Disclaimers-space.snu.ac.kr/bitstream/10371/162002/1/000000157820.pdf · 2019. 11. 14. · Speed...
153
저작자표시-비영리-변경금지 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게 l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. 다음과 같은 조건을 따라야 합니다: l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다. l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다. 저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약 ( Legal Code) 을 이해하기 쉽게 요약한 것입니다. Disclaimer 저작자표시. 귀하는 원저작자를 표시하여야 합니다. 비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다. 변경금지. 귀하는 이 저작물을 개작, 변형 또는 가공할 수 없습니다.
Transcript of Disclaimers-space.snu.ac.kr/bitstream/10371/162002/1/000000157820.pdf · 2019. 11. 14. · Speed...

저 시-비 리- 경 지 2.0 한민
는 아래 조건 르는 경 에 한하여 게
l 저 물 복제, 포, 전송, 전시, 공연 송할 수 습니다.
다 과 같 조건 라야 합니다:
l 하는, 저 물 나 포 경 , 저 물에 적 된 허락조건 명확하게 나타내어야 합니다.
l 저 터 허가를 면 러한 조건들 적 되지 않습니다.
저 에 른 리는 내 에 하여 향 지 않습니다.
것 허락규약(Legal Code) 해하 쉽게 약한 것 니다.
Disclaimer
저 시. 하는 원저 를 시하여야 합니다.
비 리. 하는 저 물 리 목적 할 수 없습니다.
경 지. 하는 저 물 개 , 형 또는 가공할 수 없습니다.

Ph.D.Dissertation
A Study on Low-Power, High-
Speed PAM-4 Transmitter with
Current-Driven Feedback Driver
전류구동 피드백 드라이버를 활용한
저전력, 고속 PAM-4 송신기 설계에 관한 연구
by
Haram Ju
August, 2019
School of Electrical Engineering and Computer Science
College of Engineering
Seoul National University

A Study on Low-Power, High-
Speed PAM-4 Transmitter with
Current-Driven Feedback Driver
지도 교수 정 덕 균
이 논문을 공학박사 학위논문으로 제출함
2019 년 6 월
서울대학교 대학원
전기·컴퓨터공학부
주 하 람
주하람의 박사 학위논문을 인준함
2019 년 6 월
위 원 장 (인)
부위원장 (인)
위 원 (인)
위 원 (인)
위 원 (인)

A Study on Low-Power, High-
Speed PAM-4 Transmitter with
Current-Driven Feedback Driver
by
Haram Ju
A Dissertation Submitted to the Department of
Electrical and Computer Engineering
in Partial Fulfillment of the Requirements for the Degree of
Doctor of Philosophy
at
SEOUL NATIONAL UNIVERSITY
June, 2019
Committee in Charge:
Professor Hyuk-Jae Lee, Chairman
Professor Deog-Kyoon Jeong, Vice-Chairman
Professor Dongsuk Jeon
Professor Jung-Hoon Chun
Professor Yongsam Moon

ABSTRACT I
Abstract
The bandwidth requirement of wireline communications has increased exponen-
tially because of the ever-increasing demand for data centers and high-performance
computing systems. However, the per-pin bandwidth improvements of high-speed
I/O circuits are faced with difficulties due to various limitations of the copper-based
channel. As a result, instead of non-return-to-zero (NRZ) signaling, multi-level sig-
naling, which increases the data rate at the same Nyquist frequency, provides an ef-
fective solution for the next-generation high-bandwidth I/O interfaces. In special,
four-level pulse-amplitude modulation (PAM-4) is widely adopted to meet the
bandwidth demand for industrial standards. Conventional PAM-4 transmitters based
on typical voltage-driven drivers exhibit limited energy efficiency due to the power-
hungry pre-driver and multi-tap feed-forward equalization (FFE) structure. To over-
come the drawbacks of existing voltage-driven PAM-4 drivers, in this thesis, the
concept of the current-driven feedback driver newly defined by the author is intro-
duced, and two prototypes of low-power, high-speed PAM-4 transmitters using the
resistive-feedback (RFB) or the active-feedback (AFB) driver are proposed.
As the first prototype, a 28 Gb/s PAM-4 transmitter with a fractionally spaced 3-
tap FFE and a Gm-regulated RFB driver is fabricated in 28 nm CMOS technology.
Owing to the current-driven characteristic of the driver, the 3-tap FFE is realized at
the pre-driver stage in a simplified current-summing manner consuming low power
consumption. The output impedance of the driver is controlled by regulating the Gm
of the driver cell, which results in good signal integrity. To obtain the appropriate

ABSTRACT II
tap delay, a novel topology is introduced for the delay generator to enhance both the
delay and the bandwidth. All the transmitter circuits are CMOS-based implemented
thanks to the increased bandwidth by using a resistive feedback. The transmitter
achieves the data rate of 28 Gb/s while consuming 44.6 mW, which results in the
energy efficiency of 1.59 pJ/b.
As the second prototype, a 64 Gb/s PAM-4 transmitter with a current-summing
3-tap FFE and a Gm-regulated AFB driver is presented. An AFB inverter-based driv-
er is proposed to achieve a larger output swing compared with the RFB driver with
limited output swing. The FFE tap generation is embedded into the serializer to min-
imize the overhead of FFE, by replacing a power-hungry delay generator. As a result,
both the energy efficiency and the operating speed are considerably enhanced com-
pared to the first prototype. A prototype chip is fabricated in 28 nm CMOS technol-
ogy, and occupies 0.185 mm2. Owing to the improved loop bandwidth of the phase-
locked loop (PLL), the integrated RMS jitter from 1 kHz to 40 MHz is measured as
115 fs, which exhibits the state-of-the-art PLL figure-of-merit (FoM) of -244.1 dB.
The proposed transmitter achieves the data rate 64 Gb/s while consuming 97.2 mW,
which exhibits the best energy efficiency of 1.5 pJ/b among recently reported PAM-
4 transmitters with an internal PLL.
Keywords : CMOS, multi-level signaling, PAM-4 transmitter, resistive-feedback
(RFB) driver, active-feedback (AFB) driver, voltage- and current-driven driver
Student Number : 2013-20891

CONTENTS III
Contents
ABSTRACT I
CONTENTS III
LIST OF FIGURES VI
LIST OF TABLES XII
CHAPTER 1 INTRODUCTION 1
1.1 MOTIVATION .................................................................................................... 1
1.2 THESIS ORGANIZATION .................................................................................... 7
CHAPTER 2 BACKGROUND OF MULTI-LEVEL SERIAL LINK 9
2.1 OVERVIEW ........................................................................................................ 9
2.2 BASICS OF MULTI-LEVEL SIGNALING ............................................................ 13
2.3 THEORETICAL ANALYSIS ................................................................................ 21
2.3.1 SENSITIVITY ........................................................................................... 21
2.3.2 SYMBOL ERROR RATE AND BIT ERROR RATE ....................................... 22
CHAPTER 3 CURRENT-DRIVEN FEEDBACK DRIVER 28
3.1 OVERVIEW ...................................................................................................... 28
3.2 VOLTAGE-DRIVEN DRIVERS ........................................................................... 31
3.2.1 BASICS OF CONVENTIONAL DRIVERS .................................................... 31
3.2.2 DRAWBACKS .......................................................................................... 44

CONTENTS IV
3.2.3 CONVENTIONAL PAM-4 DRIVERS ......................................................... 49
3.3 BASIC CONCEPT .............................................................................................. 53
3.3.1 RESISTIVE-FEEDBACK (RFB) DRIVER ................................................... 53
3.3.2 ACTIVE-FEEDBACK (AFB) DRIVER ....................................................... 58
3.4 ANALYSES AND DESIGN ISSUES ..................................................................... 66
3.4.1 MATCHING CHARACTERISTIC ................................................................ 66
3.4.2 FEED-FORWARD EQUALIZATION ........................................................... 76
3.4.3 LINEARITY ............................................................................................. 86
3.4.4 CIRCUIT BANDWIDTH ............................................................................ 88
CHAPTER 4 LOW-POWER HIGH-SPEED PAM-4 TRANSMITTER 90
4.1 OVERVIEW ...................................................................................................... 90
4.2 SYSTEM ARCHITECTURE ................................................................................. 93
4.3 CIRCUIT IMPLEMENTATION ............................................................................ 96
4.3.1 FRONT-END WITH CURRENT-SUMMING FFE ........................................ 96
4.3.2 GM CALIBRATION ................................................................................. 100
4.3.3 SERIALIZER WITH TAP GENERATION ................................................... 104
4.3.4 HALF-RATE CLOCK GENERATION ....................................................... 109
4.4 MEASUREMENT RESULTS ............................................................................. 112
4.4.1 28-GBIT/S 1.6-PJ/BIT PAM-4 TRANSMITTER WITH RFB DRIVER ........ 112
4.4.2 64-GBIT/S 1.5-PJ/BIT PAM-4 TRANSMITTER WITH AFB DRIVER ....... 116
CHAPTER 5 CONCLUSION 122
BIBLIOGRAPHY 125

CONTENTS V
초 록 136

LIST OF FIGURES VI
List of Figures
FIG. 1.1 FORECAST OF GLOBAL IP TRAFFIC ................................................................................ 2
FIG. 1.2 (A) ESTIMATED U.S. DATA CENTER ELECTRICITY CONSUMPTION BY MARKET SEGMENT
IN 2011 (B) POWER BREAKDOWN OF DATA CENTER. ....................................................... 4
FIG. 1.3 TYPICAL ARCHITECTURE OF PAM-4 TRANSCEIVER ...................................................... 5
FIG. 2.1 TRENDS OF PER-LANE DATA RATE OF INDUSTRIAL I/O STANDARDS ........................... 10
FIG. 2.2 POSSIBLE CANDIDATES OF ELECTRICAL COPPER BACKPLANE ARCHITECTURE ............ 12
FIG. 2.3 NEXT-GENERATION INTERCONNECT APPLICATION SPACES ........................................... 12
FIG. 2.4 CLASSIFICATION AND CONDITIONS OF LINK FOR CEI-56G APPLICATION SPACES ....... 12
FIG. 2.5 BINARY (PAM-2) AND MULTI-LEVEL SIGNALING (PAM-4) ....................................... 13
FIG. 2.6 NORMALIZED POWER SPECTRAL DENSITY OF NRZ, PAM-4, PAM-8 AND PAM-16
DATA WITH (A) LINEAR SCALE AND (B) LOGARITHMIC SCALE ....................................... 16
FIG. 2.7 BASIC EYE DIAGRAMS OF (A) NRZ AND (B) PAM-4 SIGNAL ...................................... 17
FIG. 2.8 LINEARITY TEST PATTERN FOR PAM-4 TRANSMITTER ............................................... 18
FIG. 2.9 PAM-4 SYMBOL LEVELS WITH A HORIZONTAL EYE MASK .......................................... 20
FIG. 2.10 POWER DENSITY FUNCTION FOR PAM-M SIGNAL .................................................... 23
FIG. 2.11 SYMBOL ERROR RATE FOR PAM-M SIGNALS ........................................................... 25
FIG. 2.12 APPROXIMATED BERS OF PAM-M SIGNALS WITH USING (A) GRAY CODING AND (B)
LINEAR CODING ............................................................................................................. 27
FIG. 3.1 EQUIVALENT CIRCUITS OF (A) VOLTAGE- AND (B) CURRENT-MODE DRIVER ............... 29
FIG. 3.2 TYPICAL CIRCUIT DIAGRAM OF CONVENTIONAL (A) N-OVER-N VOLTAGE-MODE DRIV-
ER AND (B) P-OVER-N VOLTAGE-MODE DRIVER ........................................................... 33

LIST OF FIGURES VII
FIG. 3.3 REGULATORS FOR IMPEDANCE CALIBRATION OF N-OVER-N VOLTAGE-MODE DRIVER
...................................................................................................................................... 34
FIG. 3.4 (A) PULL-DOWN REGULATOR AND (B) PULL-UP REGULATOR FOR IMPEDANCE
CALIBRATION OF P-OVER-N VOLTAGE-MODE DRIVER .................................................. 36
FIG. 3.5 EQUIVALENT CIRCUIT OF VOLTAGE-MODE DRIVER WITH PRE-EMPHASIS .................... 38
FIG. 3.6 (A) ORIGINAL STACKED STRUCTURE IN [35] AND (B) STACKED STRUCTURE WITH SIN-
GLE SHARED LINEARIZATION RESISTOR ........................................................................ 40
FIG. 3.7 FINAL STRUCTURE WITH RELOCATED CLOCKED MUX TRANSISTORS ......................... 41
FIG. 3.8 TYPICAL CIRCUIT DIAGRAM OF A CONVENTIONAL CML DRIVER ............................... 42
FIG. 3.9 TYPICAL CIRCUIT DIAGRAM OF A PUSH-PULL CURRENT-MODE DRIVER ...................... 43
FIG. 3.10 SIGNAL DISTORTION CAUSED BY VARYING IMPEDANCE OF P-OVER-N VM DRIVER . 45
FIG. 3.11 SIMPLIFIED BLOCK DIAGRAMS OF SEGMENTED VOLTAGE-DRIVEN DRIVERS WITH
MULTI-TAP FFE: (A) VOLTAGE-MODE DRIVER AND (B) CURRENT-MODE DRIVER ......... 46
FIG. 3.12 SIMPLIFIED BLOCK DIAGRAMS OF (A) SST-BASED PAM-4 DRIVERS AND (B) CML-
BASED PAM-4 DRIVERS ................................................................................................ 50
FIG. 3.13 SIMPLIFIED BLOCK DIAGRAM OF HYBRID PAM-4 DRIVER IN [11] ............................ 51
FIG. 3.14 EQUIVALENT CIRCUIT OF CURRENT-DRIVEN FEEDBACK DRIVER .............................. 53
FIG. 3.15 CIRCUIT DIAGRAM OF RESISTIVE-FEEDBACK DRIVER AND GENERAL EFFECT OF RESIS-
TIVE FEEDBACK ON TRANSFER FUNCTION OF AMPLIFIER .............................................. 54
FIG. 3.16 TYPICAL CIRCUIT DIAGRAM OF RESISTIVE-FEEDBACK DRIVER WITH SUPPLY REGULA-
TION .............................................................................................................................. 56
FIG. 3.17 SIMPLIFIED BLOCK DIAGRAMS OF RFB INVERTER-BASED PAM-4 DRIVERS WITH (A)
TYPE-1 PRE-DRIVER AND (B) TYPE-2 PRE-DRIVER ......................................................... 57
FIG. 3.18 TWO EQUIVALENT CIRCUIT DIAGRAMS OF ACTIVE-FEEDBACK DRIVER .................... 58

LIST OF FIGURES VIII
FIG. 3.19 SMALL-SIGNAL EQUIVALENT CIRCUIT FOR OUTPUT IMPEDANCE CALCULATION OF
ACTIVE-FEEDBACK DRIVER WITH A POSITIVE INPUT BIAS (I.E. 0INI ). .................... 60
FIG. 3.20 SMALL-SIGNAL EQUIVALENT CIRCUIT FOR OUTPUT IMPEDANCE CALCULATION OF
ACTIVE-FEEDBACK DRIVER WITH A NEGATIVE INPUT BIAS (I.E. 0INI ) ................... 60
FIG. 3.21 SIMULATED AC OUTPUT IMPEDANCES OF RESISTIVE-FEEDBACK AND ACTIVE-
FEEDBACK DRIVER ACCORDING TO THE VARIOUS INPUT BIAS CURRENT ....................... 63
FIG. 3.22 SIMULATED OUTPUT SWING COMPARISON BETWEEN RESISTIVE-FEEDBACK DRIVER
AND ACTIVE-FEEDBACK DRIVER ................................................................................... 65
FIG. 3.23 TERMINATED TRANSMISSION LINE AND ITS THEVENIN-EQUIVALENT MODEL ........... 66
FIG. 3.24 CIRCUIT DIAGRAM OF (A) ONE-STACKED VM DRIVER AND (B) RFB DRIVER DRIVEN
BY A CMOS INVERTER-BASED PRE-DRIVER ................................................................. 68
FIG. 3.25 IDEAL 10 GB/S PRBS 27-1 DATA APPLIED TO BOTH PRE-DRIVER INPUTS .................. 71
FIG. 3.26 SIMULATED REAL-TIME OUTPUT IMPEDANCE OF (A) VOLTAGE-MODE DRIVER AND (B)
RESISTIVE-FEEDBACK DRIVER ....................................................................................... 72
FIG. 3.27 CALCULATED REAL-TIME (A) OUTPUT RETURN LOSS (RL) AND (B) VOLTAGE SWING
WAVE RATIO (VSWR) FROM SIMULATED OUTPUT IMPEDANCE .................................... 73
FIG. 3.28 SIMULATED PEAK-TO-PEAK JITTER WITH 10 GB/S PRBS 211-1 DATA FOR VARYING
RECEIVER-SIDE TERMINATION IMPEDANCE ................................................................... 74
FIG. 3.29 SIMULATED PEAK-TO-PEAK JITTER WITH 10 GB/S PRBS 211-1 DATA FOR VARYING
RISE/FALL TIME OF THE INPUT SIGNAL WITH RXTR OF 70 Ω (+40%) .......................... 75
FIG. 3.30 SIMULATED PEAK-TO-PEAK JITTER WITH 10 GB/S PRBS 211-1 DATA FOR VARYING
SUPPLY VOLTAGE OF DRIVER WITH RXTR OF 30 Ω (-40%) ......................................... 75
FIG. 3.31 THREE TYPES OF PRE-DE-EMPHASIS IMPLEMENTATION FOR VOLTAGE-MODE DRIVER
(A) RESISTIVE-DIVIDER-BASED PE, (B) CHANNEL-SHUNTING-BASED PE, AND (C) IM-

LIST OF FIGURES IX
PEDANCE-MODULATION-BASED PE ............................................................................... 76
FIG. 3.32 CIRCUIT DIAGRAM OF PSEUDO-DIFFERENTIAL VM DRIVER DRIVEN BY THE INVERTER
CHAIN ............................................................................................................................ 79
FIG. 3.33 COMPARISON OF DRIVER POWER CONSUMPTION WHEN USING THREE TYPES OF PE . 81
FIG. 3.34 COMPARISON OF PRE-DRIVER POWER CONSUMPTION WHEN USING THREE TYPES OF
PE ................................................................................................................................. 81
FIG. 3.35 OVERALL POWER CONSUMPTION OF VM DRIVERS VERSUS NORMALIZED OUTPUT
SWING ........................................................................................................................... 82
FIG. 3.36 CURRENT-SUMMING FFE IMPLEMENTATION FOR RFB DRIVER ................................ 83
FIG. 3.37 PSEUDO-DIFFERENTIAL RFB DRIVER WITH DC-COUPLED TERMINATION ................. 83
FIG. 3.38 OVERALL POWER CONSUMPTION OF RFB DRIVER VERSUS NORMALIZED OUTPUT
SWING ........................................................................................................................... 85
FIG. 3.39 DIFFERENTIAL OUTPUT SWING VERSUS DIFFERENTIAL INPUT CURRENT OF RFB DRIV-
ER .................................................................................................................................. 86
FIG. 3.40 SIMULATED LINEAR SWING RANGE (LSR) AND VOLTAGE SWING WAVE RATIO
(VSWR) OF RFB DRIVER ACCORDING TO OUTPUT IMPEDANCE ................................... 87
FIG. 3.41 CIRCUIT BANDWIDTH COMPARISON OF VOLTAGE-MODE DRIVER, CML-BASED DRIV-
ER, AND RESISTIVE-FEEDBACK DRIVER ......................................................................... 88
FIG. 3.42 CHANNEL MODEL FOR BANDWIDTH COMPARISON SIMULATION ............................... 89
FIG. 4.1 TRENDS OF NORMALIZED ENERGY EFFICIENCY OF RECENTLY REPORTED PAM-4
TRANSMITTERS IN [9], [11], [69]-[79], [82] VERSUS PER-PIN DATA RATE ..................... 91
FIG. 4.2 OVERALL ARCHITECTURE OF TWO PROTOTYPE PAM-4 TRANSMITTERS (A) PAM-4
TRANSMITTER WITH FRACTIONALLY SPACED 3-TAP FFE AND GM-REGULATED RFB
DRIVER (PROTOTYPE 1) AND (B) PAM-4 TRANSMITTER WITH 3-TAP FFE AND GM-

LIST OF FIGURES X
REGULATED AFB DRIVER (PROTOTYPE 2) .................................................................... 94
FIG. 4.3 CONCEPTUAL DIAGRAM OF PAM-4 DRIVER BASED ON CURRENT-DRIVEN FEEDBACK
DRIVER .......................................................................................................................... 96
FIG. 4.4 CIRCUIT DIAGRAM OF RFB PAM-4 DRIVER IN PROTOTYPE 1 WITH CURRENT-SUMMING
PRE-DRIVER FOR 3-TAP FFE IMPLEMENTATION ............................................................ 97
FIG. 4.5 SIMULATED PAM-4 EYE OUTPUT WITH VARIOUS CELL SIZE OF DATA-FEEDTHROUGH
COMPENSATION (DFC) ................................................................................................. 98
FIG. 4.6 BLOCK DIAGRAM OF AFB PAM-4 TRANSMITTER FRONT-END IN PROTOTYPE 2 CON-
SISTING OF AFB PAM-4 DRIVER, PRE-DRIVER, AND GM CALIBRATION CIRCUITS ......... 99
FIG. 4.7 CIRCUIT DIAGRAM OF AFB PAM-4 DRIVER IN PROTOTYPE 2 WITH CURRENT-SUMMING
PRE-DRIVER FOR 3-TAP FFE IMPLEMENTATION ............................................................ 99
FIG. 4.8 BASIC CONCEPT FOR CONSTANT- mG BIAS GENERATOR .......................................... 100
FIG. 4.9 CIRCUIT DIAGRAM OF mG CALIBRATION CIRCUIT CONSISTING OF CONSTANT- mG
BIAS GENERATOR AND VOLTAGE REGULATOR ............................................................ 102
FIG. 4.10 SIMULATED OUTPUT IMPEDANCE OF THE DRIVER FOR (A) PROCESS CORNER AND
TEMPERATURE (PT) VARIATIONS AND FOR (B) PROCESS CORNER AND VOLTAGE (PV)
VARIATIONS ................................................................................................................ 103
FIG. 4.11 CIRCUIT DIAGRAM OF SUB-UI TAP DELAY GENERATOR FOR FRACTIONALLY SPACED
FFE ............................................................................................................................. 104
FIG. 4.12 SIMULATED TUNABLE DELAY RANGE OF SUB-UI DELAY GENERATOR .................... 105
FIG. 4.13 BLOCK DIAGRAM OF CLOCK AND DATA PATH FOR SERIALIZATION AND TAP GENERA-
TION ............................................................................................................................ 105
FIG. 4.14 BLOCK DIAGRAM AND TIMING DIAGRAM OF THE TAP GENERATING SERIALIZER .... 106
FIG. 4.15 CIRCUIT DIAGRAM OF PROPOSED LAST-STAGE 2-TO-1 SERIALIZER ......................... 108

LIST OF FIGURES XI
FIG. 4.16 POST-LAYOUT SIMULATED EYE DIAGRAMS AT THE SERIALIZER OUTPUT (A) WITHOUT
PRE-CHARGING AND –DISCHARGING DEVICES AND (B) WITH PRE-CHARGING AND –
DISCHARGING DEVICES ............................................................................................... 108
FIG. 4.17 CIRCUIT DIAGRAM OF IMPLEMENTED TWO-STAGE RING OSCILLATOR .................... 109
FIG. 4.18 BLOCK DIAGRAM OF PHASE-LOCKED LOOP (PLL) FOR HALF-RATE CLOCK GENERA-
TION ............................................................................................................................ 110
FIG. 4.19 CIRCUIT DIAGRAM OF MISMATCH REDUCED CHARGE PUMP FOR WIDE-RANGE LOOP
BANDWIDTH CONTROL OF THE PHASE-LOCKED LOOP .................................................. 110
FIG. 4.20 CHIP MICROPHOTOGRAPH OF PAM-4 TRANSMITTER (PROTOTYPE 1) ..................... 112
FIG. 4.21 MEASURED DIVIDED-BY-16 TRANSMITTER CLOCK (437.5 MHZ) ........................... 113
FIG. 4.22 OUTPUT RETURN LOSS (S11) MEASURED AT DRIVER OUTPUT .................................. 113
FIG. 4.23 MEASURED DIFFERENTIAL PAM-4 EYE DIAGRAM AT 28 GB/S ............................... 114
FIG. 4.24 MEASURED DIFFERENTIAL PAM-4 EYE DIAGRAMS WITH VARIOUS FFE CONDITIONS
.................................................................................................................................... 114
FIG. 4.25 MEASURED POWER BREAKDOWN OF THE PROTOTYPE-1 PAM-4 TRANSMITTER ..... 115
FIG. 4.26 CHIP MICROPHOTOGRAPH OF PAM-4 TRANSMITTER (PROTOTYPE 2) AND MEASURED
POWER BREAKDOWN AT 64 GB/S OPERATION ............................................................. 116
FIG. 4.27 MEASUREMENT SETUP FOR PROTORYPE-2 PAM-4 TRANSMITTER .......................... 117
FIG. 4.28 MEASURED DIVIDED-BY-16 TRANSMITTER CLOCK (1 GHZ) ................................... 117
FIG. 4.29 MEASURED FREQUENCY SPECTRUM AND PHASE NOISE PLOT OF THE DIVIDED-BY-16
TRANSMITTER CLOCK (1 GHZ) .................................................................................... 118
FIG. 4.30 MEASURED SINGLE-ENDED OUTPUT RETURN LOSS OF PAM-4 DRIVER ................... 118
FIG. 4.31 MEASURED SINGLE-ENDED NRZ (22.5 GB/S, 28 GB/S, AND 32 GB/S) AND PAM-4 (45
GB/S, 56 GB/S, AND 64 GB/S) OUTPUT EYE DIAGRAMS ............................................... 119

LIST OF TABLES XII
List of Tables
TABLE 2.1 AVERAGE HAMMING DISTANCE OF PAM-M SIGNALS WITH VARIOUS CODING ...... 26
TABLE 3.1 CURRENT LEVEL CONSUMED BY THE DRIVER ACCORDING TO RECEIVER-SIDE TER-
MINATION ...................................................................................................................... 32
TABLE 3.2 COMPARISON OF SST-BASED PAM-4 DRIVERS AND CML-BASED PAM DRIVERS . 52
TABLE 3.3 OPERATING REGIONS OF THE TRANSISTORS OF RFB DRIVER ACCORDING TO OUTPUT
SWING ........................................................................................................................... 59
TABLE 4.1 PERFORMANCE SUMMARY AND COMPARISON OF PAM-4 TRANSMITTERS ........... 121

Chapter 1. Introduction 1
Chapter 1
Introduction
1.1 Motivation
Today, the emergence of the concept of the internet of things (or it’s also known,
IoT) allows everyone to be fully connected through the internet. For example, peo-
ple use personal cloud services to store documents, and social network services to
share their daily lives. Considering further expansion into the industrial sector, the
cloud-based computing, networking and storage infrastructure of the exponentially
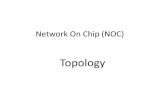
growing data centers process a vast amount of information every day. In fact, Cisco
predicts that global IP traffic will increase to nearly 300 Exabytes/month by 2021
from the current trend of annual growth rates of more than 20%, as illustrated in Fig
1.1 [1]. Note that, this is very much related to the growing demand for streaming
media such as high-definition internet video and audio, which means that the

Chapter 1. Introduction 2
computing speed and throughput of the electronics (i.e. CPU, memory) must be im-
proved. In addition, this dramatic increase in the amount of information will lead to
the development of the data communication system in chip-to-chip, board-to-board,
and rack-to-rack interconnection applications. Indeed, Multi-core microprocessor
input/output (I/O) bandwidth has improved aggressively at a rate of 2-3X every two
years [2]. However, the per-pin bandwidth improvements of high-speed I/O circuits
for wireline communication are faced with difficulties due to various limitations of
the copper-based channel: signal attenuation, distortion, and cross-talk. As a result,
electrical links based on multi-level signaling (i.e. pulse-amplitude modulation
(PAM)) and optical links based on silicon photonics have attracted much attention as
new potential solutions for the next-generation high-bandwidth I/O interface [3].
According to survey results of data center user’s group (DCUG) surveyed in
2014, 32.3% (energy efficiency), 29.2% (heat density), and 23.8% (power density)
Fig. 1.1 Forecast of global IP traffic.

Chapter 1. Introduction 3
of respondents selected energy-related problems as one of the top concerns [4]. In
reality, U.S. data centers consumed an estimated 91 billion kilowatt-hours (kWh) of
electricity in 2013. By 2020, this figure is projected to increase to roughly 140 bil-
lion kWh which cost American business $13 billion per year in electricity bills [5].
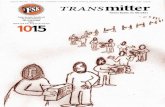
Estimated U.S. data center electricity consumption by market segment and power
breakdown of the data center are illustrated in Fig. 1.2. As shown in Fig. 1.2(b), a
large proportion of energy consumption is used to cool the heat dissipation of serv-
ers [6]. Moreover, the unsatisfactory battery development also causes energy prob-
lems to deteriorate. As a simple example, the mobile battery energy density, unlike
microprocessors, is not met by Moore’s law and increased by only 1.3 times from
2007 to 2014. So, for these reasons, not only enhancing per-pin bandwidth but also
improving energy efficiency becomes a crucial issue for next-generation I/O systems.
Meanwhile, the use of multi-level signaling that multiplies the data rate at the
same Nyquist frequency as non-return-to-zero (NRZ) modulation makes I/O circuits
address higher data throughput even for bandwidth-limited interconnect. In special,
four-level pulse-amplitude modulation (PAM-4) is widely adopted to support higher
communication speed to meet newest electrical link standards: Optical internetwork-
ing forum common electrical I/O-56G-Very short-/ Medium-/ Long-reach (OIF-
CEI-56G-VSR/MR/LR) and IEEE P802.3bs 400 Gb/s Ethernet standards [7], [8].
Typical serializer/ deserializer (SerDes) structure of PAM-4 transceiver in standard
complementary metal-oxide-semiconductor (CMOS) interface is shown in Fig. 1.3
[9]. Similar to other serializing transmitters, there are several design issues with the
PAM-4 transmitter. The impact of reflection and crosstalk on PAM-4 signal could
be 3x worse in magnitude than on NRZ or PAM-2 signal [10]. As a result, supply

Chapter 1. Introduction 4
and impedance regulation of an output driver regardless of process, voltage, and
temperature (PVT) variation is more important for PAM-4 transmitter. The intra-
(a)
(b)
Fig. 1.2 (a) Estimated U.S. data center electricity consumption by market segment in
2011 (b) Power breakdown of data center.
49%
27%
19%
4%
1%
Small- and Medium-Sized Data Centers
Enterprise/ Corporate
Multi-Tenant Data Centers
Hyper-Scale Cloud Computing
High-Performance Computing
50%
26%
11%
10%
3%
0% 10% 20% 30% 40% 50% 60%
Cooling
Server & Storage
Power Conversion
Network Hardware
Lighting

Chapter 1. Introduction 5
pair skew of most-significant-bit (MSB) and least-significant-bit (LSB) can also de-
teriorate the signal integrity of the PAM-4 signal significantly. In addition, nonline-
arity can have a much larger impact on PAM-4 than on NRZ, which is greater as the
number of signal levels increases [11]. In general, multi-level signaling needs a large
dynamic range of the transmitter output from a signal-to-ratio (SNR) perspective,
but the output driver usually experiences a severe nonlinearity problem as the output
Map
pin
g &
Lo
cal E
nco
der
DRV
PLL
MUX
MUXMSB
LSB
CKref
Da
ta C
han
ne
l
Pre-amp/ EQ
Adaptation
DFE
CDR
PA
M-4
De
co
de
r
DMUX
DMUX
Lo
cal D
eco
der
AS
IC
FFE
Supply & Imp. Reg.
PAM-4 Transmitter
PAM-4 Receiver
Fig. 1.3 Typical architecture of PAM-4 transceiver.

Chapter 1. Introduction 6
swing rises. Therefore, when designing a multi-level signaling output driver (e.g.
PAM-4 driver), much care is required to find the optimal point in terms of trade-off
between linearity and swing. On the other hand, various feed-forward equalization
(FFE) techniques have been used in high-speed serializing transmitters to compen-
sate for the bandwidth degradation due to copper-based link and package, which is
not an exception to the PAM-4 transmitter [12]-[15]. However, the use of FFE often
increases hardware complexity and thus increases the dynamic power dissipation of
the pre-driving buffers. It can also causes the inherent circuit bandwidth to drop by
adding parasitic elements (e.g. parasitic capacitance, series resistance) depending on
the driver structure. Naturally, designing straightforward and energy-efficient equal-
ization structures is an important condition for improving the overall transmitter per-
formance [16]. To sum it up, the reduction of the driver size to reduce dynamic pre-
driver power, simplification of pre-driver stage and FFE structure, and all CMOS-
based implementation are key factors to implement the high-speed and energy-
efficient PAM-4 serializing transmitter. In this thesis, various circuit techniques for
enhancing both the per-pin bandwidth and energy efficiency of the transmitter are
proposed. The proposed design of PAM-4 transmitter achieves high data rate and
lower power consumption compared to the state-of-the-art designs.

Chapter 1. Introduction 7
1.2 Thesis Organization
This thesis is organized as follows. In Chapter 2, an overview of high-speed mul-
ti-level serial link is presented by reviewing the basics of multi-level signaling and
listing practical design issues of high-speed CMOS interface circuits for multi-level
signaling communication. In addition, theoretical analyses about sensitivity and er-
ror rate issues with using multi-level signaling are discussed in Chapter 2.
In Chapter 3, a brief review and discussion about conventional voltage-mode
(VM) and current-mode (CM) output driver classified as voltage-driven drivers by
the author are presented. The drawbacks of voltage-driven drivers are also examined
and conventional current-mode logic (CML) and source-series terminated (SST)
driver based PAM-4 transmitters are described. On the other hand, an introduction to
current-driven driver newly defined by the author is presented. As a detailed imple-
mentation of the current-driven feedback driver, two types of feedback driver, resis-
tive-feedback (RFB) driver and active-feedback (AFB) driver, are introduced and
analyzed to examine the possibility of resolving the shortcomings of existing volt-
age-driven drivers. On a more quantitative level, theoretical analyses are presented
in various aspects to support the excellence of the current-driven feedback driver. In
addition, an overview of circuit design for high-speed PAM-4 driver based on the
current-driven feedback drivers are described in Chapter 3.
In Chapter 4 presents detailed designs of two prototypes of high-speed energy-
efficient PAM-4 transmitter. The system architectures and circuit implementations
of both prototype chips fabricated in 28-nm CMOS technology are described. The

Chapter 1. Introduction 8
proposed PAM-4 transmitters employ current-summing 3-tap FFE and feedback in-
verter-based driver to achieve high data rate while consuming low power, which
exhibits the state-of-the-art energy efficiency. Measurement results of the two proto-
type chips for silicon verification are also presented in Chapter 4.
Chapter 5 summarizes the proposed works and concludes this thesis.

Chapter 2. Background of Multi-Level Serial Link 9
Chapter 2
Background of Multi-Level Serial
Link
2.1 Overview
As the bandwidth demand for wireline communication has rapidly been increased
to handle the increasing volume of data traffic, the next-generation I/O systems need
alternate signaling strategies such as higher-order modulation (e.g. PAM, quadrature
amplitude modulation (QAM), quadrature phase shift keying (QPSK)), and multi-
conductor signaling [17]. In addition, the future I/O systems are constrained not only
by the bandwidth limits of copper-based links and packages but also by limits on
power consumption, by limits on the size of a system, and by the need to provide a
cost-effective solution. Fig. 2.1 shows the recent trends of per-lane data rate of indu-

Chapter 2. Background of Multi-Level Serial Link 10
strial I/O standards. Note that, as you can see in the graph, I/O per-pin bandwidth of
the standards such as OIF-CEI, Ethernet, Infiniband, Fibre Channel, Peripheral
Component Interconnect Express (PCIe), and Universal Serial Bus (USB) are explo-
sively growing to double in 3 or 4 years. To deal with these dramatic data rate in-
crease, various researches on alternative electrical architecture are continuing [17].
Several candidates for the copper backplane architecture are shown in Fig. 2.2. Ar-
chitectures include standard backplane links, shorter midplane orthogonal systems,
and low-loss cabled solutions. In particular, OIF Next Generation Interconnect
Framework identifies various application spaces for next-generation systems and
areas of future work. As shown in Fig. 2.3, interconnection interfaces in a typical
system are needed for die-to-die within a package, chip-to-chip within a module,
chip-to-chip within a printed circuit board assembly (PCBA), between two PCBAs
over a backplane/ midplane, and between two chassis [18]. The detailed classificati-
0
10
20
30
40
50
60
2004 2006 2008 2010 2012 2014 2016 2018 2020
Pe
r-la
ne
Tra
ns
fer
Ra
te [
GT
/s]
0
10
20
30
40
50
60
Year
2004 2006 2008 2010 2012 2014 2016 2018 2020
: OIF-CEI
: Fiber Channel
: Infiniband
: Ethernet
: PCIe
: USB
Fig. 2.1 Trends of per-lane data rate of industrial I/O standards.

Chapter 2. Background of Multi-Level Serial Link 11
on and conditions of electrical channel published by OIF for the CEI-56G applica-
tion spaces are shown in Fig. 2.4. In order to achieve a target speed of more than 56
Gb/s in these various application spaces, many efforts have been made: development
of a high-density connector with a smaller pitch, design of a system architecture us-
ing advanced modulation, and improvement of an I/O system with lower loss [18].
Fig. 2.2 Possible candidates of electrical copper backplane architecture.
Fig. 2.3 Next-generation interconnect Application Spaces.

Chapter 2. Background of Multi-Level Serial Link 12
Especially, among modulation techniques, PAM-4 signaling is widely used for the
CEI-56G standard of very short-, medium-, and long-reach to support baud rates (i.e.
symbol rates) from 18 Gbaud to 29 Gbaud.
In the following chapter, we will describe the basics of multi-level signaling to see
why these multi-level serial links are widely used in industry. After that, we will
introduce what circuit techniques are used to implement the PAM-4 transceiver as
part of a review of prior works.
Chip Optics
Chip PluggableOptics
Chip Chip
Chip Chip
Chip to Nearby OE
Chip-to-Module
Chip-to-Chip & Midplane
Backplane or Passive Copper Cable
CEI-56G-LR
CEI-56G-MR
CEI-56G-VSR
CEI-56G-XSR
3D Stack
CEI-56G-USR
2.5D Chip-to-OE
Ultra short reach
Extra short reach
Very short reach
Medium reach
Long reach
USR: 2.5D/3D applications- 1 cm, no connectors, no packages
XSR: Chip to nearby optics engine- 5 cm, no connectors- 5-10 dB loss @ 28 GHz
VSR: Chip-to-module- 10 cm, 1 connector- 10-20 dB loss @ 28 GHz
MR: Chip-to-chip and midrange backplane
- 50 cm, 1 connector- 15-25 dB loss @ 14 GHz- 20-50 dB loss @ 28 GHz
LR: Chip-to-chip over backplane- 100 cm, 2 connectors- 35 dB loss @ 14 GHz
Fig. 2.4 Classification and conditions of link for CEI-56G application spaces.

Chapter 2. Background of Multi-Level Serial Link 13
2.2 Basics of Multi-Level Signaling
In this section, we examine basic terms and knowledge about multi-level signal-
ing, especially PAM-4 signaling. The pulse-amplitude modulation, equivalent to
multi-level modulation, is one of the formerly known data modulation techniques in
the field of communications. The principle of multi-level signaling is to use a larger
alphabet of M levels of symbol to represent data, so that each symbol can represent
more than one bit of data. As a result, the number of symbols that need to be trans-
mitted is less than the number of bits (the symbol rate is less than the bit rate), hence
the bandwidth is compressed [20]. Fig. 2.5 shows an example for a four-level
scheme with using linear coding instead of Gray coding. In a binary digital wave-
form, each symbol represents one bit of data. On the other hand, in a PAM-4 signal,
two consecutive bits combine to form a symbol, so data is transmitted even at half
0
0
1 1 1 0
0
1
00 10 11 01
M = 2
M = 4
V
V/3
Fig. 2.5 Binary (PAM-2) and multi-level signaling (PAM-4).

Chapter 2. Background of Multi-Level Serial Link 14
the symbol rate to obtain the same data rate, as you can see from Fig. 2.5. In particu-
lar, among the two consecutive bits constituting a PAM-4 symbol, the first bit is re-
ferred as the MSB, and the latter bit is referred as the LSB.
The bandwidth required for transmission of non-return-to-zero (NRZ) data may
be larger than for transmission of PAM-4 data. For a channel and I/O circuit of
bandwidth equal to BW (Hz) the maximum symbol rate (i.e. baud rate) is given by,
2SR BW (2.1)
symbols per second. At this time, NRZ format can transmit data at bit rate of maxi-
mum SR , but PAM-M format can transmit data at bit rate of maximum SM R . Of
course, considering the degradation of SNR, PAM-M may not be able to achieve
this high data rate. If M is the number of distinct signal levels, then each symbol
now carries 2logN M bits of information, and the overall data rate rises to
2
logSR M . (2.2)
No additional bandwidth is required for this increase. The increased information rate
comes either at the expense of added transmitter power or an increased error rate at
the receiver. In addition, the multi-level signaling scheme is more sensitive to the
non-linearity and noise than the binary scheme.
Now, let us represent discrete random sequences and examine the spectrum of
them. For a general pulse ( )bTh t , NRZ and PAM-4 sequences after the pulse-
shaping filter are expressed as follows:
,( ) ( )bNRZ NRZ k T b
k
x t b h t kT (2.3)
4 4,( ) ( )bPAM PAM k T b
k
x t b h t kT (2.4)

Chapter 2. Background of Multi-Level Serial Link 15
where , 1NRZ kb and 4, 1, 3PAM kb and bT denotes the symbol duration
[21]. If the Fourier transform of ( )bTh t , ,NRZ kb , and 4,PAM kb are ( )
bTH f ,
, 4 ( )B PAMS f , and , 4 ( )B PAMS f respectively, then the power spectral density of the
NRZ and the PAM-4 signal are derived as
2 2 ( 2 )
, , ,
1( ) ( ) ( ) ( ) ( ) b
b b
j fkTX NRZ T B NRZ T B NRZ
b k
S f H f S f H f R k eT
(2.5)
2 2 ( 2 )
, 4 , 4 , 4
1( ) ( ) ( ) ( ) ( ) b
b b
j fkTX PAM T B PAM T B PAM
b k
S f H f S f H f R k eT
(2.6)
where ,B NRZR and , 4B PAMR denote the auto-correlation functions of stationary
random sequences ,NRZ kb and 4,PAM kb .
If ( )bTh t is a rectangular pulse with magnitude A and duration bT , then nor-
malized power spectral density of the NRZ and the PAM-4 signal can be written as
2, ( ) sin ( )X NRZ b bS f T c fT (2.7)
2, 4 ( ) sin (2 )X PAM b bS f T c fT . (2.8)
Note that 2sin ( )bc fT in , ( )X NRZS f vanishes to zero when the frequency is an
integer multiple of the baud rate ( 1/ bT ) while , 4 ( )X PAMS f vanishes to zero when
the frequency is a multiple of the half of baud rate. As a result, the normalized pow-
er spectral density of the PAM-M data (M=2, 4, 8, 16) with linear scale and loga-
rithmic scale are calculated, as shown in Fig. 2.6. The PAM-4 only requires half of
the bandwidth of that of the NRZ as can be seen from their power spectral density
curves (NRZ: black, PAM-4: red), while it increases the complexity of the receiver
to a two-bit ADC, which is usually implemented with three comparators [22]. For

Chapter 2. Background of Multi-Level Serial Link 16
(a)
(b)
Fig. 2.6 Normalized power spectral density of NRZ, PAM-4, PAM-8 and PAM-16 data
with (a) linear scale and (b) logarithmic scale.
0 0.5 1 1.5 2 2.5 3
Frequency / Baud Rate
0
0.2
0.4
0.6
0.8
1NRZ
PAM-4
PAM-8
PAM-16

Chapter 2. Background of Multi-Level Serial Link 17
example, for the same data throughput of 56 Gb/s, NRZ and PAM-4 have different
baud rate (NRZ: 56 Gsym/s, PAM-4: 28 Gsym/s) and Nyquist frequency (NRZ: 28
GHz, PAM-4: 14 GHz). As you can guess from the Fig. 2.6, PAM-M signal has a
baud rate of only 21 / log M compared to NRZ at the same data rate.
Fig. 2.7 illustrates the basic eye diagrams of the NRZ and the PAM-4 waveforms.
Vertical eye opening for PAM-4 signal is 1 / 3 of that of NRZ, thus intrinsic SNR
loss of using PAM-4 signaling compared with NRZ signaling is given by,
1
20 log 9.5 ( )3
dB . (2.9)
If with using PAM-M signaling, the intrinsic SNR degradation is derived as
1
20 log ( )dBM
. (2.10)
In practice, there is further degradation due to nonlinearity, thus considerable SNR
degradation of > 11 dB should be taken into account to design PAM-4 serial link.
After all, if the difference between the channel loss at the Nyquist frequency and a
half of Nyquist frequency is greater than 9.5 dB, then using PAM-4 signaling may
(a) (b)
Fig. 2.7 Basic eye diagrams of (a) NRZ and (b) PAM-4 signal.

Chapter 2. Background of Multi-Level Serial Link 18
benefit the entire link rather than using NRZ. Meanwhile, although the Nyquist fre-
quency is half for PAM-4 than for NRZ, in reality the real horizontal eye opening is
only between 1 / 2 unit interval (UI) and 2 / 3 UI, less than 1 UI, as shown in Fig.
2.7(b). In addition, the middle eye in a PAM-4 signal is almost symmetrical, but the
top and bottom eye are not symmetrical [10]. As shown in Fig. 2.7(b), horizontal eye
openings of the top and bottom eye are slightly narrower compared with that of
middle eye. If nonlinearity exists, this difference will be even greater.
As mentioned earlier, non-linearity has a greater impact on PAM-4 signal than
NRZ signal. PAM-4 waveform has three vertical eyes, but system margin bottleneck
lies with the worst eye. Therefore, adjusting the vertical eye of a transmitted PAM-4
signal to equal height is a very important issue in terms of the overall link system
including the receiver side, and several parameters for measuring the degree of non-
linearity are defined. First, the level separation mismatch ratio, LMR indicates the
vertical linearity of the signal. Fig. 2.8 shows the transmitter linearity test pattern,
0
VB
VC
VDTransmitter
linearitytest pattern
Time [UI]
20 40 60 80 100 120 140 160
VA
Fig. 2.8 Linearity test pattern for PAM-4 transmitter.

Chapter 2. Background of Multi-Level Serial Link 19
which could be used for testing 400 Gigabit Ethernet (GbE) [23], [24]. In the test
pattern shown in Fig. 2.8, each level is sustained for 16 UI. The levels { AV , BV ,
CV , DV } are given by the average value of the voltages over the center 2 UI of each
16 UI symbols. The effective symbol separations are given by:
1B avg
A avg
V VES
V V
(2.11)
2C avg
D avg
V VES
V V
(2.12)
where the average voltage is given by the average of the four symbol voltage meas-
urements, 1 ( )4 A B C DV V V V . The ideal symbol separations are as follows:
1 2 1 / 3ES ES . (2.13)
One of the PAM-4’s complications is the possibility of amplitude compression: the
variation in the voltage (or power) swing between adjacent symbols. One way to
measure voltage compression is to define the minimum signal level, MINS , as half
of the swing between the closest adjacent symbols [23]:
1
min( , , )2
MIN B A C B D CS V V V V V V . (2.14)
So that the level separation mismatch ratio can be expressed as
6 MIN
LMD A
SR
V V
. (2.15)
A linear PAM-4 transmitter should satisfy 0.92LMR according to the 100 GbE
PAM-4 spec (100GBASE-KP4) [24].
Another way to measure the symbol levels is to extract them from a PAM-4 eye
diagram, as shown in Fig. 2.9. First, define a 1 4 UI horizontal mask through the

Chapter 2. Background of Multi-Level Serial Link 20
center of the middle eye. Then project histograms of the three symbols. The symbol
levels { 0V , 1V , 2V , 3V } are given by the mean of the corresponding histograms, as
shown in Fig. 2.9. { AV , BV , CV , DV } may be pretty close to { 0V , 1V , 2V , 3V },
but the histograms, especially the top and bottom, are likely to be asymmetric. Thus,
it’s unreasonable to expect the two sets of symbol levels to be the same.
By defining the symbol separations as 1 0lowAV V V , 2 1midAV V V , and
3 2uppAV V V , we can also define the eye linearity as the ratio of the largest to the
smallest adjacent symbol voltage swings,
max , ,
min , ,
low mid upp
low mid upp
AV AV AVEye linearity
AV AV AV (2.16)
While the first technique, the one that use the transmitter linearity test pattern, is ap-
pealing in its simplicity, the second one can be much easier to relate the measure-
ment to symbol error rate (SER) or bit error rate (BER) by measuring symbol levels
and compression with a real eye diagram [23].
¼UI
AVupp
AVmid
AVlow
V0
V1
V2
V3
histogram
Fig. 2.9 PAM-4 symbol levels with a horizontal eye mask.

Chapter 2. Background of Multi-Level Serial Link 21
2.3 Theoretical Analysis
2.3.1 Sensitivity
The sensitivity of an electronic device, such as a communication system receiver
or detection device, is the minimum magnitude of input signal required to produce a
specified output signal having a specified SNR or other specified criteria. Unfortu-
nately, from the sensitivity standpoint, the use of multi-level signaling is disadvan-
tageous compared to NRZ due to intrinsic SNR degradation.
As mentioned before, the baud rate of M-level PAM is 21 log ( )M of that of the
NRZ at the same bit rate [25]. Thus, the use of multi-level signaling can reduce the
symbol rate for the same bit rate at the expense of the input electrical power effi-
ciency manifested through the receiver sensitivity. Under assumptions that the noise
is additive, white, and stationary, the input power penalty [dB] for using a PAM-M
compared to NRZ to reach the same BER at the same symbol rate SP , is given by,
10log 1SP M (2.17)
Where M is the number of PAM levels [26]. This means that 4.8 dB more received
electrical power is needed for PAM-4 at the same symbol rate as NRZ. The penalty
is less when the bit rate is kept fixed, because of reduced signal bandwidth [27]. The
input power penalty [dB] for PAM-M relative to NRZ at the same bit rate BP , is
2
110log
logB
MP
M
. (2.18)
Thus, 3.3 dB more received power is needed for PAM-4 at the same bit rate as NRZ.

Chapter 2. Background of Multi-Level Serial Link 22
2.3.2 Symbol Error Rate and Bit Error Rate
To calculate the theoretical BER values for PAM-M systems, we start with the
SER calculation. Consider M amplitude levels centered on zero, with 2lM . If the
PAM-M signals are represented geometrically as M one dimensional signal point
values, then the PAM-M signal can be expressed as
, 1, 2, ...,2
gm m
ES A m M (2.19)
where gE and mA denote the energy of the basic signal pulse and amplitude val-
ues [20]. The amplitude values are as follows:
2 1 , 1, 2, ...,mA m M d m M (2.20)
where the Euclidean distance between adjacent signal points is 2 22
gg
Ed d E .
The average symbol energy symE can be calculated from:
2
1 1
22
1
22
1 1
2 12
1
6
M M
sym m m
m m
Mg
m
g
E E SM M
d Em M
M
Md E
. (2.21)
Placing the symbol decision threshold levels as shown in Fig. 2.10 helps in evaluat-
ing the probability of symbol error. We note that if the M-th amplitude level is trans-

Chapter 2. Background of Multi-Level Serial Link 23
mitted, the demodulation output will be:
2
gm m
Er S n A n (2.22)
where the noise variable n follows a Gaussian distribution with zero mean and var-
iance of 202N and all amplitude levels are equally likely a priori. The average
probability of a symbol error is simply the probability that the noise variable n ex-
ceeds in magnitude one-half of the distance between adjacent levels. As a result, the
SER can be derived as follows:
2
0
2
0
0
2
2
1 1 2
2
1 2
g
g
x
g Nm
Ed
u
Ed
N
EM MSER P r S d e dx
M M N
Me du
M
. (2.23)
The complementary error function, ( )erfc x , and Q-function are defined as
Error region
Si Si+1 Si+2 Si+3
THi+1THi THi+2
Fig. 2.10 Power density function for PAM-M signal.

Chapter 2. Background of Multi-Level Serial Link 24
2
( ) 1 ( )
2 t
x
erfc x erf x
e dt
, (2.24)
2
2
2
2
1( )
2
1 2
2
1
2 2
u
x
t
x
Q x e du
e dt
xerfc
(2.25)
where ( )erf x denotes the error function. Thus, the SER can be expressed by using
of the complementary error function or Q-function as follows:
2 2
0 0
2 11
2
g gd E d EMMSER erfc Q
M N M N
. (2.26)
Then again, the SER can be re-written in terms of average symbol energy, symE
20
62 1
( 1)
symEMSER Q
M M N
. (2.27)
Because it is customary to plot the probability of symbol error to use SNR per bit
as a variable, re-deriving the SER based on SNR per bit is necessary. First, average
bit energy, bitE can be derived as
2log
symbit
EE
M (2.28)
since 2log M bits are included in a symbol for PAM-M. Then, the SER is given by,

Chapter 2. Background of Multi-Level Serial Link 25
2
20
2 1 6log
( 1)bit
M M ESER Q
M M N
(2.29)
Where 0bitE N denotes the average signal-to-noise ratio per bit [20]. Thus, the
SER is re-induced on the basis of SNR per bit. The SER of the PAM-M signal cal-
culated from (2.29) is shown in the Fig. 2.11. As shown in the Fig. 2.11, each time
the number of bits of a symbol increases by one, the SNR achieving SER of 1210
increases by 4 dB. Note that, as the number of levels increases in multi-level signal-
ing, the distances between adjacent levels become narrower and the probability of
symbol error rises.
Meanwhile, the BER is also closely related to the SER. For high SNR, it can be
assumed that only errors between adjacent symbols occur. In that case, the BER can
be approximated as follows:
Fig. 2.11 Symbol error rate for PAM-M signals.
8 10 12 14 16 18 20 22 24 26
Average SNR per bit (dB)
10-12
10-10
10-8
10-6
10-4
10-2
NRZ
PAM-4
PAM-8
PAM-16

Chapter 2. Background of Multi-Level Serial Link 26
2log
approx avg
SERBER d
M (2.30)
where avgd denotes the average Hamming distance between the labels of adjacent
symbols [27]-[29]. The average Hamming distances of PAM-M signals with using
both Gray coding and linear coding are listed in Table 2.1. Using the values in the
Table 2.1, we can recalculate the approximate value of BER as follows:
,2log
approx Gray
SERBER
M ,
2,
2
log2
1 logapprox Linear
M SERBER
M M
. (2.31)
As a result of direct calculation using the approximated BER equations in (2.31),
BER graphs can be obtained according to the average SNR per bit as shown in Fig.
2.12. As illustrated in the Fig. 2.12, it can be seen that the difference between the
approximated BERs of PAM-M signals is not large when using Gray coding and
linear coding. In this chapter, we examined how SER and BER are calculated when
using multi-level signaling. PAM-4 has the advantage of reducing the baud rate by
half at the same bit rate compared with NRZ, but the SNR penalty for obtaining the
same BER is about 4 dB.
Table 2.1 Average Hamming distance of PAM-M signals with various coding
Average HammingDistance
Gray Coding Linear Coding
avgd 1 2log2
1
M
M

Chapter 2. Background of Multi-Level Serial Link 27
(a)
(b)
Fig. 2.12 Approximated BERs of PAM-M signals with using (a) Gray coding and (b)
linear coding.

Chapter 3. Current-Driven Feedback Driver 28
Chapter 3
Current-Driven Feedback Driver
3.1 Overview
As the required bandwidth demand for serial link systems has aggressively been
increasing, various types of CMOS interface circuit are employed for the design of
transmitter driver. The most popular topologies for designing high-speed output
driver these days are the voltage-mode driver (e.g. SST driver) and current-mode
driver (e.g. CML driver). Equivalent circuits of the voltage- and current-mode driver
are shown in Fig. 3.1. As shown in Fig. 3.1(a), a voltage-mode driver basically con-
sists of a voltage-controlled voltage source (VCVS) with series termination re-
sistance, 0R . On the other hand, a current-mode driver is equivalent with a voltage-
controlled current source (VCCS) with parallel termination resistance, 0R , as illus-
trated in Fig. 3.1(b). VCVS and VCCS can be regarded as a voltage amplifier with a

Chapter 3. Current-Driven Feedback Driver 29
voltage gain of 0 OUT INA V V , and a transconductance amplifier with a trans-
conductance gain of m OUT ING I V , respectively. Because output impedance of
an ideal VCVS and VCCS are zero and infinite [30], respectively, the equivalent
circuits in Fig. 3.1 have same output impedance of 0R .
In Fig. 3.1, you can easily notice that both the voltage-mode and current-mode
drivers are driven by an input voltage, usually a digital data stream, regardless of the
type of both driver’s output. This is the reason why I want to classify and redefine
the conventional drivers represented by the voltage-mode and current-mode drivers
as voltage-driven drivers. From this thesis, the following chapters introduce what
inherent limitations voltage-driven drivers have and present how these problems can
be mitigated by using the proposed current-driven feedback drivers.
Z0
VIN VOUT
A0
R0
R0Voltage-ModeOutput Driver
(a)
Z0
VIN
IOUT
Gm
R0R0Current-ModeOutput Driver
(b)
Fig. 3.1 Equivalent circuits of (a) voltage- and (b) current-mode driver.

Chapter 3. Current-Driven Feedback Driver 30
This chapter briefly examines the structure of conventional voltage- and current-
mode drivers that can be classified as voltage-driven drivers by the author in order to
understand the features of existing structures. Then, the limitations of existing driv-
ers are listed and proposed current-driven feedback drivers to resolve the drawbacks
of the conventional drivers are introduced: RFB driver and AFB driver. Finally,
analyses for performance comparison of existing drivers with resistive-feedback
driver for various performance metrics and summarize design issues of feedback
driver applying to multi-level serial link.

Chapter 3. Current-Driven Feedback Driver 31
3.2 Voltage-Driven Drivers
3.2.1 Basics of Conventional Drivers
On the serializing transmitter side, the most power-hungry blocks are usually
high-speed circuits: serializer, clock buffer, pre-driver, and output driver [31], [32].
Especially, as the data rate increases, the dynamic power consumed by the serializer
and pre-driver increases drastically and is greatly influenced by the structure of the
output driver. Thus, majority of efforts have focused on improving the energy effi-
ciency of the pre-driver and output driver.
As mentioned in the overview, the voltage-mode (VM) and current-mode (CM)
drivers have been widely used for wireline serializing transmitters, especially VM
drivers for low-power applications and CM drivers for high data rate applications. In
particular, VM drivers are preferred in many recent wireline transmitters due to their
low power dissipation [12], [32]-[54]. As is well known, assuming that both trans-
mitter side and receiver side are terminated (i.e. double termination) and the receiver
side is differential terminated, the VM driver dissipates only a quarter of the current
compared to the CM driver. The current levels consumed by the driver according to
the type of receiver-side termination are listed in the Table 3.1. On the other hand, in
spite of the low power consumption of the voltage-mode driver, the CM driver is
widely employed for I/O interface requiring higher speeds due to good supply rejec-
tion and inherently fast rise/fall time [14], [55]-[65]. In recent years, however, it has
been re-examined that the SST driver has good linearity by increasing the ratio of

Chapter 3. Current-Driven Feedback Driver 32
series resistors, which is particularly beneficial for multi-level signaling. In addition
to this, the SST driver is often used again in ultra-high-speed applications with per-
pin bandwidth of above 28 Gb/s because of the advantage of having a larger swing
than the CML driver and achieving additional SNR gain [36], [46], [47], [52].
In order to understand the functions of conventional drivers and to analyze their
limitations, this section briefly reviews the structure of existing VM and CM drivers.
Firstly, simplified circuit diagrams of a conventional N-over-N and P-over-N volt-
age-mode driver are shown in Fig. 3.2 [33]. The N-over-N voltage-mode driver is
widely used for low-swing application because of its low-power design capability.
But, the pull-up or pull-down NMOS of the N-over-N driver operates in the linear
region only with a relatively small output swing. On the contrary, the P-over-N de-
sign operates in the linear region when the output swing is high. As a result, the P-
over-N driver is suitable for high output swing and has better impedance matching
performance, which makes the P-over-N driver widely used as a basic structure of a
VM driver.
One of the most important design issues when designing the VM driver is how to
adjust the output impedance of the driver. The reason why output impedance is sig-
Table 3.1 Current level consumed by the driver according to receiver-side termination
VM Single-ended Vppd / 2Z0
VM Differential Vppd / 4Z0
CM Single-ended Vppd / Z0
CM Differential Vppd / Z0
Driver RX Termination Type Current Level

Chapter 3. Current-Driven Feedback Driver 33
DinP
DinN
VR VS
(a)
DinP
DinN
VDDPDRV VDDDRV
(b)
Fig. 3.2 Typical circuit diagram of conventional (a) N-over-N voltage-mode driver and
(b) P-over-N voltage-mode driver.

Chapter 3. Current-Driven Feedback Driver 34
nificant in wireline transmitters is that reflection can cause signal integrity degrada-
tion if it does not match the characteristic impedance, 0Z , of the transmission line.
So a practical transmitters set their output impedance to 0Z , usually a 50 Ω.
N-over-N VM driver in Fig. 3.2(a) consists of a pre-driver and main-driver stages
whose supply voltages are RV and SV , respectively. In the main-driver stage, the
upper NMOS transistor serves as a pull-up device while the lower NMOS transistor
serves as a pull-down device, and their impedances are controlled by appropriately
regulated supply voltages, RV and SV [16]. Background impedance calibration
loops shown in Fig. 3.3 automatically adjust the impedance of the N-over-N driver
to a desired value regardless of any variations of device parameters such as tempera-
ture. Before understanding the operation of the background regulator in Fig. 3.3, let
us review the basic operation of the VM driver. The VM driver basically operates
4Z0
2Z0 4Z0
VBIAS
VSVR
Fig. 3.3 Regulators for impedance calibration of N-over-N voltage-mode driver.

Chapter 3. Current-Driven Feedback Driver 35
like a resistive divider when considering receiver-side termination. Naturally, pull-
up and pull–down devices of the VM driver operate in a linear region in order to act
like a resistance when turned on, which are determined by the size and overdrive
voltage of the devices. Therefore, regulating supply voltages of pre-driver and main-
driver is effective in that it can directly control the overdrive voltage of pull-up and
pull-down devices. In the N-over-N VM driver in Fig. 3.2(a), the impedance of the
lower NMOS is completely controlled by adjusting the RV . On the contrary, the
impedance of the upper NMOS is affected by both RV and SV due to its varying
source voltage. As a result, in order to perform impedance calibration, the regulators
that controls the RV and the SV must be correlated rather than independent of
each other. Indeed, the RV regulator in Fig. 3.3 regulates RV to make the sum of
two on-resistance equal to 02Z assuming receiver-side differential termination. At
the same time, the SV regulator regulates SV to make a total sum of two on-
resistance and 02Z termination resistance equal to 04Z . Because these two feed-
back loops operate simultaneously in the background, the output impedance can be
set to 0Z during pull-up and pull-down periods, respectively. Furthermore, the SV
regulator also adjusts output swing of the driver.
P-over-N VM driver in Fig. 3.2(b) consists of a pre-driver and main-driver stages
whose supply voltages are PDRVVDD and DRVVDD , respectively. Unlike the N-
over-N structure, the upper PMOS transistor serves as a pull-up device while the
lower NMOS transistor serves as a pull-down device in the P-over-N structure. The
pull-up and pull-down devices of P-over-N driver depend only on DRVVDD and
PDRVVDD , respectively. Naturally, two supply regulators are dedicated to the cali-
bration of the pull-up and pull-down impedance, as shown in Fig. 3.4 [34]. Therefo-

Chapter 3. Current-Driven Feedback Driver 36
RREF
SegmentedPull-down
Replica
RINT RINT
VDDPDRV
Segmented Switch
(a)
Segmented Switch
RCM
SegmentedPull-up Replica
RCM
RREF
IREF
VDDDRV
(b)
Fig. 3.4 (a) Pull-down regulator and (b) pull-up regulator for impedance calibration of
P-over-N voltage-mode driver.

Chapter 3. Current-Driven Feedback Driver 37
re, the impedance calibration loop for the P-over-N driver is more intuitive than the
N-over-N driver. Fig. 3.4 shows the pull-down and pull-up regulators for impedance
calibration of the P-over-N driver. These regulators in [34] use replicas of the triple-
stacked pull-up and pull-down devices and the off-chip reference resistors for output
impedance calibration. Additional resistors, INTR and CMR , are included to mimic
the DC operating condition of the output driver in the replica circuits. The output
driver and the replicas are segmented, and the number of activated segments of the
output driver and the replicas included in the feedback loop is designed to be adjust-
able. The selector switches are implemented using CMOS inverter powered by
PDRVVDD and DRVVDD , as appropriate. When the numbers of the activated seg-
ments are changed, the regulators adjust PDRVVDD and DRVVDD , to match the
impedances of the replica and the reference resistance. As a result, P-over-N driver
in Fig. 3.2(b) can scale the internal supply voltage ( PDRVVDD ) and the output swing
( DRVVDD ) without disturbing the output impedance. In this way, the number of re-
dundant slices is minimized, and any mismatch in the pull-up and pull-down re-
sistances is naturally cancelled without manual trimming, which is not feasible to
the slice programming schemes presented in [53], [54].
Recent high-speed wireline transmitters tend to merge equalization and parallel-
ism functions into the output driver as well as impedance control. In particular, time-
multiplexing is attractive for VM drivers because it allows full CMOS implementa-
tions without using any CML buffers that operate at high speeds. Further details
about multiplexing driver is discussed in the following sections, but time-
multiplexing is also employed for ultra-high-speed CML driver [66]. Meanwhile,
pre-emphasis (PE) is a traditional method widely used to pre-compensate the chan-

Chapter 3. Current-Driven Feedback Driver 38
nel loss in the wireline transmitter. By varying the pre-emphasis coefficient, a nor-
mally positive 1-tap post cursor can be removed as appropriate. Fig. 3.5 shows the
equivalent circuit of the voltage-mode driver when using the pre-emphasis function.
In the VM driver, the PE is actually implemented as pre-de-emphasis, which reduces
the signal level by adding an additional PE driver slice in parallel with the main
driver slice. As the output impedance is inversely proportional to the total number of
activated slices, regardless of whether these slices belong to the main tap or the pre-
emphasis tap, the pre-emphasis coefficient can be tuned without altering the output
impedance, as shown in Fig. 3.5. Because the pre-emphasis is implemented in the
form of a resistive divider [42], [49], the total admittance of the driver is the sum of
admittances from the main tap and the pre-emphasis tap. Therefore, if the replica str-
YPE Ymain = N x Yunit
YPE = M x Yunit
Ymain
out
Zout = (M+N) x Yunit
1
M: # of activated pre slices
N: # of activated main slices
Yunit: Admittance of a slices
M/(M+N): PE coefficient
Fig. 3.5 Equivalent circuit of voltage-mode driver with pre-emphasis.

Chapter 3. Current-Driven Feedback Driver 39
ength is determined by the total number of activated slices, ( )M N in Fig. 3.5,
the output impedance is constant regardless of the magnitude of the pre-emphasis
coefficient [34]. Using this structure, a FFE compensating for more than one tap can
be implemented without altering the output impedance by adding multi-tap slices in
parallel.
VM drivers have an inherent linearity issue not seen with CM drivers. A conven-
tional way to mitigate this linearity issue is to put linearization resistors in series
with the CMOS devices, which is commonly known as SST driver. The linearity of
the VM driver improves as the ratio of the linearization resistor in the output imped-
ance increases but resulting in a larger device size and a considerable increase in
dynamic power consumption of the pre-driver. Nonetheless, since the linearity per-
formance is strictly required in practical transmitters, the SST driver is now the most
common form of VM driver used in I/O interfaces. The VM driver, including the
SST driver, must be the stacked structure of the device in order to apply the FFE or
parallelism mentioned above. However, as the number of stacks increases, both the
device size and the parasitic component increases, which causes both power and
speed problems. From this point of view, a full-rate SST driver is certainly attractive
from a power perspective, but multiple full-rate buffer stages may suffer from severe
delay variations due to noise from data supply, ISI, and various device parameters.
Therefore, half-rate or quarter-rate SST drivers are often used despite the possible
power and speed losses [12], [34]. Fig. 3.6 and Fig. 3.7 depict the speed optimiza-
tion steps of existing half-rate SST driver in [35]. The driver incorporates a stacked
MUX that is selected by a complementary half-rate clock signal (C2, C2B) and driv-
en with half-rate even (dep, den) and odd (dop, don) data streams. A variable device

Chapter 3. Current-Driven Feedback Driver 40
C2 C2B
C2B C2
out
Dep[3:0]
Den[3:0]
Dop[3:0]
Don[3:0]
(a)
C2 C2B
C2B C2
out
Dep[3:0]
Den[3:0]
Dop[3:0]
Don[3:0]
(b)
Fig. 3.6 (a) Original stacked structure in [35] and (b) Stacked structure with single
shared linearization resistor.

Chapter 3. Current-Driven Feedback Driver 41
width with segmented structure is used for impedance tuning of the driver. Original
stacked structure shown in Fig. 3.6(a) suffers from limited slew rate, incomplete in-
ternal node settling, and data-dependent jitter due to parasitic capacitance within the
stacked driver. On the other hand, stacked structure with single shared linearization
resistor shown in Fig. 3.6(b) since some of parasitic capacitors may become undriv-
en when a clocked transistor is turned off. In the final step of the optimization, the
clocked MUX transistors (now operating as transmission gates) are relocated be-
tween the oven/odd branches and the single shared resistor, as illustrated in Fig. 3.7.
As a result, the SST driver has effectively been transformed from a stacked MUX to
a pass-gate MUX with programmable-width inverters for the even and odd data [12].
The CML driver, a typical CM driver, is still one of the most robust and powerful
options for high-speed output drivers despite the large static power dissipation. The
typical circuit diagram of a conventional full-rate CML driver is shown in Fig. 3.8,
Don[3:0]
Dop[3:0]C2
C2B
Den[3:0]
Dep[3:0]C2B
C2
out
Fig. 3.7 Final structure with relocated clocked MUX transistors.

Chapter 3. Current-Driven Feedback Driver 42
whose differential output swing is determined by 0TAILI R for both single-ended
and differential receiver-side termination and output common level is set as
0
1
2DRV TAILVDD I R . (3.1)
Because of pull-down only characteristics, a conventional CML driver exhibits low-
er output swing relative to a push-pull CM driver under the same power consump-
tion conditions. In addition, difference between linear passive pull-up path and non-
linear active pull-down path makes the CML driver have asymmetric rise/fall times.
Meanwhile, the CML driver is well compatible with both DC and AC coupling to-
pologies and has better impedance matching characteristic than the VM drivers
without a linearization resistor. The signaling bandwidth of the CML driver is de-
termined by the time constant of parallel termination resistor 0R and the load ca-
pacitance.
DinP
DinN
R0 R0
ITAIL
Fig. 3.8 Typical circuit diagram of a conventional CML driver.

Chapter 3. Current-Driven Feedback Driver 43
The push-pull CM driver shown in Fig. 3.9 has been widely used in low-voltage
differential signals (LVDS) standard. Compared with the pull-down only CML driv-
er, the push-pull driver requires only half the current to achieve the same output
swing [67]. This means that for the same driver current, the push-pull driver can
double the swing compared to the CML driver. The driver current in the push-pull
driver is ideally constant, resulting in low dI dt noise. Dual current sources with a
common-mode feedback allow good power supply rejection ratio (PSRR), but volt-
age headroom issue of the push-pull CM driver can be a more severe problem in
low-voltage technologies.
DinP
DinN
VCM,ref
VBP
R0 R0
Fig. 3.9 Typical circuit diagram of a push-pull current-mode driver.

Chapter 3. Current-Driven Feedback Driver 44
3.2.2 Drawbacks
The previous section has reviewed briefly the features of conventional voltage-
driven drivers such as VM and CM drivers that have been widely used for I/O inter-
face circuits. To sum it up, an output driver of a serializing transmitter should pos-
sess several features in terms of various performance metrics: impedance controlla-
bility for output matching, equalization compatibility for high-speed operation, par-
allelism compatibility for power and speed optimization, output swing scalability
against various receiver sensitivity and channel loss, and good linearity for N-bit
DAC applicability. However, from the point of view of these characteristics, exist-
ing voltage-driven drivers have various drawbacks and we will examine how these
drawbacks can be solved by using the proposed current-driven driver schemes.
Firstly, the output impedance of an output driver must be time-invariant, which
improves signal integrity by absorbing reflections that return at any time on the re-
ceiver side. If receiver-side termination is ideally matched properly, there is no re-
flection at all, but in reality reflection occurs inevitably due to discontinuity in the
channel and package. In addition, since the actual output driver has an impedance
variation depending on the operating region, it is important to design this impedance
perturbation as small as possible. Because the N-over-N or P-over-N VM driver
regulates the impedance based on when pull-up or pull-down path is turned on, so
the output impedance is increased to hundreds of Ohms during a transition period,
which can severely degrade signal integrity. Therefore, as shown in Fig. 3.10, a re-
flected wave distorts the edge of the incident wave when the reflected wave arrives
during a transition unfortunately [50]. How this impedance variation degrades the

Chapter 3. Current-Driven Feedback Driver 45
matching characteristics of the output driver and how it can be improved by using
the proposed current-driven feedback driver is discussed in the next chapter. The
CM driver, on the other hand, does not have significant impedance variations due to
the nature of parallel termination.
Second, an output driver must be able to embed transmit equalization or parallel-
ism without altering the output impedance. Recently, high-speed wireline transmit-
ters have applied various equalization techniques to compensate for frequency-
dependent loss of interconnection and to guarantee receiver sampling margins by
cancelling data ISI. As shown in Fig. 3.11, to implement the FFE, a widely used
equalization technique, the VM and CM driver that are classified as voltage-driven
drivers by the author must place multi-tap slices parallel to a main-tap slice at the
output node, so inherent bandwidth degradation by parasitics of disabled slices can-
not be avoided. Due to the nature of voltage-driven drivers driven by binary data, it
is not possible to sum the voltages by the tap weights at the driver inputs, so the
Transition occured
Reflectedsignal
Ideal impedance
Reflected signal wave is absorbed
Varying impendance
Reflected wave distorts edge of the incident wave
Fig. 3.10 Signal distortion caused by varying impedance of P-over-N VM driver.

Chapter 3. Current-Driven Feedback Driver 46
multi-tap cursors of FFE can only be combined at the pad. In other words, pre-
processing that multiplies tap weight to multi-tap cursors and add to main cursor at
Nyquist rate before the last driver stage is not feasible. Of course, if you switch from
analog to digital-based FFE and use an N-bit DAC driver, you can implement the
FFE before the driver stage even using voltage-driven drivers, but you may lower
the operation speed until the digital logic allows. Therefore, regardless of whether
DinP
DinN
VDDPDRV VDDDRVMAIN
PRE/POST
(a)
DinP
MAIN
PRE/POST
IMAIN
DinN
VDDDRV
(b)
Fig. 3.11 Simplified block diagrams of segmented voltage-driven drivers with multi-tap
FFE: (a) voltage-mode driver and (b) current-mode driver.

Chapter 3. Current-Driven Feedback Driver 47
the FFE is implemented at the pad or at the pre-pad, the speed limitation is inevita-
ble when the voltage-driven drivers are used. The bandwidth degradation due to
slice parasitics also occurs when implementing parallelism. In contrast, thanks to the
inherent nature of current-driven driver driven by the input current, it is possible to
sum the currents by the tap coefficients and to apply it to the driver. As a result, the
FFE tap summing can be performed at the driver input rather than at the output
where a relatively large dominant pole is located, so the bandwidth degradation due
to FFE parasitics can be mitigated. Detailed quantitative analysis is covered in the
following chapters.
The multiple slice issue also occurs for impedance control of VM drivers in addi-
tion to equalization and parallelism. In general, a VM driver is assisted by back-
ground supply regulators that regulate the supply voltages of the pre-driver or driver
to control the output impedance [34]. Since the driver supply determines the output
swing, using this scheme, the output impedance and output swing have a strong cor-
relation. Naturally, to meet the output swing specification in most I/O standards, the
range of output impedance that can be controlled by the supply regulator is limited.
As a result, in recent years, hybrid impedance control scheme has been introduced
that uses slice-based coarse tuning and analog loop-based fine tuning [36]. However,
as segmentation to obtain programmable width increases hardware complexity, the
multiple slice issue becomes even more intense. In addition, to implement the N-bit
DAC driver for multi-level signaling, the speed degradation is boosted as additional
slices are required. On the other hand, thanks to the addition of input current as a
variable, the current-driven drivers can compensate for the change in output swing
when adjusting output impedance by adjusting the driver input current.

Chapter 3. Current-Driven Feedback Driver 48
The segmented slice structure of the VM driver is not only a matter of speed loss,
but also causes problems in terms of power consumption. When a slice-selecting and
-activating switches are added in series, the device size increases as the VM driver
employs a double- or triple-stacked structure. As a result, it exponentially increases
the dynamic power dissipation of the pre-driving stages. In summary, the VM driver
must pay for the significant power and speed overhead to support essential features
such as impedance control, equalization, parallelism, and multi-level signaling. The
CM driver is no exception because it also supports the above functions by combin-
ing the driver segments at the pad.

Chapter 3. Current-Driven Feedback Driver 49
3.2.3 Conventional PAM-4 Drivers
As the per-pin bandwidth requirements of industrial I/O standards such as OIF-
CEI, Ethernet, Infiniband, Fibre Channel, PCIE, and USB are increasing, more and
more applications are taking advantage of multi-level signaling links. Especially, the
PAM-4 signaling is widely used for various application spaces: die-to-die, chip-to-
chip, and board-to-board interconnections. To reduce the cost of upgrading the in-
frastructure, industrial standards for 56 Gb/s PAM-4 interface have been enacted
that can support legacy VSR, MR, and LR channels designed for the current 28 Gb/s
NRZ electrical interface [73]. Recently, the forecast that the next generation of wire-
line I/O standards and applications will require 100 Gb/s+ SerDes transceivers with
improved energy efficiency are prevalent [79]. PAM-4 signaling has become the
most likely candidate for next-generation ultra-high-speed I/O format as the link
performance of multi-level serial link can be significantly improved with the help of
forward error correction (FEC).
Unlike NRZ, conventional PAM-4 transmitters have separate data paths for seri-
alizing MSB and LSB stream and combines the MSB and LSB at the output stage to
generate the PAM-4 symbol. The existing high-speed PAM-4 drivers are imple-
mented using various driver topologies: SST-based PAM-4 drivers [68]-[73], CML-
based PAM-4 drivers [9], [74]-[79], and hybrid PAM-4 drivers [11]. Simplified
block diagram of SST-based PAM-4 drivers, CML-based PAM-4 drivers, and hy-
brid PAM-4 driver in [11] are shown in Fig. 3.12 and Fig. 3.13. Like the NRZ driv-
ers, the conventional VM and CM PAM-4 drivers use the parallel segmented slice
structure. Since the SST driver is basically a resistive divider, the on-resistance of

Chapter 3. Current-Driven Feedback Driver 50
the MSB path and LSB path differs by a factor of two to generate a PAM-4 symbol.
As illustrated in Fig. 3.12(a), in the SST-based PAM-4 driver, the series lineariza-
tion resistor of the MSB slice is half of that of the LSB slice. Similarly, the CML-
MAIN
MSBP
MSBN
VDDPDRV VDDDRV
1X
1X
LSBP
LSBN
2X
2X
PRE/POST
Pseudo differential
PAM-4 Symbol
(a)
MSBP
MSBN
LSBPLSBN
MAIN
PRE/POST
2X 1X
VDDDRV
Fully differential
PAM-4 Symbol
(b)
Fig. 3.12 Simplified block diagrams of (a) SST-based PAM-4 drivers and (b) CML-
based PAM-4 drivers.

Chapter 3. Current-Driven Feedback Driver 51
based PAM-4 driver combines the MSB and the LSB with a weight of 2:1. As
shown in Fig. 3.12(b), the tail bias current of the MSB pair is twice the current of the
LSB pair in the CML-based PAM-4 driver. Two SST-based PAM-4 drivers transmit
pseudo-differential PAM-4 symbols, while CML-based PAM-4 driver transmits ful-
ly-differential PAM-4 symbols. On the other hand, a hybrid PAM-4 driver was in-
troduced that adds an additional current-mode path to the conventional SST-based
PAM-4 driver to enhance the output swing [11], as shown in Fig. 3.13. High output
swing and low distortion are key features for high data-rate PAM-4 transmitter to
maximize SNR and preserve signal integrity.
Since existing high-speed PAM-4 transmitters are implemented using voltage-
driven drivers, they are also exposed to the common drawbacks of the voltage-
driven drivers mentioned above, which is a significant burden to the designer in im-
MAIN
MSBP
MSBN
VDDPDRV VDDDRV
1X
1X
LSBP
LSBN
2X
2X
LSBP
LSBN
MSBP
1X 2X
MSBN
MSBP
MSBN
LSBP
2X 1X
LSBN
VDDDRV VDDDRV
PRE/POST
Fig. 3.13 Simplified block diagram of hybrid PAM-4 driver in [11].

Chapter 3. Current-Driven Feedback Driver 52
plementing an energy-efficient PAM-4 driver. Comparison of the SST-based PAM-4
drivers and the CML-based PAM-4 drivers are listed in Table 3.2. Both architectures
suffer power and bandwidth degradation due to increased slice parasitics to support
FFE or parallelism, which can be aggravated by MSB and LSB segmentation for
PAM-4 signaling.
Table 3.2 Comparison of SST-based PAM-4 drivers and CML-based PAM drivers
Pros
No driver static power
Good linearity
High output swing
Cons
Large pre-driver dynamic power
Power-hungry multi-tap FFE
Low FFE programmability
BW limits due to FFE parasitics
SST-based PAM-4 driver
Simple implementation
Relatively high BW
High FFE programmability
Large driver static power
Less linearity
Low output swing
Power-hungry multi-tap FFE
BW limits due to FFE parasitics
CML-based PAM-4 driver

Chapter 3. Current-Driven Feedback Driver 53
3.3 Basic Concept
3.3.1 Resistive-Feedback (RFB) Driver
An equivalent circuit of newly defined current-driven feedback driver is illustrat-
ed in Fig. 3.14. Unlike a voltage-driven driver, a current-driven driver is driven by
the current input, so low input impedance is the key to operating as an ideal current-
voltage amplifier (i.e. transimpedance amplifier) [30]. To reduce the input imped-
ance, an output network for the current-driven driver can be configured as an ampli-
fier with a shunt-shunt feedback, as shown in Fig. 3.14. The DC transfer gains of the
main amplifier and the feedback amplifier are denoted as 0A and FA , respectively.
By employing a CMOS inverter as the main amplifier and a resistor as the feedback
amplifier, the resistive-feedback inverter-based driver, or simply a resistive-
feedback (RFB) driver, becomes the most basic form of current-driven driver. A cir-
Z0
IIN VOUT
A0
R0
R0
AF
Fig. 3.14 Equivalent circuit of current-driven feedback driver.

Chapter 3. Current-Driven Feedback Driver 54
cuit diagram of the RFB driver and general effect of resistive feedback on transfer
function of amplifier are shown in Fig. 3.15, where FR denotes the feedback re-
sistance. Assuming a inverter as a small-signal voltage-voltage amplifier whose DC
gain and 3-dB bandwidth are 0A and 0f , respectively, resistive feedback extends
the bandwidth by a factor of ,L L totR R , where ,L totR is a parallel summation of
load resistance LR and feedback resistance FR . On the other hand, the gain is re-
duced by the same factor. As a result, by reducing the input and output impedance,
the resistive feedback allows for high-speed operation of output driver. Meanwhile,
the transimpedance gain, drvR of the RFB driver can be calculated as
0
11
1drv m F
m
R g Rg r
, (3.2)
Where mg and 0r are the sum of the transconductances and the sum of the output
resistances of the PMOS and NMOS transistors, respectively. From the equivalent
circuit in Fig. 3.14, the advantages of the resistive feedback driver are clear. In case
of the conventional VM driver, the pre-driver has to drive output stages whose input
RF
-A0, f0 gmRL,tot
gmRL
f0 f0(RL/RL,tot)
Gain
f
-20dB/dec
A0 = gmRL,tot, RF >> 1/gm, RL,tot = RL // RF
Fig. 3.15 Circuit diagram of resistive-feedback driver and general effect of resistive
feedback on transfer function of amplifier.

Chapter 3. Current-Driven Feedback Driver 55
capacitances are generally very large. On the other hand, because the RFB driver
takes a current input, the pre-driver does not have to drive a large capacitive load,
which means that the pre-driver can be much simplified and the power dissipation
can be significantly reduced [16]. As you can see from the derived drvR in (3.2),
FR is important parameter affecting the entire driver performance. In terms of
power consumption by the pre-driver, larger FR is desirable since even a small
input current results in a large output voltage with large FR . However, smaller FR
is appropriate to meet the low-input-impedance condition for the transimpedance
amplifier, thereby the optimum value of FR can be determined by considering
overall bandwidth and swing of the output driver. Meanwhile, the input impedance
of the RFB driver, inZ is given by,
0 0 0
11 1
1F F
in outm
R RZ Z
r g r r
(3.3)
Where outZ denotes the output impedance of the RFB driver that will be derived in
following chapter 3.4.
The concept of a feedback driver operating as a transimpedance amplifier has
been adopted for high-speed CMOS crosspoint switch [80] and I/O interface appli-
cations [16], [81]. In this thesis, I redefine these feedback drivers as current-driven
feedback drivers and revisit the advantages of the current-driven feedback drivers to
propose an energy-efficient PAM-4 transmitter.
Fig. 3.16 shows the typical circuit diagram of the RFB driver with supply regula-
tion. Like a pair of VM drivers, a pair of RFB drivers also transmit pseudo-
differential outputs. The pre-driver of the RFB driver can be simply configured as a

Chapter 3. Current-Driven Feedback Driver 56
cross-coupled inverter chain as shown in Fig. 3.16, but it can be implemented as a
combination of a current bias to further regulate the driver input current. As a simple
example, you can configure the pre-driver of the RFB driver in two types: a current-
starved inverter-based pre-driver for controlling a current bias (type 1) and an in-
verter-based pre-driver with series resistors for improving the linearity of the pre-
driver current (type 2). By employing these two types of pre-drivers, you can im-
plement RFB inverter-based PAM-4 drivers as shown in Fig. 3.17. In the type-1 cur-
rent-starved inverter-based pre-driver, the current bias of the MSB branch is twice
the current of the LSB branch and the two currents are combined to supply a single
PAM-4 symbol of current to the driver. Similarly, in the type-2 inverter-based pre-
driver, the series linearization resistor of the MSB slice is half of that of the LSB
slice to supply twice the current.
DinP
DinN
VDDPDRV VDDDRV
RF RF
Fig. 3.16 Typical circuit diagram of resistive-feedback driver with supply regulation.

Chapter 3. Current-Driven Feedback Driver 57
MAIN
MSBP LSBP
VDDPDRV
1X2X
1X2X
MSBN LSBN
VDDPDRV
1X2X
1X2X
PRE/POST
RF
RF
(a)
MAIN
MSBP
MSBN
VDDPDRV
1X
1X
LSBP
LSBN
2X
2X
PRE/POST
RF
RF
(b)
Fig. 3.17 Simplified block diagrams of RFB inverter-based PAM-4 drivers with (a) type-
1 pre-driver and (b) type-2 pre-driver.

Chapter 3. Current-Driven Feedback Driver 58
3.3.2 Active-Feedback (AFB) Driver
In current-driven feedback drivers, passive resistors are not the only ones that can
be used as feedback amplifiers. It is feasible to use a transfer gate pair consisting of
PMOS and NMOS transistors as shunt-shunt feedback devices with a similar effect
on resistance. To the best of the author’s knowledge, a feedback driver using trans-
fer gate as feedback amplifier was first introduced in [80] to implement a speed-
enhanced output buffer stage of CMOS crosspoint switch. I redefine this type of
driver an active-feedback inverter-based driver, or simply an active-feedback (AFB)
driver, because it is opposed to the RFB driver in that it uses active transistors rather
than a passive resistor. Two equivalent circuit diagrams of the active-feedback driv-
er are illustrated in Fig. 3.18. The gate voltages of PMOS and NMOS pass gates can
also be design variables, but they are fixed to the ground and supply voltage of the
driver, respectively, for convenience. One of the advantages of the RFB driver is
=
Fig. 3.18 Two equivalent circuit diagrams of active-feedback driver.

Chapter 3. Current-Driven Feedback Driver 59
that output impedance, outZ , is independent of the feedback resistance, FR , and
depends only on the transistor parameters. In general, since 01 r is negligible com-
pared to mg when a transistor operates in the saturation region, the output imped-
ance of the RFB driver, outZ can be approximated as
0
1 1
1out
m m
Zg r g
. (3.4)
If mg is designed to have fixed value of 01 Z , outZ can be constant with a value
of 0Z , which makes the RFB driver a good output driver in terms of impedance
matching. However, due to the fundamental assumption of this calculation that both
PMOS and NMOS operate in saturation region, (3.4) fits well at the DC operating
point near the switching threshold of the feedback inverter. Therefore, even if the
RFB driver is designed so that the output impedance at the equilibrium point is 0Z ,
outZ is distorted from 0Z as the input current increases. Assuming the input cur-
rent of the RFB driver of positive value, the operating regions of the PMOS and
NMOS of the driver according to the output swing are shown in the Table 3.3.
Table 3.3 Operating regions of the transistors of RFB driver according to output swing
Deep-linear
Cut-off
Linear
Saturation
NMOS Saturation
PMOS Saturation
Low Swing
Middle Swing
High Swing

Chapter 3. Current-Driven Feedback Driver 60
On the other hand, the output impedance of the AFB driver is slightly different
because it uses active feedback instead of a fixed passive resistor. Fig 3.19 and Fig.
3.20 show the small-signal equivalent circuits for output impedance calculation of
the active-feedback driver with a positive and negative input bias, respectively. mpg ,
r0p' || r0n'
gmp' vin ‒ gmn' vout
(gmp + gmn) vin
r0p || r0n
voutvin
ioutopen
Fig. 3.19 Small-signal equivalent circuit for output impedance calculation of active-
feedback driver with a positive input bias (i.e. 0INI ).
r0p' || r0n'
gmn' vin ‒ gmp' vout
(gmp + gmn) vin
r0p || r0n
voutvin
ioutopen
Fig. 3.20 Small-signal equivalent circuit for output impedance calculation of active-
feedback driver with a negative input bias (i.e. 0INI ).

Chapter 3. Current-Driven Feedback Driver 61
mng , 0 pr , and 0nr are the transconductances and the output resistances of the tran-
sistors in the main amplifier (i.e. inverter) of the AFB driver, while 'mpg , 'mng ,
0 'pr , and 0 'nr denote the transconductances and the output resistances of the tran-
sistors in the feedback amplifier (i.e. transfer gate pair). Firstly, applying Kirch-
hoff’s current law (KCL) to the small-signal equivalent circuit of the AFB driver
under a positive input bias condition in Fig. 3.19 yields the following two equations:
0 0 0 0
1 1' '
'|| ' '|| 'mp in mn out
p n p n
g v g vr r r r
, (3.5)
0 0'|| '
outmp mn in out
p n
vg g v i
r r . (3.6)
Solving (3.5) and (3.6) gives a relation between inv and outv as
0 0
0 0
1 ' ' || '
1 ' ' || '
mn p n
in out
mp p n
g r rv v
g r r
. (3.7)
By defining proportional constant K and substituting (3.7) into (3.6), the output im-
pedance outZ can be derived as follows:
in outv K v , (3.8)
0 0
0 0
1 ' ' || '
1 ' ' || '
mn p n
mp p n
g r rK
g r r
, (3.9)
0 0
1 1
1
||
outout
out m ds
mp mnp n
vZ
i K g gK g g
r r
, (3.10)
where the entire transconductance and conductance of the inverter are defined as
m mp mng g g and 0 01 1ds dsp dsn p ng g g r r .
Meanwhile, assuming 0 01 ' || 'p nr r is negligibly small compared to 'mpg

Chapter 3. Current-Driven Feedback Driver 62
and 'mng , the proportional constant K and outZ can be approximated as
'
'mn
mp
gK
g , (3.11)
' '1 1
' '
mp mpout
mn mp mn m mn
g gZ
g g g g g
. (3.12)
Therefore, you can easily notice that the output impedance of the AFB driver can be
approximated as the output impedance of the RFB driver, 1 mg , multiplied by
' 'mp mng g . Note that the output impedance of the AFB driver also depends only on
the transistor parameters, like the RFB driver. As a result, the AFB driver exhibits a
relatively constant output impedance when the transistor parameters are stabilized.
On the other hand, applying KCL to the small-signal equivalent circuit of the
AFB driver under a negative input bias condition in Fig. 3.20, the output impedance
outZ can be derived in same manner as before:
in outv M v , (3.13)
0 0
0 0
1 ' ' || '
1 ' ' || '
mp p n
mn p n
g r rM
g r r
, (3.14)
0 0
1
1
||
1
outout
out
mp mnp n
m ds
vZ
iM g g
r r
M g g
. (3.15)
Applying the assumptions used in (3.11) and (3.12) yields approximated outZ as

Chapter 3. Current-Driven Feedback Driver 63
' '1 1
' 'mn mn
outmn mp mp m mp
g gZ
g g g g g
. (3.16)
Similarly, for negative input bias condition, the output impedance depends only on
the transistor parameters.
Simulated AC output impedances of the RFB and AFB driver according to the
various input bias current are shown in Fig. 3.21. For a fair comparison, both drivers
are designed to have an output impedance of 50 Ω with zero input current condition.
Both drivers show that the simulated output impedance obtained from an AC simu-
lation and the value calculated by inserting the simulated transistor parameters into
the theoretical equations derived above are actually the same. As the absolute value
of the input current becomes larger, the inverter devices fall into the linear region, so
that the output of the RFB driver gradually deviates from the ideal 50 Ω. When the
input current is swept from -2 mA to 2 mA, the maximum peak-to-peak impedance
Input Current [mA]
35
40
45
50
55
60
-2 -1 0 1 2
LinearSaturation Saturation
Resistive-feedback
Active-feedback
Ou
tpu
tp I
mp
ed
an
ce
[Ω
]
Fig. 3.21 Simulated AC output impedances of resistive-feedback and active-feedback
driver according to the various input bias current.

Chapter 3. Current-Driven Feedback Driver 64
variation of the RFB driver is about 7 Ω. On the other hand, since the AFB driver
adds feedback devices to the inverter devices, it is necessary to consider the operat-
ing regions of the feedback devices written in blue letter. As shown in Fig. 3.21, the
feedback transistors of the AFB driver operate in the linear region under low input
current whereas they operate in the saturation region under high input current, which
results in a considerable variation in the feedback resistance [82]. Fortunately, the
output impedance is less sensitive to the feedback resistance, so the simulated im-
pedance of the AFB driver is almost constant regardless of the operating region of
the feedback devices. In fact, the peak-to-peak impedance variation of the AFB
driver at the same input current range is about 9 Ω, much like the RFB driver.
On the other hand, since the output swing of a feedback driver is proportional to
the feedback resistance, a higher output swing can be achieved when the feedback
devices operate in the saturation region. As a result, the AFB driver is significantly
enhanced in output swing owing to the larger feedback resistance under high input
current, compared to the RFB driver. Simulation results in Fig. 3.22 verify that the
output swing of the AFB driver is increased by 2.5 times over that of the RFB driver
under equivalent input current swing (2 mApp) condition. In summary, the AFB
driver employs an active transistor rather than a passive resistor as a feedback device,
which greatly improves the output swing without distortion of the output impedance
due to the effect of varying feedback resistance. This is why the AFB driver is suita-
ble for multi-level signaling transmitters in that it can improve the SNR by obtaining
enhanced output swing with less input current. The structure of the proposed active-
feedback PAM-4 driver with enhanced output swing is covered later.

Chapter 3. Current-Driven Feedback Driver 65
Dri
ve
r O
utp
ut
[V]
0Time [ps]
15 30
-0.2
-0.1
0
0.1
0.2
2.5XIncreased
RFB AFB
Fig. 3.22 Simulated output swing comparison between resistive-feedback driver and
active-feedback driver.

Chapter 3. Current-Driven Feedback Driver 66
3.4 Analyses and Design Issues
3.4.1 Matching Characteristic
This chapter analyzes and compares the performance of voltage-driven drivers
such as VM driver and CM driver, and current-driven feedback driver, especially
RFB driver, in various aspects. Firstly, a study of the output matching characteristics
of the two types of drivers is presented. Fig. 3.23 illustrates the situation where an
incident wave, iV , reaches the end of a transmission line with impedance, 0Z , ter-
minated in an impedance of TZ . The right side of the Fig. 3.23 gives a Thevenin-
equivalent model of the line. The impedance is 0Z , and the open circuit voltage is
twice the amplitude of the incident wave [83]. With this model, the total current
through the terminator, TI , is given by
0
2 iT
T
VI
Z Z
. (3.17)
2Vi
ZT
Z0
Vi
Z0
ZT
If Ir
IT
Fig. 3.23 Terminated transmission line and its Thevenin-equivalent model.

Chapter 3. Current-Driven Feedback Driver 67
This terminator current is the superposition of the current due to the forward travel-
ing wave, fI , and the reverse traveling wave due to the reflection, rI . We know
that the forward current is given by 0iV Z , and thus we can solve for the reverse
current as follows:
0 0
0
0 0
2
r f T
i i
T
i T
T
I I I
V V
Z Z Z
V Z Z
Z Z Z
. (3.18)
This is the Telegrapher’s equation that relates the magnitude and phase of the inci-
dent wave to those of the reflected wave. The reflection coefficient is defined as
0
0
Tr r
f f T
Z ZI V
I V Z Z
. (3.19)
Therefore, when the terminator impedance TZ perfectly matches the line imped-
ance 0Z , the reflection coefficient becomes zero and reflection does not occur. On
the other hand, if terminator impedance does not match properly, there will be signal
loss due to reflection. Two indicators are widely used as a measure of the degree of
this signal loss due to reflection: return loss (RL) and voltage swing wave ratio
(VSWR). These two parameters are defined as follows
0
0
( ) 20 log T
T
Z ZRL dB
Z Z
, (3.20)
0
0
1 max ,
1 min ,
T
T
Z ZVSWR
Z Z
. (3.21)
This section compares the output matching characteristics of the VM driver and the

Chapter 3. Current-Driven Feedback Driver 68
RFB driver during transient data transmission using these two parameters.
For a comparison, it is assumed that the most basic form of one-stacked VM
driver and the RFB driver are driven by a CMOS inverter-based pre-driver, respec-
tively, as shown in Fig. 3.24. All the pre-driver and main-driver stage are assumed to
have supply voltages of 1V and 2V , respectively, for convenience. A small-signal
analysis of the voltage-driven VM driver and the current-driven RFB driver yields
the following output impedances:
,
1 1out VM
dsdsp dsn
Zgg g
, (3.22)
,
1 1out RFB
m dsmp mn dsp dsn
Zg gg g g g
, (3.23)
Both drivers show that the output impedance depends only on the device parameters
V1
V2
V1
V2
(a) (b)
Fig. 3.24 Circuit diagram of (a) one-stacked VM driver and (b) RFB driver driven by a
CMOS inverter-based pre-driver.

Chapter 3. Current-Driven Feedback Driver 69
of the transistors.
Generally, the pull-up and pull-down path of the VM driver is in the linear region
when fully turned on, so the VM driver behaves like a resistive divider considering a
termination. Naturally, the VM driver is usually designed to have ,out VMZ equal to
the characteristic impedance of the channel, 0Z , when the pull-up or pull-down
path is fully turned on. Assuming that the transistors follow the long-channel square-
law model, the conductances of the NMOS and PMOS operating in a linear region
are calculated as
nDdsn n ox GS thn
DS n
pDdsp p ox SG thp
SD p
WIg C V V
V L
WIg C V V
V L
, (3.24)
where n , oxC , nW , nL and thnV denote the carrier mobility, gate-oxide capaci-
tance per unit, channel width and length, and threshold voltage of the NMOS, and
vice versa. Thus, by substituting (3.24) into (3.22), the output impedance ,out VMZ
during pull-up or pull-down period for impedance matching can be derived as
, 0
12
1 1out VM
p nn ox thnp ox thp
np
Z ZW W
C V VC V VLL
. (3.25)
On the other hand, the RFB driver is normally designed so that the output imped-
ance, ,out RFBZ , is equal to 0Z at zero input current, where both PMOS and NMOS
operate in the saturation region, simultaneously. The conductances and transcon-
ductances of the NMOS and PMOS operating in a saturation region are calculated as

Chapter 3. Current-Driven Feedback Driver 70
0
0
dsn
nDmn n ox GS thn
GS n
dsp
pDmp p ox SG thp
SG p
g
WIg C V V
V L
g
WIg C V V
V L
. (3.26)
By substituting (3.26) into (3.23), the output impedance ,out RFBZ at zero input cur-
rent is expressed as
,
1
1out RFB
p np ox SG thp n ox thn
p n
ZW W
C V V C V VL L
. (3.27)
If the device transconductance parameters and threshold voltage of the PMOS and
NMOS are the same (i.e. p ox p p n ox n nC W L C W L and thn thp thV V V ),
the switching threshold of the RFB driver at zero input current is set to a half of
supply voltage, 2 2V . Therefore, the output impedance matching condition for the
RFB driver can be rewrittend as
, 02
1
22
out RFBn
n ox thn
Z ZW V
C VL
. (3.28)
Note that the matching condition of the VM driver in (3.25) depends on both
supply voltages of the pre-driver and driver (i.e. 1V and 2V ), whereas the matching
condition of the RFB driver in (3.28) depends only on the driver supply voltage, 2V .
Consequently, two supply regulators must be dedicated to the calibration of the pull-
up and pull-down impedance of the VM driver, whereas only one supply regulator is

Chapter 3. Current-Driven Feedback Driver 71
needed to calibrate the impedance of the RFB driver. Obviously, the RFB driver
saves considerable power and hardware overhead compared to the VM driver, in
that it reduces the number of on-chip regulators that consume large power and area.
Meanwhile, the real-time output impedances of the VM and RFB driver deviate
from the desired value of 0Z during data transmission because the operating region
of the driver is time-varying. To observe these impedance variations, ideal 10 Gb/s
PRBS 27-1 data shown in Fig. 3.25 are applied to the input of both pre-drivers in Fig.
3.24 and the real-time output impedances of both drivers are simulated as shown in
Fig. 3.26. To assume equivalent conditions, both drivers are designed to have the
same output swing. The simulated output impedances are obtained equal to the val-
ues calculated by substituting the time-varying transistor parameters into (3.22) and
(3.23). As expected, if both drivers exceeded the ideal operating range, the imped-
ances would deviate from the desired value, in this simulation 50 Ω. The VM driver
0
0.2
0.4
0.6
0.8
1
1.2
0 1E-10 2E-10 3E-10 4E-10 5E-10 6E-10 7E-10 8E-10
1.2
1.0
0.8
0.6
0.4
0.2
00 100 200 300 400 500 600 700 800
Vin
[V
]
Time [ps]
10 Gb/s PRBS 27-1
Fig. 3.25 Ideal 10 Gb/s PRBS 27-1 data applied to both pre-driver inputs.

Chapter 3. Current-Driven Feedback Driver 72
has a much greater variation than the RFB driver and the impedance increases to
hundreds of ohms during data transitions, as shown in Fig. 3.26. The average values
of the real-time impedances are 70.8 Ω and 44.7 Ω, respectively. On the other hand,
0
50
100
150
200
250
300
350
400
0 1E-10 2E-10 3E-10 4E-10 5E-10 6E-10 7E-10 8E-10
400
350
300
250
200
150
100
50
0
Zo
ut,
VM [Ω
]
Time [ps]
70.8 Ω
0 100 200 300 400 500 600 700 800
(a)
35
40
45
50
55
60
65
0 1E-10 2E-10 3E-10 4E-10 5E-10 6E-10 7E-10 8E-10
65
60
55
50
45
40
35
Zo
ut,
RF
B [Ω
]
Time [ps]
44.7 Ω
0 100 200 300 400 500 600 700 800
(b)
Fig. 3.26 Simulated real-time output impedance of (a) voltage-mode driver and (b) resis-
tive-feedback driver.

Chapter 3. Current-Driven Feedback Driver 73
by using the obtained impedances, the plot of the two parameters for estimation of
the reflection loss, RL and VSWR, are calculated as shown in Fig. 3.27. Due to in-
creased impedance, the output RL of the VM driver increases instantaneously to -3
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
0 1E-10 2E-10 3E-10 4E-10 5E-10 6E-10 7E-10 8E-10
0
-10
-20
-30
-40
-50
-60
-90
-100
Ou
tpu
t R
L [
dB
]
-70
-80
0 100 200 300 400 500 600 700 800
Time [ps]
VMRFB
(a)
0
1
2
3
4
5
6
7
8
0 1E-10 2E-10 3E-10 4E-10 5E-10 6E-10 7E-10 8E-10
VMRFB
7
6
5
4
3
1
VS
WR
2
0
8
0 100 200 300 400 500 600 700 800
Time [ps]
(b)
Fig. 3.27 Calculated real-time (a) output return loss (RL) and (b) voltage swing wave
ratio (VSWR) from simulated output impedance.

Chapter 3. Current-Driven Feedback Driver 74
dB during the data transition, whereas the RFB driver maintains the RL below -20
dB while transmitting data.
The impact of varying impedance on signal integrity is also simulated with the
same model in Fig. 3.24. Peak-to-peak jitters simulated at the driver output while
transmitting 10 Gb/s PRBS 211-1 data are shown in Fig. 3.28 through Fig. 3.30 with
various simulation conditions: varying receiver-side termination impedance of
RXTR , varying rise/fall time of the input signal, and varying supply voltage of the
driver. If the receiver-side termination is perfect, no reflection occurs, so the RXTR
variation is assumed to be +40% and -40%, respectively, for second and third simu-
lation. As shown in simulation results, you can easily notice that the peak-to-peak
jitter of the VM driver output is higher than the RFB driver under all simulation
conditions. Thus, the RFB driver is superior to the VM driver in terms of matching.
0
2
4
6
8
10
-40 -20 0 20 40
Sim
ula
ted
Jit
ter
[ps
pp]
Variation of RRXT [%]
VM
RFB
Fig. 3.28 Simulated peak-to-peak jitter with 10 Gb/s PRBS 211-1 data for varying receiv-
er-side termination impedance.

Chapter 3. Current-Driven Feedback Driver 75
0
2
4
6
8
10
12
10 20 30 40 50
Sim
ula
ted
Jit
ter
[ps
pp]
Input Rise/Fall Time [%]
VM
RFB
Fig. 3.29 Simulated peak-to-peak jitter with 10 Gb/s PRBS 211-1 data for varying rise/fall
time of the input signal with RXTR of 70 Ω (+40%).
0
2
4
6
8
10
12
14
0.9 0.95 1 1.05 1.1
Sim
ula
ted
Jit
ter
[ps
pp]
Supply Voltage of Driver [V]
VM
RFB
Fig. 3.30 Simulated peak-to-peak jitter with 10 Gb/s PRBS 211-1 data for varying supply
voltage of driver with RXTR of 30 Ω (-40%).

Chapter 3. Current-Driven Feedback Driver 76
3.4.2 Feed-Forward Equalization
Equalization compatibility for channel pre-compensation is an essential charac-
teristic of a high-speed serializing transmitter as well as impedance controllability
for output matching. Implementation of multi-tap FFE, the most popular approach of
transmit equalization, often causes the power and speed loss due to segmentation
and stacking in the voltage-driven drivers such as VM and CM drivers. This section
examines several methods for implementing pre-emphasis (i.e. 2-tap FFE) in the
VM driver and the RFB driver, and calculates the power consumed by the pre-driver
and driver in each topologies. Thereafter, a comparison of the equalization perfor-
mance of the two drivers in terms of output swing and power consumption is pre-
sented.
Fig. 3.31 illustrates the three topologies for implementing the pre-emphasis of a
Vdrv
Gsig
Glost Gsig
Glost
Signal path
De-emphasis path
Vout
G0 /2
Gsig
Glost Gsig
Glost
Signal path
De-emphasis path 1
Vout
G0 /2
Gshunt Gshunt
De-emphasis path 2 Vdrv
Gsig
Gsig
Vout
G0 /2
Vdrv
Vdrv Vdrv
(a) (b) (c)
Fig. 3.31 Three types of pre-de-emphasis implementation for voltage-mode driver (a)
resistive-divider-based PE, (b) channel-shunting-based PE, and (c) impedance-
modulation-based PE.

Chapter 3. Current-Driven Feedback Driver 77
VM driver: resistive-divider-based pre-emphasis (RDPE), channel-shunting-based
pre-emphasis (CSPE), and impedance-modulation-based pre-emphasis (IMPE) [42]
that are renamed by the author.
Fig. 3.31(a) shows the conventional VM driver with a RDPE. The output signal
level is lowered by adding the de-emphasis path passing through the PE conductance
( lostG ) in parallel to the main signal path consisting of the main conductance ( sigG )
and the channel ( 0 2G ). As detailed in the Appendix, the total current consumed by
the RDPE VM driver in Fig. 3.31(a) can be expressed as
,0
1 1
4drv RDPE drv
sig lost
I VZ R R
(3.29)
where drvV and 0Z are driver supply voltage and characteristic impedance of
channel and 0 01Z G , 1sig sigR G , 1lost lostR G , and 0 1 2G G G are
assumed. The second term in (3.29) becomes zero as lostR becomes infinite and
grows as lostR becomes smaller. In other words, enabling pre-emphasis causes the
driver to consume more power due to current leaking. Meanwhile, ,drv RDPEI can be
rewritten for differential output swing, outV , as follows
2
,0
1
2out drv
drv RDPEdrv
V VI
V Z
. (3.30)
As expressed in (3.30), more current is consumed when transmitting lower signal
power which is proportional to the square of outV . Therefore, as the pre-emphasis
level increases reducing the signal level, the RDPE driver becomes poorer in effi-
ciency.
In order to mitigate this inefficiency, another approach in Fig. 3.31(b) was pro-
posed. The CSPE adds an extra channel-shunting path in parallel with the main sig-

Chapter 3. Current-Driven Feedback Driver 78
nal path to maintain total driver current constant. The second term of (3.29) can be
eliminated by adjusting the channel shunting conductance, shuntG , appropriately.
Therefore, the total current consumed by the CSPE VM driver in Fig. 3.31(b) is giv-
en by,
,04
drvdrv CSPE
VI
Z . (3.31)
To further reduce the signaling power, the most effective method is to use IMPE,
as shown in Fig. 3.31(c). Without any help of the de-emphasis path, the output
swing outV is determined by the voltage division ratio by modulating the conduct-
ance of the main path. Since the current flowing through the channel is the driver
current, the total current consumed by the IMPE VM driver in Fig. 3.31(c) is
,02
outdrv IMPE
VI
Z . (3.32)
By multiplying the equations from (3.30) to (3.32) by the high supply voltage DDV
of the on-chip driver supply regulator, the total power consumed by each driver in
Fig. 3.31 are derived as follows:
2
,0
,0
,0
1
2
4
2
out drv DDdrv RDPE
drv
drv DDdrv CSPE
out DDdrv IMPE
V V VP
V Z
V VP
Z
V VP
Z
. (3.33)
On the other hand, for the estimation of the dynamic power dissipation of the
pre-driver, a pseudo-differential VM driver driven by the inverter chain is assumed

Chapter 3. Current-Driven Feedback Driver 79
as shown in Fig. 3.32. The power consumption of the pre-driver can be given by [50]
2
1 12
2 4
4
pdrv L pdrv DD avg
drv drv drv pdrv DD avg
drv pdrv DD avg
P C V V f
C C C V V f
C V V f
(3.34)
where drvC , pdrvV , and avgf denote the input capacitance of the driver, the supply
voltage of the pre-driver, and the average switching frequency of input data, respec-
tively. Assuming that the channel length of PMOS and NMOS are the same (i.e.
n pL L L ), the input capacitance of the output driver can be approximated as
drv ox n p effC C W W L (3.35)
where effL denotes the sum of channel length, L , and length of overlap. Therefore,
as detailed in Appendix, the input capacitance of the RDPE VM driver can be ex-
pressed as
,0
1 1 effdrv RDPE
p drv th n pdrv th
L LC
V V ZV V
(3.36)
CdrvCdrv /2Cdrv /4
Cdrv /2Cdrv /4 Cdrv
VdrvVpdrv
Fig. 3.32 Circuit diagram of pseudo-differential VM driver driven by the inverter chain.

Chapter 3. Current-Driven Feedback Driver 80
where all device parameters are the same as defined above. By substituting (3.36)
into (3.34), the power consumption of the pre-driver of the RDPE VM driver is
,
0
41 1 effpdrv RDPE pdrv DD avg
p drv th n pdrv th
L LP V V f
V V ZV V
. (3.37)
Thus, ,pdrv RDPEP is constant regardless of the output swing, outV .
On the other hand, in the case of CSPE VM driver, output impedance matching
condition is slightly different as
0|| ||sig lost shungR R R Z (3.38)
where shuntR denotes the shunting resistance assuming 1shunt shuntR G . By using
(3.36) and (3.38), the power consumption of the pre-driver of the CSPE VM driver
and the IMPE VM driver can be derived as
2
, ,
12
2out
pdrv CSPE pdrv RDPEdrv
VP P
V
. (3.39)
, ,out
pdrv IMPE pdrv RDPEdrv out
VP P
V V
(3.40)
By substituting the actual design parameters of 28 nm CMOS technology while
transmitting random data at 32 Gb/s , the calculated power consumption of the driv-
ers and pre-drivers of three VM drivers against normalized output swing, out drvV V ,
are obtained as shown in Fig. 3.33 and Fig. 3.34. For convenience, drvV , pdrvV , and
ddV are assumed as 1 V, 1 V, and 1.2 V, respectively. Note that the IMPE driver in
which both ,drv IMPEP and ,pdrv IMPEP are scaled according to the output swing is
the most efficient structures of pre-emphasis. The overall power consumption com-
bined with the power dissipation of the pre-driver and the driver is shown in the Fig.
3.35.

Chapter 3. Current-Driven Feedback Driver 81
The power consumption of the pre-driver, pdrvP , has a relatively smaller value
than the power consumption of the driver, drvP , because driver structure without
any stack is assumed. Naturally, in an actual segmented stacked structure, the pdrvP
may increase with grown device size and parasitics. This analysis of the pre-empha-
0
2
4
6
8
10
12
0 0.1 0.2 0.3 0.4 0.5
RDPE
CSPE
IMPE
Pd
rv [
mW
]
Vout / Vdrv
Fig. 3.33 Comparison of driver power consumption when using three types of PE.
0
0.4
0.8
1.2
1.6
2
0 0.1 0.2 0.3 0.4 0.5
RDPE
CSPE
IMPE
Pp
drv
[m
W]
Vout / Vdrv
Fig. 3.34 Comparison of pre-driver power consumption when using three types of PE.

Chapter 3. Current-Driven Feedback Driver 82
sis VM driver can easily be extended for a VM driver with multi-tap FFE by consid-
ering the sum of pre- and post-tap conductances as lostG .
The structures of the pre-emphasis VM drivers shown in Fig. 3.31 are commonly
implemented by adding extra paths or by modulating the main path at the output
driver stage due to the inherent nature of the voltage-driven driver. On the other
hand, in the RFB driver, pre-emphasis can be implemented by modulating the input
current supplied from the pre-driver while keeping the driver stage intact. In this
respect, the RFB driver employs a current-summing FFE structure that combines the
tap currents at the pre-driver stage, as shown in Fig. 3.36. The sum of pre- and post-
tap currents is assumed to be lostI . To derive the power consumption of the RFB
driver with a pre-emphasis, a pseudo-differential RFB driver with a DC-coupled
termination is assumed as shown in Fig. 3.37. Assuming that both PMOS and
NMOS operate in the saturation region for the linear operation of the RFB driver,
0
2
4
6
8
10
12
14
16
0 0.1 0.2 0.3 0.4 0.5
RDPE
CSPE
IMPE
Driver
Total
Pre-driver
Pd
rv, P
pd
rv, P
To
tal [
mW
]
Vout / Vdrv
Fig. 3.35 Overall power consumption of VM drivers versus normalized output swing.

Chapter 3. Current-Driven Feedback Driver 83
the current consumed by the pseudo-differential RFB driver (whose impedance is
matched as (3.28)) versus the output swing is expresses as:
2
20,
0 0
220
0 0 0
1 1
2 2 4
1 1
2 2 4 2
drv n Fdrv RFB th n ox out
n F
drv F drv outth
F drv th drv
V W R ZI V C V
Z L R Z
V R Z V VV
Z Z R Z V V V
(3.41)
RF
Isig
Ilost
I
Vpdrv
Fig. 3.36 Current-summing FFE implementation for RFB driver.
RF RFI I
Vout
Iup
Idn
Iup
Idn
2Z0
Vdrv Vdrv
Fig. 3.37 Pseudo-differential RFB driver with DC-coupled termination.

Chapter 3. Current-Driven Feedback Driver 84
where all device parameters are the same as defined above and the device transcon-
ductance parameters and threshold voltage of the PMOS and NMOS are the same.
Therefore, the power consumption of RFB driver can be easily derived by multiply-
ing (3.41) by the supply voltage of the supply regulator as follows
220
,0 0 0
1 1
2 2 4 2drv F drv out
drv RFB th DDF drv th drv
V R Z V VP V V
Z Z R Z V V V
.(3.42)
As derived in (3.42), the driver power consumption ,drv RFBP is proportional to the
square of normalized output swing, out drvV V , in the range in which the driver op-
erates linearly. This range is about 600 mVppd as detailed later.
On the other hand, as detailed in Appendix, the absolute value of the transimped-
ance gain of the RFB driver operating linearly is given by
0RFB FR R Z . (3.43)
As a result, when the current-summing pre-emphasis for the linear RFB driver is
configured as shown in Fig. 3.36, the differential output swing follows
0 ,maxF sig outR Z I V (3.44)
0F sig lost outR Z I I V (3.45)
where ,maxoutV denotes the maximum output swing when disabling the de-emphasis
path. Solving (3.44) and (3.35) yields the total current consumed by the pre-driver as
, ,max0
12pdrv RFB out out
F
I V VR Z
, (3.46)
which results in
, ,max0
2pdrv
pdrv RFB out outF
VP V V
R Z
. (3.47)
For linear operation with sufficient margin, the maximum output swing, ,maxoutV , of

Chapter 3. Current-Driven Feedback Driver 85
the RFB driver is assumed to be approximately 500 mVppd. Assuming that the RFB
driver transmits 32 Gb/s data using 28 nm CMOS design parameters, similar to the
VM driver, the overall power consumption of the pre-driver and the driver is calcu-
lated as shown in the Fig. 3.38. Supply voltages are assumed to be the same as VM
driver cases. Given that RDPE is still mainly used for VM drivers due to its simple
and straightforward structure, a comparison of Fig. 3.35 and Fig. 3.38 reveals that
the RFB driver with voltage-scalable efficiency in most of output swings is more
power efficient than the VM driver. This tendency is slightly reversed due to in-
creased driver power consumption as the output swing approaches the maximum
linear swing range of 600 mVppd of the RFB driver. Nevertheless, it can be seen that
the RFB driver is well suited for low-power, low-voltage application. Therefore, an
energy-efficient multi-level signaling transmitter can be proposed by using the AFB
driver with enhanced swing instead of the RFB driver while taking advantages of the
current-driven feedback driver.
0
2
4
6
8
10
12
0 0.1 0.2 0.3 0.4 0.5
Pd
rv, P
pd
rv, P
To
tal [
mW
]
Vout / Vdrv
Driver
Total
Pre-driver
Fig. 3.38 Overall power consumption of RFB driver versus normalized output swing.

Chapter 3. Current-Driven Feedback Driver 86
3.4.3 Linearity
One of the most important characteristics of the output driver is linearity. As the
industrial standards requiring the multi-level signaling link are widespread, the im-
portance of linearity is being increased. In general, as the output swing of the driver
increases, the operation of the devices becomes saturated and nonlinear, thereby,
there is no ideal driver to maintain linearity up to the maximum achievable swing
range (MSR), unfortunately. Naturally, the linear swing range (LSR) of the driver is
somewhat smaller than the MSR. Conventional SST- or CML-based drivers usually
improve their linearity with the help of passive elements such as resistors to over-
come the inherent nonlinearity of the transistors.
The RFB driver also suffers a nonlinearity problem because it is based on the
CMOS inverter. Fig. 3.39 shows the simulated differential output swing according to
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
-6 -4 -2 0 2 4 6
Dif
f. O
utp
ut
Sw
ing
[V
]
Diff. Input Current [mA]
Saturation Linear
LSR
Linear
Fig. 3.39 Differential output swing versus differential input current of RFB driver.

Chapter 3. Current-Driven Feedback Driver 87
the varying differential input current of the pseudo-differential RFB driver. When
the output impedance is set to 50 Ω with zero input current, the LSR of the RFB
driver is about 600 mVppd, as illustrated in Fig. 3.39. By coincidence, the LSR is ex-
actly the same as the region where both PMOS and NMOS of the RFB driver oper-
ate in saturation mode, as indicated by the red letter in Fig. 3.39. Compared with
table 3.3, the RFB driver works linearly with relatively low output swing.
Meanwhile, the only way to extend the LSR of the RFB driver without increasing
the supply voltage or using a passive element is to lower the driving impedance to
less than 50 Ω. Simulated LSR versus the output impedance and the corresponding
VSWR to represent the reflection loss are shown in Fig. 3.40. Depending on the ap-
plication, a higher LSR can be obtained through a trade-off between the matching
characteristics of the RFB driver, as shown in Fig. 3.40.
0.5
1
1.5
2
2.5
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
20 30 40 50 60 70
Lin
ea
r S
win
g R
an
ge [
V]
Output Impedance [Ω]
VS
WR
VSWR
LSR
Fig. 3.40 Simulated linear swing range (LSR) and voltage swing wave ratio (VSWR) of
RFB driver according to output impedance.

Chapter 3. Current-Driven Feedback Driver 88
3.4.4 Circuit Bandwidth
This section compares the circuit bandwidth of the drivers as a final analysis of
the conventional voltage-driven drivers and the current-driven driver, especially the
RFB driver. The simulated 3-dB bandwidth comparison of the pseudo-differential
VM driver, the pseudo-differential RFB driver, and the fully-differential CML-based
driver is illustrated in Fig. 3.41. An output network consisting of ideal lossless
transmission lines, bonding pad capacitances of two chips and a board, and bonding
wire inductances, shown in Fig. 3.42, is used as a channel model for the simulation.
The VM and RFB driver is driven by a CMOS inverter and the CML-based driver is
driven by a CML buffer, all with a fanout of 2. For a fair comparison, all drivers are
differentially terminated with an AC-coupling configuration and all pre-drivers and
0
5
10
15
20
0.8 0.9 1 1.1 1.2 1.3
3-d
B B
an
dw
idth
[G
Hz]
Supply Voltage [V]
RFB
CML
VM
Fig. 3.41 Circuit bandwidth comparison of voltage-mode driver, CML-based driver, and
resistive-feedback driver.

Chapter 3. Current-Driven Feedback Driver 89
drivers have same supply voltage. All drivers are designed to have an AC output
impedance of 50 Ω under their respective conditions and to have a differential out-
put swing of about 500 mVppd under supply voltage of 1 V in 28 nm CMOS technol-
ogy. The simulation results clearly show that the RFB driver is superior to the VM
driver or the CML-based driver in terms of circuit bandwidth for all supply voltages
of the pre-driver and driver, as shown in Fig. 3.41. Although this is a preliminary
step based on simplified assumptions, this study is meaningful in that it confirms
that the current-driven feedback driver has a remarkable potential as an I/O interface
circuit in high-speed link applications. In addition, design issues addressed in this
thesis provide a guideline for designing energy-efficient high-speed transmitters us-
ing current-driven feedback drivers.
LBW
LBW
LBW
LBW
CPAD
CPAD
CPCB
CPCB
CPAD
CPAD
RRXT
RRXT
LBW = 1 nH, CPAD = CPCB = 100 fF, RRXT = 50 Ω
DrvP
Z0DrvN
Vout
Z0
Chip 1 Chip 2PCB Board
PdrvP
PdrvP
CPCB
CPCB
Fig. 3.42 Channel model for bandwidth comparison simulation.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 90
Chapter 4
Low-Power High-Speed PAM-4
Transmitter
4.1 Overview
As the bandwidth demand for chip-to-chip communication is rapidly being in-
creased, multi-level signaling (e.g. PAM-4 signaling) has become a promising can-
didate for the next generation high-bandwidth I/O interface. To meet the require-
ments of the standards such as OIF CEI-56G, various FFE techniques are employed
in reported PAM-4 transmitters [9], [11], [68]-[79]. In addition to compensating for
channel loss by using an equalizer, achieving a good energy efficiency is also a cru-
cial issue for the next generation I/O systems. However, recent PAM-4 transmitters
often neglect improving the energy efficiency of the PAM-4 output driver and the

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 91
corresponding pre-driver stages, as they employ conventional driver topologies. Fig.
4.1 illustrates the trends of recently reported PAM-4 transmitters in [9], [11], [69]-
[79], [82] by normalizing their energy efficiency into 28 nm CMOS technology us-
ing a scaling factor (1 S ). Conventional PAM-4 transmitters based on a current-
mode (CM) driver [9], [74]-[79] and a source-series terminated (SST) driver [68]-
[73] have shown only limited energy efficiency due to their power-hungry pre-driver
and multi-tap FFE structure.
On the other hand, a Gm-regulated resistive-feedback driver, employed in the au-
thor’s first prototype PAM-4 transmitter [31], is a good candidate for the energy-
efficient PAM-4 driver thanks to its extremely light current-summing FFE at the
output of the pre-driver. However, due to the tap delay generator operating at the
0
1
2
3
4
5
6
7
8
9
20 30 40 50 60 70 80 90 100 110 120
No
rmalized
En
erg
yE
ffic
ien
cy [
pJ/b
]
0
1
2
3
4
5
6
7
8
9
020 30 40 50 60 70 80
* Energy efficiency including the PLL power
90
Data Rate [Gb/s]
: SST
: AFB
: CML
: SST + CML
100 110 120
This work*ISSCC '18
ISSCC '15*
ISSCC '16
ISSCC '15*
JSSC '15*
ISSCC '17
JSSC '17
ISSCC '17
ISSCC '18
ISSCC '17
ISSCC '18
ISSCC '18
ISSCC '18
High Data Rate
Low Power
Fig. 4.1 Trends of normalized energy efficiency of recently reported PAM-4 transmitters
in [9], [11], [69]-[79], [82] versus per-pin data rate.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 92
baud rate, the transmitter in [31] has limited bandwidth and energy efficiency.
Moreover, the linear resistive feedback also limits the output swing.
To improve both the energy efficiency and the operating speed of the first version,
the FFE tap generation is merged into the serializer in the second transmitter. The
output swing of the PAM-4 transmitter in [82] is considerably enhanced by replac-
ing the resistive-feedback (RFB) driver with the active-feedback (AFB) driver. As a
result, a prototype PAM-4 transmitter with 3-tap FFE and Gm-regulated AFB driver
achieves the data rate of 64 Gb/s while consuming 97.2 mW, which exhibits the
state-of-the-art energy efficiency of 1.5 pJ/b.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 93
4.2 System Architecture
Two prototype chips were fabricated in 28 nm CMOS technology to validate the
advantages of the current-driven feedback driver and to apply it to low-power high-
speed PAM-4 transmitter implementations: a PAM-4 transmitter with a fractionally
spaced 3-tap FFE and a Gm-regulated RFB driver [31] (prototype 1) and a PAM-4
transmitter with a 3-tap FFE and a Gm-regulated AFB driver [82] (prototype 2).
Overall architectures of two PAM-4 transmitters are shown in Fig. 4.2. As shown
in Fig. 4.2, both prototype transmitters incorporate a phase-locked loop (PLL) for
half-rate clock generation, pre-drivers with FFE summer, and a Gm calibration cir-
cuit for impedance control, in common. A 3rd-order charge-pump PLL employs a
two-stage ring oscillator to generate the half-rate transmitter clock and AC-coupled
level-shifting clock buffers are used for duty cycle correction. The major differences
between the two prototype PAM-4 transmitters are the implementations of the inter-
nal random data generation, the serializing data path with FFE tap generation, and
the output driver stage. In addition, there is a slight difference between two transmit-
ters in that the prototype 2 improves the bandwidth or stability of PLL and Gm cali-
bration circuit over the prototype 1. In the prototype 1, an internal PRBS-7 generator
and an 8-to-2 serializer are employed for the MSB and LSB data generation, while
the prototype 2 employs two on-die PRBS-7 generators synchronized to independent
reset signals and separate data paths for the MSB and LSB data for increasing the
randomness of the PAM-4 pattern. Furthermore, to make the FFE tap delay, the pro-
totype 1 incorporates a sub-UI tap delay generator with tunable latches, but the pro-

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 94
Half-rate Clock GEN.
222 DRVs
drvoutp
drvoutn
Pseudo-Diff.RFB driver
VDRV
PDRVs
drvinn
drvinp
PRE-Tap
MAIN -Tap
POST -Tap
PRE-Tap
MAIN -Tap
POST -Tap
MSBLSB
V/I Converter
V/I Converter
MSBLSB
222
PRBS GEN. + Tap GEN. + Serializer
CPPFD
upb
dn 2-stage Ring VCO
REF
/2
Constant-Gm Bias GeneratorRTRIM
Regulator
HVDD
Gm Calibration
VDRV
/8 or /16Delay
Delay
8:4SER
4:2SER
4 2PRBS GEN( )2 - 17
8
2
2
S/DConverter
MSB, LSB
Level Shifter, DCC
(a)
Half-rate Clock GEN.
2 22 DRVs
drvoutp
drvoutnVDRV
PDRVs
drvinn
drvinp
PRE-Tap
MAIN -Tap
POST -Tap
PRE-Tap
MAIN -Tap
POST -Tap
MSBLSB
V/I Converter
V/I Converter
MSBLSB
2 22
4:2SER
2
2 - 17
4
PRBS GEN. + Tap GEN. + Serializer
CPPFD
upb
dn 2-stage Ring VCO
REF
/2
Constant-Gm Bias GeneratorRTRIM
Regulator
HVDD
Gm Calibration
VDRV
PRBS GEN( )
2 - 17PRBS GEN
( )
2:1SERs
3-TapGEN
2
2
2
S/D
4:2SER
2 2:1SERs
3-TapGEN
2
2
2
4
MSB
LSB
S/D
3
3
3
3
3
3
RSTM
RSTL
/8 or /16
Level Shifter, DCC
Pseudo-Diff.AFB driver
(b)
Fig. 4.2 Overall architecture of two prototype PAM-4 transmitters (a) PAM-4 transmitter
with fractionally spaced 3-tap FFE and Gm-regulated RFB driver (prototype 1) and (b)
PAM-4 transmitter with 3-tap FFE and Gm-regulated AFB driver (prototype 2).

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 95
totype 2 merges FFE tap delay generation into the serializer to remove the power-
and bandwidth-hungry delay generator. Finally, the prototype 1 uses the RFB driver
as an output driver stage, while the prototype 2 employs the AFB driver as an output
driver stage to enhance the output voltage swing significantly with similar current
consumption.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 96
4.3 Circuit Implementation
4.3.1 Front-End with Current-Summing FFE
In previous PAM-4 transmitters, the circuit and bandwidth overhead for imple-
menting a multi-tap FFE is a critical issue. Generally, a dominant pole is located at
the output node of the driver because of the parasitic elements of I/O pads, bonding
wires, or solder bumps. However, to implement FFE with the conventional voltage-
driven drivers mentioned earlier, additional shunt driver slices must be added at the
output node, which causes a significant increase in the parasitic capacitance. To
overcome this issue, the PAM-4 transmitter can be implemented using the current-
driven feedback driver such as the RFB driver or AFB driver, as described in Fig.
4.3. Owing to the current-driven operation of the driver, a 3-tap FFE is implemented
ILSB,DNAF
ILSB,UP
IMSB,DN
IMSB,UP
PRE
MAIN
POST
2x 1x
VDD
Gm Reg.
VDRV
ZOUT
RFB or AFB Driver
Fig. 4.3 Conceptual diagram of PAM-4 driver based on current-driven feedback driver.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 97
simply by summing the currents of the pre-driver slices at the input node, instead of
the output node, of the driver. As a result, the proposed structure resolves the issue
of bandwidth degradation due to the FFE slices and therefore it achieves a higher
bandwidth compared with the conventional SST driver. Each tap branch of the pre-
driver is composed of two independent slices with weights of 2x, and 1x, which are
driven by an MSB and an LSB, respectively, to make a PAM-4 signal packet at the
baud rate. Meanwhile, the output impedance of the PAM-4 driver in Fig. 4.3 can be
controlled as constant by regulating transconductance, mG , of the feedback inverter,
as shown in Fig. 4.3.
Fig. 4.4 shows the detailed circuit implementation of the RFB PAM-4 driver in
prototype 1 and its corresponding current-summing pre-driver for 3-tap FFE imple-
mentation. Each tap slice of the pre-driver consists of a 5-bit controlled current bias,
data-driven switches, and data-feedthrough compensation (DFC). DFC transistors
are only included in pre- and post-tap slices. To compensate the data feedthrough,
the DFC transistor provides additional current with negative polarity to the tap cur-
RF
LSBMSB
Main VDRV
IM,PRE
IM,PRE
DMSB[n+1]
PDRV cell
2X
DbMSB[n+1]
DbMSB[n+1]
IBIAS,DN
IBIAS,UP
DFC
PrePost
IM,PRE
IM,PRE
DMSB[n+1]
PDRV cell
2X
IBIAS,DN
IBIAS,UP
Fig. 4.4 Circuit diagram of RFB PAM-4 driver in prototype 1 with current-summing pre-
driver for 3-tap FFE implementation.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 98
rent. Fig. 4.5 shows the simulated PAM-4 eye diagrams of the driver output for var-
ious DFC cell sizes. As shown in the figure, the optimum size of the DFC transistor
is half of that of the main switch.
On the other hand, Fig. 4.6 illustrates the block diagram of the AFB PAM-4
transmitter front-end in prototype 2. The pre-driver is composed of a voltage-to-
current converter to flow current into the output driver and divided into two major
slices (MSB, LSB). Like the prototype 1, the 3-tap FFE is implemented by summing
the tap currents at the input node of the driver rather than at the output node unlike a
conventional driver, whereby a significant current is saved. The current bias of the
pre-driver is controlled by a simple feedback loop, as shown in Fig. 4.7. The AFB
output driver operates as a transimpedance amplifier and a mG calibration circuit is
used for PVT-invariant impedance control of the driver. The target mG value of the
driver is adjusted by trimming RREF.
0 20 40 60 80
0
0.05
0.1
0.15
-0.05
-0.1
-0.15
0 20 40 60 80
0
0.05
0.1
0.15
-0.05
-0.1
-0.15
Time [ps] Time [ps]
Vo
ltag
e [
V]
Vo
ltag
e [
V]
DFC : 2X DFC : 0.5X
Fig. 4.5 Simulated PAM-4 eye output with various cell size of data-feedthrough com-
pensation (DFC).

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 99
IL,MAIN
IL,MAIN
BIAS_L,MAIN
Bias Generator
DN,LSB[n]
PDRV cell
MainPre
Post
IM,MAIN
IM,MAIN
BIAS_M,MAIN
Bias Generator
DMSB[n]
PDRV cell
LSB
Active-Feedback Inverter-BasedOutput Driver
VDRV
Pre-driver (V-to-I Converter)
2X
1X
MSB
VSS
DN,MSB[n]
DN,MSB[n+1]
DN,MSB[n-1]
DN,OUT
DP,OUT
DP,MSB[n]
DP,MSB[n+1]
DP,MSB[n-1]
VDRV
Gm Calibration(Impedance Control)
RREF
CBYPASS
VREG
HVDD HVDD
HVDD
2X1X
20W/L
W/LW/L
DN,LSB[n]
DN,LSB[n+1]
DN,LSB[n-1]
DP,LSB[n]
DP,LSB[n+1]
DP,LSB[n-1]
MainPre
Post
Fig. 4.6 Block diagram of AFB PAM-4 transmitter front-end in prototype 2 consisting of
AFB PAM-4 driver, pre-driver, and Gm calibration circuits.
IM,MAIN
IM,MAIN
BIAS_M,MAIN
Bias Generator
DMSB[n]
PDRV cell
MSB
MainPre
Post
VDRVLSB
2X
Fig. 4.7 Circuit diagram of AFB PAM-4 driver in prototype 2 with current-summing pre-
driver for 3-tap FFE implementation.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 100
4.3.2 Gm Calibration
The mG calibration block has two purposes: to regulate the driver supply to
prevent signal integrity degradation due to supply noise, and to stabilize the output
impedance by stabilizing mG . For these purposes, a mG calibration circuit in [16]
is employed for both prototypes of PAM-4 transmitters.
The mG calibration circuit is composed of a constant- mG bias generator and a
voltage regulator. Constant mG can be achieved by using a replica circuit shown in
Fig. 4.8. The replica circuit is composed of a 2X inverter with source degeneration
by a resistor, REFR and a 1X inverter. At a low DDV , when the source-
degeneration effect is not significant, 1I is larger than 2I . However, as DDV in-
creases, the source degeneration of the 2X inverter strengthens, making 2I larger
than 1I . For this reason, two D DDI V curves intersect at the point shown in Fig.
4.8 except when DDV is zero. At the point, the currents 1I and 2I are given as
follows:
0
100
200
300
400
0.0 0.5 1.0 1.5
I2I1
Lock point
I DS [
μA
]
VDD [V]
1X
RREF
2X
I1 I2
VDD
VG1 VG2
Fig. 4.8 Basic concept for constant- mG bias generator.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 101
1 1
1 1
2
2
p DD G thp
n G thn REF
I V V V
V V I R
, (4.1)
2 2
2
p DD G thp
n G thn
I V V V
V V
. (4.2)
They are based on the alpha-power model that approximates the current equations
rather than sticking to the complicated short-channel equation. The parameters, βp
and βn in the above equations, contain technology-dependent parameters fitted to
actual simulation results. The alpha-power model for the given technology specifies
that βn is twice as large as βp with the same W/L ratio and α has a value of 1.3. On
the other hand, as derived in [16], if 1I is equal to 2I , mG of the replica inverter
can be expressed as
11
1
12
2
p nm
REF n p
GR
. (4.3)
Note that mG is now dependent only on REFR and the technology-dependent pa-
rameters, while it has nothing to do with process and temperature variations.
Fig. 4.9 details the implementation of a mG calibration circuit. To force the cur-
rents 1I and 2I to be equal, a feedback loop is enabled, and the resulting condi-
tion exactly corresponds to the point where (4.3) is derived, which means mG of
the 1X inverter is now make constant with 2V . Non-ideal distribution of the power
supply, however, mandates the use of a voltage regulator as shown in Fig. 4.9 in-
stead of directly using FBV for supplying the current for the driver. The voltage re-

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 102
gulator generates DRVV which is exactly the same as 2V , thereby providing con-
stant mG for the driver which is appropriately scaled to meet the impedance condi-
tion of 0Z .
With the mG calibration circuit, for any process and temperature variations,
DRVV is adequately adjusted to keep mG of the driver constant, which is well veri-
fied by the impedance simulation results for various corner conditions as illustrated
in Fig. 4.10. As shown in Fig. 4.10, the mG calibration circuit keeps the output im-
pedance of the feedback driver almost constant regardless of the PVT variations.
VDRV
VDD VDD
CBYPRREF
2X1X
W/L W/L
20W/L
I1I2
V1
V2 VFB
Fig. 4.9 Circuit diagram of mG calibration circuit consisting of constant- mG bias gen-
erator and voltage regulator.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 103
49.5
50
50.5
51
-20 0 20 40 60 80 100 120
TT SS FF FS SFIm
ped
an
ce [Ω
]
Temperature [°C]
(a)
49
49.5
50
50.5
51
1.8 1.85 1.9 1.95 2
Imp
ed
an
ce [Ω
]
Supply voltage [V]
TT SS FF FS SF
(b)
Fig. 4.10 Simulated output impedance of the driver for (a) process corner and tempera-
ture (PT) variations and for (b) process corner and voltage (PV) variations.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 104
4.3.3 Serializer with Tap Generation
In the prototype 1, a fractionally spaced 3-tap FFE is employed, which was intro-
duced for a PAM-4 transmitter in [69]. The fractionally spaced FFE can be more
effective than the baud-spaced FFE for channels with specific conditions. To im-
plement the fractionally spaced FFE, a controllable delay unit for sub-UI tap delay
generation is required. However, the sub-UI delay generator introduces large amount
of supply noise induced jitter and ISI in the process of adjusting the tap delay with a
wide range. In order to minimize the bandwidth loss while having a wide delay
range, the proposed delay generator proposed in prototype 1 employs a tunable latch.
Fig. 4.11 shows the proposed tap delay generator, in which two CMOS inverter
chains are coupled with tunable cross-coupled latches. Each latches increases the to-
Pre_p
Pre_n
Main_p
Main_n
Post_p
Post_n
1X
0.3X
n1
p1
n2
p2
n6
p6
...
...
enb[i]
nipi
en[i]
enb[i]
en[i]
pi
pi ni
ni
Pre-discharge & -charge
Tunable Latch
Pre-discharge & -charge
Fig. 4.11 Circuit diagram of sub-UI tap delay generator for fractionally spaced FFE.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 105
tal delay when enabled. Owing to a regeneration characteristic of the cross-coupled
latches, the proposed delay generator introduces low jitter compared with conven-
tional topologies such as delay line based on capacitive tuning. Simulated tunable
delay range of the sub-UI delay generator according to various corner and the num-
ber of activated latches are shown in Fig. 4.12.
On the other hand, Fig. 4.13 and Fig. 4.14 illustrate the serializing data path of
16
18
20
22
24
26
28
30
32
0 1 2 30 1 2 316
18
20
22
24
26
28
30
32
# of the enabled tunable latches
De
lay [
ps]
SSTTFF
0.30 UI
0.35 UI
0.40 UI
Fig. 4.12 Simulated tunable delay range of sub-UI delay generator.
3-tapGENTX
PRBSGENs
4:2
4
4
2
2 3-tapGEN
22
2
22
2
2:1SER
+ S2D
MSBmain_cursor
MSBpost_cursor
MSBpre_cursor
LSBmain_cursor
LSBpost_cursor
LSBpre_cursor
/2
Level Shifter& DCC
CK2
CK4
Fig. 4.13 Block diagram of clock and data path for serialization and tap generation.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 106
the prototype 2. A block diagram of clock and data path for serialization and tap
generation is shown in Fig. 4.13. In the clock path, AC-coupled clock buffers for
level shifting and duty-cycle correction are employed and bandwidth-enhanced
CMOS clock buffers with feedback resistance are used for improvement of logic
speed [16]. Also, tri-state inverter based flip-flops are employed for the first stage of
the frequency divider to further reduce the time delay from conventional true single
phase clocking (TSPC) flip flop (FF) based dividers. Meanwhile, two independent
parallel PRBS-7 sequences are generated in the internal PRBS-7 generators for veri-
fication, and they are serialized as final MSB and LSB data. In this process, the 3-
tap FFE tap data are generated before the last-stage of the serializer for robust opera-
tion. Fig. 4.14 shows the detailed implementation of the tap generating serializer. To
generate a baud-spaced tap delay, half-period spaced retimer is needed as shown in
the timing diagram of the Fig. 4.14. As a result, ten FFs must be added before the
CK2
D Q
CK2
PRE2:1MUX
CK2
D Q
CK2
D Q
CK2
D Q
CK2B
D Q
2:1MUX
CK2B
MAIN2:1MUX
CK2B
D Q
CK2B
D Q
CK2B
D Q
CK2
D Q
CK2
D Q
CK2
D Q
2:1MUX
CK2
POST2:1MUX
CK2
D Q
CK2
D Q
CK2
D Q
CK2
D Q
CK2
D Q
2:1 SER
2:1 SER
2:1 SER
4:2SER
D<0>
D<3>
D<1>
D<2>
D<0,2>
D<1,3>
D<0:3>Flip-flop Sharing
CK2
D Q
CK2
PRE2:1MUX
CK2
D Q
CK2B
D Q
2:1MUX
CK2B
MAIN2:1MUX
CK2B
D Q
CK2
D Q
CK2
D Q
CK2
D Q
2:1MUX
CK2
POST2:1MUX
CK2
D Q
CK2
D Q
CK2
D Q
2:1 SER
2:1 SER
2:1 SER
D<0,2>
D<1,3>
D<0:3>
10 flip-flops are added Only 4 flip-flops are added
CK2
CK2B
PRE
MAIN
POST
D0 D1
D0 D1 D2
D0
62.5 ps
1-UI (31.25 ps)
tck2q,mux
tck2q,mux
tck2q,mux
D2
D3
D1
Timing Diagram
(16GHz)
(16GHz)
Fig. 4.14 Block diagram and timing diagram of the tap generating serializer.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 107
last-stage 2-to-1 serializers to generate 3-tap cursors in a conventional scheme using
the retimers. However, by sharing the intrinsic FFs in the 2-to-1 serializer, six FFs
can be removed for the same tap generating operation. A total of twelve FFs are re-
moved for both MSB and LSB data path by using this FF sharing technique whereby
reducing the circuit overhead and power consumption of the serializer. Each clocked
FF is implemented as the tri-state inverter based FF to reduce clock-to-q delay in
high-speed operation.
On the other hand, one of the building blocks of the transmitter that operates at
the highest speed is the last-stage serializer. Fig. 4.15 shows the circuit diagram of
the last-stage 2-to-1 serializer which is employed for both prototypes of PAM-4
transmitters. It is important to reduce the data ISI introduced by the last-stage serial-
izer. Therefore, the tri-state inverter based FF is employed to enhance the circuit
bandwidth in comparison with the typical TSPC FF, as shown in Fig. 4.15. Moreo-
ver, the pre-charging and -discharging transistors are added to a last-stage multi-
plexer (MUX) in the proposed serializer to further reduce the data-dependent ISI at
the serializer output, as shown in the post-layout simulation result of Fig. 4.16.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 108
clkb
clk
clkclk
clkb
clkb
clk
clk
clkb
clk
D0_d
clk
clkb
clkb
D0
D1
D0_d
D1_d
D1_d
Qb
clkb
clkbclkb
clkclk
Pre-discharge
Pre-charge
Tri-State Inverter-Based FF
Last-stage MUX
Fig. 4.15 Circuit diagram of proposed last-stage 2-to-1 serializer.
0.2
0.0
0.4
0.6
0.8
1.0
Vo
ltag
e [
V]
1.2
Time [ps]0 10 20 30 40
w/o pre-ch. & -disch.
w/ pre-ch. & -disch.
Fig. 4.16 Post-layout simulated eye diagrams at the serializer output (a) without pre-
charging and –discharging devices and (b) with pre-charging and –discharging devices.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 109
4.3.4 Half-Rate Clock Generation
The clock generation circuit is responsible for several issues relating to the de-
sign of a wide-range transmitter. Specifically, in covering a wide range of frequen-
cies, the clock generation circuit consumes a significant amount of resources. Be-
cause an LC oscillator has a higher operating frequency but narrow frequency range,
while a ring oscillator has a wider range but lower frequency, it is difficult to cover a
wide frequency range using a single PLL with a single oscillator. As a result, many
wide-range transmitter designs employ multiple PLLs or oscillators [68], [84]-[86].
In this work, a single PLL, which maximizes the operating frequency by using an
optimized two-stage ring oscillator shown in Fig. 4.17, is employed for high-speed
and area-efficient design. Thanks to the additional phase shift introduced by cross-
1x
0.7x
2-stage ring VCO
vctrl vbias
Fig. 4.17 Circuit diagram of implemented two-stage ring oscillator.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 110
coupled latches due to the hysteresis effect, the two-stage ring oscillator can sustain
the oscillation meeting the Barkhausen criteria [87]. A latch ratio of 0.7 is used for
sufficient phase shift. The voltage-controlled oscillator (VCO) in Fig. 4.17 employs
a current-starved structure and only a pull-down current source at the bottom of the
CPPFD
upb
dn
Programmable Divider (/16 ~ /32)
REF2-stage
ring VCO
Level shifter & CLK Buffers
vctrl
Loop BW control
Fig. 4.18 Block diagram of phase-locked loop (PLL) for half-rate clock generation.
Vn1
Vp1
Vn1
Vp2
Vn2
Vp1
Vn1
Vp1
Vn2
Vp2
Replica-Feedback Bias CircuitCharge Pump (3 slices)
Upb<2> Upb<2>
dn<2> dn<2>
I1 I2I1 I2
Fig. 4.19 Circuit diagram of mismatch reduced charge pump for wide-range loop band-
width control of the phase-locked loop.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 111
ring oscillator core. The pull-down current source is controlled by two analog volt-
ages for coarse- and fine-control of oscillation frequency.
On the other hand, the overall block diagram of the PLL for half-rate clock gen-
eration is described in Fig. 4.18. A VCO based on two-stage ring oscillator generates
a 90 degree spaced four-phase half-rate clock. Coarse frequency selection is used in
the ring-VCO to support a wide-range operation and to accommodate the PVT varia-
tions. The overall division factor of the PLL is from 16 to 32, and the first divider is
implemented with the tri-state inverter based divider which can operate at the maxi-
mum frequency that the VCO can generate. An AC-coupled clock buffer corrects
the common level and duty-cycle of the VCO output and the clock is buffered to the
data paths. A mismatch reduced charge pump with a replica-feedback bias is used,
as shown in Fig. 4.19, and its current is adjusted to control the PLL loop bandwidth.
Thanks to the wide current adjusting range of the charge pump by using 2-bit ther-
mometer, the wide-range loop bandwidth control of the PLL can be achieved.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 112
4.4 Measurement Results
4.4.1 28-Gbit/s 1.6-pJ/bit PAM-4 Transmitter with
RFB Driver
The prototype chip of PAM-4 transmitter with RFB driver (prototype 1) is fab-
ricated in 28-nm CMOS technology and occupies an active area of 0.048 mm2, as
shown in Fig. 4.20. The test chip is wire-bonded to a test board for the silicon ver-
ification of the proposed PAM-4 transmitter. Firstly, the performance of the half-
rate clock generating PLL is verified. The measured waveform of the divided-by-
16 transmitter clock is shown in Fig. 4.21. The RMS jitter of the divided-by-16
PLL clock is measured as 3.347 ps, as shown in Fig. 4.21. To verify the impedan-
CLK GEN.
PRBS GEN.+ 8:2 SER.
Gm CAL.
1100 um
1000 umPDRV DRV
A
B C D
E
150u
80u
160u
250u
Fig. 4.20 Chip microphotograph of PAM-4 transmitter (prototype 1).

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 113
ce-matching characteristics of the proposed driver, the return loss of the differen-
tial outputs is measured using a network analyzer, as shown in Fig. 4.22. The
measured return loss is mostly below -10 dB, except for the high-frequency input;
this is mainly because of impedance discontinuities caused by the bonding wires
and the connectors at high frequency.
RMS Jitter : 3.347 ps
2.28 ns
437.5 MHz Clock
Fig. 4.21 Measured divided-by-16 transmitter clock (437.5 MHz).
Out (+)
Out (–)
-4.00E+01
-3.50E+01
-3.00E+01
-2.50E+01
-2.00E+01
-1.50E+01
-1.00E+01
-5.00E+00
0.00E+00
1.00E+07 1.00E+08 1.00E+09 1.00E+10
0
-5
-10
-15
-20
-25
-30
-35
-400.01 0.1 1 10
Frequency [GHz]
Mea
su
red
S1
1 [
dB
]
Out (+)
Out (–)
Fig. 4.22 Output return loss (S11) measured at driver output.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 114
Fig. 4.23 presents an eye diagram of the PAM-4 output signal at 28 Gb/s meas-
ured by a real-time oscilloscope. Only post-tap calibration is enabled with the opti-
mum coefficient for a 3 cm PCB trace channel to deliver a peak-to-peak differential
output voltage swing of 207 mVpp,diff. Fig. 4.24 shows measured PAM-4 eye dia-
grams with various FFE conditions. Measured maximum differential output voltage
swing is 221 mVpp,diff, which is achieved when both pre- and post-tap calibrations
are disabled. Fig. 4.25 summarizes the measured power breakdown of the proposed
1 Post-tap comp. only (optimum)
207mV (differential)71.4ps
Fig. 4.23 Measured differential PAM-4 eye diagram at 28 Gb/s.
Without FFE 1 Post-tap + 1 pre-tap (overshoot)
221mV (differential) 197mV (differential)
Fig. 4.24 Measured differential PAM-4 eye diagrams with various FFE conditions.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 115
PAM-4 transmitter operating at 28 Gb/s. For the optimum setting shown in Fig. 4.23,
the entire transmitter consumes a total power of 44.6 mW, which results in an ener-
gy efficiency of 1.59 pJ/b.
PDRV & 3-Tap FFE(23.0 mW)
SER& PLL
(10.2 mW)
DRV &Gm CAL.(11.4 mW)
* Total 44.6 mW @ data rate of 28 Gb/s
Fig. 4.25 Measured power breakdown of the prototype-1 PAM-4 transmitter.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 116
4.4.2 64-Gbit/s 1.5-pJ/bit PAM-4 Transmitter with
AFB Driver
The prototype chip of PAM-4 transmitter with AFB driver (prototype 2) is also
fabricated in 28nm CMOS technology and occupies 0.185 mm2, as shown in Fig.
4.26. The test chip is wire-bonded to a test board for silicon verification. Fig. 4.26
also illustrates the measured power breakdown of the proposed PAM-4 transmitter.
The pre-driver and the driver with mG calibration circuits only consume 13.3 mW
while transmitting PRBS 27-1 data at 64 Gb/s. The measurement setup for three
types of measurement is depicted in Fig. 4.27. To verify the high-speed operation of
the test chip, the differential PCB trace is optimized through electromagnetic simula-
tion. Measured return loss and insertion loss of the test channel including PCB trace
PRBS Gen. & SER
(54.8 mW)
Front-End & Gm Cal. (13.3 mW)
PLL(29.1 mW)
Total Power Consumption97.2 mW @ 64 Gb/s
CLK GEN.
PRBS GEN.+ 4:2 SERs.
PDRV DRV
B C D
A
E
Gm CAL.
BIAS GEN.
240 μm
160 μm
F
Fig. 4.26 Chip microphotograph of PAM-4 transmitter (prototype 2) and measured pow-
er breakdown at 64 Gb/s operation.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 117
and end-launch SMA connectors are shown in Fig. 4.28. Measured jitter histogram
of divided-by-16 PLL clock (1 GHz) and its frequency spectrum and phase noise
plot are shown in Fig. 4.29 and Fig. 4.30. The integrated RMS jitter from 1 kHz to
40 MHz is measured as 115 fs, which exhibits the state-of-the-art PLL figure-of-
merit (FoM) of -244.1 dB. The single-ended output return loss is measured by a
network analyzer to verify the matching characteristic of the proposed PAM-4 driver.
Measured return loss well satisfies the OIF-CEI-56G mask limit with sufficient
margin, as shown in Fig. 4.31. Fig. 4.32 shows the single-ended eye diagrams of the
PAM-4TX IC
Power & Bias Board
DC 6VBattery
DUT Board
Tektronix MSO73304 Real-time
Oscilloscope
BIAS-TDRVP
DRVN
REF CLK
DIV CLK
DC Block
DC Block
20cm Cable
20cm Cable
Agilent E4445ASpectrum A.
Agilent E5071CNetwork A.
Agilent E8267DVector Signal G.
HYPERLABSHL9404 Balun
64 Gb/s PAM-4 Data(Measure 3)
Output RL, TDR (Measure 2)
16 GHz PLL Clock(Measure 1)
Fig. 4.27 Measurement setup for prototype-2 PAM-4 transmitter.
-60
-50
-40
-30
-20
-10
0
0 5 10 15 20
-2.5
-2
-1.5
-1
-0.5
0
0 5 10 15 20
S11 S21
Fig. 4.28 Measured return loss and insertion loss of test channel.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 118
Divided PLL Clock1 GHz
20mV
20ps
RMS: 1.5psPk-Pk: 11ps
Fig. 4.29 Measured jitter histogram of divided-by-16 transmitter clock (1 GHz).
Fig. 4.30 Measured frequency spectrum and phase noise plot of the divided-by-16
transmitter clock (1 GHz).
-2.50E+01
-2.00E+01
-1.50E+01
-1.00E+01
-5.00E+00
0.00E+00
1.00E+07 1.00E+08 1.00E+09 1.00E+10
0
-5
-10
-15
-20
-25Mea
su
red
S22 [
dB
]
0.01 0.1 1 10
Frequency [GHz]20
CEI-56G-PAM4-VSR
Fig. 4.31 Measured single-ended output return loss.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 119
PAM-4 (64 Gb/s) 30mV 10ps
432 mVppd
NRZ (32 Gb/s) 30mV 10ps
324 mVppd
PAM-4 (56 Gb/s) 30mV 10ps
436.8 mVppd
NRZ (28 Gb/s) 30mV 10ps
312 mVppd
PAM-4 (50 Gb/s) 30mV 10ps
429.6 mVppd
NRZ (25 Gb/s) 30mV 10ps
312 mVppd
PAM-4 (40 Gb/s) 30mV 10ps
458.4 mVppd
NRZ (20 Gb/s) 30mV 10ps
336 mVppd
PAM-4 (32 Gb/s) 30mV 20ps
465.6 mVppd
NRZ (16 Gb/s) 30mV 20ps
338.4 mVppd
Fig. 4.32 Measured single-ended NRZ and PAM-4 eye diagrams with variable data rates.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 120
NRZ and PAM-4 outputs at variable data rates. As shown in Fig. 4.32, the proposed
PAM-4 transmitter achieves multi-standard operation by supporting various speed.
At 64 Gb/s, the optimum FFE coefficients for the MSB path are measured as [C-1, C0,
C1] = [-1, 14, -1] compensating for insertion loss by 2.5 dB at the Nyquist frequency
whereas the optimum FFE coefficients for the LSB path are measured as [-1, 5, -1]
compensating by 7.4 dB due to a nonlinearity. The differential output swing of the
64 Gb/s PAM-4 eye diagram is about 450 mVppd, which corresponds to a maximum
output swing of ~600 mVppd when the FFE is disabled. Single-ended eye height and
eye width are measured as 48 mV and 0.4 UI, respectively, and the ratio of level
mismatch (RLM) is obtained as 96 %, which satisfies 0.92LMR condition of the
100 GbE PAM-4 spec (100GBASE-KP4). As illustrated in Fig. 4.33, both the power
consumption and the energy efficiency are well scaled for both signaling modes.
The overall performance of the transmitter is summarized and compared to pre-
vious works, as shown in Table 4.1. The proposed PAM-4 transmitter with AFB
driver achieves the data rate of 64 Gb/s while consuming the power of 97.2 mW,
which exhibits the best energy efficiency of 1.5 pJ/b among the reported PAM-4
transmitters with the data rates of above 56 Gb/s.
0.8
1
1.2
1.4
1.6
1.8
2
30
40
50
60
70
80
90
100
25 35 45 55 651.5
2
2.5
3
3.5
30
40
50
60
70
80
90
100
12 18 24 30 36
Po
we
r [m
W]
Data Rate [Gb/s]E
ne
rgy E
ffic
ien
cy [
pJ
/b]
Po
we
r [m
W]
Data Rate [Gb/s]
En
erg
y E
ffic
ien
cy [
pJ
/b]
Energy EfficiencyPower Consumption
Energy EfficiencyPower Consumption
PAM4 NRZ
Fig. 4.33 Measured power and energy efficiency scalability.

Chapter 4. Low-Power High-Speed PAM-4 Transmitter 121
Table 4
.1 P
erforman
ce summ
ary and comparison of P
AM
-4 transmitters.
Tech
no
log
y N
od
e
Data
Ra
te (G
b/s
)
Po
wer (m
W)
Driv
er T
yp
e
Max
imu
m O
utp
ut
Sw
ing
(mV
pp
d )
FF
E
En
erg
y E
fficie
ncy
(pJ/b
it)
PL
L C
loc
kR
MS
Jitte
r (fs)
JS
SC
201
5[9
]
65
nm
56 −
62
290
CM
L
500
3-ta
p
508
(10
0H
z~
1G
Hz)
ISS
CC
201
7[7
6]
40
nm
56
220
CM
L
N/A
3-ta
p
3.5
7*
ISS
CC
201
7[7
5]
28
nm
FD
SO
I
64
145
*
CM
L
120
0
4-ta
p
2.2
7*
JS
SC
201
7[7
8]
16n
mF
inF
ET
56
140
*
CM
L
120
0
3-ta
p
2.5
*
ISS
CC
201
7[6
9]
14n
m
56
100
.7
SS
T
900
3-ta
p½
-bau
d
1.8
Th
is W
ork
28
nm
64
97
.2
Activ
e-
Feed
bac
k
600
3-ta
pb
au
d
1.5
* Po
wer c
on
su
mp
tion
, en
erg
y e
fficie
nc
y, a
nd
ran
do
m jitte
r ex
clu
din
g P
LL
blo
ck
** Fu
ll ch
ip a
rea
Activ
e A
rea (m
m2)
1.1
4**
1.1
4**
N/A
N/A
0.0
35
0.1
85
688
(10
0H
z~
1G
Hz)
291
(50
0k
Hz~
8G
Hz)
N/A
N/A
115
(1k
Hz~
40M
Hz)
290
(10
0H
z~
1G
Hz)
5.1
8(@
56
Gb
/s)
ISS
CC
201
8[7
9]
10n
mF
inF
ET
112
232
CM
L
750
3-ta
p
2.0
7
0.0
30
2***
ISS
CC
201
8[7
0]
14
nm
112
286
*
SS
T
920
8-ta
p
2.6
*
0.0
95
***
N/A
ISS
CC
201
8[7
3]
16
nm
Fin
FE
T
19 −
56
N/A
SS
T
100
0
4-ta
p
N/A
N/A
ISS
CC
201
8[7
1]
16n
mF
inF
ET
64
89
.7*
SS
T
100
0
N/A
1.4
*
0.0
9***
162
*
*** Ac
tive
are
a w
/o P
LL
154
(N/A
)
180
(N/A
)
��
� �
��
�=
��
���
[��
�
�� �
�
��
��
��
��
] ****

Chapter 5. Conclusion 122
Chapter 5
Conclusion
As the bandwidth demand for chip-to-chip or board-to-board communication is
rapidly being increased, multi-level signaling (e.g. PAM-4 signaling) has become a
promising candidate for the next generation high-bandwidth I/O interface. To meet
the requirements of the standards such as IEEE P802.3bs 400 Gb/s Ethernet or OIF
CEI-56G, various FFE techniques are employed in reported PAM-4 transmitters. In
addition to compensating for channel loss by using an equalizer, achieving a good
energy efficiency is also a crucial issue for the next generation I/O systems. Howev-
er, recent PAM-4 transmitters often neglect improving the energy efficiency of the
PAM-4 output driver and the corresponding pre-driver stages, as they employ typi-
cal voltage-driven driver topologies.
In this thesis, the drawbacks and limitations of the conventional voltage-mode or
current-mode PAM-4 drivers are discussed. To overcome the problems with existing
voltage-driven drivers, the concept of the current-driven driver newly defined by the

Chapter 5. Conclusion 123
author is introduced. As a detailed implementation of the current-driven feedback
driver, two types of feedback driver, RFB and AFB driver, are introduced and ana-
lyzed. On a more quantitative level, theoretical analyses are presented in various
aspects to support the excellence of the current-driven feedback driver. Based on the
study, two prototypes of low-power, high-speed PAM-4 transmitters based on the
RFB or AFB driver are proposed.
As the first prototype, a 28 Gb/s PAM-4 transmitter with a fractionally spaced 3-
tap FFE and a Gm-regulated RFB driver is fabricated in 28 nm CMOS technology.
Owing to the current-driven characteristic of the driver, the 3-tap FFE is realized at
the pre-driver stage in a simplified current-summing manner consuming low power
consumption. The output impedance of the driver is controlled by regulating the Gm
of the driver cell, which results in good signal integrity. To obtain the appropriate
tap delay, a novel topology is introduced for the delay generator to enhance both the
delay and the bandwidth. All the transmitter circuits are CMOS-based implemented
thanks to the increased bandwidth by using a resistive feedback. The transmitter
achieves the data rate of 28 Gb/s while consuming 44.6 mW, which results in the
energy efficiency of 1.59 pJ/b.
As the second prototype, a 64 Gb/s PAM-4 transmitter with a current-summing
3-tap FFE and a Gm-regulated AFB driver is presented. An AFB inverter-based driv-
er is proposed to achieve a larger output swing compared with the RFB driver with
limited output swing. The FFE tap generation is embedded into the serializer to min-
imize the overhead of FFE, by replacing a power-hungry delay generator. As a result,
both the energy efficiency and the operating speed are considerably enhanced com-
pared to the first prototype. A prototype chip is fabricated in 28 nm CMOS technol-

Chapter 5. Conclusion 124
ogy, and occupies 0.185 mm2. Owing to the improved loop bandwidth of the PLL,
the integrated RMS jitter from 1 kHz to 40 MHz is measured as 115 fs, which exhib-
its the state-of-the-art PLL FoM of -244.1 dB. The proposed transmitter achieves the
data rate 64 Gb/s while consuming 97.2 mW, which exhibits the best energy effi-
ciency of 1.5 pJ/b among recently reported PAM-4 transmitters with an internal PLL.

Bibliography 125
Bibliography
[1] Cisco Systems, Inc. [Online]. Available: http://www.cisco.com
[2] F. O’Mahony et al., “The future of electrical I/O for microprocessors,” in
Int. Symp. VLSI Design, Automation and Test, 2009, pp. 31–34.
[3] T. Tekin, N. Pleros, and D. Apostolopoulos, “Photonic interconnects for
data centers,” in OFC 2014, Mar. 2014, pp. 1–3.
[4] Data Center Users’ Group. Survey Results, Oct. 2014. [Online]. Available:
http://www.datacenterug.org
[5] Data Center Efficiency Assessment. Issue Paper, Aug. 2014. [Online].
Available: http://www.nrdc.org
[6] M. Dayarathna, Y. Wen, and R. Fan, “Data Center Energy Consumption
Modeling: A Survey,” IEEE Communications Surveys Tutorials, vol. 18, no.
1, pp. 732–794, Sep. 2016.
[7] OIF. [Online]. Available: http://www.oiforum.com
[8] IEEE P802.3bs 400 Gb/s Ethernet Task Force. Accessed: Nov. 10, 2018.
[Online]. Available: http://www.ieee802.org/3/bs/.
[9] J. Lee, P. Chiang, P. Peng, L. Chen, and C. Weng, “Design of 56 Gb/s
NRZ and PAM4 SerDes Transceivers in CMOS Technologies,” IEEE J.
Solid-State Circuits, vol. 50, no. 9, pp. 2061ᅳ2073, Sep. 2015.
[10] H. Zhang, B. Jiao, Y. Liao, and G. Zhang, “PAM4 Signaling for 56G
Serial Link Applications – A Tutorial,” in DesignCon, Jan. 2016, [Online].

Bibliography 126
Available: http://www.xilink.com
[11] M. Bassi, F. Radice, M. Bruccoleri, S. Erba, and A. Mazzanti, “A High-
Swing 45 Gb/s Hybrid Voltage and Current-Mode PAM-4 Transmitter in 28
nm CMOS FDSOI,” IEEE J. Solid-State Circuits, vol. 51, no. 11, pp. 2702–
2715, Nov. 2016.
[12] J. F. Bulzacchelli et al., “A 28-Gb/s 4-Tap FFE/15-Tap DFE Serial Link
Transceiver in 32-nm SOI CMOS Technology,” IEEE J. Solid-State Cir-
cuits, vol. 47, no. 12, pp. 3232–3248, Dec. 2012.
[13] A. Agrawal, J. F. Bulzacchelli, T. O. Dickson, Y. Liu, J. A. Tierno, and
D. J. Friedman, “A 19-Gb/s Serial Link Receiver With Both 4-Tap FFE and
5-Tap DFE Functions in 45-nm SOI CMOS,” IEEE J. Solid-State Circuits,
vol. 47, no. 12, pp. 3220–3231, Dec. 2012.
[14] H. Wang and J. Lee, “A 21-Gb/s 87-mW Transceiver With
FFE/DFE/Analog Equalizer in 65-nm CMOS Technology,” IEEE J. Solid-
State Circuits, vol. 45, no. 4, pp. 909–920, Apr. 2010.
[15] M. Chen and C. K. Yang, “A 50–64 Gb/s Serializing Transmitter With a
4-Tap, LC-Ladder-Filter-Based FFE in 65 nm CMOS Technology,” IEEE J.
Solid-State Circuits, vol. 50, no. 8, pp. 1903–1916, Aug. 2015.
[16] G. S. Jeong et al., “A 20 Gb/s 0.4 pJ/b Energy-Efficient Transmitter
Driver Utilizing Constant-Gm Bias,” IEEE J. Solid-State Circuits, vol. PP,
no. 99, pp. 1–16, 2016.
[17] Beyond 25 Gbps: A Study of NRZ & Multi-Level Modulation in Alterna-
tive Backplane Architectures. White Paper. [Online]. Available:
http://www.te.com
[18] Optical Internetworking Forum (OIF). OIF-FD-Client-400G/1T-01.0-
OIF Next Gen. Intercon. Framework White Paper. April 2013. [Online].
Available: http://www.oiforum.com

Bibliography 127
[19] Optical Internetworking Forum (OIF). OIF-CEI-04.0, Dec. 2017.
[Online]. Available: http://www.oiforum.com
[20] A. Zimmermann, Optical Communication over Plastic Optical Fibers.
Springer Series in Optical Sciences (Book 172), 2013; 5-22.
[21] B. Razavi, Design of Integrated Circuits for Optical Communications.
McGraw-Hill Series in Electrical and Computer Engineering, 2002.
[22] J. G. Proakis, and M. Salehi, Communication Systems Engineering.
Pearson, 2nd ed. 2001.
[23] R. Stephens, PAM4: Symbol levels and voltage compression measure-
ments. EDN Network [Online]. Available: http://www.edn.com.
[24] M. Bassi, F. Radice, M. Bruccoleri, S. Erba, and A. Mazzanti, “A
45Gb/s PAM-4 transmitter delivering 1.3Vppd output swing with 1V sup-
ply in 28nm CMOS FDSOI,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2016,
pp. 66–67.
[25] S. Walklin and J. Conradi, “Multilevel signaling for increasing the reach
of 10 Gb/s lightwave systems,” J. Lightwave Technology, vol. 17, no. 11,
pp. 2235–2248, Nov. 1999.
[26] J. K. Pollard, “Multilevel data communication over optical fibre,”
Speech and Vision IEE Proceedings I - Communications, vol. 138, no. 3, pp.
162–168, Jun. 1991.
[27] K. Szczerba et al., “4-PAM for High-Speed Short-Range Optical Com-
munications,” J. Optical Communications and Networking, vol. 4, no. 11, p.

Bibliography 128
885, Nov. 2012.
[28] J. G. Proakis, and M. Salehi, Digital Communications. McGraw-Hill
Education, 5th ed. 2007.
[29] E. Agrell, J. Lassing, E. G. Strom, and T. Ottosson, “On the optimality
of the binary reflected Gray code,” IEEE Trans. Information Theory, vol. 50,
no. 12, pp. 3170–3182, Dec. 2004.
[30] B. Razavi, Fundamentals of Microelectronics. Wiley: Boston, 2008.
[31] H. Ju, M. Choi, G. Jeong, W. Bae, and D. Jeong, “A 28 Gb/s 1.6 pJ/b
PAM-4 Transmitter Using Fractionally Spaced 3-Tap FFE and Gm-
Regulated Resistive-Feedback Driver,” IEEE Trans. Circuits and Systems-
II: Express Briefs, vol. 64, no. 12, pp. 1377–1381, Dec. 2017.
[32] S. Saxena et al., “A 2.8 mW/Gb/s, 14 Gb/s Serial Link Transceiver,”
IEEE J. Solid-State Circuits, vol. 52, no. 5, pp. 1399–1411, May 2017.
[33] J. Poulton et al., “A 14-mW 6.25-Gb/s Transceiver in 90-nm CMOS,”
IEEE J. Solid-State Circuits, vol. 42, no. 12, pp. 2745–2757, Dec. 2007.
[34] W. Bae, H. Ju, K. Park, J. Han, and D. K. Jeong, “A Supply-Scalable
Serializing Transmitter with Controllable Output Swing and Equalization
for Next Generation Standards,” IEEE Trans. Industrial Electronics, vol. 65,
no. 7, pp. 5979–5989, 2018.
[35] C. Menolfi et al., “A 16Gb/s Source-Series Terminated Transmitter in
65nm CMOS SOI,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2007, pp. 446–
614.
[36] K. L. Chan et al., “A 32.75-Gb/s Voltage-Mode Transmitter With
Three-Tap FFE in 16-nm CMOS,” IEEE J. Solid-State Circuits, vol. 52, no.
10, pp. 2663–2678, Oct. 2017.
[37] W. D. Dettloff et al., “A 32mW 7.4Gb/s protocol-agile source-series-
terminated transmitter in 45nm CMOS SOI,” in IEEE ISSCC Dig. Tech.
Papers, Feb. 2010, pp. 370–371.

Bibliography 129
[38] R. Sredojevic and V. Stojanovic, “Fully Digital Transmit Equalizer With
Dynamic Impedance Modulation,” IEEE J. Solid-State Circuits, vol. 46, no.
8, pp. 1857–1869, Aug. 2011.
[39] F. Zhong et al., “A 1.0625~14.025 Gb/s Multi-Media Transceiver With
Full-Rate Source-Series-Terminated Transmit Driver and Floating-Tap De-
cision-Feedback Equalizer in 40 nm CMOS,” IEEE J. Solid-State Circuits,
vol. 46, no. 12, pp. 3126–3139, Dec. 2011.
[40] K. Fukuda et al., “A 12.3-mW 12.5-Gb/s Complete Transceiver in 65-
nm CMOS Process,” IEEE J. Solid-State Circuits, vol. 45, no. 12, pp.
2838–2849, Dec. 2010.
[41] Y. Song and S. Palermo, “A 6-Gbit/s Hybrid Voltage-Mode Transmitter
With Current-Mode Equalization in 90-nm CMOS,” IEEE Trans. Circuits
and Systems II: Express Briefs, vol. 59, no. 8, pp. 491–495, Aug. 2012.
[42] Y. Lu, K. Jung, Y. Hidaka, and E. Alon, “Design and Analysis of Ener-
gy-Efficient Reconfigurable Pre-Emphasis Voltage-Mode Transmitters,”
IEEE J. Solid-State Circuits, vol. 48, no. 8, pp. 1898–1909, Aug. 2013.
[43] Y. Song, R. Bai, K. Hu, H. Yang, P. Y. Chiang, and S. Palermo, “A
0.47–0.66 pJ/bit, 4.8–8 Gb/s I/O Transceiver in 65 nm CMOS,” IEEE J.
Solid-State Circuits, vol. 48, no. 5, pp. 1276–1289, May 2013.
[44] Y. Song, H. Yang, H. Li, P. Y. Chiang, and S. Palermo, “An 8–16 Gb/s,
0.65–1.05 pJ/b, Voltage-Mode Transmitter With Analog Impedance Modu-
lation Equalization and Sub-3 ns Power-State Transitioning,” IEEE J. Solid-
State Circuits, vol. 49, no. 11, pp. 2631–2643, Nov. 2014.

Bibliography 130
[45] K. Kaviani et al., “A 0.4-mW/Gb/s Near-Ground Receiver Front-End
With Replica Transconductance Termination Calibration for a 16-Gb/s
Source-Series Terminated Transceiver,” IEEE J. Solid-State Circuits, vol.
48, no. 3, pp. 636–648, Mar. 2013.
[46] G. R. Gangasani et al., “A 32 Gb/s Backplane Transceiver With On-
Chip AC-Coupling and Low Latency CDR in 32 nm SOI CMOS Technolo-
gy,” IEEE J. Solid-State Circuits, vol. 49, no. 11, pp. 2474–2489, Nov.
2014.
[47] B. Zhang et al., “A 28 Gb/s Multistandard Serial Link Transceiver for
Backplane Applications in 28 nm CMOS,” IEEE J. Solid-State Circuits, vol.
50, no. 12, pp. 3089–3100, Dec. 2015.
[48] K.-J. Wong, H. Hatamkhani, M. Mansuri, and C.-K. Yang, “A 27-mW
3.6-gb/s I/O transceiver,” IEEE J. Solid-State Circuits, vol. 39, no. 4, pp.
602–612, Apr. 2004.
[49] S. Saxena, R. K. Nandwana, and P. K. Hanumolu, “A 5 Gb/s Energy-
Efficient Voltage-Mode Transmitter Using Time-Based De-Emphasis,”
IEEE J. Solid-State Circuits, vol. 49, no. 8, pp. 1827–1836, Aug. 2014.
[50] W. Bae and D.-K. Jeong, “A power-efficient 600-mVpp voltage-mode
driver with independently matched pull-up and pull-down impedances,” Int.
J. Circuit Theory Appl., vol. 43, no. 12, pp. 2057-2071, Dec. 2015.
[51] W. Choi et al., “3.8 A 0.45-to-0.7V 1-to-6Gb/S 0.29-to-0.58pJ/b source-
synchronous transceiver using automatic phase calibration in 65nm CMOS,”
in IEEE ISSCC Dig. Tech. Papers, Feb. 2015, pp. 66–68.
[52] M. S. Jalali et al., “A 4-Lane 1.25-to-28.05Gb/s multi-standard 6pJ/b
40dB transceiver in 14nm FinFET with independent TX/RX rate support,”

Bibliography 131
in IEEE ISSCC Dig. Tech. Papers, Feb. 2018, pp. 106–108.
[53] S. Yuan, L. Wu, Z. Wang, X. Zheng, C. Zhang, and Z. Wang, “A 70
mW 25 Gb/s Quarter-Rate SerDes Transmitter and Receiver Chipset With
40 dB of Equalization in 65 nm CMOS Technology,” IEEE Trans. Circuits
and Systems I: Regular Papers, vol. 63, no. 7, pp. 939–949, Jul. 2016.
[54] A. Roshan-Zamir, O. Elhadidy, H. Yang, and S. Palermo, “A Reconfigu-
rable 16/32 Gb/s Dual-Mode NRZ/PAM4 SerDes in 65-nm CMOS,” IEEE
J. Solid-State Circuits, vol. 52, no. 9, pp. 2430–2447, Sep. 2017.
[55] J. F. Bulzacchelli et al., “A 10-Gb/s 5-Tap DFE/4-Tap FFE Transceiver
in 90-nm CMOS Technology,” IEEE J. Solid-State Circuits, vol. 41, no. 12,
pp. 2885–2900, Dec. 2006.
[56] G. Balamurugan et al., “A Scalable 5–15 Gbps, 14–75 mW Low-Power
I/O Transceiver in 65 nm CMOS,” IEEE J. Solid-State Circuits, vol. 43, no.
4, pp. 1010–1019, Apr. 2008.
[57] K. Oh, L. Kim, K. Park, Y. Jun, J. S. Choi, and K. Kim, “A 5-Gb/s/pin
Transceiver for DDR Memory Interface With a Crosstalk Suppression
Scheme,” IEEE J. Solid-State Circuits, vol. 44, no. 8, pp. 2222–2232, Aug.
2009.
[58] T. Anand, M. Talegaonkar, A. Elkholy, S. Saxena, A. Elshazly, and P. K.
Hanumolu, “A 7 Gb/s Embedded Clock Transceiver for Energy Proportion-
al Links,” IEEE J. Solid-State Circuits, vol. 50, no. 12, pp. 3101–3119, Dec.
2015.

Bibliography 132
[59] R. Navid et al., “A 40 Gb/s Serial Link Transceiver in 28 nm CMOS
Technology,” IEEE J. Solid-State Circuits, vol. 50, no. 4, pp. 814–827, Apr.
2015.
[60] J. Han, N. Sutardja, Y. Lu, and E. Alon, “Design Techniques for a 60-
Gb/s 288-mW NRZ Transceiver With Adaptive Equalization and Baud-
Rate Clock and Data Recovery in 65-nm CMOS Technology,” IEEE J. Sol-
id-State Circuits, vol. 52, no. 12, pp. 3474–3485, Dec. 2017.
[61] M. Chen, Y. Shih, C. Lin, H. Hung, and J. Lee, “A Fully-Integrated 40-
Gb/s Transceiver in 65-nm CMOS Technology,” IEEE J. Solid-State Cir-
cuits, vol. 47, no. 3, pp. 627–640, Mar. 2012.
[62] H. Higashi et al., “A 5-6.4-Gb/s 12-channel transceiver with pre-
emphasis and equalization,” IEEE J. Solid-State Circuits, vol. 40, no. 4, pp.
978–985, Apr. 2005.
[63] Y. Hidaka, W. Gai, T. Horie, J. H. Jiang, Y. Koyanagi, and H. Osone,
“A 4-Channel 1.25–10.3 Gb/s Backplane Transceiver Macro With 35 dB
Equalizer and Sign-Based Zero-Forcing Adaptive Control,” IEEE J. Solid-
State Circuits, vol. 44, no. 12, pp. 3547–3559, Dec. 2009.
[64] U. Singh et al., “A 780 mW 4×28 Gb/s Transceiver for 100 GbE Gear-
box PHY in 40 nm CMOS,” IEEE J. Solid-State Circuits, vol. 49, no. 12,
pp. 3116–3129, Dec. 2014.
[65] Y. Frans et al., “A 0.5–16.3 Gb/s Fully Adaptive Flexible-Reach Trans-
ceiver for FPGA in 20 nm CMOS,” IEEE J. Solid-State Circuits, vol. 50, no.
8, pp. 1932–1944, Aug. 2015.
[66] J. Kim et al., “A 112 Gb/s PAM-4 56 Gb/s NRZ Reconfigurable Trans-
mitter With Three-Tap FFE in 10-nm FinFET,” IEEE J. Solid-State Circuits,
pp. 1–14, 2018.

Bibliography 133
[67] J. Hwang et al., “A 32 Gb/s, 201 mW, MZM/EAM Cascode Push–Pull
CML Driver in 65 nm CMOS,” IEEE Trans. Circuits and Systems II: Ex-
press Briefs, vol. 65, no. 4, pp. 436–440, Apr. 2018.
[68] J. Kim et al., “A 16-to-40Gb/s quarter-rate NRZ/PAM4 dual-mode
transmitter in 14nm CMOS,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2015,
pp. 60–62.
[69] T. O. Dickson, H. A. Ainspan, and M. Meghelli, “A 1.8pJ/b 56Gb/s
PAM-4 transmitter with fractionally spaced FFE in 14nm CMOS,” in IEEE
ISSCC Dig. Tech. Papers, Feb. 2017, pp. 118–119.
[70] C. Menolfi et al., “A 112Gb/S 2.6pJ/b 8-Tap FFE PAM-4 SST TX in
14nm CMOS,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2018, pp. 104–106.
[71] L. Wang, Y. Fu, M. LaCroix, E. Chong, and A. C. Carusone, “A 64Gb/s
PAM-4 transceiver utilizing an adaptive threshold ADC in 16nm FinFET,”
in IEEE ISSCC Dig. Tech. Papers, Feb. 2018, pp. 110–112.
[72] E. Depaoli et al., “A 4.9pJ/b 16-to-64Gb/s PAM-4 VSR transceiver in
28nm FDSOI CMOS,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2018, pp.
112–114.
[73] P. Upadhyaya et al., “A fully adaptive 19-to-56Gb/s PAM-4 wireline
transceiver with a configurable ADC in 16nm FinFET,” in IEEE ISSCC Dig.
Tech. Papers, Feb. 2018, pp. 108–110.
[74] A. Nazemi et al., “A 36Gb/s PAM4 transmitter using an 8b 18GS/S
DAC in 28nm CMOS,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2015, pp.

Bibliography 134
58–60.
[75] G. Steffan et al., “A 64Gb/s PAM-4 transmitter with 4-Tap FFE and
2.26pJ/b energy efficiency in 28nm CMOS FDSOI,” in IEEE ISSCC Dig.
Tech. Papers, Feb. 2017, pp. 116–117.
[76] P. J. Peng, J. F. Li, L. Y. Chen, and J. Lee, “A 56Gb/s PAM-4/NRZ
transceiver in 40nm CMOS,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2017,
pp. 110–111.
[77] L. Tang, W. Gai, L. Shi, X. Xiang, K. Sheng, and A. He, “A 32Gb/s
133mW PAM-4 transceiver with DFE based on adaptive clock phase and
threshold voltage in 65nm CMOS,” in IEEE ISSCC Dig. Tech. Papers, Feb.
2018, pp. 114–116.
[78] Y. Frans et al., “A 56-Gb/s PAM4 Wireline Transceiver Using a 32-
Way Time-Interleaved SAR ADC in 16-nm FinFET,” IEEE J. Solid-State
Circuits, vol. 52, no. 4, pp. 1101–1110, Apr. 2017.
[79] J. Kim et al., “A 112Gb/s PAM-4 transmitter with 3-Tap FFE in 10nm
CMOS,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2018, pp. 102–104.
[80] H. J. Shin and D. A. Hodges, “A 250-Mbit/s CMOS crosspoint switch,”
IEEE J. Solid-State Circuits, vol. 24, no. 2, pp. 478–486, Apr. 1989.
[81] G. Ahn, D.-K. Jeong, and G. Kim, “A 2-Gbaud 0.7-V swing voltage-
mode driver and on-chip terminator for high-speed NRZ data transmission,”
IEEE J. Solid-State Circuits, vol. 35, no. 6, pp. 915–918, Jun. 2000.
[82] H. Ju, M. Choi, G. Jeong, and D. Jeong, “A 64 Gb/s 1.5 pJ/b PAM-4
Transmitter with 3-Tap FFE and Gm-Regulated Active-Feedback Driver in
28 nm CMOS,” in IEEE Symp. on VLSI Circuits, 2018, pp. 51–52.
[83] W. J. Dally, and J. W. Poulton, Digital Systems Engineering. Cambridge

Bibliography 135
University Press, 1999.
[84] H. Kimura et al., “28Gb/s 560mW multi-standard SerDes with single-
stage analog front-end and 14-tap decision-feedback equalizer in 28nm
CMOS,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2014, pp. 38–39.
[85] T. Kawamoto et al., “multi-standard 185fsrms 0.3-to-28Gb/s 40dB back-
plane signal conditioner with adaptive pattern-match 36-Tap DFE and data-
rate-adjustment PLL in 28nm CMOS,” in IEEE ISSCC Dig. Tech. Papers,
Feb. 2015, pp. 54–56.
[86] P. Upadhyaya et al., “A 0.5-to-32.75Gb/s flexible-reach wireline trans-
ceiver in 20nm CMOS,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2015, pp.
56–58.
[87] W. Bae, H. Ju, K. Park, S. Y. Cho, and D. K. Jeong, “A 7.6 mW, 414 fs
RMS-Jitter 10 GHz Phase-Locked Loop for a 40 Gb/s Serial Link Transmit-
ter Based on a Two-Stage Ring Oscillator in 65 nm CMOS,” IEEE J. Solid-
State Circuits, vol. PP, no. 99, pp. 1–12, 2016.

초 록
최근 데이터 센터나 고성능 컴퓨팅 시스템의 수요가 늘어남에 따라 유
선 통신에서 요구되는 대역폭도 기하급수적으로 증가해왔다. 그러나 기존
구리선 기반 채널의 한계점으로 인해 고속 입출력 회로의 핀 당 대역폭
개선은 어려움에 직면해 있다. 그 결과, 비제로 복귀 (NRZ) 신호처리 방
식을 대신하여 같은 Nyquist 주파수에서 더 높은 전송 속도를 지원하는
다중레벨 신호처리 방식이 차세대 고속 입출력 인터페이스를 위한 해결책
으로 대두되었다. 그 중에서도, 4 레벨 펄스진폭변조 기술 (PAM-4)은 다
양한 산업 표준의 대역폭 요구에 부응하기 위해 널리 적용되고 있다. 전
통적인 전압구동형 드라이버에 기반한 기존 4 레벨 펄스진폭변조 송신기
들은 많은 전력을 소모하는 전치 드라이버와 다중탭 피드포워드 등화기
구조 때문에 제한된 에너지 효율만을 보여왔다. 본 논문에서는 이러한 기
존 전압구동형 드라이버의 문제점을 극복하기 위해 전류구동형 피드백 드
라이버의 개념을 새로 정의하고, 각각 저항성피드백 드라이버와 능동성피
드백 드라이버에 기반한 두 가지 타입의 저전력, 고속 4 레벨 펄스진폭변
조 송신기 구조를 제안한다.
첫 번째 프로토타입으로서, 부분간격 세 탭 피드포워드 등화기와 Gm
이 제어된 저항성피드백 드라이버를 이용하여 28 Gb/s 의 4 레벨 펄스진
폭변조 송신기가 28nm CMOS 공정에서 제작되었다. 드라이버의 전류구
동 특성 덕분에, 세 탭 피드포워드 등화기는 전치 드라이버 단에서 적은
전력만을 소모하는 전류합산 방식으로 간단하게 구현되었다. 드라이버의
출력 임피던스는 Gm 을 제어함으로서 조절 가능하고, 이는 송신기가 좋은

신호 특성을 갖도록 하였다. 또한, 적절한 탭 지연을 얻기 위하여 지연량
과 대역폭이 모두 늘어난 새로운 형태의 지연 생성기가 제안되었다. 송신
기 내의 회로들은 저항성피드백에 의해 늘어난 대역폭 덕분에 모두
CMOS 기반으로 구현된다. 제안된 송신기는 44.6 mW 의 전력만을 소모
하면서도 28 Gb/s 의 전송 속도를 달성하였고, 이는 약 1.59 pJ/b 의 에너
지 효율에 해당한다.
두 번째 프로토타입으로서, 전류합산 방식의 세 탭 피드포워드 등화기
와 Gm 이 제어된 능동성피드백 드라이버를 이용하여 64 Gb/s 의 4 레벨
펄스진폭변조 송신기가 구현되었다. 능동성피드백 인버터 기반의 드라이
버는 출력 스윙이 제한된 저항성피드백 드라이버에 비하여 더 큰 전압 출
력 스윙을 갖기 위하여 제안되었다. 피드포워드 등화기의 탭 생성은 직렬
화기에 내장되었는데, 많은 전력을 소모하는 지연 생성기를 대체함으로서
오버헤드를 대폭 줄일 수 있었다. 그 결과 첫 번째 프로토타입에 비하여
동작 속도와 에너지 효율이 모두 크게 향상되었다. 한편, 두 번째 프로토
타입의 칩도 28 nm CMOS 공정에서 제작되었고, 약 0.185 mm2 의 실리
콘 면적을 차지한다. 위상 동기화 루프의 향상된 루프 대역폭으로 인해 1
kHz 에서 40 MHz 까지 합산된 RMS 지터는 115 fs 으로 측정되었고, 이
는 좋은 FoM 인 -244.1 dB 에 해당한다. 제안된 송신기는 97.2 mW 의
전력을 소모하면서 64 Gb/s 의 전송 속도를 지원하였고, 최근에 보고된
위상 동기화 루프가 포함된 4 레벨 펄스진폭변조 송신기들 중에서 가장
좋은 에너지 효율인 1.5 pJ/b 을 달성하였다.
주요어 : CMOS, 다중레벨 신호처리, 4 레벨 펄스진폭변조 송신기, 저항성
피드백 드라이버, 능동성피드백 드라이버, 전압·전류구동형 드라이버
학 번 : 2013-20891