INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E...
120
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA FLUMINENSE FRANCISCO JOSÉ RANGEL RIBEIRO MARINA DE OLIVEIRA MIELI SISTEMA DE CONTROLE E MONITORAÇÃO DE CARGA DO MODELO ICÔNICO DO GUINDASTE STALPRODUKTER Campos dos Goytacazes 2015
Transcript of INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E...

INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA FLUMINENSE
FRANCISCO JOSÉ RANGEL RIBEIRO
MARINA DE OLIVEIRA MIELI
SISTEMA DE CONTROLE E MONITORAÇÃO DE CARGA DO MODELO ICÔNICO
DO GUINDASTE STALPRODUKTER
Campos dos Goytacazes
2015
1
FRANCISCO JOSÉ RANGEL RIBEIRO
MARINA DE OLIVEIRA MIELI
SISTEMA DE CONTROLE E MONITORAÇÃO DE CARGA DO MODELO ICÔNICO
DO GUINDASTE STALPRODUKTER
Trabalho de Conclusão de Curso, apresentado ao
Instituto Federal de Educação, Ciência e
Tecnologia Fluminense, como parte dos
requisitos necessários para obtenção do título de
Bacharel em Engenharia de Controle e
Automação.
Orientador: Profº Me. Eugenio Ferreira Naegele da
Silva
Coorientador: Profº Me. Edson Simões dos Santos
Campos dos Goytacazes
2015
2
R484s Ribeiro, Francisco José Rangel.
Sistema de controle e monitoração de carga do modelo icônico do
guindaste Stalprodukter / Francisco José Rangel Ribeiro, Marina de
Oliveira Mieli – 2015.
118 f. il. color.
Orientador: Eugênio Ferreira Naegele da Silva
Monografia (Bacharel em Engenharia de Controle e Automação).
Instituto Federal de Educação, Ciência e Tecnologia Fluminense
Campus Campos Centro. Campos dos Goytacazes (RJ), 2015.
1. 1. Guindastes, etc. 2. Máquinas para içar. 3. Máquinas elevatórias. I. Mieli, Marina de Oliveira. II. Silva, Eugênio Ferreira Naegele da
Dados Internacionais de Catalogação na Publicação (CIP)
Biblioteca. Setor de Processos Técnicos (IFF)
3

4
A João Carlos de Almeida Mieli
M.O.M.
A Deus
F.J.R.R.

5
“Você é o que repetidamente faz. Excelência não é um
evento, é um hábito.”
Aristóteles
6
RESUMO
Guindastes são equipamentos utilizados para a elevação e a movimentação
de cargas e materiais pesados. Na indústria petrolífera offshore, esse trabalho é
realizado através de guindastes hidráulicos, não só dentro dos limites da plataforma,
mas também em operações com embarcações auxiliares. Este trabalho trata,
especificamente, do guindaste hidráulico STALPRODUKTER, presente em algumas
plataformas da PETROBRAS. O mesmo, em sua condição de máquina, está
suscetível a falhas. Para evitar tais problemas, existem sistemas de intertravamento
e segurança. Foi reproduzido no modelo icônico presente no laboratório, o sistema
de controle e monitoração de carga do guindaste, que integra os sistemas de
controle do limite de içamento e do limite de elevação da lança, já encontrados no
modelo, ao sistema indicador de operação sobre a embarcação e sistema de
monitoração de carga. Tendo como objetivo o impedimento de uma operação que
possa causar sobrecargas nos motores e nos cabos dos guinchos.
Palavras-chave: Guindaste hidráulico. Monitoração de carga. Sobrecarga.

7
ABSTRACT
Cranes are equipments used for lifting and moving loads and heavy materials.
In the offshore oil industry, this work is carried out through hydraulic cranes, not only
within the limits of the platform, but also in operations with auxiliary vessels. This
work deals specifically with the STALPRODUKTER hydraulic crane, present in some
of PETROBRAS platforms. Like every machine, it is susceptible to failure. To avoid
such problems, there are interlocking and security systems. The control and load
monitoring system was developed using the iconic model present in the laboratory,
which includes the lifting limit control and boom lifting limit systems which can be
found in the model, the operation on vessel indicator systems and cargo monitoring
system, aiming the prevention of an operation that can cause overloads in the motors
and winches cables.
Keywords: Hydraulic crane. Load monitoring. Overload.
8
LISTA DE FIGURAS
Figura 1: Geometria do guindaste tomado como base para o projeto ....................... 17
Figura 2: Localização das alavancas de controle ...................................................... 18
Figura 3: Guinchos de içamento auxiliar e principal .................................................. 19
Figura 4: Princípio de funcionamento de um circuito hidráulico fechado de forma
simplificada ................................................................................................................ 28
Figura 5: Circuito hidráulico do motor ........................................................................ 29
Figura 6: (a) Motor em torque máximo e velocidade mínima; (b) Motor em torque
mínimo e velocidade máxima .................................................................................... 30
Figura 7: Circuito hidráulico fechado ......................................................................... 31
Figura 8: Motor hidráulico de pistões variáveis ......................................................... 32
Figura 9: Bomba hidráulica auxiliar ........................................................................... 33
Figura 10: (a) Alavanca de controle; (b) Localização da alavanca de controle da
lança e do giro ........................................................................................................... 33
Figura 11: Localização do botão seletor dos guinchos .............................................. 35
Figura 12: Diagrama ladder do sistema seletor de guinchos ..................................... 35
Figura 13: Localização do sensor limite de cabo frouxo ............................................ 36
Figura 14: Foto com a localização do botão para determinação da posição do
gancho e display ....................................................................................................... 36
Figura 15: Localização do encoder nos guinchos auxiliar e principal ........................ 37
Figura 16: Localização das células de carga dos guinchos auxiliar e principal ......... 37
Figura 17: Célula de carga instalada no parafuso de cisalhamento do guincho
auxiliar ....................................................................................................................... 38
Figura 18: Localização dos botões homem morto ..................................................... 39
Figura 19: Válvula direcional com solenoide HY 112 desenergizado ........................ 40
9
Figura 20: Console de controle da cabine do operador ............................................. 41
Figura 21: Modelo icônico do guindaste STALPRODUKTER.................................... 42
Figura 22: Localização dos sensores instalados no modelo icônico ......................... 43
Figura 23: Ponte de Wheatstone ............................................................................... 44
Figura 24 : Célula de carga ....................................................................................... 45
Figura 25: Diagrama ilustrativo do circuito amplificador ............................................ 46
Figura 26: Implementação do circuito amplificador ................................................... 46
Figura 27: Encoder .................................................................................................... 47
Figura 28: Sinais fornecidos por um encoder quadrature. ......................................... 47
Figura 29: (a) ilustração do potenciômetro; (b) diagrama representativo do circuito
interno do potenciômetro ........................................................................................... 49
Figura 30: Potenciômetro .......................................................................................... 50
Figura 31: Fonte de alimentação da célula de carga e do sensor de ângulo da lança
.................................................................................................................................. 50
Figura 32: Placa de aquisição ................................................................................... 51
Figura 33: Diagrama de blocos de uma cadeia de processamento ........................... 51
Figura 34: Sensor de início de curso do cabo de içamento do guincho auxiliar ........ 55
Figura 35: Sensor de fim de curso do cabo de içamento do guincho auxiliar............ 56
Figura 36: Solenoide HY 101/102 da válvula ............................................................ 56
Figura 37: Botão de by-pass para o sistema de içamento do guincho auxiliar .......... 57
Figura 38: Sensor de limite superior da lança ........................................................... 58
Figura 39: Batente amortecedor da lança ................................................................. 58
Figura 40: Sensores de limite inferior da lança ......................................................... 59
Figura 41: Solenoide HY 105 e HY 106 da válvula ................................................... 59
Figura 42: Botão de by-pass para sensor de limite inferior máximo da lança ........... 60
10
Figura 43: (a) Operação sobre a plataforma; (b) operação sobre a embarcação ...... 61
Figura 44: Detalhe do sistema indicador de operação sobre a embarcação no
supervisório ............................................................................................................... 62
Figura 45: Botão de acionamento do freio de içamento do guindaste original .......... 63
Figura 46: Altura relativa e absoluta da carga ........................................................... 64
Figura 47: Diagrama de blocos do sistema implementado no LabVIEW – Sistema de
controle e monitoração de carga ............................................................................... 65
Figura 48: Detalhe do diagrama de blocos com destaque do sistema indicador de
operação sobre a embarcação .................................................................................. 66
Figura 49: Parâmetros do sistema indicador de operação sobre a embarcação na
IHM ............................................................................................................................ 67
Figura 50: Detalhe do botão seletor da altura da onda do guindaste original............ 71
Figura 51: Detalhe do botão virtual seletor da altura da onda do modelo icônico ..... 71
Figura 52: Diagrama de blocos do sistema de controle e monitoração de carga do
modelo....................................................................................................................... 73
Figura 53: Parâmetros do sistema de monitoração de carga na IHM ....................... 74
Figura 54: Movimentação do guindaste em caso de sobrecarga .............................. 75
Figura 55: Representação do sistema hidráulico do modelo ..................................... 76
Figura 56: Representação do circuito elétrico do modelo.......................................... 77
Figura 57: Diagrama de intertravamento do CLP ...................................................... 78
Figura 58: Detalhe do circuito hidráulico com destaque para as válvulas que
representam a alavanca de controle ......................................................................... 79
Figura 59: Circuito hidráulico – Simulação dos movimentos da lança e do guincho –
situação 1 .................................................................................................................. 80
11
Figura 60: Circuito hidráulico – Simulação dos movimentos da lança e do guincho –
situação 2 .................................................................................................................. 81
Figura 61: Detalhe do circuito hidráulico com destaque para a válvula homem morto
.................................................................................................................................. 82
Figura 62: Alavanca de controle com indicação do botão homem morto presentes no
modelo icônico .......................................................................................................... 83
Figura 63: Circuito elétrico – acionamento do botão homem morto .......................... 84
Figura 64: Diagrama do CLP – Acionamento do botão homem morto ...................... 85
Figura 65: Circuito hidráulico - Acionamento do botão homem morto ....................... 85
Figura 66: Circuito hidráulico - Acionamento da alavanca de controle ...................... 86
Figura 67: Circuito elétrico – Acionamento do sensor de limite superior da lança .... 88
Figura 68: Diagrama do CLP – Acionamento do sensor de limite superior da lança . 89
Figura 69: Circuito hidráulico – Acionamento do sensor de limite superior da lança . 89
Figura 70: Circuito elétrico – Acionamento do sensor de fim de curso do cabo do
guincho auxiliar ......................................................................................................... 91
Figura 71: Diagrama do CLP – Acionamento do sensor de fim de curso do cabo do
guincho auxiliar ......................................................................................................... 92
Figura 72: Circuito hidráulico – Acionamento do sensor de fim de curso do cabo do
guincho auxiliar ......................................................................................................... 92
Figura 73: Circuito Hidráulico – Acionamento do sensor do limite de fim de curso do
cabo do guincho auxiliar com movimentação simultânea do motor da lança ............ 93
Figura 74: Circuito elétrico – Acionamento do botão de by-pass para o sistema de
movimentação da lança............................................................................................. 95
Figura 75: Diagrama do CLP – Acionamento do botão de by-pass para o sistema de
movimentação da lança............................................................................................. 96
12
Figura 76: Circuito hidráulico – Acionamento do botão de by-pass para o sistema de
movimentação da lança............................................................................................. 96
Figura 77: Circuito elétrico – Acionamento do botão de by-pass para o sistema de
movimentação do guincho auxiliar ............................................................................ 98
Figura 78: Diagrama do CLP – Acionamento do botão de by-pass para o sistema de
movimentação do guincho auxiliar ............................................................................ 99
Figura 79: Circuito hidráulico – Acionamento do botão de by-pass para o sistema de
movimentação do guincho auxiliar ............................................................................ 99
Figura 80: Representação do sistema hidráulico modificado do modelo ................ 101
Figura 81: Válvula de retenção pilotada 1 ............................................................... 102
Figura 82: Válvula de retenção pilotada 2 ............................................................... 102
Figura 83: Detalhe do solenoide HY 103 da válvula direcional ............................... 103
Figura 84: Representação do sistema elétrico modificado do modelo .................... 104
Figura 85: Diagrama de intertravamento do CLP modificado .................................. 106
Figura 86: Diagrama ilustrativo do circuito amplificador do sinal proveniente do
sistema de monitoração de carga ........................................................................... 107
Figura 87: Circuito amplificador do sinal proveniente do sistema de monitoração de
carga implementado ................................................................................................ 108
Figura 88: Circuito elétrico – Situação de sobrecarga ............................................. 109
Figura 89: Diagrama do CLP – Situação de sobrecarga ......................................... 110
Figura 90: Circuito hidráulico - Situação de sobrecarga .......................................... 110
Figura 91: Circuito hidráulico – situação de sobrecarga – sentido de movimentação
impedido .................................................................................................................. 111
Figura 92: Circuito hidráulico – situação de sobrecarga – sentido de movimentação
permitido.................................................................................................................. 112

13
Figura 93: Circuito elétrico – Acionamento do by-pass do sistema de monitoração de
carga ....................................................................................................................... 114
Figura 94: Diagrama do CLP – Acionamento do by-pass do sistema de monitoração
de carga .................................................................................................................. 115
Figura 95: Circuito hidráulico – Acionamento do by-pass do sistema de monitoração
de carga .................................................................................................................. 115
Figura 96: IHM do sistema de controle e monitoração de carga ............................. 116
Figura 97: IHM do guindaste original ....................................................................... 117
Figura 98: IHM desenvolvida para o modelo icônico ............................................... 117
14
SUMÁRIO
SUMÁRIO .................................................................................................................. 14
1. CONCEITOS ...................................................................................................... 17
1.1. GEOMETRIA DO GUINDASTE .................................................................... 17
1.2. ALAVANCAS DE CONTROLE ..................................................................... 18
1.3. ALTURA DA LANÇA .................................................................................... 18
1.4. ÂNGULO CRÍTICO ...................................................................................... 18
1.5. ÂNGULO DA LANÇA ................................................................................... 18
1.6. GUINCHOS .................................................................................................. 18
1.7. OPERADOR ................................................................................................. 19
1.8. RAIO DE CARGA ......................................................................................... 19
2. INTRODUÇÃO .................................................................................................... 20
2.1. APRESENTAÇÃO ........................................................................................ 20
2.2. JUSTIFICATIVA ........................................................................................... 21
2.3. OBJETIVOS GERAIS ................................................................................... 21
2.4. OBJETIVOS ESPECÍFICOS ........................................................................ 22
3. METODOLOGIA ................................................................................................. 23
4. TIPOS DE GUINDASTES E ASPECTOS GERAIS ............................................ 24
4.1. CONTEXTO HISTÓRICO............................................................................. 24
4.2. GUINDASTE HIDRÁULICO ......................................................................... 25
4.2.1. Sistemas Hidráulicos ............................................................................. 25
4.2.2. Características Dos Sistemas Hidráulicos ............................................. 25
5. O GUINDASTE STALPRODUKTER ................................................................... 27
5.1. SISTEMAS HIDRÁULICOS DO GUINDASTE.............................................. 27
5.1.1. Sistema Hidráulico Da Lança................................................................. 32
5.1.2. Sistema Hidráulico Dos Guinchos ......................................................... 34
5.2. SISTEMAS DE SEGURANÇA E INTERTRAVAMENTO .............................. 38
15
5.2.1. Freios ..................................................................................................... 38
5.2.2. Função Homem Morto ........................................................................... 39
5.2.3. Proteção Contra Sobrecarga ................................................................. 40
5.2.4. Início e Fim De Curso ............................................................................ 40
5.2.5. Alertas e Alarmes .................................................................................. 40
6. COMPONENTES DO PROJETO ....................................................................... 42
6.1. MODELO ...................................................................................................... 42
6.2. SENSORES ................................................................................................. 42
6.2.1. Célula De Carga .................................................................................... 43
6.2.2. Encoder ................................................................................................. 46
6.2.3. Potenciômetro ........................................................................................ 48
6.3. ALIMENTAÇÃO DA CÉLULA DE CARGA E DO SENSOR DE ÂNGULO DA
LANÇA ................................................................................................................... 50
6.4. DISPOSITIVOS DE AQUISIÇÃO DE DADOS.............................................. 51
6.5. SOFTWARE DE AQUISIÇÃO DE DADOS, PROCESSAMENTO E
SUPERVISÓRIO .................................................................................................... 52
7. SISTEMA DE CONTROLE E MONITORAÇÃO DO GUINDASTE ...................... 53
7.1. TABELA DE ALOCAÇÃO ............................................................................. 53
7.2. SISTEMA DE CONTROLE DO LIMITE DE IÇAMENTO .............................. 55
7.3. SISTEMA DE CONTROLE DO LIMITE DE ELEVAÇÃO DA LANÇA ........... 57
7.4. SISTEMA INDICADOR DE OPERAÇÃO SOBRE A EMBARCAÇÃO .......... 60
7.4.1. Descrição ............................................................................................... 60
7.4.2. Atuação.................................................................................................. 62
7.4.3. Implementação ...................................................................................... 63
7.5. SISTEMA DE MONITORAÇÃO DE CARGA ................................................ 68
7.5.1. Descrição ............................................................................................... 68
7.5.2. Atuação.................................................................................................. 69
7.5.3. Implementação ...................................................................................... 70
16
7.6. INTERTRAVAMENTO DO GUINDASTE ..................................................... 76
7.6.1. Implementação No Modelo Icônico ........................................................ 76
7.6.2. Intertravamento Através Do Sistema Homem Morto ............................. 81
7.6.3. Intertravamento Através Dos Sistemas De Controle Do Limite De
Içamento e De Elevação Da Lança .................................................................... 86
7.6.4. Intertravamento Através Do Sistema De Monitoração De Carga......... 100
7.7. INTERFACE HOMEM-MÁQUINA (IHM) .................................................... 116
8. CONCLUSÃO ................................................................................................... 118
9. REFERÊNCIAS ................................................................................................ 119

17
1. CONCEITOS
Para os propósitos deste trabalho, foram adotados os termos e definições a
seguir.
1.1. GEOMETRIA DO GUINDASTE
A geometria do projeto é representada pela Figura 1.
Figura 1: Geometria do guindaste tomado como base para o projeto
Fonte: Autores
18
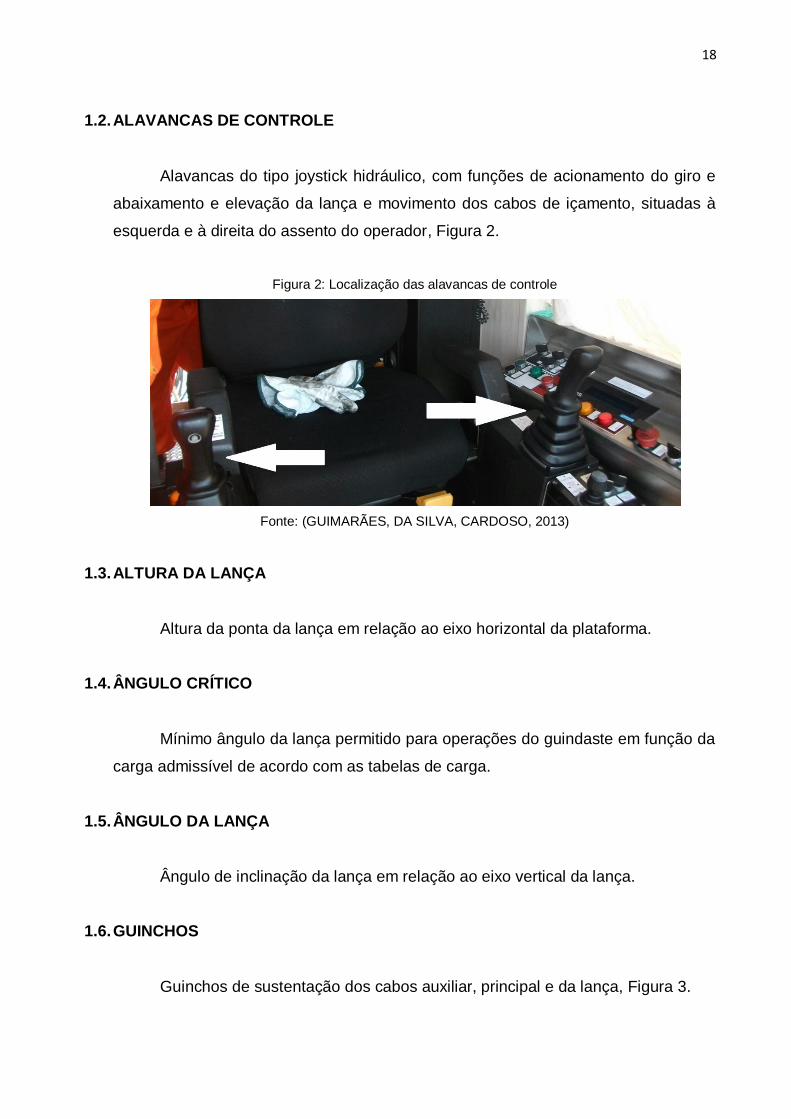
1.2. ALAVANCAS DE CONTROLE
Alavancas do tipo joystick hidráulico, com funções de acionamento do giro e
abaixamento e elevação da lança e movimento dos cabos de içamento, situadas à
esquerda e à direita do assento do operador, Figura 2.
Figura 2: Localização das alavancas de controle
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
1.3. ALTURA DA LANÇA
Altura da ponta da lança em relação ao eixo horizontal da plataforma.
1.4. ÂNGULO CRÍTICO
Mínimo ângulo da lança permitido para operações do guindaste em função da
carga admissível de acordo com as tabelas de carga.
1.5. ÂNGULO DA LANÇA
Ângulo de inclinação da lança em relação ao eixo vertical da lança.
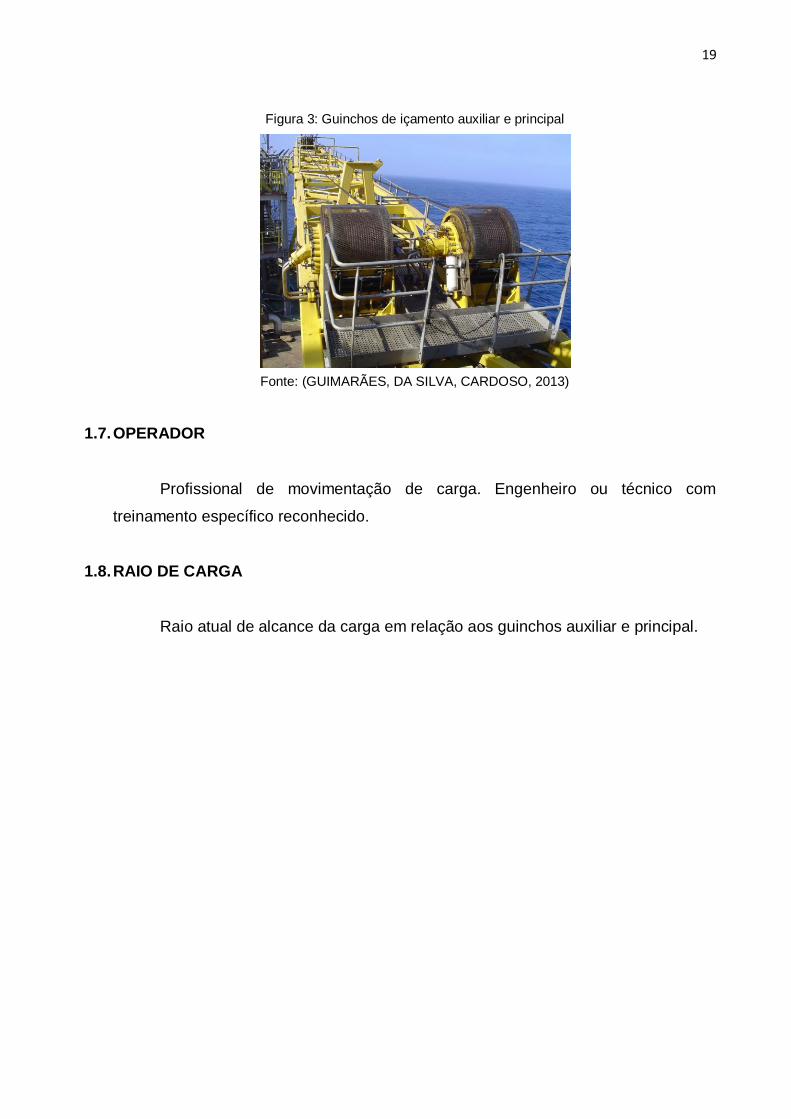
1.6. GUINCHOS
Guinchos de sustentação dos cabos auxiliar, principal e da lança, Figura 3.
19
Figura 3: Guinchos de içamento auxiliar e principal
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
1.7. OPERADOR
Profissional de movimentação de carga. Engenheiro ou técnico com
treinamento específico reconhecido.
1.8. RAIO DE CARGA
Raio atual de alcance da carga em relação aos guinchos auxiliar e principal.

20
2. INTRODUÇÃO
2.1. APRESENTAÇÃO
Guindastes são equipamentos utilizados para a elevação e a movimentação
de cargas e materiais pesados, usando o princípio da física no qual uma ou mais
máquinas simples transformam algum tipo de energia em energia mecânica para
mover cargas além da capacidade humana. São comumente empregados nas
indústrias, terminais portuários e aeroportuários, onde se exige grande mobilidade
no manuseio de cargas e transporte de uma fonte primária à embarcação, trem ou
elemento de transporte primário, para uma fonte secundária, um veículo de
transportes ou depósito local. Pode descarregar e carregar containeres, organizar
material pesado em grandes depósitos, movimentar cargas pesadas na construção
civil e na indústria petrolífera.
Na indústria petrolífera offshore, os guindastes são de fundamental
importância. As plataformas estão situadas em alto mar, necessitando ser
abastecidas com suprimentos alimentícios, equipamentos, produtos químicos, dentre
outros. A forma mais viável, logística e financeiramente, de fazê-lo, devido à
distância da costa, é por meio de operações com embarcações. As embarcações
que realizam este trabalho, normalmente, não possuem guindaste, portanto, os
guindastes das plataformas são responsáveis pela movimentação dessas cargas.
O equipamento a ser tratado neste trabalho é o Guindaste Hidráulico
STALPRODUKTER, presente em diversas plataformas de produção de petróleo da
PETROBRAS. O guindaste hidráulico, assim como todo equipamento, está
suscetível a falhas, sejam elas de natureza mecânica, por exemplo, o aquecimento
de óleo hidráulico, ou de natureza operacional, como acionamento indevido. Para
evitar tais falhas, existem sistemas de intertravamento e segurança, dentre os quais
podemos citar o sistema de controle do limite de içamento, de elevação da lança,
sistema indicador de operação sobre embarcação e sistema de monitoração de
carga que, juntos, compõe o sistema de controle e monitoração do guindaste, entre
outros sistemas como o de homem morto, de freios, seleção de guinchos e
emergência.
21
O sistema reproduzido será o de controle e monitoração de carga do
guindaste, composto por quatro subsistemas citados anteriormente, dentre os quais
os sistemas de controle do limite de içamento e do limite de elevação da lança já se
encontram instalados no modelo icônico. Será implementado o sistema de controle e
monitoração do guindaste, que irá integrar os sistemas já encontrados no modelo e
outros dois sistemas desenvolvidos no decorrer deste trabalho, os sistemas
indicador de operação sobre a embarcação e o sistema de monitoração de carga,
com o objetivo de impedir uma operação que possa causar sobrecargas nos
motores e nos cabos dos guinchos, o que poderá ocasionar danos à estrutura do
guindaste.
2.2. JUSTIFICATIVA
Atualmente, para monitoração de carga do guindaste STALPRODUKTER, o
CLP (Controlador Lógico Programável) da empresa Saia Burgess, modelo SAIA
PCD4 com módulos, vem sendo utilizado. Esses módulos, porém, encontram-se
obsoletos, não havendo mais reposição disponível no mercado. Além disto, o
software utilizado para programação apresenta linguagem de baixo nível, o que
dificulta a interpretação do programa.
Unindo a dificuldade de manutenção à dificuldade de interpretação do
programa, houve a necessidade de criar uma segunda alternativa para substituição
do CLP Saia Burgess por um de fabricação nacional, facilitando futuras
manutenções e correções no sistema de controle e monitoração dos guindastes
existentes nas plataformas PETROBRAS.
2.3. OBJETIVOS GERAIS
O objetivo desde trabalho é implementar o sistema de controle e monitoração
no modelo icônico do guindaste STALPRODUKTER presente no laboratório de
Eletro-hidráulica do Instituto Federal Fluminense. Este sistema consiste na
integração de quatro principais subsistemas: o sistema de controle do limite de
içamento, sistema de controle do limite de elevação da lança, sistema indicador de
operação sobre a embarcação e sistema de monitoração de carga, os dois
22
primeiros, porém, já se encontram instalados no modelo e serão integrados aos
outros dois sistemas desenvolvidos.
2.4. OBJETIVOS ESPECÍFICOS
Construir uma interface homem-máquina (IHM) que possibilite ao operador o
acompanhamento das operações;
Determinar o comprimento do cabo do guincho;
Indicar a angulação instantânea da lança;
Indicar o tipo de operação realizada, operação sobre a embarcação ou sobre a
plataforma;
Determinar a carga admissível pelo guindaste;
Intertravar o guindaste, caso a carga ultrapasse os limites permitidos.
23
3. METODOLOGIA
Para o funcionamento dos sistemas de monitoração de carga e indicador de
operação sobre a embarcação, é preciso determinar o comprimento do cabo do
guincho, o ângulo da lança e a carga içada pelo guincho auxiliar. Para tal, serão
instalados sensores de rotação, encoder quadrature e pontenciômetro, e uma célula
de carga.
O encoder e o potenciômetro serão instalados no guincho auxiliar e no eixo
da lança, respectivamente, para leitura do comprimento do cabo e ângulo da lança.
No guincho auxiliar, também será instalada uma célula de carga para que seja
possível calcular a carga içada pelo cabo do guincho auxiliar.
Os sensores de rotação e de carga estarão em comunicação com a Placa
DAQ, cuja função, é enviar esses sinais ao software. A partir da obtenção destes
parâmetros, serão efetuados os ajustes e cálculos necessários, com o auxilio da
ferramenta LabVIEW, que determinarão o tipo de operação realizada, operação
sobre a plataforma ou sobre a embarcação. Com isso, a carga admissível pelo
guindaste será encontrada. A ferramenta, então, enviará um sinal para o Controlador
Lógico Programável (CLP), que fará o intertravamento previamente programado no
mesmo, juntamente com o sistema eletro hidráulico do modelo, impedindo que o
guindaste seja submetido a uma carga acima da permitida pelo sistema.
Para a criação de uma interface homem-máquina (IHM), também será
utilizado o LabVIEW, que possibilitará o acompanhamento das operações a partir
de uma tela, onde estarão sinalizadas: a porcentagem da carga de trabalho, carga
no gancho, raio da carga, carga segura de trabalho para içamento em plataforma ou
em embarcação auxiliar.
24
4. TIPOS DE GUINDASTES E ASPECTOS GERAIS
4.1. CONTEXTO HISTÓRICO
“Guindastes são equipamentos utilizados para movimentação e elevação de
cargas e, desde muito tempo, têm importante papel em grandes construções.”
(RIBEIRO, 2014)
O guindaste com o propósito de mover cargas pesadas, foi criado pelos
gregos antigos, nos idos do século 6 a.C. A primeira vez que este equipamento
apareceu em algum livro, foi na obra Problemas Mecânicos, de Aristóteles. Embora
se conheça, com alguma precisão, a época em que foram inventados, ainda não se
sabe muito bem em que circunstâncias isso ocorreu e também não há registros
específicos de como ou a razão para tal. Especialistas sugerem a hipótese de que o
ambiente intelectual grego daquela época era bastante avançado e propício para os
cálculos matemáticos e estudos da física.
Na Roma antiga houve uma época em que a atividade da construção civil
alcançou patamares não imaginados até então. Segundo Ribeiro (2014), os romanos
adotaram as formas de guindastes gregos para depois aperfeiçoá-las. Foi a época
de ouro do guindaste, que foi registrada em documentos específicos de engenharia
da época. Presume-se que os engenheiros romanos da época foram capazes de
realizar movimentação de cargas de peso extremamente alto.
Na idade média, não só a técnica do guindaste havia se espalhado pela
Europa, mas também o aperfeiçoamento e incorporação de influências por parte de
cada povo. Além disso, começou-se a usar guindastes em navegações e para
movimentações de cargas que não estavam necessariamente ligadas à construção
civil. Na Inglaterra, há registros de uma forma mais avançada do guindaste a partir
de 1331.
Em 1586, na chamada “era moderna”, uma grua similar ao modelo dos
romanos passou a ser usada com ótimos resultados. Tornou-se óbvio que o ato de
puxar a estrutura por meio da coordenação de vários homens, era uma tarefa que
exigia bastante concentração e disciplina. Alguns tipos de guindastes passaram a
ser usados, inclusive, de maneira individual. Com a revolução industrial, os primeiros
guindastes modernos, mais parecidos com os utilizados atualmente, começaram a

25
ser instalados nos principais portos do mundo. O sucesso do guindaste hidráulico
causou uma verdadeira revolução e o sistema passou a ser utilizado também em
pontes.
4.2. GUINDASTE HIDRÁULICO
4.2.1. Sistemas Hidráulicos
De acordo com Linsingen (2003), os sistemas hidráulicos são baseados em
um conceito simples: a transmissão e controle de forças através de um fluido. Assim,
por meio da conversão e condicionamento da energia de entrada, sendo esta
geralmente elétrica ou térmica, obtém-se uma energia mecânica útil na saída.
Parte da energia utilizada em processos hidráulicos é dissipada devido às
características físicas e comportamentais dos componentes e do fluido. Devido a
isso, para melhor desempenho do sistema hidráulico, é necessário que as
características do fluido sejam preservadas. Temperatura e nível de contaminação,
por exemplo, são fatores que devem ser mantidos em seus valores padrões, pois ao
longo do processo essas características podem ser alteradas devido a influências do
meio.
4.2.2. Características Dos Sistemas Hidráulicos
“Os sistemas hidráulicos possuem características que os tornam
especialmente recomendados para uma série de aplicações, No entanto, também
apresentam limitações que devem ser consideradas”. (LINSINGEN, 2003)
Nos guindastes, as principais vantagens da aplicação de sistemas hidráulicos
em relação aos demais são:
Baixa relação peso/potência, ou seja, transmissão de grandes forças e
torques elevados com dimensões relativamente reduzidas;
Resposta rápida à inversão de movimento sob carga, devido aos baixos
momentos de inércia;
Adaptação automática de força ou torque;
Segurança eficaz contra sobrecargas, através do uso de válvulas limitadoras
de pressão;
26
Possível combinação com sistemas mecânicos, elétricos e pneumáticos;
Possibilidade de utilização sob condições ambientais adversas, desde que
tomadas as devidas medidas de segurança.
Apesar de suas vantagens, devem ser tomados alguns cuidados, pois o fluido
hidráulico pode perder potência, devido às perdas de carga nas linhas e nos
componentes, causando vazamentos e alterações na temperatura do fluido, o que
pode comprometer as condições operacionais desses sistemas.

27
5. O GUINDASTE STALPRODUKTER
Recentemente adquirida pela NOV (National-Oilwel Varco), a
STALPRODUKTER foi líder em suprimentos de guindastes em portos Noruegueses
e na indústria de manufatura por quase cinquenta anos.
Inicialmente, seu mercado era voltado para a indústria pesqueira. Desde o
início dos anos 1980, porém, a empresa ganhou posição, tornando-se o principal
fornecedor para a indústria offshore Norueguesa.
Seu primeiro guindaste foi construído em 1975, inicialmente destinado para
uso em plataformas móveis. Desde 1985, a empresa passou a fornecer guindastes
para plataformas fixas na Noruega de forma regular. Posteriormente, em 1988, o
guindaste hidráulico de alta pressão offshore ganhou um rápido crescimento no
mercado.
O equipamento a ser tratado neste trabalho é o Guindaste Hidráulico
STALPRODUKTER, presente em diversas plataformas de produção de petróleo da
PETROBRAS (P-32, P-33, P-35, P-37, P-47).
5.1. SISTEMAS HIDRÁULICOS DO GUINDASTE
De acordo com Guimarães, Da Silva e Cardoso (2013), o sistema hidráulico
do guindaste tema deste trabalho possui quatro circuitos: um circuito auxiliar e três
principais para acionamento dos guinchos, da lança e do giro.
Os circuitos hidráulicos principais do guindaste são do tipo circuito fechado
(transmissão hidrostática). A Figura 4 ilustra o princípio de funcionamento de um
circuito fechado, de forma simplificada.

28
Figura 4: Princípio de funcionamento de um circuito hidráulico fechado de forma simplificada
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
No circuito apresentado na Figura 4, o fluxo de saída do motor hidráulico (1) é
conduzido diretamente à sucção da bomba hidráulica (2), o sentido de giro do motor
hidráulico é determinado pelo sentido do fluxo da bomba. Através do movimento
axial dos pistões em relação ao eixo central, o fluxo de óleo da bomba é
infinitamente variável. A partir da inclinação do prato que une os pistões (dispositivo
interno à bomba), pode-se modificar a vazão ou reverter o sentido do fluxo. O
deslocamento do prato é controlado por válvulas proporcionais, sendo seu ângulo
levado ao máximo quando a alavanca de controle atinge o máximo de sua deflexão,
com isso, a bomba terá seu ângulo levado ao máximo. Consequentemente, quando
a alavanca de controle se encontra na posição neutra (central), a vazão da bomba
será zero e o motor estará parado. A reversão no sentido do fluxo se dá inclinando-
se o prato com relação à posição central.
“O controle de potência tem a função de ajustar o deslocamento da máquina hidrostática de tal forma que a potência requerida no eixo seja mantida constante, independentemente da pressão de trabalho imposta pelas condições de carregamento do sistema”. (LINSINGEN, 2003)
Como visto na Figura 4, o deslocamento de cada motor é controlado pela
posição da alavanca de comando e pela pressão no sistema. Quando a alavanca
alcança seu máximo curso, a bomba estará sempre em máximo deslocamento. O
deslocamento do motor será mínimo quando a alavanca de comando estiver em seu
máximo curso. Entretanto, o ângulo mínimo do motor é limitado a uma pressão
máxima pré-estabelecida para os sistemas.
29
Quando a pressão atinge o valor limite, o motor limitará o deslocamento para
manter a pressão constante, mantendo, assim, uma potência constante da bomba.
Aumentando-se a carga externa no motor além do ponto em que o motor
necessita seu máximo deslocamento para manter a pressão, a pressão do sistema e
a potência da bomba irão aumentar. Isto ocorrerá normalmente próximo ao máximo
torque do motor.
Todas as transmissões são dotadas de válvulas para limitação da pressão do
óleo a um valor pré-determinado. Se a pressão do sistema exceder um valor limite
pré-estabelecido (pressão de corte do motor), a redução do deslocamento do motor
irá cessar (torque equalizado) e um movimento posterior da alavanca comandará
apenas o deslocamento da bomba.
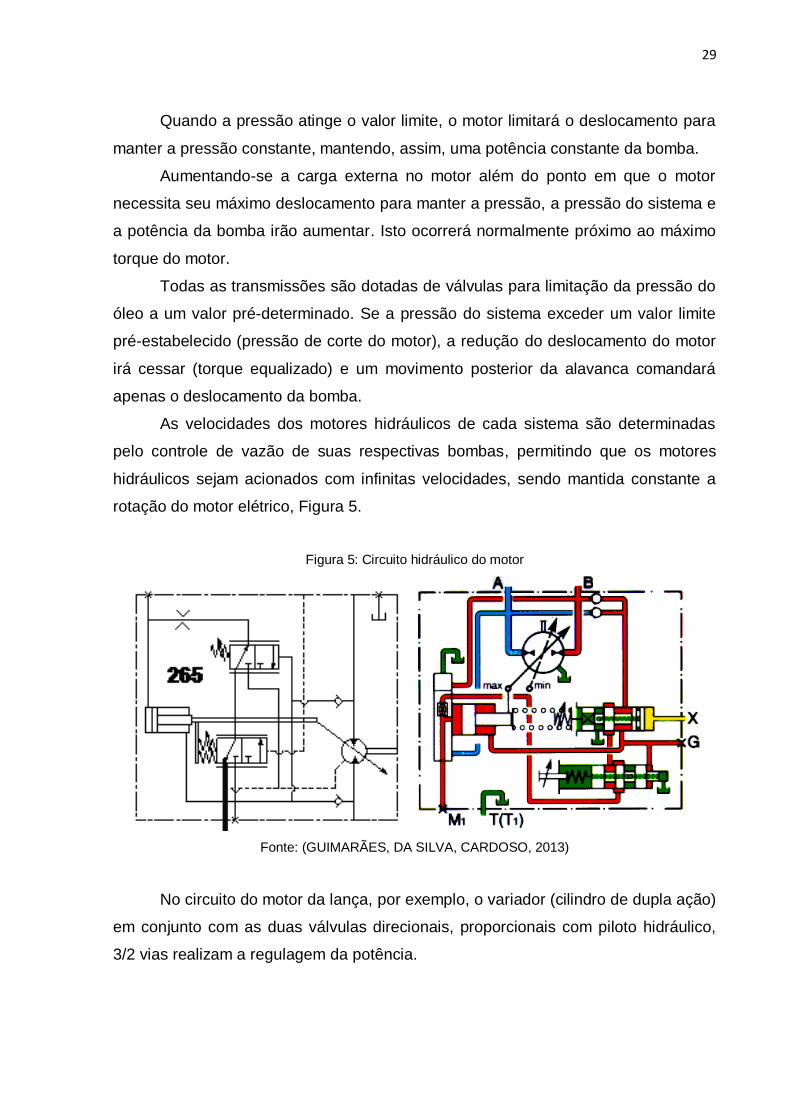
As velocidades dos motores hidráulicos de cada sistema são determinadas
pelo controle de vazão de suas respectivas bombas, permitindo que os motores
hidráulicos sejam acionados com infinitas velocidades, sendo mantida constante a
rotação do motor elétrico, Figura 5.
Figura 5: Circuito hidráulico do motor
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
No circuito do motor da lança, por exemplo, o variador (cilindro de dupla ação)
em conjunto com as duas válvulas direcionais, proporcionais com piloto hidráulico,
3/2 vias realizam a regulagem da potência.

30
O deslocamento do motor é determinado pela pressão no sistema e pela
posição da alavanca de controle. Tal deslocamento é automaticamente ajustado
para atender ao torque desejado, Figura 5.
Movendo-se a alavanca de controle da posição neutra até o máximo, o
deslocamento da bomba será aumentado proporcionalmente. A alavanca na posição
máxima significa máxima vazão disponível. Pelo mesmo tipo de movimento da
alavanca, os motores diminuirão seu deslocamento até um mínimo. Figura 6 – (a) e
(b).
Figura 6: (a) Motor em torque máximo e velocidade mínima; (b) Motor em torque mínimo e velocidade
máxima
(a) (b)
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
Quando a alavanca de controle é movida para fora de sua posição neutra, o
motor hidráulico sempre parte com torque máximo, Figura 6 (a), (máximo
deslocamento e mínima velocidade), e, então, se ajusta para o torque
(deslocamento) necessário para equilibrar a carga. A velocidade é ajustada com o
torque, para manter a potência constante. A velocidade de movimentação da lança
é, portanto realizada pela alavanca de controle do operador, isto é, quando move-se
a mesmo da posição neutra até a máxima, o deslocamento da bomba será
aumentado de forma proporcional. A alavanca na posição máxima significa máxima
vazão disponível na bomba. Pelo mesmo tipo de movimento da alavanca, os
motores diminuirão seu deslocamento até o mínimo (mínimo deslocamento e
máxima velocidade), Figura 6 (b).
“Com esta forma de controle, busca-se evitar que a potência instalada não
seja ultrapassada, protegendo o equipamento”. (LINSINGEN, 2003)
31
O movimento de elevar ou descer a lança é controlado pelo movimento para
frente ou para trás da alavanca de controle – joystick. A velocidade do cabo de
elevação ou descida da lança é proporcional ao movimento do joystick, sendo
limitada pelo sistema hidráulico, de modo a ter-se potência constante. Portanto, a
velocidade máxima do cabo e consequentemente da lança, cairá gradualmente,
conforme aumente a carga no cabo, acima de uma dada carga.
A própria lança irá pressurizar o sistema quanto o freio for liberado. Isso irá
ocorrer cada vez que a alavanca de controle for movida para fora do neutro, após ter
estado nesta posição por alguns segundos. A magnitude da queda irá depender do
ângulo da lança e da carga (queda normal é menor que 5 mm, medidos no flange do
tambor).
É importante notar que o freio estará aplicado somente, e apenas somente,
quando a alavanca de controle (joystick) estiver na posição neutra. A solução mais
segura, se o movimento de elevação da lança parecer fora de controle, é deixar a
alavanca dirigir-se para o neutro.
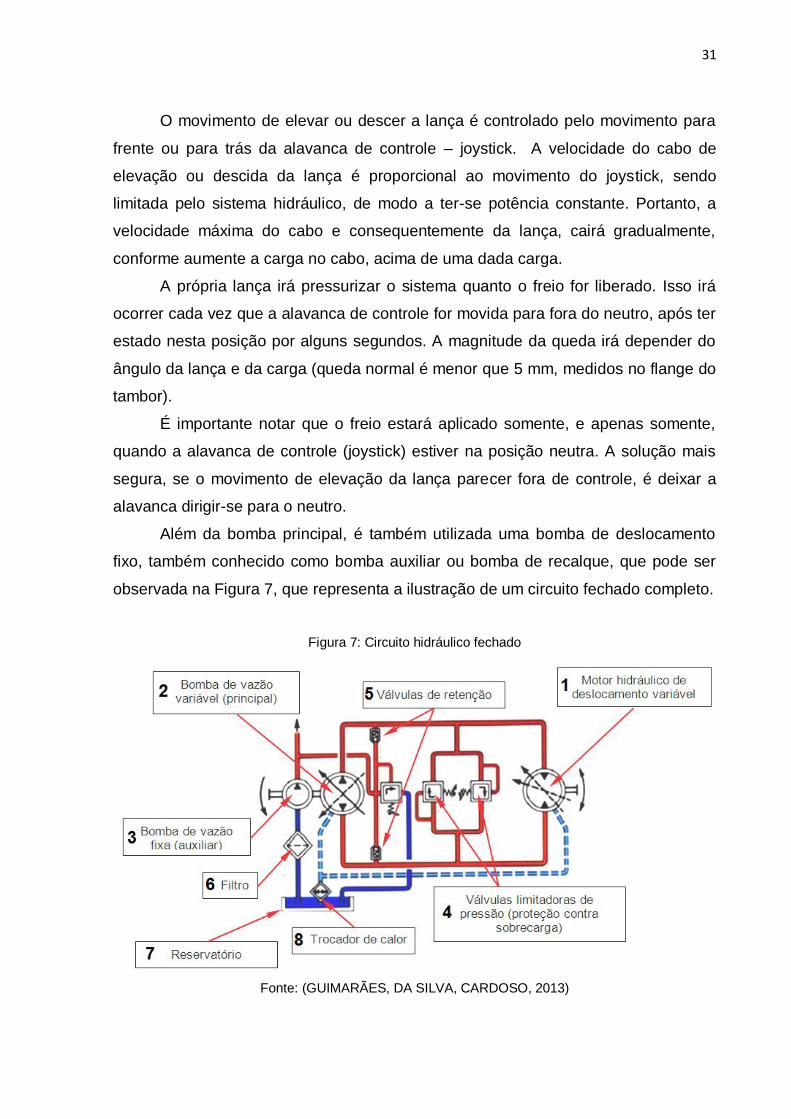
Além da bomba principal, é também utilizada uma bomba de deslocamento
fixo, também conhecido como bomba auxiliar ou bomba de recalque, que pode ser
observada na Figura 7, que representa a ilustração de um circuito fechado completo.
Figura 7: Circuito hidráulico fechado
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)

32
Observa-se na Figura 7 a bomba de recalque (3), que é responsável por
compensar vazamentos nas válvulas, bombas e motor. Suprido a partir de um
reservatório de óleo hidráulico, o circuito de óleo de recalque, sob pressão, abastece
o sistema de içamento com óleo limpo e resfriado. Se rupturas nas mangueiras
acontecerem, o freio será ativado automaticamente devido à baixa pressão nas
linhas. A proteção contra sobrecarga é proporcionada por válvulas limitadoras de
pressão (4).
5.1.1. Sistema Hidráulico Da Lança
O sistema hidráulico de movimento vertical da lança é realizado através de
um único motor hidráulico de pistões variáveis (A6VM160HD), Figura 8. O
acionamento deste motor é realizado em circuito fechado por uma bomba hidráulica
de pistões axiais com deslocamento variável e reversível, semelhante à do sistema
de giro. O acionamento da bomba é realizado por um variador hidráulico,
comandado por uma alavanca de controle. O circuito é complementado por um bloco
de liberação do freio e por um bloco de emergência, que permite a execução de
todos os movimentos da lança, um por vez, em caso de falha no motor elétrico.
Figura 8: Motor hidráulico de pistões variáveis
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
A bomba hidráulica auxiliar, Figura 9, é do tipo deslocamento variável com
pistões axiais para circuito aberto, responsável por suprir o circuito principal do giro e

33
da lança, responsável pela reposição de óleo devido a vazamentos das válvulas,
bombas e motores e está acoplada ao eixo da bomba principal do sistema da lança.
Figura 9: Bomba hidráulica auxiliar
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
A alavanca de controle é do tipo joystick hidráulico e se localiza à esquerda
do assento do operador, Figura 10 – (a) e (b). Possui as funções de acionamento
dos movimentos de abaixamento e elevação da lança e do giro. Ela atua
diretamente num conjunto de válvulas hidráulicas situadas abaixo do assento do
operador, direcionando um sinal hidráulico para o variador, conforme se deseja o
sentido do movimento.
Figura 10: (a) Alavanca de controle; (b) Localização da alavanca de controle da lança e do giro
(a) (b)
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
34
A elevação ou abaixamento da lança são controlados pelo movimento de
avanço e retorno da alavanca de controle. A velocidade do cabo de elevação ou
descida da lança é proporcional ao movimento da alavanca, sendo limitada pelo
sistema hidráulico, de modo a ter-se potência constante. Portanto, a velocidade
máxima do cabo e, consequentemente, da lança cairá de forma gradual, conforme
aumente a carga no cabo, acima de uma dada carga.
Como visto no tópico 5.1 SISTEMAS HIDRÁULICOS DO GUINDASTE, esta
alavanca também possui um circuito hidráulico de segurança que pressuriza o
sistema e libera o freio somente quando a alavanca de controle é movida para fora
da posição neutra (centro). Portanto, se o movimento de elevação ou abaixamento
da lança parecer fora de controle, a solução mais segura é deixar a alavanca se
dirigir para a posição neutra, pois nesta posição o freio estará acionado e o sistema
despressurizado.
5.1.2. Sistema Hidráulico Dos Guinchos
O guindaste é dotado de um guincho auxiliar e um principal, cujos motores
hidráulicos são de deslocamento variável, pistão axial cônico, eixo articulado para
circuito fechado e deslocamento fixo, pistão axial cônico, eixo articulado para circuito
fechado, respectivamente. A partir da cabine do operador, através de um botão
elétrico, Figura 11, pode-se selecionar o guincho a ser utilizado, auxiliar (bola-peso)
ou principal (moitão). Este botão acionará uma memória auxiliar, que desabilita a
linha do guincho principal (contato normal fechado acionado) e, consequentemente,
habilita a linha do guincho auxiliar (contato normal aberto acionado), Figura 12. A
bomba do circuito hidráulico dos guinchos possui as mesmas características da
bomba do circuito da lança, com pistões axiais e deslocamento variável e reversível.

35
Figura 11: Localização do botão seletor dos guinchos
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
Figura 12: Diagrama ladder do sistema seletor de guinchos
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
O içamento é controlado pelo movimento para frente e para trás da alavanca
de controle de içamento, situada à direita do assento do operador, Figura 2. Os
guinchos de carga são equipados com interruptores (sensores) limites de cabo
frouxo, Figura 13.

36
Figura 13: Localização do sensor limite de cabo frouxo
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
Em caso de uma carga ficar suportada em algum lugar e o operador continuar
liberando o cabo por qualquer motivo o sensor de cabo frouxo será ativado,
bloqueando o funcionamento da alavanca de controle.
A posição do gancho (extremidade do cabo do guincho auxiliar), também
denominado gato, determina o tipo de operação realizada, sobre a plataforma ou
sobre a embarcação. O sistema dos guinchos possui, então, um display que
apresenta, de acordo com o botão seletor, as posições absoluta e relativa do
gancho, o display é o mesmo para o içamento principal e auxiliar e, em ambos os
casos, a altura do gancho é compensada pela inclinação da lança. No destaque da
Figura 14, pode-se observar o display, à esquerda, e o botão seletor, à direita.
Figura 14: Foto com a localização do botão para determinação da posição do gancho e display
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)

37
Para que se possa determinar essa posição, há um encoder montado no eixo
dos guinchos Figura 15. O botão seletor também é responsável pelo reset do
encoder.
Figura 15: Localização do encoder nos guinchos auxiliar e principal
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
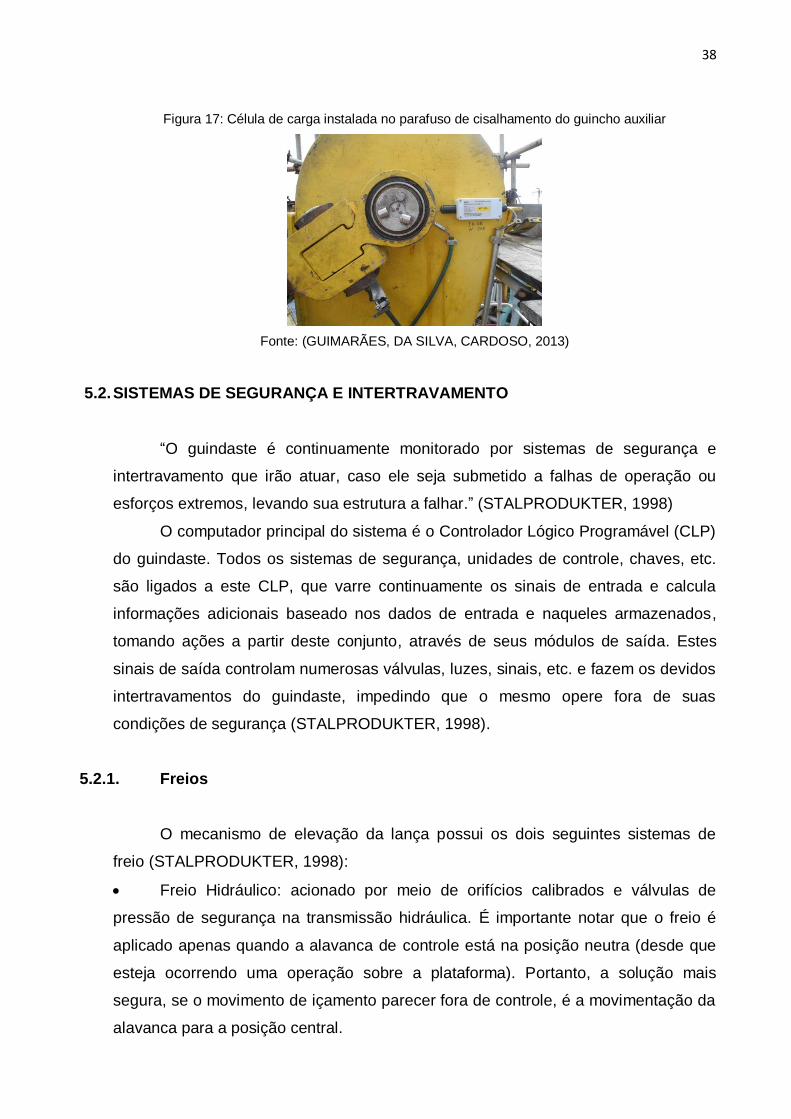
Os guinchos principal e auxiliar, assim como a lança, são providos de
sensores de carga (células de carga) medidores de deformação ultra sensíveis,
instalados nos parafusos de cisalhamento, Figura 16 e Figura 17. Em caso de
excesso de carga o sinal da célula de carga aciona um solenoide que bloqueia o
sinal para a alavanca de controle, impedindo que a carga seja elevada pelo guincho,
além de ativar um alarme sonoro através de uma buzina pneumática.
Figura 16: Localização das células de carga dos guinchos auxiliar e principal
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
38
Figura 17: Célula de carga instalada no parafuso de cisalhamento do guincho auxiliar
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
5.2. SISTEMAS DE SEGURANÇA E INTERTRAVAMENTO
“O guindaste é continuamente monitorado por sistemas de segurança e
intertravamento que irão atuar, caso ele seja submetido a falhas de operação ou
esforços extremos, levando sua estrutura a falhar.” (STALPRODUKTER, 1998)
O computador principal do sistema é o Controlador Lógico Programável (CLP)
do guindaste. Todos os sistemas de segurança, unidades de controle, chaves, etc.
são ligados a este CLP, que varre continuamente os sinais de entrada e calcula
informações adicionais baseado nos dados de entrada e naqueles armazenados,
tomando ações a partir deste conjunto, através de seus módulos de saída. Estes
sinais de saída controlam numerosas válvulas, luzes, sinais, etc. e fazem os devidos
intertravamentos do guindaste, impedindo que o mesmo opere fora de suas
condições de segurança (STALPRODUKTER, 1998).
5.2.1. Freios
O mecanismo de elevação da lança possui os dois seguintes sistemas de
freio (STALPRODUKTER, 1998):
Freio Hidráulico: acionado por meio de orifícios calibrados e válvulas de
pressão de segurança na transmissão hidráulica. É importante notar que o freio é
aplicado apenas quando a alavanca de controle está na posição neutra (desde que
esteja ocorrendo uma operação sobre a plataforma). Portanto, a solução mais
segura, se o movimento de içamento parecer fora de controle, é a movimentação da
alavanca para a posição central.

39
Freio Multi-Discos: acionado por molas, montado na redutora do
direcionamento. O freio é automaticamente operado por um sinal da alavanca de
comando. A operação do freio também é afetada pela baixa pressão do sistema
(medida contra o rompimento de mangueiras). Se a linha de pressão hidráulica do
sistema cair abaixo do limite pré-ajustado (indicando dano na mangueira ou similar
tipo de falha), o freio será automaticamente ativado.
5.2.2. Função Homem Morto
A função Homem Morto consiste em um dispositivo de segurança constituído
por dois botões, localizados nas alavancas que controle dos guinchos e da lança,
que devem ser acionados para habilitar as funções principais das mesmas, Figura
18.
Figura 18: Localização dos botões homem morto
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
Segundo Guimarães, Da Silva e Cardoso (2013), se o acionamento destes
botões for interrompido intencionalmente ou involuntariamente (no caso de um
acionamento inadvertido ou se o operador tiver um mal súbito e recair sobre a
alavanca, daí o nome “Homem Morto”), ocorrerá a desenergização imediata da
válvula solenoide responsável por pressurizar as duas alavancas de controle, HY
112, fazendo com que o fluxo do sistema seja direcionado para o tanque e a linha de
pressão fique bloqueada, interrompendo, assim, seus funcionamentos. A Figura 19

40
traz o detalhe da válvula direcional com o solenoide desenergizado, isto é, com a
linha de pressão bloqueada e o fluxo do sistema direcionado para o tanque.
Figura 19: Válvula direcional com solenoide HY 112 desenergizado
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
5.2.3. Proteção Contra Sobrecarga
“A válvula de corte fará com que a bomba reduza sua vazão a zero se a
pressão exceder um valor especificado, pré-ajustado, evitando que o guincho
maneje cargas mais pesadas que a de trabalho.” (STALPRODUKTER, 1998)
5.2.4. Início e Fim De Curso
O guindaste é dotado de chaves de início e fim de curso nos guinchos da
lança e de carga e no sistema de giro, de forma a impedir que ele ultrapasse as
barreiras físicas da plataforma, evitando colisões e acidentes.
5.2.5. Alertas e Alarmes
O guindaste é continuamente monitorado pelo Sistema de Monitoração do
Guindaste. Se este descobrir uma falha, o operador será informado via mensagem
na tela de textos, pela iluminação de luzes de alerta e alarme, localizadas no
console de controle da cabine do operador, e por sons (STALPRODUKTER, 1998),
Figura 20.
41
Figura 20: Console de controle da cabine do operador
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
Algumas falhas são mais importantes que outras. Assim, todas as falhas
monitoradas têm diferentes prioridades.
O sistema faz a diferenciação entre alertas e alarmes da seguinte forma:
Alerta: mensagem relativa a uma condição não critica no momento, e que não
necessita da atenção imediata do operador.
Alarme: indica uma condição que pode ser crítica, e que requer imediata
atenção.
Quando um alerta ou alarme é registrado (por texto, luz ou som), e o operador
nota a mensagem, estes podem ser reconhecidos por meio do botão de ciência.
Após o reconhecimento, a mensagem ainda é mostrada, porém com apresentação
menos evidente (o som irá parar e o texto deixará de piscar). O botão de ciência se
aplica à mais importante mensagem, sendo apenas esta mostrada na tela de texto.
Um alerta ou alarme continuará enquanto a causa estiver presente, cessando
quando a causa for interrompida.
42
6. COMPONENTES DO PROJETO
6.1. MODELO
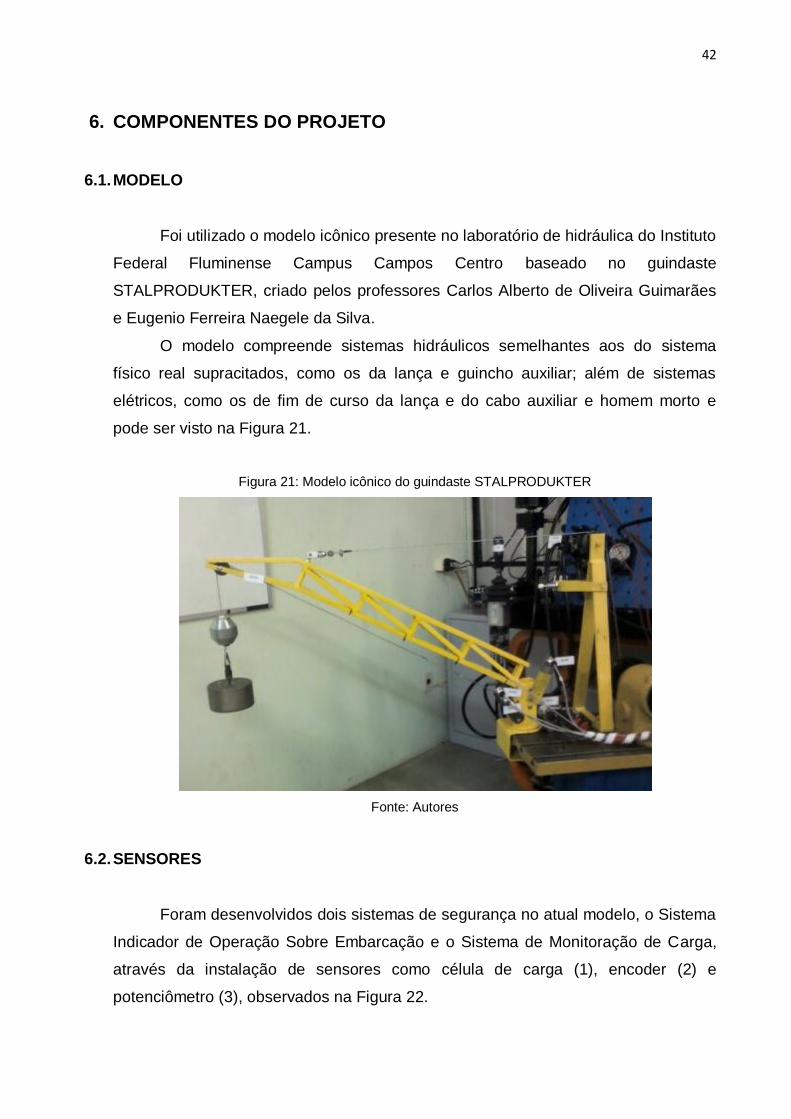
Foi utilizado o modelo icônico presente no laboratório de hidráulica do Instituto
Federal Fluminense Campus Campos Centro baseado no guindaste
STALPRODUKTER, criado pelos professores Carlos Alberto de Oliveira Guimarães
e Eugenio Ferreira Naegele da Silva.
O modelo compreende sistemas hidráulicos semelhantes aos do sistema
físico real supracitados, como os da lança e guincho auxiliar; além de sistemas
elétricos, como os de fim de curso da lança e do cabo auxiliar e homem morto e
pode ser visto na Figura 21.
Figura 21: Modelo icônico do guindaste STALPRODUKTER
Fonte: Autores
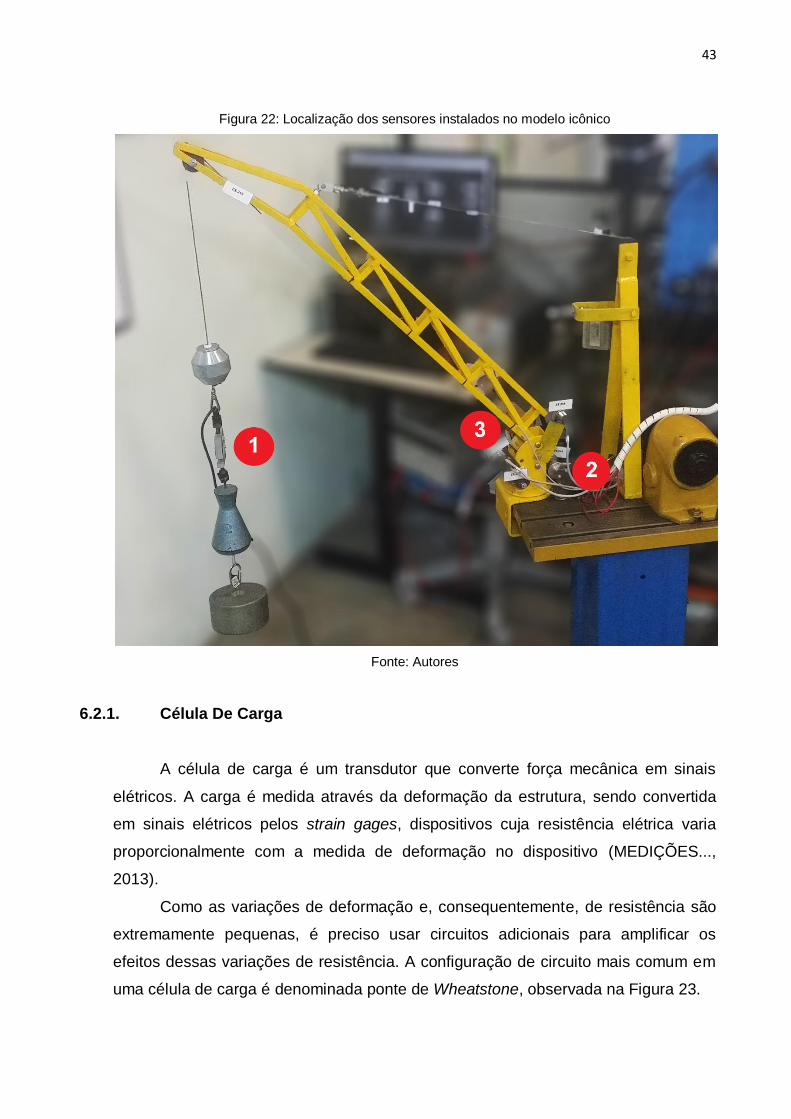
6.2. SENSORES
Foram desenvolvidos dois sistemas de segurança no atual modelo, o Sistema
Indicador de Operação Sobre Embarcação e o Sistema de Monitoração de Carga,
através da instalação de sensores como célula de carga (1), encoder (2) e
potenciômetro (3), observados na Figura 22.
43
Figura 22: Localização dos sensores instalados no modelo icônico
Fonte: Autores
6.2.1. Célula De Carga
A célula de carga é um transdutor que converte força mecânica em sinais
elétricos. A carga é medida através da deformação da estrutura, sendo convertida
em sinais elétricos pelos strain gages, dispositivos cuja resistência elétrica varia
proporcionalmente com a medida de deformação no dispositivo (MEDIÇÕES...,
2013).
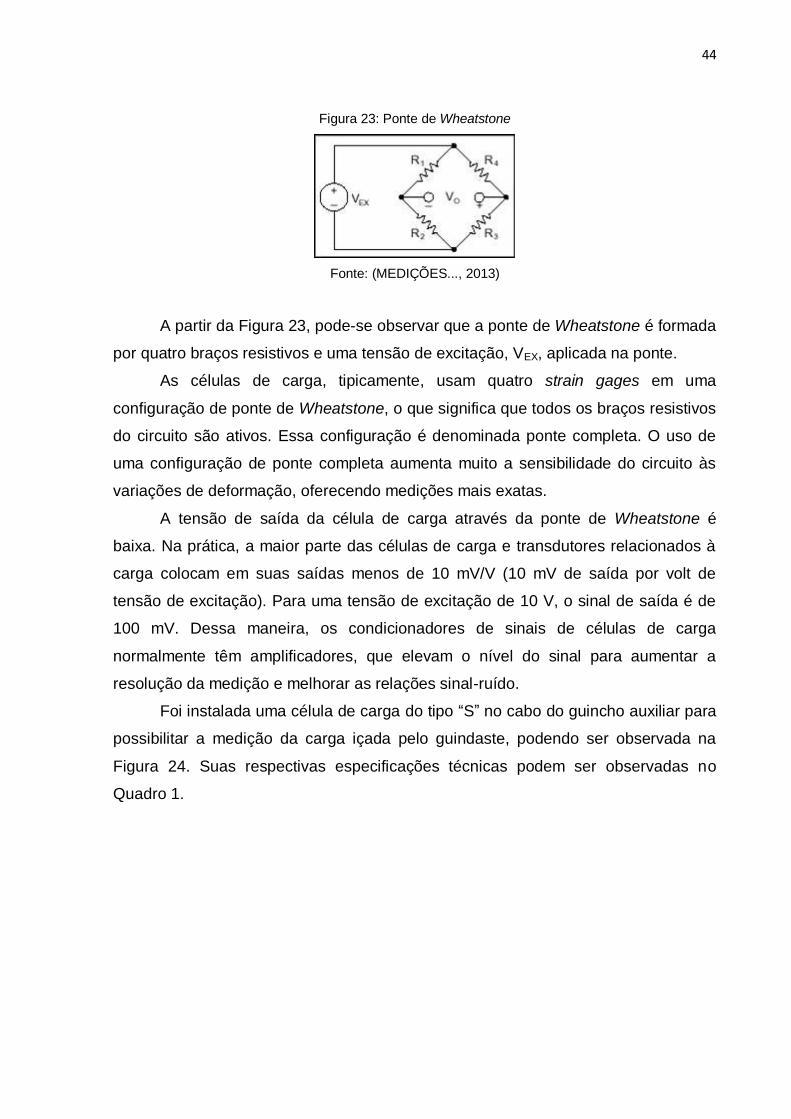
Como as variações de deformação e, consequentemente, de resistência são
extremamente pequenas, é preciso usar circuitos adicionais para amplificar os
efeitos dessas variações de resistência. A configuração de circuito mais comum em
uma célula de carga é denominada ponte de Wheatstone, observada na Figura 23.
44
Figura 23: Ponte de Wheatstone
Fonte: (MEDIÇÕES..., 2013)
A partir da Figura 23, pode-se observar que a ponte de Wheatstone é formada
por quatro braços resistivos e uma tensão de excitação, VEX, aplicada na ponte.
As células de carga, tipicamente, usam quatro strain gages em uma
configuração de ponte de Wheatstone, o que significa que todos os braços resistivos
do circuito são ativos. Essa configuração é denominada ponte completa. O uso de
uma configuração de ponte completa aumenta muito a sensibilidade do circuito às
variações de deformação, oferecendo medições mais exatas.
A tensão de saída da célula de carga através da ponte de Wheatstone é
baixa. Na prática, a maior parte das células de carga e transdutores relacionados à
carga colocam em suas saídas menos de 10 mV/V (10 mV de saída por volt de
tensão de excitação). Para uma tensão de excitação de 10 V, o sinal de saída é de
100 mV. Dessa maneira, os condicionadores de sinais de células de carga
normalmente têm amplificadores, que elevam o nível do sinal para aumentar a
resolução da medição e melhorar as relações sinal-ruído.
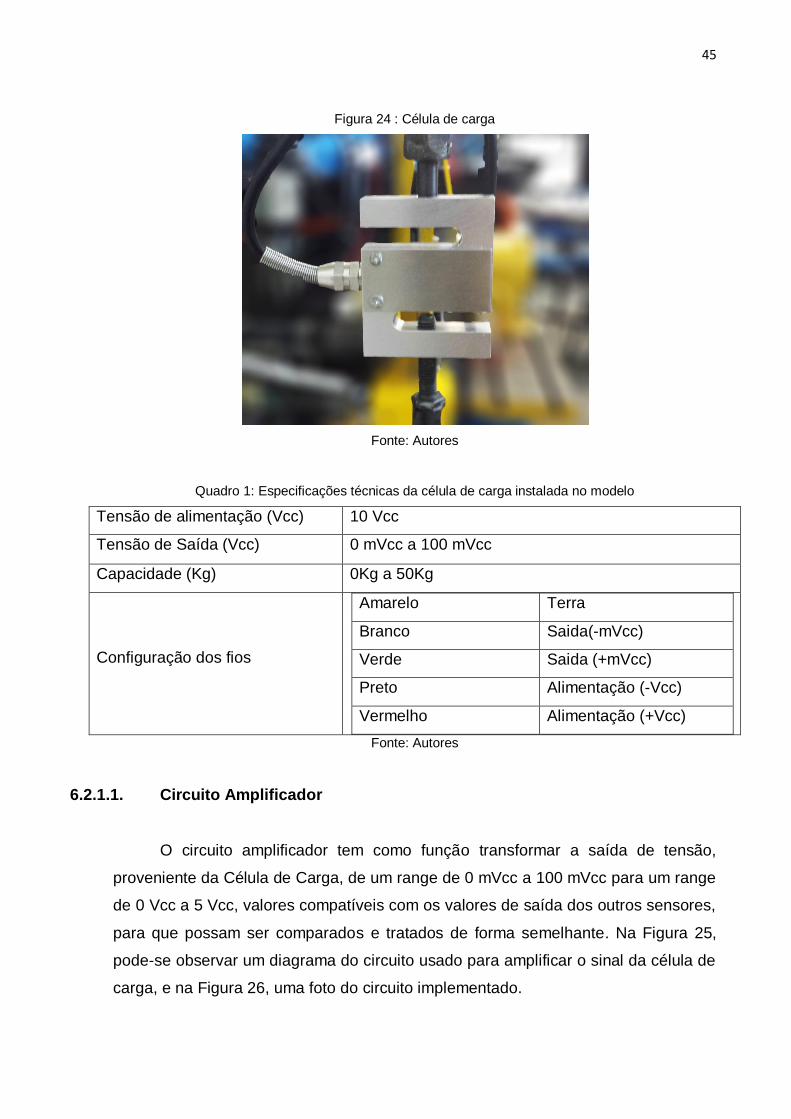
Foi instalada uma célula de carga do tipo “S” no cabo do guincho auxiliar para
possibilitar a medição da carga içada pelo guindaste, podendo ser observada na
Figura 24. Suas respectivas especificações técnicas podem ser observadas no
Quadro 1.
45
Figura 24 : Célula de carga
Fonte: Autores
Quadro 1: Especificações técnicas da célula de carga instalada no modelo
Tensão de alimentação (Vcc) 10 Vcc
Tensão de Saída (Vcc) 0 mVcc a 100 mVcc
Capacidade (Kg) 0Kg a 50Kg
Configuração dos fios
Amarelo Terra
Branco Saida(-mVcc)
Verde Saida (+mVcc)
Preto Alimentação (-Vcc)
Vermelho Alimentação (+Vcc)
Fonte: Autores
6.2.1.1. Circuito Amplificador
O circuito amplificador tem como função transformar a saída de tensão,
proveniente da Célula de Carga, de um range de 0 mVcc a 100 mVcc para um range
de 0 Vcc a 5 Vcc, valores compatíveis com os valores de saída dos outros sensores,
para que possam ser comparados e tratados de forma semelhante. Na Figura 25,
pode-se observar um diagrama do circuito usado para amplificar o sinal da célula de
carga, e na Figura 26, uma foto do circuito implementado.

46
Figura 25: Diagrama ilustrativo do circuito amplificador
Fonte: Autores
Figura 26: Implementação do circuito amplificador
Fonte: Autores
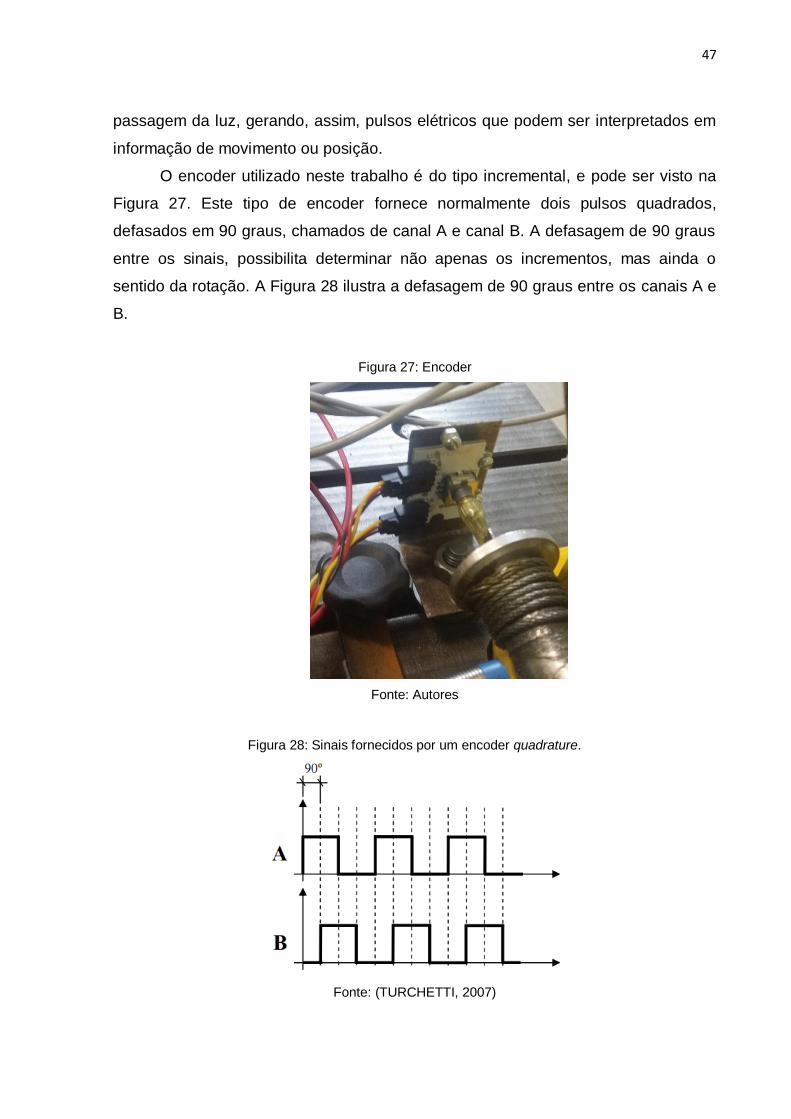
6.2.2. Encoder
Segundo Turchetti (2007), o encoder é um transdutor que converte um
movimento angular ou linear em uma série de pulsos digitais elétricos. O sistema de
leitura é baseado em um disco, um diodo emissor de luz (LED) e um detector de luz
(fototransistor) no lado oposto do disco. O disco montado no eixo giratório tem uma
série de perfurações regulares que são repetidas continuamente, formando
segmentos opacos e transparentes codificados no disco. À medida que o disco gira,
os segmentos opacos bloqueiam a luz e as janelas transparentes permitem a
47
passagem da luz, gerando, assim, pulsos elétricos que podem ser interpretados em
informação de movimento ou posição.
O encoder utilizado neste trabalho é do tipo incremental, e pode ser visto na
Figura 27. Este tipo de encoder fornece normalmente dois pulsos quadrados,
defasados em 90 graus, chamados de canal A e canal B. A defasagem de 90 graus
entre os sinais, possibilita determinar não apenas os incrementos, mas ainda o
sentido da rotação. A Figura 28 ilustra a defasagem de 90 graus entre os canais A e
B.
Figura 27: Encoder
Fonte: Autores
Figura 28: Sinais fornecidos por um encoder quadrature.
Fonte: (TURCHETTI, 2007)
48
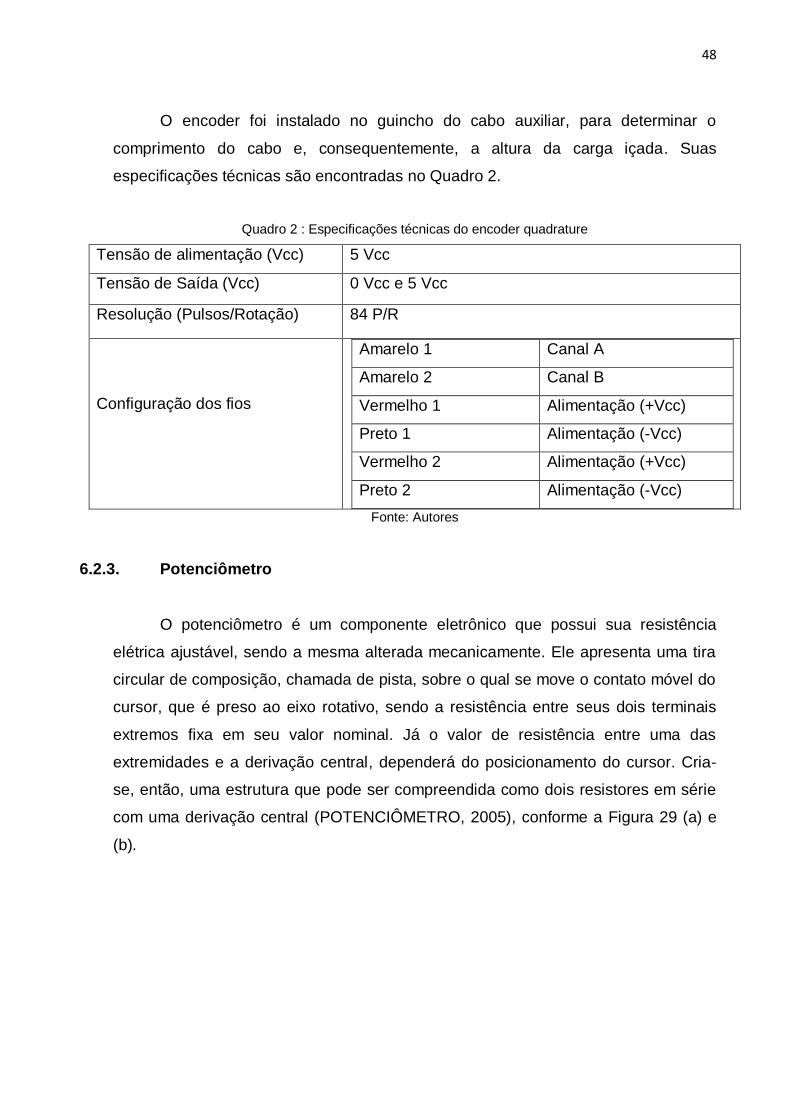
O encoder foi instalado no guincho do cabo auxiliar, para determinar o
comprimento do cabo e, consequentemente, a altura da carga içada. Suas
especificações técnicas são encontradas no Quadro 2.
Quadro 2 : Especificações técnicas do encoder quadrature
Tensão de alimentação (Vcc) 5 Vcc
Tensão de Saída (Vcc) 0 Vcc e 5 Vcc
Resolução (Pulsos/Rotação) 84 P/R
Configuração dos fios
Amarelo 1 Canal A
Amarelo 2 Canal B
Vermelho 1 Alimentação (+Vcc)
Preto 1 Alimentação (-Vcc)
Vermelho 2 Alimentação (+Vcc)
Preto 2 Alimentação (-Vcc)
Fonte: Autores
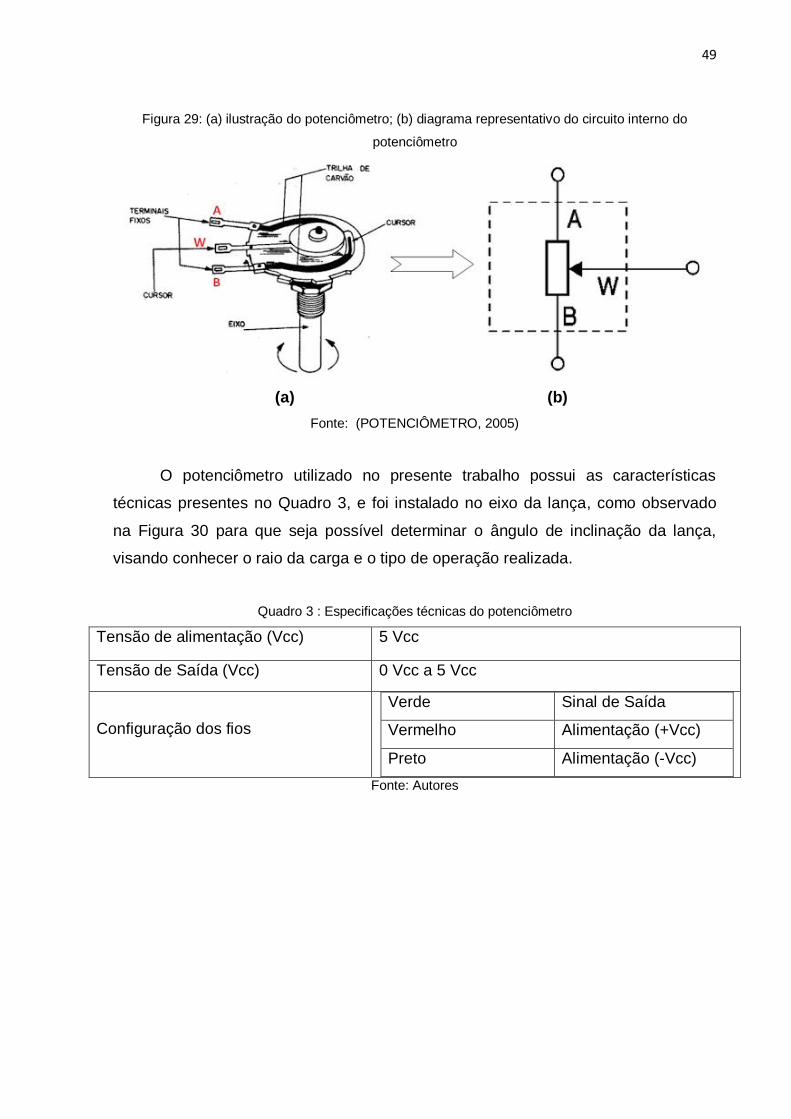
6.2.3. Potenciômetro
O potenciômetro é um componente eletrônico que possui sua resistência
elétrica ajustável, sendo a mesma alterada mecanicamente. Ele apresenta uma tira
circular de composição, chamada de pista, sobre o qual se move o contato móvel do
cursor, que é preso ao eixo rotativo, sendo a resistência entre seus dois terminais
extremos fixa em seu valor nominal. Já o valor de resistência entre uma das
extremidades e a derivação central, dependerá do posicionamento do cursor. Cria-
se, então, uma estrutura que pode ser compreendida como dois resistores em série
com uma derivação central (POTENCIÔMETRO, 2005), conforme a Figura 29 (a) e
(b).
49
Figura 29: (a) ilustração do potenciômetro; (b) diagrama representativo do circuito interno do
potenciômetro
(a) (b)
Fonte: (POTENCIÔMETRO, 2005)
O potenciômetro utilizado no presente trabalho possui as características
técnicas presentes no Quadro 3, e foi instalado no eixo da lança, como observado
na Figura 30 para que seja possível determinar o ângulo de inclinação da lança,
visando conhecer o raio da carga e o tipo de operação realizada.
Quadro 3 : Especificações técnicas do potenciômetro
Tensão de alimentação (Vcc) 5 Vcc
Tensão de Saída (Vcc) 0 Vcc a 5 Vcc
Configuração dos fios
Verde Sinal de Saída
Vermelho Alimentação (+Vcc)
Preto Alimentação (-Vcc)
Fonte: Autores

50
Figura 30: Potenciômetro
Fonte: Autores
6.3. ALIMENTAÇÃO DA CÉLULA DE CARGA E DO SENSOR DE ÂNGULO DA
LANÇA
A célula de carga e o sensor de ângulo da lança (potenciômetro) são alimentados
por uma fonte simétrica de 11Vcc, que pode ser vista na Figura 31.
Figura 31: Fonte de alimentação da célula de carga e do sensor de ângulo da lança
Fonte: Autores
51
6.4. DISPOSITIVOS DE AQUISIÇÃO DE DADOS
Para aquisição de dados provenientes dos sensores instalados no modelo do
guindaste, como encoder, célula de carga e potenciômetro, é utilizada a Placa de
Aquisição da National Instruments, Figura 32. Para comunicação via software
LabVIEW, foi instalado o DAQ (NI PCI 6221).
Figura 32: Placa de aquisição
Fonte: Autores
Na Figura 33, tem-se um diagrama de blocos que representa a cadeia de
processamento estabelecida.
Figura 33: Diagrama de blocos de uma cadeia de processamento
Fonte: Autores
Como se pode ver no diagrama da Figura 33, na entrada são obtidos sinais
provenientes dos sensores enviados para o software de processamento e controle
(LabVIEW), sendo a comunicação estabelecida via DAQ. Após o processamento dos
Entrada
(Sensores via
DAQ)
Processamento
(LabVIEW)
Saída
(Atuadores via
CLP)
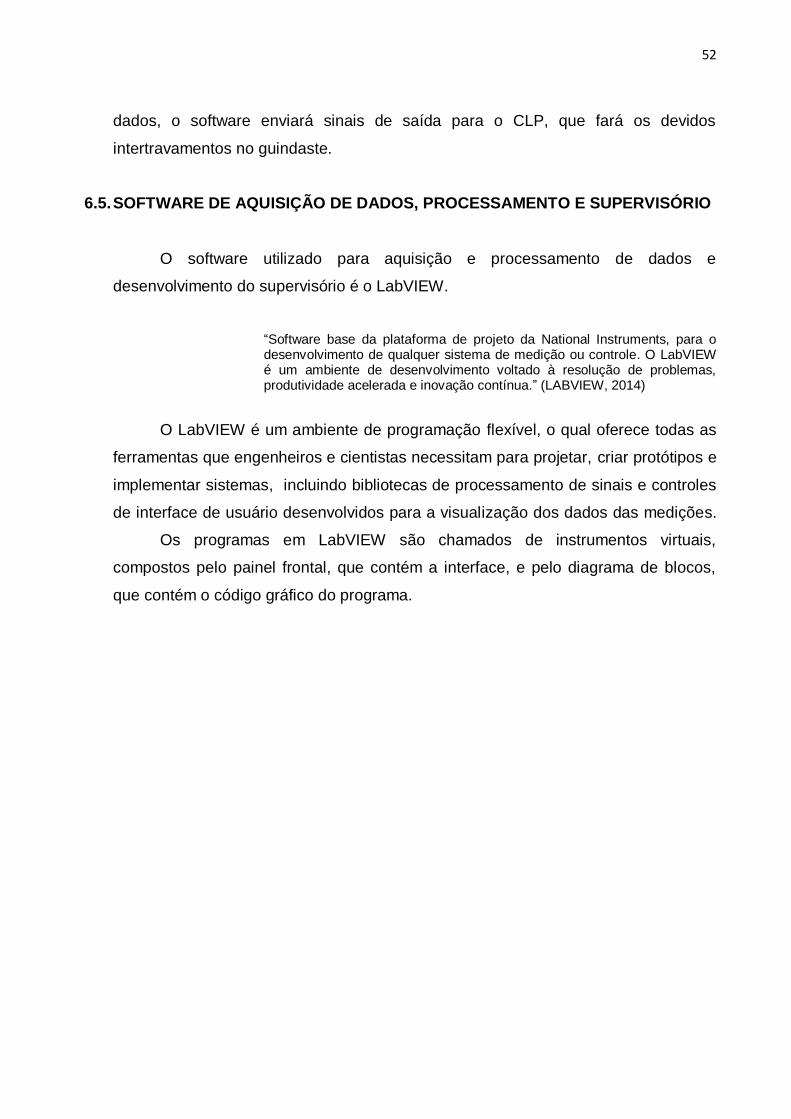
52
dados, o software enviará sinais de saída para o CLP, que fará os devidos
intertravamentos no guindaste.
6.5. SOFTWARE DE AQUISIÇÃO DE DADOS, PROCESSAMENTO E SUPERVISÓRIO
O software utilizado para aquisição e processamento de dados e
desenvolvimento do supervisório é o LabVIEW.
“Software base da plataforma de projeto da National Instruments, para o desenvolvimento de qualquer sistema de medição ou controle. O LabVIEW é um ambiente de desenvolvimento voltado à resolução de problemas, produtividade acelerada e inovação contínua.” (LABVIEW, 2014)
O LabVIEW é um ambiente de programação flexível, o qual oferece todas as
ferramentas que engenheiros e cientistas necessitam para projetar, criar protótipos e
implementar sistemas, incluindo bibliotecas de processamento de sinais e controles
de interface de usuário desenvolvidos para a visualização dos dados das medições.
Os programas em LabVIEW são chamados de instrumentos virtuais,
compostos pelo painel frontal, que contém a interface, e pelo diagrama de blocos,
que contém o código gráfico do programa.
53
7. SISTEMA DE CONTROLE E MONITORAÇÃO DO GUINDASTE
Os guindastes das plataformas auxiliam no abastecimento de suprimentos
alimentícios, equipamentos, produtos químicos, dentro outros. Além de possuírem
essencial importância para o transporte de grandes cargas dentro da própria
plataforma, como grandes equipamentos, tubos, ferramentas e containeres.
Se o guindaste é usado fora dos limites operacionais, não só a integridade
física do guindaste é ameaçada, como também toda a segurança da plataforma e do
pessoal presente na mesma. Por isso, o sistema de controle e monitoração do
guindaste, junto a todos os outros sistemas de segurança, deve estar em perfeitas
condições operacionais e todo o pessoal envolvido, treinado para operar esses
sistemas e saber como proceder em uma situação de emergência ou falha dos
mesmos.
O sistema de controle e monitoração do guindaste é baseado em subsistemas
integrados, são eles:
Sistema de controle do limite de içamento;
Sistema de controle do limite de elevação da lança;
Sistema indicador de operação sobre embarcação;
Sistemas de monitoração de carga.
Estes subsistemas irão contribuir para a correta utilização do guindaste,
impedindo que o mesmo venha a sofrer danos ou causar acidentes. Para tal, a
integração desses sistemas também consiste no intertravamento do guindaste.
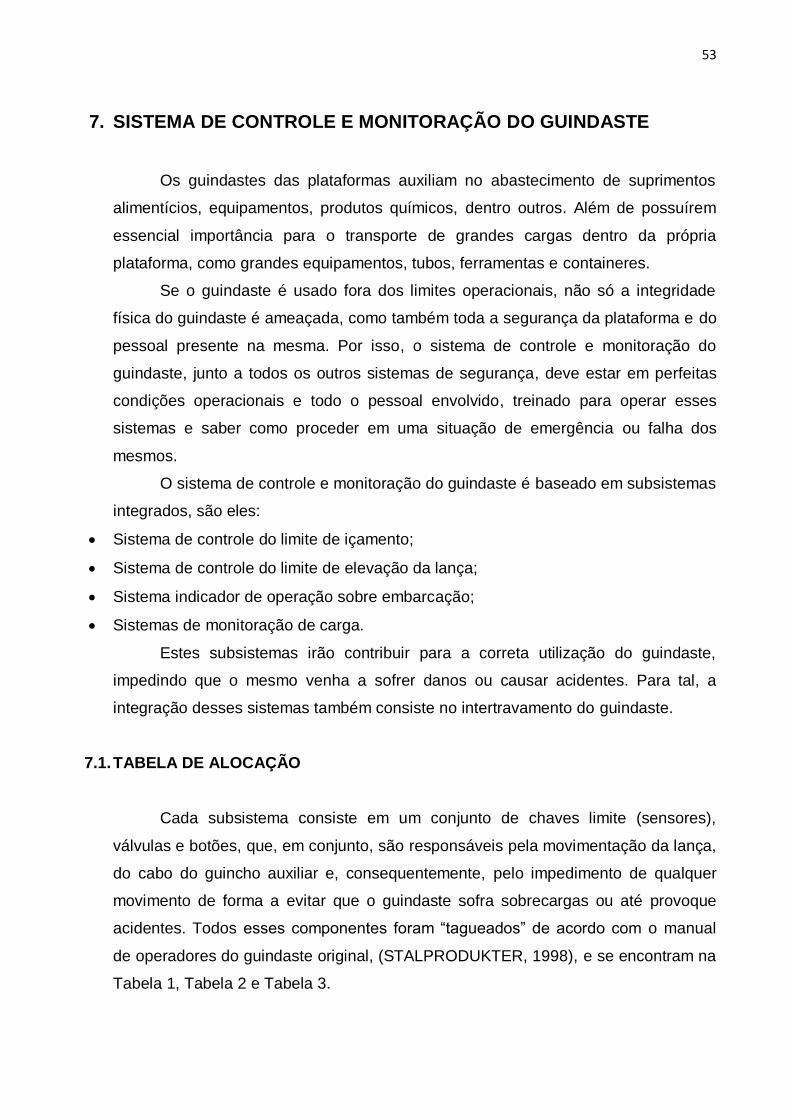
7.1. TABELA DE ALOCAÇÃO
Cada subsistema consiste em um conjunto de chaves limite (sensores),
válvulas e botões, que, em conjunto, são responsáveis pela movimentação da lança,
do cabo do guincho auxiliar e, consequentemente, pelo impedimento de qualquer
movimento de forma a evitar que o guindaste sofra sobrecargas ou até provoque
acidentes. Todos esses componentes foram “tagueados” de acordo com o manual
de operadores do guindaste original, (STALPRODUKTER, 1998), e se encontram na
Tabela 1, Tabela 2 e Tabela 3.
54
Tabela 1: Tags dos sensores
SENSOR TAG
Sensor de início de curso do cabo de içamento ZS214
Sensor de fim de curso do cabo de içamento ZS215
Sensor de limite superior da lança ZS216
Sensor de limite inferior da lança ZS218
Sensor de limite inferior máximo da lança ZS219
Fonte: Autores
Tabela 2: Tags dos botões
BOTÃO TAG
Botão de by-pass para o sistema de içamento do guincho auxiliar
e movimentação da lança
S27
Botão de by-pass para o sensor de limite inferior máximo da lança S28
Botão de ativação do sistema homem morto S35
Botão de acionamento do freio de içamento S29
Fonte: Autores
Nota: O botão de by-pass para o sensor de limite inferior máximo da lança, S28, foi adicionado ao sistema, não estando de acordo com o manual do guindaste e o botão de acionamento do freio de içamento, S29, não foi implementado no modelo icônico do guindaste.
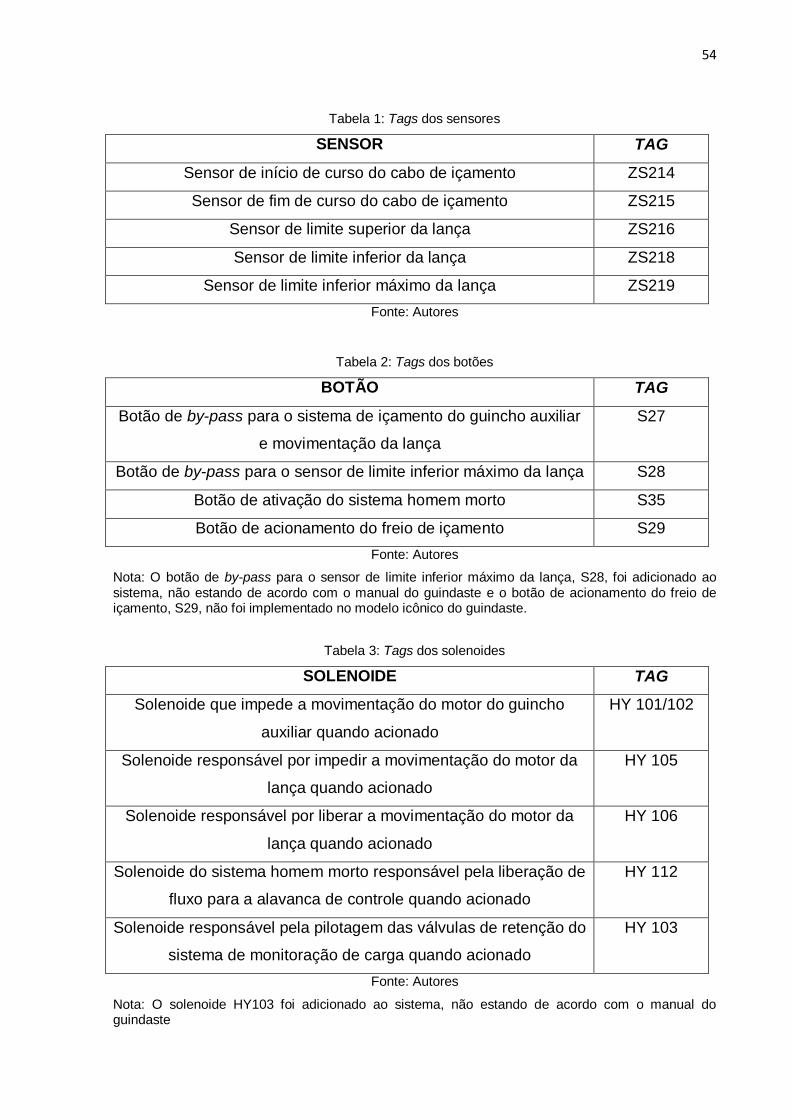
Tabela 3: Tags dos solenoides
SOLENOIDE TAG
Solenoide que impede a movimentação do motor do guincho
auxiliar quando acionado
HY 101/102
Solenoide responsável por impedir a movimentação do motor da
lança quando acionado
HY 105
Solenoide responsável por liberar a movimentação do motor da
lança quando acionado
HY 106
Solenoide do sistema homem morto responsável pela liberação de
fluxo para a alavanca de controle quando acionado
HY 112
Solenoide responsável pela pilotagem das válvulas de retenção do
sistema de monitoração de carga quando acionado
HY 103
Fonte: Autores
Nota: O solenoide HY103 foi adicionado ao sistema, não estando de acordo com o manual do guindaste
55
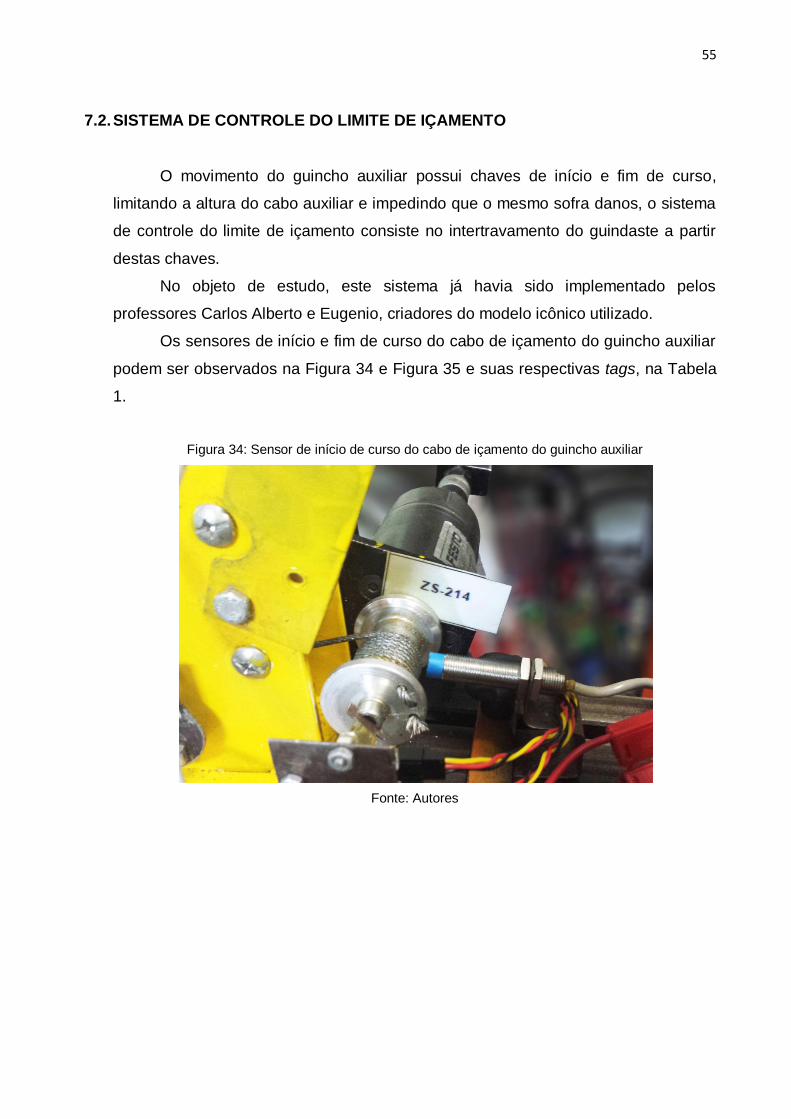
7.2. SISTEMA DE CONTROLE DO LIMITE DE IÇAMENTO
O movimento do guincho auxiliar possui chaves de início e fim de curso,
limitando a altura do cabo auxiliar e impedindo que o mesmo sofra danos, o sistema
de controle do limite de içamento consiste no intertravamento do guindaste a partir
destas chaves.
No objeto de estudo, este sistema já havia sido implementado pelos
professores Carlos Alberto e Eugenio, criadores do modelo icônico utilizado.
Os sensores de início e fim de curso do cabo de içamento do guincho auxiliar
podem ser observados na Figura 34 e Figura 35 e suas respectivas tags, na Tabela
1.
Figura 34: Sensor de início de curso do cabo de içamento do guincho auxiliar
Fonte: Autores

56
Figura 35: Sensor de fim de curso do cabo de içamento do guincho auxiliar
Fonte: Autores
O sensor mostrado na Figura 34, ZS214, encontra-se instalado próximo ao
eixo do guincho auxiliar, determinando o limite mínimo do cabo auxiliar. Já o sensor
ZS215, Figura 35, foi instalado na extremidade da lança, determinando o limite
máximo do cabo do guincho auxiliar. Quando um dos sensores é acionado, o
solenoide HY 101/102, Figura 36, é acionado, impedindo o movimento de subida ou
descida da carga. Este intertravamento será abordado com mais detalhes no tópico
7.6 INTERTRAVAMENTO DO GUINDASTE.
Figura 36: Solenoide HY 101/102 da válvula
Fonte: Autores
57
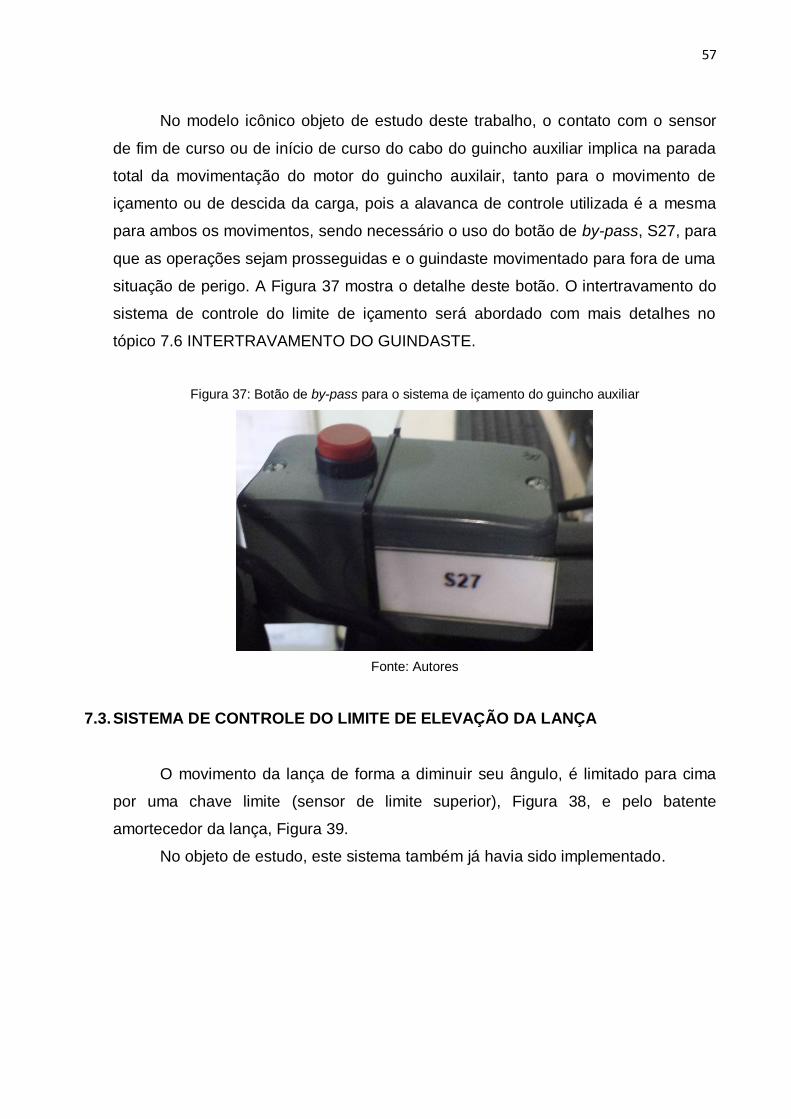
No modelo icônico objeto de estudo deste trabalho, o contato com o sensor
de fim de curso ou de início de curso do cabo do guincho auxiliar implica na parada
total da movimentação do motor do guincho auxilair, tanto para o movimento de
içamento ou de descida da carga, pois a alavanca de controle utilizada é a mesma
para ambos os movimentos, sendo necessário o uso do botão de by-pass, S27, para
que as operações sejam prosseguidas e o guindaste movimentado para fora de uma
situação de perigo. A Figura 37 mostra o detalhe deste botão. O intertravamento do
sistema de controle do limite de içamento será abordado com mais detalhes no
tópico 7.6 INTERTRAVAMENTO DO GUINDASTE.
Figura 37: Botão de by-pass para o sistema de içamento do guincho auxiliar
Fonte: Autores
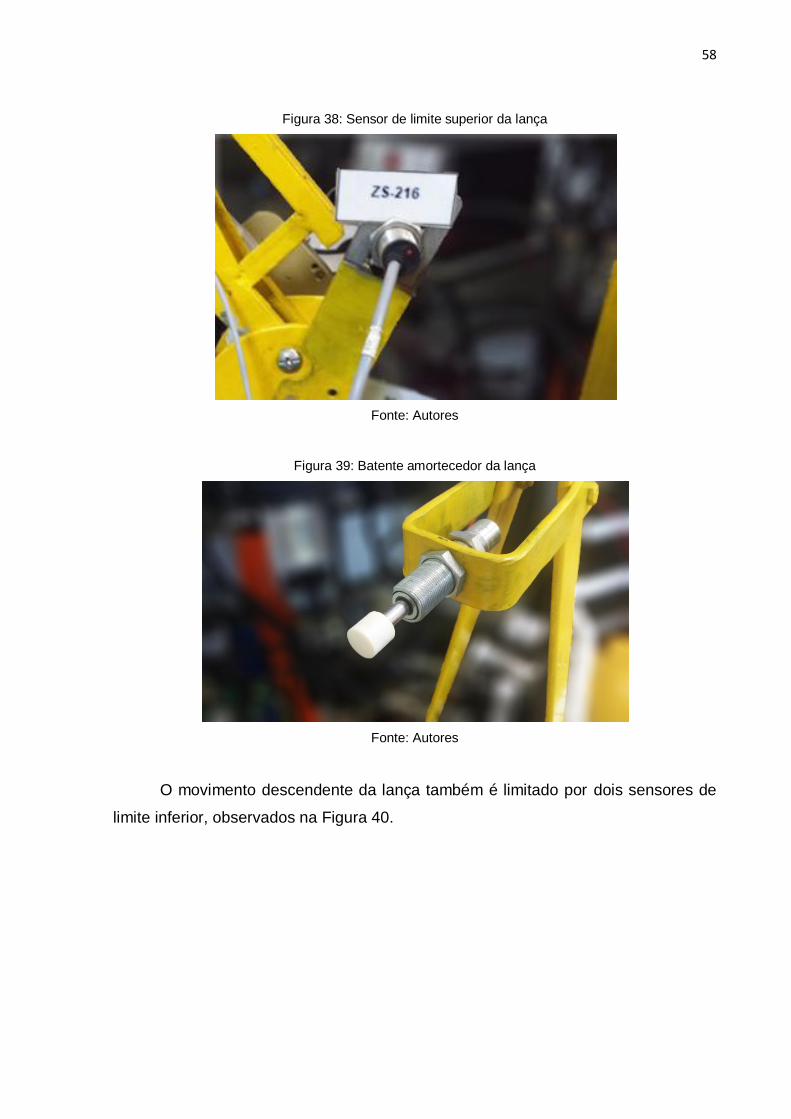
7.3. SISTEMA DE CONTROLE DO LIMITE DE ELEVAÇÃO DA LANÇA
O movimento da lança de forma a diminuir seu ângulo, é limitado para cima
por uma chave limite (sensor de limite superior), Figura 38, e pelo batente
amortecedor da lança, Figura 39.
No objeto de estudo, este sistema também já havia sido implementado.
58
Figura 38: Sensor de limite superior da lança
Fonte: Autores
Figura 39: Batente amortecedor da lança
Fonte: Autores
O movimento descendente da lança também é limitado por dois sensores de
limite inferior, observados na Figura 40.

59
Figura 40: Sensores de limite inferior da lança
Fonte: Autores
O sensor da Figura 38, ZS216, foi instalado de forma a determinar o limite
superior da lança. O contato com este sensor implica na parada do movimento da
lança, antes que ela atinja o batente. Os sensores ZS218 e ZS219, observados na
Figura 40, determinam o limite inferior, sendo o ZS218, um sensor de limite inferior e
o segundo, ZS219, limite inferior máximo.
Quando um destes três sensores é acionado, o movimento da lança é
impedido, a partir do acionamento do solenoide HY 105, que pode ser observado na
Figura 41.
Figura 41: Solenoide HY 105 e HY 106 da válvula
Fonte: Autores

60
No modelo icônico objeto de estudo deste trabalho, o contato com qualquer
sensor limite da lança implica na parada total da movimentação da mesma, tanto no
movimento ascendente, quanto descendente, pois a alavanca de controle utilizada é
a mesma para ambos os movimentos, sendo necessário o uso do botão de by-pass,
S27, comum ao sistema de movimentação do guincho auxiliar, para que as
operações sejam prosseguidas e o guindaste movimentado para fora de uma
situação de perigo.
O botão S28 foi adicionado ao modelo com o objetivo de “by-passar” o sensor
de limite inferior máximo da lança, não estando presente no guindaste original. A
Figura 42 mostra o detalhe deste botão. O intertravamento do sistema de controle do
limite de elevação da lança será abordado com mais detalhes no tópico 7.6
INTERTRAVAMENTO DO GUINDASTE.
Figura 42: Botão de by-pass para sensor de limite inferior máximo da lança
Fonte: Autores
7.4. SISTEMA INDICADOR DE OPERAÇÃO SOBRE A EMBARCAÇÃO
7.4.1. Descrição
Como citado no tópico 2.1 APRESENTAÇÃO, do capítulo 1 INTRODUÇÃO,
devido à distância da costa litorânea, são necessárias operações com embarcações
para que as plataformas sejam abastecidas. Sendo os guindastes das plataformas
61
os responsáveis por transportar esses suprimentos, pois muitas vezes essas
embarcações não possuem guindaste próprio.
Quando o guindaste da plataforma está realizando um içamento de/para o
mar, conhecido também como operação sobre a embarcação, medidas de
segurança devem ser tomadas: o operador deve estar ciente dessa operação e os
freios do cabo do guincho, liberados, para que, em caso de fixação do gancho
(extremidade do cabo do guincho auxiliar) ao barco de apoio, por exemplo, nos
movimentos das ondas do mar, o cabo não possa ser puxado pelo barco, além de
outras medidas de segurança.
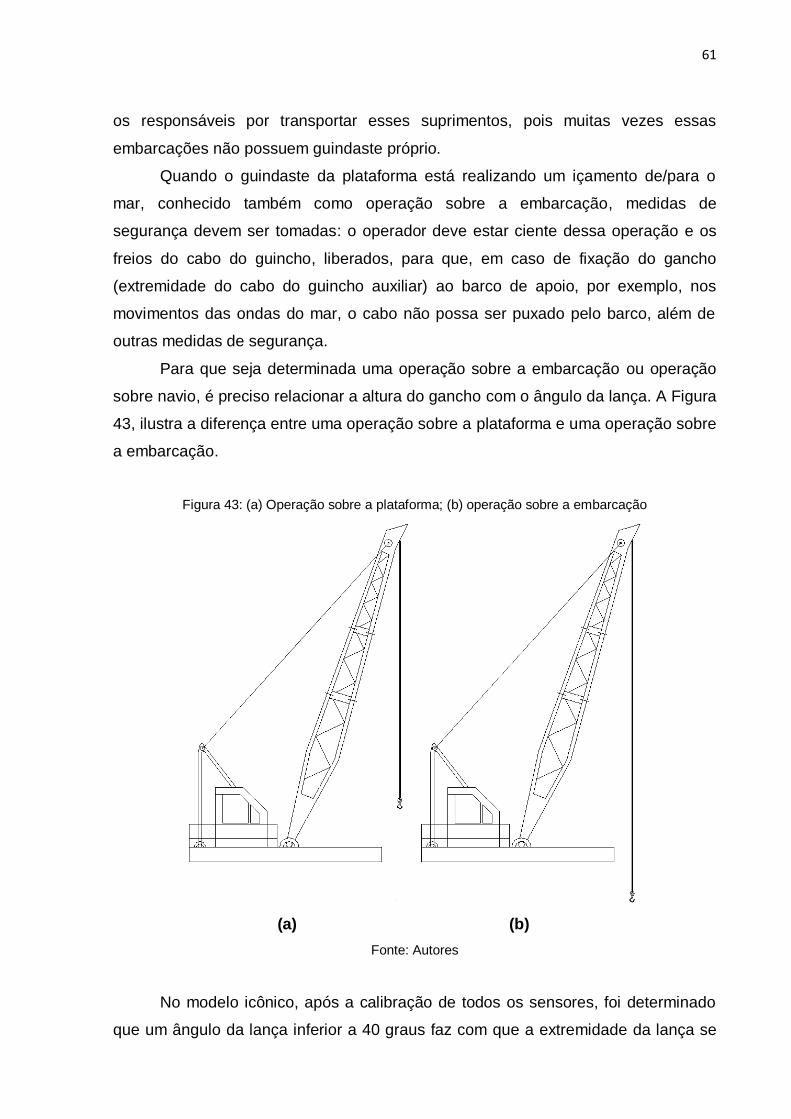
Para que seja determinada uma operação sobre a embarcação ou operação
sobre navio, é preciso relacionar a altura do gancho com o ângulo da lança. A Figura
43, ilustra a diferença entre uma operação sobre a plataforma e uma operação sobre
a embarcação.
Figura 43: (a) Operação sobre a plataforma; (b) operação sobre a embarcação
(a) (b)
Fonte: Autores
No modelo icônico, após a calibração de todos os sensores, foi determinado
que um ângulo da lança inferior a 40 graus faz com que a extremidade da lança se

62
encontre fora dos limites da plataforma, porém se o gancho estiver acima da altura
da plataforma, a operação realizada é, ainda, considerada operação sobre a
plataforma, Figura 43 (a). Uma operação sobre a embarcação é caracterizada
apenas quando a extremidade da lança se encontra fora dos limites da plataforma e
o gancho, abaixo do nível da plataforma simultaneamente, Figura 43 (b).
7.4.2. Atuação
“Durante uma operação sobre a embarcação, intertravamentos e medidas de
segurança devem ser tomadas e o operador há de estar ciente do tipo de operação
que está ocorrendo.” (STALPRODUKTER, 1998) Para tanto, um sinal luminoso
amarelo será indicado na tela do supervisório, informando que o gancho está abaixo
do nível da plataforma, como se pode ver na Figura 44.
Figura 44: Detalhe do sistema indicador de operação sobre a embarcação no supervisório
Fonte: Autores
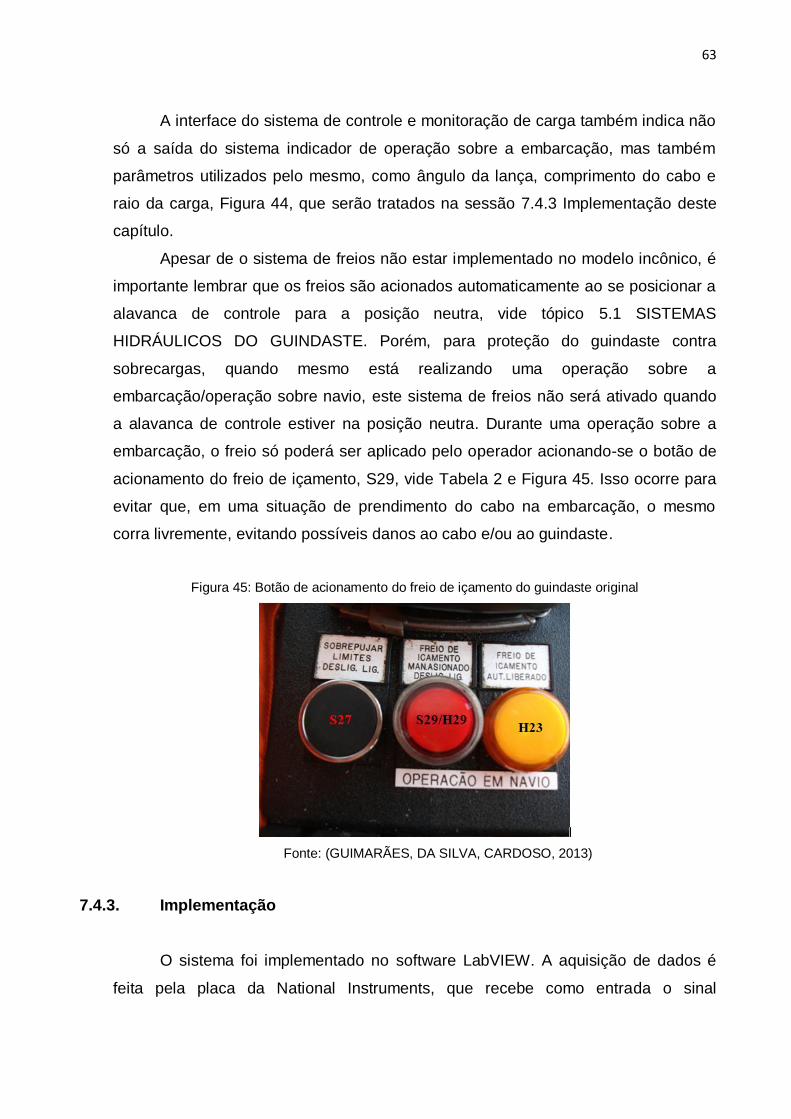
63
A interface do sistema de controle e monitoração de carga também indica não
só a saída do sistema indicador de operação sobre a embarcação, mas também
parâmetros utilizados pelo mesmo, como ângulo da lança, comprimento do cabo e
raio da carga, Figura 44, que serão tratados na sessão 7.4.3 Implementação deste
capítulo.
Apesar de o sistema de freios não estar implementado no modelo incônico, é
importante lembrar que os freios são acionados automaticamente ao se posicionar a
alavanca de controle para a posição neutra, vide tópico 5.1 SISTEMAS
HIDRÁULICOS DO GUINDASTE. Porém, para proteção do guindaste contra
sobrecargas, quando mesmo está realizando uma operação sobre a
embarcação/operação sobre navio, este sistema de freios não será ativado quando
a alavanca de controle estiver na posição neutra. Durante uma operação sobre a
embarcação, o freio só poderá ser aplicado pelo operador acionando-se o botão de
acionamento do freio de içamento, S29, vide Tabela 2 e Figura 45. Isso ocorre para
evitar que, em uma situação de prendimento do cabo na embarcação, o mesmo
corra livremente, evitando possíveis danos ao cabo e/ou ao guindaste.
Figura 45: Botão de acionamento do freio de içamento do guindaste original
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
7.4.3. Implementação
O sistema foi implementado no software LabVIEW. A aquisição de dados é
feita pela placa da National Instruments, que recebe como entrada o sinal

64
proveniente do potenciômetro, que indica o ângulo de inclinação da lança, e do
encoder, que determina o comprimento do cabo de içamento do guincho auxiliar.
A partir do comprimento do cabo, é possível determinar a altura relativa e
absoluta da carga, Figura 46.
Figura 46: Altura relativa e absoluta da carga
Fonte: Autores
Para fins deste trabalho, foi determinado e pode ser observado na Figura 46,
que a altura relativa da carga é a distância vertical entre a carga e a plataforma,
podendo variar de acordo com o ângulo de inclinação da lança. Sendo a distância
absoluta, a distância vertical entre a ponta da lança e a carga, tratada neste trabalho
como comprimento do cabo. Na tela do supervisório do modelo há a indicação do
comprimento do cabo, parâmetro fundamental para o sistema indicador de operação
sobre a embarcação.
A Figura 47 mostra o diagrama de blocos completo implementado no software
LabVIEW. E, em sequência, na Figura 48, observa-se o detalhe do diagrama de
65
blocos do sistema indicador de operação sobre a embarcação e na Figura 49, os
parâmetros do sistema indicados na IHM.
Figura 47: Diagrama de blocos do sistema implementado no LabVIEW – Sistema de controle e
monitoração de carga
Fonte: Autores
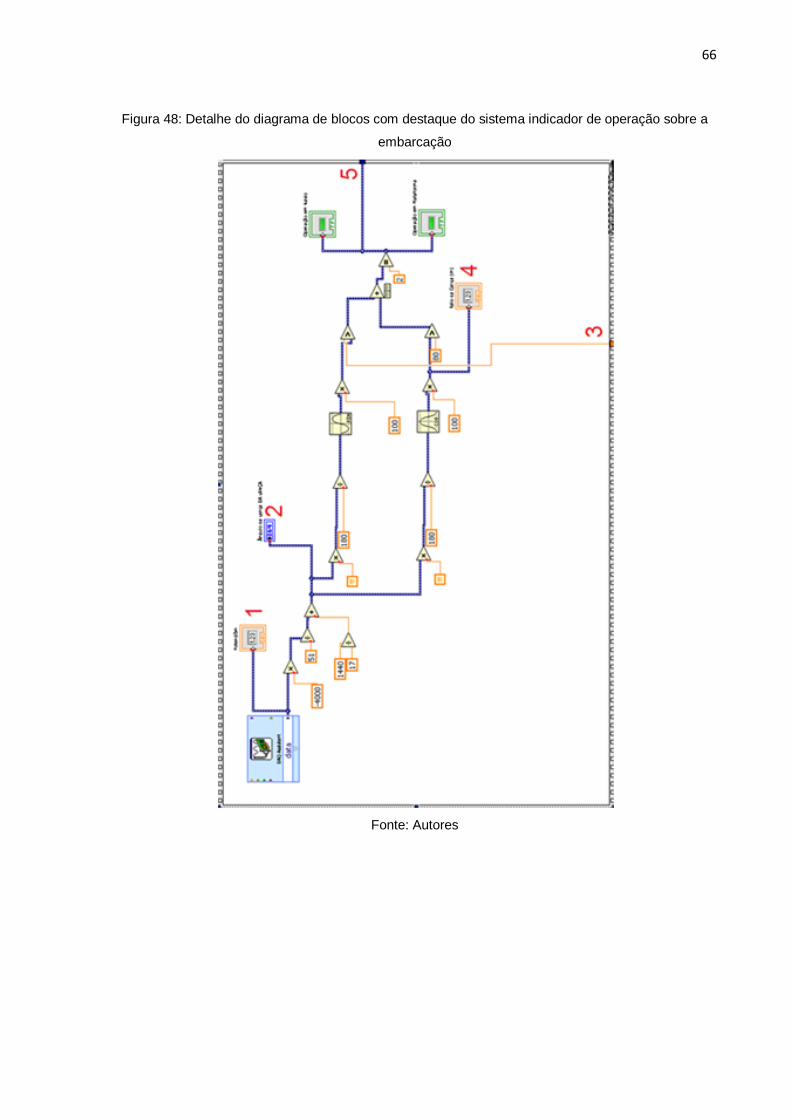
66
Figura 48: Detalhe do diagrama de blocos com destaque do sistema indicador de operação sobre a
embarcação
Fonte: Autores

67
Figura 49: Parâmetros do sistema indicador de operação sobre a embarcação na IHM
Fonte: Autores
Como entrada para este sistema temos o sinal proveniente do potenciômetro
e do encoder, Figura 48 (1) e (3), ordenadamente. A partir destes parâmetros,
podem ser calculados o ângulo da lança Figura 48 (2) e o raio da carga Figura 48
(4).
O ângulo da lança, comprimento do cabo e raio da carga podem ser
observados na IHM, Figura 49 (1), (2), e (3), respectivamente.
O sistema indicador de operação sobre a embarcação possui uma saída
digital, Figura 48 (5). A saída digital indica o tipo de operação que está sendo
realizada, sendo sinal “1” se o guindaste estiver operando sobre uma embarcação
ou “0”, caso esteja operando sobre a plataforma. Esse sinal digital fará com que um
indicador luminoso na cor amarela seja visualizado na IHM de acordo com a
operação realizada, sobre a plataforma ou sobre a embarcação, Figura 49 (4).
68
Observando-se o diagrama da Figura 48, pode-se perceber que a saída digital
desse sistema (5) também é sinal de entrada para outro sistema, o sistema de
monitoração de carga, pois durante uma operação sobre a embarcação, as cargas
permissíveis são reduzidas, de acordo com a altura significativa da onda e do raio da
carga. Este assunto será tratado com mais detalhes no próximo tópico, 7.5
SISTEMA DE MONITORAÇÃO DE CARGA.
7.5. SISTEMA DE MONITORAÇÃO DE CARGA
7.5.1. Descrição
O guindaste possui uma variedade de chaves limites de início e fim de curso
nos guinchos e na lança, de forma a impedir que ele colida com as barreiras físicas
da plataforma, além de alarmes e funções lógicas, prevenindo sobrecargas.
O manual de instruções para operadores destaca:
“O guindaste pode sofrer danos e sua estrutura vir a falhar caso ele seja submetido a esforços extremos, a lança corre o risco de cair abruptamente e o cabo de içamento, romper. Se a carga é aumentada até ocorrer uma falha, o componente mais fraco será o primeiro a falhar, dependendo do tipo e da situação da sobrecarga. Em qualquer caso, cargas causadoras de falhas estão muito acima de qualquer carga segura de trabalho. Geralmente, o cabo de içamento será o primeiro componente a falhar, por ser aquele com mais alta probabilidade de falha, seguido da lança (topo da lança). Esta é a sequência desejada de falha. Se o guindaste for sobrecarregado até que o cabo de içamento se rompa, é provável que algumas das partes estruturais do guindaste sofram deformações permanentes e muitos dos componentes mecânicos sejam danificados.” (STALPRODUKTER, 1998)
Em situações em que a carga está crítica para o raio, a descida e içamento de
carga devem ser bloqueadas, sendo permitido ao operador, apenas a movimentação
da carga para cima a partir da subida da lança e para baixo através da descida do
cabo do guincho, isso faz com que o raio da carga seja diminuído, retirando o
equipamento da situação crítica.
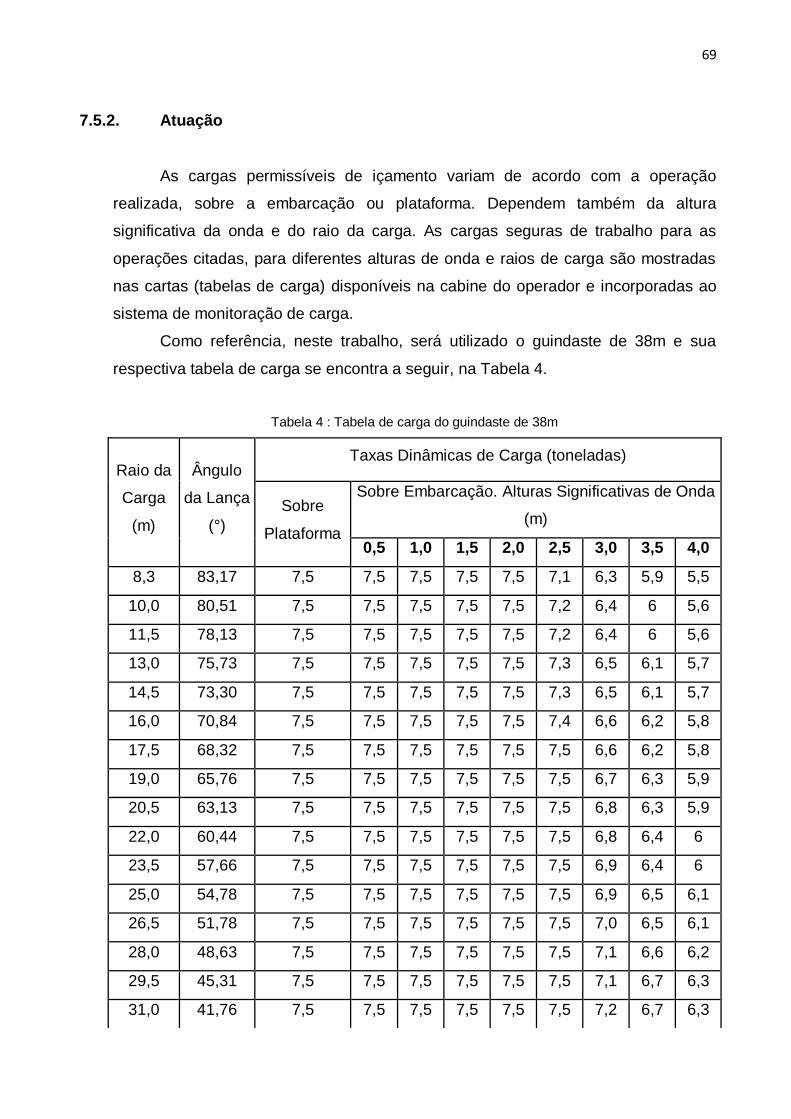
69
7.5.2. Atuação
As cargas permissíveis de içamento variam de acordo com a operação
realizada, sobre a embarcação ou plataforma. Dependem também da altura
significativa da onda e do raio da carga. As cargas seguras de trabalho para as
operações citadas, para diferentes alturas de onda e raios de carga são mostradas
nas cartas (tabelas de carga) disponíveis na cabine do operador e incorporadas ao
sistema de monitoração de carga.
Como referência, neste trabalho, será utilizado o guindaste de 38m e sua
respectiva tabela de carga se encontra a seguir, na Tabela 4.
Tabela 4 : Tabela de carga do guindaste de 38m
Raio da
Carga
(m)
Ângulo
da Lança
(°)
Taxas Dinâmicas de Carga (toneladas)
Sobre
Plataforma
Sobre Embarcação. Alturas Significativas de Onda
(m)
0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0
8,3 83,17 7,5 7,5 7,5 7,5 7,5 7,1 6,3 5,9 5,5
10,0 80,51 7,5 7,5 7,5 7,5 7,5 7,2 6,4 6 5,6
11,5 78,13 7,5 7,5 7,5 7,5 7,5 7,2 6,4 6 5,6
13,0 75,73 7,5 7,5 7,5 7,5 7,5 7,3 6,5 6,1 5,7
14,5 73,30 7,5 7,5 7,5 7,5 7,5 7,3 6,5 6,1 5,7
16,0 70,84 7,5 7,5 7,5 7,5 7,5 7,4 6,6 6,2 5,8
17,5 68,32 7,5 7,5 7,5 7,5 7,5 7,5 6,6 6,2 5,8
19,0 65,76 7,5 7,5 7,5 7,5 7,5 7,5 6,7 6,3 5,9
20,5 63,13 7,5 7,5 7,5 7,5 7,5 7,5 6,8 6,3 5,9
22,0 60,44 7,5 7,5 7,5 7,5 7,5 7,5 6,8 6,4 6
23,5 57,66 7,5 7,5 7,5 7,5 7,5 7,5 6,9 6,4 6
25,0 54,78 7,5 7,5 7,5 7,5 7,5 7,5 6,9 6,5 6,1
26,5 51,78 7,5 7,5 7,5 7,5 7,5 7,5 7,0 6,5 6,1
28,0 48,63 7,5 7,5 7,5 7,5 7,5 7,5 7,1 6,6 6,2
29,5 45,31 7,5 7,5 7,5 7,5 7,5 7,5 7,1 6,7 6,3
31,0 41,76 7,5 7,5 7,5 7,5 7,5 7,5 7,2 6,7 6,3
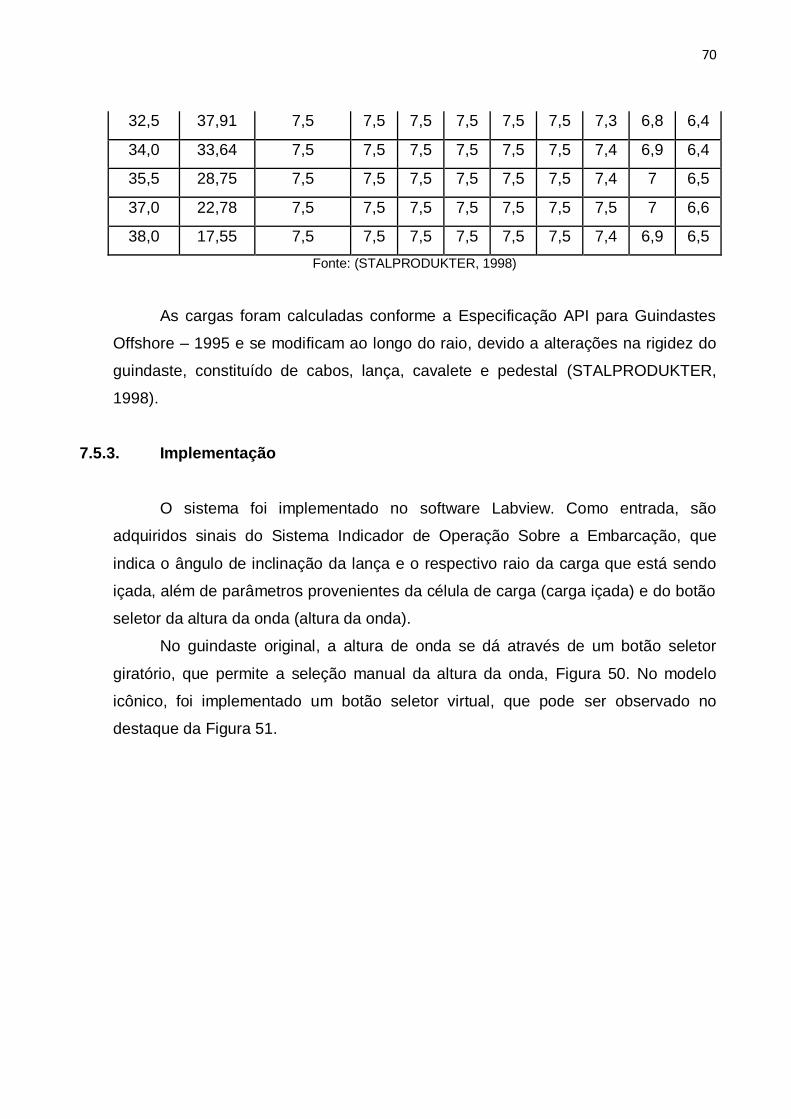
70
32,5 37,91 7,5 7,5 7,5 7,5 7,5 7,5 7,3 6,8 6,4
34,0 33,64 7,5 7,5 7,5 7,5 7,5 7,5 7,4 6,9 6,4
35,5 28,75 7,5 7,5 7,5 7,5 7,5 7,5 7,4 7 6,5
37,0 22,78 7,5 7,5 7,5 7,5 7,5 7,5 7,5 7 6,6
38,0 17,55 7,5 7,5 7,5 7,5 7,5 7,5 7,4 6,9 6,5
Fonte: (STALPRODUKTER, 1998)
As cargas foram calculadas conforme a Especificação API para Guindastes
Offshore – 1995 e se modificam ao longo do raio, devido a alterações na rigidez do
guindaste, constituído de cabos, lança, cavalete e pedestal (STALPRODUKTER,
1998).
7.5.3. Implementação
O sistema foi implementado no software Labview. Como entrada, são
adquiridos sinais do Sistema Indicador de Operação Sobre a Embarcação, que
indica o ângulo de inclinação da lança e o respectivo raio da carga que está sendo
içada, além de parâmetros provenientes da célula de carga (carga içada) e do botão
seletor da altura da onda (altura da onda).
No guindaste original, a altura de onda se dá através de um botão seletor
giratório, que permite a seleção manual da altura da onda, Figura 50. No modelo
icônico, foi implementado um botão seletor virtual, que pode ser observado no
destaque da Figura 51.

71
Figura 50: Detalhe do botão seletor da altura da onda do guindaste original
Fonte: (GUIMARÃES, DA SILVA, CARDOSO, 2013)
Figura 51: Detalhe do botão virtual seletor da altura da onda do modelo icônico
Fonte: Autores
Foi implementada a tabela de carga do guindaste de 38m, Tabela 5. Para
criação desta tabela, foi utilizada uma proporção de 1000:1 (quilograma:tonelada)
para a carga permissível. A precisão do modelo icônico para a grandeza angular da
lança será dada a partir de números inteiros e sua faixa de atuação será maior,
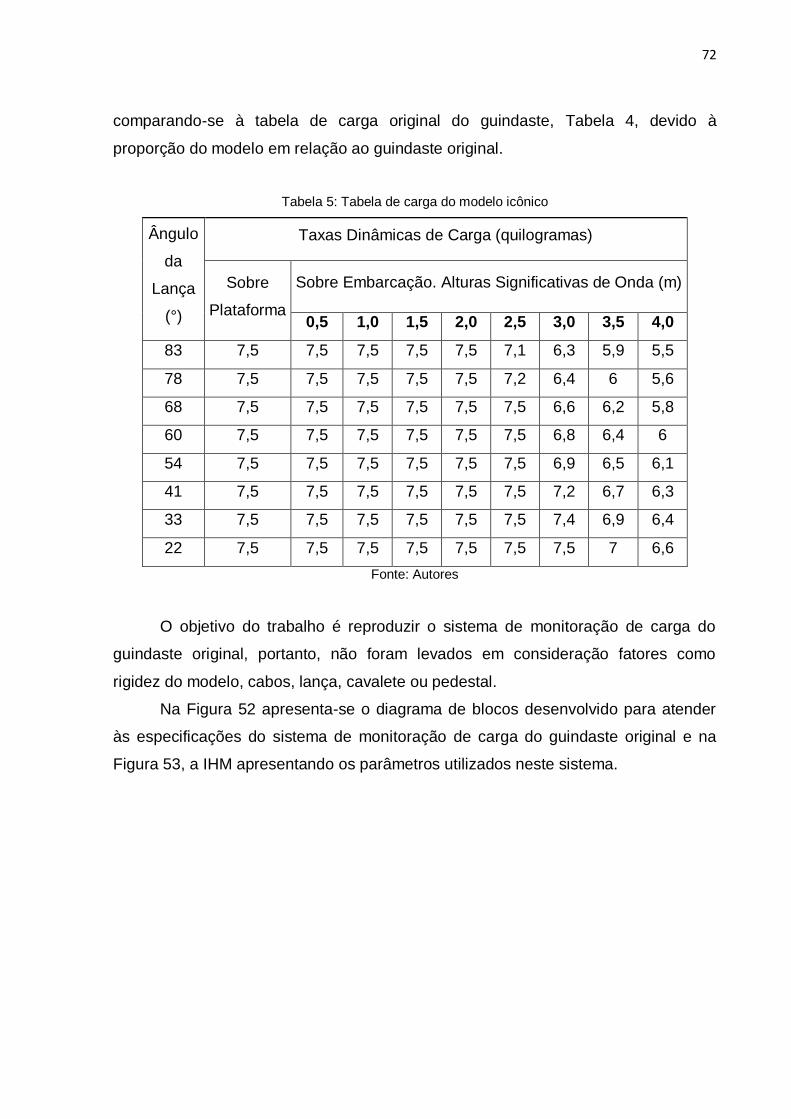
72
comparando-se à tabela de carga original do guindaste, Tabela 4, devido à
proporção do modelo em relação ao guindaste original.
Tabela 5: Tabela de carga do modelo icônico
Ângulo
da
Lança
(°)
Taxas Dinâmicas de Carga (quilogramas)
Sobre
Plataforma
Sobre Embarcação. Alturas Significativas de Onda (m)
0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0
83 7,5 7,5 7,5 7,5 7,5 7,1 6,3 5,9 5,5
78 7,5 7,5 7,5 7,5 7,5 7,2 6,4 6 5,6
68 7,5 7,5 7,5 7,5 7,5 7,5 6,6 6,2 5,8
60 7,5 7,5 7,5 7,5 7,5 7,5 6,8 6,4 6
54 7,5 7,5 7,5 7,5 7,5 7,5 6,9 6,5 6,1
41 7,5 7,5 7,5 7,5 7,5 7,5 7,2 6,7 6,3
33 7,5 7,5 7,5 7,5 7,5 7,5 7,4 6,9 6,4
22 7,5 7,5 7,5 7,5 7,5 7,5 7,5 7 6,6
Fonte: Autores
O objetivo do trabalho é reproduzir o sistema de monitoração de carga do
guindaste original, portanto, não foram levados em consideração fatores como
rigidez do modelo, cabos, lança, cavalete ou pedestal.
Na Figura 52 apresenta-se o diagrama de blocos desenvolvido para atender
às especificações do sistema de monitoração de carga do guindaste original e na
Figura 53, a IHM apresentando os parâmetros utilizados neste sistema.
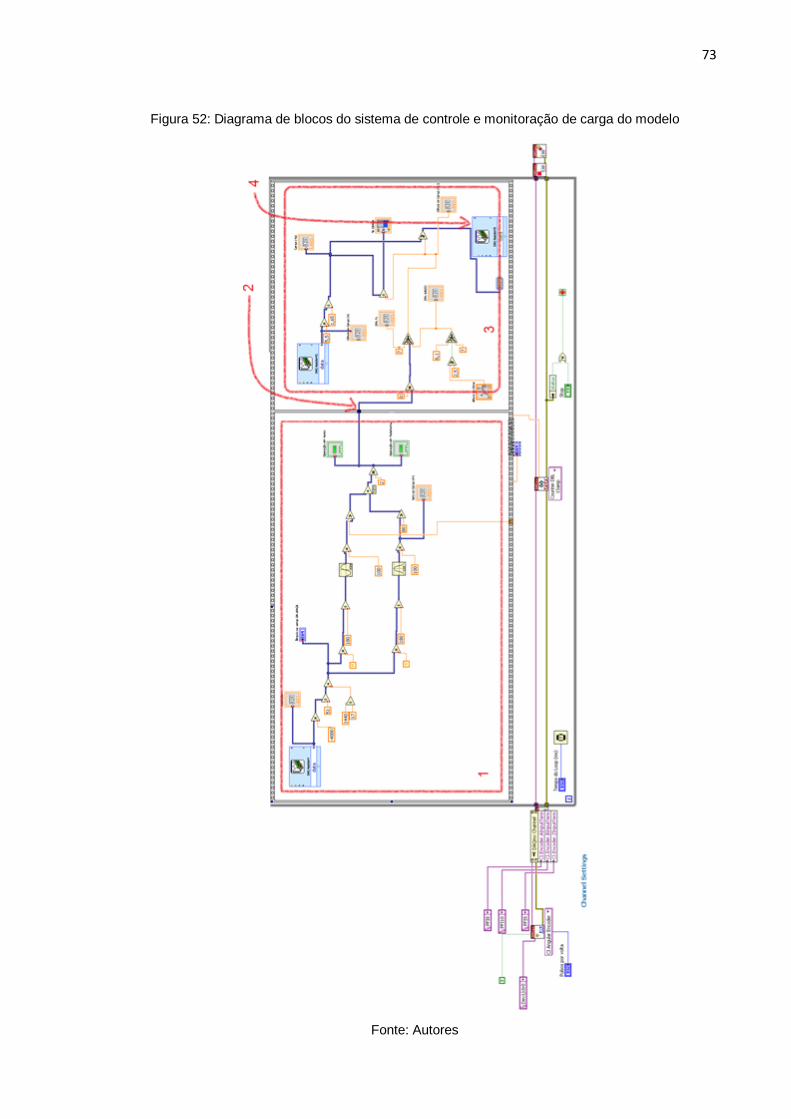
73
Figura 52: Diagrama de blocos do sistema de controle e monitoração de carga do modelo
Fonte: Autores
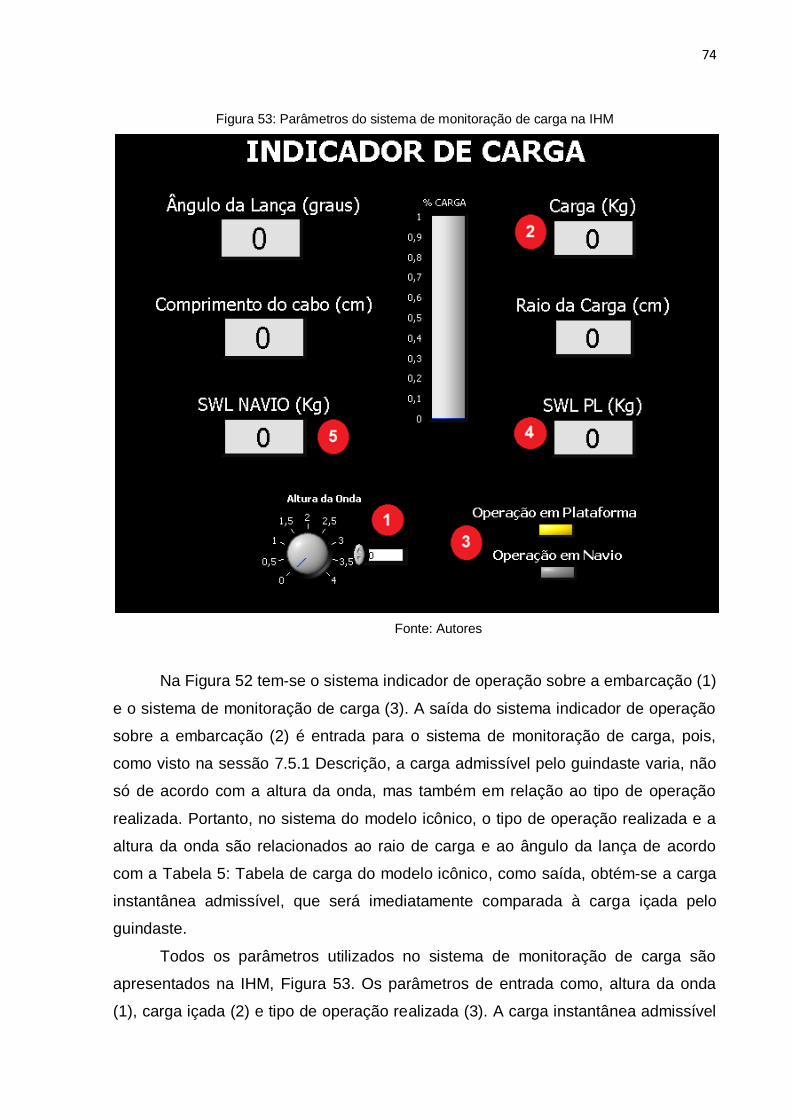
74
Figura 53: Parâmetros do sistema de monitoração de carga na IHM
Fonte: Autores
Na Figura 52 tem-se o sistema indicador de operação sobre a embarcação (1)
e o sistema de monitoração de carga (3). A saída do sistema indicador de operação
sobre a embarcação (2) é entrada para o sistema de monitoração de carga, pois,
como visto na sessão 7.5.1 Descrição, a carga admissível pelo guindaste varia, não
só de acordo com a altura da onda, mas também em relação ao tipo de operação
realizada. Portanto, no sistema do modelo icônico, o tipo de operação realizada e a
altura da onda são relacionados ao raio de carga e ao ângulo da lança de acordo
com a Tabela 5: Tabela de carga do modelo icônico, como saída, obtém-se a carga
instantânea admissível, que será imediatamente comparada à carga içada pelo
guindaste.
Todos os parâmetros utilizados no sistema de monitoração de carga são
apresentados na IHM, Figura 53. Os parâmetros de entrada como, altura da onda
(1), carga içada (2) e tipo de operação realizada (3). A carga instantânea admissível
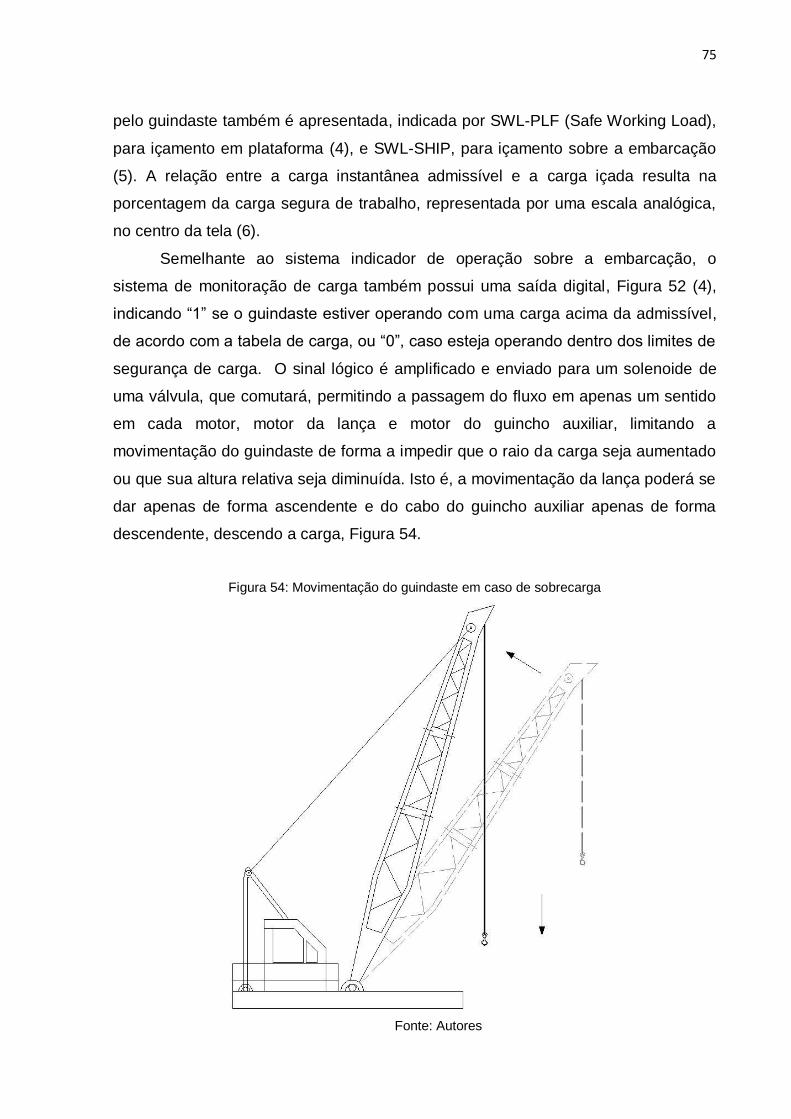
75
pelo guindaste também é apresentada, indicada por SWL-PLF (Safe Working Load),
para içamento em plataforma (4), e SWL-SHIP, para içamento sobre a embarcação
(5). A relação entre a carga instantânea admissível e a carga içada resulta na
porcentagem da carga segura de trabalho, representada por uma escala analógica,
no centro da tela (6).
Semelhante ao sistema indicador de operação sobre a embarcação, o
sistema de monitoração de carga também possui uma saída digital, Figura 52 (4),
indicando “1” se o guindaste estiver operando com uma carga acima da admissível,
de acordo com a tabela de carga, ou “0”, caso esteja operando dentro dos limites de
segurança de carga. O sinal lógico é amplificado e enviado para um solenoide de
uma válvula, que comutará, permitindo a passagem do fluxo em apenas um sentido
em cada motor, motor da lança e motor do guincho auxiliar, limitando a
movimentação do guindaste de forma a impedir que o raio da carga seja aumentado
ou que sua altura relativa seja diminuída. Isto é, a movimentação da lança poderá se
dar apenas de forma ascendente e do cabo do guincho auxiliar apenas de forma
descendente, descendo a carga, Figura 54.
Figura 54: Movimentação do guindaste em caso de sobrecarga
Fonte: Autores
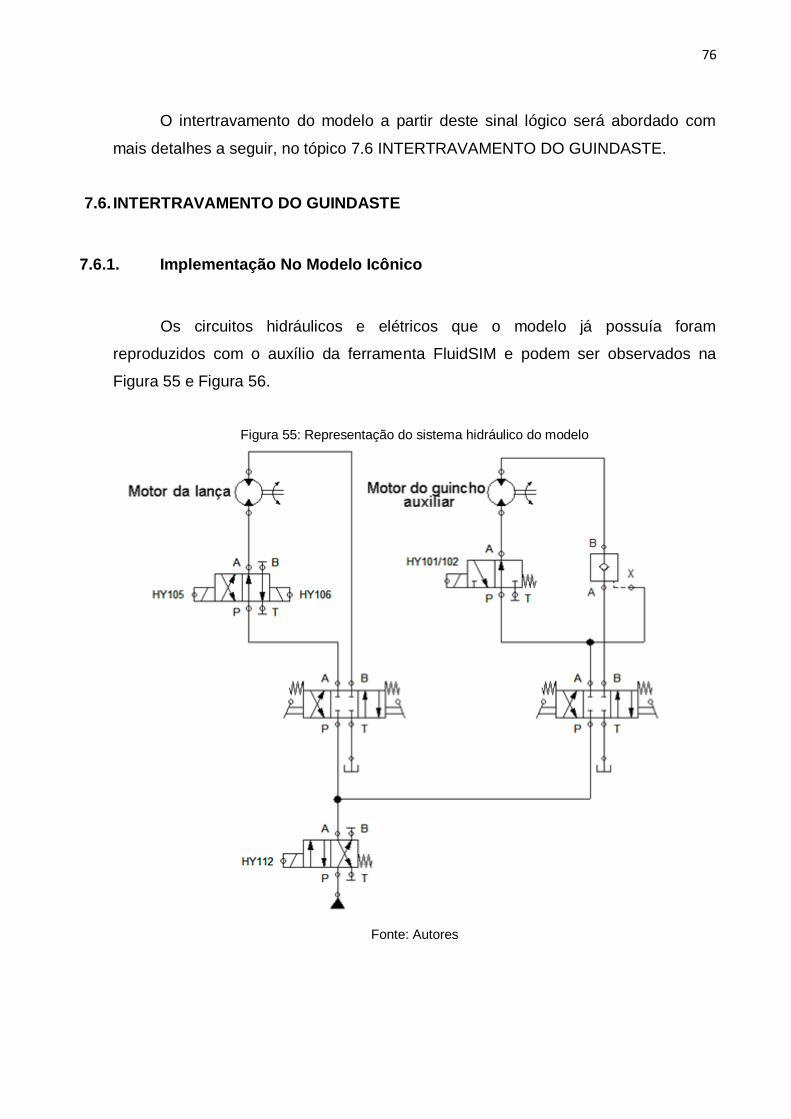
76
O intertravamento do modelo a partir deste sinal lógico será abordado com
mais detalhes a seguir, no tópico 7.6 INTERTRAVAMENTO DO GUINDASTE.
7.6. INTERTRAVAMENTO DO GUINDASTE
7.6.1. Implementação No Modelo Icônico
Os circuitos hidráulicos e elétricos que o modelo já possuía foram
reproduzidos com o auxílio da ferramenta FluidSIM e podem ser observados na
Figura 55 e Figura 56.
Figura 55: Representação do sistema hidráulico do modelo
Fonte: Autores
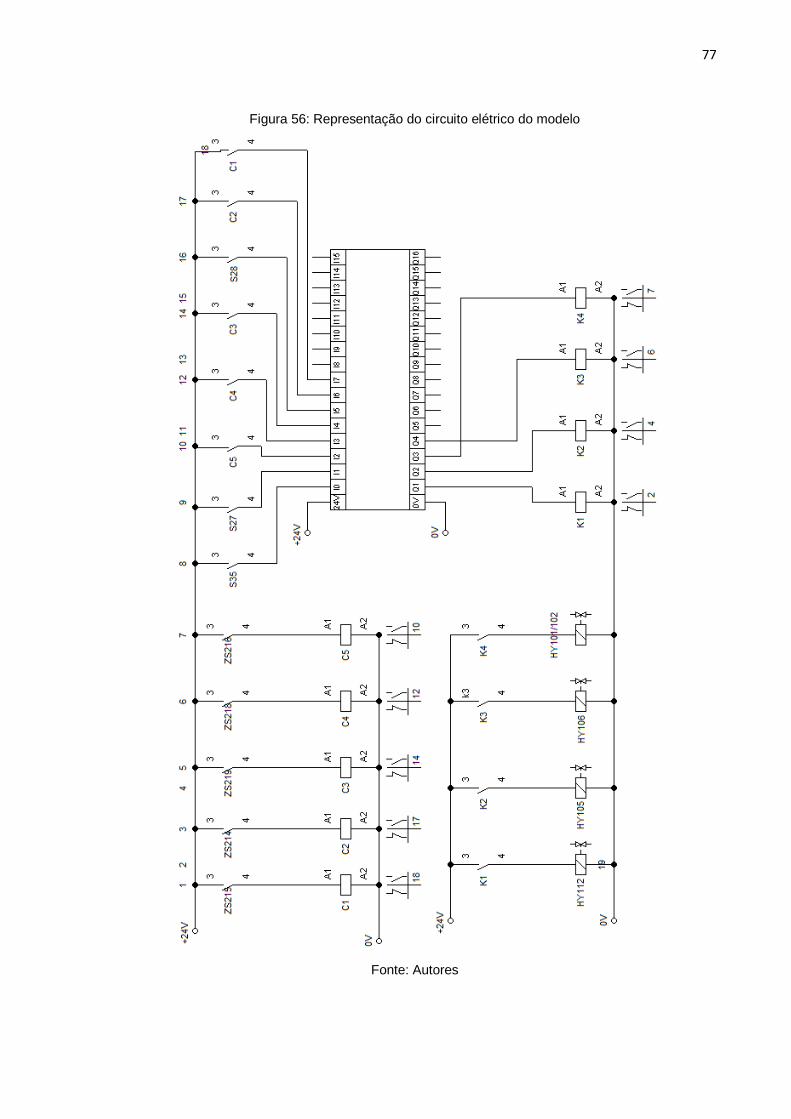
77
Figura 56: Representação do circuito elétrico do modelo
Fonte: Autores

78
Com o auxilio da ferramenta FST 4.10, foi reproduzido o diagrama na
linguagem LADDER, que complementa o sistema de intertravamento, Figura 57.
Figura 57: Diagrama de intertravamento do CLP
Fonte: Autores
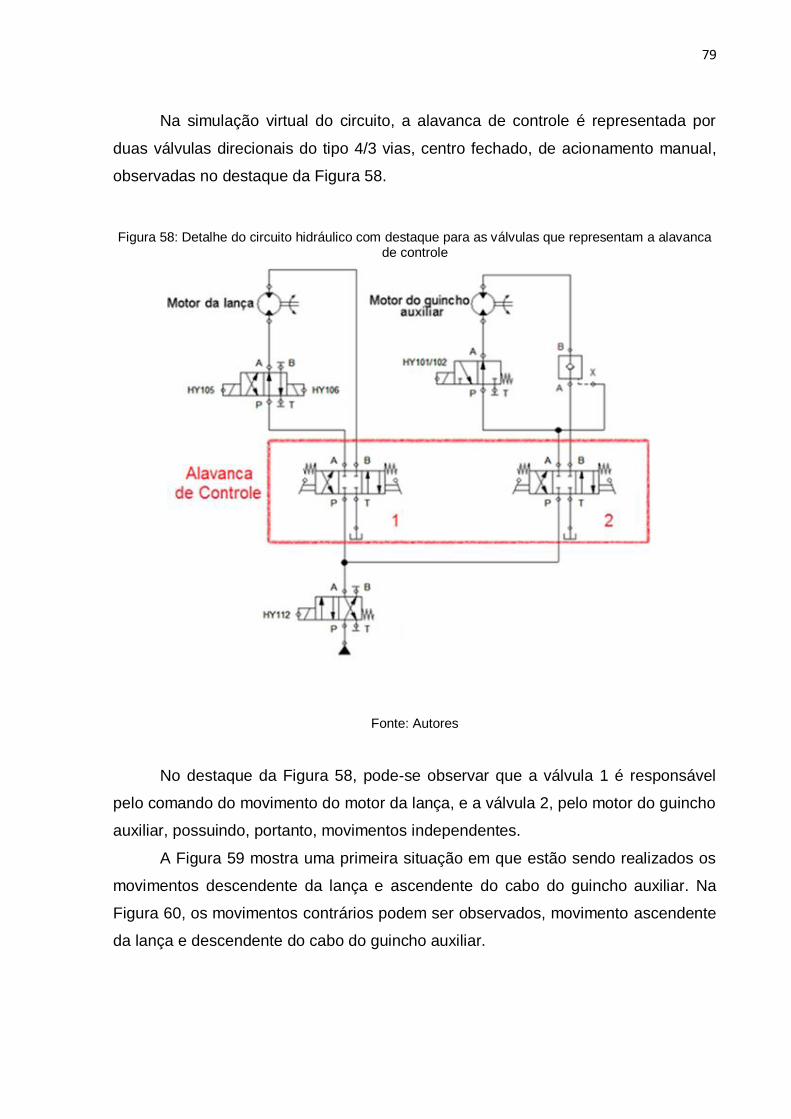
79
Na simulação virtual do circuito, a alavanca de controle é representada por
duas válvulas direcionais do tipo 4/3 vias, centro fechado, de acionamento manual,
observadas no destaque da Figura 58.
Figura 58: Detalhe do circuito hidráulico com destaque para as válvulas que representam a alavanca de controle
Fonte: Autores
No destaque da Figura 58, pode-se observar que a válvula 1 é responsável
pelo comando do movimento do motor da lança, e a válvula 2, pelo motor do guincho
auxiliar, possuindo, portanto, movimentos independentes.
A Figura 59 mostra uma primeira situação em que estão sendo realizados os
movimentos descendente da lança e ascendente do cabo do guincho auxiliar. Na
Figura 60, os movimentos contrários podem ser observados, movimento ascendente
da lança e descendente do cabo do guincho auxiliar.
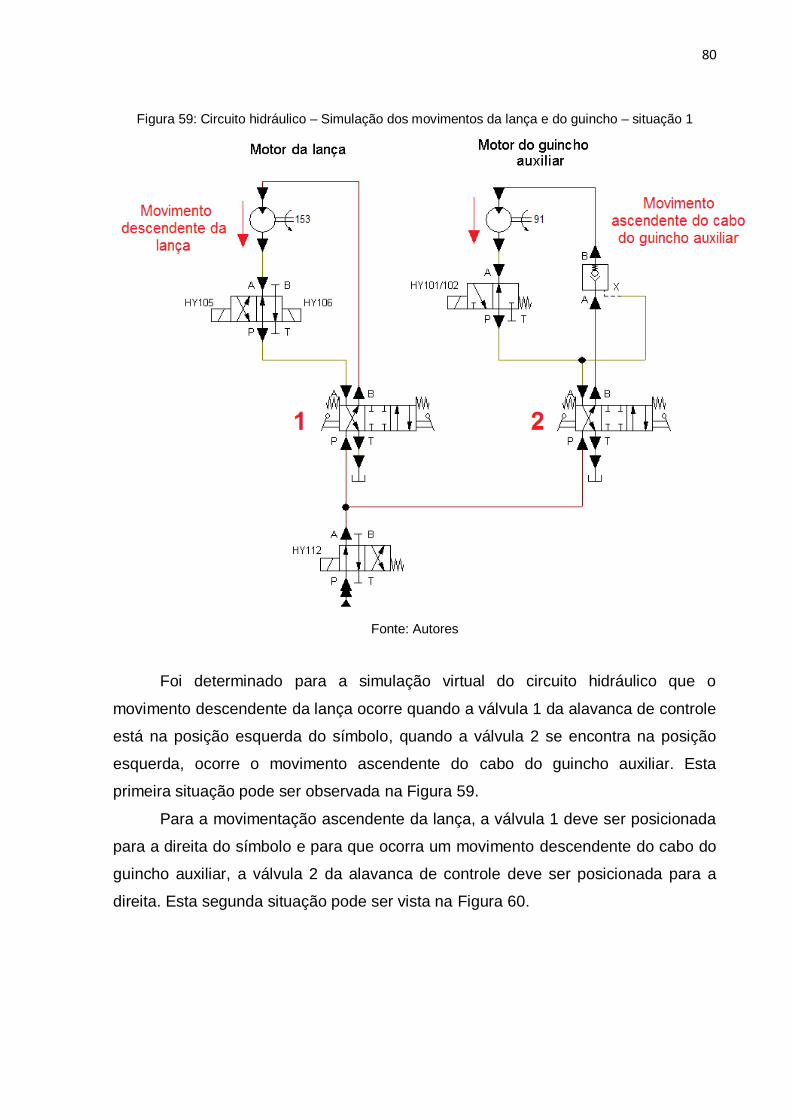
80
Figura 59: Circuito hidráulico – Simulação dos movimentos da lança e do guincho – situação 1
Fonte: Autores
Foi determinado para a simulação virtual do circuito hidráulico que o
movimento descendente da lança ocorre quando a válvula 1 da alavanca de controle
está na posição esquerda do símbolo, quando a válvula 2 se encontra na posição
esquerda, ocorre o movimento ascendente do cabo do guincho auxiliar. Esta
primeira situação pode ser observada na Figura 59.
Para a movimentação ascendente da lança, a válvula 1 deve ser posicionada
para a direita do símbolo e para que ocorra um movimento descendente do cabo do
guincho auxiliar, a válvula 2 da alavanca de controle deve ser posicionada para a
direita. Esta segunda situação pode ser vista na Figura 60.

81
Figura 60: Circuito hidráulico – Simulação dos movimentos da lança e do guincho – situação 2
Fonte: Autores
7.6.2. Intertravamento Através Do Sistema Homem Morto
O modelo icônico já possuía intertravamento através do sistema homem
morto, na Figura 61, pode-se observar a principal válvula deste sistema.
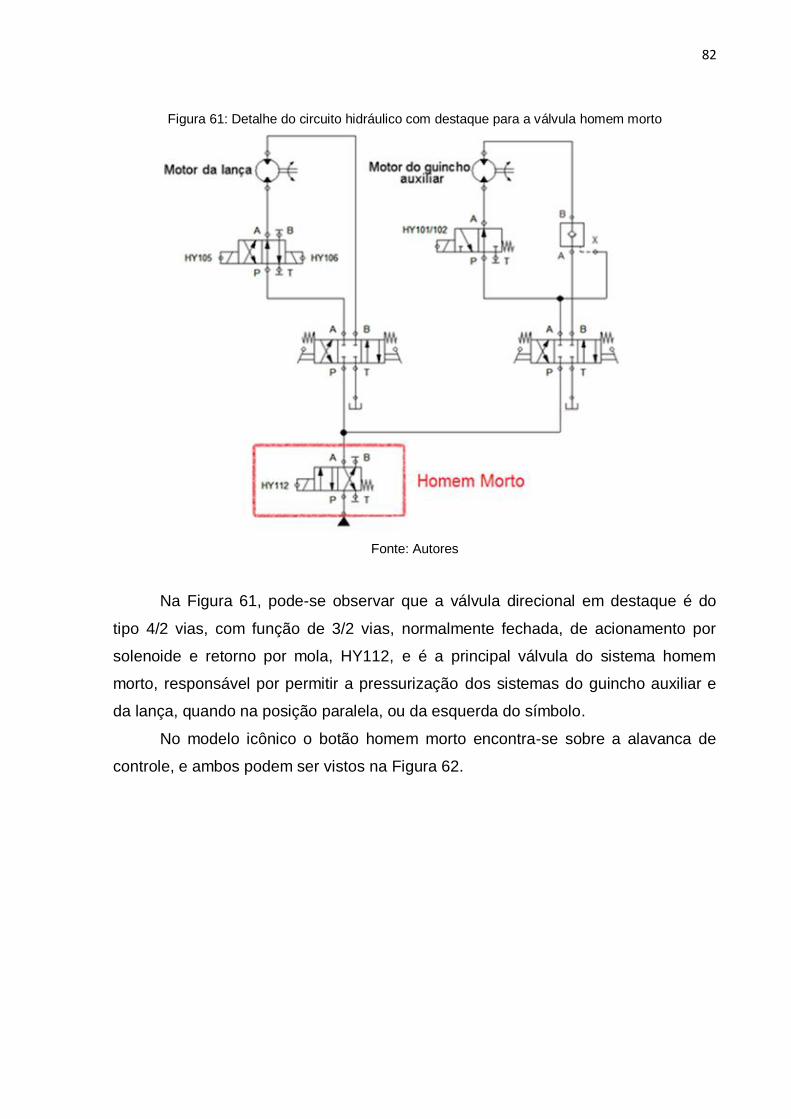
82
Figura 61: Detalhe do circuito hidráulico com destaque para a válvula homem morto
Fonte: Autores
Na Figura 61, pode-se observar que a válvula direcional em destaque é do
tipo 4/2 vias, com função de 3/2 vias, normalmente fechada, de acionamento por
solenoide e retorno por mola, HY112, e é a principal válvula do sistema homem
morto, responsável por permitir a pressurização dos sistemas do guincho auxiliar e
da lança, quando na posição paralela, ou da esquerda do símbolo.
No modelo icônico o botão homem morto encontra-se sobre a alavanca de
controle, e ambos podem ser vistos na Figura 62.

83
Figura 62: Alavanca de controle com indicação do botão homem morto presentes no modelo icônico
Fonte: Autores
Na Figura 63, Figura 64 e Figura 65 pode-se observar o passo a passo da
operação quando o botão homem morto é acionado.
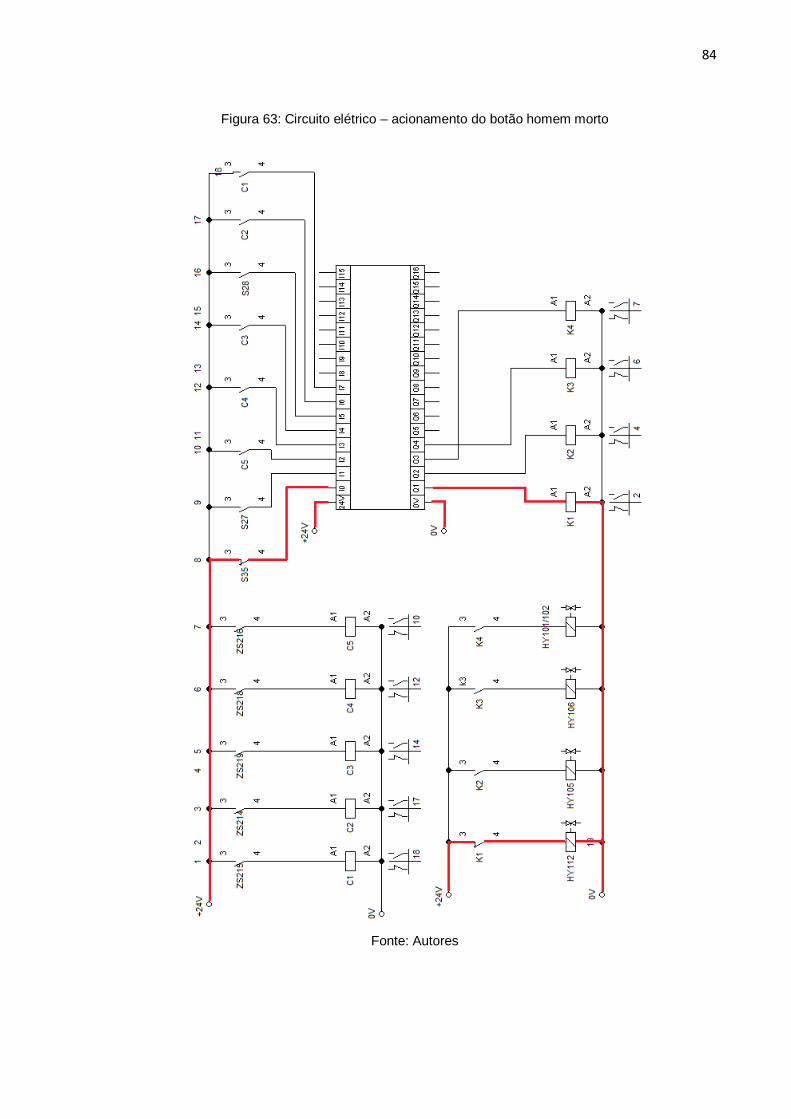
84
Figura 63: Circuito elétrico – acionamento do botão homem morto
Fonte: Autores
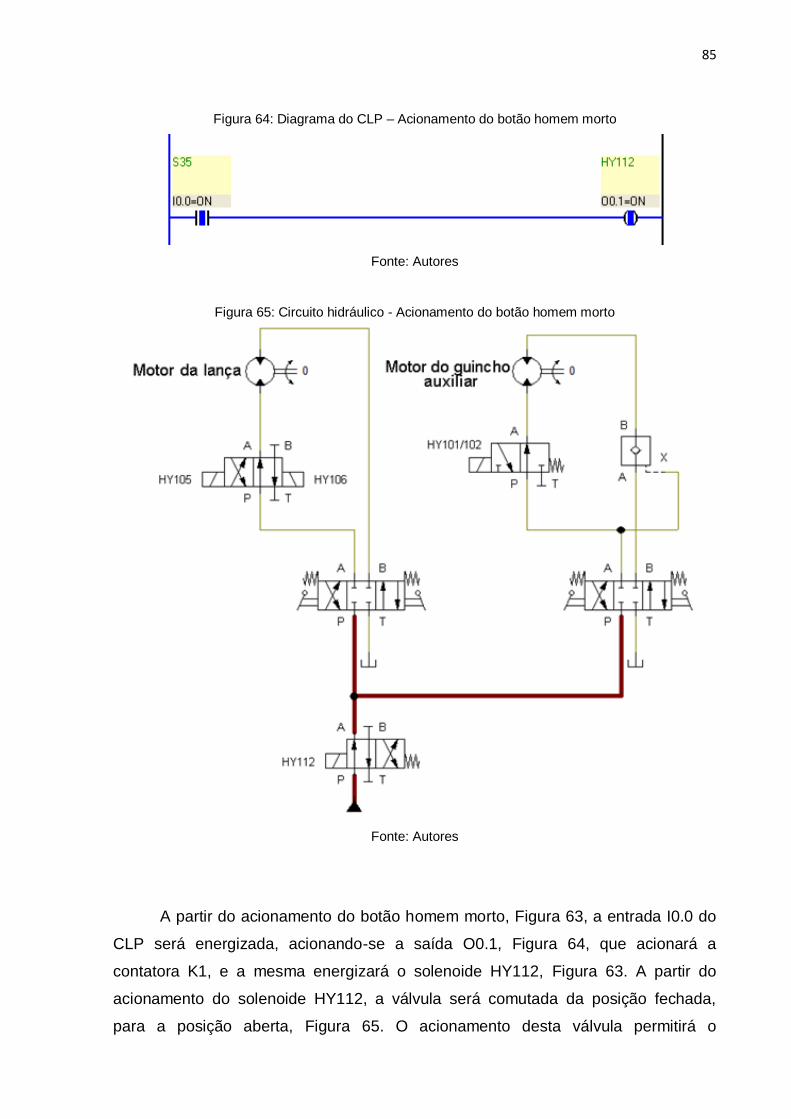
85
Figura 64: Diagrama do CLP – Acionamento do botão homem morto
Fonte: Autores
Figura 65: Circuito hidráulico - Acionamento do botão homem morto
Fonte: Autores
A partir do acionamento do botão homem morto, Figura 63, a entrada I0.0 do
CLP será energizada, acionando-se a saída O0.1, Figura 64, que acionará a
contatora K1, e a mesma energizará o solenoide HY112, Figura 63. A partir do
acionamento do solenoide HY112, a válvula será comutada da posição fechada,
para a posição aberta, Figura 65. O acionamento desta válvula permitirá o

86
fornecimento de fluido hidráulico para o sistema do guincho auxiliar e da lança.
Como exemplo, na Figura 66, após o acionamento do botão homem morto, a
alavanca de controle foi acionada, tanto para a movimentação do motor da lança
(movimento descendente da lança), quanto para a movimentação do motor do
guincho auxiliar (movimento ascendente do cabo do guincho auxiliar).
Figura 66: Circuito hidráulico - Acionamento da alavanca de controle
Fonte: Autores
7.6.3. Intertravamento Através Dos Sistemas De Controle Do Limite De
Içamento e De Elevação Da Lança
De acordo com a Tabela 4, tabela de carga do guindaste original, pode-se
observar que o mesmo opera com uma angulação mínima e máxima da lança de
17,55° e 83,17°, respectivamente, sendo estes os ângulos críticos de operação.
Reduzindo-se o ângulo da lança para valores abaixo do ângulo crítico mínimo de
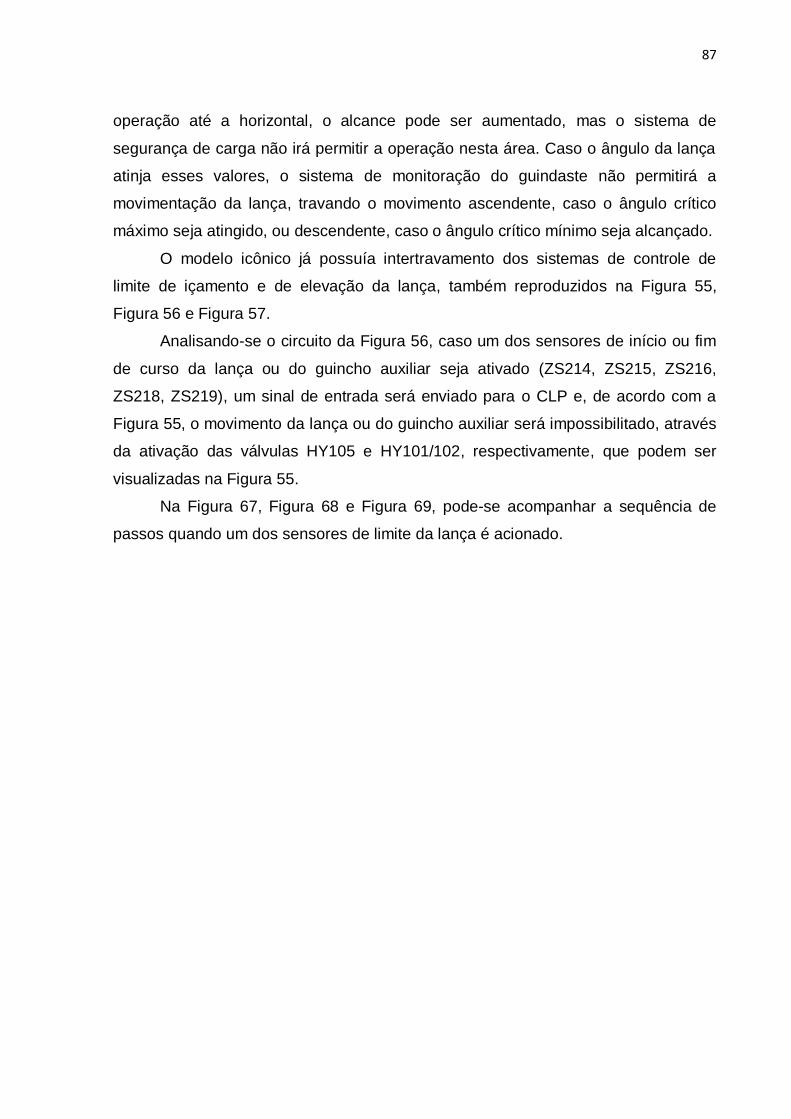
87
operação até a horizontal, o alcance pode ser aumentado, mas o sistema de
segurança de carga não irá permitir a operação nesta área. Caso o ângulo da lança
atinja esses valores, o sistema de monitoração do guindaste não permitirá a
movimentação da lança, travando o movimento ascendente, caso o ângulo crítico
máximo seja atingido, ou descendente, caso o ângulo crítico mínimo seja alcançado.
O modelo icônico já possuía intertravamento dos sistemas de controle de
limite de içamento e de elevação da lança, também reproduzidos na Figura 55,
Figura 56 e Figura 57.
Analisando-se o circuito da Figura 56, caso um dos sensores de início ou fim
de curso da lança ou do guincho auxiliar seja ativado (ZS214, ZS215, ZS216,
ZS218, ZS219), um sinal de entrada será enviado para o CLP e, de acordo com a
Figura 55, o movimento da lança ou do guincho auxiliar será impossibilitado, através
da ativação das válvulas HY105 e HY101/102, respectivamente, que podem ser
visualizadas na Figura 55.
Na Figura 67, Figura 68 e Figura 69, pode-se acompanhar a sequência de
passos quando um dos sensores de limite da lança é acionado.
88
Figura 67: Circuito elétrico – Acionamento do sensor de limite superior da lança
Fonte: Autores

89
Figura 68: Diagrama do CLP – Acionamento do sensor de limite superior da lança
Fonte: Autores
Figura 69: Circuito hidráulico – Acionamento do sensor de limite superior da lança
Fonte: Autores
Na simulação, o sensor de limite superior da lança foi acionado, ZS216,
energizando a contatora C5, e fechando o contato referente à mesma, Figura 67,
energizando a entrada I0.2 do CLP. Esta entrada, então, energiza a bobina O0.2,
90
Figura 68, que, como consequência, atua acionando a contatora K4, que ativa o
solenoide HY105, Figura 67. Quando o solenoide HY105 é ativado, a válvula
direcional 4/2 vias, normalmente aberta, é comutada para a posição fechada, Figura
69, bloqueando o fluxo de fluido, interrompendo, assim, o movimento da lança, tanto
no sentido ascendente, quanto descendente.
Uma sequência semelhante ocorre quando um dos sensores de fim de curso
do cabo do guincho auxiliar é acionado, observando-se a Figura 70, Figura 71 e
Figura 72, pode-se visualizar o passo a passo da operação.
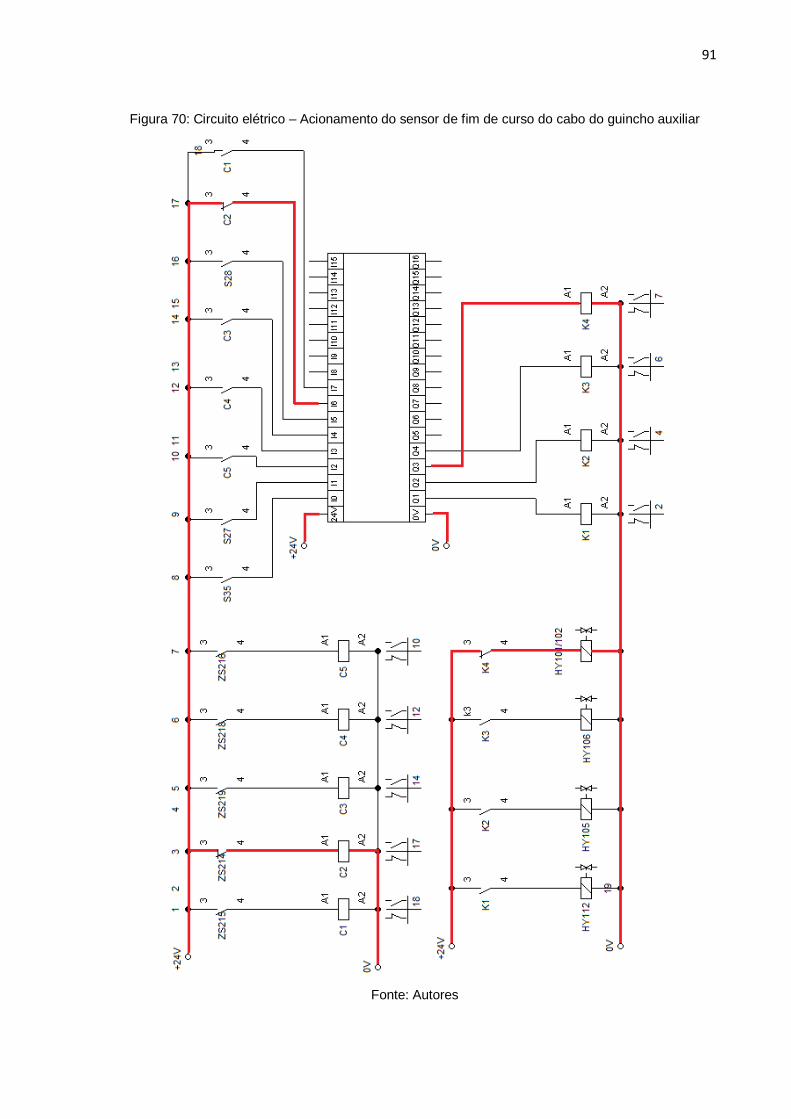
91
Figura 70: Circuito elétrico – Acionamento do sensor de fim de curso do cabo do guincho auxiliar
Fonte: Autores
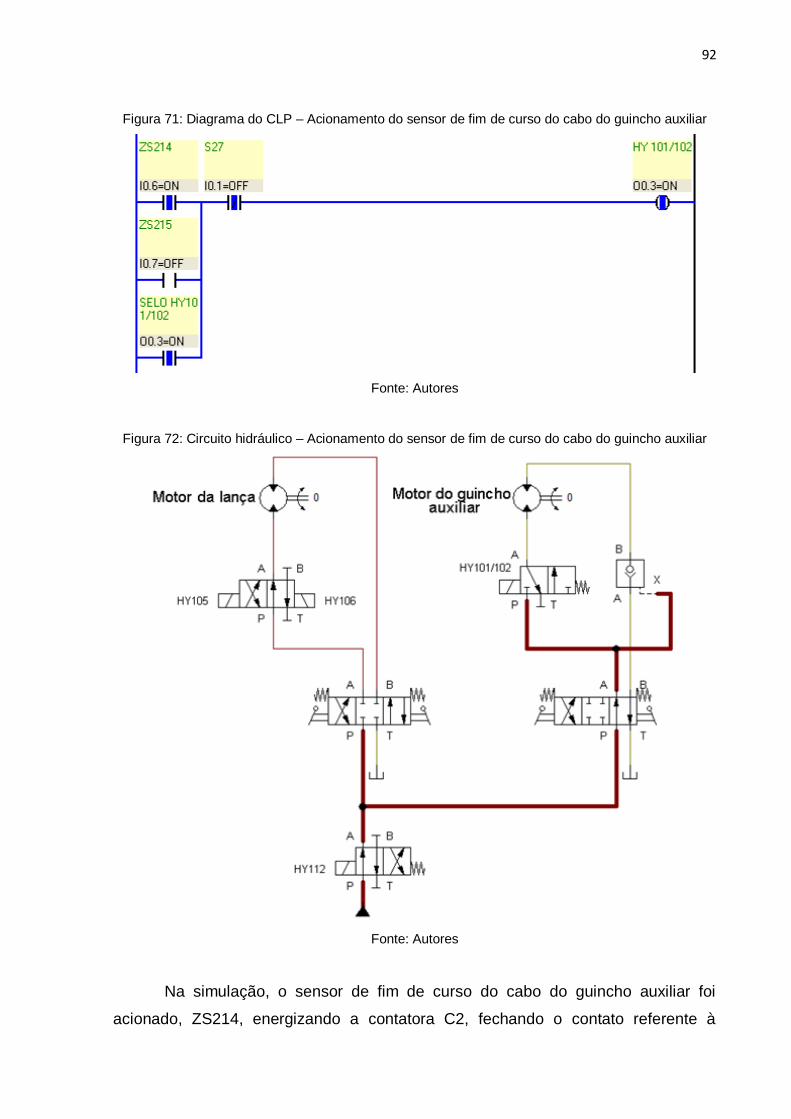
92
Figura 71: Diagrama do CLP – Acionamento do sensor de fim de curso do cabo do guincho auxiliar
Fonte: Autores
Figura 72: Circuito hidráulico – Acionamento do sensor de fim de curso do cabo do guincho auxiliar
Fonte: Autores
Na simulação, o sensor de fim de curso do cabo do guincho auxiliar foi
acionado, ZS214, energizando a contatora C2, fechando o contato referente à
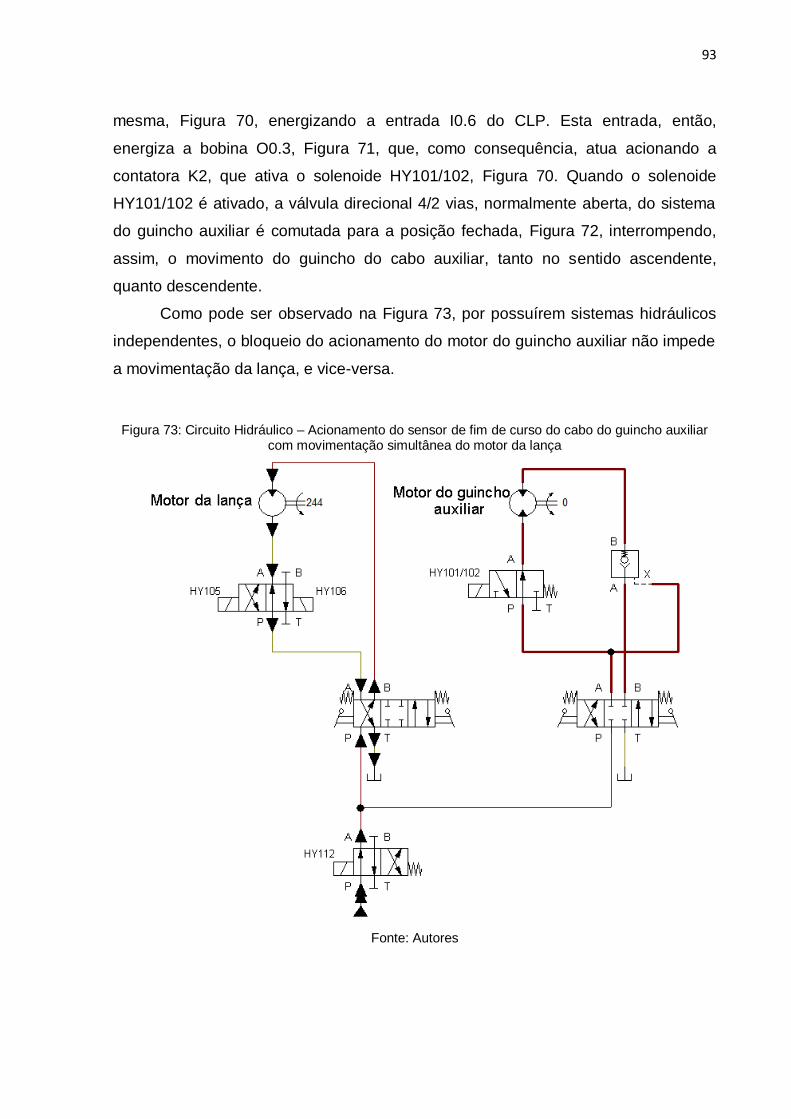
93
mesma, Figura 70, energizando a entrada I0.6 do CLP. Esta entrada, então,
energiza a bobina O0.3, Figura 71, que, como consequência, atua acionando a
contatora K2, que ativa o solenoide HY101/102, Figura 70. Quando o solenoide
HY101/102 é ativado, a válvula direcional 4/2 vias, normalmente aberta, do sistema
do guincho auxiliar é comutada para a posição fechada, Figura 72, interrompendo,
assim, o movimento do guincho do cabo auxiliar, tanto no sentido ascendente,
quanto descendente.
Como pode ser observado na Figura 73, por possuírem sistemas hidráulicos
independentes, o bloqueio do acionamento do motor do guincho auxiliar não impede
a movimentação da lança, e vice-versa.
Figura 73: Circuito Hidráulico – Acionamento do sensor de fim de curso do cabo do guincho auxiliar com movimentação simultânea do motor da lança
Fonte: Autores
94
Analisando-se o circuito da Figura 57, caso um dos sensores de início ou fim
de curso da lança ou do guincho auxiliar seja ativado (ZS214, ZS215, ZS216,
ZS218, ZS219), um sinal de entrada será enviado para o CLP e, de acordo com a
Figura 55, qualquer movimento da lança ou do guincho auxiliar será impossibilitado,
através da ativação das válvulas HY105 e HY101/102, respectivamente.
No sistema do guindaste real, quando o sensor de início de curso do cabo do
guincho auxiliar é acionado, por exemplo, a movimentação do cabo é permitida
apenas no sentido descendente, possibilitando a retirada do guindaste da situação
crítica, a partir do movimento ascendente do cabo do guincho. Com a movimentação
da lança, pode-se tomar como exemplo a ativação do sensor de limite superior da
mesma, quando este se encontra ativado, apenas o movimento descendente da
lança é permitido, para que ela possa ser tirada da situação crítica. Isto ocorre, pois,
no sistema do guindaste real, os solenoides HY105 e HY106 (solenoides
responsáveis pelo impedimento ou liberação da movimentação do motor da lança)
são duas válvulas distintas. Portanto, se a o movimento de descida da lança é
interrompido, o movimento de subida permanece liberado, e vice-versa. O mesmo
ocorre para o solenoide HY101/102 (solenoide responsável pelo impedimento da
movimentação do motor do guincho auxiliar). No modelo icônico, porém, os
solenoides HY105 e HY106 se encontram na mesma válvula e o solenoide
HY101/102 também está em uma única válvula. Com isso, após o acionamento de
um destes sensores (sensor limite da lança ou sensores de início e fim de curso do
cabo do guincho auxiliar), a movimentação da lança ou do guincho auxiliar do
modelo será impedida completamente. Para que se possa restaurar estes
movimentos no modelo icônico, de forma a tirá-lo de uma operação de risco, é
preciso “by-passar” os sensores através do botões de by-pass, que foram
incorporados ao sistema, S27 e S28, Figura 37 e Figura 42, para os movimentos do
guincho auxiliar e da lança e para o sensor de limite inferior máximo da lança,
respectivamente.
A seguir, observa-se a sequência de uma operação cujo objetivo é “by-
passar” o sensor de limite superior da lança do modelo, com o intuito de restaurar os
movimentos ascendente e descendente da mesma, Figura 74, Figura 75 e Figura
76.
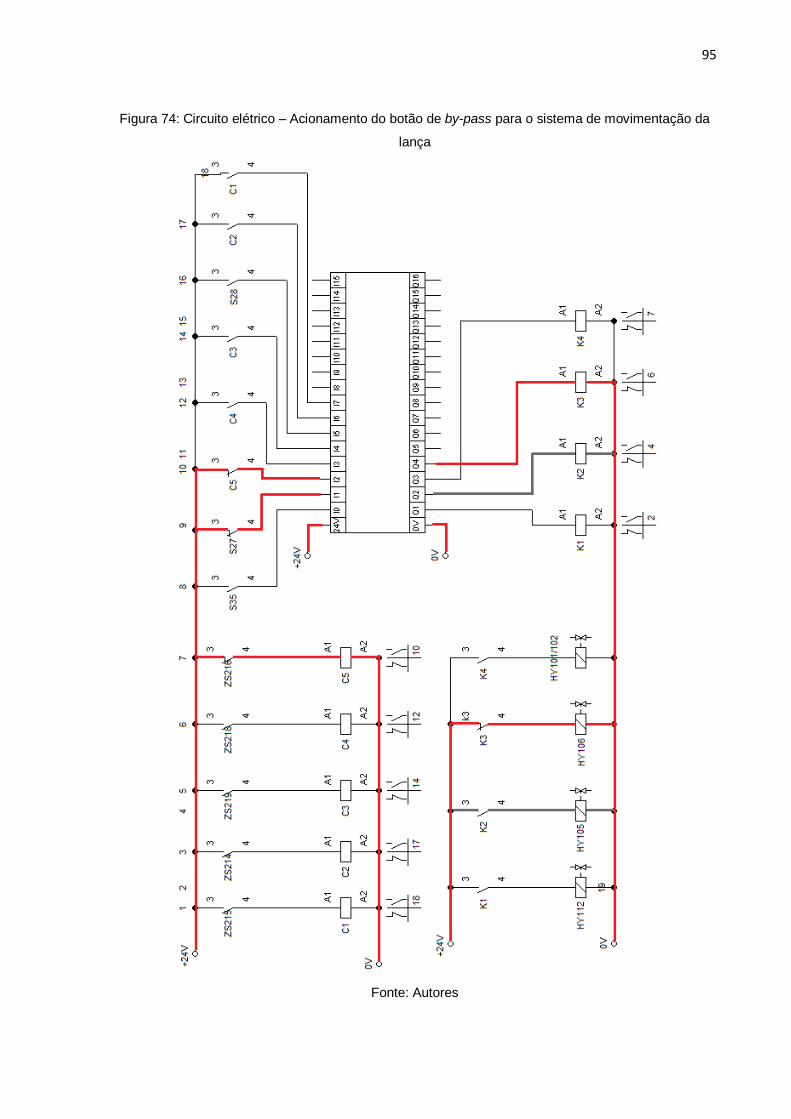
95
Figura 74: Circuito elétrico – Acionamento do botão de by-pass para o sistema de movimentação da
lança
Fonte: Autores

96
Figura 75: Diagrama do CLP – Acionamento do botão de by-pass para o sistema de movimentação
da lança
Fonte: Autores
Figura 76: Circuito hidráulico – Acionamento do botão de by-pass para o sistema de movimentação
da lança
Fonte: Autores
97
Na Figura 67, Figura 68 e Figura 69, os movimentos da lança se encontram
totalmente interrompidos, pois o sensor de limite superior está ativado. A seguir, é
necessário acionar o botão de by-pass para o sistema de movimentação da lança do
modelo, S27, Figura 42. A partir do acionamento deste botão, a entrada I0.5 do CLP
será energizada, Figura 74. Observando-se a Figura 75, o contato referente ao
botão S27, entrada I0.5, que é normal fechado, ao ser energizado, se abre,
desenergizando a bobina O0.2, consequentemente, desativando o solenoide HY105.
Esta válvula, porém, por não possuir retorno por mola, necessita que o solenoide
HY106 seja ativado, o que acontece simultaneamente à desativação do solenoide
HY105, pois, ao se analisar a Figura 75, nota-se que o contato I0.5 na linha inferior
do diagrama será energizado. Como consequência disto, a energização da bobina
O0.4 ocorrerá. Em sequência, a energização do solenoide HY106 se dará, Figura
74, restaurando a movimentação do motor da lança, como pode ser visto na Figura
76. Nota-se que a desativação do solenoide HY105 e a ativação do solenoide
HY106 não garante a movimentação livre definitiva da lança, visto que esta é uma
situação temporária e ocorre enquanto o botão de by-pass é pressionado. A
movimentação livre definitiva da lança se dará somente quando o sensor limite não
estiver mais ativado.
Se um dos sensores de início ou fim de curso do guincho auxiliar do modelo
for ativado, o solenoide HY 101/102 será energizado, como observado na sequência
da Figura 70, Figura 71 e Figura 72, resultando na parada do movimento normal de
subida ou descida do cabo do guincho auxiliar. Para que estes movimentos possam
ser restaurados, uma sequência de operações semelhante à sequência de by-pass
dos sensores limite da lança deve ser realizada. Neste caso, o botão S27 é acionado
de forma a desenergizar o solenoide HY101/102. A sequência desta operação pode
ser observada nas figuras que seguem, Figura 77, Figura 78 e Figura 79.
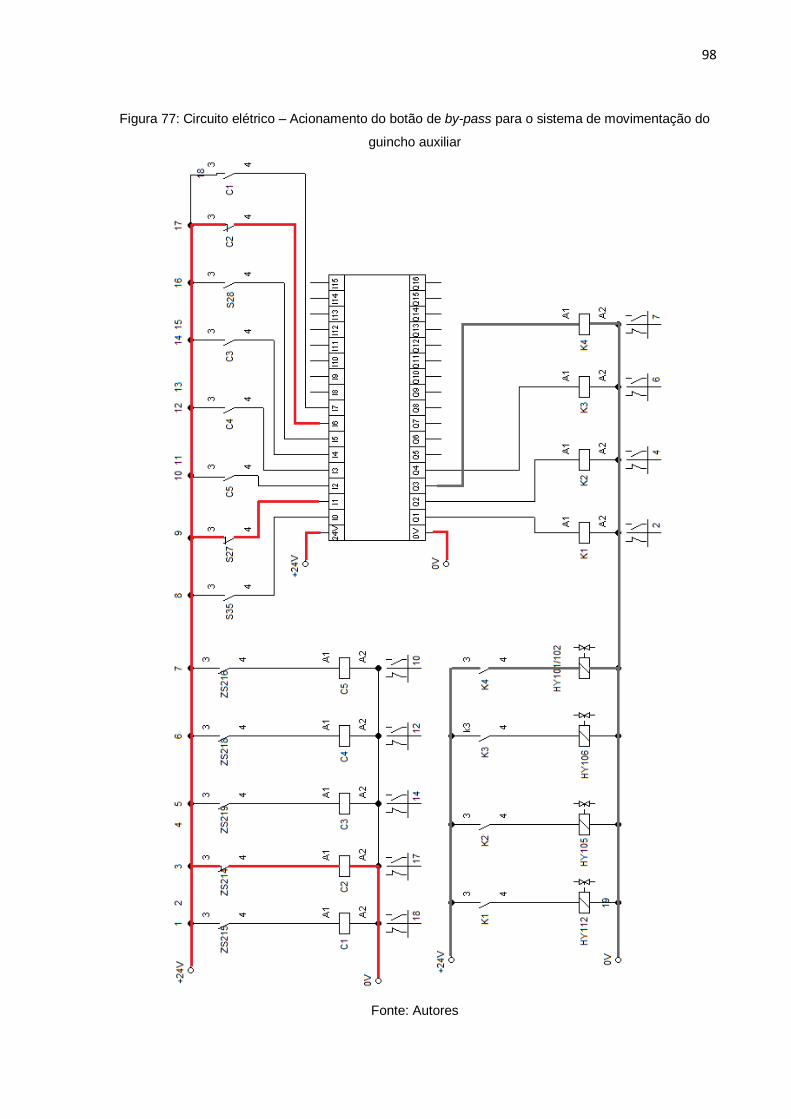
98
Figura 77: Circuito elétrico – Acionamento do botão de by-pass para o sistema de movimentação do
guincho auxiliar
Fonte: Autores
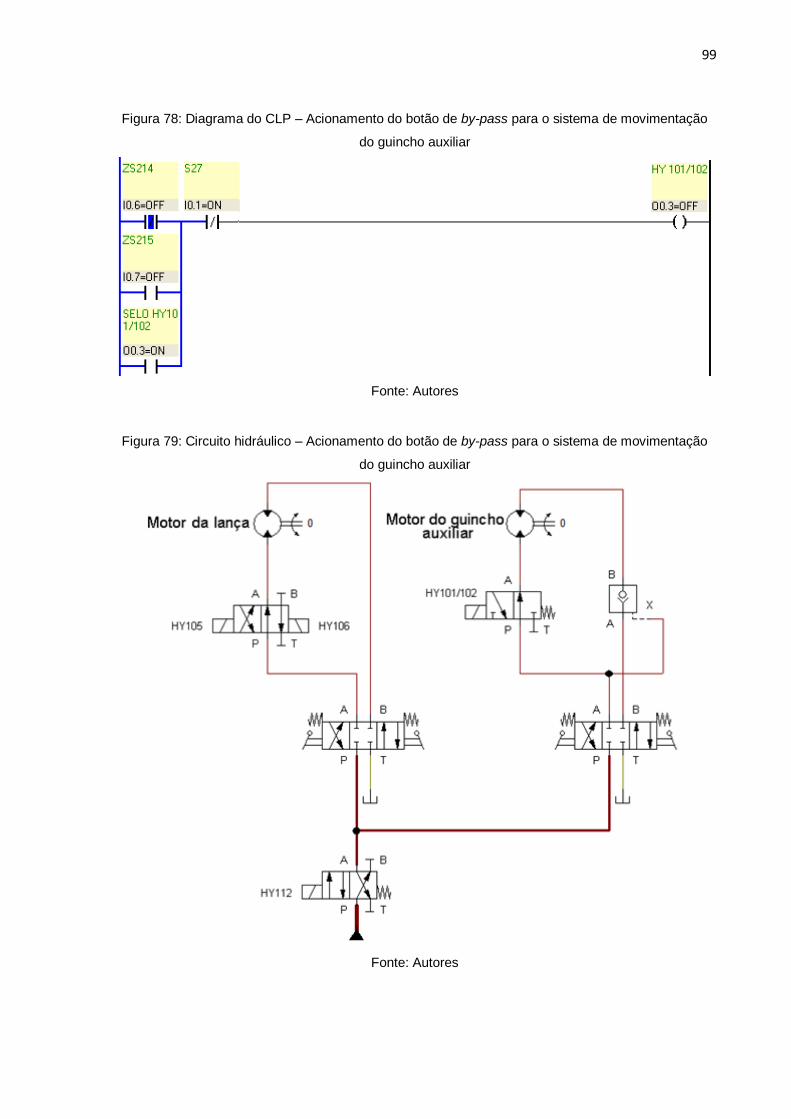
99
Figura 78: Diagrama do CLP – Acionamento do botão de by-pass para o sistema de movimentação
do guincho auxiliar
Fonte: Autores
Figura 79: Circuito hidráulico – Acionamento do botão de by-pass para o sistema de movimentação
do guincho auxiliar
Fonte: Autores
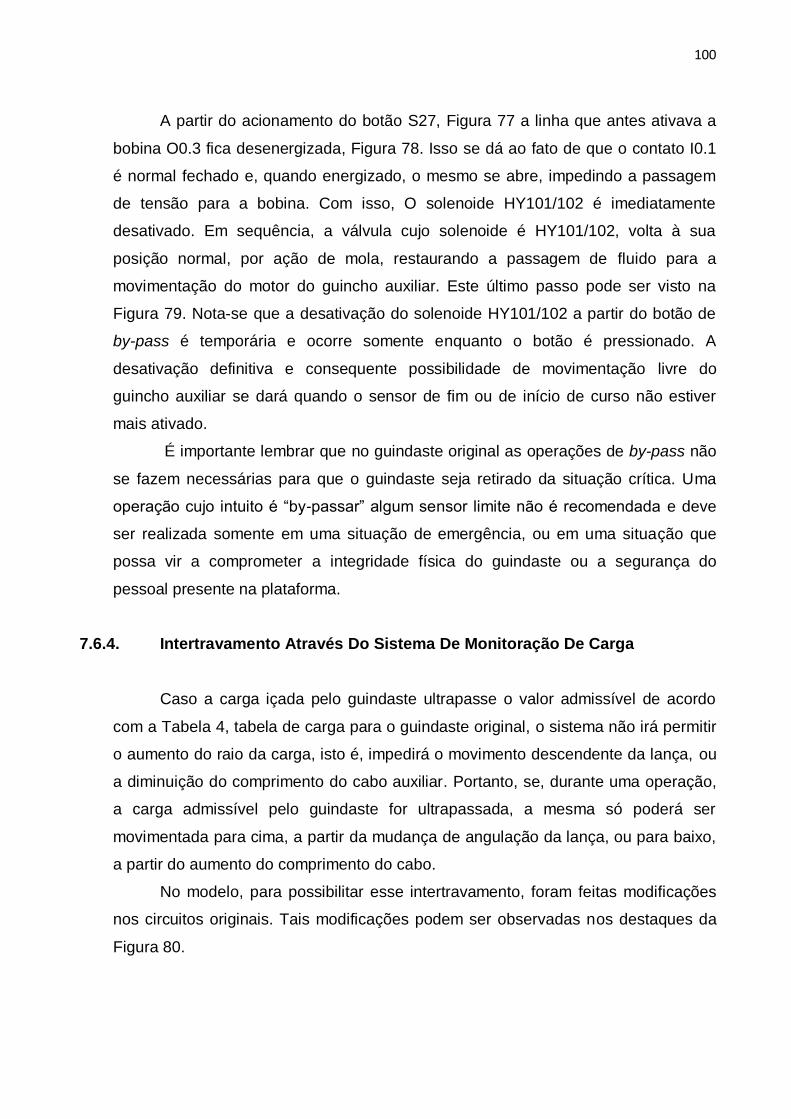
100
A partir do acionamento do botão S27, Figura 77 a linha que antes ativava a
bobina O0.3 fica desenergizada, Figura 78. Isso se dá ao fato de que o contato I0.1
é normal fechado e, quando energizado, o mesmo se abre, impedindo a passagem
de tensão para a bobina. Com isso, O solenoide HY101/102 é imediatamente
desativado. Em sequência, a válvula cujo solenoide é HY101/102, volta à sua
posição normal, por ação de mola, restaurando a passagem de fluido para a
movimentação do motor do guincho auxiliar. Este último passo pode ser visto na
Figura 79. Nota-se que a desativação do solenoide HY101/102 a partir do botão de
by-pass é temporária e ocorre somente enquanto o botão é pressionado. A
desativação definitiva e consequente possibilidade de movimentação livre do
guincho auxiliar se dará quando o sensor de fim ou de início de curso não estiver
mais ativado.
É importante lembrar que no guindaste original as operações de by-pass não
se fazem necessárias para que o guindaste seja retirado da situação crítica. Uma
operação cujo intuito é “by-passar” algum sensor limite não é recomendada e deve
ser realizada somente em uma situação de emergência, ou em uma situação que
possa vir a comprometer a integridade física do guindaste ou a segurança do
pessoal presente na plataforma.
7.6.4. Intertravamento Através Do Sistema De Monitoração De Carga
Caso a carga içada pelo guindaste ultrapasse o valor admissível de acordo
com a Tabela 4, tabela de carga para o guindaste original, o sistema não irá permitir
o aumento do raio da carga, isto é, impedirá o movimento descendente da lança, ou
a diminuição do comprimento do cabo auxiliar. Portanto, se, durante uma operação,
a carga admissível pelo guindaste for ultrapassada, a mesma só poderá ser
movimentada para cima, a partir da mudança de angulação da lança, ou para baixo,
a partir do aumento do comprimento do cabo.
No modelo, para possibilitar esse intertravamento, foram feitas modificações
nos circuitos originais. Tais modificações podem ser observadas nos destaques da
Figura 80.
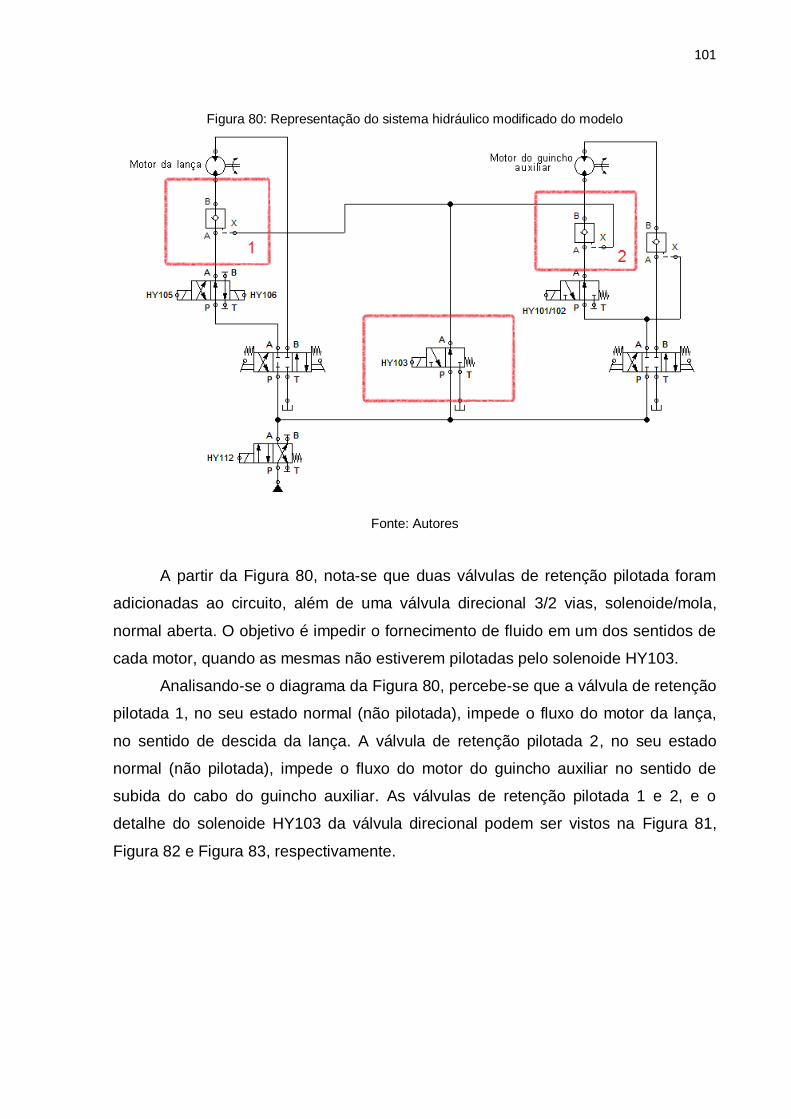
101
Figura 80: Representação do sistema hidráulico modificado do modelo
Fonte: Autores
A partir da Figura 80, nota-se que duas válvulas de retenção pilotada foram
adicionadas ao circuito, além de uma válvula direcional 3/2 vias, solenoide/mola,
normal aberta. O objetivo é impedir o fornecimento de fluido em um dos sentidos de
cada motor, quando as mesmas não estiverem pilotadas pelo solenoide HY103.
Analisando-se o diagrama da Figura 80, percebe-se que a válvula de retenção
pilotada 1, no seu estado normal (não pilotada), impede o fluxo do motor da lança,
no sentido de descida da lança. A válvula de retenção pilotada 2, no seu estado
normal (não pilotada), impede o fluxo do motor do guincho auxiliar no sentido de
subida do cabo do guincho auxiliar. As válvulas de retenção pilotada 1 e 2, e o
detalhe do solenoide HY103 da válvula direcional podem ser vistos na Figura 81,
Figura 82 e Figura 83, respectivamente.
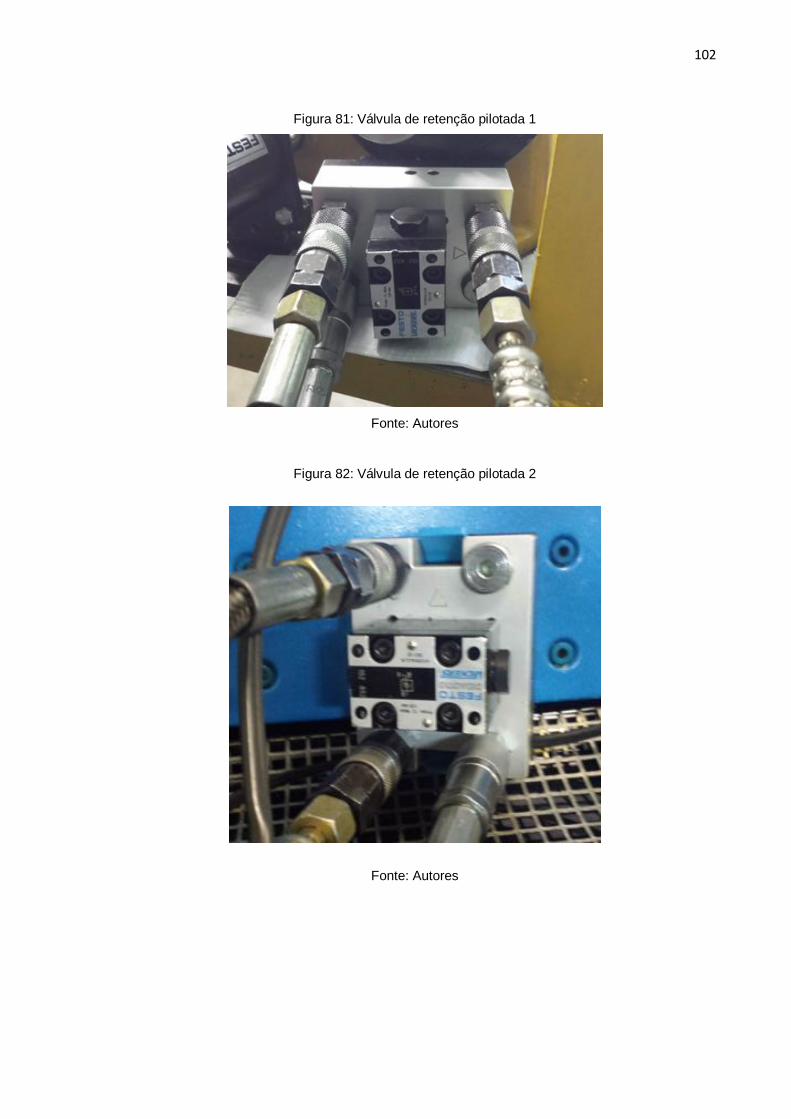
102
Figura 81: Válvula de retenção pilotada 1
Fonte: Autores
Figura 82: Válvula de retenção pilotada 2
Fonte: Autores
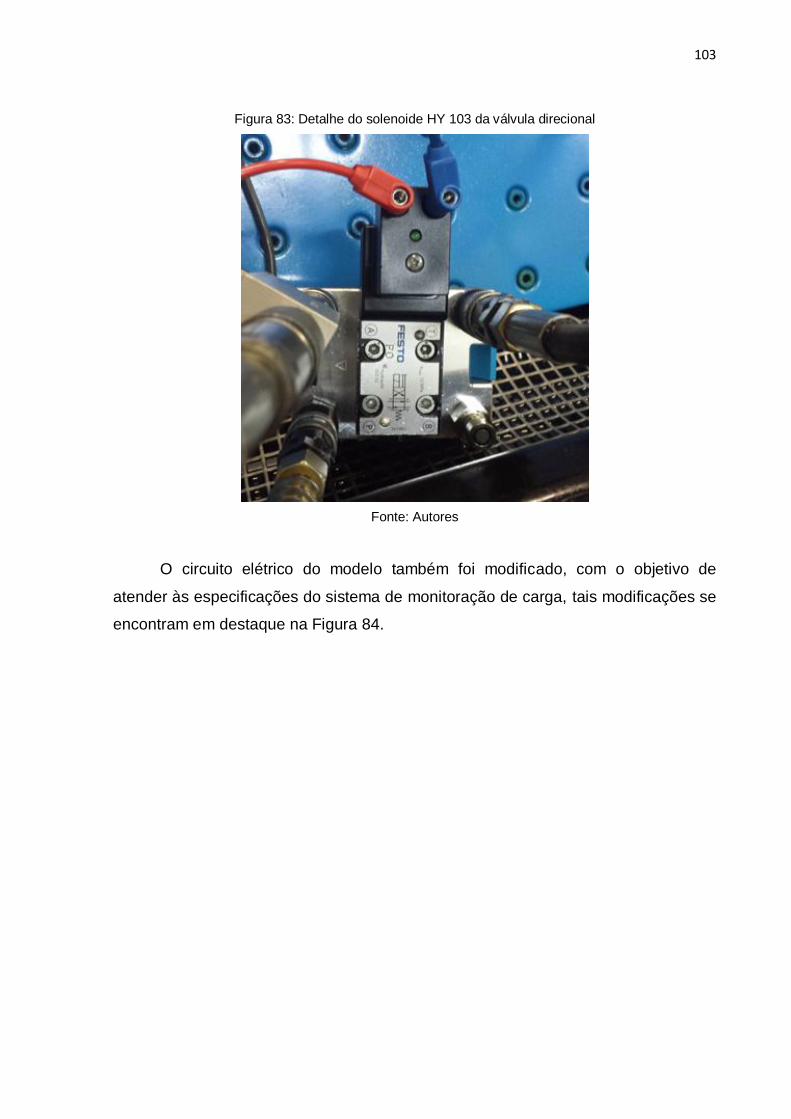
103
Figura 83: Detalhe do solenoide HY 103 da válvula direcional
Fonte: Autores
O circuito elétrico do modelo também foi modificado, com o objetivo de
atender às especificações do sistema de monitoração de carga, tais modificações se
encontram em destaque na Figura 84.
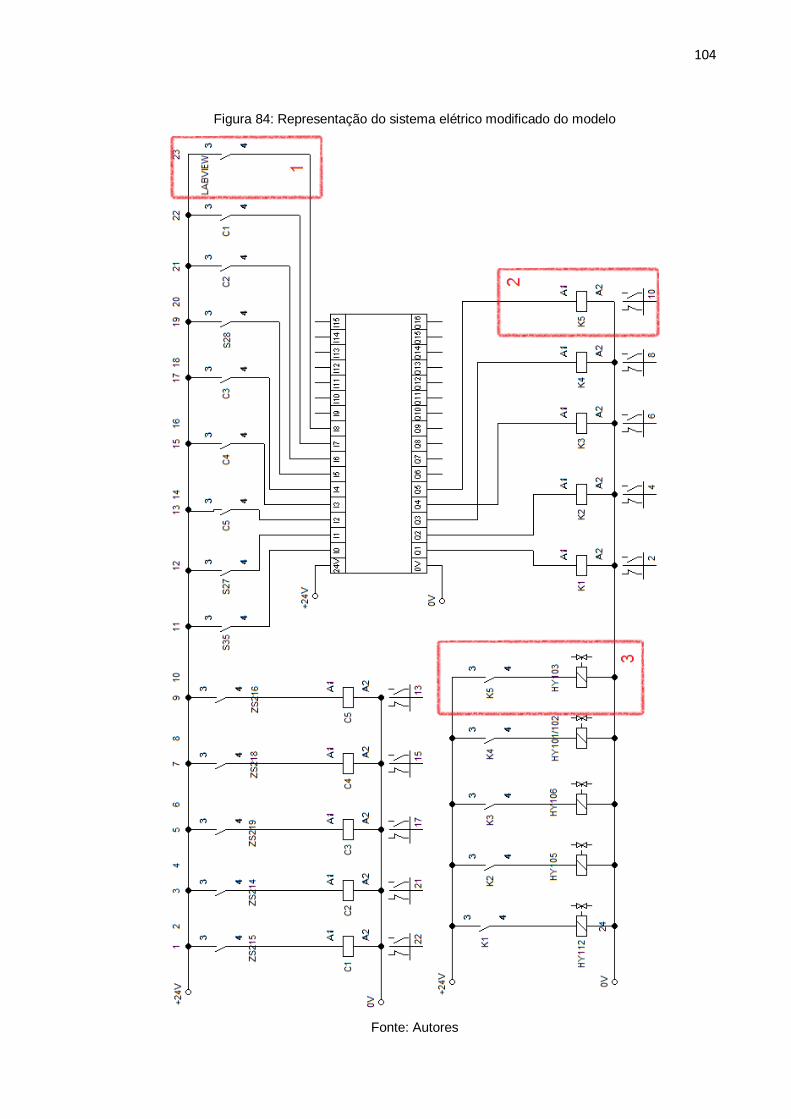
104
Figura 84: Representação do sistema elétrico modificado do modelo
Fonte: Autores
105
Na Figura 84 (1), a chave “LabVIEW” representa o sinal proveniente do
sistema de monitoração de carga implementado no software LabVIEW. Esta chave
se encontrará fechada somente quando a carga admissível instantânea for
ultrapassada. Esta carga admissível varia de acordo com o tipo de operação
realizada, operação sobre a plataforma ou operação sobre a embarcação, a altura
da onda e o raio da carga. Os detalhes sobre este tipo de operação são tratados no
tópico 7.5 SISTEMA DE MONITORAÇÃO DE CARGA.
O destaque número 2 da Figura 84, mostra a contatora auxiliar utilizada para
a energização do solenoide HY103, Figura 84 (3), da válvula direcional supracitada,
Figura 80.
O diagrama do CLP também foi complementado e encontra-se na Figura 85.
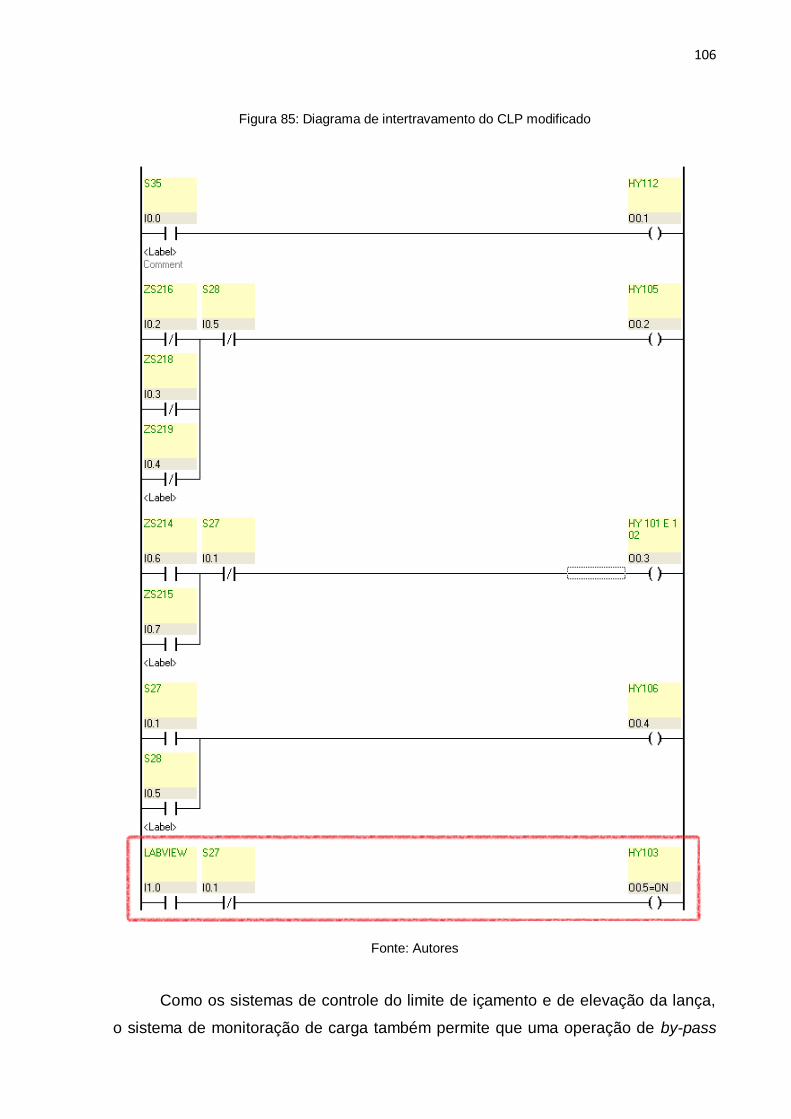
106
Figura 85: Diagrama de intertravamento do CLP modificado
Fonte: Autores
Como os sistemas de controle do limite de içamento e de elevação da lança,
o sistema de monitoração de carga também permite que uma operação de by-pass
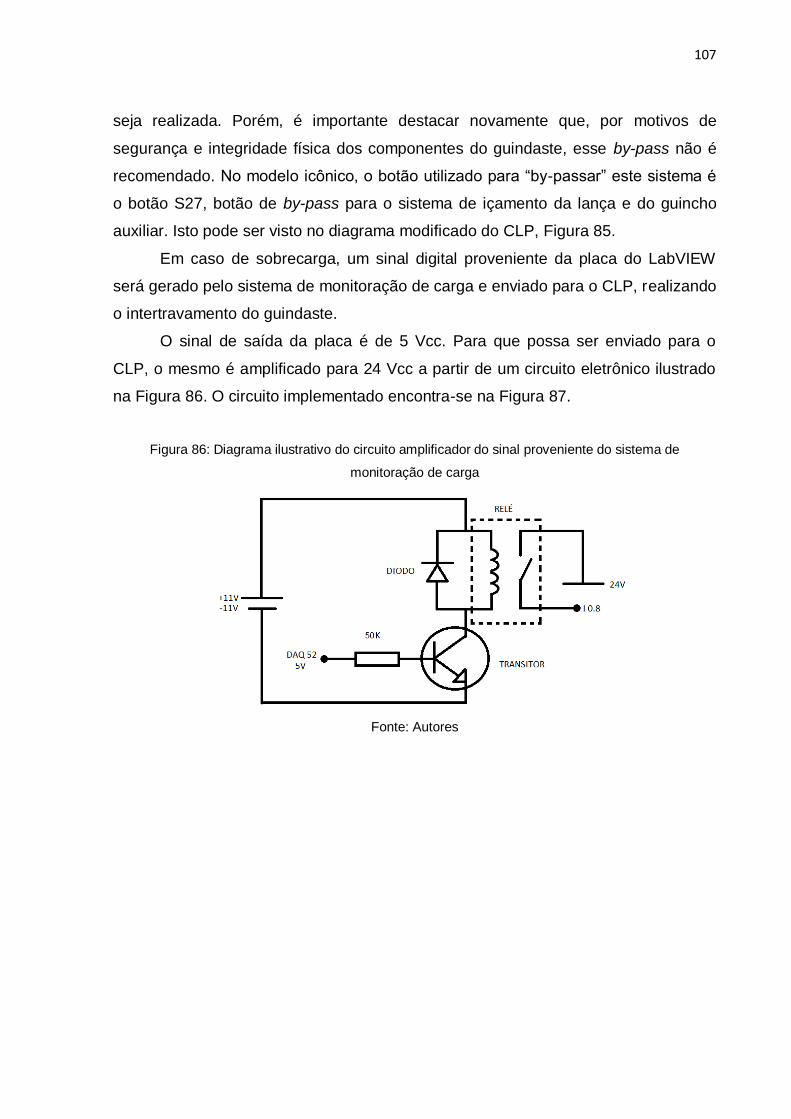
107
seja realizada. Porém, é importante destacar novamente que, por motivos de
segurança e integridade física dos componentes do guindaste, esse by-pass não é
recomendado. No modelo icônico, o botão utilizado para “by-passar” este sistema é
o botão S27, botão de by-pass para o sistema de içamento da lança e do guincho
auxiliar. Isto pode ser visto no diagrama modificado do CLP, Figura 85.
Em caso de sobrecarga, um sinal digital proveniente da placa do LabVIEW
será gerado pelo sistema de monitoração de carga e enviado para o CLP, realizando
o intertravamento do guindaste.
O sinal de saída da placa é de 5 Vcc. Para que possa ser enviado para o
CLP, o mesmo é amplificado para 24 Vcc a partir de um circuito eletrônico ilustrado
na Figura 86. O circuito implementado encontra-se na Figura 87.
Figura 86: Diagrama ilustrativo do circuito amplificador do sinal proveniente do sistema de
monitoração de carga
Fonte: Autores

108
Figura 87: Circuito amplificador do sinal proveniente do sistema de monitoração de carga
implementado
Fonte: Autores
7.6.4.1. Situação De Sobrecarga
Em uma situação de sobrecarga, a movimentação da lança e do cabo do
guincho auxiliar fica limitada. A sequência de passos em uma situação como esta se
encontra detalhada na Figura 88, Figura 89 e Figura 90.
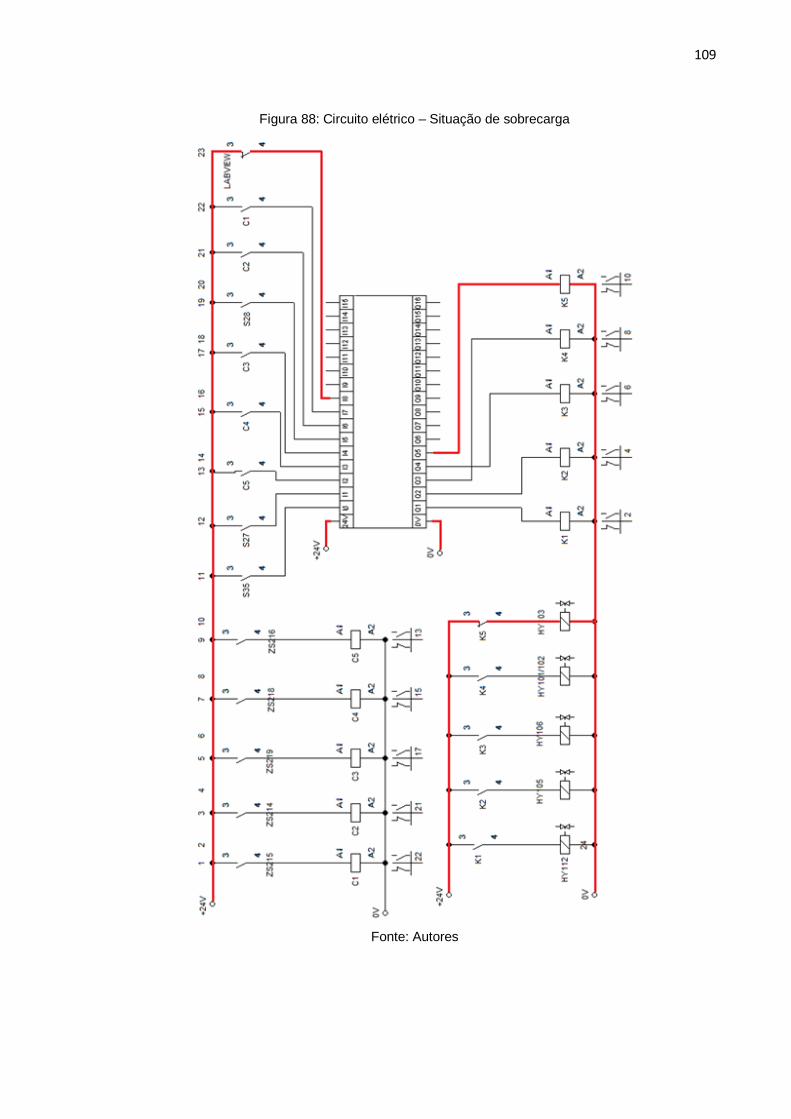
109
Figura 88: Circuito elétrico – Situação de sobrecarga
Fonte: Autores

110
Figura 89: Diagrama do CLP – Situação de sobrecarga
Fonte: Autores
Figura 90: Circuito hidráulico - Situação de sobrecarga
Fonte: Autores
Em uma situação de sobrecarga, o sistema de monitoração de carga enviará
um sinal ao CLP por meio da placa, a chave “LABVIEW”, Figura 88, será
energizada. Esta chave, que corresponde à entrada I1.0 do CLP, irá ativar a bobina
O0.5, Figura 89. De volta à Figura 88, pode-se observar que o sinal de saída O0.5
proveniente do CLP irá energizar uma contatora auxiliar, K5, que enviará um sinal
para o solenoide HY103, da válvula direcional adicionada ao sistema, Figura 90.
Esta válvula irá comutar de forma a interromper a pilotagem das válvulas de
retenção 1 e 2, também adicionadas ao sistema. Com isso, será permitida a
movimentação do motor da lança e do guincho em apenas um sentido, com o
objetivo de limitar a movimentação do guindaste para que o mesmo seja retirado da
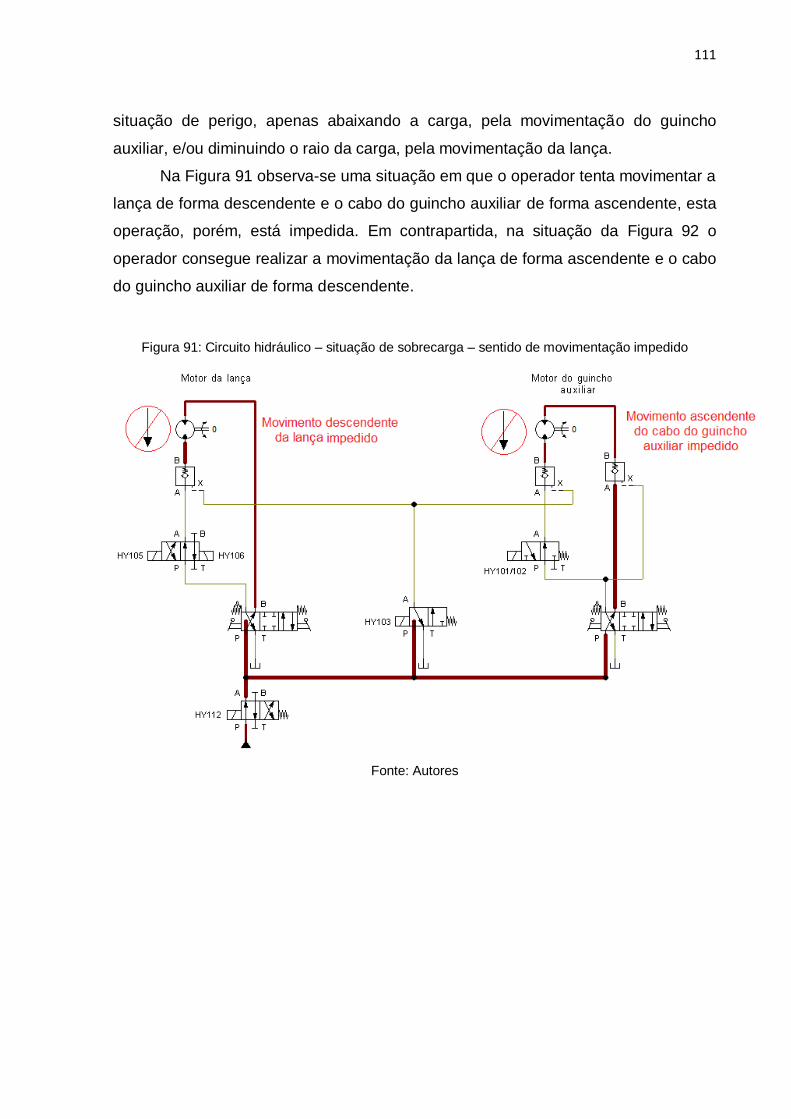
111
situação de perigo, apenas abaixando a carga, pela movimentação do guincho
auxiliar, e/ou diminuindo o raio da carga, pela movimentação da lança.
Na Figura 91 observa-se uma situação em que o operador tenta movimentar a
lança de forma descendente e o cabo do guincho auxiliar de forma ascendente, esta
operação, porém, está impedida. Em contrapartida, na situação da Figura 92 o
operador consegue realizar a movimentação da lança de forma ascendente e o cabo
do guincho auxiliar de forma descendente.
Figura 91: Circuito hidráulico – situação de sobrecarga – sentido de movimentação impedido
Fonte: Autores
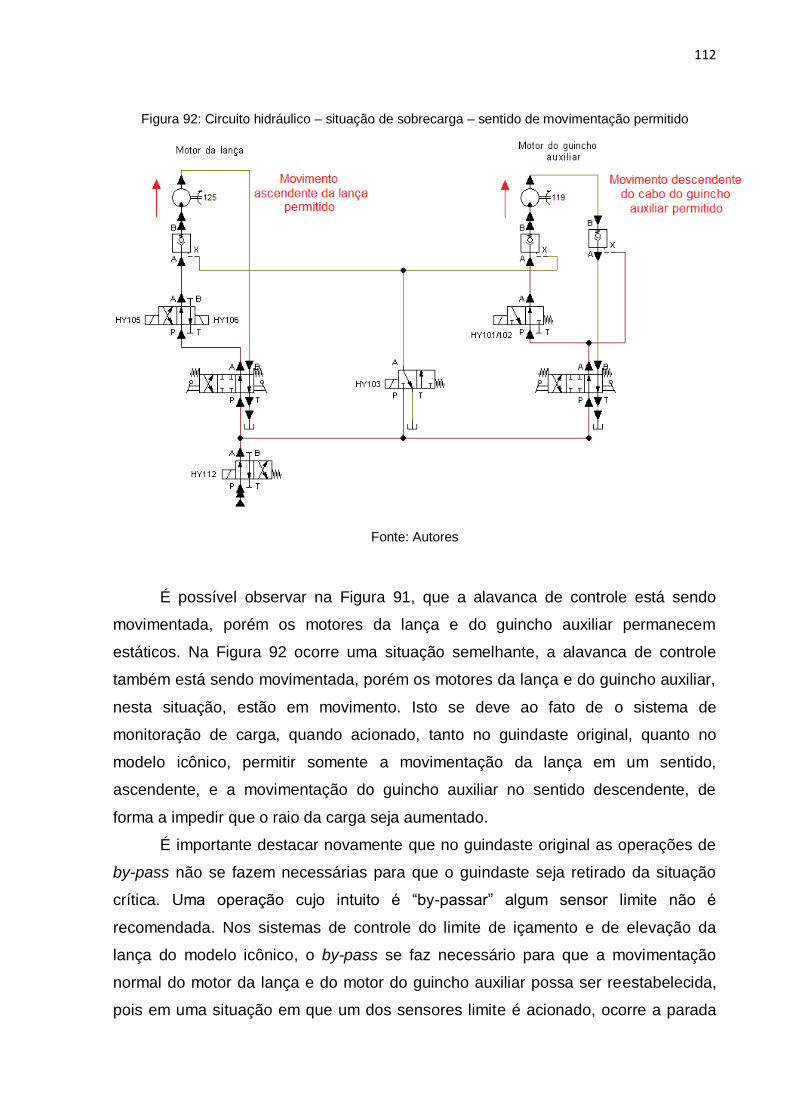
112
Figura 92: Circuito hidráulico – situação de sobrecarga – sentido de movimentação permitido
Fonte: Autores
É possível observar na Figura 91, que a alavanca de controle está sendo
movimentada, porém os motores da lança e do guincho auxiliar permanecem
estáticos. Na Figura 92 ocorre uma situação semelhante, a alavanca de controle
também está sendo movimentada, porém os motores da lança e do guincho auxiliar,
nesta situação, estão em movimento. Isto se deve ao fato de o sistema de
monitoração de carga, quando acionado, tanto no guindaste original, quanto no
modelo icônico, permitir somente a movimentação da lança em um sentido,
ascendente, e a movimentação do guincho auxiliar no sentido descendente, de
forma a impedir que o raio da carga seja aumentado.
É importante destacar novamente que no guindaste original as operações de
by-pass não se fazem necessárias para que o guindaste seja retirado da situação
crítica. Uma operação cujo intuito é “by-passar” algum sensor limite não é
recomendada. Nos sistemas de controle do limite de içamento e de elevação da
lança do modelo icônico, o by-pass se faz necessário para que a movimentação
normal do motor da lança e do motor do guincho auxiliar possa ser reestabelecida,
pois em uma situação em que um dos sensores limite é acionado, ocorre a parada
113
total do movimento da lança ou do guincho auxiliar. No sistema de monitoração de
carga do modelo, a situação se assemelha ao guindaste original, o by-pass será
utilizado apenas em uma situação de emergência, pois os movimentos descendente
e ascendente da lança e do cabo, respectivamente, serão restaurados
automaticamente quando o guindaste sair da situação de sobrecarga.
Porém, caso o by-pass do sistema de monitoração de carga seja acionado, a
sequência operacional se encontra nas figuras que seguem, Figura 93, Figura 94 e
Figura 95.
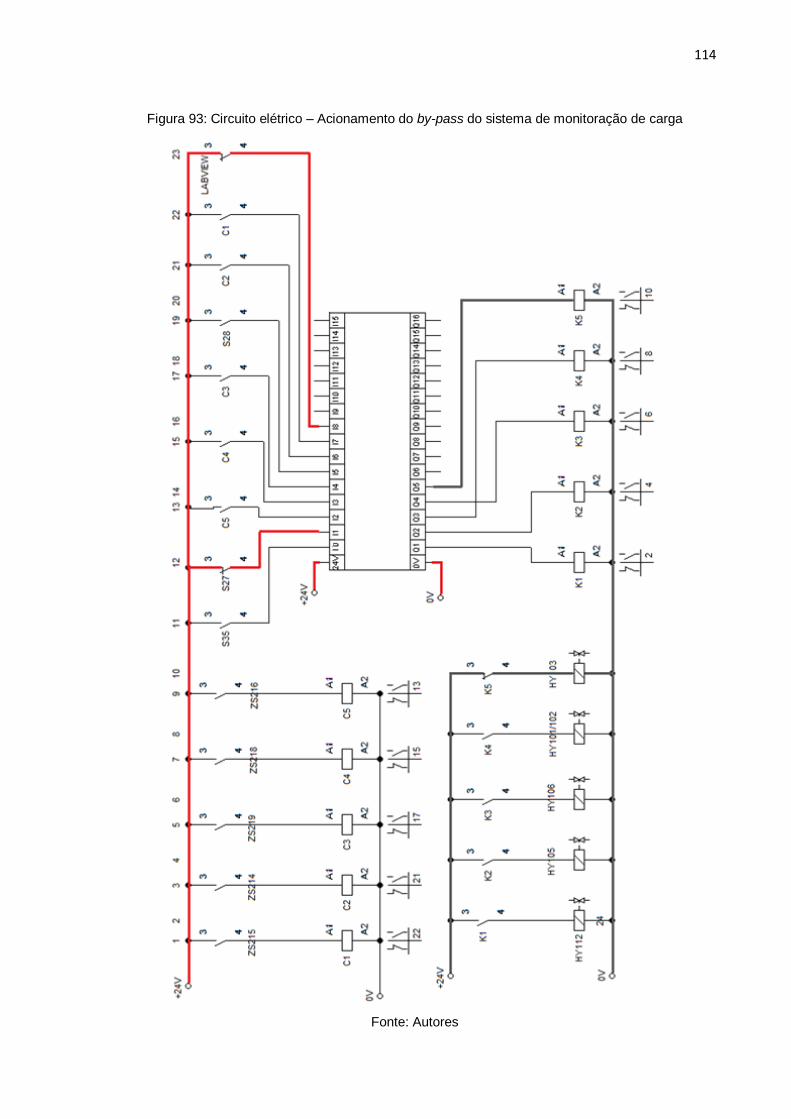
114
Figura 93: Circuito elétrico – Acionamento do by-pass do sistema de monitoração de carga
Fonte: Autores
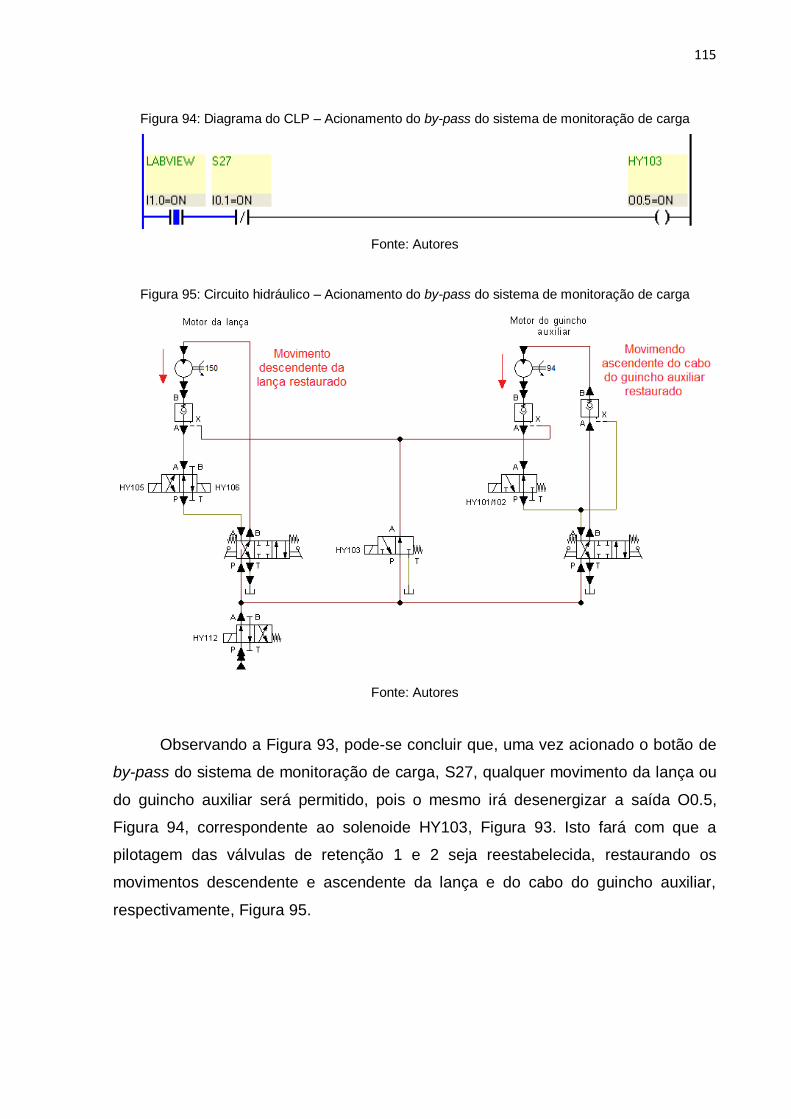
115
Figura 94: Diagrama do CLP – Acionamento do by-pass do sistema de monitoração de carga
Fonte: Autores
Figura 95: Circuito hidráulico – Acionamento do by-pass do sistema de monitoração de carga
Fonte: Autores
Observando a Figura 93, pode-se concluir que, uma vez acionado o botão de
by-pass do sistema de monitoração de carga, S27, qualquer movimento da lança ou
do guincho auxiliar será permitido, pois o mesmo irá desenergizar a saída O0.5,
Figura 94, correspondente ao solenoide HY103, Figura 93. Isto fará com que a
pilotagem das válvulas de retenção 1 e 2 seja reestabelecida, restaurando os
movimentos descendente e ascendente da lança e do cabo do guincho auxiliar,
respectivamente, Figura 95.
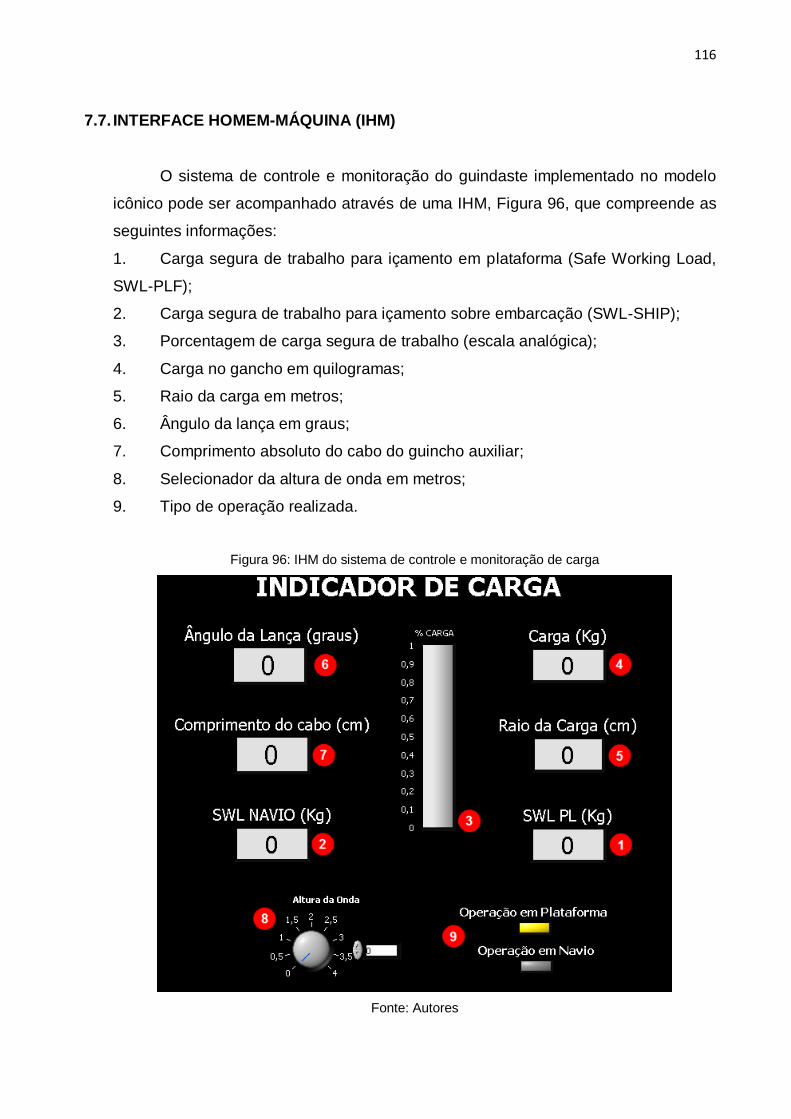
116
7.7. INTERFACE HOMEM-MÁQUINA (IHM)
O sistema de controle e monitoração do guindaste implementado no modelo
icônico pode ser acompanhado através de uma IHM, Figura 96, que compreende as
seguintes informações:
1. Carga segura de trabalho para içamento em plataforma (Safe Working Load,
SWL-PLF);
2. Carga segura de trabalho para içamento sobre embarcação (SWL-SHIP);
3. Porcentagem de carga segura de trabalho (escala analógica);
4. Carga no gancho em quilogramas;
5. Raio da carga em metros;
6. Ângulo da lança em graus;
7. Comprimento absoluto do cabo do guincho auxiliar;
8. Selecionador da altura de onda em metros;
9. Tipo de operação realizada.
Figura 96: IHM do sistema de controle e monitoração de carga
Fonte: Autores
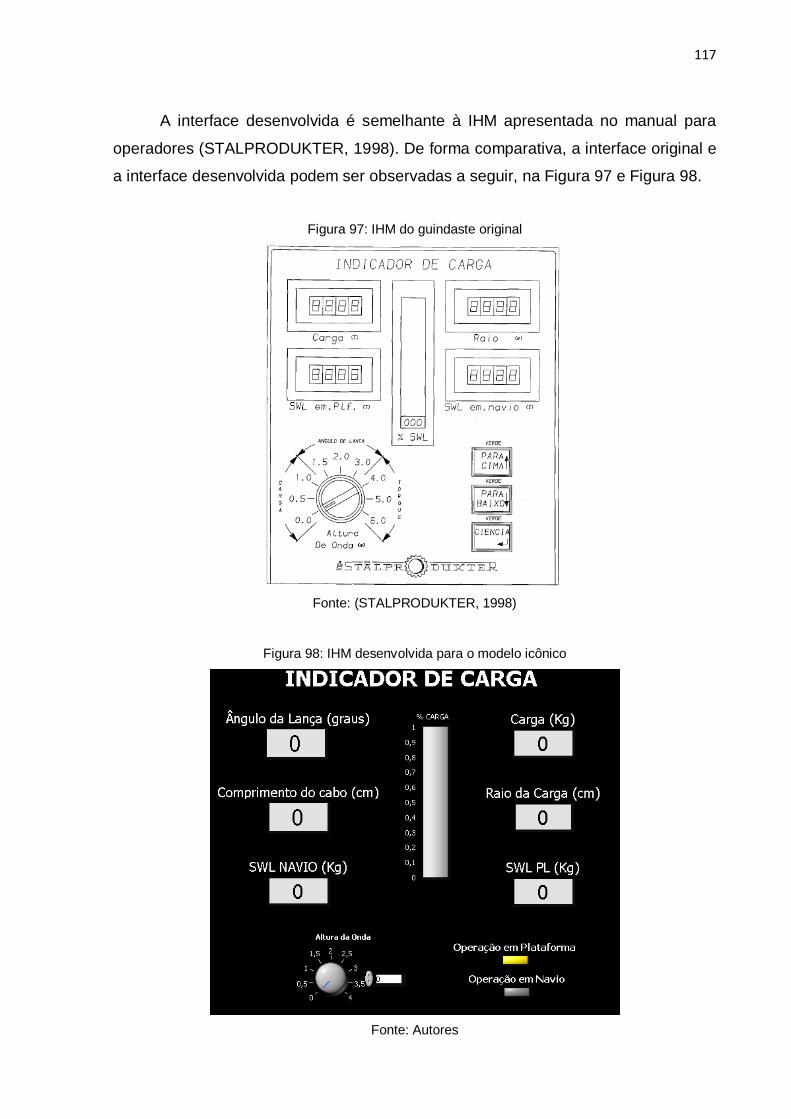
117
A interface desenvolvida é semelhante à IHM apresentada no manual para
operadores (STALPRODUKTER, 1998). De forma comparativa, a interface original e
a interface desenvolvida podem ser observadas a seguir, na Figura 97 e Figura 98.
Figura 97: IHM do guindaste original
Fonte: (STALPRODUKTER, 1998)
Figura 98: IHM desenvolvida para o modelo icônico
Fonte: Autores
118
8. CONCLUSÃO
Foi implementado o sistema de controle e monitoração de carga no modelo
icônico do laboratório, constituído por uma IHM que permite o acompanhamento das
operações. Foram instalados no modelo sensores que possibilitaram a aquisição de
parâmetros utilizados como entrada desses sistemas, tais como ângulo da lança,
carga içada, raio da carga, comprimento do cabo do guincho auxiliar e altura da
onda. Após o processamento desses dados, como saída foram obtidos o tipo de
operação realizada, sobre a embarcação ou sobre a plataforma, e a carga
instantânea admissível pelo guindaste. Caso a carga içada ultrapassasse a carga
admissível, os movimentos de abaixamento da lança e elevação da carga através do
cabo do guincho auxiliar seriam bloqueados, impedindo que a carga crítica fosse
aumentada, diminuindo, assim, os riscos de sobrecarga e danos à estrutura do
guindaste.
Sendo este sistema de fundamental importância à utilização e operação dos
guindastes, a partir da criação do modelo icônico, pode-se concluir que o sistema de
controle e monitoração de carga é de fácil instalação e uso, podendo ser adaptado
aos guindastes originais das plataformas. Pode ser considerado como uma
alternativa para a substituição dos sistemas atuais e que se encontram obsoletos,
pois possui linguagem de alto nível e peças facilmente encontradas no mercado
nacional.
Com os resultados obtidos na realização deste trabalho, pode-se sugerir os
seguintes sistemas a serem estudados e implementados no modelo icônico:
Sistema de Alarmes;
Sistema de Giro;
Sistema de Emergência.
119
9. REFERÊNCIAS
GUIMARÃES, Carlos Alberto de Oliveira; DA SILVA, Eugenio Ferreira Naegele; CARDOSO, Leonardo das Dores. Guindaste STALPRODUKTER – Relatório Técnico. 171 p. dezembro 2013
LABVIEW: ambiente gráfico de desenvolvimento de sistemas. Disponível em: <http://www.ni.com/labview/pt/>. Acesso em: 22 outubro 2014.
LINSINGEN, Irlan Von. Fundamentos de Sistemas Hidráulicos. 2 ed. Florianópolis: Universidade Federal de Santa Catarina. 399 p. 2003.
MEDIÇÕES de carga: Guia prático. 22 ago 2013. Disponível em: http://www.ni.com/tutorial/7138/pt/. Acesso em: 22 outubro 2014.
POTENCIÔMETRO, 2005. Disponível em: http://www.if.ufrgs.br/mpef/mef004/20061/Cesar/SENSORES-Potenciometro.html. Acesso em: 22 setembro 2014.
RIBEIRO, Marcus Vinicius. Da Grécia Antiga à Era Tecnológica: conheça o primeiro guindaste da história. Disponível em <www.blogmovicargas.rdstation.com.br/da-grecia-antiga-a-era-tecnologica-conheca-o-primeiro-guindaste-da-historia/>. Acesso em: 10 agosto 2014.
STALPRODUKTER, A/S. Operators Instructions – Technical Description. Project Number P47C097002. 4 ed. 7v. v.1. 163 p. 12 setembro 1998.
TURCHETTI, Victor Adriano. Estudo de Encoders Ópticos Baseados no Efeito Moiré e Projeto de um Kit de Encoder Didático. Trabalho de Graduação. Faculdade de Engenaria Mecatrônica. São Paulo: UNICAMP. Novembro 2007.