永久磁石期モータのセンサレスベクトル制御 · 永久磁石期モータのセンサレスベクトル制御 アルゴリズム編 R01AN3786JJ0102 Rev.1.02 Page 4

モータと磁気軸受を一体化したベアリングレスモータ
諏訪東京理科大学 工学部電気電子工学科
教授 大島 政英

諏訪東京理科大学
講演内容
1.ベアリングレスモータとは
2.dq軸電流制御ベアリングレスモータ・構造と原理・特長・制御システムの構成・磁気浮上試験
3.想定される用途/実用化に向けた課題/企業様への期待

rotor
1.ベアリングレスモータとは
固定子回転軸
回転子機械的軸受
従来のモータ ベアリングレスモータ
磁気力により非接触で軸支持
機械的接触面を持つ
諏訪東京理科大学

磁気軸受
(半径方向)
磁気軸受
(半径方向)
磁気軸受
(スラスト方向)モータ
(1)従来の磁気軸受付モータ
●インバータ,
コントローラの数多
●軸長長
装置全体→大コスト→増危険速度→低
諏訪東京理科大学

(2)ベアリングレスモータの特長
○インバータ,
コントローラ,配線数少
○軸長短磁気軸受
(スラスト方向)ユニット1 ユニット2
ベアリングレスモータ
モータと磁気軸受の機能を一体化
装置全体→小コスト→減高速・高出力
低振動、低騒音、メンテナンスフリー、長寿命
諏訪東京理科大学

U相
4極電動機巻線(トルク発生)
2極支持巻線(支持力発生)
2525
25
25
25 25
25
25
55
5
55
55
5
25 25
25
25
25
25
25
25
55
55
55
55
2525
2525
2525
2525
5 5 5 5
5 5 5 5
(3)固定子巻線構造
諏訪東京理科大学V相 W相

Nmb
NsbNsb
Nsa
SN
S NN S
NS
Fx
x
y
Stator
Rotor
Ysa2
12Nmb Nmb
Nmb
Nsa
Ysa2
Ysa1
Ysa1
:Ψm
Nma, Nmb : 電動機巻線Nsa, Nsb : 支持巻線Ψsa1, Ψsa2 : 支持磁束
Fx
(PM界磁)有限要素法解析結果
(無負荷,支持電流8A)
(4)支持力の発生原理
諏訪東京理科大学

(5)1種類の巻線のベアリングレスモータ
機械的軸受をもつモータ
従来のベアリングレスモータ
諏訪東京理科大学
小大
ローターコア
永久磁石
固定子
電動機巻線
N
S
N
S
N
S
S
N
S
N
S
N
電動機巻線
磁気支持巻線
外径が増加
y
xz

機械的軸受をもつモータ
巻線統合型ベアリングレスモータ
外径は同じ
諏訪東京理科大学
ローターコア
永久磁石
固定子
電動機巻線
巻線
N
S
N
S
NS
NS
N
SN
S
y
xz
(5)1種類の巻線のベアリングレスモータ(続き)

1.巻線構造が簡単になる2.外径が同じ トルク、または支持力が増加3. トルクと支持力が広い範囲で制御可能
従来のベアリングレスモータ 巻線統合型ベアリングレスモータ
巻線統合へ
・従来のベアリングレスモータと比べて
諏訪東京理科大学
(5)1種類の巻線のベアリングレスモータ(続き)

N
SN
N S
S
PM
ロータコア
ステータコア 60°
0°
300°
180°
巻線
セクション
セクション
x
y
(例)9スロット6極IPM構造
一種類の巻線で
トルク,支持力
を発生可能
各セクションで巻線電流を
ベクトル制御
q軸成分:トルクを発生d軸成分:支持力を発生
・モータを3セクションより構成・各セクションでは3本の歯にそれぞれ三相巻線を短節集中巻
(1)構造と原理
セクション
11
2.dq軸電流制御ベアリングレスモータ(dqBelm)
諏訪東京理科大学
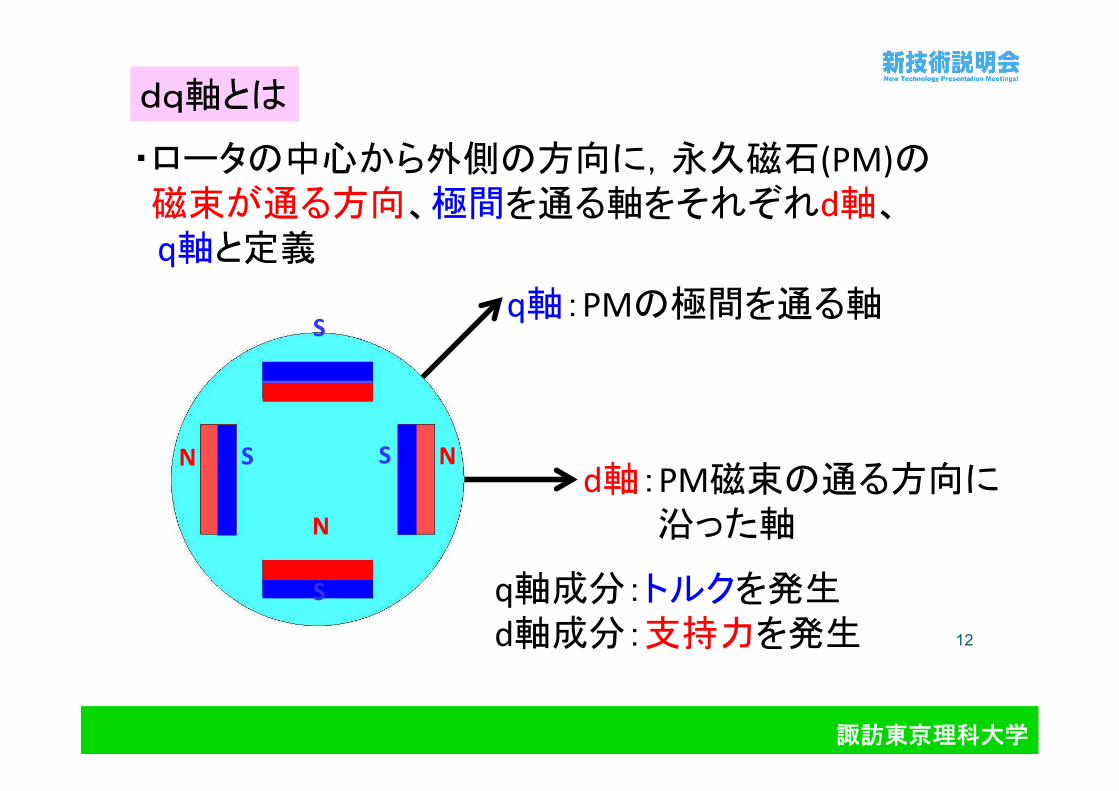
d軸:PM磁束の通る方向に沿った軸
q軸:PMの極間を通る軸
q軸成分:トルクを発生d軸成分:支持力を発生
・ロータの中心から外側の方向に,永久磁石(PM)の磁束が通る方向、極間を通る軸をそれぞれd軸、q軸と定義
N
NN
N
S
S
S S
12
諏訪東京理科大学
dq軸とは

13
x
y
セクション a
セクション g
Force磁束強め
磁束弱め:PM 界磁磁束:d軸磁束
セクション b
吸引力
反発力
d軸電流の大きさと方向を調整して任意の支持力を発生できる。
磁束弱め
反発力
Fg
Fa +Fb +Fg= Fx
FxFa
支持力の発生原理
諏訪東京理科大学

トルク,支持力特性が優れている
特長
巻線構造と制御法がシンプル
トルク,支持力の制御範囲が広い
安定性・信頼性を備えている
(インバータ故障時など)
14
Tokyo University of Science, Suwa
・基本構造、原理、制御方法・トルク、支持力解析・負荷時の安定化制御支持力補償、補償係数の同定法・1セクション故障時の安定化制御法
(2) dqBelmの特長
これまでの成果

15
トルク等しい (支持力/ロータ自重): dqBelm 最大(例)トルク 0.96pu (支持力/ロータ自重):
dqBelm 10倍, 24スロット4極(従来Belm) 2倍
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 2.0 4.0 6.0 8.0 10.0
トルク[pu]
支持力/ロータ自重
0.96
dqBelm24スロット4極36スロット6極
24スロット2極(従来Belm)
15諏訪東京理科大学
dqBelmのトルク、支持力特性

20µm
1A
10msec
x, y
iUa
20µm
1A
x, y
iUa
(a) 1セクション故障時(通常制御)
16
16
10msecat no load1,000 r/min (b) 1セクション故障時(安定化制御)
故障診断技術の進展ベアリングレスモータ・・・長時間運転故障への対応が必要
16諏訪東京理科大学
1セクション故障時の安定化制御法
諏訪東京理科大学17
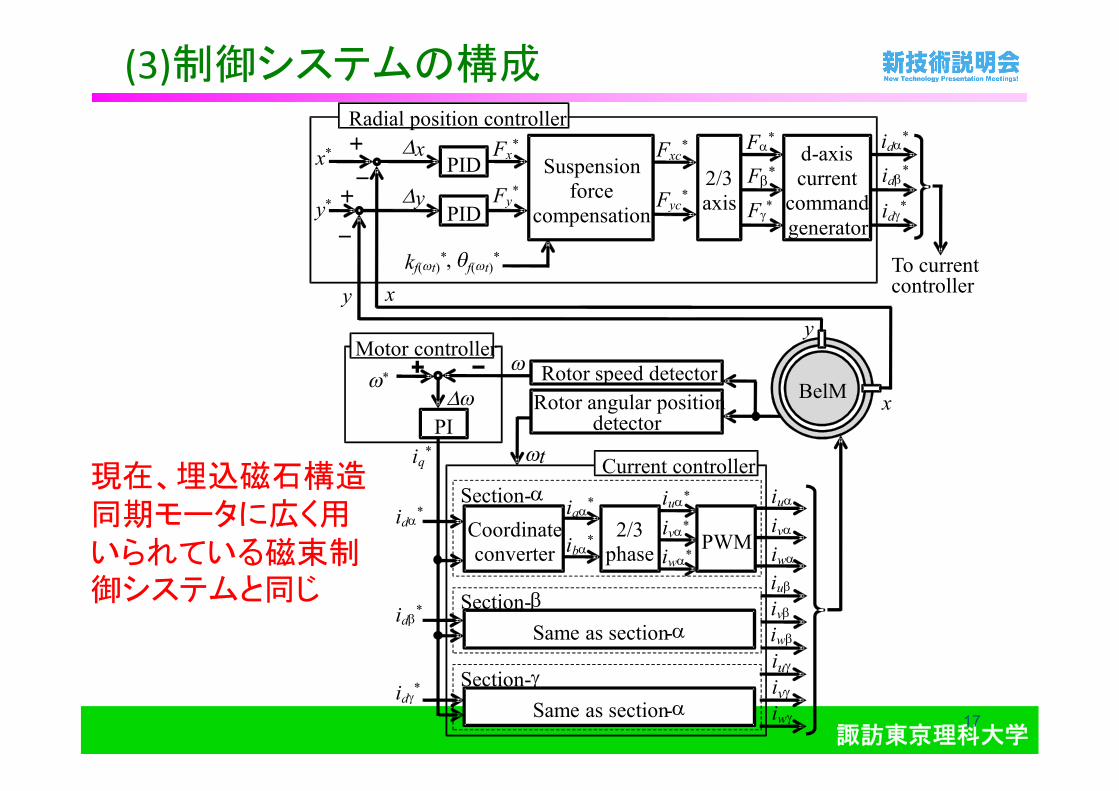
現在、埋込磁石構造同期モータに広く用いられている磁束制御システムと同じ
PID
PID
x*
y*
Dx
Dy2/3axis
Fa*
Fb*
Fg*
d-axis current
command generator
ida*
idb*
idg*
To currentcontroller
PI
iaa*
iba*
iua*
iva*
iwa*PWM
iua
iva
iwa
iq*
Section-a
Section-b
Section-g
Same as section-a
Same as section-a
BelM
xy
x
Radial position controller
Motor controller
Current controller
Rotor angular position detector
Rotor speed detector
Fx*
Fy*
y
Coordinate converter
2/3phase
iub
ivb
iwb
iug
ivg
iwg
Dw
wt
ww*
ida*
idb*
idg*
Fxc*
Fyc*
Suspension force
compensation
kf(wt)*, qf(wt)
*
(3)制御システムの構成

18
Shaft
Rotary encoder
Stator core
Rotor
Stator winding
Touchdown bearing
Gap sensor(x-, y-axis)
Self-aligning ball bearings
Frame
z
xy
195
f124
固定子、回転子コア
ケイ素鋼板
PM Nd-Fe-B
固定子巻線 導線 (114 turns), f0.6mm
モータ出力 600 W (4,500 r/min)
► 試作機の諸元
諏訪東京理科大学
(4)磁気浮上試験

19
静止状態
50 msec
0
0
x
y
1 rotation
100 mm
50 msec
x
y
0
0
Touchdown
20 msec
Magnetic suspension control:ON
回転状態 (4,500 r/min)
► 磁気浮上制御ONの直後、回転子は中心に移動。その後、安定に磁気支持されている。
Magnetic suspension control:ONTouchdown
100 mm 100 mm
100 mm
► 回転子浮上試験
諏訪東京理科大学
► 磁気浮上制御ONの直後、回転子は中心に移動。その後、安定に磁気支持されている。► 回転子の振れ回りは回転周波数に同期しており、20mm以下である。

20
100mm
100
50msec
0
0
x
y
3,000r/min
0
1 rotation
160 msec
mm
► モータを、0 から 3,000 r/min まで加速した。► 回転子の振れ回りは、加速中、加速後ともに大きな変化はない。回転子は安定に磁気支持されている。
Detected speed
Speed command
► 加速試験
諏訪東京理科大学

3.想定される用途
○軸受の潤滑,メンテナンスに手間がかかる
○潤滑剤が使用できない
(極低温,真空,液体中など)
○潤滑剤による汚損が問題になる○高速ドライブ○長い回転軸を有する○揺動運動により軸受が直ぐに破損する
諏訪東京理科大学
【試作事例(従来型)】
○小型液体ポンプ
○情報機器
○固液分離機
○フライホイール
○コンプレッサ
比較的容量の大きいドライブ装置に適する

• dqBelmについては、第1ステップとして試作機を使い、構造と制御方法の妥当性を確認。(~4,500r/min、負荷時も含む)
• 次ステップとして、用途志向型の試作機を設計、製作し試験する。用途によっては高速大容量化を目指す。
• 実用化に向けて、長時間運転して試験し、磁気支持の安定性を確認する。
諏訪東京理科大学
実用化に向けた課題

• 6極モータのため、高速化の際はSiCやGaNを使用したインバータを検討。
• 軸受に問題を抱えている企業様、真空中や高温/低温、潤滑剤が使えないなど特殊環境下でのドライブ装置を手掛けている企業様との共同研究を希望。
• また、本技術は発電機にも応用可能である。風力や水力(小容量)などエネルギー関連分野への展開を考えている企業様には、本技術の導入が有効と思われる。
諏訪東京理科大学
企業様への期待

• 発明の名称 :ベアリングレスモータ
• 出願番号 :特願2014-203445• 公開番号 :特開2014-241725• 登録番号 :特許5892628• 出願人 :学校法人 東京理科大学
• 発明者 :大島 政英、小林 俊資
諏訪東京理科大学
本技術に関する知的財産権

• 2005年-2008年 大学発ベンチャー創出推進
(分担開発者)
• 2008年- 大学発ベンチャー「モーターソリュー
ション」の一員
• 2007年-2008年 JST産学共同シーズイノベーション化事業 顕在化ステージに採択
• 2006年- 何社かと共同研究実施
諏訪東京理科大学
産学連携の経歴

学校法人 東京理科大学
研究戦略・産学連携センター
コーディネータ 国本 幸紀
TEL 03-5228 - 7431
FAX 03-5228 - 7442
e-mail [email protected]
諏訪東京理科大学
お問い合わせ先