
Drones y Agricultura de Precisión - abc.gob.ar · fascinante mundo de los nuevos avances...
72
Drones y Agricultura de Precisión 1. Descripción del eje temático Introducción 3 2. De los primeros cultivos a la agricultura de precisión 4 3. Agricultura de precisión 7 Medir, evaluar, actuar 7 El GPS 9 Las imágenes satelitales 11 Sistemas de información geográfica 12 Satélites vs. Drones 13 4. Drones en la agricultura de precisión 15 Uso actual en la agroindustria 19 Pulverización dirigida 19 Monitoreo de rendimiento y mapeo 21 Determinación de superficie útil 21 Conteo de plantas 22 Análisis de estado nutricional 23 Estrés hídrico 24 Detección de enfermedades y plagas 24 Tendencias a futuro 25 Automatización total mediante drones 25 B Droid 26 Drones para entrega de comida y medicamentos 27 5. Aprendiendo como funciona un dron por dentro 28 Tipos de drones 28 Partes principales 31 Mecánica de funcionamiento 35 Sistemas de control 37 Diferentes modos de vuelo 38 6. Consideraciones para el vuelo de drones 39 Legales 39 Limitaciones propias del dron 43 7. Principios de exploración fotográfica con drones 44 Fenómenos ópticos de la fotografía aérea 45 Resolución, altura de vuelo, velocidad… 47 1 ©RedEscuelas. Todos los derechos reservados.
Transcript of Drones y Agricultura de Precisión - abc.gob.ar · fascinante mundo de los nuevos avances...

Drones y Agricultura de Precisión
1. Descripción del eje temático Introducción 3
2. De los primeros cultivos a la agricultura de precisión 4
3. Agricultura de precisión 7
Medir, evaluar, actuar 7
El GPS 9
Las imágenes satelitales 11
Sistemas de información geográfica 12
Satélites vs. Drones 13
4. Drones en la agricultura de precisión 15
Uso actual en la agroindustria 19
Pulverización dirigida 19
Monitoreo de rendimiento y mapeo 21
Determinación de superficie útil 21
Conteo de plantas 22
Análisis de estado nutricional 23
Estrés hídrico 24
Detección de enfermedades y plagas 24
Tendencias a futuro 25
Automatización total mediante drones 25
B Droid 26
Drones para entrega de comida y medicamentos 27
5. Aprendiendo como funciona un dron por dentro 28
Tipos de drones 28
Partes principales 31
Mecánica de funcionamiento 35
Sistemas de control 37
Diferentes modos de vuelo 38
6. Consideraciones para el vuelo de drones 39
Legales 39
Limitaciones propias del dron 43
7. Principios de exploración fotográfica con drones 44
Fenómenos ópticos de la fotografía aérea 45
Resolución, altura de vuelo, velocidad… 47
1
©RedEscuelas. Todos los derechos reservados.
Cámaras 53
Formatos de imágenes 56
8. Diseño del plan de vuelo 58
9. Georeferenciación de imágenes 62
10. Generación del ortomosaico 64
11. Índices de vegetación 66
Luz visible e infrarroja 66
Índice de vegetación diferencial normalizado (NDVI) 67
Otros índices 71
12. Consideraciones finales 72
2
©RedEscuelas. Todos los derechos reservados.

1. Descripción del eje temático Introducción
Bienvenido!
A lo largo de estas páginas recorreremos los contenidos necesarios para introducirnos en el
fascinante mundo de los nuevos avances tecnológicos y sus usos dentro del campo de la agricultura.
Tendremos como principal eje a la agricultura de precisión y su implementación a través del uso de
drones.
Comenzaremos haciendo un breve recorrido histórico y analizando el contexto que llevó a su
implementación en la producción agrícola. Veremos algunas aplicaciones concretas dentro de este
campo y las principales tendencias a futuro de esta tecnología.
Luego de este panorama general, abordaremos los principales conceptos sobre la tecnología que
hace posible un sistema de precisión en la agroindustria. Conoceremos cómo funciona un dron por
dentro y todo el proceso necesario para sacarle el máximo provecho a las imágenes que podemos
obtener con él.
Junto con este material, tendrás a tu disposición una guía de trabajos prácticos que te ayudará a
comprender mejor los temas y te permitirá ponerlos en práctica.
Bueno, sin más rodeos, comencemos!
3
©RedEscuelas. Todos los derechos reservados.

2. De los primeros cultivos a la agricultura de precisión
En un principio los seres humanos accedían al alimento por medio de la caza y la recolección. Y se
cree que no fué sino hasta hace unos diez mil años, que el hombre comenzó a domesticar plantas y
animales como forma de obtener un suministro alimenticio accesible y predecible . Con esto no solo 1
nacían la agricultura y la ganadería, sino que también muchas de las tribus, que antes eran nómades,
pasaron a establecerse en lugares fijos para asegurarse el sustento y así, formaron los primeros
poblados, que con el tiempo se convertirían en ciudades.
En un primer momento, las herramientas manuales que se utilizaban para el cultivo de la tierra, eran
fabricadas principalmente con madera y piedras. Más adelante, estos materiales fueron
reemplazados por metales como el hierro y el bronce, que las hicieron más complejas y eficientes.
Sin embargo, la agricultura continuó siendo una actividad intensa y laboriosa durante mucho tiempo.
En los siglos dieciocho y diecinueve, se produjo una verdadera revolución, cuando se consiguió
mejorar sustancialmente la máquina de arado, se inventó la primera máquina sembradora del
mundo y se logró realizar un sistema mecánico de cosecha. Esto redujo notablemente los tiempos y
disparó la producción agricola.
1 Historia y Biografía (2017). Historia de la agricultura. Recuperado de: https://historia-biografia.com/historia-de-la-agricultura/
4
©RedEscuelas. Todos los derechos reservados.

Antigua máquina de arado tirada por tractor a vapor
En el siglo veinte, el motor a explosión reemplazó la tracción a sangre y junto con la aparición de los
fertilizantes y pesticidas industriales, luego de la segunda guerra mundial, permitió aumentar
notablemente el manejo de los terrenos cultivados, dándole un nuevo impulso a la producción. En
esta etapa de industrialización del campo, fue fundamental el uso de los aviones agrícolas, que
permitían fumigar grandes extensiones de terreno en muy poco tiempo.
Avión soviético para fumigación aérea de la década del 70.
Sin embargo, los cambios no se daban solo en el ámbito tecnológico. Gran parte de la población, que
antes era rural, comenzó a establecerse en los conglomerados urbanos. El comercio comenzó a
5
©RedEscuelas. Todos los derechos reservados.
hacerse más activo y requirió una mayor innovación en la producción, para satisfacer la demanda de
los consumidores.
Tratando de satisfacer esta demanda, en los años sesenta, con la llegada de la electrónica de estado
sólido y los estudios sobre automatización de las máquinas agrícolas, se comenzó a delinear una
nueva manera de hacer agricultura.
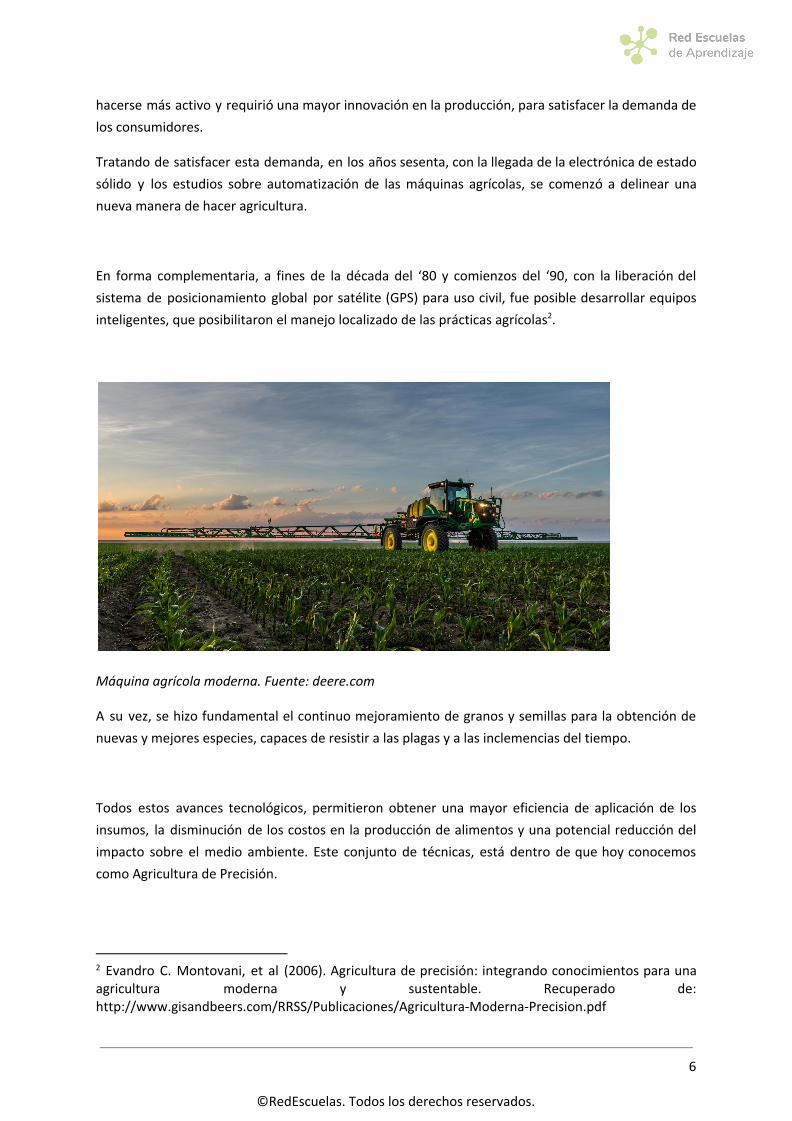
En forma complementaria, a fines de la década del ‘80 y comienzos del ‘90, con la liberación del
sistema de posicionamiento global por satélite (GPS) para uso civil, fue posible desarrollar equipos
inteligentes, que posibilitaron el manejo localizado de las prácticas agrícolas . 2
Máquina agrícola moderna. Fuente: deere.com
A su vez, se hizo fundamental el continuo mejoramiento de granos y semillas para la obtención de
nuevas y mejores especies, capaces de resistir a las plagas y a las inclemencias del tiempo.
Todos estos avances tecnológicos, permitieron obtener una mayor eficiencia de aplicación de los
insumos, la disminución de los costos en la producción de alimentos y una potencial reducción del
impacto sobre el medio ambiente. Este conjunto de técnicas, está dentro de que hoy conocemos
como Agricultura de Precisión.
2 Evandro C. Montovani, et al (2006). Agricultura de precisión: integrando conocimientos para una agricultura moderna y sustentable. Recuperado de: http://www.gisandbeers.com/RRSS/Publicaciones/Agricultura-Moderna-Precision.pdf
6
©RedEscuelas. Todos los derechos reservados.

3. Agricultura de precisión
Fuente: blog.jacto.com.br
“La agricultura de precisión es un conjunto de técnicas orientado a optimizar el uso de los insumos
agrícolas (semillas, agroquímicos y correctivos) en función de la cuantificación de la variabilidad
espacial y temporal de la producción agrícola. Esta optimización se logra con la distribución de la
cantidad correcta de esos insumos, dependiendo del potencial y de la necesidad de cada punto de
las áreas de manejo” . 3
Medir, evaluar, actuar
Es decir que la agricultura de precisión consiste en aplicar la cantidad correcta de insumos, en el
momento adecuado y en el lugar exacto.
Pero a decir verdad, este es el final de la historia. Porque para llegar hasta este punto, antes fue
necesario poder contar con suficiente información del estado del suelo, que luego de ser
correctamente interpretada, permitió tomar la decisión de en qué momento y lugar aplicar el
insumo.
3 Rodolfo Bongiovanni et al.(2006). Agricultura de precisión: integrando conocimientos para una agricultura moderna y sustentable. Recuperado de http://www.gisandbeers.com/RRSS/Publicaciones/Agricultura-Moderna-Precision.pdf
7
©RedEscuelas. Todos los derechos reservados.
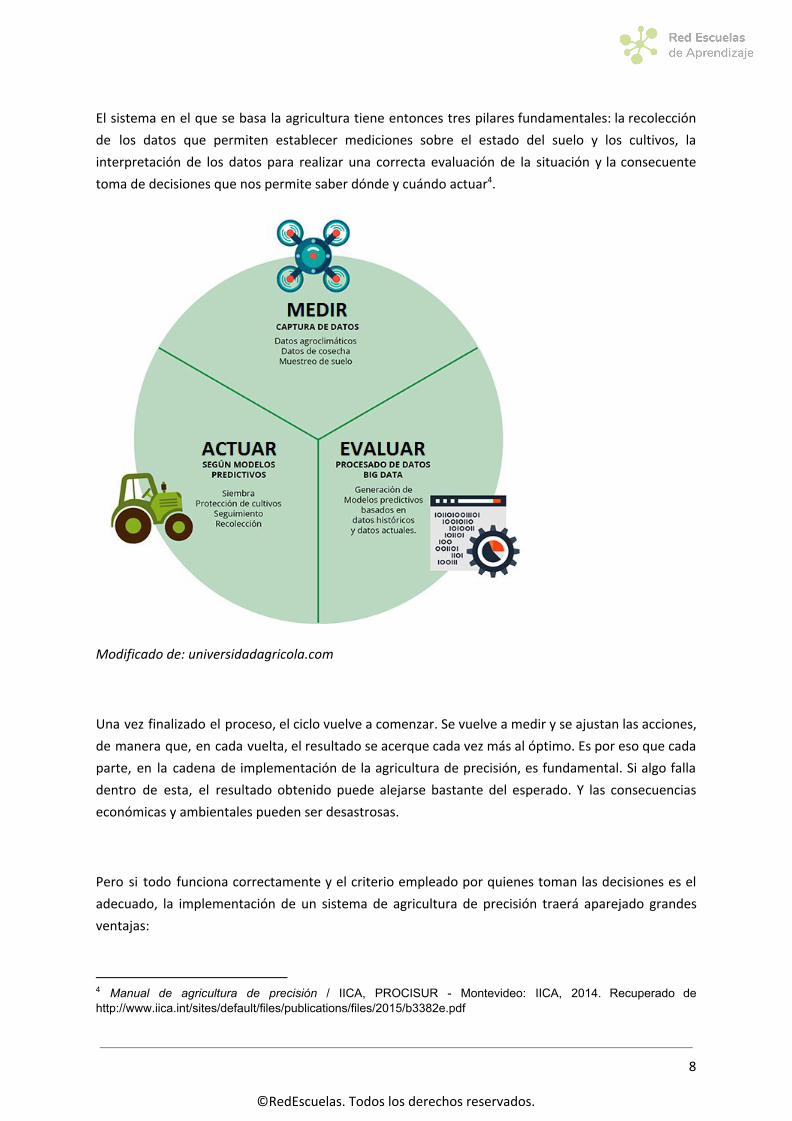
El sistema en el que se basa la agricultura tiene entonces tres pilares fundamentales: la recolección
de los datos que permiten establecer mediciones sobre el estado del suelo y los cultivos, la
interpretación de los datos para realizar una correcta evaluación de la situación y la consecuente
toma de decisiones que nos permite saber dónde y cuándo actuar . 4
Modificado de: universidadagricola.com
Una vez finalizado el proceso, el ciclo vuelve a comenzar. Se vuelve a medir y se ajustan las acciones,
de manera que, en cada vuelta, el resultado se acerque cada vez más al óptimo. Es por eso que cada
parte, en la cadena de implementación de la agricultura de precisión, es fundamental. Si algo falla
dentro de esta, el resultado obtenido puede alejarse bastante del esperado. Y las consecuencias
económicas y ambientales pueden ser desastrosas.
Pero si todo funciona correctamente y el criterio empleado por quienes toman las decisiones es el
adecuado, la implementación de un sistema de agricultura de precisión traerá aparejado grandes
ventajas:
4 Manual de agricultura de precisión / IICA, PROCISUR - Montevideo: IICA, 2014. Recuperado de http://www.iica.int/sites/default/files/publications/files/2015/b3382e.pdf
8
©RedEscuelas. Todos los derechos reservados.

● Ahorro de insumos: fertilizantes, agua, fitosanitarios
● Aumento de la producción
● Aumento de la calidad
● Optimización de los costos
● Reducción del impacto ambiental
Para llevar adelante un proceso de presión, la agricultura se sirve de los adelantos provistos por
diferentes áreas tecnológicas como las comunicaciones, la informática y la robótica. Dentro de estos,
el uso del GPS fue determinante, ya que esta tecnología permite determinar la posición de cualquier
punto sobre el planeta, en cualquier momento y con un error mínimo. Y esa posición, puede ser
conocida por cualquier ser humano o máquina que posea un detector GPS, ya que cada lugar del
espacio posee una coordenada única.
El GPS
Fuente: infoagro.com
“El sistema de posicionamiento global (GPS) es un sistema de navegación basado en satélites,
creado y operado por el Departamento de Defensa de los Estados Unidos. Comenzado a principios
de los ’80 este sistema fue declarado completamente operacional el 27 de Abril de 1995.
9
©RedEscuelas. Todos los derechos reservados.

Completamente operacional significa que el sistema puede ser usado para determinar la posición
de un receptor las 24 horas del día, en cualquier parte de la tierra. El sistema fue concebido
originalmente como un auxiliar para la navegación para las fuerzas militares de los Estados
Unidos, pero hoy en día el GPS sirve también para fines industriales, comerciales y civiles.
El servicio está disponible, en forma gratuita, las 24 horas del día y bajo cualquier condición
meteorológica” . 5
Con esta información disponible, los dispositivos utilizados en la agricultura de precisión referencian
todas sus acciones según este sistema. Es decir que comparten un mismo lenguaje para referirse a
cada punto del terreno, ya sea para saber dónde medir, qué lugar analizar o en qué posición exacta
debe llevarse a cabo una acción. Este es el caso de lo que conocemos como banderillero satelital. Lo
cual significa que, mediante el sistema GPS, puede conocerse la ubicación exacta de una máquina de
siembra, cosecha o aplicación de productos químicos, en cualquier momento y lugar.
5 Mario Grabachini et al (1999). Sistema de posicionamiento global. Recuperado de http://www.agriculturadeprecision.org/descargaItem.asp?item=%2Farticulos%2Fsistema%2Dgps%2FSistemas%2DPosicionamiento%2Epdf
10
©RedEscuelas. Todos los derechos reservados.

Las imágenes satelitales
En los últimos años, con la masificación de internet y el acceso a las imágenes satelitales, se ha
hecho posible realizar la medición y análisis del estado del suelo, por medio de las fotos que brindan
los satélites sobre cada porción del terreno.
Este procedimiento es ampliamente utilizado dentro de la agricultura, aunque sus resultados pueden
verse afectados por las condiciones atmosféricas y tiene como principal desventaja que la
actualización de las imágenes se produce con una frecuencia relativamente baja, dejando una
ventana de tiempo en el medio donde no se cuenta con información
11
©RedEscuelas. Todos los derechos reservados.

Sistemas de información geográfica
Fuente: astbly.com
Existen también otras tecnologías que permiten relevar y completar la información que brindan las
imágenes satelitales. En la actualidad, muchas plataformas recolectan información de sensores
remotos que, distribuidos estratégicamente dentro del terreno, permiten obtener datos como el
nivel de humedad del suelo y el PH, junto con otras variables ambientales como: temperatura,
presión atmosférica, nivel de dióxido de carbono, luminancia, etc.
Todos estos datos sumados constituyen un gran cúmulo de información, que debe ser gestionada
eficientemente para no perder ningún detalle, y a la vez, debe poder ser de fácil acceso e
interpretación por parte del usuario
Con este fin, se crearon los sistemas de información geográfica (GIS por sus siglas en inglés) que
permiten vincular hardware y software para almacenar, gestionar, manipular y analizar toda la
información geográficamente referenciada. Esta información puede irse agregando o desagregando
por capas según las necesidades del usuario.
12
©RedEscuelas. Todos los derechos reservados.

Fuente: enciclopedia.us.es
Satélites vs. Drones
Otra de las tecnologías que han causado gran sensación desde su masificación, son los drones. Y la
agricultura, al igual que otras industrias, no se ha quedado atrás en su utilización.
Estás unidades de vuelo no tripulada, han puesto al alcance de todos la exploración aérea de
grandes extensiones de terreno, a un costo reducido y con un variado número de prestaciones.
Dentro de la agricultura de presición, en principio, son capaces brindar un servicio parecido al uso de
imágenes satelitales para el análisis del suelo, pero con la gran ventaja, de que las imágenes pueden
actualizarse con mayor frecuencia que en el caso de los satélites. Esto proporciona la posibilidad de
enterarse más prontamente de cualquier variación que pueda ser perjudicial para los cultivos y, en
consecuencia, poder implementar de manera temprana una acción correctiva.
13
©RedEscuelas. Todos los derechos reservados.

Modificado de: hemav.com
14
©RedEscuelas. Todos los derechos reservados.

4. Drones en la agricultura de precisión
Fuente: agtech.cl
Un poco de historia…
Los drones pertenecen a un grupo más amplio de aeronaves, constituido por todas aquellos
vehículos aéreos no tripulados (VANT o UAV por sus siglas en inglés), que tienen sus orígenes en la
segunda mitad del siglo XIX, incluso antes de que se desarrollen los aviones con piloto a bordo.
Los europeos fueron los primeros en desarrollar los principios de la aeronáutica y, al tratar de
aplicarlos a aeronaves viables, volaron modelos no tripulados que podrían ser considerados los
primeros vehículos aéreos no tripulados de la historia. Luego, pioneros de la aviación en diversos
países de todo el mundo siguieron una progresión común: de los planeadores a los aviones
propulsados no tripulados, y de los vuelos no tripulados a los tripulados . 6
Durante la primera y segunda guerra mundial se concretaron importantes avances dentro de la
industria militar, que permitieron desarrollar numerosos modelos de VANT, conducidos por
radiocontrol, que fueron utilizados con fines bélicos.
6 Cristina Cuerno Rejado (2015). Origen y desarrollo de los drones. Recuperado de http://drones.uv.es/origen-y-desarrollo-de-los-drones/
15
©RedEscuelas. Todos los derechos reservados.

Durante la década del sesenta, en plena guerra fría, las aeronaves no tripuladas fueron equipadas
con cámaras de fotos para realizar misiones de reconocimiento sobre territorio enemigo. En los años
siguientes, este uso y el de vigilancia fueron ganando cada vez más terreno, por lo que se
incorporaron cámaras de video y controles por radioenlace más confiables y con mayor alcance.
A la izquierda, dron de ala fija. A la derecha, uno de los primeros modelos con hélices axiales
Hasta ese momento los VANTs eran todas con sistema de ala fija. Debían realizar su despegue
mediante un sistema de lanzaderas, lo cual generaba diversos accidentes y hacía también dificultosa
la recuperación del vehículo una vez cumplida la misión. Es por esto, que hacia fines de los años
setenta se desarrolló un vehículo basado en hélices axiales que permitía el despegue vertical y
solucionaba el problema de la recuperación. Este tipo de vehículos tuvo un gran desarrollo durante
la década del ochenta.
Despegue de un dron de ala fija mediante el sistema de lanzadera. Fuente: efeagro.com
16
©RedEscuelas. Todos los derechos reservados.
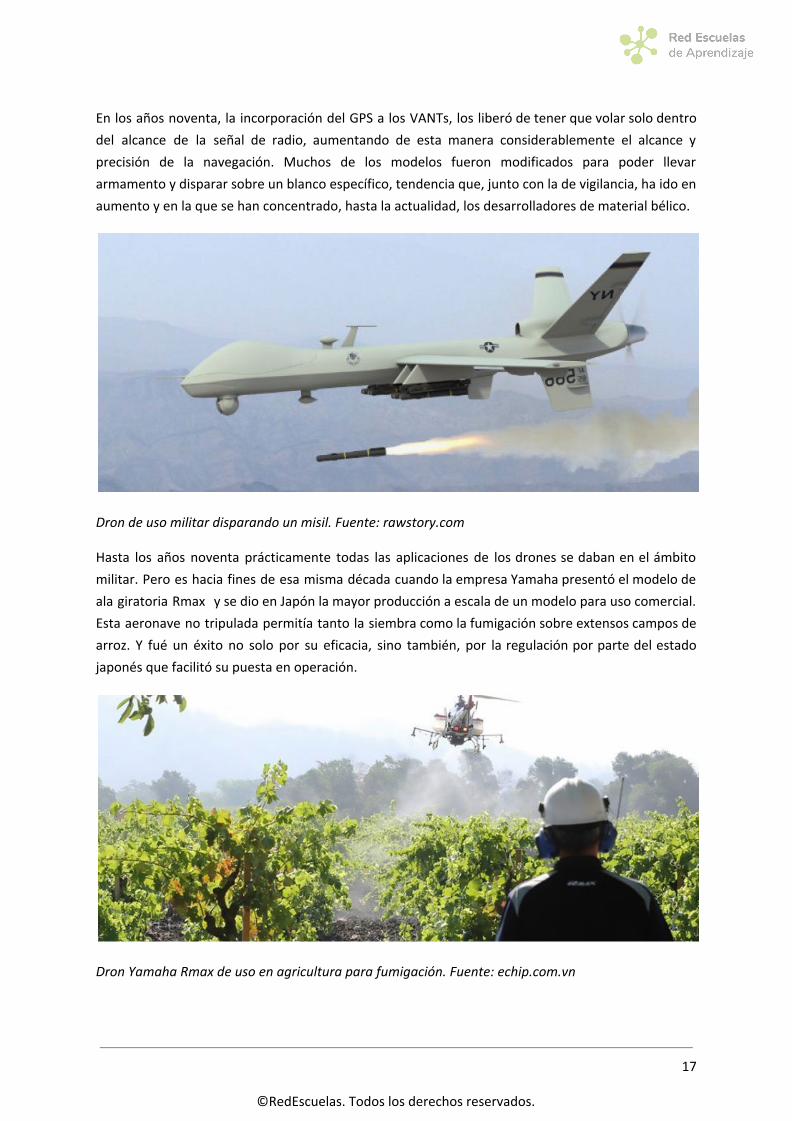
En los años noventa, la incorporación del GPS a los VANTs, los liberó de tener que volar solo dentro
del alcance de la señal de radio, aumentando de esta manera considerablemente el alcance y
precisión de la navegación. Muchos de los modelos fueron modificados para poder llevar
armamento y disparar sobre un blanco específico, tendencia que, junto con la de vigilancia, ha ido en
aumento y en la que se han concentrado, hasta la actualidad, los desarrolladores de material bélico.
Dron de uso militar disparando un misil. Fuente: rawstory.com
Hasta los años noventa prácticamente todas las aplicaciones de los drones se daban en el ámbito
militar. Pero es hacia fines de esa misma década cuando la empresa Yamaha presentó el modelo de
ala giratoria Rmax y se dio en Japón la mayor producción a escala de un modelo para uso comercial.
Esta aeronave no tripulada permitía tanto la siembra como la fumigación sobre extensos campos de
arroz. Y fué un éxito no solo por su eficacia, sino también, por la regulación por parte del estado
japonés que facilitó su puesta en operación.
Dron Yamaha Rmax de uso en agricultura para fumigación. Fuente: echip.com.vn
17
©RedEscuelas. Todos los derechos reservados.

Ya en el nuevo siglo, con la reducción del tamaño de los microcontroladores y el avance de la
tecnología, los drones se volvieron un elemento cada vez más al alcance de todos. Sin embargo, en la
mayoría de los países, la falta de una regulación apropiada no ha permitido poder desarrollar todo el
potencial del uso de drones en el ámbito civil.
Actualmente el uso de estas unidades por fuera de la esfera militar, se concentra principalmente en:
topografía, la inspección de grandes construcciones e infraestructura industrial, la prevención de
desastres naturales mediante el control de zonas de riesgo, las producciones audiovisuales y en la
agricultura.
18
©RedEscuelas. Todos los derechos reservados.

Uso actual en la agroindustria
Pulverización dirigida
Fuente: inimedia.co.id
Como vimos antes, Japón fue uno de los primeros países que incorporó el uso de drones para la
siembra y la fumigación de los campo de arroz. Para el 2010, el 30% de los arrozales de ese país
recibían los insecticidas por medio de estos dispositivos. De esta manera Japón encontró una formas
de suplantar el envejecimiento de la mano de obra campesina de su país, que al no poder cumplir
con todas la tareas que exige el cultivo, ponía en riesgo la producción de este importante alimento.
Se estima que, a la fecha, unos 7.000 agricultores de ese país confían en esta tecnología que les
permite reducir costos y aumentar la precisión . 7
A partir del año 2015 Estados Unidos permitió el uso del dron agrícola de Yamaha dentro de su
territorio y lo mismo sucedió con otros importantes países, que comenzaron a brindar permisos
especiales para que estas aeronaves pudieran sobrevolar sus campos.
7 Juan F. Samaniego (2017) Drones para agricultura: beneficios y casos reales. Recuperado de http://agriculturers.com/drones-para-agricultura-beneficios-y-casos-reales/
19
©RedEscuelas. Todos los derechos reservados.

A fines del 2017 Yamaha lanzó el YMR-01 una nuevo modelo de dron para la agricultura, basado en
un sistema multirrotor, capaz de crear un corriente de aire que pueda esparcir más uniformemente
el agroquímico y llegar hasta las raíces de los cultivos . 8
A la izquierda, dron pulverizador Yamaha RMax. A la derecha, nuevo modelo YMR-01
En los último años muchas empresas se han dedicado a la fabricación de modelos que les permitan
competir en el mercado. De esta manera un tercio de la producción de los drones que se fabricaron
en 2017 se estima que fueron para uso en industria y agricultura.
Este es el caso, por ejemplo, de la empresa china DJI y su dron para agricultura AGRAS MG-1S que
brinda la posibilidad de cargar hasta 10 kg de líquido y puede cubrir una superficie de 6000 m2 en 10
minutos . 9
Recientemente, la firma española Drone Hopper, dedicada a la fabricación de drones para el
combate de incendios, lanzó un modelo que se basa en el mismo principio de funcionamiento pero
para uso específico en la aspersión de plaguicidas.
A la izquierda, dron DJI AGRAS MG-1S. A la derecha, el modelo de Drone Hopper
8 DG DRONE (2017). Yamaha además de motos diseña drones. Recuperado de https://dgdrone.com/yamaha-ademas-motos-disena-drones/ 9 Cielito Drone (2018) Agras Mg1 Dron para agricultura. Recuperado de https://cielito-drone.myshopify.com/products/agras-mg-1-dron-para-agricultura
20
©RedEscuelas. Todos los derechos reservados.

Monitoreo de rendimiento y mapeo
Fuente: inventionary.com.ar
Una de las prestaciones que brinda cualquier dron comercial hoy en día es la de monitoreo. La
mayoría de modelos traen incorporados o permiten incorporar una cámara de fotografía o video, lo
que brinda la posibilidad de tener el panorama actualizado de extensas regiones de terreno en un
breve lapso de tiempo y a un bajo costo.
La simple observación del estado de las parcelas en tiempo real nos puede brindar valiosa
información sobre el estado del suelo o los cultivos, pero el posterior análisis de las imágenes
obtenidas, con la ayuda del software apropiado, nos brinda la clave que necesitamos para el manejo
apropiado de la producción.
Determinación de superficie útil
Una de estas aplicaciones la constituye la identificación de recursos hídricos y la determinación de la
superficie útil. A través de las imágenes tomadas por el dron, se pueden delimitar con precisión las
áreas propicias para el cultivo y hacer una medición de cuántas hectáreas representan.
21
©RedEscuelas. Todos los derechos reservados.

Detección de área util con la correspondiente cuantificación de hectáreas. Fuente: Geosistemas SRL
Conteo de plantas
Otra herramienta que nos brinda el mapeo aéreo por medio de drones, es el de realizar el conteo y
la determinación del volumen de copa de las plantas. Este es un método muy utilizado en la
actualidad por los productores vitivinícolas para realizar una estimación temprana del rendimiento.
Identificación y conteo de plantas. A la derecha, el cálculo de volumen de copa. Fuente: Ricardo
Melchiori 10
10 Ricardo Melchiori (2017). Jornada de actualización técnica en drones: Posibilidades de uso de drones en agricultura.
22
©RedEscuelas. Todos los derechos reservados.

Análisis de estado nutricional
Mediante la incorporación de cámaras multiespectrales al dron, es posible conocer el estado de
salud de los cultivos que se encuentran en nuestro campo. La cámara recoge la luz que reflejan las
plantas. De esta manera, si la planta está sana y realiza de forma correcta su proceso de fotosíntesis,
reflejará ciertas zonas del espectro de luz. Si, por el contrario, la planta se encuentra con algún
déficit de nutrientes, la luz reflejada cambiará.
Modificado de: midopt.com
Muchos de los índices que se utilizan en la actualidad para la toma de decisiones en la producción
agrícola se basan en este principio. Es el caso, por ejemplo, del Índice de Vegetación Diferencial
Normalizado (NDVI, por sus siglas en inglés) que permite conocer el estado nutricional del cultivo y
ayuda en la toma de decisiones sobre la consecuente aplicación de fertilizantes.
Análisis multiespectral sobre un campo para la obtención del índice de NDVI. Fuente: drones.uv.es
23
©RedEscuelas. Todos los derechos reservados.

Estrés hídrico
El estrés hídrico en los cultivos se traduce en las plantas a través de un aumento de la temperatura
de sus hojas. Esto puede ser detectado por las cámaras multiespectrales y puesto en evidencia
mediante un mapeo aéreo, para luego aplicar la cantidad de agua necesaria en el lugar adecuado y
así revertir el problema.
Análisis de estrés hídrico sobre un campo de olivos.
Las partes en rojo representan mayor nivel de estrés. Fuente: drones.uv.es
Detección de enfermedades y plagas
La capacidad de tomar imágenes multiespectrales en cualquier momento, nos permite detectar los
cambios que se están produciendo en los cultivos. La combinación de estos datos con predicciones
climáticas de detalle ayudan a la detección temprana de enfermedades. En este mismo sentido,
también pueden identificarse plagas y detectarse malezas . 11
11 Fundación de la energía de la comunidad de Madrid (2015). Los drones y su aplicaciones a la ingeniería civil. Recuperado de https://www.fenercom.com/pdf/publicaciones/Los-Drones-y-sus-aplicaciones-a-la-ingenieria-civil-fenercom-2015.pdf
24
©RedEscuelas. Todos los derechos reservados.

Tendencias a futuro
La posibilidades de cubrir grandes extensiones de terreno, de tener la información en tiempo real en
nuestras manos y de dirigir un vehículo aéreo cuando queramos y al lugar donde queramos, ya son
realidad y están al alcance de todos. Pero las posibilidades que se abren de cara al futuro son muy
prometedoras...
Automatización total mediante drones
Fuente: vnexpert.pro
En el proceso de lograr una automatización total del sistema de producción agrícola se estima que
los drones cumpliran un rol fundamental. Muchas empresas están trabajando en sistemas que
permitan una integración total de todos elementos tecnológicos que participan dentro de la
agricultura para llegar a que el ciclo de agricultura de precisión se lleve a cabo de manera autónoma.
Lo que involucraría, por ejemplo, que los drones puedan decidir en tiempo real cuales son las zonas
de cultivo que necesitan fertilización y la lleven adelante en el mismo momento.
25
©RedEscuelas. Todos los derechos reservados.

B Droid
Fuente: sinembargo.mx
Gran parte de la producción agrícola se debe a un proceso fundamental: la polinización. Esta es
llevada a cabo por una importante diversidad de insectos, pero fundamentalmente por las abejas.
Estudios realizados en los últimos años revelaron una alarmante reducción de la población de abejas
a nivel mundial. En estados unidos se estima que desde 1988 a la actualidad la cantidad de estos
valiosos insectos se redujo prácticamente a la mitad . 12
Pensando en como resolver este problema, científicos de la Universidad Politécnica de Varsovia, en
Polonia, trabajan en un dron en miniatura capaz de encontrar una flor, recoger su polen, y
transferirlo de la flor masculina a la femenina para fertilizarla. Tal como lo haría una abeja, pero con
el agregado de que puede programarse en que lugar y momento debe hacer el trabajo. Se cree que
para el 2019 este producto ya estará listo para su producción masiva . 13
12 Carlos Rebato (2015).Porque las abejas están muriendo y por qué debería importarte. Recuperado de https://es.gizmodo.com/por-que-las-abejas-estan-muriendo-y-por-que-deberia-imp-1717190711 13 Nacho Temiño (2016). Científicos polacos crean la primera abeja robótica que poliniza como una real. Recuperado de http://www.sinembargo.mx/28-11-2016/3120015
26
©RedEscuelas. Todos los derechos reservados.

Drones para entrega de comida y medicamentos
Fuente: pantipplaza.com
Grandes empresas, como Amazon y Google, vienen trabajando arduamente en la posibilidad de
realizar la entrega de sus productos mediante el uso de drones. Sin embargo los gobiernos de
distintos países, como Estados Unidos, por ahora prohíben el uso civil de drones para el traslados de
cargas. En cambio, países como Japón o Suiza, ya están trabajando para usar los drones como
alternativa al transporte de productos y medicamentos a zonas rurales remotas y de difícil acceso.
Estas iniciativas son llevadas adelante en conjunto por los gobiernos y empresa privadas . 1415
14 Jaime Montero (2016). Japón prueba el uso de drones para llevar alimentos a zonas rurales. Recuperado de http://www.todrone.com/japon-uso-drones-llevar-alimentos-zonas-rurales/ 15 La Voz (2017). Así es el sistema de delivery con drones que se comenzará a probar en Suiza. Recuperado de http://www.lavoz.com.ar/tecnologia/asi-es-el-sistema-de-delivery-con-drones-que-se-comenzara-probar-en-suiza
27
©RedEscuelas. Todos los derechos reservados.

5. Aprendiendo como funciona un dron por dentro
Fuente: playtech.ro
Tipos de drones
Según su uso
La palabra drone significa abejorro en inglés y hace alusión al clásico zumbido que emiten estos
dispositivos cuando están en vuelo y a su versatilidad para moverse en el aire.
Como vimos, a pesar de que un principio los drones estaban destinados únicamente al uso militar,
en la actualidad ya se encuentran disponibles para la comprar dispositivos para el uso civil. Y si bien
la gran mayoría de estos están destinados al uso por parte de aficionados, cada vez es mayor la
producción de modelos que tienen como destino un uso comercial, como puede ser la agricultura.
28
©RedEscuelas. Todos los derechos reservados.

Fuente: droneymas.es
Según su tamaño
Forma parte de una clasificación legal que los agrupa en categorías según su peso vacío en:
● Pequeños, hasta 10 kg
● Medianos, entre 10 y 150 kg
● Grandes, más de 150 kg.
29
©RedEscuelas. Todos los derechos reservados.
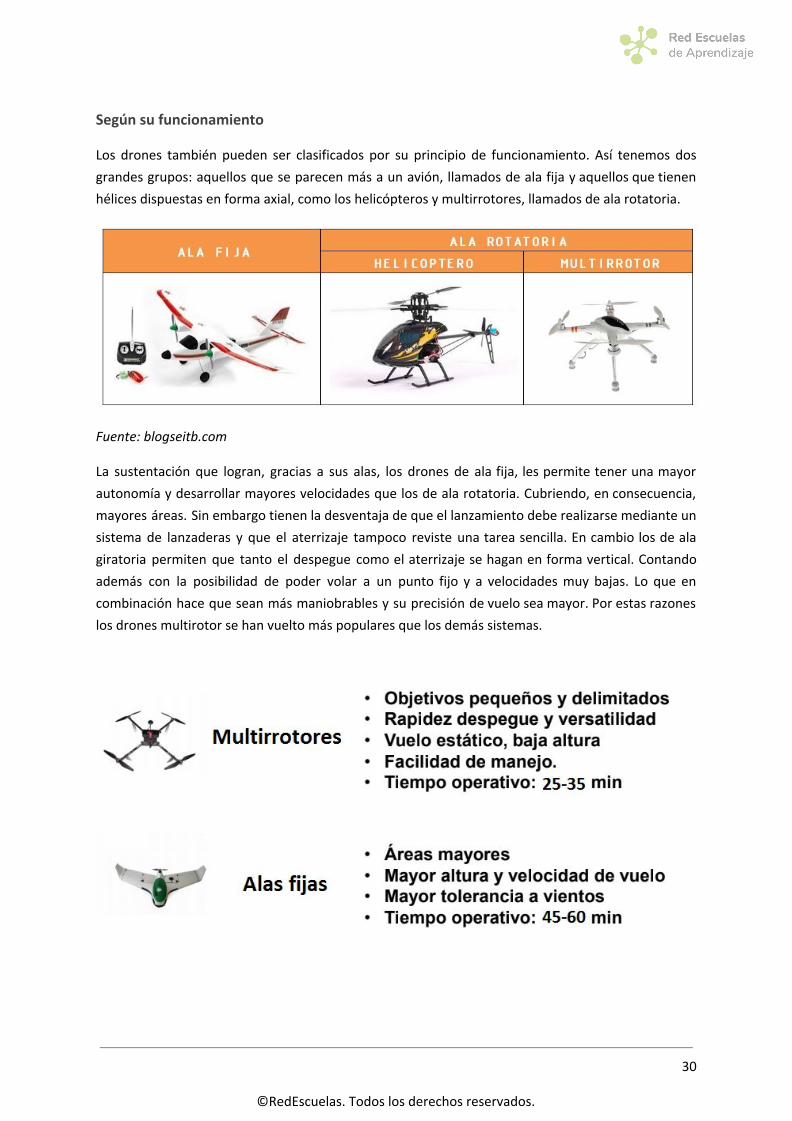
Según su funcionamiento
Los drones también pueden ser clasificados por su principio de funcionamiento. Así tenemos dos
grandes grupos: aquellos que se parecen más a un avión, llamados de ala fija y aquellos que tienen
hélices dispuestas en forma axial, como los helicópteros y multirrotores, llamados de ala rotatoria.
Fuente: blogseitb.com
La sustentación que logran, gracias a sus alas, los drones de ala fija, les permite tener una mayor
autonomía y desarrollar mayores velocidades que los de ala rotatoria. Cubriendo, en consecuencia,
mayores áreas. Sin embargo tienen la desventaja de que el lanzamiento debe realizarse mediante un
sistema de lanzaderas y que el aterrizaje tampoco reviste una tarea sencilla. En cambio los de ala
giratoria permiten que tanto el despegue como el aterrizaje se hagan en forma vertical. Contando
además con la posibilidad de poder volar a un punto fijo y a velocidades muy bajas. Lo que en
combinación hace que sean más maniobrables y su precisión de vuelo sea mayor. Por estas razones
los drones multirotor se han vuelto más populares que los demás sistemas.
30
©RedEscuelas. Todos los derechos reservados.

Multirrotores
Dentro de los multirrotores podemos encontrar tricópteros, quadricópteros, hexacópteros y
octacópteros, de acuerdo con la cantidad de motores y hélices que utilicen para su sustentación en
el aire.
Diferentes modelos de drones según su cantidad de rotores Fuente: titannet.com.es
En lo siguiente, describiremos todo lo relacionado con cuadricópteros, ya que es el que utilizaremos
durante el curso y comprendiendo su funcionamiento se puede fácilmente entender el de los demás
modelos.
Partes principales
Para comprender el funcionamiento de un dron comenzaremos conociendo cuales son sus
principales partes.
Marco o chasis
Es el esqueleto del dron, que le da forma y sobre donde se instalan el resto de las partes. Existen
diferentes formas y materiales (aluminio, fibra de carbono, fibra de vidrio, Kevlar, etc.) que varían
según el precio y el uso al que está destino el dron.
31
©RedEscuelas. Todos los derechos reservados.

Motores
Son los componentes fundamentales para mantener al dron en el aire. Hay de diferentes tipos, pero
los más comunes son los eléctricos de tipo Brushless, que no emplean escobillas para realizar el
cambio de polaridad en el rotor y se destacan por su relación peso/potencia.
Hélices
El movimiento de las hélices es el que permite la sustentación del dron en al aire. Las hélices son
fabricadas en diferentes tamaños y materiales (nylon, fibra de carbono, etc).
Reguladores de velocidad
Los reguladores de velocidad (ESC, por sus siglas en inglés) son los responsables de proporcionar
electrónicamente las revoluciones necesarias a cada motor, de manera individual y un momento
determinado, para así realizar los diferentes movimientos: elevaciones, rotaciones, traslaciones, etc.
32
©RedEscuelas. Todos los derechos reservados.

Unidad de control
La unidad de control, también conocida como controlador de vuelo, es el cerebro del dron. Sensa y
controla todo lo que pasa en el sistema para que el funcionamiento sea el óptimo, es por eso que
casi todos los componentes del dron se conectan a esta unidad. Además se comunica, por
radiofrecuencia, con el control remoto, de manera de tomar las acciones necesarias para que los
movimientos que realice el dron sean los indicados por el usuario.
Baterías
Las baterías son las encargadas de proporcionar la energía necesaria para que el dron pueda
funcionar. Si bien las hay de diferentes materiales, las más utilizadas son las de polímero de litio
(Li-Po). Cuanto mayor capacidad tengan, mayor autonomía de vuelo permitirán, aunque es necesario
que su peso no represente una carga demasiado grande para el dron.
Control remoto
A través de una comunicación por radiofrecuencia, el control remoto permite realizar maniobras y
ajustes sobre el dron. Algunos drones permiten controlar el vuelo a través de tablets o celulares vía
Wifi o Bluetooth.
33
©RedEscuelas. Todos los derechos reservados.

Cámara y estabilizador
Hoy la mayoría de los drones permiten acoplar una cámara para capturar fotos o videos desde el
aire. Dependiendo del tamaño del dron la cámara podrá ser desde una pesada profesional hasta una
liviana de acción, como una GoPro. Normalmente se utiliza un estabilizador, conocido como Gimbal,
para evitar que los movimientos propios del vuelo del multirotor afecten las tomas. Estos gimbal
absorben la vibración de los motores y corrigen automáticamente la inclinación de la cámara para
que siempre esté en el mismo ángulo respecto al suelo. Algunos también pueden ser conectados al
Controlador de Vuelo y a través del control remoto el usuario puede cambiar el ángulo de inclinación
de la cámara mientras el multirotor está en el aire.
FPV
El sistema de vista en primera persona (FPV, por sus siglas en inglés) es un sistema de transmisión y
recepción del video capturado por la cámara del dron, en tiempo real. De esta manera el piloto
puede ver lo que el drone está “viendo” y tomar decisiones sobre el rumbo de vuelo del dron.
Comúnmente esta visualización puede hacerse en un celular o tableta que se acopla al control
remoto a través de un soporte
34
©RedEscuelas. Todos los derechos reservados.

Mecánica de funcionamiento
Un dron cuadricóptero consta de cuatro hélices dispuestas simétricamente, dos giran en un sentido
y las otras dos en sentido contrario. Esto se debe a la necesidad de equilibrar los pares de fuerzas
que se generan por el movimiento de las hélices, ya que si movieran todas en el mismo sentido el
dron giraría sobre sí mismo sin control y caería inmediatamente al suelo . 16
Fuente: ourclipart.com
Para que el dron se eleve se necesita que la fuerza vertical, generada por el movimiento de las
hélices, supere al peso del dron. Algo similar sucede con el resto de los movimiento, para que se que
estable en el aire, sin trasladarse, la fuerza provocada por las hélices debe equiparar exactamente al
peso del dron.
Como el peso total del dron se divide entre los cuatro motores para equilibrar el peso, modificando
la relación de velocidad de giro de cada uno, respecto de los otros, se generan distintos movimiento
17
16 Lucas García Mateu (2015). Drones, el cielo está al alcance de todos. Recuperado de http://www.edubcn.cat/rcs_gene/treballs_recerca/2015-2016-03-1-TR.pdf 17 cursopilotodedrones.net (2018). 4.5 Controles de vuelo: 4.5.4 Controles de vuelo en multirrotor y helicóptero. Recuperado de https://cursopilotodedrones.net/leccion/4-5-controles-de-vuelo/
35
©RedEscuelas. Todos los derechos reservados.
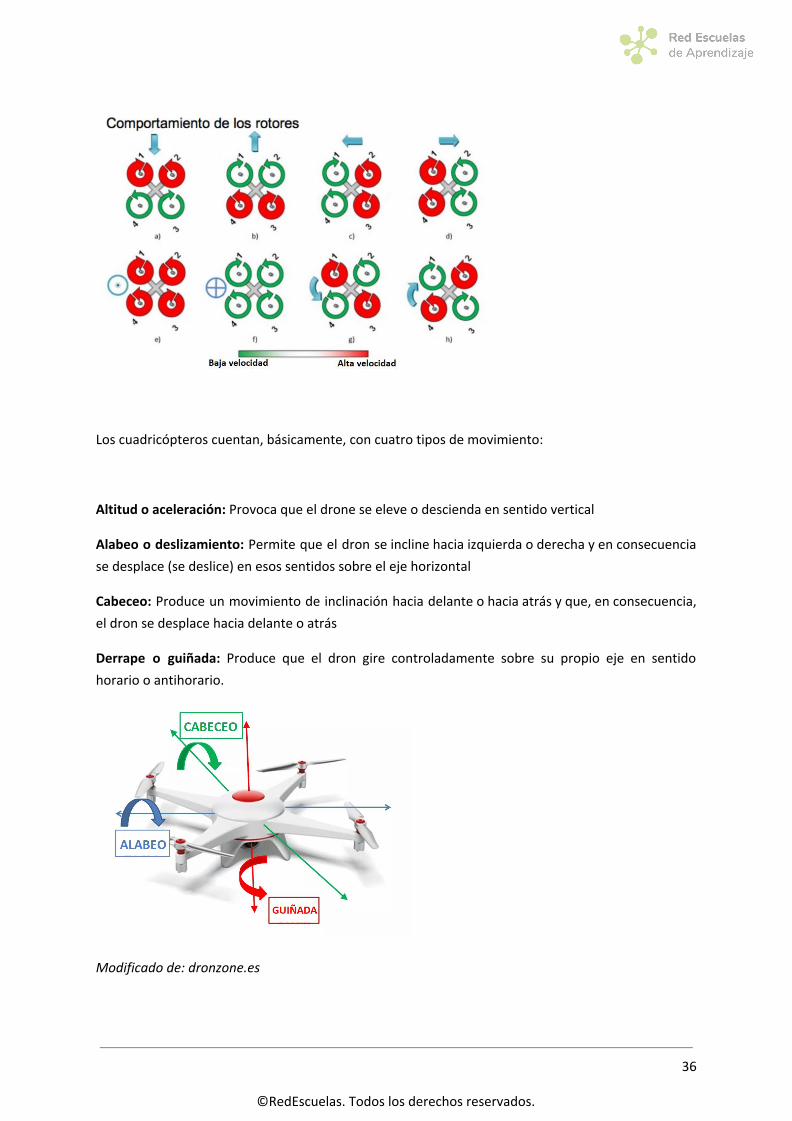
Los cuadricópteros cuentan, básicamente, con cuatro tipos de movimiento:
Altitud o aceleración: Provoca que el drone se eleve o descienda en sentido vertical
Alabeo o deslizamiento: Permite que el dron se incline hacia izquierda o derecha y en consecuencia
se desplace (se deslice) en esos sentidos sobre el eje horizontal
Cabeceo: Produce un movimiento de inclinación hacia delante o hacia atrás y que, en consecuencia,
el dron se desplace hacia delante o atrás
Derrape o guiñada: Produce que el dron gire controladamente sobre su propio eje en sentido
horario o antihorario.
Modificado de: dronzone.es
36
©RedEscuelas. Todos los derechos reservados.

Sistemas de control
Para realizar todas las operaciones y movimientos que puede efectuar un dron sin perder la
estabilidad, existe dentro del mismo una unidad de movimiento inercial (IMU, por sus siglas en
inglés), que contiene cinco sensores básicos : 18
Acelerómetro: Mide las variaciones de velocidad (aceleración) que sufre el sistema en los tres ejes
(x, y, z).
Giroscopio: Mide los ángulos de ubicación del dron en el aire. Normalmente, el giroscopio viene
incorporado en la misma unidad que el acelerómetro de 3 ejes, de esta manera, el acelerómetro
calcula la posición y el giroscopio el ángulo en el que se encuentra.
Magnetómetro: Mide la dirección y la fuerza del campo magnético terrestre. Es decir que se
comporta como una brújula y permite ubicar al dron respecto de los puntos cardinales.
Altímetro: A través de la medición de la presión absoluta, permite determinar la altura a la que se
encuentra volando el dron.
GPS: Mide y permite situar al drone respecto del sistema de coordenadas georeferenciadas por
satélite.
18 Ingenio Triana (2015). Todo lo que necesitas saber sobre drones. Recuperado de http://ingenio-triana.blogspot.com.ar/2015/12/todo-lo-que-necesitas-saber-sobre-drones.html
37
©RedEscuelas. Todos los derechos reservados.

Diferentes modos de vuelo
Controlado remotamente: Las acciones del dron son comandadas por el piloto a por medio del
control remoto. El dron hace lo que el piloto le indica.
Supervisado: Aunque un piloto opera el dron, este puede realizar algunas tareas de manera
autónoma.
Monitorizado: El dron dirige su propio plan de vuelo y el piloto, a pesar de no poder controlar los
mandos directamente, sí puede decidir que acción llevará a cabo, además de cancelar la operación, o
coger los mandos de dron en caso de incidencia.
Autónomo: El dron no necesita de un piloto humano que lo controle desde tierra. Se guía por sus
propios sistemas y sensores integrados. En la actualidad esto es ilegal.
38
©RedEscuelas. Todos los derechos reservados.

6. Consideraciones para el vuelo de drones
Antes de comenzar a volar un dron es fundamental conocer cuales son las consideraciones que se
deben tener en cuenta, a fin de evitar riesgos, cumplir con la normativa vigente y poder desarrollar
la tarea de forma de que nadie salga perjudicado. Para esto es importante conocer,además, nuestras
limitaciones y las de nuestro dron, cumplir con los requisitos de seguridad y no exceder las
restricciones aplicadas al vuelo.
Legales
Fuente: adtsgroup.com
Hasta el momento existe en Argentina un Reglamento Provisional De Los Vehículos Aéreos No
Tripulados (VANT) emitido por la Administración Nacional de Aviación Civil (ANAC), que toma sus
principales puntos de la regulación expuesta por la Organización de Aviación Civil Internacional
(OACI) . 19
19 ANAC (2015). Reglamento Provisional de los Vehículos Aéreos no Tripulados (VANT). Recuperado de http://www.anac.gov.ar/anac/web/index.php/1/1196/noticias-y-novedades/reglamento-provisional-de-los-vehiculos-aereos-no-tripulados-vant
39
©RedEscuelas. Todos los derechos reservados.
Operación y restricciones del espacio
● Deberá mantenerse visibilidad directa y continua con el dron.
● En horario diurno y en condiciones meteorológicas visuales que permitan su operación
segura. Está prohibida su operación nocturna.
● A una altura máxima de 120 metros / 400 pies
● A más de 5.5 Km de un aeródromo
● Fuera del espacio aéreo controlado
No podrán operar sobre zonas densamente pobladas o aglomeración de personas, salvo
autorización especial.
No podrán transportar personas o carga, excepto —en el caso de la carga— cuando fuera
imprescindible para realizar la actividad que se hubiera autorizado.
No podrá pilotarse más de un dron al mismo tiempo.
Se prohíben las operaciones de cualquier tipo y con cualquier finalidad de vehículos aéreos
exclusivamente autónomos. Es decir, aquellos que no permiten la intervención del piloto durante
todo el desarrollo de la operación
En el caso del dron que utilizaremos durante las prácticas, el DJI Phantom 3 Standard, en el
manual de usuario se brinda la información sobre las zonas de exclusión aérea.
Todas las zonas de exclusión aérea se indican en el sitio web oficial de DJI en
http://flysafe.dji.com/no-fly. Las zonas de exclusión aérea se dividen en aeropuertos y zonas
restringidas. Los aeropuertos incluyen los principales aeropuertos y campos de vuelo en los que
las aeronaves tripuladas operan a baja altura. Las zonas restringidas incluyen fronteras entre
países o zonas especiales.
40
©RedEscuelas. Todos los derechos reservados.

Foto de las zonas de exclusión aérea de capital federal y alrededores tomadas de
http://flysafe.dji.com/no-fly
El manual dell DJI Phantom 3 Standard puede desacrgarse de:
https://todophantom.com/Manuales/ES-Phantom%203%20Standard%20User%20Manual.pdf
Tripulación
Los miembros de la tripulación deberán ser mayores de edad. En el caso de drones para uso
deportivo o recreativo podrán ser mayores de 16 años, pero deberán estar bajo supervisión directa
de un mayor, quién será responsable por sus actos y omisiones.
Autorización
Todo sujeto que pretenda operar un vehículo aéreo pilotado a distancia deberá contar con una
autorización expedida por la ANAC, con excepción de los vehículos pequeños con fines deportivos o
recreativos.
41
©RedEscuelas. Todos los derechos reservados.
Gestión de riesgos
Los operadores de vehículos aéreos pilotados a distancia deberán contar con un manual de
operaciones y un sistema de gestión de riesgos adecuado para operar, que incluya la información e
instrucciones necesarias para su operación con seguridad y eficacia, el que —como mínimo— debe
incluir lo siguiente:
1. procedimientos para el despegue y aterrizaje;
2. procedimientos en ruta;
3. procedimientos ante la eventual pérdida de enlace con los datos de control (data link);
4. procedimientos para abortar ante la eventual falla un sistema crítico;
5. procedimientos para evaluar la zona de operación;
6. procedimientos para la identificación de riesgos y peligros potenciales y para su mitigación;
7. identificación de los responsables de la operación y el de todos los miembros de la
tripulación remota (piloto/s y observador/es) y
8. requisitos para la calificación de los piloto/s remoto/s y observador/es.
Responsabilidad
La operación será responsabilidad de quienes la lleven a cabo o faciliten, incluyendo la
responsabilidad por los daños y perjuicios que puedan provocar a terceros durante sus operaciones.
Los propietarios u operadores de vehículos están obligados a contratar un seguro de responsabilidad
por los daños a terceros que pudiera ocasionar su operación.
42
©RedEscuelas. Todos los derechos reservados.
Limitaciones propias del dron
Fuente: epdtonthenet.net
El vuelo con drones también tiene limitaciones derivadas del propio sistema que se pone a volar.
Una de las principales, está relacionada con la autonomía de vuelo, que indica cuanto tiempo
seguido podrá estar el dron en el aire. Este parámetro es crucial a la hora de diseñar nuestro plan de
vuelo y depende de varios factores, entre ellos: el estado de carga de las baterías, la velocidad que
desarrolle el dron durante el vuelo y las condiciones climáticas.
Otra de las consideraciones a tener en cuenta es la distancia máxima a la que se puede mantener
una comunicación entre el dron y la estación de control. Esta y otras cosas son provistas por el
fabricante en la hoja de características técnicas del equipo.
El fabricante, conociendo las limitaciones del equipo, provee además una serie de recomendaciones
que deben tenerse en cuenta a la hora del vuelo. En el caso del Phantom 3 Standard nos dice:
1. No utilice la aeronave en condiciones climáticas adversas como lluvia, nieve, niebla ni con
una velocidad del viento superior a 10 m/s.
2. Vuele solo en espacios abiertos. Los edificios altos y las grandes estructuras metálicas
pueden afectar a la precisión de la brújula de a bordo y a la señal GPS.
3. Evite volar cerca de obstáculos, multitudes, líneas de alta tensión, árboles y masas de agua.
4. Evite volar en zonas con altos niveles de electromagnetismo, incluidas estaciones base de
telefonía móvil y torres de transmisión de radio.
5. El rendimiento de la aeronave y de la batería depende de factores medioambientales, como
la densidad del aire y la temperatura. Tenga mucho cuidado cuando vuele por encima de
6000 m (19 685 pies) sobre el nivel del mar, ya que las prestaciones de la aeronave y la
batería pueden verse reducidas.
43
©RedEscuelas. Todos los derechos reservados.

7. Principios de exploración fotográfica con drones
Fuente: lowepro.co.uk
La fotografía aérea busca obtener una representación fiel del terreno a través de la instalación de
máquinas fotográficas a bordo de diversos medios aéreos.
Ya durante la primera guerra mundial se usaba este método para poder espiar el territorio enemigo,
utilizando palomas adiestradas como portadoras de las cámaras fotográficas automáticas . 20
En la actualidad, contamos con la posibilidad de montar las cámaras sobre drones y dirigir nuestra
atención al lugar que queramos con gran precisión.
En el caso de la agricultura, esto es de suma utilidad, ya que nos permite realizar una mapa bastante
preciso del terreno y a partir de él, poder tomar decisiones que optimicen la producción.
Cuán fiel será la representación que obtengamos del terreno fotografiado, dependerá de la
tecnología y los métodos utilizados.
20 Álvaro Hernández (2014).Palomas fotógrafas, los insólitos drones espías de la primera guerra mundial. Recuperado de https://www.eldiario.es/hojaderouter/palomas-fotografas-espias-primera_guerra_mundial_0_295020522.html
44
©RedEscuelas. Todos los derechos reservados.

Fenómenos ópticos de la fotografía aérea
Como la fotografía aérea se forma a partir de la imagen que proyecta el objeto sobre la cámara, en
este procedimiento aparecen algunas deformaciones respecto de la imagen real. Entre las
principales se encuentran: las deformaciones provocadas por el relieve del terreno y las debidas al
ángulo de inclinación de la toma. Esto provoca un cambio de escala y de posición de los objetos, lo
que hace no puedan realizarse mediciones reales.
Para corregir estos efectos y obtener una imagen más cercana a la que puede verse en un mapa, se
realiza un proceso que se conoce como ortorectificación, que transforma la proyección central en
una proyección ortogonal. De esta forma, sí pueden realizarse mediciones precisas sobre la imagen
resultante.
Cuando se quiere mapear una parte importante de terreno, no alcanza con sacar una foto, sino que
es necesario hacer una secuencia de fotos para luego juntarlas todas en una sola imagen (mosaico).
Para que esto pueda efectuarse, las imágenes deben tener puntos en común, de manera que en un
proceso posterior, puedan solaparse.
45
©RedEscuelas. Todos los derechos reservados.

Fuente: siganature.com
Para que este proceso pueda llevarse adelante, cierto porcentaje de cada imagen debe repetir en la
siguiente. Se estima que si el valor de solapamiento ronda el 70%, entonces, cuando se junten todas
las fotos en una sola imagen, no aparecerán aberraciones que la deformen. A este proceso se lo
conoce como generación de ortomosaico.
El solapamiento de las imágenes se hace utilizando los puntos que se repiten de una foto a otra.
46
©RedEscuelas. Todos los derechos reservados.

Luego del solapamiento de las fotos, se conforma una única imagen: ortomosaico.
Resolución, altura de vuelo, velocidad…
Vemos que sin problemas es posible realizar el mapeo de una porción de terreno que nosotros
elijamos mediante un dron y una cámara. Pero surgen a partir de esto algunas preguntas como:
¿Cuántas fotos son necesarias para cubrir todo el terreno? ¿Cuanto puede ampliarse la imagen para
ver algún detalle? ¿A qué altura debo volar el dron? ¿Con qué velocidad? Trataremos de responder
algunas de ellas.
Resolución espacial (GSD)
El detalle más pequeño que podemos ver en una fotografía digital, es aquel que está contenido
dentro de un pixel. Si, esos pequeños cuadraditos que aparecen en la imagen cuando hacemos
mucho zoom, son la menor unidad de una imagen digital y definen su resolución.
Pequeños cuadraditos que aparecen al hacer zoom sobre la imágen, pixels. Fuente:
blog.droneng.com.br
47
©RedEscuelas. Todos los derechos reservados.
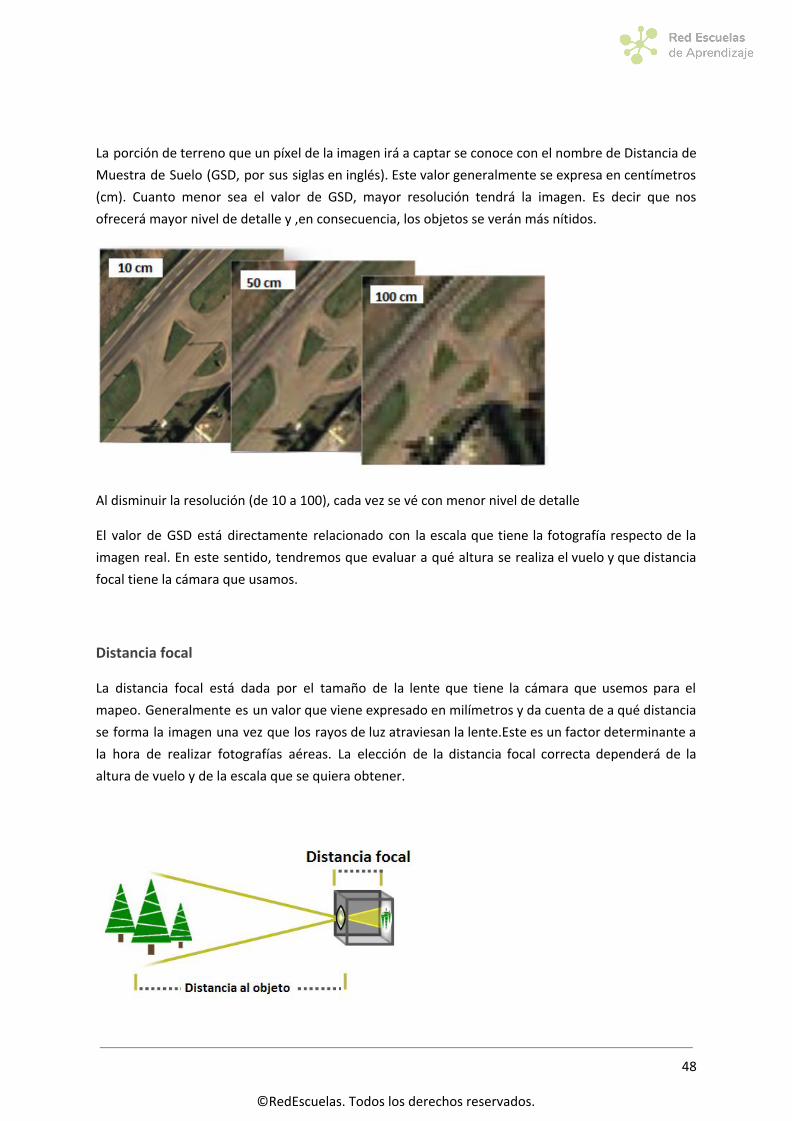
La porción de terreno que un píxel de la imagen irá a captar se conoce con el nombre de Distancia de
Muestra de Suelo (GSD, por sus siglas en inglés). Este valor generalmente se expresa en centímetros
(cm). Cuanto menor sea el valor de GSD, mayor resolución tendrá la imagen. Es decir que nos
ofrecerá mayor nivel de detalle y ,en consecuencia, los objetos se verán más nítidos.
Al disminuir la resolución (de 10 a 100), cada vez se vé con menor nivel de detalle
El valor de GSD está directamente relacionado con la escala que tiene la fotografía respecto de la
imagen real. En este sentido, tendremos que evaluar a qué altura se realiza el vuelo y que distancia
focal tiene la cámara que usamos.
Distancia focal
La distancia focal está dada por el tamaño de la lente que tiene la cámara que usemos para el
mapeo. Generalmente es un valor que viene expresado en milímetros y da cuenta de a qué distancia
se forma la imagen una vez que los rayos de luz atraviesan la lente.Este es un factor determinante a
la hora de realizar fotografías aéreas. La elección de la distancia focal correcta dependerá de la
altura de vuelo y de la escala que se quiera obtener.
48
©RedEscuelas. Todos los derechos reservados.

Es aconsejable en todos los casos utilizar un objetivo “normal” a los efectos de minimizar las
deformaciones. El “gran angular”, por ejemplo, abarca mayor superficie (por su mayor ángulo) pero
genera una mayor deformación, mientras que el “teleobjetivo” necesita una mayor altura de vuelo
para lograr la misma superficie, debido a su menor ángulo.
Altura de vuelo
Cuando se inicia el vuelo se elige un punto de partida (HOME) y una altura de vuelo determinada (H).
A partir de ahí el dron continuará volando siempre a la misma altitud respecto del nivel del mar, sin
importar las irregularidades que el terreno tenga.
Modificado de: blog.droneng.com.br
Cuando hablamos de escala de una foto, nos referimos a la relación de tamaño que hay entre la
imagen fotográfica y la imagen real. En el caso del mapeo aéreo este valor está determinado por la
relación entre la distancia focal y la altura del vuelo.
49
©RedEscuelas. Todos los derechos reservados.

De la misma manera, conociendo el tamaño de píxel que tiene la cámara que usamos y sabiendo la
escala, podemos conocer cuál será la resolución espacial de nuestro mapeo, es decir el valor de GSD.
Fuente: icgeo.org
50
©RedEscuelas. Todos los derechos reservados.

Si combinamos las dos formas de calcular la escala de la fotografía, llegamos a una expresión que
relaciona todos los conceptos que intervienen en el mapeo: Altura de vuelo (H), Distancia focal (f),
Distancia de muestreo de suelo (GSD) y tamaño de pixel (tam_pixel).
Entonces si quisiéramos saber la altura de vuelo para obtener una determinada resolución GSD en
nuestro mapeo, solo bastaría con aportar los datos necesarios dentro de la fórmula.
¿Pero qué sucede con la resolución cuando mapeamos un terreno que tiene ondulaciones o
montañas?
Modificado de: blog.droneng.com.br
En este caso la resolución de nuestro mapeo tendrá valores distintos para cada una de las distintas
alturas de vuelo. Como puede deducirse de la fórmula, para una distancia focal dada, a mayor altura
de vuelo, mayor es el valor de GSD y peor resolución tendrá la foto.
51
©RedEscuelas. Todos los derechos reservados.

Por este motivo ante terrenos irregulares conviene conocer los valores de altura máxima y mínima
de vuelo y tomar un valor intermedio como referencia para realizar los cálculos.
En definitiva, son muchas las variables a tener en cuenta cuando se quiere realizar un mapeo aéreo y
variados los problemas con que nos podemos encontrar a la hora de implementarlo. Por eso es
fundamental determinar bien el objetivo que se persigue y en base a eso ir ajustando las variables en
base a los recursos técnicos con los que se cuenta.
52
©RedEscuelas. Todos los derechos reservados.

Cámaras
Fuente: blog.dronebase.com
Cabe preguntarnos: qué cámara es la adecuada a la hora de realizar un mapeo aéreo? Y la respuesta
variará dependiendo de la finalidad que busquemos.
SI los que pretendemos es realizar un mapeo aéreo común, entonces podremos recurrir a los
diferentes modelos que cada marca nos ofrece para montar sobre el dron, teniendo en cuenta la
calidad de imágenes que se pueden obtener con la cámara. Así, hoy encontramos cámaras con
calidades de 12 Megapixels, 2K y 4K entre las resoluciones más habituales. Bastará entonces con
saber que calidad de imagen queremos y listo.
Pero si lo que buscamos es hacer una análisis de la vegetación o el suelo, tendremos que recurrir a
otro tipo de tecnología. Con este fin, en agricultura, se emplean cámaras con filtros especiales, que
permiten visualizar ciertas partes del espectro lumínico, dependiendo de la información que se
desee detectar. A estas cámaras también se las conoce como “sensores”
53
©RedEscuelas. Todos los derechos reservados.

RGB, NIR
Existen cámaras con filtros en la parte visible del espectro, como pueden ser: el rojo (Red), el azul
(Blue) y el verde (Green). Si estos tres filtros se encuentran integrados dentro del mismo equipo
entonces la cámara se conoce como RGB (por la sigla en inglés de los tres colores.)
Otras cámaras tienen filtros que le permiten centrar su visión en una parte no visible del espectro
que se conoce como infrarrojo cercano (NIR, por sus siglas en inglés).
A la izquierda imagen normal, a la derecha imagen tomada con filtro NIR
Multiespectrales
Las cámaras multiespectrales contienen un solo dispositivo varias cámaras, cada una con un filtro
diferente. De manera que con un solo vuelo pueda captarse la mayor información posible.
Generalmente para el análisis de la vegetación suelen emplearse las bandas del rojo, verde y el
54
©RedEscuelas. Todos los derechos reservados.

infrarrojo cercano, aunque para hacerse más completo el análisis pueden incorporarse otras. Por
cada disparo que hace la cámara se generan tantas fotos como sensores tenga el equipo.
Fuente: sysmap.net
Hiperespectrales
Las cámaras hiperespectrales están equipadas con sensores capaces de percibir centenares de
longitudes de onda dentro y fuera del espectro visible, haciendo posible la generación de imágenes
mucho más precisas. En este caso, por cada disparo de la cámara, se generan cientos de fotos, uno
por cada longitud de onda captada.
Fuente: equipamientocientifico.com
55
©RedEscuelas. Todos los derechos reservados.

Termográficas
Existen también otras cámaras, que permiten obtener directamente la información térmica del
suelo. Esto es de utilidad, por ejemplo, cuando se necesita conocer el estrés hídrico de un suelo o
cultivo.
A la izquierda, cámara termográfica. A la derecha, fotografía termográfica
En todo caso, al incorporar cámaras adicionales al dron, siempre es necesario considerar el peso que
estas representan en relación con lo que el dron puede transportar.
Formatos de imágenes
Las cámaras digitales guardan las fotografías en memorias. Si bien algunas cámaras tienen la
capacidad de guardarlas en su memoria interna, esta suele ser muy limitada y debe agregarse una
memoria externa con el fin de poder almacenar todas las fotos sacadas durante un vuelo. Según la
cantidad de fotografías tomadas esto puede constituir un gran volumen de datos.
56
©RedEscuelas. Todos los derechos reservados.

JPEG
Para optimizar el espacio de memoria, se utilizan algunos formatos que permiten comprimir las
imágenes y hacer que ocupen menos espacio. Es el caso, por ejemplo, del formato JPEG (o JPG), uno
de los más utilizados por las cámaras digitales. Sin embargo todo compresión lleva aparejada una
reducción de la calidad. Es decir que el precio por la reducción del tamaño de la foto es una pérdida
de la información contenida en la foto original.
RAW
Muchas veces es necesario contar con la foto tal cual fue capturada por el sensor de la cámara.
Atendiendo a esta necesidad, es que algunas cámaras ofrecen la posibilidad de guardar la foto sin
ninguna compresión. Al formato de imagen “cruda” se lo conoce como formato RAW y a diferencia
del formato JPEG permite, posteriormente, una gran manipulación de la imagen (ajuste de
exposición, balance de blancos, etc.). Las imágenes es formato RAW son más pesadas que las
imágenes en formato JPEG.
TIFF
Si bien en formato RAW mantiene las cualidades de la fotografía original, no brinda la posibilidad de
incluir junto con la imagen algunos datos esenciales, como puede ser la posición GPS de la cámara en
el instante que se sacó la foto, algo que sí permite el formato JPEG. Para tener estas dos cualidades
juntas puede utilizarse el formato TIFF, que permite tener la imagen sin compresión, como el RAW,
junto con todos los datos, como el JPEG. En consecuencia las imágenes en este formato son más
pesadas que las RAW.
57
©RedEscuelas. Todos los derechos reservados.

8. Diseño del plan de vuelo
Fuente: topconpositioning.com
Cuando queremos realizar el mapeo de una determinada área de terreno, debemos tener en cuenta
todas aquellas variables que influyen en el resultado final, e irlas ajustando de acuerdo con el
resultado que queramos obtener.
Por ejemplo, si el objetivo es mapear una parcela rectangular de 100 hectáreas con una resolución
(GSD) de 5 cm por pixel, tendremos que ver que altura de vuelo nos conviene utilizar, qué velocidad,
cada cuanto se sacarán las fotos, cuál será el tiempo total de vuelo y el número de fotos, para saber,
entre otras cosas, si nos alcanza la autonomía de vuelo y la memoria de la cámara. Cualquier
parámetro que modifiquemos influirá directamente en el resultado que obtengamos.
58
©RedEscuelas. Todos los derechos reservados.
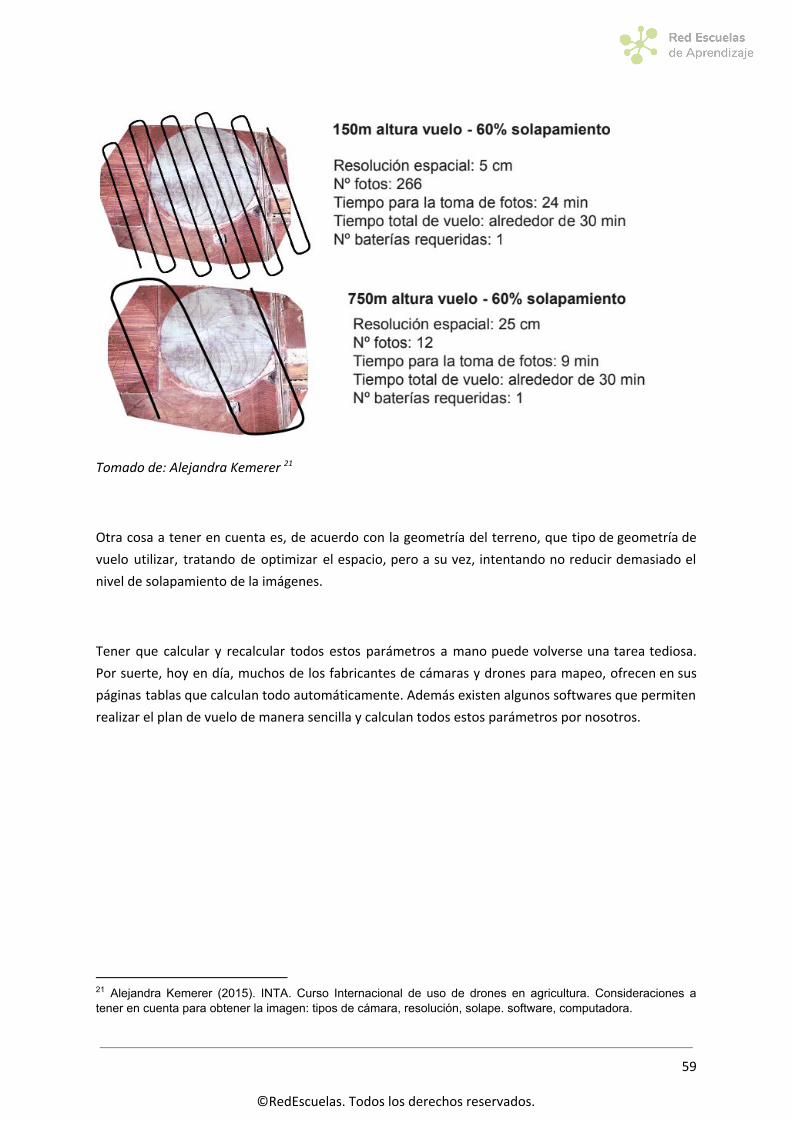
Tomado de: Alejandra Kemerer 21
Otra cosa a tener en cuenta es, de acuerdo con la geometría del terreno, que tipo de geometría de
vuelo utilizar, tratando de optimizar el espacio, pero a su vez, intentando no reducir demasiado el
nivel de solapamiento de la imágenes.
Tener que calcular y recalcular todos estos parámetros a mano puede volverse una tarea tediosa.
Por suerte, hoy en día, muchos de los fabricantes de cámaras y drones para mapeo, ofrecen en sus
páginas tablas que calculan todo automáticamente. Además existen algunos softwares que permiten
realizar el plan de vuelo de manera sencilla y calculan todos estos parámetros por nosotros.
21 Alejandra Kemerer (2015). INTA. Curso Internacional de uso de drones en agricultura. Consideraciones a tener en cuenta para obtener la imagen: tipos de cámara, resolución, solape. software, computadora.
59
©RedEscuelas. Todos los derechos reservados.

Trazado de plan de vuelo sobre un terreno. En rojo el perímetro, en verde el recorrido del dron.
Fuente: gmofreemidwest.org
En muchos de estos softwares bastará con delimitar el terreno que se desea relevar, elegir el punto
de partida y seleccionar algunos parámetros como el nivel de solapamiento y la velocidad del dron.
60
©RedEscuelas. Todos los derechos reservados.
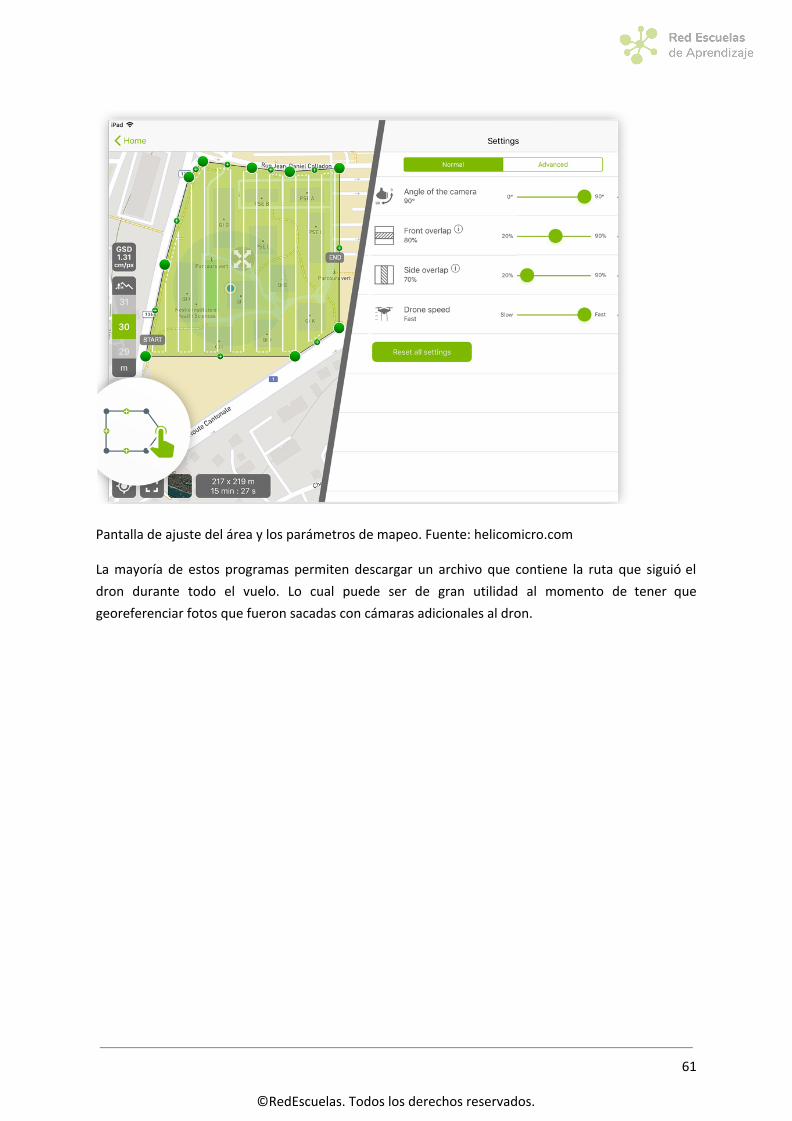
Pantalla de ajuste del área y los parámetros de mapeo. Fuente: helicomicro.com
La mayoría de estos programas permiten descargar un archivo que contiene la ruta que siguió el
dron durante todo el vuelo. Lo cual puede ser de gran utilidad al momento de tener que
georeferenciar fotos que fueron sacadas con cámaras adicionales al dron.
61
©RedEscuelas. Todos los derechos reservados.

9. Georeferenciación de imágenes
Cuando nosotros vemos una fotografía digital, estamos visualizando la imagen que surge de un
archivo informático guardado en la memoria de un equipo (cámara, celular, computadora, etc.) Pero
este archivo no contiene solo la imagen sino que, además, contiene información relacionada con esa
imagen, como puede ser: el nombre que le pusimos, la fecha en que fue sacada, la hora, las
dimensiones, etc.
Dentro del archivo de la foto, junto con la imagen, se incluye la información relacionada.
Todos esos parámetros que son guardados junto con la imagen, son completados por la cámara en el
momento que es tomada la foto. Así, si el dispositivo que toma la fotografía tiene incorporado un
sensor GPS, podrá agregar a la imagen las coordenadas geográficas del lugar donde fué sacada la
foto. A este proceso le llamamos georeferenciación de la imagen y nos permite ubicarla fácilmente y
con gran precisión en un mapa.
62
©RedEscuelas. Todos los derechos reservados.

Coordenadas GPS de referenciación de la foto y su localización en el mapa.
Como vimos, todos los drones tienen incorporada una unidad de movimiento inercial (IMU) que
contiene varios sensores, entre ellos, un altímetro y un GPS. Es por eso que los drones que ya traen
una cámara incorporada, adjuntan los datos de esos sensores a la fotografía tomada por el dron en
una imagen con formato JPEG.
En el caso de utilizar cámaras adicionales, si estas no tienen incorporadas un sensor GPS, las fotos
que tomadas no tendrán georeferenciación. Por lo cual será necesario buscar algún método que
permita georeferenciarlas.
63
©RedEscuelas. Todos los derechos reservados.

10. Generación del ortomosaico
Con las imágenes georreferenciadas y la ruta de vuelo es posibles ubicar todas las fotos tomadas por
el dron en un solo mapa y, a partir de esto, conformar un única imagen que contenga toda la
superficie fotografiada. A la imagen obtenida después de este proceso se la conoce como
ortomosaico.
Múltiples tomas fotográficas sobre el terreno. Fuente: servivant.es
El proceso de generación de un ortomosaico es un proceso complejo que implica un exhaustivo
análisis y procesamiento del set de imágenes. Es por eso que es llevado adelante por diversos
softwares dedicados para esta tarea.
64
©RedEscuelas. Todos los derechos reservados.
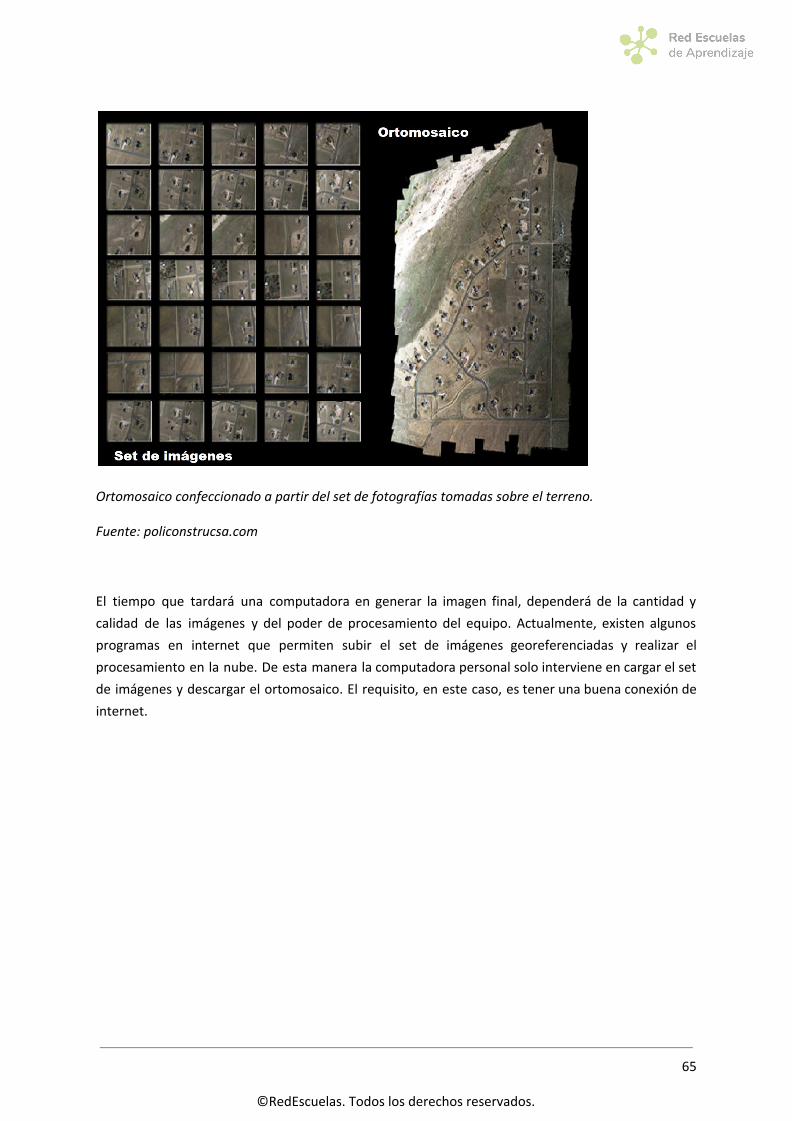
Ortomosaico confeccionado a partir del set de fotografías tomadas sobre el terreno.
Fuente: policonstrucsa.com
El tiempo que tardará una computadora en generar la imagen final, dependerá de la cantidad y
calidad de las imágenes y del poder de procesamiento del equipo. Actualmente, existen algunos
programas en internet que permiten subir el set de imágenes georeferenciadas y realizar el
procesamiento en la nube. De esta manera la computadora personal solo interviene en cargar el set
de imágenes y descargar el ortomosaico. El requisito, en este caso, es tener una buena conexión de
internet.
65
©RedEscuelas. Todos los derechos reservados.

11. Índices de vegetación
Fuente: praxperu.com
Luz visible e infrarroja
Como sabemos la luz solar está compuesta por un amplio espectro de colores, algunos de los cuales
podemos observar, por ejemplo, cuando se descompone formando un arcoiris. De todos los colores
en que se descompone la luz, solo podemos ver aquellos que pueden ser captados por nuestro ojos,
es decir los que están dentro del espectro visible. Pero hay muchos otros que, aunque no los
veamos, también forma parte de esa luz. Son por ejemplo aquellos que están en la parte del
infrarrojo y del ultravioleta del espectro.
Como la luz es una onda electromagnética, cada color ocupa una franja (o banda) dentro del
espectro y es identificable por su longitud de onda.
66
©RedEscuelas. Todos los derechos reservados.

Ubicación de la luz visible dentro del espectro electromagnético. Fuente: emaze.com
La luz solar que llega a la vegetación es en parte absorbida y en parte reflejada por esta. Pero si
miramos con detalle, podremos observar que no sucede lo mismo con todas las bandas del espectro.
Algunos “colores” serán absorbidos o reflejados más que otros. Y aprovechando este principio es
que funcionan los índices de vegetación . 22
Fuente: lesbos.webcam
Índice de vegetación diferencial normalizado (NDVI)
Una cubierta vegetal en buen estado de salud absorbe mucho la parte del espectro situada en el
visible, principalmente del rojo, a través de sus hojas y muy poco la situada en el infrarrojo cercano,
22 Agromática (2018). NDVI y por qué las plantas son verdes. Recuperado de https://www.agromatica.es/ndvi-y-por-que-las-plantas-son-verdes/
67
©RedEscuelas. Todos los derechos reservados.

la cual es reflejada en su mayoría. El contraste entre estos dos valores, nos permite, entonces,
establecer una medida del estado de salud de esa vegetación.
Absorción de diferentes partes del espectro en una planta sana. puede observarse el salto entre el
visible y el infrarrojo. Fuente: agromatica.es
Entonces, midiendo la cantidad de luz refleja en el rojo (RED) y la cantidad de luz reflejada en el
infrarrojo cercano (NIR), se puede establecer un valor que se conoce como índice de vegetación
diferencial normalizado (NDVI). Según este índice, cuanto mayor sea la diferencia entre la reflexión
del rojo y del infrarrojo, mejor estado de salud tendrá la planta.
Fuente: helidroid.com
Como los valores de reflexión en cada banda se toma en relación con la radiación incidente, siempre
estarán entre cero (cuando no haya reflexión) y uno (cuando la reflexión sea total). En consecuencia,
68
©RedEscuelas. Todos los derechos reservados.

los valores que puede tomar el índice NDVI siempre estarán entre -1 y 1. Cuanto más se acerque a 1,
mejor será el estado de salud de la vegetación, mientras que cuanto más se acerque a -1 peor será el
estado.
Fuente: sentera.com
La cantidad de luz reflejada en cada banda se detecta mediante cámaras especialmente adaptadas
para tal fin. En algunos casos se toman imágenes con dos cámaras al mismo tiempo, una con filtro
en el rojo y otra con filtro el infrarrojo cercano y luego se combinan las imágenes. Sin embargo, en el
último tiempo, al hacerse más habitual el uso de estos índices, algunas marcas ya ofrecen cámaras
que poseen un filtro doble, que permite obtener en la misma imagen la relación entre las bandas
roja (RED) e infrarroja (NIR).De esta manera, se simplifica el procedimiento de adquisición.
A la izquierda, esquema de filtro que deja pasar solo las bandas del rojo (RED) y del infrarrojo cercano
(NIR) Fuente: midopt.com
Una vez que se toman las imágenes, mediante un software, se realiza el cálculo del índice NDVI para
cada punto (pixel) de la fotografía. Finalmente, el resultado se visualiza en una nueva imagen a la
69
©RedEscuelas. Todos los derechos reservados.
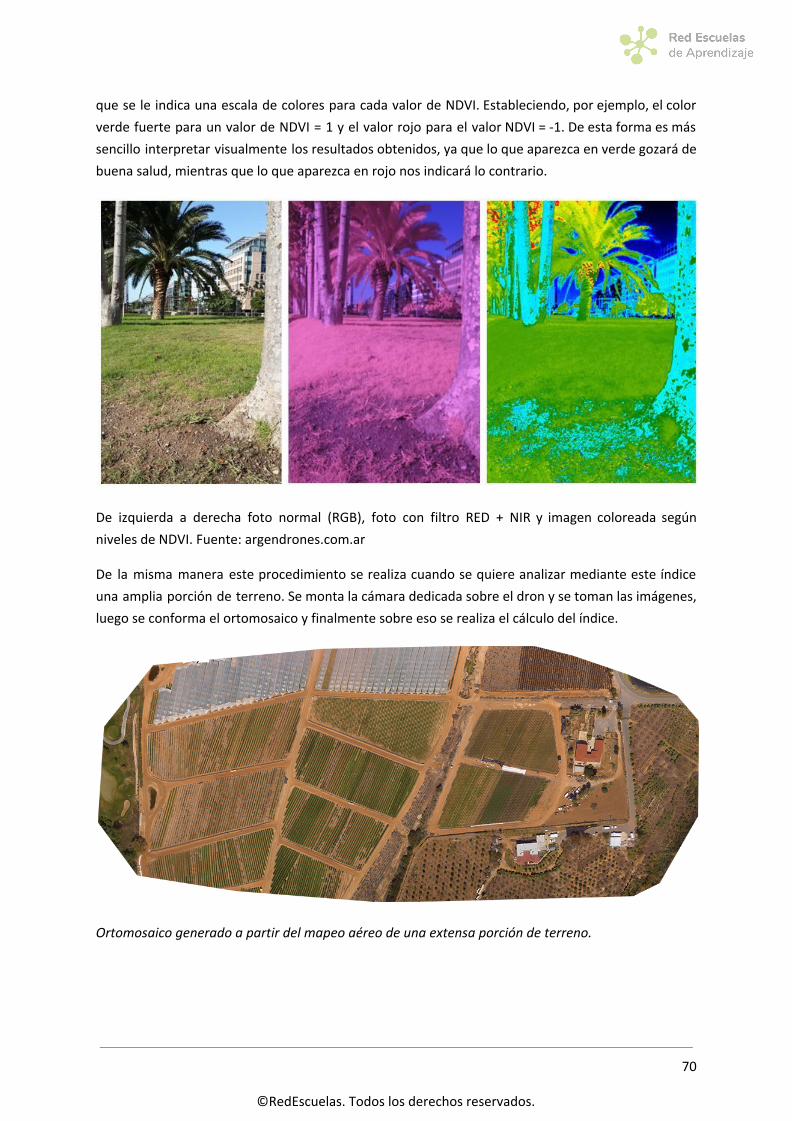
que se le indica una escala de colores para cada valor de NDVI. Estableciendo, por ejemplo, el color
verde fuerte para un valor de NDVI = 1 y el valor rojo para el valor NDVI = -1. De esta forma es más
sencillo interpretar visualmente los resultados obtenidos, ya que lo que aparezca en verde gozará de
buena salud, mientras que lo que aparezca en rojo nos indicará lo contrario.
De izquierda a derecha foto normal (RGB), foto con filtro RED + NIR y imagen coloreada según
niveles de NDVI. Fuente: argendrones.com.ar
De la misma manera este procedimiento se realiza cuando se quiere analizar mediante este índice
una amplia porción de terreno. Se monta la cámara dedicada sobre el dron y se toman las imágenes,
luego se conforma el ortomosaico y finalmente sobre eso se realiza el cálculo del índice.
Ortomosaico generado a partir del mapeo aéreo de una extensa porción de terreno.
70
©RedEscuelas. Todos los derechos reservados.
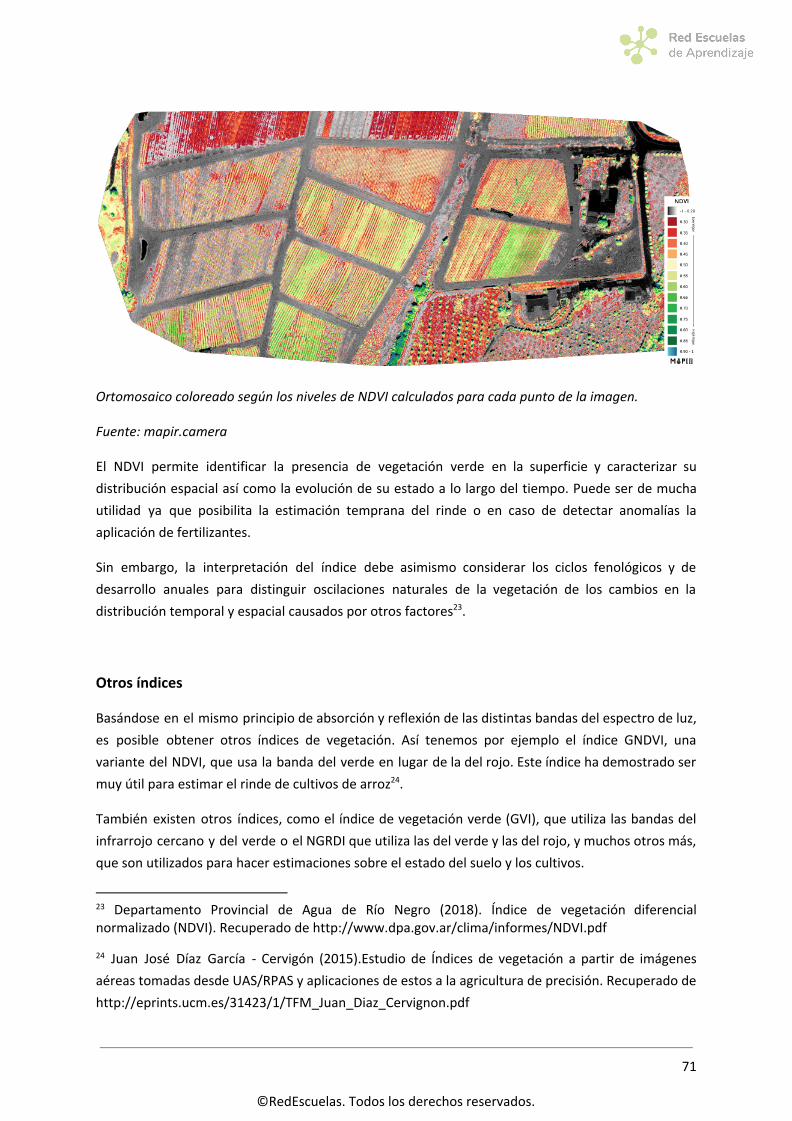
Ortomosaico coloreado según los niveles de NDVI calculados para cada punto de la imagen.
Fuente: mapir.camera
El NDVI permite identificar la presencia de vegetación verde en la superficie y caracterizar su
distribución espacial así como la evolución de su estado a lo largo del tiempo. Puede ser de mucha
utilidad ya que posibilita la estimación temprana del rinde o en caso de detectar anomalías la
aplicación de fertilizantes.
Sin embargo, la interpretación del índice debe asimismo considerar los ciclos fenológicos y de
desarrollo anuales para distinguir oscilaciones naturales de la vegetación de los cambios en la
distribución temporal y espacial causados por otros factores . 23
Otros índices
Basándose en el mismo principio de absorción y reflexión de las distintas bandas del espectro de luz,
es posible obtener otros índices de vegetación. Así tenemos por ejemplo el índice GNDVI, una
variante del NDVI, que usa la banda del verde en lugar de la del rojo. Este índice ha demostrado ser
muy útil para estimar el rinde de cultivos de arroz . 24
También existen otros índices, como el índice de vegetación verde (GVI), que utiliza las bandas del
infrarrojo cercano y del verde o el NGRDI que utiliza las del verde y las del rojo, y muchos otros más,
que son utilizados para hacer estimaciones sobre el estado del suelo y los cultivos.
23 Departamento Provincial de Agua de Río Negro (2018). Índice de vegetación diferencial normalizado (NDVI). Recuperado de http://www.dpa.gov.ar/clima/informes/NDVI.pdf
24 Juan José Díaz García - Cervigón (2015).Estudio de Índices de vegetación a partir de imágenes
aéreas tomadas desde UAS/RPAS y aplicaciones de estos a la agricultura de precisión. Recuperado de
http://eprints.ucm.es/31423/1/TFM_Juan_Diaz_Cervignon.pdf
71
©RedEscuelas. Todos los derechos reservados.

12. Consideraciones finales
Fuente: newbranch.info
Hemos llegado al final de este recorrido, donde tratamos de brindarte los principales conceptos
sobre el uso de los drones dentro de la agricultura de precisión.
Esperamos que, junto con los trabajos práctico y tutoriales, hayas podido comprender los conceptos
claves de esta nueva tecnología, que se ofrece muy prometedora de cara a la agricultura del futuro.
Como sucede con la mayoría de las cosas, para dominar la técnica de adquisición de imágenes con
drones, hace falta mucha práctica. Llegar a conocer todas las posibles variantes que surgen a la hora
de tomar fotografías aéreas sobre un terreno puede llevar bastante tiempo. En el camino podés
encontrarte con algunos contratiempos, pero no te desanimes, porque superarlos es parte del
proceso de aprendizaje.
Esperamos que te haya gustado el curso y, que a través de lo aprendido, encuentres la motivación
para hacer del uso de esta tecnología una oportunidad para resolver alguna problemática dentro de
tu comunidad.
72
©RedEscuelas. Todos los derechos reservados.


















