IP20, IP55 (NEMA 12) IP66 (NEMA 4X) -...
53
IP20, IP55 (NEMA 12) IP66 (NEMA 4X) 0.75 - 250kW (1HP - 350HP) 200 - 600V Monofásico / Trifásico Instrucciones de Instalación y Operación AF-700 FP Guía de Usuario
Transcript of IP20, IP55 (NEMA 12) IP66 (NEMA 4X) -...

IP20, IP55 (NEMA 12) IP66 (NEMA 4X) 0.75 - 250kW (1HP - 350HP) 200 - 600V Monofásico / Trifásico
Instrucciones de Instalación y Operación
AF-700 FP Guía de Usuario
2 DET1018ES www.geindustrial.com/Drives
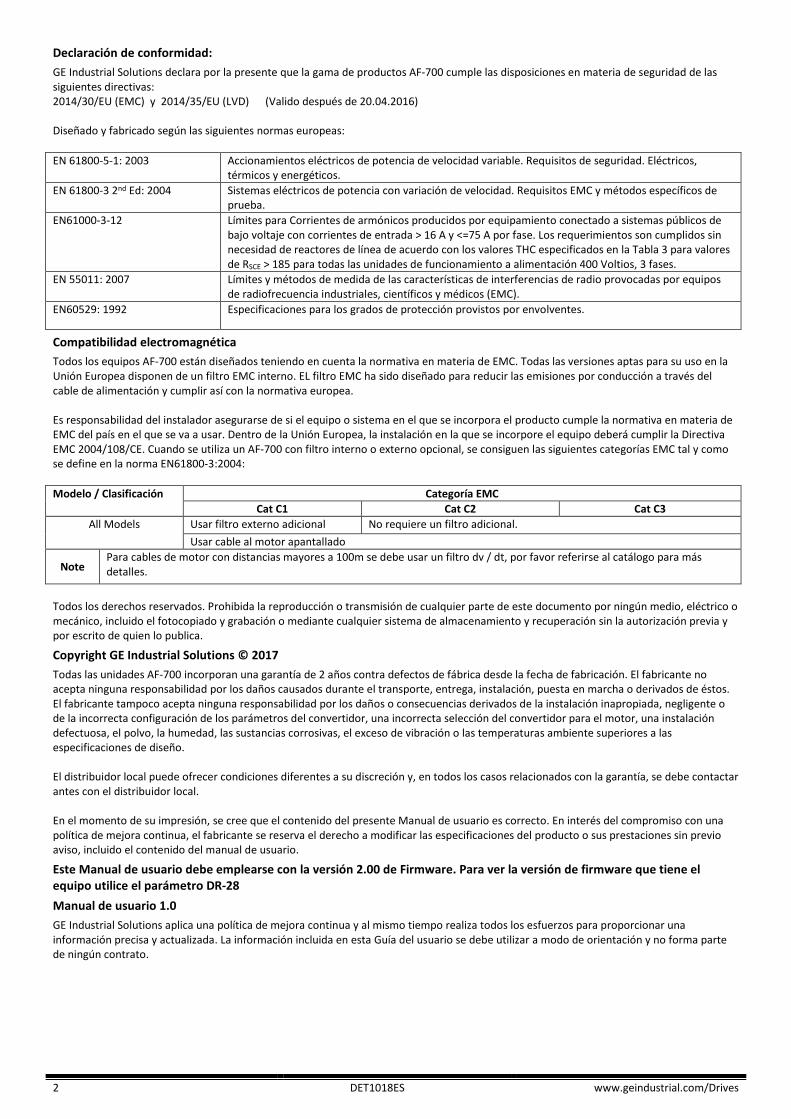
Declaración de conformidad:
GE Industrial Solutions declara por la presente que la gama de productos AF-700 cumple las disposiciones en materia de seguridad de las siguientes directivas: 2014/30/EU (EMC) y 2014/35/EU (LVD) (Valido después de 20.04.2016) Diseñado y fabricado según las siguientes normas europeas:
EN 61800-5-1: 2003 Accionamientos eléctricos de potencia de velocidad variable. Requisitos de seguridad. Eléctricos, térmicos y energéticos.
EN 61800-3 2nd Ed: 2004 Sistemas eléctricos de potencia con variación de velocidad. Requisitos EMC y métodos específicos de prueba.
EN61000-3-12 Límites para Corrientes de armónicos producidos por equipamiento conectado a sistemas públicos de bajo voltaje con corrientes de entrada > 16 A y <=75 A por fase. Los requerimientos son cumplidos sin necesidad de reactores de línea de acuerdo con los valores THC especificados en la Tabla 3 para valores de RSCE > 185 para todas las unidades de funcionamiento a alimentación 400 Voltios, 3 fases.
EN 55011: 2007 Límites y métodos de medida de las características de interferencias de radio provocadas por equipos de radiofrecuencia industriales, científicos y médicos (EMC).
EN60529: 1992 Especificaciones para los grados de protección provistos por envolventes.
Compatibilidad electromagnética
Todos los equipos AF-700 están diseñados teniendo en cuenta la normativa en materia de EMC. Todas las versiones aptas para su uso en la Unión Europea disponen de un filtro EMC interno. EL filtro EMC ha sido diseñado para reducir las emisiones por conducción a través del cable de alimentación y cumplir así con la normativa europea. Es responsabilidad del instalador asegurarse de si el equipo o sistema en el que se incorpora el producto cumple la normativa en materia de EMC del país en el que se va a usar. Dentro de la Unión Europea, la instalación en la que se incorpore el equipo deberá cumplir la Directiva EMC 2004/108/CE. Cuando se utiliza un AF-700 con filtro interno o externo opcional, se consiguen las siguientes categorías EMC tal y como se define en la norma EN61800-3:2004:
Modelo / Clasificación Categoría EMC
Cat C1 Cat C2 Cat C3
All Models
Usar filtro externo adicional No requiere un filtro adicional.
Usar cable al motor apantallado
Note Para cables de motor con distancias mayores a 100m se debe usar un filtro dv / dt, por favor referirse al catálogo para más detalles.
Todos los derechos reservados. Prohibida la reproducción o transmisión de cualquier parte de este documento por ningún medio, eléctrico o mecánico, incluido el fotocopiado y grabación o mediante cualquier sistema de almacenamiento y recuperación sin la autorización previa y por escrito de quien lo publica.
Copyright GE Industrial Solutions © 2017
Todas las unidades AF-700 incorporan una garantía de 2 años contra defectos de fábrica desde la fecha de fabricación. El fabricante no acepta ninguna responsabilidad por los daños causados durante el transporte, entrega, instalación, puesta en marcha o derivados de éstos. El fabricante tampoco acepta ninguna responsabilidad por los daños o consecuencias derivados de la instalación inapropiada, negligente o de la incorrecta configuración de los parámetros del convertidor, una incorrecta selección del convertidor para el motor, una instalación defectuosa, el polvo, la humedad, las sustancias corrosivas, el exceso de vibración o las temperaturas ambiente superiores a las especificaciones de diseño. El distribuidor local puede ofrecer condiciones diferentes a su discreción y, en todos los casos relacionados con la garantía, se debe contactar antes con el distribuidor local. En el momento de su impresión, se cree que el contenido del presente Manual de usuario es correcto. En interés del compromiso con una política de mejora continua, el fabricante se reserva el derecho a modificar las especificaciones del producto o sus prestaciones sin previo aviso, incluido el contenido del manual de usuario.
Este Manual de usuario debe emplearse con la versión 2.00 de Firmware. Para ver la versión de firmware que tiene el equipo utilice el parámetro DR-28
Manual de usuario 1.0
GE Industrial Solutions aplica una política de mejora continua y al mismo tiempo realiza todos los esfuerzos para proporcionar una información precisa y actualizada. La información incluida en esta Guía del usuario se debe utilizar a modo de orientación y no forma parte de ningún contrato.
www.geindustrial.com/Drives DET1018ES 3
1. Introducción ....................................................................................................................................................4 1.1. Información importante de seguridad .................................................................................................................................................. 4 2. Información general y valores .........................................................................................................................5 2.1. Identificar el variador por el número de modelo .................................................................................................................................. 5 3. Instalación mecánica .......................................................................................................................................6 3.1. Antes de instalar .................................................................................................................................................................................... 6 3.2. General .................................................................................................................................................................................................. 6 3.3. Dimensiones mecánicas y peso ............................................................................................................................................................. 6 3.4. Pautas para el montaje en armario (unidades IP20) ............................................................................................................................. 9 3.5. Montaje del convertidor – Unidades IP20 ............................................................................................................................................. 9 3.6. Pautas para el montaje (unidades IP66) .............................................................................................................................................. 10 3.7. Pautas para el montaje (Unidades IP55) ............................................................................................................................................. 10 3.8. Retirada de la tapa terminal ................................................................................................................................................................ 11 3.9. Mantenimiento ................................................................................................................................................................................... 11 3.10. IP66 (Nema 4X) Prensaestopas y seccionador ..................................................................................................................................... 11 4. Instalación eléctrica....................................................................................................................................... 12 4.1. Puesta a tierra ..................................................................................................................................................................................... 12 4.2. Conexión del suministro eléctrico ....................................................................................................................................................... 15 4.3. Conexión del convertidor y el motor ................................................................................................................................................... 15 4.4. Conexiones de la caja de terminales del motor .................................................................................................................................. 15 4.5. Protección de Sobrecarga térmica del motor. ..................................................................................................................................... 15 4.6. Conexionado del bornero de control .................................................................................................................................................. 16 4.7. Diagrama de conexiones ..................................................................................................................................................................... 16 4.8. Safe Torque Off ................................................................................................................................................................................... 17 5. Utilizando el keypad OLED (Estándar en las unidades IP55 & IP66) ............................................................... 20 5.1. Disposición y funciones del keypad ..................................................................................................................................................... 20 5.2. Seleccionando el idioma ...................................................................................................................................................................... 20 5.3. Displays operativos del convertidor .................................................................................................................................................... 20 5.4. Acceso y modificación de los valores de los parámetros .................................................................................................................... 21 5.5. Restablecimiento de los parámetros de fábrica .................................................................................................................................. 21 5.6. Restablecimiento de los parámetros de usuario ................................................................................................................................. 21 5.7. Seleccionando entre el control automático o manual......................................................................................................................... 22 5.8. Atajos de teclado ................................................................................................................................................................................. 22 6. Utilizando el keypad & pantalla LED en IP20 Tamaños 2 & 3 ......................................................................... 23 6.1. Funcionalidad del teclado –LED Keypad Estándar ............................................................................................................................... 23 6.2. Modificación de parámetros ............................................................................................................................................................... 23 6.3. Métodos abreviados avanzados del teclado ....................................................................................................................................... 24 6.4. Displays de funcionamiento del convertidor ....................................................................................................................................... 24 7. Puesta en marcha .......................................................................................................................................... 25 7.1. General ................................................................................................................................................................................................ 25 8. Parámetros .................................................................................................................................................... 26 8.1. Resumen de Parámetros ..................................................................................................................................................................... 26 8.2. Grupo de parámetros F – Parámetros básicos .................................................................................................................................... 26 9. Funciones de entradas digitales .................................................................................................................... 28 9.1. Parámetro F-13 de configuración de entradas digitales ...................................................................................................................... 28 10. Parámetros extendidos ................................................................................................................................. 29 10.1. Grupo de parámetros H – parámetros extendidos .............................................................................................................................. 29 10.2. Grupo de parámetros PI – Control PID ................................................................................................................................................ 33 10.3. Grupo de Parámetros P – Control de motores de alto rendimiento ................................................................................................... 35 10.4. Grupo de Parámetros O – Parámetros de comunicación .................................................................................................................... 36 10.5. Grupo de Parámetros SF – Parámetros específicos para aplicaciones ................................................................................................ 37 10.6. Grupo de parámetros DR – Parámetros de monitorización (Sólo lectura) .......................................................................................... 39 11. Comunicación en serie .................................................................................................................................. 41 11.1. Comunicación RS-485 .......................................................................................................................................................................... 41 11.2. Comunicaciones Modbus RTU ............................................................................................................................................................. 42 11.1. BACnet MSTP ....................................................................................................................................................................................... 44 12. Datos técnicos ............................................................................................................................................... 48 12.1. Medio Ambiente.................................................................................................................................................................................. 48 12.2. Rangos de voltaje de entrada .............................................................................................................................................................. 48 12.3. Fases desequilibradas .......................................................................................................................................................................... 48 12.4. Rango de entrada / salida de potencia y corriente.............................................................................................................................. 48 12.5. Información adicional para el cumplimiento de los requisitos UL ....................................................................................................... 50 12.6. Información de la reducción de potencia ............................................................................................................................................ 50 13. Resolución de problemas .............................................................................................................................. 51 13.1. Mensajes de error ............................................................................................................................................................................... 51
4 DET1018ES www.geindustrial.com/Drives
1. Introducción
1.1. Información importante de seguridad
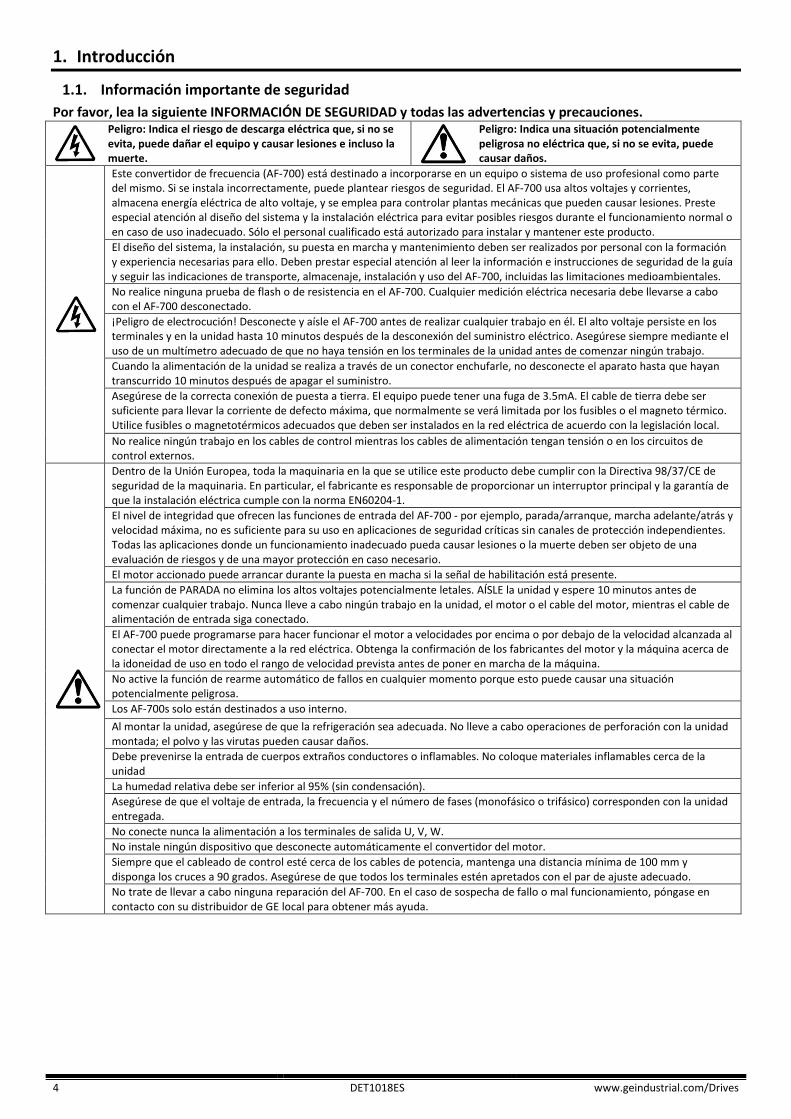
Por favor, lea la siguiente INFORMACIÓN DE SEGURIDAD y todas las advertencias y precauciones.
Peligro: Indica el riesgo de descarga eléctrica que, si no se evita, puede dañar el equipo y causar lesiones e incluso la muerte.
Peligro: Indica una situación potencialmente peligrosa no eléctrica que, si no se evita, puede causar daños.
Este convertidor de frecuencia (AF-700) está destinado a incorporarse en un equipo o sistema de uso profesional como parte del mismo. Si se instala incorrectamente, puede plantear riesgos de seguridad. El AF-700 usa altos voltajes y corrientes, almacena energía eléctrica de alto voltaje, y se emplea para controlar plantas mecánicas que pueden causar lesiones. Preste especial atención al diseño del sistema y la instalación eléctrica para evitar posibles riesgos durante el funcionamiento normal o en caso de uso inadecuado. Sólo el personal cualificado está autorizado para instalar y mantener este producto.
El diseño del sistema, la instalación, su puesta en marcha y mantenimiento deben ser realizados por personal con la formación y experiencia necesarias para ello. Deben prestar especial atención al leer la información e instrucciones de seguridad de la guía y seguir las indicaciones de transporte, almacenaje, instalación y uso del AF-700, incluidas las limitaciones medioambientales.
No realice ninguna prueba de flash o de resistencia en el AF-700. Cualquier medición eléctrica necesaria debe llevarse a cabo con el AF-700 desconectado.
¡Peligro de electrocución! Desconecte y aísle el AF-700 antes de realizar cualquier trabajo en él. El alto voltaje persiste en los terminales y en la unidad hasta 10 minutos después de la desconexión del suministro eléctrico. Asegúrese siempre mediante el uso de un multímetro adecuado de que no haya tensión en los terminales de la unidad antes de comenzar ningún trabajo.
Cuando la alimentación de la unidad se realiza a través de un conector enchufarle, no desconecte el aparato hasta que hayan transcurrido 10 minutos después de apagar el suministro.
Asegúrese de la correcta conexión de puesta a tierra. El equipo puede tener una fuga de 3.5mA. El cable de tierra debe ser suficiente para llevar la corriente de defecto máxima, que normalmente se verá limitada por los fusibles o el magneto térmico. Utilice fusibles o magnetotérmicos adecuados que deben ser instalados en la red eléctrica de acuerdo con la legislación local.
No realice ningún trabajo en los cables de control mientras los cables de alimentación tengan tensión o en los circuitos de control externos.
Dentro de la Unión Europea, toda la maquinaria en la que se utilice este producto debe cumplir con la Directiva 98/37/CE de seguridad de la maquinaria. En particular, el fabricante es responsable de proporcionar un interruptor principal y la garantía de que la instalación eléctrica cumple con la norma EN60204-1.
El nivel de integridad que ofrecen las funciones de entrada del AF-700 - por ejemplo, parada/arranque, marcha adelante/atrás y velocidad máxima, no es suficiente para su uso en aplicaciones de seguridad críticas sin canales de protección independientes. Todas las aplicaciones donde un funcionamiento inadecuado pueda causar lesiones o la muerte deben ser objeto de una evaluación de riesgos y de una mayor protección en caso necesario.
El motor accionado puede arrancar durante la puesta en macha si la señal de habilitación está presente.
La función de PARADA no elimina los altos voltajes potencialmente letales. AÍSLE la unidad y espere 10 minutos antes de comenzar cualquier trabajo. Nunca lleve a cabo ningún trabajo en la unidad, el motor o el cable del motor, mientras el cable de alimentación de entrada siga conectado.
El AF-700 puede programarse para hacer funcionar el motor a velocidades por encima o por debajo de la velocidad alcanzada al conectar el motor directamente a la red eléctrica. Obtenga la confirmación de los fabricantes del motor y la máquina acerca de la idoneidad de uso en todo el rango de velocidad prevista antes de poner en marcha de la máquina.
No active la función de rearme automático de fallos en cualquier momento porque esto puede causar una situación potencialmente peligrosa.
Los AF-700s solo están destinados a uso interno.
Al montar la unidad, asegúrese de que la refrigeración sea adecuada. No lleve a cabo operaciones de perforación con la unidad montada; el polvo y las virutas pueden causar daños.
Debe prevenirse la entrada de cuerpos extraños conductores o inflamables. No coloque materiales inflamables cerca de la unidad
La humedad relativa debe ser inferior al 95% (sin condensación).
Asegúrese de que el voltaje de entrada, la frecuencia y el número de fases (monofásico o trifásico) corresponden con la unidad entregada.
No conecte nunca la alimentación a los terminales de salida U, V, W.
No instale ningún dispositivo que desconecte automáticamente el convertidor del motor.
Siempre que el cableado de control esté cerca de los cables de potencia, mantenga una distancia mínima de 100 mm y disponga los cruces a 90 grados. Asegúrese de que todos los terminales estén apretados con el par de ajuste adecuado.
No trate de llevar a cabo ninguna reparación del AF-700. En el caso de sospecha de fallo o mal funcionamiento, póngase en contacto con su distribuidor de GE local para obtener más ayuda.
www.geindustrial.com/Drives DET1018ES 5
2. Información general y valores
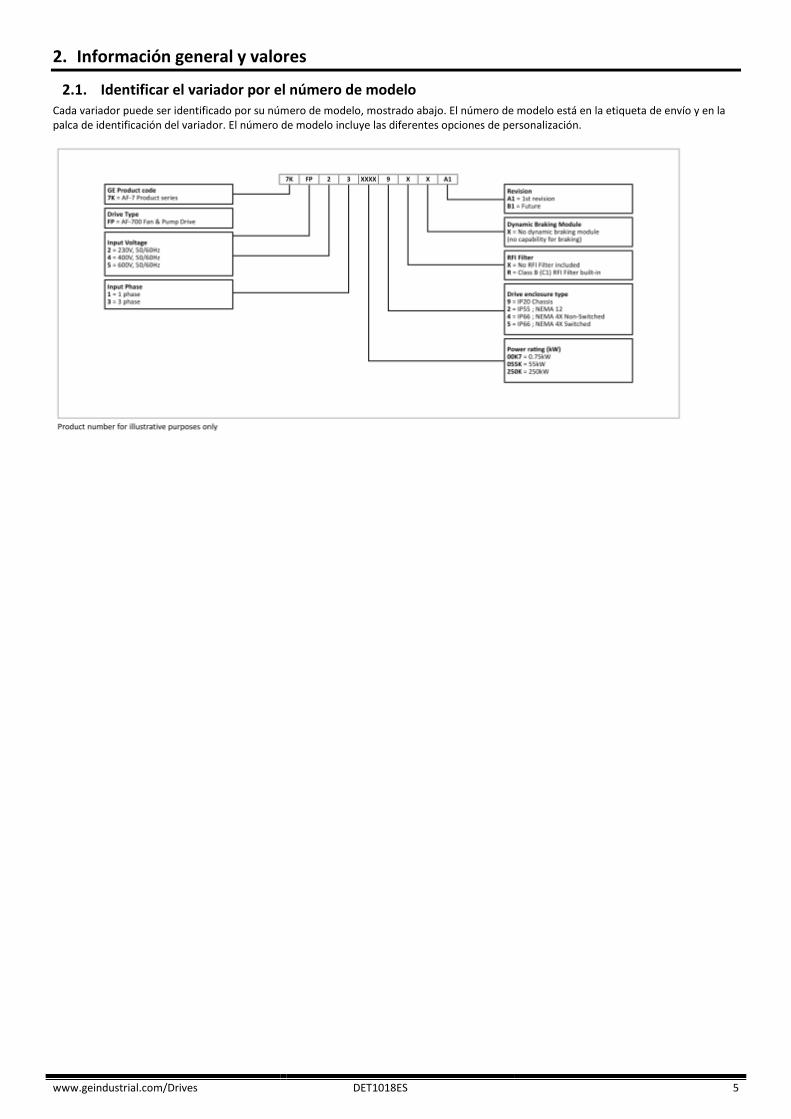
2.1. Identificar el variador por el número de modelo Cada variador puede ser identificado por su número de modelo, mostrado abajo. El número de modelo está en la etiqueta de envío y en la palca de identificación del variador. El número de modelo incluye las diferentes opciones de personalización.
6 DET1018ES www.geindustrial.com/Drives
3. Instalación mecánica
3.1. Antes de instalar
• Desembale el AF-700 y compruebe cualquier daño. Informe al remitente inmediatamente si detecta algún daño.
• Compruebe el modelo del convertidor con la etiqueta para asegurarse que sea el correcto para la aplicación.
• Almacénelo en su caja hasta que deba ser utilizado para evitar daños. Debe estar en un lugar limpio y seco a temperaturas entre –40°C y +60°C.
3.2. General
• El AF-700 debe montarse en posición vertical sobre una superficie plana, resistente al fuego, libre de vibraciones y usando los orificios de anclaje
• No monte el AF-700 cerca de productos inflamables
• Asegúrese de que las entradas de ventilación estén libres, tal y como se describe en la sección 3.5, 3.7 y 3.8.
• Asegúrese de que la temperatura ambiente no supere los rangos permitidos para el AF-700 que se describen en la sección 12.1.
• Asegúrese de que la ventilación del equipo sea suficiente además de no contener humedad, contaminantes, polvo ni suciedad, cumpliendo así los requisitos de refrigeración del AF-700.
3.3. Dimensiones mecánicas y peso
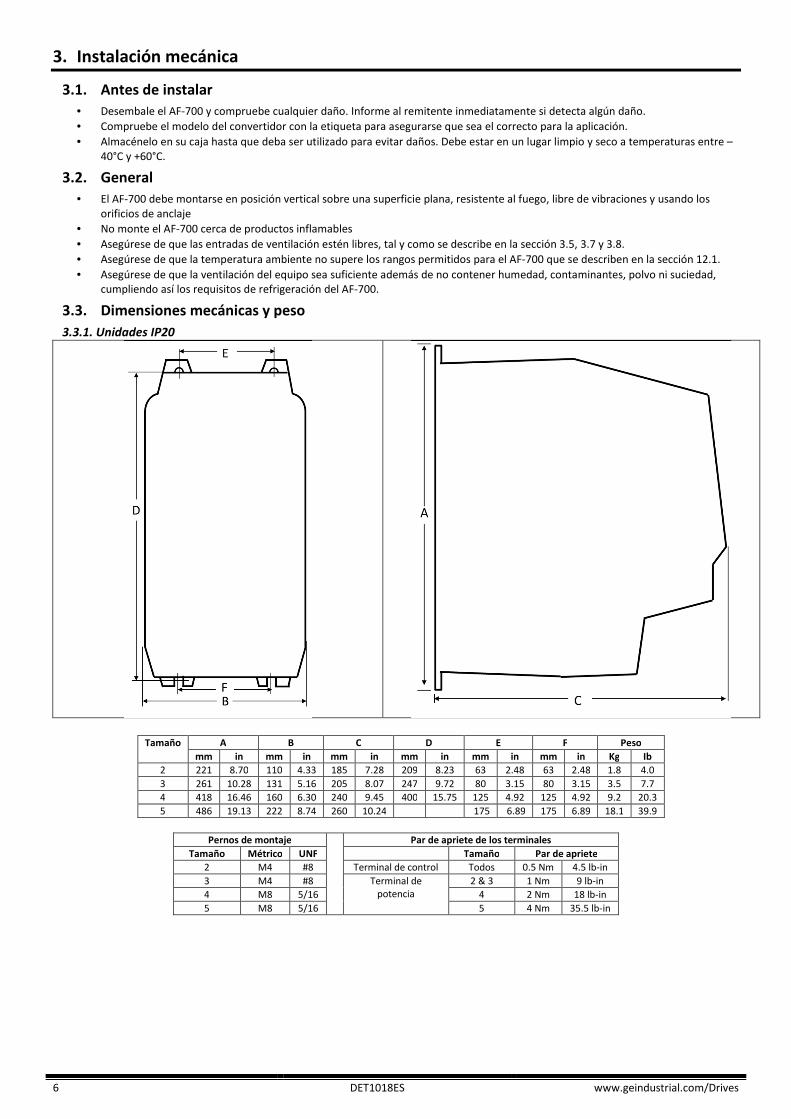
3.3.1. Unidades IP20
Tamaño A B C D E F Peso
mm in mm in mm in mm in mm in mm in Kg Ib
2 221 8.70 110 4.33 185 7.28 209 8.23 63 2.48 63 2.48 1.8 4.0
3 261 10.28 131 5.16 205 8.07 247 9.72 80 3.15 80 3.15 3.5 7.7
4 418 16.46 160 6.30 240 9.45 400 15.75 125 4.92 125 4.92 9.2 20.3
5 486 19.13 222 8.74 260 10.24 175 6.89 175 6.89 18.1 39.9
Pernos de montaje Par de apriete de los terminales
Tamaño Métrico UNF Tamaño Par de apriete
2 M4 #8 Terminal de control Todos 0.5 Nm 4.5 lb-in
3 M4 #8 Terminal de potencia
2 & 3 1 Nm 9 lb-in
4 M8 5/16 4 2 Nm 18 lb-in
5 M8 5/16 5 4 Nm 35.5 lb-in
www.geindustrial.com/Drives DET1018ES 7
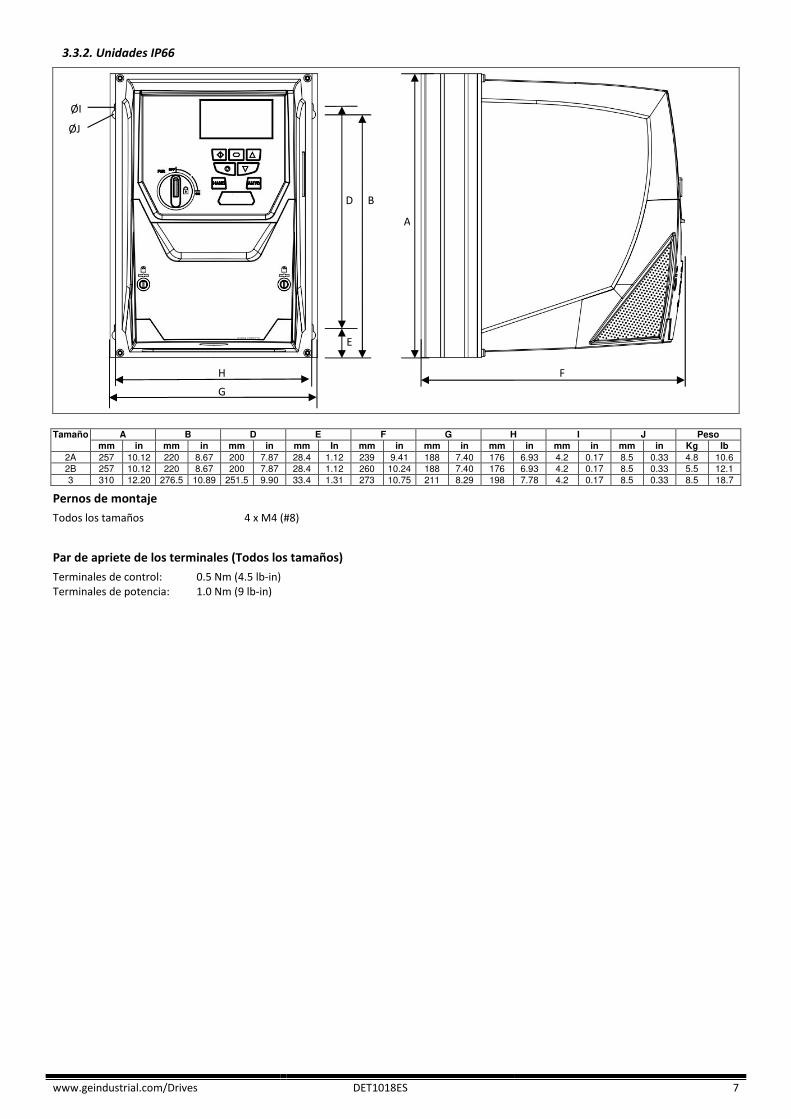
3.3.2. Unidades IP66
Tamaño A B D E F G H I J Peso
mm in mm in mm in mm In mm in mm in mm in mm in mm in Kg Ib
2A 257 10.12 220 8.67 200 7.87 28.4 1.12 239 9.41 188 7.40 176 6.93 4.2 0.17 8.5 0.33 4.8 10.6
2B 257 10.12 220 8.67 200 7.87 28.4 1.12 260 10.24 188 7.40 176 6.93 4.2 0.17 8.5 0.33 5.5 12.1
3 310 12.20 276.5 10.89 251.5 9.90 33.4 1.31 273 10.75 211 8.29 198 7.78 4.2 0.17 8.5 0.33 8.5 18.7
Pernos de montaje
Todos los tamaños 4 x M4 (#8)
Par de apriete de los terminales (Todos los tamaños)
Terminales de control: 0.5 Nm (4.5 lb-in) Terminales de potencia: 1.0 Nm (9 lb-in)
A
F
G
H
D B
E
ØJ
ØI
8 DET1018ES www.geindustrial.com/Drives
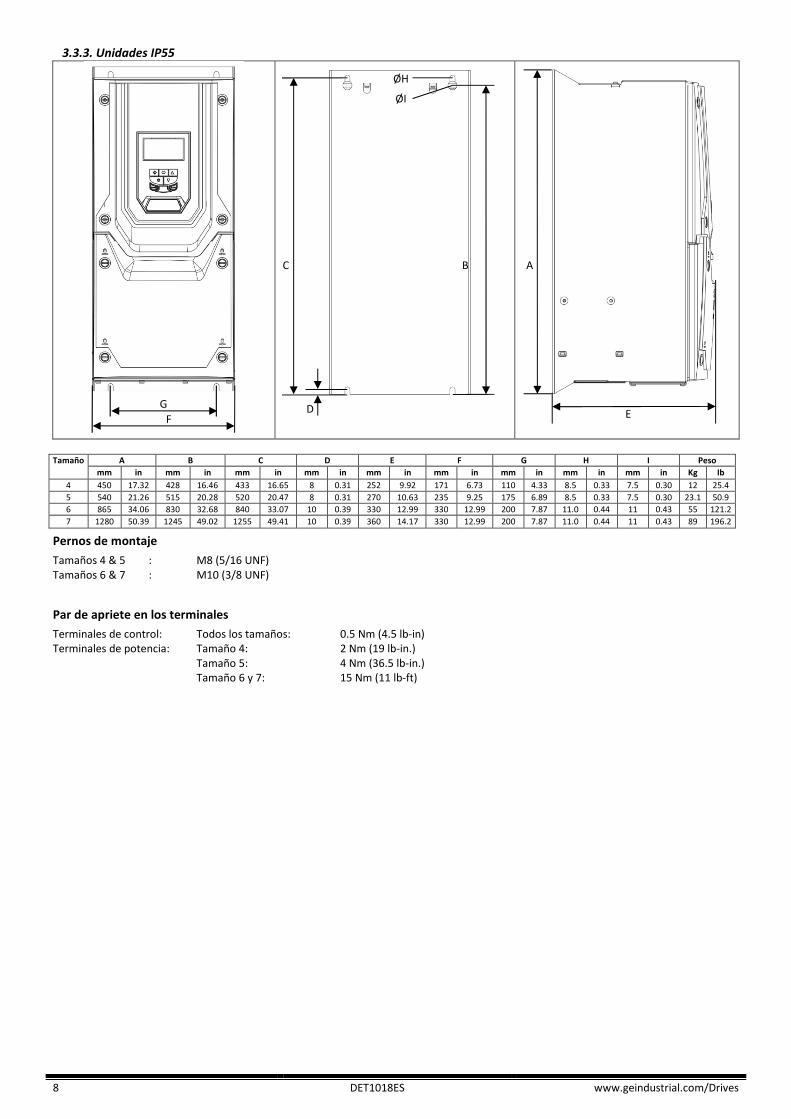
3.3.3. Unidades IP55
Tamaño A B C D E F G H I Peso
mm in mm in mm in mm in mm in mm in mm in mm in mm in Kg Ib
4 450 17.32 428 16.46 433 16.65 8 0.31 252 9.92 171 6.73 110 4.33 8.5 0.33 7.5 0.30 12 25.4
5 540 21.26 515 20.28 520 20.47 8 0.31 270 10.63 235 9.25 175 6.89 8.5 0.33 7.5 0.30 23.1 50.9
6 865 34.06 830 32.68 840 33.07 10 0.39 330 12.99 330 12.99 200 7.87 11.0 0.44 11 0.43 55 121.2
7 1280 50.39 1245 49.02 1255 49.41 10 0.39 360 14.17 330 12.99 200 7.87 11.0 0.44 11 0.43 89 196.2
Pernos de montaje
Tamaños 4 & 5 : M8 (5/16 UNF) Tamaños 6 & 7 : M10 (3/8 UNF)
Par de apriete en los terminales
Terminales de control: Todos los tamaños: 0.5 Nm (4.5 lb-in) Terminales de potencia: Tamaño 4: 2 Nm (19 lb-in.) Tamaño 5: 4 Nm (36.5 lb-in.) Tamaño 6 y 7: 15 Nm (11 lb-ft)
G
F
A B C
D E
ØH
ØI
www.geindustrial.com/Drives DET1018ES 9
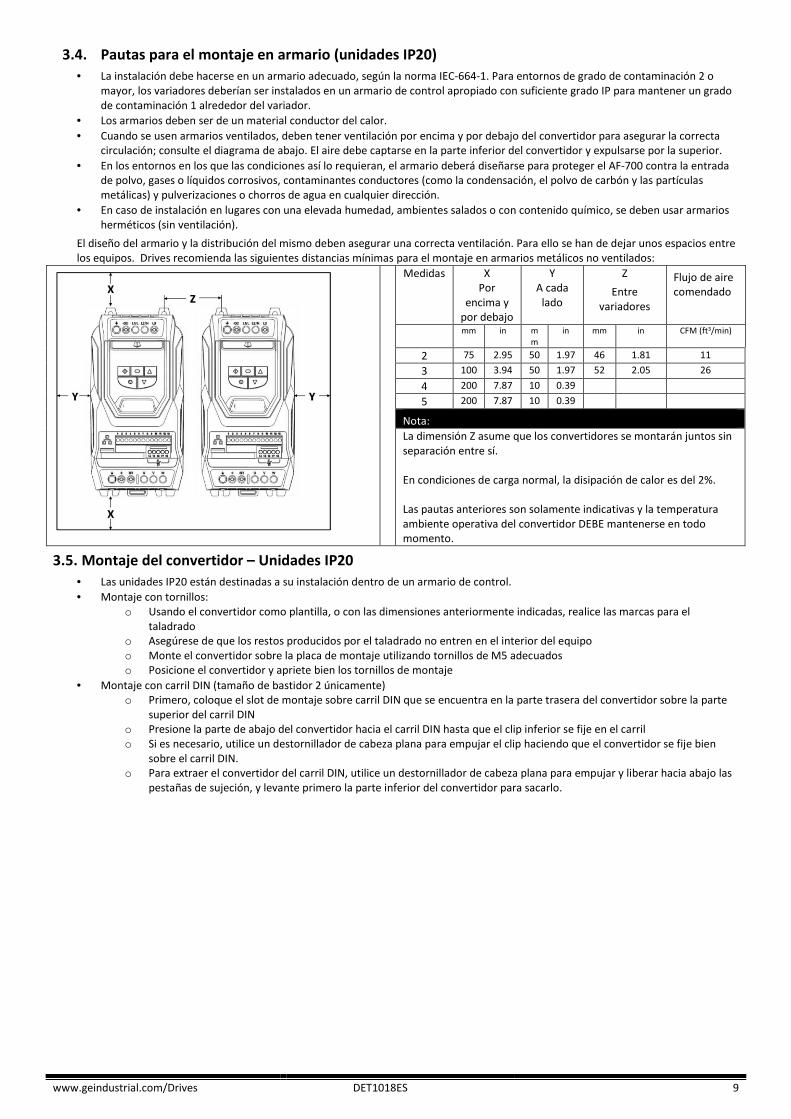
3.4. Pautas para el montaje en armario (unidades IP20)
• La instalación debe hacerse en un armario adecuado, según la norma IEC-664-1. Para entornos de grado de contaminación 2 o mayor, los variadores deberían ser instalados en un armario de control apropiado con suficiente grado IP para mantener un grado de contaminación 1 alrededor del variador.
• Los armarios deben ser de un material conductor del calor.
• Cuando se usen armarios ventilados, deben tener ventilación por encima y por debajo del convertidor para asegurar la correcta circulación; consulte el diagrama de abajo. El aire debe captarse en la parte inferior del convertidor y expulsarse por la superior.
• En los entornos en los que las condiciones así lo requieran, el armario deberá diseñarse para proteger el AF-700 contra la entrada de polvo, gases o líquidos corrosivos, contaminantes conductores (como la condensación, el polvo de carbón y las partículas metálicas) y pulverizaciones o chorros de agua en cualquier dirección.
• En caso de instalación en lugares con una elevada humedad, ambientes salados o con contenido químico, se deben usar armarios herméticos (sin ventilación).
El diseño del armario y la distribución del mismo deben asegurar una correcta ventilación. Para ello se han de dejar unos espacios entre los equipos. Drives recomienda las siguientes distancias mínimas para el montaje en armarios metálicos no ventilados:
Medidas X Por
encima y por debajo
Y A cada
lado
Z
Entre variadores
Flujo de aire comendado
mm in mm
in mm in CFM (ft3/min)
2 75 2.95 50 1.97 46 1.81 11
3 100 3.94 50 1.97 52 2.05 26
4 200 7.87 10 0.39
5 200 7.87 10 0.39
Nota:
La dimensión Z asume que los convertidores se montarán juntos sin separación entre sí. En condiciones de carga normal, la disipación de calor es del 2%. Las pautas anteriores son solamente indicativas y la temperatura ambiente operativa del convertidor DEBE mantenerse en todo momento.
3.5. Montaje del convertidor – Unidades IP20
• Las unidades IP20 están destinadas a su instalación dentro de un armario de control.
• Montaje con tornillos: o Usando el convertidor como plantilla, o con las dimensiones anteriormente indicadas, realice las marcas para el
taladrado o Asegúrese de que los restos producidos por el taladrado no entren en el interior del equipo o Monte el convertidor sobre la placa de montaje utilizando tornillos de M5 adecuados o Posicione el convertidor y apriete bien los tornillos de montaje
• Montaje con carril DIN (tamaño de bastidor 2 únicamente) o Primero, coloque el slot de montaje sobre carril DIN que se encuentra en la parte trasera del convertidor sobre la parte
superior del carril DIN o Presione la parte de abajo del convertidor hacia el carril DIN hasta que el clip inferior se fije en el carril o Si es necesario, utilice un destornillador de cabeza plana para empujar el clip haciendo que el convertidor se fije bien
sobre el carril DIN. o Para extraer el convertidor del carril DIN, utilice un destornillador de cabeza plana para empujar y liberar hacia abajo las
pestañas de sujeción, y levante primero la parte inferior del convertidor para sacarlo.
10 DET1018ES www.geindustrial.com/Drives
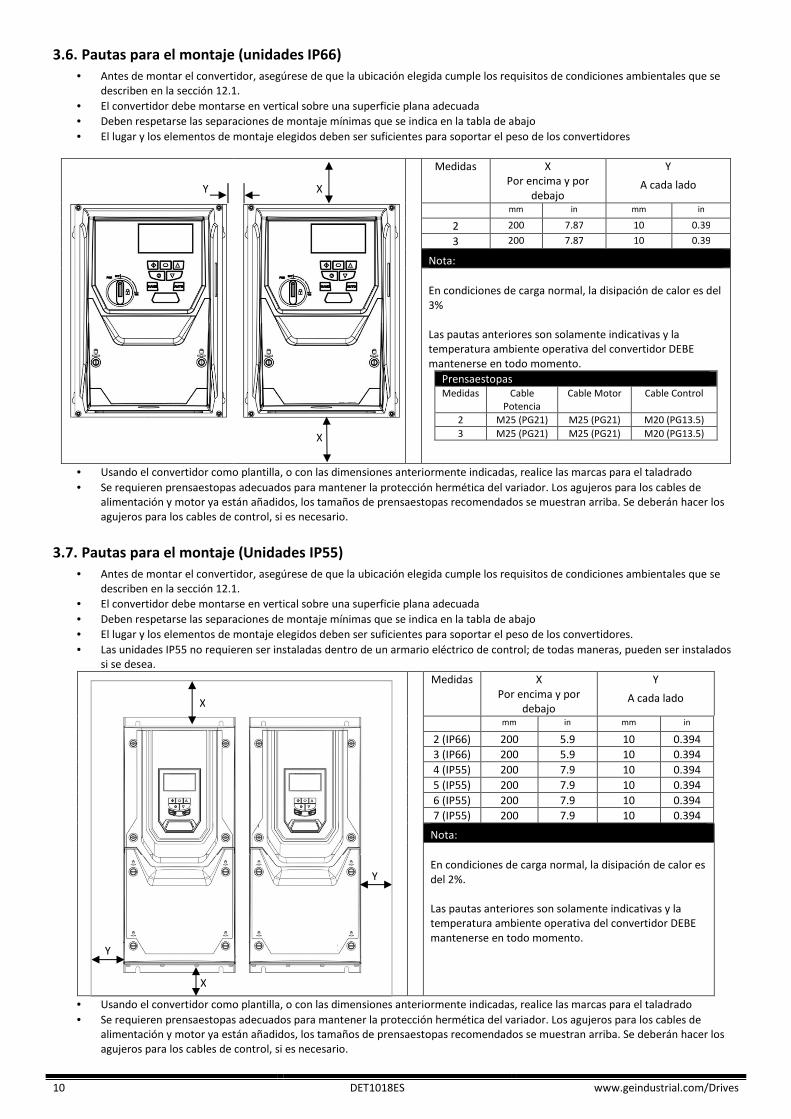
3.6. Pautas para el montaje (unidades IP66)
• Antes de montar el convertidor, asegúrese de que la ubicación elegida cumple los requisitos de condiciones ambientales que se describen en la sección 12.1.
• El convertidor debe montarse en vertical sobre una superficie plana adecuada
• Deben respetarse las separaciones de montaje mínimas que se indica en la tabla de abajo
• El lugar y los elementos de montaje elegidos deben ser suficientes para soportar el peso de los convertidores
Y
X
X
Medidas X Por encima y por
debajo
Y
A cada lado
mm in mm in
2 200 7.87 10 0.39
3 200 7.87 10 0.39
Nota:
En condiciones de carga normal, la disipación de calor es del 3% Las pautas anteriores son solamente indicativas y la temperatura ambiente operativa del convertidor DEBE mantenerse en todo momento.
Prensaestopas Medidas Cable
Potencia Cable Motor Cable Control
2 M25 (PG21) M25 (PG21) M20 (PG13.5)
3 M25 (PG21) M25 (PG21) M20 (PG13.5)
• Usando el convertidor como plantilla, o con las dimensiones anteriormente indicadas, realice las marcas para el taladrado
• Se requieren prensaestopas adecuados para mantener la protección hermética del variador. Los agujeros para los cables de alimentación y motor ya están añadidos, los tamaños de prensaestopas recomendados se muestran arriba. Se deberán hacer los agujeros para los cables de control, si es necesario.
3.7. Pautas para el montaje (Unidades IP55)
• Antes de montar el convertidor, asegúrese de que la ubicación elegida cumple los requisitos de condiciones ambientales que se describen en la sección 12.1.
• El convertidor debe montarse en vertical sobre una superficie plana adecuada
• Deben respetarse las separaciones de montaje mínimas que se indica en la tabla de abajo
• El lugar y los elementos de montaje elegidos deben ser suficientes para soportar el peso de los convertidores.
• Las unidades IP55 no requieren ser instaladas dentro de un armario eléctrico de control; de todas maneras, pueden ser instalados si se desea.
Medidas X Por encima y por
debajo
Y
A cada lado
mm in mm in
2 (IP66) 200 5.9 10 0.394
3 (IP66) 200 5.9 10 0.394
4 (IP55) 200 7.9 10 0.394
5 (IP55) 200 7.9 10 0.394
6 (IP55) 200 7.9 10 0.394
7 (IP55) 200 7.9 10 0.394
Nota:
En condiciones de carga normal, la disipación de calor es del 2%. Las pautas anteriores son solamente indicativas y la temperatura ambiente operativa del convertidor DEBE mantenerse en todo momento.
• Usando el convertidor como plantilla, o con las dimensiones anteriormente indicadas, realice las marcas para el taladrado
• Se requieren prensaestopas adecuados para mantener la protección hermética del variador. Los agujeros para los cables de alimentación y motor ya están añadidos, los tamaños de prensaestopas recomendados se muestran arriba. Se deberán hacer los agujeros para los cables de control, si es necesario.
Y
X
X
Y
www.geindustrial.com/Drives DET1018ES 11
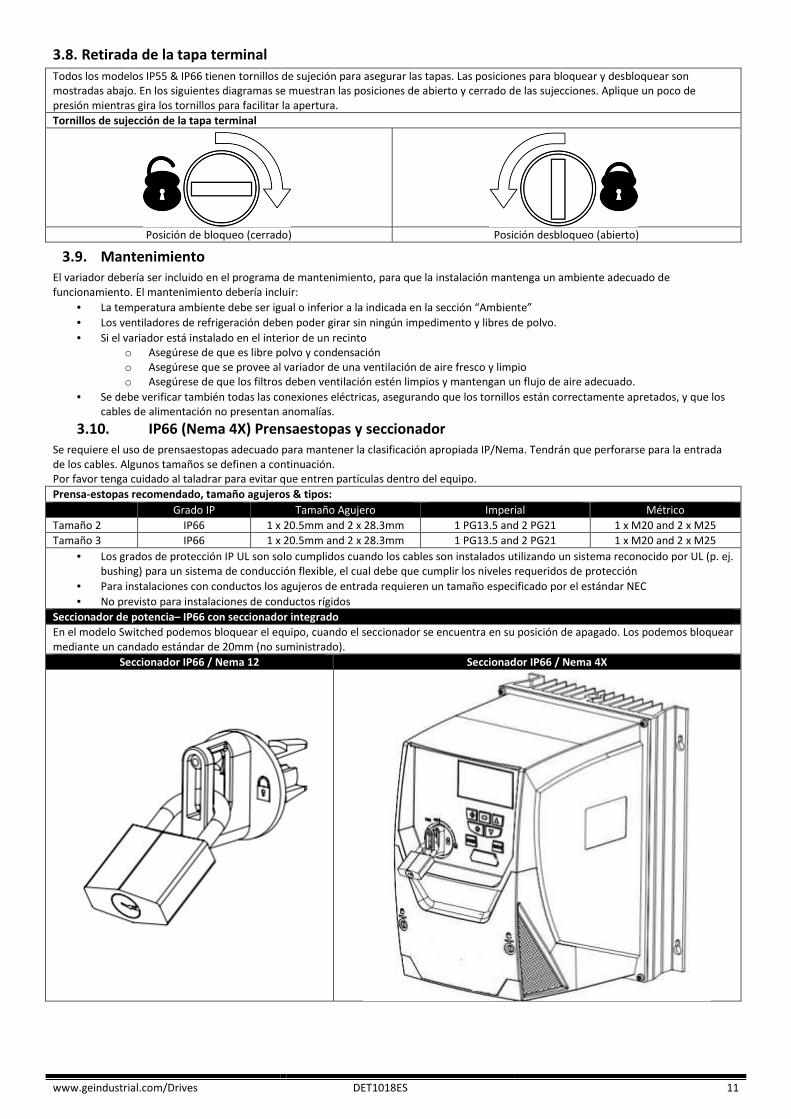
3.8. Retirada de la tapa terminal
Todos los modelos IP55 & IP66 tienen tornillos de sujeción para asegurar las tapas. Las posiciones para bloquear y desbloquear son mostradas abajo. En los siguientes diagramas se muestran las posiciones de abierto y cerrado de las sujecciones. Aplique un poco de presión mientras gira los tornillos para facilitar la apertura.
Tornillos de sujección de la tapa terminal
Posición de bloqueo (cerrado) Posición desbloqueo (abierto)
3.9. Mantenimiento El variador debería ser incluido en el programa de mantenimiento, para que la instalación mantenga un ambiente adecuado de funcionamiento. El mantenimiento debería incluir:
• La temperatura ambiente debe ser igual o inferior a la indicada en la sección “Ambiente”
• Los ventiladores de refrigeración deben poder girar sin ningún impedimento y libres de polvo.
• Si el variador está instalado en el interior de un recinto o Asegúrese de que es libre polvo y condensación o Asegúrese que se provee al variador de una ventilación de aire fresco y limpio o Asegúrese de que los filtros deben ventilación estén limpios y mantengan un flujo de aire adecuado.
• Se debe verificar también todas las conexiones eléctricas, asegurando que los tornillos están correctamente apretados, y que los cables de alimentación no presentan anomalías.
3.10. IP66 (Nema 4X) Prensaestopas y seccionador Se requiere el uso de prensaestopas adecuado para mantener la clasificación apropiada IP/Nema. Tendrán que perforarse para la entrada de los cables. Algunos tamaños se definen a continuación. Por favor tenga cuidado al taladrar para evitar que entren partículas dentro del equipo.
Prensa-estopas recomendado, tamaño agujeros & tipos:
Grado IP Tamaño Agujero Imperial Métrico
Tamaño 2 IP66 1 x 20.5mm and 2 x 28.3mm 1 PG13.5 and 2 PG21 1 x M20 and 2 x M25
Tamaño 3 IP66 1 x 20.5mm and 2 x 28.3mm 1 PG13.5 and 2 PG21 1 x M20 and 2 x M25
• Los grados de protección IP UL son solo cumplidos cuando los cables son instalados utilizando un sistema reconocido por UL (p. ej. bushing) para un sistema de conducción flexible, el cual debe que cumplir los niveles requeridos de protección
• Para instalaciones con conductos los agujeros de entrada requieren un tamaño especificado por el estándar NEC
• No previsto para instalaciones de conductos rígidos
Seccionador de potencia– IP66 con seccionador integrado
En el modelo Switched podemos bloquear el equipo, cuando el seccionador se encuentra en su posición de apagado. Los podemos bloquear mediante un candado estándar de 20mm (no suministrado).
Seccionador IP66 / Nema 12 Seccionador IP66 / Nema 4X
12 DET1018ES www.geindustrial.com/Drives
4. Instalación eléctrica
4.1. Puesta a tierra
Este manual pretende ser una guía de instalación. GE Industrial Solutions no puede asumir ninguna responsabilidad por el cumplimiento o incumplimiento de la normativa nacional, local o cualquier otra, ni por la inadecuada instalación del convertidor o de los equipos asociados. Se pueden provocar lesiones y daños en los equipos si estas normas se ignoran durante la instalación.
Este AF-700 tiene condensadores de alto voltaje que tardan en descargarse después de desconectarlo. Antes de trabajar con el convertidor, asegúrese de que se ha desconectado la alimentación de entrada. Espere diez minutos hasta que los condensadores se hayan descargado alcanzando un nivel de seguridad. No tener en cuenta esta precaución puede provocar lesiones e incluso la muerte.
Sólo el personal con una cualificación eléctrica, familiarizado con la construcción y funcionamiento de este equipo y los peligros derivados puede instalarlo, programarlo, manipularlo o repararlo. Debe leer y comprender este manual antes de continuar. No tener en cuenta esta precaución puede provocar lesiones e incluso la muerte.
4.1.1. Pautas para la puesta a tierra El terminal de puesta a tierra de cada AF-700 debe conectarse DIRECTAMENTE a la puesta a tierra de la barra de bus (a través del filtro si lo hay). Las conexiones a tierra del AF-700 no deben transferirse de una unidad a otra ni a ningún otro equipo. La impedancia de tierra debe cumplir los reglamentos locales de seguridad industrial. Para cumplir con las normas UL, se debe usar un terminal de anillo UL para todas las conexiones de tierra. La puesta a tierra de seguridad del equipo debe estar conectada a la puesta a tierra del sistema. La impedancia a tierra debe cumplir con los requisitos de las normas de seguridad nacionales y locales industriales y/o los códigos eléctricos. La integridad de todas las conexiones a tierra debe revisarse periódicamente.
4.1.2. Conductor de protección
La sección transversal del cable de tierra debe ser al menos como la del cable de entrada.
4.1.3. Puesta a tierra del motor La puesta a tierra del motor debe conectarse a unos de los terminales del convertidor.
4.1.4. Monitorización de los fallos de puesta a tierra
Como en todos los inversores, puede existir una corriente de fuga a tierra. El AF-700 está diseñado para producir la mínima corriente de fuga posible cumpliendo en todo momento la normativa mundial. El nivel de corriente se ve afectado por el tipo y la longitud del cable del motor, la frecuencia de conmutación efectiva, las conexiones de puesta a tierra empleadas y el tipo de filtro RFI instalado. Si se usa un diferencial (disyuntor de fuga a tierra o ELCB), deben respetarse las siguientes condiciones:
• Se debe usar un diferencial de tipo B.
• El equipo debe ser capaz de proteger equipos con un componente de CC en la corriente de fuga.
• Deben utilizarse diferenciales individuales para cada AF-700. Los equipos que incorporan filtro EMC tienen una corriente de a tierra superior. La gama de productos AF-700 tiene componentes de supresión de entrada de tensión de alimentación de sobretensiones instalados para proteger el equipo de los transitorios de tensión en la línea, por lo general procedentes de la caída de rayos o el cambio de equipos de alta potencia en el mismo suministro.
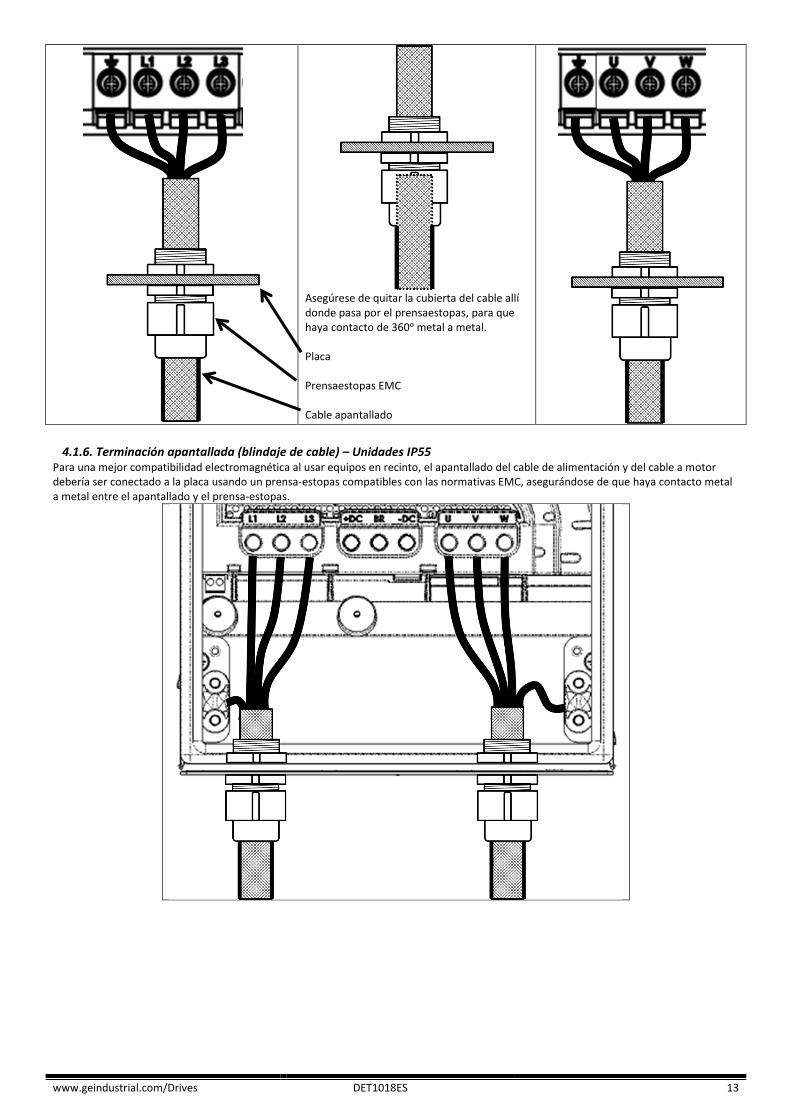
4.1.5. Terminación apantallada (blindaje de cable) – Unidades IP20 & IP66 Para una mejor compatibilidad electromagnética al usar equipos en recinto, el apantallado del cable de alimentación y del cable a motor debería ser conectado a la placa usando un prensa-estopas compatibles con las normativas EMC, asegurándose de que haya contacto metal a metal entre el apantallado y el prensa-estopas.
www.geindustrial.com/Drives DET1018ES 13
Asegúrese de quitar la cubierta del cable allí donde pasa por el prensaestopas, para que haya contacto de 360ᵒ metal a metal. Placa Prensaestopas EMC Cable apantallado
4.1.6. Terminación apantallada (blindaje de cable) – Unidades IP55
Para una mejor compatibilidad electromagnética al usar equipos en recinto, el apantallado del cable de alimentación y del cable a motor debería ser conectado a la placa usando un prensa-estopas compatibles con las normativas EMC, asegurándose de que haya contacto metal a metal entre el apantallado y el prensa-estopas.
14 DET1018ES www.geindustrial.com/Drives
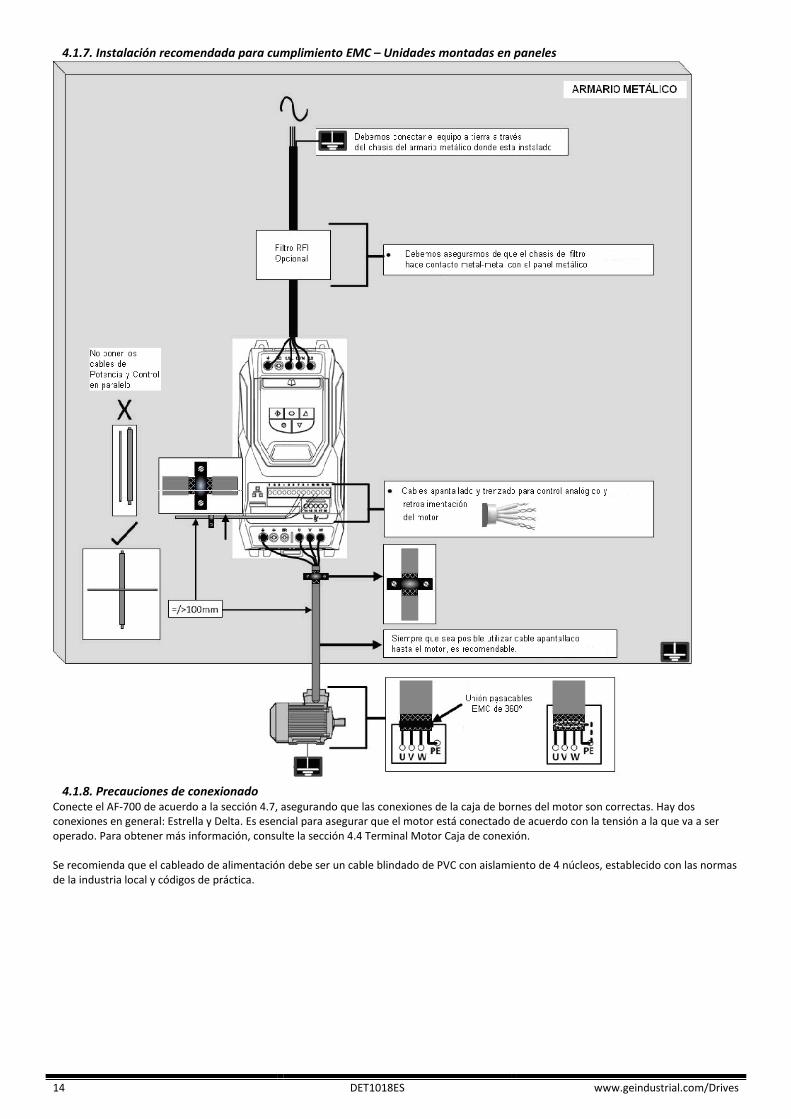
4.1.7. Instalación recomendada para cumplimiento EMC – Unidades montadas en paneles
4.1.8. Precauciones de conexionado
Conecte el AF-700 de acuerdo a la sección 4.7, asegurando que las conexiones de la caja de bornes del motor son correctas. Hay dos conexiones en general: Estrella y Delta. Es esencial para asegurar que el motor está conectado de acuerdo con la tensión a la que va a ser operado. Para obtener más información, consulte la sección 4.4 Terminal Motor Caja de conexión. Se recomienda que el cableado de alimentación debe ser un cable blindado de PVC con aislamiento de 4 núcleos, establecido con las normas de la industria local y códigos de práctica.
www.geindustrial.com/Drives DET1018ES 15
4.2. Conexión del suministro eléctrico
• Para la entrada monofásica se debe conectar a L1/L, L2/N. Para la entrada trifásica se debe conectar a L1, L2 y L3. No importa el orden de las fases.
• Para cumplir los requisitos CE y C Tick EMC, se recomienda utilizar un cable apantallado simétrico.
• Se precisa una instalación fija según IEC61800-5-1 con una adecuada desconexión entre el AF-700 y la fuente de alimentación. La desconexión del equipo debe hacerse de acuerdo con los códigos y normas de seguridad (por ejemplo: sólo en Europa, EN60204-1, Seguridad de la maquinaria).
• Los cables han de dimensionarse de acuerdo con los códigos y normas locales. La guía se encuentra en la sección 13.4
• Deben instalarse fusibles adecuados para proteger el cableado de alimentación en la línea de alimentación de acuerdo con la información que se recoge en la sección 13.4. Los fusibles deben cumplir los códigos locales o los reglamentos en vigor. En general, los fusibles de tipo gG (IEC 60269) o UL de tipo J resultan adecuados; sin embargo, en algunos casos, se precisan fusibles de tipo aR. El tiempo de actuación de los fusibles debe ser inferior a 0,5 segundos.
• En los casos permitidos por la normativa local, en lugar de los fusibles se pueden utilizar magnetotérmicos de tipo B con la calificación equivalente siempre que la capacidad de interrupción sea suficiente para la instalación.
• Cuando se desconecte la fuente de alimentación, se deben dejar transcurrir como mínimo 30 segundos antes de volver a aplicar tensión. Se debe esperar un mínimo de 10 minutos antes de retirar las tapas terminales o las conexiones.
• La corriente máxima de cortocircuito admisible en los terminales del AF-700 es la que se define en IEC60439-1 de 100 kA.
4.3. Conexión del convertidor y el motor
• El equipo produce rápidas conmutaciones de la tensión de salida (PWM) comparado con la tensión de alimentación, para motor que han sido diseñados para trabajar a velocidades variables, no hay medidas preventivas necesarias, por el contrario, si la calidad del aislamiento es desconocido, de debe consultar al fabricante del motor y si requiere medidas preventivas.
• El motor se debe conectar con los terminales U, V y W del AF-700 utilizando un cable adecuado de 3 o 4 hilos. Cuando se utilice cable de 3 hilos empleando el blindaje como conductor a tierra, el blindaje debe tener una sección transversal al menos igual a los conductores de fase si están hechos del mismo material. Si se emplea cable de 4 hilos, el conductor a tierra debe tener una sección transversal al menos igual y estar fabricado en el mismo material que los conductores de fase.
• La puesta a tierra del motor debe conectarse a uno de los terminales de tierra del AF-700.
• Para cumplir con la Directiva europea en materia de EMC, debe emplearse cable apantallado. Como mínimo, se recomienda un cable trenzado donde el blindaje cubra al menos el 85% de la superficie del cable, diseñado con una baja impedancia a las señales de alta frecuencia. Por lo general, también resulta aceptable la instalación dentro de un tubo adecuado de cobre o acero.
• El blindaje del cable debe terminar en el extremo del motor usando una prensa-estopas de tipo EMC que permita la conexión al chasis del motor con la máxima superficie posible.
• Si los convertidores se montan en un armario de panel de control de acero, el blindaje del cable puede conectarse directamente al panel de control usando un terminal o una prensa-estopas EMC tan cerca como sea posible del convertidor.
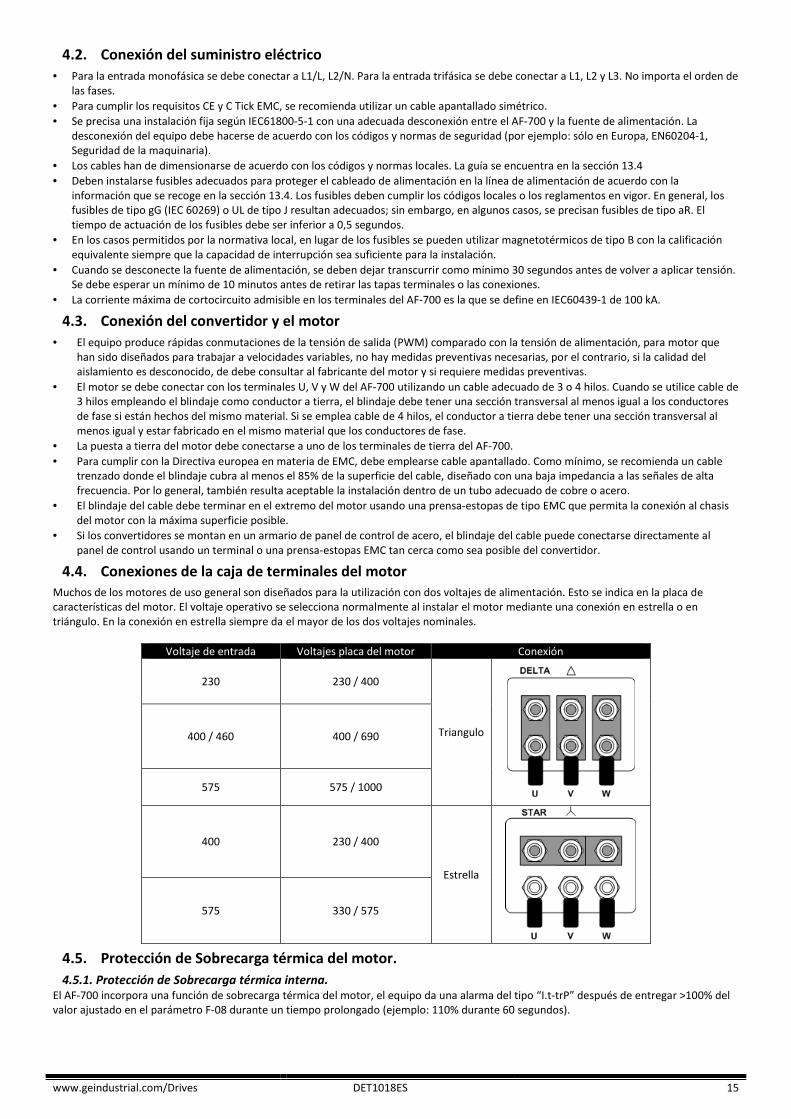
4.4. Conexiones de la caja de terminales del motor Muchos de los motores de uso general son diseñados para la utilización con dos voltajes de alimentación. Esto se indica en la placa de características del motor. El voltaje operativo se selecciona normalmente al instalar el motor mediante una conexión en estrella o en triángulo. En la conexión en estrella siempre da el mayor de los dos voltajes nominales.
Voltaje de entrada Voltajes placa del motor Conexión
230 230 / 400
Triangulo
400 / 460 400 / 690
575 575 / 1000
400 230 / 400
Estrella
575 330 / 575
4.5. Protección de Sobrecarga térmica del motor.
4.5.1. Protección de Sobrecarga térmica interna.
El AF-700 incorpora una función de sobrecarga térmica del motor, el equipo da una alarma del tipo “I.t-trP” después de entregar >100% del valor ajustado en el parámetro F-08 durante un tiempo prolongado (ejemplo: 110% durante 60 segundos).
16 DET1018ES www.geindustrial.com/Drives
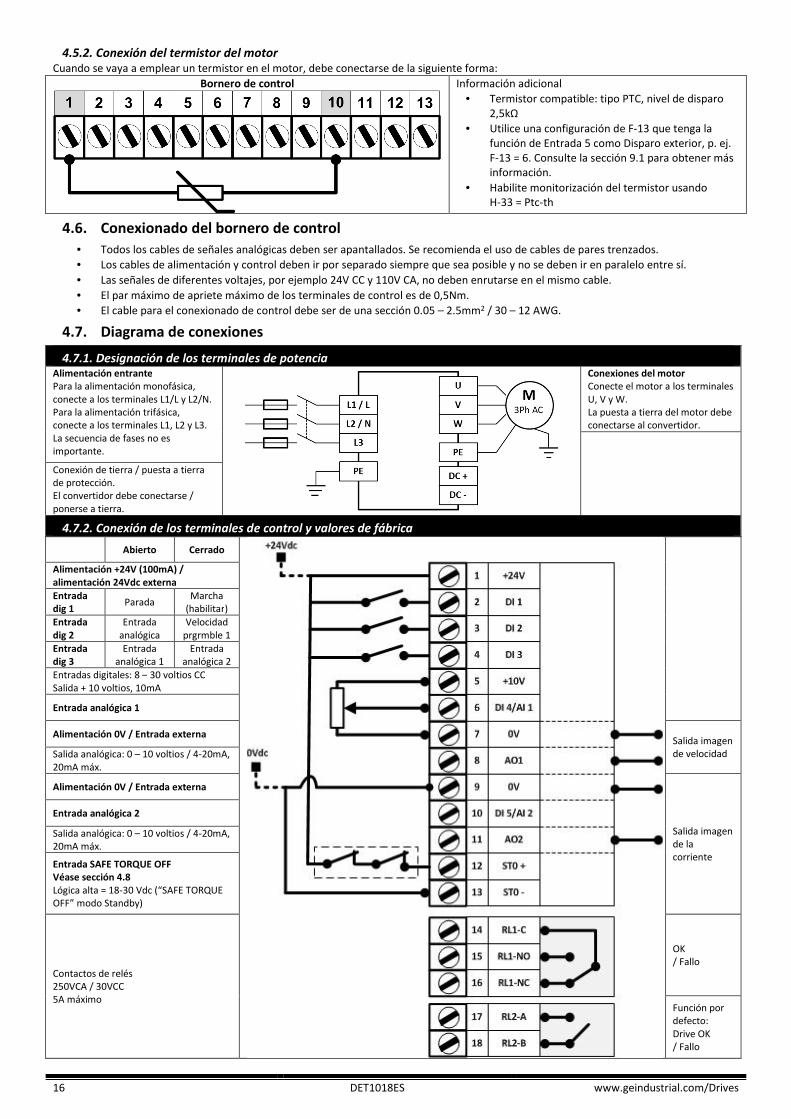
4.5.2. Conexión del termistor del motor
Cuando se vaya a emplear un termistor en el motor, debe conectarse de la siguiente forma:
Bornero de control
Información adicional
• Termistor compatible: tipo PTC, nivel de disparo 2,5kΩ
• Utilice una configuración de F-13 que tenga la función de Entrada 5 como Disparo exterior, p. ej. F-13 = 6. Consulte la sección 9.1 para obtener más información.
• Habilite monitorización del termistor usando H-33 = Ptc-th
4.6. Conexionado del bornero de control
• Todos los cables de señales analógicas deben ser apantallados. Se recomienda el uso de cables de pares trenzados.
• Los cables de alimentación y control deben ir por separado siempre que sea posible y no se deben ir en paralelo entre sí.
• Las señales de diferentes voltajes, por ejemplo 24V CC y 110V CA, no deben enrutarse en el mismo cable. • El par máximo de apriete máximo de los terminales de control es de 0,5Nm. • El cable para el conexionado de control debe ser de una sección 0.05 – 2.5mm2 / 30 – 12 AWG.
4.7. Diagrama de conexiones
4.7.1. Designación de los terminales de potencia Alimentación entrante Para la alimentación monofásica, conecte a los terminales L1/L y L2/N. Para la alimentación trifásica, conecte a los terminales L1, L2 y L3. La secuencia de fases no es importante.
Conexiones del motor Conecte el motor a los terminales U, V y W. La puesta a tierra del motor debe conectarse al convertidor.
Conexión de tierra / puesta a tierra de protección. El convertidor debe conectarse / ponerse a tierra.
4.7.2. Conexión de los terminales de control y valores de fábrica
Abierto Cerrado
Alimentación +24V (100mA) / alimentación 24Vdc externa
Entrada dig 1
Parada Marcha
(habilitar)
Entrada dig 2
Entrada analógica
Velocidad prgrmble 1
Entrada dig 3
Entrada analógica 1
Entrada analógica 2
Entradas digitales: 8 – 30 voltios CC Salida + 10 voltios, 10mA
Entrada analógica 1
Alimentación 0V / Entrada externa Salida imagen de velocidad Salida analógica: 0 – 10 voltios / 4-20mA,
20mA máx.
Alimentación 0V / Entrada externa
Salida imagen de la corriente
Entrada analógica 2
Salida analógica: 0 – 10 voltios / 4-20mA, 20mA máx.
Entrada SAFE TORQUE OFF Véase sección 4.8 Lógica alta = 18-30 Vdc (“SAFE TORQUE OFF” modo Standby)
Contactos de relés 250VCA / 30VCC 5A máximo
OK / Fallo
Función por defecto: Drive OK / Fallo
www.geindustrial.com/Drives DET1018ES 17
4.8. Safe Torque Off El Safe Torque OFF lo abreviaremos como “STO” en el resto del texto que tenemos a continuación.
4.8.1. Responsabilidades
El diseñador del sistema, es el responsable de definir los requisitos generales del “Safety Control System” es decir, Sistema de Control de Seguridad donde se incorpora el equipo, además, es responsable de garantizar que en todo el sistema es evalúa el riesgo y que los requisitos del sistema de control de seguridad han sido totalmente revisados y cumplidos. Esto debe incluir la prueba de confirmación de la función “STO” antes de la puesta en marcha del equipo. El diseñador del sistema deberá determinar los riesgos y peligros del sistema mediante la realización de un estudio exhaustivo y análisis de riesgos, el resultado del análisis debe proporcionar una estimación de los posibles peligros, además determinar los niveles de riesgo e identificar las necesidades en materia de reducción de riesgos. La función “STO” debe ser comprobado para asegurar que cumple los requisitos de seguridad.
4.8.2. ¿Qué nos proporciona el STO?
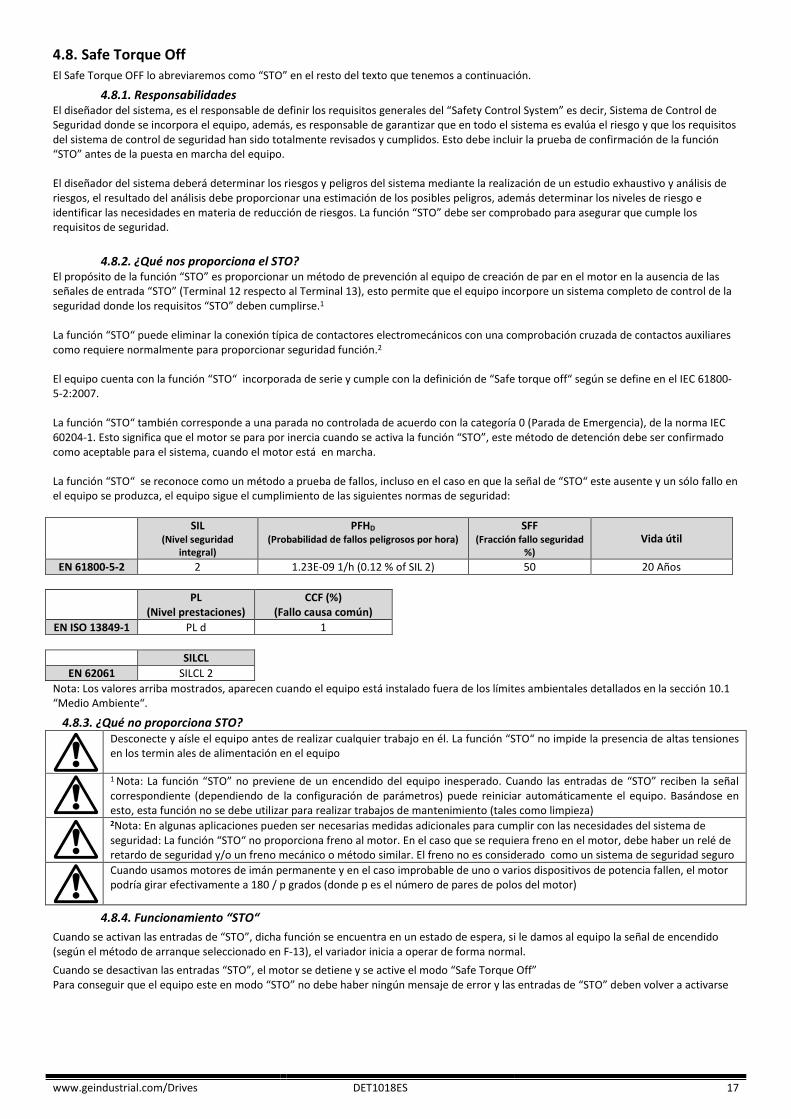
El propósito de la función “STO” es proporcionar un método de prevención al equipo de creación de par en el motor en la ausencia de las señales de entrada “STO” (Terminal 12 respecto al Terminal 13), esto permite que el equipo incorpore un sistema completo de control de la seguridad donde los requisitos “STO” deben cumplirse.1 La función “STO“ puede eliminar la conexión típica de contactores electromecánicos con una comprobación cruzada de contactos auxiliares como requiere normalmente para proporcionar seguridad función.2 El equipo cuenta con la función “STO“ incorporada de serie y cumple con la definición de “Safe torque off“ según se define en el IEC 61800-5-2:2007. La función “STO“ también corresponde a una parada no controlada de acuerdo con la categoría 0 (Parada de Emergencia), de la norma IEC 60204-1. Esto significa que el motor se para por inercia cuando se activa la función “STO”, este método de detención debe ser confirmado como aceptable para el sistema, cuando el motor está en marcha. La función “STO“ se reconoce como un método a prueba de fallos, incluso en el caso en que la señal de “STO“ este ausente y un sólo fallo en el equipo se produzca, el equipo sigue el cumplimiento de las siguientes normas de seguridad:
SIL (Nivel seguridad
integral)
PFHD
(Probabilidad de fallos peligrosos por hora) SFF
(Fracción fallo seguridad %)
Vida útil
EN 61800-5-2 2 1.23E-09 1/h (0.12 % of SIL 2) 50 20 Años
PL (Nivel prestaciones)
CCF (%) (Fallo causa común)
EN ISO 13849-1 PL d 1
SILCL
EN 62061 SILCL 2
Nota: Los valores arriba mostrados, aparecen cuando el equipo está instalado fuera de los límites ambientales detallados en la sección 10.1 “Medio Ambiente“.
4.8.3. ¿Qué no proporciona STO?
Desconecte y aísle el equipo antes de realizar cualquier trabajo en él. La función “STO“ no impide la presencia de altas tensiones en los termin ales de alimentación en el equipo
1 Nota: La función “STO” no previene de un encendido del equipo inesperado. Cuando las entradas de “STO” reciben la señal correspondiente (dependiendo de la configuración de parámetros) puede reiniciar automáticamente el equipo. Basándose en esto, esta función no se debe utilizar para realizar trabajos de mantenimiento (tales como limpieza)
2Nota: En algunas aplicaciones pueden ser necesarias medidas adicionales para cumplir con las necesidades del sistema de seguridad: La función “STO“ no proporciona freno al motor. En el caso que se requiera freno en el motor, debe haber un relé de retardo de seguridad y/o un freno mecánico o método similar. El freno no es considerado como un sistema de seguridad seguro
Cuando usamos motores de imán permanente y en el caso improbable de uno o varios dispositivos de potencia fallen, el motor podría girar efectivamente a 180 / p grados (donde p es el número de pares de polos del motor)
4.8.4. Funcionamiento “STO“
Cuando se activan las entradas de “STO”, dicha función se encuentra en un estado de espera, si le damos al equipo la señal de encendido (según el método de arranque seleccionado en F-13), el variador inicia a operar de forma normal.
Cuando se desactivan las entradas “STO”, el motor se detiene y se active el modo “Safe Torque Off” Para conseguir que el equipo este en modo “STO” no debe haber ningún mensaje de error y las entradas de “STO” deben volver a activarse
18 DET1018ES www.geindustrial.com/Drives
4.8.5. Estado y Monitorización del “STO”
Hay un número de métodos para monitorizar el estado de la entrada “STO” que se detallan a continuación: Display Durante el funcionamiento normal del equipo (alimentado a la red eléctrica CA), cuando las entradas de “STO” de desactivan (función “STO” activada), el equipo mostrará en el display “InHibit”. (Nota: Si el equipo está activo, no mostrada “InHibit”) Salida Relé
• Drive relé 1: Ajuste H-15 al valor de “13” se traducirá en la apertura del relé cuando se activa la función “STO”
• Drive relé 2: Ajuste H-18 al valor de “13” se traducirá en la apertura del relé cuando se activa la función “STO” “STO” Códigos de Fallos
Código Fallo
Código Número
Descripción Acción Correctiva
“Sto-F” 29 Un fallo ha sido detectado dentro de
cualquiera de los circuitos internos del“STO” Consulte a su distribuidor
4.8.6. Tiempo de respuesta de la función “STO”
El tiempo de respuesta total, es el tiempo relacionado con un evento de seguridad que ocurre a los componentes dentro del sistema y convertirse en una respuesta segura. (Stop Categoría 0 según la norma IEC 60204-1)
• El tiempo de respuesta de las entradas “STO”, acciona las salidas del equipo activando el par motor (“STO” activo) en un tiempo inferior a 1ms.
• El tiempo de respuesta de las entradas “STO”, no se visualiza el cambio de estado en el display pasado un tiempo de 20ms.
• El tiempo de respuesta desde que el equipo detecta un fallo en el circuito de “STO” hasta que se visualiza en el display es de un tiempo inferior a los 20ms.
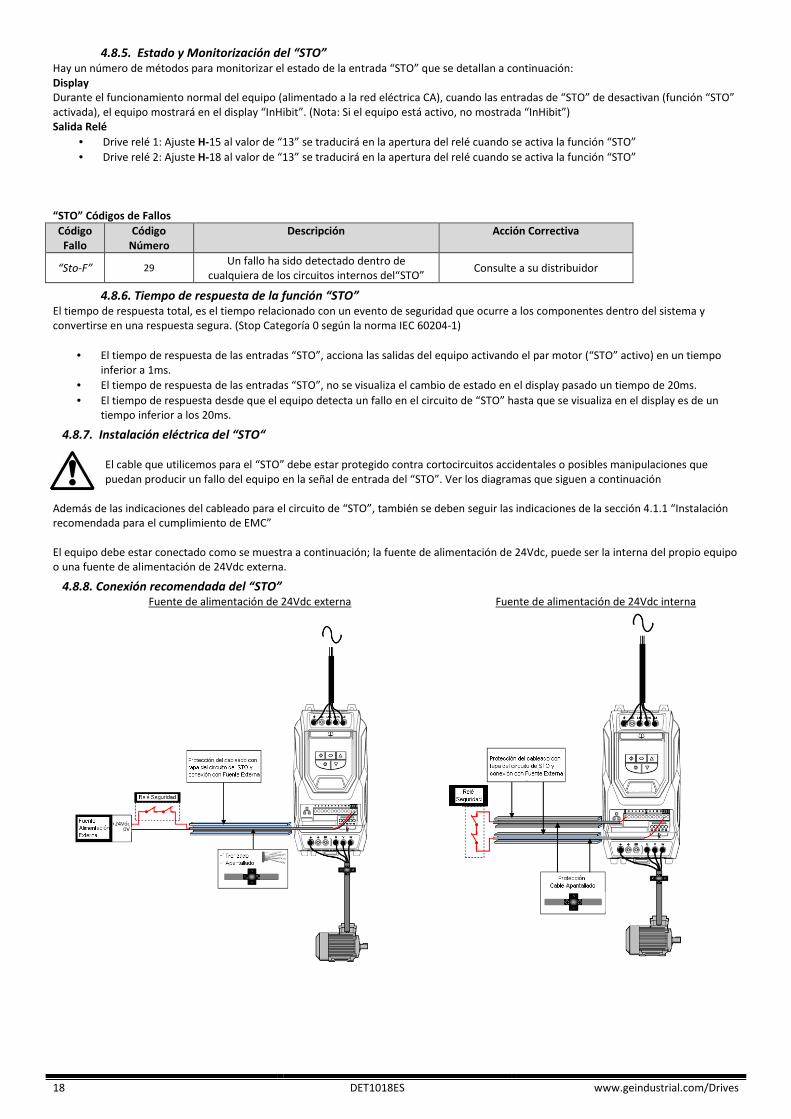
4.8.7. Instalación eléctrica del “STO“
El cable que utilicemos para el “STO” debe estar protegido contra cortocircuitos accidentales o posibles manipulaciones que puedan producir un fallo del equipo en la señal de entrada del “STO”. Ver los diagramas que siguen a continuación
Además de las indicaciones del cableado para el circuito de “STO”, también se deben seguir las indicaciones de la sección 4.1.1 “Instalación recomendada para el cumplimiento de EMC” El equipo debe estar conectado como se muestra a continuación; la fuente de alimentación de 24Vdc, puede ser la interna del propio equipo o una fuente de alimentación de 24Vdc externa.
4.8.8. Conexión recomendada del “STO” Fuente de alimentación de 24Vdc externa Fuente de alimentación de 24Vdc interna
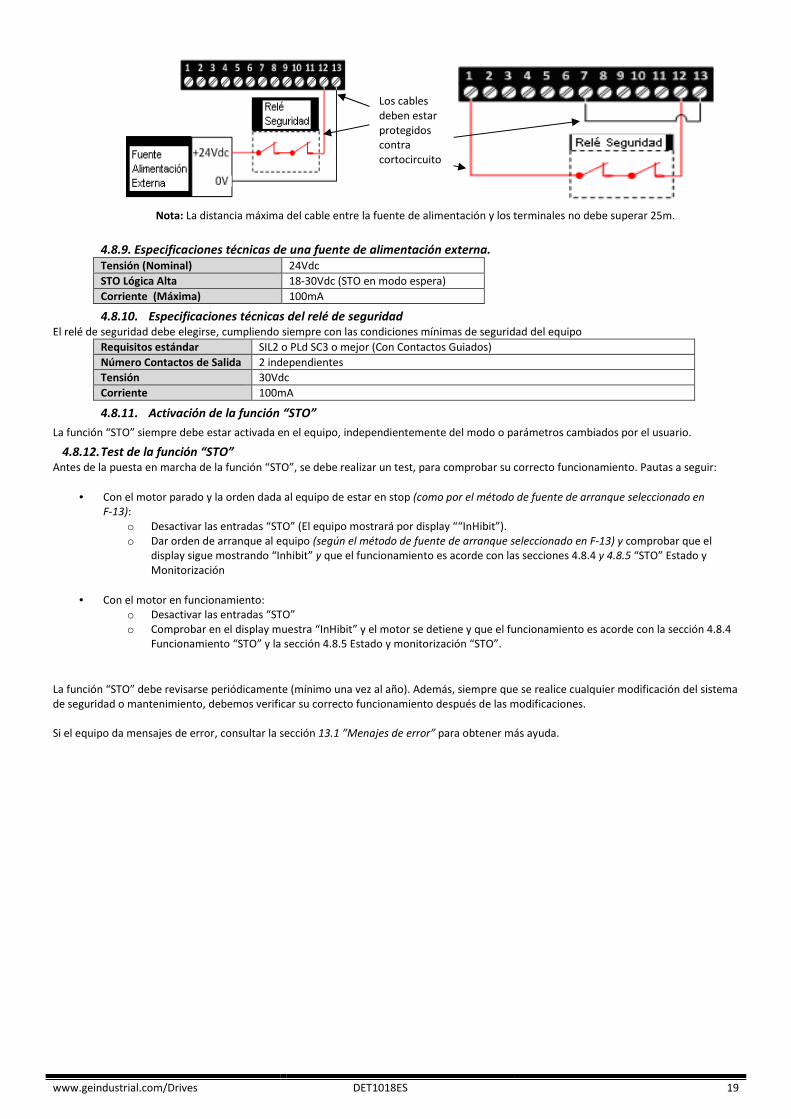
www.geindustrial.com/Drives DET1018ES 19
Nota: La distancia máxima del cable entre la fuente de alimentación y los terminales no debe superar 25m.
4.8.9. Especificaciones técnicas de una fuente de alimentación externa.
Tensión (Nominal) 24Vdc
STO Lógica Alta 18-30Vdc (STO en modo espera)
Corriente (Máxima) 100mA
4.8.10. Especificaciones técnicas del relé de seguridad
El relé de seguridad debe elegirse, cumpliendo siempre con las condiciones mínimas de seguridad del equipo
Requisitos estándar SIL2 o PLd SC3 o mejor (Con Contactos Guiados)
Número Contactos de Salida 2 independientes
Tensión 30Vdc
Corriente 100mA
4.8.11. Activación de la función “STO”
La función “STO” siempre debe estar activada en el equipo, independientemente del modo o parámetros cambiados por el usuario.
4.8.12. Test de la función “STO”
Antes de la puesta en marcha de la función “STO”, se debe realizar un test, para comprobar su correcto funcionamiento. Pautas a seguir:
• Con el motor parado y la orden dada al equipo de estar en stop (como por el método de fuente de arranque seleccionado en
F-13): o Desactivar las entradas “STO” (El equipo mostrará por display ““InHibit”). o Dar orden de arranque al equipo (según el método de fuente de arranque seleccionado en F-13) y comprobar que el
display sigue mostrando “Inhibit” y que el funcionamiento es acorde con las secciones 4.8.4 y 4.8.5 “STO” Estado y Monitorización
• Con el motor en funcionamiento: o Desactivar las entradas “STO” o Comprobar en el display muestra “InHibit” y el motor se detiene y que el funcionamiento es acorde con la sección 4.8.4
Funcionamiento “STO” y la sección 4.8.5 Estado y monitorización “STO”.
La función “STO” debe revisarse periódicamente (mínimo una vez al año). Además, siempre que se realice cualquier modificación del sistema de seguridad o mantenimiento, debemos verificar su correcto funcionamiento después de las modificaciones. Si el equipo da mensajes de error, consultar la sección 13.1 ”Menajes de error” para obtener más ayuda.
Los cables deben estar protegidos contra cortocircuito
20 DET1018ES www.geindustrial.com/Drives
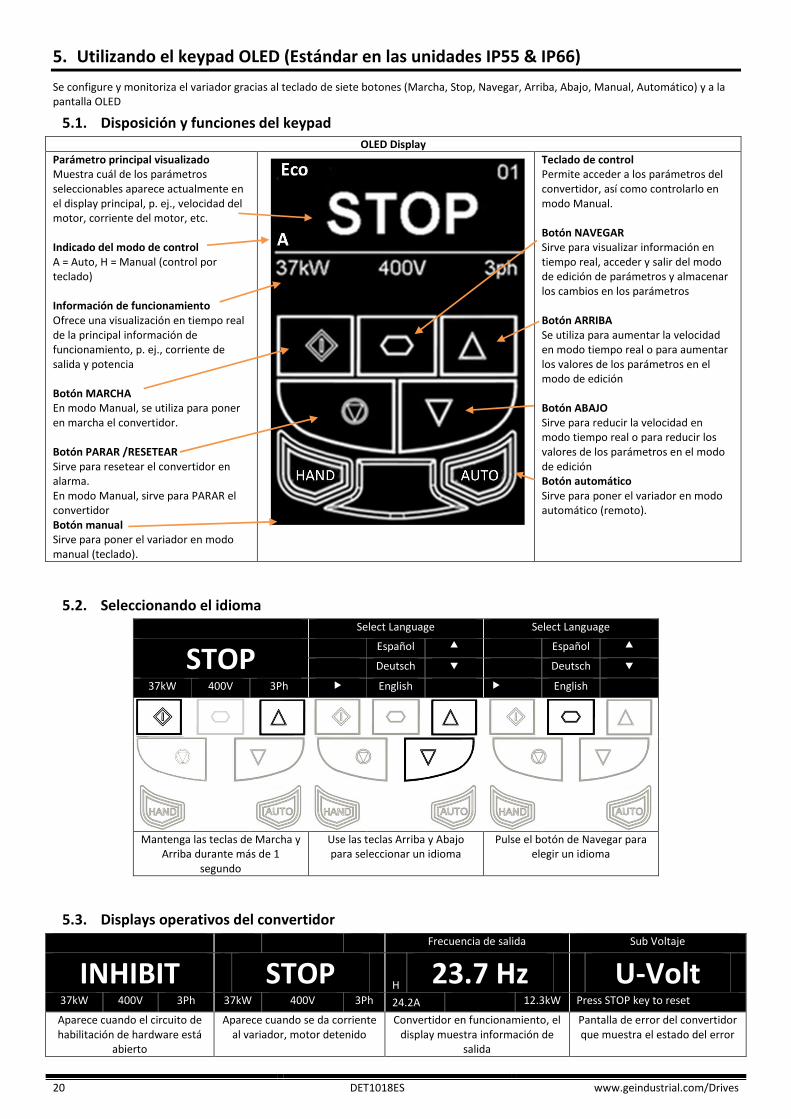
5. Utilizando el keypad OLED (Estándar en las unidades IP55 & IP66)
Se configure y monitoriza el variador gracias al teclado de siete botones (Marcha, Stop, Navegar, Arriba, Abajo, Manual, Automático) y a la pantalla OLED
5.1. Disposición y funciones del keypad
OLED Display
Parámetro principal visualizado Muestra cuál de los parámetros seleccionables aparece actualmente en el display principal, p. ej., velocidad del motor, corriente del motor, etc. Indicado del modo de control A = Auto, H = Manual (control por teclado) Información de funcionamiento Ofrece una visualización en tiempo real de la principal información de funcionamiento, p. ej., corriente de salida y potencia Botón MARCHA En modo Manual, se utiliza para poner en marcha el convertidor. Botón PARAR /RESETEAR Sirve para resetear el convertidor en alarma. En modo Manual, sirve para PARAR el convertidor Botón manual Sirve para poner el variador en modo manual (teclado).
Teclado de control Permite acceder a los parámetros del convertidor, así como controlarlo en modo Manual. Botón NAVEGAR Sirve para visualizar información en tiempo real, acceder y salir del modo de edición de parámetros y almacenar los cambios en los parámetros Botón ARRIBA Se utiliza para aumentar la velocidad en modo tiempo real o para aumentar los valores de los parámetros en el modo de edición Botón ABAJO Sirve para reducir la velocidad en modo tiempo real o para reducir los valores de los parámetros en el modo de edición Botón automático Sirve para poner el variador en modo automático (remoto).
5.2. Seleccionando el idioma
Select Language Select Language
STOP Español � Español �
Deutsch � Deutsch �
37kW 400V 3Ph � English � English
Mantenga las teclas de Marcha y
Arriba durante más de 1 segundo
Use las teclas Arriba y Abajo para seleccionar un idioma
Pulse el botón de Navegar para elegir un idioma
5.3. Displays operativos del convertidor
Frecuencia de salida Sub Voltaje
INHIBIT
STOP
H 23.7 Hz
U-Volt
37kW 400V 3Ph 37kW 400V 3Ph 24.2A 12.3kW Press STOP key to reset
Aparece cuando el circuito de habilitación de hardware está
abierto
Aparece cuando se da corriente al variador, motor detenido
Convertidor en funcionamiento, el display muestra información de
salida
Pantalla de error del convertidor que muestra el estado del error
www.geindustrial.com/Drives DET1018ES 21
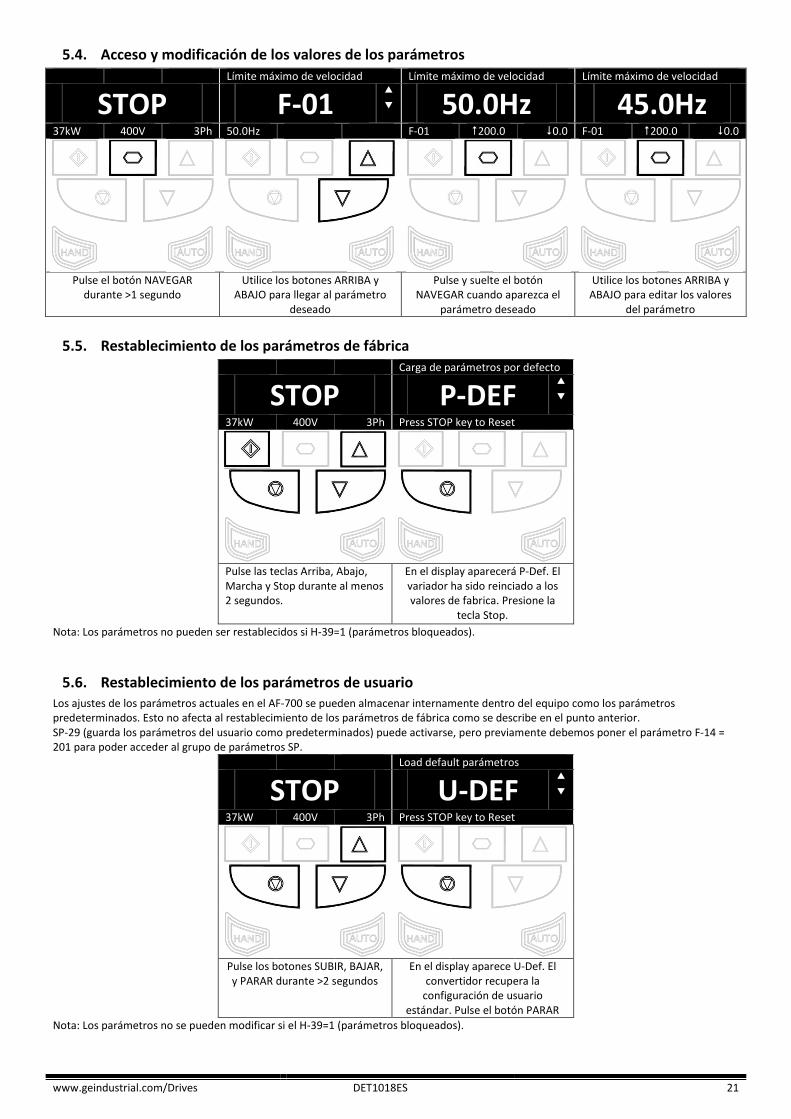
5.4. Acceso y modificación de los valores de los parámetros
Límite máximo de velocidad Límite máximo de velocidad Límite máximo de velocidad
STOP
F-01 � �
50.0Hz
45.0Hz
37kW 400V 3Ph 50.0Hz F-01 �200.0 �0.0 F-01 �200.0 �0.0
Pulse el botón NAVEGAR
durante >1 segundo Utilice los botones ARRIBA y
ABAJO para llegar al parámetro deseado
Pulse y suelte el botón NAVEGAR cuando aparezca el
parámetro deseado
Utilice los botones ARRIBA y ABAJO para editar los valores
del parámetro
5.5. Restablecimiento de los parámetros de fábrica
Carga de parámetros por defecto
STOP
P-DEF � �
37kW 400V 3Ph Press STOP key to Reset
Pulse las teclas Arriba, Abajo, Marcha y Stop durante al menos 2 segundos.
En el display aparecerá P-Def. El variador ha sido reinciado a los valores de fabrica. Presione la
tecla Stop.
Nota: Los parámetros no pueden ser restablecidos si H-39=1 (parámetros bloqueados).
5.6. Restablecimiento de los parámetros de usuario Los ajustes de los parámetros actuales en el AF-700 se pueden almacenar internamente dentro del equipo como los parámetros predeterminados. Esto no afecta al restablecimiento de los parámetros de fábrica como se describe en el punto anterior. SP-29 (guarda los parámetros del usuario como predeterminados) puede activarse, pero previamente debemos poner el parámetro F-14 = 201 para poder acceder al grupo de parámetros SP.
Load default parámetros
STOP
U-DEF � �
37kW 400V 3Ph Press STOP key to Reset
Pulse los botones SUBIR, BAJAR, y PARAR durante >2 segundos
En el display aparece U-Def. El convertidor recupera la
configuración de usuario estándar. Pulse el botón PARAR
Nota: Los parámetros no se pueden modificar si el H-39=1 (parámetros bloqueados).
22 DET1018ES www.geindustrial.com/Drives
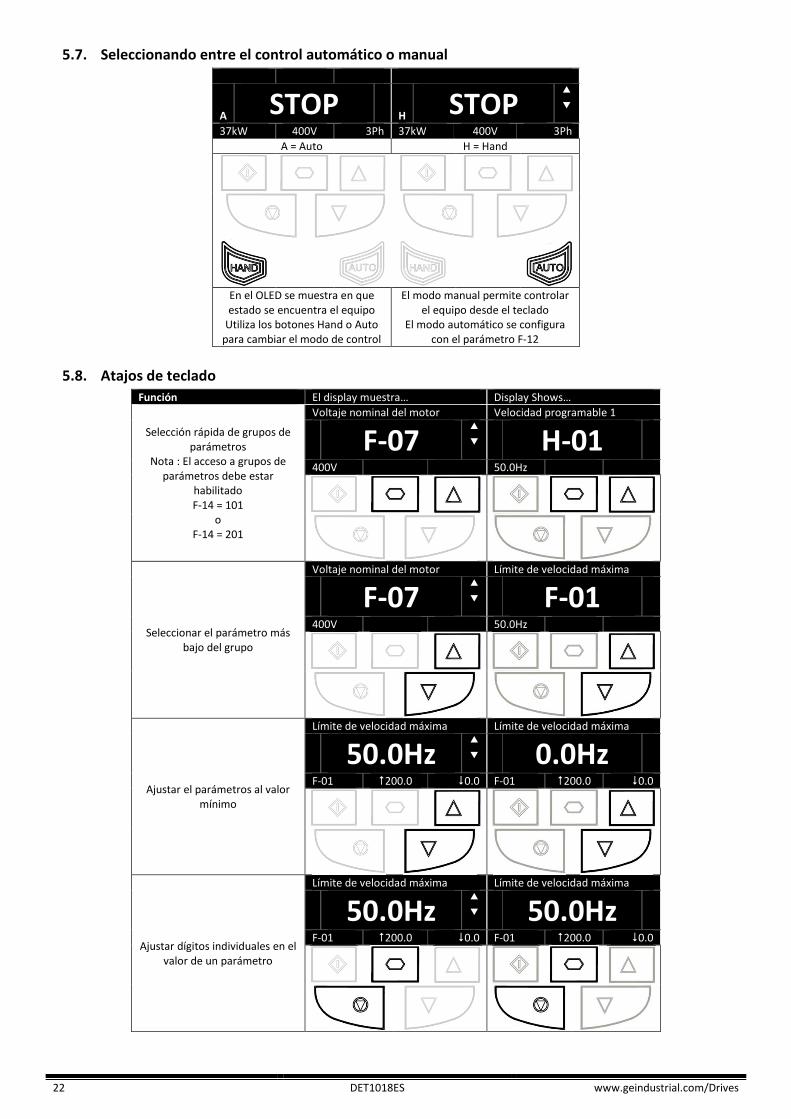
5.7. Seleccionando entre el control automático o manual
A STOP
H STOP � �
37kW 400V 3Ph 37kW 400V 3Ph
A = Auto H = Hand
En el OLED se muestra en que estado se encuentra el equipo
Utiliza los botones Hand o Auto para cambiar el modo de control
El modo manual permite controlar el equipo desde el teclado
El modo automático se configura con el parámetro F-12
5.8. Atajos de teclado
Función El display muestra… Display Shows…
Selección rápida de grupos de parámetros
Nota : El acceso a grupos de parámetros debe estar
habilitado F-14 = 101
o F-14 = 201
Voltaje nominal del motor Velocidad programable 1
F-07 � �
H-01
400V 50.0Hz
Seleccionar el parámetro más bajo del grupo
Voltaje nominal del motor Límite de velocidad máxima
F-07 � �
F-01
400V 50.0Hz
Ajustar el parámetros al valor mínimo
Límite de velocidad máxima Límite de velocidad máxima
50.0Hz � �
0.0Hz
F-01 �200.0 �0.0 F-01 �200.0 �0.0
Ajustar dígitos individuales en el valor de un parámetro
Límite de velocidad máxima Límite de velocidad máxima
50.0Hz � �
50.0Hz
F-01 �200.0 �0.0 F-01 �200.0 �0.0
www.geindustrial.com/Drives DET1018ES 23
6. Utilizando el keypad & pantalla LED en IP20 Tamaños 2 & 3
El variador ha sido configurado y su monitorización se lleva a cabo gracias al teclado y al display
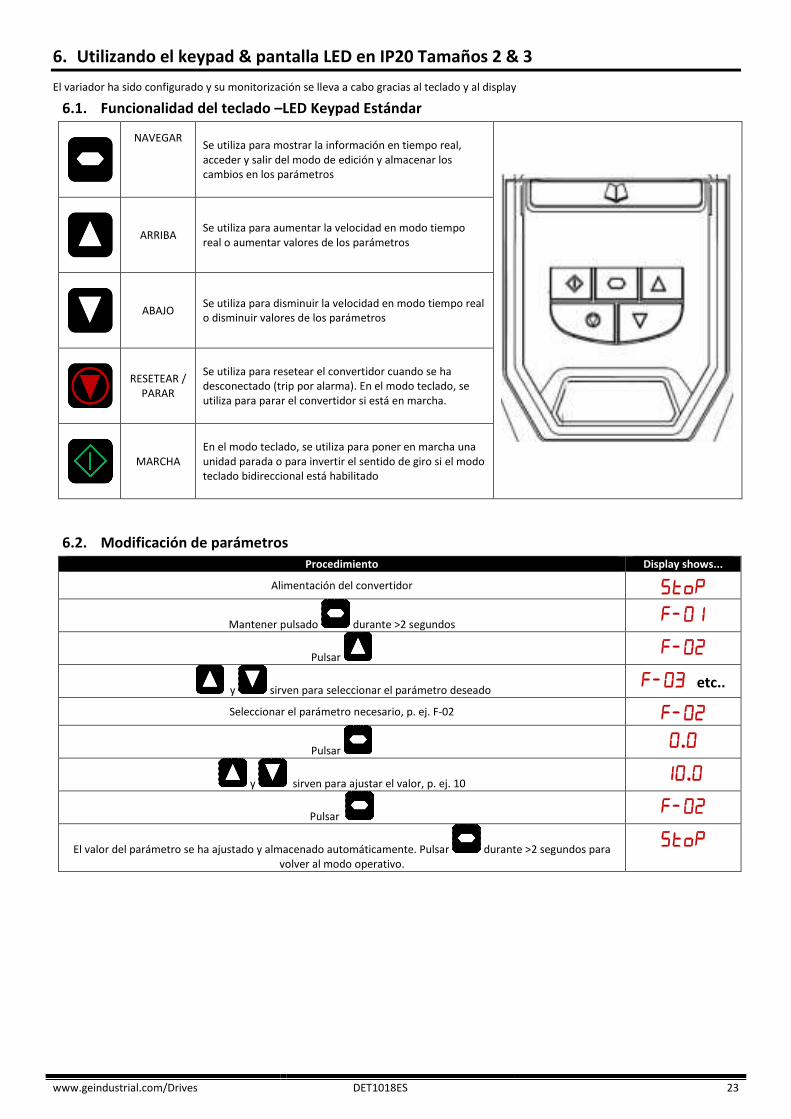
6.1. Funcionalidad del teclado –LED Keypad Estándar
NAVEGAR
Se utiliza para mostrar la información en tiempo real, acceder y salir del modo de edición y almacenar los cambios en los parámetros
ARRIBA Se utiliza para aumentar la velocidad en modo tiempo real o aumentar valores de los parámetros
ABAJO Se utiliza para disminuir la velocidad en modo tiempo real o disminuir valores de los parámetros
RESETEAR / PARAR
Se utiliza para resetear el convertidor cuando se ha desconectado (trip por alarma). En el modo teclado, se utiliza para parar el convertidor si está en marcha.
MARCHA En el modo teclado, se utiliza para poner en marcha una unidad parada o para invertir el sentido de giro si el modo teclado bidireccional está habilitado
6.2. Modificación de parámetros
Procedimiento Display shows...
Alimentación del convertidor Stop
Mantener pulsado durante >2 segundos F-01
Pulsar F-02
y sirven para seleccionar el parámetro deseado F-03 etc..
Seleccionar el parámetro necesario, p. ej. F-02 F-02
Pulsar 0.0
y sirven para ajustar el valor, p. ej. 10 10.0
Pulsar F-02
El valor del parámetro se ha ajustado y almacenado automáticamente. Pulsar durante >2 segundos para volver al modo operativo.
Stop
24 DET1018ES www.geindustrial.com/Drives
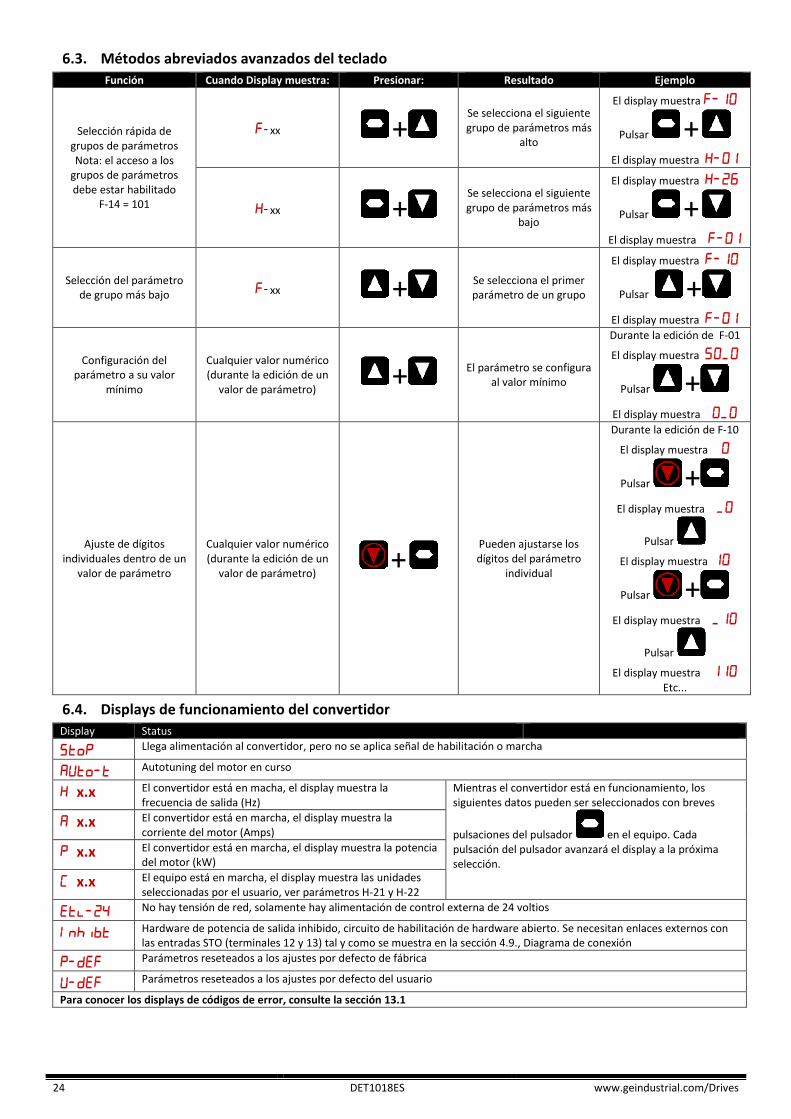
6.3. Métodos abreviados avanzados del teclado
Función Cuando Display muestra: Presionar: Resultado Ejemplo
Selección rápida de grupos de parámetros Nota: el acceso a los
grupos de parámetros debe estar habilitado
F-14 = 101
F-xx +
Se selecciona el siguiente grupo de parámetros más
alto
El display muestra F-10
Pulsar +
El display muestra H-01
H-xx +
Se selecciona el siguiente grupo de parámetros más
bajo
El display muestra H-26
Pulsar +
El display muestra F-01
Selección del parámetro de grupo más bajo F-xx +
Se selecciona el primer parámetro de un grupo
El display muestra F-10
Pulsar +
El display muestra F-01
Configuración del parámetro a su valor
mínimo
Cualquier valor numérico (durante la edición de un
valor de parámetro) +
El parámetro se configura al valor mínimo
Durante la edición de F-01
El display muestra 50.0
Pulsar +
El display muestra 0.0
Ajuste de dígitos individuales dentro de un
valor de parámetro
Cualquier valor numérico (durante la edición de un
valor de parámetro) +
Pueden ajustarse los dígitos del parámetro
individual
Durante la edición de F-10
El display muestra 0
Pulsar +
El display muestra _0
Pulsar
El display muestra 10
Pulsar +
El display muestra _10
Pulsar
El display muestra 110 Etc...
6.4. Displays de funcionamiento del convertidor
Display Status
stop Llega alimentación al convertidor, pero no se aplica señal de habilitación o marcha
Auto-t Autotuning del motor en curso
H x.x El convertidor está en macha, el display muestra la frecuencia de salida (Hz)
Mientras el convertidor está en funcionamiento, los siguientes datos pueden ser seleccionados con breves
pulsaciones del pulsador en el equipo. Cada pulsación del pulsador avanzará el display a la próxima selección.
A x.x El convertidor está en marcha, el display muestra la corriente del motor (Amps)
P x.x El convertidor está en marcha, el display muestra la potencia del motor (kW)
C x.x El equipo está en marcha, el display muestra las unidades seleccionadas por el usuario, ver parámetros H-21 y H-22
Etl-24 No hay tensión de red, solamente hay alimentación de control externa de 24 voltios
Inhibt Hardware de potencia de salida inhibido, circuito de habilitación de hardware abierto. Se necesitan enlaces externos con las entradas STO (terminales 12 y 13) tal y como se muestra en la sección 4.9., Diagrama de conexión
P-def Parámetros reseteados a los ajustes por defecto de fábrica
U-def Parámetros reseteados a los ajustes por defecto del usuario
Para conocer los displays de códigos de error, consulte la sección 13.1
www.geindustrial.com/Drives DET1018ES 25
7. Puesta en marcha
7.1. General La siguiente guía de puesta en marcha, debe utilizarse para todas las aplicaciones que realicemos.
7.1.1. Introduciendo la información de placa del motor
AF-700 utiliza la información de la placa de características del motor para:
• Hacer trabajar al motor en el nivel más eficiente.
• Proteger al motor por posibles sobrecargas. Para lograr esto, se requiere introducir la siguiente información de la placa del motor: F-07 Voltaje Nominal del Motor. Esta es la tensión de funcionamiento para el motor en función de su conexionado (estrella o triángulo). La tensión de salida, nunca puede exceder la tensión de entrada del variador. F-08 Corriente Nominal del Motor. Esta es la corriente nominal del motor, según la placa de características F-09 Frecuencia Nominal del Motor. Esta es la frecuencia estándar de funcionamiento del motor, 50 o 60Hz F-10 Velocidad Nominal del Motor. Este parámetro puede configurarse opcionalmente en RPM que muestra la placa del motor. Cuando introducimos las RPM todos los datos referentes a la velocidad, se verán en RPM. Si lo dejamos por defecto a cero, veremos velocidad en Hz.
7.1.2. Frecuencia / Velocidad Máxima y Mínima
Los AF-700 vienen configurados de fábrica para operar el motor desde cero hasta la velocidad base (50 o 60 Hz de salida). En general, este rango de operación es adecuado para una amplia gama de aplicaciones, sin embargo, en algunos casos puede ser deseable ajustar estos límites, por ejemplo, donde la velocidad máxima de un ventilador o bomba puede proporcionar un flujo excesivo , o donde nunca se requiere un funcionamiento por debajo de una cierta velocidad . En este caso, los siguientes parámetros se pueden ajustar para adaptarse a la aplicación : - F- 01 Frecuencia máxima. En general esta debería ser la frecuencia nominal del motor. Si se requiere operar por encima se requerirá de confirmación por parte de fabricante del motor o del fabricante de la bomba o ventilador conectado para evitar daño a los equipos.
F-02 Frecuencia mínima. Un valor mínimo adecuado se debe configurar para evitar que el motor funcione a baja velocidad, lo que puede
causar que el motor se sobrecaliente. En algunas aplicaciones, tales como una bomba de circulación de agua a través de una caldera, puede ser necesario para establecer una velocidad para asegurar que la caldera no funcione en seco durante la operación.
7.1.3. Tiempo de rampa de aceleración y deceleración
Los AF-700 vienen ajustados de fábrica con rampas de aceleración y deceleración de 30 segundos. El valor predeterminado es adecuado para la mayoría de aplicaciones de Eco, pero puede ser alterado cambiando los valores de los parámetros F-03 y F-04. Se debe tener cuidado para asegurar la carga accionada es capaz de realizar las rampas especificadas y que no se produce ninguna alarma debido a los tiempos de rampa excesivamente cortos. Los tiempos de rampa introducidos en el conjunto de parámetros siempre especifican el tiempo que lleva a la rampa entre 0 Hz y la velocidad nominal del motor F-09. Por ejemplo, si la tasa de rampa = 30 segundos y F-09 (velocidad base motor) = 50 Hz, y suponiendo que el motor está funcionando a 25Hz y
la unidad recibe la orden de acelerar hasta 50Hz. El tiempo necesario para alcanzar 50Hz sería 30 segundos (F-03) / 50 (F-09) * 25 (requerido
cambio de velocidad) = 15 (s)
F-03 Velocidad de rampa de aceleración: Tiempo necesario para que la unidad para acelerar el motor desde 0 Hz a la velocidad base del motor, F-09 en segundos.
F-04 Velocidad de rampa de deceleración: Tiempo necesario para que la unidad para desacelerar el motor de la velocidad base del
motor, F-09 a 0 Hz en segundos.
7.1.4. Selección modo Paro
AF-700 se puede programar para aplicar ya sea una desaceleración fija al motor durante la parada, o para liberar el control del motor y permitir que se pare libre este. La selección por defecto es paro con rampa y el modo es programado en el parámetro F-05.
F-05 Selección modo paro: Define cómo se parará el motor en el caso de que se desconecte la entrada de marcha. Rampa para parar (F-05 = 0), ejecutará rampa de parada utilizando el valor de deceleración entrado en F-04. Paro libre (F-05 = 1 permitirá que el motor se pare por sí solo (sin control).
7.1.5. Refuerzo de tensión
El refuerzo de tensión se utiliza para aumentar la tensión aplicada al motor a bajas frecuencias de salida, con el fin de mejorar estabilidad a bajas vueltas y par de arranque. Niveles de refuerzo de tensión excesivos pueden resultar en un aumento de la corriente del motor y temperatura, y ventilación forzada del motor puede ser necesaria. El valor por defecto de refuerzo de tensión se encuentra en 0.0% , y sólo debería ser aumentado si el torque de inicio no es suficiente. Asegúrese antes de ajustar el refuerzo de que el modo seleccionado en P-01 es el correcto, Torque Constante o Variable F-11 Refuerzo de tensión: Establecido como porcentaje de la tensión nominal del motor F-07.
26 DET1018ES www.geindustrial.com/Drives
8. Parámetros
8.1. Resumen de Parámetros El convertidor AF-700 presenta los siguientes 7 grupos de parámetros:
• Grupo F – Parámetros básicos
• Grupo H – Parámetros ampliados
• Grupo PI – Parámetros de control PID
• Grupo P – Parámetros de control del motor
• Grupo O – Parámetros del bus de campo (fieldbus)
• Grupo SF – Parámetros de funciones específicas Eco
• Grupo DR – Parámetros de monitorización (sólo lectura) Cuando el AF-700 se restablece a los valores predeterminados de fábrica, o se encuentra en estado suministrado de fábrica, se puede acceder sólo a parámetros del grupo F. Con el fin de permitir el acceso a los parámetros de los grupos de más alto nivel, F-14 debe establecerse en el mismo valor que H-40 (ajuste de fábrica = 101). Con este ajuste, los parámetros de los grupos F - O y el grupo SF se pueden acceder, junto con los primeros 39 parámetros en el Grupo DR. Estos parámetros se enumeran en las tablas siguientes. Para acceder a los parámetros avanzados, F-14 se puede configurar para el mismo valor que SP-30 (ajuste de fábrica = 201), que permite acceder a todos los grupos de parámetros y rangos. Descripciones de parámetros avanzados se enumeran en la guía del usuario avanzado. Los valores entre paréntesis () son valores predeterminados para los modelos de tracción de potencia nominal.
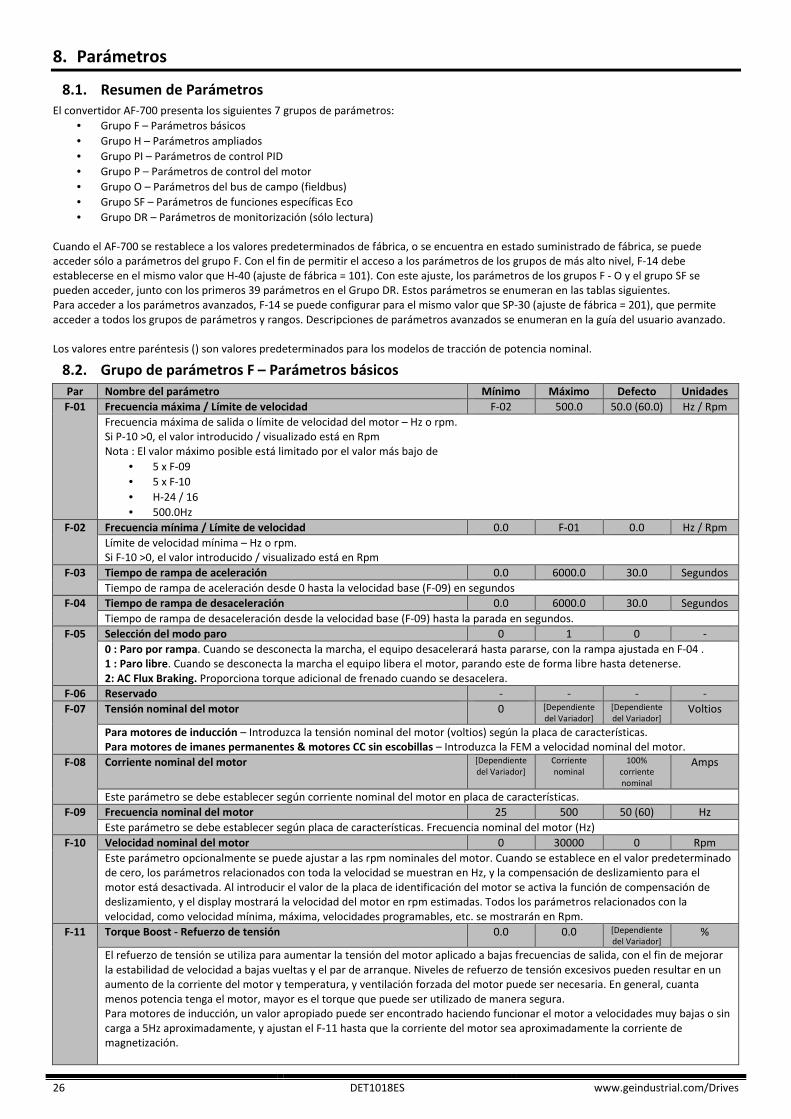
8.2. Grupo de parámetros F – Parámetros básicos
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
F-01 Frecuencia máxima / Límite de velocidad F-02 500.0 50.0 (60.0) Hz / Rpm
Frecuencia máxima de salida o límite de velocidad del motor – Hz o rpm. Si P-10 >0, el valor introducido / visualizado está en Rpm Nota : El valor máximo posible está limitado por el valor más bajo de
• 5 x F-09
• 5 x F-10
• H-24 / 16
• 500.0Hz
F-02 Frecuencia mínima / Límite de velocidad 0.0 F-01 0.0 Hz / Rpm
Límite de velocidad mínima – Hz o rpm. Si F-10 >0, el valor introducido / visualizado está en Rpm
F-03 Tiempo de rampa de aceleración 0.0 6000.0 30.0 Segundos
Tiempo de rampa de aceleración desde 0 hasta la velocidad base (F-09) en segundos
F-04 Tiempo de rampa de desaceleración 0.0 6000.0 30.0 Segundos
Tiempo de rampa de desaceleración desde la velocidad base (F-09) hasta la parada en segundos.
F-05 Selección del modo paro 0 1 0 -
0 : Paro por rampa. Cuando se desconecta la marcha, el equipo desacelerará hasta pararse, con la rampa ajustada en F-04 . 1 : Paro libre. Cuando se desconecta la marcha el equipo libera el motor, parando este de forma libre hasta detenerse. 2: AC Flux Braking. Proporciona torque adicional de frenado cuando se desacelera.
F-06 Reservado - - - -
F-07 Tensión nominal del motor 0 [Dependiente del Variador]
[Dependiente del Variador]
Voltios
Para motores de inducción – Introduzca la tensión nominal del motor (voltios) según la placa de características. Para motores de imanes permanentes & motores CC sin escobillas – Introduzca la FEM a velocidad nominal del motor.
F-08 Corriente nominal del motor [Dependiente del Variador]
Corriente nominal
100% corriente nominal
Amps
Este parámetro se debe establecer según corriente nominal del motor en placa de características.
F-09 Frecuencia nominal del motor 25 500 50 (60) Hz
Este parámetro se debe establecer según placa de características. Frecuencia nominal del motor (Hz)
F-10 Velocidad nominal del motor 0 30000 0 Rpm
Este parámetro opcionalmente se puede ajustar a las rpm nominales del motor. Cuando se establece en el valor predeterminado de cero, los parámetros relacionados con toda la velocidad se muestran en Hz, y la compensación de deslizamiento para el motor está desactivada. Al introducir el valor de la placa de identificación del motor se activa la función de compensación de deslizamiento, y el display mostrará la velocidad del motor en rpm estimadas. Todos los parámetros relacionados con la velocidad, como velocidad mínima, máxima, velocidades programables, etc. se mostrarán en Rpm.
F-11 Torque Boost - Refuerzo de tensión 0.0 0.0 [Dependiente del Variador]
%
El refuerzo de tensión se utiliza para aumentar la tensión del motor aplicado a bajas frecuencias de salida, con el fin de mejorar la estabilidad de velocidad a bajas vueltas y el par de arranque. Niveles de refuerzo de tensión excesivos pueden resultar en un aumento de la corriente del motor y temperatura, y ventilación forzada del motor puede ser necesaria. En general, cuanta menos potencia tenga el motor, mayor es el torque que puede ser utilizado de manera segura. Para motores de inducción, un valor apropiado puede ser encontrado haciendo funcionar el motor a velocidades muy bajas o sin carga a 5Hz aproximadamente, y ajustan el F-11 hasta que la corriente del motor sea aproximadamente la corriente de magnetización.
www.geindustrial.com/Drives DET1018ES 27
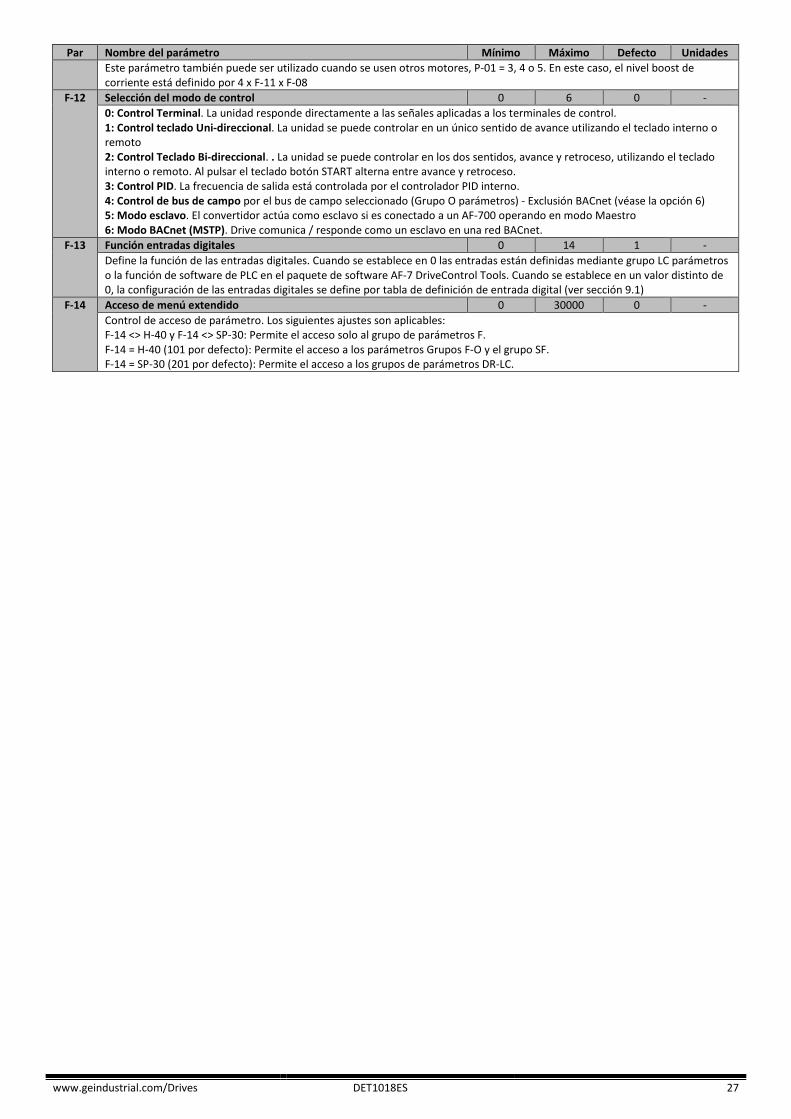
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
Este parámetro también puede ser utilizado cuando se usen otros motores, P-01 = 3, 4 o 5. En este caso, el nivel boost de corriente está definido por 4 x F-11 x F-08
F-12 Selección del modo de control 0 6 0 -
0: Control Terminal. La unidad responde directamente a las señales aplicadas a los terminales de control. 1: Control teclado Uni-direccional. La unidad se puede controlar en un único sentido de avance utilizando el teclado interno o remoto 2: Control Teclado Bi-direccional. . La unidad se puede controlar en los dos sentidos, avance y retroceso, utilizando el teclado interno o remoto. Al pulsar el teclado botón START alterna entre avance y retroceso. 3: Control PID. La frecuencia de salida está controlada por el controlador PID interno. 4: Control de bus de campo por el bus de campo seleccionado (Grupo O parámetros) - Exclusión BACnet (véase la opción 6) 5: Modo esclavo. El convertidor actúa como esclavo si es conectado a un AF-700 operando en modo Maestro 6: Modo BACnet (MSTP). Drive comunica / responde como un esclavo en una red BACnet.
F-13 Función entradas digitales 0 14 1 -
Define la función de las entradas digitales. Cuando se establece en 0 las entradas están definidas mediante grupo LC parámetros o la función de software de PLC en el paquete de software AF-7 DriveControl Tools. Cuando se establece en un valor distinto de 0, la configuración de las entradas digitales se define por tabla de definición de entrada digital (ver sección 9.1)
F-14 Acceso de menú extendido 0 30000 0 -
Control de acceso de parámetro. Los siguientes ajustes son aplicables: F-14 <> H-40 y F-14 <> SP-30: Permite el acceso solo al grupo de parámetros F. F-14 = H-40 (101 por defecto): Permite el acceso a los parámetros Grupos F-O y el grupo SF.
F-14 = SP-30 (201 por defecto): Permite el acceso a los grupos de parámetros DR-LC.
28 DET1018ES www.geindustrial.com/Drives
9. Funciones de entradas digitales
9.1. Parámetro F-13 de configuración de entradas digitales
F-13 *(2)
Función de control
Entrada digital 1 (Terminal 2)
Entrada digital 2 (Terminal 3)
Entrada digital 3
(Terminal 4)
Entrada analógica 1 (Terminal 6)
Entrada analógica 2 (Terminal 10)
Notas
0 N/A Todas las funciones de usuario definido en el Menú 9 o configura a través de la función de PLC en paquete
de software AF-7 DriveControl Tools.
1*(3)
Entrada analógica 2
O: Parada C: Marcha / Habilitación
O: Funcionamiento normal C: Velocidad programable 1 / Referencia PI 2
O: Control rem C: Control local
Analógica In 1 Analógica In 2
Si entrada digital 3 se cierra: Referencia velocidad = entrada analog 2 Comando arranque = Entrada digital 1 En modo PI, la entrada Analógica 1 debe ser utilizada para realimentación
2 O: Sin Función C: momentáneo cerrado arrancar
O: Parada (Deshabilitado) C: Arranque permitido
O: Control rem C: Control local
Analógica In 1 Analógica In 2
3 O: Parada C: Marcha / Habilitación
O: Adelante C:Atrás
O: Control rem C: Control local
Analógica In 1 Analógica In 2
4 O: Parada C: Marcha / Habilitación
O: Modo fuego *(1) C: Funcionamiento normal *(1)
O: Control rem C: Control local
Analógica In 1 Analógica In 2
5
Velocidades fijas
O: Parada C: Marcha / Habilitación
O: Velocidad programable 1 C: Velocidad programable 2
O: Control rem C: Control local
Analógica In 1 O: Ext Trip C: Funcionamiento normal
Cuando la entrada digital 3 está cerrada: Velocidad de referencia = Velocidad programable 1 / 2 Comando arranque = Entrada digital 1
6 O: Sin función C: momentáneo cerrado arrancar
O: Parada (Deshabilitado) C: Arranque permitido
O: Control rem C: Control local
Analógica In 1 O: Programable 1 C: Programable 2
7 O: Parada C: Marcha / Habilitación
O: Adelante C: Atrás
O: Control rem C: Control local
Analógica In 1 O: Programable 1 C: Programable 2
8 O: Parada C: Marcha / Habilitación
O: Modo fuego*(1) C: Funcionamiento normal *(1)
O: Control rem C: Control local
Analógica In 1 O: Programable 1 C: Programable 2
9*(3)
Referencia velocidad
de teclado
O: Parada C: Marcha / Habilitación
O: Funcionamiento normal C: Velocidad programable 1 Referencia PI 2
O: Control rem C: Control local
Analógica In 1 Analógica In 2
Cuando entrada digital 3 está cerrada: Referencia de velocidad= teclado Comando arranque determinado por H-37 10*(3)
O: Parada C: Marcha / Habilitación
O: Funcionamiento normal C: Velocidad programable / Referencia PI 2
O: Control rem C: Control local
Analógica In 1 O: Ext Trip C: Funcionamiento normal
11 O: Sin función C: momentáneo cerrado arrancar
O: Parada (Deshabilitado) C: Arranque permitido
O: Remoto Ctrl C: Local Ctrl
Analógica In 1 Analógica In 2
12 O: Parada C: Marcha Fwd
O: Adelante C:Atrás
O: Control rem C: Control local
Analógica In 1 Analógica In 2
13 O: Parada C: Marcha Fwd
O: Modo fuego (1) C: Funcionamiento normal (1)
O: Control rem C: Control local
Analógica In 1 Analógica In 2
14 O: Parada C: Marcha / habilitación
O: Forward C: Reverse
Entrada digital 3 Entrada
analógica 1 Entrada
analógica 2 Velocidad programable
Off Off Off Velocidad programable 1
On Off Off Velocidad programable 2
Off On Off Velocidad programable 3
On On Off Velocidad programable 4
Off Off On Velocidad programable 5
On Off On Velocidad programable 6
Off On On Velocidad programable 7
On On On Velocidad programable 8
Notas *(1): La lógica que se muestra es de acuerdo con la configuración predeterminada. Modo lógico de fuego se puede configurar mediante el parámetro SF-09. *(2): Ajuste estándar para F-13 = 1
*(3): Cuando la unidad está en control PID (F-12 = 3) y se selecciona de referencia prefijado digital (PI-05 = 0) entonces de F-13 se puede ajustar a 1, 9, o 10 para permitir la selección entre dos referencias digitales independientes con una entrada digital 2. De referencia prefijado digital 1 y 2 se establecen en P3 y PI-06-15, respectivamente.
Nota: La conexión del termistor del motor es a través de la entrada analógica 2, y está configurado por el parámetro H-33 (Ptc-th).La entrada "Disparo externo" ya no se utiliza para la entrada de termistor.
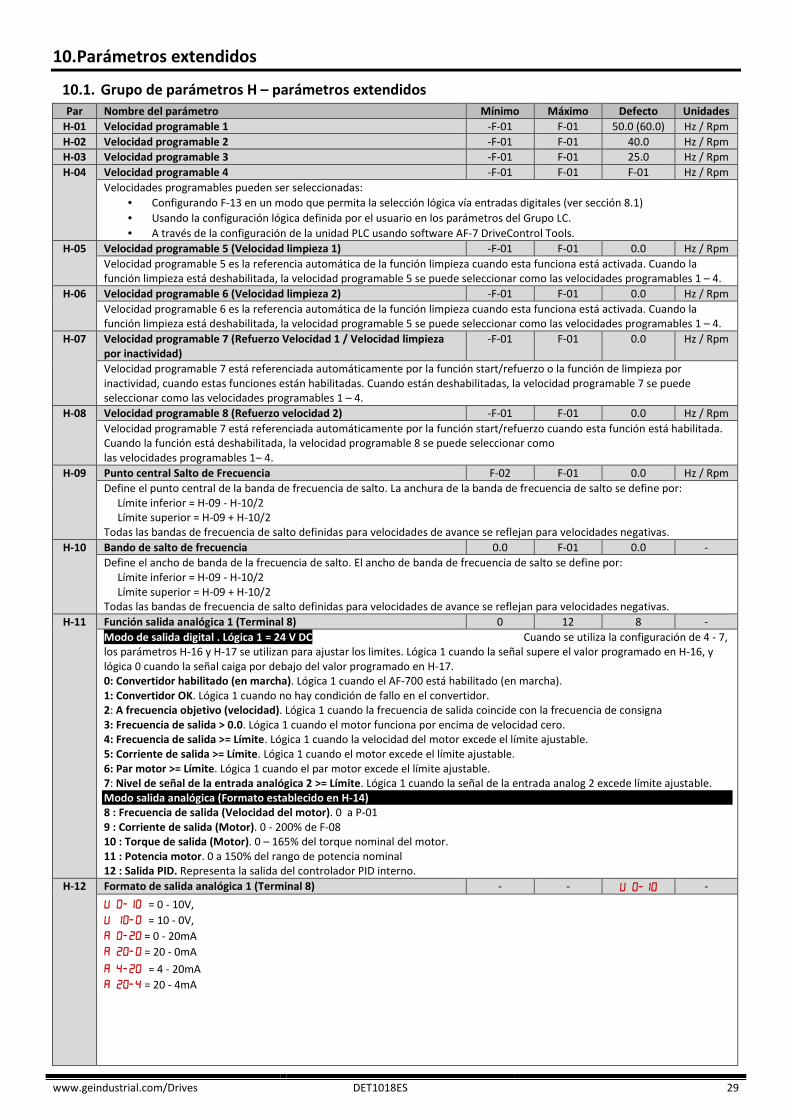
www.geindustrial.com/Drives DET1018ES 29
10. Parámetros extendidos
10.1. Grupo de parámetros H – parámetros extendidos
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
H-01 Velocidad programable 1 -F-01 F-01 50.0 (60.0) Hz / Rpm
H-02 Velocidad programable 2 -F-01 F-01 40.0 Hz / Rpm
H-03 Velocidad programable 3 -F-01 F-01 25.0 Hz / Rpm
H-04 Velocidad programable 4 -F-01 F-01 F-01 Hz / Rpm
Velocidades programables pueden ser seleccionadas:
• Configurando F-13 en un modo que permita la selección lógica vía entradas digitales (ver sección 8.1)
• Usando la configuración lógica definida por el usuario en los parámetros del Grupo LC.
• A través de la configuración de la unidad PLC usando software AF-7 DriveControl Tools.
H-05 Velocidad programable 5 (Velocidad limpieza 1) -F-01 F-01 0.0 Hz / Rpm
Velocidad programable 5 es la referencia automática de la función limpieza cuando esta funciona está activada. Cuando la función limpieza está deshabilitada, la velocidad programable 5 se puede seleccionar como las velocidades programables 1 – 4.
H-06 Velocidad programable 6 (Velocidad limpieza 2) -F-01 F-01 0.0 Hz / Rpm
Velocidad programable 6 es la referencia automática de la función limpieza cuando esta funciona está activada. Cuando la función limpieza está deshabilitada, la velocidad programable 5 se puede seleccionar como las velocidades programables 1 – 4.
H-07 Velocidad programable 7 (Refuerzo Velocidad 1 / Velocidad limpieza por inactividad)
-F-01 F-01 0.0 Hz / Rpm
Velocidad programable 7 está referenciada automáticamente por la función start/refuerzo o la función de limpieza por inactividad, cuando estas funciones están habilitadas. Cuando están deshabilitadas, la velocidad programable 7 se puede seleccionar como las velocidades programables 1 – 4.
H-08 Velocidad programable 8 (Refuerzo velocidad 2) -F-01 F-01 0.0 Hz / Rpm
Velocidad programable 7 está referenciada automáticamente por la función start/refuerzo cuando esta función está habilitada. Cuando la función está deshabilitada, la velocidad programable 8 se puede seleccionar como las velocidades programables 1– 4.
H-09 Punto central Salto de Frecuencia F-02 F-01 0.0 Hz / Rpm
Define el punto central de la banda de frecuencia de salto. La anchura de la banda de frecuencia de salto se define por: Límite inferior = H-09 - H-10/2 Límite superior = H-09 + H-10/2 Todas las bandas de frecuencia de salto definidas para velocidades de avance se reflejan para velocidades negativas.
H-10 Bando de salto de frecuencia 0.0 F-01 0.0 -
Define el ancho de banda de la frecuencia de salto. El ancho de banda de frecuencia de salto se define por: Límite inferior = H-09 - H-10/2 Límite superior = H-09 + H-10/2 Todas las bandas de frecuencia de salto definidas para velocidades de avance se reflejan para velocidades negativas.
H-11 Función salida analógica 1 (Terminal 8) 0 12 8 -
Modo de salida digital . Lógica 1 = 24 V DC Cuando se utiliza la configuración de 4 - 7, los parámetros H-16 y H-17 se utilizan para ajustar los limites. Lógica 1 cuando la señal supere el valor programado en H-16, y lógica 0 cuando la señal caiga por debajo del valor programado en H-17. 0: Convertidor habilitado (en marcha). Lógica 1 cuando el AF-700 está habilitado (en marcha). 1: Convertidor OK. Lógica 1 cuando no hay condición de fallo en el convertidor. 2: A frecuencia objetivo (velocidad). Lógica 1 cuando la frecuencia de salida coincide con la frecuencia de consigna 3: Frecuencia de salida > 0.0. Lógica 1 cuando el motor funciona por encima de velocidad cero. 4: Frecuencia de salida >= Límite. Lógica 1 cuando la velocidad del motor excede el límite ajustable. 5: Corriente de salida >= Límite. Lógica 1 cuando el motor excede el límite ajustable. 6: Par motor >= Límite. Lógica 1 cuando el par motor excede el límite ajustable. 7: Nivel de señal de la entrada analógica 2 >= Límite. Lógica 1 cuando la señal de la entrada analog 2 excede límite ajustable. Modo salida analógica (Formato establecido en H-14) 8 : Frecuencia de salida (Velocidad del motor). 0 a P-01 9 : Corriente de salida (Motor). 0 - 200% de F-08 10 : Torque de salida (Motor). 0 – 165% del torque nominal del motor. 11 : Potencia motor. 0 a 150% del rango de potencia nominal 12 : Salida PID. Representa la salida del controlador PID interno.
H-12 Formato de salida analógica 1 (Terminal 8) - - U 0-10 -
U 0-10 = 0 - 10V,
U 10-0 = 10 - 0V,
A 0-20 = 0 - 20mA
A 20-0 = 20 - 0mA
A 4-20 = 4 - 20mA
A 20-4 = 20 - 4mA
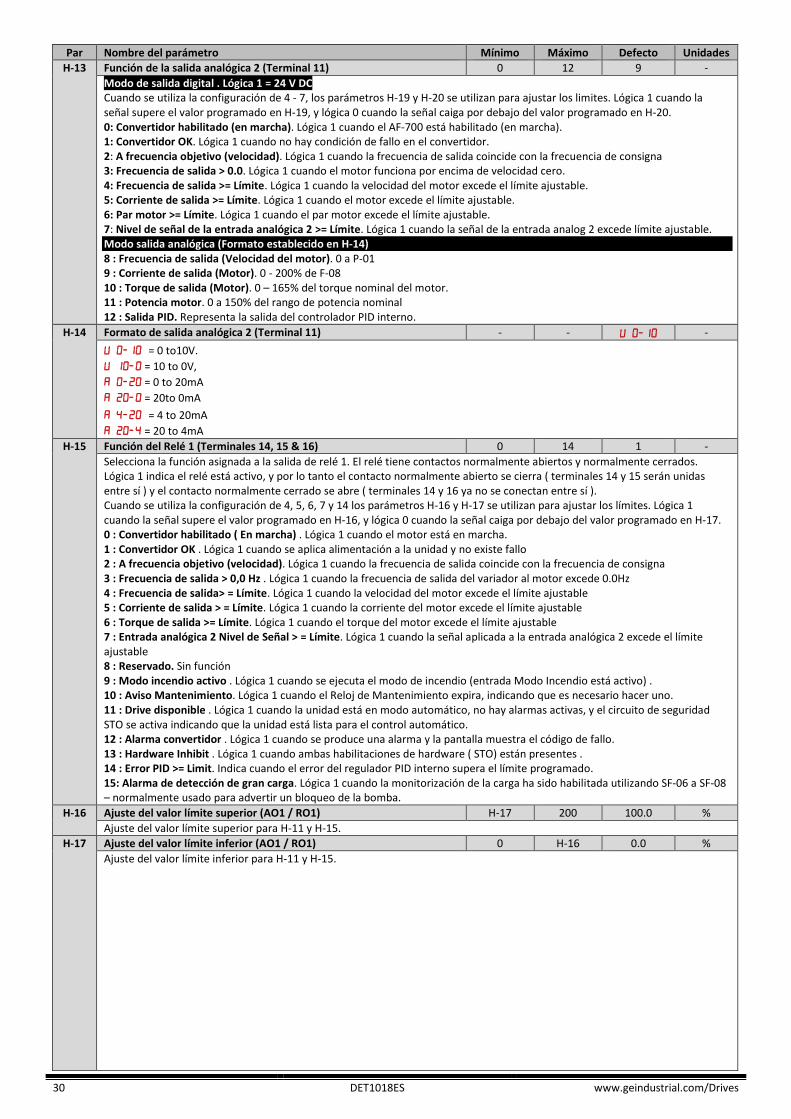
30 DET1018ES www.geindustrial.com/Drives
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
H-13 Función de la salida analógica 2 (Terminal 11) 0 12 9 -
Modo de salida digital . Lógica 1 = 24 V DC Cuando se utiliza la configuración de 4 - 7, los parámetros H-19 y H-20 se utilizan para ajustar los limites. Lógica 1 cuando la señal supere el valor programado en H-19, y lógica 0 cuando la señal caiga por debajo del valor programado en H-20. 0: Convertidor habilitado (en marcha). Lógica 1 cuando el AF-700 está habilitado (en marcha). 1: Convertidor OK. Lógica 1 cuando no hay condición de fallo en el convertidor. 2: A frecuencia objetivo (velocidad). Lógica 1 cuando la frecuencia de salida coincide con la frecuencia de consigna 3: Frecuencia de salida > 0.0. Lógica 1 cuando el motor funciona por encima de velocidad cero. 4: Frecuencia de salida >= Límite. Lógica 1 cuando la velocidad del motor excede el límite ajustable. 5: Corriente de salida >= Límite. Lógica 1 cuando el motor excede el límite ajustable. 6: Par motor >= Límite. Lógica 1 cuando el par motor excede el límite ajustable. 7: Nivel de señal de la entrada analógica 2 >= Límite. Lógica 1 cuando la señal de la entrada analog 2 excede límite ajustable. Modo salida analógica (Formato establecido en H-14) 8 : Frecuencia de salida (Velocidad del motor). 0 a P-01 9 : Corriente de salida (Motor). 0 - 200% de F-08 10 : Torque de salida (Motor). 0 – 165% del torque nominal del motor. 11 : Potencia motor. 0 a 150% del rango de potencia nominal 12 : Salida PID. Representa la salida del controlador PID interno.
H-14 Formato de salida analógica 2 (Terminal 11) - - U 0-10 -
U 0-10 = 0 to10V.
U 10-0 = 10 to 0V,
A 0-20 = 0 to 20mA
A 20-0 = 20to 0mA
A 4-20 = 4 to 20mA
A 20-4 = 20 to 4mA
H-15 Función del Relé 1 (Terminales 14, 15 & 16) 0 14 1 -
Selecciona la función asignada a la salida de relé 1. El relé tiene contactos normalmente abiertos y normalmente cerrados. Lógica 1 indica el relé está activo, y por lo tanto el contacto normalmente abierto se cierra ( terminales 14 y 15 serán unidas entre sí ) y el contacto normalmente cerrado se abre ( terminales 14 y 16 ya no se conectan entre sí ). Cuando se utiliza la configuración de 4, 5, 6, 7 y 14 los parámetros H-16 y H-17 se utilizan para ajustar los límites. Lógica 1 cuando la señal supere el valor programado en H-16, y lógica 0 cuando la señal caiga por debajo del valor programado en H-17. 0 : Convertidor habilitado ( En marcha) . Lógica 1 cuando el motor está en marcha. 1 : Convertidor OK . Lógica 1 cuando se aplica alimentación a la unidad y no existe fallo 2 : A frecuencia objetivo (velocidad). Lógica 1 cuando la frecuencia de salida coincide con la frecuencia de consigna 3 : Frecuencia de salida > 0,0 Hz . Lógica 1 cuando la frecuencia de salida del variador al motor excede 0.0Hz 4 : Frecuencia de salida> = Límite. Lógica 1 cuando la velocidad del motor excede el límite ajustable 5 : Corriente de salida > = Límite. Lógica 1 cuando la corriente del motor excede el límite ajustable 6 : Torque de salida >= Límite. Lógica 1 cuando el torque del motor excede el límite ajustable 7 : Entrada analógica 2 Nivel de Señal > = Límite. Lógica 1 cuando la señal aplicada a la entrada analógica 2 excede el límite ajustable 8 : Reservado. Sin función 9 : Modo incendio activo . Lógica 1 cuando se ejecuta el modo de incendio (entrada Modo Incendio está activo) . 10 : Aviso Mantenimiento. Lógica 1 cuando el Reloj de Mantenimiento expira, indicando que es necesario hacer uno. 11 : Drive disponible . Lógica 1 cuando la unidad está en modo automático, no hay alarmas activas, y el circuito de seguridad STO se activa indicando que la unidad está lista para el control automático. 12 : Alarma convertidor . Lógica 1 cuando se produce una alarma y la pantalla muestra el código de fallo. 13 : Hardware Inhibit . Lógica 1 cuando ambas habilitaciones de hardware ( STO) están presentes . 14 : Error PID >= Limit. Indica cuando el error del regulador PID interno supera el límite programado. 15: Alarma de detección de gran carga. Lógica 1 cuando la monitorización de la carga ha sido habilitada utilizando SF-06 a SF-08 – normalmente usado para advertir un bloqueo de la bomba.
H-16 Ajuste del valor límite superior (AO1 / RO1) H-17 200 100.0 %
Ajuste del valor límite superior para H-11 y H-15.
H-17 Ajuste del valor límite inferior (AO1 / RO1) 0 H-16 0.0 %
Ajuste del valor límite inferior para H-11 y H-15.
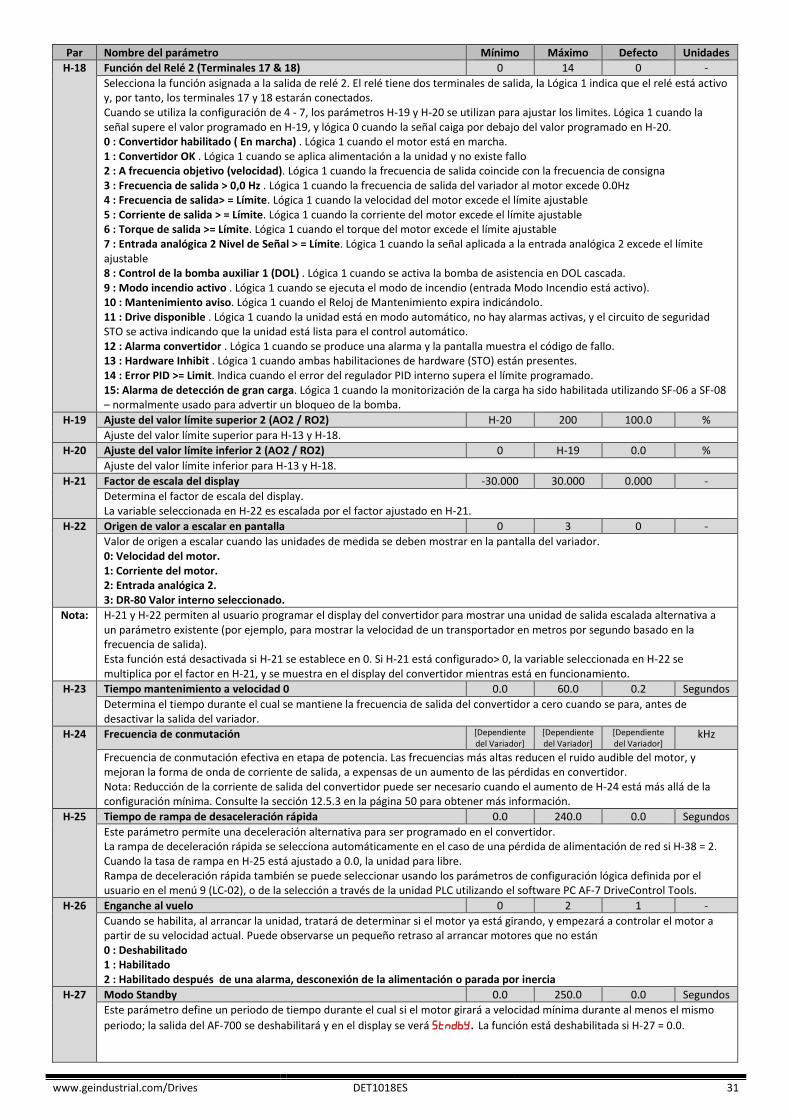
www.geindustrial.com/Drives DET1018ES 31
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
H-18 Función del Relé 2 (Terminales 17 & 18) 0 14 0 -
Selecciona la función asignada a la salida de relé 2. El relé tiene dos terminales de salida, la Lógica 1 indica que el relé está activo y, por tanto, los terminales 17 y 18 estarán conectados. Cuando se utiliza la configuración de 4 - 7, los parámetros H-19 y H-20 se utilizan para ajustar los limites. Lógica 1 cuando la señal supere el valor programado en H-19, y lógica 0 cuando la señal caiga por debajo del valor programado en H-20. 0 : Convertidor habilitado ( En marcha) . Lógica 1 cuando el motor está en marcha. 1 : Convertidor OK . Lógica 1 cuando se aplica alimentación a la unidad y no existe fallo 2 : A frecuencia objetivo (velocidad). Lógica 1 cuando la frecuencia de salida coincide con la frecuencia de consigna 3 : Frecuencia de salida > 0,0 Hz . Lógica 1 cuando la frecuencia de salida del variador al motor excede 0.0Hz 4 : Frecuencia de salida> = Límite. Lógica 1 cuando la velocidad del motor excede el límite ajustable 5 : Corriente de salida > = Límite. Lógica 1 cuando la corriente del motor excede el límite ajustable 6 : Torque de salida >= Límite. Lógica 1 cuando el torque del motor excede el límite ajustable 7 : Entrada analógica 2 Nivel de Señal > = Límite. Lógica 1 cuando la señal aplicada a la entrada analógica 2 excede el límite ajustable 8 : Control de la bomba auxiliar 1 (DOL) . Lógica 1 cuando se activa la bomba de asistencia en DOL cascada. 9 : Modo incendio activo . Lógica 1 cuando se ejecuta el modo de incendio (entrada Modo Incendio está activo). 10 : Mantenimiento aviso. Lógica 1 cuando el Reloj de Mantenimiento expira indicándolo. 11 : Drive disponible . Lógica 1 cuando la unidad está en modo automático, no hay alarmas activas, y el circuito de seguridad STO se activa indicando que la unidad está lista para el control automático. 12 : Alarma convertidor . Lógica 1 cuando se produce una alarma y la pantalla muestra el código de fallo. 13 : Hardware Inhibit . Lógica 1 cuando ambas habilitaciones de hardware (STO) están presentes. 14 : Error PID >= Limit. Indica cuando el error del regulador PID interno supera el límite programado. 15: Alarma de detección de gran carga. Lógica 1 cuando la monitorización de la carga ha sido habilitada utilizando SF-06 a SF-08 – normalmente usado para advertir un bloqueo de la bomba.
H-19 Ajuste del valor límite superior 2 (AO2 / RO2) H-20 200 100.0 %
Ajuste del valor límite superior para H-13 y H-18.
H-20 Ajuste del valor límite inferior 2 (AO2 / RO2) 0 H-19 0.0 %
Ajuste del valor límite inferior para H-13 y H-18.
H-21 Factor de escala del display -30.000 30.000 0.000 -
Determina el factor de escala del display. La variable seleccionada en H-22 es escalada por el factor ajustado en H-21.
H-22 Origen de valor a escalar en pantalla 0 3 0 -
Valor de origen a escalar cuando las unidades de medida se deben mostrar en la pantalla del variador. 0: Velocidad del motor. 1: Corriente del motor. 2: Entrada analógica 2. 3: DR-80 Valor interno seleccionado.
Nota: H-21 y H-22 permiten al usuario programar el display del convertidor para mostrar una unidad de salida escalada alternativa a un parámetro existente (por ejemplo, para mostrar la velocidad de un transportador en metros por segundo basado en la frecuencia de salida). Esta función está desactivada si H-21 se establece en 0. Si H-21 está configurado> 0, la variable seleccionada en H-22 se multiplica por el factor en H-21, y se muestra en el display del convertidor mientras está en funcionamiento.
H-23 Tiempo mantenimiento a velocidad 0 0.0 60.0 0.2 Segundos
Determina el tiempo durante el cual se mantiene la frecuencia de salida del convertidor a cero cuando se para, antes de desactivar la salida del variador.
H-24 Frecuencia de conmutación [Dependiente del Variador]
[Dependiente del Variador]
[Dependiente del Variador]
kHz
Frecuencia de conmutación efectiva en etapa de potencia. Las frecuencias más altas reducen el ruido audible del motor, y mejoran la forma de onda de corriente de salida, a expensas de un aumento de las pérdidas en convertidor. Nota: Reducción de la corriente de salida del convertidor puede ser necesario cuando el aumento de H-24 está más allá de la configuración mínima. Consulte la sección 12.5.3 en la página 50 para obtener más información.
H-25 Tiempo de rampa de desaceleración rápida 0.0 240.0 0.0 Segundos
Este parámetro permite una deceleración alternativa para ser programado en el convertidor. La rampa de deceleración rápida se selecciona automáticamente en el caso de una pérdida de alimentación de red si H-38 = 2. Cuando la tasa de rampa en H-25 está ajustado a 0.0, la unidad para libre. Rampa de deceleración rápida también se puede seleccionar usando los parámetros de configuración lógica definida por el usuario en el menú 9 (LC-02), o de la selección a través de la unidad PLC utilizando el software PC AF-7 DriveControl Tools.
H-26 Enganche al vuelo 0 2 1 -
Cuando se habilita, al arrancar la unidad, tratará de determinar si el motor ya está girando, y empezará a controlar el motor a partir de su velocidad actual. Puede observarse un pequeño retraso al arrancar motores que no están 0 : Deshabilitado 1 : Habilitado 2 : Habilitado después de una alarma, desconexión de la alimentación o parada por inercia
H-27 Modo Standby 0.0 250.0 0.0 Segundos
Este parámetro define un periodo de tiempo durante el cual si el motor girará a velocidad mínima durante al menos el mismo
periodo; la salida del AF-700 se deshabilitará y en el display se verá stndby. La función está deshabilitada si H-27 = 0.0.
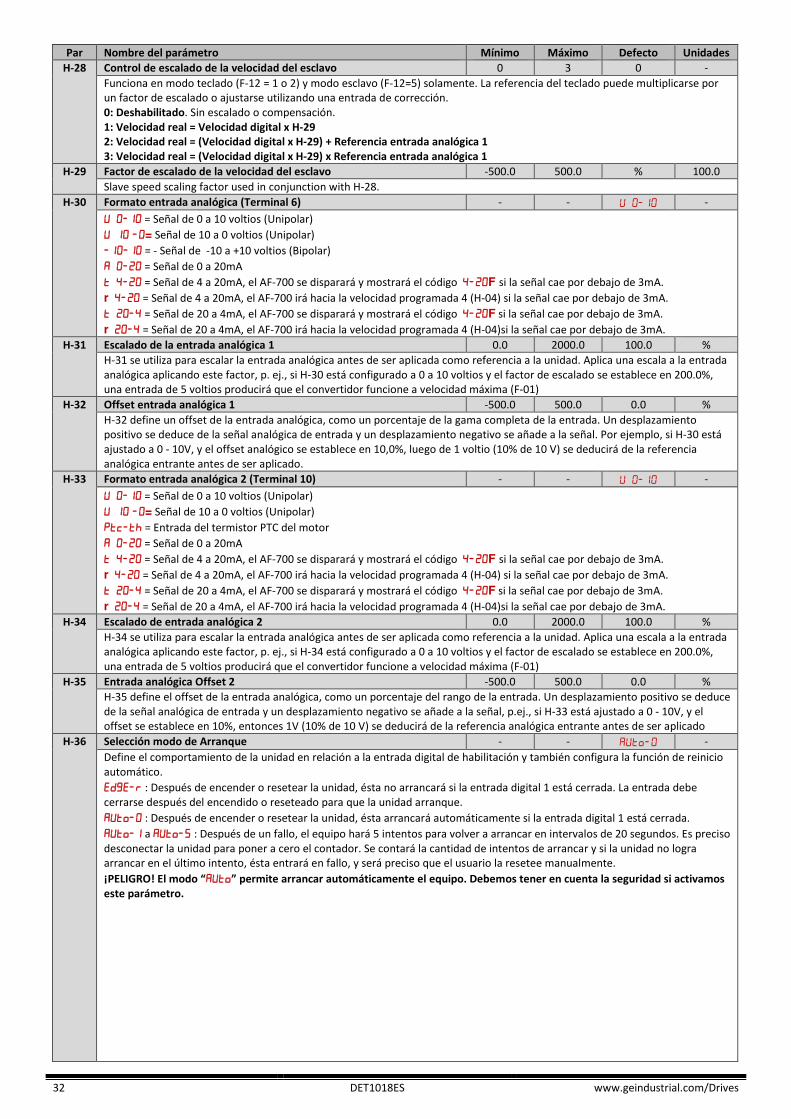
32 DET1018ES www.geindustrial.com/Drives
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
H-28 Control de escalado de la velocidad del esclavo 0 3 0 -
Funciona en modo teclado (F-12 = 1 o 2) y modo esclavo (F-12=5) solamente. La referencia del teclado puede multiplicarse por un factor de escalado o ajustarse utilizando una entrada de corrección. 0: Deshabilitado. Sin escalado o compensación. 1: Velocidad real = Velocidad digital x H-29 2: Velocidad real = (Velocidad digital x H-29) + Referencia entrada analógica 1 3: Velocidad real = (Velocidad digital x H-29) x Referencia entrada analógica 1
H-29 Factor de escalado de la velocidad del esclavo -500.0 500.0 % 100.0
Slave speed scaling factor used in conjunction with H-28.
H-30 Formato entrada analógica (Terminal 6) - - U 0-10 -
U 0-10 = Señal de 0 a 10 voltios (Unipolar)
U 10 -0= Señal de 10 a 0 voltios (Unipolar)
-10-10 = - Señal de -10 a +10 voltios (Bipolar)
A 0-20 = Señal de 0 a 20mA
T 4-20 = Señal de 4 a 20mA, el AF-700 se disparará y mostrará el código 4-20F si la señal cae por debajo de 3mA.
r 4-20 = Señal de 4 a 20mA, el AF-700 irá hacia la velocidad programada 4 (H-04) si la señal cae por debajo de 3mA.
T 20-4 = Señal de 20 a 4mA, el AF-700 se disparará y mostrará el código 4-20F si la señal cae por debajo de 3mA.
r 20-4 = Señal de 20 a 4mA, el AF-700 irá hacia la velocidad programada 4 (H-04)si la señal cae por debajo de 3mA.
H-31 Escalado de la entrada analógica 1 0.0 2000.0 100.0 %
H-31 se utiliza para escalar la entrada analógica antes de ser aplicada como referencia a la unidad. Aplica una escala a la entrada analógica aplicando este factor, p. ej., si H-30 está configurado a 0 a 10 voltios y el factor de escalado se establece en 200.0%, una entrada de 5 voltios producirá que el convertidor funcione a velocidad máxima (F-01)
H-32 Offset entrada analógica 1 -500.0 500.0 0.0 %
H-32 define un offset de la entrada analógica, como un porcentaje de la gama completa de la entrada. Un desplazamiento positivo se deduce de la señal analógica de entrada y un desplazamiento negativo se añade a la señal. Por ejemplo, si H-30 está ajustado a 0 - 10V, y el offset analógico se establece en 10,0%, luego de 1 voltio (10% de 10 V) se deducirá de la referencia analógica entrante antes de ser aplicado.
H-33 Formato entrada analógica 2 (Terminal 10) - - U 0-10 -
U 0-10 = Señal de 0 a 10 voltios (Unipolar)
U 10 -0= Señal de 10 a 0 voltios (Unipolar)
Ptc-th = Entrada del termistor PTC del motor
A 0-20 = Señal de 0 a 20mA
T 4-20 = Señal de 4 a 20mA, el AF-700 se disparará y mostrará el código 4-20F si la señal cae por debajo de 3mA.
r 4-20 = Señal de 4 a 20mA, el AF-700 irá hacia la velocidad programada 4 (H-04) si la señal cae por debajo de 3mA.
T 20-4 = Señal de 20 a 4mA, el AF-700 se disparará y mostrará el código 4-20F si la señal cae por debajo de 3mA.
r 20-4 = Señal de 20 a 4mA, el AF-700 irá hacia la velocidad programada 4 (H-04)si la señal cae por debajo de 3mA.
H-34 Escalado de entrada analógica 2 0.0 2000.0 100.0 %
H-34 se utiliza para escalar la entrada analógica antes de ser aplicada como referencia a la unidad. Aplica una escala a la entrada analógica aplicando este factor, p. ej., si H-34 está configurado a 0 a 10 voltios y el factor de escalado se establece en 200.0%, una entrada de 5 voltios producirá que el convertidor funcione a velocidad máxima (F-01)
H-35 Entrada analógica Offset 2 -500.0 500.0 0.0 %
H-35 define el offset de la entrada analógica, como un porcentaje del rango de la entrada. Un desplazamiento positivo se deduce de la señal analógica de entrada y un desplazamiento negativo se añade a la señal, p.ej., si H-33 está ajustado a 0 - 10V, y el offset se establece en 10%, entonces 1V (10% de 10 V) se deducirá de la referencia analógica entrante antes de ser aplicado
H-36 Selección modo de Arranque - - Auto-0 -
Define el comportamiento de la unidad en relación a la entrada digital de habilitación y también configura la función de reinicio automático.
Edge-r : Después de encender o resetear la unidad, ésta no arrancará si la entrada digital 1 está cerrada. La entrada debe cerrarse después del encendido o reseteado para que la unidad arranque.
Auto-0 : Después de encender o resetear la unidad, ésta arrancará automáticamente si la entrada digital 1 está cerrada.
Auto-1 a Auto-5 : Después de un fallo, el equipo hará 5 intentos para volver a arrancar en intervalos de 20 segundos. Es preciso desconectar la unidad para poner a cero el contador. Se contará la cantidad de intentos de arrancar y si la unidad no logra arrancar en el último intento, ésta entrará en fallo, y será preciso que el usuario la resetee manualmente.
¡PELIGRO! El modo “Auto” permite arrancar automáticamente el equipo. Debemos tener en cuenta la seguridad si activamos este parámetro.
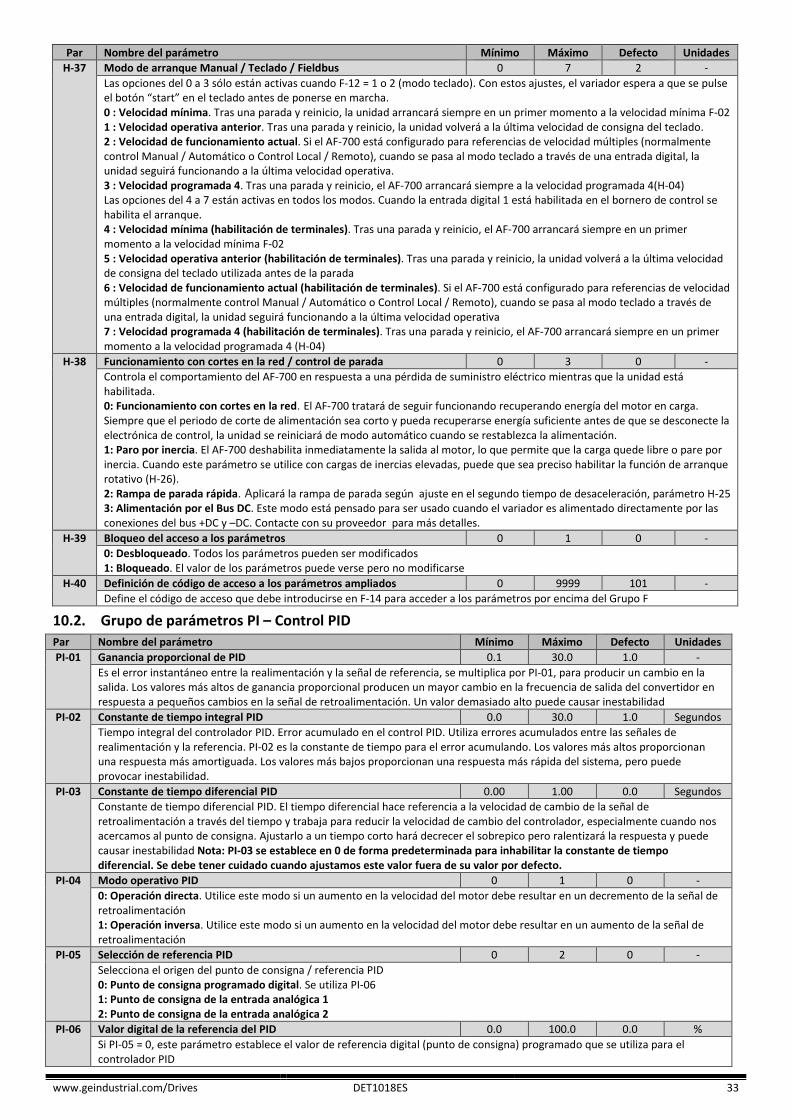
www.geindustrial.com/Drives DET1018ES 33
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
H-37 Modo de arranque Manual / Teclado / Fieldbus 0 7 2 -
Las opciones del 0 a 3 sólo están activas cuando F-12 = 1 o 2 (modo teclado). Con estos ajustes, el variador espera a que se pulse el botón “start” en el teclado antes de ponerse en marcha. 0 : Velocidad mínima. Tras una parada y reinicio, la unidad arrancará siempre en un primer momento a la velocidad mínima F-02 1 : Velocidad operativa anterior. Tras una parada y reinicio, la unidad volverá a la última velocidad de consigna del teclado. 2 : Velocidad de funcionamiento actual. Si el AF-700 está configurado para referencias de velocidad múltiples (normalmente control Manual / Automático o Control Local / Remoto), cuando se pasa al modo teclado a través de una entrada digital, la unidad seguirá funcionando a la última velocidad operativa. 3 : Velocidad programada 4. Tras una parada y reinicio, el AF-700 arrancará siempre a la velocidad programada 4(H-04) Las opciones del 4 a 7 están activas en todos los modos. Cuando la entrada digital 1 está habilitada en el bornero de control se habilita el arranque. 4 : Velocidad mínima (habilitación de terminales). Tras una parada y reinicio, el AF-700 arrancará siempre en un primer momento a la velocidad mínima F-02 5 : Velocidad operativa anterior (habilitación de terminales). Tras una parada y reinicio, la unidad volverá a la última velocidad de consigna del teclado utilizada antes de la parada 6 : Velocidad de funcionamiento actual (habilitación de terminales). Si el AF-700 está configurado para referencias de velocidad múltiples (normalmente control Manual / Automático o Control Local / Remoto), cuando se pasa al modo teclado a través de una entrada digital, la unidad seguirá funcionando a la última velocidad operativa 7 : Velocidad programada 4 (habilitación de terminales). Tras una parada y reinicio, el AF-700 arrancará siempre en un primer momento a la velocidad programada 4 (H-04)
H-38 Funcionamiento con cortes en la red / control de parada 0 3 0 -
Controla el comportamiento del AF-700 en respuesta a una pérdida de suministro eléctrico mientras que la unidad está habilitada. 0: Funcionamiento con cortes en la red. El AF-700 tratará de seguir funcionando recuperando energía del motor en carga. Siempre que el periodo de corte de alimentación sea corto y pueda recuperarse energía suficiente antes de que se desconecte la electrónica de control, la unidad se reiniciará de modo automático cuando se restablezca la alimentación. 1: Paro por inercia. El AF-700 deshabilita inmediatamente la salida al motor, lo que permite que la carga quede libre o pare por inercia. Cuando este parámetro se utilice con cargas de inercias elevadas, puede que sea preciso habilitar la función de arranque rotativo (H-26). 2: Rampa de parada rápida. Aplicará la rampa de parada según ajuste en el segundo tiempo de desaceleración, parámetro H-25 3: Alimentación por el Bus DC. Este modo está pensado para ser usado cuando el variador es alimentado directamente por las conexiones del bus +DC y –DC. Contacte con su proveedor para más detalles.
H-39 Bloqueo del acceso a los parámetros 0 1 0 -
0: Desbloqueado. Todos los parámetros pueden ser modificados 1: Bloqueado. El valor de los parámetros puede verse pero no modificarse
H-40 Definición de código de acceso a los parámetros ampliados 0 9999 101 -
Define el código de acceso que debe introducirse en F-14 para acceder a los parámetros por encima del Grupo F
10.2. Grupo de parámetros PI – Control PID
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
PI-01 Ganancia proporcional de PID 0.1 30.0 1.0 -
Es el error instantáneo entre la realimentación y la señal de referencia, se multiplica por PI-01, para producir un cambio en la salida. Los valores más altos de ganancia proporcional producen un mayor cambio en la frecuencia de salida del convertidor en respuesta a pequeños cambios en la señal de retroalimentación. Un valor demasiado alto puede causar inestabilidad
PI-02 Constante de tiempo integral PID 0.0 30.0 1.0 Segundos
Tiempo integral del controlador PID. Error acumulado en el control PID. Utiliza errores acumulados entre las señales de realimentación y la referencia. PI-02 es la constante de tiempo para el error acumulando. Los valores más altos proporcionan una respuesta más amortiguada. Los valores más bajos proporcionan una respuesta más rápida del sistema, pero puede provocar inestabilidad.
PI-03 Constante de tiempo diferencial PID 0.00 1.00 0.0 Segundos
Constante de tiempo diferencial PID. El tiempo diferencial hace referencia a la velocidad de cambio de la señal de retroalimentación a través del tiempo y trabaja para reducir la velocidad de cambio del controlador, especialmente cuando nos acercamos al punto de consigna. Ajustarlo a un tiempo corto hará decrecer el sobrepico pero ralentizará la respuesta y puede causar inestabilidad Nota: PI-03 se establece en 0 de forma predeterminada para inhabilitar la constante de tiempo diferencial. Se debe tener cuidado cuando ajustamos este valor fuera de su valor por defecto.
PI-04 Modo operativo PID 0 1 0 -
0: Operación directa. Utilice este modo si un aumento en la velocidad del motor debe resultar en un decremento de la señal de retroalimentación 1: Operación inversa. Utilice este modo si un aumento en la velocidad del motor debe resultar en un aumento de la señal de retroalimentación
PI-05 Selección de referencia PID 0 2 0 -
Selecciona el origen del punto de consigna / referencia PID 0: Punto de consigna programado digital. Se utiliza PI-06 1: Punto de consigna de la entrada analógica 1 2: Punto de consigna de la entrada analógica 2
PI-06 Valor digital de la referencia del PID 0.0 100.0 0.0 %
Si PI-05 = 0, este parámetro establece el valor de referencia digital (punto de consigna) programado que se utiliza para el controlador PID
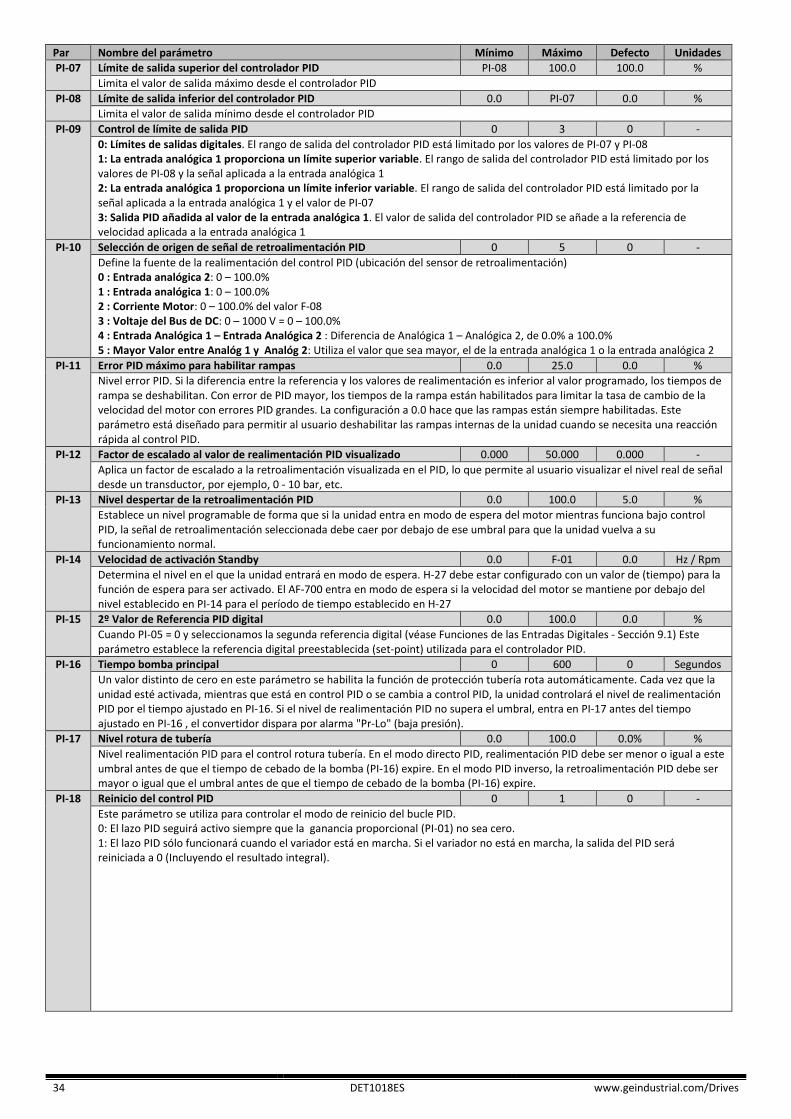
34 DET1018ES www.geindustrial.com/Drives
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
PI-07 Límite de salida superior del controlador PID PI-08 100.0 100.0 %
Limita el valor de salida máximo desde el controlador PID
PI-08 Límite de salida inferior del controlador PID 0.0 PI-07 0.0 %
Limita el valor de salida mínimo desde el controlador PID
PI-09 Control de límite de salida PID 0 3 0 -
0: Límites de salidas digitales. El rango de salida del controlador PID está limitado por los valores de PI-07 y PI-08 1: La entrada analógica 1 proporciona un límite superior variable. El rango de salida del controlador PID está limitado por los valores de PI-08 y la señal aplicada a la entrada analógica 1 2: La entrada analógica 1 proporciona un límite inferior variable. El rango de salida del controlador PID está limitado por la señal aplicada a la entrada analógica 1 y el valor de PI-07 3: Salida PID añadida al valor de la entrada analógica 1. El valor de salida del controlador PID se añade a la referencia de velocidad aplicada a la entrada analógica 1
PI-10 Selección de origen de señal de retroalimentación PID 0 5 0 -
Define la fuente de la realimentación del control PID (ubicación del sensor de retroalimentación) 0 : Entrada analógica 2: 0 – 100.0% 1 : Entrada analógica 1: 0 – 100.0% 2 : Corriente Motor: 0 – 100.0% del valor F-08 3 : Voltaje del Bus de DC: 0 – 1000 V = 0 – 100.0% 4 : Entrada Analógica 1 – Entrada Analógica 2 : Diferencia de Analógica 1 – Analógica 2, de 0.0% a 100.0% 5 : Mayor Valor entre Analóg 1 y Analóg 2: Utiliza el valor que sea mayor, el de la entrada analógica 1 o la entrada analógica 2
PI-11 Error PID máximo para habilitar rampas 0.0 25.0 0.0 %
Nivel error PID. Si la diferencia entre la referencia y los valores de realimentación es inferior al valor programado, los tiempos de rampa se deshabilitan. Con error de PID mayor, los tiempos de la rampa están habilitados para limitar la tasa de cambio de la velocidad del motor con errores PID grandes. La configuración a 0.0 hace que las rampas están siempre habilitadas. Este parámetro está diseñado para permitir al usuario deshabilitar las rampas internas de la unidad cuando se necesita una reacción rápida al control PID.
PI-12 Factor de escalado al valor de realimentación PID visualizado 0.000 50.000 0.000 -
Aplica un factor de escalado a la retroalimentación visualizada en el PID, lo que permite al usuario visualizar el nivel real de señal desde un transductor, por ejemplo, 0 - 10 bar, etc.
PI-13 Nivel despertar de la retroalimentación PID 0.0 100.0 5.0 %
Establece un nivel programable de forma que si la unidad entra en modo de espera del motor mientras funciona bajo control PID, la señal de retroalimentación seleccionada debe caer por debajo de ese umbral para que la unidad vuelva a su funcionamiento normal.
PI-14 Velocidad de activación Standby 0.0 F-01 0.0 Hz / Rpm
Determina el nivel en el que la unidad entrará en modo de espera. H-27 debe estar configurado con un valor de (tiempo) para la función de espera para ser activado. El AF-700 entra en modo de espera si la velocidad del motor se mantiene por debajo del nivel establecido en PI-14 para el período de tiempo establecido en H-27
PI-15 2º Valor de Referencia PID digital 0.0 100.0 0.0 %
Cuando PI-05 = 0 y seleccionamos la segunda referencia digital (véase Funciones de las Entradas Digitales - Sección 9.1) Este parámetro establece la referencia digital preestablecida (set-point) utilizada para el controlador PID.
PI-16 Tiempo bomba principal 0 600 0 Segundos
Un valor distinto de cero en este parámetro se habilita la función de protección tubería rota automáticamente. Cada vez que la unidad esté activada, mientras que está en control PID o se cambia a control PID, la unidad controlará el nivel de realimentación PID por el tiempo ajustado en PI-16. Si el nivel de realimentación PID no supera el umbral, entra en PI-17 antes del tiempo ajustado en PI-16 , el convertidor dispara por alarma "Pr-Lo" (baja presión).
PI-17 Nivel rotura de tubería 0.0 100.0 0.0% %
Nivel realimentación PID para el control rotura tubería. En el modo directo PID, realimentación PID debe ser menor o igual a este umbral antes de que el tiempo de cebado de la bomba (PI-16) expire. En el modo PID inverso, la retroalimentación PID debe ser mayor o igual que el umbral antes de que el tiempo de cebado de la bomba (PI-16) expire.
PI-18 Reinicio del control PID 0 1 0 -
Este parámetro se utiliza para controlar el modo de reinicio del bucle PID. 0: El lazo PID seguirá activo siempre que la ganancia proporcional (PI-01) no sea cero. 1: El lazo PID sólo funcionará cuando el variador está en marcha. Si el variador no está en marcha, la salida del PID será reiniciada a 0 (Incluyendo el resultado integral).
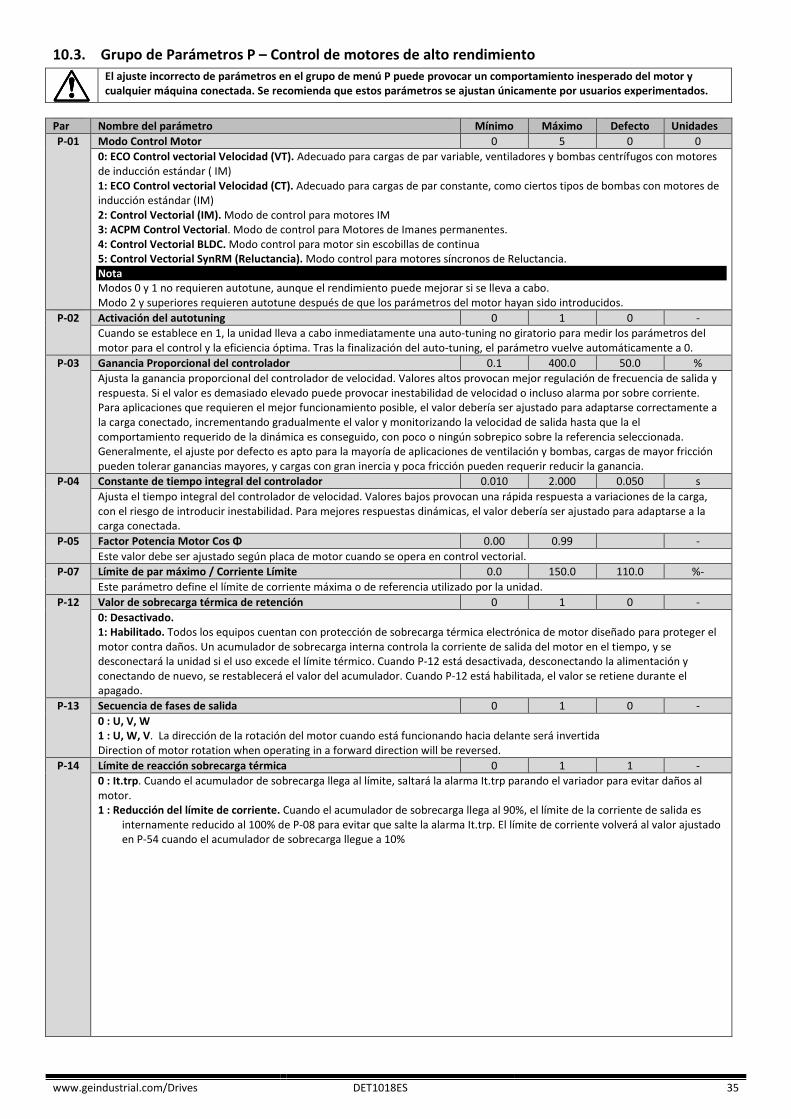
www.geindustrial.com/Drives DET1018ES 35
10.3. Grupo de Parámetros P – Control de motores de alto rendimiento
El ajuste incorrecto de parámetros en el grupo de menú P puede provocar un comportamiento inesperado del motor y cualquier máquina conectada. Se recomienda que estos parámetros se ajustan únicamente por usuarios experimentados.
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
P-01 Modo Control Motor 0 5 0 0
0: ECO Control vectorial Velocidad (VT). Adecuado para cargas de par variable, ventiladores y bombas centrífugos con motores de inducción estándar ( IM) 1: ECO Control vectorial Velocidad (CT). Adecuado para cargas de par constante, como ciertos tipos de bombas con motores de inducción estándar (IM) 2: Control Vectorial (IM). Modo de control para motores IM 3: ACPM Control Vectorial. Modo de control para Motores de Imanes permanentes. 4: Control Vectorial BLDC. Modo control para motor sin escobillas de continua 5: Control Vectorial SynRM (Reluctancia). Modo control para motores síncronos de Reluctancia. Nota Modos 0 y 1 no requieren autotune, aunque el rendimiento puede mejorar si se lleva a cabo. Modo 2 y superiores requieren autotune después de que los parámetros del motor hayan sido introducidos.
P-02 Activación del autotuning 0 1 0 -
Cuando se establece en 1, la unidad lleva a cabo inmediatamente una auto-tuning no giratorio para medir los parámetros del motor para el control y la eficiencia óptima. Tras la finalización del auto-tuning, el parámetro vuelve automáticamente a 0.
P-03 Ganancia Proporcional del controlador 0.1 400.0 50.0 %
Ajusta la ganancia proporcional del controlador de velocidad. Valores altos provocan mejor regulación de frecuencia de salida y respuesta. Si el valor es demasiado elevado puede provocar inestabilidad de velocidad o incluso alarma por sobre corriente. Para aplicaciones que requieren el mejor funcionamiento posible, el valor debería ser ajustado para adaptarse correctamente a la carga conectado, incrementando gradualmente el valor y monitorizando la velocidad de salida hasta que la el comportamiento requerido de la dinámica es conseguido, con poco o ningún sobrepico sobre la referencia seleccionada. Generalmente, el ajuste por defecto es apto para la mayoría de aplicaciones de ventilación y bombas, cargas de mayor fricción pueden tolerar ganancias mayores, y cargas con gran inercia y poca fricción pueden requerir reducir la ganancia.
P-04 Constante de tiempo integral del controlador 0.010 2.000 0.050 s
Ajusta el tiempo integral del controlador de velocidad. Valores bajos provocan una rápida respuesta a variaciones de la carga, con el riesgo de introducir inestabilidad. Para mejores respuestas dinámicas, el valor debería ser ajustado para adaptarse a la carga conectada.
P-05 Factor Potencia Motor Cos Φ 0.00 0.99 -
Este valor debe ser ajustado según placa de motor cuando se opera en control vectorial.
P-07 Límite de par máximo / Corriente Límite 0.0 150.0 110.0 %-
Este parámetro define el límite de corriente máxima o de referencia utilizado por la unidad.
P-12 Valor de sobrecarga térmica de retención 0 1 0 -
0: Desactivado. 1: Habilitado. Todos los equipos cuentan con protección de sobrecarga térmica electrónica de motor diseñado para proteger el motor contra daños. Un acumulador de sobrecarga interna controla la corriente de salida del motor en el tiempo, y se desconectará la unidad si el uso excede el límite térmico. Cuando P-12 está desactivada, desconectando la alimentación y conectando de nuevo, se restablecerá el valor del acumulador. Cuando P-12 está habilitada, el valor se retiene durante el apagado.
P-13 Secuencia de fases de salida 0 1 0 -
0 : U, V, W 1 : U, W, V. La dirección de la rotación del motor cuando está funcionando hacia delante será invertida Direction of motor rotation when operating in a forward direction will be reversed.
P-14 Límite de reacción sobrecarga térmica 0 1 1 -
0 : It.trp. Cuando el acumulador de sobrecarga llega al límite, saltará la alarma It.trp parando el variador para evitar daños al motor. 1 : Reducción del límite de corriente. Cuando el acumulador de sobrecarga llega al 90%, el límite de la corriente de salida es
internamente reducido al 100% de P-08 para evitar que salte la alarma It.trp. El límite de corriente volverá al valor ajustado en P-54 cuando el acumulador de sobrecarga llegue a 10%
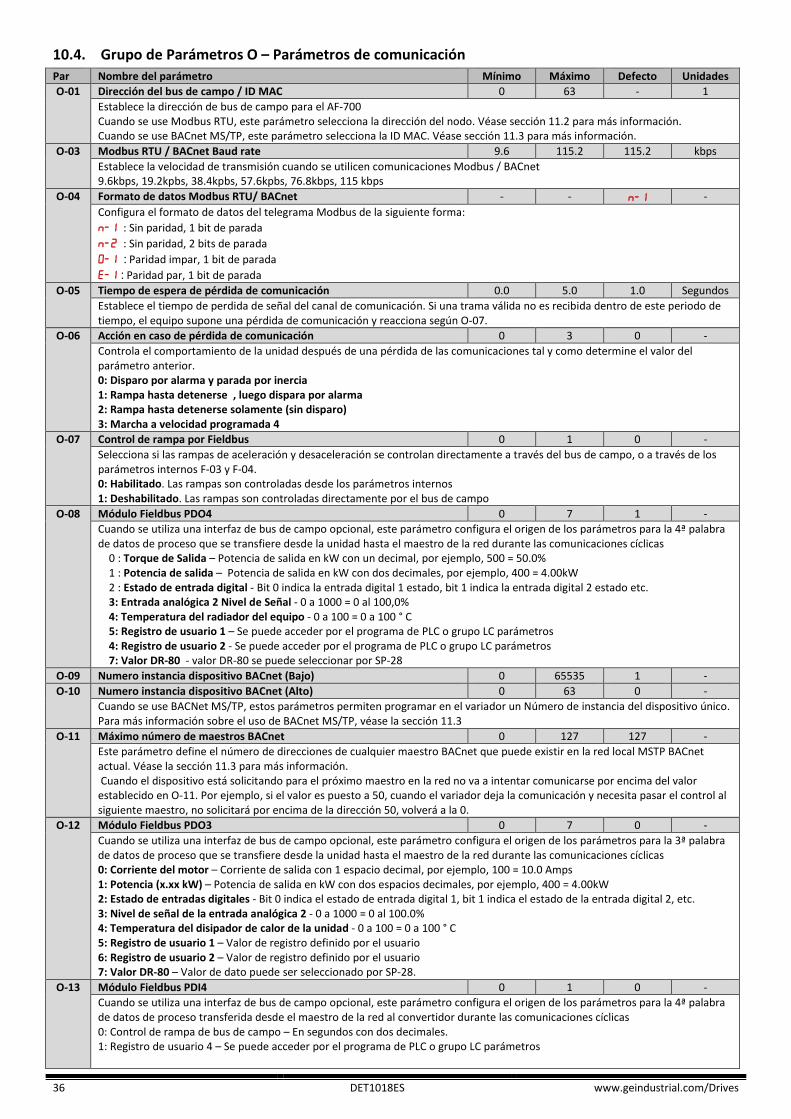
36 DET1018ES www.geindustrial.com/Drives
10.4. Grupo de Parámetros O – Parámetros de comunicación
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
O-01 Dirección del bus de campo / ID MAC 0 63 - 1
Establece la dirección de bus de campo para el AF-700 Cuando se use Modbus RTU, este parámetro selecciona la dirección del nodo. Véase sección 11.2 para más información. Cuando se use BACnet MS/TP, este parámetro selecciona la ID MAC. Véase sección 11.3 para más información.
O-03 Modbus RTU / BACnet Baud rate 9.6 115.2 115.2 kbps
Establece la velocidad de transmisión cuando se utilicen comunicaciones Modbus / BACnet 9.6kbps, 19.2kpbs, 38.4kpbs, 57.6kpbs, 76.8kbps, 115 kbps
O-04 Formato de datos Modbus RTU/ BACnet - - n-1 -
Configura el formato de datos del telegrama Modbus de la siguiente forma:
n-1 : Sin paridad, 1 bit de parada
n-2 : Sin paridad, 2 bits de parada
O-1 : Paridad impar, 1 bit de parada
E-1 : Paridad par, 1 bit de parada
O-05 Tiempo de espera de pérdida de comunicación 0.0 5.0 1.0 Segundos
Establece el tiempo de perdida de señal del canal de comunicación. Si una trama válida no es recibida dentro de este periodo de tiempo, el equipo supone una pérdida de comunicación y reacciona según O-07.
O-06 Acción en caso de pérdida de comunicación 0 3 0 -
Controla el comportamiento de la unidad después de una pérdida de las comunicaciones tal y como determine el valor del parámetro anterior. 0: Disparo por alarma y parada por inercia 1: Rampa hasta detenerse , luego dispara por alarma 2: Rampa hasta detenerse solamente (sin disparo) 3: Marcha a velocidad programada 4
O-07 Control de rampa por Fieldbus 0 1 0 -
Selecciona si las rampas de aceleración y desaceleración se controlan directamente a través del bus de campo, o a través de los parámetros internos F-03 y F-04. 0: Habilitado. Las rampas son controladas desde los parámetros internos 1: Deshabilitado. Las rampas son controladas directamente por el bus de campo
O-08 Módulo Fieldbus PDO4 0 7 1 -
Cuando se utiliza una interfaz de bus de campo opcional, este parámetro configura el origen de los parámetros para la 4ª palabra de datos de proceso que se transfiere desde la unidad hasta el maestro de la red durante las comunicaciones cíclicas 0 : Torque de Salida – Potencia de salida en kW con un decimal, por ejemplo, 500 = 50.0% 1 : Potencia de salida – Potencia de salida en kW con dos decimales, por ejemplo, 400 = 4.00kW 2 : Estado de entrada digital - Bit 0 indica la entrada digital 1 estado, bit 1 indica la entrada digital 2 estado etc. 3: Entrada analógica 2 Nivel de Señal - 0 a 1000 = 0 al 100,0% 4: Temperatura del radiador del equipo - 0 a 100 = 0 a 100 ° C 5: Registro de usuario 1 – Se puede acceder por el programa de PLC o grupo LC parámetros 4: Registro de usuario 2 - Se puede acceder por el programa de PLC o grupo LC parámetros 7: Valor DR-80 - valor DR-80 se puede seleccionar por SP-28
O-09 Numero instancia dispositivo BACnet (Bajo) 0 65535 1 -
O-10 Numero instancia dispositivo BACnet (Alto) 0 63 0 -
Cuando se use BACNet MS/TP, estos parámetros permiten programar en el variador un Número de instancia del dispositivo único. Para más información sobre el uso de BACnet MS/TP, véase la sección 11.3
O-11 Máximo número de maestros BACnet 0 127 127 -
Este parámetro define el número de direcciones de cualquier maestro BACnet que puede existir en la red local MSTP BACnet actual. Véase la sección 11.3 para más información. Cuando el dispositivo está solicitando para el próximo maestro en la red no va a intentar comunicarse por encima del valor establecido en O-11. Por ejemplo, si el valor es puesto a 50, cuando el variador deja la comunicación y necesita pasar el control al siguiente maestro, no solicitará por encima de la dirección 50, volverá a la 0.
O-12 Módulo Fieldbus PDO3 0 7 0 -
Cuando se utiliza una interfaz de bus de campo opcional, este parámetro configura el origen de los parámetros para la 3ª palabra de datos de proceso que se transfiere desde la unidad hasta el maestro de la red durante las comunicaciones cíclicas 0: Corriente del motor – Corriente de salida con 1 espacio decimal, por ejemplo, 100 = 10.0 Amps 1: Potencia (x.xx kW) – Potencia de salida en kW con dos espacios decimales, por ejemplo, 400 = 4.00kW 2: Estado de entradas digitales - Bit 0 indica el estado de entrada digital 1, bit 1 indica el estado de la entrada digital 2, etc. 3: Nivel de señal de la entrada analógica 2 - 0 a 1000 = 0 al 100.0% 4: Temperatura del disipador de calor de la unidad - 0 a 100 = 0 a 100 ° C 5: Registro de usuario 1 – Valor de registro definido por el usuario 6: Registro de usuario 2 – Valor de registro definido por el usuario 7: Valor DR-80 – Valor de dato puede ser seleccionado por SP-28.
O-13 Módulo Fieldbus PDI4 0 1 0 -
Cuando se utiliza una interfaz de bus de campo opcional, este parámetro configura el origen de los parámetros para la 4ª palabra de datos de proceso transferida desde el maestro de la red al convertidor durante las comunicaciones cíclicas 0: Control de rampa de bus de campo – En segundos con dos decimales. 1: Registro de usuario 4 – Se puede acceder por el programa de PLC o grupo LC parámetros
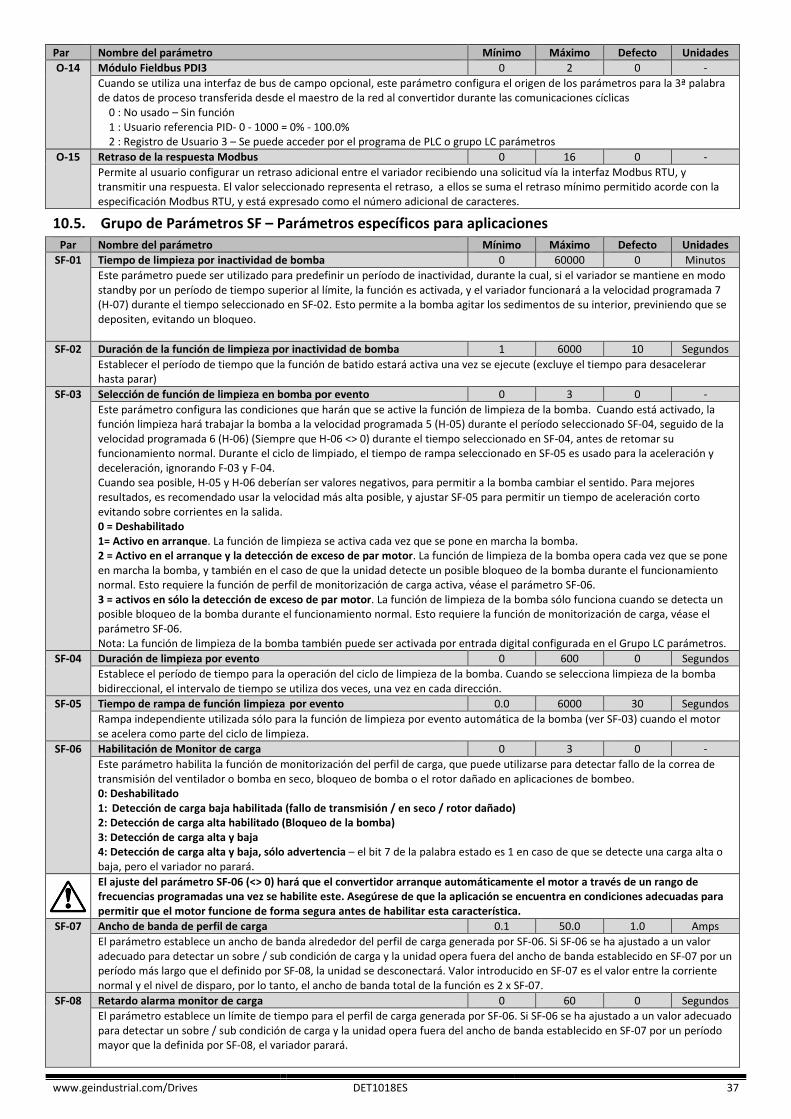
www.geindustrial.com/Drives DET1018ES 37
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
O-14 Módulo Fieldbus PDI3 0 2 0 -
Cuando se utiliza una interfaz de bus de campo opcional, este parámetro configura el origen de los parámetros para la 3ª palabra de datos de proceso transferida desde el maestro de la red al convertidor durante las comunicaciones cíclicas 0 : No usado – Sin función 1 : Usuario referencia PID- 0 - 1000 = 0% - 100.0% 2 : Registro de Usuario 3 – Se puede acceder por el programa de PLC o grupo LC parámetros
O-15 Retraso de la respuesta Modbus 0 16 0 -
Permite al usuario configurar un retraso adicional entre el variador recibiendo una solicitud vía la interfaz Modbus RTU, y transmitir una respuesta. El valor seleccionado representa el retraso, a ellos se suma el retraso mínimo permitido acorde con la especificación Modbus RTU, y está expresado como el número adicional de caracteres.
10.5. Grupo de Parámetros SF – Parámetros específicos para aplicaciones
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
SF-01 Tiempo de limpieza por inactividad de bomba 0 60000 0 Minutos
Este parámetro puede ser utilizado para predefinir un período de inactividad, durante la cual, si el variador se mantiene en modo standby por un período de tiempo superior al límite, la función es activada, y el variador funcionará a la velocidad programada 7 (H-07) durante el tiempo seleccionado en SF-02. Esto permite a la bomba agitar los sedimentos de su interior, previniendo que se depositen, evitando un bloqueo.
SF-02 Duración de la función de limpieza por inactividad de bomba 1 6000 10 Segundos
Establecer el período de tiempo que la función de batido estará activa una vez se ejecute (excluye el tiempo para desacelerar hasta parar)
SF-03 Selección de función de limpieza en bomba por evento 0 3 0 -
Este parámetro configura las condiciones que harán que se active la función de limpieza de la bomba. Cuando está activado, la función limpieza hará trabajar la bomba a la velocidad programada 5 (H-05) durante el período seleccionado SF-04, seguido de la velocidad programada 6 (H-06) (Siempre que H-06 <> 0) durante el tiempo seleccionado en SF-04, antes de retomar su funcionamiento normal. Durante el ciclo de limpiado, el tiempo de rampa seleccionado en SF-05 es usado para la aceleración y deceleración, ignorando F-03 y F-04. Cuando sea posible, H-05 y H-06 deberían ser valores negativos, para permitir a la bomba cambiar el sentido. Para mejores resultados, es recomendado usar la velocidad más alta posible, y ajustar SF-05 para permitir un tiempo de aceleración corto evitando sobre corrientes en la salida. 0 = Deshabilitado 1= Activo en arranque. La función de limpieza se activa cada vez que se pone en marcha la bomba. 2 = Activo en el arranque y la detección de exceso de par motor. La función de limpieza de la bomba opera cada vez que se pone en marcha la bomba, y también en el caso de que la unidad detecte un posible bloqueo de la bomba durante el funcionamiento normal. Esto requiere la función de perfil de monitorización de carga activa, véase el parámetro SF-06. 3 = activos en sólo la detección de exceso de par motor. La función de limpieza de la bomba sólo funciona cuando se detecta un posible bloqueo de la bomba durante el funcionamiento normal. Esto requiere la función de monitorización de carga, véase el parámetro SF-06. Nota: La función de limpieza de la bomba también puede ser activada por entrada digital configurada en el Grupo LC parámetros.
SF-04 Duración de limpieza por evento 0 600 0 Segundos
Establece el período de tiempo para la operación del ciclo de limpieza de la bomba. Cuando se selecciona limpieza de la bomba bidireccional, el intervalo de tiempo se utiliza dos veces, una vez en cada dirección.
SF-05 Tiempo de rampa de función limpieza por evento 0.0 6000 30 Segundos
Rampa independiente utilizada sólo para la función de limpieza por evento automática de la bomba (ver SF-03) cuando el motor se acelera como parte del ciclo de limpieza.
SF-06 Habilitación de Monitor de carga 0 3 0 -
Este parámetro habilita la función de monitorización del perfil de carga, que puede utilizarse para detectar fallo de la correa de transmisión del ventilador o bomba en seco, bloqueo de bomba o el rotor dañado en aplicaciones de bombeo. 0: Deshabilitado 1: Detección de carga baja habilitada (fallo de transmisión / en seco / rotor dañado) 2: Detección de carga alta habilitado (Bloqueo de la bomba) 3: Detección de carga alta y baja 4: Detección de carga alta y baja, sólo advertencia – el bit 7 de la palabra estado es 1 en caso de que se detecte una carga alta o baja, pero el variador no parará.
El ajuste del parámetro SF-06 (<> 0) hará que el convertidor arranque automáticamente el motor a través de un rango de frecuencias programadas una vez se habilite este. Asegúrese de que la aplicación se encuentra en condiciones adecuadas para permitir que el motor funcione de forma segura antes de habilitar esta característica.
SF-07 Ancho de banda de perfil de carga 0.1 50.0 1.0 Amps
El parámetro establece un ancho de banda alrededor del perfil de carga generada por SF-06. Si SF-06 se ha ajustado a un valor adecuado para detectar un sobre / sub condición de carga y la unidad opera fuera del ancho de banda establecido en SF-07 por un período más largo que el definido por SF-08, la unidad se desconectará. Valor introducido en SF-07 es el valor entre la corriente normal y el nivel de disparo, por lo tanto, el ancho de banda total de la función es 2 x SF-07.
SF-08 Retardo alarma monitor de carga 0 60 0 Segundos
El parámetro establece un límite de tiempo para el perfil de carga generada por SF-06. Si SF-06 se ha ajustado a un valor adecuado para detectar un sobre / sub condición de carga y la unidad opera fuera del ancho de banda establecido en SF-07 por un período mayor que la definida por SF-08, el variador parará.
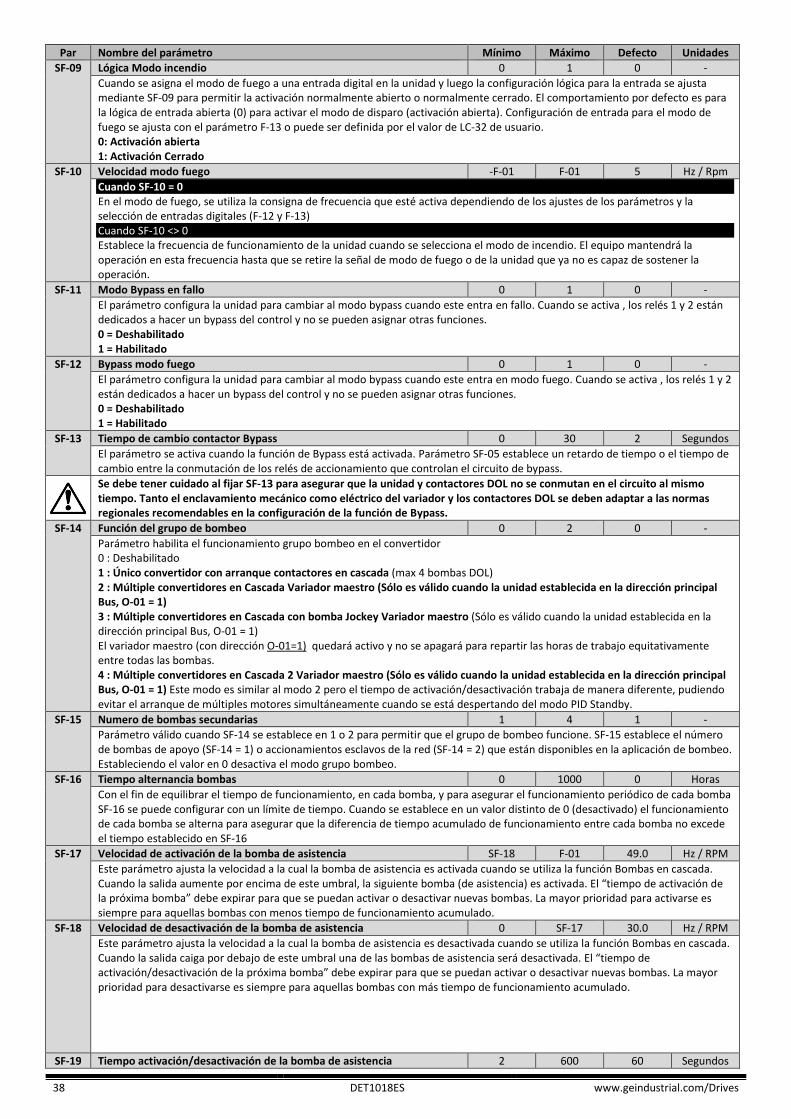
38 DET1018ES www.geindustrial.com/Drives
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
SF-09 Lógica Modo incendio 0 1 0 -
Cuando se asigna el modo de fuego a una entrada digital en la unidad y luego la configuración lógica para la entrada se ajusta mediante SF-09 para permitir la activación normalmente abierto o normalmente cerrado. El comportamiento por defecto es para la lógica de entrada abierta (0) para activar el modo de disparo (activación abierta). Configuración de entrada para el modo de fuego se ajusta con el parámetro F-13 o puede ser definida por el valor de LC-32 de usuario. 0: Activación abierta 1: Activación Cerrado
SF-10 Velocidad modo fuego -F-01 F-01 5 Hz / Rpm
Cuando SF-10 = 0 En el modo de fuego, se utiliza la consigna de frecuencia que esté activa dependiendo de los ajustes de los parámetros y la selección de entradas digitales (F-12 y F-13) Cuando SF-10 <> 0 Establece la frecuencia de funcionamiento de la unidad cuando se selecciona el modo de incendio. El equipo mantendrá la operación en esta frecuencia hasta que se retire la señal de modo de fuego o de la unidad que ya no es capaz de sostener la operación.
SF-11 Modo Bypass en fallo 0 1 0 -
El parámetro configura la unidad para cambiar al modo bypass cuando este entra en fallo. Cuando se activa , los relés 1 y 2 están dedicados a hacer un bypass del control y no se pueden asignar otras funciones. 0 = Deshabilitado 1 = Habilitado
SF-12 Bypass modo fuego 0 1 0 -
El parámetro configura la unidad para cambiar al modo bypass cuando este entra en modo fuego. Cuando se activa , los relés 1 y 2 están dedicados a hacer un bypass del control y no se pueden asignar otras funciones. 0 = Deshabilitado 1 = Habilitado
SF-13 Tiempo de cambio contactor Bypass 0 30 2 Segundos
El parámetro se activa cuando la función de Bypass está activada. Parámetro SF-05 establece un retardo de tiempo o el tiempo de cambio entre la conmutación de los relés de accionamiento que controlan el circuito de bypass.
Se debe tener cuidado al fijar SF-13 para asegurar que la unidad y contactores DOL no se conmutan en el circuito al mismo tiempo. Tanto el enclavamiento mecánico como eléctrico del variador y los contactores DOL se deben adaptar a las normas regionales recomendables en la configuración de la función de Bypass.
SF-14 Función del grupo de bombeo 0 2 0 -
Parámetro habilita el funcionamiento grupo bombeo en el convertidor 0 : Deshabilitado 1 : Único convertidor con arranque contactores en cascada (max 4 bombas DOL) 2 : Múltiple convertidores en Cascada Variador maestro (Sólo es válido cuando la unidad establecida en la dirección principal Bus, O-01 = 1) 3 : Múltiple convertidores en Cascada con bomba Jockey Variador maestro (Sólo es válido cuando la unidad establecida en la dirección principal Bus, O-01 = 1) El variador maestro (con dirección O-01=1) quedará activo y no se apagará para repartir las horas de trabajo equitativamente entre todas las bombas. 4 : Múltiple convertidores en Cascada 2 Variador maestro (Sólo es válido cuando la unidad establecida en la dirección principal Bus, O-01 = 1) Este modo es similar al modo 2 pero el tiempo de activación/desactivación trabaja de manera diferente, pudiendo evitar el arranque de múltiples motores simultáneamente cuando se está despertando del modo PID Standby.
SF-15 Numero de bombas secundarias 1 4 1 -
Parámetro válido cuando SF-14 se establece en 1 o 2 para permitir que el grupo de bombeo funcione. SF-15 establece el número de bombas de apoyo (SF-14 = 1) o accionamientos esclavos de la red (SF-14 = 2) que están disponibles en la aplicación de bombeo. Estableciendo el valor en 0 desactiva el modo grupo bombeo.
SF-16 Tiempo alternancia bombas 0 1000 0 Horas
Con el fin de equilibrar el tiempo de funcionamiento, en cada bomba, y para asegurar el funcionamiento periódico de cada bomba SF-16 se puede configurar con un límite de tiempo. Cuando se establece en un valor distinto de 0 (desactivado) el funcionamiento de cada bomba se alterna para asegurar que la diferencia de tiempo acumulado de funcionamiento entre cada bomba no excede el tiempo establecido en SF-16
SF-17 Velocidad de activación de la bomba de asistencia SF-18 F-01 49.0 Hz / RPM
Este parámetro ajusta la velocidad a la cual la bomba de asistencia es activada cuando se utiliza la función Bombas en cascada. Cuando la salida aumente por encima de este umbral, la siguiente bomba (de asistencia) es activada. El “tiempo de activación de la próxima bomba” debe expirar para que se puedan activar o desactivar nuevas bombas. La mayor prioridad para activarse es siempre para aquellas bombas con menos tiempo de funcionamiento acumulado.
SF-18 Velocidad de desactivación de la bomba de asistencia 0 SF-17 30.0 Hz / RPM
Este parámetro ajusta la velocidad a la cual la bomba de asistencia es desactivada cuando se utiliza la función Bombas en cascada. Cuando la salida caiga por debajo de este umbral una de las bombas de asistencia será desactivada. El “tiempo de activación/desactivación de la próxima bomba” debe expirar para que se puedan activar o desactivar nuevas bombas. La mayor prioridad para desactivarse es siempre para aquellas bombas con más tiempo de funcionamiento acumulado.
SF-19 Tiempo activación/desactivación de la bomba de asistencia 2 600 60 Segundos
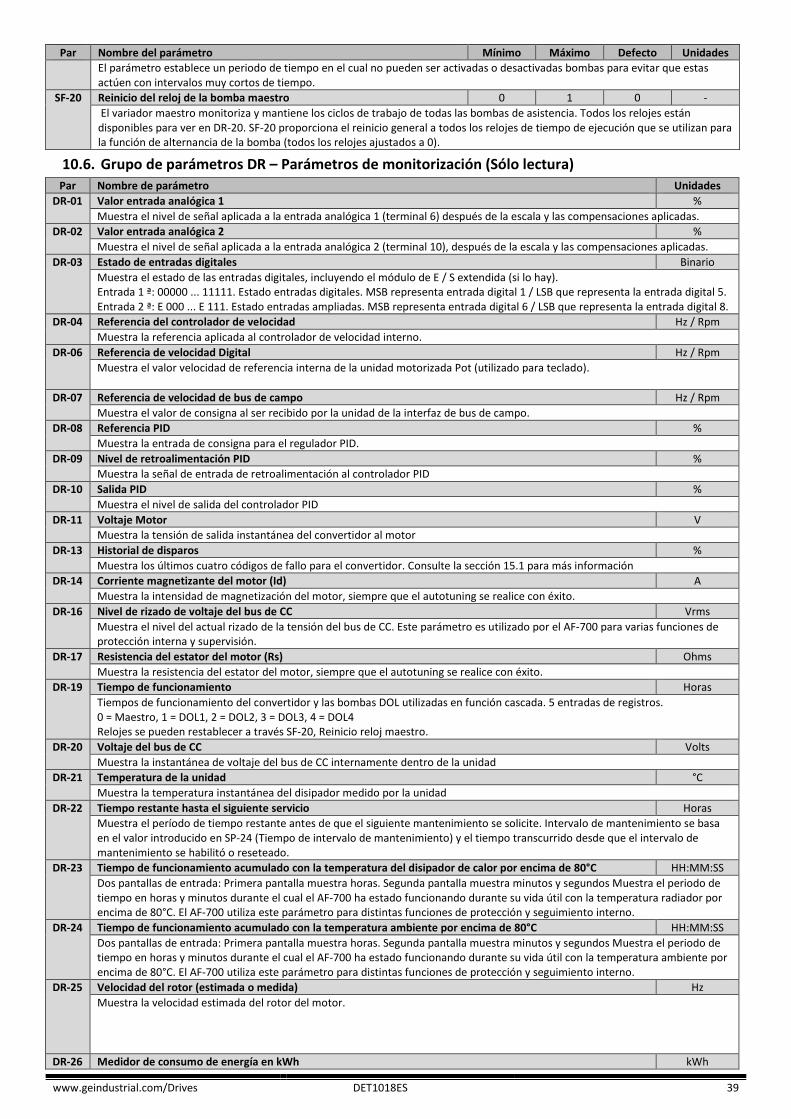
www.geindustrial.com/Drives DET1018ES 39
Par Nombre del parámetro Mínimo Máximo Defecto Unidades
El parámetro establece un periodo de tiempo en el cual no pueden ser activadas o desactivadas bombas para evitar que estas actúen con intervalos muy cortos de tiempo.
SF-20 Reinicio del reloj de la bomba maestro 0 1 0 -
El variador maestro monitoriza y mantiene los ciclos de trabajo de todas las bombas de asistencia. Todos los relojes están disponibles para ver en DR-20. SF-20 proporciona el reinicio general a todos los relojes de tiempo de ejecución que se utilizan para la función de alternancia de la bomba (todos los relojes ajustados a 0).
10.6. Grupo de parámetros DR – Parámetros de monitorización (Sólo lectura)
Par Nombre de parámetro Unidades
DR-01 Valor entrada analógica 1 %
Muestra el nivel de señal aplicada a la entrada analógica 1 (terminal 6) después de la escala y las compensaciones aplicadas.
DR-02 Valor entrada analógica 2 %
Muestra el nivel de señal aplicada a la entrada analógica 2 (terminal 10), después de la escala y las compensaciones aplicadas.
DR-03 Estado de entradas digitales Binario
Muestra el estado de las entradas digitales, incluyendo el módulo de E / S extendida (si lo hay). Entrada 1 ª: 00000 ... 11111. Estado entradas digitales. MSB representa entrada digital 1 / LSB que representa la entrada digital 5. Entrada 2 ª: E 000 ... E 111. Estado entradas ampliadas. MSB representa entrada digital 6 / LSB que representa la entrada digital 8.
DR-04 Referencia del controlador de velocidad Hz / Rpm
Muestra la referencia aplicada al controlador de velocidad interno.
DR-06 Referencia de velocidad Digital Hz / Rpm
Muestra el valor velocidad de referencia interna de la unidad motorizada Pot (utilizado para teclado).
DR-07 Referencia de velocidad de bus de campo Hz / Rpm
Muestra el valor de consigna al ser recibido por la unidad de la interfaz de bus de campo.
DR-08 Referencia PID %
Muestra la entrada de consigna para el regulador PID.
DR-09 Nivel de retroalimentación PID %
Muestra la señal de entrada de retroalimentación al controlador PID
DR-10 Salida PID %
Muestra el nivel de salida del controlador PID
DR-11 Voltaje Motor V
Muestra la tensión de salida instantánea del convertidor al motor
DR-13 Historial de disparos %
Muestra los últimos cuatro códigos de fallo para el convertidor. Consulte la sección 15.1 para más información
DR-14 Corriente magnetizante del motor (Id) A
Muestra la intensidad de magnetización del motor, siempre que el autotuning se realice con éxito.
DR-16 Nivel de rizado de voltaje del bus de CC Vrms
Muestra el nivel del actual rizado de la tensión del bus de CC. Este parámetro es utilizado por el AF-700 para varias funciones de protección interna y supervisión.
DR-17 Resistencia del estator del motor (Rs) Ohms
Muestra la resistencia del estator del motor, siempre que el autotuning se realice con éxito.
DR-19 Tiempo de funcionamiento Horas
Tiempos de funcionamiento del convertidor y las bombas DOL utilizadas en función cascada. 5 entradas de registros. 0 = Maestro, 1 = DOL1, 2 = DOL2, 3 = DOL3, 4 = DOL4 Relojes se pueden restablecer a través SF-20, Reinicio reloj maestro.
DR-20 Voltaje del bus de CC Volts
Muestra la instantánea de voltaje del bus de CC internamente dentro de la unidad
DR-21 Temperatura de la unidad °C
Muestra la temperatura instantánea del disipador medido por la unidad
DR-22 Tiempo restante hasta el siguiente servicio Horas
Muestra el período de tiempo restante antes de que el siguiente mantenimiento se solicite. Intervalo de mantenimiento se basa en el valor introducido en SP-24 (Tiempo de intervalo de mantenimiento) y el tiempo transcurrido desde que el intervalo de mantenimiento se habilitó o reseteado.
DR-23 Tiempo de funcionamiento acumulado con la temperatura del disipador de calor por encima de 80°C HH:MM:SS
Dos pantallas de entrada: Primera pantalla muestra horas. Segunda pantalla muestra minutos y segundos Muestra el periodo de tiempo en horas y minutos durante el cual el AF-700 ha estado funcionando durante su vida útil con la temperatura radiador por encima de 80°C. El AF-700 utiliza este parámetro para distintas funciones de protección y seguimiento interno.
DR-24 Tiempo de funcionamiento acumulado con la temperatura ambiente por encima de 80°C HH:MM:SS
Dos pantallas de entrada: Primera pantalla muestra horas. Segunda pantalla muestra minutos y segundos Muestra el periodo de tiempo en horas y minutos durante el cual el AF-700 ha estado funcionando durante su vida útil con la temperatura ambiente por encima de 80°C. El AF-700 utiliza este parámetro para distintas funciones de protección y seguimiento interno.
DR-25 Velocidad del rotor (estimada o medida) Hz
Muestra la velocidad estimada del rotor del motor.
DR-26 Medidor de consumo de energía en kWh kWh
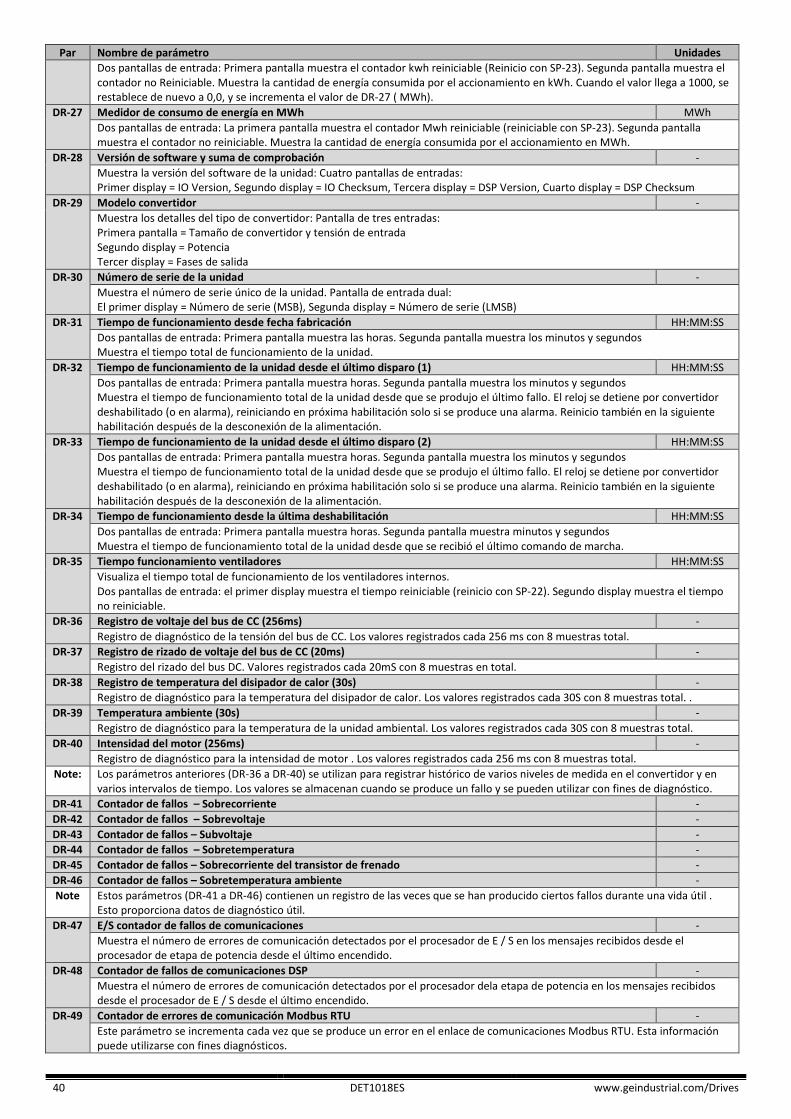
40 DET1018ES www.geindustrial.com/Drives
Par Nombre de parámetro Unidades
Dos pantallas de entrada: Primera pantalla muestra el contador kwh reiniciable (Reinicio con SP-23). Segunda pantalla muestra el contador no Reiniciable. Muestra la cantidad de energía consumida por el accionamiento en kWh. Cuando el valor llega a 1000, se restablece de nuevo a 0,0, y se incrementa el valor de DR-27 ( MWh).
DR-27 Medidor de consumo de energía en MWh MWh
Dos pantallas de entrada: La primera pantalla muestra el contador Mwh reiniciable (reiniciable con SP-23). Segunda pantalla muestra el contador no reiniciable. Muestra la cantidad de energía consumida por el accionamiento en MWh.
DR-28 Versión de software y suma de comprobación -
Muestra la versión del software de la unidad: Cuatro pantallas de entradas: Primer display = IO Version, Segundo display = IO Checksum, Tercera display = DSP Version, Cuarto display = DSP Checksum
DR-29 Modelo convertidor -
Muestra los detalles del tipo de convertidor: Pantalla de tres entradas: Primera pantalla = Tamaño de convertidor y tensión de entrada Segundo display = Potencia Tercer display = Fases de salida
DR-30 Número de serie de la unidad -
Muestra el número de serie único de la unidad. Pantalla de entrada dual: El primer display = Número de serie (MSB), Segunda display = Número de serie (LMSB)
DR-31 Tiempo de funcionamiento desde fecha fabricación HH:MM:SS
Dos pantallas de entrada: Primera pantalla muestra las horas. Segunda pantalla muestra los minutos y segundos Muestra el tiempo total de funcionamiento de la unidad.
DR-32 Tiempo de funcionamiento de la unidad desde el último disparo (1) HH:MM:SS
Dos pantallas de entrada: Primera pantalla muestra horas. Segunda pantalla muestra los minutos y segundos Muestra el tiempo de funcionamiento total de la unidad desde que se produjo el último fallo. El reloj se detiene por convertidor deshabilitado (o en alarma), reiniciando en próxima habilitación solo si se produce una alarma. Reinicio también en la siguiente habilitación después de la desconexión de la alimentación.
DR-33 Tiempo de funcionamiento de la unidad desde el último disparo (2) HH:MM:SS
Dos pantallas de entrada: Primera pantalla muestra horas. Segunda pantalla muestra los minutos y segundos Muestra el tiempo de funcionamiento total de la unidad desde que se produjo el último fallo. El reloj se detiene por convertidor deshabilitado (o en alarma), reiniciando en próxima habilitación solo si se produce una alarma. Reinicio también en la siguiente habilitación después de la desconexión de la alimentación.
DR-34 Tiempo de funcionamiento desde la última deshabilitación HH:MM:SS
Dos pantallas de entrada: Primera pantalla muestra horas. Segunda pantalla muestra minutos y segundos Muestra el tiempo de funcionamiento total de la unidad desde que se recibió el último comando de marcha.
DR-35 Tiempo funcionamiento ventiladores HH:MM:SS
Visualiza el tiempo total de funcionamiento de los ventiladores internos. Dos pantallas de entrada: el primer display muestra el tiempo reiniciable (reinicio con SP-22). Segundo display muestra el tiempo no reiniciable.
DR-36 Registro de voltaje del bus de CC (256ms) -
Registro de diagnóstico de la tensión del bus de CC. Los valores registrados cada 256 ms con 8 muestras total.
DR-37 Registro de rizado de voltaje del bus de CC (20ms) -
Registro del rizado del bus DC. Valores registrados cada 20mS con 8 muestras en total.
DR-38 Registro de temperatura del disipador de calor (30s) -
Registro de diagnóstico para la temperatura del disipador de calor. Los valores registrados cada 30S con 8 muestras total. .
DR-39 Temperatura ambiente (30s) -
Registro de diagnóstico para la temperatura de la unidad ambiental. Los valores registrados cada 30S con 8 muestras total.
DR-40 Intensidad del motor (256ms) -
Registro de diagnóstico para la intensidad de motor . Los valores registrados cada 256 ms con 8 muestras total.
Note: Los parámetros anteriores (DR-36 a DR-40) se utilizan para registrar histórico de varios niveles de medida en el convertidor y en varios intervalos de tiempo. Los valores se almacenan cuando se produce un fallo y se pueden utilizar con fines de diagnóstico.
DR-41 Contador de fallos – Sobrecorriente -
DR-42 Contador de fallos – Sobrevoltaje -
DR-43 Contador de fallos – Subvoltaje -
DR-44 Contador de fallos – Sobretemperatura -
DR-45 Contador de fallos – Sobrecorriente del transistor de frenado -
DR-46 Contador de fallos – Sobretemperatura ambiente -
Note Estos parámetros (DR-41 a DR-46) contienen un registro de las veces que se han producido ciertos fallos durante una vida útil . Esto proporciona datos de diagnóstico útil.
DR-47 E/S contador de fallos de comunicaciones -
Muestra el número de errores de comunicación detectados por el procesador de E / S en los mensajes recibidos desde el procesador de etapa de potencia desde el último encendido.
DR-48 Contador de fallos de comunicaciones DSP -
Muestra el número de errores de comunicación detectados por el procesador dela etapa de potencia en los mensajes recibidos desde el procesador de E / S desde el último encendido.
DR-49 Contador de errores de comunicación Modbus RTU -
Este parámetro se incrementa cada vez que se produce un error en el enlace de comunicaciones Modbus RTU. Esta información puede utilizarse con fines diagnósticos.
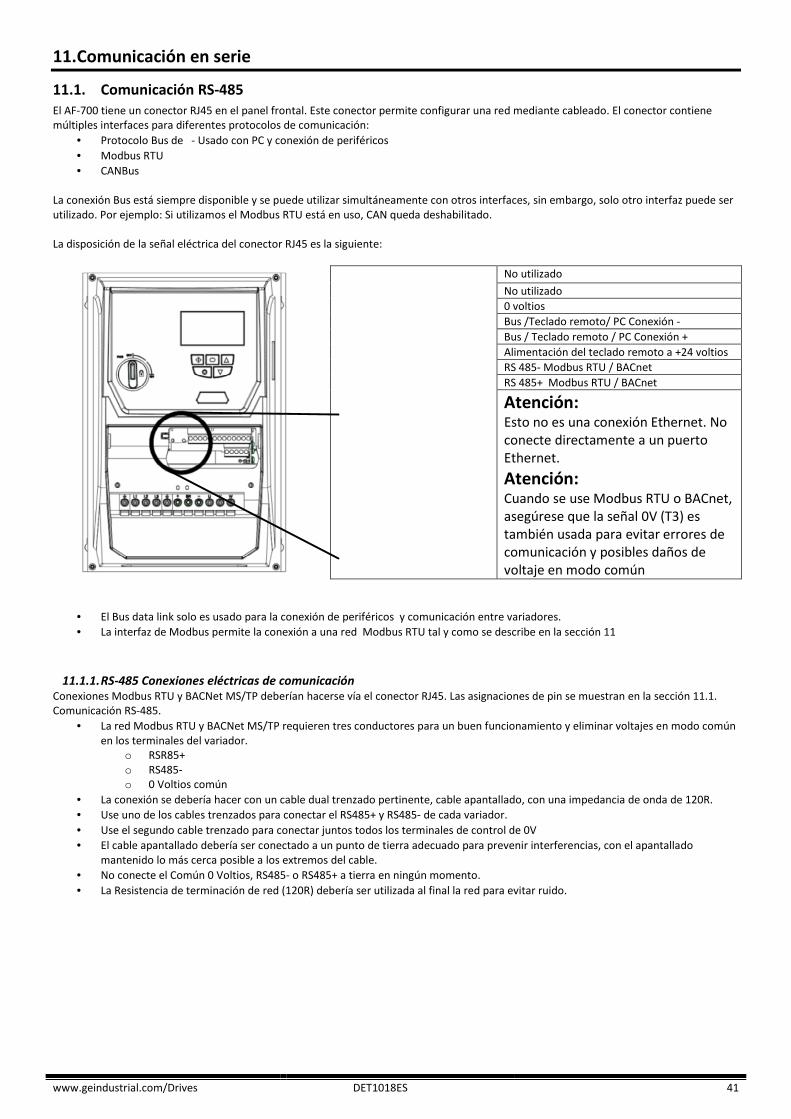
www.geindustrial.com/Drives DET1018ES 41
11. Comunicación en serie
11.1. Comunicación RS-485 El AF-700 tiene un conector RJ45 en el panel frontal. Este conector permite configurar una red mediante cableado. El conector contiene múltiples interfaces para diferentes protocolos de comunicación:
• Protocolo Bus de - Usado con PC y conexión de periféricos
• Modbus RTU
• CANBus La conexión Bus está siempre disponible y se puede utilizar simultáneamente con otros interfaces, sin embargo, solo otro interfaz puede ser utilizado. Por ejemplo: Si utilizamos el Modbus RTU está en uso, CAN queda deshabilitado. La disposición de la señal eléctrica del conector RJ45 es la siguiente:
No utilizado
No utilizado
0 voltios
Bus /Teclado remoto/ PC Conexión -
Bus / Teclado remoto / PC Conexión +
Alimentación del teclado remoto a +24 voltios
RS 485- Modbus RTU / BACnet
RS 485+ Modbus RTU / BACnet
Atención: Esto no es una conexión Ethernet. No conecte directamente a un puerto Ethernet.
Atención: Cuando se use Modbus RTU o BACnet, asegúrese que la señal 0V (T3) es también usada para evitar errores de comunicación y posibles daños de voltaje en modo común
• El Bus data link solo es usado para la conexión de periféricos y comunicación entre variadores.
• La interfaz de Modbus permite la conexión a una red Modbus RTU tal y como se describe en la sección 11
11.1.1. RS-485 Conexiones eléctricas de comunicación
Conexiones Modbus RTU y BACNet MS/TP deberían hacerse vía el conector RJ45. Las asignaciones de pin se muestran en la sección 11.1. Comunicación RS-485.
• La red Modbus RTU y BACNet MS/TP requieren tres conductores para un buen funcionamiento y eliminar voltajes en modo común en los terminales del variador.
o RSR85+ o RS485- o 0 Voltios común
• La conexión se debería hacer con un cable dual trenzado pertinente, cable apantallado, con una impedancia de onda de 120R.
• Use uno de los cables trenzados para conectar el RS485+ y RS485- de cada variador.
• Use el segundo cable trenzado para conectar juntos todos los terminales de control de 0V
• El cable apantallado debería ser conectado a un punto de tierra adecuado para prevenir interferencias, con el apantallado mantenido lo más cerca posible a los extremos del cable.
• No conecte el Común 0 Voltios, RS485- o RS485+ a tierra en ningún momento.
• La Resistencia de terminación de red (120R) debería ser utilizada al final la red para evitar ruido.
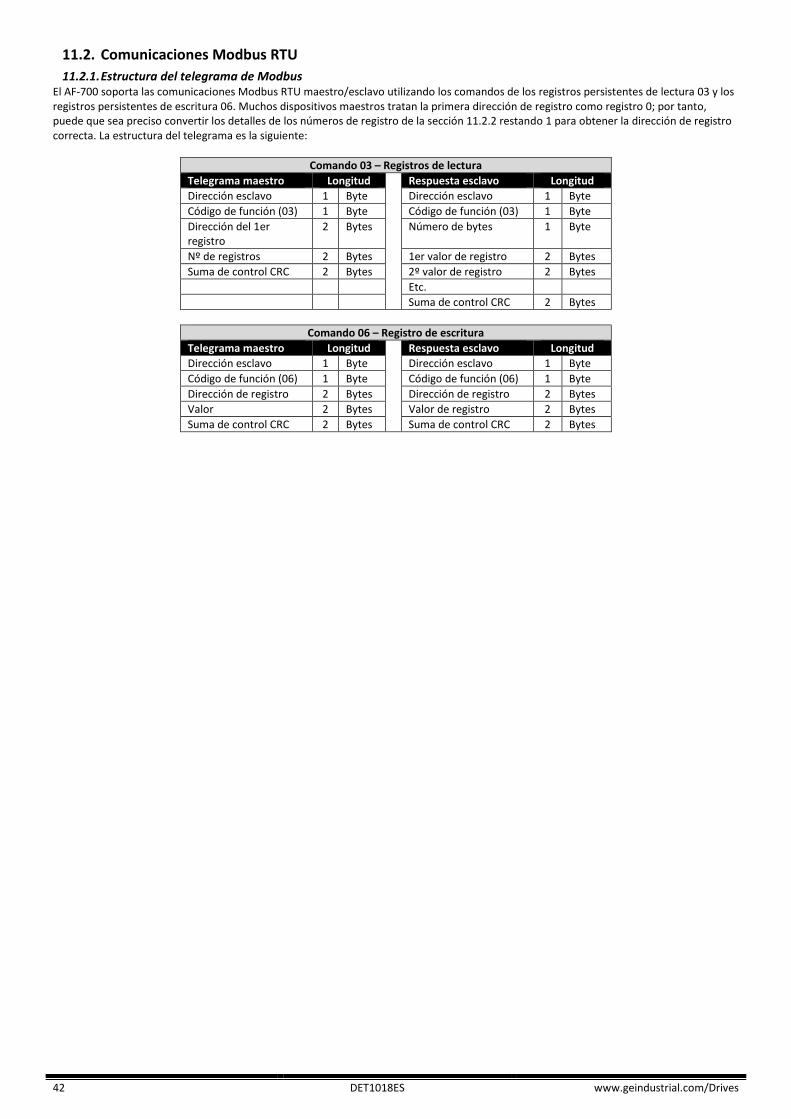
42 DET1018ES www.geindustrial.com/Drives
11.2. Comunicaciones Modbus RTU
11.2.1. Estructura del telegrama de Modbus
El AF-700 soporta las comunicaciones Modbus RTU maestro/esclavo utilizando los comandos de los registros persistentes de lectura 03 y los registros persistentes de escritura 06. Muchos dispositivos maestros tratan la primera dirección de registro como registro 0; por tanto, puede que sea preciso convertir los detalles de los números de registro de la sección 11.2.2 restando 1 para obtener la dirección de registro correcta. La estructura del telegrama es la siguiente:
Comando 03 – Registros de lectura
Telegrama maestro Longitud Respuesta esclavo Longitud
Dirección esclavo 1 Byte Dirección esclavo 1 Byte
Código de función (03) 1 Byte Código de función (03) 1 Byte
Dirección del 1er registro
2 Bytes Número de bytes 1 Byte
Nº de registros 2 Bytes 1er valor de registro 2 Bytes
Suma de control CRC 2 Bytes 2º valor de registro 2 Bytes
Etc.
Suma de control CRC 2 Bytes
Comando 06 – Registro de escritura
Telegrama maestro Longitud Respuesta esclavo Longitud
Dirección esclavo 1 Byte Dirección esclavo 1 Byte
Código de función (06) 1 Byte Código de función (06) 1 Byte
Dirección de registro 2 Bytes Dirección de registro 2 Bytes
Valor 2 Bytes Valor de registro 2 Bytes
Suma de control CRC 2 Bytes Suma de control CRC 2 Bytes
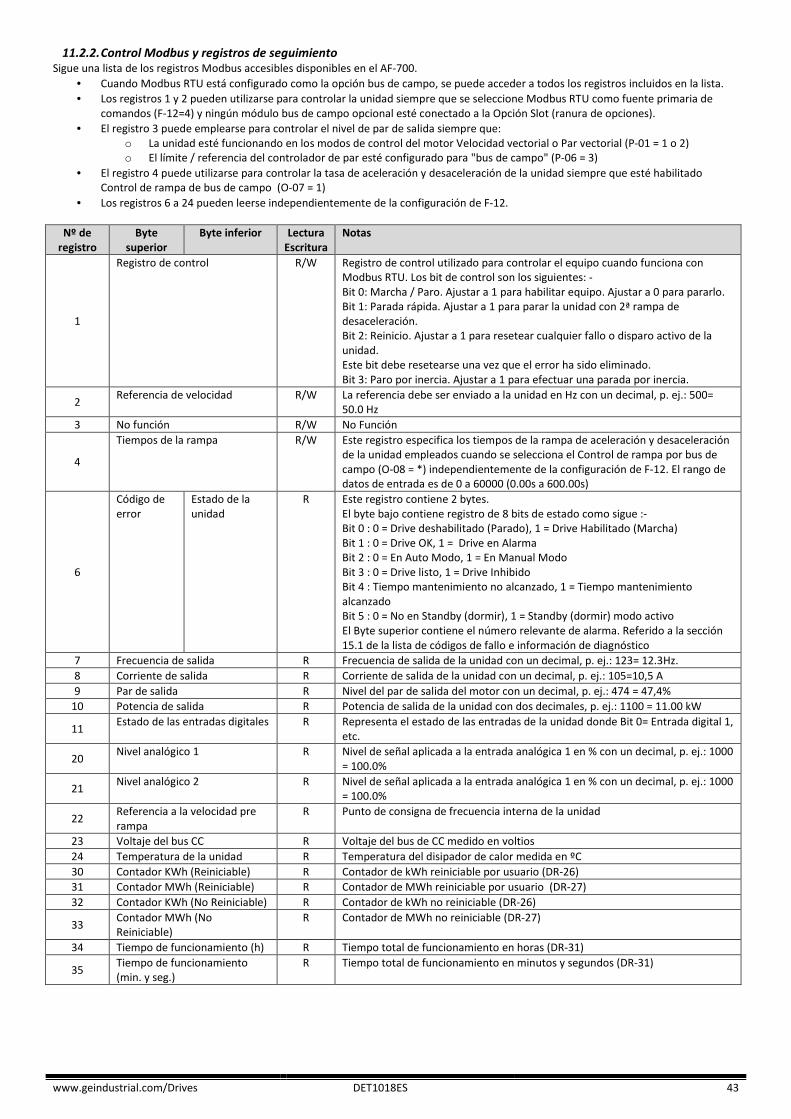
www.geindustrial.com/Drives DET1018ES 43
11.2.2. Control Modbus y registros de seguimiento
Sigue una lista de los registros Modbus accesibles disponibles en el AF-700.
• Cuando Modbus RTU está configurado como la opción bus de campo, se puede acceder a todos los registros incluidos en la lista.
• Los registros 1 y 2 pueden utilizarse para controlar la unidad siempre que se seleccione Modbus RTU como fuente primaria de comandos (F-12=4) y ningún módulo bus de campo opcional esté conectado a la Opción Slot (ranura de opciones).
• El registro 3 puede emplearse para controlar el nivel de par de salida siempre que: o La unidad esté funcionando en los modos de control del motor Velocidad vectorial o Par vectorial (P-01 = 1 o 2) o El límite / referencia del controlador de par esté configurado para "bus de campo" (P-06 = 3)
• El registro 4 puede utilizarse para controlar la tasa de aceleración y desaceleración de la unidad siempre que esté habilitado Control de rampa de bus de campo (O-07 = 1)
• Los registros 6 a 24 pueden leerse independientemente de la configuración de F-12.
Nº de registro
Byte superior
Byte inferior Lectura Escritura
Notas
1
Registro de control
R/W Registro de control utilizado para controlar el equipo cuando funciona con Modbus RTU. Los bit de control son los siguientes: - Bit 0: Marcha / Paro. Ajustar a 1 para habilitar equipo. Ajustar a 0 para pararlo. Bit 1: Parada rápida. Ajustar a 1 para parar la unidad con 2ª rampa de desaceleración. Bit 2: Reinicio. Ajustar a 1 para resetear cualquier fallo o disparo activo de la unidad. Este bit debe resetearse una vez que el error ha sido eliminado. Bit 3: Paro por inercia. Ajustar a 1 para efectuar una parada por inercia.
2 Referencia de velocidad R/W La referencia debe ser enviado a la unidad en Hz con un decimal, p. ej.: 500= 50.0 Hz
3 No función R/W No Función
4
Tiempos de la rampa R/W Este registro especifica los tiempos de la rampa de aceleración y desaceleración de la unidad empleados cuando se selecciona el Control de rampa por bus de campo (O-08 = *) independientemente de la configuración de F-12. El rango de datos de entrada es de 0 a 60000 (0.00s a 600.00s)
6
Código de error
Estado de la unidad
R Este registro contiene 2 bytes. El byte bajo contiene registro de 8 bits de estado como sigue :- Bit 0 : 0 = Drive deshabilitado (Parado), 1 = Drive Habilitado (Marcha) Bit 1 : 0 = Drive OK, 1 = Drive en Alarma Bit 2 : 0 = En Auto Modo, 1 = En Manual Modo Bit 3 : 0 = Drive listo, 1 = Drive Inhibido Bit 4 : Tiempo mantenimiento no alcanzado, 1 = Tiempo mantenimiento alcanzado Bit 5 : 0 = No en Standby (dormir), 1 = Standby (dormir) modo activo El Byte superior contiene el número relevante de alarma. Referido a la sección 15.1 de la lista de códigos de fallo e información de diagnóstico
7 Frecuencia de salida R Frecuencia de salida de la unidad con un decimal, p. ej.: 123= 12.3Hz.
8 Corriente de salida R Corriente de salida de la unidad con un decimal, p. ej.: 105=10,5 A
9 Par de salida R Nivel del par de salida del motor con un decimal, p. ej.: 474 = 47,4%
10 Potencia de salida R Potencia de salida de la unidad con dos decimales, p. ej.: 1100 = 11.00 kW
11 Estado de las entradas digitales R Representa el estado de las entradas de la unidad donde Bit 0= Entrada digital 1, etc.
20 Nivel analógico 1 R Nivel de señal aplicada a la entrada analógica 1 en % con un decimal, p. ej.: 1000 = 100.0%
21 Nivel analógico 2 R Nivel de señal aplicada a la entrada analógica 1 en % con un decimal, p. ej.: 1000 = 100.0%
22 Referencia a la velocidad pre rampa
R Punto de consigna de frecuencia interna de la unidad
23 Voltaje del bus CC R Voltaje del bus de CC medido en voltios
24 Temperatura de la unidad R Temperatura del disipador de calor medida en ºC
30 Contador KWh (Reiniciable) R Contador de kWh reiniciable por usuario (DR-26)
31 Contador MWh (Reiniciable) R Contador de MWh reiniciable por usuario (DR-27)
32 Contador KWh (No Reiniciable) R Contador de kWh no reiniciable (DR-26)
33 Contador MWh (No Reiniciable)
R Contador de MWh no reiniciable (DR-27)
34 Tiempo de funcionamiento (h) R Tiempo total de funcionamiento en horas (DR-31)
35 Tiempo de funcionamiento (min. y seg.)
R Tiempo total de funcionamiento en minutos y segundos (DR-31)
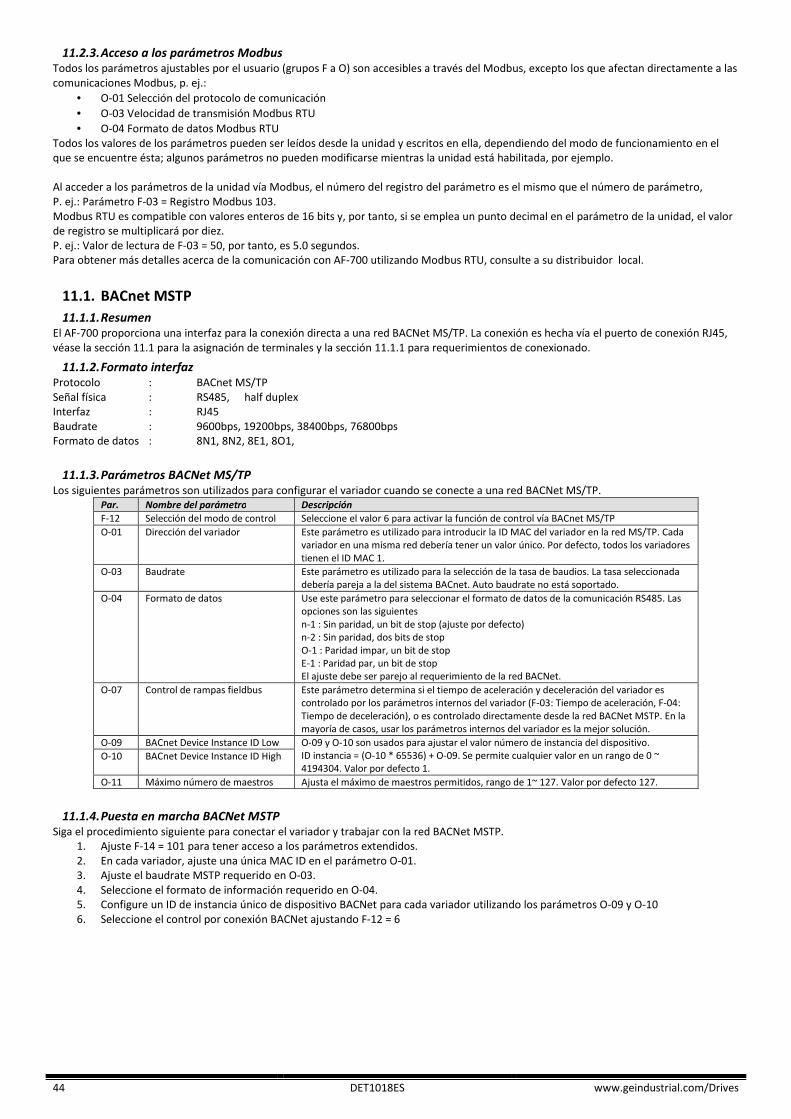
44 DET1018ES www.geindustrial.com/Drives
11.2.3. Acceso a los parámetros Modbus
Todos los parámetros ajustables por el usuario (grupos F a O) son accesibles a través del Modbus, excepto los que afectan directamente a las comunicaciones Modbus, p. ej.:
• O-01 Selección del protocolo de comunicación
• O-03 Velocidad de transmisión Modbus RTU
• O-04 Formato de datos Modbus RTU Todos los valores de los parámetros pueden ser leídos desde la unidad y escritos en ella, dependiendo del modo de funcionamiento en el que se encuentre ésta; algunos parámetros no pueden modificarse mientras la unidad está habilitada, por ejemplo. Al acceder a los parámetros de la unidad vía Modbus, el número del registro del parámetro es el mismo que el número de parámetro, P. ej.: Parámetro F-03 = Registro Modbus 103. Modbus RTU es compatible con valores enteros de 16 bits y, por tanto, si se emplea un punto decimal en el parámetro de la unidad, el valor de registro se multiplicará por diez. P. ej.: Valor de lectura de F-03 = 50, por tanto, es 5.0 segundos. Para obtener más detalles acerca de la comunicación con AF-700 utilizando Modbus RTU, consulte a su distribuidor local.
11.1. BACnet MSTP
11.1.1. Resumen
El AF-700 proporciona una interfaz para la conexión directa a una red BACNet MS/TP. La conexión es hecha vía el puerto de conexión RJ45, véase la sección 11.1 para la asignación de terminales y la sección 11.1.1 para requerimientos de conexionado.
11.1.2. Formato interfaz
Protocolo : BACnet MS/TP Señal física : RS485, half duplex Interfaz : RJ45 Baudrate : 9600bps, 19200bps, 38400bps, 76800bps Formato de datos : 8N1, 8N2, 8E1, 8O1,
11.1.3. Parámetros BACNet MS/TP
Los siguientes parámetros son utilizados para configurar el variador cuando se conecte a una red BACNet MS/TP. Par. Nombre del parámetro Descripción
F-12 Selección del modo de control Seleccione el valor 6 para activar la función de control vía BACnet MS/TP
O-01 Dirección del variador Este parámetro es utilizado para introducir la ID MAC del variador en la red MS/TP. Cada variador en una misma red debería tener un valor único. Por defecto, todos los variadores tienen el ID MAC 1.
O-03 Baudrate Este parámetro es utilizado para la selección de la tasa de baudios. La tasa seleccionada debería pareja a la del sistema BACnet. Auto baudrate no está soportado.
O-04 Formato de datos Use este parámetro para seleccionar el formato de datos de la comunicación RS485. Las opciones son las siguientes n-1 : Sin paridad, un bit de stop (ajuste por defecto) n-2 : Sin paridad, dos bits de stop O-1 : Paridad impar, un bit de stop E-1 : Paridad par, un bit de stop El ajuste debe ser parejo al requerimiento de la red BACNet.
O-07 Control de rampas fieldbus Este parámetro determina si el tiempo de aceleración y deceleración del variador es controlado por los parámetros internos del variador (F-03: Tiempo de aceleración, F-04: Tiempo de deceleración), o es controlado directamente desde la red BACNet MSTP. En la mayoría de casos, usar los parámetros internos del variador es la mejor solución.
O-09 BACnet Device Instance ID Low O-09 y O-10 son usados para ajustar el valor número de instancia del dispositivo. ID instancia = (O-10 * 65536) + O-09. Se permite cualquier valor en un rango de 0 ~ 4194304. Valor por defecto 1.
O-10 BACnet Device Instance ID High
O-11 Máximo número de maestros Ajusta el máximo de maestros permitidos, rango de 1~ 127. Valor por defecto 127.
11.1.4. Puesta en marcha BACNet MSTP
Siga el procedimiento siguiente para conectar el variador y trabajar con la red BACNet MSTP. 1. Ajuste F-14 = 101 para tener acceso a los parámetros extendidos. 2. En cada variador, ajuste una única MAC ID en el parámetro O-01. 3. Ajuste el baudrate MSTP requerido en O-03. 4. Seleccione el formato de información requerido en O-04. 5. Configure un ID de instancia único de dispositivo BACNet para cada variador utilizando los parámetros O-09 y O-10 6. Seleccione el control por conexión BACNet ajustando F-12 = 6
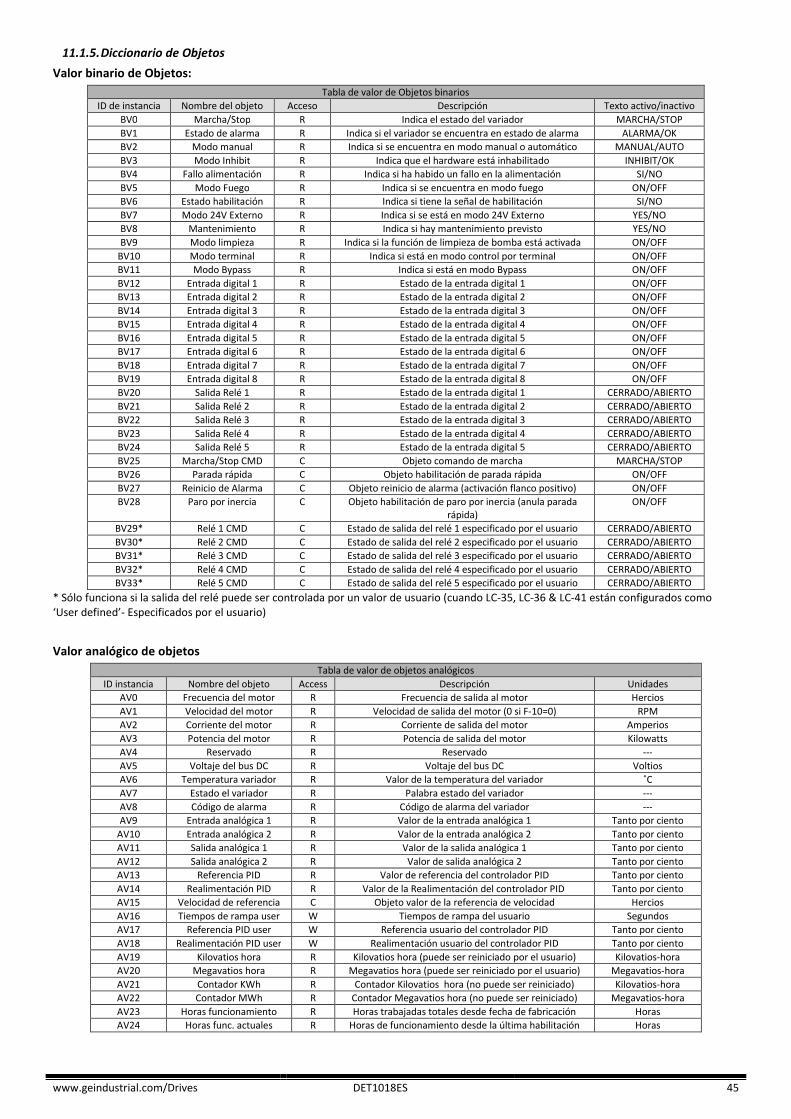
www.geindustrial.com/Drives DET1018ES 45
11.1.5. Diccionario de Objetos
Valor binario de Objetos:
Tabla de valor de Objetos binarios
ID de instancia Nombre del objeto Acceso Descripción Texto activo/inactivo
BV0 Marcha/Stop R Indica el estado del variador MARCHA/STOP
BV1 Estado de alarma R Indica si el variador se encuentra en estado de alarma ALARMA/OK
BV2 Modo manual R Indica si se encuentra en modo manual o automático MANUAL/AUTO
BV3 Modo Inhibit R Indica que el hardware está inhabilitado INHIBIT/OK
BV4 Fallo alimentación R Indica si ha habido un fallo en la alimentación SI/NO
BV5 Modo Fuego R Indica si se encuentra en modo fuego ON/OFF
BV6 Estado habilitación R Indica si tiene la señal de habilitación SI/NO
BV7 Modo 24V Externo R Indica si se está en modo 24V Externo YES/NO
BV8 Mantenimiento R Indica si hay mantenimiento previsto YES/NO
BV9 Modo limpieza R Indica si la función de limpieza de bomba está activada ON/OFF
BV10 Modo terminal R Indica si está en modo control por terminal ON/OFF
BV11 Modo Bypass R Indica si está en modo Bypass ON/OFF
BV12 Entrada digital 1 R Estado de la entrada digital 1 ON/OFF
BV13 Entrada digital 2 R Estado de la entrada digital 2 ON/OFF
BV14 Entrada digital 3 R Estado de la entrada digital 3 ON/OFF
BV15 Entrada digital 4 R Estado de la entrada digital 4 ON/OFF
BV16 Entrada digital 5 R Estado de la entrada digital 5 ON/OFF
BV17 Entrada digital 6 R Estado de la entrada digital 6 ON/OFF
BV18 Entrada digital 7 R Estado de la entrada digital 7 ON/OFF
BV19 Entrada digital 8 R Estado de la entrada digital 8 ON/OFF
BV20 Salida Relé 1 R Estado de la entrada digital 1 CERRADO/ABIERTO
BV21 Salida Relé 2 R Estado de la entrada digital 2 CERRADO/ABIERTO
BV22 Salida Relé 3 R Estado de la entrada digital 3 CERRADO/ABIERTO
BV23 Salida Relé 4 R Estado de la entrada digital 4 CERRADO/ABIERTO
BV24 Salida Relé 5 R Estado de la entrada digital 5 CERRADO/ABIERTO
BV25 Marcha/Stop CMD C Objeto comando de marcha MARCHA/STOP
BV26 Parada rápida C Objeto habilitación de parada rápida ON/OFF
BV27 Reinicio de Alarma C Objeto reinicio de alarma (activación flanco positivo) ON/OFF
BV28 Paro por inercia C Objeto habilitación de paro por inercia (anula parada rápida)
ON/OFF
BV29* Relé 1 CMD C Estado de salida del relé 1 especificado por el usuario CERRADO/ABIERTO
BV30* Relé 2 CMD C Estado de salida del relé 2 especificado por el usuario CERRADO/ABIERTO
BV31* Relé 3 CMD C Estado de salida del relé 3 especificado por el usuario CERRADO/ABIERTO
BV32* Relé 4 CMD C Estado de salida del relé 4 especificado por el usuario CERRADO/ABIERTO
BV33* Relé 5 CMD C Estado de salida del relé 5 especificado por el usuario CERRADO/ABIERTO
* Sólo funciona si la salida del relé puede ser controlada por un valor de usuario (cuando LC-35, LC-36 & LC-41 están configurados como ‘User defined’- Especificados por el usuario)
Valor analógico de objetos
Tabla de valor de objetos analógicos
ID instancia Nombre del objeto Access Descripción Unidades
AV0 Frecuencia del motor R Frecuencia de salida al motor Hercios
AV1 Velocidad del motor R Velocidad de salida del motor (0 si F-10=0) RPM
AV2 Corriente del motor R Corriente de salida del motor Amperios
AV3 Potencia del motor R Potencia de salida del motor Kilowatts
AV4 Reservado R Reservado ---
AV5 Voltaje del bus DC R Voltaje del bus DC Voltios
AV6 Temperatura variador R Valor de la temperatura del variador ˚C
AV7 Estado el variador R Palabra estado del variador ---
AV8 Código de alarma R Código de alarma del variador ---
AV9 Entrada analógica 1 R Valor de la entrada analógica 1 Tanto por ciento
AV10 Entrada analógica 2 R Valor de la entrada analógica 2 Tanto por ciento
AV11 Salida analógica 1 R Valor de la salida analógica 1 Tanto por ciento
AV12 Salida analógica 2 R Valor de salida analógica 2 Tanto por ciento
AV13 Referencia PID R Valor de referencia del controlador PID Tanto por ciento
AV14 Realimentación PID R Valor de la Realimentación del controlador PID Tanto por ciento
AV15 Velocidad de referencia C Objeto valor de la referencia de velocidad Hercios
AV16 Tiempos de rampa user W Tiempos de rampa del usuario Segundos
AV17 Referencia PID user W Referencia usuario del controlador PID Tanto por ciento
AV18 Realimentación PID user W Realimentación usuario del controlador PID Tanto por ciento
AV19 Kilovatios hora R Kilovatios hora (puede ser reiniciado por el usuario) Kilovatios-hora
AV20 Megavatios hora R Megavatios hora (puede ser reiniciado por el usuario) Megavatios-hora
AV21 Contador KWh R Contador Kilovatios hora (no puede ser reiniciado) Kilovatios-hora
AV22 Contador MWh R Contador Megavatios hora (no puede ser reiniciado) Megavatios-hora
AV23 Horas funcionamiento R Horas trabajadas totales desde fecha de fabricación Horas
AV24 Horas func. actuales R Horas de funcionamiento desde la última habilitación Horas
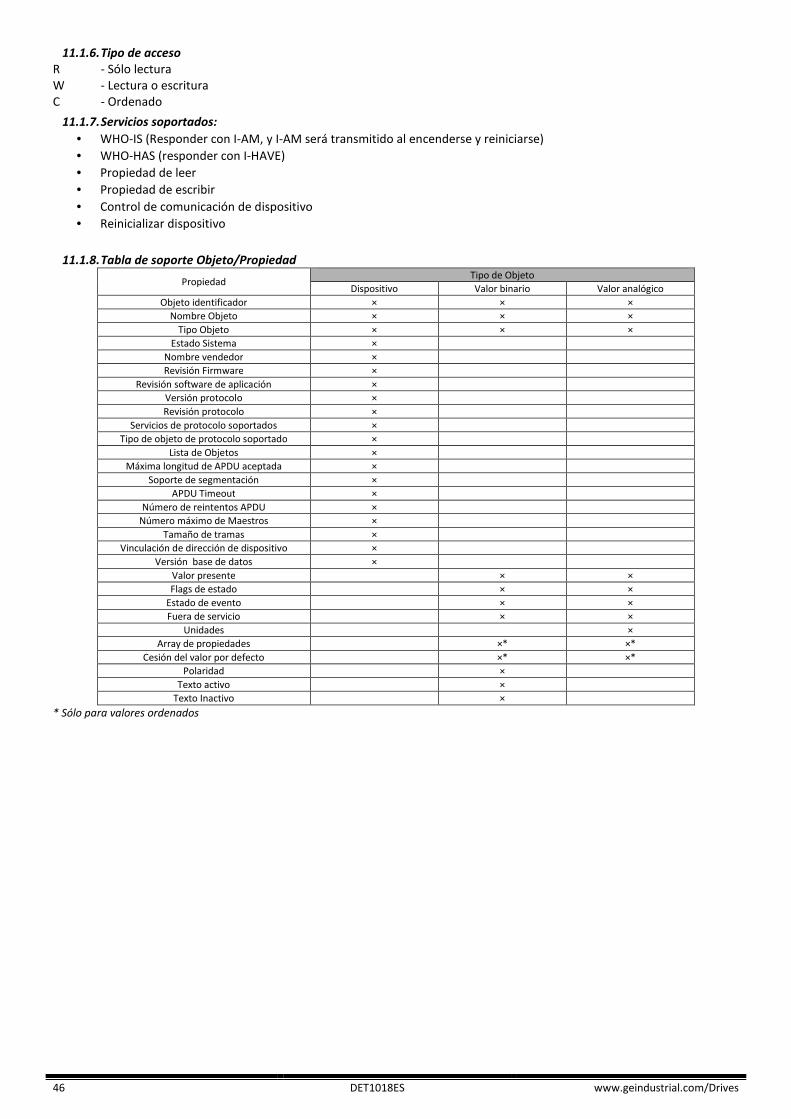
46 DET1018ES www.geindustrial.com/Drives
11.1.6. Tipo de acceso
R - Sólo lectura W - Lectura o escritura C - Ordenado
11.1.7. Servicios soportados:
• WHO-IS (Responder con I-AM, y I-AM será transmitido al encenderse y reiniciarse)
• WHO-HAS (responder con I-HAVE)
• Propiedad de leer
• Propiedad de escribir
• Control de comunicación de dispositivo
• Reinicializar dispositivo
11.1.8. Tabla de soporte Objeto/Propiedad
Propiedad Tipo de Objeto
Dispositivo Valor binario Valor analógico
Objeto identificador × × ×
Nombre Objeto × × ×
Tipo Objeto × × ×
Estado Sistema ×
Nombre vendedor ×
Revisión Firmware ×
Revisión software de aplicación ×
Versión protocolo ×
Revisión protocolo ×
Servicios de protocolo soportados ×
Tipo de objeto de protocolo soportado ×
Lista de Objetos ×
Máxima longitud de APDU aceptada ×
Soporte de segmentación ×
APDU Timeout ×
Número de reintentos APDU ×
Número máximo de Maestros ×
Tamaño de tramas ×
Vinculación de dirección de dispositivo ×
Versión base de datos ×
Valor presente × ×
Flags de estado × ×
Estado de evento × ×
Fuera de servicio × ×
Unidades ×
Array de propiedades ×* ×*
Cesión del valor por defecto ×* ×*
Polaridad ×
Texto activo ×
Texto Inactivo ×
* Sólo para valores ordenados
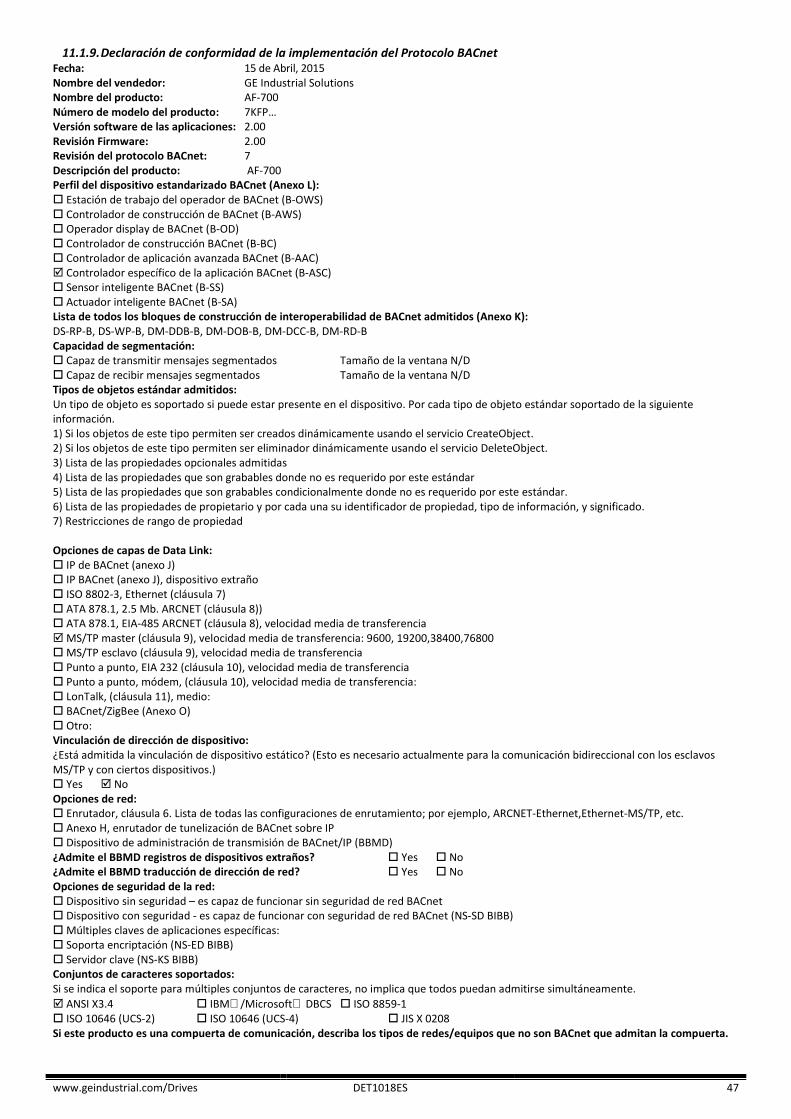
www.geindustrial.com/Drives DET1018ES 47
11.1.9. Declaración de conformidad de la implementación del Protocolo BACnet
Fecha: 15 de Abril, 2015 Nombre del vendedor: GE Industrial Solutions Nombre del producto: AF-700 Número de modelo del producto: 7KFP… Versión software de las aplicaciones: 2.00 Revisión Firmware: 2.00 Revisión del protocolo BACnet: 7 Descripción del producto: AF-700 Perfil del dispositivo estandarizado BACnet (Anexo L): � Estación de trabajo del operador de BACnet (B-OWS) � Controlador de construcción de BACnet (B-AWS) � Operador display de BACnet (B-OD) � Controlador de construcción BACnet (B-BC) � Controlador de aplicación avanzada BACnet (B-AAC) � Controlador específico de la aplicación BACnet (B-ASC) � Sensor inteligente BACnet (B-SS) � Actuador inteligente BACnet (B-SA) Lista de todos los bloques de construcción de interoperabilidad de BACnet admitidos (Anexo K): DS-RP-B, DS-WP-B, DM-DDB-B, DM-DOB-B, DM-DCC-B, DM-RD-B Capacidad de segmentación: � Capaz de transmitir mensajes segmentados Tamaño de la ventana N/D � Capaz de recibir mensajes segmentados Tamaño de la ventana N/D Tipos de objetos estándar admitidos: Un tipo de objeto es soportado si puede estar presente en el dispositivo. Por cada tipo de objeto estándar soportado de la siguiente información. 1) Si los objetos de este tipo permiten ser creados dinámicamente usando el servicio CreateObject. 2) Si los objetos de este tipo permiten ser eliminador dinámicamente usando el servicio DeleteObject. 3) Lista de las propiedades opcionales admitidas 4) Lista de las propiedades que son grabables donde no es requerido por este estándar 5) Lista de las propiedades que son grabables condicionalmente donde no es requerido por este estándar. 6) Lista de las propiedades de propietario y por cada una su identificador de propiedad, tipo de información, y significado. 7) Restricciones de rango de propiedad Opciones de capas de Data Link: � IP de BACnet (anexo J) � IP BACnet (anexo J), dispositivo extraño � ISO 8802-3, Ethernet (cláusula 7) � ATA 878.1, 2.5 Mb. ARCNET (cláusula 8)) � ATA 878.1, EIA-485 ARCNET (cláusula 8), velocidad media de transferencia � MS/TP master (cláusula 9), velocidad media de transferencia: 9600, 19200,38400,76800 � MS/TP esclavo (cláusula 9), velocidad media de transferencia � Punto a punto, EIA 232 (cláusula 10), velocidad media de transferencia � Punto a punto, módem, (cláusula 10), velocidad media de transferencia: � LonTalk, (cláusula 11), medio: � BACnet/ZigBee (Anexo O) � Otro: Vinculación de dirección de dispositivo: ¿Está admitida la vinculación de dispositivo estático? (Esto es necesario actualmente para la comunicación bidireccional con los esclavos MS/TP y con ciertos dispositivos.) � Yes � No Opciones de red: � Enrutador, cláusula 6. Lista de todas las configuraciones de enrutamiento; por ejemplo, ARCNET-Ethernet,Ethernet-MS/TP, etc. � Anexo H, enrutador de tunelización de BACnet sobre IP � Dispositivo de administración de transmisión de BACnet/IP (BBMD) ¿Admite el BBMD registros de dispositivos extraños? � Yes � No ¿Admite el BBMD traducción de dirección de red? � Yes � No Opciones de seguridad de la red: � Dispositivo sin seguridad – es capaz de funcionar sin seguridad de red BACnet � Dispositivo con seguridad - es capaz de funcionar con seguridad de red BACnet (NS-SD BIBB) � Múltiples claves de aplicaciones específicas: � Soporta encriptación (NS-ED BIBB) � Servidor clave (NS-KS BIBB) Conjuntos de caracteres soportados: Si se indica el soporte para múltiples conjuntos de caracteres, no implica que todos puedan admitirse simultáneamente.
� ANSI X3.4 � IBM/Microsoft DBCS � ISO 8859-1 � ISO 10646 (UCS-2) � ISO 10646 (UCS-4) � JIS X 0208 Si este producto es una compuerta de comunicación, describa los tipos de redes/equipos que no son BACnet que admitan la compuerta.
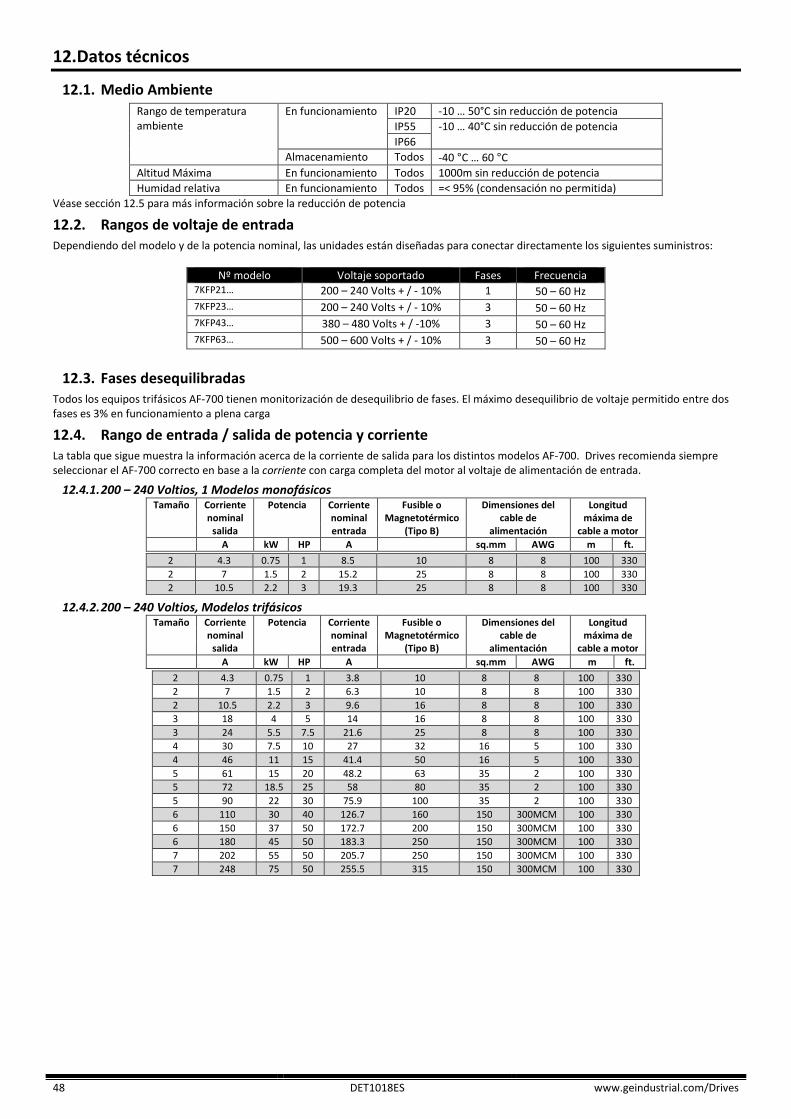
48 DET1018ES www.geindustrial.com/Drives
12. Datos técnicos
12.1. Medio Ambiente
Rango de temperatura
ambiente En funcionamiento IP20 -10 … 50°C sin reducción de potencia
IP55 -10 … 40°C sin reducción de potencia
IP66
Almacenamiento Todos -40 °C … 60 °C
Altitud Máxima En funcionamiento Todos 1000m sin reducción de potencia
Humidad relativa En funcionamiento Todos =< 95% (condensación no permitida)
Véase sección 12.5 para más información sobre la reducción de potencia
12.2. Rangos de voltaje de entrada Dependiendo del modelo y de la potencia nominal, las unidades están diseñadas para conectar directamente los siguientes suministros:
Nº modelo Voltaje soportado Fases Frecuencia 7KFP21… 200 – 240 Volts + / - 10% 1 50 – 60 Hz 7KFP23… 200 – 240 Volts + / - 10% 3 50 – 60 Hz 7KFP43… 380 – 480 Volts + / -10% 3 50 – 60 Hz 7KFP63… 500 – 600 Volts + / - 10% 3 50 – 60 Hz
12.3. Fases desequilibradas Todos los equipos trifásicos AF-700 tienen monitorización de desequilibrio de fases. El máximo desequilibrio de voltaje permitido entre dos fases es 3% en funcionamiento a plena carga
12.4. Rango de entrada / salida de potencia y corriente La tabla que sigue muestra la información acerca de la corriente de salida para los distintos modelos AF-700. Drives recomienda siempre seleccionar el AF-700 correcto en base a la corriente con carga completa del motor al voltaje de alimentación de entrada.
12.4.1. 200 – 240 Voltios, 1 Modelos monofásicos Tamaño Corriente Potencia Corriente Fusible o Dimensiones del Longitud
nominal nominal Magnetotérmico cable de máxima de salida entrada (Tipo B) alimentación cable a motor
A kW HP A sq.mm AWG m ft.
2 4.3 0.75 1 8.5 10 8 8 100 330
2 7 1.5 2 15.2 25 8 8 100 330
2 10.5 2.2 3 19.3 25 8 8 100 330
12.4.2. 200 – 240 Voltios, Modelos trifásicos Tamaño Corriente Potencia Corriente Fusible o Dimensiones del Longitud
nominal nominal Magnetotérmico cable de máxima de salida entrada (Tipo B) alimentación cable a motor
A kW HP A sq.mm AWG m ft.
2 4.3 0.75 1 3.8 10 8 8 100 330
2 7 1.5 2 6.3 10 8 8 100 330
2 10.5 2.2 3 9.6 16 8 8 100 330
3 18 4 5 14 16 8 8 100 330
3 24 5.5 7.5 21.6 25 8 8 100 330
4 30 7.5 10 27 32 16 5 100 330
4 46 11 15 41.4 50 16 5 100 330
5 61 15 20 48.2 63 35 2 100 330
5 72 18.5 25 58 80 35 2 100 330
5 90 22 30 75.9 100 35 2 100 330
6 110 30 40 126.7 160 150 300MCM 100 330
6 150 37 50 172.7 200 150 300MCM 100 330
6 180 45 50 183.3 250 150 300MCM 100 330
7 202 55 50 205.7 250 150 300MCM 100 330
7 248 75 50 255.5 315 150 300MCM 100 330
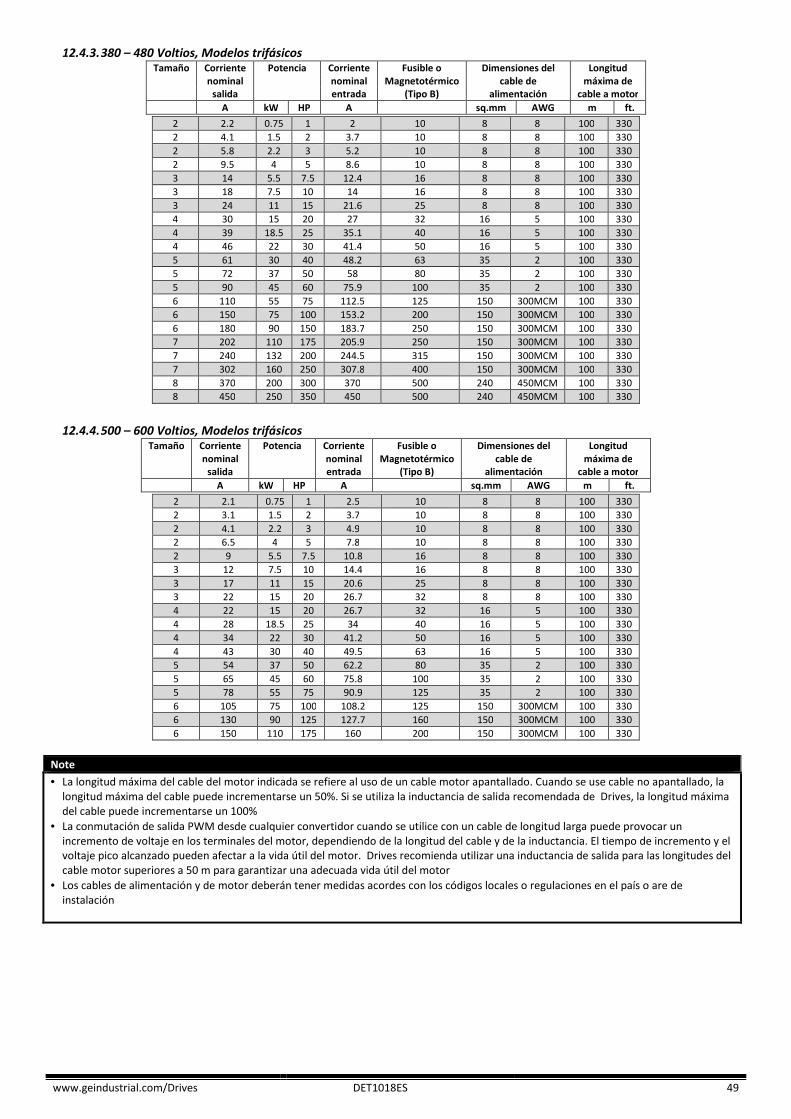
www.geindustrial.com/Drives DET1018ES 49
12.4.3. 380 – 480 Voltios, Modelos trifásicos Tamaño Corriente Potencia Corriente Fusible o Dimensiones del Longitud
nominal nominal Magnetotérmico cable de máxima de salida entrada (Tipo B) alimentación cable a motor
A kW HP A sq.mm AWG m ft.
2 2.2 0.75 1 2 10 8 8 100 330
2 4.1 1.5 2 3.7 10 8 8 100 330
2 5.8 2.2 3 5.2 10 8 8 100 330
2 9.5 4 5 8.6 10 8 8 100 330
3 14 5.5 7.5 12.4 16 8 8 100 330
3 18 7.5 10 14 16 8 8 100 330
3 24 11 15 21.6 25 8 8 100 330
4 30 15 20 27 32 16 5 100 330
4 39 18.5 25 35.1 40 16 5 100 330
4 46 22 30 41.4 50 16 5 100 330
5 61 30 40 48.2 63 35 2 100 330
5 72 37 50 58 80 35 2 100 330
5 90 45 60 75.9 100 35 2 100 330
6 110 55 75 112.5 125 150 300MCM 100 330
6 150 75 100 153.2 200 150 300MCM 100 330
6 180 90 150 183.7 250 150 300MCM 100 330
7 202 110 175 205.9 250 150 300MCM 100 330
7 240 132 200 244.5 315 150 300MCM 100 330
7 302 160 250 307.8 400 150 300MCM 100 330
8 370 200 300 370 500 240 450MCM 100 330
8 450 250 350 450 500 240 450MCM 100 330
12.4.4. 500 – 600 Voltios, Modelos trifásicos Tamaño Corriente Potencia Corriente Fusible o Dimensiones del Longitud
nominal nominal Magnetotérmico cable de máxima de salida entrada (Tipo B) alimentación cable a motor
A kW HP A sq.mm AWG m ft.
2 2.1 0.75 1 2.5 10 8 8 100 330
2 3.1 1.5 2 3.7 10 8 8 100 330
2 4.1 2.2 3 4.9 10 8 8 100 330
2 6.5 4 5 7.8 10 8 8 100 330
2 9 5.5 7.5 10.8 16 8 8 100 330
3 12 7.5 10 14.4 16 8 8 100 330
3 17 11 15 20.6 25 8 8 100 330
3 22 15 20 26.7 32 8 8 100 330
4 22 15 20 26.7 32 16 5 100 330
4 28 18.5 25 34 40 16 5 100 330
4 34 22 30 41.2 50 16 5 100 330
4 43 30 40 49.5 63 16 5 100 330
5 54 37 50 62.2 80 35 2 100 330
5 65 45 60 75.8 100 35 2 100 330
5 78 55 75 90.9 125 35 2 100 330
6 105 75 100 108.2 125 150 300MCM 100 330
6 130 90 125 127.7 160 150 300MCM 100 330
6 150 110 175 160 200 150 300MCM 100 330
Note
• La longitud máxima del cable del motor indicada se refiere al uso de un cable motor apantallado. Cuando se use cable no apantallado, la longitud máxima del cable puede incrementarse un 50%. Si se utiliza la inductancia de salida recomendada de Drives, la longitud máxima del cable puede incrementarse un 100%
• La conmutación de salida PWM desde cualquier convertidor cuando se utilice con un cable de longitud larga puede provocar un incremento de voltaje en los terminales del motor, dependiendo de la longitud del cable y de la inductancia. El tiempo de incremento y el voltaje pico alcanzado pueden afectar a la vida útil del motor. Drives recomienda utilizar una inductancia de salida para las longitudes del cable motor superiores a 50 m para garantizar una adecuada vida útil del motor
• Los cables de alimentación y de motor deberán tener medidas acordes con los códigos locales o regulaciones en el país o are de instalación
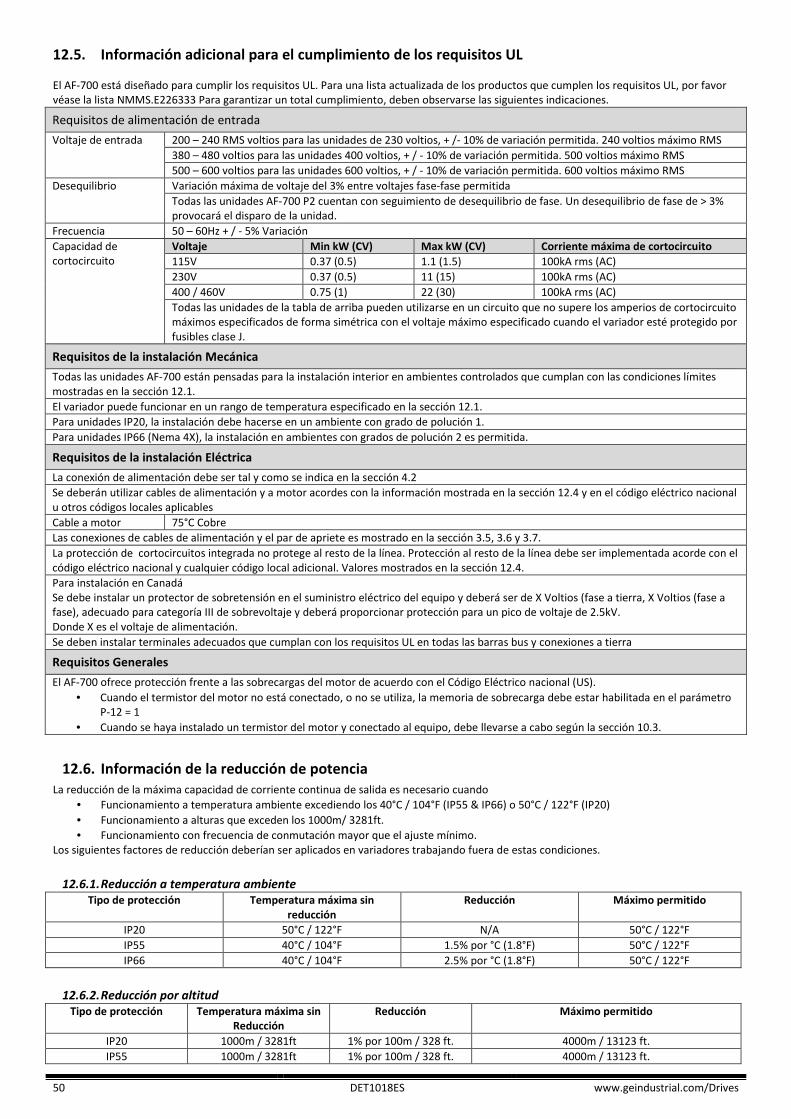
50 DET1018ES www.geindustrial.com/Drives
12.5. Información adicional para el cumplimiento de los requisitos UL
El AF-700 está diseñado para cumplir los requisitos UL. Para una lista actualizada de los productos que cumplen los requisitos UL, por favor véase la lista NMMS.E226333 Para garantizar un total cumplimiento, deben observarse las siguientes indicaciones.
Requisitos de alimentación de entrada
Voltaje de entrada 200 – 240 RMS voltios para las unidades de 230 voltios, + /- 10% de variación permitida. 240 voltios máximo RMS
380 – 480 voltios para las unidades 400 voltios, + / - 10% de variación permitida. 500 voltios máximo RMS
500 – 600 voltios para las unidades 600 voltios, + / - 10% de variación permitida. 600 voltios máximo RMS
Desequilibrio Variación máxima de voltaje del 3% entre voltajes fase-fase permitida
Todas las unidades AF-700 P2 cuentan con seguimiento de desequilibrio de fase. Un desequilibrio de fase de > 3% provocará el disparo de la unidad.
Frecuencia 50 – 60Hz + / - 5% Variación
Capacidad de cortocircuito
Voltaje Min kW (CV) Max kW (CV) Corriente máxima de cortocircuito
115V 0.37 (0.5) 1.1 (1.5) 100kA rms (AC)
230V 0.37 (0.5) 11 (15) 100kA rms (AC)
400 / 460V 0.75 (1) 22 (30) 100kA rms (AC)
Todas las unidades de la tabla de arriba pueden utilizarse en un circuito que no supere los amperios de cortocircuito máximos especificados de forma simétrica con el voltaje máximo especificado cuando el variador esté protegido por fusibles clase J.
Requisitos de la instalación Mecánica
Todas las unidades AF-700 están pensadas para la instalación interior en ambientes controlados que cumplan con las condiciones límites mostradas en la sección 12.1.
El variador puede funcionar en un rango de temperatura especificado en la sección 12.1.
Para unidades IP20, la instalación debe hacerse en un ambiente con grado de polución 1.
Para unidades IP66 (Nema 4X), la instalación en ambientes con grados de polución 2 es permitida.
Requisitos de la instalación Eléctrica
La conexión de alimentación debe ser tal y como se indica en la sección 4.2
Se deberán utilizar cables de alimentación y a motor acordes con la información mostrada en la sección 12.4 y en el código eléctrico nacional u otros códigos locales aplicables
Cable a motor 75°C Cobre
Las conexiones de cables de alimentación y el par de apriete es mostrado en la sección 3.5, 3.6 y 3.7.
La protección de cortocircuitos integrada no protege al resto de la línea. Protección al resto de la línea debe ser implementada acorde con el código eléctrico nacional y cualquier código local adicional. Valores mostrados en la sección 12.4.
Para instalación en Canadá Se debe instalar un protector de sobretensión en el suministro eléctrico del equipo y deberá ser de X Voltios (fase a tierra, X Voltios (fase a fase), adecuado para categoría III de sobrevoltaje y deberá proporcionar protección para un pico de voltaje de 2.5kV. Donde X es el voltaje de alimentación.
Se deben instalar terminales adecuados que cumplan con los requisitos UL en todas las barras bus y conexiones a tierra
Requisitos Generales
El AF-700 ofrece protección frente a las sobrecargas del motor de acuerdo con el Código Eléctrico nacional (US).
• Cuando el termistor del motor no está conectado, o no se utiliza, la memoria de sobrecarga debe estar habilitada en el parámetro P-12 = 1
• Cuando se haya instalado un termistor del motor y conectado al equipo, debe llevarse a cabo según la sección 10.3.
12.6. Información de la reducción de potencia La reducción de la máxima capacidad de corriente continua de salida es necesario cuando
• Funcionamiento a temperatura ambiente excediendo los 40°C / 104°F (IP55 & IP66) o 50°C / 122°F (IP20)
• Funcionamiento a alturas que exceden los 1000m/ 3281ft.
• Funcionamiento con frecuencia de conmutación mayor que el ajuste mínimo. Los siguientes factores de reducción deberían ser aplicados en variadores trabajando fuera de estas condiciones.
12.6.1. Reducción a temperatura ambiente
Tipo de protección Temperatura máxima sin reducción
Reducción Máximo permitido
IP20 50°C / 122°F N/A 50°C / 122°F
IP55 40°C / 104°F 1.5% por °C (1.8°F) 50°C / 122°F
IP66 40°C / 104°F 2.5% por °C (1.8°F) 50°C / 122°F
12.6.2. Reducción por altitud
Tipo de protección Temperatura máxima sin Reducción
Reducción Máximo permitido
IP20 1000m / 3281ft 1% por 100m / 328 ft. 4000m / 13123 ft.
IP55 1000m / 3281ft 1% por 100m / 328 ft. 4000m / 13123 ft.
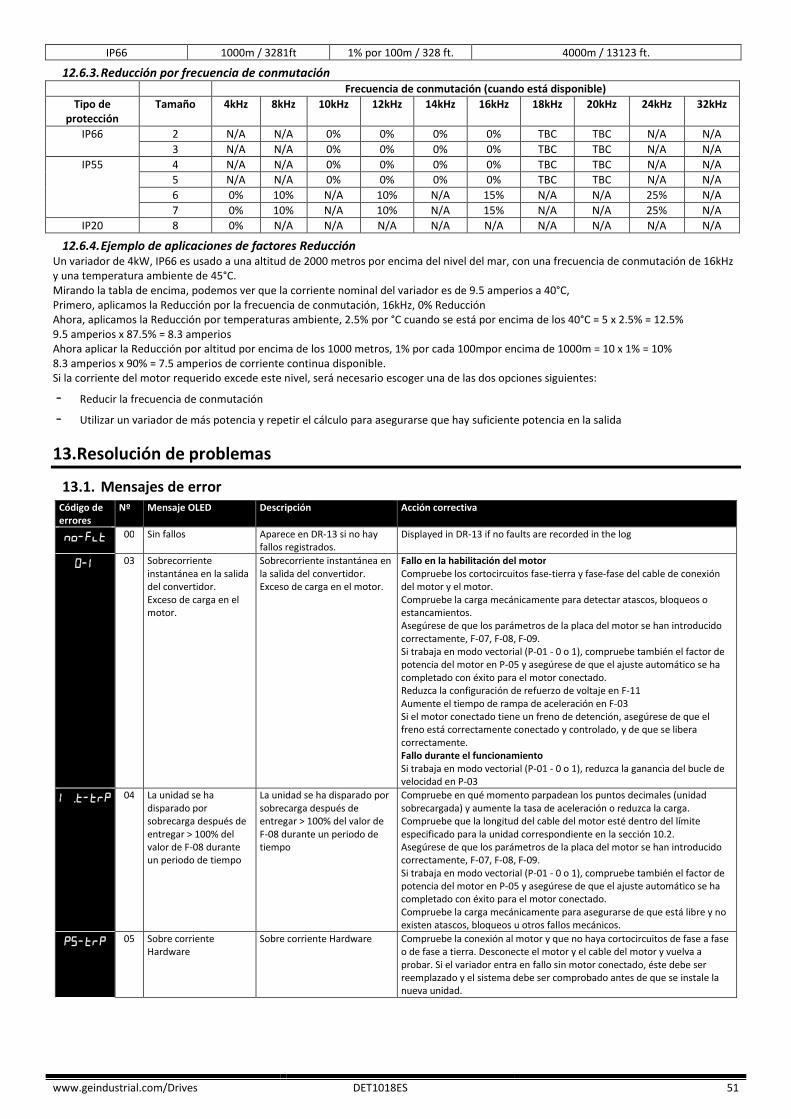
www.geindustrial.com/Drives DET1018ES 51
IP66 1000m / 3281ft 1% por 100m / 328 ft. 4000m / 13123 ft.
12.6.3. Reducción por frecuencia de conmutación
Frecuencia de conmutación (cuando está disponible)
Tipo de protección
Tamaño 4kHz 8kHz 10kHz 12kHz 14kHz 16kHz 18kHz 20kHz 24kHz 32kHz
IP66 2 N/A N/A 0% 0% 0% 0% TBC TBC N/A N/A
3 N/A N/A 0% 0% 0% 0% TBC TBC N/A N/A
IP55 4 N/A N/A 0% 0% 0% 0% TBC TBC N/A N/A
5 N/A N/A 0% 0% 0% 0% TBC TBC N/A N/A
6 0% 10% N/A 10% N/A 15% N/A N/A 25% N/A
7 0% 10% N/A 10% N/A 15% N/A N/A 25% N/A
IP20 8 0% N/A N/A N/A N/A N/A N/A N/A N/A N/A
12.6.4. Ejemplo de aplicaciones de factores Reducción
Un variador de 4kW, IP66 es usado a una altitud de 2000 metros por encima del nivel del mar, con una frecuencia de conmutación de 16kHz y una temperatura ambiente de 45°C. Mirando la tabla de encima, podemos ver que la corriente nominal del variador es de 9.5 amperios a 40°C, Primero, aplicamos la Reducción por la frecuencia de conmutación, 16kHz, 0% Reducción Ahora, aplicamos la Reducción por temperaturas ambiente, 2.5% por °C cuando se está por encima de los 40°C = 5 x 2.5% = 12.5% 9.5 amperios x 87.5% = 8.3 amperios Ahora aplicar la Reducción por altitud por encima de los 1000 metros, 1% por cada 100mpor encima de 1000m = 10 x 1% = 10% 8.3 amperios x 90% = 7.5 amperios de corriente continua disponible. Si la corriente del motor requerido excede este nivel, será necesario escoger una de las dos opciones siguientes:
- Reducir la frecuencia de conmutación - Utilizar un variador de más potencia y repetir el cálculo para asegurarse que hay suficiente potencia en la salida
13. Resolución de problemas
13.1. Mensajes de error Código de errores
Nº Mensaje OLED Descripción Acción correctiva
No-flt 00 Sin fallos Aparece en DR-13 si no hay fallos registrados.
Displayed in DR-13 if no faults are recorded in the log
0-I
03 Sobrecorriente instantánea en la salida del convertidor. Exceso de carga en el motor.
Sobrecorriente instantánea en la salida del convertidor. Exceso de carga en el motor.
Fallo en la habilitación del motor Compruebe los cortocircuitos fase-tierra y fase-fase del cable de conexión del motor y el motor. Compruebe la carga mecánicamente para detectar atascos, bloqueos o estancamientos. Asegúrese de que los parámetros de la placa del motor se han introducido correctamente, F-07, F-08, F-09. Si trabaja en modo vectorial (P-01 - 0 o 1), compruebe también el factor de potencia del motor en P-05 y asegúrese de que el ajuste automático se ha completado con éxito para el motor conectado. Reduzca la configuración de refuerzo de voltaje en F-11 Aumente el tiempo de rampa de aceleración en F-03 Si el motor conectado tiene un freno de detención, asegúrese de que el freno está correctamente conectado y controlado, y de que se libera correctamente. Fallo durante el funcionamiento Si trabaja en modo vectorial (P-01 - 0 o 1), reduzca la ganancia del bucle de velocidad en P-03
I .t-trp 04 La unidad se ha disparado por sobrecarga después de entregar > 100% del valor de F-08 durante un periodo de tiempo
La unidad se ha disparado por sobrecarga después de entregar > 100% del valor de F-08 durante un periodo de tiempo
Compruebe en qué momento parpadean los puntos decimales (unidad sobrecargada) y aumente la tasa de aceleración o reduzca la carga. Compruebe que la longitud del cable del motor esté dentro del límite especificado para la unidad correspondiente en la sección 10.2. Asegúrese de que los parámetros de la placa del motor se han introducido correctamente, F-07, F-08, F-09. Si trabaja en modo vectorial (P-01 - 0 o 1), compruebe también el factor de potencia del motor en P-05 y asegúrese de que el ajuste automático se ha completado con éxito para el motor conectado. Compruebe la carga mecánicamente para asegurarse de que está libre y no existen atascos, bloqueos u otros fallos mecánicos.
Ps-trp
05 Sobre corriente Hardware
Sobre corriente Hardware Compruebe la conexión al motor y que no haya cortocircuitos de fase a fase o de fase a tierra. Desconecte el motor y el cable del motor y vuelva a probar. Si el variador entra en fallo sin motor conectado, éste debe ser reemplazado y el sistema debe ser comprobado antes de que se instale la nueva unidad.
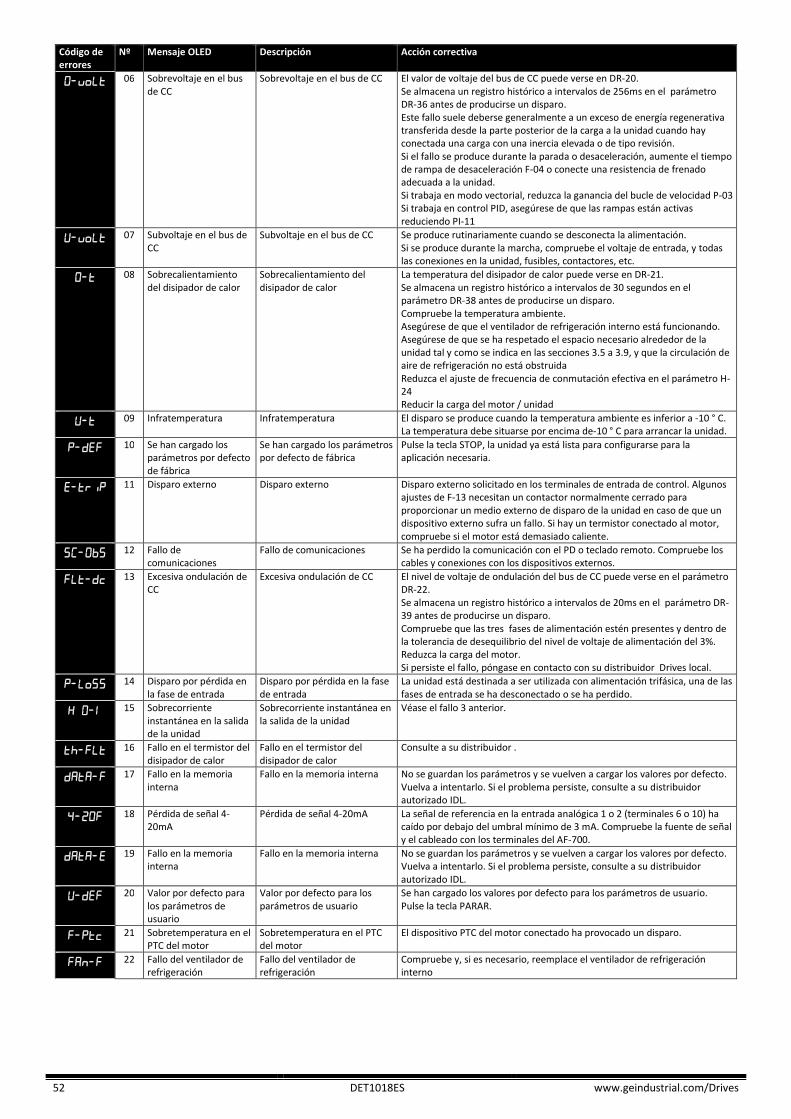
52 DET1018ES www.geindustrial.com/Drives
Código de errores
Nº Mensaje OLED Descripción Acción correctiva
0-voLt
06 Sobrevoltaje en el bus de CC
Sobrevoltaje en el bus de CC El valor de voltaje del bus de CC puede verse en DR-20. Se almacena un registro histórico a intervalos de 256ms en el parámetro DR-36 antes de producirse un disparo. Este fallo suele deberse generalmente a un exceso de energía regenerativa transferida desde la parte posterior de la carga a la unidad cuando hay conectada una carga con una inercia elevada o de tipo revisión. Si el fallo se produce durante la parada o desaceleración, aumente el tiempo de rampa de desaceleración F-04 o conecte una resistencia de frenado adecuada a la unidad. Si trabaja en modo vectorial, reduzca la ganancia del bucle de velocidad P-03 Si trabaja en control PID, asegúrese de que las rampas están activas reduciendo PI-11
U-voLt
07 Subvoltaje en el bus de CC
Subvoltaje en el bus de CC Se produce rutinariamente cuando se desconecta la alimentación. Si se produce durante la marcha, compruebe el voltaje de entrada, y todas las conexiones en la unidad, fusibles, contactores, etc.
0-t 08 Sobrecalientamiento del disipador de calor
Sobrecalientamiento del disipador de calor
La temperatura del disipador de calor puede verse en DR-21. Se almacena un registro histórico a intervalos de 30 segundos en el parámetro DR-38 antes de producirse un disparo. Compruebe la temperatura ambiente. Asegúrese de que el ventilador de refrigeración interno está funcionando. Asegúrese de que se ha respetado el espacio necesario alrededor de la unidad tal y como se indica en las secciones 3.5 a 3.9, y que la circulación de aire de refrigeración no está obstruida Reduzca el ajuste de frecuencia de conmutación efectiva en el parámetro H-24 Reducir la carga del motor / unidad
U-t 09 Infratemperatura Infratemperatura El disparo se produce cuando la temperatura ambiente es inferior a -10 ° C. La temperatura debe situarse por encima de-10 ° C para arrancar la unidad.
p-def 10 Se han cargado los parámetros por defecto de fábrica
Se han cargado los parámetros por defecto de fábrica
Pulse la tecla STOP, la unidad ya está lista para configurarse para la aplicación necesaria.
e-trip 11 Disparo externo Disparo externo Disparo externo solicitado en los terminales de entrada de control. Algunos ajustes de F-13 necesitan un contactor normalmente cerrado para proporcionar un medio externo de disparo de la unidad en caso de que un dispositivo externo sufra un fallo. Si hay un termistor conectado al motor, compruebe si el motor está demasiado caliente.
sC-Obs 12 Fallo de comunicaciones
Fallo de comunicaciones Se ha perdido la comunicación con el PD o teclado remoto. Compruebe los cables y conexiones con los dispositivos externos.
FLt-dc 13 Excesiva ondulación de CC
Excesiva ondulación de CC El nivel de voltaje de ondulación del bus de CC puede verse en el parámetro DR-22. Se almacena un registro histórico a intervalos de 20ms en el parámetro DR-39 antes de producirse un disparo. Compruebe que las tres fases de alimentación estén presentes y dentro de la tolerancia de desequilibrio del nivel de voltaje de alimentación del 3%. Reduzca la carga del motor. Si persiste el fallo, póngase en contacto con su distribuidor Drives local.
p-Loss 14 Disparo por pérdida en la fase de entrada
Disparo por pérdida en la fase de entrada
La unidad está destinada a ser utilizada con alimentación trifásica, una de las fases de entrada se ha desconectado o se ha perdido.
H 0-I 15 Sobrecorriente instantánea en la salida de la unidad
Sobrecorriente instantánea en la salida de la unidad
Véase el fallo 3 anterior.
Th-fLt 16 Fallo en el termistor del disipador de calor
Fallo en el termistor del disipador de calor
Consulte a su distribuidor .
Data-f 17 Fallo en la memoria interna
Fallo en la memoria interna No se guardan los parámetros y se vuelven a cargar los valores por defecto. Vuelva a intentarlo. Si el problema persiste, consulte a su distribuidor autorizado IDL.
4-20f 18 Pérdida de señal 4-20mA
Pérdida de señal 4-20mA La señal de referencia en la entrada analógica 1 o 2 (terminales 6 o 10) ha caído por debajo del umbral mínimo de 3 mA. Compruebe la fuente de señal y el cableado con los terminales del AF-700.
Data-e 19 Fallo en la memoria interna
Fallo en la memoria interna No se guardan los parámetros y se vuelven a cargar los valores por defecto. Vuelva a intentarlo. Si el problema persiste, consulte a su distribuidor autorizado IDL.
U-def 20 Valor por defecto para los parámetros de usuario
Valor por defecto para los parámetros de usuario
Se han cargado los valores por defecto para los parámetros de usuario. Pulse la tecla PARAR.
f-ptc 21 Sobretemperatura en el PTC del motor
Sobretemperatura en el PTC del motor
El dispositivo PTC del motor conectado ha provocado un disparo.
Fan-f 22 Fallo del ventilador de refrigeración
Fallo del ventilador de refrigeración
Compruebe y, si es necesario, reemplace el ventilador de refrigeración interno
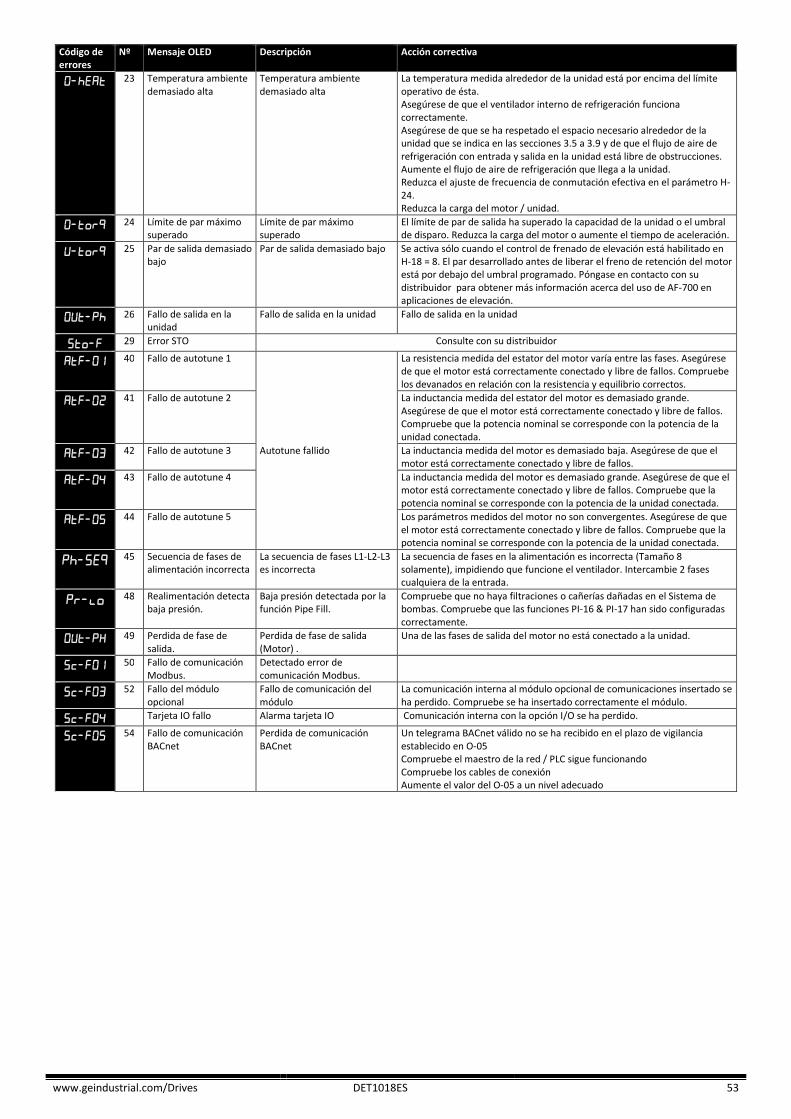
www.geindustrial.com/Drives DET1018ES 53
Código de errores
Nº Mensaje OLED Descripción Acción correctiva
0-heat 23 Temperatura ambiente demasiado alta
Temperatura ambiente demasiado alta
La temperatura medida alrededor de la unidad está por encima del límite operativo de ésta. Asegúrese de que el ventilador interno de refrigeración funciona correctamente. Asegúrese de que se ha respetado el espacio necesario alrededor de la unidad que se indica en las secciones 3.5 a 3.9 y de que el flujo de aire de refrigeración con entrada y salida en la unidad está libre de obstrucciones. Aumente el flujo de aire de refrigeración que llega a la unidad. Reduzca el ajuste de frecuencia de conmutación efectiva en el parámetro H-24. Reduzca la carga del motor / unidad.
0-torq 24 Límite de par máximo superado
Límite de par máximo superado
El límite de par de salida ha superado la capacidad de la unidad o el umbral de disparo. Reduzca la carga del motor o aumente el tiempo de aceleración.
U-torq 25 Par de salida demasiado bajo
Par de salida demasiado bajo Se activa sólo cuando el control de frenado de elevación está habilitado en H-18 = 8. El par desarrollado antes de liberar el freno de retención del motor está por debajo del umbral programado. Póngase en contacto con su distribuidor para obtener más información acerca del uso de AF-700 en aplicaciones de elevación.
Out-Ph 26 Fallo de salida en la unidad
Fallo de salida en la unidad Fallo de salida en la unidad
Sto-F 29 Error STO Consulte con su distribuidor
Atf-01
40 Fallo de autotune 1
Autotune fallido
La resistencia medida del estator del motor varía entre las fases. Asegúrese de que el motor está correctamente conectado y libre de fallos. Compruebe los devanados en relación con la resistencia y equilibrio correctos.
Atf-02 41 Fallo de autotune 2 La inductancia medida del estator del motor es demasiado grande. Asegúrese de que el motor está correctamente conectado y libre de fallos. Compruebe que la potencia nominal se corresponde con la potencia de la unidad conectada.
Atf-03 42 Fallo de autotune 3 La inductancia medida del motor es demasiado baja. Asegúrese de que el motor está correctamente conectado y libre de fallos.
Atf-04 43 Fallo de autotune 4 La inductancia medida del motor es demasiado grande. Asegúrese de que el motor está correctamente conectado y libre de fallos. Compruebe que la potencia nominal se corresponde con la potencia de la unidad conectada.
Atf-05 44 Fallo de autotune 5 Los parámetros medidos del motor no son convergentes. Asegúrese de que el motor está correctamente conectado y libre de fallos. Compruebe que la potencia nominal se corresponde con la potencia de la unidad conectada.
Ph-seq
45 Secuencia de fases de alimentación incorrecta
La secuencia de fases L1-L2-L3 es incorrecta
La secuencia de fases en la alimentación es incorrecta (Tamaño 8 solamente), impidiendo que funcione el ventilador. Intercambie 2 fases cualquiera de la entrada.
Pr-lo 48 Realimentación detecta
baja presión. Baja presión detectada por la función Pipe Fill.
Compruebe que no haya filtraciones o cañerías dañadas en el Sistema de bombas. Compruebe que las funciones PI-16 & PI-17 han sido configuradas correctamente.
Out-PH 49 Perdida de fase de salida.
Perdida de fase de salida (Motor) .
Una de las fases de salida del motor no está conectado a la unidad.
Sc-F01 50 Fallo de comunicación Modbus.
Detectado error de comunicación Modbus.
Sc-F03 52 Fallo del módulo opcional
Fallo de comunicación del módulo
La comunicación interna al módulo opcional de comunicaciones insertado se ha perdido. Compruebe se ha insertado correctamente el módulo.
Sc-F04 Tarjeta IO fallo Alarma tarjeta IO Comunicación interna con la opción I/O se ha perdido.
Sc-F05 54 Fallo de comunicación BACnet
Perdida de comunicación BACnet
Un telegrama BACnet válido no se ha recibido en el plazo de vigilancia establecido en O-05 Compruebe el maestro de la red / PLC sigue funcionando Compruebe los cables de conexión Aumente el valor del O-05 a un nivel adecuado