逢 甲 自動控制工程學系專題製作 專 題 論 文 ·...
99
逢 甲 大 學 自動控制工程學系專題製作 專 題 論 文 PIC16F877 直流馬達伺服控制 PIC16F877 DC Motor Server Control 指導教授:陳孝武 學 生:張岑瑋 張恩焌 彭子昂 考試日期:中華民國九十三年一月
Transcript of 逢 甲 自動控制工程學系專題製作 專 題 論 文 ·...

逢 甲 大 學 自動控制工程學系專題製作
專 題 論 文
PIC16F877直流馬達伺服控制
PIC16F877 DC Motor Server Control
指導教授陳孝武 學 生張岑瑋
張恩焌 彭子昂
考試日期中華民國九十三年一月
逢甲大學自動控制工程學系
學年度第 學期畢業專題評分表
專 題 題 目
學 生 姓 名
1 論 點
內容(30)2 創 見
3 深 度
分
1 結 構
文字(20)2 修 辭
3 圖 表
分
1 理路分析
口試(50)2 表達能力
3 綜合識見
分
總 分 分
改 進 意 見
評審教授
i
感謝
本專題的完成首先要感謝指導教授陳孝武老師這一年多來細心的指導
在我們對此專題還不熟悉找不到方向時老師給予我們很大協助不論是在設計
還是觀念架構上給予我們的啟發與分享使我們授益良多再來要感謝大學生
涯中的教導過的老師們讓我們打下了良好的基礎使我們在完成這項專題的同
時能夠把過去學過的知識運用在上面還有實驗室的學長同學提供了不少寶
貴的經驗給我們在許多小細節提醒我們使我們能夠順利完成專題
ii
中文摘要
現今科技發達在工業界中自動化已經是相當普遍也相當重要的一環而馬
達控制則是自動化中不可或缺的一項本專題為 PIC16F877直流馬達伺服控制
由 PIC單晶片以及相關的電路實現目的為得到一個控制命令用來減去位置回
授產生 error 再送出至下級在這專題中我們採用的控制命令的輸入方式為
AD 轉換這部份也可以使用其他種類的輸入譬如鍵盤輸入回授的部份由馬
達的 Encoder得到利用單晶片之硬體功能將 AB做為觸發外部中斷將馬
達的位置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任
意方式表現譬如七節顯示器經過 AD 的轉換之後由馬達的驅動電路實現
最後得到我們想要之位置控制
iii
Abstract
In high-tect age it is almost popular and also important part to use automation
in industrial field and motor-control is a necessary part of the automations This
subject is talking about PIC16F877 DC motor server controlBy using PIC uni-chip
and related circuit accomplishing the goal is to get a control order and to release
the position producing error-reback and send the control order to the next lower
levelIn this subject we use AD transformation to show the input of control order
and this part of input could represent by other methods like keyboard-input The
part of reback could get from encoder of motorBy using the function of hardware
of uni-chip we could use A and B to trigger external interrupt and save the
position of motor in the registers of PIC internal part If we need to show the angle
displacement we could directly use any kind of representation of registers like 7
segment LED Therefore after using AD transformation we could get the result
from propel circuit of motor Finally we get what we want the position control
iv
目錄
感謝middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddoti
中文摘要middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotii
Abstractmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotiii
表目錄middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotvii
第一章 前言middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot1
第二章 PIC與馬達的基本介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
21 微電腦與微控制器middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
211 微電腦系統的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
212 微控制器的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot3
22 PIC16F87X 單晶片微控制器架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
221 PIC16F87X單晶片微控制器的系統架構方塊圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
222 PIC16F87X輸出輸入功能介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot5
223 MPLAB 介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot6
23 PIC晶片內部架構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
231 PIC16F877之接腳圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
232 PIC16F877的內部結構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot8
24 馬達的基本介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot9
第三章 基本架構及驅動電路middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
31 基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
32 電子元件介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot12
33 電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
331 驅動電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
332 PIC16F877電路 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot18
第四章 程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
v
41 暫存器介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
42 主程式流程圖middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot25
421 外部中斷middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot27
422 AD轉換 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot31
423 24位元+24位元加法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot33
424 16位元times8位元乘法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot35
425 16位元-16位元減法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot38
43 PID控制器介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot40
431 Kp_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot41
432 Kd_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot45
433 Ki_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot47
44 PWM的介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot50
45 PIC主程式 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot57
第五章 結論middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot81
附錄 A 中斷 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot82
附錄 B AD轉換middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot83
附錄 C AD轉換時間middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot84
附錄 D MPLAB操作說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot85
參考文獻middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot89
vi
圖目錄
圖 21 微電腦基本方塊圖 2
圖 22 微控制器單晶片架構方塊圖 3
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖5
圖 25 PIC16F877的內部電路圖8
圖 26 直流馬達外觀 10
圖 31 整體基本架構圖11
圖 32 硬體電路架構12
圖 33 三角波及直流電壓比較產生 PWM訊號 12
圖 34 UC3843接腳圖13
圖 35 UC3843內部電路圖13
圖 36 光耦合接腳圖 14
圖 38 IR2111接腳圖15
圖 310 DCW03B-15元件圖以及接腳圖16
圖 311 current sensor電路圖16
圖 312 LM348電路圖17
圖 313 完整驅動電路圖 18
圖 314 PIC16F877電路圖19
圖 41 AB相訊號關係圖30
vii
表目錄
表 21 PIC16F87X家族成員6
1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
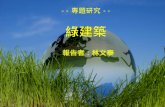
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

逢甲大學自動控制工程學系
學年度第 學期畢業專題評分表
專 題 題 目
學 生 姓 名
1 論 點
內容(30)2 創 見
3 深 度
分
1 結 構
文字(20)2 修 辭
3 圖 表
分
1 理路分析
口試(50)2 表達能力
3 綜合識見
分
總 分 分
改 進 意 見
評審教授
i
感謝
本專題的完成首先要感謝指導教授陳孝武老師這一年多來細心的指導
在我們對此專題還不熟悉找不到方向時老師給予我們很大協助不論是在設計
還是觀念架構上給予我們的啟發與分享使我們授益良多再來要感謝大學生
涯中的教導過的老師們讓我們打下了良好的基礎使我們在完成這項專題的同
時能夠把過去學過的知識運用在上面還有實驗室的學長同學提供了不少寶
貴的經驗給我們在許多小細節提醒我們使我們能夠順利完成專題
ii
中文摘要
現今科技發達在工業界中自動化已經是相當普遍也相當重要的一環而馬
達控制則是自動化中不可或缺的一項本專題為 PIC16F877直流馬達伺服控制
由 PIC單晶片以及相關的電路實現目的為得到一個控制命令用來減去位置回
授產生 error 再送出至下級在這專題中我們採用的控制命令的輸入方式為
AD 轉換這部份也可以使用其他種類的輸入譬如鍵盤輸入回授的部份由馬
達的 Encoder得到利用單晶片之硬體功能將 AB做為觸發外部中斷將馬
達的位置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任
意方式表現譬如七節顯示器經過 AD 的轉換之後由馬達的驅動電路實現
最後得到我們想要之位置控制
iii
Abstract
In high-tect age it is almost popular and also important part to use automation
in industrial field and motor-control is a necessary part of the automations This
subject is talking about PIC16F877 DC motor server controlBy using PIC uni-chip
and related circuit accomplishing the goal is to get a control order and to release
the position producing error-reback and send the control order to the next lower
levelIn this subject we use AD transformation to show the input of control order
and this part of input could represent by other methods like keyboard-input The
part of reback could get from encoder of motorBy using the function of hardware
of uni-chip we could use A and B to trigger external interrupt and save the
position of motor in the registers of PIC internal part If we need to show the angle
displacement we could directly use any kind of representation of registers like 7
segment LED Therefore after using AD transformation we could get the result
from propel circuit of motor Finally we get what we want the position control
iv
目錄
感謝middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddoti
中文摘要middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotii
Abstractmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotiii
表目錄middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotvii
第一章 前言middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot1
第二章 PIC與馬達的基本介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
21 微電腦與微控制器middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
211 微電腦系統的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
212 微控制器的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot3
22 PIC16F87X 單晶片微控制器架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
221 PIC16F87X單晶片微控制器的系統架構方塊圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
222 PIC16F87X輸出輸入功能介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot5
223 MPLAB 介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot6
23 PIC晶片內部架構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
231 PIC16F877之接腳圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
232 PIC16F877的內部結構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot8
24 馬達的基本介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot9
第三章 基本架構及驅動電路middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
31 基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
32 電子元件介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot12
33 電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
331 驅動電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
332 PIC16F877電路 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot18
第四章 程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
v
41 暫存器介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
42 主程式流程圖middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot25
421 外部中斷middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot27
422 AD轉換 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot31
423 24位元+24位元加法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot33
424 16位元times8位元乘法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot35
425 16位元-16位元減法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot38
43 PID控制器介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot40
431 Kp_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot41
432 Kd_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot45
433 Ki_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot47
44 PWM的介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot50
45 PIC主程式 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot57
第五章 結論middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot81
附錄 A 中斷 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot82
附錄 B AD轉換middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot83
附錄 C AD轉換時間middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot84
附錄 D MPLAB操作說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot85
參考文獻middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot89
vi
圖目錄
圖 21 微電腦基本方塊圖 2
圖 22 微控制器單晶片架構方塊圖 3
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖5
圖 25 PIC16F877的內部電路圖8
圖 26 直流馬達外觀 10
圖 31 整體基本架構圖11
圖 32 硬體電路架構12
圖 33 三角波及直流電壓比較產生 PWM訊號 12
圖 34 UC3843接腳圖13
圖 35 UC3843內部電路圖13
圖 36 光耦合接腳圖 14
圖 38 IR2111接腳圖15
圖 310 DCW03B-15元件圖以及接腳圖16
圖 311 current sensor電路圖16
圖 312 LM348電路圖17
圖 313 完整驅動電路圖 18
圖 314 PIC16F877電路圖19
圖 41 AB相訊號關係圖30
vii
表目錄
表 21 PIC16F87X家族成員6
1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

i
感謝
本專題的完成首先要感謝指導教授陳孝武老師這一年多來細心的指導
在我們對此專題還不熟悉找不到方向時老師給予我們很大協助不論是在設計
還是觀念架構上給予我們的啟發與分享使我們授益良多再來要感謝大學生
涯中的教導過的老師們讓我們打下了良好的基礎使我們在完成這項專題的同
時能夠把過去學過的知識運用在上面還有實驗室的學長同學提供了不少寶
貴的經驗給我們在許多小細節提醒我們使我們能夠順利完成專題
ii
中文摘要
現今科技發達在工業界中自動化已經是相當普遍也相當重要的一環而馬
達控制則是自動化中不可或缺的一項本專題為 PIC16F877直流馬達伺服控制
由 PIC單晶片以及相關的電路實現目的為得到一個控制命令用來減去位置回
授產生 error 再送出至下級在這專題中我們採用的控制命令的輸入方式為
AD 轉換這部份也可以使用其他種類的輸入譬如鍵盤輸入回授的部份由馬
達的 Encoder得到利用單晶片之硬體功能將 AB做為觸發外部中斷將馬
達的位置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任
意方式表現譬如七節顯示器經過 AD 的轉換之後由馬達的驅動電路實現
最後得到我們想要之位置控制
iii
Abstract
In high-tect age it is almost popular and also important part to use automation
in industrial field and motor-control is a necessary part of the automations This
subject is talking about PIC16F877 DC motor server controlBy using PIC uni-chip
and related circuit accomplishing the goal is to get a control order and to release
the position producing error-reback and send the control order to the next lower
levelIn this subject we use AD transformation to show the input of control order
and this part of input could represent by other methods like keyboard-input The
part of reback could get from encoder of motorBy using the function of hardware
of uni-chip we could use A and B to trigger external interrupt and save the
position of motor in the registers of PIC internal part If we need to show the angle
displacement we could directly use any kind of representation of registers like 7
segment LED Therefore after using AD transformation we could get the result
from propel circuit of motor Finally we get what we want the position control
iv
目錄
感謝middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddoti
中文摘要middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotii
Abstractmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotiii
表目錄middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotvii
第一章 前言middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot1
第二章 PIC與馬達的基本介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
21 微電腦與微控制器middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
211 微電腦系統的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
212 微控制器的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot3
22 PIC16F87X 單晶片微控制器架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
221 PIC16F87X單晶片微控制器的系統架構方塊圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
222 PIC16F87X輸出輸入功能介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot5
223 MPLAB 介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot6
23 PIC晶片內部架構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
231 PIC16F877之接腳圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
232 PIC16F877的內部結構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot8
24 馬達的基本介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot9
第三章 基本架構及驅動電路middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
31 基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
32 電子元件介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot12
33 電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
331 驅動電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
332 PIC16F877電路 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot18
第四章 程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
v
41 暫存器介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
42 主程式流程圖middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot25
421 外部中斷middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot27
422 AD轉換 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot31
423 24位元+24位元加法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot33
424 16位元times8位元乘法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot35
425 16位元-16位元減法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot38
43 PID控制器介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot40
431 Kp_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot41
432 Kd_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot45
433 Ki_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot47
44 PWM的介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot50
45 PIC主程式 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot57
第五章 結論middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot81
附錄 A 中斷 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot82
附錄 B AD轉換middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot83
附錄 C AD轉換時間middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot84
附錄 D MPLAB操作說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot85
參考文獻middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot89
vi
圖目錄
圖 21 微電腦基本方塊圖 2
圖 22 微控制器單晶片架構方塊圖 3
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖5
圖 25 PIC16F877的內部電路圖8
圖 26 直流馬達外觀 10
圖 31 整體基本架構圖11
圖 32 硬體電路架構12
圖 33 三角波及直流電壓比較產生 PWM訊號 12
圖 34 UC3843接腳圖13
圖 35 UC3843內部電路圖13
圖 36 光耦合接腳圖 14
圖 38 IR2111接腳圖15
圖 310 DCW03B-15元件圖以及接腳圖16
圖 311 current sensor電路圖16
圖 312 LM348電路圖17
圖 313 完整驅動電路圖 18
圖 314 PIC16F877電路圖19
圖 41 AB相訊號關係圖30
vii
表目錄
表 21 PIC16F87X家族成員6
1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

ii
中文摘要
現今科技發達在工業界中自動化已經是相當普遍也相當重要的一環而馬
達控制則是自動化中不可或缺的一項本專題為 PIC16F877直流馬達伺服控制
由 PIC單晶片以及相關的電路實現目的為得到一個控制命令用來減去位置回
授產生 error 再送出至下級在這專題中我們採用的控制命令的輸入方式為
AD 轉換這部份也可以使用其他種類的輸入譬如鍵盤輸入回授的部份由馬
達的 Encoder得到利用單晶片之硬體功能將 AB做為觸發外部中斷將馬
達的位置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任
意方式表現譬如七節顯示器經過 AD 的轉換之後由馬達的驅動電路實現
最後得到我們想要之位置控制
iii
Abstract
In high-tect age it is almost popular and also important part to use automation
in industrial field and motor-control is a necessary part of the automations This
subject is talking about PIC16F877 DC motor server controlBy using PIC uni-chip
and related circuit accomplishing the goal is to get a control order and to release
the position producing error-reback and send the control order to the next lower
levelIn this subject we use AD transformation to show the input of control order
and this part of input could represent by other methods like keyboard-input The
part of reback could get from encoder of motorBy using the function of hardware
of uni-chip we could use A and B to trigger external interrupt and save the
position of motor in the registers of PIC internal part If we need to show the angle
displacement we could directly use any kind of representation of registers like 7
segment LED Therefore after using AD transformation we could get the result
from propel circuit of motor Finally we get what we want the position control
iv
目錄
感謝middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddoti
中文摘要middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotii
Abstractmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotiii
表目錄middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotvii
第一章 前言middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot1
第二章 PIC與馬達的基本介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
21 微電腦與微控制器middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
211 微電腦系統的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
212 微控制器的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot3
22 PIC16F87X 單晶片微控制器架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
221 PIC16F87X單晶片微控制器的系統架構方塊圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
222 PIC16F87X輸出輸入功能介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot5
223 MPLAB 介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot6
23 PIC晶片內部架構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
231 PIC16F877之接腳圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
232 PIC16F877的內部結構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot8
24 馬達的基本介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot9
第三章 基本架構及驅動電路middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
31 基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
32 電子元件介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot12
33 電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
331 驅動電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
332 PIC16F877電路 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot18
第四章 程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
v
41 暫存器介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
42 主程式流程圖middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot25
421 外部中斷middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot27
422 AD轉換 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot31
423 24位元+24位元加法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot33
424 16位元times8位元乘法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot35
425 16位元-16位元減法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot38
43 PID控制器介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot40
431 Kp_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot41
432 Kd_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot45
433 Ki_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot47
44 PWM的介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot50
45 PIC主程式 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot57
第五章 結論middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot81
附錄 A 中斷 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot82
附錄 B AD轉換middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot83
附錄 C AD轉換時間middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot84
附錄 D MPLAB操作說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot85
參考文獻middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot89
vi
圖目錄
圖 21 微電腦基本方塊圖 2
圖 22 微控制器單晶片架構方塊圖 3
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖5
圖 25 PIC16F877的內部電路圖8
圖 26 直流馬達外觀 10
圖 31 整體基本架構圖11
圖 32 硬體電路架構12
圖 33 三角波及直流電壓比較產生 PWM訊號 12
圖 34 UC3843接腳圖13
圖 35 UC3843內部電路圖13
圖 36 光耦合接腳圖 14
圖 38 IR2111接腳圖15
圖 310 DCW03B-15元件圖以及接腳圖16
圖 311 current sensor電路圖16
圖 312 LM348電路圖17
圖 313 完整驅動電路圖 18
圖 314 PIC16F877電路圖19
圖 41 AB相訊號關係圖30
vii
表目錄
表 21 PIC16F87X家族成員6
1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

iii
Abstract
In high-tect age it is almost popular and also important part to use automation
in industrial field and motor-control is a necessary part of the automations This
subject is talking about PIC16F877 DC motor server controlBy using PIC uni-chip
and related circuit accomplishing the goal is to get a control order and to release
the position producing error-reback and send the control order to the next lower
levelIn this subject we use AD transformation to show the input of control order
and this part of input could represent by other methods like keyboard-input The
part of reback could get from encoder of motorBy using the function of hardware
of uni-chip we could use A and B to trigger external interrupt and save the
position of motor in the registers of PIC internal part If we need to show the angle
displacement we could directly use any kind of representation of registers like 7
segment LED Therefore after using AD transformation we could get the result
from propel circuit of motor Finally we get what we want the position control
iv
目錄
感謝middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddoti
中文摘要middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotii
Abstractmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotiii
表目錄middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotvii
第一章 前言middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot1
第二章 PIC與馬達的基本介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
21 微電腦與微控制器middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
211 微電腦系統的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
212 微控制器的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot3
22 PIC16F87X 單晶片微控制器架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
221 PIC16F87X單晶片微控制器的系統架構方塊圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
222 PIC16F87X輸出輸入功能介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot5
223 MPLAB 介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot6
23 PIC晶片內部架構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
231 PIC16F877之接腳圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
232 PIC16F877的內部結構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot8
24 馬達的基本介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot9
第三章 基本架構及驅動電路middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
31 基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
32 電子元件介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot12
33 電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
331 驅動電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
332 PIC16F877電路 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot18
第四章 程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
v
41 暫存器介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
42 主程式流程圖middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot25
421 外部中斷middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot27
422 AD轉換 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot31
423 24位元+24位元加法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot33
424 16位元times8位元乘法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot35
425 16位元-16位元減法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot38
43 PID控制器介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot40
431 Kp_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot41
432 Kd_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot45
433 Ki_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot47
44 PWM的介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot50
45 PIC主程式 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot57
第五章 結論middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot81
附錄 A 中斷 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot82
附錄 B AD轉換middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot83
附錄 C AD轉換時間middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot84
附錄 D MPLAB操作說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot85
參考文獻middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot89
vi
圖目錄
圖 21 微電腦基本方塊圖 2
圖 22 微控制器單晶片架構方塊圖 3
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖5
圖 25 PIC16F877的內部電路圖8
圖 26 直流馬達外觀 10
圖 31 整體基本架構圖11
圖 32 硬體電路架構12
圖 33 三角波及直流電壓比較產生 PWM訊號 12
圖 34 UC3843接腳圖13
圖 35 UC3843內部電路圖13
圖 36 光耦合接腳圖 14
圖 38 IR2111接腳圖15
圖 310 DCW03B-15元件圖以及接腳圖16
圖 311 current sensor電路圖16
圖 312 LM348電路圖17
圖 313 完整驅動電路圖 18
圖 314 PIC16F877電路圖19
圖 41 AB相訊號關係圖30
vii
表目錄
表 21 PIC16F87X家族成員6
1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

iv
目錄
感謝middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddoti
中文摘要middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotii
Abstractmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotiii
表目錄middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotvii
第一章 前言middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot1
第二章 PIC與馬達的基本介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
21 微電腦與微控制器middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
211 微電腦系統的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot2
212 微控制器的基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot3
22 PIC16F87X 單晶片微控制器架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
221 PIC16F87X單晶片微控制器的系統架構方塊圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot4
222 PIC16F87X輸出輸入功能介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot5
223 MPLAB 介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot6
23 PIC晶片內部架構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
231 PIC16F877之接腳圖 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot7
232 PIC16F877的內部結構 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot8
24 馬達的基本介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot9
第三章 基本架構及驅動電路middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
31 基本架構middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot11
32 電子元件介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot12
33 電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
331 驅動電路內部說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot17
332 PIC16F877電路 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot18
第四章 程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
v
41 暫存器介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
42 主程式流程圖middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot25
421 外部中斷middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot27
422 AD轉換 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot31
423 24位元+24位元加法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot33
424 16位元times8位元乘法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot35
425 16位元-16位元減法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot38
43 PID控制器介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot40
431 Kp_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot41
432 Kd_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot45
433 Ki_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot47
44 PWM的介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot50
45 PIC主程式 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot57
第五章 結論middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot81
附錄 A 中斷 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot82
附錄 B AD轉換middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot83
附錄 C AD轉換時間middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot84
附錄 D MPLAB操作說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot85
參考文獻middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot89
vi
圖目錄
圖 21 微電腦基本方塊圖 2
圖 22 微控制器單晶片架構方塊圖 3
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖5
圖 25 PIC16F877的內部電路圖8
圖 26 直流馬達外觀 10
圖 31 整體基本架構圖11
圖 32 硬體電路架構12
圖 33 三角波及直流電壓比較產生 PWM訊號 12
圖 34 UC3843接腳圖13
圖 35 UC3843內部電路圖13
圖 36 光耦合接腳圖 14
圖 38 IR2111接腳圖15
圖 310 DCW03B-15元件圖以及接腳圖16
圖 311 current sensor電路圖16
圖 312 LM348電路圖17
圖 313 完整驅動電路圖 18
圖 314 PIC16F877電路圖19
圖 41 AB相訊號關係圖30
vii
表目錄
表 21 PIC16F87X家族成員6
1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

v
41 暫存器介紹middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot20
42 主程式流程圖middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot25
421 外部中斷middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot27
422 AD轉換 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot31
423 24位元+24位元加法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot33
424 16位元times8位元乘法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot35
425 16位元-16位元減法副程式middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot38
43 PID控制器介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot40
431 Kp_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot41
432 Kd_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot45
433 Ki_Controlmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot47
44 PWM的介紹 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot50
45 PIC主程式 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot57
第五章 結論middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot81
附錄 A 中斷 middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot82
附錄 B AD轉換middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot83
附錄 C AD轉換時間middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot84
附錄 D MPLAB操作說明middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot85
參考文獻middotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddotmiddot89
vi
圖目錄
圖 21 微電腦基本方塊圖 2
圖 22 微控制器單晶片架構方塊圖 3
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖5
圖 25 PIC16F877的內部電路圖8
圖 26 直流馬達外觀 10
圖 31 整體基本架構圖11
圖 32 硬體電路架構12
圖 33 三角波及直流電壓比較產生 PWM訊號 12
圖 34 UC3843接腳圖13
圖 35 UC3843內部電路圖13
圖 36 光耦合接腳圖 14
圖 38 IR2111接腳圖15
圖 310 DCW03B-15元件圖以及接腳圖16
圖 311 current sensor電路圖16
圖 312 LM348電路圖17
圖 313 完整驅動電路圖 18
圖 314 PIC16F877電路圖19
圖 41 AB相訊號關係圖30
vii
表目錄
表 21 PIC16F87X家族成員6
1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

vi
圖目錄
圖 21 微電腦基本方塊圖 2
圖 22 微控制器單晶片架構方塊圖 3
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖5
圖 25 PIC16F877的內部電路圖8
圖 26 直流馬達外觀 10
圖 31 整體基本架構圖11
圖 32 硬體電路架構12
圖 33 三角波及直流電壓比較產生 PWM訊號 12
圖 34 UC3843接腳圖13
圖 35 UC3843內部電路圖13
圖 36 光耦合接腳圖 14
圖 38 IR2111接腳圖15
圖 310 DCW03B-15元件圖以及接腳圖16
圖 311 current sensor電路圖16
圖 312 LM348電路圖17
圖 313 完整驅動電路圖 18
圖 314 PIC16F877電路圖19
圖 41 AB相訊號關係圖30
vii
表目錄
表 21 PIC16F87X家族成員6
1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

vii
表目錄
表 21 PIC16F87X家族成員6
1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

1
第一章 前言
現在工業界由於市場競爭激烈自動化的技術成為工業界相當重要的一
環而自動化技術最主要的基礎就是有良好的馬達控制系統而如果欠缺了一套
優良的驅動方式去控制馬達一切都是空談
本專題是利用單晶片微處理器作為馬達控制器之用單晶片微控制器(Micro
controller unitMCU)憑藉其速度快體積耗電量小和彈性大的優點逐漸
取代傳統電子電路或邏輯電路的自動化領域包括辦公室自動化工廠自動化和
家庭自動化顯而易見的單晶片微電腦必是未來自動化最受歡迎的主控元件
我們這次專題所使用到的是美國 Microchip公司所開發的 8位元單晶片微控
制器 PIC16F877在硬體方面配合 PWM的工作方式配合 H型的馬達驅動電路來
驅動馬達經由編碼器回授位置構成精密的馬達位置控制軟體方面是將傳統
之 PID控制寫入單晶片中由於 PIC的指令較少易上手如果再加上已有之動
作或程式流程圖這將會是一種極容易擴充其功能的系統
預期能夠利用單晶片使得馬達控制之重心由電路轉移至單晶片方面達到
自動化之控制
2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

2
第二章 PIC與馬達的基本介紹
21 微電腦與微控制器
211 微電腦系統的基本架構
電腦泛指具有中央處理器加上記憶體以及輸出輸入設備之系統圖 2-1為一
般電腦系統的基本方塊圖微處理器是指將 CPU的功能製造於一個半導體晶片
上微電腦系統則是指使用微處理器及外加一些記憶體以及一些輸入輸出設備或
週邊元件所構成的一個電腦系統微電腦系統中 CPU程式與資料的記憶體與輸
出輸入間的資料必須藉由匯流排來讀取及寫入〔參考 PIC16F87X微控制器原理
實習與專題製作施慶隆〕
匯流排可分為資料匯流排(Data Bus)位址匯流排(Address Bus)與控
制匯流排(Control Bus)資料匯流排負責傳遞資料所有往來於 CPU記憶
體與周邊 IO 的資料訊息與控制命令都要經過資料匯流排傳送位址匯流排負
責傳送記憶體及周邊 IO 的位址線控制匯流排上控制訊號包括有指示傳輸資料
方向交談的時序訊號以及中斷訊號等
圖 21 微電腦基本方塊圖
3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

3
212 微控制器的基本架構
微控制器又稱單晶片一般微電腦系統大多採用 Von Neumann架構而微控
制器與數位信號處理器則大多採用 Harvard架構因為微控制器將應用所需的所
有硬體(計時器數位輸出輸入類比輸入)皆包括在單晶片中因此系統只需
接上電源震盪器與啟動按鈕即可工作
單晶片微控制器的內部記憶體通常只有數千個位元大小故用小型系統控
制一般微控制器的單晶片的程式通常放置於內部的 ROM程式記憶體而資料變
數則放置於內部 RAM資料記憶體
圖 22 微控制器單晶片架構方塊圖
4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

4
22 PIC16F87X 單晶片微控制器架構
221 PIC16F87X單晶片微控制器的系統架構方塊圖
PIC微控制器是由美國 Microchip公司所開發生產的 8位元單晶片微電腦
PIC是採用精簡指令架構PIC16F87X系列單晶片微控制器屬於精簡指令集 RISC
(Reduced Instruction Set Computing)作為設計架構它只有 35個組合語言
指令且每一個指令皆固定 14位元的字元
PIC16F87X 單晶片微控制器採用 Harvard 電腦結構系列中主要有 4 個不
同型號的單晶片 PICF873874876877基本上這四種單晶片接腳數和記憶體容
量交互搭配所得到四種選擇
工作頻率範圍為 DC至 20MHz內建有 Power-on Reset和 Brown-out Reset
兩種重置功能電源啟動延遲計時器和震盪器啟動延遲計時器除了一個看門狗
計時器外另外還有 3 個計時器和兩個 CCP 模組串聯通訊模組方面共支援
USARTSPI及 I2C
由於 PIC 的程式記憶體與資料記憶體分開所有指令只須從程式記憶體讀
取一次加上它的 CPU具有 Pipelining式的平行處理功能因此可以執行一個
指令同時讀取下一個指令故除了屬於跳躍指令其他一般指令只是單一個指令
週期(Instruction Cycle)的執行時間PIC 系統輸入 Clock 周期的 4 倍因
此 PIC的一小段組合語言程式的執行時間很容易計算出來PIC微控制器的最大
工作頻率為 20MHz
5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

5
圖 23 PIC16F87X單晶片微控制器的系統架構方塊圖
222 PIC16F87X輸出輸入功能介紹
1 3個計時器(Timer)除了最基本的定時功能之外具有捕捉比較產生
PWM信號等功能
2 12個外部中斷源共有一個中斷向量(位於程式記憶體之 0x04)
3 33個輸出輸入接腳
4 串聯 RS232通訊
5 8個 10-bit類比數位轉換器(AD)
6 同步串列通訊包括 SPI主控模式及主控與從屬模式
7 8位元的平行從屬模式(Parallel Slave PortPSP)
6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

6
表 21 PIC16F87X家族成員
223 MPLAB 介紹
MPLAB是 Microchip 公司對 PIC系列單晶片所發展的一套整合發展環境
(Integrated Development Environment IDE) MPLAB包含下列工具
1 MPLAB Editor―程式編輯器
2 MPASM Assembler―程式組譯器
3 MPLAB-SIM Software Simulator―軟體模擬器
4 MPLAB-ICEMULATOR―硬體模擬器
5 MPLAB-ICD―ICD元件的偵錯模擬環境
7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

7
23 PIC晶片內部架構
231 PIC16F877之接腳圖
PIC系列之單晶片微電腦是一個 40隻接腳接腳的排列如圖 24所示
圖 24 PIC16F87X接腳圖
8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

8
232 PIC16F877的內部結構
PIC16F877系列單晶片微電腦的內部電路圖 25
圖 25 PIC16F877的內部電路圖
9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

9
24 馬達的基本介紹
電動機即為工業界俗稱的馬達種類依照使用電源可分成直流馬達(DC
motor)與交流馬達(AC motor)兩大類若再以控制方式啟動方式與繞組方式分
類則可分成步進馬達(stepping motor)伺服馬達(servo motor)無刷馬達(霍爾
馬達)單相交流馬達三相感應馬達串激式直流馬達分激式直流馬達與
複激式直流馬達等
馬達之基本構造
1 電樞(armature)為馬達旋轉的部份材質為永久磁鐵線圈(外接電源)
導線(無外接電源)或特殊形狀之導磁材料
2 場繞組(field)材質為永久磁鐵或是線圈(外接電源)
3 滑環(slip ring)連接轉子繞線至外部換向器用於改變電樞繞線之電流方
向使用永久磁鐵為轉子材質的馬達則無需滑環或換向器
4 軸承(bearing)可使用滾珠滾針滾柱主要提供轉子穩固的支撐
5 馬達控制器(motor controller)
包含控制馬達的輸出扭矩速度或轉角以及大型馬達起動停止之順序控
制
10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

10
專題所使用的直流馬達規格如下
1 直流電壓範圍3~75V
2 最大轉速1800rpm
3 功率30W
4 每轉一圈會產生 360個脈衝訊號
5 編碼器接線-----紫---+5V
棕---GND
橙---A相
白---B相
圖 26 直流馬達外觀
11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

11
第三章 基本架構及驅動電路
31 基本架構
PID控制器 DA 馬達驅動電路
Encoder
Input θ+
-int
ω
圖 31 整體基本架構圖
圖 31中虛線左側的部份由 PIC單晶片以及相關的電路實現目的為得到
一個控制命令用來減去位置回授的值產生誤差值再送出至後級在這專題中
我們採用的控制命令的輸入方式為 AD 轉換回授的部份由馬達的編碼器得到
利用單晶片之外部中斷將 AB 相訊號之上升邊緣訊號作為觸發將馬達的位
置存入 PIC內部之暫存器如需要做顯示角位移可直接將此暫存器用任意方式
表現譬如七節顯示器
經過 AD 的轉換之後進入到虛線右邊由馬達的驅動電路實現最後得到
我們想要之位置控制
12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

12
圖 32 硬體電路架構
32 電子元件介紹
UC3843
1工作頻率由 TC TR 來決定
T=f1
TT CRf 81
=
2直流電壓輸入 25V時責任週期為 50
3輸出振幅為 0V~15V
4內部為直流電壓與三角波做比較產生 PWM訊號調整直流電壓即調整
PWM的 duty cycle (責任週期)如圖 33
圖 33 三角波及直流電壓比較產生 PWM訊號
13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

13
5UC3843接腳
由圖 34第 2根接腳由 LM348輸入一直流電壓第 8根接腳輸出 REFV 供給
TC TR BJT運作第 7根接腳接上 15V為了驅動 IC的電壓以及 PWM輸出的
參考電壓當電壓 25V由第 3根接腳輸入 UC3843內時內部的比較器跟直流電
壓做比較後產生 PWM訊號
圖 34 UC3843接腳圖
圖 35 UC3843內部電路圖
14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

14
TLP250
1目的為了把兩個不同的電源分開來
2輸出的參考電壓為 0V和 17V
3UC3843所輸入的 PWM訊號經由兩顆 TLP250後產生出二組反向的 PWM訊號
圖 36 光耦合接腳圖
IR2111
1 主要的目的是將一組 PWM訊號分成二組反向之 PWM訊號
2 二組 PWM訊號分別接到二個 MOS之 GSV 使 MOS進入三極區或是截止區作
為開關使用
3 IR21112的 HO及 LO分別接到 MOS的 Gate接腳如圖 37
圖 37 IR2111內部電路
15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

15
圖 38 IR2111接腳圖
電源電路
1由一般的 110V的交流電壓經過變壓器轉為 12V之交流電壓
經過全波整流器電容產生 17V 的直流電壓 DCW03B-15 產生三個直流參考
電壓 15V 0V -15V提供 IC動作
2經過變壓器轉為 48V之交流電壓經過全波整流器電容後產生 70V的直流
電壓作為馬達之驅動電壓
3由齊納二極體之特性逆偏時崩潰而近似一直流電壓2V
圖 39 齊納二極體電路
16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

16
圖 310 DCW03B-15元件圖以及接腳圖
current sensor(HY05P)與 OP(LM384)
current sensor主要目的為檢測馬達電流轉成電壓大小做為回授
接腳 1+15V
接腳 2-15V
接腳 3量測電壓輸出
接腳 40V
接腳 5電流輸入
接腳 6電流輸出
圖 311 current sensor電路圖
17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

17
LM384
內部由 4個 op所組成作為 current sensor回授前級的輸出以及提升準
位
圖 312 LM348電路圖
33 電路內部說明
331 驅動電路內部說明
由 PIC產生的 PWM訊號經過電容充放電轉成中心準位在 2V之直流電壓
送入 LM348後送出中心準位於 25V的直流電壓送入 UC3843UC3843將輸入
訊號經由內部的放大器降低電壓後與三角波比較後產生準位在 50的 PWM訊
號此時的 PWM訊號在 50的情況下馬達將會停止而超過 50時馬達會做
正轉的動作在 50以下時馬達會做反轉的動作
由 UC3843所送出的 PWM訊號送入 2個 TLP250內如圖 313的編號 12
TLP250送出一組反向輸出的 PWM訊號TLP250主要用途是將兩個不同的電源分
開編號 1的光耦合 PWM訊號送入如圖 313編號 3的 IR2111編號 2的光耦合
送入編號 4的 IR2111IR2111功用是將一 PWM分兩個反向之 PWM訊號一個有
浮接功能編號 3的 IR2111輸出的兩個 PWM訊號中一個由 HO端接至編號 5的
MOS之 G端Vs接至 S端LO則送至編號 7的 MOS之 G端編號 4之 IR2111 同
理最後使得 4個 MOS之 G端訊號編號 5以及編號 8同相編號 6以及編號 7
18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

18
同相
圖 313 完整驅動電路圖
332 PIC16F877電路
PIC
第 1隻接腳用來做開機 RESET用途
第 2隻接腳RA0作為 AD轉換通道
第 11123132隻接腳PIC的參考電壓以及接地
第 1314隻接腳震盪器
第 17隻腳RC2PIC的 PWM輸出
第 3334接腳接到圖 313 右邊的 Encoder的 46隻接腳Encoder的第 5
19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

19
隻接腳接至 5V
LM7805 5V之穩壓 IC
圖 314 PIC16F877電路圖
由 RA0當做系統之輸入AD轉換之後將輸入值以 2進位形式存於暫存器中
3334 接腳為回授以外部中斷之方式將數值存於暫存器中稍後於程式說
明中會介紹由第 17隻接腳輸出 PWM訊號當訊號為 5V時PIC通過電阻對電
容充電訊號為 0V 時PIC 通過電阻對電容放電由於充放電時間短近似於
一個直流電壓值送至馬達驅動電路作為輸入電壓
20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

20
第四章 程式
41 暫存器介紹
基本功能暫存器
STATUS 狀態
PORTX 輸入輸出接腳與暫存器同名(PORT有 5組X=ABCDE)
TRISX 設定各個 PORTX接腳的輸入輸出形式(X=ABCDE)
TXCON 計時計數器以及 PWM功能設定(X=0122為特殊功能如 PWM)
中斷相關暫存器
INTCON 基本中斷的致能以及旗標
PIE1 特殊中斷的致能
PIR1 特殊中斷的旗標
OPTION_REG觸發信號設定
AD轉換相關暫存器
ADCON0設定振盪器種類轉換通道
ADCON1設定轉換類型
ADRESH轉換結束資料的高位元組
ADRESL轉換結束資料的低位元組
PWM相關暫存器
CCP1CONPWM設定
PR2 設定週期値
CCPR1L 決定 Duty Cycle之 L位元組(可設定 10位元)
21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

21
CCPR1H 決定 Duty Cycle之 H位元組
TMR2 Timer2計數値
自定義暫存器
W_Temp EQU 0x20 W暫存器暫時存放處
STATUS_Temp EQU 0x21 STATUS狀態暫存處
SUB1_H EQU 0x23 減法副程式相關指令
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b 加法副程式相關指令
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e 乘法副程式相關指令
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32 加法副程式相關指令
TMP_M EQU 0x33
TMP_H EQU 0x34
ERR_SGN EQU 0x35 PID副程式儲存正負號
Count EQU 0x36 乘法副程式計數
EncoderL EQU 0x37 馬達位置計數器
22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

22
EncoderH EQU 0x38
Cmd_H EQU 0x39 控制命令暫存器
Cmd_L EQU 0x3a
Error_L EQU 0x3b 誤差
Error_H EQU 0x3c
Error1_L EQU 0x3d 前一刻之誤差
Error1_H EQU 0x3e
Kp EQU 0x4f 比例常數
Kp_Term_L EQU 0x40 比例常數乘上誤差值
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43 微分常數
Kd_Term_L EQU 0x44 微分常數乘上誤差變化量
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47 積分常數
Ki_Term_L EQU 0x48 積分常數乘上累積誤差
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b Kp_Term+ Kd_Term+ Ki_Term
MSum_M EQU 0x4c
MSum_H EQU 0x4d
Itemp_L EQU 0x5e 累積誤差(可能會更改到數字)
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

23
Error_Sum_L EQU 0x51 累積誤差(只累加)
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54 誤差的高位元組
相關指令介紹
movf 將 f暫存器的値移至 W暫存器
movwf 將 W暫存器的値存入 f暫存器中
movlw 將常數存入 W暫存器中
clrw 清除 W暫存器
clrf 清除 f暫存器
swapf 一位元組中高四位元與低四位元互換
rlf 暫存器資料左移一位元
rrf 暫存器資料右移一位元
addwf 將 f暫存器加上 W暫存器
addlw 將常數 k加入 W暫存器
subwf 將 f暫存器減去 W暫存器
sublw 將常數 k減去 W暫存器
comf 將 f暫存器取補數
incf 將 f暫存器加 1
decf 將 f暫存器減 1
bcf 將 f暫存器指定之位元設為 0
bsf 將 f暫存器指定之位元設為 1
goto 跳躍指令
call 必須與 return或 retlw配合的副程式呼叫指令
24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

24
return 回至上層程式
retfie 離開中斷程式
btfss 判斷指定位元狀態0則執行下個指令1則執行第二個指令
btfsc 判斷指定位元狀態1則執行下個指令0則執行第二個指令
nop 不執行動作
25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

25
42 主程式流程圖
MainLine
Initial設定
AD_Converter
PID_Control
PWM_Output
開機後程式先進入初始值設定在 Initial 中設定 AD 轉換PWM 輸出
暫存器初始值外部中斷接著進入 AD轉換在 AD轉換中取得輸入命令存入
Cmd暫存器中再與 Encoder暫存器相減得到 Error將 Error放入 PID副程式
中做運算運算完的值存入 MSum中經由 PWM輸出
以下會逐步介紹程式內部副程式的程式流程圖副程式包含了硬體功能的
PWMAD轉換外部中斷等軟體部分包含了比例微分積分等運算且由於
PWM指令限制無法直接做出乘法以及 PID運算中所需要多位元組的計算所
以各別寫出 16位元-16位元減法副程式24位元+24位元加法副程式16位
元times8位元乘法副程式等
26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

26
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

27
421 外部中斷
在 8051中每一個中斷都有著中斷向量在 PIC中所有的中斷向量皆在
0x04程式判斷為中斷後跳至 0x04再用軟體判斷它是屬於何種中斷再跳
到中斷程式執行可在以下程式第 4到 6行加入判斷中斷旗標之程式附錄中會
有所有中斷之簡介
28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

28
IntService 中斷副程式
movwf W_Temp 儲存狀態
swapf STATUSw
movwf STATUS_Temp
banksel INTCON 檢查 INTCON暫存器
btfsc INTCONINTF 判斷此為何種中斷
call Encoder_ISR 是外部中斷則進入 Encoder
計數之副程式
swapf STATUS_Tempw 取回狀態
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie 離開中斷程式
Encoder_ISR Encoder計數副程式
banksel PORTB B相信號 L則跳至 Forward
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse B相信號 L則跳至 Forward
banksel INTCON
bcf INTCONINTF
return
29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

29
Forward Encoder計數値+1
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
incf EncoderHf
clrf EncoderL
return
Reverse Encoder計數値-1
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

30
A相
B相
圖 41 AB相訊號關係圖
這邊先介紹硬體部分將馬達 Encoder之 A相信號接至 RB0B向信號接至
RB1(PIC程式中用 RB0表示 PORTB0其餘接腳亦同)程式部分進入中斷
後首先將目前的狀態儲存儲存 W 暫存器以及 STATUS馬達位置計數方式參
考上表中斷程式設計為當 A相之上升邊緣信號產生時後程式跳至中斷副程
式此時讀取 B相信號的輸入值當 A相上升邊緣觸發時中斷產生時如果 B相
信號 L判斷為正轉Encoder暫存器值+1如果 B相信號=H則 Encoder暫
存器值-1接著取回狀態回到主程式PIC 系列單晶片中return 指令代表
回到上一層程式retfie代表中斷結束回到主程式
31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

31
422 AD轉換
AD轉換
ADCON02=1
ADCON02=0
Cmd_H=ADRESHCmd_L=ADRESL
return
No
Yes
AD_Convert
banksel ADCON0
bsf ADCON0GO 開始 AD轉換
AD_Wait
btfsc ADCON0GO 等待轉換時間
goto AD_Wait
movf ADRESHw 轉換結束儲存結果
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

32
banksel Cmd_L
movwf Cmd_L
return
AD轉換是 PIC系列單晶片的一大特色不用再外接 ADC0804稍微比較一下
二者的差別ADC0804需外接轉換位元為 8位元大約需要 100uspic16f877
內建的 AD 轉換轉換位元為 10 位元轉換時間約為 40us詳細的算法於附錄
中介紹且可依照 AD 模式的選定以數根接腳做為輸入雖然不能同時轉換
但也大大的節省了外部電路的麻煩以及時間
在初始值設定過之後AD轉換就只需要把 ADCON0中的第 2位元 GoDone設
為 1接著等待轉換時間等 GoDone位元變為 0即為轉換完畢將資料存入 Cmd
(控制命令)中回到主程式
33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

33
423 24位元+24位元加法副程式
34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

34
加法副程式的目的在運算多位元組的加法將被加數放入 Sum_HSum_M
Sum_L暫存器中加數放入 TMP_HTMP_MTMP_L答案存入 Sum_HSum_MSum_L
中
先將低位元組相加如有進位則中位元組加 1如中位元組加 1後進位
則高位元組再加 1再將中位元組相加如有進位則高位元組加 1回主程式
ADD24
banksel TMP_L 低位元組相加
movf TMP_Lw
addwf Sum_Lf
movlw 0x01 處理低位元組相加後之溢位
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw 中位元組相加
addwf Sum_Mf
movlw 0x01 處理中位元組相加後之溢位
btfsc STATUSC
addwf Sum_Hf 高位元組相加
movf TMP_Hw
addwf Sum_Hf
return
35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

35
424 16位元times8位元乘法副程式
MULT16
Count=8
MM20=0
Call ADD24
MM2右移一位TMP左移一位
Count=Count-1
Count=0
Yes
No
return
Yes
No
乘法副程式主要用在有關 KpKdKi的運算所以用 16位元乘 8位元即可
這邊的設計呼叫副程式之前將被乘數存入 MM1_HMM1_MMM1_L中乘數放
入 MM2副程式中將 MM1_HMM1_MMM1_L分別存入 TMP_HTMP_MTMP_L中
36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

36
運算後之結果放入 Sum_HSum_MSum_L中
進入副程式後將 Count暫存器存入 8代表著做 8次迴圈判斷 MM20是
否為 0如果不是則呼叫加法副程式將 MM1 加入 Sum如果是 0則直接進
入下一步將 MM2右移一位可以讓下一迴圈時繼續判斷 MM20將 TMP左移
一位代表著乘以 2如同加法一般做疊加的動作在此將 MM1的值存入 TMP
是因為使用到加法副程式所以必須存進 TMP重複執行 8次後回主程式
在此需要注意乘法副程式限用 2位元組之內的在這裡不用擔心超過 3個
位元組因為 Error與 Error1(Error後面會提到)都很小ErrorSum(累
積誤差後面會提到)有加入條件限制都會在 2位元組之內乘上 1位元組
可以用 3位元組儲存但是如果被乘數以補數形式出現高位元的 1將會使得答
案錯誤所以如果要加強乘法副程式的功能使被乘數以補數型態仍可運算
可在原副程式之上加入判斷 MM1為正或負負的話取補數記錄正負號原副
程式執行完之後依照已記錄之正負號再取補數
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08 連做 8次加法存入計數値
movwf Count
movf MM1_Hw 數字存入加法相關暫存器
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

37
MUL_Loop
btfsc MM20 MM20=0時不執行加法
call ADD24 MM20=1時執行加法
bcf STATUSC
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

38
425 16位元-16位元減法副程式
減法程式用在控制命令(Cmd)減回授值(Encoder)與 Error 減上一筆
Error時所以使用 16位元相減
將被減數存入 SUB2_HSUB2_L中減數存入 SUB1_HSUB1_L中先做低位
元組之相減判斷是否借位如果是則高位元組減 1否則直接進行下一步
再來做高位元組之相減答案存入 temp_Htemp_L中回主程式
SUB16
banksel SUB1_L
movf SUB1_Lw 低位元相減
subwf SUB2_Lw
39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

39
movwf temp_L
btfss STATUSC 處理借位現象
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

40
43 PID控制器介紹
PID控制器就是根據系統的誤差利用比例積分微分計算出控制量比例控
制是一種最簡單的控制方式其控制器的輸出與輸入誤差訊號成比例關係當僅
有比例控制時系統輸出存在穩態誤差(Steady-state error) 在積分控制中
控制器的輸出與輸入誤差訊號的積分成正比關係
對一個自動控制系統如果在進入穩態後存在穩態誤差則稱這個控制系統
是有穩態誤差的或簡稱有差系統(System with Steady-state Error)為了消
除穩態誤差在控制器中必須引入ldquo積分項rdquo積分項對誤差取關於時間的積
分隨著時間的增加積分項會增大這樣即便誤差很小積分項也會隨著時
間的增加而加大它推動控制器的輸出增大使穩態誤差進一步減小直到等於零
因此比例+積分(PI)控制器可以使系統在進入穩態後無穩態誤差 在微分控
制中控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係
自動控制系統在克服誤差的調節過程中可能會出現振盪甚至失穩解決的辦
法是使克服誤差的作用的變化要有些ldquo超前rdquo即在誤差接近零時克服誤差的
作用就應該是零這就是說在控制器中僅引入ldquo比例rdquo項往往是不夠的比例
項的作用僅是放大誤差的幅值而目前需要增加的是ldquo微分項rdquo它能預測誤差
變化的趨勢這樣具有比例+微分的控制器就能夠提前使克服誤差的控制作
用等於零甚至為負值所以對有較大慣性和(或)滯後的被控對象比例+微
分(PD)的控制器能改善系統在調節過程中的動態特性
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

41
431 Kp_Control
進入副程式後將控制命令(Cmd)-回授值(Encoder)得到 Error(存於
temp)接下來做乘法的動作前面提到過乘法副程式被乘數只能是正數所以
先將暫存器 temp的正負號儲存於 ERR_SGN0中如已是補數型態則再補數再
進入下一步正數的話直接進入下一步將 Kptimes|Error|存入 Kp_term中再依
照 ERR_SGN0所記錄原本是取補數的再取補數一次原本是正數的則不動
回主程式
42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

42
Kp_Control
banksel Cmd_L 控制命令減去位置值得到 error
movf Cmd_Lw
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0 儲存 error正負號
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive error為正至 Positive做乘法
comf temp_Lf error為負取補數後再至
comf temp_Hf Positive做乘法
movlw 0x01
43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

43
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0 error原來為正回 PID主程式
return
44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

44
comf Kp_Term_Lf 取過補數之 error再取補數得
comf Kp_Term_Mf 原來數再回 PID程式
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

45
432 Kd_Control
Kd_Control
temp=Error-Error1Error1=Error
ERR_SHN1=0
temp=(-1)timestemp
Kd_Term=Kdtimestemp
ERR_SGN1=0
Kd_Term=(-1)timesKd_Term
return
Yes
Yes
No
No
進入微分控制副程式後將 Error-Error1Error1為前一刻的 Error(存
於 temp)第一次執行時設為 0將暫存器 temp的正負號儲存於 ERR_SGN1中
如是補數型態則再取補數再進入下一步正數的話直接進入下一步將 Kdtimes
|temp|存入 Kd_term中再依照 ERR_SGN1所記錄原本是取補數的再取補數
一次原本是正數的則不動回主程式
46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

46
Kd_Control
movf Error_LW Error1減去 Error得到error
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H 將此刻之 Error存入 Error1
movf Error_Hw 供下一輪使用
movwf Error1_H
movf Error_Lw
movwf Error1_L
下面步驟與 Kp_Control相似
47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

47
433 Ki_Control
Ki_Control
Error_Sum=Error+ErrorSumItemp=ErrorSum
ERR_SGN2=0
Itemp=(-1)timesItemp
Ki_Term=KitimesItemp
ERROR_SGN2=0
Ki_Term=(-1)timesKi_Term
return
Yes
Yes
No
No
|ErrorSum_H|=0
No
Yes
進入積分副程式後首先將 ErrorSum(累積誤差初值為 0)加上 Error(這
48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

48
次的誤差)存入 ErrorSum以及 Itemp由於乘法副程式的限制被乘數不能超
過 2位元組所以在這邊檢查 ErrorSum是否超過 2位元組超過則回主程式
沒超過則繼續進行積分運算將 Itemp的正負號儲存於 ERR_SGN2中如已是補
數型態則再取補數再進入下一步正數的話直接進入下一步將 Kitimes|Itemp|
存入 Ki_term中再依照 ERR_SGN2所記錄原本是取補數的再取補數一次
原本是正數的則不動回主程式
Ki_Control
banksel ErrorOver 判斷 Error是否過大
movf ErrorOverf 過大則回主程式
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw 累加 Error
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

49
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
movf Error_Sum_Hw
movwf TMP_H
call ADD24 以下步驟與前面類似
50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

50
44 PWM的介紹
馬達的驅動電路有很多種其中間斷式驅動電路大多採用脈寬調變(PWM)來
作工作原理是利用一顆 OP 放大器將不同電壓值和三角波來作比較所產生出
不同脈波寬度的方波
脈波寬度調變(Pulse Width Modulation PWM)此種驅動方式以固定頻率
開關直流供應電壓它的驅動原理是將一可調式的電壓和一個固定頻率的三角
波信號比較經由比較器比較後可得工作週期(Duty Cycle)和頻率不變的方
波這一方波的平均電壓值正比於輸入之可調電壓若輸入電壓改變輸出的方
波寬度亦不同所以脈波寬度來表示其電壓型態稱為脈波寬度調變
Summation以及 PWM輸出
將 Kp_Term加 Kd_Term加 Ki_Term存入 MSum再判斷其正負號正則將 RC3
設為 1負則取補數RC3設為 0回主程式
Summation
51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

51
movf Kp_Term_Lw Kp_Term存入 TMP
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw Kd_Term存入 Sum
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
movf Kd_Term_HW
movwf Sum_H
call ADD24 Sum=Kp_Term+Kd_Term
movf Ki_Term_Lw Ki_Term存入 Sum
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24 Sum=Kp_Term+Kd_Term+Ki_Term
52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

52
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7 判斷總和的正負號以決定增加或
bcf PORTC3 減少 duty cycle
btfss MSum_H7
bsf PORTC3
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

53
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM輸出
在這將之前所得之|MSum|以及正負號反應到 PWM的 duty cycle上這
邊會受到一些限制在這之前的運算Kp_Temp等數值都是用 2位元組來表示
54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

54
但是 pic決定 duty cycle是由 1個位元組來表示所以先判斷|MSum_H|是否有
值如果有則再依照 RC3為 0或 1將 duty cycle設為 100或是 0若 MSum_H
為 0則繼續往下執行若 MSum_M≧0x04則如上再依照 RC3為 0或 1將 duty
cycle設為 100或是 0若 MSum_M<0x04則繼續往下執行
由於暫存器 CCPR1L的值決定 duty cycle又無誤差時必須在 50所以
先存入 Brsquo10000000rsquo代表 50如此之後可存入之值只能為 7位元將 MSum_M
MSum_L右移 3位這樣一來MSum_L即為所需要之 7位元而這裡忽略掉最低
3位元降低靈敏度這裡可依照使用需要而改變MSum右移 3位後依照 RC3
的值使 CCPR1L加上 MSum_L或是減掉 MSum_L由 PWM形式的輸出達到 PID
的目的
PWM_Output
movf MSum_Hf 判斷 MSum值的大小
btfss STATUSZ
goto PWM_Limit 過大則判斷全速轉動
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

55
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf MSum過大參數調整不易
rrf MSum_Lf 在這將其値做適當之減少
bcf STATUSC 方便觀察結果
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
goto PWM_Send
PWM_Limit 全速轉動之副程式
banksel CCPR1L 在此判斷應反轉或是正轉
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

56
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

57
45 PIC主程式
PIC主程式
list p=16f877R=DEC
include ltp16f877incgt
W_Temp EQU 0x20
STATUS_Temp EQU 0x21
SUB1_H EQU 0x23
SUB1_L EQU 0x24
SUB2_H EQU 0x25
SUB2_L EQU 0x26
temp_L EQU 0x29
temp_H EQU 0x2a
Sum_L EQU 0x2b
Sum_M EQU 0x2c
Sum_H EQU 0x2d
MM1_L EQU 0x2e
MM1_M EQU 0x2f
MM1_H EQU 0x30
MM2 EQU 0x31
TMP_L EQU 0x32
TMP_M EQU 0x33
TMP_H EQU 0x34
58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

58
ERR_SGN EQU 0x35
Count EQU 0x36
EncoderL EQU 0x37
EncoderH EQU 0x38
Cmd_H EQU 0x39
Cmd_L EQU 0x3a
Error_L EQU 0x3b
Error_H EQU 0x3c
Error1_L EQU 0x3d
Error1_H EQU 0x3e
Kp EQU 0x4f
Kp_Term_L EQU 0x40
Kp_Term_M EQU 0x41
Kp_Term_H EQU 0x42
Kd EQU 0x43
Kd_Term_L EQU 0x44
Kd_Term_M EQU 0x45
Kd_Term_H EQU 0x46
Ki EQU 0x47
Ki_Term_L EQU 0x48
Ki_Term_M EQU 0x49
Ki_Term_H EQU 0x4a
MSum_L EQU 0x4b
MSum_M EQU 0x4c
MSum_H EQU 0x4d
59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

59
Itemp_L EQU 0x5e
Itemp_M EQU 0x5f
Itemp_H EQU 0x50
Error_Sum_L EQU 0x51
Error_Sum_M EQU 0x52
Error_Sum_H EQU 0x53
ErrorOver EQU 0x54
org 0x00
nop
goto MainLine
org 0x04
goto IntService
IntService
movwf W_Temp
swapf STATUSw
movwf STATUS_Temp
banksel INTCON
btfsc INTCONINTF
call Encoder_ISR
swapf STATUS_Tempw
60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

60
movwf STATUS
swapf W_Tempf
swapf W_Tempw
retfie
Encoder_ISR
banksel PORTB
btfss PORTB1
call Forward
btfsc PORTB1
call Reverse
banksel INTCON
bcf INTCONINTF
return
Forward
banksel EncoderL
movlw 0xff
subwf EncoderLw
btfsc STATUSZ
goto Forward1
incf EncoderLf
return
Forward1
61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

61
incf EncoderHf
clrf EncoderL
return
Reverse
banksel EncoderL
movf EncoderLf
btfsc STATUSZ
goto Reverse1
decf EncoderLf
return
Reverse1
decf EncoderHf
decf EncoderLf
return
MainLine
call Initial
MainLoop
call AD_Convert
call PID_Control
call PWM_Output
goto MainLoop
62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

62
Initial
banksel ERR_SGN
clrf ERR_SGN
clrf Error1_L
clrf Error1_H
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
clrf Kp_Term_L
clrf Kp_Term_M
clrf Kp_Term_H
clrf Kd_Term_L
clrf Kd_Term_M
clrf Kd_Term_H
clrf Error_Sum_L
clrf Error_Sum_M
clrf Error_Sum_H
clrf MSum_L
clrf MSum_M
clrf MSum_H
clrf Cmd_L
clrf Cmd_H
movlw 0x6e
movwf Kp
63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

63
movlw 0x80
movwf Kd
movlw 0x01
movwf Ki
banksel TRISC
movlw B00000000
movwf TRISC
banksel PORTC
movlw B00000000
movwf PORTC
movlw 0xff
movwf PR2
banksel TMR2
clrf TMR2
movlw 0x80
movwf CCPR1L
movlw 0x0C
movwf CCP1CON
movlw 0x00
movwf T2CON
bsf T2CONTMR2ON
movlw 0x00
movwf EncoderL
64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

64
movwf EncoderH
banksel OPTION_REG
bsf OPTION_REGINTEDG
bsf TRISB0
bsf TRISB1
movlw B10010000
movwf INTCON
banksel ADCON1
movlw B10001110
movwf ADCON1
bsf TRISA0
bcf STATUSRP0
movlw B10000001
movwf ADCON0
return
AD_Convert
banksel ADCON0
bsf ADCON0GO
AD_Wait
btfsc ADCON0GO
goto AD_Wait
movf ADRESHw
65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

65
clrf Cmd_H
movwf Cmd_H
banksel ADRESL
movf ADRESLw
banksel Cmd_L
movwf Cmd_L
return
MULT16
clrf Sum_H
clrf Sum_M
clrf Sum_L
movlw 0x08
movwf Count
movf MM1_Hw
movwf TMP_H
movf MM1_Mw
movwf TMP_M
movf MM1_Lw
movwf TMP_L
MUL_Loop
btfsc MM20
call ADD24
bcf STATUSC
66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

66
rrf MM2f
bcf STATUSC
rlf TMP_Lf
rlf TMP_Mf
rlf TMP_Hf
decfsz Countf
goto MUL_Loop
return
ADD24
banksel TMP_L
movf TMP_Lw
addwf Sum_Lf
movlw 0x01
btfsc STATUSC
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Mw
addwf Sum_Mf
movlw 0x01
btfsc STATUSC
addwf Sum_Hf
movf TMP_Hw
67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

67
addwf Sum_Hf
return
SUB16
banksel SUB1_L
movf SUB1_Lw
subwf SUB2_Lw
movwf temp_L
btfss STATUSC
decf SUB2_Hf
movf SUB1_Hw
subwf SUB2_Hw
movwf temp_H
return
PID_Control
call Kp_Control
call Kd_Control
call Ki_Control
call Summation
return
Kp_Control
banksel Cmd_L
movf Cmd_Lw
68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

68
movwf SUB2_L
movf Cmd_Hw
movwf SUB2_H
movf EncoderLw
movwf SUB1_L
movf EncoderHw
movwf SUB1_H
call SUB16
movf temp_Lw
movwf Error_L
movf temp_Hw
movwf Error_H
bcf ERR_SGN0
btfsc temp_H7
bsf ERR_SGN0
btfss ERR_SGN0
goto Positive
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

69
Positive
movf temp_Hw
movwf ErrorOver
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kpw
movwf MM2
call MULT16
movf Sum_Hw
movwf Kp_Term_H
movf Sum_Mw
movwf Kp_Term_M
movf Sum_Lw
movwf Kp_Term_L
btfss ERR_SGN0
return
comf Kp_Term_Lf
comf Kp_Term_Mf
70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

70
comf Kp_Term_Hf
movlw 0x01
addwf Kp_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Kp_Term_Hf
return
Kd_Control
movf Error_LW
movwf SUB2_L
movf Error_Hw
movwf SUB2_H
movf Error1_Lw
movwf SUB1_L
movf Error1_Hw
movwf SUB1_H
call SUB16
banksel Error1_H
71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

71
movf Error_Hw
movwf Error1_H
movf Error_Lw
movwf Error1_L
bcf ERR_SGN1
btfsc temp_H7
bsf ERR_SGN1
btfss ERR_SGN1
goto Kd_Control1
comf temp_Lf
comf temp_Hf
movlw 0x01
addwf temp_Lf
btfsc STATUSC
incf temp_Hf
Kd_Control1
clrf MM1_H
movf temp_Hw
movwf MM1_M
movf temp_Lw
movwf MM1_L
movf Kdw
movwf MM2
72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

72
call MULT16
movf Sum_Hw
movwf Kd_Term_H
movf Sum_Mw
movwf Kd_Term_M
movf Sum_Lw
movwf Kd_Term_L
btfss ERR_SGN1
return
comf Kd_Term_Hf
comf Kd_Term_Mf
comf Kd_Term_Lf
movlw 0x01
addwf Kd_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Kd_Term_Mf
btfss STATUSC
return
movlw 0x01
73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

73
addwf Kd_Term_Hf
return
Ki_Control
banksel ErrorOver
movf ErrorOverf
btfsc STATUSZ
goto Ki_Control1
clrf Ki_Term_L
clrf Ki_Term_M
clrf Ki_Term_H
return
Ki_Control1
movf Error_Lw
movwf Sum_L
movf Error_Hw
movwf Sum_M
movlw 0xff
movwf Sum_H
btfss Error_H7
clrf Sum_H
movf Error_Sum_Lw
movwf TMP_L
movf Error_Sum_Mw
movwf TMP_M
74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

74
movf Error_Sum_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf Error_Sum_L
movwf Itemp_L
movf Sum_Mw
movwf Error_Sum_M
movwf Itemp_M
movf Sum_Hw
movwf Error_Sum_H
movwf Itemp_H
bcf ERR_SGN2
btfsc Itemp_H7
bsf ERR_SGN2
btfss ERR_SGN2
goto Ki_Control2
comf Itemp_Lf
comf Itemp_Mf
comf Itemp_Hf
movlw 0x01
addwf Itemp_Lf
btfss STATUSC
goto Ki_Control2
movlw 0x01
75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

75
addwf Itemp_Mf
btfss STATUSC
goto Ki_Control2
movlw 0x01
addwf Itemp_Hf
Ki_Control2
movf Itemp_Lw
movwf MM1_L
movf Itemp_Mw
movwf MM1_M
movf Itemp_Hw
movwf MM1_H
movf Kiw
movwf MM2
call MULT16
movf Sum_Lw
movwf Ki_Term_L
movf Sum_Mw
movwf Ki_Term_M
movf Sum_Hw
movwf Ki_Term_H
btfss ERR_SGN2
return
comf Ki_Term_Lf
76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

76
comf Ki_Term_Mf
comf Ki_Term_Hf
movlw 0x01
addwf Ki_Term_Lf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Mf
btfss STATUSC
return
movlw 0x01
addwf Ki_Term_Hf
return
Summation
movf Kp_Term_Lw
movwf TMP_L
movf Kp_Term_Mw
movwf TMP_M
movf Kp_Term_Hw
movwf TMP_H
movf Kd_Term_Lw
movwf Sum_L
movf Kd_Term_Mw
movwf Sum_M
77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

77
movf Kd_Term_HW
movwf Sum_H
call ADD24
movf Ki_Term_Lw
movwf TMP_L
movf Ki_Term_Mw
movwf TMP_M
movf Ki_Term_Hw
movwf TMP_H
call ADD24
movf Sum_Lw
movwf MSum_L
movf Sum_Mw
movwf MSum_M
movf Sum_Hw
movwf MSum_H
btfsc MSum_H7
bcf PORTC3
btfss MSum_H7
bsf PORTC3
78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

78
btfss MSum_H7
return
comf MSum_Lf
comf MSum_Mf
comf MSum_Hf
movlw 0x01
addwf MSum_Lf
btfss STATUSC
return
movlw 0x01
addwf MSum_Mf
btfss STATUSC
return
movlw 0x01
addwf MSum_Hf
return
PWM_Output
movf MSum_Hf
btfss STATUSZ
goto PWM_Limit
79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

79
movlw 0x00
movwf SUB2_L
movlw 0x04
movwf SUB2_H
movf MSum_Lw
movwf SUB1_L
movf MSum_Mw
movwf SUB1_H
call SUB16
btfsc temp_H7
goto PWM_Limit
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
bcf STATUSC
rrf MSum_MF
rrf MSum_LF
bcf STATUSC
rrf MSum_Mf
rrf MSum_Lf
goto PWM_Send
80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

80
PWM_Limit
banksel CCPR1L
movlw 0xff
btfsc PORTC3
movwf CCPR1L
btfss PORTC3
clrf CCPR1L
return
PWM_Send
banksel CCPR1L
movlw 0x80
movwf CCPR1L
movf MSum_Lw
btfsc PORTC3
addwf CCPR1Lf
btfss PORTC3
subwf CCPR1Lf
return
END
81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

81
第五章 結論
以前讀書的時候都是由理論方面去看從來不知道實做的時候會有什麼問
題真正著手的時候才發現一切都和以前不同從一開始的硬體部分電路測試
就碰到了許多問題比方說 IC不會使用電阻值如何選定到了做 PCB板的時
候又碰到許多焊接的問題接下來進入程式部份接觸一個完全沒學過的單晶
片可能會碰到的問題自然不在話下每一個階段都碰到了許多問題 後來都慢
慢的解決與其說學會了如何控制馬達不如說學會了正視問題以及解決問題
在這專題中還有一些地方是我們已經發現的但是無法確實處理的問題
說到位置控制應該都會想到說要如何顯示出角位移這一點在上面提到過
了加裝個顯示就可以做到重點在於這樣的結果是否真的能達到想要的位移
以我們的程式發現只有 error=0的時候馬達才會停止轉動這點倒是可以確定
了馬達有確實執行程式但是其實還是會有誤差其原因可能發生在於馬達的轉
角是否確實的讓 PIC讀取到了或是編碼器之問題或是單晶片程式問題這
點倒是可以改善的地方
82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

82
附錄 A 中斷
PIC中有三種最常用的中斷分別是 TIMER0(TOIE致能TOIF旗標)
RB0外部中斷(致能 INTE旗標 INTF)RB4RB7中斷(致能 RBIE旗標 RBIF)
這三種中斷的致能以及旗標都在中斷設定中最常使用到的暫存器 INTCON
中可以設定其餘的就要到暫存器 PIR(旗標)PIE(致能)中找尋要注
意的是RB4RB7中斷都用同一個中斷旗標使用時需要加入一些程式判斷
可以看到的是RB0是一個很常用的中斷而且好判斷所以把它直接用來當作
輸入或是最主要的中斷是個很常用的作法
與 8051不同的是PIC的中斷向量都在 0x04如果同時使用到多種中斷
其優先權是由使用者在程式中定義這也算是個 PIC的優點
83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

83
附錄 B AD轉換
PIC的 AD 轉換最大的強處是它有數個 AD 轉換通道經由 ADCON1暫存器
之<30>位元(PCFG3PCFG0)設定可以決定出要使用到幾組類比輸入通道
以及參考電壓方式使用時在初始值中設定好之後在 ADCON0 暫存器之<53
>位元做類比輸入通道的選擇然後將 ADCON0暫存器<2>位元設為 1就能開
始轉換了
84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

84
附錄 C AD轉換時間
總轉換時間 ADADACQ TTTT 212 ++= 其中 ACQT 為內部取樣保持以及溫度參數
的詳細計算PIC的 data sheet中已有計算約為 1972us ADT 為轉換一個 bit
所需時間而轉換 10個 bit時間至少需要 12 ADT 後面的 2 ADT 代表如果
接著要轉換其他 AD轉換通道則需要等待 2 ADT 的時間才能繼續進行考慮 ADT
的值如果使用 20MHz的震盪器則 OSCAD TT 32= 其目的在使 ADT 至少為 16us
用以上公式算出來如果使用 20MHz之震盪器以及多個 AD轉換通道每
一個轉換通道之轉換時間約為
T=1972us+14times16us=4212us
85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

85
附錄 D MPLAB操作說明
參考使用到的編譯軟體為 MPLAB-IDE這是一個免費軟體仿間賣的書後之
目錄都可以找到或是由官方網(httpwwwmicrochipcom1010indexhtm)
下載本專題使用到的版本為 57版官方網站至今為止最新到 64版由於使
用介面與參考書籍不同所以我仍然使用 57版方便使用
安裝過程沒什麼需要注意的以下從安裝完之後的介面開始介紹
第一次使用要在 Project-New Project建立專案準備一個資料夾專案
產生的檔案要與以後編譯的程式放在一起專案的目的是儲存個人喜好的使用環
境以後開啟 MPLAB-IDE時會自動跳出提示畫面選擇自己要開啟的專案
(pjt)再執行後續動作
Project-New Project之後會出現以下畫面
86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

86
這畫面以後要開啟的話可以在 Project-Edit Project找到會很常需要使
用這指令按下 OK就可以從 File開始編寫程式
程式編寫完成後儲存Project-Edit Project在「Add Node」中將程式
(asm)加入在「Change」可選擇軟體模擬硬體模擬等功能要注意的是
要加入的程式要先組譯過(下面會說明)才行
按下 Change可以看到以下畫面
87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

87
以下就會使用到的選項做說明
None「Editor Only」編輯
MPLAB SIM Simulator在 PC上模擬
MALAB ICD Debugger硬體(MALAB-ICD)模擬
選擇完模式之後右上方選擇使用到的單晶片型號按下 OK回到主畫面
程式編輯好之後接著是組譯在 Project下面可以看到三個指令
Make Project這指令只能組譯包含一個程式的專案
Build All組譯專案內所有的程式
Build Node只組譯選擇的檔案比方說有多個檔案的程式只組譯所選的
在此專題較常使用的是 Build All
組譯完成後所出現的訊息與操作方式和程式語言的編輯環境一樣不贅述
如在 Edit Project所選擇的是軟體模擬組譯完之後可由 Debug下的子
指令來操作若要換到硬體模擬要先到 Edit Project「Change」為硬體模
擬再繼續操作
要注意一點選擇硬體模擬時會出現以下畫面
這畫面在選擇硬體模擬時是不能關閉的他代表著硬體的連結訊息以及環境
設定
左側的 COMX選擇自己所連接至電腦的通訊埠
右側代表所使用的震盪器其他不用變更
「Reconnect」代表重新與硬體做連線硬體連線是否順利可以從MALAB-ICD
上的指示燈得知燈亮代表連結成功閃爍代表連結失敗連結不順利就可
以從這邊重新連線直到成功為止
88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

88
「Program」是將已組譯好之程式燒錄進單晶片中
「Option」是其餘更仔細的設定如下圖所示
「Oscillator」需仔細設定代表所使用的震盪器種類
LP低功率振盪晶體(Low Power Crystal)
XT振盪器 諧振器(Crystal Resonator)
HS高速振盪器(High Speed Crystal Resonator)
RC電阻 電容器(Resistor Capacitor)
有關振盪器的詳細的介紹以及設定可從書籍上深入得知
以下的選擇本專題沒有去研究專題目的只在燒錄可以燒錄就行了以下
功能的選擇都選擇關閉不變更右下勾選的部份
89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91

89
參考文獻
1 Microchip PIC16F87X Data Sheet 1999
2 卓恩慶郭建志直流電動機之脈波寬度調變驅動電路研究逢甲大學自動
控制系學士論文民 86
3 施慶隆PIC16F87X微控制器原理實習與專題製作全華科技圖書民 90
4 蔡木村小型電動機全華科技圖書民 83
5 趙春棠PIC單晶片學習秘笈全威圖書有限公司民 91