Masini Unelte II

of 45
Transcript of Masini Unelte II
-
8/12/2019 Masini Unelte II
1/45
Ciupan C. Masini nunelte Curs nr.1 Page 1 03.05.2010
1. PROIECTAREA MAINILOR UNELTE1.1. Bibliografie:
[GAL94][GHE83]
[BOT75]
[POP]
1.2. Clasificarea masinilor unelte- Duptipul operaiei de baz:
- Dupgradul de universalitate:
- Dupgradul de automatizare:- Dupmrime:- Dupclasa de precizie:1.3. Aspecte generale privind proiectarea m-u
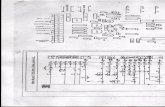
Pentru a corespunde procedeului tehnologic i operaiilor prevzute a se executa, m-u trebuie sasigure urmtoarele funcii: Realizarea micrii relative scul-pies; Reglarea parametriilor regimului de achiere; Reglarea poziiei relative scul-pies; Fixarea sculelor i a semifabricatului.Realizarea acestor funcii necesitmicri elementare sau operative care se obin de la una sau de la mai multe sursemotoare. n multe cazuri sunt necesare mecanisme de transmitere, de transformarei de reglare a micrii.Pentru acasta structura cinematica a m-u conine mai multe axe cinematice carecontribuie la realizareafunciilor prezentatemai sus. Fiecare axcinematicgenereazo micare elementarcare poate fi o micare operativ:- principal;- de avans;- auxiliar(de reglare).Figura de mai jos reprezintschema cinematici constructiva unei maini de frezat universale.
-
8/12/2019 Masini Unelte II
2/45
Ciupan C. Masini nunelte Curs nr.1 Page 2 03.05.2010
Fig. 3.1 a Din punct de vedere constructiv maina are n componena urmtoarele subansamble:
o Batiu (placa de baz+montant);o Sanii de avans X,Y,Z;o Traversa;o Arborele principal (cu sistemul de fixare a sculei);
Pentru realizarea micrilor necesare prelucrrii, freza din figura 3.1a are n componenurmtoarele axe cinematice(lanuri cinematice):
o principal (Motor 1-1-2-arbore principal);o de avans (motor avans-CA-/surub X; surub Y; urub Z).
Din analiza de mai sus se constatcproiectarea unei masini unelte poate fi abordatn douetape:o proiectarea cinematic;o proiectarea organologic.
Cele douetape sunt ntr-o interdependenperfect, deoarece se supun scopului principal-maina.Proiectarea cinematic presupune stabilirea schemelor de prelucrare, a schemelor cinematice i efectuarea calculelorcinematice. Proiectarea organologic se refer la proiectarea ansamblelor, subansamblelor i a organelor componente ale
mainii. (ezi fig. 3.1b.).La mainile unelte NC (i la roboi industriali), micrile operative complexe sunt rezultatul aciunii combinate a mai multoraxe NC, fiecare dintre acestea realiznd cte o micare elementar. In scopul generrii unor suprafee complexe, mainileunelte NC sunt prevzute cu echipamente de conturare n dou sau trei axe, fapt ce le permite corelarea a dou sau treimicri elementere.
Automatizarea flexibil a proceselor de prelucrare presupune, n cazul unor maini unelte speciale (cum ar fi cele dedanturat), existena unui numr mai mare de axe cinematice NC i a unor echipamente de comandadecvate.
n aplicaiile roboilor industriali sunt rare situaiile n care generarea traiectoriei spaiale a organului de lucru nu necesitcel puin o micare complex compusdin dou micri elementare. Aici, fade cazurile ntlnite la maini unelte NC,apar frecvent micri complexe alctuite dintr-un numr mult mai mare de micri elementare. Spre exemplu, la roboiparaleli, chiar i o deplasare simplde translaie sau de rotatie constituie o micare complexgeneratcu ajutorul a asemicri elementare. Numrul de axe NC (i de micri elementare) se amplific la utilizarea unor structuri nseriate de
roboi paraleli sau la realizarea unor roboi cu micri umanoide.
Placa de baz
Montant
Arboreprincipal
TraversaSuport
Dornportfreza
Freza
Piesa
Sania X
Sania Z
Sania Y
Motor 1Cutia deviteze
Volant
1
2Surub X
Surub Z
Surub Y
Cutia deavans
Motoravans
Roti demana
-
8/12/2019 Masini Unelte II
3/45
Ciupan C. Masini nunelte Curs nr.1 Page 3 03.05.2010
Necesitatea de a realiza pe cale cinematic sau nu curbele generatoare din procesul de achiere sau curbele dupcare are
loc mnuirea sculelor sau obiectelor, are n majoritatea cazurilor, influendecisivasupra modului de acionare a axelorcinematice.
Motoarele utilizatepentru acionarea axelor cinematice pot fi mprite, dupmodul de lucru, n doumari categorii:
motoare de turaie constant:
motoare de turaie variabil:
Este evident faptul c includerea unui motor ntr-una din cele doucategorii nu poate fi fcut fra lua n considerare
echipamentul de comand. Spre exemplu un motor asincron poate face parte din ambele categorii.
Axele cinematice cu comand rigid (lanturile cinematice) utilizeaz cu preponderen acionarea cu motoare de turaie
constant, n timp ce axele cu comandflexibilutilizeazaproape n exclusivitate motoare de turaie variabil.
STABILIREA SCHEMELOR DE PRELUCRARE
CALCULUL REGIMURILOR DE ASCHIERE(pentru cazurile cele mai defavorabile)
REZULTATE(viteze; turatii; forte; momente; puteri)
CONCEPTIA SCHEMEICINEMATICE
componenta; actionarea;transmiterea si reglarea miscarii;
inerconexiuni etc.
PROIECTAREA ORGANOLOGICAbatiu; ghidaje; sanii; lagare;
mecanisme de transmiterea sireglarea miscarii; etc.
CALCULE CINEMATICEturatii; viteze de avans;acceleratii;
forte;momente; puteri
rapoarte de transfer;
CALCULE SI VERIFICARIORGANOLOGICE
batiuri; ghidaje; sanii; arbori;lagare; transmisii etc.
-
8/12/2019 Masini Unelte II
4/45
Ciupan C. Masini nunelte Curs nr.1 Page 4 03.05.2010
2. PROIECTAREA PRINCIPALELOR GRUPE DE MASINI UNELTE2.1. MASINI DE GAURIT
Destinatie:Operatii:
Scule utilizate:
-
8/12/2019 Masini Unelte II
5/45
Ciupan C. Masini nunelte Curs nr.1 Page 5 03.05.2010
2.2. STRUNGURIClasificare:
Destinatie:
Operatii:
Scule utilizate:
-
8/12/2019 Masini Unelte II
6/45
Ciupan C. Masini nunelte Curs nr.1 Page 6 03.05.2010
-
8/12/2019 Masini Unelte II
7/45
Ciupan C. Proiectarea m-u Curs nr.2 Page 1 03.05.2010
1.3 MASINI DE FREZAT
Destinatie:
Operatii:
Scule utilizate:
-
8/12/2019 Masini Unelte II
8/45
Ciupan C. Proiectarea m-u Curs nr.2 Page 2 03.05.2010
-
8/12/2019 Masini Unelte II
9/45
Ciupan C. Proiectarea m-u Curs nr.2 Page 3 03.05.2010
-
8/12/2019 Masini Unelte II
10/45
Ciupan C. Proiectarea m-u Curs nr.2 Page 4 03.05.2010
-
8/12/2019 Masini Unelte II
11/45
Ciupan C. Proiectarea m-u Curs nr.2 Page 5 03.05.2010
-
8/12/2019 Masini Unelte II
12/45
Ciupan C. Proiectarea m-u Curs nr.2 Page 6 03.05.2010
1.4 MASINI DEALEZAT SI FREZATClasificare:
Destinatie:
Operatii:
Scule utilizate:
-
8/12/2019 Masini Unelte II
13/45
Ciupan C. Proiectarea m-u Curs nr.2 Page 7 03.05.2010
-
8/12/2019 Masini Unelte II
14/45
Ciupan Cornel Masini unelte Curs 2_Zalau Masini de rectificat
8
-
8/12/2019 Masini Unelte II
15/45
Ciupan Cornel Masini unelte Curs 2_Zalau Masini de rectificat
9
Fig.1
Fig. 2
-
8/12/2019 Masini Unelte II
16/45
Ciupan Cornel Masini unelte Curs 2_Zalau Masini de rectificat
10
-
8/12/2019 Masini Unelte II
17/45
Ciupan Cornel Masini unelte Curs 2_Zalau Masini de rectificat
11
-
8/12/2019 Masini Unelte II
18/45
Ciupan C MU Zalau Curs nr. 3 Page 1 03/05/2010Masini de rabotat
Destinatia masinilor:
v=2L*ncd/1000 [m/min]
Scule utilizate:Clasificare:
Fig. 1 Schema prelucrarii
Fig. 2 scule utilizate
-
8/12/2019 Masini Unelte II
19/45
Ciupan C MU Zalau Curs nr. 3 Page 2 03/05/2010
Fig. 3 Arhitectura unei masini de rabotat transversal (sheping)
Fig. 4 Arhitectura unei masini de rabotat longitudinal (1886)
-
8/12/2019 Masini Unelte II
20/45
Ciupan C MU Zalau Curs nr. 3 Page 3 03/05/2010
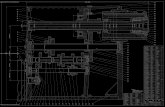
Fig. 5 Schema cinematica a unei masini de rabotat transversal
-
8/12/2019 Masini Unelte II
21/45
Ciupan C MU Zalau Curs nr. 3 Page 4 03/05/2010Masini de mortazat
Destinatia masinilor:Scule utilizate:
Clasificare:
Fig. 6 Arhitectura unei masini de mortezat
-
8/12/2019 Masini Unelte II
22/45
Ciupan C MU Zalau Curs nr. 3 Page 5 03/05/2010
Fig. 7 Schema cinematica a unei masini de mortezat
Fig. 2
Fig. 4
-
8/12/2019 Masini Unelte II
23/45
-
8/12/2019 Masini Unelte II
24/45
-
8/12/2019 Masini Unelte II
25/45
-
8/12/2019 Masini Unelte II
26/45
-
8/12/2019 Masini Unelte II
27/45
-
8/12/2019 Masini Unelte II
28/45
-
8/12/2019 Masini Unelte II
29/45
-
8/12/2019 Masini Unelte II
30/45
-
8/12/2019 Masini Unelte II
31/45
-
8/12/2019 Masini Unelte II
32/45
-
8/12/2019 Masini Unelte II
33/45
-
8/12/2019 Masini Unelte II
34/45
-
8/12/2019 Masini Unelte II
35/45
-
8/12/2019 Masini Unelte II
36/45
-
8/12/2019 Masini Unelte II
37/45
-
8/12/2019 Masini Unelte II
38/45
Generalitati privind sistemele hidraulice de actionareDefinitie. Prin sistem hidraulic de actionare se intelege acel sistem in care transmiterea
energiei de la sursa la consumator se realizeaza prin intermediul unui curent de lichidsub presiune.
Dupa ponderea energiei potentiale sau a celei cinetice in cadrul energiei totale, exista:
-sisteme hidrostatice- la carepredomina energia potentialadatorata presiunii statice; ele
prezinta o caracteristica mecanica rigida si au o larga utilizare in actionarea masinilor si
utilajelor industriale;
-sisteme hidrodinamice- la carepredomina energia cinetica; ele prezinta o caracteristica
mecanica elastica si au o utilizare redusa in industrie.
In general, un sistem hidraulic presupune existenta unei pompe hidraulice care realizeaza
presiunea de lucru si debitul necesar si a unui motor hidraulic care transforma energiafluidului in energie mecanica.
Figura 1. Avansul de pendulare a mesei la o masina de rectificat (schema simplificata)
Spunem ca schma din fig. 1 este simplificata deoarece nu prezinta modul de reglare a vitezei
de avans. Pentru o functionare corespunzatoare mai sunt necesare si alte aparate hidraulice
-
8/12/2019 Masini Unelte II
39/45
Mediul hidraulicMediul hidraulic este suportul material prin prin care se transmite energia hidraulica de la
sursa la consumator.
Deoarece el vine in contact cu masinile hidraulice, cu aparatajul si cu personalul de deservire,iar in timpul functionarii instalatiei este supus unor variatii importante depresiune,
temperatura si viteza, el trebuie sa raspunda urmatoarelor cerinte generale:
- stabilitate ridicata a proprietatilor fizico-chimice, in special a vascozitatii, in domeniul
temperaturilor normale de lucru (30-70C) si la variatii ale presiunii (0- x100 bar.);
- sa nu fie coroziv sau toxic;
- sa aiba un cost cat mai redus.
2. Elemente esentiale intr-un sistem hidraulic:Presiune si debitul Forta si viteza
Reluam exemplul din fig. 1. Motorul hidraulic trebuie sa asigure o anumita forta pentru a ficapabil sa capabil sa invinga forta de avans de la rectificare si celelate forte (de frecare, de
inertie). Pe langa asigurarea fortei necesare, motorul trebuie sa ofere si o viteza de avans
corespunzatoare procesului de rectificare, reglabila intr-un anumit domeniu (exemplu 1-50
m/min).
Figura 2. Dependenta presiune-forta si debit viteza
Pe baza fig. 2 se pot scrie :
4
DpSpF
2
== (1)
Cunoscand forta totala rezistenta si considerand F=Fr, din (1) se poate determina diametrul
cilindrului sau daca se considera diametrul cunoscut rezulta presiunea de lucru.
Cum obtinem viteza dorita ? SA MARIM PRESIUNEA ????
Din fig 2 rezulta ca odata cu modificarea vitezei se modifica si cantitatea de ulei ce intra in
cilindru :
-
8/12/2019 Masini Unelte II
40/45
4
DvSvQ
2
== (2)
Pentru a obtine o viteza maxima, pompa trebuie sa fie capabila de a oferii un debit
corespunzator, dat de relatia 2.
3. Pompe volumiceAceste pompe lucreaza prin modificarea volumului camerelor de lucru (sa ne gandim la
pompa cu piston de la bicicleta).
Clasificare
Caracteristicile generale ale pompelor volumice:
a)Debitul mediu teoretic:
QT = V.z.i.n, in care:
V este variatia volumului camerelor de pompare;
z- numarul camerelor de pompare;
i-numarul de actiuni (cicluri absorbtie refulare la o rotatie a axului pompei);n-turatia de antrenare a pompei;
b)Debitul real:QR = QT - Q
Q -pierderea interioara la trecerea lichidului prin pompa;
c)Pulsatia debitului: variatia acestuia in timp datorata actiuniii succesivea camerelor de
pompare in camera de refulare si variatiei neliniarein timp a debitului pompat, caracterizata
prinfrecventa pulsatiei, f p =z.i.n, si gradul de neuniformitate,
= (Qmax-Qmin) / Qmed ;
d)Presiunea nominala, p n ;
e)Puterea hidraulica,N h = Q. p ;
f)Randamentul total:t = v. p. m , ca produs al randamentelor partiale: volumic, de
-
8/12/2019 Masini Unelte II
41/45
presiune si mecanic.
3.1 Pompa cu roti dintate. Principiul constructiv si functional
1-corpul pompei;
2- rotor conducator;
3- rotor condus;4- capace laterale;
5-lagare;
6-garnitura de etansare; 7-capac;
A- camera de absorbtie;B- R- camera de refulare;
n turatia de antrenare;
Caracteristici :
simplitate constructiva; cost redus; debite medii (x1-x10 l/min); presiuni mici-medii (x1-150 bar); debit constant.
3.2 Pompa cu pistoane axiale
c) - cu disc fulant si distribuitor frontal;d) - cu disc fulant si distributie prin ventile de sens.1 - blocul pistoanelor;2 - disc de actionare a pistoanelor;3 - distribuitor frontal;4 - biele sau arcuri de antrenare a pistoanelor;5 - sistem de rotire si actionare axiala
a elementului condus;
-
8/12/2019 Masini Unelte II
42/45
- unghi de inclinare;n - turatia de antrenare a pompei;Va - ventile de absorbtie ;Vr - ventile de refulare.3.3 Pompe cu pistoane radialeAu pistoanele dispuse perpendicular pe axa de rotatie a pompei.
3.4 Pompe cu paleteLa pompele cu palete camerele de pompare (fig.3.48 ) sunt delimitate de statorul 1, rotorul 2,
doua palete radiale alaturate mobile 3 deplasabile in rotor, si capacele laterale 4.
Debitul pompelor cu simpla actiune se calculeaza cu o formula de forma:Q=4..e.Rs.b.n ;
4. Motoare hidrauliceSunt masini hidraulice volumice care realizeaza conversia energiei hidraulice ( Q; p ) in
energie mecanica (M; n, sau F ; v ), conform cerintelor de actionare impuse de masina
antrenata.
Clasificareamotoarelor hidrostatice:
-
8/12/2019 Masini Unelte II
43/45
4.1 Motoare hidrostatice pentru rotatie continuaSunt destinate antrenarii organelor de lucru intr-o miscare de rotatie continuasi deriva din
pompele hidraulice, prin reversibilitatea acestora.
Turatia lor se calculeaza cu o relatie de forma:
n = Q /V1,
in care V1 este volumul specific (cilindreea, sau volumul corespunzator unei rotatii).
V1 poate fi constant(motoare de turatie constanta), sau reglabil(motoare de turatie
reglabila).
Motoarelelente(n = x1-x100 rot/min ) sunt in general constructii speciale bazate insa pe
aceleasi principii functionale ca si motoarele normale.Simbolizarea motoarelor pentru rotatie continua (fig. 3.68):
a) motor unisens, de cilindree constanta ;
b)- motor dublu sens, de turatie constanta ;
c)- motor unisens, reglabil ;
d)- motor dublu sens, reglabile,f)- unitati de lucru (pompa si motor)
4.2 Motoare hidrostatice oscilanteSunt destinate realizarii miscarii de rotatie pe un unghi limitat, determinat, constant sau
reglabil.
Constructiv, pot fi realizate:- cu paleta(simpla, dubla, sau multipla), fig.3.73, sau cu piston
(simplu, dublu , sau multiplu), .
-
8/12/2019 Masini Unelte II
44/45
Marimi caracteristice pentru motoarele cu paleta
Pentru motoarele cu piston:
Simbolizare:
-
8/12/2019 Masini Unelte II
45/45
ERROR: stackunderflow
OFFENDING COMMAND: ~
STACK: