσω ταχύτητα του μοντέλου (δηλαδή η ταχύτητά του κατά τον διαμήκη σωματοπαγή άξονα) και η εγκάρσια ταχύτητά του v δίνονται από τις σχέσεις:
U
cosU V Vβ= ≈ , (1) sinv V V Uβ β= − ≈ − ≈ − β . (2)
Ένα δυναμόμετρο στην αρχή (προτιμότερο να βρίσκεται στο μέσο νομέα) μετράει την δύναμη και την ροπή η οποία ασκείται στο μοντέλο για διαφορετικές τιμές της γωνίας β. Αυτές οι μετρήσεις στην συνέχεια μετατρέπονται σε διαγράμματα
και αντίστοιχα (Σχήμα 2).
ONY
N −Y V− V
Σχήμα 1: Πείραμα ευθύγραμμης ρυμούλκησης.
Σχήμα 2: Τυπικές καμπύλες Y V− και N V− .
- 280 -

22
Οι κλίσεις αυτών των καμπυλών για 0V = δίνουν αριθμητικές τιμές των και για το μοντέλο, οι οποίες συνήθως αδιαστατοποιούνται ως εξής:
vY vN
212
vv
m m m
YYL Vρ
′ = , (3)
31
2
vv
m m m
NNL Vρ
′ = , (4)
όπου , είναι το μήκος και η ταχύτητα του μοντέλου, και m mL V mρ η πυκνότητα του νερού της δεξαμενής. Οι διαστατές τιμές των υδροδυναμικών παραγώγων , για το πλοίο λαμβάνονται
αν πολλαπλασιάσουμε τις ανωτέρω αδιάστατες τιμές με
vY vN2
2s
s sL Vρ και
3
2S
s sL Vρ ,αντίστοιχα, όπου ,s sL V είναι το μήκος και η ταχύτητα του πλοίου και sρ η
πυκνότητα του θαλασσινού νερού. Η μεθοδολογία που περιγράφηκε ανωτέρω μπορεί να χρησιμοποιηθεί και για τον καθορισμό των υδροδυναμικών παραγώγων επιφανειών ελέγχου (π.χ. πηδαλίου) και . Αν το μοντέλο του Σχήματος 1 ρυμουλκείται με μηδενική γωνία πρόσπτωσης
αλλά με διάφορες γωνίες εκτροπής του πηδαλίου γ, τότε οι μετρήσεις του δυναμομέτρου θα δώσουν την δύναμη Y και την ροπή ως συνάρτηση της γωνίας εκτροπής του πηδαλίου. Αν αυτές οι μετρήσεις παρασταθούν διαγραμματικά λαμβάνονται όπως και προηγουμένως οι και .
vY
vN0=(β )
N
vY vN 5.2 Πείραμα περιστροφικής ρυμούλκησης (με χρήση περιστροφικού βραχίονα,
rotating arm mechanism) Mε το πείραμα αυτό προσδιορίζονται οι υδραδυναμικές παράγωγοι και καθώς και οι και , που αποτελούν τα βασικά υδροδυναμικά δεδομένα για την μελέτη της ευστάθειας πορείας του πλοίου. Για την πραγματοποίηση αυτού του πειράματος απαιτείται ειδικός τύπος δεξαμενής. Το μοντέλο στερεώνεται (πακτώνεται), (Σχήμα 3), στην άκρη ενός βραχίονα ο οποίος περιστρέφεται περί το άλλο άκρο του με σταθερή γωνιακή ταχύτητα . Κάτω απ’ αυτές τις συνθήκες το μοντέλο κινείται με σταθερή πρόσω ταχύτητα U , όπου
rY rN
vY vN
r= rR R η ακτίνα περιστροφής.
Η δύναμη , που είναι απαραίτητη για την συγκράτηση του μοντέλου και ασκείται κατά την διεύθυνση της ακτίνας καθώς και η ροπή περί τον κατακόρυφο άξονα από το κέντρο βάρους του μοντέλου μετριούνται για σταθερή ταχύτητα πρόωσης και για διάφορες γωνιακές ταχύτητες. Όπως προκύπτει από την σχέση η διαφοροποίηση στην γωνιακή ταχύτητα επιτυγχάνεται με μεταβολή της ακτίνας περιστροφής. Επιπλέον τα δυναμόμετρα μετρούν την δύναμη και την ροπή που ασκούνται επί του μοντέλου. Το μοντέλο επιταχύνεται στην επιθυμητή ταχύτητα και
nF
zG
U rR=
NY
- 281 -

γίνονται οι μετρήσεις. Οι εξισώσεις κίνησης του μοντέλου υπό την επίδραση της δύναμης και της ροπής είναι: nF
nF Y
z
zG2mr R+ = , (5)
0 . (6) G N+ =
Αφού παρθούν οι μετρήσεις και χαραχθούν τα διαγράμματα ( ) και ( ) (τυπικές μορφές αυτών φαίνονται στο Σχήμα 4), οι υδροδυναμικές παράγωγοι και μπορούν να υπολογισθούν εκτιμώντας την κλίση των καμπυλών στην αρχή των αξόνων, δηλαδή για .
Y r N r
rY rN
0r =
Σχήμα 3: Πείραμα περιστροφικής ρυμούλκησης.
Σχήμα 4: Τυπικές καμπύλες Y r− και N r− .
Το μοντέλο και εδώ όπως και στην προηγούμενη μεθοδολογία πρέπει να είναι ερματισμένο έτσι ώστε να πλέει στο κατάλληλο βύθισμα και διαγωγή. Επίσης το πηδάλιο πρέπει να βρίσκεται σε μηδενική γωνία εκτροπής και η έλικα του μοντέλου (εάν υπάρχει) να λειτουργεί στο σημείο το αντίστοιχο του σημείου πρόωσης του πλοίου. Με την μεθοδολογία του περιστρεφόμενου βραχίονα μπορούν να καθορισθούν και οι υδροδυναμικές παράγωγοι και . Αυτό επιτυγχάνεται vY vN
23 - 282 -

24
ρυμουλκώντας το μοντέλο σε διάφορες γωνίες β για κάθε τιμή της περιστροφικής ταχύτητας , όχι μόνο για 0r β = . αγια ο
Αν χαραχθούν σε διάγραμμα οι τιμές των vY κ ι vN κάθε τιμή r , συναρτήσει του r , ι τιμές των vY και N για 0r μπορούν να
υπολογισθούν. Επίσης είναι δυνατό να υπολογισθούν οι τιμές των υδροδυναμικών παραγώγων ελέγχου
v =
Yγ και Nγ με τρόπο ανάλογο εκείνο του υπολογισμού των και . Δυστυχώς οι τιμές των που λαμβάνονται εδώ δεν συμφωνούν πάντα με τις τιμές της προηγούμενης μεθοδολογίας.
vY
vN , , ,v vY N Y Nγ γ
Σημαντικά μειονεκτήματα αυτής της μεθόδου είναι: α) η εξειδικευμένη μορφή της δεξαμενής πειραμάτων β) η αναγκαιότητα μετρήσεων για μικρές τιμές της περιστροφικής ταχύτητας πράγμα
που οδηγεί στην απαίτηση μεγάλης ακτίνας περιστροφής. 5.3 Πείραμα ταλαντωτικής ρυμούλκησης με μηχανισμό επιπέδου κινήσεως (planar
motion mechanism) Προκειμένου να μειωθεί η δαπάνη που επιφέρουν τα πειράματα με περιστρεφόμενο βραχίονα αναπτύχθηκε η μεθοδολογία μηχανισμού επιπέδου κινήσεως, η οποία μπορεί να υλοποιηθεί σε κοινή μακρόστενη δεξαμενή ρυμούλκησης, για να μετρηθούν οι υδροδυναμικές παράγωγοι Y . ,v N , ,v vY Y Y N, ,r rN , ,vN r r
Ο μηχανισμός επιπέδου κινήσεως αποτελείται από δύο ταλαντωτές, ένας από τους οποίους παράγει εγκάρσιες ταλαντώσεις στην πλώρη και ο άλλος εγκάρσιες ταλαντώσεις στην πρύμνη, ενώ ταυτόχρονα το μοντέλο ρυμουλκείται στην δεξαμενή με σταθερή ταχύτητα . Σχηματικά τα παραπάνω φαίνονται στο Σχήμα 5 που ακολουθεί.
U
Σχήμα 5: Πείραμα ταλαντωτικής ρυμούλκησης με μηχανισμό επιπέδου κίνησης.
Το σημείο B , κοντά στην πλώρη σε απόσταση Sx μπροστά από την αρχή , (η οποία συνήθως λαμβάνεται στο μέσο νομέα), ταλαντούται εγκαρσίως με μικρό πλάτος και γωνιακή συχνότητα
O
oa ω . Το σημείο , κοντά στην πρύμνη, σε απόσταση
S
sx από την αρχή Ο, ταλαντούται εγκαρσίως με το ίδιο πλάτος και την ίδια συχνότητα
oaω . Η διαφορά φάσεως της ταλάντωσης στην πρύμνη σχετικά με
εκείνη της πλώρης έστω ότι είναι ε . Η ταλαντωτική κίνηση που επιβάλλουν οι βραχίονες στην πλώρη και στην πρύμνη δίδεται από τις παρακάτω σχέσεις:
- 283 -

25
( )coss oy a tω ε= + , (7) cosB oy a tω= . (8)
Οι δείκτες και S B σημαίνουν stern και bow,πρύμνη και πλώρη, αντίστοιχα. Αν 0ε = τότε ισχύει:
cosS B oy y y a tω= = = , (9)
sin cos2o oy v a t a t πω ω ω ω⎛= = − = +⎜
⎝ ⎠⎞⎟ , (10)
( )2 2cos coso oy v a t a tω ω ω ω= = − = +π . (11)
Στην περίπτωση αυτή το μοντέλο υπόκεινται στην ταλαντωτική κίνηση που φαίνεται στο Σχήμα 6 που ακολουθεί.
Σχήμα 6: Πορεία και προσανατολισμός του μοντέλου στην περίπτωση εγκάρσιας ταλαντωτικής κίνησης χωρίς περιστροφή.
Οι εξισώσεις κίνησης είναι:
( ) ( ) ( ) ( )S Bmv t Y t Y t Y t= Δ − − , (12)
( ) ( ) ( )( ) ( )G s B Sm v t x Y t Y t N tξ = − + Δ . (13)
Μετρώντας τις δυνάμεις στα δύο δυναμόμετρα και γνωρίζοντας την κίνηση μπορούμε να υπολογίσουμε τις υδροδυναμικές αντιδράσεις
( ), ( )S BY t Y t( ), ( ).Y t N tΔ Δ
Εξάλλου οι υδροδυναμικές δυνάμεις και ροπές στην προκειμένη περίπτωση, όπου το μοντέλο υποβάλλεται σε εγκάρσια αρμονική ταλάντωση χωρίς περιστροφή, αναπτύσσονται ως εξής:
( ) ( ) ( ) ( ) ( ) .....v v v vY t Y v t Y v t Y v t Y v tΔ = + + + + , (14)
( ) ( ) ( ) ( ) ( ) ....v v v vN t N v t N v t N v t N v tΔ = + + + + , (15)
όπου οι υδροδυναμικοί συντελεστές υποτίθενται ανεξάρτητοι του χρόνου. Δεδομένου ότι:
, (16) ( ) ( )v t y t=
- 284 -

26
, (17) ( ) ( ) ( )2v t y t y tω= = −
, (18) ( ) ( ) ( )2v t y t y tω= = −
, (19) ( ) ( ) ( )22v t y tω= −
οι σχέσεις (14) και (15) θα μετασχηματισθούν στις:
( ) ( ) ( ) ( ) ( )2 2... ... ...v v v vY t Y Y v t Y Y v tω ωΔ = − + + − + +
( ) ( ), (20)
( ) ( ) ( )2 2... ...v v v vN t N N v t N N vω ωΔ = − + + − + ...t + . (21) Στο πείραμα αυτό η κυκλική συχνότητα ω της εγκάρσιας ταλάντωσης του μοντέλου είναι σχετικά μικρή, ώστε να μπορούμε να υποθέσουμε ότι βρισκόμαστε κοντά στο όριο . Το ίδιο υποθέτουμε ότι ισχύει και για τις άλλες
υδροδυναμικές παραγώγους που εμφανίζονται στις προηγούμενες σχέσεις. Εισάγοντας αυτή την απλούστευση στις εξισώσεις (20) και (21) παίρνουμε:
( 2
0...lim v vY Y
ωω
→− + =) vY
( ) ( ) ( ) ( ) ( ) ...v vY t Y v t Y v tΔ = + + , (20')
( ) ( ) ( ) ( ) ( ) ...v vN t N v t N v tΔ = + + . (21')
Ας συμβολίσουμε τώρα με την χρονική στιγμή για την οποία ισχύει int( ) sin 0in o inv t a tω ω= − =
2( ) cosout o outv t a tω ω= − =
και με την χρονική στιγμή για την οποία είναι , δηλαδή:
outt0
, 1, 2,...2in inTt l t l lω π= ⇒ = = (22)
1 , 1, 2,...2 2 2out out
Tt l t l lπω π ⎛ ⎞= + ⇒ = + =⎜ ⎟⎝ ⎠
, (23)
όπου είναι η περίοδος της εγκάρσιας ταλάντωσης του μοντέλου. T Τότε, από τις σχέσεις (20΄) και (21΄), σε συνδυασμό με τις (12) και (13), λαμβάνουμε τις ακόλουθες σχέσεις για τις υδροδυναμικές παραγώγους : , , ,v v v vY Y N N
( ) ( )B out S outv
o
Y t Y tY
α ω+
=−
, (24)
( ) ( )B out S out s
vo
Y t Y t xN
α ω−⎡ ⎤⎣ ⎦=−
, (25)
( ) ( )2
B in S inv
o
Y t Y tY m
ω α+
− =−
, (26)
( ) ( )
2B in S in s
v Go
Y t Y t xN mξ
ω α−⎡ ⎤⎣ ⎦− =
−. (27)
Για να παραχθούν οι παράγωγοι και το μοντέλο πρέπει να κινείται έτσι ώστε
και οι μετρήσεις πρέπει να γίνουν όταν rY rN
0r ≠ 0, 0r v= = και 0v = . Ομοίως για να
- 285 -

27
βρεθούν οι και θα πρέπει να έχουμε rY rN 0r ≠ και μετρήσεις να ληφθούν όταν και 0, 0r v= = 0v = . Προκειμένου να επιβληθεί γωνιακή ταχύτητα και επιτάχυνση
στο μοντέλο με 0v v= = , αυτό πρέπει να ρυμουλκηθεί με τον τρόπο που φαίνεται στο Σχήμα 7.
Σχήμα 7: Πορεία και προσανατολισμός του μοντέλου στην περίπτωση περιστοφικής ταλάντωσης.
Οι εξισώσεις κίνησης τώρα είναι:
( ) ( ) ( ) ( ) ( )t−G SY t Y t YΔ − BmUr t m
( )rξ t+ =
( ), (28)
( ) ( )( ) ( )s B Sx Y t Y t t+ = − ΔG zI rm Ur t t N+
π
ξ . (29) Για να παραχθεί το είδος της κίνησης του Σχήματος 7 απαιτείται διαφορά φάσης μεταξύ πρυμναίου και πρωραίου ταλαντωτή ίση με 0 (180 ).
Τότε έχουμε (v y= + ) 0y =12 B S και:
( ) ( ) 2 o
m m
aL L
cos ,o ot t/ 2
By tψ ψ ω ψ− == = − , (30)
( ) ( )t sino tr t ψ ψ ω ω+= = , (31)
( ) ( ) ( )tω ψ−2 coso tω ω+ = 2r t
( )t= =ψ ψ , (32)
( ) (2 tψ− )r t
( )r t
t= =
( )22ω ψ
( )
ψ ω
(= −
, (33)
. (34) )t Ακολουθώντας την λογική της προηγούμενης περίπτωσης γράφουμε:
( ) ( ) ( ) ( )r r t+ ...r r rt Y r t Y r t Y+ + +Y tΔ =
( )
Y r
( )
, (35)
( ) ( ) ( )rN r t+ ...r r rN r t N r tΔ = + + +N t
( )
N r t , (36)
και χρησιμοποιώντας τις σχέσεις (33), (34) παίρνουμε:
( ) ( ) ( ) ( )2 2... ...rr t Y Y r tω ω+ + − +...r +r rY YY tΔ =
( )
− , (37)
( ) ( ) ( ) ( ).. .. ...r r r rt r t r tω ω+ + + +2 2N N−NΔ = N N− . (38) Θεωρώντας και σ’ αυτό το σημείο ότι, η γωνιακή συχνότητα ω είναι σχετικά μικρή, oι ανωτέρω σχέσεις απλουστεύονται στις:
- 286 -

( ) ( ) ( ) ( ) ( ) ...r rY t Y r t Y r tΔ = + + , (37')
( ) ( ) ( ) ( ) ( ) ...r rN t N r t N r tΔ = + + . (38') Συμβολίζοντας τώρα με την χρονική στιγμή για την οποία int ( ) sin 0in o inr t tψ ω ω= =
0out
και την χρονική στιγμή για την οποία outt 2( ) cosout or t tψ ω ω= = , έχουμε:
, 1, 2,...2in inTlt l t lω π= ⇒ = = , (39)
1 , 1, 2,...2 2 2out out
Tt l t l lπω π ⎛ ⎞= + ⇒ = + =⎜ ⎟⎝ ⎠
. (40)
Εφαρμόζοντας τις σχέσεις (37΄), (38΄) για int t= και outt t= , σε συνδυασμό με τις εξισώσεις κίνησης (28), (29) παίρνουμε τις ακόλουθες σχέσεις για τις υδροδυναμικές παραγώγους : , , ,r r r rY Y N N
( ) ( )B out S outr
o
Y t Y tY mu
ψ ω+
− = , (41)
( ) ( )B out S out s
r Go
Y t Y t xN m uξ
ψ ω−⎡ ⎤⎣ ⎦− = , (42)
( ) ( )2
B in S inr G
o
Y t Y tY mξ
ψ ω+
− = , (43)
( ) ( )
2B in S in s
r zo
Y t Y t xN I
ψ ω−⎡ ⎤⎣ ⎦− = . (44)
Τα και είναι όπως και προηγουμένως οι μετρήσεις των δυναμομέτρων. BY SY Προσοχή πρέπει να δίνεται στην χρήση των αποτελεσμάτων της μεθοδολογίας μηχανισμού επιπέδου κίνησης, σε σχέση με πιθανές επιδράσεις της συχνότητας ω στα αποτελέσματα. (Οι ταλαντωτικές κινήσεις του μοντέλου παράγουν κύματα συχνότητας ω, τα οποία αλλοιώνουν τα αποτελέσματα). Κάνοντας πειράματα σε διάφορες (μικρές) συχνότητες μπορούμε να ελέγξουμε εάν οι υδροδυναμικές παράγωγοι είναι ανεξάρτητες από την συχνότητα στις συνθήκες του πειράματος. 5.4 Πειράματα με ελεύθερα μοντέλα (free model experiments) Η διαδικασία αυτή περιλαμβάνει πειράματα με τηλεχειριζόμενα μοντέλα (ή μοντέλα με πιλότο) τα οποία λαμβάνουν χώρα σε τετράγωνες δεξαμενές ή λίμνες. Εκτελούνται δε ελιγμοί όμοιοι με εκείνους του πραγματικού πλοίου. Από τα πειράματα αυτά λαμβάνονται αποτελέσματα τα οποία μπορούν να χρησιμοποιηθούν σε πρόγραμμα εξομοίωσης της κίνησης του πλοίου. Δεν θα ασχοληθούμε ιδιαίτερα με τα πειράματα αυτά στα πλαίσια του παρόντος μαθήματος. 5.5 Αποτελέσματα πειραματικού προσδιορισμού υδροδυναμικών παραγώγων
28 - 287 -

Οι πειραματικές μετρήσεις των υδροδυναμικών παραγώγων μοντέλων δίνουν την δυνατότητα παραγωγής εμπειρικών ή ημιεμπειρικών σχέσεων οι οποίες χρησιμοποιούνται κατά τον αρχικό σχεδιασμό του πλοίου, προκειμένου να εκτιμηθούν οι υδροδυναμικές παράγωγοι αυτού. Τέτοιου είδους σχέσεις παρήχθησαν από τον Clarke (1982) ο οποίος χρησιμοποίησε την μέθοδο της πολλαπλής παλινδρόμησης (multiple regression) προκειμένου να αξιοποιήσει υπάρχοντα αποτελέσματα πειραμάτων με περιστρεφόμενο βραχίονα και με μηχανισμό επιπέδου κινήσεως. Οι σχέσεις στις οποίες κατέληξε ο Clarke ακολουθούν. (Στην δεύτερη στήλη δίδονται, ενδεικτικά, οι αριθμητικές τιμές των δεξιά μελών των εξισώσεων της πρώτης στήλης για μια γάστρα με / 1/ 7 0.143, / 2.5B L B t= = = και ). 0.70BC =
( )
2
2 1 0.16 5.1/v
BY B BC
T LT Lπ
′− ⎛ ⎞= + − ⎜ ⎟⎝ ⎠
(45) 1.176
( )
2
2 0.67 0.0033/rY B B
L TT Lπ
′− ⎛ ⎞= − ⎜ ⎟⎝ ⎠
(46) 0.075
( )2 1.1 0.041
/vN B B
L TL Tπ
′−= − (47) 0.055
( )2
1 0.017 0.3312/
rB
N B BCT LT Lπ
′−= + − (48) 0.066
( )2 1 0.40
/v
BY BC
TT Lπ
′−= + (49) 1.7
( )2
1 2.2 0.0802/
rY B BL TT Lπ
′−= − + − 0.385− (50)
( )2
1 2.42/
vN TLT Lπ
′−= + (51) 0.637
( )2
1 0.039 0.564/
rN B BT LT Lπ
′−= + − (52) 0.267
Στο Σχήμα 8 δίδονται ενδεικτικά τα σφάλματα (residuals) των τιμών των υδροδυναμικών παραγώγων σε διάφορες περιπτώσεις, τα οποία προκύπτουν αν αφαιρέσουμε τις πειραματικές τιμές από τις αντίστοιχες τιμές που λαμβάνονται μέσω των σχέσεων (δεξιά μέλη) (45)-(52). Είναι φανερό ότι η διασπορά των πειραματικών αποτελεσμάτων είναι πολύ μεγάλη, πράγμα που σημαίνει ότι οι ανωτέρω σχέσεις πρέπει να χρησιμοποιούνται με επιφύλαξη, και μόνον στο αρχικό στάδιο σχεδίασης, όπου δεν είναι διαθέσιμα αναλυτικά στοιχεία για τη μορφή της γάστρας. Όταν η γάστρα σχεδιασθεί οι υπολογισμοί πρέπει να επαναληφθούν, είτε με αναλυτικές μεθόδους είτε με την βοήθεια πειραμάτων με μοντέλο.
29 - 288 -

Σχήμα 8: Τιμές σφαλμάτων των εμπειρικά υπολογιζόμενων υδροδυναμικών παραγώγων σε σχέση με πειραματικά αποτελέσματα (ο: αποτελέσματα πειραμάτων με περιστρεφόμενο βραχίονα, x: αποτελέσματα πειραμάτων με μηχανισμό επιπέδου κινήσεως).
30 - 289 -

31
6. Αναλυτικός προσδιορισμός υδροδυναμικών παραγώγων Ο αναλυτικός προσδιορισμός των υδροδυναμικών παραγώγων πλοίου+πηδαλίου συνίσταται στην εύρεση των υδροδυναμικών δυνάμεων που δρούν στο σύστημα για οποιαδήποτε κινητική του κατάσταση (στροφή, αλλαγή πορείας κ.τ.λ). Είναι φανερό ότι τα προηγούμενα μεγέθη μπορούν να προκύψουν με την επίλυση του υδροδυναμικού προβλήματος, με χρήση της θεωρίας των ανωστικών ροών. Στοιχεία της θεωρίας αυτής παρουσιάζονται στο μάθημα “Βασικές Αρχές Ναυτικής Θαλάσσιας Υδροδυναμικής”. Εκτενέστερα αναπτύσσονται στο κατ’ επιλογήν μάθημα “Ανωστικές Ροές”. Προς αυτή την κατεύθυνση βρίσκεται η εργασία των Landrini και Campana (1996), οι οποίοι υπολόγισαν τις υδροδυναμικές δυνάμεις επί λεπτού επίπεδου ελάσματος το οποίο εκτελεί στροφή ή έχει σταθερή γωνία πρόσπτωσης ως προς την ροή. Το πρόβλημα μελετήθηκε με βάση το στροβιλό μη συνεκτικό μοντέλο ροής και χρησιμοποιήθηκε το ολοκληρωτικό θεώρημα αναπαράστασης της πεδιακής ταχύτητας. Προκειμένου να επιλυθεί αριθμητικά η ολοκληρωτική εξίσωση εφαρμόσθηκε συνδυασμός κατανομών πηγών και στροβιλοτήτων επί του σώματος και του ομόρρου, σε συνδυασμό με ορισμένες απλοποιητικές παραδοχές για την ελεύθερη επιφάνεια και την γεωμετρία του ομόρρου. Στην εργασία αυτή λαμβάνεται υπόψη και η επίδραση της στροβιλότητας της τρόπιδας στα αποτελέσματα. Επειδή τέτοιου είδους προσπάθειες, αφ’ ενός είναι περίπλοκες και, αφ’ ετέρου δεν έχουν επεκταθεί σε πλήρεις τύπους γαστρών, ο υπολογισμός των υδροδυναμικών παραγώγων κατά την σχεδίαση ενός πλοίου γίνεται ακόμα με βάση απλούστερες θεωρήσεις. Συνήθως χρησιμοποιείται η θεωρία λωρίδων σε συνδυασμό με την παραδοχή της γραμμικής υπέρθεσης των υδροδυναμικών χαρακτηριστικών των διαφόρων στοιχείων του συστήματος (πλοίου, πηδαλίου, πτερυγίων κ.λ.π.). Σύμφωνα με την παραδοχή αυτή, για τις υδροδυναμικές παραγώγους πλοίου και πηδαλίου (ή άλλων πτερυγίων) θα ισχύει:
( ) ( )v v vh fY Y Y′ ′ ′= + , ( ) ( )v v vh
N N N′ ′ ′= +f, (1)
( ) ( )r r rh fY Y Y′ ′ ′= + , , (2) ( ) ( )r r rh
N N N′ ′ ′= +f
( ) ( )v v vh fY Y Y′ ′ ′= + , , (3) ( ) ( )v v vh
N N N′ ′ ′= +f
( ) ( )r r rh fY Y Y′ ′ ′= + , , (4) ( ) ( )r r rh
N N N′ ′ ′= +f
)όπου με συμβολίζονται οι υδροδυναμικές παράγωγοι της καθαρής γάστρας και με
(h hull( )f fin τα αντίστοιχα μεγέθη του πτερυγίου (πηδαλίου) για μηδενική γωνία
εκτροπής. (Υπενθυμίζεται η σύμβαση ότι τα τονιζόμενα μεγέθη είναι καταλλήλως αδιαστατοποιημένα. Βλέπε και εδάφιο 5).
Στα πλαίσια της ανωτέρω θεώρησης, ο υπολογισμός των υδροδυναμικών δυνάμεων και ροπών επί του πηδαλίου και της γάστρας ανάγεται στον υπολογισμό υδροδυναμικών δυνάμεων και ροπών σε απλούστερα διδιάστατα σώματα (διατομές). Η μεθοδολογία αυτή χρησιμοποιείται συχνά σε εφαρμογές σχεδίασης πηδαλίου (βλ. Principles of Naval Architecture, Vol III, 1989). Οι υδροδυναμικοί υπολογισμοί που απαιτούνται γι’ αυτά τα σώματα περιγράφονται συνοπτικά και δίδονται παραπομπές σε άλλα μαθήματα (και βιβλία), όπου εξετάζονται αναλυτικά.
- 290 -

32
Υδροδυναμικές παράγωγοι πτερυγίου Θεωρούμε ότι το σώμα και το πτερύγιο που σχεδιάζονται στο Σχήμα 1 αρχικά έχουν ταχύτητα κατά μήκος του άξονα u x . Κατόπιν δίνεται στο σώμα μια εγκάρσια ταχύτητα διαταραχής . Η γωνία πρόσπτωσης στο πτερύγιο v+ ( )fβ για είναι:
fv v= << u
ff
f
vu
β = , (5)
όπου fu είναι η προς τον άξονα x ταχύτητα του πτερυγίου. Η ολική ταχύτητα γίνεται:
2 1/ 2(1 )f fV u uβ= + ≈ f . (6)
Σχήμα 1: Τοποθέτηση πτερυγίου για τον υπολογισμό δυνάμεων και ροπών.
Η κάθετη δύναμη στον άξονα του σώματος και η αντίστοιχη ροπή που παράγονται εξαιτίας της ύπαρξης γωνίας πρόσπτωσης στο πτερύγιο υπολογίζονται από τις ακόλουθες σχέσεις:
( cos sin )f f f fY L D fβ β= ± + , (7a)
f f fN Y x= , (7b)
όπου ,f fL D είναι οι δυνάμεις άνωσης και αντίστασης στο πτερύγιο αντίστοιχα και
fx είναι η απόσταση από το σωματοπαγές σύστημα αξόνων του σημείου δράσης της δύναμης στο πτερύγιο. Ο υπολογισμός της οδηγεί στην: ( )v fY
( ) ( )v f ff f ff
Y Y d dYv dv β
∂ ∂ β∂ ∂β
⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞= = − = −⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠
Ydvβ . (8)
Δεδομένου ότι ισχύουν οι:
1 1
f f
ddv u Vβ⎛ ⎞ = ≈⎜ ⎟
⎝ ⎠, (9)
( ) sin cos cos sin( )f f f f ff
ff
L DY L Dβ∂
f∂β β β
∂β ∂β⎛ ⎞
= − − −⎜ ⎟⎝ ⎠
β . (10)
- 291 -

33
Για 0β = προκύπτει:
( ) fff
LY Dβ∂∂β
⎡ ⎤⎛ ⎞= − +⎢ ⎥⎜ ⎟
⎝ ⎠⎢ ⎥⎣ ⎦. (11)
Συνήθως η άνωση και η αντίσταση δίδονται με την μορφή αδιάστατων συντελεστών άνωσης και αντίστασης και LC DC , ως εξής:
( ) 2
2f L ffL C A Vρ
= , (12)
( ) 2
2f D ffD C A Vρ
= , (13)
όπου fA είναι η επιφάνεια του πτερυγίου στο επίπεδο . Τιμές για τους συντελεστές άνωσης και αντίστασης αεροτομών NACA μπορούν να βρεθούν στα Applied Fluid Dynamics Handbook του Blevins (1984) και Theory of Wing Sections του Abbot (1958). Χαρακτηριστικά διαγράμματα από τις προηγούμενες πηγές δίδονται στο τέλος του εδαφίου. Παραγωγίζοντας την σχέση που δίνει την ανωστική δύναμη (12) λαμβάνεται η ακόλουθη:
Oxz
2
2L
ff f
CL A V ∂∂ ρ∂β ∂β
⎛ ⎞ ⎛ ⎞=⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠. (14)
Η σχέση (8) με την βοήθεια των (11), (13) και (14) γίνεται:
( ) ( )2
Lv f Df f
f
CY A V C∂ρ∂β
⎡ ⎤⎛ ⎞= − +⎢ ⎥⎜ ⎟
⎝ ⎠⎢ ⎥⎣ ⎦. (15)
Αν ληφθεί υπόψη ότι ο συντελεστής αντίστασης ( )D fC για μηδενική γωνία
πρόσπτωσης είναι πολύ μικρός σε σχέση με τον LC∂∂β
, αδιαστατοποιώντας την
προηγούμενη σχέση προκύπτει η:
( )( )
( )
/ 2
/ 2
Lf
f Lv
ff
f
CA VCY
LTV
∂ρ∂β ∂
ρ ∂
⎛ ⎞⎜ ⎟
⎛ ⎞⎝ ⎠′ ′= − = − ⎜ ⎟⎝ ⎠
Aβ
fx′
. (16)
Από την δεύτερη των σχέσεων (7) παράγεται η ακόλουθη:
, (17) ( ) ( )v vf fN Y′ ′=
ενώ για τις υδροδυναμικές παραγώγους ( )r fY ′ και ( )r fN ′ ισχύει:
( ) ( )r f vf fY x Y′ ′ ′= , (18)
( ) ( )2r f vf f
N x Y′ ′ ′= . (19)
- 292 -

34
Η υδροδυναμική παράγωγος ( )v fY ′ αντιστοιχεί στην πρόσθετη μάζα επιπέδου
ελάσματος για επιταχύνσεις κάθετες στο επίπεδο του και μπορεί να προσεγγισθεί ως ακολούθως:
( )( ) ( )1/ 2 1/ 222 2
21( / 2)1 1
fv f
G G
bA b AY
L Ta afπρ π
ρ′ ′
′ = − = −+ +
. (20)
Οι εκφράσεις για τις υδροδυναμικές παραγώγους ( ) ( ) ( ), ,v r rf fN Y N
f′ ′ ′ σε αντιστοιχία
με τις προηγούμενες σχέσεις έχουν ως εξής:
, (21) ( ) ( )v vf fN Y′ ′= fx′
( ) ( )r f vf fY x Y′ ′ ′= , (22)
( ) ( )2r f vf f
N x Y′ ′ ′= , (23)
όπου b είναι το γεωμετρικό άνοιγμα του πτερυγίου, fA όπως και προηγουμένως είναι η επιφάνεια του πτερυγίου στο επίπεδο 0xz και είναι ο γεωμετρικός λόγος επιμήκους που ορίζεται ως εξής:
Ga
2
GbaAR
= .
Υδροδυναμικές παράγωγοι καθαρής γάστρας Για το σκοπό αυτής της ανάλυσης η γάστρα του πλοίου μπορεί να θεωρηθεί πτερύγιο πολύ μικρού λόγου επιμήκους. Ο γεωμετρικός λόγος επιμήκους της γάστρας είναι ο λόγος , ο λόγος πάχους προς μήκος χορδής είναι ο /T L /B L
nF, ενώ ο λόγος πάχους
συνήθως είναι κοντά στην μονάδα. Σε μικρές ταχύτητες ( 0.25< ) η επίδραση των κυματισμών ελεύθερης επιφάνειας θεωρείται αμελητέα. Κατά συνέπεια, το ‘ενεργό πεδίο ροής’ που ενδιαφέρει είναι το υπαρκτό πεδίο ροής γύρω από την γάστρα συμπληρωμένο με το κατοπτρικό του (ως προς την ελεύθερη επιφάνεια) (Σχήμα 2). Ως εκ τούτου, ο ενεργός λόγος επιμήκους της γάστρας λαμβάνεται . ea 2 /T L
Σχήμα 2: Επίδραση του φαινομένου του κατοπτρισμού στο πεδίο ροής γύρω από τη γάστρα ( δυναμικό της ταχύτητας της ροής) . Φ−
- 293 -

35
Εξαιτίας της θεώρησης της γάστρας ως πτερυγίου η σχέση (15) εφαρμοζόμενη εδώ δίνει:
( ) ( ) ( )/ 2 Lv hh
h
CY A V ∂ρ∂β
⎡ ⎤⎛ ⎞= − +⎢ ⎥⎜ ⎟
⎝ ⎠⎣ ⎦D h
C , (24)
όπου η διαμήκης προβολή της επιφάνειας της γάστρας. Για λόγους επιμήκους μεγαλύτερους του 1/5 (γεγονός που ισχύει για τον ενεργό λόγο επιμήκους της γάστρας) ισχύει (Abbot & Doenhoff,1958):
hA
2L
eh
C a∂ π∂β
⎛ ⎞=⎜ ⎟
⎝ ⎠
ea : ενεργός λόγος επιμήκους.
Στην προκειμένη περίπτωση δηλαδή είναι:
L
h
C TL
∂ π∂β
⎛ ⎞=⎜ ⎟
⎝ ⎠. (25)
Αν ο συντελεστής ( )D hC μπορεί να ληφθεί από τα χαρακτηριστικά αντίστασης σε μηδενική γωνία πρόσπτωσης, αδιαστατοποιημένη η σχέση (24) γίνεται:
( ) ( )v Dh h
TY΄ CLπ⎛ ⎞= − +⎜ ⎟⎝ ⎠
. (26)
Η υδροδυναμική παράγωγος με χρήση της θεωρίας λωρίδων λαμβάνει την ακόλουθη μορφή:
( )v hN΄
( ) ( ) ( )2 1p
v vh
xN΄ ΄ k ΄ Y΄
L= − Δ − Δ +
h, (27)
όπου
′Δ : αδιάστατη μάζα του πλοίου (μέγεθος αδιαστατοποίησης= 2
2L Tρ ),
22 22 2 2( / 2) ( / 2) 2
stern
sbow
k L΄ C h dxL T L T T
ρ πρ ρΔ
Δ = = ∫ ,
sC : διδιάστατος συντελεστής πρόσθετης μάζας που καθορίζεται για κάθε λωρίδα νομέα πλάτους κατά μήκος του dx x − άξονα. Τιμές αυτού φαίνονται στο Σχήμα 3,
1k ′Δ : Πρόσθετη μάζα του πλοίου κατά την x − διεύθυνση,
2΄Δ : πρόσθετη μάζα του πλοίου κατά την y − διεύθυνση, h : τοπικό βύθισμα σε κάθε νομέα,
1 2,k k :συντελεστές των οποίων οι τιμές παίρνονται από το διάγραμμα του Σχήματος 4,
px : διαμήκης απόσταση από το μέσο νομέα του κέντρου της προβολής της επιφάνειας της γάστρας στο επίπεδο, Oxz
( )v hY΄ : τιμή που λαμβάνεται από την σχέση (26).
- 294 -

36
Σχήμα 3. Τιμές των διδιάστατων συντελεστών προσθέτων μαζών
Σχήμα 4. Τιμές των συντελεστών 1 2, ,k k k′
Στην συνέχεια δίνονται οι τύποι υπολογισμού των ( )rh
Y ′ και ( )rh
N ′
( ) ( )1p
r vh h
xY k Y
L′ ′′= − Δ + , (28)
( ) ( )2o
r zh h
xxN YL L
′ ′= −Δ + v′ , (29)
όπου
- 295 -

37
22
zkk′′ ′Δ = Δ ,
2
2
stern
sbowstern
sbow
C h xdxx
C h dx=∫
∫,
και x : απόσταση από την αρχή των αξόνων της λωρίδας νομέα πάχους dx, θετική
αν είναι πρώραθεν, αρνητική αν είναι πρύμνηθεν, ox
L: λαμβάνεται ως η μισή τιμή του πρισματικού συντελεστή του πλοίου.
Οι υδροδυναμικές παράγωγοι έχουν πολύ μικρές τιμές για καθαρή γάστρα και πρακτικά λαμβάνονται μηδενικές.
,r vY N
Για τις παραγώγους ( )vh
Y ′ και ( )rh
N ′ ισχύει:
( ) 222 2( / 2) 2
stern
vh bow
k LYL T T
ρ πρ−′ ′= −Δ = ∫ sC h dx , (30)
( ) 2 24( / 2) 2
stern
r sh bow
k LNL T T
ρ πρ
′′ = − ∫ C h x dx . (31)
Στους πίνακες 1 και 2 που ακολουθούν φαίνονται ενδεικτικές τιμές των υδροδυναμικών παραγώγων για μοντέλα με τύπους γαστρών της σειράς 60. Οι κωδικοί που φαίνονται στους πίνακες και αποτελούνται από 3 ακέραιους αριθμούς δηλώνουν τα ακριβή γεωμετρικά χαρακτηριστικά του κάθε μοντέλου. Οι αντιστοιχίες φαίνονται στο πίνακα που ακολουθεί.
Μοντέλο L/B B/T L/T CP CB x΄G x΄μέσ.νομ Έλικα Πηδάλιο, Επιφάν.
1,1,1 7,5 2,5 18,75 0,614 0,60 0 0,015 1 1, 0,016 2,1,1 7,0 2,68 18,75 0,614 0,60 0 0,015 1 1, 0,016 2,1,2 7,0 2,68 18,75 0,614 0,60 0 0,015 1 2, 0,025 2,1,3 7,0 2,68 18,75 0,614 0,60 0 0,015 1 3, 0,012 3,1,1 6,0 3,12 18,75 0,614 0,60 0 0,015 1 1, 0,016 4,1,1 8,0 2,34 18,75 0,614 0,60 0 0,015 1 1, 0,016 5,1,1 7,0 3,28 23,0 0,614 0,60 0 0,015 1 1, 0,016 6,1,1 7,0 2,07 14,50 0,614 0,60 0 0,015 1 1, 0,016 7,1,1 7,0 2,68 18,75 0,713 0,70 0 0,005 1 1, 0,016 8,1,1 7,0 2,68 18,75 0,807 0,80 0 -0,025 1 1, 0,016
Με βάση τα αποτελέσματα των Πινάκων 1,2 μπορεί να γίνει σύγκριση μεταξύ θεωρητικά προβλεπόμενων τιμών και πειραματικών αποτελεσμάτων. ΠΙΝΑΚΑΣ 1 (Πειραματικές και θεωρητικές τιμές των υδροδυναμικών παραγώγων μοντέλων με τύπους γαστρών της σειράς 60)
- 296 -

CB 0.60 0.70 0.80 L/B 6.0 7.0 7.5 8.0 2,1,1 7,1,1 8,1,1 3,1,1 2,1,1 1,1,1 4,1,1 B/T 2.68 2.68 2.68 B/T 3.12 2.68 2.50 2.34 Δ΄ 0.171 0.200 0.229 Δ΄ 0.200 0.171 0.160 0.150 LCG/L 0.515 0.505 0.475 LCG/L 0.515 0.515 0.515 0.515 Υδροδυναμικές παράγωγοι υπολογισμένες αναλυτικά
-Y΄v 0.335 0.335 0.335 0.335 0.335 0.335 0.335 -N΄v 0.086 0.097 0.095 0.085 0.086 0.088 0.089 Y΄r 0.076 0.075 0.089 0.076 0.076 0.077 0.067 N΄r -0.066 -0.068 -0.077 -0.066 -0.066 -0.066 -0.066 Y΄γ 0.038 0.038 0.038 0.038 0.038 0.038 0.038 Ν΄γ -0.019 -0.019 -0.019 -0.019 -0.019 -0.019 -0.019 Υδροδυναμικές παράγωγοι υπολογισμένες πειραματικά
-Y΄v 0.305 0.324 0.354 0.308 0.305 0.270 0.283 -N΄v 0.095 0.104 0.086 0.089 0.095 0.108 0.091 Y΄r 0.090 0.083 0.085 0.089 0.090 0.088 0.088 N΄r -0.070 -0.068 -0.060 -0.075 -0.070 -0.067 -0.066 Y΄γ -0.024 -0.025 -0.035 -0.024 -0.022 Ν΄γ 0.050 0.052 0.065 0.050 0.046 ΠΙΝΑΚΑΣ 2 (Πειραματικές και θεωρητικές τιμές των υδροδυναμικών παραγώγων μοντέλων με τύπους γαστρών της σειράς 60) L/T 14.5 18.75 23.0 A’T 0 0.012 0.016 0.025 6,1,1 2,1,1 5,1,1 2,1,3 2,1,1 2,1,2 B/T 2.07 2.68 3.28 B/T 2.68 2.68 2.68 2.68 Δ΄ 0.171 0.171 0.171 Δ΄ 0.1710 0.171 0.171 0.171 LCG/L 0.515 0.515 0.515 LCG/L 0.515 0.515 0.515 0.515 Υδροδυναμικές παράγωγοι υπολογισμένες αναλυτικά
-Y΄v 0.434 0.335 0.273 0.303 0.329 0.335 0.347 -N΄v 0.114 0.086 0.071 0.110 0.089 0.082 0.080 Y΄r 0.094 0.076 0.061 0.052 0.073 0.076 0.082 N΄r -0.081 -0.066 -0.054 -0.055 -0.065 -0.066 -0.069 Y΄γ 0.045 0.038 0.031 0.034 0.038 0.041 Ν΄γ -0.023 -0.019 -0.015 -0.017 -0.019 -0.021 Υδροδυναμικές παράγωγοι υπολογισμένες πειραματικά
-Y΄v 0.349 0.305 0.260 0.245 0.293 0.305 0.311
38 - 297 -

-N΄v 0.133 0.095 0.075 0.114 0.100 0.095 0.081 Y΄r 0.099 0.090 0.094 0.070 0.082 0.090 0.096 N΄r -0.081 -0.070 -0.057 -0.055 -0.073 -0.070 -0.076 Y΄γ -0.024 -0.018 -0.024 -0.031 Ν΄γ 0.050 0.037 0.050 0.060
39 - 298 -

Παράρτημα εδαφίου 6 Διαγράμματα συντελεστών άνωσης και αντίστασης για υδροτομές NACA 0009, 0012, 0018.
40 - 299 -

41 - 300 -

42 - 301 -

Γ. Α. Αθανασούλης 29/3/2012 2:17 πμ 43
7. Μελέτη της κίνησης στο οριζόντιο επίπεδο: Ι. Κίνηση κατά το διαμήκη άξονα Στο εδάφιο αυτό μελετάται η προς τα πρόσω κίνηση του πλοίου με τη βοήθεια της εξίσωσης 4(5a). Για τη μελέτη της ευστάθειας της κίνησης αυτής θα εξετασθεί η χρονική εξέλιξη της διαταραχής ( )u tδ , η οποία οφείλεται στη δράση μιας
κρουστικής («στιγμιαίας») δύναμης ( ) ( )1 10X t X tδ= . (τέτοιου είδους δυνάμεις μπορεί να προκύψουν π.χ. από μια στιγμιαία αύξηση/μείωση των στροφών της μηχανής λόγω ξενερίσματος της έλικας ή άλλης αιτίας). Στην περίπτωση αυτή, η εξίσωση κίνησης κατά τον διαμήκη άξονα γράφεται στη μορφή:
( ) ( )10u um X u X u X tδ δ δ− − = . (1)
Για να επιλύσουμε την εξίσωση (1) θα την μετατρέψουμε σε ένα ισοδύναμο κλασσικό πρόβλημα αρχικών τιμών. Προς τούτο ολοκληρώνουμε τα δύο μέλη της εξίσωσης (1) από t ε= − έως t ε= + και ύστερα θεωρούμε ( 0ε > ) 0ε → :
. (2) ( ) ( ) ( ) ( )10 10
t ttu ut t t
m X u t X u t dt X t dt Xε εε
ε ε εδ δ δ
=+ =+=+
=− =− =−− − =⎤⎦ ∫ ∫ =
Δεδομένου ότι η ταχύτητα διαταραχής ( )u tδ παραμένει φραγμένη στο διάστημα
[ ],ε ε− + , στο όριο 0ε − > , το ολοκλήρωμα ( )u t dtδ∫ τείνει στο μηδέν, και η
σχέση (2) γίνεται:
( ) ( ) ( ) 100 0um X u u Xδ δ− + − − = . (3)
Όμως , εφ’ όσον για 0( )0uδ − = 0 t < δεν έχει επιδράσει η κρουστική φόρτιση και άρα δεν έχει διαταραχθεί η ομοιόμορφη κίνηση του πλοίου. Έτσι, από την (3) προκύπτει
( ) 1000
u
Xum X
uδ δ+ = =−
. (4)
Κατά συνέπεια, η διαφορική εξίσωση (1) είναι ισοδύναμη με το ακόλουθο πρόβλημα αρχικών τιμών,
, (5) ( ) 0u um X u X uδ δ− − =
u ( ) 00uδ δ= , (6)
όπου 0uδ δίδεται από τη σχέση (4). Το ανωτέρω πρόβλημα αρχικών τιμών θα επιλυθεί με τη βοήθεια του μετασχηματισμού Laplace (αν και λόγω της απλότητάς του μπορεί εύκολα να επιλυθεί και με απ’ ευθείας ολοκλήρωση). Μετασχηματίζοντας κατά Laplace και τα δύο μέλη της (5) παίρνουμε
( ) ( ) ( ) ( )0um X s U s u X U sδ δ δ− − −⎡ ⎤⎣ ⎦ 0u = , (7) όπου
. (8) ( ) ( ) ( )0
stU s u t , t s e u t dtδ δ δ∞
−= → = ∫L
Επιλύοντας της εξίσωση (7), παίρνουμε:
- 302 -

( ) 0
3
uU ssδδσ
=−
, όπου 3u
u
Xm X
σ =−
. (9)
Με χρήση του αντιστρόφου μετασχηματισμού Laplace η (9) μας δίνει την λύση:
( ) 30
tu t u eσδ δ= . (10) Για πλοία συμβατικής μορφής ο αριθμός 3σ είναι αρνητικός, δεδομένου ότι και 0 , και επομένως η λύση (10) παριστάνει μια εκθετικά φθίνουσα διαταραχή (βλ. Σχήμα 1) με όριο
0uX <
um X− >
( ) 0tlim u tδ→∞
= .
Κατά συνέπεια, μια οποιαδήποτε κρουστική φόρτιση κατά τον διαμήκη άξονα προκαλεί διαταραχή της ταχύτητας, η οποία αποσβένυται εκθετικά με το χρόνο. Το πλοίο επιστρέφει στην αρχική κατάσταση αναφοράς (σταθερή μέση ταχύτητα ), θεωρητικά μεν ασυμπτωτικά, πρακτικά δε μετά την πάροδο κάποιου (μικρού) χρονικού διαστήματος το οποίο εξαρτάται από το μέγεθος του εκθέτη
U
3σ . Με άλλα λόγια τα συμβατικά πλοία είναι ευσταθή σε διαταραχές κατά τον διαμήκη άξονα. Η εξίσωση κίνησης του πλοίου κατά τον διαμήκη άξονα 4(5a) μπορεί (θεωρητικά) επίσης να χρησιμοποιηθεί για τον υπολογισμό της ταχύτητας ( )u t όταν στο πλοίο
ασκείται μια οποιαδήποτε (γνωστή) εξωτερική διεγείρουσα δύναμη ( )1X t
)
. Στην περίπτωση όμως αυτή η παράλειψη των μη γραμμικών όρων καθίσταται γρήγορα σημαντική, δεδομένου ότι η επίδραση μιας διαρκούς φόρτισης (1X t μπορεί να οδηγήσει σε σημαντική μεταβολή της μέσης ταχύτητας U .
0uδ
( )u tδ
t
Σχήμα 1: Η συνάρτηση ( )u tδ
44 E:\koko_shmeiwseis\koko55\04_07_motions_study_in_horizontal_plane_I_x-motion.doc - 303 -

8. Μελέτη της κίνησης στο οριζόντιο επίπεδο: ΙΙ. Ευστάθεια Στο εδάφιο αυτό, με τη βοήθεια του συστήματος 4(7b,c), θα μελετήσουμε της ευστάθεια ευθύγραμμης πορείας ενός πλοίου κινούμενου με σταθερή μέση ταχύτητα
, χωρίς την χρήση επιφανειών ελέγχου ή άλλων μέσων πηδαλιουχίας. Το σύστημα 4(7b,c) επαναλαμβάνεται εδώ χάριν ευκολίας: U
( ) ( ) ( ) ( )10v v G r rm Y v Y v m Y r mU Y r Y tξ δ− − + − + − = , (1) ( ) ( ) ( ) (10G v v r G rm N v N v I N r m U N r N tζζξ ξ− − + − + − = )δ . Η δράση των κρουστικών φορτίσεων ( )10Y tδ και ( )10N tδ έχει ως αποτέλεσμα τη
στιγμιαία μεταβολή των ταχυτήτων διαταραχής ( )v t και ( )r t από και
σε ( )0v − = 0
( )0r − = ( )0 0v + ≠ και ( )0r 0+ ≠ . Για να βρούμε τις τιμές και ( )0+ 0rv ( )+ εργαζόμεθα τελείως ανάλογα με την προηγούμενη περίπτωση (εδάφιο 7), όπου εξετάσαμε την ευστάθεια της κίνησης του πλοίου κατά το διαμήκη άξονα. Κατ’ αρχήν ολοκληρώνουμε τις εξισώσεις (1) από t ε=− έως 0t ,ε ε=+ > , και θεωρούμε
0ε → . Τότε, λαμβάνονται υπ’ όψιν τις σχέσεις
( ) 1t
t
t dtε
ε
δ=+
=−
=∫ , ( )0 0t
lim
t
v t dtε
ε
ε=+
=−
⎯⎯→ =∫ ,
και ( ) ( ) ( ) ( )0 0 0t
lim
t
v t dt v v vε
ε
ε=+
=−
0⎯⎯→ = + − − =∫ + ,
παίρνουμε: ( ) ( ) ( ) ( ) 100 0v G rm Y v m Y r Yξ ′− + + − + = , (2) ( ) ( ) ( ) ( ) 100 0G v rm N v I N r Nζζξ ′− + + − + = . Επιλύοντας το σύστημα (2) ως προς ( )0v + και ( )0r + βρίσκουμε:
( ) ( ) ( )( )( ) ( )( )
10 1000 r G r
v r G v G
Y I N N m Yv v
m Y I N m N m Yζζ
ζζ
ξ
ξ ξ
− − −+ = =
− − − − − r
,
και (3)
( ) ( ) ( )( )( ) ( )( )
10 1000 v v
v r G v G
Y I N N m Yr r
m Y I N m N m Yζζ
ζζ ξ ξ
− − + −+ = =
− − − − − r
.
Κατά συνέπεια, για τον υπολογισμό των διαταραχών ( )v t και ( )r t αρκεί να επιλυθεί το πρόβλημα αρχικών τιμών ( ) ( ) ( ) 0v v G r rm Y v Y v m Y r mU Y rξ− − + − + − = ,
( ) ( ) ( ) 0G v v r G rm N v N v I N r m U N rζζξ ξ− − + − + − = ,
- 304 -

με αρχικές συνθήκες (4) , ( ) ( ) 00 0v v= + = v
r , ( ) ( ) 00 0r r= + = όπου το και δίνονται από τις (3). 0v 0r Μετασχηματίζοντας κατά Laplace το πρόβλημα (4) προκύπτει το ακόλουθο (αλγεβρικό) σύστημα εξισώσεων: , ( ) ( ) ( ) ( )11 12 1A s V s A s R s B+ = (5) , ( ) ( ) ( ) ( )21 22 2A s V s A s R s B+ = όπου ( ) ( )11 v vA s Y s m Y= − + − , ( ) ( ) ( )12 r G rA s mU Y s m Yξ= − + − ,
( ) ( )21 v G vA s N s m Nξ= − + − , ( ) ( ) ( )22 G r rA s m U N s I Nζζξ= − + − , (6)
( ) (1 A v A G )rB v m Y r m Yξ= − + − , ( ) ( )2 A G v A rB v m N r I Nζζξ= − + − ,
( ) ( ) ( )0
stV s v t , t s e v t dt∞
−= → = ∫L ,
(7)
( ) ( ) ( )0
stR s r t , t s e r t∞
−= → = ∫L dt ,
είναι οι μετασχηματισμένες κατά Laplace των συναρτήσεων ( )v t και . Ας σημειωθεί ότι οι συντελεστές
( )r t1 2klA , k ,l ,= , είναι οι γραμμικές συναρτήσεις της
παραμέτρου , ενώ οι συντελεστές s kB είναι ανεξάρτητοι του . s Η διακρίνουσα του συστήματος (5) είναι ένα δευτεροβάθμιο τριώνυμο του το οποίο ορίζεται από τη σχέση:
s
, (8) ( ) ( )( ) ( ) ( )(11 12 2
1 221 22
A s A sAs Bs C A s s
A s A sΔ σ
⎛ ⎞= = + + = −⎜ ⎟⎝ ⎠
)σ−
όπου οι σταθερές , είναι ανεξάρτητες του και δίδονται από τις σχέσεις: A,B,C s
( )( ) ( )( )v r r G vA Y m N I Y m N mζζ Gξ ξ= − − − − − ,
( )( ) ( )v r G r vB Y m N m U N I Yζζξ= − − − − −
( ) ( )( )r G v v G rY m N N m Y mUξ ξ− − − − − , (9)
( ) ( )v r G v rC Y N m U N Y mUξ= − − − . Οι ρίζες 1 , 2σ σ του τριωνύμου 2As Bs C+ + δίδονται από τη σχέση:
- 305 -

2
1 2 2 2,B B CA A
σ ⎛ ⎞= − ± −⎜ ⎟⎝ ⎠ A
)
. (10)
Με τη βοήθεια των σχέσεων (6) και (8) η λύση του συστήματος (5) γράφεται στη μορφή
( ) ( )(
( ) ( )( )
1 2
1 2
a sV s ,A s s
sR s ,A s s
βσ σγ δσ σ
+=
− −
+=
− −
(11)
όπου , ( ) (1 2G ra B m U N B mU Yξ= − − )r− ( ) ( )1 2r G rB I N B m Yζζβ ξ= − − − , (12) 1 2v vB N B Yγ = − , ( ) (1 2G v v )B m Y B m Yδ ξ= − − + − . Ας σημειωθεί ότι οι ανωτέρω ποσότητες a, , ,β γ δ , είναι επίσης ανεξάρτητες του . Αναλύοντας σε απλά κλάσματα τα δεξιά μέλη των σχέσεων (11) βρίσκουμε:
s
( ) ( ) ( )
( ) ( ) ( )
1 2
1 2
1 2
1 1
v vV s ,s s
r rR s ,s s
σ σ
σ σ
= +− −
= +− −
(13)
όπου:
( )
11
1 2
avA
βσσ σ+
= −−
, ( )
22
1 2
avA
σ βσ σ+
= −−
,
(14)
( )
11
2 1
rAγ δσσ σ+
= −−
, ( )
22
2 1
rAγ δσσ σ+
= −−
.
Με τη χρήση του αντίστροφου μετασχηματισμού Laplace, από τις σχέσεις (13) προκύπτει αμέσως ότι η λύση του αρχικού προβλήματος (4) είναι: ( ) 1 2
1 2t tv t v e v eσ σ= + ,
(15) ( ) 1 2
1 2t tr t r e r eσ σ= + .
Οι τελευταίες εξισώσεις περιγράφουν πως θα εξελιχθούν, συναρτήσει του χρόνου, οι στιγμιαίες διαταραχές και , τις οποίες υπέστη το πλοίο τη χρονική στιγμή , λόγω της επίδρασης των κρουστικών φορτίων
0v 0r 0t =
( )10Y tδ και ( )10N tδ . Η (ασυμπτωτική) ευστάθεια κατευθύνσεως του εξεταζόμενου πλοίου ισοδυναμεί με τον (ασυμπτωτικό) μηδενισμό των ταχυτήτων διαταραχής ( )v t και , καθώς
. Βάσει των σχέσεων (15), καταλήγουμε στο συμπέρασμα πως ένα πλοίο θα είναι ευσταθές όταν και μόνον όταν οι σταθερές
( )r tt→∞
1σ και 2σ είναι είτε πραγματικοί αρνητικοί αριθμοί, είτε μιγαδικοί αριθμοί με αρνητικό πραγματικό μέρος. Δηλαδή όταν
- 306 -

1 1 1jvσ μ= + και 2 2 2jvσ μ= + με 1 2 0,μ μ < και 1 2v v v IR= − = ∈ . (16) Οι συνθήκες (16) ισοδυναμούν με τις συνθήκες:
0CA> και 0B
A> . (17)
(Διότι 1 2 B / Aσ σ+ = − και 1 2 C / Aσ σ = ). Προκειμένου να εξετασθεί πότε ισχύουν οι συνθήκες (17), θα εξετάσουμε ξεχωριστά τα πρόσημα των σταθερών και , οι οποίες ορίζονται από τις σχέσεις (9).
A,B C
Όσον αφορά το πρόσημο του A θα πρέπει να λάβουμε υπ’ όψη ότι οι ποσότητες
και ( vY m− ) )( rN Iζζ− είναι μεγάλοι αρνητικοί αριθμοί, ενώ οι ποσότητες
( )GvY mξ− και ( rN m )Gξ− (1) είναι μικροί κατ’ απόλυτη τιμή, θετικοί ή αρνητικοί, αριθμοί. Επομένως ο A είναι μεγάλος θετικός αριθμός. Ο αριθμός B είναι επίσης θετικός διότι οι ποσότητες ( ) ( ) ( )v r G rY m , N m U , N Iζζξ− − − , είναι μεγάλοι
αρνητικοί αριθμοί, ενώ οι ποσότητες vY
( ) ( )r G v vY m , N , N Gmξ ξ− − και είναι μικροί κατ’ απόλυτη τιμή, θετικοί ή αρνητικοί, αριθμοί. Κατά συνέπεια, τουλάχιστον για συμβατικά πλοία, ισχύουν πάντοτε οι ανισότητες:
( )rY mU−
0 και . (18) A > 0B > Από τις (17) και (18) προκύπτει ότι ένα πλοίο είναι ευσταθές αν και μόνον αν ισχύει η σχέση:
( ) ( ) 0v r G v rC Y N m U N Y mUξ= − − − >
− − ± −. (19)
Το πρόσημο του δεν μπορεί να προβλεφθεί εκ των προτέρων διότι οι ποσότητες
και είναι μεγάλοι αρνητικοί αριθμοί, ενώ η υδροδυναμική παράγωγος είναι (μικρός) θετικός ή αρνητικός αριθμός.
C( )v r GY , N m Uξ− ( rY mU−
vN)
Από τα παραπάνω γίνεται φανερό ότι η ανισότητα (19) αποτελεί το τελικό κριτήριο για την ευστάθεια ευθύγραμμης πορείας πλοίων συμβατικής μορφής. Για το λόγο αυτό, η ποσότητα ονομάζεται δείκτης ευστάθειας του πλοίου. Όπως φαίνεται από τη σχέση (19), ο δείκτης ευστάθειας ενός πλοίου εξαρτάται από τη μάζα του πλοίου
, τη θέση του κέντρου βάρους του
C
m Gξ , την ταχύτητα , και τις τέσσαρες υδροδυναμικές παραγώγους ως προς τις εγκάρσιες ταχύτητες .
U
v rY ,N v,N ,Yr
G(1) Η προσημασμένη απόσταση ξ του κέντρου βάρους είναι είτε μηδέν, αν ως αρχή των αξόνων
ληφθεί το κέντρο βάρους, είτε μικρός θετικός ή αρνητικός αριθμός, αν ως αρχή των αξόνων ληφθεί το μέσο του πλοίου.
- 307 -

Στο σημείο αυτό θα πρέπει να τονισθεί η ιδιαίτερη σημασία της υδροδυναμικής παραγώγου για την ευστάθεια του πλοίου. Σύμφωνα με τη σχέση (19), αν τότε ισχύει οπωσδήποτε . Εν τούτοις, η υδροδυναμική παράγωγος δεν μπορεί να αντικαταστήσει τον δείκτη ευστάθειας , διότι η ανισότητα δεν συνεπάγεται κατ’ ανάγκη και ότι
vN 0vN >
vN0<
0C >C vN
0C < . Η υδροδυναμική παράγωγος αποτελεί σημαντική παράμετρο σχεδιάσεως ενός πλοίου, εφ’ όσον όσο μεγαλύτερη (αλγεβρικά) είναι η τιμή της, τόσο ευσταθέστερο καθίσταται το πλοίο. Προκειμένου να αυξηθεί η τιμή της , θα πρέπει να αυξηθούν οι δυνάμεις που ασκούνται από το νερό στο πρυμναίο τμήμα του πλοίου ή/και να ελαττωθούν οι αντίστοιχες δυνάμεις που ασκούνται στο πρωραίο τμήμα. Ένας εύκολος τρόπος για να επιτευχθεί αυτό είναι η προσθήκη καταλλήλων επιφανειών (skegs) στο πρυμναίο τμήμα. Θα πρέπει όμως να σημειωθεί ότι τόσο η υπέρμετρη ευστάθεια, όπως και η έλλειψη ευστάθειας, δεν είναι επιθυμητές. Και τούτο διότι στην πρώτη περίπτωση είναι περιορισμένες οι ελικτικές ικανότητες του πλοίου, ενώ στην δεύτερη περίπτωση απαιτείται συχνή (διαρκής) χρήση του πηδαλίου, γεγονός που οδηγεί στην ταχύτερη φθορά του μηχανισμού του.
vN
vN
Γ. Α. Αθανασούλης 29/3/2012 10:17 πμ 49 - 308 -

Γ. Α. Αθανασούλης 29/3/2012 2:18 πμ 51
9. Μελέτη της κίνησης στο οριζόντιο επίπεδο: ΙΙΙ. Πηδαλιουχία. Εξίσωση Nomoto Αντικείμενο του παρόντος εδαφίου είναι ο προσδιορισμός της απόκρισης ενός πλοίου σε δεδομένη ιστορία γωνιακής εκτροπής ( )tγ του πηδαλίου του. στην περίπτωση αυτή οι εγκάρσιες κινήσεις του πλοίου διέπονται από το σύστημα 4(8b,c), το οποίο επαναλαμβάνεται εδώ χάριν ευκολίας: ( ) ( ) ( ) ( )v G r v rm Y v m Y r Y v mU Y r Y tγξ γ− + − − + − = , (1) ( ) ( ) ( ) ( )G v r v G rm N v I N r N v m U N r N tζζ γξ ξ γ− + − − + − = . Περαιτέρω, θεωρούμε ότι το πηδάλιο εκτρέπεται συναρτήσει του χρόνου ως εξής:
Γωνία εκτροπής του πηδαλίου ( )
0 00
, tt , t ,γ
,<⎧⎪= ⎨ ≥⎪⎩ (2)
όπου ( )tγ γνωστή συνάρτηση του χρόνου. Επίσης θεωρούμε ότι κατά τη χρονική στιγμή το πλοίο έχει γνωστή εγκάρσια ταχύτητα και γνωστή γωνιακή ταχύτητα , δηλαδή:
0t =
0r0v
, ( ) 00v t v= = (3) . ( ) 00r t r= = Για τον υπολογισμό της απόκρισης του πλοίου υπό τις ανωτέρω συνθήκες, θα πρέπει να επιλυθεί το σύστημα (1) με διέγερση (2) και αρχικές συνθήκες (3). Μετασχηματίζοντας κατά Laplace το σύστημα (1), και λαμβάνοντας υπ’ όψιν μας τις σχέσεις (2) και (3), βρίσκουμε το ακόλουθο αλγεβρικό σύστημα ως προς και ( )V s
( )R s (πρβλ. με σύστημα 8(5)): ( ) ( ) ( ) ( ) ( )11 12 1A s V s A s R s B Y sγ Γ+ = + , (4) ( ) ( ) ( ) ( ) ( )21 22 2A s V s A S R s B N sγ Γ+ = + όπου και είναι οι μετασχηματισμένες κατά Laplace των
συναρτήσεων και ( ) ( )V s , R s
( )v t( )sΓ
(t( ), r t )γ , αντίστοιχα. Οι συντελεστές ( ) 1 2klA s , k ,l ,= , και
1 2B ,B , εξαρτώνται από τα αδρανειακά και υδροδυναμικά χαρακτηριστικά του πλοίου, και δίνονται από τις σχέσεις 8(6). Από την επίλυση του αλγεβρικού συστήματος (4) προκύπτει ότι (πρβλ. με λύση 8(13) του συστήματος 8(5)):
- 309 -

52 E:\koko_shmeiwseis\koko55\04_09_motions_study_in_horizontal_plane_ΙII_manouverability.doc
( ) ( )
( ) ( )
31 2 4
1 2 1
31 2 4
1 2 1
vv v vV s s ,s s s s
rr r r1
1
R s ss s s s
Γσ σ σ σ
Γσ σ σ σ
⎛ ⎞= + + +⎜ ⎟− − − −⎝
⎛ ⎞= + + +⎜ ⎟− − − −⎝ ⎠
,
⎠ (5)
όπου
( ) ( ) ( ) ( )( )
( ) ( )( )
1 23 4
2 1
1 23 4
2 1
G r r , r G r,
v v , v G v,
m U N Y mU Y N I N Y m U Y NV ,
A
N Y N Y m Y N m N Yr .
A
γ γ ζζ γ
γ γ γ γ
ξ σ ξ
σ σ
σ ξσ σ
γ⎡ ⎤− − − + − − −⎣ ⎦=
−
⎡ ⎤− − − − −⎣ ⎦=−
∓
∓
(6)
Στη σχέση (6a) ισχύει η αντιστοιχία 3 1v ,σ⇔− και 4v , 2σ⇔+ . Παρόμοια αντιστοιχία ισχύει και στην περίπτωση των , σχέση (6b). Οι συντελεστές 3r ,r4 1 2 1 2 1 2A, , ,v ,v ,r ,rσ σ , δίνοντας από τις σχέσεις 8(9a), 8(10) και 8(14). Αντιστρέφοντας κατά Laplace τις σχέσεις (5) προκύπτει ότι:
( ) ( ) ( ) ( )1 21 21 2 3 40
t t tt tv t v e v e v e v e dσ τ σ τσ σ γ τ − − τ⎡ ⎤= + + +⎣ ⎦∫ , (7a)
και
( ) ( ) ( ) ( )1 21 21 2 3 40
t t tt tr t r e r e r e r e dσ τ σ τσ σ γ τ − − τ⎡ ⎤= + + +⎣ ⎦∫ . (7b)
Οι εκφράσεις (7) αποτελούν τη γενική λύση του συστήματος (1) με διέγερση (2) και αρχικές συνθήκες (3). Η χρησιμότητα των σχέσεων (7) περιορίζεται εν μέρει, λόγω της πολυπλοκότητας τους. Για τον λόγο αυτό συχνά προχωρούμε στην παραγωγή απλούστερων παραλλαγών των εξισώσεων πηδαλιουχίας, όπως είναι, επί παραδείγματι, η εξίσωση Nomoto. - Αποσυζευγμένη μορφή των εξισώσεων πηδαλιουχίας Πριν προχωρήσουμε στην παραγωγή της εξίσωσης Nomoto, θα δώσουμε μια ισοδύναμη, αλλά αποσυζευγμένη, μορφή των εξισώσεων πηδαλιουχίας (1). Όπως περιγράφεται στο Συμπλήρωμα, στο τέλος του παρόντος εδαφίου, το σύστημα των εξισώσεων πηδαλιουχίας (1) μπορεί ισοδυνάμως να γραφεί στη μορφή: ( )1 2 1 2 3T ,T r T ,T r r K K Tγ γ+ + = + , (8a)
( )1 2 1 2 4v vT ,T v T ,T v v K K Tγ γ+ + = + , (8b) όπου
( )( ) ( )( )
( ) ( )1 2v r r G v
v G r r r
Y m N I Y m N mT T
Y m U N N Y mUζζ Gξ ξ
ξ
− − − − −=
− − −, (9a)
( )( ) ( ) ( ) ( )( )( ) ( )1 2
v r G r v r G v v G r
v G r v r
Y m N m U N I Y Y m N N m Y mUT T
Y m U N N Y mUζζξ ξ ξ
ξ
− − + − − − − − −+ =
− − −,
(9b)
- 310 -

Γ. Α. Αθανασούλης 29/3/2012 2:18 πμ 53
( ) ( )
3v G v
v v
N m Y Y m NT
N Y Y Nγ γ
γ γ
ξ− − −=
−, (9c)
( ) ( )( ) ( )4
r r G
r G r
N I Y Y m NT
N m U Y Y mU Nζζ γ γ
γ γ
ξ
ξ
− − −=
− − −, (9d)
( ) ( )
v v
v r G v r
N Y Y NK
Y N m U N Y mUγ γ
ξ−
=− − −
, (9e)
( ) (( ) (
))
v G vv
v r G v r
N m U Y Y mU NK
Y N m U N Y mUγ γξ
ξ− − −
=− − −
. (9f)
Κατ’ αυτόν τον τρόπο το αρχικό σύστημα των εξισώσεων πηδαλιουχίας (1), ανάγεται σε δυο αποσυζευγμένες διαφορικές εξισώσεις, μια ως προς τη γωνιακή ταχύτητα
(εξίσωση (8a)), και μια ως προς την εγκάρσια ταχύτητα ( )r t ( )v t (εξίσωση (8b)). Το αντίτιμο της αποσύζευξης αυτής είναι η αύξηση της τάξης των διαφορικών εξισώσεων. Από τις δυο εξισώσεις (8α) και (8b), μόνο η πρώτη ενδιαφέρει για την πηδαλιουχία του πλοίου. - Φυσική σημασία των σταθερών 1 2 3K ,T ,T ,T Η εξίσωση (8α) περιέχει τους συντελεστές και , οι οποίοι εξαρτώνται από τα αδρανειακά και τα υδροδυναμικά χαρακτηριστικά του πλοίου μέσω των σχέσεων (9). Οι συντελεστές αυτοί (ιδιαίτερα οι τρεις πρώτοι) έχουν ένα απλό και ενδιαφέρον φυσικό νόημα, το οποίο θα περιγράψουμε εδώ. Προς τούτο θεωρούμε την ειδική περίπτωση κίνησης όπου το πλοίο κινείται σε ευθεία πορεία και το πηδάλιο βρίσκεται σε μηδενική γωνία εκτροπής για
1 2K ,T ,T 3T
0t < , ενώ για η γωνία εκτροπής του πηδαλίου θεωρείται σταθερά και ίση με . δηλαδή
0t ≥
(10) ( )0
0 00
, t ,t
, t .γ
γ<⎧
= ⎨ ≥⎩ Αν αμελήσουμε τον όρο ( )3KT tγ στο δεξιά μέλος της εξίσωσης (8a), τότε προκύπτει ότι το πλοίο θα αποκτήσει γωνιακή ταχύτητα περιστροφής περί τον κατακόρυφο άξονα η οποία δίδεται από τη σχέση: ( ) 1 2
1 2t / T t / Tr t A e A e K 0γ
− −= + + , (11) όπου και κατάλληλες σταθερές (οι οποίες προσδιορίζονται από τις αρχικές συνθήκες). Από τη σχέση (11) μπορούμε αμέσως να συμπεράνουμε τη φυσική σημασία των όρων και . Οι ποσότητες , οι οποίες έχουν διαστάσεις χρόνου και σε ευσταθή πλοία είναι θετικές, χαρακτηρίζουν τους ρυθμούς απόσβεσης των μεταβατικών φαινομένων. Συγκεκριμένα, όσο μικρότερες είναι οι τιμές των και , τόσο γρηγορότερα αποσβένυται το μεταβατικό φαινόμενο, δηλαδή τόσο ταχύτερη είναι η απόκριση του πλοίου σε πηδαλιουχία. Δεδομένου ότι, εν γένει,
1A
2
2A
1 2T ,T K 1 2T ,T
1TT
- 311 -

54 E:\koko_shmeiwseis\koko55\04_09_motions_study_in_horizontal_plane_ΙII_manouverability.doc
1T >> 2T , η κρίσιμη ποσότητα, όσον αφορά την ταχύτητα απόκρισης σε πηδαλιουχία, είναι ο συντελεστής . 1T Καθώς αποσβένυνται οι εκθετικοί όροι, η γωνιακή ταχύτητα ( )r t τείνει την τιμή
0Kγ . Άρα όσο μεγαλύτερη είναι η τιμή της σταθεράς , τόσο μεγαλύτερη είναι και η τελική τιμή της γωνιακής ταχύτητας που αποκτά το πλοίο, πράγμα που σημαίνει ότι το πλοίο έχει καλύτερες ελικτικές ικανότητες.
K
Η σημασία του συντελεστή είναι μικρότερη από αυτήν των τριών άλλων συντελεστών και δεν θα περιγραφεί εδώ. Θα σημειώσουμε μόνο ότι η δράση του όρου
3T
3KT γ , στον οποίο περιλαμβάνεται ο συντελεστής , περιορίζεται στο χρονικό διάστημα κατά το οποίο λαμβάνει χώρα περιστροφή του πηδαλίου.
3T
Συνοψίζοντας τα ανωτέρω παρατηρούμε ότι οι ελικτικές ικανότητες του πλοίου περιγράφονται ικανοποιητικά μέσω των τεσσάρων συντελεστών και , εκ των οποίων σημαντικότεροι είναι οι δύο πρώτοι. Όπως θα δούμε στη συνέχεια, και άλλα μεγέθη τα οποία αφορούν τις ελικτικές ικανότητες του πλοίου, όπως η προχώρηση, η τακτική διάμετρος κ.λπ., μπορούν να εκφρασθούν συναρτήσει των ανωτέρω συντελεστών.
1 2K ,T ,T 3T
- Η εξίσωση Νομοτο Η εξίσωση (8α) συχνά απλουστεύεται περαιτέρω σε μια εξίσωση πρώτης τάξεως. Η απλούστευση αυτή επιτυγχάνεται προσεγγίζοντας κατάλληλα τη συνάρτηση μεταφοράς που αντιστοιχεί στην εξίσωση (8α). προς τούτο εργαζόμεθα ως εξής: μετασχηματίζουμε κατά Laplace την (8α) θεωρώντας ότι ( )0r 0= και και αγνοώντας τον όρο
( )0r = 0
3KT γ (ο οποίος είναι σημαντικός μόνον όταν το πηδάλιο στρέφεται γρήγορα), οπότε λαμβάνουμε ( ) )( ( ) ( ) ( )2
1 2 1 2T s R s T T sR s R s K sΓ+ + + =T , (12) όπου ( ) ( )( ; )R s L r t s= t → είναι η μετασχηματισμένη κατά Laplace της . Από
την (12) προκύπτει ότι η συνάρτηση μεταφοράς ( )r t
( )G s που αντιστοιχεί στην (8α) δίνεται από τη σχέση:
( ) ( )( )
( ) ( )( )( )
3
1 2
11 1
R s K T sG s
s T s TΓ+
s+ += = . (13)
Αναπτύσσοντας την κατά Taylor γύρω από την τιμή ( )G s 0s= παίνρουμε: ( ) )( ( ) (2 2 2 3
1 2 3 1 2 1 2 2 3 3 11 0G s K T T T s T T TT T T T T s s⎡ ⎤+ − − + + − − +⎣ ⎦ )= − . (14)
Από την παραπάνω ανάπτυξη προκύπτει ότι η ακόλουθη συνάρτηση μεταφοράς
- 312 -

Γ. Α. Αθανασούλης 29/3/2012 2:18 πμ 55
( )1 1KG sTs
=+
, (15)
με , αποτελεί την πρωτοτάξια προσέγγιση της συνάρτησης μεταφοράς στην περιοχή 0
1 2T T T T= + −
( )G s3
s= . Ακριβέστερα, ισχύει η σχέση ( ) ( ) ( )2
1 0G s G s s= + . Όμως η συνάρτηση μεταφοράς ( )1G s αντιστοιχεί στην πρωτοτάξια διαφορική εξίσωση Tr r Kγ+ = , (16) η οποία ονομάζεται εξίσωση Nomoto, από το όνομα του Ιάπωνα μηχανικού ο οποίος την εισήγαγε. Η εξίσωση αυτή περιέχει δύο μόνο συντελεστές, τους και
, οι οποίοι περιγράφουν ικανοποιητικά την ευστάθεια και τις ελικτικές ικανότητες του πλοίου, και οι οποίοι ονομάζονται δείκτες ποιότητας πηδαλιουχίας (steering quality indices). Το ακριβές νόημα των συντελεστών και καθίσταται φανερό με τη βοήθεια της γενικής λύσης της εξίσωσης Nomoto (πρβλ. σχέση (11) ανωτέρω):
K1 2T T T T= + − 3
K T
( ) ( ) ( )0
t t / Tt / T Kr t Ae e dT
τγ τ τ− −−= + ∫ , (17)
όπου η σταθερά A προσδιορίζεται από τις αρχικές συνθήκες. Βάσει της σχέσεως αυτής βλέπουμε ότι η ευστάθεια του πλοίου ισοδυναμεί με 0 , η γρήγορη απόκριση σε πηδαλιουχία ισοδυναμεί με μεγάλο, ενώ η ικανότητα στροφής αντιστοιχεί σε μεγάλο. Έτσι, οι σταθερές και ονομάζονται και ως εξής:
T >1 / T
1T , /K T K : Δείκτης ευστάθειας (ή ευστάθεια) T (course stability), : Ταχύτητα απόκρισης σε πηδαλιουχία 1 / T (responsiveness to rudder), : Ικανότητα στροφής K (turning stability). Η εξίσωση Nomoto είναι το απλούστερο δυνατό μοντέλο για τη μελέτη της ευστάθειας και της πηδαλιουχίας του πλοίου. Τίθεται βέβαια το εύλογο ερώτημα, πόσο καλά περιγράφει η εξίσωση Nomoto την κίνηση του πλοίου. Για να απαντήσουμε γενικά στο ερώτημα αυτό πρέπει να χρησιμοποιήσουμε τις ασυμπτωτικές ιδιότητες του μετασχηματισμού Laplace. Το γεγονός ότι η
προσεγγίζει ικανοποιητικά την ( )1G s
( )G s στη γειτονιά του σημείου 0 (δηλαδή για μικρές συχνότητες), έχει ως συνέπεια ότι η αντίστοιχη αρχέτυπη συνάρτηση
s=
( ) ( ) 11g t G s−= L 1 προσεγγίζει ικανοποιητικά τη ( ) ( ) 1−L 1g t G s= για
- 313 -

56 E:\koko_shmeiwseis\koko55\04_09_motions_study_in_horizontal_plane_ΙII_manouverability.doc
μεγάλους χρόνους (φορμαλιστικά για ). Από την παρατήρηση αυτή καταλαβαίνουμε ότι η εξίσωση Nomoto περιγράφει ικανοποιητικά την απόκριση του πλοίου για μεγάλους χρόνους, αλλά υστερεί στην περιγραφή του μεταβατικού φαινομένου, δηλαδή της πρώτης φάσεως της κινήσεως του πλοίου αμέσως μετά την εφαρμογή της διέγερσης (δηλαδή αμέσως μετά την αλλαγή θέσεως του πηδαλίου).
t→∞
Συμπλήρωμα εδαφίου 9: Παραγωγή της αποσυζευγμένης μορφής των εξισώσεων της
πηδαλιουχίας Σκοπός του συμπληρώματος αυτού είναι η περιγραφή της διαδικασίας αποσύζευξης των εξισώσεων πηδαλιουχίας (1), η οποία επιτυγχάνεται με ταυτόχρονη αύξηση της τάξης των αντίστοιχων διαφορικών εξισώσεων(1). Για την καλύτερη κατανόηση της διαδικασίας αποσύζευξης, αποφεύγεται η καταγραφή των μακροσκελών ενδιάμεσων αλγεβρικών εκφράσεων, ενώ περιγράφονται με σαφήνεια όλα τα βήματα της διαδικασίας,. Το αρχικό σύστημα των εξισώσεων πηδαλιουχίας, εξισώσεις (1), επιλύεται ως αλγεβρικό γραμμικό σύστημα κατά διάφορους τρόπους. Κατ’ αρχήν επιλύεται ως προς τις επιταχύνσεις v και , οπότε παίρνουμε εκφράσεις της μορφής: r
(Σ1) 1 2 1
1 2 3
v v vv v r
r E v E r E .
Δ Δ Δ
γ
= + +
= + +
,γ
,
,
γ
Επίσης, επιλύεται ως προς και , οπότε παίρνουμε σχέσεις της μορφής: v v
1 2 1
1 2 3
v v v
r r r
v v r
v E v E r E
Δ Δ Δ
γ
= + +
= + + (Σ2)
και, τέλος, επιλύεται ως προς και , οπότε βρίσκουμε r r
1 2 1
1 2 3
r r r
r r r
r v v
r E v E v E
Δ Δ Δ ,
.
γ
γ
= + +
= + + (Σ3)
Σε όλες τις ανωτέρω σχέσεις οι συντελεστές Δ και εξαρτώνται από τα αδρανειακά και τα υδροδυναμικά χαρακτηριστικά του πλοίου, αλλά όχι από τα μεγέθη
Ev, r , γ και
τις παραγώγους τους. Παραγωγίζοντας τώρα τις εξισώσεις (Σ1) ως προς χρόνο παίρνουμε τις σχέσεις: , 1 2 3v v rΔ Δ Δ= + + γ
3
(Σ4) 1 2r E v E r E γ= + +
. Τέλος, αντικαθιστώντας τη γωνιακή επιτάχυνση στην (Σ4a) από την (Σ3b), και τη γραμμική επιτάχυνση στην (Σ4b) από την (Σ2b), προκύπτουν ασύζευκτες εξισώσεις της μορφής:
rv
vxv
v −(1) Είναι γνωστό πως κάθε σύστημα γραμμικών εξισώσεων πρώτης τάξεως, μπορεί να αναχθεί σε μια διαφορική εξίσωση ιοστής τάξεως.
- 314 -

1 2 3v H v H v H H4γ γ+ + = + , (Σ5) 1 2 3 4r r rΘ Θ Θ γ Θ+ + = + γ . Το σύστημα των εξισώσεων (Σ5), η αναλυτική μορφή του οποίου δίδεται στο κυρίως εδάφιο 9 (εξισώσεις (8) και (9)), είναι ένα σύστημα δύο ανεξαρτήτων γραμμικών δευτεροτάξιων εξισώσεων με σταθερούς συντελεστές, το οποίο είναι ισοδύναμο με το αρχικό σύστημα.
Γ. Α. Αθανασούλης 29/3/2012 2:18 πμ 57 - 315 -

10. Δοκιμές πηδαλιουχίας και ελικτικές ικανότητες πλοίου Η θεωρία της δυναμικής ευστάθειας και πηδαλιουχίας που έχει ήδη εκτεθεί στα προηγούμενα εδάφια επιτρέπει τον προσδιορισμό (πρόβλεψη) των ελικτικών ικανοτήτων ενός πλοίου στο στάδιο της σχεδίασης, με χρήση μοντέλων και θεωρητικών μεθόδων. Επιτρέπει επίσης τη σχεδίαση (επιλογή) του συστήματος πηδαλιουχίας (βλ. και εδάφιο 13), έτσι ώστε να επιτυγχάνονται ορισμένα επιθυμητά χαρακτηριστικά ευστάθειας και πηδαλιουχίας του πλοίου. Βέβαια, όταν το πλοίο κατασκευασθεί, απαιτείται ο έλεγχος των πραγματικών ελικτικών ικανοτήτων και της ευστάθειας κατευθύνσεως αυτού. Ο έλεγχος αυτός γίνεται με τη βοήθεια ορισμένων δοκιμών, οι σημαντικότερες από τις οποίες περιγράφονται στο παρόν εδάφιο. Οι δοκιμές που περιγράφονται στη συνέχεια είναι οι ακόλουθες:
i) Σπειροειδής ελιγμός (Spiral maneuver, Dieudonne 1953) ii) Αντίστροφος σπειροειδής ελιγμός (Reverse spiral maneuver, Bech 1968) iii) Ελιγμός απλής επαναφοράς πηδαλίου (Pullout maneuver) iv) Κυκλικός ελιγμός (Circle or turning maneuver) v) Οφιοειδής ελιγμός (Zig-zag maneuver, Kempf 1944) vi) Ελιγμός σταματήματος (Stopping maneuver)
i) Σπειροειδής ελιγμός (Spiral maneuver)
Όπως για τον έλεγχο της στατικής ευστάθειας ενός νεοναυπηγηθέντος πλοίου εκτελείται το πείραμα ευσταθείας (το οποίο έχει μελετηθεί στο μάθημα Υδροστατική του Πλοίου), έτσι και για τον έλεγχο της ευστάθειας κατευθύνσεως ενός πλοίου εκτελείται παραδοσιακά ο σπειροεδής ελιγμός. Ο σπειροειδής ελιγμός εκτελείται ως εξής:
(α) Το πλοίο “σταθεροποιείται” σε ευθεία πορεία με προκαθορισμένη ταχύτητα (π.χ. την ταχύτητα υπηρεσίας). Στη συνέχεια, καθ’ όλη τη διάρκεια του ελιγμού, η παροχή του καυσίμου διατηρείται σταθερή.
U
(β) Όταν αποκατασταθεί πλήρως η μόνιμη ευθύγραμμη κίνηση στην προκαθορισμένη ταχύτητα , το πηδάλιο εκτρέπεται απότομα κατά μια μεγάλη γωνία
U1δ δ= (π.χ. , όπου συνήθως θετική θεωρείται η εκτροπή
προς τα αριστερά) και κρατείται στη θέση αυτή μέχρι να αποκατασταθεί σταθερή τιμή της γωνιακής ταχύτητας του πλοίου
1 = 20δ
1r r= . (Ο απαιτούμενος χρόνος για συμβατικά πλοία μετρίου μεγέθους είναι της τάξεως των 2 min). Το ζεύγος των τιμών 1( , 1)rδ σημειώνεται σε ένα διάγραμμα ( , r)δ . Βλ. Σχήμα 1.
(γ) Στη συνέχεια η γωνία εκτροπής του πηδαλίου ελαττώνεται κατά (έστω) 5ο, και επαναλαμβάνεται η ανωτέρω διαδικασία. Προκύπτει έτσι ένα νέο ζεύγος τιμών
2 2( , )rδ , το οποίο σημειώνεται στο ίδιο διάγραμμα ( , )rδ .
(δ) Η ίδια διαδικασία επαναλβάνεται για μικρότερες γωνίες εκτροπής του πηδαλίου 3 4, ,δ δ … έως την γωνία 1Nδ δ= − (π.χ. -20ο), και τα λαμβανόμενα ζεύγη τιμών
γωνίας εκτροπής πηδαλίου - γωνιακής ταχύτητας πλοίου 3 3 4 4( , ), ( , ), ,r rδ δ …
59 - 316 -

60
( ,N Nr )δ , σημειώνονται στο διάγραμμα ( , )rδ . Συνήθως, στην περιοχή των γωνιών εκτροπής από 5ο έως -5ο χρησιμοποιείται μικρότερο βήμα, π.χ. 1ο ή 2ο.
(ε) Η ανωτέρω διαδικασία (α), (β), (γ), (δ) επαναλαμβάνεται αρχίζοντας από δεξιά εκτροπή πηδαλίου, π.χ. από 1 20δ ′ = −
1 2, ,N N
, και προχωρώντας με τελείως αντίστοιχα βήματα έτσι ώστε 1 3 2 , ,…N N 1δ δ δ δ δ δ δ− −′ ′= =δ′ ′= = . Και πάλι, σε κάθε γωνία εκτροπής nδ ′ μετράται η αντίστοιχη μόνιμη τιμή της γωνιακής ταχύτητας του πλοίου . Τα προκύπτοντα ζεύγη nr′ ( , ), 1, 2,n nr n , Nδ ′ ′ = … , σημειώνονται και πάλι στο ίδιο διάγραμμα ( , )rδ .
Σχήμα 1: Σπειροειδής και αντίστροφος σπειροειδής ελιγμός για ευσταθές και ασταθές πλοίο.
Η μορφή του λαμβανομένου διαγράμματος ( , )rδ εξαρτάται ουσιωδώς από το εάν το πλοίο είναι ευσταθές ή ασταθές. (Βλ. Σχήμα 1). Στην πρώτη περίπτωση (ευσταθές πλοίο) η γωνιακή ταχύτητα που αντιστοιχεί σε κάθε γωνία εκτροπής του πηδαλίου rδ είναι μονοσημάτως ορισμένη. Προκύπτει έτσι μια μοναδική καμπύλη (συνάρτηση)
( )r r δ= , η οποία διαγράφεται κατά τη φορά όταν οι γωνίες εκτροπής βαίνουν μειούμενες, και κατά την αντίθετη φορά
0A→ → B0B A→ → όταν οι γωνίες
εκτροπής βαίνουν αυξανόμενες. Στην περίπτωση αυτή, σε μικρές τιμές της γωνίας δ
- 317 -

61
αντιστοιχούν μικρές τιμές της γωνιακής ταχύτητας , με συνέπεια η συμπεριφορά του πλοίου να προβλέπεται ικανοποιητικά (για μικρά
rδ ) από τις γραμμικές εξισώσεις
που αναπτύχθηκαν στο εδάφιο 6, εξισώσεις 6(8), και μελετήθηκαν διεξοδικά στο εδάφιο 9. Εφαρμόζοντας, π.χ., την αποσυζευγμένη εξίσωση πηδαλιουχίας 9(8α) για μια συγκεκριμένη φάση του σπειροειδούς ελιγμού, όπου έχουμε σταθερόnδ δ= = ,
, και άρα και σταθερόnr r= = 0, 0rδ = = 0r = , βρίσκουμε
0 ( )r
Υ NU Nδ δ−
− − (vY
m )n v
G r
r Nr KYδ
∂δ ∂δ ξ=
⎛ ⎞= =⎜ ⎟⎝ ⎠n vY N m
=v U−
r r
. (1)
Η ανωτέρω σχέση δίδει την κλίση της καμπύλης ( )δ= στο σημείο 0δ = και ορίζει την ευθεία r Kδ= , η οποία, στην περίπτωση ευσταθούς πλοίου, είναι όντως εφαπτομένη στην καμπύλη ( )r r δ= που προκύπτει από τις μετρήσεις. Η περιοχή των τιμών δ για τις οποίες η πειραματική καμπύλη και η (θεωρητική) ευθεία r Kδ= σχεδόν συμπίπτουν (π.χ. το τμήμα στο διάγραμμα του Σχήματος 1), είναι ακριβώς η περιοχή ισχύος της γραμμικής θεωρίας. Προφανής συνέπεια των ανωτέρω είναι ότι η αληθής τιμή του συντελεστή (ικανότητα στροφής) ευσταθούς πλοίου μπορεί εύκολα να προκύψει (μετρηθεί) από τον σπειροειδή ελιγμό, ως η κλίση της καμπύλης
1A B1
K
( )r r δ= στο σημείο 0δ = . Οι περιοχές και 1AA 1B B της καμπύλης ( )r r δ= μπορούν να προβλεφθούν θεωρητικά μόνο με χρήση μη γραμμικών
εξισώσεων πηδαλιουχίας (οι οποίες δεν αναπτύσσονται στις παρούσες σημειώσεις). Στην περίπτωση ασταθούς πλοίου προκύπτει ο βρόχος ΚΛΜΝ (βρόχος υστερήσεως). Ο βρόχος προκύπτει επειδή στο ασταθές πλοίο, για δεδομένη γωνία εκτροπής δ του πηδαλίου στο διάστημα lim limδ δ δ− < < + , όπου lim m| | li| |δ δ− = + , υπάρχουν δύο δυνατές γωνιακές ταχύτητες του πλοίου, μία προς τα δεξιά (αρνητική), , και μία προς τα αριστερά (θετική), , οι οποίες προκύπτουν ανάλογα με το εάν η γωνία εκτροπής του πηδαλίου λαμβάνει την τιμή
( ) 0r δ− <( ) 0r δ+ >
δ με μείωση από μεγαλύτερες προηγούμενες τιμές ή με αύξηση από μικρότερες προηγούμενες τιμές. Η φορά διαγραφής των κλάδων του βρόχου, που δείχνεται στο Σχήμα 1, είναι λοιπόν ουσιώδης. Με άλλα λόγια, για δεδομένη γωνία lim( , lim )δ δ δ− +∈
0>
, το πλοίο θα κινείται με γωνιακή ταχύτητα είτε είτε , ανάλογα με την προηγούμενη ιστορία της κίνησής του, ή/και με τις εξωτερικές επιδράσεις που ασκούνται σ’ αυτό (ρεύμα, κύμα, άνεμος). Η συμπεριφορά αυτή του ασταθούς πλοίου, που περιγράφεται από το βρόχο υστερήσεως, δεν μπορεί να ερμηνευθεί από τις γραμμικές εξισώσεις πηδαλιουχίας που αναπτύχθηκαν στα προηγούμενα εδάφια 6-9. Μπορεί όμως να ερμηνευθεί (και να προβλεφθεί θεωρητικά) με κατάλληλες μη γραμμικές εξισώσεις.
( ) 0r δ− < ( )r δ+
Ας σημειωθεί εδώ ότι η ιδιότητα ενός πλοίου να είναι ασταθές δεν είναι πάντοτε αρνητική, δεδομένου ότι όσο ευσταθέστερο είναι ένα πλοίο, τόσο δυσκολότερα πηδαλιουχείται. Έτσι, είναι συχνά προτιμότερο ένα μεγάλο πλοίο (το οποίο συνήθως κινείται σε χαμηλές ταχύτητες υπηρεσίας) να είναι ελαφρώς ασταθές, ώστε να πηδαλιουχείται ευκολότερα. Η αστάθεια κατευθύνσεως ενός πλοίου μπορεί να αντιμετωπισθεί με τη βοήθεια μηχανισμών πηδαλιουχίας με αυτόματο έλεγχο, έτσι ώστε να μην υπάρχει πρακτικά ούτε πρόβλημα διατηρήσεως της ευθείας πορείας.
- 318 -

62
Ο σπειροειδής ελιγμός μπορεί να επαναληφθεί για διάφορες ταχύτητες του πλοίου, U τα αποτελέσματα όμως είναι συνήθως παρόμοια. Αυτό που είναι ιδιαίτερα σημαντικό για τη σωστή εκτέλεση του σπειροειδούς ελιγμού είναι να κρατείται το πηδάλιο σε κάθε μια γωνία nδ δ= επαρκή χρόνο nt τ= , ώστε να αποκαθίσταται η μόνιμη κίνηση
σταθερόnr r= = πίδραση του χρ n. Η ε όνου τ στο διάγραμμα r δ− δείχνεται στο ρουσιάζονται τα διαγράμμα rΣχήμα 2, όπου πα τα δ− για το ίδιο αθές) πλοίο σε
ίδιες συνθήκες, με μοναδική διαφορά ότι ο χρ εκάστης φάσεως n
(ευστόνος δ δ= είναι
διαφορετικός:
a) 1minnτ = , b) 2minnτ = , c) nτ απεριόριστος (όσος χρειάζεται ώστε η γωνιακή ταχύτητα να καταστεί
στ
α αποτελέσματα σχήματος, που έχουν προκύψει από την αριθμητική επίλυση
r αθερά).
τουΤενός μη-γραμμικού συστήματος εξισώσεων πηδαλιουχίας (Strom-Tejsen 1965, βλ. επίσης Crane et al. 1989, Section 4), δείχνουν ότι, εάν ο χρόνος nτ δεν είναι αρκετός, προκύπτει ένας επιμήκης βρόχος υστερήσεως (Σχήματα 2(α) κα β)), ο οποίος όμως δεν ανταποκρίνεται στην πραγματικότητα. Πράγματι, από το Σχήμα 2(γ) είναι φανερό ότι το συγκεκριμένο πλοίο είναι απολύτως ευσταθές.
ι (
εκτέλεση του σπειροειδούς ελιγμού σε μεγάλα πλοία (π.χ. υπερδεξαμενόπλοια) Ηαπαιτεί υπερβολικά μεγάλο χρονικό διάστημα, αφού ο χρόνος για να φτάσουμε σε σταθερές τιμές της γωνιακής ταχύτητας r υπό σταθερό δ είναι μεγάλος. Ως συνέπεια αυτού, απαιτείται μεγάλη θαλάσσ έκταση για την τέλεσή του ελιγμού. Επι πλέον, τα αποτελέσματα του σπειροειδούς ελιγμού είναι πολύ ευαίσθητα σε εξωτερικές διεγέρσεις. Τα ανωτέρω μειονεκτήματα οδήγησαν στην εισαγωγή του αντίστροφου σπειροειδούς ελιγμού, ο οποίος περιγράφεται στη συνέχεια.
ια εκ
) Αντίστροφος σπειροειδής ελιγμός (Reverse spiral maneuver) ii
και αποτελεί
αντίστροφος σπειροειδής ελιγμός προτάθηκε από τον Bech το 1968, Οέναν εναλλακτικό τρόπο για τον πειραματικό (μέσω μετρήσεων) προσδιορισμό του διαγράμματος (ή του βρόχου) r δ− . Στα πλαίσια, όμως, του αντίστροφου σπειροειδούς ελιγμού επιδιώκεται διορισμός του γραφήματος της απεικόνισης
( )rο προσ
δ δ= , δηλαδή της αντίστροφης απεικόνισης της ( )r r δ= . Ιδιαίτερο ενδιαφέρον ζει το γεγονός ότι η απεικόνιση (r rπαρουσιά )δ δ→ = μονοσήμαντη για κάθε
τιμή της γωνιακής ταχύτητας r , ακόμη κα πλοία (δηλαδή και εντός του βρόχου υστερήσεως!!). Αυτό τ παράδοξο, εκ πρώτης όψεως, γεγονός, καθώς και η σχέση της καμπύλης ( )r
είναι ι για ασταθή
οδ δ= , που προκύπτει από τον αντίστροφο σπειροειδή ελιγμό,
- 319 -

α)
β)
γ)
Σχήμα 2. Αποτελέσματα σπειροειδούς ελιγμού (Strom – Tejsen, 1965)
63 - 320 -

64
με την καμπύλη (βρόχο) ( )r r δ= , που προκύπτει από τον ευθύ σπειροειδή ελιγμό, θα συζητηθούν στη συνέχεια. Ο αντίστροφος σπειροειδής ελιγμός εκτελείται ως εξής: Για δεδομένη (προκαθορισμένη) τιμή της γωνιακής ταχύτητας nr r= , το πλοίο πηδαλιουχείται καταλλήλως, έτσι ώστε να επιτύχει την τιμή αυτή. Δηλαδή, δοθείσης της τιμής , ο τιμονιέρης (ή ο αυτόματος πιλότος, εάν υπάρχει), επιβάλλει μια χρονική ιστορία εκτροπής του πηδαλίου
nr r=
( )tδ δ= , έτσι ώστε, η τιμή της γωνιακής ταχύτητας να τείνει τελικά προς την προκαθορισμένη τιμή . Για να επιτευχθεί αυτός ο ελιγμός, απαιτούνται οι ενδείξεις δύο οργάνων: ενός μετρητού της γωνίας εκτροπής του πηδαλίου και ενός γυροσκοπικού μηχανισμού μέτρησης της γωνιακής ταχύτητας του πλοίου (rate gyro). Πρακτικά η σύγκλιση πραγματοποιείται με τη βοήθεια “ταλαντωτικής” πηδαλιουχίας (διαρκείς μικρές εκτροπές του πηδαλίου με εύρος 2ο-4ο περίπου)), οπότε βέβαια προκύπτει και μια ελαφρώς ταλαντευόμενη (γύρω από την
) τιμή της . Το αντίστοιχο σημείο
( )r r t=
nr
nr→
)n
( )r t
( ,n rnr ( )r t δ του διαγράμματος rδ − προκύπτει λαμβάνοντας τη μέση τιμή των ταλαντευομένων ποσοτήτων ( )tδ και ( ) . Από την ανωτέρω περιγραφή είναι φανερό ότι, με τον αντίστροφο σπειροειδή ελιγμό, κάθε σημείο
r t
( ,n )nrδ του διαγράμματος rδ − κατασκευάζεται αυτοτελώς (ανεξαρτήτως των υπολοίπων). Άρα μπορούμε να βρίσκουμε τα σημεία ( ,n r )nδ με οποιαδήποτε σειρά. Εάν το πλοίο είναι ευσταθές και η τιμή είναι μικρή (ώστε να μπορούμε να θεωρήσουμε ισχυρή τη γραμμική θεωρία), τότε μπορούμε να ερμηνεύσουμε τη δυναμική του συστήματος με τη βοήθεια της εξίσωσης 9(8α) ως εξής:
nr
Θεωρώντας ότι οι όροι και 1 2 ( )TT r t 1 2( ) (T T r t)+ είναι αμελητέοι σε σχέση με τους όρους ( ), ( )r t K tδ και 3 ( )tKT δ , η εξίσωση 9(8α) γίνεται
3( ) ( ) ( )r t K t KT tδ δ≈ + . (2)
Λαμβάνοντας μέση τιμή σε ένα (κατάλληλο) χρονικό διάστημα [0, ]nτ παίρνουμε
( )30 0
1 ( ) ( ) ( )n n
n nn n
Kr r t dt t T t dt Kτ τ
δ δτ τ
= = + ≡∫ ∫ δ . (3)
Το ζεύγος ( , )n nrδ τοποθετείται στο διάγραμμα rδ − και αποτελεί ένα σημείο της καμπύλης του αντίστροφου σπειροειδούς ελιγμού. Η κλίση που προκύπτει από τη σχέση (3) είναι κατά κανόνα ελαφρώς μεγαλύτερη (απολύτως) από την κλίση που προκύπτει από τον ευθύ σπειροειδή ελιγμό. (Η σύγκριση αυτή έχει νόημα μόνο για ευσταθή πλοία). Στο Σχήμα 3 φαίνονται τα διαγράμματα του ευθέος και του αντιστρόφου σπειροειδούς ελιγμού για ένα μεγάλο Tanker (13th ITTC, September 1972). (Ο άξονας
KK
δ στο Σχήμα 3 έχει τις αρνητικές τιμές δεξιά και τις θετικές αριστερά. Γι’ αυτό το λόγο η μορφή του διαγράμματος είναι διαφορετική από αυτή των άλλων σχημάτων. Το ίδιο συμβαίνει και στο Σχήμα 5, κατωτέρω).
- 321 -

Σχήμα 3. Σύγκριση αποτελεσμάτων ευθέος και αντιστρόφου σπειροειδούς ελιγμού για ευσταθές πλοίο. (13th ITTC, 1972)
65 - 322 -

Σχήμα 4. Χαρακτηρισμός ευστάθειας πλοίου μέσω των αποτελεσμάτων του αντίστροφου σπειροειδούς ελιγμού. (Strom-Tejsen 1965, Crane et al. 1989)
66 - 323 -

Σχήμα 5. Συνδυασμός ευθέος και αντιστρόφου σπειροειδούς ελιγμού για ευσταθή και ασταθή γάστρα. (13th ITTC, 1972).
67 - 324 -

68
Ο συνολικός χρόνος που απαιτείται για την εκτέλεση του αντιστρόφου σπειροειδούς ελιγμού εξαρτάται από το χρόνο nτ που απαιτείται για τον υπολογισμό της κάθε τιμής nδ (βλ. σχέση (3)). Είναι όμως, κατά κανόνα, πολύ μικρότερος από τον αντίστοιχο χρόνο που απαιτείται για τον ευθύ σπειροειδή ελιγμό. Ένα άλλο σημαντικό πλεονέκτημα του αντίστροφου σπειροειδούς ελιγμού είναι ότι λαμβάνονται μονοσήμαντες τιμές της γωνίας δ ακόμη και μέσα στο βρόχο υστερήσεως. Έτσι, η καμπύλη του αντιστρόφου σπειροειδούς ελιγμού αποτελεί (υπό τις συνθήκες που περιγράψαμε ανωτέρω) έναν πραγματοποιήσιμο δρόμο σύνδεσης δύο περιοχών ευστάθειας του διαγράμματος r δ− , ο οποίος “διέρχεται” μέσα από την περιοχή αστάθειας (βρόχο υστερήσεως) του συστήματος. (Βλ. Σχήμα 1, καμπύλη ΝΝ1Λ1Λ). Η ακριβής μορφή της καμπύλης ( )rδ δ= στην περιοχή του (μέσα στο βρόχο υστερήσεως) παρέχει σημαντικές πληροφορίες για την ευστάθεια και την ικανότητα πηδαλιουχίας του πλοίου. Βλ. Σχήμα 4.
0r =
Τέλος, αναφέρουμε ότι συχνά οι δύο σπειροειδείς ελιγμοί (ο ευθύς και ο αντίστροφος) συνδυάζονται, έτσι ώστε ένα τμήμα της καμπύλης rδ − να λαμβάνεται με τον αντίστροφο (στην περιοχή του ), και η υπόλοιπη καμπύλη να λαμβάνεται με τον ευθύ. Βλ. Σχήμα 5.
(0, 0)
iii) Ελιγμός απλής επαναφοράς πηδαλίου (Pullout maneuver) Ο ελιγμός αυτός, ο οποίος μας δίδει ποιοτικό χαρακτηρισμό της ευστάθειας ευθύγραμμης κίνησης του πλοίου, εκτελείται ως εξής: Το πλοίο πηδαλιουχείται, κατ’ αρχήν, έτσι ώστε να αποκτήσει μια σταθερή (και αρκετά μεγάλη) γωνιακή ταχύτητα
. Στη συνέχεια το πηδάλιο επαναφέρεται στη θέση μηδενικής εκτροπής 0r ( 0)δ = , και εξετάζεται η γωνιακή ταχύτητα ( )r r t= του πλοίου. Εάν αυτό είναι ευσταθές, τότε η γωνιακή ταχύτητα θα τείνει μηδέν, , ή σε μια πολύ μικρή τιμή, οφειλόμενη σε διάφορες ασυμμετρίες (δυναμικές, αδρανειακές, γεωμετρικές). Στην περίπτωση αυτή, η γωνιακή ταχύτητα ( ) τείνει στο ίδιο όριο (μηδέν ή μικρή τιμή), ανεξαρτήτως της αρχικής τιμής της γωνιακής ταχύτητας. Ο ελιγμός αυτός πρέπει να γίνεται για δύο τουλάχιστον τιμές της , μία θετική και μία αρνητική. Βλ. και Σχήμα 6α.
( )r t
r t
0r
0→
0r
Σχήμα 6. Ελιγμός απλής επαναφοράς πηδαλίου (pullout maneuver). (α): ευσταθές πλοίο, (β): ασταθές πλοίο.
- 325 -

69
Όταν το πλοίο είναι ασταθές, τότε, μετά την επαναφορά του πηδαλίου στην ουδέτερη θέση ( 0)δ = , η γωνιακή ταχύτητα μειούται μεν (αν η αρχική γωνιακή ταχύτητα είναι αρκετά μεγάλη), αλλά δεν τείνει στο μηδέν. Στην περίπτωση αυτή
0r
( ) 0resr t r+→ > , όταν , 0 0r >
και ( ) 0resr t r−→ < , όταν 0 0r < ,
όπου , είναι πεπερασμένες παραμένουσες τιμές της γωνιακής ταχύτητας. Η απόλυτη τιμή αυτών, , αποτελεί ένα μέτρο της αστάθειας του συστήματος. Για πλήρως συμμετρικό πλοίο θα είναι
resr±
| |, |res resr r+ − ||| | |res resr r+ −=
r. Γενικώς, οι
διάφορες ασυμμετρίες οδηγούν σε ελαφρά διαφορετικές τιμές των | | και . Βλ. και Σχήμα 6b.
res+ | resr− |
Με τη βοήθεια του ελιγμού απλής επαναφοράς του πηδαλίου (pullout test) μπορούμε να προσδιορίσουμε με ακρίβεια δύο σημεία της καμπύλης rδ − ασταθούς πλοίου: τα σημεία και . Τα σημεία αυτά προκύπτουν επίσης και με τη βοήθεια του ευθέος ή του αντιστρόφου σπειροειδούς ελιγμού.
( 0, resr rδ += = ) ( 0, )resr rδ −= =
iv) Κυκλικός ελιγμός (Circle or turning maneuver)
Ο κυκλικός ελιγμός είναι η περισσότερο διαδεδομένη δοκιμή πηδαλιουχίας, η οποία μας δίδει σημαντικά στοιχεία για την ικανότητα στροφής του πλοίου. Διεξάγεται σε ήρεμη θάλασσα, απουσία ανέμου και ρευμάτων. Ο ελιγμός αρχίζει με πλεύση σε ευθεία πορεία με σταθερή ταχύτητα. Κατόπιν, με σταθερή παροχή καυσίμου, εφαρμόζεται μία σταθερή εκτροπή πηδαλίου Rδ , και εξετάζεται η τροχιά του πλοίου από 0ψ =
360 (αρχική κατεύθυνση ευθείας πορείας) έως γωνία στροφής του πλοίου
ψ = (ή και περισσότερο). Η δοκιμή επαναλαμβάνεται για διάφορες παροχές καυσίμου και διάφορες τιμές του Rδ . Η τροχιά του πλοίου έχει τη μορφή που δείχνεται στο Σχήμα 7. Στο σχήμα αυτό φαίνονται επίσης τα ακόλουθα μεγέθη:
- Τακτική διάμετρος (tactical diameter), η οποία ορίζεται ως η απόσταση του πλοίου από την αρχική (ευθεία) πορεία, όταν αυτό έχει στραφεί κατά 180ο,
- Προχώρηση (advance), η οποία ορίζεται ως η απόσταση (κατά την έννοια της
αρχικής πορείας) μεταξύ του σημείου εκκίνησης του ελιγμού (θέση όπου έγινε η στροφή του πηδαλίου) και του σημείου στο οποίο η γωνία στροφής του πλοίου είναι 90ο.
- Μετατόπιση (transfer), η οποία ορίζεται ως η απόσταση του πλοίου από την
αρχική (ευθεία) πορεία, όταν αυτό έχει στραφεί κατά 90ο. - Ακτίνα στροφής (steady turning radius), η οποία ορίζεται ως η ακτίνα της
σταθερής κυκλικής τροχιάς, επί της οποίας (αποδεικνύεται ότι) κινείται το πλοίο, μετά την απόσβεση των μεταβατικών φαινομένων.
- 326 -

Σχήμα 7. Κυκλικός ελιγμός.
70 - 327 -

71
Επίσης, μετρώνται και τα ακόλουθα μεγέθη, η τιμή των οποίων παρουσιάζει ιδιαίτερο ενδιαφέρον στη φάση της μόνιμης κίνησης επί του κύκλου στροφής:
- Ταχύτητα προώσεως (η οποία μειώνεται κατά τη διάρκεια του ελιγμού),
- Γωνία εκτροπής του πλοίου (drift angle), δηλαδή η γωνία μεταξύ του διαμήκους άξονα του πλοίου και της ολικής ταχύτητάς του,
- Γωνία εγκαρσίας κλίσεως του πλοίου (heel angle). Ο κυκλικός ελιγμός μπορεί να υποδιαιρεθεί σε τρείς φάσεις. Η πρώτη φάση αρχίζει τη στιγμή που αρχίζει η εκτροπή του πηδαλίου και περατούται όταν σταθεροποιηθεί το πηδάλιο σε μία γωνία Rδ . Κατά τη διάρκεια αυτής της φάσεως η πλευρική ταχύτητα και η γωνιακή ταχύτητα είναι πρακτικά μηδενικές (δεδομένου ότι δεν έχει μεσολαβήσει αρκετός χρόνος ώστε να αναπτυχθούν). Έτσι, η φάση αυτή μπορεί να μελετηθεί με την βοήθεια των εξισώσεων 9(1), αν θέσουμε , και κρατήσουμε μόνο τους αδρανειακούς όρους:
v r
0, 0v r= =
( ) ( ) (G Rv rm Y v m Y r Y tδ )ξ δ− + − = , (4)
( ) ( ) ( )G rm N I N r N tυ ζζ δ Rξ υ δ− + − = .
Η ανάπτυξη αυτών των αρχικών επιταχύνσεων και οδηγεί, φυσικά, στην ανάπτυξη και σημαντικών τιμών για τις ταχύτητες και .
v rv r
Η δεύτερη φάση του κυκλικού ελιγμού περιλαμβάνει το μη μόνιμο φαινόμενο, το οποίο βαθμιαίως αποσβένυται και, τελικά, οδηγούμεθα στη μόνιμη κίνηση, η οποία όπως θα αποδειχθεί στη συνέχεια, είναι κύκλος. Κατά τη διάρκεια της δευτέρας φάσεως, το φαινόμενο διέπεται από τις πλήρεις εξισώσεις 9(1). Ιδιαίτερο ενδιαφέρον, όσον αφορά τα χαρακτηριστικά πηδαλιουχίας του πλοίου, παρουσιάζει η τρίτη φάση, η οποία περιλαμβάνει τη μόνιμη κίνηση, όπου, δηλαδή, 0v = , 0r = . Οι εξισώσεις κίνησης μπορούν να ληφθούν και πάλι από τις 9(1), θέτοντας 0v = και , ή από τις αποσυζευγμένες εξισώσεις 9(8), θέτοντας
0r =0v = , 0v = , 0r = , και .
Ακολουθώντας το δεύτερο δρόμο, βρίσκουμε ότι η μόνιμη πλευρική ταχύτητα και γωνιακή ταχύτητα δίδονται από τις σχέσεις
0r = 0δR =v
r
V Rv K δ= και Rr K δ= , (5α,β)
όπου οι σταθερές και δίδονται από τις σχέσεις 9(9e,f), αντίστοιχα. Η συνολική πλευρική (εγκάρσια) ταχύτητα ( ) , στα διάφορα σημεία του άξονα του πλοίου δίδεται, συναρτήσει των , και της θέσης
K VK
v rv x
x , από τη σχέση (πρβλ. σχέση 1.5(3)): ( )v x v x r= − ,
όπου το x μετράται ως προς το σωματοπαγές σύστημα επί του πλοίου. Κατά συνέπεια, υπάρχει μια τιμή px x= , τέτοια ώστε ( ) 0p pv v x= = :
pvxr
= . (6)
- 328 -

72
Η θέση px x= βρίσκεται συνήθως επί του πλοίου, και μάλιστα κοντά στην πλώρη (μεταξύ πλώρης και 0.20 L πίσω από την πλώρη), και ορίζει εκείνο το σημείο του πλοίου που κινείται ακριβώς κατά την κατεύθυνση του διαμήκους άξονα. Το σημείο αυτό ονομάζεται pivot point και έχει την ιδιότητα η κάθετος στο επίπεδο συμμετρίας του πλοίου στο σημείο αυτό να διέρχεται από ένα σταθερό σημείο (γιατί;), το οποίο είναι το κέντρο στροφής του πλοίου. Η ακτίνα στροφής του πλοίου, R , δίδεται από τη σχέση R U r= , όπου η ταχύτητα προχώρησης. Συνδυάζοντας την τελευταία σχέση με την (5β) ανωτέρω και την 9(9ε), βρίσκουμε
U
( ) (1 v r G v r
R R v v
Y N m U N Y mUR U U UL rL KL L Y N N Yδ δ
)ξδ δ
− − −= = = −
−,
(7α) ή, ισοδυνάμως,
( ) (1 v r G v r
R v v
Y N m N Y mRL Y N N Yδ δ
)ξδ
′ ′ ′ ′ ′ ′ ′− − −= −
′ ′ ′ ′−, (7β)
όπου τα τονιζόμενα (αδιάστατα) μεγέθη ( , ,Gm Yυξ′ ′ ′ , κ.λπ.) έχουν αδιαστατικοποιηθεί ως εξής:
3
, 12
GG
mmL L
ξξρ
′ ′= = , 2 3
,1 12 2
rr
Y YY YL U L Uυ
υ
ρ ρ′ ′= = ,
3 4
,1 12 2
rr
N NN NL U L Uυ
υ
ρ ρ′ ′= = ,
2 2 3 2,1 1
2 2
Y NY NL U L Uδ δ
δ δ
ρ ρ′ ′= = .
Ο αριθμητής του δεξιά μέλους των σχέσεων (7α,β) δεν είναι άλλος από τον δείκτη (κριτήριο) ευσταθείας του πλοίου (βλ. σχέση 8(19)), ο οποίος είναι θετικός για ευσταθή πλοία και αρνητικός για ασταθή πλοία. Ο παρονομαστής των σχέσεων (7α,β) είναι πάντοτε θετικός (γιατί;). Προκύπτει έτσι ότι, για ευσταθή πλοία, (δηλ. το κέντρο στροφής θα βρίσκεται προς τα θετικά του άξονα
C
0R >y ) όταν 0δ < , ως
αναμένεται.
Η γωνία εκτροπής του πλοίου (drift angle) v Uβ = − υπολογίζεται εύκολα με τη βοήθεια της σχέσης (5α).
Όπως αναφέρθηκε ήδη ανωτέρω, κατά τη διάρκεια του κυκλικού ελιγμού διατηρείται σταθερή η παροχή καυσίμου, όμως η ταχύτητα προχώρησης μεταβάλλεται (μειούται). Ιδιαίτερο ενδιαφέρον παρουσιάζει η τιμή της ταχύτητας προχώρησης στην τρίτη φάση του ελιγμού, όταν δηλαδή το πλοίο εκτελεί τον σταθερό κύκλο στροφής ακτίνας
UU
R . Όπως είναι αναμενόμενο, η τιμή του λόγου U U εξαρτάται κυρίως από τον κύκλο στροφής (ακριβέστερα το λόγο R L , όπου το μήκος του πλοίου) και τη μορφή της γάστρας (π.χ. του συντελεστή ). Στο Σχήμα 8 δίδονται αποτελέσματα για το λόγο
L
BCU U συναρτήσει των ποσοτήτων R L και . BC
- 329 -

\
Σχήμα 8. Μείωση της ταχύτητας προχώρησης U , του πλοίου, κατά τη διάρκεια εκτέλεσης του κύκλου στροφής, συναρτήσει του λόγου R L και του συντελεστή γάστρας BC
Σχήμα 9. Διάγραμμα δ − r με συνδυασμό κυκλικού ελιγμού, ελιγμού απλής επαναφοράς και αντιστρόφου σπειροειδούς ελιγμού
73 - 330 -

74
Τα αποτελέσματα του κυκλικού ελιγμού μπορούν να συνδυασθούν με αποτελέσματα των προηγουμένων ελιγμών προκειμένου να ληφθεί το πλήρες διάγραμμα rδ − , το οποίο χαρακτηρίζει την ευστάθεια κατευθύνσεως και τις ελκτικές ικανότητες του πλοίου. Στο Σχήμα 9 δείχνεται ένα διάγραμμα rδ − που έχει ληφθεί με συνδυασμό κυκλικού ελιγμού, ελιγμού απλής επαναφοράς και αντίστροφου σπειροειδούς ελιγμού. v) Οφιοειδής ελιγμός (Zig-zag maneuver)
Ο οφιοειδής ελιγμός προτάθηκε από τον Kempf το 1944, και αναφέρεται επίσης ως Kempf overshoot ή “Ζ” maneuver. Είναι πολύ σημαντικός και, ταυτόχρονα, εύκολα πραγματοποιήσιμος ελιγμός. Τα μόνα όργανα που απαιτούνται για την εκτέλεσή του είναι ένα χρονόμετρο και μία γυροσκοπική πυξίδα (gyro compass). Ο οφιοειδής ελιγμός πραγματοποείται ως εξής: αφού αποκατασταθεί ευθύγραμμος πλεύση με σταθερή ταχύτητα (σταθερή παροχή καυσίμου), το πηδάλιο τίθεται σε γωνία εκτροπής 0δ δ= (π.χ. 20ο) δεξιά “όσο πιο γρήγορα και ομαλά γίνεται”. Η θέση αυτή του πηδαλίου διατηρείται σταθερή καθώς το πλοίο αλλάζει κατεύθυνση, μέχρις ότου η γωνία στροφής του πλοίου ψ να λάβει μια προκαθορισμένη τιμή 0ψ ψ= . Στη συνέχεια το πηδάλιο τίθεται σε γωνία εκτροπής 0δ αριστερά, πάλι “όσο πιο γρήγορα και ομαλά γίνεται”, και η θέση αυτή του πηδαλίου διατηρείται σταθερή μέχρις ότου το πλοίο στραφεί κατά γωνία 0ψ προς την αντίθετη φορά, οπότε και πάλι η εκτροπή του πηδαλίου αντιστρέφεται κατά τον ίδιο τρόπο. Η όλη διαδικασία επαναλαμβάνεται 4 με 5 φορές, οπότε επιτυγχάνεται μία σταθερή περιοδική κίνηση. Η γωνία εκτροπής του πηδαλίου ( )tδ δ= και η γωνία στροφής του πλοίου ( )tψ ψ= καταγράφονται, όπως φαίνεται στο Σχήμα 10. Από το περιοδικό τμήμα της κινήσεως μετρούνται τα παρακάτω μεγέθη (βλ. και Σχήμα 10):
- Η γωνία υπερβάσεως (overshoot yaw angle), η οποία ορίζεται ως η γωνία πέραν της 0δ κατά την οποία συνεχίζει να στρέφεται το πλοίο (παρά την αναστροφή του πηδαλίου), πριν αλλάξει κατεύθυνση (δηλαδή, γωνία υπερβάσεως max 0ψ δ= − ),
- Η περίοδος, η οποία ορίζεται ως ο χρόνος μεταξύ δύο διαδοχικών στιγμών
, στις οποίες ισχύει η σχέση , 1, 2t = 0( ) 0tψ δ= > , - Ο χρόνος υπερβάσεως (time to overshoot), δηλαδή ο χρόνος που
απαιτείται ώστε η γωνία στροφής του πλοίου ( )tψ να γίνει ίση με τη γωνία εκτροπής του πηδαλίου 0δ , για πρώτη φορά.
Η δοκιμή επαναλαμβάνεται για διάφορες παροχές καυσίμου και οι τιμές των τριών ανωτέρω παραμέτρων σχεδιάζονται καταλλήλως και συγκρίνονται με τις αντίστοιχες τιμές άλλων πλοίων “επιτυχημένης σχεδιάσεως”. Ο κλασσικός οφιοειδής ελιγμός διεξάγεται λαμβάνοντας 0 0ψ δ= . Δηλαδή, η φορά του πηδαλίου αντιστρέφεται τη στιγμή κατά την οποία η γωνία στροφής του πλοίου γίνεται ίση με τη γωνία στροφής του πηδαλίου. Συνήθως λαμβάνεται 0 0δ ψ= = 20 ή ο
- 331 -

75
10ο, και ο ελιγμός χαρακτηρίζεται με το αντίστοιχο όνομα, π.χ. 20ο-20ο est. Ο zig-zag tτροποποιημένος οφιοειδής ελιγμός διεξάγεται με ψ δ< , π.χ. 10o-1o modified zig-zag test. Για ευσταθή πλοία ο οφιοειδής ελιγμός μπορ μελετηθεί με τη βοήθεια των γραμμικών εξισώσεων πηδαλιουχίας που αναπτύχθηκαν στα εδάφια 6 και 9. ολλά πειράματα οφιοειδούς ελιγμού σε πλοία και μοντέλα έχουν γίνει στην
εί να
Π Ιαπωνία
ι σ ρ
i) Ελιγμός σταματήματος (Stopping maneuver)
(από τον Nomoto και άλλους ερευνητές), για τον προσδιορισμό των δεικτών πηδαλιουχίας K και T . Στον πίνακα της επομένης σελίδας (ΠΙΝΑΚΑΣ 10.1) παρουσιάζοντα υγκεντ ωμένα αποτελέσματα από πειράματα κλασσικού οφιοειδούς ελιγμού που έκανε ο Nomoto σε πραγματικά πλοία.
v
Η γρήγορη ανάπτυξη του μεγέθους των δεξαμενοπλοίων, δεν ακολουθήθηκε από
σημαντική αύξηση της ταχύτητάς τους, γεγονός που κατέληξε στη μείωση της ισχύος ανά τόννο εκτοπίσματος. Επομένως, η διαθέσιμος ισχύς για σταμάτημα δεν ακολούθησε την αύξηση της αδράνειας στα μεγάλα πλοία, με αποτέλεσμα η ικανότητα σταματήματος να μειωθεί. Σε κάθε περίπτωση όμως, η ικανότητα ενός πλοίου, που τρέχει με μια ορισμένη ταχύτητα U , να ακινητοποιηθεί, είναι ένα πολύ σημαντικό χαρακτηριστικό του συστήματος πλοίου-μηχανοστασίου, το οποίο ελέγχεται με τη βοήθεια του ελιγμού σταματήματος. ατά κανόνα, σε κατάσταση ανάγκης, η καλύτερηΚ λύση για την αποφυγή
ν ’συγκρούσεως, είναι α στραφεί το πηδάλιο στη μέγιστη γωνία του, εφ όσον υπάρχει αρκετός διαθέσιμος χώρος. Και τούτο διότι, εκτός από τις μικρές ταχύτητες, η απόσταση που διανύεται κατά την κατεύθυνση της αρχικής πορείας (προχώρηση), όταν εκτελείται μία πλήρης στροφή, είναι πολύ μικρότερη από την απόσταση που διανύεται αν δοθεί η εντολή “όπισθεν ολοταχώς”. Παρ’ όλα ταύτα, όταν δεν υπάρχει η δυνατότητα να επιχειρηθεί ο ελιγμός πλήρους στροφής, ο ελιγμός σταματήματος είναι η μοναδική μέθοδος αποφυγής συγκρούσεως. ατωτέρω αναφέρονται τα κυριώτερα είδη ελιγμούΚ σταματήματος, καθώς και
περιστρέφεται
σταμάτημα: Η φορά περιστροφής της έλικας αντιστρέφεται (ή
ισχύς εφαρμόζεται ανάποδα
απόσταση στην κατεύθυνση
μήκος της τροχιάς του σκάφους έως ότου ακινητοποιηθεί.
διάφοροι ορισμοί χρήσιμοι για την περαιτέρω ανάπτυξη του θέματος:
Φυσικό σταμάτημα: Η κύρια μηχανή σταματάει, και η έλικα- ελεύθερα.
Συμβατικό- μεταβάλλεται κατάλληλα το βήμα, σε έλικα μεταβλητού βήματος), χωρίς ιδιαίτερη φροντίδα για γρήγορη αναστροφή.
Επείγον σταμάτημα (crash stop): Όλη η διαθέσιμος- μόλις δοθεί η εντολή “όπισθεν ολοταχώς”.
Προχώρηση (head reach): Η μεγίστη διανυομένη- της αρχικής κινήσεως (ταχύτητας).
Μήκος τροχιάς (track reach): Το-
- 332 -

76
Πλάγια μετατόπ- ιση (lateral transfer): Η μεγίστη απόσταση σε κατεύθυνση κάθετο προς την αρχική κατεύθυνση κινήσεως (αρχική ταχύτητα).
- από τη στιγμή που δίνεται η εντολή “όπισθεν ολοταχώς” έως ότου ακινητοποιηθεί το
- μεταφοράς (transmission dead time): Ο χρόνος από τη στιγμή
που δίνεται η εντολή μέχρις ότου αρχίσει να εκτελείται.
- όνος από τη στιγμή που αρχίζει να εκτελείται ο ελιγμός μέχρι τη στιγμή που η ώση γίνεται αρνητική.
-
Χρόνος σταματήματος (stopping time): Ο χρόνος που διαρκεί ο ελιγμός
σκάφος.
Νεκρός χρόνος
Νεκρός χρόνος εκτελέσεως (execution dead time): Χρ
Ολικός νεκρός χρόνος (total dead time): Άθροισμα των δύο προηγουμένων.
Στους ελιγμούς σταματήματος διακρίνουμε τρεις φάσεις: 1η Φάση: Αρχίζει τη στιγμή που θα δίδεται η εντολή “όπισθεν ολοταχώς”, και
περατούται όταν η ώση της έλικας μηδενισθεί (οπότε, στη συνέχεια,
2η Φάση
περνάει σε αρνητικές τιμές). Μπορεί να διαρκέσει (ολικός νεκρός χρόνος) από 0.5 έως 2 λεπτά, αναλόγως της αρχικής ταχύτητας και του τύπου της προώσεως (συνδιασμού κυρίας μηχανής - έλικας).
: κας είναι αρνητική. Αν η αρχική ταχύτητα είναι μεγάλη, η υδροδυναμική αντίσταση της γάστρας
3η Φάση
Κατά τη διάρκεια της φάσεως αυτής η ώση της έλι
και η ώση της έλικας είναι της αυτής τάξεως μεγέθους. Ο αριθμός των περιστροφών της έλικας τείνει προς μία σταθερή τιμή, εξαρτωμένη από τη διαθέσιμη ισχύ. Κατά τη διάρκεια αυτής της φάσεως όλα τα μεγέθη μεταβάλλονται σημαντικά και είναι, επίσης, δυνατόν να συμβούν ισχυρές ταλαντώσεις της γάστρας.
: μειούται και η υδροδυναμική αντίσταση της γάστρας είναι μικρή εν συγκρίσει προς την ώση της έλικας. Η ροπή και η
Οταν η αρχ χύτητα είναι μικρή, η φάση 2 ελαχιστοποιείται και μόνον οι φάσεις
και 3 διακρίνονται. Κατά τις φάσεις 2 και 3 είναι πρακτικά αδύνατος ο έλεγχος
αναλυτικά με τη βοήθεια της εξίσωσης . εξίσωση 4(5α)):
(8)
όπου είναι ταχύτητα ροχώρ σης του πλοίου, είναι η προσημασμένη ώση της έλικας (θετική προς τα εμπρός), και
Η ταχύτητα έχει αρχίσει να
ώση της έλικας μεταβάλλονται ομαλά και λαμβάνουν σχεδόν σταθερή τιμή.
ική τα1μονελίκων σκαφών με ένα πηδάλιο. Ο ελιγμός σταματήματος μπορεί να μελετηθεί(πρβλ
( )Um X U T R− = − η στιγμιαία π η( )U U t=
T R είναι η αντίσταση του πλοίου (πάντοτε θετική).
- 333 -

Γενικώς, ματος προώσεως
για ένα συγκεκριμένο συνδυασμό γάστρας-συστή
( ), ,T T w U n= και ( )R R U= , (9)
όπου συντελεστής ομόρρου και
w o )t (n n= οι στρο έλικας. Κατά την φές της ιάρκ του ελιγμού η συνάρτηση από την παροχή καυσίμου.
σωση (8) έχουν ίνει πειράματα με διάφορες γάστρες. Υπάρχουν σχετικά διαγράμματα ελίκων που
δ εια ώς
( )n t εξαρτάται συναρτ ε
Συνεπ , αν γνωρίζουμε τις ανωτέρω ήσεις, η εξίσωση (8) μπορεί να ολοκληρωθεί και να δώσει το χρόνο του λιγμού σταματήματος και την απόσταση που θα διανύσει το πλοίο στο χρόνο αυτό. Αν γνωρίζουμε μόνο τη ώση της έλικας σε ελεύθερη ροή, τότε αντικαθιστούμε το T , στην εξίσωση (8), από τον όρο ( )1T t− , όπου t συντελεστής μειώσεως ώσεως (thrust deduction coefficient). Για τον προσδιορισμό των ποσοτήτων που υπεισέρχονται στην εξίγαναφέρονται σε προσημασμένες ταχύτητες ροής και προσημασμένες στροφές περιστροφής. Επίσης, έχουν γίνει πειράματα για τον προσδιορισμό των συντελεστών αλληλεπιδράσεως w και t , σε ανάλογες συνθήκες.
Σχήμα 10. Οφιοειδής ελιγμός
77 - 334 -

78
ΠΙΝΑΚΑΣ 10.1. Δείκτες ποιότητας πηδαλιουχίας (αδιάστατη ικανότητα στροφής K KL U′ = , και αδιάστατος δείκτης ευστάθειας
T TU L ) διαφόρων πλοίων από οφιοειδή ελιγμό (Nomoto 1966). ′ =
- 335 -

79
13. Σχεδίαση πηδαλίου Προκειμένου να επιτευχθεί ελεγξιμότητα των κινήσεων ενός πλοίου είναι απαραίτητη η ύπαρξη επιφανειών ελέγχου, οι οποίες μπορεί να αποτελούνται από μια κινητή επιφάνεια ή από συνδυασμό ακίνητων και κινητών μερών. Το πηδάλιο είναι η πλέον διαδεδομένη επιφάνεια ελέγχου, τουλάχιστον για τα περισσότερα εμπορικά πλοία. Οι διαστάσεις μιας τυπικής εξ’ ολοκλήρου κινητής επιφάνειας ελέγχου (Σχήμα 1)(1) εκφράζονται σε τρεις ορθογώνιες μεταξύ τους διευθύνσεις: διάσταση χορδής c παράλληλη στην κατεύθυνση της κίνησης, διάσταση ανοίγματος κάθετη στην κατεύθυνση της κίνησης, διάσταση πάχους t κάθετη στην διεύθυνση του ανοίγματος και της χορδής. (Το επίπεδο ανοίγματος-χορδής συμπίπτει με το διάμηκες επίπεδο του πλοίου όταν η γωνία εκτροπής του πηδαλίου είναι μηδενική). Οι βασικές γεωμετρικές παράμετροι είναι:
b
• μήκος χορδής του άκρου του πηδαλίου που βρίσκεται κοντά στην γάστρα Rc , • μήκος χορδής του αντιθέτου άκρου Tc , • μέσο μήκος χορδής c , • μέσο άνοιγμα b ,
• γεωμετρικός λόγος επιμήκους 2bAR
S= ,
• μέσο πάχος t ,
• λόγος πάχους-χορδής tc
,
προβεβλημένη επιφάνεια στο επίπεδο ανοίγματος-χορδής . TA Οι πιο κοινοί τύποι πηδαλίου που συναντώνται είναι οι εξής: α) Εξ’ ολοκλήρου κινητό πηδάλιο (Σχήμα 2 a,b,c), b) Πηδάλιο που εκτός από το κινούμενο περιλαμβάνει και ακίνητο τμήμα, horn
rudder (Σχήμα 2 d,e), c) Πηδάλιο με δύο ανεξαρτήτως κινούμενα τμήματα, flap rudder (Σχήμα 2f). Το πηδάλιο είναι ανωστική επιφάνεια σε κινούμενο ρευστό με μεταβλητή γωνία πρόσπτωσης. Κατά συνέπεια είναι δυνατή η δημιουργία κυκλοφορίας γύρω από το πηδάλιο και η παραγωγή υδροδυναμικής δύναμης και ροπής έπ’ αυτού. Στο Σχήμα 3 φαίνεται η ανάλυση σε συνιστώσες της υδροδυναμικής δύναμης που ασκείται στο πηδάλιο όταν αυτό βρίσκεται σε λειτουργία στον ομόρρου του πλοίου και της έλικας. Τα σύμβολα που φαίνονται στο σχήμα είναι:
:F ολική δύναμη ασκούμενη επί του πηδαλίου , ( K AF L D X Y F F= + = + = + )
:L δύναμη ανώσεως, κάθετη στην διεύθυνση της κίνησης του νερού, :D δύναμη αντίστασης, παράλληλη στην διεύθυνση της κίνησης του νερού, :Y δύναμη κάθετη στον διαμήκη άξονα του πλοίου,
(1) Τα σχήματα βρίσκονται στο τέλος του εδαφίου.
- 336 -

80
:X δύναμη παράλληλη στον διαμήκη άξονα του πλοίου, :KF δύναμη κάθετη στο επίπεδο συμμετρίας του πηδαλίου, :AF δύναμη παράλληλη στο επίπεδο συμμετρίας του πηδαλίου,
:V ολική ταχύτητα του σημείου Ο του πλοίου, :VΓ ολική ταχύτητα του σημείου Γ του πλοίου, :β “γωνία πρόσπτωσης” της ροής στο πλοίο (drift angle), :Rβ “γωνία πρόσπτωσης” της ροής στην περιοχή του πηδαλίου,
:a αληθής γωνία πρόσπτωσης της ροής στο πηδάλιο, :Rδ γωνία εκτροπής του πηδαλίου,
:d θέση του άξονα του πηδαλίου, :cCP θέση του σημείου δράσης της υδροδυναμικής δύναμης επί του πηδαλίου.
Αν θεωρήσουμε ότι δεν υπάρχει αλληλεπίδραση μεταξύ των πεδίων ροής του πηδαλίου και της γάστρας τότε μπορούμε να υποθέσουμε ότι η γωνία πρόσπτωσης της ροής στο πηδάλιο είναι R Ra δ β= − και η άνωση ασκείται κάθετα στη διεύθυνση της VΓ, οπότε: , (1) ( cos sinR R R rudderY L D Yδδ β β= ± + =)
x R rudder RN Yδδ = . (2) όπου Rx είναι η απόσταση του σημείου δράσης της δύναμης στο πηδάλιο από την αρχή των αξόνων του σωματόδετου συστήματος συντεταγμένων στο πλοίο. Σημειώνεται εδώ ότι και ( )L L a= ( )D D a= . Εξαιτίας της σχετικής θέσης πηδαλίου, γάστρας, έλικας, η υπόθεση της μη αλληλεπίδρασης γάστρας-πηδαλίου-έλικας δεν ευσταθεί. Η ύπαρξη του οριακού στρώματος της γάστρας έχει ως αποτέλεσμα το νερό γύρω από την πρύμνη του πλοίου να αποκτά μια κίνηση προς τα εμπρός (στην ίδια κατεύθυνση με την ταχύτητα του πλοίου). Επομένως, σ’ αυτή την περιοχή η σχετική ταχύτητα (ως προς παρατηρητή σωματόδετο στο πλοίο) είναι μικρότερη από την ταχύτητα του
πλοίου. Ο συντελεστής ομόρρου AV VwV−
= (V:ταχύτητα πλοίου, ταχύτητα
προχώρησης) είναι αυτός που μετρά την μείωση αυτή της ταχύτητας. Πειραματικές μετρήσεις του συντελεστή αυτού σε διάφορα σημεία δίνουν μια εικόνα του πεδίου ταχύτητας που διαμορφώνεται στην πρύμνη. Τα αποτελέσματα αυτών των μετρήσεων έδειξαν ότι η μορφή του ομόρρου επηρεάζεται κυρίως από την μορφή του πρυμναίου τμήματος του σκάφους.
:AV
Από πειραματικές μετρήσεις σε σειρά μοντέλων (Harvald, 1983) έχει ληφθεί η ακτινική κατανομή του ομόρρου που φαίνεται στο Σχήμα 4. Όπως είναι φανερό απ’ αυτή την κατανομή μπορεί να προκύψει η ακτινική κατανομή της αξονικής ταχύτητας. Τα μεγέθη που εμφανίζονται στα διαγράμματα του Σχήματος 4 είναι:
:L μήκος του μοντέλου, :B πλάτος του μοντέλου,
- 337 -

81
:D διάμετρος της έλικας, :R ακτίνα έλικας, :r θέση του σημείου στο οποίο μετράται ο συντελεστής ομόρρου, :δ συντελεστής γάστρας.
Οι κατανομές των αξονικών ταχυτήτων (στην κατεύθυνση της ταχύτητας του πλοίου
) στην θέση της γραμμής συμμετρίας για δυο διαφορετικούς τύπους πρύμνης δείχνονται στο Σχήμα 5. Οι τιμές της ταχύτητας που αναγράφονται στο σχήμα είναι ενδεικτικές και έχουν ληφθεί από το PNA (Lewis 1989).
U
Η παρουσία της έλικας τώρα έχει ως αποτέλεσμα την επιτάχυνση της ροής στην περιοχή της. Πειράματα σε σήραγγα σπηλαίωσης έδειξαν ότι η περιοχή αυξημένης ταχύτητας ομόρρου είναι περίπου όπου είναι η διάμετρος της έλικας (φαινόμενο συστολής του ομόρρου της έλικας). Από εξέταση σειράς εγκαταστημένων συστημάτων πρόωσης/πηδαλιουχίας προκύπτει ότι ο λόγος της διαμέτρου της έλικας προς το άνοιγμα του πηδαλίου βρίσκεται στο διάστημα
0.82D D
0.75 0.85− . Η σχετική θέση τους είναι τέτοια ώστε, ο άξονας της έλικας να βρίσκεται κοντά στο μισό του ανοίγματας του πηδαλίου, ενώ η απόστασή τους κατά το διάμηκες είναι ίση με ποσοστό της ακτίνας της έλικας από έως . Με βάση τα προηγούμενα η επίδραση της έλικας στο πηδάλιο μπορεί να αναπαρασταθεί προσεγγιστικά από την ακόλουθη κατανομή ταχύτητας:
0.30 1.0
Ο λόγος της απόλυτης τιμής της ταχύτητας στην κεντρική περιοχή προς την τιμή των άκρων είναι περίπου 1.25 (Lewis 1989,Vol II). Για να είναι δυνατή η σύγκριση των δυνάμεων και ροπών που ασκούνται σε πηδάλια όμοια μεταξύ τους αλλά διαφορετικών διαστάσεων, και τα οποία λειτουργούν σε διαφορετικές ταχύτητες, είναι απαραίτητο αυτά τα μεγέθη να υπολογίζονται σε αδιάστατη μορφή. Τα σημαντικότερα αδιάστατα χαρακτηριστικά του πηδαλίου έχουν ως εξής:
Συντελεστής άνωσης 2 ,( / 2)L
T
LCA Uρ
= (3)
Συντελεστής αντίστασης 2 ,( / 2)D
T
DCA Uρ
= (4)
Συντελεστής κάθετης δύναμης 2 cos sin ,( / 2)
KN L
T
FC CA U DCα α
ρ= = + (5)
Συντελεστής ροπής γύρω από τον άξονα του πηδαλίου 2
( ),
( / 2)K C
MHT
F d CPC
A U cρ−
= (6)
b ( )0 6 0 7. .− b
- 338 -

Συντελεστής ροπής γύρω από το 1/ της χορδής 4 / 4 2
(0.25 ) .( / 2)
K cMc
T
F c CPCA U cρ−
= (7)
Στο παράρτημα αυτού του εδαφίου αναπτύσονται εμπειρικοί τρόποι υπολογισμού των προηγούμενων χαρακτηριστικών του πηδαλίου για πρόσω και οπίσθια κίνηση. Κατά τον σχεδιασμό του πηδαλίου υπάρχουν διάφοροι περιορισμοί που πρέπει να λαμβάνονται υπόψη. Οι κυριότεροι απ’ αυτούς είναι: (α) Γεωμετρικός περιορισμός. Η προβολή της επιφάνειας του πηδαλίου στο διάμηκες
επίπεδο δεν πρέπει να ξεπερνά τα όρια που υπαγορεύονται από την μορφή της γάστρας.
(b) Οικονομικός περιορισμός. Το πηδάλιο, ο άξονας και το μηχάνημα πηδαλιουχίας ως σύνολο, πρέπει να έχουν το μικρότερο δυνατό μέγεθος, βάρος, πολυπλοκότητα και αρχικό κόστος. Η απώλεια ταχύτητας από το όλο σύστημα πηδαλιουχίας πρέπει να είναι η μικρότερη δυνατή.
c) Περιορισμοί απαιτήσεων. Ανεπιθύμητα φαινόμενα όπως επαγόμενες ταλαντώσεις στην γάστρα πρέπει να μένουν σε ανεκτά επίπεδα.
Από υδροδυναμική άποψη, κατά τον σχεδιασμό του πηδαλίου πρέπει να ληφθούν αποφάσεις σχετικά με τα ακόλουθα:
Α. Τύπος πηδαλίου και θέση Β. Αριθμός πηδαλίων C. Μέγεθος πηδαλίου D. Μέγιστη γωνία εκτροπής πηδαλίου E. Ρυθμός εκτροπής πηδαλίου F. Μορφή υδροτομής πηδαλίου
Στην συνέχεια θα αναλυθούν τα ανωτέρω. Α Τύπος και θέση πηδαλίου Οι τύποι πηδαλίων που φαίνονται στο Σχήμα 2 έχουν χρησιμοποιηθεί ως μοναδικά ή πολλαπλά πηδάλια σε μονέλικα ή διπλέλικα πλοία. Ο τύπος πηδαλίου με δύο ανεξαρτήτως κινούμενα τμήματα χρησιμοποιείται όταν αρχικά υπάρχει έλλειψη ευστάθειας κατεύθυνσης. Τα κυριότερα μειονεκτήματα του είναι η πολυπλοκότητα, το κόστος και η μη επάρκειά του για όπισθεν κίνηση. Για τα περισσότερα συμβατικά πλοία το εξ’ ολοκλήρου κινητό πηδάλιο είναι προτιμότερο. Για τα πλοία εκείνα που είναι ασταθή χωρίς πηδάλιο, η επιφάνεια πηδαλίου η αναγκαία για την επίτευξη ευστάθειας ευθύγραμμης κίνησης μπορεί να είναι μεγαλύτερη από την επιφάνεια εκείνη που είναι αναγκαία για την επίτευξη αλλαγής πορείας. Αν συμβαίνει κάτι τέτοιο τότε η επιλογή του τύπου πηδαλίου με κινητό και ακίνητο τμήμα παρέχει λύση στο πρόβλημα. Πειράματα και θεωρητικές αναλύσεις οδηγούν στο συμπέρασμα ότι για ένα δυναμικά ευσταθές πλοίο, σ’ όλες τις ταχύτητες, οι πλευρικές δυνάμεις ελέγχου πρέπει να ασκούνται στην πρύμνη και όχι στην πλώρη. Από φυσική άποψη (βλ. Σχήμα 6) αυτό εξηγείται ως εξής. Μια πλευρική δύναμη ελέγχου στην πρύμνη έχει ως αποτέλεσμα: α) περιστροφή ως προς το μέσο νομέα (ή γενικότερα ως προς την αρχή του σωματόδετου στο πλοίο συστήματος συντεταγμένων) και β) μεταφορά. Όταν αυτές οι κινήσεις συνδυαστούν με την πρόσω κίνηση του πλοίου παράγουν μια γωνία
82 - 339 -

83
πρόσπτωσης της ροής στο πλοίο (drift angle) στην ίδια διεύθυνση, πράγμα που οδηγεί στην ανάπτυξη μιας μεγάλης υδροδυναμικής πλευρικής δύναμης και αντίστοιχης περιστροφικής ροπής στο πλοίο οι οποίες προκαλούν το στρίψιμο του πλοίου. Αντίθετα, αν η πλευρική δύναμη ελέγχου ενεργήσει στην πλώρη, οι συνεισφορές στην γωνία πρόσπτωσης της ροής στο πλοίο της περιστροφής και της μεταφοράς είναι σε διαφορετικές διευθύνσεις και ακυρώνουν η μια την άλλη. Τοποθετώντας το πηδάλιο στην πρύμνη, στην περιοχή του ομόρρου της έλικας, παρατηρείται αύξηση της υδροδυναμικής δύναμης που αναπτύσσεται σ’αυτό. Ο λόγος είναι η διαφοροποίηση της κατανομής της ταχύτητας που φτάνει στο πηδάλιο εξαιτίας του φαινομένου συστολής του ομόρρου που αναφέρθηκε και παραπάνω. Σ’ αυτή την περίπτωση το πηδάλιο ανακτά μέρος της περιστροφικής ενέργειας του ομόρρου, η οποία θα έμενε στο νερό. Υπάρχουν όμως και μερικά μειονεκτήματα σ’ αυτή την τοποθέτηση. Το ένα είναι η πιθανότητα επαγόμενων ταλαντώσεων στο πλοίο. Για την αποφυγή αυτού του φαινομένου είναι σκόπιμο οι αποστάσεις έλικας-πηδαλίου να είναι περίπου ίσες με μια ακτίνα έλικας. Το δεύτερο μειονέκτημα είναι η πιθανότητα σπηλαίωσης του πηδαλίου συνήθως σε πλοία υψηλών ταχυτήτων. Σ’ αυτή την περίπτωση είναι καλύτερη η επιλογή δυο πηδαλίων. Β Αριθμός πηδαλίων Η χρήση περισσοτέρων του ενός πηδαλίων μπορεί να αυξήσει την ελεγξιμότητα. Διπλά πηδάλια χρησιμοποιούνται σε διπλέλικα πλοία και όταν, εξαιτίας του μικρού βυθίσματος, είναι αδύνατη η επίτευξη των ελικτικών απαιτήσεων μ’ ένα πηδάλιο. C Μέγεθος πηδαλίου Για τον καθορισμό του εμβαδού του πηδαλίου στο επίπεδο ανοίγματος-χορδής μπορούμε να χρησιμοποιήσουμε τον εξής τύπο (Det Norske Veritas, DnV) για την ελάχιστη απαιτούμενη επιφάνεια:
2
1 25100
BPT
BP
TL BAL
⎡ ⎤⎛ ⎞⎢ ⎥= + ⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
(8)
όπου
TA : εμβαδό της επιφάνειας του πηδαλίου, T : βύθισμα,
BPL : μήκος μεταξύ καθέτων, B : πλάτος.
Ο παραπάνω τύπος εφαρμόζεται μόνο σε περιπτώσεις όπου το πηδάλιο βρίσκεται ακριβώς πίσω από την έλικα. Για άλλες περιπτώσεις ο προτείνει μια αύξηση στην επιφάνεια του πηδαλίου το λιγότερο 30%. Προκειμένου να ελεγχθεί αν είναι επαρκής η επιφάνεια του πηδαλίου που επιλέχθηκε, εξετάζουμε το πρόσημο των σταθερών
DnV
1,2σ , η σημασία των οποίων αναλύθηκε στην παράγραφο 8. Υποθέτοντας ότι ισχύουν οι παραδοχές της παραγράφου 6 οι σταθερές 1,2σ δίδονται από τον εξής τύπο:
2
1,2
( ) ( ) 4 [ (2
z v y r v y r y z v r r v
y z
n Y N n Y N n Y N Y Nn
σ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′− − − Δ ± − −Δ + Δ − − Δ −
=′Δ
) ] (9)
- 340 -

84
όπου
2 ,( / 2)L Tρ
Δ′Δ =
,′
z z rn I N′ ′ ′= − .y vY′ ′Δ = Δ − Υπενθυμίζεται ότι οι υδροδυναμικοί συντελεστές που υπεισέρχονται στη σχέση (9) αναφέρονται στο σύστημα πλοίου-πηδαλίου και υπολογίζονται προσεγγιστικά ως αθροίσματα των αντίστοιχων συντελεστών γάστρας και πηδαλίου, μεμονωμένα. Η εξάρτηση των υδροδυναμικών συντελεστών του πηδαλίου από το εμβαδόν ΑΤ έχει αναλυθεί στο εδάφιο 6. Αν με την αρχικώς επιλεγείσα ΑΤ προκύψει ότι 1,2 0σ < , τότε το κριτήριο της ευστάθειας κατεύθυνσης ικανοποιείται και η επιφάνεια ΑΤ μπορεί να θεωρηθεί επαρκής. Αν κάποια από τις σταθερές 1,2σ είναι θετική τότε είναι αναγκαία αύξηση της επιφάνειας του πηδαλίου. Συνιστάται να αποφεύγεται αύξηση της επιφάνειας του πηδαλίου πέραν του ορίου 2% της επιφάνειας της διαμήκους τομής της βυθισμένης γάστρας του πλοίου (PNA,Vol III). Ένα άλλο σημαντικό μέγεθος που πρέπει κατόπιν να επιλεγεί είναι ο λόγος επιμήκους. Η επιλογή της επιφάνειας ΑΤ , έτσι όπως έγινε προηγουμένως, και του ανοίγματος , που προκύπτει από το όριο των ναυπηγικών γραμμών, οδηγεί σε δεδομένη τιμή για το λόγο επιμήκους.
b
Πρέπει να σημειωθεί ότι η αποτελεσματικότητα του πηδαλίου δεν μεγαλώνει σημαντικά όταν αυξάνεται μόνο η χορδή του πηδαλίου. Έχουμε μεγαλύτερη αποτελεσματικότητα όταν αυξάνεται το άνοιγμα του πηδαλίου. Όταν αυξάνεται η επιφάνεια του πηδαλίου χωρίς να αυξάνεται το άνοιγμα οδηγούμαστε σε μικρές τιμές του λόγου επιμήκους πράγμα που έχει ως αποτέλεσμα, όπως φαίνεται στο Σχήμα 7, τη δραστική μείωση του συντελεστή άνωσης, δηλαδή τη μείωση της επαγόμενης δύναμης εξαιτίας της γωνίας εκτροπής του πηδαλίου. Σε ορισμένες περιπτώσεις διπλών πηδαλίων, υπάρχει η ελευθερία να αυξάνεται η επιφάνεια και ο λόγος επιμήκους ανεξάρτητα το ένα από το άλλο. Στο Σχήμα 8 φαίνεται η επίδραση του μεγέθους του πηδαλίου στην διάμετρο του κύκλου στροφής, για διάφορες γωνίες εκτροπής του πηδαλίου, και για μοντέλα με διαφορετικούς συντελεστές γάστρας CB. Τα μοντέλα ανήκουν στη Σειρά 60. Φαίνεται ότι η καλύτερη συμπεριφορά εμφανίζεται όταν η επιφάνεια πηδαλίου βρίσκεται στο
διάστημα: 1 1( ) ( )50 40TLT A LT< < .
D Μέγιστη γωνία εκτροπής Είναι σημαντικό να διακρίνουμε τουλάχιστον τρεις έννοιες της “μέγιστης” γωνίας εκτροπής του πηδαλίου:
- 341 -

a) Μέγιστη γωνία σχεδιάσεως (design maximum). Η μέγιστη γωνία στην οποία το μηχάνημα πηδαλιουχίας μπορεί να στρέψει το πηδάλιο. Μια τυπική τιμή αυτής είναι περίπου 350.
b) Μέγιστη γωνία ελιγμών (maneuner maximum). Η μέγιστη γωνία στην οποία εκτρέπεται το πηδάλιο κατά την διάρκεια των ελιγμών.
c) Μέγιστη χρήσιμη γωνία (maximum useful). Για την επίτευξη ορισμένων ελιγμών, όπως π.χ. ο κυκλικός ελιγμός υπάρχει μια γωνία εκτροπής, την οποία αν υπερβούμε δεν παρατηρούμε σημαντική βελτίωση των χαρακτηριστικών του ελιγμού.
Αποφάσεις που αφορούν τα α) και b) καθορίζουν το c). Για πηδάλια που παρουσιάζουν απότομη μείωση της άνωσης μετά από κάποια συγκεκριμένη γωνία (stall angle), η μέγιστη χρήσιμη γωνία εκτροπής είναι αυτή η γωνία. Δεδομένου όμως ότι, όπως φαίνεται και στο Σχήμα 3, η γωνία πρόσπτωσης της ροής είναι μικρότερη από τη γωνία εκτροπής του πηδαλίου η μέγιστη χρήσιμη γωνία εκτροπής μπορεί να αυξηθεί και πέρα από την γωνία απώλειας άνωσης. Σύμφωνα με τον Taplin (1960) η γωνία πρόσπτωσης της ροής στο πηδάλιο είναι περίπου ίση με τα 5/7 της γωνίας εκτροπής αυτού. Τέλος για τον καθορισμό της μέγιστης γωνίας σχεδιάσεως (αλλά και της μέγιστης χρήσιμης γωνίας) λαμβάνεται υπ’ όψιν και η συμπεροφορά του πλοίου σε κυκλικό ελιγμό. Στο Σχήμα 9 φαίνονται πειραματικές μετρήσεις της γωνίας πρόσπτωσης της ροής στο πηδάλιο σαν συνάρτηση της γωνίας εκτροπής του πηδαλίου και της αδιάστατης διαμέτρου του κύκλου στροφής. Οι μετρήσεις πάρθηκαν από πειράματα με μοντέλα μονέλικων εμπορικών πλοίων. E Ρυθμός εκτροπής πηδαλίου Ενώ τα απαιτούμενα χαρακτηριστικά του κυκλικού ελιγμού είναι εκείνα που οδηγούν στην επιλογή μέγιστης σχεδιαστικής γωνίας εκτροπής του πηδαλίου, στην επιλογή του ρυθμού εκτροπής οδηγούμαστε από τα ζητούμενα χαρακτηριστικά άλλων ελιγμών (zig-zag, χρόνος για συγκεκριμένη αλλαγή κατεύθυνσης, κτλ.). Ο συνηθέστερος ρυθμός εκτροπής του πηδαλίου είναι, σύμφωνα με τους κανονισμόυς των Νηογνωμόνων, 2 1/3 deg/sec (ανεξάρτητος από τις παραμέτρους του πλοίου). Πειραματικά αποτελέσματα έχουν δείξει ότι δεν υπάρχουν σημαντικές βελτιώσεις όταν ο ρυθμός εκτροπής είναι μεγαλύτερος από 2 deg/sec. Εξάλλου αυξάνοντας το ρυθμό εκτροπής, αυξάνεται η δύναμη και η ροπή που απαιτούνται για την περιστροφή του πηδαλίου, και οι οποίες αναπτύσσονται από το μηχανισμό πηδαλιουχίας. Διαστατική ανάλυση οδηγεί στο συμπέρασμα ότι ο ρυθμός εκτροπής είναι άμεσα συνδεδεμένος με το μέγεθος και την ταχύτητα του πλοίου. Αν ένας ρυθμός εκτροπής είναι αποδεκτός για κάποια δεδομένη σχεδίαση, τότε ο ρυθμός εκτροπής για όμοια πλοία διαφορετικού μεγέθους και ταχύτητας μπορεί να καθορισθεί ως εξής:
A BRA RB
A B
L LV V
δ δ= , (10)
όπου
85 - 342 -

86
Rδ : ρυθμός εκτροπής, L : μήκος πλοίου, V : ταχύτητα πλοίου, A,B: διαφορετικά πλοία.
F Μορφή υδροτομής πηδαλίου Συστηματικά πειράματα έχουν δείξει ότι συμμετρικές υδροτομές πηδαλίου τύπου συμμετρικών αεροτομών NACA έχουν την καλύτερη συμπεριφορά (Nomoto 1966). Για κατασκευαστικούς λόγους το χείλος εκφυγής του πηδαλίου πρέπει να έχει σημαντικό πάχος. Σε κάθε περίπτωση όμως, ο λόγος πάχος χορδής/μήκος χορδής δεν πρέπει να ξεπερνά το 0.25 για να αποφεύγονται φαινόμενα αποκόλλησης της ροής. Οι υδροτομές (αεροτομές) NACA 0018 έως 0025 χρησιμοποιούνται συνηθέστερα διότι παρουσιάζουν υδροδυναμικά πλεονεκτήματα, όπως:
α) μεγαλύτερη γωνία απώλειας άνωσης (stall angle), b) σχετικά σταθερή θέση του κέντρου πίεσης, c) σχετικά μικρή αύξηση της αντίστασης με το πάχος.
Ενδεικτικά διαγράμματα για τα αδιάστατα υδροδυναμικά χαρακτηριστικά της υδροτομής (αεροτομής) NACA 0018 δίδονται στο παράρτημα του εδαφίου 6. Χαρακτηριστικά ελιγμών πλοίου με δεδομένο πηδάλιο Ύστερα από τον καθορισμό των βασικών γεωμετρικών παραμέτρων του πηδαλίου είναι σκόπιμο να ελέγχεται (το πηδάλιο) ως προς την συμπεριφορά του σε συγκεκριμένους ελιγμούς. Οι εμπειρικές εκφράσεις που ακολουθούν δίνουν μια πρώτη προσέγγιση για τα χαρακτηριστικά του κυκλικού ελιγμού (διάμετρος κύκλου στροφής (STD), τακτική διάμετρος (TD), προχώρηση (AD), μεταφορά (TR), και λόγος μείωσης ταχύτητας) (PNA, Vol III, 1989). α) Μονέλικα πλοία
( )203 13.0 1944.19 47.4 35.8 1B
R R
cSTD Trim B SpCh STL L L LTδ δ
= − + − + − − +
( ) (3.82 2 7.79 0.70 1 1B R
L R
ASpCh TST STLT LT T
δδ
⎛ ⎞⎛ ⎞+ − + + − ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
)− (11)
0.910 0.424 0.675AVTD STDL L L
= + + (12)
0.519 1.33AD TDL L
= + (13)
0.497 0.065TR TDL L
= − (14)
0.074 0.149T
A
V TDV L
= + (15)
- 343 -

87
β) Διπλέλικα πλοία
0.727STD= 197 4.65 41.0B
R
c B TrimL L Lδ
− + + +
( )1188 218 1 3.20 25.56A B
R
V ASpCh NRLT LTLδ
+ − − + + (16)
0.140 1.00TD STDL L
= + (17)
1.100 0.514AD TL L
= + D (18)
0.357 0.531TR TDL L
= − + (19)
0.543 0.028T
A
V TDV L
= + (20)
α μεγέθη που εμφανίζονται είναι τα:
τύπος πρύμνης (ST=1 για κλειστή πρύμνη, ST=2 για πρύμνη άβακος)
ων,ft
Τ
: ST:NR αριθμός πηδαλίων
:L μήκος μεταξύ καθέτ: συντελεστής γάστρας Bc :Rδ γωνία πηδαλίου, μοίρες (αρνητική αν είναι προς τα δεξιά)
:B πλάτος : βυθισμέBA νη πρωραία επιφάνεια η οποία θεωρείται θετική αν εκτείνεται και
το βύθισμα
ots
στροφής
πέραν της πρωραίας καθέτου βύθισμα ελιγμού :T
: σχεδιαστικό έμφορLT : ταχύτητα προχώρησης,knots AV:TV ταχύτητα κατά την στροφή,kn: άνοιγμα πηδαλίου Sp: χορδή πηδαλίου Ch
: μόνιμη διάμετρος του κύκλουSTD :TD τακτική διάμετρος :AD προχώρηση για στροφή 90 μοιρών
ν στροφή
αράρτημα εδαφίου 13
το 1958 έχοντας υπολογίσει πειραματικά τα αδιάστατα διαφόρων μορφών πηδαλίων κατέληξαν στους ακόλουθους ημι-
εμπειρικούς τύπους υπολογισμού των
:TR μεταφορά για στροφή 90 μοιρών /T AV :V λόγος μείωσης ταχύτητας κατά τη
Π ι Whicker και Felhner Ο
χαρακτηριστικά / 4, , , ,L D mc c sC C C CP CP .
- 344 -

88
Συντελεστής άνωσης, LC
2
DCLL
CC aC a∂ ⎛ ⎞⎛ ⎞= +⎜ ⎟ ⎜ ⎟0aa∂ =⎝ ⎠
57,3AR ⎝ ⎠
(21)
που Ό
20
4
0.9(2 )
57.3 cos 4 1.8cos
L
a
C ARa AR
∂ π∂ =
⎛ ⎞ =⎜ ⎟ ⎡ ⎤⎝ ⎠ ⎛ ⎞Λ + +⎢ ⎥⎜ ⎟Λ⎢ ⎥⎝ ⎠⎣ ⎦
(22)
0
L
a
Ca
∂∂ =
⎛ ⎞⎜ ⎟⎝ ⎠
: η κλίση της καμπύλης του συντελεστή άνωσης συναρτήσει της γωνίας
πρόσπτωσης α, για α=0, :AR η γωνία που σχηματίζει η ευθεία του της χορδής με τον άξονα του
σε μοίρες,
λόγος επιμήκους, 1/4
πηδαλίου, :Λ
:a γωνία πρόσπτωσης της ροής :DCC συντελεστής αντίστασης εξαιτίας της ροής στα άκρα ο οποίος
εξαρτάται από το σχήμα των άκρων και το λόγο . τ
Συντελεστής α
/T Rc cΤιμές αυτού του συντελεστή λαμβάνον αι από το Σχήμα 10 που ακολουθεί.
ντίστασης, DC .
2LC
D doC C= + (23)
: ελάχιστος συντελ τή αντίστασης διατομής
ARπόπου
doC εσ ς , 0.0065doC = γι CA 0015
α NA
Συν
τελεστής ροπής γύρω από το 1/4 της χορδής
2
/ 400L
aL CC a∂ ∂ ==
10.252 57.3
m DCLmc
C CC aC aAR
∂ ∂⎤⎡ ⎡ ⎤⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎢ ⎥= − − ⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠⎢ ⎥ ⎢ ⎥⎝ ⎠ ⎣ ⎦
,
(24) που
⎣ ⎦
ό
( )( )
1/ 22
0
1.11 4 212 4 2
L
m
L C
ARCC AR
∂∂
=
⎡ ⎤+ +⎛ ⎞ ⎢ ⎥⎣ ⎦= −⎜ ⎟ +⎝ ⎠. (25)
Απόσταση κέντρου πίεσης από το χείλος πρόσπτωσης
/ 40.25 mcc
N⎝ ⎠όπου
CCP cC
⎛ ⎞= −⎜ ⎟ ,
(26)
a . (27) cos sinN L DC C a C= +
- 345 -

89
Απόσταση κέντρου πίεσης από την ρίζα του πηδαλίου
43sCP bπ
⎛ ⎞= ⎜ ⎟⎝ ⎠
.
ίναι φανερό εξαιτίας ς μορφής των νομέων του σε όπισθεν προηγούμενες σχέσει εν δίνουν σωστά αποτελέσματα σ’ την περίπορεί να χρησιμοποιηθεί η φόρμουλα του Joessel που βασίζεται σε πειραματικά
(28)
Ε τη πηδαλίου ορεία ότι οι π ς δ αυτή πτωση. Εδώ μαποτελέσματα που έγιναν με επίπεδο ορθογώνιο έλασμα. Ισχύουν τα εξής: 20.811 sin ,TQ A u w a=
( )0.195 0.305sin ,x aw= +
όπου ροπή πηδαλίου με σημείο αναφοράς το σημείο πρόσπτωσης(lb*ft), επιφάνεια πηδαλίου(ft*ft)ταχύτητα πλοίου(fps),
:Q :TA ,
:u :w άνοιγμα πηδαλίου(ft), :a γωνία πρόσπτωσης(deg), :x απόσταση του κέντρου πίεσης από το σημείο πρόσπτωσης(ft).
- 346 -

Σχήμα 1. Διαστάσεις μιας τυπικής επιφάνειας ελέγχου
(a) (b) (c)
(d) (e) (f)
Σχήμα 2. Διάφοροι τύποι πηδαλίων
90 - 347 -

Σχήμα 3. Συνιστώσες της υδροδυναμικής δύναμης επί πηδαλίου
Σχήμα 4. Ακτινική κατανομή του ομόρρου σε μονέλικο μοντέλο πλοίου
91 - 348 -

α) πρύμνη ανοικτού τύπου β) πρύμνη παραδοσιακού τύπου
Σχήμα 5. Κατανομή της αξονικής ταχύτητας ομόρρου στο επίπεδο συμμετρίας του πλοίου
92 - 349 -

Σχήμα 6. Επίδραση της θέσης της στρεπτικής δύναμης
Σχήμα 7. Επίδραση του λόγου επιμήκους στον συντελεστή άνωσης
93 - 350 -

Σχήμα 8. Επίδραση της επιφάνειας και της γωνίας εκτροπής του πηδαλίου στην διάμετρο του κύκλου στροφής
94 - 351 -

Σχήμα 9. Σχέση της γωνίας πρόσπτωσης της ροής στο πηδάλιο και της γωνίας εκτροπής αυτού για συγκεκριμένη συμπεριφορά κατά τον κυκλικό ελιγμό
(Πειραματικά αποτελέσματα, Lewis 1989)
95 - 352 -

Σχήμα 10. Επίδραση του σχήματος των άκρων και του λόγου /Tc cRστον συντελεστή αντίστασης DCC
96 - 353 -

ΒΙΒΛΙΟΓΡΑΦΙΑ 1. Abkowitz, M.A. (1969), Stability and Motion Control of Ocean Vehicles, MIT
Press, Boston, Mass. 2. Bishop, R.E.D. and Parkinson, A.G. (1970), On the Planar Motion Mechanism
Used in Ship Model Testing, Phil. Trans. R. Soc. (A), 266,35-61. 3. Bishop, R.E.D., Burcher, R.K., Parkinson, A.G. and Price, W.G. (1974),
Oscillatory Testing for the Assessment of Ship Manoeuvrability, 10th Symposium on Naval Hydrodynamics, Boston, Mass.
4. Clarke, D. and Gelding, P. (1982), The Application of Manoeuvring Criteria in
Hull Design Using Linear Theory, The Royal Institution of Naval Architects. 5. Crane, C.L. and Landsburg, A.C. (1989), Controllability, Principles of Naval
Architecture, Vol. III.
6. Fedyayevskiy, K.K. and Sobolev, G.V. (1964), Control and Stability in Ship Design, Joint Publication Research Service, Washington, D.C.
7. Harvald, S.A. (1983), Resistance and Propulsion of Ships.
8. Jacobs, W.R. (1966), Estimation of Stability Derivatives and Indices of Various Ship Forms, and Comparison With Experimental Results, Journal of Ship Research.
9. Lewis, E.V. (1989), Principles of Naval Architecture, Vol.II.
10. Landrini, M. and Campana, E.F. (1996), Steady Waves and Forces About a Yawing Flat Plate, Journal of Ship Research, Vol. 40, pp 179-192
11. Nomoto, K. (1966), Response Analysis of Manoeuvrability and its Application to Ship Design, Chapter 2 of Researhes on the Manoeuvrability of Ships in Japan, pp 17-59 of Vol. 11 of the 60th Anniversary Series of the Society of Naval Architects of Japan, Tokyo.
12. Ogawa, A. and Kasai, H. (1978), On the Mathematical Model of Manoeuvring Motion of Ships.
97 - 354 -