
La quantità di moto
15
G.M. - Informatica B- Automazione 2002/03 La quantità di moto • Data una particella di massa m che si muove con velocità v • Si definisce quantità di moto la quantità: r p =m r v r v m r p =m r v – È un vettore • Prodotto di uno scalare positivo, m, per un vettore, v. • Stessa direzione e verso di v, • Il modulo è m volte quello di v. – Le dimensioni: [p]=[m][v]=[M][LT -1 ] – Nel SI si misurerà in kg m s -1 • Se sul punto materiale agisce una forza, – la sua velocità cambierà, – ma cambierà anche la sua quantità di moto d r p dt = dm r v ( ) dt = per m costante d r p dt = dm r v ( ) dt =m d r v dt =m r a = r F d r p dt = r F
-
Upload
stacey-riddle -
Category
Documents
-
view
42 -
download
0
description
La quantità di moto. Data una particella di massa m che si muove con velocità v. Si definisce quantità di moto la quantità:. È un vettore Prodotto di uno scalare positivo, m, per un vettore, v . Stessa direzione e verso di v , Il modulo è m volte quello di v . - PowerPoint PPT Presentation
Transcript of La quantità di moto

G.M. - Informatica B-Automazione 2002/03
La quantità di moto
• Data una particella di massa m che si muove con velocità v
• Si definisce quantità di moto la quantità: r p =m
r v
r v
m
r p =m
r v
– È un vettore• Prodotto di uno scalare positivo, m, per un vettore, v.
• Stessa direzione e verso di v,
• Il modulo è m volte quello di v.
– Le dimensioni: [p]=[m][v]=[M][LT-1]
– Nel SI si misurerà in kg m s -1
• Se sul punto materiale agisce una forza, – la sua velocità cambierà,
– ma cambierà anche la sua quantità di moto
dr p dt
=d mr v ( )
dt= per m costante
dr p dt
=d mr v ( )
dt=m
dr v dt
=mr a =
r F
dr p dt
=r F

G.M. - Informatica B-Automazione 2002/03
Il prodotto vettoriale
• Dati i vettori a e b , si definisce prodotto vettoriale r a ×
r b
il vettore c così individuato:– Il modulo del vettore c è dato da:
– La direzione è perpendicolare al piano individuato dai vettori a e b.
– Il verso è determinato con la regola della mano destra:• I formulazione:
– Si dispone il pollice della mano destra lungo il primo vettore
– Si dispone l’indice della mano destra secondo il secondo vettore
– Il verso del medio individua il verso del prodotto vettoriale
• II formulazione– Si chiude a pugno la mano destra mantenendo sollevato il pollice
– Si dispone la mano destra in maniera che le dita chiuse a pugno indichino il verso in cui bisogna far ruotare il primo vettore per sovrapporlo al secondo percorrendo l’angolo minore di 180°
– Il verso del pollice individua il verso del prodotto vettoriale.
c =absenφ
dove l’angolo è l’angolo minore di 180° compreso tra i due vettori

G.M. - Informatica B-Automazione 2002/03
Proprietà del prodotto vettoriale
• Il prodotto vettoriale non è commutativo: r a ×
r b ≠
r b ×
r a
r a ×
r b =−
r b ×
r a • Infatti:
θ
h = b sin θ
rarb
Area = ah = absin θ =
r
a ×
r
b
• Interpretazione geometrica del prodotto vettoriale
• Il modulo del prodotto vettoriale è uguale all’area del parallelogramma formato con u due vettori.
• Vettori paralleli o antiparalleli hanno un prodotto vettoriale nullo

G.M. - Informatica B-Automazione 2002/03
Ulteriori proprietà del prodotto vettoriale• Prodotto vettoriale attraverso le
componenti cartesiane:
r i ×
r i =0
r i ×
r j =
r k
r i ×
r k =−
r j
r j ×
r j =0
r j ×
r k =
r i
r j ×
r i =−
r k
r k ×
r k =0
r k ×
r i =
r j
r k ×
r j =−
r i
r a ×
r b +
r c ( ) =
r a ×
r b +
r a ×
r c
Proprietà distributiva
r a ×r b =
r i
r j
r k
ax ay az
bx by bz
=
=r i aybz −byaz( )−
r j axbz −bxaz( ) +
r k axby −bxay( )

G.M. - Informatica B-Automazione 2002/03
Il momento di un vettore
• Dato un vettore V qualsiasi ed il punto O, che in questa occasione si chiama “polo”, si definisce momento del vettore V rispetto al polo O la quantità:
r M O =
r r ×
r V r posizione rispetto ad O del punto
di applicazione del vettore V. r V
r r
θ
θ
MO=rVsenθ=V(rsenθ) =bV
Il modulo del momento, MO, è uguale al modulo del vettore V per il braccio del vettore V rispetto al polo O
• Il braccio è la distanza della retta di azione del vettore V dal polo O
• Spostando il vettore V sulla sua retta di azione il momento resta invariato.
x
y
O
È importante l’ordine!Prima r poi V!
b=r senθ

G.M. - Informatica B-Automazione 2002/03
Momento della quantità di moto o momento angolare
• Data la particella di massa m, – la cui posizione è individuata, al tempo t, dal
vettore posizione r,
– che al tempo t si muove con velocità v
– E quindi possiede una quantità di moto p=mv
• Si definisce momento della quantità di moto della particella rispetto al polo O, la grandezza:
r p
r r
θ
y
O
r l O =
r r ×
r p
Il modulo vale: l O =rmvsenθ=bmv
Le dimensioni: l O[ ] = r[ ] m[ ] v[ ] senθ[ ]= LMLT −1
[ ]= ML2T−1[ ]
Le unità di misura: kgm2s-1
b=rsenθx

G.M. - Informatica B-Automazione 2002/03
Momento della forza
• Data la particella di massa m, – la cui posizione è individuata, al tempo t, dal
vettore posizione r,
– che al tempo t subisce l’azione della forza F
• Si definisce momento della forza F rispetto al polo O, la grandezza:
r F
r r
θ
y
O
r M O =
r r ×
r F
Il modulo vale: MO =rFsenθ =bF
Le dimensioni: MO[ ]= r[ ] F[ ] senθ[ ]= LMLT −2[ ]= ML2T−2
[ ]
Le unità di misura: kgm2s-2
Da non confondere con il lavoro che ha le stesse dimensioni(il lavoro è uno scalare, il momento della forza un vettore: sono due grandezze completamente diverse)
b=rsenθ=rsen180°−θ( )
b
x

G.M. - Informatica B-Automazione 2002/03
Relazione tra il momento della quantità di moto ed il momento della forza
• Durante il moto di una particella, sia la sua posizione r che la sua velocità cambiano con il tempo,– È lecito aspettarsi che anche il momento della quantità di moto della
particella rispetto al polo O vari con il tempo.
– Valutiamo a quanto è uguale la sua variazione (calcoliamo la derivata):
dr l Odt
=d
r r ×
r p ( )
dt=
dr r dt
×r p +
r r ×
dr p dt
• Attenzione a non cambiare il posto dei vettori, il prodotto vettoriale non commuta.
• Il primo termine è nullo: i due vettori sono paralleli
dr r dt
×r p =
r v ×
r p =
r v ×m
r v
dr l Odt
=r r ×
dr p dt
=r r ×
r F =
r M O
• La variazione del momento della quantità di moto della particella rispetto al polo O è uguale al momento della forza applicata valutato rispetto allo stesso polo! (è una diretta conseguenza della II legge di Newton)

G.M. - Informatica B-Automazione 2002/03
Forze centrali• Si definisce forza centrale una forza agente in una certa regione dello
spazio con le seguenti proprietà: – per qualunque posizione del punto materiale P che subisce la forza,
– la direzione della forza agente su P passa sempre per un punto fisso dello spazio, detto centro della forza centrale,
– e il suo modulo è funzione soltanto della distanza del punto materiale P dal centro stesso.
• Esempio di forza centrale: la forza di gravitazione universale.
r
r
r
F
x
y
O=S
P
r F =−G
mMr2
r u r =−G
mMr2
r r r
• Anche la forza di Coulomb è centrale
r F =
14πεo
q1q2
r2r u r
• Così come la forza elastica r F =−kxi
• Le forze centrali sono conservative
G.M. - Informatica B-Automazione 2002/03
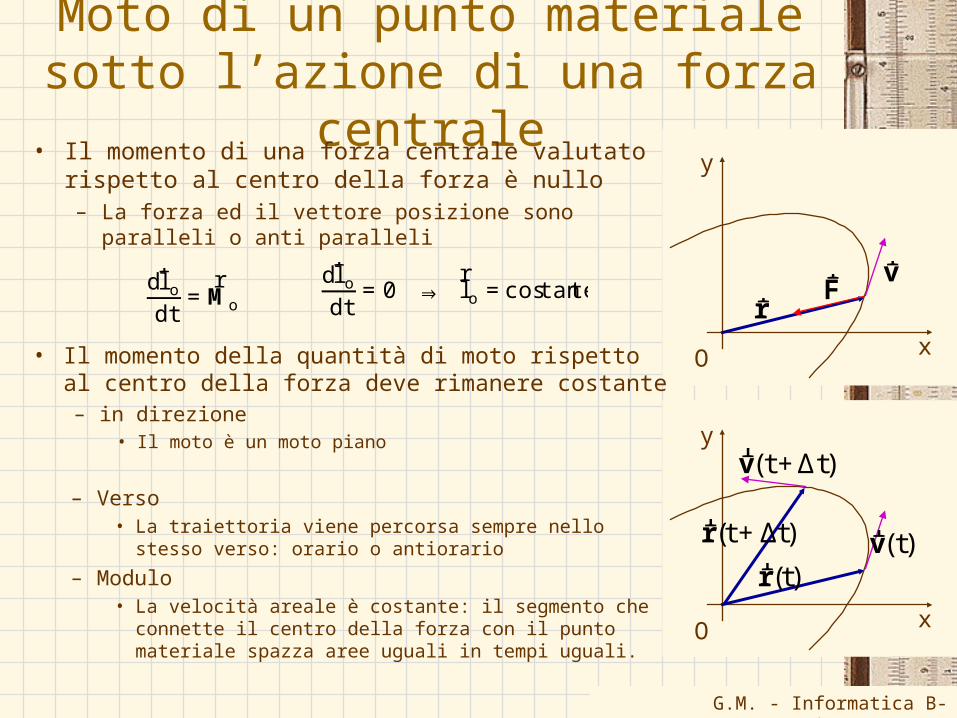
Moto di un punto materiale sotto l’azione di una forza centrale
• Il momento di una forza centrale valutato rispetto al centro della forza è nullo– La forza ed il vettore posizione sono paralleli o anti
paralleli
dr l odt
=r M o
dr l odt
=0 ⇒r l o =costante
– Verso• La traiettoria viene percorsa sempre nello stesso verso:
orario o antiorario
– Modulo• La velocità areale è costante: il segmento che connette il
centro della forza con il punto materiale spazza aree uguali in tempi uguali.
r F
r r
y
O x
r v
r r (t)
y
O x
r v (t)
r r (t+Δt)
r v t+Δt( )
• Il momento della quantità di moto rispetto al centro della forza deve rimanere costante– in direzione
• Il moto è un moto piano

G.M. - Informatica B-Automazione 2002/03
La velocità areale• Consideriamo l’intervallo di tempo t
– L’area spazzata nell’intervallo t è quella evidenziata in figura
– Approssimativamente uguale all’area del triangolo di lati r(t), r(t+t), r.
– L’eguaglianza approssimata diventa precisa per t che tende a zero.
– L’area del triangolo vale:
Il modulo del momento della quantità di moto rispetto al centro della
forza vale: e quindi: l O =rmvsenφ
dAdt
=12l O
m
r r (t)
y
O x
r v (t)
r r (t+Δt)
r v t+Δt( )
Δr r
r v θ
r v r
φh
ΔA =12 r(t)h
La velocità areale: dAdt
=limΔt→ 0ΔAΔt
=limΔt→ 0
12 r(t)h
Δt=1
2r(t)limΔt→ 0hΔt
Dalla definizione di velocità istantanea ricaviamo che:
r v =limΔt→ 0
Δr r Δt
⇒ vθ =limΔt→ 0hΔt
e quindidAdt
=12 rvθ =1
2rvsenφ
Nel caso di forze centrali, poiché il modulo del momento della quantità di moto è costante, allora la velocità areale è costante

G.M. - Informatica B-Automazione 2002/03
La velocità areale
l O =rmvsenθ=mrvθ =mrrω =mr2ω
• Se indichiamo con θ l’angolo formato tra i vettori posizione all’istante t e t+t
Il momento angolare:
vθ =limΔt→ 0hΔt
=limΔt→ 0r(t+Δt)senΔθ( )
Δt=
=r(t)limΔt→ 0ΔθΔt
=rω r r (t)
y
O x
r v (t)
r r (t+Δt)
r v t+Δt( )
Δr r
r v θ
r v r
φh
θθ
AfelioPiù lento
PerielioPiù veloce
e= 1−b2
a2

G.M. - Informatica B-Automazione 2002/03
Le leggi di Keplero• Le orbite dei pianeti sono delle ellissi. Il sole occupa uno dei fuochi.
• Il segmento che congiunge il pianeta con il sole, spazza aree uguali in tempi uguali: in altre parole la velocità areale (l'area spazzata nell'unità di tempo), è costante.
• Il quadrato del tempo di rivoluzione (T2), è proporzionale al cubo del semiasse maggiore dell'ellisse (a3). La costante di proporzionalità è la stessa per tutti i pianeti del sistema solare.
• L’ipotesi che la forza di gravitazione universale sia una forza centrale
• insieme con quella che un sistema di riferimento legato al sole possa essere considerato inerziale
• giustifica le prime due leggi di Keplero ( in realtà la prima solo parzialmente)

G.M. - Informatica B-Automazione 2002/03
Verifica della III legge di Keplero
• Faremo la verifica supponendo che le orbite dei pianeti siano circolari anziché ellittiche.– L’eccentricità per la terra è 0.0167
– a è il semiasse maggiore
– b quello minore
• Se la traiettoria è circolare il moto è uniforme (la velocità areale deve essere costante)
• Il pianeta è soggetto ad un’accelerazione centripeta
• Quindi la forza di gravitazione universale si comporterà da forza centripeta:
e= 1−b2
a2
FG =GmMr2 =man =
mv2
r

G.M. - Informatica B-Automazione 2002/03
Verifica della III legge di Keplero
GmMr2
=mv2
r=
m2πrT
⎛ ⎝
⎞ ⎠
2
r=
m4π2r2
rT2 =m4π2r
T2
Che appunto verifica la III legge di Keplero
GmMr2
=m4π2r
T2 ⇒ T2 =4π2
GMr3
Ma la velocità è legata al periodo dalla relazione: T =2πrv


















