Kalkulus Variasi - tbakhtiar.staff.ipb.ac.idtbakhtiar.staff.ipb.ac.id/files/2016/02/handout2.pdf ·...
38
Kalkulus Variasi Masalah Kalkulus Variasi, Fungsional Objektif, Variasi, Syarat Perlu Optimalitas Toni Bakhtiar Departemen Matematika IPB Februari 2014 [email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 1 / 38
Transcript of Kalkulus Variasi - tbakhtiar.staff.ipb.ac.idtbakhtiar.staff.ipb.ac.id/files/2016/02/handout2.pdf ·...

Kalkulus VariasiMasalah Kalkulus Variasi, Fungsional Objektif, Variasi, Syarat Perlu
Optimalitas
Toni Bakhtiar
Departemen Matematika IPB
Februari 2014
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 1 / 38

Outline
Masalah kalkulus variasi
Fungsional objektif
Perluasan Taylor
Variasi
Nilai ekstrem
Syarat perlu optimalitas: Persamaan Euler
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 2 / 38

Masalah Brachistochrone
Brachistochrone: brakhistos (tercepat, terpendek), khronos (waktu).
Masalah: Tentukan lintasan (kurva) yang harus dilewati bolasehingga bola bergerak dari titik A ke titik B dalam waktu tercepat.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 3 / 38

Masalah Brachistochrone
Hukum konservasi energi di A: Energi Kinetik = Energi Potensial:12mv
2 −mgy = 0⇔ v =√2gy .
Lintasan di sekitar bola dapat dipandang sebagai sebuah garis lurussehingga
ds =√dx2 + dy2 =
√1+
(dydx
)2dx .
Hubungan waktu t, jarak s, dan kecepatan v :
v =dsdt⇔ dt =
dsv=
√1+
(dydx
)2dx
√2gy
.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 4 / 38

Masalah Brachistochrone
Integralkan:
t =1√2g
∫ b
0
√√√√1+(dydx
)2y
dx .
Masalah kalkulus variasi:
min J =∫ b
0
√1+ y2
ydx s.t. y(0) = 0, y(b) = a,
dengan y := dydx .
Solusi parametrik:
x =12c2
(1− cos θ)
y =12c2
(θ − sin θ).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 5 / 38

Masalah Lintasan Terpendek
Tentukan lintasan terpendek yang menghubungkan A dan B.
A(0,0)
B a,b( )
x
y
Di sepotong lintasan kecil berlaku
ds =√dx2 + dy2 =
√1+
(dydx
)2dx .
Masalah kalkulus variasi:
min J =∫ a
0
√1+ y2dx s.t. y(0) = 0, y(a) = b.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 6 / 38

Masalah Luas Permukaan Terkecil
Tentukan kurva y = y(x) yang melewati A dan B sedemikiansehingga benda putar yang terbentuk memiliki luas permukaanterkecil.
x
yA
B a,b( )
Di sepotong lintasan kecil berlaku
ds =√dx2 + dy2 =
√1+
(dydx
)2dx .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 7 / 38

Masalah Luas Permukaan Terkecil
Luas permukaan:
A =∫S2πy ds
Masalah kalkulus variasi:
min J = 2π∫ a
0y√1+ y2dx s.t. y(0) = A, y(a) = b.
Solusi:
y = C1 cosh(x + C2C1
),
dengan C1 dan C2 ditentukan sehingga kurva melalui titik-titik A danB. Kurva di atas dikenal sebagai kurva catenary (bahasa latin,catena, yang berarti rantai): kurva yang terbentuk jika sebuah rantaiyang berat dengan densitas seragam digantungkan pada dua titikujung. Benda putar yang terbentuk disebut catenoid.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 8 / 38

MKV vs MKO
Masalah Kalkulus Variasi:
opt J(x(t)) =∫ tf
t0f (x(t), x(t), t) dt
Masalah kontrol optimal:
opt J(x(t)) =∫ tf
t0f (x(t), u(t), t) dt
x(t) = g(x(t), u(t)),
baik dengan kendala ataukah tanpa kendala.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 9 / 38

Fungsional Objektif
Bentuk umum fungsional objektif (kriteria, performance index)
J = S(x(tf ), tf ) +∫ tf
t0f (x(t), u(t), t)dt,
dengan S dan f kontinu dan terturunkan.1 S = 0, f = 1 (minimal time problem).2 S = 0, f = |u| (minimal fuel/energy problem):
J =∫ tf
t0|u(t)| dt, J =
∫ tf
t0uTRu dt.
3 S 6= 0, f 6= 0 (Bolza problem).4 S = 0, f 6= 0 (Lagrange problem).5 S 6= 0, f = 0 (Mayer problem).6 Integral square problem:
J =∫ tf
t0xT x dt, J =
∫ tf
t0xTQx dt.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 10 / 38

Fungsional Objektif
Meskipun Bolza problem tampak memiliki formulasi yang lebih umum,ketiga problem bersifat convertible satu sama lain.Diberikan Bolza problem:
JBolza = S(x(tf ), tf ) +∫ tf
t0f (x(t), u(t), t)dt.
Definisikan:
xn+1(t) =∫ t
t0f (x , u, τ)dτ ⇒ xn+1(t0) = 0,
maka
JBolza = S(x(tf ), tf ) + xn+1(tf )
= S(x(tf ), tf )
= JMayer.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 11 / 38

Fungsional Objektif
Diberikan Lagrange problem:
JLagrange =∫ tf
t0f (x(t), u(t), t)dt.
Definisikan peubah state baru xa sedemikian sehingga
x =(xa x1 x2 . . . xn
)T,
xa = f (x(t), u(t), t),
xa(t0) = 0.
Diperoleh
JLagrange =∫ tf
t0xa(t)dt = xa|tft0 = x(tf )
= S(x(tf ), tf )
= JMayer.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 12 / 38

Fungsional Objektif
Diberikan Mayer problem:
JMayer = S(x(tf ), tf ).
Definisikan peubah state baru xa sedemikian sehingga
x =(xa x1 x2 . . . xn
)T,
xa = 0⇒ xa(t) = k ,
xa(tf ) =1
tf − t0S(x(tf ), tf ).
Diperoleh
JMayer = (tf − t0)xa(tf )= (tf − t0)(xa(tf )− k) + k(tf − t0)
= S(x(tf ), tf ) +∫ tf
t0kdt
= S(x(tf ), tf ) +∫ tf
t0xa(t)dt = JLagrange.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 13 / 38

Fungsi dan Fungsional
Fungsi FungsionalPemetaan x : R→ R J : x → R
Notasi x = x(t) J = J(x(t))
Contoh x(t) = t J(x(t)) =∫ ba x(t)dt
Riap dt = t∗ − t δx(t) = x∗(t)− x(t)∆x(t) = x(t + dt)− x(t) ∆J(x) = J(x + δx)− J(x)
Kalkulus Variasi: cabang matematika yang memelajari masalahpengoptimuman fungsional, yaitu mencari fungsi yang meminimumkanatau memaksimumkan suatu fungsional.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 14 / 38

Perluasan Taylor 1 Peubah
Diberikan fungsi f dengan f ′, f ′′, . . . , f (n+1) kontinu di [a, b] danmisalkan c ∈ [a, b].Perluasan Taylor dari f di sekitar c diberikan oleh
f (x) =∞
∑n=0
f (n)(c)n!
(x − c)n + Rn+1(x),
dengan Rn+1 disebut sebagai remainder (sisaan):
Rn+1(x) =1n!
∫ x
c(x − s)f (n+1)(s)ds.
Jika limn→∞ Rn+1 = 0 maka
f (x) =∞
∑n=0
f (n)(c)n!
(x − c)n.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 15 / 38

Perluasan Taylor 1 Peubah
Set h = x − cf (c + h) =
∞
∑n=0
f (n)(c)n!
hn.
Dengan demikian
f (x + h) =∞
∑n=0
f (n)(x)n!
hn.
Dapat juga ditulis
f (x + h) ≈ f (x) + hf ′(x) + h2
2!f ′′(x).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 16 / 38

Perluasan Taylor Peubah Ganda
m peubah di sekitar (c1, . . . , cm) :
f (x1, . . . , xm) =∞
∑n1=0· · ·
∞
∑nm=0
(x1 − c1)n1 · · · (xm − cm)nmn1! · · · nm !(
∂n1+···+nm f∂xn11 · · · ∂x
nmm
)(c1, . . . , cm).
2 peubah di sekitar (a, b) :
f (x , y) ≈ f (a, b) + (x − a)fx (a, b) + (y − b)fy (a, b)
+(x − a)22!
fxx (a, b) +2(x − a)(y − b)
2!fxy (a, b)
+(y − b)22!
fyy (a, b).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 17 / 38

Perluasan Taylor 2 Peubah
Set h1 = x − a dan h2 = y − b :
f (a+ h1, b+ h2) ≈ f (a, b) + h1fx (a, b) + h2fy (a, b)
+h212fxx (a, b) + h1h2fxy (a, b)
+h222fyy (a, b).
Atau
f (x + h1, y + h2) ≈ f (x , y) + h1fx (x , y) + h2fy (x , y)
+h212fxx (x , y) + h1h2fxy (x , y)
+h222fyy (x , y).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 18 / 38

Variasi Pertama (1 Peubah)
Diberikan fungsional
J(x) =∫ T
t0f (x , t) dt.
Diperoleh
4J(x) = J(x + h)− J(x)
=∫ T
t0f (x + h, t) dt −
∫ T
t0f (x , t) dt
≈∫ T
t0[f (x , t) + hf ′(x , t)] dt −
∫ T
t0f (x , t) dt
=∫ T
t0hf ′(x , t) dt.
Variasi pertama
δJ(x) :=∫ T
t0hf ′(x , t) dt.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 19 / 38

Variasi Pertama (2 Peubah)
Diberikan fungsional
J(x , y) =∫ T
t0f (x , y , t) dt.
Diperoleh
4J(x , y) = J(x + h1, y + h2, t)− J(x , y)
=∫ T
t0f (x + h1, y + h2, t) dt −
∫ T
t0f (x , y , t) dt
≈∫ T
t0[h1fx (x , y , t) + h2fy (x , y , t)] dt.
Variasi pertama
δJ(x , y) :=∫ T
t0[h1fx (x , y , t) + h2fy (x , y , t)] dt.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 20 / 38

Nilai Maksimum dan Nilai Minimum
DefinitionFungsi f = f (t) mencapai:
maksimum lokal di t∗ jika f (t∗) ≥ f (t) untuk semua t di sekitar t∗.minimum lokal di t∗ jika f (t∗) ≤ f (t) untuk semua t di sekitar t∗.maksimum global di t∗ jika f (t∗) ≥ f (t) untuk semua t ∈ Df .minimum global di t∗ jika f (t∗) ≤ f (t) untuk semua t ∈ Df .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 21 / 38

Nilai Maksimum dan Nilai Minimum
DefinitionFungsional J = J(x(t)) mencapai:
maksimum lokal di x∗ jika J(x∗) ≥ J(x) untuk semua x di sekitarx∗.
minimum lokal di di x∗ jika J(x∗) ≤ J(x) untuk semua x di sekitarx∗.
maksimum global di x∗ jika J(x∗) ≥ J(x) untuk semua x .minimum global di x∗ jika J(x∗) ≤ J(x) untuk semua x .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 22 / 38

Masalah Kalkulus Variasi
Definisikan:
C [a, b] = {f | f kontinu di [a, b]},C i [a, b] = {f | f terdefinisi di [a, b], f (i ) kontinu di [a, b]}.
Tanpa kehilangan sifat keumuman, diasumsikan [a, b] = [0,T ].Diberikan fungsional
J(x) =∫ T
0f (x , x , t) dt
dengan A(0, x(0)) dan B(T , x(T )) adalah dua titik yang sudahditetapkan, f ∈ C 2[0,T ], dan x ∈ C 2[0,T ].
Problem (MKV)
Tentukan fungsi x∗(t) dalam C 2[0,T ] yang memiliki titik awal A(0, x(0))dan titik akhir B(T , x(T )) dan memberikan nilai optimum bagi J(x).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 23 / 38

Lema Dasar
LemmaMisalkan g(t) ∈ C [0,T ] dan S = {h | h ∈ C 1[0,T ], h(0) = h(T ) = 0}.Jika ∫ T
0 g(t)h(t) dt = 0
untuk semua h ∈ S (h disebut sebagai displacement function atau fungsipenyimpang) maka g(t) ≡ 0 untuk semua t ∈ [0,T ].
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 24 / 38

Proof.Akan dibuktikan kontrapositif dari lema di atas. Andaikan g(t) 6= 0,katakanlah g(t) > 0 pada t ∈ [t1, t2] ⊂ [0,T ]. Fungsi h dapat berbentuk
h(t) ={(t − t1)3(t2 − t)3 ; t ∈ [t1, t2]0 ; t /∈ [t1, t2]
.
Jelas terpenuhi h(0) = h(T ) = 0. Dengan demikian∫ T0 g(t)h(t) dt =
∫ t2t1g(t)(t − t1)3(t2 − t)3 dt 6= 0.
Kontradiksi. Haruslah g(t) ≡ 0.
ProblemTunjukkan bahwa h terturunkan di t1 dan t2.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 25 / 38

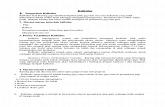
Fungsi penyimpang:
h(t) ={(t − 1)3(3− t)3 ; t ∈ [1, 3]0 ; t /∈ [1, 3] .
0 1 2 3 40.0
0.2
0.4
0.6
0.8
1.0
t
h
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 26 / 38

Persamaan Euler
Theorem (Persamaan Euler)Misalkan
J(x) =∫ T0 f (x , x , t) dt,
x(0) = x0,
x(T ) = xT .
Syarat perlu agar J(x) memiliki ekstremum ialah x(t) memenuhipersamaan Euler berikut:
fx −ddtfx = 0.
Dengan kata lain, jika x(t) merupakan ekstremum, maka x(t) memenuhipersamaan Euler.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 27 / 38

Proof: Asumsikan terdapat solusi x(t) bagi MKV di atas, yang memenuhisyarat batas dan memberikan ekstremum bagi fungsional J. Dengan katalain, semua fungsi lain tidak akan mencapai ekstremum. Misalkansebarang fungsi tersebut ialah
z(t) = x(t) + εh(t),
dengan h merupakan fungsi penyimpang (displacement function) yangterturunkan dan memenuhi h(0) = h(T ) = 0, dan ε konstanta real. Jikaε = 0 maka z(t) = x(t).
0.2 0.4 0.6 0.8 1.00.0
0.5
1.0
1.5
t
z, x, h
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 28 / 38

Karena z(t) memenuhi syarat batas:
z(0) = x(0) + εh(0) = x0,
z(T ) = x(T ) + εh(T ) = xT ,
maka diperoleh fungsional yang bergantung pada parameter ε :
J(ε) =∫ T0 f (z , z , t) dt,
dengan z(t) = x(t) + εh(t). Fungsional J(ε) identik dengan J(x) jika
ε = 0 dan mencapai ekstremum ketika ∂J (ε)∂ε
∣∣∣ε=0
= 0. Diperoleh,
∂J(ε)∂ε
=∫ T0
(fzdzdε+ fz
dzdε
)dt.
Karena dzd ε = h dan
d zd ε = h maka
∂J(ε)∂ε
=∫ T0
(fzh+ fz h
)dt.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 29 / 38

Suku kedua diintegralkan secara parsial dengan memisalkan
u = fz ⇒ du = ddt fz dt,
dv = h dt ⇒ v = h,
sehingga ∫ T0 fz h dt = fzh|
T0 −
∫ T0 h
ddt fz dt = −
∫ T0 h
ddt fz dt.
Jadi,∂J(ε)
∂ε=∫ T0
(fz − d
dt fz)h dt.
Ekstremum dicapai ketika ∂J (ε)∂ε = 0 dan ε = 0 yang membuat fz = fx dan
fz = fx . Lema dasar mengakibatkan
∂J(ε)∂ε
∣∣∣∣ε=0
= 0⇔ fx − ddt fx = 0.
Terbukti. �[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 30 / 38

Proof (Alternative): Pertama akan dibuktikan bahwa syarat perlu bagi Juntuk mencapai ekstremum ialah δJ = 0. Perhatikan bahwa
J(ε) =∫ T0 f (z , z , t) dt =
∫ T0 f (x + εh, x + εh, t) dt.
Penguraian Taylor memberikan
J(ε) ≈∫ T0
[f (x , x , t) + εhfx (x , x , t) + εhfx (x , x , t)
]dt
=∫ T0 f (x , x , t) dt + ε
∫ T0
[hfx (x , x , t) + hfx (x , x , t)
]dt
= J(x) + εδJ(x).
Fungsional J(ε) identik dengan J(x) jika dan hanya jika δJ(x) = 0.Selanjutnya,
δJ(ε) = 0 ⇔∫ T0 (hfx + hfx ) dt = 0
⇔∫ T0 (fx −
ddt fx )h dt = 0
⇔ fx − ddt fx = 0.
Terbukti. �[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 31 / 38

ExampleTentukan ekstremum dari
J(x) =∫ 10 (ax
2 + bt) dt, a > 0,
x(0) = 0, x(1) = 2.
SolutionDengan f (x , t) = ax2 + bt maka diperoleh fx = 0 dan fx = 2ax sehinggapersamaan Euler memberikan
0− ddt (2ax) = 0⇔ 2ax = 0⇔ x = 0⇔ x(t) = k1t + k2.
Dengan mensubstitusikan syarat batas diperoleh x∗(t) = 2t danJ(x∗) =
∫ 10 (4a+ bt) dt = 4a+
12b.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 32 / 38

Beberapa fungsi penyimpang ialah sbb:
h1(t) = t(t − 1)⇒ x1(t) = 2t + εt(t − 1),h2(t) = sin(2πt)⇒ x2(t) = 2t + ε sin(2πt)
sehingga diperoleh
J(x1) =∫ 10 (a(2+ ε(2t − 1))2 + bt) dt
= 4a+ 12b+
13aε2 > J(x∗),
J(x2) =∫ 10 (a(2+ 2πε cos(2πt))2 + bt) dt
= 4a+ 12b+ 2π2aε2 > J(x∗).
Dapat disimpulkan bahwa masalah di atas adalah masalah minimisasi danx∗(t) = 2t merupakan minimum lokal.Catatan: Nantinya, suatu ekstremum merupakan minimum ataukahmaksimum ditentukan berdasarkan syarat cukup (syarat orde-2).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 33 / 38

ExampleTinjau sebuah masalah makroekonomi di mana sebuah indikator ekonomiy(t) ingin dikendalikan dengan kendali u(t) = y(t) sehingga mencapailevel yang diinginkan y dalam periode [0,T ]. Pengendalian memerlukanbiaya sehingga ingin diminimumkan fungsional
J(y) =∫ T0
[(y − y)2 + cu2
]dt, c > 0.
Definisikan x := y − y sehingga
x = y = u,
x(T ) = y(T )− y = y − y = 0.
Masalah kalkulus variasi:
min J(x) =∫ T0 (x
2 + cx2) dt,
x(0) = x0, x(T ) = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 34 / 38

SolutionPersamaan Euler memberikan:
2x − 2cx = 0 ⇔ x − 1c x = 0
⇔ x(t) = Aert + Be−rt , r = 1√c .
Syarat batas menghasilkan:
x∗(t) =x0
erT − e−rT[er (T−t) − e−r (T−t)
],
sehingga
y ∗(t) = x∗(t) + y ,
u∗(t) = x∗(t).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 35 / 38

ExampleSelesaikan MKV berikut:
min J(x) =∫ 10 (x
2 + x2) dt,
x(0) = 1,
x(1) = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 36 / 38

SolutionDefinisikan f (x , x , t) = x2 + x2, diperoleh fx = 2x dan fx = 2x .Persamaan Euler menjadi
2x − ddt(2x) = 0⇔ x − x = 0.
Karena persamaan karakteristik PD orde dua di atas r2 − 1 = 0 memilikisolusi r = 1 dan r = −1 maka solusi umum PD di atas ialah
x(t) = C1et + C2e−t .
Syarat batas x(0) = 1 dan x(1) = 0 memberikan
C1 + C2 = 1, C1e + C2e−1 = 0,
sehingga C2 = e2e2−1 dan C1 = 1−
e2e2−1 = −
1e2−1 . Jadi,
x∗(t) = 1e2−1 (e
2−t − et ).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 37 / 38

Problem
Selesaikan persamaan Euler dari J(x) =∫ T0 f (x , x , t) dt jika
1 f (x , x , t) = x2 + x2 + 2xet .2 f (x , x , t) = −e x−ax , a > 0.3 f (x , x , t) = 2tx + 3xx + tx2.4 f (x , x , t) =
[(x − x)2 + x2
]e−at , a > 0.
ProblemSelesaikan MKV berikut:
1 max∫ 10 (4xt − x2) dt, x(0) = 2, x(1) = 2
3 .
2 max∫ 10 (tx − x2) dt, x(0) = 1, x(1) = 0.
3 min∫ 10 (x
2 + 2txx + x2) dt, x(0) = 1, x(1) = 2.
4 min∫ 10 (x
2 + tx + txx + x2) dt, x(0) = 0, x(1) = 1.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2014 38 / 38