
Inhalte - Hochschule Bochumhochschule-bochum.de/fileadmin/media/fb_v/labore/photogrammetrie/3... ·...
21
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 1 Inhalte Bildflug – Bildflugplanung – Navigation (Einsatzmöglichkeiten von GPS und Inertialsystemen) Zweibildauswertung – Grundlagen – Stereoskopisches Sehen und Messen – Stereoauswertesysteme – Orientierungsverfahren in der Stereoauswertung
Transcript of Inhalte - Hochschule Bochumhochschule-bochum.de/fileadmin/media/fb_v/labore/photogrammetrie/3... ·...
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 1
Inhalte
Bildflug – Bildflugplanung – Navigation (Einsatzmöglichkeiten von GPS und
Inertialsystemen) Zweibildauswertung
– Grundlagen – Stereoskopisches Sehen und Messen – Stereoauswertesysteme – Orientierungsverfahren in der
Stereoauswertung
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 2
Orientierungsverfahren in der Stereoauswertung
Zweibildauswertung
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 3
Zweibild- (Stereo-) Auswertung
Zielsetzung: Rekonstruktion des photographierten Objekts aus zwei Aufnahmen.
Lösungen:
Getrennte Orientierung der Bilder Gemeinsame Orientierung der Bilder (einstufig) Gemeinsame Orientierung der Bilder (zweistufig)
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 4
Zweibild- (Stereo-) Auswertung
Getrennte Orientierung: Die Parameter der Äußeren Orientierung werden über
das Verfahren des räumlichen Rückwärtsschnitts rechnerisch bestimmt.
Voraussetzung ist, dass in jedem Bild mindestens 3 Vollpaßpunkte (X,Y,Z) bekannt sind.
Nachteilig bei diesem Verfahren ist, dass die Information „der sich schneidenden homologen Bildstrahlen“ nicht genutzt wird.
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 5
Zweibild- (Stereo-) Auswertung
Gemeinsame Orientierung der Bilder (einstufig):
Die Bildorientierung erfolgt im Rahmen einer Bündelblockausgleichung.

HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 6
Zweibild- (Stereo-) Auswertung
Gemeinsame Orientierung der Bilder (zweistufig):
Das zweistufige Orientierungsverfahren, bestehend aus den Elementen der relativen und absoluten Orientierung, ist eine in der Praxis (der analytischen Systeme) noch gängige Orientierungsform.
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 7
Orientierung
Gegenseitige (relative) Orientierung: Beschreibt die räumliche Lage zweier Bilder
zueinander. Die Bilder verfügen über gemeinsame Bildbereiche
und bilden ein „photogrammetrisches Modell“.
Absolute Orientierung: Wird auch als „Räumliche Helmerttransformation“
bezeichnet. Beschreibt die notwendigen Transformationen, um ein
photogrammetrisches Modell in ein übergeordnetes Koordinatensystem zu überführen.
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 8
Relative Orientierung
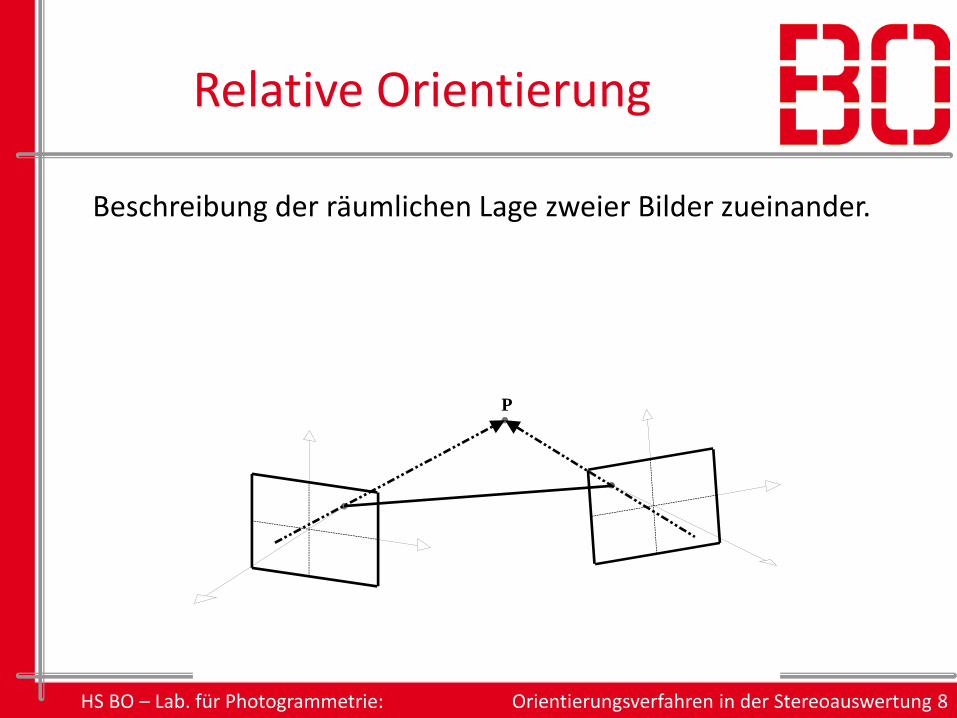
Beschreibung der räumlichen Lage zweier Bilder zueinander.
P
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 9
Relative Orientierung
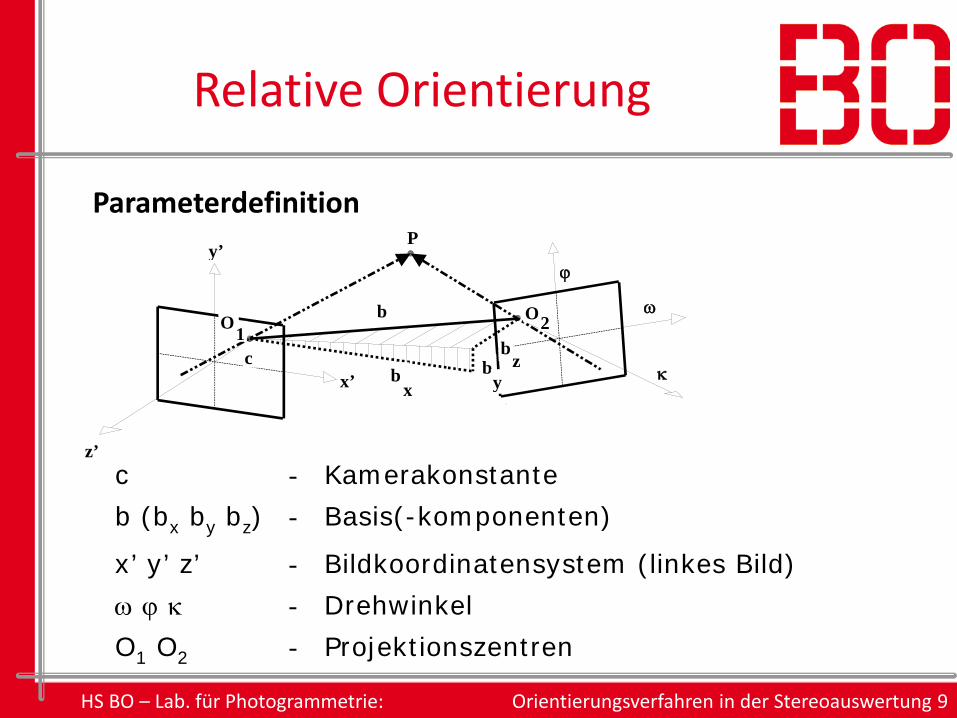
Parameterdefinition
x’
y’
z’
c
b
b b b
x y z
P
O 2 O 1
ω
κ
ϕ
c - Kamerakonstante b (bx by bz) - Basis(-komponenten)
x’ y’ z’ - Bildkoordinatensystem (linkes Bild) ω ϕ κ - Drehwinkel O1 O2 - Projektionszentren
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 10
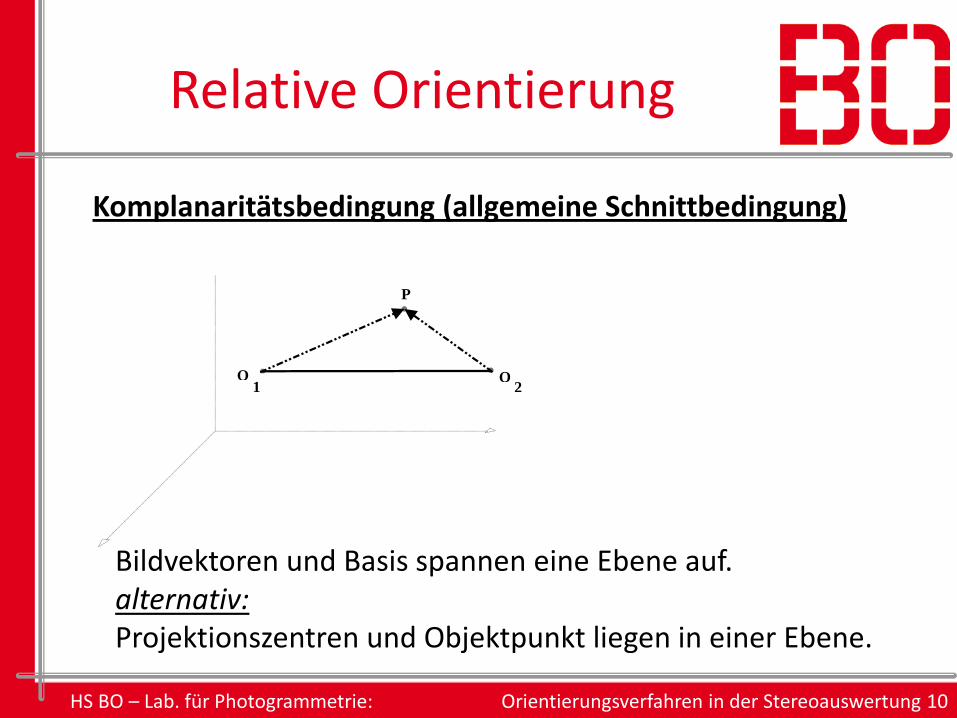
Relative Orientierung
Komplanaritätsbedingung (allgemeine Schnittbedingung)
O O 1 2
P
Bildvektoren und Basis spannen eine Ebene auf. alternativ: Projektionszentren und Objektpunkt liegen in einer Ebene.
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 11
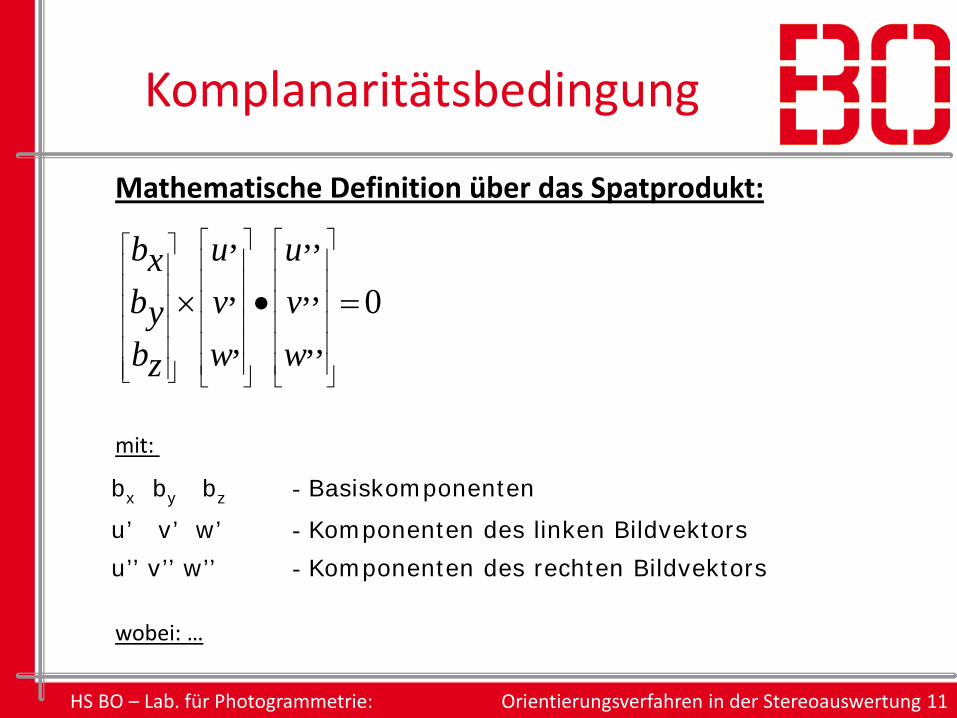
Komplanaritätsbedingung
Mathematische Definition über das Spatprodukt:
0,,,,,,
,,,
=•×
wvu
wvu
zbybxb
mit:
bx by bz - Basiskomponenten
u’ v’ w’ - Komponenten des linken Bildvektors u’’ v’’ w’’ - Komponenten des rechten Bildvektors
wobei: …
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 12
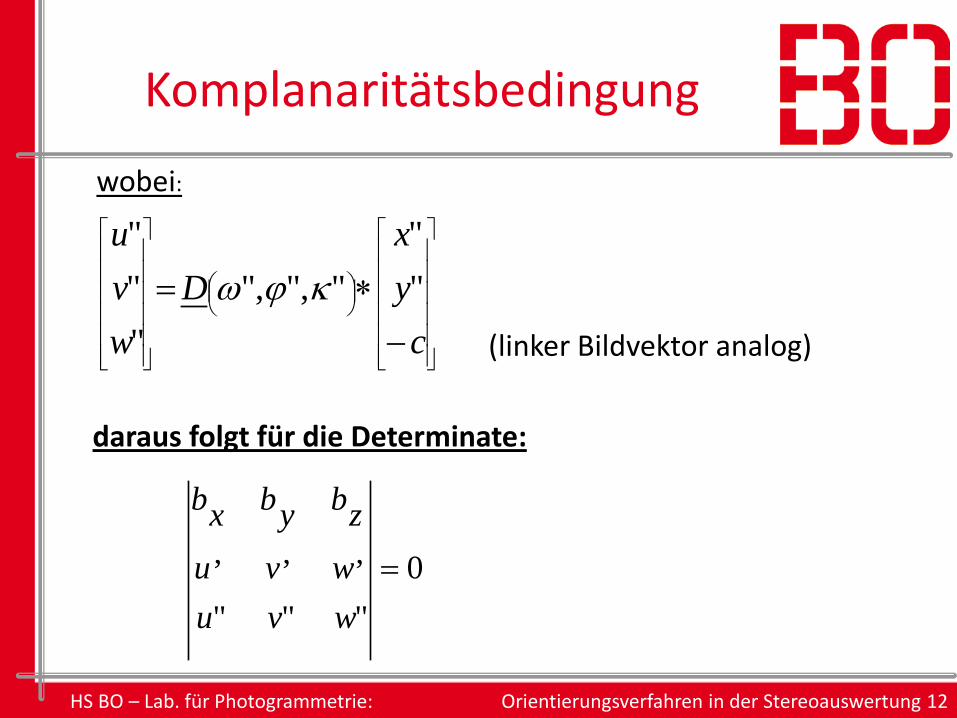
Komplanaritätsbedingung
wobei:
−∗=
cyx
Dwvu
""
",",""""
κϕω
0"""
,,, =wvuwvu
zbybxb
daraus folgt für die Determinate:
(linker Bildvektor analog)
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 13
Relative Orientierung
Die relative Orientierung weist 5 Unbekannte auf, d. h. sie kann über 5 Modellpunkte erreicht werden. Anzahl der Modellpunkte > 5: ⇒ Redundanz in der Anzahl der Beobachtungen ⇒ Ausgleichung (nach vermittelnden Beobachtungen)
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 14
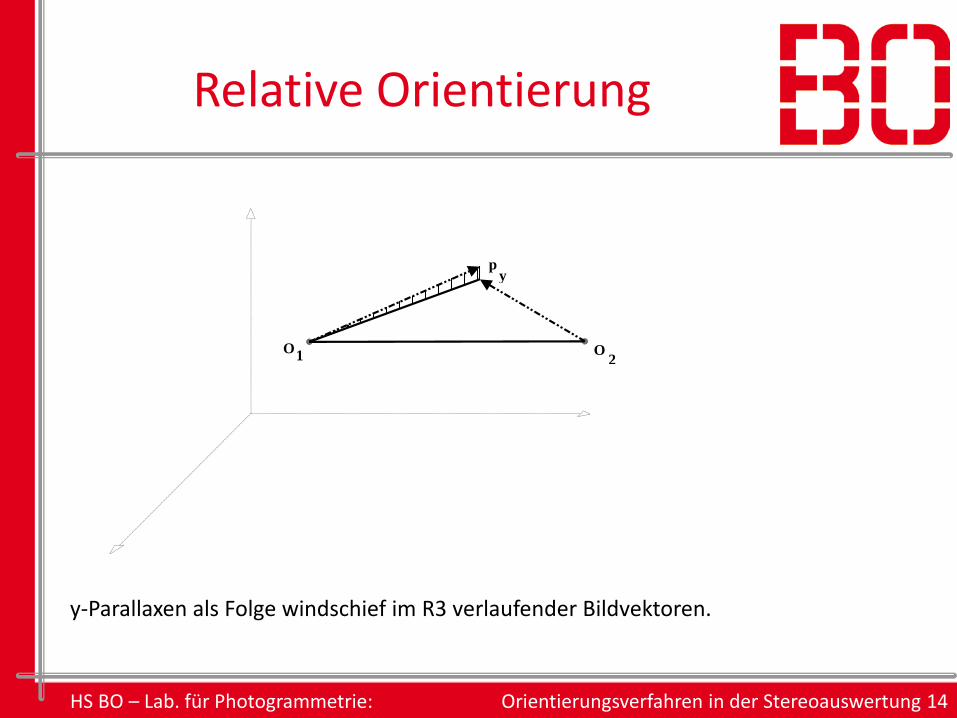
Relative Orientierung
O O 2 1
p y
y-Parallaxen als Folge windschief im R3 verlaufender Bildvektoren.
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 15
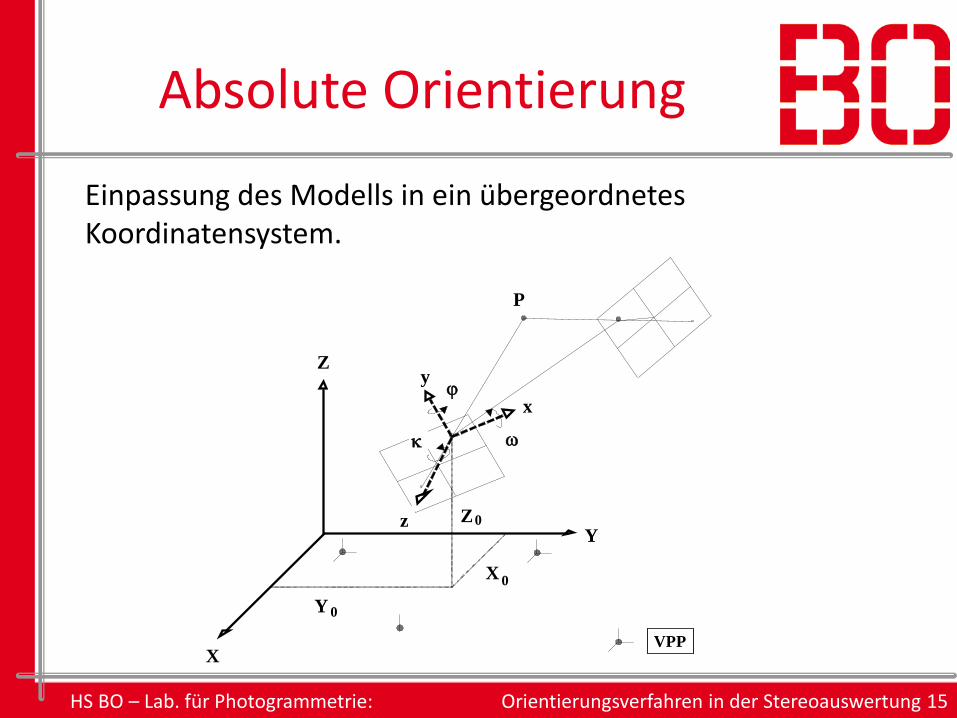
Absolute Orientierung
Einpassung des Modells in ein übergeordnetes Koordinatensystem.
Z
X
Y
X 0
Y 0
Z 0 z
x
y ϕ
ω κ
P
VPP
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 16
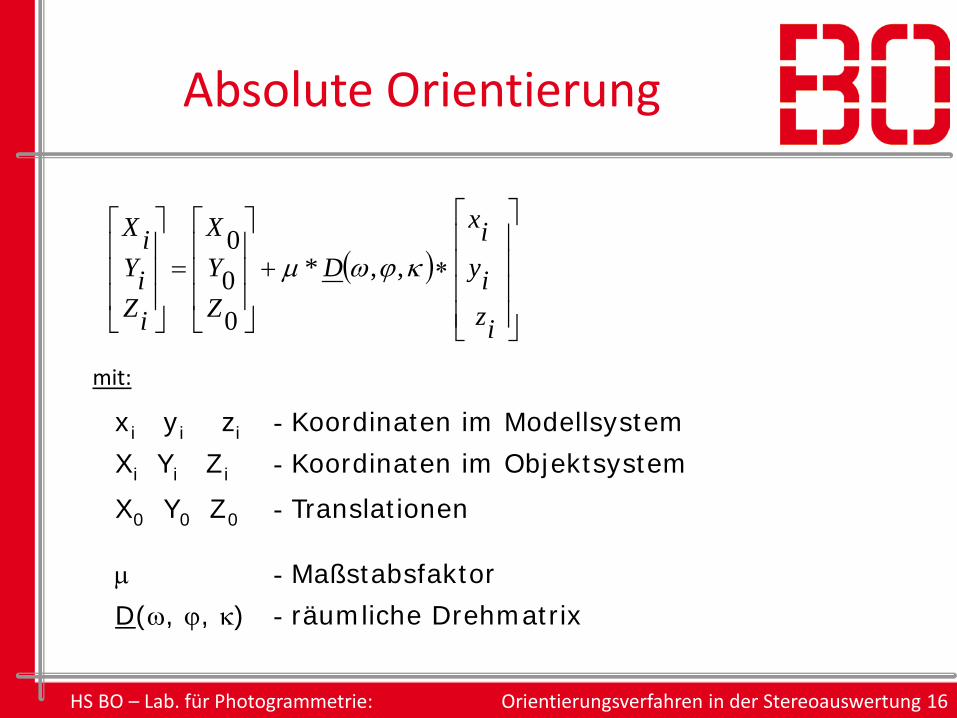
Absolute Orientierung
( )
∗+
=
iziyix
DZYX
iZiYiX
κϕωµ ,,*
000
mit:
xi yi zi - Koordinaten im Modellsystem Xi Yi Zi - Koordinaten im Objektsystem
X0 Y0 Z0 - Translationen
µ - Maßstabsfaktor D(ω, ϕ, κ) - räumliche Drehmatrix
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 17
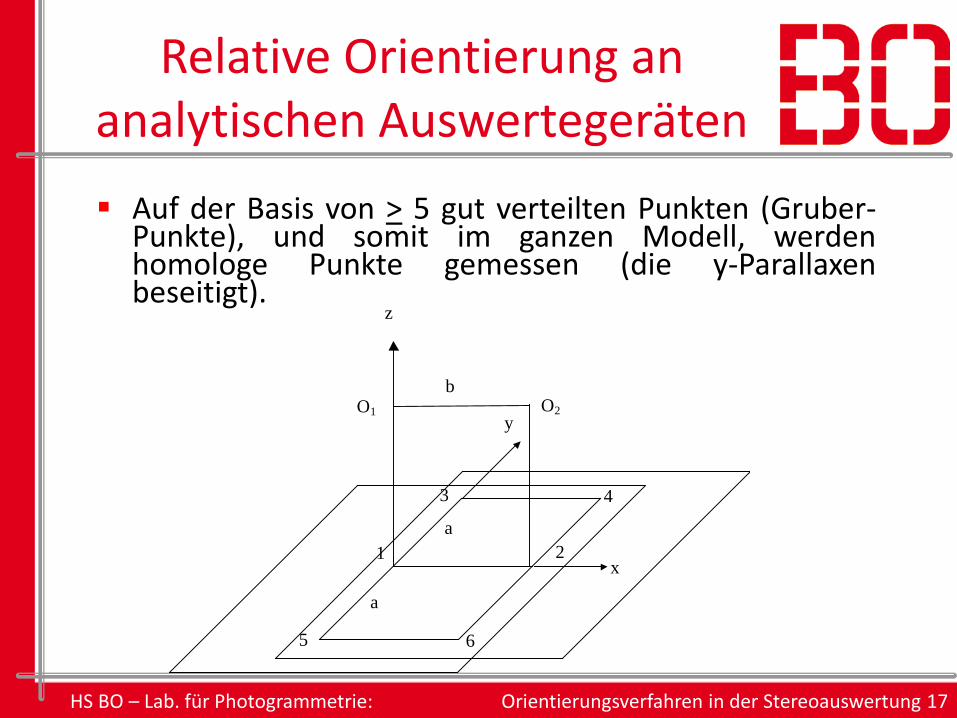
Relative Orientierung an analytischen Auswertegeräten Auf der Basis von > 5 gut verteilten Punkten (Gruber-
Punkte), und somit im ganzen Modell, werden homologe Punkte gemessen (die y-Parallaxen beseitigt).
O1 b
z
x
y
1 2
3 4
5 6
a
a
O2
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 18
P1
x-Parallaxe
b
P1 P2 P2
b
y-Parallaxe
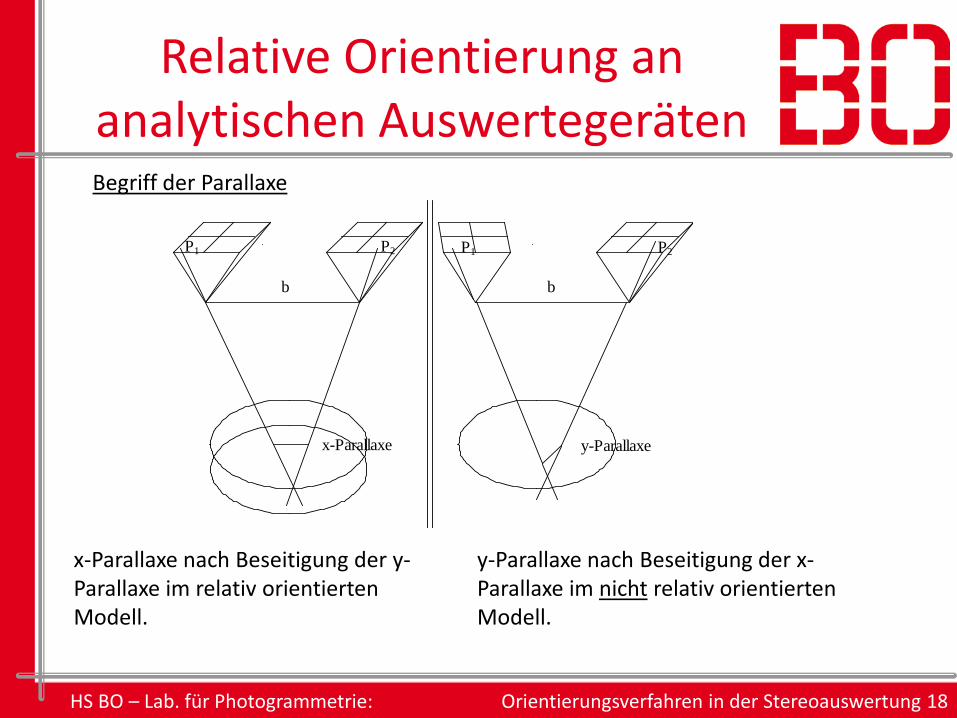
Begriff der Parallaxe
x-Parallaxe nach Beseitigung der y-Parallaxe im relativ orientierten Modell.
y-Parallaxe nach Beseitigung der x-Parallaxe im nicht relativ orientierten Modell.
Relative Orientierung an analytischen Auswertegeräten
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 19
Innere Orientierung: Rahmenmarken werden im
Komparatormodus programmgesteuert angefahren. Ihre Sollwerte sowie die sonstigen Innere
Orientierungs-Parameter sind im System gespeichert.
Relative Orientierung an analytischen Auswertegeräten
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 20
Gegenseitige Orientierung: Automatisches Anfahren von 6
Orientierungspunkten in „Gruber“-Lage. Beseitigung der Parallaxen an geeigne-ten
Objektpunkten. Es können zusätz-liche Punkte für das Orientierungsver-fahren genutzt werden.
Berechnung der Orientierungsparam-eter, Umschalten in den Modellmodus.
Relative Orientierung an analytischen Auswertegeräten
HS BO – Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 21
Absolute Orientierung: Eingabe der Passpunktkoordinaten in den
Punktnummernspeicher. Anfahren der für die Orientierung
notwendigen Passpunkte und registrieren ihrer Modellkoordinaten. Berechnung der Orientierungsparameter -
das Modell ist jetzt absolut orientiert.
Relative Orientierung an analytischen Auswertegeräten


















