Fizyka I - if.pw.edu.plwilczyns/wyklad1_biog.pdf · Siera ński, K. Jezierski, B. Kołodka, Fizyka...
56
Michal Wilczyński e-mail: [email protected] Informacje związane z wykladem będą umieszczane na stronie: http://www.if.pw.edu.pl/~wilczyns Fizyka I I semestr studiów stacjonarnych I stopnia na kierunku Biogospodarka Konsultacje piątki 14:30-15:30 sala 103 Gmach Fizyki środy 15-16 sala 103 Gmach Fizyki W razie zmian terminu konsultacji aktualne terminy konsultacji będą umieszczone na stronie internetowej
Transcript of Fizyka I - if.pw.edu.plwilczyns/wyklad1_biog.pdf · Siera ński, K. Jezierski, B. Kołodka, Fizyka...

Michał Wilczyński
e-mail: [email protected]
Informacje związane z wykładem będą umieszczane na stronie:
http://www.if.pw.edu.pl/~wilczyns
Fizyka I I semestr studiów stacjonarnych I stopnia na kierunku
Biogospodarka
Konsultacje
piątki 14:30-15:30 sala 103 Gmach Fizyki
środy 15-16 sala 103 Gmach Fizyki
W razie zmian terminu konsultacji aktualne terminy konsultacji
będą umieszczone na stronie internetowej

Program ramowy0) Wielkości wektorowe i skalarne w fizyce, układ jednostek SI. Podstawowe działania na
wektorach.
1) Kinematyka: wprowadzenie wielkości służących do opisu ruchu: wektor wodzący, droga,
prędkość, szybkość średnia i chwilowa, przyspieszenie, związki ogólne między tymi
wielkościami. Ruch jednostajny i jednostajnie zmienny po linii prostej. Składanie
ruchów. Wielkości służące do opisu ruchu po okręgu: prędkość i przyspieszenie kątowe.
Ruch jednostajny i jednostajnie zmienny po okręgu.
2) Dynamika: Układy inercjalne. Zasady dynamiki Newtona. Przykłady sił (np. siła reakcji
podłoża, siła tarcia, siła naciągu nici, siła sprężystości, siła dośrodkowa).
3) Pęd pojedynczego ciała i układu ciał. Zasada zachowania pędu. Energia kinetyczna.
Zderzenia ciał sprężyste i niesprężyste.
4) Praca i jej związek z energią, siły zachowawcze i energia potencjalna. Zagadnienie
zachowania energii.
5) Moment pędu i moment siły. Zasada zachowania momentu pędu. Dynamika ruchu
obrotowego bryły sztywnej. Moment bezwładności. Energia kinetyczna bryły w
ruchu obrotowym. Równanie ruchu obrotowego bryły.
6) Ruch harmoniczny prosty i wielkości go opisujące. Energia ruchu harmonicznego.
Wahadła. Fale: Klasyfikacja fal, podstawowe wielkości charakteryzujące ruch falowy.
Zasada superpozycji. Fale akustyczne.
7) Elementy termodynamiki. Parametry charakteryzujące stan równowagowy układu
gazowego. Ciepło, praca i energia wewnętrzna, I zasada termodynamiki. Równanie
stanu gazu doskonałego. Podstawowe przemiany termodynamiczne.

8) Elektrostatyka: Ładunek elektryczny. Prawo Coulomba. Natężenie pola
elektrostatycznego. Prawo Gaussa. Potencjał pola elektrostatycznego .
Kondensatory –pojemność i energia pola elektrycznego kondensatora, szeregowe i
równoległe łączenie kondensatorów.
9) Prąd elektryczny: Natężenie i gęstość natężenia prądu elektrycznego. Prawo Ohma,
opór, przewodność właściwa i opór właściwy, Obwody prądu stałego- przemiany
energii, Prawa Kirchhoffa. Szeregowe i równolegle łączenie oporników.
10) Pole magnetyczne: Indukcja pola magnetycznego, Siła Lorentza-
działanie pola na poruszające się ładunki i przewodnik z prądem.
Wyznaczanie indukcji pola wytworzonego przez przewodniki z prądem przy
pomocy prawa Ampera. Oddziaływanie przewodników z prądem. Podział
materiałów ze względu na ich własności magnetyczne.
11) Indukcja elektromagnetyczna: Prawo Faradaya, reguła Lenza, cewka indukcyjna i
energia pola magnetycznego w cewce. Samoindukcja i indukcja wzajemna.
Drgania w obwodach elektrycznych w skład których wchodzą kondensator i
cewka.
12) Wirowe pola elektryczne i magnetyczne. Równania Maxwella. Fale
elektromagnetyczne i mechanizm ich rozchodzenia się. Światło jako fala
elektromagnetyczna; prędkość światła, polaryzacja światła. Interferencja i
dyfrakcja fal świetlnych, spójność światła . Elementy optyki geometrycznej:
zjawisko odbicia i załamania światła, całkowite wewnętrzne odbicie.

Literatura1. D. Halliday, R. Resnick, J. Walker, Podstawy fizyki, tom 1-4, PWN
Warszawa 2003.
2. R. Resnick, D. Halliday, Fizyka, tom 1-2, PWN, Warszawa 1983.
3. J. Orear – Fizyka, tom 1 i 2, WNT, Warszawa, 1990.
4. C. Bobrowski, Fizyka –krótki kurs, WNT, Warszawa 2003.
5. W. Bogusz, J. Garbarczyk, F. Krok, Podstawy fizyki, OWPW Warszawa 2010.
6. K. Sierański, K. Jezierski, B. Kołodka, Fizyka Wzory i prawa objaśnieniami,
część I i II, skrypt do zajęć z fizyki dla studentów I roku, Oficyna Wydawnicza
Scripta Wrocław 2005.7. K. Sierański, K. Jezierski, B. Kołodka, Fizyka Wzory i prawa objaśnieniami
(kurs powtórkowy) , Oficyna Wydawnicza Scripta Wrocław 2002.
8. K. Jezierski, K. Sierański, I. Szlufarska, Repetytorium zadania z
rozwiązaniami, kurs powtórkowy dla studentów 1 roku i uczniów szkół
średnich, Oficyna Wydawnicza Scripta, Wrocław 2003.
9. K. Jezierski, B. Kołodka, K. Sierański, Zadania z rozwiązaniami, Skrypt do
ćwiczeń z fizyki dla studentów 1 roku wyższych uczelni cześć 1, Oficyna
Wydawnicza Scripta, Wrocław 2000.
10. K. Jezierski, B. Kołodka, K. Sierański, Zadania z rozwiązaniami, Skrypt do
ćwiczeń z fizyki dla studentów 1 roku wyższych uczelni cześć 2, Oficyna
Wydawnicza Scripta, Wrocław 1999.

Zasady zaliczenia przedmiotu fizyka I1) W trakcie semestru odbędą się dwa kolokwia złożone z części teoretycznej i zadaniowej.
2) Część teoretyczna każdego z kolokwiów będzie obejmować pytania dotyczące zagadnieńbędących przedmiotem wykładu i zajęć wyrównawczych. Za część teoretyczną każdego z
kolokwiów będzie można otrzymać do 15 punktów .
3) Część zadaniowa obejmować będzie zadania rachunkowe. Zadania o podobnej tematyce
będą rozważane na ćwiczeniach i zajęciach wyrównawczych. Za część zadaniowąkażdego z kolokwiów będzie można otrzymać do 15 punktów.
4) Zaliczenie ćwiczeń i wykładu odbywać się będzie na oddzielne oceny określone w oparciu
o uzyskaną liczbę punktów z kolokwiów oraz punktów za aktywność na ćwiczeniach i
zajęciach wyrównawczych. Za aktywność można będzie otrzymać do 10 punktów
wliczanych do oceny ćwiczeń i 4 punktów wliczanych do oceny wykładu
5) Do zaliczenia ćwiczeń wymagane jest uzyskanie co najmniej 15 punktów branych pod
uwagę przy zaliczeniu ćwiczeń6) Do zaliczenia wykładu wymagane jest uzyskanie co najmniej 15 punktów branych pod
uwagę przy zaliczeniu wykładu
7) Do zaliczenia przedmiotu wymagane jest zaliczenie zarówno wykładu jak i ćwiczeń na
ocenę przynajmniej dostateczną. Ocena końcowa z przedmiotu jest zależna od ilości
wszystkich uzyskanych punktów .
8) W przypadku braku zaliczenia wykładu będzie możliwość napisania dodatkowego
kolokwium obejmującego pytania dotyczące materiału całego wykładu we wspólnym dla
całej grupy terminie, który może być wyznaczony poza terminem regularnych zajęć. Analogiczna możliwość dotyczyć będzie ćwiczeń, przy czym kolokwium będzie
obejmować zadania rachunkowe.

• Mechanika zajmuje się badaniem ruchu ciał materialnych a także
określeniem warunków przy których ciała pozostają w spoczynku .
• Mechanika klasyczna: Teoria, która przewiduje jakościowo i ilościowo
rezultaty eksperymentów na obiektach, które nie są:– Zbyt małe: atomy i cząstki subatomowe – Mechanika Kwantowa
– Zbyt szybkie: obiekty bliskie prędkości światła – Szczególna Teoria Względności
– Zbyt gęste: czarne dziury, wczesne stadium wszechświata – Ogólna Teoria
Względności
• Mechanika klasyczna zajmuje się obiektami znanymi w życiu codziennym!
Mechanika

Kinematyka
Kinematyka-dział mechaniki zajmujący sięopisem ruchu ciała bez analizowania przyczyn
go powodujących

Ruch na płaszczyźnie i przestrzeni-Wektor wodzący, przemieszczenie, droga
wektor określający przemieszczenie ciała w trakcie jego ruchu od punktu
początkowego (w którym znajdował się w chwili czasu t1 ) do końcowego (w
którym znajdował się w chwili czasu t2=t1+∆t ) równy zmianie (przyrostowi)
wektora wodzącego.
określa położenie ciała (traktowanego jako punkt materialny) względem
początku układu współrzędnych (w pewnej ustalonej chwili czasu t). Długośćtego wektora jak i jego składowe wyrażamy w układzie SI w metrach
( ) ( ) ( )11212 , trtttrttrrrrrr
−∆+==∆=∆
)(trrrr
=1)
2)
3) S- droga-wielkość skalarna
określająca długość toru po którym
poruszało się ciało w takcie ruchu
x
y
( )1trr
rr
∆
A
B( )2trr
O
S
Droga S =długość toru
tor ruchu
Długość wektora nie jest w
ogólności równa drodze pokonanej
przez ciało. Jednak długość tego
wektora jest równa drodze wtedy, gdy
ciało porusza się po linii prostej w tym
samym kierunku (nie zawracając) lub teżczas trwania ruchu jest nieskończenie
krótki
rr
∆
-wektor wodzący (promień wodzący) -
(można go wówczas przybliżyć przez odcinek prostej).

Przedstawiony tutaj sposób opisu ruchu punktu materialnego można tez
wykorzystać do opisu ruchu (postępowego) translacyjnego bryły sztywnej,
złożonej z wielu punktów poruszających się z jednakową prędkością ( w tym
samym kierunku z tą samą wartością prędkości) . Wektor wodzący
charakteryzuje wówczas położenie wybranego punktu bryły (zwykle środka
masy). Przy opisie ruchu obrotowego bryły będziemy stosować wielkości
wprowadzone przy opisie ruchu punktu materialnego po okręgu
rr

Prędkość (chwilowa) jest równa stosunkowi -wektora przemieszczenia
ciała (przyrostu jego wektora wodzącego) do ∆t -czasu w którym to
przemieszczenie nastąpiło, gdy długość tego czasu dąży do zera .
Prędkość
Gdy to kierunek wektora
jest styczny do toru ruchu, jego długośćrówna zaś przyrostowi drogi przebytej
przez ciało
Kierunek wektora jest taki jak
i styczny do toru ruchu .
rr
∆
0→∆t
Vr
rr
∆
0→∆t
Sr ∆=∆r
rr
∆ ( )tVr
tor ruchu
O( początek układu
współrzędnych)
( )trr
( )ttr ∆+r
0→∆t
rr
∆
( )t
trttr
t
rtV
tt ∆
−∆+=
∆
∆=
→∆→∆
)(limlim)(
00
rrrr
Prędkość jest w ogólności funkcją czasu.
W układzie SI mierzymy ją w m/s

Szybkość (wartość prędkości) chwilowa i średnia
Wartości prędkości, szybkość (chwilowa) jest równa długości
wektora prędkości (chwilowej). Opisuje jak szybko ciało sięprzemieszcza nie precyzując kierunku w jakim się porusza.
( )t
tSttS
t
StV
tt ∆
−∆+=
∆
∆=
→∆→∆
)()(limlim
00
r
Wyraża się ona przez stosunek przebytej drogi ∆S w czasie
do tego czasu , gdy długość tego czasu dąży do zera 0→∆t
t∆
Średnią szybkość ciała w przedziale czasu (t1,t2) dla dowolnego
skończonego przedziału tego czasu można określić jako
gdzie - droga pokonana od chwili czasu
t=t1 do chwili czasu t=t2.
Jest ona równa szybkości (chwilowej) wtedy gdy szybkość nie zależy
od czasu.
t
SVsr
∆
∆=
12 ttt −=∆
)()( 112 tStttSS −∆+==∆

W dowolnym ruchu droga
pokonana przez ciało w czasie
od t=t1 do t=t2 jest równa polu
pod wykresem zależności
wartości prędkości (szybkości)
od czasu zakreskowanemu na
czerwono. Pole to jest równe
polu prostokąta ograniczonego
od góry przez prostą V=Vsr
zakreskowanego na niebiesko
Droga jako pole pod wykresem szybkości od czasu
tt2t1
S
)(tVr
)(tVr
srV

Ruch ze stałą szybkością
tVtSr
=)(
Związek drogi pokonanej od chwili t=0 z wartością prędkości
i czasem trwania ruchu t w przypadku gdy określa wzór
ttk
)(tVr
Vr
kk tVttSr
== )(
Vr
S(t)
t
Wykresem zależności S(t) jest
prosta o współczynniku
kierunkowym równym
tVSr
=
Vr
Droga S(t=tk) pokonana od chwili t=0 do chwili
t=tk jest równa polu odpowiedniego prostokąta
pod wykresem zależności szybkości od czasu
constV =r

Ruch prostoliniowy punktu materialnego

Określenie położenia ciała w ruchu prostoliniowym
xO
Do scharakteryzowania położenia ciała wystarczające jest określenie
jego położenia względem ustalonego punktu O na osi Ox. Wielkość x,
której moduł jest odległością ciała od tego punktu, może przyjmowaćwartości zarówno dodatnie jak i ujemne i stanowi jedyną niezerowąskładową jego wektora wodzącego
Wprowadzamy oś Ox jednowymiarowego układu współrzędnych
wzdłuż prostej po której porusza się ciało.
x wzrasta w trakcie ruchux maleje w trakcie ruchu
ixrrr
=
Jeżeli w trakcie ruchu ciało nie zawraca to droga przebyta przez ciało
od chwili t=tp do t=tk wyraża się wzorem ( ) ( )pk ttxttxS =−==
ir
-wersor będący wektorem o długości równej 1 oraz kierunku i
zwrocie osi Oxir
rr

Prędkość w ruchu prostoliniowym
xO ir
Vr
Vr
V>0V<0
VV =r
iVVrr
=
1=ir
Wielkość jest równa szybkości (wartości) prędkości.
t
txttxV
t ∆
−∆+=
→∆
)()(lim
0
Prędkość jest równa stosunkowi zmiany współrzędnej x przyjętej do
określenia położenia ciała do czasu w którym ta zmiana
nastąpiła , przy założeniu iż czas ten dąży do zera
t∆
0→∆t

Przyspieszenie w ruchu prostoliniowym
xO ir
Vr
Vr 1=i
r
V>0
a>0
V<0
a<0
iaarr
=
W trakcie ruchu wielkości a i V mogą zmieniać znak.
Mogą one przyjmować wartości dodatnie jak i ujemne. Gdy są one takiego
samego znaku ( wektory i maja ten sam zwrot) to szybkość (wartośćprędkości) ciała rośnie, gdy przeciwnego ( wektory i maja przeciwny
zwrot) to szybkość ciała maleje.
aa =r
ar
Vr
ara
r
V>0
a<0
Vr
ar
ar
Vr
t
tVttVa
t ∆
−∆+=
→∆
)()(lim
0
Przyspieszenie jest równa stosunkowi zmiany prędkości do czasu
w którym ta zmiana nastąpiła , przy założeniu iż czas ten dąży do zera .
t∆
0→∆t Przyspieszenie w układzie SI mierzymy w m/s2.

Vtxtx += 0)(VconsttV ==)(
t
txttxtV
t ∆
−∆+=
→∆
)()(lim)(
0
t
txttxtV
t ∆
=−∆===
→∆
)0()(lim)0(
0
ttVtxttx ∆=+==∆= )0()0()(
to dowolnyt∆
W przypadku ruchu ze stała prędkością wzdłuż osi Ox zależność
położenia ciała od czasu określa wzór
Vtxtx += 0)( gdzie )0(0 == txx constV =
Wzór powyższy obowiązuje niezależnie od znaku V
Dowód:
tVtSr
=)(Zależność drogi od czasu
Ruch prostoliniowy jednostajny constV =r
0=ar

Ruch prostoliniowy jednostajnie zmienny
atVtV += 0)(
Gdy a i V są tego
samego znaku to
szybkość ciała rośnie
V(t)
V0
t
a>0
a<0
a(t)
a
t
a>0
a<0
a
Gdy a i V mająprzeciwne znaki to
szybkość ciała maleje
Załóżmy iż V>0 ( ciało porusza się w kierunku dodatnim osi Ox,
wektor prędkości ma ten sam zwrot co wersor ). Wówczas szybkość
Gdy a=const i a>0 to ruch jest jednostajnie przyspieszony, zaś gdy a=const i a<0 to ruch
jest jednostajnie opóźniony. W ruchu w którym szybkość maleje wielkośćokreślamy mianem opóźnienia.
ir
constta =)(
)0(0 == tVV
t
tVttVta
t ∆
−∆+=
→∆
)()(lim)(
0 t
tVttVta
t ∆
=−∆===
→∆
)0()(lim)0(
0
ttatVttV ∆=+==∆= )0()0()(
t∆ dowolny
( nie zależy od czasu)
VV =r
aaaop
r=−=
constta =)(

Droga w ruchu prostoliniowym
jednostajnie zmiennym
Załóżmy iż V>0 (ciało porusza się w kierunku dodatnim osi Ox,
wektor prędkości ma ten sam zwrot co wersor )ir
2
2
kko
tatV +
S(t)
tk tO
V(t)
V0
t
V(t)=V0+at
tk
Vk=V0+atk
2
2)(
2
00
kko
kk
k
attV
tatVV
ttS
+=
=⋅++
==
0
2)0()()(
2
0k
kkk
attVtxttxttS +==−===
Droga pokonana przez ciało od chwili t=0 do t=tk jest równa
zakreskowanemu polu trapezu .
VV =r
Rysunki dla a>o
Zakładając iż ruch analizujemy od
chwili t=0 zależność drogi od czasu
wyraża wzór
2)(
2
0
attVtS +=
VV =r

2)(
2
00
attVxtx ++=
)0(0 == tVV
)0(0 == txx
Wzór obowiązuje zawsze w ruchu w którym niezależnie od
znaku wielkości x0 , V0 i a . W szczególności w takim ruchu prędkośćmoże zmienić znak (co odpowiada zmianie zwrotu
wektora prędkości ).
Gdy V<0 w pewnym zakresie czasu to
Uwaga
Gdy w trakcie całego ruchu V>0, a a=const<0 (czyli mamy do czynienia z ruchem
jednostajnie opóźnionym ) to niekiedy wprowadza się wielkość zwaną opóźnieniem
aop=-a i zapisać wzory na zależność szybkości i drogi pokonanej od czasu w postaci
consta =
)0()()( =−≠ txtxtS
2)0()()(
2
0
attVtxtxtS +==−=
atVtV += 0)(
iVVr
=
W przypadku ruchu ze stałym przyspieszeniem wzdłuż osi Ox
zależność położenia ciała od czasu określa wzór
gdzie
taVtV op−= 0)(2
)(
2
0
tatVtS
op−=

Związki ogólne między wielkościami służącymi do opisu
dowolnego ruchu ciała -sformułowane przy wykorzystaniu
pochodnych

S(t2)
S(t1)
t1 t2 t
∆t
Jest równa
współczynnikowi
kierunkowemu a
(nachyleniu)
prostej
przechodzącej
przez punkty 1 i 2
S(t)
1
2
Szybkość średnia w trakcie ruchu od chwili do chwili 1t ttt ∆+= 12
t
tSttS
tt
tStS
t
SttttVsr
∆
−∆+=
−
−=
∆
∆=∆+=
)()()()(),( 11
12
12121
Można ją określić jako stosunek drogi przebytej przez ciało ∆S w
czasie ∆t do czasu ∆t
∆S
S=at+b
S(t)
Szybkość średnia zależy zarówno od czasu rozpoczęcia analizowanego odcinka
ruchu t1, jak i czasu jego trwania ∆t .

S(t2)
S(t1)
t1 t2t
Jej współczynnik kierunkowy określa (chwilową) szybkość ciała w chwili t=t1 . Jest
ona równa wartości pierwszej pochodnej funkcji S(t) po czasie określonej dla t=t1.
S(t)
0→∆tto prosta przechodząca przez punkty 1 i 2 staje się stycznądo krzywej obrazującej zależność drogi pokonanej przez
ciało od czasu S(t) w punkcie o t=t1
)()()(
limlim)( 111
001 tt
dt
dS
t
tSttS
t
SttV
tt==
∆
−∆+=
∆
∆==
→∆→∆
r
12 tt →Gdy
1
2
Szybkość (chwilowa)
Szybkość i prędkość chwilowa w ogólności może być funkcją czasu t, ale nie jest
funkcją . t∆
Pierwsza pochodna S po t

Definicja pierwszej pochodnej funkcji y=f(t) zmiennej t
( ) ( )t
tfttf
dt
df
t ∆
−∆+=
→∆ 0lim
dt
dfott =
( )tf ott =
Pochodna jest również funkcją zmiennej t. Jej wartość dla
jest równa współczynnikowi kierunkowemu a stycznej
dla
.
do wykresu funkcji
t
y=at+b
t0
f(t)
y
t∆
y∆ t
ya
∆
∆=
( ) attdt
df== 0

Wartość pochodnej funkcji malejącej jest ujemna bo dla
dodatniego przyrostu argumentu funkcji ∆t>0, przyrost
wartości funkcji ∆y<0 jest ujemny
t
y=at+b
t0
f(t)y
t∆
0<∆y
0)( 0 <∆
∆===
t
yatt
dt
df

Pochodne wybranych funkcji:
a) ( ) pttf =
1−= ppt
dt
df p-stała,
(argumenty funkcji )(tf muszą należeć do jej dziedziny)
b) ( ) )sin(ttf = )cos(tdt
df=
( ) )sin(bttf = )cos(btbdt
df= b-stała
c) ( ) )cos(ttf = )sin(tdt
df−=
( ) )cos(bttf = )sin(btbdt
df−= b-stała
Wybrane własności pochodnej:
( )thhtggtff === ),(),( - funkcje zmiennej t; c-stała
1) dt
dh
dt
dg
dt
hgd+=
+ )( 2) dt
dfc
dt
cfd=
)(
3) dt
dhgh
dt
dg
dt
ghd+=
)( 4) 2
h
dt
dhgh
dt
dg
dt
h
gd
−
=

5) Jeśli ( )( )tuftf =)( to mamy dt
du
du
df
dt
df=
Przykład. )sin(
)cos(btb
dt
btd−=
(ponieważ oznaczając ( ) uuf cos= , bttu =)(
mamy u
du
dfsin−=
, b
dt
du=
)
10 =t
1)( −= pp
ptdt
td
t
f(t)=by
b
0)( btbtf == 0=dt
df
Wartość pochodnej funkcji stałej jest równa zeru
Informacje dodatkowe ( dla zainteresowanych))

Prędkość (chwilowa) jest równa stosunkowi -wektora przemieszczenia
ciała (przyrostu jego wektora wodzącego) do ∆t -czasu w którym to
przemieszczenie nastąpiło, gdy długość tego czasu dąży do zera .
Może być ona wyrażona jako pierwsza pochodna wektora wodzącego
po czasie. Prędkość jest w ogólności funkcją czasu.
Prędkość
Gdy to kierunek wektora
jest styczny do toru ruchu, jego długośćrówna zaś przyrostowi drogi przebytej
przez ciało
Kierunek wektora jest taki jak
i styczny do toru ruchu .
rr
∆0→∆t
Vr
rr
∆
0→∆t
Sr ∆=∆r
rr
rr
∆
( )tVr
tor ruchu
O( początek układu
współrzędnych)
( )trr
( )ttr ∆+r
0→∆t
rr
∆
Pierwsza pochodna po t
rr
( )( ) ( )
dt
rd
t
trttr
t
rtV
tt
rrrrr
=∆
−∆+=
∆
∆=
→∆→∆ 00limlim

W układzie kartezjańskim
wektor wodzący punktu
materialnego poruszającego sięw przestrzeni ma w ogólności
trzy niezerowe składowe x, y, z
które zmieniają się w czasie
( )dt
kdzk
dt
dz
dt
jdyj
dt
dy
dt
idxi
dt
dxkzjyix
dt
d
dt
rdV
rr
rr
rrrrr
rr
+++++=++==
kzjyixrrrrr
++=
Przy uwzględnieniu tego iż wersory nie zależą od czasu kjirrr
,,
0===dt
kd
dt
jd
dt
idrrr
otrzymujemy
( ) kVjViVkdt
dzj
dt
dyi
dt
dxkzjyix
dt
d
dt
rdV zyx
rrrrrrrrrr
r++=++=++==
Prędkość jako pochodna wektora wodzącego po czasie rr
x
y
rr
A
O
x
y
ir
jr
1=== kjirrr
)(
)(
)(
tzz
tyy
txx
=
=
=
kr
z
z
)(),(),( tzztyytxx ===

( )( ) ( )
dt
rd
t
trttr
t
rtV
tt
rrrrr
=∆
−∆+=
∆
∆=
→∆→∆ 00limlim
( )( ) ( )
dt
dx
t
txttx
t
xtV
ttx =
∆
−∆+=
∆
∆=
→∆→∆ 00limlim
Składowe Vx,Vy,Vz wektora prędkości
można określić jako pierwsze pochodne po czasie
odpowiednich składowych x=x(t),y=y(t),z=z(t)
wektora wodzącego będących funkcjami czasu
kVjViVV zyx
rrrr++=
( )( ) ( )
dt
dy
t
tytty
t
ytV
tty =
∆
−∆+=
∆
∆=
→∆→∆ 00limlim
Pierwsza
pochodna
po trr
Składowe prędkości w układzie kartezjańskim
( )( ) ( )
dt
dz
t
tzttz
t
ztV
ttz =
∆
−∆+=
∆
∆=
→∆→∆ 00limlim
Pierwsza
pochodna
x po t
kzjyixrrrrr
++=
222
zyx VVVV ++=r

Wiadomo iż xx VV αcosr
= , yy VV αcosr
= , zz VV αcosr
=
gdzie: zyx ααα ,, oznaczają kąty jakie wektor Vr
tworzy odpowiednio z wersorami kjirrr
,, , zaś
222
zyx VVVV ++=r
x
y
Vr
O iVx
r
jVz
r
kjirrr
==
kVz
r
z
x
y
Vr
ir
jr
kr
z
xαyα
zα

y’
x=x’
ur
−
O’
Vr'V
r
A
y
O
ur
Prędkość ciała zależy od przyjętego do
opisu ruchu ciała układu odniesienia.Jeżeli układ odniesienia O’ porusza sięwzględem układu odniesienia O z
prędkością a ciało A porusza sięwzględem układu O z prędkością , to
prędkość ciała A określona w układzie O’
można określić ze wzoru
ur
Vr
uVVrrr
−='
Względność prędkości

Przyspieszenie jest równe stosunkowi przyrostu wektora prędkości do czasu w
którym ten przyrost nastąpił, gdy długość tego czasu dąży do zera .
Można go określić jako pierwszą pochodną wektora prędkości po czasie
( )( ) ( )
dt
Vd
t
tVttV
t
Vta
tt
rrrrr
=∆
−∆+=
∆
∆=
→∆→∆ 00limlim
Przyspieszenie
Istnienie niezerowego przyspieszenia może
być związane ze zmianą wartości prędkości
(szybkości) ciała oraz (lub) zmianą kierunku
wektora prędkości (kierunku ruchu ciała)
Można dokonać rozkładu przyspieszenia ar
na przyspieszenie styczne do
toru ciała sar
oraz przyspieszenie normalne prostopadłe do toru nar
.
W ruchu w którym szybkość ciała constV =r
mamy 0rr
=s
a .
W ruchu po linii prostej mamy 0=nar
.
sar
nav
ar
ns aaarrr
+=
Przyspieszenie w układzie SI mierzymy w m/s2.

Przyspieszenie dt
Vda
rr
= będące pochodną wektora prędkości po
czasie jest wektorem. W układzie kartezjańskim
trójwymiarowym można go rozłożyć na składowe
kajaiaa zyx
rrrr++=
Składowe wektora przyspieszenia można przedstawić jako pochodne składowych wektora prędkości
kVjViVV zyx
rrrr++= po czasie a więc
dt
dV
t
Va xx
tx =
∆
∆=
→∆ 0lim ,
dt
dV
t
Va
yy
ty =
∆
∆=
→∆ 0lim ,
dt
dV
t
Va zz
tz
=∆
∆=
→∆ 0lim
Wiadomo iż xx aa αcosr
= , yy aa αcosr
= , zz aa αcosr
=
gdzie: zyx ααα ,, oznaczają kąty jakie wektor ar
tworzy odpowiednio z wersorami kjirrr
,, , zaś 222
zyx aaaa ++=r
Składowe wektora przyspieszenia w układzie kartezjańskim

( )dt
Vdta
rr
=
Przyspieszenie jest pierwszą pochodną prędkości po czasie
Prędkość jest pierwszą pochodną wektora wodzącego
po czasie
( )dt
rdtV
rr
=
Przyspieszenie jest drugą pochodną wektora wodzącego
po czasie
( )2
2
dt
rdta
rr
=
Podstawowe relacje kinematyki

Prędkość i przyspieszenie jako odpowiednie
pochodne w ruchu prostoliniowym
xO
Wprowadzamy oś Ox jednowymiarowego układu współrzędnych
wzdłuż prostej po której porusza się ciało.
ixrrr
=
ir
Wektor wodzący
Wektor prędkości dt
dxV =iVV
rr=
iaarr
=2
2
dt
xd
dt
dVa ==
Wektor przyspieszenia

Wykorzystując operacje różniczkowania (liczenia pochodnych)
można sprawdzić w szczególności iż w ruchach prostoliniowych
jednostajnym i jednostajnie zmiennym zachodzą ogólne relacje
wiążące położenie, prędkość i przyspieszenie ciała.
Np. w ruchu jednostajnym wzdłuż osi Ox mamy
W ruchu jednostajnie zmiennym wzdłuż osi Ox mamy
( ) Vtxtx += 0
( ) ( )VVt
dt
tdV
dt
tdV
dt
dx
dt
Vtxd
dt
dxVx =+=+=+=
+== 0
1
00 00)(
( ) constVtVx ==
constatax ==)( atVtVx += 0)( 2
002
)( ta
tVxtx ++=
( )atVt
aV
dt
tda
dt
tdV
dt
dx
dt
ta
tVxd
dt
dxVx +=+=++=
++
== 00
2
00
2
00
22
)(
2
2
adt
dta
dt
dV
dt
atVd
dt
dVa x
x =+=+
== 00 )(
1)( −= pp
ptdt
td
dt
fdc
dt
cfd )()(=
dt
gd
dt
fd
dt
gfd )()()(+=
+
f,g-funkcje
c,p-stałe
)0(
)0(
0
0
==
==
txx
tVV

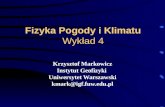
V[m/s]
a[m/s2]
x[m] sm /40sm /7
2/30 sm2/30 sm−
sm /5
t(s)
t(s)
t(s)
dt
dxV =
dt
dVa =
R. Świrkowicz
Ruch prostoliniowy- przykład
ixrrr
=
iVVrr
=
iaarr
=

W dowolnym ruchu droga
pokonana przez ciało w
czasie od t=t1 do t=t2 jest
równa polu pod wykresem
zależności wartości
prędkości (szybkości) od
czasu.
Jest ona równa calce
oznaczonej ∫=2
1
)(
t
t
dttVS
Droga jako całka oznaczona
tt2t1
S
)(tVr
)(tVr

Całka oznaczona:
( ) ( )∫ =−===
b
a
b
aatHbtHtHdtth )()(
,
przy czym dt
tdHth
)()( =
Liczby a i b oznaczają dolną i górną granicę całkowania.
W celu obliczenia całki oznaczonej trzeba znaleźć dowolną
funkcję H(t) zwana całką nieoznaczoną , której pochodna jest
równa funkcji podcałkowej czyli zachodzi dt
tdHth
)()( =
a następnie określić wartość tej funkcji dla górnej granicy
całkowania H(t=b) i odjąć wartość tej funkcji dla dolnej
granicy całkowania H(t=a).

Gdy składowe wektora przyspieszenia
nie zależą od czasu to każdy z
ruchów składowych jest ruchem jednostajnie zmiennym.
Zależność od czasu składowych wektorów wodzącego
i prędkości można określić ze wzorów
kzjyixrrrrr
++=
kVjViVV zyx
rrrr++=
kajaiaa zyx
rrrr++=
constax = constay = constaz =
2
002
1)( tatVxtx xx ++= taVtV xxx += 0)(
2
002
1)( tatVyty yy ++=
2
002
1)( tatVztz zz ++=
taVtV yyy += 0)(
taVtV zzz += 0)(
)0(0 == tVV xx
)0(0 == tVV yy
)0(0 == tVV zz
W przypadku ruchu płaskiego zachodzącego w płaszczyźnie z=0 i
obraniu osi układu Ox i Oy w płaszczyźnie ruchu ruch można opisaćjako złożenie dwóch ruchów zachodzących wzdłuż osi Ox i Oy.
Gdy ax=0 to ruch wzdłuż osi Ox jest ruchem jednostajnym.
Składanie ruchówDowolny ruch w przestrzeni trójwymiarowej można traktować jako
złożenie ruchów w trzech prostopadłych kierunkach określonych
przez osie układu współrzędnych.
)0(0 == txx
)0(0 == tyy
)0(0 == tzz

Ruch w polu siły ciężkości
Ciało poruszające się w pobliżu powierzchni Ziemi
przy zaniedbaniu wpływu na ruch ciała innych sił
niż siła ciężkości porusza się z przyspieszeniem
constga ==rr
)0( =tVr
Gdy prędkość ciała w chwili początkowej ruchu
jest skierowana w kierunku równoległym do pionu
to ciało porusza się ruchem jednostajnie zmiennym po
linii prostej (rzut pionowy)
)0(0 == tVVrr
równym przyspieszeniu ziemskiemu
skierowanym w kierunku środka Ziemi.
Gdy prędkość ciała w chwili początkowej ruchu
tworzy pewien kąt z kierunkiem pionowym to ciało
porusza się w płaszczyźnie wyznaczonej przez wektory
)0(0 == tVVrr
oraz
constga ==rr
jggavrr
−== .
Ruch ciała jest złożeniem ruchu jednostajnego w
kierunku równoległym do powierzchni Ziemi (wzdłużosi Ox) i ruchu jednostajnie zmiennego w kierunku
prostopadłym ( wzdłuż osi Oy) (rzut ukośny)
281,9
s
mgg ==
r
0Vr
O x
y
0Vr
0=Vr
gaa yx −== 0
gr
gr
jr
1=jr

Tor w ruchu płaskim
W przypadku ruchu odbywającego się w płaszczyźnie xOy
określonego poprzez zależności składowych wektora wodzącego od
czasu
można wyznaczyć równanie toru eliminując czas z powyższych
równań i zapisując wynik końcowy w postaci np. funkcji typu
lub lub
)(
)(
tgy
tfx
=
=
)(xhy = 0),(~~
=yxh
(**)
(*)
Bty
Atx
=
=Np. gdy zależność od czasu opisują funkcje
to równanie przyjmuje np. postać lub lubxA
By = 0=− x
A
By
)(~
yhx =
yB
Ax =

Ruch po okręgu

Do opisu położenia (punktu materialnego) poruszającego się po okręgu może służyć zamiast wektora wodzącego np. kąt ϕ
między wektorem wodzącym a osią OX układu o początku w środku okręgu pokazany na rysunku, będący w ogólności
funkcją czasu ( )tϕϕ = . Zakładamy przy tym iż może się on
zmieniać w zakresie ( )∞∞− , i mierzymy go w radianach.
Jednemu pełnemu obiegowi okręgu odpowiada zmiana kąta
ϕ o π2 radianów.
Prędkość kątowa (chwilowa)
t
ttt
tdt
d
tt ∆
−∆+=
∆
∆==
→∆→∆
)()(limlim
00
ϕϕϕϕω
Przyspieszenie kątowe
t
ttt
tdt
d
tt ∆
−∆+=
∆
∆==
→∆→∆
)()(limlim
00
ωωωωε
Prędkość kątowa i przyspieszenie kątowe dowolnego punktu
spoczywającego na obracającej się tarczy jest jednakowe.
Wielkości te mogą służyć do opisu ruchu obrotowego bryły,
w którym wszystkie punkty bryły poruszają się po okręgach
o środkach leżących na osi obrotu.
]/[ sradω
]/[ 2sradε
Ruch po okręgu-prędkość i przyspieszenie kątowe
x
y
( )trr
( )tϕ
r
0
1 0=ϕ
0
2 90=ϕ

x
y
( )trr
( )tϕ
r
S(t)
• Drogi liniowej S (przebytej od chwili t=0)
od czasu t z drogą kątową mierzymy w radianach)
R-promień okręgu
• Szybkości z prędkością kątową ω
= dS/dt = R|dϕ/dt|
)0()()( =−= ttRtS ϕϕ
ϕ
Vr
ωRV =r
Ruch po okręgu-związki ogólne
ϕ
R

Ruch jednostajny po okręgu
Prędkość kątowa i szybkość ciała jest stała
Zależność kąta od czasu
( ) tt ωϕϕ += 0
( )00 == tϕϕ
constRVconst === ωωr
,
gdzie
Dobierając odpowiednio osie układu współrzędnych można
przyjąć iż 00 =ϕ
ttttt ∆=+==∆= )0()0()( ωϕϕ
const=ω t∆ dowolny
Przyspieszenie kątowe jest równe zeru 0=ε
t
tttt
t ∆
=−∆===
→∆
)0()(lim)0(
0
ϕϕω
t
tttt
t ∆
−∆+=
→∆
)()(lim)(
0
ϕϕω
x
y
( )trr
( )tϕ
rR

Ruch jednostajny po okręgu
Droga przebyta w tym czasie
Tf 1=
T-okres ruchu, czas potrzebny do wykonania 1 obiegu okręgu [s]
TRRS
RS
ωϕ
π
=∆=
= 2
ω
π2=T
Częstotliwość (liczba obiegów okręgu w jednostce czasu) [Hz=1/s]
π
ω
2=f

Szybkość ciała jest stała
Ale kierunek wektora
prędkości zmienia się stale.
Zatem prędkość zmienia sięstale, czyli mamy
niezerowe przyspieszenie
Z podobieństwa trójkątów
BCD i ABO
R
r
V
Vr
r
r
∆=
∆
Rozpatrzmy ruch w
trakcie ∆t→0
R
tV
V
V ∆=
∆r
r
r
R
V
t
V2rr
=∆
∆ RR
V
t
V
t
Vaa
ttd
22
00limlim ω==
∆
∆=
∆
∆==
→∆→∆
rrrr
Przyspieszenie dośrodkowe w ruchu jednostajnym po okręgu
OA
AB
BD
BC=
r
( )tVr
( )ttV ∆+r
( ) ( )tVttVVrrr
−∆+=∆
O
A
B
C
D
( )tVr
−
rr
∆
( )trr
( )ttr ∆+r
VttVtVozn rrr .
)()( =∆+=
Wektor przyspieszenia dośrodkowego jest skierowany w kierunku
środka okręgu po którym porusza się ciało
R
tVSr ∆==∆rr
constV =r

Ruch jednostajny po okręgu –opis w układzie kartezjańskim
x
y
rr
)(tθ
R
daarr
=
Vr
rrV
r
daarr
=
Szybkość ciała jest stała
Ale kierunek wektora prędkości zmienia
się stale. Zatem prędkość zmienia się stale
czyli mamy niezerowe przyspieszenie
( )tRdt
dxVx ωω sin−==
( ) ( )tRRy ωϕ sinsin ==( ) ( )tRRx ωϕ coscos ==
( )tRdt
dyVy ωω cos==
( ) ytRdt
dVa
y
y
22 sin ωωω −=−==
( )r
jyixjaiaa yx
r
rrrrr
2
2
ω
ω
−=
=+−=+=
R
VRraa d
2
22
r
rrr==== ωω
Przyspieszenie dośrodkowe
constRVVV yx ==+= ω22r
szybkość
)cos())(sin(
btbdt
btd=
)sin())(cos(
btbdt
btd−=
( ) xtRdt
dVa x
x
22 cos ωωω −=−==
ϕ
00 =ϕ

Przyspieszenie jest sumą przyspieszenia normalnego (dośrodkowego) i stycznego
sd aaarrr
+=
dt
dVat =tts eaa
rr= gdzie
sar
dar
Vr
0,,.
≠=≠≠=dt
dconstconstVV
ozn ωεω
r
Ruch po okręgu ze zmienną szybkością (wartością prędkości)
Gdy at>0 ( szybkość rośnie)
to zwrot zgodny ze zwrotem
Gdy at<0 (szybkość maleje)
to ma zwrot przeciwny niż
sar
sar
Vr
Vr
ar
ar
sar
0>dt
dV
0<dt
dV
dn aarr
= sar
V
Vet r
rr
=
222aaa sd
rrr=+
Ras ε=r
R
VRad
22 == ω
r

dt
dωε = =const
( ) tt εωω += 0
( )2
2
00
ttt εωϕϕ ++=
gdzie ( )00 == tωω , ( )00 == tϕϕ ,
Ruch jednostajnie zmienny po okręgu

Ruch po Ruch prostoliniowy
okręgu wzdłuż osi OX
tεωω += 0
2
002
1tt εωϕϕ ++=
atVV += 0
2
002
1attVxx ++=
Charles Gammie
Porównanie ruchu jednostajnie zmiennego prostoliniowego z
ruchem jednostajnie zmiennym po okręgu
xVV =
constaa x ==const=ε

Vr
. ωrO
x
y
, oś OZ,
ϕ
kr
Vr
ωr
O x
y
ϕ
Prędkość kątowa jako wektor
Wektor prędkości kątowej ma kierunek zgodny z kierunkiem osi
obrotu (prostopadłym do płaszczyzny rysunku). Zwrot wektora
prędkości kątowej można ustalić przy pomocy reguły prawej
ręki. Gdy palce prawej ręki wskazują kierunek obiegu ciała po
okręgu, to prawy kciuk wskazuje zwrot wektora prędkości
kątowej.
0>ω],0,0[ ωωω == k
rr
0<ω
ωω =r

Vr
. εrO
x
y
, oś OZ,
ϕ
kr
Przyspieszenie kątowe jako wektor
Zakładamy iż płaszczyzna okręgu nie ulega zmianie w czasie.
Wektor przyspieszenia kątowego ma kierunek zgodny z kierunkiem osi
obrotu. Zwrot wektora przyspieszenia kątowego jest taki sam jak
prędkości kątowej gdy szybkość ciała rośnie i przeciwny gdy szybkośćciała maleje.
0>dt
dω ],0,0[dt
dk
dt
d
dt
d ωωωε ===
rr
r
Vr
εrO
x
y
ϕ
0<dt
dω