
ANÁLISE DE ENRIJECEDORES À FLEXÃO COM CONCENTRADOR DE TENSÕES

MODELO DE COMPORTAMENTO VISCOELÁSTICO DE ENRIJECEDORES À
FLEXÃO
Marcelo Caire
Tese de Doutorado apresentada ao Programa
de Pós-graduação em Engenharia Oceânica,
COPPE, da Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários à
obtenção do título de Doutor em Engenharia
Oceânica.
Orientador: Murilo Augusto Vaz
Rio de Janeiro
Agosto de 2011

MODELO DE COMPORTAMENTO VISCOELÁSTICO DE ENRIJECEDORES À
FLEXÃO
Marcelo Caire
TESE SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ
COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE) DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM CIÊNCIAS EM
ENGENHARIA OCEÂNICA.
Examinada por:
_______________________________________
Prof. Murilo Augusto Vaz, Ph.D.
______________________________________
Prof. Segen Farid Estefen, Ph.D.
______________________________________
Prof. Ilson Paranhos Pasqualino, D.Sc.
______________________________________
Prof.ª Marysilvia Ferreira da Costa, D.Sc.
______________________________________
Prof. Celso Pupo Pesce, D.Sc.
______________________________________
Dr. Carlos Alberto Duarte de Lemos, D.Sc.
RIO DE JANEIRO, RJ – BRASIL
AGOSTO DE 2011

iii
Caire, Marcelo
Modelo de Comportamento Viscoelástico de
Enrijecedores à Flexão/ Marcelo Caire – Rio de Janeiro:
UFRJ/COPPE, 2011.
XIII, 157 p.: il.; 29,7 cm.
Orientador: Murilo Augusto Vaz
Tese (doutorado) – UFRJ/ COPPE/ Programa de
Engenharia Oceânica, 2011.
Referências Bibliográficas: p. 142-144.
1. Enrijecedores à flexão. 2. Análise Numérica. 3.
Viscoelasticidade não-linear. I. Vaz, Murilo Augusto. II.
Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Oceânica. III. Título.

iv
“Transportai um punhado de terra todos
os dias e fareis uma montanha”.
Confúcio
Dedico este trabalho à minha filha
Gabriela. Nunca desista de seus sonhos.

v
AGRADECIMENTOS
Ao meu orientador Professor Murilo Augusto Vaz pelo incentivo ao ingresso na área
acadêmica, pelas incontáveis horas de discussão produtiva e por todo apoio oferecido,
tanto no desenvolvimento deste trabalho, quanto profissionalmente.
A todos os companheiros de estudo e funcionários do laboratório NEO (Núcleo de
Estruturas Oceânicas da COPPE/UFRJ): Felipe Castelpoggi, Nicolau Rizzo, Rômulo
Lima Barbosa, Aynor Ariza Gomez, Athos Costa Neves, Rafael Boechat, Luiz Felipe
dentre muitos outros.
À Professora Marysilvia Ferreira da Costa pelo suporte oferecido na realização dos
ensaios experimentais realizados no LabPol (Laboratório de Polímeros do Programa
de Engenharia Metalúrgica e de Materiais).
A todos os funcionários do programa de Engenharia Oceânica, em especial à Suely
Klajman e Glace Farias.
À Agencia Nacional do Petróleo pelo apoio financeiro concedido através do Programa
de Recursos Humanos – PRH 03.
À CAPES pelo suporte financeiro empregado na bolsa sanduíche, para realização de
estágio de Doutorando na universidade Norwegian University of Science and
Technology (NTNU) no ano de 2008.
Ao Professor Stig Berge pela oportunidade e suporte oferecido na NTNU.
Aos pesquisadores e funcionários da empresa Marintek pelo suporte técnico, em
especial à Philippe Mainçon.
À empresa Marintek do Brasil por disponibilizar tempo e apoiar a conclusão deste
trabalho.
Aos familiares e amigos que direta ou indiretamente incentivaram o desenvolvimento
deste trabalho.

vi
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D.Sc.)
MODELO DE COMPORTAMENTO VISCOELÁSTICO DE ENRIJECEDORES À
FLEXÃO
Marcelo Caire
Agosto/2011
Orientador: Murilo Augusto Vaz
Programa: Engenharia Oceânica
Enrijecedores à flexão são estruturas cônicas de poliuretano utilizadas na
indústria offshore para suavizar a conexão de dutos flexíveis com a unidade flutuante
de produção submarina. O comportamento viscoelástico e a dissipação de energia que
ocorre quando o enrijecedor está submetido a carregamento periódico pode gerar
resposta diferente da obtida quando se considera material elástico. O presente
trabalho apresenta o modelo matemático do sistema composto pelo duto flexível e
pelo enrijecedor à flexão considerando a teoria da viscoelasticidade para descrever a
resposta do poliuretano. Os modelos são desenvolvidos considerando a teoria linear e
não-linear, inicialmente no domínio do tempo e estendidos para o domínio da
frequência. Ensaios experimentais de tração e relaxação de tensão são realizados
utilizando amostras de poliuretano retiradas de um enrijecedor para caracterização do
comportamento mecânico não-linear dependente do tempo. Estudos de caso são
apresentados para avaliar o efeito do comportamento viscoelástico e da frequência de
carregamento na resposta do sistema de conexão de topo quando este está
submetido a carregamento harmônico.

vii
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
VISCOELASTIC BEHAVIOR MODELING OF BEND STIFFENERS
Marcelo Caire
August/2011
Advisor: Murilo Augusto Vaz
Department: Ocean Engineering
Bend stiffeners are conical polyurethane structures used in the offshore industry
to ensure a smooth transition in the upper connection of flexible risers with the floating
production unit. The viscoelastic behavior and the energy dissipation due to periodic
loading conditions may lead to different responses when compared to elastic models.
This work presents the mathematical formulation to represent the flexible pipe/bend
stiffener system considering the viscoelasticity theory to describe the polyurethane
behavior. The numerical models are developed considering the linear and the non-
linear theory, firstly in the time domain and then extended to the frequency domain.
Tensile and relaxation tests are carried out using samples cut from an actual bend
stiffener in order to characterize the non-linear time dependent mechanical behavior.
Case studies are presented to assess the effect of viscoelastic behavior and loading
frequency on the top connection when subjected to harmonic loading conditions.

viii
SUMÁRIO
1 INTRODUÇÃO ................................................................................................ 1
1.1 Descrição do sistema duto flexível/enrijcedor à flexão .............................. 1
1.2 Dimensionamento e análise ........................................................................... 7
1.3 Estado da arte em análise local ................................................................... 13
1.4 Objetivos específicos e relevância da pesquisa ....................................... 18
1.5 Descrição dos capítulos ............................................................................... 19
2 RESPOSTA MECÂNICA DO POLIURETANO ........................................... 20
2.1 Comportamento viscoelástico linear .......................................................... 34 2.1.1 Equação constitutiva na forma integral para resposta unidimensional.................... 34 2.1.2 Equação constitutiva na forma integral para resposta em três dimensões ............ 39 2.1.3 Resposta viscoelástica linear no domínio da frequência ........................................... 41 2.1.4 Limites de aplicação da viscoelasticidade linear ......................................................... 44
2.2 Comportamento viscoelástico não-linear .................................................. 46 2.2.1 Modelo de Leaderman .................................................................................................... 49 2.2.2 Modelo de Green-Rivlin .................................................................................................. 53 2.2.3 Modelo baseado no princípio da superposição modificado....................................... 58 2.2.4 Resposta viscoelástica não-linear no domínio da frequência ................................... 65
2.3 Ensaios experimentais e ajuste ................................................................... 67 2.3.1 Ensaios de tração ............................................................................................................ 69 2.3.2 Ensaios de relaxação ...................................................................................................... 72
3 FORMULAÇÃO MATEMÁTICA DO SISTEMA DUTO
FLEXÍVEL/ENRIJECEDOR À FLEXÃO ............................................................. 84
3.1 Hipóteses simplificadoras ............................................................................ 85
3.2 Relações trigonométricas ............................................................................ 87
3.3 Equilíbrio de forças e momentos ................................................................ 88
3.4 Equações de governo para viscoelasticidade linear ................................ 89 3.4.1 Formulação matemática no domínio do tempo ........................................................... 89 3.4.2 Formulação matemática para resposta harmônica em regime permanente .......... 90
3.5 Equações de governo para viscoelasticidade não-linear ........................ 97 3.5.1 Formulação matemática no domínio do tempo ........................................................... 97 3.5.2 Formulação matemática para resposta harmônica em regime permanente .......... 99
3.6 Solução numérica ........................................................................................ 107 3.6.1 Solução no domínio do tempo ..................................................................................... 107 3.6.2 Solução harmônica em regime permanente .............................................................. 109
4 ESTUDO DE CASO .................................................................................... 111
4.1 Dimensionamento do enrijecedor ............................................................. 111
4.2 Análise de enrijecedor viscoelástico linear ............................................. 118
4.3 Análise de enrijecedor viscoelástico não-linear ..................................... 128
5 CONCLUSÕES ........................................................................................... 137

ix
5.1 Recomendações finais ............................................................................... 139
5.2 Sugestões para trabalhos futuros ............................................................. 140
6 REFERÊNCIAS BIBLIOGRÁFICAS ......................................................... 142

x
LISTA DE FIGURAS
FIGURA 1.1 – CONFIGURAÇÃO DE RISERS [1] .................................................................................... 2
FIGURA 1.2 – DUTO FLEXÍVEL E SUAS CAMADAS [2] ........................................................................... 4
FIGURA 1.3 – CONECTOR (END FITTING) [3]....................................................................................... 4
FIGURA 1.4 – ENRIJECEDOR À FLEXÃO TRADICIONAL [4]..................................................................... 5
FIGURA 1.5 – ENRIJECEDOR À FLEXÃO PARA BOCA DE SINO [3] .......................................................... 6
FIGURA 1.6 – MODELOS DE ANÁLISE DO SISTEMA DUTO FLEXÍVEL/ENRIJECEDOR À FLEXÃO .................. 8
FIGURA 1.7 - FLUXOGRAMA PARA DIMENSIONAMENTO DE ENRIJECEDORES À FLEXÃO ........................ 12
FIGURA 2.1 – ELEMENTOS MECÂNICOS SIMPLES .............................................................................. 22
FIGURA 2.2 – RESPOSTA MECÂNICA DOS ELEMENTOS SIMPLES ........................................................ 23
FIGURA 2.3 – MODELO ELASTO-PERFEITAMENTE PLÁSTICO .............................................................. 24
FIGURA 2.4 – MODELO VISCOELÁSTICO DE MAXWELL ...................................................................... 25
FIGURA 2.5 – MODELO VISCOELÁSTICO DE KELVIN-VOIGT ............................................................... 25
FIGURA 2.6 – MODELO VISCOELÁSTICO DO SÓLIDO LINEAR PADRÃO ................................................ 26
FIGURA 2.7 – RESPOSTA DE RELAXAÇÃO E FLUÊNCIA DO MODELO SÓLIDO LINEAR PADRÃO .............. 28
FIGURA 2.8 – CARREGAMENTO COM TAXA CONSTANTE DE DEFORMAÇÃO E RESPOSTA DE TENSÃO DO
SÓLIDO LINEAR PADRÃO ....................................................................................................... 29
FIGURA 2.9 – INFLUÊNCIA DA TAXA DE DEFORMAÇÃO NA CURVA x DO MODELO SÓLIDO LINEAR
PADRÃO ............................................................................................................................... 30
FIGURA 2.10 – INFLUÊNCIA DA TAXA DE DEFORMAÇÃO E )0(/)( GG NA CURVA x DO
MODELO SÓLIDO LINEAR PADRÃO .......................................................................................... 30
FIGURA 2.11 – MODELO VISCOELÁSTICO DE MAXWELL GENERALIZADO ............................................. 32
FIGURA 2.12 – APROXIMAÇÃO DE UMA HISTÓRIA DE DEFORMAÇÃO POR SUPERPOSIÇÃO DE SALTOS ... 35
FIGURA 2.13 – COMPORTAMENTO VISCOELÁSTICO LINEAR ............................................................... 45
FIGURA 2.14 – RESPOSTAS DE DEFORMAÇÃO DIVERSAS .................................................................. 53
FIGURA 2.15 – RESPOSTAS DE DEFORMAÇÃO PARA SALTOS DE TENSÃO ........................................... 55
FIGURA 2.16 – ILUSTRAÇÃO DO MÉTODO DA SUPERPOSIÇÃO MODIFICADO ........................................ 59
FIGURA 2.17 - GEOMETRIA DOS CORPOS DE PROVA [MM] ................................................................. 68
FIGURA 2.18 – CORPO DE PROVA E EXTENSÔMETRO ....................................................................... 69
FIGURA 2.19 - ENSAIOS DE TRAÇÃO (0-30%) .................................................................................. 70
FIGURA 2.20 - ENSAIOS DE TRAÇÃO (0-5%) .................................................................................... 70
FIGURA 2.21 - INFLUÊNCIA DA TAXA DE CARREGAMENTO .................................................................. 71
FIGURA 2.22 - DESLOCAMENTO ADIMENSIONAL DO TRAVESSÃO ....................................................... 73
FIGURA 2.23 – ESPECTRO DE RELAXAÇÃO ...................................................................................... 75
FIGURA 2.24 – FUNÇÃO DE RELAXAÇÃO )(1 tG ............................................................................... 76
FIGURA 2.25 – FUNÇÃO DE RELAXAÇÃO )(2 tG ............................................................................... 76
FIGURA 2.26 – FUNÇÃO DE RELAXAÇÃO )(3 tG ............................................................................... 77

xi
FIGURA 2.27 – FUNÇÃO DE RELAXAÇÃO )(4 tG .............................................................................. 77
FIGURA 2.28 - RESULTADOS DO ENSAIO DE RELAXAÇÃO .................................................................. 79
FIGURA 2.29 - RESULTADOS DO ENSAIO DE RELAXAÇÃO (ESCALA LOGARÍTMICA) ............................... 79
FIGURA 2.30 – MÓDULO DE PERDA E ARMAZENAMENTO ................................................................... 80
FIGURA 2.31 – CURVA ISOCRÔNICA ................................................................................................ 81
FIGURA 2.32 – ENSAIO DE TRAÇÃO X AJUSTES VISCOELÁSTICOS DE RELAXAÇÃO (0-15%) ................. 82
FIGURA 2.33 – ENSAIO DE TRAÇÃO X AJUSTES VISCOELÁSTICOS DE RELAXAÇÃO (0-5%) ................... 82
FIGURA 3.1 – DESENHO ESQUEMÁTICO DO SISTEMA DUTO FLEXÍVEL/ENRIJECEDOR À FLEXÃO ............ 84
FIGURA 3.2 – ELEMENTO INFINITESIMAL .......................................................................................... 87
FIGURA 3.3 - FLUXOGRAMA NUMÉRICO – DOMÍNIO DO TEMPO ........................................................ 108
FIGURA 3.4 - FLUXOGRAMA NUMÉRICO – DOMÍNIO DA FREQUÊNCIA ................................................ 110
FIGURA 4.1 – TRAÇÃO DE TOPO E ÂNGULO (047.15 ) ............................................................. 113
FIGURA 4.2 – ESPAÇO DE PROJETO .............................................................................................. 114
FIGURA 4.3 – DIMENSÕES DO ENRIJECEDOR ................................................................................. 115
FIGURA 4.4 – FUNÇÕES 1I E
3I .................................................................................................... 116
FIGURA 4.5 – DEFORMAÇÃO MÁXIMA X TRAÇÃO DE TOPO ............................................................... 117
FIGURA 4.6 – DEFORMAÇÃO MÁXIMA X ÂNGULO DE TOPO ............................................................... 118
FIGURA 4.7 – LINEAR VISCOELÁSTICO NO DOMÍNIO DO TEMPO (CURVATURA NO ENGASTE) ............... 119
FIGURA 4.8 – LINEAR VISCOELÁSTICO NO DOMÍNIO DO TEMPO (COMPARAÇÃO COM ABAQUS) ........... 120
FIGURA 4.9 – INFLUÊNCIA DO HISTÓRICO DE CARREGAMENTO ........................................................ 121
FIGURA 4.10 – MODELO LINEAR VISCOELÁSTICO NO DOMÍNIO DA FREQUÊNCIA (CURVATURA NO
ENGASTE - ORDEM 1, 2 E 3) ................................................................................................. 122
FIGURA 4.11 – MODELO LINEAR VISCOELÁSTICO NO DOMÍNIO DA FREQUÊNCIA (ENVELOPE-ORDEM 1, 2 E
3) ....................................................................................................................................... 123
FIGURA 4.12 – MODELO LINEAR VISCOELÁSTICO NO DOMÍNIO DA FREQUÊNCIA (DISTRIBUIÇÃO DE
CURVATURA AO LONGO DO TEMPO – ORDEM 3) ..................................................................... 123
FIGURA 4.13 – MODELO LINEAR VISCOELÁSTICO NO DOMÍNIO DO TEMPO X FREQUÊNCIA (ENVELOPE)
%10%,10 ........................................................................................................... 124
FIGURA 4.14 – MODELO LINEAR VISCOELÁSTICO NO DOMÍNIO DO TEMPO X FREQUÊNCIA (ENVELOPE)
%27%,45 .......................................................................................................... 125
FIGURA 4.15 – MODELO LINEAR VISCOELÁSTICO NO DOMÍNIO DO TEMPO X FREQUÊNCIA (ENVELOPE)
%50%,50 ........................................................................................................... 125
FIGURA 4.16 – CURVATURA MÁXIMA X FREQUÊNCIA ( %10%,10 ) .................................... 127
FIGURA 4.17 – CURVATURA MÁXIMA X FREQUÊNCIA ( %27%,45 ) ................................... 127
FIGURA 4.18 – CURVATURA MÁXIMA X FREQUÊNCIA ( %50%,50 ) .................................... 128
FIGURA 4.19 – COMPARAÇÃO VISCOELÁSTICO LINEAR X NÃO-LINEAR ............................................. 130
FIGURA 4.20 – MODELO VISCOELÁSTICO NÃO-LINEAR NO DOMÍNIO DA FREQUÊNCIA X ELÁSTICO NÃO-
LINEAR (CURVATURA NO ENGASTE) ...................................................................................... 132

xii
FIGURA 4.21 – MODELO VISCOELÁSTICO NÃO-LINEAR NO DOMÍNIO DA FREQUÊNCIA X ELÁSTICO NÃO-
LINEAR (CURVATURA NO ENGASTE) ...................................................................................... 133
FIGURA 4.22 – MODELO VISCOELÁSTICO NÃO-LINEAR NO DOMÍNIO DA FREQUÊNCIA X ELÁSTICO NÃO-
LINEAR (CURVATURA NO ENGASTE) ...................................................................................... 133
FIGURA 4.23 – MODELO VISCOELÁSTICO NÃO-LINEAR NO DOMÍNIO DA FREQUÊNCIA X ELÁSTICO NÃO-
LINEAR 0,05MM/MIN (DIFERENÇA PERCENTUAL DE CURVATURA AO LONGO DE UM PERÍODO) .... 134
FIGURA 4.24 – MODELO VISCOELÁSTICO NÃO-LINEAR NO DOMÍNIO DA FREQUÊNCIA X ELÁSTICO NÃO-
LINEAR (VARIAÇÃO DE CURVATURA) ...................................................................................... 134
FIGURA 4.25 – MODELO VISCOELÁSTICO NÃO-LINEAR NO DOMÍNIO DA FREQUÊNCIA X ELÁSTICO NÃO-
LINEAR (ENVELOPE DE DEFORMAÇÃO) .................................................................................. 135

xiii
LISTA DE TABELAS
TABELA 2.1 – MÓDULO SECANTE PARA OS ENSAIOS DE TRAÇÃO ....................................................... 72
TABELA 2.2 - TAXA DE CARREGAMENTO PARA CADA NÍVEL DE DEFORMAÇÃO ..................................... 73
TABELA 2.3 - COEFICIENTES DA FUNÇÃO DE RELAXAÇÃO NÃO-LINEAR – AJUSTE LEADERMAN ............. 75
TABELA 2.4 - COEFICIENTES DA FUNÇÃO DE RELAXAÇÃO NÃO-LINEAR – AJUSTE PSM ....................... 75
TABELA 2.5 – MÓDULO SECANTE PARA OS AJUSTES VISCOELÁSTICOS .............................................. 83
TABELA 4.1 – DADOS DO DUTO FLEXÍVEL ...................................................................................... 112
TABELA 4.2 - COEFICIENTES DE CARREGAMENTO .......................................................................... 113
TABELA 4.3 - MÓDULO SECANTE (5 MM/MIN) ................................................................................. 115
TABELA 4.4 - COMPARAÇÃO ENTRE DOMÍNIO DO TEMPO E DA FREQUÊNCIA ..................................... 126
TABELA 4.5 - EFEITO DA FREQUÊNCIA DE CARREGAMENTO NA CURVATURA MÁXIMA ......................... 128
TABELA 4.6 - COMPARAÇÃO ENTRE MODELO VISCOELÁSTICO LINEAR E NÃO-LINEAR ........................ 130

1
1 INTRODUÇÃO
Este capítulo apresenta a descrição do sistema mecânico composto pelo
enrijecedor à flexão e pelo duto flexível, componentes utilizados na indústria de
petróleo offshore e objeto de investigação do presente trabalho. Em seguida, descreve
a metodologia de dimensionamento e análise de enrijecedores à flexão adotada como
prática atual e o estado da arte da pesquisa, destacando os principais trabalhos
publicados no tema. Por fim, a relevância da pesquisa e os objetivos específicos a
serem alcançados com o desenvolvimento deste trabalho são apresentados.
1.1 Descrição do sistema duto flexível/enrijcedor à flexão
Dutos flexíveis vêm sendo utilizados para transporte de fluidos na indústria de
óleo e gás offshore desde o início da década de 1970. As principais aplicações podem
ser divididas de modo geral em: a) flowlines utilizadas para conexão de árvores de
natal com manifolds ou de poços com unidades fixas de produção; b) jumpers para
conexão de unidades fixas com flutuantes e c) risers para conexão de instalações
submarinas com a unidade flutuante de produção.
São estruturas essenciais aos sistemas de produção atuais, podendo
responder por cerca de um terço dos custos de desenvolvimento de um campo em
águas profundas. Atualmente cerca de 6000 km de flexíveis se encontram em
operação no Brasil, sendo a maioria na Bacia de Campos. Com a crescente expansão
das atividades offshore para águas cada vez mais profundas, verifica-se a
necessidade de constante ampliação da fronteira do conhecimento em engenharia
nesta área, principalmente com as novas descobertas nos campos do pré-sal
brasileiro onde está previsto a instalação de cerca de mais 4000 km de dutos flexíveis
e 2200 km de umbilicais submarinos. Não só as grandes profundidades implicam
aumento de carga na própria estrutura e na conexão de topo com as unidades
flutuantes de produção, como também, a presença de contaminantes como o 2CO e
SH2 impõem a necessidade de requisitos especiais na seleção do material a ser
empregado no projeto do duto.
Uma das principais vantagens de utilização de dutos flexíveis quando
comparados com rígidos é a facilidade de transporte e velocidade de instalação, já que
o duto é pré-fabricado e armazenado em carretéis. Além disso, é uma estrutura
complacente, o que permite a conexão com unidades flutuantes de produção que

2
apresentam grandes amplitudes de movimento. Outra característica importante a ser
mencionada é sua versatilidade, pois um determinado duto pode ser recuperado e
utilizado em diversos campos sem perda de suas características funcionais, bastando
a reavaliação para as novas condições de aplicação, assim como o cálculo do dano
acumulado por fadiga. Diversas configurações são possíveis para utilização de um
duto flexível como riser, dentre elas: catenária livre, lazy wave, steep wave, pliant
wave, lazy S e steep S como mostrado na Fig. 1.1 a seguir.
Figura 1.1 – Configuração de risers [1]
Dutos flexíveis
Um flexível é composto de diversas camadas metálicas e poliméricas, cada
uma apresentando funções específicas. Cada sistema de produção submarina exige
um requisito específico de projeto, e este tipo de construção modular onde cada
camada é dimensionada individualmente, mas considerando o efeito da interação
entre elas permite grande flexibilidade ao projetista. A Fig. 1.2 ilustra um duto flexível

3
com algumas das principais camadas, onde suas funções são apresentadas como
segue:
a) Carcaça intertravada – primeira camada interna de aço do duto flexível.
Deve garantir resistência aos esforços causados pela pressão externa e ao
esmagamento transmitido pelas armaduras de tração quando estas são
tracionadas. É conformada utilizando o aço inoxidável (AISI 304/316) ou
duplex e sua geometria gera um intertravamento entre passos sucessivos.
b) Camada de estanqueidade – camada polimérica interna que deve garantir a
estanqueidade do duto flexível. A composição química do fluido e sua
temperatura são os fatores essenciais na escolha do material empregado
nesta camada. Poliamida-11, HDPE (polietileno de alta densidade) e PVDF
(fluoreto de vinilideno) são alguns dos materiais mais comumente
empregados.
c) Armadura de pressão – sua principal função é garantir resistência à
pressão exercida pelo fluido interno, mas em conjunto com a carcaça
intertravada contribui para resistir à pressão externa. O material tipicamente
utilizado nesta camada é o aço carbono de alta resistência mecânica.
d) Armaduras de tração – utilizada para resistir aos carregamentos de tração e
balanceamento à torção. Através do conector, transfere todo o
carregamento axial para a unidade flutuante de produção. Para dutos
flexíveis, usualmente utiliza-se arames de aço carbono com seção
transversal retangular assentados com ângulo variando em torno de 30º a
55º.
e) Capa externa – forma uma barreira para evitar o contato das camadas
internas com água do mar. Com exceção do PVDF, os mesmos materiais
utilizados na camada interna de estanqueidade podem ser utilizados na
capa externa.
f) Outras camadas – fitas anti-atrito podem ser utilizadas entre as armaduras
de tração para reduzir o atrito e o desgaste do aço. Fitas de alta resistência
mecânica podem ser adicionadas sobre a camada de tração mais externa
para evitar a formação do modo de falha resultante de compressão axial do
duto e conhecido como gaiola de passarinho ou birdcaging.

4
Figura 1.2 – Duto flexível e suas camadas [2]
Este tipo de configuração estrutural em que as camadas deslizam umas sobre
as outras fornece um duto com elevada rigidez axial e torsional, porém baixa rigidez
flexional, permitindo que um valor muito menor de raio de curvatura seja alcançado
quando comparado com um duto rígido.
Conexão com a unidade flutuante de produção
A conexão do flexível com a unidade flutuante de produção é uma das partes
mais críticas do projeto. Este conector deve garantir que todo o carregamento estático
e dinâmico suportado pelo flexível seja transferido para a unidade flutuante. Além
disso, deve garantir a continuidade da estanqueidade do duto. A Fig. 1.3 ilustra um
tipo de conector (end fitting) utilizado para flexíveis.
Figura 1.3 – Conector (end fitting) [3]

5
Esta conexão final do flexível com a unidade de produção é sujeita a grandes
esforços cíclicos, consequência da ação aleatória de ondas, ventos e correntes
marítimas. Para prevenir dano às linhas flexíveis, tanto por curvatura excessiva como
por fadiga, estruturas conhecidas como enrijecedores à flexão ou bend stiffeners são
utilizados nesta região. A idéia básica do enrijecedor é fornecer uma suave transição
de rigidez entre a estrutura flexível do riser e outra extremamente rígida como a
plataforma. A Fig. 1.4 ilustra um tipo de bend stiffener utilizado na indústria offshore.
Figura 1.4 – Enrijecedor à flexão tradicional [4]
Com relação à geometria do enrijecedor, frequentemente, apresentam uma parte
inicial cilíndrica seguida da parte cônica, proporcionando uma transição de rigidez
gradual da conexão até o duto flexível. A camada externa do duto flexível, na maioria
dos enrijecedores utilizados atualmente, não é aderida à camada interna do corpo do
enrijecedor. Existe, consequentemente, um espaçamento radial entre as duas
estruturas, onde o atrito devido aos movimentos cíclicos pode causar desgaste em
uma ou ambas as partes e ainda contribuir para aquecimento do material.
Embora novos conceitos de enrijecedores tenham sido propostos e avaliados,
basicamente dois tipos de enrijecedores são usualmente utilizados, os tradicionais e
os para bocas de sino ou bell-mouths. Os tradicionais são normalmente utilizados em
plataformas fixas ou semi-submersíveis que utilizam suportes de risers convencionais,
do tipo cônico ou castelo, conforme descrito por LEMOS [4]. Estes são montados

6
diretamente sobre o conector do duto flexível que por sua vez é conectado ao seu
suporte na plataforma.
Os enrijecedores para bell-mouth são conectados em unidades de produção que
possuem este sistema, como por exemplo, uma unidade flutuante de produção FPSO
(Floating Production Storage and Offloading) com turret. O turret é uma estrutura
localizada na proa da embarcação que funciona como ponto de amarração para o
sistema de ancoragem e como interface entre os sistemas submarinos de produção e
a unidade flutuante através da conexão dos dutos flexíveis e cabos umbilicais
submarinos. A Fig. 1.5 ilustra este tipo de enrijecedor, onde na ilustração à esquerda,
a estrutura metálica acoplada ao enrijecedor fica encaixado diretamente na boca de
sino. Alguns enrijecedores não podem ser acoplados diretamente à boca de sino,
devido ao seu diâmetro elevado. Uma das soluções adotadas é mostrada na ilustração
à direita, onde o enrijecedor é acoplado a um prolongador até o encaixe do capacete
na boca de sino. Para esta configuração, o conector do duto flexível (end fitting) é
apoiado diretamente no nível do convés.
Em ambos os tipos apresentados, a estrutura metálica que suporta o enrijecedor
apresenta insertos metálicos no corpo polimérico. Esta interface é um dos pontos
críticos com relação à fadiga devido aos pontos de concentração de tensões e
problemas de adesão entre o poliuretano e o componente metálico.
Figura 1.5 – Enrijecedor à flexão para boca de sino [3]

7
1.2 Dimensionamento e análise
O dimensionamento do sistema composto pelo duto flexível e pelo enrijecedor à
flexão segue o mesmo princípio adotado para outras estruturas oceânicas. Isto
significa que, devido à sua natureza aleatória, as condições ambientais devem ser
conhecidas e representadas por parâmetros estatísticos. Esta caracterização é então
considerada no cálculo da resposta estrutural dos componentes considerando as
condições de carregamento ambientais mais relevantes.
Semelhante ao projeto do duto flexível, os enrijecedores à flexão são
primeiramente projetados considerando carregamentos extremos e em seguida
verificados quanto à vida útil devido ao fenômeno de fadiga por carregamento cíclico.
Uma das normas que tratam de dutos flexíveis e enrijecedores à flexão é a API 17 J
[5]. De acordo com o Apêndice B desta norma, o carregamento de projeto para
enrijecedores à flexão deve ser definido em termos da variação de tração em um
ponto do duto próximo ao enrijecedor e da variação do ângulo relativo, resultados
obtidos de análises estruturais dinâmicas globais.
Estas análises dinâmicas são ilustradas na Fig. 1.6, que mostra os tipos de
modelo utilizados no projeto e análise de enrijecedores à flexão. A análise dinâmica é
usualmente baseada no método dos elementos finitos, utilizando elementos de viga
para representação tanto da estrutura complacente quanto do enrijecedor, quando se
considera o modelo completo. Os efeitos de onda e corrente são considerados
atuando na estrutura e o movimento da unidade flutuante é representado utilizando
funções de transferência (RAO - Response Amplitude Operator) quando se adota a
metodologia de análise desacoplada. Estas funções de transferência fornecem as
amplitudes de movimento por unidade de altura de onda para uma determinada faixa
de frequência e são calculadas utilizando softwares específicos.
No modelo completo, tanto o duto quanto o enrijecedor são modelados para
representar o sistema. Devido ao tempo computacional utilizado neste tipo de análise,
este é aplicado para verificação do dimensionamento e não na fase iterativa de
projeto. Já no modelo global, apenas o duto é modelado e as séries temporais de
tração, momento e ângulo relativo são os dados de saída utilizados no modelo local do
enrijecedor.

8
Figura 1.6 – Modelos de análise do sistema duto flexível/enrijecedor à flexão
Análise dinâmica - modelo completo e global
O objetivo de uma análise dinâmica global para sistemas compostos por
estruturas complacentes como dutos flexíveis e cabos umbilicais submarinos é
descrever a resposta estrutural estática e dinâmica quando estes estão submetidos às
condições de carregamento ambientais e aos movimentos da unidade flutuante de
produção a que estão conectados. A metodologia de análise desacoplada utilizando
funções de transferência pode ser aplicada desde que os dutos flexíveis, cabos
umbilicais e/ou linhas de amarração não apresentem influência relevante na resposta
da unidade flutuante. Caso contrário, uma análise simultânea envolvendo a dinâmica
das linhas e da unidade flutuante deve ser realizada. A este tipo de procedimento
chama-se análise acoplada. As principais variáveis da resposta de uma análise global,
seja ela acoplada ou não, podem ser agrupadas nas seguintes categorias:
a) forças na seção transversal (tração efetiva, momento fletor, momento
torsional);
b) deslocamentos (curvatura, deformação axial, orientação angular);
c) posição (co-ordenadas globais, translações, distância para outras estruturas,
posição do touch down point, etc.) e

9
d) forças de conexão dos risers com as unidades flutuantes (forças e
momentos resultantes).
A análise de sistemas complacentes como dutos flexíveis e umbilicais
submarinos mostra que a resposta global apresenta forte dependência de efeitos
dinâmicos. A resposta de enrijecedores à flexão pode, entretanto, ser considerada
dominada por efeitos quase-estáticos sem levar em conta os efeitos inerciais. Esta
observação é de grande importância para seleção dos princípios adotados para o
projeto e análise destas estruturas. Levando este fato em consideração, pode-se
combinar o modelo de análise global com o modelo de análise local do enrijecedor
sem perda de relevância nos resultados obtidos.
A principal vantagem de se utilizar os resultados da análise global como
condições de contorno para a análise local, ao invés da utilização do modelo completo
no processo iterativo de projeto é que os resultados de uma única análise global
podem ser utilizados como dados de entrada para diversas análises locais com
geometrias de enrijecedores e propriedades materiais diferentes. Esta metodologia
reduz de forma significativa o número de análises dinâmicas necessárias na etapa de
dimensionamento do enrijecedor.
A verificação da influência dos efeitos dinâmicos na análise local do
enrijecedor, assim como, o efeito da incorporação deste componente na resposta
global do duto pode ser posteriormente realizada utilizando o modelo de análise
completo. Para este modelo considera-se o enrijecedor como parte integrante do
modelo global, sendo este representado por diversos elementos adicionais de viga
com rigidez variando ao longo do comprimento para representar sua geometria cônica.
De acordo com PESCE [6], o comprimento da região de influência da rigidez flexional
na resposta dinâmica global é da ordem de TEIf / , onde EI é a rigidez flexional
do duto e T é a tração no topo.
Análise quase-estática local
Para o dimensionamento preliminar do enrijecedor à flexão, utiliza-se o modelo
local com formulação matemática considerando teoria de viga para representar o
sistema composto pelo enrijecedor e por um trecho do duto flexível, onde na faixa de
frequência de excitação, os efeitos de carregamentos inerciais podem ser
desprezados. Este modelo resulta num problema de valor de contorno definido por um
sistema de equações diferenciais ordinárias não-lineares e utiliza como dados de
entrada os resultados de tração e variação de ângulo obtidos da análise global. Utiliza-

10
se, usualmente, o método das diferenças finitas ou dos elementos finitos para
obtenção da solução numérica do problema de viga.
Análises detalhadas utilizando o método de elementos finitos em três
dimensões podem ser utilizadas quando a teoria de viga se torna insatisfatória para
alguns casos específicos. A avaliação de pontos de concentração de tensões no
inserto metálico, a ovalização da extremidade do enrijecedor, assim como, a
distribuição da pressão de contato ao longo do comprimento são alguns exemplos de
aplicação.
Requisitos de projeto
Um dos requisitos de projeto de enrijecedores à flexão é não permitir que o
duto flexível ultrapasse o raio de curvatura mínimo de armazenamento (MBR –
Minimum Bend Radius). Este raio deve ser calculado para satisfazer alguns critérios
previstos em norma [5], como por exemplo: a máxima deformação de flexão da
camada polimérica de pressão não deve ultrapassar 7,7 % para polietileno (PE) e
poliamida (PA) e 7,0 % para fluoreto de vinilideno (PVDF) em aplicações estáticas. O
MBR para aplicações dinâmicas deve ser no mínimo 1,5 vezes o MBR de
armazenamento.
Outro requisito importante que deve ser atendido no projeto destas estruturas é
o valor de deformação máxima do próprio corpo do enrijecedor. O critério usualmente
adotado para definição deste valor é o limite abaixo do qual o número de ciclos para
gerar falha por carregamento periódico tende a infinito (treshold de fadiga). Valores
experimentais comumente encontrados para enrijecedores estão entre 7 e 15%. De
acordo com a norma [5], a metodologia de projeto deve ainda levar em conta algumas
considerações importantes, tais como:
a) falha na adesão do poliuretano com os componentes metálicos do conector;
b) ruptura ou fratura do polímero;
c) fadiga;
d) falha do conector;
e) desgaste (abrasão);
f) fluência;
g) degradação mecânica, química e térmica.
h) efeitos da não-linearidade do material.
A avaliação de cada item requer uma metodologia de análise diferente. O
modelo local apresentado anteriormente pode ser utilizado para dimensionamento do
enrijecedor considerando o critério de MBR e deformação máxima. Neste modelo, os

11
efeitos de fluência e não-linearidade do material podem ser avaliados. Além disso, o
modelo local pode ser utilizado para avaliação da vida à fadiga da estrutura.
Fluxograma de projeto
A Fig. 1.7 sugere um fluxograma que pode ser adotado para o
dimensionamento do enrijecedor a ser utilizado em um determinado sistema de
produção offshore com dutos flexíveis. A primeira etapa é a análise dinâmica do
sistema utilizando o modelo global e considerando o duto com condição de contorno
rotulada na unidade flutuante de produção, sem incluir o enrijecedor. Nesta etapa,
diversos parâmetros devem ser definidos, tais como: espectro de onda e perfil de
correnteza para obtenção da resposta extrema; função de transferência da unidade
flutuante (RAO), entre outros. Desta análise, obtém-se o espaço de projeto que
contém todas as combinações possíveis de força e ângulo de topo. Vale destacar a
necessidade de obtenção do espaço de projeto, pois a utilização de valores máximos
de força e ângulo não leva necessariamente aos maiores valores de curvatura e
deformação do enrijecedor.
Utilizando os dados obtidos na análise global, faz-se o dimensionamento
preliminar do enrijecedor e a análise quase-estática com o modelo local de viga. Os
resultados de distribuição de curvatura e deformação ao longo do comprimento do
sistema são utilizados para verificar a aderência aos requisitos de projeto. Caso os
critérios não sejam atendidos, faz-se novo dimensionamento em um processo iterativo.
Com as dimensões preliminares definidas, pode-se realizar a análise dinâmica
com o modelo completo incluindo o enrijecedor. Esta análise é realizada com o
objetivo de avaliar o efeito da inclusão do enrijecedor na resposta do sistema. Caso os
resultados de tração e ângulo de topo obtidos nesta etapa apresentem resultados fora
de uma determinada tolerância, quando comparados com os resultados da análise
global, um novo dimensionamento do enrijecedor é realizado utilizando o modelo local.
Este processo iterativo continua até que se obtenha um dimensionamento ideal.

12
Figura 1.7 - Fluxograma para dimensionamento de enrijecedores à flexão

13
1.3 Estado da arte em análise local
Diversas hipóteses são adotadas no modelo local do sistema duto
flexível/enrijecedor à flexão com o objetivo de simplificar a formulação matemática
baseada na teoria de viga. Algumas dessas suposições podem, entretanto, gerar um
modelo que não represente a resposta do sistema com a acurácia necessária ao
projeto. A análise e projeto de enrijecedores à flexão e os modelos matemáticos
utilizados já foram assunto de pesquisa de diversos autores, sendo os principais
trabalhos apresentados a seguir. Estes são separados de acordo com a representação
adotada para o comportamento do poliuretano.
Modelos com material elástico
Um dos primeiros trabalhos publicados sobre enrijecedores à flexão foi
apresentado por BOEF e OUT [7]. Eles modelaram a conexão de topo da linha flexível
submetida a carregamento estático extremo, considerando a teoria de viga de Euler-
Bernoulli e poliuretano com resposta linear elástica. Comparam os resultados com
uma análise em elementos finitos, concluindo que o modelo de viga esbelta pode ser
aplicado de forma mais prática como ferramenta de projeto devido a sua simplicidade
numérica e que modelos em elementos finitos podem ser utilizados para verificação
final do projeto.
SØDAHL e LARSEN [8] apresentaram um procedimento para projeto de
enrijecedores combinando a análise dinâmica global com o modelo local, mostrando
as vantagens de se adotar esta metodologia ao invés de utilizar o modelo completo,
conforme descrito no item anterior. Para resolução numérica do modelo local
utilizaram o método do tiro (shooting method) no sistema de equações diferenciais de
governo.
LANE et al. [9] realizaram uma revisão no estado da arte em materiais,
construção, instalação e projeto de enrijecedores. Compararam os resultados de um
programa comercial baseado no modelo de viga esbelta descrito por [7], com modelos
de elementos finitos em duas e três dimensões. Relataram que excelentes correlações
são obtidas na comparação destes modelos, confirmando o modelo de viga esbelta
como ferramenta de projeto.
Ainda considerando o poliuretano com comportamento linear elástico, em
trabalho apresentado por CAIRE e VAZ [10,11], o modelo matemático de viga esbelta
foi estendido para incorporar a resposta não-linear em flexão de linhas flexíveis ou
cabos umbilicais submarinos. Além disso, utilizaram o método dos elementos finitos

14
através do software Abaqus [12] para avaliação do efeito do espaçamento radial entre
as duas estruturas na resposta de curvatura e deformação.
Como descrito nestes trabalhos, a natureza multicamada de linhas flexíveis e
cabos umbilicais submarinos leva a uma elevada rigidez axial e torsional, porém baixa
rigidez flexional. Estes dutos exibem comportamento histerético quando sujeitos a
esforços de flexão devido ao atrito e escorregamento que ocorre entre suas camadas.
Este comportamento não-linear pode ser representado considerando-se toda a curva
momento fletor x curvatura na formulação matemática, ou de forma simplificada,
porém representativa do observado em ensaios experimentais, por uma função bi-
linear.
A resposta em flexão é bastante influenciada pela pressão de contato e pelo
coeficiente de atrito entre as armaduras de tração. No estágio inicial de flexão, o atrito
impede deslizamento relativo entre camadas e as armaduras de tração podem ser
consideradas aderidas ao duto, gerando um elevado valor de rigidez. Com o
acréscimo do momento fletor, começa a ocorrer um deslizamento relativo entre as
camadas após um valor crítico de curvatura, no qual o atrito estático é vencido e uma
queda significativa no valor de rigidez à flexão é observada. Embora esse processo
não-linear ocorra na verdade de forma suave, pode ser modelado considerando
comportamento bi-linear com transição em determinado valor de curvatura crítica crk .
A estratégia usual para o projeto de enrijecedores é considerar o menor valor
de rigidez à flexão, de forma a obter resultados conservativos. Outra questão que
surge quando se introduz essa não-linearidade é o efeito do espaçamento radial que
existe entre o duto e o enrijecedor. Com esta hipótese, alguns segmentos do riser
podem ultrapassar o valor de curvatura crítico de forma diferente do que ocorreria sem
folga. Consequentemente, outra forma de não-linearidade é introduzida no modelo, já
que diferentes trechos da linha flexível podem apresentar diferentes valores de rigidez
à flexão.
Para o estudo de caso realizado, observa-se que a consideração da resposta
não-linear em flexão, assim como, o espaçamento radial entre as estruturas não afeta
significantemente os resultados quando se aplica carregamento extremo. Para
condições de carregamento mais brandas, como no caso de avaliação de vida à
fadiga, observa-se uma tendência de aumento na diferença de resultados obtidos
quando se inclui estas hipóteses no modelo.
Em sua dissertação de mestrado CAIRE [13] e em trabalho publicado por VAZ
et al. [14] a não-linearidade do comportamento do poliuretano é considerada na
formulação matemática do modelo. Além disso, consideram o comportamento
assimétrico, ou seja, resposta em tração diferente da resposta em compressão quando

15
submetido a carregamentos de mesma amplitude. Dessa forma, a posição do eixo
neutro não coincide necessariamente com o centróide de área e deve, portanto, ser
calculada numericamente. Consideraram as estruturas separadamente, permitindo o
cálculo da força de contato ao longo do comprimento através de um pós-
processamento do resultado numérico do sistema de equações diferenciais e posterior
estimativa das pressões de contato. Concluíram que a não-linearidade material com
comportamento assimétrico afeta a resposta do sistema e que caso se queira utilizar o
módulo de elasticidade para avaliação de esforços na estrutura, uma metodologia
consistente para levantamento desse parâmetro deve ser definida.
Modelos com material viscoelástico
CAIRE et al. [15] introduzem um modelo para representar o sistema linha
flexível/enrijecedor considerando o poliuretano com comportamento mecânico
dependente do tempo, ou seja, comportamento viscoelástico. Realizam testes de
fluência com aparato desenvolvido especificamente para tal ensaio e fazem o ajuste
dos dados utilizando séries de Prony. Um importante aspecto observado pelos autores
nos resultados experimentais é o fato de a função de fluência ser muito afetada pelos
níveis de tensão aplicados, caracterizando o fenômeno de viscoelasticidade não-
linear.
Apesar desta observação, utilizam um modelo matemático considerando a
teoria da viscoelasticidade linear no domínio do tempo com o objetivo de simplificar a
formulação e o método de solução numérica. O sistema de quatro equações
diferenciais não-lineares é resolvido utilizando o método do tiro (shooting method), que
consiste em transformar o problema de valor de contorno em um problema equivalente
de valor inicial.
Apresentam um estudo de caso considerando carregamento estático e
mostram que um aumento de até 20% na máxima curvatura observada ao longo do
enrijecedor, pode ocorrer quando se considera este tipo de carregamento. Embora
esta hipótese não represente de forma adequada o carregamento que deve ser
aplicado em um enrijecedor com comportamento viscoelástico, os resultados
ressaltam a necessidade de uma melhor compreensão dos fenômenos que regem a
resposta do sistema.
Em trabalho posterior, VAZ et al. [16] verificam o efeito do carregamento
harmônico na resposta da conexão de topo de um sistema com enrijecedor
viscoelástico linear utilizando a formulação matemática no domínio do tempo. A
formulação matemática é uma extensão de [15] considerando agora, que as condições
de contorno do carregamento são funções do tempo. Realizam ensaios experimentais

16
de fluência com o poliuretano utilizando equipamento servo-hidráulico para testes de
tração/compressão, onde a medição de deformação é feita utilizando um extensômetro
específico para grandes deformações. Desta forma, uma resposta acurada do
comportamento em fluência do poliuretano é obtido para curto prazo.
Além da formulação matemática e método de solução numérica apresentados,
realizam uma análise em elementos finitos utilizando o software Abaqus [12] para
verificação dos resultados obtidos. Um estudo de caso é apresentado considerando
força e ângulo como carregamento harmônico com determinada diferença de fase.
Verifica-se que a resposta de máxima curvatura do sistema ao longo do comprimento
varia com a frequência de carregamento imposta, podendo apresentar acréscimo ou
decréscimo de valor, dependendo da amplitude da força média aplicada. Os
resultados destacam a necessidade de adequada caracterização do comportamento
material, assim como a correta determinação do carregamento a ser aplicado como
condição de contorno obtida da análise global.
Análise de fadiga
No que se refere a avaliação de vida à fadiga de enrijecedores à flexão, pouco
se encontra na literatura sobre metodologia de análise. A avaliação de acumulo de
dano nestas estruturas é dificultada pelo efeito viscoelástico inerente a materiais
poliméricos. Os principais enfoques utilizados são: a) realização de testes
experimentais em escala real, b) utilização de curva NS (variação de tensão por
número de ciclos até a falha) ou curva N (variação de deformação por número de
ciclo até a falha) e c) utilização dos conceitos de mecânica da fratura.
Um estudo para determinação da vida à fadiga de enrijecedores foi
apresentado por MENICONI e LOPES [17]. Realizaram ensaios experimentais para
levantamento da curva N , utilizando um enrijecedor que apresentou falha por
fadiga quando em operação no campo de Marlim, na bacia de Campos. Estas falhas
ocorreram em dois risers de exportação de 9,5’’ conectados a monobóia IMODCO III
da Petrobras, operando numa profundidade de 405 metros. Através dos ensaios
experimentais realizados verificaram comportamento assimétrico, ou seja, resposta
diferente do comportamento em tração e compressão e ainda comportamento
viscoelástico.
A curva de fadiga foi levantada reproduzindo-se o detalhe de sustentação do
enrijecedor na região de falha. Os corpos de prova foram usinados considerando dois
orifícios com diferentes níveis de rugosidade e os testes feitos com diferentes níveis
de amplitude de deformação, mas sem avaliação do efeito da deformação média. Os
resultados obtidos mostraram uma forte dependência da rugosidade superficial,

17
sugerindo a utilização de uma metodologia baseada nos conceitos de mecânica da
fratura.
Outro trabalho relacionado à fadiga de enrijecedores foi apresentado por
DEMANZE et al. [18] no qual foram realizadas análises em elementos finitos para
avaliação de deformações em áreas críticas (inserto metálico e área de deformação
máxima) e testes em escala real e reduzida com objetivo de propor uma metodologia
para determinação da vida à fadiga de enrijecedores.
Neste trabalho, os autores utilizam os conceitos da mecânica da fratura para
avaliar, em um determinado conjunto de defeitos e deformações, o número de ciclos
para falha por propagação de trincas. Realizam diversos ensaios experimentais para
descrever a resposta em fadiga do poliuretano, levantando curvas do número de ciclos
até falha para diversos fatores de intensidade de deformações. Através de correlação
com resultado de diversos ensaios experimentais em escala real, definem os defeitos
equivalentes que devem ser utilizados nas áreas de deformação critica na etapa de
projeto.
Ampliação da fronteira do conhecimento
Não foi encontrada, pelo menos na literatura pesquisada, nenhuma metodologia
clara e que trate de forma consistente todos os aspectos relacionados ao projeto e
análise de enrijecedores à flexão. Um dos pontos essenciais é a correta
caracterização do comportamento mecânico do poliuretano específico utilizado na
fabricação do enrijecedor.
Embora tenha sido verificado por alguns dos trabalhos apresentados
anteriormente que o poliuretano apresenta comportamento viscoelástico e,
consequentemente, dissipação de energia quando submetido a carregamento cíclico,
em nenhum dos trabalhos citados realizou-se a verificação consistente deste efeito na
resposta do sistema.
O presente trabalho apresenta a formulação matemática do sistema
considerando comportamento viscoelástico linear e não-linear para representar o
poliuretano. O modelo é apresentado inicialmente no domínio do tempo e
posteriormente na frequência, utilizando a teoria da perturbação, para obtenção da
resposta em regime permanente. Desta forma, condições de carregamento
harmônicas podem ser utilizadas para representar as condições reais nas quais a
estrutura está submetida e obter a solução numérica de forma eficiente.
Atualmente, com a crescente utilização de materiais poliméricos na indústria
offshore e em outras indústrias de forma geral, a compreensão do comportamento
mecânico se torna essencial para projeto de estruturas que utilizem esse tipo de

18
material. Os modelos matemáticos apresentados neste trabalho, resultantes da
pesquisa realizada, podem ser estendidos com relativa facilidade para outras
aplicações similares. Um exemplo de aplicação mais geral é o trabalho publicado por
VAZ e CAIRE [19] que trata do problema de grandes deflexões de vigas viscoelásticas
e dos conceitos de energia armazenada e dissipada durante um histórico de
carregamento específico.
1.4 Objetivos específicos e relevância da pesquisa
Os principais objetivos do trabalho realizado, assim como a relevância do
mesmo no cenário atual, são apresentados nos itens a seguir.
Objetivos específicos da pesquisa
Os objetivos específicos a serem alcançados com o desenvolvimento deste
trabalho são apresentados como segue,
Realização de ensaios experimentais para caracterização mecânica do
comportamento viscoelástico de poliuretano utilizado em enrijecedores à
flexão;
Formulação matemática do sistema duto flexível/enrijecedor à flexão
considerando material viscoelástico linear e não-linear no domínio do tempo e,
utilizando o método da perturbação, na frequência para obtenção da reposta
harmônica em regime permanente.
Avaliação da influência da taxa de carregamento e do amortecimento
viscoelástico na resposta mecânica do sistema considerando carregamento
harmônico e as consequências na análise e projeto do sistema.
Relevância da pesquisa
Cada conexão de duto flexível ou cabo umbilical submarino com a unidade
flutuante de produção deve utilizar um enrijecedor à flexão para evitar possíveis falhas
devido a carregamento extremo e por fadiga. As novas descobertas nos campos do
pré-sal brasileiro irão exigir diminuição no conservadorismo de novos projetos para
redução de custo e viabilização de projetos que antes não seriam possíveis. Neste
contexto de novas descobertas, a Petrobras prevê a compra de cerca de 4000 km de
dutos flexíveis e 2200 km de cabos umbilicais submarinos o que significa que
centenas de enrijecedores à flexão serão necessários para instalação destes risers.

19
Uma das vantagens do uso de dutos flexíveis é que este permite a sua
reutilização em um novo sistema de produção submarina, e consequentemente uma
re-análise do sistema completo, incluindo o enrijecedor à flexão, deve ser feita para
avaliar se o mesmo poderá ser usado na nova aplicação ou se uma nova estrutura
deverá ser dimensionada. Todos estes fatores projetam uma forte demanda para os
próximos 10 anos no contexto de análise e projeto de enrijecedores à flexão ou bend
stiffeners.
1.5 Descrição dos capítulos
No Capítulo 2 uma introdução a teoria da viscoelasticidade é apresentada e as
equações constitutivas para a teoria linear e não-linear são desenvolvidas no domínio
do tempo e da frequência. Os diversos ensaios experimentais realizados para
caracterização do comportamento mecânico de amostras retiradas de um enrijecedor
à flexão são apresentados e os métodos de ajuste discutidos.
No Capítulo 3 a formulação matemática do sistema mecânico composto pelo
enrijecedor à flexão e duto flexível é apresentada, considerando a teoria da
viscoelasticidade linear e não-linear para representar o poliuretano. O modelo
matemático é primeiramente desenvolvido no domínio do tempo e estendido para o
domínio da frequência utilizando a teoria da perturbação. As hipóteses simplificadoras
assumidas no modelo e suas consequências na resposta são discutidas.
No Capítulo 4 diversos estudos de caso são realizados para verificação do efeito
viscoelástico do poliuretano do enrijecedor na resposta do sistema de conexão de
topo. As conclusões finais obtidas, comentários e sugestões para continuidade do
trabalho são apresentados no Capítulo 5.

20
2 RESPOSTA MECÂNICA DO POLIURETANO
A primeira parte deste capítulo apresenta a classificação do poliuretano dentro da
ampla classe de materiais poliméricos. Em seguida as principais propriedades que
devem ser atendidas para utilização do poliuretano como enrijecedor à flexão são
discutidas. As características básicas do comportamento viscoelástico são
introduzidas utilizando analogias mecânicas com sistemas formados pela combinação
de molas e amortecedores e os ensaios experimentais necessários para sua
caracterização mecânica são então apresentados.
No item 2.1 as equações constitutivas para teoria linear, utilizando a forma da
integral hereditária, são apresentadas no domínio do tempo utilizando o principio da
superposição e estendidas para o domínio da frequência. Com o objetivo de expandir
a faixa de aplicação da teoria linear, no item 2.2, alguns modelos da teoria da
viscoelasticidade não-linear são apresentados e discutidos.
Por fim, o item 2.3 apresenta os ensaios experimentais e os ajustes realizados
para caracterização mecânica do poliuretano. A teoria não-linear que apresenta a
melhor correlação com os dados experimentais obtidos é então utilizada para
formulação matemática do sistema linha flexível/enrijecedor à flexão desenvolvida no
Cap. 3.
Classificação
O corpo do enrijecedor à flexão é fabricado com poliuretano, um tipo específico
de polímero. Polímeros são estruturas formadas por grandes moléculas
(macromoléculas), caracterizadas por seu tamanho, estrutura química, interações
intramoleculares e intermoleculares. As unidades químicas básicas que formam os
polímeros são denominadas meros. Possuem ligações covalentes repetidas
regularmente ao longo da cadeia, onde o número de meros da cadeia indica o grau de
polimerização. Em geral, graus elevados de polimerização irão assegurar melhores
propriedades mecânicas e físicas do produto.
Pela atuação de forças externas, as macromoléculas tendem a escoar e
quando removida a tensão retornam parcialmente à situação primitiva. Se o material é
muito cristalino, é também rígido e resiste mais à deformação. Sempre há, entretanto,
uma variação dimensional irreversível quando se ultrapassa o limite elástico de cada
material. Quando o polímero é pouco cristalino, ou está acima da sua temperatura de
transição vítrea, há maior escoamento (creep) e as peças sofrem deformações mais
pronunciadas, até mesmo por escoamento sob a ação de seu próprio peso em alguns
casos.

21
Um polímero pode ser classificado de diversas maneiras. De acordo com o
critério do comportamento mecânico dos polímeros, os materiais macromoleculares
podem ser divididos em três grupos: borrachas, plásticos e fibras. Uma característica
que delimita um grupo do outro, embora de forma superficial, é o limite do módulo de
elasticidade. Os respectivos intervalos são apresentados a seguir: borrachas
( 21 1010 psi), plásticos ( 43 1010 psi) e fibras 65 1010( psi), de acordo com MANO
[20].
Os poliuretanos são polímeros produzidos pela reação de poliadição de um
diisocianato com um diol e outros reagentes. Os isocianatos podem ser aromáticos ou
alifáticos. Os polidióis podem ser poliéteres, poliésteres, ou possuir estrutura
hidrocarbônica. A natureza química bem como a funcionalidade dos reagentes deve
ser escolhida de acordo com as propriedades finais desejadas. Esta flexibilidade
possibilita a obtenção de materiais com diferentes propriedades físicas e químicas.
Dependendo dos monômeros e do catalisador pode-se gerar uma grande variedade
de materiais, como por exemplo, plásticos ou fibras, de natureza termoplástica ou
termorrígida.
Propriedades necessárias ao enrijecedor
De acordo com a norma API 17 J [5], o material polimérico utilizado no projeto
de enrijecedores à flexão deve atender a alguns critérios de projeto específicos, tais
como:
a) resistência à água do mar e hidrólise - o poliuretano inevitavelmente sofre
algum nível de hidrólise com o tempo, mas a resistência a este tipo de degradação
pode ser aumentada quando se utiliza poliéter, por exemplo. A absorção de água pode
ocorrer em alguns tipos de poliuretano, levando a um pequeno aumento de massa,
mas sem efeito significante na rigidez e no comportamento mecânico.
b) exposição a produtos químicos - caso exista a possibilidade de exposição do
material a produtos químicos, suas consequências devem ser avaliadas, pois líquidos
corrosivos, como ácidos em geral, atacam o poliuretano quimicamente.
c) exposição à radiação ultravioleta - a resistência de poliuretanos a radiações
ultravioletas é relativamente boa. Quando exposto à luz solar pode ocorrer um
escurecimento superficial, mas que não necessariamente está associado com a perda
de propriedades físicas.
d) resistência à temperatura máxima esperada - a temperatura tem grande
influência no comportamento do poliuretano devido ao rearranjo das cadeias do
polímero e deve ser avaliado para cada tipo de aplicação específica.

22
e) fluência e relaxação de tensões – o poliuretano apresenta continuidade da
deformação quando submetido à tensão constante e relaxação de tensão quando
submetido à deformação constante, características do comportamento viscoelástico,
descrito a seguir.
Observa-se que devido a sua grande versatilidade, o poliuretano utilizado na
fabricação de enrijecedores à flexão deve ser adequadamente selecionado para
atender as propriedades descritas acima, além da necessidade de ser corretamente
caracterizado quanto ao seu comportamento mecânico para que o dimensionamento
da estrutura não leve a erros de projeto.
Analogia da resposta mecânica com sistemas simples
No âmbito da mecânica dos sólidos, equações constitutivas caracterizam a
resposta de um corpo contínuo aos carregamentos externos impostos e uma
compreensão física deste comportamento pode ser obtida utilizando a analogia com
elementos fundamentais como a mola, o amortecedor e um sólido rígido deslizando
sobre uma superfície com atrito, como ilustrado na Fig. 2.1 a seguir.
(a) Mola (b) Amortecedor (c) Sólido com atrito
Figura 2.1 – Elementos mecânicos simples
O comportamento elástico, por exemplo, pode ser compreendido considerando
a aplicação de um carregamento em uma mola. Quando se aplica uma determinada
tração, a mola se alonga instantaneamente e se a força aumenta o alongamento
também aumenta. A relação entre força e deslocamento é a mesma para
carregamento e descarregamento. Se a força é linearmente proporcional ao
deslocamento, pode-se escrever a seguinte equação constitutiva relacionando força x
deslocamento kF e tensão x deformação E , onde k é o coeficiente da
mola e E o módulo de elasticidade ou módulo de Young.
A deformação viscosa pode ser caracterizada considerando um amortecedor,
ou seja, um pistão perfurado se movendo dentro de um cilindro. Quando uma
determinada força é aplicada ao pistão, o líquido flui pelo orifício com um fluxo que

23
depende da pressão aplicada no pistão. Quanto maior a intensidade da força, maior a
pressão observada. Desta forma, a taxa de deformação pode ser relacionada
diretamente à tensão aplicada utilizando a seguinte relação, , onde é o
módulo de viscosidade.
O comportamento plástico pode ser compreendido fisicamente fazendo-se a
analogia com o deslocamento de um corpo rígido sobre uma superfície rugosa quando
submetido à aplicação de uma determinada força horizontal constante. A força irá
causar um deslocamento no corpo apenas se sua intensidade for maior do que a força
de atrito entre ele e a superfície de contato. Uma vez que o deslocamento é iniciado,
este continua a ocorrer sem acréscimo na força aplicada. Quando se retira o
carregamento, o corpo não retorna a sua posição inicial e isso significa que todo o
trabalho realizado é dissipado em forma de calor com a superfície de contato. A Fig.
2.2 ilustra o comportamento tensão x deformação destes sistemas mecânicos.
(a) Elástico (b) Viscoso (c) Plástico
Figura 2.2 – Resposta mecânica dos elementos simples
Utilizando os elementos básicos descritos acima, modelos com resposta mais
próxima do observado em materiais reais podem ser obtidos. Conectando o modelo
elástico e plástico em série, por exemplo, obtém-se como resposta o comportamento
elastoplástico, ilustrado na Fig. 2.3. Quando se aplica um carregamento externo, o
deslocamento da mola aumenta até que a força externa aplicada se iguale a força de
atrito entre o corpo e a superfície. A partir deste instante, a força se mantém constante
e o deslocamento irreversível p aumenta até o instante da retirada da força.
Outro modelo pode ser obtido acoplando o elemento plástico com um
amortecedor em paralelo e associando este conjunto com uma mola em série. Desta
forma pode-se observar algumas características do modelo viscoplástico. A aplicação
de carregamento externo provoca uma resposta elástica instantânea. A partir do
instante em que a força externa se iguala a força de atrito do elemento plástico, a
deformação irreversível aumenta com uma taxa constante devido à presença do

24
amortecedor. No limite, quando a taxa de carregamento tende a zero 0 , o
material responde com comportamento elastoplástico.
Figura 2.3 – Modelo elasto-perfeitamente plástico
De forma similar ao descrito acima, a analogia com sistemas mecânicos
simples permite a fácil compreensão de fenômenos importantes do comportamento
viscoelástico. Com o objetivo de simular este comportamento dependente do tempo e
derivar equações constitutivas com operadores diferenciais relacionando tensão e
deformação, diversas analogias podem ser feitas utilizando combinações de molas e
amortecedores lineares. Nesse contexto, a mola representa o trabalho mecânico
armazenado e o amortecedor a parcela da energia dissipada em forma de calor. As
equações constitutivas obtidas sugerem formas das funções de relaxação e de
fluência que podem ser utilizadas para o ajuste de dados experimentais. Dentre as
diversas combinações possíveis, algumas das mais relevantes para compreensão
deste comportamento viscoelástico, são apresentadas a seguir,
a) Maxwell – mola e amortecedor conectados em série, como mostrado na Fig.
2.4. Quando submetido a uma tensão constante 0 no instante
0t , alcança
imediatamente o valor de deformação E/0 seguido de um estado com taxa de
deformação constante. Quando submetido a uma deformação constante 0 no
instante 0t , a tensão alcança instantaneamente o valor
0E e relaxa completamente
até zero ao longo do tempo devido à deformação do amortecedor. Este
comportamento é típico da resposta de fluidos. As funções de relaxação e fluência
obtidas com este modelo não representam, portanto, o comportamento viscoelástico
observado em poliuretanos.

25
Figura 2.4 – Modelo viscoelástico de Maxwell
b) Kelvin-Voigt – mola e amortecedor conectados em paralelo, como mostrado
na Fig. 2.5. Quando submetido a uma tensão constante 0 no instante
0t , todo o
carregamento é suportado pelo amortecedor já que o mesmo não se deforma
instantaneamente. A partir deste instante, com o aumento da deformação com o
tempo, a tensão na mola aumenta gradativamente e consequentemente ocorre um
decréscimo na tensão do amortecedor. A taxa de deformação se anula quando toda a
tensão é transferida para a mola, o que ocorre quando t e a deformação tende a
E/0 . Quando submetido a uma deformação constante 0 no instante
0t , o
amortecedor reage com um salto de força que tende a infinito. A partir deste instante
inicial, o amortecedor atinge o equilíbrio e a única força requerida para manter o
sistema na sua configuração é uma tensão proporcional a deformação da mola dada
por 0E . Esta resposta de relaxação de tensão não gradual e a resposta em fluência
não fornecem uma boa aproximação do comportamento observado em materiais
viscoelásticos.
Figura 2.5 – Modelo viscoelástico de Kelvin-Voigt

26
c) Sólido linear padrão – pode ser formado pelo modelo de Maxwell e uma
mola em paralelo ou pelo modelo de Kelvin-Voigt e uma mola em série, onde ambos
os modelos fornecem as mesmas equações constitutivas e indicam uma forma
exponencial para as funções de relaxação e fluência. A Fig. 2.6 mostra
esquematicamente o modelo.
Figura 2.6 – Modelo viscoelástico do Sólido Linear Padrão
O equilíbrio de forças do modelo fornece a seguinte relação,
)()()( 21 ttt (2.1)
onde o índice 1 se refere a mola com módulo de elasticidade 1E e o índice 2 se refere
ao modelo de Maxwell constituído de uma mola com módulo de elasticidade 2E e um
amortecedor com módulo viscoso . Para este modelo, a equação de compatibilidade
geométrica é dada por,
)()()( 21 ttt (2.2)
A relação tensão x deformação é descrita pelas seguintes relações,
22
2
2
111
E
E
(2.3)
Utilizando a condição inicial )0()0( 222 E para resolver a equação
diferencial apresentada na Eq. (2.3), obtém-se a seguinte solução para tensão 2 do
modelo de Maxwell,

27
t
dtE
EtEt0
2222 )()](exp[)()(
(2.4)
Utilizando as Eq. (2.1), (2.3) e (2.4) chega-se a,
t
dtE
EtEEt0
2221 )()](exp[)()()(
(2.5)
Definindo as seguintes constantes,
2
1
210
/E
EG
EEG
R
(2.6)
e definindo a função de relaxação )(tG como,
]/exp[)()( 0 RtGGGtG
(2.7)
pode-se reescrever a Eq. (2.5) da seguinte forma,
t
t
dt
tGtG
dtG
tGt
0
0
)(
)()()()0(
)()()()0()(
(2.8)
Fazendo uso da transformada de Laplace em (2.8) e considerando um salto de
tensão 0)( t para 0t pode-se obter a resposta de deformação, como segue,
t
t
dt
tJtJ
dtJ
tJt
0
0
)(
)()()()0(
)()()()0()(
(2.9)
sendo a função de fluência )(tJ descrita por,
]/exp[)()( 0 CtJJJtJ
(2.10)

28
com os seguintes coeficientes,
RC GG
GJ
GJ
)/(
/1
/1
0
00
(2.11)
A resposta deste modelo para o ensaio de relaxação de tensão ( 0,)( 0 tt )
e fluência ( 0,)( 0 tt ) é apresentada esquematicamente na Fig. 2.7 a seguir.
Quando submetido a uma deformação instantânea 0 , o modelo atinge seu valor
máximo de tensão 00G e continua sua relaxação de tensão até atingir o valor limite
G0 quando t . Quando submetido a uma tensão instantânea
0 , salta para um
valor de deformação 00J e flui até atingir o valor máximo de
J0 quando t .
Este é o modelo mais simples capaz de representar as características essenciais do
comportamento viscoelástico.
(a) Relaxação (b) Fluência
Figura 2.7 – Resposta de relaxação e fluência do modelo Sólido Linear Padrão
Considerando um histórico de deformação com taxa constante, descrito por
tt )( , e substituindo na Eq. (2.8) com manipulações algébricas obtém-se,
t
dGt0
)()( (2.12)

29
Utilizando a Eq. (2.12) verifica-se que a resposta de tensão ao longo do tempo
é proporcional à função de relaxação para cada instante, sendo descrito
matematicamente por,
)(/)( tGdttd (2.13)
Desta forma a inclinação inicial é dada por )0(G e quando t decresce
continuamente até atingir o valor )(G . A Fig. 2.8 ilustra esquematicamente este
comportamento. A Fig. 2.9 ilustra o efeito da taxa de carregamento na curva tensão x
deformação de um material viscoelástico linear representado pelo modelo do sólido
linear padrão. Pode-se verificar que quanto maior a taxa de deformação utilizada no
ensaio, maior será o valor de rigidez obtido como resposta. Substituindo /t em
(2.12), pode-se ainda escrever,
)/(/ Gdd (2.14)
Esta relação mostra que a inclinação da curva tensão x deformação de um
material viscoelástico linear é proporcional a função relaxação de tensão.
Consequentemente, o fato desta curva não ser uma reta, não caracteriza o material
como viscoelástico não-linear. A Fig. 2.10 mostra a curva x para três
combinações de )0(/)( GG . A teoria viscoelástica linear é válida, quando, para
qualquer taxa de deformação aplicada, as curvas x coincidem. Pode-se
verificar ainda, que quanto mais viscoelástico for o material, maior será a não-
linearidade da curva tensão x deformação.
(a) Carregamento (b) Resposta de tensão
Figura 2.8 – Carregamento com taxa constante de deformação e resposta de tensão
do Sólido Linear Padrão

30
0,00 0,02 0,04 0,06 0,08 0,10
0,0
0,2
0,4
0,6
0,8
1,0
3 R = 0,01
2 R = 0,05
1 R = 0,5
Go = 10
Ginf = 1
R = 1
Figura 2.9 – Influência da taxa de deformação na curva x do modelo Sólido Linear
Padrão
0 1 2 3 4 5
0
10
20
30
40
50
R = 1
Ginf/Go = 0,9
Ginf/Go = 0,5
Ginf/Go = 0,1
Figura 2.10 – Influência da taxa de deformação e )0(/)( GG na curva x do
modelo Sólido Linear Padrão

31
Outro aspecto importante do comportamento viscoelástico é o conceito de
memória. Considere, por exemplo, que inicialmente se aplique o mesmo carregamento
0 ilustrado na Fig. 2.7. Após a aplicação deste, ao invés da retirada em um
determinado instante, ocorra a aplicação de outro salto instantâneo de tensão com
magnitude 0c , onde c é uma constante. A resposta a partir desse instante irá
depender não apenas da magnitude da tensão alcançada, mas também do histórico
do primeiro carregamento. Isto significa que para um determinado carregamento de
tensão ou deformação especificado arbitrariamente, a resposta de deformação ou
tensão irá depender de todo o seu histórico. Estas características são representadas
matematicamente pelas integrais hereditárias apresentadas nas Eq. (2.8) e (2.9). Para
um material elástico a resposta seria, simplesmente, a deformação correspondente à
tensão total para o instante considerado
Muitas outras combinações com molas e amortecedores podem ser formadas,
fornecendo as mesmas equações constitutivas relacionando tensão e deformação
apresentadas anteriormente, diferindo apenas nas funções de relaxação e fluência
obtidas. Os modelos de Lethersich (combinação do modelo de Kelvin-Voigt com um
amortecedor em série) e Burgers (combinação do modelo de Kelving-Voigt com o
modelo de Maxwell em série) são alguns exemplos. Qualquer forma da função é válida
desde que represente o melhor ajuste dos dados experimentais obtidos. Embora
ajudem na compreensão de fenômenos essenciais na reposta viscoelástica, suas
restrições não permitem o desenvolvimento de uma teoria consistente para este tipo
de material. O modelo do sólido linear padrão, por exemplo, apresenta apenas um
tempo de relaxação R ou fluência
C . Para correta representação de materiais reais,
diversos tempos de relaxação ou fluência devem ser utilizados e nesse contexto,
generalizações dos modelos descritos acima podem ser obtidas considerando uma
série de elementos de Maxwell ou Kelvin-Voigt. Considerando, por exemplo, a
generalização do modelo de Maxwell,
d) Modelo de Maxwell generalizado – Este modelo é formado por uma série de
N elementos de Maxwell em paralelo, como ilustrado na Fig. 2.11 a seguir. O
equilíbrio de forças para este modelo fornece a seguinte relação,
N
i
i tt1
)()( (2.15)
A equação de compatibilidade geométrica é dada por,

32
),..,1()()( Nitt i (2.16)
Figura 2.11 – Modelo viscoelástico de Maxwell generalizado
De modo similar ao modelo de Maxwell com apenas um elemento, a relação
tensão x deformação para o modelo generalizado pode ser descrita por,
N
i i
N
i i
tE
tt11
1)(
1)()(
(2.17)
Utilizando as Eq. (2.15-17) e as condições iniciais do modelo, obtêm-se as
seguintes funções de relaxação e fluência,
]/exp[...]/exp[)( ,1,10 MRMR tGtGGtG (2.18)
]/exp[...]/exp[)( ,1,10 MCMC tJtJJtJ (2.19)
onde os tempos de relaxação são descritos por iiiR E/, e os tempos de fluência
por iC , ),..,1( Mi . A forma das funções de relaxação e fluência apresentadas nas Eq.
(2.18) e (2.19) é chamada série de Prony. A generalização destes tempos, quando

33
M , introduz o conceito de espectro contínuo de relaxação ou fluência, como será
apresentado no item 2.1.
Ensaios experimentais
Os principais testes experimentais que podem ser utilizados para
caracterização mecânica do comportamento viscoelástico linear observado em
poliuretanos são descritos a seguir:
a) Teste de relaxação de tensões – diversos níveis de deformação são
aplicados nos corpos de prova e o histórico da resposta de tensão medido
ao longo do tempo para uma determinada temperatura. Um desenho
esquemático deste teste é ilustrado na Fig. 2.7 (a) para um nível de
deformação.
b) Teste de fluência – diversos níveis de tensão são aplicados nos corpos de
prova e o histórico da resposta de deformação medido ao longo do tempo
para uma determinada temperatura. Um desenho esquemático deste teste
é ilustrado na Fig. 2.7 (b) para um nível de tensão.
c) Teste oscilatório – carregamento harmônico é imposto aos corpos de prova
com diferentes frequências e amplitudes e a resposta medida ao longo do
tempo para uma determinada temperatura.
Na análise e interpretação dos resultados experimentais de relaxação e fluência,
usualmente se considera que o carregamento é aplicado instantaneamente e mantido
constante ao longo do ensaio. O termo instantaneamente, impossível de se obter
experimentalmente, pode ser entendido como rápido o suficiente para obter a resposta
elástica, mas que ao mesmo tempo não provoque resposta dinâmica no corpo de
prova devido a efeitos de inércia do sistema experimental. O efeito da taxa de
carregamento adotada para se alcançar o nível de carregamento do ensaio deve ser
avaliado, uma vez que a mesma apresenta influência na resposta mecânica do
material. A escolha do aparato a ser utilizado depende do material e da caracterização
que se quer obter. A utilização de um aparato servo-hidráulico para testes de
tração/compressão, por exemplo, fornece resultados precisos, mas não se torna
adequada para ensaios de longo prazo.
As funções de relaxação e fluência obtidas com os diferentes tipos de ensaios
apresentados acima podem ser relacionadas umas com as outras como será visto a
seguir. A função de relaxação no domínio da frequência )(wG pode ser obtida
diretamente através da função )(tG obtida com o teste de relaxação, por exemplo.

34
Para comportamento viscoelástico não-linear, o número de testes experimentais
para caracterização da resposta material e ajuste dos coeficientes depende da teoria
adotada, mas é usualmente muito mais elevado que para a teoria linear. Em alguns
casos, diversos saltos de deformação ou tensão devem ser aplicados no mesmo
ensaio de relaxação ou fluência, respectivamente. A influência da temperatura é outro
aspecto que dificulta a caracterização viscoelástica.
2.1 Comportamento viscoelástico linear
Neste item, uma forma geral da equação constitutiva unidimensional para
resposta viscoelástica linear é derivada utilizando o conceito da integral hereditária
para relaxação e fluência como descrito por WINEMAN e RAJAGOPAL [21]. A relação
entre as duas formas é apresentada, assim como, o conceito de espectro de
relaxação. As equações obtidas são posteriormente derivadas no domínio da
frequência considerando carregamento harmônico. Em seguida são generalizadas
para resposta em três dimensões e por fim, alguns critérios para demarcação do limite
de aplicação da teoria viscoelástica linear são apresentados.
2.1.1 Equação constitutiva na forma integral para resposta unidimensional
Na formulação apresentada a seguir, o tempo atual será denotado por t e um
tempo representativo de estados anteriores representado por .
Principio da superposição de Boltzman
Se uma deformação )(1)( 0 , ],0[ t , é aplicada a um material
viscoelástico, a resposta de tensão pode ser descrita por )()( 0 tGt . A função de
salto unitária )(1 t é definida como,
0,1
0,0)(1
t
tt (2.20)
A função de relaxação )(tG será descrita utilizando a série de Prony como
apresentado na Eq. (2.18). Considerando agora uma função arbitrária )( , ],0[ t ,
com variação suave ao longo do tempo e possíveis descontinuidades em um

35
determinado tempo *T , como mostrado na Fig. 2.12, pode-se utilizar uma
superposição de saltos para aproximação, como segue,
i
n
i
itt 1
0 )(1)(1)()( (2.21)
onde 00 t e i é definido por,
)()( 1 iii tt (2.22)
Figura 2.12 – Aproximação de uma história de deformação por superposição de saltos
De acordo com o principio da superposição de Boltzman, a soma da resposta
de tensões individuais devido a componentes de deformação individuais deve ser igual
a resposta total de tensão devido a combinação de todos os pulsos de deformação.
Desta forma, a resposta de tensão pode ser descrita por,
i
n
i
ittGtGt 1
)()()0()( (2.23)
Se for considerado que o número de incrementos de deformação i tende ao
infinito, a magnitude de cada termo decresce e pode-se representar o somatório da
Eq. (2.23) por uma integral, como segue,

36
t
dtGtGt0
)()()()0()( (2.24)
A integral acima é chamada de integral de Riemann-Stieltjes e envolve
diferencial da deformação ao invés do tempo, como descrito por WINEMAN e
RAJAGOPAL [21]. Considerando que a função )(t é continua no intervalo de
integração, pode-se escrever,
dd
)()( (2.25)
de forma que o tempo se torne a variável independente. Substituindo a Eq. (2.25)
em (2.24) e considerando a descontinuidade no tempo *T , obtém-se,
)()()()(
)()()0()( ***
0TtGTTdtGtGt
t
(2.26)
A Eq. (2.26) é usualmente descrita em sua forma reduzida,
t
dtGt0
)()()( (2.27)
Equações constitutivas para relaxação
A Eq. (2.27) pode ser reescrita de duas formas diferentes utilizando mudança
de variáveis, como segue,
t
t
t
dtGtG
dt
tGtG
dtGt
0
0
0
)()()()0(
)(
)()()()0(
)()()(
(2.28)
Utilizando ainda, integração por partes e a mesma mudança de variáveis
adotada anteriormente, pode-se reescrever a equação constitutiva como,

37
t
t
t
dG
ttG
dt
tGtG
dGtt
0
0
0
)()()()0(
)(
)()()()0(
)()()(
(2.29)
A Eq. (2.29) é a mesma obtida com o modelo do sólido linear padrão
apresentada anteriormente na Eq. (2.8). A escolha da utilização da equação
constitutiva (2.28) ou (2.29) irá depender do problema específico a ser tratado.
Equações constitutivas para fluência
Utilizando o mesmo procedimento descrito anteriormente para um histórico de
tensões, pode-se obter a resposta de deformação em função do tempo. Neste caso a
função )(tJ que caracteriza o material é chamada de função de fluência, como
apresentado anteriormente na Eq. (2.19). Estas relações são dadas por,
t
t
t
dtJtJ
dt
tJtJ
dtJt
0
0
0
)()()()0(
)(
)()()()0(
)()()(
(2.30)
ou ainda, utilizando integração por partes em (2.30),
t
t
t
dJ
ttJ
dt
tJtJ
dJtt
0
0
0
)()()()0(
)(
)()()()0(
)()()(
(2.31)
Relação entre relaxação e fluência
A caracterização do comportamento viscoelástico, seja ele linear ou não, é
usualmente feita realizando-se apenas um dos dois tipos de ensaios descritos
anteriormente, o de fluência ou relaxação. Desta forma, caso a formulação do modelo
matemático utilizado para descrever o comportamento mecânico do problema em
questão não utilize a mesma forma da equação constitutiva adotada para descrever o
ensaio, torna-se necessário utilizar uma relação matemática para o cálculo da mesma.

38
Esta relação pode ser obtida substituindo o histórico de tensão )(1)( 0 tt em
(2.28). Levando em conta a teoria da viscoelasticidade linear, a relação para a
deformação em função do tempo se torna )()( 0 tJt e, consequentemente a Eq.
(2.28) pode ser reescrita como,
t
dJ
tGtGJ0
)()()()0(1
(2.32)
Considerando )(1)( 0 tt e )()( 0 tGt em (2.30), relação similar pode ser
obtida. Se a função de relaxação )(tG ou de fluência )(tJ forem conhecidas
experimentalmente, pode-se resolver numericamente a relação integral dada pela Eq.
(2.32) para cálculo da função não conhecida. Algumas considerações importantes
podem ser obtidas da relação (2.32). Considerando, por exemplo, o tempo 0t ,
pode-se verificar que o valor da função de relaxação é dado pelo inverso da função de
fluência 1)0()0( JG . O mesmo é válido quando se considera t , ou seja,
1)()( JG . Para o caso não-linear a relação será apresentada no item 2.2.3.
Espectro de relaxação
As funções de relaxação e fluência apresentadas anteriormente são utilizadas
para caracterização do comportamento viscoelástico linear e são obtidas diretamente
através de resultados experimentais utilizando a série de Prony com um determinado
número de termos. Outra forma de caracterizar o comportamento é através do uso da
função espectro de relaxação )(tH , definida a seguir,
0)/exp()()( dtHGtG (2.33)
A função )(tH pode ser considerada como uma distribuição contínua dos
tempos de relaxação que caracterizam a série de Prony. De forma similar pode-se
definir o espectro de fluência )(tL . Como não podem ser obtidas experimentalmente,
seu cálculo deve ser feito numericamente utilizando a Eq. (2.33) ou utilizando
aproximações, como a apresentada por CHRISTENSEN [22] e definida a seguir,
dt
tdGtH
)2ln()( (2.34)

39
Estas funções são usualmente adotadas para correlacionar as propriedades
macroscópicas com os movimentos moleculares. Assim como as funções de relaxação
e fluência no tempo podem ser utilizadas para determinação do comportamento na
frequência, a função )(tH pode ser utilizada para determinação de )(wG .
2.1.2 Equação constitutiva na forma integral para resposta em três dimensões
As equações apresentadas para o caso unidimensional na forma integral
podem ser generalizadas considerando as similaridades entre o comportamento
elástico e viscoelástico. Para o caso linear elástico isotrópico, onde as propriedades
são idênticas em todas as direções, a relação tensão x deformação pode ser escrita
da seguinte forma,
ijijkkij 2 (2.35)
onde e são as duas constantes que caracterizam o comportamento elástico,
sendo usualmente denominadas de constantes de Lamé. O termo kk utiliza a
convenção de somatório, e consequentemente, 332211 kk
. O tensor unitário
ij é definido, como segue,
ji
ji
ij
,0
,1 (2.36)
Considerando E como o módulo de elasticidade e o coeficiente de Poisson,
pode-se construir as seguintes relações para as constantes de Lamé,
)21)(1(
)1(2
E
E
(2.37)
Utilizando a notação da convolução de Stieltjes () e fazendo uso da analogia
com o comportamento linear elástico, pode-se escrever para o caso viscoelástico
linear a seguinte relação tensão x deformação,

40
ijRijkkRij dd 2 (2.38)
onde as funções dependentes do tempo )(tR e )(tR caracterizam o comportamento
viscoelástico. A utilização da convolução de Stieltjes permite que a equação
constitutiva para viscoelasticidade linear seja manipulada de forma similar ao utilizado
nas equações constitutivas para elasticidade linear. A convolução, d , de duas
funções contínuas )(t e )(t é definida como,
dtt
dtd
t
t
0
0
)()()()0(
)()(
(2.39)
Utilizando esta notação e expandindo a Eq. (2.38), chega-se a,
tR
ijijR
ij
tR
kkkkRij
dtt
dtt
0
0
)()(2)()0(2
)()()()0(
(2.40)
onde as funções )(tR e )(tR são definidas como segue,
)(21)(1
)()()(
)(12
)()(
tt
ttEt
t
tEt
RR
RR
(2.41)
Algumas considerações especiais quanto ao comportamento volumétrico
podem ser definidas. Caso se considere a hipótese de incompressibilidade, onde o
coeficiente de Poisson passa a ser descrito por )(15.0)( tt , obtém-se a seguinte
relação entre os coeficientes,
3
)()(
tEt R
R (2.42)

41
Pode-se considerar o coeficiente de Poisson como constante e independente
do tempo 0 , ou ainda, que a deformação volumétrica ( )()()()( 332211 tttt ) é
independente do tempo.
2.1.3 Resposta viscoelástica linear no domínio da frequência
As equações constitutivas apresentadas anteriormente fornecem a resposta de
tensão ou deformação com o tempo. Em muitas aplicações de engenharia, a estrutura
viscoelástica pode ser submetida a carregamentos harmônicos por um longo período
de tempo. Para estas situações se torna mais conveniente reescrever as equações
diretamente no domínio da frequência. Considera-se a seguinte história de
deformação,
twt sin)( 0 (2.43)
onde 0 é a amplitude, a variação em torno do valor médio e w a frequência de
carregamento. Neste ponto, torna-se conveniente reescrever a função de relaxação
)(tG da seguinte forma,
)()( 0 tGGtG (2.44)
onde a parte independente do tempo 0G é o valor da função quando t e )(tG é
o termo que varia com o tempo, podendo ser definido, por exemplo, utilizando a série
de Prony de três termos, como segue,
3,32,21,1 /exp/exp/exp)( RRR tGtGtGtG (2.45)
Substituindo o histórico de deformação harmônico descrito na Eq. (2.43) na
terceira equação de (2.29) e utilizando a função de relaxação (2.44), obtém-se com
manipulações algébricas,
)cos()(
sin
)sin()(
cos)0(
)()(
0
0
0
wtdG
w
wtdG
wG
tGtt
t
(2.46)

42
Com o objetivo de simplificar a Eq. (2.46), pode-se definir as seguintes
relações,
t
t
dG
wtwG
dG
wGtwG
0
0
)(sin),(
)(cos)0(),(
(2.47)
Considerando t para que a função relaxação dependa apenas da
frequência de oscilação,
),(lim)(
),(lim)(
twGwG
twGwG
t
t (2.48)
e utilizando a função definida em (2.44) e (2.45), obtém-se,
)1()1()1()(
)1()1()1()0()(
2
3,
2
33
2
2,
2
22
2
1,
2
11
2
3,
2
3
2
2,
2
2
2
1,
2
1
R
R
R
R
R
R
RRR
w
G
w
G
w
GwwG
w
G
w
G
w
GGwG
(2.49)
onde a função )(wG é definida como módulo de armazenamento e )(wG como
módulo de perda. Considerando t e substituindo a Eq. (2.49) em (2.46), chega-se
a seguinte equação constitutiva para material viscoelástico linear submetido a histórico
de deformação harmônico dado pela Eq. (2.43),
)(sin)()()(
)cos()()sin()()()(
2/122
0
0
wtwwGwGG
twwGtwwGGt
(2.50)
onde a diferença de fase é definida por )(/)()](tan[ wGwGw . Este resultado
mostra que a resposta de tensão devido a uma deformação senoidal, irá oscilar com a
mesma frequência w e com uma diferença de fase )(w . Caso se considere um
histórico de deformação descrito por, twt cos)( 0 , chega-se a seguinte
relação,

43
)sin()()cos()()()( 0 twwGtwwGGt (2.51)
Seguindo procedimento similar ao descrito anteriormente e utilizando o
princípio da superposição, pode-se definir uma relação entre a função de relaxação e
de fluência no domínio da frequência, como apresentado a seguir,
22
22
)()(
)()(
)()(
)()(
wGwG
wGwJ
wGwG
wGwJ
(2.52)
Dissipação de energia viscoelástica
VAZ e CAIRE [19] apresentaram as equações para cálculo da energia
armazenada e dissipada de uma viga viscoelástica linear sujeita a carregamento
estático concentrado em uma de suas extremidades. O trabalho total exercido por uma
carga concentrada é convertido em uma parcela SU (energia potencial) e outra
parcela CU (energia dissipada). Introduzindo o conceito de decomposição da
deformação, DS (onde
S e D estão associadas às deformações
armazenadas e dissipadas respectivamente), a equação de potência total pode ser
escrita como,
DS
VD
VS
VT
UU
dVdV
dVW
(2.53)
Diferenciando a Eq. (2.31) com relação ao tempo e introduzindo o termo de
deformação relacionado à energia armazenada na Eq. (2.53), obtém-se,
VS dV
GU
)0(
(2.54)
As equações descritas acima podem ser derivadas utilizando a analogia com
sistemas mecânicos simples compostos por elementos fundamentais como a mola e o
amortecedor linear, sendo estendidas para aplicações em sistemas mais complexos.
Estas mesmas equações podem ser utilizadas para o cálculo de energia de

44
deformação quando se considera a formulação matemática do sistema duto
flexível/enrijecedor à flexão com comportamento viscoelástico.
Substituindo as equações (2.43) e (2.50) em (2.53), por exemplo, pode-se obter
o trabalho por unidade de volume realizado durante um ciclo de deformação como
segue,
)(
)()(
2
/2
wG
dW
wPiT
T
T
(2.55)
O resultado acima mostra que o módulo de armazenamento, representando o
efeito de deformação e recuperação elástica se anula durante um ciclo de
carregamento. Apenas a componente do módulo de perda )(wG , associada ao
trabalho convertido em calor, aparece no resultado.
O enrijecedor à flexão está sujeito a carregamentos oscilatórios durante sua
vida em operação, e consequentemente apresenta dissipação de energia devido ao
comportamento viscoelástico. O efeito dessa dissipação na resposta de curvatura e
deformação ao longo do comprimento deve ser avaliado no projeto da estrutura.
2.1.4 Limites de aplicação da viscoelasticidade linear
Devido à relativa simplicidade de aplicação da teoria da viscoelasticidade linear
a problemas práticos de engenharia, muitos componentes poliméricos são modelados
considerando esta teoria. Entretanto, uma grande parte dos polímeros exibe
comportamento não-linear mesmo para pequenas tensões ou deformações e tempos.
Nestes casos, o limite de aplicação da viscoelasticidade linear na análise de
componentes estruturais se torna parâmetro importante para correta avaliação de sua
resposta mecânica. A utilização da teoria linear para um material altamente não-linear
pode incorrer em erros graves de análise e projeto estrutural.
A validade da teoria linear é limitada para condições de teste específicas,
sendo bastante afetada pelos efeitos da temperatura, umidade, taxa de deformação e
diversos outros fatores. A transição de comportamento linear para não-linear ocorre de
forma progressiva, não existindo um procedimento padrão bem definido para sua
determinação.
De acordo com FINDLEY et al. [23], o material viscoelástico é considerado
linear se a tensão é proporcional à deformação para um determinado tempo t e o

45
princípio da superposição é valido. Expressa matematicamente, esta hipótese leva às
seguintes equações,
)()( tctc (2.56)
)()()()( 121121 tttttt (2.57)
onde c é uma constante. A Fig. 2.13 ilustra este tipo de resposta linear.
Figura 2.13 – Comportamento viscoelástico linear
Pode-se observar no desenho esquemático à esquerda da Fig. 2.13 que a
resposta de deformação devido à tensão )(tc é igual à resposta de deformação
devido à tensão )(t multiplicado pela constante c . A Eq. (2.57), baseada no principio
da superposição de Boltzmann descrito anteriormente, mostra que a resposta de
deformação devido a combinação de dois históricos de tensão diferentes, 1 e
2 , é
igual à soma das respostas de deformação atuando separadamente, como pode ser
visto no desenho esquemático à direita da Fig. 2.13. Uma consequência do princípio
da superposição foi mostrada na curva x da Fig. 2.10. Desta forma, para

46
material não-linear, carregamentos com diferentes taxas irão gerar curvas não
coincidentes.
Outra forma de avaliar o efeito da variável tempo na não-linearidade, baseado
no mesmo princípio da superposição, é o uso de isocrônicas. Curvas isocrônicas de
tensão x deformação, são gráficos da deformação aplicada no teste de relaxação
versus a tensão para um tempo específico, ou alternativamente, a tensão aplicada no
teste de fluência versus a deformação para um tempo específico. Como apenas um
ponto da curva é obtido para cada ensaio de relaxação ou fluência, vários níveis de
tensão ou deformação constantes são necessários para obtenção de uma curva
adequada.
Para comportamento viscoelástico linear, a relação tensão x deformação da
isocrônica é uma reta cuja inclinação decresce com a evolução do tempo. Esta
transição para resposta não-linear é usualmente determinada assumindo uma
porcentagem (1 - 3%) de desvio do comportamento linear para um tempo específico.
2.2 Comportamento viscoelástico não-linear
No item anterior, o princípio da superposição de Boltzmann foi utilizado para
derivar a equação constitutiva para a teoria da viscoelasticidade linear considerando
carregamento unidimensional e posteriormente estendido para carregamento tri-
dimensional utilizando a analogia com o comportamento elástico. Para o caso não-
linear este princípio não pode ser aplicado e outras metodologias devem ser utilizadas
para representação da resposta mecânica do material.
A formulação não-linear proposta por LEADERMAN [24], pode ser considerada
como uma extensão da teoria viscoelástica linear apresentada anteriormente. Na
descrição de sua teoria, considerou que a resposta viscoelástica poderia ser separada
em duas funções, uma dependente do tempo e outra função não-linear dependente da
tensão ou deformação. Desta forma para resposta de deformação em função da
tensão, pode-se escrever,
t
dftJt0
)]([)()( (2.58)
onde f é uma função não-linear da tensão e )(tJ é a função de fluência dependente
do tempo. De forma similar, a resposta de tensão em função de deformação pode ser
escrita como segue,

47
t
dftGt0
)]([)()( (2.59)
onde f é uma função não-linear da deformação e )(tG é a função de relaxação
dependente do tempo. Pode-se verificar que, considerando )()]([ ttf ou
)()]([ ttf obtém-se a mesma formulação apresentada anteriormente nas Eq. (2.28)
e (2.30) para viscoelasticidade linear. Esta formulação não-linear pode ser utilizada
para alguns tipos específicos de polímeros, não sendo em geral, suficiente para cobrir
uma grande classe de materiais. A metodologia de obtenção dos coeficientes será
apresentada no item 2.2.1 e sua aplicabilidade ao poliuretano utilizado em
enrijecedores à flexão será verificada através dos ajustes experimentais no item 2.3.
PIPKIN e ROGERS [25], utilizando o princípio da superposição modificado,
expandiram a teoria de LEADERMAN [24] para um caso mais geral em que as funções
dependentes do tempo de fluência e relaxação não são necessariamente
independentes do carregamento de tensão ou deformação. De acordo com esta teoria,
para resposta de deformação em função da tensão, pode-se escrever,
t
tCdt0
),()( (2.60)
onde ),( tC é uma função de fluência não-linear dependente da tensão e do tempo.
De maneira análoga, para a resposta de tensão em função da deformação, obtém-se,
t
tRdt0
),()( (2.61)
onde ),( tR é uma função de relaxação não-linear dependente da deformação e do
tempo. Considerando que as funções )( e )( sejam contínuas no intervalo de
integração, pode-se reescrever as Eq. (2.60) e (2.61) como segue,
t
dtC
t0
)(
)(
),()(
(2.62)
t
dtR
t0
)(
)(
),()(
(2.63)

48
Uma forma mais geral para descrever o comportamento viscoelástico não-
linear e, consistente com os princípios da mecânica do contínuo, foi proposta por
GREEN e RIVLIN [26] utilizando a análise funcional para representar a equação
constitutiva como uma série de múltiplas integrais hereditárias.
Embora mais representativa do comportamento real de materiais
viscoelásticos, esta caracterização apresenta muitas dificuldades para caracterização
experimental e para resolução de problemas práticos de análise de estruturas. Com o
objetivo de simplificar a representação por múltiplas integrais, as funções de fluência e
relaxação podem ser redefinidas de forma a limitar a memória da integral hereditária
resultando nas mesmas equações constitutivas obtidas considerando o princípio da
superposição modificado discutido por PIPKIN e ROGERS [25] e apresentadas nas
Eq. (2.62) e (2.63). A formulação de GREEN e RIVLIN [26] como uma função de
múltiplas integrais será apresentada no item 2.2.2 e a simplificação para integral
simples utilizando o princípio da superposição modificado no item 2.2.3.
Outra forma de caracterização do comportamento viscoelástico não-linear
utilizando a representação por integrais simples foi apresentada por SCHAPERY [27].
Baseado em considerações termodinâmicas e utilizando o conceito de tempo
reduzido, descreveu a seguinte equação constitutiva unidimensional para
caracterização do comportamento não-linear de materiais viscoelásticos,
t
dd
dgDgDgt
0
2100
)()()()()(
(2.64)
onde as funções e são descritas por,
)(,
)()(
0
t
ta
tdt (2.65)
Alternativamente, para descrever a tensão em função da deformação,
t
dd
dhEhEht
0
2100
)()()()()(
(2.66)
onde as funções e são descritas por,

49
)(,
)()(
0
t
ta
tdt (2.67)
As funções 210 ,, ggg e
a são dependentes da tensão, enquanto 210 ,, hhh e
a
variam com a deformação. Definindo 1210 aggg , pode-se reduzir a Eq. (2.64)
para a formulação viscoelástica linear. De forma análoga, definindo 1210 ahhh ,
obtém-se a resposta de tensão para um dado histórico de deformação para o caso
linear.
SMART e WILLIAMS [28] compararam as teorias baseadas no método da
superposição modificado descrita por PIPKIN e ROGERS [25] e em considerações
termodinâmicas apresentada por SCHAPERY [27] para caracterização da resposta de
dois materiais poliméricos. Os materiais adotados foram o polipropileno e a
polivinilclorida devido as suas características altamente não-lineares. Concluíram que,
para os casos avaliados, o modelo de PIPKIN e ROGERS [25] apresentou melhor
representatividade do comportamento material, levando em conta também a
simplicidade de obtenção das funções e coeficientes que caracterizam a resposta.
Consequentemente, para caracterização do comportamento viscoelástico não-
linear do poliuretano utilizado na fabricação de enrijecedores à flexão, apenas os
modelos de LEADERMAN [24] e a simplificação das múltiplas integrais do modelo de
GREEN e RIVLIN [26], que resulta no mesmo modelo de PIPKIN e ROGERS [25],
serão utilizados. A comparação dos dois modelos será feita através dos ajustes
obtidos com os resultados experimentais apresentados no item 2.3.
2.2.1 Modelo de Leaderman
A equação constitutiva para esta formulação é baseada na teoria da
viscoelasticidade não-linear sugerida por LEADERMAN [24]. A resposta de
deformação utilizando a função de fluência devido a um histórico de tensão e a
resposta de tensão utilizando a função de relaxação, devido a um histórico de
deformação, são apresentadas a seguir.
Equação constitutiva para fluência
Considerando continuidade da função )( no intervalo de integração e
considerando o salto inicial de tensão pode-se reescrever a Eq. (2.58) da seguinte
forma,

50
t
dtJf
ftJt0
)()]([
)]0([)()(
(2.68)
Utilizando a técnica da integração por partes, pode-se ainda reescrever a Eq.
(2.68) da seguinte forma,
t
dt
tJftfJt
0 )(
)()]([)]([)0()(
(2.69)
A escolha da função f depende da resposta mecânica do material em questão
e deve ser avaliada para cada caso específico de modo a se obter o melhor ajuste.
Para polímeros como o poliuretano, esta pode ser representada adequadamente por
um polinômio de quarta ordem como segue,
4
4
3
3
2
21 )()()()()]([ tatatatatf (2.70)
onde ka )4,..,1( k são os coeficientes que caracterizam o comportamento material,
juntamente com a função de fluência )(tJ que, para o poliuretano, pode ser descrita
utilizando a seguinte série exponencial de Prony,
N
m
mCm tJJtJ1
,0 )/exp()( (2.71)
onde 0J e
mJ ),..,1( Nm são os coeficientes que caracterizam o material, devendo
ser obtidos experimentalmente, e N é o número de termos da série. Substituindo a Eq.
(2.70) em (2.69), obtém-se,
t
dt
tJaaaa
tatatataJt
0
4
4
3
3
2
21
4
4
3
3
2
21
)(
)()()()()(
)()()()()0()(
(2.72)
Considerando o ensaio de fluência, onde se aplica uma tensão constante
)(1)( tt i com o índice i se referindo a um determinado nível de tensão constante,
chega-se a seguinte função de fluência,

51
4
4
3
3
2
21
)()(
iiii
i
aaaa
ttJ
(2.73)
Pode-se verificar experimentalmente, que para uma determinada classe de
polímeros como o poliuretano, a deformação de fluência resultante de carregamento
de tração, compressão, torção ou combinados pode ser descrita por uma função
exponencial similar à utilizada na função de fluência, como segue,
N
m
mCmiii tt1
,0 )/exp()( (2.74)
onde para cada tensão i ,
i0 é o coeficiente de deformação independente do tempo,
e mi ),..,1( Nm são os coeficientes de deformação dependentes do tempo. Esta
relação representa a fluência de materiais que apresentam deformação constante
quando o tempo tende a infinito.
De acordo com a Eq. (2.73) deveria existir uma relação entre a resposta de
deformação de fluência )(ti , sujeita a qualquer nível i de tensão constante i , e os
coeficientes 321 ,, aaa e
4a que forneça solução única para a função de fluência )(tJ .
Isto não ocorre experimentalmente e a forma utilizada para obtenção dos coeficientes
é descrita como segue. Para cada nível i de tensão aplicada, faz-se o ajuste dos
coeficientes i0 e
mi ),..,1( Nm da resposta de deformação apresentada na Eq.
(2.74). De posse destes dados plota-se a função )0(ii x , onde o número de pontos
da curva corresponde ao número i de ensaios realizados. O ajuste dessa curva irá
fornecer os valores dos coeficientes 321 ,, aaa e
4a . Um número de funções de fluência
)(tJ igual aos i níveis de tensão aplicados pode consequentemente, ser calculado
utilizando a Eq. (2.73). O valor final da função de fluência é simplesmente o valor
médio das diversas funções obtidas. Deve-se observar que outra metodologia de
ajuste pode ser utilizada desde que apresente melhor correlação numérico-
experimental.
Equação constitutiva para relaxação de tensões
Considerando continuidade da função )( no intervalo de integração e
considerando o salto inicial de deformação pode-se reescrever a Eq. (2.59) da
seguinte forma,

52
t
dtGf
ftGt0
)()]([
)]0([)()(
(2.75)
Utilizando a técnica da integração por partes, pode-se ainda reescrever a Eq.
(2.75) como segue,
t
dt
tGftfGt
0 )(
)()]([)]([)0()(
(2.76)
Utilizando função semelhante à utilizada para fluência, pode-se descrever a
função material f por um polinômio de quarta ordem,
4
4
3
3
2
21 )()()()()]([ tbtbtbtbtf (2.77)
onde kb )4,..,1( k são os coeficientes que caracterizam o comportamento material,
juntamente com a função de relaxação )(tG .Substituindo a Eq. (2.77) em (2.76),
obtém-se a seguinte equação constitutiva,
t
dt
tGbbbb
tbtbtbtbGt
0
4
4
3
3
2
21
4
4
3
3
2
21
)(
)()()()()(
)()()()()0()(
(2.78)
Considerando o ensaio de relaxação de tensões, onde se mantém uma
deformação constante )(1)( 0 tt após o salto inicial de carregamento, e substituindo
na Eq. (2.78) chega-se a seguinte função de fluência,
4
4
3
3
2
21
)()(
iiii
i
bbbb
ttG
(2.79)
A resposta de tensão à um nível i de deformação constante pode ser
representada utilizando função exponencial similar ao apresentado na Eq. (2.74) para
o ensaio de fluência.
N
m
mRmiii tt1
,0 )/exp()( (2.80)

53
onde para cada nível de deformação i ,
i0 é o coeficiente de tensão independente
do tempo, e mi ),..,1( Nm são os coeficientes de deformação dependentes do
tempo. O procedimento para realização do ajuste e obtenção dos coeficientes kb
)4,..,1( k e da função de relaxação )(tG é análogo ao apresentado anteriormente
para fluência.
2.2.2 Modelo de Green-Rivlin
Utilizando os conceitos da mecânica do contínuo, pode-se representar a
resposta de um material viscoelástico não-linear utilizando funções de múltiplas
integrais hereditárias. A derivação formal não será apresentada aqui, e pode ser
encontrada em FINDLEY et al. [23]. Ao invés disso, estende-se o princípio da
superposição apresentado anteriormente para incluir os efeitos da não-linearidade.
Embora menos rigorosa, esta derivação apresenta os mesmos resultados para a
equação constitutiva unidimensional que a derivação formal utilizando a mecânica do
contínuo.
Se um histórico de tensão )(1)( 0 tt é aplicado a um material não-linear,
como ilustrado na Fig. 2.14 (a), a resposta de deformação pode ser descrita por uma
função polinomial como segue,
...)()()()( 3
3
02
2
0100 tJtJtJt (2.81)
Figura 2.14 – Respostas de deformação diversas

54
onde )(1 tJ , )(2 tJ e )(3 tJ são as funções de fluência independentes que caracterizam a
resposta do material não-linear. Na Eq. (2.81) apenas três termos são apresentados
no polinômio, embora, a princípio, a descrição do comportamento possa ser
melhorada com a adição de mais termos.
As Fig. 2.14 (b) e (c) ilustram tensões 1 e
2 sendo aplicadas nos
instantes 1t e
2t respectivamente. Utilizando a mesma forma da Eq (2.81), as
respostas de deformação para esses carregamentos podem ser descritas por,
11
113
3
112
2
11111
,0)(
),()()()(
ttt
ttttJttJttJt
(2.82)
22
223
3
222
2
22122
,0)(
),()()()(
ttt
ttttJttJttJt
(2.83)
As Eq. (2.82) e (2.83) consideram que a resposta de deformação para uma
dada tensão é independente do instante em que ela foi aplicada. Por exemplo, se no
instante 2t o carregamento aplicado fosse
1 , a resposta de deformação seria a
mesma para o instante 1t , ou seja,
1 . Este tipo de material que não apresenta
envelhecimento pode ser chamado de non-aging. Materiais como o cimento e alguns
adesivos, por exemplo, apresentam envelhecimento devido ao processo de cura.
Consequentemente, a resposta do material depende do instante em que ele sofreu o
carregamento relativamente ao instante em que ele foi criado ou iniciado o processo
de cura. A hipótese adotada para o poliuretano do enrijecedor é de que o material não
sofre o processo de envelhecimento.
Considerando agora um carregamento com três saltos de tensão consecutivos,
como mostrado na Fig. 2.15, observa-se que a resposta obtida com a aplicação do
primeiro salto de tensão 0 é a mesma que a descrita na Eq. (2.81). Já a resposta
para o segundo salto de carregamento não pode considerar apenas a soma das duas
respostas 10 , como ocorreria no caso linear onde o principio da superposição é
válido.

55
Figura 2.15 – Respostas de deformação para saltos de tensão
Para o caso não-linear, o princípio da superposição aplicado na teoria linear é
modificado e termos cruzados são incluídos, fornecendo a seguinte relação,
),,(3),,(3),(2
),,(),()(
),,(),()()(
113
2
10131
2
01210
1113
3
1112
2
1111
3
3
02
2
010
tttttJttttJtttJ
ttttttJttttJttJ
tttJttJtJt
(2.84)
Pode-se observar que a função )(2 tJ da Eq. (2.81), quando se considerou
apenas um salto de tensão, se tornou ),(2 ttJ em (2.84). O termo 2
0 pode ser
considerado como a ação separada de 0 e
0 , consequentemente, um parâmetro
do tempo para cada tensão pode ser utilizado na função ),(2 ttJ . Argumento similar
pode ser utilizado para as outras funções de fluência da Eq. (2.84). Cabe ainda
ressaltar que o efeito cruzado de 0 em
1 é suposto idêntico ao de 1 em
0 .
Dessa forma, ),(),( 1212 tttJtttJ resultando no fator 2 no termo ),(2 1210 tttJ .
A constante 3 nos termos restantes é explicado de forma similar. Estes resultados
podem ser expandidos para consideração de N saltos de tensão, como segue,

56
kji
N
i
N
j
N
k
kji
ji
N
i
N
j
ji
i
N
i
i
ttttttJ
ttttJ
ttJt
0 0 0
3
0 0
2
0
1
),,(
),(
)()(
(2.85)
Se as funções de fluência 2J e
3J se anulam na Eq. (2.85), a equação se torna
a mesma que para o caso linear, onde o princípio da superposição de Boltzmann é
válido. A equação acima pode ser considerada como uma extensão deste princípio
para inclusão de termos não-lineares. Considerando agora o caso limite, onde o
número de incrementos de tensão tende a infinito, N , e ainda adicionando um
quarto termo ao polinômio apresentado em (2.81) para melhor caracterização do
comportamento, obtém-se a seguinte representação integral,
t t t t
t t t
t t
t
ddddttttJ
dddtttJ
ddttJ
dtJt
0 0 0 04321
4
4
3
3
2
2
1
143214
0 0 0321
3
3
2
2
1
13213
0 021
2
2
1
1212
01
1
111
)()()()(),,,(
)()()(),,(
)()(),(
)()()(
(2.86)
Considerações similares podem ser feitas para o caso de relaxação de
tensões, obtendo-se,
t t t t
t t t
t t
t
ddddttttG
dddtttG
ddttG
dtGt
0 0 0 04321
4
4
3
3
2
2
1
143214
0 0 0321
3
3
2
2
1
13213
0 021
2
2
1
1212
01
1
111
)()()()(),,,(
)()()(),,(
)()(),(
)()()(
(2.87)
Vale ressaltar que nas Eq. (2.86) e (2.87) utilizou-se termos de quarta ordem
para representação da função polinomial apresentada em (2.81). Termos de ordem

57
superior podem ser utilizados, aumentando, consequentemente, o número de integrais
múltiplas das equações constitutivas (2.86) e (2.87). As funções de fluência )(1 tJ e
relaxação )(1 tG são descritas em função de um único parâmetro de tempo t e podem,
consequentemente, ser representadas por uma única curva. Já as funções de
segunda ordem ),(2 ttJ e ),(2 ttG devem ser representadas graficamente por uma
superfície. Para as funções de terceira ordem ou superior não é possível apresentar
uma representação gráfica.
A obtenção experimental das funções que caracterizam o comportamento
viscoelástico não-linear utilizando as funções de múltiplas integrais apresentadas em
(2.86) e (2.87) requer um número muito elevado de experimentos, como mostrado por
LOCKETT [29]. Um estudo na acurácia desta representação, apresentado por
GRADOWCZYK [30], ressalta a elevada sensibilidade a erros experimentais.
Além da difícil caracterização experimental das funções de relaxação e
fluência, ainda existe a dificuldade numérica da resolução de problemas de valor de
contorno utilizando múltiplas integrais. Dessa forma, diversos métodos aproximados
são sugeridos para simplificar a formulação. Considerando, por exemplo, a
aproximação do produto das funções como sugerido por NAKADA [31], obtém-se a
seguinte relação para a função de fluência de terceira ordem apresentada na Eq.
(2.86),
3/1
23
3/1
23
3/1
133213 )()()(),,( tJtJtJtttJ (2.88)
Relação similar pode ser obtida para a função de relaxação. A forma aditiva
também foi sugerida por alguns autores. GOTTENBERG et al. [32] propôs a seguinte
forma para uma função de terceira ordem,
)3(),,( 32133213 tJtttJ (2.89)
ou ainda, como apresentado por FINDLEY et al. [23]
)()()(),,( 3331
2331
1331
3213 tJtJtJtttJ (2.90)
Outra forma de simplificação da teoria não-linear apresentada por GREEN e
RIVLIN [26] é a utilização do princípio da superposição modificado nas múltiplas
integrais como mostrado no item 2.2.3 a seguir. Esta metodologia leva a mesma
representação de integrais simples proposta por PIPKIN e ROGERS [25].

58
2.2.3 Modelo baseado no princípio da superposição modificado
De acordo com o princípio da superposição modificado, a resposta de
deformação para uma série de N saltos de tensão pode ser expressa pela seguinte
relação,
N
N
i
iiii ttttfttft
,),(),()(
0
1 (2.91)
onde f é uma função não-linear da tensão e do tempo. Considerando 1N , ou seja,
apenas uma mudança no nível de tensão aplicada, obtém-se a seguinte resposta de
deformação utilizando a Eq. (2.91),
1111000 ),,(),(),()( ttttfttfttft (2.92)
A Fig. 2.16 ilustra o salto de carregamento e a resposta de deformação. No
instante 1t , considera-se que a tensão
0 é removida enquanto 1 é aplicada no
mesmo instante, mas como eventos independentes. Desta forma, a recuperação
viscoelástica devido à retirada da tensão 0 em
1t pode ser descrita por,
11000 ),,(),()( ttttfttftr (2.93)
e a deformação devido a aplicação da tensão 1 no mesmo instante
1t dada por,
111 ),,()( ttttftc (2.94)
A superposição das duas respostas irá fornecer a deformação total, ou seja,
cr . Dessa forma a resposta de deformação devido a uma série de
carregamentos instantâneos de tensão é descrita pela superposição da resposta
individual de cada salto. Considerando o caso limite quando N pode-se
descrever o somatório da Eq. (2.91) da seguinte forma,
t
dtf
t0
)()(
),()(
(2.95)

59
ou seja, a mesma forma da Eq. (2.62) apresentada por PIPKIN e ROGERS [25]. A
resposta da tensão em função da deformação pode ser obtida de forma análoga.
Figura 2.16 – Ilustração do método da superposição modificado
Alternativamente, a Eq. (2.95) pode ser obtida diretamente da representação
por integrais múltiplas apresentadas por GREEN e RIVLIN [26]. De acordo com
NOLTE e FINDLEY [33], as equações constitutivas de fluência e relaxação (2.86) e
(2.87) podem ser redefinidas como função do menor tempo anterior i . Esta
redefinição limita a memória da representação por múltiplas integrais, mas simplifica
de forma significativa a equação constitutiva. Considerando, por exemplo, a função de
fluência de terceira ordem ),,( 3213 tttJ e redefinindo como uma função da
ocorrência mais recente ou do menor tempo 3t pode-se escrever,

60
)(),,( 333213 tJtttJ (2.96)
Aplicando esta metodologia na integral de terceira ordem da Eq. (2.86), chega-
se a seguinte relação,
dtJdtJ
dddtttJ
tt
t t t
0
3
30
3
0 0 0321
3
3
2
2
1
13213
)()()()()()(
)()()(),,(
(2.97)
Equações constitutivas para fluência
Aplicando este método para todas as integrais múltiplas da Eq. (2.86) e
considerando o salto inicial da tensão, obtém-se,
tt
tt
dtJdtJ
dtJdtJ
tJtJtJtJt
0
4
40
3
3
0
2
20
1
4
4
3
3
2
21
)()(
)()(
)()(
)()(
)0()()0()()0()()0()()(
(2.98)
Sabendo que,
)()(
)( 1nn
n (2.99)
pode-se reescrever a Eq. (2.98) como,
t
dtJtJtJtJ
tJtJtJtJt
0
3
4
2
321
4
4
3
3
2
21
)()()(4)()(3)()(2)(
)0()()0()()0()()0()()(
(2.100)
Esta é a mesma forma da equação constitutiva obtida por PIPKIN e ROGERS
[25] e apresentada na Eq. (2.62), sendo a função tC ),( descrita pela seguinte
relação,
4
4
3
3
2
21 )()()()()()()()(),( tJtJtJtJtC (2.101)

61
Utilizando a técnica de integração por partes pode-se descrever
alternativamente a Eq (2.98) como,
tt
tt
dt
tJd
t
tJ
dt
tJd
t
tJ
tJtJtJtJt
0
44
0
33
0
22
0
1
4
4
3
3
2
21
)(
)()(
)(
)()(
)(
)()(
)(
)()(
)()0()()0()()0()()0()(
(2.102)
As funções de fluência 1J ,
2J , 3J e
4J são descritas adequadamente para
muitos materiais viscoelásticos pelas seguintes séries de Prony,
N
m
mCm
N
m
mCm
N
m
mCm
N
m
mCm
tJJtJ
tJJtJ
tJJtJ
tJJtJ
1
,4044
1
,3033
1
,2022
1
,1011
)/exp()(
)/exp()(
)/exp()(
)/exp()(
(2.103)
onde 01J ,
02J , 03J ,
04J e 1mJ ,
2mJ , 3mJ ,
4mJ , mC, ( Nm ,..,1 ) são os coeficientes que
caracterizam o material e devem ser obtidos experimentalmente e N é o número de
termos da série. Deve-se ressaltar que qualquer outra forma das funções de fluência
pode ser utilizada desde que o ajuste da deformação com o tempo )(ti apresente a
melhor correlação. Para o ensaio de fluência, quando se aplica uma tensão
)(1)( tt i , com o índice i se referindo à tensão constante aplicada, chega-se a
seguinte relação,
4
4
3
3
2
21 )()()()()( iiiii tJtJtJtJt (2.104)
Foi demonstrado por diversos autores, que para uma determinada classe de
polímeros, a deformação de fluência )(ti resultante de carregamento de tração,
compressão, torção ou combinados pode ser descrita para uma temperatura
específica pela mesma função utilizada no modelo de Leaderman e apresentada em
(2.74). Esta relação representa a fluência de materiais que apresentam deformação

62
constante quando o tempo tende a infinito. Os coeficientes são obtidos ajustando
diretamente a curva de deformação x tempo obtida nos ensaios de fluência para cada
tensão aplicada. Utilizando a Eq. (2.74) e substituindo (2.103) em (2.104) com
manipulações algébricas, obtém-se a seguinte relação,
),..,1(4
4
3
3
2
21
4
04
3
03
2
02010
NmJJJJ
JJJJ
imimimimmi
iiiii
(2.105)
Os coeficientes 01J ,
02J , 03J e
04J podem ser obtidos fazendo o ajuste da curva
ii x 0 para os i níveis de tensão ensaiados. De forma semelhante os coeficientes
miJ
( Nm ,..,1 ) podem ser obtidos através do ajuste da curva imi x . Uma vez obtidos
os coeficientes, deve-se verificar a eficácia de representação da Eq. (2.98) para o
material viscoelástico não-linear em questão. Isto é feito comparando-se o resultado
do ajuste da Eq.(2.98), utilizando a forma da função de fluência apresentada na Eq.
(2.103), com os ensaios realizados.
Equações constitutivas para relaxação
De forma similar à representação matemática de fluência, a relaxação de
materiais poliméricos pode ser determinada, considerando o salto da deformação no
tempo inicial, pela seguinte expressão,
tt
tt
dtGdtG
dtGdtG
tGtGtGtGt
0
4
40
3
3
0
2
20
1
4
4
3
3
2
21
)()(
)()(
)()(
)()(
)0()()0()()0()()0()()(
(2.106)
Sabendo que,
)()(
)( 1nn
n (2.107)
Pode-se reescrever a Eq. (2.106) como,

63
t
dtGtGtGtG
tGtGtGtGt
0
3
4
2
321
4
4
3
3
2
21
)()()(4)()(3)()(2)(
)0()()0()()0()()0()()(
(2.108)
Esta é a mesma forma da equação constitutiva obtida por PIPKIN e ROGERS
[25] e apresentada na Eq. (2.63), sendo a função tR ),( descrita pela seguinte
relação,
4
4
3
3
2
21 )()()()()()()()(),( tGtGtGtGtR (2.109)
Utilizando integração por partes pode-se ainda reescrever a Eq (2.108) como,
tt
tt
dt
tGd
t
tG
dt
tGd
t
tG
tGtGtGtGt
0
44
0
33
0
22
0
1
4
4
3
3
2
21
)(
)()(
)(
)()(
)(
)()(
)(
)()(
)()0()()0()()0()()0()(
(2.110)
As funções de fluência 1G ,
2G , 3G e
4G podem ser descritas por,
N
m
mRm
N
m
mRm
N
m
mRm
N
m
mRm
tGGtG
tGGtG
tGGtG
tGGtG
1
,4044
1
,3033
1
,2022
1
,1011
)/exp()(
)/exp()(
)/exp()(
)/exp()(
(2.111)
onde 01G ,
02G , 03G ,
04G , 1mG ,
2mG , 3mG ,
4mG , mR, ( Nm ,..,1 ) são os coeficientes
que caracterizam o material, obtidos experimentalmente, e N é o número de termos
adotados na série de Prony. De maneira similar ao realizado para fluência, as funções
de relaxação devem ter a mesma forma que a função utilizada para o ajuste da
resposta de tensão com o tempo )(ti . Para este ensaio, onde se aplica e mantém
uma deformação constante )(1)( tt i , tem-se,

64
4
4
3
3
2
21 )()()()()( iiiii tGtGtGtGt (2.112)
O cálculo dos coeficientes das funções de relaxação é feito seguindo
procedimento similar ao descrito anteriormente para o ensaio de fluência.
Relação entre relaxação e fluência
Uma vez realizados os ensaios de fluência para diversos níveis de tensão
constante, pode-se obter numericamente as relações entre as funções de fluência
)(tJk )4,..,1( k e relaxação )(tGk
)4,..,1( k . Uma forma de se obter a resposta de
tensão para uma dada deformação constante conhecendo a função de fluência é
resolver numericamente a Eq. (2.100). Isto pode ser feito discretizando a equação e
utilizando o método de Euler, por exemplo, como segue,
1
0
3
4
2
3
2
1
3
4
2
3
2
1
4
4
3
3
2
21
)()1(
)0())1((4
)0())1((3
)0())1((2
))1((
)()1(
)0()(4
)0()(3
)0()(2
)(
2
)0()()0()()0()()0()(
inc
inc
t
inciinci
iincinc
iincinc
iincinc
incinc
inciinci
iincinc
iincinc
iincinc
incinc
iinciinciinciinci
t
ttJ
ttJ
ttJ
ttJ
t
ttJ
ttJ
ttJ
ttJ
t
ttJttJttJttJDef
(2.113)
onde iDef é a deformação constante para a qual se deseja obter a resposta da tensão
variando com o tempo, t é o incremento de tempo utilizado, tttinc / e tinc / .
Deve-se observar que para cada incremento de tempo inct , deve-se resolver uma
equação polinomial de ordem 4 para explicitar a tensão nesse tempo. Além disso, a
solução obtida em um tempo anterior é necessária para resolução da equação no
tempo atual devido a integral hereditária da equação.
Uma vez que os históricos de tensão i sejam calculados numericamente para
os i níveis de deformação iDef , obtidos experimentalmente, os coeficientes das
equações de relaxação podem ser obtidos seguindo procedimento semelhante ao
descrito para obtenção dos coeficientes de fluência.

65
2.2.4 Resposta viscoelástica não-linear no domínio da frequência
Procedimento similar ao adotado para o caso da teoria linear no domínio da
frequência considerando a história de deformação apresentada em (2.43) pode ser
aplicado para o caso não-linear considerando o modelo baseado no princípio da
superposição modificado. As funções de relaxação apresentadas na Eq. (2.111)
podem ser reescritas da seguinte forma,
)()(
)()(
)()(
)()(
4044
3033
2022
1011
tGGtG
tGGtG
tGGtG
tGGtG
(2.114)
Os termos )(tGk )4,..,1( k da função relaxação de tensão podem ser
definidos utilizando a série de Prony de três termos, como segue,
3,342,241,144
3,332,231,133
3,322,221,122
3,312,211,111
/exp/exp/exp)(
/exp/exp/exp)(
/exp/exp/exp)(
/exp/exp/exp)(
RRR
RRR
RRR
RRR
tGtGtGtG
tGtGtGtG
tGtGtGtG
tGtGtGtG
(2.115)
Através de mudança de variáveis, a equação constitutiva (2.110) pode ser
reescrita da seguinte forma,
tt
tt
dd
dGtd
d
dGt
dd
dGtd
d
dGt
tGtGtGtGt
0
44
0
33
0
22
0
1
4
4
3
3
2
21
)()(
)()(
)()(
)()(
)()0()()0()()0()()0()(
(2.116)
Com o objetivo de simplificar a equação constitutiva no domínio da frequência,
pode-se definir as seguintes relações utilizando as funções de relaxação (2.114)
quando t ,

66
t
kk
tk
kk
dG
wwG
dG
wGwG
0
0
)(sin)(
)(cos)0()(
(2.117)
Substituindo (2.115) em (2.117), obtém-se,
)1()1()1()(
)1()1()1()0()(
2
3,
2
33
2
2,
2
22
2
1,
2
11
2
3,
2
3
2
2,
2
2
2
1,
2
1
R
k
R
k
R
kk
R
k
R
k
R
kkk
w
G
w
G
w
GwwG
w
G
w
G
w
GGwG
(2.118)
Da mesma forma que para o caso linear, as funções )(wGk podem ser
consideradas como módulo de armazenamento e )(wGk como módulo de perda,
associado à dissipação de energia. Fazendo uso das equações acima e substituindo o
histórico de deformação harmônico, descrito na Eq. (2.43), na equação constitutiva
(2.116), obtém-se com manipulações algébricas,

67
)4(8
14cos)4(
8
14sin
)3()3(4
13cos
)3()3(4
13sin
)2(2
1)2(3)2(
2
3)2(
2
1)2cos(
)2(2
1)2(3)2(
2
3)2(
2
1)2sin(
)(3)(4
3
)(4)(3)(2)(
cos
)(3)(4
3
)(4)(3)(2)(
sin
)(8
3)(3)(
2
3
2
)(
)()()()(),(
4
4
4
4
403
3
403
3
4
4
4
2
0302
2
4
4
4
2
0302
2
403
3
4
3
03
2
0201
403
3
4
3
03
2
0201
4
4
4
2
03022
4
4
03
3
02
2
010
wGwtwGwt
wGwGwt
wGwGwt
wGwGwGwGwt
wGwGwGwGwt
wGwG
wGwGwGwG
tw
wGwG
wGwGwGwG
tw
GGGG
GGGGtw
(2.119)
O resultado acima se torna idêntico ao caso linear se apenas a função )(1 tG for
considerada como propriedade material. Para este caso a resposta de tensão para um
histórico de tensão senoidal apresenta componentes harmônicos até
)4cos(),4sin( wtwt . A importância desses componentes pode ser verificada utilizando
os resultados experimentais obtidos.
2.3 Ensaios experimentais e ajuste
Normas e corpos de prova
Para caracterização da resposta mecânica do poliuretano utilizado em
enrijecedores à flexão, corpos de prova (CP) retirados de uma estrutura real foram
utilizados. A geometria do corpo de prova foi selecionada de acordo com a norma
ASTM D 2990 (Standard Test Methods for Tensile, Compressive and Flexural Creep
and Creep-Rupture of Plastics) [34] que recomenda o uso dos Tipos I ou II descritos

68
na norma ASTM D 638 (Standard Test Method for Tensile Properties of Plastics) [35].
As dimensões do Tipo I são adotadas, pois esta apresenta maior largura da seção
mais estreita do corpo de prova quando comparada com o Tipo II. Com a adoção da
maior área da seção transversal a influência da vibração do sistema na resposta do
poliuretano é minimizada, assim como uma possível influência do extensômetro na
deformação medida. Um total de 50 CPs foram usinados para realização dos ensaios
experimentais. Para cada amostra, as medidas de espessura e largura são registradas
em três pontos ao longo da seção mais estreita e sua respectiva área média calculada.
A Fig. 2.17 ilustra as dimensões utilizadas nos corpos de prova.
Figura 2.17 - Geometria dos corpos de prova [mm]
Descrição dos ensaios
Os ensaios de tração e relaxação foram realizados em uma máquina Instron
(modelo 5567) do Programa de Engenharia Metalúrgica e de Materiais da
COPPE/UFRJ. A medição da deformação foi feita com extensômetro apropriado para
elastômeros (Instron Long Travel Elastomeric Extensometer, modelo OP-1439). Foram
realizados ensaios de tração com três diferentes taxas de carregamento até cerca de
30% de deformação e testes de relaxação de tensões com seis diferentes níveis de
deformação ( %0,30,0,20,0,10,5,7,0,5,5,2 ) por um período de 4h para cada ensaio,
como será visto a seguir. A Fig. 2.18 ilustra o extensômetro colocado no corpo de
prova e as garras do aparato de ensaio.
Embora a temperatura apresente elevada influência na resposta mecânica do
poliuretano, esta não foi avaliada na formulação matemática nem nos ensaios
experimentais realizados, onde se manteve uma temperatura laboratorial em torno de
24°C. A umidade relativa do ar, embora monitorada, também não foi controlada
durante os ensaios. Os resultados obtidos e os ajustes realizados para os ensaios de
tração e relaxação são apresentados, respectivamente, nos itens 2.3.1 e 2.3.2 a
seguir.

69
Figura 2.18 – Corpo de prova e extensômetro
2.3.1 Ensaios de tração
Os ensaios de tração foram realizados com três taxas de carregamento
constantes, ou seja, velocidades do travessão de: 5, 50 e 500 mm/min. Foram
utilizadas três amostras para cada taxa, totalizando nove ensaios de tração. As
amostras foram tracionadas até atingir uma deformação de aproximadamente 30%,
medida através do extensômetro.
Os resultados médios obtidos são mostrados até a deformação de 30% na Fig.
2.19 e até 5% na Fig. 2.20. Pode-se observar que quanto maior a taxa de
carregamento, maior será a tensão necessária para atingir um mesmo nível de
deformação, ilustrando a influência da taxa de carregamento na resposta do
poliuretano devido ao seu comportamento viscoelástico. Embora não caracterize
necessariamente viscoelasticidade não-linear, verifica-se na Fig. 2.20 que mesmo para
valores de deformação menores do que 5% a curva tensão x deformação não
apresenta linearidade.

70
0 5 10 15 20 25 30
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
Te
nsã
o [M
Pa
]
Deformação [%]
5 mm/min
50 mm/min
500 mm/min
Figura 2.19 - Ensaios de tração (0-30%)
0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
Te
nsã
o [M
Pa
]
Deformação [%]
5 mm/min
50 mm/min
500 mm/min
Figura 2.20 - Ensaios de tração (0-5%)

71
Uma forma de avaliar a validade da teoria da viscoelasticidade linear para
caracterização do comportamento mecânico do poliuretano pode ser feita utilizando a
Eq. (2.14) que considera o histórico de deformação com taxa constante descrita por
tt )( . Como discutido anteriormente, para material linear a relação / x /
não depende da taxa de deformação aplicada. A Fig. 2.21 mostra claramente
diferentes resultados para as três taxas de carregamento adotadas, indicando,
portanto, comportamento não-linear.
0,1 1 10 100
0,1
1
10
5 mm/min
50 mm/min
500 mm/min
Figura 2.21 - Influência da taxa de carregamento
A Tab 2.1 mostra os valores de módulo secante calculados considerando
deformações de 1, 2,5, 5, e 10% para as três taxas de carregamento utilizadas nos
ensaios de tração.Observa-se uma diferença expressiva de 41%, por exemplo, para o
módulo secante calculado a 1% de deformação quando se compara as taxas de 5 e
500 mm/min. Além disso, pode-se verificar que quanto maior o valor de deformação
utilizado, menores os valores de módulo secante calculado.

72
Tabela 2.1 – Módulo secante para os ensaios de tração
Taxa de
carregamento
[mm/min]
Módulo secante [MPa]
1,0% 2,5% 5,0% 10,0%
5 68 61 52 37
50 70 67 58 42
500 96 80 67 47
Conclui-se, consequentemente, que devido ao comportamento não-linear
dependente do tempo do poliuretano, a escolha de um módulo de elasticidade
representativo da resposta mecânica do enrijecedor deve ser feita com cautela. Além
disso, como mostrado por VAZ et al. [14], o poliuretano apresenta comportamento
assimétrico (resposta em tração diferente da resposta em compressão), o que pode
dificultar ainda mais a escolha de um valor adequado para este parâmetro já que o
enrijecedor pode sofrer compressão devido aos esforços de flexão.
2.3.2 Ensaios de relaxação
Procedimento de ensaio
Os ensaios de relaxação de tensão foram realizados com os seguintes níveis
de deformação constante: %0,30,0,20,0,10,5,7,0,5,5,2 . A deformação da amostra
é medida através do extensômetro e a tensão é calculada dividindo a força aplicada,
medida através da célula de carga, pela área média da seção transversal inicial
(tensão de engenharia). Com o objetivo de obter um valor médio, foram utilizadas duas
amostras para cada nível de deformação adotado.
A Instron é programada através do software próprio do equipamento BlueHill de
modo que o deslocamento do travessão se mantenha fixo após atingir um determinado
nível de deformação medido pelo extensômetro. O decaimento da tensão é então
medido pela célula de carga por um período de 4 h ou 14400 s no ambiente com
temperatura constante de 24°C. A Tab. 2.2 mostra as taxas de carregamento adotadas
nos instantes iniciais do ensaio até atingir o nível de deformação a ser mantido
constante ao longo do ensaio. A Fig. 2.22 ilustra o deslocamento adimensional
(max/ ) do travessão para cada uma das deformações aplicadas.

73
Tabela 2.2 - Taxa de carregamento para cada nível de deformação
Deformação [%] Taxa [mm/min]
2,50 250
5,00 250
7,50 500
10,00 500
20,00 500
30,00 500
0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
Tempo [s]
2.5%
5%
7.5%
10%
20%
30%
Figura 2.22 - Deslocamento adimensional do travessão
Resultados do ensaio e ajuste viscoelástico
Os resultados dos ensaios de relaxação são ajustados utilizando o modelo de
LEADERMAN [24] e o modelo obtido através do princípio da superposição modificado
(PSM) apresentado por PIPKIN e ROGERS [25], obtido alternativamente através de
simplificações do modelo de múltiplas integrais de GREEN e RIVLIN [26]. A Eq. (2.78)
é utilizada para o ajuste do modelo de Leaderman, enquanto a Eq. (2.108) é utilizada
para o PSM.

74
Para o modelo de Leaderman, faz-se o ajuste dos coeficientes i0 e
mi
)4,..,1( m da resposta de tensão apresentada na Eq. (2.80) para os seis níveis de
deformação aplicados )6,..,1( i . De posse destes dados plota-se a função )0(ii x
com os seis pontos correspondentes aos ensaios realizados. O ajuste da curva é feito
utilizando o método dos mínimos quadrados fornecendo os valores dos coeficientes
321 ,, bbb e 4b . Utilizando estes coeficientes, seis funções de relaxação podem ser
obtidas utilizando a Eq. (2.79). O valor final da função de relaxação é obtido fazendo-
se a média das funções obtidas. Os valores dos coeficientes 4321 ,,, bbbb e da função
de relaxação são apresentados na Tab. 2.3.
Vale ressaltar que para este modelo, outras formas de ajuste podem ser
utilizadas. Os coeficientes kb )4,..,1( k , por exemplo, podem ser obtidos
considerando os resultados de um ensaio de tração a uma determinada taxa para
caracterizar a não-linearidade, e a função de relaxação ajustada considerando apenas
um nível de deformação para caracterizar sua dependência no tempo.
Para o modelo PSM, a primeira etapa do ajuste consiste em utilizar o método
dos mínimos quadrados para obter os coeficientes da resposta de tensão para cada
nível de deformação aplicado no ensaio de relaxação. O número de termos utilizados
na série de Prony para este ajuste deve ser o mesmo do utilizado no ajuste das curvas
de relaxação )(tGi. Considerando, por exemplo, 2,5% como o primeiro nível de
deformação e a utilização de quatro termos na série de Prony, cinco coeficientes da
curva tensão devem ser calculados, ou seja, 31211101 ,,, e
41 . Procedimento
similar deve ser utilizado para os outros cinco níveis de deformação adotados (5, 7,5,
10, 20 e 30%), totalizando 30 coeficientes a serem calculados para as respostas de
tensão. O Anexo I apresenta o resultado desses ajustes.
Os coeficientes 3,2,1, ,, RRR e 4,R são calculados fazendo-se uma média dos
valores ajustados em cada nível de deformação. Na segunda etapa do ajuste, deve-se
utilizar os coeficientes das curvas de tensão obtidos anteriormente para formar função
similar à descrita na Eq. (2.105) para o ensaio de fluência e, utilizando o método dos
mínimos quadrados, calcular os coeficientes das funções de relaxação
)4,..,1()( ktGk. Estes coeficientes são apresentados na Tab. 2.4 e a curva para cada
função nas Fig. 2.24 – 2.27. Os ajustes foram feitos utilizando a unidade de MPa para
tensão e mm/mm para deformação. A Fig. 2.23 apresenta o espectro de relaxação
calculado utilizando a aproximação proposta por CHRISTENSEN [22] e apresentado
na Eq. (2.34).

75
Tabela 2.3 - Coeficientes da função de relaxação não-linear – ajuste Leaderman
k ]/[ MPaMPaGk ][MPabk ][sk
0 0,716 --- ---
1 0,136 78,50 3,33
2 0,069 -521,21 66,13
3 0,043 1738,60 659,55
4 0,050 -2117,55 6852,15
Tabela 2.4 - Coeficientes da função de relaxação não-linear – ajuste PSM
k ][0 MPaG k ][1 MPaG k
][2 MPaG k ][3 MPaG k
][4 MPaG k ][sk
1 57,93 9,153 4,785 3,210 3,429 3,33
2 -394,60 -53,12 -29,83 -21,71 -21,94 66,13
3 1305,91 175,87 103,65 76,59 76,58 659,55
4 -1579,21 -214,45 -129,80 -96,93 -97,17 6852,15
0,01 0,1 1 10 100 1000 10000
1E-4
1E-3
0,01
0,1
1
10
H(
)
[s]
Figura 2.23 – Espectro de relaxação

76
0,01 0,1 1 10 100 1000 10000
55
60
65
70
75
80
G1(t
) [M
Pa
]
t [s]
Figura 2.24 – Função de relaxação )(1 tG
10 100 1000 10000
-470
-460
-450
-440
-430
-420
-410
-400
-390
G2(t
) [M
Pa
]
t [s]
Figura 2.25 – Função de relaxação )(2 tG

77
10 100 1000 10000
1300
1350
1400
1450
1500
1550G
3(t
) [M
Pa
]
t [s]
Figura 2.26 – Função de relaxação )(3 tG
10 100 1000 10000
-1900
-1850
-1800
-1750
-1700
-1650
-1600
-1550
G4(t
) [M
Pa
]
t [s]
Figura 2.27 – Função de relaxação )(4 tG

78
A Fig. 2.28, mostrada a seguir, apresenta os resultados obtidos nos ensaios de
relaxação. Pode-se observar que o modelo utilizando o PSM apresenta melhor
correlação com os dados experimentais obtidos, principalmente para valores mais
altos de deformação, quando comparado com o ajuste de Leaderman.
Consequentemente, este será o modelo adotado na formulação matemática do
sistema duto flexível/enrijecedor à flexão.
A Fig. 2.29 mostra os mesmos resultados da Fig. 2.28 utilizando, entretanto,
escala logarítmica para o tempo. Verifica-se que mesmo após 4h de ensaio, o material
continua apresentando relaxação de tensão, destacando a necessidade de um ensaio
mais longo para definição do valor limite quando t . A utilização de aparato servo-
hidráulico para realização de ensaio de relaxação de longo prazo não se torna viável
devido ao custo envolvido e a necessidade de mobilização de diversos equipamentos.
A solução usualmente adotada é a utilização de um aparato específico para realização
de ensaios de relaxação ou fluência onde diversas amostras podem ser testadas por
um período que pode durar, em alguns casos, meses ou até anos.
A Fig. 2.30 apresenta o módulo de perda )(1 wG e armazenamento )(1 wG da
função de relaxação apresentada anteriormente. O módulo de perda está associado à
dissipação de energia viscoelástica do material e apresenta seu máximo para um
período de oscilação harmônica em torno de 20-25 seg. Para frequências a partir
deste valor, a função apresenta decaimento contínuo.

79
0 2000 4000 6000 8000 10000 12000 14000
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
6.0
6.5
7.0
Te
nsã
o [M
Pa
]
Tempo [s]
Ajuste PSM
Ajuste Leaderman
Ensaio
2.5%
5.0%
7.5%
10%
20%
30%
Figura 2.28 - Resultados do ensaio de relaxação
10 100 1000 10000
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
Te
nsã
o [M
Pa
]
Tempo [s]
Ajuste PSM
Ajuste Leaderman
Ensaio
2.5%
5.0%
7.5%
10%
20%
30%
Figura 2.29 - Resultados do ensaio de relaxação (escala logarítmica)

80
0,01 0,1 1
66
68
70
72
74
76
78
80
82 G'[MPa]
G''[MPa]
Frequência [Hz]
G1'[M
Pa
]
0
1
2
3
4
5
G1''[
MP
a]
Figura 2.30 – Módulo de perda e armazenamento
Curva isocrônica – verificação da não-linearidade
Como descrito anteriormente no item 2.1.4, uma forma de verificação da
hipótese de linearidade e interpretação da resposta viscoelástica é o uso do conceito
de curva isocrônica. A curva é feita utilizando o valor da resposta de tensão obtida em
um determinado tempo para cada nível de deformação adotado. A Fig. 2.31 apresenta
esta função para os sete níveis de deformação adotados no ensaio de relaxação
realizado, ou seja, %0,30,0,20,0,10,5,7,0,5,5,2 . Foram considerados seis
instantes de tempo diferentes na determinação das curvas.
Verifica-se claramente a não-linearidade para valores de deformação maiores
que 5%, embora não se possa determinar um valor acurado para este limite, pois
apenas dois pontos são utilizados para definição da curva nesta faixa.
Observa-se, como esperado, que quanto maior o tempo decorrido de ensaio
menor será a inclinação da curva ou módulo tangente, e ainda que, a maior variação
da curva ocorre nos instantes iniciais de ensaio.

81
0 5 10 15 20 25 30
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0T
en
sã
o [M
Pa
]
Deformação [%]
Isocrônica
t = 0
t = 30s
t = 60s
t = 1h
t = 2h
t = 4h
Figura 2.31 – Curva isocrônica
Comparação do ajuste viscoelástico linear e não-linear
O ajuste viscoelástico realizado no ensaio de relaxação pode ser utilizado para
determinação da curva tensão x deformação quando se considera um histórico de
carregamento constante. Considerando, por exemplo, as mesmas taxas de
carregamento utilizadas no ensaio de tração, ou seja, 5, 50 e 500 mm/min e utilizando
a Eq. (2.29) para o ajuste viscoelástico linear e a Eq. (2.110) para o ajuste não-linear,
obtêm-se as curvas observadas nas Fig. 2.32-33. Os coeficientes utilizados no caso
viscoelástico não-linear são apresentados na Tab. 2.4, enquanto para o caso linear
apenas o primeiro termo do ajuste é mantido. Os resultados do ensaio de tração
também são apresentados no mesmo gráfico para efeitos de comparação.
Verifica-se uma boa correlação quando se compara o resultado do ensaio de
tração com a caracterização do ensaio de relaxação, confirmando a escolha da teoria
não-linear adotada para representação do comportamento viscoelástico não-linear.
Embora o ajuste viscoelástico linear leve em conta o efeito da taxa de carregamento
na resposta tensão x deformação, este só apresenta valores próximos ao ajuste não-
linear para pequenos valores de deformação.

82
0,00 0,02 0,04 0,06 0,08 0,10 0,12 0,14
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
10,0
Ajuste visco não-linear
Ensaio de tração
Te
nsã
o [M
Pa
]
Deformação [mm/mm]
Taxa [mm/min]
5
50
500
Ajuste visco linear
Figura 2.32 – Ensaio de tração x ajustes viscoelásticos de relaxação (0-15%)
0,00 0,01 0,02 0,03 0,04 0,05
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
Te
nsã
o [M
Pa
]
Deformação [mm/mm]
Taxa [mm/min]
5
50
500
Figura 2.33 – Ensaio de tração x ajustes viscoelásticos de relaxação (0-5%)

83
De modo semelhante ao apresentado anteriormente na Tab. 2.1 para os
ensaios de tração, a Tab. 2.5 mostra os valores de módulo secante calculados
considerando deformações de 1, 2,5, 5, e 10% para três taxas de deformação
substituídas nos ajustes viscoelásticos linear e não-linear realizados para o ensaio de
relaxação. A tabela destaca o observado na Fig. 2.32, ou seja, mesmo para pequenos
valores de deformação a teoria da viscoelasticidade linear não representa de forma
adequada o comportamento do poliuretano utilizado na fabricação do enrijecedor. O
módulo secante calculado a 10% de deformação considerando as curvas obtidas para
uma taxa de 500 mm/min, por exemplo, fornecem uma diferença de cerca de 92%
entre a teoria linear e não-linear.
Tabela 2.5 – Módulo secante para os ajustes viscoelásticos
Taxa de
carregamento
[mm/min]
Módulo secante [MPa]
1,0% 2,5% 5,0% 10,0%
L NL L NL L NL L NL
5 71 66 69 58 68 48 66 34
50 77 71 75 63 73 52 71 37
500 78 75 78 67 78 56 77 40
Considerando os resultados experimentais apresentados, conclui-se que a teoria
da viscoelasticidade não-linear apresentada representa de forma adequada as não-
linearidades e os efeitos da taxa de carregamento observados na resposta de tensão x
deformação do poliuretano. A teoria da viscoelasticidade linear, embora capture
intrinsecamente o efeito da taxa de carregamento na resposta do poliuretano não
apresenta boa correlação com os ensaios experimentais, mesmo para valores
moderados de deformação. Como, usualmente, em operação, o enrijecedor à flexão
está sujeito a deformações maiores que 10%, recomenda-se o uso da teoria não-linear
para caracterização do seu comportamento mecânico.

84
3 FORMULAÇÃO MATEMÁTICA DO SISTEMA DUTO FLEXÍVEL/ENRIJECEDOR À FLEXÃO
Os modelos existentes para avaliação de esforços mecânicos em enrijecedores
à flexão são baseados na análise de uma viga engastada, com seção variável e sujeita
a grandes deslocamentos. A metodologia para obtenção das condições de
carregamento a ser aplicada no modelo local foi apresentada anteriormente no
Capítulo 1, assim como as propriedades mecânicas do poliuretano utilizado na
fabricação do enrijecedor à flexão foram mostradas no Capítulo 2. Um desenho
esquemático do modelo utilizado para análise local quase-estática do sistema é
mostrado na Fig. 3.1.
O sistema é composto pelo duto flexível e pelo enrijecedor à flexão, sendo
ambos considerados engastados em sua parte inicial. Na extremidade livre, o duto
está sujeito a uma tração )(tF e um ângulo de contorno )(tL , ambos variando com o
tempo de acordo com as condições ambientais e movimentos da unidade flutuante de
produção. Uma parte do duto é incorporada ao modelo para garantir que a condição
de contorno do ângulo não seja perturbada por efeitos do enrijecedor no modelo
completo do sistema.
O modelo de viga é utilizado nas fases iniciais de projeto e análise, quando se
deseja uma resposta global do sistema. Quando existe a necessidade de avaliar
pontos de concentração de tensões, tais como, a região de interface do enrijecedor
com seu suporte, faz-se uso de análises tridimensionais através do método dos
elementos finitos.
L
F(t)
X
Y
O
y(s)
x(s)
Figura 3.1 – Desenho esquemático do sistema duto flexível/enrijecedor à flexão

85
Neste capítulo, a formulação matemática do sistema é apresentada
considerando o enrijecedor à flexão com comportamento viscoelástico linear e não-
linear, inicialmente no domínio do tempo e posteriormente estendido para obtenção da
resposta harmônica em regime permanente utilizando o método da perturbação.
Embora tenha se verificado através dos ensaios experimentais que a teoria linear não
representa de forma adequada a resposta mecânica do poliuretano, a formulação
matemática do modelo linear é mantida como forma de verificação e validação do
modelo não-linear.
O item 3.1 apresenta e discute as hipóteses simplificadoras adotadas no
desenvolvimento do modelo matemático, o item 3.2 apresenta as relações
trigonométricas, enquanto no item 3.3 o equilíbrio de forças e momentos é
apresentado. A formulação matemática de cada modelo e os respectivos sistemas de
equações diferenciais resultantes são então apresentados nos itens 3.4 e 3.5, para
teoria viscoelástica linear e não-linear, respectivamente.
3.1 Hipóteses simplificadoras
A formulação matemática para o modelo local do sistema composto pelo duto
flexível e pelo enrijecedor à flexão é apresentada neste trabalho considerando as
seguintes hipóteses simplificadoras:
a) teoria de viga de Euler-Bernoulli, sendo ambas estruturas engastadas em sua
parte inicial;
b) deformação axial é desconsiderada para as duas estruturas;
c) o espaçamento radial entre as estruturas é desconsiderado;
d) o duto flexível é considerado com rigidez flexional constante ao longo do
comprimento;
e) o poliuretano do enrijecedor é considerado com resposta viscoelástica e,
consequentemente, amortecimento estrutural;
f) comportamento mecânico em tração é igual ao em compressão;
g) os efeitos dinâmicos devido à massa do sistema são desconsiderados;
h) a força e o ângulo de topo são funções harmônicas.
A teoria de Euler-Bernoulli para a flexão de vigas não considera o efeito da
deformação de cisalhamento devido à ação do cortante, considerando apenas a
deformação causada pelo momento fletor. Quanto mais delgada for a viga, maior será

86
a predominância do momento fletor nas deflexões e menor a parcela do esforço
cortante.
Os efeitos desta hipótese foram avaliados por CAIRE [13], que considerou
inicialmente um modelo com deformação angular única. Posteriormente, avaliou o
efeito do cisalhamento utilizando um modelo em elementos finitos utilizando o software
Abaqus [12]. Neste modelo considerou diferentes deformações angulares para o
enrijecedor e para o duto. Constatou que embora o modelo linha flexível/enrijecedor
apresente uma relação diâmetro/comprimento não desprezível, a distribuição de
curvatura ao longo do comprimento não é muito afetada pela inclusão das
deformações de cisalhamento e, portanto, a inclusão desta hipótese no presente
modelo não se torna relevante.
A condição de contorno adotada neste trabalho, considerando as duas
estruturas engastadas, só é válida para algumas configurações de enrijecedor. Na
configuração para boca de sino apresentada anteriormente na Fig. 1.5, por exemplo, a
conexão do duto é feita a uma determinada distância do enrijecedor. Neste caso a
distribuição de curvatura e deformação das duas estruturas será diferente e,
consequentemente, o modelo matemático e suas respectivas condições de contorno
devem ser adequadas à configuração utilizada.
A linha flexível apresenta elevada rigidez axial quando comparada com o corpo
de poliuretano do enrijecedor à flexão, sem incluir o fato de que as duas estruturas
apresentam espaçamento radial e, portanto sem adesão. Consequentemente, a
inclusão da hipótese de deformação axial da linha flexível não altera significantemente
a distribuição de curvatura e deformações do enrijecedor.
O modelo matemático incluindo a resposta não-linear em flexão do duto foi
desenvolvido por CAIRE e VAZ [10,11], considerando o poliuretano do enrijecedor
com comportamento linear elástico. Além disso, o espaçamento radial entre as
estruturas foi avaliada por um modelo de elementos finitos utilizando o software
Abaqus [12]. Concluíram que, para carregamento extremo, a inclusão das duas
hipóteses não altera significantemente a resposta do sistema, embora tenham
observado maior influência para condições de carregaento mais brandas.
O comportamento não-linear elástico com resposta mecânica do material em
tração diferente da resposta em compressão foi avaliada por CAIRE [13] e VAZ et al.
[14]. Este comportamento assimétrico leva a uma excentricidade do eixo neutro com
relação ao centróide de área. Esta excentricidade e a relação momento fletor x
curvatura devem, portanto, ser calculadas numericamente para cada seção transversal
ao longo do comprimento, podendo ser ajustadas por uma série de polinômios. Além
disso, modelaram o sistema considerando as estruturas separadamente, o que

87
permite o cálculo da força de contato ao longo do comprimento e posterior estimativa
das pressões de contato. Concluíram que a não-linearidade material com
comportamento assimétrico afeta a resposta do sistema e que caso se queira utilizar o
módulo de elasticidade para avaliação de esforços da estrutura, uma metodologia
consistente para levantamento desse parâmetro deve ser definida.
Com o objetivo de capturar o efeito da frequência de carregamento e do
amortecimento estrutural viscoelástico na resposta do sistema é necessário aplicar
carregamento harmônico como forma de representar o carregamento ambiental
aleatório, e embora o modelo matemático desenvolvido no domínio do tempo possa
ser utilizado para estas avaliações, este não se mostra eficiente computacionalmente.
Um modelo para obtenção da resposta harmônica em regime permanente, onde
os efeitos transientes não são levados em conta, é um dos objetivos do presente
trabalho. Além disso, o efeito da resposta não-linear dependente do tempo é
posteriormente incluído. Os efeitos inerciais na resposta dinâmica do modelo local não
foram avaliados, mas espera-se pouca influência devido à magnitude do carregamento
aplicado.
3.2 Relações trigonométricas
Na presente formulação, considera-se que o duto flexível e o enrijecedor à flexão
apresentam a mesma deflexão, o que pode ser considerado uma hipótese coerente
quando o espaçamento radial entre as estruturas é pequeno. A Fig. 3.2 apresenta um
elemento infinitesimal do sistema.
V
V+dV
T
T+dT
M
M+dM
dS dx
X
YO
dy
Figura 3.2 – Elemento infinitesimal
Aplicando relações trigonométricas ao elemento infinitesimal da Fig. 3.2 e
considerando a definição geométrica da curvatura, obtêm-se as seguintes equações,

88
),(cos),(
tss
tsx
(3.1)
),(sin),(
tss
tsy
(3.2)
),(),(
tsks
ts
(3.3)
onde s é o arco comprimento medido a partir da origem engastada, ),(),,( tsytsx são
as coordenadas cartesianas que variam com o tempo, ),( ts é o ângulo de inclinação
com relação ao eixo x de qualquer ponto ao longo do arco comprimento e ),( tsk a
curvatura.
3.3 Equilíbrio de forças e momentos
Considerando equilíbrio para cada instante de tempo t, as reações de força e
momento podem ser calculadas na origem do sistema cartesiano considerando a
condição de carregamento )(,),( ttF L ilustrada na Fig. 3.1. Os esforços internos de
tração ),( tsT e o momento fletor ),( tsM podem ser facilmente determinados como
segue,
L
sL
L
sL
L
dststdststtFtsM
tsttFtsT
),(sin)(cos),(cos)(sin)(),(
),()(cos)(),(
(3.4)
Diferenciando o momento fletor com respeito à s , verifica-se que o esforço
cortante é dado pela sua derivada primeira,
),()(sin)(),(),(
tsttFtsVs
tsML
(3.5)
Assumir que seções planas permanecem planas após flexão, implica que a
deformação axial para um determinado instante de tempo t varia linearmente com sua
posição em relação ao eixo neutro , sendo descrita por,

89
),(),,( tskts (3.6)
Como hipótese simplificadora, considera-se o comportamento viscoelástico
com resposta simétrica em tração-compressão. Consequentemente, o eixo neutro
passa pelo centróide de área da seção transversal para qualquer tempo e o equilíbrio
de momentos pode ser descrito pela seguinte relação,
BSPIPE A
BSA
PIPE dAdAtsM ),( (3.7)
onde o índice BS se refere ao enrijecedor à flexão ou bend stiffener e PIPE se refere
ao duto flexível.
3.4 Equações de governo para viscoelasticidade linear
As equações de governo do sistema duto flexível/enrijecedor à flexão no domínio
do tempo e da frequência são obtidas utilizando as equações constitutivas
apresentadas no item 2.1 e as relações trigonométricas e equilíbrio de forças e
momentos apresentados nos itens 3.2 e 3.3 respectivamente.
3.4.1 Formulação matemática no domínio do tempo
Utilizando a Eq. (3.7), considerando rigidez à flexão constante ao longo do
comprimento para o duto e introduzindo a Eq. (2.29) chega-se à seguinte relação
momento fletor x curvatura para o sistema,
t
BSBSPIPE dt
tGsksItskGsItskEItsM
0 )(
)(),()(),()0()(),(),(
(3.8)
onde BSA
BS dAsI 2)( é o segundo momento de área para o enrijecedor à flexão e
PIPEEI é a rigidez a flexão do duto. Diferenciando o momento fletor dado pela Eq. (3.8)
com relação à posição, introduzindo a Eq. (3.5) e manipulando algebricamente chega-
se à seguinte equação de governo,

90
tBS
t
BS
L
BSPIPE dt
tGsktskG
ds
sdI
dt
tG
s
sksI
tsttF
sIGEIs
tsk
0
0
)(
)(),(),()0(
)(
)(
)(),()(
),()(sin)(
)()0(
1),(
(3.9)
É importante ressaltar que caso se considere 0t na equação anterior, os
termos integrais se anulam e a equação final resultante é a mesma que para o caso
linear elástico com )0(G representando o módulo de elasticidade. As relações
geométricas dadas pelas Eq. (3.1-3) juntamente com a Eq. (3.9) formam o sistema de
quatro equações integro-diferenciais que governam o problema de valor de contorno.
Um conjunto de quatro condições de contorno deve ser definido como segue,
0)(),(),0(),0(),0( ttLttytx L (3.10)
3.4.2 Formulação matemática para resposta harmônica em regime permanente
A Eq. (3.9) apresentada anteriormente para formulação no domínio do tempo
pode ser utilizada para obter a solução em estado permanente quando o sistema está
sujeito a condições de carregamento harmônicas, mas esse procedimento demanda
uma solução numérica com custo computacional muito alto. De forma a obter a
solução no domínio da frequência, desconsiderando os efeitos transientes, considera-
se a seguinte força harmônica aplicada ao sistema, como segue,
twFFtF sin)( 00 (3.11)
onde 0F é a tensão de topo média, w é a frequência de carregamento e é um
pequeno valor de perturbação em torno do valor médio, de modo que a teoria da
perturbação possa ser aplicada na formulação do problema. Desta forma, as equações
de governo podem ser descritas por uma expansão em série de Taylor utilizando o
valor de perturbação para a força e para o ângulo, como será visto a seguir. A
resposta da inclinação de um ponto ao longo do arco comprimento com respeito ao
eixo x pode ser aproximada pela seguinte relação,

91
),()(),( 0 tssts (3.12)
onde )(0 s é a função do angulo médio independente do tempo e ),( ts pode ser
expandida considerando uma expansão de terceira ordem como segue,
2233
22
2233
22),(
ts (3.13)
Vale salientar que com a utilização de dois parâmetros de perturbação ( , ),
a solução do sistema de equações de governo é independente da variação em torno
da média. Dessa forma, uma vez obtida a solução numérica considerando ângulo e
tração de topo médios, pode-se obter resultados com diferentes variações em torno da
média sem a necessidade de obter uma nova solução numérica para o sistema de
equações de governo. Os coeficientes são descritos pelas seguintes funções em
forma matricial, para os termos de primeira ordem ( , ),
tw
tw
ss
ss
cos
sin
)()(
)()(
43
21
(3.14)
para os termos de segunda ordem ( 2 , 2 , ),
tw
tw
sss
sss
sss
2cos
2sin
1
)()()(
)()()(
)()()(
131211
1098
765
2
2
(3.15)
e para os termos de terceira ordem ( 3 , 3 , 2 , 2 ),
tw
tw
tw
tw
ssss
ssss
ssss
ssss
3cos
3sin
cos
sin
)()()()(
)()()()(
)()()()(
)()()()(
29282726
25242322
21201918
17161514
2
2
3
3
(3.16)

92
onde 290)( isi são os trinta coeficientes que devem ser obtidos numericamente
para obtenção da solução. Utilizando a Eq. (3.12) para descrição da condição de
contorno de ângulo, obtém-se,
)()( 0 tt LLL (3.17)
onde L0 é o valor médio do ângulo de topo. A variação angular em torno da média, ou
seja, a função )(tL pode ser descrita pelos termos de primeira ordem da Eq. (3.13)
como segue,
twt LL sin)( 0 (3.18)
Desta forma a diferença de fase entre a força e o ângulo de topo é dada por
e a variação em torno do valor médio definida pela perturbação . Vale ressaltar que
uma representação da condição de contorno de ângulo definidos pelas Eq. (3.17) e
(3.18) com mais termos harmônicos, resulta em diferentes termos da função ),( ts
apresentada anteriormente em (3.13).
Com o objetivo de simplificar a formulação matemática e reunir termos em
comum durante a manipulação algébrica, define-se o seguinte ângulo e variação do
ângulo, como segue,
)()( 000 ss L (3.19)
),()(),( tstts L (3.20)
Substituindo a Eq. (3.19) e (3.20) na relação do cortante definida pela Eq. (3.5),
considerando 0 e assumindo pequenos valores para a variação angular )(s ,
pode-se utilizar uma expansão de terceira ordem para senos e cossenos, o que leva a
seguinte aproximação,
6
),(),()(cos
2
),(1)(sin),()(sin
3
0
2
0
tstss
tsststL
(3.21)

93
As funções esforço cortante ),( tsV e curvatura ),( tsk devem ser descritas
utilizando a teoria da perturbação, com uma função independente para o valor médio e
uma componente dependente do tempo utilizando o mesmo formato apresentado na
Eq. (3.13). Substituindo a Eq. (3.11) e (3.21) em (3.5) com manipulações algébricas,
resulta uma função com parâmetros de perturbação e com ordem superior a 10.
Desprezando todos os termos de ordem superior a três, resulta como esperado, na
relação do cortante com 30 coeficientes. Estas funções coeficientes podem ser
representadas em forma vetorial TsVsV )(),...,( 290V e são descritas por,
290cos)(sin)()( 000 issBssAFsV iii (3.22)
onde os coeficientes )(sAi and )(sBi
são descritos no Anexo II. Substituindo a relação
de curvatura dada por,
2233
22
2233
22
0 )(),(
kkkk
kkkkksktsk
(3.23)
na Eq. (3.8), utilizando os módulos de perda e armazenamento apresentados na Eq.
(2.118) com manipulações algébricas e considerando t , chega-se a relação
momento fletor x curvatura no domínio da frequência. Igualando os termos com
mesma potência dos parâmetros e e de suas respectivas combinações, pode-se
achar a relação entre os coeficientes da relação dada por EI.KM . A matriz de
rigidez à flexão é então descrita pela seguinte matriz diagonal em bloco,
3333222110 ,,,,,,,,, EIEIEIEIEIEIEIEIEIEIEI diag (3.24)
onde as matrizes 0EI ,
1EI , 2EI e
3EI para os termos de ordem zero, um, dois e três
respectivamente, são dadas por,

94
)3,()3,(00
)3,()3,(00
00),(),(
00),(),(
)2,()2,(0
)2,()2,(0
00)(
),(),(
),(),(
)(
12
21
12
21
12
21
0
2
12
21
1
00
wsCwsC
wsCwsC
wsCwsC
wsCwsC
wsCwsC
wsCwsC
sC
wsCwsC
wsCwsC
sC
3EI
EI
EI
EI
(3.25)
e os coeficientes 0C ,
1C e 2C são descritos por,
)()(),(
)()(),(
)()()(
2
1
0
sIwGwsC
sIwGEIwsC
sIGEIsC
BS
BSPIPE
BSPIPE
(3.26)
Os vetores das funções coeficientes de momento fletor e curvatura podem ser
respectivamente descritos por, TsMsM )(),...,( 290M e Tsksk )(),...,( 290k .
Considerando que a relação entre os coeficientes da função momento fletor e do
cortante é dada por VdM/ds e utilizando a relação linear EI.KM com
manipulações algébricas, chega-se à seguinte relação,
.VEI.kEI
.EIk 11
ds
d
ds
d (3.27)
Substituindo as Eq. (3.22) e (3.24) em (3.27) leva ao seguinte sistema de
equações diferenciais não-lineares que governam o problema de valor de contorno,
para ordem zero,

95
)()()()()( 00000
0 sVsDsksCsDds
dk (3.28)
para os termos de primeira ordem ( 31 i ),
)(),()(),()(),()(),(
)(),()(),()(),()(),(
,
112112
1
121121
sVwsDsVwsDskwsEskwsEds
dk
sVwsDsVwsDskwsEskwsEds
dk
iiii
i
iiii
i
(3.29)
para os termos de segunda ordem ( 115 i ),
)()2,()()2,(
)()2,()()2,(
)()2,()()2,(
)()2,()()2,(
)()()()(
,,
2112
21122
2211
22111
00
22
sVwsDsVwsD
skwsEskwsEds
dk
sVwsDsVwsD
skwsEskwsEds
dk
sVsDsksEds
dk
ii
iii
ii
iii
iii
(3.30)
e para os termos de terceira ordem ( 2614 i ),
)()3,()()3,(
)()3,()()3,(
)()3,()()3,(
)()3,()()3,(
)(),()(),(
)(),()(),(
)(),()(),(
)(),()(),(
,
,,
3122
3122
3
3221
32212
112
1121
121
121
22
33
sVwsDsVwsD
skwsEskwsEds
dk
sVwsDsVwsD
skwsEskwsEds
dk
sVwsDsVwsD
skwsEskwsEds
dk
sVwsDsVwsD
skwsEskwsEds
dk
ii
ii
i
ii
iii
ii
iii
ii
iii
(3.31)
onde os coeficientes )(0 sD , ),(1 wsD , ),(2 wsD são descritos por,

96
222
221
0
)()()()(
)()(),(
)()()()(
)()(),(
)()(
1)(
sIwGEIsIwG
sIwGwsD
sIwGEIsIwG
sIwGEIwsD
sIGEIsD
BSPIPEBS
BS
BSPIPEBS
BSPIPE
BSPIPE
(3.32)
e os coeficientes )(0 sE , ),(1 wsE , ),(2 wsE são dados por,
222
22
22
1
0
)()()()(
)(')(),(
)()()()(
)(')()()()(),(
)()(
)(')()(
sIwGEIsIwG
sIwGEIwsE
sIwGEIsIwG
sIsIwGwGwGEIwsE
sIGEI
sIGsE
BSPIPEBS
BSPIPE
BSPIPEBS
BSBSPIPE
BSPIPE
BS
(3.33)
O sistema de trinta equações diferenciais (3.28-31) em conjunto com,
290)()(
iskds
sdi
i (3.34)
formam o sistema de sessenta equações diferenciais não-lineares que governam o
problema de valor de contorno do enrijecedor à flexão viscoelástico linear submetido a
condições de carregamento harmônicas de tração e ângulo de topo. O seguinte
sistema de condições de contorno deve ser especificado para o problema, como
segue,
295,210)(
sin)(
cos)(
)(
04
03
00
iiL
L
L
L
i
L
L
L
(3.35)
onde os coeficientes L0 e são os dados de entrada da função ângulo de topo. Uma
vez que o sistema de Eq. (3.28-31, 3.34) seja resolvido numericamente, a distribuição
de curvatura é obtida substituindo os coeficientes )(),..,( 290 sksk na Eq. (3.23). As
coordenadas cartesianas do sistema ),(),,( tsytsx podem ser obtidas integrando as

97
Eq. (3.1) e (3.2). O método de solução numérica adotado é apresentado
posteriormente no item 3.6.
3.5 Equações de governo para viscoelasticidade não-linear
As equações de governo do sistema duto flexível/enrijecedor à flexão no domínio
do tempo e da frequência são agora obtidas utilizando as equações constitutivas para
viscoelasticidade não-linear apresentadas no item 2.2.3 (princípio da superposição
modificado) e as relações trigonométricas e equilíbrio de forças e momentos
apresentados nos itens 3.2 e 3.3 respectivamente.
3.5.1 Formulação matemática no domínio do tempo
As equações de governo no domínio do tempo, considerando a teoria não-
linear, através do princípio da superposição modificado, podem ser derivadas
considerando o procedimento descrito a seguir. Substituindo a equação constitutiva
descrita por (2.110) em (3.7), obtém-se a seguinte relação momento fletor x curvatura,
t
t
t
t
PIPE
dt
tGsksItskGsI
dt
tGsksItskGsI
dt
tGsksItskGsI
dt
tGsksItskGsI
tskEItsM
0
44
4
4
44
0
33
3
3
33
0
22
2
2
22
0
1111
)(
)(),()(),()0()(
)(
)(),()(),()0()(
)(
)(),()(),()0()(
)(
)(),()(),()0()(
),(),(
(3.36)
onde as funções 1I ,
2I , 3I e
4I são dadas respectivamente por,
BS
BS
BS
BS
A
A
A
ABS
dAsI
dAsI
dAsI
dAsIsI
5
4
4
3
3
2
2
1
)(
)(
)(
)()(
(3.37)

98
Para a seção transversal do enrijecedor, obtém-se as seguintes funções,
66
3
44
1
)(512
)(
)(64
)()(
DisDesI
DisDesIsI BS
(3.38)
onde )(sDe é o diâmetro externo, que varia ao longo do comprimento devido a sua
geometria que usualmente apresenta uma parte inicial cilíndrica, seguida do corpo
cônico e Di é o diâmetro interno. Vale ressaltar que o diâmetro interno do enrijecedor
não precisa ser necessariamente igual ao diâmetro externo do duto flexível, mesmo
com a utilização da formulação considerando as duas estruturas aderidas. Pode-se
verificar que para seções simétricas obtém-se, 0)()( 42 sIsI . Derivando a Eq. (3.36)
com relação ao arco comprimento, observando que,
s
tsktskn
s
tsk nn
),(),(
),( 1 (3.39)
introduzindo a Eq. (3.5) e manipulando algebricamente a Eq. (3.36) para explicitar a
derivada primeira da curvatura com relação ao arco comprimento, chega-se à seguinte
equação de governo para a formulação não-linear no domínio do tempo,
t
t
t
t
L
PIPE
dt
tGsktskG
s
sI
dt
tGsktskG
s
sI
dt
tG
s
sksksI
dt
tG
s
sksI
tsttF
tsksIG
sIGEIs
tsk
0
333
3
3
0
1
1
1
0
32
3
0
1
1
2
33
11
)(
)(),(),()0(
)(
)(
)(),(),()0(
)(
)(
)(),(),()(3
)(
)(),()(
),()(sin)(
),()()0(3
)()0(
1),(
(3.40)
A Eq. (3.40) em conjunto com as Eq. (3.1-3) formam o sistema de quatro
equações diferenciais parciais não-lineares que governam o problema de valor de
contorno do sistema linha flexível/enrijecedor considerando o poliuretano com

99
comportamento viscoelástico não-linear. As condições de contorno são as mesmas
utilizadas na formulação do problema linear e apresentadas na Eq. (3.10).
Observa-se que a Eq. (3.40) se iguala à formulação linear apresentada na Eq.
(3.9) caso se considere as seguintes hipóteses: )()(1 tGtG e 0)(3 tG . As funções
)(2 tG e )(4 tG não influenciam diretamente a resposta do sistema, mas sim através do
ajuste geral para obtenção de forma acoplada de )4,..,1(),( itGi.
3.5.2 Formulação matemática para resposta harmônica em regime permanente
As equações de governo no domínio da frequência considerando a teoria da
viscoelasticidade não-linear são descritas incluindo termos de perturbação até
segunda ordem. Desta forma o ângulo ),( ts é descrito utilizando os termos de
primeira ordem apresentados na Eq. (3.14) e de segunda ordem mostrados na Eq.
(3.15). A descrição harmônica das condições de carregamento de força e ângulo
permanecem as mesmas, sendo representadas, respectivamente pelas Eq. (3.11) e
(3.17).
Utilizando o mesmo procedimento anterior para o caso linear, pode-se obter a
relação momento fletor x curvatura no domínio da frequência considerando a teoria da
viscoelasticidade não-linear. Substituindo a relação de curvatura dada pela Eq. (3.23)
(eliminando os termos de terceira ordem) na Eq. (3.36), utilizando os módulos de
perda e armazenamento apresentados na Eq. (2.118), considerando t para
eliminação de efeitos transientes e igualando os termos de mesma potência e
obtém-se a relação dos coeficientes da função momento fletor x curvatura. Os
coeficientes da função momento fletor podem ser descritos em forma matricial como
segue,
T
TsMsM
MMMMMM
M
0,,,,,
)(),...,( 130
(3.41)
Deve-se ressaltar que, devido à não-linearidade, a matriz de rigidez não pode
ser definida por uma matriz quadrada como anteriormente. Desta forma para o termo
de ordem zero ordem, obtém-se,
000 .kEIM (3.42)

100
onde o vetor curvatura 0k e a matriz de rigidez são descritas respectivamente por ,
3
0
0
0
)(
)(
sk
skk (3.43)
)()( 100 sPsPEI (3.44)
Para os coeficientes de primeira ordem )(),(),(),( 4321 sMsMsMsM
representados em forma matricial por,
.kEIM
.kEIM
1
1 (3.45)
utilizam-se os seguintes vetores curvatura e matriz de rigidez respectivamente,
)()(
)()(
)(
)(
2
2
0
1
2
0
2
1
sksk
sksk
sk
sk
k
)()(
)()(
)(
)(
4
2
0
3
2
0
4
3
sksk
sksk
sk
sk
k
(3.46)
),(3),(3),(),(
),(3),(3),(),(
3524
5342
1wsPwsPwsPwsP
wsPwsPwsPwsPEI (3.47)
Para os coeficientes de segunda ordem )(),...,( 135 sMsM representados em
forma matricial por,
.kEIM
.kEIM
.kEIM
22
2
2
(3.48)
onde os vetores curvatura são apresentados a seguir. Pode-se observar que os
coeficientes de segunda ordem )(),(),( 131211 sMsMsM apresentam dez termos não-
lineares enquanto )(),...,( 105 sMsM apenas nove.
101
)()(
)()(
)()(
)()(
)()(
)()()(
)(
)(
)(
7
2
0
6
2
0
5
2
0
2
20
2
10
210
7
6
5
sksk
sksk
sksk
sksk
sksk
sksksk
sk
sk
sk
k
)()(
)()(
)()(
)()(
)()(
)()()(
)(
)(
)(
10
2
0
9
2
0
8
2
0
2
40
2
30
430
10
9
8
sksk
sksk
sksk
sksk
sksk
sksksk
sk
sk
sk
k
)()(
)()(
)()(
)()()(
)()()(
)()()(
)()()(
)(
)(
)(
13
2
0
12
2
0
11
2
0
420
320
410
310
13
12
11
sksk
sksk
sksk
sksksk
sksksk
sksksk
sksksk
sk
sk
sk
k
(3.49)
A matriz de rigidez à flexão utilizada na Eq. (3.48) para os termos de ordem
dois ( 2 , 2 ) é apresentada a seguir,
T
wsPwsP
wsPwsP
sP
wsPwsPsP
wsPwsPsP
wsPwsP
wsPwsP
wsPwsP
sP
)2,(3)2,(30
)2,(3)2,(30
00)(3
)2,()2,()(
)2,()2,()(
)2,(3)2,(30
)2,()2,(0
)2,()2,(0
00)(
35
53
1
323
523
123
323
523
123
53
24
42
0
2EI (3.50)
e para o termo cruzado de ordem dois, , é descrita por,

102
T
wsPwsP
wsPwsP
sP
wsPwsPsP
wsPwsP
wsPwsP
wsPwsPsP
wsPwsP
wsPwsP
sP
)2,(3)2,(30
)2,(3)2,(30
00)(3
)2,(3)2,(3)(3
)2,(3)2,(30
)2,(3)2,(30
)2,(3)2,(3)(3
)2,()2,(0
)2,()2,(0
00)(
35
53
1
351
53
53
351
24
42
0
22EI (3.51)
Os coeficientes 50,..,PP utilizados nas equações acima são descritos por,
)()(),(
)()(),(
)()(),(
)()(),(
)()()(
)()()(
335
114
333
112
331
110
sIwGwsP
sIwGwsP
sIwGwsP
sIwGEIwsP
sIGsP
sIGEIsP
PIPE
PIPE
(3.52)
Considerando que a relação entre os coeficientes da função momento fletor
),( tsM e do esforço cortante ),( tsV é dada por VdM/ds , utilizando a definição do
cortante descrito na Eq. (3.22), e derivando as Eq. (3.42), (3.45) e (3.48) com relação
à posição com manipulações algébricas, obtém-se o seguinte sistema de equações
diferenciais não-lineares. Para ordem zero, chega-se a,
)()(
)()()()(2 0
3
0
0
100
0 sVsk
sksPsPsQ
ds
dk
(3.53)
Para os termos de primeira ordem,

103
)(
)(
)()(
)()(
)()(
)()(
)()()(
)()()(
)(
)(
)(
)(
0),(3
),(3),(3
),(30
),(3),(
),(6),(6
),(6),(6
0),(
),(),(
),(0
),(),(
),(2
2
1
2
2
0
2
2
0
1
2
0
1
2
0
200
100
2
2
1
1
5
35
5
53
35
53
4
24
4
42
1
2
1
sV
sV
sksk
sksk
sksk
sksk
sksksk
sksksk
sk
sk
sk
skT
wsP
wsPwsP
wsP
wsPwsP
wsPwsP
wsPwsP
wsP
wsPwsP
wsP
wsPwsP
wsQdsdk
dsdk
(3.54)
)(
)(
)()(
)()(
)()(
)()(
)()()(
)()()(
)(
)(
)(
)(
0),(3
),(3),(3
),(30
),(3),(3
),(6),(6
),(6),(6
0),(
),(),(
),(0
),(),(
),(2
4
3
4
2
0
4
2
0
3
2
0
3
2
0
400
300
4
4
3
3
5
35
5
53
35
53
4
24
4
42
1
4
3
sV
sV
sksk
sksk
sksk
sksk
sksksk
sksksk
sk
sk
sk
skT
wsP
wsPwsP
wsP
wsPwsP
wsPwsP
wsPwsP
wsP
wsPwsP
wsP
wsPwsP
wsQdsdk
dsdk
(3.55)
Os coeficientes 0Q e
1Q são apresentados a seguir,
2
03311
1
2
03311
0
)()()2(3)()2(2
1),(
)()()(3)()(2
1)(
sksIwGsIwGEIwsQ
sksIGsIGEIsQ
PIPE
PIPE (3.56)
Para os termos de segunda ordem obtém-se o seguinte sistema de nove
equações diferenciais não-lineares que governam o problema de valor de contorno do
sistema duto flexível/enrijecedor à flexão considerando a teoria da viscoelasticidade
não-linear. Para os termos associados à perturbação 2 ,

104
)(
)(
)(
2
)()(
)()(
)()(
)()(
)()(
)()(
)()(
)()(
)()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)(
)(
)(
)(
)(
0)2,(60
)2,(6)2,(60
)2,(600
)2,(6)2,(60
00)(6
)2,(3)2,(3)(3
)2,(3)2,(3)(3
)2,(3)2,(30
)2,(3)2,(30
)2,(6)2,(6)(6
)2,(6)2,(60
)2,(6)2,(60
)2,(6)2,(60
)2,(6)2,(60
)2,(6)2,(6)(6
)2,(12)2,(120
)2,(12)2,(120
00)(12
0)2,(20
)2,(2)2,(20
)2,(200
)2,(2)2,(20
00)(2
7
6
5
7
2
0
7
2
0
6
2
0
6
2
0
5
2
0
2
20
2
20
2
10
2
10
220
210
210
210
210
110
700
600
500
7
7
6
6
5
5
35
5
53
1
351
351
35
35
351
53
53
53
53
351
35
53
1
4
24
4
42
0
1
1
0
7
6
5
sV
sV
sV
sksk
sksk
sksk
sksk
sksk
sksk
sksk
sksk
sksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sk
sk
sk
sk
skT
wsP
wsPwsP
wsP
wsPwsP
sP
wsPwsPsP
wsPwsPsP
wsPwsP
wsPwsP
wsPwsPsP
wsPwsP
wsPwsP
wsPwsP
wsPwsP
wsPwsPsP
wsPwsP
wsPwsP
sP
wsP
wsPwsP
wsP
wsPwsP
sP
Q
Q
Q
ds
dkds
dkds
dk
(3.57)
Para os termos associados à perturbação 2 , as equações de governo são
descritas por,
105
)(
)(
)(
2
)()(
)()(
)()(
)()(
)()(
)()(
)()(
)()(
)()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)(
)(
)(
)(
)(
0)2,(60
)2,(6)2,(60
)2,(600
)2,(6)2,(60
00)(6
)2,(3)2,(3)(3
)2,(3)2,(3)(3
)2,(3)2,(30
)2,(3)2,(30
)2,(6)2,(6)(6
)2,(6)2,(60
)2,(6)2,(60
)2,(6)2,(60
)2,(6)2,(60
)2,(6)2,(6)(6
)2,(12)2,(120
)2,(12)2,(120
00)(12
0)2,(20
)2,(2)2,(20
)2,(200
)2,(2)2,(20
00)(2
10
9
8
10
2
0
10
2
0
9
2
0
9
2
0
8
2
0
2
40
2
40
2
30
2
30
440
430
430
430
430
330
1000
900
800
10
10
9
9
8
5
35
5
53
1
351
351
35
35
351
53
53
53
53
351
35
53
1
4
24
4
42
0
1
1
0
10
9
8
sV
sV
sV
sksk
sksk
sksk
sksk
sksk
sksk
sksk
sksk
sksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sk
sk
sk
sk
skT
wsP
wsPwsP
wsP
wsPwsP
sP
wsPwsPsP
wsPwsPsP
wsPwsP
wsPwsP
wsPwsPsP
wsPwsP
wsPwsP
wsPwsP
wsPwsP
wsPwsPsP
wsPwsP
wsPwsP
sP
wsP
wsPwsP
wsP
wsPwsP
sP
Q
Q
Q
ds
dkds
dkds
dk
(3.58)
e finalmente para os termos associados à perturbação cruzada , obtém-se,

106
TsVsVsV
sksk
sksk
sksk
sksk
sksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sksksk
sk
sk
sk
sk
skT
wsP
wsPwsP
wsP
wsPwsP
sP
wsPwsPsP
wsPwsPsP
wsPwsPsP
wsPwsPsP
wsPwsP
wsPwsP
wsPwsP
wsPwsP
wsPwsP
wsPwsP
wsPwsP
wsPwsP
wsPwsPsP
wsPwsPsP
wsPwsPsP
wsPwsPsP
wsPwsP
wsPwsP
sP
wsP
wsPwsP
wsP
wsPwsP
sP
Q
Q
Q
ds
dkds
dkds
dk
)()()(
)()(
)()(
)()(
)()(
)()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)()()(
)(
)(
)(
)(
)(
0)2,(30
)2,(3)2,(30
)2,(300
)2,(3)2,(30
00)(3
)2,(3)2,(3)(3
)2,(3)2,(3)(3
)2,(3)2,(3)(3
)2,(3)2,(3)(3
)2,(3)2,(30
)2,(3)2,(30
)2,(3)2,(30
)2,(3)2,(30
)2,(3)2,(30
)2,(3)2,(30
)2,(3)2,(30
)2,(3)2,(30
)2,(3)2,(3)(3
)2,(3)2,(3)(3
)2,(3)2,(3)(3
)2,(3)2,(3)(3
)2,(6)2,(60
)2,(6)2,(60
00)(6
0)2,(20
)2,()2,(0
)2,(200
)2,()2,(20
00)(
2
2
2
131211
13
2
0
13
2
0
12
2
0
12
2
0
11
2
0
420
420
420
420
320
320
320
320
410
410
410
410
310
310
310
310
1300
1200
1100
13
13
12
12
11
5
35
5
53
1
351
351
351
351
53
53
53
53
53
53
53
53
351
351
351
351
35
53
1
4
24
4
42
0
1
1
0
13
12
11
(3.59)

107
As quatorze equações diferenciais apresentadas nas Eq. (3.53-55) e (3.57-59)
em conjunto com )130()()( iskdssd ii formam o sistema de vinte e oito
equações diferenciais não-lineares que governam o problema do enrijecedor à flexão
viscoelástico não-linear no domínio da frequência. As condições de contorno do
sistema são as mesmas descritas para a formulação linear e apresentadas na Eq.
(3.35).
3.6 Solução numérica
O método de solução numérica adotado para resolver os sistemas de equações
descritos anteriormente é apresentado a seguir para a formulação no domínio do
tempo e da frequência, respectivamente. A escolha natural para solução dos sistemas
apresentados anteriormente é a utilização do método das diferenças finitas ou método
do tiro (shooting method). A discretização de ambos é similar, porém o último utiliza
um método iterativo de tentativa e erro para cálculo da solução enquanto no método
das diferenças finitas o problema de valor de contorno deve ser resolvido de forma
simultânea.
3.6.1 Solução no domínio do tempo
Para a formulação no domínio do tempo, o sistema resultante de equações
íntegro-diferenciais parciais não-lineares é resolvido para cada instante de tempo t,
utilizando o método do tiro, que consiste em transformar o problema de valor de
contorno em um problema de valor inicial equivalente utilizando um processo iterativo.
As curvaturas no engaste são estimadas para um determinado tempo atual t e
o sistema de equações é integrado utilizando o método de Runge-Kutta de quarta
ordem. Para a integral hereditária das Eq. (3.9) e (3.40) utiliza-se a regra de um terço
de Simpson. Esse método é utilizado para resolver o problema desde o tempo inicial
0t até um determinado tempo final.
Um dos fatos que torna a solução no domínio do tempo dispendiosa
computacionalmente, é que a solução encontrada em um determinado tempo anterior
deve ser armazenada para ser utilizada na solução do tempo atual t , como pode
ser observado na Eq. (3.9) da formulação linear e na Eq. (3.40) da não-linear. A Fig.
3.3 mostra o fluxograma numérico para solução no domínio do tempo utilizando o
método do tiro.

108
Figura 3.3 - Fluxograma numérico – Domínio do tempo
O programa computacional Mathematica [36] foi utilizado para implementação
do algoritmo e obtenção da solução numérica. Para discretização das equações
diferenciais que regem o problema de valor de contorno, utilizou-se um intervalo de
tempo st 1 e de espaço ms 01,0 , onde a escolha destes parâmetros foi
baseada em um estudo de sensibilidade numérica. A cada 1000 incrementos de
tempo, a solução era armazenada em arquivo para liberação da memória de acesso
aleatório (RAM – Random Access Memory). Dessa forma, 15 arquivos foram gerados
com tamanho aproximado de 100 Mb cada. O tempo de análise computacional para a
análise viscoelástica linear até o intervalo de tempo de 14400 s, foi de

109
aproximadamente 20 h utilizando um computador portátil (CPU Dual Core 2.8 Ghz,
3GB RAM). A mesma análise utilizando o método dos elementos finitos através do
software Abaqus [12] e com os mesmos intervalos de tempo e espaço para
discretização do modelo levou cerca de 3 h.
3.6.2 Solução harmônica em regime permanente
A solução numérica para o modelo matemático na frequência é obtida
utilizando o método do tiro, como descrito anteriormente. Apesar de apresentar um
número maior de equações quando comparado com o domínio do tempo, esta não
apresenta a dificuldade numérica imposta pela integral hereditária e, portanto, se torna
mais eficiente numericamente quando se busca a solução em estado permanente do
sistema sujeito a carregamento harmônico.
Vale ressaltar que a solução de algumas equações é independente da solução
de outras. Por exemplo, a solução das funções )(0 sk apresentada em (3.28), assim
como de )(5 sk , )(8 sk e )(11 sk em (3.30) para a formulação linear são obtidas sem a
necessidade de resolver um sistema de equações. Por outro lado, os seguintes
sistemas de equações devem ser resolvidos simultaneamente devido aos termos
mutuamente dependentes, para os termos de primeira e segunda ordem: )(),( 21 sksk ,
)(),( 43 sksk , )(),( 76 sksk , )(),( 109 sksk e )(),( 1312 sksk . O mesmo é válido para os
termos de terceira ordem. O fluxograma apresentado na Fig. 3.4 facilita a
compreensão do método numérico utilizado.
O mesmo procedimento descrito acima é adotado para o modelo viscoelástico
não-linear, entretanto a convergência da solução é dificultada devido aos diversos
termos não-lineares presentes nas equações de governo.

110
Figura 3.4 - Fluxograma numérico – Domínio da frequência
O pacote Mathematica [36] foi empregado para implementação do algoritmo no
domínio da frequência com os mesmos intervalos de espaço e tempo utilizados na
discretização do sistema de equações ( st 1 , ms 01,0 ) do domínio do tempo. A
obtenção da solução numérica levou cerca de 2-3 min tanto para o caso linear quanto
para o não-linear, ou seja, tempo muito inferior quando comparado com as 20 h
necessárias para obtenção da solução no domínio do tempo.

111
4 ESTUDO DE CASO
Neste capítulo, apresenta-se um estudo de caso para avaliação do
comportamento viscoelástico na resposta mecânica do sistema duto
flexível/enrijecedor à flexão utilizando os modelos no domínio do tempo e da
frequência apresentados no Capítulo 3 e a caracterização mecânica de um tipo de
poliuretano específico utilizado na fabricação de enrijecedores como mostrado no
Capítulo 2.
Análises dinâmicas globais, sem incluir o enrijecedor à flexão, são realizadas no
item 4.1 para determinação das condições de carregamento utilizadas nos modelos
locais, ou seja, série temporal de tração e ângulo de topo. O dimensionamento do
enrijecedor é então apresentado considerando comportamento linear elástico e
comparado com a resposta não-linear elástica. Três valores de deformação são
utilizados para o cálculo do módulo secante a ser utilizado no caso linear para efeitos
de comparação com o caso não-linear elástico ou hiperelástico.
Nos itens 4.2 e 4.3 apresenta-se a análise do enrijecedor dimensionado
considerando comportamento viscoelástico linear e não-linear, respectivamente, no
domínio do tempo e da frequência. O modelo matemático e a solução numérica obtida
para o modelo viscoelástico linear no domínio do tempo são comparados com
resultados obtidos utilizando o método dos elementos finitos através do pacote
comercial Abaqus [12]. Os resultados no domínio do tempo são então utilizados para
confirmar a validade do modelo desenvolvido para obtenção da resposta em regime
permanente e, devido às limitações impostas pela teoria da perturbação utilizada na
formulação matemática, sua representatividade para diferentes níveis de deformação
verificada. O efeito da frequência de carregamento e da diferença de fase na resposta
de curvatura e deformação são posteriormente verificados.
Por fim, o item 4.4 compara o modelo viscoelástico não-linear com os modelos
viscoelástico linear e não-linear elástico. Diversas taxas de carregamento são
consideradas no ajuste viscoelástico não-linear para caracterizar a curva tensão x
deformação utilizada na análise hiperelástica, assim como, diferentes níveis de
deformação são empregados na comparação.
4.1 Dimensionamento do enrijecedor
Análise dinâmica global – definição das condições de carregamento
Como apresentado no item 1.2 do Capítulo 1, as condições de carregamento
utilizadas no dimensionamento do enrijecedor podem ser obtidas através da realização

112
de análises dinâmicas globais sem a inclusão do enrijecedor. Para o estudo de caso
apresentado, considera-se um duto flexível de exportação acoplado a um FPSO
(Floating Production Storage and Offloading) operando em condições ambientais
típicas da Bacia de Campos, com lâmina d’água de 800m. O duto está instalado em
configuração de catenária livre e apresenta as seguintes propriedades,
Tabela 4.1 – Dados do duto flexível
Ângulo de topo 7º Rigidez flexional 2.50 mkN
Comprimento total m1400 Rigidez axial MN400
Diâmetro interno ''10 Rigidez torsional radmMN 2.8,4
A análise global foi realizada utilizando o software RIFLEX [37], específico para
análise não-linear dinâmica de estruturas complacentes, e implementado utilizando o
método dos elementos finitos. O carregamento de corrente e onda foi considerado
atuando em linha com a unidade flutuante de produção com um passeio estático
(offset) de 120m. O ponto de conexão do enrijecedor é considerado rotulado na
unidade flutuante.
O espectro de onda irregular JONSWAP definido pela altura significativa de
onda Hs e período de pico Tp considerando período de retorno de 100 anos é cruzado
com o RAO (Response Amplitude Operator) da embarcação no ponto de conexão para
diversas direções de onda. Assumindo uma distribuição de Rayleigh estima-se qual o
valor máximo de aceleração vertical e amplitude de rotação neste ponto. A onda
irregular (Hs,Tp) que fornece os maiores resultados é selecionada para a análise
dinâmica global com mar irregular.
Para resolução do problema viscoelástico deve-se fornecer como dados de
entrada as séries temporais harmônicas de força e ângulo de topo. A metodologia
simplificada adotada para escolha da onda regular é utilizar uma onda equivalente que
forneça como resultado da análise dinâmica os mesmos resultados de ângulo e tração
de topo máxima obtidos da análise irregular. Utilizando esse procedimento, obtém-se
uma onda regular com altura mH 6 e sT 25 . O tempo adotado para cada análise
é de cinco períodos de onda, ou seja, 125 s. Os instantes iniciais (equivalente a um
período) são retirados dos resultados apresentados a seguir para eliminação de
efeitos transientes observados neste tipo de análise.
Os resultados de série temporal de tração e ângulo de topo obtidos da análise
dinâmica são utilizados para ajustar os coeficientes das funções de carregamento

113
harmônicas descritos em (3.11), (3.17) e (3.18). Os coeficientes ajustados são
apresentados na Tab. 4.2, enquanto a Fig. 4.1 ilustra a série temporal de tração e
ângulo de topo obtida com o ajuste.
Tabela 4.2 - Coeficientes de carregamento
0F kN660 %45
L0 018 %27
047,15 w srad25/2
O espaço de projeto, contendo todas as combinações de tração e ângulo de
topo ao longo de um período é apresentado na Fig. 4.2. O gráfico ilustra ainda, o
espaço de projeto para três diferenças de fase 090,45,0 . O máximo ângulo de topo
observado é dado por 0
max 86,22 , enquanto a tração de topo máxima kNF 957max .
0 5 10 15 20 25
300
400
500
600
700
800
900
1000 Tração de topo
Ângulo
Tempo [s]
Tra
çã
o d
e to
po
[kN
]
12
14
16
18
20
22
24
Ân
gu
lo [g
rau
s]
Figura 4.1 – Tração de topo e ângulo ( 047.15 )

114
12 14 16 18 20 22 24
300
400
500
600
700
800
900
1000
=15.47o
=90o
Tra
çã
o d
e to
po
[kN
]
Ângulo de topo [graus]
max
min
Fmax
Fmin
=45o
Figura 4.2 – Espaço de projeto
Dimensionamento do enrijecedor
Como o objetivo do estudo de caso não é avaliar detalhadamente a metodologia
de projeto de enrijecedores à flexão, mas sim o efeito do comportamento viscoelástico
na resposta do sistema duto flexível/enrijecedor, um procedimento simplificado é
aplicado e apenas os valores extremos de tração e ângulo de topo retirados do espaço
de projeto são utilizados como dados de entrada para a etapa de dimensionamento.
Os critérios de projeto adotados são:
a) curvatura limite do duto flexível (MBR = 2,0m);
b) deformação máxima do poliuretano do enrijecedor à flexão (15%).
O critério usualmente adotado para definição do valor máximo de deformação do
poliuretano é o limite abaixo do qual o número de ciclos para gerar falha por fadiga
tende a infinito, enquanto o MBR é um parâmetro bem definido de falha do duto
flexível como descrito anteriormente no Capítulo 1.
Para esta análise linear elástica utilizou-se um software desenvolvido em
linguagem FORTRAN e apresentado na dissertação de mestrado de CAIRE [13]. O
sistema de equações diferenciais que regem o problema de valor de contorno do
sistema linha flexível/enrijecedor à flexão considerando comportamento linear elástico
é resolvido utilizando o método das diferenças finitas. Como dados de entrada o

115
usuário deve fornecer os critérios de MBR do duto flexível e deformação máxima do
poliuretano. Como dados de saída o programa fornece as diversas combinações
possíveis de geometria do enrijecedor que atendam a estes critérios. Fornece ainda, o
volume de material polimérico utilizado em cada combinação e o valor e posição de
curvatura máxima e deformação máxima como parâmetros para auxiliar o projetista na
escolha da melhor geometria a ser utilizada.
Três valores para o módulo secante foram calculados utilizando a curva tensão x
deformação obtida através do ajuste do ensaio de relaxação utilizando a teoria da
viscoelasticidade não-linear e considerando uma velocidade de travessão de 5
mm/min como mostrado na Fig. 2.33. A Tab. 4.3 a seguir mostra o módulo secante
obtido para três valores de deformação (1,0, 2,5 e 5%),
Tabela 4.3 - Módulo secante (5 mm/min)
Deformação [%] Módulo secante [MPa]
1,0 66
2,5 58
5,0 48
Pode-se observar que a escolha do nível de deformação utilizado para o cálculo
do módulo secante apresenta forte influência nos valores obtidos. Verifica-se, por
exemplo, uma diferença percentual de 33% entre os valores obtidos com 1 e 5% de
deformação. Fazendo uso da metodologia descrita acima, e considerando inicialmente
o valor de MPaEp 48 , obtêm-se as seguintes dimensões para o enrijecedor,
1,3 m 1,5 m 0,2 m
3,0 m
0,7
0 m
Figura 4.3 – Dimensões do enrijecedor
A Fig. 4.4 apresenta as funções )(1 sI e )(3 sI descritas na Eq. (3.38) para o
enrijecedor apresentado na figura acima.

116
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6
0,0
2,0x10-3
4,0x10-3
6,0x10-3
8,0x10-3
1,0x10-2
1,2x10-2
I1
I3
Comprimento [m]
I 1(s
) [m
4]
0,0
1,0x10-4
2,0x10-4
3,0x10-4
4,0x10-4
5,0x10-4
6,0x10-4
7,0x10-4
I3 (s) [m
6]
Figura 4.4 – Funções 1I e
3I
Análise não-linear elástica
Utilizando o procedimento para análise de enrijecedores com material não-
linear elástico descrito por VAZ et al. [14], pode-se comparar a resposta de
deformação máxima do enrijecedor para várias trações e ângulos de topo com o
resultado obtido considerando os módulos secantes apresentados anteriormente na
Tab. 4.3 e calculados considerando a curva tensão x deformação do ajuste
viscoelástico não-linear para uma taxa de 5 mm/min. A Fig. 4.5 apresenta a
deformação máxima obtida para o caso linear elástico e não-linear elástico
considerando trações de topo variando de 350 até kN950 e ângulo de topo mantido
constante 0
0 86,22L . A Fig. 4.6 mostra os mesmos resultados, mantendo a tração
de topo constante kNF 957max e variando o ângulo de 12 a 024 . Pode-se observar
que, para os três valores de módulo secante obtidos para material linear elástico, os
valores de deformação são mais conservativos do que os obtidos com material
hiperelástico.
Estes resultados ressaltam a necessidade de uma adequada escolha do
módulo de elasticidade a ser utilizado no dimensionamento do enrijecedor caso não se
utilize toda a curva tensão x deformação para caracterização do material elástico. Um
valor inadequado pode levar a um dimensionamento excessivamente conservador do

117
enrijecedor, elevando os custos ou impossibilitando sua utilização em um determinado
projeto devido as restrições de dimensão da boca de sino, por exemplo.
Deve-se ressaltar, entretanto, que o valor do módulo secante depende da curva
tensão x deformação utilizada para o seu cálculo, e, além disso, esta depende da taxa
de carregamento utilizada para sua caracterização como mostrado anteriormente na
Fig. 2.33. Consequentemente, a escolha de um módulo secante adequado para
análise e projeto deve partir do princípio de que a curva tensão x deformação foi obtida
experimentalmente utilizando uma taxa de carregamento adequada. Como esta taxa
não é conhecida a priori, conclui-se que um modelo matemático que considere este
efeito no comportamento mecânico do poliuretano deva ser utilizado para uma correta
análise de enrijecedores. No item 4.3 uma comparação da resposta entre o modelo
viscoelástico linear, que captura intrinsecamente o efeito da taxa, e o modelo
hiperelástico considerando diversas taxas será apresentado.
400 500 600 700 800 900
6
7
8
9
10
11
12
13
14
15
16
De
form
açã
o m
áxim
a [%
]
Tração de topo [kN]
Não-linear elástico (5 mm/min)
Linear elástico
1,0 % 2,5 % 5,0 %
max
Figura 4.5 – Deformação máxima x tração de topo

118
12 14 16 18 20 22 24
6
8
10
12
14
16 Não-linear elástico (5 mm/min)
Linear elástico
1,0 % 2,5 % 5,0 %D
efo
rma
çã
o m
áxim
a [%
]
Ângulo de topo [graus]
Fmax
=957 kN
Figura 4.6 – Deformação máxima x ângulo de topo
4.2 Análise de enrijecedor viscoelástico linear
O comportamento viscoelástico não-linear foi caracterizado através dos
ensaios de relaxação apresentados no Capítulo 2 utilizando a Eq. (2.116). Os
coeficientes ajustados foram apresentados na Tab. 2.4 e as respectivas funções de
relaxação nas Fig. 2.25-2.28. Com o objetivo de permitir uma comparação efetiva
entre os modelos viscoelástico linear e não-linear, apenas o termo linear )(1 tG é
mantido na Eq. (2.116) para caracterizar o comportamento viscoelástico linear.
Validação do modelo no domínio do tempo com análise em elementos finitos
A equação de governo no domínio do tempo (3.9) é resolvida utilizando o
método do tiro como descrito no item 3.6.1. Com o objetivo de validar a formulação
matemática e o método de solução numérica adotado, um modelo em elementos
finitos é avaliado no software Abaqus [12] utilizando as mesmas hipóteses adotadas
na formulação analítica. A análise é dividida em um passo estático e outro quase-
estático. A semelhança entre os modelos é alcançada utilizando o seguinte

119
procedimento no software Abaqus [12]: a) o elemento de viga Euler-Bernoulli B23 é
utilizado para geração da malha; b) o parâmetro Nlgeom é ativado no comando *Step
para indicar que a não-linearidade geométrica deve ser considerada na análise devido
aos grandes deslocamentos sofridos pelo sistema; c) no passo quase-estático a opção
*Visco é utilizada para obtenção da resposta com material viscoelástico linear; d) o
comando *Tie é utilizado para garantir que os graus de liberdade de todos os nós do
enrijecedor e do duto flexível sejam os mesmos, ou seja, não existe deslocamento
relativo nem folga entre as duas estruturas. Uma sub-rotina utilizando a linguagem de
programação FORTRAN é desenvolvida para geração dos nós, elementos e
propriedades das seções variáveis ao longo do comprimento, além de permitir o pós-
processamento de resultados dos arquivos de saída gerados.
A análise foi realizada até o tempo de 14400 s, ou seja, mesmo intervalo
utilizado na realização do ensaio de relaxação com as condições de carregamento
apresentadas na Tab. 4.2. A Fig. 4.7 mostra a curvatura no engaste do sistema ao
longo do tempo para os dois últimos períodos de análise (50 s). A Fig. 4.8 compara os
resultados obtidos no Abaqus [12] com os resultados utilizando o método numérico
descrito em 3.6.1 para o intervalo total de análise. Observa-se excelente correlação
entre os dois, validando, portanto, a formulação matemática e o método de solução
numérico adotado para o modelo viscoelástico linear.
14350 14360 14370 14380 14390 14400
0,10
0,15
0,20
0,25
0,30
0,35
0,40
Cu
rva
tura
no
en
ga
ste
[1
/m]
Tempo [s]
Numérico
ABAQUS
Figura 4.7 – Linear viscoelástico no domínio do tempo (curvatura no engaste)

120
0,10 0,15 0,20 0,25 0,30 0,35 0,40
0,10
0,15
0,20
0,25
0,30
0,35
0,40
Cu
rva
tura
no
en
ga
ste
- A
ba
qu
s [1
/m]
Curvatura no engaste - numérico [1/m]
Figura 4.8 – Linear viscoelástico no domínio do tempo (comparação com Abaqus)
Influência do histórico de carregamento
Uma das características do comportamento viscoelástico no domínio do tempo
é a dependência da resposta mecânica com o histórico de carregamento ocorrido até
o momento atual devido às integrais hereditárias presentes na equação constitutiva.
Com o objetivo de avaliar esta influência na resposta mecânica do enrijecedor sujeito a
carregamento harmônico, diversas funções temporais foram utilizadas. A Fig. 4.9
ilustra, por exemplo, o efeito de manter carregamento constante com tração e ângulo
de topo médio até o instante de 14350 s e então aplicar o carregamento harmônico
para os dois últimos períodos da análise utilizando os parâmetros de carregamento
apresentados na Tab. 4.2.
Observa-se que os resultados obtidos são praticamente idênticos aos
resultados quando se considera carregamento harmônico desde o instante inicial.
Diversas análises semelhantes foram realizadas considerando, entretanto, instantes
diferentes (14275 s – 5 períodos, 14150 s – 10 períodos, 14025 s – 15 períodos) para
início de aplicação do carregamento harmônico com período de 25 s. Além disso,
análises foram realizadas considerando carregamento harmônico com período de 2 e
50 s até atingir os instantes de 14350, 14275, 14150 e 14025 s, para posteriormente
retornar ao carregamento com período de 25 s. Nenhuma das análises mencionadas

121
mostrou influência relevante na resposta de curvatura do sistema. O histórico de
carregamento apresenta maior relevância quando o material apresenta elevada taxa
de relaxação ou fluência, ou seja nos instantes iniciais.
14330 14340 14350 14360 14370 14380 14390 14400
0,10
0,15
0,20
0,25
0,30
0,35
0,40
Cu
rva
tura
no
en
ga
ste
[1
/m]
Tempo [s]
Figura 4.9 – Influência do histórico de carregamento
A formulação matemática no domínio da frequência foi apresentada no item
3.4.2. Neste tipo de análise, os efeitos transientes são desconsiderados e o sistema
está sujeito a carregamento harmônico de tração e ângulo de topo com uma
determinada diferença de fase entre eles. Os tópicos a seguir apresentam os
resultados dessa formulação, onde o método de solução numérica foi apresentado no
item 3.6.2.
Influência da ordem da perturbação utilizada na formulação da frequência
A Fig. 4.10 mostra o resultado de curvatura no engaste ao longo de um período
considerando termos de ordem um, dois e três para formulação utilizando a teoria da
perturbação descrita na Eq. (3.23). Os parâmetros de carregamento utilizados foram
apresentados na Tab. 4.2.
A Fig. 4.11 ilustra o envelope de distribuição de curvatura ao longo do
comprimento, ou seja, distribuição nos instantes em que a curvatura máxima atinge

122
seu valor máximo e mínimo ao longo de um período. Observa-se pouca diferença
quando se compara a resposta de curvatura representada com termos de ordem 2 e 3.
Conclui-se, consequentemente, que a formulação com termos de ordem 2 pode ser
utilizada sem perder a acurácia quando comparada com a formulação utilizando
termos de ordem 3, pelo menos para as amplitudes de carregamento utilizadas no
estudo de caso em questão.
A Fig. 4.12 ilustra a distribuição de curvatura ao longo do comprimento e do
tempo, para um período, considerando a formulação com termos de ordem 3. Pode-se
verificar que para este estudo de caso, a curvatura máxima sempre ocorre no engaste.
0 5 10 15 20 25
0,10
0,15
0,20
0,25
0,30
0,35
0,40
Cu
rva
tura
no
en
ga
ste
[1
/m]
Tempo [s]
Ordem 1
Ordem 2
Ordem 3
Figura 4.10 – Modelo linear viscoelástico no domínio da frequência (curvatura no
engaste - ordem 1, 2 e 3)

123
0,0 0,5 1,0 1,5 2,0 2,5 3,0
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
Cu
rva
tura
[1
/m]
Comprimento [m]
Ordem 1
Ordem 2
Ordem 3
Figura 4.11 – Modelo linear viscoelástico no domínio da frequência (envelope-ordem 1,
2 e 3)
Figura 4.12 – Modelo linear viscoelástico no domínio da frequência (distribuição de
curvatura ao longo do tempo – ordem 3)

124
Domínio do tempo x domínio da frequência
Com o objetivo de verificar a validade da formulação matemática desenvolvida
para obtenção da resposta harmônica em regime permanente, comparações com os
resultados obtidos no domínio do tempo são apresentados nas Fig. 4.13-15
considerando diferentes níveis de deformação. O envelope de curvatura ao longo do
comprimento é apresentado para três diferentes condições de carregamento, ou seja,
%)50%,50(%),27%,45(%),10%,10(),( . A análise no domínio do tempo foi
realizada até o instante de 14400 s. utilizando o método dos elementos finitos como
descrito anteriormente. Termos de ordem 3 foram considerados na análise do domínio
da frequência. O envelope no domínio do tempo é obtido considerando a distribuição
de curvatura nos instantes em que ocorre o valor máximo e mínimo de curvatura no
último período de carregamento, ou seja, no intervalo compreendido entre 14375 e
14400 s. Pode-se observar que as melhores correlações entre a solução obtida no
domínio da frequência e do tempo são obtidas, como esperado, para as menores
magnitudes de carregamento, ou seja, %)10%,10(),( . Mesmo para valores
elevados de perturbação, %)50%,50(),( , excelente correlação entre os dois
métodos é obtida, validando, portanto a formulação matemática no domínio da
frequência e o método de solução adotado.
0,0 0,5 1,0 1,5 2,0 2,5 3,0
0,00
0,05
0,10
0,15
0,20
0,25
0,30
Cu
rva
tura
[1
/m]
Comprimento [m]
Domínio do tempo (MEF)
Domínio da frequência
Figura 4.13 – Modelo linear viscoelástico no domínio do tempo x frequência (envelope)
%10%,10

125
0,0 0,5 1,0 1,5 2,0 2,5 3,0
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
Cu
rva
tura
[1
/m]
Comprimento [m]
Domínio do tempo (MEF)
Domínio da frequênica
Figura 4.14 – Modelo linear viscoelástico no domínio do tempo x frequência (envelope)
%27%,45
0,0 0,5 1,0 1,5 2,0 2,5 3,0
0,0
0,1
0,2
0,3
0,4
0,5
Cu
rva
tura
[1
/m]
Comprimento [m]
Domínio do tempo (MEF)
Domínio da frequência
Figura 4.15 – Modelo linear viscoelástico no domínio do tempo x frequência (envelope)
%50%,50

126
A Tab. 4.4, apresentada a seguir, ilustra a diferença percentual observada
entre o valor de curvatura máxima obtida na análise utilizando o modelo no domínio do
tempo e da frequência. A maior diferença (3,36%) ocorre quando se considera as
maiores magnitudes de carregamento, ou seja, parâmetros %)50%,50(),( .
Tabela 4.4 - Comparação entre domínio do tempo e da frequência
[%]),( Dif. percentual [%]
Curvat. Máx. Tempo → Freq.
(10,10) 1,64
(45,27) 2,48
(50,50) 3,36
Efeito da frequência de carregamento e fase na resposta do sistema
viscoelástico
O poliuretano utilizado no enrijecedor, quando submetido a carregamento
harmônico, apresenta dissipação de energia inerente ao seu comportamento
viscoelástico. Consequentemente, diferentes frequências de carregamento impostas
no sistema podem gerar diferentes respostas. Com o objetivo de avaliar esta
influência, a variação da curvatura máxima com a frequência de carregamento
Piwf 2/ é mostrada nas Fig. 4.16-4.18 para quatro valores de fase
( 000 90,45,47,15,0 ) e para três combinações dos parâmetros
%)50%,50(%),27%,45(%),10%,10(),( .
Os resultados demonstram que, para o estudo de caso em questão, quanto
maior a frequência de carregamento, menor será o valor da curvatura máxima. A Tab.
4.5 mostra a variação percentual entre os valores de curvatura máxima obtidos
considerando a frequência de carregamento de 0,02 e 0,5 Hz. Verifica-se que quanto
maior a magnitude de carregamento mais significativa será a diferença da resposta de
curvatura máxima com respeito à frequência de carregamento. Para
%)50%,50(),( e 047,15 , por exemplo, observa-se uma diferença de 2,56%
enquanto para %)10%,10(),( a diferença cai para 0,82%. A variação da fase gera
uma variação mais elevada. Para a frequência de carregamento de 0,04 Hz e
%27%,45 , pode-se observar no gráfico da Fig. 4.17, uma diferença percentual
de aproximadamente 12% entre as fases 0 e 900.

127
0,01 0,1 1
0,270
0,272
0,274
0,276
0,278
0,280
0,282
0,284
0,286
0,288
C
urv
atu
ra m
áxim
a [1
/m]
Frequência [Hz]
900
450
15,470
00
Figura 4.16 – Curvatura máxima x frequência ( %10%,10 )
0,01 0,1 1
0,320
0,330
0,340
0,350
0,360
0,370
0,380
0,390
00
15,470
450
Cu
rva
tura
má
xim
a [1
/m]
Frequência [Hz]
900
Figura 4.17 – Curvatura máxima x frequência ( %27%,45 )

128
0,01 0,1 1
0,370
0,380
0,390
0,400
0,410
0,420
0,430
0,440
0,450
0,460
Cu
rva
tura
má
xim
a [1
/m]
Frequência [Hz]
900
450
15,470
00
Figura 4.18 – Curvatura máxima x frequência ( %50%,50 )
Tabela 4.5 - Efeito da frequência de carregamento na curvatura máxima
][graus Diferença percentual [%] – Curvat. Máx. 0,02 → 0,5 Hz
%10%,10 %27%,45 %50%,50
0 0,82 2,08 2,55
15,47 0,82 2,07 2,56
45 0,76 1,98 1,82
90 0,59 1,64 2,22
4.3 Análise de enrijecedor viscoelástico não-linear
A formulação matemática considerando a teoria da viscoelasticidade não-linear
no domínio da frequência foi apresentada no item 3.5.2. Para o modelo viscoelástico
linear no domínio do tempo é possível fazer uma comparação direta com o pacote de
elementos finitos Abaqus [12], como apresentado anteriormente no item 4.2.1. Para o
caso não-linear esta comparação não é possível, a não ser que modelos constitutivos
fossem implementados utilizando a sub-rotina UMAT (User Material). Neste trabalho a

129
sub-rotina UMAT não foi implementada para o caso não-linear e, consequentemente,
esta comparação não foi realizada.
A validação da formulação no domínio da frequência foi feita comparando os
resultados obtidos com o modelo no domínio do tempo de forma similar ao que foi
apresentado anteriormente para o caso viscoelástico linear. Observou-se excelente
correlação entre os resultados e a mesma tendência de resposta, ou seja, melhores
correlações para as menores magnitudes de carregamento %)10%,10(),( .
Com o objetivo de simplificar a formulação matemática, sem perder a acurácia
nos resultados, apenas termos de ordem 2 foram utilizados na teoria da perturbação
para o caso não-linear. Como apresentado em 4.2.2 para o modelo viscoelástico
linear, os resultados do estudo de caso apresentado considerando ordem 2 e 3 foram
praticamente idênticos.
Comparação entre o modelo viscoelástico linear x não-linear
Uma comparação de resultados obtidos com o modelo viscoelástico linear e não-
linear no domínio da frequência é feita na Fig. 4.19 e na Tab. 4.6. O gráfico mostra a
variação da curvatura máxima com a frequência de carregamento para três
combinações de parâmetros ),( . Na tabela pode-se observar que quanto maior a
magnitude do carregamento, e consequentemente maior o valor de curvatura e
deformação máxima obtido, mais elevada será a diferença percentual entre os dois
modelos. Para %)10%,10(),( verifica-se uma diferença percentual média de
6,73% enquanto para %)50%,50(),( , 11,65%. Como esperado, quanto maior o
valor de deformação obtido, maior será a diferença entre a resposta do modelo linear e
não-linear. Considerando que a teoria da viscoelasticidade não-linear apresenta a
melhor representação da resposta do poliuretano, pode-se concluir que, caso a
formulação linear seja utilizada para avaliação da resposta mecânica do sistema, esta
deve ser feita com cautela utilizando parâmetros de ajuste que representem a faixa de
comportamento esperada.
Os resultados mostram, ainda, que a influência da frequência de carregamento
na resposta de curvatura máxima apresenta a mesma tendência observada no caso
viscoelástico linear. Embora pouco relevante, quanto maior a frequência de
carregamento, menor será o valor de curvatura máxima obtido como resposta. A
variação da fase implica na mesma tendência observada no caso linear, ou seja,
quanto maior o valor de menor será o valor da máxima curvatura obtida para cada
frequência de carregamento.
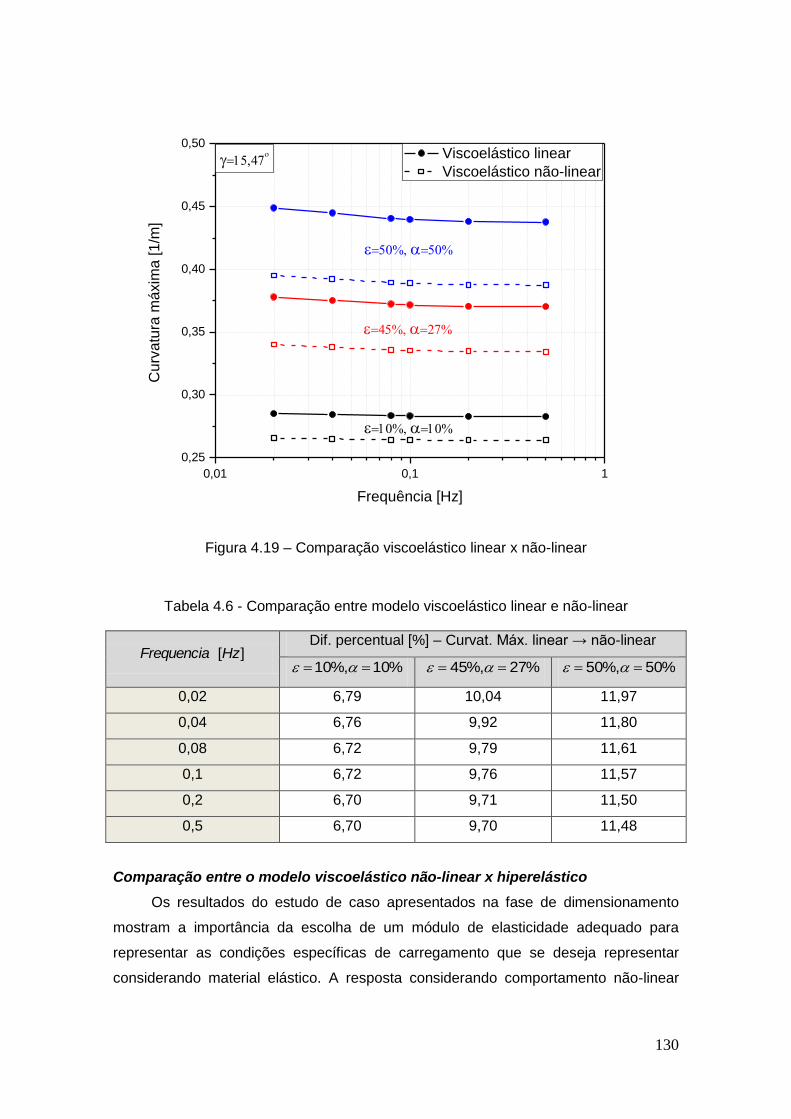
130
0,01 0,1 1
0,25
0,30
0,35
0,40
0,45
0,50
Cu
rva
tura
má
xim
a [1
/m]
Frequência [Hz]
Viscoelástico linear
Viscoelástico não-linear
Figura 4.19 – Comparação viscoelástico linear x não-linear
Tabela 4.6 - Comparação entre modelo viscoelástico linear e não-linear
][HzFrequencia Dif. percentual [%] – Curvat. Máx. linear → não-linear
%10%,10 %27%,45 %50%,50
0,02 6,79 10,04 11,97
0,04 6,76 9,92 11,80
0,08 6,72 9,79 11,61
0,1 6,72 9,76 11,57
0,2 6,70 9,71 11,50
0,5 6,70 9,70 11,48
Comparação entre o modelo viscoelástico não-linear x hiperelástico
Os resultados do estudo de caso apresentados na fase de dimensionamento
mostram a importância da escolha de um módulo de elasticidade adequado para
representar as condições específicas de carregamento que se deseja representar
considerando material elástico. A resposta considerando comportamento não-linear

131
elástico apresentou diferenças significativas quando comparadas com módulos
secantes obtidos para três diferentes níveis de deformação.
Para o caso viscoelástico, as comparações realizadas mostram diferenças
relevantes nos resultados obtidos considerando teoria linear e não-linear. Para os
casos apresentados houve uma variação de curvatura máxima de aproximadamente 6
até 12 % entre as duas formulações, ressaltando o comportamento viscoelástico não-
linear observado no poliuretano.
Os ensaios experimentais realizados mostraram a forte influência da taxa de
carregamento aplicada em um ensaio de tração no resultado da curva tensão x
deformação obtida. Esta dependência da taxa é uma característica intrínseca do
comportamento dependente do tempo e, consequentemente, está incorporada nos
modelos viscoelásticos utilizados, mas não no modelo hiperelástico.
Com o objetivo de verificar a possibilidade de utilização de comportamento
hiperelástico para análise e dimensionamento de enrijecedores à flexão, os resultados
obtidos considerando a formulação viscoelástica não-linear no domínio da frequência
são comparados com os resultados obtidos considerando material não-linear elástico.
Cinco diferentes taxas de deformação são então utilizadas no ajuste viscoelástico não-
linear para obtenção da curva tensão x deformação empregada na análise
hiperelástica.
Os resultados de curvatura no engaste ao longo de um período são mostrados
nas Fig. 4.20-22 comparando a resposta viscoelástica não-linear e hiperelástica para
três diferentes condições de carregamento, ou seja, 047,15 e
%)50%,50(%),27%,45(%),10%,10(),( . Pode-se observar, que para todos os
casos analisados, quanto menor a taxa de carregamento maior será o valor de
curvatura obtido no caso hiperelástico. Para os dois últimos casos, a resposta
hiperelástica obtida com taxa de 0,05 mm/min é a que apresenta melhor correlação
com o comportamento viscoelástico não-linear. Como mostrado na Fig. 4.20, para
%)10%,10(),( , a taxa de 0,005 mm/min é a que apresenta resultados mais
próximos.
A Fig. 4.23 ilustra a diferença percentual de curvatura entre os dois modelos
considerando a taxa de 0,05 mm/min para a curva tensão x deformação utilizada no
modelo hiperelástico. Verifica-se que, inicialmente, os valores de curvatura no engaste
apresentam uma diferença percentual inferior a 5%, enquanto entre 15 e 20 s. a
diferença pode chegar a aproximadamente 24%.
A variação de curvatura, diferença entre o valor máximo e mínimo observado
ao longo de um período de carregamento, é mostrada na Fig. 4.24. Para o caso

132
hiperelástico, a taxa de carregamento utilizada na obtenção da curva tensão x
deformação apresenta uma influência significativa na variação deste parâmetro.
Considerando, por exemplo, os valores obtidos com a menor e maior taxa utilizada no
estudo de caso, observa-se uma diferença percentual de aproximadamente 30%. A
variação de curvatura só coincide com a formulação viscoelástica não-linear para uma
frequência de carregamento específico.
A Fig. 4.25 mostra o envelope para o caso viscoelástico não-linear e para caso
hiperelástico com taxa de carregamento de 0,05 mm/min para o caso de carregamento
%)27%,45(),(
0 5 10 15 20 25
0,16
0,18
0,20
0,22
0,24
0,26
0,28
Cu
rva
tura
no
en
ga
ste
[1
/m]
Tempo [s]
Viscoelástico não-linear
Elástico não-linear [mm/min]
0,005 0,05
5 50 500
Figura 4.20 – Modelo viscoelástico não-linear no domínio da frequência x elástico não-
linear (curvatura no engaste)

133
0 5 10 15 20 25
0,10
0,15
0,20
0,25
0,30
0,35C
urv
atu
ra n
o e
ng
aste
[1
/m]
Tempo [s]
Viscoelástico não-linear
Elástico não-linear [mm/min]
0,005 0,05
5 50 500
Figura 4.21 – Modelo viscoelástico não-linear no domínio da frequência x elástico não-
linear (curvatura no engaste)
0 5 10 15 20 25
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
Cu
rva
tura
no
en
ga
ste
[1
/m]
Tempo [s]
Viscoelástico não-linear
Elástico não-linear [mm/min]
0,005 0,05
5 50 500
Figura 4.22 – Modelo viscoelástico não-linear no domínio da frequência x elástico não-
linear (curvatura no engaste)

134
0 5 10 15 20 25
0
5
10
15
20
25
Dif. p
erc
en
tua
l [%
]
Tempo [s]
Figura 4.23 – Modelo viscoelástico não-linear no domínio da frequência x elástico não-
linear 0,05mm/min (diferença percentual de curvatura ao longo de um período)
0,01 0,1 1
0,17
0,18
0,19
0,20
0,21
0,22
0,23
0,24
500
50
5
0,05
Va
ria
çã
o d
e c
urv
atu
ra [1
/m]
Frequência [Hz]
Viscoelástico não-linear
Elástico não-linear [mm/min]
0,005
Figura 4.24 – Modelo viscoelástico não-linear no domínio da frequência x elástico não-
linear (variação de curvatura)

135
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6
0
1
2
3
4
5
6
7
8
9
10
11
12
13
De
form
açã
o [%
]
Comprimento [m]
Viscoelástico não-linear
Elástico não-linear (0,05mm/min)
Figura 4.25 – Modelo viscoelástico não-linear no domínio da frequência x elástico não-
linear (envelope de deformação)
Os resultados do estudo de caso apresentado, mostram que para fins de
dimensionamento com carregamento extremo, a utilização de comportamento não-
linear elástico pode apresentar resultados muito próximos da teoria viscoelástica não-
linear se uma taxa de carregamento adequada for escolhida. Embora recomendações
não possam ser generalizadas com base em apenas um estudo de caso e um tipo de
poliuretano, a menor taxa utilizada (0,005 mm/min) poderia ser utilizada para
levantamento da curva tensão x deformação pois foi a única que apresentou
resultados conservadores para as três condições de carregamento avaliadas.
Para avaliação de vida à fadiga da estrutura, onde o parâmetro variação de
curvatura é o fator mais importante a ser avaliado, conclusões diferentes são obtidas.
A escolha de uma taxa de carregamento não se torna evidente, pois valores acima e
abaixo da referência viscoelástica são obtidos. Uma variação de cerca de 30% foi
observada entre a menor e maior taxa de carregamento utilizada para determinação
da curva tensão x deformação. Além disso, a frequência de carregamento, apesar de
pequena, influencia a resposta do sistema devido à dissipação de energia do sistema
viscoelástico. Dessa forma recomenda-se o uso da teoria viscoelástica não-linear no
domínio da frequência para avaliação de vida à fadiga da estrutura. Vale ainda

136
ressaltar que o poliuretano do enrijecedor está submetido a diferentes taxas de
carregamento ao longo do comprimento para um ciclo e, consequentemente, a única
forma de se avaliar este fenômeno na resposta é a utilização do comportamento
viscoelástico na formulação do problema. Alguns comentários e recomendações finais
são apresentados a seguir no Capítulo 5.

137
5 CONCLUSÕES
Enrijecedores à flexão ou bend stiffeners são componentes críticos em sistemas
submarinos de produção, onde sua falha pode induzir a falha do duto flexível e
provocar, consequentemente, sérios danos econômicos e ambientais. A crescente
demanda de dutos flexíveis e cabos umbilicais submarinos, no contexto das novas
descobertas de reservas em águas profundas, impulsionam uma melhor compreensão
dos fenômenos que regem a resposta mecânica de enrijecedores para garantir um
projeto mais seguro e menos conservador.
Usualmente são utilizados dois modelos para análise e dimensionamento de
enrijecedores, o global e o local. O primeiro permite a obtenção dos esforços
dinâmicos de tração e ângulo de topo a serem utilizados como condições de contorno
na análise local. O segundo modelo determina a distribuição de tensões e
deformações ao longo do comprimento, obtida utilizando o modelo de viga ou o
método dos elementos finitos quando há necessidade de avaliação de pontos de
concentração de tensões, por exemplo.
Os modelos matemáticos atuais, encontrados na literatura e disponíveis
comercialmente através de programas computacionais, consideram o poliuretano do
enrijecedor com comportamento não-linear elástico e sujeito a condições de
carregamento estático. O sistema duto flexível/enrijecedor está, na verdade, sujeito ao
carregamento ambiental aleatório de ondas, correntes e ventos atuantes na unidade
flutuante de produção e no próprio sistema. Neste trabalho, a forma adotada para
representar o carregamento atuante na estrutura foi à utilização de funções
harmônicas de tração e ângulo de topo incorporadas matematicamente em um modelo
viscoelástico não-linear para obtenção da resposta harmônica em regime permanente
de excitação. Desta forma, tanto a representação das condições de carregamento
como a caracterização do comportamento mecânico do poliuretano reproduzem
melhor a resposta real do sistema.
Devido ao seu comportamento viscoelástico, o poliuretano utilizado na fabricação
de enrijecedores à flexão apresenta resposta mecânica dependente da taxa de
carregamento imposta e, consequentemente, da frequência de oscilação do
carregamento ambiental. Além disso, apresenta dissipação de energia e geração de
calor quando submetido a carregamento oscilatório, ou seja, amortecimento estrutural.
Com o objetivo de caracterizar este comportamento dependente do tempo,
diversos ensaios experimentais de tração e relaxação de tensão foram realizados
utilizando amostras de um tipo específico de poliuretano retiradas de um enrijecedor à
flexão. Os ensaios realizados com um aparato servo-hidráulico de tração/compressão

138
com extensômetro para medida de deformação do corpo de prova foram utilizados
para ajustar os coeficientes da teoria viscoelástica linear e de dois modelos da teoria
não-linear. Os modelos de LEADERMAN [24] e PIPKIN e ROGERS [25] (baseado no
princípio da superposição modificado) foram utilizados para ajuste dos ensaios
experimentais. Os resultados mostraram que o segundo modelo apresentou melhor
correlação numérico-experimental com os ensaios de tração e relaxação de tensões.
Com relação à formulação matemática e obtenção da solução numérica do problema
de valor de contorno, pode-se verificar que as duas representações não-lineares
apresentam o mesmo nível de dificuldade para os modelos no domínio do tempo e da
frequência. Opta-se, consequentemente, pela utilização do modelo baseado no
princípio da superposição modificado para avaliação da resposta viscoelástica não-
linear do enrijecedor à flexão.
O modelo matemático para representar o sistema mecânico composto pelo
enrijecedor à flexão e parte do duto flexível conectado à unidade flutuante de produção
foi formulado considerando a teoria da viscoelasticidade linear e não-linear no domínio
do tempo e da frequência. As hipóteses simplificadoras adotadas e uma discussão de
suas consequências na resposta do modelo de viga foram apresentadas, assim como,
as relações trigonométricas e equilíbrio de forças e momentos utilizados como base da
formulação matemática do problema de valor de contorno. Considerando condições de
carregamento harmônica para representar as séries temporais de tração e ângulo de
topo, utilizou-se a teoria da perturbação para formulação no domínio da frequência.
Dois parâmetros ),( foram utilizados de modo que, uma vez obtida a solução em
torno de um valor médio, a resposta para diferentes variações de tração e ângulo de
topo seja obtida sem a necessidade de resolver novamente o sistema de equações
diferenciais. Esta nova formulação permite a fácil obtenção da resposta dependente da
frequência de carregamento considerando ainda as não-linearidades físicas e
geométricas.
No estudo de caso apresentado, resultados de uma análise dinâmica global
simplificada considerando um duto flexível em catenária livre conectado a um FPSO
operando em condições ambientais típicas da Bacia de Campos, foram utilizados para
obtenção do espaço de projeto representado pelas séries temporais de tração e
ângulo de topo. Aplicando estas séries como condições de contorno do modelo local,
comparações da resposta de curvatura e deformação foram apresentadas utilizando o
comportamento linear elástico, hiperelástico, viscoelástico linear e viscoelástico não-
linear para representar o poliuretano do enrijecedor. A verificação e validação dos
modelos no domínio da frequência foram feitas através dos modelos no domínio do
tempo utilizando a formulação apresentada e o método dos elementos finitos (apenas

139
no caso linear). Além disso, avaliou-se o efeito da frequência de carregamento na
resposta do modelo viscoelástico. A teoria da perturbação utilizando termos de ordem
dois apresentou essencialmente os mesmos resultados da formulação utilizando
termos de terceira ordem no modelo viscoelástico linear no domínio da frequência.
Utilizando apenas termos de segunda ordem, reduz-se significantemente o número de
equações diferenciais não-lineares que governam o problema de valor de contorno. O
sistema cai de sessenta (60) para vinte e oito (28) equações diferenciais. Com base
nestas observações e com o objetivo de simplificar a formulação do modelo não-linear
sem, entretanto, perder sua representatividade, apenas termos de ordem dois foram
utilizados. As principais conclusões e recomendações obtidas com o estudo de caso
são apresentadas a seguir no item 5.1 e, por fim, algumas sugestões para trabalhos
futuros no item 5.2.
5.1 Recomendações finais
Nos resultados apresentados no Cap. 4, entre os modelos avaliados verificou-se
que o único capaz de incluir intrinsecamente a não-linearidade do poliuretano e o
efeito da taxa de carregamento na resposta do sistema foi o viscoelástico não-linear.
Especificamente para o estudo de caso apresentado, a utilização do modelo
hiperelástico com a menor taxa de carregamento, ou seja, 0,005 mm/min apresentou
resultados conservadores quando comparados com o modelo viscoelástico não-linear.
Embora não se possa generalizar uma recomendação com base em apenas um
estudo de caso e considerando um tipo específico de poliuretano, verificou-se que
ensaios de tração realizados com as menores taxas de carregamento disponíveis
tendem a apresentar resultados mais conservadores. Desta forma, caso não seja
possível utilizar o modelo viscoelástico não-linear para o dimensionamento do
enrijecedor à flexão, onde os carregamentos extremos são considerados, deve-se
optar por utilizar uma baixa taxa de carregamento para caracterização experimental da
curva tensão x deformação utilizada no modelo hiperelástico. Não se recomenda a
utilização do modelo linear elástico para determinação final do projeto, podendo,
entretanto, ser utilizado como suporte no processo iterativo inicial ou para fins de
viabilidade econômica devido a sua relativa facilidade de solução numérica.
Para avaliação de vida à fadiga da estrutura, onde se deve avaliar a variação da
deformação ou curvatura em um ciclo, os resultados não apresentaram boa correlação
entre o modelo hiperelástico e viscoelástico não-linear. Consequentemente, para uma
correta avaliação desse fenômeno deve-se utilizar o modelo viscoelástico não-linear

140
no domínio da frequência. Embora, a princípio o modelo no domínio do tempo possa
ser utilizado para este fim, o mesmo não apresenta a mesma facilidade de resolução
numérica quando comparado com o modelo no domínio da frequência. Além disso, o
modelo no domínio da frequência apresenta a vantagem da fácil obtenção da variação
de carregamento em torno de um valor médio. Com a obtenção da resposta do
sistema para um determinado valor médio e diferença de fase, pode-se utilizar os
valores de perturbação ),( para variação da tração e ângulo de topo.
Para o poliuretano utilizado no estudo de caso, a frequência de carregamento
utilizada na tração e ângulo de topo apresentou pouca influência na resposta do
sistema, mas mostrou a tendência de diminuição dos valores máximos de curvatura
obtidos com o aumento da frequência de carregamento. Para materiais com
comportamento viscoelástico mais pronunciado (em temperaturas mais elevadas, por
exemplo) espera-se uma maior influência e, consequentemente, esta avaliação deve
ser feita para cada material específico.
5.2 Sugestões para trabalhos futuros
Algumas sugestões para trabalhos futuros são apresentadas a seguir. Os itens a),
b) e c) podem ser considerados como uma extensão do trabalho apresentado. O item
d) propõe a utilização do comportamento viscoelástico para avaliação de vida à fadiga
da estrutura. Os itens e) e f) são recomendações gerais para trabalhos que podem
contribuir para o melhor entendimento de possíveis modos de falha deste componente
crítico em sistemas de produção offshore.
a) Desenvolvimento de uma metodologia simplificada para caracterização do
comportamento mecânico do poliuretano utilizado na fabricação de
enrijecedores à flexão;
b) Incluir o efeito da temperatura nos modelos viscoelásticos apresentados, uma
vez que a resposta do poliuretano apresenta forte dependência deste
parâmetro;
c) Desenvolvimento de modelo acoplado de análise termo-mecânica em que o
aumento da temperatura devido a carregamento harmônico altere as

141
propriedades mecânicas do poliuretano que por sua vez irá apresentar
comportamento dissipativo diferente;
d) Avaliação da vida à fadiga do enrijecedor à flexão considerando o
comportamento viscoelástico do poliuretano e desenvolvimento de metodologia
de análise baseado nos conceitos de mecânica da fratura;
e) O contato entre a capa externa da linha flexível e a parte interna do enrijecedor
pode gerar desgaste nos mesmos. Um modelo matemático para estimar a
distribuição das pressões de contato pode ser utilizado para, em conjunto com
estudos tribológicos, melhor compreender este modo de falha. Ensaios
experimentais e modelos em elementos finitos podem ser utilizados para
verificação do modelo matemático desenvolvido.
f) A conicidade do enrijecedor à flexão leva a uma variação de rigidez ao longo
do comprimento devido à diminuição de espessura até sua extremidade. A
ovalização que ocorre nesta região quando o riser é submetido a
carregamentos extremos deve ser avaliada considerando dois critérios: i) efeito
desta ovalização na resposta do sistema linha flexível/enrijecedor. Esta
avaliação pode ser feita através de uma análise em três dimensões utilizando o
método dos elementos finitos e comparada com os resultados obtidos
utilizando o modelo simplificado de viga; ii) resistência ao rasgamento do
poliuretano nesta região na presença de falhas, utilizando os conceitos de
mecânica da fratura.
g) Testes em escala real com aparato de fadiga para avaliar o aquecimento do
material devido a carregamento cíclico, característica do comportamento
viscoelástico, e avaliação do contato entre o enrijecedor à flexão e o duto
flexível utilizando filme sensível à variação de pressão.

142
6 REFERÊNCIAS BIBLIOGRÁFICAS
[1] GUO, B., SONG, S., GHALAMBOR, A., Offshore pipelines. 1 ed. Oxford,
Elsevier, 2005.
[2] Technip, Engineering and technologies – Flexible pipe, Disponível em:
<http://www.technip.com/en/entities/flexi-france/flexi-france-technology>
Acesso: 27 de maio de 2011.
[3] XAVIER, G., Acessórios e componentes, Curso de Extensão em Tubos
Flexíveis e Cabos Umbilicais Submarinos, COPPE/UFRJ, 2005.
[4] LEMOS, C.A.D., Análise de fadiga em risers flexíveis. Tese de
D.Sc.,COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2005.
[5] API SPECIFICATION 17J, Specification for Unbonded Flexible Pipe, 2nd ed.,
2002.
[6] PESCE, C. P., Mecânica de cabos e tubos submersos lançados em catenária:
uma abordagem analítica e experimental, Tese de livre docência, Escola
Politécnica, USP, São Paulo, SP, Brasil, 1997.
[7] BOEF, W. J. C., OUT, J. M. M., “Analysis of a flexible riser top connection with
bend restrictor”. In: Proceedings of the Offshore Technology Conference, OTC
6436, pp. 131-142, Houston, May 1990.
[8] SØDAHL, N., LARSEN, C.M., “Design procedure for bending stiffener in flexible
riser systems”. In: Proceedings of the International Symposium on Practical
Design of Ships and Other Floating Structures, PRADS, Varna, 1989.
[9] LANE, M., McNAMARA, J.F., GIBSON, R., et al. “Bend stiffeners for flexible
risers”. In: Proceedings of the Offshore Technology Conference, OTC 7730, pp.
345-353, Houston, May 1995.
[10] CAIRE, M., VAZ, M.A., “Análise de enrijecedores à flexão: efeito da relação bi-
linear momento fletor x curvatura da linha flexível”. In: 21º Congresso Nacional
de Transportes Marítimos, Construção Naval e Offshore, SOBENA, Rio de
Janeiro, Brasil, Novembro 2006.
[11] CAIRE, M., VAZ, M.A., “The effect of flexible pipe non-linear bending stiffness
behavior on bend stiffener analysis”. In: Proceedings of the 26th International

143
Conference on Offshore Mechanics and Arctic Engineering, OMAE 2007, San
Diego, California, USA, June 2007.
[12] SIMULIA, ABAQUS 6.8, 2008.
[13] CAIRE, M., Análise de Enrijecedores à Flexão. Dissertação de M.Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2005.
[14] VAZ, M., LEMOS, C.A.D, CAIRE, M., “A nonlinear analysis formulation for bend
stiffeners”, Journal of Ship Research, v. 51, n. 3, pp. 250-258, 2007.
[15] CAIRE, M., VAZ, M.A., LEMOS, C.A.D., “Viscoelastic analysis of bend
stiffeners”. In: Proceedings of the 27th International Conference on Offshore
Mechanics and Arctic Engineering, OMAE2008-57464, Estoril, Portugal, June
2008.
[16] VAZ, M., CAIRE, M., GOMEZ, A.A, FARIAS, L.F.A., “Bend stiffener linear
viscoelastic response subjected to harmonic loading”. In: Proceedings of the
20th International Congress of Mechanical Engineering, Gramado, Rio Grande
do Sul, Brasil, 2009.
[17] MENICONI, L.C.M., LOPES, T.A.P., “Fatigue analysis of bend stiffeners”. In:
Proceedings of the International Conference on Offshore Mechanics and Arctic
Engineering, OMAE2001/OFT-1215, Rio de Janeiro, Brazil, June 2001.
[18] DEMANZE, F., HANONGE, D., CHALUMEAU, A., LECLERC, O., “Fatigue
analysis of polyurethane bending stiffeners”, In: Proceedings of the 24th
International Conference on Offshore Mechanics and Arctic Engineering,
OMAE2005-67506, Halkidiki, Greece, June 2005.
[19] VAZ, M., CAIRE, M., “On the large deflections of linear viscoelastic beams”,
International Journal of Non-Linear Mechanics, v. 45, pp. 75-81, 2010.
[20] MANO, E.B., Polímeros como Materiais de Engenharia. São Paulo, Editora
Edgard Blücher, 2000.
[21] WINEMAN, A. S., RAJAGOPAL, K.R., Mechanical response of polymers –
An introduction. 1 ed. Cambridge University Press, 2000.
[22] CHRISTENSEN, R. M., Theory of Viscoelasticity. 2 ed. New York, Dover
Publications, 1982.
[23] FINDLEY, W. N., LAI, J. S., ONARAN, K., Creep and relaxation of nonlinear
viscoelastic materials. 1 ed. Hungary, North-Holland Publishing Company,
1976.

144
[24] LEADERMAN, H., “Elastic and creep properties of filamentous materials”,
Textile Foundation, Washington D.C., 1943.
[25] PIPKIN, A.C., ROGERS, T.G., “A non-linear integral representation for
viscoelastic behavior”, Journal of the Mechanics and Physics of Solids, v.
16, pp. 59-72, 1968.
[26] GREEN, A., RIVLIN, R., “The mechanics of non-linear materials with memory I”.
Archive for Rational and Mechanical Analysis, v.1, pp. 1-21, 1957.
[27] SCHAPERY, R.A., “On the characterization of nonlinear viscoelastic materials”,
Polymer Engineering and Science, v. 9, pp.295-310, 1969.
[28] SMART, J., WILLIAMS, J.G., “A comparison of single integral non-linear
viscoelasticity theories”, Journal of the Mechanics and Physics of Solids, v.
20, pp. 313-324, 1972.
[29] LOCKETT, F.J., “Creep and stress relaxation experiments for non-linear
materials”, International Journal of Engineering Science, v. 3, pp. 59-75,
1965.
[30] GRADOWCZYK, M.H., “On the accuracy of the Green-Rivlin representation for
viscoelastic materials”, International Journal of Solids and Structures, v. 5,
pp. 873-877, 1969.
[31] NAKADA, O., “Theory of non-linear responses”, Journal of the Physical
Society of Japan, v. 15, pp. 2280, 1960.
[32] GOTTENBERG, W.G., BIRD, J.O., AGRAWALL, G.L., “An experimental study
of a non-linear viscoelastic solid in uniaxial tension”, Journal of Applied
Mechanics, v. 36, pp. 558, 1969.
[33] NOLTE, K.G., FINDLEY, W.N., “Multiple step nonlinear creep of polyurethane
predicted from constant stress creep by three integral representations”,
Transactions of the Society of Rheology, v. 15, pp. 111, 1971.
[34] ASTM D-2990, Standard Test Methods for Tensile, Compressive and Flexural
Creep and Creep-Rupture of Plastics.
[35] ASTM D-638, Standard Test Method for Tensile Properties of Plastics
[36] WOLFRAM RESEARCH, Mathematica v 6.0, Illinois, United States, 2007.
[37] MARINTEK, RIFLEX 3.6 – Program documentation, Trondheim, Norway,
2008.

145
ANEXO I – AJUSTE DOS ENSAIOS DE RELAXAÇÃO (PSM)
Para o modelo viscoelástico não-linear baseado no princípio da superposição
modificado (PSM), a primeira etapa do ajuste consiste em, utilizando o método
iterativo não-linear dos mínimos quadrados, obter os nove coeficientes
( 4,3,2,1,43210 ,,,,,,,, RRRRMMMMM ) da resposta de tensão média definida a seguir,
4,
4
3,
3
2,
2
1,
10
6
1
expexpexpexp
6/)(
)(
R
M
R
M
R
M
R
MM
i i
iMedio
tttt
tt
(AI.1)
O objetivo deste ajuste é determinar valores médios para os tempos de
relaxação 3,2,1, ,, RRR e 4,R . Estes valores são então utilizados no ajuste dos
históricos de tensão, obtidos como resposta do ensaio de relaxação, para cada um
dos seis níveis de deformação aplicados ( 6,..,1i ). O programa computacional
Mathematica [36] foi utilizado para obtenção dos tempos de relaxação, sendo estes
apresentados anteriormente na Tab. 2.4.
A Eq. (AI.2) apresenta os cinco coeficientes que determinam a resposta de
tensão com o tempo, iiii 3210 ,,, e i4 , e devem ser calculados para cada nível de
deformação aplicado ( 6,..,1i ). Os resultados do ajuste são apresentados
graficamente nas Fig. AI.1-6 e os valores dos coeficientes na Tab. AI.1.
4,
4
3,
3
2,
2
1,
10 expexpexpexp)(R
i
R
i
R
i
R
iii
ttttt
(AI.2)
Tabela AI.1 - Coeficientes de ajuste da função tensão
[%]Def i ][0 MPai ][1 MPai ][2 MPai ][3 MPai ][4 MPai
2,5 1 1,175 0,247 0,126 0,085 0,110
5,0 2 2,160 0,342 0,177 0,113 0,129
7,5 3 2,701 0,454 0,231 0,153 0,149
10,0 4 2,975 0,541 0,269 0,167 0,191
20,0 5 3,810 0,785 0,394 0,237 0,272
30,0 6 4,297 0,971 0,495 0,289 0,332

146
Os vinte coeficientes kmG ( 4,..,0m e 4,..,1k ) que determinam as quatro
funções de relaxação, )4,..,1()( ktGk, apresentadas anteriormente na Eq. (2.111),
são obtidos ajustando diretamente a curva formada pelos coeficientes da função
tensão versus os seis níveis de deformação iim x ( 4,..,0m e 6,..,1i ), de acordo
com a seguinte relação,
4
4
3
3
2
21 imimimimim GGGG (AI.3)
As Fig. AI.7-11 mostram os pontos que formam as curvas iim x e o resultado
dos ajustes utilizando a função polinomial da Eq. (AI.3). Os valores dos coeficientes
foram anteriormente apresentados na Tab. 2.4 e podem, também, ser observados nos
gráficos.
1 10 100 1000 10000
1,1
1,2
1,3
1,4
1,5
1,6
1,7
Te
nsã
o [M
Pa
]
Tempo [s]
Def. = 2,5 %
Ensaio
Ajuste
Figura AI.1 – Resposta e ajuste de tensão para deformação 2,5 %

147
1 10 100 1000 10000
2,0
2,2
2,4
2,6
2,8
3,0Def. = 5,0 %
Ensaio
AjusteT
en
sã
o [M
Pa
]
Tempo [s]
Figura AI.2 – Resposta e ajuste de tensão para deformação 5,0 %
1 10 100 1000 10000
2,6
2,8
3,0
3,2
3,4
3,6Def. = 7,5 %
Ensaio
Ajuste
Te
nsã
o [M
Pa
]
Tempo [s]
Figura AI.3 – Resposta e ajuste de tensão para deformação 7,5 %

148
1 10 100 1000 10000
2,8
3,0
3,2
3,4
3,6
3,8
4,0Def. = 10,0 %
Ensaio
AjusteT
en
sã
o [M
Pa
]
Tempo [s]
Figura AI.4 – Resposta e ajuste de tensão para deformação 10,0 %
1 10 100 1000 10000
3,6
3,9
4,2
4,5
4,8
5,1
5,4Def. = 20,0 %
Ensaio
Ajuste
Te
nsã
o [M
Pa
]
Tempo [s]
Figura AI.5 – Resposta e ajuste de tensão para deformação 20,0 %

149
1 10 100 1000 10000
4,2
4,5
4,8
5,1
5,4
5,7
6,0
6,3Def. = 30,0 %
Ensaio
AjusteT
en
sã
o [M
Pa
]
Tempo [s]
Figura AI.6 – Resposta e ajuste de tensão para deformação 30,0 %
0,00 0,05 0,10 0,15 0,20 0,25 0,30
0,00
1,00
2,00
3,00
4,00
5,00
0
i -
Te
nsã
o [M
Pa
]
i - Deformação [mm/mm]
0 i
x i (i=1,..,6)
Ajuste
57,93.- 394,6.
+ 1305,91.
- 1579,21.
Figura AI.7 – Ajuste dos coeficientes ][0 MPaG k

150
0,00 0,05 0,10 0,15 0,20 0,25 0,30
0,00
0,20
0,40
0,60
0,80
1,00
1 i
x i (i=1,..,6)
Ajuste
9,15.- 53,12.
+ 175,87.
- 214,45.
1
i -
Te
nsã
o [M
Pa
]
i - Deformação [mm/mm]
Figura AI.8 – Ajuste dos coeficientes ][1 MPaG k
0,00 0,05 0,10 0,15 0,20 0,25 0,30
0,00
0,10
0,20
0,30
0,40
0,50
2 i x
i (i=1,..,6)
Ajuste
4,78.- 29,83.
+ 103,65.
- 129,80.
2
i -
Te
nsã
o [M
Pa
]
i - Deformação [mm/mm]
Figura AI.9 – Ajuste dos coeficientes ][2 MPaG k
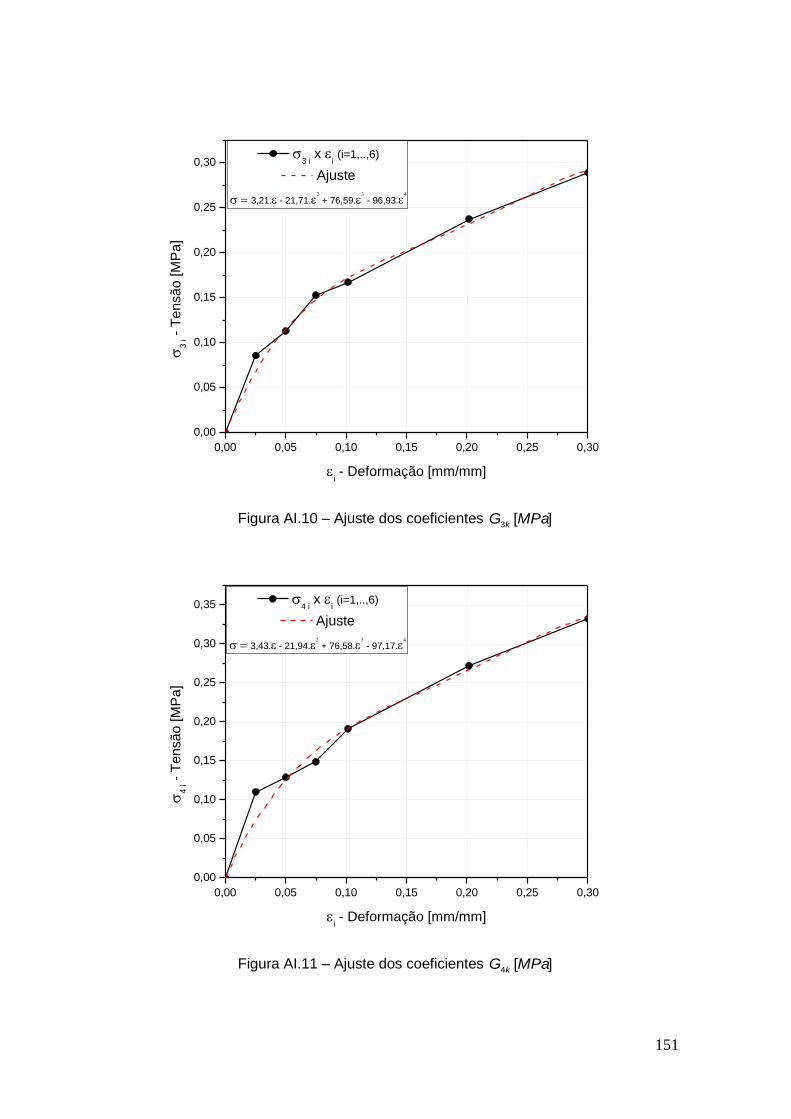
151
0,00 0,05 0,10 0,15 0,20 0,25 0,30
0,00
0,05
0,10
0,15
0,20
0,25
0,30
3 i x
i (i=1,..,6)
Ajuste
3,21.- 21,71.
+ 76,59.
- 96,93.
3
i -
Te
nsã
o [M
Pa
]
i - Deformação [mm/mm]
Figura AI.10 – Ajuste dos coeficientes ][3 MPaG k
0,00 0,05 0,10 0,15 0,20 0,25 0,30
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35 4 i
x i (i=1,..,6)
Ajuste
3,43.- 21,94.
+ 76,58.
- 97,17.
4
i -
Te
nsã
o [M
Pa
]
i - Deformação [mm/mm]
Figura AI.11 – Ajuste dos coeficientes ][4 MPaG k

152
ANEXO II – COEFICIENTES DA FUNÇÃO CORTANTE
COEFICIENTES iA
10 A
0
0
0
1
4
3
2
1
A
A
A
A
)()sin()()()cos()(
)()sin()()()cos()(
)()sin()()()cos()(
)()()sin(2)()()cos(2)2cos(
)()sin()()cos(
)()()sin(2)()()cos(2
)()(
)()(
)()(
40230121
40130221
40230121
2
440
2
330
2
041
403021
2
440
2
330
2
041
2
2
2
141
2121
2
2
2
141
13
12
11
10
9
8
7
6
5
ssss
ssss
ssss
ssss
ss
ssss
ss
ss
ss
A
A
A
A
A
A
A
A
A
LL
LL
LL
LLL
LL
LLL
)()(2)(2)()(
)()(2)(4)()()(
)()(2)(2)(2)()(
)(4)(8)(3)()(4)()(
7262141
72622
2
181
75262141
751162281
17
16
15
14
sssss
ssssss
ssssss
sssssss
A
A
A
A

153
)()()()(
)()cos()()sin(
)()()()(
)()sin()()cos(
)()()(2)()(
)()cos()(2)()sin(
)()()(2)()(
)()sin()(2)()cos(
9310421
921
1021
0
9410321
921
1021
0
93810421
921
81021
0
94810321
921
81021
0
21
20
19
18
ssss
ss
ssss
ss
sssss
sss
sssss
sss
A
A
A
A
L
L
L
L
)()(2)()(2
)()()()()()(2)()(2
)(2)()sin()(2)()cos(
)()(2)()(2
)()()()()()(2)()(2
)(2)()cos()(2)()sin(
)()(2)()(2)()(4)()(
)()()()(2)()(4)()(2
)(2)(4)()sin()(2)()cos(
)()(2)()(2)()(4)()(
)()(3)()(2)()(2)()(4
)(2)(4)(3)cos()(2)()sin(
7463
4132132121
41
7141
6241
0
7364
4231122131
41
7141
6241
0
74635441
32132112121
41
75141
6241
0
73645342
31212131111
41
75141
6241
0
25
24
23
22
ssss
ssssssss
ssss
ssss
ssssssss
ssss
ssssssss
ssssssss
sssss
ssssssss
ssssssss
sssss
A
A
A
A
L
L
L
L

154
)cos()sin()()(2)()(
)()(2)()(2)()(2
)()(2)cos()()(2)sin(
)2cos()()(4)(
)()(4)()()(4)()(4
)()(2)sin()()(2)cos(
)2sin()()(4)()(8)()(4
)()(2)()(4)()(8)()(4
)()(2)cos()()(2)(4)sin(
)2cos(2)()(4)()(8)()(4)(
)()(4)(3)()(4)()(8
)()(2)sin()(3)(2)(4)cos(
2
041
9143
134123102
41
41241
31341
0
2
081
92
2
4
124
2
3133101
81
41241
31341
0
2
081
9182102
43134114123
81
41241
3131141
0
2
081
9281101
2
4
124
2
3133113
81
41241
3131141
0
29
28
27
26
L
L
L
L
L
L
L
L
ssss
ssssss
ssss
sss
sssssss
ssss
ssssss
ssssssss
sssss
sssssss
sssssss
sssss
A
A
A
A

155
COEFICIENTES iB
00 B
)()sin(
)()cos(
)(
)(
40
30
2
1
4
3
2
1
s
s
s
s
B
B
B
B
L
L
)()(2)cos(
)()(2)sin(
)()(2)cos(
)(
)(
)(
)()(
)()(
)()(
313021
412021
311021
10
9
8
7121
6221
5121
13
12
11
10
9
8
7
6
5
ss
ss
ss
s
s
s
ss
ss
ss
B
B
B
B
B
B
B
B
B
L
L
L
)(24)(12)()()(3
)(24)(12)()(3)(
)(8)(4)()()(
)(8)(4)(8)()()(
176
3
22
2
1241
167
2
21
3
1241
156
3
22
2
181
1475
2
21
3
181
17
16
15
14
sssss
sssss
sssss
ssssss
B
B
B
B

156
)()(3)()(24)2cos()()2sin()(
)(3)(3)sin()()()cos()3sin(
)()(3)()(24)2sin()()2cos()(
)(3)(3)cos()()()sin()3cos(
)sin()()()()(8
)()cos()sin(2)()cos(2)(
)(3)()sin()()()cos(
)cos()()()()(8
)()cos()sin(2)()cos(2)(
)()(3)cos()()()sin(
4
2
3
3
421241
43
2
081
2
4
2
3241
4341
0
3
0241
2
43
3
320241
43
2
081
2
4
2
3241
4341
0
3
0241
3
0813
44
2
31981
44
2
4
2
081
2
4
2
381
4341
0
3
0812
43
3
31881
43
2
3
2
081
2
4
2
381
4341
0
21
20
19
18
ssssss
ssss
ssssss
ssss
ssss
sss
ssss
ssss
sss
ssss
B
B
B
B
L
LL
L
LL
L
L
L
L
L
L
)()()(2)()()()()(8)(4
)()()sin()()()cos(
)()()(2)()()()()(8)(4
)()()cos()()()sin(
)()()(2)()(3)()()(8)(4
)(3)()sin()()()cos(
)()()(2)()()()(3)(8)(4)(8
)()(3)cos()()()sin(
3214
2
24
2
1251281
2
2
2
181
2141
0
4213
2
23
2
1241381
2
2
2
181
2141
0
3214
2
24
2
1231281
2
2
2
181
2141
0
4213
2
23
2
122131181
2
2
2
181
2141
0
25
24
23
22
sssssssss
ssss
sssssssss
ssss
sssssssss
ssss
ssssssssss
ssss
B
B
B
B
L
L
L
L

157
2
42431
2
3229981
241
181
2
0
423181
413281
0
2
41432
2
31281081
241
181
2
0
423181
413281
0
927
2
42431
2
3281
141
281
2
0
423181
413281
0
268
2
41432
2
311081
241
181
2
0
423181
413281
0
29
28
27
26
)()()()()(2)()()(8)(4
)()cos()sin()()2cos(
)()(2)()(2)sin()()(2)()(2)cos(
)()()()()(2)()()(8)(4
)()cos()sin()()2cos(
)()(2)()(2)cos()()(2)()(2)sin(
)(4)(8)()(3)()()(2)()(3
)()cos()sin()()2cos(2
)()(6)()(2)sin()()(2)()(2)cos(
)(8)(8)()()()()(2)()(3)(4
)()cos()sin()()2cos(2
)()(6)()(2)sin()()(2)()(2)cos(
sssssssss
ss
ssssssss
sssssssss
ss
ssssssss
sssssssss
ss
ssssssss
ssssssssss
ss
ssssssss
B
B
B
B
L
L
L
L
L
L
L
L


















