Mechanika tuhého t ělesa - jcu.czKinematika tuhého t ělesa • Tuhé těleso má maximáln...
29
Mechanika tuhého tělesa Kinematika + dynamika
Transcript of Mechanika tuhého t ělesa - jcu.czKinematika tuhého t ělesa • Tuhé těleso má maximáln...

Mechanika tuhého tělesa
Kinematika + dynamika
Kinematika tuhého tělesa
• Pojem tuhé těleso vzniká abstrakcí reálného tělesa
• Tuhé těleso zachovává tvar a rozložení hmotnostireálného tělesa, předpokládá se však, že vzájemnévzdálenosti jednotlivých bodů tělesa zůstávajíneproměnné při libovolných silách působících na těleso
• Tuhým tělesem tedy nazýváme těleso, které sepůsobením vnějších sil nedeformuje

Tuhé těleso• Tuhé těleso si můžeme představit buď jako soustavu
hmotných bodů, pro než se nemění vzdálenost (tuhásoustava) nebo jako útvar se spojitě rozloženou hmotou

Kinematika tuhého tělesa
• Tuhé těleso má maximálně šest stupňů volnosti
• Je-li ve svém pohybu ještě nějak omezeno, počet stupňůvolnosti se zmenší
• Tuhé těleso může konat pohyby translační (posuvný,postupný) a rotační (otáčivý)
• Kombinací obou pohybů dostáváme pohyb obecný

Translační pohyb• Trajektorie všech bodů mají stejný tvar a v libovolném
okamžiku jsou rychlosti a zrychlení všech bodůtuhého tělesa stejné
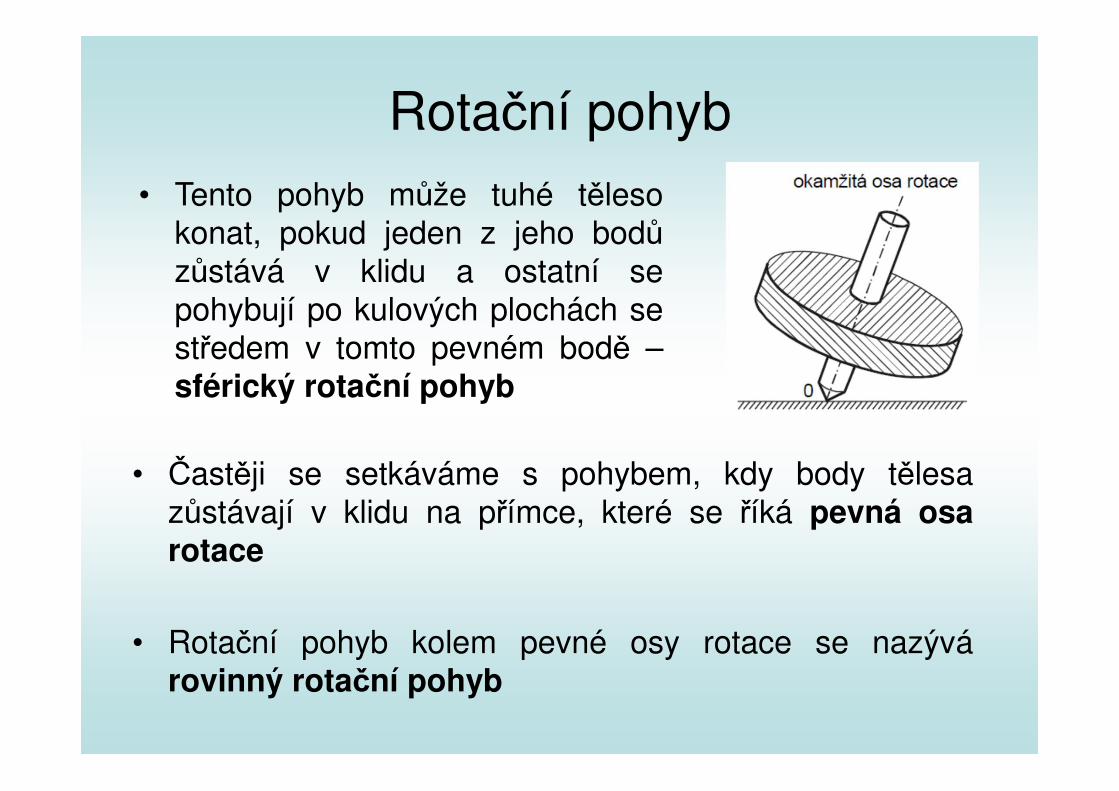
Rotační pohyb• Tento pohyb může tuhé těleso
konat, pokud jeden z jeho bodůzůstává v klidu a ostatní sepohybují po kulových plochách sestředem v tomto pevném bodě –sférický rotační pohyb
• Častěji se setkáváme s pohybem, kdy body tělesazůstávají v klidu na přímce, které se říká pevná osarotace
• Rotační pohyb kolem pevné osy rotace se nazývárovinný rotační pohyb

Sférický rotační pohyb
Kinematika tuhého tělesa
• Volná soustava hmotných bodů má 3N stupňůvolnosti
• Tuhá soustava hmotných bodů a tuhé těleso majípouze šest stupňů volnosti
• Udáním polohy tří hmotných bodů tuhé soustavy, kterévšechny neleží v jedné přímce, je jednoznačně určenapoloha všech bodů soustavy
Určení polohy tuhého tělesa (bodů soustavy)
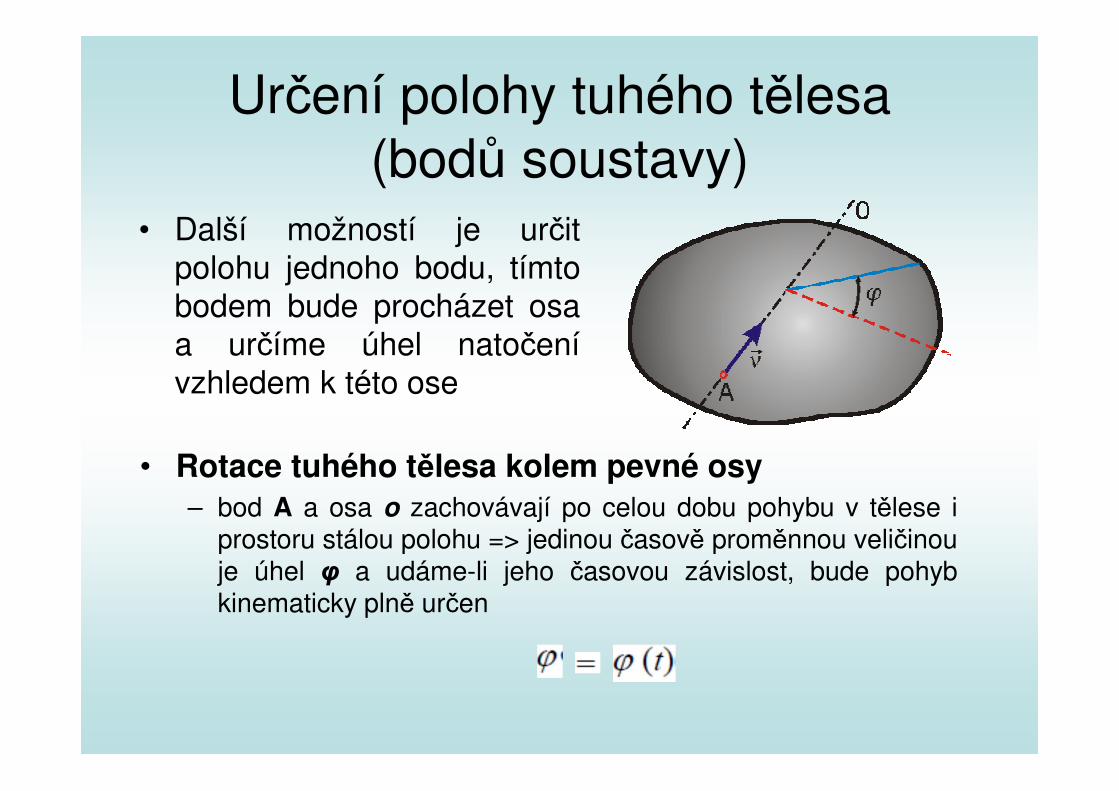
• Další možností je určitpolohu jednoho bodu, tímtobodem bude procházet osaa určíme úhel natočenívzhledem k této ose
• Rotace tuhého tělesa kolem pevné osy
– bod A a osa o zachovávají po celou dobu pohybu v tělese iprostoru stálou polohu => jedinou časově proměnnou veličinouje úhel φ a udáme-li jeho časovou závislost, bude pohybkinematicky plně určen

Směr vektoru úhlové rychlosti
• Vektor úhlové rychlosti je vždy rovnoběžný s osourotace a jeho směr určí palec pravé ruky, ukazují-liostatní sevřené prsty pravé ruky smysl rotace tělesa
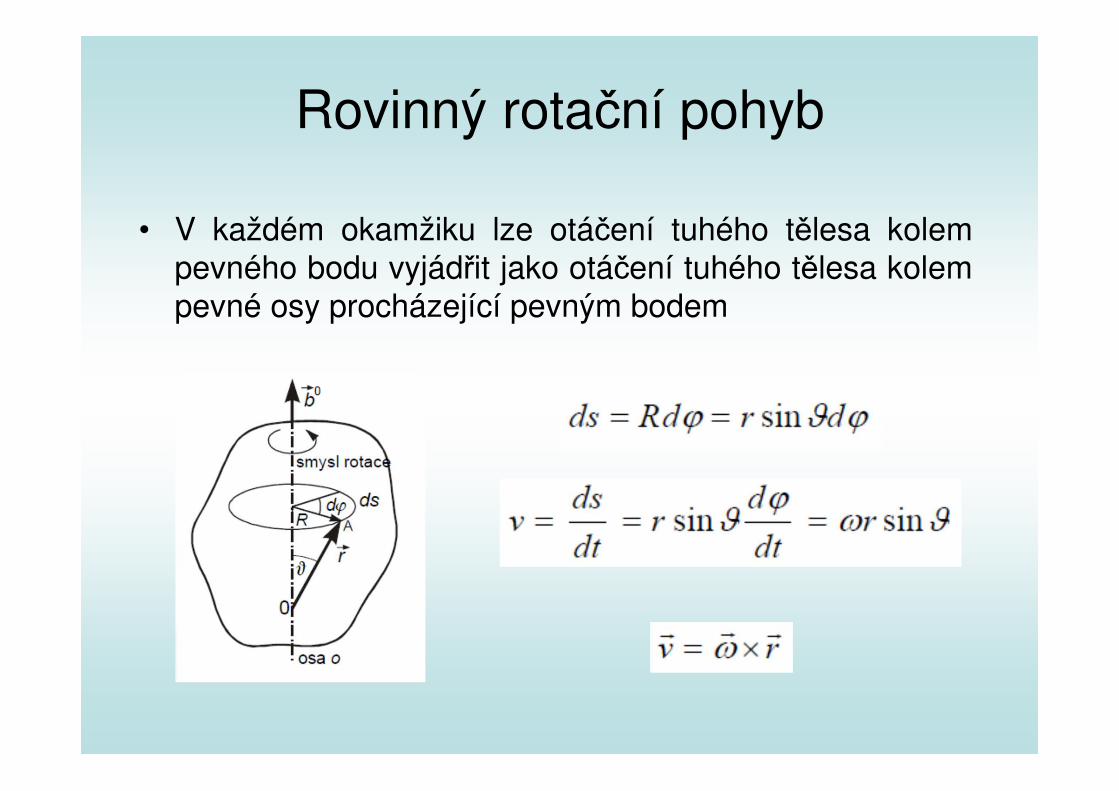
Rovinný rotační pohyb
• V každém okamžiku lze otáčení tuhého tělesa kolempevného bodu vyjádřit jako otáčení tuhého tělesa kolempevné osy procházející pevným bodem
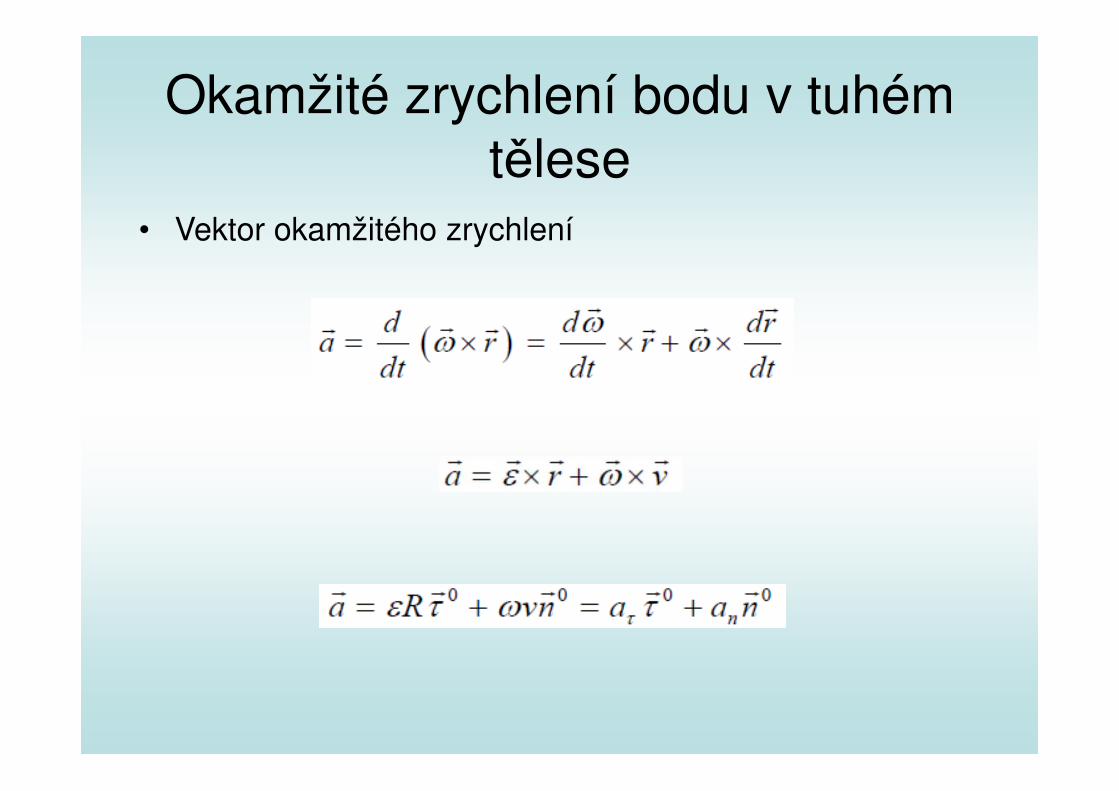
Okamžité zrychlení bodu v tuhém tělese
• Vektor okamžitého zrychlení
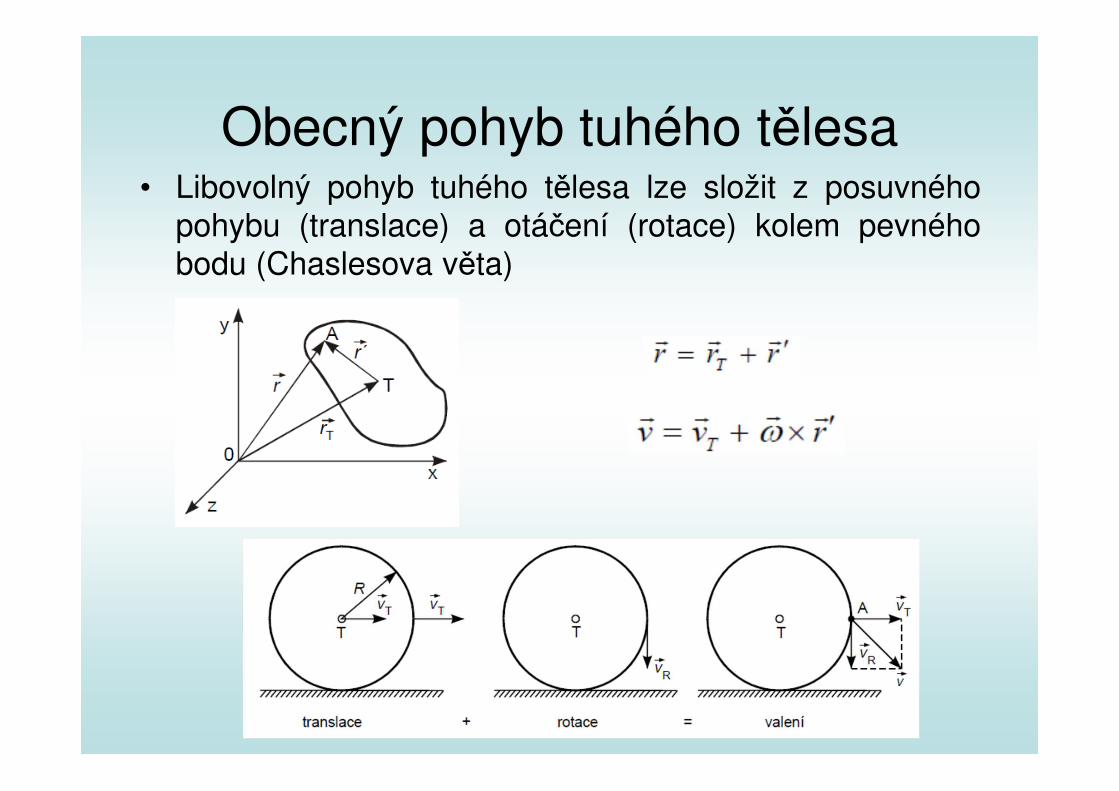
Obecný pohyb tuhého tělesa• Libovolný pohyb tuhého tělesa lze složit z posuvného
pohybu (translace) a otáčení (rotace) kolem pevnéhobodu (Chaslesova věta)

Kinematika tuhého tělesa
• Úhlová rychlost otáčení tělesanezávisí na volbě bodu, vůčikterému otáčení uvažujeme.
• Rychlosti dvou různých bodůtělesa zde označené V a V’jsou obecně různé
• Velikost posuvné rychlosti navolbě bodu A závisí

Dynamika tuhého tělesa
• Stejně jako v dynamice hmotného bodu budeme hledatsouvislosti mezi veličinami popisujícími příčinu změnypohybového stavu TT a veličinami popisujícími pohyb TT
• Těžištěm dynamiky TT je opět pohybový zákon a s nímsouvisející věta o kinetické energii a zákon zachovánímechanické energie
• Dynamika HB je v podstatě dynamikou translačníhopohybu, v případě TT je vhodné v závislosti nacharakteru pohybu tělesa rozlišit dynamiku translačního,dynamiku rotačního a dynamiku obecného pohybu TT

Dynamika tuhého tělesa
• Translační pohyb – reprezentuje pohyb hmotnéhostředu, platí pro něj všechny zákony, uvedené prodynamiku hmotného bodu
• Rotační pohyb – známe kinematické veličiny
které jsou analogické kinematickým veličinám přitranslačním pohybu
• Pro potřeby dynamiky TT je třeba zavést dynamickéveličiny obdobné hmotnosti, síle a hybnosti
Rotační pohyb tuhého tělesa
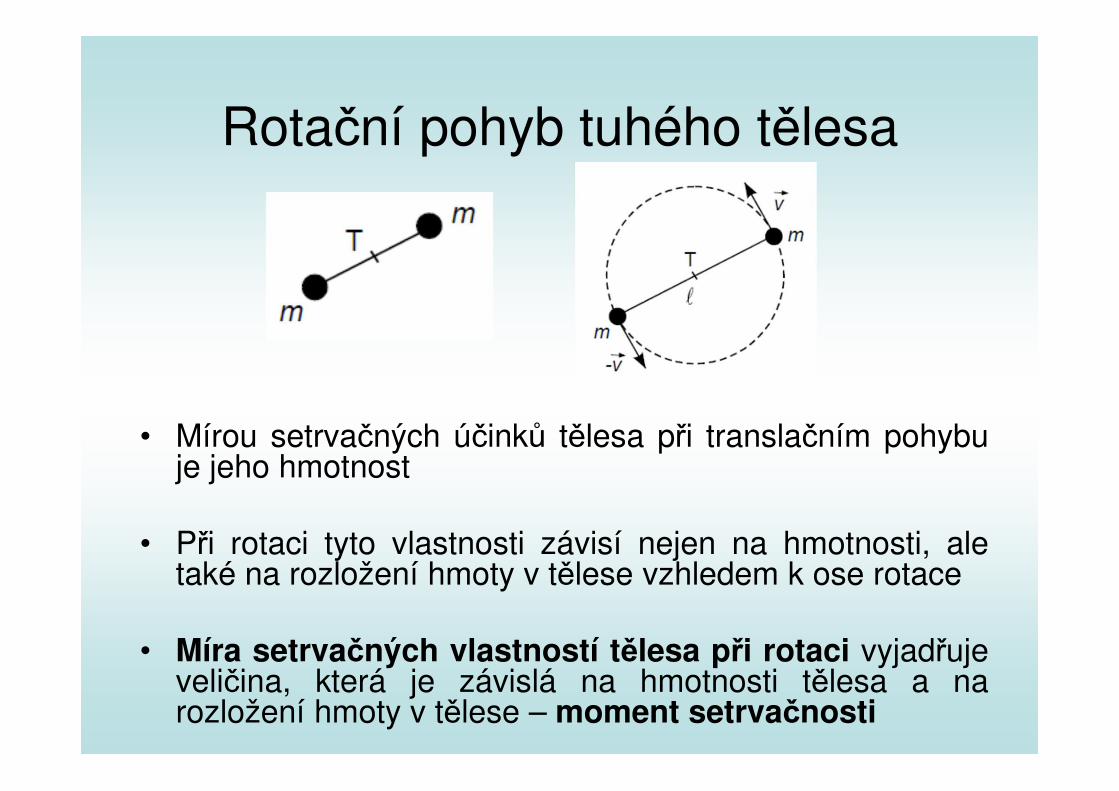
• Mírou setrvačných účinků tělesa při translačním pohybuje jeho hmotnost
• Při rotaci tyto vlastnosti závisí nejen na hmotnosti, aletaké na rozložení hmoty v tělese vzhledem k ose rotace
• Míra setrvačných vlastností tělesa při rotaci vyjadřujeveličina, která je závislá na hmotnosti tělesa a narozložení hmoty v tělese – moment setrvačnosti
Rotační pohyb tuhého tělesa
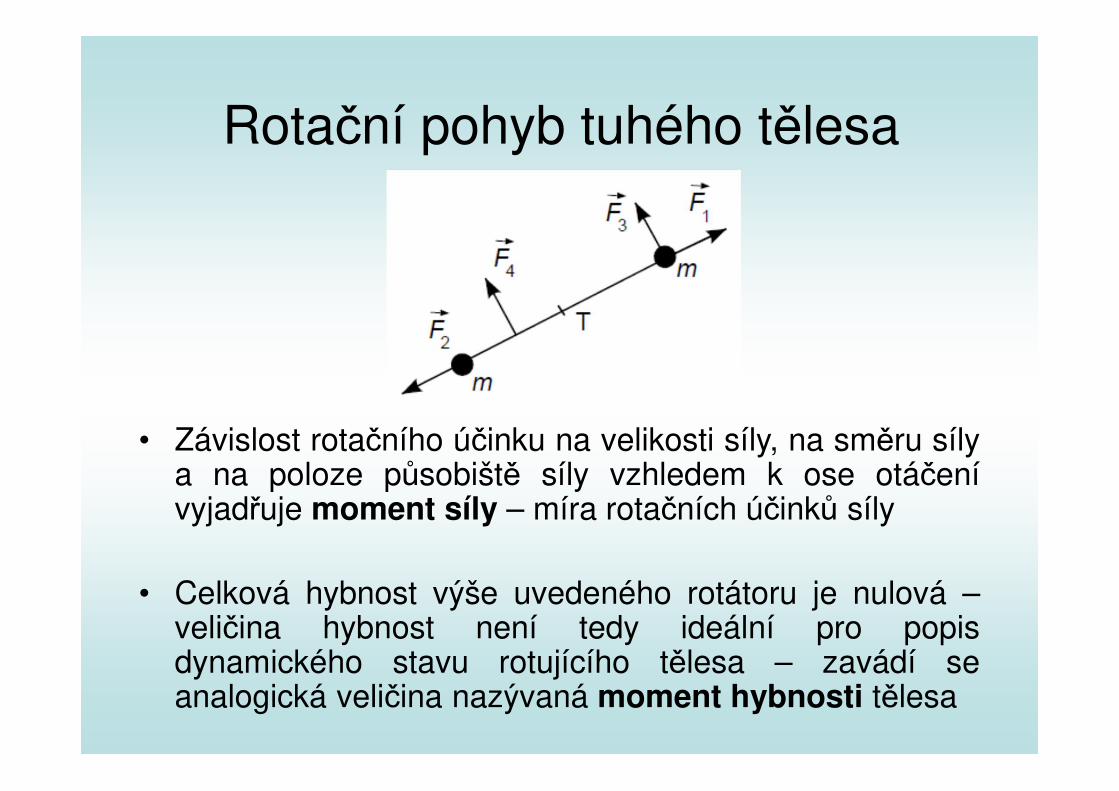
• Závislost rotačního účinku na velikosti síly, na směru sílya na poloze působiště síly vzhledem k ose otáčenívyjadřuje moment síly – míra rotačních účinků síly
• Celková hybnost výše uvedeného rotátoru je nulová –veličina hybnost není tedy ideální pro popisdynamického stavu rotujícího tělesa – zavádí seanalogická veličina nazývaná moment hybnosti tělesa

Moment setrvačnosti TT• Kinetická energie rotujícího tělesa, složeného z n
hmotných bodů
• Moment setrvačnosti je mírou setrvačných vlastnostídaného soustavy při jejím rotačním pohybu kolem osy

Moment setrvačnosti TT
• V případě spojitého rozložení hmoty v tělese
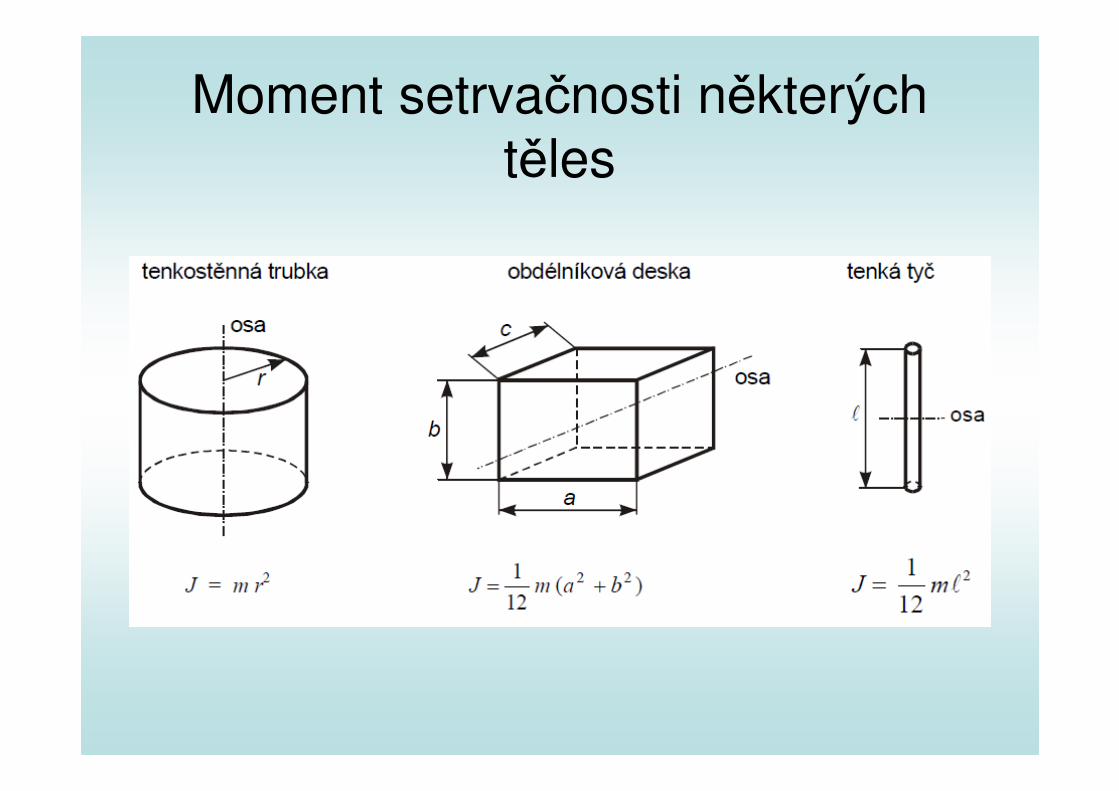
Moment setrvačnosti některých těles

Steinerova věta

Moment síly
• Otáčivé účinky sil, které působí na tuhé těleso, závisínejen na velikosti sil, ale také na směru působení apoloze působišť sil vzhledem k ose rotace
• Moment síly je tedy míra otáčivých účinků při rotacitělesa
• Tuto veličinu můžeme definovat vzhledem k bodu(sférický rotační pohyb) nebo vzhledem k ose (rovinnýrotační pohyb)

Moment síly vzhledem k bodu
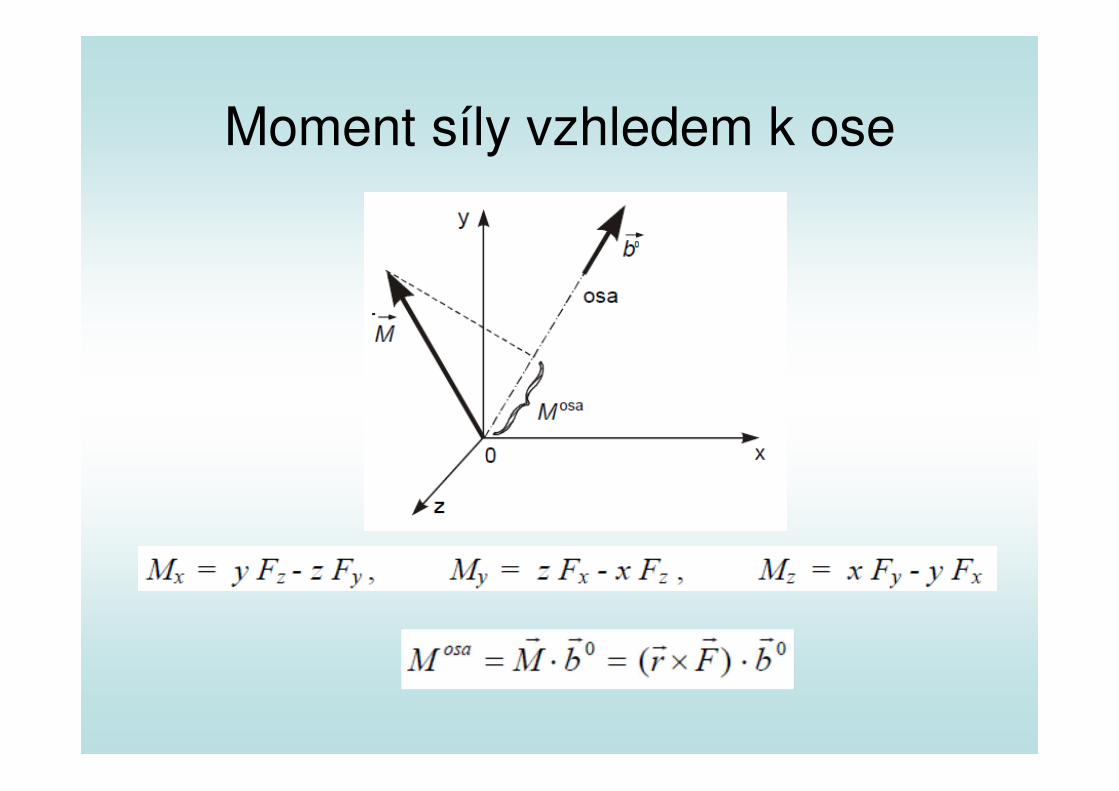
Moment síly vzhledem k ose

Dvojice sil

Dvojice sil
• Přeneseme-li sílu F z bodu A do bodu B, její dynamickýúčinek na těleso se nezmění, přidáme-li k síle F v boduB silovou dvojici o momentu

Dvojice sil
• Z předchozího vyplývá, že– sílu, působící na tuhé těleso můžeme přenést do jiného bodu,
když současně přidáme dvojici sil, jejíž moment se rovnámomentu dané síly vzhledem k novému působišti
– působí-li na těleso v jeho různých bodech soustava sil, můžemevšechny přenést do určitého bodu a nahradit je v něm jedinousilou
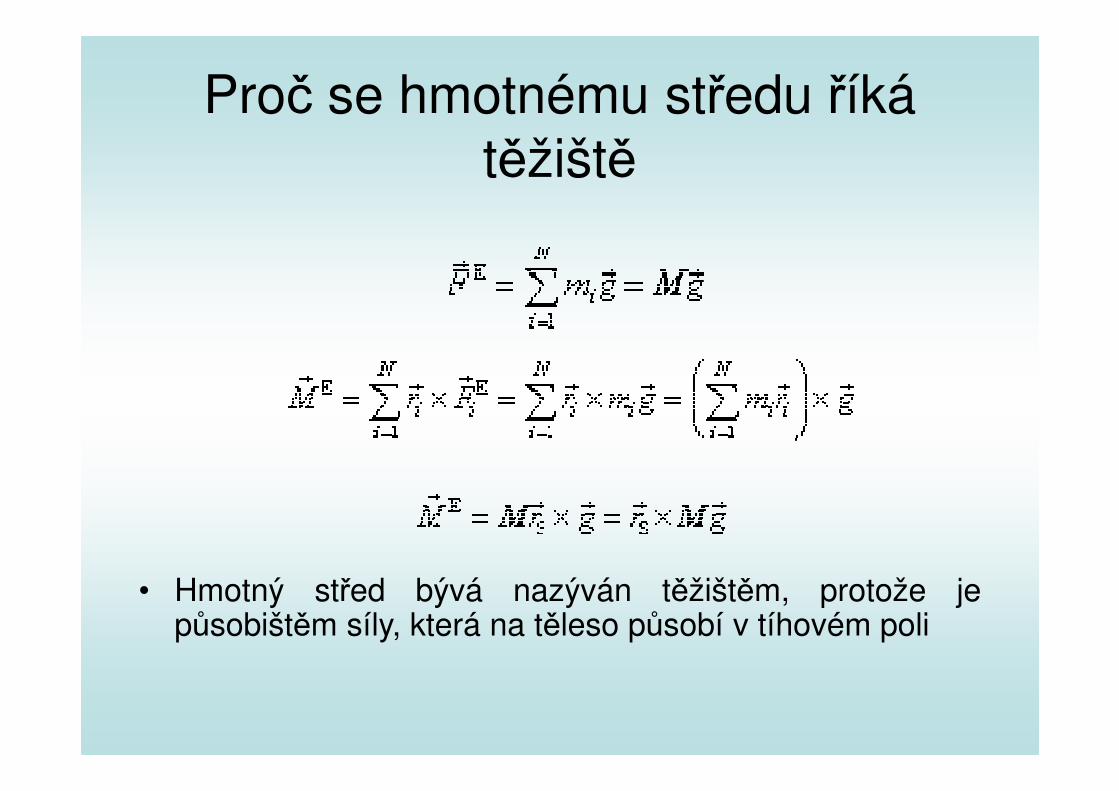
Proč se hmotnému středu říká těžiště
• Hmotný střed bývá nazýván těžištěm, protože jepůsobištěm síly, která na těleso působí v tíhovém poli