InvertingtheMultiple-AssistingToolNetworkProblemto...
13
Research Article Inverting the Multiple-Assisting Tool Network Problem to Solve for Optimality Robert Rich Industrial & Systems Engineering, Liberty University, Lynchburg, VA, USA CorrespondenceshouldbeaddressedtoRobertRich;[email protected] Received 20 October 2019; Revised 9 January 2020; Accepted 22 February 2020; Published 20 March 2020 AcademicEditor:Yi-KueiLin Copyright©2020RobertRich.isisanopenaccessarticledistributedundertheCreativeCommonsAttributionLicense,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Manynetworkproblemsdealwiththeroutingofamaintoolcomprisedofseveralparallelassistingtools.eseproblemscanbe found with multi-tool-head routing of CNC machines, waterjets, plasma sprayers, and cutting machines. Other applications involvelogistics,distribution,andmaterialhandlingthatrequireamaintoolwithassistingtools.Currentlynostudiesexistthat optimally route a main tool comprised of and fitted with multiple tools, nor do any studies evaluate the impact of adding additional capabilities to the tool set. Herein we define the network routing problem for a main tool comprised of multiple secondarytools.Weintroducefirstprinciplestoproperlyconfigurethemaintoolwiththeappropriatenumberofsupportingtools such that that system is not overstatured. We invert the network geometry to extract the “best case” configuration for toolset configuration to include speed, range, and number of such that the system is lean. Our computational studies reveal that the theoremsintroducedhereingreatlyimprovetheoverallsystemperformancewithoutoversaturatingitwithunusedresources.In order to validate experiments, we define a mixed integer program and compare it to our metaheuristics developed for ex- perimentation.BoththeMIPandthemetaheuristicshereinoptimallyrouteamaintoolwithmultipleassistingtoolsaswellasthe routing of a parcel delivery truck comprised of many drones. 1. Introduction e use of multiple tools consisting of a main tool and several parallel resources in conjunction with the primary tooloffersprocessingefficienciesinarangeofapplications. Semiconductor manufacturers are looking at ways to allow autonomousvehiclestointeractsuchthatoveralltraveltime and traffic-congestion are reduced. Advances in multi- headedCNCand3Dprinting-devicesareexpectedtoreduce print time significantly. In these designs, the main tool is confinedtotheprimaryaxisofperformancewhileassisting tool heads operate in parallel to the main tool. From a lo- gisticsstandpoint,UPS,FedEx,andAmazonareevaluating the use of a single truck that is fitted with multiple parcel delivery drones to achieve greater efficiencies in delivery time. esimplestexampleofthisproblemcanbevisualized as a mother with several children assisting with grocery shopping.efamilyhasonegrocerycart,andchildrenare dispatched in different directions around the store to re- trieveitemsbacktothecartwhiletheparentroutesthrough thestore.Itisobviousthatthereexistsasetofoptimalroutes that the mother and children take that would optimize the total shopping time. However, it is less clear how the un- derlyingrelationshipsbetweenthespeedofthemotherand children as well as their ranges of travel will also greatly impact any gained efficiencies in shopping. If a child is exceptionallyslow,thentheparentisbetterofftocarrythe child.Ifthechildisexceptionallyfast,butdoesnothavethe travel range, then the child’s speed gives little advantage. Furthermore, that if the mother were to bring all her childrenintothestore(inwhichcaseshehasmorethana dozen), she would be overwhelmed by idle children ac- companying the overburdened shopping cart with much complaining due to their unemployed idle time. So,itiseasytoimaginethatthereexistsasetofoptimal assistingtoolparameters(speed,range,andnumberof)that properlydefinetheconfigurationoftheoverallsystem.For Hindawi Advances in Operations Research Volume 2020, Article ID 3515709, 13 pages https://doi.org/10.1155/2020/3515709
Transcript of InvertingtheMultiple-AssistingToolNetworkProblemto...

Research ArticleInverting the Multiple-Assisting Tool Network Problem toSolve for Optimality
Robert Rich
Industrial amp Systems Engineering Liberty University Lynchburg VA USA
Correspondence should be addressed to Robert Rich rkrichlibertyedu
Received 20 October 2019 Revised 9 January 2020 Accepted 22 February 2020 Published 20 March 2020
Academic Editor Yi-Kuei Lin
Copyright copy 2020 Robert Rich)is is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Many network problems deal with the routing of a main tool comprised of several parallel assisting tools )ese problems can befound with multi-tool-head routing of CNC machines waterjets plasma sprayers and cutting machines Other applicationsinvolve logistics distribution and material handling that require a main tool with assisting tools Currently no studies exist thatoptimally route a main tool comprised of and fitted with multiple tools nor do any studies evaluate the impact of addingadditional capabilities to the tool set Herein we define the network routing problem for a main tool comprised of multiplesecondary toolsWe introduce first principles to properly configure themain tool with the appropriate number of supporting toolssuch that that system is not overstatured We invert the network geometry to extract the ldquobest caserdquo configuration for toolsetconfiguration to include speed range and number of such that the system is lean Our computational studies reveal that thetheorems introduced herein greatly improve the overall system performance without oversaturating it with unused resources Inorder to validate experiments we define a mixed integer program and compare it to our metaheuristics developed for ex-perimentation Both the MIP and the metaheuristics herein optimally route a main tool with multiple assisting tools as well as therouting of a parcel delivery truck comprised of many drones
1 Introduction
)e use of multiple tools consisting of a main tool andseveral parallel resources in conjunction with the primarytool offers processing efficiencies in a range of applicationsSemiconductor manufacturers are looking at ways to allowautonomous vehicles to interact such that overall travel timeand traffic-congestion are reduced Advances in multi-headed CNC and 3D printing-devices are expected to reduceprint time significantly In these designs the main tool isconfined to the primary axis of performance while assistingtool heads operate in parallel to the main tool From a lo-gistics standpoint UPS FedEx and Amazon are evaluatingthe use of a single truck that is fitted with multiple parceldelivery drones to achieve greater efficiencies in deliverytime
)e simplest example of this problem can be visualizedas a mother with several children assisting with groceryshopping )e family has one grocery cart and children are
dispatched in different directions around the store to re-trieve items back to the cart while the parent routes throughthe store It is obvious that there exists a set of optimal routesthat the mother and children take that would optimize thetotal shopping time However it is less clear how the un-derlying relationships between the speed of the mother andchildren as well as their ranges of travel will also greatlyimpact any gained efficiencies in shopping If a child isexceptionally slow then the parent is better off to carry thechild If the child is exceptionally fast but does not have thetravel range then the childrsquos speed gives little advantageFurthermore that if the mother were to bring all herchildren into the store (in which case she has more than adozen) she would be overwhelmed by idle children ac-companying the overburdened shopping cart with muchcomplaining due to their unemployed idle time
So it is easy to imagine that there exists a set of optimalassisting tool parameters (speed range and number of) thatproperly define the configuration of the overall system For
HindawiAdvances in Operations ResearchVolume 2020 Article ID 3515709 13 pageshttpsdoiorg10115520203515709
simplicity we adopt a parcel delivery truck comprised of andfitted with multiple delivery drones to describe the problem
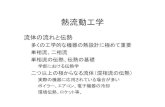
)e main idea here is that there exists a geometric re-lationship between the size and delivery-density of the totaloperations area (Figure 1) and the density of truck-droneoperations area Specifically the size and number of deliv-eries in the total operational area needs to be proportional tothe size and number of deliveries in the truck-drone op-erations area for the most efficient operations In words asingle truck-drone operation is described as a trucklaunching one or more drones each drone traverses out tomake deliveries and then subsequently rendezvous with thetruck at a downstream delivery location In a single truck-drone operation we know that there is a max coverage area(denoted by the elliptical circle) that n drones can reach(being constrained by range) and a total number of deliveriesthat can be performed To achieve the maximum efficienciesthe truck-drone operation area density needs to be pro-portional to the total density of the larger delivery spaceSince the larger space density is fixed we adjust the droneparameters (speed range and number of) in order to matchthe truck-drone operations density to the larger deliverydensity )us we advise to invert the network problem andsolve the assisting tool parameters a priori such that they fitldquothe mostrdquo typical delivery scenarios for the delivery regionin order to achieve maximum efficiencies
In Section (2) we lay out the first principles geometricrelationships between drone parameters and the truck-droneoperations area )e notion here is that an operations iscomprised of several truck-drone routing triangles Each ofthese triangles fits within the area of an ellipse defined bytruck speed and drone range )us the elliptical area of thetruck-drone operation and the number of deliveries withinthis space must be proportional to the larger delivery spacedelivery-density To support the working theory we conductseveral computer experiments that reveal the productioncurve and ldquoefficiencies gainedrdquo for systems described by thegeometric relationships compared to systems defined bystandard drone parameters of speed and range found in theliterature Section (3) reveals the results of these experiments
An evolutionary algorithm (EA) was developed toperform empirical tests of our theory )e EA solves thetruck-multidrone network routing problem by minimizingthe total cumulative time based on either the max truck timeor the max drone time for each set of launch-deliver-ren-dezvous operations cumulated in the total tour Figure 1shows simoptimal routing solution for one of the problemscenarios )e algorithm is used to test the performance(total delivery time) of a lean configured truck-dronessystem to a standard configured system )e EA is validatedby comparing it to the mixed integer program (MIP) shownin Section (5) )e MIP is also validated by comparing it toknown solutions and to brute force methods for smallerproblem sets As such the validated metaheuristic solvesproblems optimally for nearly all of the smaller problem setsinvolving ten or less delivery stops and simoptimal forproblems as large as one hundred stops
)e sections comprised herein are as follow Section (2)discusses working theory and theoretical insights Section
(3) reveals the results of the hypothesis testing performed inrelation to the fundamental theorems Section (4) discussesthe literature surrounding the network routing problemsSection (5) defines a tractable version of the mixed integerprogramming (MIP) used to validate metaheuristics that canbe easily adopted to optimization software tools available toresearchers Section (6) formulates EA used to higher di-mension truck-multidrone routing problems Section (7)gives comparative studies the first comparative study showsthe performance of the evolutionary algorithms (EA-1 andEA-2) used to solve the optimal routing for empirical studies)e algorithms are compared to each other and toMIP-solvedoptimal solutions )e second study compares a lean con-figured system to a standard system configurations found inthe literature Section (8) concludes the research findings
2 Theoretical Insights
21 Truck-Drone Performance Boundaries )e simplesttruck-drone example involves a truck and one drone (Fig-ure 2) For this there are three nodes comprised of a depot vo
and two delivery locations i and j If the truckrsquos speed isscaled to one (1) and the dronersquos speed is a factor of the truckspeed then an optimal configuration exists when the dronersquosrange (κ) equals the dronersquos speed factor (α) So as the trucktravels out one unit distance from the depot (Figure 2) to adelivery (i) the drone also travels one (κ) units of distance(where α κ) from the depot to delivery location j for bestconfiguration )e important thing here is that under theldquobestrdquo configuration both the truck and drone return at thesame time such that neither is waiting on the other So thebest percent time (Π) improvement that the dual system canpossibly achieve over a truck-only system (truck having todeliver the two parcels itself and return to the depot tsp) isdefined by [1] )us the best case (Π) of a truck-one-droneover a truck-only system is
Total delivery operations area
Truck-drone operationTruck-drone operations area
15
16
17
18
19
20
21
22
23
24
25
y-co
ordi
nate
20 2515x-coordinate (KM)
Figure 1 Total delivery operations area proportional to the truck-drone operations area
2 Advances in Operations Research
Π 1 minus2
2α + 21113874 1113875 1 minus
1a + 1
1113874 1113875 (1)
22 Truck-Multiple-Drone Performance Boundaries )emore complex case for a truck fitted with multiple dronesnecessarily involves more than three delivery locations say(i j m v0) For this argument we assume that a well-con-figured system will involve the drones as much as possiblethroughout the delivery process )erefore if there are N
delivery stops to bemade during the day then the ldquobest caserdquonumber of deliveries allotted to each resources is (N) dividedby the number of assisting drones (]) plus the main tool(truck) (N(] + 1)) Furthermore that delivery densityplays an important role in determining the proper speed (α)and range (κ) factors in the analysis where total deliverydensity ρ is defined as the number (N) of required deliveriesfor the operation divided by the size of the geometric op-erating or delivery area (A) as in ρ NA A denselypopulated delivery area requires more short-range droneswhile a sparse delivery density requires longer range andhigher speed drones
In order to construct a case for the theoretical upperboundary in potential performance improvement we ex-amine the geometry of a circle We surmise that the best case(truck-multidrone) system for delivery time performance Π(over a truck-only) can be determined by launching dronesfrom the depot sending the drones out to delivery locationsalong the perimeter of the circle and returning to the depotas shown in (Figure 3) Both drones and truck launch fromthe depot traverse out and return to the depot Converselyin an absolute worst case scenario the truck would have todeliver to all delivery locations )is means that the worst-case truck route having no drones (ie hub-spoke route) willhave to traverse from depot to edge of circle and then back tothe depot
Concretely there exists a maximum and minimum yield(Π ) on potential performance improvement for a truck andmultiple drones system over the truck-only system )eworst case performance (lower boundary) is the truck havingto make all the deliveries itself inside the circle (hub-spoke))e best case improvement requires the drones to traverseout to the radius of the circle (α) each makes a delivery andthen traverses back to the depot rendezvousing simulta-neously with the truck
Summarizing if the truck traverses out one unit distancewhile the drones traverse κ units of distance where (κ α)then the max time for any truck or drone is 2 units of time(Figure 3) )us a worst-case situation would exist if a truckhad to visit all ] + 1 deliveries on the circle (hub-spokefashion) In such case the absolute worst time the truckcould encounter would be 2(1 + ]α) where (]) is the number
of deliveries around the circle (thus number of drones) atradius (α) and one delivery made by the truck (1) Con-versely the best case (Π) improvement for truck-multidrone(]) over a truck-only system (Π) is
Π 1 minus2
2 + 2]α 1 minus
11 + ]α
(2)
23 Truck-Multidrone Operations Area Expanding on thetheoretical delivery problem means that trucks and eachdrone must traverse through the operating space andtherefore do not return immediately to the depot As suchdrones travel using a triangular path to launch and deliverand then rendezvous with the truck downstream where thetwo legs of the dronersquos triangular path cannot exceed thedronersquos total range kappa (κ) Since the truck and the dronedo not have the same speed we have to adopt a configurationusing an ellipse (as opposed to a circle) (Figure 4) such thatthe foci f points on the ellipse denotes the truckrsquos deliverylocations while a triangle formed inside the ellipse (usingthe foci points and edge of ellipse) denotes any of the po-tential launch-delivery-rendezvous operation for any of thedrones )us the drones are confined by range to operatewithin the area of the ellipse where they are launched )eyare launched from the first foci point and must then beretrieved at the second foci of the ellipse by the truck in aperfect scenario )erefore it is easy to imagine that thereexists a proper sizing of the ellipse whereby the truckrsquos speedand distance (from foci to foci) must be aligned with thedronersquos range dronersquos speed and the number of drones )enumber of drones is based on the density of deliver locationswithin the elliptical area
)e first interrelationship requires that in order for thedrone to traverse out to its maximum distance and returnback to the truck without any idle time it is require that thetruck-only travel kappa divided by alpha κα distance)erefore the distance between the two foci is a factor ofboth drone range and drone speed For example if the dronetravels twice the speed of the truck (α 2) and the drone cantravel a total of 10 km (κ 10) then the truck should only
i
m
j
n
1 V0α
Figure 3 Practical best case truck-multiple drone delivery
dTSP i j t = max(2 2α)V0
Figure 2 Best case for truck-drone (Agatz et al 2015)
Advances in Operations Research 3
travel 5 km before having to retrieve the faster drone havingtravelled 10 km in the same time period if there is to be noidle time As such we limit our elliptical area such that fromfoci to foci is denoted as (2c) must be equal to (κα) for aperfectly lean scenario
)e second interrelationship requires that the totaldistance that the drone can travel is limited by the dronersquosrange )erefore the drone should be limited to twice theaxis of the major axis (κ 2a) For relaxation of theproblem drone range must be greater than twice the majoraxis (κge 2a) and truck travel distance (2c) at speed one isconsistent with drone speed factor (αge κ2c) where thetruck speed sT and drone speed sD are defined by speedfactor alpha α sDsT
Moreover delivery density directly reflects the numberof drones assigned to deliver within the elliptical area Wecan imagine that if given the total delivery density (ρ) for theentire area is comprised of total deliveries (N) and a totalarea (A) then delivery density would be computed asρ (NA) km2 Under a best-case delivery density scenariothe densities of two of the ellipses (ρprime) would need to beproportional to the total delivery density for the problemspace as in ρ ρprime )us we define the truck-drone opera-tions area as that of two overlapping ellipses joined at the foci(minus intersection) as
Aprime 2πab minusΦ
radicπ(a minus c)
21113960 1113961 (3)
where (a) is the major axis (b) is the minor axis (agt b) (c)
is the foci distance from centre to foci and (Φ) is the goldenratio (sim1618) shown in figure (Figure 5)
Furthermore based on the interrelationship betweentruck speed drone speed and drone range the total distancebetween two foci (2c) is approximately equal to (κα) )erefore we would expect to see Nprime deliveries within thedual elliptical area Aprime )us we compute the number ofexpected deliveries inside any of our elliptical drone oper-ational areas as Nprime Aprime(ρ) for a ldquopractical best-caserdquoscenario
In summary we can surmise for practical best-casesituation that twice the distance from the centre of the ellipseto the foci is a factor of both drone range (κ) and dronespeed (α) as in (2c κα) so that the truck and dronersquosoperation reduces idle time and that drone range is greaterthan or equal to the two legs of the triangle (κge 2a)
(Figure 5) In such case the ldquopractical best caserdquo for thenumber of drones (]) fitted to the truck is based on Nprimedeliveries needed to be within the combined area of the twoellipses (Aprime) Also since the truck canmake three of the total(Nprime) deliveries then the number of drones required to befitted to the truck under ldquobest caserdquo scenario is ] (Nprime minus 3)
Using the area of two ellipses Aprime and the appropriateldquopractical best caserdquo density ρprime for a given system theproblem can be inverted by knowing a priori the deliverydensity ρ and then forcing ρprime to be equal to ρ by selectingproper parameters for range speed and number of drones)us inverting the problem we solve for the drone rangedrone speed and number of drones that would produce aldquopractical best caserdquo geometric design for the problem
24 1eoretical Summary In summary the hypothesis ford]tsp is as follows
241 Maximum1eoretical Upper Boundary )ere exists amaximum theoretical upper boundary for best possiblepercent time improvement (Π) over a truck-only systemthat will never be exceeded without special construction ofproblem scenario based on the assisting dronersquos time im-provement factor (1 + α]) where α denotes the speed factorand ] denotes the number of drones assigned
Πlt 1 minus1
1 + α] (4)
242 Lower Boundary )e theoretical lower boundarypercent improvement (worst case) for a truck-multiple-drone system over a single truck only solution is Π 0based on the fact that a truck can perform all the deliveries byitself and default to a single truck route thus no timeimprovement
243 Improvement Improvement Π moves toward thepractical upper boundary as the delivery density of the givenoperating area (ρ) scenario moves toward the calculatedtheoretical ldquobest caserdquo delivery density (ρprime) As such theproblem can be inverted As the absolute value between theproblem delivery density (ρ) and the ldquopractical best caserdquodelivery density (ρprime) are minimized the best case (optimal)drone speed factor α drone range κ and number of drones ]based on the geometric layout of the ellipse emerge Due tothe stochastic nature of most problem scenarios the optimaldrone speed drone range and number of drones is a lowerboundary optimal
min ρ minus ρprime1113868111386811138681113868
1113868111386811138681113868 (5)
ST
κge 2a (6)
] Nprime minus 3 (7)
a a
b
gf
Foci Focic c
Rangeκ ge 2a = f + g
Speed factorα ge κ2c
Figure 4 Example of truck-drone delivery inside an ellipse
4 Advances in Operations Research
αgeκ2c
(8)
Nprime Aprime(ρ) (9)
ρ N
A (10)
ρprime Nprime
Aprime (11)
Aprime 2πab minusΦ
radicπ(a minus c)
21113960 1113961 (12)
c2
+ b2
a2 (13)
α sD
sT
(14)
sD gt sT (15)
sDLBle sD le sDUB
(16)
κLB le κle κUB (17)
]LB le ]le ]UB (18)
ρ ρprime gt 0 α κ ]ge 1 (19)
For the proper configuration of the minimizationproblem let (a) be the major axis let (b) be the minor axisand let (c) denote the distance from foci to the centre of theellipse Furthermore let alpha (α) denote the speed factor ofdrone as related to the truckrsquos speed of one (1) Let kappa (κ)
denote the range of the drone whereby the range must begreater than twice the major axis of the ellipse let nu (]) bethe number of drones assigned to assist the truck Let thearea of one ellipse be Aellipse (πab) and the combined areaof two ellipses (Atwo 2πab) Since the ellipses are inter-secting at a foci point (c) then let the area of the twocombined ellipses be reduced by the area of one of theintersected ellipses [
Φ
radicπ(a minus c)2] where (Φ) is the golden
ratio (sim1618)
Concretely equation (5) minimizes the absolute distancebetween the problem delivery density and the practical bestcase delivery density of the two ellipses Equation (6) forcesthe range of the drone (κ) to be greater than that of the twolegs of the triangle inscribed within an ellipse Equation (7)solves for the optimal number of drones to be fitted to thetruck by allowing the truck the opportunity to deliver tothree of the delivery vertices found within the area of the twoellipses Equation (8) guarantees that the interrelationshipbetween truck speed drone speed and range are configuredsuch that for each operation (launch-deliver-rendezvous)the truck and drone arrive back at nearly the same time toreduce potential idle time for either truck or drone )etruck travels (2c) while the drone travels a max of (2a) andthe interrelationship gives enough flexibility to solve theproblem by establishing that (2cge κα) Equation (9) cal-culates the expected number of deliveries found within thearea of two ellipses (Aprime) Equation (10) defines the deliverydensity as the number of deliveries per total area of oper-ation Equation (11) calculates the delivery density of the twoellipses Equation (12) defines the area of the two ellipsesminus their intersecting area Equation (13) establishes thegeometric relationship of the triangle inscribed within anellipse where (a) is the hypotenuse Equation (14) solves fordrone speed factor alpha as the ratio of the dronersquos speed tothe truckrsquos speed Equations (15)ndash(18) are boundary equa-tions for the dronersquos speed truckrsquos speed drone range andthe total number of drones Equation (19) ensures thatdelivery density of ellipses is greater than zero while dronerange drone speed factor and number of drones are greaterthan one
3 Hypothesis Testing
To test our hypothesis thousands of random experimentswere conducted by holding range (κ) speed factor (α) andnumber of drones (]) stationary while perturbing number ofdeliveries (N) over the delivery area (A) In essence theoptimal delivery density (ρprime) is precalculated based on droneparameters (α κ ]) For each experiment delivery density(ρ) changes based on changing number of deliveries (N)
within the delivery space (A) )e experiments are designedto test the performance of a truck multidrone system againsta truck-stand-alone (no drones) system In the experiments
Vi Vk
f
κα καFociV0
FociV1
FociVj
Assisting tool area
ggf
Figure 5 Best-case geometric layout for truck-multiple-drone scenario
Advances in Operations Research 5
we see that when the delivery density (along the x-axis)reaches the optimal density line on the graph then theoverall performance of the system improves until it begins tosaturate In words the denser the deliveries are in a deliveryspace the better the system performs until saturation Usingthe fundamentals mentioned above we can now calculatethe optimal density (ρprime) at which the system saturates )efigure below (Figure 6) reveals low performance when de-livery density is sparse )e system then begins to improveup to and including the optimal delivery density before theresources begin to saturate and improvement curve as-ymptotically reaches its peak performance
)e figure shows that the fundamental relationshipsestablished in Section 3 accurately predict the system per-formance Using the fundamentals as a guide the experi-ments revealed that as the delivery density (ρ) approachedthe optimal density (ρprime) the overall performance of thesystem improved Concretely that as density ρ NAmoved closer toward ρprime NprimeAprime the system improved untilsaturation As such we can surmise that the geometriclayout of the ellipses comprising the delivery density ρprime is anaccurate depiction of the practical best case geometricconfiguration for the system )erefore the minimizationproblem established in Section 3 is a ldquopractical best caserdquomethod to derive speed factor alpha (α) drone range kappa(κ) and number of drones nu (]) to be fitted to a truck basedon a typical delivery situation
4 Literature
A large body of literature exists about the traveling salesmanproblem (tsp) and the vehicle routing problem (vrp) Manyapproaches and variations to both can be found in surveysreports and papers [2ndash4] As a general rule the vrp problemextents the tsp problem by adding additional constraints)ese constraints are comprised of time windows prioritiesrange loiter times permissible-to-vehicle type route seg-ments load configurations traffic patterns etc [5 6]Originally Danzig and Ramser [7] investigated the vehiclerouting problem Later Clarke and Wright [8] proposed aneffective greedy heuristic which subsequently followed byseveral techniques or models involving exact and heuristicapproaches to solve the extensions and variations of the vrpAn extensive survey can be found in [9] with exact methodsto solve various routing problems
While many variants to the tsp problem exist in theliterature including multivehicle customer pickup and de-livery problem multiple synchronization constraints [10]multiple depot vehicle scheduling problem [11] and many-to-many milk run routing problem [12] there exists only ahandful of studies concerning the truck-drone problemMoreover the truck multidrone problem is a relatively newparadigm not found in the recent literature Although thetruck-drone problem has been addressed by research thusfar there is no work found on the truck-n-drone problem
41 Truck-Drone Problem )e operational aspects and theformulation of the truck-drone problem were first shown by
Murray and Chu [13] Shortly thereafter Agatz et al [1]considered a close but slightly altered version of theproblem Murray and Chu identify two ways that drone canbe useful in delivery drones can be launched and recoveredfrom the depot (parallel drone scheduling traveling salesmanproblem PDSTSP) or drones can assist the truck in a paralleloperation (launch-deliver-recover) as in the ldquoflying sidekicktsprdquo FSTSP Both Murray and Agatz define the materialaspects of the truck-drone problem and discuss the mixedinteger formulation for the optimal min-time route )eyconsider the drone is constrained in range capacity andspeed Agatz only considers a slightly altered version of theFSTSP and does not address the PDSTSP Agatz likeMurray considers the truck-drone in tandem as a teamwhereby the truck launches the drone traverses to a separatedelivery location from the drone and then rendezvous withthe drone again However the main difference between theapproaches is that Agatz et al [1] proposed that the droneand truck traverse along the road network system a con-straint not enforced by [13] )ey do this to facilitateconstruction of heuristic approaches with approximationsthat guarantee a bound on the maximum achievable gain ofthe delivery system over a ldquotruck-only solutionrdquo Murray andChu [13] formally define the flying sidekick traveling sales-man problem (FSTSP) as an NP-hard problem )eir studysuggests a mixed integer programming (MIP) as well as ametaheuristic approach )ey also consider a second similarhub-type problem that addresses the case where the cus-tomers are close enough to the depot to be serviced directlyfrom the depot by the drone while the truck delivers tofarther reach areas )is is denoted as the parallel dronescheduling TSP (PDSTSP) More recently Agatz et al [14]presented an exact solution approach for the truck-droneproblem denoted as the TSP-D based on dynamic pro-gramming )ey conducted experimental studies using thedifferent dynamic programming heuristics which indicatedthat the dynamic-programming-problem could solve largerproblems better than mathematically programming ap-proaches found in the literature
ndash5 0 5 10 15 20 ndash10log(ρ) problem density
0
01
02
03
04
05
06
d
el ti
me p
erfo
rman
ce im
prov
emen
t
larrlog(ρprime) optimal density
Figure 6 As problem delivery density nears optimal density for thesystem performance improves
6 Advances in Operations Research
Although existing research shows mathematical for-mulations and discusses various methods to approach themetaheuristics the main gaps are that no studies revealdetails concerning the expected percent improvement for agiven configuration of the truck-drone to various deliverydensities Specifically there are no studies that investigatethe tradeoff between number of drones speed factor anddrone range
42 TruckMultiple Drones Ferrandez et al [15] introduce amethod using k-means clustering to cluster deliveries basedon distance and then to route the truck around to each of theclusters using a tsp approach)is cluster-first-route-secondapproach also introduces a genetic algorithm to optimallytsp route the truck through center mass quasinodes createdfrom each of the clusters In the described scenario the truckmay loiter at any center mass cluster node (hub) while thedrones deliver to customers within the cluster region usinga minimum spanning tree (MST) hub-spoke type of ap-proach Additionally analysis was conducted on thetradeoffs between total time and total energy consumed bythe truck-drone team as a factor of number of truck stops
Our study herein is different than Ferrandez et al [15]Here we require that the truck launch multiple drones thenproceed to the next delivery location prior to rendezvous Itis an improvement in time over a hub-spoke methodFurthermore we use an MIP metaheuristic to solve foroptimal network routing while minimizing total deliverytime Furthermore we introduce the concepts of ldquopracticalbest caserdquo or lean configuration which has not beenaddressed by any author for any of the main toolassistingtool problems
Other gaps in the literature are that no research dealssquarely with the truck-multidrone problem from a math-ematical modeling or a metaheuristic perspective Moreoverthere exists no study that discusses of the tradeoffs or se-lection of system parameters α κ ] with changes in theoperating area or density of the delivery area )ere isobviously a delta time improvement that can be determinedusing two or more drones or proper selection of range andspeed when these are used in conjunction with a truckaddressed herein
5 Mixed Integer Program (MIP)
)e MIP for the truck-multiple (]) drones d travelingsalesman problem (d]tsp) solves for the optimal networkrouting of a truck with multiple ] drones while minimizingtotal time It was developed and used herein as the basis toanalyze and evaluate the effectiveness of the ldquopractical bestcaserdquo configuration Material elements of the d]tsp aredescribed as a network graph G (V E) where V denotesthe customers-delivery-stops and E the edges between stopsEach vertex V 1 |V| where n |V| Edge E is de-scribed by two vertices i j1113864 1113865 and two edges or an operationis described by two vertices i j1113864 1113865 for a truck indicatinglaunch and recovery Furthermore the binary variables
(xij yikykj) denote a truck and the two edges used by adrone in an operation if an operation exists between (i j))e binary variable xij 1 if truck traverses edge E(i j) If adrone is dormant it is assigned no vertices for a null op-eration As in the truck-drone problem the first and lastvertices of an operation must always be the same for thetruck and all drones )e distance matrix is denoted as D
where dij isin D is the cost or distance of traversing edgeE(i j) )e subtour elimination variable Uj ensures thatsequence of j follows i in the event that E(i j) is part of thesolution as such it restricts subtour formations )e min-sum of max (of max) objective function minimizes the maxtime of either the truckrsquos time or any of ] dronersquos time for anoperation As such zij is used to evaluate each vehiclersquos max-time where i j are the first and last nodes of the two visitednodes for truck (xij) as well as the first and last of threenodes traveled by any drone as in (yikykj) Since zij isgreater than or equal to the max time of the truck or any ofthe ] drones it forces zij to evaluate the max (of max) of allvehiclersquos time
minimizeZ 1113944iisinV
maxjisinV
zij (20)
STzij ge dijxij
zij geyiKyKj yiKdik + yKjdKj1113872 1113873
α
foralli j k i j k isin V
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(21)
1113944iisink
xik 1113944jisink
xkj forallk isin V(22)
1113944
iisinVinek
xik + 1113944
iisinVinek
yjk ge 1 forallk isin V
(23)
1113944
iisinVinek
xki + 1113944
jisinVjnek
ykj ge 1 forallk isin V
(24)
1113944
iisinVik
xki 0 forallk isin V
(25)
1113944
iisinVik
yki 0 forallk isin V
(26)
xij geyikykj foralli k j isin V (27)
xij + yij le 1 foralli j isin V (28)
Advances in Operations Research 7
U j
jgt1jnek
geUk + xkj minus (N minus 2) 1 minus xkj1113872 1113873 +(N minus 3)xjk forallk j isinV
(29)
U k
kgt1
leN minus 1 minus (N minus 2)x1k forallk isin V(30)
U k
kgt1
gt 1 +(N minus 2)xk1 forallk isin V(31)
3le 1113880n
]1113881leNle n (32)
yikykj yikdik + ykjdkj1113872 1113873le κ foralli k j isin V (33)
dij ge 0 κLB le κle κUB αLB le αle αUB forall i j isin V
(34)
xij isin 0 1 foralli j i j isin V (35)
yij isin 0 1 foralli j i j isin V (36)
In the dvtsp construction equation (20) minimizes thesum all the max of truck or drone edges (i j) to all oper-ations described as a truck route xij 1 and potentially atriangle drone operation described by (yikykj 1) Equation(21) forces the max (worst case) of either a truck edge or thedronesrsquo two-edges to be in the resultant minimization cal-culation for objective Z )e distance for a truck edge (i j) isdenoted as dijxij whereas the dronersquos triangular operationdistance is denoted by yikykj(dikyik + dkjykj)α where α isthe drone speed as a factor of truck speed s where s 1 Inessence this equation serves as a mini-sum of max (of max)construction Equation (22) constrains the truck portion ofthe route xij 1 to make a circuit or at a minimummanifests a sub-tour Equations (23) and (24) ensure eachcity has at least one truck or one drone visiting the cityEquation (23) establishes that each city must be visited(entered) while (24) constrains that each city visited mustthen be exited Equations (25) and (26) prohibit any truck ordrone from loitering as in xii or yii Equation (27) requiresthat any drone operation triangle yikykj has an associatedtruck launch and recovery xij Equation (28) forces that anydrone operation edge is not already a truck edge Equation(29) forces a utility variable Uj and Uk to properly sequencetruck route segments xjk such that sequence number j
follows k so that no subtour is formed in the truck sequenceof the truck portion of the route Equation (30) and (31)work in conjunction with equation (29) to set vertex (20) asfirst and vertex N | (3le n]le Nle n) as the last of the truck-route segments Equation (32) sets the minimum number oftruck cities visited to be greater than or equal to three(3le n]le Nle n) but less than total nodes available nEquation (33) limits any drone operation to be less than the
constrained range of the drone (κ) if those two edges (i k)
and (k j) are used as a drone operation yikykj 1 Equa-tions (34)ndash(36) set minimum requirements for distancematrix range and speed factor as well as sets truck variablexij and drone variable yij as binary integers
6 Evolutionary Algorithm
)e tournament-based evolutionary algorithm (EA) hereadopts a cluster-during-routing approach to solve the truck-drone problem More accurately it assigns both truck anddrone labels during the routing process Currently there areno other algorithms found in the literature )e algorithmdenoted as EA1 creates a population matrix of randomlypermuted routes whereby each node in a tour is evaluated asa potential drone-delivery node unless that node is out ofrange Since a population of many randomly generated toursis evaluated simultaneously any node not within dronerange is autoassigned and labelled truck otherwise the al-gorithm labels it drone
61 Evolutionary Algorithm (1) Steps )e EA randomlypermutes a population P of m tours where each tourdenoted as a genome sequence (1 2 n) for n deliverynodes in the tour It determines the fitness for eachpopulation member (tours) based on total tour deliverytime All fitness times are saved for seed tournament )etotal population is then divided into groups of five tourseach to conduct a set of seed tournaments For each of thegroups the best member within the seed group (of the five)is chosen as the single gene to mutate for the remainingfour members of the seed group Gene mutation (tourmutation) first copies the fittest member of the group offive within the seed tournament to replace the four less fitmembers Each of the four less fit members (now identicalto the fittest) is then slightly mutated to improve fitnessFor each of the four mutations are comprised of only oneof (a) randomly selecting and swapping two nodes withinthe tour (b) reverse ordering of the tour between twonodes (c) sliding a tour segment down between nodes toleft or right and (d) replacing the last node in the tour withany other node )e algorithm iterates repeatedly untilconvergence or a terminating condition is met based on apredetermined budget tolerance or a saturation found inimprovements (Algorithm 1)
62 Evolutionary Algorithm (2) )e second metaheuristicdenoted as EA2 is nearly identical to EA1 but differs byperforming a cost check before assigning a drone to the jobConcretely EA2 performs a calculation to determine if it ismore efficient to assign the truck or the next drone If thetruck is more efficient the greedy algorithm assigns the truckand foregoes assigning a drone
Both algorithms use an approach similar to simulatedannealing A seed tournament genetic algorithmrsquos strengthlies in the ability to overcome local optima by retainingmultiple paths (or seeds) that simultaneously advance to-ward optimization )is ideology is especially critical for
8 Advances in Operations Research
network routing problems Furthermore because there aremultiple members of the population within a seed tour-nament the algorithm allows for various mutation meth-odologies to be performed on the members of the seedtournament In this case the random swap (or pairwiseswap) flip and slide mutations have proven to be robustfast and extremely accurate for problems involving per-mutations whereby order matters
)e performance of the evolutionary algorithm is basedon the underlying theoretical principles (a) by initializing arelatively large population (ie 5n) of randomly permutedtours multiple tracks are maintained toward optimal con-vergence (seed tournaments) )ese multiple but differentpaths slowly converge and thus increase the probability ofan optimal convergence (b) By saving the fittest gene in aseed and then slightly perturbing (mutating) the best gene(tour) found in the seed group ensure the solution never getsworse while promoting improvements at each iteration (c)By autoassigning the drone to any ldquowithin rangerdquo node theuse of the drone is maximized throughout the routingprocess while simultaneously reducing the truckrsquos overalltour length )e risk of assigning the wrong node to a droneis mitigated by multiple seeds (d) Multiple path (seed)random search is much faster than having to calculate thegreediness or the exactness of each neighborhood withinreach as in other algorithms )erefore the algorithm relieson computational speed and iterations without the burdenof unnecessary calculations
Both EA1 and EA2 use a route-during-clustering ap-proach )is approach has several advantages over otheralgorithms All algorithms found in the literature with theexception of [16] use route-first cluster-second or a cluster-first route-second approach )is results in a two-phasealgorithmic process whereby the first phase solves forrouting (as in travelling salesperson routing (tsp) or mini-mum spanning tree (mst) routing) the second phase relyingextensively on solutions found in first phase performs swapsbetween truck or drone delivery )e best known algorithmsfor tsp (or mst) routing are on the order of O(n22n) where nis the number of nodes in the route )e second phase in aroute-first-cluster-second algorithm relies heavily on theinitial routing solutions being in the vicinity of a truck-dronesolution As such the second phase is equally complex as thefirst phase with the disadvantage of being locked into apotentially suboptimal routing scheme especially whendrone configurations change
Conversely the route-during-clustering algorithm per-forms the routing and the selection of the truck or drone forthe next operational move segment of the route As such thecomplexity of the algorithm is based on the number of it-erations (n2) the population size (4n) and the number ofnodes (n) found in the tour In such case the algorithm isconsistent with the order of O(n2 times 4n times n) or O(4n4) Acomputer with an Intel core (i5) and 170GHz CPUcomprised of 50 nodes and 3 drones requires approximatelysim25 million iterations or sim35 seconds for convergence
)e overall complexity of the truck-multidrone problemdenoted as (d]tsp) can be analysed from a brute forcemethodology To evaluate every potential solution for a ten
node problem would require slightly less than ((102) times 210)permutations or approximately sim186e+09 routes and binarydrone assignments Every solution requires two genes a genedescribing the order of the tour (102) and a gene to describeevery possible truck or drone assignments 210 For larger problemsizes say n 50 would require ((502) times 250) 68486e+79iterations translating to approximately 28e61 seconds computertime or sim71e53 years on a 170GHz CPU For such method thenumber of iterations to accomplish would exceed the time in theuniverse
7 Comparison Studies
Two different computational studies are conducted here)efirst study analyses the performance of the metaheuristicsagainst the optimal solution based on MIP and brute forcesolution )e second study analyses the performance of thesystem model parameters (α κ ]) against arbitrarily(standard) assigned system variables
In the first study the performance of the two meta-heuristics described in Section 6 is analysed )e twometaheuristics are compared against themselves as well ascompared with the guaranteed optimal results obtainedfrom the mixed integer program (MIP) )e comparisonstudy analyses four different performance factors (1) theaverage delta delivery-time of the metaheuristic versus theoptimal delivery time found using theMIP (2) the max delta(delivery-time) between the metaheuristic versus the opti-mal time of MIP and (3) the total number of metaheuristicexperiments that resulted in optimal results out of tenstudies and the average computer solution time for themetaheuristic to compute the optimal solution
)e second study analyses the performance of properly(optimally) configured system parameters (α κ ]) as de-scribed in Section 2 (theoretical insights system model)against standard parameters found in the literature(α 2 κ 10 ] 3) In many cases the literature arbi-trarily chooses system parameters as drone speed factor setat two times the speed of the truck (α 2) and an arbitrarydrone range set at ten kilometres (κ 10) based on currenttechnical capabilities )e system comparison study hereanalyses three performance metrics (1) the total delivery-time obtained by a properly configured (lean) system versusthe total delivery-time obtained by arbitrary system pa-rameters (α κ ]) (2) the overall utilization of the dronesthroughout the delivery a properly configured (lean) systemversus the utilization of the drones from a system witharbitrary parameters and (3) the under or oversaturation ofthe system determined by the average wait or idle time (bythe truck or by drone) for all operations
71 Computational Study 1 Metaheuristic Performance toOptimal Solution For the sake of simplicity a plane of(x y) coordinates is uniformly randomly generated fromthe Cartesian coordinate system with Euclidean distancebetween the nodes Concretely all nodes for problemcomparisons herein were sampled from the uniform dis-tribution from 0 1 2 30 For each metaheuristic
Advances in Operations Research 9
experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

simplicity we adopt a parcel delivery truck comprised of andfitted with multiple delivery drones to describe the problem
)e main idea here is that there exists a geometric re-lationship between the size and delivery-density of the totaloperations area (Figure 1) and the density of truck-droneoperations area Specifically the size and number of deliv-eries in the total operational area needs to be proportional tothe size and number of deliveries in the truck-drone op-erations area for the most efficient operations In words asingle truck-drone operation is described as a trucklaunching one or more drones each drone traverses out tomake deliveries and then subsequently rendezvous with thetruck at a downstream delivery location In a single truck-drone operation we know that there is a max coverage area(denoted by the elliptical circle) that n drones can reach(being constrained by range) and a total number of deliveriesthat can be performed To achieve the maximum efficienciesthe truck-drone operation area density needs to be pro-portional to the total density of the larger delivery spaceSince the larger space density is fixed we adjust the droneparameters (speed range and number of) in order to matchthe truck-drone operations density to the larger deliverydensity )us we advise to invert the network problem andsolve the assisting tool parameters a priori such that they fitldquothe mostrdquo typical delivery scenarios for the delivery regionin order to achieve maximum efficiencies
In Section (2) we lay out the first principles geometricrelationships between drone parameters and the truck-droneoperations area )e notion here is that an operations iscomprised of several truck-drone routing triangles Each ofthese triangles fits within the area of an ellipse defined bytruck speed and drone range )us the elliptical area of thetruck-drone operation and the number of deliveries withinthis space must be proportional to the larger delivery spacedelivery-density To support the working theory we conductseveral computer experiments that reveal the productioncurve and ldquoefficiencies gainedrdquo for systems described by thegeometric relationships compared to systems defined bystandard drone parameters of speed and range found in theliterature Section (3) reveals the results of these experiments
An evolutionary algorithm (EA) was developed toperform empirical tests of our theory )e EA solves thetruck-multidrone network routing problem by minimizingthe total cumulative time based on either the max truck timeor the max drone time for each set of launch-deliver-ren-dezvous operations cumulated in the total tour Figure 1shows simoptimal routing solution for one of the problemscenarios )e algorithm is used to test the performance(total delivery time) of a lean configured truck-dronessystem to a standard configured system )e EA is validatedby comparing it to the mixed integer program (MIP) shownin Section (5) )e MIP is also validated by comparing it toknown solutions and to brute force methods for smallerproblem sets As such the validated metaheuristic solvesproblems optimally for nearly all of the smaller problem setsinvolving ten or less delivery stops and simoptimal forproblems as large as one hundred stops
)e sections comprised herein are as follow Section (2)discusses working theory and theoretical insights Section
(3) reveals the results of the hypothesis testing performed inrelation to the fundamental theorems Section (4) discussesthe literature surrounding the network routing problemsSection (5) defines a tractable version of the mixed integerprogramming (MIP) used to validate metaheuristics that canbe easily adopted to optimization software tools available toresearchers Section (6) formulates EA used to higher di-mension truck-multidrone routing problems Section (7)gives comparative studies the first comparative study showsthe performance of the evolutionary algorithms (EA-1 andEA-2) used to solve the optimal routing for empirical studies)e algorithms are compared to each other and toMIP-solvedoptimal solutions )e second study compares a lean con-figured system to a standard system configurations found inthe literature Section (8) concludes the research findings
2 Theoretical Insights
21 Truck-Drone Performance Boundaries )e simplesttruck-drone example involves a truck and one drone (Fig-ure 2) For this there are three nodes comprised of a depot vo
and two delivery locations i and j If the truckrsquos speed isscaled to one (1) and the dronersquos speed is a factor of the truckspeed then an optimal configuration exists when the dronersquosrange (κ) equals the dronersquos speed factor (α) So as the trucktravels out one unit distance from the depot (Figure 2) to adelivery (i) the drone also travels one (κ) units of distance(where α κ) from the depot to delivery location j for bestconfiguration )e important thing here is that under theldquobestrdquo configuration both the truck and drone return at thesame time such that neither is waiting on the other So thebest percent time (Π) improvement that the dual system canpossibly achieve over a truck-only system (truck having todeliver the two parcels itself and return to the depot tsp) isdefined by [1] )us the best case (Π) of a truck-one-droneover a truck-only system is
Total delivery operations area
Truck-drone operationTruck-drone operations area
15
16
17
18
19
20
21
22
23
24
25
y-co
ordi
nate
20 2515x-coordinate (KM)
Figure 1 Total delivery operations area proportional to the truck-drone operations area
2 Advances in Operations Research
Π 1 minus2
2α + 21113874 1113875 1 minus
1a + 1
1113874 1113875 (1)
22 Truck-Multiple-Drone Performance Boundaries )emore complex case for a truck fitted with multiple dronesnecessarily involves more than three delivery locations say(i j m v0) For this argument we assume that a well-con-figured system will involve the drones as much as possiblethroughout the delivery process )erefore if there are N
delivery stops to bemade during the day then the ldquobest caserdquonumber of deliveries allotted to each resources is (N) dividedby the number of assisting drones (]) plus the main tool(truck) (N(] + 1)) Furthermore that delivery densityplays an important role in determining the proper speed (α)and range (κ) factors in the analysis where total deliverydensity ρ is defined as the number (N) of required deliveriesfor the operation divided by the size of the geometric op-erating or delivery area (A) as in ρ NA A denselypopulated delivery area requires more short-range droneswhile a sparse delivery density requires longer range andhigher speed drones
In order to construct a case for the theoretical upperboundary in potential performance improvement we ex-amine the geometry of a circle We surmise that the best case(truck-multidrone) system for delivery time performance Π(over a truck-only) can be determined by launching dronesfrom the depot sending the drones out to delivery locationsalong the perimeter of the circle and returning to the depotas shown in (Figure 3) Both drones and truck launch fromthe depot traverse out and return to the depot Converselyin an absolute worst case scenario the truck would have todeliver to all delivery locations )is means that the worst-case truck route having no drones (ie hub-spoke route) willhave to traverse from depot to edge of circle and then back tothe depot
Concretely there exists a maximum and minimum yield(Π ) on potential performance improvement for a truck andmultiple drones system over the truck-only system )eworst case performance (lower boundary) is the truck havingto make all the deliveries itself inside the circle (hub-spoke))e best case improvement requires the drones to traverseout to the radius of the circle (α) each makes a delivery andthen traverses back to the depot rendezvousing simulta-neously with the truck
Summarizing if the truck traverses out one unit distancewhile the drones traverse κ units of distance where (κ α)then the max time for any truck or drone is 2 units of time(Figure 3) )us a worst-case situation would exist if a truckhad to visit all ] + 1 deliveries on the circle (hub-spokefashion) In such case the absolute worst time the truckcould encounter would be 2(1 + ]α) where (]) is the number
of deliveries around the circle (thus number of drones) atradius (α) and one delivery made by the truck (1) Con-versely the best case (Π) improvement for truck-multidrone(]) over a truck-only system (Π) is
Π 1 minus2
2 + 2]α 1 minus
11 + ]α
(2)
23 Truck-Multidrone Operations Area Expanding on thetheoretical delivery problem means that trucks and eachdrone must traverse through the operating space andtherefore do not return immediately to the depot As suchdrones travel using a triangular path to launch and deliverand then rendezvous with the truck downstream where thetwo legs of the dronersquos triangular path cannot exceed thedronersquos total range kappa (κ) Since the truck and the dronedo not have the same speed we have to adopt a configurationusing an ellipse (as opposed to a circle) (Figure 4) such thatthe foci f points on the ellipse denotes the truckrsquos deliverylocations while a triangle formed inside the ellipse (usingthe foci points and edge of ellipse) denotes any of the po-tential launch-delivery-rendezvous operation for any of thedrones )us the drones are confined by range to operatewithin the area of the ellipse where they are launched )eyare launched from the first foci point and must then beretrieved at the second foci of the ellipse by the truck in aperfect scenario )erefore it is easy to imagine that thereexists a proper sizing of the ellipse whereby the truckrsquos speedand distance (from foci to foci) must be aligned with thedronersquos range dronersquos speed and the number of drones )enumber of drones is based on the density of deliver locationswithin the elliptical area
)e first interrelationship requires that in order for thedrone to traverse out to its maximum distance and returnback to the truck without any idle time it is require that thetruck-only travel kappa divided by alpha κα distance)erefore the distance between the two foci is a factor ofboth drone range and drone speed For example if the dronetravels twice the speed of the truck (α 2) and the drone cantravel a total of 10 km (κ 10) then the truck should only
i
m
j
n
1 V0α
Figure 3 Practical best case truck-multiple drone delivery
dTSP i j t = max(2 2α)V0
Figure 2 Best case for truck-drone (Agatz et al 2015)
Advances in Operations Research 3
travel 5 km before having to retrieve the faster drone havingtravelled 10 km in the same time period if there is to be noidle time As such we limit our elliptical area such that fromfoci to foci is denoted as (2c) must be equal to (κα) for aperfectly lean scenario
)e second interrelationship requires that the totaldistance that the drone can travel is limited by the dronersquosrange )erefore the drone should be limited to twice theaxis of the major axis (κ 2a) For relaxation of theproblem drone range must be greater than twice the majoraxis (κge 2a) and truck travel distance (2c) at speed one isconsistent with drone speed factor (αge κ2c) where thetruck speed sT and drone speed sD are defined by speedfactor alpha α sDsT
Moreover delivery density directly reflects the numberof drones assigned to deliver within the elliptical area Wecan imagine that if given the total delivery density (ρ) for theentire area is comprised of total deliveries (N) and a totalarea (A) then delivery density would be computed asρ (NA) km2 Under a best-case delivery density scenariothe densities of two of the ellipses (ρprime) would need to beproportional to the total delivery density for the problemspace as in ρ ρprime )us we define the truck-drone opera-tions area as that of two overlapping ellipses joined at the foci(minus intersection) as
Aprime 2πab minusΦ
radicπ(a minus c)
21113960 1113961 (3)
where (a) is the major axis (b) is the minor axis (agt b) (c)
is the foci distance from centre to foci and (Φ) is the goldenratio (sim1618) shown in figure (Figure 5)
Furthermore based on the interrelationship betweentruck speed drone speed and drone range the total distancebetween two foci (2c) is approximately equal to (κα) )erefore we would expect to see Nprime deliveries within thedual elliptical area Aprime )us we compute the number ofexpected deliveries inside any of our elliptical drone oper-ational areas as Nprime Aprime(ρ) for a ldquopractical best-caserdquoscenario
In summary we can surmise for practical best-casesituation that twice the distance from the centre of the ellipseto the foci is a factor of both drone range (κ) and dronespeed (α) as in (2c κα) so that the truck and dronersquosoperation reduces idle time and that drone range is greaterthan or equal to the two legs of the triangle (κge 2a)
(Figure 5) In such case the ldquopractical best caserdquo for thenumber of drones (]) fitted to the truck is based on Nprimedeliveries needed to be within the combined area of the twoellipses (Aprime) Also since the truck canmake three of the total(Nprime) deliveries then the number of drones required to befitted to the truck under ldquobest caserdquo scenario is ] (Nprime minus 3)
Using the area of two ellipses Aprime and the appropriateldquopractical best caserdquo density ρprime for a given system theproblem can be inverted by knowing a priori the deliverydensity ρ and then forcing ρprime to be equal to ρ by selectingproper parameters for range speed and number of drones)us inverting the problem we solve for the drone rangedrone speed and number of drones that would produce aldquopractical best caserdquo geometric design for the problem
24 1eoretical Summary In summary the hypothesis ford]tsp is as follows
241 Maximum1eoretical Upper Boundary )ere exists amaximum theoretical upper boundary for best possiblepercent time improvement (Π) over a truck-only systemthat will never be exceeded without special construction ofproblem scenario based on the assisting dronersquos time im-provement factor (1 + α]) where α denotes the speed factorand ] denotes the number of drones assigned
Πlt 1 minus1
1 + α] (4)
242 Lower Boundary )e theoretical lower boundarypercent improvement (worst case) for a truck-multiple-drone system over a single truck only solution is Π 0based on the fact that a truck can perform all the deliveries byitself and default to a single truck route thus no timeimprovement
243 Improvement Improvement Π moves toward thepractical upper boundary as the delivery density of the givenoperating area (ρ) scenario moves toward the calculatedtheoretical ldquobest caserdquo delivery density (ρprime) As such theproblem can be inverted As the absolute value between theproblem delivery density (ρ) and the ldquopractical best caserdquodelivery density (ρprime) are minimized the best case (optimal)drone speed factor α drone range κ and number of drones ]based on the geometric layout of the ellipse emerge Due tothe stochastic nature of most problem scenarios the optimaldrone speed drone range and number of drones is a lowerboundary optimal
min ρ minus ρprime1113868111386811138681113868
1113868111386811138681113868 (5)
ST
κge 2a (6)
] Nprime minus 3 (7)
a a
b
gf
Foci Focic c
Rangeκ ge 2a = f + g
Speed factorα ge κ2c
Figure 4 Example of truck-drone delivery inside an ellipse
4 Advances in Operations Research
αgeκ2c
(8)
Nprime Aprime(ρ) (9)
ρ N
A (10)
ρprime Nprime
Aprime (11)
Aprime 2πab minusΦ
radicπ(a minus c)
21113960 1113961 (12)
c2
+ b2
a2 (13)
α sD
sT
(14)
sD gt sT (15)
sDLBle sD le sDUB
(16)
κLB le κle κUB (17)
]LB le ]le ]UB (18)
ρ ρprime gt 0 α κ ]ge 1 (19)
For the proper configuration of the minimizationproblem let (a) be the major axis let (b) be the minor axisand let (c) denote the distance from foci to the centre of theellipse Furthermore let alpha (α) denote the speed factor ofdrone as related to the truckrsquos speed of one (1) Let kappa (κ)
denote the range of the drone whereby the range must begreater than twice the major axis of the ellipse let nu (]) bethe number of drones assigned to assist the truck Let thearea of one ellipse be Aellipse (πab) and the combined areaof two ellipses (Atwo 2πab) Since the ellipses are inter-secting at a foci point (c) then let the area of the twocombined ellipses be reduced by the area of one of theintersected ellipses [
Φ
radicπ(a minus c)2] where (Φ) is the golden
ratio (sim1618)
Concretely equation (5) minimizes the absolute distancebetween the problem delivery density and the practical bestcase delivery density of the two ellipses Equation (6) forcesthe range of the drone (κ) to be greater than that of the twolegs of the triangle inscribed within an ellipse Equation (7)solves for the optimal number of drones to be fitted to thetruck by allowing the truck the opportunity to deliver tothree of the delivery vertices found within the area of the twoellipses Equation (8) guarantees that the interrelationshipbetween truck speed drone speed and range are configuredsuch that for each operation (launch-deliver-rendezvous)the truck and drone arrive back at nearly the same time toreduce potential idle time for either truck or drone )etruck travels (2c) while the drone travels a max of (2a) andthe interrelationship gives enough flexibility to solve theproblem by establishing that (2cge κα) Equation (9) cal-culates the expected number of deliveries found within thearea of two ellipses (Aprime) Equation (10) defines the deliverydensity as the number of deliveries per total area of oper-ation Equation (11) calculates the delivery density of the twoellipses Equation (12) defines the area of the two ellipsesminus their intersecting area Equation (13) establishes thegeometric relationship of the triangle inscribed within anellipse where (a) is the hypotenuse Equation (14) solves fordrone speed factor alpha as the ratio of the dronersquos speed tothe truckrsquos speed Equations (15)ndash(18) are boundary equa-tions for the dronersquos speed truckrsquos speed drone range andthe total number of drones Equation (19) ensures thatdelivery density of ellipses is greater than zero while dronerange drone speed factor and number of drones are greaterthan one
3 Hypothesis Testing
To test our hypothesis thousands of random experimentswere conducted by holding range (κ) speed factor (α) andnumber of drones (]) stationary while perturbing number ofdeliveries (N) over the delivery area (A) In essence theoptimal delivery density (ρprime) is precalculated based on droneparameters (α κ ]) For each experiment delivery density(ρ) changes based on changing number of deliveries (N)
within the delivery space (A) )e experiments are designedto test the performance of a truck multidrone system againsta truck-stand-alone (no drones) system In the experiments
Vi Vk
f
κα καFociV0
FociV1
FociVj
Assisting tool area
ggf
Figure 5 Best-case geometric layout for truck-multiple-drone scenario
Advances in Operations Research 5
we see that when the delivery density (along the x-axis)reaches the optimal density line on the graph then theoverall performance of the system improves until it begins tosaturate In words the denser the deliveries are in a deliveryspace the better the system performs until saturation Usingthe fundamentals mentioned above we can now calculatethe optimal density (ρprime) at which the system saturates )efigure below (Figure 6) reveals low performance when de-livery density is sparse )e system then begins to improveup to and including the optimal delivery density before theresources begin to saturate and improvement curve as-ymptotically reaches its peak performance
)e figure shows that the fundamental relationshipsestablished in Section 3 accurately predict the system per-formance Using the fundamentals as a guide the experi-ments revealed that as the delivery density (ρ) approachedthe optimal density (ρprime) the overall performance of thesystem improved Concretely that as density ρ NAmoved closer toward ρprime NprimeAprime the system improved untilsaturation As such we can surmise that the geometriclayout of the ellipses comprising the delivery density ρprime is anaccurate depiction of the practical best case geometricconfiguration for the system )erefore the minimizationproblem established in Section 3 is a ldquopractical best caserdquomethod to derive speed factor alpha (α) drone range kappa(κ) and number of drones nu (]) to be fitted to a truck basedon a typical delivery situation
4 Literature
A large body of literature exists about the traveling salesmanproblem (tsp) and the vehicle routing problem (vrp) Manyapproaches and variations to both can be found in surveysreports and papers [2ndash4] As a general rule the vrp problemextents the tsp problem by adding additional constraints)ese constraints are comprised of time windows prioritiesrange loiter times permissible-to-vehicle type route seg-ments load configurations traffic patterns etc [5 6]Originally Danzig and Ramser [7] investigated the vehiclerouting problem Later Clarke and Wright [8] proposed aneffective greedy heuristic which subsequently followed byseveral techniques or models involving exact and heuristicapproaches to solve the extensions and variations of the vrpAn extensive survey can be found in [9] with exact methodsto solve various routing problems
While many variants to the tsp problem exist in theliterature including multivehicle customer pickup and de-livery problem multiple synchronization constraints [10]multiple depot vehicle scheduling problem [11] and many-to-many milk run routing problem [12] there exists only ahandful of studies concerning the truck-drone problemMoreover the truck multidrone problem is a relatively newparadigm not found in the recent literature Although thetruck-drone problem has been addressed by research thusfar there is no work found on the truck-n-drone problem
41 Truck-Drone Problem )e operational aspects and theformulation of the truck-drone problem were first shown by
Murray and Chu [13] Shortly thereafter Agatz et al [1]considered a close but slightly altered version of theproblem Murray and Chu identify two ways that drone canbe useful in delivery drones can be launched and recoveredfrom the depot (parallel drone scheduling traveling salesmanproblem PDSTSP) or drones can assist the truck in a paralleloperation (launch-deliver-recover) as in the ldquoflying sidekicktsprdquo FSTSP Both Murray and Agatz define the materialaspects of the truck-drone problem and discuss the mixedinteger formulation for the optimal min-time route )eyconsider the drone is constrained in range capacity andspeed Agatz only considers a slightly altered version of theFSTSP and does not address the PDSTSP Agatz likeMurray considers the truck-drone in tandem as a teamwhereby the truck launches the drone traverses to a separatedelivery location from the drone and then rendezvous withthe drone again However the main difference between theapproaches is that Agatz et al [1] proposed that the droneand truck traverse along the road network system a con-straint not enforced by [13] )ey do this to facilitateconstruction of heuristic approaches with approximationsthat guarantee a bound on the maximum achievable gain ofthe delivery system over a ldquotruck-only solutionrdquo Murray andChu [13] formally define the flying sidekick traveling sales-man problem (FSTSP) as an NP-hard problem )eir studysuggests a mixed integer programming (MIP) as well as ametaheuristic approach )ey also consider a second similarhub-type problem that addresses the case where the cus-tomers are close enough to the depot to be serviced directlyfrom the depot by the drone while the truck delivers tofarther reach areas )is is denoted as the parallel dronescheduling TSP (PDSTSP) More recently Agatz et al [14]presented an exact solution approach for the truck-droneproblem denoted as the TSP-D based on dynamic pro-gramming )ey conducted experimental studies using thedifferent dynamic programming heuristics which indicatedthat the dynamic-programming-problem could solve largerproblems better than mathematically programming ap-proaches found in the literature
ndash5 0 5 10 15 20 ndash10log(ρ) problem density
0
01
02
03
04
05
06
d
el ti
me p
erfo
rman
ce im
prov
emen
t
larrlog(ρprime) optimal density
Figure 6 As problem delivery density nears optimal density for thesystem performance improves
6 Advances in Operations Research
Although existing research shows mathematical for-mulations and discusses various methods to approach themetaheuristics the main gaps are that no studies revealdetails concerning the expected percent improvement for agiven configuration of the truck-drone to various deliverydensities Specifically there are no studies that investigatethe tradeoff between number of drones speed factor anddrone range
42 TruckMultiple Drones Ferrandez et al [15] introduce amethod using k-means clustering to cluster deliveries basedon distance and then to route the truck around to each of theclusters using a tsp approach)is cluster-first-route-secondapproach also introduces a genetic algorithm to optimallytsp route the truck through center mass quasinodes createdfrom each of the clusters In the described scenario the truckmay loiter at any center mass cluster node (hub) while thedrones deliver to customers within the cluster region usinga minimum spanning tree (MST) hub-spoke type of ap-proach Additionally analysis was conducted on thetradeoffs between total time and total energy consumed bythe truck-drone team as a factor of number of truck stops
Our study herein is different than Ferrandez et al [15]Here we require that the truck launch multiple drones thenproceed to the next delivery location prior to rendezvous Itis an improvement in time over a hub-spoke methodFurthermore we use an MIP metaheuristic to solve foroptimal network routing while minimizing total deliverytime Furthermore we introduce the concepts of ldquopracticalbest caserdquo or lean configuration which has not beenaddressed by any author for any of the main toolassistingtool problems
Other gaps in the literature are that no research dealssquarely with the truck-multidrone problem from a math-ematical modeling or a metaheuristic perspective Moreoverthere exists no study that discusses of the tradeoffs or se-lection of system parameters α κ ] with changes in theoperating area or density of the delivery area )ere isobviously a delta time improvement that can be determinedusing two or more drones or proper selection of range andspeed when these are used in conjunction with a truckaddressed herein
5 Mixed Integer Program (MIP)
)e MIP for the truck-multiple (]) drones d travelingsalesman problem (d]tsp) solves for the optimal networkrouting of a truck with multiple ] drones while minimizingtotal time It was developed and used herein as the basis toanalyze and evaluate the effectiveness of the ldquopractical bestcaserdquo configuration Material elements of the d]tsp aredescribed as a network graph G (V E) where V denotesthe customers-delivery-stops and E the edges between stopsEach vertex V 1 |V| where n |V| Edge E is de-scribed by two vertices i j1113864 1113865 and two edges or an operationis described by two vertices i j1113864 1113865 for a truck indicatinglaunch and recovery Furthermore the binary variables
(xij yikykj) denote a truck and the two edges used by adrone in an operation if an operation exists between (i j))e binary variable xij 1 if truck traverses edge E(i j) If adrone is dormant it is assigned no vertices for a null op-eration As in the truck-drone problem the first and lastvertices of an operation must always be the same for thetruck and all drones )e distance matrix is denoted as D
where dij isin D is the cost or distance of traversing edgeE(i j) )e subtour elimination variable Uj ensures thatsequence of j follows i in the event that E(i j) is part of thesolution as such it restricts subtour formations )e min-sum of max (of max) objective function minimizes the maxtime of either the truckrsquos time or any of ] dronersquos time for anoperation As such zij is used to evaluate each vehiclersquos max-time where i j are the first and last nodes of the two visitednodes for truck (xij) as well as the first and last of threenodes traveled by any drone as in (yikykj) Since zij isgreater than or equal to the max time of the truck or any ofthe ] drones it forces zij to evaluate the max (of max) of allvehiclersquos time
minimizeZ 1113944iisinV
maxjisinV
zij (20)
STzij ge dijxij
zij geyiKyKj yiKdik + yKjdKj1113872 1113873
α
foralli j k i j k isin V
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(21)
1113944iisink
xik 1113944jisink
xkj forallk isin V(22)
1113944
iisinVinek
xik + 1113944
iisinVinek
yjk ge 1 forallk isin V
(23)
1113944
iisinVinek
xki + 1113944
jisinVjnek
ykj ge 1 forallk isin V
(24)
1113944
iisinVik
xki 0 forallk isin V
(25)
1113944
iisinVik
yki 0 forallk isin V
(26)
xij geyikykj foralli k j isin V (27)
xij + yij le 1 foralli j isin V (28)
Advances in Operations Research 7
U j
jgt1jnek
geUk + xkj minus (N minus 2) 1 minus xkj1113872 1113873 +(N minus 3)xjk forallk j isinV
(29)
U k
kgt1
leN minus 1 minus (N minus 2)x1k forallk isin V(30)
U k
kgt1
gt 1 +(N minus 2)xk1 forallk isin V(31)
3le 1113880n
]1113881leNle n (32)
yikykj yikdik + ykjdkj1113872 1113873le κ foralli k j isin V (33)
dij ge 0 κLB le κle κUB αLB le αle αUB forall i j isin V
(34)
xij isin 0 1 foralli j i j isin V (35)
yij isin 0 1 foralli j i j isin V (36)
In the dvtsp construction equation (20) minimizes thesum all the max of truck or drone edges (i j) to all oper-ations described as a truck route xij 1 and potentially atriangle drone operation described by (yikykj 1) Equation(21) forces the max (worst case) of either a truck edge or thedronesrsquo two-edges to be in the resultant minimization cal-culation for objective Z )e distance for a truck edge (i j) isdenoted as dijxij whereas the dronersquos triangular operationdistance is denoted by yikykj(dikyik + dkjykj)α where α isthe drone speed as a factor of truck speed s where s 1 Inessence this equation serves as a mini-sum of max (of max)construction Equation (22) constrains the truck portion ofthe route xij 1 to make a circuit or at a minimummanifests a sub-tour Equations (23) and (24) ensure eachcity has at least one truck or one drone visiting the cityEquation (23) establishes that each city must be visited(entered) while (24) constrains that each city visited mustthen be exited Equations (25) and (26) prohibit any truck ordrone from loitering as in xii or yii Equation (27) requiresthat any drone operation triangle yikykj has an associatedtruck launch and recovery xij Equation (28) forces that anydrone operation edge is not already a truck edge Equation(29) forces a utility variable Uj and Uk to properly sequencetruck route segments xjk such that sequence number j
follows k so that no subtour is formed in the truck sequenceof the truck portion of the route Equation (30) and (31)work in conjunction with equation (29) to set vertex (20) asfirst and vertex N | (3le n]le Nle n) as the last of the truck-route segments Equation (32) sets the minimum number oftruck cities visited to be greater than or equal to three(3le n]le Nle n) but less than total nodes available nEquation (33) limits any drone operation to be less than the
constrained range of the drone (κ) if those two edges (i k)
and (k j) are used as a drone operation yikykj 1 Equa-tions (34)ndash(36) set minimum requirements for distancematrix range and speed factor as well as sets truck variablexij and drone variable yij as binary integers
6 Evolutionary Algorithm
)e tournament-based evolutionary algorithm (EA) hereadopts a cluster-during-routing approach to solve the truck-drone problem More accurately it assigns both truck anddrone labels during the routing process Currently there areno other algorithms found in the literature )e algorithmdenoted as EA1 creates a population matrix of randomlypermuted routes whereby each node in a tour is evaluated asa potential drone-delivery node unless that node is out ofrange Since a population of many randomly generated toursis evaluated simultaneously any node not within dronerange is autoassigned and labelled truck otherwise the al-gorithm labels it drone
61 Evolutionary Algorithm (1) Steps )e EA randomlypermutes a population P of m tours where each tourdenoted as a genome sequence (1 2 n) for n deliverynodes in the tour It determines the fitness for eachpopulation member (tours) based on total tour deliverytime All fitness times are saved for seed tournament )etotal population is then divided into groups of five tourseach to conduct a set of seed tournaments For each of thegroups the best member within the seed group (of the five)is chosen as the single gene to mutate for the remainingfour members of the seed group Gene mutation (tourmutation) first copies the fittest member of the group offive within the seed tournament to replace the four less fitmembers Each of the four less fit members (now identicalto the fittest) is then slightly mutated to improve fitnessFor each of the four mutations are comprised of only oneof (a) randomly selecting and swapping two nodes withinthe tour (b) reverse ordering of the tour between twonodes (c) sliding a tour segment down between nodes toleft or right and (d) replacing the last node in the tour withany other node )e algorithm iterates repeatedly untilconvergence or a terminating condition is met based on apredetermined budget tolerance or a saturation found inimprovements (Algorithm 1)
62 Evolutionary Algorithm (2) )e second metaheuristicdenoted as EA2 is nearly identical to EA1 but differs byperforming a cost check before assigning a drone to the jobConcretely EA2 performs a calculation to determine if it ismore efficient to assign the truck or the next drone If thetruck is more efficient the greedy algorithm assigns the truckand foregoes assigning a drone
Both algorithms use an approach similar to simulatedannealing A seed tournament genetic algorithmrsquos strengthlies in the ability to overcome local optima by retainingmultiple paths (or seeds) that simultaneously advance to-ward optimization )is ideology is especially critical for
8 Advances in Operations Research
network routing problems Furthermore because there aremultiple members of the population within a seed tour-nament the algorithm allows for various mutation meth-odologies to be performed on the members of the seedtournament In this case the random swap (or pairwiseswap) flip and slide mutations have proven to be robustfast and extremely accurate for problems involving per-mutations whereby order matters
)e performance of the evolutionary algorithm is basedon the underlying theoretical principles (a) by initializing arelatively large population (ie 5n) of randomly permutedtours multiple tracks are maintained toward optimal con-vergence (seed tournaments) )ese multiple but differentpaths slowly converge and thus increase the probability ofan optimal convergence (b) By saving the fittest gene in aseed and then slightly perturbing (mutating) the best gene(tour) found in the seed group ensure the solution never getsworse while promoting improvements at each iteration (c)By autoassigning the drone to any ldquowithin rangerdquo node theuse of the drone is maximized throughout the routingprocess while simultaneously reducing the truckrsquos overalltour length )e risk of assigning the wrong node to a droneis mitigated by multiple seeds (d) Multiple path (seed)random search is much faster than having to calculate thegreediness or the exactness of each neighborhood withinreach as in other algorithms )erefore the algorithm relieson computational speed and iterations without the burdenof unnecessary calculations
Both EA1 and EA2 use a route-during-clustering ap-proach )is approach has several advantages over otheralgorithms All algorithms found in the literature with theexception of [16] use route-first cluster-second or a cluster-first route-second approach )is results in a two-phasealgorithmic process whereby the first phase solves forrouting (as in travelling salesperson routing (tsp) or mini-mum spanning tree (mst) routing) the second phase relyingextensively on solutions found in first phase performs swapsbetween truck or drone delivery )e best known algorithmsfor tsp (or mst) routing are on the order of O(n22n) where nis the number of nodes in the route )e second phase in aroute-first-cluster-second algorithm relies heavily on theinitial routing solutions being in the vicinity of a truck-dronesolution As such the second phase is equally complex as thefirst phase with the disadvantage of being locked into apotentially suboptimal routing scheme especially whendrone configurations change
Conversely the route-during-clustering algorithm per-forms the routing and the selection of the truck or drone forthe next operational move segment of the route As such thecomplexity of the algorithm is based on the number of it-erations (n2) the population size (4n) and the number ofnodes (n) found in the tour In such case the algorithm isconsistent with the order of O(n2 times 4n times n) or O(4n4) Acomputer with an Intel core (i5) and 170GHz CPUcomprised of 50 nodes and 3 drones requires approximatelysim25 million iterations or sim35 seconds for convergence
)e overall complexity of the truck-multidrone problemdenoted as (d]tsp) can be analysed from a brute forcemethodology To evaluate every potential solution for a ten
node problem would require slightly less than ((102) times 210)permutations or approximately sim186e+09 routes and binarydrone assignments Every solution requires two genes a genedescribing the order of the tour (102) and a gene to describeevery possible truck or drone assignments 210 For larger problemsizes say n 50 would require ((502) times 250) 68486e+79iterations translating to approximately 28e61 seconds computertime or sim71e53 years on a 170GHz CPU For such method thenumber of iterations to accomplish would exceed the time in theuniverse
7 Comparison Studies
Two different computational studies are conducted here)efirst study analyses the performance of the metaheuristicsagainst the optimal solution based on MIP and brute forcesolution )e second study analyses the performance of thesystem model parameters (α κ ]) against arbitrarily(standard) assigned system variables
In the first study the performance of the two meta-heuristics described in Section 6 is analysed )e twometaheuristics are compared against themselves as well ascompared with the guaranteed optimal results obtainedfrom the mixed integer program (MIP) )e comparisonstudy analyses four different performance factors (1) theaverage delta delivery-time of the metaheuristic versus theoptimal delivery time found using theMIP (2) the max delta(delivery-time) between the metaheuristic versus the opti-mal time of MIP and (3) the total number of metaheuristicexperiments that resulted in optimal results out of tenstudies and the average computer solution time for themetaheuristic to compute the optimal solution
)e second study analyses the performance of properly(optimally) configured system parameters (α κ ]) as de-scribed in Section 2 (theoretical insights system model)against standard parameters found in the literature(α 2 κ 10 ] 3) In many cases the literature arbi-trarily chooses system parameters as drone speed factor setat two times the speed of the truck (α 2) and an arbitrarydrone range set at ten kilometres (κ 10) based on currenttechnical capabilities )e system comparison study hereanalyses three performance metrics (1) the total delivery-time obtained by a properly configured (lean) system versusthe total delivery-time obtained by arbitrary system pa-rameters (α κ ]) (2) the overall utilization of the dronesthroughout the delivery a properly configured (lean) systemversus the utilization of the drones from a system witharbitrary parameters and (3) the under or oversaturation ofthe system determined by the average wait or idle time (bythe truck or by drone) for all operations
71 Computational Study 1 Metaheuristic Performance toOptimal Solution For the sake of simplicity a plane of(x y) coordinates is uniformly randomly generated fromthe Cartesian coordinate system with Euclidean distancebetween the nodes Concretely all nodes for problemcomparisons herein were sampled from the uniform dis-tribution from 0 1 2 30 For each metaheuristic
Advances in Operations Research 9
experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

Π 1 minus2
2α + 21113874 1113875 1 minus
1a + 1
1113874 1113875 (1)
22 Truck-Multiple-Drone Performance Boundaries )emore complex case for a truck fitted with multiple dronesnecessarily involves more than three delivery locations say(i j m v0) For this argument we assume that a well-con-figured system will involve the drones as much as possiblethroughout the delivery process )erefore if there are N
delivery stops to bemade during the day then the ldquobest caserdquonumber of deliveries allotted to each resources is (N) dividedby the number of assisting drones (]) plus the main tool(truck) (N(] + 1)) Furthermore that delivery densityplays an important role in determining the proper speed (α)and range (κ) factors in the analysis where total deliverydensity ρ is defined as the number (N) of required deliveriesfor the operation divided by the size of the geometric op-erating or delivery area (A) as in ρ NA A denselypopulated delivery area requires more short-range droneswhile a sparse delivery density requires longer range andhigher speed drones
In order to construct a case for the theoretical upperboundary in potential performance improvement we ex-amine the geometry of a circle We surmise that the best case(truck-multidrone) system for delivery time performance Π(over a truck-only) can be determined by launching dronesfrom the depot sending the drones out to delivery locationsalong the perimeter of the circle and returning to the depotas shown in (Figure 3) Both drones and truck launch fromthe depot traverse out and return to the depot Converselyin an absolute worst case scenario the truck would have todeliver to all delivery locations )is means that the worst-case truck route having no drones (ie hub-spoke route) willhave to traverse from depot to edge of circle and then back tothe depot
Concretely there exists a maximum and minimum yield(Π ) on potential performance improvement for a truck andmultiple drones system over the truck-only system )eworst case performance (lower boundary) is the truck havingto make all the deliveries itself inside the circle (hub-spoke))e best case improvement requires the drones to traverseout to the radius of the circle (α) each makes a delivery andthen traverses back to the depot rendezvousing simulta-neously with the truck
Summarizing if the truck traverses out one unit distancewhile the drones traverse κ units of distance where (κ α)then the max time for any truck or drone is 2 units of time(Figure 3) )us a worst-case situation would exist if a truckhad to visit all ] + 1 deliveries on the circle (hub-spokefashion) In such case the absolute worst time the truckcould encounter would be 2(1 + ]α) where (]) is the number
of deliveries around the circle (thus number of drones) atradius (α) and one delivery made by the truck (1) Con-versely the best case (Π) improvement for truck-multidrone(]) over a truck-only system (Π) is
Π 1 minus2
2 + 2]α 1 minus
11 + ]α
(2)
23 Truck-Multidrone Operations Area Expanding on thetheoretical delivery problem means that trucks and eachdrone must traverse through the operating space andtherefore do not return immediately to the depot As suchdrones travel using a triangular path to launch and deliverand then rendezvous with the truck downstream where thetwo legs of the dronersquos triangular path cannot exceed thedronersquos total range kappa (κ) Since the truck and the dronedo not have the same speed we have to adopt a configurationusing an ellipse (as opposed to a circle) (Figure 4) such thatthe foci f points on the ellipse denotes the truckrsquos deliverylocations while a triangle formed inside the ellipse (usingthe foci points and edge of ellipse) denotes any of the po-tential launch-delivery-rendezvous operation for any of thedrones )us the drones are confined by range to operatewithin the area of the ellipse where they are launched )eyare launched from the first foci point and must then beretrieved at the second foci of the ellipse by the truck in aperfect scenario )erefore it is easy to imagine that thereexists a proper sizing of the ellipse whereby the truckrsquos speedand distance (from foci to foci) must be aligned with thedronersquos range dronersquos speed and the number of drones )enumber of drones is based on the density of deliver locationswithin the elliptical area
)e first interrelationship requires that in order for thedrone to traverse out to its maximum distance and returnback to the truck without any idle time it is require that thetruck-only travel kappa divided by alpha κα distance)erefore the distance between the two foci is a factor ofboth drone range and drone speed For example if the dronetravels twice the speed of the truck (α 2) and the drone cantravel a total of 10 km (κ 10) then the truck should only
i
m
j
n
1 V0α
Figure 3 Practical best case truck-multiple drone delivery
dTSP i j t = max(2 2α)V0
Figure 2 Best case for truck-drone (Agatz et al 2015)
Advances in Operations Research 3
travel 5 km before having to retrieve the faster drone havingtravelled 10 km in the same time period if there is to be noidle time As such we limit our elliptical area such that fromfoci to foci is denoted as (2c) must be equal to (κα) for aperfectly lean scenario
)e second interrelationship requires that the totaldistance that the drone can travel is limited by the dronersquosrange )erefore the drone should be limited to twice theaxis of the major axis (κ 2a) For relaxation of theproblem drone range must be greater than twice the majoraxis (κge 2a) and truck travel distance (2c) at speed one isconsistent with drone speed factor (αge κ2c) where thetruck speed sT and drone speed sD are defined by speedfactor alpha α sDsT
Moreover delivery density directly reflects the numberof drones assigned to deliver within the elliptical area Wecan imagine that if given the total delivery density (ρ) for theentire area is comprised of total deliveries (N) and a totalarea (A) then delivery density would be computed asρ (NA) km2 Under a best-case delivery density scenariothe densities of two of the ellipses (ρprime) would need to beproportional to the total delivery density for the problemspace as in ρ ρprime )us we define the truck-drone opera-tions area as that of two overlapping ellipses joined at the foci(minus intersection) as
Aprime 2πab minusΦ
radicπ(a minus c)
21113960 1113961 (3)
where (a) is the major axis (b) is the minor axis (agt b) (c)
is the foci distance from centre to foci and (Φ) is the goldenratio (sim1618) shown in figure (Figure 5)
Furthermore based on the interrelationship betweentruck speed drone speed and drone range the total distancebetween two foci (2c) is approximately equal to (κα) )erefore we would expect to see Nprime deliveries within thedual elliptical area Aprime )us we compute the number ofexpected deliveries inside any of our elliptical drone oper-ational areas as Nprime Aprime(ρ) for a ldquopractical best-caserdquoscenario
In summary we can surmise for practical best-casesituation that twice the distance from the centre of the ellipseto the foci is a factor of both drone range (κ) and dronespeed (α) as in (2c κα) so that the truck and dronersquosoperation reduces idle time and that drone range is greaterthan or equal to the two legs of the triangle (κge 2a)
(Figure 5) In such case the ldquopractical best caserdquo for thenumber of drones (]) fitted to the truck is based on Nprimedeliveries needed to be within the combined area of the twoellipses (Aprime) Also since the truck canmake three of the total(Nprime) deliveries then the number of drones required to befitted to the truck under ldquobest caserdquo scenario is ] (Nprime minus 3)
Using the area of two ellipses Aprime and the appropriateldquopractical best caserdquo density ρprime for a given system theproblem can be inverted by knowing a priori the deliverydensity ρ and then forcing ρprime to be equal to ρ by selectingproper parameters for range speed and number of drones)us inverting the problem we solve for the drone rangedrone speed and number of drones that would produce aldquopractical best caserdquo geometric design for the problem
24 1eoretical Summary In summary the hypothesis ford]tsp is as follows
241 Maximum1eoretical Upper Boundary )ere exists amaximum theoretical upper boundary for best possiblepercent time improvement (Π) over a truck-only systemthat will never be exceeded without special construction ofproblem scenario based on the assisting dronersquos time im-provement factor (1 + α]) where α denotes the speed factorand ] denotes the number of drones assigned
Πlt 1 minus1
1 + α] (4)
242 Lower Boundary )e theoretical lower boundarypercent improvement (worst case) for a truck-multiple-drone system over a single truck only solution is Π 0based on the fact that a truck can perform all the deliveries byitself and default to a single truck route thus no timeimprovement
243 Improvement Improvement Π moves toward thepractical upper boundary as the delivery density of the givenoperating area (ρ) scenario moves toward the calculatedtheoretical ldquobest caserdquo delivery density (ρprime) As such theproblem can be inverted As the absolute value between theproblem delivery density (ρ) and the ldquopractical best caserdquodelivery density (ρprime) are minimized the best case (optimal)drone speed factor α drone range κ and number of drones ]based on the geometric layout of the ellipse emerge Due tothe stochastic nature of most problem scenarios the optimaldrone speed drone range and number of drones is a lowerboundary optimal
min ρ minus ρprime1113868111386811138681113868
1113868111386811138681113868 (5)
ST
κge 2a (6)
] Nprime minus 3 (7)
a a
b
gf
Foci Focic c
Rangeκ ge 2a = f + g
Speed factorα ge κ2c
Figure 4 Example of truck-drone delivery inside an ellipse
4 Advances in Operations Research
αgeκ2c
(8)
Nprime Aprime(ρ) (9)
ρ N
A (10)
ρprime Nprime
Aprime (11)
Aprime 2πab minusΦ
radicπ(a minus c)
21113960 1113961 (12)
c2
+ b2
a2 (13)
α sD
sT
(14)
sD gt sT (15)
sDLBle sD le sDUB
(16)
κLB le κle κUB (17)
]LB le ]le ]UB (18)
ρ ρprime gt 0 α κ ]ge 1 (19)
For the proper configuration of the minimizationproblem let (a) be the major axis let (b) be the minor axisand let (c) denote the distance from foci to the centre of theellipse Furthermore let alpha (α) denote the speed factor ofdrone as related to the truckrsquos speed of one (1) Let kappa (κ)
denote the range of the drone whereby the range must begreater than twice the major axis of the ellipse let nu (]) bethe number of drones assigned to assist the truck Let thearea of one ellipse be Aellipse (πab) and the combined areaof two ellipses (Atwo 2πab) Since the ellipses are inter-secting at a foci point (c) then let the area of the twocombined ellipses be reduced by the area of one of theintersected ellipses [
Φ
radicπ(a minus c)2] where (Φ) is the golden
ratio (sim1618)
Concretely equation (5) minimizes the absolute distancebetween the problem delivery density and the practical bestcase delivery density of the two ellipses Equation (6) forcesthe range of the drone (κ) to be greater than that of the twolegs of the triangle inscribed within an ellipse Equation (7)solves for the optimal number of drones to be fitted to thetruck by allowing the truck the opportunity to deliver tothree of the delivery vertices found within the area of the twoellipses Equation (8) guarantees that the interrelationshipbetween truck speed drone speed and range are configuredsuch that for each operation (launch-deliver-rendezvous)the truck and drone arrive back at nearly the same time toreduce potential idle time for either truck or drone )etruck travels (2c) while the drone travels a max of (2a) andthe interrelationship gives enough flexibility to solve theproblem by establishing that (2cge κα) Equation (9) cal-culates the expected number of deliveries found within thearea of two ellipses (Aprime) Equation (10) defines the deliverydensity as the number of deliveries per total area of oper-ation Equation (11) calculates the delivery density of the twoellipses Equation (12) defines the area of the two ellipsesminus their intersecting area Equation (13) establishes thegeometric relationship of the triangle inscribed within anellipse where (a) is the hypotenuse Equation (14) solves fordrone speed factor alpha as the ratio of the dronersquos speed tothe truckrsquos speed Equations (15)ndash(18) are boundary equa-tions for the dronersquos speed truckrsquos speed drone range andthe total number of drones Equation (19) ensures thatdelivery density of ellipses is greater than zero while dronerange drone speed factor and number of drones are greaterthan one
3 Hypothesis Testing
To test our hypothesis thousands of random experimentswere conducted by holding range (κ) speed factor (α) andnumber of drones (]) stationary while perturbing number ofdeliveries (N) over the delivery area (A) In essence theoptimal delivery density (ρprime) is precalculated based on droneparameters (α κ ]) For each experiment delivery density(ρ) changes based on changing number of deliveries (N)
within the delivery space (A) )e experiments are designedto test the performance of a truck multidrone system againsta truck-stand-alone (no drones) system In the experiments
Vi Vk
f
κα καFociV0
FociV1
FociVj
Assisting tool area
ggf
Figure 5 Best-case geometric layout for truck-multiple-drone scenario
Advances in Operations Research 5
we see that when the delivery density (along the x-axis)reaches the optimal density line on the graph then theoverall performance of the system improves until it begins tosaturate In words the denser the deliveries are in a deliveryspace the better the system performs until saturation Usingthe fundamentals mentioned above we can now calculatethe optimal density (ρprime) at which the system saturates )efigure below (Figure 6) reveals low performance when de-livery density is sparse )e system then begins to improveup to and including the optimal delivery density before theresources begin to saturate and improvement curve as-ymptotically reaches its peak performance
)e figure shows that the fundamental relationshipsestablished in Section 3 accurately predict the system per-formance Using the fundamentals as a guide the experi-ments revealed that as the delivery density (ρ) approachedthe optimal density (ρprime) the overall performance of thesystem improved Concretely that as density ρ NAmoved closer toward ρprime NprimeAprime the system improved untilsaturation As such we can surmise that the geometriclayout of the ellipses comprising the delivery density ρprime is anaccurate depiction of the practical best case geometricconfiguration for the system )erefore the minimizationproblem established in Section 3 is a ldquopractical best caserdquomethod to derive speed factor alpha (α) drone range kappa(κ) and number of drones nu (]) to be fitted to a truck basedon a typical delivery situation
4 Literature
A large body of literature exists about the traveling salesmanproblem (tsp) and the vehicle routing problem (vrp) Manyapproaches and variations to both can be found in surveysreports and papers [2ndash4] As a general rule the vrp problemextents the tsp problem by adding additional constraints)ese constraints are comprised of time windows prioritiesrange loiter times permissible-to-vehicle type route seg-ments load configurations traffic patterns etc [5 6]Originally Danzig and Ramser [7] investigated the vehiclerouting problem Later Clarke and Wright [8] proposed aneffective greedy heuristic which subsequently followed byseveral techniques or models involving exact and heuristicapproaches to solve the extensions and variations of the vrpAn extensive survey can be found in [9] with exact methodsto solve various routing problems
While many variants to the tsp problem exist in theliterature including multivehicle customer pickup and de-livery problem multiple synchronization constraints [10]multiple depot vehicle scheduling problem [11] and many-to-many milk run routing problem [12] there exists only ahandful of studies concerning the truck-drone problemMoreover the truck multidrone problem is a relatively newparadigm not found in the recent literature Although thetruck-drone problem has been addressed by research thusfar there is no work found on the truck-n-drone problem
41 Truck-Drone Problem )e operational aspects and theformulation of the truck-drone problem were first shown by
Murray and Chu [13] Shortly thereafter Agatz et al [1]considered a close but slightly altered version of theproblem Murray and Chu identify two ways that drone canbe useful in delivery drones can be launched and recoveredfrom the depot (parallel drone scheduling traveling salesmanproblem PDSTSP) or drones can assist the truck in a paralleloperation (launch-deliver-recover) as in the ldquoflying sidekicktsprdquo FSTSP Both Murray and Agatz define the materialaspects of the truck-drone problem and discuss the mixedinteger formulation for the optimal min-time route )eyconsider the drone is constrained in range capacity andspeed Agatz only considers a slightly altered version of theFSTSP and does not address the PDSTSP Agatz likeMurray considers the truck-drone in tandem as a teamwhereby the truck launches the drone traverses to a separatedelivery location from the drone and then rendezvous withthe drone again However the main difference between theapproaches is that Agatz et al [1] proposed that the droneand truck traverse along the road network system a con-straint not enforced by [13] )ey do this to facilitateconstruction of heuristic approaches with approximationsthat guarantee a bound on the maximum achievable gain ofthe delivery system over a ldquotruck-only solutionrdquo Murray andChu [13] formally define the flying sidekick traveling sales-man problem (FSTSP) as an NP-hard problem )eir studysuggests a mixed integer programming (MIP) as well as ametaheuristic approach )ey also consider a second similarhub-type problem that addresses the case where the cus-tomers are close enough to the depot to be serviced directlyfrom the depot by the drone while the truck delivers tofarther reach areas )is is denoted as the parallel dronescheduling TSP (PDSTSP) More recently Agatz et al [14]presented an exact solution approach for the truck-droneproblem denoted as the TSP-D based on dynamic pro-gramming )ey conducted experimental studies using thedifferent dynamic programming heuristics which indicatedthat the dynamic-programming-problem could solve largerproblems better than mathematically programming ap-proaches found in the literature
ndash5 0 5 10 15 20 ndash10log(ρ) problem density
0
01
02
03
04
05
06
d
el ti
me p
erfo
rman
ce im
prov
emen
t
larrlog(ρprime) optimal density
Figure 6 As problem delivery density nears optimal density for thesystem performance improves
6 Advances in Operations Research
Although existing research shows mathematical for-mulations and discusses various methods to approach themetaheuristics the main gaps are that no studies revealdetails concerning the expected percent improvement for agiven configuration of the truck-drone to various deliverydensities Specifically there are no studies that investigatethe tradeoff between number of drones speed factor anddrone range
42 TruckMultiple Drones Ferrandez et al [15] introduce amethod using k-means clustering to cluster deliveries basedon distance and then to route the truck around to each of theclusters using a tsp approach)is cluster-first-route-secondapproach also introduces a genetic algorithm to optimallytsp route the truck through center mass quasinodes createdfrom each of the clusters In the described scenario the truckmay loiter at any center mass cluster node (hub) while thedrones deliver to customers within the cluster region usinga minimum spanning tree (MST) hub-spoke type of ap-proach Additionally analysis was conducted on thetradeoffs between total time and total energy consumed bythe truck-drone team as a factor of number of truck stops
Our study herein is different than Ferrandez et al [15]Here we require that the truck launch multiple drones thenproceed to the next delivery location prior to rendezvous Itis an improvement in time over a hub-spoke methodFurthermore we use an MIP metaheuristic to solve foroptimal network routing while minimizing total deliverytime Furthermore we introduce the concepts of ldquopracticalbest caserdquo or lean configuration which has not beenaddressed by any author for any of the main toolassistingtool problems
Other gaps in the literature are that no research dealssquarely with the truck-multidrone problem from a math-ematical modeling or a metaheuristic perspective Moreoverthere exists no study that discusses of the tradeoffs or se-lection of system parameters α κ ] with changes in theoperating area or density of the delivery area )ere isobviously a delta time improvement that can be determinedusing two or more drones or proper selection of range andspeed when these are used in conjunction with a truckaddressed herein
5 Mixed Integer Program (MIP)
)e MIP for the truck-multiple (]) drones d travelingsalesman problem (d]tsp) solves for the optimal networkrouting of a truck with multiple ] drones while minimizingtotal time It was developed and used herein as the basis toanalyze and evaluate the effectiveness of the ldquopractical bestcaserdquo configuration Material elements of the d]tsp aredescribed as a network graph G (V E) where V denotesthe customers-delivery-stops and E the edges between stopsEach vertex V 1 |V| where n |V| Edge E is de-scribed by two vertices i j1113864 1113865 and two edges or an operationis described by two vertices i j1113864 1113865 for a truck indicatinglaunch and recovery Furthermore the binary variables
(xij yikykj) denote a truck and the two edges used by adrone in an operation if an operation exists between (i j))e binary variable xij 1 if truck traverses edge E(i j) If adrone is dormant it is assigned no vertices for a null op-eration As in the truck-drone problem the first and lastvertices of an operation must always be the same for thetruck and all drones )e distance matrix is denoted as D
where dij isin D is the cost or distance of traversing edgeE(i j) )e subtour elimination variable Uj ensures thatsequence of j follows i in the event that E(i j) is part of thesolution as such it restricts subtour formations )e min-sum of max (of max) objective function minimizes the maxtime of either the truckrsquos time or any of ] dronersquos time for anoperation As such zij is used to evaluate each vehiclersquos max-time where i j are the first and last nodes of the two visitednodes for truck (xij) as well as the first and last of threenodes traveled by any drone as in (yikykj) Since zij isgreater than or equal to the max time of the truck or any ofthe ] drones it forces zij to evaluate the max (of max) of allvehiclersquos time
minimizeZ 1113944iisinV
maxjisinV
zij (20)
STzij ge dijxij
zij geyiKyKj yiKdik + yKjdKj1113872 1113873
α
foralli j k i j k isin V
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(21)
1113944iisink
xik 1113944jisink
xkj forallk isin V(22)
1113944
iisinVinek
xik + 1113944
iisinVinek
yjk ge 1 forallk isin V
(23)
1113944
iisinVinek
xki + 1113944
jisinVjnek
ykj ge 1 forallk isin V
(24)
1113944
iisinVik
xki 0 forallk isin V
(25)
1113944
iisinVik
yki 0 forallk isin V
(26)
xij geyikykj foralli k j isin V (27)
xij + yij le 1 foralli j isin V (28)
Advances in Operations Research 7
U j
jgt1jnek
geUk + xkj minus (N minus 2) 1 minus xkj1113872 1113873 +(N minus 3)xjk forallk j isinV
(29)
U k
kgt1
leN minus 1 minus (N minus 2)x1k forallk isin V(30)
U k
kgt1
gt 1 +(N minus 2)xk1 forallk isin V(31)
3le 1113880n
]1113881leNle n (32)
yikykj yikdik + ykjdkj1113872 1113873le κ foralli k j isin V (33)
dij ge 0 κLB le κle κUB αLB le αle αUB forall i j isin V
(34)
xij isin 0 1 foralli j i j isin V (35)
yij isin 0 1 foralli j i j isin V (36)
In the dvtsp construction equation (20) minimizes thesum all the max of truck or drone edges (i j) to all oper-ations described as a truck route xij 1 and potentially atriangle drone operation described by (yikykj 1) Equation(21) forces the max (worst case) of either a truck edge or thedronesrsquo two-edges to be in the resultant minimization cal-culation for objective Z )e distance for a truck edge (i j) isdenoted as dijxij whereas the dronersquos triangular operationdistance is denoted by yikykj(dikyik + dkjykj)α where α isthe drone speed as a factor of truck speed s where s 1 Inessence this equation serves as a mini-sum of max (of max)construction Equation (22) constrains the truck portion ofthe route xij 1 to make a circuit or at a minimummanifests a sub-tour Equations (23) and (24) ensure eachcity has at least one truck or one drone visiting the cityEquation (23) establishes that each city must be visited(entered) while (24) constrains that each city visited mustthen be exited Equations (25) and (26) prohibit any truck ordrone from loitering as in xii or yii Equation (27) requiresthat any drone operation triangle yikykj has an associatedtruck launch and recovery xij Equation (28) forces that anydrone operation edge is not already a truck edge Equation(29) forces a utility variable Uj and Uk to properly sequencetruck route segments xjk such that sequence number j
follows k so that no subtour is formed in the truck sequenceof the truck portion of the route Equation (30) and (31)work in conjunction with equation (29) to set vertex (20) asfirst and vertex N | (3le n]le Nle n) as the last of the truck-route segments Equation (32) sets the minimum number oftruck cities visited to be greater than or equal to three(3le n]le Nle n) but less than total nodes available nEquation (33) limits any drone operation to be less than the
constrained range of the drone (κ) if those two edges (i k)
and (k j) are used as a drone operation yikykj 1 Equa-tions (34)ndash(36) set minimum requirements for distancematrix range and speed factor as well as sets truck variablexij and drone variable yij as binary integers
6 Evolutionary Algorithm
)e tournament-based evolutionary algorithm (EA) hereadopts a cluster-during-routing approach to solve the truck-drone problem More accurately it assigns both truck anddrone labels during the routing process Currently there areno other algorithms found in the literature )e algorithmdenoted as EA1 creates a population matrix of randomlypermuted routes whereby each node in a tour is evaluated asa potential drone-delivery node unless that node is out ofrange Since a population of many randomly generated toursis evaluated simultaneously any node not within dronerange is autoassigned and labelled truck otherwise the al-gorithm labels it drone
61 Evolutionary Algorithm (1) Steps )e EA randomlypermutes a population P of m tours where each tourdenoted as a genome sequence (1 2 n) for n deliverynodes in the tour It determines the fitness for eachpopulation member (tours) based on total tour deliverytime All fitness times are saved for seed tournament )etotal population is then divided into groups of five tourseach to conduct a set of seed tournaments For each of thegroups the best member within the seed group (of the five)is chosen as the single gene to mutate for the remainingfour members of the seed group Gene mutation (tourmutation) first copies the fittest member of the group offive within the seed tournament to replace the four less fitmembers Each of the four less fit members (now identicalto the fittest) is then slightly mutated to improve fitnessFor each of the four mutations are comprised of only oneof (a) randomly selecting and swapping two nodes withinthe tour (b) reverse ordering of the tour between twonodes (c) sliding a tour segment down between nodes toleft or right and (d) replacing the last node in the tour withany other node )e algorithm iterates repeatedly untilconvergence or a terminating condition is met based on apredetermined budget tolerance or a saturation found inimprovements (Algorithm 1)
62 Evolutionary Algorithm (2) )e second metaheuristicdenoted as EA2 is nearly identical to EA1 but differs byperforming a cost check before assigning a drone to the jobConcretely EA2 performs a calculation to determine if it ismore efficient to assign the truck or the next drone If thetruck is more efficient the greedy algorithm assigns the truckand foregoes assigning a drone
Both algorithms use an approach similar to simulatedannealing A seed tournament genetic algorithmrsquos strengthlies in the ability to overcome local optima by retainingmultiple paths (or seeds) that simultaneously advance to-ward optimization )is ideology is especially critical for
8 Advances in Operations Research
network routing problems Furthermore because there aremultiple members of the population within a seed tour-nament the algorithm allows for various mutation meth-odologies to be performed on the members of the seedtournament In this case the random swap (or pairwiseswap) flip and slide mutations have proven to be robustfast and extremely accurate for problems involving per-mutations whereby order matters
)e performance of the evolutionary algorithm is basedon the underlying theoretical principles (a) by initializing arelatively large population (ie 5n) of randomly permutedtours multiple tracks are maintained toward optimal con-vergence (seed tournaments) )ese multiple but differentpaths slowly converge and thus increase the probability ofan optimal convergence (b) By saving the fittest gene in aseed and then slightly perturbing (mutating) the best gene(tour) found in the seed group ensure the solution never getsworse while promoting improvements at each iteration (c)By autoassigning the drone to any ldquowithin rangerdquo node theuse of the drone is maximized throughout the routingprocess while simultaneously reducing the truckrsquos overalltour length )e risk of assigning the wrong node to a droneis mitigated by multiple seeds (d) Multiple path (seed)random search is much faster than having to calculate thegreediness or the exactness of each neighborhood withinreach as in other algorithms )erefore the algorithm relieson computational speed and iterations without the burdenof unnecessary calculations
Both EA1 and EA2 use a route-during-clustering ap-proach )is approach has several advantages over otheralgorithms All algorithms found in the literature with theexception of [16] use route-first cluster-second or a cluster-first route-second approach )is results in a two-phasealgorithmic process whereby the first phase solves forrouting (as in travelling salesperson routing (tsp) or mini-mum spanning tree (mst) routing) the second phase relyingextensively on solutions found in first phase performs swapsbetween truck or drone delivery )e best known algorithmsfor tsp (or mst) routing are on the order of O(n22n) where nis the number of nodes in the route )e second phase in aroute-first-cluster-second algorithm relies heavily on theinitial routing solutions being in the vicinity of a truck-dronesolution As such the second phase is equally complex as thefirst phase with the disadvantage of being locked into apotentially suboptimal routing scheme especially whendrone configurations change
Conversely the route-during-clustering algorithm per-forms the routing and the selection of the truck or drone forthe next operational move segment of the route As such thecomplexity of the algorithm is based on the number of it-erations (n2) the population size (4n) and the number ofnodes (n) found in the tour In such case the algorithm isconsistent with the order of O(n2 times 4n times n) or O(4n4) Acomputer with an Intel core (i5) and 170GHz CPUcomprised of 50 nodes and 3 drones requires approximatelysim25 million iterations or sim35 seconds for convergence
)e overall complexity of the truck-multidrone problemdenoted as (d]tsp) can be analysed from a brute forcemethodology To evaluate every potential solution for a ten
node problem would require slightly less than ((102) times 210)permutations or approximately sim186e+09 routes and binarydrone assignments Every solution requires two genes a genedescribing the order of the tour (102) and a gene to describeevery possible truck or drone assignments 210 For larger problemsizes say n 50 would require ((502) times 250) 68486e+79iterations translating to approximately 28e61 seconds computertime or sim71e53 years on a 170GHz CPU For such method thenumber of iterations to accomplish would exceed the time in theuniverse
7 Comparison Studies
Two different computational studies are conducted here)efirst study analyses the performance of the metaheuristicsagainst the optimal solution based on MIP and brute forcesolution )e second study analyses the performance of thesystem model parameters (α κ ]) against arbitrarily(standard) assigned system variables
In the first study the performance of the two meta-heuristics described in Section 6 is analysed )e twometaheuristics are compared against themselves as well ascompared with the guaranteed optimal results obtainedfrom the mixed integer program (MIP) )e comparisonstudy analyses four different performance factors (1) theaverage delta delivery-time of the metaheuristic versus theoptimal delivery time found using theMIP (2) the max delta(delivery-time) between the metaheuristic versus the opti-mal time of MIP and (3) the total number of metaheuristicexperiments that resulted in optimal results out of tenstudies and the average computer solution time for themetaheuristic to compute the optimal solution
)e second study analyses the performance of properly(optimally) configured system parameters (α κ ]) as de-scribed in Section 2 (theoretical insights system model)against standard parameters found in the literature(α 2 κ 10 ] 3) In many cases the literature arbi-trarily chooses system parameters as drone speed factor setat two times the speed of the truck (α 2) and an arbitrarydrone range set at ten kilometres (κ 10) based on currenttechnical capabilities )e system comparison study hereanalyses three performance metrics (1) the total delivery-time obtained by a properly configured (lean) system versusthe total delivery-time obtained by arbitrary system pa-rameters (α κ ]) (2) the overall utilization of the dronesthroughout the delivery a properly configured (lean) systemversus the utilization of the drones from a system witharbitrary parameters and (3) the under or oversaturation ofthe system determined by the average wait or idle time (bythe truck or by drone) for all operations
71 Computational Study 1 Metaheuristic Performance toOptimal Solution For the sake of simplicity a plane of(x y) coordinates is uniformly randomly generated fromthe Cartesian coordinate system with Euclidean distancebetween the nodes Concretely all nodes for problemcomparisons herein were sampled from the uniform dis-tribution from 0 1 2 30 For each metaheuristic
Advances in Operations Research 9
experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

travel 5 km before having to retrieve the faster drone havingtravelled 10 km in the same time period if there is to be noidle time As such we limit our elliptical area such that fromfoci to foci is denoted as (2c) must be equal to (κα) for aperfectly lean scenario
)e second interrelationship requires that the totaldistance that the drone can travel is limited by the dronersquosrange )erefore the drone should be limited to twice theaxis of the major axis (κ 2a) For relaxation of theproblem drone range must be greater than twice the majoraxis (κge 2a) and truck travel distance (2c) at speed one isconsistent with drone speed factor (αge κ2c) where thetruck speed sT and drone speed sD are defined by speedfactor alpha α sDsT
Moreover delivery density directly reflects the numberof drones assigned to deliver within the elliptical area Wecan imagine that if given the total delivery density (ρ) for theentire area is comprised of total deliveries (N) and a totalarea (A) then delivery density would be computed asρ (NA) km2 Under a best-case delivery density scenariothe densities of two of the ellipses (ρprime) would need to beproportional to the total delivery density for the problemspace as in ρ ρprime )us we define the truck-drone opera-tions area as that of two overlapping ellipses joined at the foci(minus intersection) as
Aprime 2πab minusΦ
radicπ(a minus c)
21113960 1113961 (3)
where (a) is the major axis (b) is the minor axis (agt b) (c)
is the foci distance from centre to foci and (Φ) is the goldenratio (sim1618) shown in figure (Figure 5)
Furthermore based on the interrelationship betweentruck speed drone speed and drone range the total distancebetween two foci (2c) is approximately equal to (κα) )erefore we would expect to see Nprime deliveries within thedual elliptical area Aprime )us we compute the number ofexpected deliveries inside any of our elliptical drone oper-ational areas as Nprime Aprime(ρ) for a ldquopractical best-caserdquoscenario
In summary we can surmise for practical best-casesituation that twice the distance from the centre of the ellipseto the foci is a factor of both drone range (κ) and dronespeed (α) as in (2c κα) so that the truck and dronersquosoperation reduces idle time and that drone range is greaterthan or equal to the two legs of the triangle (κge 2a)
(Figure 5) In such case the ldquopractical best caserdquo for thenumber of drones (]) fitted to the truck is based on Nprimedeliveries needed to be within the combined area of the twoellipses (Aprime) Also since the truck canmake three of the total(Nprime) deliveries then the number of drones required to befitted to the truck under ldquobest caserdquo scenario is ] (Nprime minus 3)
Using the area of two ellipses Aprime and the appropriateldquopractical best caserdquo density ρprime for a given system theproblem can be inverted by knowing a priori the deliverydensity ρ and then forcing ρprime to be equal to ρ by selectingproper parameters for range speed and number of drones)us inverting the problem we solve for the drone rangedrone speed and number of drones that would produce aldquopractical best caserdquo geometric design for the problem
24 1eoretical Summary In summary the hypothesis ford]tsp is as follows
241 Maximum1eoretical Upper Boundary )ere exists amaximum theoretical upper boundary for best possiblepercent time improvement (Π) over a truck-only systemthat will never be exceeded without special construction ofproblem scenario based on the assisting dronersquos time im-provement factor (1 + α]) where α denotes the speed factorand ] denotes the number of drones assigned
Πlt 1 minus1
1 + α] (4)
242 Lower Boundary )e theoretical lower boundarypercent improvement (worst case) for a truck-multiple-drone system over a single truck only solution is Π 0based on the fact that a truck can perform all the deliveries byitself and default to a single truck route thus no timeimprovement
243 Improvement Improvement Π moves toward thepractical upper boundary as the delivery density of the givenoperating area (ρ) scenario moves toward the calculatedtheoretical ldquobest caserdquo delivery density (ρprime) As such theproblem can be inverted As the absolute value between theproblem delivery density (ρ) and the ldquopractical best caserdquodelivery density (ρprime) are minimized the best case (optimal)drone speed factor α drone range κ and number of drones ]based on the geometric layout of the ellipse emerge Due tothe stochastic nature of most problem scenarios the optimaldrone speed drone range and number of drones is a lowerboundary optimal
min ρ minus ρprime1113868111386811138681113868
1113868111386811138681113868 (5)
ST
κge 2a (6)
] Nprime minus 3 (7)
a a
b
gf
Foci Focic c
Rangeκ ge 2a = f + g
Speed factorα ge κ2c
Figure 4 Example of truck-drone delivery inside an ellipse
4 Advances in Operations Research
αgeκ2c
(8)
Nprime Aprime(ρ) (9)
ρ N
A (10)
ρprime Nprime
Aprime (11)
Aprime 2πab minusΦ
radicπ(a minus c)
21113960 1113961 (12)
c2
+ b2
a2 (13)
α sD
sT
(14)
sD gt sT (15)
sDLBle sD le sDUB
(16)
κLB le κle κUB (17)
]LB le ]le ]UB (18)
ρ ρprime gt 0 α κ ]ge 1 (19)
For the proper configuration of the minimizationproblem let (a) be the major axis let (b) be the minor axisand let (c) denote the distance from foci to the centre of theellipse Furthermore let alpha (α) denote the speed factor ofdrone as related to the truckrsquos speed of one (1) Let kappa (κ)
denote the range of the drone whereby the range must begreater than twice the major axis of the ellipse let nu (]) bethe number of drones assigned to assist the truck Let thearea of one ellipse be Aellipse (πab) and the combined areaof two ellipses (Atwo 2πab) Since the ellipses are inter-secting at a foci point (c) then let the area of the twocombined ellipses be reduced by the area of one of theintersected ellipses [
Φ
radicπ(a minus c)2] where (Φ) is the golden
ratio (sim1618)
Concretely equation (5) minimizes the absolute distancebetween the problem delivery density and the practical bestcase delivery density of the two ellipses Equation (6) forcesthe range of the drone (κ) to be greater than that of the twolegs of the triangle inscribed within an ellipse Equation (7)solves for the optimal number of drones to be fitted to thetruck by allowing the truck the opportunity to deliver tothree of the delivery vertices found within the area of the twoellipses Equation (8) guarantees that the interrelationshipbetween truck speed drone speed and range are configuredsuch that for each operation (launch-deliver-rendezvous)the truck and drone arrive back at nearly the same time toreduce potential idle time for either truck or drone )etruck travels (2c) while the drone travels a max of (2a) andthe interrelationship gives enough flexibility to solve theproblem by establishing that (2cge κα) Equation (9) cal-culates the expected number of deliveries found within thearea of two ellipses (Aprime) Equation (10) defines the deliverydensity as the number of deliveries per total area of oper-ation Equation (11) calculates the delivery density of the twoellipses Equation (12) defines the area of the two ellipsesminus their intersecting area Equation (13) establishes thegeometric relationship of the triangle inscribed within anellipse where (a) is the hypotenuse Equation (14) solves fordrone speed factor alpha as the ratio of the dronersquos speed tothe truckrsquos speed Equations (15)ndash(18) are boundary equa-tions for the dronersquos speed truckrsquos speed drone range andthe total number of drones Equation (19) ensures thatdelivery density of ellipses is greater than zero while dronerange drone speed factor and number of drones are greaterthan one
3 Hypothesis Testing
To test our hypothesis thousands of random experimentswere conducted by holding range (κ) speed factor (α) andnumber of drones (]) stationary while perturbing number ofdeliveries (N) over the delivery area (A) In essence theoptimal delivery density (ρprime) is precalculated based on droneparameters (α κ ]) For each experiment delivery density(ρ) changes based on changing number of deliveries (N)
within the delivery space (A) )e experiments are designedto test the performance of a truck multidrone system againsta truck-stand-alone (no drones) system In the experiments
Vi Vk
f
κα καFociV0
FociV1
FociVj
Assisting tool area
ggf
Figure 5 Best-case geometric layout for truck-multiple-drone scenario
Advances in Operations Research 5
we see that when the delivery density (along the x-axis)reaches the optimal density line on the graph then theoverall performance of the system improves until it begins tosaturate In words the denser the deliveries are in a deliveryspace the better the system performs until saturation Usingthe fundamentals mentioned above we can now calculatethe optimal density (ρprime) at which the system saturates )efigure below (Figure 6) reveals low performance when de-livery density is sparse )e system then begins to improveup to and including the optimal delivery density before theresources begin to saturate and improvement curve as-ymptotically reaches its peak performance
)e figure shows that the fundamental relationshipsestablished in Section 3 accurately predict the system per-formance Using the fundamentals as a guide the experi-ments revealed that as the delivery density (ρ) approachedthe optimal density (ρprime) the overall performance of thesystem improved Concretely that as density ρ NAmoved closer toward ρprime NprimeAprime the system improved untilsaturation As such we can surmise that the geometriclayout of the ellipses comprising the delivery density ρprime is anaccurate depiction of the practical best case geometricconfiguration for the system )erefore the minimizationproblem established in Section 3 is a ldquopractical best caserdquomethod to derive speed factor alpha (α) drone range kappa(κ) and number of drones nu (]) to be fitted to a truck basedon a typical delivery situation
4 Literature
A large body of literature exists about the traveling salesmanproblem (tsp) and the vehicle routing problem (vrp) Manyapproaches and variations to both can be found in surveysreports and papers [2ndash4] As a general rule the vrp problemextents the tsp problem by adding additional constraints)ese constraints are comprised of time windows prioritiesrange loiter times permissible-to-vehicle type route seg-ments load configurations traffic patterns etc [5 6]Originally Danzig and Ramser [7] investigated the vehiclerouting problem Later Clarke and Wright [8] proposed aneffective greedy heuristic which subsequently followed byseveral techniques or models involving exact and heuristicapproaches to solve the extensions and variations of the vrpAn extensive survey can be found in [9] with exact methodsto solve various routing problems
While many variants to the tsp problem exist in theliterature including multivehicle customer pickup and de-livery problem multiple synchronization constraints [10]multiple depot vehicle scheduling problem [11] and many-to-many milk run routing problem [12] there exists only ahandful of studies concerning the truck-drone problemMoreover the truck multidrone problem is a relatively newparadigm not found in the recent literature Although thetruck-drone problem has been addressed by research thusfar there is no work found on the truck-n-drone problem
41 Truck-Drone Problem )e operational aspects and theformulation of the truck-drone problem were first shown by
Murray and Chu [13] Shortly thereafter Agatz et al [1]considered a close but slightly altered version of theproblem Murray and Chu identify two ways that drone canbe useful in delivery drones can be launched and recoveredfrom the depot (parallel drone scheduling traveling salesmanproblem PDSTSP) or drones can assist the truck in a paralleloperation (launch-deliver-recover) as in the ldquoflying sidekicktsprdquo FSTSP Both Murray and Agatz define the materialaspects of the truck-drone problem and discuss the mixedinteger formulation for the optimal min-time route )eyconsider the drone is constrained in range capacity andspeed Agatz only considers a slightly altered version of theFSTSP and does not address the PDSTSP Agatz likeMurray considers the truck-drone in tandem as a teamwhereby the truck launches the drone traverses to a separatedelivery location from the drone and then rendezvous withthe drone again However the main difference between theapproaches is that Agatz et al [1] proposed that the droneand truck traverse along the road network system a con-straint not enforced by [13] )ey do this to facilitateconstruction of heuristic approaches with approximationsthat guarantee a bound on the maximum achievable gain ofthe delivery system over a ldquotruck-only solutionrdquo Murray andChu [13] formally define the flying sidekick traveling sales-man problem (FSTSP) as an NP-hard problem )eir studysuggests a mixed integer programming (MIP) as well as ametaheuristic approach )ey also consider a second similarhub-type problem that addresses the case where the cus-tomers are close enough to the depot to be serviced directlyfrom the depot by the drone while the truck delivers tofarther reach areas )is is denoted as the parallel dronescheduling TSP (PDSTSP) More recently Agatz et al [14]presented an exact solution approach for the truck-droneproblem denoted as the TSP-D based on dynamic pro-gramming )ey conducted experimental studies using thedifferent dynamic programming heuristics which indicatedthat the dynamic-programming-problem could solve largerproblems better than mathematically programming ap-proaches found in the literature
ndash5 0 5 10 15 20 ndash10log(ρ) problem density
0
01
02
03
04
05
06
d
el ti
me p
erfo
rman
ce im
prov
emen
t
larrlog(ρprime) optimal density
Figure 6 As problem delivery density nears optimal density for thesystem performance improves
6 Advances in Operations Research
Although existing research shows mathematical for-mulations and discusses various methods to approach themetaheuristics the main gaps are that no studies revealdetails concerning the expected percent improvement for agiven configuration of the truck-drone to various deliverydensities Specifically there are no studies that investigatethe tradeoff between number of drones speed factor anddrone range
42 TruckMultiple Drones Ferrandez et al [15] introduce amethod using k-means clustering to cluster deliveries basedon distance and then to route the truck around to each of theclusters using a tsp approach)is cluster-first-route-secondapproach also introduces a genetic algorithm to optimallytsp route the truck through center mass quasinodes createdfrom each of the clusters In the described scenario the truckmay loiter at any center mass cluster node (hub) while thedrones deliver to customers within the cluster region usinga minimum spanning tree (MST) hub-spoke type of ap-proach Additionally analysis was conducted on thetradeoffs between total time and total energy consumed bythe truck-drone team as a factor of number of truck stops
Our study herein is different than Ferrandez et al [15]Here we require that the truck launch multiple drones thenproceed to the next delivery location prior to rendezvous Itis an improvement in time over a hub-spoke methodFurthermore we use an MIP metaheuristic to solve foroptimal network routing while minimizing total deliverytime Furthermore we introduce the concepts of ldquopracticalbest caserdquo or lean configuration which has not beenaddressed by any author for any of the main toolassistingtool problems
Other gaps in the literature are that no research dealssquarely with the truck-multidrone problem from a math-ematical modeling or a metaheuristic perspective Moreoverthere exists no study that discusses of the tradeoffs or se-lection of system parameters α κ ] with changes in theoperating area or density of the delivery area )ere isobviously a delta time improvement that can be determinedusing two or more drones or proper selection of range andspeed when these are used in conjunction with a truckaddressed herein
5 Mixed Integer Program (MIP)
)e MIP for the truck-multiple (]) drones d travelingsalesman problem (d]tsp) solves for the optimal networkrouting of a truck with multiple ] drones while minimizingtotal time It was developed and used herein as the basis toanalyze and evaluate the effectiveness of the ldquopractical bestcaserdquo configuration Material elements of the d]tsp aredescribed as a network graph G (V E) where V denotesthe customers-delivery-stops and E the edges between stopsEach vertex V 1 |V| where n |V| Edge E is de-scribed by two vertices i j1113864 1113865 and two edges or an operationis described by two vertices i j1113864 1113865 for a truck indicatinglaunch and recovery Furthermore the binary variables
(xij yikykj) denote a truck and the two edges used by adrone in an operation if an operation exists between (i j))e binary variable xij 1 if truck traverses edge E(i j) If adrone is dormant it is assigned no vertices for a null op-eration As in the truck-drone problem the first and lastvertices of an operation must always be the same for thetruck and all drones )e distance matrix is denoted as D
where dij isin D is the cost or distance of traversing edgeE(i j) )e subtour elimination variable Uj ensures thatsequence of j follows i in the event that E(i j) is part of thesolution as such it restricts subtour formations )e min-sum of max (of max) objective function minimizes the maxtime of either the truckrsquos time or any of ] dronersquos time for anoperation As such zij is used to evaluate each vehiclersquos max-time where i j are the first and last nodes of the two visitednodes for truck (xij) as well as the first and last of threenodes traveled by any drone as in (yikykj) Since zij isgreater than or equal to the max time of the truck or any ofthe ] drones it forces zij to evaluate the max (of max) of allvehiclersquos time
minimizeZ 1113944iisinV
maxjisinV
zij (20)
STzij ge dijxij
zij geyiKyKj yiKdik + yKjdKj1113872 1113873
α
foralli j k i j k isin V
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(21)
1113944iisink
xik 1113944jisink
xkj forallk isin V(22)
1113944
iisinVinek
xik + 1113944
iisinVinek
yjk ge 1 forallk isin V
(23)
1113944
iisinVinek
xki + 1113944
jisinVjnek
ykj ge 1 forallk isin V
(24)
1113944
iisinVik
xki 0 forallk isin V
(25)
1113944
iisinVik
yki 0 forallk isin V
(26)
xij geyikykj foralli k j isin V (27)
xij + yij le 1 foralli j isin V (28)
Advances in Operations Research 7
U j
jgt1jnek
geUk + xkj minus (N minus 2) 1 minus xkj1113872 1113873 +(N minus 3)xjk forallk j isinV
(29)
U k
kgt1
leN minus 1 minus (N minus 2)x1k forallk isin V(30)
U k
kgt1
gt 1 +(N minus 2)xk1 forallk isin V(31)
3le 1113880n
]1113881leNle n (32)
yikykj yikdik + ykjdkj1113872 1113873le κ foralli k j isin V (33)
dij ge 0 κLB le κle κUB αLB le αle αUB forall i j isin V
(34)
xij isin 0 1 foralli j i j isin V (35)
yij isin 0 1 foralli j i j isin V (36)
In the dvtsp construction equation (20) minimizes thesum all the max of truck or drone edges (i j) to all oper-ations described as a truck route xij 1 and potentially atriangle drone operation described by (yikykj 1) Equation(21) forces the max (worst case) of either a truck edge or thedronesrsquo two-edges to be in the resultant minimization cal-culation for objective Z )e distance for a truck edge (i j) isdenoted as dijxij whereas the dronersquos triangular operationdistance is denoted by yikykj(dikyik + dkjykj)α where α isthe drone speed as a factor of truck speed s where s 1 Inessence this equation serves as a mini-sum of max (of max)construction Equation (22) constrains the truck portion ofthe route xij 1 to make a circuit or at a minimummanifests a sub-tour Equations (23) and (24) ensure eachcity has at least one truck or one drone visiting the cityEquation (23) establishes that each city must be visited(entered) while (24) constrains that each city visited mustthen be exited Equations (25) and (26) prohibit any truck ordrone from loitering as in xii or yii Equation (27) requiresthat any drone operation triangle yikykj has an associatedtruck launch and recovery xij Equation (28) forces that anydrone operation edge is not already a truck edge Equation(29) forces a utility variable Uj and Uk to properly sequencetruck route segments xjk such that sequence number j
follows k so that no subtour is formed in the truck sequenceof the truck portion of the route Equation (30) and (31)work in conjunction with equation (29) to set vertex (20) asfirst and vertex N | (3le n]le Nle n) as the last of the truck-route segments Equation (32) sets the minimum number oftruck cities visited to be greater than or equal to three(3le n]le Nle n) but less than total nodes available nEquation (33) limits any drone operation to be less than the
constrained range of the drone (κ) if those two edges (i k)
and (k j) are used as a drone operation yikykj 1 Equa-tions (34)ndash(36) set minimum requirements for distancematrix range and speed factor as well as sets truck variablexij and drone variable yij as binary integers
6 Evolutionary Algorithm
)e tournament-based evolutionary algorithm (EA) hereadopts a cluster-during-routing approach to solve the truck-drone problem More accurately it assigns both truck anddrone labels during the routing process Currently there areno other algorithms found in the literature )e algorithmdenoted as EA1 creates a population matrix of randomlypermuted routes whereby each node in a tour is evaluated asa potential drone-delivery node unless that node is out ofrange Since a population of many randomly generated toursis evaluated simultaneously any node not within dronerange is autoassigned and labelled truck otherwise the al-gorithm labels it drone
61 Evolutionary Algorithm (1) Steps )e EA randomlypermutes a population P of m tours where each tourdenoted as a genome sequence (1 2 n) for n deliverynodes in the tour It determines the fitness for eachpopulation member (tours) based on total tour deliverytime All fitness times are saved for seed tournament )etotal population is then divided into groups of five tourseach to conduct a set of seed tournaments For each of thegroups the best member within the seed group (of the five)is chosen as the single gene to mutate for the remainingfour members of the seed group Gene mutation (tourmutation) first copies the fittest member of the group offive within the seed tournament to replace the four less fitmembers Each of the four less fit members (now identicalto the fittest) is then slightly mutated to improve fitnessFor each of the four mutations are comprised of only oneof (a) randomly selecting and swapping two nodes withinthe tour (b) reverse ordering of the tour between twonodes (c) sliding a tour segment down between nodes toleft or right and (d) replacing the last node in the tour withany other node )e algorithm iterates repeatedly untilconvergence or a terminating condition is met based on apredetermined budget tolerance or a saturation found inimprovements (Algorithm 1)
62 Evolutionary Algorithm (2) )e second metaheuristicdenoted as EA2 is nearly identical to EA1 but differs byperforming a cost check before assigning a drone to the jobConcretely EA2 performs a calculation to determine if it ismore efficient to assign the truck or the next drone If thetruck is more efficient the greedy algorithm assigns the truckand foregoes assigning a drone
Both algorithms use an approach similar to simulatedannealing A seed tournament genetic algorithmrsquos strengthlies in the ability to overcome local optima by retainingmultiple paths (or seeds) that simultaneously advance to-ward optimization )is ideology is especially critical for
8 Advances in Operations Research
network routing problems Furthermore because there aremultiple members of the population within a seed tour-nament the algorithm allows for various mutation meth-odologies to be performed on the members of the seedtournament In this case the random swap (or pairwiseswap) flip and slide mutations have proven to be robustfast and extremely accurate for problems involving per-mutations whereby order matters
)e performance of the evolutionary algorithm is basedon the underlying theoretical principles (a) by initializing arelatively large population (ie 5n) of randomly permutedtours multiple tracks are maintained toward optimal con-vergence (seed tournaments) )ese multiple but differentpaths slowly converge and thus increase the probability ofan optimal convergence (b) By saving the fittest gene in aseed and then slightly perturbing (mutating) the best gene(tour) found in the seed group ensure the solution never getsworse while promoting improvements at each iteration (c)By autoassigning the drone to any ldquowithin rangerdquo node theuse of the drone is maximized throughout the routingprocess while simultaneously reducing the truckrsquos overalltour length )e risk of assigning the wrong node to a droneis mitigated by multiple seeds (d) Multiple path (seed)random search is much faster than having to calculate thegreediness or the exactness of each neighborhood withinreach as in other algorithms )erefore the algorithm relieson computational speed and iterations without the burdenof unnecessary calculations
Both EA1 and EA2 use a route-during-clustering ap-proach )is approach has several advantages over otheralgorithms All algorithms found in the literature with theexception of [16] use route-first cluster-second or a cluster-first route-second approach )is results in a two-phasealgorithmic process whereby the first phase solves forrouting (as in travelling salesperson routing (tsp) or mini-mum spanning tree (mst) routing) the second phase relyingextensively on solutions found in first phase performs swapsbetween truck or drone delivery )e best known algorithmsfor tsp (or mst) routing are on the order of O(n22n) where nis the number of nodes in the route )e second phase in aroute-first-cluster-second algorithm relies heavily on theinitial routing solutions being in the vicinity of a truck-dronesolution As such the second phase is equally complex as thefirst phase with the disadvantage of being locked into apotentially suboptimal routing scheme especially whendrone configurations change
Conversely the route-during-clustering algorithm per-forms the routing and the selection of the truck or drone forthe next operational move segment of the route As such thecomplexity of the algorithm is based on the number of it-erations (n2) the population size (4n) and the number ofnodes (n) found in the tour In such case the algorithm isconsistent with the order of O(n2 times 4n times n) or O(4n4) Acomputer with an Intel core (i5) and 170GHz CPUcomprised of 50 nodes and 3 drones requires approximatelysim25 million iterations or sim35 seconds for convergence
)e overall complexity of the truck-multidrone problemdenoted as (d]tsp) can be analysed from a brute forcemethodology To evaluate every potential solution for a ten
node problem would require slightly less than ((102) times 210)permutations or approximately sim186e+09 routes and binarydrone assignments Every solution requires two genes a genedescribing the order of the tour (102) and a gene to describeevery possible truck or drone assignments 210 For larger problemsizes say n 50 would require ((502) times 250) 68486e+79iterations translating to approximately 28e61 seconds computertime or sim71e53 years on a 170GHz CPU For such method thenumber of iterations to accomplish would exceed the time in theuniverse
7 Comparison Studies
Two different computational studies are conducted here)efirst study analyses the performance of the metaheuristicsagainst the optimal solution based on MIP and brute forcesolution )e second study analyses the performance of thesystem model parameters (α κ ]) against arbitrarily(standard) assigned system variables
In the first study the performance of the two meta-heuristics described in Section 6 is analysed )e twometaheuristics are compared against themselves as well ascompared with the guaranteed optimal results obtainedfrom the mixed integer program (MIP) )e comparisonstudy analyses four different performance factors (1) theaverage delta delivery-time of the metaheuristic versus theoptimal delivery time found using theMIP (2) the max delta(delivery-time) between the metaheuristic versus the opti-mal time of MIP and (3) the total number of metaheuristicexperiments that resulted in optimal results out of tenstudies and the average computer solution time for themetaheuristic to compute the optimal solution
)e second study analyses the performance of properly(optimally) configured system parameters (α κ ]) as de-scribed in Section 2 (theoretical insights system model)against standard parameters found in the literature(α 2 κ 10 ] 3) In many cases the literature arbi-trarily chooses system parameters as drone speed factor setat two times the speed of the truck (α 2) and an arbitrarydrone range set at ten kilometres (κ 10) based on currenttechnical capabilities )e system comparison study hereanalyses three performance metrics (1) the total delivery-time obtained by a properly configured (lean) system versusthe total delivery-time obtained by arbitrary system pa-rameters (α κ ]) (2) the overall utilization of the dronesthroughout the delivery a properly configured (lean) systemversus the utilization of the drones from a system witharbitrary parameters and (3) the under or oversaturation ofthe system determined by the average wait or idle time (bythe truck or by drone) for all operations
71 Computational Study 1 Metaheuristic Performance toOptimal Solution For the sake of simplicity a plane of(x y) coordinates is uniformly randomly generated fromthe Cartesian coordinate system with Euclidean distancebetween the nodes Concretely all nodes for problemcomparisons herein were sampled from the uniform dis-tribution from 0 1 2 30 For each metaheuristic
Advances in Operations Research 9
experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

αgeκ2c
(8)
Nprime Aprime(ρ) (9)
ρ N
A (10)
ρprime Nprime
Aprime (11)
Aprime 2πab minusΦ
radicπ(a minus c)
21113960 1113961 (12)
c2
+ b2
a2 (13)
α sD
sT
(14)
sD gt sT (15)
sDLBle sD le sDUB
(16)
κLB le κle κUB (17)
]LB le ]le ]UB (18)
ρ ρprime gt 0 α κ ]ge 1 (19)
For the proper configuration of the minimizationproblem let (a) be the major axis let (b) be the minor axisand let (c) denote the distance from foci to the centre of theellipse Furthermore let alpha (α) denote the speed factor ofdrone as related to the truckrsquos speed of one (1) Let kappa (κ)
denote the range of the drone whereby the range must begreater than twice the major axis of the ellipse let nu (]) bethe number of drones assigned to assist the truck Let thearea of one ellipse be Aellipse (πab) and the combined areaof two ellipses (Atwo 2πab) Since the ellipses are inter-secting at a foci point (c) then let the area of the twocombined ellipses be reduced by the area of one of theintersected ellipses [
Φ
radicπ(a minus c)2] where (Φ) is the golden
ratio (sim1618)
Concretely equation (5) minimizes the absolute distancebetween the problem delivery density and the practical bestcase delivery density of the two ellipses Equation (6) forcesthe range of the drone (κ) to be greater than that of the twolegs of the triangle inscribed within an ellipse Equation (7)solves for the optimal number of drones to be fitted to thetruck by allowing the truck the opportunity to deliver tothree of the delivery vertices found within the area of the twoellipses Equation (8) guarantees that the interrelationshipbetween truck speed drone speed and range are configuredsuch that for each operation (launch-deliver-rendezvous)the truck and drone arrive back at nearly the same time toreduce potential idle time for either truck or drone )etruck travels (2c) while the drone travels a max of (2a) andthe interrelationship gives enough flexibility to solve theproblem by establishing that (2cge κα) Equation (9) cal-culates the expected number of deliveries found within thearea of two ellipses (Aprime) Equation (10) defines the deliverydensity as the number of deliveries per total area of oper-ation Equation (11) calculates the delivery density of the twoellipses Equation (12) defines the area of the two ellipsesminus their intersecting area Equation (13) establishes thegeometric relationship of the triangle inscribed within anellipse where (a) is the hypotenuse Equation (14) solves fordrone speed factor alpha as the ratio of the dronersquos speed tothe truckrsquos speed Equations (15)ndash(18) are boundary equa-tions for the dronersquos speed truckrsquos speed drone range andthe total number of drones Equation (19) ensures thatdelivery density of ellipses is greater than zero while dronerange drone speed factor and number of drones are greaterthan one
3 Hypothesis Testing
To test our hypothesis thousands of random experimentswere conducted by holding range (κ) speed factor (α) andnumber of drones (]) stationary while perturbing number ofdeliveries (N) over the delivery area (A) In essence theoptimal delivery density (ρprime) is precalculated based on droneparameters (α κ ]) For each experiment delivery density(ρ) changes based on changing number of deliveries (N)
within the delivery space (A) )e experiments are designedto test the performance of a truck multidrone system againsta truck-stand-alone (no drones) system In the experiments
Vi Vk
f
κα καFociV0
FociV1
FociVj
Assisting tool area
ggf
Figure 5 Best-case geometric layout for truck-multiple-drone scenario
Advances in Operations Research 5
we see that when the delivery density (along the x-axis)reaches the optimal density line on the graph then theoverall performance of the system improves until it begins tosaturate In words the denser the deliveries are in a deliveryspace the better the system performs until saturation Usingthe fundamentals mentioned above we can now calculatethe optimal density (ρprime) at which the system saturates )efigure below (Figure 6) reveals low performance when de-livery density is sparse )e system then begins to improveup to and including the optimal delivery density before theresources begin to saturate and improvement curve as-ymptotically reaches its peak performance
)e figure shows that the fundamental relationshipsestablished in Section 3 accurately predict the system per-formance Using the fundamentals as a guide the experi-ments revealed that as the delivery density (ρ) approachedthe optimal density (ρprime) the overall performance of thesystem improved Concretely that as density ρ NAmoved closer toward ρprime NprimeAprime the system improved untilsaturation As such we can surmise that the geometriclayout of the ellipses comprising the delivery density ρprime is anaccurate depiction of the practical best case geometricconfiguration for the system )erefore the minimizationproblem established in Section 3 is a ldquopractical best caserdquomethod to derive speed factor alpha (α) drone range kappa(κ) and number of drones nu (]) to be fitted to a truck basedon a typical delivery situation
4 Literature
A large body of literature exists about the traveling salesmanproblem (tsp) and the vehicle routing problem (vrp) Manyapproaches and variations to both can be found in surveysreports and papers [2ndash4] As a general rule the vrp problemextents the tsp problem by adding additional constraints)ese constraints are comprised of time windows prioritiesrange loiter times permissible-to-vehicle type route seg-ments load configurations traffic patterns etc [5 6]Originally Danzig and Ramser [7] investigated the vehiclerouting problem Later Clarke and Wright [8] proposed aneffective greedy heuristic which subsequently followed byseveral techniques or models involving exact and heuristicapproaches to solve the extensions and variations of the vrpAn extensive survey can be found in [9] with exact methodsto solve various routing problems
While many variants to the tsp problem exist in theliterature including multivehicle customer pickup and de-livery problem multiple synchronization constraints [10]multiple depot vehicle scheduling problem [11] and many-to-many milk run routing problem [12] there exists only ahandful of studies concerning the truck-drone problemMoreover the truck multidrone problem is a relatively newparadigm not found in the recent literature Although thetruck-drone problem has been addressed by research thusfar there is no work found on the truck-n-drone problem
41 Truck-Drone Problem )e operational aspects and theformulation of the truck-drone problem were first shown by
Murray and Chu [13] Shortly thereafter Agatz et al [1]considered a close but slightly altered version of theproblem Murray and Chu identify two ways that drone canbe useful in delivery drones can be launched and recoveredfrom the depot (parallel drone scheduling traveling salesmanproblem PDSTSP) or drones can assist the truck in a paralleloperation (launch-deliver-recover) as in the ldquoflying sidekicktsprdquo FSTSP Both Murray and Agatz define the materialaspects of the truck-drone problem and discuss the mixedinteger formulation for the optimal min-time route )eyconsider the drone is constrained in range capacity andspeed Agatz only considers a slightly altered version of theFSTSP and does not address the PDSTSP Agatz likeMurray considers the truck-drone in tandem as a teamwhereby the truck launches the drone traverses to a separatedelivery location from the drone and then rendezvous withthe drone again However the main difference between theapproaches is that Agatz et al [1] proposed that the droneand truck traverse along the road network system a con-straint not enforced by [13] )ey do this to facilitateconstruction of heuristic approaches with approximationsthat guarantee a bound on the maximum achievable gain ofthe delivery system over a ldquotruck-only solutionrdquo Murray andChu [13] formally define the flying sidekick traveling sales-man problem (FSTSP) as an NP-hard problem )eir studysuggests a mixed integer programming (MIP) as well as ametaheuristic approach )ey also consider a second similarhub-type problem that addresses the case where the cus-tomers are close enough to the depot to be serviced directlyfrom the depot by the drone while the truck delivers tofarther reach areas )is is denoted as the parallel dronescheduling TSP (PDSTSP) More recently Agatz et al [14]presented an exact solution approach for the truck-droneproblem denoted as the TSP-D based on dynamic pro-gramming )ey conducted experimental studies using thedifferent dynamic programming heuristics which indicatedthat the dynamic-programming-problem could solve largerproblems better than mathematically programming ap-proaches found in the literature
ndash5 0 5 10 15 20 ndash10log(ρ) problem density
0
01
02
03
04
05
06
d
el ti
me p
erfo
rman
ce im
prov
emen
t
larrlog(ρprime) optimal density
Figure 6 As problem delivery density nears optimal density for thesystem performance improves
6 Advances in Operations Research
Although existing research shows mathematical for-mulations and discusses various methods to approach themetaheuristics the main gaps are that no studies revealdetails concerning the expected percent improvement for agiven configuration of the truck-drone to various deliverydensities Specifically there are no studies that investigatethe tradeoff between number of drones speed factor anddrone range
42 TruckMultiple Drones Ferrandez et al [15] introduce amethod using k-means clustering to cluster deliveries basedon distance and then to route the truck around to each of theclusters using a tsp approach)is cluster-first-route-secondapproach also introduces a genetic algorithm to optimallytsp route the truck through center mass quasinodes createdfrom each of the clusters In the described scenario the truckmay loiter at any center mass cluster node (hub) while thedrones deliver to customers within the cluster region usinga minimum spanning tree (MST) hub-spoke type of ap-proach Additionally analysis was conducted on thetradeoffs between total time and total energy consumed bythe truck-drone team as a factor of number of truck stops
Our study herein is different than Ferrandez et al [15]Here we require that the truck launch multiple drones thenproceed to the next delivery location prior to rendezvous Itis an improvement in time over a hub-spoke methodFurthermore we use an MIP metaheuristic to solve foroptimal network routing while minimizing total deliverytime Furthermore we introduce the concepts of ldquopracticalbest caserdquo or lean configuration which has not beenaddressed by any author for any of the main toolassistingtool problems
Other gaps in the literature are that no research dealssquarely with the truck-multidrone problem from a math-ematical modeling or a metaheuristic perspective Moreoverthere exists no study that discusses of the tradeoffs or se-lection of system parameters α κ ] with changes in theoperating area or density of the delivery area )ere isobviously a delta time improvement that can be determinedusing two or more drones or proper selection of range andspeed when these are used in conjunction with a truckaddressed herein
5 Mixed Integer Program (MIP)
)e MIP for the truck-multiple (]) drones d travelingsalesman problem (d]tsp) solves for the optimal networkrouting of a truck with multiple ] drones while minimizingtotal time It was developed and used herein as the basis toanalyze and evaluate the effectiveness of the ldquopractical bestcaserdquo configuration Material elements of the d]tsp aredescribed as a network graph G (V E) where V denotesthe customers-delivery-stops and E the edges between stopsEach vertex V 1 |V| where n |V| Edge E is de-scribed by two vertices i j1113864 1113865 and two edges or an operationis described by two vertices i j1113864 1113865 for a truck indicatinglaunch and recovery Furthermore the binary variables
(xij yikykj) denote a truck and the two edges used by adrone in an operation if an operation exists between (i j))e binary variable xij 1 if truck traverses edge E(i j) If adrone is dormant it is assigned no vertices for a null op-eration As in the truck-drone problem the first and lastvertices of an operation must always be the same for thetruck and all drones )e distance matrix is denoted as D
where dij isin D is the cost or distance of traversing edgeE(i j) )e subtour elimination variable Uj ensures thatsequence of j follows i in the event that E(i j) is part of thesolution as such it restricts subtour formations )e min-sum of max (of max) objective function minimizes the maxtime of either the truckrsquos time or any of ] dronersquos time for anoperation As such zij is used to evaluate each vehiclersquos max-time where i j are the first and last nodes of the two visitednodes for truck (xij) as well as the first and last of threenodes traveled by any drone as in (yikykj) Since zij isgreater than or equal to the max time of the truck or any ofthe ] drones it forces zij to evaluate the max (of max) of allvehiclersquos time
minimizeZ 1113944iisinV
maxjisinV
zij (20)
STzij ge dijxij
zij geyiKyKj yiKdik + yKjdKj1113872 1113873
α
foralli j k i j k isin V
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(21)
1113944iisink
xik 1113944jisink
xkj forallk isin V(22)
1113944
iisinVinek
xik + 1113944
iisinVinek
yjk ge 1 forallk isin V
(23)
1113944
iisinVinek
xki + 1113944
jisinVjnek
ykj ge 1 forallk isin V
(24)
1113944
iisinVik
xki 0 forallk isin V
(25)
1113944
iisinVik
yki 0 forallk isin V
(26)
xij geyikykj foralli k j isin V (27)
xij + yij le 1 foralli j isin V (28)
Advances in Operations Research 7
U j
jgt1jnek
geUk + xkj minus (N minus 2) 1 minus xkj1113872 1113873 +(N minus 3)xjk forallk j isinV
(29)
U k
kgt1
leN minus 1 minus (N minus 2)x1k forallk isin V(30)
U k
kgt1
gt 1 +(N minus 2)xk1 forallk isin V(31)
3le 1113880n
]1113881leNle n (32)
yikykj yikdik + ykjdkj1113872 1113873le κ foralli k j isin V (33)
dij ge 0 κLB le κle κUB αLB le αle αUB forall i j isin V
(34)
xij isin 0 1 foralli j i j isin V (35)
yij isin 0 1 foralli j i j isin V (36)
In the dvtsp construction equation (20) minimizes thesum all the max of truck or drone edges (i j) to all oper-ations described as a truck route xij 1 and potentially atriangle drone operation described by (yikykj 1) Equation(21) forces the max (worst case) of either a truck edge or thedronesrsquo two-edges to be in the resultant minimization cal-culation for objective Z )e distance for a truck edge (i j) isdenoted as dijxij whereas the dronersquos triangular operationdistance is denoted by yikykj(dikyik + dkjykj)α where α isthe drone speed as a factor of truck speed s where s 1 Inessence this equation serves as a mini-sum of max (of max)construction Equation (22) constrains the truck portion ofthe route xij 1 to make a circuit or at a minimummanifests a sub-tour Equations (23) and (24) ensure eachcity has at least one truck or one drone visiting the cityEquation (23) establishes that each city must be visited(entered) while (24) constrains that each city visited mustthen be exited Equations (25) and (26) prohibit any truck ordrone from loitering as in xii or yii Equation (27) requiresthat any drone operation triangle yikykj has an associatedtruck launch and recovery xij Equation (28) forces that anydrone operation edge is not already a truck edge Equation(29) forces a utility variable Uj and Uk to properly sequencetruck route segments xjk such that sequence number j
follows k so that no subtour is formed in the truck sequenceof the truck portion of the route Equation (30) and (31)work in conjunction with equation (29) to set vertex (20) asfirst and vertex N | (3le n]le Nle n) as the last of the truck-route segments Equation (32) sets the minimum number oftruck cities visited to be greater than or equal to three(3le n]le Nle n) but less than total nodes available nEquation (33) limits any drone operation to be less than the
constrained range of the drone (κ) if those two edges (i k)
and (k j) are used as a drone operation yikykj 1 Equa-tions (34)ndash(36) set minimum requirements for distancematrix range and speed factor as well as sets truck variablexij and drone variable yij as binary integers
6 Evolutionary Algorithm
)e tournament-based evolutionary algorithm (EA) hereadopts a cluster-during-routing approach to solve the truck-drone problem More accurately it assigns both truck anddrone labels during the routing process Currently there areno other algorithms found in the literature )e algorithmdenoted as EA1 creates a population matrix of randomlypermuted routes whereby each node in a tour is evaluated asa potential drone-delivery node unless that node is out ofrange Since a population of many randomly generated toursis evaluated simultaneously any node not within dronerange is autoassigned and labelled truck otherwise the al-gorithm labels it drone
61 Evolutionary Algorithm (1) Steps )e EA randomlypermutes a population P of m tours where each tourdenoted as a genome sequence (1 2 n) for n deliverynodes in the tour It determines the fitness for eachpopulation member (tours) based on total tour deliverytime All fitness times are saved for seed tournament )etotal population is then divided into groups of five tourseach to conduct a set of seed tournaments For each of thegroups the best member within the seed group (of the five)is chosen as the single gene to mutate for the remainingfour members of the seed group Gene mutation (tourmutation) first copies the fittest member of the group offive within the seed tournament to replace the four less fitmembers Each of the four less fit members (now identicalto the fittest) is then slightly mutated to improve fitnessFor each of the four mutations are comprised of only oneof (a) randomly selecting and swapping two nodes withinthe tour (b) reverse ordering of the tour between twonodes (c) sliding a tour segment down between nodes toleft or right and (d) replacing the last node in the tour withany other node )e algorithm iterates repeatedly untilconvergence or a terminating condition is met based on apredetermined budget tolerance or a saturation found inimprovements (Algorithm 1)
62 Evolutionary Algorithm (2) )e second metaheuristicdenoted as EA2 is nearly identical to EA1 but differs byperforming a cost check before assigning a drone to the jobConcretely EA2 performs a calculation to determine if it ismore efficient to assign the truck or the next drone If thetruck is more efficient the greedy algorithm assigns the truckand foregoes assigning a drone
Both algorithms use an approach similar to simulatedannealing A seed tournament genetic algorithmrsquos strengthlies in the ability to overcome local optima by retainingmultiple paths (or seeds) that simultaneously advance to-ward optimization )is ideology is especially critical for
8 Advances in Operations Research
network routing problems Furthermore because there aremultiple members of the population within a seed tour-nament the algorithm allows for various mutation meth-odologies to be performed on the members of the seedtournament In this case the random swap (or pairwiseswap) flip and slide mutations have proven to be robustfast and extremely accurate for problems involving per-mutations whereby order matters
)e performance of the evolutionary algorithm is basedon the underlying theoretical principles (a) by initializing arelatively large population (ie 5n) of randomly permutedtours multiple tracks are maintained toward optimal con-vergence (seed tournaments) )ese multiple but differentpaths slowly converge and thus increase the probability ofan optimal convergence (b) By saving the fittest gene in aseed and then slightly perturbing (mutating) the best gene(tour) found in the seed group ensure the solution never getsworse while promoting improvements at each iteration (c)By autoassigning the drone to any ldquowithin rangerdquo node theuse of the drone is maximized throughout the routingprocess while simultaneously reducing the truckrsquos overalltour length )e risk of assigning the wrong node to a droneis mitigated by multiple seeds (d) Multiple path (seed)random search is much faster than having to calculate thegreediness or the exactness of each neighborhood withinreach as in other algorithms )erefore the algorithm relieson computational speed and iterations without the burdenof unnecessary calculations
Both EA1 and EA2 use a route-during-clustering ap-proach )is approach has several advantages over otheralgorithms All algorithms found in the literature with theexception of [16] use route-first cluster-second or a cluster-first route-second approach )is results in a two-phasealgorithmic process whereby the first phase solves forrouting (as in travelling salesperson routing (tsp) or mini-mum spanning tree (mst) routing) the second phase relyingextensively on solutions found in first phase performs swapsbetween truck or drone delivery )e best known algorithmsfor tsp (or mst) routing are on the order of O(n22n) where nis the number of nodes in the route )e second phase in aroute-first-cluster-second algorithm relies heavily on theinitial routing solutions being in the vicinity of a truck-dronesolution As such the second phase is equally complex as thefirst phase with the disadvantage of being locked into apotentially suboptimal routing scheme especially whendrone configurations change
Conversely the route-during-clustering algorithm per-forms the routing and the selection of the truck or drone forthe next operational move segment of the route As such thecomplexity of the algorithm is based on the number of it-erations (n2) the population size (4n) and the number ofnodes (n) found in the tour In such case the algorithm isconsistent with the order of O(n2 times 4n times n) or O(4n4) Acomputer with an Intel core (i5) and 170GHz CPUcomprised of 50 nodes and 3 drones requires approximatelysim25 million iterations or sim35 seconds for convergence
)e overall complexity of the truck-multidrone problemdenoted as (d]tsp) can be analysed from a brute forcemethodology To evaluate every potential solution for a ten
node problem would require slightly less than ((102) times 210)permutations or approximately sim186e+09 routes and binarydrone assignments Every solution requires two genes a genedescribing the order of the tour (102) and a gene to describeevery possible truck or drone assignments 210 For larger problemsizes say n 50 would require ((502) times 250) 68486e+79iterations translating to approximately 28e61 seconds computertime or sim71e53 years on a 170GHz CPU For such method thenumber of iterations to accomplish would exceed the time in theuniverse
7 Comparison Studies
Two different computational studies are conducted here)efirst study analyses the performance of the metaheuristicsagainst the optimal solution based on MIP and brute forcesolution )e second study analyses the performance of thesystem model parameters (α κ ]) against arbitrarily(standard) assigned system variables
In the first study the performance of the two meta-heuristics described in Section 6 is analysed )e twometaheuristics are compared against themselves as well ascompared with the guaranteed optimal results obtainedfrom the mixed integer program (MIP) )e comparisonstudy analyses four different performance factors (1) theaverage delta delivery-time of the metaheuristic versus theoptimal delivery time found using theMIP (2) the max delta(delivery-time) between the metaheuristic versus the opti-mal time of MIP and (3) the total number of metaheuristicexperiments that resulted in optimal results out of tenstudies and the average computer solution time for themetaheuristic to compute the optimal solution
)e second study analyses the performance of properly(optimally) configured system parameters (α κ ]) as de-scribed in Section 2 (theoretical insights system model)against standard parameters found in the literature(α 2 κ 10 ] 3) In many cases the literature arbi-trarily chooses system parameters as drone speed factor setat two times the speed of the truck (α 2) and an arbitrarydrone range set at ten kilometres (κ 10) based on currenttechnical capabilities )e system comparison study hereanalyses three performance metrics (1) the total delivery-time obtained by a properly configured (lean) system versusthe total delivery-time obtained by arbitrary system pa-rameters (α κ ]) (2) the overall utilization of the dronesthroughout the delivery a properly configured (lean) systemversus the utilization of the drones from a system witharbitrary parameters and (3) the under or oversaturation ofthe system determined by the average wait or idle time (bythe truck or by drone) for all operations
71 Computational Study 1 Metaheuristic Performance toOptimal Solution For the sake of simplicity a plane of(x y) coordinates is uniformly randomly generated fromthe Cartesian coordinate system with Euclidean distancebetween the nodes Concretely all nodes for problemcomparisons herein were sampled from the uniform dis-tribution from 0 1 2 30 For each metaheuristic
Advances in Operations Research 9
experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

we see that when the delivery density (along the x-axis)reaches the optimal density line on the graph then theoverall performance of the system improves until it begins tosaturate In words the denser the deliveries are in a deliveryspace the better the system performs until saturation Usingthe fundamentals mentioned above we can now calculatethe optimal density (ρprime) at which the system saturates )efigure below (Figure 6) reveals low performance when de-livery density is sparse )e system then begins to improveup to and including the optimal delivery density before theresources begin to saturate and improvement curve as-ymptotically reaches its peak performance
)e figure shows that the fundamental relationshipsestablished in Section 3 accurately predict the system per-formance Using the fundamentals as a guide the experi-ments revealed that as the delivery density (ρ) approachedthe optimal density (ρprime) the overall performance of thesystem improved Concretely that as density ρ NAmoved closer toward ρprime NprimeAprime the system improved untilsaturation As such we can surmise that the geometriclayout of the ellipses comprising the delivery density ρprime is anaccurate depiction of the practical best case geometricconfiguration for the system )erefore the minimizationproblem established in Section 3 is a ldquopractical best caserdquomethod to derive speed factor alpha (α) drone range kappa(κ) and number of drones nu (]) to be fitted to a truck basedon a typical delivery situation
4 Literature
A large body of literature exists about the traveling salesmanproblem (tsp) and the vehicle routing problem (vrp) Manyapproaches and variations to both can be found in surveysreports and papers [2ndash4] As a general rule the vrp problemextents the tsp problem by adding additional constraints)ese constraints are comprised of time windows prioritiesrange loiter times permissible-to-vehicle type route seg-ments load configurations traffic patterns etc [5 6]Originally Danzig and Ramser [7] investigated the vehiclerouting problem Later Clarke and Wright [8] proposed aneffective greedy heuristic which subsequently followed byseveral techniques or models involving exact and heuristicapproaches to solve the extensions and variations of the vrpAn extensive survey can be found in [9] with exact methodsto solve various routing problems
While many variants to the tsp problem exist in theliterature including multivehicle customer pickup and de-livery problem multiple synchronization constraints [10]multiple depot vehicle scheduling problem [11] and many-to-many milk run routing problem [12] there exists only ahandful of studies concerning the truck-drone problemMoreover the truck multidrone problem is a relatively newparadigm not found in the recent literature Although thetruck-drone problem has been addressed by research thusfar there is no work found on the truck-n-drone problem
41 Truck-Drone Problem )e operational aspects and theformulation of the truck-drone problem were first shown by
Murray and Chu [13] Shortly thereafter Agatz et al [1]considered a close but slightly altered version of theproblem Murray and Chu identify two ways that drone canbe useful in delivery drones can be launched and recoveredfrom the depot (parallel drone scheduling traveling salesmanproblem PDSTSP) or drones can assist the truck in a paralleloperation (launch-deliver-recover) as in the ldquoflying sidekicktsprdquo FSTSP Both Murray and Agatz define the materialaspects of the truck-drone problem and discuss the mixedinteger formulation for the optimal min-time route )eyconsider the drone is constrained in range capacity andspeed Agatz only considers a slightly altered version of theFSTSP and does not address the PDSTSP Agatz likeMurray considers the truck-drone in tandem as a teamwhereby the truck launches the drone traverses to a separatedelivery location from the drone and then rendezvous withthe drone again However the main difference between theapproaches is that Agatz et al [1] proposed that the droneand truck traverse along the road network system a con-straint not enforced by [13] )ey do this to facilitateconstruction of heuristic approaches with approximationsthat guarantee a bound on the maximum achievable gain ofthe delivery system over a ldquotruck-only solutionrdquo Murray andChu [13] formally define the flying sidekick traveling sales-man problem (FSTSP) as an NP-hard problem )eir studysuggests a mixed integer programming (MIP) as well as ametaheuristic approach )ey also consider a second similarhub-type problem that addresses the case where the cus-tomers are close enough to the depot to be serviced directlyfrom the depot by the drone while the truck delivers tofarther reach areas )is is denoted as the parallel dronescheduling TSP (PDSTSP) More recently Agatz et al [14]presented an exact solution approach for the truck-droneproblem denoted as the TSP-D based on dynamic pro-gramming )ey conducted experimental studies using thedifferent dynamic programming heuristics which indicatedthat the dynamic-programming-problem could solve largerproblems better than mathematically programming ap-proaches found in the literature
ndash5 0 5 10 15 20 ndash10log(ρ) problem density
0
01
02
03
04
05
06
d
el ti
me p
erfo
rman
ce im
prov
emen
t
larrlog(ρprime) optimal density
Figure 6 As problem delivery density nears optimal density for thesystem performance improves
6 Advances in Operations Research
Although existing research shows mathematical for-mulations and discusses various methods to approach themetaheuristics the main gaps are that no studies revealdetails concerning the expected percent improvement for agiven configuration of the truck-drone to various deliverydensities Specifically there are no studies that investigatethe tradeoff between number of drones speed factor anddrone range
42 TruckMultiple Drones Ferrandez et al [15] introduce amethod using k-means clustering to cluster deliveries basedon distance and then to route the truck around to each of theclusters using a tsp approach)is cluster-first-route-secondapproach also introduces a genetic algorithm to optimallytsp route the truck through center mass quasinodes createdfrom each of the clusters In the described scenario the truckmay loiter at any center mass cluster node (hub) while thedrones deliver to customers within the cluster region usinga minimum spanning tree (MST) hub-spoke type of ap-proach Additionally analysis was conducted on thetradeoffs between total time and total energy consumed bythe truck-drone team as a factor of number of truck stops
Our study herein is different than Ferrandez et al [15]Here we require that the truck launch multiple drones thenproceed to the next delivery location prior to rendezvous Itis an improvement in time over a hub-spoke methodFurthermore we use an MIP metaheuristic to solve foroptimal network routing while minimizing total deliverytime Furthermore we introduce the concepts of ldquopracticalbest caserdquo or lean configuration which has not beenaddressed by any author for any of the main toolassistingtool problems
Other gaps in the literature are that no research dealssquarely with the truck-multidrone problem from a math-ematical modeling or a metaheuristic perspective Moreoverthere exists no study that discusses of the tradeoffs or se-lection of system parameters α κ ] with changes in theoperating area or density of the delivery area )ere isobviously a delta time improvement that can be determinedusing two or more drones or proper selection of range andspeed when these are used in conjunction with a truckaddressed herein
5 Mixed Integer Program (MIP)
)e MIP for the truck-multiple (]) drones d travelingsalesman problem (d]tsp) solves for the optimal networkrouting of a truck with multiple ] drones while minimizingtotal time It was developed and used herein as the basis toanalyze and evaluate the effectiveness of the ldquopractical bestcaserdquo configuration Material elements of the d]tsp aredescribed as a network graph G (V E) where V denotesthe customers-delivery-stops and E the edges between stopsEach vertex V 1 |V| where n |V| Edge E is de-scribed by two vertices i j1113864 1113865 and two edges or an operationis described by two vertices i j1113864 1113865 for a truck indicatinglaunch and recovery Furthermore the binary variables
(xij yikykj) denote a truck and the two edges used by adrone in an operation if an operation exists between (i j))e binary variable xij 1 if truck traverses edge E(i j) If adrone is dormant it is assigned no vertices for a null op-eration As in the truck-drone problem the first and lastvertices of an operation must always be the same for thetruck and all drones )e distance matrix is denoted as D
where dij isin D is the cost or distance of traversing edgeE(i j) )e subtour elimination variable Uj ensures thatsequence of j follows i in the event that E(i j) is part of thesolution as such it restricts subtour formations )e min-sum of max (of max) objective function minimizes the maxtime of either the truckrsquos time or any of ] dronersquos time for anoperation As such zij is used to evaluate each vehiclersquos max-time where i j are the first and last nodes of the two visitednodes for truck (xij) as well as the first and last of threenodes traveled by any drone as in (yikykj) Since zij isgreater than or equal to the max time of the truck or any ofthe ] drones it forces zij to evaluate the max (of max) of allvehiclersquos time
minimizeZ 1113944iisinV
maxjisinV
zij (20)
STzij ge dijxij
zij geyiKyKj yiKdik + yKjdKj1113872 1113873
α
foralli j k i j k isin V
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(21)
1113944iisink
xik 1113944jisink
xkj forallk isin V(22)
1113944
iisinVinek
xik + 1113944
iisinVinek
yjk ge 1 forallk isin V
(23)
1113944
iisinVinek
xki + 1113944
jisinVjnek
ykj ge 1 forallk isin V
(24)
1113944
iisinVik
xki 0 forallk isin V
(25)
1113944
iisinVik
yki 0 forallk isin V
(26)
xij geyikykj foralli k j isin V (27)
xij + yij le 1 foralli j isin V (28)
Advances in Operations Research 7
U j
jgt1jnek
geUk + xkj minus (N minus 2) 1 minus xkj1113872 1113873 +(N minus 3)xjk forallk j isinV
(29)
U k
kgt1
leN minus 1 minus (N minus 2)x1k forallk isin V(30)
U k
kgt1
gt 1 +(N minus 2)xk1 forallk isin V(31)
3le 1113880n
]1113881leNle n (32)
yikykj yikdik + ykjdkj1113872 1113873le κ foralli k j isin V (33)
dij ge 0 κLB le κle κUB αLB le αle αUB forall i j isin V
(34)
xij isin 0 1 foralli j i j isin V (35)
yij isin 0 1 foralli j i j isin V (36)
In the dvtsp construction equation (20) minimizes thesum all the max of truck or drone edges (i j) to all oper-ations described as a truck route xij 1 and potentially atriangle drone operation described by (yikykj 1) Equation(21) forces the max (worst case) of either a truck edge or thedronesrsquo two-edges to be in the resultant minimization cal-culation for objective Z )e distance for a truck edge (i j) isdenoted as dijxij whereas the dronersquos triangular operationdistance is denoted by yikykj(dikyik + dkjykj)α where α isthe drone speed as a factor of truck speed s where s 1 Inessence this equation serves as a mini-sum of max (of max)construction Equation (22) constrains the truck portion ofthe route xij 1 to make a circuit or at a minimummanifests a sub-tour Equations (23) and (24) ensure eachcity has at least one truck or one drone visiting the cityEquation (23) establishes that each city must be visited(entered) while (24) constrains that each city visited mustthen be exited Equations (25) and (26) prohibit any truck ordrone from loitering as in xii or yii Equation (27) requiresthat any drone operation triangle yikykj has an associatedtruck launch and recovery xij Equation (28) forces that anydrone operation edge is not already a truck edge Equation(29) forces a utility variable Uj and Uk to properly sequencetruck route segments xjk such that sequence number j
follows k so that no subtour is formed in the truck sequenceof the truck portion of the route Equation (30) and (31)work in conjunction with equation (29) to set vertex (20) asfirst and vertex N | (3le n]le Nle n) as the last of the truck-route segments Equation (32) sets the minimum number oftruck cities visited to be greater than or equal to three(3le n]le Nle n) but less than total nodes available nEquation (33) limits any drone operation to be less than the
constrained range of the drone (κ) if those two edges (i k)
and (k j) are used as a drone operation yikykj 1 Equa-tions (34)ndash(36) set minimum requirements for distancematrix range and speed factor as well as sets truck variablexij and drone variable yij as binary integers
6 Evolutionary Algorithm
)e tournament-based evolutionary algorithm (EA) hereadopts a cluster-during-routing approach to solve the truck-drone problem More accurately it assigns both truck anddrone labels during the routing process Currently there areno other algorithms found in the literature )e algorithmdenoted as EA1 creates a population matrix of randomlypermuted routes whereby each node in a tour is evaluated asa potential drone-delivery node unless that node is out ofrange Since a population of many randomly generated toursis evaluated simultaneously any node not within dronerange is autoassigned and labelled truck otherwise the al-gorithm labels it drone
61 Evolutionary Algorithm (1) Steps )e EA randomlypermutes a population P of m tours where each tourdenoted as a genome sequence (1 2 n) for n deliverynodes in the tour It determines the fitness for eachpopulation member (tours) based on total tour deliverytime All fitness times are saved for seed tournament )etotal population is then divided into groups of five tourseach to conduct a set of seed tournaments For each of thegroups the best member within the seed group (of the five)is chosen as the single gene to mutate for the remainingfour members of the seed group Gene mutation (tourmutation) first copies the fittest member of the group offive within the seed tournament to replace the four less fitmembers Each of the four less fit members (now identicalto the fittest) is then slightly mutated to improve fitnessFor each of the four mutations are comprised of only oneof (a) randomly selecting and swapping two nodes withinthe tour (b) reverse ordering of the tour between twonodes (c) sliding a tour segment down between nodes toleft or right and (d) replacing the last node in the tour withany other node )e algorithm iterates repeatedly untilconvergence or a terminating condition is met based on apredetermined budget tolerance or a saturation found inimprovements (Algorithm 1)
62 Evolutionary Algorithm (2) )e second metaheuristicdenoted as EA2 is nearly identical to EA1 but differs byperforming a cost check before assigning a drone to the jobConcretely EA2 performs a calculation to determine if it ismore efficient to assign the truck or the next drone If thetruck is more efficient the greedy algorithm assigns the truckand foregoes assigning a drone
Both algorithms use an approach similar to simulatedannealing A seed tournament genetic algorithmrsquos strengthlies in the ability to overcome local optima by retainingmultiple paths (or seeds) that simultaneously advance to-ward optimization )is ideology is especially critical for
8 Advances in Operations Research
network routing problems Furthermore because there aremultiple members of the population within a seed tour-nament the algorithm allows for various mutation meth-odologies to be performed on the members of the seedtournament In this case the random swap (or pairwiseswap) flip and slide mutations have proven to be robustfast and extremely accurate for problems involving per-mutations whereby order matters
)e performance of the evolutionary algorithm is basedon the underlying theoretical principles (a) by initializing arelatively large population (ie 5n) of randomly permutedtours multiple tracks are maintained toward optimal con-vergence (seed tournaments) )ese multiple but differentpaths slowly converge and thus increase the probability ofan optimal convergence (b) By saving the fittest gene in aseed and then slightly perturbing (mutating) the best gene(tour) found in the seed group ensure the solution never getsworse while promoting improvements at each iteration (c)By autoassigning the drone to any ldquowithin rangerdquo node theuse of the drone is maximized throughout the routingprocess while simultaneously reducing the truckrsquos overalltour length )e risk of assigning the wrong node to a droneis mitigated by multiple seeds (d) Multiple path (seed)random search is much faster than having to calculate thegreediness or the exactness of each neighborhood withinreach as in other algorithms )erefore the algorithm relieson computational speed and iterations without the burdenof unnecessary calculations
Both EA1 and EA2 use a route-during-clustering ap-proach )is approach has several advantages over otheralgorithms All algorithms found in the literature with theexception of [16] use route-first cluster-second or a cluster-first route-second approach )is results in a two-phasealgorithmic process whereby the first phase solves forrouting (as in travelling salesperson routing (tsp) or mini-mum spanning tree (mst) routing) the second phase relyingextensively on solutions found in first phase performs swapsbetween truck or drone delivery )e best known algorithmsfor tsp (or mst) routing are on the order of O(n22n) where nis the number of nodes in the route )e second phase in aroute-first-cluster-second algorithm relies heavily on theinitial routing solutions being in the vicinity of a truck-dronesolution As such the second phase is equally complex as thefirst phase with the disadvantage of being locked into apotentially suboptimal routing scheme especially whendrone configurations change
Conversely the route-during-clustering algorithm per-forms the routing and the selection of the truck or drone forthe next operational move segment of the route As such thecomplexity of the algorithm is based on the number of it-erations (n2) the population size (4n) and the number ofnodes (n) found in the tour In such case the algorithm isconsistent with the order of O(n2 times 4n times n) or O(4n4) Acomputer with an Intel core (i5) and 170GHz CPUcomprised of 50 nodes and 3 drones requires approximatelysim25 million iterations or sim35 seconds for convergence
)e overall complexity of the truck-multidrone problemdenoted as (d]tsp) can be analysed from a brute forcemethodology To evaluate every potential solution for a ten
node problem would require slightly less than ((102) times 210)permutations or approximately sim186e+09 routes and binarydrone assignments Every solution requires two genes a genedescribing the order of the tour (102) and a gene to describeevery possible truck or drone assignments 210 For larger problemsizes say n 50 would require ((502) times 250) 68486e+79iterations translating to approximately 28e61 seconds computertime or sim71e53 years on a 170GHz CPU For such method thenumber of iterations to accomplish would exceed the time in theuniverse
7 Comparison Studies
Two different computational studies are conducted here)efirst study analyses the performance of the metaheuristicsagainst the optimal solution based on MIP and brute forcesolution )e second study analyses the performance of thesystem model parameters (α κ ]) against arbitrarily(standard) assigned system variables
In the first study the performance of the two meta-heuristics described in Section 6 is analysed )e twometaheuristics are compared against themselves as well ascompared with the guaranteed optimal results obtainedfrom the mixed integer program (MIP) )e comparisonstudy analyses four different performance factors (1) theaverage delta delivery-time of the metaheuristic versus theoptimal delivery time found using theMIP (2) the max delta(delivery-time) between the metaheuristic versus the opti-mal time of MIP and (3) the total number of metaheuristicexperiments that resulted in optimal results out of tenstudies and the average computer solution time for themetaheuristic to compute the optimal solution
)e second study analyses the performance of properly(optimally) configured system parameters (α κ ]) as de-scribed in Section 2 (theoretical insights system model)against standard parameters found in the literature(α 2 κ 10 ] 3) In many cases the literature arbi-trarily chooses system parameters as drone speed factor setat two times the speed of the truck (α 2) and an arbitrarydrone range set at ten kilometres (κ 10) based on currenttechnical capabilities )e system comparison study hereanalyses three performance metrics (1) the total delivery-time obtained by a properly configured (lean) system versusthe total delivery-time obtained by arbitrary system pa-rameters (α κ ]) (2) the overall utilization of the dronesthroughout the delivery a properly configured (lean) systemversus the utilization of the drones from a system witharbitrary parameters and (3) the under or oversaturation ofthe system determined by the average wait or idle time (bythe truck or by drone) for all operations
71 Computational Study 1 Metaheuristic Performance toOptimal Solution For the sake of simplicity a plane of(x y) coordinates is uniformly randomly generated fromthe Cartesian coordinate system with Euclidean distancebetween the nodes Concretely all nodes for problemcomparisons herein were sampled from the uniform dis-tribution from 0 1 2 30 For each metaheuristic
Advances in Operations Research 9
experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

Although existing research shows mathematical for-mulations and discusses various methods to approach themetaheuristics the main gaps are that no studies revealdetails concerning the expected percent improvement for agiven configuration of the truck-drone to various deliverydensities Specifically there are no studies that investigatethe tradeoff between number of drones speed factor anddrone range
42 TruckMultiple Drones Ferrandez et al [15] introduce amethod using k-means clustering to cluster deliveries basedon distance and then to route the truck around to each of theclusters using a tsp approach)is cluster-first-route-secondapproach also introduces a genetic algorithm to optimallytsp route the truck through center mass quasinodes createdfrom each of the clusters In the described scenario the truckmay loiter at any center mass cluster node (hub) while thedrones deliver to customers within the cluster region usinga minimum spanning tree (MST) hub-spoke type of ap-proach Additionally analysis was conducted on thetradeoffs between total time and total energy consumed bythe truck-drone team as a factor of number of truck stops
Our study herein is different than Ferrandez et al [15]Here we require that the truck launch multiple drones thenproceed to the next delivery location prior to rendezvous Itis an improvement in time over a hub-spoke methodFurthermore we use an MIP metaheuristic to solve foroptimal network routing while minimizing total deliverytime Furthermore we introduce the concepts of ldquopracticalbest caserdquo or lean configuration which has not beenaddressed by any author for any of the main toolassistingtool problems
Other gaps in the literature are that no research dealssquarely with the truck-multidrone problem from a math-ematical modeling or a metaheuristic perspective Moreoverthere exists no study that discusses of the tradeoffs or se-lection of system parameters α κ ] with changes in theoperating area or density of the delivery area )ere isobviously a delta time improvement that can be determinedusing two or more drones or proper selection of range andspeed when these are used in conjunction with a truckaddressed herein
5 Mixed Integer Program (MIP)
)e MIP for the truck-multiple (]) drones d travelingsalesman problem (d]tsp) solves for the optimal networkrouting of a truck with multiple ] drones while minimizingtotal time It was developed and used herein as the basis toanalyze and evaluate the effectiveness of the ldquopractical bestcaserdquo configuration Material elements of the d]tsp aredescribed as a network graph G (V E) where V denotesthe customers-delivery-stops and E the edges between stopsEach vertex V 1 |V| where n |V| Edge E is de-scribed by two vertices i j1113864 1113865 and two edges or an operationis described by two vertices i j1113864 1113865 for a truck indicatinglaunch and recovery Furthermore the binary variables
(xij yikykj) denote a truck and the two edges used by adrone in an operation if an operation exists between (i j))e binary variable xij 1 if truck traverses edge E(i j) If adrone is dormant it is assigned no vertices for a null op-eration As in the truck-drone problem the first and lastvertices of an operation must always be the same for thetruck and all drones )e distance matrix is denoted as D
where dij isin D is the cost or distance of traversing edgeE(i j) )e subtour elimination variable Uj ensures thatsequence of j follows i in the event that E(i j) is part of thesolution as such it restricts subtour formations )e min-sum of max (of max) objective function minimizes the maxtime of either the truckrsquos time or any of ] dronersquos time for anoperation As such zij is used to evaluate each vehiclersquos max-time where i j are the first and last nodes of the two visitednodes for truck (xij) as well as the first and last of threenodes traveled by any drone as in (yikykj) Since zij isgreater than or equal to the max time of the truck or any ofthe ] drones it forces zij to evaluate the max (of max) of allvehiclersquos time
minimizeZ 1113944iisinV
maxjisinV
zij (20)
STzij ge dijxij
zij geyiKyKj yiKdik + yKjdKj1113872 1113873
α
foralli j k i j k isin V
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(21)
1113944iisink
xik 1113944jisink
xkj forallk isin V(22)
1113944
iisinVinek
xik + 1113944
iisinVinek
yjk ge 1 forallk isin V
(23)
1113944
iisinVinek
xki + 1113944
jisinVjnek
ykj ge 1 forallk isin V
(24)
1113944
iisinVik
xki 0 forallk isin V
(25)
1113944
iisinVik
yki 0 forallk isin V
(26)
xij geyikykj foralli k j isin V (27)
xij + yij le 1 foralli j isin V (28)
Advances in Operations Research 7
U j
jgt1jnek
geUk + xkj minus (N minus 2) 1 minus xkj1113872 1113873 +(N minus 3)xjk forallk j isinV
(29)
U k
kgt1
leN minus 1 minus (N minus 2)x1k forallk isin V(30)
U k
kgt1
gt 1 +(N minus 2)xk1 forallk isin V(31)
3le 1113880n
]1113881leNle n (32)
yikykj yikdik + ykjdkj1113872 1113873le κ foralli k j isin V (33)
dij ge 0 κLB le κle κUB αLB le αle αUB forall i j isin V
(34)
xij isin 0 1 foralli j i j isin V (35)
yij isin 0 1 foralli j i j isin V (36)
In the dvtsp construction equation (20) minimizes thesum all the max of truck or drone edges (i j) to all oper-ations described as a truck route xij 1 and potentially atriangle drone operation described by (yikykj 1) Equation(21) forces the max (worst case) of either a truck edge or thedronesrsquo two-edges to be in the resultant minimization cal-culation for objective Z )e distance for a truck edge (i j) isdenoted as dijxij whereas the dronersquos triangular operationdistance is denoted by yikykj(dikyik + dkjykj)α where α isthe drone speed as a factor of truck speed s where s 1 Inessence this equation serves as a mini-sum of max (of max)construction Equation (22) constrains the truck portion ofthe route xij 1 to make a circuit or at a minimummanifests a sub-tour Equations (23) and (24) ensure eachcity has at least one truck or one drone visiting the cityEquation (23) establishes that each city must be visited(entered) while (24) constrains that each city visited mustthen be exited Equations (25) and (26) prohibit any truck ordrone from loitering as in xii or yii Equation (27) requiresthat any drone operation triangle yikykj has an associatedtruck launch and recovery xij Equation (28) forces that anydrone operation edge is not already a truck edge Equation(29) forces a utility variable Uj and Uk to properly sequencetruck route segments xjk such that sequence number j
follows k so that no subtour is formed in the truck sequenceof the truck portion of the route Equation (30) and (31)work in conjunction with equation (29) to set vertex (20) asfirst and vertex N | (3le n]le Nle n) as the last of the truck-route segments Equation (32) sets the minimum number oftruck cities visited to be greater than or equal to three(3le n]le Nle n) but less than total nodes available nEquation (33) limits any drone operation to be less than the
constrained range of the drone (κ) if those two edges (i k)
and (k j) are used as a drone operation yikykj 1 Equa-tions (34)ndash(36) set minimum requirements for distancematrix range and speed factor as well as sets truck variablexij and drone variable yij as binary integers
6 Evolutionary Algorithm
)e tournament-based evolutionary algorithm (EA) hereadopts a cluster-during-routing approach to solve the truck-drone problem More accurately it assigns both truck anddrone labels during the routing process Currently there areno other algorithms found in the literature )e algorithmdenoted as EA1 creates a population matrix of randomlypermuted routes whereby each node in a tour is evaluated asa potential drone-delivery node unless that node is out ofrange Since a population of many randomly generated toursis evaluated simultaneously any node not within dronerange is autoassigned and labelled truck otherwise the al-gorithm labels it drone
61 Evolutionary Algorithm (1) Steps )e EA randomlypermutes a population P of m tours where each tourdenoted as a genome sequence (1 2 n) for n deliverynodes in the tour It determines the fitness for eachpopulation member (tours) based on total tour deliverytime All fitness times are saved for seed tournament )etotal population is then divided into groups of five tourseach to conduct a set of seed tournaments For each of thegroups the best member within the seed group (of the five)is chosen as the single gene to mutate for the remainingfour members of the seed group Gene mutation (tourmutation) first copies the fittest member of the group offive within the seed tournament to replace the four less fitmembers Each of the four less fit members (now identicalto the fittest) is then slightly mutated to improve fitnessFor each of the four mutations are comprised of only oneof (a) randomly selecting and swapping two nodes withinthe tour (b) reverse ordering of the tour between twonodes (c) sliding a tour segment down between nodes toleft or right and (d) replacing the last node in the tour withany other node )e algorithm iterates repeatedly untilconvergence or a terminating condition is met based on apredetermined budget tolerance or a saturation found inimprovements (Algorithm 1)
62 Evolutionary Algorithm (2) )e second metaheuristicdenoted as EA2 is nearly identical to EA1 but differs byperforming a cost check before assigning a drone to the jobConcretely EA2 performs a calculation to determine if it ismore efficient to assign the truck or the next drone If thetruck is more efficient the greedy algorithm assigns the truckand foregoes assigning a drone
Both algorithms use an approach similar to simulatedannealing A seed tournament genetic algorithmrsquos strengthlies in the ability to overcome local optima by retainingmultiple paths (or seeds) that simultaneously advance to-ward optimization )is ideology is especially critical for
8 Advances in Operations Research
network routing problems Furthermore because there aremultiple members of the population within a seed tour-nament the algorithm allows for various mutation meth-odologies to be performed on the members of the seedtournament In this case the random swap (or pairwiseswap) flip and slide mutations have proven to be robustfast and extremely accurate for problems involving per-mutations whereby order matters
)e performance of the evolutionary algorithm is basedon the underlying theoretical principles (a) by initializing arelatively large population (ie 5n) of randomly permutedtours multiple tracks are maintained toward optimal con-vergence (seed tournaments) )ese multiple but differentpaths slowly converge and thus increase the probability ofan optimal convergence (b) By saving the fittest gene in aseed and then slightly perturbing (mutating) the best gene(tour) found in the seed group ensure the solution never getsworse while promoting improvements at each iteration (c)By autoassigning the drone to any ldquowithin rangerdquo node theuse of the drone is maximized throughout the routingprocess while simultaneously reducing the truckrsquos overalltour length )e risk of assigning the wrong node to a droneis mitigated by multiple seeds (d) Multiple path (seed)random search is much faster than having to calculate thegreediness or the exactness of each neighborhood withinreach as in other algorithms )erefore the algorithm relieson computational speed and iterations without the burdenof unnecessary calculations
Both EA1 and EA2 use a route-during-clustering ap-proach )is approach has several advantages over otheralgorithms All algorithms found in the literature with theexception of [16] use route-first cluster-second or a cluster-first route-second approach )is results in a two-phasealgorithmic process whereby the first phase solves forrouting (as in travelling salesperson routing (tsp) or mini-mum spanning tree (mst) routing) the second phase relyingextensively on solutions found in first phase performs swapsbetween truck or drone delivery )e best known algorithmsfor tsp (or mst) routing are on the order of O(n22n) where nis the number of nodes in the route )e second phase in aroute-first-cluster-second algorithm relies heavily on theinitial routing solutions being in the vicinity of a truck-dronesolution As such the second phase is equally complex as thefirst phase with the disadvantage of being locked into apotentially suboptimal routing scheme especially whendrone configurations change
Conversely the route-during-clustering algorithm per-forms the routing and the selection of the truck or drone forthe next operational move segment of the route As such thecomplexity of the algorithm is based on the number of it-erations (n2) the population size (4n) and the number ofnodes (n) found in the tour In such case the algorithm isconsistent with the order of O(n2 times 4n times n) or O(4n4) Acomputer with an Intel core (i5) and 170GHz CPUcomprised of 50 nodes and 3 drones requires approximatelysim25 million iterations or sim35 seconds for convergence
)e overall complexity of the truck-multidrone problemdenoted as (d]tsp) can be analysed from a brute forcemethodology To evaluate every potential solution for a ten
node problem would require slightly less than ((102) times 210)permutations or approximately sim186e+09 routes and binarydrone assignments Every solution requires two genes a genedescribing the order of the tour (102) and a gene to describeevery possible truck or drone assignments 210 For larger problemsizes say n 50 would require ((502) times 250) 68486e+79iterations translating to approximately 28e61 seconds computertime or sim71e53 years on a 170GHz CPU For such method thenumber of iterations to accomplish would exceed the time in theuniverse
7 Comparison Studies
Two different computational studies are conducted here)efirst study analyses the performance of the metaheuristicsagainst the optimal solution based on MIP and brute forcesolution )e second study analyses the performance of thesystem model parameters (α κ ]) against arbitrarily(standard) assigned system variables
In the first study the performance of the two meta-heuristics described in Section 6 is analysed )e twometaheuristics are compared against themselves as well ascompared with the guaranteed optimal results obtainedfrom the mixed integer program (MIP) )e comparisonstudy analyses four different performance factors (1) theaverage delta delivery-time of the metaheuristic versus theoptimal delivery time found using theMIP (2) the max delta(delivery-time) between the metaheuristic versus the opti-mal time of MIP and (3) the total number of metaheuristicexperiments that resulted in optimal results out of tenstudies and the average computer solution time for themetaheuristic to compute the optimal solution
)e second study analyses the performance of properly(optimally) configured system parameters (α κ ]) as de-scribed in Section 2 (theoretical insights system model)against standard parameters found in the literature(α 2 κ 10 ] 3) In many cases the literature arbi-trarily chooses system parameters as drone speed factor setat two times the speed of the truck (α 2) and an arbitrarydrone range set at ten kilometres (κ 10) based on currenttechnical capabilities )e system comparison study hereanalyses three performance metrics (1) the total delivery-time obtained by a properly configured (lean) system versusthe total delivery-time obtained by arbitrary system pa-rameters (α κ ]) (2) the overall utilization of the dronesthroughout the delivery a properly configured (lean) systemversus the utilization of the drones from a system witharbitrary parameters and (3) the under or oversaturation ofthe system determined by the average wait or idle time (bythe truck or by drone) for all operations
71 Computational Study 1 Metaheuristic Performance toOptimal Solution For the sake of simplicity a plane of(x y) coordinates is uniformly randomly generated fromthe Cartesian coordinate system with Euclidean distancebetween the nodes Concretely all nodes for problemcomparisons herein were sampled from the uniform dis-tribution from 0 1 2 30 For each metaheuristic
Advances in Operations Research 9
experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

U j
jgt1jnek
geUk + xkj minus (N minus 2) 1 minus xkj1113872 1113873 +(N minus 3)xjk forallk j isinV
(29)
U k
kgt1
leN minus 1 minus (N minus 2)x1k forallk isin V(30)
U k
kgt1
gt 1 +(N minus 2)xk1 forallk isin V(31)
3le 1113880n
]1113881leNle n (32)
yikykj yikdik + ykjdkj1113872 1113873le κ foralli k j isin V (33)
dij ge 0 κLB le κle κUB αLB le αle αUB forall i j isin V
(34)
xij isin 0 1 foralli j i j isin V (35)
yij isin 0 1 foralli j i j isin V (36)
In the dvtsp construction equation (20) minimizes thesum all the max of truck or drone edges (i j) to all oper-ations described as a truck route xij 1 and potentially atriangle drone operation described by (yikykj 1) Equation(21) forces the max (worst case) of either a truck edge or thedronesrsquo two-edges to be in the resultant minimization cal-culation for objective Z )e distance for a truck edge (i j) isdenoted as dijxij whereas the dronersquos triangular operationdistance is denoted by yikykj(dikyik + dkjykj)α where α isthe drone speed as a factor of truck speed s where s 1 Inessence this equation serves as a mini-sum of max (of max)construction Equation (22) constrains the truck portion ofthe route xij 1 to make a circuit or at a minimummanifests a sub-tour Equations (23) and (24) ensure eachcity has at least one truck or one drone visiting the cityEquation (23) establishes that each city must be visited(entered) while (24) constrains that each city visited mustthen be exited Equations (25) and (26) prohibit any truck ordrone from loitering as in xii or yii Equation (27) requiresthat any drone operation triangle yikykj has an associatedtruck launch and recovery xij Equation (28) forces that anydrone operation edge is not already a truck edge Equation(29) forces a utility variable Uj and Uk to properly sequencetruck route segments xjk such that sequence number j
follows k so that no subtour is formed in the truck sequenceof the truck portion of the route Equation (30) and (31)work in conjunction with equation (29) to set vertex (20) asfirst and vertex N | (3le n]le Nle n) as the last of the truck-route segments Equation (32) sets the minimum number oftruck cities visited to be greater than or equal to three(3le n]le Nle n) but less than total nodes available nEquation (33) limits any drone operation to be less than the
constrained range of the drone (κ) if those two edges (i k)
and (k j) are used as a drone operation yikykj 1 Equa-tions (34)ndash(36) set minimum requirements for distancematrix range and speed factor as well as sets truck variablexij and drone variable yij as binary integers
6 Evolutionary Algorithm
)e tournament-based evolutionary algorithm (EA) hereadopts a cluster-during-routing approach to solve the truck-drone problem More accurately it assigns both truck anddrone labels during the routing process Currently there areno other algorithms found in the literature )e algorithmdenoted as EA1 creates a population matrix of randomlypermuted routes whereby each node in a tour is evaluated asa potential drone-delivery node unless that node is out ofrange Since a population of many randomly generated toursis evaluated simultaneously any node not within dronerange is autoassigned and labelled truck otherwise the al-gorithm labels it drone
61 Evolutionary Algorithm (1) Steps )e EA randomlypermutes a population P of m tours where each tourdenoted as a genome sequence (1 2 n) for n deliverynodes in the tour It determines the fitness for eachpopulation member (tours) based on total tour deliverytime All fitness times are saved for seed tournament )etotal population is then divided into groups of five tourseach to conduct a set of seed tournaments For each of thegroups the best member within the seed group (of the five)is chosen as the single gene to mutate for the remainingfour members of the seed group Gene mutation (tourmutation) first copies the fittest member of the group offive within the seed tournament to replace the four less fitmembers Each of the four less fit members (now identicalto the fittest) is then slightly mutated to improve fitnessFor each of the four mutations are comprised of only oneof (a) randomly selecting and swapping two nodes withinthe tour (b) reverse ordering of the tour between twonodes (c) sliding a tour segment down between nodes toleft or right and (d) replacing the last node in the tour withany other node )e algorithm iterates repeatedly untilconvergence or a terminating condition is met based on apredetermined budget tolerance or a saturation found inimprovements (Algorithm 1)
62 Evolutionary Algorithm (2) )e second metaheuristicdenoted as EA2 is nearly identical to EA1 but differs byperforming a cost check before assigning a drone to the jobConcretely EA2 performs a calculation to determine if it ismore efficient to assign the truck or the next drone If thetruck is more efficient the greedy algorithm assigns the truckand foregoes assigning a drone
Both algorithms use an approach similar to simulatedannealing A seed tournament genetic algorithmrsquos strengthlies in the ability to overcome local optima by retainingmultiple paths (or seeds) that simultaneously advance to-ward optimization )is ideology is especially critical for
8 Advances in Operations Research
network routing problems Furthermore because there aremultiple members of the population within a seed tour-nament the algorithm allows for various mutation meth-odologies to be performed on the members of the seedtournament In this case the random swap (or pairwiseswap) flip and slide mutations have proven to be robustfast and extremely accurate for problems involving per-mutations whereby order matters
)e performance of the evolutionary algorithm is basedon the underlying theoretical principles (a) by initializing arelatively large population (ie 5n) of randomly permutedtours multiple tracks are maintained toward optimal con-vergence (seed tournaments) )ese multiple but differentpaths slowly converge and thus increase the probability ofan optimal convergence (b) By saving the fittest gene in aseed and then slightly perturbing (mutating) the best gene(tour) found in the seed group ensure the solution never getsworse while promoting improvements at each iteration (c)By autoassigning the drone to any ldquowithin rangerdquo node theuse of the drone is maximized throughout the routingprocess while simultaneously reducing the truckrsquos overalltour length )e risk of assigning the wrong node to a droneis mitigated by multiple seeds (d) Multiple path (seed)random search is much faster than having to calculate thegreediness or the exactness of each neighborhood withinreach as in other algorithms )erefore the algorithm relieson computational speed and iterations without the burdenof unnecessary calculations
Both EA1 and EA2 use a route-during-clustering ap-proach )is approach has several advantages over otheralgorithms All algorithms found in the literature with theexception of [16] use route-first cluster-second or a cluster-first route-second approach )is results in a two-phasealgorithmic process whereby the first phase solves forrouting (as in travelling salesperson routing (tsp) or mini-mum spanning tree (mst) routing) the second phase relyingextensively on solutions found in first phase performs swapsbetween truck or drone delivery )e best known algorithmsfor tsp (or mst) routing are on the order of O(n22n) where nis the number of nodes in the route )e second phase in aroute-first-cluster-second algorithm relies heavily on theinitial routing solutions being in the vicinity of a truck-dronesolution As such the second phase is equally complex as thefirst phase with the disadvantage of being locked into apotentially suboptimal routing scheme especially whendrone configurations change
Conversely the route-during-clustering algorithm per-forms the routing and the selection of the truck or drone forthe next operational move segment of the route As such thecomplexity of the algorithm is based on the number of it-erations (n2) the population size (4n) and the number ofnodes (n) found in the tour In such case the algorithm isconsistent with the order of O(n2 times 4n times n) or O(4n4) Acomputer with an Intel core (i5) and 170GHz CPUcomprised of 50 nodes and 3 drones requires approximatelysim25 million iterations or sim35 seconds for convergence
)e overall complexity of the truck-multidrone problemdenoted as (d]tsp) can be analysed from a brute forcemethodology To evaluate every potential solution for a ten
node problem would require slightly less than ((102) times 210)permutations or approximately sim186e+09 routes and binarydrone assignments Every solution requires two genes a genedescribing the order of the tour (102) and a gene to describeevery possible truck or drone assignments 210 For larger problemsizes say n 50 would require ((502) times 250) 68486e+79iterations translating to approximately 28e61 seconds computertime or sim71e53 years on a 170GHz CPU For such method thenumber of iterations to accomplish would exceed the time in theuniverse
7 Comparison Studies
Two different computational studies are conducted here)efirst study analyses the performance of the metaheuristicsagainst the optimal solution based on MIP and brute forcesolution )e second study analyses the performance of thesystem model parameters (α κ ]) against arbitrarily(standard) assigned system variables
In the first study the performance of the two meta-heuristics described in Section 6 is analysed )e twometaheuristics are compared against themselves as well ascompared with the guaranteed optimal results obtainedfrom the mixed integer program (MIP) )e comparisonstudy analyses four different performance factors (1) theaverage delta delivery-time of the metaheuristic versus theoptimal delivery time found using theMIP (2) the max delta(delivery-time) between the metaheuristic versus the opti-mal time of MIP and (3) the total number of metaheuristicexperiments that resulted in optimal results out of tenstudies and the average computer solution time for themetaheuristic to compute the optimal solution
)e second study analyses the performance of properly(optimally) configured system parameters (α κ ]) as de-scribed in Section 2 (theoretical insights system model)against standard parameters found in the literature(α 2 κ 10 ] 3) In many cases the literature arbi-trarily chooses system parameters as drone speed factor setat two times the speed of the truck (α 2) and an arbitrarydrone range set at ten kilometres (κ 10) based on currenttechnical capabilities )e system comparison study hereanalyses three performance metrics (1) the total delivery-time obtained by a properly configured (lean) system versusthe total delivery-time obtained by arbitrary system pa-rameters (α κ ]) (2) the overall utilization of the dronesthroughout the delivery a properly configured (lean) systemversus the utilization of the drones from a system witharbitrary parameters and (3) the under or oversaturation ofthe system determined by the average wait or idle time (bythe truck or by drone) for all operations
71 Computational Study 1 Metaheuristic Performance toOptimal Solution For the sake of simplicity a plane of(x y) coordinates is uniformly randomly generated fromthe Cartesian coordinate system with Euclidean distancebetween the nodes Concretely all nodes for problemcomparisons herein were sampled from the uniform dis-tribution from 0 1 2 30 For each metaheuristic
Advances in Operations Research 9
experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

network routing problems Furthermore because there aremultiple members of the population within a seed tour-nament the algorithm allows for various mutation meth-odologies to be performed on the members of the seedtournament In this case the random swap (or pairwiseswap) flip and slide mutations have proven to be robustfast and extremely accurate for problems involving per-mutations whereby order matters
)e performance of the evolutionary algorithm is basedon the underlying theoretical principles (a) by initializing arelatively large population (ie 5n) of randomly permutedtours multiple tracks are maintained toward optimal con-vergence (seed tournaments) )ese multiple but differentpaths slowly converge and thus increase the probability ofan optimal convergence (b) By saving the fittest gene in aseed and then slightly perturbing (mutating) the best gene(tour) found in the seed group ensure the solution never getsworse while promoting improvements at each iteration (c)By autoassigning the drone to any ldquowithin rangerdquo node theuse of the drone is maximized throughout the routingprocess while simultaneously reducing the truckrsquos overalltour length )e risk of assigning the wrong node to a droneis mitigated by multiple seeds (d) Multiple path (seed)random search is much faster than having to calculate thegreediness or the exactness of each neighborhood withinreach as in other algorithms )erefore the algorithm relieson computational speed and iterations without the burdenof unnecessary calculations
Both EA1 and EA2 use a route-during-clustering ap-proach )is approach has several advantages over otheralgorithms All algorithms found in the literature with theexception of [16] use route-first cluster-second or a cluster-first route-second approach )is results in a two-phasealgorithmic process whereby the first phase solves forrouting (as in travelling salesperson routing (tsp) or mini-mum spanning tree (mst) routing) the second phase relyingextensively on solutions found in first phase performs swapsbetween truck or drone delivery )e best known algorithmsfor tsp (or mst) routing are on the order of O(n22n) where nis the number of nodes in the route )e second phase in aroute-first-cluster-second algorithm relies heavily on theinitial routing solutions being in the vicinity of a truck-dronesolution As such the second phase is equally complex as thefirst phase with the disadvantage of being locked into apotentially suboptimal routing scheme especially whendrone configurations change
Conversely the route-during-clustering algorithm per-forms the routing and the selection of the truck or drone forthe next operational move segment of the route As such thecomplexity of the algorithm is based on the number of it-erations (n2) the population size (4n) and the number ofnodes (n) found in the tour In such case the algorithm isconsistent with the order of O(n2 times 4n times n) or O(4n4) Acomputer with an Intel core (i5) and 170GHz CPUcomprised of 50 nodes and 3 drones requires approximatelysim25 million iterations or sim35 seconds for convergence
)e overall complexity of the truck-multidrone problemdenoted as (d]tsp) can be analysed from a brute forcemethodology To evaluate every potential solution for a ten
node problem would require slightly less than ((102) times 210)permutations or approximately sim186e+09 routes and binarydrone assignments Every solution requires two genes a genedescribing the order of the tour (102) and a gene to describeevery possible truck or drone assignments 210 For larger problemsizes say n 50 would require ((502) times 250) 68486e+79iterations translating to approximately 28e61 seconds computertime or sim71e53 years on a 170GHz CPU For such method thenumber of iterations to accomplish would exceed the time in theuniverse
7 Comparison Studies
Two different computational studies are conducted here)efirst study analyses the performance of the metaheuristicsagainst the optimal solution based on MIP and brute forcesolution )e second study analyses the performance of thesystem model parameters (α κ ]) against arbitrarily(standard) assigned system variables
In the first study the performance of the two meta-heuristics described in Section 6 is analysed )e twometaheuristics are compared against themselves as well ascompared with the guaranteed optimal results obtainedfrom the mixed integer program (MIP) )e comparisonstudy analyses four different performance factors (1) theaverage delta delivery-time of the metaheuristic versus theoptimal delivery time found using theMIP (2) the max delta(delivery-time) between the metaheuristic versus the opti-mal time of MIP and (3) the total number of metaheuristicexperiments that resulted in optimal results out of tenstudies and the average computer solution time for themetaheuristic to compute the optimal solution
)e second study analyses the performance of properly(optimally) configured system parameters (α κ ]) as de-scribed in Section 2 (theoretical insights system model)against standard parameters found in the literature(α 2 κ 10 ] 3) In many cases the literature arbi-trarily chooses system parameters as drone speed factor setat two times the speed of the truck (α 2) and an arbitrarydrone range set at ten kilometres (κ 10) based on currenttechnical capabilities )e system comparison study hereanalyses three performance metrics (1) the total delivery-time obtained by a properly configured (lean) system versusthe total delivery-time obtained by arbitrary system pa-rameters (α κ ]) (2) the overall utilization of the dronesthroughout the delivery a properly configured (lean) systemversus the utilization of the drones from a system witharbitrary parameters and (3) the under or oversaturation ofthe system determined by the average wait or idle time (bythe truck or by drone) for all operations
71 Computational Study 1 Metaheuristic Performance toOptimal Solution For the sake of simplicity a plane of(x y) coordinates is uniformly randomly generated fromthe Cartesian coordinate system with Euclidean distancebetween the nodes Concretely all nodes for problemcomparisons herein were sampled from the uniform dis-tribution from 0 1 2 30 For each metaheuristic
Advances in Operations Research 9
experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

experiment 10 runs were conducted in order to average theresults Results obtained were based on delta from optimalwhereby delta is defined as the difference between delivery-
time (and final route) obtained from the metaheuristicversus the delivery-time (and final route) obtained by anoptimal guarantee process (ie MIP)
DATA Random Population matrix tours where Routei isin Population
RESULT Routeopt sim optimal tour isin Population of n delivery stops
FOR iterations in budjet LOOPFOR each (i) population member LOOP
Routei⟵ a tour within the populations of tourslaunch⟵Routei (1) first noderendezvous⟵Routei (2) second nodecandidate⟵Routei (3) third nodedrone count⟵ 0route time⟵ 0
WHILE candidatele total delivery nodes DOtruck op time⟵ get truck time (launch rendezvous)drone op time⟵ get drone time (launch candidate rendezvous)drone op dist⟵ get drone distance (launch candidate rendezvous)IF candidatege total delivery nodes THENIF drone countge number drones availOR drone op distgt drone range THENMax op timemax (truck op time drone op time multiple drone op time)route time⟵ route time+max op time+ truck op timeroute time⟵ route time+ get truck time (candidate depot)
ELSE (drone makes last delivery)Max op timemax (truck op time drone op time multiple drone op time)Route time⟵ route time+max op time+ get truck time (rendezvous depot)
END IFBREAK while loop
END IFIF drone countge number drone avail OR drone distgt drone range THENMax op time⟵max (truck op time multiple drone op time)Route time⟵ route time+max op timeLaunch⟵ rendezvousrendezvous⟵ candidatecandidate⟵min (Routei(candidate+ 1) total number stops)drone count⟵ 0multi drone op time⟵ 0
ELSE (assign delivery to drone)max op time⟵max (truck op time drone op time multiple drone op time)route time⟵ route time+max op timecandidate⟵Routei(candidate+ 1)drone count⟵ drone count+ 1multi drone op time(drone count)⟵ drone op time
END IFList of all Route Times (p)⟵ route time
END WHILEEND FOR (each population member)Population⟵ randomly shuffle among the tours in population keep routes intact
FOR each of five tours in population LOOP through keep tournament winners mutate losersBest time Id Best Route⟵Get Fittest Member tour of tournament of 5Overwrite each of the four less fit tours with the fittest memberMutate first of the four less fit tours by random swapMutate second of the four less fit tours by random segment slideMutate third of the four less fit tours by random segment flipMutate fourth of the four less fit tours by swapping last node in tour with any otherDo nothing for fifth tour keep the fittest tour intact
END FOR mutations and tournament winnersPopulation⟵ update old Population with new Population mutations and winners
END FOR total budget exhaustedRETURN overall best tour in population (time route) and graph route
ALGORITHM 1 Evolutionary Algorithm (EA1)
10 Advances in Operations Research
Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

Δ objective value heuristic minus optimal objective value
optimal objective value
(37)
)e metaheuristic experiments were run on a Windows10 operating system Intelreg Coretrade i5-835OU CPU 170GHz and 4GB of memory )e main purpose of theexperiments was to determine the accuracy of the meta-heuristics denoted by delta (Δ or deviation fromoptimal)and total computer-solution time (elapse time) Since op-timization can only be guaranteed (compared to MIP) bysmaller job sizes the job size for experiments ranged from 10to 15 jobs (nodes) Table (Table 1) below shows results for 10randomly generated instances with 10 and 15 nodes of eachinstance type For each experiment (10 runs) the delta fromoptimal is averaged (avg) the max deviation from optimal isdetermined (max) the total number of experiments found tobe optimal (opt out of 10) and the total computer-solutiontime is given (elapse time) for comparison
Results indicate that both EA-1 and EA-2 are capable ofsolving the truck-multidrone problem near optimal)e EA-1 slightly outperformed EA-2 due to the higher utilization ofdrones It is estimated that depending on the configurationof the system parameters to the operational spaced EA-2 isefficient when there are more drones than necessary fitted tothe truck or the system is highly saturated with resources
72 Computational Study 2 Lean System Parameters Com-pared to Standard Parameters )e second study comparesthe performance of a lean or properly configured systemparameters (α κ ]) against an arbitrarily set of systemparameters (α 2 κ 10 ] 3) often found in the litera-ture For the sake of simplicity an experiment was drawnfrom a uniform random distribution of the (x y) plane
comprised of Euclidean distance between each of the co-ordinate delivery nodes Since the experiments are designedto compare the performance of a lean system to an arbitrarysystem the performance parameters selected for comparisonare delivery-time ti utilization util and truck or drone waittime Each experiment was comprised of ten (10) runs inorder to obtain an averaged set of results )e delivery areawas perturbed between 1 km2 to 1000 km2 to evaluate vari-ous delivery densities for 30 delivery sites Table 2 shows theresults of six experiments each with ten runs comparing thearbitrary system parameters to the lean system parametersderived from the nonlinear optimization in Section 3 )eevolutionary algorithm EA-1 (Section 7) was used to opti-mally route and cluster the truck and n-drones throughoutthe delivery area to arrive at the optimal delivery times foreach run for each experiment EA-1 was also used to obtainaverage utilization (of drones) and the average wait time foreither the truck or the drone for each operation within eachrun )e average of the ten runs is reported in Table 2
Experiment results show that by adopting the leansystem parameters the overall delivery time is consistentlyreduced Results show delivery time reductions for eachexperiment (56 33 15 8 9 and 26) It is notedthat for at least two experiments the arbitrary configurationwas close to the calculated lean configuration thus no majorimprovements were expected for experiments 4 and 5 Anexpected tradeoff is utilization In poorly configured sys-tems the drones are either highly utilized or rarely utilizedthus they range from bottleneck to saturated resources )elean configuration slightly relieves the bottleneck system andunsaturates low utilization configurations Average waittime for each operation slightly increased due to the sto-chastic nature of within the experiment design In this casethe drones often found themselves advance of the truck in
Table 1 Comparison of EA1 and EA2 to optimal solutions
From optimal Comp performance timeEA-I EA-2 EA-1 EA-2
Sire kg Max opt Avg Max opt Elapse time (s) Elapse time (s)10 nodes 000 000 1010 000 000 11110 23 2515 node 003 003 910 004 004 910 32 41Note algorithm performances arc compared to known optimal solulions (brute force 4EP) Rends averaged over ten MICHMelat Standard drone pa-rameters Delivery nodes sampled from random uniform distribution drone speed factor α 2 drone range κ 10 number drones assigned truck v 4
Table 2 Lean system performance results System performance Comparing geometric-based optimal drone parameters to standard droneparameters
Exp Size operating area (km2)Standard parameters (α 2 κ 10 v 3) Optimal system parameters (α κ and v)Avg utiL Avg wait Avg time Avg utiL Avg wait Avg time
1 1 100 0063 248 098 005 1082 25 100 0286 1182 099 024 7913 100 095 093 2503 086 176 21134 300 075 203 5152 064 210 47105 700 022 273 10294 029 330 93246 1000 024 222 13947 029 316 10331For each of the six experiments ten runs were conducted for each delivery area (km2) and results were averaged Each experiment was comprised of 30delivery nodes Arbitrary system parameters (α 2 κ 10 v 3) were compared to lean system parameters determined by nonlinear-optimization equationsfound in Section 2
Advances in Operations Research 11
operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

operations and therefore at an increased opportunity toaccumulate wait time
8 Conclusions
)e current literature lacks any usable information in termsof the highest yield regions of the design space (speed rangeand number drones) for a main tool with multiple assistingtools specifically herein we analysed a truck-multiple-drone configuration Few if any research articles address atractable usable MIP for the truck-multidrone problem forquick transfer and testing within standard optimization tools(IBMreg ILOG CPLEX Lindoreg Lingo) )erefore anybusiness wishing to evaluate the use of a single truck fittedwith multiple drones has a way neither to guide the selectionof drone parameters nor to evaluate the efficiencies of thoseselections without developing scientific experiments )eldquopractical best caserdquo geometric approach shown herein in-verts the problem space and solves for practical best casedrone speed drone range and number of drones given ageneral delivery scenario Concretely it serves as a basis toaddress practical design decisions regarding the properconfigurations to achieve the maximum desired yields for asystem It serves as a way to screen out low performingdesigns while giving the decision maker a Pareto front ofpotential configuration solutions that achieve a lean align-ment Moreover both the MIP and metaheuristics devel-oped herein for empirical studies accurately solve for theoptimal truck-multidrone routing thus giving the businessample tools for evaluating generalized scenarios
)e simplified version of the MIP is not found in anyother study it is useful and an easily implemented meta-heuristic necessary to solve for the optimal route and op-timal time for the truck-multiple-drone for smaller problemsets For larger problem sets the single chromosome evo-lutionary algorithm (EA-1) is best in class metaheuristic totest various test-case scenarios Both EA-1 and EA-2 weremodelled as functions within the MATLABreg developmentenvironment language and the files were made available atMathworksreg file exchange (dvtsp_ga_basic) for evaluationand general purpose usetesting As far as we could surmiseour EA is the only algorithm available for such problemsfound in the literature or in an open resource environment
In conclusion this research answers the questions ofexpected efficiencies in time that would be expected given atruck-multidrone configuration as well as finding ldquowhat is theproper configuration for a truck-multidrone situationrdquo Itgives business a foundation to evaluate a variety of config-urations against a typical daily last-mile parcel-delivery sce-nario )e work also opens several additional questions forfuture research )ese questions tend to be toward the totalenergy savings and the energy saturation for different truck-multiple-drone generalized situations the business may en-counter Future research studies a fleet of trucks each fittedwith the optimal number and type of drones
Data Availability
Genetic algorithms and metaheuristics are available onlinein MATLAB after publication
Conflicts of Interest
)e authors declare that they have no conflicts of interest
Authorsrsquo Contributions
(1) R R conceived the presented idea developed the systemtheory performed the computations developed the theo-retical formalism performed the analytic calculationsperformed the numerical simulations verified the analyticalmethods of the system theory mixed integer program andmetaheuristics wrote all sections of the paper including allthe tables and graphs conducted the fundamental experi-ments conducted the performance comparison for evolu-tionary algorithms 1 and 2 against optimal solution andconducted the lean comparison tests to the arbitrarilyconfigured system
References
[1] N Agatz P Bouman and M Schmidt ldquoOptimization ap-proaches for the traveling salesman problem with dronerdquoTransportation Science vol 52 no 4 pp 965ndash981 2018
[2] B Golden S Raghavan and E Wasil ldquo)e vehicle routingproblem latest advances and new challengesrdquo in OperationsResearchComputer Sciences Interfaces vol 43 SpringerBerlin Germany 2008
[3] P Toth and D Vigo 1e Vehicle Routing Problem SIAMMonographs on Discrete Mathematics and Applications SIAMMonographs on Discrete Mathematics and ApplicationsPhiladelphia PA USA 2002
[4] S N Kumar and R Panneerselvam ldquoA survey on the vehiclerouting problem and its variantsrdquo Intelligent InformationManagement vol 4 no 3 pp 66ndash74 2012
[5] P Toth and D Vigo Vehicle Routing Problems Methods andApplications Society for Industrial and Applied MathematicsPhiladelphia PA USA 2nd edition 2014
[6] C E Miller A W Tucker and R A Zemlin ldquoInteger pro-gramming formulation of traveling salesman problemsrdquoJournal of the ACM (JACM) vol 7 no 4 pp 326ndash329 1960
[7] G Dantzi and J Ramser ldquo)e truck dispatching problemrdquoManagement Science vol 6 no 1 pp 80ndash91 1959
[8] G Clarke and J W Wright ldquoScheduling of vehicles from acentral depot to a number of delivery pointsrdquo OperationsResearch vol 12 no 4 pp 568ndash581 1964
[9] M Desrochers J K Lenstra and M W P Savelsbergh ldquoAclassification scheme for vehicle routing and schedulingproblemsrdquo European Journal of Operational Research vol 46no 3 pp 322ndash332 1990
[10] M Drexl ldquoSynchronization in vehicle routing-A survey ofVRPs with multiple synchronization constraintsrdquo Trans-portation Science vol 46 no 3 pp 297ndash316 2012
[11] A-S Pepin G Desaulniers A Hertz and D Huisman ldquoAcomparison of five heuristics for the multiple depot vehiclescheduling problemrdquo Journal of Scheduling vol 12 no 1pp 17ndash30 2009
[12] Y Lin Z Bian S Sun and T Xu ldquoA two stage simulatedannealing algorithm for the many-to-many milk run routingproblem with pipleline inventory costrdquo Mathematical Prob-lems in Engineering vol 2015 Article ID 428925 22 pages2015
12 Advances in Operations Research
[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13

[13] C C Murray and A G Chu ldquo)e flying sidekick travelingsalesman problem optimization of drone-assisted parceldeliveryrdquo Transportation Research Part C Emerging Tech-nologies vol 54 pp 86ndash109 2015
[14] P Bouman N Agatz and M Schmidt ldquoDynamic program-ming approaches for the traveling salesman problem withdronerdquo September 2017 httpsssrncomabstract=3035323
[15] S Ferrandez T Harbison T Weber R Sturges and R RichldquoOptimization of a truck-drone in tandem delivery networkusing K-means and genetic algorithmrdquo Journal of IndustrialEngineering and Management vol 9 no 2 pp 379ndash383 2016
[16] R Rich ldquoInverting the truck-drone network problem to findbest case configurationrdquo Advances in Operations Researchvol 2020 Article ID 4053983 10 pages 2020
Advances in Operations Research 13