
Journal of System Design and Dynamics Review Paper
9
J ournal of System Design and Dynamics Vol. 1, No. 2, 2007 120 Prospect and Recent Research & Development for Civil Use Autonomous Unmanned Aircraft as UAV and MAV * Kenzo NONAMI ** **Department of Electronics and Mechanical Engineering, Chiba University, 1-33Yayoi-cho, Inage-ku, Chiba 263-8522, Japan E-mail : [email protected] Abstract This paper describes the present state of research and development for civil use autonomous unmanned aircraft. In particular, the history of civil use UAVs, the research and development in the world and in Japan, and the subjects and prospects for control and operation systems of civil use autonomous UAVs are described. Key words: UAV, MAV, Autonomy, Civil Use, Flight Control, Aircraft, Robot, Research Trend 1. Introduction Development of autonomous uninhabited aircraft, or so-called “robotic aircraft”, in the form of UAVs (Unmanned Aerial Vehicles) and MAVs (Micro Air Vehicles) outfitted with autonomous control devices has progressed quickly in recent years, and interest in this field continues to spread. Although they can be classified as being for either military use or civil use, the most notable developments to fall into military application. However, autonomous uninhabited aircraft also hold remarkable potential for civil use, and while some of these civil uses are already being explored, there are no doubt countless others waiting to be discovered. In support of this view, this paper describes the present state of research and development for civil use autonomous uninhabited aircraft. First, an uninhabited aircraft is defined (1) . An uninhabited aircraft is defined as the general term for UAV(Uninhabited Aerial Vehicle, Unmanned Aerial Vehicle), ROA (Remotely Operated Aircraft), and RPV (Remotely Piloted Vehicle). Neither an operation pilot nor a passenger is carried by an uninhabited aerial vehicle, but the navigation is the controlled body with the power source which uses the dynamic lift and thrust based on aerodynamics, and flies with autonomous navigation or remote-control navigation. Therefore, neither the rocket which flies a ballistic orbit, nor a cruise missile, a shell, etc. belong to this category. The unmanned air ship which swims in the air by lift simultaneously is not this category. On the other hand, the AIAA defines a UAV to be “An aircraft which is designed or modified, not to carry a human pilot and is operated through electronic input initiated by the flight controller or by an onboard autonomous flight management control system that does not require flight controller intervention.” Although there is no strict definition about the difference between UAV and MAV, according to the definition of DARPA (Defense Advanced Research Projects Agency: defense Advanced Research Projects Agency) of the U.S. Department of Defense, magnitude length, width, each is calling MAV the thing with a size of 15cm or less in height. 2.History of Civil Use UAVs The first UAV was created by Americans Lawrence and Elmer Sperry in 1916. It is shown in Fig. 1. They developed the gyroscope which stabilized the body, thereby creating the first auto pilot. It is considered the first time so-called "attitude control" was mounted on an aircraft, creating the first aircraft with automatic steering. In 1916 they developed the “Aerial Torpodo”, a pilotless airplane designed to deliver an explosive payload to a target. The Aerial Torpodo successfully flew a distance over 30 miles. It seems the technical *Received 24 Jan., 2007 (No. R-07-0053) [DOI: 10.1299/jsdd.1.120] 【Review Paper】
Transcript of Journal of System Design and Dynamics Review Paper

Journal of System Design and
Dynamics
Vol. 1, No. 2, 2007
120
Prospect and Recent Research & Development for Civil Use Autonomous Unmanned Aircraft
as UAV and MAV*
Kenzo NONAMI** **Department of Electronics and Mechanical Engineering, Chiba University,
1-33Yayoi-cho, Inage-ku, Chiba 263-8522, Japan E-mail : [email protected]
Abstract This paper describes the present state of research and development for civil use autonomous unmanned aircraft. In particular, the history of civil use UAVs, the research and development in the world and in Japan, and the subjects and prospects for control and operation systems of civil use autonomous UAVs are described.
Key words: UAV, MAV, Autonomy, Civil Use, Flight Control, Aircraft, Robot, Research Trend
1. Introduction
Development of autonomous uninhabited aircraft, or so-called “robotic aircraft”, in the form of UAVs (Unmanned Aerial Vehicles) and MAVs (Micro Air Vehicles) outfitted with autonomous control devices has progressed quickly in recent years, and interest in this field continues to spread. Although they can be classified as being for either military use or civil use, the most notable developments to fall into military application. However, autonomous uninhabited aircraft also hold remarkable potential for civil use, and while some of these civil uses are already being explored, there are no doubt countless others waiting to be discovered. In support of this view, this paper describes the present state of research and development for civil use autonomous uninhabited aircraft.
First, an uninhabited aircraft is defined (1). An uninhabited aircraft is defined as the general term for UAV(Uninhabited Aerial Vehicle, Unmanned Aerial Vehicle), ROA (Remotely Operated Aircraft), and RPV (Remotely Piloted Vehicle). Neither an operation pilot nor a passenger is carried by an uninhabited aerial vehicle, but the navigation is the controlled body with the power source which uses the dynamic lift and thrust based on aerodynamics, and flies with autonomous navigation or remote-control navigation. Therefore, neither the rocket which flies a ballistic orbit, nor a cruise missile, a shell, etc. belong to this category. The unmanned air ship which swims in the air by lift simultaneously is not this category.
On the other hand, the AIAA defines a UAV to be “An aircraft which is designed or modified, not to carry a human pilot and is operated through electronic input initiated by the flight controller or by an onboard autonomous flight management control system that does not require flight controller intervention.” Although there is no strict definition about the difference between UAV and MAV, according to the definition of DARPA (Defense Advanced Research Projects Agency: defense Advanced Research Projects Agency) of the U.S. Department of Defense, magnitude length, width, each is calling MAV the thing with a size of 15cm or less in height.
2.History of Civil Use UAVs
The first UAV was created by Americans Lawrence and Elmer Sperry in 1916. It is shown in Fig. 1. They developed the gyroscope which stabilized the body, thereby creating the first auto pilot. It is considered the first time so-called "attitude control" was mounted on an aircraft, creating the first aircraft with automatic steering. In 1916 they developed the “Aerial Torpodo”, a pilotless airplane designed to deliver an explosive payload to a target. The Aerial Torpodo successfully flew a distance over 30 miles. It seems the technical
*Received 24 Jan., 2007 (No. R-07-0053) [DOI: 10.1299/jsdd.1.120]
【Review Paper】
Journal of System Design and Dynamics
Vol. 1, No. 2, 2007
121
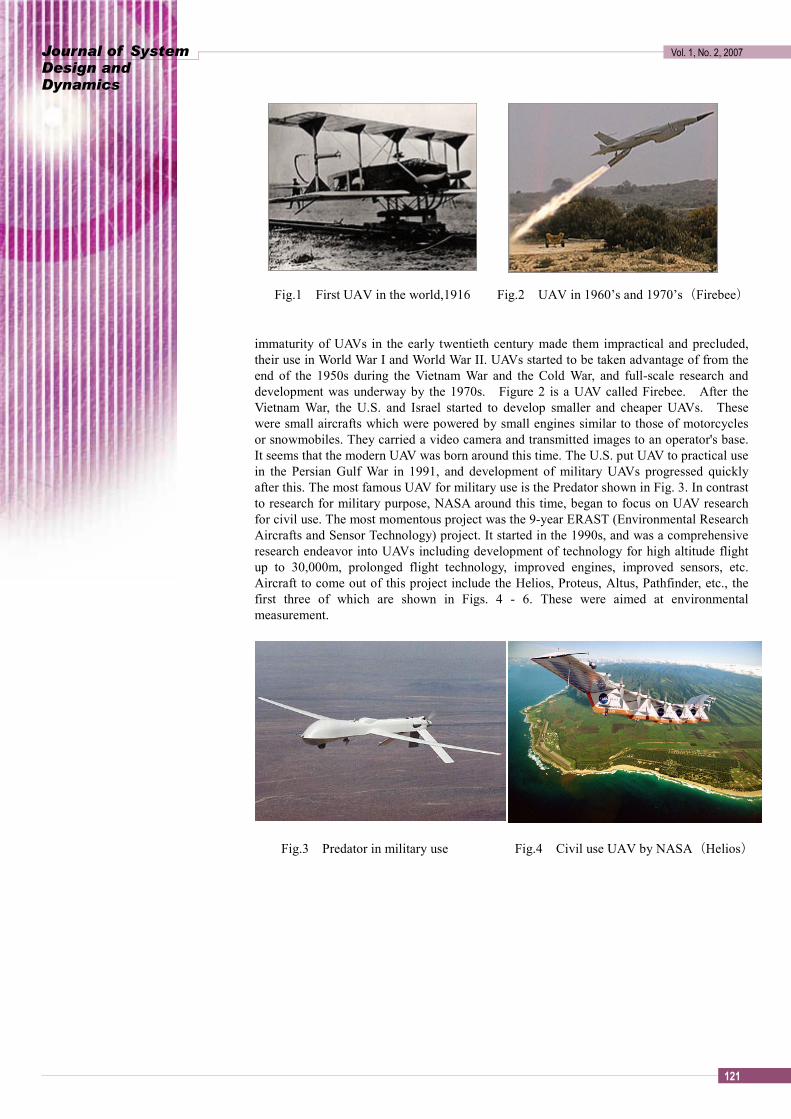
Fig.1 First UAV in the world,1916 Fig.2 UAV in 1960’s and 1970’s(Firebee) immaturity of UAVs in the early twentieth century made them impractical and precluded, their use in World War I and World War II. UAVs started to be taken advantage of from the end of the 1950s during the Vietnam War and the Cold War, and full-scale research and development was underway by the 1970s. Figure 2 is a UAV called Firebee. After the Vietnam War, the U.S. and Israel started to develop smaller and cheaper UAVs. These were small aircrafts which were powered by small engines similar to those of motorcycles or snowmobiles. They carried a video camera and transmitted images to an operator's base. It seems that the modern UAV was born around this time. The U.S. put UAV to practical use in the Persian Gulf War in 1991, and development of military UAVs progressed quickly after this. The most famous UAV for military use is the Predator shown in Fig. 3. In contrast to research for military purpose, NASA around this time, began to focus on UAV research for civil use. The most momentous project was the 9-year ERAST (Environmental Research Aircrafts and Sensor Technology) project. It started in the 1990s, and was a comprehensive research endeavor into UAVs including development of technology for high altitude flight up to 30,000m, prolonged flight technology, improved engines, improved sensors, etc. Aircraft to come out of this project include the Helios, Proteus, Altus, Pathfinder, etc., the first three of which are shown in Figs. 4 - 6. These were aimed at environmental measurement.
Fig.3 Predator in military use Fig.4 Civil use UAV by NASA(Helios)

Journal of System Design and Dynamics
Vol. 1, No. 2, 2007
122
Fig.5 Civil use UAV by NASA(Proteus) Fig.6 Civil use UAV by NASA(Altus)
3.Present State of Research and Development of Civil Use Autonomy UAV
In this chapter, the present state of research and development of the civil use UAV, such as for science observation, is described. The information was gathered from Aviation Week and Space Technology, "2005 Aerospace Source Book", January 17, 2005 (2). (1)Aerosonde: The Aerosonde shown in Fig.7 was developed by Aerosonde Pty Ltd. of Australia. This aircraft conducts weather surveys and environmental monitoring, and has a payload of about 2-5kg and a gross weight of 15kg. Although its flying ability is dependent on the payload, it can reach a maximum altitude of 7000m, and can fly in a circle of 2000 - 3000km in 10 hours, with a cruising flight time of 30 hours. It operates as an instrument for earth science observation now.
Fig7 Aerosonde for environmental monitoring Fig.8 Altair with high reliabilty
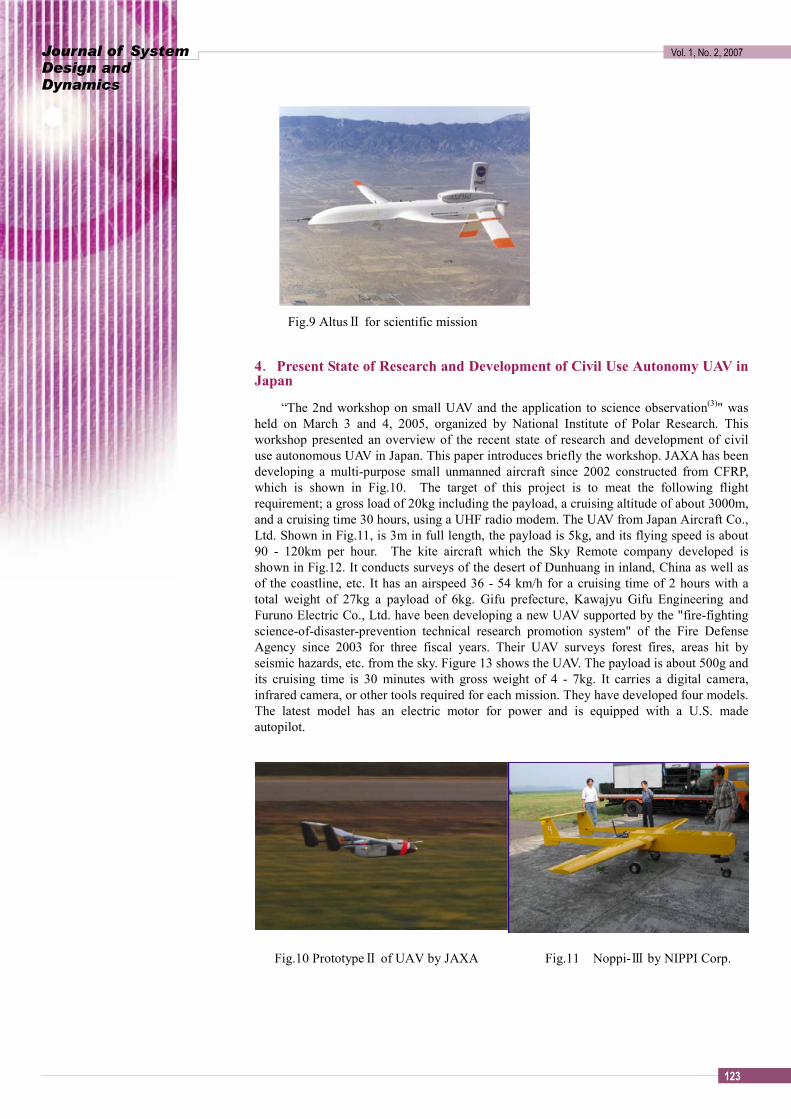
(2) Altair: The Altair shown in Fig. 8 was developed by General Atomics Aeronautical Systems Incorporated. The Altair can fly at super-high altitude with high reliability. It has a fault-tolerant flight control system and three-fold avionics system apparatus. Moreover, a 30-hour flight of an altitude of 15km is possible, and a 1300kg payload can be carried in the core of the body and 300kg in the body exterior. (3) Altus I/Altus II: These were developed by General Atomics Aeronautical Systems Incorporated. They are also UAVs which are manufactured to fly at super-high altitude. It is designed to carry atmospheric sampling instruments for private scientific research missions. The Altus II is shown in Fig. 9. It can reach an altitude of about 20km can fly for 24 hours.
Journal of System Design and Dynamics
Vol. 1, No. 2, 2007
123
Fig.9 AltusⅡ for scientific mission
4.Present State of Research and Development of Civil Use Autonomy UAV in Japan
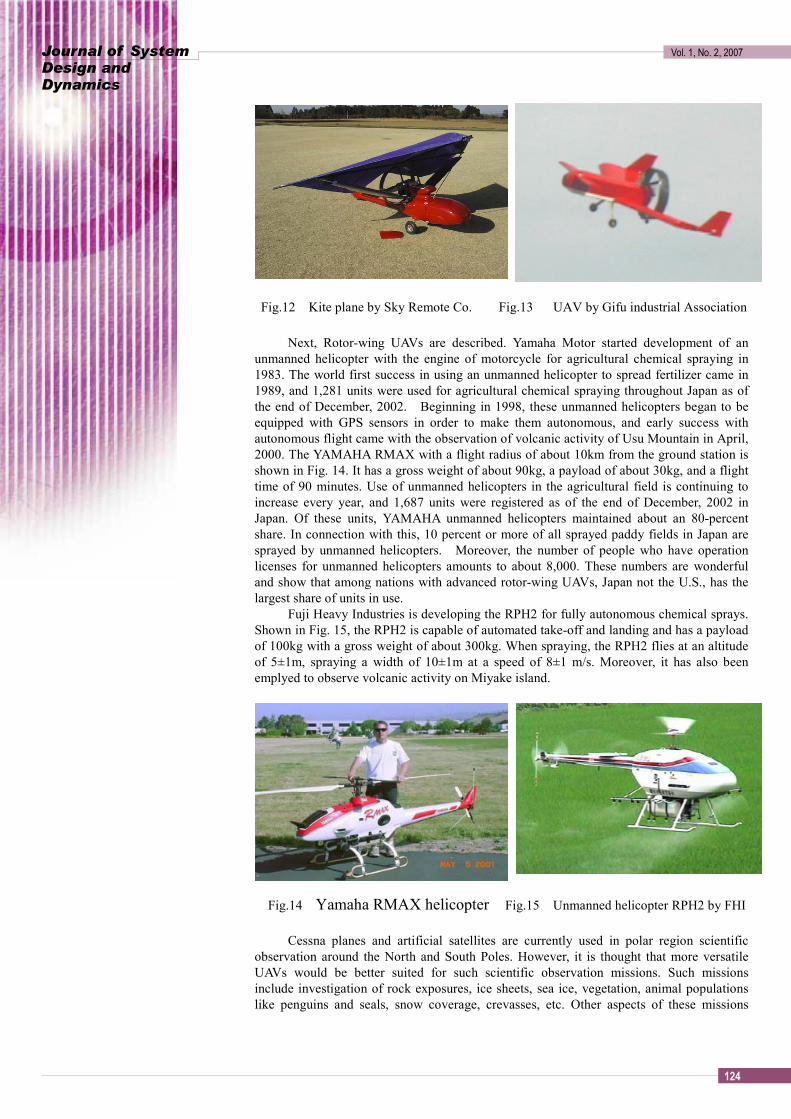
“The 2nd workshop on small UAV and the application to science observation(3)" was held on March 3 and 4, 2005, organized by National Institute of Polar Research. This workshop presented an overview of the recent state of research and development of civil use autonomous UAV in Japan. This paper introduces briefly the workshop. JAXA has been developing a multi-purpose small unmanned aircraft since 2002 constructed from CFRP, which is shown in Fig.10. The target of this project is to meat the following flight requirement; a gross load of 20kg including the payload, a cruising altitude of about 3000m, and a cruising time 30 hours, using a UHF radio modem. The UAV from Japan Aircraft Co., Ltd. Shown in Fig.11, is 3m in full length, the payload is 5kg, and its flying speed is about 90 - 120km per hour. The kite aircraft which the Sky Remote company developed is shown in Fig.12. It conducts surveys of the desert of Dunhuang in inland, China as well as of the coastline, etc. It has an airspeed 36 - 54 km/h for a cruising time of 2 hours with a total weight of 27kg a payload of 6kg. Gifu prefecture, Kawajyu Gifu Engineering and Furuno Electric Co., Ltd. have been developing a new UAV supported by the "fire-fighting science-of-disaster-prevention technical research promotion system" of the Fire Defense Agency since 2003 for three fiscal years. Their UAV surveys forest fires, areas hit by seismic hazards, etc. from the sky. Figure 13 shows the UAV. The payload is about 500g and its cruising time is 30 minutes with gross weight of 4 - 7kg. It carries a digital camera, infrared camera, or other tools required for each mission. They have developed four models. The latest model has an electric motor for power and is equipped with a U.S. made autopilot.
Fig.10 PrototypeⅡ of UAV by JAXA Fig.11 Noppi-Ⅲ by NIPPI Corp.
Journal of System Design and Dynamics
Vol. 1, No. 2, 2007
124
Fig.12 Kite plane by Sky Remote Co. Fig.13 UAV by Gifu industrial Association
Next, Rotor-wing UAVs are described. Yamaha Motor started development of an
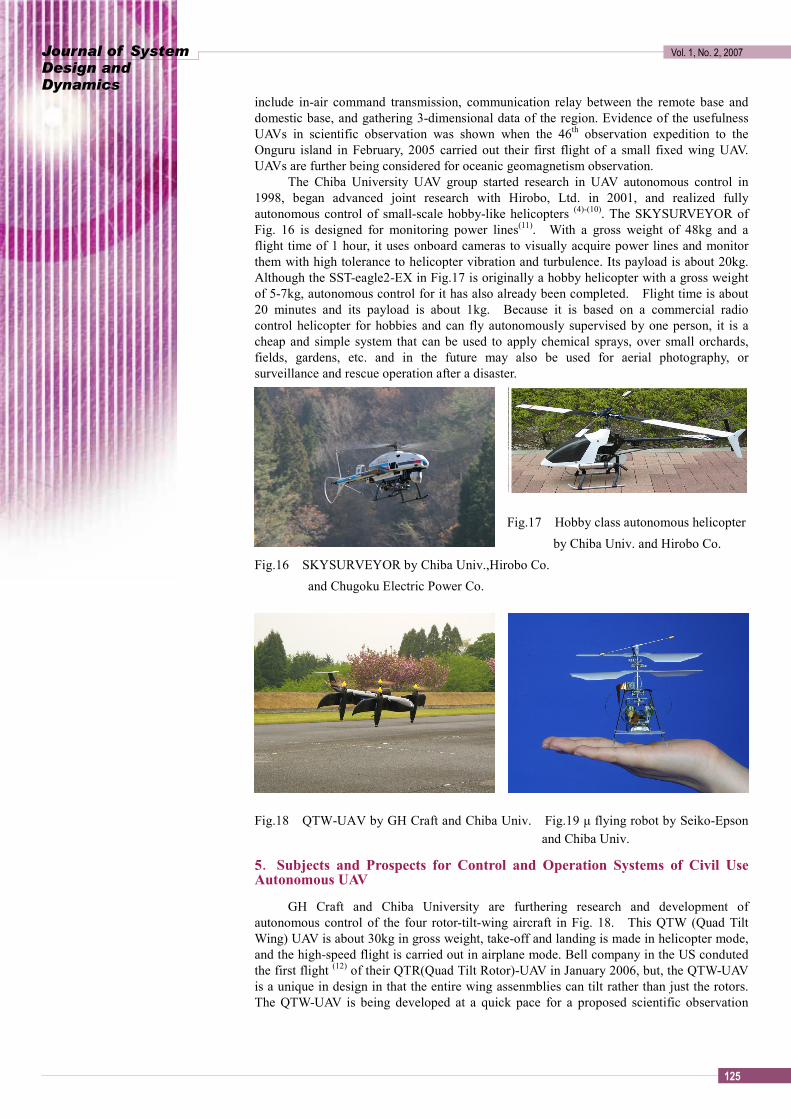
unmanned helicopter with the engine of motorcycle for agricultural chemical spraying in 1983. The world first success in using an unmanned helicopter to spread fertilizer came in 1989, and 1,281 units were used for agricultural chemical spraying throughout Japan as of the end of December, 2002. Beginning in 1998, these unmanned helicopters began to be equipped with GPS sensors in order to make them autonomous, and early success with autonomous flight came with the observation of volcanic activity of Usu Mountain in April, 2000. The YAMAHA RMAX with a flight radius of about 10km from the ground station is shown in Fig. 14. It has a gross weight of about 90kg, a payload of about 30kg, and a flight time of 90 minutes. Use of unmanned helicopters in the agricultural field is continuing to increase every year, and 1,687 units were registered as of the end of December, 2002 in Japan. Of these units, YAMAHA unmanned helicopters maintained about an 80-percent share. In connection with this, 10 percent or more of all sprayed paddy fields in Japan are sprayed by unmanned helicopters. Moreover, the number of people who have operation licenses for unmanned helicopters amounts to about 8,000. These numbers are wonderful and show that among nations with advanced rotor-wing UAVs, Japan not the U.S., has the largest share of units in use.
Fuji Heavy Industries is developing the RPH2 for fully autonomous chemical sprays. Shown in Fig. 15, the RPH2 is capable of automated take-off and landing and has a payload of 100kg with a gross weight of about 300kg. When spraying, the RPH2 flies at an altitude of 5±1m, spraying a width of 10±1m at a speed of 8±1 m/s. Moreover, it has also been emplyed to observe volcanic activity on Miyake island.
Fig.14 Yamaha RMAX helicopter Fig.15 Unmanned helicopter RPH2 by FHI
Cessna planes and artificial satellites are currently used in polar region scientific
observation around the North and South Poles. However, it is thought that more versatile UAVs would be better suited for such scientific observation missions. Such missions include investigation of rock exposures, ice sheets, sea ice, vegetation, animal populations like penguins and seals, snow coverage, crevasses, etc. Other aspects of these missions
Journal of System Design and Dynamics
Vol. 1, No. 2, 2007
125
include in-air command transmission, communication relay between the remote base and domestic base, and gathering 3-dimensional data of the region. Evidence of the usefulness UAVs in scientific observation was shown when the 46th observation expedition to the Onguru island in February, 2005 carried out their first flight of a small fixed wing UAV. UAVs are further being considered for oceanic geomagnetism observation.
The Chiba University UAV group started research in UAV autonomous control in 1998, began advanced joint research with Hirobo, Ltd. in 2001, and realized fully autonomous control of small-scale hobby-like helicopters (4)-(10). The SKYSURVEYOR of Fig. 16 is designed for monitoring power lines(11). With a gross weight of 48kg and a flight time of 1 hour, it uses onboard cameras to visually acquire power lines and monitor them with high tolerance to helicopter vibration and turbulence. Its payload is about 20kg. Although the SST-eagle2-EX in Fig.17 is originally a hobby helicopter with a gross weight of 5-7kg, autonomous control for it has also already been completed. Flight time is about 20 minutes and its payload is about 1kg. Because it is based on a commercial radio control helicopter for hobbies and can fly autonomously supervised by one person, it is a cheap and simple system that can be used to apply chemical sprays, over small orchards, fields, gardens, etc. and in the future may also be used for aerial photography, or surveillance and rescue operation after a disaster.
Fig.17 Hobby class autonomous helicopter
by Chiba Univ. and Hirobo Co. Fig.16 SKYSURVEYOR by Chiba Univ.,Hirobo Co.
and Chugoku Electric Power Co.
Fig.18 QTW-UAV by GH Craft and Chiba Univ. Fig.19 µ flying robot by Seiko-Epson
and Chiba Univ.
5.Subjects and Prospects for Control and Operation Systems of Civil Use Autonomous UAV
GH Craft and Chiba University are furthering research and development of autonomous control of the four rotor-tilt-wing aircraft in Fig. 18. This QTW (Quad Tilt Wing) UAV is about 30kg in gross weight, take-off and landing is made in helicopter mode, and the high-speed flight is carried out in airplane mode. Bell company in the US conduted the first flight (12) of their QTR(Quad Tilt Rotor)-UAV in January 2006, but, the QTW-UAV is a unique in design in that the entire wing assenmblies can tilt rather than just the rotors. The QTW-UAV is being developed at a quick pace for a proposed scientific observation
Journal of System Design and Dynamics
Vol. 1, No. 2, 2007
126
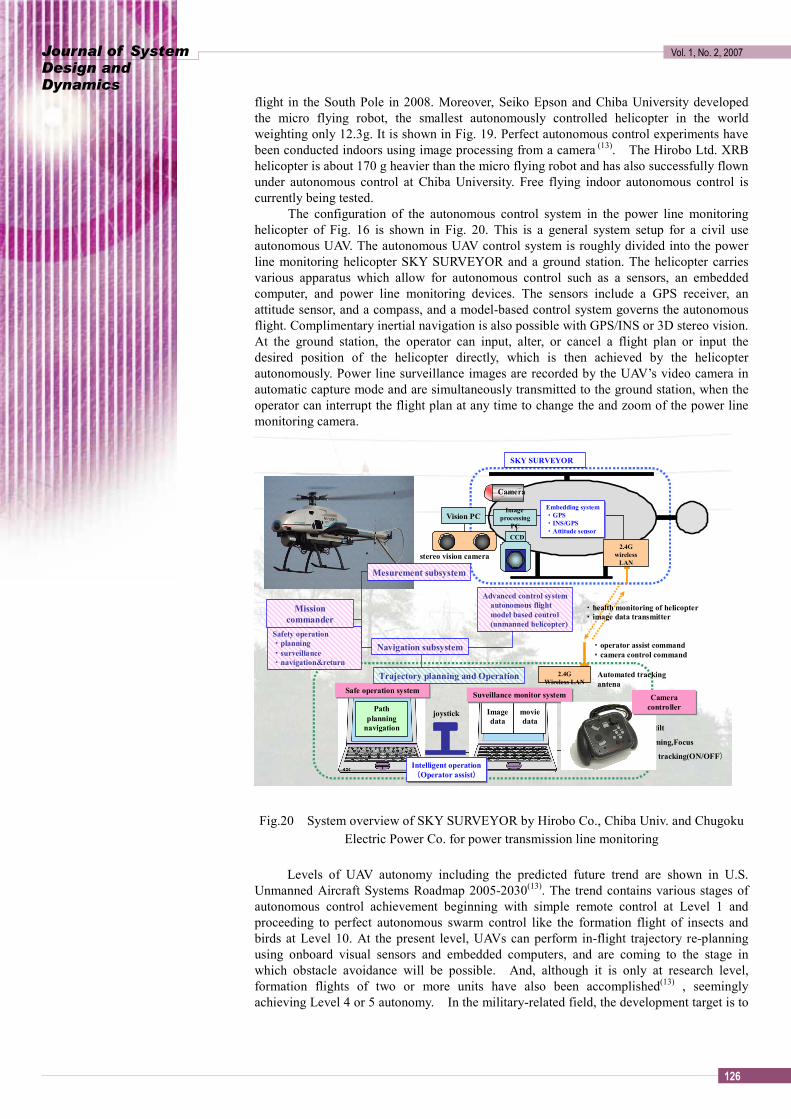
flight in the South Pole in 2008. Moreover, Seiko Epson and Chiba University developed the micro flying robot, the smallest autonomously controlled helicopter in the world weighting only 12.3g. It is shown in Fig. 19. Perfect autonomous control experiments have been conducted indoors using image processing from a camera (13). The Hirobo Ltd. XRB helicopter is about 170 g heavier than the micro flying robot and has also successfully flown under autonomous control at Chiba University. Free flying indoor autonomous control is currently being tested. The configuration of the autonomous control system in the power line monitoring helicopter of Fig. 16 is shown in Fig. 20. This is a general system setup for a civil use autonomous UAV. The autonomous UAV control system is roughly divided into the power line monitoring helicopter SKY SURVEYOR and a ground station. The helicopter carries various apparatus which allow for autonomous control such as a sensors, an embedded computer, and power line monitoring devices. The sensors include a GPS receiver, an attitude sensor, and a compass, and a model-based control system governs the autonomous flight. Complimentary inertial navigation is also possible with GPS/INS or 3D stereo vision. At the ground station, the operator can input, alter, or cancel a flight plan or input the desired position of the helicopter directly, which is then achieved by the helicopter autonomously. Power line surveillance images are recorded by the UAV’s video camera in automatic capture mode and are simultaneously transmitted to the ground station, when the operator can interrupt the flight plan at any time to change the and zoom of the power line monitoring camera. Fig.20 System overview of SKY SURVEYOR by Hirobo Co., Chiba Univ. and Chugoku
Electric Power Co. for power transmission line monitoring
Levels of UAV autonomy including the predicted future trend are shown in U.S. Unmanned Aircraft Systems Roadmap 2005-2030(13). The trend contains various stages of autonomous control achievement beginning with simple remote control at Level 1 and proceeding to perfect autonomous swarm control like the formation flight of insects and birds at Level 10. At the present level, UAVs can perform in-flight trajectory re-planning using onboard visual sensors and embedded computers, and are coming to the stage in which obstacle avoidance will be possible. And, although it is only at research level, formation flights of two or more units have also been accomplished(13) , seemingly achieving Level 4 or 5 autonomy. In the military-related field, the development target is to
・pan/tilt
・Zooming,Focus
・auto tracking(ON/OFF)
2.4GWireless LAN
Image data
moviedata
Suveillance monitor systemSuveillance monitor system
Path planning
navigation
Safe operation systemSafe operation system
Mesurement subsystem
stereo vision camera
Safety operation・planning・surveillance・navigation&return
Navigation subsystem
Mission commander
Camera controllerCamera
controller
Trajectory planning and Operation
SKY SURVEYOR
Advanced control systemautonomous flightmodel based control(unmanned helicopter)
自律制御装置Image
processingPC
Intelligent operation(Operator assist)
Intelligent operation(Operator assist)
Camera
Vision PC
CCD2.4G
wireless LAN
Embedding system・GPS・INS/GPS・Attitude sensor
Embedding system・GPS・INS/GPS・Attitude sensor
・operator assist command・camera control command
・health monitoring of helicopter・image data transmitter
Automated tracking antena
joystick

Journal of System Design and Dynamics
Vol. 1, No. 2, 2007
127
realize perfect autonomous uninhabited aircraft are expected to follow similar evolution. The key technology for realizing such technology is the CPU, which seen exponential improvement in processing speed over the years as Moore’s Law predicted as shown in reference(13). It is predicted that autonomous control of UAVs will similarly advance in step with the evolution of the CPU. Reference(13) shows that the computation speed of CRAY’s most powerful mainframe was nearly equal to that of the human brain in 2005. Furthermore, Moore's Law is predicting that the performance of microprocessors for personal computers will be equal to human brain level around 2015, and personal computers will have equal storage capacity to a human around 2030. On the other hand, if computer technology falls short of Moore’s prediction, it may be difficult for UAV autonomy to reach the upper fiers of evolution.
Also, with respect to body design, it is important for a UAV to have a light body, high-stabilty construction, a high thrust-to-weight ratio, and a general body design that is particularly well-suited for autonomous flight. And further, with regard to autonomous control, a UAV requires a highly reliable data link and advanced sensors. Starting from the present, important UAV research topics include: (1) Formation flight control, such as for civil use observation work, data relay, in-air refueling, etc. Some of these applications will require flight control accuracy of cm-order. (2) Integrated hierarchical control of UAVs and MAVs ; flying various classes of aircraft simultaneously. For example, highly precise missions can be carried at by coordinating small UAVs and MAVs with a larger supervisory UAV. (3) High-altitude flight. Since a UAV does not carry people, it is well-suited for prolonged flight in the stratosphere for scientific observation missions. (4) High precision trajectory following flight ; a technology which will be needed in the future. (5) All weather flight. (6) Installation of collision-avoidance rader systems and other equipment. (7) Intelligent flight control and management systems. (8) Advanced reliability, etc.
6.Conclusions
This paper described the present condition and the subject of research and development of civil use autonomous UAVs. Since the UAVs described here contain an infinite potential, competitive development is being under taken all over the world. In particular, after the New York WTC terror attack on September 11, 2001, the U.S. Department of Homeland Security, rapidly increased its budget for funding UAV research and development.
Although the use of UAVs is various among the countries, without the contribution of Japan and some other countries, much of the remaining research and development would be funded by and in support of military interests. It is important to recognize that the potential of public welfare application of UAVs is infinite. Obvious civil application include observation and surveys of the ozone layer, air pollution, coastlines, wild fires, vegetation growth, glaciers, snow coverage, polar zones, rivers, conditions for typhoon and hurricane generation, tornado formation, forests, large-scale national parks, traffic, power lines, industrial complexes, and pipelines. Rotor-based UAVs can take advantage of vertical flight to take atmospheric measurements at various altitudes. UAVs can also be employed for chemical spraying, gravity and magnetic field measurements, rescue operation support in the aftermath of disasters, or next generation logistics distribution. The possibilities are endless. Japan should focus on leading the world in such research and development of UAV technology for civil use.
As with all advanced technology, how we use UAVs will be of profound importance. Misuse of this new technology would be a tragedy, but if put to good use, history has shown that new technology has infinite potential to improve our lives and our world. Therefore as we continue to develop UAV technology, we must in parallel develop safeguards and take steps to ensure its proper use. The author will be pleased if this paper serves to aid fellow researchers and engineers in the field.

Journal of System Design and Dynamics
Vol. 1, No. 2, 2007
128
References
(1)T.H.Cox et al: Civil UAV Capability Assessment -Draft Version-, NASA Report, December 2004. (2) Aviation Week and Space Technology, “2005 Aerospace Source Book”. January 17, 2005 (3)Presentation Materials of the 2nd Workshop on Trends of Small Unmanned Aircraft and Application for Scientific Observation, 2005 (4)D. Fujiwara, J. Shin, K. Hazawa, K. Igarashi, D. Fernando, and K.Nonami:”Autonomous Flight Control of Small Hobby-Class Unmanned Helicopter, Report 1: Hardware Developmentand Verification Experiments of Autonomous Flight Control System”, Journal of Robotics and Mechatronics, Vol.15 No.5, pp.537-545,2003. (5) D. Fujiwara, J. Shin, K. Hazawa and K. Nonami:H∞ Hovering and Guidance Control for Autonomous Small-Scale Unmanned Helicopter,Trans. of the Japan Society of Mechanical Engineers , Vo.70, No.694, C, pp.1708-1714,2004. (6) J. Shin, D. Fujiwara,K. Hazawa and K. Nonami:Attitude Control and Hovering Control of Radio-Controlled Helicopter,Trans. of the Japan Society of Mechanical Engineers , Vo.68, No.675, C, pp.3284-3291,2002. (7)K. Hazawa, J. Shin, D. Fujiwara, K. Igarashi, D. Fernando, and K.Nonami:”Autonomous Flight Control of Small Hobby-Class Unmanned Helicopter, Report 2: Modeling Based on Experimental Identification and Autonomous Flight Control Experiments”, Journal of Robotics and Mechatronics, Vol.15 No.5, pp.546-554,2003. (8) J. Shin, D. Fujiwara,K. Hazawa and K. Nonami:Model Based Optimal Attitude and Positioning Control of Small-Scale Unmanned Helicopter,Trans. of the Japan Society of Mechanical Engineers , Vo.70, No.697, C, pp. 2631-2637,2004. (9) K. Hazawa, J. Shin, D. Fujiwara, K. Igarashi, D. Fernando, and K. Nonami: Autonomous Autorotation Landing of Small Unmanned Helicopter, Trans. of the Japan Society of Mechanical Engineers , Vo.70, No.698, C, pp. 2862-2869,2004. (10)Y. Shimo,T. Nishioka:Small Unmanned Helicopter and Development for Actual Use of Power Transmission Line Monitoring Syste, Trans.ofthe Japan Society for Aeronautical and Space Siences, Vol.54,No.627,pp.22-25,2006 (11)M. Hirschberg: Bell Makes First Flight With New Eagle Eye Demonstrator, Vertiflight, The American Helicopter Socity, Vol.52, No1.,pp.14-19, Spring 2006. (12)W. Wang,M. Hirata,K. Nonami and O. Miyazawa:Modeling and H∞ Hovering Control of Microminiature Ultra-Light Weight Micro Flying Robot,CD-823,Proceedings of the 47th Joint Conference on Automatic Control,2004. (13)Unmanned Aircraft Systems Roadmap2005-2030, Department of Defence, USA, Aug.5,2005. (14)Y.Masuko:Toward Cooperative Aircraft Swarm Control, Mitsubishi Heavy Industries Report, Vo.42.No.1,pp.20-21,2005.


















