GEOMETRY and CALIBRATION - Rutgers University …soe.rutgers.edu/~meer/UGRAD/cv11calibration.pdf-...
43
The slides are mainly from Silvio Savarese (U. of Michigan). GEOMETRY and CALIBRATION
-
Upload
truonghanh -
Category
Documents
-
view
226 -
download
7
Transcript of GEOMETRY and CALIBRATION - Rutgers University …soe.rutgers.edu/~meer/UGRAD/cv11calibration.pdf-...

The slides are mainly from Silvio Savarese (U. of Michigan).
GEOMETRY and CALIBRATION

Lines in a 2D plane - Transformation
0cbyax
-c/b
slope -a/b
cba
l
If x = [ x1, x2]T line 0cba
1xx T
2
1
line
x
y point * line = 0
(new point) = H (old point) o.p. H H o.l. = 0(new line) = H (old line) H is 3x3 matrix
lines in projective transformation remain lines
T
-T
measured
T -TTransformation:
nonsingular in homogeneous coor.
T

Projective transformation of an ideal line (in 2D)
lHl T
bvtA
H
?lH T
btt
100
bvtA
y
xT
is it the line at infinity?
no, another line!
?lH TA
100
100
10
100
10 TT
TT
AtAtA
3x3
affine transformation
line atinfinity
T
T
nonsingular


Points and planes in 3D
1xxx
x3
2
1
dcba
0dczbyax
x
y
z
0xx T
Lines in 3D • Lines have 4 degrees of freedom. • Defined as intersection of 2 planes. (3 and 3 minus 2 the intersection line)
plane

Plane at infinity -- vanishing lines in 3D
1000
x
y
z
• Parallel planes in 3D intersect at the plane at infinity.
• Two planes are parallel iff their intersections is a line that belongs to
• Parallel planes intersect the plane at infinity in a common line – the vanishing line (horizon).
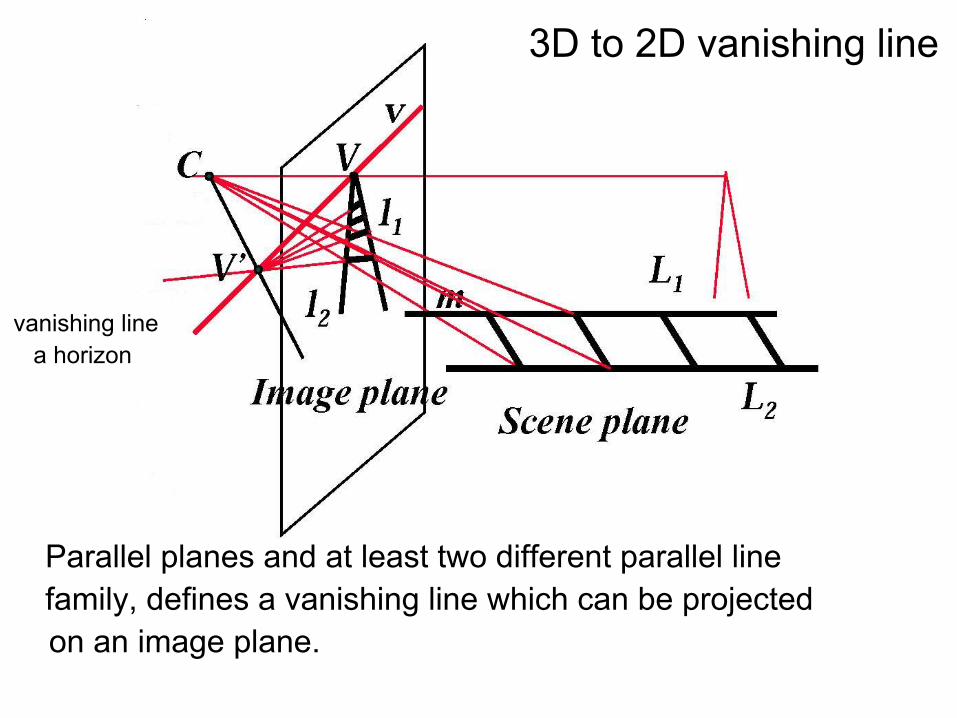
vanishing line a horizon
Parallel planes and at least two different parallel linefamily, defines a vanishing line which can be projected
on an image plane.
3D to 2D vanishing line

Projective transformation of l_inf in 2D
horizon
- Recognize the horizon line. - Measure if two lines meet at the horizon. - If yes, these two lines are parallel in 3D.
Are these two lines parallel or not?
lHl Thor
known

The image of 3D vanishing points
dv K
d=direction of the line d
C
v
In 3D a (homogeous) point on the line evolves P = [ P_0 + t * d 1 ]When t goes to infinity P_0 and 1, disappear. 3D ideal point P_inf = [ d 0]
3D nonhomogeneous vector
T
T
camera internal K [I 0] * P_inf
homogeous in 2Dideal point in the plane
(3x3)(3x1)
P_0
(time)
3D nonhomogeneous
P
3D nonhomogeneous
A line defined by 2 planes, not directly d.The 3D ideal point is along the line, that is d.

The image of 3D vanishing lines
C
n
Parallel planes intersect the plane at infinity in a common line – the vanishing line (horizon).
horizTK ln
horizl
Proof. d = K v is orthogonal to n d n = 0 v K n = 0 but v l_hor = 0
-1
T T -T
l_horiz (image) is obtained byintersecting a plane parallelwith the family through the camera center C.
3D nonhomogeneous normal
in the plane.
l_horiz 2D homogeneous
v
T
peter
Line

Vanishing points - example
C2
v2
C1
v1
R,T
11
11
1 KK
vvd
21
21
2 KK
vvd
21 R dd
v1, v2: measurement of vanishing points K = known and constant Can we compute R?
d_1,2 are directions of 3D parallel lines in image 1 and 2
translation does not play a role!
3D unit vectors
peter
Text Box

11
11
1 KK
vvd
21
21
2 KK
vvd
needs TWO corresponding directionsin each image - a vanishing line d(v1/2) and d(v3/4) 2x2 > 3
one corresponding direction
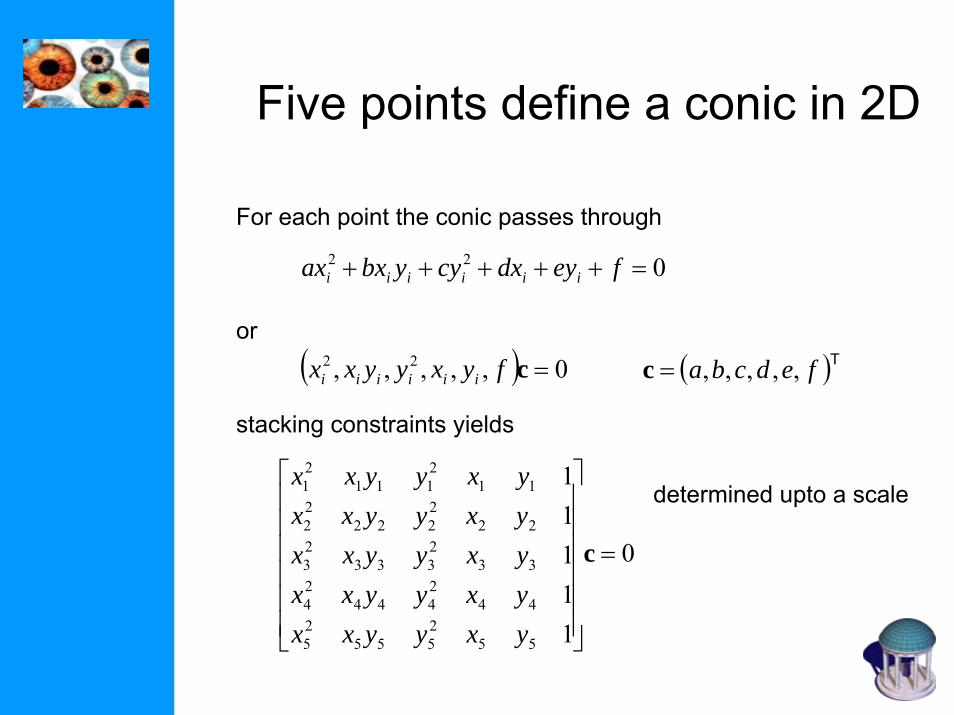
Five points define a conic in 2D
For each point the conic passes through
022 =+++++ feydxcyybxax iiiiii
or( ) 0,,,,, 22 =cfyxyyxx iiiiii ( )Tfedcba ,,,,,=c
0
11111
552555
25
442444
24
332333
23
222222
22
112111
21
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
c
yxyyxxyxyyxxyxyyxxyxyyxxyxyyxx
stacking constraints yields
determined upto a scale
- If a point x C
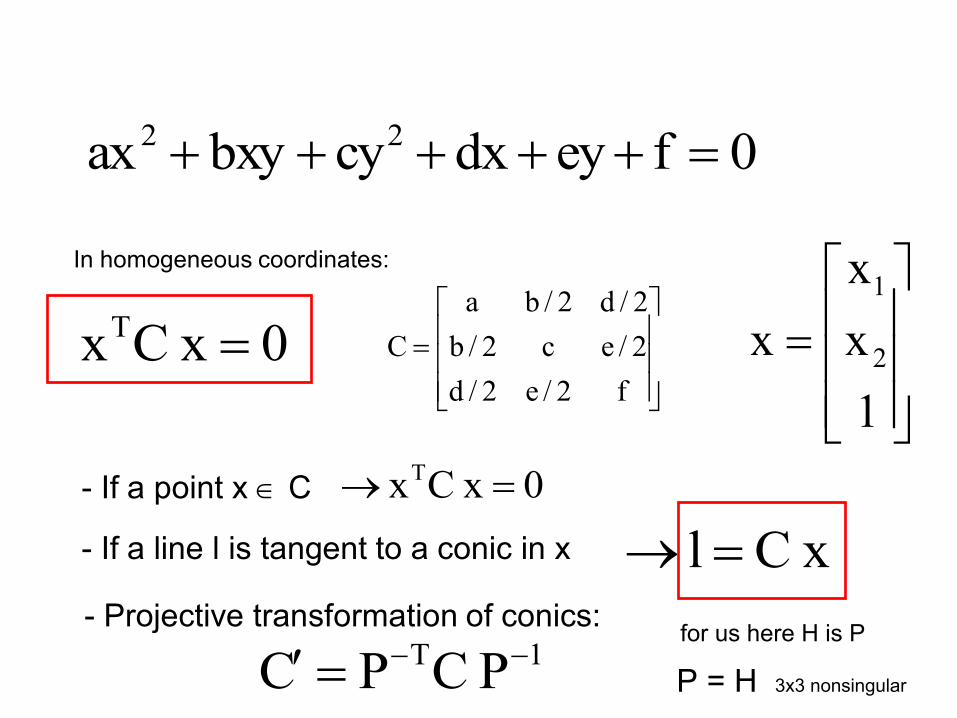
0feydxcybxyax 22
In homogeneous coordinates:
0xCxT
f2/e2/d2/ec2/b2/d2/ba
C
1xx
x 2
1
0xCxT
- If a line l is tangent to a conic in x xCl
1T PCPC - Projective transformation of conics:
P = H 3x3 nonsingular
for us here H is P

Proves for the conics:
The line l tangent to C at point x on C is given by l=Cx.
lx
C
x l = x C x = 0T T
Projective transformation of conicsx' = P x x C x = x' P C P x' = 0
T -T -1
C' = P C P-T -1
T

Circular points (see also lecture 2)
l
0i1
pi
0i1
p j
Circular points (point at infinity)
Circular points are fixed under similarity transformation.
0i1
0i1
100tcosssinstsinscoss
pH y
x
is
i2=-1 rotation around z axis
s e magnitude-i theta
plus translation

Conic C
Circular points define a degenerate
conic called ; any C
0x0xx
3
22
21
Cx
000010001
C0xCxT
l
0i1
pi
0i1
p j
Circular points (point at infinity)
is fixed under similarity transformation.
C

In 3D: absolute conic
Any x satisfies:
01
11
0xxT
0x0xxx
4
23
22
21
is fixed under 3D similarity transformation.
Do transformation from plane at infinity to camera plane.
P = K[R t]C' = (KR) I (KR) = K RR K = (K K )-T -1 -T -1 -1 T -1
is in 3D plane at infinity

2D projective transf. of the
It is not function of R, T
654
532
421
symmetric
02 zero-skew 31 square pixel
02
1.
2.
3. 4.
TRKP omega is in 2D theimage of the absolute conic (IAC)
(K K )T -1
also K K-T -1

Angle between two vanishing points
2T21
T1
2T1
vvvvvvcos
C
d1 v1
dv Kv2
d2
90 0vv 2T1
d = K v-1
cos(d , d )1 2
If between two raysin 3D
cos <d_1, d_2>

90
0vv 2T1
v1 v2
Constraint on K
(K K )T-1
Internal camera calibration...
zero-skewsquare pixels

...in a single view.
v2
v3
0vv 2T1
0vv 3T1
0vv 3T2
654
532
421
31
02
Compute :6 unknown - 1 scale5 constraints known up to scale
K (Cholesky factorization)
v2
(K K )T -1

R. Hartley and A. Zisserman: Multiple view geometry. Cambridge, 2004.
Cholesky factorization

A4.1 Orthogonal matrices 57 9
A4.1.1 Givens rotations and RQ decomposition
A 3-dimensional Given s rotation i s a rotation abou t one of the three coordinate axes . The three Givens rotations are
" 1 C s c —s c —s Qy = 1 Qz = s c s c —s c 1
where c = cos(6> ) and s = sin(0 ) fo r some angle 6 and blank entries represent zeros. Multiplying a 3 x 3 matrix A on the right by (for instance) Qz has the effect o f leaving
the last column o f A unchanged , an d replacing the first tw o columns by linear combi-nations of the original two columns. The angle 8 may be chosen so that any given entry in the first two columns becomes zero.
For instance, to set the entry A2i to zero, we need to solve the equation ca2i + sa<zi = 0. Th e solutio n t o this i s c = —022/(̂ 2 2 + a2iY^2 an< ^ s — a2i/(a|2 + a\\Y^• I t ' s
required tha t c 2 + ,s 2 = 1 since c = cos(# ) an d s — sin(0), and the values of c and s given here satisfy tha t requirement.
The strategy of the RQ algorithm is to clear out the lower half of the matrix one entry at a time by multiplication b y Givens rotations. Consider the decomposition o f a 3 x 3 matrix A a s A = R Q where R is upper-triangula r an d Q i s a rotation matrix . Thi s may take place in three steps . Eac h ste p consists of multiplication o n the right by a Givens rotation to set a chosen entry o f the matrix A to zero. Th e sequence of multiplications must be chosen in such a way as not to disturb the entries that have already been set to zero. An implementation o f the RQ decomposition is given in algorithm A4.1.
Objective
Carry out the RQ decomposition o f a 3 x 3 matrix A using Givens rotations.
Algorithm
(i) Multipl y by Qx so as to set A32 to zero, (ii) Multipl y by Qy so as to set A31 t o zero. This multiplication doe s not change the second
column of A, hence A 32 remains zero, (iii) Multipl y b y Qz so as t o se t A 2i t o zero . Th e first two columns ar e replaced b y linea r
combinations o f themselves. Thus , A31 and A32 remain zero.
Algorithm A4.1 . RQ decomposition of a 3 x3 matrix.
Other sequence s o f Given s rotation s ma y b e chose n t o giv e th e sam e result . A s a resul t o f thes e operations , w e fin d tha t AQ xQyQz = R where R is upper-triangular . Consequently, A = RQjQ^Qj , an d s o A = R Q where Q = QjQj[Q j i s a rotation. I n addition, the angles 6X, 0y an d 9Z associated with the three Givens rotations provide a parametrization o f th e rotation b y thre e Eule r angles , otherwis e know n a s roll , pitc h and yaw angles.
It should be clear from thi s description o f the decomposition algorith m how simila r QR, QL and LQ factorizations may be carried out. Furthermore, the algorithm is easily generalized to higher dimensions.
a_31 and a_33 change
a_21 and a_22 change
a_32 and a_33 changein the lower-triangular part:
meer
Text Box
See also 2HZSec.A4.1.1
peter
Line
peter
Line

No distortion
Pin cushion
Barrel
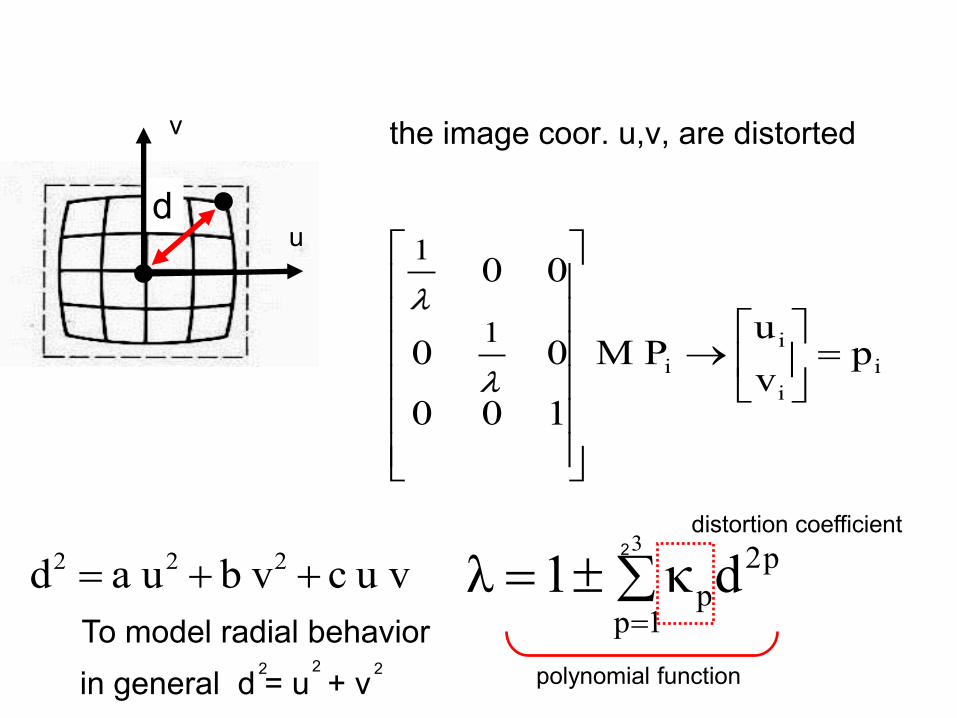
Radial Distortion – Caused by imperfect lenses. – Deviations are most noticeable for rays that pass through
the edge of the lens.

Radial distortion included in the 2D calibration.
ii
ii p
vu
PM
100
00
00
1
1
d
v
vucvbuad 222
u
3
1p
2ppdκ1λ
polynomial function
distortion coefficient
To model radial behavior in general d = u + v 2 2 2
the image coor. u,v, are distorted
2
peter
Text Box
peter
Text Box

Radial Distortion
i
ii v
up
i3
i2
i3
i1
PPPP
1
mmmm
m
We find the (two) coefficients (r and r ) by requesting that straight lines should be straight.
2 4
T
T
T
T
nonlinear function
peter
Text Box

before radial distortion was removed

after radial distortion was removed

Correcting Radial Lens Distortions
Before After
http://www.grasshopperonline.com/barrel_distortion_correction_software.html

Calibration Procedure Camera Calibration Toolbox for Matlab J. Bouguet – [1998-2000] http://www.vision.caltech.edu/bouguetj/calib_doc/index.html#examples
see webpage
with aplane

Take images of a planar checkerboard.

For each image click in this order on the four extreme corners.
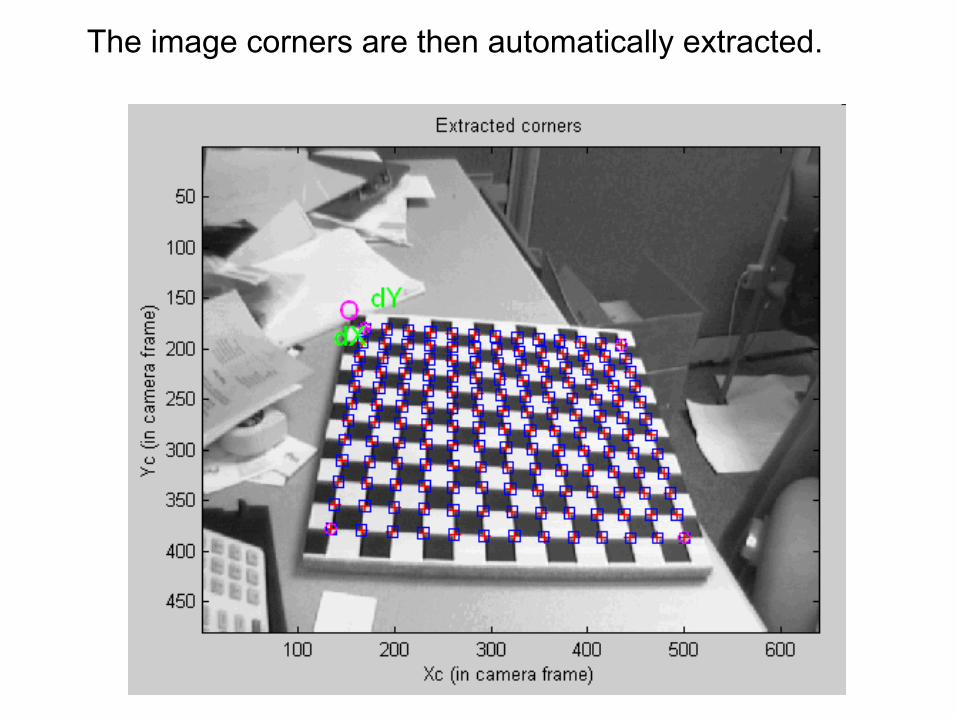
The image corners are then automatically extracted.

After the estimation was done, we have 11 parameters (max.) (12 parameters divided by the scale)
The first three columns of the recovered matrix give the 5 intrinsic parameters through image of the absolute conic which we saw before => K (some given!)
For rotation have to add orthonormality of the three directionsand R ~ K M_13. Translation is obtained t = K m_4.
There are 6 extrinsic parameters. All X_i’s in 3D cannot lie on the same plane.
-1 -1
[M_13 m_4] or K [R t]

If you do a recomputation of corners and estimate againthe reprojection error will decrease an order of magnitude more.

camera viewpoint

world viewpoints - example 20 images
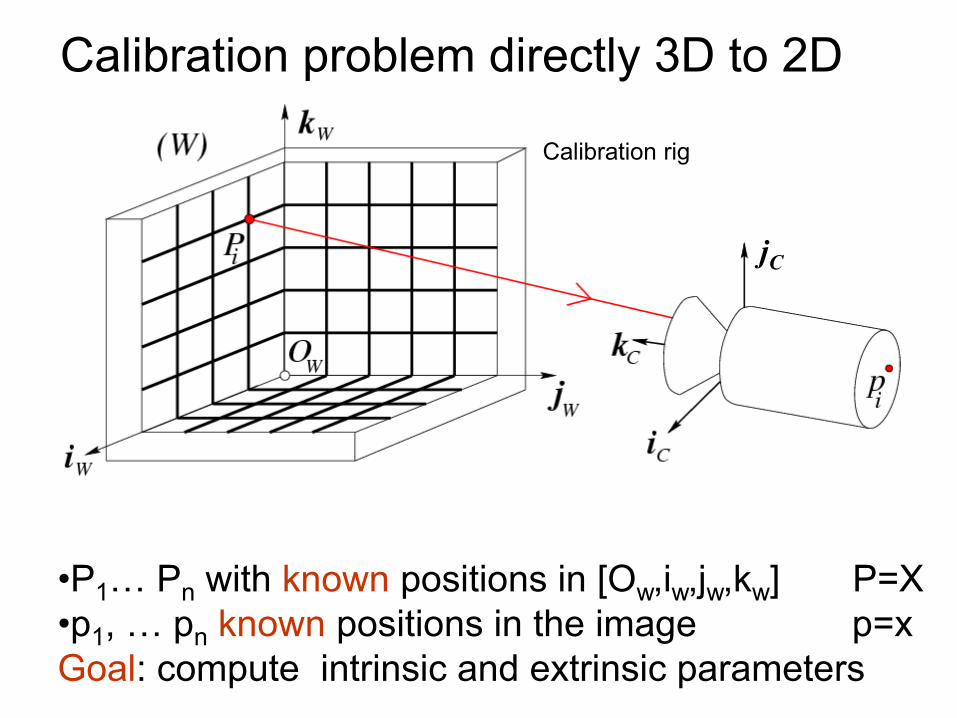
Calibration problem directly 3D to 2D
•P1… Pn with known positions in [Ow,iw,jw,kw] P=X•p1, … pn known positions in the image p=x Goal: compute intrinsic and extrinsic parameters
jC
Calibration rig

Linear method 3D to 2D
ii PXx =λ 0PXx =× ii0XP
XP
2
1
=⎥⎥⎥⎤
⎢⎢⎢⎡
×⎥⎥⎤
⎢⎢⎡
iT
iT
i
i
yx
ii iiXP1 3⎥⎦⎢⎣⎥
⎥⎦⎢
⎢⎣ i
T
PXX0 ⎞⎛⎤⎡ TT
0PP
X0XXX0
2
1
=⎟⎟⎟⎞
⎜⎜⎜⎛
⎥⎥⎥⎤
⎢⎢⎢⎡
−−
Tii
Ti
Tii
Ti
xy
P0XX 3⎟⎠
⎜⎝⎥⎦⎢⎣−
Tii
Tii xy
Two linearly independent equations.
homogeneous coordinates
P a 3x4 matrix -- will need 6 correspondences.

image jC
Calibration rig
In practice: user may need to look at the image and select the n > 6 correspondences. Today used only if very precise calibration is needed.
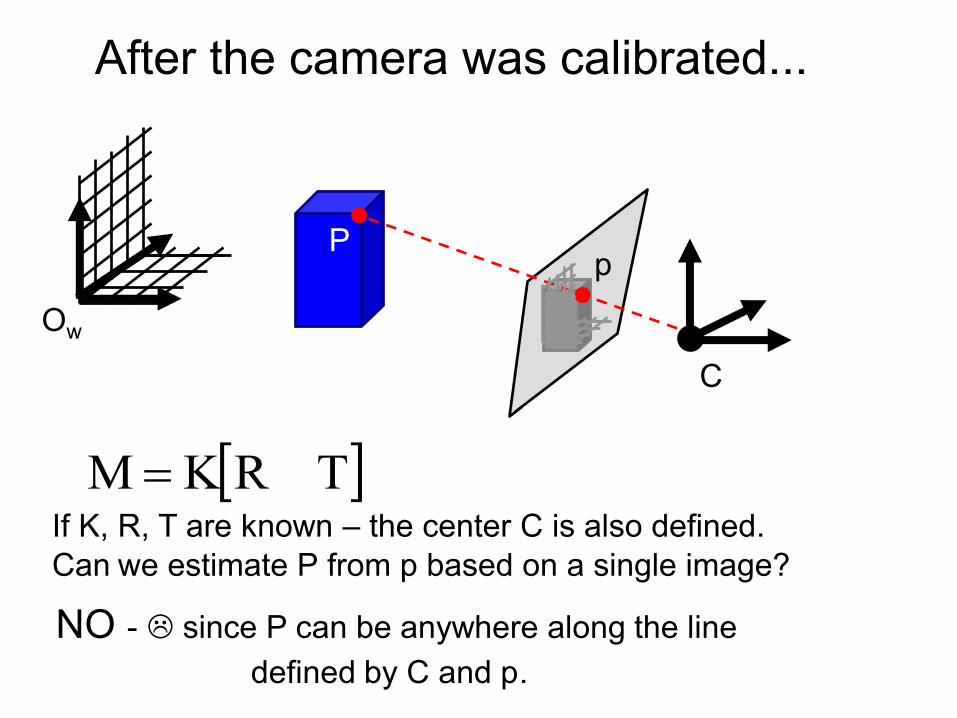
After the camera was calibrated...
TRKM
C
Ow
If K, R, T are known – the center C is also defined. Can we estimate P from p based on a single image?
P p
NO - since P can be anywhere along the line defined by C and p.