
Giuseppe Fedele Dip. Elettronica, Informatica e ... · Fondamenti di Automatica Giuseppe Fedele...
91
Fondamenti di Automatica Giuseppe Fedele Giuseppe Fedele Dip. Elettronica, Informatica e Sistemistica Università degli Studi della Calabria Email: [email protected] Tel : 0984-494720 1
-
Upload
nguyentuyen -
Category
Documents
-
view
231 -
download
0
Transcript of Giuseppe Fedele Dip. Elettronica, Informatica e ... · Fondamenti di Automatica Giuseppe Fedele...

Fondamenti di Automatica
Giuseppe FedeleGiuseppe FedeleDip. Elettronica, Informatica e SistemisticaUniversità degli Studi della Calabria
Email: [email protected] : 0984-494720
1

Michele Basso, Luigi Chisci, Paola Falugi
Fondamenti di AutomaticaCittàStudi Edizioni
2

Problema del CONTROLLO AUTOMATICO
In italiano corrente il verbo controllare ha il significato di• comandare• regolare o anche dirigere• supervisionare o governare
Molto spesso il significato del termine controllo ha un'accezionepassiva (si pensi al controllore del treno, il cui compito èsemplicemente verificare il possesso o meno dei biglietti da parte
Molto spesso il significato del termine controllo ha un'accezionepassiva (si pensi al controllore del treno, il cui compito èsemplicemente verificare il possesso o meno dei biglietti da parte
L'aggettivo automatico implica invece un auto-funzionamento che nonrichiede l'intervento umano. Per tale motivo nella locuzione controlliautomatici il significato del verbo controllare ha sempre un'accezione attiva:in altre parole il sinonimo che usiamo per tale verbo è regolare, comandare.
L'aggettivo automatico implica invece un auto-funzionamento che nonrichiede l'intervento umano. Per tale motivo nella locuzione controlliautomatici il significato del verbo controllare ha sempre un'accezione attiva:in altre parole il sinonimo che usiamo per tale verbo è regolare, comandare.
semplicemente verificare il possesso o meno dei biglietti da partedei passeggeri dunque con semplici funzioni di supervisione).semplicemente verificare il possesso o meno dei biglietti da partedei passeggeri dunque con semplici funzioni di supervisione).
3

Cos’è l’AUTOMATICA ?
Con il termine automatico si vuole indicare un sistema odispositivo che può funzionare correttamente senzal’intervento di un operatore umano.
L’AUTOMATICA è quindi un complesso didiscipline che forniscono strumenti per laprogettazione e la realizzazione di sistemiautomatici di vario genere.
• pilota automatico di un velivolo;• climatizzazione di un ambiente;• sistema di produzione industriale;• sistema di controllo di livello e/o flusso di una rete idrica;• …
4

CONTROLLO AUTOMATICO
L’azione o l’insieme delle azioni indirizzate a farassumere ad una grandezza, in generale unagrandezza fisica, un valore determinato o unasuccessione determinata di valori nel tempo.
Controllo della velocità di un motore
Controllo della traiettoria di un veicolo
Controllo delle nascite
Controllo delle entrate in una nazione
5

CONTROLLO AUTOMATICO
L’azione o l’insieme delle azioni indirizzate a farassumere ad una grandezza, in generale unagrandezza fisica, un valore determinato o unasuccessione determinata di valori nel tempo.
Come facciamo a capire se la grandezza inquestione sta effettivamente assumendo i valoridesiderati?
Confronto, “continuamente” o “periodicamente”, ciò chesta di fatto avvenendo con ciò che vorrei ottenere.
A seconda dell’esito di tale confronto, si cerca diintervenire sulla variabile da controllare in modo daridurre lo scostamento fra il comportamento voluto equello effettivo.
CONTROLLO IN RETROAZIONE 6

Flusso costante
L’acqua gocciola con flusso costante in uncontenitore che misura il tempo in base all’altezzadel liquido.
Il contenitorea montevienetenutoa livello costante
Cenni storici
Ctesibio di Alessandria (250 a.C.)Orologio ad acqua
Il contenitorea montevienetenutoa livello costante(in modo che l’acqua ne fuoriesca con flussocostante) per mezzo di una valvola comandata da ungalleggiante del tutto simile a quella degli odierniwater.
7

Cenni storici
Apertura e chiusura automatica delle porte di un tempio.
L’espansione dell’aria calda prodotta dal fuoco sull’altare mettein pressione l’acqua di un serbatoio che, attraverso un sifone,riempie un secchio sospeso. La discesa del secchio fa aprireleportedel tempio.
Erone di Alessandria (I secolo d.C.)Ricettacolo della divinità
portedel tempio.
Se il fuoco viene spento, la pressione nel recipiente diminuiscee l’acqua ritorna indietro nel serbatoio, svuotando il secchio.Allora il peso (in basso a destra) cadendo fa chiudere le porte.
8

Cenni storici
Cornelis Drebbel (ingegnere), Inghilterra 1620Incubatrice per uova
Temperatura costante
Contenitore a doppia parete con acqua circolante inmodo da garantire una distribuzione uniforme delcalore. La temperatura veniva mantenuta costanteagendo sulla valvola di tiraggio della fornace.
L’aumento della temperatura provocava un aumentodella pressione di vapore dell’alcol ed uninnalzamento del livello del mercurio con laconseguente chiusura della valvola di tiraggio.
Quando la temperatura diminuiva, la pressione delvapore dell’alcol diminuiva insieme al livello dimercurio provocando un’apertura della valvola.
9

Cenni storici
James Watt (inventore), Scozia 1787Regolatore di velocità per macchina a vapore
10

Cenni storici
In seguito si svilupparono le prime teorie del controllo, basate su modellidescritti da equazioni differenziali. Tra i vari contributi si possonoricordare quelli di G.B. Airy (1840), J.C. Maxwell (1868), E.J. Routh(1877), A.M. Lyapunov (1893). In particolare venne studiata a fondo lastabilità dei sistemi dinamici.
Un altro importante capitolo nella storia dei controlli è quello relativo allostudio dei sistemi di pilotaggio automatico e di controllo di assetto. Daricordare il contributo di E. Sperry che nel 1914 progettò un autopilotautilizzando i giroscopi.utilizzando i giroscopi.
Una pietra miliare dello sviluppo dei controlli automatici è l’invenzionedell’amplificatore con retroazione negativa da parte di H.S. Black (1927).Tale invenzione consentì di risolvere in maniera soddisfacente il problemadella costruzione di linee telefoniche per lunghe distanze. Per evitareun’eccessiva attenuazione del segnale era necessario amplificarloperiodicamente senza introdurre rumori e distorsioni intollerabili.
Per quanto riguarda le metodologie basate sulla risposta frequenzialedecisivi furono i contributi di Nyquist (1932) e Bode (1938).
11

Cenni storici
Nel 1948 W.R. Evans propone il metodo del luogo delle radici, applicabilesia nella progettazione sia nell’analisi della stabilità.
Verso la fine degli anni ‘50 nasce la teoria del controllo moderno, basatasui modelli nello spazio di stato. Importanti sono i contributi di L.S.Pontryagin (1956), R. Bellman (1957) e soprattutto R.E. Kalman (1960).Lo sviluppo di tale teoria venne stimolato dalla conquista dello spazionegli anni ‘60 e ‘70.
Dal 1957 ad oggi: teoria moderna.Dal 1957 ad oggi: teoria moderna.
12

13

Cenni storici
La storia dell’automatica è legata allo sviluppo del concetto diRETROAZIONE. Il termine feedback risale agli anni 20 delsecolo XX quando fu introdotto in riferimento ad applicazionirelative alle comunicazioni elettriche.
Fra il 1914 ed il 1915 venne realizzato negli Stati Uniti il primocollegamento telefonico transoceanico tra New York e SanFrancisco (3000 miglia – 4828 Km).Francisco (3000 miglia – 4828 Km).
Data l’enorme distanza si poneva il problema dellaCOMPENSAZIONE DELL’ATTENUAZIONE DEL SEGNALEper cui si introdussero AMPLIFICATORI DI POTENZAELETTRONICI REALIZZATI CON TUBI A VUOTO.
14

Cenni storici
PROBLEMA :difficoltà tecnica dovuta alle distorsioni digrossa entità introdotte dagli amplificatoridi potenza.
Un ingegnere americano HAROLD S. BLACK propose nel1927 uno SCHEMA DI ATTENUAZIONE DEI DISTURBI IN1927 uno SCHEMA DI ATTENUAZIONE DEI DISTURBI INRETROAZIONE
15

Cenni storici
y = g u− βy( ) + d
β
g
u
−Una frazione β dell’uscita viene retroazionatanegativamente all’ingresso dell’amplificatore.
y = g u− βy( ) + d y = g+ β
u+ 1
+ βdy = g u− βy( ) + d y =
1+ βgu+
1+ βgd
La retroazione riduce sia il guadagno chela distorsione di un fattore 1+ βg
Se g >>1 g1+ βg
≈ 1
βd
1+ βg≈ 0
Desensibilizzazione dell’amplificatore rispetto a variazioni diparametri e al disturbo d. 16

Cenni storici
Desensibilizzazione dell’amplificatore rispettoa variazioni di parametri e al disturbo.
FATTORE CHIAVE DEI SISTEMI IN RETROAZIONE SISTEMI IN RETROAZIONE
RISPETTO AI SISTEMI PRIVI DI RETROAZIONE.
17

Si vuole seguire una traiettoria desiderata Si vuole seguire una traiettoria desiderata
• si stima la posizione dell'auto• si agisce sul volante
Si vuole seguire una profilo di velocità Si vuole seguire una profilo di velocità
Casi quotidiani in cui “inconsciamente” applichiamoi principi della retroazione (feedback)
• si misura la velocità dell'auto (tachimetro)• si agisce sui pedali (acceleratore, freno) e sul cambio
18

Guida di un autoveicoloGuida di un autoveicolo
Casi quotidiani in cui “inconsciamente” applichiamoi principi della retroazione (feedback)
19

Si vuole mantenere costante la temperatura di una stanza
Si vuole mantenere costante la temperatura di una stanza
Casi quotidiani in cui “inconsciamente” applichiamoi principi della retroazione (feedback)
20

Controllo della temperatura di un liquidoControllo della temperatura di un liquido
Casi quotidiani in cui “inconsciamente” applichiamoi principi della retroazione (feedback)
21

PLANTPLANT
Sistema controllato: in generale un sistema èun complesso di più elementi interconnessi, incui si possono distinguere grandezze soggettea variare nel tempo.
Insieme complesso e organizzato dicomponenti (sottosistemi) legati darelazioni di causa/effetto.
22
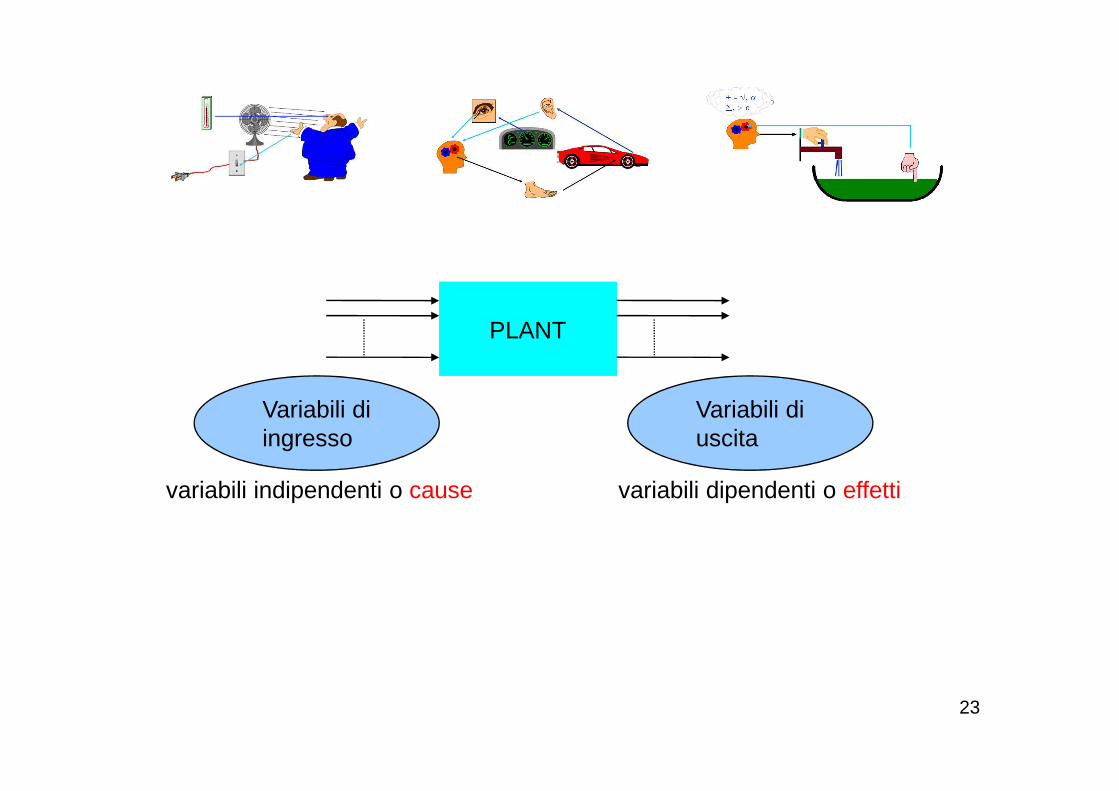
PLANTPLANT
Variabili di ingresso
Variabili di uscita
variabili indipendenti o cause variabili dipendenti o effetti
23

PLANTPLANT
Variabili di ingresso Variabili manipolabili :
sono le variabili di ingresso il cui andamento neltempo può essere arbitrariamente imposto.
Variabili non manipolabili o disturbi :sono le variabili di ingresso sul cui andamentonel tempo non si può influire, in quanto casualio assegnabili ad arbitrio solo da un altrooperatore.
24

La coppia erogata dal motore è un ingresso o un uscita?
Evidentemente per il veicolo essa è uningresso, mentre per il sistema motoreè una uscita.
Evidentemente per il veicolo essa è uningresso, mentre per il sistema motoreè una uscita.è una uscita.è una uscita.
Questo esempio mostra quindi come in un sistemacomplesso alcune uscite possano essere ingressi dialtri sottosistemi.
25

Un sistema di controllo automatico dovrà far sì che le variabili diuscita seguano il più fedelmente possibile l'andamento di una opiù variabili d'ingresso nonostante la presenza di disturbi e/o
Un sistema di controllo automatico dovrà far sì che le variabili diuscita seguano il più fedelmente possibile l'andamento di una opiù variabili d'ingresso nonostante la presenza di disturbi e/opiù variabili d'ingresso nonostante la presenza di disturbi e/ovariazioni parametriche.più variabili d'ingresso nonostante la presenza di disturbi e/ovariazioni parametriche.
26

27

Controllo automatico della temperatura di un’aula
Obiettivo: mantenere la temperatura dell’aula T ad unvalore desiderato agendo sulla potenza termica Qinimmessa dai radiatori.E’ inevitabile che una parte della potenza termica (Qout)venga ceduta all’esterno dell’aula.
Funzionamento: una caldaia centralizzata, esterna al nostro sistema, produce acqua calda aduna temperatura adeguata. L’acqua viene convogliata con tubazioni ad un radiatore collocatonell’aula. Il circuito dell’acqua calda è sezionato da una valvola che si apre o si chiude mediantecomando elettrico (elettrovalvola).L’elettrovalvola è comandata da un controllore elettronico collocato all’interno dell’aula cheapre/chiude l’elettrovalvola sulla base della misura della temperatura dell’aula rilevata da unsensore.
28
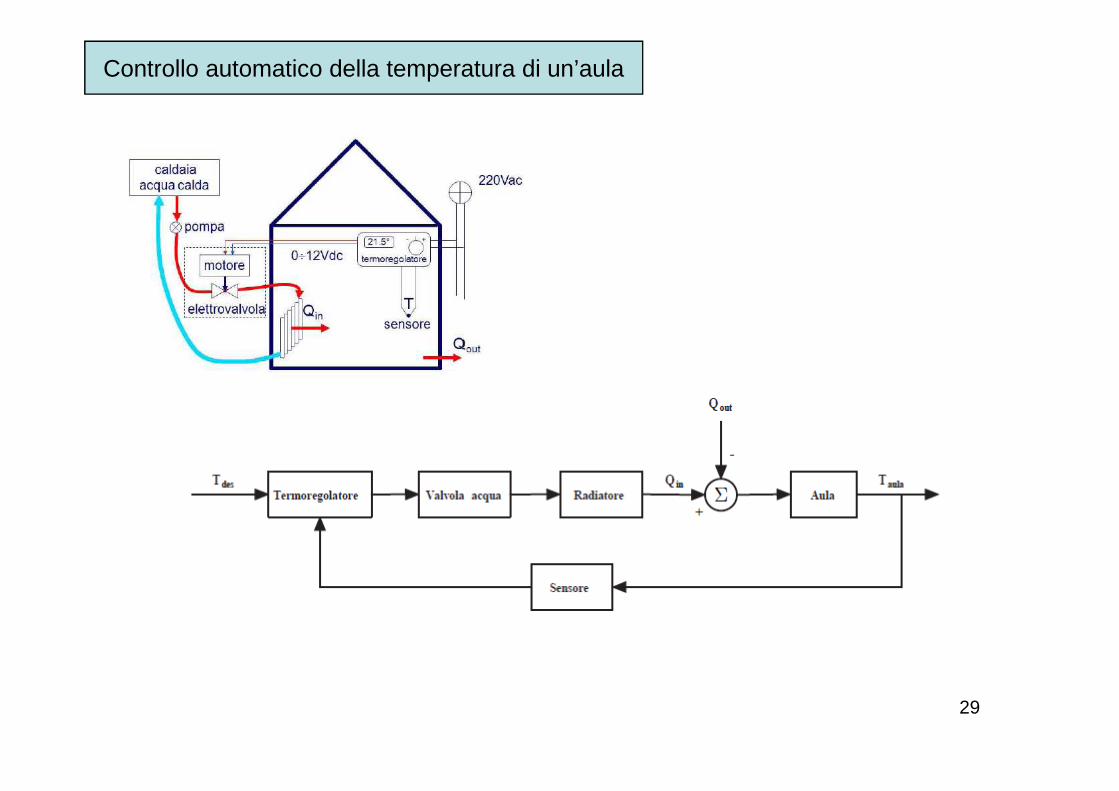
Controllo automatico della temperatura di un’aula
29

Elementi principali di un sistema di controllo
30

Cosa faremo?
Modellazione di sistemi reali tramite sistemi dinamici .
Analisi e simulazione di sistemi dinamici.sistemi dinamici.
Analisi e progettazione di sistemi di controllo
automatico a retroazione .
31

Cosa faremo?
MONDO REALE
Formulazione Interpretazione
L’intero processo di costruzione del modellomatematico si basa sulla formulazione delmondo reale in termini matematici; sullasoluzione del problema matematico (esatta oapprossimata) ed infine sulla interpretazionedei risultati in relazione al vero fenomenofisico.
MODELLO RISULTATIAnalisi
Tale processo viene ripetuto ciclicamente finoa quando non si dispone di un modello ingrado di descrivere in modo sufficientementeaccurato il problema in esame.
32

Leggi costitutive (fisica, chimica, etc.)c
Strumenti di analisi per sistemi dinamici
Cosa faremo?
Automatica
33

Cosa faremo?
Avremo a che fare con
SEGNALI SISTEMI
Rappresentano l’andamento temporale divariabili di interesse, normalmentegrandezze fisiche o astratte; evoluzione di•una posizione;•una pressione;
Stabiliscono relazioni tra segnali.
Ri(t)
•una pressione;•della dimensione di una popolazione;•di un tasso di interesse;•…
Considereremo segnali continui
x = x(t), x ∈ ℜ, t ∈ ℜ
v(t)
Alcuni segnali sono visti come cause(ingressi) , altri come effetti (uscite) .
i(t) = 1
Rv(t)
v(t) = Ri(t)
34

Cosa faremo?
ANALISI SINTESI
Studio del comportamento di un sistemaad un determinato ingresso. Stabilità delsistema.
Uno o più segnali di ingresso del sistemasono manipolabili con un opportunosistema di attuazione.
Si vuole stabilire come agire sulle variabiliSi vuole stabilire come agire sulle variabilimanipolabili per ottenere, tra tutti ipossibili comportamenti del processo,quelli che soddisfano specifiche date, oche si avvicinano maggiormente.
35

Modello matematico
Un modello di un sistema è una descrizionedelle sue caratteristiche più importanti edelle variazioni nel tempo e/o nello spaziodelle grandezze che lo caratterizzano.
Serve:Serve:• per trasmettere informazioni• per definire e risolvere problemi
36

Modello matematico
37

Modello matematico
38

Modello matematico
39

Modello matematico
Poiché i modelli matematici limitano la lorodescrizione ai legami quantitativi che isistemi stabiliscono tra i loro attributimisurabili essi costituiscono solo descrizioniapprossimate della realtà.
Lo stesso termine “legge fisica” è un retaggio del passatoe deriva dal considerare la natura come “scritta” inlinguaggio matematico.linguaggio matematico.
Anche le relazioni accettate come leggi fisiche devonoessere considerate come modelli non ancora falsificati.
Esempio:Moto dei pianeti.
• Tolomeo (sistema geocentrico)• Keplero (sistema eliocentrico, legge dei pianeti)• Newton (legge di gravitazione universale)• Einstein (teoria della relatività)
40

Modello matematico
41

Modello matematico
42

Sistema dinamico e variabili di statoSistema dinamico e variabili di stato
Per sistema si intende un ente (fisico o astratto) datodall'interconnessione di più parti elementari, per cui vale ilprincipio di azione e reazione.
Per sistema si intende un ente (fisico o astratto) datodall'interconnessione di più parti elementari, per cui vale ilprincipio di azione e reazione.
La variabile di interesse del sistema èl'uscita y il cui andamento è influenzatodall'ingresso u.
La variabile di interesse del sistema èl'uscita y il cui andamento è influenzatodall'ingresso u.
43

Il comportamento di un sistema è descrivibile da un insieme S direlazioni matematiche (detto modello matematico) che legano fra lorol'ingresso u e l'uscita y.
Problematiche di interesse:
PREVISIONE
Sistema dinamico e variabili di statoSistema dinamico e variabili di stato
PREVISIONE
CONTROLLO
IDENTIFICAZIONE
44

Per sistema statico si intende un sistema in cui il legame ingresso-uscita è istantaneo o statico:
il valore dell'uscita y all'istante t dipende solo dal valore dell'ingresso uallo stesso istante t.
Sistema dinamico e variabili di statoSistema dinamico e variabili di stato
allo stesso istante t.
45

Per sistema dinamico si intende un sistema in cui il legame ingresso-uscita è di tipo dinamico:
cioè il valore dell'uscita y all'istante t dipende da tutti i valori dell'ingressou fino all'istante t.
Sistema dinamico e variabili di statoSistema dinamico e variabili di stato
u fino all'istante t.
46

Sistema dinamico e variabili di statoSistema dinamico e variabili di stato
Dal momento che in un sistema dinamico l’uscita attuale y(t)dipende solo dall’ingresso passato e presente u(σ), σ≤t, vienespontaneo chiedersi se è possibile individuare un vettore adimensione finita (variabili di stato), il cui valore istantaneo x(t) ad ungenerico istante t riassuma tutta la storia passata u(σ), σ≤t epermetta quindi di determinare, congiuntamente a u(σ), σ>t,l’evoluzione futura dell’uscita y(σ), σ≥t.
47

Introduciamo una nuova grandezza, detta stato del sistema, cheracchiude la “storia passata” del sistema fino ad un certo istante.
Ultimo istante
Sistema dinamico e variabili di statoSistema dinamico e variabili di stato
Stato
della “storia”
48

Sistema dinamico e variabili di statoSistema dinamico e variabili di stato
49

Ammortizzatore
Ingressi:
la forza u(t) agente sulla massa m
Uscite:
lo spostamento y(t) della massa m rispetto alla posizione di riposo
Sistema SISO
ykfrr
−=
fr
rfr Molla
Smorzatore vbdt
ydbf
rr
r−=−=
50

Ammortizzatore
u
y
kyfel −=
2 yd
dt
dybfvis −=
y2
2
dt
ydm
dt
dybkyu
dt
ydm −−=
2
2La forza agente sulla massa m deve eguagliare,all’equilibrio, la somma di tutte le altre forze.
51

ukyybym =++ &&&
Ammortizzatore
Sistema del 2° ordine
Trasformazione in un sistema di due equazioni del 1° ordine:
)()(
)()(
2
1
tytx
tytx
&==
um
xm
bx
m
kx
xx
1212
21
+−=
=
&
&Equazione di stato
1xy = Equazione di uscita
[ ]
=
+
−=
2
1
2
1
2
1
01
1010
x
xy
umx
x
m
b
m
kx
x
&
&
DuCxy
BuAxx
+=+=&
52

53

Ammortizzatore
54

55

56

57

58

59

60
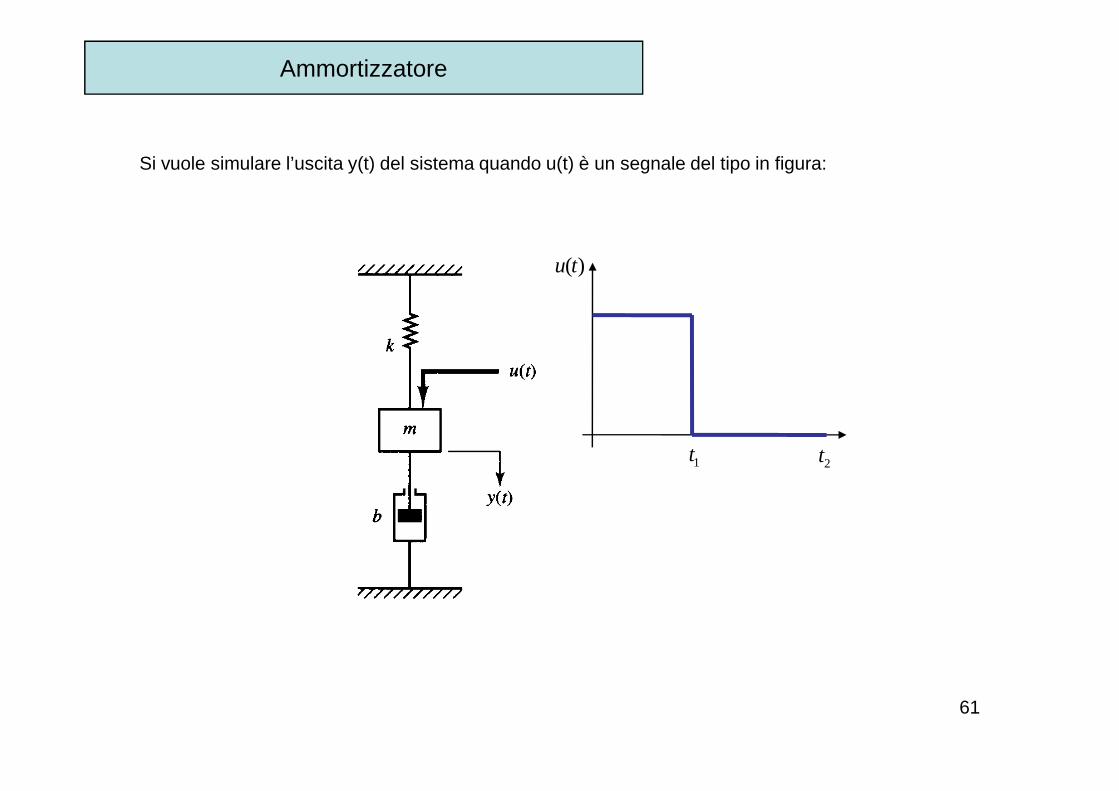
Ammortizzatore
Si vuole simulare l’uscita y(t) del sistema quando u(t) è un segnale del tipo in figura:
)(tu
1t 2t
61

Ammortizzatore
62

Ammortizzatore
63

Ammortizzatore
64

Ammortizzatore
65

Qualche osservazione???
66

Pendolo
ϕl
dsdt
dlF
mgF
attr
ϕµ
ϕϕ
−=
−= sin
ϕdlds ⋅= dt
dlv
ϕ=
2
2
dt
dla
ϕ=
mg
dt
All’equilibrio:
attrm FFF += ϕ
0sin2
2
=++dt
dlmg
dt
dml
ϕµϕϕ
67

0sin =++ ϕϕµϕl
g
m&&&
Pendolo
)()(
)()(1
ttx
ttx
ϕϕ&=
= 21
sin xxg
x
xx
µ−−=
=
&
&
)()(2 ttx ϕ&= 212 sin xm
xl
gx
µ−−=&
1xy =
68

Pendolo
69

Pendolo
70

Pendolo
2
0 2
2
ϕ l
d1
d2
71

Linearizzazione
...)()(
)()( 00
0
+−+= ttdt
tdftftf
t
Esempio:
tttt =+−+= ...)0()cos()0sin()sin(0
72

Pendolo
73

Pendolo
74

Pendolo
75

Pendolo
76

77

Circuiti elettrici
78
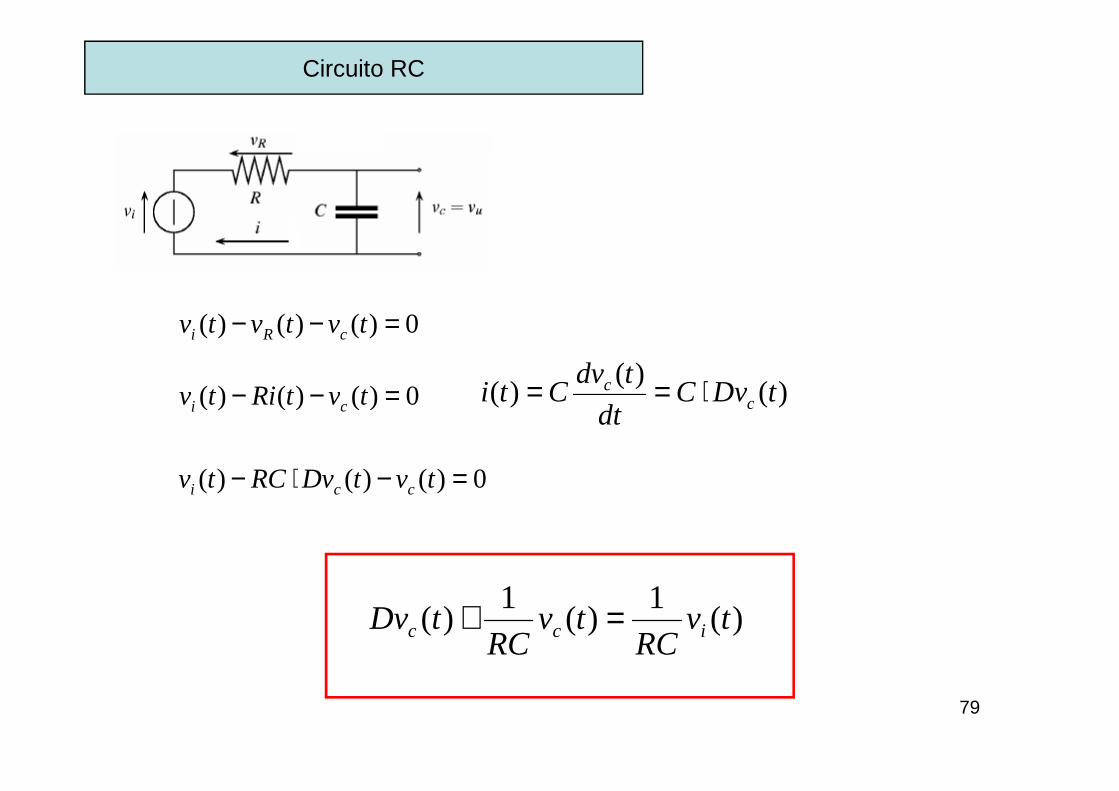
Circuito RC
0)()()( =−− tvtvtv cRi
0)()()( =−− tvtRitv )()(
)( tDvCtdv
Cti cc ⋅==0)()()( =−− tvtRitv ci
)()( tDvCdt
Cti c⋅==
0)()()( =−⋅− tvtDvRCtv cci
)(1
)(1
)( tvRC
tvRC
tDv icc =+
79

Circuito RC
Si vuole simulare l’uscita vc del sistema quando vi è un segnale del tipo in figura:
)(tu
20 =E
sec1.0== RCτ
sec2
sec1
1
0
==
t
t
0t 1t
80

Circuito RC
81

Circuito RC
82

Circuito RC
sec 1)0( =cv
0)(1
)( =+ tvRC
tDv cc
83

Modelli di stato e ingresso-uscita
&x(t) = f (t, x(t),u(t)), t ∈ ℜy(t) = h(t, x(t),u(t))
Def. Sistema lineareIl sistema dinamico si dice lineare se le funzioni f(t,x,u) e h(t,x,u) sonolineari rispetto ad x e u, cioèlineari rispetto ad x e u, cioè
f (t, x(t),u(t)) = A(t)x(t)+ B(t)u(t)
h(t, x(t),u(t)) = C(t)x(t)+ D(t)u(t)
A(t) ∈ ℜn×n,B(t) ∈ ℜn×m,C(t) ∈ ℜp×n,D(t) ∈ ℜp×m
84

Modelli di stato e ingresso-uscita
&x(t) = f (t, x(t),u(t)), t ∈ ℜy(t) = h(t, x(t),u(t))
Def. Sistema tempo-invariante o stazionarioIl sistema dinamico si dice tempo-invariante o stazionario se le funzionif(t,x,u) e h(t,x,u) non dipendono dall’argomento t, cioèf(t,x,u) e h(t,x,u) non dipendono dall’argomento t, cioè
f (t, x(t),u(t)) = f (x(t),u(t))
h(t, x(t),u(t)) = h(x(t),u(t))
85

Modelli di stato e ingresso-uscita
SISTEMA LINEARE E STAZIONARIO
&x(t) = Ax(t)+ Bu(t)
y(t) = Cx(t)+ Du(t)
A(t) ∈ ℜn×n,B(t) ∈ ℜn×m,C(t) ∈ ℜp×n,D(t) ∈ ℜp×m
86

Proprietà dei sistemi studiati
Γ)(tu )(ty
( )[ ]tuty Γ=)(
87

Proprietà dei sistemi studiati
Stazionarietà
( )[ ]tuty Γ=)( La risposta corrispondente all’eccitazione traslatanel tempo ha lo stesso andamento della risposta alsegnale originario non traslato, purchè la si traslidella medesima quantità.( )[ ]00)( ttutty −Γ=−della medesima quantità.
88

Esempi
( )[ ] ( ) ( )000
cost ),()(
ttyttAuttu
AtAuty
−=−=−Γ
== ( )
( )[ ] ( ) ( )( ) ( )( ) ( ) ( )[ ]
00
cost, ),()(
ttuBtAttu
BAtuBtAty
−+=−Γ
=+=
Proprietà dei sistemi studiati
000
stazionario
( ) ( )( ) ( ) ( )[ ]0000 ttuttuttBAtty −Γ≠−−+=−
non stazionario
89

Proprietà dei sistemi studiati
Linearità
)()()( 2211 tututu αα +=
Al segnale in ingresso
il sistema risponde con
( )[ ]
( )[ ]( )[ ]tuty
tuty
tytytuty
22
11
2211
)(
)(
)()()(
Γ=Γ=
+=Γ= αα
90

Proprietà dei sistemi studiati
Esempi
( )[ ] ( )( ) ( ) ( )tututu
tutu
21 +==Γ ( )[ ] ( ) ( )
( ) ( ) ( )tututu
tuBtAtu
2211 +=+=Γ
αα
( ) ( )[ ] ( ) ( )( )[ ] ( ) ( )[ ] ( )( ) ( )[ ] ( )[ ] ( )[ ]tutututu
tutututu
tutututu
2121
2211
2121
,
Γ+Γ≠+Γ=Γ=Γ
+=+Γ
non lineare
( ) ( )[ ] ( ) ( ) ( )( )( )[ ] ( ) ( )( )[ ] ( ) ( )tuBtAtu
tuBtAtu
tutuBtAtutu
2222
1111
22112211
,
+=Γ+=Γ
++=+Γ
αααα
αααα
lineare
91


















