
รถตัดหญ้าไฟฟ้าควบคุมด้วยรีโมทคอลโทรลhrd.rmutl.ac.th/qa/docUpload/pj/3551100090738/150930171713fullpp.pdf ·...
116
รถตัดหญ้าไฟฟ้าควบคุมด้วยรีโมทคอลโทรล จักรพันธ์ สมนันชัย จุฑาวัฒน์ ดาคา ปรัชญา เตปันวงศ์ ปริญญานิพนธ์นี้เป็นส่วนหนึ่งของวิชาโครงงานตามหลักสูตรวิศวกรรมศาสตรบัณฑิต สาขาวิศวกรรมไฟฟ้า คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลล้านนา ตาก ปีการศึกษา พ.ศ. 2556
-
Upload
hoangtuong -
Category
Documents
-
view
263 -
download
16
Transcript of รถตัดหญ้าไฟฟ้าควบคุมด้วยรีโมทคอลโทรลhrd.rmutl.ac.th/qa/docUpload/pj/3551100090738/150930171713fullpp.pdf ·...

รถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล
จกรพนธ สมนนชย จฑาวฒน ด าค า ปรชญา เตปนวงศ
ปรญญานพนธนเปนสวนหนงของวชาโครงงานตามหลกสตรวศวกรรมศาสตรบณฑต
สาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก
ปการศกษา พ.ศ. 2556

รถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล
จกรพนธ สมนนชย จฑาวฒน ด าค า ปรชญา เตปนวงศ
ปรญญานพนธนเปนสวนหนงของวชาโครงงานตามหลกสตรวศวกรรมศาสตรบณฑต สาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร
มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก ปการศกษา พ.ศ. 2556

REMOTE CONTROL ELECTRICAL CAR MOWER
CHAKKRAPHAN SOMNANCHAI JUTAWAT DAMKHAM
PRATCHYA TEPUNWONG
THIS PROJECT REPORT SUBMITTED IN PARTIAL FULFILLMENT OF
THE REQUIREMENT FOR THE DEGREE OF BACHELOR OF ENGINEERING DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF ENGINEERING RAJAMANGALA UNIVERSITY OF TECHNOLOGY LANNA TAK
ACADEMIC YEAR 2013

ปรญญานพนธเรอง รถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล Remote Control Electrical Car Mower
ชอนกศกษา นายจกรพนธ สมนนชย รหสนกศกษา 53243207004 - 5 นายจฑาวฒน ด าค า รหสนกศกษา 53243207007 - 8 นายปรชญา เตปนวงศ รหสนกศกษา 53243207018 - 5 หลกสตร วศวกรรมศาสตรบณฑต วชาเอก วศวกรรมไฟฟา สาขา วศวกรรมไฟฟา อาจารยทปรกษา อาจารยมานะ ทะนะอน ปการศกษา 2556 ------------------------------------------------------------------------------------------------------------------------
สาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก อนมตใหนบปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรปรญญาวศวกรรมศาสตรบณฑต
....................................... (อาจารยทศนะ ถมทอง)
รกษาการหวหนาสาขาวชาวศวกรรมไฟฟา
คณะกรรมการสอบปรญญานพนธ
............................................................ประธานกรรมการ (อาจารยอดม เครอเทพ) ...............................................................กรรมการ (อาจารยมานะ ทะนะอน)
...............................................................กรรมการ (อาจารยปรมตถ สขสายอน) © ลขสทธของสาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร

ง
ปรญญานพนธเรอง รถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล Remote Control Electrical Car Mower
ชอนกศกษา นายจกรพนธ สมนนชย รหสนกศกษา 53243207004 - 5 นายจฑาวฒน ด าค า รหสนกศกษา 53243207007 - 8 นายปรชญา เตปนวงศ รหสนกศกษา 53243207018 - 5 หลกสตร วศวกรรมศาสตรบณฑต วชาเอก วศวกรรมไฟฟา สาขา วศวกรรมไฟฟา อาจารยทปรกษา อาจารยมานะ ทะนะอน ปการศกษา 2556
บทคดยอ
ปรญญานพนธฉบบน เปนการออกแบบและสรางรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล สามารถตดหญาได 2 ชวโมงตอครง มสญญาณไฟแจงเตอนเมอระดบแรงดนแบตเตอรต ากวา 23 โวลต ขบเคลอนลอตะขาบดวยมอเตอรไฟฟากระแสตรงแบบกระตนดวยตวเอง 350 วตต ขางละ 1 ตว มใบมดตดหญาทควบคมดวยมอเตอรไฟฟากระแสตรงแบบกระตนดวยตวเอง 350 วตต 1 ตว สามารถหมนรอบตวเองโดยอสระไมถกยดตดแนนเหมอนใบมดทวไป สามารถควบคมการเคลอนทดวยรโมทคอนโทรล รศมการควบคม 100 เมตร มสวตซปรบความเรวในการหมนของมอเตอรตดหญาดวยการมอดเลตตามความกวางของพลส สามารถปรบความเรวสงสดได 3,400 รอบตอนาท
จากการทดสอบ รถตดหญาไฟฟาควบคมดวยรโมทคอลโทรลสามารถตดหญาญปน หญามาเลเซย หญาแขงได โดยหญาญปน จะเรมขาดทความเรวมอเตอร 2,000 รอบตอนาท มอเตอรกนกระแส 1.89 แอมแปร หญามาเลเซย จะเรมขาดทความเรวมอเตอร 1,500 รอบตอนาท มอเตอรกนกระแส 2.16 แอมแปร หญาแขง จะเรมขาดทความเรวมอเตอร 2,500 รอบตอนาท มอเตอรกนกระแส 4.76 แอมแปร ในการชารจประจแบตเตอรเตมหนงครงสามารถตดหญาแตละชนดได 120 นาท จนกวาระดบแรงดนประจแบตเตอรเหลอ 23 โวลต และสามารถตดหญาบนพนทแหงไดด

กตตกรรมประกาศ
ปรญญานพนธฉบบนส าเรจลลวงไปไดตามวตถประสงค เพราะไดรบความชวยเหลอในดานตาง ๆ อยางดยงของ อาจารยมานะ ทะนะอน ซงเปนอาจารยทปรกษาปรญญานพนธทไดใหค าแนะน าและขอคดเหนตาง ๆ ทเปนประโยชนแกคณะผจดท าปรญญานพนธมาโดยตลอด ซงตองขอกราบขอบพระคณเปนอยางสงไว ณ โอกาสนดวย คณะผจดท าขอขอบคณสาขาวศวกรรมไฟฟา ทสนบสนนเครองมอและอปกรณทจ าเปนในการจดท าปรญญานพนธ คณะผจดท าขอขอบคณอาจารยอดม เครอเทพ ทชวยในการสบคนขอมลแลกเปลยนความรความคด และใหก าลงใจในการศกษาคนควาตลอดมา ทายนคณะผจดท าใครขอกราบขอบพระคณบดา มารดา ซงสนบสนนในดานการเงนและใหก าลงใจแกคณะผจดท าเสมอมาจนส าเรจการศกษา
จกรพนธ สมนนชย จฑาวฒน ด าค า ปรชญา เตปนวงศ
21 พฤษภาคม 2557

สารบญ
หนา บทคดยอภาษาไทย ง
กตตกรรมประกาศ จ
สารบญ ฉ
สารบญรป ฌ
สารบญตาราง ฏ
บทท 1 บทน า
1.1 ความเปนมาและความส าคญของปญหา 1
1.2 วตถประสงคของโครงงาน 1
1.3 ขอบเขตของโครงงาน 1
1.4 ประโยชนทคาดวาจะไดรบ 2
1.5 แผนการด าเนนโครงงาน 2
บทท 2 ทฤษฎทเกยวของ
2.1 บทน า 3
2.2 มอเตอรไฟฟากระแสตรง 3
2.3 เซอรโวมอเตอร 8
2.4 วทยบงคบ 13
2.5 รเลย 15
2.6 แมกเนตกคอนแทกเตอร 17
2.7 โอเวอรโหลดรเลย 20
2.8 ฟวส 23
2.9 ระบบเครองลาง เครองจกรกล 25
2.10 สวตชจ ากดระยะ ลมตสวตช 30 2.11 แบตเตอรชนดน า 31

ช
สารบญ (ตอ)
หนา 2.12 ใบมดตดหญา 33
บทท 3 การออกแบบเครองควเมลดกาแฟดวยลมรอน
3.1 บทน า 35
3.2 ข นตอนการด าเนนงาน 35
3.3 แนวคดในการออกแบบโครงสรางรถตดหญาควบคมดวยรโมทคอลโทรล 37
3.4 โครงสรางรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล 40
3.5 วงจรควบคมการท างานรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล 41
3.6 วงจรรวมรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล 48
3.7 การทดสอบหาขนาดความเรวมอเตอรใบตดทเหมาะสม 50
3.8 การค านวณหาระยะทางของใบมดตดหญาในการหมนหนงรอบ 51
3.9 การค านวณหาขนาดมอเตอรขบเคลอน 51
3.10 การค านวณหาคาแบตเตอร 52
บทท 4 ผลการทดสอบโครงงาน
4.1 บทน า 54
4.2 การทดสอบความเรวรอบและกระแสมอเตอรตดหญา 54
4.3 การทดสอบแบตเตอรดวยการตดหญา 57 4.4 การทดลองการขบเคลอนของลอตะขาบ 58 4.5 ผลการทดลองระยะทางการบงคบดวยรโมทคอลโทรล 60
บทท 5 สรปผลของโครงงานและขอเสนอแนะ
5.1 บทน า 61
5.2 สรปผลการด าเนนโครงงาน 61
5.3 ปญหาและอปสรรคในการจดท าโครงงาน 61
5.4 ขอเสนอแนะในการพฒนาโครงงาน 61
เอกสารอางอง 62

ซ
สารบญ (ตอ)
หนา ภาคผนวก
ภาคผนวก ก. การจดท าโครงสราง 64
ภาคผนวก ข. ออกแบบโครงสรางโครงงาน 68
ภาคผนวก ค. ขอมลอปกรณประกอบการท าวงจร 81
ภาคผนวก ง. เครองมอทใชเกบผลการทดลอง 94
ภาคผนวก จ. ตารางการเกบผลการทดลอง 96
ประวตผเขยน 101

สารบญตาราง
ตารางท หนา
1.1 แผนด าเนนโครงงาน 2
3.1 คาความเรวและผลทไดจากการตดหญาญปน 50
3.2 คาความเรวและผลทไดจากการตดหญามาเลเซย 50
3.3 คาความเรวและผลทไดจากการตดชนดหญาแขง 51
4.1 คาการปรบความเรวของมอเตอรตดหญาญปน 55
4.2 คาการปรบความเรวของมอเตอรตดหญามาเลเซย 56
4.3 คาการปรบความเรวของมอเตอรตดชนดหญาแขง 56
4.4 คาการทดลองทดสอบแบตเตอรดวยการตดหญา 57
4.5 ผลการทดลองการขบเคลอนของลอตะขาบในพนทระดบ 59
4.6 ผลการทดลองการขบเคลอนของลอตะขาบในพนทตางระดบ 59
4.7 ผลการทดลองระยะทางการบงคบดวยรโมทคอลโทรล 60

สารบญรป
รปท หนา 2.1 มอเตอรไฟฟากระแสตรงแบบกระตนแยก 4
2.2 มอเตอรไฟฟากระแสตรงแบบขนาน 5
2.3 โครงสรางทวไปของดซมอเตอร 6
2.4 การกลบทศทางมอเตอรไฟฟากระแสตรงโดยใชรเลย 8
2.5 องคประกอบพนฐานของเซอรโวมอเตอร 8
2.6 การท างานของเซอรโวมอเตอร 9
2.7 ขนาดของเซอรโวมอเตอร 10
2.8 สญญาณดจตอลเซอรโวและสญญาณแอนะลอกเซอรโว 11
2.9 การท างานของเซอรโว แอนะลอก 12
2.10 การท างานของเซอรโวดจตอล 12
2.11 คลนความถในยานตาง ๆ 13
2.12 วทยบงคบ 2.4 GHZ 14
2.13 ความกวางของความถคลน 15
2.14 รปรางและสญลกษณของรเลย 15
2.15 หลกการท างานเบองตนของรเลย 16
2.16 การใชมลตมเตอรตรวจสภาพรเลย 16
2.17 แมกเนตกคอนแทกเตอร 17
2.18 อปกรณภายในแมคเนตกคอนแทคเตอร 17
2.19 ระบบดบอารก 18
2.20 โครงสรางภายนอกของแมกเนตกคอนแทกเตอร 19
2.21 อปกรณปองกนโหลดเกน 21
2.22 โอเวอรโหลดรเลยแบบธรรมดา 22

ญ
สารบญรป (ตอ)
รปท หนา 2.23 สญลกษณโอเวอรโหลดรเลย แบบมปม Reset 22
2.24 ชนดฟวส 23
2.25 สายพานตนตะขาบ 27
2.26 ฟนของลอเฟอง 28
2.27 ขาไก 28
2.28 ลกรอกลาง 29
2.29 แทรกเฟรม 30
2.30 สวตชจ ากดระยะ ลมตสวตช 30
2.31 การท างานของสวตชจ ากดระยะ ลมตสวตช 31
2.32 แบตเตอรชนดน า 31
2.33 ใบมดตดหญา 34
3.1 โฟลวชารตล าดบขนตอนการออกแบบและสรางรถตดหญาในโครงงานน 35
3.2 โครงรถตดหญา 37
3.3 โครงยดแบตเตอร 37
3.4 ลอตะขาบ 38
3.5 โครงครอบกนใบมดตดหญา 38
3.6 การตดตงมอเตอรขบเคลอนรถตดหญา 39
3.7 กลองควบคม 39
3.8 โครงสรางรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล 40
3.9 บลอกไดอะแกรมของรถตดหญาไฟฟาบงคบดวยรโมทคอลโทรล 41
3.10 วงจรก าลง 42

ฎ
สารบญรป (ตอ)
รปท หนา 3.11 วงจรควบคม 43
3.12 วงจรควบคมความเรวดซมอเตอร 12/24 V 15 A 45
3.13 ความกวางของพลสขนาดตาง ๆ และคาดวตไซเคล ของชวงพลสทมความถคงท 46
3.14 วงจรเตอนแบตเตอรต า 47
3.15 รวมวงจรรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล 49
4.1 ลกษณะการวดความเรวรอบมอเตอรและวดคากระแสไฟฟามอเตอร 54
4.2 ลกษณะการวดคากระแสไฟฟามอเตอรขณะตดหญา 55
4.3 การทดสอบแบตเตอรดวยการตดหญา 57
4.4 การทดลองขบเคลอนของลอตะขาบ 58
4.5 การทดลองระยะทางการบงคบดวยรโมทคอลโทรล 60

บทท 1
บทน ำ
1.1 ควำมเปนมำและควำมส ำคญของปญหำ ประเทศไทยเปนประเทศอยในเขตรอนชนพนดนมความอดมสมบรณเหมาะแกการท าเกษตร
ท าไร ท าสวน ท านา ขณะทมการเพาะปลกกจะมการปกคลมไปดวยวชพช เชน หญา จดวามสวนท าใหพนดนชมชน ในบรเวณบางสวนตองการใหมหญา แตตองมการควบคมใหอยในระดบทเหมาะสมกบสนาม เชน สนามฟตบอล สนามเดกเลน หรอสนามนงพกผอนบรเวณบานทอยอาศย
ในสวนของหญาเมอปลอยทงไวนานวน หญากจะยาวขนมา จงตองมการควบคมใหหญานนมความพอดพอเหมาะกบสนามทใชคอ ตองมการตดอาจตองใชกรรไกร มด หรอรถตดหญา แตทผานมามการตดหญาโดยจะใชก าลงคนในการควบคมการตดหญาคอ ใชคนเดนเขนรถตดหญา ลวนแลวท าใหเกดการเมอยลา นอกจากนการอยกลางแจงทแดดรอนจดเปนเวลานาน ๆ อาจท าใหมผลกระทบตอผวหนง เปนมะเรงไดเพราะแสงแดดมรงสอลตราไวโอเลต
ดงนน ทางกลมของขาพเจาจงสนใจทจะศกษาคนหาวธทจะใชเทคโนโลยมาประยกตใชเพอชวยในการควบคมการท างานของรถตดหญาไฟฟาโดยการควบคมดวยรโมทคอนโทรล ทสามารถควบคมการ เดนหนา ถอยหลง เลยวซาย เลยวขวาไดโดย แบงออกเปน ระบบสงก าลง ระบบควบคมการเคลอนทโดยรโมทคอนโทรล
1.2 วตถประสงคของโครงงำน 1.2.1 เพอศกษาการออกแบบและสรางรถตดหญาไฟฟาควบคมดวยรโมทคอนโทรล 1.2.2 เพอศกษาการท างานของวงจรควบคมมอเตอร
1.2.3 เพอศกษาการควบคมรถตดหญาดวยรโมทคอนโทรล
1.3 ขอบเขตของโครงงำน 1.3.1 ตดหญาชนดตนหญาออน 1.3.2 ใชลอตะขาบในการเคลอนท 1.3.3 สามารถควบคมการเคลอนทดวยรโมทคอนโทรลไดระยะทาง 100 เมตร 1.3.4 สามารถตดหญาได 2 ชวโมงตอครง 1.3.5 สามารถปรบความเรวรอบการตดไดทตวรถ ในขณะทรถหยดนง

2
1.4 ประโยชนทคำดวำจะไดรบ 1.4.1 ไดรถตดหญาไฟฟาควบคมดวยรโมทคอนโทรล 1.4.2 ไดทราบถงวงจรการควบคมมอเตอร 1.4.3 มความปลอดภยในการท างาน
1.5 แผนกำรด ำเนนโครงงำน ตำรำงท 1.1 แผนด าเนนโครงงาน
ล าดบ รายละเอยดของงาน พฤศจกายน ธนวาคม มกราคม กมภาพนธ
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1. รวมกลม คนควาหาขอมลท
สนใจในการจดท าโครงงาน
2. จดท าโครงรางเสนอหวขอ
3. ออกแบบรถตดหญาไฟฟาควบคมดวยรโมทคอนโทรล
4. จดเตรยมอปกรณทจะท าโครงงาน
5. ลงมอท าโครงงาน
6. สรปผลการท างานและจดท ารปเลมปรญญานพนธ

บทท 2 เอกสารและงานวจยทเกยวของ
2.1 บทน า ในการท าโครงงานครงน ทางกลมของขาพเจาไดศกษาคนควาขอมลตาง ๆ จากเอกสาร ต ารา
และงานวจยทเกยวของซงจะเปนประโยชนตอการท าโครงงานในครงน ใหเปนไปตามวตถประสงคทไดตงไว ดงน มอเตอรไฟฟากระแสตรง, เซอรโวมอเตอร, วทยบงคบ, รเลย, แมกเนตกคอนแทคเตอร และโอเวอรโหลดรเลย
2.2 มอเตอรไฟฟากระแสตรง [1]
มอเตอรไฟฟากระแสตรง หรอ ดซมอเตอร คอเครองกลไฟฟาทเปลยนพลงงานไฟฟากระแสตรงใหเปนพลงงานกล โดยมอเตอรไฟฟากระแสตรง สามารถแบงออกเปนสองชนดไดแก ดซมอเตอรแบบกระตนแยก (Separately Excited DC Motor) และดซมอเตอรแบบกระตนดวยตนเอง (Self Excited DC Motor)
2.2.1 ดซมอเตอรแบบกระตนแยก เปนพนฐานทส าคญของระบบขบเคลอนทางไฟฟา และมบทบาทส าคญทใชในการควบคมความเรวในเครองจกรและกระบวนการผลตอตโนมตในระบบอตสาหกรรม โดยพนฐานของดซมอเตอรแบบกระตนแยก จะคลายกนกบ ดซมอเตอรแบบกระตนดวยตนเอง ลกษณะโครงสรางหลกจะประกอบดวย สเตเตอร และโรเตอร หากพจารณาในรปท 2.1 เปนวงจรสมมลยของ ดซมอเตอรแบบกระตนแยกประกอบดวย วงจรสนามแมเหลกและวงจรโรเตอร วงจรสนามแมเหลกท าหนาทในการสรางสนามแมเหลกหลก และวงจรโรเตอรทท าหนาทสรางสนามแมเหลกรอบ ๆ อารเมเจอร ดซมอเตอรแบบกระตนแยก แหลงจายกระแสไฟฟาทตอเขากบวงจรฟลด และวงจรอารเมเจอรจะแยกเปนอสระซงกนและกน

4
รปท 2.1 มอเตอรไฟฟากระแสตรงแบบกระตนแยก ทมา : [1]
2.2.2 ดซมอเตอรแบบกระตนดวยตนเอง (Self Excited DC Motor) ดซมอเตอรแบบกระตนดวยตนเอง สามารถทจะแบงออกไดเปนสามชนด คอดซมอเตอรกระตนดวยตนเองแบบอนกรม, ดซมอเตอรกระตนดวยตนเองแบบขนาน และดซมอเตอรกระตนดวยตนเองแบบผสม ซงดซมอเตอรกระตนดวยตนเองแบบผสมนนสามารถแยกยอยออกไดเปนสองลกษณะตามวงจรการตอภายในคอ ดซมอเตอรกระตนดวยตนเองแบบผสมชนดขดลวดขนานสน และดซมอเตอรกระตนดวยตนเองแบบผสมชนดขดลวดขนานยาว
1) ดซมอเตอรกระตนดวยตนเองแบบอนกรม (Series Self Excited DC Motor) ดซมอเตอรกระตนดวยตนเองแบบอนกรม หรอซรสมอเตอร คอมอเตอรทตอขดลวดฟลด
อนกรมกบอารเมเจอรของมอเตอร เรยกขดลวดฟลดชนดนวา ซรสฟลด ซงซรสฟลดเปนตวสรางสนามแมเหลกขนมาเพอท าปฏกรยากบสนามแมเหลกของขดลวดอารเมเจอร โดยขดลวดฟลดของ มอเตอรแบบอนกรมจะมขนาดคอนขางใหญพนขวแมเหลกไวในจ านวนนอยรอบ เนองจากการทขดลวดมคาความตานทานต าดงนนในขณะเรมหมน จะกนกระแสไฟฟามากท าใหเกดแรงบดขณะเรมหมนสงและความเรวรอบของมอเตอรขนอยกบโหลดของมอเตอร ถาโหลดของมอเตอรเปลยนแปลงจะท าใหความเรวรอบของมอเตอรเปลยนแปลงดวย มอเตอรแบบอนกรมจะหมนรอบสงถาไมมโหลดและจะหมนความเรวรอบต า หากมโหลดเพมขน

5
2) ดซมอเตอรกระตนดวยตนเองแบบขนาน (Self Excited Shunt DC Motor) ดซมอเตอรกระตนดวยตนเองแบบขนาน หรอเรยกวา ชนทมอเตอร คอมอเตอรทมขดลวดฟลด ตอแบบขนานกบชดขดลวดอารเมเจอร ดงแสดงในรปท 2.2 คาความตานทานของขดลวดฟลดมคาสงมากและตอครอมไวโดยตรงกบแหลงจายแรงดนไฟฟาภายนอกท าใหกระแสไฟฟาทไหลผานขดลวดฟลดมคาคงท โดยทจะไมเปลยนแปลงตามรอบการหมนของมอเตอรเหมอนกบกระแสไฟฟาทไหลผานขดลวดฟลดของมอเตอรแบบอนกรม
รปท 2.2 มอเตอรไฟฟากระแสตรงแบบขนาน ทมา : [1]
3) ดซมอเตอรกระตนดวยตนเองแบบผสม (Self Excited Compound DC Motor) ดซมอเตอรกระตนดวยตนเองแบบผสม หรอเรยกวา คอมปาวดมอเตอร คอมอเตอรทมขดลวดฟลด 2 ชด ชดหนงจะตออนกรมและอกชดหนงตอขนานกบชดขดลวดอารเมเจอร ขดลวดฟลดซงตอขนานเปนลวดตวน าขนาดเลกพนไวจ านวนมาก สวนขดลวดฟลดทตออนกรมอยจะเปนลวดตวน าขนาดใหญพนไวจ านวนนอย แรงบดเรมหมนของมอเตอรแบบผสม จะมมากกวามอเตอรแบบขนาน แตนอยกวาของมอเตอรอนกรม และการเปลยนแปลงความเรวรอบของมอเตอรขณะมโหลดจะมคานอยกวามอเตอรแบบอนกรม แตเปลยนแปลงมากกวามอเตอรแบบขนาน
ดซมอเตอรกระตนดวยตนเองแบบผสมน จะน าคณลกษณะทดของ ดซมอเตอรกระตนดวยตนเองแบบขนาน และดซมอเตอรกระตนดวยตนเองแบบอนกรมมารวมกน ดซมอเตอรกระตนดวยตนเองแบบผสม มคณลกษณะพเศษ คอมแรงบดสงแตความเรวรอบคงท ขณะยงไมมโหลดจนขณะมโหลดสงสด

6
รปท 2.3 โครงสรางทวไปของดซมอเตอร ทมา : [2]
ทางเดนของฟลกซแมเหลก และสนามแมเหลกจะเกดจากแทงแมเหลกเฟอรไรตสองชนทขนรปเปนแบบโคงยดตดกบตวถงไดพอด เพอทจะใหเสนแรงแมเหลกวงเขาสใจกลางของมอเตอรได ดงนนความเขมของแมเหลกจะขนอยกบขนาดความหนาของแมเหลกดวย ซงสงผลใหฟลกซแมเหลกวงไปบนตวถงโลหะ กระแสไฟฟาในขดลวดทพนกบทนโรเตอรกจะท าใหเกดสนามแมเหลกไฟฟา และตานกบสนามแมเหลกถาวร จงเกดเปนแรงบดเพอทจะหมนทนโรเตอร ใหไปในทศทางเดยวกนกบทศทางของสนามแมเหลกทมแรงมากกวา กระแสกจะไหลผานไปยงทนโรเตอร โดยผานแปรงถาน ซงจะสมผสกบแหวนตวน าในทนโรเตอร และแหวนคอมมวเตเตอร ซงจะถกแบงออกเปนสามสวนเพอทจะท าหนาทน ากระแสเขาขดลวด
2.2.3 สวนประกอบมอเตอรไฟฟากระแสตรง ก) ขดลวดสนามแมเหลก (Field Coil) คอขดลวดทถกพนอยกบขวแมเหลกทยดตดกบโครง
มอเตอร ท าหนาทก าเนดขวแมเหลกขวเหนอ (N) และขวใต (S) แทนแมเหลกถาวรขดลวดทใชเปนขดลวดอาบน ายาฉนวน สนามแมเหลกจะเกดขนเมอจายแรงดนไฟฟากระแสตรงใหมอเตอร
ข) ขวแมเหลก (Pole Pieces) คอแกนส าหรบรองรบขดลวดสนามแมเหลกถกยดตดกบโครงมอเตอรดานใน ขวแมเหลกท ามาจากแผนเหลกออนบาง ๆ อดซอนกน (Lamination Sheet Steel) เพอลดการเกดกระแสไหลวน (Eddy Current) ทจะท าใหความเขมของสนามแมเหลกลดลง ขวแมเหลกท าหนาทใหก าเนดสนามแมเหลกมความเขมสงสด แทนขวสนามแมเหลกถาวร ผวดานหนาของขวแมเหลกท าใหโคงรบกบอารเมเจอรพอด

7
ค) โครงมอเตอร (Motor Frame) คอสวนเปลอกหมภายนอกของมอเตอร และยดสวนอยกบท ของมอเตอรไวภายในรวมกบฝาปดหวทายของมอเตอร โครงมอเตอรท าหนาทเปนทางเดนของเสนแรงแมเหลกระหวางขวแมเหลกใหเกดสนามแมเหลกครบวงจร
ง) อารเมเจอร คอโรเตอร ถกยดตดกบเพลาและรองรบการหมนดวยทรองรบการหมนตวอารเมเจอรท าจากเหลกแผนบาง ๆ อดซอนกน ถกเซาะรองออกเปนสวน ๆ เพอไวพนขดลวดอารเมเจอร ขดลวดอารเมเจอรเปนขดลวดอาบน ายาฉนวน รองขดลวดอารเมเจอรจะมขดลวดพนอยและมลมไฟเบอรอดแนนยดขดลวดอารเมเจอรไว ปลายขดลวดอารเมเจอรตอไวกบคอมมวเตเตอร อารเมอเจอรผลกดนของสนามแมเหลกทงสอง ท าใหอารเมเจอรหมนเคลอนท
จ) คอมมวเตเตอร คอสวนเคลอนทอกสวนหนง ถกยดตดเขากบอารเมเจอรและเพลารวมกน คอมมวเตเตอรท าจากแทงทองแดงแขงประกอบเขาดวยกนเปนรปทรงกระบอก แตละแทงทองแดงของคอมมวเตเตอรถกแยกออกจากกนดวยฉนวนไมกา อารเมเจอร คอมมวเตเตอรท าหนาทเปนขวรบแรงดนไฟฟากระแสตรงทจายมาจากแปรงถาน เพอสงไปใหขดลวดอารเมเจอร
ฉ) แปรงถาน คอตวสมผสกบคอมมวเตเตอร ท าเปนแทงสเหลยมผลตมาจากคารบอนหรอแกรไฟตผสมผงทองแดง เพอใหแขงและน าไฟฟาไดด มสายตวน าตอรวมกบแปรงถานเพอไปรบแรงดนไฟฟากระแสตรงตรงทจายเขามา แปรงถานท าหนาทรบแรงดนไฟฟากระแสตรงจากแหลงจาย จายผานไปใหคอมมวเตเตอร
2.2.4 การขบและกลบทศทางการหมนของมอเตอรไฟฟากระแสตรง
ในการใชไอซไมโครคอนโทรเลอรเปนตวควบคมการหมน และทศทางของมอเตอรกระแสตรงนน จะตองมสวนของวงจรทเรยกวา วงจรขบมอเตอร ในสวนของวงจรกลบทศทางของมอเตอรนน สามารถทจะใชรเลยตอวงจร สวตซเพอกลบทศทางของขวไฟฟากระแสตรง หรออาจใชอปกรณสารกงตวน าทเปนวงจรขบก าลงเชน ทรานซสเตอร มอสเฟต แลวแตวธทเราจะเลอกใชงาน
การใชรเลยควบคมการเปลยนทศทางการหมนของมอเตอร โดยการควบคมการปด-เปด ทรเลย 2 ตว ซงจะท าหนาทกลบทศทางของขวไฟทปอนใหกบมอเตอร โดยการสลบการท างานของรเลย เชน ใหรเลยตวทหนงท างาน และรเลยตวทสองหยดท างาน จะท าใหมอเตอรหมนไปทางซาย และในท านองเดยวกนถาหากรเลยตวทหนงหยดท างาน และรเลยตวทสองท างาน กจะท าใหมอเตอรหมนไปทางขวา

8
รปท 2.4 การกลบทศทางมอเตอรไฟฟากระแสตรงโดยใชรเลย ทมา : [2]
2.2.5 หลกวธการมอดเลตตามความกวางของพลส การควบคมความเรวของมอเตอรกระแสตรงมหลายวธดวยกน ซงอาจจะใชวธการควบคมแบบพนฐานทวไปเชน การควบคมดวยวธการใชตวตานทานปรบคาโดยตออนกรมกบมอเตอร หรอใชวธการการควบคมโดยการเปลยนคาของระดบแรงดนทปอนใหกบมอเตอร แตการจะควบคมความเรวมอเตอรใหคงทได แตทความเรวต าจะสงผลใหแรงบดต าไปดวย ดงนน จงเลอกใชวธการควบคมโดยการจายกระแสไฟฟาใหกบมอเตอรเปนชวง ๆ โดยอาศยกระแสไฟฟาทปอนใหกบมอเตอรใหเปนคาเฉลยทเกดขนในแตละชวง ซงเรยกวา การมอดเลตตามความกวางพลส (Pulse Width Modulation: PWM)
2.3 เซอรโวมอเตอร [3]
หลกการท างานของเซอรโวมอเตอร คอการเปลยนค าสงทเปนสญญาณไฟฟาจากรซฟเวอรใหเปนการเคลอนทของแขนเซอรโวมอเตอร ซงโดยปกตแลวสายสญญาณของเซอรโวมอเตอรจะเสยบไวทชองใดชองหนงของรซฟเวอรเพอใชบงคบสวนตาง ๆ การเคลอนทของเซอรโวมอเตอรจงขนอยกบการควบคมจากวทย
2.3.1 องคประกอบพนฐานของเซอรโว
รปท 2.5 องคประกอบพนฐานของเซอรโวมอเตอร ทมา : [3]

9
องคประกอบหลกของเซอรโวมอเตอรโดยทวไปม ดงน ก) เซอรโวเคส สวนใหญท ามาจากพลาสตก ข) มอเตอร เปนสวนตนก าลงในการหมนของเซอรโวมอเตอร ค) ตวควบคมกระแสไฟฟา มหนาทในการถอดรหสสญญาณควบคมจากรซฟเวอรซงสงมา
เปนแบบ PWM และสงการควบคมไปสงการท างานของมอเตอรใหหมนแขนของเซอรโวมอเตอรใหอย ณ ต าแหนงทถอดรหสได
ง) โพเทนตโอมเตอร คอสวนทตรวจวดต าแหนงของเซอรโวมอเตอรและสงสญญาณกลบไปยงตวควบคมกระแสไฟฟา เพอแกไขต าแหนงใหถกตองตามสญญาณทไดตงไวตงแตแรก
จ) เกยรขบ คอชดทดรอบจากการหมนของมอเตอรเพอใหไดแรงบดทสง ฉ) เอาตพตสลป คอสวนทปองกนการเสยดสระหวาง เซอรโวเคสและเอาตพตสลป ซงอาจใช
อปกรณประเภท แบรงเพอชวยลดแรงเสยดทานทด ช) เซอรโววาย คอสายไฟของเซอรโวมอเตอรซงมรายละเอยดดงน สายไฟของเซอรโวมอเตอรจะมอยสามเสนซงจะตดเปนชดเดยวกน ซงจะมหนาทคอ เสนทหนง ส าหรบตอกบขวบวกของแหลงจาย ซงแรงดนดซปกตจะอยท 5-6 โวลต เสนทสอง ส าหรบตอกบขวลบของแหลงจาย เสนทสาม เปนสายสญญาณ ซงรซฟเวอรจะสงสญญาณลกษณะเปนพลส
รปท 2.6 การท างานของเซอรโวมอเตอร ทมา : [3]
ในรปท 2.6 แสดงระบบการท างานของเซอรโวมอเตอร โดยทรซฟเวอรจะสงสญญาณการควบคมต าแหนงของเซอรโวมอเตอรไปยงสวนตวควบคมกระแสไฟฟาของเซอรโวมอเตอร โดยสญญาณทสงมาจะเปนสญญาณแบบ มอดเลตตามความกวางพลส จากนน ตวควบคมกระแสไฟฟา จะถอดรหสสญญาณ PWM ทไดใหเปนต าแหนงของเซอรโวมอเตอรทถกตองโดยเปรยบเทยบคา

10
ต าแหนงปจจบนกบสญญาณกลบจาก โพเทนตโอมเตอร แลวจงสงแรงดนไฟฟาไปยงมอเตอรใหไปหมนไปในทศทางทจะท าใหต าแหนงของ โพเทนตโอมเตอร มคาทถกตองเทากบคาทไดถอดรหสมา ซงขณะทมอเตอรหมนกจะมเฟองทไปตอกบแกนของ โพเทนตโอมเตอร ดงนนกระบวนการนจะเกดขนซ า ๆ จนกวาคาของ โพเทนตโอมเตอร จะมคาเทากบการถอดรหสสญญาณทไดรบมาจากรซฟเวอรการท างานของมอเตอรจงจะหยด แตกระบวนการท างานของตวควบคมกระแสไฟฟา จะยงท างานอยตลอดเวลา แตถาคาของ โพเทนตโอมเตอร มคาเทากบสญญาณทถอดรหสมาจากรซฟเวอรแลวกจะไมมการสงแรงดนไฟฟาไปยงมอเตอร ซงกระบวนการนเรยกวา การอพเดทสญญาณโดยมความเรวท 50 ครงตอหนงวนาท จงเหนเปนการเคลอนทของเซอรโวมอเตอร
2.3.2 ขนาดของเซอรโวมอเตอร
โ ด ย ป ก ต ข น า ด ข อ ง เ ซ อ ร โ ว ม อ เ ต อ ร จ ะ ม อ ย ด ว ย ก น ส า ม แ บ บ ค อ Micro, Standard และ Giant หรอ 1/4 Scale เพอทจะใหครอบคลมการใชงาน ซงมการใชงานทแตกตางกนไปแตในปจจบนกไดมเซอรโวทมขนาดทหลากหลายเพอครอบคมการใชงานมากขน
รปท 2.7 เซอรโวมอเตอรขนาดตาง ๆ ทมา : [3]
2.3.3 ความเรว และ แรงบด นอกเหนอจากขนาดภายนอกของเซอรโวมอเตอรทเราตองพจารณาในการใชงานแลวยงมคณลกษณะทตองพจารณาอกกคอ ความเรว และ แรงบด การวดความเรวของเซอรโวมอเตอรกคอเวลาทเซอรโวมอเตอรใชตอองศาในการหมนคาหนง ซงมมมาตรฐานทใชวดกนทวไปคอ 60 องศา จงกลาวไดวา ความเรวของเซอรโวมอเตอรกคอ เวลาทใชในการหมนแขนของเซอรโวมอเตอรไปจากต าแหนงเดมเปนมม 60 องศา ดงนน ตวเลขเวลาทมคานอยเทาไหร หมายถงเซอรโวยงมความเรวมากขนเทานน ยกตวอยางเชน เซอรโวมอเตอรตวหนงมความเรว 0.12 Sec/60° ซงหมายถงเซอรโวมอเตอรตวนใชเวลา 0.12 วนาท ในการหมนแขนของเซอรโวมอเตอรเปนมม 60 องศา ซงถอวาเปนมความเรวเปนสองเทาของความเรวของเซอรโวมอเตอรมาตรฐานซงมความเรวอยท 0.24 Sec/60°

11
แรงบด คอแรงทแขนของเซอรโวมอเตอรสามารถกระท าได ซงแรงนวดกนในหนวยของ ออนซตอนว หรอ กโลกรมตอเซนตเมตร ซงตวเลขทมากหมายถงแรงทเซอรโวมอเตอรสามารถฉดหรอผลกได โดยทแรงบดกลางเซอรโวมอเตอรจะอยทประมาณ 40 ออนซ ตอนว ส าหรบเซอรโวมอเตอรประเภทแรงบดสงอาจมแรงบดสงถง 200 ออนซตอนว
ความเรวและแรงบดของเซอรโวมอเตอรจะมคาตางกนเมอจายแรงดนไฟฟาทตางกนใหกบรซฟเวอร โดยทวไปจะมอย 2 คา คอ 4.8 โวลต และ 6 โวลต ซงจะไดมาจากการจายแรงดนไฟฟาของ อปกรณปรบแรงดนไฟฟาและแรงดนไฟฟาสงกวายอมใหความเรวและแรงบดทสงกวา จงไดมเซอรโวมอเตอรทรองรบแรงดนไฟฟาไดถง 8.6 โวลต ซงใหความเรวและแรงบดทสงมาก และรซฟเวอรกตองสามารถรองรบแรงดนไฟฟานไดดวยซงรซฟเวอรระบบ 2.4 GHz ในปจจบนสวนใหญกสามารถรองรบได
2.3.4 สญญาณดจตอลเซอรโวและสญญาณแอนะลอกเซอรโว
เซอรโวมอเตอรในยคแรกนนยงมเฉพาะระบบสญญาณแอนะลอกเทานนแตปจจบนไดมเซอรโวมอเตอรในระบบสญญาณดจตอลเกดขน ลกษณะภายนอกและองคประกอบหลกไมมความแตกตางกน ทง เซอรโวเคส, มอเตอร, เกยร และ โพเทนตโอมเตอร ยงเปนแบบเดยวกนทงสองระบบ ขอแตกตางเพยงอยางเดยวของทงสองระบบน คอรปแบบการแปลสญญาณทไดจากรซฟเวอรและการสงตอสญญาณนนไปสงการท างานใหมอเตอรของเซอรโวมอเตอรหมน
รปท 2.8 สญญาณเซอรโวแบบดจตอลและสญญาณเซอรโวแบบแอนะลอก ทมา : [3]

12
2.3.4.1 การท างานของเซอรโวมอเตอรแบบแอนะลอก เซอรโวมอเตอรแบบแอนะลอกควบคมความเรวในการหมนของมอเตอรโดยการเปดและปด
แรงดนไฟฟาทไดจากสญญาณ ซงแรงดนไฟฟาไดจาก รซฟเวอร, วงจรลดแรงดนไฟฟา โดยทแรงดนอยท 4.8-6 โวลต ทปอนใหเซอรโวมอเตอรนนมคาคงท
ในการเปดและปดแรงดนไฟฟานโดยมาตรฐานแลวมความเรวอยท 50 รอบตอวนาท ยงความกวางของคลนสญญาณ มความกวางมากมอเตอรกจะมความเรวและแรงบดมากขนเทานน ซงเปนวธการเดยวกนกบการควบคมความเรวของวงจรควบคมมอเตอร ซงความเรวในการเปดและปดสญญาณท 50 รอบตอวนาทนนเทากบมการเปดและปดสญญาณ ทก ๆ 20 มลลวนาท ซงยงไมเรวพอทจะท าใหมอเตอรมการตอบสนองไดดพอและมอเตอรกยงไมสามารถสรางแรงบดไดเพยงพอในการเปดและปดสญญาณในแตละครง ซงเปนปญหาอยางหนงของเซอรโวมอเตอรแบบแอนะลอกคอไมสามารถตอบสนองตอสญญาณไดเรวพอหรอสรางแรงบดไดดพอเมอมการเปลยนแปลงสญญาณควบคมเพยงเลกนอยหรอเมอมแรงจากภายนอกมากระท าใหต าแหนงของเซอรโวมอเตอรเลอนไปจากต าแหนงทตงคาไวกอน พนทมการตอบสนองของเซอรโวทงความเรวและแรงบดทชา
รปท 2.9 การท างานของเซอรโว แอนะลอก
ทมา : [3]
2.3.4.2 การท างานของเซอรโวแบบดจตอล เซอรโวมอเตอรแบบดจตอลจะมไมโครโปรเซสเซอรทอยภายในตวเซอรโวโวมอเตอรซงท า
หนาทแปลงสญญาณทสงมาจากรซฟเวอรและสงเปนสญญาณแรงดนไฟฟาทความถสงไปยงเซอรโวมอเตอร 50 ครงตอวนาท เหมอนเชน เซอรโวมอเตอรแบบแอนะลอก แตในเซอรโวมอเตอรแบบดจตอลน มความถในการเปดและปดสญญาณสงถง 300 ครงตอวนาท ซงคลนจะมความยาวทสนลงแตผลทไดคอความเรวของมอเตอรทตอบสนองไดเรวขน อกทงการใหแรงบดทคงทอกดวย ดงนนผลลพธทไดคอเซอรโวมอเตอรมขนาดของการตอบสนองทเลกลง, มการตอบสนองทเรวขน และมอตราเรงทราบเรยบขน

13
ในปจจบนเทคโนโลยของเซอรโวมอเตอรไดพฒนาไปมาก ดงนนอาจจะเหนเซอรโวมอเตอรแบบแอนะลอกบางตวมประสทธภาพดกวาเซอรโวมอเตอรแบบดจตอล ขนอยกบความเหมาะสมในการประยกตใชงาน
รปท 2.10 เซอรโวมอเตอรแบบดจตอล
ทมา : [3]
2.4 วทยบงคบ [4]
ปจจบนเทคโนโลยการสอสารแบบไรสายไดมความตองการใชงานทมากขนแตความถทสามารถใชงานไดกยงคงมอยอยางจ ากด ในวงการวทยบงคบซงกใชคลนวทย ในการตดตอสอสารเชนเดยวกบการสอสารไรสายทวไปเชน วทย, โทรทศน เปนตน
รปท 2.11 คลนความถในยานตาง ๆ ทมา : [4]

14
ในการจดสรรความถในการใชงานแตละสาขาของการใชงาน เพอปองกนการรบกวนกนของสญญาณ ตวอยางเชน วทยระบบ FM ใชคลนความถอยท 87.5 – 108.0 MHz เปนตน ส าหรบคลนความถทใชกบอปกรณประเภทวทยบงคบกไดถกก าหนดมาแลว ทคลน 27 MHz 49 MHz 50 MHz 72 MHz 75 MHz ซงระบบวทยแบบเดมดวยการเขารหสสญญาณคลนวทยแบบ (Frequency Modulation : FM) ในการเลนวทยบงคบในแตละพนททระยะสงสญญาณไปถงจะตองไมมการใชวทยบงคบทมคลนความถซ ากนซงเปนขอจ ากดอยางหนงของระบบวทยน แมจะมการแกปญหาโดยการแบงความถใหยอยลงไปอกเพอใหมการใชงานพรอมกนไดมากขนเชนความถ 72 MHz ทแบงไดอกถง 50 ชองสญญาณ
รปท 2.12 วทยบงคบ 2.4 GHZ ทมา : [4]
2.4.1 วทยบงคบความถ 2.4 GHz เนองจากคลน 2.4 – 2.5 GHz เปนคลนประเภท Unlicensed ISM Band หมายถงทกคนสามารถใชไดภายใตก าลงสงทกฎหมายก าหนด ส าหรบประเทศไทยก าลงสงตองไมเกน 100 mW ยกตวอยางเชน การตดตอสอสารในระยะทางใกล ๆ กใชความถคลน 2.4 GHz ซงสามารถซอมาใชงานไดโดยไมตองขออนญาตจากหนวยงานของรฐบาล แตตองมก าลงสงอยในอตราทกฎหมายก าหนดส าหรบการน าเขา การตดตอสอสารในระยะทางใกล ๆ จากตางประเทศกจะตองถกตรวจสอบจากหนวยงานของรฐในดานความถและก าลงสงกอนเขามาในประเทศ ไมสามารถใชเทคนคการสอสารไรสายกบความถส าหรบวทยบงคบเดมไดเนองจากชวงความถแคบเกนไป

15
รปท 2.13 ความกวางของความถคลน
ทมา : [4]
จากรปท 2.13 เปนรปของสญญาณวทยระบบ 2.4 GHz จะเหนไดวา ความกวางของความถคลนมขนาดความกวางถง 834 kHz เมอเทยบกบ ชวงความถของคลน 72 MHz ซงจะมความกวาง 20 kHz
2.5 รเลย (Relay) [5] รเลย คอสวตชทท างานโดยอาศยอ านาจแมเหลกเพอใชในการดงดดหนาสมผส ใหเปลยน
สภาวะ โดยอ านาจแมเหลกจะเกดขน เมอมการจายกระแสไฟฟาเขาขดลวดของรเลย เพอท าการปดหรอเปดหนาสมผส ซงสามารถน ารเลยไปประยกตใช ในการควบคมวงจรตาง ๆ ในงานชางอเลกทรอนกสมากมาย
รปรางของรเลยทมตวถง สญลกษณแบบ สญลกษณแบบตว เปนพลาสตกใสปองกนฝน ลวดพน เหนยวน าพนแกนเหลก
รปท 2.14 รปรางและสญลกษณของรเลย ทมา : [5]

16
หลกการท างานเบองตนของรเลยแสดงดงรปท 2.15 การท างานเรมจากปดสวตช เพอปอนกระแสใหกบขดลวด โดยทวไปจะเปนขดลวดพนรอบแกนเหลก ท าใหเกดสนามแมเหลกไปดดเหลกออนทเรยกวา อารเมเจอร ใหต าลงมา ทปลายของอารเมเจอรดานหนงมกยดตดกบสปรง และปลายอกดานหนงยดตดกบหนาสมผส การเคลอนทอารเมเจอร จงเปนการควบคมการเคลอนทของหนาสมผส ใหแยกจากหรอแตะกบหนาสมผสอกอนหนงซงยดตดอยกบท เมอเปดสวตชอารเมเจอร กจะกลบสต าแหนงเดม เราสามารถน าหลกการนไปควบคมโหลด หรอวงจรอเลกทรอนกสตาง ๆ ไดตามตองการ
รปท 2.15 หลกการท างานเบองตนของรเลย ทมา : [5]
2.5.1 การตรวจสอบรเลย การตรวจสอบรเลยวาอยในสภาพดหรอช ารดนน สามารถกระท าไดโดยใชมลตมเตอรตงยาน
วดโอหมแลวใชสายวดทงสองสมผสทขวขดลวด ของรเลยทงสองขว ถาเขมมเตอรเบยงเบน แสดงวาขดลวดไมขาด ใชงานไดอย แตถาหากเขมไมขน แสดงวาขดลวดขาด ไมสามารถใชงานได
รปท 2.16 การใชมลตมเตอรตรวจสภาพรเลย ทมา : [5]

17
2.6 แมกเนตกคอนแทคเตอร (Magnetic Contactor) [6]
รปท 2.17 แมกเนตกคอนแทกเตอร (Magnetic Contactor)
ทมา : [6]
เปนอปกรณทอาศยการท างานโดยอ านาจแมเหลกในการเปด – ปดหนาสมผสในการควบคมวงจรมอเตอรเรยกวา สวตชแมเหลก (Magnetic Switch) หรอคอนแทคเตอร (Contactor)
2.6.1 ขอดของการใชรเลยและแมคเนตกคอนแทคเตอร เมอเทยบกบสวตชอน ก) ใหความปลอดภยส าหรบผควบคมสง ข) ใหความสะดวกในการควบคม ค) ประหยดเมอเทยบกบการควบคมดวยมอ
2.6.2 โครงสรางและสวนประกอบของแมคเนตกคอนแทกเตอร หรอสวตชแมเหลก แมคเนตกคอนแทคเตอรแตละรน จะตองมโครงสรางหลกทส าคญเหมอนกน ดงน
ก) แกนเหลก ข) ขดลวด ค) หนาสมผส
รปท 2.18 สวนประกอบภายในแมคเนตกคอนแทคเตอร
ทมา : [6]

18
2.6.3 รายละเอยดของสวนประกอบภายในแมคเนตกคอนแทคเตอร แกนเหลกแบงออกเปนสองสวน คอ 1) แกนเหลกอยกบท (Fixed Core) จะมลกษณะขาทงสองขางของแกนเหลก มลวดทองแดง
เสนใหญตอลดอยเปนรปวงแหวนฝงอยทผวหนาของแกน เพอลดการสนสะเทอนของแกนเหลก อนเนองมาจากการสนสะเทอนไฟฟากระแสสลบ เรยกวงแหวนนวา เชดเดดรง (Shaddedring)
2) แกนเหลกเคลอนท (Movable Core) ท าดวยแผนเหลกบางอดซอนกนเปนแกน จะมชดหนาสมผสเคลอนท (Moving Contact) ยดตดอย
ขดลวด (Coil) ท ามาจากลวดทองแดงพนอยรอบบอบบนสวมอยตรงกลางของขาอกตวทอยกบท ขดลวดท าหนาทสรางสนามแมเหลก มขวตอไฟฟาเขาใชสญลกษณอกษรก ากบ คอ A1- A2 หรอ a-b
หนาสมผส (Contact) หนาสมผสจะยดตดอยกบแกนเหลกเคลอนท แบงออกเปนสองสวนคอหนาสมผสหลกหรอเรยกวา เมนคอนแทค (Main Contact) ใชในวงจรก าลงท าหนาทตดตอระบบไฟฟาเขาสโหลด
หนาสมผสชวย (Auxiliary Contact) ใชกบวงจรควบคมหนาสมผสชวยแบออกเปนสองชนด 1) หนาสมผสปตเปด (Normally Open : N.O.) 2) หนาสมผสปกตปด (Normally Close : N.C.)
รปท 2.19 ระบบดบอารค ทมา : [6]
19
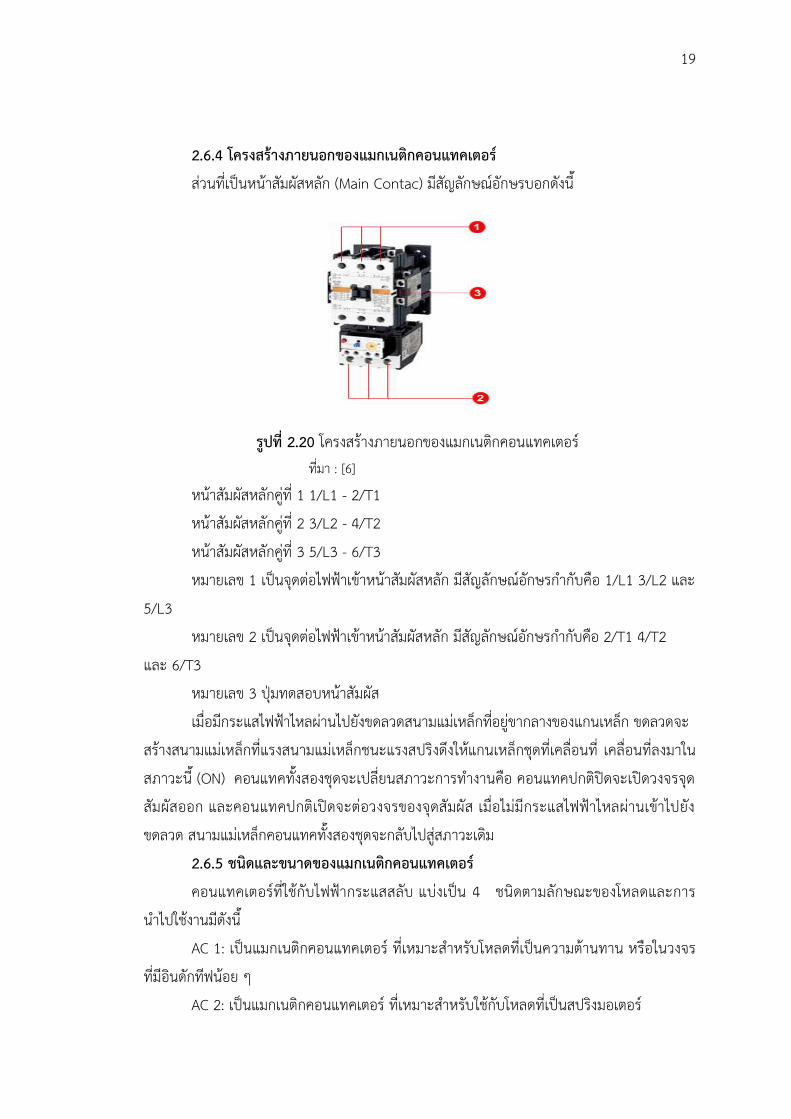
2.6.4 โครงสรางภายนอกของแมกเนตกคอนแทคเตอร สวนทเปนหนาสมผสหลก (Main Contac) มสญลกษณอกษรบอกดงน
รปท 2.20 โครงสรางภายนอกของแมกเนตกคอนแทคเตอร ทมา : [6]
หนาสมผสหลกคท 1 1/L1 - 2/T1 หนาสมผสหลกคท 2 3/L2 - 4/T2 หนาสมผสหลกคท 3 5/L3 - 6/T3 หมายเลข 1 เปนจดตอไฟฟาเขาหนาสมผสหลก มสญลกษณอกษรก ากบคอ 1/L1 3/L2 และ
5/L3 หมายเลข 2 เปนจดตอไฟฟาเขาหนาสมผสหลก มสญลกษณอกษรก ากบคอ 2/T1 4/T2
และ 6/T3 หมายเลข 3 ปมทดสอบหนาสมผส เมอมกระแสไฟฟาไหลผานไปยงขดลวดสนามแมเหลกทอยขากลางของแกนเหลก ขดลวดจะ
สรางสนามแมเหลกทแรงสนามแมเหลกชนะแรงสปรงดงใหแกนเหลกชดทเคลอนท เคลอนทลงมาในสภาวะน (ON) คอนแทคทงสองชดจะเปลยนสภาวะการท างานคอ คอนแทคปกตปดจะเปดวงจรจดสมผสออก และคอนแทคปกตเปดจะตอวงจรของจดสมผส เมอไมมกระแสไฟฟาไหลผานเขาไปยงขดลวด สนามแมเหลกคอนแทคทงสองชดจะกลบไปสสภาวะเดม
2.6.5 ชนดและขนาดของแมกเนตกคอนแทคเตอร คอนแทคเตอรทใชกบไฟฟากระแสสลบ แบงเปน 4 ชนดตามลกษณะของโหลดและการ
น าไปใชงานมดงน AC 1: เปนแมกเนตกคอนแทคเตอร ทเหมาะส าหรบโหลดทเปนความตานทาน หรอในวงจร
ทมอนดกทฟนอย ๆ AC 2: เปนแมกเนตกคอนแทคเตอร ทเหมาะส าหรบใชกบโหลดทเปนสปรงมอเตอร

20
AC 3: เปนแมกเนตกคอนแทคเตอร ทเหมาะส าหรบใชการสตารทและหยดโหลดทเปนมอเตอรกรงกระรอก
AC 4: เปนแมกเนตกคอนแทคเตอร ทเหมาะส าหรบการสตารท – หยดมอเตอรวงจร Jogging และการกลบทางหมนมอเตอรแบบกรงกระรอก
2.6.6 การพจารณาเลอกไปใชงาน
ในการเลอกแมกเนตกคอนแทคเตอรในการใชงานใหเหมาะสมกบมอเตอรนน จะพจารณาทกระแสไฟฟาสงสดในการใชงาน (Rated Current) และแรงดนไฟฟาของมอเตอร ตองเลอกแมกเนตกคอนแทคเตอรทมกระแสไฟฟาสงกวากระแสไฟฟาทใชงานของมอเตอรทมแรงดนไฟฟาเทากน ในการพจารณาเลอกแมกเนตกคอนแทคเตอรใชงานควรพจารณาดงน 1) ลกษณะของโหลดและการใชงาน
2) แรงดนไฟฟาและความถ 3) สถานทใชงาน 4) ความบอยครงในการใชงาน 5) การปองกนจากการสมผสและการปองกนน า 6) ความคงทนทางกลและทางไฟฟา รเลยชวยหรออาจเรยกวา รเลยควบคม (Control Relay) การท างานอาศยอ านาจในการ
เปด - ปดหนาสมผส เหมอนกบหลกการท างานของแมคเนตกคอนแทคเตอร ตางกนตรงทรเลยชวยจะทนกระแสไฟฟาไดต า หนาสมผสจะเลกกวาหนาสมผสของแมคเนตกคอนแทคเตอรลกษณะของหนาสมผสของรเลยชวยมสองชนด ไดแก หนาสมผสปกตเปด (Normally Open : N.O.) และหนาสมผสปกตปด (Normally Close : N.C.) จ านวนหนาสมผสและชนดของหนาสมผสขนอยกบบรษทผผลตและการน าไปงาน
2.7 โอเวอรโหลดรเลย (Over Load Relay) [7]
โอเวอรโหลดรเลย เปนอปกรณปองกนมอเตอรท างานเกนก าลง หรอปองกนมอเตอรไมใหเกดการเสยหาย เมอมกระแสไฟฟาไหลเกนพกดในมอเตอร
2.7.1 หลกการท างาน
จากโครงสรางภายในของโอเวอรโหลดทประกอบไปดวยเหลกมขดลวดตวน าพนรอบอย เมอมอเตอรท างานหนกเกนก าลง จะท าใหมกระแสไฟฟาไหลผานตวน าสงเกนพกดของโอเวอรโหลดทตงไว ท าใหเกดความรอนทไบเมทล ท าใหไบเมทลงอตวไปดนกานดนหนาสมผส ท าใหหนาผสทปดจะเปลยนเปนเปด และหนาสมผสเปดจะเปลยนเปนปด และเมอกดปมรเซทหนาสมผสจะกลบคนสภาพ

21
เดม แตในกรณทโอเวอรโหลดเปนแบบไมมปมรเซทจะตองรอใหไบเมทลเยนตวลง หนาสมผสถงจะกลบคนสสภาพเดม
2.7.2 รเลยปองกนกระแสไฟฟาเกนพกด เปนอปกรณปองกนอปกรณไฟฟา เกนก าลงหรอปองกนมอเตอร ไมใหเกดการเสยหาย เมอมกระแสไฟฟาไหลเกนพกด โดยมสวนประกอบภายนอกทส าคญ ของโอเวอรโหลดรเลย ดงน
1) ปมปรบกระแสไฟฟา (RC.A) 2) ปมทรพ (TRIP) 3) ปมรเซท (RESET) 4) จดตอไฟเขาเมนไบมทอล 5) จดตอไฟออกจากเมนไบมทอล 6) หนาสมผสชวยปกตปด (N.O.) 7) หนาสมผสชวยปกตเปด (N.C.)
รปท 2.21 อปกรณปองกนโหลดเกน (Over Load Relay) ทมา : [7]
รเลยปองกนกระแสไฟฟาเกนพกด มขดลวดความรอน (Heater) พนกบแผนไบเมทลแผนโลหะผลตจากโลหะตางชนดกนเชอมตดกน เมอไดรบความรอนแผนโลหะจะโกงตว ขดลวดความรอนซงเปนทางผานของกระแสไฟฟาจากแหลงจายไฟฟาใหมอเตอร เมอกระแสไฟฟาไหลเขาสงในระดบคาหนง สงผลขดลวดความรอนท าใหแผนไบเมทลรอน และโกงตว ดนใหหนาสมผสปกตปด N.C. ของโอเวอรโหลดทตออนกรมอยกบแผงควบคมเปดวงจรตดกระแสไฟฟา จากคอลยแมเหลกของคอนแทกเตอร ท าใหหนาสมผสหลก (Main Contact) ของคอนแทกเตอรปลดมอเตอรออกจากแหลงจายไฟฟา ปองกนความเสยหายของมอเตอรจากกระแสไฟฟาเกนได

22
2.7.3 ชนดของโอเวอรโหลดรเลย โอเวอรโหลดรเลยแบบธรรมดา เมอแผนไบเมทลงอไปแลวจะกลบมาอยต าแหนงเดม เมอ
เยนตวลงเหมอนในเตารด
รปท 2.22 โอเวอรโหลดรเลยแบบธรรมดา ทมา : [7]
โอเวอรโหลดรเลยแบบทมรเซต (Reset) คอเมอตดวงจรไปแลว หนาสมผสจะถกลอกเอาไว ถาตองการจะใหวงจรท างานอกครง ท าไดโดยกดทปม Reset ใหหนาสมผสกลบมาตอวงจรเหมอนเดม
รปท 2.23 สญลกษณโอเวอรโหลดรเลย แบบมปม Reset ทมา : [7]

23
2.8 ฟวส [8] ฟวส เปนอปกรณปองกนโดยท าหนาท เหมอนตวน าตวหน งในวงจรไฟฟา เมอเกด
กระแสไฟฟาเกนพกด (Overload Current) หรอกระแสไฟฟาลดวงจร (Short Circuit Current) มคามากกวากระแสไฟฟาทฟวสทนได (Fuse’s Current Rating) จะท าใหฟวสขาด (Blown Fuse) ท าใหวงจรขาดและกระแสไฟฟาไมไหลอกตอไป เพอปองกนความเสยหายทจะเกดขนกบอปกรณและผใชอปกรณ
ปกตแลวกระแสไฟฟาเกนพกด (Overload Current) เกดขนจากการดงกระแสไฟฟาทมากเกนจากอปกรณปลายทาง สวนกระแสไฟฟาลดวงจร (Short Circuit Current) เกดจากการทกระแสไฟฟาเคลอนทผานทางลดทอาจจะเกดจากการแตะกนของสายไฟฟาหรอมตวน าไฟฟาเชอมตอการลดวงจร ซงสามารถมคามากกวาพนเทาของกระแสไฟฟาตอเนองทฟวสทนได โดยปกต ฟวสจะเปนอปกรณทออนแอทสดในวงจร โดยจะขาดและตดวงจรกอนทอปกรณอน เชน หลอดไฟ สายไฟฟา หรอหมอแปลงไฟฟา จะไหมหรอระเบด
รปท 2.24 ชนดฟวส ทมา : [8]
2.8.1 ฟวสกบเบรคเกอร ฟวสแตกตางจากเบรกเกอรตรงท ฟวสเมอท าการตดวงจรออกแลวจะใชงานตอไปไมไดตอง
ท าการเปลยนฟวสใหม สวนเบรกเกอรเมอตดวงจรแลว สามารถรเซทคาแลวใชงานไดตอไปอก ฟวสมราคาถกกวาและใหความเสถยรภาพและรวดเรวในการตดวงจรไดดกวาเบรคเกอร นอกจากนฟวสทกชนดสามารถปองกนทงกระแสไฟฟาเกนพกด (Overload Current) และกระแสไฟฟาลดวงจร (Short Circuit Current) แตเบรกเกอรนนโดยสวนใหญจะออกแบบมาเพอปองกนกระแสไฟฟาเกนพกด (Overload Current) อยางเดยวเทานน ไมสามารถจะปองกนกระแสไฟฟาลดวงจรได

24
ดงนน การออกแบบระบบไฟฟาทตองการเสถยรภาพในการตดวงจรคอนขางสง จงมกมการน าเอาฟวสมาตอรวมกบเบรกเกอร โดยใหเบรกเกอรท าการตดวงจรกอน (คากระแสไฟฟาพกดต า) แตถาเบรก-เกอรไมตด ฟวสจะท าหนาทตดวงจรเอง (คากระแสไฟฟาพกดสง) หรอระบบทใชฟวสเปนตวตดวงจรเพยงตวเดยว บางทอาจจะมการตอเบรกเกอรไวดวย เพอประโยชนในการตดวงจรขณะตรวจเชคหรอบ ารงรกษา มอเตอรมกไมใชฟวส แตจะใชเบรกเกอรคกบรเลยปองกนกระแสไฟฟาเกน ในการตดวงจรออกจากระบบไฟฟา เนองจากมอเตอรเปนอปกรณทมกเกดกระแสไฟฟาเกนชวขณะเมอสตารท จงตองการอปกรณปองกนทตดวงจรชา โดยจะตดวงจรเมอเกดกระแสไฟฟาเกนจรง ๆ ดงนนอปกรณทตดวงจรจะเปนโอเวอรโหลดรเลย และเบรกเกอรซงจะเปนตวส ารอง เพอตดระบบไฟฟาออกส าหรบการบ ารงรกษาตควบคมไฟฟาหรอเพอการตรวจเชคเทานน
2.8.2 ประเภทของฟวส (Type Of Fuses) ก) ฟวสแบบหนวงเวลา ฟวสประเภทนจะหนวงเวลาขณะทมกระแสไฟฟาเกนพกดขนาดเลก
เพอปองกนการขาดของฟวสทไมจ าเปนส าหรบกระแสไฟฟาเกนชวขณะบางประเภท เชน Motor Start-Ups หรอ Switching Surges บางครงเรยกฟวสชนดนวา Dual-Element Fuses
ข) ฟวสแบบไมหนวงเวลา ฟวสชนดนไมมการหนวงเวลา จะตดวงจรทนททมกระแสไฟฟาทเกนกระแสไฟฟาตอเนองทฟวสทนได ใชในวงจรทไมมกระแสไฟฟาเกนชวขณะ เชน วงจรใหความรอน หรอวงจรแสงสวาง
2.8.3 คาพกดกระแสไฟฟาลดวงจร คาพกดกระแสไฟฟาลดวงจร คอคากระแสไฟฟาทสงสดทฟวสสามารถตดวงจรไดอยางปลอดภยทเมอฟวสใชงานอยทแรงดนไฟฟาพกด หรอกลาวอกนยหนงวา เมอเกดกระแสไฟฟาลดวงจร ซงมคาสงมากหลายเทาของกระแสไฟฟาปกตทฟวสทนได ฟวสจะยงท าหนาทตดวงจรตามปกต โดยไมเกดการระเบดหรอแตกหก ถาหากกระแสไฟฟาลดวงจรไมเกนคาพกดกระแสไฟฟาลดวงจรของฟวสนน ๆ และคาความตางศกยทใชไมเกนคาพกดความตางศกยของฟวสนน ๆ
2.8.4 คาพกดแรงดนไฟฟาสงสด คาพกดแรงดนไฟฟาสงสด คอคาความตางศกยทเหมาะสมส าหรบการน าไปใชงานจรง ๆ แลวจะเปนคาความตางศกยทสงสดทฟวสจะสามารถตดวงจรไดอยางปลอดภยเมอเกดกระแส ไฟฟาลดวงจร ดงนน ฟวสจะสามารถน าไปใชไดอยางปลอดภย ทกความตางศกยทต ากวาคาพกดความตางศกย โดยไมท าใหความสามารถในการตดวงจรของฟวสเสยไป
25
โดยปกต คาพกดแรงดนไฟฟา ทผผลตแจงมาจะเหมาะสมกบแหลงจายเอซหรอดซเพยงอยางใดอยางหนง แตผใชสามารถพจารณาน าไปใชได ดงน ก) ถาเปนฟวสกระบอกแกว คาพกดแรงดนไฟฟากระแสตรงจะมคาประมาณครงหนงของไฟฟากระแสสลบ ข) ถาเปนฟวสเซรามก คาพกดแรงดนไฟฟากระแสตรงจะมคาเทากบไฟฟากระแสสลบ
2.8.5 คาพกดกระแสไฟฟา คาพกดกระแสไฟฟา คอคากระแสไฟฟาปกตทฟวสสามารถทนไดกอนทจะตดวงจร โดยเปนคากระแสไฟฟาทฟวสสามารถทนไดจากการทดสอบจากผผลตทอณหภมหองทดสอบ 25°C หรอ 77°F โดยประมาณ
2.8.6 หลกการเลอกใชฟวส ในการเลอกฟวสทมขนาดถกตอง ผ ใชตองทราบขนาดกระแสไฟฟาปกตในวงจรท
อณหภมหอง (25°C) เสยกอน เมอทราบขนาดของกระแสไฟฟาดงกลาวแลวจงเลอกใชฟวสทมคาพกดกระแสไฟฟา 135% ของคากระแสไฟฟานน โดยใหเลอกฟวสขนาดมาตรฐานถดไปจากคากระแสไฟฟาทค านวณได ตวอยางเชน ระบบทเดนปกตซงมกระแสไฟฟาในระบบ 15 แอมแปร ทอณหภมหอง ควรเลอกใชฟวสขนาด 15 แอมแปร (คา 135% ของกระแสไฟฟาดงกลาวคอ 1.35x15 A = 20.25 A ซงขนาดมาตรฐานของฟวสถดไปทควรเลอกใชกคอขนาด 20 A)
การเลอกใชจรง มอเตอร DC ขนาด 15 A ในกรณทเลอกฟวสแบบท างานไวเปนตวปองกนวงจรยอยของมอเตอร
จะได พกดของฟวส = 300% ของกระแสไฟฟาพกดโหลด = ขนาด A ของมอเตอร x พกดของฟวส = 15 A x 3 = 45 A
ดงนน จงเลอกใชฟวสทมพกด 50 A เปนอปกรณปองกน
2.9 ระบบเครองลาง เครองจกรกล เครองจกรกลงานกอสรางแบบท างานในขณะเคลอนท ทงชนดขบเคลอนดวยตวเอง และ
แบบลากนน จะตองมสวนสมผสกบพน ซงจะท าหนาทรองรบน าหนกของตวเครองจกรกล ดนใหตวเครองจกรกลเคลอนทไป และท าใหตวเครองจกรกลลอยตวไมจม สวนทสมผสกบพน ส าหรบ

26
เครองจกรกลทใชกนอยในปจจบนแบงออกเปน 2 ประเภทคอ ลอซงอาจจะเปนยางหรอ ลกกลง และเครองลาง (Under Carriage) ทใชกบเครองจกรกลตนตะขาบ
2.9.1 ระบบเครองลาง (Under Carriage System) [9] ระบบเครองลางของเครองจกรกลตนตะขาบ กคอสวนของเครองจกรกลทอยต าจากตวรถ
(Main Frame) ลงมาจนถงจดทสมผสกบพนดน ซงโดยทวไปจะประกอบดวยลอเฟอง (Sprocket) ทรบแรงขบเคลอนมาจากชดขบเคลอนทาย (Final Drive) มาขบสายพานตนตะขาบ (Track) ให เลอนไป และท าใหแผนตนตะขาบ (Shoes) ซงตดอยกบสายพานตนตะขาบตะกยไปบนพน ท าใหตวรถเคลอนทไป นอกจากนระบบเครองลางยงตองประกอบดวยลอน า (Front Idler) ลกรอกบน (Carrier Roller) ลกรอกลาง (Track Roller) ชดสปรงเรงแทรก (Tension Mechanism) ซงท าหนาทในการท าใหสายพานตนตะขาบมความตงตามก าหนดและแทรกเฟรม (Track Frame) ท าหนาทเปนแทนยดและเปนเสอของชนสวนสวนอน ๆ ของระบบเครองลาง
2.9.1.1 สายพานตนตะขาบ สายพานตนตะขาบมลกษณะเปนวงโซ ซงประกอบขนดวยขอโซ (Link) สองแถวเปนค ๆ
รอยตอกนโดยบชชง (Bushing) และพน (Pin) สามารถมวนตวไดเปนค ๆ และบนขอโซแตละค จะมแผนตนตะขาบขนยดตดอยคและแผนชนสวนทส าคญของสายพานตนตะขาบจะมรายละเอยดคอ
ก) แผนตนตะขาบ เปนสวนทสมผสกบพนและท าใหเครองจกรลอยตว แผนตนตะขาบมใหเลอกใชหลายแบบทงนขนอยกบลกษณะของงานและสภาพของพนเชน แผนตนตะขาบทมสนเดยว (Grouser Shoe) เปนแบบทนยมใชกนกวางขวางส าหรบรถแทรกเตอรตนตะขาบทใชในงานดงและดนในการเคลอนทสนจะถกกดลงบนพนท าใหแรงฉดลากด แผนตนตะขาบทมหลายสน (Semi-Grouser Shoe) เปนแบบทมสนเตยแตมหลายอน จะไมกดลงบนพนลกเหมอนแบบแรก ท าใหคลองตวกวา จงนยมใชกบรถตนตะขาบทตองเคลอนตวไปในทศทางตาง ๆ ตลอดเวลา และแผนตนตะขาบแบบแบน (Flat Shoe) จะใชกบรถแทรกเตอรตนตะขาบทใชในงานบรรทกซงท างานบรเวณทไมตองการใหพนเสยมาก แผนตนตะขาบแบบนแรงฉดลากจะไมดและลนไถลไดงาย นอกจากนแผนตนตะขาบแบบแบนยงสามารถตดตงแผนยางเพอใหรถแทรกเตอรตนตะขาบท างานไดในบรเวณอาคารหรอบนถนนลาดยาง
แผนตนตะขาบแบบตาง ๆ ขางตนยงมชนดทเจาะชองไวตรงกลาง เพอใหดนหรอโคลนถกอดออกจากชดเครองลางอกดวย นอกจากนยงมแผนตนตะขาบแบบพเศษอน ๆ อก เชน แบบทใชงานในทลม (Low Ground Pressure) เปนตน

27
รปท 2.25 สายพานตนตะขาบ
ทมา : [9]
ขนาดของแผนตนตะขาบจะเปนตวก าหนดการลอยตวของเครองจกรกล โดยจะก าหนด ในรปของความดนทกดลงบนพน (Ground Pressure) ถาแผนตนตะขาบมขนาดกวางกจะท าใหความดนทกดลงบนพนต า ท าใหการลอยตวของเครองจกรกลด สามารถท างานในทลมได แตแผนตนตะขาบทกวางมากอาจท าใหเกดการบดงอไดงายและเปนผลใหชนสวนตาง ๆ ของระบบเครองลางสกหรอเรว
ข) โซ (Track Chain) ประกอบขนดวยขอโซสองแถวเปนค ๆ ขอโซแตละอนจะมรสองดาน รดานหนงจะอดบชชงไว และรอกดานหนงจะมสลกไวโดยสลกจะสอดอยในบชชงของขอโซอนถดไป การประกอบบชชงกบสลกเขากบขอโซนจะตองใชเครองอดไฮดรอลกทมแรงดนสงบางคร งเรยกวาเครองยงแทรก การประกอบโซหรอสายพานตนตะขาบใหเปนวงจะตองประกอบทตวรถซงไมสะดวกทจะใชเครองอด ดงนนโซจงจะตองมต าแหนงทสามารถถอดออกไดโดยใชเครองมอธรรมดา ซงทใชกนอยมสองแบบคอ แบบขอโซแยกกนได (Split Master Link) ยดไวดวยหมดเกลยวและแบบทใชสลกและบชชงทใสเขาโดยไมตองอดเขาหนงชด (Master Bushing And Master Pin) นอกจากนระหวางบชชงและสลกอาจมการหลอลนโดยใชน ามนหลอลนอดเขาไปในชองวางระหวางบชชงกบสลกหรออาจจะไมมการหลอลน แตจะมเฉพาะซลกนมใหเศษดนหรอสงสกปรกเขาไปได
ค) ลอเฟอง มกมลกษณะเปนลอฟนโดยรอบ ท าหนาทรบแรงขบจากชดขบเคลอนทายมาถายทอดใหกบสายพานตนตะขาบ ซงจะหมนงดพาใหบชชงของสายพานตนตะขาบใหขยบเคลอนทไปท าใหสายพานตนตะขาบเคลอนท และแผนตนตะขาบซงกดอยกบพนกจะท าใหตวรถเสมอนเคลอนทไปบนราง
บชชงของสายพานตนตะขาบจะเขาไปในรองฟนของลอเฟองรองเวนรอง จ านวนฟนและรองของลอเฟองจะท าเปนจ านวนเลขคซงจะท าใหแตละฟนสมผสกบบชชงทก ๆ สองรอบ เปนผลใหฟนของลอเฟองทกฟนสกหรอเทา ๆ กน

28
ฟนของลอเฟองทใชกนอยม 2 แบบคอ แบบทท าเปนชนเดยวกบลอและแบบทท าเปนสวน ๆ โดยยดตดกบลอดวยหมดเกลยว
รปท 2.26 ฟนของลอเฟอง ทมา : [9]
ง) ลอน า มลกษณะเปนวงลอกลมและท าเปนสนตรงกลางของขอบลอ ท าหนาทเปนตวขงวงโซและเปนตวบงคบทศทางการตะกยของสายพานชวงหนาโดยใชสนกลางเปนตวบงคบทศทาง ลอน านตดตงอยบนแทรกเฟรม โดยมขาไก (Yoke) เปนตวยด สามารถเลอนเขาออกบนแทรกเฟรมไดตามแนวยาวของแทรกเฟรม ขาไกทยดลอน านปลายอกขางหนงตอเขากบชดเรงแทรก ชดเรงแทรกนจะตดอยกบหนาของสปรงเรงแทรก เมอมแรงกระแทกสวนหนาของสายพานตนตะขาบ แรงกระแทกจะท าใหลอน าอดกบขาไกไปอดสปรงใหหดเขาจงสามารถผอนแรงกระแทกใหลดลงได และเนองจากลอน าเปนตวขงวงโซดานหนาอย ดงนนเมอดนใหขาไกยดออกลอน ากจะเลอนออกซงจะท าใหวงโซตงขนไดตามทตองการ
รปท 2.27 ขาไก ทมา : [10]

29
จ) ลกรอกบน ท าหนาทรองรบวงโซหรอสายพานตนตะขาบไมใหตกทองชางมาก และท าหนาทเปนตวบงคบทศทางการเคลอนทของวงสายพานตนตะขาบดานบนดวยลกรอกบน มลกษณะเปนลกกลงหมนไดอสระบนเพลาทยดตดกบแทรกเฟรม และมตลบลกปนรองรบระหวางลกกลงกบเพลา ลกรอกบนมปกดานในเพอท าหนาทบงคบทศทางการเคลอนทของวงสายพาน จ านวนลกรอกบนของเครองจกรกลตนตะขาบจะขนอยกบบรษทผผลตโดยทวไปจะใชหนงหรอสองลกเทานน หากมมากเกนไปกจะท าใหเกดการสญเสยเนองจากความฝดโดยไมจ าเปน
ฉ) ลกรอกลาง ท าหนาทเปนตวรบน าหนกของตวรถจากแทรกเฟรมมาถายทอดลงบนสายพานตนตะขาบ โดยวางเรยงกนเปนแถวอยดานลางของแทรกเฟรม ลกรอกลางจะมลกษณะคลายกบลกรอกบนคอเปนลกกลงทหมนไดอสระบนเพลาทยดตดกบแทรกเฟรม และนยมใชบชเปนตวรองรบระหวางลกกลงกบเพลา
รปท 2.28 ลกรอกลาง ทมา : [9]
ลกรอกลางนม 2 ชนดคอชนดปกเดยว (Single Flange) และปกค (Double Flange) ซงจะวางเรยงสลบกนไปและมจ านวนตามการออกแบบของบรษทผผลต ปกบนลกรอกจะท าหนาทบงคบทศทางการเคลอนทของสายพาน แตหากจะใชลกรอกทมปกคทงหมดกอาจจะเกดการเสยดส ระหวางโซกบปกมากเกนไป ช) แทรกเฟรม ท าหนาทเปนแทนยดของชนสวนเครองลางแทรกเตอรและยงท าหนาท เปนเสอของชนสวนบางชนดวยเชน ชดเรงแทรก ซงชดเรงแทรกนแบงออกเปน 2 ชวง คอชวงทเปน ชดสปรง (Recoil Spring) ท าหนาทรบแรงกระแทกทางดานหนาหรอดานลอน า ปองกนไมให ลอน า แทรกเฟรม และโซตนตะขาบช ารด คอท าหนาทเหมอนโชกอพ (Shoke Absorber) สวน อกตอนหนงท าหนาทเปนตวเรงแทรกใหตงหยอนตามทเราตองการ โดยทเมอเราจะเรงใหสายพานตนตะขาบตง ชดเรงแทรกจะไปดนขาไก ซงเปนตวยดลอน าใหดนลอน าไปดนใหวงโซตงขน และเมอเราจะหยอนโซ

30
ชดเรงแทรกจะท าใหขาไกหดกลบมาท าใหลอน าหดกลบตามเขามาท าใหวงโซหยอนลง ในการทจะเรงหรอหยอนวงโซน อาจจะใชแบบอดจาระบหรอแบบขนสกร แลวแตรนและยหอของเครองจกร
รปท 2.29 แทรกเฟรม ทมา : [9]
ทแทรกเฟรมจะมตวปองกนและฝาครอบหลายตวเพอปองกนฝน หน ดน หรอเศษไม หลดลอดเขาไปในระบบเครองลาง เครองปองกนบางตวจะท าหนาทบงคบไมใหสายพานแกวง และบางตวท าหนาทบงคบใหสายพานตนตะขาบเลอนเขาลอเฟองและลอน าในแนวตรง
2.10 สวตชจ ากดระยะ ลมตสวตช [11]
รปท 2.30 สวตชจ ากดระยะ ลมตสวตช ทมา : [11]
ก) สวตชจ ากดระยะ (Limit Switch) เปนอปกรณทส าคญมากชนดหนงทใชในงานอตสาหกรรมในระบบการควบคมแบบอตโนมต

31
ข) ลมตสวตช (Limit Switch) เปนสวตชทจ ากดระยะทาง การท างานอาศยแรงกดภายนอกมากระท าเชน วางของทบทปมกดหรอลกเบยวมาชนทปมกด และเปนผลท าใหหนาสมผสทตออยกบกานชน เปด-ปด ตามจงหวะของการชน
รปท 2.31 การท างานของสวตชจ ากดระยะ ลมตสวตช
ทมา : [11]
ดงนน จงมการน าไปใชประโยชนไดอยางมากมายเชน ลฟทโดยสาร, ลฟทขนของ, ประตทท างานดวยไฟฟา, ระบบสายพานล าเลยง เปนตน และลมตสวตช (Limit Switch) สามารถมคอนแทคไดหลายอน มคอนแทคปกตปดและปกตเปดม โครงสรางคลายสวตช ปมกด
2.10.1 ขอดของลมตสวตช (Limit Switch) ก) ตดตงงาย สะดวกตอการใชงาน ข) ไมตองมไฟเลยงวงจรในการท างาน ค) การท างานเชอถอได มความแมนย าในการท างาน ง) ราคาต ากวาอปกรณตรวจจบชนดอน
2.11 แบตเตอรชนดน า [12]
รปท 2.32 แบตเตอรชนดน า ทมา : [12]

32
2.11.1 แบตเตอร
แบตเตอร (Battery) คออปกรณทท าหนาทจดเกบพลงงานเพอไวใชตอไป ถอเปนอปกรณท
สามารถแปลงพลงงานเคมใหเปนไฟฟาไดโดยตรงดวยการใชเซลลกลวานก (Galvanic Cell) ท
ประกอบดวยขวบวกและขวลบ พรอมกบสารละลายอเลกโตรไลต (Electrolyte Solution) แบตเตอร
อาจประกอบดวยเซลลกลวานกเพยงหนงเซลลหรอมากกวา
แบตเตอรทใชคอแบตเตอรชนดน า 12 VDC 80 Ah แบตเตอรเปนอปกรณส าหรบจดเกบ
ไฟฟาเทานน ไมไดผลตไฟฟา สามารถประจไฟฟาเขาไปใหม (Recharge) ไดหลายครง และ
ประสทธภาพจะไมเตม 100% จะอยทประมาณ 80% เพราะมการสญเสยพลงงานบางสวนไปในรป
ความรอนและปฏกรยาเคมจากการชารจประจและคายประจ
แบตเตอรจดเปนอปกรณทมราคาแพงและเสยหายไดงายหากดแลรกษาไมดเพยงพอหรอใชงานผดวธ รวมถงอายการใชงานของแบตเตอรแตละชนดจะแตกตางกนไป เนองดวยวธการใช การบ ารงรกษา การประจและอณหภม ฯลฯ โดยสามารถจ าแนกแบตเตอรออกไดสองกลมส าคญ ๆ คอ ตามการใชงานและประเภทของโครงสราง
2.11.2 การชารจประจไฟฟาเขาแบตเตอร การชารจไฟฟาเขาแบตเตอร หรอ การประจไฟฟาเขาไปในแตละครงนน ควรจะเลอกใชการ
ชารจอยางชาเอาไว และทงไวซกประมาณ 5-10 ชวโมง โดยเฉพาะในการเปลยนแบตเตอรลกใหม เพอใหแบตเตอรรถยนตเสอมสภาพไดชาลง และมอายการใชงานทยาวนานขน แตตามรานทเปลยนแบตเตอรรถยนตโดยทวไป มกจะใชวธชารจเรวเพอรบใหบรการลกคา ซงจะท าใหแบตเตอรลกนนเสอมสภาพเรว ตองเวยนมาเปลยนใหมเรวขนเลกนอย
2.11.3 ขอควรระวงในการท างานกบแบตเตอร เนองจากในแบตเตอรนนมสารเคมอยภายในเชน สารตะกว น ากรด เปนตน ดงนนในการ
ท างานกบแบตเตอรควรใชความระมดระวงเปนพเศษ ก) ใหระมดระวงพวกไฟฟา หรอประกายไฟฟาตาง ๆ รวมทงประกายไฟจากการสบบหร ข) ใหท าการสวมใสอปกรณปองกนดวงตา ค) ระวงอยาใหเดกเขาใกลน ากรด และแบตเตอร ง) การจดวางและจดเกบแบตเตอรเกาควรจดวางและเกบในสถานททปลอดภยและเปนจดท
จดเกบแบตเตอรโดยเฉพาะไมวางทงเกลอนกลาด จ) ไมควรทงแบตเตอรรถยนตเกาลงในถงขยะปกตธรรมดาทวไป

33
ฉ) ใหระมดระวงอนตรายจากแบตเตอรระเบด ในขณะทท าการชารจแบตเตอรนนจะมแกสเกดขน ซงแกสนนเปนสารทท าใหเกดการระเบดไดอยางสง
ช) ใหปฏบตตามค าแนะน าบนตวแบตเตอร ปฏบตตามคมองานซอมประจ าอเรองระบบไฟฟา และปฏบตตามคมอประจ ารถ
ซ) ใหระวงอนตรายจากน ากรดเวลาเดอด น ากรดในแบตเตอรนนเปนสารกดกรอนอยางรนแรง ดงนนควรสวมอปกรณปองกนดวงตา และถงมอขณะทท างานในกรณนอย รวมทงระวงอยาเอยง หรอตะแคงแบตเตอรเปนอนขาด เพราะน ากรดสามารถรวไหลออกมาทางรระบายได
2.11.4 การดแลแบตเตอร ก) ตรวจสอบสภาพของแบตเตอรเสมอ อยาใหมรอยแตกราว เพราะจะท าใหแบตเตอรไม
เกบประจไฟฟา ข) ดแลขวแบตเตอรใหสะอาดเสมอ ถามคราบเกลอเกดขนใหท าความสะอาด ค) ตรวจสภาพของระดบน ากลนแบตเตอรทก ๆ หนงสปดาห ง) ตรวจเชคระบบไฟฟาชารจของอลเทอรเนเตอร วาระบบไฟฟาชารจต าหรอสงไป ถาต าไป
จะมผลท าใหก าลงไฟฟาไมพอใชในขณะสตารทเครองยนต หรอถาสงไปจะท าใหน ากรดและน ากลนอยภายในระเหยเรวหรอเดอดเรวไดในชวงเวลาเดยวกน
จ) ชวงทมอากาศหนาวหรออณหภมต า ประสทธภาพการแพรกระจาย ของน ากรด และน ากลนจะดอยลง เพราะฉะนนควรหลกเลยงการใชกระแสไฟฟามาก ๆ ขณะอากาศเยน
ช) ควรศกษาถงการใชอปกรณไฟฟาตาง ๆ ใหเหมาะสมกบแบตเตอรและไดชารจเพอทจะใหวงจรการไหลของไฟฟาเปนไปดวยด
ซ) ควรเตมน ากลนใหไดตามระดบทก าหนด ไมควรเตมต าหรอสงเกนไป (เตมสงไป เปนสาเหตหลกท าใหขเกลอขนเรว แบตเตอรสกปรกเรว)
2.12 ใบมดตดหญา [13]
ใบมดตดหญาทใชในโครงงานนสามารถยดดวยนอตเพยงตวเดยว โดยมการประดษฐบชขนมาใหมเพอท าหนาทเหมอนตลบลกปน ท าใหตวของใบมดมหศจรรยสามารถหมนไดรอบตวเองโดยอสระไมถกยดตดแนนตายตวเหมอนใบมดทวไป
เมอมอเตอรหมนท างานจะเกดแรงหนศนยกลางท าใหใบมดถกเหวยงโดยสวนปลายของใบมดทเปนมมแหลมจะเอยงแลวแทรกตวจกเขาไปในกลมของตนหญา ท าใหตนหญาถกยดไวทงหมด พรอม ๆ กนทนทกบการเกยวกระชากอยางรนแรงคลายกบรปแบบการท างานของเคยวเกยวขาว ท าใหตนหญาจะถกกระชากขาดทงหมด ภายในหนงรอบของการหมนของใบมด และเมอเกดอบตเหต

34
ใบมดหมนปะทะของแขงมาก ๆ ตวของใบมดจะสามารถหมนตกลบไดเพราะม บชทชวยท างานเหมอนตลบลกปน เปนการดดซบแรงปะทะไมใหสะเทอนถงฟนเฟอง-กานเพลา และนอตตวผ ตดไดเรวกวา ประหยดพลงงานมากกวาใบมดตดหญาทวไป ใบมดตดหญาสามารถตดหญาขาดไดงายและหลากหลายชนด หญาสง หญาขน หญาคา หญาหนา กสามารถตดได
รปท 2.33 ใบมดตดหญา
ทมา : [13]

บทท 3 ล ำดบขนตอนกำรออกแบบและสรำงโครงงำน
3.1 บทน ำ
ในการออกแบบรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล ไดมการเรมตนศกษาหาขอมลทเกยวของกบโครงสรางของรถตดหญาจากแบบเดมทมอยแลวใหมรปรางทมความทนสมย มความนาสนใจ สะดวก ปลอดภยในการใชงาน รวมถงการขบเคลอน การเคลอนทของลอตะขาบ ในการเลอกทจะใชลอตะขาบ นนกคอลอตะขาบสามารถเคลอนทในพนทตางระดบไดด มแรงฉดลากสง ไมตดหลมงาย มการกระจายแรงลงพนไดดมาก และยงมประสทธภาพในการเคลอนทไดดกวาลอยาง เมอท าการศกษาขอมลจนเขาใจแลว จากนนน าขอมลทศกษาเหลานนมาออกแบบ และท าการสรางรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล แลวท าการทดลองและปรบปรงจดบกพรองตาง ๆ ทเกดขนระหวางการทดลอง เพราะโครงสรางรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล เปนโครงงานทตองสรางออกมาใหมประสทธภาพในการตดหญาสงกวาแบบเดมทมอยแลว
3.2 ขนตอนกำรด ำเนนงำน
ในการออกแบบและการสรางโครงงานตองมการวางแผนขนตอนการด าเนนงาน เพอการปฏบตงานทสะดวกและรวดเรว
รปท 3.1 โฟลวชารตล าดบขนตอนการออกแบบและสรางรถตดหญาในโครงงานน
เรมตน
ออกแบบและสรางโครงรถตดหญา
ออกแบบแลวสรางวงจรควบคมและวงจรก าลง
ทดสอบ
1

36
รปท 3.1 (ตอ) โฟลวชารตล าดบขนตอนการออกแบบและสรางรถตดหญาในโครงงานน
ศกษาการท างานของวงจรปรบความเรว
ก าลง
จดท าปรญญานพนธ
สงอาจารยทปรกษา
ยนคณะกรรมการการสอบ
จบ
ออกแบบแลวสรางวงจรเตอนแบตเตอรต า
บนทกและสรปผลการทดลอง
ทดสอบ
1

37
3.3 แนวคดในกำรออกแบบโครงสรำงรถตดหญำควบคมดวยรโมทคอลโทรล แนวคดในการออกแบบโครงสรางรถตดหญาควบคมดวยรโมทคอลโทรลน มการเปรยบเทยบกบรถตดหญาทวไปและไดออกแบบใหมรปรางใหมความทนสมย มความนาสนใจและตอบสนองความตองการของผบรโภค สะดวกในการใชงาน ปลอดภย สรางรปแบบโครงงานใหมความแตกตางและ ดขนจากเดม สวนแนวคดสวนประกอบตาง ๆ ของรถตดหญาควบคมดวยรโมทคอลโทรล มดงน
3.3.1 แนวคดในกำรออกแบบโครงรถตดหญำ
รปท 3.2 โครงรถตดหญา
จากรปท 3.2 แนวคดในการออกแบบโครงรถตดหญา ไดมการออกแบบใหมความคลายคลงกบ รถเกยวขาว รถแบคโฮ รถถง ซงโครงรถจ าพวกนมความแขงแกรงและทนทานตอการใชงาน โดยระยะของโครงสรางรถตดหญาควบคมดวยรโมทคอลโทรล ตองอางองจากความกวางยาวของแบตเตอร
3.3.2 แนวคดในกำรออกแบบโครงยดแบตเตอร
รปท 3.3 โครงยดแบตเตอร

38
จากรปท 3.3 แนวคดในการออกแบบโครงยดแบตเตอร [11] โครงยดแบตเตอรตองอยกงกลางบนโครงรถตดหญาเพอการกระจายน าหนกของแบตเตอรแลวจะตองอยกงกลางของลอตะขาบเพอท าใหเกดความสมดล
3.3.3 แนวคดในกำรออกแบบลอตะขำบ
รปท 3.4 ลอตะขาบ
จากรปท 3.4 แนวคดในการออกแบบลอตะขาบ [8] ในการเลอกลอตะขาบนนจากการไดสงเกตสนามหญาทมความตางระดบของพนท และลอทสามารถลยไดทกพนทนนกคอลอตะขาบ โดยลอตะขาบนจะมแรงฉดลากสง ไมตดหลมงาย สามารถท าใหตดหญาไดระดบ และมการกระจายแรงลงพนไดดมาก
3.3.4 แนวคดในกำรออกแบบโครงครอบกนใบมดตดหญำ
รปท 3.5 โครงครอบกนใบมดตดหญา

39
จากรปท 3.5 แนวคดในการออกแบบโครงครอบกนใบมดตดหญา [12] ในการออกแบบนไดเลงเหนความปลอดภยของผใชเปนหลก โดยทโครงครอบกนใบมดตดหญานนจะตองครอบคลมรอบใบตดหญาทงหมด ยนไปขางหนารถเพองายตอการตดหญาและท าความสะอาด ซงมลกษณะทสามารถยกขนลงไดเพอใหไดระดบแบบอสระ และมลออสระในการปรบระดบโดยอตโนมตหากพนทตางระดบกน
3.3.5 แนวคดในกำรออกแบบกำรตดตงมอเตอรขบเคลอนรถตดหญำ
รปท 3.6 การตดตงมอเตอรขบเคลอนรถตดหญา
จากรปท 3.6 แนวคดในการออกแบบตดตงมอเตอร [1] ขบเคลอนรถตดหญา ในการออกแบบโดยจะตองขบเคลอนลอหลงสงก าลงไปทลอหนาเพองายตอการควบคมการเคลอนท สะดวกตอการใสเฟองทดรอบความเรวของรถตดหญาแกไขงาย
3.3.6 แนวคดในกำรออกแบบกลองควบคม
รปท 3.7 กลองควบคม

40
จากรปท 3.7 แนวคดในการออกแบบกลองควบคม ในการออกแบบกลองควบคมจะตองดขนาดของวงจรและขนาดอปกรณเปนหลก โดยกลองควบคมนจะตองปองกนของเหลวได สวนต าแหนงของกลองควบคมนนจะตองอยสงกวาแบตเตอรรเลกนอย เพอรบสญญาณรโมทคอลโทรลไดสะดวก งายตอการปรบเปลยนแกไขวงจรและท าใหสวยงาม
3.4 โครงสรำงรถตดหญำไฟฟำควบคมดวยรโมทคอลโทรล
รปท 3.8 โครงสรางรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล
3.4.1 ใบมดตดหญำ [13] ใบมดตดหญา เสนผานศนยกลาง 9 ½ นว โดยใบมดสามารถหมนรอบตวเองได เพอลดแรงกระแทกทรนแรงใหลดลงได จะท าใหใบมดมโอกาสหมดคมชาลง ใบมดตดหญานจะยดตดกบดซมอเตอรแบบแมเหลกถาวร
3.4.2 มอเตอรขบเคลอน [2] มอเตอรขบเคลอนทใชมทงหมดสองตว มการทดรอบใหลดลงเพอใหมก าลงในการขบเคลอนมากยงขน โดนมอเตอรทน ามาใชคอ ดซมอเตอรแบบแมเหลกถาวรทมการทดรอบ
โครงครอบกนใบมดตดหญำ
มอเตอรขบเคลอน
กลองควบคมกำรท ำงำน
ชดเฟองทดรอบขบเคลอน
ชดขบเคลอนลอตะขำบ
โครงยดแบตเตอร
ใบมดตดหญำ

41
3.4.3 ชดเฟองทดรอบขบเคลอน ชดเฟองทดรอบขบเคลอน [8] จะมสองสวนคอ ชดเพลาทดรอบ และชดเฟองหลง โดยชดเพลาทดรอบจะมการรบความเรวจากมอเตอรขบเคลอนมาทดรอบใหชาลงอก เพอสงใหชดเฟองหลงท าการขบเคลอน และจะมชดเพลาหนาซงท าหนาทปรบความตงของโซอกทหนง
3.4.4 กลองควบคมกำรท ำงำน กลองควบคมการท างานภายในจะม วงจรควบคม วงจรก าลง วงจรปรบความเรว วงจรเตอนแบตเตอรรต า วงจรวทยบงคบ ซงกลองนจะปองกนสงทเปนอนตรายใหกบวงจร
3.5 วงจรควบคมกำรท ำงำนรถตดหญำไฟฟำควบคมดวยรโมทคอลโทรล
แนวคดในการออกแบบวงจรควบคมการท างานรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล จะประกอบไปดวยวงจรควบคม วงจรก าลง วงจรปรบความเรว วงจรเตอนแบตเตอรรต า วงจรวทยคอลโทรล โดยมแนวคดในการออกแบบคอ จะมวงจรวทยคอลโทรล ท าหนาทควบคมลมตสวตซดวยเซอรโวมอเตอร จากนนลมตสวตซจะไปควบคมวงจรก าลง แลวผานวงจรปรบความเรว และเขามอเตอร สวนวงจรเตอนแบตเตอรรต ากจะไปควบคมวงจรก าลงเชนกน
รปท 3.9 บลอกไดอะแกรมของรถรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล
แบตเตอร 24V;
80 A
วงจรวทยบงคบ วงจรควบคม
มอเตอร
แบตเตอร 12 V
วงจรก าลง วงจรปรบความเรว
วงจรเตอนแบตเตอรต า

42
3.5.1 วงจรควบคมมอเตอร
รปท 3.10 วงจรก าลง
3.5.1.1 หลกกำรท ำงำนของวงจรก ำลง 1) LM1 = ลมตสวตชตวท 1 รบแรงดนไฟฟาจาก F1 ท าหนาทจายแรงดนไฟฟาให
คอยลแมกเนตกคอนแทกเตอร (K1) และจายกระแสไฟฟาให LM2, LM3, LM4, LM5 2) LM2 = ลมตสวตชตวท 2 รบแรงดนไฟฟาจาก LM1 ท าหนาท จายแรงดนไฟฟา
ใหกบ LR1 3) LM3 = ลมตสวตชตวท 3 รบแรงดนไฟฟาจาก LM1 ท าหนาท จายแรงดนไฟฟา
ใหกบ LR2 4) LM4 = ลมตสวตชตวท 4 รบแรงดนไฟฟาจาก LM1 ท าหนาท จายแรงดนไฟฟา
ใหกบ LR3 5) LM5 = ลมตสวตชตวท 5 รบแรงดนไฟฟาจาก LM1 ท าหนาท จายแรงดนไฟฟา
ใหกบ LR4 6) F1 = โอเวอรโหลดรเลย ท าหนาท ตดแหลงจายไฟฟาเมอกระแสไฟฟาเกนพกด 7) F2 = ฟวสกระบอก ท าหนาทตดแหลงจายไฟฟาเมอกระแสไฟฟามอเตอร
ขบเคลอนดานซาย (M2) กระแสเกนไฟฟาพกด

43
8) F3 = ฟวสกระบอก ท าหนาทตดแหลงจายไฟฟาเมอกระแสไฟฟามอเตอร ขบเคลอนดานขวา (M3) กระแสไฟฟาเกนพกด
9) K1 = แมกเนตกคอนแทกเตอร รบแรงดนไฟฟาจาก LM1 ท าหนาท เปด/ปด แหลงจายไฟฟา 24 V
10) RL1 = รเลย 14 ขา 10 A รบแรงดนไฟฟาจาก LM2 ท าหนาท ขบเคลอน มอเตอรดานซาย ไปดานหนา
11) RL2 = รเลย 14 ขา 10 A รบแรงดนไฟฟาจาก LM3 ท าหนาท ขบเคลอน มอเตอรดานซาย ไปดานหลง
12) RL3 = รเลย 14 ขา 10 A รบแรงดนไฟฟาจาก LM2 ท าหนาท ขบเคลอน มอเตอรดานขวา ไปดานหนา
13) RL4 = รเลย 14 ขา 10 A รบแรงดนไฟฟาจาก LM2 ท าหนาท ขบเคลอน มอเตอรดานขวา ไปดานหลง
14) RL5 = รเลย 14 ขา 10 A รบแรงดนไฟฟาจาก โอเวอรโหลดรเลย และ วงจร เตอนแบตเตอรต า ท าหนาท ตดแหลงจายไฟฟาใหกบมอเตอรตดหญา
15) S1 = สวตชโยก ท าหนาท เปด/ปด แหลงจายกระแสไฟฟาใหกบมอเตอร ขบเคลอน
16) S2 = สวตชโยก ท าหนาท เปด/ปด แหลงจายกระแสไฟฟาใหกบมอเตอรตด หญา 17) M1 = มอเตอรตดหญา
18) M2 = มอเตอรขบเคลอนดานซาย
19) M2 = มอเตอรขบเคลอนดานขวา
รปท 3.11 วงจรควบคม
24V DC
24V DC

44
3.5.1.2 หลกกำรท ำงำนของวงจรควบคม 1) จากรปท 3.11 เมอ LM1 ท างาน จะท าใหไฟไหลจาก ขวบวกผาน F1;
LM1; วงจรปรบความเรว; และผาน RL5 ท าให K1 ท างานจากรปท 3.11 เมอ LM2 - LM5 ท างาน จะท าให RL1 – RL4 ท างานตามล าดบ
2) จากรปท 3.10 เมอตอวงจรท S1 จะท าให M1 ท างาน 3) จากรปท 3.10 เมอตอวงจรท S2 จะท าให M2 และ M3 ท างาน 4) เมอ RL1 ท างานจะท าให RL2 ไมสามารถท างานได และเมอ RL3 ท างาน
จะท าให RL4 ไมสามารถท างานไดเชนกน แต RL1 และ RL3 สามารถท างานพรอมกนได และ RL2 และ RL4 กสามารถท างานพรอมกนไดเชนกน
5) เมอมกระแสไฟฟาเกนท M1 จะท าให F1 หยดจายไฟให LM1 ท าให M1; M2; M3 หยดการท างานจากนนจะท าให F1 จายไฟใหกบ RL5 ขา 12 ท าใหหลอดไฟตด
6) เมอแรงดนไฟฟาทแบตเตอรรลดลงถงแรงดนทก าหนด จะท าให RL5 หยดการ ท างาน ท าให M1 หยดการท างาน
อกษรยอทใชในวงจร
- F1 = โอเวอรโหลดรเลย - F2; F3 = ฟวส - K1 = คอนแทคเตอร - RL1; RL2; RL3; RL4; RL5 = รเลย - LM1; LM2; LM3; LM4; LM5 = ลมตสวตช - S1; S2 = สวตชโยก - M1 = มอเตอรตดหญา - M2; M3 = มอเตอรขบเคลอน

45
3.5.2 วงจรควบคมควำมเรวดซมอเตอร 12/24 V 15 A
รปท 3.12 วงจรควบคมความเรวดซมอเตอร 12/24 V 15 A
3.5.2.1 ขอมลทำงเทคนค 1) ใชแหลงจายไฟฟาขนาด 12 VDC หรอ 24 VDC (เลอกการตอ) 2) สามารถควบคมดซมอเตอร ขนาด 12/24 VDC กระแสไฟฟาสงสด 15 A 3) ใชหลกการมอดเลตตามความกวางพลสในการควบคมความเรวมอเตอร 4) สามารถปรบความเรวมอเตอรไดตงแต 0-100 %
3.5.2.2 จดตอและจดปรบแตง 1) จด +12 V เปนจดตอไฟฟากระแสตรงขนาด 12 V หรอ 24 V (เลอกจากการตอ)
เพอน าไปเลยงวงจรทงหมด 2) จด +M เปนจดตอขวบวกของมอเตอร 3) จด –M เปนจดตอขวลบของมอเตอร 4) จด G เปนจดตอขวลบของแหลงจายไฟฟา 5) VR10K ใชส าหรบปรบความเรวมอเตอร มอดเลตตามความกวางพลส 0-100 % 6) J มไวส าหรบเลอกแหลงจายไฟฟาของมอเตอรทใช ถาตอ J ไปทต าแหนง 12 V
จะใชแหลงจายไฟฟาขนาด 12 VDC และมอเตอร 12 VDC แตถาตอ J ไปทต าแหนง 24 V จะใชแหลงจายไฟฟาขนาด 24 VDC และมอเตอร 24 VDC
3
2
1
411
LM324/13
2
1
411
LM324/2
R1
5k
R4
50k
R5
5.6k
R6
4.7k
TR4
2N3905
TR2
BC547
R1
10k
R2
10k
C1
0.1uF
VR1
10K
C2
0.1uF
C6
0.1uF
C5
47uF
R7
5k
R8
2.2k
R9
1k
R10
1k
TR3
BC547
TR1
BC547
ZD1
1N4740A
C3
10uF
C4
100uF
R11
1.5k
R12
300
12
J
D1
1N4001
D2
BYW95
+M
-M
MOSFET
+12V
GND
IRF3205

46
3.5.2.3 หลกกำรสวตชสญญำณมอดเลตตำมควำมกวำงพลส หลกการท างานของวงจรปรบความเรวมอเตอรไฟฟากระแสตรง จะใชการมอดเลตตาม
ความกวางของพลส PWM (Pulse Width Modulation) โดยมหลกการท างานคอการน า ออปแอมป เพอสรางสญญาณฟนเลอย และใชออปแอมปอกตวเพอสรางสญญาณพาหะ แลวน าสญญาณสองสญญาณมาท าการเปรยบเทยบกน เพอใหไดสญญาณ PWM การมอดเลชนทางความกวางของพลสจะเปนการปรบเปลยนทสดสวน และความกวางของสญญาณพลส โดยความถของสญญาณพลสจะไมมการเปลยนแปลง หรอเปนการเปลยนแปลงทคาของดวตไซเคล (Duty Cycle) ซงคาดวตไซเคลสามารถ จะหาไดจากคาความสมพนธดงรปท 3.14
.………(3.1)
เมอ คอ ชวงเวลาปอนลอจกสง
คอ ชวงหนงคาบเวลา
รปท 3.13 ความกวางของพลสขนาดตาง ๆ และคาดวตไซเคล ของชวงพลสทมความถคงท

47
3.5.3 วงจรเตอนแบตเตอรต ำ
3.5.3.1 หลกกำรท ำงำน หลกการท างานของวงจรเตอนแบตเตอร TL431 มหลกการท างานเหมอน ซเนอรไดโอด ท าหนาทรกษาแรงดนไฟฟาตกครอม โดยมตวตานทาน 2.2 กโลโอหม เปนตวก าหนดแรงดนไฟฟา เพอใหจายแรงดนได 5 โวลต เขาไปทขา B ของทรานซสเตอรเพอท าการเทยบแรงดนไฟฟาโดยจะมการรวมแรงดนไฟฟาทขา B ของทรานซสเตอร เมอขา B มแรงดนไฟฟามากกวาจะท าใหขา E จายไฟฟาใหกบขา C และทรานซสเตอรขา C จะจายไฟฟาใหกบรเลยโดยมไดโอดมาตอขนานเพอปองกนกระแสไฟฟาไหลยอนกลบ
รปท 3.14 วงจรเตอนแบตเตอรต า

48
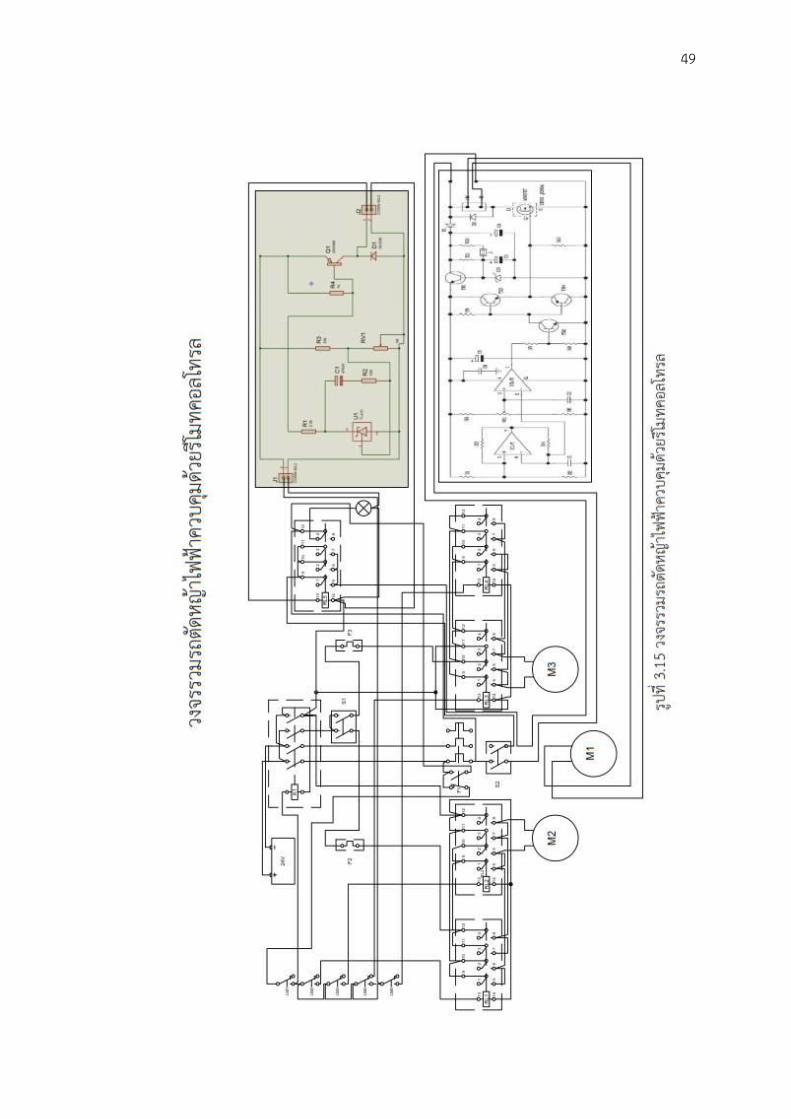
3.6 วงจรรวมรถตดหญำไฟฟำควบคมดวยรโมทคอลโทรล วงจรทงหมดในการน ามาควบคมรถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล มทงหมดส
วงจรมารวมกนคอ วงจรควบคมมอเตอร, วงจรควบคม, วงจรควบคมความเรวดซมอเตอร 12/24 โวลต 15 แอมแปร, วงจรเตอนแบตเตอรต า โดยเลงเหนความส าคญทางดานการศกษาคนควาของผอานไดเขาใจวงจรไดงาย และครอบคลมทงหมด โดยรปวงจรตาง ๆ นนอางองจาก รปท 3.10, 3.11, 3.12 และ รปท 3.14 โดยวงจรควบคมมอเตอรและวงจรควบคม จะเปนวงจรทแสดงการตดตงอปกรณการควบคมสวนการเคลอนทของมอเตอรรถตดหญา โดยจากการรบค าสงจากรโมทคอลโทรล ใหเดนหนา ถอยหลง เลยวซาย เลยวขวาได และสวนการควบคมมอเตอรของใบมดตดหญา สามารถสงตดวงจรผานรโมทคอลโทรลไดอกดวย วงจรควบคมความเรวดซมอเตอร 12/24 โวลต 15 แอมแปร จะใชในการควบคมมอเตอรใบมดตดหญา เพอท าใหสามารถปรบความเรวของมอเตอร ใบตดได โดยวงจรทใชคอ วงจรมอดเลตตามความกวางของพลส สวนวงจรสดทายคอ วงจรเตอนแบตเตอรต า โดยวงจรเตอนแบตเตอรต าน จะแสดงไฟเตอน ในขณะทระดบแรงดนแบตเตอรต ากวาคาทไดตงไว
49

50
3.7 กำรทดสอบหำขนำดควำมเรวมอเตอรใบตดทเหมำะสม การค านวณหาขนาดมอเตอรขบเคลอนใบมดตดหญานน ตองค านงถงความเรวของตวสงก าลงเปนหลก ดงนนจะตองเกบผลความเรวของรถตดหญาทวไป เพอน ามาเปรยบเทยบหามอเตอรทมความเรวใกลเคยงกน ซงจะทดสอบวดคาความเรวท 800 รอบตอนาท เพมขนทละ 200 รอบตอนาท จนหญาเรมขาด โดยท าการไดทดสอบกบรถตดหญามก าลงขนาด 4 แรงมา ยหอ ฮอนดา จดวางแผนการทดสอบการตดหญาสนาม คอหญาญปน มาเลเซย และหญาแขง โดยคาความเรวทไดมดงน
ตำรำงท 3.1 คาความเรวและผลทไดจากการตดหญาญปน
ความเรวรอบของมอเตอร (rpm) ผลทไดทดลองตดหญา 800 ไมขาด
1,000 เรมขาด
1,200 ขาดเลกนอย 1,400 ขาด
จากตารางท 3.1 จะเหนไดวาความเรวทท าใหหญาเรมขาดอยท 1,000 รอบตอนาท และขาด
ดวยความเรว 1,400 รอบตอนาท
ตำรำงท 3.2 คาความเรวและผลทไดจากการตดหญามาเลเซย
ความเรวรอบของมอเตอร (rpm) ผลทไดทดลองตดหญา 800 เรมขาด
1,000 ขาดเลกนอย
1,200 ขาด
จากตารางท 3.2 จะเหนไดวาความเรวทท าใหหญาเรมขาดอยท 800 รอบตอนาท และขาดดวยความเรว 1,200 รอบตอนาท

51
ตำรำงท 3.3 คาความเรวและผลทไดจากการตดหญาชนดหญาแขง
ความเรวรอบของมอเตอร (rpm) ผลทไดทดลองตดหญา
800 ไมขาด 1,000 ไมขาด
1,200 เรมขาด 1,400 ขาด
จากตารางท 3.3 จะเหนไดวาความเรวทท าใหหญาเรมขาดอยท 1,200 รอบตอนาท และขาด
ดวยความเรว 1,400 รอบตอนาท ดงนนกลมขาพเจาจงเลอก ดซมอเตอรแบบแมเหลกถาวร 24 โวลต 350 วตต 2,750 รอบตอ
นาท ทเลอกมอเตอรชนดนเพราะ จ านวนรอบ (N) ของมอเตอร สงถง 2,750 รอบตอนาท เปนมอเตอรทสามารถรบน าหนกของโหลดได 30-40 กโลกรม
3.8 กำรค ำนวณหำระยะทำงของใบมดตดหญำในกำรหมนหนงรอบ ก าหนดตองการใหมอเตอรตดหญา สามารถตดหญาใน 1 รอบ ได 4 มลลเมตร ดงนน จงตองการความเรวในการขบเคลอน 2,750/0.004 = 11000 มลลเมตร =11 เมตรตอวนาท จากรศมของฟนเพอง 40 ฟนเฟอง เบอร 35 มเสนผานศนยกลาง 10 เซนตเมตร ในการหมน 1 รอบของฟนเฟอง 40 ฟนเฟอง เบอร 35
r = 0.05 เมตร โดยท r คอ รศมของลอตะขาบ จากสมการ ทางคณตศาสตร 2
2 (0.05) = 0.31 เมตร ใน 1 นาท รถสามารถขบเคลอนไดดวยความเรว 11/0.31=35.48 รอบตอนาท ดงนน ในการหมน 1 รอบ ของใบมดตดหญา จะสามารถตดหญาได 4 มลลเมตร ความเรวของรถอยท 35.48 รอบตอนาท สามารถตดหญาไดสมดลกน
3.9 กำรค ำนวณหำขนำดมอเตอรขบเคลอน มอเตอรเคลอนทลอตะขาบ จ านวน 2 ตว ขอมลของรถตดหญาไฟฟาบงคบดวยรโมทคอล
โทรล m = 60 กโลกรม, r = 0.05 เมตร, N = 35.48 รอบตอนาท โดยท m คอน าหนกของรถตดหญาไฟฟาบงคบดวยรโมทคอลโทรล r คอรศมของลอตะขาบ

52
N คอความเรวในการเคลอนทของรถตดหญา หา .………(3.2)
= (60)(9.81)
= 588.6 N
หา ……….(3.3)
= (588.6)(2)( )(0.05)
= 184.9 N.m
หา
……….(3.4)
686.63 W
มอเตอรใชจ านวน 2 ตว
= 343.32 W
ดงนน เลอกใชมอเตอร 350 วตต (จากการค านวณได 343.32 วตต) ชนดของมอเตอร เลอกใช มอเตอรเกยร ชนด Permanent-Magnet Electric Motor 24 โวลต 350 วตต เปนมอเตอรทสามารถรบน าหนกของโหลดได 60-100 กโลกรม
3.10 กำรค ำนวณหำคำแบตเตอร ภาระโหลดทงหมดทจะใชในแหลงจายแบตเตอร มดงน
1) พลงงานทน าไปใช มอเตอรตดขบเคลอนใบตดหญา 24 โวลต 350 วตต จ านวน 1 ตว (มอเตอรไฟฟากระแสตรง) พลงงานทจะน ามาใช 350 วตต 14.583 แอมแปร, 0.469 แรงมา
2) มอเตอรขบเคลอนทลอ 2 ตว 24 โวลต 350 วตต (มอเตอรไฟฟากระแสตรง) พลงงานท น ามาใช 700 วตต ตวละ 14.583 แอมแปร, 0.469 แรงมา
3) วงจรปรบ Speed Motor 24 โวลต ปรบกระแสไดมากสด 15 แอมแปร
จากสมการ (24)(15) 360 W

53
ดงนน พลงงานทจะน ามาใชงาน 360 วตต ดงนน พลงงานทจะใชงานกบแบตเตอร = 350+700+360 W
= 1,410 W ตองการค านวณหาแหลงจายแบตเตอรทสามารถใชงานได 2 ชวโมงตอครง
1,410 W x 2 hr. = 2,820 W จากสมการ
ดงนน จงเลอกแหลงจายแบตเตอร 12 โวลต 120 แอมปฮาว จ านวน 2 ตว (ตอแบบอนกรม) แตในการใชงานจรงใชแหลงจายแบตเตอรท 12 โวลต 80 แอมปฮาว จ านวน 2 ตว (ตอแบบ
อนกรม) เนองจากการค านวณเบองตนนน ใชกระแสไฟฟาเตมตามพกดมอเตอรในการค านวณ ตางจากการใชจรง มอเตอรกนกระแสมากสดแค 6.81 แอมแปร จากตารางท 4.3 จงลดพกดแหลงจายแบตเตอรรลง ท าใหลดคาใชจายและลดน าหนกของตวรถตดหญาควบคมรโมทคอลโทรลลง แตยงสามารถตดหญาไดตามขอบเขตโครงงานคอ 2 ชวโมงตอครง จากตารางท 4.4

บทท 4 ผลการทดลองโครงงาน
4.1 บทน า ในบทนจะเปนการทดสอบตาง ๆ ของเครองตดหญาไฟฟาควบคมดวยรโมทคอนโทรลทละ
สวน ซงผลการทดสอบมดงตอไปน
4.2 การทดสอบความเรวรอบและกระแสมอเตอรตดหญา ต าแหนงทใชวดความเรวรอบ วดจากจดกงกลางของใบตดหญา โดยจะคอยปรบความเรวรอบมอเตอรขนเรอย ๆ โดยเรมความเรวรอบต าสดคอ 1,000 รอบตอนาท เพมขนทละ 500 รอบตอนาท จนกระทงมอเตอรถงความเรวพกดคอ 3,400 รอบตอนาท ในขณะปรบความเรวรอบเพมขน กจะท าการวดคากระแสไฟฟาของมอเตอรตดหญาไปพรอม ๆ กน จะไดกระแสไฟฟาทขณะไมมโหลด และท าการสงเกตทกความเรวรอบในการทดลอง ความเรวรอบใดทจะใหหญา ไมขาด เรมขาด ขาดเลกนอย หรอขาดได สวนกระแสไฟฟามอเตอรขณะทท าการตดหญา จะดผลในขณะตดดวยความเรวรอบทไดวางแผนไว คอ 1,000 1,500 2,000 2,500 3,000 และ 3,400 รอบตอนาท สามารถตดหญาชนดตาง ๆ ทหญาไมมความชน โดยมแหลงจาย 24.64 โวลต
รปท 4.1 ลกษณะการวดความเรวรอบมอเตอรและวดคากระแสไฟฟามอเตอร

55
รปท 4.2 ลกษณะการวดคากระแสไฟฟามอเตอรขณะตดหญา
ตารางท 4.1 คาการปรบความเรวของมอเตอรตดหญาญปน
ความเรวมอเตอร (rpm)
ผลทได กระแสไฟฟาท NO LOAD (A)
กระแสไฟฟามอเตอรตดหญา (A)
1,000 ไมขาด 1.18 1.70
1,500 ไมขาด 1.38 1.77 2,000 เรมขาด 1.58 1.89
2,500 ขาดเลกนอย 2.13 2.64 3,000 ขาดเลกนอย 2.26 2.82
3,400 ขาด 2.75 3.90
จากผลการทดลองตารางท 4.1 จากกระแสไฟฟาขณะไมมโหลดท 1.58 แอมแปร จะสงเกต
ไดวาในการตดหญาญปนจะเรมขาดท 2,000 รอบตอนาท กระแสไฟฟาทมอเตอรใชตดหญา 1.89 แอมแปร และในการตดหญาญปนจะขาดท 3,400 รอบตอนาท กระแสไฟฟาทมอเตอรใชตดหญา 3.90 แอมแปร

56
ตารางท 4.2 คาการปรบความเรวของมอเตอรตดหญามาเลเซย
ความเรวมอเตอร (rpm)
ผลทได กระแสไฟฟาท NO LOAD (A)
กระแสไฟฟามอเตอร ตดหญา (A)
1,000 ไมขาด 1.18 1.83
1,500 เรมขาด 1.38 2.16 2,000 ขาดเลกนอย 1.58 3.05
2,500 ขาด 2.13 3.97
จากผลการทดลองตารางท 4.2 จากกระแสไฟฟาขณะไมมโหลดท 1.58 แอมแปร จะสงเกต
ไดวาในการตดหญามาเลเซยจะเรมขาดท 1,500 รอบตอนาท กระแสไฟฟาทมอเตอรใชตดหญา 2.16 แอมแปร และในการตดหญามาเลเซยจะขาดท 2,500 รอบตอนาท กระแสไฟฟาทมอเตอรใชตดหญา 3.97 แอมแปร
ตารางท 4.3 คาการปรบความเรวของมอเตอรตดหญาชนดหญาแขง
ความเรวมอเตอร(rpm)
ผลทได กระแสไฟฟาท NO LOAD (A)
กระแสไฟฟามอเตอร ตดหญา (A)
1,000 ไมขาด 1.18 2.03
1,500 ไมขาด 1.38 2.64 2,000 ไมขาด 1.58 3.66
2,500 เรมขาด 2.13 4.76 3,000 ขาดเลกนอย 2.26 5.78
3,400 ขาด 2.75 6.81
จากผลการทดลองตารางท 4.3 จากกระแสไฟฟาขณะไมมโหลดท 1.58 แอมแปร จะสงเกต
ไดวาในการตดหญามาเลเซยจะเรมขาดท 2,500 รอบตอนาท กระแสไฟฟาทมอเตอรใชตดหญา 4.76 แอมแปร และในการตดหญามาเลเซยจะขาดท 3,400 รอบตอนาท กระแสไฟฟาทมอเตอรใชตดหญา 6.18 แอมแปร

57
4.3 การทดสอบแบตเตอรดวยการตดหญา การทดสอบแบตเตอรเปนการทดสอบ เพอใหรวาแบตเตอรจะสามารถใชงานในการตดหญา
เวลานานเทาไร ในการตดหญา 1 ครง เพอเปนการทดสอบใหตรงกบขอบเขตทตงไว ปรมาณแรงดนไฟฟาของแบตเตอรกอนท าการทดลอง 24.64 โวลต ในการทดสอบแบตเตอรจะวดคา ทก ๆ 15 นาท จนถง 120 นาท ตามขอบเขตของโครงงาน โดยลกษณะพนเรยบและแหง โดยหญาสวนใหญสงประมาณ 7 เซนตเมตร วนทท าการทดลอง 31 มนาคม 2557 สภาพอากาศรอนเวลา 13.00 นาฬกา บรเวณทตด รอบสนามฟตบอล มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก
รปท 4.3 การทดสอบแบตเตอรดวยการตดหญา
ตารางท 4.4 ผลการทดสอบแบตเตอรดวยการตดหญา
เวลาในการตดหญา (นาท)
ระดบแรงดนแบตเตอร (V)
กอนท าการตดหญา 24.54 15 24.34
30 24.00
45 23.95 60 23.69
75 23.63
90 23.23 105 23.19
120 23.09

58
จากการทดลองตารางท 4.4 เปนการทดสอบแบตเตอรโดยการตดหญาเพอทดสอบวาการตดหญาใน 1 ครงสามารถตดหญาไดเวลาเทาไหร โดยขณะเรมตดหญาระดบแรงดนแบตเตอรอยท 24.54 โวลต จะวดคาทก ๆ 15 นาท จนถง 120 นาท ตามขอบเขตของโครงงาน แรงดนแบตเตอรท เวลา 120 นาท อยท 23.09 นาท ยงสามารถตดหญาไดตามปกต
หากแรงดนแบตเตอรต ากวา 23 โวลต ไฟแจงเตอนจะแสดงขน การทกลมขาพเจาไดตงแรงดนแบตเตอรไวท 23 โวลต นนเพอปองกนกระแสไฟฟาทสงขนของมอเตอร เนองจากแรงดนไฟฟาลดลงกระแสไฟฟาจะสงขน ตามกฎของโอหม
4.4 การทดลองการขบเคลอนของลอตะขาบ การทดสอบการขบเคลอนของลอตะขาบ ท าการทดสอบเพอรถงขดความสามารถในการ
ขบเคลอนบนพนททหลากหลายของลอตะขาบทงพนทระดบ และตางระดบ
รปท 4.4 การทดลองขบเคลอนของลอตะขาบ

59
ตารางท 4.5 ผลการทดลองการขบเคลอนของลอตะขาบในพนทระดบ
พนทในการขบเคลอน ความพงพอใจ
พนหญาแหง ดมาก พนหญาเปยกชน ด
พนดน ด พนถนนลกรง พอใช
พนถนนคอนกรต นอย
จากผลการทดลองตารางท 4.5 จะสงเกตไดวาพนทในการขบเคลอน พนทระดบทพนหนาผว
มความเสยดสนอยจะท าใหลอตะขาบขบเคลอนไดด ไดแก พนหญาแหง, พนหญาเปยกชน, พนดน
สวนพนทหนาผวมความเสยดสมาก ไดแก พนถนนลกรง, พนถนนคอนกรต จะท าใหลอตะขาบหลดได
งาย
ตารางท 4.6 ผลการทดลองการขบเคลอนของลอตะขาบในพนทตางระดบ
จากผลการทดลองตารางท 4.6 จะเหนวาพนทในการขบเคลอน พนทตางระดบทพนหนาผว
มความเสยดสนอยจะท าใหลอตะขาบขบเคลอนไดด ไดแก พนหญาแหง, พนหญาเปยกชน, พนดน สวนพนทหนาผวมความเสยดสมาก ไดแก พนถนนลกรง, พนถนนคอนกรต จะท าใหลอตะขาบหลดไดงาย
พนทในการขบเคลอน ความพงพอใจ
พนหญาแหง ดมาก
พนหญาเปยกชน ด พนดน ด
พนถนนลกรง พอใช
พนถนนคอนกรต นอย

60
4.5 ผลการทดลองระยะทางการบงคบดวยรโมทคอลโทรล การทดลองระยะการบงคบดวยรโมทคอลโทรล ทดสอบเพอรถงระยะทจะสามารถบงคบรถ
ตดหญาไดวามระยะทสามารถการควบคมรถทเทาไหร โดยเรมทระยะ 50 เมตร จนถงระยะทไมสามารถบงคบดวยรโมทคอลโทรลได
รปท 4.5 การทดลองระยะทางการบงคบดวยรโมทคอลโทรล
ตารางท 4.7 ผลการทดลองระยะทางการบงคบดวยรโมทคอนโทรล
ระยะทางการบงคบดวยรโมทคอนโทรล (เมตร)
การบงคบ
50 บงคบได
100 บงคบได
150 บงคบได 200 บงคบได
250 บงคบได
300 บงคบไมได จากผลการทดลองตารางท 4.7 จะเหนวาระยะทางการบงคบดวยรโมทคอนโทรล จะเหนได
วา ระยะท 50-250 เมตร สามารถบงคบรถได ทระยะ 300 เมตร จะไมสามารถบงคบรถได โดยขอบเขต ท 100 เมตร

บทท 5 สรปผลของโครงงานและขอเสนอแนะ
5.1 บทน า ในนจะกลาวถงการสรปผลการด าเนนโครงงาน ปญหาและอปสรรคในการท าโครงงานรวมทงขอเสนอแนะในการพฒนาโครงงาน หลกจากทท าการทดลองและเกบผลการทดลอง
5.2 สรปผลการด าเนนโครงงาน
รถตดหญาไฟฟาควบคมดวยรโมทคอลโทรลทสรางขนมานน สามารถตดหญาได 2 ชวโมงตอครง มวงจรเตอนแบตเตอรตรวจจบระดบแรงดนไฟฟาหากต ากวา 23 โวลต จะมไฟแจงเตอน ขบเคลอนดวยลอตะขาบ ระยะการควบคม 100 เมตร มชดปรบความเรวมอเตอร สามารถปรบความเรวรอบสงสดถง 3,400 รอบตอนาท สามารถตดหญาบนพนแหงไดด มโครงสรางและสวนประกอบตรงตามทไดออกแบบไว
รถตดหญาไฟฟาควบคมดวยรโมทคอลโทรลทสรางขนมานน สามารถตดหญาญปน, หญามาเลเซย, หญาแขงได โดยหญาญปน จะเรมขาดทความเรวมอเตอร 2,000 รอบตอนาท มอเตอรกนกระแสไฟฟา 1.89 แอมแปร, หญามาเลเซย จะเรมขาดทความเรวมอเตอร 1,500 รอบตอนาท มอเตอรกนกระแสไฟฟา 2.16 แอมแปรม, หญาแขง จะเรมขาดทความเรวมอเตอร 2,500 รอบตอนาท มอเตอรกนกระแสไฟฟา 4.76 แอมแปร
5.3 ปญหาและอปสรรคในการจดท าโครงงาน
5.3.1 รถตดหญามน าหนกมากพอสมควร ยากตอการขนยาย 5.3.2 บรเวณทมหญาหนาแนน มอเตอรควบคมใบมดตดหญา จะมกระแสไฟฟาสงท าให
มอเตอรรอน 5.3.3 ในการตดหญา มเศษหญาในบรเวณรองโซ จะท าใหโซหลดออกจากฟนของลอเฟอง
5.4 ขอเสนอแนะในการพฒนาโครงงาน
5.4.1 ท าสนตนตะขาบใหมการยดเกาะหนาดนดขน 5.4.2 เพมแผงโซลาเซลลเปนตวสรางแรงดนไฟฟาใหกบแบตเตอร 5.4.3 ตดกลองทตวรถตดหญา ท าใหสะดวกในการมองเหนในระยะไกล 5.4.4 สงการใหรถตดหญาตดแบบอตโนมต โดยอางองรปพนทจากดาวเทยม

เอกสารอางอง
[1] ชนดของมอเตอรไฟฟากระแสตรง (ออนไลน), 2552 เขาถงไดจาก http://www.lamptech.ac.th/webprg/vitsawa/file_ar/a0671031.ชนดของมอเตอรไฟฟากระแสตรง.pdf (3 พฤศจกายน 2556).
[2] อดศกด ชณะวงศ, มอเตอรกระแสตรง (ออนไลน), 2543. เขาถงไดจาก: http:// www.adisak51.com/page21.html (3 พฤศจกายน 2556).
[3] Rc Servo (ออนไลน), 2555. เขาถงไดจาก: http://www.tdhobby.com/index.php?option=com_content&view= article&id=89:understand-rc-servo&catid=43&Itemid=79 (3 พฤศจกายน 2556).
[4] ระบบวทย 2.4 GHz (ออนไลน), 2555. เขาถงไดจาก: http://www.tdhobby.com/index.php?option=com_content&view= article &id=90:24-ghz-spread-spectrumfhssdsss&catid=43&Itemid=79 (3 พฤศจกายน 2556).
[5] รเลย (ออนไลน), 2012. เขาถงไดจาก: http://kpp.ac.th/elearning/elearning3/book-09.html (5 พฤศจกายน 2556).
[6] Magnetic Contactor (ออนไลน), 2013. เขาถงไดจาก: http://www.praguynakorn.com /product/959/s-n21- (5 พฤศจกายน 2556).
[7] โอเวอรโหลดรเลย (ออนไลน), 2555. เขาถงไดจาก: http://fonengineering.com/products-tips-electric-industry/51-over-load-relay.html (6 พฤศจกายน 2556).
[8] ฟวส (ออนไลน), 2553. เขาถงไดจาก: http://www.maceducation.com/e-knowledge/2432210110/10.htm (10 พฤศจกายน 2556).
[9] สายพานตนตะขาบ (ออนไลน), 2554. เขาถงไดจาก: http://www.thaisafetywork.com (10 พฤศจกายน 2556).

63
เอกสารอางอง (ตอ)
[10] ขาไก (ออนไลน), 2011. เขาถงไดจาก: http://www.kitcha.com/products/preview.php?G_prdIdx=52070000000031 (15 พฤศจกายน 2556).
[11] ลมตสวตช (ออนไลน), 2011. เขาถงไดจาก: http://fonengineering.com/our-products/19-limit-switch.html (16 พฤศจกายน 2556).
[12] แบตเตอร (ออนไลน), 2550. เขาถงไดจาก: http://www.rta.mi.th/15900u/SDMP /Interest/Magazine/training.html (16 พฤศจกายน 2556).
[13] ใบมดตดหญามหศจรรย (ออนไลน), 2555.
เขาถงไดจาก: http://www.monmai.com (16 พฤศจกายน 2556).

ภาคผนวก ก.
การจดท าโครงสราง

65
รป ก-1 ตดเหลกและเจาะรแกนเพลา
รป ก-2 เพลา เสอเพลาและสเตอร

66
รป ก-3 เชอมประกอบโครงสราง
รป ก-4 จดท าแทรคลอตะขาบ

67
รป ก-5 ท าการตอวงจรควบคมมอเตอรและประกอบลงกลอง
รป ก-6 รถตดหญาไฟฟาควบคมดวยรโมทคอลโทรล

ภาคผนวก ข. ออกแบบโครงสรางโครงงาน











ภาคผนวก ค. ขอมลอปกรณประกอบการท าวงจร

82

83

84

85

86

87

88

89

90

91

92

93

ภาคผนวก ง.
เครองมอทใชเกบผลการทดลอง

95
เครองมอทใชเกบผลการทดลอง
ผลตภณฑ Tachometer รน DIGICON DT-250TP
รายละเอยด เครองวดรอบแบบใชแสงและสมผส
วดรอบแบบใชแสง 5~99,999 RPM วดรอบแบบสมผส 0.5~19,999 RPM
ผลตภณฑ Multimeter รน Daiichi DM 209 รายละเอยด สามรถวดแรงดนไฟฟา AC/DC ได วดกระแสไฟฟา AC/DC 20A และ 400mAได

ภาคผนวก จ. ตารางการเกบผลการทดลอง

97
ตารางท จ-1 คาการปรบความเรวของมอเตอรตดหญาญปน
ความเรวท (rpm)
ผลทได กระแสไฟฟาท NO LOAD (A)
กระแสไฟฟามอเตอร ตดหญา (A)
1000 ไมขาด 1.18 1.70 1500 ไมขาด 1.38 1.77
2000 เรมขาด 1.58 1.89
2500 ขาดเลกนอย 2.13 2.64 3000 ขาดเลกนอย 2.26 2.82
3400 ขาด 2.75 3.90
ตารางท จ-2 คาการปรบความเรวของมอเตอรตดหญามาเลเซย
ความเรวท (rpm)
ผลทได กระแสไฟฟาท NO LOAD (A)
กระแสไฟฟามอเตอร ตดหญา (A)
1000 ไมขาด 1.18 1.83 1500 เรมขาด 1.38 2.16
2000 ขาดเลกนอย 1.58 3.05 2500 ขาด 2.13 3.97
ตารางท จ-3 คาการปรบความเรวของมอเตอรตดหญาแขง
ความเรวท (rpm)
ผลทได กระแสไฟฟาท NO LOAD (A)
กระแสไฟฟามอเตอร ตดหญา (A)
1000 ไมขาด 1.18 2.03 1500 ไมขาด 1.38 2.64
2000 ไมขาด 1.58 3.66
2500 เรมขาด 2.13 4.76. 3000 ขาดเลกนอย 2.26 5.78
3400 ขาด 2.75 6.81

98
ตาราง จ-4 ราคาวสด
ล าดบ รายการอปกรณ จ านวน(หนวย)
ราคาตอหนวย(บาท)
รวมเปนเงน(บาท)
1 แบตเตอร 24V/80A 2 2,000 4,000
2 ชดรโมทคอลโทรล 1 3,000 3,000
3 Permanent DC Motor 24V/350W (แบบทดรอบ)
2 1,800 3,600
4 Permanent DC Motor 24V/350W
1 1,600 1,600
5 ลมตสวตซ 15A 5 40 200
6 รเลย 14 ขา 10A 5 120 600
7 ซอกเกตรเลย 14 ขา 5 80 400
8 แมกเนตกคอนแทคเตอร DC/24V 1 600 600
9 วงจรปรบความเรวมอเตอร 1 380 380
10 วงจรเตอนแบตเตอรต า 1 250 250
11 สวตซโยก 20A 2 40 80
12 สายไฟ VSF 2.5 15 20 300
13 สายไฟ VSF 1.5 8 15 120
14 หางปลาเสยบ 150 2 300
15 ขอตอสาย 5 5 25
16 กระบอกฟวส 2 70 140
17 ฟวส 40 A 2 8 16
18 เทอรมนลตอสาย 1 30 30
19 รางวางสายไฟ 1 120 120
20 หจบแบตเตอร (ทองแดง) 4 40 160

99
ตาราง จ-4 ราคาวสด (ตอ)
ล าดบ รายการอปกรณ จ านวน(หนวย)
ราคาตอหนวย(บาท)
รวมเปนเงน(บาท)
21 สายตอแบตเตอร 1 240 240
22 แทนยดแกนทองแดง 4 75 300
23 กลองใสอปกรณ 1 170 170
24 โซ No.35 มปก 2 1,000 2,000
25 เฟองโซ No.35 40 ฟน 4 250 1,000
26 เฟองโซ No.35 11 ฟน 6 80 480
27 เฟองโซ No.428 40 ฟน 2 80 160
28 เฟองโซ No.428 15 ฟน 6 80 480
29 ตลบลกปน 8 150 1,200
30 เหลกกลอง 1x1 นว 1 170 170
31 เหลกกลอง 1x2 นว 1 150 150
32 เหลกฉาก 1x1 นว 1 180 180
33 เหลกเพลาขาว 1 400 400
34 เหลกกลวงกลมเสนผานศนยกลาง 60 มม. 1 950 950
35 อลมเนยมเสน 3 200 600
36 นอต M3x10 320 2 640
37 นอต M4x20 30 1 30
38 แหวนลอคนอก 6 8 48
39 แหวนลอคใน 6 20 120
40 ใบมดตดหญา 1 380 380
41 สสเปรย (สสมสะทอนแสง) 3 110 330
42 คากลงเหลกทงหมด - 2,800 2,800

100
ตาราง จ-4 ราคาวสด (ตอ)
ล าดบ รายการอปกรณ จ านวน(หนวย)
ราคาตอหนวย(บาท)
รวมเปนเงน(บาท)
43 อน ๆ - 2,000 2,000
รวม 30,749

101
ประวตผเขยน
ทอย 132 หม 7 ต.รมปง อ.เมอง จ.ล ำพน 51000 ประวตการศกษา พ.ศ. 2552 ส ำเรจกำรศกษำระดบมธยมศกษำตอนปลำย โรงเรยนตำกพทยำคม อ.เมอง จ.ตำก 63000

102
ประวตผเขยน
ชอ-สกล นำยจฑำวฒน ด ำค ำ รหสนกศกษำ 53243207007-8 วน เดอน ปเกด 19 พฤศจกำยน 2534 ทอย 55 หม 4 ต.หนองหมอ อ.ตำคล จ.นครสวรรค 60140 ประวตการศกษา พ.ศ. 2552 ส ำเรจกำรศกษำระดบประกำศนยบตรวชำชพ วทยำลยเทคนคชยนำท อ.เมอง จ.ชยนำท 17000

103
ประวตผเขยน
ชอ-สกล นำยปรชญำ เตปนวงศ รหสนกศกษำ 53243207018-5 วน เดอน ปเกด 19 กมภำพนธ 2535 ทอย 147/2 หม 3 ต.แมป อ.แมพรก จ.ล ำปำง 52180 ประวตการศกษา พ.ศ.2552 ส ำเรจกำรศกษำระดบประกำศนยบตรวชำชพ วทยำลยเทคนคล ำปำง อ.เมอง จ.ล ำปำง 52100


















