Materiały do wykładu #9
53
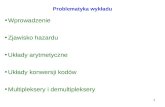
LINIOWE UKŁADY DYSKRETNE Współczesne układy regulacji automatycznej wyposażone są w regulatory cyfrowe, co narzuca konieczność stosowania w ich analizie i syntezie odpowiednich równań dynamiki, opisujących charakter zmian sygnałów cyfrowych i dyskretnych. A/D A/D OBIEKT D/A Algorytm ZEGAR KOMPUTER u(t ) u(k) e(k) y o (t ) y(t ) y(k) y o (k) Układy regulacji automatycznej, w których informacja jest przekazywana za pomocą sygnałów dyskretnych nazywane są układami dyskretnymi. Rozróżnia się sygnały dyskretne w poziomie i sygnały dyskretne w czasie. Sygnałem dyskretnym w poziomie nazywa się sygnał przyjmujący dwie lub więcej wartości dyskretnych. Sygnałem dyskretnym w czasie nazywa się sygnał będący ciągiem impulsów. 1
Transcript of Materiały do wykładu #9

LINIOWE UKŁADY DYSKRETNE
Współczesne układy regulacji automatycznej wyposażone są w regulatory cyfrowe, co narzuca
konieczność stosowania w ich analizie i syntezie odpowiednich równań dynamiki, opisujących charakter
zmian sygnałów cyfrowych i dyskretnych.
A/D
A/D
OBIEKTD/AAlgorytm
ZEGAR
KOMPUTER
u(t)u(k)e(k)yo(t) y(t)
y(k)
yo(k)
Układy regulacji automatycznej, w których informacja jest przekazywana za pomocą sygnałów
dyskretnych nazywane są układami dyskretnymi.
Rozróżnia się sygnały dyskretne w poziomie i sygnały dyskretne w czasie.
Sygnałem dyskretnym w poziomie nazywa się sygnał przyjmujący dwie lub więcej wartości dyskretnych.
Sygnałem dyskretnym w czasie nazywa się sygnał będący ciągiem impulsów. 1

Operację przekształcania sygnału w czasie ciągłego w dyskretny nazywa się kwantowaniem sygnału.
Rozróżnia się kwantowanie sygnału w poziomie i kwantowanie sygnału w czasie zwane próbkowaniem.
Układy, w których występuje kwantowanie sygnału w czasie, nazywane są układami impulsowymi.
Informacja jest tu przekazywana w dyskretnych chwilach czas, zwanych chwilami impulsowania.
Modulacją impulsów nazywa się funkcję ciągłą przedstawioną w postaci ciągu impulsów, których
amplituda, szerokość i położenie wewnątrz okresu próbkowania, zwanego okresem impulsowania �� zależą od
wartości funkcji w dyskretnych chwilach czasu � = ��� (� = 0, 1, . . . ).
W przypadku, gdy obiektem
sterowania jest obiekt ciągły ��
(�), to układ
sterowania musi być wyposażony w dwa
dodatkowe elementy jakimi są impulsator
i ekstrapolator �(�) .
Oba elementy pracują synchronicznie
z zadanym okresem próbkowania ��
(sampling time).
�(�) �(�) �
�(�)
���
�(�)
�∗(�)
Rys. 1. Układ dyskretny sterowania obiektem ciągłym
�(�)
2

�(�)
�∗(�) ���
Impulsator,
przetwarza sygnał wyjściowy ���� na jego przebieg dyskretny w czasie
�∗��� = �������� − �����
���
= ���������� − �����
���
przy czym � = 0, 1, 2, … (1)
gdzie ��� − ���� opisuje idealny impulsator, generujący impulsy typu Diraca,
y(t)
t
δ(t)
t
y*(t)
t
Zakłada się , że impulsator zamyka się i otwiera ze stałą częstotliwością (stałym ��) i pozostaje zamknięty
przez czas τ = 0, a co najwyżej przez chwilę pomijalnie małą w porównaniu z czasami odpowiedzi układu.
3

Ekstrapolator zerowego rzędu
���� =1 − �����
� , (2)
przetwarzający dyskretny sygnał sterujący �(�) na jego postać ciągłą w czasie �(�), możliwą do podania
na wejście obiektu ciągłego.
� = ��� 1 2 � � + 1
�(�)
0
�
���
�(�)
1
�
−����
�
(� + 1)��
���
(� + 1)��
�
�
�(�) ���� = ��� − (� − ��)
3
�
3 � = ���
�(�)
1 2 � � + 1 0
4

RÓWNANIA ROŻNICOWE
Równania różnicowe są analogiem równań różniczkowych, i uzyskuje się je poprzez dyskretyzację
równań różniczkowych.
��(�)
�� = lim∆�→�
���� − �(� − ∆�)
∆� ∆���� = ���� − �(� − 1)
���(�)
��� = lim∆�→�
��(�)�� −
��(� − ∆�)��
∆�
∆����� = ∆���� − ∆��� − 1�
= ���� − 2��� − 1� + ��� − 2�
���(�)
��� = lim∆�→�
���(�)
��� −���(� − ∆�)
���∆�
∆����� = ∆����� − ∆���� − 1�
= ���� − 3��� − 1� + 3��� − 2� − �(� − 3)
Ogólnie, różnice n - tego rzędu ∆����� funkcji dyskretnej ����w k chwili można wyznaczyć na
podstawie poniższej formuły
∆����� = ∆������� − ∆������ − 1� = ��−1�� �!
�� − 1�! !�(� − 1)
�
��
5

Dyskretyzacja pochodnych względem czasu
������� ≈
���� − ��� − 1���
���(�)
��� ≈���� − 2��� − 1� + ��� − 2�
���
���(�)
��� ≈���� − 3��� − 1� + 3��� − 2� − �(� − 3)
���
⋮ ⋮
���(�)
��� ≈1
��� ��−1�� !
� − 1�! ! �(� − 1)
�
���
Ogólna postać symulatora cyfrowego równań różniczkowych
Równaniem różnicowym n-tego rzędu nazywamy związek między funkcją dyskretną i jej różnicami do
n-tego rzędu włącznie. Biorąc pod uwagę, że różnice n-tego rzędu można wyrazić za pomocą n -1
kolejnych wartości funkcji, możemy równanie różnicowe rzędu n-tego określić jako związek między
kolejnymi wartościami funkcji dyskretnej.
Liniowe równania zwyczajne: różniczkowe
������ + a��������� + ⋯ + a������ + a����� = ������ + b �������� + ⋯ + b������ + b�����
i różnicowe
∆����� + a��∆������ + ⋯ + a�∆���� + a����� = ∆����� + b��∆������ + ⋯ + b�∆���� + b�����
6

� a�∆����� =
�
���
� b�∆�������
���
Gdy �(�) ≠ 0, to równanie jest równaniem niejednorodnym, a gdy ���� = 0 – równaniem różnicowym
jednorodnym. Warunki początkowe dla równania są dane, jeżeli znane są dla � = 0 wartości funkcji
dyskretnej �(�) oraz jej kolejnych różnic rzędu od 1 do � − 1, tzn. kiedy są dane:
�� = ��0�, �� = ��(0), . . ., ���� = ∆����(0).
Rozwiązanie równania różnicowego polega na wyznaczeniu takiej funkcji dyskretnej �(�), która spełnia
równanie przy danych warunkach początkowych.
������� − � =
�
���
������� − ���
��
Współczynniki równania różnicowego (różnice wsteczne) ze współczynnikami równania różniczkowego
wiążą zależności
��� = ��−1���� �� − �!
�� − �! � − �!
�
���
1
����a��� , ��� = ��−1���
�� − �!
�� − ��! �� − �!
���
1
����b���
7

Przykład: Rozwiązanie równania metodą rekurencyjną, przy założeniu zerowych warunków
początkowych ��0�,��−1�, ��−2� = 0 oraz �(�) = 1 dla � ≥ 0
����� − 2� + ����� − 1� + ������ = ������
������ = ������ − ����� − 2� − ����� − 1�
���� =���� ���� −
���� ��� − 2� −
���� ��� − 1�
��0� =���� ��0� −
���� ��−2� −
���� ��−1� =
����
�(1) =���� ��1� −
���� ��−1� −
���� ��0� = �−
���� + 1 ����
�(2) =���� ��2� −
���� ��0� −
���� ��1� = −��
�� −���� �−
���� + 1 + 1� ����
��3� =���� ��3� −
���� ��1� −
���� ��2� = �−��
�� �−���� + 1 −
���� −
���� −
���� �−
���� + 1 + 1� + 1 ����
8

Przykład: Dyskretyzacja równania różniczkowego drugiego rzędu;
Równanie różniczkowe: a��� + a��� + a�� = b��
Równanie różniczkowe: ���(� − 2) + ���(� − 1) + ��� = ���(�)
Związki pomiędzy współczynnikami: �� =a�
���
+a�
��+ 1, �� =
2a�
���
−a�
��, �� =
a�
���
9

PRZEKSZTAŁCENIE �
Przekształcenie � jest zdefiniowane za pomocą wzoru
���� = ���(�) = ��������
���
(3)
gdzie ���� = ������, � = 0,1,2, … jest ciągiem wartości funkcji dyskretnej (sygnału dyskretnego).
Przekształcenie � przyporządkowuje funkcji dyskretnej (oryginałowi) funkcję (transformatę) ����
zmiennej z.
Tak utworzona funkcja �(�) jest nazywana jednostronną transformatą � ciągu �(�).
Gdy znana jest transformata ���� oryginał funkcji wyznacza się z odwrotnego przekształcenia �
�(�) = �������� (4)
Przekształcenie � spełnia zasadę superpozycji
��������� + ������� = ��������� + ��������� = ������� + ����(�), gdzie �� i �� − stałe
Twierdzenie o transformacie splotu.
Transformata � splotu dwóch funkcji dyskretnych �1��� i �2��� jest równa iloczynowi transformat � tych
funkcji, tj. ���1��� ∗ �2��� = ���1��� ∙ ���2��� = �1��� ∙ �2(�)
gdzie splotem ����� ∗ ����� funkcji dyskretnych ����� i ����� jest funkcja dyskretna określona wzorem
����� ∗ ����� = ���� − ���� ����
��
10

Transformata funkcji dyskretnej przesuniętej w lewo o n okresów impulsowania:
����� + ��� = ��� − ������ + ��� = ��� − �����������
���
������
���
Jeśli ���� dla � = 0, 1, … , � − 1, to ����� + ��� = ���.
Transformata funkcji dyskretnej przesuniętej w prawo (opóźnionej) o n okresów impulsowania:
����� − ��� = ���� Twierdzenie o wartości początkowej: ��0� = lim�→ ().
Twierdzenie o wartości końcowej: ��∞� = lim�→�( − 1)()
11

Transformaty � wybranych funkcji dyskretnych
oraz odpowiadające im funkcje ciągłe i ich transformaty
�(�) �(�) �(�) �(� ∙ ��)
(�) 1 1 (� ∙ ��)
1 1(�) 1
�
�
� − 1 1(� ∙ ��)
2 � 1
�� ��
�
� − 1�� � ∙ ��
3 �� 2
�� ��
��� + 1�
� − 1�� � ∙ ���
�
4 ���� 1
� +
�
� − ����� ���∙�∙��
5 � ∙ ���� 1
� + �� ���
�����
� − ����� � ∙ ���
����
6 ������ 2
� + �� ��
������ ∙ �� + �����
� − ����� � ∙ ���
����∙�∙��
12

7 ��� �� 1
�� + ��
� sin����� − 2� cos��� + 1
sin����
8 � �� �
�� + ��
��� − � ������ − 2� � ��� + 1
� ����
9 ��� ��� �� �
�� + ��� + ��
� ���� ��� ����� − 2� ���� � ��� + ����� ����� ��� ����
10 ��� � �� � + �
�� + ��� + ��
�� − � ���� � ����� − 2� ���� � ��� + ����� ����� � ����
Wyznaczanie oryginału ���� funkcji wymiernej zmiennej zespolonej �(�) Wyznaczanie odwrotnej transformaty � metodą rozkładu na ułamki proste.
Odwołując się do zależności podanych na stronach 16 i 17 wykładu 2, poprzedniego semestru, gdzie
uwidocznione są składniki rozkładu na ułamki proste funkcji wymiernej zmiennej zespolonej s, których to
transformaty odwrotne prowadzą do funkcji eksponencjalnych typu
��� = ℒ� � � − �� , (5)
13

oraz biorąc pod uwagę wiersz 4 tabeli transformat, łatwo spostrzec, że relacja pomiędzy dyskretną
postacią tej funkcji wykładniczej a jej transformatą � jest następująca
������ ⇆�
� − ������ =�
� − �� . (6)
Z powyższego wynika, że rozkład na ułamki proste funkcji wymiernej zmiennej zespolonej z winien
przyjąć postać
�(�) =���
� − �� +���
� − �� + ⋯ = � ���� − ��
�
��
(7)
Ze względu na to, że w licznikach składników rozkładu funkcji �(�) nie występują operatory s, więc
rozkład �(�) należy podzielić obustronnie przez operator z, aby po wyznaczeniu współczynników udziału
�� liczniki składników rozkładu ponownie pomnożyć przez operator z.
Transformatę odwrotną otrzymuje się z zależności
���� = ��� ���� = ���� � ���� − ���
�
��
(8)
14

Przykład
Dana jest funkcja wymierna zmiennej zespolonej z.
���� =0,5�
�� − 0,5��� − 0,7�
Wyznaczyć funkcje dyskretną.
Rozwiązanie
Dzielimy obustronnie funkcję ���� i wyznaczamy współczynniki udziału (residua) rozkładu
����
�=
0,5
�� − 0,5��� − 0,7�=
��
� − 0,5+
��
� − 0,7=
−2,5
� − 0,5+
2,5
� − 0,7
który ponownie mnożymy obustronnie przez operator z, otrzymując
���� =0,5�
�� − 0,5��� − 0,7�= −2,5
�
� − 0,5+ 2,5
�
� − 0,7
Korzystając z tabeli transformat, gdzie widać, że
�
� − ����� → ���∙��∙�
lub �
� − ��→ ��
� , gdzie �� = �����
otrzymujemy funkcję dyskretną
����� = �������� = −2,5�0,5�� + 2,5�0,7�� .
15

Uwzględniając idealny impulsatora otrzymujemy wartości próbek sygnału dyskretnego w chwilach
odległych od siebie o okres próbkowania ��
�∗(�) = � ��������� − �����
����
= � −2,5�0,5�� + 2,5�0,7���
����
��� − ����
Dla � = 0, 1, 2 , 3, 4
�∗��� = 0 ���� + 0,5��� − ��� + 0,6��� − 2��� + 0,545��� − 3��� + 0,444��� − 3���
0 2 4 6 8 10 0
0.2
0.4
0.6
���
�∗���
Rys. Przebieg funkcji dyskretnej z zadania 1
16

Transmitancja operatorowa
Niech proces będzie opisany liniowym równaniem operatorowym
���� + ����� − 1� + ����� − 2� +⋯+ ����� − ��= ���� + ����� − 1� + ����� − 2� +⋯+ ����� −�
Stosując twierdzenie o przesunięciu w prawo otrzymuje się równanie operatorowe
����1 + ����� + ����� +⋯+ ����� = ������� + ����� + ����� +⋯+ �����
���� = (�)�(�) =
�� + ����� + ����� +⋯+ �����1 + ����� + ����� +⋯+ ����� =
�(���)�(���)
Podobnie korzystając z twierdzenia o przesunięciu w lewo, czyli
�������
���
���� = �������
��
���
���� = (�)�(�) =
���� + ������ + ������ +⋯+ ���� + ������ + ������ +⋯+ �� =
�(�)�(�)
17

Wyznaczanie transmitancji dyskretnej metodą transformacji transformat
Transformata ���� funkcji dyskretnej �(�) związana jest z oryginałem zależnością (3)
Przy wyznaczaniu transformaty � na podstawie znajomości danej funkcji dyskretnej łatwiej posługiwać
się tablicą transformat, niż na podstawie powyższego wzoru definicyjnego.
Tablica, oprócz funkcji dyskretnych i ich transformat � podaje funkcje ciągłe wraz z ich transformatami
Laplace’a, odpowiadające podanym funkcjom dyskretnym. Znając postać funkcji ciągłej lub jej
transformatę w dziedzinie zmiennej zespolonej s, jednocześnie można określić odpowiadającą jej funkcję
dyskretną lub transformatę w dziedzinie zmiennej zespolonej z. Znając natomiast transformatę �
jednoznacznie można określić odpowiadającą jej funkcję dyskretną. Operacja ta nazywa się odwrotnym
przekształceniem � lub odwrotnym przekształceniem Laurenta.
Operacja wyznaczania transformaty � na podstawie znajomości transformaty Laplace’a danej funkcji
ciągłej (a nie na podstawie odpowiadającej jej funkcji dyskretnej) nazywa się transformacją transformat
���� = ��()� (9)
gdzie � oznacza symbol przekształcenia transformaty Laplace’a w transformatę � Laurenta.
Operacje te można wykonywać posługując się bezpośrednio tablicą transformat
18

W przypadku gdy obiekt ciągły jest opisany transmitancją ciągłą jak w układzie na stronie 1,
transmitancja dyskretna obiektu z impulsatorem i ekstrapolatorem zerowego rzędu opisana jest
następująco
����� = ��������(�) = �1 − �����
� ��(�)� = � �1 − ������ ��(�)� � (10)
ale � = ���� więc
����� = �1 − ����� ��(�)� � = �z − 1
z�� ��(�)� � = �z − 1
z� �(�). (11)
Wprowadzając oznaczenie
�(�) = ��(�)� (12)
operację �(�) = ���(�) można wykonać posługując się bezpośrednio tablicą transformat, rozkładając
przedtem funkcję wymierną �(�) na ułamki proste.
19

Przykład 1
Wyznaczyć dyskretną odpowiedź skokową układu opisanego transmitancją operatorową
����� =�
�
Transmitancja ekstrapolatora ma postać
���� =1 − �����
�
Rozwiązanie
���� =�
� ∙ �=
�
�� ⟹ ��� = �
�
� − 1��
Transmitancja dyskretna układu
���� =
− 1
��� =
− 1
�
�
� − 1��= �
�
− 1
Wymuszenie skokowe
���� =1
� ⟹ ��� =
− 1
Odpowiedź operatorowa
��� = ������� = �
�
− 1∙
− 1= �
�
� − 1��
Odpowiedź dyskretna (��) = � ∙ � ∙ �
20

Odpowiedzi dyskretna układu
z ekstrapolatorem �(���) = � ∙ ��
�
bez ekstrapolatora �(���) = � ∙ (� + 1)
5
15
20
10
0 1 2 3 4 5 6 7 8 9 10
5
15
20
10
0 1 2 3 4 5 6 7 8 9 10
������
������
������
��
= 2 [s]
��
= 0.5 [s]
��
= 1 [s]
0 1 2 3 4 5 6 7 8 9 10
5
10
15
20
� = ���
21

Przykład 2. Wyznaczyć transmitancję dyskretną i dyskretną odpowiedź skokową jednostkową układu
sterowania gdzie człon ciągły, opisany transmitancją operatorową
����� =����� + 1� ,
jest poprzedzony ekstrapolatorem zerowego rzędu.
Rozwiązanie
Uwzględniając oznaczenie (12) związane z (11) otrzymujemy
���� =�����
s=
�� ∙ ���� + 1� =���� +
����� +���� + 1
gdzie współczynniki udziału wynoszą
��� = −� ∙ � , ��� = � , �� = � ∙ �� .
Otrzymany rozkład funkcji wymiernej w dziedzinie zmiennej zespolonej s
���� = �−�� +
1�� +�
� +1� ,
przekształcamy, posługując się tablicą transformat, w rozkład w dziedzinie zmiennej zespolonej z , stąd
���� = � ����� = ��−� �� − 1+
����� − 1�� + � �� − ������ = � �−� �� − 1
+����� − 1�� + � �� − ���
gdzie: �� = ����
�
22

Poszukiwana postać transmitancji dyskretnej układu wynika z zależności (11)
����� =
� − 1
� ���� = � �−� +��
� − 1+ � � − 1
� − ��
Postać transformaty sygnału wymuszenia wynika z transformacji
��� = ��� �� = � �1 � =�
� − 1 .
Stąd odpowiedź operatorowa wynosi
���� = �������� = � �−� +
��� − 1
+ � � − 1
� − �� ∙�
� − 1= � �−� �
� − 1+
����� − 1�� + � �
� − �� .
a jej postać dyskretną określa związek
������ = ������� = ��−� + ���� + � ∙ ��� = ��� ∙ �� − ��1 − �����
5
15
20
10
0 1 2 3 4 5 6 7 8 9 10
������ �
�= 1 [s]
5
15
20
10
0 1 2 3 4 5 6 7 8 9 10
������
��
= 0.5 [s]
� = ���
23

Przykład 3
Wyznaczyć dyskretną odpowiedź skokową układu opisanego transmitancją operatorową
����� =��
��� + 1�
Transmitancja ekstrapolatora ma postać
���� =1 − �����
�
Rozwiązanie
��� =��
� ∙ ��� + 1�=
�
�� + 1
�� = �
− ����
�
= �
− �
gdzie: � = ����
�
Transmitancja dyskretna układu
���� =
− 1
�� =
− 1
�
− �
Wymuszenie skokowe
���� =1
�⟹ ��� =
− 1
24

Odpowiedź operatorowa
���� = ��������� =
� − 1
��
�
� − ��∙
�
� − 1= �
�
� − ��
Odpowiedź dyskretna
���� = ����= � ∙ �
���
� �
1 2 3 4 5 6 7 8 9 10 0
0.2
0.4
0.6
0.8
1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
��
= 1 [s] ��
= 0.5 [s] ����
�� ����
��
� = ���
25

Badanie stabilności dyskretnego układu regulacji automatycznej
Struktura dyskretnego układu regulacji automatycznej pokazana jest na rys. 4.
Zamknięty układ regulacji jest asymptotycznie stabilny, jeżeli przy wymuszeniach równych zeru
i dowolnych warunkach początkowych uchyb w układzie dąży do zera, gdy k dąży do nieskończoności.
Wynika stąd, że układ jest asymptotycznie stabilny wtedy i tylko wtedy, gdy
lim�→�
���� = 0, (13)
a to ma miejsce wtedy gdy
|��| < 1 , � = 1, 2, … , �
�(���) �(�)
�(�) ��
(�)
���
�(�) (���) �
�(�) (�)
�(���) �(�)
��
(�)
���
�(�)
−
(�)
Rys. Schemat dyskretnego układu regulacji a) i jego schemat równoważny b)
��(�)
�(���) �(��
�)
��
() ��
(���)
− ��()
(���)
a)
b) ��
() �() () �()
26

Bieguny rzeczywiste
Weźmy pod uwagę transmitancję układu pierwszego rzędu o postaci:
���� =�(�)
�(�)=
�
�� + 1=
�
�
1
� + z biegunem �� = − = −
1
�
Odpowiadająca temu obiektowi transmitancja w dziedzinie tegoż obiektu, nie poprzedzonego
ekstrapolatorem, przyjmie postać:
��� =�()
�()=
�
�
− �����=
�
�
− �=
�
�
1
1 − z�z��= z biegunem � = �����
Odpowiadające tej transmitancji równanie różnicowe ma postać
�� � − a��� − 1� = ���� �, gdzie: � = �, �� =�
�
Dla warunków początkowych �(0) ≠ 0 i dla �( ) = 0 otrzymuje się równanie jednorodne
�� � − a��� − 1� = 0
o poniższym zbiorze wartości chwilowych zmiennej �( ):
��1� = ���0�
��2� = ���1� = ����0�
⋮
�� � = ����0�
27

1.5 1 0.5 0 0.5 1 1.51
0.5
0
0.5
1
Re{z}
Im{z}
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
y k( )
y k( )
k
0 1 2 3 4 5 6 7 8 9 101
0.6
0.2
0.2
0.6
1
1.4
y k( )
y k( )
k
0 a 1< 1<1− a 1< 0<
y k( ) a 1k y0⋅:=
28

1.5 1 0.5 0 0.5 1 1.51
0.5
0
0.5
1
Re{z}
Im{z}
y k( ) a 1k y0⋅:=
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
y k( )
y k( )
k0 1 2 3 4 5 6 7 8 9 10
1.2
0.8
0.4
0
0.4
0.8
1.2
y k( )
y k( )
k
a1 1a 1 1−
29

1.5 1 0.5 0 0.5 1 1.51
0.5
0
0.5
1
Re{z}
Im{z}
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
y k( )
y k( )
k0 1 2 3 4 5 6 7 8 9 10
2.5
1.5
0.5
0.5
1.5
2.5
y k( )
y k( )
k
a 1 1−< a 1 1>
y k( ) a 1k y0⋅:=
30

1.5 1 0.5 0 0.5 1 1.51
0.5
0
0.5
1
Re{z}
Im{z}
0 1 2 3 4 5 6 7 8 9 100.1
0.1
0.3
0.5
0.7
0.9
1.1
y k( )
y k( )
k
y k( ) a 1k y0⋅:=
a 1 0=
Ponieważ bieguny w płaszczyźnie si z związane są relacją
Tseaz 111 ==
wynika stąd poniższa odpowiedniośćzmienności biegunów w swoich płaszczyznach:
bieguny w płaszczyźnie s
+∞<<∞− ps
bieguny w płaszczyźnie z∞<< pz0
Właściwość ta wskazuje, że bieguny dodatnie rzeczywiste w płaszczyźnie zwynikają tylko z położenia rzeczywistych biegunów w płaszczyźnie s. Tak więc, ujemne bieguny w płaszczyźnie z nie mają swego odpowiednika na osi rzeczywistej płaszczyzny s.
31

Bieguny zespolone sprzężone
Weźmy pod uwagę transmitancję układu ciągłego
( )( )
( )( )( )21
21
2
21
2
21
2
22
2
2 212)()()(
ssssK
sK
ssK
sTsTK
susysG
nn
o
ns
n
−−+
=++
+=
++=
++==
ωω
ω
ωζωω
ζ
aa
a( ) ( )
12,1
2222
21 111
ω
ζωζω
ζωζ
jsT
T
nn
nn
±−=
−=−=
==
a
a
gdzie
Transmitancja tego obiektu w dziedzinie z
( ) ( )( )21
12
12
11
21
2
cos2
sin
)()()(
zzzzzb
zTz
zTK
zuzyzG
−−=
+−
⎟⎟⎠
⎞⎜⎜⎝
⎛ +
==αωα
ωωωα a
Te a−=αgdzie
Bieguny układu opisuje zależność: [ ] TjTj eeTjTz )(112,1
11sincos ωωαωωα ±−± ==±= a
Równanie jednorodne przyjmie postać 0)2()1()cos2()( 21 =−+−− kykyTky αωα
Przyjmując warunki początkowe oraz ,
)0(cos)( 1 ykTky k ⋅= ωαrozwiązanie powyższego równania opisuje związek
0)0( ≠y Ty 1cos)1( ωα=
32

1.5 1 0.5 0 0.5 1 1.51
0.5
0
0.5
1
Re{z}
Im{z}
0 1 2 3 4 5 6 7 8 9 100.5
0.1
0.3
0.7
1.1
1.5
y k
y k
k
0 α< 1<
0 1 2 3 4 5 6 7 8 9 101
0.5
0
0.5
1
1.5
y k
y k
k
ω 1 T⋅ 30oω 1 T⋅ 150o
)0(cos)( 1 ykTky k ⋅= ωα
33

1.5 1 0.5 0 0.5 1 1.51
0.5
0
0.5
1
Re{z}
Im{z}
0 1 2 3 4 5 6 7 8 9 101.5
0.9
0.3
0.3
0.9
1.5
y k
y k
k
ω 1 T⋅ 30o
α 1
0 1 2 3 4 5 6 7 8 9 102
1.3
0.6
0.1
0.8
1.5
y k
y k
k
α 1>
)0(cos)( 1 ykTky k ⋅= ωα
34

)0(cos)( 1 ykTky k ⋅= ωα
1.5 1 0.5 0 0.5 1 1.51
0.5
0
0.5
1
Re{z}
Im{z}
0 1 2 3 4 5 6 7 8 9 102
1.3
0.6
0.1
0.8
1.5
y k
y k
k
ω1 T⋅ 90o
0 α< 1<
0 1 2 3 4 5 6 7 8 9 102
1.3
0.6
0.1
0.8
1.5
y k
y k
k
ω 1 T⋅ 180o
35

Jeżeli pojedynczy biegun, lub pojedyncza para biegunów zespolonych sprzężonych, znajduje się na
okręgu jednostkowym, wówczas układ jest na granicy stabilności (stabilny krytycznie). W przypadku
istnienia na okręgu jednostkowym biegunów wielokrotnych układ staje się niestabilny.
Stabilność układów impulsowych można badać metodami algebraicznymi i częstotliwościowymi.
Korzysta się przy tym z innego rodzaju transformacji zwanej transformacją biliniową, w której
operatorem jest zmienna w.
Transformacja biliniowa
� =1 + �
1 − �
odwzorowuje okrąg jednostkowy na płaszczyźnie zmiennej zespolonej z na oś liczb urojonych w
płaszczyźnie w. Zatem wnętrze okręgu jednostkowego jest odwzorowywane w lewej półpłaszczyźnie
zmiennej zespolonej w.
Zachodzi tu zależność
�(�) = ��(�)|��
���
���
(14)
Ponieważ płaszczyzna w odgrywa tę samą rolę co płaszczyzna s dla układów ciągłych, dlatego też mogą tu
być stosowane kryteria stabilności opracowane dla układów ciągłych.
36

Jeśli znana jest transmitancja
���� = ���(�)��(�)|��
������
=�(�)
(�) (15)
układu otwartego lub równanie charakterystyczne dla zmiennej zespolonej w układu zamkniętego
���� = ��� + ���� , (16)
to postępowanie przy badaniu stabilności metodą Hurwitza jest takie same jak w przypadku badania
stabilności układów ciągłych na podstawie transmitancji �().
Badając stabilność układów dyskretnych za pomocą kryterium Nyquista postępuje się tak jak
w przypadku układów ciągłych. Analogię transmitancji widmowej otrzymuje się przez podstawienie
� = �� (17)
Zmienna � związana jest z częstotliwością sygnału wejściowego zależnością
=2
�arc tan� (18)
Funkcja �(��) = ��(�)|���� może być wykorzystana do analizy stabilności układu na podstawie
kryterium Nyquista.
37

Przykład 4
Sprawdź stabilność układu, którego równanie charakterystyczne ma postać:
���� = 27�� + 27�� + 9� + 1 = 0
���� = �����|��
���
���
= 27 �1 + �1 − �
�
+ 27 �1 + �1 − �
�
+ 91 + �1 − � + 1 =
8(� + 2)�
�1 − ���
���� = �� + 6�� + 12� + 8 = 0
∆�= 6 1
8 12� > 0 , ∆�= ∆� ∙ 8 > 0.
Układ dyskretny jest stabilny
38

Przykład 5
Wyznacz dla jakich wartości współczynnika a układ jest stabilny asymptotycznie
���� =� + 1
�� + � + �
���� = ��(�)|��
���
���
= 1 + �1 − ��
�
+1 + �1 − � + � = 0
����� = ��� + 2�1 − ��� + 2 + � = 0
� > 0, 1 − � > 0 ↔ � < 1, 2 + � > 0 ↔ � > −2
1 > � > 0
Przykład 6
Wyznacz dla jakich wartości współczynnika a, dyskretny układ regulacji automatycznej o transmitancji
układu otwartego z zadania poprzedniego będzie asymptotycznie stabilny.
Równanie charakterystyczne układu regulacji ma postać
���� = �� + � + � + � + 1 = �� + 2� + � + 1
���� = ��(�)|��
���
���
= 1 + �1 − ��
�
+ 21 + �1 − � + � + 1
����� = ��� − 2a� + 4 + �
Układ jest niestabilny. Nie jest spełnione pierwsze kryterium Hurwitza
39

Dokładność statyczna jest szacowana na podstawie oceny uchybu regulacji w stanie ustalonym
�� = lim���
��1 − ��� 1
1 + ���� ��(�)� = lim���
��� − 1� 1
1 + ���� ��(�)� (19)
Obliczana tu jest wartość uchybu ustalonego w zależności od typu sygnału wymuszenia i stopnia
astatyzmu układu otwartego, czyli klasy układu.
Standardowymi typami sygnałów wymuszających są:
− sygnał skokowy (sterowanie pozycyjne) ����� = �� = Az
z − 1 (20)
− sygnał liniowy (sterowanie prędkościowe) ����� = ��� = A�� z
�z − 1�� (21)
− sygnał paraboliczny (sterowanie przyspieszające) ����� = ��� = A��� z(z + 1)
�z − 1�� (22)
40

Przy wymuszeniu skokowym uchyb pozycyjny
�� = �� = lim���
��� − 1� 1
1 + ���� ��
� − 1� = lim
���� 1
1 + ���� �� (23)
wynosi
�� =�
1 + �
(24)
i którego wartość zależy od wartości współczynnika wzmocnienia pozycyjnego określonego wyrażeniem
� = lim���
���� . (25)
W identyczny sposób można określić uchyby: prędkościowy
�� = lim���
��� − 1� 1
1 + ���� ���
(� − 1)�� =
��
(26)
gdzie wartość współczynnika wzmocnienia prędkościowego wynika z zależności
� =1
� lim���
(� − 1)���� (27)
oraz przyspieszeniowy
� = lim���
��� − 1� 1
1 + ���� ������ + 1�
2�� − 1��� =�
(27)
przy czym
=1
�� lim���
(� − 1)����� . (28)
41

Zadanie 7
Wyznacz uchyby regulacji przy wymuszeniach:
pozycyjnym, prędkościowym i przyspieszeniowym
dla układu regulacji pokazanym na rysunku obok,
gdzie:
����� =�
���� + 1�
Transmitancja ekstrapolatora ma postać
���� =1 − �����
�
Rozwiąznie
Transmitancja układu otwartego ma postać (patrz przykład 2)
���� = � −� + � − 1
− � +��
− 1�
Wzmocnienie pozycyjne wynosi
�� = lim��
��� = ∞; stąd � =�
1 + ��
= 0
Wzmocnienie prędkościowe wynosi
�� =1
�� lim��
( − 1)��� =1
�� lim��
� − 1�� −� + � − 1
− � +��
− 1� = �
stąd � =���
=��
�(�) �(�) �(�)
���
��� �
�(�)
�(�)
�(�)
42

Wzmocnienie przyspieszeniowe wynosi
�� =1
��� lim���
(� − 1)����� =1
��� lim���
(� − 1)�� �−� + � � − 1
� − �� +��
� − 1� = 0
stąd � =��
= ∞
43

Przykład 8. Dany jest układ regulacji o transmitancji układu otwartego
���� = � ��� − 1
Dla jakich wartości wzmocnienia i okresu próbkowania układ regulacji będzie stabilny przy określonej
wartości uchybu prędkościowego regulacji. Wymuszenie układu wynosi
����� = � = ��
����� = �� ��� − 1��
Uchyb układu zamkniętego
� = lim��� �� − 1� 1
���� ��(�)� = lim��� �� − 1� � − 1
��� �� ��� − 1��� =
�
Wielomian charakterystyczny
���� = � − 1 + ���
���� =1 + �1 − � − 1 + ���, ��
��� = ���� + 2 − ���
Warunek stabilności układu
2 − ��� > 0 ↔ 0 < � <2
��
Ale ze względu na dokładność wzmocnienie ma też lewostronne ograniczenie
� < � <
2
��
44

PODSTAWOWE ALGORYTMY BEZPOŚREDNIEGO STEROWANIA CYFROWEGO (DDC)
���� = �� ����� +1�� ����(�)
�
0
+ �� �(�)� � (29)
Algorytm pozycyjny
���� = �� ���� +���� ��(�)
���
�
+���� ����� − �(� − 1)�� (30)
Podstawowe wady algorytmu pozycyjnego:
− trudność w obliczaniu składnika
���� ��(�)���
�
− (ograniczenia pamięci – sumowanie od � = 0)
− brak zabezpieczenia przed nieograniczonym wzrostem sygnału �(�) w przypadku niemożności
wyzerowania uchybu regulacji �(�) = ��(�) − �(�) . Sygnał uchybu jest bowiem zależny od
wartości zadanej ��(�) i wobec tego wszystkie trzy składniki wzoru algorytmu zależne są od ��(�).
Wad tych pozbawiony jest tzw. algorytm prędkościowy, który oparty jest na uwzględnieniu przyrostów
zmiennych . tj. i uchybu regulacji ∆�(�) = �(�) − �(� − 1) i sterowania ∆�(�) = �(�) − ��� − 1�, przy
czym
��� − 1� = �� ��� − 1� +���� ��(�)
���
�
+���� ���� − 1� − �(� − 2)�� (31)
45

Stąd, odejmując wyrażenie (30) od wyrażenia (31), algorytm prędkościowy PID przyjmuje postać
∆���� = ���� − ��� − 1� = �� �∆���� +���� ∆��� − 1� +
���� ∆��� − 1� − ∆��� − 2�� (32)
lub
∆���� = ���� − ��� − 1� = ������ + ����� − 1� + ����� − 2� (33)
gdzie
�� = �� 1 +���� � , �� = �� ���� − 2
���� − 1� , �� = ��
����
��
��
�(� − 1) ��� ���
�(� − 2) ��
���
�(�)
�(� − 1)
�(�) Δ�(�)
Algorytm prędkościowy
Algorytm pozycyjny
46

Algorytm PID
Regulator dyskretny drugiego rzędu opisany jest poniższą transmitancją operatorową
����� =��z���z� =
�� + ����� + �����1 − ��� (34)
Zakładając skokowy charakter wymuszenia, podanego na wejście regulatora, jakim jest uchyb regulacji,
czyli
��� = 1�� = 1 dla > 0
0 dla < 0�
uzyskuje się odpowiedź regulatora w postaci ciągu wartości próbek:
��0� = ����1� = ��0� + �� + �� = 2�� + ����2� = ��1� + �� + �� + �� = 3�� + 2�� + ��⋮
��� = �� − 1� + �� + �� + �� = � + 1��� + �� + ( − 1)��
Jeżeli założy się, że kolejne próbki mają spełnić warunki ��1� < ��0� i ��� < �� − 1� ( ≥ 2 ), wówczas
otrzymuje się regulator dyskretny, którego charakter przebiegu sygnału wyjściowego (odpowiedzi) jest
podobny do powszechnie stosowanego w układach analogowych (ciągłych) regulatora PID. Przebieg
próbek tak ukształtowanego sygnału ilustruje poniższy rysunek
47

Wartości poszczególnych próbek wynikają stąd, że dla:
��1� < ��0� �� + �� < 0 lub �� < −��
���� > ��� − 1� �� + �� + �� > 0 lub �� > −��� + ���
Zatem, aby regulator realizował algorytm typu PID,
pomiędzy jego współczynnikami qi powinny zachodzić
następujące relacje
�� > 0 �� < �� > 0 − ��� + ��� < �� < ��
k
u(k)
q0
2q0+q1
q0+q1+q2
q0-q2
1 2 3 4 0 5
q1= -q0
q0i q0i
-q 0i
-2q0i
q1= -(q0i + q2)
q0 q2
q1 q1
48

Regulatory o skończonej odpowiedzi impulsowej – SOI
Wiadomo, że im „głębiej” bieguny układu zamkniętego przesunięte są w lewą półpłaszczyznę zmiennej
zespolonej s, tym „szybciej” układ uzyskuje wartość zadaną sygnału wejściowego. W skrajnym przypadku,
gdyby bieguny te mogły osiągnąć -∞, co w praktyce analogowych technik regulacji jest niemożliwe, układ
byłby „najszybszy”.
Z zależności � = ���� widać, że wartościom �� = −∞ biegunów w płaszczyźnie zmiennej zespolonej �
odpowiadają wartości �� = 0 biegunów w płaszczyźnie zmiennej zespolonej �. Są to więc bieguny leżące
w początku układu współrzędnych – w środku okręgu jednostkowego. Zatem jest to interesujące miejsce
lokalizacji biegunów w układach regulacji dyskretnej. Zapewnia ono bowiem minimalny czas osiągnięcia
stanu ustalonego. Wielomian charakterystyczny takiego układu regulacji miałby więc postać
����� = ���� , (35)
przy czym: � =�
� i gdzie � jest opóźnieniem transportowym występującym w układzie sterowania.
Układy z regulatorami umożliwiającymi uzyskanie takich postaci wielomianów charakterystycznych
układów zamkniętych regulacji nazywane są układami o skończonym czasie odpowiedzi impulsowej SOI..
W literaturze anglosaskiej ten typ regulacji znany jest pod nazwą deadbeat control. Regulatory realizujące
taki algorytm należą do grupy regulatorów kompensacyjnych
Regulatory kompensacyjne zapewniają uzyskanie pożądanych właściwości układu regulacji w wyniku
kompensacji całości lub fragmentu transmitancji obiektu sterowanego.
49

Znajomość pożądanej transmitancji wynikowej
����� =
��z�
��z�=
��(�)
1 + ������
�(�)
(36)
pozwala, na drodze przekształceń algebraicznych, wyznaczyć transmitancje regulatora
����� =
1
��(�)
�����
1 − �����
(37)
Otrzymany regulator powinien spełnić warunek realizowalności, tzn. wynikowa wartość próbek sygnału
sterującego �(�) nie może zależeć od następnych - „przyszłych” - próbek uchybu regulacji (� + )
(stopień wielomianu licznika regulatora nie może być większy od stopnia wielomianu mianownika). Poza
tym stosowanie regulatorów kompensacyjnych jest możliwe tylko w sytuacjach, gdy ma się gwarancję co
do odpowiednio dobrej (pewnej) lokalizacji biegunów i zer transmitancji procesu wewnątrz okręgu
jednostkowego. Przy projektowaniu regulatorów kompensacyjnych, wymaga się również dokładnego
określenia oczekiwanej odpowiedzi układu zamkniętego w każdej dyskretnej chwili czasowej, a więc tym
samym precyzyjnego określenia transmitancji dyskretnej układu �����. Pominięcie tego wymogu może
spowodować pojawianie się, w zakresie czasowym pomiędzy poszczególnymi chwilami czasu
dyskretnego, przebiegów odpowiedzi układu o charakterze oscylacyjnym lub nieregularnego falowania -
„marszczenia" się sygnału odpowiedzi. Przebiegi te są zwykle słabo tłumione i znacząco wpływają na
sygnał sterowania.
50

Tego niekorzystnego zjawiska, towarzyszącego układom regulacji (patrz rys na str.13) z regulatorami
kompensacyjnymi można uniknąć stosując regulator o postaci:
����� =����
����=
����(���)
1 − ���(���)���, gdzie �� = 1
∑��� (38)
gdzie �(���) i ��(���) są wielomianami transmitancji obiektu regulacji opisanego w postaci
����� =�(���)
��(���)��� =
�� + ����� + ���
�� + ⋯ + ���
1 + ���� + ���� + ⋯ + ����� , (39)
umożliwiający regulację typu SOI (DB).
Tak więc, parametry regulatora mogą być wyznaczone w bardzo prosty sposób, bo bezpośrednio na
podstawie wartości parametrów procesu (obiektu)
Transmitancja wypadkowa układu regulacji przyjmie postać
����� =����
�����=
���(�)
���, gdzie �� = 1
∑��� (40)
To oznacza, że poddając układ wymuszeniu np. skokowemu, sygnały sterujący �(�) i wyjściowy �(�)
procesu osiągną swój nowy stan ustalony po ściśle określonym czasie �� = �� + ��� .
Warto przy tym zwrócić uwagę na fakt, że wraz ze zmniejszaniem okresu impulsowania T wartość sumy
∑ �� maleje co powoduje wzrost wartości współczynnika �0
, a w rezultacie wzrost wartości próbki
początkowej sygnału sterującego, gdyż �(0) = �0. Spostrzeżenie to jest istotne ze względu na ograniczenia
jakim w praktyce podlegają wartości tego sygnału (ograniczenia poziomu sygnałów przetworników C/A,
ograniczenia źródeł zasilania, zjawisko nasycenia).
51

Uwagi dotyczące doboru czasu próbkowania w algorytmach o optymalizowanych parametrach.
Jak wiadomo regulatory dyskretne mają ogólnie gorsze własności w stosunku do regulatorów
ciągłych. Interpretacja tego faktu jest niekiedy oparta na stwierdzeniu, że sygnały dyskretne zawierają
mniej informacji niż sygnały ciągłe. Z drugiej strony trzeba jednak podkreślić, że nie tylko zasób informacji
ale także sposób jej wykorzystania powinien być przedmiotem szczególnego zainteresowania. Ponadto na
ocenę własności regulatorów ma wpływ klasa oraz widmo częstotliwości sygnałów zakłócających. Pod
tym wzlędem trudno jest dokonać jakiejś uogólnionej oceny własności regulatorów dyskretnych.
Dla regulatorów dyskretnych jedno podstawowe stwierdzenie jest słuszne, a mianowicie to, że własności
regulacyjne pogarszają się wraz ze wzrostem okresu próbkowania. Zatem, okres próbkowania powinien
być możliwie jak najmniejszy, o ile zasadniczym podmiotem zainteresowania są własności regulacyjne.
Wybór wartości okresu próbkowania zależy nie tylko od osiągalnych własności regulacyjnych, ale także
od:
• pożądanych (wystarczająco dobrych) własności regulacyjnych,
• dynamiki procesu,
• widma częstotliwości,
• wyposażenia pomiarowego,
• wymagań operatora,
• mocy obliczeniowej i kosztów przypadających na jedną pętlę sprzężenia zwrotnego.
52

W praktyce wartość okresu próbkowania �� dobiera się ze względu na:
− czas wysterowania procesu ��� → ���� = 0,95��(�)
1
15��� ≤ �� ≤
1
6���
− dominującą wartość czasu martwego � (opóźnienia występującego w procesie ����exp (−��)
�� ≈ �1,2 ⋯ 0,35�� dla 0,1 ≤�
��≤ 1,0
�� ≈ �0,35 ⋯ 0,22�� dla 1,0 ≤�
��≤ 10
�� ≈ �0,125 ⋯ 0,35�� dla �
��> 10
gdzie: �� - suma stałych czasowych obiektu,
− drgania na granicy stabilności �� = (0.01 ⋯ 0,05)��
− zakłócenia (tw. Shanona-Kotielnikowa) �� < ���
53