Numerical simulation of LNG dispersion under two-phase release conditions
10
Numerical simulation of LNG dispersion under two-phase release conditions S.G. Giannissi a, b, * , A.G. Venetsanos a , N. Markatos b , J.G. Bartzis c a Environmental Research Laboratory, National Centre for Scientific Research Demokritos, 15310 Aghia Paraskevi, Attikis, Greece b Department of Process Analysis and Plant Design, School of Chemical Engineering, National Technical University of Athens, Heroon Polytechniou 9, 15780 Zografou, Greece c Department of Mechanical Engineering, University of Western Macedonia, Parko Agiou Dimitriou, West Macedonia, 50100 Kozani, Greece article info Article history: Received 9 January 2012 Received in revised form 10 August 2012 Accepted 21 November 2012 Keywords: LNG dispersion Two phase jet Falcon series Stable conditions ADREA-HF code CFD abstract The use of LNG (liquefied natural gas) as fuel brings up issues regarding safety and acceptable risk. The potential hazards associated with an accidental LNG spill should be evaluated, and a useful tool in LNG safety assessment is computational fluid dynamics (CFD) simulation. In this paper, the ADREA-HF code has been applied to simulate LNG dispersion in open-obstructed environment based on Falcon Series Experiments. During these experiments LNG was released and dispersed over water surface. The spill area is confined with a billboard upwind of the water pond. FA1 trial was chosen to be simulated, because its release and weather conditions (high total spill volume and release rate, low wind speed) allow the gravitational force to influence the cold, dense vapor cloud and can be considered as a benchmark for LNG dispersion in fenced area. The source was modeled with two different approaches: as vapor pool and as two phase jet and the predicted methane concentration at sensors’ location was compared with the experimental one. It is verified that the source model affect to a great extent the LNG dispersion and the best case was the one modeling the source as two phase jet. However, the numerical results in the case of two phase jet source underestimate the methane concentration for most of the sensors. Finally, the paper discusses the effect of neglecting the 9.3 experimental wind direction, which leads to the symmetry assumption with respect to wind and therefore less computational costs. It was found that this effect is small in case of a jet source but large in the case of a pool source. Ó 2012 Elsevier Ltd. All rights reserved. 1. Introduction In the last years the need to depend on other than petroleum energy resources, such as renewable energy sources or natural gas is growing rapidly. Especially, the use of natural gas as fuel has increased over the past few years. That along with the fact that natural gas is a flammable gas and for its storage and transportation usually liquefaction is necessary, led the research and industry community to evaluate the hazards of a potential LNG spill. Therefore, several experiments and computational studies related to LNG release have been conducted in the past. The LNG dispersion experiments that have been performed are the Burro Series (Burro Series Data Report, 1982), Coyote Series (Coyote Series Data Report, Oct. 1983), Falcon Series (Falcon Series Data Report, June 1990), Maplin Sands tests (Colenbrander, Evans, & Puttock, 1984a), Esso tests (Feldbauer, Heigl, McQueen, Whipp, & May, 1972), Shell jettision tests (Kneebone & Prew, 1974), Avocet (Koopman, Bowman, & Ermak, 1979) and BFTF (Cormier, Qi, Yun, Zhang, & Mannan, 2009; Qi, Cormier, & Mannan, 2010). In all these experiments the release is above water surface, except for BFTF experiments, which also include the case of release above concrete. From the above experiments the effect of obstacles in an open environment was present only in the Falcon series and the BFTF experiments. In the present work the Falcon experiments were selected for simulation, because of the presence of obstacles. Specifically, FA1 trial was chosen, because of its release and weather conditions (high total spill volume and release rate, low wind speed) that permitted the gravitational force to influence the dense cold vapor cloud dispersion. Moreover, during that trial no rapid phase transition (RPT) explosions or fire were occurred, so the data of all sensors are available. Previous simulation work related to the Falcon experiments was performed by Chan (1992) using the Fem3A code (Chan, 1992). The * Corresponding author. Environmental Research Laboratory, National Centre for Scientific Research Demokritos,15310 Aghia Paraskevi, Attikis, Greece. Tel.: þ30 210 6503416. E-mail addresses: [email protected] (S.G. Giannissi), venets@ ipta.demokritos.gr (A.G. Venetsanos), [email protected] (N. Markatos), bartzis@ uowm.gr (J.G. Bartzis). Contents lists available at SciVerse ScienceDirect Journal of Loss Prevention in the Process Industries journal homepage: www.elsevier.com/locate/jlp 0950-4230/$ e see front matter Ó 2012 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.jlp.2012.11.010 Journal of Loss Prevention in the Process Industries 26 (2013) 245e254
Transcript of Numerical simulation of LNG dispersion under two-phase release conditions

at SciVerse ScienceDirect
Journal of Loss Prevention in the Process Industries 26 (2013) 245e254
Contents lists available
Journal of Loss Prevention in the Process Industries
journal homepage: www.elsevier .com/locate/ j lp
Numerical simulation of LNG dispersion under two-phaserelease conditions
S.G. Giannissi a,b,*, A.G. Venetsanos a, N. Markatos b, J.G. Bartzis c
a Environmental Research Laboratory, National Centre for Scientific Research Demokritos, 15310 Aghia Paraskevi, Attikis, GreecebDepartment of Process Analysis and Plant Design, School of Chemical Engineering, National Technical University of Athens, Heroon Polytechniou 9,15780 Zografou, GreececDepartment of Mechanical Engineering, University of Western Macedonia, Parko Agiou Dimitriou, West Macedonia, 50100 Kozani, Greece
a r t i c l e i n f o
Article history:Received 9 January 2012Received in revised form10 August 2012Accepted 21 November 2012
Keywords:LNG dispersionTwo phase jetFalcon seriesStable conditionsADREA-HF codeCFD
* Corresponding author. Environmental Research LaScientific Research Demokritos, 15310 Aghia Paraskevi6503416.
E-mail addresses: [email protected] (A.G. Venetsanos), [email protected] (J.G. Bartzis).
0950-4230/$ e see front matter � 2012 Elsevier Ltd.http://dx.doi.org/10.1016/j.jlp.2012.11.010
a b s t r a c t
The use of LNG (liquefied natural gas) as fuel brings up issues regarding safety and acceptable risk. Thepotential hazards associated with an accidental LNG spill should be evaluated, and a useful tool in LNGsafety assessment is computational fluid dynamics (CFD) simulation. In this paper, the ADREA-HF codehas been applied to simulate LNG dispersion in open-obstructed environment based on Falcon SeriesExperiments. During these experiments LNG was released and dispersed over water surface. The spillarea is confined with a billboard upwind of the water pond. FA1 trial was chosen to be simulated,because its release and weather conditions (high total spill volume and release rate, low wind speed)allow the gravitational force to influence the cold, dense vapor cloud and can be considered asa benchmark for LNG dispersion in fenced area. The source was modeled with two different approaches:as vapor pool and as two phase jet and the predicted methane concentration at sensors’ location wascompared with the experimental one. It is verified that the source model affect to a great extent the LNGdispersion and the best case was the one modeling the source as two phase jet. However, the numericalresults in the case of two phase jet source underestimate the methane concentration for most of thesensors. Finally, the paper discusses the effect of neglecting the �9.3� experimental wind direction,which leads to the symmetry assumption with respect to wind and therefore less computational costs. Itwas found that this effect is small in case of a jet source but large in the case of a pool source.
� 2012 Elsevier Ltd. All rights reserved.
1. Introduction
In the last years the need to depend on other than petroleumenergy resources, such as renewable energy sources or natural gasis growing rapidly. Especially, the use of natural gas as fuel hasincreased over the past few years. That along with the fact thatnatural gas is a flammable gas and for its storage and transportationusually liquefaction is necessary, led the research and industrycommunity to evaluate the hazards of a potential LNG spill.Therefore, several experiments and computational studies relatedto LNG release have been conducted in the past.
The LNG dispersion experiments that have been performed arethe Burro Series (Burro Series Data Report, 1982), Coyote Series
boratory, National Centre for, Attikis, Greece. Tel.: þ30 210
(S.G. Giannissi), [email protected] (N. Markatos), bartzis@
All rights reserved.
(Coyote Series Data Report, Oct. 1983), Falcon Series (Falcon SeriesData Report, June 1990), Maplin Sands tests (Colenbrander, Evans,& Puttock, 1984a), Esso tests (Feldbauer, Heigl, McQueen, Whipp, &May, 1972), Shell jettision tests (Kneebone & Prew, 1974), Avocet(Koopman, Bowman, & Ermak, 1979) and BFTF (Cormier, Qi, Yun,Zhang, & Mannan, 2009; Qi, Cormier, & Mannan, 2010). In all theseexperiments the release is above water surface, except for BFTFexperiments, which also include the case of release above concrete.
From the above experiments the effect of obstacles in an openenvironment was present only in the Falcon series and the BFTFexperiments. In the present work the Falcon experiments wereselected for simulation, because of the presence of obstacles.Specifically, FA1 trial was chosen, because of its release andweather conditions (high total spill volume and release rate, lowwind speed) that permitted the gravitational force to influence thedense cold vapor cloud dispersion. Moreover, during that trial norapid phase transition (RPT) explosions or firewere occurred, so thedata of all sensors are available.
Previous simulationwork related to the Falcon experiments wasperformed by Chan (1992) using the Fem3A code (Chan, 1992). The

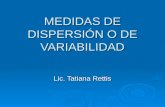
Fig. 1. The multi-exit spider configuration for the LNG release (Falcon Series DataReport, June 1990).
S.G. Giannissi et al. / Journal of Loss Prevention in the Process Industries 26 (2013) 245e254246
turbulence submodel that was used is the K-theory local equilib-rium model. The value of K-diffusivity within the fence was esti-mated using some parameters that were adapted in order to obtainresults consistentwith experiment. The sourcemodel thatwas usedin that study assumed that the spilled LNG evaporated as fast as itwas spilled and over the entire water pond surface area. Althoughthe experimentally measured wind direction formed an angleof �9.3� with respect to the fence alignment, Chan et al. assumedthat the direction of the wind was parallel to the alignment of thefence. The predicted results were consistent with the experiment,however the model overall underpredicted the concentrations.
Later on Gavelli, Bullister, and Kytomaa (2008 and 2009) simu-lated FA1 with the commercial CFD code Fluent. His first work(Gavelli et al., 2008) discusses the effect of vapor barriers on the areaof ignitable vapor cloud, concluding thatwith barriers the hazardousarea is reduced and impounded inside the fence. The source wasmodeled as an evaporating pool from the entire water pond surface.The model underpredicted the gas concentrations at the sensorsdownwind the fence and Gavelli et al. suggested that additionalmixing of the cloud inside the fence would tend to improve thenumerical prediction.Having noticed that the turbulence inducedbythe spill and by the evaporating LNG pool affects the LNG dispersion,in his latter study (Gavelli, Chernovsky, Bullister, & Kytomaa, 2009)he introduced amethod to estimate the turbulent intensity by usingthe experimental video frames, and compared the calculated resultswith the experimental results. Four independent evaporating LNGpools (one beneath each spill spider arm) were assumed to be theLNG source. The pools were assumed to spread in time. The pools’horizontal spreading velocities were estimated from the experi-mental video frames. The vapor from the pool was assumed verti-cally injectedwithvelocity of approximately 0.07m/s correspondingto an LNG vaporization flux of 0.127 kg/m2s. Three different turbu-lent intensity levels at the source were tested, in order to evaluatethe sensitivity of the vapor cloud dispersion to the source-levelturbulence. His investigation pointed out that turbulence createdby the spreading and vaporization of an LNG pool ontowater surfaceis important and a detailed definition of the LNG vapor source termincluding the turbulence intensity in the simulation process is crit-ical in order to obtain acceptable results. However, the numericalresults underestimated the gas concentration at the sensors down-wind the fence in all three cases of different source-levels ofturbulent intensity. In both studies the direction of thewind formedan angle of �9.3� with respect to the alignment of the fence.
Focusing on the last observation that the spreading and vapor-ization of an LNG pool onto water surface creates an importantamount of turbulence along with the fact that when modeling thesource as an evaporating pool an assumption about the pool sizeand the evaporation rate per unit area should be made, the presentstudy used a new approach of modeling the source. In the newapproach the source is treated as a two phase jet, enabling simul-taneous modeling of pool formation and spreading as well as thesubsequent methane vapor dispersion. The computational resultswere compared with the experimental results and with the resultsthat were obtained with modeling the source as a vapor pool.
Additionally the effect of neglecting the �9.3� experimentalwind direction, which leads to the symmetry assumption withrespect to wind and therefore less computational costs was testedby performing calculations with and without wind direction.
The numerical simulations were performed with the ADREA-HFthree dimensional, time dependent, fully compressible finite volumeCFD code (Bartzis,1991;Würtz et al.,1996; Venetsanos, Papanikolaou,& Bartzis, 2010), that has been successfully used in the past forprediction of pollutants and hazardous gases dispersion in open andclosed environments. In the last years main focus has been given toprediction of hydrogen dispersion for both cryogenic and compressed
releases (Baraldi, Venetsanos, Papanikolaou, Heitsch, & Dallas, 2009;Statharas, Venetsanos, Bartzis, Würtz, & Schmidtchen, 2000;Venetsanos, Baraldi, Adams, Heggem, &Wilkening, 2008; Venetsanos& Bartzis, 2007), concluding that ADREA-HF code is an appropriateCFD tool for risk assessment of hydrogen applications.
2. Description of Falcon series experiments
The Falcon Series experiments were conducted in the FrenchmanFlat area inNevada in 1987by Lawrence LivermoreNational Laboratory(LLNL) for the Department of Transportation (DOT) and the GasResearch Institute (GRI) as part of a joint government/industry study. Aseries of five LNG spills were performed in order to evaluate the effec-tiveness of walls and barriers on reducing the hazard distance associ-ated with a large scale LNG release and to obtain extensive data forcomputer models validation. The LNG was spilled into a rectangularwater pond (60 � 40 � 0.76 m) through a multi-exit spill “spider” foruniform distribution above water pond. The “spider” consisted of fourarms and each armwas oriented 90� fromadjacent arms. The exits had0.11mdiameterandtheLNGwasreleasedstraightdownwardabovethewater surface (Fig.1). Therewasacirculationsystemin thepond, so thatthewater temperaturewould be stable and the vaporization rate couldbe considered nearly equal to the spill rate. The domainwas a confinedarea with an 88 m long, 44 m wide and 8.7 m tall fence. A billboard13.3 m tall and 17.1 mwide was located upwind of the water pond.
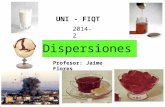
During the Falcon series, a total of 77 gas concentration sensorswere deployed. The sensors were located at 50, 150, and 250 mdownwind of the fence and at 1, 5,11, and 17m height. The facility isdepicted in Fig. 2. The figure is taken from the graphical user inter-face of ADREA-HF code named Edes. The rectangular blue area is thewater pond, and the release points are where the four yellow dotsindicate. The spheres show the sensors’ location in the experiment.
Along with the gas sensors, several instruments were deployed,in order to measure the air temperature, pressure and humidity,wind speed and direction, turbulence intensity, and heat flux fromthe ground.
The release conditions of Falcon series experiments variesfrom 8.7 to 30.3 m3/min spill rate, 20.6e66.4 m3 spill volume, and78e138.8 s spill duration. The wind speed measured at 2 m heightranged from 1.7 to 5.2 m/s and the atmospheric stability conditionswere neutral to stable. Table 1 shows analytically the experimentalconditions of FA1 test.
3. Mathematical formulation
The governing equations that describe the mean flow are the3-D time-dependent conservation equations for mixture mass,momentum, enthalpy and component (methane) total massfraction.

Fig. 2. The experimental layout of the Falcon tests (ADREA-HF view). The spheresrepresent the sensors’ locations.
S.G. Giannissi et al. / Journal of Loss Prevention in the Process Industries 26 (2013) 245e254 247
Mixture mass (continuity equation):
vr
vtþ vrui
vxi¼ 0 (1)
Mixture NaviereStokes (momentum equations)
vruivt
þ vruiujvxj
¼ �vPvxi
þ v
vxj
mef
vuivxj
þ vujvxi
!!þ rgi (2)
Mixture Enthalpy:
vrHvt
þ vrujHvxj
¼ v
vxj
mefs
vHvxj
!þ dP
dt(3)
Component total mass fraction:
vrqivt
þ vrujqivxj
¼ v
vxj
mefs
vqivxj
!(4)
The mixture density is related to component densities and massfractions through:
1r¼X qi
ri¼X�
qivriv
þ qilril
�(5)
Table 1FA1 trial release and weather conditions and boundary layer data.
Spill rate (m3/min) 28.7Spill duration (s) 138.8Ambient Pressure (atm) 0.9Ambient Temperature (K)/upper-lower 307.25e305.95Wind Speed (m/s) 1.7(@ 2 m)Atmospheric Stability conditions StableFriction velocity, u* (m/s) 0.0605Dynamical temperature, T* (K) 0.0577Surface temperature, To (K) 304.5MonineObukhov length (m) 4.963Roughness length (m) 0.008
Xqi ¼ 1 (6)
qi ¼ qiv þ qil (7)
Turbulence was modeled using the standard k- 3model (Launder& Spalding, 1974), in which buoyancy effects were included(Markatos & Pericleous, 1984; Venetsanos et al., 2010). The value ofturbulent Schmidt and Prandtl numbers (s) was 0.72.
The phase distribution of the binary mixture (air and methane)is performed assuming thermodynamic equilibrium. Methane inliquid phase is assumed to appear instantaneously when themixture temperature falls below the mixture dew temperature. Ifthis happens then the amount of liquid methane is calculated usingRaoult’s law for ideal mixtures.
It is important to take under consideration the heat exchangebetween the ground and the bulk flow. Therefore, the ground heattransfer was modeled by solving a transient one-dimensionaltemperature equation inside the ground (Statharas et al., 2000).
4. Modeling strategy
The simulations were performed in two steps. First a 3D steadystate wind field problem was solved to obtain the 3D-wind fieldover the obstructed terrain. The computational domain for thisproblem covered a wider area around the obstacles. Then thetransient dispersion problem was solved in a domain morerestricted and refined near the sources. The first problem providedinitial and inflow boundary conditions for the second problem. Dueto the different grids used, transfer of values from one problem tothe next was performed using linear interpolation.
4.1. The 3D steady state wind problem
The domain dimensions for the 3D steady state wind fieldsimulation were 500 � 500 � 50 m in the x, y, z directionsrespectively. The total number of cells was 132020.
Inflow velocity and temperature profiles were obtained froma least squares fit of the available experimental data. The derivedprofiles and the experimental data are shown in Fig. 3. The figuresalso shows thewind velocity and temperature profiles generated bythe MonineObukhov similarity theory, using the reported experi-mental data (L ¼ 4.963) and described by the following equations:
uðzÞ ¼�u*k
�$
�ln�zzo
�� jm
�zL
��
TðzÞ ¼ To þ�T*k
�$
�ln�zzo
�� jh
�zL
�� (8)
Where for stable conditions (L � 0):
jm
�zL
�¼ jh
�zL
�¼ �5$
zL
(9)
It can be observed that the velocity and temperature profilesproduced by the Similarity Theory differ from the respectiveexperimental. This behavior can be attributed to the fact that FA1trial was performed in the evening during summer, when theatmospheric conditions were not yet stabilized.
The average measured wind direction was at an angle of �9.3�
with respect of the alignment of the fence. Therefore, u- and v-velocity components were computed by multiplying the windvelocity by the cosine and by the sine of the angle respectively. Bothcomponents were set as input in the 3D steady state problem.
Inflow profiles for the turbulent kinetic energy and its dissipa-tion rate were generated using the following relationships:

0
1
2
3
4
5
6
7
8
9
0 10 20 30 40 50
Height (m)
)s/m(
yticol eV
experimental dataleast squares fit datasimilatiry theory
(a)
303
305
307
309
311
313
315
0 10 20 30 40 50
Height (m)
)K(erutarepmeT
experimental dataleast squares fit datasimilarity theory
(b)
Fig. 3. Wind velocity (a) and ambient temperature (b) profiles determined from a least squares fit of the available experimental data (boxes) and compared against similarity theory.
S.G. Giannissi et al. / Journal of Loss Prevention in the Process Industries 26 (2013) 245e254248
k ¼ 11 =u2* ; 3 ¼ u3* (10)
c 2mkz
where cm ¼ 0:09 and k ¼ 0:41.
4.2. The 3D transient dispersion problem
The computational domain was 376 � 400 � 50 m in the x, y, zdirections respectively, see Fig. 4.
The total number of cells was 605 744. The minimum horizontalcell size was 0.11 m near the sources and expanding away fromthemwith an expansion factor of 1.12. The minimum cell size in thevertical direction was 0.4 m near the ground and expanding awayfrom it with an expansion factor of 1.07.
The abovementioned grid provided grid-independent results.This was verified by performing a separate grid dependency studywhich examined grids consisting of 269 008, 399 840, 605 744 and621 792 cells.
At the inlet boundaries inflow (Dirichlet) boundary conditionswere used with values provided by the previous 3D steady statewind field problem. Due to thewind direction the boundaries at the
Fig. 4. The mesh display on plane y ¼ 0 and the bottom section and an aspect of the grid refilocation of the release points (For interpretation of the references to colour in this figure l
west and north domainwere considered both inlet boundaries. Theoutlet boundaries are prescribed by applying zero gradient for allvariables exceptmethanemass fraction and temperature, for whicheither a zero gradient boundary condition was applied if outflowoccurs or a given value boundary condition (equal to the initialvalue) if inflow occurs The top boundary is a free boundary.According to Luketa-Hanlin et al. (Luketa-Hanlin, Koopman, &Ermak, 2007) symmetry boundary condition along the top planeis more appropriate. Therefore, the normal component of velocitywas set equal to zero and for all other variables zero gradientboundary condition was applied. At the bottom boundary standardrough wall functions were applied and a zero gradient for methanemass fraction. On the ground part of the bottom boundary the heatflux was obtained by solving the one-dimensional energy equationinside the ground. On the water part of the bottom boundary (thepond) a constant temperature was assumed equal to 301.55 K. Thesourcewasmodeled with two different methods: as a constant areaevaporating pool and as a two-phase jet.
In the constant area evaporating pool formulation it is assumedthat the liquid methane evaporates instantly as soon as it touchesthe ground. This assumption is valid since the release is abovewater. Water has large heat capacity, so its temperature can be
nement close to the LNG release points (ADREA-HF view). The yellow arrows show theegend, the reader is referred to the web version of this article.).

S.G. Giannissi et al. / Journal of Loss Prevention in the Process Industries 26 (2013) 245e254 249
conserved almost constant during the spill process. Furthermore,there was a recirculation system in the pond, in order to keepthe water’s temperature constant. The liquid methane pool wasassumed to have during the entire release period, the horizontaldimensions of the water pond (2400 m2). This area was assumedto release saturated vapor methane (at 90 890 Pa, 110.25 K)upwards with a vertical velocity of 0.054 m/s. This velocity wascalculated from the given mass spill rate (205.71 kg/s), the densityof saturated vapor methane (1.59 kg/m3) and the assumed poolarea.
In the two-phase jet formulation it is assumed that methanewas released vertically downwards under two-phase flow condi-tions exactly from the experimental release points from 4 jets withdiameters 0.11 m (as in the experiment). The amount of liquidmethane that flashed vaporized at the source was calculated byassuming isenthalpic expansion from a pressure of 450 000 Pa(before opening the valve) to 90 890 Pa (ambient pressure). Thetemperature upwind and downwind the exit was the saturatedtemperature at each pressure. The calculated boundary conditionson each jet area were vertical velocity �544.57 m/s, ambientpressure, temperature 110.25 K and void fraction (vapor volume/total volume) 98.04%. The density of the two-phase methane was9.937 kg/m3.
The two phase jet formulation enables the prediction of both themethane vapor dispersion and the pool formation and spreading. Ifliquid methane mass fraction has been predicted in the boundarycells on the bottom domain (ground level) then the total horizontalarea of these cells is assumed to be the liquid pool area. Thisprocedure is followed for every time step, and thus the predictionof the spreading of the pool is possible.
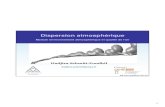
Fig. 5. Methane concentration (by volume) time histories compared against the experimentaplane y ¼ 0 and at 1 m elevation.
The discretization of the differential equations is performed inADREA-HF with the control volume approach. For the time inte-gration and for discretization of convective terms the first orderfully implicit scheme and the first order upwind scheme were usedrespectively. The time step was set automatically by the codestarting from a minimum of 10�4 s with a restriction of maximumCourant number equal to 2.
5. Results and discussion
5.1. Qualitative comparison with the experiment
Fig. 5 shows the predicted methane concentration (v/v) timehistories for both types of source modeling compared against theexperimental for three sensors at locations 50, 150 and 250 mdownwind of the impoundment on the plane y ¼ 0 and at 1 mabove the ground surface.
It can be observed that for both source modeling formulationsthe predictions underestimate the maximum methane concentra-tion with respect to the experiment. With the two phase jetformulation the maximum predicted concentration is in betteragreement to the experimental at all sensors, except the one nearthe release point (at the location 50 m downwind of the fence).
Another effect of the source modeling can be observed in thepredicted arrival time of the vapor cloud. The arrival time predictedusing the two phase jet formulation is shorter and in much betteragreement to the experiment thanwith the vapor pool formulation.In the case of the pool the vapor cloud is impounded inside thefence for longer duration than in the case of two phase jet. Themain reasons for this behavior are the high momentum and the
l data for FA1 trial. The sensors are in different distances downwind the release point at

Fig. 6. The predicted LFL (5% v/v) iso-surface at 60 s in the case of vapor pool (left) in comparison with the respective predicted LFL iso-surface in the case of two phase jet (right).
Fig. 7. FA1 predicted vapor concentration contours (left) on the plane x ¼ 150 m at 140 s (top) and 160 s (bottom) compared with the experimental contours (right). Source ismodeled as two phase jet.
S.G. Giannissi et al. / Journal of Loss Prevention in the Process Industries 26 (2013) 245e254250

Fig. 8. The liquid pool area of methane versus time for the whole domain.
Table 2Statistical performance measures for both types of source modeling.
Trial Statistical number
FB NMSE MG ln(VG)
Ideal value 0 0 1 0FA1 vapor pool �0.62 2.02 0.002 196FA1 two phase jet �0.60 1.15 0.65 1.0
S.G. Giannissi et al. / Journal of Loss Prevention in the Process Industries 26 (2013) 245e254 251
turbulence associated/generated by the two-phase jet source. Bothmechanisms contribute to the fast overfilling of the fence and thesubsequent downwind dispersion of the cloud.
Fig. 6 presents the predicted LFL (5% v/v) iso-surface at 60 s forboth types of source modeling. The trapping of the LFL cloud insidethe impoundment is clearly shown in the case of the vapor poolprediction.
In Fig. 7, the predicted vapor concentration contours with thecase of two phase jet for two different times (140 and 160 s) on thecrosswind plane x ¼ 150 m are compared with the respectiveobserved concentration contours. The overall agreement betweenmodel prediction and the experiment is fairly good.
Fig. 8 represents the time history of the liquid pool area ofmethane for the whole domain. According to the figure the poolarea gradually increases and reaches its highest value (61 m2) atapproximately 136 s. This behavior indicates that the constant
Fig. 9. Scatter plot for observed versus predicted maximum (left) and average (right)
evaporating area assumption made for the vapor pool formulationis not totally consistent. After the ceasing of the release (at 138.8 s)the pool area disappears almost instantaneously.
5.2. Quantitative comparison with the experiment
For a quantitative comparison of the predicted results comparedto the experimental statistical performancemeasures were applied.The statistical measures used in the present work are the fractionalbias (FB), normalized mean square error (NMSE), geometric meanbias (MG) and geometric mean variance (VG).
FB ¼ 2
Cp � Co
Co þ Cp
!(11)
NMSE ¼�Cp � Co
2Cp � Co
(12)
MG ¼ exp�ln Cp � ln Co
(13)
lnðVGÞ ¼ �ln Cp � ln Co
2 (14)
where C is for the time average methane concentration and X is themean value of X, based on all available sensors. Subscripts (p) and(o) denote predicted and observed values respectively. The idealvalue of FB, ln(VG) and NMSE is zero, while the ideal value of MGis 1. A negative sign in FB and values of MG lower than 1.0 indicateunderestimation of the concentration compared to the experi-mental values.
Table 2 displays the statistical performance measures for bothtypes of source modeling. It can be observed that the case of sourcemodeling as two phase jet gives statistical measures closer to theideal values and with much less spreading. It can also be observedthat both formulations generally underpredict the concentrations.
One possible reason for the underestimation of the gasconcentration is the fact that the effect of the spider arm structurefromwhich the LNG was released was not taken into account. As itis mentioned in the study of Gavelli et al. (Gavelli et al., 2009) thespider arm hindered the vapor cloud to spread in its direction(upwind the fence). As a result, the cloud spreads more downwindthe release.
The underprediction of the gas concentration with the vaporpool formulation can mainly be attributed to the fact that the winddrifts the cloud to its direction. Therefore, at the sensors alongx-axis and at the sensors in the north area of the computationaldomain very low gas concentration levels are predicted.
gas concentration for 18 sensors from FA1 (source modelling as two phase jet).

Fig. 10. Scatter graph of observed versus predicted arrival time (s) of maximumconcentration for 18 sensors from FA1 (source modelling as two phase jet).
S.G. Giannissi et al. / Journal of Loss Prevention in the Process Industries 26 (2013) 245e254252
Fig. 9 depicts the scatter plot for predictions versus observa-tions, using the maximum and average concentration of 18 sensorsfor the two phase jet case. According to these scatter plots thesimulation underestimates both the maximum and averageconcentration approximately by a factor of 3.
Fig. 11. Methane concentration (by volume) time histories compared against the experimentthe vapor pool formulation. The sensors are in different distances downwind the release p
Fig. 12. Methane concentration (by volume) time histories compared against the experimenthe two phase jet formulation. The sensors are in different distances downwind the releas
Fig. 10 presents the observed versus the predicted arrival time ofthe maximum gas concentration. The points represent the arrivaltime of maximum concentration for 18 sensors. It can be observedthat themajority of the points are in the vicinity of the diagonal lineand so the simulation is in good agreement with the experiment asfar as the arrival time of maximum gas concentration is concerned.The points with smaller times correspond to the sensors nearest tothe source and it can be concluded by the scatter graph that theprediction of the arrival time for those sensors is better than theprediction for the sensors far from the source. However, the modeltends to predict the arrival time of maximum concentrationapproximately within a factor of 2.
5.3. Effect of wind direction on the vapor cloud dispersion
In previous work (Chan et al. (Chan, 1992)), the averagemeasured wind direction at an angle of �9.3� with respect to thealignment of the fence was neglected. The wind direction wasassumed parallel to the fence and the x-z plane was the plane ofsymmetry, in order to decrease computational time. In the presentwork the effect of neglecting the wind direction on vapor clouddispersion was examined.
Fig. 11 and Fig. 12 show the predicted methane concentration(v/v) time histories with wind direction parallel to the fencecompared against the experimental and the prediction with winddirection at an angle of �9.3� with respect to the alignment of the
al data and the predicted methane concentration with the measured wind direction foroint at symmetry axis (y ¼ 0) and at 1 m elevation.
tal data and the predicted methane concentration with the measured wind direction fore point at symmetry axis (y ¼ 0) and at 1 m elevation.

Fig. 13. The predicted vapor concentration contours with the vapor pool formulation at 280 sec with wind direction shifted at an angle of �9.3� (left) and wind direction parallel tothe x-axis (right).
Fig. 14. The predicted vapor concentration contours with the two phase jet formulation at 100 sec with wind direction shifted at an angle of �9.3� (left) and wind direction parallelto the x-axis (right).
S.G. Giannissi et al. / Journal of Loss Prevention in the Process Industries 26 (2013) 245e254 253
fence for the vapor pool and two phase jet formulation respec-tively. The sensors are at locations downwind of the impoundmenton the symmetry plane (y ¼ 0).
The effect of the wind direction on vapor cloud dispersion isgreater in the case of vapor pool than in the case of two phase jet.For the vapor pool formulation the prediction with wind directionparallel to the alignment of the fence seems in better agreementwith the experiment. With the measured wind direction the pre-dicted methane cloud disperses at the angle of wind direction (seeFig. 13), and consequently lower gas concentration levels reach thesensors along the x-axis.
For the two phase jet formulation the effect of the wind direc-tion on vapor cloud dispersion is less significant. The wind driftedthe vapor cloud to its direction, but the spread is significant in bothlateral sides (see Fig. 14), in contrast to the vapor pool formulation.
The aforementioned discrepancy, with respect to the winddirection, between the two source modeling formulations can beattributed to the high jet source momentum.
6. Conclusions
In this work, the ADREA-HF code was applied to simulate theFA1 experiment related to atmospheric dispersion of LNG in thepresence of obstacles. Two different source modeling formulationswere applied: a) a constant area vapor pool formulation without
any account of extra turbulence generated by the spill itself, emit-ting vapor methane vertically upwards and b) a two-phase jetformulation with 4 jets of diameter and location as in the experi-ment emitting two-phase methane with a void fraction of 98%vertically downwards. In the second case the turbulence generateddue to the spill is predicted.
The predictions were compared with the experimentalconcentrations both qualitatively and quantitatively. The quanti-tative assessment was based on statistical performance measures.It was found that for the case of the two phase jet the model is ingeneral better agreement with the experiment but with underes-timation of maximum concentrations. For the case of constant areavapor pool the model generally underestimates concentrations andoverestimates the arrival times.
One possible reason for the underestimation of the gasconcentration is the fact that the effect of the spider arm structurehindering the vapor cloud to spread upwind the fence was nottaken into account. While, the main reason for the underestimationof the gas concentrationwith the vapor pool formulation is that thecloud is drifted in the direction of the wind, and at the sensorsalong x-axis and in the north area of the computational domain themodel predicts very low gas concentration levels.
In the present work, a sensitivity study was also performed onthe effect of wind direction (approximately 10� variation) on thevapor cloud dispersion for both source modeling formulations. The

S.G. Giannissi et al. / Journal of Loss Prevention in the Process Industries 26 (2013) 245e254254
effect of wind direction was found important for the vapor poolformulation and not significant for the jet formulation. The mainreason for this discrepancy was attributed to the high two-phase jetmomentum.
Nomenclature
xi Cartesian j co-ordinate (m)ui i component of velocity (ms�1)P pressure (Pa)T temperature (K)gi gravity acceleration in the i-direction (ms�2)qi mass fraction of i component (dimensionless)t time (s)H Enthalpy (Jkg�1)s turbulent Prandtl and Schmidt number (dimensionless)k turbulent kinetic energy (m2s�2)cm dimensionless constantu* friction velocity (ms�1)k von Karman constant (dimensionless)T* dynamical temperature (K)To surface temperature (K)L MonineObukhov length (m)z height (m)zo roughness length (m)
Greek3 Turbulent energy dissipation rate (m2s�3)mef effective viscosity (kgm-1s�1)r,ri mixture density, i-component density (kgm�3)
Subscriptsv vaporl liquid
References
Baraldi, D., Venetsanos, A. G., Papanikolaou, E., Heitsch, M., & Dallas, V. (2009).Numerical analysis of release, dispersion and combustion of liquid hydrogen ina mock-up hydrogen refuelling station. Journal of Loss Prevention in the ProcessIndustries, 22, 303e315.
Bartzis, J. C. (1991). ‘ADREA-HF: A three dimensional finite volume code for vapourcloud dispersion in complex terrain’. Report EUR 13580.
Burro Series Data Report. (1982). LLNL/NWC Report No.UCID-19075, v.1 2. Berkeley,CA: Lawrence Livermore National Laboratory.
Chan, S. T. (1992). Numerical simulations of LNG vapor dispersion from a fencedstorage area. Journal of Hazardous Materials, 30, 195e224.
Colenbrander, G. W., Evans, A., & Puttock, J. S. (1984a). Spill tests of LNG andrefrigerated liquid propane on the sea’ Maplin Sands 1980, Dispersion Data digest,Trial 27. Shell Research Ltd, Thornton Research Center, Report TNER.84.028, May1984.
Cormier, B. R., Qi, R., Yun, G. W., Zhang, Y., & Mannan, M. S. (2009). Applicationof computational fluid dynamics for LNG vapor dispersion modeling: a studyof key parameters. Journal of Loss Prevention in the Process Industries, 22,332e352.
Coyote Series Data Report. (Oct. 1983). LLNL/NWC, UCID-19953, Vol. 1 2.Falcon Series Data Report; Gas research Institute, 1987 LNG barrier Verification field
trials, GRI Report No. 89/0138, Chicago, IL, June 1990.Feldbauer, G. F., Heigl, J. J., McQueen, W., Whipp, R. H., & May, W. G. (1972). Spills of
LNG on water: Vaporization and downwind drift of combustible mixtures. ESSOResearch and Engg. Co, Report no EE61E-72.
Gavelli, F., Bullister, E., & Kytomaa, H. (2008). Application of CFD(Fluent) to LNGspills into geometrically complex environments. Journal of Hazardous Materials,159, 158e168.
Gavelli, F., Chernovsky, M. K., Bullister, E., & Kytomaa, H. K. (2009). Quantification ofsource-level turbulence during LNG spills onto water. Journal of Loss Preventionin the Process Industries, 22, 809e819.
Kneebone, A., & Prew, L. R. ‘Shipboard jettison test of LNG onto the sea’. InProceedings on the 4th International Conference on LNG, Algiers, 1974; pp. 1e25.
Koopman, R. P., Bowman, B. R., & Ermak, D. L. (1979). Data and calculation ofdispersion on 5m3LNG spill tests. Lawrence Livermore Laboratory.
Launder, B. E., & Spalding, D. B. (1974). The numerical computation of turbu-lent flow. Computer Methods in Applied Mechanics and Engineering, 3(2),269e289.
Luketa-Hanlin, A., Koopman, P. R., & Ermak, D. L. (2007). On the application ofcomputational fluid dynamics codes for liquefied natural gas dispersion. Journalof Hazardous Materials, 140(3), 504e517.
Markatos, N. C., & Pericleous, K. A. (1984). Laminar and turbulent natural convectionin an enclosed cavity. International Journal of Heat and Mass Transfer, 27(5),755e772.
Qi, R., Cormier, B. R., & Mannan, M. S. (2010). Numerical simulations of LNG vapourdispersion in Brayton Fire Training Field tests with ANSYS CFX. Journal ofHazardous Materials, 183, 51e61.
Statharas, J. C., Venetsanos, A. G., Bartzis, J. G., Würtz, J., & Schmidtchen, U. (2000).Analysis of data from spilling experiments performed with liquid hydrogen.Journal of Hazardous Materials A, 77(1e3), 57e75.
Venetsanos, A. G., & Bartzis, J. G. (2007). CFD modeling of large-scale LH2 spills inopen environment. International Journal Hydrogen Energy, 32, 2171e2177.
Venetsanos, A. G., Baraldi, D., Adams, P., Heggem, P. S., & Wilkening, H. (2008). CFDmodelling of hydrogen release, dispersion and combustion for automotivescenarios. Journal of Loss Prevention in the Process Industries, 21, 162e184.
Venetsanos, A. G., Papanikolaou, E., & Bartzis, J. G. (2010). The ADREA-HF CFD codefor consequence assessment of hydrogen applications. International Journal ofHydrogen Energy, 35, 3908e3918.
Würtz, J., Bartzis, J. G., Venetsanos, A. G., Andronopoulos, S., Statharas, J., &Nijsing, R. (1996). A dense vapour dispersion code package for applicationsin the chemical and process industry. Journal of Hazardous Materials, 46,273e284.