Introduction to Introduction to Control SystemsControl Systems
26
Lecture Notes Lecture Notes Introduction to Introduction to Control Systems Control Systems Instructor: Dr. Huynh Thai Hoang Department of Automatic Control Faculty of Electrical & Electronics Engineering Ho Chi Minh City University of Technology Ho Chi Minh City University of Technology Email: [email protected] [email protected] Homepage: www4 hcmut edu vn/ hthoang/ 16 November 2012 © H. T. Hoang - www4.hcmut.edu.vn/~hthoang/ 1 Homepage: www4.hcmut.edu.vn/~hthoang/
Transcript of Introduction to Introduction to Control SystemsControl Systems
Lecture NotesLecture Notes
Introduction to Introduction to Control SystemsControl Systems
Instructor: Dr. Huynh Thai HoangDepartment of Automatic Control
Faculty of Electrical & Electronics EngineeringHo Chi Minh City University of TechnologyHo Chi Minh City University of Technology
Email: [email protected]@yahoo.com
Homepage: www4 hcmut edu vn/ hthoang/
16 November 2012 © H. T. Hoang - www4.hcmut.edu.vn/~hthoang/ 1
Homepage: www4.hcmut.edu.vn/~hthoang/
Chapter 7Chapter 7
Digital Control SystemsDigital Control SystemsDigital Control SystemsDigital Control Systems
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 2
Introduction to digital control system
ContentContent
Introduction to digital control system Digital PID controller Examples of digital control system
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 3

Introduction Introduction to digital control systemsto digital control systems
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 4
Digital Digital control systemscontrol systems
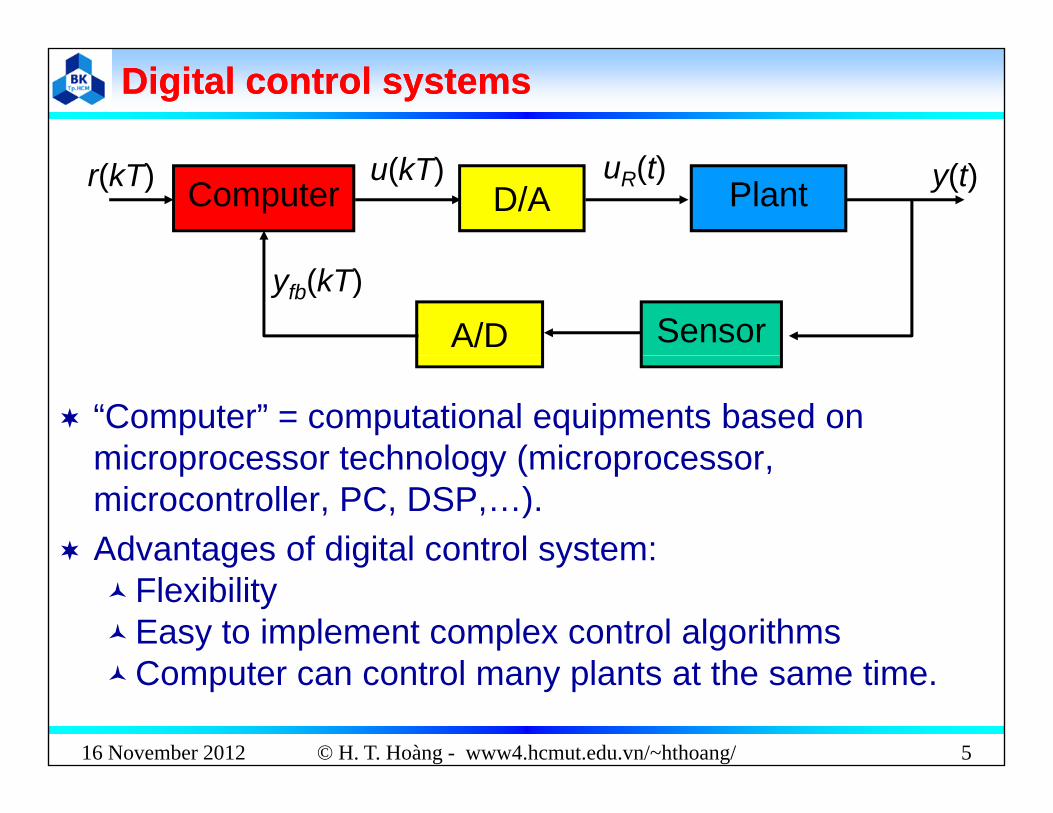
Computer D/A Plantr(kT) y(t)u(kT) uR(t)
A/Dyfb(kT)
Sensor
“Computer” = computational equipments based on microprocessor technology (microprocessormicroprocessor technology (microprocessor, microcontroller, PC, DSP,…).
Advantages of digital control system:d a tages o d g ta co t o systeFlexibilityEasy to implement complex control algorithms
C t t l l t t th ti
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 5
Computer can control many plants at the same time.
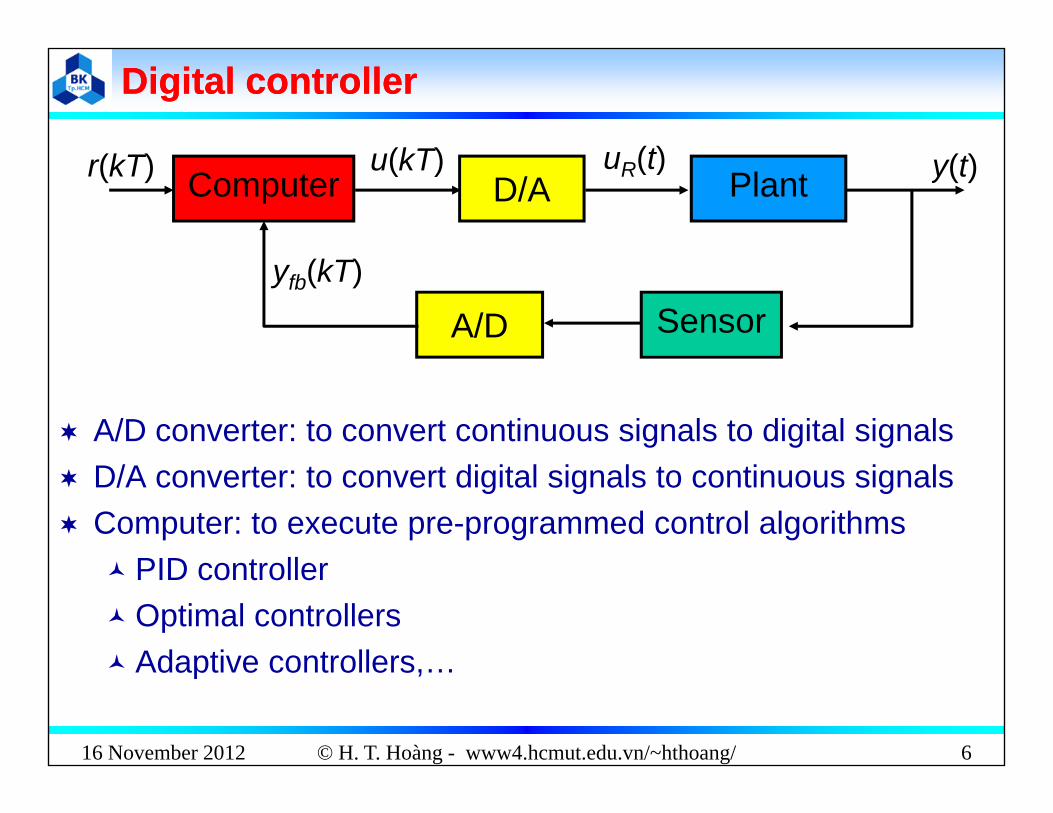
Digital controllerDigital controller
(kT) (t)Computer D/A Plantr(kT) y(t)u(kT) uR(t)
A/Dyfb(kT)
Sensor
A/D converter: to convert continuous signals to digital signals D/A converter: to convert digital signals to continuous signals Computer: to execute pre-programmed control algorithms
PID t ll PID controllerOptimal controllers Adaptive controllers
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 6
Adaptive controllers,…
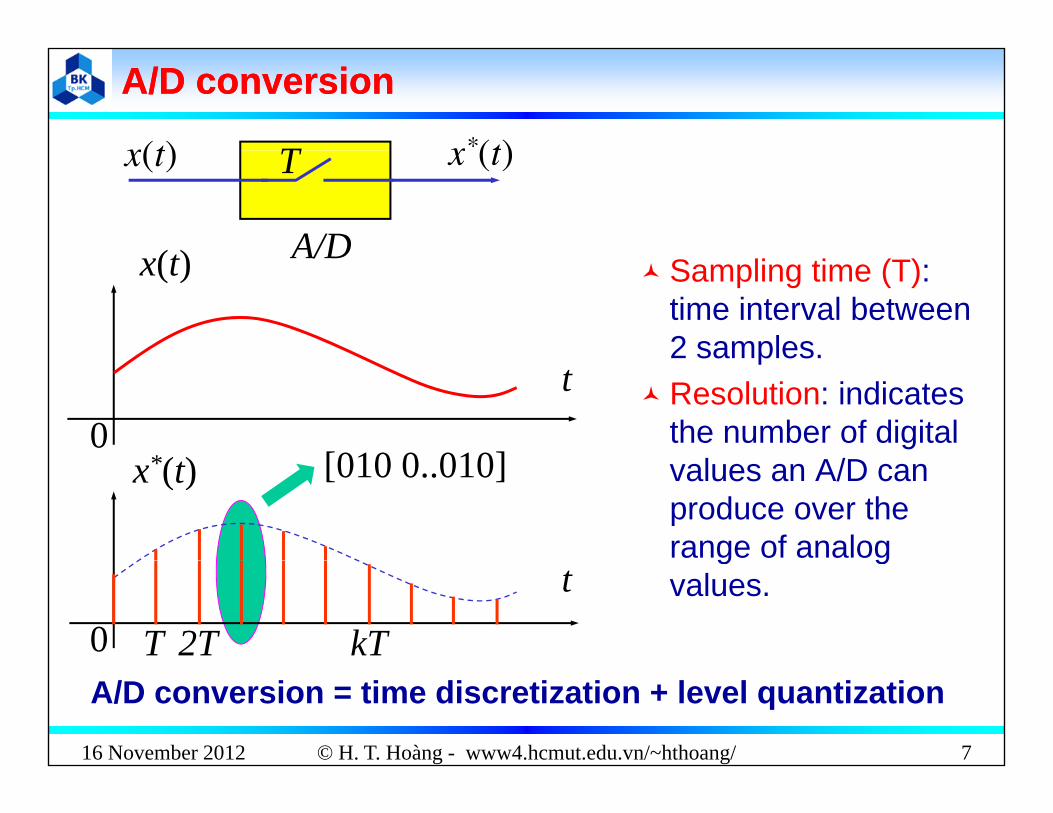
A/D conversionA/D conversion
x(t) x*(t)Tx(t) x (t)T
A/D( ) A/Dx(t) Sampling time (T): time interval between 2 samples.
[010 0 010]
t0
*( )
2 samples. Resolution: indicates
the number of digital /[010 0..010]x*(t) values an A/D can
produce over the range of analog
0t
T 2T kT
g gvalues.
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 7
A/D conversion = time discretization + level quantization
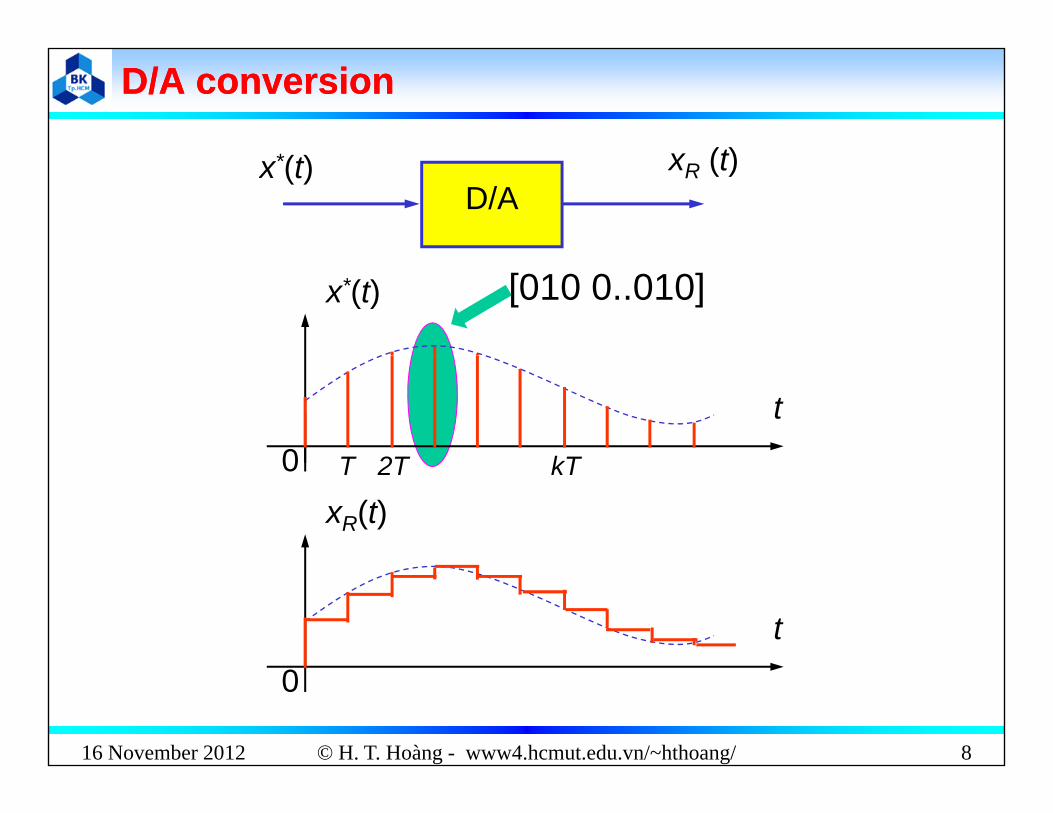
D/A conversionD/A conversion
(t)x*(t) xR (t)D/A
[010 0..010]x*(t)
0t
T 2T kT0xR(t)T 2T kT
t
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 8
0
Digital PID controllersDigital PID controllers
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 9
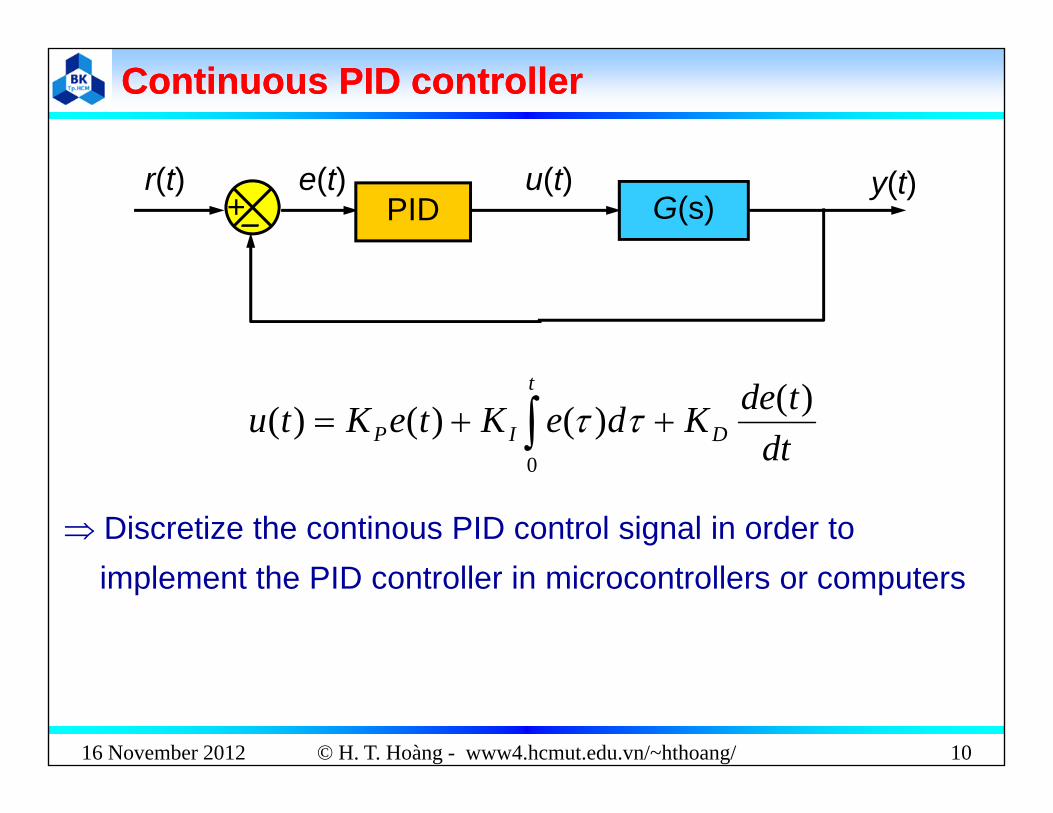
Continuous Continuous PID controllerPID controller
r(t)+
y(t)e(t) u(t)G(s)PID
dttdeKdeKteKtu
t
DIP)()()()(
0
dt0
Discretize the continous PID control signal in order to implement the PID controller in microcontrollers or computers
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 10
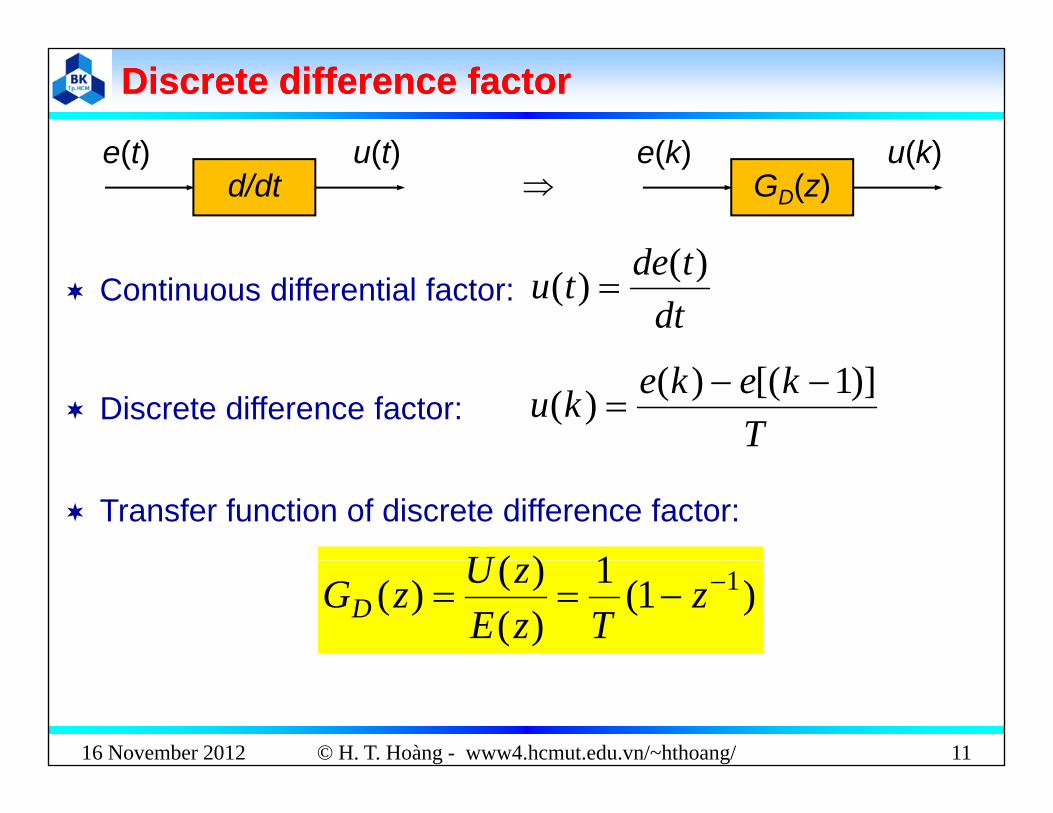
Discrete difference Discrete difference factorfactor
u(t)e(t) u(k)e(k)d/dt
u(t)e(t)
d )(
GD(z)u(k)e(k)
dttdetu )()( Continuous differential factor:
Discrete difference factor:T
kekeku )]1[()()(
Transfer function of discrete difference factor:
1)(U )1(1)()()( 1 z
TzEzUzGD
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 11
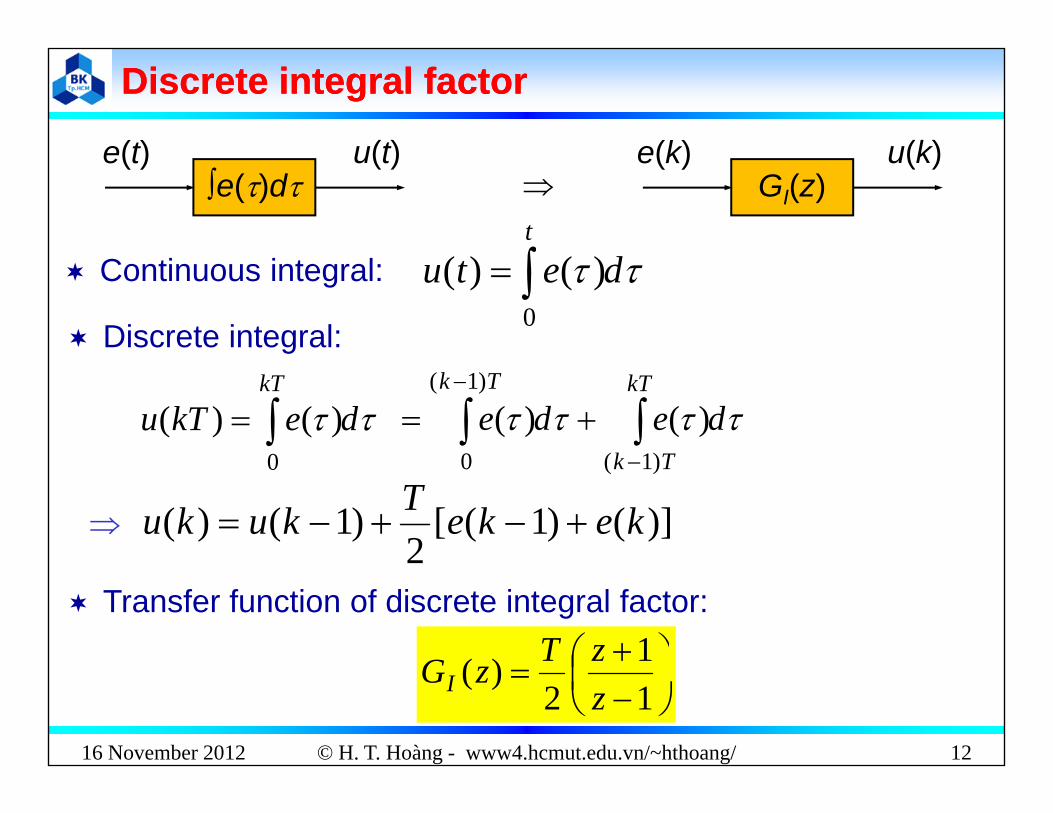
Discrete integral Discrete integral factorfactor
u(t)e(t) u(k)e(k)
t
e()du(t)e(t)
GI(z)u(k)e(k)
detu 0
)()( Continuous integral:
Discrete integral:
dekTukT
0
)()( dedekT
Tk
Tk
)1(
)1(
0
)()(0 Tk )1(0
)]()1([2
)1()( kekeTkuku 2
Transfer function of discrete integral factor:
1)( zTG
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 12
12)(
zzGI
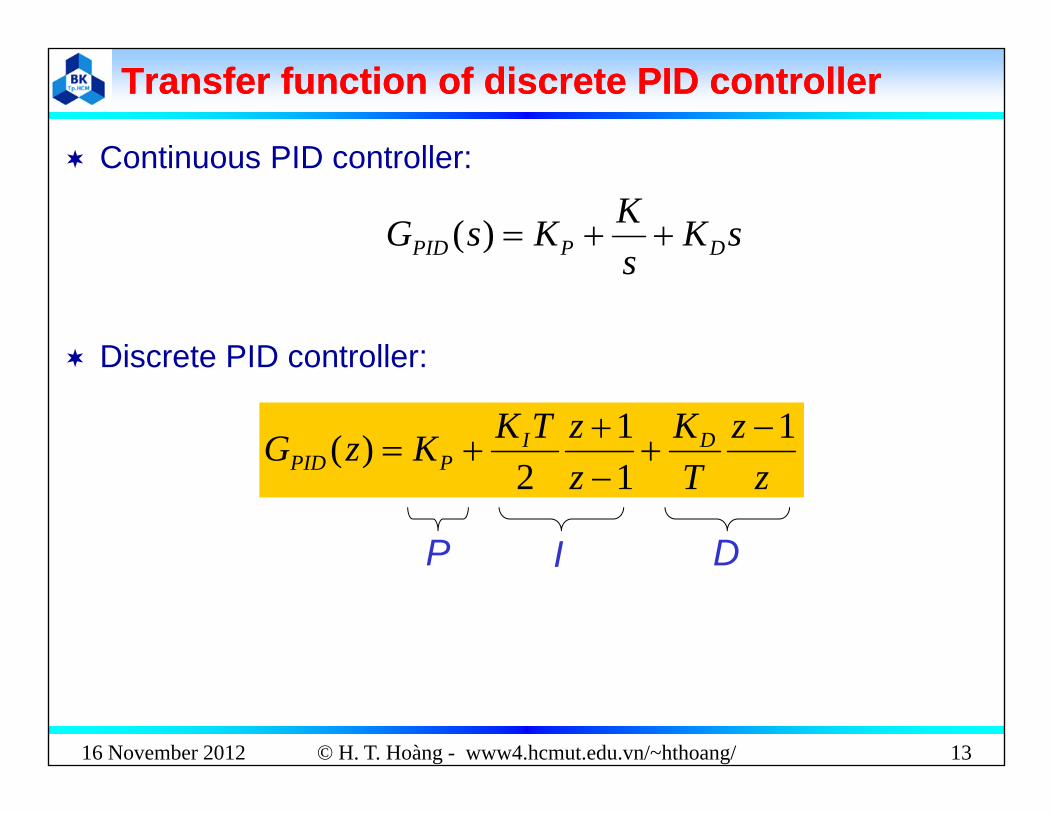
Transfer function of discrete PID controllerTransfer function of discrete PID controller
C ti PID t ll Continuous PID controller:
sKKKsG DPPID )(
Discrete PID controller:
s DPPID )(
zKzTKKzG DIPPID
11)(
Discrete PID controller:
zTzKzG PPID 12
)(
P I DP I D
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 13
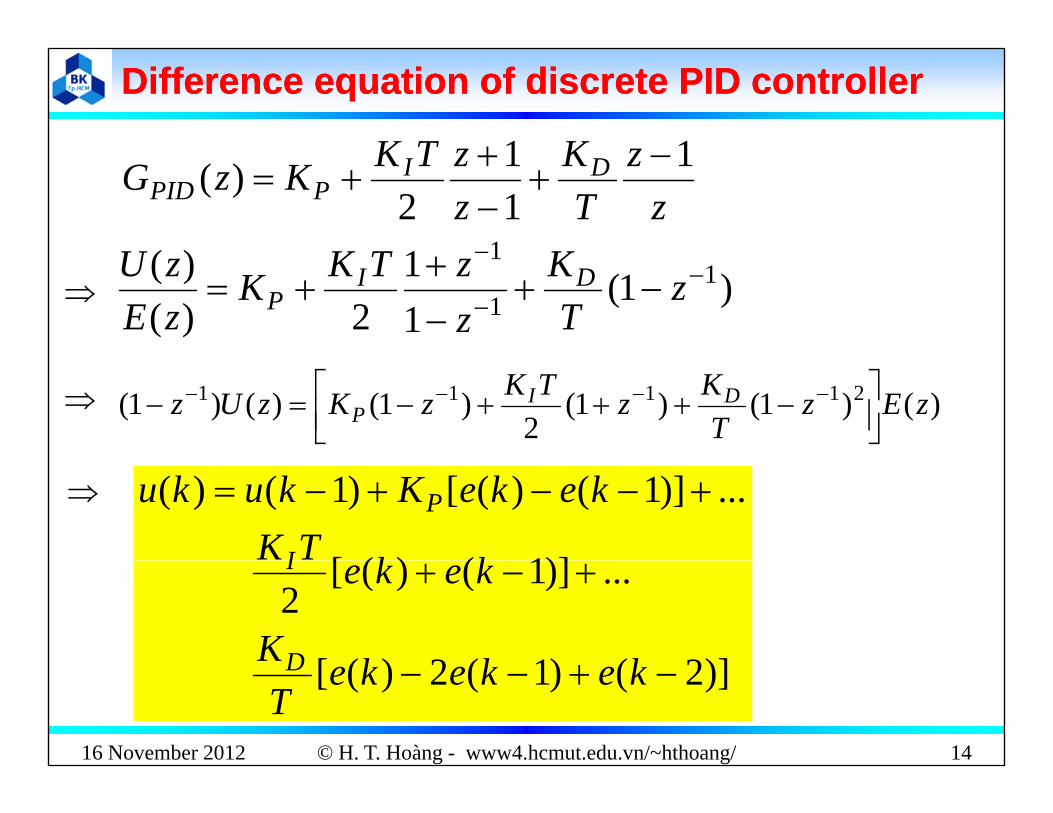
Difference equation of discrete Difference equation of discrete PID controllerPID controller
zKzTK 11z
zT
KzzTKKzG DI
PPID1
11
2)(
1)( 1 KTKU )1(11
2)()( 1
1
1
zT
KzzTKK
zEzU DI
P
)()1()1(2
)1()()1( 21111 zEzT
KzTKzKzUz DIP
)]1()([
...)]1()([)1()(
kkTKkekeKkuku
I
P
)]2()1(2)([
...)]1()([2
kkkK
keke
D
I
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 14
)]2()1(2)([ kekekeT
D
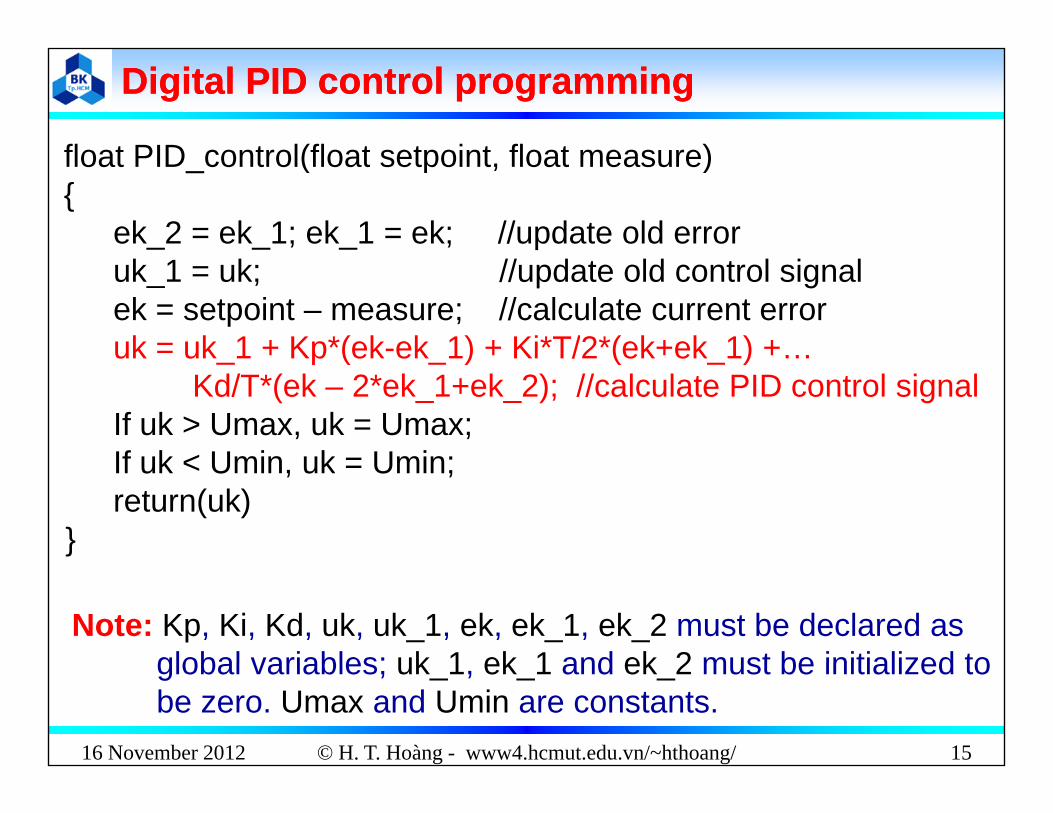
Digital PID control programming Digital PID control programming
float PID control(float setpoint float measure)float PID_control(float setpoint, float measure){
ek_2 = ek_1; ek_1 = ek; //update old erroruk_1 = uk; //update old control signalek = setpoint – measure; //calculate current erroruk = uk 1 + Kp*(ek-ek 1) + Ki*T/2*(ek+ek 1) +…uk uk_1 Kp (ek ek_1) Ki T/2 (ek ek_1) …
Kd/T*(ek – 2*ek_1+ek_2); //calculate PID control signalIf uk > Umax, uk = Umax;If uk < Umin uk = Umin;If uk < Umin, uk = Umin;return(uk)
}
Note: Kp, Ki, Kd, uk, uk_1, ek, ek_1, ek_2 must be declared as global variables; uk 1 ek 1 and ek 2 must be initialized to
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 15
global variables; uk_1, ek_1 and ek_2 must be initialized to be zero. Umax and Umin are constants.
Approaches to design discrete controllersApproaches to design discrete controllers
Indirect design: First design a continuous controller Indirect design: First design a continuous controller,then discretize the controller to have a discrete controlsystem. The performances of the obtained discretey pcontrol system are approximate those of the continuouscontrol system provided that the sample time is small
henough.
Direct design: Directly design discrete controllers in Zdomain.Methods: root locus, pole placement, analyticalmethod, …
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 16
Implementation of control systemsImplementation of control systems
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 17
Knowlegde requiredKnowlegde required
C t l th Control theory
Electronic circuits
Sensors and measurement
Power electronic Power electronic
Microcontroller
Programming
Knowledge relalated to the plant to be controlled Knowledge relalated to the plant to be controlled
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 18
Basic conponents of microcontrollersBasic conponents of microcontrollers
A i t ll b i ll t i f ll iA microcontroller basically contains one or more following components: Central processing unit(CPU) Central processing unit(CPU) Random Access Memory)(RAM) Read Only Memory(ROM)y y( ) Input/output ports Timers and Counters Interrupt Controls Analog to digital converters
Di it l l t Digital analog converters Serial interfacing ports Oscillatory circuits
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 19
Oscillatory circuits
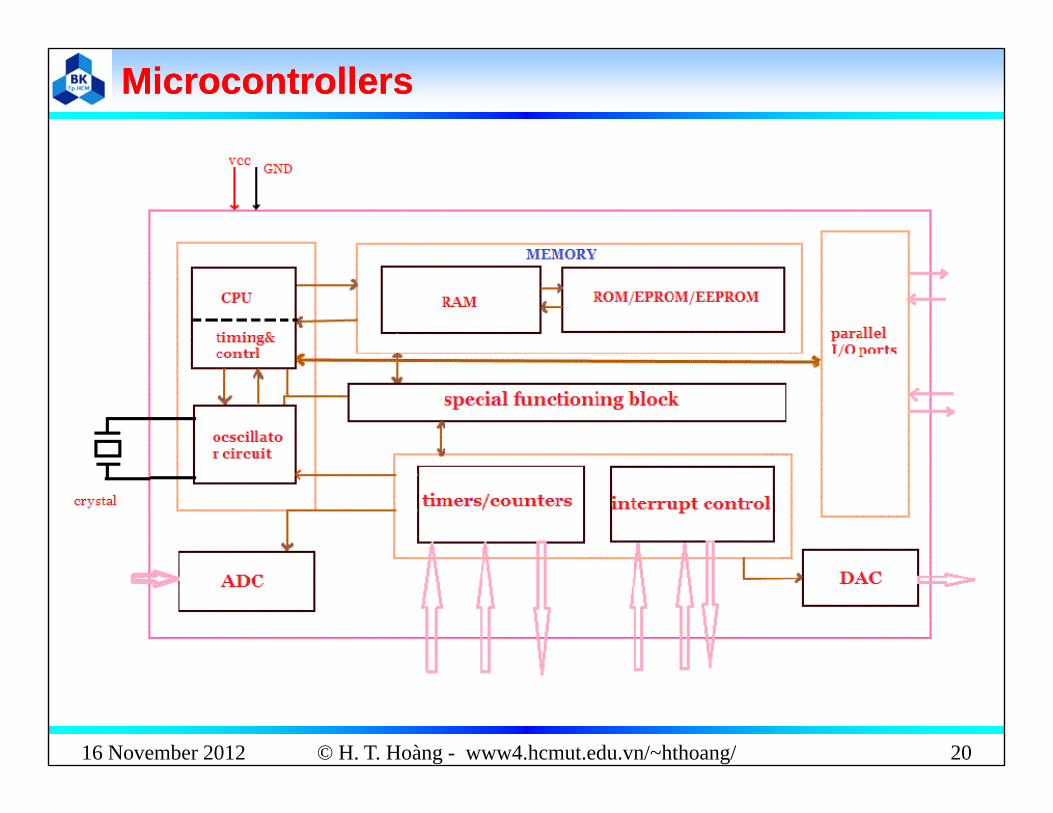
MicrocontrollersMicrocontrollers
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 20
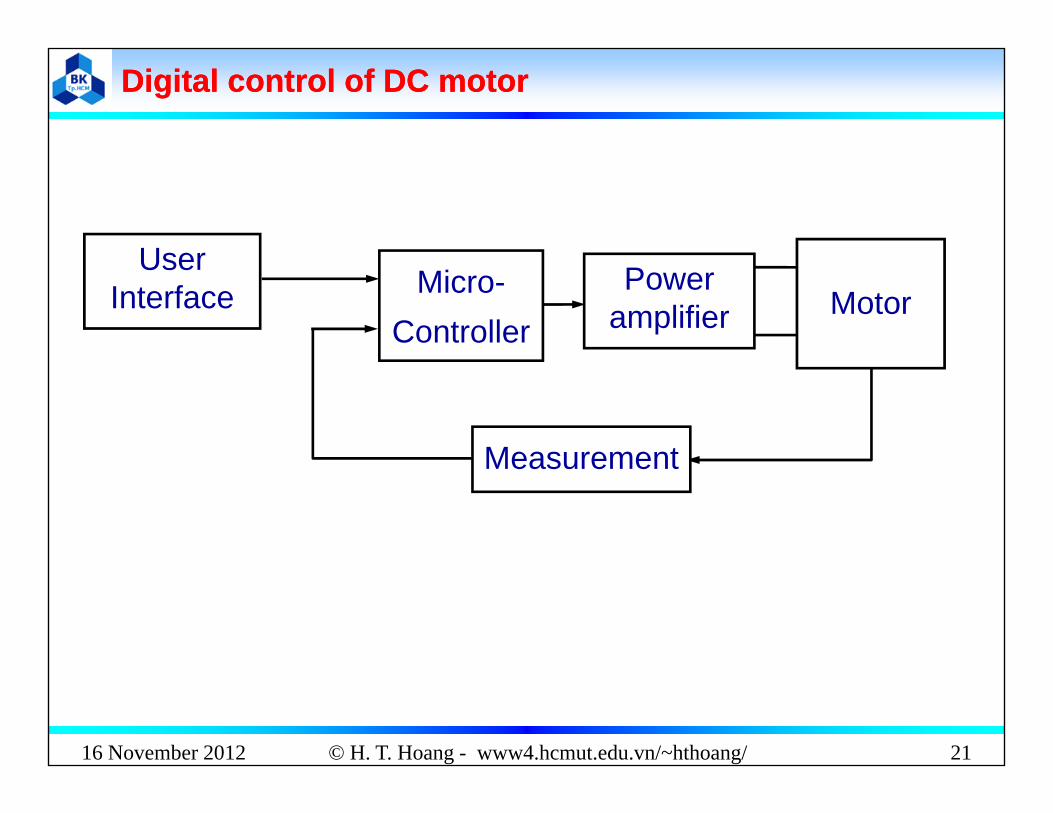
Digital control of DC motorDigital control of DC motor
UserMicro-
ControllerPower
amplifier MotorUser
Interface
MeasurementMeasurement
16 November 2012 21© H. T. Hoang - www4.hcmut.edu.vn/~hthoang/
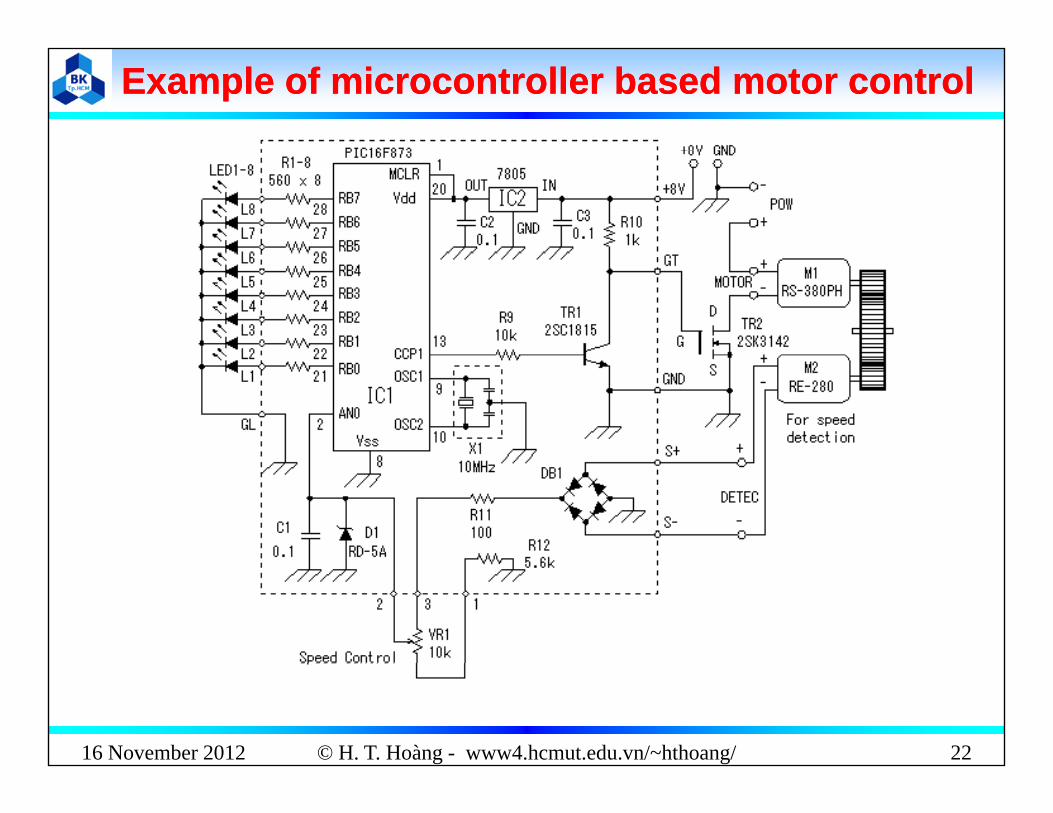
Example of microcontroller based motor controlExample of microcontroller based motor control
16 November 2012 © H. T. Hoàng - www4.hcmut.edu.vn/~hthoang/ 22
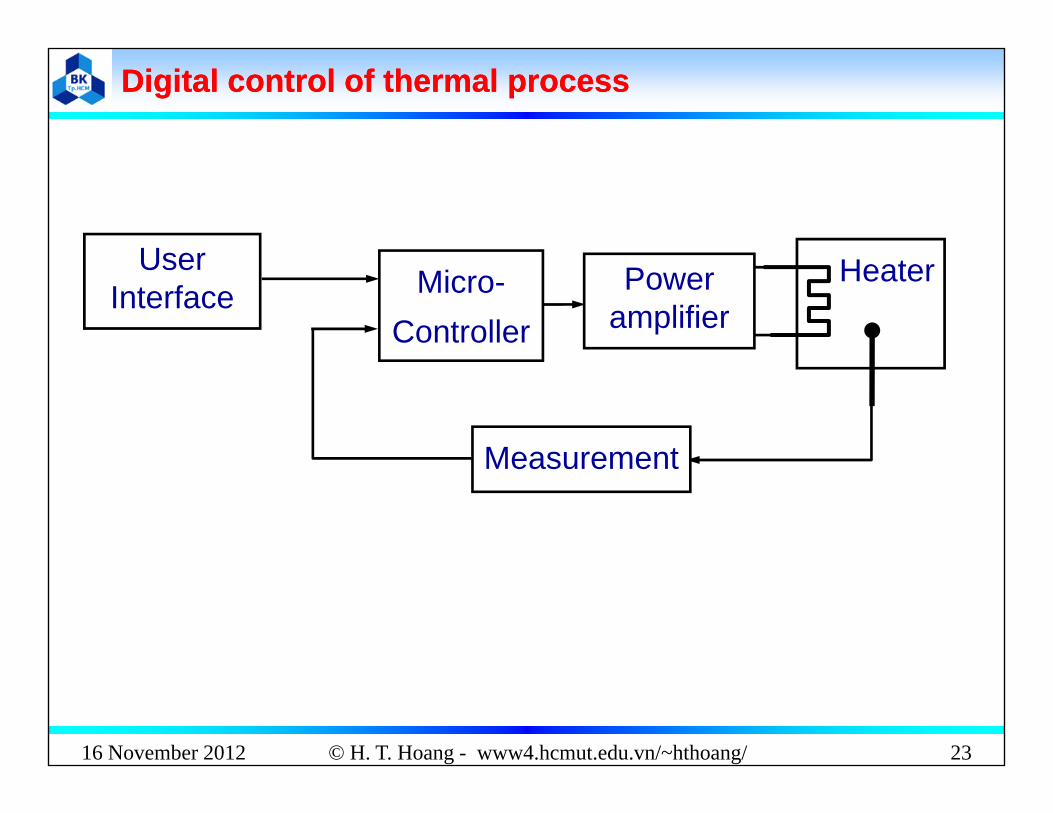
Digital control of thermal processDigital control of thermal process
UserMicro-
ControllerPower
amplifierHeaterUser
Interface
MeasurementMeasurement
16 November 2012 23© H. T. Hoang - www4.hcmut.edu.vn/~hthoang/
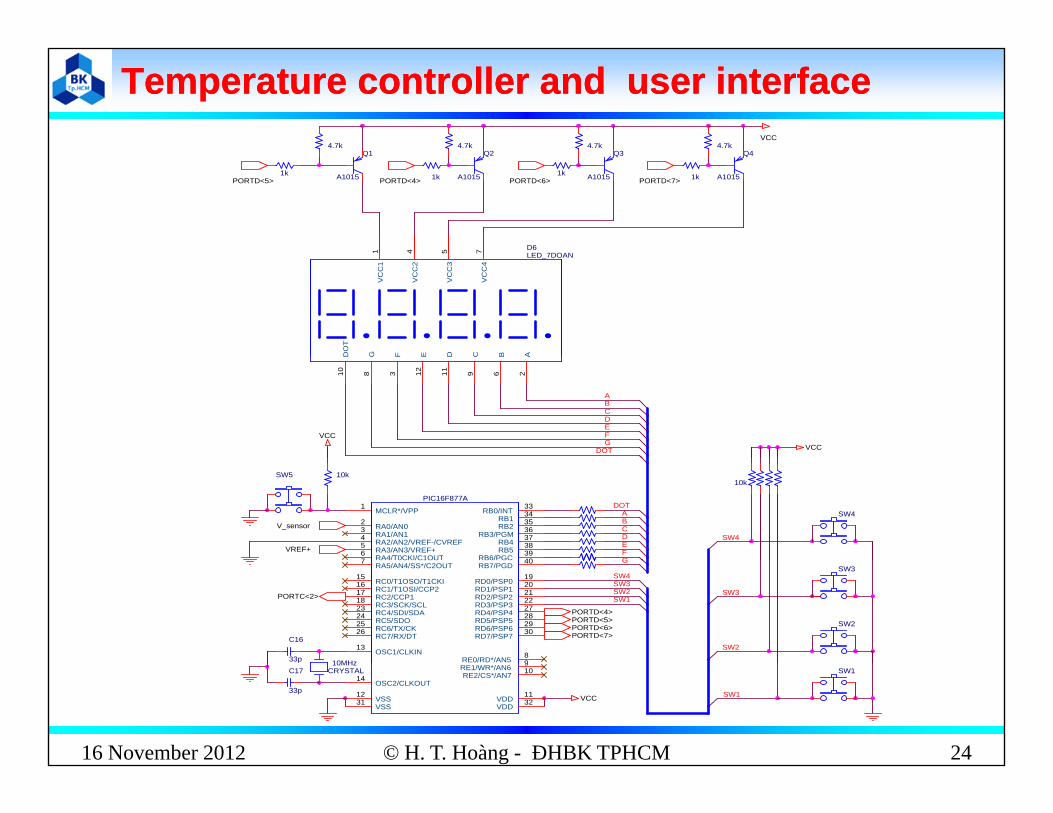
4.7k 4.7kVCC
4.7k 4.7k
Temperature controller and user interfaceTemperature controller and user interface
1k
D6LED 7DOAN1 4 5 7
1kPORTD<6>
Q2
A1015
Q3
A1015PORTD<4> 1k 1k
Q1
A1015PORTD<5>
Q4
A1015PORTD<7>
. . . .
LED_7DOAN4 5 7
VC
C1
AF
VC
C2
VC
C3
VC
C4
G CDO
T
DE B
DOT
238 910 1112 6
AFG CD DE B
G
C
ED
VCCVCC F
AB
D
SW4A
V_sensor
GF
B
VREF+SW4
10k
E
PIC16F877A
234567
3334353637383940
1
RA0/AN0RA1/AN1RA2/AN2/VREF-/CVREFRA3/AN3/VREF+RA4/T0CKI/C1OUT
RB0/INTRB1RB2
RB3/PGMRB4RB5
RB6/PGC
MCLR*/VPPDOT
10k
C
SW5
SW2
SW3
PORTD<5>
10MHz
C16
33p
SW3
SW4
PORTD<6>
PORTD<4>
G
SW1
SW2
7 40
1516171823242526
1920212227282930
1389
RA5/AN4/SS*/C2OUT RB7/PGD
RC0/T1OSO/T1CKIRC1/T1OSI/CCP2RC2/CCP1RC3/SCK/SCLRC4/SDI/SDARC5/SDORC6/TX/CKRC7/RX/DT
RD0/PSP0RD1/PSP1RD2/PSP2RD3/PSP3RD4/PSP4RD5/PSP5RD6/PSP6RD7/PSP7
OSC1/CLKINRE0/RD*/AN5
SW2
SW3
PORTC<2>
PORTD<7>
16 November 2012 © H. T. Hoàng - ÐHBK TPHCM 24
10MHzCRYSTAL
VCC SW1
C17
33p
SW114
3211
3112
910
OSC2/CLKOUT
VDDVDD
VSSVSS
RE1/WR*/AN6RE2/CS*/AN7
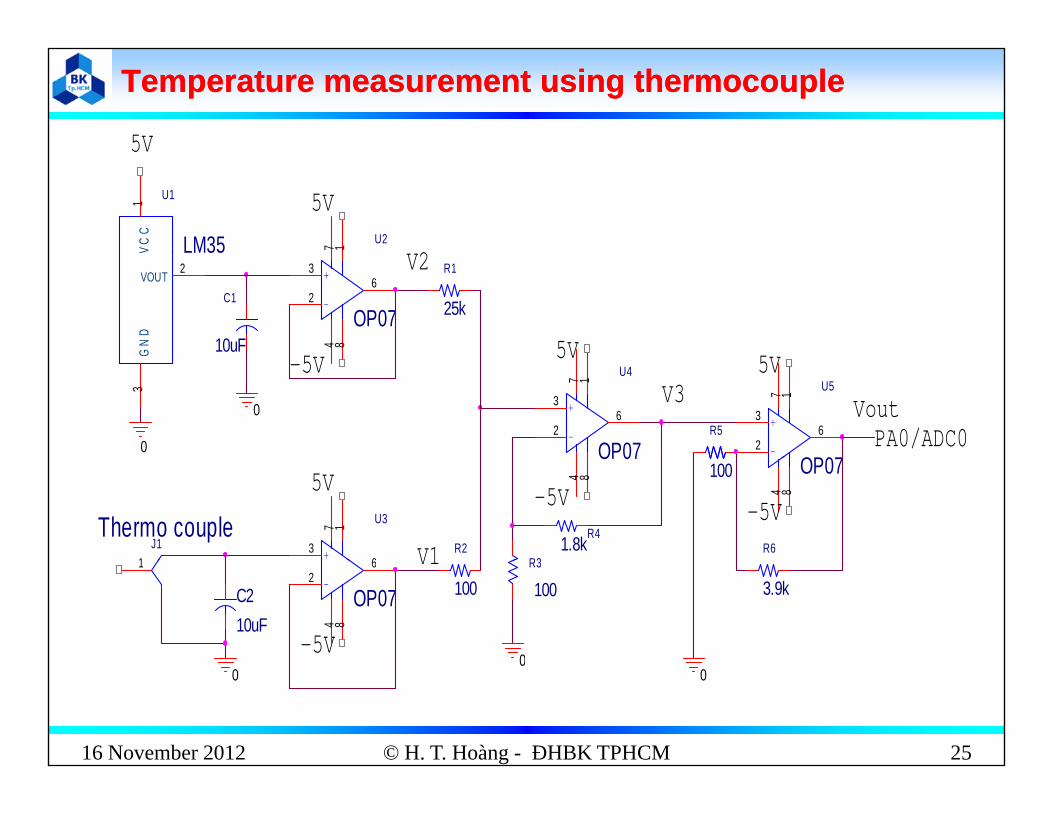
Temperature measurement using thermocoupleTemperature measurement using thermocouple
5V
U27 1
5V
5VU1
LM35
1VC
C
2C1
10uF
-
+
OP07
3
26
4 8
5 5V 5
352
GN
D
VOUT
V V2 R1
25k
0
0
-5V
-
+
U4
OP07
3
26
7 1
5V 5V
-
+
U5
OP07
3
26
7 1
R5 PA0/ADC0
3G
V3 Vout
OP07
4 85V
R6R2J1Thermo couple
1 +
U3
36
7 1
OP07
4 8-5V -5VR41.8k
100
V1 R3
C210uF
3.9k1001
-5V
-OP07
26
4 8
V1 R3
100
0
16 November 2012 © H. T. Hoàng - ÐHBK TPHCM 25
0 00
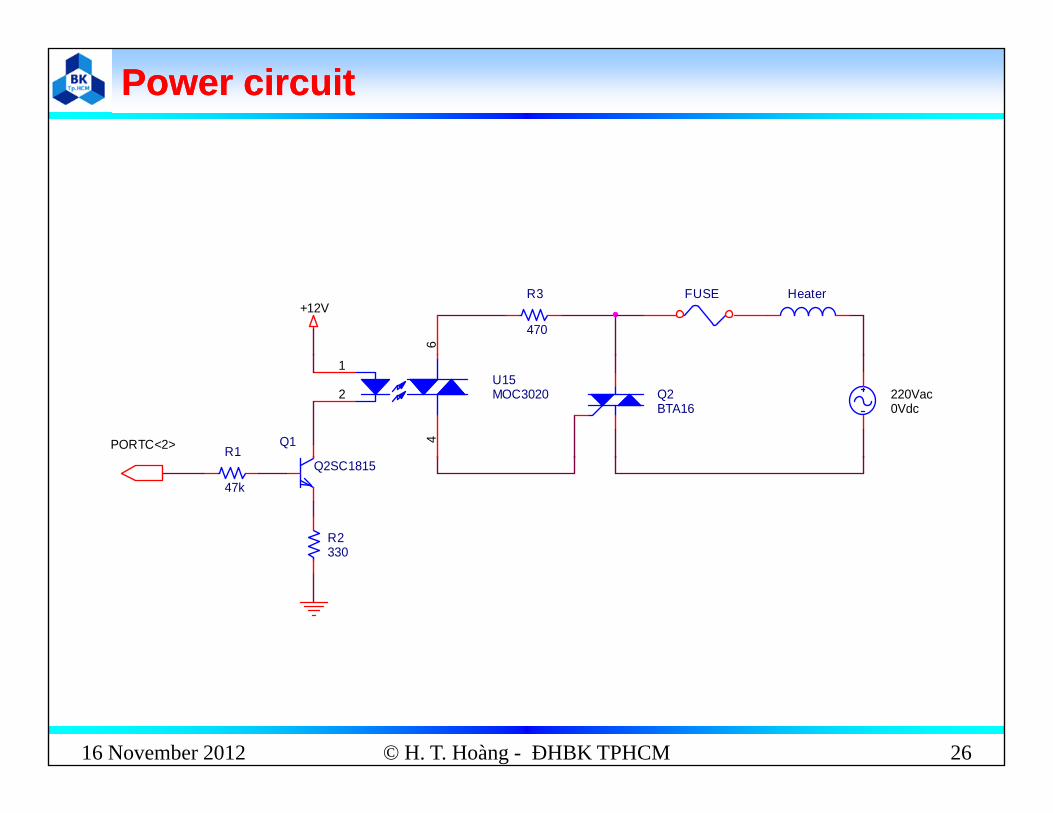
Power circuitPower circuit
+12V
6
HeaterFUSER3
470
220Vac0Vdc
Q2BTA16
Q1R1
U15MOC3020
1
2
4PORTC<2>Q2SC1815
47k
R2330
16 November 2012 © H. T. Hoàng - ÐHBK TPHCM 26