Mathematical Progress in Expressivegcoe-mi.jp/english/temp/publish/ffd099e... · Akiyasu Tomoeda...
141
九州大学マス・フォア・インダストリ研究所 Symposium MEIS2014 : Mathematical Progress in Expressive Image Synthesis Editors: Ken Anjyo,Hiroyuki Ochiai M MI Lecture Note Vol.58 : Kyushu University IL t N t Vl 58 K h Ui it 2188-1200
Transcript of Mathematical Progress in Expressivegcoe-mi.jp/english/temp/publish/ffd099e... · Akiyasu Tomoeda...

九州大学マス・フォア・インダストリ研究所
Symposium MEIS2014:
Mathematical Progress in ExpressiveImage SynthesisEditors: Ken Anjyo,Hiroyuki Ochiai
MMI Lecture Note Vol.58 : Kyushu UniversityI L t N t V l 58 K h U i it
MI Lecture Note Vol.58 : Kyushu University
Symposium
MEIS2014: M
athematical Progress in Expressive Im
age Synthesis
九州大学マス・フォア・インダストリ研究所九州大学大学院 数理学府
Editors:Ken Anjyo,Hiroyuki Ochiai
2188-1200
URL http://www.imi.kyushu-u.ac.jp/

Symposium MEIS2014:
Mathematical Progress in Expressive Image Synthesis
Editors: Ken Anjyo
Hiroyuki Ochiai

About MI Lecture Note Series
The Math-for-Industry (MI) Lecture Note Series is the successor to the COE Lecture Notes, which were published for the 21st COE Program “Development of Dynamic Mathematics with High Functionality,” sponsored by Japan’s Ministry of Education, Culture, Sports, Science and Technology (MEXT) from 2003 to 2007. The MI Lec-ture Note Series has published the notes of lectures organized under the following two programs: “Training Program for Ph.D. and New Master’s Degree in Mathematics as Required by Industry,” adopted as a Support Program for Improving Graduate School Education by MEXT from 2007 to 2009; and “Education-and-Research Hub for Mathematics-for-Industry,” adopted as a Global COE Program by MEXT from 2008 to 2012.
In accordance with the establishment of the Institute of Mathematics for Industry (IMI) in April 2011 and the authorization of IMI’s Joint Research Center for Advanced and Fundamental Mathematics-for-Industry as a MEXT Joint Usage / Research Center in April 2013, hereafter the MI Lecture Notes Series will publish lecture notes and pro-ceedings by worldwide researchers of MI to contribute to the development of MI.
October 2014Yasuhide FukumotoDirectorInstitute of Mathematics for Industry
Symposium MEIS2014:
Mathematical Progress in Expressive Image Synthesis
MI Lecture Note Vol.58, Institute of Mathematics for Industry, Kyushu UniversityISSN 2188-1200Editors: Ken Anjyo, Hiroyuki OchiaiDate of issue: 12 November 2014Publisher: Institute of Mathematics for Industry, Kyushu UniversityGraduate School of Mathematics, Kyushu UniversityMotooka 744, Nishi-ku, Fukuoka, 819-0395, JAPAN Tel +81-(0)92-802-4402, Fax +81-(0)92-802-4405URL http://www.imi.kyushu-u.ac.jp/
Printed by Kijima Printing, Inc.Shirogane 2-9-6, Chuo-ku, Fukuoka, 810-0012, JapanTEL +81-(0)92-531-7102 FAX +81-(0)92-524-4411

Preface
Welcome to MEIS2014, the international symposium “Mathematical Progress in Expres-sive Image Synthesis”, held in Fukuoka, Japan, November 12-14, 2014. The symposiumMEIS gives a unique venue where mathematicians, CG researchers, and those who workin industry gather to share and discuss their contemporary issues and future collabora-tive projects. Following the great success of the first MEIS (MEIS2013), this year inMEIS2014 we have more industrial topics and deeper mathematics, while inviting severalrenowned researchers. From the graphics community we have three outstanding invitedspeakers: Bernd Bickel (Disney Research), Eitan Grinspun (Columbia University), andSunil Hadap (Adobe Research). Furthermore, to provoke more lively discussions than lastyear, we called for papers/posters, which were peer-reviewed by international committeesand external reviewers.
The present volume is the proceedings of MEIS2014. The industrial topics include fabrica-tion, image editing, medical imaging, character animation and fluids. These are discussedthrough mathematical approaches such as continuous and discrete differential geometry,Lie theory, computational fluid dynamics, function interpolation and learning theory.
We are very much grateful to the Institute of Mathematics for Industry (IMI), KyushuUniversity for sponsoring this symposium. We would like to thank the Japan Science andTechnology Agency (JST), Mathematics Program: Alliance for Breakthrough betweenMathematics and Sciences (ABMS) on our five-year project “Mathematics for ComputerGraphics” for continuous support. We would like to thank The Institute of Statistical Math-ematics (ISM), The Cooperation with Mathematics Program for their financial resources.We also extend our thanks to Ayumi Kimura for her hard work on the conference arrange-ment and the production of the proceedings. Last but not least, we appreciate the hardwork of the international program committee and the external reviewers in the tight sched-ule. Finally we wish to thank all contributing authors and attendees for their involvement.We hope all the participants enjoy this exciting event in Fukuoka.
Program Co-Chairs:Ken AnjyoHiroyuki Ochiai
i

Committee
Co-Chairs
Ken Anjyo, OLM DigitalHiroyuki Ochiai, Kyushu University
International Program Committee
Mathieu Desbrun, California Institute of TechnologyYoshinori Dobashi, Hokkaido UniversityYasuhide Fukumoto, Kyushu UniversityJunichi Inoguchi, Yamagata UniversityShizuo Kaji, Yamaguchi UniversityKenji Kajiwara, Kyushu UniversityLadislav Kavan, University of PennsylvaniaMiyuki Koiso, Kyushu UniversityJ.P. Lewis, Victoria University of Wellington / Weta DigitalReiko Miyaoka, Tohoku UniversityYoshihiro Mizoguchi, Kyushu UniversityYoshiyuki Ninomiya, Kyushu UniversityMakoto Okabe, University of Electro-CommunicationsDaisuke Tagami, Kyushu UniversityShigeo Takahashi, University of Tokyo
External Reviewers
Zin Arai, Hokkaido UniversityAlexandre Derouet-Jourdan, OLM DigitalLiu Gengdai, OLM DigitalDiego Gutierrez, Universidad de ZaragozaTsuneya Kurihara, HitachiTomohiko Mukai, Tokai UniversityTakaaki Shiratori, Microsoft Research Asia
ii

Committee
Co-Chairs
Ken Anjyo, OLM DigitalHiroyuki Ochiai, Kyushu University
International Program Committee
Mathieu Desbrun, California Institute of TechnologyYoshinori Dobashi, Hokkaido UniversityYasuhide Fukumoto, Kyushu UniversityJunichi Inoguchi, Yamagata UniversityShizuo Kaji, Yamaguchi UniversityKenji Kajiwara, Kyushu UniversityLadislav Kavan, University of PennsylvaniaMiyuki Koiso, Kyushu UniversityJ.P. Lewis, Victoria University of Wellington / Weta DigitalReiko Miyaoka, Tohoku UniversityYoshihiro Mizoguchi, Kyushu UniversityYoshiyuki Ninomiya, Kyushu UniversityMakoto Okabe, University of Electro-CommunicationsDaisuke Tagami, Kyushu UniversityShigeo Takahashi, University of Tokyo
External Reviewers
Zin Arai, Hokkaido UniversityAlexandre Derouet-Jourdan, OLM DigitalLiu Gengdai, OLM DigitalDiego Gutierrez, Universidad de ZaragozaTsuneya Kurihara, HitachiTomohiko Mukai, Tokai UniversityTakaaki Shiratori, Microsoft Research Asia
iii

iv

Table of contents
A Geometric Approach to Elasticity, Contact, and Design*Eitan Grinspun (Columbia University)
Explicit Formula and Extension of the Discrete Power Function Associatedwith the Circle Patterns of Schramm TypeHisashi Ando (Kyushu University), Mike Hay (INFN Sezione di Roma Tre), Kenji Kajiwara
(Kyushu University) and Tetsu Masuda (Aoyama Gakuin University)
On Connectivity of Discretized 2D Explicit CurveFumiki Sekiya (Graduate University for Advanced Studies [SOKENDAI]), and Akihiro Sugimoto
(National Institute of Informatics)
Probe-type DeformersShizuo Kaji (Yamaguchi University / JST CREST) and Gengdai Liu (OLM Digital, Inc. / JST
CREST)
Computer Graphics and Minimal Surfaces*Shoichi Fujimori (Okayama University)
Fast Implicit Simulation of Flexible TreesJean-Marie Aubry (Weta Digital) and Xian Xiao (Weta Digital)
A Prior Reduced Model of Dynamical SystemsHaoran Xie (JAIST / JSPS Research Fellow), Zhiqiang Wang (Kent State University), Kazunori
Miyata (JAIST), and Ye Zhao (Kent State University)
Computer Graphics and Digital Fabrication: Computational Challenges in De-signing Virtual Models for Fabrication*Bernd Bickel (Disney Research)
Mathematical Model for Epidermal Homeostasis*Yasuaki Kobayashi (Hokkaido University), Masaharu Nagayama (Hokkaido University), Yusuke
Sawabu (Hokkaido University), Satoshi Ota (Hokkaido University)
Sinogram Based Geometry Processing for CT Scanning*Yutaka Ohtake (The University of Tokyo), Hiromasa Suzuki (The University of Tokyo), Yukie Nagai
(The University of Tokyo)
Computational Creation of a New Illusionary Solid Sign with Shading Effect*Akiyasu Tomoeda (Musashino University / JST CREST), Kokichi Sugihara (Meiji University / JST
CREST)
Importance Sampling for Cloth Rendering under Environment LightKazutaka Mizutani (Wakayama University) and Kei Iwasaki (Wakayama University)
……………………… 1
………………………………………… 5
………………………………16
………………………………………………………………26
………………………………………36
…………………………………………43
……………………………………55
……………………………………………65
…………………………………68
…………………………73
…77
……………81
v

From Mathematical Study of Visual Information Processing in the Brain toImage Processing*Hitoshi Arai (The University of Tokyo)
Skeleton-sheets Extraction using Shape Diameter FunctionRoman Durikovic (Comenius University Bratislava) and Martin Madaras (Comenius University
Bratislava)
Superresolution Principal Component Models by RKHS SamplingJ.P. Lewis (Victoria University and Weta Digital / JST CREST), Ken Anjyo (OLM Digital / JST
CREST) and Taehyun Rhee (Victoria University)
Advent of RGBD Images: Image Editing, Relighting and Compositing*Sunil Hadap (Adobe Research)
Fluid Volume Modeling from Ortho-View ImagesMakoto Okabe (The University of Electro-Communications / JST CREST), Yoshinori Dobashi
(Hokkaido University / JST CREST), Ken Anjyo (OLM Digital, Inc. / JST CREST), Takatsugu
Yamaguchi (NHK) and Rikio Onai (The University of Electro-Communications)
Real-time Volume Visualization for Large-scale Grid-based Fluid Simulationson Distributed multi-GPU SystemUn-Hong Wong (Tokyo Institute of Technology), Takayuki Aoki (Tokyo Institute of Technology) and
Hon-Cheng Wong (Macau University of Science and Technology)
From posters presentations:A Mathematica Module for Conformal Geometric AlgebraMitsuhiro Kondou (Kyushu University) and Takuya Matsuo (Kyushu University)
* Invited paper
from
……………………………………………………………………89
………………………92
………99
…… 107
……………………………… 112
……………………………………………… 122
…………………… 132
vi

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
A Geometric Approach to Elasticity, Contact,and Design
Eitan Grinspun
Columbia University
Keywords: Simulation, Geometry, Elasticity, Contact, Friction, Design, Interaction
Extended Abstract Computer graphics and animation applications require mathematical mod-els and simulation codes that capture the qualitative, characteristic behavior of a physical system,even at very coarse discretizations. Our research group develops such numerical tools by using ideasfrom discrete differential geometry (DDG) and discrete geometric mechanics.
We formulate physical models by building a discrete picture from the ground up, mimicking theaxioms, structures, and symmetries of the smooth setting. The result is a discrete (hence immediatelycomputable) model of the system, and in particular one that preserves conservation laws. Over time,we have been learning that this computations can be useful not just in filmmaking, but also in gainingunderstanding of geometric nonlinearities and basic problems in the sciences.
We will begin with a quick introduction to discrete differential geometry, focusing on discrete cur-vature [6], as depicted in Fig. 1, and discrete geometric mechanics [12].
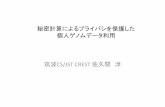
Figure 1: Smooth and Discrete Gauss Maps. Left: The Gauss map assigns to everypoint on the curve a corresponding point on the unit circle. Right: The discrete Gauss mapassigns to every edge of the polygon a corresponding point on the unit circle, and to everyvertex of the polygon a corresponding arc on the unit circle.
From there, we will study a couple recent examples of physical systems whose models can be for-mulated using this mathematical language. We will review the computational model of elastic rods[4], or flexible strands, with a natural extension to viscous threads of liquid [2]. These models repro-duce a variety of fascinating physical phenomena, including plectoneme formation in twisted rods,
1

Figure 2: Elastic rods. A simple (trefoil) knot tied on an elastic rope can be turned intoa number of fascinating shapes when twisted. Starting with a twist-free knot (left), weobserve both continuous and discontinuous changes in the shape, for both directions oftwist. Using our model of Discrete Elastic Rods, we are able to reproduce experimentswith high accuracy.
Figure 3: Viscous threads. A thin thread of viscous fluid is poured onto a moving belt,creating a dazzling array of intricate patterns. Simulations using discrete viscous threadsreproduce this rich and complex behavior. Translucent thread: laboratory experiment [5];gold thread: discrete viscous threads simulation [2].
helical perversion of telephone cords, hysteric transitions between coiling regimes in poured honey,competitions between surface tension and gravity in pulled molten plastics, the motion of humanhair, buckling instabilities in knot tying (see Fig. 2), and the first fluid-mechanical viscous sewingmachine (see Fig. 3).
Figure 4: ADONIS makes large simulationtime steps more stable in hair simulation [8].
The temporal evolution of mechanical systems (andcomputation thereof) becomes inherently more complexwhen we further consider contact, impact, and dissipa-tion. We will examine recent DDG-based computationaltreatments of contact. We will review methods for com-plex contact configurations in the crumpling of cloth andthin shells [7, 1]. We will discuss the core geomet-ric properties governing simultaneous impact of three ormore rigid bodies [11], as depicted in Fig. 5. We will em-phasize the importance of adapting on the degree of non-linearity in the impact solve (ADONIS) [8], and demon-strate the benefits of this adaptivity in large-scale hairsimulations (see adjacent figure). Even at coarse dis-cretizations, the resulting simulations capture desirable
2

Figure 2: Elastic rods. A simple (trefoil) knot tied on an elastic rope can be turned intoa number of fascinating shapes when twisted. Starting with a twist-free knot (left), weobserve both continuous and discontinuous changes in the shape, for both directions oftwist. Using our model of Discrete Elastic Rods, we are able to reproduce experimentswith high accuracy.
Figure 3: Viscous threads. A thin thread of viscous fluid is poured onto a moving belt,creating a dazzling array of intricate patterns. Simulations using discrete viscous threadsreproduce this rich and complex behavior. Translucent thread: laboratory experiment [5];gold thread: discrete viscous threads simulation [2].
helical perversion of telephone cords, hysteric transitions between coiling regimes in poured honey,competitions between surface tension and gravity in pulled molten plastics, the motion of humanhair, buckling instabilities in knot tying (see Fig. 2), and the first fluid-mechanical viscous sewingmachine (see Fig. 3).
Figure 4: ADONIS makes large simulationtime steps more stable in hair simulation [8].
The temporal evolution of mechanical systems (andcomputation thereof) becomes inherently more complexwhen we further consider contact, impact, and dissipa-tion. We will examine recent DDG-based computationaltreatments of contact. We will review methods for com-plex contact configurations in the crumpling of cloth andthin shells [7, 1]. We will discuss the core geomet-ric properties governing simultaneous impact of three ormore rigid bodies [11], as depicted in Fig. 5. We will em-phasize the importance of adapting on the degree of non-linearity in the impact solve (ADONIS) [8], and demon-strate the benefits of this adaptivity in large-scale hairsimulations (see adjacent figure). Even at coarse dis-cretizations, the resulting simulations capture desirable
Before Pre-impact Post-impact After
Bernoulli’sProblem
Newton’sCradle
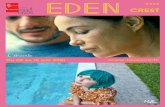
Figure 5: Reflections on simultaneous impact. Left: The game of billiards has inspiredthe study of impact since its inception. Center: Consider arrangements of three balls atthe instant they all collide. In each case, leaving pre-impact velocities unchanged leadsto pen- etration. These velocities must therefore be altered via instanta- neous impulsesto avoid penetration. Bernoulli’s problem teaches us that impacts should preserve symme-try. Newton’s problem teaches us that impacts should be sequenced, even when they aresimultaneous. Right: By developing a computer algorithm that simultaneously respectsboth of these geometric properties, we can reproduce (top) the laboratory-observed (bot-tom) formation of so-called extended patterns [9], emergent behaviors known to be drivensolely by floor vibrations and high-speed inelastic impacts between granules.
phenomena such as good long-time energy conservation, energy exchange between coupled modes,and characteristic instabilities.
Once a physical model is formulated, and an efficient computational treatment is established, myriadapplications become possible, including design processes spanning the creative arts and the precisesciences. We will close with an exploration of physics-based interactive software tools that focus onthe design of cloth animations [3], garments and papercraft [14] (as depicted in Fig. 6), inflatablestructures [10], and mechanical linkages [13].
References[1] Samantha Ainsley, Etienne Vouga, Eitan Grinspun, and Rasmus Tamstorf. Speculative parallel
asynchronous contact mechanics. ACM Trans. Graph., 31(6):151:1–151:8, November 2012.
[2] Miklos Bergou, Basile Audoly, Etienne Vouga, Max Wardetzky, and Eitan Grinspun. Discreteviscous threads. In ACM SIGGRAPH 2010 Papers, SIGGRAPH ’10, pages 116:1–116:10,New York, NY, USA, 2010. ACM.
[3] Miklos Bergou, Saurabh Mathur, Max Wardetzky, and Eitan Grinspun. Tracks: Toward di-rectable thin shells. In ACM SIGGRAPH 2007 Papers, SIGGRAPH ’07, New York, NY, USA,2007. ACM.
[4] Miklos Bergou, Max Wardetzky, Stephen Robinson, Basile Audoly, and Eitan Grinspun. Dis-crete elastic rods. In ACM SIGGRAPH 2008 Papers, SIGGRAPH ’08, pages 63:1–63:12, NewYork, NY, USA, 2008. ACM.
[5] S. Chiu-Webster and J. R. Lister. The fall of a viscous thread onto a moving surface: a ‘fluid-mechanical sewing machine’. J. Fluid Mech., 569:89–111, 2006.
[6] Eitan Grinspun and Adrian Secord. Introduction to discrete differential geometry: The geom-etry of plane curves. In ACM SIGGRAPH 2006 Courses, SIGGRAPH ’06, pages 1–4, NewYork, NY, USA, 2006. ACM.
[7] David Harmon, Etienne Vouga, Breannan Smith, Rasmus Tamstorf, and Eitan Grinspun. Asyn-chronous contact mechanics. In ACM SIGGRAPH 2009 Papers, SIGGRAPH ’09, pages 87:1–87:12, New York, NY, USA, 2009. ACM.
3

Figure 6: Design of garments using Sensitive Couture. “2D or not 2D?” This timelessquestion is rendered moot by Sensitive Couture [14], a software tool for simultaneous, syn-chronized modeling and editing of both a 2D garment pattern (top) and its corresponding3D drape (bottom).
[8] Danny M. Kaufman, Rasmus Tamstorf, Breannan Smith, Jean-Marie Aubry, and Eitan Grin-spun. Adaptive nonlinearity for collisions in complex rod assemblies. ACM Trans. Graph.,33(4):123:1–123:12, July 2014.
[9] Francisco Melo, Paul Umbanhowar, and Harry L. Swinney. Transition to parametric wavepatterns in a vertically oscillated granular layer. Phys. Rev. Lett., 72(1):172–175, Jan 1994.
[10] Melina Skouras, Bernhard Thomaszewski, Peter Kaufmann, Akash Garg, Bernd Bickel, EitanGrinspun, and Markus Gross. Designing inflatable structures. ACM Trans. Graph., 33(4):63:1–63:10, July 2014.
[11] Breannan Smith, Danny M. Kaufman, Etienne Vouga, Rasmus Tamstorf, and Eitan Grinspun.Reflections on simultaneous impact. ACM Trans. Graph., 31(4):106:1–106:12, July 2012.
[12] Ari Stern and Mathieu Desbrun. Discrete geometric mechanics for variational time integrators.In ACM SIGGRAPH 2006 Courses, SIGGRAPH ’06, pages 75–80, New York, NY, USA, 2006.ACM.
[13] Bernhard Thomaszewski, Stelian Coros, Damien Gauge, Vittorio Megaro, Eitan Grinspun,and Markus Gross. Computational design of linkage-based characters. ACM Trans. Graph.,33(4):64:1–64:9, July 2014.
[14] Nobuyuki Umetani, Danny M. Kaufman, Takeo Igarashi, and Eitan Grinspun. Sensitive cou-ture for interactive garment modeling and editing. In ACM SIGGRAPH 2011 Papers, SIG-GRAPH ’11, pages 90:1–90:12, New York, NY, USA, 2011. ACM.
4

Figure 6: Design of garments using Sensitive Couture. “2D or not 2D?” This timelessquestion is rendered moot by Sensitive Couture [14], a software tool for simultaneous, syn-chronized modeling and editing of both a 2D garment pattern (top) and its corresponding3D drape (bottom).
[8] Danny M. Kaufman, Rasmus Tamstorf, Breannan Smith, Jean-Marie Aubry, and Eitan Grin-spun. Adaptive nonlinearity for collisions in complex rod assemblies. ACM Trans. Graph.,33(4):123:1–123:12, July 2014.
[9] Francisco Melo, Paul Umbanhowar, and Harry L. Swinney. Transition to parametric wavepatterns in a vertically oscillated granular layer. Phys. Rev. Lett., 72(1):172–175, Jan 1994.
[10] Melina Skouras, Bernhard Thomaszewski, Peter Kaufmann, Akash Garg, Bernd Bickel, EitanGrinspun, and Markus Gross. Designing inflatable structures. ACM Trans. Graph., 33(4):63:1–63:10, July 2014.
[11] Breannan Smith, Danny M. Kaufman, Etienne Vouga, Rasmus Tamstorf, and Eitan Grinspun.Reflections on simultaneous impact. ACM Trans. Graph., 31(4):106:1–106:12, July 2012.
[12] Ari Stern and Mathieu Desbrun. Discrete geometric mechanics for variational time integrators.In ACM SIGGRAPH 2006 Courses, SIGGRAPH ’06, pages 75–80, New York, NY, USA, 2006.ACM.
[13] Bernhard Thomaszewski, Stelian Coros, Damien Gauge, Vittorio Megaro, Eitan Grinspun,and Markus Gross. Computational design of linkage-based characters. ACM Trans. Graph.,33(4):64:1–64:9, July 2014.
[14] Nobuyuki Umetani, Danny M. Kaufman, Takeo Igarashi, and Eitan Grinspun. Sensitive cou-ture for interactive garment modeling and editing. In ACM SIGGRAPH 2011 Papers, SIG-GRAPH ’11, pages 90:1–90:12, New York, NY, USA, 2011. ACM.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Explicit Formula and Extension of the DiscretePower Function Associated with the Circle
Patterns of Schramm Type
Hisashi AndoGraduate School of Mathematics, Kyushu University,744 Motooka, Nishi-ku, Fukuoka 819-0395, Japan
Mike HayINFN Sezione di Roma Tre,
84 Via della Vasca Navale, Rome 0146, ItalyKenji Kajiwara∗
Institute of Mathematics for Industry, Kyushu University,744 Motooka, Nishi-ku, Fukuoka 819-0395, Japan
Tetsu Masuda†
Department of Physics and Mathematics, Aoyama Gakuin University,Sagamihara, Kanagawa 229-8558, Japan
Abstract We consider the discrete power function introduced by Bobenko, which is associated withthe circle patterns of Schramm type. We first present an explicit formula in terms of the hyperge-ometric τ functions for the sixth Painleve equation. There is a restriction on the exponent and thedomain by geometric reasons. Based on the formula, we next extend the value of the exponent to ar-bitrary complex numbers except even integers and the domain to a discrete analogue of the Riemannsurface of the power function.
Keywords: discrete differential geometry, discrete conformal map, circle patterns, discrete inte-grable systems, Painleve equations, hypergeometric function, τ function
1 Introduction
The theory of discrete analytic functions was initiated by Thurston’s idea of using circle packings asan approximation of the Riemann mapping [17], and considerable developments have been achievedin recent years based on the theory of circle packings or circle patterns. For a comprehensive intro-duction to the theory of discrete analytic functions, we refer to [16].
It is known that certain circle patterns with fixed regular combinatorics admit rich structure. Forexample, it has been pointed out that the circle patterns with square grid combinatorics introducedby Schramm [15] are related to integrable systems. Some explicit examples of discrete analogues
∗[email protected]†[email protected]
5

Figure 1: The map defined by (1) with the initial values fn,0 = n12 , f0,m = (im)
12 .
of analytic functions have been presented which are associated with Schramm’s patterns: exp(z),erf(z), Airy function [15], zγ , log(z) [3].
Among those examples, it is remarkable that the discrete analogue of the power function zγ has aclose relationship with the sixth Painleve equation (PVI) [5]. The discrete power function can beformulated as a solution to a system of difference equations on the square lattice (n,m) ∈ Z2 witha certain initial condition, which appears on the lattice of the Backlund transformations of PVI [12].Agafonov has constructed a formula for the radii of circles of the associated circle pattern at somespecial points on Z2 in terms of the Gauss hypergeometric function [2]. In this paper, we aim togive a brief survey of an explicit representation formula and extension of the discrete power functionobtained in [4]. The formula is expressible in terms of the hypergeometric τ function of PVI whichis valid on Z2
+ = (n,m) ∈ Z2 |n,m ≥ 0 and for γ ∈ C\2Z. Based on this formula, we extendthe domain of the discrete power function to a discrete analogue of the Riemann surface of the powerfunction.
2 Discrete Power Function
In the framework of discrete differential geometry, a discrete analogue of conformality has beenproposed by Bobenko and Pinkall [7]:
Definition 1 (Discrete conformal map) A map f : Z2 → C ; (n,m) → fn,m is called discreteconformal if the cross-ratio with respect to every elementary quadrilateral is equal to −1:
(fn,m − fn+1,m)(fn+1,m+1 − fn,m+1)
(fn+1,m − fn+1,m+1)(fn,m+1 − fn,m)= −1. (1)
The condition (1) is a discrete analogue of the Cauchy-Riemann relation. Actually, a smooth mapf : D ⊂ C → C, where D is a certain domain of the complex plane, is conformal if and only if itsatisfies
limϵ→0
(f(x, y) − f(x + ϵ, y))(f(x + ϵ, y + ϵ) − f(x, y + ϵ))
(f(x + ϵ, y) − f(x + ϵ, y + ϵ))(f(x, y + ϵ) − f(x, y))= −1 (2)
for all (x, y) ∈ D. However, using Definition 1 alone, one cannot exclude maps whose behaviour isfar from that of usual holomorphic maps. Figure 1 illustrates the map fn,m ∈ C defined by (1) withthe initial values fn,0 = n
12 , f0,m = (im)
12 , which is considered as a discrete analogue of z
12 but
shows undesirable behaviour. Because of this, an additional condition for a discrete conformal maphas been considered [1, 3, 5, 8].
Definition 2 (Embedded map) A discrete conformal map fn,m is called embedded if inner partsof different elementary quadrilaterals (fn,m, fn+1,m, fn+1,m+1, fn,m+1) do not intersect.
6

Figure 1: The map defined by (1) with the initial values fn,0 = n12 , f0,m = (im)
12 .
of analytic functions have been presented which are associated with Schramm’s patterns: exp(z),erf(z), Airy function [15], zγ , log(z) [3].
Among those examples, it is remarkable that the discrete analogue of the power function zγ has aclose relationship with the sixth Painleve equation (PVI) [5]. The discrete power function can beformulated as a solution to a system of difference equations on the square lattice (n,m) ∈ Z2 witha certain initial condition, which appears on the lattice of the Backlund transformations of PVI [12].Agafonov has constructed a formula for the radii of circles of the associated circle pattern at somespecial points on Z2 in terms of the Gauss hypergeometric function [2]. In this paper, we aim togive a brief survey of an explicit representation formula and extension of the discrete power functionobtained in [4]. The formula is expressible in terms of the hypergeometric τ function of PVI whichis valid on Z2
+ = (n,m) ∈ Z2 |n,m ≥ 0 and for γ ∈ C\2Z. Based on this formula, we extendthe domain of the discrete power function to a discrete analogue of the Riemann surface of the powerfunction.
2 Discrete Power Function
In the framework of discrete differential geometry, a discrete analogue of conformality has beenproposed by Bobenko and Pinkall [7]:
Definition 1 (Discrete conformal map) A map f : Z2 → C ; (n,m) → fn,m is called discreteconformal if the cross-ratio with respect to every elementary quadrilateral is equal to −1:
(fn,m − fn+1,m)(fn+1,m+1 − fn,m+1)
(fn+1,m − fn+1,m+1)(fn,m+1 − fn,m)= −1. (1)
The condition (1) is a discrete analogue of the Cauchy-Riemann relation. Actually, a smooth mapf : D ⊂ C → C, where D is a certain domain of the complex plane, is conformal if and only if itsatisfies
limϵ→0
(f(x, y) − f(x + ϵ, y))(f(x + ϵ, y + ϵ) − f(x, y + ϵ))
(f(x + ϵ, y) − f(x + ϵ, y + ϵ))(f(x, y + ϵ) − f(x, y))= −1 (2)
for all (x, y) ∈ D. However, using Definition 1 alone, one cannot exclude maps whose behaviour isfar from that of usual holomorphic maps. Figure 1 illustrates the map fn,m ∈ C defined by (1) withthe initial values fn,0 = n
12 , f0,m = (im)
12 , which is considered as a discrete analogue of z
12 but
shows undesirable behaviour. Because of this, an additional condition for a discrete conformal maphas been considered [1, 3, 5, 8].
Definition 2 (Embedded map) A discrete conformal map fn,m is called embedded if inner partsof different elementary quadrilaterals (fn,m, fn+1,m, fn+1,m+1, fn,m+1) do not intersect.
Figure 2: Examples of discrete conformal maps. Left: embedded, right: immersed.
An example of an embedded map is presented in the left figure of Figure 2. This condition seems torequire that f = fn,m is a univalent function in the continuous limit, and is too strict to capture awide class of discrete holomorphic functions. In fact, a relaxed requirement has been considered asfollows [1, 3].
Definition 3 (Immersed map) A discrete conformal map fn,m is called immersed, or an immer-sion, if inner parts of adjacent elementary quadrilaterals (fn,m, fn+1,m, fn+1,m+1, fn,m+1) aredisjoint.
See the right figure of Figure 2 for an example of an immersed map. We now give the definition ofthe discrete power function proposed by Bobenko [3, 5, 8].
Definition 4 (Discrete power function) Let f : Z2+ → C ; (n,m) → fn,m be a discrete confor-
mal map. If fn,m is the solution to the difference equation
γfn,m = 2n(fn+1,m − fn,m)(fn,m − fn−1,m)
fn+1,m − fn−1,m+ 2m
(fn,m+1 − fn,m)(fn,m − fn,m−1)
fn,m+1 − fn,m−1(3)
with the initial conditions
f0,0 = 0, f1,0 = 1, f0,1 = eγπi/2 (4)
for 0 < γ < 2, then we call f a discrete power function.
We note that the first term of the right hand side of (3) is nothing but the harmonic mean of theforward difference fn+1,m − fn,m and the backward difference fn,m − fn−1,m in n multipliedby n, and the second term is the same for m. Therefore, the difference equation (3) is a discreteanalogue of the differential equation γf = x ∂f
∂x+ y ∂f
∂y= z ∂f
∂z(z = x+ iy) for the power function
f(z) = zγ , which means that the parameter γ corresponds to the exponent of the discrete powerfunction.
The value of each fn,m ((n,m) ∈ Z2+) can be computed by using (1) and (3) from the initial values
(4) as follows. Putting m = 0 and n = 0 in (3), we have
γfn,0 = 2n(fn+1,0 − fn,0)(fn,0 − fn−1,0)
fn+1,0 − fn−1,0,
γf0,m = 2m(f0,m+1 − f0,m)(f0,m − f0,m−1)
f0,m+1 − f0,m−1,
(5)
respectively, from which we obtain fn,0 and f0,m starting from the initial values (4). We can com-pute other fn,m from fn,0 and f0,m by using (1) successively. Then it is possible to show by anelementary argument that fn,m has the following fundamental property:
7

fn,m−1
fn,m+1
fn+1,m
fn−1,m
Figure 3: Circle pattern associated with fn,m. Left: a circle (yellow) with the centerfn,m (n +m = 0 mod 2), circles of neighbouring quadrilaterals (magenta) and circles ofhalf-neighbourning quadrilaterals (blue). Right: the circle pattern of the case γ = 1
2 .
Proposition 5 Let fn,m be the discrete power function introduced in Definition 4. Then all the el-ementary quadrilaterals (fn,m, fn+1,m, fn+1,m+1, fn,m+1) are of the kite form, namely, all edgesat each vertex fn,m with n + m = 0 (mod 2) are of the same length,
|fn+1,m − fn,m| = |fn,m+1 − fn,m| = |fn−1,m − fn,m| = |fn,m−1 − fn,m|. (6)
Moreover, all angles between the neighbouring edges at the vertex fn,m with n + m = 1 (mod 2)are equal to π
2.
From Proposition 5, it is possible to associate the circles circumscribing the quadrilaterals(fn−1,m, fn,m−1, fn+1,m, fn,m+1) with n + m = 0 (mod 2) having the following properties:
1. The circles of neighbouring quadrilaterals intersect orthogonally.
2. The circles of half-neighbouring quadrilaterals with a common vertex are tangent.
The set of circles with the above properties are called the circle pattern of Schramm type [3, 15] (SeeFigure 3).
The purpose of this paper to present the following results on the discrete power function defined by(1), (3) and (4) [4]:
1. An explicit formula of fn,m in terms of the Gauss hypergeometric function, more precisely, interms of the hypergeometric τ function of the Painleve VI equation.
By definition, it is clear that each fn,m is computed as rational function of the initial values.A direct calculation yields the explicit formula of the discrete power function for m = 0 (orn = 0). Actually, when m = 0, (3) is reduced to the second equation of (5). Solving thethree-term recurrence relation with the initial condition f0,0 = 0, f1,0 = 1, we have
fn,0 =2l
2l + γ
l∏k=1
2k + γ
2k − γ(n = 2l),
l∏k=1
2k + γ
2k − γ(n = 2l + 1), (7)
for n ∈ Z+. When m = 1 (or n = 1), it may be surprising that fn,1 (and f1,m) can beexpressed in terms of the Gauss hypergeometric function [2]. Generalizing this result, wegive an explicit formula for the discrete power function fn,m for arbitrary (n,m) ∈ Z2
+.This is established through the underlying relationship between the discrete power functionand PVI, which is one of the most important equations in the theory of integrable systems.
8

fn,m−1
fn,m+1
fn+1,m
fn−1,m
Figure 3: Circle pattern associated with fn,m. Left: a circle (yellow) with the centerfn,m (n +m = 0 mod 2), circles of neighbouring quadrilaterals (magenta) and circles ofhalf-neighbourning quadrilaterals (blue). Right: the circle pattern of the case γ = 1
2 .
Proposition 5 Let fn,m be the discrete power function introduced in Definition 4. Then all the el-ementary quadrilaterals (fn,m, fn+1,m, fn+1,m+1, fn,m+1) are of the kite form, namely, all edgesat each vertex fn,m with n + m = 0 (mod 2) are of the same length,
|fn+1,m − fn,m| = |fn,m+1 − fn,m| = |fn−1,m − fn,m| = |fn,m−1 − fn,m|. (6)
Moreover, all angles between the neighbouring edges at the vertex fn,m with n + m = 1 (mod 2)are equal to π
2.
From Proposition 5, it is possible to associate the circles circumscribing the quadrilaterals(fn−1,m, fn,m−1, fn+1,m, fn,m+1) with n + m = 0 (mod 2) having the following properties:
1. The circles of neighbouring quadrilaterals intersect orthogonally.
2. The circles of half-neighbouring quadrilaterals with a common vertex are tangent.
The set of circles with the above properties are called the circle pattern of Schramm type [3, 15] (SeeFigure 3).
The purpose of this paper to present the following results on the discrete power function defined by(1), (3) and (4) [4]:
1. An explicit formula of fn,m in terms of the Gauss hypergeometric function, more precisely, interms of the hypergeometric τ function of the Painleve VI equation.
By definition, it is clear that each fn,m is computed as rational function of the initial values.A direct calculation yields the explicit formula of the discrete power function for m = 0 (orn = 0). Actually, when m = 0, (3) is reduced to the second equation of (5). Solving thethree-term recurrence relation with the initial condition f0,0 = 0, f1,0 = 1, we have
fn,0 =2l
2l + γ
l∏k=1
2k + γ
2k − γ(n = 2l),
l∏k=1
2k + γ
2k − γ(n = 2l + 1), (7)
for n ∈ Z+. When m = 1 (or n = 1), it may be surprising that fn,1 (and f1,m) can beexpressed in terms of the Gauss hypergeometric function [2]. Generalizing this result, wegive an explicit formula for the discrete power function fn,m for arbitrary (n,m) ∈ Z2
+.This is established through the underlying relationship between the discrete power functionand PVI, which is one of the most important equations in the theory of integrable systems.
2. Generalization of the exponent and the domain.
In Definition 4, the domain of the discrete power function is restricted to the “first quadrant”Z2
+, and the exponent γ to the interval 0 < γ < 2. Under this condition, it has been shownthat the discrete power function is embedded [1]. It is also shown that it is immersed for realγ [3]. However, the explicit formula mentioned above allow us to generalize the exponent toγ ∈ C\2Z. Furthermore, one can extend the domain to a discrete analogue of the Riemannsurface of the power function.
3 Main Results
3.1 Relationship to the Painleve VI equation
Before presenting the explicit formula for the discrete power function fn,m, we will move to a moregeneral setting and show the relationship to PVI
d2q
dt2=
1
2
(1
q+
1
q − 1+
1
q − t
)(dq
dt
)2
−(
1
t+
1
t− 1+
1
q − t
)dq
dt
+q(q − 1)(q − t)
2t2(t− 1)2
[κ2∞ − κ2
0t
q2+ κ2
1t− 1
(q − 1)2+ (1 − θ2)
t(t− 1)
(q − t)2
],
(8)
where κ0, κ1, κ∞, θ ∈ C are parameters (see, for example, [6, 13]). PVI enjoys quite rich math-ematical structure, but here we focus on the symmetry. Namely, PVI admits a family of birationaltransformations, called the Backlund transformations, which transform a solution of PVI to anothersolution of PVI with a different set of parameters. The Backlund transformations form a group calledthe affine Weyl group of typeD(1)
4 , which is generated by the reflections and translations with respectto the lattice characterized by the Dynkin diagram of type D(1)
4 [11].
The cross-ratio condition (1) can be regarded as a special case of the discrete Schwarzian KdVequation (or the cross-ratio equation)
(fn,m − fn+1,m)(fn+1,m+1 − fn,m+1)
(fn+1,m − fn+1,m+1)(fn,m+1 − fn,m)=
pnqm
, (9)
where pn and qm are arbitrary functions in the indicated variables. The discrete Schwarzian KdVequation is known as one of the typical discrete integrable systems, and some of the authors haveconstructed various special solutions to the above equation [9]. In particular, it is known that anautonomous case
(fn,m − fn+1,m)(fn+1,m+1 − fn,m+1)
(fn+1,m − fn+1,m+1)(fn,m+1 − fn,m)=
1
t, (10)
where t is independent of n and m, can be regarded as a part of the Backlund transformations of PVI
[9, 12].
We here give a brief account of the relationship between (3), (10) and PVI according to [12]. Thediscrete Schwarzian KdV equation (10) is automatically satisfied if there exists a function vn,m
satisfying
fn,m − fn+1,m = t−1/2vn,mvn+1,m, fn,m − fn,m+1 = vn,mvn,m+1. (11)
It can be shown that the difference equation (3) is reduced to
nvn+1,m − vn−1,m
vn+1,m + vn−1,m+ m
vn,m+1 − vn,m−1
vn,m+1 + vn,m−1= µ− (−1)m+nλ (12)
9

with γ = 1 + 2µ, where λ ∈ C is an integration constant. We take λ = µ so that (12) is consistentwhen n = m = 0 and v1,0 + v−1,0 = 0 = v0,1 + v0,−1.
Now assume that the dependence of the variable vn,m = vn,m(t) on the deformation parameter t isgiven by
−2td
dtlog vn,m = n
vn+1,m − vn−1,m
vn+1,m + vn−1,m+ χn+m, (13)
where χn+m = χn+m(t) is an arbitrary function satisfying χn+m+2 = χn+m. Then we have thefollowing Proposition:
Proposition 6 Let q = qn,m = qn,m(t) be the function defined by qn,m = t1/2vn+1,m
vn,m+1. Then q
satisfies PVI (8) with
κ2∞ =
1
4(µ− µ + m− n)2, κ2
0 =1
4(µ− µ−m + n)2,
κ21 =
1
4(µ + µ−m− n− 1)2, θ2 =
1
4(µ + µ + m + n + 1)2,
(14)
where we denote µ = (−1)m+nµ.
It is known that the solutions of PVI are transcendental in general, but it also admits various specialsolutions for special values of parameters. An important class of such special solutions is the hy-pergeometric solutions, which are expressed by the rational functions of the Gauss hypergeometricfunctions.
Proposition 7 (Hypergeometric solutions to PVI) [11]Define the function τν(a, b, c; t) (c /∈ Z, ν ∈ Z+) by
τν(a, b, c; t) =
det (φ(a + i− 1, b + j − 1, c; t))1≤i,j≤ν (ν > 0),
1 (ν = 0),(15)
with
φ(a, b, c; t) = c0Γ(a)Γ(b)
Γ(c)F (a, b, c; t)
+c1Γ(a− c + 1)Γ(b− c + 1)
Γ(2 − c)t1−cF (a− c + 1, b− c + 1, 2 − c; t).
(16)
Here, F (a, b, c; t) is the Gauss hypergeometric function, Γ(x) is the gamma function, and c0 and c1are arbitrary constants. Then
q =τν(a + 1, b + 1, c + 1; t)τν+1(a, b + 1, c; t)
τν+1(a + 1, b + 1, c + 1; t)τν(a, b + 1, c; t)(17)
gives a family of hypergeometric solutions to PVI with the parameters
κ∞ = a + ν, κ0 = b− c + 1 + ν, κ1 = c− a, θ = −b. (18)
We call τν(a, b, c; t) the hypergeometric τ function of PVI. We remark that (16) is the generalsolution to the Gauss hypergeometric differential equation,
t(1 − t)d2φ
dt2+ c− (a + b + 1)t dφ
dt− abφ = 0. (19)
It is interesting to note here that the hypergeometric solutions are on the special locations in theparameter space, namely, they are on the reflection hyperplanes with respect to the affine Weylgroup actions. The special case of PVI in Proposition 6 is included in the case of (18).
10

with γ = 1 + 2µ, where λ ∈ C is an integration constant. We take λ = µ so that (12) is consistentwhen n = m = 0 and v1,0 + v−1,0 = 0 = v0,1 + v0,−1.
Now assume that the dependence of the variable vn,m = vn,m(t) on the deformation parameter t isgiven by
−2td
dtlog vn,m = n
vn+1,m − vn−1,m
vn+1,m + vn−1,m+ χn+m, (13)
where χn+m = χn+m(t) is an arbitrary function satisfying χn+m+2 = χn+m. Then we have thefollowing Proposition:
Proposition 6 Let q = qn,m = qn,m(t) be the function defined by qn,m = t1/2vn+1,m
vn,m+1. Then q
satisfies PVI (8) with
κ2∞ =
1
4(µ− µ + m− n)2, κ2
0 =1
4(µ− µ−m + n)2,
κ21 =
1
4(µ + µ−m− n− 1)2, θ2 =
1
4(µ + µ + m + n + 1)2,
(14)
where we denote µ = (−1)m+nµ.
It is known that the solutions of PVI are transcendental in general, but it also admits various specialsolutions for special values of parameters. An important class of such special solutions is the hy-pergeometric solutions, which are expressed by the rational functions of the Gauss hypergeometricfunctions.
Proposition 7 (Hypergeometric solutions to PVI) [11]Define the function τν(a, b, c; t) (c /∈ Z, ν ∈ Z+) by
τν(a, b, c; t) =
det (φ(a + i− 1, b + j − 1, c; t))1≤i,j≤ν (ν > 0),
1 (ν = 0),(15)
with
φ(a, b, c; t) = c0Γ(a)Γ(b)
Γ(c)F (a, b, c; t)
+c1Γ(a− c + 1)Γ(b− c + 1)
Γ(2 − c)t1−cF (a− c + 1, b− c + 1, 2 − c; t).
(16)
Here, F (a, b, c; t) is the Gauss hypergeometric function, Γ(x) is the gamma function, and c0 and c1are arbitrary constants. Then
q =τν(a + 1, b + 1, c + 1; t)τν+1(a, b + 1, c; t)
τν+1(a + 1, b + 1, c + 1; t)τν(a, b + 1, c; t)(17)
gives a family of hypergeometric solutions to PVI with the parameters
κ∞ = a + ν, κ0 = b− c + 1 + ν, κ1 = c− a, θ = −b. (18)
We call τν(a, b, c; t) the hypergeometric τ function of PVI. We remark that (16) is the generalsolution to the Gauss hypergeometric differential equation,
t(1 − t)d2φ
dt2+ c− (a + b + 1)t dφ
dt− abφ = 0. (19)
It is interesting to note here that the hypergeometric solutions are on the special locations in theparameter space, namely, they are on the reflection hyperplanes with respect to the affine Weylgroup actions. The special case of PVI in Proposition 6 is included in the case of (18).
3.2 Explicit formula
As we have seen in the previous section, the relationship between the discrete power function andthe dependent variable q of PVI is rather indirect. However, it is possible to establish the explicitformula for fn,m in terms of the hypergeometric τ function.
We present the solution to the simultaneous system of the discrete Schwarzian KdV equation (10)and the difference equation (3) under the initial conditions
f0,0 = 0, f1,0 = c0, f0,1 = c1tr, r =
γ
2(20)
where c0 and c1 are arbitrary constants. We set c0 = c1 = 1 and t = eπi(= −1) to obtain theexplicit formula for the original discrete power function. Note that τν(b, a, c; t) = τν(a, b, c; t) bythe definition. Moreover, we interpret F (k, b, c; t) for k ∈ Z>0 as F (k, b, c; t) = 0 and Γ(−k) for
k ∈ Z≥0 as Γ(−k) =(−1)k
k!.
Theorem 8 (Explicit formula) For (n,m) ∈ Z2+, the function fn,m = fn,m(t) can be expressed
as follows.
1. Case where n ≤ m (or n′ = n). When n + m is even, we have
fn,m = c1tr−nN
(r + 1)N−1
(−r + 1)N
τn(−N,−r −N + 1,−r; t)τn(−N + 1,−r −N + 2,−r + 2; t)
, (21)
where N =n + m
2. When n + m is odd, we have
fn,m = c1tr−n (r + 1)N−1
(−r + 1)N−1
τn(−N + 1,−r −N + 1,−r; t)τn(−N + 2,−r −N + 2,−r + 2; t)
, (22)
where N =n + m + 1
2.
2. Case where n ≥ m (or n′ = m). When n + m is even, we have
fn,m = c0N(r + 1)N−1
(−r + 1)N
τm(−N + 2,−r −N + 1,−r + 2; t)
τm(−N + 1,−r −N + 2,−r + 2; t), (23)
where N =n + m
2. When n + m is odd, we have
fn,m = c0(r + 1)N−1
(−r + 1)N−1
τm(−N + 2,−r −N + 1,−r + 1; t)
τm(−N + 1,−r −N + 2,−r + 1; t), (24)
where N =n + m + 1
2.
Here, (u)j = u(u + 1) · · · (u + j − 1) is the Pochhammer symbol.
Note that these expressions are applicable to the case where r ∈ C\Z. A typical example of thediscrete power function and its continuous counterpart are illustrated in Figure 4. It also includes anexample of the case suggesting multivalency of the map.
11

Figure 4: Left: the discrete power function with γ = 1 + i. Middle: the ordinary power functionz1+i. Right: the discrete power function with γ = 0.25 + 3.35i.
3.3 Extension of the domain
So far the discrete power function fn,m was defined for (n,m) ∈ Z2+. We first extend the domain
to Z2. To determine the values of fn,m in the second, third and fourth quadrants, we have to givethe values of f−1,0 and f0,−1 as the initial conditions. Set the initial conditions as
f−1,0 = c2t2r, f0,−1 = c3t
3r, (25)
where c2 and c3 are arbitrary constants. This is natural because these conditions reduce to
f1,0 = 1, f0,1 = eπir, f−1,0 = e2πir, f0,−1 = e3πir (26)
at the original setting. Due to the symmetry of equations (10) and (3), we immediately obtain theexplicit formula of fn,m in the second and third quadrant.
Corollary 9 Under the initial conditions f0,1 = c1tr and (25), we have for n,m ∈ Z+,
f−n,m = fn,m| c0 →c2t2r, f−n,−m = fn,m| c0 →c2t2r,c1 →c3t2r
. (27)
Next, let us discuss the explicit formula in the fourth quadrant. Naively, we use the initial conditionsf0,−1 = c3t
3r and f1,0 = c0 to get the formula fn,−m = fn,m| c1 →c3t2r. However, this setting
makes the discrete power function fn,m become a single-valued function on Z2. In order to allowfn,m to be multi-valued on Z2, we introduce a discrete analogue of the Riemann surface associatedwith the power function (hereafter we simply call it the discrete Riemann surface) by the followingprocedure: Prepare an infinite number of Z2-planes, cut the positive part of the “real axis” of eachZ2-plane and glue them in a similar manner to the continuous case. The next step is to write theinitial conditions (20) and (25) in polar form as
f(1, kπ/2) = cktkr (k = 0, 1, 2, 3), (28)
where the first component, 1, denotes the absolute value of n+im and the second component, πk/2,is the argument. We must generalize the above initial conditions to those for arbitrary k ∈ Z so thatwe obtain the explicit expression of fn,m for each quadrant of each Z2-plane. Let us illustrate atypical case. When 3
2π ≤ arg(n + im) ≤ 2π, we solve the equations (10) and (3) under the initial
conditionsf(1, 3π/2) = c3t
3r, f(1, 2π) = c4t4r, (29)
to obtain the formula
f−n,−m = fn,m| c0 →c4t4r,c1 →c3t2r(n,m ∈ Z+). (30)
12

Figure 4: Left: the discrete power function with γ = 1 + i. Middle: the ordinary power functionz1+i. Right: the discrete power function with γ = 0.25 + 3.35i.
3.3 Extension of the domain
So far the discrete power function fn,m was defined for (n,m) ∈ Z2+. We first extend the domain
to Z2. To determine the values of fn,m in the second, third and fourth quadrants, we have to givethe values of f−1,0 and f0,−1 as the initial conditions. Set the initial conditions as
f−1,0 = c2t2r, f0,−1 = c3t
3r, (25)
where c2 and c3 are arbitrary constants. This is natural because these conditions reduce to
f1,0 = 1, f0,1 = eπir, f−1,0 = e2πir, f0,−1 = e3πir (26)
at the original setting. Due to the symmetry of equations (10) and (3), we immediately obtain theexplicit formula of fn,m in the second and third quadrant.
Corollary 9 Under the initial conditions f0,1 = c1tr and (25), we have for n,m ∈ Z+,
f−n,m = fn,m| c0 →c2t2r, f−n,−m = fn,m| c0 →c2t2r,c1 →c3t2r
. (27)
Next, let us discuss the explicit formula in the fourth quadrant. Naively, we use the initial conditionsf0,−1 = c3t
3r and f1,0 = c0 to get the formula fn,−m = fn,m| c1 →c3t2r. However, this setting
makes the discrete power function fn,m become a single-valued function on Z2. In order to allowfn,m to be multi-valued on Z2, we introduce a discrete analogue of the Riemann surface associatedwith the power function (hereafter we simply call it the discrete Riemann surface) by the followingprocedure: Prepare an infinite number of Z2-planes, cut the positive part of the “real axis” of eachZ2-plane and glue them in a similar manner to the continuous case. The next step is to write theinitial conditions (20) and (25) in polar form as
f(1, kπ/2) = cktkr (k = 0, 1, 2, 3), (28)
where the first component, 1, denotes the absolute value of n+im and the second component, πk/2,is the argument. We must generalize the above initial conditions to those for arbitrary k ∈ Z so thatwe obtain the explicit expression of fn,m for each quadrant of each Z2-plane. Let us illustrate atypical case. When 3
2π ≤ arg(n + im) ≤ 2π, we solve the equations (10) and (3) under the initial
conditionsf(1, 3π/2) = c3t
3r, f(1, 2π) = c4t4r, (29)
to obtain the formula
f−n,−m = fn,m| c0 →c4t4r,c1 →c3t2r(n,m ∈ Z+). (30)
Figure 5: The discrete power function with γ = 5/2. Left: domain is Z2. Right: domain is thediscrete Riemann surface.
Figure 6: Discrete power function with γ = 1 + i and associated circle pattern.
We present the discrete power function with γ = 52
whose domain is Z2 and the discrete Riemannsurface in Figure 5. Note that the necessary and sufficient condition for the discrete power functionto reduce to a single-valued function on Z2 is (ck = ck+4 and) e4πir = 1, which means that theexponent γ is an integer.
4 Concluding Remarks
In this paper, we have discussed the discrete power function defined by (1), (3) and (4). By using theunderlying relationship to PVI (8), we have constructed the explicit formula for the discrete powerfunction in terms of the hypergeometric τ function. Based on this formula, we have generalized theexponent to C\2Z. Also, we have extended the domain naturally from Z2
+ to the discrete Riemannsurface.
As mentioned before, it is shown that the discrete power function fn,m is an immersion when theexponent γ is real. Unfortunately, fn,m is not an immersion for generic γ and not associated withthe circle pattern. One can find, however, another case Re γ = 1 where it becomes an immersion[4].Figure 6 illustrates the discrete power function with γ = 1 + i together with the associated circlepattern.
We have excluded the case of γ ∈ 2Z. It was pointed out that there is a kind of duality relation be-tween these cases and the discrete logarithmic function [3]. From the viewpoint of explicit formula,these cases correspond to the case where the difference of characteristic exponents of the fundamen-tal solutions of the Gauss hypergeometric differential equation (19) becomes an integer and the logsingularity arises. Thus we need a different treatment for the precise description of these cases. Itmay be an interesting problem to establish the similar formulas for these cases.
13

Finally, the key of the discrete power function discussed in this paper is that it is formulated as thesimultaneous system of the discrete Schwarzian KdV equation (1) (or (10)) and a non-autonomousdifference equation (3) on the lattice of Backlund transformations of PVI (8). Now the Painleve equa-tions and their discrete analogues (the Painleve systems) are understood well from the viewpoint ofunderlying geometry of defining manifolds (the space of initial conditions) and their symmetries[14,10]. It may be an interesting problem to find various examples of discrete holomorphic functionsand investigate their properties by using the theory of the Painleve systems. Recently, we have foundother examples of discrete power function and discrete exponential function. We hope that we willbe able to report the results in the forthcoming publications soon.
References[1] S.I. Agafonov, Imbedded circle patterns with the combinatorics of the square grid and discrete
Painleve equations. Discrete Comput. Geom. 29, 305–319 (2003)
[2] S.I. Agafonov, Discrete Riccati equation, hypergeometric functions and circle patterns ofSchramm type. Glasg. Math. J. 47A, 1–16 (2005)
[3] S.I. Agafonov and A. I. Bobenko, Discrete Zγ and Painleve equations. Internat. Math. Res.Notices 2000, 165–193 (2000)
[4] H. Ando, M. Hay, K. Kajiwara and T. Masuda, An explicit formula for the discrete powerFunction associated with circle patterns of Schramm type. Funkcial. Ekvac. 57, 1–41 (2014)
[5] A.I. Bobenko, Discrete conformal maps and surfaces, Symmetries and integrability of differenceequations. London Math. Soc. Lecture Note Ser. 255 (Cambridge Univ. Press, Cambridge, 1999)97–108
[6] A. I. Bobenko, and U. Eitner, Painleve equations in the differential geometry of surfaces. LectureNotes in Mathematics 1753 (Springer-Verlag, Berlin 2000)
[7] A.I. Bobenko and U. Pinkall, Discrete isothermic surfaces. J. Reine Angew. Math. 475, 187–208(1996)
[8] A.I. Bobenko and U. Pinkall, Discretization of surfaces and integrable systems. Discrete inte-grable geometry and physics, Oxford Lecture Ser. Math. Appl. 16 (Oxford Univ. Press, NewYork, 1999) 3–58
[9] M. Hay, K. Kajiwara and T. Masuda, Bilinearization and special solutions to the discreteSchwarzian KdV equation. J. Math-for-Ind. 3, 53–62 (2011)
[10] K. Kajiwara, T. Masuda, M. Noumi, Y. Ohta and Y. Yamada, Hypergeometric solutions to theq-Painleve equations, Int. Math. Res. Not. 2004, 2497–2521 (2004)
[11] T. Masuda, Classical transcendental solutions of the Painleve equations and their degeneration.Tohoku Math. J. 56, 467–490 (2004)
[12] F.W. Nijhoff, A. Ramani, B. Grammaticos and Y. Ohta, On discrete Painleve equations associ-ated with the lattice KdV systems and the Painleve VI equation. Stud. Appl. Math. 106, 261–314(2001)
[13] M. Noumi, Painleve equations through symmetry. Translations of Mathematical Monographs223 (American Mathematical Society, Providence, RI, 2004)
[14] H. Sakai, Rational surfaces associated with affine root systems and geometry of the Painleveequations. Comm. Math. Phys. 220, 165–229 (2001)
[15] O. Schramm, Circle patterns with the combinatorics of the square grid. Duke Math. J. 86,347–389 (1997)
14

Finally, the key of the discrete power function discussed in this paper is that it is formulated as thesimultaneous system of the discrete Schwarzian KdV equation (1) (or (10)) and a non-autonomousdifference equation (3) on the lattice of Backlund transformations of PVI (8). Now the Painleve equa-tions and their discrete analogues (the Painleve systems) are understood well from the viewpoint ofunderlying geometry of defining manifolds (the space of initial conditions) and their symmetries[14,10]. It may be an interesting problem to find various examples of discrete holomorphic functionsand investigate their properties by using the theory of the Painleve systems. Recently, we have foundother examples of discrete power function and discrete exponential function. We hope that we willbe able to report the results in the forthcoming publications soon.
References[1] S.I. Agafonov, Imbedded circle patterns with the combinatorics of the square grid and discrete
Painleve equations. Discrete Comput. Geom. 29, 305–319 (2003)
[2] S.I. Agafonov, Discrete Riccati equation, hypergeometric functions and circle patterns ofSchramm type. Glasg. Math. J. 47A, 1–16 (2005)
[3] S.I. Agafonov and A. I. Bobenko, Discrete Zγ and Painleve equations. Internat. Math. Res.Notices 2000, 165–193 (2000)
[4] H. Ando, M. Hay, K. Kajiwara and T. Masuda, An explicit formula for the discrete powerFunction associated with circle patterns of Schramm type. Funkcial. Ekvac. 57, 1–41 (2014)
[5] A.I. Bobenko, Discrete conformal maps and surfaces, Symmetries and integrability of differenceequations. London Math. Soc. Lecture Note Ser. 255 (Cambridge Univ. Press, Cambridge, 1999)97–108
[6] A. I. Bobenko, and U. Eitner, Painleve equations in the differential geometry of surfaces. LectureNotes in Mathematics 1753 (Springer-Verlag, Berlin 2000)
[7] A.I. Bobenko and U. Pinkall, Discrete isothermic surfaces. J. Reine Angew. Math. 475, 187–208(1996)
[8] A.I. Bobenko and U. Pinkall, Discretization of surfaces and integrable systems. Discrete inte-grable geometry and physics, Oxford Lecture Ser. Math. Appl. 16 (Oxford Univ. Press, NewYork, 1999) 3–58
[9] M. Hay, K. Kajiwara and T. Masuda, Bilinearization and special solutions to the discreteSchwarzian KdV equation. J. Math-for-Ind. 3, 53–62 (2011)
[10] K. Kajiwara, T. Masuda, M. Noumi, Y. Ohta and Y. Yamada, Hypergeometric solutions to theq-Painleve equations, Int. Math. Res. Not. 2004, 2497–2521 (2004)
[11] T. Masuda, Classical transcendental solutions of the Painleve equations and their degeneration.Tohoku Math. J. 56, 467–490 (2004)
[12] F.W. Nijhoff, A. Ramani, B. Grammaticos and Y. Ohta, On discrete Painleve equations associ-ated with the lattice KdV systems and the Painleve VI equation. Stud. Appl. Math. 106, 261–314(2001)
[13] M. Noumi, Painleve equations through symmetry. Translations of Mathematical Monographs223 (American Mathematical Society, Providence, RI, 2004)
[14] H. Sakai, Rational surfaces associated with affine root systems and geometry of the Painleveequations. Comm. Math. Phys. 220, 165–229 (2001)
[15] O. Schramm, Circle patterns with the combinatorics of the square grid. Duke Math. J. 86,347–389 (1997)
[16] K. Stephenson, Introduction to circle packing. (Cambridge University Press, New York, 2005)
[17] W.P. Thurston, The finite Riemann mapping theorem. Invited address, International Sympo-sium in Celebration of the Proof of the Bieberbach Conjecture (Purdue University, 1985)
15

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
On connectivity of discretized 2D explicit curve
Fumiki Sekiya∗
Graduate University for Advanced Studies [SOKENDAI], JapanAkihiro Sugimoto†
National Institute of Informatics, Tokyo, Japan
Abstract Preserving connectivity is an important property commonly required for object discretiza-tion. Connectivity of a discretized object differs depending on how to discretize its original object.The morphological discretization is known to be capable of controlling the connectivity of a dis-cretized object, by selecting appropriate structuring elements. The analytical approximation, whichapproximates the morphological discretization by a finite number of inequalities, on the other hand,is recently introduced to reduce the computational cost required for the morphological discretization.However, whether this approximate discretization has the same connectivity that the morphologicaldiscretization has is yet to be investigated. In this paper, we study the connectivity relationship be-tween the morphological discretization and the analytical approximation, focusing on 2D explicitcurves. We show that they guarantee the same connectivity for 2D explicit curves.
Keywords: Discretization, explicit curve, connectivity, morphological discretization, structuringelement, analytical approximation
1 Introduction
An object such as a curve or line is continuous in the real world while in the computer it is discretizedto be stored and manipulated. We therefore need a discrete representation of a given object, whichdiffers depending on how to discretize it. An important property commonly required for objectdiscretization is to preserve the connectivity of an original object. In this paper, we consider dis-cretization of a explicit continuous curve in 2D, i.e., a continuous function in the form of y = f(x)in the xy-plane, primarily focusing on the connectivity of discretized curves.
Two integer points v,w (v = w) ∈ Z2 are said to be 0-adjacent if ∥v−w∥∞ ≤ 1, and 1-adjacentif ∥v − w∥1 ≤ 1 (Fig. 1). Note that ∥(x, y)∥∞ = max(|x|, |y|) and ∥(x, y)∥1 = |x| + |y|.A set of integer points D ⊂ Z2 is said to be k-connected for k ∈ 0, 1, if for any two pointsv,w (v = w) ∈ D there exists a sequence of integer points in D connecting v and w, such thatany two consecutive points in the sequence are k-adjacent. Figure. 2 shows k-connected sets fork = 0, 1. We remark that if D is 1-connected then it is 0-connected.
The discretization most commonly used is the morphological discretization [11–14]. In this ap-proach, for a continuous curve, its discretized curve is defined as a set of the integer points, whose
∗[email protected]†[email protected]
16

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
On connectivity of discretized 2D explicit curve
Fumiki Sekiya∗
Graduate University for Advanced Studies [SOKENDAI], JapanAkihiro Sugimoto†
National Institute of Informatics, Tokyo, Japan
Abstract Preserving connectivity is an important property commonly required for object discretiza-tion. Connectivity of a discretized object differs depending on how to discretize its original object.The morphological discretization is known to be capable of controlling the connectivity of a dis-cretized object, by selecting appropriate structuring elements. The analytical approximation, whichapproximates the morphological discretization by a finite number of inequalities, on the other hand,is recently introduced to reduce the computational cost required for the morphological discretization.However, whether this approximate discretization has the same connectivity that the morphologicaldiscretization has is yet to be investigated. In this paper, we study the connectivity relationship be-tween the morphological discretization and the analytical approximation, focusing on 2D explicitcurves. We show that they guarantee the same connectivity for 2D explicit curves.
Keywords: Discretization, explicit curve, connectivity, morphological discretization, structuringelement, analytical approximation
1 Introduction
An object such as a curve or line is continuous in the real world while in the computer it is discretizedto be stored and manipulated. We therefore need a discrete representation of a given object, whichdiffers depending on how to discretize it. An important property commonly required for objectdiscretization is to preserve the connectivity of an original object. In this paper, we consider dis-cretization of a explicit continuous curve in 2D, i.e., a continuous function in the form of y = f(x)in the xy-plane, primarily focusing on the connectivity of discretized curves.
Two integer points v,w (v = w) ∈ Z2 are said to be 0-adjacent if ∥v−w∥∞ ≤ 1, and 1-adjacentif ∥v − w∥1 ≤ 1 (Fig. 1). Note that ∥(x, y)∥∞ = max(|x|, |y|) and ∥(x, y)∥1 = |x| + |y|.A set of integer points D ⊂ Z2 is said to be k-connected for k ∈ 0, 1, if for any two pointsv,w (v = w) ∈ D there exists a sequence of integer points in D connecting v and w, such thatany two consecutive points in the sequence are k-adjacent. Figure. 2 shows k-connected sets fork = 0, 1. We remark that if D is 1-connected then it is 0-connected.
The discretization most commonly used is the morphological discretization [11–14]. In this ap-proach, for a continuous curve, its discretized curve is defined as a set of the integer points, whose
∗[email protected]†[email protected]
v
(a) k = 0.
v
(b) k = 1.
Figure 1: k-adjacent points of a discrete point v.
(a) k = 0. (b) k = 1.
Figure 2: k-connected sets in Z2.
Minkowski additions with a so-called structuring element intersects with the original curve. Someclassical discretizations, such as the supercover discretization [9] or the grid-intersection discretiza-tion [15], can be seen as particular cases of the morphological discretization. The morphologicaldiscretization can control the connectivity in the discrete space of a discretized curve by selectingappropriate structuring elements [6–8,21–23].
How to discretize a curve and how to compute its discretized one are different issues. The compu-tational cost required for the morphological discretization is expensive. On the other hand, repre-senting a discretized curve by a finite set of Diophantine inequalities (from which we choose onlyinteger points) was introduced in [19], where a discrete 2D straight line is defined by two inequalities.Such a representation, called the analytical representation, has been developed for more complicateddiscrete curves in subsequent researches [1–5,10,22,23]. A discretized curve with an analytical rep-resentation is straightforwardly computed at low cost, just by evaluating inequalities for each integerpoint. This property is useful also for curve fitting problems [16–18,20, 24, 25]. To reduce the com-putational cost further, an approximation of the analytical representation was recently introducedin [22], where only vertices of the employed structuring element are evaluated to have the systemof Diophantine inequalities. This approximation is capable of handling even further complicated(and implicit) curves/surfaces in any dimensions. However, whether this approximation, called theanalytical approximation, has the same connectivity that the original morphological discretizationhas is yet to be investigated.
In this paper, we study the relationship on the connectivity between discretized 2D explicit curves,by the morphological discretization and by the analytical approximation. We show that the analyticalapproximation has the same connectivity that the morphological discretization has for 2D explicitcurves.
17

SE
(a) DS(E) in (1).
S
E
(b) DS(E) in (2).
Figure 3: Two different interpretations of morphological discretizationDS(E). Red pointsdepict DS(E).
2 Morphological discretization and analytical approxima-tion
In this section, we first introduce the general definition of the morphological discretization, with twostructuring elements respectively guaranteeing 1-connectivity and 0-connectivity (Section 2.1). Wethen give the analytical approximation of the morphological discretization of a 2D explicit curvewith these structuring elements, based on the approach introduced in [22] (Section 2.2).
2.1 Morphological discretization
A morphological discretization (see [11–14]) of a curve E ⊂ R2, with a structuring element S ⊂R2, is defined by
DS(E) = (E ⊕ S) ∩ Z2, (1)
where S = −s : s ∈ S. ⊕ denotes the Minkowski addition (E ⊕ S = e+ s : e ∈ E, s ∈ S).(1) can be also written as
DS(E) =v ∈ Z2 : (v ⊕ S) ∩ E = ∅
. (2)
Figure 3 illustrates the two different interpretations of DS(E) in (1) and (2).
Using different structuring elements for the same curve results in different discretizations, and inparticular, different connectivities (see Fig. 4 for example). How to select an appropriate structuringelement is therefore important. In this paper, we consider two structuring elements defined by
B∞ =
p ∈ R2 : ∥p∥∞ ≤ 1
2
,
B1 =
p ∈ R2 : ∥p∥1 ≤ 1
2
.
The morphological discretization withB∞, i.e.,DB∞(E), is equivalent to the supercover discretiza-tion of E, which is known to be 1-connected if E is connected in R2 [21] (Fig. 4(a)). DB1(E), onthe other hand, is 0-connected for connected E (Fig. 4(b)), which has yet to be reported to the bestof our knowledge; here we give its proof.
18

SE
(a) DS(E) in (1).
S
E
(b) DS(E) in (2).
Figure 3: Two different interpretations of morphological discretizationDS(E). Red pointsdepict DS(E).
2 Morphological discretization and analytical approxima-tion
In this section, we first introduce the general definition of the morphological discretization, with twostructuring elements respectively guaranteeing 1-connectivity and 0-connectivity (Section 2.1). Wethen give the analytical approximation of the morphological discretization of a 2D explicit curvewith these structuring elements, based on the approach introduced in [22] (Section 2.2).
2.1 Morphological discretization
A morphological discretization (see [11–14]) of a curve E ⊂ R2, with a structuring element S ⊂R2, is defined by
DS(E) = (E ⊕ S) ∩ Z2, (1)
where S = −s : s ∈ S. ⊕ denotes the Minkowski addition (E ⊕ S = e+ s : e ∈ E, s ∈ S).(1) can be also written as
DS(E) =v ∈ Z2 : (v ⊕ S) ∩ E = ∅
. (2)
Figure 3 illustrates the two different interpretations of DS(E) in (1) and (2).
Using different structuring elements for the same curve results in different discretizations, and inparticular, different connectivities (see Fig. 4 for example). How to select an appropriate structuringelement is therefore important. In this paper, we consider two structuring elements defined by
B∞ =
p ∈ R2 : ∥p∥∞ ≤ 1
2
,
B1 =
p ∈ R2 : ∥p∥1 ≤ 1
2
.
The morphological discretization withB∞, i.e.,DB∞(E), is equivalent to the supercover discretiza-tion of E, which is known to be 1-connected if E is connected in R2 [21] (Fig. 4(a)). DB1(E), onthe other hand, is 0-connected for connected E (Fig. 4(b)), which has yet to be reported to the bestof our knowledge; here we give its proof.
B 8
E
(a) DB∞ (E).
B1
E
(b) DB1 (E).
Figure 4: Morphological discretizations using structuring elements B∞ and B1. (a) is1-connected while (b) is 0-connected.
ui
C
Figure 5: Illustration for proof of Theorem 1. Blue region depicts ui ⊕ B1, while redregion depicts A0(ui)⊕B1.
Theorem 1. DB1(E) is 0-connected for connected E ⊂ R2, as long as it has at least two differentinteger points.
Proof. Let s, t be any two different integer points in DB1(E). We show that there exists a sequenceof integer points from s and t in DB1(E), such that any two consecutive points in the sequence are0-adjacent. We call such a sequence a 0-path from s to t in DB1(E). We denote by p, q ∈ R2
intersection points of E respectively with s ⊕ B1 and t ⊕ B1. Then, since E is connected,there exists a segmentC ⊂ E whose end points are p and q. We now consider the unique path alongC from p to q, with collecting in the path integer points u1, . . . ,un, whose Minkowski additionswith B1 (i.e., ui ⊕ B1, i = 1, . . . , n) intersect with C. This process makes a 0-path from sto t in DB1(E), which is proven as follows. First, it is obvious that u1 = s and un = t. Next,u1, . . . ,un ⊂ DB1(E) because u1, . . . ,un = DB1(C) and C ⊂ E. Finally, we showthat ui+1 is a 0-adjacent point of ui for i = 1, . . . , n − 1. We denote by A0(v) the set of the0-adjacent points of v ∈ Z2 (see Fig. 1(a)). Any point in ui ⊕B1 is then either contained also inA0(ui) ⊕ B1 or enclosed by it as in Fig. 5. Therefore, the path along C from an intersection pointwith ui⊕B1 toward the terminal point q, has to crossA0(ui)⊕B1 before reaching the “outside”of it. This indicates that ui+1 ∈ A0(ui). There exists a 0-path from s to t, accordingly.
2.2 Analytical approximation
Computing DS(E) for a given E ⊂ R2 with S = B∞, B1 requires evaluating for each v ∈ Z2
whether or not v⊕S intersects with E. This is computationally expensive. When E is an explicit
19

curve, i.e., in the form of y = f(x), however, we can compute it approximately at low cost (withina finite region in Z2) based on the approach introduced in [22].
A 2D explicit continuous curve is represented by
E =
(x, y) ∈ R2 : y = f(x), (3)
where f : R → R is a continuous function. From (2), for E in (3), DS(E) can be written as
DS(E) =
(xint, yint) ∈ Z2 : yint + ty = f(xint + tx) for ∃(tx, ty) ∈ S. (4)
Note that yint + ty = f(xint + tx) means (xint + tx, yint + ty) ∈ E. Since f is continuous, theintermediate-value theorem allows for connected S to rewrite (4) as
DS(E) =
(xint, yint) ∈ Z2 :
yint ≥ min(tx,ty)∈S
(f(xint + tx) − ty) ,
yint ≤ max(tx,ty)∈S
(f(xint + tx) − ty)
. (5)
Note that both B∞ and B1 are connected.
For S = B∞, B1, unfortunately, evaluating the minimum and maximum of f(xint + tx) − ty withrespect to (tx, ty) ∈ S is practically impossible, because S has infinite elements. Following [22],however, we can approximately compute (5) by replacing S = B∞, B1 with finite subsets V∞, V1
defined by
V∞ =
(−1
2,−1
2
),
(−1
2,
1
2
),
(1
2,−1
2
),
(1
2,
1
2
),
V1 =
(−1
2, 0
),
(0,−1
2
),
(0,
1
2
),
(1
2, 0
).
They are the sets of the vertices respectively of B∞ and B1 as in Fig. 6. We then obtain theanalytical approximations for DB∞(E) and DB1(E) respectively as
D′V∞(E) =
(xint, yint) ∈ Z2 :
yint ≥ minf(xint − 1
2
), f(xint + 1
2
)− 1
2,
yint ≤ maxf(xint − 1
2
), f(xint + 1
2
)+ 1
2
,
D′V1
(E) =
(xint, yint) ∈ Z2 :
yint ≥ minf(xint − 1
2
), f(xint + 1
2
), f (xint) − 1
2
,
yint ≤ maxf(xint − 1
2
), f(xint + 1
2
), f (xint) + 1
2
.
For each (xint, yint) ∈ Z2, the inequalities in (5) are evaluated at only the four vertices of S =B∞ (resp. B1) in D′
V∞(E) (resp. D′V1
(E)), while they have to be evaluated at all the points inS = B∞ (resp. B1) in the morphological discretization. Therefore the analytical approximationis computationally more inexpensive than the morphological discretization. On the other hand, theanalytical approximation may fail in collecting some integer points involved in the morphologicaldiscretization as in Figs. 7 and 8 (in the next section, we will see that such cases arise when theMinkowski addition of an integer point and B∞ [resp. B1] is intersected by E, but not by itspiecewise linear approximation defined in (6) [resp. (7)]). We remark that we can also replace B∞and B1 with larger finite subsets than V∞ and V1 for more accurate approximation. However, V∞and V1 are sufficient at least to obtain the same connectivities as the morphological discretization,which is proven in the next section.
3 Connectivity relation betweenmorphological discretiza-tion and analytical approximation
In this section, we show that the analytical approximation for a 2D explicit curve introduced in thelast section has the same connectivity in Z2 that its morphological discretization has. To prove this,
20

curve, i.e., in the form of y = f(x), however, we can compute it approximately at low cost (withina finite region in Z2) based on the approach introduced in [22].
A 2D explicit continuous curve is represented by
E =
(x, y) ∈ R2 : y = f(x), (3)
where f : R → R is a continuous function. From (2), for E in (3), DS(E) can be written as
DS(E) =
(xint, yint) ∈ Z2 : yint + ty = f(xint + tx) for ∃(tx, ty) ∈ S. (4)
Note that yint + ty = f(xint + tx) means (xint + tx, yint + ty) ∈ E. Since f is continuous, theintermediate-value theorem allows for connected S to rewrite (4) as
DS(E) =
(xint, yint) ∈ Z2 :
yint ≥ min(tx,ty)∈S
(f(xint + tx) − ty) ,
yint ≤ max(tx,ty)∈S
(f(xint + tx) − ty)
. (5)
Note that both B∞ and B1 are connected.
For S = B∞, B1, unfortunately, evaluating the minimum and maximum of f(xint + tx) − ty withrespect to (tx, ty) ∈ S is practically impossible, because S has infinite elements. Following [22],however, we can approximately compute (5) by replacing S = B∞, B1 with finite subsets V∞, V1
defined by
V∞ =
(−1
2,−1
2
),
(−1
2,
1
2
),
(1
2,−1
2
),
(1
2,
1
2
),
V1 =
(−1
2, 0
),
(0,−1
2
),
(0,
1
2
),
(1
2, 0
).
They are the sets of the vertices respectively of B∞ and B1 as in Fig. 6. We then obtain theanalytical approximations for DB∞(E) and DB1(E) respectively as
D′V∞(E) =
(xint, yint) ∈ Z2 :
yint ≥ minf(xint − 1
2
), f(xint + 1
2
)− 1
2,
yint ≤ maxf(xint − 1
2
), f(xint + 1
2
)+ 1
2
,
D′V1
(E) =
(xint, yint) ∈ Z2 :
yint ≥ minf(xint − 1
2
), f(xint + 1
2
), f (xint) − 1
2
,
yint ≤ maxf(xint − 1
2
), f(xint + 1
2
), f (xint) + 1
2
.
For each (xint, yint) ∈ Z2, the inequalities in (5) are evaluated at only the four vertices of S =B∞ (resp. B1) in D′
V∞(E) (resp. D′V1
(E)), while they have to be evaluated at all the points inS = B∞ (resp. B1) in the morphological discretization. Therefore the analytical approximationis computationally more inexpensive than the morphological discretization. On the other hand, theanalytical approximation may fail in collecting some integer points involved in the morphologicaldiscretization as in Figs. 7 and 8 (in the next section, we will see that such cases arise when theMinkowski addition of an integer point and B∞ [resp. B1] is intersected by E, but not by itspiecewise linear approximation defined in (6) [resp. (7)]). We remark that we can also replace B∞and B1 with larger finite subsets than V∞ and V1 for more accurate approximation. However, V∞and V1 are sufficient at least to obtain the same connectivities as the morphological discretization,which is proven in the next section.
3 Connectivity relation betweenmorphological discretiza-tion and analytical approximation
In this section, we show that the analytical approximation for a 2D explicit curve introduced in thelast section has the same connectivity in Z2 that its morphological discretization has. To prove this,
(a) V∞. (b) V1.
Figure 6: V∞ and V1 (red points). They are the sets of the vertices respectively of B∞ andB1 (depicted in blue).
0
1
2
3
4
0 1 2 3 4
y
x
E
(a) DB∞ (E).
0
1
2
3
4
0 1 2 3 4
y
x
E
(b) D′V∞
(E).
Figure 7: DB∞(E) and D′V∞
(E) (red points on the grids) for E = (x, y) ∈ R2 : y =f(x) = 0.4571x3−3.127x2+5.019x+1.228. In (b), points (x, y) ∈ Z2⊕V∞ satisfyingy > f(x) are depicted in green, while those satisfying y < f(x) in orange; an integer pointv ∈ Z2 is in D′
V∞(E) iff v ⊕ V∞ (four points) are depicted in both colors or include a
point on E.
we show that the discretization of an explicit curve E by the analytical approximation can be seenas the morphological discretization of a piecewise linear approximation of E. We first show thatD′
V∞(E) has the same connectivity with DB∞(E).Theorem 2. D′
V∞(E) is 1-connected.
Proof. We show that D′V∞(E) = DB∞(E′) for E′ defined by
E′ = (x, y) ∈ R2 : y = f ′(x), (6)
where
f ′(x) = f(⌊x + 1
2
⌋− 1
2
)+(x−(⌊x + 1
2
⌋− 1
2
)) (f(⌊x + 1
2
⌋+ 1
2
)− f(⌊x + 1
2
⌋− 1
2
)).
E′ is a piecewise linear approximation ofE as in Fig. 9. We remark that f ′(xint+12) = f(xint+
12),
and f ′(x) is linear within[xint − 1
2, xint + 1
2
]for ∀xint ∈ Z. DB∞(E′) is 1-connected because
E′ is connected in R2.
21

0
1
2
3
4
0 1 2 3 4
y
x
E
(a) DB1 (E).
0
1
2
3
4
0 1 2 3 4
y
x
E
(b) D′V1
(E).
Figure 8: DB1(E) and D′V1(E) (red points on the grids) for E = (x, y) ∈ R2 : y =
f(x) = 0.4571x3−3.127x2+5.019x+1.228. In (b), points (x, y) ∈ Z2⊕V1 satisfyingy > f(x) are depicted in green, while those satisfying y < f(x) in orange; an integerpoint v ∈ Z2 is in D′
V1(E) iff v⊕V1 (four points) are depicted in both colors or include
a point on E.
E
E’
1/2 3/2-1/2x = -3/2
Figure 9: E and E′.
From (5), DB∞(E′) is written as
DB∞(E′) =
(xint, yint) ∈ Z2 :
yint ≥ min(tx,ty)∈B∞
(f ′(xint + tx) − ty
),
yint ≤ max(tx,ty)∈B∞
(f ′(xint + tx) − ty
) .
We will transform it intoD′V∞(E). Since tx and ty are independent of each other for (tx, ty) ∈ B∞,
the extrema of f ′(xint+tx)−ty with respect to (tx, ty) are obtained by minimizing and maximizingit independently for tx and ty . With respect to ty , it is obviously minimal with ty = 1
2, and maximal
with ty = − 12. With respect to tx, on the other hand, the extrema are at tx = − 1
2or 1
2because
f ′(x) is linear within[xint − 1
2, xint + 1
2
]for ∀xint ∈ Z. Consequently,
DB∞(E′) =
(xint, yint) ∈ Z2 :yint ≥ min
f ′(xint −
1
2
), f ′(xint +
1
2
)− 1
2,
yint ≤ max
f ′(xint −
1
2
), f ′(xint +
1
2
)+
1
2
,
which is equal to D′V∞(E), because f ′(xint ± 1
2) = f(xint ± 1
2) for ∀xint ∈ Z.
22

0
1
2
3
4
0 1 2 3 4
y
x
E
(a) DB1 (E).
0
1
2
3
4
0 1 2 3 4
y
x
E
(b) D′V1
(E).
Figure 8: DB1(E) and D′V1(E) (red points on the grids) for E = (x, y) ∈ R2 : y =
f(x) = 0.4571x3−3.127x2+5.019x+1.228. In (b), points (x, y) ∈ Z2⊕V1 satisfyingy > f(x) are depicted in green, while those satisfying y < f(x) in orange; an integerpoint v ∈ Z2 is in D′
V1(E) iff v⊕V1 (four points) are depicted in both colors or include
a point on E.
E
E’
1/2 3/2-1/2x = -3/2
Figure 9: E and E′.
From (5), DB∞(E′) is written as
DB∞(E′) =
(xint, yint) ∈ Z2 :
yint ≥ min(tx,ty)∈B∞
(f ′(xint + tx) − ty
),
yint ≤ max(tx,ty)∈B∞
(f ′(xint + tx) − ty
) .
We will transform it intoD′V∞(E). Since tx and ty are independent of each other for (tx, ty) ∈ B∞,
the extrema of f ′(xint+tx)−ty with respect to (tx, ty) are obtained by minimizing and maximizingit independently for tx and ty . With respect to ty , it is obviously minimal with ty = 1
2, and maximal
with ty = − 12. With respect to tx, on the other hand, the extrema are at tx = − 1
2or 1
2because
f ′(x) is linear within[xint − 1
2, xint + 1
2
]for ∀xint ∈ Z. Consequently,
DB∞(E′) =
(xint, yint) ∈ Z2 :yint ≥ min
f ′(xint −
1
2
), f ′(xint +
1
2
)− 1
2,
yint ≤ max
f ′(xint −
1
2
), f ′(xint +
1
2
)+
1
2
,
which is equal to D′V∞(E), because f ′(xint ± 1
2) = f(xint ± 1
2) for ∀xint ∈ Z.
E
E”
1/2 3/2-1/2x = -3/2
Figure 10: E and E′′.
We next show that D′V1
(E) has the same connectivity with DB1(E).Theorem 3. D′
V1(E) is 0-connected.
Proof. We show that D′V1
(E) = DB1(E′′) for E′′ defined by
E′′ = (x, y) ∈ R2 : y = f ′′(x), (7)
wheref ′′(x) = f
(⌊2x⌋2
)+ 2(x− ⌊2x⌋
2
)(f(
⌊2x⌋+12
)− f(
⌊2x⌋2
)).
E′′ is a piecewise linear approximation of E as in Fig. 10. We remark that f ′′(xint2
) = f(xint2
), andf ′′(x) is linear within
[xint2, xint+1
2
]for ∀xint ∈ Z. From Theorem 1, DB1(E′′) is 0-connected
because E′′ is connected in R2.
DB1(E′′) is written as
DB1(E′′) =
(xint, yint) ∈ Z2 :
yint ≥ min(tx,ty)∈B1
(f ′′(xint + tx) − ty
),
yint ≤ max(tx,ty)∈B1
(f ′′(xint + tx) − ty
) .
We will transform it into D′V1
(E). Since − 12
+ |tx| ≤ ty ≤ 12− |tx| for (tx, ty) ∈ B1, DB1(E′′)
can be rewritten as
DB1(E′′) =
(xint, yint) ∈ Z2 :
yint ≥ mintx∈[− 1
2, 12 ]
(f ′′(xint + tx) − 1
2+ |tx|),
yint ≤ maxtx∈[− 1
2, 12 ]
(f ′′(xint + tx) +
1
2− |tx|)
.
Here, the minimum of f ′′(xint + tx)− 12
+ |tx| and the maximum of f ′′(xint + tx) + 12− |tx| with
respect to tx ∈[− 1
2, 12
]are at tx = − 1
2, 0 or 1
2, because they are linear within
[xint − 1
2, xint
]and[
xint, xint + 12
]. We thus obtain
DB1(E′′) =
(xint, yint) ∈ Z2 :yint ≥ min
f ′′(xint −
1
2
), f ′′(xint +
1
2
), f ′′ (xint) −
1
2
,
yint ≤ max
f ′′(xint −
1
2
), f ′′(xint +
1
2
), f ′′ (xint) +
1
2
,
which is equal to D′V1
(E), because f ′′(xint ± 12) = f(xint ± 1
2), and f ′′(xint) = f(xint) for
∀xint ∈ Z.
For 2D explicit curves, thus, the analytical approximation introduced in [22] guarantees the sameconnectivity in Z2 that their morphological discretization does.
23

4 Conclusion
We investigated the connectivity relation between the morphological discretization and the analyt-ical approximation introduced in [22] for 2D explicit continuous curves. We first showed that themorphological discretization of a 2D continuous curve with the structuring element B1 (the ball ofradius 1
2based on l1 norm) guarantees 0-connectivity of the obtained result. We then showed that
the discretization of a 2D explicit curve by the analytical approximation has the same connectivityin Z2 that its morphological discretization has. Our proof was based on the idea that the analyticalapproximation for a 2D explicit curve can be seen as the morphological discretization of a piecewiselinear approximation of the curve. Whether this property holds for parametric curves, or curves andsurfaces in higher dimensions, will be investigated in our future work.
References[1] E. Andres. Discrete linear objects in dimension n: the standard model. Graphical models,
65(1):92–111, 2003.
[2] E. Andres. The supercover of an m-flat is a discrete analytical object. Theoretical ComputerScience, 406(1):8–14, 2008.
[3] E. Andres, R. Acharya, and C. Sibata. Discrete analytical hyperplanes. Graphical Models andImage Processing, 59(5):302–309, 1997.
[4] E. Andres and M.-A. Jacob. The discrete analytical hyperspheres. IEEE Transactions onVisualization and Computer Graphics, 3(1):75–86, 1997.
[5] E. Andres and T. Roussillon. Analytical description of digital circles. Proc. of InternationalConference on Discrete Geometry for Computer Imagery (DGCI2011), LNCS 6607, 235–246.Springer, 2011.
[6] V.E. Brimkov, E. Andres, and R.P. Barneva. Object discretization in higher dimensions. InProc. of International Conference on Discrete Geometry for Computer Imagery (DGCI2000),LNCS 1953, 210–221. Springer, 2000.
[7] V.E. Brimkov, R.P. Barneva, and B. Brimkov. Minimal offsets that guarantee maximal orminimal connectivity of digital curves in nd. Proc. of International Conference on DiscreteGeometry for Computer Imagery (DGCI2009), LNCS 5810, 337–349. Springer, 2009.
[8] V.E. Brimkov, R.P. Barneva, and B. Brimkov. Connected distance-based rasterization of objectsin arbitrary dimension. Graphical Models, 73(6):323–334, 2011.
[9] D. Cohen-Or and A. Kaufman. Fundamentals of surface voxelization. Graphical models andimage processing, 57(6):453–461, 1995.
[10] Y. Gerard, L. Provot, and F. Feschet. Introduction to digital level layers. Proc. of the Inter-national Conference on Discrete Geometry for Computer Imagery (DGCI2011), LNCS 6607,83–94. Springer, 2011.
[11] H.J.A.M. Heijmans. Morphological discretization. Geometrical Problems of Image Process-ing, 99–106, 1991.
[12] H.J.A.M. Heijmans. Discretization of morphological operators. Journal of Visual Communi-cation and Image Representation, 3(2):182–193, 1992.
[13] H.J.A.M. Heijmans. Morphological image operators. Advances in electronics and electronphysics, supplement. Academic Press, 1994.
[14] H.J.A.M. Heijmans and A. Toet. Morphological sampling. CVGIP: Image understanding,54(3):384–400, 1991.
24

4 Conclusion
We investigated the connectivity relation between the morphological discretization and the analyt-ical approximation introduced in [22] for 2D explicit continuous curves. We first showed that themorphological discretization of a 2D continuous curve with the structuring element B1 (the ball ofradius 1
2based on l1 norm) guarantees 0-connectivity of the obtained result. We then showed that
the discretization of a 2D explicit curve by the analytical approximation has the same connectivityin Z2 that its morphological discretization has. Our proof was based on the idea that the analyticalapproximation for a 2D explicit curve can be seen as the morphological discretization of a piecewiselinear approximation of the curve. Whether this property holds for parametric curves, or curves andsurfaces in higher dimensions, will be investigated in our future work.
References[1] E. Andres. Discrete linear objects in dimension n: the standard model. Graphical models,
65(1):92–111, 2003.
[2] E. Andres. The supercover of an m-flat is a discrete analytical object. Theoretical ComputerScience, 406(1):8–14, 2008.
[3] E. Andres, R. Acharya, and C. Sibata. Discrete analytical hyperplanes. Graphical Models andImage Processing, 59(5):302–309, 1997.
[4] E. Andres and M.-A. Jacob. The discrete analytical hyperspheres. IEEE Transactions onVisualization and Computer Graphics, 3(1):75–86, 1997.
[5] E. Andres and T. Roussillon. Analytical description of digital circles. Proc. of InternationalConference on Discrete Geometry for Computer Imagery (DGCI2011), LNCS 6607, 235–246.Springer, 2011.
[6] V.E. Brimkov, E. Andres, and R.P. Barneva. Object discretization in higher dimensions. InProc. of International Conference on Discrete Geometry for Computer Imagery (DGCI2000),LNCS 1953, 210–221. Springer, 2000.
[7] V.E. Brimkov, R.P. Barneva, and B. Brimkov. Minimal offsets that guarantee maximal orminimal connectivity of digital curves in nd. Proc. of International Conference on DiscreteGeometry for Computer Imagery (DGCI2009), LNCS 5810, 337–349. Springer, 2009.
[8] V.E. Brimkov, R.P. Barneva, and B. Brimkov. Connected distance-based rasterization of objectsin arbitrary dimension. Graphical Models, 73(6):323–334, 2011.
[9] D. Cohen-Or and A. Kaufman. Fundamentals of surface voxelization. Graphical models andimage processing, 57(6):453–461, 1995.
[10] Y. Gerard, L. Provot, and F. Feschet. Introduction to digital level layers. Proc. of the Inter-national Conference on Discrete Geometry for Computer Imagery (DGCI2011), LNCS 6607,83–94. Springer, 2011.
[11] H.J.A.M. Heijmans. Morphological discretization. Geometrical Problems of Image Process-ing, 99–106, 1991.
[12] H.J.A.M. Heijmans. Discretization of morphological operators. Journal of Visual Communi-cation and Image Representation, 3(2):182–193, 1992.
[13] H.J.A.M. Heijmans. Morphological image operators. Advances in electronics and electronphysics, supplement. Academic Press, 1994.
[14] H.J.A.M. Heijmans and A. Toet. Morphological sampling. CVGIP: Image understanding,54(3):384–400, 1991.
[15] R. Klette and A. Rosenfeld. Digital geometry: geometric methods for digital picture analysis.Elsevier, 2004.
[16] G. Largeteau-Skapin, R. Zrour, and E. Andres. O(n3 log n) time complexity for the op-timal consensus set computation for 4-connected digital circles. Proc. of the InternationalConference on Discrete Geometry for Computer Imagery (DGCI2013), LNCS 7749, 241–252.Springer, 2013.
[17] G. Largeteau-Skapin, R. Zrour, E. Andres, A. Sugimoto, and Y. Kenmochi. Optimal consensusset and preimage of 4-connected circles in a noisy environment. Proc. of the InternationalConference on Pattern Recognition (ICPR2012), 3774–3777. IEEE, 2012.
[18] M.S. Phan, Y. Kenmochi, A. Sugimoto, H. Talbot, E. Andres, and R. Zrour. Efficient robustdigital annulus fitting with bounded error. Proc. of the International Conference on DiscreteGeometry for Computer Imagery (DGCI2013), LNCS 7749, 253–264. Springer, 2013.
[19] J.-P. Reveilles. Geometrie discrete, calcul en nombres entiers et algorithmique. PhD thesis,Departement d’Informatique, Universite Louis Pasteur, Strasbourg, France, 1991.
[20] F. Sekiya and A. Sugimoto. Fitting discrete polynomial curve and surface to noisy data. Annalsof Mathematics and Artificial Intelligence, 1–28, 2014.
[21] M. Tajine and C. Ronse. Topological properties of hausdorff discretization, and comparison toother discretization schemes. Theoretical Computer Science, 283(1):243–268, 2002.
[22] J.-L. Toutant, E. Andres, G. Largeteau-Skapin, and R. Zrour. Implicit digital surfaces in arbi-trary dimensions. Proc. of the International Conference on Discrete Geometry for ComputerImagery (DGCI2014), LNCS 8668. Springer, 2014. To appear.
[23] J.-L. Toutant, E. Andres, and T. Roussillon. Digital circles, spheres and hyperspheres: Frommorphological models to analytical characterizations and topological properties. Discrete Ap-plied Mathematics, 161(16):2662–2677, 2013.
[24] R. Zrour, G. Largeteau-Skapin, and E. Andres. Optimal consensus set for annulus fitting. Proc.of the International Conference on Discrete Geometry for Computer Imagery (DGCI2011),LNCS 6607, 358–368. Springer, 2011.
[25] R. Zrour, Y. Kenmochi, H. Talbot, L. Buzer, Y. Hamam, I. Shimizu, and A. Sugimoto. Optimalconsensus set for digital line and plane fitting. International Journal of Imaging Systems andTechnology, 21(1):45–57, 2011.
25

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Probe-type deformers
Shizuo Kaji∗
Yamaguchi University, Japan / JST CRESTGengdai Liu†
OLM Digital Inc., Japan
Abstract Fast and easy-to-use deformers to warp 3D space are vital tools for both modelling and an-imation. In this paper, we introduce an interactive and easy-to-manipulate shape deformer based oninterpolation of affine transformations. We devise a new interface with probes, which are metaphorsof operating handles. Users are allowed to place “probes” around the target shape and tweak theminteractively. The system automatically interpolates the transformations of them to produce a de-formed shape.
Keywords: animation, modelling, deformation, affine transformation, as-rigid-as-possible defor-mation, harmonic field
1 Introduction
Fast deformers with easy-to-use interfaces are vital tools for modelling and animation. We list someof the desirable properties for such deformers: (i) Less user input is required. (ii) Users can controlboth local and global deformation seamlessly. (iii) There is no hidden condition or limitation onthe inputs and users can freely operate without a fear of an infinite loop or destructive output. (iv)Similar inputs reproduce the same or similar output. (v) Users can get a real-time response.
From the viewpoint of the algorithm, property (i) amounts to saying that the input should be interpo-lated naturally. (ii) means that the algorithm can handle global shapes but also can be localised. (iii)and (iv) can be rephrased as the robustness and continuity of the function with regards to the input.(v) is, of course, about efficiency.
With these points in mind, we introduce a deformer called the probe deformer. Users place an arbi-trary number of “probes” around the target shape and specify a transformation (rotation, translation,scale, and shear) for each probe. Additionally, users can specify how the weights of the probe arepropagated. The system interpolates the effect of the probes and computes the deformation of thetarget shape.
Our deformer is similar to standard deformers such as twist, bend, flare, squash, sculpt, and wave,but can produce far more extensive effects.
Simple versions of this deformer are briefly considered in [6] for 2D shapes and in [5] for 3D shapes.In this paper, we describe an improved version, together with a detailed account of the algorithm. AC++ implementation of the Maya plugin is provided.1
∗[email protected]†[email protected]
26

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Probe-type deformers
Shizuo Kaji∗
Yamaguchi University, Japan / JST CRESTGengdai Liu†
OLM Digital Inc., Japan
Abstract Fast and easy-to-use deformers to warp 3D space are vital tools for both modelling and an-imation. In this paper, we introduce an interactive and easy-to-manipulate shape deformer based oninterpolation of affine transformations. We devise a new interface with probes, which are metaphorsof operating handles. Users are allowed to place “probes” around the target shape and tweak theminteractively. The system automatically interpolates the transformations of them to produce a de-formed shape.
Keywords: animation, modelling, deformation, affine transformation, as-rigid-as-possible defor-mation, harmonic field
1 Introduction
Fast deformers with easy-to-use interfaces are vital tools for modelling and animation. We list someof the desirable properties for such deformers: (i) Less user input is required. (ii) Users can controlboth local and global deformation seamlessly. (iii) There is no hidden condition or limitation onthe inputs and users can freely operate without a fear of an infinite loop or destructive output. (iv)Similar inputs reproduce the same or similar output. (v) Users can get a real-time response.
From the viewpoint of the algorithm, property (i) amounts to saying that the input should be interpo-lated naturally. (ii) means that the algorithm can handle global shapes but also can be localised. (iii)and (iv) can be rephrased as the robustness and continuity of the function with regards to the input.(v) is, of course, about efficiency.
With these points in mind, we introduce a deformer called the probe deformer. Users place an arbi-trary number of “probes” around the target shape and specify a transformation (rotation, translation,scale, and shear) for each probe. Additionally, users can specify how the weights of the probe arepropagated. The system interpolates the effect of the probes and computes the deformation of thetarget shape.
Our deformer is similar to standard deformers such as twist, bend, flare, squash, sculpt, and wave,but can produce far more extensive effects.
Simple versions of this deformer are briefly considered in [6] for 2D shapes and in [5] for 3D shapes.In this paper, we describe an improved version, together with a detailed account of the algorithm. AC++ implementation of the Maya plugin is provided.1
∗[email protected]†[email protected]
2 Previous work
A deformer receives an original shape and user specified constraints to produce a deformed shape.The input and final output shapes are usually given as a point cloud with vertex position coordinates,and possibly with an additional structure such as triangulation. The user interface to specify theconstraints is often called a handle.
Most of the existing techniques employ the following scheme: (1) The difference in the deformedshape from the original one is represented in a certain form (such as displacement vectors or Lapla-cian coordinates). (2) The user manipulates the handles to specify the constraints. (3) User con-straints are interpolated or propagated to the whole shape and applied to the representation. (4) Thedeformed shape is reconstructed from the modified representation.
We discuss previous work from this point of view.
2.1 Shape representation
To represent the difference between the shapes, the most basic way is to give difference (translation)vectors of the 3D coordinates of the vertices. The reconstruction is simply done by adding the vectorsto the original vertex positions (see, for example, [8, 18]).
Another widely used representation is by transformations, which we use for our deformer. Thisgives more flexibility than just considering difference vectors since it can deal with rotation, scale,and shear in addition to translation. Each basic element (vertex, face, etc.) in a shape is assigned atransformation and the deformed shape is reconstructed by applying it to the original shape (see, forexample, [1, 10, 16, 19, 21, 15]).
Recently, the differential coordinates have been actively studied to achieve detail preserving defor-mations. Here, the difference between shapes is represented implicitly by gradients, curvature, etc.Reconstruction sometimes involves solving a global variational problem or integration (see, for ex-ample, [17, 23, 14]). Although we present it in a different way, our mesh-based deformer (see §3.5)can be rephrased in terms of a Poisson equation.
2.2 User interface
A simple and intuitive way to interact with a shape is to directly manipulate vertices. The userchooses a block of points (region-of-interest) and moves around to specify their positions (see, forexample, [4, 15, 23]). Sometimes, additional data besides positional data, e.g., a rotation or scale, isgiven to the selected points (see, for example, [10, 14]).
To give more complex input, one need auxiliary objects. In skinning (see [3] for a survey), bonesand joints are associated with the shape, and the user specifies a transformation on the joints. Cage-based deformers (see [20] for a survey) uses a surrounding proxy object (cage), and users manipulatethe cage. More generally, various curves and surfaces have been proposed as a means of indirectmanipulation (see [9] for a survey). Usually, it is not easy to add, remove, or change the initialconfiguration of the handles. For our deformer, we employ a so-called probe as a proxy object.Probes can be placed or removed anytime or anywhere in the space and given affine transformationsby users.
1https://github.com/shizuo-kaji/ProbeDeformerMaya
27

2.3 Transformation interpolation
In computer graphics, we usually need to interpolate transformations in case of skinning, defor-mation, animation, etc. In [16], transformations are directly interpolated by linear interpolation ofmatrices. Although this method is very fast and simple, it has some problems, most notably, itcauses the candy-wrapper effect. Dual quaternion Linear Blending (DLB, for short) [7] uses unitdual quaternions to represent and interpolate transformations in order to avoid this side effect. Polardecomposition and SLERP of transformations [1, 2, 13, 15, 22] is another way to avoid this problem.In [5], a method is developed to parametrise transformations based on Lie theory. It is more versatilethan the above methods (see Figure 2 and the supplemental video), and we use it in the deformerproposed in this paper.
In order to obtain a good interpolation, the weight assignment is also very important. Althoughweights are often manually assigned by animators, there are a lot of techniques to automate thisprocedure. In skinning, the weights are often computed by using the Euclidean distance betweenvertices and bones [11]. Dionne et al. [12] improved this method by replacing the Euclidean dis-tance with a geodesic distance computed by voxelizing the character. In [16], weights are computedby using radial basis functions. In [14], the discrete geodesic distance on mesh surfaces is used tocompute weights. In [13, 10], a harmonic field is used for a smoother distribution of the weights.MeshIK [15] optimises the energy of the deformation gradients (affine transformations) to find ap-propriate weights automatically. In this paper, we use weights computed by both the Euclideandistance and the harmonic field.
3 Framework
In our deformer, the difference between the target mesh and the deformed mesh is represented byaffine transformations. Depending on how the target shape is represented, we introduce two kindsof deformer; one disregarding topology and the other respecting topology.
Both are based on the same framework. Hence, we will describe the framework before givingspecific instances.
3.1 Affine transformation
Shapes in computer graphics are most commonly represented as triangulated surfaces. Then, defor-mation of a shape is represented by a piecewise linear (PL, for short) map, which consists of affinemaps, one for each triangle, agreeing on the shared edges. In this context, affine maps serve as abasic building block for shape manipulation, so that we can construct deformers based on them.
Recall that an affine transformation is a composition of a rotation, translation, shear, scale and re-flection. One is represented by a 4 × 4-homogeneous matrix of the form:
A =
0BB@a11 a12 a13 lxa21 a22 a23 lya31 a32 a33 lz0 0 0 1
1CCA . (1)
The upper-left 3 × 3-submatrix is called the linear part of A and denoted by A.
The set of (non-degenerate) affine transformations forms a Lie group Aff(3), which has two con-nected components. Since we consider a deformer which produces a continuous output, we will
28

2.3 Transformation interpolation
In computer graphics, we usually need to interpolate transformations in case of skinning, defor-mation, animation, etc. In [16], transformations are directly interpolated by linear interpolation ofmatrices. Although this method is very fast and simple, it has some problems, most notably, itcauses the candy-wrapper effect. Dual quaternion Linear Blending (DLB, for short) [7] uses unitdual quaternions to represent and interpolate transformations in order to avoid this side effect. Polardecomposition and SLERP of transformations [1, 2, 13, 15, 22] is another way to avoid this problem.In [5], a method is developed to parametrise transformations based on Lie theory. It is more versatilethan the above methods (see Figure 2 and the supplemental video), and we use it in the deformerproposed in this paper.
In order to obtain a good interpolation, the weight assignment is also very important. Althoughweights are often manually assigned by animators, there are a lot of techniques to automate thisprocedure. In skinning, the weights are often computed by using the Euclidean distance betweenvertices and bones [11]. Dionne et al. [12] improved this method by replacing the Euclidean dis-tance with a geodesic distance computed by voxelizing the character. In [16], weights are computedby using radial basis functions. In [14], the discrete geodesic distance on mesh surfaces is used tocompute weights. In [13, 10], a harmonic field is used for a smoother distribution of the weights.MeshIK [15] optimises the energy of the deformation gradients (affine transformations) to find ap-propriate weights automatically. In this paper, we use weights computed by both the Euclideandistance and the harmonic field.
3 Framework
In our deformer, the difference between the target mesh and the deformed mesh is represented byaffine transformations. Depending on how the target shape is represented, we introduce two kindsof deformer; one disregarding topology and the other respecting topology.
Both are based on the same framework. Hence, we will describe the framework before givingspecific instances.
3.1 Affine transformation
Shapes in computer graphics are most commonly represented as triangulated surfaces. Then, defor-mation of a shape is represented by a piecewise linear (PL, for short) map, which consists of affinemaps, one for each triangle, agreeing on the shared edges. In this context, affine maps serve as abasic building block for shape manipulation, so that we can construct deformers based on them.
Recall that an affine transformation is a composition of a rotation, translation, shear, scale and re-flection. One is represented by a 4 × 4-homogeneous matrix of the form:
A =
0BB@a11 a12 a13 lxa21 a22 a23 lya31 a32 a33 lz0 0 0 1
1CCA . (1)
The upper-left 3 × 3-submatrix is called the linear part of A and denoted by A.
The set of (non-degenerate) affine transformations forms a Lie group Aff(3), which has two con-nected components. Since we consider a deformer which produces a continuous output, we will
restrict ourselves to the set Aff+(3) of positive affine transformations, which is the connected com-ponent of Aff(3) including the identity. In other words, Aff+(3) consists of reflection-free affinetransformations. It is also characterised by the condition that the determinant of the linear part ispositive.
3.2 Probe
Next, we will discuss how to give the user an intuitive interface to specify an affine transformation.A probe consists of three directed line segments (red, green, and blue) intersecting at the middlepoints of the segments. We require that the three lines are not co-planar and left-hand oriented. Thestandard probe is a probe which consists of three unit-length line segments intersecting orthogonally.
Figure 1: Left: standard probe, Middle: probe representing a rotation, Right: probe repre-senting a shear
If you are given two probes P and P , you can read off:
1. a 3-dimensional vector p which is the intersection point of P (we call it the position of P )
2. and a positive affine transformation A which maps P to P (this is uniquely determined)
So by placing a standard probe in the space and moving it around, one can interactively and intu-itively specify those two data.
3.3 Interpolation of affine transformation
To propagate users’ input naturally, we need to solve the following: Given a set of weights wi ∈R | 1 ≤ i ≤ n and a set of positive affine transformations Ai ∈ Aff+(3) | 1 ≤ i ≤ n, find ablended affine transformation Blend(wi, Ai) ∈ Aff+(3) which satisfies Blend(wi, Ai) = Ak for
wi =
(1 (i = k)
0 (i = k).
Here, reference [5] defines a 12-dimensional vector space U and parametrisation maps
φ : U → Aff+(3), ψ : Aff+(3) → U
which satisfy φψ = Id. By applying ψ, one gets elements ψ(Ai)’s of the vector space U . They areblended simply by taking the linear combination
Pni=1 wiψ(Ai). Mapping
Pni=1 wiψ(Ai) back to
Aff+(3) by φ gives the desired blending Blend(wi, Ai) := φ(Pn
i=1 wiψ(Ai)). (See [5] for detailsand an implementation.)
We use this blending function and our deformer has properties (ii)–(v) in the Introduction. We canalso use the standard technique based on polar decomposition [22, 2, 14]. However, [5] has a fewadvantages: It can handle rotations with angles greater than 2π, and it is easily localised since theparameter space has a flat geometry. (See Figure 2.)
29

Figure 2: Left: The original octopus model, Middle: One deformed with a probe to swirla leg. Thanks to the blending function of the affine transformations, rotations with largeangles (≥ 2π) are captured. Right: The same deformation is applied using a polar decom-position based blending. See also the supplemental video.
3.4 Vertex-based deformer
Assume that the target shape is given as a set of vertices. No further structure is required. This isuseful when one wants to deform a shape consisting of particles (see Figure 3).
Let V be the set of vertices so that an element v ∈ V is a 3-dimensional vector. The user places anynumber of standard probes Pi (1 ≤ i ≤ n) in the space (not restricted to the surface of the targetshape). We denote the position of Pi by xi. We require weight functions for each probe wi : V → R,which tells how much the probe Pi affects the vertex v ∈ V . This can be painted manually ordetermined automatically by the system as we describe in §4. As the user moves the probes around,the system receives positive affine transformations Ai for each probe. The deformed shape is thencomputed by applying to v the interpolated affine transformation Blend(wi, Ai) ∈ Aff+(3) givenin §3.3.
Figure 3: Left: Particles Right: Particles deformed by probes.
3.5 Mesh based deformer
If the original shape has not only vertex coordinates but also topology, i.e., a triangulated mesh struc-ture, users may want to preserve it as much as possible. For this, we employ the idea of “as-rigid-as-possible” deformation introduced in [1] (see also [15] for a brilliant explanation). Our methodis similar to [23], but the main difference is that with our deformer users specify the transforma-tions for the probes while in [23] users specify only the positions and the local transformations aredetermined by the system.
Assume that the target shape is triangulated. Let V be the set of vertices, and T be the index set ofthe triangulation, that is, τ = τ1, τ2, τ3 ∈ T if and only if vτ1 , vτ2 , and vτ3 form a triangle. Just
30

Figure 2: Left: The original octopus model, Middle: One deformed with a probe to swirla leg. Thanks to the blending function of the affine transformations, rotations with largeangles (≥ 2π) are captured. Right: The same deformation is applied using a polar decom-position based blending. See also the supplemental video.
3.4 Vertex-based deformer
Assume that the target shape is given as a set of vertices. No further structure is required. This isuseful when one wants to deform a shape consisting of particles (see Figure 3).
Let V be the set of vertices so that an element v ∈ V is a 3-dimensional vector. The user places anynumber of standard probes Pi (1 ≤ i ≤ n) in the space (not restricted to the surface of the targetshape). We denote the position of Pi by xi. We require weight functions for each probe wi : V → R,which tells how much the probe Pi affects the vertex v ∈ V . This can be painted manually ordetermined automatically by the system as we describe in §4. As the user moves the probes around,the system receives positive affine transformations Ai for each probe. The deformed shape is thencomputed by applying to v the interpolated affine transformation Blend(wi, Ai) ∈ Aff+(3) givenin §3.3.
Figure 3: Left: Particles Right: Particles deformed by probes.
3.5 Mesh based deformer
If the original shape has not only vertex coordinates but also topology, i.e., a triangulated mesh struc-ture, users may want to preserve it as much as possible. For this, we employ the idea of “as-rigid-as-possible” deformation introduced in [1] (see also [15] for a brilliant explanation). Our methodis similar to [23], but the main difference is that with our deformer users specify the transforma-tions for the probes while in [23] users specify only the positions and the local transformations aredetermined by the system.
Assume that the target shape is triangulated. Let V be the set of vertices, and T be the index set ofthe triangulation, that is, τ = τ1, τ2, τ3 ∈ T if and only if vτ1 , vτ2 , and vτ3 form a triangle. Just
as before, the user places any number of standard probes Pi (1 ≤ i ≤ n) in the space. This time, werequire weight functions for each probe wi : T → R, which tell how much the probe Pi affects eachtriangle τ ∈ T . Again, this can be painted manually or determined automatically by the system (see§4). As the user moves the probes around, the system receives positive affine transformations Ai foreach probe.
A deformation is made by executing the following three steps. First, interpolate Ai’s by Aτ :=Blend(wi(τ), Ai) for each triangle τ ∈ T . Then patch Aτ ’s to obtain another set of affine trans-formations Bτ such that Bτvτj = Bτ vτ
kwhen τj = τ k for different triangles τ, τ ∈ T . In other
words, Bτ ’s are consistent on the edges of the mesh (i.e., they form a PL-map B for the triangula-tion). There is a one-to-one linear correspondence of the positions of V and Bτ ’s as follows: Foreach triangle τ ∈ T , there is a unique affine transformation which maps Vτ := (vτ1 , vτ2 , vτ3 , fτ )to V τ := (vτ1 , v
τ2 , v
τ3 , f
τ ), where fτ and f τ are unit normal vectors. In fact, this transformation is
given by V τV−1τ . Through this correspondence, we regard Bτ ’s as a linear function of the deformed
position V . Then the deformed shape V is obtained by minimising the following quadratic energyfunctional
E(B) :=Xτ∈T
|Aτ − Bτ |2F , (2)
where |X|F is the Frobenius norm of the matrix X . (Figure 4 illustrates the idea.)
Figure 4: The concept of the mesh-based deformer. Left: A shape consisting of twotriangles is deformed by two probes rotating in different orientations. Middle: Applyingthe blended transformation Aτ to each triangle pulls apart the shape. Right: By minimisingthe energy (2), the final deformation is obtained.
Since the minimiser is unique only up to translation, we need a constraint to fix this indeterminacy.It is given by adding the following function to E
nXi=1
Xv∈V
di(v)|Bv −Aiv|2,
where di : V → R≥0 is a weighting function. For example, we can use the following cut-offfunction
di(v) =
((|v − xi| − Ci)
2/C2 (|x− pi| < Ci)
0 (|x− pi| ≥ Ci), (3)
where Ci is a threshold constant. This means that those vertices whose distances from Pi are closerthan Ci try to follow the affine transformation represented by Pi.
Note that both functionals are positive symmetric quadratic, so that the minimiser can be found bysolving a sparse symmetric linear system of the form:
HV = G, (4)
where V and G are (3 × #V )-matrices, and H is a (#V × #V )-matrix. H is independent ofAi’s so that we can pre-compute its Cholesky factorisation once and obtain the solution by backsubstitution in runtime operation.
31

Although the mesh-based deformer achieves a shape-preserved deformation, it is more expensivethan the vertex-based one. In particular, when users add or remove probes, the sparse linear system(4) needs to be (partially) rebuilt and factorised.
Figure 5: Human model deformed with six probes. From Left to Right: The originalmodel, one deformed with the vertex-based deformer, and one deformed with the mesh-based deformer (detail and volume are preserved), Not only rotation and translation butalso scaling and shear are applied to the last two.
4 Weight assignment
Here, we discuss how to assign weights for each probe manually or automatically.
4.1 Euclidean distance
The weight function for a probe Pi is given by wi(v) := d(|v − xi|) for any function d dependingon the Euclidean distance between the point v and the position of the probe xi.
The simplest example is given by the “inverse-square law” wi(v) =Ri
|v − xi|2, where Ri is a
constant specifying the influence of the probe. In this case, it is indeed better to normalise theweights by w
i(v) := wi(v)/Pn
j=1 wj(v). Another option is to use the cut-off function (3). Theinfluence of the probe Pi is localised according to a user defined “effect radius” Ci.
Users can also define the function d by directly drawing its graph. See Figure 6.
Figure 6: Left: Graph of the weight function drawn by user, Middle: Original plate model,Right: Model deformed by a single probe rotated 90 degrees
32

Although the mesh-based deformer achieves a shape-preserved deformation, it is more expensivethan the vertex-based one. In particular, when users add or remove probes, the sparse linear system(4) needs to be (partially) rebuilt and factorised.
Figure 5: Human model deformed with six probes. From Left to Right: The originalmodel, one deformed with the vertex-based deformer, and one deformed with the mesh-based deformer (detail and volume are preserved), Not only rotation and translation butalso scaling and shear are applied to the last two.
4 Weight assignment
Here, we discuss how to assign weights for each probe manually or automatically.
4.1 Euclidean distance
The weight function for a probe Pi is given by wi(v) := d(|v − xi|) for any function d dependingon the Euclidean distance between the point v and the position of the probe xi.
The simplest example is given by the “inverse-square law” wi(v) =Ri
|v − xi|2, where Ri is a
constant specifying the influence of the probe. In this case, it is indeed better to normalise theweights by w
i(v) := wi(v)/Pn
j=1 wj(v). Another option is to use the cut-off function (3). Theinfluence of the probe Pi is localised according to a user defined “effect radius” Ci.
Users can also define the function d by directly drawing its graph. See Figure 6.
Figure 6: Left: Graph of the weight function drawn by user, Middle: Original plate model,Right: Model deformed by a single probe rotated 90 degrees
4.2 Harmonic field
When the shape is not merely a point cloud but has complicated geometry, the Euclidean distanceis not a good metric for a weight assignment because it is unrelated to the variation of the surface.The geodesic distance may be a better alternative, but it is computationally expensive. Here, we canemploy a harmonic field, as was suggested in [10, 13]. A harmonic field is a scalar field h definedon the surface, satisfying the Laplace equation ∆h = 0. Once the boundary conditions are welldefined, the values of the harmonic field are distributed smoothly over the surface. In our case, theboundary conditions are defined as
wi(cj) =
(1 (i = j)
0 (i = j),
where cj is the closest point (or triangle) to the j-th probe. Fortunately, under a certain discretisation,we can use the same system matrix H in Eq. (4) to solve the Laplace equation. Figure 7 comparesthe results generated with the Euclidean distance and harmonic field weighting.
Figure 7: Left: Original octopus model, Middle: Model deformed with the Euclideandistance weighting, Right: Model deformed with the harmonic field weighting. The colourindicates the weight for the front probe. The Euclidean distance weighing causes unwantedaccompanying motions (e.g. of the leg to the left) away from probes.
5 Improvements
Finally, we give a few modifications for the mesh-based deformer.
5.1 Face stiffness
We can replace Eq. (2) withE(B) :=
Xτ∈T
ατ |Aτ − Bτ |2F (5)
in order to incorporate a “stiffness” ατ ∈ R≥0 in each face τ . (See Figure 8.) This stiffness is eitherpainted by the user or learnt from examples.
5.2 Iterative refinement of energy
The following iterative refinement of the energy function can produce better results in some cases.(See Figure 9.) From the second iteration, for those faces away from the probes, we replace Aτ in
33

Figure 8: A pillar model deformed with two probes. Left: Original shape with paintedstiffness, Middle: Shape deformed with Eq. (2), Right: Shape deformed with Eq. (5).Users can tell the system where it is easier to wrinkle.
Eq. (2) with RτSτ where Rτ is the rotation part of B and Sτ is the symmetric part of A in the polardecompositions. The idea is to allow faces to rotate but not to allow scaling or shearing.
Figure 9: An octopus leg is deformed with two probes. Left to Right: The original model,no iteration, five iterations, and ten iterations. As the number of iterations increases, thedeformation gets smoother with less creases.
Acknowledgements
This work was partially supported by the Core Research for Evolutional Science and Technology(CREST) Program titled “Mathematics for Computer Graphics” of the Japan Science and Technol-ogy Agency (JST). The octopus model used in this paper is courtesy of the AIM@SHAPE ShapeRepository.
References[1] M. Alexa, D. Cohen-Or and D. Levin, As-Rigid-As-Possible Shape Interpolation, In Proceedings
of the 27th annual conference on Computer graphics and interactive techniques, Proc. ACMSIGGRAPH 2000, pp. 157–164 (2000)
[2] M. Botsch and O. Sorkine. On Linear Variational Surface Deformation Methods, IEEE Trans-actions on Visualization and Computer Graphics 14(1), 213–230 (2008)
[3] E. Chaudhry, L. You, and J. Zhang, Character Skin Deformation: A Survey, in 2010 SeventhInternational Conference on Computer Graphics, Imaging and Visualization. IEEE, pp. 41–48(2010)
[4] T. Igarashi, T. Moscovich, and J. F. Hughes, As-rigid-as-possible shape manipulation. Proc.ACM SIGGRAPH 2005, 1134–1141 (2005)
34

Figure 8: A pillar model deformed with two probes. Left: Original shape with paintedstiffness, Middle: Shape deformed with Eq. (2), Right: Shape deformed with Eq. (5).Users can tell the system where it is easier to wrinkle.
Eq. (2) with RτSτ where Rτ is the rotation part of B and Sτ is the symmetric part of A in the polardecompositions. The idea is to allow faces to rotate but not to allow scaling or shearing.
Figure 9: An octopus leg is deformed with two probes. Left to Right: The original model,no iteration, five iterations, and ten iterations. As the number of iterations increases, thedeformation gets smoother with less creases.
Acknowledgements
This work was partially supported by the Core Research for Evolutional Science and Technology(CREST) Program titled “Mathematics for Computer Graphics” of the Japan Science and Technol-ogy Agency (JST). The octopus model used in this paper is courtesy of the AIM@SHAPE ShapeRepository.
References[1] M. Alexa, D. Cohen-Or and D. Levin, As-Rigid-As-Possible Shape Interpolation, In Proceedings
of the 27th annual conference on Computer graphics and interactive techniques, Proc. ACMSIGGRAPH 2000, pp. 157–164 (2000)
[2] M. Botsch and O. Sorkine. On Linear Variational Surface Deformation Methods, IEEE Trans-actions on Visualization and Computer Graphics 14(1), 213–230 (2008)
[3] E. Chaudhry, L. You, and J. Zhang, Character Skin Deformation: A Survey, in 2010 SeventhInternational Conference on Computer Graphics, Imaging and Visualization. IEEE, pp. 41–48(2010)
[4] T. Igarashi, T. Moscovich, and J. F. Hughes, As-rigid-as-possible shape manipulation. Proc.ACM SIGGRAPH 2005, 1134–1141 (2005)
[5] S. Kaji and H. Ochiai, A concise parametrisation of affine transformation, preprint available athttp://skaji.org/files/WEB-exponential.pdf
[6] G. Matsuda, S. Kaji, and H. Ochiai, Anti-commutative Dual Complex Numbers and 2D RigidTransformation, Mathematical Progress in Expressive Image Synthesis I, Springer-Japan, 131–138 (2014)
[7] L. Kavan, S. Collins, J. Zara, C. O’Sullivan. Geometric Skinning with Approximate Dual Quater-nion Blending. ACM Transaction on Graphics, 27(4), 105 (2008)
[8] M. S. Floater, Mean value coordinates, Computer Aided Geometric Design 20(1), 19–27 (2003)
[9] J. Gain and D. Bechmann, A survey of spatial deformation from a user-centered perspective,ACM Trans. Graph. 27(4), 107 (2008)
[10] A. Jacobson, I. Baran, J. Popovic, and O. Sorkine, Bounded biharmonic weights for real-timedeformation, ACM Trans. Graph. 30, 78:1–78:8 (2011)
[11] I. Baran and J. Popovic, Automatic rigging and animation of 3D characters. ACM TransactionGraphics. 26(3), 72 (2007)
[12] O. Dionne and M. de Lasa. Geodesic Voxel Binding for Production Character Meshes, ACMSIGGRAPH/Eurographics Symposium on Computer Animation (SCA), pp. 173–180 (2013)
[13] R. Zayer, C. Rossl, Z. Karni, and H-P. Seidel, Harmonic Guidance for Surface Deformation,Computer Graphics Forum, 24(3): 601–609 (2005)
[14] Y. Yu, K. Zhou, D. Xu, X. Shi, H. Bao, B. Guo, and H-Y Shum, Mesh Editing with Poisson-based Gradient Field Manipulation, ACM Transactions on Graphics (Proc. ACM SIGGRAPH2004), 23(3), 644–651 (2004)
[15] R. W. Sumner, M. Zwicker, C. Gotsman, and J. Popovic. Mesh-based inverse kinematics, ACMTransaction on Graphics, 24(3), 488–495 (2005)
[16] J. P. Lewis, M. Cordner and N. Fong, Pose Space Deformation: A Unified Approach to ShapeInterpolation and Skeleton-driven Deformation, Proc. ACM SIGGRAPH 2000, 165–172 (2000)
[17] Y. Lipman, O. Sorkine, D. Levin, and D. Cohen-Or, Linear Rotation-Invariant Coordinates forMeshes, ACM Trans. Graphics. 24(3), pp. 479–487 (2005)
[18] Y. Lipman, D. Levin, and D. Cohen-Or, Green coordinates, ACM Trans. Graph. 27, 78:1–78:10(2008)
[19] I. Llamas, B. Kim, J. Gargus, J. Rossignac, and C. D. Shaw, Twister: A Space-warp Operatorfor the Two-handed Editing of 3D Shapes, Proc. ACM SIGGRAPH 2003, 663–668 (2003)
[20] J. R. Nieto and A. Susın, Cage Based Deformations: A Survey, Deformation Models, M. G.Hidalgo, A. M. Torres and Javier Varona Gomez (eds.), Lecture Notes in Computational Visionand Biomechanics 7 (2013)
[21] S. Schaefer, T. McPhail, and J. Warren, Image deformation using moving least squares, ACMTransactions on Graphics (TOG), vol 25, 533–540 (2006)
[22] K. Shoemake and T. Duff, Matrix animation and polar decomposition, In Proceedings of theconference on Graphics interface ’92, Kellogg S. Booth and Alain Fournier (Eds.). MorganKaufmann Publishers Inc., San Francisco, CA, USA, 258–264 (1992)
[23] O. Sorkine and M. Alexa, As-rigid-as-possible surface modeling, In Proceedings of the fifthEurographics symposium on Geometry processing (SGP ’07), Eurographics Association, Aire-la-Ville, Switzerland, Switzerland, 109–116 (2007)
35

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Computer graphics and minimal surfaces
Shoichi Fujimori ∗
Department of Mathematics, Okayama University, Okayama, Japan
Abstract We give a summary of the computer-aided discoveries in minimal surface theory.
Keywords: computer graphics, minimal surfaces
1 Introduction
A minimal surface in Euclidean three-space R3 is a surface at which each point of the surface has aneighborhood that is the surface of least area with respect to its boundary. Such soap films (not soapbubbles trapping air) are physical models of minimal surfaces. Minimal surface theory is one of theclassical subjects in differential geometry.
The global theory of minimal surfaces has generated much interesting literature in the past threedecades. One reason for this is related to the development of computers. Using computers we cantry numerical experiments and visualize the surfaces. This gives mathematicians the ability to findessential properties of minimal surfaces, and then establish those properties mathematically.
In this talk we exhibit some examples of how computer graphics have contributed to the developmentof minimal surface theory.
Although we do include some computer graphics of minimal surfaces in this paper, there are numer-ous places where one can find a wide variety of computer graphics. In particular, the web page [8]maintained by Matthias Weber is a great resource.
2 The history of minimal surfaces, 18th and 19th cen-turies
In this section we briefly review the history of minimal surface theory in the 18th and 19th centuriesby giving examples. For further details of this history, we refer to [2, 6].
The flat plane is the simplest and oldest example of a minimal surface. The first example of minimalsurfaces other than the plane is the catenoid found by L. Euler in 1744 as a minimal surface ofrevolution (Euler called the surface an “alysseid”, but after Plateau’s work the surface has beencalled a catenoid). See the left hand side of Figure 2.1. In 1776, J. B. M. C. Meusnier found the nextexample, the helicoid, as a ruled minimal surface. See the right hand side of Figure 2.1. Note that
36

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Computer graphics and minimal surfaces
Shoichi Fujimori ∗
Department of Mathematics, Okayama University, Okayama, Japan
Abstract We give a summary of the computer-aided discoveries in minimal surface theory.
Keywords: computer graphics, minimal surfaces
1 Introduction
A minimal surface in Euclidean three-space R3 is a surface at which each point of the surface has aneighborhood that is the surface of least area with respect to its boundary. Such soap films (not soapbubbles trapping air) are physical models of minimal surfaces. Minimal surface theory is one of theclassical subjects in differential geometry.
The global theory of minimal surfaces has generated much interesting literature in the past threedecades. One reason for this is related to the development of computers. Using computers we cantry numerical experiments and visualize the surfaces. This gives mathematicians the ability to findessential properties of minimal surfaces, and then establish those properties mathematically.
In this talk we exhibit some examples of how computer graphics have contributed to the developmentof minimal surface theory.
Although we do include some computer graphics of minimal surfaces in this paper, there are numer-ous places where one can find a wide variety of computer graphics. In particular, the web page [8]maintained by Matthias Weber is a great resource.
2 The history of minimal surfaces, 18th and 19th cen-turies
In this section we briefly review the history of minimal surface theory in the 18th and 19th centuriesby giving examples. For further details of this history, we refer to [2, 6].
The flat plane is the simplest and oldest example of a minimal surface. The first example of minimalsurfaces other than the plane is the catenoid found by L. Euler in 1744 as a minimal surface ofrevolution (Euler called the surface an “alysseid”, but after Plateau’s work the surface has beencalled a catenoid). See the left hand side of Figure 2.1. In 1776, J. B. M. C. Meusnier found the nextexample, the helicoid, as a ruled minimal surface. See the right hand side of Figure 2.1. Note that
the helicoid is a singly periodic surface. Meusnier noticed that the definition of a minimal surfaceis equivalent to a surface having a vanishing geometric quantity which is known today as the meancurvature.
Catenoid Helicoid
Figure 2.1: The catenoid and helicoid.
If the surface is given as a graph z = f(x, y), then it is a minimal surface if and only if f satisfiesthe following (quasilinear elliptic) partial differential equation
(1 + f2y )fxx − 2fxfyfxy + (1 + f2
x)fyy = 0 (2.1)
which is today called the minimal surface equation.
So finding minimal surfaces is equivalent to finding solutions of the minimal surface equation (2.1).But because of the difficulties in solving it, in the 18th century no other minimal surfaces were found,as far as I know, and in 1835 H. F. Scherk found new examples. The most famous example Scherkfound is a doubly periodic minimal surface. See the left hand side of Figure 2.2. Scherk found thisexample as a translation surface. Another famous surface by Scherk is a singly periodic minimalsurface. See the right hand side of Figure 2.2.
Doubly periodic Singly periodic
Figure 2.2: Scherk surfaces.
In the latter half of the 19th century, an important connection between minimal surfaces and complexanalysis was obtained by great mathematicians such as K. Weierstrass, A. Enneper, H. A. Schwarz,
37

B. Riemann, and so on. One of the strongest tools for minimal surface theory is the followingrepresentation formula, which is today called the Weierstrass representation.Theorem (Weierstrass representation). Let M be a Riemann surface, g a meromorphic function,and η a holomorphic 1-form on M so that (1+ |g|2)2ηη gives a positive definite metric on M . Then
f(p) = Re
∫ p
p0
(1− g2, i(1 + g2), 2g
)η (p ∈ M) (2.2)
is a conformally immersed minimal surface into R3. The stereographic projection of the Gauss map,that is, the unit normal, of f is equal to g. Moreover, f is single-valued on M if and only if
Re
ℓ
(1− g2, i(1 + g2), 2g
)η = 0 (2.3)
for any closed curve ℓ on M . Conversely, any minimal surface can be obtained in this manner.
This formula is extremely useful, because with it we can avoid finding a solution of the minimalsurface equation (2.1), which is a second order partial differential equation, and we only need totake path integrals of complex analytic functions instead.
Using this formula, many interesting examples have been found. This formula is still one of the mostpowerful tools for minimal surface theory.
To close this section, we give two more examples found in this period. One is by Riemann. Riemannconsidered a minimal surface foliated by parallel circles, and then found a singly periodic minimalsurface which is today called the Riemann’s staircase. See the left hand side of Figure 2.3.
The other is by Schwarz. Schwarz gave explicit parametrizations of minimal surfaces bounded bysome special quadrilaterals in R3. He then applied the technique which is today called the Schwarzreflection principle, and he and his student E. R. Neovius constructed five examples of triply periodicminimal surfaces. The right hand side of Figure 2.3 is called the Schwarz primitive surface.
Riemann Schwarz
Figure 2.3: Riemann’s staircase and the Schwarz primitive surface.
Some beautiful images of minimal surfaces drawn by Meusnier, Schwarz, and Neovius themselvescan be found in [9].
38

B. Riemann, and so on. One of the strongest tools for minimal surface theory is the followingrepresentation formula, which is today called the Weierstrass representation.Theorem (Weierstrass representation). Let M be a Riemann surface, g a meromorphic function,and η a holomorphic 1-form on M so that (1+ |g|2)2ηη gives a positive definite metric on M . Then
f(p) = Re
∫ p
p0
(1− g2, i(1 + g2), 2g
)η (p ∈ M) (2.2)
is a conformally immersed minimal surface into R3. The stereographic projection of the Gauss map,that is, the unit normal, of f is equal to g. Moreover, f is single-valued on M if and only if
Re
ℓ
(1− g2, i(1 + g2), 2g
)η = 0 (2.3)
for any closed curve ℓ on M . Conversely, any minimal surface can be obtained in this manner.
This formula is extremely useful, because with it we can avoid finding a solution of the minimalsurface equation (2.1), which is a second order partial differential equation, and we only need totake path integrals of complex analytic functions instead.
Using this formula, many interesting examples have been found. This formula is still one of the mostpowerful tools for minimal surface theory.
To close this section, we give two more examples found in this period. One is by Riemann. Riemannconsidered a minimal surface foliated by parallel circles, and then found a singly periodic minimalsurface which is today called the Riemann’s staircase. See the left hand side of Figure 2.3.
The other is by Schwarz. Schwarz gave explicit parametrizations of minimal surfaces bounded bysome special quadrilaterals in R3. He then applied the technique which is today called the Schwarzreflection principle, and he and his student E. R. Neovius constructed five examples of triply periodicminimal surfaces. The right hand side of Figure 2.3 is called the Schwarz primitive surface.
Riemann Schwarz
Figure 2.3: Riemann’s staircase and the Schwarz primitive surface.
Some beautiful images of minimal surfaces drawn by Meusnier, Schwarz, and Neovius themselvescan be found in [9].
3 The Plateau problem
Between the late 19th century and the first half of the 20th century, the main topic of minimal surfacetheory was to solve the Plateau problem, that is, for any given Jordan curve in R3, to ask whetherthere exists an area minimizing surface with that Jordan curve as its boundary. This problem wasaffirmatively solved by J. Douglas and T. Rado in 1930. They did not give an explicit solution, likeSchwarz did for a given quadrilateral, but, using abstract arguments like in the Bourbaki style, theysolved the problem. Do to the non-explicit methods, drawing images of minimal surfaces went outof fashion until the 1980s.
4 The Costa-Hoffman-Meeks surfaces
The examples explained in Section 2 are all properly embedded, that is, each of them is free of self-intersections, and the inverse image of any compact set in R3 into the associated Riemann surface(in which the minimal surface is defined) is compact. Such surfaces are called properly embeddedminimal surfaces. We remark that only the plane and catenoid are non-periodic in the examples inSection 2. In fact, no non-periodic properly embedded minimal surfaces other than the plane and thecatenoid were known before the beginning of 1980s.
In 1983, R. Schoen [7] showed that the catenoid was the unique non-periodic properly embeddedminimal surface which is homeomorphic to a compact surface with two points removed. Also in1983, L. Jorge and W. Meeks III showed that there do not exist non-periodic properly embeddedminimal surfaces which are homeomorphic to a sphere with three, four, or five points removed.
So the following question naturally occurs:Question. Do there exist non-periodic properly embedded minimal surfaces other than the planeand the catenoid?
We now follow [3] to describe how this problem was solved, and how computer graphics helped tosolve it.
In 1982, C. J. Costa at IMPA in Rio de Janeiro constructed a new minimal surface which is homeo-morphic to a torus with three points removed, using the Weierstrass elliptic ℘ function. Costa showedthat his example is non-periodic, properly immersed, and satisfies all known necessary conditions forthe surface to be embedded. See [1]. We call a punctured neighborhood of an omitted point an end.Costa’s surface has three ends. Two ends grow logarithmically in the z direction with z → ±∞,like a catenoid, while the other end is asymptotic to the xy-plane. We quote from D. Hoffman [3]:
The idea of having one “flat” end between two “catenoid” ends occurred to Costa in anunusual way. ... at the movies at Rio, watching a documentary about the preparationsof some “Samba School” for the dance competitions at Carnival time, he saw a dancerwith an outlandish headdress that was made to look like two crows—one head up, theother head down—with their wings meeting in an expanding circle in the middle. Thisgave him the idea to try to create a plane-like end between the catenoid ends.
Although Costa did vaguely have a resemblance of the surface in his mind, nobody knew what thesurface would look like, nor if it were embedded.
Hoffman and Meeks (with a graphics programmer J. Hoffman) has succeeded to produce computergraphics of the Costa surface, to investigate geometric features of the surface. See Figure 4.1. Theywere able to reveal that the Costa surface is highly symmetric. In fact, the intersection of the Costasurface and the xy-plane consists of two straight lines meeting at a right angle at the origin, and the
39

intersection of the surface with the xz-plane and yz-plane consists of three geodesics respectively.See Figure 4.2. As a result, the Costa surface can be decomposed into eight congruent pieces, andthis is the key to prove the embeddedness of the Costa surface mathematically. Hoffman describedthis in [3]:
To prove the surface is embedded is now reduced to the question of whether eachpiece is embedded. In fact, we were able to show that each piece is a graph over anappropriate plane in R3. The computer graphics were quite helpful in checking thecomputation concerning which planes were the correct planes for projection.
In this way, they could prove that the Costa surface is indeed a properly embedded (non-periodic)minimal surface, other than the plane and the catenoid.
Figure 4.1: The Costa surface (left) and its fundamental piece (right).
z < 0 y < 0 x < 0
Figure 4.2: Halves of Costa surfaces.
Moreover, they succeeded to generalize the Costa surface to an arbitrary value for the genus. Thatis, for an arbitrary positive integer n, there exists a non-periodic properly embedded minimal surfacewhich is homeomorphic to a compact surface of genus n with three points removed. See Figure 4.3.These minimal surfaces are now called the Costa-Hoffman-Meeks surfaces. For details, we refer to[4].
Thereafter, many new minimal surfaces were discovered in quick succession, and minimal surfacetheory progressed explosively.
40

intersection of the surface with the xz-plane and yz-plane consists of three geodesics respectively.See Figure 4.2. As a result, the Costa surface can be decomposed into eight congruent pieces, andthis is the key to prove the embeddedness of the Costa surface mathematically. Hoffman describedthis in [3]:
To prove the surface is embedded is now reduced to the question of whether eachpiece is embedded. In fact, we were able to show that each piece is a graph over anappropriate plane in R3. The computer graphics were quite helpful in checking thecomputation concerning which planes were the correct planes for projection.
In this way, they could prove that the Costa surface is indeed a properly embedded (non-periodic)minimal surface, other than the plane and the catenoid.
Figure 4.1: The Costa surface (left) and its fundamental piece (right).
z < 0 y < 0 x < 0
Figure 4.2: Halves of Costa surfaces.
Moreover, they succeeded to generalize the Costa surface to an arbitrary value for the genus. Thatis, for an arbitrary positive integer n, there exists a non-periodic properly embedded minimal surfacewhich is homeomorphic to a compact surface of genus n with three points removed. See Figure 4.3.These minimal surfaces are now called the Costa-Hoffman-Meeks surfaces. For details, we refer to[4].
Thereafter, many new minimal surfaces were discovered in quick succession, and minimal surfacetheory progressed explosively.
n = 2 n = 3 n = 4
Figure 4.3: The Costa-Hoffman-Meeks surfaces of genus n.
5 The Weierstrass data
Here we list the data for minimal surfaces we have seen in this paper. Solving the integral (2.2) forthese data, one can obtain parametrizations of the surfaces.
(1) The catenoid (non-periodic): M = C \ 0, g = z, η =dz
z2.
(2) The helicoid (singly periodic): M = C \ 0, g = z, η = idz
z2.
(3) Scherk surface (doubly periodic): M = (C ∪ ∞) \ 1, −1, i, −i,
g = z, η =dz
z4 − 1.
(4) Scherk surface (singly periodic): M = (C ∪ ∞) \ 1, −1, i, −i,
g = z, η = idz
z4 − 1.
(5) Riemann’s staircase (singly periodic):
M =(z, w) ∈ (C ∪ ∞)2 | w2 = z(z2 − 1)
\ (0, 0), (∞,∞),
g = z, η =dz
zw.
(6) Schwarz primitive surface (triply periodic):
M =(z, w) ∈ (C ∪ ∞)2 | w2 = z8 + 14z4 + 1
,
g = z, η =dz
w.
(7) Costa-Hoffman-Meeks surface of genus n (non-periodic):
M =(z, w) ∈ (C ∪ ∞)2 | wn+1 = zn(z2 − 1)
\ (1, 0), (−1, 0), (∞,∞),
g =c
w, η =
w
z2 − 1dz,
where c is the real constant defined by
c =
√2A
B, A =
∫ 1
0
(t
1− t2
)n/(n+1)
dt, B =
∫ 1
0
dt(tn(1− t2)
)1/(n+1).
When n = 1, the surface coincides with the original Costa surface.
41

To verify the periodicity of surfaces, consider the following map.
Per(f) :=
Re
ℓ
(1 − g2, i
(1 + g2
), 2g)η
ℓ ∈ H1(M,Z)
. (5.1)
The periodicity can be determined in the following way:
• If Per(f) = 0, that is, f satisfies the condition (2.3) for any closed curve ℓ on M, thenf : M → R3 is well-defined on M , that is, f is non-periodic.
• If there exists only one direction v ∈ R3 \ 0 such that
Per(f) ⊂ Λ1 := nv | n ∈ Z,
then f is singly periodic. In this case, f is well-defined in R3/Λ1 = R2 × S1.
• If there exist two linearly independent vectors v1,v2 ∈ R3 (with spanv1,v2 uniquelydetermined) such that
Per(f) ⊂ Λ2 :=
2∑
j=1
njvj
nj ∈ Z
,
then f is doubly periodic. In this case, f is well-defined in R3/Λ2 = T 2 × R.
• If there exist three linearly independent vectors v1,v2,v3 ∈ R3 such that
Per(f) ⊂ Λ3 :=
3∑
j=1
njvj
nj ∈ Z
,
then f is triply periodic. In this case, f is well-defined in R3/Λ3 = T 3.
References[1] C. J. Costa: Example of a complete minimal immersion in R3 of genus one and three embedded
ends, Bol. Soc. Brasil. Mat., 15: 47–54, 1984.
[2] U. Dierkes, S. Hildebrandt, A. Kuster, and O. Wohlrab: Minimal surfaces I, Springer-Verlag,1992.
[3] D. Hoffman: The computer-aided discovery of new embedded minimal surfaces, Math. Intelli-gencer, 9: 8–21, 1987.
[4] D. Hoffman and W. Meeks III: Embedded minimal surfaces of finite topology, Ann. of Math.,131: 1–34, 1990.
[5] L. P. Jorge and W. Meeks III: The topology of complete minimal surfaces of finite total Gaussiancurvature, Topology 22: 203–221, 1983.
[6] J. C. C. Nitsche: Lectures on minimal surfaces Vol. 1, Cambridge, 1989.
[7] R. Schoen: Uniqueness, symmetry, and embeddedness of minimal surfaces, J. DifferentialGeom., 18: 791–809, 1983.
[8] M. Weber: “Bloomington’s Virtual Minimal Surface Museum” Web Page:http://www.indiana.edu/˜minimal/
[9] M. Weber and M. Wolf: About the cover: Early images of minimal surfaces, Bull. Amer. Math.Soc., 48: 457–460, 2011.
42

To verify the periodicity of surfaces, consider the following map.
Per(f) :=
Re
ℓ
(1 − g2, i
(1 + g2
), 2g)η
ℓ ∈ H1(M,Z)
. (5.1)
The periodicity can be determined in the following way:
• If Per(f) = 0, that is, f satisfies the condition (2.3) for any closed curve ℓ on M, thenf : M → R3 is well-defined on M , that is, f is non-periodic.
• If there exists only one direction v ∈ R3 \ 0 such that
Per(f) ⊂ Λ1 := nv | n ∈ Z,
then f is singly periodic. In this case, f is well-defined in R3/Λ1 = R2 × S1.
• If there exist two linearly independent vectors v1,v2 ∈ R3 (with spanv1,v2 uniquelydetermined) such that
Per(f) ⊂ Λ2 :=
2∑
j=1
njvj
nj ∈ Z
,
then f is doubly periodic. In this case, f is well-defined in R3/Λ2 = T 2 × R.
• If there exist three linearly independent vectors v1,v2,v3 ∈ R3 such that
Per(f) ⊂ Λ3 :=
3∑
j=1
njvj
nj ∈ Z
,
then f is triply periodic. In this case, f is well-defined in R3/Λ3 = T 3.
References[1] C. J. Costa: Example of a complete minimal immersion in R3 of genus one and three embedded
ends, Bol. Soc. Brasil. Mat., 15: 47–54, 1984.
[2] U. Dierkes, S. Hildebrandt, A. Kuster, and O. Wohlrab: Minimal surfaces I, Springer-Verlag,1992.
[3] D. Hoffman: The computer-aided discovery of new embedded minimal surfaces, Math. Intelli-gencer, 9: 8–21, 1987.
[4] D. Hoffman and W. Meeks III: Embedded minimal surfaces of finite topology, Ann. of Math.,131: 1–34, 1990.
[5] L. P. Jorge and W. Meeks III: The topology of complete minimal surfaces of finite total Gaussiancurvature, Topology 22: 203–221, 1983.
[6] J. C. C. Nitsche: Lectures on minimal surfaces Vol. 1, Cambridge, 1989.
[7] R. Schoen: Uniqueness, symmetry, and embeddedness of minimal surfaces, J. DifferentialGeom., 18: 791–809, 1983.
[8] M. Weber: “Bloomington’s Virtual Minimal Surface Museum” Web Page:http://www.indiana.edu/˜minimal/
[9] M. Weber and M. Wolf: About the cover: Early images of minimal surfaces, Bull. Amer. Math.Soc., 48: 457–460, 2011.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Fast implicit simulation of flexible trees
Jean-Marie Aubry∗
Weta DigitalXian Xiao†
Weta Digital
Abstract We present a model for flexible trees using constrained elastic rods, that can be solvedimplicitly in linear cost. We also demonstrate how to solve frictional hard contacts, as well as theinverse static equilibrium problem.
Keywords: Trees, simulation, elastic rods, frictional contact
1 Introduction
Some natural structures, most notably plants, have a hierarchic organization with a large numberof subdivisions. The number of branches on a big tree easily reaches several thousands; each ofthem subject to internal (elasticity), external (gravity, wind) and branching forces at the parent/childinterfaces. When treating the dynamic simulation of such a system implicitly (§ 2), branching forcesintroduce non-local connectivity into the Jacobian matrix. This constitutes the specificity of theproblem treated in this paper.
Because thick trunks and branches move very little, we can focus on the dynamics of the most slenderand treat them as unidimensional bodies. Regardless of the physical model used for individuallimbs, we see two main ways to model a branching. First, it could be a three (or more)-prongedelastic body, which would be naturally connected to the branch bodies. Or, each branching could berepresented by a hard constraint linking some degrees of freedom. We chose the second approachfor its simplicity and versatility: external constraints (for instance, on the tree’s root) naturally fit inthis framework and multiple branching can be handled simply by adding as many binary branchingconstraints as necessary.
The main contribution of this paper is two-fold. First, we derive a model for a branching constraintexpressed among neighbouring degrees of freedom in space × torsion coordinates (§ 3). Second, weshow how to efficiently solve the resulting Jacobian matrix (§ 4). To our knowledge, this approachis the first one that is both implicit and in linear cost for simulating flexible trees in maximal coor-dinates. Additionally, we implemented in this framework hard frictional contact (§ 5) and inversestatic equilibrium (§ 6), which are generally required in computer graphics simulation.
∗[email protected]†[email protected]
43

1.1 Brief description of the model
A material tree is a set of N flexible bodies (hereafter called “branches”), considered together withrigid branchings in the structure of a tree graph. In this paper the branches are modelled after theelastic rods of Bergou et al. [3]. Compared to reduced coordinates approaches such as Bertails etal. [6], this model’s main advantage is that its Jacobian matrix is band-limited, thus solvable in lineartime.
As for the concept of rigid branching, it simply means that a connection between two differentbranches is made in such a way that some vertex and its attached material frame on one branch keepconstant coordinates in the material frame attached to some vertex on the other branch (and viceversa). Mathematically, a rigid branching imposes a nonlinear hard constraint of dimension 6, tobe solved using a 6-dimensional Lagrange multiplier. The root and eventual external constraints aretreated similarly.
If di is the number of degrees of freedom of branch number i, the body dimension isDb :=N
i=0 di,the constraint dimension Dc := 6N (assuming the root is the only external constraint) and the totaldimension D := Db +Dc. Our aim is to solve the global system in cost O(D).
1.2 Related work
In robotics, tree structures are often considered but the linking bodies are usually rigid. This makesthe use of reduced coordinates more attractive because the reconstruction cost is not dominant. Mostworks in that field follow Featherstone’s recursive approach [10] formulated in reduced coordinates.Extension to flexible bodies in reduced coordinates were proposed by Changizi and Shabana [7],Hadap [12] or Bertails [5]. Baraff [1] considers rigid bodies in maximal coordinates with unspecifiedconstraints.
In Barbic and Zhao’s work [2], a full tridimensional mesh model of the tree is used as a startingpoint, then reduced to a small number of coupled harmonic modes via a volumetric discretization.This method allows interactive simulation rates for fairly large trees; however the preprocessing statecan take some time; leaves with flat cross sections requires a very fine volumetric discretization and,arguably, the number of modes needed to achieve a physically convincing simulation can be large.Also using modal analysis, but focusing on simulation of turbulence using stochastic motion, is thepaper of Stam [13].
The first elastic rods paper of Bergou et al. [4] proposed an application to tree simulation using“torque transducer” (coupling rigid bodies); however in that paper the time discretization is explicit.The difference with the model of [3] is explained in § 3.1.
2 Constrained implicit Euler
2.1 Dynamics
We consider a mechanical system subject to force f , to be solved under constraint g = g (depen-dence in time and branches’ degrees of freedom for f and g is implied but not written). Recall thatDb is the dimension of the system’s degrees of freedom and Dc the dimension of the constraintviewed as a manifold in the space of degrees of freedom, so ∇g is a Dc ×Db matrix. The Db ×Db
mass matrix of the system is denoted by M .
44

1.1 Brief description of the model
A material tree is a set of N flexible bodies (hereafter called “branches”), considered together withrigid branchings in the structure of a tree graph. In this paper the branches are modelled after theelastic rods of Bergou et al. [3]. Compared to reduced coordinates approaches such as Bertails etal. [6], this model’s main advantage is that its Jacobian matrix is band-limited, thus solvable in lineartime.
As for the concept of rigid branching, it simply means that a connection between two differentbranches is made in such a way that some vertex and its attached material frame on one branch keepconstant coordinates in the material frame attached to some vertex on the other branch (and viceversa). Mathematically, a rigid branching imposes a nonlinear hard constraint of dimension 6, tobe solved using a 6-dimensional Lagrange multiplier. The root and eventual external constraints aretreated similarly.
If di is the number of degrees of freedom of branch number i, the body dimension isDb :=N
i=0 di,the constraint dimension Dc := 6N (assuming the root is the only external constraint) and the totaldimension D := Db +Dc. Our aim is to solve the global system in cost O(D).
1.2 Related work
In robotics, tree structures are often considered but the linking bodies are usually rigid. This makesthe use of reduced coordinates more attractive because the reconstruction cost is not dominant. Mostworks in that field follow Featherstone’s recursive approach [10] formulated in reduced coordinates.Extension to flexible bodies in reduced coordinates were proposed by Changizi and Shabana [7],Hadap [12] or Bertails [5]. Baraff [1] considers rigid bodies in maximal coordinates with unspecifiedconstraints.
In Barbic and Zhao’s work [2], a full tridimensional mesh model of the tree is used as a startingpoint, then reduced to a small number of coupled harmonic modes via a volumetric discretization.This method allows interactive simulation rates for fairly large trees; however the preprocessing statecan take some time; leaves with flat cross sections requires a very fine volumetric discretization and,arguably, the number of modes needed to achieve a physically convincing simulation can be large.Also using modal analysis, but focusing on simulation of turbulence using stochastic motion, is thepaper of Stam [13].
The first elastic rods paper of Bergou et al. [4] proposed an application to tree simulation using“torque transducer” (coupling rigid bodies); however in that paper the time discretization is explicit.The difference with the model of [3] is explained in § 3.1.
2 Constrained implicit Euler
2.1 Dynamics
We consider a mechanical system subject to force f , to be solved under constraint g = g (depen-dence in time and branches’ degrees of freedom for f and g is implied but not written). Recall thatDb is the dimension of the system’s degrees of freedom and Dc the dimension of the constraintviewed as a manifold in the space of degrees of freedom, so ∇g is a Dc ×Db matrix. The Db ×Db
mass matrix of the system is denoted by M .
Solving under constraint means that an effective “constraint force” k will appear to be applied, sothe equation of motion is
Mx = f + k
g = g
As this system is underdetermined, some extra hypothesis must be made about k. A usual choice isto ask the constraint force to be workless, that is x · k = 0. As g = g implies x ∈ Txg (the tangentspace to that manifold at x), this in turn implies that k lies in the normal space to g at x, in otherwords k = ∇gTλ for some Dc-dimensional Lagrange multiplier λ.
Given a time step h > 0, we write the constrained implicit Euler discretization1 (post-step quantitiesare denoted with prime):
x = x+ hv
v = v +M−1(hf − h−1∇gTλ)g = g
2.2 Linear step
Let δ := x − x. We eliminate v while linearizing f and g in (δ, λ):
M − h2∇fδ +∇gTλ = hMv + h2f
∇gδ = g − g(1)
Using the notation A := M − h2∇f , J := ∇g, a := hMv + h2f and b := g − g we obtain thelinear system
A JT
J 0
δλ
=
ab
(2)
The matrix on the left hand side has a band-limited block A, but is only block-sparse overall becauseof J and JT . Nevertheless, thanks to the special structure stemming from the tree organization ofconstraints, (2) can still be solved in linear cost, as we shall see in §4.
3 Branching constraint
3.1 Elastic rods
First we briefly recall the elastic rod model of [3] and in particular the interpretation of the torsiondegree of freedom.
A rod is modelled as a finite set of vertices x0, . . . , xn ∈ R3 together with edge torsion scalarsψ0, . . . , ψn−1. Those are interlaced into an array of 4n + 3 degrees of freedom. An orthonormalreference frame is associated to each of the vertices x0, . . . , xn−1. The first vector of each framecoincides with the tangent vector τ :=
xi+1 − xi
/xi+1 − xi
; the second vector µ is, initially,chosen arbitrarily2 in the normal plane and the third one ν completes the orthonormal basis. As therod vertices change in time, the reference frames evolve by parallel transport of the tangent vector.
1As λ is arbitrary up to a scalar factor, we multiplied it by h2 to obtain a symmetric matrix in (2).2Which can be done without any extra normalization, see [11].
45

The torsion degree of freedom records the angle between the material frame attached to each vertexand its reference frame. Thanks to this set-up, it is shown in [3] that the bending, twisting andstretching internal forces at any vertex depend only on itself and the neighbouring vertices andtorsions. Thus the Jacobian ∇f is band-limited (width 3+ 1+ 3+ 1+ 3 = 11). This model allowsanisotropic cross sections. Leaves, or grass blades for instance, can be simulated as very flat ellipticfrustums.
In the following, we identify a material frame to the rotation A ∈ SO(3) that brings the canonicalbasis of R3 onto it. Also, because material frames are always attached to a specific vertex α, withoutconfusion the term “material frame” will also designate the couple (A,α), identified to an elementof the Euclidean group SE(3). It is worth remembering that (A,α) depends on seven degrees offreedom on the rod: three for the vertex α, three for the next vertex (needed to define the tangentvector and hence the reference frame) and one for the torsion (to obtain A from the reference frame).
Consider a branching between a parent branch (hereafter named “trunk”) and a child branch (orsimply “branch”). This branching involves one material frame on the trunk and one on the branch(at its root), in total fourteen degrees of freedom. Rigidity means that we constrain three dimensionsfor position and three for spatial orientation. In conclusion, a rigid branching between two elasticrods is modelled as a 6-dimensional manifold embedded in a 14-dimensional space. In terms of § 2,the function g describing one branching is a (non-linear) map: R14 → R6.
We now turn to the computation of ∇g, needed in our constrained implicit Euler integration scheme.
3.2 Rigidity
Let v designate the seven degrees of freedom starting from the branching vertex on the trunk andlet u be the initial seven degrees of freedom of the branch that is attached to v. Associated to uand v are material frames mu and mv that are functions of the degrees of freedom as explained in§ 3.1. We shall also refer to the corresponding original (beginning of simulation) positions u, v andmaterial frames mu, mv . Figure 1 illustrate these concepts during the first step motion from (u, v)to (u, v).
mv
τv
µv
νv
τv
µvνv
mv
τv
µvνv
mu
τu
µu
νu
τu
µu
νu
mu
τu
µu
νu
Figure 1: Trunk and branch frames motion during one time step. Blue = reference frames;black = material frames; dotted line = vertex motion; red = parallel transport of the refer-ence frame.
46

The torsion degree of freedom records the angle between the material frame attached to each vertexand its reference frame. Thanks to this set-up, it is shown in [3] that the bending, twisting andstretching internal forces at any vertex depend only on itself and the neighbouring vertices andtorsions. Thus the Jacobian ∇f is band-limited (width 3+ 1+ 3+ 1+ 3 = 11). This model allowsanisotropic cross sections. Leaves, or grass blades for instance, can be simulated as very flat ellipticfrustums.
In the following, we identify a material frame to the rotation A ∈ SO(3) that brings the canonicalbasis of R3 onto it. Also, because material frames are always attached to a specific vertex α, withoutconfusion the term “material frame” will also designate the couple (A,α), identified to an elementof the Euclidean group SE(3). It is worth remembering that (A,α) depends on seven degrees offreedom on the rod: three for the vertex α, three for the next vertex (needed to define the tangentvector and hence the reference frame) and one for the torsion (to obtain A from the reference frame).
Consider a branching between a parent branch (hereafter named “trunk”) and a child branch (orsimply “branch”). This branching involves one material frame on the trunk and one on the branch(at its root), in total fourteen degrees of freedom. Rigidity means that we constrain three dimensionsfor position and three for spatial orientation. In conclusion, a rigid branching between two elasticrods is modelled as a 6-dimensional manifold embedded in a 14-dimensional space. In terms of § 2,the function g describing one branching is a (non-linear) map: R14 → R6.
We now turn to the computation of ∇g, needed in our constrained implicit Euler integration scheme.
3.2 Rigidity
Let v designate the seven degrees of freedom starting from the branching vertex on the trunk andlet u be the initial seven degrees of freedom of the branch that is attached to v. Associated to uand v are material frames mu and mv that are functions of the degrees of freedom as explained in§ 3.1. We shall also refer to the corresponding original (beginning of simulation) positions u, v andmaterial frames mu, mv . Figure 1 illustrate these concepts during the first step motion from (u, v)to (u, v).
mv
τv
µv
νv
τv
µvνv
mv
τv
µvνv
mu
τu
µu
νu
τu
µu
νu
mu
τu
µu
νu
Figure 1: Trunk and branch frames motion during one time step. Blue = reference frames;black = material frames; dotted line = vertex motion; red = parallel transport of the refer-ence frame.
Let T, T , U, V ∈ SE(3) be the linear transformations defined in the commutative diagram:
mu mu
mv mv
U
T
V
T
(that is to say, U = mum−1u etc.) The rigidity of the branching will be satisfied if T and T are
conjugate via V , namely T = V TV −1. Since from the above diagram T = UTV −1, the rigidityconstraint can be written
g := UV −1 = Id =: g (3)
3.3 Local linearization
We write mu =: (A,α), mv =: (B, β), where A,B are the 3 × 3 rotation matrices associated tothe material frame vectors and α := (u0, u1, u2), β := (v0, v1, v2) as explained in § 3.1. Carryingthe computation using semi-direct product rules,
g =AAT BBT , α−AAT BBTβ −AAT (α− β)
hence (3) can be split into a rotation constraint
R := AAT BBT = Id
and a translation constraintα−Rβ −AAT (α− β) = 0
The latter is a linear constraint which contributes to 3 rows of (2):Id 0 03 −R 0 03
δ = AAT (α− β)− (α−Rβ) (4)
Remark: assuming that the rotation constraint remains satisfied to the first order in δ, we can takeR Id in the above to simplify computations.
For the rotation R, notice that A depends only on u while B depends only on v, so
∇u,vR =(∇uA) A
T BBT , AAT B∇vB
T
To study this dependency, we shall first compute the gradients ∇uA and ∇vBT .
For any variable x, ∂xA = A[ωx] where ωx is the instantaneous rotation axis (in object coordinates)caused by an infinitesimal change in x and [ωx] ∈ so(3) is the corresponding Lie algebra element,represented as an antisymmetric 3 × 3 matrix. Extending this notation to the multidimensionalvariable u ∈ R7, we see that ∇uA = A[ωu], where ωu ∈ so(3)7.
Let e := (u4 − u0, u5 − u1, u6 − u2, ψ) be the edge vector with torsion ψ := u3 and s := e0..2e0..2
.Let h0 := (1, 0, 0). The fact that the reference frame is moved by parallel transport of s meansthat the instantaneous rotation axis of the reference frame observed when s is being infinitesimallychanged in direction i ∈ 0..2 is (i in reference frame coordinates) βi := h0× i. To get that axisin material frame coordinates, we must apply a rotation ρ of axis h0 and angle −ψ to it.
On the other hand, moving in direction e4 simply means changing the torsion angle, so for thematerial frame a rotation of axis s. In the end, the gradient of A with respect to e is given by
ωe = (ρβ0, ρβ1, ρβ2, h0)
47

And since
∇ue =
−1 0 0 0 1 0 00 −1 0 0 0 1 00 0 −1 0 0 0 10 0 0 1 0 0 0
we get finallyωu = (−ρβ0,−ρβ1,−ρβ2, h0, ρβ0, ρβ1, ρβ2) ∈ R3×7
For the second part, ∇vBT can be computed similarly, but beware of the change of sign ∇vB
T =−[ωv]B
T . At last,
∇u,vR = A[ωu]A
T B,−AT B[ωv]BT (5)
To reveal three independent equations, we simply multiply the condition ∇Rδ = Id−R to the leftby RT . Then on the left-hand side
RT∇Rδ =BBT A[ωu]A
T BBT ,−B[ωv]BTδ
= (AdjBBT A([ωu]),−AdjB([ωv])) δ
(recall that for X ∈ SO(3), the adjoint map AdjX is the automorphism of so(3) defined byAdjX([ω]) := X[ω]XT ). On the right-hand side, the term is small to the first order in δ andcan be approximated
RT (Id−R) = BBT AAT − Id [logSO(3)(BBT AAT )]
Identifying an element AdjX([ω]) of so(3) to its rotation axis AdjX(ω) ∈ R3, we obtain 3 morerows of (2):
(AdjBBT A(ωu),−AdjB(ωv)) δ = logSO(3)(BBT AAT ) (6)
Together, (4) and (6) furnish a 6-dimensional linearized constraint J in (2).
3.4 Root constraint
Let u denote the first 7 degrees of freedom of the tree’s main trunk. The treatment of the constraint onu is slightly different because this constraint is absolute, not relative to another branch; furthermore,it may be scripted, for artistic control.
The derivation is in fact very similar to the general case and yieldsAdjA(ωu)δ = logSO(3)
AAT
Id 0 03
δ = AAT α− α
for the rotation and translation constraints respectively (now δ ∈ R7). As for scripting, it simplymeans that (A, α) is no longer constant.
Similarly, external constraints such as translation and/or rotation on an arbitrary branch materialframe can be added to the problem without changing its basic structure or properties (providedthose constraints do not conflict with each other). A typical case where constraints apply both onroots and mid-branch vertices is when a branch, which is neither the trunk nor a terminal branch,must be animated. That animated branch exerts both a mid-branch constraint on its parent and rootconstraints on its children, which are now independent sub-trees. Note that for those constraints tobe properly defined, the animation should provide a torsion along the edges, together with the keyedspatial positions of the vertices.
48

And since
∇ue =
−1 0 0 0 1 0 00 −1 0 0 0 1 00 0 −1 0 0 0 10 0 0 1 0 0 0
we get finallyωu = (−ρβ0,−ρβ1,−ρβ2, h0, ρβ0, ρβ1, ρβ2) ∈ R3×7
For the second part, ∇vBT can be computed similarly, but beware of the change of sign ∇vB
T =−[ωv]B
T . At last,
∇u,vR = A[ωu]A
T B,−AT B[ωv]BT (5)
To reveal three independent equations, we simply multiply the condition ∇Rδ = Id−R to the leftby RT . Then on the left-hand side
RT∇Rδ =BBT A[ωu]A
T BBT ,−B[ωv]BTδ
= (AdjBBT A([ωu]),−AdjB([ωv])) δ
(recall that for X ∈ SO(3), the adjoint map AdjX is the automorphism of so(3) defined byAdjX([ω]) := X[ω]XT ). On the right-hand side, the term is small to the first order in δ andcan be approximated
RT (Id−R) = BBT AAT − Id [logSO(3)(BBT AAT )]
Identifying an element AdjX([ω]) of so(3) to its rotation axis AdjX(ω) ∈ R3, we obtain 3 morerows of (2):
(AdjBBT A(ωu),−AdjB(ωv)) δ = logSO(3)(BBT AAT ) (6)
Together, (4) and (6) furnish a 6-dimensional linearized constraint J in (2).
3.4 Root constraint
Let u denote the first 7 degrees of freedom of the tree’s main trunk. The treatment of the constraint onu is slightly different because this constraint is absolute, not relative to another branch; furthermore,it may be scripted, for artistic control.
The derivation is in fact very similar to the general case and yieldsAdjA(ωu)δ = logSO(3)
AAT
Id 0 03
δ = AAT α− α
for the rotation and translation constraints respectively (now δ ∈ R7). As for scripting, it simplymeans that (A, α) is no longer constant.
Similarly, external constraints such as translation and/or rotation on an arbitrary branch materialframe can be added to the problem without changing its basic structure or properties (providedthose constraints do not conflict with each other). A typical case where constraints apply both onroots and mid-branch vertices is when a branch, which is neither the trunk nor a terminal branch,must be animated. That animated branch exerts both a mid-branch constraint on its parent and rootconstraints on its children, which are now independent sub-trees. Note that for those constraints tobe properly defined, the animation should provide a torsion along the edges, together with the keyedspatial positions of the vertices.
4 Solving the linear step
4.1 Data structure
Following [1], the key to an efficient treatment of the matrix M :=A JT
J 0
in (2) is to reorganize
the branches in depth-first (post) order and to put just after each block of branch degrees of freedomthe 6 Lagrange variables associated with the rigidity constraint on the root of that branch. In columnorder and with the notation of the previous section, the 6 × 7 block of J corresponding to u is pre-diagonal and the block corresponding to v is post-diagonal. Those are the only non-zero blocks onthe 6 rows following the branch degrees of freedom. Naturally, the matrix remains symmetric.
Storage is organized in nodes (D, J) where either D is a matrix of type A and J is the block justbelow it (body nodes), or D is a 6 × 6 zero block on the diagonal and J is the block next to itsright (constraint nodes). The tree’s root constraint node has the last diagonal block for D and has anempty J .
As an example, we show in Figure 2 the matrix M for two branches s0 and s1 on a trunk t, itselfsubject to a root constraint. The trunk degrees of freedom v0 and v1 respectively carrying thosetwo branches can be disjoint, overlap by 3 or even coincide, which allows us to handle multiplebranching within the same model. The degrees of freedom u0 and u1 on branches and r on the trunkare the first 7 of their respective bodies.
•• r
t
s1
s0
••v1
•u1
•••v0u0
M =
As0
JTu0
00
Ju0 0 0 0 0 0 Jv0 0
As1
JTu1
00
Ju1 0 0 0 0 Jv1 0 0
00
JTv0
0
0
JTv1
00
At
JTr
000
Jr 0 0 0 0
Figure 2: A simple tree and its reordered Jacobian matrix
4.2 Linear-cost factorization
As M is symmetric (not necessarily positive), to solve (2) we perform an in-place LDLT decom-position. The only difference between our matrix M and the one in [1] is that the diagonal blocksAx are bigger. Nevertheless, by construction they are band-limited, so they can be solved in linearcost. Adapting the sparsefactor and sparsesolve procedures from [1], reproduced in § A
49

for convenience, we can thus solve (2) in cost O(Db + Dc) (recall that Db is the total number ofdegrees of freedom, and Dc is 6 times the number of branches).
A point worthy of attention is the following: if Mii is a (band-limited) body block of dimensiondi×di, then each of its children Mkk is a constraint block of dimension 6×6 and Mki has dimension6× di. But Mki (which is one of the matrices J formed by the adjunction of the rotation constraint(6) and translation constraint (4)) has only one 6 × 7 non-zero block. Thus, in sparsefactor,MT
kiMkkMki has only one 7×7 non-zero block on its diagonal and Mii preserves its band-limitedstructure, hence can be solved in O(di) in the next step of the algorithm.
5 Frictional contact
Whenever a branch of the tree is in contact with an external object or another branch, a local forceapplies to a vertex (or two vertices for edge contacts) on each branch involved. Let Dk be thecontact dimension (equal to 3× the number of vertices involved) and let H be the Dk ×Db changeof coordinates from global to contact-local.
To the external force f in (1) we need to add a contact force term HT r, where r is the Dk-dimensional force in contact-local coordinates. For an individual contact i, Coulomb’s law withfriction coefficient µi can be written in terms of contact force ri and velocity ui expressed in thelocal contact basis (first coordinate on contact normal) using the second order cone
Kµi := x ∈ R3, µix0 ≥ x1,2
as the disjunction
(ri, ui) ∈ C(µi) ⇔ either
ri = 0 and ui0 ≥ 0 (take-off)
ri ∈ Kµ and ui = 0 (stick)ri ∈ ∂Kµi and ui
0 = 0 and ∃α < 0, ui1,2 = αri1,2 (slide)
(7)With the notation A := M − h2∇f , J := ∇g, a := hMv + h2f and b := g − g we obtain
A JT
J 0
δλ
=
ab
+
h2HT r
0
(8)
Introducing M :=
A JT
J 0
, H :=
H 00 IdDc
,W := HM−1HT , u :=
u
h−1λ
, a :=
h−1HM−1
ab
and r :=
r0
, we can rewrite (8) as
u = a+ hWr
Once a and W have been computed using the solver of § 4, observe that only theDk first coordinatesof r are really needed, to be plugged back into (8). Writing a and W for the firstDc (resp. upper-leftDc ×Dc block) of a and W, the equation to solve boils down to
u = a+ hWr (9)
Together with the contact conditions (7), (9) can be solved using any friction dual solver such as theGauss-Seidel algorithm with a hybrid local solver of Daviet et al. [8]. The main difference with thesituation considered in [8] is that, because the branches of any single tree are all linked, W is nowa dense matrix. This means that, for a large number of contacts, the update step in the Gauss-Seidelsolver may become cost-dominant, and justifies transfer to a GPU device for speed. However, asshown on Figure 4, in practice the computation of W itself is the bottleneck.
50

for convenience, we can thus solve (2) in cost O(Db + Dc) (recall that Db is the total number ofdegrees of freedom, and Dc is 6 times the number of branches).
A point worthy of attention is the following: if Mii is a (band-limited) body block of dimensiondi×di, then each of its children Mkk is a constraint block of dimension 6×6 and Mki has dimension6× di. But Mki (which is one of the matrices J formed by the adjunction of the rotation constraint(6) and translation constraint (4)) has only one 6 × 7 non-zero block. Thus, in sparsefactor,MT
kiMkkMki has only one 7×7 non-zero block on its diagonal and Mii preserves its band-limitedstructure, hence can be solved in O(di) in the next step of the algorithm.
5 Frictional contact
Whenever a branch of the tree is in contact with an external object or another branch, a local forceapplies to a vertex (or two vertices for edge contacts) on each branch involved. Let Dk be thecontact dimension (equal to 3× the number of vertices involved) and let H be the Dk ×Db changeof coordinates from global to contact-local.
To the external force f in (1) we need to add a contact force term HT r, where r is the Dk-dimensional force in contact-local coordinates. For an individual contact i, Coulomb’s law withfriction coefficient µi can be written in terms of contact force ri and velocity ui expressed in thelocal contact basis (first coordinate on contact normal) using the second order cone
Kµi := x ∈ R3, µix0 ≥ x1,2
as the disjunction
(ri, ui) ∈ C(µi) ⇔ either
ri = 0 and ui0 ≥ 0 (take-off)
ri ∈ Kµ and ui = 0 (stick)ri ∈ ∂Kµi and ui
0 = 0 and ∃α < 0, ui1,2 = αri1,2 (slide)
(7)With the notation A := M − h2∇f , J := ∇g, a := hMv + h2f and b := g − g we obtain
A JT
J 0
δλ
=
ab
+
h2HT r
0
(8)
Introducing M :=
A JT
J 0
, H :=
H 00 IdDc
,W := HM−1HT , u :=
u
h−1λ
, a :=
h−1HM−1
ab
and r :=
r0
, we can rewrite (8) as
u = a+ hWr
Once a and W have been computed using the solver of § 4, observe that only theDk first coordinatesof r are really needed, to be plugged back into (8). Writing a and W for the firstDc (resp. upper-leftDc ×Dc block) of a and W, the equation to solve boils down to
u = a+ hWr (9)
Together with the contact conditions (7), (9) can be solved using any friction dual solver such as theGauss-Seidel algorithm with a hybrid local solver of Daviet et al. [8]. The main difference with thesituation considered in [8] is that, because the branches of any single tree are all linked, W is nowa dense matrix. This means that, for a large number of contacts, the update step in the Gauss-Seidelsolver may become cost-dominant, and justifies transfer to a GPU device for speed. However, asshown on Figure 4, in practice the computation of W itself is the bottleneck.
6 Inverse static problem
An artist would model a tree in its static configuration within the planet’s gravity field. This meansthat the zero-gravity shape of the tree has to be computed so that internal forces in the artist’s mod-elled position compensate for gravity, and more generally external forces e.
In first approximation3, internal forces for an elastic rod having n+1 vertices (see § 3.1) are a linearfunction of σ − σ0, where the shape σ gathers the current 4n− 3 edge lengths, twists and bendingscomputed from the 4n + 3 degrees of freedom, while σ0 is the same quantity in the static positionin absence of external forces. Thus a rigidity matrix K gives the internal force as
fi = Kς := K(σ − σ0)
The matrix K is not symmetric, not even square; indeed in this model, for a single rod, it has size(4n+ 3)× (4n− 3). Furthermore, it is a 3-lower, 9-upper band matrix.
For several rods, the degrees of freedom and shape parameters are concatenated, resulting in a biggermatrix K. When the are rods subject to the constraint g = g, constraint forces ∇gTλ are to beaccounted for as well. The static equilibrium problem of finding σ0 such that total forces vanish thusamounts to solving
∇gTλ+Kς = −e (10)
For a single rod s subject to a root rigidity constraint (see § 3.4), ∇gT has a single non-zero7 × 6 block JT starting at row 0, whose lower left quadrant is furthermore empty. Thus Ks :=∇gT K
can be stored as a 9-lower, 3-upper band matrix of size (4n + 3, 4n + 3) of maximal
rank and (10) is easily solved, in linear time and space. This covers the case of terminal branches.
For an assembly of rods, if the constraints in g respect the tree structure hypothesis, then the matrixK is block-lower triangular. For instance, the simple tree of Figure 2 has constrained rigidity matrix
K =
JTu0
00
Ks0
JTu1
00
Ks1
00
JTv0
0
0
JTv1
00
JTr
000
Kt
In that case the inverse static problem is solved recursively: assuming that the rods si, branching atvi off a trunk t, have been solved, then the resulting Lagrange multipliers λsi yield external forcesJTviλsi that apply on the parent. Hence the equation for t:
Kt
λt
ςt
= −et −
i
JTviλsi
This solution does not take into account external contacts, which are rarely needed as most treesare modelled free-standing. If necessary, for instance in the case of a felled tree, the contact-awareinverse static problem can be solved by combining the technique of Desrouet-Jourdan et al. [9] withthe extended Delassus operator of § 5. Details of this are beyond the scope of this paper.
3Kirchhoff’s elasticity model implies that K depends on the rest lengths as well, so is in fact a nonlinearfunction of σ0.
51

7 Results
We tested computation time (average for one linear step) and memory usage for contact-less simu-lation on a family of procedurally generated trees, with up to 2, 674 branches and total dimension(body degrees of freedom + constraints) 121, 962. Results are shown in Figure 3 (compare to slope1 for the linear reference).
103 104 105
101
102
103
Total dimension
Cos
t
Time (ms)Memory (MB)
Ref. slope 1
Figure 3: Scaling in function of tree size (no contacts)
Next, Figure 4 illustrates the scaling of the frictional contacts solver for a fixed tree size (12695degres of freedom). Here “W build” stands for the computation of the Dc × Dc upper-left blockof HM−1HT , “GS solve” represents the Gauss-Seidel dual contact solve and “Tree solve” is thesolution of (8) once r has been determined.
102 103 104100
101
102
103
104
Contact dimension
Tim
e(m
s)
W buildGS solve
Tree solve
Figure 4: Scaling in function of contact size (fixed tree size)
52

7 Results
We tested computation time (average for one linear step) and memory usage for contact-less simu-lation on a family of procedurally generated trees, with up to 2, 674 branches and total dimension(body degrees of freedom + constraints) 121, 962. Results are shown in Figure 3 (compare to slope1 for the linear reference).
103 104 105
101
102
103
Total dimension
Cos
t
Time (ms)Memory (MB)
Ref. slope 1
Figure 3: Scaling in function of tree size (no contacts)
Next, Figure 4 illustrates the scaling of the frictional contacts solver for a fixed tree size (12695degres of freedom). Here “W build” stands for the computation of the Dc × Dc upper-left blockof HM−1HT , “GS solve” represents the Gauss-Seidel dual contact solve and “Tree solve” is thesolution of (8) once r has been determined.
102 103 104100
101
102
103
104
Contact dimension
Tim
e(m
s)
W buildGS solve
Tree solve
Figure 4: Scaling in function of contact size (fixed tree size)
Finally, we compare on some typical assets above the performance of our solver with the systemthat was previously used at Weta Digital, consisting of Maya Hair strands linked by constraints. Thesimulation frame duration is fixed at 1/24 s. For this relatively large time step, our implicit solver isstable but exhibits numeric dissipation; in order to visually match previous results we subdivide theframe up to 8 times. Even so, our solver outperforms the previous one by a factor 2 to 3.
Asset # branches Our solver # substeps Maya HairGrass 137 15 fps 8 7.8 fpsFern 580 9.3 fps 8 3.6 fps
Shrub 321 13.8 fps 8 4.7 fpsThorn 131 54 fps 2 7.5 fps
Table 1: Performance comparison with Maya Hair
Acknowledgements We would like to thank Alex Nowotny, David Caeiro and Alasdair Coullfrom Weta Digital for their support, as well as Eitan Grinspun from Columbia University for discus-sions and comments. We are also grateful to the anonymous reviewers for their insightful sugges-tions.
A Algorithms
The following procedures are directly adapted from [1].
Consider a matrix M such as in 4.1, with blocks Mij , 1 ≤ i, j ≤ n. If Mii refers to a (trunk)body block, its children are all the constraint blocks that link it to its branches. If Mii refers to aconstraint block, its only child is the branch block it links to.
To perform an in-place block-LDLT decomposition:function SPARSEFACTOR(M)
for i = 1 to n dofor k ∈ children(i) do Mii = Mii −MT
kiMkkMki
end forif i = n then Mi,parent(i) = M−1
ii Mi,parent(i)
end ifend for
end function
To solve Mx = z:function SPARSESOLVE(M)
for i = 1 to n do xi = zi
53

for j ∈ children(i) do xi = xi −MTijxj
end forend forfor i = n to 1 do xi = M−1
ii xi
if i = n then xi = xi −Mi,parent(i)xparent(i)
end ifend for
end function
References[1] BARAFF, D. Linear-time dynamics using Lagrange multipliers. SIGGRAPH (Computer
Graphics Proceedings) (1996), 137–146.
[2] BARBIC, J., AND ZHAO, Y. Real-time large-deformation substructuring. ACM Trans. onGraphics (SIGGRAPH 2011) 30, 4 (2011), 91:1–91:7.
[3] BERGOU, M., AUDOLY, B., VOUGA, E., WARDETZKY, M., AND GRINSPUN, E. DiscreteViscous Threads. SIGGRAPH (ACM Transactions on Graphics) (2010).
[4] BERGOU, M., WARDETZKY, M., ROBINSON, S., DOLY, B. A., AND GRINSPUN, E. DiscreteElastic Rods. ACM Transactions on Graphics (SIGGRAPH) 27, 3 (aug 2008), 63:1–63:12.
[5] BERTAILS, F. Linear time super-helices. In EUROGRAPHICS (2009), P. Dutre and M. Stam-minger, Eds., vol. 28, pp. 417–426.
[6] BERTAILS, F., AUDOLY, B., CANI, M.-P., QUERLEUX, B., LEROY, F., AND LEVEQUE, J.-L. Super-helices for predicting the dynamics of natural hair. ACM Trans. Graph. 25, 3 (July2006), 1180–1187.
[7] CHANGIZI, K., AND SHABANA, A. A. A recursive formulation for the dynamic analysis ofopen loop deformable multibody systems. J. Appl. Mech. 55, 3 (1988), 687–693.
[8] DAVIET, G., BERTAILS-DESCOUBES, F., AND BOISSIEUX, L. A hybrid iterative solver forrobustly capturing Coulomb friction in hair dynamics. ACM Trans. on Graphics 30, 6 (2011).
[9] DEROUET-JOURDAN, A., BERTAILS-DESCOUBES, F., DAVIET, G., AND THOLLOT, J. In-verse dynamic hair modelling with frictional contact. ACM Transactions on Graphics 32, 6(2013), 159:1–159:10.
[10] FEATHERSTONE, R. Rigid Body Dynamics Algorithms. Springer, 2008.
[11] FRISVAD, J. R. Building an orthonormal basis from a 3D unit vector without normalization.J. Graphic Tools 16, 3 (2012), 151–159.
[12] HADAP, S. Oriented strands: Dynamics of stiff multi-body system. In Proceedings of the 2006ACM SIGGRAPH/Eurographics Symposium on Computer Animation (Aire-la-Ville, Switzer-land, Switzerland, 2006), SCA ’06, Eurographics Association, pp. 91–100.
[13] STAM, J. Stochastic dynamics: Simulating the effects of turbulence on flexible structures.Computer Graphics Forum 16 (1997), C159–C164.
54

for j ∈ children(i) do xi = xi −MTijxj
end forend forfor i = n to 1 do xi = M−1
ii xi
if i = n then xi = xi −Mi,parent(i)xparent(i)
end ifend for
end function
References[1] BARAFF, D. Linear-time dynamics using Lagrange multipliers. SIGGRAPH (Computer
Graphics Proceedings) (1996), 137–146.
[2] BARBIC, J., AND ZHAO, Y. Real-time large-deformation substructuring. ACM Trans. onGraphics (SIGGRAPH 2011) 30, 4 (2011), 91:1–91:7.
[3] BERGOU, M., AUDOLY, B., VOUGA, E., WARDETZKY, M., AND GRINSPUN, E. DiscreteViscous Threads. SIGGRAPH (ACM Transactions on Graphics) (2010).
[4] BERGOU, M., WARDETZKY, M., ROBINSON, S., DOLY, B. A., AND GRINSPUN, E. DiscreteElastic Rods. ACM Transactions on Graphics (SIGGRAPH) 27, 3 (aug 2008), 63:1–63:12.
[5] BERTAILS, F. Linear time super-helices. In EUROGRAPHICS (2009), P. Dutre and M. Stam-minger, Eds., vol. 28, pp. 417–426.
[6] BERTAILS, F., AUDOLY, B., CANI, M.-P., QUERLEUX, B., LEROY, F., AND LEVEQUE, J.-L. Super-helices for predicting the dynamics of natural hair. ACM Trans. Graph. 25, 3 (July2006), 1180–1187.
[7] CHANGIZI, K., AND SHABANA, A. A. A recursive formulation for the dynamic analysis ofopen loop deformable multibody systems. J. Appl. Mech. 55, 3 (1988), 687–693.
[8] DAVIET, G., BERTAILS-DESCOUBES, F., AND BOISSIEUX, L. A hybrid iterative solver forrobustly capturing Coulomb friction in hair dynamics. ACM Trans. on Graphics 30, 6 (2011).
[9] DEROUET-JOURDAN, A., BERTAILS-DESCOUBES, F., DAVIET, G., AND THOLLOT, J. In-verse dynamic hair modelling with frictional contact. ACM Transactions on Graphics 32, 6(2013), 159:1–159:10.
[10] FEATHERSTONE, R. Rigid Body Dynamics Algorithms. Springer, 2008.
[11] FRISVAD, J. R. Building an orthonormal basis from a 3D unit vector without normalization.J. Graphic Tools 16, 3 (2012), 151–159.
[12] HADAP, S. Oriented strands: Dynamics of stiff multi-body system. In Proceedings of the 2006ACM SIGGRAPH/Eurographics Symposium on Computer Animation (Aire-la-Ville, Switzer-land, Switzerland, 2006), SCA ’06, Eurographics Association, pp. 91–100.
[13] STAM, J. Stochastic dynamics: Simulating the effects of turbulence on flexible structures.Computer Graphics Forum 16 (1997), C159–C164.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
A Prior Reduced Model of Dynamical Systems
Haoran Xie1, Zhiqiang Wang2, Kazunori Miyata3, and Ye Zhao4
JAIST13, Kent State University24, JSPS Research Fellow1
Abstract A reduced model technique for simulating dynamical systems in computer graphics isproposed. Most procedural models of physics-based simulations consist of control parameters in ahighly dimensional domain in which the real-time controllability of simulations is an ongoing issue.Therefore, we adopt a separated representation of the model solutions that can be preprocessed of-fline without relying on the knowledge of the complete solutions. To achieve the functional productsin this representation, we utilize an iterative method involving enrichment and projection steps in atensor formulation. The proposed approaches are successfully applied to different parametric andcoupled models.
Keywords: model reduction, separated representation, tensor product
1 Introduction
The simulation of dynamical systems in computer graphics (CG) can be divided into two maincategories, i.e., physics-based and data-driven methods. Physics-based methods follow physicalprinciples and have seen remarkable progress recently. The main disadvantages of these methodsinclude high computational cost, low simulation controllability due to numerous control parameters,and the reliance on the development of related knowledge. Alternatively, data-driven methods aremore efficient and adaptable to complex dynamical systems, where prerecorded data are largelyconsumed. One of the limitations of these methods is that the simulation results are highly restrictedin the prior database or the training data.
A reduced model is a spectacular strategy in data-driven methods, which has been applied success-fully to the simulations of deformable bodies [10] and fluids [1]. Most reduced models are based onproper orthogonal decomposition, also known as principal component analysis, which is a posteriormethod built on a precomputed data field to determine coherent features and reduced basis. Our goalis to introduce a prior reduced model that does not rely on the preprocessed solutions of the prob-lems. The prior reduced model [4] is a developing technique based on separated representations. Ithas recently been used in different engineering research, including fluids [7, 8] and soft tissue [14].In contrast to the previous study [3-9], this study describes separated representation in discrete andtensor formulations with high-dimensional dynamical systems and proposes a decoupling approachfor coupled problems. In other words, the contribution of this study is the first reported attempt toconstruct a practical framework for separated representations that can be used in CG applications toachieve realistic simulations at low computational cost.
55

2 Reduced model
2.1 Problem description
Given a dynamical systemD(U) = G(U,P ) with unknown state fieldU(x1, x2, ..., xd) whereU =U(t) ∈ RN , t ∈ [0, T ], N denotes the degree of freedom (DOF) of the system, G is a source termrelated to the state U and parameter set P (p1.p2, ...) and D is represented as a differential operatorfrom the time or parameter dependent ordinary or partial differential equations. The solution of thedynamical systems can be approximated in a high-dimensional domain (x1, x2, ..., xd) ∈ Ω1 ×Ω2 × ...× Ωd as follows:
U(x1, x2, ..., xd) =
N∑i=1
αi
d∏j=1
U ji (xj) (1)
This is also known as a separated representation of the solution [2, 3]. The representation is a sumof N functional products of prior unknown functions U j
i (xj) and the normalization coefficientsαi (j = 1, 2, ..., d in the following sections), which are constructed by enrichment steps in aniterative manner. As soon as this representation becomes available, we can obtain the approximatedsolution with different domains, i.e., temporal and spatial domains, physical parameters, and initialand boundary conditions as extra coordinates. If we assume to discretize each domain in M nodes,then the representation involves N × d × M rather than Md DOFs in the original problem. Forexample, if d = 6,M = 300, and N = 15 (usually, N ≪ M ), the separated representationreduces the DOFs of the dynamical model at a magnitude of 1010 . In this sense, the separatedrepresentation is a model reduction technique, also known as proper generalized decomposition. Incontrast to other reduced models, such as proper orthogonal decomposition, it is a priori model thatdoes not depend on fully precomputed snapshots of the solution. In a two-dimensional problem,the separated representation is similar to singular value decomposition; however, this approach isefficient in high-dimensional dynamical system problems.
2.2 Reduction solver
To determine the functions U ji (xj) and coefficient αi in the representation Equation (1), we assume
that the first n − 1 separated representation has been obtained at step n. It is straightforward toutilize an iterative process to calculate each U j
n(xj). First, we begin from αn = 1, which is thenrecalculated from a projection process. The solution of the representation at step n is defined asfollows:
U =
n−1∑i=1
αi
d∏j=1
U ji (xj) +
d∏j=1
U jn(xj) (2)
whereUn = U1n(x1), U2
n(x2), ..., Udn(xd) are the test functions that need to be solved next. Then,
each term of Un is projected on the weak form of the dynamical model D(U) = G.
⟨D(U), U jn⟩Ωj = ⟨G,U j
n⟩Ωj (3)
where ⟨, ⟩Ωj represents the scalar product in L2 norm on the domain Ωj . Note that the followingresidual term Rn is omitted in the weak form which can be used to check the process convergence.
Rn = D(
n−1∑i=1
αi
d∏j=1
U ji (xj) +
d∏j=1
U jn(xj)) −G (4)
56

2 Reduced model
2.1 Problem description
Given a dynamical systemD(U) = G(U,P ) with unknown state fieldU(x1, x2, ..., xd) whereU =U(t) ∈ RN , t ∈ [0, T ], N denotes the degree of freedom (DOF) of the system, G is a source termrelated to the state U and parameter set P (p1.p2, ...) and D is represented as a differential operatorfrom the time or parameter dependent ordinary or partial differential equations. The solution of thedynamical systems can be approximated in a high-dimensional domain (x1, x2, ..., xd) ∈ Ω1 ×Ω2 × ...× Ωd as follows:
U(x1, x2, ..., xd) =
N∑i=1
αi
d∏j=1
U ji (xj) (1)
This is also known as a separated representation of the solution [2, 3]. The representation is a sumof N functional products of prior unknown functions U j
i (xj) and the normalization coefficientsαi (j = 1, 2, ..., d in the following sections), which are constructed by enrichment steps in aniterative manner. As soon as this representation becomes available, we can obtain the approximatedsolution with different domains, i.e., temporal and spatial domains, physical parameters, and initialand boundary conditions as extra coordinates. If we assume to discretize each domain in M nodes,then the representation involves N × d × M rather than Md DOFs in the original problem. Forexample, if d = 6,M = 300, and N = 15 (usually, N ≪ M ), the separated representationreduces the DOFs of the dynamical model at a magnitude of 1010 . In this sense, the separatedrepresentation is a model reduction technique, also known as proper generalized decomposition. Incontrast to other reduced models, such as proper orthogonal decomposition, it is a priori model thatdoes not depend on fully precomputed snapshots of the solution. In a two-dimensional problem,the separated representation is similar to singular value decomposition; however, this approach isefficient in high-dimensional dynamical system problems.
2.2 Reduction solver
To determine the functions U ji (xj) and coefficient αi in the representation Equation (1), we assume
that the first n − 1 separated representation has been obtained at step n. It is straightforward toutilize an iterative process to calculate each U j
n(xj). First, we begin from αn = 1, which is thenrecalculated from a projection process. The solution of the representation at step n is defined asfollows:
U =
n−1∑i=1
αi
d∏j=1
U ji (xj) +
d∏j=1
U jn(xj) (2)
whereUn = U1n(x1), U2
n(x2), ..., Udn(xd) are the test functions that need to be solved next. Then,
each term of Un is projected on the weak form of the dynamical model D(U) = G.
⟨D(U), U jn⟩Ωj = ⟨G,U j
n⟩Ωj (3)
where ⟨, ⟩Ωj represents the scalar product in L2 norm on the domain Ωj . Note that the followingresidual term Rn is omitted in the weak form which can be used to check the process convergence.
Rn = D(
n−1∑i=1
αi
d∏j=1
U ji (xj) +
d∏j=1
U jn(xj)) −G (4)
To solve each Un, 1 ≤ n ≤ N , a simple choice to obtain the enrich term Un is an iterative methodas an alternating directions fixed-point algorithm to solve Equation (3) simultaneously. The ideaat p-th iteration for Un is described as follows. First, u1
p is computed with the previously obtainedvalues (u2
p−1, u3p−1, ..., u
dp−1) (Small letter u is distinguished from capital letter U for Un in a fixed-
point iterative process.). Then, for the term ukp, k ∈ (1, d], the updated values and previous values
(u1p, ..., u
k−1p , uk+1
p−1, ..., udp−1) are utilized. After reaching convergence, the Un values are updated
from u.
As per the obtained n functional products∏d
j=1 Uji (xj), 1 ≤ i ≤ n, the coefficients αi is computed
by projection of D(U) to each functional product.
⟨D(U),
d∏j=1
U ji (xj)⟩ = ⟨G,
d∏j=1
U ji (xj)⟩ (5)
Finally, if the residual term Rn < ϵ, ϵ is a designated threshold value, the entire process is inconvergence; otherwise, the computation process returns to the enrichment step in the fixed-pointalgorithm.
2.3 Discrete formulation
Here, we clarify the scalar products in L2 using a discrete formulation. For simplicity, a lineardifferential operator is considered as follows:
du
dt+ ku = 0 (6)
where u(t, k) =∑N
i=1 Ti(t)Ki(k) on the domain Ωt ×Ωk where the normalization coefficients αi
are omitted for simplicity. From Equation (3), the formulation is substituted as follows:
⟨dTn
dt, Tn⟩⟨Kn,Kn⟩+⟨Tn, Tn⟩⟨kKn,Kn⟩ = −
n−1∑i=1
(⟨dTi
dt, Tn⟩⟨Ki,Kn⟩+⟨Ti(t), Tn⟩⟨kKi(k),Kn⟩)
(7)By adopting finite element discretization techniques in each domain mesh, the equation has thefollowing matrix form (for simplicity, the subscript n is omitted):
TTPT ·KTMkK + TTMtT ·KTNK = −n−1∑i=1
(TTi PT ·KT
i MkK + TiMtT ·KTi NK) (8)
The definitions of P,N,Mt,and Mk are as follows:
Pij =∫Ωt
dNidt
Njdt
Nij =∫Ωk
NikNjdk
Mt =∫Ωt
NiNjdt
Mk =∫Ωk
NiNjdk
(9)
where Ni and Nj are shape functions associated with meshes on Ωt and Ωk. Note that the discreteformulation is commonly available for other differential operators, such as gradient and Laplacianetc..
57

Algorithm 1 Pseudo-code for the prior reduced model of the separated representation.1: Initialize D,G,and U from Equations (8)(10)2: for E = 1 to Emax do // number of coupled equations3: for N = 1 to Nmax do // number of enrichments4: for p = 1 to pmax do // fixed-point iteration5: Compute Rp
j from Equation (12) // enrichment step6: Check convergence from Equation (13)7: end for8: Normalize Un
j from Equation (14)9: Compute coefficients αi from Equation (15) // projection step
10: Update Un
11: Check convergence from Equation (16)12: end for13: Update G14: end for
2.4 Tensor formulation
From the discrete form of a dynamical model, the separated representation can be described inalgebraic form with tensor products. For D(U) = G:
D =
ND∑i=1
Di1 ⊗Di
2...⊗Did, G =
NG∑i=1
Gi1 ⊗Gi
2...⊗Gid, U =
N∑i=1
αiUi1 ⊗ U i
2...⊗ U id (10)
where Dij , j = 1, 2, ..., d is an Nj × Nj matrix, and Nj is the number of nodes in domain mesh
Ωj . The sizes of Gij and U i
j are Nj , and they can be obtained directly from the discrete formulationof the dynamical system. We describe the implementation details of the algorithm (Section 2.2) byutilizing a tensor formulation in the next section.
3 Implementation
In this section, the proposed algorithm is discussed comprehensively. The pseudo code is shown inAlgorithm 1.
3.1 Enrichment step
As mentioned in Section 2.2, the fixed-point algorithm is adopted to search for an enrichment Un =αnR1 ⊗ R2... ⊗ Rd using iterative processes. In the dynamical model, we have the followingformulation of Un from Equation (2).
ND∑i=1
Di1R1 ⊗Di
2R2...⊗DidRd = G−
ND∑i=1
n−1∑k=1
αiDi1U
k1 ⊗Di
2Uk2 ...⊗Di
dUkd (11)
58

Algorithm 1 Pseudo-code for the prior reduced model of the separated representation.1: Initialize D,G,and U from Equations (8)(10)2: for E = 1 to Emax do // number of coupled equations3: for N = 1 to Nmax do // number of enrichments4: for p = 1 to pmax do // fixed-point iteration5: Compute Rp
j from Equation (12) // enrichment step6: Check convergence from Equation (13)7: end for8: Normalize Un
j from Equation (14)9: Compute coefficients αi from Equation (15) // projection step
10: Update Un
11: Check convergence from Equation (16)12: end for13: Update G14: end for
2.4 Tensor formulation
From the discrete form of a dynamical model, the separated representation can be described inalgebraic form with tensor products. For D(U) = G:
D =
ND∑i=1
Di1 ⊗Di
2...⊗Did, G =
NG∑i=1
Gi1 ⊗Gi
2...⊗Gid, U =
N∑i=1
αiUi1 ⊗ U i
2...⊗ U id (10)
where Dij , j = 1, 2, ..., d is an Nj × Nj matrix, and Nj is the number of nodes in domain mesh
Ωj . The sizes of Gij and U i
j are Nj , and they can be obtained directly from the discrete formulationof the dynamical system. We describe the implementation details of the algorithm (Section 2.2) byutilizing a tensor formulation in the next section.
3 Implementation
In this section, the proposed algorithm is discussed comprehensively. The pseudo code is shown inAlgorithm 1.
3.1 Enrichment step
As mentioned in Section 2.2, the fixed-point algorithm is adopted to search for an enrichment Un =αnR1 ⊗ R2... ⊗ Rd using iterative processes. In the dynamical model, we have the followingformulation of Un from Equation (2).
ND∑i=1
Di1R1 ⊗Di
2R2...⊗DidRd = G−
ND∑i=1
n−1∑k=1
αiDi1U
k1 ⊗Di
2Uk2 ...⊗Di
dUkd (11)
Note that we assume αn = 1. At the p-th step of the fixed-point iteration, Rpj , 1 ≤ j ≤ d is obtained
from (Rp1, .., R
pj−1R
p−1j+1 , ...R
p−1d ). Thus, we obtain the following:
ERj =
NG∑i=1
(
d∏k=1,k =j
RTkG
ik)Gi
j −ND∑i=1
n−1∑k=1
(
d∏m=1,m =j
RTmD
imU
im)αkDi
jUkj (12)
Here, the matrix E =∑ND
i=1(∏d
k=1,k =j RTkD
ikRk)Di
j . After all (R1, R2, ..., Rd) are obtained atthe p-th step. The convergence condition is defined as follows:
∥Rp1 ⊗Rp
2...⊗Rpd −Rp−1
1 ⊗Rp−12 ...⊗Rp−1
d ∥ < ϵ (13)
Here, ϵ is set by the user and ∥·∥ represents L2-norm. Finally, Unj in the formulation of U (Equation
10) is obtained by the normalization of each Rj .
Unj =
Rj
∥Rj∥, j = 1, 2, ..., d (14)
3.2 Projection step
From the Equation 5, the formulation is modified as follows by using the value of G.
BA = H, Bij =
ND∑k=1
[
d∏e=1
(U ie)TDk
eUje ] Hi =
NG∑m=1
[
d∏k=1
(U ik)TGm
k ] (15)
where A = [α1α2...αn]T and 1 ≤ i, j ≤ n. Finally, Un is updated and the residual term Rn isgiven as follows:
Rn =
ND∑i=1
n∑k=1
αiDi1U
k1 ⊗Di
2Uk2 ...⊗Di
dUkd −G (16)
3.3 Coupled terms
For simultaneous differential equations, their solutions benefit from utilizing a decoupling strategyto reduce computational complexity. If another variable W =
∑Ni=1 βiW
i1 ⊗W i
2 ...⊗W id + S1 ⊗
S2...⊗ Sd exists, then the coupled equations can be decoupled as follows:DU (U,W,R, S = 0) = GU
DW (U,W,R = 0, S) = GW
(17)
where DU and DW are different operators for U and W , respectively. Therefore, there is (n −1) × (n − 1) terms when a multiple term U ·W is computed using their previously known valuesUn−1 · Wn−1. The value of the coupled term is known; therefore, we place all the terms in G assource terms, as shown in Line 13 of Algorithm 1.
4 Numerical results
Here, we provide numerical examples to verify the efficiency and the accuracy of the proposed priorreduced model of dynamical systems. The examples include a parametric model and two coupledmodels with unknown initial values. All examples were implemented on a standard PC (Intel Corei7 CPU 2.10 GHz and 8.0 GB RAM), and their reference solutions were obtained from MATLABODE solvers.
59

(a) (b)
Figure 1: (a) Numerical result of the separated representation. (b) Computation errorcompared with the reference solution.
0 2 4 6 8 10
-0.1
-0.05
0
0.05
0.1
t
Ti(t)
T1
T2
T3
T4
T5
T6
(a)
2 4 6 8 10
-2
-1.5
-1
-0.5
0
0.5
1
1.5
k
Ki(k)
K1
K2
K3
K4
K5
K6
(b)
Figure 2: First six functions of Ti(t) and Ki(k). (Note that the values of functions havebeen curve fitted by the polynomial curves)
4.1 Parametric model
In a separated representation, the control parameters can be introduced into the representation asextra coordinates. The following differential equation is considered as an example:
k(du
dt+ 1) = 10 (18)
with initial condition u(t = 0) = 0. The separated representation of this parametric model is givenin the following formulation:
u(t, k) =n∑
i=1
αiTi(t)Ki(k) (19)
where t ∈ [0, 10] and k ∈ [1, 10]. Figure 1 (a) shows the simulation results obtained using theproposed approach, which is sufficiently accurate with an error level of 10−11 (Figure 1 (b)). Thereference solutions in the examples are calculated by an ODE solver, e.g., the Runge-Kutta method.Figure 2 shows the first six functions in the representation, which are obtained by the enrichmentsteps in Algorithm 1.
60

(a) (b)
Figure 1: (a) Numerical result of the separated representation. (b) Computation errorcompared with the reference solution.
0 2 4 6 8 10
-0.1
-0.05
0
0.05
0.1
t
Ti(t)
T1
T2
T3
T4
T5
T6
(a)
2 4 6 8 10
-2
-1.5
-1
-0.5
0
0.5
1
1.5
k
Ki(k)
K1
K2
K3
K4
K5
K6
(b)
Figure 2: First six functions of Ti(t) and Ki(k). (Note that the values of functions havebeen curve fitted by the polynomial curves)
4.1 Parametric model
In a separated representation, the control parameters can be introduced into the representation asextra coordinates. The following differential equation is considered as an example:
k(du
dt+ 1) = 10 (18)
with initial condition u(t = 0) = 0. The separated representation of this parametric model is givenin the following formulation:
u(t, k) =n∑
i=1
αiTi(t)Ki(k) (19)
where t ∈ [0, 10] and k ∈ [1, 10]. Figure 1 (a) shows the simulation results obtained using theproposed approach, which is sufficiently accurate with an error level of 10−11 (Figure 1 (b)). Thereference solutions in the examples are calculated by an ODE solver, e.g., the Runge-Kutta method.Figure 2 shows the first six functions in the representation, which are obtained by the enrichmentsteps in Algorithm 1.
4.2 Coupled model
We evaluate the proposed method for dynamical systems with coupled terms using the followingdifferential equations:
du1dt
+ u2u3 = 1du2dt
+ u1u3 = 2du3dt
+ u1u2 = 3
(20)
The initial conditions ui(t = 0) = u0i , i = 1, 2, 3 are considered unknown in this example. To
solve these equations, we introduce new variables ui = ui − u0i . Then, Equation (20) becomes a
system of the variables ui, where the initial conditions are considered as new model coordinates inthe separated representation of ui.
ui(t, u0i ) =
n∑j=1
αjTj(t)U1j (u0
1)U2j (u0
2)U3j (u0
3) (21)
where the domains are Ωt(t)×Ω1(u01)×Ω2(u0
2)×Ω3(u03) = [0, 1]× [0, 1]× [0, 1]× [0, 1]. From
Figure 3, we determine that our simulation results have good compliance with the reference solutionsin this coupled model. The coupled terms in this example are solved by the proposed approach, andthe convergence of the solutions can be achieved after eight iterations, as shown in Figure 4 (a).
As per Figure 4 (b), the computation speed of the proposed reduced model is stable and fast com-pared to a simple iterative procedure for parameter identification. The computation cost of the refer-ence ODE solver increases exponentially, which is known as the ”curse of dimensionality” [9]. Forexample, the computation cost of the proposed method is only 17 ms, i.e., 50 times faster than thereference approach when the node numbers of u0
i , i = 1, 2, 3 are set to 20, as shown in Figure 4 (b).The computation cost can be reduced remarkably with high DOFs of the dynamical system.
4.3 Complex model
This example considers six DOFs rigid body dynamics in potential flow [13, 17], where the non-linear viscous forces are omitted. The dynamical equations are as follows:
(mE + M) du
dt= (mE + M)u× ω + fg
(J + I) dωdt
= (J + I)ω × ω + (Mu) × u + τg(22)
where E is a unit tensor, I is the moment of inertia of the body, M and J are added mass and addedmoment of inertia due to the accelerations from the surrounding flow, respectively, and fg and τgare the force and its torque from the buoyancy-corrected gravity in terms of initial velocity state,respectively. In this example, we do not consider the strongly coupled terms due to translational andangular velocities (u, ω). However, it is helpful to evaluate the strongly coupled terms due to initialconditions, where six initial values of U0 = (u0, ω0) ∈ R6 are introduced in the following separatedrepresentation as new coordinates.
Uk(t, u0k) =
n∑i=1
αiTi(t)
6∏j=1
U ji (u0
j ) (23)
where 1 ≤ k ≤ 6. The simulation results of the separated representation match the referencesolution, as shown in Figure 5.
61

0 0.5 1
-2
-1
0
1
2
3
4
t
u
u01 = 0.0, u0
1 = 0.0, u03 = 0.5
(a)
0 0.5 1
-15
-10
-5
0
5
10
15
t
u
u01 = 0.0, u0
1 = 0.5, u03 = 1.0
(b)
0 0.2 0.4 0.6 0.8 1
-2
-1
0
1
2
3
t
u
u01 = 0.5, u0
1 = 0.5, u03 = 0.5
(c)
0 0.2 0.4 0.6 0.8 1
-10
-5
0
5
10
t
u
u01 = 0.5, u0
1 = 1.0, u03 = 1.0
(d)
Figure 3: Comparison with reference results for different values of initial conditions (linesrepresent reference results; empty squares represent the computation results of our sepa-rated representation (red: u1; blue: u2; green: u3))
0 5 10 15
10-4
10-3
10-2
10-1
100
Iterations
Error
u1
u2
u3
(a)
0 5 10 15 20
0
2
4
6
8
10
Node number
Time(s)
Our solver
ODE solver
(b)
Figure 4: (a) Convergence of simulation results after iterations in the coupled model withinitial conditions corresponding to the case of Figure 3 (d). (b) Computation times com-pared with a simple iterative procedure.
62

0 0.5 1
-2
-1
0
1
2
3
4
t
u
u01 = 0.0, u0
1 = 0.0, u03 = 0.5
(a)
0 0.5 1
-15
-10
-5
0
5
10
15
t
u
u01 = 0.0, u0
1 = 0.5, u03 = 1.0
(b)
0 0.2 0.4 0.6 0.8 1
-2
-1
0
1
2
3
t
u
u01 = 0.5, u0
1 = 0.5, u03 = 0.5
(c)
0 0.2 0.4 0.6 0.8 1
-10
-5
0
5
10
t
u
u01 = 0.5, u0
1 = 1.0, u03 = 1.0
(d)
Figure 3: Comparison with reference results for different values of initial conditions (linesrepresent reference results; empty squares represent the computation results of our sepa-rated representation (red: u1; blue: u2; green: u3))
0 5 10 15
10-4
10-3
10-2
10-1
100
Iterations
Error
u1
u2
u3
(a)
0 5 10 15 20
0
2
4
6
8
10
Node number
Time(s)
Our solver
ODE solver
(b)
Figure 4: (a) Convergence of simulation results after iterations in the coupled model withinitial conditions corresponding to the case of Figure 3 (d). (b) Computation times com-pared with a simple iterative procedure.
0 0.1 0.2 0.3 0.4
-2
-1.5
-1
-0.5
0
0.5
1
t
U
(a)
0 0.1 0.2 0.3 0.4
10
-15
10
-10
10
-5
10
0
t
Error
(b)
Figure 5: (a) Simulation result with initial velocities [1.0, 1.0, 1.0, 1.0, 1.0, 1.0] and (b) itscomputation error (red: translational velocity; green: angular velocity)
5 Discussion and conclusion
We have introduced a new prior reduced model based on separated representations that do not requiresnapshots of complete solutions for dynamical systems. This method can reduce high dimensionalproblems and tackle different domains, i.e., temporal and spatial domains, physical parameters, andinitial and boundary conditions as extra coordinates. We have proposed a framework for separatedrepresentation on discrete and tensor formulations and a method to account for coupled terms in theproposed framework. The proposed method utilizes a fixed-point algorithm in an iterative processto control the desired accuracy of the problems under convergence.
The limitation of the proposed method is the difficulty in accounting for nonlinear and coupled terms.For complex models, especially strongly coupled problems, the proposed approach may fail becauseof the large amount of terms generated in the iterative process, i.e., O(N2). Other approaches,such as an asymptotic numerical method and discrete empirical interpolation method [5, 6, 16] alsosuffer the same limitations. A promising solution for this issue is the adoption of nonlinear modelreduction techniques, such as piecewise-linear approximation. Furthermore, a promising future workis to decouple the system model and reduce its nonlinearity by combining with POD.
The proposed approach is efficient because the computation of the reduced model is only executedin a precomputed process. The preprocessed data can be saved as a codebook to search solutions fordifferent control parameters and initial and boundary conditions, and the computation cost is only afew milliseconds. The proposed approaches can be applied to motion control, inverse identification,and parameter estimations for various physical simulations in real-time CG applications. The chal-lenge of the physical simulations and their control problem for complex dynamics in CG is relatedto the physical control parameters, such as the coefficients of restitution and surface normals forrigid bodies [15], stiffness and friction coefficients for deformable bodies [12], drag and lift coeffi-cients for aerodynamics simulations [11], and the Reynolds number for flow simulations, which areusually designated by measured data in constant or curve forms. In the proposed method, all theseparameters would be embedded in separated representations as extra coordinates to achieve realisticsimulation results at low computational cost.
63

References[1] T. Adrien, L. Andrew, and P. Zoran. Model reduction for real-time fluids. ACM Trans. Graph.,
25(3):826–834, July 2006.
[2] G. Beylkin and M. Mohlenkamp. Algorithms for numerical analysis in high dimensions. SIAMJournal on Scientific Computing, 26(6):2133–2159, 2005.
[3] F. Chinesta, A. Ammar, and E. Cueto. Recent advances and new challenges in the use of theproper generalized decomposition for solving multidimensional models. Archives of Compu-tational Methods in Engineering, 17(4):327–350, 2010.
[4] F. Chinesta, R. Keunings, and A. Leygue. The proper generalized decomposition for advancednumerical simulations:a primer. Springer International Publishing, 2014.
[5] F. Chinesta, A. Leygue, M. Beringhier, L. Nguyen, J. Grandidier, B. Schrefler, and F. Pe-savento. Towards a framework for non-linear thermal models in shell domains. InternationalJournal of Numerical Methods for Heat and Fluid Flow, 23(1):55–73, 2013.
[6] F. Chinesta, A. Leygue, F. Bordeu, J.V. Aguado, E. Cueto, D. Gonzalez, I. Alfaro, A. Ammar,and A. Huerta. Pgd-based computational vademecum for efficient design, optimization andcontrol. Archives of Computational Methods in Engineering, 20(1):31–59, 2013.
[7] A. Dumon, C. Allery, and A. Ammar. Proper general decomposition for the resolution of navierstokes equations. Journal of Computational Physics, 230(4):1387 – 1407, 2011.
[8] A. Dumon, C. Allery, and A. Ammar. Proper generalized decomposition method for incom-pressible navier-stokes equations with a spectral discretization. Applied Mathematics and Com-putation, 219(15):8145 – 8162, 2013.
[9] D. Gonzalez, F. Masson, F. Poulhaon, A. Leygue, E. Cueto, and F. Chinesta. Proper generalizeddecomposition based dynamic data driven inverse identification. Mathematics and Computersin Simulation, 82(9):1677 – 1695, 2012.
[10] D. Jame and F. Kayvon. Precomputing interactive dynamic deformable scenes. ACM Trans.Graph., 22(3):879–887, July 2003.
[11] E. Ju, J. Won, J. Lee, B. Choi, J. Noh, and M. Choi. Data-driven control of flapping flight.ACM Trans. Graph., 32(5):151:1–151:12, October 2013.
[12] E. Miguel, R. Tamstorf, D. Bradley, Sara C. Schvartzman, B. Thomaszewski, B. Bickel, W. Ma-tusik, S. Marschner, and Miguel A. Otaduy. Modeling and estimation of internal friction incloth. ACM Trans. Graph., 32(6):212:1–212:10, November 2013.
[13] G. Mougin and J. Magnaudet. The generalized kirchhoff equations and their application to theinteraction between a rigid body and an arbitrary time-dependent viscous flow. InternationalJournal of Multiphase Flow, 28(11):1837 – 1851, 2002.
[14] S. Niroomandi, D. Gonzalez, I. Alfaro, F. Bordeu, A. Leygue, E. Cueto, and F. Chinesta. Real-time simulation of biological soft tissues: a pgd approach. International Journal for NumericalMethods in Biomedical Engineering, 29(5):586–600, 2013.
[15] J. Popovic, Steven M. Seitz, and M. Erdmann. Motion sketching for control of rigid-bodysimulations. ACM Trans. Graph., 22(4):1034–1054, October 2003.
[16] E. Pruliere, F. Chinesta, and A. Ammar. On the deterministic solution of multidimensionalparametric models using the proper generalized decomposition. Mathematics and Computersin Simulation, 81(4):791 – 810, 2010.
[17] H. Xie and K. Miyata. Stochastic modeling of immersed rigid-body dynamics. SIGGRAPHAsia 2013 Technical Briefs, pages 12:1–12:4, 2013.
64

References[1] T. Adrien, L. Andrew, and P. Zoran. Model reduction for real-time fluids. ACM Trans. Graph.,
25(3):826–834, July 2006.
[2] G. Beylkin and M. Mohlenkamp. Algorithms for numerical analysis in high dimensions. SIAMJournal on Scientific Computing, 26(6):2133–2159, 2005.
[3] F. Chinesta, A. Ammar, and E. Cueto. Recent advances and new challenges in the use of theproper generalized decomposition for solving multidimensional models. Archives of Compu-tational Methods in Engineering, 17(4):327–350, 2010.
[4] F. Chinesta, R. Keunings, and A. Leygue. The proper generalized decomposition for advancednumerical simulations:a primer. Springer International Publishing, 2014.
[5] F. Chinesta, A. Leygue, M. Beringhier, L. Nguyen, J. Grandidier, B. Schrefler, and F. Pe-savento. Towards a framework for non-linear thermal models in shell domains. InternationalJournal of Numerical Methods for Heat and Fluid Flow, 23(1):55–73, 2013.
[6] F. Chinesta, A. Leygue, F. Bordeu, J.V. Aguado, E. Cueto, D. Gonzalez, I. Alfaro, A. Ammar,and A. Huerta. Pgd-based computational vademecum for efficient design, optimization andcontrol. Archives of Computational Methods in Engineering, 20(1):31–59, 2013.
[7] A. Dumon, C. Allery, and A. Ammar. Proper general decomposition for the resolution of navierstokes equations. Journal of Computational Physics, 230(4):1387 – 1407, 2011.
[8] A. Dumon, C. Allery, and A. Ammar. Proper generalized decomposition method for incom-pressible navier-stokes equations with a spectral discretization. Applied Mathematics and Com-putation, 219(15):8145 – 8162, 2013.
[9] D. Gonzalez, F. Masson, F. Poulhaon, A. Leygue, E. Cueto, and F. Chinesta. Proper generalizeddecomposition based dynamic data driven inverse identification. Mathematics and Computersin Simulation, 82(9):1677 – 1695, 2012.
[10] D. Jame and F. Kayvon. Precomputing interactive dynamic deformable scenes. ACM Trans.Graph., 22(3):879–887, July 2003.
[11] E. Ju, J. Won, J. Lee, B. Choi, J. Noh, and M. Choi. Data-driven control of flapping flight.ACM Trans. Graph., 32(5):151:1–151:12, October 2013.
[12] E. Miguel, R. Tamstorf, D. Bradley, Sara C. Schvartzman, B. Thomaszewski, B. Bickel, W. Ma-tusik, S. Marschner, and Miguel A. Otaduy. Modeling and estimation of internal friction incloth. ACM Trans. Graph., 32(6):212:1–212:10, November 2013.
[13] G. Mougin and J. Magnaudet. The generalized kirchhoff equations and their application to theinteraction between a rigid body and an arbitrary time-dependent viscous flow. InternationalJournal of Multiphase Flow, 28(11):1837 – 1851, 2002.
[14] S. Niroomandi, D. Gonzalez, I. Alfaro, F. Bordeu, A. Leygue, E. Cueto, and F. Chinesta. Real-time simulation of biological soft tissues: a pgd approach. International Journal for NumericalMethods in Biomedical Engineering, 29(5):586–600, 2013.
[15] J. Popovic, Steven M. Seitz, and M. Erdmann. Motion sketching for control of rigid-bodysimulations. ACM Trans. Graph., 22(4):1034–1054, October 2003.
[16] E. Pruliere, F. Chinesta, and A. Ammar. On the deterministic solution of multidimensionalparametric models using the proper generalized decomposition. Mathematics and Computersin Simulation, 81(4):791 – 810, 2010.
[17] H. Xie and K. Miyata. Stochastic modeling of immersed rigid-body dynamics. SIGGRAPHAsia 2013 Technical Briefs, pages 12:1–12:4, 2013.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Computer Graphics and Digital Fabrication:Computational Challenges in Designing Virtual
Models for Fabrication
Bernd Bickel∗
Disney Research, Zurich
Abstract In this talk, I will briefly reflect the state-of-the-art of 3D printers and then focus oncomputational challenges in designing virtual models for fabrication. I will present several projectsthat demonstrate our recent efforts in creating computational design tools that allow novice users tointuitively design functional models that can be 3D printed.
Keywords: Computational Design, 3D printing, Digital Fabrication, Digital Content Creation
1 Motivation
3D printing is considered a disruptive technology with potentially tremendous socioeconomic im-pact. In recent years, additive manufacturing technologies have made significant progress in termsof both sophistication and price; they have advanced to a point where devices now feature high-resolution, full-color, and multi-material printing. Nonetheless, they remain of limited use, giventhe lack of efficient algorithms and intuitive tools that can be used to design and model 3D-printablecontent.
Our vision is to unleash the full potential of 3D printing technology with the help of computationalmethods. In our research, we are working to invent and develop new computational techniques forintuitively designing virtual 3D models and bringing them to the real world. Given the digital natureof the process, three factors play a central role: computational models and efficient representationsthat facilitate intuitive design, accurate and fast simulation techniques, and intuitive authoring toolsfor physically realizable objects and materials.
In this talk, I will present several projects that demonstrate our recent efforts in working towardthis goal, structured according to basic object properties, and the lessons learned from working overseveral years with various 3D printers.
65

2 Deformation Behavior
Displacement in mmFo
rce
in N
1 5 9 13 170
10
20
30
40
TBP 5Flip
flop
Printed
Flipflo
p
DM502
Figure 1: Designing and replicating objects and materials that feature desired deformationbehavior (images from [1, 4]).
I will introduce a data-driven process, using 3D printers, for designing and replicating objects andmaterials that feature desired deformation behavior [1, 2]. This technique can be seen as a firstinstance of a “3D hard copy machine” for deformable objects (Figure 1, left). As a further applicationexample, I will present a software tool for creating physical versions of deformable virtual charactersthat features a complete process for design, simulation, and fabrication [4]. As input, the designsystem begins with a 3D representation of the figure in its neutral state, as well as a set of targetshapes representing the desired deformations. The system then automatically suggests the placementof actuators and computes an optimal distribution of soft and stiff materials within the character suchthat the final object resembles the desired deformation behavior. Figure 1, right, shows a 3D-printedcharacter that can be posed by hand.
3 Motion
Figure 2: Optimizing the moment of inertia (images from [6]). The algorithm takes a 3Dmodel of an object and calculates how mass can be distributed within the object to enablea stable spin around a desired axis.
As the motions of such characters are determined by the underlying mechanical structure, we re-cently also developed a general interactive design system for automatically creating the mechanismsthat reproduce the desired motions [5, 3]. This will allow novice users, for example, to createcomplex 3D mechanical characters that are ready for fabrication through the use of manufacturingdevices such as 3D printers. Furthermore, we investigated optimization approaches for designingobjects with desired static balancing and moment-of-inertia properties [6] (Figure 2).
66

2 Deformation Behavior
Displacement in mm
Forc
e in
N
1 5 9 13 170
10
20
30
40
TBP 5Flip
flop
Printed
Flipflo
p
DM502
Figure 1: Designing and replicating objects and materials that feature desired deformationbehavior (images from [1, 4]).
I will introduce a data-driven process, using 3D printers, for designing and replicating objects andmaterials that feature desired deformation behavior [1, 2]. This technique can be seen as a firstinstance of a “3D hard copy machine” for deformable objects (Figure 1, left). As a further applicationexample, I will present a software tool for creating physical versions of deformable virtual charactersthat features a complete process for design, simulation, and fabrication [4]. As input, the designsystem begins with a 3D representation of the figure in its neutral state, as well as a set of targetshapes representing the desired deformations. The system then automatically suggests the placementof actuators and computes an optimal distribution of soft and stiff materials within the character suchthat the final object resembles the desired deformation behavior. Figure 1, right, shows a 3D-printedcharacter that can be posed by hand.
3 Motion
Figure 2: Optimizing the moment of inertia (images from [6]). The algorithm takes a 3Dmodel of an object and calculates how mass can be distributed within the object to enablea stable spin around a desired axis.
As the motions of such characters are determined by the underlying mechanical structure, we re-cently also developed a general interactive design system for automatically creating the mechanismsthat reproduce the desired motions [5, 3]. This will allow novice users, for example, to createcomplex 3D mechanical characters that are ready for fabrication through the use of manufacturingdevices such as 3D printers. Furthermore, we investigated optimization approaches for designingobjects with desired static balancing and moment-of-inertia properties [6] (Figure 2).
4 Appearance
Controlling the interaction of light with 3D-printed objects has recently gained increasing attentionin the research community [7, 8]. I will briefly describe our efforts toward physical reproduction anddesign of homogeneous materials with desired subsurface scattering. Our data-driven process startswith acquiring the reflectance profiles of color pigments mixed in a base material using a custom-built measurement device. We use the same device to measure the reflectance profile of a targetmaterial. Based on the database of mappings from pigment concentrations to reflectance profiles,we use an optimization process to compute the concentration of pigments to best replicate the targetmaterial appearance.
5 Summary
I will introduce several approaches for computationally designing and fabricating objects with de-sired deformation behavior, motion, and appearance properties and demonstrate the practicality ofour methods by showing several printed physical prototypes. Finally, I will take a step back and con-clude by listing important open computational challenges in this area and summarizing the lessonslearned from working over several years with various 3D printers.
References[1] B. Bickel, M. Baecher, M. Otaduy, H. Lee, H. Pfister, M. Gross, and W. Matusik: Design and
fabrication of materials with desired deformation behavior. ACM Trans. Graph., 29, 4, 2010.
[2] B. Bickel, P. Kaufmann, M. Skouras, B. Thomaszewski, D. Bradley, T. Beeler, P. Jackson, S.Marschner, W. Matusik, and M. Gross: Physical Face Cloning. ACM Trans. Graph., 31, 3, 2012.
[3] S. Coros, B. Thomaszewski, G. Noris, S. Sueda, M. Forberg, B. Sumner, W. Matusik, and B.Bickel: Computational Design of Mechanical Characters. ACM Trans. Graph., 32, 3, 2013.
[4] M. Skouras, B. Thomaszewski, S. Coros, B. Bickel, and M. Gross: Computational Design ofActuated Deformable Characters. ACM Trans. Graph., 32, 3, 2013.
[5] M. Bacher, B. Bickel, D. James, and H. Pfister: Fabricating Articulated Characters from SkinnedMeshes. ACM Trans. Graph, 31, 3, 2012.
[6] M. Bacher, E. Whiting, B. Bickel, and O. Sorkine-Hornung: Spin-It: Optimizing Moment ofInertia for Spinnable Objects. ACM Trans. Graph., 33, 4, 2014.
[7] O. Rouiller, B. Bickel, J. Kautz, W. Matusik, and M. Alexa: 3D Printing Spatially VaryingBRDFs. IEEE Computer Graphics and Applications, 2013.
[8] M. Papas, C. Regg, W. Jarosz, B. Bickel, S. Marschner, P. Jackson, W. Matusik, and M. Gross:Fabricating Translucent Materials using Continuous Pigment Mixtures. ACM Trans. Graph., 32,3, 2013.
67

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Mathematical model for epidermal homeostasis
Yasuaki Kobayashi ∗, Masaharu NagayamaResearch Instutite for Electronic Science, Hokkaido University, Japan
Yusuke Sawabu, Satoshi OtaGraduate School of Science, Hokkaido University, Japan
Abstract We construct a mathematical model of the epidermis consisting of particle dynamics com-bined with Ca2+dynamics. Numerical simulations show that our model epidermis realize homeosta-sis, for which a Ca2+localization layer formed under the stratum corneum is responsible. Visualiza-tion of the Ca2+localization layer reveals the dependence of its stability on the reproducibility of thebasal layer.
Keywords: Reaction-diffusion system, Calcium dynamics, Dermatology
1 Introduction
Mammalian skin is a boundary separating the body from the environment. It serves as a barrier,keeping away foreign substances and retaining water inside. Such barrier functions are realizedby forming the stratum corneum (SC), the outermost structure of the epidermis, which consists ofcornified cells surrounded by inter-cellular lipids. Hence the spatial and temporal stability of the SCis essential for the barrier function.
Epidermal cells are continually reproduced in the basal layer, moving upward, differentiating intostratum spinosum and then stratum granulosum, and finally undergoing cornification to becomea part of the SC. It is remarkable that ordered SC layers are formed through these complicatedprocesses, and reformed immediately after damages. How such homeostasis is maintained, however,is still unclear.
Epidermis is maintained by continual supply and removal of cells, a typical example of dissipa-tive structures. Mathematical description is quite often useful to uncover the mechanism of suchemergent properties in non-equilibrium systems. In this study, we developed a mathematical modelof epidermis. It consists of cell dynamics, including cell division, differentiation and kinetics, andCa2+dynamics, which several experiments have suggested affects the epidermal homeostasis.
68

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Mathematical model for epidermal homeostasis
Yasuaki Kobayashi ∗, Masaharu NagayamaResearch Instutite for Electronic Science, Hokkaido University, Japan
Yusuke Sawabu, Satoshi OtaGraduate School of Science, Hokkaido University, Japan
Abstract We construct a mathematical model of the epidermis consisting of particle dynamics com-bined with Ca2+dynamics. Numerical simulations show that our model epidermis realize homeosta-sis, for which a Ca2+localization layer formed under the stratum corneum is responsible. Visualiza-tion of the Ca2+localization layer reveals the dependence of its stability on the reproducibility of thebasal layer.
Keywords: Reaction-diffusion system, Calcium dynamics, Dermatology
1 Introduction
Mammalian skin is a boundary separating the body from the environment. It serves as a barrier,keeping away foreign substances and retaining water inside. Such barrier functions are realizedby forming the stratum corneum (SC), the outermost structure of the epidermis, which consists ofcornified cells surrounded by inter-cellular lipids. Hence the spatial and temporal stability of the SCis essential for the barrier function.
Epidermal cells are continually reproduced in the basal layer, moving upward, differentiating intostratum spinosum and then stratum granulosum, and finally undergoing cornification to becomea part of the SC. It is remarkable that ordered SC layers are formed through these complicatedprocesses, and reformed immediately after damages. How such homeostasis is maintained, however,is still unclear.
Epidermis is maintained by continual supply and removal of cells, a typical example of dissipa-tive structures. Mathematical description is quite often useful to uncover the mechanism of suchemergent properties in non-equilibrium systems. In this study, we developed a mathematical modelof epidermis. It consists of cell dynamics, including cell division, differentiation and kinetics, andCa2+dynamics, which several experiments have suggested affects the epidermal homeostasis.
2 The mathematical model
2.1 Cell dynamics
Now we proceed to make a dynamical model of the epidermal structure, where cells are contin-ually reproduced in the basal layer and supplied to the upper structure, undergo cornification anddesquamate in the uppermost layer.
We consider spherical cells in a three dimensional space Ω = [0, Lx] × [0, Ly] × [0, Lz]. Theplane z = 0 defines the dermis. The center of the ith cell with the radius ri is positioned at xi =(xi, yi, zi). Each cell has an intra-cellular Ca2+concentration ci. In the basal layer, located on thedermis, there are two types of proliferative cells: The stem cells can reproduce infinite times. Thetransit amplifying (TA) cells can reproduce only finite times. These cells become differentiated cellswhen their distance from the dermis becomes greater than a certain length l∗. The proliferative celli have an internal variable ϕi(t), the phase of the cell division cycle, which evolves in time as
ϕi = ω + α(ci − c)+, (1)
where (x)+ equals x if x is positive and otherwise 0. ω, α, c are constants. It is assumed that the cellcycle accelerates in the presence of Ca2+. When ϕi = 2π the cell i enters the cell division period,where the division occurs in a stochastic way, following the Poisson process with the rate τdiv.
The differentiated cells have internal the state variable Si(t) which specifies the differentiation stageand evolves as
Si = ω′ + α′(ci − c)+, (2)
where ω′ and α′ are constants. Differentiation is also affected by Ca2+. Cells finally becomecornified when Si = S∗, and desquamate after a certain time elapses.
Cells migrate from the basal layer and move outward passively: They can change the position onlydue to the ambient pressure caused by cell growth. The mechanical motion of individual cells isdescribed by the following equation of motion:
xi = − ∂
∂xi
∑j
VLJ(|xi − xj |). (3)
The potential VLJ must realize the excluded volume effect, i.e., the prevention of overlapping thecells. Here we have assumed the Lennard-Jones-type short-range repulsive interaction
VLJ(|xi − xj |) =
(ri + rj
|xi − xj |
)6
−(
ri + rj|xi − xj |
)12
. (4)
2.2 Calcium dynamics
Intriguing experiments have recently been reported by [1, 2, 3] on the behavior of epidermal cells:(i) In normal skins, a localized layer of Ca2+was found in the cells just below the SC. (ii) When theSC was impaired, this localization of Ca2+disappeared. (iii) Ca2+wave propagation was found incultured keratinocytes when air-exposed. These findings make a strong case that Ca2+has an impor-tant role in the maintenance and the recovery of the SC. Therefore we incorporate Ca2+dynamicsinto our cell dynamics model. The Ca2+concentration for individual cells are determined by theCa2+dynamics model that we have previously proposed for in vitro Ca2+dynamics in keratinocytes[4], which successfully described finite-range wave propagation that was found in an experiment
69

of mechanically stimulated cultured keratinocytes. The Ca2+model also assumes the existence ofa stimulant, which is released when the cell ruptures by strong stimulation [6], suggesting that thisstimulant is released in the process of cornification and is the source of Ca2+localization. Details ofthe Ca2+and the stimulant dynamics are described in [4].
3 Simulation Results
3.1 Effect of Ca2+dynamics
Figure 1(a) shows the simulation results of our model. It is clear that the cells form a layered structureaccording to the stage of differentiation. In particular, the SC has a well-defined boundary. On theother hand, if the Ca2+dynamics is absent [Fig.1(b)], the layered structure becomes less obvious andthe boundary of the SC is blurred.
Figure 1: Visualization of the epidermis model with Ca2+dynamics (a) and withoutCa2+dynamics (b). In (a1) and (b1), colors are assigned according to the state variablesSi. In (a2) and (b2), white, blue, and green indicate cornified cells, differentiated cells,and reproducible cells, respectively. Differently colored cells between the cornified anddifferentiated cells in (a2) indicate Ca2+excitation.
3.2 Recovery from barrier disruption
Next we performed a numerical experiment on the recovery from damage on the SC. Figure 2 showsthat, after the removal of a part of SC cells, Ca2+excitation propagates downward, which enhancesthe formation of SC cells, finally recovering the stable layered structure.
Figure 2: Snapshots of the barrier disruption experiment.
70

of mechanically stimulated cultured keratinocytes. The Ca2+model also assumes the existence ofa stimulant, which is released when the cell ruptures by strong stimulation [6], suggesting that thisstimulant is released in the process of cornification and is the source of Ca2+localization. Details ofthe Ca2+and the stimulant dynamics are described in [4].
3 Simulation Results
3.1 Effect of Ca2+dynamics
Figure 1(a) shows the simulation results of our model. It is clear that the cells form a layered structureaccording to the stage of differentiation. In particular, the SC has a well-defined boundary. On theother hand, if the Ca2+dynamics is absent [Fig.1(b)], the layered structure becomes less obvious andthe boundary of the SC is blurred.
Figure 1: Visualization of the epidermis model with Ca2+dynamics (a) and withoutCa2+dynamics (b). In (a1) and (b1), colors are assigned according to the state variablesSi. In (a2) and (b2), white, blue, and green indicate cornified cells, differentiated cells,and reproducible cells, respectively. Differently colored cells between the cornified anddifferentiated cells in (a2) indicate Ca2+excitation.
3.2 Recovery from barrier disruption
Next we performed a numerical experiment on the recovery from damage on the SC. Figure 2 showsthat, after the removal of a part of SC cells, Ca2+excitation propagates downward, which enhancesthe formation of SC cells, finally recovering the stable layered structure.
Figure 2: Snapshots of the barrier disruption experiment.
3.3 Effect of reproducibility of stem cells
Finally we checked the dependence of the structure on the reproducibility in the basal layer. Ca2+localizationlayers are visualized in Fig.3, which indicates that the formation of the stable Ca2+localization layerrelies on sufficient supply of cells from the basal layer.
Figure 3: Dependence of the stability of Ca2+localization layers on the fraction of stemcells and the reproducibility (number of maximum cell division times) of TA cells. Foreach panel, Ca2+excitation of the localization layer is visualized.
4 Conclusion
We have developed a mathematical model that exhibits homeostasis of the SC, where the Ca2+dynamicsplay important roles. Our model also suggests that the reproducibility in the basal layer affects thestability of the upper structures. We have also developed a way of quantifying the stability of theCa2+localized layer by utilizing an evaluation function, which is to be reported elsewhere [7]. It isexpected that such a quantifying measure could be used for image diagnosis of the epidermis.
References[1] T. Mauro, G. Bench, E. Sidderas-Haddad, K. R. Feingold, P. M. Elias and C. Cullander, Acute
barrier perturbation abolishes the Ca2+ and K+ gradients in murine epidermis: quantitativemeasurement using PIXE., J. Invest. Dermatol. 111, 1198 (1998)
[2] M. Denda, J. Hosoi and Y. Ashida, Visual imaging of ion distribution in human epidermis,Biochem. Biophys. Res. Commun., 272, 134 (2000)
[3] M.Denda and S.Denda, Air-exposed keratinocytes exhibited intracellular oscillation, Skin Re-search and Technology, 13, 195-201 (2007)
[4] Y. Kobayashi, Y. Sanno, A. Sakai, Y. Sawabu, M. Tsutsumi, M. Goto, H. Kitahata, S. Nakata,J. Kumamoto, M. Denda and M. Nagayama, Mathematical modeling of calcium waves inducedby mechanical stimulation in keratinocytes, PLOS ONE 9(3): e92650 (2014)
[5] M. Denda, S. Denda, M. Tsutsumi, M. Goto, J. Kumamoto, M. Nakatani, K. Takei, H. Kitahata,S. Nakata, Y. Sawabu, Y. Kobayashi and M. Nagayama, Frontiers in epidermal barrier home-ostasis - an approach to mathematical modelling of epidermal calcium dynamics, ExperimentalDermatology 23, 79 (2014)
71

[6] M. Tsutsumi, M. Goto and M. Denda, Dynamics of intracellular calcium in cultured humankeratinocytes after localized cell damage, Exp. Dermatol, 22, 367 (2013)
[7] Y. Kobayashi et.al., in preparation.
72

[6] M. Tsutsumi, M. Goto and M. Denda, Dynamics of intracellular calcium in cultured humankeratinocytes after localized cell damage, Exp. Dermatol, 22, 367 (2013)
[7] Y. Kobayashi et.al., in preparation.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Sinogram-based Geometry Processing
for CT Scanning
Yutaka Ohtake ∗
The University of Tokyo
Hiromasa Suzuki †
The University of Tokyo
Yukie Nagai ‡
The University of Tokyo
Abstract X-ray Computed Tomography (CT) is a powerful scanning tool for capturing the three
dimensional (3D) geometry of real-world objects. In conventional geometry processing for CT
scanned objects, only CT values sampled on a 3D regular grid (i.e., a CT volume) are used. However,
this CT volume-based geometry processing is sensitive to grid artifacts. To solve this problem, we
propose sinogram-based geometry processing, wherein a sinogram is a sequence of X-ray projection
images. The proposed method provides high quality mesh generation, sharp feature extraction, and
curvature estimation.
Keywords: 3D scanning, Computed tomography, X-ray imaging, Sinogram
1 Introduction
X-ray Computed Tomography (CT) has been widely used for non-destructive inspection in industrial
applications as well as in medical ones. Due to the recent advances of X-ray imaging technology,
we can now obtain clear CT volumes that can generate sufficiently accurate 3D shapes for industrial
applications, such as reverse engineering, physical simulations, and dimensional metrology.
Figure 1 shows an overview of 3D geometry generation obtained by CT scanning. First, a sequence
of X-ray projection images called a sinogram is obtained by rotating a scanned object between an
X-ray source and a detector array. We then reconstruct a CT volume wherein CT values are sampled
on a regular 3D grid [1]. Finally, the surface of the object is extracted as a polygon mesh. In standard
surface extraction methods, only CT volumes are used, and the sinogram does not contribute directly.
In this paper we propose a method for processing the geometry of a CT scanned object using a
sinogram, i.e., sinogram-based geometry processing. The proposed method provides high quality
mesh generation, sharp feature extraction, and curvature estimation.
∗email [email protected]†email [email protected]‡email [email protected]
73

Figure 1: Overview of 3D geometry generation with CT scanning (blue arrows represent
standard data conversion steps); pink arrows represent the proposed method, in which the
sinogram contributes directly to geometry processing)
2 Geometry Processing using Sinogram
Isosurface meshing
The surface of the scanned object on a CT volume is usually polygonized by applying a grid-based
isosurfacing algorithm such as Marching cubes [2]. As shown in the top row of Figure 2, a large
number of polygons are generated because the grid of the CT volume is fine. Furthermore, grid
artifacts, i.e., is step shapes on smooth parts and jaggy sharp features, are observed. To use the
mesh for CAD/CAE applications, we typically require post mesh processing, such as simplification,
smoothing, and sharp feature restoration. The important point for industrial purposes is to main-
tain scanning accuracy during mesh processing; thus, we must carefully consider accuracy when
selecting algorithms.
The sinogram polygonizer was proposed in our previous work [3]. In the algorithm, we reconstruct
a CT volume on an unstructured grid consisting of tetrahedra rather than a regular grid form. The
vertices of the tetrahedral grid are iteratively adjusted to the isosurface on the CT volume by per-
forming filtered back-projection procedure [1] using the sinogram. The generated surface mesh with
the sinogram polygonizer is shown in the bottom row of Figure 2. Only 10% of the polygons are
used to represent the surface; however, sharp features are well captured. Furthermore, the tetrahedra
that correspond to the inside parts of an object can be used as a mesh of a finite element method for
physical simulations.
Sharp feature extraction
Typically, the sharp features of a scanned object are extracted on the reconstructed mesh, as shown
in the top row of Figure 3. However, the extracted feature lines are sometimes jaggy, and a large
number of projection images are required for accurate CT reconstruction.
74

Figure 1: Overview of 3D geometry generation with CT scanning (blue arrows represent
standard data conversion steps); pink arrows represent the proposed method, in which the
sinogram contributes directly to geometry processing)
2 Geometry Processing using Sinogram
Isosurface meshing
The surface of the scanned object on a CT volume is usually polygonized by applying a grid-based
isosurfacing algorithm such as Marching cubes [2]. As shown in the top row of Figure 2, a large
number of polygons are generated because the grid of the CT volume is fine. Furthermore, grid
artifacts, i.e., is step shapes on smooth parts and jaggy sharp features, are observed. To use the
mesh for CAD/CAE applications, we typically require post mesh processing, such as simplification,
smoothing, and sharp feature restoration. The important point for industrial purposes is to main-
tain scanning accuracy during mesh processing; thus, we must carefully consider accuracy when
selecting algorithms.
The sinogram polygonizer was proposed in our previous work [3]. In the algorithm, we reconstruct
a CT volume on an unstructured grid consisting of tetrahedra rather than a regular grid form. The
vertices of the tetrahedral grid are iteratively adjusted to the isosurface on the CT volume by per-
forming filtered back-projection procedure [1] using the sinogram. The generated surface mesh with
the sinogram polygonizer is shown in the bottom row of Figure 2. Only 10% of the polygons are
used to represent the surface; however, sharp features are well captured. Furthermore, the tetrahedra
that correspond to the inside parts of an object can be used as a mesh of a finite element method for
physical simulations.
Sharp feature extraction
Typically, the sharp features of a scanned object are extracted on the reconstructed mesh, as shown
in the top row of Figure 3. However, the extracted feature lines are sometimes jaggy, and a large
number of projection images are required for accurate CT reconstruction.
Figure 2: The isosurface meshes generated by the Marching Cube algorithm (top) and the
sinogram polygonizer (bottom). Carl Zeiss METROTOM 800 was used for CT scanning.
Figure 3: Results of sharp feature extraction via conventional isosurface polygonization
(top) and crease extraction on the sinogram (bottom). To generate the sinogram we simu-
lated X-ray projection to the original fandisk mesh using Scorpius XLab.
An efficient algorithm for extracting the sharp feature lines was proposed [4]. As shown in the bot-
tom row of Figure 3, crease pixels on a sinogram are first extracted, then a wireframe consisting of
sharp features is constructed by connecting the peak points of the CT-reconstructed volume obtained
from the feature sinogram. Compared to typical extraction algorithms, we only require a small num-
ber of projection images. This advantage is expected to contribute to a quick dimensional inspection
of mechanical parts using a CT scanner.
Curvature estimation
In reverse engineering, curvatures on the surface of a scanned object play an important role when
extracting primitive shapes, i.e., plane, sphere, cylinder, cone, and torus. To date, many curvature
75

Figure 4: Comparison of curvature estimation methods. Top row, left to right: scanned
plastic drill cover, its sinogram, and the 2D color map of the principal curvatures κmax
and κmin. TOSHIBA TOSCANER-34500fd at TIRI was used for CT scanning.
estimation algorithms for a polygon mesh or isosurface on a volume have been studied intensively.
The left and center images in the bottom row of Figure 4 show the curvature maps obtained by the
standard finite difference methods using the mesh or the CT volume. As shown in the images, the
resulting maps are adversely affected by the grid artifact of the CT volume, which is cased by the
discretization error of CT reconstruction and isosurface polygonization. To solve this problem, we
have developed a direct curvature estimation algorithm using the sinogram. To evaluate the gradient
and Hessian used for computing the shape matrix, the differentiation is first applied to the sinogram,
and the derivatives are then integrated by the back-projection procedure. A high-quality curvature
map can be obtained by the proposed sinogram based algorithm, as shown in the right image in the
bottom row of Figure 4.
References
[1] J. Hsieh: Computed Tomography: Principles, Design, Artifacts, and Recent Advances, SPIE
Press, 2003.
[2] W. E. Lorensen, H. E, Cline: Marching Cubes: A High Resolution 3D Surface Construction
Algorithm, ACM SIGGRAPH Computer Graphics, Vol. 21, No. 4, pp. 163–169, 1987.
[3] D. Yamanaka, Y. Ohtake, and H. Suzuki: The Sinogram Polygonizer for Reconstructing 3D
Shapes, IEEE Transactions on Visualization and Computer Graphics, Vol. 19, No. 11, pp. 1911–
1922, 2013.
[4] R. Jinnouchi, Y. Ohtake, H. Suzuki, and Y. Nagai: Efficient 3D Crease Point Extraction from
2D Crease Pixels of Sinogram, Conference on Industrial Computed Tomography 2014, pp. 439–
446, 2014.
76

Figure 4: Comparison of curvature estimation methods. Top row, left to right: scanned
plastic drill cover, its sinogram, and the 2D color map of the principal curvatures κmax
and κmin. TOSHIBA TOSCANER-34500fd at TIRI was used for CT scanning.
estimation algorithms for a polygon mesh or isosurface on a volume have been studied intensively.
The left and center images in the bottom row of Figure 4 show the curvature maps obtained by the
standard finite difference methods using the mesh or the CT volume. As shown in the images, the
resulting maps are adversely affected by the grid artifact of the CT volume, which is cased by the
discretization error of CT reconstruction and isosurface polygonization. To solve this problem, we
have developed a direct curvature estimation algorithm using the sinogram. To evaluate the gradient
and Hessian used for computing the shape matrix, the differentiation is first applied to the sinogram,
and the derivatives are then integrated by the back-projection procedure. A high-quality curvature
map can be obtained by the proposed sinogram based algorithm, as shown in the right image in the
bottom row of Figure 4.
References
[1] J. Hsieh: Computed Tomography: Principles, Design, Artifacts, and Recent Advances, SPIE
Press, 2003.
[2] W. E. Lorensen, H. E, Cline: Marching Cubes: A High Resolution 3D Surface Construction
Algorithm, ACM SIGGRAPH Computer Graphics, Vol. 21, No. 4, pp. 163–169, 1987.
[3] D. Yamanaka, Y. Ohtake, and H. Suzuki: The Sinogram Polygonizer for Reconstructing 3D
Shapes, IEEE Transactions on Visualization and Computer Graphics, Vol. 19, No. 11, pp. 1911–
1922, 2013.
[4] R. Jinnouchi, Y. Ohtake, H. Suzuki, and Y. Nagai: Efficient 3D Crease Point Extraction from
2D Crease Pixels of Sinogram, Conference on Industrial Computed Tomography 2014, pp. 439–
446, 2014.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Computational Creation of a New IllusionarySolid Sign with Shading Effect
Akiyasu Tomoeda∗
Musashino University / JST CRESTKokichi Sugihara†
Meiji University / JST CREST
Abstract We present a computational method to create new illusionary solid signs inspired by twokinds of illusions; “hollow mask illusion” and “crater illusion”. The three-dimensional vertices ofthe illusionary solid sign are obtained by the straight line voronoi diagram for a given base shape.Then, the shading effect on each surface is calculated on the assumption that each surface has dif-fusely reflecting surface (Lambertian reflectance). Here we show two specific examples of our newillusionary solid works, so-called “hollow arrow sign” and “hollow arrow sign with shading”.
Keywords: Computational illusion, Hollow mask illusion, Crater illusion, Voronoi diagram, Lam-bertian reflectance
1 Introduction
We see the world in three dimensions. However, the information from the external world is projectedonto the two-dimensional retinal image, when we perceive the world through our eyes. We some-times fall into a serious error, which is a kind of visual illusions, in the process of three-dimensionalreconstruction due to the lack of depth information in the two-dimensional retinal image.
Now, let us briefly introduce two examples of depth inversion. One example is “hollow mask illu-sion” [1]. If a hollow mask of a face is viewed from a distance of a few feet even under dynamicbinocular viewing conditions, the impression is of a normal face with the nose nearer to the observerthan the forehead, that is, the mask appears as a convex face (see the left mask in Fig. 1). The otherexample is “crater illusion” [2, 3]. The crater has actually a dent as shown in Fig. 2 (left), however,the alternate perception is preferred by turning the image upside down (see Fig. 2 (right)). The key ofthis illusion is shading effect. Shading indicates spatial changes of brightness of illuminated region,that is, the information obtained from the shading can be a cue of depth perception of the objectsin the picture. In particular, the inference of shape from shading widely relies on the fact that lightcomes from above our heads, so-called “light-from-above” hypothesis. This kind of visual illusionsdue to light-from-above prior is provided by not only the picture of craters but also the shaded imageof a planar surface which appears to be covered by bumps and dents [3] . Accordingly, the solid isgenerally perceived as a bump, when the upside of the solid is brighter than the downside. On theother hand, when the upside of the solid is darker than the downside, the solid is perceived as a dent.Thus, the shading plays an important role in crater illusion to reconstruct three-dimensional shape.
∗a [email protected]†[email protected]
77

Figure 1: (Left) The hollow mask is perceived incorrectly as a normal face, that is, the noseis nearer than the forehead. (Right) The normal mask is perceived correctly as a normalmask, that is, the nose is actually nearer than the forehead.
Figure 2: The concave shape of the crater changes to an apparent convex, when the imageis rotated through 180 degrees. (Left) The crater has a really concave shape. (Right) Thecrater is perceived as a bump (convex shape).
Whereas, the shading is not essential in the hollow mask illusion, since we have a prior knowledgethat a face is a convex shape. Note, however, that the effect of the hollow mask illusion can beenhanced by the shading when the hollow mask is illuminated from below.
In this paper, first we explain the method to create a new illusionary solid sign, which shows the sameeffect with hollow mask illusion by calculating the geometric shape of the solid. Then, we also intro-duce another illusionary solid sign by calculating the shading effect built on the phenomenologicalfeature of the crater illusion. In general, illusionary products are accidentally discovered or createdon an empirical basis. However, our method achieves that one can easily create the illusionary solidsign as one likes.
2 Computational creation of new illusionary solid signs
2.1 Calculation of the hollow structure
Let P be a polygon, i.e., a two-dimensional region bounded by a closed sequence of straight line seg-ments. We want to generate a hollow structure with slanted walls whose bottom coincides with P . In[4], we proposed the procedure to generate the hollow structure by the Voronoi diagram based on thestraight skeleton [5]. This procedure provides the three-dimensional coordinates of vertices on the
78

Figure 1: (Left) The hollow mask is perceived incorrectly as a normal face, that is, the noseis nearer than the forehead. (Right) The normal mask is perceived correctly as a normalmask, that is, the nose is actually nearer than the forehead.
Figure 2: The concave shape of the crater changes to an apparent convex, when the imageis rotated through 180 degrees. (Left) The crater has a really concave shape. (Right) Thecrater is perceived as a bump (convex shape).
Whereas, the shading is not essential in the hollow mask illusion, since we have a prior knowledgethat a face is a convex shape. Note, however, that the effect of the hollow mask illusion can beenhanced by the shading when the hollow mask is illuminated from below.
In this paper, first we explain the method to create a new illusionary solid sign, which shows the sameeffect with hollow mask illusion by calculating the geometric shape of the solid. Then, we also intro-duce another illusionary solid sign by calculating the shading effect built on the phenomenologicalfeature of the crater illusion. In general, illusionary products are accidentally discovered or createdon an empirical basis. However, our method achieves that one can easily create the illusionary solidsign as one likes.
2 Computational creation of new illusionary solid signs
2.1 Calculation of the hollow structure
Let P be a polygon, i.e., a two-dimensional region bounded by a closed sequence of straight line seg-ments. We want to generate a hollow structure with slanted walls whose bottom coincides with P . In[4], we proposed the procedure to generate the hollow structure by the Voronoi diagram based on thestraight skeleton [5]. This procedure provides the three-dimensional coordinates of vertices on the
Figure 3: ”Hollow arrow sign”. The solid is a concave shape in both figures. The left(right) figure is illuminated from above (below).
solid for given bottom shape P . We actually make a three-dimensional solid with hollow structurefrom the developed figure printed on a hard paper, which is obtained by the development projectionfrom three-dimensional coordinates of vertices. Two snapshots of the same three-dimensional solidwith hollow structure for given arrow shape, so-called “hollow arrow sign” are shown in Fig. 3.When the hollow arrow sign is illuminated from above (the left in Fig. 3), the shape of the arrowis perceived as a dent. Whereas, when the sign is illuminated from below (the right in Fig. 3), theshape is perceived as a bump. In the case of the right one, the hollow arrow sign creates a visualillusion in such a way that the depth is inversely perceived for one’s eyes. We emphasize again thatthe shading effect plays an important role in our illusionary solid sign.
2.2 Calculation of the shading effect
As noted in the previous section, the shading effect due to the light from below is important toprovide the alternative perception. In this section, we propose the procedure to create the hollowarrow sign by painting the shading colors on each surface insted of illuminating from the bottom.First of all, we set the shading colors for each region of the arrow shape designed on a plane, i.e.,two-dimensional arrow design, where above region of the arrow is brighter than the bottom regionas shown in Fig. 4 (left), so that this two-dimensional arrow shape appears to the three-dimensionalsolid. Then, we want to calculate the shading effect on each surface of the real three-dimensionalhollow arrow sign to achieve the same effect with the hollow arrow sign illuminated from bottom. Ifthe shading planer arrow (the left in Fig. 4) appears to the real three-dimensional solid with convexshape and if we paint the shading color on each surface of real three-dimensional hollow arrow signso that the apparent colors of the solid are the same as the colors of the planar arrow, the hollowarrow sign without illumination can be obtained.
Here, we assume that each surface has diffusely reflecting surface (Lambertian reflectance), that is,we ignore the effect of specular reflection and transparency. If a surface exhibits Lambertian re-flectance, light falling on it is diffused such that the apparent brightness of the surface to an observeris the same regardless of the observer’s angle of view. Especially, the brightness on the surface isproportional to the intensity along the surface’s normal direction. Accordingly, the brightness ofperception L described as
L = xI0Cn · (−I)
|n|| − I| (1)
where x, I0 and C are the reflection rate of the surface, the intensity of the incoming light, color ofthe surface. The vector n and I are the surface’s normal vector and the light vector, respectively. In
79

Figure 4: ”Hollow arrow sign with shading”. The left is a arrow design with shading onflat surface. The right is a real solid with concave shape.
order to obtain the same shading effect of the solid, it is necessary to equalize the brightness betweenshading planar arrow and hollow arrow sign with shading. Accordingly, the relation
Cpnp · (−I)
|np|| − I| = Chnh · (−I)
|nh|| − I| (2)
provides the shading color of the solid, where Cp and Ch are the color of a surface of planar arrowand hollow arrow sign. Fig. 4 (right) is the real three dimensional hollow arrow sign with shading.This will be the same as the shading planar arrow (the left in Fig. 4).
3 Conclusions
In this paper, we show two specific examples of our new illusionary solid signs inspired by “hollowmask illusion” and “crater illusion”, which are obtained by computational method. The advantage ofusing computational method is that anyone can easily create the illusionary solid sign as one likes.Moreover, if we obtain the quantitative effect of the illusions, we can control the illusionary effect bychanging the conditions or parameters in the computational method. As a future work, we improveour method to calculate the curve geometry. Finally, the authors are grateful to Jun ONO for hisvaluable comments and discussions.
References[1] R. L. Gregory, ”The Intelligent Eye”, London: Weidenfeld and Nicolson, (1970).
[2] Fieandt, K. von, ”Improvements in depth perception by changes in lighting”, Helsinki, Finland:Psychologisches Itistitut Universitat Helsinki, (1938).
[3] Ramachandran, V. S., ”Perceiving shape from shading”, Scientific American, 256, 76-83,(1988)., Ramachandran, V. S., ”Perception of shape from shading”, Nature, 331, 163-166,(1988).
[4] A. Tomoeda and K. Sugihara: Computational creation of a new illusionary solid sign. NinthInternational Symposium on Voronoi Diagrams in Science and Engineering (ISVD 2012),pp. 144–147.
[5] O. Aichholzer, F. Aurenhammer, D. Alberts and B. Gartner: A novel type of skeleton for poly-gons. Journal of Universal Computer Science, vol. 1 (1995), pp. 752–761.
80

Figure 4: ”Hollow arrow sign with shading”. The left is a arrow design with shading onflat surface. The right is a real solid with concave shape.
order to obtain the same shading effect of the solid, it is necessary to equalize the brightness betweenshading planar arrow and hollow arrow sign with shading. Accordingly, the relation
Cpnp · (−I)
|np|| − I| = Chnh · (−I)
|nh|| − I| (2)
provides the shading color of the solid, where Cp and Ch are the color of a surface of planar arrowand hollow arrow sign. Fig. 4 (right) is the real three dimensional hollow arrow sign with shading.This will be the same as the shading planar arrow (the left in Fig. 4).
3 Conclusions
In this paper, we show two specific examples of our new illusionary solid signs inspired by “hollowmask illusion” and “crater illusion”, which are obtained by computational method. The advantage ofusing computational method is that anyone can easily create the illusionary solid sign as one likes.Moreover, if we obtain the quantitative effect of the illusions, we can control the illusionary effect bychanging the conditions or parameters in the computational method. As a future work, we improveour method to calculate the curve geometry. Finally, the authors are grateful to Jun ONO for hisvaluable comments and discussions.
References[1] R. L. Gregory, ”The Intelligent Eye”, London: Weidenfeld and Nicolson, (1970).
[2] Fieandt, K. von, ”Improvements in depth perception by changes in lighting”, Helsinki, Finland:Psychologisches Itistitut Universitat Helsinki, (1938).
[3] Ramachandran, V. S., ”Perceiving shape from shading”, Scientific American, 256, 76-83,(1988)., Ramachandran, V. S., ”Perception of shape from shading”, Nature, 331, 163-166,(1988).
[4] A. Tomoeda and K. Sugihara: Computational creation of a new illusionary solid sign. NinthInternational Symposium on Voronoi Diagrams in Science and Engineering (ISVD 2012),pp. 144–147.
[5] O. Aichholzer, F. Aurenhammer, D. Alberts and B. Gartner: A novel type of skeleton for poly-gons. Journal of Universal Computer Science, vol. 1 (1995), pp. 752–761.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Importance Sampling for Cloth Renderingunder Environment Light
Kazutaka MizutaniWakayama University
Kei Iwasaki∗
Wakayama University
Abstract In this paper, we present an importance sampling method for the BRDF of cloth whichconsists of interwoven threads under environment light. As the scattering model for cloth, ourmethod employs a microcylinder model proposed by Sadeghi et al [1]. In the microcylinder model,BRDF is represented by using Gaussian functions. Our method represents the environment lightwith a linear combination of spherical Gaussians. Since the product of environment lighting andBRDF is represented by a linear combination of Gaussians, our method can perform an importancesampling by using a probability density function that is proportional to the product. This enables usto perform sampling taking into account the product of environment lighting and BRDF. Our impor-tance sampling method can render realistic images of cloth with less noise compared to the uniformsampling with the same number of sampling. Our results show that realistic rendering of cloth underenvironment lighting can be achieved efficiently.
Keywords: importance sampling, cloth, environment light, Gaussian
Figure 1: Rendering results by using our method. The cloth types of the pillows from leftto right are silk, linen, velvet, silkshot, and polyester satin charmuse.
81

1 Introduction
Realistic rendering of cloth is one of the most important research topics in the field of ComputerGraphics. Real-world complex lighting and physically-based reflectance model of cloth are essentialto reproduce realistic visual appearance of cloth. Image-based lighting method (also known as en-vironment light) is a powerful technique to represent real-world complex lighting and hence widelyused. In recent years, microcylinder appearance model [1], which can represent various types ofcloth, has been proposed as a physically-based reflectance model of cloth. The radiance of clothunder environment light is calculated by integrating the product of environment light and scatteringfunctions of threads. For such integration computations, Monte Carlo methods are widely used torender photo realistic images. However, Monte Carlo methods are computationally expensive andrequire a large number of samples to render noise-free images, especially for the product integral ofhigh-frequency complex functions of lighting and reflectance.
This paper proposes an importance sampling method that takes into account the product of environ-ment light and scattering functions of threads. Our method represents the environment light with alinear combination of spherical Gaussians. The dominant factor of scattering functions of threads canbe represented by Gaussian functions. Therefore, the distribution of the product of the environmentlight and scattering functions are approximated with the Gaussian functions. Gaussian functions,however, do not have the closed form antiderivative, which is necessary to draw samples by usingthe inversion method. To address this problem, our method employs Cauchy distribution, whichis similar to Gaussian functions and has the closed form antiderivative. Compared to the uniformsampling, our method can render less noise images of cloth under environment lighting efficiently.
1.1 Related Work
Although many rendering methods for cloth such as volumetric approaches [1] and BTF-based meth-ods have been proposed, we briefly review the modeling methods of cloth BRDFs since our methodmainly focuses on importance sampling of analytically represented cloth BRDFs. Yasuda et al. pro-posed a simple shading model of cloth [3]. Daubert et al. modeled spatially-varying BRDFs frominterwoven threads using implicit functions [4]. Ashikhmin et al. presented microfacet BRDF mod-els and a rendering method for satin and velvet [5]. Adabala et al proposed a real-time renderingmethod for woven cloth [6]. These methods mainly focus on developing a plausible shading modelfor cloth and may lack the physical accuracy. Irawan et al. proposed a specular reflection model ofinterwoven threads [7]. This method, however, does not take into account shadowing and maskingeffects due to threads. Sadeghi et al. [1] proposed a physically-based reflectance model of cloth,called microcylinder appearance model. The microcylinder appearance model takes into account thesurface scattering and volume scattering of threads. The effectiveness of the microcylinder modelis validated for various types of cloth. Iwasaki et al. [10] proposed an interactive rendering methodfor microcylinder cloth model under environment light. This method, however, requires a precom-putation of the visibility and therefore this method cannot be applied to dynamic cloth rendering.Our method develops an importance sampling method of cloth under environment light to lift thislimitation.
In recent years, importance sampling methods for fibers such as hair and threads have been proposed.Ou et al. proposed an importance sampling method for hair [2]. d’Eon et al. proposed a bidirectionalcurve scattering distribution function method for hair [8]. Xie proposed a importance samplingmethod of microcylinder-based BRDF [9]. These methods, however, only consider the BRDF forthe importance sampling, while our method takes into account the product of lighting and BRDFs todraw samples.
82

1 Introduction
Realistic rendering of cloth is one of the most important research topics in the field of ComputerGraphics. Real-world complex lighting and physically-based reflectance model of cloth are essentialto reproduce realistic visual appearance of cloth. Image-based lighting method (also known as en-vironment light) is a powerful technique to represent real-world complex lighting and hence widelyused. In recent years, microcylinder appearance model [1], which can represent various types ofcloth, has been proposed as a physically-based reflectance model of cloth. The radiance of clothunder environment light is calculated by integrating the product of environment light and scatteringfunctions of threads. For such integration computations, Monte Carlo methods are widely used torender photo realistic images. However, Monte Carlo methods are computationally expensive andrequire a large number of samples to render noise-free images, especially for the product integral ofhigh-frequency complex functions of lighting and reflectance.
This paper proposes an importance sampling method that takes into account the product of environ-ment light and scattering functions of threads. Our method represents the environment light with alinear combination of spherical Gaussians. The dominant factor of scattering functions of threads canbe represented by Gaussian functions. Therefore, the distribution of the product of the environmentlight and scattering functions are approximated with the Gaussian functions. Gaussian functions,however, do not have the closed form antiderivative, which is necessary to draw samples by usingthe inversion method. To address this problem, our method employs Cauchy distribution, whichis similar to Gaussian functions and has the closed form antiderivative. Compared to the uniformsampling, our method can render less noise images of cloth under environment lighting efficiently.
1.1 Related Work
Although many rendering methods for cloth such as volumetric approaches [1] and BTF-based meth-ods have been proposed, we briefly review the modeling methods of cloth BRDFs since our methodmainly focuses on importance sampling of analytically represented cloth BRDFs. Yasuda et al. pro-posed a simple shading model of cloth [3]. Daubert et al. modeled spatially-varying BRDFs frominterwoven threads using implicit functions [4]. Ashikhmin et al. presented microfacet BRDF mod-els and a rendering method for satin and velvet [5]. Adabala et al proposed a real-time renderingmethod for woven cloth [6]. These methods mainly focus on developing a plausible shading modelfor cloth and may lack the physical accuracy. Irawan et al. proposed a specular reflection model ofinterwoven threads [7]. This method, however, does not take into account shadowing and maskingeffects due to threads. Sadeghi et al. [1] proposed a physically-based reflectance model of cloth,called microcylinder appearance model. The microcylinder appearance model takes into account thesurface scattering and volume scattering of threads. The effectiveness of the microcylinder modelis validated for various types of cloth. Iwasaki et al. [10] proposed an interactive rendering methodfor microcylinder cloth model under environment light. This method, however, requires a precom-putation of the visibility and therefore this method cannot be applied to dynamic cloth rendering.Our method develops an importance sampling method of cloth under environment light to lift thislimitation.
In recent years, importance sampling methods for fibers such as hair and threads have been proposed.Ou et al. proposed an importance sampling method for hair [2]. d’Eon et al. proposed a bidirectionalcurve scattering distribution function method for hair [8]. Xie proposed a importance samplingmethod of microcylinder-based BRDF [9]. These methods, however, only consider the BRDF forthe importance sampling, while our method takes into account the product of lighting and BRDFs todraw samples.
1.2 Preliminary
Our method employs the microcylinder model [1] for cloth reflectance, which represents cloth asa repetitive pattern of interwoven two threads. In the microcylinder model, the outgoing radianceL(ωr) of thread is calculated by the following equation [1]:
L(ωr) =1
Q
1
N
t∈C
Ω
L(ωi)fs(t, ωi, ωr)M(t, ωi, ωr)P (t, ωi, ωr) cos θidωi, (1)
where ωi and ωr are incident and outgoing directions, N is the number of sample points of thetangent directions of thread, Q is the normalization factor, Ω is a set of directions on the hemisphere,C is a set of tangent directions of thread, L is the incident light, fs is the scattering function ofthreads, M represents the masking and shadowing effects, and P represents the projected length ofthread onto the screen, t is the tangent of thread, and θi is the longitudinal angle of ωi.
Since our method utilizes Gaussian functions for rendering, we briefly describe Gaussian functionsas follows.
G(ωi; ξ, σ) = exp((ωi · ξ − 1)/σ2), (2)
gc(x;µ, σ) = exp((cos(x− µ)− 1)/σ2), (3)
gu(x;µ, σ) =1√2πσ
exp(−(x− µ)2/2σ2), (4)
where G is spherical Gaussian, defied by lobe axis ξ and bandwidth σ. gc is circular Gaussian defiedby mean parameter µ and bandwidth σ. gu is Gaussian with unit area.
2 Proposed Method
Our method represents the environment light with a linear combination of spherical GaussiansG(ωi; ξk, σk) as:
L(ωi) =K
k=1
LkG(ωi; ξk, σk), (5)
where Lk, ξk, σk are coefficient, lobe axis, and bandwidth of k-th spherical Gaussian, respectively.In the following, G(ωi; ξk, σk) is represented by Gk(ωi), and M(t, ωi, ωr), P (t, ωi, ωr) are rep-resented by M(t) and P (t) for the simplicity. By substituting Eq. (5) into Eq. (1), the outgoingradiance is calculated by
L(ωr) =1
Q
1
N
t∈C
Kk=1
Lk
Ω
Gk(ωi)fs(t, ωi, ωr)M(t)P (t) cos θidωi, (6)
2.1 Importance Sampling
To render realistic cloth under environment light efficiently, our method proposes an importancesampling method based on Gaussian functions. Our method focuses on the product of lighting andthe scattering function, and proposes a probability density function that has a similar distribution ofthe product. In Eq. (6), the scattering function fs is proportional to the Gaussian function as follows:
fs(t, ωi, ωr) ∝ gu((θi + θr)/2; 0, γs), (7)
83

where θr is the longitudinal angle of ωr and γs is the bandwidth parameter of the Gaussian function.Therefore, our method calculates the probability density function p(ωi) as follows:
p(ωi) ∝ Gk(ωi) · gu((θi + θr)/2; 0, γs) (8)
To draw samples, our method decomposes the incident direction ωi into the longitudinal angle θi andazimuthal angle φi. Then the probability density function p(ωi) is decomposed as p(ωi) cos θi =p(θi)p(φi). To compute pdfs p(θi) and p(φi), spherical Gaussian Gk is also decomposed into theproduct of two circular Gaussians as:
Gk(ωi) = gc(θi; θk, σk)gc(φi;φk, σ
k), (9)
where θk and φk are longitudinal and azimuthal angles of ξk, and σk is calculated by σk/
√cos θi cos θk.
Gaussian gu is also represented by the circular Gaussian as follows.
gu((θi + θr)/2; 0, γs) ≈1√2πγs
gc(θi;−θr, 2γs). (10)
Since the product of two circular Gaussian is closed in circular Gaussian, Eq. (8) is calculated as:
p(θi) ∝ gc(θi; θu, σθ)/ cos θi, (11)
p(φi) ∝ gc(φi;φu, σφ). (12)
To draw samples according to pdfs, the inversion method is widely used. The inversion methodcalculates the cumulative density function (cdf) of the pdf and calculates the inverse function ofcdf, which requires the antiderivative of the pdf. Unfortunately, circular Gaussian does not have theclosed form solution of the antiderivative.
To address this problem, our method approximates the distribution of circular Gaussian with Cauchydistribution that is similar to circular Gaussian but has the closed form solution of the antideriva-tive [2] Cauchy distribution f is defined by the following equation:
f(γ, x− x0) =1
π
γ
(x− x0)2 + γ2, (13)
where x0 and γ correspond to µ and σ in circular Gaussian. Contrast to circular Gaussian, theantiderivative F of Cauchy distribution f is calculated by:
F (x) =1
πtan−1
x− x0
γ
. (14)
2.2 Sampling of θi and φi
Our method can draw samples of θi by using the following PDF proportional to the Cauchy distri-bution as:
p(θi) ∝σθ
(θi − θµ)2 + σ2θ
1
cos θi. (15)
Since the integrated value of PDF should be 1, our method calculates the normalization factor c asfollows.
c
π/2
−π/2
σθ
(θi − θµ)2 + σ2θ
1
cos θicos θidθi = c
tan−1(
θi − µθ
σθ)
π/2
−π/2
= 1. (16)
84

where θr is the longitudinal angle of ωr and γs is the bandwidth parameter of the Gaussian function.Therefore, our method calculates the probability density function p(ωi) as follows:
p(ωi) ∝ Gk(ωi) · gu((θi + θr)/2; 0, γs) (8)
To draw samples, our method decomposes the incident direction ωi into the longitudinal angle θi andazimuthal angle φi. Then the probability density function p(ωi) is decomposed as p(ωi) cos θi =p(θi)p(φi). To compute pdfs p(θi) and p(φi), spherical Gaussian Gk is also decomposed into theproduct of two circular Gaussians as:
Gk(ωi) = gc(θi; θk, σk)gc(φi;φk, σ
k), (9)
where θk and φk are longitudinal and azimuthal angles of ξk, and σk is calculated by σk/
√cos θi cos θk.
Gaussian gu is also represented by the circular Gaussian as follows.
gu((θi + θr)/2; 0, γs) ≈1√2πγs
gc(θi;−θr, 2γs). (10)
Since the product of two circular Gaussian is closed in circular Gaussian, Eq. (8) is calculated as:
p(θi) ∝ gc(θi; θu, σθ)/ cos θi, (11)
p(φi) ∝ gc(φi;φu, σφ). (12)
To draw samples according to pdfs, the inversion method is widely used. The inversion methodcalculates the cumulative density function (cdf) of the pdf and calculates the inverse function ofcdf, which requires the antiderivative of the pdf. Unfortunately, circular Gaussian does not have theclosed form solution of the antiderivative.
To address this problem, our method approximates the distribution of circular Gaussian with Cauchydistribution that is similar to circular Gaussian but has the closed form solution of the antideriva-tive [2] Cauchy distribution f is defined by the following equation:
f(γ, x− x0) =1
π
γ
(x− x0)2 + γ2, (13)
where x0 and γ correspond to µ and σ in circular Gaussian. Contrast to circular Gaussian, theantiderivative F of Cauchy distribution f is calculated by:
F (x) =1
πtan−1
x− x0
γ
. (14)
2.2 Sampling of θi and φi
Our method can draw samples of θi by using the following PDF proportional to the Cauchy distri-bution as:
p(θi) ∝σθ
(θi − θµ)2 + σ2θ
1
cos θi. (15)
Since the integrated value of PDF should be 1, our method calculates the normalization factor c asfollows.
c
π/2
−π/2
σθ
(θi − θµ)2 + σ2θ
1
cos θicos θidθi = c
tan−1(
θi − µθ
σθ)
π/2
−π/2
= 1. (16)
By solving the above equation, c = 1A−B
, where A = tan−1(π/2−µθσθ
) and B = tan−1(−π/2−µθσθ
).Then pdf p(θi) is calculate by the following equation.
p(θi) =1
cos θi(A−B)
σθ
(θi − θµ)2 + σ2θ
. (17)
The cumulative density function P (θi) is then calculated by integrating p(θi) as follows.
P (θi) =
θi
−π/2
p(θi) cos θidθ
i =
tan−1( θi−µθσθ
)−B
A−B(18)
Finally, the longitudinal angle θi can be sampled by using the canonical random number η as
θi = σθ tan(η(A−B) +B) + µθ. (19)
The azimuthal angle φi can be sampled in the similar way as:
φi = σφ tan(η(C −D) +D) + µφ, (20)
where C = tan−1(π/2−µφ
σφ) and D = tan−1(
−π/2−µφ
σφ).
2.3 Rendering
Our method first selects a spherical Gaussian lobe Gk with a probability proportional to its coeffi-cient Lk and tangent direction t of interwoven threads uniformly. Then our method calculates theincident direction ωi by using the sampled angles θi and φi described in Sec. 2.2. When the sam-pled tangent direction t of interwoven threads is below the upper hemisphere of the normal of cloth,sampled directions on the lower hemisphere of the normal of cloth can be generated. To alleviatethis problem, our method currently employs two sampling strategies (i.e. the proposed importancesampling and the uniform sampling) using multiple importance sampling.
3 Results
Figs. 1 and 2 show the rendering results by using path tracing with our importance sampling method.Our method can render plausible images of various types of cloth under environment light. Thenumber of samples in Figs. 1 and 2 is 4096. All the computations are performed on a PC with IntelCore i7 920 2.67GHz and 6GB memory. The image resolution of all results is 256×256. The numberof spherical Gaussians used to approximate environment light is 10. Fig. 3 shows comparisons ofour importance sampling approach (top) and a uniform sampling approach (bottom) with differentnumbers of samples. The computational times of our method are 35s, 148s, and 568s for 64, 256,and 1024 samples, and those of the uniform sampling are 22s, 66s, and 245s, respectively. Fig. 4visualizes the differences from the reference image in Fig. 3(d). The color bar is shown in Fig. 4(d).As shown in these images, with the equal number of samples, our method can render less noiseimages compared to the uniform sampling method. Fig. 5 shows the graph of the mean square errorof our importance sampling method and simple uniform sampling method. As shown in the graph,with the equal quality, the simple uniform sampling requires about three to four times more samplesthan our importance sampling method.
85

4 Conclusions and Future Work
We have proposed an importance sampling method for the product of cloth BRDF and environmentlight. By representing the environment light and BRDF with circular Gaussians, the distribution ofthe product of lighting and BRDF is represented by circular Gaussians. Then the distribution of theproduct is approximated by Cauchy distribution, which allows us to easily use the inversion method.Our method can reduce the variance of Monte Carlo integration compared to the uniform sampling.
In future work, we plan to accelerate our importance sampling method. In the current implementa-tion, the computational times of our importance sampling method are about two times larger thanthose of the uniform sampling method with the same number of samples. In addition, we plan to takeinto account the masking and shadowing term M and the projected length term P for the importancesampling to reduce the noise.
(a) linen (b) silk (c) silkshot
(d) polyester front (e) polyester back (f) velvet
Figure 2: Rendering results of our method.
References[1] I. Sadeghi, O. Bisker, J. Deken, H. W. Jensen, A Practical Microcylinder Appearance Model for
Cloth Rendering, ACM Transactions on Graphics, Vol. 32, No. 2, pp. 14:1-14:12, 2013.
[2] J. Ou, F. Xie, P. Krishnamachari, F. Pellacini, ISHair : Importance Sampling for Hair Scattering,Computer Graphics Forum (EGSR2012), Vol. 31, No. 4, pp. 1537-1545, 2012.
[3] T. Yasuda, S. Yokoi, J. Toriwaki, K. Inakage, A Shading Model for Cloth Objects, IEEE Com-puter Graphics and Applications, Vol. 12, No. 6, pp. 15-24, 1992.
86

4 Conclusions and Future Work
We have proposed an importance sampling method for the product of cloth BRDF and environmentlight. By representing the environment light and BRDF with circular Gaussians, the distribution ofthe product of lighting and BRDF is represented by circular Gaussians. Then the distribution of theproduct is approximated by Cauchy distribution, which allows us to easily use the inversion method.Our method can reduce the variance of Monte Carlo integration compared to the uniform sampling.
In future work, we plan to accelerate our importance sampling method. In the current implementa-tion, the computational times of our importance sampling method are about two times larger thanthose of the uniform sampling method with the same number of samples. In addition, we plan to takeinto account the masking and shadowing term M and the projected length term P for the importancesampling to reduce the noise.
(a) linen (b) silk (c) silkshot
(d) polyester front (e) polyester back (f) velvet
Figure 2: Rendering results of our method.
References[1] I. Sadeghi, O. Bisker, J. Deken, H. W. Jensen, A Practical Microcylinder Appearance Model for
Cloth Rendering, ACM Transactions on Graphics, Vol. 32, No. 2, pp. 14:1-14:12, 2013.
[2] J. Ou, F. Xie, P. Krishnamachari, F. Pellacini, ISHair : Importance Sampling for Hair Scattering,Computer Graphics Forum (EGSR2012), Vol. 31, No. 4, pp. 1537-1545, 2012.
[3] T. Yasuda, S. Yokoi, J. Toriwaki, K. Inakage, A Shading Model for Cloth Objects, IEEE Com-puter Graphics and Applications, Vol. 12, No. 6, pp. 15-24, 1992.
(a) 64 sample (b) 256 sample (c) 1024 sample
(e) 64 sample (f) 256 sample (g) 1024 sample
(d) reference
Figure 3: Comparison of rendered images between our method (top) and uniform sampling(bottom) with different number of samples. Our method can render less noise imagescompared to the uniform sampling.
[4] K. Daubert, H. P. A. Lensch, W. Heidrich, H. Seidel, Efficient Cloth Modeling and Rendering,Proc. of Eurographics Workshop on Rendering, pp. 63-70, 2001.
[5] M. Ashikmin, S. Premoze, P. Shirley, A Microfacet-based BRDF Generator, Proc. of SIG-GRAPH00, pp. 65-74, 2000.
[6] N. Adabala, N. Thalmann, Visualization of Woven Cloth, Proc. of Eurographics Symposium onRendering, pp. 178-185, 2003.
[7] P. Irawan, S. Marschner, Specular Reflection from Woven Cloth, ACM Transactions on Graph-ics, Vol. 32, No. 1, pp. 11:1-11:20, 2012.
[8] E. d’Eon, S. Marschner, J. Hanika, Importance Sampling for Physically-Based Hair Fiber Mod-els, Proc. of SIGGRAPH Asia Technical Briefs, 2013.
[9] F. Xie, Importance Sampling for a Microcylinder-Based Cloth BSDF, SIGGRAPH 2014 Talk.
[10] K. Iwasaki, K. Mizutani, Y. Dobashi, T. Nishita, Interactive Cloth Rendering of MicocylinderAppearance Model under Environment Lighting, Computer Graphics Forum, Vol. 33, No. 2, pp.333-340, 2014.
87

0.128+
0.000
0.096
0.064
0.032
(a) 64 sample (b) 256 sample (c) 1024 sample
(e) 64 sample (f) 256 sample (g) 1024 sample
(d) color bar
Figure 4: Error images Fig. 3. Our method (top images) can render less noise images thanthe uniform sampling method (bottom images).
proposed method
uniform sampling
num. of samples
err
or
Figure 5: Comparison of mean square errors between our method and the uniform sam-pling. The uniform sampling requires about 4x number of samples to produce equal qualityimages of our method.
88

0.128+
0.000
0.096
0.064
0.032
(a) 64 sample (b) 256 sample (c) 1024 sample
(e) 64 sample (f) 256 sample (g) 1024 sample
(d) color bar
Figure 4: Error images Fig. 3. Our method (top images) can render less noise images thanthe uniform sampling method (bottom images).
proposed method
uniform sampling
num. of samples
err
or
Figure 5: Comparison of mean square errors between our method and the uniform sam-pling. The uniform sampling requires about 4x number of samples to produce equal qualityimages of our method.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
From mathematical study of visual informationprocessing in the brain to image processing
Hitoshi Arai ∗
The University of Tokyo, Japan
Abstract In order to construct a mathematical model of human’s vision, we invented new waveletframes: pinwheel framelets and simple pinwheel framelets. In this lecture we will talk on pinwheelframelets and mainly on applications to image processing. In particular, we will be concerned withcolor image processing, sharpening of blurred images, edge detection, and a new method for designof various types of 2D digital filters of finite length. This talk is based on joint work with ShinobuArai.
Keywords: Image processig, design of digital filters, color perception, wavelet frame, framelet
1 Pinwheel framelets
After the discovery of simple cells in the primary visual cortex by two physiologists, D. H. Hubel andT. N. Wiesel, some mathematical models of these cells have been proposed: Gabor functions, DOGfunctions, and Gaussian derivatives. However, these functions have some mathematical disadvan-tages: for example their supports are not compact (or filters are of infinite length). We invented newwavelet frames: pinwheel framelets, simple pinwheel framelets, and shift invariant, directional filterbanks ([2], [4]; see also [1], [3], [6]). Our wavelet frames overcome such disadvantages. Moreover,pinwheel framelets and simple pinwheel framelets satisfy all conditions in order to be a compactlysupported tight framelet.
2 Applications to image processing
We have devised image processing techniques based on a new mathematical model of visual infor-mation processing constructed by using pinwheel framelets ([5]). In particular, we will talk aboutcolor image processing, sharpening of blurred images, noise reduction, and edge detection. Thefollowing Fig. 2(2) is an example of our image processing (edge detection). On the left and righthand sides of the processed image (Fig. 2 (2)) we can easily find pylons and power lines. Howeverthey were very hardly identifiable in the original image (Fig. 2(1)). In our talk, we will show alsoother examples, and outline our method.
∗email [email protected]
89

Figure 1: Pinwheel framelet (degree 7, level 3).
Figure 2: (1) Original image. (2) Processed image by our edge detection technique. (Wepointed pylons and power lines by arrows.)
90

Figure 1: Pinwheel framelet (degree 7, level 3).
Figure 2: (1) Original image. (2) Processed image by our edge detection technique. (Wepointed pylons and power lines by arrows.)
3 New method for designing 2D FIR digital filters
Traditionally digital filters of finite length were designed by a window function technique or a fre-quency sampling technique. We will explain our method which is completely different from suchtechniques ([6]), and show some examples of 2D digital filters designed by our method.
References[1] Hitoshi Arai: ”Mathematical models of visual information processing in the human brain and
applications to visual illusions and image processing”, Mathematical Progress in ExpressiveImage Synthesis I (K. Anjyo ed.), Mathematics for Industry 4, Springer Japan, 2014, pp.7-12.
[2] Hitoshi Arai and Shinobu Arai: ”2D tight framelets with orientation selectivity suggested byvision science”, JSIAM Letters. 1 (2009), 9-12, Invited Paper.
[3] Hitoshi Arai: Wavelets, Kyoritsu Publ. Co. 2010 (Japanese book).
[4] Hitoshi Arai and Shinobu Arai:”Finite discrete, shift-invariant, directional filterbanks for visualinformation processing, I: Construction”, Interdisciplinary Information Sciences, 13 (2007),255-273.
[5] Hitoshi Arai and Shinobu Arai: ”Image processing device, image processing method, program,print medium and recording medium”, PCT/JP2013/063871; pat. 5599520 (JP) etc.
[6] Hitoshi Arai and Shinobu Arai: ”Digital filter for image processing, and character string tiltillusion generating device”, PCT/JP2012/084256; pat. 5456929 (JP).
91

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Skeleton-sheets Extraction using ShapeDiameter Function
Roman Durikovic∗
Martin Madaras†
Faculty of Mathematics, Physics and Informatics, Comenius University BratislavaSlovak Republic
Abstract The Shape Diameter Function (SDF) is a scalar function defined on the mesh surfaceexpressing a measure of the diameter of the objects volume in the neighborhood of each point on thesurface [SSCO08]. In our approach we propose to compute internal skeleton, from which every meshvertex is visible. There are automatic techniques for curve-skeleton extraction, but extracted curve-skeletons does not satisfy this condition. Therefore, we have extended Laplacian smoothing basedmethod [ATC+08] with the SDF term that moves skeleton vertices near medial axis. In addition,SDF values can be used to modify parameters as weights and grouping distance during Laplacian-based skeleton extraction to obtain better results with skeleton extraction. Resulting skeleton isreliable, centered in the mesh volume, consist of curves and sheets and is useful for skeleton basedparametrization of meshes.
Keywords: Mesh contraction, Laplace operator, skeleton
1 Introduction
Given a mesh G = (V,E), with vertices V and edges E, where V = [vT1 ,v
T2 , . . . ,v
Tn ] are
the vertex positions. We address the problem of extraction a curve-skeleton including sheet-skeletonparts S = (U,B) with nodes U and edges B, where U = [uT
1 ,uT2 , . . . ,u
Tm] are the node positions.
In order to parameterize a mesh along its skeleton, so called skeleton texture mapping (STM) [Mv13],the skeleton reliability has to be guaranteed. Reliability, refers to the property of the curve-skeleton,that every mesh point is visible from at least one skeleton point belonging to skeleton nodes orskeleton edges. In majority of cases, the mesh can be parameterized by a curve-skeleton but not ingeneral, particularly when mesh contains a double fold, as shown in Figure 1. In such cases, theskeleton has to contain sheets do guarantee reliability. In [TAOZ12] authors used Voronoi polesto guide the surface toward the medial axis. Shifted vertices into the central sheet using the shapediameter function (SDF) are less noisy than Voronoi poles, moreover the SDF can be efficientlyparallelized on GPU for faster computing. Our approach is based on a geometry contraction pro-cess with SDF method that iteratively smoothes the inner offset surface to a zero-volume surfaceas described in Section 2. Next, we build a skeleton S by an edge collapsing method described in
∗[email protected]†[email protected]
92

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Skeleton-sheets Extraction using ShapeDiameter Function
Roman Durikovic∗
Martin Madaras†
Faculty of Mathematics, Physics and Informatics, Comenius University BratislavaSlovak Republic
Abstract The Shape Diameter Function (SDF) is a scalar function defined on the mesh surfaceexpressing a measure of the diameter of the objects volume in the neighborhood of each point on thesurface [SSCO08]. In our approach we propose to compute internal skeleton, from which every meshvertex is visible. There are automatic techniques for curve-skeleton extraction, but extracted curve-skeletons does not satisfy this condition. Therefore, we have extended Laplacian smoothing basedmethod [ATC+08] with the SDF term that moves skeleton vertices near medial axis. In addition,SDF values can be used to modify parameters as weights and grouping distance during Laplacian-based skeleton extraction to obtain better results with skeleton extraction. Resulting skeleton isreliable, centered in the mesh volume, consist of curves and sheets and is useful for skeleton basedparametrization of meshes.
Keywords: Mesh contraction, Laplace operator, skeleton
1 Introduction
Given a mesh G = (V,E), with vertices V and edges E, where V = [vT1 ,v
T2 , . . . ,v
Tn ] are
the vertex positions. We address the problem of extraction a curve-skeleton including sheet-skeletonparts S = (U,B) with nodes U and edges B, where U = [uT
1 ,uT2 , . . . ,u
Tm] are the node positions.
In order to parameterize a mesh along its skeleton, so called skeleton texture mapping (STM) [Mv13],the skeleton reliability has to be guaranteed. Reliability, refers to the property of the curve-skeleton,that every mesh point is visible from at least one skeleton point belonging to skeleton nodes orskeleton edges. In majority of cases, the mesh can be parameterized by a curve-skeleton but not ingeneral, particularly when mesh contains a double fold, as shown in Figure 1. In such cases, theskeleton has to contain sheets do guarantee reliability. In [TAOZ12] authors used Voronoi polesto guide the surface toward the medial axis. Shifted vertices into the central sheet using the shapediameter function (SDF) are less noisy than Voronoi poles, moreover the SDF can be efficientlyparallelized on GPU for faster computing. Our approach is based on a geometry contraction pro-cess with SDF method that iteratively smoothes the inner offset surface to a zero-volume surfaceas described in Section 2. Next, we build a skeleton S by an edge collapsing method described in
∗[email protected]†[email protected]
Figure 1: Commonly used Laplacian-based contraction applied on C-shape mesh (topfigures) and S-shape mesh (bottom figures). Images show the four steps of contraction,the final skeletons are the rightmost images. Resulting skeletons are not reliable, it fallsoutside the mesh because method can not handle the non-convex cross sections.
Section 2.4. Finally, we post-process the skeleton nodes to the center of their respective local neigh-borhood in V as described in [ATC+08]. Our approach collapses the mesh geometry to the skeletonwith the skeleton-sheets only in regions, where curve-skeleton reliability is not satisfied.
2 Geometry Contraction
The geometry contraction process first presented in [ATC+08] removes details and noise from themesh surface by applying a Laplacian smoothing that moves the vertices along their approximatecurvature normal directions.
We extend the original mesh contraction method for skeleton extraction, by adding the last equationin the system, that moves the vertices to the inner offset surface
WL LWH
WC
V =
0WH VWC C
, (1)
where the matrix C = [cT1 , cT2 , . . . , c
Tn ] consist of shifted mesh vertices by half of SDF values in
the direction of inward normal (see Figure 2)
ci = vi − (SDF i/2) · ni, (2)
where vi, ni, and SDF i are position of vertex i, normal at vertex i and SDF value at vertex i,respectively. Matrix V = [vT
1 ,vT2 , . . . ,v
Tn ], with the size n× 3, consist of the vertex positions. V
is n×3 matrix with contracted vertex positions. Matrices WL, WH and WC are the diagonal n×nweighting matrices balancing the contraction and attraction constraints, the ith diagonal element ofWL (resp. WH , WC ) is denoted WL,i (resp. WH,i, WC,i). Note that the system Eqn. 1 is
93

Figure 2: Shape diameter function. (Left) Inner normal vectors, Eqn. (2). (Right) Meshcolored, red-to-blue, visualize high-to-low SDF values on the mesh vertices.
over-determined. Thus, we solve it in the least-squares sense, which is equivalent to the finding theminimum energy potential for unknown V
:
WLLV2 +
i
W2H,iv
i − vi+i
W2C,ici − ci, (3)
where the first term corresponds to the smoothing contraction constraints and the last two terms cor-respond to the attraction constraints and attraction due to SDF. Setting the initial weights is discussedin Section 2.3.
Matrix L is a n× n Laplacian smoothing matrix with cotangent weights:
Lij =
ωij = cotαij + cotβij if (i, j) ∈ Ek(i,k)∈E −ωik if i = j
0 otherwise,(4)
and αij and βij are the opposite angles corresponding to the edge (i, j).
2.1 Iteration and contraction parameters
V
is contracted noticeably after first iteration. To collapse V further into a skeleton, we solveEqn. 1 iteratively while increasing the contraction weigh WL and updating the attraction weightsWH , WC to avoid over contraction. V
is contracted noticeably after first iteration.
We evaluate iteration t as follows:
1. Solve
WtLL
t
WtH
WtC
Vt+1 =
0Wt
HVt
WtCC
t
for unknown Vt+1, (5)
2. Update Wt+1L,i = sLW
tL,i and Wt+1
H,i = sHW0H,i
A0
i /Ati , where A0
i and Ati are the orig-
inal and current one-ring areas of vertex i, respectively. SDF weights Wt+1C,i stay unchanged
with the same value WtC,i as in previous iteration.
94

Figure 2: Shape diameter function. (Left) Inner normal vectors, Eqn. (2). (Right) Meshcolored, red-to-blue, visualize high-to-low SDF values on the mesh vertices.
over-determined. Thus, we solve it in the least-squares sense, which is equivalent to the finding theminimum energy potential for unknown V
:
WLLV2 +
i
W2H,iv
i − vi+i
W2C,ici − ci, (3)
where the first term corresponds to the smoothing contraction constraints and the last two terms cor-respond to the attraction constraints and attraction due to SDF. Setting the initial weights is discussedin Section 2.3.
Matrix L is a n× n Laplacian smoothing matrix with cotangent weights:
Lij =
ωij = cotαij + cotβij if (i, j) ∈ Ek(i,k)∈E −ωik if i = j
0 otherwise,(4)
and αij and βij are the opposite angles corresponding to the edge (i, j).
2.1 Iteration and contraction parameters
V
is contracted noticeably after first iteration. To collapse V further into a skeleton, we solveEqn. 1 iteratively while increasing the contraction weigh WL and updating the attraction weightsWH , WC to avoid over contraction. V
is contracted noticeably after first iteration.
We evaluate iteration t as follows:
1. Solve
WtLL
t
WtH
WtC
Vt+1 =
0Wt
HVt
WtCC
t
for unknown Vt+1, (5)
2. Update Wt+1L,i = sLW
tL,i and Wt+1
H,i = sHW0H,i
A0
i /Ati , where A0
i and Ati are the orig-
inal and current one-ring areas of vertex i, respectively. SDF weights Wt+1C,i stay unchanged
with the same value WtC,i as in previous iteration.
3. Compute the new Laplacian operator Lt+1 with the current vertex positions Vt+1 usingEqn. 4. Similarly, update Ct+1 using Eqn. 2.
4. If there is not much change, (At+1i − At
i)/Aoi < T for all vertices, where T = 0.01 is the
user-specified threshold, the process stops.
The SDF is an offset function prescribing the offset distance. Shifting the vertices by half of theSDF values in inward normal direction, creates an offset surface inside the volume of the model.During the contraction process, vertices are pushed towards the inner offset surface. This constraintkeeps the current contracted vertices inside the mesh volume, thus guaranteeing the reliability of theskeleton.
2.2 Updating of Contraction Weights
The initial ration of the weights W0L and W0
H is important. It controls the smoothness and thedegree of initial contraction. Increasing W0
L or decreasing W0H both result in nearly the same
skeleton with only small differences. This is clear from the fact that the updated weighs in iterationwill change the initial ratio.
Scaling parameter sH is defined as inverse normalized SDFi value
SDF ∗ =SDFi − SDFmin
SDFmax − SDFmin,
sH =1
SDF ∗(1.0− bias) + bias,
where bias = 0.01 is an offset value because we want to avoid the division by zero, SDFmin
and SDFmax are the minimal and the maximal SDF values, respectively. Using this modification,already contracted parts with low SDF values do not contract and uncontracted parts with high SDFvalues contract in next iteration.
2.3 Parameters
In our experiments, we use sL = 2.0 allowing us to converge in fewer that 5 iteration. Since,the Laplacian operator is proportional to a neighborhood area of a point, the contraction forces aresmaller for higher resolution models. Fortunately, the Laplacian is independent on model size. Thusto handle models of different sizes and resolutions, we set W0
L = S/A and W0H = 1.0 for all
examples in this paper, where A is the average face area of the model and S is the sum of face areasover the model.
Stability of the iterative contraction is guaranteed by the incremental increase of the attractionweights WH making the system more diagonally dominant as the iteration progresses. We alsoavoid any possible numerical errors such as division by zero and very large numbers.
2.4 Edge collapsing method
. Given the degenerated mesh, we collapse unnecessary edges until no zero area triangles remain.We collapse the edge (vi,vj) with Euclidean length vi−vj < dti and merge vertex vi to vertexvj , with the resulting vertex at its midpoint. Collapse is prohibited when vi, vj are adjacent to vk
but (vi,vj ,vk) is not a face in the degenerated mesh.
95

Note, that the collapsing condition is local for each vertex vi based on the SDF value at that vertex:
dti = ggt · diag + (SDF i/2) · gmt, (6)
where ggt = 0.05 is a global grouping tolerance threshold, SDF i is the SDF value for vertex vi,gmt = 1.25 is global multiplication constant and diag is a diagonal of the mesh bounding boxestimating the absolute mesh size. Threshold value dti is relatively small at places where the meshis narrow and the threshold will be larger at places where the mesh is thick. These parameters enableto collapse all the uncontracted parts of the degenerated mesh while the contracted parts of the meshremain unchanged (see Figure 3).
(a) (b) (c)
Figure 3: Edge collapsing method with locally changed grouping distance. (a) Geomet-rically contracted mesh, (b) Edge collapsing using global grouping distance, (c) Edgecollapsing using local grouping distance based on SDF, Eqn. 6.
3 Results
We can compare the results of the original method, Figure 1 and the proposed method with extensionusing SDF shown in Figure 4. The proposed method solved the problem of double concavity bycontraction to a sheet skeleton that is inside the original mesh volume. The proposed method takesinto account the volume differences of the mesh contrary to original method that takes into accountthe surface difference. That is the main reason why the original method fails to contract meshes withhigh differences of local shape diameter.
Results of the contraction along with visualization of dynamically changing SDF values on thesurface are shown in Figure 5. Low SDF values are colored in blue and high values in red. 5.
The proposed algorithm is able to preserve small-scale details in case, when thickness of the meshchanges rapidly sa can be seen on skeleton of panda ears (see Figure 6). Using the original Laplacian-based contraction, these details were lost while contracting the thick mesh parts.
4 Conclusions
We have proposed the Laplacian smoothing based method with SDF term that moves skeleton ver-tices near medial axis transform. Resulting skeleton consist of curve-skeleton parts and the skeletonsheets enabling us to fin the reliable skeleton for highly concave shapes. Another advantage of ourmethod is that the skeleton keeps the small details for highly changing shape distance function onthe surface. Proposed method can be extended to point clouds straightforwardly by replacing theLaplace operator estimation for a numerical model based on unstructured point sets. Skeletons wefind suites very well for the purpose of skeleton based parameterizations of mesh models.
96

Note, that the collapsing condition is local for each vertex vi based on the SDF value at that vertex:
dti = ggt · diag + (SDF i/2) · gmt, (6)
where ggt = 0.05 is a global grouping tolerance threshold, SDF i is the SDF value for vertex vi,gmt = 1.25 is global multiplication constant and diag is a diagonal of the mesh bounding boxestimating the absolute mesh size. Threshold value dti is relatively small at places where the meshis narrow and the threshold will be larger at places where the mesh is thick. These parameters enableto collapse all the uncontracted parts of the degenerated mesh while the contracted parts of the meshremain unchanged (see Figure 3).
(a) (b) (c)
Figure 3: Edge collapsing method with locally changed grouping distance. (a) Geomet-rically contracted mesh, (b) Edge collapsing using global grouping distance, (c) Edgecollapsing using local grouping distance based on SDF, Eqn. 6.
3 Results
We can compare the results of the original method, Figure 1 and the proposed method with extensionusing SDF shown in Figure 4. The proposed method solved the problem of double concavity bycontraction to a sheet skeleton that is inside the original mesh volume. The proposed method takesinto account the volume differences of the mesh contrary to original method that takes into accountthe surface difference. That is the main reason why the original method fails to contract meshes withhigh differences of local shape diameter.
Results of the contraction along with visualization of dynamically changing SDF values on thesurface are shown in Figure 5. Low SDF values are colored in blue and high values in red. 5.
The proposed algorithm is able to preserve small-scale details in case, when thickness of the meshchanges rapidly sa can be seen on skeleton of panda ears (see Figure 6). Using the original Laplacian-based contraction, these details were lost while contracting the thick mesh parts.
4 Conclusions
We have proposed the Laplacian smoothing based method with SDF term that moves skeleton ver-tices near medial axis transform. Resulting skeleton consist of curve-skeleton parts and the skeletonsheets enabling us to fin the reliable skeleton for highly concave shapes. Another advantage of ourmethod is that the skeleton keeps the small details for highly changing shape distance function onthe surface. Proposed method can be extended to point clouds straightforwardly by replacing theLaplace operator estimation for a numerical model based on unstructured point sets. Skeletons wefind suites very well for the purpose of skeleton based parameterizations of mesh models.
Figure 4: Proposed Laplacian-based contraction method based on the SDF. (left) Theoriginal mesh. (middle) Contraction iteration to offset surface. (right) Final skeleton sheetinside the volume of original mesh.
Figure 5: Examples of contraction using SDF weights. (left) Original mesh colored ac-cording to normalized SDF values. Red is the highest value and blue is the lowest value.(middle images) Contraction process. (right) Final curve-skeleton with small sheet partsat the branching.
Figure 6: Contraction using SDF weights on panda mesh model. Final skeleton is curvedskeleton with skeleton sheets at branches.
In the future we would like to improve our mesh reconstruction method from curved and sheetskeletons.
97

References[ATC+08] Oscar Kin-Chung Au, Chiew-Lan Tai, Hung-Kuo Chu, Daniel Cohen-Or, and Tong-Yee
Lee. Skeleton extraction by mesh contraction. In SIGGRAPH ’08: ACM SIGGRAPH2008 papers, pages 1–10, New York, NY, USA, 2008. ACM.
[Mv13] Martin Madaras and Roman Durikovic. Skeleton texture mapping. In Proceedings of the28th Spring Conference on Computer Graphics, SCCG ’12, pages 121–127, New York,NY, USA, 2013. ACM.
[SSCO08] Lior Shapira, Ariel Shamir, and Daniel Cohen-Or. Consistent mesh partitioning andskeletonisation using the shape diameter function. Vis. Comput., 24:249–259, March2008.
[TAOZ12] Andrea Tagliasacchi, Ibraheem Alhashim, Matt Olson, and Hao Zhang. Mean curvatureskeletons. Comp. Graph. Forum, 31(5):1735–1744, August 2012.
98

References[ATC+08] Oscar Kin-Chung Au, Chiew-Lan Tai, Hung-Kuo Chu, Daniel Cohen-Or, and Tong-Yee
Lee. Skeleton extraction by mesh contraction. In SIGGRAPH ’08: ACM SIGGRAPH2008 papers, pages 1–10, New York, NY, USA, 2008. ACM.
[Mv13] Martin Madaras and Roman Durikovic. Skeleton texture mapping. In Proceedings of the28th Spring Conference on Computer Graphics, SCCG ’12, pages 121–127, New York,NY, USA, 2013. ACM.
[SSCO08] Lior Shapira, Ariel Shamir, and Daniel Cohen-Or. Consistent mesh partitioning andskeletonisation using the shape diameter function. Vis. Comput., 24:249–259, March2008.
[TAOZ12] Andrea Tagliasacchi, Ibraheem Alhashim, Matt Olson, and Hao Zhang. Mean curvatureskeletons. Comp. Graph. Forum, 31(5):1735–1744, August 2012.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Superresolution from Principal ComponentModels by RKHS Sampling
J.P. Lewis∗
Victoria University and Weta Digital/ JST CRESTKen Anjyo†
OLM Digital/ JST CRESTTaehyun Rhee‡
Victoria University
Abstract Principal component analysis (PCA) involves a signal that is sampled at some arbitrarybut fixed and countable set of locations. Radial Basis Function (RBF) regression interpolates a-priori known data to arbitrary locations as a weighted sum of a (radial) kernel function centered atthe data points. In recent work we showed that if the RBF kernel is equated to the covariance, RBFand Gaussian Process (GP) models perform a similar computation, differing in what information isassumed known in advance, and what is known at runtime. Building on the RBF-GP equivalence,we show that if the data covariance is known (or can be estimated), an RBF-inspired regression canprovide data-driven “superresolution” interpolation of given data. This procedure can alternately beinterpreted as a superresolution extension of eigenvector (principal component) data models, as sig-nal sampling (function evaluation) in a discrete reproducing kernel Hilbert space (RKHS) generatedby the data covariance, or as an elementary Gaussian process model in which the observations havea low-rank representation.
Keywords: Radial Basis Function regression, Principal Component Analysis, Gaussian Process
1 Introduction
In this paper we demonstrate a data-driven superresolution procedure. The approach follows from ageneralization of RBF regression using the data covariance. The resulting procedure can alternatelybe interpreted as a superresolution extension of principal component analysis (PCA) data models,or as function evaluation (signal sampling) in a discrete reproducing kernel Hilbert space (RKHS)generated by the data covariance.
Terminology. The paper informally equates a radial basis function G(∆) to a covariance. In sodoing we consider covariances C(x, y) = C(x − y) = C(∆) corresponding to stationary pro-cesses. Throughout the paper the mean of the process or data is assumed to be zero without lossof generality. We further use the covariance as the kernel in an RKHS. The reader should also dis-tinguish continuous functions and the matrices generated by evaluating the continuous function atdiscrete locations. Discrete variables are indicated in bold font. M(d, n,R) denotes the set of real
∗[email protected]†[email protected]‡[email protected]
99

matrices of size d × n. n denotes a number of data points, d is the dimensionality of a single datapoint in the case of PCA data, and m is the number of eigenvectors retained in a PCA model.
Principal Component Analysis. PCA represents data in a linear subspace obtained from the eigen-vectors of the covariance matrix, estimated as C ≈ 1
nFFT where F ∈ M(d, n,R) is a matrix
containing the data points fk ∈ Rd in its columns. We refer to a PCA “model” as
f = Uc+m
where f is a vector representing the signal being modeled, U ∈ M(d,m,R) are eigenvectors of thecovariance matrix C corresponding to the m largest eigenvalues (m ≤ d), m ∈ Rd is the mean ofthe data points, and c are PCA “coefficients”. Strictly speaking PCA is a valid model only in thecase where the data is jointly Gaussian. Nevertheless, this approximate model is adequate in someapplications. For example, a jointly Gaussian model of face proportions has been widely employedin computer vision [5] and even psychological theory [13]. PCA is not considered a generativemodel because the estimated covariance of f ,
C = E(f −m)(f −m)T
= E
UccTUT
= UΛ1:mUT
is necessarily singular due to retaining only the m largest eigenvalues (Λ1:m ∈ M(m,m,R) de-notes the diagonal matrix formed from the largest eigenvalues). However, it is easy to synthesizedata with this covariance by picking a random coefficient c according to c2k ∼ λk.
RBF regression. RBF regression at a location p has the form f(p) =n
k wkG(p − pk),where G() is a radial function situated at the n training data points pk. Assembling the data to beinterpolated in a vector f , the weights can be obtained from the linear system
Gw = f
where G is the n × n matrix consisting of the radial basis function evaluated at all pairs of datapoints, Gr,c = G(pr − pc). This describes the case of regression with a positive definite radialkernel G. Other RBF kernels are conditionally positive definite and require solving a block matrixsystem [2]. In matrix-vector notation the regression can be written
f(p) = rTw = rTG−1f (1)
where r ≡ r(p) is the vector of the kernel evaluated at the distance between the evaluation point pand all the training points pk, i.e.,
r = [G(p− p1), G(p− p2), G(p− p3), · · · ]
Note that the position p is arbitrary.
Gaussian process regression. A discrete Wiener filter estimates the signal f(p) at a location p asa linear weighted sum of the data f at previous or surrounding locations,
f(p) = wT f (2)
The orthogonality principle states that the error of the optimal estimator is orthogonal in expectationto the data:
Eff(p)− fTw
= 0
orEf f(p)
= E
ffT
w
EffT
= C is the covariance of a zero-mean stationary process and E
f f(p)
= r is the cross
covariance between the signal at the location p and at the data points f(pk) ≡ fk ∀k. This gives a
100

matrices of size d × n. n denotes a number of data points, d is the dimensionality of a single datapoint in the case of PCA data, and m is the number of eigenvectors retained in a PCA model.
Principal Component Analysis. PCA represents data in a linear subspace obtained from the eigen-vectors of the covariance matrix, estimated as C ≈ 1
nFFT where F ∈ M(d, n,R) is a matrix
containing the data points fk ∈ Rd in its columns. We refer to a PCA “model” as
f = Uc+m
where f is a vector representing the signal being modeled, U ∈ M(d,m,R) are eigenvectors of thecovariance matrix C corresponding to the m largest eigenvalues (m ≤ d), m ∈ Rd is the mean ofthe data points, and c are PCA “coefficients”. Strictly speaking PCA is a valid model only in thecase where the data is jointly Gaussian. Nevertheless, this approximate model is adequate in someapplications. For example, a jointly Gaussian model of face proportions has been widely employedin computer vision [5] and even psychological theory [13]. PCA is not considered a generativemodel because the estimated covariance of f ,
C = E(f −m)(f −m)T
= E
UccTUT
= UΛ1:mUT
is necessarily singular due to retaining only the m largest eigenvalues (Λ1:m ∈ M(m,m,R) de-notes the diagonal matrix formed from the largest eigenvalues). However, it is easy to synthesizedata with this covariance by picking a random coefficient c according to c2k ∼ λk.
RBF regression. RBF regression at a location p has the form f(p) =n
k wkG(p − pk),where G() is a radial function situated at the n training data points pk. Assembling the data to beinterpolated in a vector f , the weights can be obtained from the linear system
Gw = f
where G is the n × n matrix consisting of the radial basis function evaluated at all pairs of datapoints, Gr,c = G(pr − pc). This describes the case of regression with a positive definite radialkernel G. Other RBF kernels are conditionally positive definite and require solving a block matrixsystem [2]. In matrix-vector notation the regression can be written
f(p) = rTw = rTG−1f (1)
where r ≡ r(p) is the vector of the kernel evaluated at the distance between the evaluation point pand all the training points pk, i.e.,
r = [G(p− p1), G(p− p2), G(p− p3), · · · ]
Note that the position p is arbitrary.
Gaussian process regression. A discrete Wiener filter estimates the signal f(p) at a location p asa linear weighted sum of the data f at previous or surrounding locations,
f(p) = wT f (2)
The orthogonality principle states that the error of the optimal estimator is orthogonal in expectationto the data:
Eff(p)− fTw
= 0
orEf f(p)
= E
ffT
w
EffT
= C is the covariance of a zero-mean stationary process and E
f f(p)
= r is the cross
covariance between the signal at the location p and at the data points f(pk) ≡ fk ∀k. This gives a
linear system Cw = r that can be used to solve for the weight vector w. Substituting in equation (2)gives the estimator
f(p) = rTC−1f (3)
The variance of the estimator is
E
f −wT f2
= σ2 + E
−2fwT f +wT f fTw
= σ2 − 2wTEf f
+wTCw
where σ2 is the variance of the (stationary) process, and f ≡ f(p) is written for brevity. Substitutingw = C−1r,
= σ2 − 2wTEf f
+ rTC−1 CC−1r
= σ2 − rTC−1r
In recent work [1] we observed that if the radial basis kernel function is equated to the covariance,RBF regression has the same computational form as Gaussian Process (GP) regression. Indeed,equation (3) and the subsequent expression for the variance have the same form as the mean andvariance in Gaussian process regression [10, 2.19]. This correspondence requires simultaneous gen-eralization of the RBF kernel to non-radial form and a restriction to valid (i.e. positive-(semi)definite)covariances.
In the remainder of this paper we first describe the superresolution procedure. We show that theprocedure has the representer of evaluation and reproducing kernel properties of an RKHS, albeitin discrete rather than continuous form. Finally, we show a computational experiment using thesuperresolution procedure.
2 Superresolution
We start from the matrix-vector representation of RBF regression, (1). We will equate G to a covari-ance function C, which is a generalization to non-radially symmetric kernels. “Oriented” flavors ofRBF regression have previously appeared in the literature [6, 4]. Since the matrix G is symmetric,it has an eigen expansion UΛUT . Substituting this eigenexpansion, the regression takes the form
f(p) = rTC−1f = rTUΛ−1UT f (4)
Denoting c ≡ Λ−1UT f , equation (4) can be interpreted as incorporating the results of a represen-tation f = Uc involving the data eigenvectors U (we again assume the data mean is zero):
f(p) = rTUΛ−1UT f
= rTUc(5)
The discrete principal component model f = Uc involves data that is sampled at some arbitrarybut fixed and countable set of locations. Equation (5) extends this by premultiplying with r. Recallthat r can be interpreted as a vector of cross-covariances between the location p at which the theregression is evaluated and the locations of the data points pk,
r = C(p, ·) = [C(p− p1), C(p− p2), C(p− p3), · · · ] (6)
101

If the covariance function C(∆) is known for all offsets ∆ then the data estimate (5) can be evalu-ated at arbitrary locations, effectively providing a covariance-driven superresolution.
We next sketch that function generated with the superresolution estimate (5) in fact has covarianceC. In this section let ri denote the cross-covariance (6) evaluated at the location pi (rather than atan arbitrary location). The covariance of the estimated signal is:
E [f(pi), f(pj)] = ErTi C
−1f fTC−1rj
= rTi C−1 CC−1rj
= rTi C−1rj
= Ci,j
(For the last step note that ri is the ith row of C, hence multiplying by C−1 gives ei, the indicatorvector with 1 in the ith location, otherwise zero).
3 Interpretation as evaluation in an RKHS
In this section we show that (4) resembles function evaluation in an RKHS corresponding to thecovariance C.
Representer of evaluation
The kernel in an RKHS acts similarly to a delta function, providing function evaluation at a particularlocation under the inner product:
f,K(·, x)C = f(x) (7)
In our discrete case we propose that
fTC−1r = f(j) (8)
with r defined as the vector of K(·, x) evaluated at the data points. In the case of where x is one ofthe data locations pj
r = Cej
(em is the indicator vector). Then, substituting,
fTC−1Cej = f(j)
Reproducing property
Similarly,K(·, x),K(·, y) = K(x, y)
≈eTxC,Cey
C= eT
xCC−1 Cey = eTxCey = Cx,y
102

If the covariance function C(∆) is known for all offsets ∆ then the data estimate (5) can be evalu-ated at arbitrary locations, effectively providing a covariance-driven superresolution.
We next sketch that function generated with the superresolution estimate (5) in fact has covarianceC. In this section let ri denote the cross-covariance (6) evaluated at the location pi (rather than atan arbitrary location). The covariance of the estimated signal is:
E [f(pi), f(pj)] = ErTi C
−1f fTC−1rj
= rTi C−1 CC−1rj
= rTi C−1rj
= Ci,j
(For the last step note that ri is the ith row of C, hence multiplying by C−1 gives ei, the indicatorvector with 1 in the ith location, otherwise zero).
3 Interpretation as evaluation in an RKHS
In this section we show that (4) resembles function evaluation in an RKHS corresponding to thecovariance C.
Representer of evaluation
The kernel in an RKHS acts similarly to a delta function, providing function evaluation at a particularlocation under the inner product:
f,K(·, x)C = f(x) (7)
In our discrete case we propose that
fTC−1r = f(j) (8)
with r defined as the vector of K(·, x) evaluated at the data points. In the case of where x is one ofthe data locations pj
r = Cej
(em is the indicator vector). Then, substituting,
fTC−1Cej = f(j)
Reproducing property
Similarly,K(·, x),K(·, y) = K(x, y)
≈eTxC,Cey
C= eT
xCC−1 Cey = eTxCey = Cx,y
Inner Product
The analogy between (7) and (8) requires an inner product of the form
a,bC = aTC−1b
This can be motivated as follows: in the continuous case, the reproducing kernel has the (Mercer)expansion:
C(x, y) =
∞k=1
λkuk(x)uk(y)
A signal is also representable in terms of the eigenvectors of the kernel:
f(x) =∞
k=1
ckuk(x)
The inner product is defined to be
∞k=1
ckuk(x),∞
k=1
dkuk(x)
C
=∞
k=1
ckdkλk
giving the norm∞
k=1
c2k
λk.
In practice in the discrete case the summation is finite. The squared norm can be written in matrix-vector form
mk=1
c2kλk
= cTΛ−1c
and re-expressed in terms of the kernel,
= fTUΛ−1UT f = fTC−1f
We will take the kernel as the covariance matrix, and for simplicity consider only the case of positivedefinite covariances. In this case all the eigenvalues are positive real and the norm is valid.
4 Computational Experiment
The superresolution estimate (5) requires supplying or estimating a covariance matrix. In some casesthe form of the covariance matrix is known or assumed. For example, the use of the Discrete CosineTransform (DCT) in image compression is motivated by the choice of Cr,c = ρ|r−c|, ρ ≈ 0.9 as ageneric covariance for images [9]. Estimating a nonparametric covariance matrix from data requirescare if the number of data points is not sufficient to reliably estimate the n(n + 1)/2 parametersof the covariance matrix, and is a subject of continuing research [8]. Although the covariance mustbe estimated, even an approximate covariance might result in better interpolation than would beobtained using generic spline interpolation.
There are known algorithms for generating multivariate normal random vectors with a specifiedcovariance [7]. One simple algorithm is obtained by considering the covariance of Cx a linearlytransformed random vector x = Tn where n is an uncorrelated normal random vector (i.e. havingan identity covariance matrix):
Cx = ETnnTTT
= TTT
103

Figure 1: One dimensional oscillatory covariance.
Thus, if the transform T is the “square root” of a desired covariance matrix C = TTT , then x willhave covariance C. T can be obtained using the Cholesky decomposition if the covariance is nonsingular. This algorithm is limited to generating vectors x with a fixed number of samples at offsetscorresponding to those that generated the covariance matrix, whereas our procedure can generate thesignal at arbitrary locations.
In our experiments we simply select a covariance for the purpose of illustration. The first exper-iment uses the oscillatory covariance function C(∆) = exp(−∆2) cos(10∆) shown in Figure 1to interpolate randomly chosen data points (Figure 2). The low-resolution points are interpolatedexactly.
Figure 3 shows a second experiment using the covariance C(∆) = exp(−(15∆))2.
5 Conclusion and Future Work
Radial basis functions, principal component analysis, and Gaussian processes are widely used incomputer graphics and computer vision. Particular applications include reconstruction of scanneddata [3], motion capture from single-cameras [11], character animation [12], and many others. Aseach technique is founded on pairwise relationships expressed through a two-argument kernel orcovariance function, it is not surprising that relationships between these techniques can be discov-ered. We illustrate the value of exploring these relationships through the derivation of a data-drivensuperresolution procedure.
References[1] Ken Anjyo and J.P. Lewis. RBF interpolation and Gaussian process regression through an
RKHS formulation. JMI, 3, 2011A-6:63–71, 2011.
[2] Ken Anjyo and J.P. Lewis. Scattered data interpolation for computer graphics. SIGGRAPHCourse, http://portal.acm.org, 2014.
[3] J. C. Carr, R. K. Beatson, J. B. Cherrie, T. J. Mitchell, W. R. Fright, B. C. McCallum, and T. R.Evans. Reconstruction and representation of 3d objects with radial basis functions. In SIG-GRAPH ’01: Proceedings of the 28th annual conference on Computer graphics and interactivetechniques, pages 67–76, New York, NY, USA, 2001. ACM.
104

Figure 1: One dimensional oscillatory covariance.
Thus, if the transform T is the “square root” of a desired covariance matrix C = TTT , then x willhave covariance C. T can be obtained using the Cholesky decomposition if the covariance is nonsingular. This algorithm is limited to generating vectors x with a fixed number of samples at offsetscorresponding to those that generated the covariance matrix, whereas our procedure can generate thesignal at arbitrary locations.
In our experiments we simply select a covariance for the purpose of illustration. The first exper-iment uses the oscillatory covariance function C(∆) = exp(−∆2) cos(10∆) shown in Figure 1to interpolate randomly chosen data points (Figure 2). The low-resolution points are interpolatedexactly.
Figure 3 shows a second experiment using the covariance C(∆) = exp(−(15∆))2.
5 Conclusion and Future Work
Radial basis functions, principal component analysis, and Gaussian processes are widely used incomputer graphics and computer vision. Particular applications include reconstruction of scanneddata [3], motion capture from single-cameras [11], character animation [12], and many others. Aseach technique is founded on pairwise relationships expressed through a two-argument kernel orcovariance function, it is not surprising that relationships between these techniques can be discov-ered. We illustrate the value of exploring these relationships through the derivation of a data-drivensuperresolution procedure.
References[1] Ken Anjyo and J.P. Lewis. RBF interpolation and Gaussian process regression through an
RKHS formulation. JMI, 3, 2011A-6:63–71, 2011.
[2] Ken Anjyo and J.P. Lewis. Scattered data interpolation for computer graphics. SIGGRAPHCourse, http://portal.acm.org, 2014.
[3] J. C. Carr, R. K. Beatson, J. B. Cherrie, T. J. Mitchell, W. R. Fright, B. C. McCallum, and T. R.Evans. Reconstruction and representation of 3d objects with radial basis functions. In SIG-GRAPH ’01: Proceedings of the 28th annual conference on Computer graphics and interactivetechniques, pages 67–76, New York, NY, USA, 2001. ACM.
Figure 2: Left column: Example signals synthesized with the oscillatory covariance inFigure 1. Right column: corresponding superresolution signal. The indicated points areinterpolated exactly.
Figure 3: Left column: Example signals synthesized with covariance exp(−(10∆))2.Right column: corresponding superresolution signal. The indicated points are interpolatedexactly.
105

[4] G. Casciola, L.B. Montefusco, and S. Morigi. Edge-driven image interpolation using adaptiveanisotropic radial basis functions. Journal of Mathematical Imaging and Vision, 36(2):125–139, 2010.
[5] T. F. Cootes, G. J. Edwards, and C. J. Taylor. Active Appearance Models, volume 1407 ofLecture Notes in Computer Science. Springer, 1998.
[6] Huong Quynh Dinh, Greg Turk, and Greg Slabaugh. Reconstructing surfaces using anisotropicbasis functions. In Computer Vision, 2001. ICCV 2001. Proceedings. Eighth IEEE Interna-tional Conference on, volume 2, pages 606–613. IEEE, 2001.
[7] J.E. Gentle. Random Number Generation and Monte Carlo Methods. Statistics and Computing.Springer, 2003.
[8] M. Pourahmadi. High-Dimensional Covariance Estimation: With High-Dimensional Data.Wiley Series in Probability and Statistics. Wiley, 2013.
[9] K.R. Rao and P. Yip. Discrete cosine transform: algorithms, advantages, applications. Aca-demic Press, 1990.
[10] C.E. Rasmussen and C.K.I. Williams. Gaussian Processes for Machine Learning. AdaptiveComputation And Machine Learning. Mit Press, 2006.
[11] Mathieu Salzmann and Raquel Urtasun. Implicitly constrained gaussian process regression formonocular non-rigid pose estimation. In J.D. Lafferty, C.K.I. Williams, J. Shawe-Taylor, R.S.Zemel, and A. Culotta, editors, Advances in Neural Information Processing Systems 23, pages2065–2073. Curran Associates, Inc., 2010.
[12] Yeongho Seol, Jaewoo Seo, Paul Hyunjin Kim, J. P. Lewis, and Junyong Noh. Weighted posespace editing for facial animation. The Visual Computer, 28(3):319–327, 2012.
[13] Tim Valentine. In M.J. Wenger and J.T. Townsend, editors, Computational, Geometric, andProcess Perspectives on Facial Cognition: Contexts and Challenges, Scientific PsychologySeries, chapter Face-Space Models of Face Recognition. Taylor & Francis, 2012.
106

[4] G. Casciola, L.B. Montefusco, and S. Morigi. Edge-driven image interpolation using adaptiveanisotropic radial basis functions. Journal of Mathematical Imaging and Vision, 36(2):125–139, 2010.
[5] T. F. Cootes, G. J. Edwards, and C. J. Taylor. Active Appearance Models, volume 1407 ofLecture Notes in Computer Science. Springer, 1998.
[6] Huong Quynh Dinh, Greg Turk, and Greg Slabaugh. Reconstructing surfaces using anisotropicbasis functions. In Computer Vision, 2001. ICCV 2001. Proceedings. Eighth IEEE Interna-tional Conference on, volume 2, pages 606–613. IEEE, 2001.
[7] J.E. Gentle. Random Number Generation and Monte Carlo Methods. Statistics and Computing.Springer, 2003.
[8] M. Pourahmadi. High-Dimensional Covariance Estimation: With High-Dimensional Data.Wiley Series in Probability and Statistics. Wiley, 2013.
[9] K.R. Rao and P. Yip. Discrete cosine transform: algorithms, advantages, applications. Aca-demic Press, 1990.
[10] C.E. Rasmussen and C.K.I. Williams. Gaussian Processes for Machine Learning. AdaptiveComputation And Machine Learning. Mit Press, 2006.
[11] Mathieu Salzmann and Raquel Urtasun. Implicitly constrained gaussian process regression formonocular non-rigid pose estimation. In J.D. Lafferty, C.K.I. Williams, J. Shawe-Taylor, R.S.Zemel, and A. Culotta, editors, Advances in Neural Information Processing Systems 23, pages2065–2073. Curran Associates, Inc., 2010.
[12] Yeongho Seol, Jaewoo Seo, Paul Hyunjin Kim, J. P. Lewis, and Junyong Noh. Weighted posespace editing for facial animation. The Visual Computer, 28(3):319–327, 2012.
[13] Tim Valentine. In M.J. Wenger and J.T. Townsend, editors, Computational, Geometric, andProcess Perspectives on Facial Cognition: Contexts and Challenges, Scientific PsychologySeries, chapter Face-Space Models of Face Recognition. Taylor & Francis, 2012.
MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Advent of RGBD Images: Image Editing,Relighting and Compositing
Sunil Hadap∗
Adobe Research
Abstract D in RGBD images is poised to revolutionize aspects of digital photography and contentcreation. In last half decade or so, researchers made huge strides in capturing or estimating notonly the depth in traditional imagery, but also reflectance, material properties, lighting etc. Subse-quently, many innovative applications were developed based on the underlying 3D estimation. DOFRendering, Intrinsic Images, Relighting, Image Editing, Segmentation and Compositing pushed theboundaries of Computational Imaging. In this paper, we review the state-of-the-art and discuss openproblems and future directions.
Keywords: Depth Cameras, RGBD Images, Depth Aware Image Editing, Image Relighting
1 Introduction to RGBD Images
Figure 1: Typical RGBD Image (Pelican Imaging)
RGBD image is simply a color image augmented with the per-pixel depth information. Figure 1shows a typical RGBD image captured by Pelican Imaging’s PiCam [6]. The image on the leftis the standard color image in RGB space, and the image on the right depicts the depth channelvisualized as change in the hue. Figure 2 gives a quick overview of the techniques developed overlast half decade or so, and corresponding commercial devices that made capturing depth in an imagemainstream.
The depth estimation using each of these techniques has advantages and disadvantages. Techniquessuch as depth from stereo and depth from light-field data work well when the image has texturaldetails. The depth acquired is high quality and is of the same resolution as corresponding RGBimages. However, the techniques fail to measure depth in the texture-less areas. The Structured
107

Figure 2: a) Stereo Camera (Fujifilm), b) Stereo Images c) Camera Array (Stanford Uni-versity), d) PiCam Camera Array Module (Pelican Imaging) e) Lightfield Camera (Lytro)f) Typical Lightfield Data g) Structured Light Depth Sensors (ASUS and Microsoft Kinect)h) Time of Flight Depth Sensor (Microsoft Kinect 2) i) Typical Depth Measurement from(g) and (h)
108

Figure 2: a) Stereo Camera (Fujifilm), b) Stereo Images c) Camera Array (Stanford Uni-versity), d) PiCam Camera Array Module (Pelican Imaging) e) Lightfield Camera (Lytro)f) Typical Lightfield Data g) Structured Light Depth Sensors (ASUS and Microsoft Kinect)h) Time of Flight Depth Sensor (Microsoft Kinect 2) i) Typical Depth Measurement from(g) and (h)
Light Depth Sensors get around the problem by projecting an infrared light pattern on to the scene toresolve the depth in the texture-less areas. Unfortunately, they produce low resolution and relativelynoisy depth measurements, and they typically do not work in outdoor scenes with large distances.Time of Flight Depth Sensors currently give similar performance as Structured Light Depth Sensors,and have similar disadvantages of limited depth range and needing to have an active light source.
2 Applications of RGBD Images
The availability of per pixel depth information in an image, opens up a plethora of creative imageand interaction possibilities. In this section, we briefly discuss some key applications that revolution-ized aspects of digital imaging. There are number of great publications that push the technologicalboundaries in each application space. However, in the interest of space and concise discussion, wecite only few representative work.
2.1 Synthetic Depth of Field, Lens Effects and Refocusing
Figure 3: a) Bokeh and Chromatic Aberration, b) Tilt-shift Lens Effect c) Shallow DOF
The cameras in cell phones have seen tremendous developments in terms of lens quality, auto-focusand image resolution. However, the cameras do not still match the quality and characteristics ofDSLR camera with a bulky expensive lens – shallow depth of field that isolates the subject from thebackground, nice rendering of Bokeh (out-of-focus rendition of highlights) and the artistic use ofchromatic aberration and lens flare. The depth captured along with the color image offers an intrigu-ing alternative of simulating these artistic effects in the camera firmware, or in the post-processingsoftware. In fact many smartphone apps have started to render the effects such as shallow depth-of-field, Bokeh rendering. Sungkil Lee, et al. [3] demonstrated various lens blur effects and defocusrendering by ray-tracing in real-time using GPU. One can use such techniques to render the RGBDdata to generate imagery that would rival bulky and expensive professional camera/lens combination.
2.2 Depth Aware Scene Compositing
Figure 4: Compositing 3D Objects into Legacy Photographs, via 3D Scene Estimation
109

Kevin Karsch et al. presented [1, 2] a user-friendly image editing system that supports drag-and-drop3D object insertion, where the user merely drags objects into the image and the system automaticallyplaces them in 3D and relights them appropriately. The system also supports post-process illumina-tion editing and depth of field manipulation. Underlying the system is a fully automatic techniquefor estimating 3D scene model (geometry, illumination, diffuse albedo and camera parameters) froma single, low dynamic range photograph [2]. Previously [1], they relied on a simple user interactionworkflow to mark the perspective in the scene, and annotate the light sources and the rough geom-etry. Even though the authors demonstrate the 3D compositing quite effectively albeit approximate3D geometry inference, the availability of depth information captured along with the image wouldmake the task very effective and flawless.
2.3 Image Relighting
Figure 5: Seamless Image Composition via Light Detection and Relighting
Jorge Lopez-Moreno et al. [5] demonstrated a fascinating use case of being able to completelychange the lighting in an image after the fact. On many occasions, one wishes to change the light-ing in an image to match the mood or the color scheme before compositing. Or a good lightingsetup may not be available during the image capture – situations such as subject in an outdoor harshlighting environment. The authors developed novel techniques to estimate the lighting in the sceneby using subjects in the scene as a virtual light-probe. They subsequently estimate the approximatedepth in the image, along with the estimate of reflectance and material properties. Once the estimateof 3D scene is made, they demonstrated that one can change the lighting in an image very effectively.The availability of depth information will greatly improve the results, and open up the possibility ofrelighting an image a common workflow.
2.4 3D Acquisition
Figure 6: 3D Acquisition of Geometry and Texture using Single RGBD Sensor
110

Kevin Karsch et al. presented [1, 2] a user-friendly image editing system that supports drag-and-drop3D object insertion, where the user merely drags objects into the image and the system automaticallyplaces them in 3D and relights them appropriately. The system also supports post-process illumina-tion editing and depth of field manipulation. Underlying the system is a fully automatic techniquefor estimating 3D scene model (geometry, illumination, diffuse albedo and camera parameters) froma single, low dynamic range photograph [2]. Previously [1], they relied on a simple user interactionworkflow to mark the perspective in the scene, and annotate the light sources and the rough geom-etry. Even though the authors demonstrate the 3D compositing quite effectively albeit approximate3D geometry inference, the availability of depth information captured along with the image wouldmake the task very effective and flawless.
2.3 Image Relighting
Figure 5: Seamless Image Composition via Light Detection and Relighting
Jorge Lopez-Moreno et al. [5] demonstrated a fascinating use case of being able to completelychange the lighting in an image after the fact. On many occasions, one wishes to change the light-ing in an image to match the mood or the color scheme before compositing. Or a good lightingsetup may not be available during the image capture – situations such as subject in an outdoor harshlighting environment. The authors developed novel techniques to estimate the lighting in the sceneby using subjects in the scene as a virtual light-probe. They subsequently estimate the approximatedepth in the image, along with the estimate of reflectance and material properties. Once the estimateof 3D scene is made, they demonstrated that one can change the lighting in an image very effectively.The availability of depth information will greatly improve the results, and open up the possibility ofrelighting an image a common workflow.
2.4 3D Acquisition
Figure 6: 3D Acquisition of Geometry and Texture using Single RGBD Sensor
3D scanning has gained a lot of popularity in the advent of affordable 3D printers and personalfabrication technologies. One straightforward application of RGBD sensors is 3D acquisition offigurine geometry and texture. The idea is to capture color and depth information from numerousviews around the object to be scanned. This step is then followed by signal processing and point-cloud or surface reconstruction from per-view depth, followed by rigid and non-rigid alignment,followed by global reconstruction of 3D geometry and texture data. Hao Li et al. [4] used a singleRGBD sensor (Microsoft Kinect) to develop an automatic pipeline to capture textured 3D models ofpeople. The method is robust to small deformations and changes of pose that inevitably arise duringscanning.
3 Open Problems and Future Directions
A lot of progress is made in terms of depth acquisition; 3D scene estimation in terms of geome-try, reflectance, material properties and lighting; and applications. However, there are many openproblems, we would like to list few of them.
• The depth captured by many devices is often noisy and very low resolution as compared tocorresponding RGB image. We need to focus on vastly improving the quality and resolutionof depth estimation on par with the RGB data.
• Even after having good information about depth, understanding or estimating remaining as-pects of 3D scene is still one of the challenging problems in computer graphics and computervision.
• A seemingly well researched problem of intrinsic images, where an image is decomposedinto shading and reflectance, still remains to be far from mature.
• The topic of depth capture using time-of-flight estimation is being actively researched. Theopen problems include effectively handling multiple-bounce light paths, higher resolution.
• Direct acquisition of material reflectance, material properties and lighting in the scene.
References[1] KARSCH, K., HEDAU, V., FORSYTH, D., AND HOIEM, D. Rendering synthetic objects into
legacy photographs. ACM Transactions on Graphics (TOG) 30, 6 (2011), 157.
[2] KARSCH, K., SUNKAVALLI, K., HADAP, S., CARR, N., JIN, H., FONTE, R., SITTIG, M.,AND FORSYTH, D. Automatic scene inference for 3d object compositing. ACM Trans. Graph.33, 3 (June 2014).
[3] LEE, S., EISEMANN, E., AND SEIDEL, H.-P. Real-time lens blur effects and focus control.ACM Transactions on Graphics (TOG) 29, 4 (2010), 65.
[4] LI, H., VOUGA, E., GUDYM, A., LUO, L., BARRON, J. T., AND GUSEV, G. 3d self-portraits.ACM Transactions on Graphics (Proceedings SIGGRAPH Asia 2013) 32, 6 (November 2013).
[5] LOPEZ-MORENO, J., HADAP, S., REINHARD, E., AND GUTIERREZ, D. Compositing imagesthrough light source detection. Computers & Graphics 34, 6 (2010), 698–707.
[6] VENKATARAMAN, K., LELESCU, D., DUPARRE, J., MCMAHON, A., MOLINA, G., CHAT-TERJEE, P., MULLIS, R., AND NAYAR, S. Picam: an ultra-thin high performance monolithiccamera array. ACM Transactions on Graphics (TOG) 32, 6 (2013), 166.
111

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Real-time Volume Visualization for Large-scaleGrid-based Fluid Simulations on Distributed
Multi-GPU Systems
Un-Hong Wong ∗
Department of Energy Sciences, Tokyo Institute of Technology, Kanagawa, JapanTakayuki Aoki †
Global Scientific Information and Computing Center, Tokyo Institute of Technology, Tokyo, JapanHon-Cheng Wong‡
Faculty of Information Technology, Macau University of Science and Technology, Macao, China
Abstract Numerical simulation of fluids including computational fluid dynamics (CFD) and mag-netohydrodynamics (MHD) have been powerful tools in many engineering and research area, butthey are computationally expensive. In the recent decade, general-purpose computing on graphicsprocessing units (GPGPU) has been widely used in accelerating the numerical simulation, utilizingthe high computational power of the many-core and parallelism architecture of graphics process-ing unit (GPU). Due to the lack of the dedicate memory on the GPU board, distributed multi-GPUsystems or GPU clusters are required for large-scale simulations. The lack of sufficient storage isanother problem that slows down our research activities. Even the simulation process can been ac-celerated dozens or hundred times by using GPU, the I/O time of recording the simulation resultsis time consuming and is storage demanding. Therefore, real-time visualization can be significantlyhelpful in analyzing the simulation results and reduce the storage. In this paper, real-time volumevisualization for large-scale CFD/MHD simulations running on distribute multi-GPU systems is pre-sented. Physics quantities of each partition of the calculation domain are being visualized in everytime step on each GPU and then be composed to form the final image, where no data gathering isneeded.
Keywords: Grid-based, Numerical Simulation, Distributed Multi-GPU System, Graphics ProcessUnits, Volume Visualization
1 Introduction
Due to the difficulties and high cost of real experiments and observations, numerical simulation offluid dynamics as well as magnetohydrodynamics has become powerful tools across many fields ofengineering and scientific researches, from mechanical design to space exploration. Visualization is
∗[email protected]†[email protected]‡[email protected]
122

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
Real-time Volume Visualization for Large-scaleGrid-based Fluid Simulations on Distributed
Multi-GPU Systems
Un-Hong Wong ∗
Department of Energy Sciences, Tokyo Institute of Technology, Kanagawa, JapanTakayuki Aoki †
Global Scientific Information and Computing Center, Tokyo Institute of Technology, Tokyo, JapanHon-Cheng Wong‡
Faculty of Information Technology, Macau University of Science and Technology, Macao, China
Abstract Numerical simulation of fluids including computational fluid dynamics (CFD) and mag-netohydrodynamics (MHD) have been powerful tools in many engineering and research area, butthey are computationally expensive. In the recent decade, general-purpose computing on graphicsprocessing units (GPGPU) has been widely used in accelerating the numerical simulation, utilizingthe high computational power of the many-core and parallelism architecture of graphics process-ing unit (GPU). Due to the lack of the dedicate memory on the GPU board, distributed multi-GPUsystems or GPU clusters are required for large-scale simulations. The lack of sufficient storage isanother problem that slows down our research activities. Even the simulation process can been ac-celerated dozens or hundred times by using GPU, the I/O time of recording the simulation resultsis time consuming and is storage demanding. Therefore, real-time visualization can be significantlyhelpful in analyzing the simulation results and reduce the storage. In this paper, real-time volumevisualization for large-scale CFD/MHD simulations running on distribute multi-GPU systems is pre-sented. Physics quantities of each partition of the calculation domain are being visualized in everytime step on each GPU and then be composed to form the final image, where no data gathering isneeded.
Keywords: Grid-based, Numerical Simulation, Distributed Multi-GPU System, Graphics ProcessUnits, Volume Visualization
1 Introduction
Due to the difficulties and high cost of real experiments and observations, numerical simulation offluid dynamics as well as magnetohydrodynamics has become powerful tools across many fields ofengineering and scientific researches, from mechanical design to space exploration. Visualization is
∗[email protected]†[email protected]‡[email protected]
indispensable in analyzing the simulation results. In general, simulation results are recorded duringthe simulation process and will then be visualized and analyzed using a scientific visualization soft-ware or analysis tools. However, storing data for each time step of the simulation is time consuming.Writing files in every step will cause big overhead and delay the simulation process and will bestorage demanding. Recording data once after several steps is a feasible way but some importantsnapshots that may contain interesting phenomena of the simulation will be skipped. Therefore,real-time visualization during the simulation process will be significantly helpful. An ideal MHDsimulation and visualization on single GPU had been presented in our previous work [7]. However,many problems require large-scale simulation running on cluster. In this paper, a real-time globalMHD simulation and visualization implementation is proposed. The whole computational domainis decomposed into partitions and processed on each GPU of a distributed multi-GPU system. Ourapproach visualizes each partition using the same GPU that is running the simulation. The visual-ization result of each partition will be combined to form a complete visualization of the simulationdata. Since the visualization is also done within the same GPU where the physics quantities stored,these quantities are not needed to be gathered before being visualized. All GPUs are utilized forboth simulation and visualization, resulting in better load balance. GPU Direct is used to reducethe communication overhead between each GPU. Images of the simulation process can be generatedrapidly to provide real-time visualization of the simulation. A global MHD simulation code is beendiscuss and as a demonstration of our real-time simulation and visualization approach However, thisapproach can applied to any grid-based numerical simulation using distributed multi-GPU systems.
2 Background
Large-scale simulation running on cluster and its visualization are commonly process separately:Run the simulation, record the data and then visualize the data as a post-process. The data size ofthe results of a large-scale simulation is huge. Therefore, visualization for large-scale data usingcluster is also being developed. Many advance methods had been published in the recent years suchas [1][2][3]. However, recording data not only time consuming but also storage demanding. In therecent decade, GPGPU largely enhance the efficiency of numerical simulation. We consider thatlarge-scale simulation is now able to achieve the performance of the level of 10−1 seconds per step,and it is possible to perform a real-time visualization along the simulation.
3 GPU Computing and Distributed Multi-GPU Systems
GPUs were originally designed to accelerate the computations of computer graphics, handling thevertices, vectors, textures, pixels, etc. using its many-core architecture in parallel. Aware of the highparallelism and computational power, GPUs had been used for non-graphics purpose computationssince the programmable GPUs and shading language(shader) were available. This pushed the de-velopment of the compute-purposed GPUs as well as the CUDA [4] and OpenCL for using GPU toaccelerate the non-graphics purpose computations in a much easier and flexible way. GPGPU im-pacted the research fields related to high performance computing(HPC) and had became a commonacceleration device in the computing nodes of clusters. To use GPUs for computation, data have tobe stored in the video memory (GRAM) on the GPU board. However, the capacity of GRAM on asingle GPU is limited. Thus, distributed multi-GPU system / GPU cluster such as TSUBAME 2.5supercomputer of Tokyo Institute of Technology [5][6] is needed for large-scale simulations.
123

4 Large-scale Numerical Simulations
4.1 A Efficient Simulation and Visualization Framework on DistributedMulti-GPU Systems
GPUs provide extremely high computation speed but contain lack of memory for large-scale sim-ulation. Using distributed multi-GPU system or GPU cluster can solve the problem. However,comparing to the high computation speed of GPUs, the data transfer speed between the GPUs andthe computing nodes is comparatively slow. Hence, data communications between GPUs and com-puting nodes bottleneck the efficiency of numerical simulation using distributed multi-GPU system.Enhancement of data communications directly reflect to total efficiency gain. A GPU Direct-MPIhybrid approach for efficient CFD/MHD simulation using distributed multi-GPU system had beenpresented in our work [8]. Our GPU Direct-MPI hybrid approach use GPU Direct for the data com-munication between the GPUs within a single node (Figure.1) which perform large speedup to thedata communication as well as the whole simulation process on distributed multi-GPU system. Inthis paper, the simulation as well as the visualization are implemented using our efficient CFD/MHDsimulation framework.
MPI
Node
Process
GPU
Process
GPU
Process
GPU
Node
Process
GPU
Process
GPU
Process
GPU
Node
Process
GPU GPU GPU
Node
Process
GPU GPU GPU
MPI
MPI GPU Direct Transfer
Figure 1: Flat MPI (top) and our GPU Direct-MPI hybrid approach (bottom)
GPU implemented volume visualization for each partition will be run on the corresponding GPUwhich running the simulation. As shown in Figure 2, the simulation results of a partition can di-rectly visualized by the same GPU along each simulation step. After the image of a partition isgenerated, it will be send to another node to compose the final image. Benefited by the efficient datacommunication of our GPU Direct-MPI hybrid approach, the data transfer overheads of composingthe images is very low. As a result, the final image can be generated very fast. Detail of renderingand composing the image will be introduced in Section 5.
4.2 Large-Scale Global MHD Simulations
Our global MHD simulations using multiple GPUs of a workstation can be referred to our previouswork [9]. The MHD equations are solved by a GPU implemented modified leapfrog scheme [10] forsimulating the solar wind interacting with the Earths magnetosphere. For large-scale global MHDsimulation, we extend our simulation [9] for distribute multi-GPU system with our framework [8].
124

4 Large-scale Numerical Simulations
4.1 A Efficient Simulation and Visualization Framework on DistributedMulti-GPU Systems
GPUs provide extremely high computation speed but contain lack of memory for large-scale sim-ulation. Using distributed multi-GPU system or GPU cluster can solve the problem. However,comparing to the high computation speed of GPUs, the data transfer speed between the GPUs andthe computing nodes is comparatively slow. Hence, data communications between GPUs and com-puting nodes bottleneck the efficiency of numerical simulation using distributed multi-GPU system.Enhancement of data communications directly reflect to total efficiency gain. A GPU Direct-MPIhybrid approach for efficient CFD/MHD simulation using distributed multi-GPU system had beenpresented in our work [8]. Our GPU Direct-MPI hybrid approach use GPU Direct for the data com-munication between the GPUs within a single node (Figure.1) which perform large speedup to thedata communication as well as the whole simulation process on distributed multi-GPU system. Inthis paper, the simulation as well as the visualization are implemented using our efficient CFD/MHDsimulation framework.
MPI
Node
Process
GPU
Process
GPU
Process
GPU
Node
Process
GPU
Process
GPU
Process
GPU
Node
Process
GPU GPU GPU
Node
Process
GPU GPU GPU
MPI
MPI GPU Direct Transfer
Figure 1: Flat MPI (top) and our GPU Direct-MPI hybrid approach (bottom)
GPU implemented volume visualization for each partition will be run on the corresponding GPUwhich running the simulation. As shown in Figure 2, the simulation results of a partition can di-rectly visualized by the same GPU along each simulation step. After the image of a partition isgenerated, it will be send to another node to compose the final image. Benefited by the efficient datacommunication of our GPU Direct-MPI hybrid approach, the data transfer overheads of composingthe images is very low. As a result, the final image can be generated very fast. Detail of renderingand composing the image will be introduced in Section 5.
4.2 Large-Scale Global MHD Simulations
Our global MHD simulations using multiple GPUs of a workstation can be referred to our previouswork [9]. The MHD equations are solved by a GPU implemented modified leapfrog scheme [10] forsimulating the solar wind interacting with the Earths magnetosphere. For large-scale global MHDsimulation, we extend our simulation [9] for distribute multi-GPU system with our framework [8].
CPU Process
Process of a Node
GPU
Process
GPU Manager
GPU
Process
GPU
Process
Sim
ula
tor
Sim
ula
tor
Vis
ua
lize
r
Vis
ua
lize
r
Sim
ula
tor
Vis
ua
lize
r
MPI Parallel
Re
nd
eri
ng
Figure 2: Simulation and visualization framework for distributed multi-GPU systems
Since each GPU contains dedicated GRAM, the whole computational domain is decomposed intoseveral partitions, which are assigned to and being computed on each GPU of each computing nodeof the distributed multi-GPU system. To update the halo grid points of each partition, data exchangebetween GPUs is required in every calculation step. The data exchanges of halo grid points aretransferred via our GPU Direct-MPI hybrid approach. The calculation domain is showed in Figure3. The whole computational domain of the simulations is (x, y, z) = (−60Re,−30Re,−30Re) ∼(30Re, 30Re, 30Re) (Re = Earth radius). The Earth is placed at the origin of the coordinate system.The Earths magnetosphere is approximated by a dipole magnetic field with a dipole magnetic poles.The interplanetary magnetic field (IMF) is set to Bz = −5nT (nanotesla). Solar wind comes alongthe x-axis from the upstream boundary at x = x0 to the outflow boundary at x = x1.
Bow shock
Magnetopause
Plasma sheet
z
x
y
x0 x1
z0
y
Solar
wind
0
-y0
-z0
Figure 3: Simulation domain of solar wind interacting with the planet’s magnetosphere
125

5 Real-Time Volume Visualization
Recording the simulation data at every time step for post-visualization is storage demanding. Inaddition, writing files to disk is time consuming, resulting in a decrease of the simulation perfor-mance. Real-time visualization is significant helpful in reducing disk storage and providing fastpreview of the simulation results. We hereby present a real-time simulation and visualization ofglobal MHD simulations using distributed multi-GPU system. For efficient real-time direct volumevisualization, volume ray casting [11] on multiple GPUs is implemented and used. Volume ray cast-ing is one of the widely use direct volume rendering (DVR) algorithms for visualizing volume data.The color of a pixel on the image plane is calculated as the projection of the sample points along aray shot through the volume. Volume ray casting algorithm calculates the accumulation of all thesample points of the data volume lying on a ray. The equations of volume ray casting is listed asEquation 1 and 2. Actually, the algorithm of volume ray casting allows us to calculate the resultof each partition first and then combine them together as shown in Figure 4. Blending the resultsof two partitions has no difference to blending the RGBA value of two sample points. What weneed to do is to calculate the α factor correctly. Reference to Equation 1 and 2, we can describe itclearly by extending Equation 1 and 2 to Equation 3 - 6, where Ccurrent, αcurrent represent thecurrent accumulated Color and α, Cnew, αnew represent the Color and α of a new sample point,Cpartitionn and αpartitionn represent the accumulated Color and α of a partition. For each par-tition n, (Cpartitionn , αpartitionn) is calculated by accumulation of its sample points. After that,the results of all partitions (Cpartitionn , αpartitionn) lying on the same ray will be accumulated togenerate the final (C,α) of a pixel of the image plane.
Sample pointsRay
Viewing point
Image plane
Figure 4: Volume ray casting for multiple partition volumes
C = Ccurrent + (1.0− αcurrent)Cnewαnew (1)
α = αcurrent + (1.0− αcurrent)αnew (2)
Cpartitionn = Ccurrent + (1.0− αcurrent)Cnewαnew (3)
αpartitionn = αcurrent + (1.0− αcurrent)αnew (4)
C = Cpartition1 + (1.0− αpartition1)Cpartition2αpartition2 (5)
α = αpartition1 + (1.0− αpartition1)αpartition2 (6)
One important issue is that the coordinate system of the viewing volume of each partition must bealigned with the cell face of the boundary grids (not the halo grids). This issue is seldom being
126

5 Real-Time Volume Visualization
Recording the simulation data at every time step for post-visualization is storage demanding. Inaddition, writing files to disk is time consuming, resulting in a decrease of the simulation perfor-mance. Real-time visualization is significant helpful in reducing disk storage and providing fastpreview of the simulation results. We hereby present a real-time simulation and visualization ofglobal MHD simulations using distributed multi-GPU system. For efficient real-time direct volumevisualization, volume ray casting [11] on multiple GPUs is implemented and used. Volume ray cast-ing is one of the widely use direct volume rendering (DVR) algorithms for visualizing volume data.The color of a pixel on the image plane is calculated as the projection of the sample points along aray shot through the volume. Volume ray casting algorithm calculates the accumulation of all thesample points of the data volume lying on a ray. The equations of volume ray casting is listed asEquation 1 and 2. Actually, the algorithm of volume ray casting allows us to calculate the resultof each partition first and then combine them together as shown in Figure 4. Blending the resultsof two partitions has no difference to blending the RGBA value of two sample points. What weneed to do is to calculate the α factor correctly. Reference to Equation 1 and 2, we can describe itclearly by extending Equation 1 and 2 to Equation 3 - 6, where Ccurrent, αcurrent represent thecurrent accumulated Color and α, Cnew, αnew represent the Color and α of a new sample point,Cpartitionn and αpartitionn represent the accumulated Color and α of a partition. For each par-tition n, (Cpartitionn , αpartitionn) is calculated by accumulation of its sample points. After that,the results of all partitions (Cpartitionn , αpartitionn) lying on the same ray will be accumulated togenerate the final (C,α) of a pixel of the image plane.
Sample pointsRay
Viewing point
Image plane
Figure 4: Volume ray casting for multiple partition volumes
C = Ccurrent + (1.0− αcurrent)Cnewαnew (1)
α = αcurrent + (1.0− αcurrent)αnew (2)
Cpartitionn = Ccurrent + (1.0− αcurrent)Cnewαnew (3)
αpartitionn = αcurrent + (1.0− αcurrent)αnew (4)
C = Cpartition1 + (1.0− αpartition1)Cpartition2αpartition2 (5)
α = αpartition1 + (1.0− αpartition1)αpartition2 (6)
One important issue is that the coordinate system of the viewing volume of each partition must bealigned with the cell face of the boundary grids (not the halo grids). This issue is seldom being
cared in volume visualization of a single volume. Since the partitions won’t be composed to thewhole dataset, if the coordinates between each partition do not align, overlapped grids of a gap willbe appeared in the composed results (see Figure 5). On the other hand, when processing volumevisualization on GPU, the dataset is stored as a 3D texture. It is common to use normalized coordi-nate for the texels. However, using normalised coordinates system of each partition will make thecomposition process much more complicated. More transformation and scaling of the coordinatesystem will be needed. In additional, the precision(machine error) of these calculation may maketwo partition do not align precisely. Therefore, we suggest to use the original coordinates as thecomputation domain of the simulation. Using normailize or non-normailize coordinate system whencreating the 3D texture is very simple. It can be done by changing a parameter of the CUDA API.
Overlapped
Align the partitions by the cell faces
Gap
Figure 5: Align the partition by cell face to prevent overlapped grid points or a gap.
Blending order is another key point of combining the visualization results of partitions in DVR usingmultiple GPUs. Blending order must be the same as the accumulation order of the sample pointsof volume ray casting. For example, if the ray casting is front-to-back, then the blending orderof the partitions are also front-to-back. As shown in Figure 6, the order of the partition will bedifferent according to the position of the viewer. Thus, the direction and the position of the viewingpoints have to be tested and broadcasted to all computing node before combining the visualizationresults of partitions. Figure 6 shows an example of composition in 1D. For 3D composition, we canjust blend the results one dimension by one dimension. For example, first blending in z-dimensionand then y-dimension. And finally the x-dimension. The information of the viewing point andthe decomposition of the computational domain of the simulation can be used to make a correctlyblending order.
Reduction algorithm is used for combining the visualization results. Based on our GPU Direct-MPI hybrid parallel approach, the data communication is a two-layered architecture. Thus, thecombination process of the visualization results also be done in two steps. The visualization resultsof multiple GPU of each computing node are being combined via GPU Direct 2.0 first. And thenthe visualization results of the computing nodes will be combined. For example, for a computingnode contains four GPUs, which are named GPU0, GPU1, GPU2 and GPU3. The reductionprocess will combine the results between GPU0 and GPU1, GPU2 and GPU3, and then combinethe results between GPU0 and GPU2. As shown in Figure 7. After that the same reduction processwill be done between the computing nodes.
Rather then gathering the data to a single node for visualization, our approach copy the visualizationresults to another GPU/computing node only. As a result, it performs less overheads of data copyand requires less memory than gather the data of whole computational domain into a single GPU
127

Viewing
point
Image
plane
Figure 6: Blending order for combining the visualization results (Black: forward blending.Red: reverse blending).
GPU 0 GPU 1 GPU 3GPU 2
GPU 0 GPU 2GPU 1 GPU 3
GPU 0 GPU 2GPU 1 GPU 3
Figure 7: Reduction process of combing visualization results of each nodes.
for visualization. Furthermore, every GPU of every computing node invokes not only the simulationprocess but also the visualization process, resulting in better load balancing than visualization usingone GPU after gathering the data. A example of composing the final visualization results from 4partitions of our MHD simulation is shown in Figure 8.
6 Results
Large-scale simulation and visualization were run on the TSUBAME 2.5 supercomputer of TokyoInstitute of Technology. Experimental tests of Kelvin-Helmholtz instability and solar wind interact-ing with the Earth’s magnetic field are presented. Volume ray casting can generate different kind ofviualization results of the dataset. Accumulation with 1D transfer function, 2D transfer function andthe isosurface are shown in this section.
The first test results shown in the following Figure 9 is a CFD Kelvin-Helmholtz instability test.By setting the magnetic field and corresponding parameters to 0, MHD equations are not differ-ent to a CFD Euler equations for compressible fluid simulation. It is a demonstration of real-timevisualization of CFD simulation.
The second test results shown in Figure 10 are the real-time visualization of the solar wind-Earth’smagnetosphere interaction (as described in Section 4.2). The direct volume visualization results ofthe partition domains was generated and combined using multiple GPU as mentioned in Section 5,and then rendered in real-time to the screen via the OpenGL. It is done simultaneously with thesimulation using multiple GPU on TSUBAME 2.5. The evolution of the simulation as well as the
128

Viewing
point
Image
plane
Figure 6: Blending order for combining the visualization results (Black: forward blending.Red: reverse blending).
GPU 0 GPU 1 GPU 3GPU 2
GPU 0 GPU 2GPU 1 GPU 3
GPU 0 GPU 2GPU 1 GPU 3
Figure 7: Reduction process of combing visualization results of each nodes.
for visualization. Furthermore, every GPU of every computing node invokes not only the simulationprocess but also the visualization process, resulting in better load balancing than visualization usingone GPU after gathering the data. A example of composing the final visualization results from 4partitions of our MHD simulation is shown in Figure 8.
6 Results
Large-scale simulation and visualization were run on the TSUBAME 2.5 supercomputer of TokyoInstitute of Technology. Experimental tests of Kelvin-Helmholtz instability and solar wind interact-ing with the Earth’s magnetic field are presented. Volume ray casting can generate different kind ofviualization results of the dataset. Accumulation with 1D transfer function, 2D transfer function andthe isosurface are shown in this section.
The first test results shown in the following Figure 9 is a CFD Kelvin-Helmholtz instability test.By setting the magnetic field and corresponding parameters to 0, MHD equations are not differ-ent to a CFD Euler equations for compressible fluid simulation. It is a demonstration of real-timevisualization of CFD simulation.
The second test results shown in Figure 10 are the real-time visualization of the solar wind-Earth’smagnetosphere interaction (as described in Section 4.2). The direct volume visualization results ofthe partition domains was generated and combined using multiple GPU as mentioned in Section 5,and then rendered in real-time to the screen via the OpenGL. It is done simultaneously with thesimulation using multiple GPU on TSUBAME 2.5. The evolution of the simulation as well as the
Figure 8: Real-time rendering results of the combined final image (bottom) from the visu-alization results of 4 partitions.
Figure 9: Real-time DVR results of Kelvin-Helmholtz instability test. (Left: 1D transferfunction. Middle: 2D transfer function. Right: isosurface)
129

appearance of the bow shock can be visualized in on the fly along each simulation step. The FPS isbottlenecked by the overheads of synchronization, images combination and the data communicationof remote rendering (remote OpenGL). Nevertheless, 5 to 17 FPS can be achieved with differentresolution and number of GPUs. The results is shown as the following table 1. A node of TSUBAME2.5 contains 3 GPUs. It can be found that using 6 GPUs (2 nodes) performs slower than the 3 GPUsbecause of data communication of the simulation and images combination overheads. Moreover,higher performance can be expected for CFD simulation since the computational complexity of ourMHD code is high.
Figure 10: Real-time DVR results of the solar wind-Earth’s magnetosphere interaction.(Left: 1D transfer function. Middle: 2D transfer function. Right: isosurface)
Table 1: Performance of the real-time global MHD simulation and visualization on TSUB-AME 2.5
Domain resolution Number of Nodes Number of GPUs FPS180 × 120 × 120 1 1 8180 × 120 × 120 1 3 17180 × 120 × 120 2 6 12450 × 300 × 300 8 24 10540 × 360 × 360 8 24 5540 × 360 × 360 27 81 8810 × 540 × 540 27 81 5
7 Conclusion
In the recent years, many numerical simulations have been performing on GPUs. Distributed multi-GPU system is becoming widely used for efficient large-scale simulation. However, it is time con-suming and storage demanding to recording results of a simulation at each step, especially for large-scale simulation which generated dozens or more than hundred Giga bytes data. In this paper, areal-time visualization of grid-based fluid simulation is proposed. A global MHD simulation andvisualization framework on multiple GPUs is presented to demonstrate our methods. Simulationand visualization are processed using multiple GPUs simultaneously. Minimizing the overheads ofcopying and gathering the data, only the visualization results of each partition needed to be combinedfor rendering. Experimental results of our global MHD simulation and visualization running on 81GPUs performs up to 8 FPS and 5 FPS for the simulations of solar wind magnetosphere interactionof the 540× 360× 360 and 810× 540× 540 domain, respectively.
130

appearance of the bow shock can be visualized in on the fly along each simulation step. The FPS isbottlenecked by the overheads of synchronization, images combination and the data communicationof remote rendering (remote OpenGL). Nevertheless, 5 to 17 FPS can be achieved with differentresolution and number of GPUs. The results is shown as the following table 1. A node of TSUBAME2.5 contains 3 GPUs. It can be found that using 6 GPUs (2 nodes) performs slower than the 3 GPUsbecause of data communication of the simulation and images combination overheads. Moreover,higher performance can be expected for CFD simulation since the computational complexity of ourMHD code is high.
Figure 10: Real-time DVR results of the solar wind-Earth’s magnetosphere interaction.(Left: 1D transfer function. Middle: 2D transfer function. Right: isosurface)
Table 1: Performance of the real-time global MHD simulation and visualization on TSUB-AME 2.5
Domain resolution Number of Nodes Number of GPUs FPS180 × 120 × 120 1 1 8180 × 120 × 120 1 3 17180 × 120 × 120 2 6 12450 × 300 × 300 8 24 10540 × 360 × 360 8 24 5540 × 360 × 360 27 81 8810 × 540 × 540 27 81 5
7 Conclusion
In the recent years, many numerical simulations have been performing on GPUs. Distributed multi-GPU system is becoming widely used for efficient large-scale simulation. However, it is time con-suming and storage demanding to recording results of a simulation at each step, especially for large-scale simulation which generated dozens or more than hundred Giga bytes data. In this paper, areal-time visualization of grid-based fluid simulation is proposed. A global MHD simulation andvisualization framework on multiple GPUs is presented to demonstrate our methods. Simulationand visualization are processed using multiple GPUs simultaneously. Minimizing the overheads ofcopying and gathering the data, only the visualization results of each partition needed to be combinedfor rendering. Experimental results of our global MHD simulation and visualization running on 81GPUs performs up to 8 FPS and 5 FPS for the simulations of solar wind magnetosphere interactionof the 540× 360× 360 and 810× 540× 540 domain, respectively.
References[1] J. A. Stuart, C-K. Chen, K. L. Ma, J. D. Owens: Multi-GPU Volume Rendering Using MapRe-
duce, Proceedings of the 19th ACM International Symposium on High Performance DistributedComputing 841-848, 2010
[2] M. Strengert, M. Magallon, D. Weiskopf, S. Guthe, T. Ertl: Hierarchical Visualization and Com-pression of Large Volume Datasets Using GPU Clusters, Proceedings of Eurographics Sympo-sium on Parallel Graphics and Visualization 41-18, 2004
[3] K.L. Ma, A. Stompel, J. Bielak, O. Ghattas, E. J. Kim: Visualizing Very Large-Scale EarthquakeSimulations, Supercomputing, 2003 ACM/IEEE Conference 48, 2003
[4] CUDA Zone Web Page:http://developer.nvidia.com/category/zone/cuda-zone
[5] T. Endo, A. Nukada, S. Matsuoka, N. Maruyama: Linpack evaluation on a supercomputer withheterogeneous accelerators, in Proceedings of the 24th IEEE International Parallel and Dis-tributed Processing Symposium (IPDPS10), IEEE, Atlanta, GA, USA, 2010.
[6] G. S. Information, T. I. o. T. Computing Center, TSUBAME hardware software specificationsWeb Page:http://www.gsic.titech.ac.jp/sites/default/files/TSUBAMESPECIFICATIONS en 0.pdf
[7] Hon-Cheng Wong, Un-Hong Wong, Xueshang Feng, Zesheng Tang: Efficient magnetohydro-dynamic simulations on graphics processing units with CUDA, Computer Physics Communica-tions 182: 2132-2160, 2011
[8] Un-Hong Wong, Takayuki Aoki, Hon-Cheng Wong: Efficient magnetohydrodynamic simula-tions on distributed multi-GPU systems using a novel GPU Direct-MPI hybrid approach, Com-puter Physics Communications 185: 1901-1913, 2014
[9] Un-Hong Wong, Hon-Cheng Wong, Yonghui Ma: Global magnetohydrodynamic simulationson multiple GPUs, Computer Physics Communications 185: 144-152, 2014
[10] T. Ogino, R. J. Walker, M. Ashour-Abdalla: A global magnetohydrodynamic simulation of themagnetosheath and magnetopause when the interplanetary magnetic field is northward. IEEETransactions on Plasma Science 20, 1992
[11] M. Hadwiger, J. Kniss, C. Rezk-Salama, D. Weiskopf, and K. Engel. Real time volume graph-ics, A K Peters, 2006.
131

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
A Mathematica modulefor Conformal Geometric Algebra
Mitsuhiro Kondou∗
Graduate School of Mathematics, Kyushu UniversityTakuya Matsuo†
Graduate School of Mathematics, Kyushu University
Abstract Our motivation is to find a useful algorithm to visualize the basic geometric entities used incomputer graphics through the concepts in CGA(Conformal Geometric Algebra). We implementeda Mathematica module of CGA which includes functions to denote CGA elements and computeseveral operations in CGA. Further, we can draw the figure in 3D space which is corresponding to aCGA element. Our draw function is using Grobner Basis for simplifying equations of figures. It canbe used for any dimensional figures. We also implement a function to check the equality of figureswhich are represented by different CGA elements.
Keywords: Conformal Geometric Algebra, Visualization, Grobner Basis, Mathematica
1 Introduction
Our research goal is to find a useful algorithm to visualize the basic geometric entities used incomputer graphics through the concepts in CGA (Conformal Geometric Algebra). A traditionalequation for a motion is an interpolation formula defined by a start figure and an end figure. Itis better that an interpolation equation does not produce crushed figures. To do this, we need toinvestigate and summarize mathematical properties of equations. For example, we may define asymbolic notation such as comp(A,B, 0.8, Lin) for a 8 : 2 combined motion of rotation A, andtranslation B using a linear interpolation. To construct a formula, we need a mathematical object inwhich we can describe motions or figures and also we can discuss about properties of equations ofmotions or figures. One of the excellent candidates of mathematical objects is CGA. It is popularthat a complex number multiplication is used for denoting a rotation in 2D plane and that a dualquaternion is used for a combination of a rotation and a translation in 3D space[4]. Complex numbersand dual quaternions are considered as a subset of CGA. So CGA gives a uniform mathematicalplatform for describing motions and figures in 2D plane and 3D space. And also we can investigateseveral properties of an equation for analyzing motions and figures using CGA.
A 2D plane R2 and a linear space R2 × R2 are algebra, so we can make equations and considermotions using a formula. Figure 1 is a linear interpolation in R2. A linear interpolation givesintermediate figures from two figures, a start figure and an end figure. We note the center figure is
∗[email protected]†[email protected]
132

MATHEMATICAL PROGRESS IN EXPRESSIVE IMAGE SYNTHESIS 2014
Nov 12-14, 2014, Nishijin Plaza Kyushu University, Fukuoka
A Mathematica modulefor Conformal Geometric Algebra
Mitsuhiro Kondou∗
Graduate School of Mathematics, Kyushu UniversityTakuya Matsuo†
Graduate School of Mathematics, Kyushu University
Abstract Our motivation is to find a useful algorithm to visualize the basic geometric entities used incomputer graphics through the concepts in CGA(Conformal Geometric Algebra). We implementeda Mathematica module of CGA which includes functions to denote CGA elements and computeseveral operations in CGA. Further, we can draw the figure in 3D space which is corresponding to aCGA element. Our draw function is using Grobner Basis for simplifying equations of figures. It canbe used for any dimensional figures. We also implement a function to check the equality of figureswhich are represented by different CGA elements.
Keywords: Conformal Geometric Algebra, Visualization, Grobner Basis, Mathematica
1 Introduction
Our research goal is to find a useful algorithm to visualize the basic geometric entities used incomputer graphics through the concepts in CGA (Conformal Geometric Algebra). A traditionalequation for a motion is an interpolation formula defined by a start figure and an end figure. Itis better that an interpolation equation does not produce crushed figures. To do this, we need toinvestigate and summarize mathematical properties of equations. For example, we may define asymbolic notation such as comp(A,B, 0.8, Lin) for a 8 : 2 combined motion of rotation A, andtranslation B using a linear interpolation. To construct a formula, we need a mathematical object inwhich we can describe motions or figures and also we can discuss about properties of equations ofmotions or figures. One of the excellent candidates of mathematical objects is CGA. It is popularthat a complex number multiplication is used for denoting a rotation in 2D plane and that a dualquaternion is used for a combination of a rotation and a translation in 3D space[4]. Complex numbersand dual quaternions are considered as a subset of CGA. So CGA gives a uniform mathematicalplatform for describing motions and figures in 2D plane and 3D space. And also we can investigateseveral properties of an equation for analyzing motions and figures using CGA.
A 2D plane R2 and a linear space R2 × R2 are algebra, so we can make equations and considermotions using a formula. Figure 1 is a linear interpolation in R2. A linear interpolation givesintermediate figures from two figures, a start figure and an end figure. We note the center figure is
∗[email protected]†[email protected]
shrunk. To keep the area, we may use a rotation (cf. Figure 2) which is considered as an elementin R2 × R2. The difference of a figure space R2 and a motion space R2 × R2 prevents an uniforminvestigation of figures and motions. CGA contains figures and motions in itself. So we can easilyfind a rotation from a given start and end figures and demonstrate it as an equation.
Figure 1: Linear interpolation in R2 Figure 2: Interpolation using CGA.
We compare our module with other software related to CGA. The Versor [1] is a C++ library todraw figures using CGA. The CLUCalc [3] is an interactive visualization tool for manipulatingCGA. Those are using a CGA element implicitly and we can not use them as an mathematicalformula to investigate equations of motions and figures for computer graphics animations. We wouldlike to check directly the calculation result of CGA. We implemented a Mathematica module ofCGA to investigate mathematical properties of CGA elements and equations for analyzing motionsand figures for computer graphics. Our Mathematica module have functions for CGA elements,operations, simplification, equality checks, etc. We can use them to analyze an equation interactivelyby trial and error.
2 Conformal Geometric Algebra
We explain Conformal Geometric Algebra. We use 5-dimensional conformal model for expressinggeometric figure in 3D Euclidean space R3. This model have five basis such that in addition to stan-dard basis e1, e2, e3 for the 3-dimensional Euclidean space R3, two null basis e0 , e∞ correspondsto origin and infinity point. Considering basis products, this model is a 32-dimensional linear space25 = 32
. We consider basis wS for subset S of the set 0, 1, 2, 3,∞. 3D geometric objects
and motions such as point, line, circle, sphere, plane, rotor, translator, dilator are expressed as CGAelements.
2.1 Elements
There are known relationship CGA elements and figures in 3D space. We give some examples. Apoint (x, y, x) ∈ R3 is represented by a CGA element P(x,y,z) = w0 + xw1 + yw2 + zw3 +12
x2 + y2 + z2
w∞. A circle passes through three points a, b and c is Pa ∧ Pb ∧ Pc where ∧
is outer product. A sphere passes through four points a, b, c and d is Pa ∧ Pb ∧ Pc ∧ Pd. A linepasses through two points a and b is Pa∧Pb∧w∞. A plane passes through three points a, b and c isPa ∧Pb ∧Pc ∧w∞. For a vector d, the Translator is defined by exp(− d
2w∞)Pexp( d
2w∞). Rotor
is defined by exp(− θ2B)Pexp( θ
2B), where θ ∈ R is angle of rotation and B is bivector. Dilator is
exp(−λ2w0 ∧ w∞)Pexp(λ
2w0 ∧ w∞), where λ ∈ R is scaling factor.
2.2 Visualization
Our Mathematica module has various functions. For example, Production, InnerProduction andOuterProduction are functions to product of two CGA elements. Pnt, Cir, Trs etc are functions to
133

make a CGA element point, circle, translator, etc. CGAOutput3D is a function to draw the cor-responding figure in a 3D space for a given CGA element. CGAEquationCheck is a function tocheck the figures that represented by two CGA elements. We consider a CGA element X as a figure(x, y, z) ∈ R3 |X ∧ P(x,y,z) = 0 in 3D space. We implement a function to draw the corre-sponding figure for a given CGA element using Mathematica. Since CGA has 25 bases, conditionalexpressions for drawing a figure is too complicated. We simplify conditional expressions by us-ing GrobnerBasis to find characteristics in a figure. After simplifying an expression, we choose anappropriate function and arguments to draw the figure.
Figure 3 is an example of an output of the visualization function in our module. Let S1 be a spherepasses through (3, 0, 0), (0, 3, 1), (0, 2, 3) and (−3, 3, 2), and S2 a sphere passes through (−3, 0, 0),(0, 3, 1), (0, 2, 3) and (5, 3, 2). That is S1 = P(3,0,0) ∧P(0,3,1)∧P(0,2,3) ∧P(−3,3,2) and S2 =P(−3,0,0) ∧P(0,3,1)∧P(0,2,3) ∧P(5,3,2). The intersection of S1 and S2 is a CGA element S1 · S∗
2 ,where S∗
2 is the dual element of S2 and · is inner product. Using our Mathematica functions, weare able to compute several CGA operations and have a simplified CGA element. In Figure 4, weshow a simple animation defined by a CGA equation using a rotor operation. Figure 5 representsan intersection of a plane P1 and the sphere S1. P1 is defined as a plane passes through (3, 0, 1),(0, 3, 1) and (0, 2, 1). That is P1 = P(3,0,1) ∧P(0,3,1) ∧P(0,2,1) ∧w∞. The intersection of S1 andP1 is a CGA element S1 ·P ∗
1 . Figure 6 represents an intersection of the plane P1 and a circle C1. C1
is defined as a circle passes through (3, 0, 2), (0, 3, 1) and (0, 3, 0). That is C1 = P(3,0,2) ∧P(0,3,1)
∧P(0,3,0). The intersection of C1 and P1 is a CGA element C1 · P ∗1 .
We note that our visualization function detect the dimension of a CGA object and draw it using anappropriate drawing function.
S1 = 3w012∞ − 33w013∞ + 37w023∞+192w123∞ − 18w0123
S2 = −17w012∞ + 82w013∞ + 93w023∞−423w123∞ + 32w0123
S1 · S∗2 = −210w012 + 420w013 + 315w01∞ + 2858w023
−908w02∞ + 6103w03∞ − 1470w123
−1995w12∞ + 1785w13∞ + 33507w23∞
Figure 3: The intersection of two sphere
Figure 4: The rotor of circle
We also implemented a function to check if two figures of CGA elements are equal or not. Let X1 =w0∞ −6w1∞ −5w2∞ −4w3∞ +w01∞ +w02∞ +w03∞ +6w12∞ +5w13∞ +6w23∞ +w012∞+w013∞ +w023∞ −5w123∞ +w0123∞ +w01 +w02 +w03 −w12 −2w13 −w23 +w012 +w013
+w023 +2w123 +w0123 and X2 = w0 +w1 +2w2 +3w3 +7w∞. The appearance of X1 and X2
are different. But those represent a same point (1, 2, 3) in 3D space. Our implemented functionCGAEquationCheck can check the equality of given any two CGA elements.
134

make a CGA element point, circle, translator, etc. CGAOutput3D is a function to draw the cor-responding figure in a 3D space for a given CGA element. CGAEquationCheck is a function tocheck the figures that represented by two CGA elements. We consider a CGA element X as a figure(x, y, z) ∈ R3 |X ∧ P(x,y,z) = 0 in 3D space. We implement a function to draw the corre-sponding figure for a given CGA element using Mathematica. Since CGA has 25 bases, conditionalexpressions for drawing a figure is too complicated. We simplify conditional expressions by us-ing GrobnerBasis to find characteristics in a figure. After simplifying an expression, we choose anappropriate function and arguments to draw the figure.
Figure 3 is an example of an output of the visualization function in our module. Let S1 be a spherepasses through (3, 0, 0), (0, 3, 1), (0, 2, 3) and (−3, 3, 2), and S2 a sphere passes through (−3, 0, 0),(0, 3, 1), (0, 2, 3) and (5, 3, 2). That is S1 = P(3,0,0) ∧P(0,3,1)∧P(0,2,3) ∧P(−3,3,2) and S2 =P(−3,0,0) ∧P(0,3,1)∧P(0,2,3) ∧P(5,3,2). The intersection of S1 and S2 is a CGA element S1 · S∗
2 ,where S∗
2 is the dual element of S2 and · is inner product. Using our Mathematica functions, weare able to compute several CGA operations and have a simplified CGA element. In Figure 4, weshow a simple animation defined by a CGA equation using a rotor operation. Figure 5 representsan intersection of a plane P1 and the sphere S1. P1 is defined as a plane passes through (3, 0, 1),(0, 3, 1) and (0, 2, 1). That is P1 = P(3,0,1) ∧P(0,3,1) ∧P(0,2,1) ∧w∞. The intersection of S1 andP1 is a CGA element S1 ·P ∗
1 . Figure 6 represents an intersection of the plane P1 and a circle C1. C1
is defined as a circle passes through (3, 0, 2), (0, 3, 1) and (0, 3, 0). That is C1 = P(3,0,2) ∧P(0,3,1)
∧P(0,3,0). The intersection of C1 and P1 is a CGA element C1 · P ∗1 .
We note that our visualization function detect the dimension of a CGA object and draw it using anappropriate drawing function.
S1 = 3w012∞ − 33w013∞ + 37w023∞+192w123∞ − 18w0123
S2 = −17w012∞ + 82w013∞ + 93w023∞−423w123∞ + 32w0123
S1 · S∗2 = −210w012 + 420w013 + 315w01∞ + 2858w023
−908w02∞ + 6103w03∞ − 1470w123
−1995w12∞ + 1785w13∞ + 33507w23∞
Figure 3: The intersection of two sphere
Figure 4: The rotor of circle
We also implemented a function to check if two figures of CGA elements are equal or not. Let X1 =w0∞ −6w1∞ −5w2∞ −4w3∞ +w01∞ +w02∞ +w03∞ +6w12∞ +5w13∞ +6w23∞ +w012∞+w013∞ +w023∞ −5w123∞ +w0123∞ +w01 +w02 +w03 −w12 −2w13 −w23 +w012 +w013
+w023 +2w123 +w0123 and X2 = w0 +w1 +2w2 +3w3 +7w∞. The appearance of X1 and X2
are different. But those represent a same point (1, 2, 3) in 3D space. Our implemented functionCGAEquationCheck can check the equality of given any two CGA elements.
P1 = 3w012∞ + 3w123∞
S1 · P∗1 = −99w01∞ + 111w02∞ + 567w12∞
+99w13∞ − 111w23∞+54w012 + 54w123
Figure 5: Sphere and Plane
C1 =3
2w01∞ −
3
2w02∞ − w03∞
−9
2w12∞ +
27
2w13∞ −
33
2w23∞
+3w013 − 3w023 − 9w123
C1 · P∗1 = −3w0∞ + 45w1∞ − 54w2∞
−3w3∞ − 9w01 + 9w02
+27w12 + 9w13 − 9w23
Figure 6: Plane and Circle
3 Conclusion
Our motivation is to find a useful algorithm to visualize the basic geometric entities used in computergraphics through the concepts in CGA. The first step was construction of an computer environment.Manipulating developed Mathematica functions, we can investigate properties of each CGA opera-tions and also visualize elements. Since dual quaternions are included in CGA, the implementationof a blend of a transformation and a rotation can be realized if we implemented it explicitly. Our fu-ture work includes a demonstration of a general blending framework, in which we realize a blendingoperation using dual quaternions as an example. We can not realize a blend of a non-uniform scalingand a rotation by the blending using dual quaternions. The next step is to implement the blendingoperation. To do this, we are developing a simple algorithm to compute the inverse of an element inCGA. And also , it may be useful to classify elements which have inverse of it.
References[1] P. Colapinto, VERSOR Spatial Computing with Conformal Geometric Algebra, Master Thesis,
University of California Santa Barbara, 2011.
[2] A. Macdonald, A Survey of Geometric Algebra and Geometric Calculus, 2014.
[3] C. Perwass, Geometric Algebra with Applications in Engineering, Springer, 2009.
[4] L. Kavan, S. Collins, J. Zara, C. O’Sullivan. Geometric Skinning with Approximate Dual Quater-nion Blending. ACM Transaction on Graphics, 2008, 27(4), 105.
135

MIレクチャーノートシリーズ刊行にあたり
本レクチャーノートシリーズは、文部科学省 21世紀 COEプログラム「機能数理学の構築と展開」(H.15-19年度)において作成した COE Lecture Notes の続刊であり、文部科学省大学院教育改革支援プログラム「産業界が求める数学博士と新修士養成」(H19-21年度)および、同グローバル COEプログラム「マス・フォア・インダストリ教育研究拠点」(H.20-24年度)において行われた講義の講義録として出版されてきた。平成 23年 4月のマス・フォア・インダストリ研究所(IMI)設立と平成 25年 4月の IMIの文部科学省共同利用・共同研究拠点として「産業数学の先進的・基礎的共同研究拠点」の認定を受け、今後、レクチャーノートは、マス・フォア・インダストリに関わる国内外の研究者による講義の講義録、会議録等として出版し、マス・フォア・インダストリの本格的な展開に資するものとする。
平成 26年 10月マス・フォア・インダストリ研究所
所長 福本康秀
Symposium MEIS2014:Mathematical Progress in Expressive
Image Synthesis発 行 2014年11月12日編 集 安生健一,落合啓之発 行 九州大学マス・フォア・インダストリ研究所 九州大学大学院数理学府 819-0395 福岡市西区元岡744 九州大学数理・IMI事務室 TEL 092-802-4402 FAX 092-802-4405 URL http://www.imi.kyushu-u.ac.jp/
印 刷 城島印刷株式会社 810-0012 福岡市中央区白金 2 丁目 9 番 6 号 TEL 092-531-7102 FAX 092-524-4411

シリーズ既刊
Issue Author/Editor Title Published
COE Lecture Note Mitsuhiro T. NAKAO Kazuhiro YOKOYAMA
Computer Assisted Proofs - Numeric and Symbolic Approaches - 199pages
August 22, 2006
COE Lecture Note M.J.Shai HARAN Arithmetical Investigations - Representation theory, Orthogonal polynomials and Quantum interpolations- 174pages
August 22, 2006
COE Lecture Note Vol.3 Michal BENES Masato KIMURA Tatsuyuki NAKAKI
Proceedings of Czech-Japanese Seminar in Applied Mathematics 2005 155pages October 13, 2006
COE Lecture Note Vol.4 宮田 健治 辺要素有限要素法による磁界解析 -機能数理学特別講義 21pages May 15, 2007
COE Lecture Note Vol.5 Francois APERY Univariate Elimination Subresultants - Bezout formula, Laurent series and vanishing conditions - 89pages
September 25, 2007
COE Lecture Note Vol.6 Michal BENES Masato KIMURA Tatsuyuki NAKAKI
Proceedings of Czech-Japanese Seminar in Applied Mathematics 2006 209pages
October 12, 2007
COE Lecture Note Vol.7 若山 正人 中尾 充宏
九州大学産業技術数理研究センター キックオフミーティング 138pages
October 15, 2007
COE Lecture Note Vol.8 Alberto PARMEGGIANI Introduction to the Spectral Theory of Non-Commutative Harmonic Oscillators 233pages
January 31, 2008
COE Lecture Note Vol.9 Michael I.TRIBELSKY Introduction to Mathematical modeling 23pages February 15, 2008
COE Lecture Note Vol.10 Jacques FARAUT Infinite Dimensional Spherical Analysis 74pages March 14, 2008
COE Lecture Note Vol.11 Gerrit van DIJK Gelfand Pairs And Beyond 60pages August 25, 2008
COE Lecture Note Vol.12 Faculty of Mathematics, Kyushu University
Consortium “MATH for INDUSTRY” First Forum 87pages September 16, 2008
COE Lecture Note Vol.13 九州大学大学院 数理学研究院
プロシーディング「損保数理に現れる確率モデル」 ― 日新火災・九州大学 共同研究 2008年 11月 研究会 ― 82pages
February 6, 2009

シリーズ既刊
Issue Author/Editor Title Published
COE Lecture Note Vol.14 Michal Beneš, Tohru Tsujikawa Shigetoshi Yazaki
Proceedings of Czech-Japanese Seminar in Applied Mathematics 2008 77pages
February 12, 2009
COE Lecture Note Vol.15 Faculty of Mathematics, Kyushu University
International Workshop on Verified Computations and Related Topics 129pages
February 23, 2009
COE Lecture Note Vol.16 Alexander Samokhin Volume Integral Equation Method in Problems of Mathematical Physics 50pages
February 24, 2009
COE Lecture Note Vol.17 矢嶋 徹 及川 正行 梶原 健司 辻 英一 福本 康秀
非線形波動の数理と物理 66pages February 27, 2009
COE Lecture Note Vol.18 Tim Hoffmann Discrete Differential Geometry of Curves and Surfaces 75pages April 21, 2009
COE Lecture Note Vol.19 Ichiro Suzuki The Pattern Formation Problem for Autonomous Mobile Robots ―Special Lecture in Functional Mathematics― 23pages
April 30, 2009
COE Lecture Note Vol.20 Yasuhide Fukumoto Yasunori Maekawa
Math-for-Industry Tutorial: Spectral theories of non-Hermitian operators and their application 184pages
June 19, 2009
COE Lecture Note Vol.21 Faculty of Mathematics, Kyushu University
Forum “Math-for-Industry” Casimir Force, Casimir Operators and the Riemann Hypothesis 95pages
November 9, 2009
COE Lecture Note Vol.22 Masakazu Suzuki Hoon Hong Hirokazu Anai Chee Yap Yousuke Sato Hiroshi Yoshida
The Joint Conference of ASCM 2009 and MACIS 2009: Asian Symposium on Computer Mathematics Mathematical Aspects of Computer and Information Sciences 436pages
December 14, 2009
COE Lecture Note Vol.23 荒川 恒男 金子 昌信
多重ゼータ値入門 111pages February 15, 2010
COE Lecture Note Vol.24 Fulton B.Gonzalez Notes on Integral Geometry and Harmonic Analysis 125pages March 12, 2010
COE Lecture Note Vol.25 Wayne Rossman Discrete Constant Mean Curvature Surfaces via Conserved Quantities 130pages
May 31, 2010
COE Lecture Note Vol.26 Mihai Ciucu Perfect Matchings and Applications 66pages July 2, 2010

シリーズ既刊
Issue Author/Editor Title Published
COE Lecture Note Vol.27 九州大学大学院 数理学研究院
Forum “Math-for-Industry” and Study Group Workshop Information security, visualization, and inverse problems, on the basis of optimization techniques 100pages
October 21, 2010
COE Lecture Note Vol.28 ANDREAS LANGER MODULAR FORMS, ELLIPTIC AND MODULAR CURVES LECTURES AT KYUSHU UNIVERSITY 2010 62pages
November 26, 2010
COE Lecture Note Vol.29 木田 雅成 原田 昌晃 横山 俊一
Magmaで広がる数学の世界 157pages December 27, 2010
COE Lecture Note Vol.30 原 隆 松井 卓 廣島 文生
Mathematical Quantum Field Theory and Renormalization Theory 201pages
January 31, 2011
COE Lecture Note Vol.31 若山 正人 福本 康秀 高木 剛 山本 昌宏
Study Group Workshop 2010 Lecture & Report 128pages February 8, 2011
COE Lecture Note Vol.32 Institute of Mathematics for Industry, Kyushu University
Forum “Math-for-Industry” 2011 “TSUNAMI-Mathematical Modelling” Using Mathematics for Natural Disaster Prediction, Recovery and Provision for the Future 90pages
September 30, 2011
COE Lecture Note Vol.33 若山 正人 福本 康秀 高木 剛 山本 昌宏
Study Group Workshop 2011 Lecture & Report 140pages October 27, 2011
COE Lecture Note Vol.34 Adrian Muntean Vladimír Chalupecký
Homogenization Method and Multiscale Modeling 72pages October 28, 2011
COE Lecture Note Vol.35 横山 俊一 夫 紀恵 林 卓也
計算機代数システムの進展 210pages November 30, 2011
COE Lecture Note Vol.36 Michal Beneš Masato Kimura Shigetoshi Yazaki
Proceedings of Czech-Japanese Seminar in Applied Mathematics 2010 107pages
January 27, 2012
COE Lecture Note Vol.37 若山 正人 高木 剛 Kirill Morozov 平岡 裕章 木村 正人 白井 朋之 西井 龍映 栄 伸一郎 穴井 宏和 福本 康秀
平成 23年度 数学・数理科学と諸科学・産業との連携研究ワークショップ 拡がっていく数学 ~期待される “見えない力”~ 154pages
February 20, 2012

シリーズ既刊
Issue Author/Editor Title Published
COE Lecture Note Vol.38 Fumio Hiroshima Itaru Sasaki Herbert Spohn Akito Suzuki
Enhanced Binding in Quantum Field Theory 204pages March 12, 2012
COE Lecture Note Vol.39 Institute of Mathematics for Industry, Kyushu University
Multiscale Mathematics: Hierarchy of collective phenomena and inter relations between hierarchical structures 180pages
March 13, 2012
COE Lecture Note Vol.40 井ノ口順一 太田 泰広 筧 三郎 梶原 健司 松浦 望
離散可積分系・離散微分幾何チュートリアル 2012 152pages March 15, 2012
COE Lecture Note Vol.41 Institute of Mathematics for Industry,Kyushu University
Forum “Math-for-Industry” 2012 “Information Recovery and Discovery” 91pages
October 22, 2012
COE Lecture Note Vol.42 佐伯 修若山 正人山本 昌宏
Study Group Workshop 2012 Abstract, Lecture & Report 178pages November 19, 2012
COE Lecture Note Vol.43 Institute of Mathematics for Industry, Kyushu University
Combinatorics and Numerical Analysis Joint Workshop 103pages December 27, 2012
COE Lecture Note Vol.44 萩原 学 モダン符号理論からポストモダン符号理論への展望 107pages January 30, 2013
COE Lecture Note Vol.45 金山 寛 Joint Research Workshop of Institute of Mathematics for Industry (IMI), Kyushu University “Propagation of Ultra-large-scale Computation by the Domain-decomposition-method for Industrial Problems (PUCDIP 2012)” 121pages
February 19, 2013
COE Lecture Note Vol.46 西井 龍映栄 伸一郎岡田 勘三落合 啓之小磯 深幸斎藤 新悟白井 朋之
科学・技術の研究課題への数学アプローチ―数学モデリングの基礎と展開― 325pages
February 28, 2013
COE Lecture Note Vol.47 SOO TECK LEE BRANCHING RULES AND BRANCHING ALGEBRAS FOR THE COMPLEX CLASSICAL GROUPS 40pages
March 8, 2013
COE Lecture Note Vol.48 溝口 佳寛脇 隼人平坂 貢谷口 哲至島袋 修
博多ワークショップ「組み合わせとその応用」 124pages March 28, 2013

シリーズ既刊
Issue Author/Editor Title Published
COE Lecture Note Vol.49 照井 章小原 功任濱田 龍義横山 俊一穴井 宏和横田 博史
マス・フォア・インダストリ研究所 共同利用研究集会 II数式処理研究と産学連携の新たな発展 137pages
August 9, 2013
MI Lecture Note Vol.50 Ken AnjyoHiroyuki OchiaiYoshinori DobashiYoshihiro MizoguchiShizuo Kaji
Symposium MEIS2013:Mathematical Progress in Expressive Image Synthesis 154pages
October 21, 2013
MI Lecture Note Vol.51 Institute of Mathematics for Industry, Kyushu University
Forum “Math-for-Industry” 2013“The Impact of Applications on Mathematics” 97pages
October 30, 2013
MI Lecture Note Vol.52 佐伯 修岡田 勘三髙木 剛若山 正人山本 昌宏
Study Group Workshop 2013 Abstract, Lecture & Report 142pages
November 15, 2013
MI Lecture Note Vol.53 四方 義啓櫻井 幸一安田 貴徳Xavier Dahan
平成25年度 九州大学マス・フォア・インダストリ研究所 共同利用研究集会 安全・安心社会基盤構築のための代数構造~サイバー社会の信頼性確保のための数理学~ 158pages
December 26, 2013
MI Lecture Note Vol.54 Takashi Takiguchi Inverse problems for practice, the present and the future 93pages January 30, 2014
MI Lecture Note Vol.55 栄 伸一郎溝口 佳寛脇 隼人渋田 敬史
Study Group Workshop 2013 数学協働プログラム Lecture & Report98pages
February 10, 2014
MI Lecture Note Vol.56 Yoshihiro MizoguchiHayato WakiTakafumi ShibutaTetsuji TaniguchiOsamu ShimabukuroMakoto TagamiHirotake KuriharaShuya Chiba
Hakata Workshop 2014~ Discrete Mathematics and its Applications ~ 141pages
March 28, 2014
MI Lecture Note Vol.57 Institute of Mathematics for Industry, Kyushu University
Forum “Math-for-Industry” 2014:“Applications + Practical Conceptualization + Mathematics = fruitful Innovation” 93pages
October 23, 2014