GDEによるILC設計開発と 今後の展開 - KEK...2007.4.13 KEK メカワークショップ 2...
65
GDEによるILC設計開発と 今後の展開 2007年KEK機械工学センター・メカワークショップ 峠 暢一(KEK 加速器研究施設)
Transcript of GDEによるILC設計開発と 今後の展開 - KEK...2007.4.13 KEK メカワークショップ 2...

GDEによるILC設計開発と今後の展開
2007年KEK機械工学センター・メカワークショップ
峠 暢一(KEK 加速器研究施設)

2007.4.13 KEK メカワークショップ 2
概要• ILC (国際リニアコライダー)の設計開発にむけて2005年秋から活動を本
格化したGDE (Global Design Effort) では
– 2006年のあいだ加速器系の基本設計と一次コスト評価の作業をおこない、
– Reference Design Report (RDR) として、2007年2月にICFA/ILCSC に提出した。
• 本報告では、
– まず、リニアコライダーのごく簡単な説明と、GDEのこれまでの活動について概略をご紹介。
– つぎに、RDR のうち、とくに機械工学センターと関連諸研究機関、企業の皆様に関係深いと思われる ILC 主線形加速器の技術構想について概観。
– 最後に、今後のILC詳細設計作業のなかで「ものづくり」に携わる皆様の出番、お願いしたい寄与の勘所がどこにあるのか、について、コメント。

2007.4.13 KEK メカワークショップ 3
電子・陽電子 vs 陽子・陽子
• 電子・陽電子は:
– 陽子のような複合粒子でないので、
– 衝突時の
• エネルギー
• 角運動量、に不確定性が少なく、
– 重心系エネルギーがフルに使え、
– 光子またはZ粒子の「電弱ゲージ
粒子」経由で生まれる終状態粒子の生成比が、陽子-陽子の場合にくらべて”democratic” である。
陽子陽子
電子 陽電子

2007.4.13 KEK メカワークショップ 4
リニアコライダー = 第五世代電子陽
電子加速器

2007.4.13 KEK メカワークショップ 5
リニアコライダー/ILCとは• リニアコライダー:二本の線形加速器を対向させ、電子と陽電子を正面衝
突させることで高エネルギー物理フロンティアの実験研究に供することを目的とする加速器装置の一般名称。
• ILC: 2004年の国際委員会勧告をうけ、超伝導空洞をつかった線形加速器によって、到達重心系エネルギー500- 1000GeVを仕様として、現在
国際協力により開発設計が推進されている、リニアコライダーの一形態

2007.4.13 KEK メカワークショップ 6
LC の歩み• 先史時代:
– 「自然発生」的研究グループ(日本 - GLC、欧州 – TESLA, CLIC、北米 -NLC);
– 隔年ワークショップ;– cold vs warm の競争
• 2004.8: 超伝導技術を採択 (ICHEP at 北京)– 高い電力効率– 高周波源開発+建設が比較的楽– 「ウェーク場」が弱いこと 大電流ビーム加速上の利
• 2005.8 : GDE発足 (Snowmass Workshop);GDEとは、– ILC基幹技術にかんする2004年夏のITRP (国際技術選定諮問委)答申を
うけ、– またILC設計開発のための2005年春のICFA/ILCSCによる合意書署名を
ふまえ、– 2005年春-夏に発足した、国際協力によってILCの設計開発を進めるため
の、実行主体。

2007.4.13 KEK メカワークショップ 7
GDE 組織 – 2007春現在
CCB(Change Control Boad)
DCB(Design-Cost Board)
RDB(R&D Board)
RDR Management Board
EC + CE + 1
RDR Matrix Leaders
Executive CommitteeCost Experts
CFS Experts
Working Groups
Task Forces
S0/S1 S2 S3
S4 S5

2007.4.13 KEK メカワークショップ 8
GDE 組織 – 2007春現在
CCB(Change Control Boad)
DCB(Design-Cost Board)
RDB(R&D Board)
RDR Management Board
EC + CE + 1
RDR Matrix Leaders
Executive CommitteeCost Experts
CFS Experts
Working Groups
Task Forces
S0/S1 S2 S3
S4 S5
GDE Director: Barry Barish (Caltech)2005/4 ILCSCによって任命
Regional Directors: 三領域主要研究所での
協議から選任Brian Foster (Oxford)Mike Harrison (BNL)Mitsuaki Nozaki (KEK)
Chief Accelerator Scientists:三領域主要
研究所での協議により選任Nick Walker (DESY)Tor Raubenheimer (SLAC)Kaoru Yokoya (KEK)

2007.4.13 KEK メカワークショップ 9
GDE 組織 – 2007春現在
CCB(Change Control Boad)
DCB(Design-Cost Board)
RDB(R&D Board)
RDR Management Board
EC + CE + 1
RDR Matrix Leaders
Executive CommitteeCost Experts
CFS Experts
Working Groups
Task Forces
S0/S1 S2 S3
S4 S5
三領域主要研究所での協議から選任Willhelm Bialowons (DESY)Peter Garbincius (FNAL)Tetsuo Shidara (KEK)
コスト関連の実務作業とりまとめ責任者

2007.4.13 KEK メカワークショップ 10
GDE 組織 – 2007春現在
CCB(Change Control Boad)
DCB(Design-Cost Board)
RDB(R&D Board)
RDR Management Board
EC + CE + 1
RDR Matrix Leaders
Executive CommitteeCost Experts
CFS Experts
Working Groups
Task Forces
S0/S1 S2 S3
S4 S5
三領域主要研究所での協議から選任Jean-Luc Baldy (DESY)Vic Kuchler (FNAL)Atsushi Enomoto (KEK)
サイトおよび一般施設(トンネル、建屋)関連とりまとめ責任者。

2007.4.13 KEK メカワークショップ 11
GDE 組織 – 2007春現在
CCB(Change Control Boad)
DCB(Design-Cost Board)
RDB(R&D Board)
RDR Management Board
EC + CE + 1
RDR Matrix Leaders
Executive CommitteeCost Experts
CFS Experts
Working Groups
Task Forces
S0/S1 S2 S3
S4 S5
Chair: Peter Garbincius (FNAL)ほか8名 2005/12 ECにより任命;RDR設計にかんする各種指針の
策定、活動管理を司る(含コスト評価)

2007.4.13 KEK メカワークショップ 12
GDE 組織 – 2007春現在
CCB(Change Control Boad)
DCB(Design-Cost Board)
RDB(R&D Board)
RDR Management Board
EC + CE + 1
RDR Matrix Leaders
Executive CommitteeCost Experts
CFS Experts
Working Groups
Task Forces
S0/S1 S2 S3
S4 S5
Chair: Nobu Toge (KEK)ほか8名 2005/12 ECにより任命;基本設計指針(Baseline Configuration Document)の管理を司り、設計指針変更時
に審査と部内確認をおこなう。

2007.4.13 KEK メカワークショップ 13
GDE 組織 – 2007春現在
CCB(Change Control Boad)
DCB(Design-Cost Board)
RDB(R&D Board)
RDR Management Board
EC + CE + 1
RDR Matrix Leaders
Executive CommitteeCost Experts
CFS Experts
Working Groups
Task Forces
S0/S1 S2 S3
S4 S5
Chair: Bill Willis (Columbia U.)ほか10名 2005/12 ECにより任命;GDE関連の加速器技術開発推進について
指針策定を司る。加速器-測定器間の開発連
携についても司る。

2007.4.13 KEK メカワークショップ 14
GDE 組織 – 2007春現在
CCB(Change Control Boad)
DCB(Design-Cost Board)
RDB(R&D Board)
RDR Management Board
EC + CE + 1
RDR Matrix Leaders
Executive CommitteeCost Experts
CFS Experts
Working Groups
Task Forces
S0/S1 S2 S3
S4 S5
RDR Matrix2006/1ころから整備
RDR執筆とコスト評価に必要な技術方針策
定、調整、データ整理、評価などの実作業の実行チーム。
ILC加速器の諸部門を、「Area Systems」と「Technical Systems」の二つの切り口でグ
ループ化したマトリクス構造をもつ組織。

2007.4.13 KEK メカワークショップ 15
GDE 組織 – 2007春現在

2007.4.13 KEK メカワークショップ 16
Reference Design Report• 大きな加速器建設プロジェクトでよく出てくる「Conceptual Design
Report」(概念設計書)にルーズに対応する。
– 在処は、• http://ilc.kek.jp/RDR/• ただし、2007/4現在はまだ「ドラフト」。最終版は2007/7予定。
– 基本的メッセージ• ILCで必要な技術はFeasibleであり、
• 設計作業は、「もっともらしい建設コストを評価出来る段階」に到達している。
– 書いてあるのは、• 目的、基本性能仕様、個別システム性能仕様• システム実装の概観• 建設コストの第一次(第ゼロ次?)評価の概観
– 書いてないのは、• システム詳細設計• 建設コスト詳細• 今後の開発計画(すべて完了しているわけではなく、含:分担)の詳細

2007.4.13 KEK メカワークショップ 17
RDR レイアウト
第一期重心系エネルギー:最大 500 GeV

2007.4.13 KEK メカワークショップ 18
加速器サブシステム: 陽電子源
電子ビーム アンジュレータ 光 陽電子生成

2007.4.13 KEK メカワークショップ 19
加速器サブシステム:ダンピングリング5GeV ダンピングリング 二基(電子用、陽電子用);周長 6.7km

2007.4.13 KEK メカワークショップ 20
5GeV ダンピングリング 二基(電子用、陽電子用);周長 6.7km
開発要目:速い(立ち上がり・下がり3ns、繰り返し 5.5MHz)のバンチキッカー
加速器サブシステム:ダンピングリング

2007.4.13 KEK メカワークショップ 21
実験測定器構成
- 二台の測定器装置を交代でビーム衝突点に設置
- Detector “Push-Pull”
- …が、可能であるような
o 最終集束磁石
o 測定器支持機構
o 冷凍機関連配管
加速器サブシステム:衝突点近傍

2007.4.13 KEK メカワークショップ 22
特殊電磁石超伝導 (QD0はdetector磁場内)
使用後のビームは外を通る
加速器サブシステム:衝突点近傍

2007.4.13 KEK メカワークショップ 23
ILCでの実験条件• 電子・陽電子ビーム
– バンチあたり2x1010個
– 繰り返し:毎秒5パルス
– 1パルスあたり2626バンチ• 毎秒13,000回のバンチ交差
• ビーム衝突点– 一カ所(測定器二台は”Push-Pull”)– ビームエネルギー:250GeV x 2– ビーム交差画く:14mrad– ビームサイズ:~ 0.64μm x 5.7 nm– ルミノシティ:~ 2 x 1034/cm2s

2007.4.13 KEK メカワークショップ 24
4.5km
13km
Damping Ring Plane
加速器サブシステム:主線形加速器

2007.4.13 KEK メカワークショップ 25
4.5km
13km
Damping Ring Plane
加速器サブシステム:主線形加速器

2007.4.13 KEK メカワークショップ 26
加速器サブシステム:主線形加速器

2007.4.13 KEK メカワークショップ 27
加速器サブシステム:主線形加速器

2007.4.13 KEK メカワークショップ 28
主線形加速器のキモ• 1.8K超流動Heで冷却されたNb空洞(超伝導)によ
る加速
– 空洞あたり:セル数9、実効長1.038m– 空洞総数:16,000– 平均加速勾配:31.5MV/m– 8~9空洞内蔵(12.7m)のクライオスタット総数:1,700台– 空洞駆動用クライストロンと電源総数:各約650台

2007.4.13 KEK メカワークショップ 29
空洞パッケージ

2007.4.13 KEK メカワークショップ 30
空洞パッケージ

2007.4.13 KEK メカワークショップ 31
空洞パッケージ

2007.4.13 KEK メカワークショップ 32
空洞パッケージ

2007.4.13 KEK メカワークショップ 33
空洞パッケージ

2007.4.13 KEK メカワークショップ 34
空洞パッケージ

2007.4.13 KEK メカワークショップ 35
空洞パッケージ

2007.4.13 KEK メカワークショップ 36
クライオスタット

2007.4.13 KEK メカワークショップ 37
クライオスタット

2007.4.13 KEK メカワークショップ 38
クライオスタット

2007.4.13 KEK メカワークショップ 39
クライオスタット

2007.4.13 KEK メカワークショップ 40
クライオスタット

2007.4.13 KEK メカワークショップ 41
クライオスタット

2007.4.13 KEK メカワークショップ 42
クライオスタット

2007.4.13 KEK メカワークショップ 43
クライオスタット

2007.4.13 KEK メカワークショップ 44
クライオスタット

2007.4.13 KEK メカワークショップ 45
クライオスタット

2007.4.13 KEK メカワークショップ 46
クライオスタット

2007.4.13 KEK メカワークショップ 47
クライオスタット

2007.4.13 KEK メカワークショップ 48
クライオスタット

2007.4.13 KEK メカワークショップ 49
クライオスタット

2007.4.13 KEK メカワークショップ 50
クライオスタット

2007.4.13 KEK メカワークショップ 51
クライオスタット

2007.4.13 KEK メカワークショップ 52
トンネル、建造物、諸設備
• 敷地Footprint ~ 32km• トンネル総延長 72.5km• 大口径(D 9m) アクセスシャフトもしくはアクセス経路 13
• 掘り出し岩土砂総量 443km3
• 地表建てや 92棟、総床面積 52,700 m2

2007.4.13 KEK メカワークショップ 53
トンネル、建造物、諸設備

2007.4.13 KEK メカワークショップ 54
RDRにおけるコスト評価• Cost (支弁覚悟すべき所要資金)というよりは、必要設備の
Value (資産価値)の評価をおこなった。
– ITERのValue評価方式に類似。
– Value評価品目は以下の三種に大別• Site-dependent: サイト依存の施設整備関係 サイトグループ
Best effort• Conventional: 一般市場から調達可能な物品 最安妥当市場価
格
• High-Tech: 工業化開発が今後必要な項目 三領域独立評価+ cross-check

2007.4.13 KEK メカワークショップ 55
評価項目織り込む 織り込まない
500GeV加速器 + エネルギー増強に不
可欠な「種」となる準備項目
最終設計、機材製造態勢整備、生産管理
R&D、実機モデル試作試験
トンネル、地上地下建造物、地上下間連絡通路
敷地調達経費
実験施設ホール、実験施設アセンブリ領域、実験施設連絡通路
実験測定器
立ち上げ経費、運転経費、償却機材処理
研究施設で所要の人員(人-週単位)、
含:管理、事務要員各種税金、予備費、インフラ対応費

2007.4.13 KEK メカワークショップ 56
付帯条件もしくは留意事項
• Ground-Breakingから7年の建設期間
• 基本資材料金:– 電気 = $0.10 / kWh– 銅 = $8 /kg– 鉄 = $0.6/kg (SUS、珪素鋼は約3倍まで)– ニオブ = $70/kg
• 調達物品評価:製造者管理費、工賃含む
• Value単位:”ILC Unit”– 1 ILCU = $US 1 (2007) = 0.83 Euro = 117円

2007.4.13 KEK メカワークショップ 57
WBS (Work Breakup Sheet) 例

2007.4.13 KEK メカワークショップ 58
評価総額領域 Site-Specific Shared Total
アジア 1.61 B 4.86 B 6.47 B
アメリカ 1.89 B 4.87 B 6.76 B
欧州 1.85 B 4.86 B 6.71 B
平均 1.78 B 4.87 B 6.65 B
研究機関人員:13,000 人年 = 22 M 人・時間 (1年 = 1,700時間)
評価誤差につき諸説あり。30%程度か?

2007.4.13 KEK メカワークショップ 59
0
500
1,000
1,500
2,000
2,500
3,000
3,500
4,000
4,500
MainLinac
DampingRings
RTML e+Source
BDS Common Exp Hall e- Source
VALU
E-$M
加速器Area System 毎では
Conventional FacilitiesComponents
MainCost
Driver
Val
ue (M
-ILC
U)

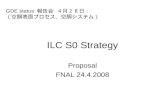
2007.4.13 KEK メカワークショップ 60
Costs - MAC - Daresbury January 10-12, 2007
Global Design Effort 25
0.00
1.00
2.00
3.00
4.00
5.00
6.00
Instal
lation
(all l
abor)
Manage
ment (1
/2 SSCL)
Cavities
& C
ryomodu
les
Controls
& C
ompu
ting
RF Pow
er Sys
tems
Alignm
ent
Cryogen
ics
Instru
mentatio
nDR sp
ecific
CF&S (con
struc
tion p
hase
)
e+ Sou
rce sp
ecific
Vacuum
RTML spe
cific
Dumps & C
ollim
ators
e- Sou
rce sp
ecific
in-h
ouse
labo
r - K
per
son-
year
s
plus Institutional Manpower= 13 K person-yrs = 22 M person-hrs
*
Installation (all labor)Management (1/2 SSCL)Cavities & CryomodulesControls & ComputingRF Power SystemsAlignmentCryogenicsInstrumentationDR specificCF&S (construction phase)e+ Source specificVacuumRTML specificDumps & Collimators e- Source specific
“management” includes overhead sections

2007.4.13 KEK メカワークショップ 61
こんご
• RDR最終版の完成:2007年7月を目標– 基本的メッセージを伝え得ているか、の確認
• ILCで必要な技術はFeasibleであり、
• 設計作業は、「もっともらしい建設コストを評価出来る段階」に到達している。
• 記述正誤、整合性
• 「リスク」分析
– 上部機関レビュー• 4月後半、5月後半
• RDR以降の活動指針策定– Engineering Design Phase

2007.4.13 KEK メカワークショップ 62
「Engineering Design」 段階
• 現在、GDE部内タスクフォースほかにて検討
協議中。以下は考察例:
• ED段階の目標(例)
– ILCの(i)基幹技術、(ii)詳細設計、(iii)建設計画を
深化。結果、次の二点を確保;• ILC計画について、政府間の(a)サイト、(b)予算、(c)組織、(d)執行関連の協議を開始、同時に
• 政府協議収束のときまでに建設開始OKに必ずなる、
と確信できる、技術的自信を確立。

2007.4.13 KEK メカワークショップ 63
たとえば
Engin
eerin
g De
sign
Phas
e
Fina
l Des
ignPh
ase
Cons
tructi
onPh
ase

2007.4.13 KEK メカワークショップ 64
前ページの意味するところ
• 具体的な時間スケールの明示は難しい。– 諸説によれば、ED段階の完了は~2010年とも2012年とも。– なんらかの指針は出されるはずだが、検討協議中(入力歓迎)
• 動作確実なシステム設計• さらに強力なコスト低減努力!
• 「設計」よりも「開発」「検証」への一時的傾斜• 明快なゴール設定への圧力、文書化• GDE国際舞台上での、作業進捗状況の定量的評価の励行、
文書化• 組織改編

2007.4.13 KEK メカワークショップ 65
前二ページの示唆するところ
• 先は長い。が、「先は長いので、ゆっくりと」、ではだめ。
• 「確実に動く加速器像を、確実に描け」の圧力の高まりを要覚悟。
• GDEでの「設計最適化」「開発方針策定」などに寄与するア
イデア、自己の信ずるところの主張は、これまで通り(以上に)せよ。ただし、
• 「何故、これを開発するのか」の明確化。実証的、科学的な、説得力ある議論、実行、結果説明がますます重要。
• 釈迦に説法の段、ひらに、請御容赦。