DSP Notes Transforms
1
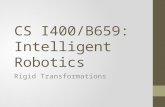
Useful Transforms and Relationships - DePiero, CalPoly State University DTFT: Discrete-Time Fourier Transform • ] [ ) ( n h F H ⇔ where ∑ +∞ = −∞ = − = n n Fn j e n h F H π 2 ] [ ) ( • Principle Range: 5 . 0 5 . 0 ≤ ≤ − F , F is a continuous variable for digital frequency • ) ( F H is the frequency response of a system with impulse response h(n) • If x(n) = A cos(2 pi F0 n) then y(n) = A ) ( 0 F H cos(2 pi F0 n + ) ( 0 F H 〈 ) • Note that ) 0 ( H is a sum, not a mean (there is a scaling by N with discrete FT’s) • Not computationally feasible DFT: Discrete Fourier Transform • ] [ ) ( n h k H N ⇔ where ∑ − = = − = 1 0 / 2 ] [ ) ( N n n N kn j e n h k H π for 1 0 − ≤ ≤ N k • k is a sample index for digital frequency. N samples present in time and frequency domains. • H(k) consists of samples of H(F): N k F for F H k H k k / ) ( ) ( = = • Computationally feasible FFT: Fast Fourier Transform • Described by a butterfly diagram, no formula. • Variables N k , as with DFT. Also N k j k N e W / 2π − = • In FFT r N 2 = , so signal may need to be zero padded. • Computationally efficient! Z-Transform • ] [ ) ( n h z H z ⇔ with ∑ +∞ = = − = n n n z n h z H 0 ] [ ) ( • F pi j e z for F H z H 2 ) ( ) ( = = Relationship Between ) ( z H and Difference Equation for a 2 nd Order System • ∑ ∑ − = = − = = − − − = 1 1 1 0 ] [ ] [ ] [ N k k k M k k k k n y A k n x B n y , M=N=3 for 2 nd Order • ) 1 ( ) 1 ( ) 1 ( ) 1 ( 1 ) ( 1 2 1 2 1 1 1 1 2 2 1 1 2 2 1 1 0 − − − − − − − − − − − − = + + + + = z z z z z A z A z B z B B z H ρ α ρ α , α are zeros and ρ are poles Relationship between Frequency Axes and Unit Circle in Z Plane (S = sample rate in Hz) 0 S/2 S -S/2 f (Hz) 0 0 . 1 - 5 . 0 F (cycles/sample) 5 . 0 0 , 1 = = F z 25 . 0 , = = F j z 5 . 0 , 1 = − = F z k 0 N/2 N -1 W 1 4 -1 -1 -1 x[0] x[2] x[1] x[3] X(0) X(1) X(2) X(3) x[n] X(k) FFT Butterfly, N=4
-
Upload
estraj1954 -
Category
Documents
-
view
218 -
download
3
description
Signal Processing Algorithm
Transcript of DSP Notes Transforms
-
Useful Transforms and Relationships - DePiero, CalPoly State University DTFT: Discrete-Time Fourier Transform
][)( nhFH where +== = nn FnjenhFH 2][)( Principle Range: 5.05.0 F , F is a continuous variable for digital frequency )(FH is the frequency response of a system with impulse response h(n) If x(n) = A cos(2 pi F0 n) then y(n) = A )( 0FH cos(2 pi F0 n + )( 0FH ) Note that )0(H is a sum, not a mean (there is a scaling by N with discrete FTs) Not computationally feasible
DFT: Discrete Fourier Transform
][)( nhkHN where == = 10 /2][)( Nnn NknjenhkH for 10 Nk
k is a sample index for digital frequency. N samples present in time and frequency domains. H(k) consists of samples of H(F): NkFforFHkH kk /)()( == Computationally feasible
FFT: Fast Fourier Transform
Described by a butterfly diagram, no formula. Variables Nk, as with DFT. Also NkjkN eW /2= In FFT rN 2= , so signal may need to be zero padded. Computationally efficient!
Z-Transform
][)( nhzHz with +== = nn nznhzH 0 ][)(
FpijezforFHzH 2)()( == Relationship Between )(zH and Difference Equation for a 2nd Order System
==== = 1110 ][][][ Nkk kMkk k knyAknxBny , M=N=3 for 2nd Order
)1()1(
)1()1(
1)( 1
2
12
11
11
22
11
22
110
=++
++=zz
zz
zAzAzBzBBzH
, are zeros and are poles Relationship between Frequency Axes and Unit Circle in Z Plane (S = sample rate in Hz)
0 S/2 S -S/2
f (Hz)
0 0.1 - 5.0
F (cycles/sample)
5.0
0,1 == Fz25.0, == Fjz
5.0,1 == Fzk
0 N/2 N
-1
W14 -1
-1
-1
x[0]
x[2]
x[1]
x[3]
X(0)
X(1)
X(2)
X(3)
x[n] X(k) FFT Butterfly, N=4