
DOCUMENTO PROYECTO FINAL ELECTRONICA - copia
24
1 INFORME DE LA INVESTIGACION TEMA: PUERTO PARALELO CONTENIDO 1. Teoría Atómica 1.1. Inicios de la Teoría Atómica 1.2. El Átomo 1.3. Movimiento electrónico 2. Conceptos Básicos 2.1. Carga eléctrica 2.2. Corriente eléctrica 2.3. Tensión eléctrica o Voltaje 2.4. Capacitancia 2.5. Inductancia 3. Redes de corriente Directa 3.1. Ley de Ohm 3.2. Reducción de circuitos serie y paralelo 3.3. Fuentes de voltaje y corriente serie y paralelo 3.4. Divisor de voltaje y corriente 3.5. Potencia en un circuito 3.6. Leyes de Kirchhoff 3.6.1. Ley de mallas 3.6.2. Ley de nodos 3.7. Superposición 3.8. Circuito Equivalente de Thevénin y Norton 3.9. Máxima transferencia de potencia 3.10. Regulación de Voltaje 4. Redes de corriente Alterna 4.1. Onda senoidal (ca) 4.2. Valor promedio 4.3. Voltaje y corriente efectiva (rms) 4.4. Red R-L y R-C 4.5. Impedancia 4.6. El transformador 4.7. Fuentes de Voltaje y corriente
-
Upload
isacastaneda -
Category
Documents
-
view
423 -
download
3
Transcript of DOCUMENTO PROYECTO FINAL ELECTRONICA - copia
1
INFORME DE LA INVESTIGACION
TEMA: PUERTO PARALELO
CONTENIDO
1. Teoría Atómica 1.1. Inicios de la Teoría Atómica 1.2. El Átomo 1.3. Movimiento electrónico
2. Conceptos Básicos 2.1. Carga eléctrica 2.2. Corriente eléctrica 2.3. Tensión eléctrica o Voltaje 2.4. Capacitancia 2.5. Inductancia
3. Redes de corriente Directa 3.1. Ley de Ohm 3.2. Reducción de circuitos serie y paralelo 3.3. Fuentes de voltaje y corriente serie y paralelo 3.4. Divisor de voltaje y corriente 3.5. Potencia en un circuito 3.6. Leyes de Kirchhoff
3.6.1. Ley de mallas 3.6.2. Ley de nodos
3.7. Superposición 3.8. Circuito Equivalente de Thevénin y Norton 3.9. Máxima transferencia de potencia 3.10. Regulación de Voltaje
4. Redes de corriente Alterna 4.1. Onda senoidal (ca) 4.2. Valor promedio 4.3. Voltaje y corriente efectiva (rms) 4.4. Red R-L y R-C 4.5. Impedancia 4.6. El transformador 4.7. Fuentes de Voltaje y corriente
2
4.8. Aplicación del transformador con fuentes de voltaje
5. Dispositivos electrónicos 5.1. Diodos 5.2. Transistores 5.3. Otros tipos de dispositivos Semiconductores
JUSTIFICACION: Conocimiento de hardware y comprender el funcionamiento electrónico de los elementos que forman la computadora. Y el controlar sistemas eléctricos o electrónicos por medio de aplicaciones desarrolladas en lenguaje de programación.
OBJETIVOS
3
OBJETIVOS GENERALES
• Conocimiento de la terminología de circuitos eléctricos y electrónicos, así como el funcionamiento de los mismos.
• Tener la capacidad de resolver analíticamente circuitos eléctricos sencillos que pueda encontrar en alguna aplicación.
OBJETIVOS ESPECIFICOS
• Conocimiento de los dispositivos eléctricos y electrónicos. • Conocimiento de componentes de la computadora. • Desarrollo de aplicaciones para controlar sistemas eléctricos. • Realizar el movimiento de 2 motores DC con giro a la izquierda y derecha
controlado a través del puerto Paralelo, enviando por medio de un software desarrollado.
4
Introducción
En el presente trabajo queremos dar a conocer los aspectos sobre algunos
componentes electrónicos/eléctricos y su adaptación para creación de un circuito que
moviliza dos motores de corriente directa. Se realizo la investigación de cada uno de
los componentes necesarios, funciones, características generales y especificas, y el
como conectar cada uno de estos componentes.
Se tuvieron varias dificultades para llegar al objetivo inicial, llegando así a construir una
solución parcial a la solicitada.
Adjuntamos documentación que nos ayudo a la realización del proyecto, diagramas y el
software final.
5
MARCO TEORICO
Transistores
Los transistores son unos elementos que han facilitado, en gran medida, el diseño de circuitos electrónicos de reducido tamaño, gran versatilidad y facilidad de control.
Vienen a sustituir a las antiguas válvulas termoiónicas de hace unas décadas. Gracias a ellos fue posible la construcción de receptores de radio portátiles llamados comúnmente "transistores", televisores que se encendían en un par de segundos, televisores en color... Antes de aparecer los transistores, los aparatos a válvulas tenían que trabajar con tensiones bastante altas, tardaban más de 30 segundos en empezar a funcionar, y en ningún caso podían funcionar a pilas, debido al gran consumo que tenían.
(ver ANEXO Ilustración 1)
Los transistores tienen multitud de aplicaciones, entre las que se encuentran:
• Amplificación de todo tipo (radio, televisión, instrumentación) • Generación de señal (osciladores, generadores de ondas, emisión de
radiofrecuencia) • Conmutación, actuando de interruptores (control de relés, fuentes de
alimentación conmutadas, control de lámparas, modulación por anchura de impulsos PWM)
• Detección de radiación luminosa (fototransistores)
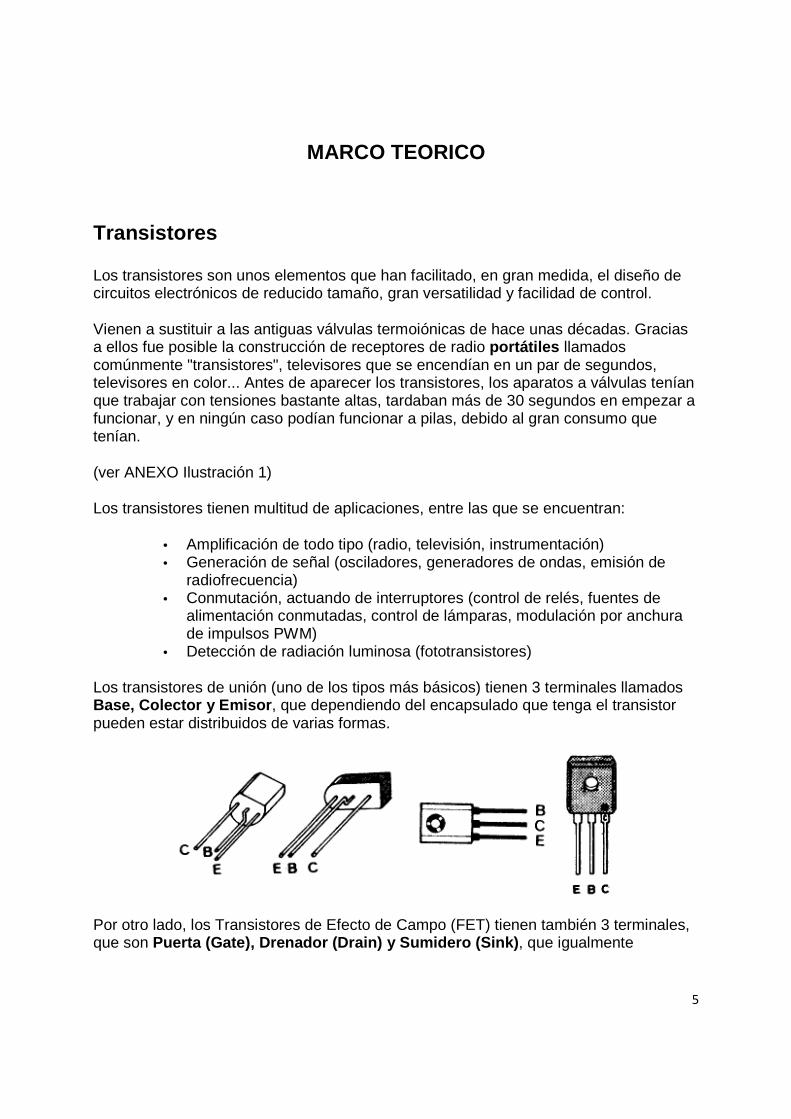
Los transistores de unión (uno de los tipos más básicos) tienen 3 terminales llamados Base, Colector y Emisor , que dependiendo del encapsulado que tenga el transistor pueden estar distribuidos de varias formas.
Por otro lado, los Transistores de Efecto de Campo (FET) tienen también 3 terminales, que son Puerta (Gate), Drenador (Drain) y Sumidero (Sink) , que igualmente
6
dependiendo del encapsulado que tenga el transistor pueden estar distribuidos de varias formas.
Tipos de transistores. Simbología
Existen varios tipos que dependen de su proceso de construcción y de las apliaciones a las que se destinan. Tabla con los tipos de uso más frecuente y su simbología:
(ver ANEXO Ilustración 2)
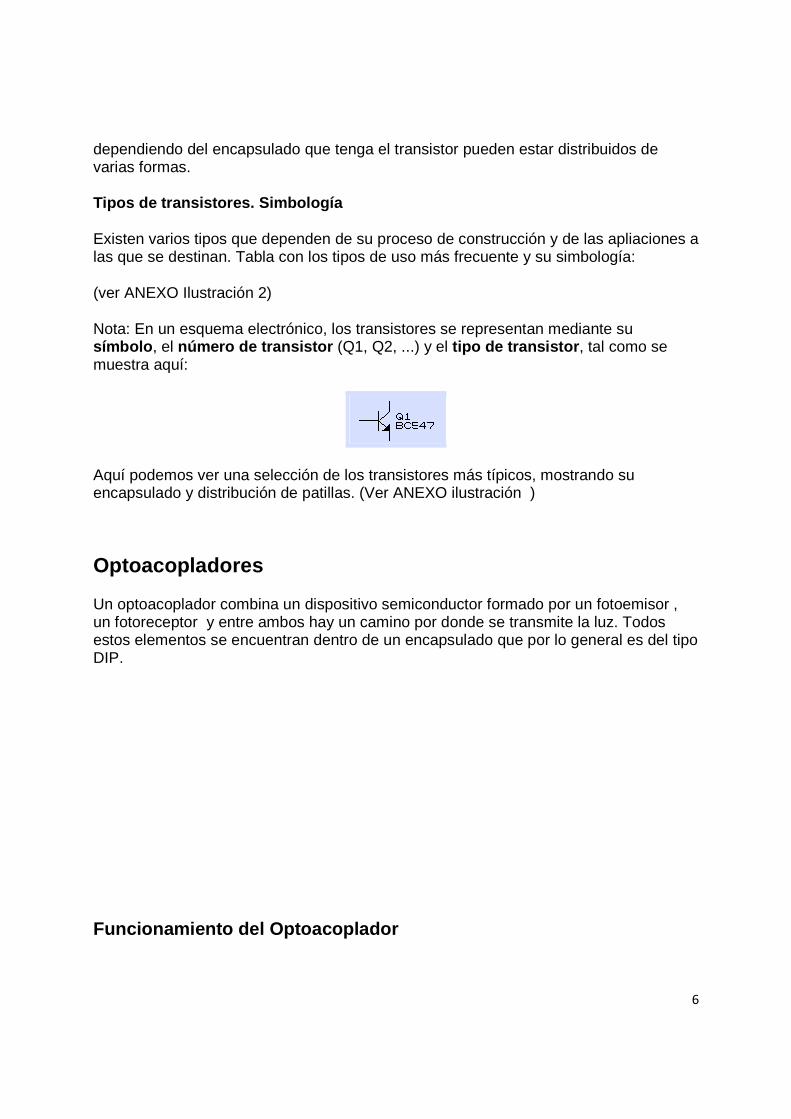
Nota: En un esquema electrónico, los transistores se representan mediante su símbolo , el número de transistor (Q1, Q2, ...) y el tipo de transistor , tal como se muestra aquí:
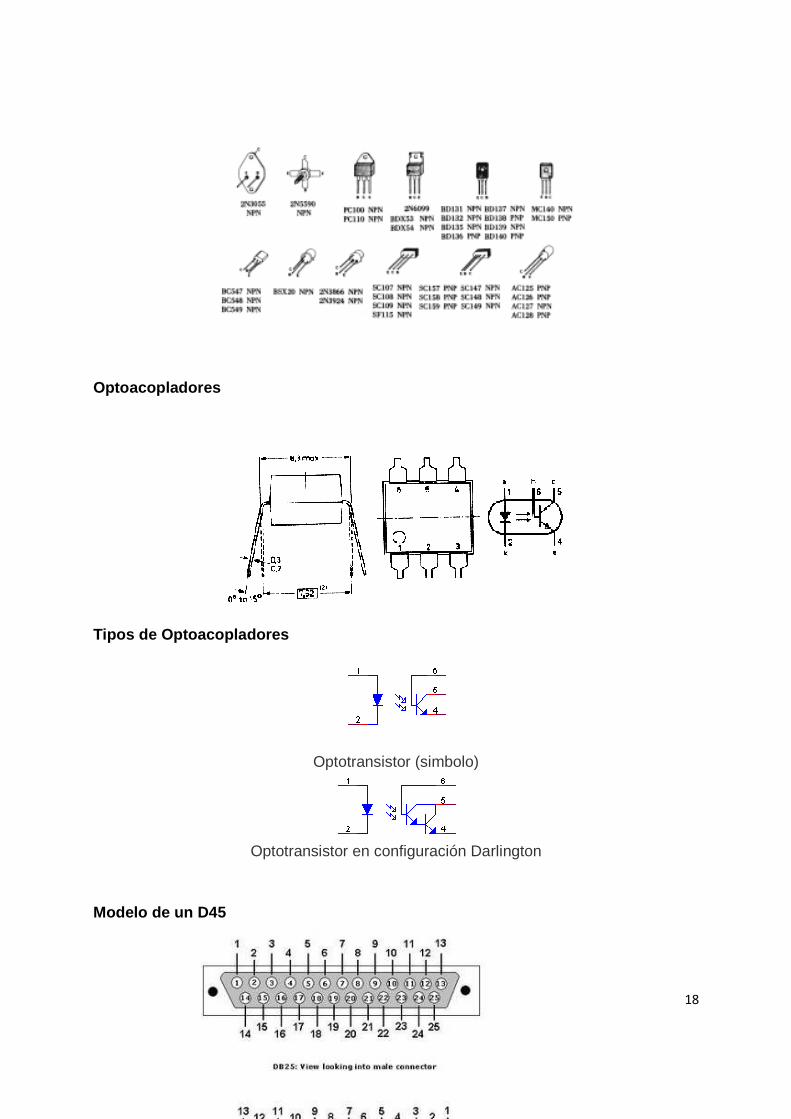
Aquí podemos ver una selección de los transistores más típicos, mostrando su encapsulado y distribución de patillas. (Ver ANEXO ilustración )
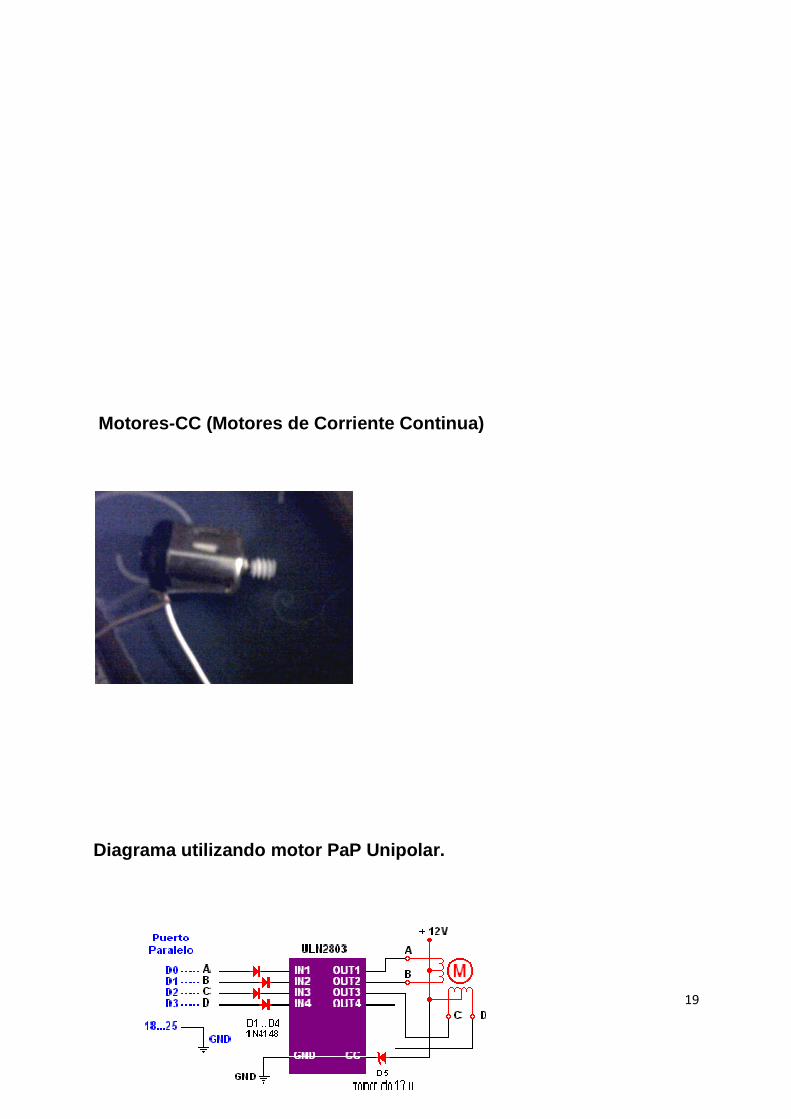
Optoacopladores
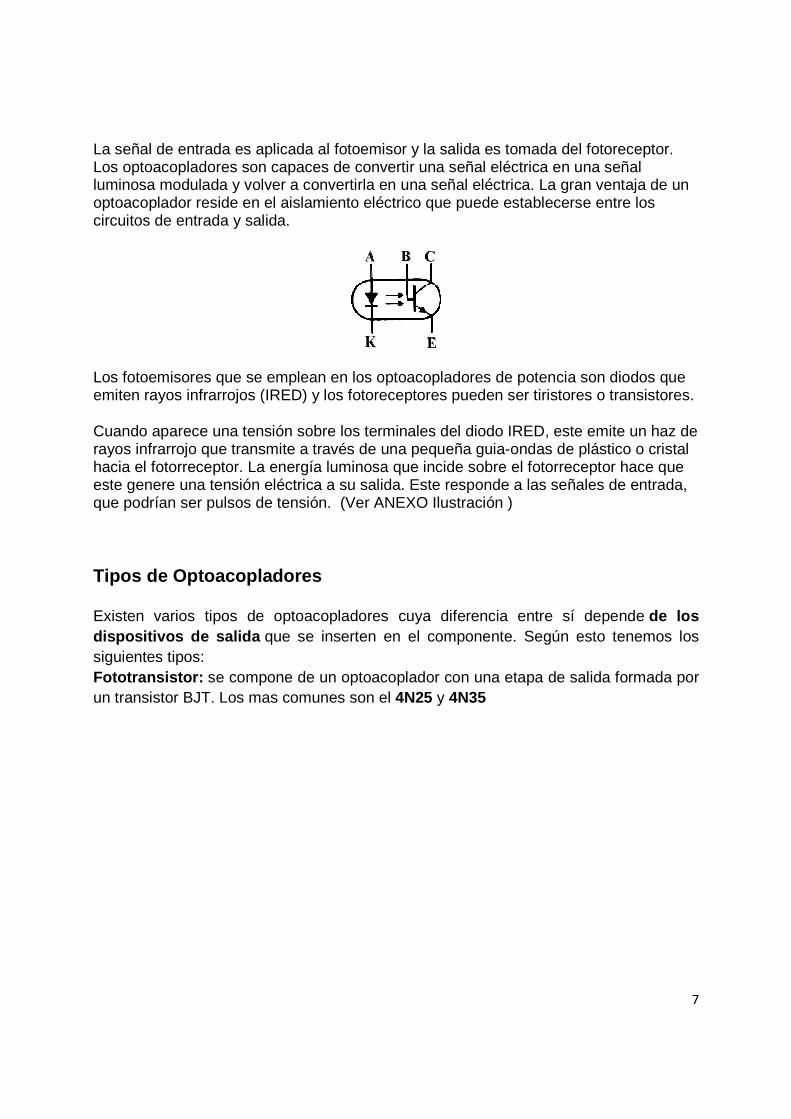
Un optoacoplador combina un dispositivo semiconductor formado por un fotoemisor , un fotoreceptor y entre ambos hay un camino por donde se transmite la luz. Todos estos elementos se encuentran dentro de un encapsulado que por lo general es del tipo DIP.
Funcionamiento del Optoacoplador
7
La señal de entrada es aplicada al fotoemisor y la salida es tomada del fotoreceptor. Los optoacopladores son capaces de convertir una señal eléctrica en una señal luminosa modulada y volver a convertirla en una señal eléctrica. La gran ventaja de un optoacoplador reside en el aislamiento eléctrico que puede establecerse entre los circuitos de entrada y salida.
Los fotoemisores que se emplean en los optoacopladores de potencia son diodos que emiten rayos infrarrojos (IRED) y los fotoreceptores pueden ser tiristores o transistores.
Cuando aparece una tensión sobre los terminales del diodo IRED, este emite un haz de rayos infrarrojo que transmite a través de una pequeña guia-ondas de plástico o cristal hacia el fotorreceptor. La energía luminosa que incide sobre el fotorreceptor hace que este genere una tensión eléctrica a su salida. Este responde a las señales de entrada, que podrían ser pulsos de tensión. (Ver ANEXO Ilustración )
Tipos de Optoacopladores
Existen varios tipos de optoacopladores cuya diferencia entre sí depende de los dispositivos de salida que se inserten en el componente. Según esto tenemos los siguientes tipos: Fototransistor: se compone de un optoacoplador con una etapa de salida formada por un transistor BJT. Los mas comunes son el 4N25 y 4N35
8
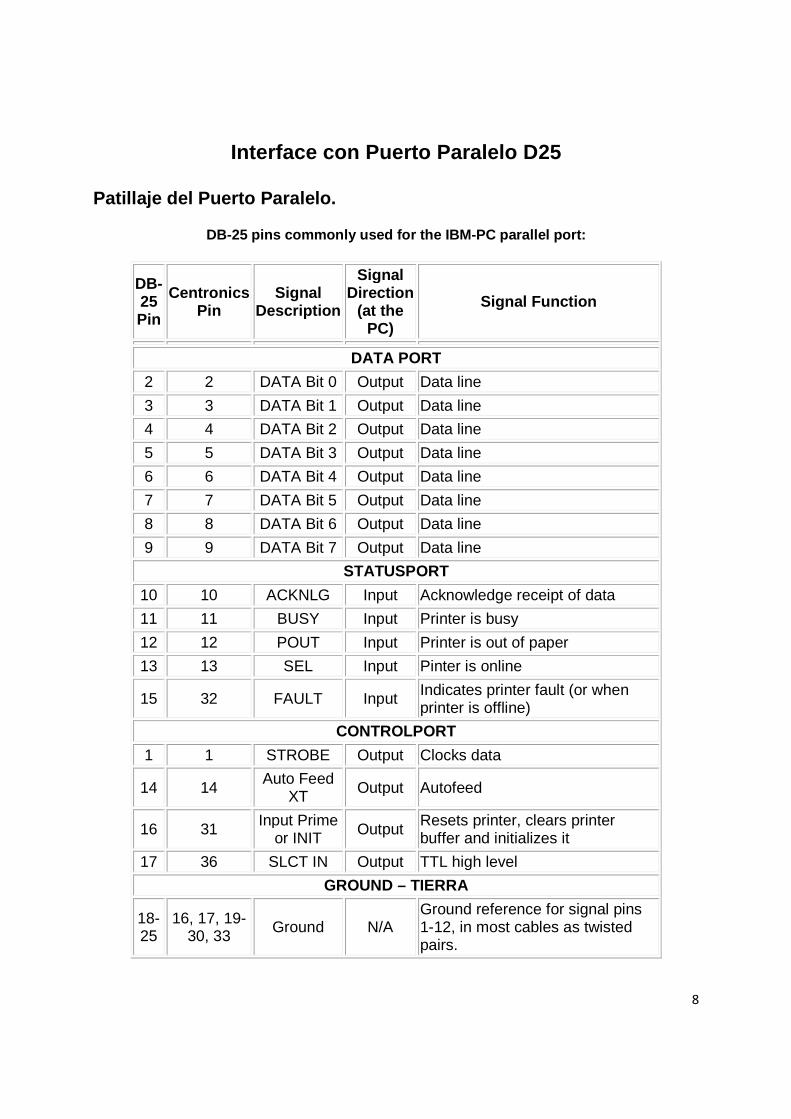
Interface con Puerto Paralelo D25 Patillaje del Puerto Paralelo.
DB-25 pins commonly used for the IBM-PC parallel po rt:
DB-25 Pin
Centronics Pin
Signal Description
Signal Direction
(at the PC)
Signal Function
DATA PORT
2 2 DATA Bit 0 Output Data line
3 3 DATA Bit 1 Output Data line
4 4 DATA Bit 2 Output Data line
5 5 DATA Bit 3 Output Data line
6 6 DATA Bit 4 Output Data line
7 7 DATA Bit 5 Output Data line
8 8 DATA Bit 6 Output Data line
9 9 DATA Bit 7 Output Data line
STATUSPORT
10 10 ACKNLG Input Acknowledge receipt of data
11 11 BUSY Input Printer is busy
12 12 POUT Input Printer is out of paper
13 13 SEL Input Pinter is online
15 32 FAULT Input Indicates printer fault (or when printer is offline)
CONTROLPORT
1 1 STROBE Output Clocks data
14 14 Auto Feed
XT Output Autofeed
16 31 Input Prime
or INIT Output Resets printer, clears printer
buffer and initializes it
17 36 SLCT IN Output TTL high level
GROUND – TIERRA
18-25
16, 17, 19-30, 33
Ground N/A Ground reference for signal pins 1-12, in most cables as twisted pairs.
9
Modelo de un D45 (ver ANEXO ilustración ) El Dataport se usa como salida El Statusport se usa como entrada El controlport se usa de las dos formas anteriores Asi que para encender mandar voltaje al puerto usaremos el Dataport, para recibir niveles de voltaje usaremos el Statusport (un ejemplo del uso del statusport es para cuando en un sistema de riego que al terminar de regar, este haga un cambio de voltaje en algún dispositivo (como un rele) se detecta el cambio de cero a 5 voltios y se puede hacer la detección de acciones físicas desde la computadora) Motores CC y PaP
Motores-CC (Motores de Corriente Continua)
Son de los más comunes y económicos, y puedes encontrarlo en la mayoría de los juguetes a pilas, constituidos, por lo general, por dos imanes permanentes fijados en la carcaza y una serie de bobinados de cobre ubicados en el eje del motor, que habitualmente suelen ser tres.
El funcionamiento se basa en la interacción entre el campo magnético del imán permanente y el generado por las bobinas, ya sea una atracción o una repulsión hacen que el eje del motor comience su movimiento, bueno, eso es a grandes rasgos.
(Ver ANEXO Ilustración 2)
Motores PaP o Motores Paso a Paso. A diferencia de los Motores-CC, que giran sin control cuando son conectados a la fuente de alimentación, los Motores-PaP solamente giran un ángulo determinado, los primeros sólo disponen de dos terminales de conexión, mientras los otros pueden tener 4, 5 o 6, según el tipo de motor que se trate, por otro lado los motores de corriente continua no pueden quedar enclavados en una sola posición, mientras los motores paso a paso. Los Motores-PaP suelen ser clasificado en dos tipos, según su diseño y fabricación pueden ser Bipolares o Unipolares. (ver ANEXO Ilustración )
MARCO METODOLOGICO
Descripción del Proyecto.
(Literalmente del documento entregado por el Ingeniero)
10
El proyecto consiste en un sistema que sea capaz de posicionar un eje en razón a pulsos enviados por la PC, estos pulsos tendrá que amplificarlos a través de transistores en cascada o bien un par Darlington que tendrán la suficiente corriente para mover dos motores DC en un plano cartesiano, enseguida de indica el proceso. Tarea a Realizar (Literalmente del documento entregado por el Ingeniero)
Utilizando la PC y el teclado, deberá enviar coordenadas cartesianas X, Y a una maqueta diseñada con punteros en cada eje, estos pulsos activaran dos relé electromagnético a fin de activar dos motores que serán la guía de eje (X, Y). La coordenada a enviar desde el puerto esta determinada por un único pulso (una a cada motor a utilizar) y deberá pensar en una forma optima para detener el motor en la coordenada deseada, cualquiera que se elija (Ejemplo: un circuito RC). Nota: Puede dividir el plano de trabajo en 4 posiciones (coordenadas (x, y)) y desde la PC enviar por algún tiempo determinado voltaje al capacitor (amplificado previamente) para que se cargue el capacitor a las constantes de tiempo necesarias para el movimiento en 4 puntos del plano. El movimiento finalizara una vez que cada eje llegue a la posición programada. El retorno de los punteros se realizar a la inversa. (Investigar Relé de doble polo y doble tiro). Sera necesario que analice su ingenio para el proceso con circuitos RC, reles de doble polo y doble tiro, resistores, optoacopladores etc. Como solo necesitara un pulso para activar cada motor Do y D1 quedara libre las salidas del puerto paralelo D2 a D7 (6 leds), en estos deberá hacer un barrido “Auto fantástico” con leds de un color. El barrido será de izquierda a derecha y regresar por la derecha hacia la izquierda, este barrido será mientras estén caminando los motores hacia la coordenada pedida, el barrido deberá ser lento. Fase 1. Investigación y prototipo.
1. Realizando las investigaciones sobre patillaje del puesto paralelo LPT1, conceptos y patillaje de los optoacopladores 4N25, Tipos de Transistores, circuitos RC.
2. Se realizo el primer prototipo del circuito a elaborar en software livewire (ver ANEXO Ilustración)
3. Adaptamos el diseño a la necesidad del movimiento de los motores.
4. Cuando se estaba realizando el diseño en Livewire dibujamos el diseño
con las parte de los reles de esta forma. (ver ANEXO Ilustración ) Pero
11
nos dimos cuenta que para conectar los motores al rele debíamos utilizar los reles de esta forma. (ver ANEXO Ilustracion )
5. Este al ser presentado fueron encontrados algunos errores en el diagrama los cuales fueron modificados. Los cambios realizados fueron:
� Conexión de los Relés junto al circuito RC. � Las resistencias se necesitaban de mayor valor de ohmios. � Conexión de los leads. � Conexión del circuito de carga (RC) aun 3er Rele para la descarga
de motores. (Ver ANEXO Ilustracion )
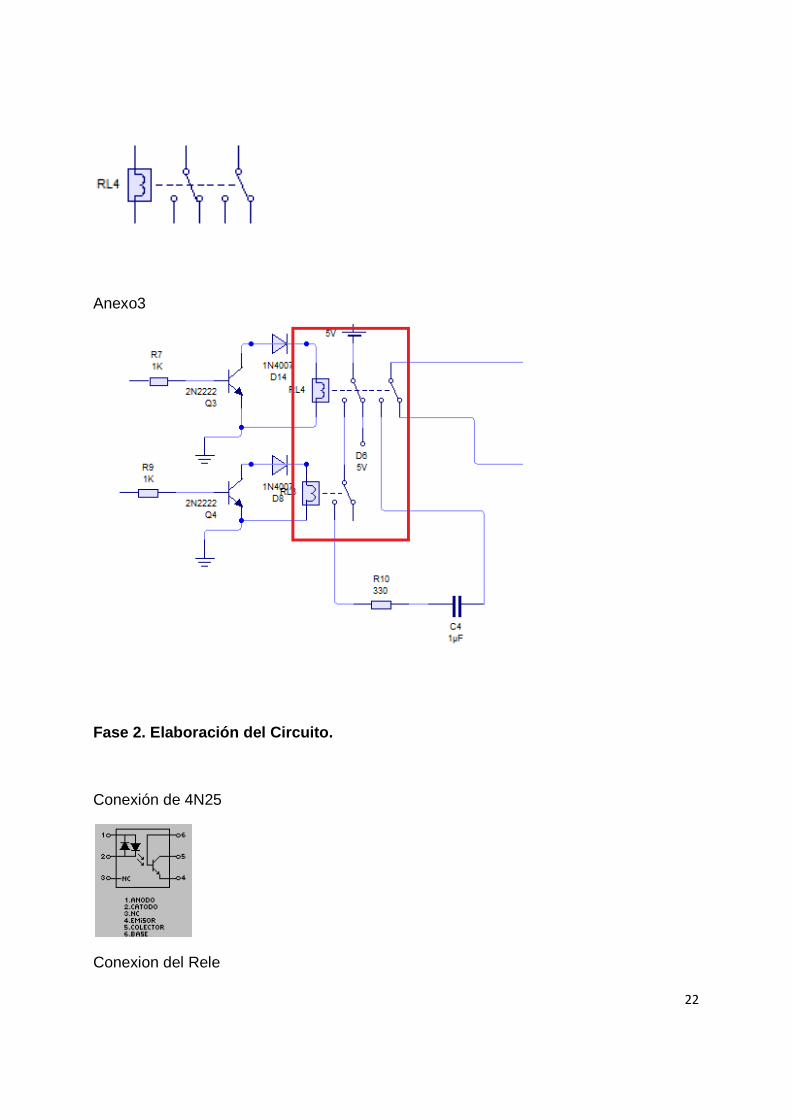
Fase 2. Elaboración del Circuito.
1. Conexión de los Optoacopladores. (revisión de patillaje). (Ver ANEXO Ilustracion )
2. Conexión de Transistores 2N2222 3. Conexión del Rele. Simulacion directa a los motores omitiendo el circuito
RC. (Ver ANEXO Ilustracion ) 4. Para poder cargar los reles se tubo que modificar el circuito incluyendo
una fuente de 19v (Dos baterías de 9v) 5. Adjunto diagrama de circuito final. (Ver ANEXO Ilustracion )
Fase 3. Elaboración de Software.
1. Investigación de sobre envío de datos desde el puerto paralelo. 2. Palabras reservadas en el lenguaje de programación de VB5 para envío de
datos. 3. Dlls necesarias. 4. Adjunto código de la aplicación:
Public Class Form1 Public i As Integer = 0, j As Integer = 0, adress As Integer = 888 Public D3 As Integer , D2 As Integer , D1 As Integer , D0 As Integer Private Sub Form1_Load( ByVal sender As System.Object, ByVal e As System.EventArgs) Handles MyBase.Load Reset()
12
End Sub Private Sub reset() ' resetea todo antes Try PuertoParaleloElectronica.PortInterop.O utput(adress, 0) PuertoParaleloElectronica.PortInterop.I nput(adress) Catch generatedExceptionName As DllNotFoundException alerta_1() End Try End Sub Private Sub alerta_1() MessageBox.Show( "No se encuentra la .dll especificada." & vbCr & vbLf & vbCr & vbLf & "Asegurar que la .dll 'input32.dll' este al lado de l ejecutabel principal ." & vbCr & vbLf & "La instalacion puede resolver el problema." , "Aviso:" , MessageBoxButtons.OK, MessageBoxIcon.[Stop]) End Sub #Region "Opciones" Public Sub Opciones() Dim value As Integer = 0 If D0 = 1 Then value += CInt (Math.Pow(2, 0)) End If value += 0 If D1 = 1 Then value += CInt (Math.Pow(2, 1)) End If value += 0 If D2 = 1 Then value += CInt (Math.Pow(2, 2)) End If value += 0 If D3 = 1 Then value += CInt (Math.Pow(2, 3)) End If value += 0 Try PuertoParaleloElectronica.PortInterop.O utput(adress, value) Catch GeneratedExceptionName As DllNotFoundException alerta_1() End Try End Sub '#End Region '#Region
13
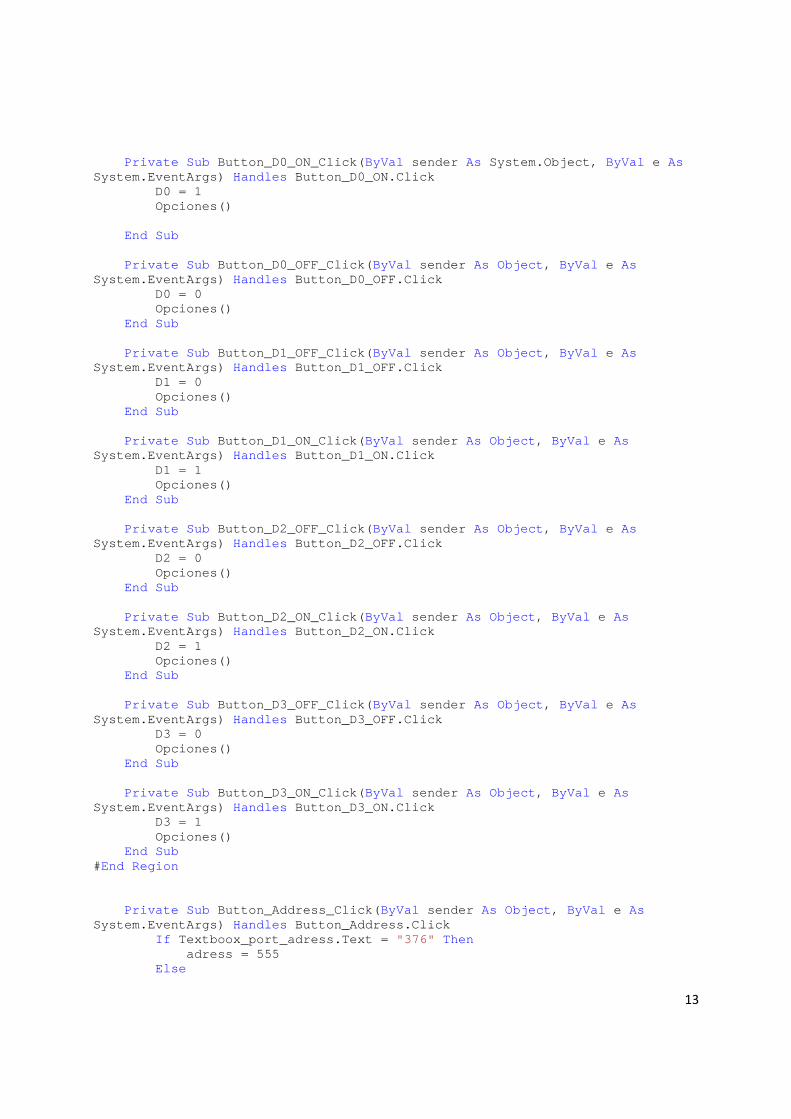
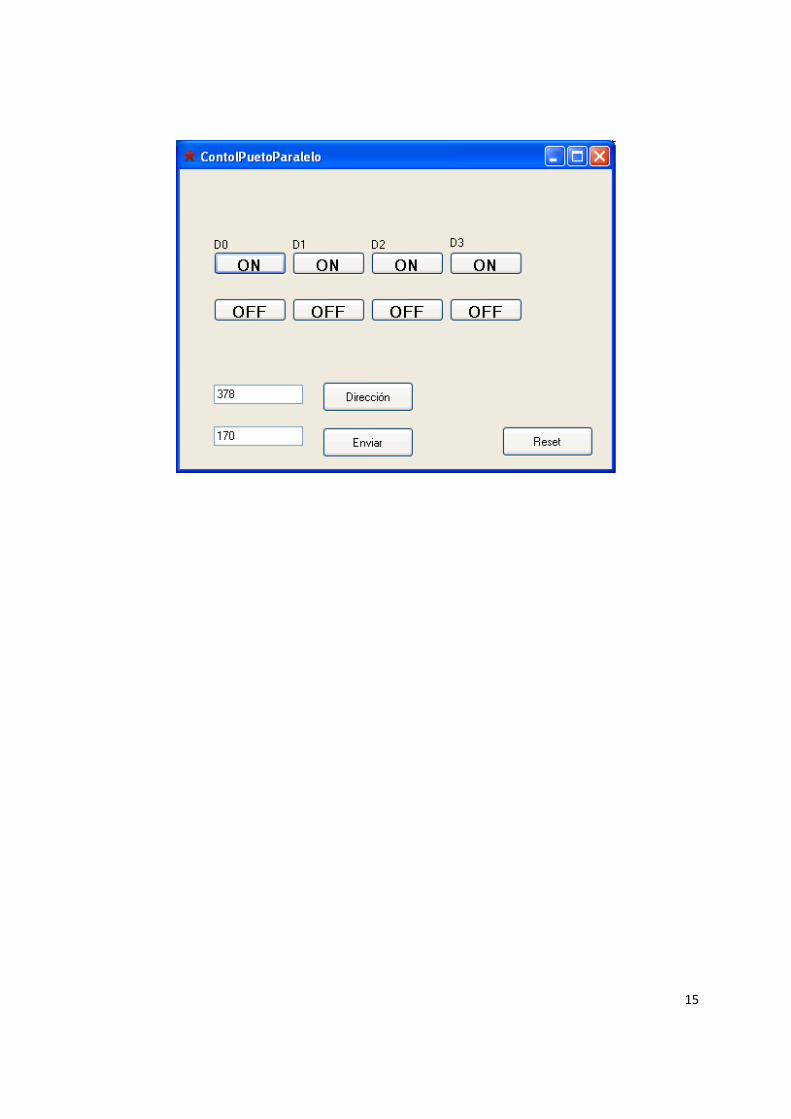
Private Sub Button_D0_ON_Click( ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button_D0_ON.Click D0 = 1 Opciones() End Sub Private Sub Button_D0_OFF_Click( ByVal sender As Object , ByVal e As System.EventArgs) Handles Button_D0_OFF.Click D0 = 0 Opciones() End Sub Private Sub Button_D1_OFF_Click( ByVal sender As Object , ByVal e As System.EventArgs) Handles Button_D1_OFF.Click D1 = 0 Opciones() End Sub Private Sub Button_D1_ON_Click( ByVal sender As Object , ByVal e As System.EventArgs) Handles Button_D1_ON.Click D1 = 1 Opciones() End Sub Private Sub Button_D2_OFF_Click( ByVal sender As Object , ByVal e As System.EventArgs) Handles Button_D2_OFF.Click D2 = 0 Opciones() End Sub Private Sub Button_D2_ON_Click( ByVal sender As Object , ByVal e As System.EventArgs) Handles Button_D2_ON.Click D2 = 1 Opciones() End Sub Private Sub Button_D3_OFF_Click( ByVal sender As Object , ByVal e As System.EventArgs) Handles Button_D3_OFF.Click D3 = 0 Opciones() End Sub Private Sub Button_D3_ON_Click( ByVal sender As Object , ByVal e As System.EventArgs) Handles Button_D3_ON.Click D3 = 1 Opciones() End Sub #End Region Private Sub Button_Address_Click( ByVal sender As Object , ByVal e As System.EventArgs) Handles Button_Address.Click If Textboox_port_adress.Text = "376" Then adress = 555 Else
14
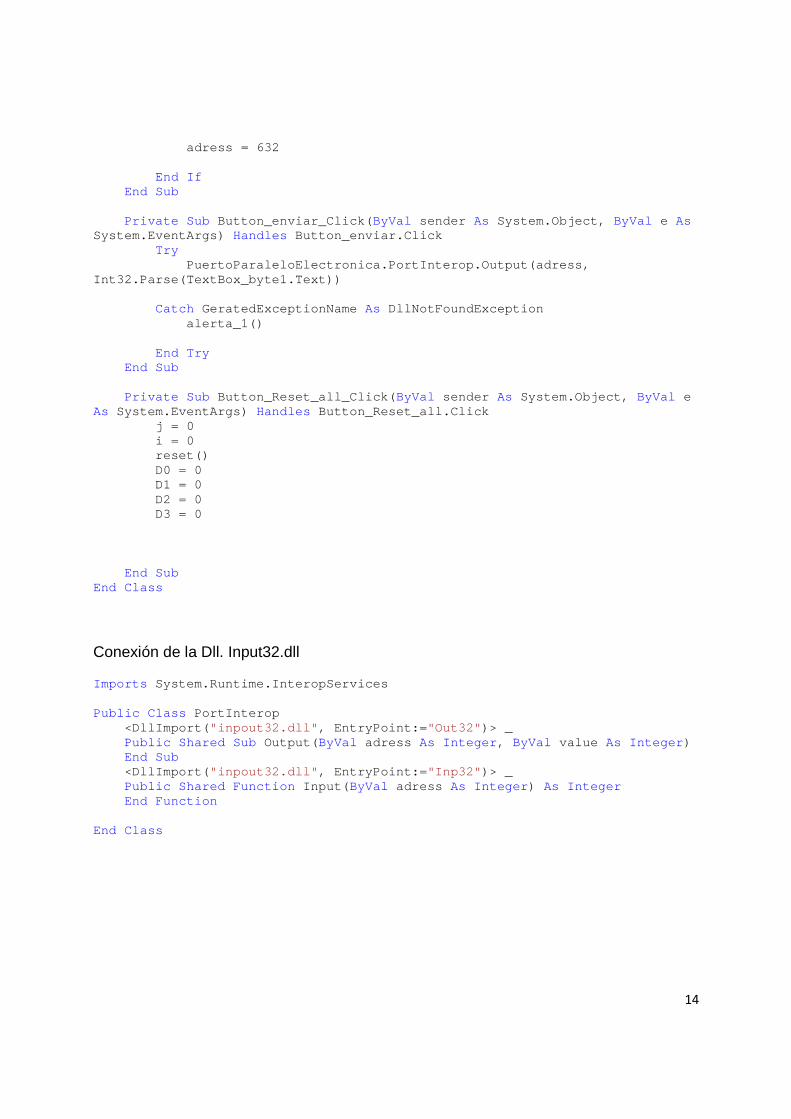
adress = 632 End If End Sub Private Sub Button_enviar_Click( ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button_enviar.Click Try PuertoParaleloElectronica.PortInterop.O utput(adress, Int32.Parse(TextBox_byte1.Text)) Catch GeratedExceptionName As DllNotFoundException alerta_1() End Try End Sub Private Sub Button_Reset_all_Click( ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button_Reset_all.Click j = 0 i = 0 reset() D0 = 0 D1 = 0 D2 = 0 D3 = 0 End Sub End Class
Conexión de la Dll. Input32.dll
Imports System.Runtime.InteropServices Public Class PortInterop <DllImport( "inpout32.dll" , EntryPoint:= "Out32" )> _ Public Shared Sub Output( ByVal adress As Integer , ByVal value As Integer ) End Sub <DllImport( "inpout32.dll" , EntryPoint:= "Inp32" )> _ Public Shared Function Input( ByVal adress As Integer ) As Integer End Function End Class
15
16
Bibliografía (1) http://proyectoselectronics.blogspot.com/2008/09/optoacoplador-que-es-y-como-funcionan.html (2) http://server-die.alc.upv.es/asignaturas/LSED/2002-03/Sensores_Luz/fotoemisores.htm (3) http://www.uv.es/marinjl/electro/opto.html
Anexos
Transistores

17
Ilustracion 1
Tipos de transistores. Simbología
Transistor Bipolar de Unión (BJT)
Transistor de Efecto de Campo, de Unión (JFET)
Transistor de Efecto de Campo, de Metal-Óxido-Semiconductor (MOSFET)
Fototransistor
Ilustracion 22
Los transistores más típicos, mostrando su encapsul ado y distribución de patillas.
18
Optoacopladores
Tipos de Optoacopladores
Optotransistor (simbolo)
Optotransistor en configuración Darlington
Modelo de un D45
Motores- CC (Motores de
Diagrama utilizando motor PaP Unipolar.
CC (Motores de Corriente Continua)
Diagrama utilizando motor PaP Unipolar.
19

20
21
Conexion de Reles.
Anexo 2.
22
Anexo3
Fase 2. Elaboración del Circuito.
Conexión de 4N25
Conexion del Rele
23
Glosario Fotoemisor : Los fotoemisores emiten electrones cuando existe energía radiante que incide sobre material sensible a dicha radiación.
Fototransistor: es una combinación integrada de fotodiodo y transistor bipolar npn (sensible a la luz) donde la base recibe la radiación óptica. Existen transistores FET (de efecto de campo), que son muy sensibles a la luz.
Fotoreceptor: Sensor de estado sólido que convierte la [energía solar] en [energía eléctrica], generando habitualmente una fotocorriente a su salida. La incidencia de fotones de una determinada energía provoca la transición de electrones de la banda de valencia a la banda de conducción.

24
DIP se trata de un conjunto de interruptores eléctricos que se presenta en un formato encapsulado (en lo que se denomina Dual In-line Package), la totalidad del paquete de interruptores se puede también referir como interruptor DIP en singular.


















