Java para Líderes e Gerentes
29
Globalcode – Open4education José Luiz Sanchez Lorenzo Como ligar a injeção eletrônica do seu carro no Arduino
Transcript of Java para Líderes e Gerentes

Globalcode – Open4education
José Luiz Sanchez Lorenzo
Como ligar a injeção eletrônica do seu carro no Arduino

Globalcode – Open4education
Sobre o palestrante
Formação em EletrônicaAtuando desde 1988 na área de telecomunicações.1988 a 2000 - NEC do Brasil (especialidade em hardware e suporte técnico de centrais de telefonia celular)2000 a 2007 – Lucent Technologies (suporte técnico e implantação de centrais de telefonia fixa e celular) a partir de 2007 - Alcatel-Lucent (coordenando equipe de base de dados de centrais de pequeno porte e implantação de equipamentos NGN).Instrutor dos cursos de formação em robótica na Globalcode.

Globalcode – Open4education
Agenda
Evolução do sistema elétrico e de alimentação dos carros.
Sistema de injeção eletrônicaSensores
Atuadores
Central de controle
Elétrica do módulo de controleConexão dos sensores e atuadores ao Arduíno
Parâmetros dos sensores
Velocímetro com Arduino
Rede CAN-Bus

Globalcode – Open4education
Evolução do sistema elétrico e de Alimentação dos veículos

Globalcode – Open4education
Sensores

Globalcode – Open4education
Atuadores

Globalcode – Open4education
Módulo de Injeção Eletrônica

Globalcode – Open4education
Módulo de Injeção Eletrônica

Globalcode – Open4education
Diagrama de Conexões

Globalcode – Open4education
Parâmetros dos sensores

Globalcode – Open4education
Velocímetro com Arduino

Globalcode – Open4education
Sketch Velocímetro

Globalcode – Open4education
Sketch Velocímetro#include <MsTimer2.h>
int velocidade = 0;
void setup(){
Serial.begin(19200);
TCCR1B = 0x0007; // Def. Timer/Counter 1 (External clock on T1 pin "pino 5 do arduino"/Clock on rising edge)
TCCR1A = 0x0000; // Define o Timer/Counter como Normal Mode. (não utiliza o recuso do comparador)
TCNT1 = 0x0000; // Zera o contador
MsTimer2::set(810, lerVelocidade); // programa interrupcao a cada 810ms
MsTimer2::start();
}
void loop(){
}
void lerVelocidade(){
velocidade = TCNT1;
Serial.println("Velocidade = "); Serial.println(velocidade);
TCNT1 = 0;
interrupts();
}

Globalcode – Open4education
Registradores TCCR1A e TCCR1B

Globalcode – Open4education
Library MsTimer2
http://www.arduino.cc/playground/Main/MsTimer2
MsTimer2::set(unsigned long ms, void (f)()) // configura-se um período em ms ea cada transbordo do contador a função f será executada.A função “f” deverá ser declarada sem parâmetros.
MsTimer2::start() //habilita interrupção
MsTimer2::stop() //desabilita interrupção

Globalcode – Open4education
Diagrama blocos Atmega 1280

Globalcode – Open4education
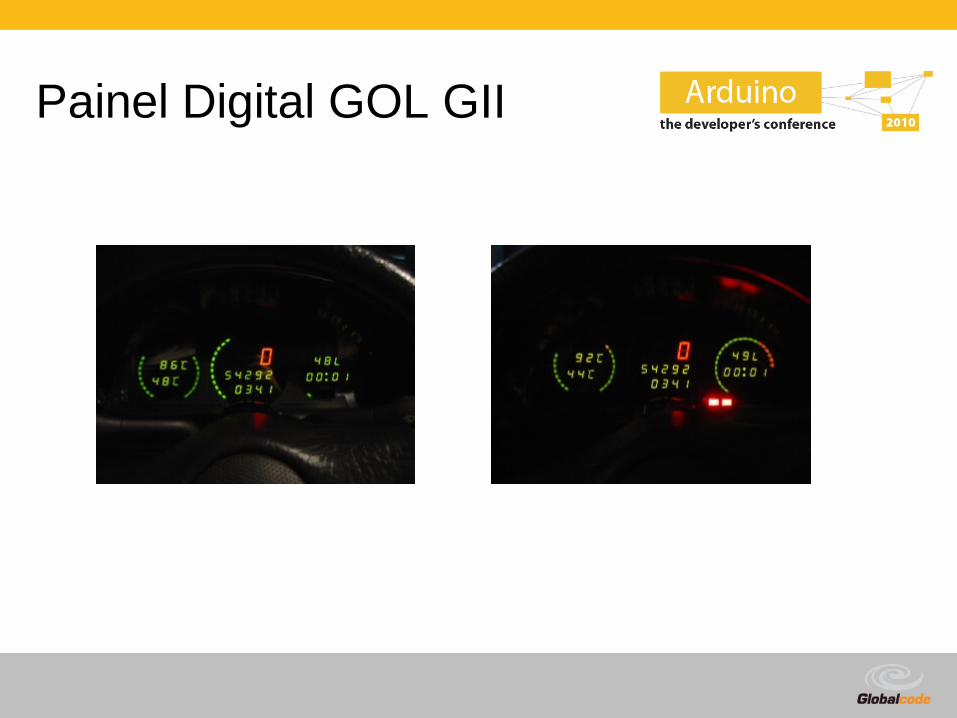
Painel Digital GOL GII

Globalcode – Open4education
Painel Digital GOL GII
Globalcode – Open4education
Painel Digital GOL GII

Globalcode – Open4education
CAN-Bus Network

Globalcode – Open4education
Conexão OBDII (CAN-Bus)
Pin 2 - J1850 Bus+Pin 4 - Chassis GroundPin 5 - Signal GroundPin 6 - CAN High (J-2284)Pin 7 - ISO 9141-2 K LinePin 10 - J1850 BusPin 14 - CAN Low (J-2284)Pin 15 - ISO 9141-2 L LinePin 16 - Battery Power

Globalcode – Open4education
CAN-Bus (ODBII)
Protocolos:
SAE J1850 – PWM (41.6kB/sec, padrão Ford)
SAE J1850 – VPW (variable pulse width 41,6kB/sec padrão GM)
ISO 9141-2 – asynchronous serial data rate of 10.4 kBaud.
ISO 14230 KWP2000 (Keyword Protocol 2000)
ISO 15765 CAN (250 kBits/s ou 500 kBits/s)

Globalcode – Open4education
CAN-Bus (ODBII)
Modos de operação
Modo 1 – Solicitação de dados em tempo real (PIDs)
Modo 2 – Visualização de dados no momento das falhas ocorridas (Freeze Frame data).
Modo 3 – Solicitar histórico de falhas.
Modo 4 – utilizado para limpar informações de diagnóstico e falhas e também registrar execução de manutenção.
Modo 5 - informações de teste do sensor de oxigênio (sonda Lambda)

Globalcode – Open4education
Tabela PIDs (CAN-Bus)Mode (Hex)
PID (hex) Data Bytes returned
Description Min value Max value Units Formula
01 04 1 CARGA DO MOTOR 0 100 % A*100/255
01 05 1 TEMPERATURA DA AGUA -40 215 °C A-40
01 0A 1 PRESSÃO DE COMBUSTIVEL 0 765 kPa A*3
01 0C 2 RPM 0 16.383,75 rpm ((A*256)+B)/4
01 0D 1 VELOCIDADE 0 255 km/h A
01 0F 1 TEMPERATURA AR (INTAKE) -40 215 °C A-40
01 10 2 SENSOR DE MASSA DE AR 0 655.35 g/s ((A*256)+B) / 100
01 11 1 POSIÇÃO DA BORBOLETA 0 100 % A*100/255
01 1F 2 TEMPO DE FUNCIONAMENTO 0 65.535 seg (A*256)+B

Globalcode – Open4education
CAN-Bus transceiver (MCP2551)
No CAN-Bus, os dados não são representados por bits em nível “0” ou nível “1”.São representados por bits Dominantes e bits Recessivos, criados em função da condição presente nos fios CAN_H e CAN_L. A Figura abaixo ilustra os níveis de tensão em uma rede CAN, assim como os bits Dominantes e Recessivos.

Globalcode – Open4education
CAN-Bus Controller com SPI (MCP2515)

Globalcode – Open4education
Sketch acesso CAN-Bus

Globalcode – Open4education
CAN-Shield

Globalcode – Open4education
José Luiz Sanchez [email protected]
www.eletronlivre.com.brhttp://program-me.ning.com