
8 razred - Prvanovic - Geometrija za VIII razred osnovne skole - matematika
Upload
slonocipelicCategory
view
489download
82description
Geometrija za informaticare
Matematicki fakultet
T. Sukilovic, S. Vukmirovic
January 31, 2014
1 Vektori, linearna nezavisnost, operacije sa vek-torima
1.1 Definicija vektora i osnovne osobine
Pretpostavimo da je studentu poznata geometrija Euklidske ravni, odnostnoprostora koje oznacavamo sa E. Kada zelimo da istaknemo dimenziju koris-timo oznaku E2,E3, odnosno En. Taj prostor zovemo i afini prostor, a njegoveelemente zovemo tackama.
Sada cemo da pridruzimo prostoru tacaka E, odnosno En, prostor vektorakoga oznacavamo sa V, odnosno Vn.
Podsetimo se da se tacka A naziva pocetak, a tacka B kraj usmerene duziAB prostora E. Za usmerene duzi definisemo pojam intenziteta, pravca i smera.
• Intenzitet usmerene duzi |AB| je njena duzina. Ocigledno, duzina jenenegativan broj, tj. |AB| ≥ 0.
• Za dve usmerene duzi kazemo da imaju isti pravac ako su paralelne (tj.njima odredjene prave su paralelne). Ako je intenzitet usmerene duzijednak nuli njen pravac nije definisan.
• Intuitivno prihvatamo da svaka prava ima dve orjentacije, tj. dva smera.Zato dve usmerene duzi koje imaju isti pravac, mogu imati isti ili suprotansmer.
Kazemo da su dve usmerene duzi AB i CD ekvivalentne ako imaju istiintenzitet, pravac i smer. Nije tesko pokazati da je relacija ekvivalentnosti us-merenih duzi refleksivna, simetricna i tranzitivna, tj. da je relacija ekvivalencije.Klase ekvivalencije nazivamo vektorima, tj. usvajamo sledecu definiciju.
Definicija 1.1 Vektor je klasa ekvivalencije usmerenih duzi, tj. usmerenih duzikoje imaju isti pravac, smer i intenzitet.
Vektor, odnosno klasu ekvivalencije usmerene duzi AB, oznacavamo sa→AB .
Kazemo da je usmerena duzAB predstavnik vektora→AB. Vektore oznacavamo
i malim slovima latinice:→v ,
→u,
→w . . . Kada govorimo o intenzitetu, pravcu i
smeru vektora, mislimo na intenzitet, pravac i smer bilo koje usmerene duzikoja ga predstavlja. Jasno je da pravac, smer i intenzitet jednoznacno odred-
juju vektor. Intenzitet vektora→v oznacavamo sa | →
v |.Ako jeB = A, tada odgovarajuci vektor
→AA zovemo nula vektor i obelezavamo
sa→0 . Jasno je da nula vektor ima intenzitet jednak nula i nema definisan pravac,
pa ni smer.
1
3
3
→v
→v
A
B
C
D 3→v
X
Y
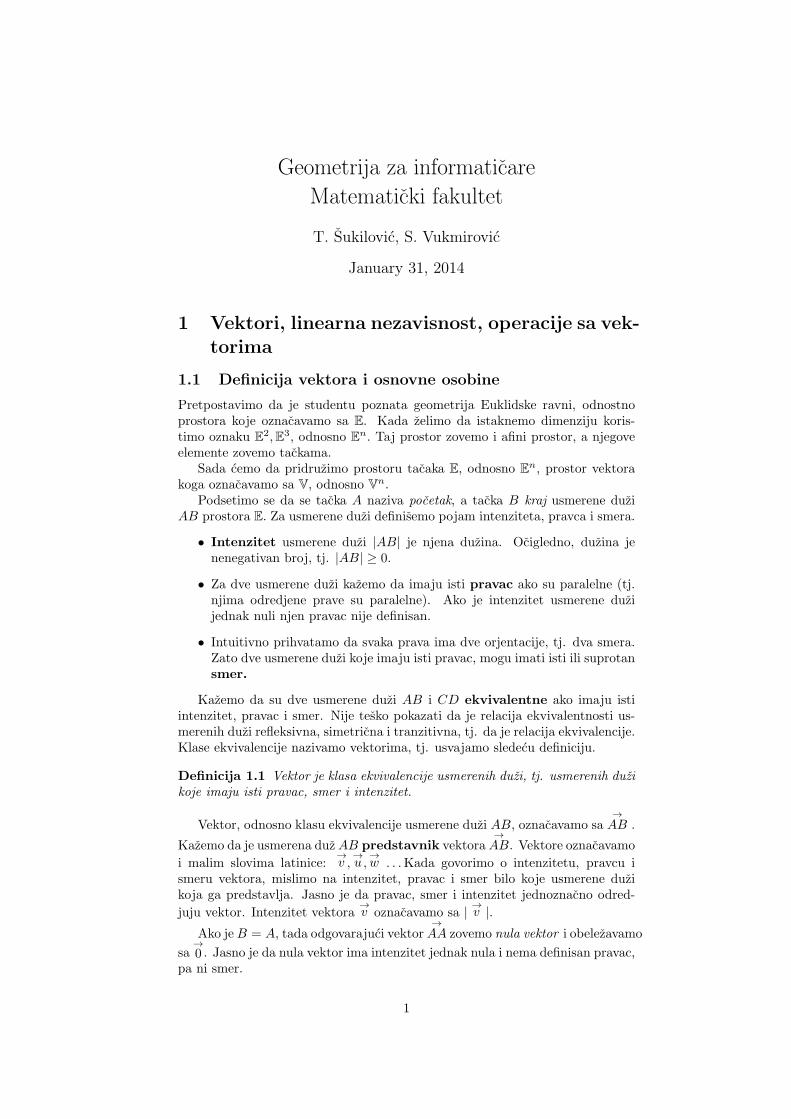
Slika 1: Ekvivalentne usmerene duzi su predstavnici istog vektora
Jasno je da za svaku tacku A i svaki vektor→v postoji jedinstvena tacka
B takva da je→v=
→AB, tj. da svaki vektor ima jedinstvenog predstavnika sa
pocetkom u datoj tacki A.Vektore nazivamo kolinearnim ako su njihovi predstavnici imaju isti pravac
(tj. paralelni su istoj pravoj), a koplanarnim ako su njihovi predstavnici par-alelni istoj ravni. Smatramo da je nula vektor kolinearan i komplanaran sa bilokojim vektorima.
Skup klasa ekvivalencije svih usmerenih duzi, tj. skup svih vektora oznacavamosa V (odnosno sa Vn ako zelimo da istaknemo dimenziju prostora od kog je nas-tao).
1.2 Linearne operacije sa vektorima. Prostor vektora kaovektorski prostor
Definisimo sada linearne operacije nad vektorima: sabiranje vektora i mnozenjevektora brojem (skalarom).
Vektore sabiramo ”nadovezivanjem,” tj. tako sto predstavimo vektore takoda pocetak drugog vektora bude kraj prvog.
Definicija 1.2 Neka su→v ,
→u∈ V vektori predstavljeni sa
→v=
→AB,
→u=
→BC. Zbir
vektora→v +
→u je vektor
→w=
→AC.
Mnozenje vektora brojem zapravo menja intenzitet vektora, a ako je taj brojnegativan, menja i njegov smer.
Definicija 1.3 Neka je α ∈ R realan broj i→v∈ V vektor. Proizvod α
→v broja
i vektora je vektor→u koji ima isti pravac kao vektor
→v , intenzitet | →u | = |α|| →
v
|, a smer vektora→u je isti kao smer vektora
→v ako je α > 0, odnosno suprotan
smeru vektora→v ako je α < 0.
Lako se pokazuje da ove operacije ne zavise od izbora predstavnika, tj. dobrosu definisane.
2

→v
7
s1
→u
A
B
C
�→v
�α
→v
α > 0
α→v
α < 0
7→v
s
→u
Slika 2: Linearne operacije sa vektorima
Razlika dva vektora→u − →
v :=→u +(−1)
→v
je zbir vektora→u i vektora −→
v suprotnog vektoru→v .
Sledecom teoremom se pokazuje da je skup vektora V sa upravo definisanimoperacijama sabiranja i mnozenja brojem, vektorski prostor nad poljem R kojise izucava u kursu Linearna algebra.
Teorema 1.1 Ako su→v ,
→u,
→w∈ V vektori, a α, β ∈ R realni brojevi tada je:
(S1)→u +(
→v +
→w) = (
→u +
→v )+
→w, (M1) α(
→u +
→v ) = α
→u +α
→v ,
(S2)→u +
→0=
→u=
→0 +
→u, (M2) α(β
→u) = (αβ)
→u,
(S3)→u +(− →
u) =→0 , (M3) (α+ β)
→u= α
→u +β
→u,
(S4)→u +
→v=
→v +
→u, (M4) 1
→u=
→u .
Dokaz: Dokazimo, primera radi, samo osobinu (S1) – asocijativnost sabi-ranja. Ostala svojstva se takodje jednostavno dokazuju (vidi Dodatak ??).
Neka su A,B,C,D ∈ E tacke takve da vazi:→u= AB,
→v= BC,
→w= CD.
Tada je:
→u +(
→v +
→w) =
→AB +(
→BC +
→CD) =
→AB +
→BD=
→AD=
=→AC +
→CD= (
→AB +
→BC)+
→CD= (
→u +
→v )+
→w .
⊓⊔
1.3 Linearna nezavisnost vektora. Koordinate.
Podsetimo se pojma linearne nezavisnosti vektora, koji se radi u kursu Linearnaalgebra.
Ako su α1, . . . , αn ∈ R brojevi, a→v1, . . . ,
→vn vektori, tada se izraz
α1→v1 + . . .+ αn
→vn
naziva linearna kombinacija vektora.
Definicija 1.4 Vektori→v1, . . . ,
→vn su linearno nezavisni ako iz relacije
α1→v1 + . . .+ αn
→vn=
→0
sledi α1 = . . . = αn = 0. U suprotnom, kada je bar jedan od brojeva αi razlicitod nule vektori se nazivaju linearno zavisnim.
3

Nije tesko dokazati da su vektori linearno zavisni ako i samo ako se nekivektor moze izraziti kao linearna kombinacija preostalih.
Takodje, ako je neki od vektora nula vektor, vektori su linearno zavisni.Sledeca teorema sledi direktno iz definicije mnozenja vektora brojem.
Teorema 1.2 Sledeca tvrdjenja su ekvivalentna:
a) Vektori→u i
→v su linearno zavisni;
b) Vektori→u i
→v su kolinearni;
c)→u= α
→v ili
→v= α
→u, za neko α ∈ R.
Teorema 1.3 U ravni postoje dva linearno nezavisna vektora, a svaka tri vek-tora ravni su linearno zavisna.
Dokaz: Ako su O,A,B ∈ E2 tri nekolinearne tacke tada su vektori→OA i
→OB
nekolinearni, pa i nezavisni vektori u ravni.
-
�
*
A
B
O
X
YC
-
�
�
-
*
→v
→u
→w
Slika 3: Zavisnost vektora u ravni
Neka su→v ,
→u,
→w∈ V2 tri vektora ravni. Ako su vektori
→u i
→v zavisni, tada
je→u= α
→v , α ∈ R, pa je
→u −α →
v +0→w=
→0 ,
tj. sva tri vektora su zavisna.
Pretpostavimo zato da su vektori→u i
→v nezavisni. Neka su O,A,B,C ∈ E2
tacke takve da→v=
→OA,
→u=
→OB,
→w=
→OC . Neka su tacke X,Y tacke pravih OA
i OB takve da je takve da je cetvorougao OXCY paralelogram. Tada za nekebrojeve α, β ∈ R vazi:
→w=
→OC=
→OX +
→XC= α
→OA +β
→OB= α
→u +β
→v ,
pa su vektori→v ,
→u,
→w linearno zavisni. ⊓⊔
Podsetimo se da je baza vektorskog prostora maksimalan skup linearno nezav-isnih vektora, a da je dimenzija tog prostora broj elemenata baze. Iz prethodneteoreme dobijamo vazne posledice.
Posledica 1.1 Dimenzija vektorskog prostora V2, vektora ravni, je dva. Svaki
vektor→v∈ V2 moze da se napise u obliku
→v= x1
→e1 +x2
→e2, (1)
gde je e = (→e1,
→e2) neka baza vektorskog prostora V2, a x1, x2 ∈ R jedinstveni
brojevi.
4

Posledica 1.2 Vektori→v ,
→u,
→w prostora V3 su linearno zavisni ako i samo ako
su koplanarni.
Naredna teorema se dokazuje slicno onoj u ravni, pa njen dokaz ostavljamoza Dodatak ??.
Teorema 1.4 U prostoru postoje tri linearno nezavisna vektora, a svaka cetirivektora su linearno zavisna.
Posledica 1.3 Dimenzija vektorskog prostora V3, vektora prostora, je tri. Svaki
vektor prostora→u∈ V3 moze da se napise u obliku
→v= x1
→e1 +x2
→e2 +x3
→e3, (2)
gde je e = (→e1,
→e2,
→e3) neka baza vektorskog prostora V3, a x1, x2, x3 ∈ R jedin-
stveni brojevi.
1.4 Koordinate vektora i tacke
Formule (1) i (2) nas dovode do pojma koordinata vektora u bazi. Naime,
fiksiramo li bazu e = (→e1,
→e2) ravni, na osnovu formula (1) svakom vektoru
→v ravni mozemo da pridruzimo par brojeva (x1, x2). Taj par brojeva zovemo
koordinate vektora→v u bazi e sto pisemo
[→v ]e = (x1, x2)
T .
Analogno se, izbor baze e = (→e1,
→e2,
→e3) prostora, na osnovu formula (2), svakom
vektoru→v prostora V3 pridruzuju njegove koordinate
[→v ]e = (x1, x2, x3)
T
u toj bazi, a vektoru→v n−dimenzionog vektorskog prostora Vn u bazi e = (
→e1
, . . . ,→en) pridruzuju koordinate
[→v ]e = (x1, . . . , xn)
T . (3)
Koordinate transponujemo, tj. posmatramo ih kao kolone iz cisto tehnickograzloga: tako su pogodnije za matricni zapis koji cemo u nastavku koristiti. Uracunima se oznaka za transponovanje obicno izostavlja.
Primetimo da, kad fiksiramo bazu e svakom vektoru odgovara n−torka real-nih brojeva, tj. vektor iz Rn. Kazemo da izbor baze vektorskog prostora zadajekoodinatni izomorfizam (3), tj. preslikavanje V ∼= Rn kojim vektor identifiku-jemo sa njegovim koordinatama.
Sada uvodimo pojam koordinata tacaka iz prostora E. Neka je e = (→e1
, . . . ,→en) baza odgovarajuceg vektorskog prostora V O ∈ E fiksirana tacka. Tada
se Oe naziva koordinatnim sistemom ili reperom prostora E.
Definicija 1.5 Koordinate tacke X ∈ E u reperu Oe definisemo kao koordi-
nate vektora→OX u bazi e, tj.
[X]Oe := [→OX]e. (4)
Primer 1.1 Neka je OABC paralelogram, E = S(BC) i→e1=
→AE,
→e2=
→AB baza.
Odrediti koordinate temena paralelograma u reperu Ae.
5

Resenje: Tacka A je koordinatni pocetak, a vektor→AA nula vektor, pa vazi
→0=
→AA= 0
→e1 +0
→e2, pa zato imamo
[A]Ae = [→AA]e = (0, 0)T .
Jasno je da su u svakom reperu koordinate koordinatnog pocetka (0, 0)T .
�O
E
O A
BC
→e1 →
e2
Slika 4: Primer 1.1
Odredimo koordinate tacke C. Posto vazi:→AC =
→AE +
→EC=
→AE +
→BE=
=→AE +(
→BA +
→AE) = 2
→AE −
→AB= 2
→e1 − →
e2
dobijamo da su koordinate tacke C
[C]Ae = [→AC]e = (2,−1)T .
Na slican se nacin dobija da je
[B]Ae = (0, 1)T , [O]Ae = (2,−2)T .
Primetimo da ista tacka u razlicitim koordinatnim sistemima moze (i uglavnomi ima) razlicite koordinate.
Slicno kao kod vektora, izbor repera Oe zadaje identifikaciju (4) tacaka sanjihovim koordinatama, tj. preslikavanje En → Rn. Na taj nacin n−torke iz Rn
predstavljaju i tacke i vektore.
Primedba 1.1 U praksi se cesto koristi cinjenica da se koordinate vektora→MN
dobijaju ”oduzimanjem koordinate tacke M od koordinata tacke N.” Da je tokorektno sledi iz
[→MN ]e = [
→MO +
→ON ]e = [
→ON ]e − [
→OM ]e = [N ]Oe − [M ]Oe.
U praksi se oznaka za koordinate obicno ne pise.
1.5 Skalarni proizvod
Skalarni proizvod definisemo kako za vektore ravni, tako i za vektore prostorama koje dimenzije.
Definicija 1.6 Skalarni proizvod vektora je operacija koja dvama vektorima→v
,→u∈ V dodeljuje broj
→v · →u := | →
v || →u | cosω,
gde je ω ∈ [0, π) ugao izmedju vektora→u i
→v , a sa ∥ →
v ∥ je oznacen intentzitetvektora.
6

Osim tacke · za skalarni proizvod koriste se i oznake ⟨→v ,→u⟩ ili (→v ,→u).
Teorema 1.5 (Osobine skalarnog proizvoda) Neka su→v ,
→u,
→w∈ V i α ∈
R. Tada vazi:1)
→u · →
v=→v · →u (simetricnost);
2)→u ·(α →
v +β→w) = α(
→u · →
v ) + β(→u · →
w) (linearnost po drugom argu-mentu)
3)→u · →u= | →u |2 ≥ 0, (pozitivnost)
4)→u · →u= 0 ako i samo ako je
→u=
→0 . (nedegenerisanost)
Osobine 1, 3 i 4 slede direktno iz definicije, a osobina 2 se dokazuju u Dodatku??.
Kombinovanje osobina 1) i 2) daje nam osobinu linearnosti (po prvomargumentu) skalarnog proizvoda
(α→v +β
→w)· →u= α(
→v · →u) + β(
→w · →u).
1.5.1 Skalarni proizvod u ortonormiranoj bazi
Podsetimo se da je ortonormirana baza takva baza e = (→e1, . . . ,
→en) za koju
vazi vazi→ei ·
→ej=
{0 ako je i = j,1 ako je i = j.
Drugim recima, bazni vektori su medjusobno ortogonalni (normalni) i svakivektor je duzine jedan.
Neka je sada, primera radi e = (→e1,
→e2) ortonormirana baza ravni V2 i
→v=
x1→e1 +x2
→e2,
→u= y1
→e1 +y2
→e2 dva vektora ravni. Tada, na osnovu linearnosti,
vazi:
→u · →
v = (x1→e1 +x2
→e2) · (y1
→e1 +y2
→e2) =
= x1y1→e1 · →
e1 +x1y2→e1 · →
e2 +x2y1→e2 · →
e1 +x2y2→e2 · →
e2=
= x1y1 + x2y2,
pri cemu smo za poslednju jednakost koristili ortonormiranost baze.
Na slican nacin se pokazuje da je skalarni proizvod vektora→v= x1
→e1 +x2
→e2
+x3→e3 i
→u= y1
→e1 +y2
→e2 +y3
→e3 prostora V3 jednak
→v · →u= x1y1 + x2y2 + x3y3 (5)
u ortonormiranoj bazi e = (→e1,
→e2,
→e3).
Jasno je da slicno vazi i u proizvoljnoj dimenziji. Sledecom formulom isticemomatricni zapis skalarnog proizvoda u ortonormiranoj bazi.
→v · →u= x1y1 + . . .+ xnyn = (x1, . . . , xn) ·
y1...yn
= [v]Te · [u]e. (6)
1.6 Orjentacija u ravni i prostoru
U ovom poglavlju orjentaciju u ravni i prostoru uvodimo intuitivno zato sto jeformalno uvodjenje orjentacije relativno komplikovano (vidi poglavlje ??).
Vazno je razumeti da je pojam pozitivne, tj. negativne orjentacije stvardogovora, pa u raznim primenama mozemo naici na zamenjenu ulogu pozitivnei negativne orjentacije.
7

Kazemo da je trougao ABC u ravni pozitivne orjentacije ako je smer obilaskatemena suprotan smeru kretanja kazaljke na satu. U suprotnom, trougao jenegativne orjentacije.
AB
C
A
B
C
Slika 5: Trougao pozitivne i negativne orjentacije
Takodje, za bazu e = (→OA,
→OB) kazemo da je pozitivne orjentacije, ako
je trougao OAB pozitivne orjentacije. Ekvivalentno, ta baza je pozitivne or-
jentacije ako je smer kretanja od vektora→OA do vektora
→OB, kracim putem,
suprotan smeru kretanja kazaljke na satu.Orjentaciju u prostoru uvodimo ”pravilom desne ruke.”Neka je baza e = (
→e1,
→e2,
→e3) prostora V3 predstavljena usmerenim duzima sa
istim pocetkom. Kazemo da je e baza pozitivne orjentacije ako vazi ”pravilodesne ruke:”
”ako ispruzenim prstima desne ruke idemo od vektora→e1 prema vek-
toru→e2, kracim putem, palac te ruke pokazuje onaj poluprostor
u kom se nalazi vektor→e3 .”
U suprotnom, ako za bazu e prostora pravilo desne ruke ne vazi, tada je tabaza negativne orjentacije.
Vazno je shvatiti da kretanja cuvaju orjentaciju. Kako god mi pomeraliili rotirali desnu rukavicu, ona nikada ne moze postati leva. Sa druge strane,refleksije menjaju orjentaciju: pogledamo li desnu rukavicu u ogledalu, ona ceizgledati kao leva.
1.7 Vektorski proizvod i mesoviti proizvod
Vektorski proizvod se definise na skupu vektora prostora, mada se moze koristitii za vektore ravni tako sto ravan posmatramo kao deo prostora.
Definicija 1.7 (Vektorski proizvod) Vektorski proizvod je operacija koja dvama
vektorima prostora→v i
→u dodeljuje vektor
→v × →
u koji je odredjen sledecim os-obinama:
1. | →v × →
u | = | →v || →u | sinφ, gde je φ ∈ [0, π) ugao izmedju
→v i
→u .
2. vektor→v × →
u je normalan na svaki od vektora→v i
→u .
3. smer vektora→v × →
u je takav da je baza (→v ,
→u,
→v × →
u) pozitivne or-
jentacije (ukoliko je baza, tj. ako je | →v × →
u | = 0).
Primetimo da je na osnovu 1) intenzitet vektorskog proizvoda jednak povrsini
paralelograma razapetog vektorima→v i
→u koje mnozimo. Kako nezavisni vektori
i samo oni razapinju paralelogram dobijamo
8

Posledica 1.4 Vektori→v ,
→u prostora V3 su linearno nezavisni ako i samo ako
→v × →
u =→0 .
Definicija 1.8 (Mesoviti proizvod) Mesoviti proizvod je operacija koja trima
vektorima→v ,
→u,
→w dodeljuje broj
[→v ,
→u,
→w] := (
→v × →
u)· →w
Teorema 1.6 Apsolutna vrednost mesovitog proizvoda [→v ,
→u,
→w] jednaka je za-
premini paralelopipeda odredjenog vektorima→v ,
→u,
→w .
q
7*
B
→v
→u
→w
6→v × →
u
R�ϕ
Pr→v ×→
u(→w)
Slika 6: Geometrijski smisao mesovitog proizvoda
Dokaz: Neka je osnova paralelopipeda paralelogram odredjen vektorima→v i
→u , cija je povrsina B = | →
v × →u |. Visina h paralelopipeda jednaka je normalnoj
projekciji vektora→w na vektor
→v × →
u koji je normalan na osnovu. Dakle visina
je h = | →w || cosϕ|, gde je ϕ ∈ [0, π] ugao izmedju vektora
→w i vektora
→v × →
u .Tada je zapremina V paralolepipeda
V = Bh = | →v × →
u || →w || cosϕ| =
= |(→v × →u)· →
w | = |[→v ,→u,→w]|.
Trecu jednakost smo dobili na osnovu definicije skalarnog proizvoda. ⊓⊔Ako su vektori
→v ,
→u,
→w nezavisni (tj. nekomplanarni) oni razapinju par-
alelopiped cija je zapremina pozitivan broj. Ako su vektori zavisni (kompla-narni), tada je taj paralelopiped degenerisan tj. pripada ravni i ima zapreminujednaku nuli. Dakle vazi
Posledica 1.5 Vektori→v ,
→u,
→w su linearno nezavisni ako i samo ako
[→v ,
→u,
→w] = 0.
Vazi i vise od toga:
Posledica 1.6 Vektori→v ,
→u,
→w cine bazu pozitivne orjentacije ako je [
→v ,
→u,
→w
] > 0, a negativne orjentacije ako je [→v ,
→u,
→w] < 0
Naime, u dokazu Teoreme 1.6 je jasno da [→v ,
→u,
→w] > 0 ako i samo ako je
cosϕ > 0, tj ako i samo ako ϕ ∈ [0, π2 ). To je ispunjeno ako i samo ako se vektori→w nalazi u istom poluprostoru kao i vektor
→v × →
u , sto znaci da za bazu→v ,
→u,
→w
vazi pravilo desne ruke, pa je ona pozitivne orjentacije.Algebarske osobine vektorskog i mesovitog proizvoda date su sledecom teo-
remom ciji se dokaz moze pronaci u Dodatku A.
9

Teorema 1.7 Za vektore→v ,
→u,
→w,
→v∈ V3 i α, β ∈ R vazi:
1)→u × →
v= − →v × →
u (antisimetricnost),
2) (α→u +β
→v )× →
w= α(→u × →
w) + β(→v × →
w) (linearnost),
3) [→v ,
→u,
→w] = −[
→u,
→v ,
→w], (antisimetricnost)
4) [→v ,
→u,
→w] = [
→u,
→w,
→v ] = [
→w,
→v ,
→u ], (ciklicnost)
5) [α→u +β
→v ,
→w,
→v ] = α[
→u,
→z ,
→v ] + β[
→v ,
→w,
→v ] (linearnost).
Iz osobina 1) i 2) moze se izvesti da je vektorski proizvod linearan i po drugomargumentu, a iz osobina 4) i 5) da je mesoviti proizvod linearan po svim argu-mentima. Takodje, iz osobina 3) i 4) dobijamo da zamena mesta bilo koja dvavektora u mesovitom proizvodu menja njegov znak.
Primetimo da vektorski proizvod nije komutativan, vec antikomutativan (os-obina 1). Sledecu osobinu vektorskog proizvoda dokazujemo u Dodatku ??.
Teorema 1.8 (Dvostruki vektorski proizvod)
→v ×(
→u × →
w) = (→v · →
w)→u −(
→v · →u) →
w .
Iz ove formule se vidi da vektorski proizvod nije ni asocijativan, tj. u opstemsluaju
→v ×(
→u × →
w) = (→v × →
u)× →w .
Naime, na osnovu formule za dvostruki vektorski proizvod, vektor→v ×(
→u × →
w)
pripada ravni razapetoj vektorima→u i
→w dok vektor
(→v × →
u)× →w= − →
w ×(→v × →
u)
pripada ravni razapetoj sa→v i
→u . Zato ti vektori, u opsem slucaju ne mogu biti
jednaki.U Dodatku ?? predstavljeni su kvaternioni cije mnozenje veoma lici na
vektorski proizvod.
1.7.1 Vektorski i mesoviti proizvod u koordinatama
Vektorski i mesoviti proizvod se najlakse racunaju u ortonormiranoj bazi. Pret-posavimo zato da je e = (
→e1,
→e2,
→e3) ortonormirana baza pozitivne orjentacije.
Zbog linearnosti vektorskog proizvoda, dovoljno je izracunati vektorski proizvodna baznim vektorima, sto zapisujemo tablicom:
× →e1
→e2
→e3
→e1
→0
→e3 − →
e2→e2 − →
e3→0
→e1
→e3
→e2 − →
e1→0
Ta tablica se lako proverava. Recimo, vektor→e1 × →
e2 je normalan na ravanrazapetu sa
→e1 i
→e2, pa je zato kolinearan sa
→e3, tj.
→e1 × →
e2= α→e3, α ∈ R.
Paralelogram razapet sa→e1 i
→e2 je kvadrat ivice 1, pa mu je povrsina jednaka 1
i zato je1 = | →
e1 × →e2 | = |α|| →
e3 | = |α|,
pa je→e1 × →
e2= ± →e3 . Na kraju, posto je baza e pozitivne orjentacije dobijamo
→e1 × →
e2=→e3 .
10

Neka su→v= x1
→e1 +x2
→e2 +x3
→e3,
→u= y1
→e1 +y2
→e2 +y3
→e3
dva vektora prostora E3
Koristeci linearnost lako se proverava da vazi→v × →
u= (x2y3 − x3y2)→e1 +(x3y1 − x1y3)
→e2 +(x1y2 − x2y1)
→e3 .
Ta jednakost se cesto zapisuje simbolickom determinantom:
→v × →
u=
∣∣∣∣∣∣→e1
→e2
→e3
x1 x2 x3y1 y2 y3
∣∣∣∣∣∣ , (7)
ciji je razvoj po prvoj vrsti upravo jednak prethodnoj formuli. Formulu (7)obicno koristimo za racunanje vektorskog proizvoda.
Neka je→w= z1
→e1 +z2
→e2 +z3
→e3 treci vektor. Koristeci formulu (5) za
skalarni proizvod dobijamo
[→v ,
→v ,
→w] = (
→v × →
u)· →w= (x2y3 − x3y2)z1 + (x3y1 − x1y3)z2 + (x1y2 − x2y1)z3,
sto je zapravo razvoj po trecoj vrsti determinante cije su vrste koordinate vek-tora koje mnozimo, tj.
[→v ,
→u,
→w] =
∣∣∣∣∣∣x1 x2 x3y1 y2 y3z1 z2 z3
∣∣∣∣∣∣ .Prethodnu formulu obicno korisimo za racunanje mesovitog proizvoda.
1.8 Primena vektorskog i mesovitog proizvoda
1.8.1 Orjentacija trougla
Podsetimo se da je trougao ABC pozitivne orjentacije ako je smer obilaskaod tacke A, preko B do tacke C suprotan smeru kazaljke na satu.
Primetimo da je redosled temena veoma vazan. Recimo, ako je trougao ABCpozitivne orjentacije, trougao ACB je negativne orjentacije.
Nadjimo analiticki zapis orjentacije trougla. Pretpostavimo da je trougaoABC zadat u ravni koordinatama temena
A(xA, yA), B(xB , yB), C(xC , yC).
Dopunimo li ortonormirani reper Oe, e = (→e1,
→e2) ravni do ortonormiranog
repera Oe, e = (→e1,
→e2,
→e3) prostora, sve tacke u nasoj ravni ce imati trecu koor-
dinatu jednaku nuli, tj. bice
A(xA, yA, 0), B(xB, yB, 0), C(xC , yC , 0).
Lako se vidi da je trougao ABC pozitivne orjentacije ako i samo ako je pravac
od vektora→AB prema vektoru
→AC, kracim putem, suprotan smeru kazaljke na
satu, tj. da je vektorski proizvod→AB ×
→AC istog pravca i smera kao vektor
→e3 .
Kako je
→AB ×
→AC =
∣∣∣∣∣∣→e1
→e2
→e3
xB − xA yB − yA 0xC − xA yC − yA 0
∣∣∣∣∣∣= ((xB − xA)(yC − yA)− (xC − xA)(yB − yA))
→e3,
vidimo da je trougao ABC pozitivne orjentacije ako i samo ako je determinanta
DABC := ((xB − xA)(yC − yA)− (xC − xA)(yB − yA)) > 0.
11

1.8.2 Povrsina trougla i paralelograma
Posto je povrsina trougla jednaka polovini povrsine paralelograma razapetog
vektorima→AB i
→AC, dobijamo da je povrsina trougla
P△ABC =1
2|
→AB ×
→AC | = 1
2|DABC
→e3 | = 1
2|DABC ||
→e3 | = 1
2|DABC |.
Jasno je da je povrsina paralelograma razapetog vektorima→AB i
→AC jednaka
|DABC |.Povrsina prostog ravanskog poligona se takodje racuna upotrebom vektorskog
proizvoda (vidi poglavlje ??).
1.8.3 Kolinearnost tri tacke u ravni
Tacke A, B i C su kolinearne ako i samo ako one ne cine trougao, odnosno akoje povrsina degenerisanog trougla ABC jednaka nuli, tj.
DABC = 0
Ako su A,B,C proizvoljne tacke prostora, tj. nemaju trecu koordinatu jednaku
nuli, njihovu kolinearnost je i dalje ekvivalentna uslovu→AB ×
→AC=
→0 , ali to ne
mozemo racunati na osnovu prethodnog uslova vec direktno na osnovu formule(7).
1.8.4 Odredjivanje da li tacka pripada trouglu
Pretpostavimo da je trougao ABC zadat koordinatama temena kao u prethod-nom poglavlju. Zelimo da proverimo da li tacka P pripada trouglu ABC.
Primetimo da tacka P pripada trouglu ako i samo ako su svi trouglovi ABP,BCP, CAP iste orjentacije, tj. ako i samo ako je
sign(DABP ) = sign(DBCP ) = sign(DCAP ). (8)
Ako je neka od tih vrednosti jednaka nuli, tada tacka P pripada odgovarajucojpravoj. Recimo ako jeDABP = 0 to znaci da tacka P pripada pravoj AB. Ako sudve vrednosti jednake nuli, tacka je teme trougla. Konacno, sve tri vrednosti ujednacni (8) ne mogu biti jednake nuli ako su tacke A,B,C medjusobno razlicite.
k
]
6P
A B
C
Slika 7: Tacka unutar pozitivno orjentisanog trougla
12

1.8.5 Odredjivanje da li su tacke sa iste strane prave
Neka je prava p = AB data koodinatama dveju njenih tacaka A i B i neka su uistoj ravni date i tacke C i D. Zelimo da ispitamo da li su tacke C i D sa istestrane prave p, tj. da li pripadaju istoj poluravni ciji je rub prava p.
Primetimo da su tacke C i D sa iste strane prave p ako i samo ako sutrouglovi ABC i ABD istih orjentacija, tj.
sign(DABC) = sign(DABD).
Drugi nacin da resimo ovaj problem jeste da ispitamo da li duz CD secepravu p = AB, ali taj nacin je komplikovaniji i manje efikasan.
Ukoliko je prava p = AB data svojom jednacinom, resenje je objasnjeno upoglavlju ??.
2 Transformacije koordinata
Podsetimo se kako su u Linearnoj algebri transformisale koordinate vektora→v
pri promeni baze.
Neka su e = (→e1, . . . ,
→en), f = (
→f1, . . . ,
→fn) dve baze prostora Vn (ne moraju
biti ortonormirane), koje obicno zovemo stara i nova baza. Matrica prelaskaC = Ce→f je matrica cije su kolone koordinate vektora nove baze f u staroj
bazi e, redom. Tada su stare i nove koordinate istog vektora→v vezane relacijom:
[v]e = C[v]f . (9)
Primetimo da u prethodnoj formuli koristimo matricni zapis, tako da n × nmatrica C mnozi vektor kolonu [v]f i kao rezultat daje vektor kolonu [v]e.
Izdvojimo sledece osobine matrice prelaska:
• Matrica prelaska je invertibilna, stavise: (Ce→f )−1 = Cf→e. Obrnuto,
kolone svake invertibilne n × n matrice su linearno nezavisne, pa pred-stavljaju koordinate vektora neke baze.
• Primetimo da smo geometrijski uveli orjentaciju samo u dimenzijama 2 i 3.Ipak, u proizvoljnoj dimenziji vazi algebarska definicija (koja se poklapa sageometrijskom): baze e i f su iste orjentacije ako je determinanta njihovematrice prelaska pozitivna, a razlicitih orjentacija ako je ta determinantanegativna.
2.1 Transformacije koordinata tacaka
Odredimo sada transformacije koordinata tacaka prostora E pri transformacijiiz jednog repera u drugi.
O
O′(b1, b2)
M
z→e1
6
w
�
* y→e2
→e′1
→e′2
13

Slika 8: Transformacije koordinata tacaka
Neka su Oe i Qf stari i novi reper prostora E i X ∈ E proizvoljna tacka.Tada vazi:
[X]Oe = [→OX]e = [
→OQ +
→QX]e = [
→OQ]e + [
→QX]e = [Q]Oe + C[
→QX]f =
= C[X]Qf + [Q]Oe.
Primetimo da treca jednakost vazi jer ”koordinate prolaze kroz zbir”, tj. dodelakoordinata (3) je izomorfizam vektorskih prostora V i Rn, a cetvrta jednakostje posledica formule (9).
Uvedemo li oznake
x = [X]Oe = (x1, . . . , xn)T , x′ = [X]Qf = (x′1, . . . , x
′n)
T
za koordinate iste tacke u starom i novom reperu i i q = [Q]Oe = (q1, . . . , qn)T
za koordinate novog repera, prethodne formule mozemo jednostavno zapisatikao:
x = Cx+ q. (10)
U koordinatnom obliku jednacina (10) glasi: x1...xn
=
c11 . . . c1n...
...cn1 . . . cnn
x′1
...x′n
+
q1...qn
, (11)
Kazemo da se transformacija koordinata tacaka sastoji od translatornogdela q i linearnog dela Cx′.
Primetimo da transformacije koordinata vektora (9) nemaju translatorni deojer koordinate vektora ne zavise od izbora koordinatnog pocetka O, tj. Q.
Primer 2.1 Neka je kao u Primeru 1.1 dat paralelogram OABC i stari reper
Ae i novi reper Of ,→f1=
→OA,
→f2=
→OC Odrediti vezu koordinata tacaka i na osnovu
nje proveriti rezultat Primera 1.1.
Resenje: Trebaju nam koordinate novog koordinatnog pocetka O u staromreperu Ae. Primetimo da je
→AO= 2
→BE= 2(
→BA +
→AE) = 2
→e1 −2
→e2,
pa je zato [O]Ae = (2,−2)T . Ove koordinate ce predstavljati translacioni deotransformacije.
�O
E
O A
BC
→e1 →
e2
-
�
→f1
→f2
14

Slika 9: Primer 2.1
Odredimo sada koordinate novih vektora u staroj bazi. Na osnovu prethodnogje
→f1=
→OA= −
→AO= −2
→e1 +2
→e2 .
Takodje vazi→f2=
→OC=
→AB= 0
→e1 +1
→e2 .
Dakle, dobijamo
[→f1]e = (−2, 2)T , [
→f2]e = (0, 1)T ,
sto su kolone matrice prelaska. Dakle transformacija koordinata je(x1x2
)=
(−2 02 1
)(x′1x′2
)+
(2−2
).
Koordinate (x′1, x′2) temena paralelograma u novom koordinatnom sistemu
su ocigledne:
(x′1, x′2) : O(0, 0), A(1, 0), B(1, 1), C(0, 1).
Njihovom zamenom u formulu transformacije dobijamo koordinate (x1, x2) tihistih tacaka u starom reperu Ae, bas kao u Primeru 1.1. Proverite!
2.2 Transformacija ortonormiranih repera ravni
Neka su Oe i Qf dva ortonormirana repera u ravni. Odredimo formule transfor-macija koordinata iz jednog repera u drugi. Te formule ce biti specijalan slucajrelacija (11), n = 2.
Slucaj 1: reperi Oe i Qf imaju iste orjenatacije, recimo, oba su pozi-tivne orjentacije.
Koordinate tacke Q u reperu Oe su Q(q1, q2). Vektor→f1 gradi sa vektorom
→e1
neki ugao ϕ ∈ [0, 2π) (mereno u pozitivnom smeru). Kako je vektor→f1 jedinicni
vazi: →f1= cosϕ
→e1 +sinϕ
→e2,
pa su mu koordinate [→f1]e = (cosϕ, sinϕ)T .
Posto je baza f pozitivne orjentacije vektor→f2 gradi ugao ϕ+ π
2 sa vektorom→e1, pa su njegove koordinate
[→f2]e = (cos(ϕ+
π
2), sin(ϕ+
π
2))T = (− sinϕ, cosϕ)T .
Matricu prelaska dobijamo tako sto koordinate vektora [→f1]e i [
→f2]e upisemo prvu
i drugu kolonu matrice, redom. Formule transformacija koordinata su:(x1x2
)=
(cosϕ − sinϕsinϕ cosϕ
)(x′1x′2
)+
(q1q2
). (12)
15
-
6
3
]
e1
e23
]
f1
f2
f1f2
ϕ
=
ϕ
]
O
Q
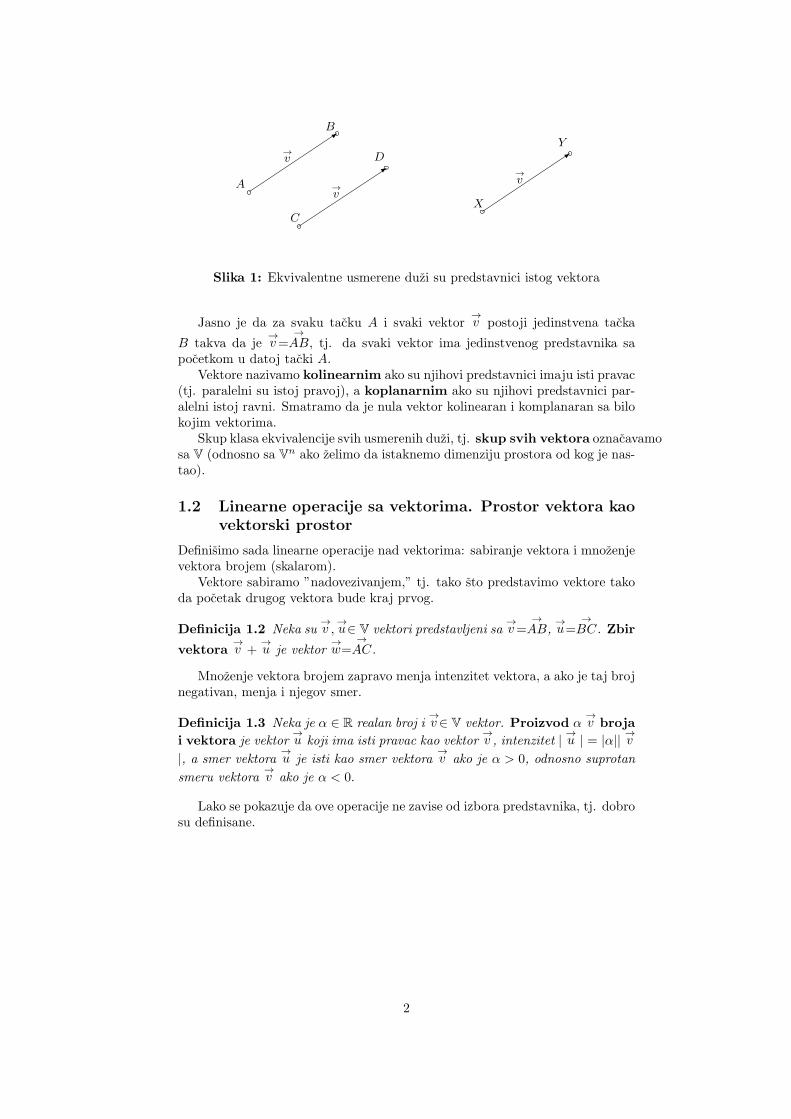
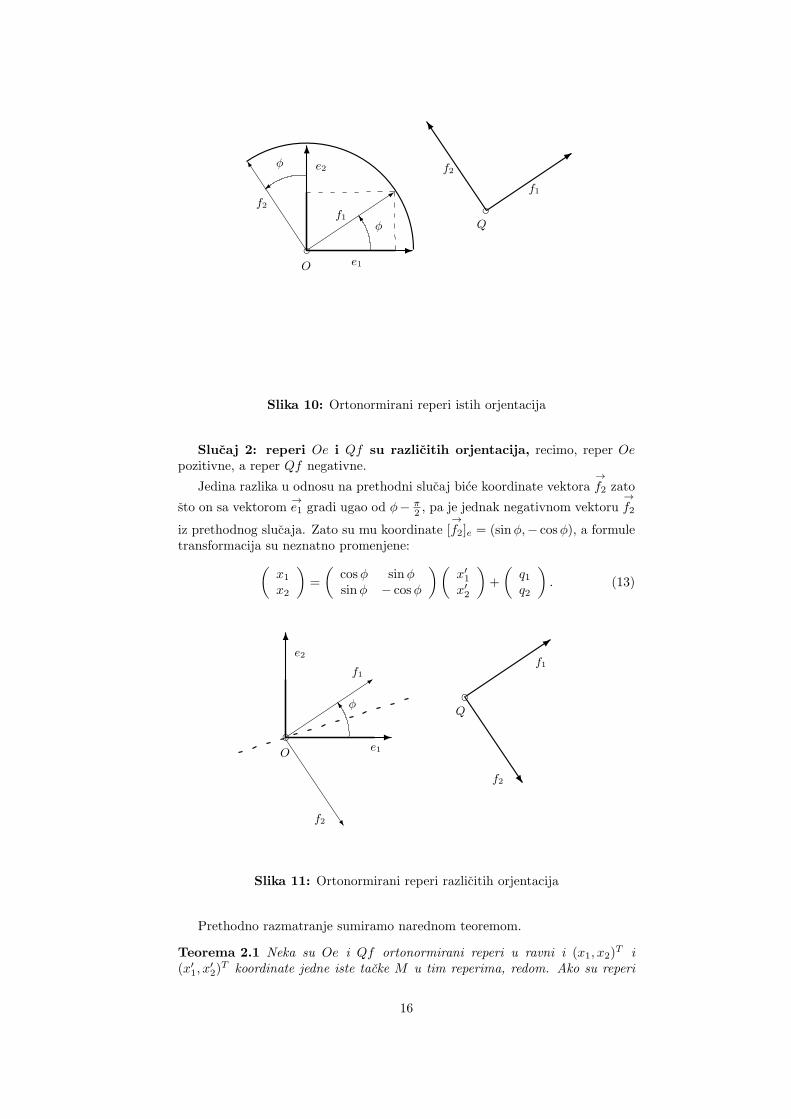
Slika 10: Ortonormirani reperi istih orjentacija
Slucaj 2: reperi Oe i Qf su razlicitih orjentacija, recimo, reper Oepozitivne, a reper Qf negativne.
Jedina razlika u odnosu na prethodni slucaj bice koordinate vektora→f2 zato
sto on sa vektorom→e1 gradi ugao od ϕ− π
2 , pa je jednak negativnom vektoru→f2
iz prethodnog slucaja. Zato su mu koordinate [→f2]e = (sinϕ,− cosϕ), a formule
transformacija su neznatno promenjene:(x1x2
)=
(cosϕ sinϕsinϕ − cosϕ
)(x′1x′2
)+
(q1q2
). (13)
-
6
3
f2
e1
e23f1
f2
f1
ϕ]
O
Q
^
^
Slika 11: Ortonormirani reperi razlicitih orjentacija
Prethodno razmatranje sumiramo narednom teoremom.
Teorema 2.1 Neka su Oe i Qf ortonormirani reperi u ravni i (x1, x2)T i
(x′1, x′2)
T koordinate jedne iste tacke M u tim reperima, redom. Ako su reperi
16

istih orjentacija koordinate su vezane relacijom (12), a ako su reperi razlicitihorjentacija relacijom (13), za neko ϕ ∈ [0, 2π).
Formula (12) predstavlja kompoziciju rotacije za ugao ϕ i translacije koor-dinatnog sistema za vektor (q1, q2) (tim redom!). Odgovarajuca matrica
Rϕ :=
(cosϕ − sinϕsinϕ cosϕ
)se naziva matrica rotacije za ugao ϕ. Ona ima sledece vazne osobine.
Teorema 2.2 Matrica rotacije ima sledece osobine:
1. (Rϕ)−1 = R−ϕ = (Rϕ)
T ;
2. detRϕ = 1;
3. RϕRθ = Rϕ+θ = RθRϕ.
Sve tri osobine se proveravaju direktno. ⊓⊔Zbog periodicnosti trigonometrijskih funkcija, mozemo uzeti ϕ ∈ [0, 2π) i
racunati po modulu 2π ili uzeti ϕ ∈ R pa racunati bez modula.Prva jednakost u osobini 1) se vidi i geometrijski: inverzna operacija rotacije
za ugao ϕ je rotacija za ugao −ϕ.U osobini 2) vidimo da je determinanta matrice prelaska Rϕ pozitivna, sto
odgovara cinjenici da su baze istih orjentacija.I osobina 3) se vidi geometrijski: kompozicija rotacije za ugao θ, a zatim za
ugao ϕ je rotacija za ugao ϕ + θ. Naravno da bi isti rezultat dobili i da smoprvo zarotirali za ugao ϕ, pa onda za ugao θ, tako da te rotacije komutiraju.
Primetimo da iz ovih osobina sledi da je skup svih rotacija ravni, oko fiksnetacke O
SO(2) := {Rϕ |ϕ ∈ R}
komutativna grupa, koju zovemo grupa rotacija ravni ili specijalna ortogonalna(otud oznaka SO) grupa reda 2.
Formula (13) predstavlja kompoziciju, redom, refleksije u odnosu na pravu
koja sadrzi tacku O i gradi ugao od ϕ2 u odnosu na vektor
→e1 i translacije
koordinatnog sistema za vektor (q1, q2).Odgovarajuca matrica
Sϕ :=
(cosϕ sinϕsinϕ − cosϕ
)se naziva matrica refleksije.
Teorema 2.3 Matrica refleksije ima sledece osobine:
1. (Sϕ)−1 = (Sϕ)
T ;
2. detSϕ = −1;
3. SϕSθ = Rϕ−θ
Sve tri osobine se proveravaju direktno. ⊓⊔Osobina 1) je ista kao kod matrice rotacije i karakterise tzv. ortogonalne
matrice koje se detaljnije obradjuju u poglavlju ???Osobina 2) odgovara cinjenici da su baze razlicitih orjentacija (negativna
determinanta matrice prelaska).Osobina 3) pokazuje veliku razliku izmedju matrica rotacije i refleksije.
Kompozicija dve refleksije (u odnosu na prave kroz tacku O) nije refleksija, vec
17

rotacija oko tacke O.! Na taj nacin, skup svih matrica refleksija nije zatvorenza mnozenje, pa ne cini grupu (on ne cini grupu i zato sto jedninicna matricanije matrica refleksije).
Ipak, zajedno, skup matrica rotacije i matrica refleksije
O(2) := SO(2) ∪ {Sϕ |ϕ ∈ R} = {A ∈ Gl2(R) |A−1 = AT }.
cini grupu koja se zove grupa linearnih izometrija ravni ili ortogonalna grupa(otud oznaka O) reda 2. Druga jednakost, tj. cinjenica da su matrice rotacijei refleksije karakterisane uslovom A−1 = AT , tj. AAT = E, se moze proveritidirektno, a bice dokazana kasnije u opstijem kontekstu.
Primer 2.2 Dat je pravougaonik ABCD cije su ivice AB = 4, BC = 3. Sredistepravougaonika je tacka S. Dat je stari ortonormirani reper Ae, gde su
→e1 i
→e2
jedinicni vektori ivica AB i AD i novi ortonormirani reper iste orjentacije Sf ,
gde je→f1 jedinini vektor dijagonale SC. Odrediti vezu koordinata kao i koordinate
temena pravougaonika u novom reperu.
A B
CD
S
-
6
→e1
>o
→e2
→f1
→f2
oϕ
4
3
Slika 12: Zadatak 2.2
Koordinate sredista pravougaonika u staroj bazi su S(2, 32 ) sto nam odredjuje
translacioni deo. Ugao ϕ izmedju novog vektora→f1 i starog vektora
→e1 je jednak
uglu izmedju ivice AB i dijagonale AC. Hipotenuza AC pravouglog trouglaABC je duzine 5 pa iz tog trougla dobijamo:
cosϕ =4
5, sinϕ =
3
5.
Kako su reperi istih orjentacija, na osnovu formula (12) dobijamo trazenu vezukoordinata (
x1x2
)=
(45 − 3
535
45
)(x′1x′2
)+
(232
).
Odredjivanje koordinata temena se prepusta za vezbu citaocu.
3 Afina preslikavanja
U ovom poglavlju objasnicemo sta su afina preslikavanja, koje su njihove osobinei znacaj u geometriji i racunarstvu. Pri tome zelimo da izbegnemo formalizami da se skoncentrismo na prakticnu primenu afinih preslikavanja.
18
Vazno je shvatiti da je afino preslikavanje moguce definisati bez prethodnoguvodjenja koordinata, tj. afino preslikavanje je cisto geometrijski pojam. Ipak,kada uvedemo koordinate stvari postanu konkretnije i operativnije.
Definicija 3.1 Afino preslikavanje f : E → E, je preslikavanje tacaka kojeindukuje linearno preslikavanje f : V → V odgovarajuceg vektorskog prostora V.
Dakle, svaka tackaM se preslikava u neku tackuM ′ = f(M) tog istog prostora.
Svaki vektor→MN se preslikava u vektor
→M ′N ′= f(
→MN).
Fiksirajmo reperOe prostora E.Ako sa (x1, . . . , xn)T i (x′1, . . . , x′n)
T oznacimokoordinate tacke M i njene slike M ′, redom, nije tesko pokazati da afino pres-likavanje f ima oblik: x′1
...x′n
=
a11 . . . a1n...
...an1 . . . ann
x1
...xn
+
b1...bn
. (14)
Matrica A = (aij) predstavlja linearni deo tog preslikavanja, a (b1, . . . , bn)T
je translatorni deo. Obicno pretpostavljamo da je detA = 0 da bi preslikavanjebilo invertibilno, tj. bijekcija. Indukovano preslikavanje f vektora, u bazi e imaupravo matricu A. Translatorni deo preslikavanja nema efekta na vektorima, jertranslacija vektor preslikava u isti vektor.
Primetimo da su afino preslikavanje (14) i transformacije koordinata tacaka(11) date formulama sasvim istog tipa (to sto su oznake razlicite nije od znacaja).Zapravo, bilo koje od tih formula mozemo posmatrati na dva nacina: pasivno iaktivno.
Pasivno posmatrano: tacke su fiksirane (pasivne), a (x1, . . . , xn)T i (x′1, . . . , x
′n)
T
oznacavaju koordinate jedne iste tacke u reperima Oe i Qf.Aktivno posmatrano: koordinatni sistem Oe je fiksan, a (x1, . . . , xn)
T i(x′1, . . . , x
′n)
T oznacavaju koordinate tacke M i njene slike M ′ pri afinom pres-likavanju. Dakle, sve tacke prostora se pomeraju (aktivne su).
Vratimo se sada na formule (14) afinog preslikavanja f. Direktno se poverava:
• tacka O′(b1, . . . , bn) je slika koordinatnog pocetka O(0, . . . , 0), tj. O′ =f(O);
• kolone matrice A su koordinate slika baznih vektora f(e1), . . . f(en), re-dom. To znaci da je matrica A upravo matrica linearnog preslikavanja fu bazi e (po njenoj definiciji).
Osobinama afinih preslikavanja cemo se vise baviti u narednim sekcijama.
19
3.1 Afine preslikavanja ravni
Pretpostavljamo da je fiksiran ortonormiran reper Oe pozitivne orjentacije uravni.
Na osnovu recenog u prethodnoj sekciji afino preslikavanje ravni E2 je datoformulama: (
x′1x′2
)=
(a11 a12a21 a22
)(x1x2
)+
(b1b2
), (15)
pri cemu je det(aij) = 0. Pocnimo sa primerom.
Primer 3.1 Odrediti formule afinog preslikavanja f ravni koje tacke O(0, 0),A(1, 0), B(0, 1) preslikava redom u tacke O′(2, 3), A′(6, 5), B′(3, 0).
Resenje: Slika koordinatnog pocetka je tacka O′, pa je (b1, b2) = (2, 3). Odred-imo slike baznih vektora.
f(→e1) = f(OA) =
→f(O)f(A)=
→O′A′= (4, 2).
Slicno je f(→e1) = (1,−3). Upisemo li koordinate slika baznih vektora kao kolone
matrice dobijamo trazene formule preslikavanja(x′1x′2
)=
(4 12 −3
)(23
)+
(b1b2
).
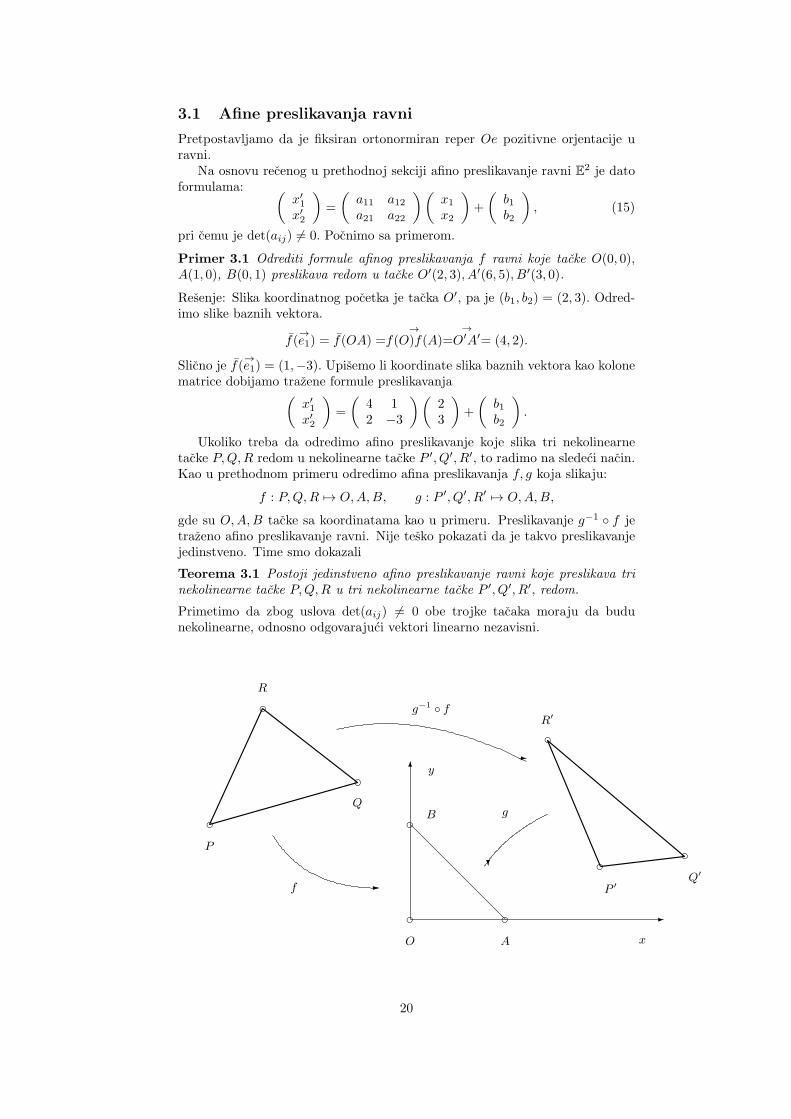
Ukoliko treba da odredimo afino preslikavanje koje slika tri nekolinearnetacke P,Q,R redom u nekolinearne tacke P ′, Q′, R′, to radimo na sledeci nacin.Kao u prethodnom primeru odredimo afina preslikavanja f, g koja slikaju:
f : P,Q,R 7→ O,A,B, g : P ′, Q′, R′ 7→ O,A,B,
gde su O,A,B tacke sa koordinatama kao u primeru. Preslikavanje g−1 ◦ f jetrazeno afino preslikavanje ravni. Nije tesko pokazati da je takvo preslikavanjejedinstveno. Time smo dokazali
Teorema 3.1 Postoji jedinstveno afino preslikavanje ravni koje preslikava trinekolinearne tacke P,Q,R u tri nekolinearne tacke P ′, Q′, R′, redom.
Primetimo da zbog uslova det(aij) = 0 obe trojke tacaka moraju da budunekolinearne, odnosno odgovarajuci vektori linearno nezavisni.
P
-
x
y
-
?
-6
Q
R
P ′Q′
R′
O A
B
f
g−1 ◦ f
g
20

Slika 13: Dokaz Teoreme 3.1
Teorema 3.2 (Osobine afinih preslikavanja) a) Bijekcije su;b) Preslikavaju prave u prave;c) Cuvaju razmeru;d) Cuvaju paralelnost;e) Odnos povrsine slike i originala jednak je | det aij |;f) Cuvaju teziste sistema tacaka.
Dokaz:a) vazi zbog uslova det(aij) = 0 koji pretpostavljamo.b) i c) Neka su A,B,C kolinearne tacke i A′, B′, C ′ njihove slike pri afi-
nom preslikavanju f. Kako vazi→AB= α
→AC,α ∈ R, tada je zbog linearnosti
preslikavanja f :
→A′C ′= f(
→AB) = f(α
→AC) = αf(
→AC) = α
→A′C ′ .
Prvo, to znaci da su i A′, B′, C ′ kolinearne tacke, pa se prave slikaju u prave.Drugo, to znaci da se cuva razmera α = |AB| : |AC|.
d) Neka su prave p i q paralelne, tj. p ∩ q = ∅. Posto je afino preslikavanjebijekcija za njihove slike takodje vazi p′ ∩ q′ = ∅, pa su i one paralelne.
e) Posmatrajmo odnos povrsina paralelograma razapetog vektorima→OA,
→OB
i njegove slike, proizvoljnog paralelograma razapetog vektorima→
O′A′,→
O′B′, kaou Primeru 3.1. Prvi paralelogram je kvadrat ivice 1, pa mu je povrsina jednaka1. Drugi paralelogram ima povrsinu jednak |DOAB | = | det(aij)|, pa je trazeniodnos povrsina upravo | det(aij)| (u Primeru je to broj 14). Odatle zakljucujemoda tvrdjenje vazi za proizvoljne paralelograme, a odatle i za proizvoljan lik, jerse on ”moze aproksimirati” paralelogramima. ⊓⊔
Primedba 3.1 Osobine afinih preslikavanja nam pokazuju da ona imaju rela-tivno malu slobodu. Trougao mozemo preslikati u drugi trougao, bez obzira nanjegovu velicinu i oblik.
Paralelogram ABCD mozemo preslikati u proizvoljan drugi paralelogramPQRS (dovoljno je temena A,B,C preslikati u P,Q,R redom po Teoremi 3.1.Prave CD ∥ AB i AD ∥ BC ce se slikati redom u prave RS i PS zbog cuvanjaparalelnosti, pa ce se i teme D slikati u teme S.)
Primetimo da je tu slobodi kraj: paralelogram ne mozemo preslikati u proizvol-jan cetvorougao, upravo zbog cuvanja paralelnosti.
3.2 Predstavljanje afinih preslikavanja matricama
U ovom poglavlju pokazujemo kako se afino preslikavanje ravni moze pred-staviti jednom jedinom matricom (umesto matricom linearnog dela i vektoromtranslacije). Slicno vazi i u proizvoljnoj dimenziji. Ova cinjenica je veomazgodna za primene u programiranju.
Naime, afino preslikavanje (15) mozemo predstaviti matricom
Ab =
a11 a12 b1a21 a22 b20 0 1
(16)
u sledecem smislu.
21

Teorema 3.3 Proizvod matrica (16) odgovara kompoziciji afinih preslikavanja.Drugim recima, grupa svih matrica oblika (16) je izomorfna grupi afinih pres-likavanja ravni.
Dokaz: Oznacimo afino preslikavanje ravni f dato formulama (15) sa f =(A, b), gde je A matrica formata 2× 2, a b vektor kolona duzine 2. Neka je g =(C, d) drugo afino preslikavanje ravni. Zelimo da odredimo afino preslikavanjeg ◦ f. Mozemo kratko pisati
f : x′ = Ax+ b, g : x′′ = Cx′ + d.
Kompozicija preslikavanja se lako racuna:
g ◦ f : x′′ = Cx′ + d = C(Ax+ b) + d = (CA)x+ (Cb+ d).
Primetimo da smo u prethodnoj formuli A, b, C, d, x, x′, x′′ smatrali matricama(tj. sva mnozenja i sabiranja su matricna), samo sto su neki od njih 2 × 2matrice, a neki vektori kolone. Dakle, odredili smo matricu i vektor translacijekompozicije afinih preslikavanja
g ◦ f = (CA,Cb+ d).
Treba da pokazemo da kompoziciji g ◦ f odgovara proizvod odgovarajucih 3× 3matrica Ab i Cd, tj. da je preslikavanje
Ψ(f) = Ψ((A, b)) := Ab
izomorfizam grupa. Pomnozimo te matrice u blokovskoj formi:
Ψ(g)Ψ(f) = CdAb =
(C d0 1
)(A b0 1
)=
(CA Cb+ d0 1
)= Ψ(g ◦ f).
Dakle, proizvod matrica odgovara kompoziciji preslikavanja, tj. preslikavanje Ψje izomorfizam grupa. ⊓⊔
3.3 Neka znacajna afina preslikavanja ravni
3.3.1 Translacija
Translacija τ→bza vektor
→b (b1, b2) data je formulama
x′ = x+ b1,
y′ = y + b2,
ili u matricnom obliku(x′
y′
)=
(1 00 1
)(xy
)+
(b1b2
).
22

M
-
3
M ′
b1
b2
3
A
A′
x
y6
O
Slika 14: Translacija za vektor (b1, b2)T
Matrica formata 3× 3 koja predstavlja translaciju je
τ→b:
1 0 b10 1 b20 0 1
.
Primetimo:
• Kompozicija dve translacije je translacija, stavise
τ→p◦ τ→
q= τ→
p+→q.
• Zbog komutativnosti sabiranja vektora vidimo da svake dve translacijekomutiraju, tj. τ→
p◦ τ→
q= τ→
q◦ τ→
p.
Primer 3.2 Prestaviti kao afinu transformaciju ”pan” alatku: ako je mis pri-tisnut u P (x0, y0), a otpusten u Q(x1, y1) slika se translira iz P u Q.
3.3.2 Rotacija
Rotacija oko koordinatnog pocetka, za ugao ϕ, je data formulama
Rϕ :
(x′
y′
)=
(cosϕ − sinϕsinϕ cosϕ
)(xy
).
Za rotaciju oko proizvoljne tacke Q(q1, q2) se realizuje malim trikom:
RQ,ϕ = τ →OQ
◦ Rϕ ◦ τ →QO
.
Zato je 3× 3 matrica rotacije oko proizvoljne tacke Q proizvod matrica:
RQ,ϕ :
1 0 q10 1 q20 0 1
cosϕ − sinϕ 0sinϕ cosϕ 0
0 0 1
1 0 −q10 1 −q20 0 1
.
23

6
-
+
3
O
Q
M
M1
M2
M ′
Y
Y
ϕ
ϕ
Slika 15: Rotacija oko proizvoljne tacke Q za ugao ϕ
Primer 3.3 Odrediti formule rotacije oko tacke S(1,−2) za ugao od 2π3 .
Resenje:
RS, 2π3=
− 12 −
√32
32 −
√3√
32 − 1
2 −1−√32
0 0 1
.
3.3.3 Refleksija
Kao sto smo vec videli, preslikavanje dato formulama
Sp0 :
(x′
y′
)=
(cosϕ sinϕsinϕ − cosϕ
)(xy
).
je refleksija u odnosu na pravu p0 kroz koordinatni pocetak, koja gradi ugao ϕ2
sa x−osom.
Ako prava p ∥ p0 ne prolazi kroz koordinatni pocetak, nego kroz neku tackuQ ∈ p, tada je refleksija u odnosu na pravu p :
Sp = τ →OQ
◦ Sp0 ◦ τ →QO
.
Kasnije cemo videti i drugi, opstiji, nacin da odredimo formule refleksije.
24
3.3.4 Skaliranje
Sa HQ,λ1,λ2 oznacavamo skaliranje u pravcu koordinatnih osa, sa centrom utacki Q (λ1, λ2 = 0).. Dakle, to je afino preslikavanje koje tacku Q ostavlja
fiksnom, bazni vektor→e1 preslikava u λ1
→e1, a bazni vektor
→e2 u λ2
→e2 .
Ako je tacka Q koordinatni pocetak, u oznaci je obicno izostavljamo, a formuleskaliranja su
Hλ1,λ2 :
(x′
y′
)=
(λ1 00 λ2
)(xy
).
Ako je tacka Q proizvoljna, slicno kao kod rotacije vazi:
HQ,λ1,λ2 = τ →OQ
◦ Hλ1,λ2 ◦ τ →QO
.
• H1,−1 refleksija u odnosu na x−osu, a H−1,1 refleksija u odnosu na y−osu.
• Primetimo da je homotetija sa centrom Q i koeficientom λ specijalanslucaj ovog preslikavanja za λ = λ1 = λ2. Ona je jedino skaliranje kojecuva odnos duzine i sirine. Ona cuva uglove, duzine povecava λ puta, apovrsine λ2 puta.
Primer 3.4 Predstaviti kao afine transformacije sledece alatke:1) ”zoom in”: klikom misa u P (x0, y0), slika se uvecava 40%.2) ”zoom to window”: mis je pritisnut u tacki P (x0, y0), a otpusten u
Q(x1, y1), gde je PQ dijagonala prozora. Pri tome voditi racuna da se uvecanaslika uklopi u ekran ili po sirini, ili po visini - u zavisnosti od proporcija prozora(uzeti da je odnos sirine i visine ekrana 16 : 10).
3.3.5 Smicanje
Preslikavanje dato formulama(x′
y′
)=
(1 λ0 1
)(xy
)naziva se smicanje sa koeficientom λ u pravcu x ose.
Smicanje preslikava kvadrat u paralelogram iste visine i osnovice, pa dakle iiste povrsine (detA = 1).
3.4 Afina preslikavanja prostora
Afina preslikavanja prostora su data formulama (14) za n = 3, tj. tackaM(x, y, z) prostora se preslikava u tacku M ′(x′, y′, z′) po pravilu x′
y′
z′
=
a11 a12 a13a21 a22 a23a31 a32 a33
xyz
+
b1b2b3
, (17)
det(aij) = 0. Kao i u opstem slucaju kolone matrice A = (aij) su slike baznihvektora, a tacka (b1, b2, b3) je slika koordinatnog pocetka.
Slicno kao u ravni preslikavanje (17) se moze predstaviti 4× 4 matricom:
Ab :=
a11 a12 a13 b1a21 a22 a23 b2a31 a32 a33 b30 0 0 1
i tada kompoziciji preslikavanja odgovara mnozenje matrica.
Najznacajnija klasa afinih preslikavanja su izometrije jer se njima realizujukretanja objekata, kao i ogledanja objekata.
25

3.5 Izometrije ravni i prostora
Preslikavanja koja cuvaju duzinu u euklidskom prostoru E nazivaju se izometrije.Izometrije koje cuvaju orjentaciju zovu se kretanja.Na primer,
identitet je izometrija;translacija je izometrija;rotacija (oko tacke u ravni ili oko prave u prostoru) je izometrija;refleksija (u odnosu na pravu u ravni ili u odnosu na ravan u prostoru) je
izometrija, ali nije kretanje, itd...Nije tesko pokazati da izometrija euklidskog prostora mora da bude neko
afino preslikavanje f (vidi Dodatak ??). Odgovarajuce linearno preslikavanje fvektora cuva duzinu vektora i ugao izmedju njih ili ekvivalentno, cuva skalarniproizvod.
Prisetimo se da se skalarni proizvod · matricno zapisuje formulom (6),tj.
→x ·
→y= xT y = xTEy,
gde je E jedinicna matrica, x i y kolone koordinata vektora→x i
→y . S druge
strane skalarni proizvod slika tih vektora je
f(→x) · f(
→y ) = (Ax)TAy = xT (ATA)y.
Poredjenem prethodnih izraza koji vaze za ma koje vektore→x i
→y , dobijamo da
u bilo kojoj dimenziji n, matrica A izometrije f zadovoljava relaciju ATA = E.Takve matrice zovu se ortogonalne matrice, a skup svih takvih matrica cinigrupu koja se zove ortogonalna grupa reda n:
O(n) := {A ∈ Gln(R) |ATA = E}.
Za ortogonalnu matricu vazi:
1 = detE = det(ATA) = det(AT ) detA = (detA)2,
tj. detA = ±1. Zato imamo dve vrste ortogonalnih matrica.Jedne cuvaju orjentaciju, imaju determinatu jednaku 1 i zovu se matrica
kretanja. Ona cine tzv. specijalnu ortogonalnu grupu reda n
SO(n) := {A ∈ O(n) | detA = 1} ⊂ O(n).
Druga vrsta izometrija menja orjentaciju, ima determinantu jednaku −1 i necini grupu. Ovim smo dokazali sledecu teoremu
Teorema 3.4 Svaka izometrija euklidskog prostora E je afino preslikavanje cijije linearni deo predstavljen ortogonalnom matricom A, tj. vazi ATA = E.
Primedba 3.2 Izometrije ravni E2 (sa pasivne tacke gledista) smo ranije opisaliformulama (12) i (13). Dakle, formule (12) su sva kretanja ravni, a predstavljajukompoziciju rotacije i translacije. Formule (13) nisu kretanja, a predstavljajukompoziciju refleksije i translacije.
Primedba 3.3 Medju preslikavanjima koje smo predstavili u prethodnom poglavljuizometrije su: translacija, rotacija i refleksija u odnosu na pravu. Skaliranje nijeizometrija (osim u specijalnim slucajevima), a ni smicanje.
U vecim dimenzijama ne postoji tako eksplicitan opis izometrija. Izometri-jama prostora se bavimo malo kasnije u poglavlju
26

3.6 Neka znacajna afina preslikavanja prostora
3.6.1 Translacija
Translacija τ→bza vektor
→b (b1, b2, b3) data je formulama
x′ = x+ b1,
y′ = y + b2,
z′ = z + b3.
Matrica formata 4× 4 koja predstavlja translaciju je
τ→b:
1 0 0 b10 1 0 b20 0 1 b30 0 0 1
.
Kao i u ravanskom slucaju njen linearni deo je identitet, tj. vektori ”ne vide”translaciju. Takodje, kompozicija dve translacije je translacija koja odgovarazbiru vektora, pa svake dve translacije medjusobno komutiraju.
3.6.2 Rotacija oko prave u prostoru
Podsetimo se kako se dobija slika M ′ tacke M u rotaciji oko orjentisane pravep za ugao ϕ ∈ [0, 2π), u prostoru. Prava p se zove osa rotacije.
Ako M ∈ p tada M ′ =M, tj. tacke prave p su fiksne.AkoM ∈ p, neka je α ravan koja sadrzi tackuM i normalna je na pravu p, a
{O′} = p∩ α. Tacka M ′ se dobija rotacijom tacke M u ravni α oko tacke O′ zaugao ϕ. Smer rotacije se odredjuje tako sto ispruzeni palac desne ruke pokazujesmer prave p, a ostali prsti te ruke smer rotacije.
Dakle, rotacija oko prave p u prostoru se svodi na rotacije u ravnima ortog-onalnim na pravu p.
Vazan primer rotacija su rotacije oko koordinatnih osa Ox,Oy i Oz. U svatri slucaja koordinatni pocetak je fiksiran, pa ne postoji translacioni deo pres-likavanja. Odredimo matricu ovih rotacija, tako sto cemo odrediti slike baznihvektora.
Kada rotiramo oko Ox ose, ta osa je fiksna, pa je i vektor te ose fiksan.Zato se vektor
→e1 slika u sebe, pa je prva kolona trazene matrice (1, 0, 0)T .
Vektori→e2 i
→e3 se nalaze u ravni ortogonalnoj na Ox osu pa se oni u toj ravni
rotiraju za ugao ϕ, u smeru od vektora→e2 ka vektoru
→e3 . Zato se
→e2 slika u
0→e1 +cosϕ
→e2 +sinϕ
→e3, pa je druga kolona trazene matrice (0, cosϕ, sinϕ).
Slicno se dobija i treca kolona matrice
Rx(ϕ) =
1 0 00 cosϕ − sinϕ0 sinϕ cosϕ
. (18)
Na slican se nacin dobijaju i matrice rotacija oko koordinatnih osa Oy i Oz.
Ry(θ) =
cosψ 0 sinψ0 1 0
− sinψ 0 cosψ
, Rz(ψ) =
cosψ − sinψ 0sinψ cosψ 00 0 1
. (19)
27

p
j
:>
M
M ′
O
O′ 6ϕ
xx1
x2
p× x2
6
Slika 16: Rotacija oko prave p za ugao ϕ
Odredimo sada formule rotacije oko proizvoljne orjentisane prave p koja
sadrzi koordinatni pocetak O, a ciji je jedinicni vektor pravca→p (vidi Sliku 16).
Ako jeM data tacka, a O′ je α∩p kao ranije, oznacimo sa→x=
→OM . Tada se
vektor→x1=
→OO′ zove ortogonalna projekcija vektora
→x na vektor
→p , a vektor
→x2=
→O′M ortogonalna dopuna. Dakle, projekcija je kolinearna vektoru
→p , a
dopuna ortogonalna na njega.
Lema 3.1 Neka su x, x1, x2 kolone koordinata vektora→x,
→x1,
→x2, redom. Tada
vazi:x1 = (ppT )x, x2 = (E − ppT )x,
gde je ppT matrica formata 3 × 3 koja zavisi od koordinata p = (p1, p2, p3)T
jedinicnog vektora→p
ppT =
p1p2p3
(p1 p2 p3
)=
p21 p1p2 p1p3p1p3 p22 p1p3p1p3 p1p3 p23
.
Dokaz: Jasno je da vazi
→x=
→x1 +
→x2= α
→p +
→x2,
za neko α ∈ R. Pomnozimo li tu jednacinu skalarno vektorom→p dobijamo u
koordinatama:pTx = α(pT p) + pTx2 = α|p|2 = α,
pri cemu smo skalarni proizvod zapisali matricnim mnozenjem. Sada, uz upotrebuasocijativnosti matricnog mnozenja dobijamo
x1 = pα = p(pTx) = (ppT )x
sto je i trebalo dokazati. Druga relacija se jednostavno dobija
x2 = x− x1 = Ex− (ppT )x = (E − ppT )x.⊓⊔
Teorema 3.5 Matrica rotacije Rp(ϕ) za ugao ϕ oko prave p koja sadrzi koor-dinatni pocetak je
Rp0(ϕ) : ppT + cosϕ(E − ppT ) + sinϕp×,
28

gde je p× matrica vektorskog mnozenja vektorom p:
p× =
0 −p3 p2p3 0 −p1−p2 p1 0
.
Dokaz: Primetimo da vektori→p ,
→x2,
→p × →
x2 cine ortogonalnu bazu. Pri tome
je→p= |1|, a vektori
→x2,
→p × →
x2 su jednakih duzina jer
|→p × →
x2 | = |→p || →
x2 | = | →x2 |.
Ta dva vektora cine ortonogonalnu bazu u ravni rotacije. Tada za vektor→
O′M ′
koji odgovara zarotiranoj tackiM ′ vazi:→
O′M ′= cosϕx2+sinϕ(→p × →
x2). Prime-
timo da je→p × →
x2=→p ×(
→x1 +
→x2) =
→p × →
x . Ako sa x′ znacimo koordinatevektora OM ′ vazice
x′ = x1 + cosϕ→x2 +sinϕ(
→p × →
x2) = (ppT )x+ cosϕ(E − ppT )x+ sinϕp×x,
odakle sledi tvrdjenje. ⊓⊔Ako prava q ∥ p ne sadrzi koordinatni pocetak nego neku tacku Q, tada se
rotacija Rq,ϕ moze predstaviti kao kompozicija
Rq(ϕ) = T →OQ
◦ Rp(ϕ) ◦ T →QO
.
3.6.3 Refleksija u odnosu na ravan
Teorema 3.6 Matrica refleksije Sα u odnosu na ravan α koja sadrzi koordi-natni pocetak O i ciji normalni vektor ima kolonu koordinata p je data sa
Sα : E − 2ppT ,
Dokaz: Neka jeM proizvoljna tacka,M1 normalna projekcija te tacke na ravanα i M ′ tacka simetricna tacki M u odnosu na ravan α (vidi Sliku 17). Tadavazi: →
OM ′=→OM −2
→M1M .
Posto je→
M1M normalna projekcija vektora→OM na vektor
→p tvrdjenje teoreme
sledi iz Leme 3.1. ⊓⊔
O
Mp
α
�
1
M
M ′
M1
q
Slika 17: Refleksija u odnosu na ravan kroz O
Ako ravan β ∥ α ne sadrzi koordinatni pocetak nego neku tacku B, tada serefleksija Sβ moze predstaviti kao kompozicija
Sβ = T →OB
◦ Sα ◦ T →BO
.
29

3.6.4 Kretanja trodimenzionog prostora
Posledica sledece teoreme jeste da je svako kretanje kompozicija triju rotacijaoko koordinatnih osa i translacije. Uglovi tih rotacija su tacno odredjeni i nazi-vaju se Ojlerovi uglovi.
Dakle kretanjem mozemo dovesti objekat u proizvoljan polozaj u prostoru.
Teorema 3.7 (Ojlerova 1) Svaka matrica kretanja (AAT = I, detA = 1) semoze predstaviti kao kompozicija tri rotacije oko koordinatnih osa, tj:
A = Rx′(ϕ) ◦Ry′(θ) ◦Rz′(ψ).
Uglove ψ, ϕ ∈ [−π, π], θ ∈ [−π2 ,
π2 ] zovemo Ojlerovi uglovi.
Dokaz teoreme dajemo u dodatku ??. Teorema je ilustrovana na slici. Prime-timo da se rotacija ne izvodi u odnosu na koordinatne ose fiksiranog (svetskog)koordinatnog sistema, vec u odnosu na ose koordinatnog sistema vezanog zaavion. Tako je x′−osa uzduzna osa aviona, y′−osa ide duz krila aviona, az′−osa je normalna na avion.
Sledeca teorema se takodje pripisuje Leonardu Ojleru. Njena posledica jeda se svako kretanje moze realizovati kao kompozicija samo jedne rotacije itranslacije, pri cemu se rotacija izvodi oko tacno odredjene orjentisane prave,za tacno odredjen ugao.
Dokaz dajemo u Dodatku. Ipak primetimo da je vektor prave p oko koje serotacija izvodi zapravo sopstveni vektor matrice preslikavanja A, a odgovarajucasopstvena vrednost jednaka je 1.
Teorema 3.8 (Ojlerova 2) Svako kretanje prostora koje fiksira neku tacku Oje rotacija oko neke prave p koja sadrzi O, za neki ugao ϕ ∈ [0, 2π).
Primer 3.5 Odrediti formule refleksije u osnosu na pravu p : 3x − 4y − 6 = 0(u ravni).
Primer 3.6 Odrediti formule rotacije za ugao ϕ = 3Pi2 oko prave p koja sadrzi
tacku Q(1, 0, 0) i ima vektor pravca p = (1, 2, 2).
4 Linearni likovi u ravni
Radi tradicije i jednostavnosti koordinate tacaka u ravni oznacavacemo sa (x, y),a ne sa (x1, x2). Pretpostavicemo da su to koordinate u nekom ortonormiranom
30

koordinatnom sistemu Oe, e = (→e1,
→e2), pozitivne orjentacije. Iz tog razloga
necemo pisati [M ]Oe = (x, y), vec kratko M(x, y).
4.1 Prava u ravni
Dobro poznatom jednacinom y = kx + n nisu predstavljene sve prave u ravni.Naime, ”vertikalne” prave, tj. prave x = const nisu tog oblika. To je jedan odrazloga sto taj oblik jednacine prave ovde necemo koristiti. Kada bi ga koristili,svaki algoritam bi sadrzao obradu oba slucaja.
4.1.1 Implicitna jednacina prave
Prava p je odredjena tackom P (x0, y0) koja joj pripada i normalnim vektorom
prave koga obicno oznacavamo sa→np. To je nenula vektor sa koordinatama
→np (a, b).
Da bi izveli jednacinu prave, neka je M(x, y) ∈ p proizvoljna tacka prave.
Tada je→PM upravan na normalni vektor pa vazi:
0 =→np ·
→PM= (a, b) · (x− x0, y − y0)
= a(x− x0) + b(y − y0) = ax+ by − ax0 − by0.
Dakle jednacinu proizvoljne prave u ravni mozemo zapisati u obliku
ax+ by + c = 0, (20)
pri cemu nisu oba koeficienta a i b istovremeno jednaka nuli. Jednacina (20) senaziva implicitna jednacina prave.
M
M(x, y)
P (x0, y0))
→np (a, b)
P (x0, y0)
1M(x, y)1
→p t
→p
ppf > 0
f < 0
Slika 18: Implicitna i parametarska jednacina prave
Posmatramo funkciju fp : E2 → R, f(x, y) = ax+ by + c. Ona je jednaka 0na tackama prave p, pa je zbog neprekidnosti veca od 0 u jednoj poluravni, amanja od nule u drugoj poluravni odredjenoj pravom p. To nam obezbedjujenacin da karakterisemo poluravan, tj. da proverimo da li su dve tacke sa istestrane prave p ili ne. Naime, tacke X i Y pripadaju istoj poluravni ako i samoako su f(X) i f(Y ) istog znaka .
Ako je normalni vektor prave jedinicni, tj. | →np |2 = a2 + b2 = 1 onda
se jednacina (20) naziva normalizovana jednacina. Tada se moze izabratia = cosϕ, b = sinϕ za neki ugao ϕ.
4.1.2 Parametarska jednacina prave
Drugi nacin da opisemo pravu jeste da joj zadamo jednu tacku P (x0, y0) i nenula
vektor pravca→p (px, py). Tada se svaka tacka M prave p moze zapisati u obliku
M(t) =M = P + t→p , (21)
31

za neko t ∈ R. Recimo, tacka P se dobija bas za t = 0. Vektorska jednacina(23) se u koordinatama zapisuje kao
x = x0 + t px,
y = y0 + t py, t ∈ R,
sto obicno zovemo parametarska jednacina prave. Mozemo toj param-etarskoj jednacini dati sledecu mehanicku interpretaciju. Krenemo li iz tacke P
u trenutku t = 0 konstantom brzinom→p (brzina je vektorska velicina!) onda
cemo u trenutku t, tj. nakon t sekundi, biti u tacki M(t). Ako je t < 0 to znaci
da se krecemo istom brzinom u smeru suprotnom od smera vektora→p .
4.1.3 Prelazak iz jednog oblika prave u drugi
Iz jednacina (22) eliminacijom parametra t dobijamo
x− x0px
=y − y0py
(= t),
odnosnopyx− pxy + (pxy0 − pyx0) = 0
odakle se vide vrednosti a, b, c implicitnog oblika.Obrnuto, ako je data prava implicitnim oblikom (20), moze se direktno
proveriti da je ona odredjena sa
P (−ac
a2 + b2,
−bca2 + b2
),→p= (−b, a), (22)
odakle se mogu procitati vrednosti x0, y0, px, py.
4.1.4 Predstavljanje duzi i poluprave
Neka su A(xA, yA) i B(xB , yB) razlicite tacke koje odredjuju pravu p. Vektor
prave AB je→AB= (xB − xA, yB − yA). Duz AB je sada predstavljena sa
M(t) = A+ t→AB, t ∈ [0, 1], (23)
pri cemu je M(0) = A,M(1) = B. Ova reprezentacija je veoma pogodna zadeljenje duzi AB. Srediste duzi AB, recimo, je tacka M( 12 ).
Poluprava [AB) sa temenom u tacki A koja sadrzi B predstavljena jeistom jednacinom za t > 0, a njoj komplementna poluprava za t < 0.
4.2 Trougao
4.2.1 Parametrizacija trougla
Trougao je odredjen trima nekolinearnim tackamaA(x0, y0), B(x1, y1), C(x2, y2).
Neka je→f1=
→AB,
→f2=
→AC . Tada se svaka tacka trougla moze zapisati u obliku
X(t1, t2) = A+ t1→f1 +t2
→f2, 0 ≤ t0, t1 ≤ 1, t0 + t1 ≤ 1.
Prethodna jednacina se naziva parametarska jednacina trougla.
32

4.3 Krug
Krug sa centrom C(x0, y0) je geometrijsko mesto tacaka M(x, y) koje su odcentra udaljene za rastojanje r - poluprecnik kruga. Jednacina tog kruga je
(x− x0)2 + (y − y0)
2 = r2. (24)
Krug je specijalni slucaj elipse, tj. krivih drugog reda kojima se bavimo upoglavlju 6.
-
6
x
y
C(x0, y0)-
�M(x, y)
ϕ
Slika 19: Krug sa centrom u tacki C(x0, y0) i poluprecnikom r
Deljenjem jednacine (24) sa r2 i upotrebom identiteta cos2 ϕ + sin2 ϕ = 1dobijamo parametarsku jednacinu kruga
x = x0 + r cosϕ, y = y0 + r sinϕ, ϕ ∈ [0, 2π). (25)
Parametar ϕ je orjentisani ugao izmedju Ox ose i vektora→CM .
5 Krive u ravni
Definicija 5.1 Parametrizovana kriva u ravni je neprekidno preslikavanjeα : (a, b) → R2, intervala u ravan. Parametrizovana kriva je glatka ako jeα′(t) = (0, 0) za svako t ∈ (a, b).
Kad kazemo kriva, obicno mislimo na skup njenih slika α(t), t ∈ (a, b). Tajskup slika moze imati razne parametrizacije. Geometrijski, glatkost krive znacipostojanje jedinstvene tangente u svakoj tacki krive. Nenula vektor α′(t) zovese vektor brzine krive i on predstavlja vektor pravca tangente u tacki α(t).
a b
qα
t0
:α′(t0)
.... ... . . . . .
. . . . . .. . . . . .
. . . . . .. . . . . .
. . . . .
Slika 20: Tangenta glatke parametrizovane krive
33

Primer 5.1 Zvuci paradoksalno, ali najjednostavnija kriva je prava. Prava y =ax + b je glatka kriva. Naime, uzmemo li x = t za parametar, dobijamo jednunjenu parametrizaciju
α(t) = (t, at+ b), t ∈ R.Vektor brzine α′(t) = (1, a) = (0, 0) je konstantan vektor pravca prave. Tangentana pravu u ma kojoj njenoj tacki je ona sama.
Primer 5.2 Zvuci paradoksalno, ali najjednostavnija kriva je prava. Prava y =ax + b je glatka kriva. Naime, uzmemo li x = t za parametar, dobijamo jednunjenu parametrizaciju α(t) = (t, at + b), t ∈ R. Vektor brzine α′(t) = (1, a) =(0, 0) je konstantan vektor pravca prave. Tangenta na pravu u ma kojoj njenojtacki je ona sama.
Primer 5.3 Krug je takodje glatka kriva. Kako primer, uzmimo specijalanslucaj kruga (x− 2)2+(y− 1)2 = 5 sa centrom C(2, 1) i poluprecnikom r =
√5.
Parametrizacije (25) tada postaje:
α(ϕ) = (2 +√5 cosϕ, 1 +
√5 sinϕ), ϕ ∈ (0, 2π).
Vektor brzine je α′(ϕ) = (−√5 sinϕ,
√5 cosϕ) = (0, 0).
-
6
C
�
p
.............................
T
Slika 21: Tangenta kruga
Odredimo, recimo, tangentu kruga u tacki T (0, 2) = α(ϕ0) koja pripadakrugu. U tacki T vazi:
(0, 2) = (2 +√5 cosϕ0, 1 +
√5 sinϕ0),
odnosno
cosϕ0 = − 2√5, sinϕ0 =
1√5,
pa je vektor brzine u tacki T jednak α′(ϕ0) = (−1,−2). Zato je tangenta krugau tacki T prava M = T + tα′(ϕ0), t ∈ R. Eliminacijom parametra t dobijamotangentu y = 2 + 2x.
Moze se dokazati da je skup resenja jednacine F (x, y) glatka kriva (tj. dapostoji njegova glatka parametrizacija) ako je (∂F∂x ,
∂F∂y ) = (Fx, Fy) nenula vektor
u svakoj tacki tog skupa. Takodje se pokazuje da je u tom slucaju (Fx, Fy)jednak vektoru normale, tj. da je normalan na vektor brzine.
Krug iz primera 5.3 moze se predstaviti jednacinom
F (x, y) = (x− 2)2 + (y − 1)2 − 5 = 0.
Vektor brzine je(Fx, Fy) = (2x− 4, 2y − 2).
Kada to izracunamo u tacki T (0, 2) dobijamo vektor normale (−4, 2) = 2(−2, 1).Zato je vektor brzine (1, 2) (ili (−1,−2), kako zelite), sto smo dobili i u primeru5.3.
34

6 Krive drugog reda
6.1 Konusni preseci
Neka su i i s dve prave u prostoru koje se seku u tacki T. Kruzni konus satemenom T je povrs koja se dobija rotacijom prave i oko ose s. Rotirana pravai (u raznim polozajima) naziva se izvodnica konusa, a prava s se naziva osakonusa.
Mozemo reci da je kruzni konus povrs beskonacne kupe.
s
i
T
Slika 22: Kruzni konus
Konusni presek je presek konusa i bilo koje ravni α.Konika je specijalni slucaj konusnog preseka, tj. konika je presek konusa i
ravni α koja ne sadrzi teme konusa.Ukoliko ravan α sadrzi teme T konusa, kazemo da je konusni presek degener-
isan, tj. taj presek je: tacka, prava (izvodnica) ili dve prave (izvodnice) kojese seku u T. Mi smo zainteresovani upravo za nedegenerisani slucaj, tj. slucajkonika.
Moze se pokazati teorema (vidi Dodatak)
Teorema 6.1 U ravni α konike postoji prava d i tacka F takve da je odnosrastojanja
e =MF
d(M,d)
proizvoljne tacke M konike od tacke F i od prave d konstantan.
Broj e ≥ 0 naziva se escentricitet konike. Tacka F se naziva ziza, a prava ddirektrisa konike.
Moze se pokazati da je konika za
35
• za e = 0 krug;
• za 0 < e < 1 elipsa;
• za e = 1 parabola;
• za e > 1 hiperbola.
Pri tome, ziza kruga je njegov centar, a direktrisa je beskonacno daleko. Elipsai hiperbola imaju dve zize i dve odgovarajuce direktrise. Parabola ima jednuzizu i jednu direktrisu.
Konike se cesto srecu u prirodi u raznim primenama.
• Recimo, prvi Keplerov zakon kaze da se tela suncevog sistema krecu okoSunca po konici, a Sunce se nalazi u zizi te konike. Za veci nu planetata putanja je elipsa koja se jedva razlikuje od kruga posto joj je ekscen-tricitet blizak nuli (trenutni ekscentricitet Zemlje je ko 0.0167). Nebeskatela suncevog sistema koja se vise udaljavaju od Sunca imaju veci ekscen-tricitet, pa im je putanja izduzena elipsa (Halejeva kometa ima ekscen-tricitet oko 0.995)
• Putanja kosog hica ima oblik parabole.
• Sunceva senka vrha stapa u toku dana je konika.
• Senka koju baca kruzni predmet na ravan zid je konika.
U narednim poglavljima dajemo tzv. kanonske jednacine konika, tj. njihovejednacine u pogodno odabranim reperima u ravni α.
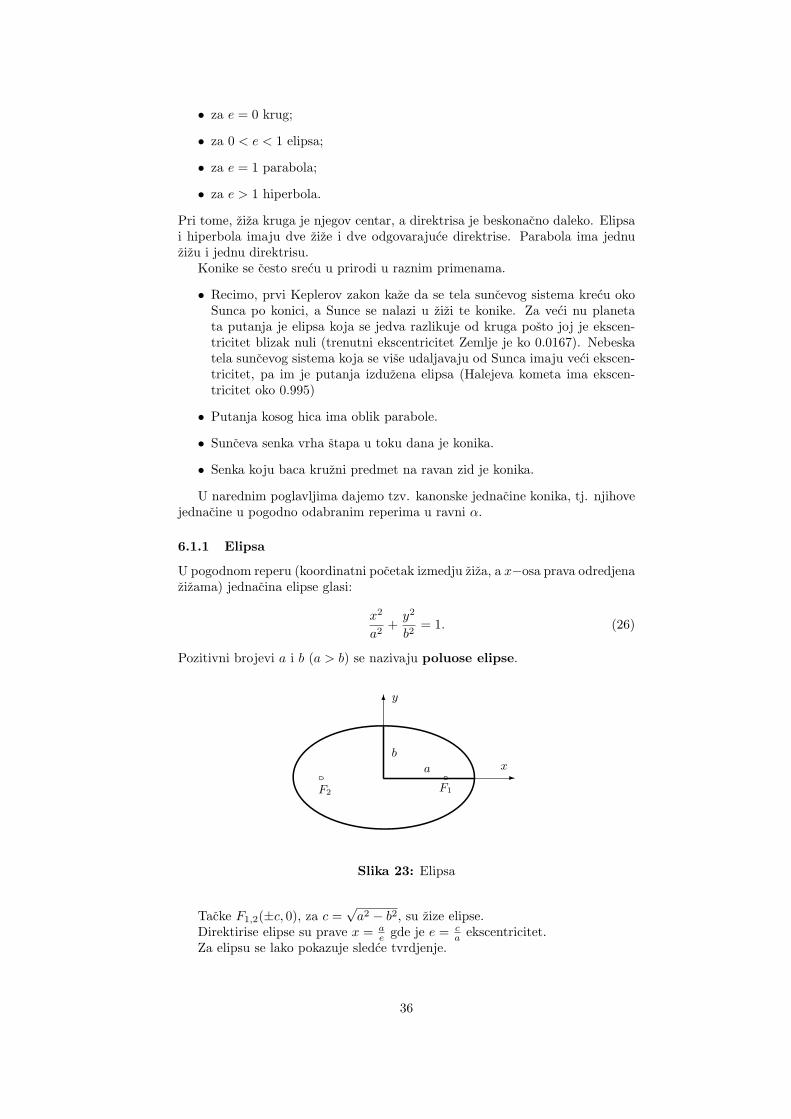
6.1.1 Elipsa
U pogodnom reperu (koordinatni pocetak izmedju ziza, a x−osa prava odredjenazizama) jednacina elipse glasi:
x2
a2+y2
b2= 1. (26)
Pozitivni brojevi a i b (a > b) se nazivaju poluose elipse.
-
6
x
y
a
b
F1F2
Slika 23: Elipsa
Tacke F1,2(±c, 0), za c =√a2 − b2, su zize elipse.
Direktirise elipse su prave x = ae gde je e = c
a ekscentricitet.Za elipsu se lako pokazuje sledce tvrdjenje.
36

Teorema 6.2 Zbir rastojanja proizvoljne tacke elipse od njenih ziza je konstan-tan. Tacnije
MF1 +MF2 = 2a.
Dokaz: Neka je M proizvoljna tacka elipse i A1, A2 podnozja normale iz M nadirektrisama d1 i d2 redom. Duzi MA1 i MA2 mere rastojanje od tacke M dodirektrisa. Zato, na osnovu Teoreme 6.1 vazi
MF1 +MF2 = ed(M,F1) + ed(M,F2) = e(MA1 +MA2) = eA1A2 = const.
Da bismo izracunali tu konstantu, uzmimo specijalan slucaj M = T1, gde je T1teme elipse na vecoj poluosi. Dobijamo
const = T1F1 + T1F2 = (a+ c) + (a− c) = 2a.⊓⊔
T1(a)
T2(b)
F1(c)F2
M
d2 d1
A1A2
Slika 24: Zbir rastojanja tacke elipse od njenih ziza je konstantan
Primetimo da ako za M = T2 uzemo teme na manjoj poluosi, primenomPitagorine teoreme dobijamo
2a = T2F1 + T2F2 = 2T2F2 = 2√b2 + c2,
odnosno c2 = a2 − b2, sto je relacija koju smo u tekstu iznad naveli.Lako je proveriti da je
x = a cosϕ, y = b sinϕ, ϕ ∈ [0, 2π) (27)
parametarska jednacina elipse. Za razliku od parmetrizacije kruga, param-etar ϕNIJE ugao izmedju vektora polozaja tacke i x ose, sem za uglove 0, π2 , π,
3π2 .
6.1.2 Hiperbola
Ako izaberemo reper Oxy tako da O bude izmedju ziza hiperbole, a x osa budeprava odredjena zizama, jednacina hiperbole je:
x2
a2− y2
b2= 1 (28)
gde su a,≥ b > 0.Tacke F1,2(±c, 0), za c =
√a2 + b2 su zize hiperbole, a prave a1,2 : y =
± bax asimptote hiperbole.
37

Direktirise hiperbole su prave x = ae gde je e = c
a ekscentricitet.Lako je proveriti da je
x = ±a coshϕ, y = b sinhϕ, ϕ ∈ R (29)
parametarska jednacina hiperbole. Izbor znaka + paremetrizuje desnu, aznak − levu granu hiperbole.
-
6
x
y
a
b
F1F2
Slika 25: Hiperbola
Prilikom crtanja hipebole ovom parametrizacijom voditi racuna da su funkcijecosh i sinh definisane eksponencijanom funkcijom. Dakle, njihov argument trebauzimati relativno malim (|t| ≤ 15) inace se mogu dobiti greske prekoracenja.
6.1.3 Parabola
Kanonska jednacina parabole glasi:
y2 = 2px, (30)
pri cemu je p > 0.Tacka F (p2 , 0) je ziza parabole, a prava d : x = −p
2 direktrisa parabole.Primetimo da je kod parabole ekscentricitet e = 1, tj. MF = d(M,d), pa
imamo
Posledica 6.1 Svaka tacka M parabole je jednako udaljena od zize i od direk-trise parabole.
Parabola nema parametrizaciju u terminima trigonometrijskih (tj. hiper-bolickih) funkcija, ali je korisna ocigledna parametrizacija
x =t2
2p, y = t, t ∈ R. (31)
-
6
x
y
F
d
p2
p2
38

Slika 26: Parabola
6.2 Opticke osobine konika
Zakon odbijanja svetlosti kaze da se svetlost odbija od glatku povrsinu takoda je upadni ugao zraka svetlosti jednak odbojnom uglu. Kada je povrsina odkoje se svetlost odbija ravna (recimo obicno ogledalo) tada je taj zakon lakoprimeniti.
k]7 ϕϕ^
ogledalo y
zrak svetlosti
Slika 27: Zakon odbijanja svetlosti
Ako je povrsina od koje se svetlost odbija kriva, tada se upadni i odbojniugao zraka svetlosti mere u odnosu na tangentu na povrs u tacki udara svetlosti.
U ovom poglavlju bavimo se pitanjem: sta ako se svetlost odbija od koniku?Potrebna nam je tehnicka lema ciji dokaza dajemo u Dodatku.
Lema 6.1 Tangenta t parabole y2 = 2px u tacki (x0, y0) parabole data je jednacinom
t : yy0 = p(x+ x0). (32)
Sada mozemo da dokazemo
Teorema 6.3 (Opticka osobina parabole) Svetlosni zrak koji izvire iz zizeparabole odbija se od parabole paralelno njenoj osi.
Dokaz: Neka je svetlosni zrak koji ide iz zize F (p2 , 0) parabole udario u tackuM(x0, y0) parabole u kojoj je tangenta t data jednacinom (32). Neka se taj zrakodbio dalje u pravcu neke tacke R (vidi Sliku). Presek ose parabole (x osa cijaje jednacina y = 0) i tangente t je tacka Q(−x0, 0).
-x
O F
M R -
Q
t6
39

Slika 28: Opticka osobina parabole
Po zakonu odbijanja svetlosti
∠(MR, t) = ∠(FM, t) = ∠FMQ.
Zrak MR se odbija paralelno osi parabole (x−osi) ako i samo ako
∠(MR, t) = ∠(QF, t) = ∠FQM,
tj. ako i samo ako ∠FMQ = ∠FQM , tj. ako FM = FQ. Imamo da je
FQ = FO +OQ =p
2+ x0.
Sa druge strane
FM =
√(p
2− x0)2 + y20 =
√((p2
)2
− px0 + x20) + 2px0 =
√(p
2+ x0)2 =
p
2+x0,
gde smo koristili daM(x0, y0) pripada paraboli, tj. y0 = 2px0. Dakle FQ = FMsto je i trebalo dokazati. ⊓⊔
Teorema 6.4 (Opticka osobina elipse) Svetlosni zrak koji izvire iz jedne zizeelipse i odbija se od elipse, prolazi kroz drugu zizu elipse.
Dokaz: Posmatrajmo tacku M elipse i tangentu t u toj tacki. Neka je F ′2 tacka
simetricna tacki F2 u odnosu na tangentu t. Tada vazi MF2 =MF ′2, pa je zato
2a =MF1 +MF2 =MF1 +MF ′2. (33)
Primetimo da zbog simetrije u odnosu na t vazi ∠(F2M, t) = ∠(F ′2M, t).
Zato je upadni ugao ∠(F1M, t) jednak odbojnom ∠(F2M, t) ako i samo akoje ∠(F ′
2M, t) = ∠(F1M, t), tj. ako i samo ako su tacke F1,M, F ′2 kolinearne
(unakrsni uglovi).Pretpostavimo da tacke F1,M, F ′
2 nisu kolinearne i neka su N i T preseciprave F1F
′2 sa elipsom i tangentom t. Tada je
F1F′2 = F1N +NT + TF ′
2 = NF1 + (NT + TF2) > NF1 +NF2 = 2a, (34)
gde smo koristili nejednakost trougla (zbir dve ivice trougla NTF2 je veci odtrece). Iz relacija (33) i (33) i nejednakosti trougla F1F
′2M sledi kontradikcija
2a =MF1 +MF ′2 > F1F
′2 > 2a.
Dakle, F1,M, F ′2 su kolinearne i zrak svetlosti nakon odbijanja u tacki M
prolazi kroz druu zizu. ⊓⊔
F1
M
F2
F ′2
t
N
Tt
F1 F2
�
40

Slika 29: Opticka osobina elipse i njen dokaz
6.3 Opsti oblik krive drugog reda
Kriva drugog reda je skup tacaka cije koordinate (x, y) u nekom reperu Oe(mozemo pretpostaviti da je on ortonormiran) zadovoljavaju jednacinu drugogstepena
a11x2 + 2a12xy + a22y
2 + 2a13x+ 2a23y + a33 = 0. (35)
Koliko god prethodna jednacina izgledala komplikovano, moze se pokazati daona geometrijski opisuje elipsu, hiperbolu, parabolu ili neku degenerisanu krivu.Naime, izborom ”boljeg” ortonormiranog repera Qf jednacina nedegenerisanekrive se moze dosta pojednostaviti i postati jedna od ”kanonskih jednacina” okojima je rec u sledecem poglavlju. Proces nalazenja tog boljeg repera, nazivase svodjenje jednacine krive na kanonski oblik izometrijskom trans-formacijom koordinata. On predstavlja sustinu Teoreme ??.
6.4 Krive drugog reda u kanonskom obliku
6.5 Svodjenje krive drugog reda na kanonski oblik
Dokazimo sada teoremu koja klasifikuje krive drugog reda do na izometrijsketransformacije koordinata. Njen dokaz nam daje efektivan nacin za svodjenjekrive na kanonski oblik.
Teorema 6.5 Za svaku krivu drugog reda (35) datu u ortonormiranom reperu,postoji novi ortonormirani reper Qx”y” u kom ona ima jedan od sledecih oblika:
(ND1) x”2
a2 + y”2
b2 = 1, (elipsa)
(ND2) x”2
a2 − y”2
b2 = 1, (hiperbola)
(ND3) y”2 = 2px”, p > 0 (parabola)
(D1) x”2
a2 + y”2
b2 = −1, (prazan skup)
(D2) x”2
a2 + y”2
b2 = 0, (tacka)
(D3) x”2
a2 − y”2
b2 = 0, (dve prave koje se seku)
(D4) x”2 = a2, (dve paralelne prave)
(D5) x”2 = 0, (”dvostruka” prava)
(D6) x”2 = −a2 (prazan skup).
Dokaz: Svodjenje krive (35) na jedan od kanonskih oblika navedenih u tvrd-jenju teoreme sastoji se od dva koraka. Prvo, vrsimo rotaciju (x, y) → (x′, y′)koordinatnog sistema, cime je moguce eliminisati clan uz x′y′. Zatim vrsimotranslaciju (x′, y′) → (x′′, y′′) koordinatnog pocetka u centar krive. Nekadje potrebno izvrsiti i treci korek - refleksiju, tj. zamenu koordinatnih osax′′′ = y”, y′′′ = x” (recimo, da bi se dobio oblik y′′′2 = 2px′′′, a ne x”2 = 2py”).
41

6
-
]3 Q
]3
O
x”
x′
y”
y′
x
y
Iϕ
Slika 30: Svodjenje krive drugog reda (na slici elipse) na kanonski oblik
Odredimo prvo ugao rotacije
x = cosϕx′ − sinϕy′ (36)
y = sinϕx′ + cosϕy′
tako da eliminisemo clan x′y′. Zamenom formula (36) u jednacinu krive (35)dobijamo da je koeficient uz x′y′ jednak
−2a11 cosϕ sinϕ+ 2a12(cos2 ϕ− sin2 ϕ) = 2a12 cos(2ϕ)− (a11 − a22) sin(2ϕ).
Da bi on bio jednak nuli mora biti
cot 2ϕ =cos 2ϕ
sin 2ϕ=a11 − a22
2a12,
odakle je jedinstveno odredjen ugao ϕ ∈ [0, π2 ). Formule rotacije (36) dobijamosledecim racunom:
cos 2ϕ =cot 2ϕ
+√1 + cot2 2ϕ
,
cosϕ = +
√1 + cos 2ϕ
2, sinϕ = +
√1− cos 2ϕ
2.
Zamenom jednacina (36) u jednacinu krive (35) dobijamo jednacinu bez clanax′y′, recimo:
mx′2 + ny′2 + 2cx′ + 2dy′ + e = 0,
gde je bar jedan od m ili n razlicit od nule (u suprotnom je jednacina linearna,pa je i jednacina (35) linearna). Sada se ona ”napakuje na pune kvadrate”:
m
(x′2 + 2
c
mx′ +
c2
m2
)+ n
(y′2 + 2
d
ny′ +
d2
n2
)− c2
m− d2
n+ e = 0,
odnosno
m(x′ +c
m)2 + n(y′ +
d
n)2 + e′ = 0 (37)
za e′ = − c2
m − d2
n + e. Sada transliramo koordinatni sistem, tj. zamenjujemorelacije
x′′ = x′ +c
m(38)
y′′ = y′ +d
n,
42

u formulu (37) i dobijamo
mx”2 + ny”2 + e′ = 0.
O zavisnosti od znaka brojeva m, n i e′ dobijamo krive navedene u postavciteoreme, osim parabole. Parabolu dobijamo slicnim postupkom ako je jedan odbrojeva m ili n jednak nuli. ⊓⊔
Primedba 6.1 Moze se pokazati da rotacijom za veci ugao ϕ ∈ [0, 2π) mozemoeliminisati potrebu za trecim korakom, tj. refleksijom koordinatnog sistema. Toznaci da se u tvrdjenju teoreme moze zahtevati da novi koordinatni sistem Qx”y”bude iste orjentacije kao polazni.
7 Bezijerove krive
Neka su P0, P1 . . . Pn tacke ravni. Bezijerova kriva stepena n je
α(t) =n∑
i=0
(ni
)ti(1− t)n−iPi =
n∑i=0
Bi(t)Pi, t ∈ [0, 1].
Tacke Pi nazivaju se kontrolne tacke, a polinomi Bi(t) Bernstajnovi poli-nomi ili bazne funkcije.
Najvise se primenjuju, a i imaju geometrijski najjasniju interpretaciju Bez-ijerove krive stepena 2 i 3, tj. one sa 3, odnosno 4 kontrolne tacke. One su,redom, date sledecim parametrizacijama:
α2(t) = (1− t)2P0 + 2t(1− t)P1 + t2P 2, t ∈ [0, 1];
α3(t) = (1− t)3P0 + 3t(1− t)2P1 + 3t2(1− t)P2 + t3P 3, t ∈ [0, 1].
P1
P0
P2
P3P0
P1
P2
3
]
Slika 31: Bezijerove krive stepena 2 i 3
7.0.1 Osobine Bezijerovih krivih
Bezijerova kriva ima sledece osobine.
• Stepen Bezijerove krive αn definisane sa n+1 kontrolnih tacaka je n. Ovosledi iz cinjenice da je svaki Bernstajnov polinom te krive stepena n.
• Pocetna tacka krive je P0, tj. αn(0) = P0. Krajnja tacka krive je Pn, tj.αn(1) = Pn. Ove dve cinjenice se poveravaju jednostavnim racunom.
43

• Vektor→
P0P1 je kolinearan tangentnom vektoru krive u tacki P0. Vektor→
Pn−1Pn je kolinearan tangentom vektoru krive u tacki Pn.
• Osobina nenegativnosti: Primetimo da su za t ∈ [0, 1] svi Bernstajnovipolinomi nenegativni.
• Osobina konveksnog omotaca: Bezijerova kriva odredena sa datih n + 1kontrolnih tacaka pripada konveksnom omotacu tih tacaka.
• Osobina manje varijacije: ova osobina znaci da ni jedna prava ne presecaBezijerovu krivu vie puta nego sto sece kontrolnu poligonalnu liniju.
Na slici, zuta linija preseca krivu 3 puta i poligonalnu liniju 7 puta; zelenalinija sece krivu 5, a poligonalnu liniju 7 puta; plava linija ima po dvepresecne tacke i sa krivom i sa poligonalnom linijom.
Ova osobina nam govori da je kontrolna poligonalna linija slozenije odkrive koju odredjuje. Naime, poligonalna linija se cesce uvrce i skrece,nego sto je to slucaj sa Bezijerovom krivom.
• Osobina afine invarijantnosti: Ako je je Bezijerova kriva αn odredjenatackama P0, . . . , Pn tada je njena slika pri afinom preslikavanju upravoBezijerova kriva odredjena slikama P ′
0, . . . P′n kontrolnih tacaka pri tom
preslikavanju.
Dakle, kada zelimo da primenimo afinu transformaciju na Bezijerovu krivu,jednostavno ih primenimo na kontrolne tacke (sto je znatno lakse), atrazenu krivu formiramo na osnovu novih, izmenjenih kontrolnih tacaka.
7.0.2 De-Kasteljau algoritam
Jednostavan nacin odredjivanja tacke α(t) na Bezijerovoj krivoj, za neko t ∈[0, 1], je zamena parametra t u jednacinu krive, ali ovaj nacin je numerickinestabilan - dolazi do greske pri racunanju Bernstajnovih polinoma.
Sada predstavljamo tzv. De-Kasteljau algoritam cija je osnovna ideja uiterativnoj podeli kontrolnih duzi u odnostu t : (1− t). Prisetimo se da je tackakoja deli C koja deli duz AB u tom odnosu data sa
C = A+ t→AB= A+ t(B −A) = (1− t)A+ tB.
Oznacimo kontrolne tacke na sledeci nacin:
P00 = P0, P01 = P1, . . . , P0n = Pn,
gde prva indeks oznacava broj iteracije (ovde je 0, a kasnije ce biti 1, 2, . . . n).U prvom koraku, deleci kontrolne duzi P00P01, P01P02, . . .P0n−1P0n, dobi-
jamo n novih tacaka, P10, P11, . . . , P1n−1 koje te duzi dele u datom odnosu
P1i = (1− t)P0i + tP0i+1, i = 0, . . . , n− 1
U drugom koraku dobijamo novih n−1 tacaka koristeci duzi iz prvog koraka.Generalno, u k−tom koraku dobijamo n−k+1 tacaka deleci duzi iz prethodnogkoraka
Pki = (1− t)Pk−1i + tPk−1i+1, i = 0, . . . , n− k. (39)
Proces se zavrsava u n−tom koraku kada se dobija samo jedna tacka i to jeupravo trazena tacka Bezijerove krive α(t) = Pn0.
Na slici je predstavljeno dobijanje tacke α(0.4) Bezijerove krive petog ste-pena.Iterativna implementacija De-Kasteljau algoritma
Izracunavanje se vrsi po principu prikazanom na slici.
44
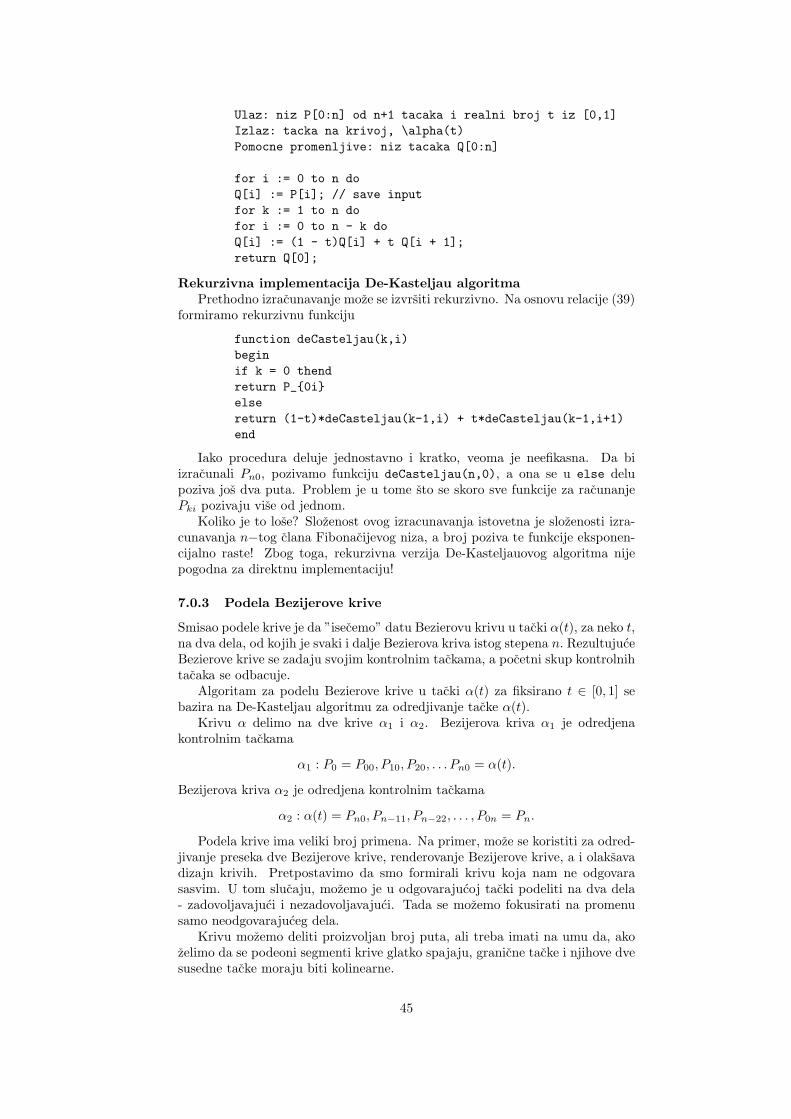
Ulaz: niz P[0:n] od n+1 tacaka i realni broj t iz [0,1]
Izlaz: tacka na krivoj, \alpha(t)
Pomocne promenljive: niz tacaka Q[0:n]
for i := 0 to n do
Q[i] := P[i]; // save input
for k := 1 to n do
for i := 0 to n - k do
Q[i] := (1 - t)Q[i] + t Q[i + 1];
return Q[0];
Rekurzivna implementacija De-Kasteljau algoritmaPrethodno izracunavanje moze se izvrsiti rekurzivno. Na osnovu relacije (39)
formiramo rekurzivnu funkciju
function deCasteljau(k,i)
begin
if k = 0 thend
return P_{0i}
else
return (1-t)*deCasteljau(k-1,i) + t*deCasteljau(k-1,i+1)
end
Iako procedura deluje jednostavno i kratko, veoma je neefikasna. Da biizracunali Pn0, pozivamo funkciju deCasteljau(n,0), a ona se u else delupoziva jos dva puta. Problem je u tome sto se skoro sve funkcije za racunanjePki pozivaju vise od jednom.
Koliko je to lose? Slozenost ovog izracunavanja istovetna je slozenosti izra-cunavanja n−tog clana Fibonacijevog niza, a broj poziva te funkcije eksponen-cijalno raste! Zbog toga, rekurzivna verzija De-Kasteljauovog algoritma nijepogodna za direktnu implementaciju!
7.0.3 Podela Bezijerove krive
Smisao podele krive je da ”isecemo” datu Bezierovu krivu u tacki α(t), za neko t,na dva dela, od kojih je svaki i dalje Bezierova kriva istog stepena n. RezultujuceBezierove krive se zadaju svojim kontrolnim tackama, a pocetni skup kontrolnihtacaka se odbacuje.
Algoritam za podelu Bezierove krive u tacki α(t) za fiksirano t ∈ [0, 1] sebazira na De-Kasteljau algoritmu za odredjivanje tacke α(t).
Krivu α delimo na dve krive α1 i α2. Bezijerova kriva α1 je odredjenakontrolnim tackama
α1 : P0 = P00, P10, P20, . . . Pn0 = α(t).
Bezijerova kriva α2 je odredjena kontrolnim tackama
α2 : α(t) = Pn0, Pn−11, Pn−22, . . . , P0n = Pn.
Podela krive ima veliki broj primena. Na primer, moze se koristiti za odred-jivanje preseka dve Bezijerove krive, renderovanje Bezijerove krive, a i olaksavadizajn krivih. Pretpostavimo da smo formirali krivu koja nam ne odgovarasasvim. U tom slucaju, mozemo je u odgovarajucoj tacki podeliti na dva dela- zadovoljavajuci i nezadovoljavajuci. Tada se mozemo fokusirati na promenusamo neodgovarajuceg dela.
Krivu mozemo deliti proizvoljan broj puta, ali treba imati na umu da, akozelimo da se podeoni segmenti krive glatko spajaju, granicne tacke i njihove dvesusedne tacke moraju biti kolinearne.
45
7.0.4 Povecanje stepena krive
Mnoge aplikacije koje koriste dve i vise Bezijerovih krivih zahtevaju da svekrive budu istog stepena. Iako Bezijerove krive viseg stepena zahtevaju visevremena za obradu, one su pogodnije za dizajniranje razlicitih oblika. Stoga bibilo od velike pomoci da se povisi stepen Bezijerove krive bez promene njenogoblika. Primetimo da je ocuvanje oblika krive kljucni zahtev; u suprotnom,povecavanje stepena Bezijerove krive ne bi imalo prakticnog smisla.
Primetimo da smanjenje stepena Bezijerove krive bez promene njenog oblikau opstem slucaju nije moguce. Ono je moguce je ako je toj krivoj prethodnobio povecan stepen, tj. ako je ta kriva sustinski kriva manjeg stepena.
Povecanje stepena krive izvodi se sledecim postupkom (ukoliko zelimo vecepovecanje stepena krive za k onda se taj postupak ponavlja k puta).
Pretpostavimo da je Bezijerova kriva α stepena n odredjena sa n + 1 kon-trolnih tacaka P0, P1, P2, ..., Pn i da zelimo da joj povisimo stepen za 1 bezpromene njenog oblika. Formiramo novi skup Q0, . . . , Qn+1 od n+ 2 kontrolnetacke. Kako pocetak i kraj krive takodje ostaju fiksirani uzimamo Q0 = P0,Qn+1 = Pn, a ostale tacke se odredjuju po sledecoj formuli:
Qi =i
n+ 1Pi−1 +
(1− i
n+ 1
)Pi, 1 ≤ i ≤ n.
Za razliku od De-Kasteljauovog algoritma, ovaj odnos u kom tacka Qi deli duzPi−1Pi nije konstantan, vec zavisi od vrednosti i. Ipak, racun je veoma slicanonom iz De-Kasteljauovog algoritma.
Kada dobijemo novi skup kontrolnih tacaka, pocetni skup moze biti odbacen.Kako svaka duz pocetne poligonalne linije sadri novu kontrolnu tacku, proceszamene starog skupa novim moze se posmatrati kao odsecanje uglova u pocetnimkontrolnim tackama.
Sledeca slika ilustruje ovaj efekat odsecanja uglova. Na njoj je prikazanaBezierova kriva 4. stepena, cije su kontrolne tacke oznacene crvenim kvadratima,a kontrolna poligonalna linija plavom isprekidanom linijom.
Primetimo da se stepen krive moe povecavati dok god to sistem dozvoljava,pri cemu se sa povecanjem broja kontrolnih tacaka poligonalna linija priblizavakrivoj.
8 Rastojanja i preseci likovi u ravni
8.1 Rastojanje tacke od prave, poluprave i duzi
Pretpostavimo da je data tacka M i prava p. Rastojanje d = d(M,p) tacke Mod prave p jednako je rastojanju tacke M od njene projekcije N na pravu p.Sledecim teoremama dajemo formule za to rastojanje u zavisnosti od toga nakoji je nacin zadata prava p.
p
P
M
→p :
d�.......
..............
................................
N
46

Slika 32: Rastojanje tacke od prave
Teorema 8.1 Rastojanje tacke M od prave p koja je zadata svojom tackom P
i vektorom pravca→p dato je jednacinom
d =|→p ×
→PM |
|→p |
.
Ova formula bez izmena vazi i u prostoru.
Povrsina P♢ paralelograma razapetog vektorima→p i
→PM jednaka je normi vek-
torskog proizvoda tih vektora. Sa druge strane ta je povrsina jednaka proizvodu
duzine osnove |→p | i visine d paralelograma. Dakle vazi,
|→p ×
→PM | = P♢ = |
→p | · d,
odakle sledi trazena formula. ⊓⊔
Teorema 8.2 Rastojanje tacke M(x0, y0) od prave p : ax+ by + c = 0 dato jeformulom
d =|ax0 + by0 + c|√
a2 + b2.
Odredicemo jednacinu normale n iz tacke M na ravan p. Vektor normale je→n= (a, b) tako da je svaka tacka normale data sa
x = x0 + ta, y = y0 + tb,
za neko t ∈ R (pri tome se za t = 0 dobija tackaM). Presecna tacka N pravih ni p desava se u trenutku t koji je resenje jednacine: a(x0+ta)+b(y0+tb)+c = 0,odakle je
t = −ax0 + by0 + c
a2 + b2.
Kako je predjeni put jednak proizvodu vremena i brzine dobijamo:
d = V t = | →n ||t| =√a2 + b2
∣∣∣∣ax0 + by0 + c
a2 + b2
∣∣∣∣ = |ax0 + by0 + c|√a2 + b2
,
sto je i trebalo dokazati. ⊓⊔
8.2 Preseci pravih, polupravih i duzi
8.2.1 Presek pravih zadatih parametarski
Pretpostavimo da su date dve prave: prava p tackom P i vektorom→p i prava q
tackom Q i vektorom→q . Cilj nam je da odredimo presek tih dveju pravih, ako
postoji.
Tacke M = P + t→p i N = Q + s
→q za t, s ∈ R predstavljaju proizvoljne
tacke pravih p i q, redom. U presecnoj tacki vazi: P + t→p= Q+ s
→q , odnosno
t→p −s
→q= Q− P =
→PQ .
47

Mnozenjem prethodne jednacine vektorski sa desne strane vektorima→p i
→q
dobijamo:
s→p ×
→q=
→PQ ×
→p , odnosno t
→p ×
→q=
→PQ ×
→q . (40)
Ove vektorske jednacine su identicki zadovoljene po prvim dvema koordinatama.Koristeci oznaku uvedenu formulom (??) te dve jednacine su ekvivalente sa:
sD(→p ,
→q ) = D(
→PQ,
→p ), odnosno tD(
→p ,
→q ) = D(
→PQ,
→q ).
a) Kada je D(→p ,
→q ) = 0, tj. vektori
→p i
→q paralelni, postoji jedinstvena
presecna tacka koja se dobija ma kojim od parametara s ili t.
b) Kada je D(→p ,
→q ) = 0 i D(
→PQ,
→q ) = 0, prave imaju isti pravac i tacka P
pripada pravoj q, pa se te prave poklapaju.
c) Kada je D(→p ,
→q ) = 0 i D(
→PQ,
→q ) = 0, prave imaju isti pravac, ali tacka
P ne pripada pravoj q pa su prave paralelne.
8.2.2 Presek duzi, polupravih i pravih
Kada su duzi AB i CD date svojim temenima najzgodnije ih je zapisati param-etarski (vidi poglavlje (4.1.4)) tj.
M = A+ t→AB, odnosno N = C + s
→CD,
za 0 ≤ t, s ≤ 1. Slicno kao kod preseka dve prave imamo tri slucaja.
a) Kada je D(→AB,
→CD) = 0 postoji jedinstvena presecna tacka pravih AB i
CD. Potrebno je jos proveriti da li ta ta tacka pripada obema duzima, tj. da lije 0 ≤ t, s ≤ 1.
b) Kada je D(→AB,
→CD) = 0 i D(
→AC,
→CD) = 0, prave AB i CD se poklapaju.
Pitanje, koliko se, i da li se duzi AB i CD poklapaju zahteva dodatnu (i dosadnu,iako jednostavnu) analizu.
c) Kada je D(→AB,
→CD) = 0 i D(
→AC,
→CD) = 0 duzi AB i CD su disjunktne.
Poluprava [AB) zadata temenom A i tackom B je parametarski data sa
M = A+ t→AB,
za t ≥ 0. Zato pri odredjivanju preseka poluprave sa drugom polupravom, duziili pravom treba proveriti ispunjenost uslova t ≥ 0, nakon sto se parametar tizracuna. Slicno se razmislja u ostalim kombinacijama.
8.2.3 O aritmetici u pokretnom zarezu
Racun u pokretnom zarezu u najvecem broju slucajeva (narocito prilikommnozenja,delenja, korenovanja...) dovodi do gresaka. U ovom poglavlju navodimo primerekako te male greske mogu dovesti do pogresnih zakljucaka ili gresaka u tokuizvrsavanja programa.
U slucaju paralelnih pravih p i q vrednost D(→p ,
→q ) bice veoma mala, ali
razlicita od nule. To dovodi do toga da nas algoritam te prave proglasi pravamakoje se seku. Da stvar bude gora, kad pokusamo da odredimo presek, deleci sa
veoma malim brojem D(→p ,
→q ) lako dolazi do prekoracenja.
Standardno resenje ovog problema je da se predefinise dozvoljena greskaϵ > 0 i ako vazi
|D(→p ,
→q )| < ϵ, (41)
48

smatramo da je |D(→p ,
→q )|. Ovo resenje primenjujemo za sva poredjenja sa 0
promenljivih dobijenih racunom u pokretnom zarezu.Navedeni problem nije jedini. Recimo, neka je ϵ = 0.00001 i prave p i q
ortogonalne, tj. takve da je sin∠(→p ,
→q ) = 1. Moze se desiti da su vektori
→p
i→q malih duzina (naprimer, da su odredjeni veoma bliskim tackama), recimo
|→p |, |
→q | ≤ 0.001. Odatle je
|D(→p ,
→q )| = |
→p ×
→q | = |
→p ||
→q || sin∠(
→p ,
→q )| ≤ 0.001 · 0.001 = 0.000001 < ϵ,
odakle bi zakljucili da su prave paralelne!!!Jedno resenje ove vrste problema je da se za vektore pravih uvek uzimaju
normalizovani vektori (poglavlje ??).Drugo moguce resenje je da umesto kriterijuma (41) koristi kriterijum
|D(→p ,
→q )| < ϵ|
→p ||
→q |,
u kom se uzimaju u obzir duzine vektora→p i
→q . On je ekvivalentan metodu
upotrebe normalizovanih vektora.
8.3 Presek pravih zadatih implicitno
Neka su prave p i q zadate implicitno
p : ax+ by + c = 0, q : a1x+ b1y + c1 = 0.
Jedna mogucnost je da se formulama (22) prave predstave parametarski, a pre-sek zatim odredi kao u poglavlju (8.2.1).
Druga mogucnost je da se primeni Kramerovo pravilo po kom su koordinatepresecne tacke
x =△x
△, y =
△y
△,
pri cemu je△ = ... △x = ... △y = ...
Ako je △ = 0 postoji jedinstveno resenje. Ako je △ = △x = △y = 0 prave sepoklapaju. U preostalim slucajevima prave su paralelne.
9 Interesantni problemi u ravni
9.1 Normala iz date tacke na datu pravu. Simetrala duzi
9.2 Paralela na datom rastojanju
9.3 Krug opisan oko trougla
9.4 Krug upisan u trougao
9.5 Tangenta iz date tacke na krug (krivu drugog reda)
9.6 Zajednicka tangenta dva kruga
9.7 Poligon i poligonska povrs
Poligoni su vazni objekti u geometriji, a posebno u njenim primenama u racunarstvu.Naime, cak i krive i povrsi se diskretizuju, tj. aproksimiraju poligonima, odnosnopoligonskim povrsima. U ovom poglavlju ce biti reci o poligonima u ravni.
49
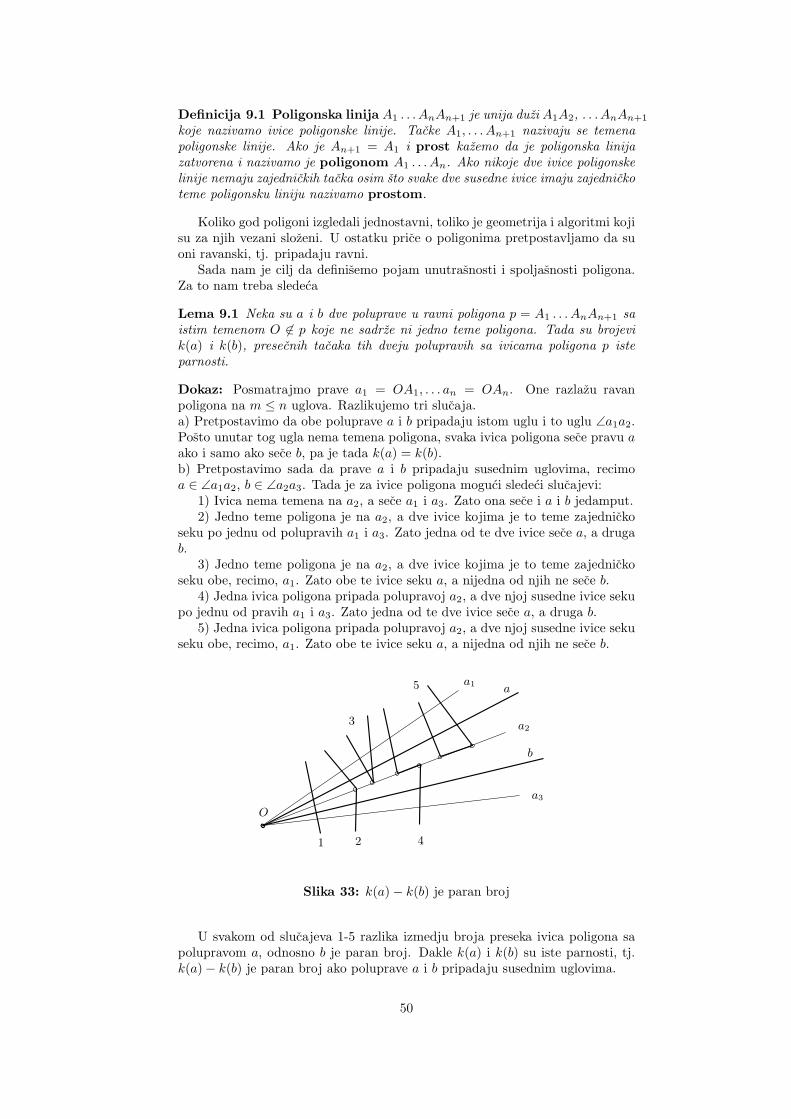
Definicija 9.1 Poligonska linija A1 . . . AnAn+1 je unija duzi A1A2, . . .AnAn+1
koje nazivamo ivice poligonske linije. Tacke A1, . . . An+1 nazivaju se temenapoligonske linije. Ako je An+1 = A1 i prost kazemo da je poligonska linijazatvorena i nazivamo je poligonom A1 . . . An. Ako nikoje dve ivice poligonskelinije nemaju zajednickih tacka osim sto svake dve susedne ivice imaju zajednickoteme poligonsku liniju nazivamo prostom.
Koliko god poligoni izgledali jednostavni, toliko je geometrija i algoritmi kojisu za njih vezani slozeni. U ostatku price o poligonima pretpostavljamo da suoni ravanski, tj. pripadaju ravni.
Sada nam je cilj da definisemo pojam unutrasnosti i spoljasnosti poligona.Za to nam treba sledeca
Lema 9.1 Neka su a i b dve poluprave u ravni poligona p = A1 . . . AnAn+1 saistim temenom O ∈ p koje ne sadrze ni jedno teme poligona. Tada su brojevik(a) i k(b), presecnih tacaka tih dveju polupravih sa ivicama poligona p isteparnosti.
Dokaz: Posmatrajmo prave a1 = OA1, . . . an = OAn. One razlazu ravanpoligona na m ≤ n uglova. Razlikujemo tri slucaja.a) Pretpostavimo da obe poluprave a i b pripadaju istom uglu i to uglu ∠a1a2.Posto unutar tog ugla nema temena poligona, svaka ivica poligona sece pravu aako i samo ako sece b, pa je tada k(a) = k(b).b) Pretpostavimo sada da prave a i b pripadaju susednim uglovima, recimoa ∈ ∠a1a2, b ∈ ∠a2a3. Tada je za ivice poligona moguci sledeci slucajevi:
1) Ivica nema temena na a2, a sece a1 i a3. Zato ona sece i a i b jedamput.2) Jedno teme poligona je na a2, a dve ivice kojima je to teme zajednicko
seku po jednu od polupravih a1 i a3. Zato jedna od te dve ivice sece a, a drugab.
3) Jedno teme poligona je na a2, a dve ivice kojima je to teme zajednickoseku obe, recimo, a1. Zato obe te ivice seku a, a nijedna od njih ne sece b.
4) Jedna ivica poligona pripada polupravoj a2, a dve njoj susedne ivice sekupo jednu od pravih a1 i a3. Zato jedna od te dve ivice sece a, a druga b.
5) Jedna ivica poligona pripada polupravoj a2, a dve njoj susedne ivice sekuseku obe, recimo, a1. Zato obe te ivice seku a, a nijedna od njih ne sece b.
1 2
O
3
4
5 a1
a2
a3
a
b
Slika 33: k(a)− k(b) je paran broj
U svakom od slucajeva 1-5 razlika izmedju broja preseka ivica poligona sapolupravom a, odnosno b je paran broj. Dakle k(a) i k(b) su iste parnosti, tj.k(a)− k(b) je paran broj ako poluprave a i b pripadaju susednim uglovima.
50
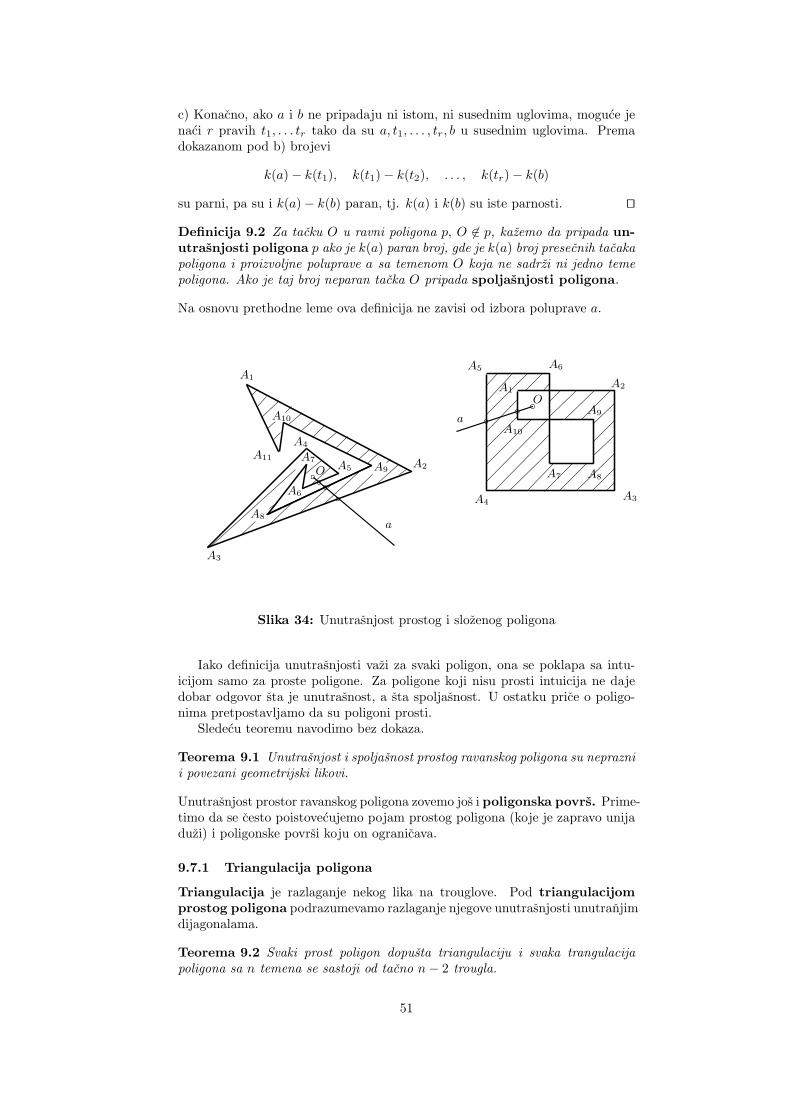
c) Konacno, ako a i b ne pripadaju ni istom, ni susednim uglovima, moguce jenaci r pravih t1, . . . tr tako da su a, t1, . . . , tr, b u susednim uglovima. Premadokazanom pod b) brojevi
k(a)− k(t1), k(t1)− k(t2), . . . , k(tr)− k(b)
su parni, pa su i k(a)− k(b) paran, tj. k(a) i k(b) su iste parnosti. ⊓⊔
Definicija 9.2 Za tacku O u ravni poligona p, O ∈ p, kazemo da pripada un-utrasnjosti poligona p ako je k(a) paran broj, gde je k(a) broj presecnih tacakapoligona i proizvoljne poluprave a sa temenom O koja ne sadrzi ni jedno temepoligona. Ako je taj broj neparan tacka O pripada spoljasnjosti poligona.
Na osnovu prethodne leme ova definicija ne zavisi od izbora poluprave a.
A1
A2
A3
A4
A5A7
A8
A9
A10
A11
O
A6
a
A1A2
A3A4
A5 A6
A7 A8
A9
A10
O
a
Slika 34: Unutrasnjost prostog i slozenog poligona
Iako definicija unutrasnjosti vazi za svaki poligon, ona se poklapa sa intu-icijom samo za proste poligone. Za poligone koji nisu prosti intuicija ne dajedobar odgovor sta je unutrasnost, a sta spoljasnost. U ostatku price o poligo-nima pretpostavljamo da su poligoni prosti.
Sledecu teoremu navodimo bez dokaza.
Teorema 9.1 Unutrasnjost i spoljasnost prostog ravanskog poligona su nepraznii povezani geometrijski likovi.
Unutrasnjost prostor ravanskog poligona zovemo jos i poligonska povrs. Prime-timo da se cesto poistovecujemo pojam prostog poligona (koje je zapravo unijaduzi) i poligonske povrsi koju on ogranicava.
9.7.1 Triangulacija poligona
Triangulacija je razlaganje nekog lika na trouglove. Pod triangulacijomprostog poligona podrazumevamo razlaganje njegove unutrasnjosti unutranjimdijagonalama.
Teorema 9.2 Svaki prost poligon dopusta triangulaciju i svaka trangulacijapoligona sa n temena se sastoji od tacno n− 2 trougla.
51
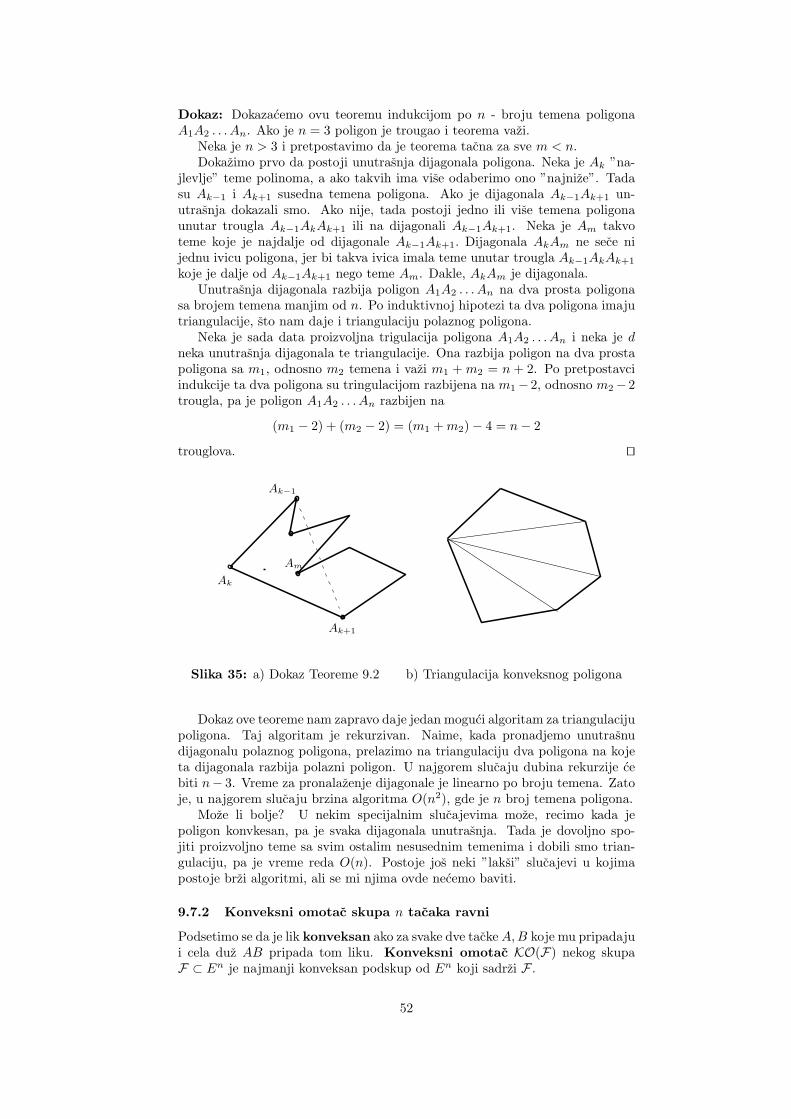
Dokaz: Dokazacemo ovu teoremu indukcijom po n - broju temena poligonaA1A2 . . . An. Ako je n = 3 poligon je trougao i teorema vazi.
Neka je n > 3 i pretpostavimo da je teorema tacna za sve m < n.Dokazimo prvo da postoji unutrasnja dijagonala poligona. Neka je Ak ”na-
jlevlje” teme polinoma, a ako takvih ima vise odaberimo ono ”najnize”. Tadasu Ak−1 i Ak+1 susedna temena poligona. Ako je dijagonala Ak−1Ak+1 un-utrasnja dokazali smo. Ako nije, tada postoji jedno ili vise temena poligonaunutar trougla Ak−1AkAk+1 ili na dijagonali Ak−1Ak+1. Neka je Am takvoteme koje je najdalje od dijagonale Ak−1Ak+1. Dijagonala AkAm ne sece nijednu ivicu poligona, jer bi takva ivica imala teme unutar trougla Ak−1AkAk+1
koje je dalje od Ak−1Ak+1 nego teme Am. Dakle, AkAm je dijagonala.Unutrasnja dijagonala razbija poligon A1A2 . . . An na dva prosta poligona
sa brojem temena manjim od n. Po induktivnoj hipotezi ta dva poligona imajutriangulacije, sto nam daje i triangulaciju polaznog poligona.
Neka je sada data proizvoljna trigulacija poligona A1A2 . . . An i neka je dneka unutrasnja dijagonala te triangulacije. Ona razbija poligon na dva prostapoligona sa m1, odnosno m2 temena i vazi m1 +m2 = n + 2. Po pretpostavciindukcije ta dva poligona su tringulacijom razbijena na m1− 2, odnosno m2− 2trougla, pa je poligon A1A2 . . . An razbijen na
(m1 − 2) + (m2 − 2) = (m1 +m2)− 4 = n− 2
trouglova. ⊓⊔
Ak
Am
Ak−1
Ak+1
Slika 35: a) Dokaz Teoreme 9.2 b) Triangulacija konveksnog poligona
Dokaz ove teoreme nam zapravo daje jedan moguci algoritam za triangulacijupoligona. Taj algoritam je rekurzivan. Naime, kada pronadjemo unutrasnudijagonalu polaznog poligona, prelazimo na triangulaciju dva poligona na kojeta dijagonala razbija polazni poligon. U najgorem slucaju dubina rekurzije cebiti n− 3. Vreme za pronalazenje dijagonale je linearno po broju temena. Zatoje, u najgorem slucaju brzina algoritma O(n2), gde je n broj temena poligona.
Moze li bolje? U nekim specijalnim slucajevima moze, recimo kada jepoligon konvkesan, pa je svaka dijagonala unutrasnja. Tada je dovoljno spo-jiti proizvoljno teme sa svim ostalim nesusednim temenima i dobili smo trian-gulaciju, pa je vreme reda O(n). Postoje jos neki ”laksi” slucajevi u kojimapostoje brzi algoritmi, ali se mi njima ovde necemo baviti.
9.7.2 Konveksni omotac skupa n tacaka ravni
Podsetimo se da je lik konveksan ako za svake dve tackeA,B koje mu pripadajui cela duz AB pripada tom liku. Konveksni omotac KO(F) nekog skupaF ⊂ En je najmanji konveksan podskup od En koji sadrzi F .
52
U ovom poglavlju bavicemo se odredjivanjem konveksnog omotaca skupaF = {P1, . . . Pn} koji se sastoji od n tacaka ravni. Moze se dokazati da tajkonveksni omotac uvek postoji, da je jedinstven i da je to konveksan poligoncija su temena neke od tacaka skupa F .
Nama ce osnovni cilj biti da pronadjemo algoritam za odredjivanje konveksogomotaca. Dacemo dva algoritma: prvi je ocigledan, ali prilicno ”spor”, a drugi,iako nije mnogo slozeniji je znatno ”brzi”.
P1
P3
P7
P4
P11
P10
P8
P9P6
P5P2
Slika 36: Primer konveksnog omotaca skupa od 11 tacaka
9.7.3 Konveksni omotac-algoritam brzine O(n3)
9.7.4 Konveksni omotac-algoritam brzine O(n lnn)
10 Ravan u prostoru
Ravan u prostoru je analogna pravoj u ravni. Naime, obe objekta su opisanajednom linearnom jednacinom, samo sto je u slucaju prave ta jednacina po dvepromenlive x, y, a u slucaju ravni, ta je jednacina po tri promenljive x, y, z.Odatle dobijamo je dimenzija prave 2 − 1 = 1, a dimenzija ravni 3 − 1 = 2.Zato je za generisanje prave potreban jedan vektor pravca, za dimenziju ravnije potrebno dva nezavisna vektora.
10.1 Implicitna jednacina ravni
Ravan α je odredjena tackom A(x0, y0, z0) koja joj pripada i normalnim vek-
torom ravni koga obicno oznacavamo sa→nα. To je nenula vektor sa koordi-
natama→nα (a, b, c).
Da bi izveli jednacinu ravni, neka je M(x, y, z) ∈ α proizvoljna tacka ravni.
Tada je→AM upravan na normalni vektor pa vazi:
0 =→nα ·
→AM= (a, b, c) · (x− x0, y − y0, z − z0) =
= a(x− x0) + b(y − y0) + c(z − z0) = ax+ by + cz − ax0 − by0 − cz0.
Dakle jednacinu proizvoljne ravni u prostoru mozemo zapisati u obliku
ax+ by + cz + d = 0, (42)
pri cemu nisu sva tri koeficienta a, b i c istovremeno jednaka nuli. Jednacina(42) se naziva implicitna jednacina ravni.
53

6→nα
A
MRα
A
MR
→b
-
-→c
t→b
αs
→c
Slika 37: Implicitna i parametarska jednacina ravni
Posmatramo funkciju fp : E2 → R, f(x, y) = ax + by + cz + d. Ona jejednaka 0 na tackama ravni α, pa je zbog neprekidnosti veca od 0 u jednompoluprostoru, a manja od nule u drugomm poluprostoru odredjenom sa ravniα. To nam obezbedjuje nacin da karakterisemo poluprostor, tj. da proverimoda li su dve tacke sa iste strane ravni α ili ne. Naime, tacke X i Y pripadajuistom poluprostoru ako i samo ako su f(X) i f(Y ) istog znaka .
Ako je normalni vektor ravni jedinicni, tj. | →nα |2 = a2 + b2 + c2 = 1 onda
se jednacina (42) naziva normalizovana jednacina ravni.
10.1.1 Parametarska jednacina ravni
Drugi nacin da opisemo ravan α jeste da joj zadamo jednu tacku A(x0, y0, z0) i
dva vektora→v (bx, by, bz) i
→w (cx, cy, cz) paralelna ravni α. Tada se svaka tacka
M ravni α moze zapisati u obliku
M(t, s) =M = A+ t→v +s
→w, (43)
za neke brojeve t, s ∈ R. Recimo, tacka A se dobija bas za t = 0 = s. Vektorskajednacina (43) se u koordinatama zapisuje kao
x = x0 + tbx + scx,
y = y0 + tby + scy, (44)
z = z0 + tbz + scz,
za t, s ∈ R sto obicno zovemo parametarska jednacina ravni.
10.1.2 Prelazak iz jednog oblika ravni na drugi
Ako je ravan zadata parametarski, tj. jednacinom (44) tada eliminacijom param-etara s i t dobijamo implicitnu jednacinu ravni.
Drugi nacin (pogodniji za implementaciju) da od parametarske jednacinedobijemo implicitnu jeste da izracunamo normalni vektor ravni
→nα=
→v × →
w= (a, b, c),
cime su odredjeni koeficienti a, b, c u jednacini (42). Preostali koeficienat d jeodredjen relacijom d = −ax0 − by0 − cz0.
Obrnuto, pretpostavimo da je ravan α zadata implicitno jednacinom (42).
Tada su vektori paralelni ravni normalni na normalni vektor ravni→nα= (a, b, c),
pa njihove koordinate (x, y, z) zadovoljavalju jednacinu
ax+ by + cz = 0. (45)
54

Iz tog uslova je potrebno odrediti nezavisne vektore→v i
→w paralelne ravni.
Detaljnije o odredjivanju tih vektora mozete procitati u sledecem poglavlju.Potrebno je odrediti i jednu tacku A ravni α. Ako je a = 0, tada za y = 0 = z
dobijamo tacku A(− da , 0, 0) koja pripada ravni α.
10.1.3 Izbor koordinatnog sistema u odnosu na datu ravan
Za resavanje mnogih problema korisno je preci na novi ortonormirani koordi-natni sistem Ax′y′z′ u kom data ravan α : ax+ by + cz + d = 0 ima jednacinuz′ = 0.
6
→e1+
→e2
-
→e3
O
]3
→nα
b
→c
A-
^
α
Slika 38: Koordinatni sistem u odnosu na datu ravan
Vektor z′ ose, tj. treci novi bazni vektor je do na znak jedinstven ti to je
jedinicni vektor normale→nα. Potrebno je izabrati jos i vektore
→v i
→w tako da (
→v
,→w,
→nα) bude ortonormirana baza. Zato vektori
→v i
→w moraju da zadovoljavaju
jednacinu (45). Vektor→v= (x, y, z) biramo da bude ma koji jedinicni vektor
koji zadovoljava tu jednacinu. Elegantan nacin za to je opisan u Algoritmu.
Vektor→w=
→nα × →
v , ce tada biti jedinicni i ortogonalan na prethodn dva. Tako
konstruisani reper (→v ,
→w,
→nα) je Za novi koordinatni pocetak mozem uzeti bilo
koju tacku A ∈ α.Napomenimo da izbor tog kordinatnog sistema nije jedinstven. Pored proizvoljnosti
u izboru koordinatnog pocetka A ∈ α i znaka ± →nα jednicnog vektora normale
i ortonormirana baza (→v ,
→w) ravni α je proizvoljna.
Izbor takvog koordinatnog sistema je koristan kada zelimo da analiticki pred-stavimo likove u datoj ravni α kao u narednom primeru.
Primer 10.1 Data je ravan α : x+ 2y + 2z − 1 = 0 i u njoj tacka C(3, 1,−2).Odrediti parametrizaciju kruga poluprecnika r = 2 sa centrom C koji pripadaravni α.
Jedinicni normalni vektor je→nα=
13 (1, 2, 2). Jednacina (45) postaje x+2y+
2z, a jedan vektor koji je zadovoljava je→v= (−2y, y, 0), y ∈ R, a iz uslova da je
→v normiran dobijamo
→v= (−2
√5
5,
√5
5, 0).
Konacno dobijamo da je
→w=
→nα × →
v=1
15(−2
√5,−4
√5, 5
√5).
55

Sada je parametrizacija kruga:
M(ϕ) = C + 2 cosϕ→v +2 sinϕ
→w, ϕ ∈ [0, 2π).
Drugo moguce resenje je da se predje na novi koordinatni sistem Cx′y′z′ ukom je ravan α data sa z′ = 0 i iskoristi parametrizacija (25) za x0 = 0 =y0, r = 2.
11 Prava u prostoru
Postoji vise nacina da zadamo pravu u prostoru. Jedan je primenljiv u svakojdimenziji: zadavanje prave tackom i vektorom pravca. Prava se moze zadatii kao presek dve ravni, tj. sistemom dve linearne jednacine ranga dva po trinepoznate. To odgovara cinjenici da je dimenzija prave 3−2 = 1. Primetimo dau prostoru prava nema jedinstven normalni vektor, vec citavu ravan normalnihvektora.
11.0.4 Parametarski oblik jednacine prave
Prava u prostoru je zadata tackom P (x0, y0, z0) i nenula vektor pravca→p (px, py, pz).
Tada se svaka tacka M prave p moze zapisati u obliku
M(t) =M = P + t→p , (46)
za neko t ∈ R. Recimo, tacka P se dobija bas za t = 0. Vektorska jednacina(23) se u koordinatama zapisuje kao
x = x0 + tpx,
y = y0 + tpy, (47)
z = z0 + tpz, (48)
t ∈ R sto obicno zovemo parametarska jednacina prave. Kao i u ravni,
parametarski oblik mozemo smatrati kretanjem konstantnom brzinom→p , pri
cemu je parametar t vreme.Kada jednacine prave (47) resimo po parametru t dobijamo
x− x0px
=y − y0py
=z − z0pz
= t, (49)
sto se cesto zove Kanonski oblik jednacine prave. Primetimo da on nijejedinstven, pa dakle ni zaista kanonski.
11.0.5 Prava kao presek dve ravni
Posmatrajmo sistem dve linearne jednacine
α : ax+ by + cz + d = 0,
β : a1x+ b1y + c1z + d1 = 0 (50)
koje predstavljaju ravni α i β. Ako su vektori→nα i
→nβ kolinearni, tj. | →
nαtimes
→nβ | = 0, prave su paralelne ili se poklapaju. U suprotnom, ako su
vektori→nα i
→nβ nezavisni one se seku po jedinstvenoj pravoj p = α ∩ β.
56

/
j
p
→p
→nβ
α
β
6
→nα
Slika 39: Prava kao presek dve ravni
Posto prava p pripada obema ravnima ona je normalna na njihovim normal-
nim vektorima→nα,
→nβ , pa je zato
→p=
→nα × →
nβ . Da bismo odredili jednu tackuprave p dovoljno je odrediti jedno resenje sistema (50), recimo ono za z = 0 (akotakvo postoji).
Obrnuto, ako je prava p zadata u obliku (49) tada je lako odrediti dve ravnikoje se po njoj seku, recimo:
γ :x− x0px
=y − y0py
δ :y − y0py
=z − z0pz
.
Konacno, primetimo da beskonacno mnogo ravni sadrzi datu pravu p - onecine tzv. snop ravni.
Teorema 11.1 Skup svih ravni koje sadrze pravu p koja je data jednacinom(50), osim ravni β je dat jednacinom
γλ : ax+ by + cz + d+ λ(a1x+ b1y + c1z + d1) = 0,
za λ ∈ R.
Primetimo da je jednacina ravni γλ zavisna od jednacina α i β ako i samoako je sistem koji se sastoji od njihove tri jednacine ekvivalentan sistemu (50).Geometrijski receno: α∩β = p = α∩β ∩ γλ sto vazi ako i samo ako je γλ ⊃ p.⊓⊔
11.0.6 Koordinatni sistem u odnosu na datu pravu
Slicno kao u slucaju ravni u primenama se javlja potreba za odredjivanjemkoordinatnog sistema Ox′y′z′ u odnosu na koji se data prava p poklapa sa Oz′
osom. U tom sistemu jednacina prave p je p : x = 0, y = 0.
6
→e1+
→e2
-
→e3
O
]3
→p
p
b
→c
P-
^
57

Slika 40: Koordinatni sistem u odnosu na datu pravu
Ortonormirana baza (→v ,
→w,
→p ) dobija se kao u slucaju ravni, ali se umesto
vektora→nα uzima vektor
→p prave p. Za koordinatni pocetak moze se uzeti bilo
koja tacka prave p.
11.1 Rastojanja u prostoru
Na osnovu Teoreme 8.1 koja vazi i u prostoru rastojanje tacke M od prave p jedato formulom
d =|→p ×
→PM |
|→p |
.
Slicno Teoremi 8.2 moze se dokazati sledeca teorema
Teorema 11.2 Rastojanje tacke M(x0, y0, z0) od ravni p : ax+ by+ cz+ d = 0dato je formulom
d =|ax0 + by0 + cz0 + d|√
a2 + b2 + c2.
11.2 Medjusobni polozaji dve prave
11.2.1 Paralelne prave i prave koje se seku
Neka su prave p i q date vektorima pravca→p i
→q i tackama P ∈ p, Q ∈ q.
Ako su prave koplanarne to znaci i da su vektori→p ,
→q i
→PQ, takodje ko-
planarni, tj. linearno zavisni. Posto vazi i obrnuto mozemo reci da su pravekoplanarne ako i samo ako
[→p ,
→q ,
→PQ] = 0.
Iz razloga objasnjenih u poglavlju ???, prilikom implementacije, ovaj uslov jenajbolje ispitivati nejednakocu
|[→p ,
→q ,
→PQ]| < |
→p ||
→q ||
→PQ |ϵ,
gde je ϵ predefinisana dozvoljena greska.Medju komplanarnim pravama treba razlikovati one koje su paralelne i one
koje se seku. Prave p i q su paralelne ako su im vektori pravca→p i
→q linearno
zavisni (paralelni). Dakle, kriterijum za paralelnost je
|→p ×
→q | = 0,
odnosno, u implementaciji
|→p ×
→q | ≤ |
→p ||
→q |ϵ.
Ako su prave koplanarne, a nisu paralelne, onda se one seku. Presecnutacku pravih datih parametarski odredjujemo resavanjem sistema po s i t (gdeje t parametar na pravoj p, a s na q), nakon sto izjednacimo odgovarajucekoordinate. Ako su prave date svaka dvema jednacinama, onda presecnu tackumozemo odrediti resavanjem sistema 4 jednacine sa 3 nepoznate.
58

11.2.2 Mimoilazne prave
Dve prave u prostoru su mimoilazne ako nisu koplanarne.Osnovna teorema za mimoilazne prave je sledeca.
Teorema 11.3 Mimoilazne prave p i q imaju jedinstvenu zajednicku nor-malu, tj. pravu n koja sece obe prave p i q i na njih je upravna.
Neka je α ravan koja sadrzi pravu p i paralelna je pravoj q i neka je β ravankoja sadrzi pravu q i paralelna je pravoj p. Tada je α ∥ β. Neka je γ ravan kojasadrzi pravu p i upravna je na ravni α i β. Ona sece pravu q u nekoj tacki N .Dokazimo da je prava n koja sadrzi tacku N i upravna je na ravan β je trazenanormala.
p1
M
N
α
p
n
γ
β
q
P
Slika 41: Mimoilazne prave
Prava n sece pravu q u tacki N i upravna je na q ⊂ β (jer je n ⊥ β). Kakosu i prava n i ravan γ upravne na ravan β i sadrze tacku N , vazi n ⊂ γ. Praven i p pripadaju istoj ravni γ, tj. koplanarne su. Kako je n ⊥ α i p ⊂ α vazii n ⊥ p i prave n i p se seku u nekoj tacki M , pa je prava n zaista zajednickanormala. ⊓⊔
Za analitickp odredjivanje zajednicke normale moze se primeniti postupakopisan u prethodnoj teoremi.
Moze se pokazati da je rastojanje izmedju pravih p i q upravo rastojanjeizmedju podnozja zajednike normale M i N , tj. d(p, q) = d(M,N). Za odred-jivanje rastojanja izmedju mimoilaznih pravih moze se koristiti i formula kojudokazujemo sledecom teoremom.
Teorema 11.4 Rastojanje izmedju mimoilaznih pravih p i q dato je sledecomformulom
d(p, q) =|[→p ,
→q ,
→PQ]|
|→p ×
→q |
.
Presek dve prave smo diskutovali u poglavlju ??. Presek dve ravni
11.2.3 Medjusobni polozaj prave i ravni
Prava p i ravan α mogu da se seku ili da budu paralelne. One su paralelne ako i
samo ako je vektor prave p normalan na normalni vektor ravni α, tj.→p · →
nα= 0.
59
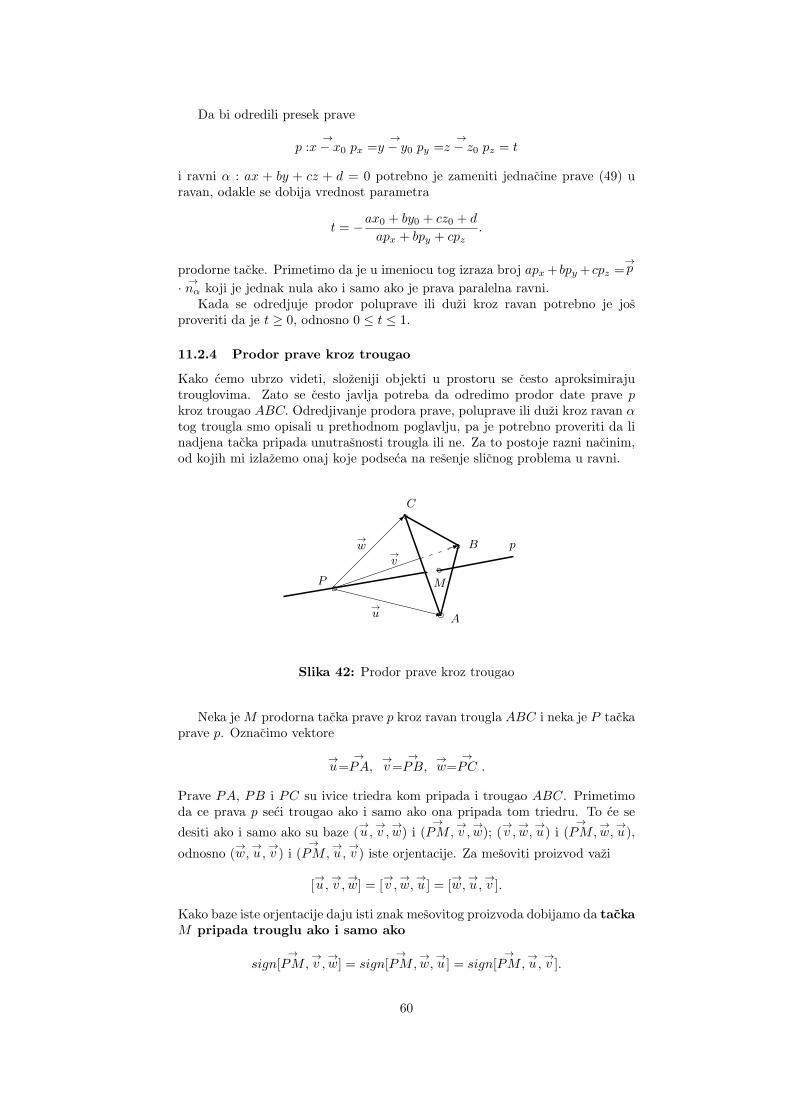
Da bi odredili presek prave
p :→
x− x0 px =→
y − y0 py =→
z − z0 pz = t
i ravni α : ax + by + cz + d = 0 potrebno je zameniti jednacine prave (49) uravan, odakle se dobija vrednost parametra
t = −ax0 + by0 + cz0 + d
apx + bpy + cpz.
prodorne tacke. Primetimo da je u imeniocu tog izraza broj apx+ bpy + cpz =→p
· →nα koji je jednak nula ako i samo ako je prava paralelna ravni.Kada se odredjuje prodor poluprave ili duzi kroz ravan potrebno je jos
proveriti da je t ≥ 0, odnosno 0 ≤ t ≤ 1.
11.2.4 Prodor prave kroz trougao
Kako cemo ubrzo videti, slozeniji objekti u prostoru se cesto aproksimirajutrouglovima. Zato se cesto javlja potreba da odredimo prodor date prave pkroz trougao ABC. Odredjivanje prodora prave, poluprave ili duzi kroz ravan αtog trougla smo opisali u prethodnom poglavlju, pa je potrebno proveriti da linadjena tacka pripada unutrasnosti trougla ili ne. Za to postoje razni nacinim,od kojih mi izlazemo onaj koje podseca na resenje slicnog problema u ravni.
z
�
M
→u
→w
→v
A
B
C
1
P
p
Slika 42: Prodor prave kroz trougao
Neka jeM prodorna tacka prave p kroz ravan trougla ABC i neka je P tackaprave p. Oznacimo vektore
→u=
→PA,
→v=
→PB,
→w=
→PC .
Prave PA, PB i PC su ivice triedra kom pripada i trougao ABC. Primetimoda ce prava p seci trougao ako i samo ako ona pripada tom triedru. To ce se
desiti ako i samo ako su baze (→u,
→v ,
→w) i (
→PM,
→v ,
→w); (
→v ,
→w,
→u) i (
→PM,
→w,
→u),
odnosno (→w,
→u,
→v ) i (
→PM,
→u,
→v ) iste orjentacije. Za mesoviti proizvod vazi
[→u,
→v ,
→w] = [
→v ,
→w,
→u ] = [
→w,
→u,
→v ].
Kako baze iste orjentacije daju isti znak mesovitog proizvoda dobijamo da tackaM pripada trouglu ako i samo ako
sign[→PM,
→v ,
→w] = sign[
→PM,
→w,
→u ] = sign[
→PM,
→u,
→v ].
60
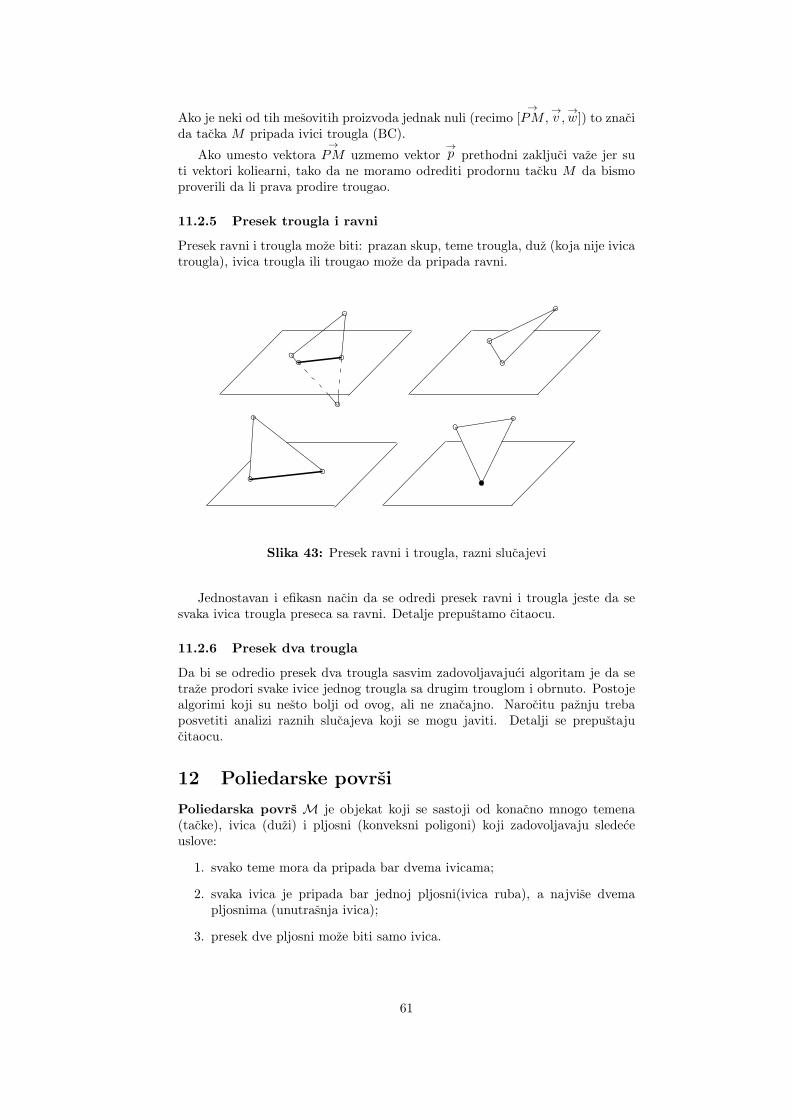
Ako je neki od tih mesovitih proizvoda jednak nuli (recimo [→PM,
→v ,
→w]) to znaci
da tacka M pripada ivici trougla (BC).
Ako umesto vektora→PM uzmemo vektor
→p prethodni zakljuci vaze jer su
ti vektori koliearni, tako da ne moramo odrediti prodornu tacku M da bismoproverili da li prava prodire trougao.
11.2.5 Presek trougla i ravni
Presek ravni i trougla moze biti: prazan skup, teme trougla, duz (koja nije ivicatrougla), ivica trougla ili trougao moze da pripada ravni.
Slika 43: Presek ravni i trougla, razni slucajevi
Jednostavan i efikasn nacin da se odredi presek ravni i trougla jeste da sesvaka ivica trougla preseca sa ravni. Detalje prepustamo citaocu.
11.2.6 Presek dva trougla
Da bi se odredio presek dva trougla sasvim zadovoljavajuci algoritam je da setraze prodori svake ivice jednog trougla sa drugim trouglom i obrnuto. Postojealgorimi koji su nesto bolji od ovog, ali ne znacajno. Narocitu paznju trebaposvetiti analizi raznih slucajeva koji se mogu javiti. Detalji se prepustajucitaocu.
12 Poliedarske povrsi
Poliedarska povrs M je objekat koji se sastoji od konacno mnogo temena(tacke), ivica (duzi) i pljosni (konveksni poligoni) koji zadovoljavaju sledeceuslove:
1. svako teme mora da pripada bar dvema ivicama;
2. svaka ivica je pripada bar jednoj pljosni(ivica ruba), a najvise dvemapljosnima (unutrasnja ivica);
3. presek dve pljosni moze biti samo ivica.
61

Skup temena oznacavamo sa T , ivica sa I, a pljosni sa P. Podrazumeva seda ivice svih pljosni pripadaju skupu svih ivica, a temena svih ivica, skuputemena. U algoritmima se obicno zahteva da pljosnji budu trouglovi. Mi smou definiciji oslabili taj uslov zato sto se konveksni poligoni mogu jednostavno ibrzo triangulisati. Primetimo da je konveksni poligon obavezno ravanski.
A B
C
D
NK
M
L
P
Q
Slika 44: ABCD jeste, a KLMNPQ nije poligonska povrs
Unija svih ivica koje pripadaju samo jednoj pljosni (tj. svih rubnih ivica)naziva se rub poliedarske povrsi. Poliedarsku povrs bez ruba zvacemo poliedrom.
Pojam poliedarske povrsi mozemo da posmatramo cisto skupovno i tada seta povrs naziva apstraktna poliedarska povrs. Ako su sve pljosni, ivice itemena smesteni u trodimenzioni prostor onda govorimo o realizaciji te apstrak-tne poliedarske povrsi.
U narednom tekstu koristimo oba ova pojma, a iz konteksta je jasno koji.Narednu teoremu necemo dokazivati zbog slozenosti dokaza.
Teorema 12.1 Poliedar razlaze prostor na dve oblasti, (njih zovemo unutrasnjosti spoljasnost).
12.0.7 Tabela temena i povezanosti
Tabela temena i povezanosti je zapravo spisak pljosni koje su zadate njihovimtemenima. Recimo, tabela temena i povezanosti tetraedra T0T1T2T3 je
p0 = < 1, 2, 3 >, p1 =< 0, 2, 3 >,
p2 = < 0, 1, 3 >, p3 =< 0, 1, 2 >,
gde smo sa 0, 1, 2, 3 skraceno oznacili tacke T0, T1, T2, T3.
62

0 1
2
3
Slika 45: Tetraedar
Primetimo da tabela te poliedarske povrsi zadaje samo apstraktnu poliedarskupovrs. Tek kada bismo zadali koordinate temena u prostoru dobili bismo real-izaciju te poliedarske povrsi.
Ono sto je vazno je da se iz tabele temena i povezanost moze odrediti skupivica, kao i rub poliedarske povrsi. Pogledajmo sledeci primer.
Primer 12.1 Data je apstraktna poliedarska povrs tabelom povezanosti:
p0 =< 0, 1, 3 >, p1 =< 0, 1, 5, 4 >, p2 =< 1, 2, 6, 5 >,
p3 =< 5, 6, 7 >, p4 =< 7, 4, 0, 3 >, p5 =< 2, 6, 7, 3 > .
Odrediti joj listu temena i ivica, rub i broj komponenata ruba.
Resenje: Lista temena je ocigledno
T = {T0, . . . T7}.
Lista ivica se dobija tako to posmatramo ivice svake pljosni ciklicki. Recimo izpljosni p0 dobijamo ivice (pisemo samo indekse njihovih temena) 01, 13, 30; izpljosni p1 ivice 01, 15, 54, 40, itd.
Primetimo da smo ivicu 01 dobili u dvema pljosnima, sto znaci da je onaunutrasnja ivica. Takvih unutrasnjih ivica u ovom primeru ima jos.
Konacno, kada prodjemo kroz sve pljosni, dobijamo spisak svih ivica
I = {01, 13, 30, 15, 54, 40, 12, 26, 65, 67, 75, 74, 37, 32}.
Pri tom smo podvukli one ivice koje su se javile u dvema pljosnima, tj. un-utrasnje ivice. Ivice koje nisu podvucene pripadaju jednoj pljosni i to su iviceruba.
Da bismo odredili komponente ruba, krenemo od ma koje rubne ivice, rec-imo, ivice 13. Trazimo koja se rubna ivica na nju nadovezuje, to je 32, a nju21. Tu se taj deo ruba zatvara, tj. jedna komponenta ruba je poligon 1321.
Na isti nacin dobijamo da je druga komponenta ruba poligon 5475. Dakle,data poliedarska povrs ima dve komponente ruba.
63
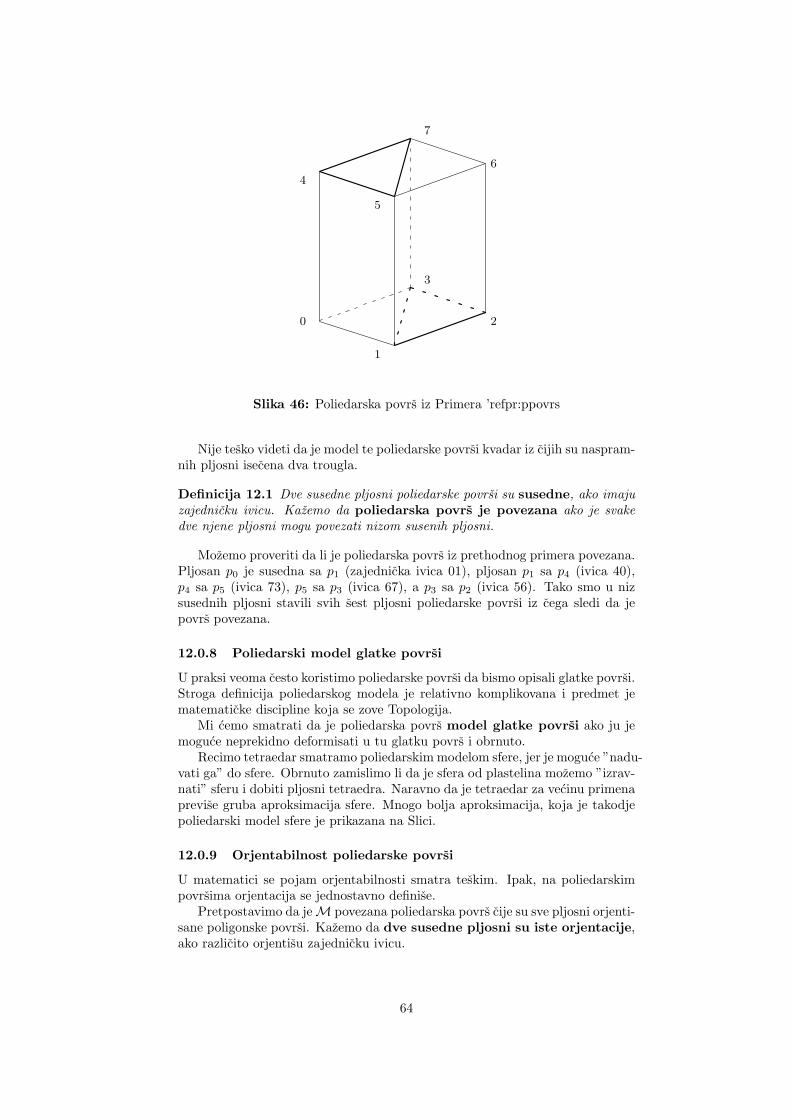
0
1
5
4
2
6
7
3
Slika 46: Poliedarska povrs iz Primera ’refpr:ppovrs
Nije tesko videti da je model te poliedarske povrsi kvadar iz cijih su naspram-nih pljosni isecena dva trougla.
Definicija 12.1 Dve susedne pljosni poliedarske povrsi su susedne, ako imajuzajednicku ivicu. Kazemo da poliedarska povrs je povezana ako je svakedve njene pljosni mogu povezati nizom susenih pljosni.
Mozemo proveriti da li je poliedarska povrs iz prethodnog primera povezana.Pljosan p0 je susedna sa p1 (zajednicka ivica 01), pljosan p1 sa p4 (ivica 40),p4 sa p5 (ivica 73), p5 sa p3 (ivica 67), a p3 sa p2 (ivica 56). Tako smo u nizsusednih pljosni stavili svih sest pljosni poliedarske povrsi iz cega sledi da jepovrs povezana.
12.0.8 Poliedarski model glatke povrsi
U praksi veoma cesto koristimo poliedarske povrsi da bismo opisali glatke povrsi.Stroga definicija poliedarskog modela je relativno komplikovana i predmet jematematicke discipline koja se zove Topologija.
Mi cemo smatrati da je poliedarska povrs model glatke povrsi ako ju jemoguce neprekidno deformisati u tu glatku povrs i obrnuto.
Recimo tetraedar smatramo poliedarskim modelom sfere, jer je moguce ”nadu-vati ga” do sfere. Obrnuto zamislimo li da je sfera od plastelina mozemo ”izrav-nati” sferu i dobiti pljosni tetraedra. Naravno da je tetraedar za vecinu primenaprevise gruba aproksimacija sfere. Mnogo bolja aproksimacija, koja je takodjepoliedarski model sfere je prikazana na Slici.
12.0.9 Orjentabilnost poliedarske povrsi
U matematici se pojam orjentabilnosti smatra teskim. Ipak, na poliedarskimpovrsima orjentacija se jednostavno definise.
Pretpostavimo da jeM povezana poliedarska povrs cije su sve pljosni orjenti-sane poligonske povrsi. Kazemo da dve susedne pljosni su iste orjentacije,ako razlicito orjentisu zajednicku ivicu.
64
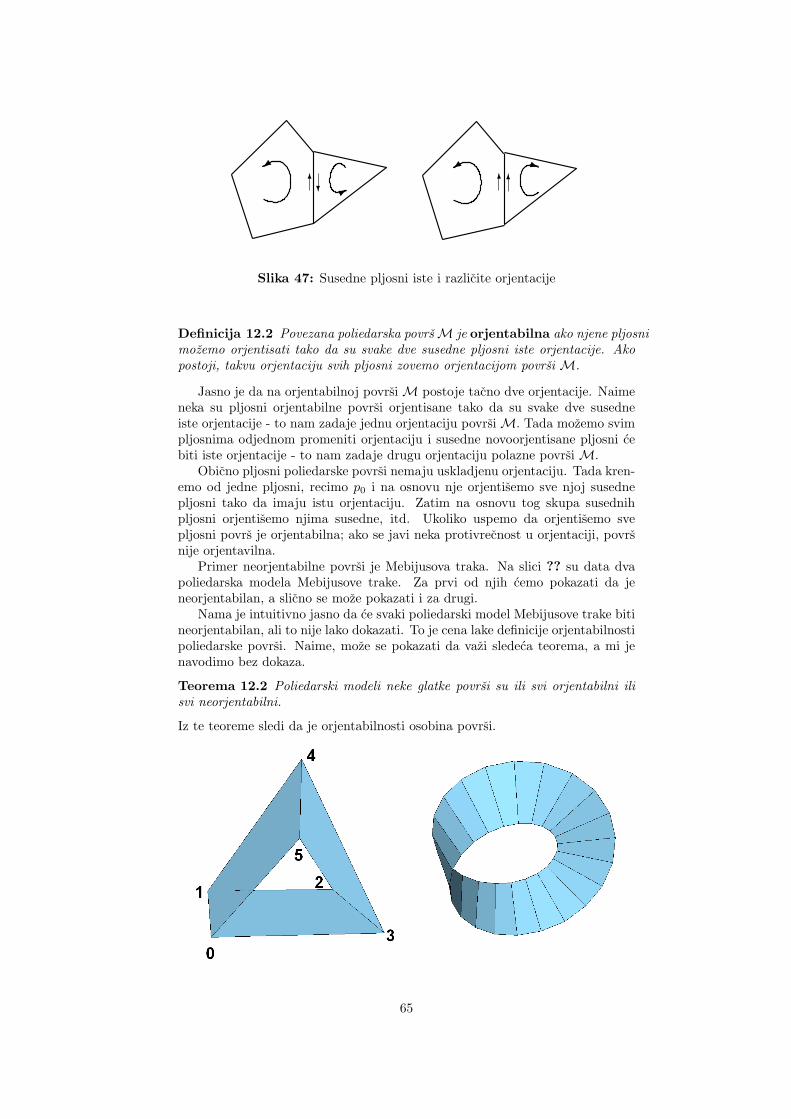
+
*
+ q66 6?
Slika 47: Susedne pljosni iste i razlicite orjentacije
Definicija 12.2 Povezana poliedarska povrs M je orjentabilna ako njene pljosnimozemo orjentisati tako da su svake dve susedne pljosni iste orjentacije. Akopostoji, takvu orjentaciju svih pljosni zovemo orjentacijom povrsi M.
Jasno je da na orjentabilnoj povrsi M postoje tacno dve orjentacije. Naimeneka su pljosni orjentabilne povrsi orjentisane tako da su svake dve susedneiste orjentacije - to nam zadaje jednu orjentaciju povrsi M. Tada mozemo svimpljosnima odjednom promeniti orjentaciju i susedne novoorjentisane pljosni cebiti iste orjentacije - to nam zadaje drugu orjentaciju polazne povrsi M.
Obicno pljosni poliedarske povrsi nemaju uskladjenu orjentaciju. Tada kren-emo od jedne pljosni, recimo p0 i na osnovu nje orjentisemo sve njoj susednepljosni tako da imaju istu orjentaciju. Zatim na osnovu tog skupa susednihpljosni orjentisemo njima susedne, itd. Ukoliko uspemo da orjentisemo svepljosni povrs je orjentabilna; ako se javi neka protivrecnost u orjentaciji, povrsnije orjentavilna.
Primer neorjentabilne povrsi je Mebijusova traka. Na slici ?? su data dvapoliedarska modela Mebijusove trake. Za prvi od njih cemo pokazati da jeneorjentabilan, a slicno se moze pokazati i za drugi.
Nama je intuitivno jasno da ce svaki poliedarski model Mebijusove trake bitineorjentabilan, ali to nije lako dokazati. To je cena lake definicije orjentabilnostipoliedarske povrsi. Naime, moze se pokazati da vazi sledeca teorema, a mi jenavodimo bez dokaza.
Teorema 12.2 Poliedarski modeli neke glatke povrsi su ili svi orjentabilni ilisvi neorjentabilni.
Iz te teoreme sledi da je orjentabilnosti osobina povrsi.
65

Primer 12.2 Poliedarski model Mebijusove trake
p0 =< 0, 1, 2, 3 >, p1 =< 5, 2, 3, 4 >, p2 =< 1, 4, 5, 0 >
je neorjentabilan.
Fiksirajmo datu orjentaciju pljosni p0. Ona sa pljosni p1 ima izajednicku ivicu23, koja od pljosni p0 nasledjuje orjentaciju 23. Da bi p0 i p1 razlicito orjentisaletu ivicu moramo da promenimo orjentaciju pljosni p1 da bude, recimo, p1 =<3, 2, 5, 4 >. Na isti nacin pljosan p1 orjentise ivicu 54 koja je zajednicka sapljosni p2. Kako tu ivicu pljosan p2 orjentise u smeru 45 vidimo da su p1 i p2iste orjentacije. Dakle p0 i p1 su iste orjentacije; p1 i p2 su iste orjentacije. Ostajeda se proveri jos da li su p2 i p0 iste orjentacije. Ali kako obe te pljosni istoorjentisu zajednicku ivicu 01 (u pljosni p2 temena posmatramo ciklicki), pljosnisu razlicite orjentacije. Zakljucujemo da nije moguce uskladiti orjentaciju svihpljosni, pa je ovaj model Mebijusove trake (a i svaki drugi) neorjentabilan.
Iskoristimo ovu priliku da uocimo neke interesantne osobine Mebijusovetrake:
• Jednostrana je.
• Rub Mebijusove trake je jedna linija.
• Kada je prerezemo uzduzno (po sredini) dobijamo jednu traku, ali dvaputa uvrnutu. Kada i tu traku prerezemo dobijamo dve trake, ali ulancane.Proveriti!
U nastavku, jednostavnosti radi, posmatramo triangulisanu poliedarsku povrs.Neka su T0T1T2 i T3T2T1 dve susedne pljosni poliedarske povrsi. Poluravni sarubom T1T2 koje sadrze T0 i T3 razbijaju prostor na dva diedra. Primetimo danormalni vektori
→n1=
→T0T1 ×
→T0T2,
→n2=
→T3T2 ×
→T3T1
pripadaju istom diedru (reci cemo ”su lokalno sa iste strane poliedarske povrsi”)ako i samo ako su te pljosni iste orjentacije.
T0
�}
T1
T2
T3
→n1
→n2
y7
Slika 48: Normale isto orjentisanih pljosni
Dakle, uslov da je povrs orjentabilna, tj. da svake dve susednepljosni mozemo isto orjentisati je ekvivalentna uslovu da pljosnimamozemo pridruziti normalne vektore, tako da su svaka dva susednanormalna vektora lokalno sa iste strane povrsi.
66

Neka je sada poliedarska povrs bez ruba, tj. poliedar. Prema teoremi onarazbija prostor na unutrasnost i spoljasnost. Ako izaberemo normale na pljosnida one pokazuju, recimo, ka spoljasnosti tada ce svake dve susedne normale bitisa iste strane povrsi pa ce povrs biti orjentabilna. Dakle:
Teorema 12.3 Svaki poliedar je orjentabilna povrs (tj. u prostoru ne postojeneorjentabilne povrsi bez ruba).
Podsetimo se da poliedarska povrs, pa i poliedar, po definiciji nema samopre-seka. Ako dozvolimo sampreseke tada postoje primeri neorjentabilnih poliedarau prostoru. Jedan od njih je Klajnova flasa.
12.0.10 Znacaj orjentabilnosti za kompjutersku grafiku
Sta god da radimo sa poligonskom povrsi, bilo da je projektujemo, osvetljavamoili transfomisemo, potrebno je razmatrati sve pljosni povrsi. Tacnije, ne bas sve,vec samo one koje su vidljive. Na taj se nacin postize mnogo veca efikasnost akose mogu raspoznati vidljive od nevidljivih pljosni. Upravo to se moze uraditiorjentacijom povrsi.
→n0
k
>O
W→n1
M0
:
→n2
→n3
Slika 49: Odredjivanje vidljivosti uz pomoc normala na pljosni
Prvo treba izabrati orjentaciju povrsi, tj. izvrsiti proces uskladjivanje or-jentacija pljosni. Time su i normale
→ni svih pljosni pi uskladjene, tj. sve su ili
spoljasnje ili unutrasnje.Neka se za pljosan p0 zna da je vidljiva iz tacke posmatranja O. Ako za njen
normalni vektor→n0 vazi
→n0 ·
→M0O< 0 (gde je M0 neka tacka te pljosni, moze i
teme), tj. ako vektor→n0 pokazuje u pravcu tacke O tada su vidljive samo one
pljosni pi za ciji normalni vektor→ni i ma koju tacku Mi ∈ pi vazi:
→ni ·
→MiO< 0.
Ako je→n0 ·
→M0O> 0 onda i u prethodnoj formuli treba da stoji suprotan znak
nejednakosti.Pored vidljivosti, orjentacija tj. izbor spoljasnje normale je vazan i za druge
primene. Recimo, kada zelimo da odredimo da li se tacka nalazi unutar kon-veksnog poliedra. Citaocu se ostavlja da razmisli o algoritmu koji resava tajproblem.
12.1 Ojlerova karakteristika povrsi
Definicija 12.3 Ojlerova karakteristika poliedarske povrsi M je broj
ξ(M) = T − I + P,
gde su T , I i P redom brojevi temena, ivica i pljosni te poliedarske povrsi.
67

Nije tesko pokazati da se ovaj broj ne menja ako izvrsimo triangualciju poliedarskepovrsi. Mnogo teze i vaznije tvrdjenje je dato sledecom teoremom koju necemodokazati.
Teorema 12.4 Svake dva poliedarska modela glatke povrsi imaju jednake Ojlerovekarakteristike.
Dakle, kao i orjentabilnost i Ojlerova karakteristika je osobina povrsi, a ne njenogkonkretnog poliedarskog modela.
Ojlerova karakteristika opisuje neke vazne geometrijske osobine povrsi kojecemo sada samo intuitivno objasniti i dati bez dokaza.
1) Ako je M poliedar i r rod poliedra (on se intuitivno definise kao ”brojrupa”) tada vazi:
ξ(M) = 2− 2r.
Recimo rod modela sfere, kao sto su tetraedar, kocka je jednak 0 jer oni nemajurupa. Odatle je ξ(M) = 2 kad god je povrs reda nula.
Ako je M model torusa tada je ξ(M) = 0, jer torus ima jednu rupu, tj.r = 1.
2) Ako je M orjentabilna povrs sa rubom iz jednog komada (recimo modelpolusfere) tada je ξ(M) = 1.
Ojlerova karakteristika je znacajna jer kada su napravi tabela temena ipovezanosti za neku povrs, racunanje Ojlerove karakteristike moze biti potvrdada je tabela konzistentno napravljena.
12.2 Platonova tela
Topoloski pravilnim poliedrom zovemo poliedar nultog roda cije su svepljosni poligoni sa q ivica, a svako u svakom temenu se sustice jednak broj pivica. Ako jos zahtevamo da su sve te ivice jednake duzine onda takav poliedarzovemo pravilan poliedar ili Platonovo telo.
Teorema 12.5 Postoji tacno pet topoloski pravilnih poliedara.
Oznacimo sa T , I i P redom brojevi temena, ivica i pljosni poliedra. Kako jepoliedar roda nula vazi
T − I + P = 2. (51)
68
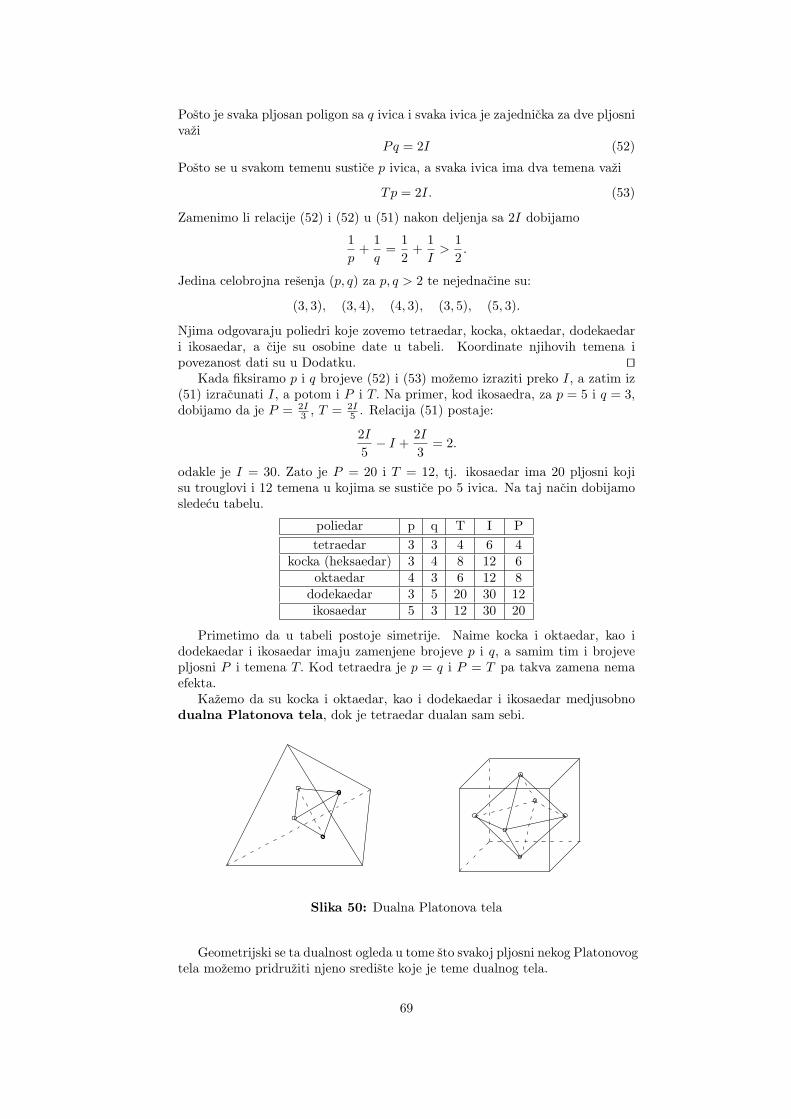
Posto je svaka pljosan poligon sa q ivica i svaka ivica je zajednicka za dve pljosnivazi
Pq = 2I (52)
Posto se u svakom temenu sustice p ivica, a svaka ivica ima dva temena vazi
Tp = 2I. (53)
Zamenimo li relacije (52) i (52) u (51) nakon deljenja sa 2I dobijamo
1
p+
1
q=
1
2+
1
I>
1
2.
Jedina celobrojna resenja (p, q) za p, q > 2 te nejednacine su:
(3, 3), (3, 4), (4, 3), (3, 5), (5, 3).
Njima odgovaraju poliedri koje zovemo tetraedar, kocka, oktaedar, dodekaedari ikosaedar, a cije su osobine date u tabeli. Koordinate njihovih temena ipovezanost dati su u Dodatku. ⊓⊔
Kada fiksiramo p i q brojeve (52) i (53) mozemo izraziti preko I, a zatim iz(51) izracunati I, a potom i P i T. Na primer, kod ikosaedra, za p = 5 i q = 3,dobijamo da je P = 2I
3 , T = 2I5 . Relacija (51) postaje:
2I
5− I +
2I
3= 2.
odakle je I = 30. Zato je P = 20 i T = 12, tj. ikosaedar ima 20 pljosni kojisu trouglovi i 12 temena u kojima se sustice po 5 ivica. Na taj nacin dobijamosledecu tabelu.
poliedar p q T I P
tetraedar 3 3 4 6 4kocka (heksaedar) 3 4 8 12 6
oktaedar 4 3 6 12 8dodekaedar 3 5 20 30 12ikosaedar 5 3 12 30 20
Primetimo da u tabeli postoje simetrije. Naime kocka i oktaedar, kao idodekaedar i ikosaedar imaju zamenjene brojeve p i q, a samim tim i brojevepljosni P i temena T. Kod tetraedra je p = q i P = T pa takva zamena nemaefekta.
Kazemo da su kocka i oktaedar, kao i dodekaedar i ikosaedar medjusobnodualna Platonova tela, dok je tetraedar dualan sam sebi.
Slika 50: Dualna Platonova tela
Geometrijski se ta dualnost ogleda u tome sto svakoj pljosni nekog Platonovogtela mozemo pridruziti njeno srediste koje je teme dualnog tela.
69
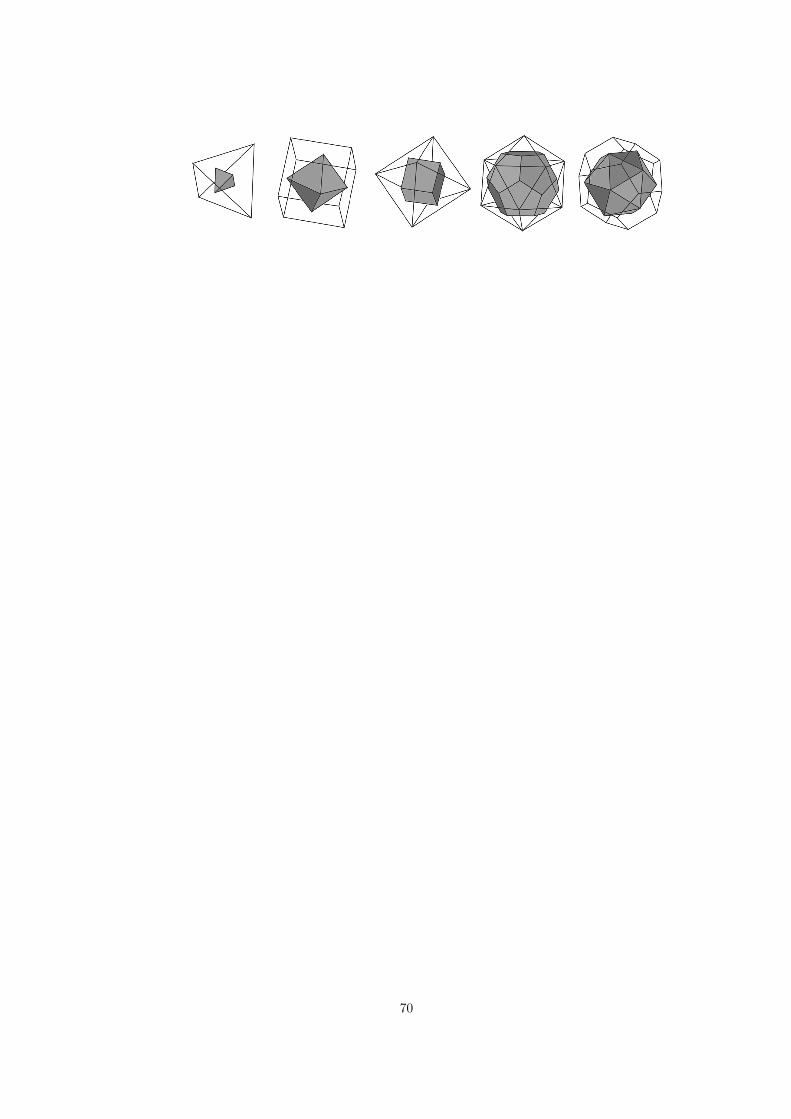
70















![GEOMETRIJA VIJKA, prema [2] Geometrija linija i ploha · GEOMETRIJA VIJKA, prema [2] Geometrija vijčanih linija i ploha Krila vijka približno prate relativno dobro poznate geometrijske](https://static.fdocument.pub/doc/165x107/5e05332a3c91ed60e56c072d/geometrija-vijka-prema-2-geometrija-linija-i-geometrija-vijka-prema-2-geometrija.jpg)
