講義内容(10/30) - 東京大学2006/10/30 機械力学Ⅰ 講義内容(10/30)...
35
2006/10/30 機械力学Ⅰ 講義内容(10/30) • 3. 1自由度減衰系の自由振動 – 3.1 粘性減衰系の自由振動 – 3.1.1 運動方程式とその解 – 3.1.2 ζ>1の場合 – 3.1.3 ζ=1の場合 – 3.1.4 ζ<1の場合 – 3.1.5 振動波形と減衰比の関係 – 3.2 固体摩擦による減衰振動 • 剛体運動における重心の並進と回転 • 演習 5.1,5.2,5.3,5.4,5.5
Transcript of 講義内容(10/30) - 東京大学2006/10/30 機械力学Ⅰ 講義内容(10/30)...

2006/10/30 機械力学Ⅰ
講義内容(10/30)• 3. 1自由度減衰系の自由振動
– 3.1 粘性減衰系の自由振動– 3.1.1 運動方程式とその解– 3.1.2 ζ>1の場合– 3.1.3 ζ=1の場合– 3.1.4 ζ<1の場合– 3.1.5 振動波形と減衰比の関係– 3.2 固体摩擦による減衰振動
• 剛体運動における重心の並進と回転• 演習 5.1,5.2,5.3,5.4,5.5

2006/10/30 機械力学Ⅰ
前回の復習

2006/10/30 機械力学Ⅰ
回転系の振動
角運動量の変化(慣性力)=外力モーメント(復原トルク)
エネルギー法による解法
θθ kI −=&& Ikn /=ω
2
21 θ&IT = 2
21 θkU =
( ) 0=+UTdtd ( ) 0=+ θθθ kI &&&

2006/10/30 機械力学Ⅰ
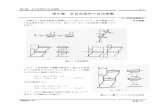
いくつかの例題 (1)
図1.14 剛体振子
G
θ
O
l
mg
θsinmgF =
g
復原力
トルク発生に無関係
回転に寄与せず
θαθ sinsinmglI −=&&
剛体振り子のg→gsinαに相当
Imgl
nαω sin
=図1.15 水平振子
αsinmg
θα sinsinmgθα cossinmg
αcosmg
αsinmg
mg
G
g
G
θ
α
l

2006/10/30 機械力学Ⅰ
いくつかの例題 (2)
( ) 02 =−+ θθ mglkhI &&
kh2 > mglのとき
Imglkh
n−
=2
ω
θsinmg
図1.17 倒立振子
mg
g
m
k/2×hθ×h×2=kh2θ
kh2 < mglのとき
∞→⇒∞→+= −+
θθ λλ
tBeAe tt

2006/10/30 機械力学Ⅰ
いくつかの例題 (3)
Fkxxm −−=&&
FrI =θ&&
0=++ rkxIxmr θ&&&&
θrx =0
23
=+ kxxm &&
並進方向の釣り合い
円筒中心周りの釣り合い
Fを消去
滑らない条件(制約条件)
k
x
r θ
2
21 mrI =
m
滑らない
F摩擦力
回転と並進が同時に起こる

2006/10/30 機械力学Ⅰ
いくつかの例題 (4)
円柱
θ
R
g
O
m
r
A’
A
BC
ψ
φ
図1.19 円筒面を転がる円柱
( )( )θcos1−−= rRmgU
( ) 221 2
1 θ&rRmT −=
22 2
1 φ&IT =
( )φθθθφ rrRr
rR+=
−=
並進運動の運動エネルギー
ポテンシャルエネルギー
回転運動の運動エネルギー
運動の制約条件

2006/10/30 機械力学Ⅰ
並進と回転を伴う運動の解き方
1. 重心における、並進自由度(x)と回転自由度(Θ)について、それぞれ、釣り合い式(運動方程式)を立てる。
2. 並進と回転が独立か?あるいは連成するか?
3. 連成するなら、自由度同士の関係式から、一方の自由度を消去。⇒1自由度系の運動。

2006/10/30 機械力学Ⅰ
剛体運動における重心の並進と回転(配布資料)

2006/10/30 機械力学Ⅰ
剛体運動における重心の並進と回転
FxM =&&
FcI =θ&&θ
x
F
重心
c
重心における並進方向の釣り合い
重心回りのモーメントの釣り合い
2自由度(x,θ)の運動となり、x,θについて独立に解けばよい.
外力を加える点と重心がずれているのに,なぜ力が釣合うのか?重心は回転中心ではないのに,なぜその回りのモーメントが釣合うのか?

2006/10/30 機械力学Ⅰ
重心で釣り合うことの証明
回転中心(未知.力, トルクなし)動かない点
im
bir
a
∑∑ == θ&&&& iiii rmxmF
∑∑ =⋅= θ&&&& 2iiiii rmrxmFa
θ
x
F
重心
c
並進方向の釣り合い
回転中心回りの釣り合い
∑ = Mmi
( ) 0=−∑ ii mbrMbrm ii =∑
xMMbrmF ii &&&&&& === ∑ θθ
(1)
(2)(3)
(4);重心の定義
⇒ (5)
(5)→(1)並進方向の釣り合い

2006/10/30 機械力学Ⅰ
( )[ ]22 ∑∑ +−== bbrmrmFa iiii θθ &&&&
( ) ( )[ ]∑ −++−= brbbbrm iii 222θ&&
( ) ( )∑ ∑ ∑ −++−= brmbmbbrm iiiii θθθ &&&&&& 222
0++= bMxIG &&&&θ
FbIG +=θ&&
( ) θ&&GIbaF =−回転中心(未知.力, トルクなし)動かない点
im
bir
a
θ
x
F
重心
c
回転中心回りの釣り合い
重心まわりでモーメントの釣り合い

2006/10/30 機械力学Ⅰ
剛体運動における釣り合い
• 回転中心が決まっているとき→回転中心回りのモーメントが釣合う.系の自由度は回転のみ.
• 回転中心が不定のとき→重心回りのモーメントの釣り合いと,重心の並進に関する力の釣合いの2式が必要.系の自由度は,重心の並進と回転の2つ.

2006/10/30 機械力学Ⅰ
間違い易い例(1)
Gx&& 場所によって が異なるx&&
重心以外では とならないxmF &&=

2006/10/30 機械力学Ⅰ
間違い易い例(2)
θ&&GIFa =
( )
( )
( ) B
B
BG
G
GB
xMbbaFxMbFbFaxxMbFa
bMbI
MbII
&&
&&
&&&&
&&&&
&&&&
−+=−+=
−+=⋅+=
+=
θθ
θθ 2
重心以外では とならない(B点回りの例)( ) θ&&BIbaF =+
θ
FA
G
B
b
Gxa
Bx
00==
Bxb&&
⇒ Bが重心
⇒ Bが回転中心

2006/10/30 機械力学Ⅰ
間違い易い例(3)回転中心が決まっている場合は とならない.(モーメントも)
G
x
F
xmF &&=
回転中心で力が働く
GFxM −=&&重心の慣性力と釣合うのは,外力と支点反力の和

2006/10/30 機械力学Ⅰ
3. 減衰がある1自由度系の自由振動前章では,慣性力と復元力のみからなる系を対象とし,その振動
は振幅一定で無限に持続するものであった.しかし実際の機械
では,空気抵抗,摺動部の摩擦,ローレンツ力などにより系のエ
ネルギーが散逸し,振動は減衰していく.振動減衰のメカニズム
は複雑であり,速度に比例するもの,速度の2乗に比例するも
の,速度に比例し周波数に反比例するものなどがある.それら
のうち,最も重要で解析も容易なものは,速度に比例する抵抗
であり,ついで固体摩擦によるものである.本章ではこれらの減
衰力が働く場合の振動を解説する.

2006/10/30 機械力学Ⅰ
3.1 粘性減衰系の自由振動
図2.1 粘性減衰系
xc&
mx
ダンパーc
kx
ばねk
x&
図2.2 流体ダンパー
図2.3 電磁ダンパー
N S
図2.3 電磁ダンパー
N S
速度に比例する反力が発生

2006/10/30 機械力学Ⅰ
3.1.1 運動方程式とその解
xckxxm &&& −−=力の釣り合い(運動方程式)
パラメータの導入
2nm
k ω=
02 2 =++ xxx nn ωζω &&&
線形同次型の運動方程式
減衰の無い系の固有角振動数
mkmc
n 22 ×== ζζω減衰比
図2.1 粘性減衰系
xc&
mx
ダンパーc
kx
ばねk

2006/10/30 機械力学Ⅰ
tex λ=
02 22 =++ nn ωλζωλ
( )121 −+−= ζζωλ n
( )122 −−−= ζζωλ n
tt eCeCx 2121
λλ +=
線形同次型方程式の解法指数関数を仮定
特性方程式
特性方程式の解(特性根)
一般解
C1,C2は初期条件で決ま
る複素数の定数.
ζ(減衰比)は正の値を取り,その大きさ(ζ<>1)によってλ1,λ2は実数または複素数となる.

2006/10/30 機械力学Ⅰ
3.1.2 ζ>1の場合(過減衰)λ1,λ2は実数
tt nn eCeCxωζζωζζ
−−−
−+−
+=1
2
1
1
22
()内<0
0→⇒∞→ xtx
t
(a) ζ>1
0>x&
0<x&o

2006/10/30 機械力学Ⅰ
双曲線関数
( ) ( ) 1sinhcosh
cosh2
sinh,sinh2
cosh
10cosh,00sinh2
cosh,2
sinh
22 =−
=+
==−
=
==
+=
−=
−−
−−
xx
xeexdxdxeex
dxd
eexeex
xxxx
xxxx
2cosh
xx eexy−+
==
xey21
= xey −=21
xey21
=xey
21
−=
xx
(a) cosh x (a) sinh x
図2.4 双曲線関数
2sinh
xx eexy−−
==
y y
o
o

2006/10/30 機械力学Ⅰ
tt nn eCeCxωζζωζζ
−−−
−+−
+=1
2
1
1
22
双曲線関数による一般解の表現
12 −= ζωω nh
DCCCCC =+=+ 2121 ,
( )tDtCex hhtn ωωζω sinhcosh += −

2006/10/30 機械力学Ⅰ
過渡応答初期条件
( ) 00 xCx == ( ) 00 vDCx hn =+−= ωζω&
++= − txvtxex h
h
nh
tn ωωζωωζω sinhcosh 00
0
解

2006/10/30 機械力学Ⅰ
3.1.3 ζ=1の場合(臨界減衰)λ1=λ2重根をもち、2階微分方程式には2つの基本解が必要
tnn
nexxxx ωωω −=⇒=++ 02 2&&&
ttex µ=( ) ( ) 0222 22 =++++ t
nnt
n tee µµ ωµωµωµμ=-ωnとすれば,tによらず0
tntex ω−=(第2)基本解
tt nn DteCex ωω −− +=一般解
(第1)基本解

2006/10/30 機械力学Ⅰ
初期条件
( ) 00 xCx == ( ) 00 vDCx n =+−= ω&
( ){ } tn
netxvxx ωω −++= 000
x
t
(b) ζ=1
o
0>x&
0<x&
0→⇒∞→ xt
解

2006/10/30 機械力学Ⅰ
3.1.4 ζ<1の場合λ1,λ2は共役な複素数
tjtj nn eCeCxωζζωζζ
−−−
−+−
+=22 1
2
1
1
ndnd ωωζωω ≤⇒−= 21
( )( ) ( )
( )tDtCe
jeejCCeeCCe
eCeCex
ddt
tjtjtjtjt
tjtjt
n
ddddn
ddn
ωωζω
ωωωωζω
ωωζω
sincos
22 2121
21
+=
−
−++
+=
+=
−
−−−
−−
減衰固有角振動数
Eulerの公式

2006/10/30 機械力学Ⅰ
++= − txvtxex d
d
nd
tn ωωζωωζω sincos 00
0
初期条件
( ) 00 xCx == ( ) 00 vDCx n =+−= ω&解
x
t
(c) ζ<1
o
tne ζω−

2006/10/30 機械力学Ⅰ
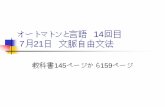
減衰比ζについて:
一般にζ<<1.例えばζ<0.2ならばωdとωnの差は2%以下であり,通常はωd=ωnと見なして問題ない.ζの値は,例えばタービンブレードやコイルばねで10-2で程度,アルミニウムやガラスの丸棒を糸で吊った状態では10-4程度である.
ωnt
x
o
ζ=10
ζ=5
ζ=2
ζ=1
ζ=0.52 4 6 8
1
図2.6 種々の減衰比におけるxの挙動
mk
m
mc
n
ncr
2
2
2 1
=
=
= =
ω
ζω ζ
臨界減衰係数

2006/10/30 機械力学Ⅰ
実演
Interactive PhysicsMSC. Software Corp.
http://www.interactivephysics.com

2006/10/30 機械力学Ⅰ
3.1.5 振動波形と減衰比の関係teax d
tn ωζω cos0−=
( )( )
2
0
1tan
00sincos
ζζ
ωζωω
ωωωζωζω
−−=−=⇒
=⇒=−−= −
d
nd
dddnt
t
tteax n&
振動のピーク(速度0)位置
tdωtan
tdω
21 ζζ−
−
02π
π23 π
25
図3.7 減衰振動のピークの時刻
22 1
tan11cos ζω
ω −=+
=t
td
d

2006/10/30 機械力学Ⅰ
図3.8 減衰振動の振幅
πζ22 ≈− +
i
ii
aaa
T=
20 1 ζζω −= − int
i eaa2
02 12 ζζω −= +−+
inti eaa
( )
( ) ( )
πζ
πζπζ
ζ
ζ
πζ
ζ
πζ
ωπζω
ζω
ζω
ζω
21
2!2
121
11
22
1
22
20
20
2
22
2
+≈
+++=≈
===
−
−=
−−
−
−
+
+
+
Le
eee
eaea
aa
dn
iin
in
in
tt
t
t
i
i
対数減衰率
δπζ ≡≅
+
2log2i
ie a
a
一定値;等比級数的に減衰
隣り合う振幅比

2006/10/30 機械力学Ⅰ
エネルギーの減少
( ) ( ) πζπζπζ
πζ
414!2
141
1
1
21
21
21
2
4
2
222
22
2
≈−+++≈
−≈
−
=
−
++
+
L
e
aa
ka
kaka
i
i
i
ii
一周期毎のエネルギー減少

2006/10/30 機械力学Ⅰ
複号は で+で-
3.2 固体摩擦による減衰振動
図3.9 固体摩擦のある系の振動
mk
xkx
cF±
0>x&
x&
FNFC µ=
CF−
クーロン摩擦
運動方程式
0=±+ cFkxxm &&
( )
kFb
mk
wherebxx
cn
n
==
=±+
,
0
2
2
ω
ω&&
0<x&
x&
FNFc µ=
cF−摩擦力と釣り合うばねの伸び

2006/10/30 機械力学Ⅰ
① ② ③
図3.10 固体摩擦系の自由振動
x 初期条件 ( ) ( ) 00,0 == xax &0<x&( ) 02 =−+ bxx nω&&
0>x& ( )( ) ( )
( ) btbaxxbax
bxx
n
nn
n
−−=⇒=+−=
=++
ωωπωπ
ω
cos30,2
02
&
&&
振幅の包絡線は直線的(等差級数的)に減少
bxx ≤∩= 0&
停止の条件
何故止まらない?
初期条件により異なる位置で停止⇒機械の位置決め精度の低下
tBtAbx nn ωω sincos +=−一般解
( ) btbax n +−=⇒ ωcos