Instituto Polit ecnico Nacional - WordPress.com
83
Instituto Polit ´ ecnico Nacional Centro de Innovaci´ on y Desarrollo Tecnol´ ogico en C´ omputo Sistema electr´ onico para el monitoreo de gases de efecto invernadero utilizando internet de las cosas y veh´ ıculos a´ ereos no tripulados Tesis para obtener el grado de Maestr´ ıa en Tecnolog´ ıa de C´ omputo Presenta: Ing. Esther Viridiana V´ azquez Carmona Directores de tesis: Dr. Juan Carlos Herrera Lozada Dr. Juan Irving V´ asquez G´ omez Ciudad de M´ exico, Diciembre de 2019
Transcript of Instituto Polit ecnico Nacional - WordPress.com

Instituto Politecnico Nacional
Centro de Innovacion y Desarrollo
Tecnologico en Computo
Sistema electronico para el monitoreo degases de efecto invernadero utilizando
internet de las cosas y vehıculos aereos notripulados
Tesis para obtener el grado de
Maestrıa en Tecnologıa de Computo
Presenta:
Ing. Esther Viridiana Vazquez Carmona
Directores de tesis:
Dr. Juan Carlos Herrera Lozada
Dr. Juan Irving Vasquez Gomez
Ciudad de Mexico, Diciembre de 2019





Resumen
Hoy en día, la Tierra está siendo afectada por el efecto invernadero, por lo que ha llevado a los
países a aplicar estándares de normalización para disminuir la concentración de los gases contami-
nantes, enfocándose principalmente en gases de efecto invernadero. Un primer paso para mejorar la
situación actual es rastrear las variables involucradas bajo muestreo temporal y espacial.
Este documento presenta el desarrollo de un prototipo de un sistema de monitoreo que tiene por ob-
jetivo recolectar el grado de concentración de gases tóxicos presentes en el aire causados por el efecto
invernadero, como el dióxido de carbono, óxido nitroso, ozono, metano y variables ambientales como
temperatura, presión y humedad. El sistema ha sido diseñado para montarse en un vehículo aéreo no
tripulado para superar las limitaciones espaciales y también ha sido diseñado para funcionar bajo el
paradigma de Internet de las Cosas para superar las limitaciones temporales. Adicionalmente el siste-
ma integra el algoritmo del filtro de Kalman para estimar las mediciones no medibles de los sensores.
Se realizaron experimentos en los cuales se muestra el uso del filtro de Kalman, el cual disminuye
el error cuadrático del sistema con respecto a un sensor de referencia. El sistema propuesto puede
proporcionar la información al usuario final en tiempo casi real puesto que el tiempo de latencia es
de 10 segundos aproximadamente.

Abstract
Nowadays, Earth is being affected by the greenhouse effect, which has led countries to develop
standards to reduce the concentration of polluting gases, focusing mainly on greenhouse gases. A
first step to improve the current situation is to track the variables involved under temporal and spa-
tial sampling.
This document presents the development of a prototype of a monitoring system that aims to collect
the concentration of toxic gases present in the air caused by the greenhouse effect, such as carbon
dioxide, nitrous oxide, ozone, methane and environmental variables such as temperature, pressure
and humidity.
The system has been designed to mount in an unmanned aerial vehicle to overcome spatial limi-
tations and has also been designed to operate under the Internet of Things paradigm to overcome
temporary limitations. In addition, the system integrates the Kalman filter algorithm to estimate the
non-measurable measurements of the sensors. Experiments were made that show the use of the Kal-
man filter. The Kalman filter decreases the root mean square error of the system by comparing with
a reference sensor. The proposed system can provide the information to the end user in almost real
time since the latency time is 10 seconds.

Agradecimientos
El presente trabajo está dedicado principalmente a Dios quien me ha dado fuerza, salud y vida para cumplir
uno de mis sueños. A mis padres y hermanos que son el motor de mi vida, que están ahí siempre para sostenerme
y alentarme a no darme por vencida. A ti amor que siempre has estado en las buenas y en las malas apoyándome
cuando más lo necesito, por ser tan comprensible y brindarme tu ayuda en los momentos más difíciles de mi
vida. A ti amigo que no me dejas sola, que siempre tienes el tiempo necesario para transmitir tus conocimientos,
que estas ahí para darme palabras de aliento cuando más lo he necesitado.
Deseo expresar mi eterno agradecimiento y cariño al Dr. Juan Carlos Herrera Lozada y Dr. Juan Irving Vás-
quez Gómez mis directores de tesis, quienes se han encargado de impulsarme cada día a través de la enseñanza,
sabiduría, dedicación y esfuerzo para forjarme un nuevo camino, agradezco la confianza que me han brindado
pero sobre todo el haberme ayudado a enfrentar mis miedos. Agradezco al Instituto Politécnico Nacional, CO-
NACYT y SIP-IPN por el apoyo brindado para concluir mis estudios a través de las becas BEIFI y la beca de
posgrado.


Índice general
Capítulos Página
1. Introducción 1
1.1. Motivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3. Hipótesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4. Solución propuesta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.5. Justificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.6. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.7. Metodología . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.8. Organización de la tesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2. Marco teórico y trabajo relacionado 7
2.1. Marco teórico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1. Estructura de la Tierra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.2. Efecto invernadero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.3. Sistema de monitoreo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.4. Sistemas SCADA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.5. Sistema embebido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.6. Sistemas a bordo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.7. Puerto serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.8. Tipos de errores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.9. Filtro de Kalman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.1.10. Telemetría . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.1.11. Internet de las cosas (IoT en inglés Internet of Things) . . . . . . . . . . . . . . . . 22
2.2. Trabajo relacionado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero 35
3.1. Módulo de sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
I

Índice general
3.2. Módulo de procesamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.2.1. Estimación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3. Módulo de comunicación inalámbrica e IoT . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3.1. Comunicación inalámbrica a través de telemetría . . . . . . . . . . . . . . . . . . 40
3.4. Diseño de hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.4.1. Alimentación del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4. Experimentos y resultados 47
4.1. Filtrado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2. Comparación con EMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2.1. Resultados de comparación EMA . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3. Experimento del filtro de Kalman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3.1. Resultados filtro de Kalman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5. Conclusiones 56
5.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.2. Trabajo a futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Apéndice 65
A. Inventario Nacional de Emisiones de Gases y Compuestos de Efecto Invernadero en la Ciu-
dad de México en 2015. 66
B. Productividad 68
II

Índice de figuras
1.1. Metodología propuesta para el sistema monitoreo. . . . . . . . . . . . . . . . . . . . . . . 6
2.1. Efecto Invernadero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2. Proceso automatizado de un sistema SCADA . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3. Arquitectura de un microcontrolador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4. Placa Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5. Señal analógica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.6. Señal digital. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.7. Proceso de actualización de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.8. Proceso de estimación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.9. Arquitectura IoT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.10. Modelo TCP/IP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.11. Protocolo MQTT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.12. Protocolo HTTP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.1. Diagrama del sistema de monitoreo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.2. Módulo de sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3. Módulo de procesamiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4. Antenas de telemetría . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.5. Módulo de sensores y procesamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.6. Sistema de monitoreo montado en el dron. . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.7. Baterías de iones de litio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.8. Regulador LM2596. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.9. Módulo de carga USB TP4056. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.10. Cargador baterías LiPo o Li-ion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.11. Sistema de monitoreo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.12. Variables monitoreadas desde la plataforma IoT. . . . . . . . . . . . . . . . . . . . . . . . 46
III

Índice de figuras
4.1. Temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.2. Presión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3. Metano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.4. Dióxido de carbono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.5. Humedad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.6. Altitud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.7. Ozono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.8. NOx . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.9. UV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
A.1. Inventario Nacional de Emisiones de Gases y Compuestos de Efecto Invernadero . . . . 67
IV

Índice de tablas
2.1. Origen de los gases de efecto invernadero . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2. Características que distinguen a un sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3. Modelos y características principales de la microcomputadora Raspberry Pi . . . . . . . 15
2.4. Comparación de los protocolos HTTP Y MQTT . . . . . . . . . . . . . . . . . . . . . . . 28
2.5. Resumen de trabajos relacionados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.6. Resumen de trabajos relacionados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.7. Resumen de trabajos relacionados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.1. Sensores de variables ambientales y GPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.2. Sensores de gases del efecto invernadero. . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3. Características del vehículo aéreo no tripulado (VANT) utilizado para la experimentación 41
4.1. Comparación del de error cuadrático medio entre la señal de los sensores y la señal
filtrada contra la señal del referencia de la EMA. . . . . . . . . . . . . . . . . . . . . . . . 52
V

Capítulo 1
Introducción
Hoy en día es un hecho que el cambio climático y el calentamiento global se han convertido en un
problema ambiental que afectan el planeta Tierra, lo cual ha generado extinciones masivas, migracio-
nes desmedidas, deshielos, enfermedades entre otras problemáticas. Existe la certeza de que el efecto
invernadero es una de las causas del calentamiento global y el cambio climático, dicho fenómeno es
un proceso natural para la regulación de la temperatura del planeta, en el que la radiación térmica
emitida por la superficie de la Tierra hacía el suelo es reflejada en forma de energía y es retenida por
gases nocivos que se encuentran en la atmósfera tales como el óxido de nitrógeno, metano, ozono, va-
por de agua, clorofluorocarbonos y dióxido de carbono [1]. El efecto invernadero se ha intensificado
debido al incremento en la energía retenida por los gases en la atmósfera responsables de dicho fenó-
meno [2]. Se han creado diferentes estrategias para su control, como primera instancia se ha recurrido
a la observación de las variables a través del monitoreo. [3].
En este trabajo de investigación, se propone un sistema embebido para el monitoreo de variables
ambientales en tiempo real montado sobre un vehículo aéreo no tripulado VANT. El objetivo de dicho
sistema, es proporcionar datos en tiempo real a bajo costo. El sistema está integrado por sensores de
detección de gases [4], los cuales están conectados a la nube a través de una plataforma bajo el para-
digma de Internet de las Cosas (IoT). El sistema integra un filtrado de los datos detectados haciendo
uso del filtro Kalman [5]. Este filtrado permite disminuir el ruido de los sensores de bajo costo e in-
ferir la tasa de cambio de las variables ambientales medidas. La interfaz IoT proporciona al usuario
final datos para la toma de decisiones [6]. Este trabajo presenta el desarrollo y la prueba del sistema,
den el que se muestra la integración del hardware y el software. Además, se presentan experimentos
del filtrado de datos utilizando el filtro de Kalman, envío de datos hacía la nube utilizando una plata-
forma IoT [7]. El Internet de las Cosas o IoT se define como un paradigma en la que los dispositivos,
sensores o actuadores pueden comunicarse entre sí, a través de la red, recopilando e intercambiando
datos que permiten cumplir con tareas vía remota, haciendo uso de una plataforma IoT que es el
software para dicha interconexión, la cual está integrada por la gestión de dispositivos, una base de
1

Capítulo 1. Introducción
datos, procesamiento de datos, la analítica, una visualización, interfaces externas y la conectividad a
través de diferentes protocolos [8].
Los experimentos realizados muestran que el sistema trabaja en tiempo real con un retraso de 10
segundos. Por otro lado, el filtrado tiene por objetivo eliminar mediciones erróneas del sensor así
como reducir el error que existe al comparar mediciones con respeto a una estación especializada de
monitoreo ambiental de referencia (EMA).
1.1. Motivación
Como se mencionó anteriormente, el efecto invernadero se ha convertido en un problema serio del
cual que se han desprendido diferentes aplicaciones para la gestión de los gases que permanecen en
la atmósfera generados por dicho fenómeno. Sin embargo con la proliferación de nuevas tendencias
tecnológicas, surge la idea de realizar un sistema, que se encargue del monitoreo de estos gases y que
además de gestionarlos minimice el tiempo que lleva consigo para realizar dicho proceso, mostrando
las mediciones en tiempo real utilizando el concepto de Internet de las Cosas para la automatización
e interconexión de dispositivos hacía la red, además de emplear recursos como VANTs, dado que
desde hace algún tiempo han adquirido poularidad, ya que se caracterizan por realizar trayectorias,
monitoreo, mapeo y fotografía aérea, de manera que se convirtieron en herramientas de apoyo para
la coumunidad científica.
Debido a la intensificación de los gases de efecto invernadero en los últimos años, surge la nece-
sidad de crear estrategias que puedan contribuir al cuidado de la población y del planeta, problema
que si no se atiende de inmediato podría desencadenar la propagación de enfermedades, esto debido
a olas de calor o inundaciones generadas por el aumento de los niveles de dióxido de carbono [9]. Los
expertos en este tema han llegado a la conclusión de que se deben mejorar las metodologías, toman-
do en cuenta las nuevas tecnologías y adelantos científicos, así como hacer hincapié en la revisión de
los criterios de evaluación para las áreas de procesos industriales, transporte agricultura, manejo de
desechos y generación de energía [10].
Los datos proporcionados por la Organización Meteorológica Mundial (OMM), han demostrado
que el dióxido de carbono C02 es el principal gas contendio en la atmósfera, el cual ha alcanzado su
máximo nivel desde 1950 pues la concentración media de C02 pasó de 400.1 partes por millón (ppm)
en 2015 a 403.3 ppm en 2016 y a 405.5 ppm en 2017. Mientras que el metano CH4 alcanzó en 2017
un nuevo máximo con aproximadamente 1859 ppm. Por otro lado las emisiones de óxido nitroso N20
hacía atmósfera provienen de fuentes naturales como los océanos, los suelos, la quema de biomasa,
el uso de fertilizantes y diversos procesos industriales, en 2017 su concentración atmosférica fue de
329.9 ppm [11]. Estos datos están basados en las observaciones que se hacen para documentar los
cambios en los niveles de concentración de dichos gases. Recientemente ha surgido el interés por
2

Capítulo 1. Introducción
desarrollar sistemas de monitoreo que pueden dar seguimiento a el incremento de los gases de efecto
invernadero, así como la gestión de la calidad del aire y la vinculación con VANTs e Internet de las
Cosas. A continuación se presenta la propuesta de un sistema de monitoreo para gases de efecto
invernadero que dará seguimiento al incremento de dichos gases.
1.2. Planteamiento del problema
¿Qué sistema basado en IoT permitiría el monitoreo de los gases de efecto invernadero sobrepa-
sando las limitaciones temporales y espaciales?
1.3. Hipótesis
En la actualidad el uso de VANTs se ha convertido en un medio para desarrollar sistemas y/o
aplicaciones en el área de la investigación. Se han desarrollado sistemas embebidos que permiten la
supervisión a través de sensores a bordo, este tipo de vehículos podrían reemplazar sistemas com-
plejos de alto costo y realizar tareas como el monitoreo de manera que se tenga al alcance los datos
recolectados a través del uso de plataformas que permitan conectar todo en un sistema.
1.4. Solución propuesta
En este trabajo se propone un sistema para monitorear variables ambientales y gases involucra-
dos en el efecto invernadero, integra además el filtro de Kalman para filtrar el ruido de los sensores
y predecir el estado aunque el sensor deje de funcionar, dicho sistema trabaja con tecnología IoT y
se encuentra montado en un vehículo aéreo no tripulado para el monitoreo en tiempo real. La in-
formación obtenida está compuesta por gases de efecto invernadero y variables ambientales como
temperatura, presión, humedad y rayos UV. La Fig. 1 muestra la arquitectura del sistema embebi-
do. El sistema se compone de varios módulos: sensores, procesamiento, estimación, comunicación
inalámbrica e Internet de las Cosas.
1.5. Justificación
La importancia de este proyecto radica en la importancia de generar tecnología de bajo costo pa-
ra el monitoreo ambiental. El monitoreo ambiental se aplica actualmente a diversas tareas, e.g., el
pronóstico del clima [12]. En tales aplicaciones, se utilizan EMAs para registrar y enviar datos meteo-
rológicos y ambientales. Sin embargo, estas estaciones son costosas y la mayoría de ellas están fijas en
el suelo. Por lo tanto, los datos están sesgados a una sola región. Por otro lado, en la última década, los
3

Capítulo 1. Introducción
VANTs, también conocidos como drones, han revolucionado varias áreas, por ejemplo, el mapeo o la
cinematografía. Su uso está tan extendido, que no se limita a la comunidad científica, sino a personas
que no son especialistas. Una de las ventajas de los VANT es su capacidad de movimiento, por lo que
cuando se agregan sensores, la restricción espacial de la EMA se supera [13]. En otro sentido, aunque
los VANT superan las restricciones espaciales, en la mayoría de los casos, la información todavía está
limitada por restricciones temporales, dado que los datos se descargan hasta que el dron aterriza. En
algunos casos, se necesita la intervención humana para obtener los datos y realizar el envío a la nube.
En general los sistemas de monitoreo permiten observar los cambios de estado, que se producen
con el tiempo en cierto ambiente para cada uno de sus procesos. La optimización de estos, se debe en
gran medida a la llegada de IoT, puesto que una de sus ventajas es la de automatizar tareas, a través
del control vía remota y el análisis de datos.
1.6. Objetivos
General
Desarrollar un sistema electrónico montado en un VANT para monitorear en tiempo real (interac-
ciona repetidamente con su entorno físico, más no rápido) los gases de efecto invernadero, utilizando
un sistema embebido vinculado al Internet de las Cosas.
Específicos
Diseñar un sistema electrónico de medición basado en arquitecturas de sistemas embebidos y
sensores especializados.
Considerar la temperatura, la humedad, la velocidad y dirección del viento, la luminosidad,
hora, fecha y localización, para realizar un registro de las lecturas.
Seleccionar los sensores especializados y acoplarlos a través de la electrónica de soporte
Realizar la conexión inalámbrica utilizando protocolos de comunicación.
Aplicar el concepto de Internet de las cosas para la comunicación, el almacenamiento y el aná-
lisis de los datos obtenidos.
Montar el sistema electrónico en un VANT y realizar las pruebas necesarias.
1.7. Metodología
La metodología del sistema de monitoreo se describe a continuación:
4

Capítulo 1. Introducción
Diseñar el módulo de los sensores: Este módulo estará integrado por la placa Arduino Nano,
en el cual se conectaran los sensores que detectaran gases tóxicos que se producen por el efecto
invernadero, como el dióxido de carbono, óxido de nitrógeno, ozono y metano, cabe destacar
que primero se realizará una investigación sobre los posibles sensores que puedan cumplir con
los requerimientos. Se integraran sensores adicionales que se encargaran de detectar temperatu-
ra, humedad, presión y un GPS que envié los datos de la ubicación de las lecturas, este sistema
estará montado sobre un VANT, de manera que se logre cumplir con el objetivo se encargará
de considerar la temperatura, la humedad, la velocidad y dirección del viento, la luminosidad,
hora, fecha y localización, para realizar un registro de las lecturas, así como el diseño de un
sistema electrónico de medición basado en arquitecturas de sistemas embebidos y sensores es-
pecializados.
Diseño del módulo principal: Este módulo será el encargado de la comunicación inalámbrica y
los datos adquiridos por el módulo de sensores, además será la vía para el envío de datos hacía
la nube y el módulo principal.
Diseño de un filtro: Este módulo está pensado para integrar un filtro que tendrá por objetivo
eliminar el ruido generado por los sensores, de manera que se obtendran mediciones fiables
para el sistema.
Diseño la comunicación inalámbrica: Este módulo esta integrado por una antena de recep-
ción y transmisión de datos, el cual se encargará de enviar los datos utilizando protocolos de
comunicación.
Diseño del montaje: En este módulo se propone montar el sistema embebido en un VANT y
realizar las pruebas necesarias,se está considerando empotrar el sistema embebido bajo el dron,
esto por que la lectura de las variables ambientales se vería manipulada si se llega a poner en
cualquier otro lugar.
Diseño de la fuente de alimentación: Para este módulo se piensa utilizar una fuente ligera
que se encargue de la alimentación del sistema embebido y realizar las pruebas necesarias para
concluir con el proyecto.
En la Fig. 1.1 se muestra la metodología que seguirá el desarrollo del sistema de monitoreo.
1.8. Organización de la tesis
A continuación se ofrece un panorama general de los capítulos que integran la tesis.
Capítulo 1: En este capítulo se presenta en general el problema a desarrollar, los objetivos la
justificación, solución y metodología para el desarrrollo de esta investigación.
5

Capítulo 1. Introducción
Sensores Módulo principal Comunicacióninalámbrica
Dióxido de carbono
Ozono
Óxido de nitrógeno
Metano
Tem
per
atura
Pres
ión
Hum
edad
GPS
Rad
iaci
ón
IoT
MontajeVANT
Figura 1.1: Metodología propuesta para el sistema monitoreo.
Capítulo 2: En este capítulo se introducen los conceptos básicos que forman parte del marco
teórico en el contexto de esta investigación. Adicionalmente se encuentran los trabajos relacio-
nados con sistemas de monitoreo y vehículos no tripulados.
Capítulo 3: Este capítulo esta integrado por el desarrollo y la descripción de cada uno de los
módulos que forman parte del sistema de monitoreo.
Capítulo 4: Este capítulo expone los experimentos que se realizaron para comprobar el funcio-
namiemto del filtro de Kalman y la adquisición de datos así como los resultados obtenidos.
Capítulo 5: Este capítulo presenta las conclusiones acerca del trabajo desarrollado.
Apéndice: En el apéndice se incluye un inventario de emisiones realizado en 2015 para gases
de efecto invernadero así como la productividad de la alumna.
6

Capítulo 2
Marco teórico y trabajo relacionado
En este capítulo se plantean los conceptos más importantes para el desarrollo de este trabajo, en
el que se incluye la descripción general acerca de tecnologías, técnicas y métodos utilizados para el
sistema. Posteriormente se presenta el trabajo relacionado, partiendo desde los sistemas de monitoreo
que se encuentran fijos hasta sistemas de monitoreo que utilizan VANT´s para realizar la recolección
de los datos.
2.1. Marco teórico
2.1.1. Estructura de la Tierra
La tierra se formo hace 4.600 millones de años a partir de una nube gigantesca de gas y polvo que
creo al Sol. Debido a la gravedad y la combinación entre gases y partículas se formaron pequeñas
masas lo que dio lugar a la formación de asteroides y pequeños planetas primitivos.
La estructura de la Tierra está dividida en diferentes capas que pueden ser internas o externas. Las
capas internas están compuestas por el manto, nucleo y capas, mientras que las capas externas están
integradas por la litósfera, corteza, hidrósfera, biósfera y atmósfera. La atmósfera se divide a su vez en
troposfera, estratósfera, mesosfera, termosfera o ionosfera [14]. La tropósfera está comprendida desde
la superficie terrestre hasta una altitud de 7 a 17 kilómetros en ella tienen lugar todos los fenómenos
meteorológicos y climáticos. La estratósfera está situada sobre la tropósfera, la temperatura aumenta
conforme a la altitud, esto se debe a la absorción de las moléculas de ozono que absorben radiación
electromagnética en la región del ultravioleta. La mesósfera se encuentra entre la estratósfera y la
termosfera, entre los 50 y los 80 kilómetros de altura. La ionósfera es la capa atmosférica que se
ubica sobre los 80 kilómetros de altitud, debido a la radiación solar, se concentran moléculas que se
convierten en iones, como consecuencia incide en la difusión de las ondas radioeléctricas (radiación
electromagnética con longitudes de onda en el espectro electromagnético).
7

Capítulo 2. Marco teórico y trabajo relacionado
Cuando una onda es emitida hacia la atmósfera y llega a esta capa a energía es absorbida por el
aire que está ionizado, mientras que la energía restante es refractada nuevamente hacia la superficie
terrestre.
2.1.2. Efecto invernadero
El efecto invernadero es un proceso natural en el que la temperatura de la atmósfera se incrementa
debido a la radiación térmica emitida por la superficie de la Tierra (la radiación térmica es parte la
energía que el suelo emite por el calentamiento durante la radiación solar), esta se absorbe a través
de los gases de efecto invernadero (componentes de la atmósfera en la Tierra) como consecuencia se
produce el incremento de los gases en la atmósfera. La atmósfera es una capa gaseosa que rodea a
la Litosfera e Hidrosfera está compuesta por una mezcla de nitrógeno (78 %), oxígeno (21 %), y otros
gases (1 %), en ella se forman todos los fenómenos meteorológicos. Los gases implicados en el efecto
invernadero son el dióxido de carbono (CO2), metano (CH4), ozono (O3), óxido nitroso (N2O), vapor
de agua (gases que componen la atmósfera) y clorofluorocarburos (CFC o ClFC). En la tabla 2.1 se
muestra el origen de cada uno de los gases de efecto invernadero [15].
Tabla 2.1: Origen de los gases de efecto invernadero
Gas de Efecto Invernadero Origen
Dióxido de carbono Quema de combustibles fósiles, deforesta-ción, quema de bosques, agricultura.
Metano Tiraderos, excremento de animales, gas natu-ral, descomposición de desechos orgánicos.
Óxido nitroso Combustión de automóviles, fertilizantes, ali-mento de ganado, fertilización a base de ni-trógeno, estiércol.
Clorofluorocarbonos (CFC) Sistemas de refrigeración, aerosoles, electró-nica.
Etapas de efecto invernadero
El Sol calienta la superficie de la Tierra sin embargo esta no retiene parte de la energía prove-
niente del Sol. La energía es reflejada hacía la atmósfera.
Aproximadamente el 70 % de la energía solar es devuelta al espacio. La energía restante es
retenida por los gases que producen el efecto invernadero y regresa a la superficie terrestre.
Este proceso funciona de manera natural cuando la temperatura en la superficie del planeta es
de 14º C.
8

Capítulo 2. Marco teórico y trabajo relacionado
La temperatura de la Tierra se ha incrementado, las consecuencias de este fenómeno es el calen-
tamiento global y cambio climático, lo cual trae consigo reducción de la superficie de glaciares,
elevación del nivel del agua de los mares y océanos, posibles inundaciones de zonas próximas
al mar o islas, disminución de recursos hídricos por las sequías y la mayor evaporación del
agua, ciertas zonas fértiles podrían convertirse en desiertos, escasez de alimentos, enfermeda-
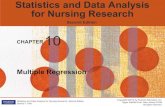
des y pandemias (malaria, el cólera o el dengue). En la Fig. 2.1 se observa el ciclo de efecto
invernadero [16].
Figura 2.1: Las moléculas de los Gases de Efecto Invernadero (GEI) tienen las capacidad de controlarel flujo de energía a través del sistema climático . Fuente: Cambio climático, Abr. 2018, Recuperadode http://icambioclimatico.blogspot.com/2018/04/el-efecto-invernadero.html
Normas para la medición de gases de efecto invernadero
La organización que se encarga de regular los procedimientos para la implantación concreta de
un sistema de gestión ambiental, industrial o un sector en específico se denomina International Or-
ganization for Standardization (ISO) a través de normas específicas. La ISO 14064 es una norma que
tiene como iniciativa la regulación de gases de efecto invernadero a través de la cuantificación, el
seguimiento, los informes y la verificación de las emisiones realizadas por las organizaciones. Esta
norma estan dividida en 3 partes:
La especificación de la cuantificación y emisiones de efecto invernadero.
Directrices para los inventarios nacionales de gases de efecto invernadero
Protocolo de gases de efecto invernadero
9

Capítulo 2. Marco teórico y trabajo relacionado
México se rige por diferentes normas algunas de ellas son NOM-037-SEMARNAT-1993, NOM-036
SEMARNAT-1993 entre otras. Estas normas definen la metodología para el monitoreo de los conta-
minantes como el dióxido de nitrógeno y ozono. También se incluyen otras normas que en las que
se establece que deberan instalarse estaciones de monitoreo para la calidad del aire con asentamien-
tos con más de 500 mil habitantes. Hoy en día en la zona metropolitana del valle de México existen
aproximadamente 45 estaciones. Cada estación mide diferentes parámetros como ozono, monóxido
de carbono, partículas PM entre otros [17].
2.1.3. Sistema de monitoreo
Un sistema de monitoreo es un dispositivo que tiene como objetivo recolectar, tratar, analizar y
mostrar información de parámetros físicos, químicos o metereológicos de manera continua para con-
tribuir a la toma de decisiones con respecto a un problema en particular en donde es necesario medir
y/o conservar constantes algunas magnitudes. Los sistemas de monitoreo pueden ser útiles en pro-
blemáticas ambientales como la medición de la calidad del aire, gases de efecto invernadero, calidad
del agua, suelo, en otros con el objetivo de mantener un entorno estable. El monitoreo consiste en ser
consciente del estado de un sistema, para observar los cambios que se puedan producir con el tiem-
po, más no se encarga de la automatización. La automatización consiste en hacer uso de elementos
computacionales y mecánicos para ejecutar procesos con la mínima intervención humana [18].
Existen estaciones especializadas de monitoreo ambiental que tienen por objetivo supervisar a
distancia variables para cierta instalación o dar seguimiento al cambio de estas y con ello tomar deci-
siones para llevar a cabo la automatización de procesos, como aumentar la temperatura, activar una
bomba de agua o cerrar algún ducto y evitar problemas a futuro como fugas, incendios o predecir un
fenómeno natural [19].
2.1.4. Sistemas SCADA
Los sistemas SCADA (Supervisión, Control y Adquisición de Datos en inglés Supervisory Control
And Data Acquisition) es el conjunto de software y hardware que comunican y controlan diversos
dispositivos. Estos sistemas trabajan mediante la adquisición de datos que permiten supervisar un
proceso utilizando una estación central llamada unidad terminal maestra (MTU) y varias estaciones
remotas (RTU), en las cuales se realiza el control.En la Fig.2.2 se puede observar esquemáticamente el
proceso de un sistema SCADA [20]. Los objetivos de los sistemas SCADA son la economía, accesibili-
dad, mantenimiento, ergonomía, gestión, flexibilidad y conectividad. Las ventajas de usar un sistema
SCADA son la creación de aplicaciones de forma simple, gracias a las herramientas de diagnóstico y
a los programas de visualización se reducen los costos de mantenimiento. El uso de GSM, GPRS Y
UMTS, estos sistemas se mantienen en comunicación sobre cualquier incidencia a través de mensajes
o correos electrónicos [21].
10

Capítulo 2. Marco teórico y trabajo relacionado
Proceso de objeto del control
Dispositivos de adquisición de
SCADA
Clientes de datos Clientes de visualización Clientes de visualización
datos o dispositivo de lógica
de control programable
Figura 2.2: El sistema SCADA es la combinación de hardware y software que permite la recolección yvisualización de los datos, realiza la tarea de interfase entre los nivles de control (controlador lógicoprogramable PLC o controlador de automatización programable PAC). El proceso de objeto de con-trol es el proceso que se desea supervisar, colectar y distribuir. La adquisición de datos es el conjuntode instrumentos de medición integrados por una interfaz de comunicación que permita su intercone-xión. Los clientes son el conjunto de las aplicaciones que utilizan los datos obtenidos por el sistema.
2.1.5. Sistema embebido
Un sistema embebido es un sistema electrónico integrado por hardware y software, está diseñado
para cumplir una labor específica. Es común encontrar sistemas embebidos para controlar teléfonos
celulares, cámaras fotográficas, vehículos, alarmas, cajeros automáticos, equipo médico, entre otros.
Usualmente trabaja a través de un microcontrolador o microprocesador en el que se alojan la inte-
ligencia artificial, secuencias y los algoritmos. Un microcontrolador es un circuito integrado progra-
mable que ejecuta órdenes desde memoria. La arquitectura de un microcontrolador se caracteriza por
tener un solo sistema de memoria donde se almacenan los datos e instrucciones. Los microprocesado-
res difieren de los microcontroladores por ocupar componentes independientes que reciben y envían
infomación. Ambos trabajan bajo la arquitectura de Von Newman que se muestra en la Fig.2.3 esta
arquitectura se caracteriza por tener un solo sistema de memoria donde se almacenan datos e instruc-
ciones, una unidad central de proceso (CPU) conectada a una memoria única donde se guardan las
instrucciones del programa y los datos [22] [23].
11

Capítulo 2. Marco teórico y trabajo relacionado
CPU MEMORIA
ENTRADA
SALIDA
Direcciones
Datos
Control
TecladoMouse
MonitorImpresora
Figura 2.3: La arquitectura de un microcontrolador define la estructura de su funcionamiento. Ac-tualmente las arquitecturas más usadas para microcontroladores son la arquitectura Von Newman yla arquitectura Harvard que se caracteriza por poseer una memoria exclusivamente para datos y unamemoria para las instrucciones, de esta forma se usan dos buses definidos. Los microcontroladoresAVR de Atmel Corp y PIC de Microchip utilizan este tipo de arquitectura.
2.1.6. Sistemas a bordo
Actualmente el uso de drones o VANTs se hn convertido en una tecnología emergente que permi-
ten a los sistemas embebidos volar de forma autónoma mejorando la calidad de los datos y evitando
las restricciones espaciales, sin embargo estos presentan desafíos como la comunicación entre el sis-
tema embebido y los receptores, así como el entorno, la potencia y el peso. Entre los sistemas a bordo
más comúnes se encuentran la supervisión inteligente de terrenos, sistemas de navegación, vuelos
autónomos, hasta reconocimiento de rostros dentro de ambientes urbanos [24].
Sensores
Un sensor es un dispositivo que tiene la capacidad de detectar magnitudes físicas o químicas pa-
ra transformarlas en señales eléctricas. Los sensores son dispositivos imperfectos con errores tanto
sistemáticos y naturaleza aleatoria. Los errores aleatorios no pueden corregirse, ya que que represen-
tan una valor notable en cuanto a incertidumbre. Los sistemas embebidos requieren de sensores para
medir variables como: temperatura, humedad, presión, luminosidad, posición, proximidad, lumino-
sidad, alcohol, humo de cigarro, ozono, pH, humedad del suelo entre otros. Los sensores tienen un
transductor que es un elemento importante para el propio dispositivo pues tiene por objetivo traducir
una magnitud física(señal de entrada) en una señal eléctrica adecuada para el sistema. En la tabla 2.2
se encuentran las características más importantes que definen a los sensores [25].
12

Capítulo 2. Marco teórico y trabajo relacionado
Tabla 2.2: Características que distinguen a un sensor
Características
Resolución Variación de la magnitud de entrada que puede de-tectar el sensor.
Precisión Error en la medición del sensor. La precisión es larelación del rango de salida del sensor con respectoa la desviación estándar.
Offset Valor de la variable de salida del sensor cuando lavariable de entrada es nula.
Tiempo de res-puesta
Tiempo o variación de la magnitud a medir.
Medición Límite de la magnitud de medida en un sensor.
Deriva Mangintud de las condiciones ambientales en lasque debe estar el sensor que influyen en la variablede salida.
Repetitividad Error esperado al repetir varias veces la misma me-dida.
Sensibilidad Variación en la magnitd de entrada.
Error El error se define como el grado de conformidad en-tre la medición del sensor y el valor verdadero, amenudo se expresa como una proporción del valorverdadero.
Arduino
Arduino es una plataforma de hardware y software libre en el cual se pueden llevar a cabo pro-
yectos básicos y de tipo científico de bajo costo. El lenguaje de programación con el que trabajan
está basado en C++. Este proyecto nació en el Instituto de Diseño de Interacción Ivrea, Italia como
una herramienta para la creación de prototipos, dirigida a personas sin experiencia en electrónica y
programación. Con el tiempo Arduino comenzó a adaptarse a nuevas necesidades y desafíos, diferen-
ciando su oferta de placas simples de 8 bits a productos para aplicaciones IoT, dispositivos portátiles,
impresión 3D y entornos integrados [26] .
Placas Arduino
Las placas Arduino incorporan un microcontrolador re-programable Atmega que es capaz de eje-
cutar las órdenes grabadas en su memoria. Se compone de varios bloques funcionales, los cuales
13

Capítulo 2. Marco teórico y trabajo relacionado
cumplen una tarea específica. Un microcontrolador está compuesto por una unidad central de pro-
cesamiento, memoria y periféricos de entrada/salida. Las placas Arduino están integrados además
de una serie de pines, que permiten establecer conexiones entre el microcontrolador y los diferentes
sensores o actuadores. Existen diferentes modelos de tarjetas Arduino, el tipo va de acuerdo a las
necesidades del usuario. Algunos modelos son: Arduino Uno que incorpora 16 pines digitales y 6 en-
tradas analógicas. La tarjeta Arduino Mega ofrece 54 pines digitales de entrada/salida (14 de ellos son
salidas PWM) y 16 entradas analógicas. Arduino Leonardo integra 20 pines digitales de entrada/salida
y 7 canales PWM. La tarjeta Arduino Nano se compone de 14 pines digitales de entrada/salida. En la
Fig. 2.4 se describen las características a detalle de la placa Arduino Nano [27] [28].
Microcontrolador ATMega328P
Arduino Nano
14 pines digitalesde entrada/salida
6 pines PWM
Reloj externo de 16Mhz
8 pines analógicos
Figura 2.4: La Placa Arduino Nano también integra una memoria de 16 KB, 1 KB de SRAM, 512bytes de EPROM y 1 UART(Universal Asynchronous Receiver-Transmitter, en español Transmisor-Receptor Asíncrono Universal). El voltaje de operación con el cual trabaja es 5V. Está diseñada parausarse en espacios pequeños. La tarjeta Arduino trabaja con un núcleo, sin embargo se pueden consi-derar 2 si se toma en cuenta el microcontrolador que se encarga de la conexión USB.
Placa de circuito impreso (PCB)
Las PCBs son superficies planas fabricadas en un material no conductor, está integrada por dis-
tintas capas de material conductor en las que se encuentran caminos, pistas o buses, usualmente de
cobre. Una PCB es la forma más compacta y estable de construir un circuito electrónico. Un ejemplo
de ello es la placa Arduino en la que implementó un determinado diseño de circuitería interna, de
esta forma el usuario final no se debe preocupar por las conexiones eléctricas [29].
Raspberry Pi
Raspberry Pi es una microcomputadora de memoria limitada, con conectividad a Internet capaz
de ejecutar aplicaciones como una PC en el que se aloja un chip Broadcom BCM2835 con procesador
ARM. Este dispositivo trabaja con un sistema operativo optimizado que se encuentra instalado en la
14

Capítulo 2. Marco teórico y trabajo relacionado
tarjeta microSD de la microcomputadora. La familia Raspberry Pi ha tenido 4 versiones en la tabla 2.3
se observan las características principales y modelos hasta la actualidad [30] [31].
Tabla 2.3: Modelos y características principales de la microcomputadora Raspberry Pi
Modelo Características
Raspberry Pi 1 El modelo A cuenta con un Procesador ARM 11,256Mb de SDRAM, 1 puerto USB (el modelo B aña-de 2 puertos USB y el modelo B+ se compone de 4puertos USB), no cuenta con conectividad Ethernet(el modelo B añade un puerto Ethernet).
Raspberry Pi 2 Procesador ARM Cortex A7 (potencia de cálculo su-perior), 4 núcleos a 900 MHz, 1Gb de SDRAM, 17GPIO con funciones SPI, I²C y 1 UART.
Raspberry Pi 3 Procesador ARMv8 de cuatro núcleos a 1.2GHz de64 bits. Se mantiene el chip gráfico VideoCore IV,1Gb de SDRAM, puerto Ethernet, 4 puertos USB y17 GPIO con funciones SPI, I²C y UART. Bluetooth4.1 y Wifi 802.11n.
Raspberry PiZero
Potencia que un Raspberry Pi 1 B pero de menortamaño, cuenta con 512Mb de SDRAM, no cuentacon puerto Ethernet y el conector DSI, cuenta con 1puerto Micro USB y GPIO, SPI, I²C y UART.
Raspberry PiZero W
Esta tarjeta incluye las características de la tarje-ta Raspberry Pi Zero, añade Bluetooth 4.1 y Wifi802.11n.
Raspberry Pi 4 Procesador Quad Core Cortex A-72 1.5 GHz. RAM1-4 GB, 4 puertos USB, HDMI, Bluetooth 5.0 y Wifi2.4/5.0.
Características del microcontrolador ATmega 328p
El microcontrolador ATmega 328p, forma parte del hardware en las tarjetas Arduino. Sus caracte-
rísticas principales se mencionan a continuación [32]:
Memoria flash DE 32KB, este tipo de memoria permite la lectura y escritura.
Memoria RAM de 2KB, en esta memoria se cargan todas las instrucciones que ejecuta la unidad
de procesamiento.
Frecuencia de operación de 20Mhz, es decir la velocidad en la que se transmiten y reciben los
datos.
Voltaje de operación 2.7 a 5.5 V.
Arquitectura RISC (conjunto reducido de instrucciones, menos espacio)
15

Capítulo 2. Marco teórico y trabajo relacionado
Tipos de señales
Una señal eléctrica es una manifestación o signo que transporta información como voltaje, corrien-
te e intensidad. Existen diferentes tipos de señales entre ellas se encuentran las señales analógicas,
digitales, eléctricas, periódicas, aleatoria, señales de tiempo continuo, tiempo discreto, entre otras.
Para efectos de estudio se definirá una señal digital y una señal analógica. Una señal analógica es
una señal senoidal o sinusoidal, es decir es una curva que representa gráficamente la función seno
con variación continua en el tiempo para interpretar una variable física como la luz, energía y sonido.
Los parámetros que la caracterizan son la amplitud y periodo. En la Fig. 2.5 se observa una señal
analógica [33].
Figura 2.5: En la actualidad los micrófonos, la radio, entre otros utilizan este tipo de señales. La ventajade usar este tipo de señales es que consumen poco ancho de banda. Una de sus desventajas es quesuele haber transmisión fallida, además la transmisión se va degradando a medida que se realizancopias.
Por otro lado las señales digitales representan una señal discontinua con respecto a el tiempo.
La forma que toman este tipo de señales es una onda cuadrada (pulsos). Este tipo de señales se
caracterizan por tener parámetros como altura, duración y frecuencia. El hecho de que las señales
trabajen con pulsos siginifica que se utilizan 0’sy 1’s. Los reproductores de CD’s trabajan con este tipo
de señales. La Fig. 2.6 muestra el ejemplo de una señal digital [34].
Figura 2.6: Una señal digital permite mayor espacio de almacenamiento. Una señal digital es creadapor el mismo ser humano, por tanto necesita previa conversión analógica-digital y una decodificaciónpara su recepción. Una de las ventajas de esta señal es que puede ser amplificada y reconstruida almismo tiempo, gracias a los sistemas de regeneración de señales.
16

Capítulo 2. Marco teórico y trabajo relacionado
Modulación por anchura de pulsos (PWM)
La modulación por anchura de pulso (PWM en inglés pulse-width modulation) es una técnica de
modulación que se basa en la variación de la anchura del pulso de una señal digital dada una señal
analógica, ya sea para transmitir información o para controlar la cantidad de energía. Habitualmente
se usa para el control de motores, regulación de potencia, rectificación y como conversión digital-
analógica. Las placas Arduino permiten utilizar este tipo de modulación, utilizan timers [22].
Bus I2C
El bus de dos hilos con interfaz serie I2C (Inter-Integrated Circuit) se diseñó específicamente para
aplicaciones con microcontroladores. Permite la interconexión de hasta 120 dispositivos diferentes
usando solo dos lineas bidireccionales de bus, una para el reloj (SCL) y otra para datos (SDA) [22].
2.1.7. Puerto serie
Es un puerto que permite el flujo de comunicación en el cual los datos son transmitidos bit a bit,
este puerto puede enviar y recibir datos pero no simultáneamete. Los Puertos Series suelen contener
desde nueve pines, hasta veinticinco [35].
2.1.8. Tipos de errores
El uso de aproximaciones en las mediciones lleva consigo problemas de inexactitud llamado tam-
bién error o incertidumbre. Las mediciones deben exactas o sin sesgo para satisfacer los requisitos de
problemas llevados a la implementación de aplicaciones y técnicas científicas. El error se define como
la diferencia entre el valor verdadero y el valor experimental, debido a las causas que lo producen, se
han clasificado en errores sistemáticos y errores aleatorios, a continuación se describen cada de ellos.
Error aleatorio o error estocástico
El error aleatorio se define como pequeñas variaciones entre una medición y otra, pero para un
gran número de mediciones se obtiene un número considerable de desviaciones, este tipo de errores
se acotan mediante un tratamiento estadístico.
Error sistemático
Los errores sistemáticos provienen del instrumento de medición, con problemas de calibración o
del proceso de medición.
17

Capítulo 2. Marco teórico y trabajo relacionado
Error absoluto
Para cuantificar los errores de medición, existen métodos que se utilizan en los cálculos, el error
absoluto y el error relativo. El error relativo es la diferencia entre el valor medido y el valor real. En
la ecuación 2.1 se observa el cálculo del error absoluto.
E = |Xm −Xr| (2.1)
Error relativo
El error relativo resulta ser el cociente entre el error absoluto y el valor real. En la ecuación 2.2 se
observa el cálculo del error relativo.
e = E/Xm (2.2)
Error cuadrático medio (ECM)
Para medir la tendencia de una serie de datos, mide la cantidad de error que hay entre dos conjun-
tos de datos, compara un valor predicho y un valor observado o conocido. Esta medida es la media
aritmética de la suma de las diferencias cuadráticas entre los valores de la serie y los valores produci-
dos por el modelo, mientras el error sea de menor valor, más adecuado es el modelo. La ecuación 2.3
muestra el cálculo del error cuadrático medio.
ECM =1
n
n∑i=1
(Yi − Yi)2 (2.3)
Donde: Yi son las predicciones. Mientras que Yi son los valores del estimado [36] [37].
2.1.9. Filtro de Kalman
El filtro de Kalman resulta ser un algoritmo para procesar mediciones discretas (entrada) en esti-
maciones óptimas (salida). El filtro de Kalman se utiliza particularmente en aplicaciones de robótica
móvil. El filtro de Kalman se utiliza para mantener una estimación continua del estado de un vehículo
o para los parámetros que describen objetos de interés en el medio ambiente. Permite que una esti-
mación existente de la posición del robot sea combinado con información de posición de uno o más
sensores, también permite una estimación de la certeza de forma que una matriz de covarianza se
mantendrá bajo ciertas circunstancias, el filtro de Kalman logra esta actualización de manera óptima
de manera tal que minimice el error esperado en dicha estimación. El filtro de Kalman trabaja con dos
estados uno de predicción y uno de actualización. A continuación se describen algunos conceptos
fundamentales para detallar el funcionamiento del filtro de Kalman [38].
18

Capítulo 2. Marco teórico y trabajo relacionado
Valor medio o media: Es el promedio dada una muestra o una serie de valores. La media gene-
ralmente se denota con una letra griega µ. La media de las mediciones es el valor esperado de
la variable aleatoria. Para poder estimar la media de un conjunto extenso de muestras se hace
uso de la ecuación 2.4.
xN,N =1
N(z1 + z2 + ...+ zN−1 + zN ) =
1
N
N∑n=1
(zn) (2.4)
Varianza: La varianza suele representarse como σ2 de una variable aleatoria, es una medida de
dispersión definida por la variabilidad (la variedad que estos presentan) de una serie de datos
respecto a su media. La varianza está representada por la ecuación 2.5
V ar(x) = σ2 =
∫ ∞−∞
(x− µ)2f(x)dx. (2.5)
Desviación estándar: Es la raíz cuadrada de la varianza, está representada por σ
Distribución normal, gaussiana o función de densidad de probabilidad: Es una de las distri-
buciones de probabilidad de variable continua para calcular probabilidades. El diseño del filtro
Kalman supone una distribución normal de los errores de medición.
La distribución gaussiana se muestra en la ecuación 2.6.
f(x) =1
σ√
2πexp(− (x− µ)2
2σ2) (2.6)
Estimación: Consiste en evaluar el estado oculto del sistema (parámetros no conocidos).La es-
timación se puede mejorar significativamente mediante el uso de múltiples sensores y la apli-
cación de algoritmos avanzados de estimación y seguimiento (como el filtro de Kalman). Cada
parámetro medido o calculado es una estimación.
Precisión: Indica qué tan cerca está la medición del valor verdadero. El valor verdadero está
representado por la ecuación 2.7
V alorverdadero = valoraproximado+ error (2.7)
La precisión describe cuánta variabilidad hay en varias mediciones del mismo parámetro. Los
sistemas de alta precisión tienen baja varianza en sus mediciones (es decir, baja incertidumbre),
mientras que los sistemas de baja precisión tienen alta varianza en sus mediciones (es decir, alta
incertidumbre). La varianza es producida por el error de medición aleatorio. El desplazamiento
entre la media de las mediciones y el valor verdadero es la precisión de las mediciones, también
19

Capítulo 2. Marco teórico y trabajo relacionado
conocida como sesgo o error de medición sistemática. La dispersión de la distribución es la
precisión de la medición, también conocida como precisión o ruido de medición o error de
medición aleatorio o incertidumbre de medición
Matriz de covarianza
Dada una variable estadística n-dimensional (X1, X2, X3, ..., Xn) la matriz de covarianza contie-
ne las varianzas de las distintas variables con las que se está trabajando. La matriz de varianzas-
covarianzas es simétrica respecto a su diagonal principal, es positiva, su determinante es positivo.
La matriz de covarianza en el filtro de Kalman depende de la resolución de cada uno de los senso-
res [39] [40].
Matriz de correlación
La matriz de correlación es una matriz cuadrada y simétrica que tiene 1’s en la diagonal y fuera de
ella los coeficientes de correlación entre las variables. Este tipo de matriz se caracterizá por la relación
que existe entre cada una de sus variables [39].
Vector de estado
Es un vector compuesto de variables aleatorias, obedece a una relación descrita para sistemas
continuos. Determina de manera única el estado de un sistema x(t) para cualquier tiempo t. El vector
de estado representa grados de libertad del sistema. Las variables en el vector de estado no se pueden
medir directamente, sino que se pueden deducir a través de los valores que se pueden medir como la
posición, velocidad, ángulos de orientación, entre otros [39] [40].
Ecuaciones filtro de Kalman
Para estimar xN,N se requiere usar la estimación anterior y agregar un pequeño ajuste. La Fig. 2.7
representa el proceso que requiere seguir la actualización de estado. Matemáticamente la ecuación de
actualización de estado se describe en 2.8
Estimación del estado
actual
=
Valor de prediccióndel estado
actual
Factor x Medición
Valor de prediccióndel estado
actual
+ -( )Figura 2.7: Proceso de actualización de estado
20

Capítulo 2. Marco teórico y trabajo relacionado
xN,N =1
N
N∑n=1
(zn) =1
N(
N−1∑n=1
(zn) + zN )) =1
N
N−1∑n=1
(zn) +1
NzN =
1
N
N − 1
N − 1
N−1∑n=1
(zn) +1
NzN =
N − 1
N
1
N − 1
N−1∑n=1
(zn) +1
NzN =
N − 1
NxN,N−1 +
1
NzN = xN,N−1 −
1
NxN,N−1 +
1
NzN =
xN,N−1 +1
N(zN − xN,N−1)
(2.8)
El factor 1N se llama ganancia de Kalman. Se denota por Kn. El subíndice n indica que la ganancia de
Kalman puede cambiar con cada iteración. zn indica las mediciones obtenidas.
Por lo tanto la ecuación de actualización se representa en la ecuación 2.9.
xn,n = xn,n−1 + αn(zn − xn,n−1) (2.9)
El término zn − xn,n−1 es una medida residual que contiene la nueva información. El algoritmo de
estimación se describe en la Fig.2.8.
Estimación del estado
actual usando la ecuación
de actualización
Calcular la ganancia
de Kalman
Estimación del estado Xn,n
Calcular la predicción
para la siguiente
iteración
Xn,n+1
Valor medidoZn
Estado inicial del sistema
Tiempo de espera
n+1Xn,n-1
Figura 2.8: Proceso de estimación
La ecuación de ganancia de Kalman debe ser entre 0 y 1 el cálculo se observa en la ecuación 2.10
Kn =Incertidumbre en Estimacion
Incertidumbre en Estimacion + Incertidumbre en medicion=
pn,n−1pn,n−1 + rn
(2.10)
Donde: pn,n−1es la incertidumbre estimada extrapolada y rn es la incertidumbre de la medición.
Cuando la incertidumbre de medición es muy grande y la incertidumbre estimada es muy peque-
ña, la ganancia de Kalman es cercana a cero. La actualización de incertidumbre estimada (ecuación
de actualización de covarianza) se muestra en la ecuacion 2.11.
21

Capítulo 2. Marco teórico y trabajo relacionado
pn,n = (1−Kn)pn,n−1 (2.11)
Donde: Kn es la ganancia de Kalman, pn,n−1 es la incertidumbre estimada que se calculó durante la
estimación del filtro anterior y pn,n es la incertidumbre estimada del estado actual. Cuando la incer-
tidumbre de medición es grande, la ganancia de Kalman será baja, por lo tanto, la convergencia de la
incertidumbre estimada sería lenta. Sin embargo, cuando la incertidumbre de medición es pequeña,
la ganancia de Kalman será alta y la incertidumbre estimada convergería rápidamente hacia cero. La
extrapolación de incertidumbre estimada se observa en la ecuación 2.12.
pxn,n−1 = pxn−1,n−1 + ∆t2 · pvn−1,n−1pvn,n−1 = pvn−1,n−1 (2.12)
Donde: px es la incertidumbre estimada de posición y pv es la incertidumbre estimada de velocidad
[41] [42].
2.1.10. Telemetría
La telemetría es una tecnología que permite medir y rastrear magnitudes físicas de forma remota
e inalámbrica, la telemetría se basa en la conversión de señales captadas por un sensor a señales
eléctricas que son transmitidas para su registro y posterior medición. Existen sistemas telemétricos
que aportan información sobre el estado de procesos específicos y controlarlos a distancia [43].
2.1.11. Internet de las cosas (IoT en inglés Internet of Things)
Es una red de área extendida que está integrada por millones de redes privadas, públicas, acadé-
micas, comerciales y gubernamentales, de alcance local a global, estan vinculadas por una gama de
tecnologías de redes electrónicas, inalámbricas y ópticas. Hoy en día más de 100 países están vincula-
dos a intercambios de datos, noticias y opiniones a través de Internet. IoT describe un mundo donde
se puede conectar caualquier dispositivo que se comunica de manera inteligente como servidores,
computadoras, tabletas, teléfonos y teléfonos inteligentes. Internet de las cosas implica el uso de sen-
sores y actuadores incrustados en objetos físicos, desde carreteras hasta marcapasos, están vinculados
a través de redes cableadas e inalámbricas, a menudo utilizando la misma IP de Internet que conecta
Internet. Estas redes producen grandes volúmenes de datos que fluyen a las computadoras para su
análisis. El Internet de las cosas entonces es la codificación y la creación de redes de objetos cotidianos
para hacerlos individualmente legibles y rastreables. La arquitectura de IoT se describe en la Fig. 2.9.
En la primera etapa los sensores recopilan los datos del entorno u objeto bajo medición y los
convierten en datos útiles. Si se esta trabajando con actuadores pueden intervenir para cambiar las
22

Capítulo 2. Marco teórico y trabajo relacionado
SensoresActuadores
Adquisición de datos
Pre-procesamiento
Nube
Eta
pa 1
Eta
pa 2
Eta
pa 3
Eta
pa 4
Figura 2.9: Digrama general de la arquitectura propuesta. En esta figura se muestra la arquitecturapropuesta para IoT, sin embargo dicha arquitectura va a depender de la solución que se le este dando.La Fig. muestra los componentes principales. La etapa 1 se denomina también capa de dispositivosen donde los sensores y los actuadores a menudo se conectan directamente o de forma inalámbrica,a través de tecnologías como Bluetooth o ZigBee a dispositivos de IoT. En la etapa 2 los sistemas seencuentran cerca de los sensores y actuadores, en donde un dispositivo o servidor de puerta de enlaceadyacente procesará los datos y los reenviará a los sistemas de la etapa 3. El objetivo de la etapa 3 ocapa Edge es el preprocesamiento, como el filtrado y la agregación de datos, se ejecutan en el límitey luego los datos principales preprocesados se transfieren en sentido ascendente hacia los servicios yaplicaciones de la nube para procesarlos. En la etapa 4 o capa de la nube las aplicaciones en la nubeque realizan el procesado de datos, se complementan con aplicaciones móviles y de clientes basadasen la web, que presentan los datos a los usuarios finales y brindan acceso a herramientas para explorary analizar.
23

Capítulo 2. Marco teórico y trabajo relacionado
condiciones físicas que generan los datos, algunos de estos tipos pueden ser cámaras robóticas, detec-
tores de nivel de agua, sensores de calidad del aire, acelerómetros y monitores de frecuencia cardíaca.
En la segunda etapa un dispositivo o servidor de puerta de enlace adyacente procesará los datos y los
reenviará a los sistemas etapa 3 o etapa 4. En la etapa 3 los datos pueden requerir un procesamiento
adicional antes de ingresar al centro de datos, los sistemas de procesamiento pueden estar ubicados
en oficinas remotas. Finalmente los datos de la etapa 3 se envían al centro de datos físico o a los siste-
mas basados en la nube, donde sistemas de más potentes pueden analizar, administrar y almacenar
de forma segura los datos. El procesamiento de la etapa 4 puede realizarse localmente, en la nube o
en un sistema de nube híbrido, pero el tipo de procesamiento ejecutado en esta etapa sigue siendo el
mismo, independientemente de la plataforma [44] [45].
En general Internet de las cosas son los dispositivos que se conectan a la red para tener cierto
control sobre otros dispositivos electrónicos y mecánicos de manera remota usando módulos WI-FI
o GSM . Para configurar IoT es necesario desarrollar una infraestructura adecuada para que todos
los nodos esten conectados al dispositivo del nodo maestro (puede ser un dispositivo maestro local
o un control remoto Servidor). Para conectar el sistema interno de IoT se debe construir un servidor
cliente para que el sistema local y remoto esten siempre conectados a través de protocolos como
MQTT, HTTP, entre otros [46].
JSON (JavaScript Object Notation)
JSON es un formato liviano para almacenar y transportar datos, se usa a menudo cuando los datos
se envían desde un servidor a una página web. Se basa en un subconjunto del estándar de lenguaje de
programación JavaScript. JSON es un conjunto desordenado de pares de nombre / valor. EL objeto
comienza con llave izquierda y termina con llave derecha. Cada nombre es seguido por: dos puntos
y los pares de nombre / valor están separados por una coma [47] [48].
Modelo TCP/IP
Es una colección de protocolos que se han especificado como estándares de Internet por parte de
IAB (Internet Architecture Board). La capas de este modelo se describen a continuación:
Capa física: Esta capa se encarga de la especificación de las características del medio de trans-
misión, la naturaleza de las señales y la velocidad de datos. Define la interfaz física entre el
dispositivo de transmisión de datos y el medio de transmisión o red.
Capa de acceso a la red: Esta capa es responsable del intercambio de datos entre el sistema final y
la red a la cual está conectado. El emisor debe proporcionar a la red la dirección del destino, de
tal manera que ésta pueda encaminar los datos hasta el destino.
24

Capítulo 2. Marco teórico y trabajo relacionado
Capa internet: El protocolo internet (IP Internet Protocol) se utiliza en esta capa para ofrecer el
servicio de encaminamiento a través de varias redes. Este protocolo se implementa tanto en los
sistemas finales como en los encaminadores intermedios. Un encaminador es un procesador que
conecta dos redes y cuya función principal es retransmitir datos desde una red a otra siguiendo
la ruta adecuada para alcanzar el destino.
Capa extremo-a-extremo o de transporte: El protocolo para el control de la transmisión, TCP (Trans-
mission Control Protocol), es el más utilizado para agrupar los mecanismos y garantizar que los
paquetes lleguen en secuencia y sin errores, al intercambiar la confirmación de la recepción de
los datos y retransmitir los paquetes perdidos, además de que se intercambien de forma fiable.
Capa de aplicación: Esta capa contiene toda la lógica necesaria para definir las aplicaciones de red
y los servicios de Internet además permite el envío de mensajes y señales entre diferentes redes.
Facilita la posibilidad de acceder a los servicios de las demás capas y define los protocolos que
utilizan las aplicaciones para intercambiar datos, como correo electrónico [49] [50].
En la Fig. 2.10 se muestra la jerarquía de las capas que integran el modelo TCP/IP.
Transporte
origen-destino
Internet
Acceso a la red
Física
Aplicación
Figura 2.10: La arquitectura TCP/IP utiliza el protocolo TCP sin embargo también hace uso del pro-tocolo de datagramas de usuario, UDP (User Datagram Protocol), el cual no garantiza la entrega, elorden secuencial, ni la protección frente a duplicados.
25

Capítulo 2. Marco teórico y trabajo relacionado
Protocolo HTTP vs MQTT
MQTT (Message Queue Telemetry Transport) es un protocolo de mensajería ligera inventado por
IBM para IoT, funciona a través de los métodos publicar y suscribir. En el Modelo OSI basado en
TCP/IP, es una capa de aplicación protocolo que tiene una sobrecarga muy ligera ya que tiene tamaño
de encabezado fijo de 2 bytes. Los mensajes se clasifican como topics los cuales deben ser gestiona-
dos por un servidor llamado Broker. Un broker es un servidor que recibe todos los mensajes de los
clientes y redirige estos mensajes a los clientes de destino. En la Fig. 2.11 se observa la estructura de
el protocolo MQTT [51].
Dispositivo 1
Dispositivo 2
Dispositivo 3
Servidor Cliente
Publicar
Suscribir
Suscribir
Publicar
Figura 2.11: Este protocolo es útil cuando se intercambian pequeños mensajes que requieren menosancho de banda en redes inalámbricas y en las que se experimenta latencia debido al ancho de banda.
Por otro lado el protocolo de transferencia de hipertexto (HTTP en inglés Hypertext Transfer Pro-
tocol) utiliza una arquitectura de solicitud/respuesta. HTTP puede transferir un gran cantidad de
datos en pequeños paquetes que pueden posiblemente causar problemas de ancho de banda. Se es-
tila incluir el cliente en el dispositivo IoT y no el servidor por cuestiones de seguridad. La solicitud
HTTP usa un formato de encabezado complejo de TCP (Protocolo de Control de Transmisión) con
9 paquetes que no son necesarios en la mayoría casos de IoT ya que es una pérdida innecesaria de
recursos. El protocolo HTTP se usa comúnmente donde se encuentran datos que son activados por el
cliente, por ejemplo, informes meteorológicos, estado de contaminación, entre otros [52]. La estructu-
ra del protocolo HTTP se muestra en la Fig. 2.12.
26

Capítulo 2. Marco teórico y trabajo relacionado
Dispositivo 1
Dispositivo 2
Dispositivo 3
Servidor
Cliente 1
HTTP solicitud
HTTP respuesta
Cliente 2
HTTP solicitud
HTTP respuesta
Figura 2.12: HTTP funciona en TCP/IP, lo cual proporciona una comunicación confiable. En cualquierarquitectura de IoT, existe un servidor y dispositivos IoT que se conectarán todo el tiempo para queel proceso sea controlado por el servidor y los dispositivos IoT se encarguen de enviar y recibir datosdel propio servidor.
Las ventajas de utilizar el protocolo HTTP para IoT, se describen a continuación:
HTTP es un protocolo de la capa de aplicación, lo cual permite en IoT utilizar la infraestructura
web (servidores y clientes) para implementar el intercambio de mensajes.
La integración de las comunicaciones de IoT con interfaces de usuario se vueleve muy práctica ,
tanto del lado del desarrollador como del usuario final, ya que ambos están muy familiarizados
con aplicaciones web.
Existe una infraestrucutura muy robusta soportando las comunicaciones vía web. La conectivi-
dad a nivel físico está ampliamente difundida, así como las tecnologías de desarrollo de soft-
ware (lenguajes, APIs, web services, cloud computing), por lo que el desarrollo de aplicaciones
de gestión y monitoreo de dispositivos IoT en web es muy práctica y rápida.
Es sencillo implementar un nivel de seguridad en el intercambio de mensajes utilizando HTTPS
(comunicación encriptada con SSL sobre el protocolo HTTP)
La aplicación web IoT, puede implementarse de forma prácticamente inmediata sobre un ser-
vidor web, sin la necesidad de middleware adicional que funcione como intermediario entre la
gestión de los datos y la presentación al usuario final.
Existe abundante documentación y herramientas de acceso libre sobre el desarrollo de aplicacio-
nes web y la implementación del protocolo HTTP. Este hecho puede impactar favorablemente
en el costo de desarrollo de aplicaciones IoT, puesto que no hay dependencias fuertes con tec-
nologías de propietario.
27

Capítulo 2. Marco teórico y trabajo relacionado
Tabla 2.4: Comparación de los protocolos HTTP Y MQTT
Protocolo HTTP Protocolo MQTT
El protocolo HTTP envía varios paquetes pe-queños a el servidor para conectarse.
El protocolo MQTT está diseñado para enviarun mensaje a uno o más dispositivos con me-nos latencia la cantidad de mensajes puedeser de 0-256 Mb, pero no se vuelve a enviar.
Cuando se envían varios paquetes, requiereuna alta demanda en la red y puede provocardemoras.
En las aplicaciones IoT, la cantidad de datoses demasiado baja para que se pueda usar es-te protocolo para enviar mensajes a través deredes frágiles.
HTTP funciona en el protocolo TCP/IP, elcual proporciona una comunicación confia-ble.
La entrega del paquete está 100 % asegura-da. El mensaje se entregará al menos una vez.Garantiza que cada mensaje sea recibido solouna vez por el receptor.
Las llamadas HTTP no tienen estado, lo queconduce a la autenticación cada vez que se co-necta, ya que está conectado a una IP o URLpara relaizar llamadas API (Interfaz de Pro-gramación de Aplicaciones) que es una formade describir la forma en que los programas olos sitios webs intercambian datos, por lo quela sesión no se guarda.
Según las mediciones en redes 3G, el rendi-miento de MQTT es 90 veces más rápido queHTTP.
Después de obtener respuesta, el dispositivocierra la conexión. Por lo tanto, IoT causa gas-tos generales graves en la comunicación dered.
MQTT tiene una especificación muy peque-ña, conectar, publicar, suscribir y desconectar.
Cuando el usuario se conecta a una aplicacióncliente, envía una solicitud HTTP al servidor.
MQTT tiene un encabezado y paquete demensaje muy pequeño El tamaño del mensajetambién es muy pequeño de 2 bytes.
Como se puede observar ambos protocolos de comunicación tienen ventajas y desventajas. El pro-
tocolo se debe elegir según los requerimientos del proyecto a desarrollar. Se debe tomar en cuenta el
tipo de información a enviar. Si se trata de pequeños mensajes es mejor MQTT, mientras que para blo-
ques de datos conviene HTTP. MQTT es conveniente cuando los nodos son alimentados por baterías
ya que mejora el uso de la energía. HTTP es útil en gateways para transferir toda la información de
una sola vez, en lugar de enviar varios mensajes [53].
28

Capítulo 2. Marco teórico y trabajo relacionado
2.2. Trabajo relacionado
Entre los sistemas que integran una sola plataforma para la medición de variables se encuentran
los siguientes trabajos: Arizaga y Rincón [54] desarrollaron un sistema telemétrico en un servidor
web. El sistema está basado en un microcontrolador, una memoria y una pantalla de LCD. Dicho
sistema es responsable de detectar la temperatura, la presión atmosférica y la humedad y es capaz
de enviar la información a través de la comunicación Ethernet. En el trabajo de Vera y Romero [55]
se desarrolló una aplicación que utiliza un módulo Xbee para la transmisión de los datos de varia-
bles ambientales que se han medido a través de una red sensores especializados. En el estudio de
Palacios y Ríos [56] se desarrolló un instrumento que permite medir la concentración de CO, CH4,
temperatura y presión ambiental. El dispositivo está integrado por un microcontrolador, una pantalla
LCD, un reloj y una microSD que sirve para almacenar los datos obtenidos. Kumar and Jasuja [57]
presentan el desarrollo de un sistema de monitoreo para la calidad del aire en tiempo real, que in-
cluye los parámetros de PM 2.5, monóxido de carbono, dióxido de carbono, temperatura, humedad,
aire y presión. Además hace uso de Internet de las Cosas para la gestión de los datos provenientes de
los diferentes sensores recopilados y transmitidos por una microcomputadora Raspberry Pi, los datos
son mostrados a través de la plataforma IBM Bluemix. Ilie and Vaccaro [58] desarrollaron un dispo-
sitivo para detectar y medir el gas metano en áreas de almacenamiento de gas natural. Puede medir
la calidad del aire y del agua como temperatura, pH, conductividad eléctrica así como CH4 y CO2.
El nodo del sensor se basa en el microcontrolador Arduino UNO, que recibe los datos de los sensores
y los transmite a la base de datos en Raspberry Pi 3, accediendo de forma remota a todos los datos.
Mois, et al. [59] presentan el desarrollo de un sensor ambiental de eficiencia energética que envía da-
tos de medición a una plataforma en la nube mediante solicitudes HTTP (Protocolo de transferencia
de hipertexto). El dispositivo se basa en un sistema en chip programable (PSoC) y está equipado con
un sensor de temperatura y humedad relativa para tomar medidas y con un módulo WLAN (red
de área local inalámbrica) para enviar datos al servidor. Parmar, et al. [60] desarrollaron un sistema
de monitoreo para concentraciones de los principales gases contaminantes del aire. El sistema utiliza
nodos de monitoreo de de bajo costo que están integrados por sensores de gas y módulos Wi-Fi. Este
sistema mide las concentraciones de gases como CO, CO2, SO2 y NO2 utilizando sensores semicon-
ductores. Los sensores recopilan los datos de varios parámetros ambientales y se los proporcionarán
a la microcomputadora Raspberry Pi, que actúa como estación base. Los valores se muestran en el
servidor web basado en la misma microcomputadora. Ahmed, et al. [61] proponen un sistema de
monitoreo en tiempo real para medir gases, cuenta con alerta de emergencia basado en Internet de
las cosas (IoT), permite a los usuarios rastrear la calidad del aire circundante de su hogar u oficina o
industrias desde cualquier lugar. El sistema mide gases como CH4, CO, CO2, entre otros. Holovatyy,
et al. [62] desarrollaron un sistema de detección y medición de la concentración para gases tóxicos y
vapores en tiempo real. Este sistema mantiene dos estados: uno de monitoreo y otro de alarma, este
29

Capítulo 2. Marco teórico y trabajo relacionado
último se acciona cuando sobrepasa el grado de concentración según la norma de los gases tóxicos,
enviando un mensaje SMS a través de un módulo GSM y un mensaje a la PC por medio de la interfaz
serie. Rosero-Montalvo, et al. [63] desarrollaron un sistema de monitoreo para la calidad del aire con
diferentes nodos establecidos en la ciudad de Ibarra, Ecuador a través de sensores que evalúan los
parámetros de CO2, NOx, Luz UV, temperatura y humedad. Los datos adquiridos mediante técnicas
y algoritmos de aprendizaje de máquina permiten al sistema clasificar de forma autónoma si una de-
terminada ubicación geográfica se encuentra excediendo los límites establecidos de emisión de gases.
Como resultado el algoritmo k-Nearest Neighbor presentó un gran rendimiento de clasificación al
seleccionar los sectores de mayor contaminación. Asthana and Bahl [64] desarrollaron un proyecto
que tiene como objetivo proporcionar soluciones inteligentes para monitorear gases tóxicos de aguas
residuales. Cuando se cruza cierto umbral, se envía una alerta al usuario que está examinando las
condiciones desde una ubicación remota. La información se reenvía junto con diferentes valores de
ppm de gas que indican si es seguro para el trabajador limpiar o trabajar en ese entorno o no. El equi-
po de monitoreo integra una plataforma IoT. Los sensores utilizados requieren de calibración para
fines industriales y la determinación de los niveles de umbral correctos para plantas e instalaciones
sépticas. Abdullah and Farhat [65] presentan un diseño para un sistema de monitoreo que tiene como
objetivo notificar a los residentes del nivel de concentración de COV(compuestos orgánicos volátiles)
y TVOC (Compuestos orgánicos volátiles totales) en ambientes interiores y exteriores. El sistema está
basado en Arduino e informa al usuario los valores de estos a través de su sistema de comunicación
inalámbrica.
Por otro lado, entre los sistemas que incluyen un VANT para superar las restricciones espaciales
se encuentran los siguientes. Malaver Rojas, et al. [66] desarrollaron un sistema de monitoreo para
gases contaminantes como NO2 (Dióxido de nitrógeno) y NH3 (Amoniaco), este sistema recopila los
datos así como la ubicación en la que se hizo dicha recolección, cuenta con dos sistemas: un portátil
ligero de sensor de gas y un VANT eléctrico-solar que puede ser usado opcionalmente. El prototipo
opera en la troposfera inferior sobre los 100 y hasta 500 metros, el objetivo es servir de apoyo para la
comunidad científica, que puede ayudar a analizar el comportamiento y los gases contaminantes. En
el estudio de Sidek y Abdullahfue [67], se propone un prototipo para el monitoreo de gases de efecto
invernadero. El sistema recopila datos utilizando un VANT; también utiliza la tecnología Zigbee para
transferir datos en un canal inalámbrico. Vargas y Lange [68] proponen un sistema de medición de
aire para gases contaminantes, como el ozono, el monóxido de carbono, así como la temperatura y
la presión atmosférica utilizando un VANT. Abou-Elnour, et al. [69] desarrollaron un sistema de bajo
costo que se encarga de medir gases de efecto invernadero (GEI), además de temperatura, presión y
humedad a través de un VANT, el cual está integrado por un sistema de comunicación inalámbrica
implementado en un microcontrolador que recolecta las mediciones constantemente, enviando los
datos a un centro de monitoreo. Si la conexión inalámbrica es débil el sistema cuenta con un disposi-
30

Capítulo 2. Marco teórico y trabajo relacionado
tivo para respaldar los datos sin que se pierda la información. Tripolitsiotis, et al. [70], desarrollaron
una plataforma en la cual se puede adaptar casi cualquier tipo de sensor para el monitoreo ambiental,
transmitiendo las mediciones de cada sensor hacía controlador del VANT. El sistema tiene integra-
do un protocolo de comunicación para proximidad entre sensores para evitar colisiones entre estos.
También incorpora un módulo de telecomunicaciones mediante el uso de dispositivos móviles, estos
datos se pueden observar en tiempo real a través de mapas animados. Elloumi, et al. [71] proponen
un sistema de monitoreo de tráfico vial que utiliza varios VANTs, en el cual desarrollaron un método
para generar VANTs adaptativos que se basan en el seguimiento de puntos en movimiento en el cam-
po de visión del VANT. También generaron trayectorias de VANTs usando modelos de movilidad.
Los VANTs monitorean el tráfico en una carretera de la ciudad, son responsables de recopilar y en-
viar, en tiempo real la información del vehículo a un centro de procesamiento de tráfico para fines de
regulación del tráfico. En el estudio de Marinov, et al. [72] presentan el desarrollo de una aplicación
para estudiar la calidad del aire a diferentes altitudes. El enfoque se basa principalmente en el uso de
VANTs y sensores de bajo costo. Su objetivo es recopilar los datos tridimensionales de concentración
de contaminantes del aire.
La similitud que existe entre los sistemas de monitoreo antes mencionados y el proyecto desarro-
llado, es que ambos se encargan de medir variables ambientales y gases de efecto invernadero. La
novedad de este sistema es la integración del filtro de Kalman para ayudar a filtrar el ruido creado
por los sensores, además de predecir el estado aunque el sensor deje de funcionar por cortos pe-
riodos de tiempo. También cuenta con un sistema de transmisión en tiempo real para observar el
comportamiento de dichos gases. En las tablas 2.5, 2.6 y 2.7 se puede observar el resumen de los tra-
bajos relacionados, se clasificaron en sistemas de monitoreo fijos, móviles, si trabajan en tiempo real
o manual y si agregan un tipo de filtrado para sus datos. Además se añade el sistema de monitoreo
para gases de efecto invernadero desarrollado en este documento para observar qué características lo
identifican y lo hacen similar o diferente al resto de los trabajos mencionados.
31

Capítulo 2. Marco teórico y trabajo relacionado
Tabla 2.5: Resumen de trabajos relacionados
Trabajos
Restriccionesespaciales
Restriccionestemporales Filtrado
Fijo Móvil Tiemporeal
Manual
I. Rincon, F. Oswaldo, G.Manzanilla and J. A. ArizagaSilva, “Sistema de monitoreode variables ambientales uti-lizando ethernet”
x x
C. A. V. Romero, “Acople desensores en la medición devariables ambientales usan-do tecnología zigbee”
x x
E. A. M. Rios, J. Palacios, andN. Falcón, “Diseño y cons-trucción de sensores automa-tizados de gases de efecto in-vernadero en la baja tropos-fera”
x x
S. Kumar and A. Jasuja, “Airquality monitoring systembased on iot using raspberrypi”
x x
A. M. C. Ilie and C. Vaccaro,“Design of a smart gas detec-tion system in areas of natu-ral gas storage”
x x
G. Mois, Z. Szilagyi, T. Sanis-lav, and S. Folea, “An http-based environmental moni-toring system using powerharvesting”
x x
G. Parmar, S. Lakhani, andM. K. Chattopadhyay, “Aniot based low cost air pollu-tion monitoring system”
x x
M. M. Ahmed, S. Banu, andB. Paul, “Real-time air qua-lity monitoring system forbangladesh’s perspective ba-sed on internet of things”
x x
A. Holovatyy, V. Teslyuk, M.Lobur, S. Pobereyko, and Y.Sokolovsky, “Developmentof arduinobased embeddedsystem for detection of toxicgases in air”
x x
32

Capítulo 2. Marco teórico y trabajo relacionado
Tabla 2.6: Resumen de trabajos relacionados
Trabajos
Restriccionesespaciales
Restriccionestemporales Filtrado
Fijo Móvil Tiemporeal
Manual
P. D. Rosero-Montalvo, J.A. Caraguay-Procel, E. D.Jaramillo, J. M. Michilena-Calderón, A. C. Umaquinga-Criollo, M. Mediavilla-Valverde, M. A. Ruiz, L. A.Beltrán, and D. H. Peluffo,“Air quality monitoring inte-lligent system using machinelearning techniques”
x x
N. Asthana and R. Bahl, “Iotdevice for sewage gas moni-toring and alert system”
x x
A. J. Alabdullah, B. I. Far-hat, and S. Chtourou, “Airquality arduino based moni-toring system”
x x
J. A. Malaver Rojas, N. Mot-ta, L. F. Gonzalez, P. Corke,and A. Depari, “Towards thedevelopment of a gas sensorsystem for monitoring pollu-tant gases in the low troposp-here using small unmannedaerial vehicles”
x x x
O. Sidek, A. Abdullah, U.Za’bah, N. Amran, H. Ja-far, M. A. Hadi, F. Nikmat,Z. Halim, and M. Mansor,“Development of prototypesystem for monitoring andcomputing greenhouse gaseswith unmanned aerial vehi-cle (uav) deployment”
x x
V. Vargas, V. Lange, et al.,“Sistema aéreo de mediciónde gases contaminantes ba-sado en un uav, resultadospreliminares”
x x
A. Abou-Elnour, M. Odeh,M. Abdelrhman, A. Balkis,and A. Amira, “Measure-ment of greenhouse gases inuae by using unmanned ae-rial vehicle (uav)”
x x
33

Capítulo 2. Marco teórico y trabajo relacionado
Tabla 2.7: Resumen de trabajos relacionados
Trabajos
Restriccionesespaciales
Restriccionestemporales Filtrado
Fijo Móvil Tiemporeal
Manual
A. Tripolitsiotis, N. Pro-kas, S. Kyritsis, A. Dollas,I. Papaefstathiou, and P.Partsinevelos, “Dronesour-cing: a modular, expandablemulti-sensor uav platformfor combined, real-timeenvironmental monitoring”
x x
M. Elloumi, R. Dhaou, B. Es-crig, H. Idoudi, and L. A. Sai-dane, “Monitoring road traf-fic with a uav-based system”
x x
M. B. Marinov, I. Topalov, B.Ganev, E. Gieva, and V. Ga-labov, “Uavs based particu-late matter pollution monito-ring”
x x
E. V. Vázquez. “Sistema pa-ra el monitoreo de gases deefecto invernadero utilizan-do internet de las cosas yvehículos aéreos no tripula-dos”
x x x
34

Capítulo 3
Sistema de monitoreo de variables
ambientales y gases del efecto
invernadero
En este capítulo se plantea el desarrollo del sistema de monitoreo, así como los módulos que lo
integran. El capítulo inicia con la descripción del módulo de sensores seguido por el módulo de pro-
cesamiento, el módulo de comunicación inalámbrica e IoT y finalmente por el diseño del hardware,
etapa de la integración del sistema embebido en conjunto.
El sistema está integrado por un módulo de adquisición de datos que está conformado por un
conjunto de sensores de bajo costo interconectados hacía la tarjeta Arduino Nano. El segundo mó-
dulo es un módulo de procesamiento, el cual tiene implementado el filtro de Kalman para el filtrado
óptimo de estos datos, estos módulos se encuentran montados sobre un VANT. Posteriormente estos
datos van hacía un módulo de comunicación inalámbrica a través de una antena de telemetría, los
datos de esta antena son enviados a una antena receptora que se encuentra integrada en un equipo de
cómputo fijo. Posteriormente los datos son enviados hacía la nube a través del uso de una plataforma
IoT. La Fig. 3.1 muestra la arquitectura del sistema embebido.
3.1. Módulo de sensores
Este módulo recibe las señales analógicas del sensor y las convierte en señales digitales. Utiliza
una placa Arduino Nano [73] para integrar los siguientes sensores: GPS, humedad, presión, tempera-
tura, Dióxido de carbono, Metano, Óxidos de nitrógeno, Ozono y radiación solar. La Fig. 3.2 muestra
la interconexión de dispositivos. Las especificaciones de los sensores utilizados, tanto para gases am-
bientales como para gases de efecto invernadero, se muestran en las tablas 3.1 y 3.2. Se está tomando
35

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
Módulo de
ProcesamientoMódulo
Sensores
Filtro de
kalman
Vehículo Aéreo
no Tripulado (VANT)
Datos
de
sensores
Internet
de las
Cosas
Nube
Telemetría
Ambiente
Figura 3.1: Sistema de monitoreo ambiental: el entorno se observa y los datos recopilados son proce-sados a través de un filtro Kalman. Luego, los datos se envían a la nube por telemetría y una interfazde Internet de las cosas.
en cuenta la recopilación de la información ambiental además del efecto invernadero previniendo
que el usuario final pueda hacer futuras correlaciones. Cabe destacar que la selección de sensores
está basado en la sección 2.1.2.
Tabla 3.1: Sensores de variables ambientales y GPS
Variable Sensor Frecuencia
Humedad DHT-22 0.5 Hz
Temperatura BMP-180 120 Hz
Presión BMP-180 120 Hz
UV Radiación SEN-0162 0.016 Hz
GPS NEO-6M 5 Hz
3.2. Módulo de procesamiento
Este módulo está integrado por una microcomputadora Raspberry Pi Zero W, el módulo de senso-
res, un proceso de estimación y un transmisor de telemetría. Los datos de la placa Arduino se envían
al filtro de Kalman que estima las variables y luego las estimaciones se envían por un canal de te-
36

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
SEN 0162Radiación
UVDHT-22
Humedad Temperatura
BMP-180Presión
MQ-135Óxidos de Nitrógeno
MQ-4Metano
Q-131Ozono
NEO-6MGPS
SEN 0159Dióxido deCarbono
Figura 3.2: Módulo de sensores. En este módulo se encuentran interconectados los sensores ha-cia el Arduino Nano. La frecuencia de muestreo con la que trabajan cada uno de los sensores es:BMP180-120 Hz, DHT22-0.5 Hz, NEO6M-5 Hz, Radiación UV-2 Hz, SEN 0159-0.016 Hz, MQ135-0.1Hz, MQ131- 0.03 Hz y MQ4-50 Hz.
lemetría. Este módulo se encarga del procesamiento de los datos. El filtro de Kalman se encuentra
implementado en está microcomputdora a través de un script en Python. La lectura de los datos que
provienen de los sensores son leídos por medio del puerto serie de la tarjeta Arduino hacía la micro-
computadora, la conexión se hace a través de un cable mini USB, mismo que provee la energía de la
tarjeta, cabe mencionar que para la ejecución del script se creó un servicio para configurar la línea de
comandos y que ejecuta automáticamente el script cada vez que se enciende la microcomputadora.
La Fig. 3.3 muestra un diagrama del módulo.
Microcomputadora Kit de telemetría
Figura 3.3: Módulo de procesamiento. En este módulo los datos provenientes de la placa Arduino, sonprocesados por la microcomputadora Raspberry Pi Zero W a través del filtro de Kalman, de maneraque retorne las mediciones obtenidas por éste, hacia la antena de telemetría.
37

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
Tabla 3.2: Sensores de gases del efecto invernadero.
Compuesto Características Sensor
Dióxido deCarbono CO2
Es un gas incoloro y vital para lavida en la Tierra, es parte de losgases de efecto invernadero.
SEN-0159
Óxidos deNitrógeno
NOx
El NOx es uno de los gases másrelevantes que contribuyen a lacontaminación del aire, se encar-ga de la formación de smog ylluvia ácida, además de afectarel ozono troposférico.
MQ-135
Ozono
O3
El ozono es un gas formado porla luz ultravioleta (UV) y des-cargas eléctricas dentro de la at-mósfera de la Tierra. La mayorconcentración se encuentra en lacapa de ozono de la estratósfera.
MQ-131
Metano
CH4
Es un gas incoloro e inflamable.Este gas se produce naturalmen-te por la descomposición de lamateria orgánica, donde funcio-na como un gas de efecto inver-nadero.
MQ-4
3.2.1. Estimación
Uno de los objetivos de este proyecto es desarrollar un sistema de bajo costo, ya que debe im-
plementarse en varios lugares de detección. La desventaja de los desarrollos de bajo costo es que los
datos adquiridos se ven comprometidos por la precisión de los sensores. En algunos casos, las medi-
ciones se ven afectadas por el ruido o se adquieren a bajas tasas. Para superar estos problemas, se ha
implementado un módulo de filtrado mediante el filtro Kalman. El filtro de Kalman no sólo ayuda a
filtrar el ruido, permite predecir el estado aunque el sensor deje de funcionar por cortos periodos de
tiempo. Cabe destacar que se puede sincronizar a una frecuencia según la tasa de transmisión de da-
tos. El filtro de Kalman, propuesto por Rudolf E. Kalman a finales de 1950, es un algoritmo de filtrado
lineal óptimo que funciona en dos pasos iterativos [74]:
Predicción. Consiste en estimar el estado actual de un sistema en función del estado de creencia
anterior y la ecuación de transición de estado.
Actualización. Ajusta la estimación de creencias de acuerdo con las observaciones.
38

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
Una forma de implementar el filtro de Kalman es rastrear un vector de medias y mantener la incer-
tidumbre del sistema con una sola matriz de correlación. Sin embargo, dado que se esta asumiendo
independencia en las variables, mantener el seguimiento en una matriz de covarianzas de 9 × 9 ele-
mentos (variables que integran el sistema de monitoreo) es muy costoso para un sistema embebido
debido a las operaciones matriciales. Por esa razón, se esta modelando el estado de cada variable
observada como:
µi =
xixi
(3.1)
donde xi es la variable observada y xi es su respectiva tasa de cambio. De acuerdo a lo anterior, para
cada una de las nueve variables se estima la media de la magnitud y su tasa de cambio. De forma
similar, para cada variable observada se define la matriz de covarianzas como:
σi =
σ2xx σ2
xx
σ2xx σ2
xx
(3.2)
Finalmente las lecturas del sensor se escriben como:
zi = sensori() (3.3)
Utilizando las definiciones anteriores el filtro de Kalman se resume en el Algoritmo 1. Donde µ y
Algoritmo 1 Algoritmo del filtro de Kalman
1: procedure KALMAN FILTER(µt−1, σt−1, µt, zt)2: µ = Atµt−1 +Btut3: ˜σt−1 = At
T +Qt
4: Kt = ˜σt−1CtT (CtσtCt
T +Rt)−1
5: µt = µt +Kt(zt − Ctµt)6: σt = (I −KtCt)σt7: return µt, σt
˜σt−1 son las predicciones, Kt, µt y σt indican la ganancia de Kalman y las variables corregidas con
la observación, Qt modela la incertidumbre del proceso observado y Ct indica la relación entre las
mediciones y el vector de estado. Dado que se está ultilizando un modelo de magnitud y velocidad
entonces:
At =
1 dt
0 1
(3.4)
donde dt es el intervalo de tiempo. Por otro lado, dado que no se está controlando el estado ambiental
entonces: µt = 0 y
Bt =
0
0
(3.5)
39

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
Las variables Qt y Rt se definen para cada sensor como se indica en los experimentos. Hasta ahora,
el filtro de Kalman se implementó para cada una de las variables, en cada una de sus etapas, que son
predicción y actualización permitiendo así estimar la siguiente medición sobre cada variable.
3.3. Módulo de comunicación inalámbrica e IoT
El objetivo de este módulo es recibir los datos que provienen de la microcomputadora Raspberry
Pi y enviarlos a una plataforma de Internet de las Cosas, a través de algún protocolo como MQTT,
CoAP o HTTP; este último es el que se utiliza en el sistema desarrollado. Este módulo recibe los datos
al ejecutar un script en Python, a el cual se le añadieron parámetros como el puerto al que se conecta,
velocidad de los datos y los baudios en este caso 57600 es la tasa de baudios para realizar la conexión
entre estas antenas. Una vez que recibe los datos, estos son convertidos a una trama en formato JSON,
la cual se caracteriza por tener como parámetros el nombre del HOST (nombre del sitio o ip que es el
punto de inicio y final de las transferencias de datos) hacía donde van dirigidos los datos, el dato a
enviar y un identificador que la plataforma provee para relacionar el dispositivo.
3.3.1. Comunicación inalámbrica a través de telemetría
La telemetría funciona a través de un transductor (dispositivo que convierte una señal eléctrica)
como un dispositivo de entrada y un transmisor (ondas de radio) a una distancia para efectos de
registro. Para esta investigación, se utiliza un kit de telemetría con una frecuencia de 915 Mhz y
un alcance de 1000 metros, el peso es aproximadamente de 24 gramos del receptor. En la Fig. 3.4,
se observan el kit de telemetría que se utiliza en el módulo de comunicación inalámbrica, en este
caso es una computadora, a la cual se le interconecta dicha antena receptora para el intercambio de
información. La antena que realiza el envió de datos se conecta a la microcomputadora Raspberry Pi
Figura 3.4: Antenas para telemetría. Los datos enviados por el módulo de procesamiento son recibidospor la antena receptora que se encuentra interconectada a través de una computadora.
a través de módulo FTDI, el cual es una interfaz que permite establecer comunicación desde USB a
40

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
TTL. El voltaje de 5V lo convierte a 3.3 V que es el suministro de energía que permite la Raspberry Pi
Zero W. El envío de datos se hace a través de un script en Python que tiene como parámetros la tasa
de baudios, paridad, el número de bytes, el puerto al que hay que conectarse, en este caso se utiliza
el puerto 57600. Una vez que los datos han sido enviados la computadora lee los datos recibidos a
través del puerto serie indicando lo mismos parámetros mencionados.
3.4. Diseño de hardware
Como se mencionó anteriormente, el sistema embebido se dividió en varios módulos. El diseño
de hardware se puede ver en la Fig. 3.5, en la cual se puede observar el módulo de sensores, el
módulo de procesamiento y las baterías que serán la fuente para el sistema. En la Fig. 3.6, se puede
observar el dron utilizado para la experimentación es un 3DR Solo cuyas características se describen
en la Tabla 3.3. El sistema embebido, con sus respectivos módulos, se implementó en una placa de
Figura 3.5: Diseño del módulo de sensores y procesamiento. El peso total aproximado del sistema demonitoreo es de 30 gramos. La intención de utilizar una placa de circuito impreso (PCB) es dismi-nuir el espacio entre los componentes que se genera durante el cableado, así como la reducción delvolumen y el peso de los productos electrónicos.
Tabla 3.3: Características del vehículo aéreo no tripulado (VANT) utilizado para la experimentación
Características
Peso 1.5 kg
Batería 22 minutos (14.7 V 5200-mAh)
Dimensiones 25 cm x 46 cm
Carga máxima 420 gramos
Tiempo de vuelo 20-25 min
Altura (modo seguro) 121.9 m
circuito impreso, de tal forma que en conjunto forman el sistema de monitoreo. En la Fig. 3.6, se
puede observar el sistema de monitoreo montado en la parte baja del dron; se decidió que fuera en la
41

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
parte baja ya que al montarlo sobre el dron, las hélices creaban un ambiente de interferencia entre los
sensores, tal como se reporta en [75].
Figura 3.6: Sistema de monitoreo montado en el dron. El monitoreo se realiza en la capa más baja dela atmósfera terrestre llamada tropósfera. La troposfera se extiende desde el nivel del suelo hasta los11 Km de altura.
3.4.1. Alimentación del sistema
La alimentación del circuito se basa principlamente en el uso de baterías de litio (el ánodo de me-
tal es de litio o tiene compuestos de litio), las cuales se observan en la Fig. 3.7, se caracterizan por ser
baterías recargables. Estas baterías producen voltajes de 1.5 V y 3.7 V y . Sin embargo el sistema se
alimenta con 5 V, por lo que se preciso de un arreglo de baterías en serie, sin embargo este tipo de
arreglo brinda 7.4 V de manera que uso el módulo LM2596 el cual se muestra en la Fig.3.8 y es un
regulador de voltaje que en principio funciona con una entrada mayor de voltaje y posteriormente
lo convierte en uno menor a su salida, a diferencia de otros esta fuente de alimentación de corriente
directa puede proveer hasta 3 amperes, cabe destacar que el sistema completo absorbe 3 A aproxi-
madamente, ya que la microcomputadora Raspberry Pi requiere 1.2 A [76], mientras que la tarjeta
Arduino Nano absorbe 19 miliamperios, los sensores en total requieren de 1.2 A aproximadamente.
Adicionalmente se integró un módulo de carga TP4056 el cual se observa en la Fig. 3.9, funciona para
la carga de las baterias LiPo o Li-ion a través del puerto micro USB hembra, la ventaja de este módulo
es el uso de un cargador común de smartphone, este módulo ofrece una corriente de carga de 1A,
posteriormente cuando las baterías esten totalmente cargadas, la corriente de carga se interrumpirá.
Por otro lado las baterías cuentan con un cargador externo que se conecta directamente a la corriente,
el cargador se puede observar en la Fig. 3.10. Finalmente para el envío de datos hacía la nube, se
utilizó un equipo de cómputo portátil que cuenta con la antena receptora de telemetría y se comunica
de forma inalámbrica hacía el sistema de monitoreo. Los datos recibidos se leen desde el puerto serie
del equipo a través de un script en Python, que se encarga de generar una trama de datos en forma-
to JSON (JavaScript Object Notation) para comunicarse con la plataforma de propietario con opción
gratuita llamada ThingsBoard que cuenta con los servicios necesarios para monitorear los datos de los
sensores en tiempo de real y así tomar decisiones dependiendo de la información. La comunicación
42

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
Figura 3.7: Baterías de iones de litio marca Samsung.
Figura 3.8: Regulador LM2596.
hacía ThingsBoard se hace a través del protocolo HTTP y un servidor local que cuenta con IP fija y que
forma parte de la trama JSON. Dicha IP se encuentra oculta por cuestiones de seguridad bajo un host,
de manera que en cualquier lugar se pueda acceder a dichos datos.La Fig. 3.11 muestra la integración
de dicho sistema. En la Fig. 3.12 se muestran las variables monitoreadas por el sistema desarrollado
vistas de la plataforma.
43

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
Figura 3.9: Módulo de carga USB TP4056.
Figura 3.10: Cargador baterías LiPo o Li-ion.
44

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
Servidor local
Sistema demonitoreo
Recepción de datos
docloudiot.ddns.net
Figura 3.11: La dirección del host que contiene los datos en la nube es: docloudiot.ddns.net:8080. Elpuerto 8080 se utiliza cuando un servidor HTTP recibe la petición hecha por un cliente en este caso lapetición la realiza una PC.
45

Capítulo 3. Sistema de monitoreo de variables ambientales y gases del efecto invernadero
(a) Humedad (b) Temperatura (c) Presión
(d) Altitud (e) Ozono (f) NOx
(g) Metano (h) CO2 (i) RayosUV
Figura 3.12: Visualización de las variables monitoreadas vistas desde la plataforma IoT. Los datos queprovenienen del filtro de Kalman son los datos que la plataforma está mostrando.
46

Capítulo 4
Experimentos y resultados
En este capítulo se plantean los experimentos que se realizaron, con el fin de demostrar el funcio-
namiento de filtro de kalman sección 3.2.1. En el primer experimento se pone en marcha el módulo
de sensores y el filtro de Kalman. El segundo experimento realiza la comparación de los datos obte-
nidos por los sensores con una EMA y el rendimiento del sistema (alta disponibilidad del sistema de
cómputo que en este caso es la Raspberry Pi Zero W) con el filtro de Kalman.
4.1. Filtrado
En esta sección se presentan dos experimentos. En el primer experimento se compararon la me-
diciones del sensor y el filtrado contra las mediciones provistas por una EMA oficial a fin de validar
nuestros resultados. Cabe señalar que la EMA de referencia no provee todas las variables que se están
midiendo por lo cual el segundo experimento presenta el filtrado de las señales provenientes de los
sensores con el filtro de Kalman sin valores de referencia.
Para todos los experimentos se usó la siguiente configuración de filtrado. Las variables Rt que
modelan la icertidumbre del sensor fueron capturadas en su mayoría a partir de la información pro-
vista por cada fabricante. De tal forma que:
Rt−Humedad = 2.0
Rt−Temperatura= 0.1
Rt−Presion= 1.0
Rt−Altitud= 1.0
Rt−UV = 1.0
Para los casos donde el fabricante no provee información se utilizaron los siguientes valores:
Rt−Ozono= 2.0
Rt−NOx= 2.0
Rt−Metano= 2.0
47

Capítulo 4. Experimentos y resultados
Rt−CO2= 2.0
Estos valores son relativamente pequeños en comparación con las magnitudes medidas, implicando
sensores confiables. La obtención de parámetros óptimos queda fuera del alcance de este estudio. En
el caso de Qt, ésta se define a partir de la naturaleza aleatoria del cambio ambiental, sin embargo,
modelar el cambio ambiental es un proceso difícil [77], por lo cual, se establecieron los valores de
forma empírica.
Los valores de Qt utilizados son:
QHumedadt =
0.042 0
0 0.012
(4.1)
QTemperaturat =
0.042 0
0 0.012
(4.2)
QPresiont =
0.082 0
0 0.012
(4.3)
QAltitudt =
0.082 0
0 0.012
(4.4)
QOzonot =
0.082 0
0 0.012
(4.5)
QNOxt =
0.082 0
0 0.012
(4.6)
QMetanot =
0.082 0
0 0.012
(4.7)
QCO2t =
0.082 0
0 0.012
(4.8)
QUVt =
0.082 0
0 0.012
(4.9)
4.2. Comparación con EMA
Este experimento consiste en comparar los datos de los sensores de bajo costo y los datos del ob-
tenidos por el filtro de Kalman contra una EMA utilizando el error cuadrático medio (ECM). La EMA
de referencia fue la estación del Centro de Ciencias de la Atmósfera de la UNAM [78] dado que sus
48

Capítulo 4. Experimentos y resultados
datos son públicos. Para realizar la comparación el sistema se colocó a 539 metros de distancia debido
a las restricciones de la misma EMA. El muestreo se realizó durante 21.5 horas. Las tasas de muestreo
de la EMA son menores a nuestro sistema, por lo cual se ajustaron nuestros datos a la frecuencia de
la EMA. En total se obtuvieron 1266 muestras para los sensores de temperatura, humedad y presión
(1 muestra por minuto). Para los sensores de CO2 y CH4 se obtuvieron 248 muestras (1 muestra cada
5 minutos). Los gráficas comparativas se pueden observan en la Fig. 4.1, 4.2, 4.3, 4.4 y 4.5.
20:00 PM
23:00 PM
02:00 AM
05:00 AM
08:00 AM
11:00 AM
14:00 PM
17:00 PM
Horas por muestra
12
14
16
18
20
22
24
Temperatura °C
Sensor de temperaturaFiltro de KalmanTemperatura CCA
Figura 4.1: Mediciones obtenidas por el sensor de temperatura BMP-180 en comparación con el sensorde referencia.
49

Capítulo 4. Experimentos y resultados
20:00 PM
23:00 PM
02:00 AM
05:00 AM
08:00 AM
11:00 AM
14:00 PM
17:00 PM
Horas por muestra
800
900
1000
1100
1200
Presión hPa
Sensor de presiónFiltro de KalmanPresión CCA
Figura 4.2: Mediciones obtenidas por el sensor de presión BMP-180 en comparación con el sensor dereferencia.
21:00 PM
00:00 AM
03:00 AM
06:00 AM
09:00 AM
12:00 PM
15:00 PM
Horas por muestra
0
50
100
150
200
250
300
350
Metan
o pp
m
Sensor de metanoFiltro de KalmanMetano CCA
Figura 4.3: Mediciones obtenidas por el sensor de metano MQ-4 en comparación con el sensor dereferencia.
50

Capítulo 4. Experimentos y resultados
21:00 PM
00:00 AM
03:00 AM
06:00 AM
09:00 AM
12:00 PM
15:00 PM
Horas por muestra
0
5000
10000
15000
20000
25000
30000
Dióx
ido pp
mSensor de CO2Filtro de KalmanCO2 CCA
Figura 4.4: Mediciones obtenidas por el sensor de dióxido de carbono SEN-0159 en comparación conel sensor de referencia.
20:00 PM
23:00 PM
02:00 AM
05:00 AM
08:00 AM
11:00 AM
14:00 PM
17:00 PM
Horas por muestra
0
20
40
60
80
100
Humed
ad %
RH
Sensor de humedadFiltro de KalmanHumedad CCA
Figura 4.5: Mediciones obtenidas por el sensor de humedad DHT-22 en comparación con el sensor dereferencia.
51

Capítulo 4. Experimentos y resultados
Tabla 4.1: Comparación del de error cuadrático medio entre la señal de los sensores y la señal filtradacontra la señal del referencia de la EMA.
Variable ECM Sensor ECM F. Kalman
Humedad 888.727 886.132
Temperatura 8.400 8.306
Presión 3.083E+03 621.929
CO2 5.403E+07 2.692E+07
CH4 8.736E+04 8.729E+04
4.2.1. Resultados de comparación EMA
Los errores obtenidos al comparar los sensores de bajo costo y el filtrado contra la EMA se pueden
observar en la tabla 4.1. Como se puede observar en la tabla el filtro del Kalman muestra un menor
error para todas las variables comparadas. Por lo tanto, se concluye que el sistema que integra el filtra-
do provee mediciones más confiables. Este comportamiento se debe a que el filtro en todo momento
obtiene la media de las observaciones eliminando valores atípicos lejanos. Como caso particular se
puede destacar el efecto del filtro en la medición de la presión atmosférica (Fig. 4.2) donde al final
de las observaciones el sensor presentó valores atípicos, vistos como picos en la señal, y fueron com-
pensados en el filtrado. También se puede observar que hay discrepancia entre los datos de la EMA
y los sensores, esto se debe a la menor precisión de los sensores y a la diferencia de su ubicación con
respecto de la EMA. El objetivo de este experimento es comprobar el correcto funcionamiento del
filtro de Kalman en comparación con un sensor de referencia. El valor del sensor de referencia se está
tomando como el valor verdadero, dicho valor se resta con el valor del sensor y posteriormente se
eleva al cuadrado. La magnitud de los datos obtenidos son grandes para normalizarlos se requiere
de un proceso de calibración.
4.3. Experimento del filtro de Kalman
En este experimento se pusieron a prueba los sensores y el módulo de procesamiento. Dado que
no se cuenta con valores de referencia para estos sensores, el objetivo de este experimento es co-
rroborar el funcionamiento sistema completo. En la Fig. 4.6,4.7,4.8 y 4.9 se comparan las mediciones
adquiridas por los sensores de altitud, ozono, óxido de nitrógeno y rayos UV, respectivamente, contra
la estimación del filtro de Kalman representado por las curvas en color rojo.
52

Capítulo 4. Experimentos y resultados
4.3.1. Resultados filtro de Kalman
Para este experimento se concluye que el filtro de Kalman elimina el ruido generado por los sen-
sores. Como se puede observar en el gráfico de manera cualitativa, el filtro suaviza las señales de
manera efectiva. El comportamiento se debe al hecho de que el filtro Kalman está actualizando las
señales de acuerdo con la distribución de errores del sensor. El tiempo promedio de retraso desde
la medición hasta su despliegue en la computadora del usuario final es en 10 segundos. La tasa de
cambio de las variables para este experimento es de 5 segundos aproximadamente.
20:00 PM
23:00 PM
02:00 AM
05:00 AM
08:00 AM
11:00 AM
14:00 PM
17:00 PM
Horas por muestra
−3000
−2000
−1000
0
1000
2000
Altitud
m.s.n.m
Sensor altitudFiltro de Kalman
Figura 4.6: Mediciones obtenidas por el sensor de altitud en a través del filtro de Kalman.
53

Capítulo 4. Experimentos y resultados
20:00 PM
23:00 PM
02:00 AM
05:00 AM
08:00 AM
11:00 AM
14:00 PM
17:00 PM
Horas por muestra
300
400
500
600
700
Ozon
o pp
mSensor de ozonoFiltro de Kalman
Figura 4.7: Mediciones obtenidas por el sensor de ozono a través del filtro de Kalman.
20:00 PM
23:00 PM
02:00 AM
05:00 AM
08:00 AM
11:00 AM
14:00 PM
17:00 PM
Horas por muestra
320
340
360
380
400
NOx pp
m
Sensor de NOxFiltro de Kalman
Figura 4.8: Mediciones obtenidas por el sensor de NOx a través del filtro de Kalman.
54

Capítulo 4. Experimentos y resultados
20:00 PM
23:00 PM
02:00 AM
05:00 AM
08:00 AM
11:00 AM
14:00 PM
17:00 PM
Horas por muestra
320
340
360
380
400
Índice
UV
Sensor de UVFiltro de Kalman
Figura 4.9: Mediciones obtenidas por el sensor de UV a través del filtro de Kalman.
55

Capítulo 5
Conclusiones
Este capítulo se centra en presentar las conclusiones con base al desarrollo de un sistema de mo-
nitoreo para gases de efecto invernadero. Adicionalmente se presentan los trabajos a futuro que se
pretenden realizar con respecto al filtro de Kalman y los sensores.
5.1. Conclusiones
Para este trabajo se desarrolló un sistema embebido de bajo costo para monitorear gases de efecto
invernadero y variables ambientales que funciona en tiempo cercano al real usando un vehículo aéreo
no tripulado e Internet de las cosas. El sistema implementa e integra un filtro de Kalman para tratar el
ruido producido por los sensores de bajo costo. El hardware integra todos los dispositivos en una sola
plataforma. Se llevaron a cabo varios experimentos para validar el correcto funcionamiento del filtro
y la plataforma obteniendo resultados satisfactorios. Los experimentos realizados muestran que el
error cuadrático medio, se reduce con respecto a una estación de monitoreo ambiental de referencia.
El filtro de Kalman reduce el ruido generado por los sensores, predice el estado siguiente en caso de
que el sensor deje de funcionar como se puede observar en la sección 4. En cuanto al hardware se
observó que los sensores manejan un valor considerable en base a su incertidumbre. Para acoplar el
sistema embebido al VANT se observó que los sensores deben estar en ciertas condiciones en cuanto
a temperatura y humedad, ya que estos factores influyen de manera considerable en su desempeño.
De acuerdo a los resultados obtenidos se concluye lo siguiente:
Es factible monitorear diversos gases tanto con muestreo espacial y temporal mediante el uso
del sistema propuesto.
El muestreo temporal está disponible al usuario en tiempo casi real, considerando que el tiempo
de latencia es de 10 segundos y las variaciones en las mediciones no son abruptas.
56

Capítulo 5. Conclusiones
El filtrado disminuye el error cuadrático medio de los experimentos realizados, por lo tanto el
sistema presenta mediciones más cercanas a los valores de referencia.
5.2. Trabajo a futuro
Para futuros trabajos, se utilizará el sistema desarrollado en conjunto con un algoritmo de pla-
nificación para realizar la cobertura de cierta área y recopilar la información de diferentes espacios
así como buscar correlaciones entre las variables. Para estabilizar las mediciones de los sensores se
propone un proceso de calibración el cual podría mejorar significativamente la precisión. El traba-
jo que puede desarrollarse a partir de este proyecto, podría ser un sistema que realice el envío de
alertas hacía un dispositivo móvil cuando las concentraciones de gases puedan afectar la salud de la
población.
57

Bibliografía
[1] Inventario de emsiones 2016, CDMX, “Aire.cdmx.gob.mx.” [Online].Available:http:
//www.aire.cdmx.gob.mx/descargas/publicaciones/flippingbook/
inventario-emisiones-2016/mobile/inventario-emisiones-2016.pdf. [Ac-
cessed: 29- Oct- 2019].
[2] R. A. Bernabeo, H. A. Khalifeh, A. Andretta, I. T. Al Khatib, and M. H. Ghori, “The impact of
climate change and weather on air transport in the uae: Reduction of co2 emissions,” in 2018
Advances in Science and Engineering Technology International Conferences (ASET), pp. 1–7, Feb 2018.
[3] C. K. Wikle and J. A. Royle, “Space: time dynamic design of environmental monitoring net-
works,” Journal of Agricultural, Biological, and Environmental Statistics, pp. 489–507, 1999.
[4] O. Evangelatos and J. Rolim, “An airborne wireless sensor system for near-real time air pollution
monitoring,” Sensors & Transducers, vol. 189, no. 6, p. 12, 2015.
[5] W. Ren and U. M. Al-Saggaf, “Distributed kalman–bucy filter with embedded dynamic avera-
ging algorithm,” IEEE Systems Journal, vol. 12, pp. 1722–1730, June 2018.
[6] A. Carrasquilla-Batista, A. Chacón-Rodríguez, and M. Solórzano-Quintana, “Using iot resour-
ces to enhance the accuracy of overdrain measurements in greenhouse horticulture,” in Central
American and Panama Convention (CONCAPAN XXXVI), 2016 IEEE 36th, pp. 1–5, IEEE, 2016.
[7] M. Noor-A-Rahim, M. O. Khyam, G. G. M. N. Ali, Z. Liu, D. Pesch, and P. H. J. Chong, “Reliable
state estimation of an unmanned aerial vehicle over a distributed wireless iot network,” IEEE
Transactions on Reliability, vol. 68, pp. 1061–1069, Sep. 2019.
[8] A. Al-Fuqaha, M. Guizani, M. Mohammadi, M. Aledhari, and M. Ayyash, “Internet of things:
A survey on enabling technologies, protocols, and applications,” IEEE Communications Surveys
Tutorials, vol. 17, pp. 2347–2376, Fourthquarter 2015.
[9] Scientific American, “El niño y el calentamiento global son responsables de la propagación
del zika.” [Online].Available:https://www.scientificamerican.com/espanol/
58

Bibliografía
noticias/el-nino-y-el-calentamiento-global-son-responsables-de-la-propagacion-del-zika/.
[Accessed: 17-Nov-2019].
[10] Gobierno de la ciudad de México, “Estrategia nacional de la calidad del aire.”
[Online].Available:https://www.gob.mx/cms/uploads/attachment/file/
195809/Estrategia_Nacional_Calidad_del_Aire.pdf. [Accessed: 17-Nov-2019].
[11] Organización Meteorológica Mundial, “Los niveles de gases de efec-
to invernadero en la atmósfera alcanzan un nuevo récord.” [Online]
.Available:https://public.wmo.int/es/media/comunicados-de-prensa/
los-niveles-de-gases-de-efecto-invernadero-en-la-atmÃssfera-alcanzan-un.
[Accessed: 17-Nov-2019].
[12] P. Vimal and K. Shivaprakasha, “Iot based greenhouse environment monitoring and controlling
system using arduino platform,” in Intelligent Computing, Instrumentation and Control Technologies
(ICICICT), 2017 International Conference on, pp. 1514–1519, IEEE, 2017.
[13] G. M. Bolla, M. Casagrande, A. Comazzetto, R. D. Moro, M. Destro, E. Fantin, G. Colombatti,
A. Aboudan, and E. C. Lorenzini, “Aria: Air pollutants monitoring using uavs,” in 2018 5th IEEE
International Workshop on Metrology for AeroSpace (MetroAeroSpace), pp. 225–229, June 2018.
[14] Geografía y medio ambiente, “Capas internas y externas de la tierra.” [Online]
.Available:https://geografia-y-medio-ambiente130.webnode.mx/
capas-internas-y-externas-de-la-tierre/. [Accessed: 17-Nov-2019].
[15] Centro Internacional para la Investigación del Fenómeno de El Niño, “Efecto invernadero.”
[Online].Available:http://www.ciifen.org/index.php?option=com_content&
view=category&layout=blog&id=99&Itemid=342&lang=es. [Accessed: 17-Nov-2019].
[16] twenergy, “¿qué es el efecto invernadero y cuáles son sus consecuencias?.” [Online]
.Available:https://twenergy.com/ecologia-y-reciclaje/contaminacion/
consecuencias-del-efecto-invernadero-609/. [Accessed: 17-Nov-2019].
[17] Gobierno de la ciudad de México, “El monitoreo de la calidad del aire.” [Online]
.Available:http://www.aire.cdmx.gob.mx. [Accessed: 3- Dic- 2019].
[18] J. E. O. R. Darío Sbarato, Viviana Sbarato, Predicción y evaluación de impactos ambientales sobre la
atmósfera. Encuentro.
[19] Suministros Hidráulicos del sureste S.A. DE C.V., “Suhissa.” [Online].Available:https:
//suhissa.com.mx/sistemas-de-monitoreo/. [Accessed: 17-Nov-2019].
59

Bibliografía
[20] Escuela Politécnica Nacional, “Interfaces de comunicación industrial.” [Online]
.Available:https://bibdigital.epn.edu.ec. [Accessed: 17-Nov-2019].
[21] A. R. Penin, Sistemas SCADA: guía práctica. Marcombo, first ed., 2007.
[22] J. P. S. J. R. L. Vizcaino, Sistemas integrados con Arduino. Alfaomega, first ed., nov 2013.
[23] I. R. G. Bravo, Sistemas digitales con Microcontroladores. Universidad Autónoma Metropolitana,
2018.
[24] A. Ollero, I. Maza, A. R. Castaño, J. M. de Dios, F. Caballero, and J. Capitán, “Proyecto aware.
integración de vehículos aéreos no tripulados con redes inalámbricas de sensores y actuadores,”
Revista Iberoamericana de Automática e Informática industrial, vol. 9, no. 1, pp. 46–56, 2012.
[25] Mecatrónica LATAM, “Sensor ¿qué es y tipos de sensores?.” [Online].Available:https:
//www.mecatronicalatam.com/tutorial/es/sensores. [Accessed: 17-Nov-2019].
[26] Arduino.org, “What is arduino?.” [Online].Available:https://www.arduino.cc/en/
Guide/Introduction. [Accessed: 17-Nov-2019].
[27] Arduino.cl, “Arduino.” [Online].Available:https://arduino.cl/arduino-2/. [Ac-
cessed: 17-Nov-2019].
[28] Arduino.cl, “Arduino.” [Online].Available:https://arduino.cl/arduino-nano/.
[Accessed: 17-Nov-2019].
[29] Arduino.cl, “Arduino.” [Online].Available:https://arduino.cl/
que-es-arduino/. [Accessed: 17-Nov-2019].
[30] J. Sobota, R. PiSl, P. Balda, and M. Schlegel, “Raspberry pi and arduino boards in control educa-
tion,” IFAC Proceedings Volumes, vol. 46, no. 17, pp. 7–12, 2013.
[31] Ingeniería, informática y diseño, “Modelos y características de raspberry pi.” [Online]
.Available:https://www.luisllamas.es/modelos-de-raspberry-pi/. [Accessed:
17-Nov-2019].
[32] https://www.sparkfun.com, “Atmega328.” [Online].Available:https://www.
sparkfun.com/datasheets/Components/SMD/ATMega328.pdf. [Accessed: 3-Dic-2019].
[33] EcuRed, “Señales analógicas y digitales.” [Online].Available:https://www.ecured.
cu/SeÃsales_analÃsgicas_y_digitales. [Accessed: 17-Nov-2019].
[34] A. Ambardar, Procesamiento de señales analógicas y digitales. S.A. Ediciones Paraninfo, second ed.,
2003.
60

Bibliografía
[35] ConceptoDefinición, “Puerto serie.” [Online].Available:https://
conceptodefinicion.de/puerto-serie/. [Accessed: 17-Nov-2019].
[36] Departamento de Física, “Introducción a la teoría de errores de medición.” [Online]
.Available:http://www.fisica.uns.edu.ar. [Accessed: 1-Dic-2019].
[37] M. H. DeGroot, Probability and Statistics. Pearson, fourth ed., 2011.
[38] G. Dudek and M. Jenkin, Computational principles of mobile robotics. Cambridge University Press,
second ed., 2010.
[39] A. N. R. Juan Manuel Martín Sánchez, Pedro CABRERA CÁMARA, Conceptos básicos de filtrado,
estimación e identificación. UNED, 2006.
[40] Universitat de València, “Matriz de varianzas-covarianzas.” [Online].Available:https:
//www.uv.es/ceaces/base/descriptiva/mvarcovar.htm. [Accessed: 17-Nov-2019].
[41] kalmanfilter.net, “Kalman filter.” [Online].Available:https://www.kalmanfilter.
net/kalman1d.html. [Accessed: 1-Dic-2019].
[42] D. S. Roland Siegwart, Illah Reza Nourbakhsh, Introduction to Autonomous Mobile Robots. Mit Pr,
second ed., 2011.
[43] Cengage, “¿qué es la telemetría?.” [Online].Available:https://latinoamerica.
cengage.com/que-es-la-telemetria/. [Accessed: 17-Nov-2019].
[44] S. Madakam, R. Ramaswamy, and S. Tripathi, “Internet of things (iot): A literature review,” Jour-
nal of Computer and Communications, vol. 3, pp. 164–173, 04 2015.
[45] IBM, “Simplifique el desarrollo de sus soluciones de iot con arquitecturas de iot.”
[Online].Available:https://www.ibm.com/developerworks/ssa/library/
iot-lp201-iot-architectures/index.html. [Accessed: 17-Nov-2019].
[46] Quora, “What is iot architecture?.” [Online].Available:https://www.quora.com/
What-is-IoT-architecture. [Accessed: 17-Nov-2019].
[47] Json.org, “Introducing json.” [Online].Available:http://www.json.org. [Accessed:
17-Nov-2019].
[48] w3schools, “What is json?.” [Online].Available:https://www.w3schools.com/
whatis/whatis_json.asp. [Accessed: 17-Nov-2019].
[49] W. Stallings, Comunicaciones y redes de computadoras. PEARSON Prentice Hall, seventh ed., 2004.
61

Bibliografía
[50] Oracle, “Modelo de arquitectura del protocolo tcp/ip.” [Online].Available:https://
docs.oracle.com/cd/E19957-01/820-2981/ipov-10/. [Accessed: 17-Nov-2019].
[51] B. Wukkadada, K. Wankhede, R. Nambiar, and A. Nair, “Comparison with http and mqtt in inter-
net of things (iot),” in 2018 International Conference on Inventive Research in Computing Applications
(ICIRCA), pp. 249–253, July 2018.
[52] T. Yokotani and Y. Sasaki, “Comparison with http and mqtt on required network resources for
iot,” in 2016 International Conference on Control, Electronics, Renewable Energy and Communications
(ICCEREC), pp. 1–6, Sep. 2016.
[53] IoT Consulting, “Mqtt vs http – qué elegir para tu proyec-
to iot.” [Online].Available:https://iotconsulting.tech/
mqtt-vs-http-que-elegir-para-tu-proyecto-iot/. [Accessed: 17-Nov-2019].
[54] I. Rincon, F. Oswaldo, G. Manzanilla, and J. A. Arizaga Silva, “Sistema de monitoreo de varia-
bles ambientales utilizando de ethernet,” Congreso Internacional de Informática aplicada, At
Mizantla, Veracruz, 2013.
[55] C. A. V. Romero, “Acople de sensores en la medición de variables ambientales usando tecnología
zigbee,” Scientia et technica, vol. 19, no. 4, pp. 419–424, 2014.
[56] E. A. M. Rios, J. Palacios, and N. Falcón, “Diseño y construcción de sensores automatizados de
gases de efecto invernadero en la baja troposfera,” Ingenius, vol. 1, no. 14, pp. 21–29, 2016.
[57] S. Kumar and A. Jasuja, “Air quality monitoring system based on iot using raspberry pi,” in
2017 International Conference on Computing, Communication and Automation (ICCCA), pp. 1341–
1346, May 2017.
[58] A. M. C. Ilie and C. Vaccaro, “Design of a smart gas detection system in areas of natural gas
storage,” in 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), pp. 5954–
5957, July 2017.
[59] G. Mois, Z. Szilagyi, T. Sanislav, and S. Folea, “An http-based environmental monitoring sys-
tem using power harvesting,” in 2017 21st International Conference on System Theory, Control and
Computing (ICSTCC), pp. 845–848, Oct 2017.
[60] G. Parmar, S. Lakhani, and M. K. Chattopadhyay, “An iot based low cost air pollution monitoring
system,” in 2017 International Conference on Recent Innovations in Signal processing and Embedded
Systems (RISE), pp. 524–528, Oct 2017.
[61] M. M. Ahmed, S. Banu, and B. Paul, “Real-time air quality monitoring system for bangladesh’s
perspective based on internet of things,” in 2017 3rd International Conference on Electrical Informa-
tion and Communication Technology (EICT), pp. 1–5, Dec 2017.
62

Bibliografía
[62] A. Holovatyy, V. Teslyuk, M. Lobur, S. Pobereyko, and Y. Sokolovsky, “Development of arduino-
based embedded system for detection of toxic gases in air,” in 2018 IEEE 13th International Scienti-
fic and Technical Conference on Computer Sciences and Information Technologies (CSIT), vol. 1, pp. 139–
142, Sep. 2018.
[63] P. D. Rosero-Montalvo, J. A. Caraguay-Procel, E. D. Jaramillo, J. M. Michilena-Calderón, A. C.
Umaquinga-Criollo, M. Mediavilla-Valverde, M. A. Ruiz, L. A. Beltrán, and D. H. Peluffo, “Air
quality monitoring intelligent system using machine learning techniques,” in 2018 International
Conference on Information Systems and Computer Science (INCISCOS), pp. 75–80, Nov 2018.
[64] N. Asthana and R. Bahl, “Iot device for sewage gas monitoring and alert system,” in 2019 1st In-
ternational Conference on Innovations in Information and Communication Technology (ICIICT), pp. 1–7,
April 2019.
[65] A. J. Alabdullah, B. I. Farhat, and S. Chtourou, “Air quality arduino based monitoring system,”
in 2019 2nd International Conference on Computer Applications Information Security (ICCAIS), pp. 1–
5, May 2019.
[66] J. A. Malaver Rojas, N. Motta, L. F. Gonzalez, P. Corke, and A. Depari, “Towards the develop-
ment of a gas sensor system for monitoring pollutant gases in the low troposphere using small
unmanned aerial vehicles,” In Smith, Ryan N. (Ed.) Workshop on Robotics for Environmental Moni-
toring, 11 July 2012, Sydney University, N. S. W., 2012.
[67] O. Sidek, A. Abdullah, U. Za’bah, N. Amran, H. Jafar, M. A. Hadi, F. Nikmat, Z. Halim, and
M. Mansor, “Development of prototype system for monitoring and computing greenhouse ga-
ses with unmanned aerial vehicle (uav) deployment,” in Technology Management and Emerging
Technologies (ISTMET), 2014 International Symposium on, pp. 98–101, IEEE, 2014.
[68] V. Vargas, V. Lange, et al., “Sistema aéreo de medición de gases contaminantes basado en un uav,
resultados preliminares,” Acta Nova, vol. 7, no. 2, pp. 194–212, 2015.
[69] A. Abou-Elnour, M. Odeh, M. Abdelrhman, A. Balkis, and A. Amira, “Measurement of green-
house gases in uae by using unmanned aerial vehicle (uav),” in Sensors and Smart Structures
Technologies for Civil, Mechanical, and Aerospace Systems 2017, vol. 10168, p. 101682S, International
Society for Optics and Photonics, 2017.
[70] A. Tripolitsiotis, N. Prokas, S. Kyritsis, A. Dollas, I. Papaefstathiou, and P. Partsinevelos, “Dro-
nesourcing: a modular, expandable multi-sensor uav platform for combined, real-time environ-
mental monitoring,” International journal of remote sensing, vol. 38, no. 8-10, pp. 2757–2770, 2017.
63

Bibliografía
[71] M. Elloumi, R. Dhaou, B. Escrig, H. Idoudi, and L. A. Saidane, “Monitoring road traffic with
a uav-based system,” in 2018 IEEE Wireless Communications and Networking Conference (WCNC),
pp. 1–6, April 2018.
[72] M. B. Marinov, I. Topalov, B. Ganev, E. Gieva, and V. Galabov, “Uavs based particulate mat-
ter pollution monitoring,” in 2019 IEEE XXVIII International Scientific Conference Electronics (ET),
pp. 1–4, Sep. 2019.
[73] P. Singh and S. Saikia, “Arduino-based smart irrigation using water flow sensor, soil moistu-
re sensor, temperature sensor and esp8266 wifi module,” in Humanitarian Technology Conference
(R10-HTC), 2016 IEEE Region 10, pp. 1–4, IEEE, 2016.
[74] S. Thrun, W. Burgard, and D. Fox, Probabilistic robotics. Cambridge, Mass.: MIT Press, 2005.
[75] O. Ruiz-Espitia, J. Martinez-Carranza, and C. Rascon, “Aira-uas: an evaluation corpus for audio
processing in unmanned aerial system,” in 2018 International Conference on Unmanned Aircraft
Systems (ICUAS), pp. 836–845, June 2018.
[76] Raspberrypi.org, “Documentation-faqs.” [Online].Available:https://www.
raspberrypi.org/documentation/faqs/#pi-power. [Accessed: 17-Nov-2019].
[77] J. Fabry, S. Liebich, P. Vary, and P. Jax, “Active noise control with reduced-complexity kalman
filter,” in 2018 16th International Workshop on Acoustic Signal Enhancement (IWAENC), pp. 166–
170, Sep. 2018.
[78] R. U. de Observatorios Atmosféricos de la Universidad Nacional Autónoma de México, “red
universitaria de observatorios atmosféricos".” [Online].Available:https://www.ruoa.
unam.mx/. [Accessed: 26- Oct- 2019].
64

Apéndice
65

Apéndice A
Inventario Nacional de Emisiones de
Gases y Compuestos de Efecto
Invernadero en la Ciudad de México
en 2015.
66

Apéndice A. Inventario Nacional de Emisiones de Gases y Compuestos de Efecto Invernadero en laCiudad de México en 2015.
Figura A.1: Inventario Nacional de Emisiones de Gases y Compuestos de Efecto Invernadero enla Ciudad de México en 2015. INEEC. Recuperado de https://www.gob.mx/inecc/acciones-y-programas/inventario-nacional-de-emisiones-de-gases-y-compuestos-de-efecto-invernadero
67

Apéndice B
Productividad
R. Vázquez López, E. V. Vázquez Carmona, J. C. Herrera Lozada, M. Hernández Bolaños y M.
Marciano Melchor, “PROTOTIPO DE APOYO PARA EMULAR EL FUNCIONAMIENTO DEL
PROTOCOLO MESI”, Pistas Educativas No. 130, vol. 40, ISSN: 2448-847X, 2018
E. V. Vázquez Carmona, R. Vázquez López y J. C. Herrera Lozada, “APLICACIONES CON
ARDUINO: MANEJO DE DISPLAY DE 7 SEGMENTOS Y LED RGB”, Boletín UPIITA, No.67,
ISSN: 2007-6150. Jul. 2018
E. V. Vázquez Carmona, R. Vázquez López, N. F. Encarnación, Ávalos y J. C. Herrera Lozada,
“CONTROL DE PANTALLAS DE LCD Y OLED UTILIZANDO ARDUINO”, Boletín UPIITA,
No.69, ISSN: 2007-6150. Nov. 2018
R. Vázquez López, E. V. Vázquez Carmona, J. C. Herrera Lozada y J. Sandoval Gutiérrez, “DO-
MÓTICA: CONTROL DE ENCENDIDO DE DISPOSITIVOS POR MEDIO DE UNA APLICA-
CIÓN MÓVIL Y UNA RASPBERRY PI”, Boletín UPIITA, No.74, ISSN: 2007-6150. Sep. 2019
E. V. Vázquez Carmona, R. Vázquez López, y J. C. Herrera Lozada, “ARDUINO: MONITO-
REO DE VARIABLES CLIMÁTICAS HACIENDO USO DE LOS SENSORES BMP-180, DHT-22
Y NEO-6M”, Boletín UPIITA, No.74, ISSN: 2007-6150. Sep.2019
E. V. Vázquez Carmona, J. I. Vásquez Gómez y J. C. Herrera Lozada “SISTEMA PARA EL MO-
NITOREO DE GASES DE EFECTO INVERNADERO UTILIZANDO INTERNET DE LAS CO-
SAS y VEHÍCULOS AÉREOS NO TRIPULADOS”, Foro PIFI 2019, UPDCE, México, Agosto,
2019
E. V. Vázquez Carmona, R. Vázquez López y J. C. Herrera Lozada, “REPRESENTACIÓN GRÁ-
FICA DE DATOS ESTADÍSTICOS EN PYTHON UTILIZANDO LA BIBLIOTECA MATPLOTLIB”,
Boletín UPIITA, No.75, ISSN: 2007-6150. Nov. 2019
68

Apéndice B. Productividad
E. V. Vázquez Carmona, R. Vázquez López y J. C. Herrera Lozada, “USO DE LA PLATAFORMA
CLOUDERA CDH COMO UNA HERRAMIENTA DE BIG DATA Y CIENCIA DE DATOS”,
Boletín UPIITA, No.75, ISSN: 2007-6150. Nov. 2019
E. V. Vázquez Carmona, J. I. Vásquez Gómez y J. C. Herrera Lozada, .Environmental Monitoring
using Embedded Systems on UAVs", IEEE Latin America Transactions Special Issue on Embed-
ded Systems. (en revisión)
69