
Disciplina: Máquinas Elétricas · 2018-05-02 · 1.4 Noções de bobinagem Os motores comerciais...
58
Disciplina: Máquinas Elétricas CENTRO UNIVERSITÁRIO DINÂMICA DAS CATARATAS
Transcript of Disciplina: Máquinas Elétricas · 2018-05-02 · 1.4 Noções de bobinagem Os motores comerciais...

Disciplina: Máquinas Elétricas
CENTRO UNIVERSITÁRIO DINÂMICA DAS CATARATAS
ÍNDICE
1. MOTORES DE INDUÇÃO .................................................................................. 1
1.1 Introdução .................................................................................................... 1
1.1.1 Classificação dos motores: .................................................................... 1
1.2 Características construtivas ......................................................................... 2
1.3 Princípio de funcionamento .......................................................................... 4
1.3.1 Formação do campo girante .................................................................. 4
1.4 Noções de bobinagem ................................................................................. 7
1.4.1 Ligação dos grupos de bobinas: ............................................................ 8
1.4.2 Considerações sobre o passo de bobina, para bobinas concêntricas . 10
1.4.3 Número de bobinas par: ...................................................................... 10
1.4.4 Número de bobinas ímpar: .................................................................. 11
1.4.5 Relações de bobinagem ...................................................................... 11
1.5 Escorregamento ......................................................................................... 15
1.6 Torque ........................................................................................................ 17
1.6.1 Torque de partida ou torque com motor bloqueado ............................. 18
1.6.2 Torque máximo .................................................................................... 19
1.7 Classificação dos motores de indução de acordo com a NBR 7094: ......... 19
1.8 Circuito equivalente do motor de indução .................................................. 20
1.8.1 Determinação dos parâmetros do motor de indução ........................... 24
1.9 Rendimento e perdas no motor de indução ............................................... 25
1.10 Motor de indução de rotor bobinado .......................................................... 26
1.11 Motor de indução alimentado em frequência diferente da nominal ............ 29
1.12 Grau de proteção ....................................................................................... 30
1.13 Elevação de temperatura ........................................................................... 30
1.14 Fator de serviço ......................................................................................... 31

1.15 Regime de serviço...................................................................................... 31
2. ACIONAMENTO DE MOTORES DE INDUÇÃO ............................................... 33
2.1 Partida direta .............................................................................................. 33
2.2 Partida compensada .................................................................................. 34
2.3 Partida estrela-triângulo ............................................................................. 35
2.4 Partida estática (Soft-Starter) ..................................................................... 35
2.5 Partida com reostato .................................................................................. 36
3. TRANSFORMADORES MONOFÁSICOS ........................................................ 37
3.1 O transformador ideal ................................................................................. 37
3.2 Impedância refletida ................................................................................... 40
3.3 O transformador real .................................................................................. 40
3.4 Circuito equivalente do transformador ........................................................ 41
3.5 Regulação do transformador ...................................................................... 43
3.6 Determinação das perdas no transformador .............................................. 44
3.7 Rendimento do transformador .................................................................... 45
3.8 Polaridade dos transformadores ................................................................ 46
3.9 Autotransformadores .................................................................................. 50
3.9.1 Autotransformador abaixador .............................................................. 52
3.9.2 Autotransformador elevador ................................................................ 53
3.9.3 Relações de potência para o autotransformador ................................. 53
4. REFERÊNCIAS BIBLIOGRÁFICAS ................................................................. 55

1
1. MOTORES DE INDUÇÃO
1.1 Introdução
1.1.1 Classificação dos motores:
Figura 1 - Classificação dos motores
O motor elétrico é um equipamento que converte energia elétrica em energia
mecânica. Esta energia mecânica, usualmente, está disponibilizada em um eixo em
rotação.
Os motores de indução, ou motores assíncronos, são atualmente os motores mais
utilizados na indústria, suas principais vantagens em relação a outros motores são
a baixa manutenção, custo relativamente inferior e, com o advento da eletrônica de
potencia, passou a ser possível ter um controle sobre sua velocidade.
Figura 2 - Motor de indução

2
Os princípios físicos de conversão de energia de motores cc e síncronos são
válidos e aplicáveis ao motor de indução, como a lei de Lenz, de Ampere, de
Faraday etc.
1.2 Características construtivas
As principais partes construtivas de um motor de indução são Carcaça, Estator e
Rotor. Além destes componentes, existem ainda rolamentos ou mancais,
ventilador, anéis e escovas (para motor de rotor bobinado) termômetros, graxeiras
etc.
Todas as partes construtivas de um motor de indução de gaiola podem ser vistas
na figura abaixo.
Figura 3 - Partes construtivas de um motor de indução
A principal diferença entre o motor de gaiola de esquilo (ou rotor de curto circuito) e
o motor de rotor bobinado (ou enrolado) está na construção do rotor. Enquando o
primeiro possui um rotor totalmente curto-circuitado, o segundo possui aneis
coletores, de forma que através de escovas, a resistência do rotor possa ser
alterada.
Na figura seguinte, vemos o rotor de um motor de indução de rotor bobinado:
3
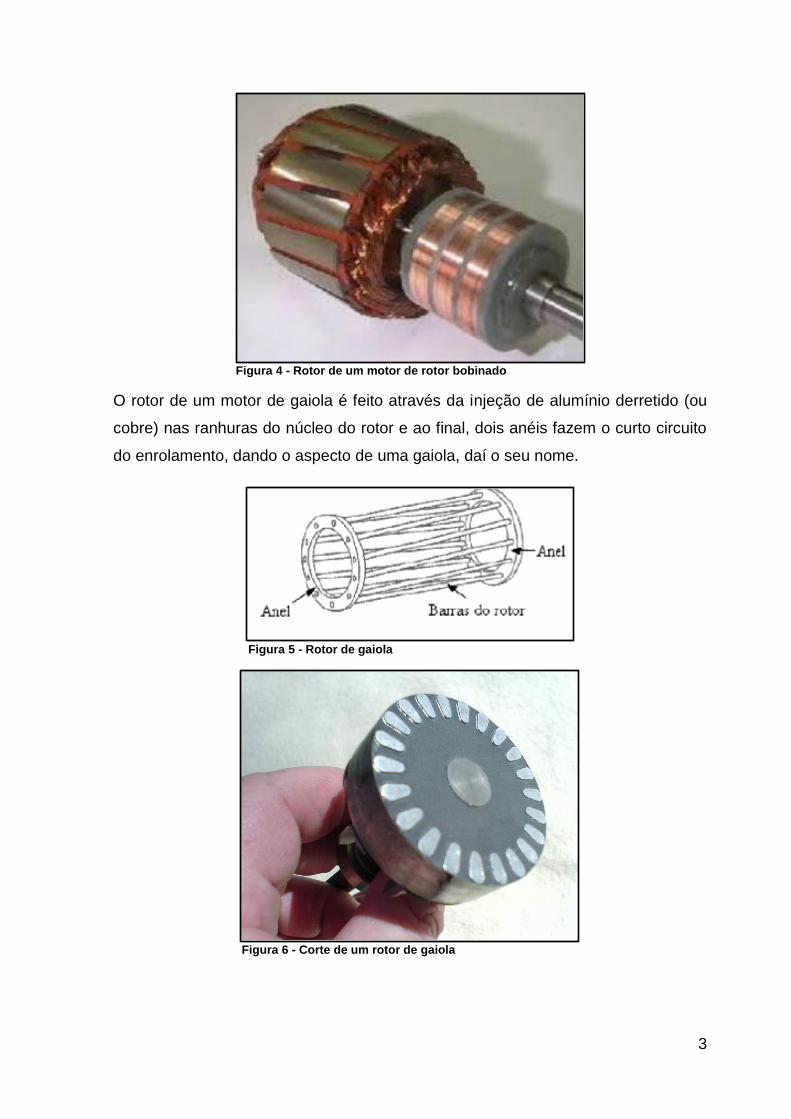
Figura 4 - Rotor de um motor de rotor bobinado
O rotor de um motor de gaiola é feito através da injeção de alumínio derretido (ou
cobre) nas ranhuras do núcleo do rotor e ao final, dois anéis fazem o curto circuito
do enrolamento, dando o aspecto de uma gaiola, daí o seu nome.
Figura 5 - Rotor de gaiola
Figura 6 - Corte de um rotor de gaiola

4
Figura 7 - Rotor e estator de um motor de indução tipo gaiola
1.3 Princípio de funcionamento
O motor de indução funciona, como o próprio nome sugere, através da indução
magnética entre estator e rotor. Seu funcionamento se assemelha muito ao
principio de funcionamento de um transformador monofásico, ou seja, uma tensão
aplicada ao primário (estator) produz uma corrente elétrica e consequentemente
um campo magnético, que induz no secundário (rotor) que, como está curto-
circuitado, produz uma corrente elétrica. Esta corrente elétrica, interagindo com o
campo, cria uma força, cujo sentido é dado pela regra da mão direita. Como o rotor
está livre, ou seja, apoiado em rolamentos, surge um binário de forças que faz com
ele gire, no sentido do campo magnético, no entanto, ligeiramente mais lento que
este, pois se sua velocidade se igualasse, não haveria fluxo cortando os
condutores do rotor e consequentemente não haveria força.
1.3.1 Formação do campo girante
Como foi visto anteriormente, para o motor de indução funcionar, é necessário um
fluxo rotativo no estator para induzir no rotor. Veremos a seguir, como esse fluxo é
criado no motor de indução trifásico.
Considere a figura seguinte, onde uma tensão trifásica, equilibrada é aplicada aos
terminais de um motor de indução trifásico.
5
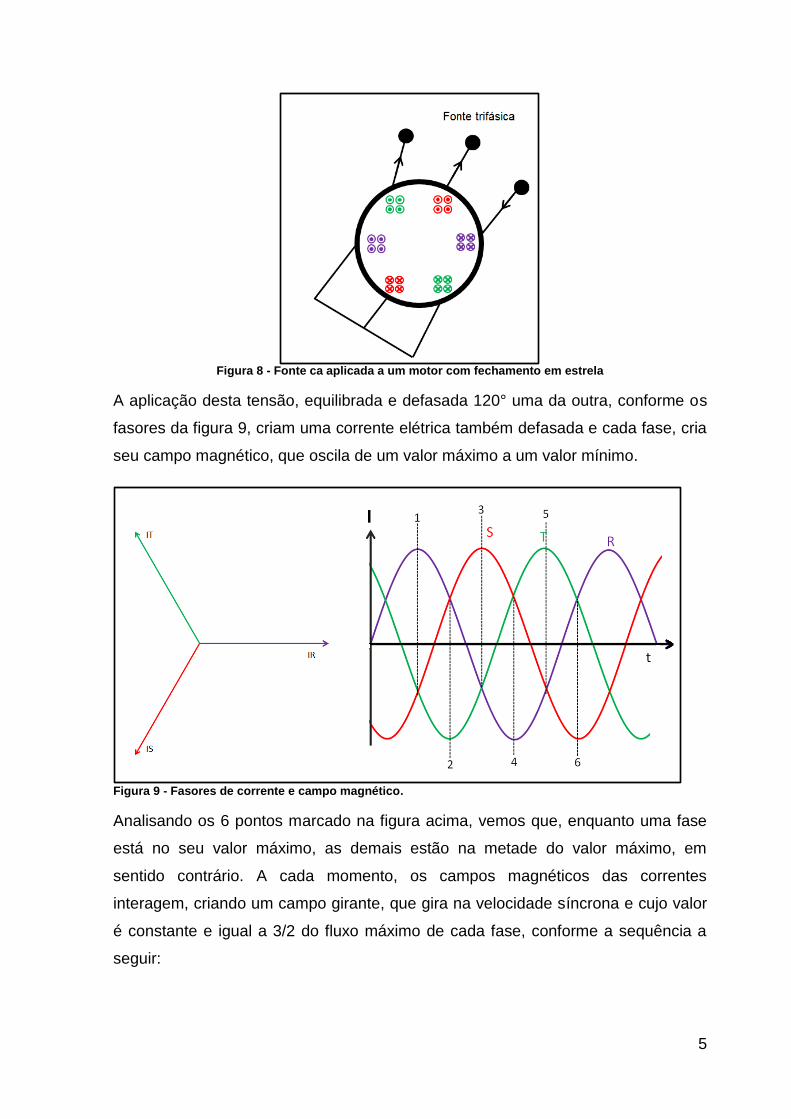
Figura 8 - Fonte ca aplicada a um motor com fechamento em estrela
A aplicação desta tensão, equilibrada e defasada 120° uma da outra, conforme os
fasores da figura 9, criam uma corrente elétrica também defasada e cada fase, cria
seu campo magnético, que oscila de um valor máximo a um valor mínimo.
Figura 9 - Fasores de corrente e campo magnético.
Analisando os 6 pontos marcado na figura acima, vemos que, enquanto uma fase
está no seu valor máximo, as demais estão na metade do valor máximo, em
sentido contrário. A cada momento, os campos magnéticos das correntes
interagem, criando um campo girante, que gira na velocidade síncrona e cujo valor
é constante e igual a 3/2 do fluxo máximo de cada fase, conforme a sequência a
seguir:
6
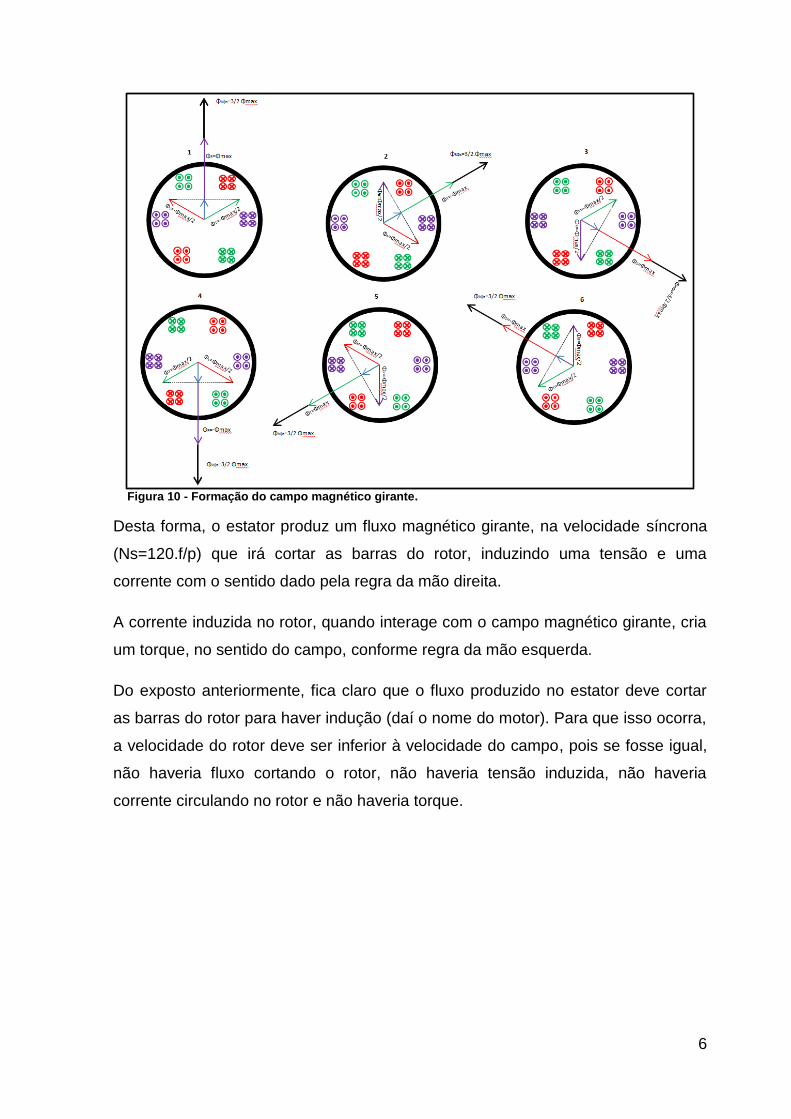
Figura 10 - Formação do campo magnético girante.
Desta forma, o estator produz um fluxo magnético girante, na velocidade síncrona
(Ns=120.f/p) que irá cortar as barras do rotor, induzindo uma tensão e uma
corrente com o sentido dado pela regra da mão direita.
A corrente induzida no rotor, quando interage com o campo magnético girante, cria
um torque, no sentido do campo, conforme regra da mão esquerda.
Do exposto anteriormente, fica claro que o fluxo produzido no estator deve cortar
as barras do rotor para haver indução (daí o nome do motor). Para que isso ocorra,
a velocidade do rotor deve ser inferior à velocidade do campo, pois se fosse igual,
não haveria fluxo cortando o rotor, não haveria tensão induzida, não haveria
corrente circulando no rotor e não haveria torque.

7
1.4 Noções de bobinagem
Os motores comerciais mais comuns são fabricados com 2, 4, 6 ou 8 pólos. O
número de ranhuras em um motor de indução é: 24, 36, 48, 54 ou 72.
O número de ranhuras independe do número de polos da máquina.
As fases de um enrolamento são montadas por grupos idênticos de bobinas, com o
mesmo número de espiras. A montagem dos grupos de bobinas para as três fases
devem ser idênticos, apenas com a defasagem de 120°.
Os grupos com mais de uma bobina são então montados de forma concêntrica ou
imbricados. Dentro de um grupo as bobinas são ligadas em série e a última espira
de uma bobina é ligada diretamente no início da bobina seguinte. Os grupos, por
sua vez podem ser ligados em série ou em paralelo. Os enrolamentos podem ser
do tipo concêntrico, imbricado ou ainda mistos, com camadas duplas ou simples.
Enrolamentos mistos não serão vistos aqui.
Figura 11 - Grupos de bobinas a) imbricada e b) concêntrica
Número de polos Grupos de bobinas por fase
2 2
4 2 ou 4
6 3 ou 6
8 4 ou 8
Tabela 1- relação entre os polos e grupos de bobinas.

8
A tabela 1 é uma tabela prática, nela podemos verificar a relação entre os grupos
de bobinas por fase e o número de polos.
1.4.1 Ligação dos grupos de bobinas:
Os grupos de bobinas das fases podem ser ligados em série ou paralelo. A ligação
depende principalmente da relação corrente e tensão, para uma mesma potência.
Bobinas ligadas em série possuem uma maior tensão, no entanto, a corrente fica
reduzida. Da mesma forma, se as bobinas forem ligadas em paralelo, a corrente
aumenta, mas em contrapartida, a tensão reduz. A forma de conexão, em série ou
paralelo também não influencia no numero de polos da máquina.
Uma forma de criar uma mudança do número de polos em função da ligação é
fazendo a conexão dos grupos de bobinas em sequência direta ou em oposição.
Desta forma, para obter um grupo de bobinas por par de polos, todos os grupos da
fase deverão ter uma sequência direta. Os grupos são então ligados na forma
começo – fim, começo-fim,...
Para obter dois grupos de bobinas por par de polos, os grupos deverão ser ligados
na forma começo-fim, fim-começo,...
Assim, garantimos a inversão do sentido da corrente entre os sucessivos grupos de
bobinas.
Estas ligações podem ser executadas em série e em paralelo, em bobinas
imbricadas ou concêntricas. Observe que na Figura 12, existem 4 inversões do
sentido da corrente, ou seja, estabelecemos assim um motor de 4 polos.

9
Figura 12 - ligação sequencia direta um grupo de bobinas por par de pólo- série e paralelo
Na Figura 13 vemos uma ligação em oposição. Nela, existem apenas duas
inversões no sentido da corrente, caracterizando assim, dois polos.
Figura 13 - Ligação sequência direta, dois grupos de bobinas por par de pólo - série e paralelo.
Na maioria dos enrolamentos, os grupos de bobinas de uma fase são agregados
em um ou dois conjuntos, com o mesmo número de grupos. Cada conjunto
disponibiliza dois terminais numerados. A identificação segue o mostrado na figura
abaixo:

10
Figura 14 - Marcação dos terminais
Desta forma, para as diferentes tensões que podem ser ligados os motores, temos
as seguintes configurações:
Figura 15 - Ligações dos motores
1.4.2 Considerações sobre o passo de bobina, para bobinas concêntricas
Considerando que, para o caso de enrolamentos com bobinas concêntricas o
passo de bobina não é constante, temos que determinar qual o passo de bobina
que deve ser utilizado em um enrolamento com bobinas concêntricas. Para isso,
vale a seguinte consideração:
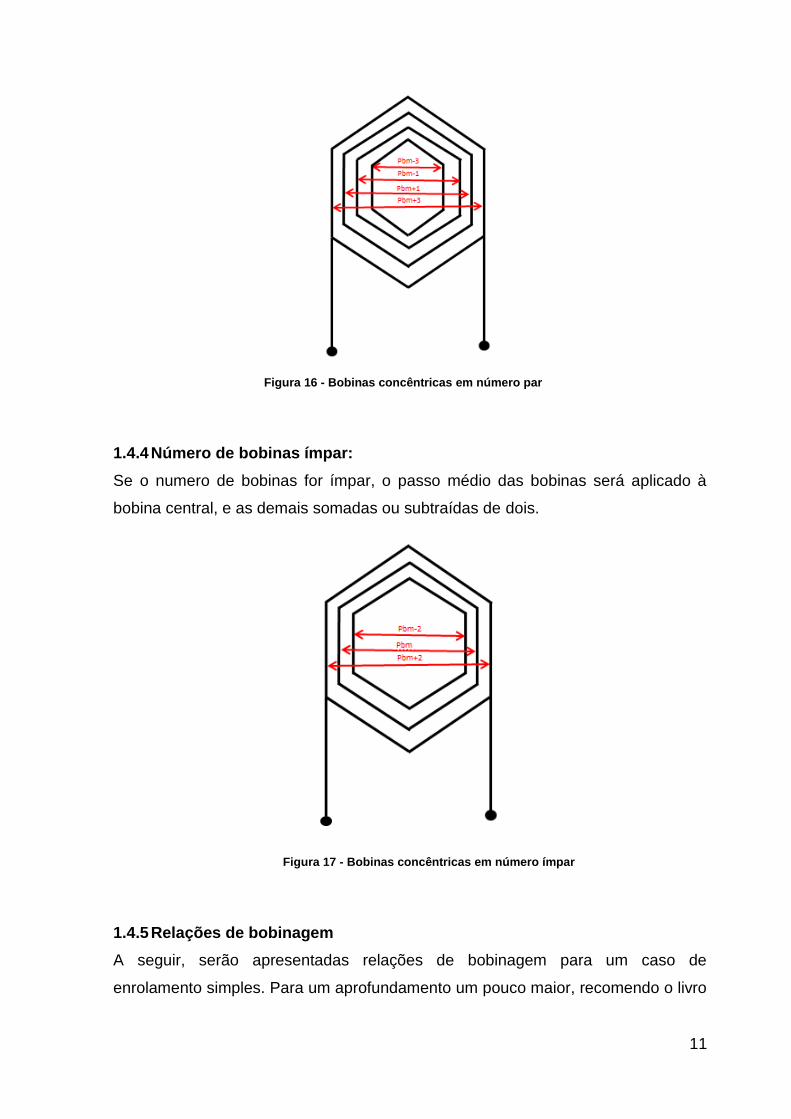
1.4.3 Número de bobinas par:
Se o numero de bobinas for par, a bobina central interna terá o passo médio
subtraído de um, e a bobina central externa, somado de um.
11
Figura 16 - Bobinas concêntricas em número par
1.4.4 Número de bobinas ímpar:
Se o numero de bobinas for ímpar, o passo médio das bobinas será aplicado à
bobina central, e as demais somadas ou subtraídas de dois.
Figura 17 - Bobinas concêntricas em número ímpar
1.4.5 Relações de bobinagem
A seguir, serão apresentadas relações de bobinagem para um caso de
enrolamento simples. Para um aprofundamento um pouco maior, recomendo o livro

12
do prof. Guilherme Fillipo que consta na bibliografia no final da apostila. Definem-se
os seguintes parâmetros:
P – número de polos do motor
Z – número de ranhuras do estator
Pp – passo polar
Pg – passo do grupo de bobinas
Pf – passo das fases
Pb – passo das bobinas
Ng – número de grupos de bobinas por fase e por par de polos (1 ou 2)
Nb – número de bobinas dos grupos
Onde:
Para um enrolamento de camada única (simples), o passo das bobinas é dado por:
𝑃𝑏 = 𝑃𝑝 𝑠𝑒 𝑃𝑏 < 𝑃𝑔
𝑃𝑏 = 𝑃𝑝 − 𝑁𝑏 𝑠𝑒 𝑃𝑏 = 𝑃𝑔
𝑃𝑝 =𝑍
𝑃
𝑃𝑓 =2
3𝑃𝑝
𝑃𝑔 =2.𝑃𝑝
𝑁𝑔
𝑁𝑏 =𝑃𝑝
3.𝑁𝑔

13
Exemplo:
Desenvolva o enrolamento de um motor trifásico de indução, com 24 ranhuras,
camada simples, 4 polos, bobinas concêntricas.
Solução:
Temos três fases e 24 ranhuras, logo, cada fase irá ocupar 8 ranhuras. Como o
enrolamento não é formado por apenas um grupo de bobina por par de pólos e por
fase, (ver tabela 1) devemos ter então dois grupos de bobinas por fase. Ou seja,
cada grupo de bobina de uma fase irá ocupar 4 ranhuras. Como as bobinas são
concêntricas, devemos ter em cada grupo duas bobinas, ocupando as quatro
ranhuras. Portanto, temos dois grupos de bobinas por fase, para o enrolamento de
quatro polos. Dessa forma, temos dois grupos de bobinas por fase e dois pares de
pólos, assim, Ng=1. A partir daí, basta colocar nas equações anteriores e
desenvolver o enrolamento.
Como Pp<Pg, temos:
Como o passo de bobina é igual a 6, mas o número é par, temos que a interior terá
um passo de 6-1=5 e a externa terá um passo de 6+1=7
Figura 18 - Formação das bobinas
𝑃𝑝 =24
4= 6 𝑃𝑓 =
2
3. 6 = 4
𝑃𝑔 =2.6
1 =12 𝑁𝑏 =
6
3.1 =2
𝑃𝑏 = 𝑃𝑝 = 6

14
Figura 19 - Enrolamento em camada simples

15
1.5 Escorregamento
O escorregamento é um conceito extremamente importante para o motor de
indução, trata-se da diferença entre a velocidade síncrona e a velocidade do
rotor, é designado pela letra “s”.
𝑠% =𝑁𝑠 − 𝑁𝑟
𝑁𝑠. 100
Onde:
s = escorregamento
Ns = velocidade síncrona (Ns=120f/p)
Nr = velocidade do rotor
O escorregamento pode ainda ser dado em pu ou em rpm, sendo neste caso, a
diferença entre a velocidade do campo girante (velocidade síncrona) e do rotor.
Se o motor gira a uma velocidade diferente da velocidade síncrona (rotação do
campo girante), o enrolamento do rotor corta as linhas de força magnéticas do
campo girante e, pelas leis do eletromagnetismo, circularão nele correntes
induzidas. Quanto maior a carga, maior terá que ser o conjugado necessário para
acioná-la. Para obter um maior conjugado, proporcionalmente terá que ser maior a
diferença de velocidades entre rotor e o campo girante no estator para que as
correntes induzidas e os campos produzidos sejam maiores. Portanto, à medida
que a carga aumenta, cai a rotação do motor. Quando a carga for zero (motor a
vazio) o rotor irá girar praticamente na rotação síncrona.
Imediatamente após a energização do motor, o rotor ainda se encontra parado,
prestes a iniciar seu processo de aceleração. O escorregamento neste momento é
máximo (100% ou 1 pu), pois a velocidade do rotor é zero, logo o escorregamento
é unitário. A medida que o rotor vai acelerando, seu escorregamento vai ficando
cada vez mais próximo de zero.
A tensão induzida no rotor, E2, segue a equação:
𝐸2 = 𝑘. 𝛷. 𝑁
onde:
K: constante do motor, que depende do numero de pólos, tipo do enrolamento etc.
Φ: fluxo no entreferro (Wb)
N: velocidade relativa entre o rotor e o campo girante.
16
Com base nesta equação, observamos que a tensão induzida no rotor está
diretamente ligada à velocidade relativa, ou seja, podemos dizer que a tensão
induzida no rotor é máxima quando o rotor estiver parado e mínima quando o rotor
estiver na velocidade nominal.
Como esta variação segue a variação do escorregamento, podemos assumir que a
tensão induzida no rotor, E2, em qualquer momento, é dada por:
𝐸2 = 𝑠. 𝐸𝑏𝑙
Onde:
E2 = tensão induzida no rotor;
s = escorregamento;
Ebloq = tensão induzida no rotor estando o rotor parado ou bloqueado, ou seja,
velocidade do rotor igual a zero.
A frequência da tensão induzida no rotor também é proporcional à velocidade
relativa entre rotor e estator, logo:
𝑓2 = 𝑠. 𝑓𝑏𝑙
Onde:
f2 = frequência da tensão induzida no rotor para um determinado escorregamento s;
s = escorregamento;
fbloq = frequência da tensão induzida no rotor estando o rotor parado ou bloqueado,
ou seja, velocidade do rotor igual a zero.
Da mesma maneira, a reatância indutiva do rotor depende da frequência, já que:
𝑋2 = 2. 𝜋. 𝑓. 𝐿
Ou seja, podemos então assumir que:
𝑋2 = 𝑠. 𝑋𝑏𝑙
Por questões de simplificação de cálculos e estudos, a resistência do rotor é
considerada constante por não haver dependência com a velocidade, no
entanto, isso não é totalmente verdadeiro. A frequência no momento da partida
é maior do que em outros momentos, por efeito peculiar, a resistência se torna
mais alta na partida e a medida que o rotor vai acelerando, a distribuição de
corrente vai ficando mais homogênea, reduzindo a resistência.

17
1.6 Torque
O torque do motor é dado por 𝑇 = 𝐾𝑡. ∅. 𝐼𝑟. 𝑐𝑜𝑠𝜃𝑟
Kt= constante de torque, que depende do número de pólos, tipo de
enrolamento, unidades empregadas etc.
Ф= fluxo
Ir.cosθ = componente da corrente em fase com Ф.
Em função da reatância indutiva do rotor, a corrente sofre um atraso em
relação a Er (tensão induzida no rotor). Para gerar o torque, é necessário que a
corrente esteja em fase com a tensão, portanto, apenas a parcela da corrente
em fase com a tensão do rotor que gera o torque.
Figura 20 - Atraso do rotor em relação ao fluxo e torque produzido.
A curva característica de torque de um motor de indução é a mostrada na figura
seguinte:
Figura 21 - Curva de torque.

18
1.6.1 Torque de partida ou torque com motor bloqueado
O torque de partida, ou torque de rotor bloqueado é o torque desenvolvido pelo
motor no momento em que o mesmo é energizado. É responsável por iniciar o
movimento da carga.
Para o motor quando seu rotor está bloqueado, a impedância Zbl é dada por
𝑍𝑏𝑙𝑞 = 𝑅𝑟 + 𝑗𝑋𝑏𝑙 = √𝑅𝑟2 + 𝑋𝑏𝑙2
e
𝑐𝑜𝑠𝜃𝑟 =𝑅𝑟
𝑍𝑏𝑙
A corrente no rotor quando ele está bloqueado é:
𝐼𝑏𝑙 =𝐸𝑏𝑙
𝑍𝑏𝑙=
𝐸𝑏𝑙
𝑅𝑟 + 𝑗𝑋𝑏𝑙=
𝐸𝑏𝑙
√𝑅𝑟2 + 𝑋𝑏𝑙2
Ebl é a tensão induzida no rotor no momento da partida, essa tensão é a mais alta
durante o funcionamento do motor, pois a diferença relativa de velocidade do
campo e do rotor é máxima.
𝑇𝑝 = 𝐾𝑡. ∅. 𝐼𝑟. 𝑐𝑜𝑠𝜃𝑟 = 𝐾𝑡. ∅.𝐸𝑏𝑙
√𝑅𝑟2 + 𝑋𝑏𝑙2.
𝑅𝑟
√𝑅𝑟2 + 𝑋𝑏𝑙2
Considerado que Ebl e o fluxo Φ são proporcionais à tensão por fase do estator
(Vf), podemos dizer que:
𝑇𝑝 = 𝐾𝑡′. 𝑉𝑓2
Exemplo: Um motor de indução trifásico de 75cv, 2 pólos tem tensão nominal de
440V e torque de partida de 190 N.m. Durante a partida, sua corrente atinge 800 A.
Determine o novo torque e a nova corrente de partida se o mesmo for energizado
em 254 V.
19
1.6.2 Torque máximo
O ponto em que o torque máximo ocorre pode ser determinado a partir da equação
geral do torque do motor, 𝑇 = 𝐾𝑡. ∅. 𝐼𝑟. 𝑐𝑜𝑠𝜃𝑟 = 𝐾𝑡. ∅.𝑠.𝐸𝑏𝑙.𝑅𝑟
𝑅𝑟2+ 𝑠2.𝑋𝑏𝑙2
. A única grandeza
variável na equação é o escorregamento, logo, podemos derivar o torque em
relação a s e definir quando ocorre o torque máximo. Fazendo dT/ds=0,
encontramos s=Rr/Xbl, ou seja, o torque máximo ocorre no momento em que o
escorregamento tiver o valor da relação da resistência do rotor com a reatância do
rotor bloqueado.
Substituindo 𝑠 =𝑅𝑟
𝑋𝑏𝑙 na equação 𝑇 = 𝐾𝑡. ∅.
𝑠.𝐸𝑏𝑙.𝑅𝑟
𝑅𝑟2+ 𝑠2.𝑋𝑏𝑙2 chegamos a 𝑇 = 𝐾𝑡. ∅.
𝐸𝑏𝑙
2.𝑋𝑏𝑙 , ou
seja, o torque máximo independe da resistência do rotor, depende na verdade do
ponto em que ele ocorre.
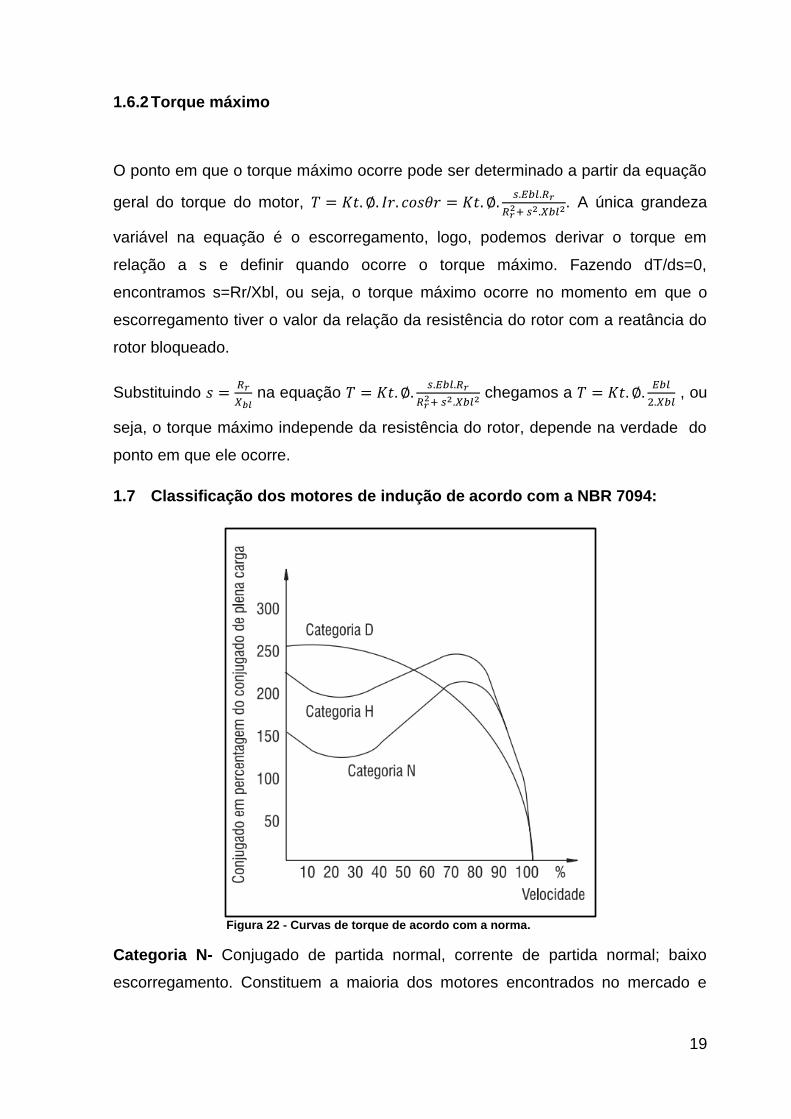
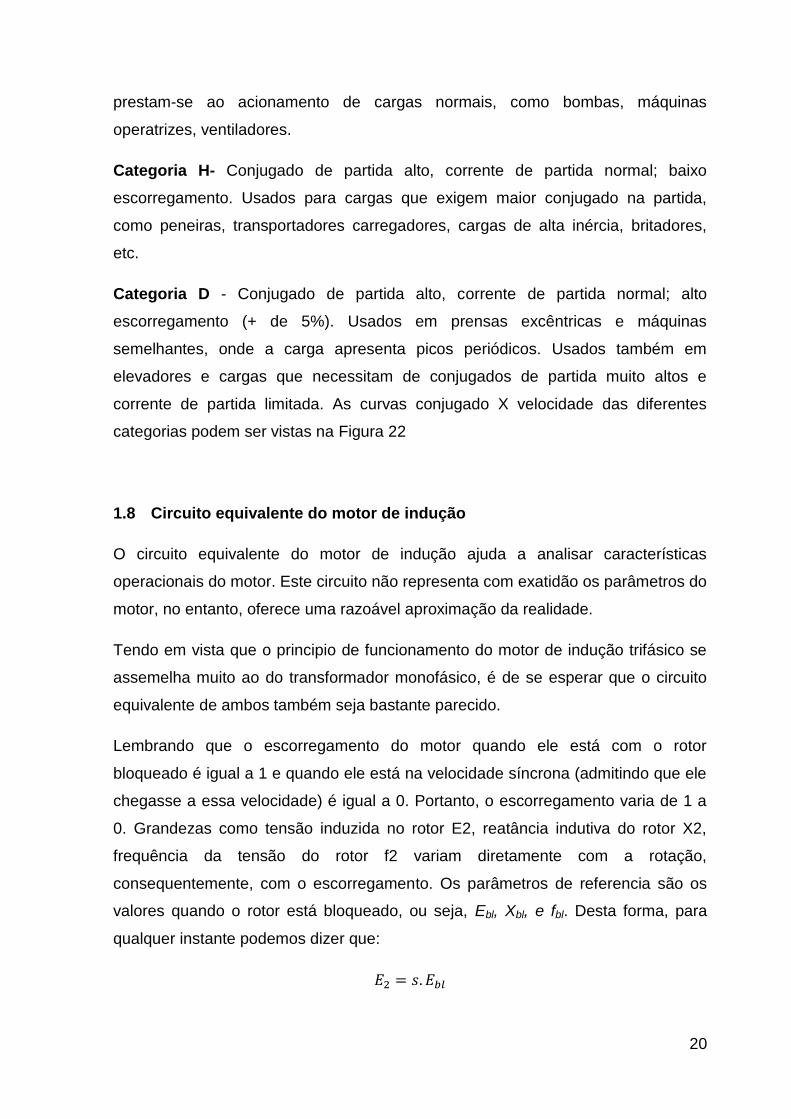
1.7 Classificação dos motores de indução de acordo com a NBR 7094:
Figura 22 - Curvas de torque de acordo com a norma.
Categoria N- Conjugado de partida normal, corrente de partida normal; baixo
escorregamento. Constituem a maioria dos motores encontrados no mercado e
20
prestam-se ao acionamento de cargas normais, como bombas, máquinas
operatrizes, ventiladores.
Categoria H- Conjugado de partida alto, corrente de partida normal; baixo
escorregamento. Usados para cargas que exigem maior conjugado na partida,
como peneiras, transportadores carregadores, cargas de alta inércia, britadores,
etc.
Categoria D - Conjugado de partida alto, corrente de partida normal; alto
escorregamento (+ de 5%). Usados em prensas excêntricas e máquinas
semelhantes, onde a carga apresenta picos periódicos. Usados também em
elevadores e cargas que necessitam de conjugados de partida muito altos e
corrente de partida limitada. As curvas conjugado X velocidade das diferentes
categorias podem ser vistas na Figura 22
1.8 Circuito equivalente do motor de indução
O circuito equivalente do motor de indução ajuda a analisar características
operacionais do motor. Este circuito não representa com exatidão os parâmetros do
motor, no entanto, oferece uma razoável aproximação da realidade.
Tendo em vista que o principio de funcionamento do motor de indução trifásico se
assemelha muito ao do transformador monofásico, é de se esperar que o circuito
equivalente de ambos também seja bastante parecido.
Lembrando que o escorregamento do motor quando ele está com o rotor
bloqueado é igual a 1 e quando ele está na velocidade síncrona (admitindo que ele
chegasse a essa velocidade) é igual a 0. Portanto, o escorregamento varia de 1 a
0. Grandezas como tensão induzida no rotor E2, reatância indutiva do rotor X2,
frequência da tensão do rotor f2 variam diretamente com a rotação,
consequentemente, com o escorregamento. Os parâmetros de referencia são os
valores quando o rotor está bloqueado, ou seja, Ebl, Xbl, e fbl. Desta forma, para
qualquer instante podemos dizer que:
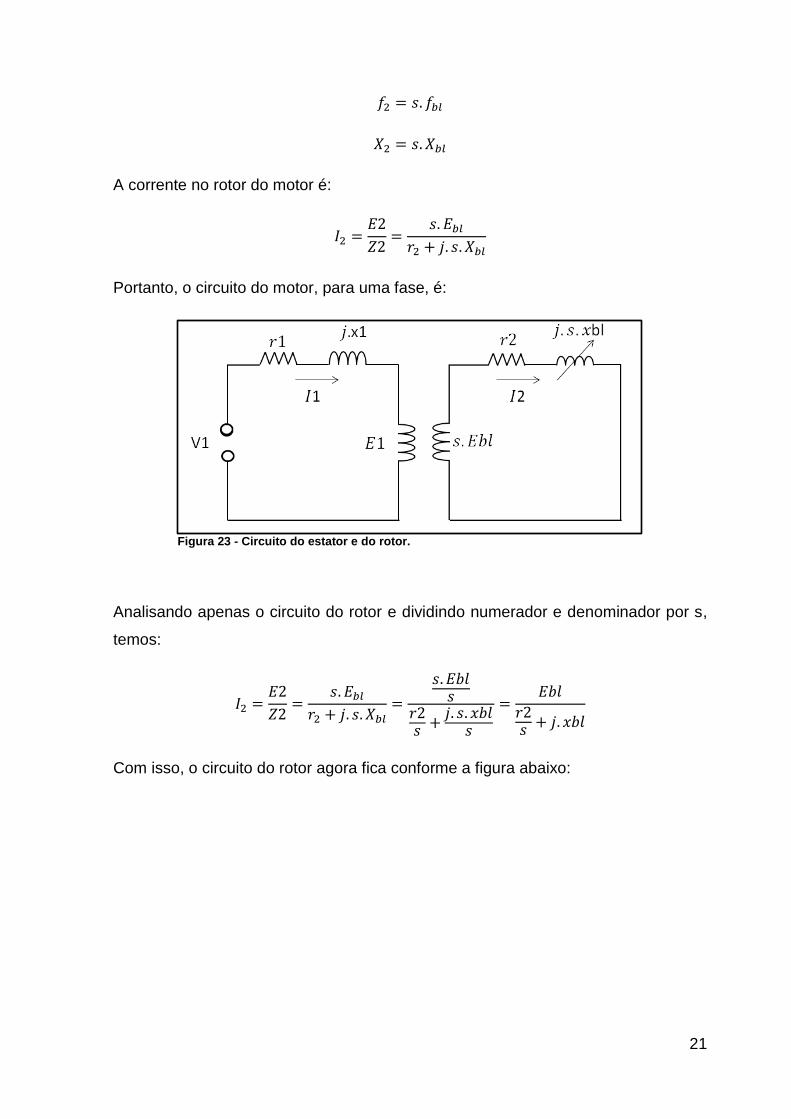
𝐸2 = 𝑠. 𝐸𝑏𝑙
21
𝑓2 = 𝑠. 𝑓𝑏𝑙
𝑋2 = 𝑠. 𝑋𝑏𝑙
A corrente no rotor do motor é:
𝐼2 =𝐸2
𝑍2=
𝑠. 𝐸𝑏𝑙
𝑟2 + 𝑗. 𝑠. 𝑋𝑏𝑙
Portanto, o circuito do motor, para uma fase, é:
Figura 23 - Circuito do estator e do rotor.
Analisando apenas o circuito do rotor e dividindo numerador e denominador por s,
temos:
𝐼2 =𝐸2
𝑍2=
𝑠. 𝐸𝑏𝑙
𝑟2 + 𝑗. 𝑠. 𝑋𝑏𝑙=
𝑠. 𝐸𝑏𝑙𝑠
𝑟2𝑠 +
𝑗. 𝑠. 𝑥𝑏𝑙𝑠
=𝐸𝑏𝑙
𝑟2𝑠 + 𝑗. 𝑥𝑏𝑙
Com isso, o circuito do rotor agora fica conforme a figura abaixo:

22
Figura 24 - Circuito do rotor após modificação.
A parcela variável agora está em r2 e não mais no reativo, já que xbl é uma
constante.
Considerando que:
𝑟2
𝑠= 𝑟2 +
(1 − 𝑠)
𝑠. 𝑟2
O circuito do rotor pode ser redesenhado conforme abaixo:
Figura 25 - circuito do rotor.
Com o circuito acima, é possível separar as perdas por aquecimento no rotor 𝐼22. 𝑟2
da potência mecânica gerada no rotor 𝐼22.
(1−𝑠)
𝑠.𝑟2.
Referindo as grandezas ao estator, temos:

23
𝑟2′ = 𝑟2. (
𝑁1
𝑁2)2 = 𝑟2. 𝛼2
𝑥2′ = 𝑥𝑏𝑙 . (
𝑁1
𝑁2)2 = 𝑥𝑏𝑙 . 𝛼2
𝐸1
𝐸2
= 𝛼 ∴ 𝐸1 = 𝛼. 𝐸2 = 𝐸2′
Onde:
𝛼 = 𝑟𝑒𝑙𝑎çã𝑜 𝑑𝑒 𝑡𝑟𝑎𝑛𝑠𝑓𝑜𝑟𝑚𝑎çã𝑜 𝑒𝑛𝑡𝑟𝑒 𝑒𝑠𝑡𝑎𝑡𝑜𝑟 𝑒 𝑟𝑜𝑡𝑜𝑟.
𝑟2 = 𝑟𝑒𝑠𝑖𝑠𝑡ê𝑛𝑐𝑖𝑎 𝑑𝑜 𝑟𝑜𝑡𝑜𝑟.
𝑟2′ = 𝑟𝑒𝑠𝑖𝑠𝑡ê𝑛𝑐𝑖𝑎 𝑑𝑜 𝑟𝑜𝑡𝑜𝑟 𝑟𝑒𝑓𝑙𝑒𝑡𝑖𝑑𝑎 𝑎𝑜 𝑒𝑠𝑡𝑎𝑡𝑜𝑟.
𝑥𝑏𝑙 = 𝑟𝑒𝑎𝑡â𝑛𝑐𝑖𝑎 𝑑𝑜 𝑟𝑜𝑡𝑜𝑟 𝑐𝑜𝑚 𝑜 𝑟𝑜𝑡𝑜𝑟 𝑏𝑙𝑜𝑞𝑢𝑒𝑎𝑑𝑜.
𝑥2′ = 𝑟𝑒𝑎𝑡â𝑛𝑐𝑖𝑎 𝑑𝑜 𝑟𝑜𝑡𝑜𝑟 𝑟𝑒𝑓𝑙𝑒𝑡𝑖𝑑𝑎 𝑎𝑜 𝑒𝑠𝑡𝑎𝑡𝑜𝑟.
Assim, o circuito equivalente exato do motor de indução trifásico por fase,
considerando o ramo de magnetização é o da figura abaixo:
Figura 26 - Circuito exato do motor de indução.
Uma alteração na configuração da figura acima facilita bastante os cálculos, e
chamamos de circuito aproximado do motor de indução.

24
Figura 27 - Circuito aproximado do motor de indução.
1.8.1 Determinação dos parâmetros do motor de indução
Os parâmetros do circuito equivalente são obtidos através de dois ensaios, o
ensaio a vazio e o ensaio com rotor bloqueado.
a) Ensaio a vazio
Aplica-se ao motor tensão nominal, sem nenhuma carga conectada (na
verdade, haverá uma parcela da carga, referente às perdas mecânicas, ou
seja, ventilação e atrito), nessa condição, todo o lado direito do circuito
equivalente passa a ter um valor considerado infinito, pois o escorregamento
é nulo. São medidos os valores por fase de tensão, corrente, potência ativa
e potência reativa.
𝑅𝑚 =𝑉𝑓
2
𝑃𝑓
𝑋𝑚 =𝑉𝑓
2
𝑄𝑓
b) Ensaio de rotor bloqueado
Com o eixo do motor bloqueado (travado), aplica-se uma tensão reduzida
suficiente apenas para circular a corrente nominal. Tendo em vista que a tensão
aplicada é baixa e os valores do ramo de magnetização são altos, toda a corrente
flui pelo lado direito do circuito equivalente. O escorregamento é máximo (s=1) o
que elimina a parcela variável da resistência. Não existem perdas mecânicas, já
que o rotor está travado. A parcela referente às perdas no ferro também pode ser

25
desprezada, pois as perdas no ferro variam com o quadrado da tensão aplicada, e,
como a tensão aplicada é uma parcela da tensão nominal, este valor elevado ao
quadrado, torna-se ainda menor, podendo assim ser considerado desprezível.
Devem ser monitorados os valores por fase de corrente, tensão aplicada,
potência ativa e potência reativa.
𝑅𝑒 =𝑃𝑐𝑐
𝐼𝑐𝑐2
𝑋𝑒 =𝑄𝑐𝑐
𝐼𝑐𝑐2
Neste caso, tanto a reatância quanto a resistência medido tratam-se dos
valores somados, do estator e do rotor. Para encontrar os valores do rotor
referenciados ao estator, devemos medir a resistência ou a reatância do estator e
subtrair do valor encontrado acima, assim teremos os valores de resistência e
reatância do rotor refletidos ao estator (r2’ e x2’).
1.9 Rendimento e perdas no motor de indução
O motor elétrico fornece em seu eixo um determinado valor de potência, que é da
potência indicada em sua placa de dados. No entanto, para aquela potência estar
disponibilizada, ocorre uma série de perdas ao longo do caminho. A figura a seguir
ilustra as transformações até a disponibilização da potência no eixo do motor:
Figura 28 - Perdas no motor de indução.
26
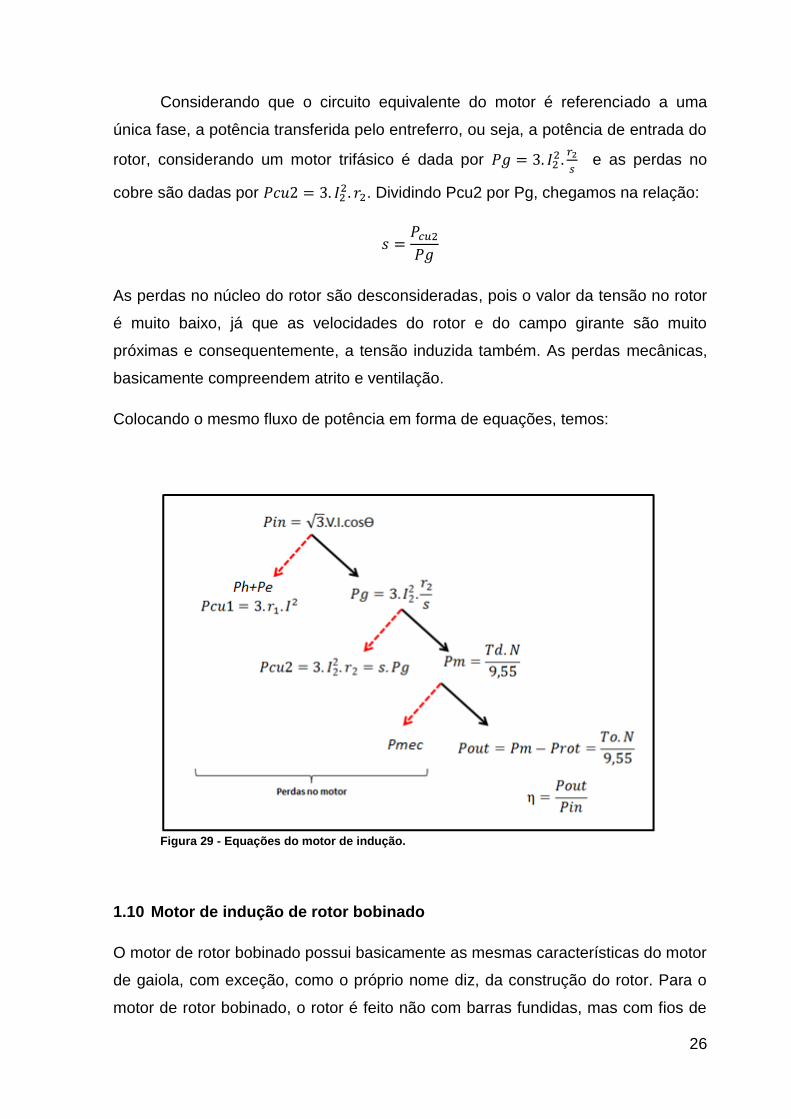
Considerando que o circuito equivalente do motor é referenciado a uma
única fase, a potência transferida pelo entreferro, ou seja, a potência de entrada do
rotor, considerando um motor trifásico é dada por 𝑃𝑔 = 3. 𝐼22.
𝑟2
𝑠 e as perdas no
cobre são dadas por 𝑃𝑐𝑢2 = 3. 𝐼22. 𝑟2. Dividindo Pcu2 por Pg, chegamos na relação:
𝑠 =𝑃𝑐𝑢2
𝑃𝑔
As perdas no núcleo do rotor são desconsideradas, pois o valor da tensão no rotor
é muito baixo, já que as velocidades do rotor e do campo girante são muito
próximas e consequentemente, a tensão induzida também. As perdas mecânicas,
basicamente compreendem atrito e ventilação.
Colocando o mesmo fluxo de potência em forma de equações, temos:
Figura 29 - Equações do motor de indução.
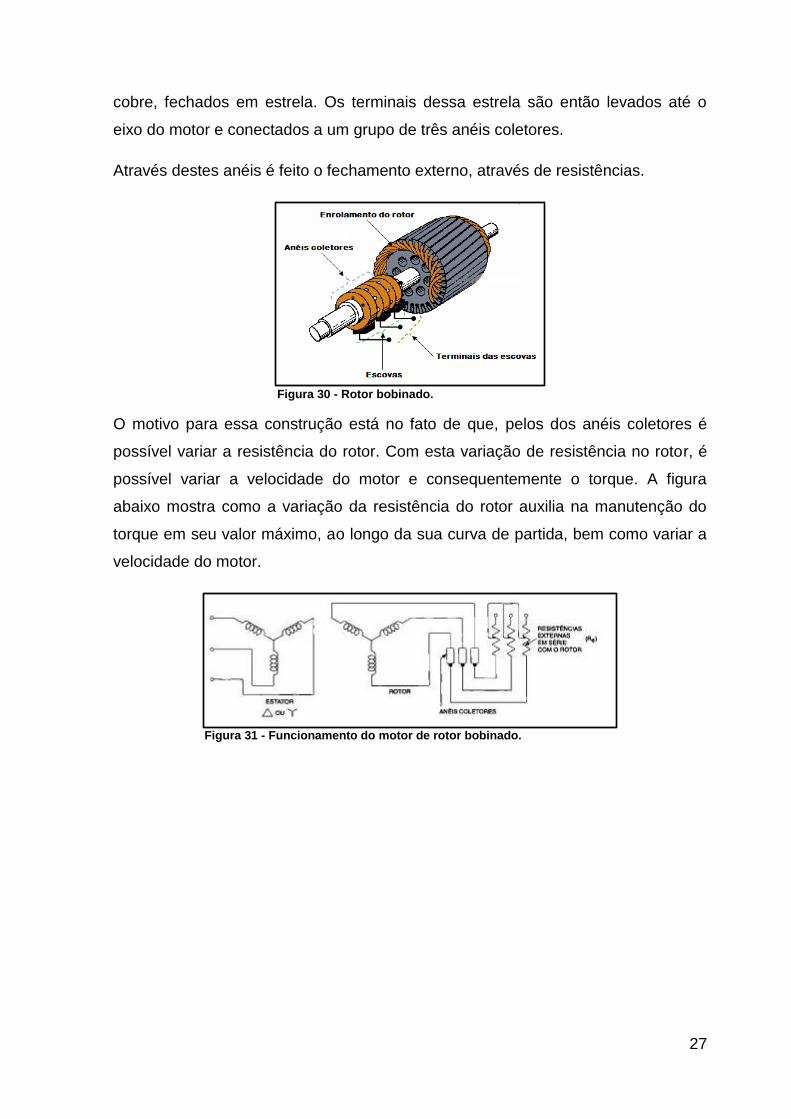
1.10 Motor de indução de rotor bobinado
O motor de rotor bobinado possui basicamente as mesmas características do motor
de gaiola, com exceção, como o próprio nome diz, da construção do rotor. Para o
motor de rotor bobinado, o rotor é feito não com barras fundidas, mas com fios de
27
cobre, fechados em estrela. Os terminais dessa estrela são então levados até o
eixo do motor e conectados a um grupo de três anéis coletores.
Através destes anéis é feito o fechamento externo, através de resistências.
Figura 30 - Rotor bobinado.
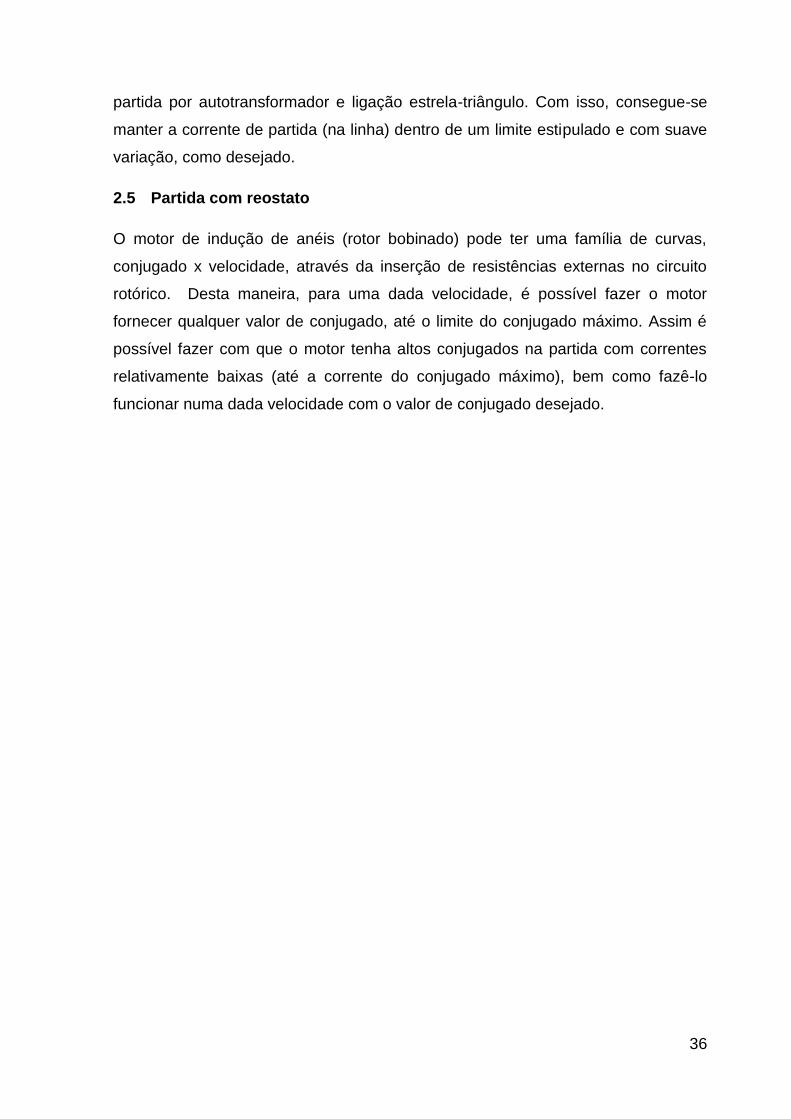
O motivo para essa construção está no fato de que, pelos dos anéis coletores é
possível variar a resistência do rotor. Com esta variação de resistência no rotor, é
possível variar a velocidade do motor e consequentemente o torque. A figura
abaixo mostra como a variação da resistência do rotor auxilia na manutenção do
torque em seu valor máximo, ao longo da sua curva de partida, bem como variar a
velocidade do motor.
Figura 31 - Funcionamento do motor de rotor bobinado.

28
Figura 32 - Variação da velocidade em função da variação da resistência do rotor.
Para um novo valor de resistência Rx inserida no rotor, existe um novo
escorregamento, sx.
A relação entre eles é dada pela equação abaixo:
𝑠𝑥 =(𝑅𝑟 + 𝑅𝑥)
𝑅𝑟 . 𝑠𝑜
Onde:
sx: novo escorregamento com a resistência Rx inserida.
Rr: Resistencia do rotor.
Rx: resistência adicionada
So: escorregamento original.

29
1.11 Motor de indução alimentado em frequência diferente da nominal
Motores trifásicos bobinados para 50Hz poderão ser ligados também em rede de
60Hz, porém:
a) Ligando o motor de 50Hz, com a mesma tensão, em 60Hz:
A potência disponível do motor será a mesma;
A corrente nominal será a mesma;
A corrente de partida diminui em 17%;
O conjugado de partida diminui em 17%;
O conjugado máximo diminui em 17%;
A velocidade nominal aumenta em 20%.
b) Ligando o motor de 50Hz em 60Hz, alterando a tensão na mesma proporção
da frequência:
Aumenta a potência disponível do motor em 20%;
A corrente nominal será a mesma;
A corrente de partida será aproximadamente a mesma;
O conjugado de partida será aproximadamente o mesmo;
O conjugado máximo será aproximadamente o mesmo;
A rotação nominal aumenta 20%.
c) Ligando o motor de 60Hz em 50Hz, alterando a tensão na mesma proporção
da frequência:
Reduz a potência disponível do motor em 17%;
A corrente nominal será a mesma;
A corrente de partida será aproximadamente a mesma;

30
O conjugado de partida será aproximadamente o mesmo;
O conjugado máximo será aproximadamente o mesmo;
A rotação nominal diminui 17%.
Obs.: Para motores de 60Hz que serão ligados em 50Hz, isto só é possível se a
tensão do motor em 50Hz for 20% abaixo da tensão em 60Hz, pois desta forma o
fluxo permanecerá praticamente o mesmo da frequência anterior e sendo assim as
características elétricas serão aproximadamente as mesmas da frequência de
60Hz.
1.12 Grau de proteção
Figura 33 - Grau de proteção
1.13 Elevação de temperatura
Figura 34 - Elevação de temperatura

31
1.14 Fator de serviço
Chama-se fator de serviço (FS) o fator que, aplicado à potência nominal, indica a
carga permissível que pode ser aplicada continuamente ao motor, sob condições
especificadas. Note que se trata de uma capacidade de sobrecarga contínua, ou
seja, uma reserva de potência que dá ao motor uma capacidade de suportar
melhor o funcionamento em condições desfavoráveis.
Entretanto, no fator de serviço as normas permitem que exista um acréscimo de
10ºC na elevação de temperatura da classe.
1.15 Regime de serviço
a) Serviço contínuo S1:
Funcionamento a carga constante de duração suficiente para que se alcance o
equilíbrio térmico. Exemplos: Moinhos, britadores, bombas, compressores, esteira
transportadoras. Todas as cargas que permanecem com rotação constante e sem
grande variação de carga após a partida.
Figura 35 - Regime de serviço S1
b) Regime de tempo limitado S2:
Funcionamento a carga constante, durante um certo tempo, inferior ao necessário
para atingir o equilíbrio
térmico, seguido de um período de repouso de duração suficiente para restabelecer
a igualdade de temperatura com o meio refrigerante.

32
Exemplos: Motores de emergência, Unidades Hidráulicas, Bombas de incêndio.
Figura 36 - Regime de serviço S2
c) Regime intermitente periódico S3:
Sequência de ciclos idênticos, cada qual incluindo um período de funcionamento a
carga constante e um período de repouso, sendo tais períodos muito curtos para
que se atinja o equilíbrio térmico durante um ciclo de regime e no qual a corrente
de partida não afete de modo significativo a elevação de temperatura.
Exemplos: Compressores, bombas...
Figura 37 - Regime de serviço S3.

33
2. ACIONAMENTO DE MOTORES DE INDUÇÃO
2.1 Partida direta
Sempre que possível a partida de um motor trifásico de gaiola, deverá ser direta na
rede ou plena tensão, por meio de contatores e/ou disjuntores. Nos casos em que a
corrente de partida é muito elevada, podem ocorrer alguns inconvenientes:
-Elevada queda de tensão no sistema de alimentação da rede, provocando
interferência em equipamentos instalados neste sistema;
-O sistema de alimentação (cabos, chaves, proteção, transformador) deverá ser
sobre dimensionado, elevando os custos;
-A imposição das concessionárias de energia elétrica que limitam a queda de
tensão da rede;
-Limitação no caso de redes isoladas operando com grupos geradores.
Figura 2-1 - Partida direta

34
2.2 Partida compensada
A chave compensadora pode ser usada para a partida de motores sob carga. Ela
reduz a corrente de partida, evitando uma sobrecarga no circuito, deixando, porém,
o motor com um conjugado "suficiente" para a partida e aceleração. A tensão na
chave compensadora é reduzida através de autotransformador que possui
normalmente taps de 50, 65 e 80% da tensão nominal. Para motores que irão partir
com uma tensão menor que a tensão nominal, a corrente e o conjugado de partida
deverão ser multiplicados pelos fatores K1 (fator de multiplicação da corrente) e K2
(fator de multiplicação do conjugado) obtidos no gráfico da figura seguinte:
Figura 2-2 - Fatores k
Figura 2-3 - Partida compensada

35
2.3 Partida estrela-triângulo
É fundamental que para a partida estrela-triângulo o motor tenha possibilidade de
ligação em dupla tensão, ou seja, 220-380V , 380-660V ou ainda 440-762V. A
partida estrela-triângulo poderá ser usada quando a curva de conjugados do motor
é suficientemente elevada para poder garantir a aceleração da máquina com a
corrente reduzida. Na ligação estrela, o conjugado fica reduzido para 25 a 33% do
conjugado de partida e a corrente de partida para 33% do valor em da ligação
triângulo. Por este motivo, sempre que for necessária uma partida estrela-triângulo,
deverá ser usado um motor com conjugado de partida elevado.
Figura 2-4 - Partida estrela-triângulo
2.4 Partida estática (Soft-Starter)
O avanço da eletrônica permitiu a criação da chave de partida a estado sólido a
qual consiste de um conjunto de pares de tiristores (SCR, ou combinações de
tiristores/diodos), um em cada borne de potência do motor. O ângulo de disparo de
cada par de tiristores é controlado eletronicamente para uma tensão variável aos
terminais do motor durante a "aceleração". Este comportamento recebe o nome de
"partida suave" (soft-starter).
No final do período de partida, ajustável conforme a aplicação, a tensão atinge seu
valor pleno após uma aceleração suave ou uma rampa ascendente, ao invés de ser
submetido a incrementos ou "saltos" repentinos, como ocorre com os métodos de
36
partida por autotransformador e ligação estrela-triângulo. Com isso, consegue-se
manter a corrente de partida (na linha) dentro de um limite estipulado e com suave
variação, como desejado.
2.5 Partida com reostato
O motor de indução de anéis (rotor bobinado) pode ter uma família de curvas,
conjugado x velocidade, através da inserção de resistências externas no circuito
rotórico. Desta maneira, para uma dada velocidade, é possível fazer o motor
fornecer qualquer valor de conjugado, até o limite do conjugado máximo. Assim é
possível fazer com que o motor tenha altos conjugados na partida com correntes
relativamente baixas (até a corrente do conjugado máximo), bem como fazê-lo
funcionar numa dada velocidade com o valor de conjugado desejado.
37
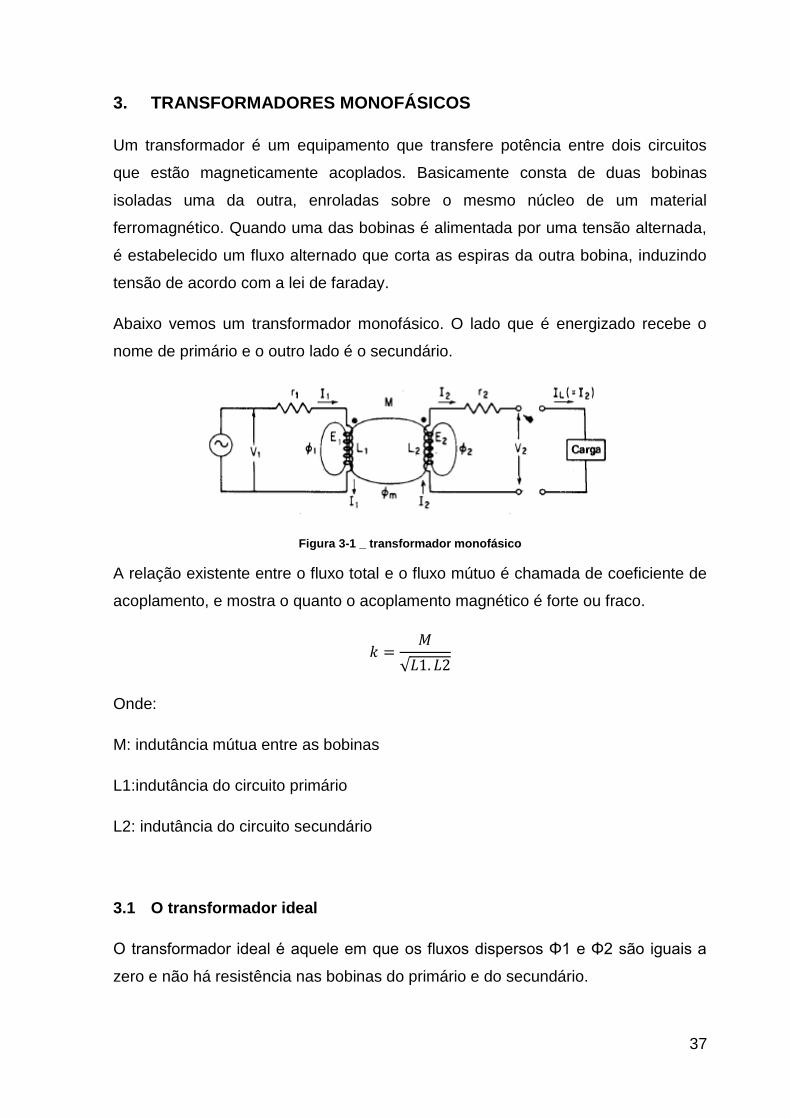
3. TRANSFORMADORES MONOFÁSICOS
Um transformador é um equipamento que transfere potência entre dois circuitos
que estão magneticamente acoplados. Basicamente consta de duas bobinas
isoladas uma da outra, enroladas sobre o mesmo núcleo de um material
ferromagnético. Quando uma das bobinas é alimentada por uma tensão alternada,
é estabelecido um fluxo alternado que corta as espiras da outra bobina, induzindo
tensão de acordo com a lei de faraday.
Abaixo vemos um transformador monofásico. O lado que é energizado recebe o
nome de primário e o outro lado é o secundário.
Figura 3-1 _ transformador monofásico
A relação existente entre o fluxo total e o fluxo mútuo é chamada de coeficiente de
acoplamento, e mostra o quanto o acoplamento magnético é forte ou fraco.
𝑘 =𝑀
√𝐿1. 𝐿2
Onde:
M: indutância mútua entre as bobinas
L1:indutância do circuito primário
L2: indutância do circuito secundário
3.1 O transformador ideal
O transformador ideal é aquele em que os fluxos dispersos Φ1 e Φ2 são iguais a
zero e não há resistência nas bobinas do primário e do secundário.

38
Figura 3-2 _ transformador ideal
A figura 5-2 mostra um transformador ideal, onde uma tensão V1 é aplicada ao
enrolamento 1, fazendo com que circule uma corrente I1, que gera um fluxo, esse
fluxo pela lei de Lenz induz uma tensão contrária, E1 que se opõe a V1. Esse
mesmo fluxo induz também E2, cujo sentido deve ser tal que gere uma corrente
cujo fluxo se oponha ao fluxo que o produziu.
O diagrama fasorial do transformador mostra as relações entre as grandezas
existentes.
Figura 3-3 _ diagrama fasorial de um transformador ideal
Conforme observamos no gráfico, a corrente I1’ é a soma fasorial da corrente de
magnetização Io e da corrente necessária para equilibrar os ampere-espira com o
secundário.

39
No entanto, a corrente de magnetização é tão pequena quando comparada com a
corrente de carga, que normalmente ela é desprezada.
Para o transformador ideal, a potência que entra é igual à potência de saída, ou
seja, S1=S2, logo:
𝑉1. 𝐼1 = 𝑉2. 𝐼2
As tensões induzidas E1 e E2 são dadas por:
𝐸1 = 𝑁1.𝑑∅𝑚
𝑑𝑡 e 𝐸2 = 𝑁2.
𝑑∅𝑚
𝑑𝑡
Desconsiderando a componente de magnetização da corrente, podemos dizer que:
𝑉1
𝑉2=
𝐼2
𝐼1=
𝐸1
𝐸2=
𝑁1
𝑁2= 𝛼
Onde α é a chamada relação de transformação.
Um transformador pode ser elevador ou abaixador (ou apenas isolador, relação
1:1). O transformador abaixador possui uma tensão no primário superior a do
secundário, e a relação de transformação é maior que 1. No caso do transformador
elevador, a tensão no primário é inferior à tensão no secundário e a relação de
transformação é menor que 1.
A partir das relações de tensão anteriormente vistas, podemos agora deduzir a
tensão induzida no primário e no secundário de um transformador:
𝐸1 = 4,44. 𝑁1. 𝑓. 𝐵𝑚𝑎𝑥. 𝑆
e
𝐸2 = 4,44. 𝑁2. 𝑓. 𝐵𝑚𝑎𝑥. 𝑆
Onde:
E1 e E2: tensões induzidas no primário e no secundário respectivamente;
N1 e N2: número de espiras do primário e do secundário, respectivamente;
f: frequência;

40
Bmax: máxima densidade de fluxo permissível e
S: área da seção reta do núcleo.
3.2 Impedância refletida
A impedância secundária, vista pelos terminais secundários do transformador da
figura 5-4 é 𝑍2 =𝑉2
𝐼2, independente da carga no secundário. Da mesma forma, a
impedância vista pela fonte no transformador abaixo é 𝑍1 =𝑉1
𝐼1 .
Figura 3-4 _ transformador ideal com carga
Tendo em vista que V1=α.V2 e I2=α.I1 podemos verificar que:
𝑍1 =𝛼. 𝑉2
𝐼2𝛼
= 𝛼2.𝑉2
𝐼2= 𝛼2. 𝑍2
3.3 O transformador real
Um transformador real é mostrado na figura 5-5, nele podemos verificar a
existência das reatâncias primárias e secundárias, que ocasionam quedas de
tensão e perdas no transformador.

41
Figura 3-5 _ transformador real
Para o transformador real mostrado, temos:
𝐸1̇ = 𝑉1̇ − 𝑍1̇. 𝐼1 = 𝑉1̇ − 𝐼1. (𝑟1 + 𝑗𝑥𝐿1)
𝐸2̇ = 𝑉2̇ + 𝑍2̇. 𝐼2 = 𝑉2̇ + 𝐼2. (𝑟2 + 𝑗𝑥𝐿2)
3.4 Circuito equivalente do transformador
Através de algumas mudanças e transformações de impedâncias, é possível
desenvolver um circuito equivalente de um transformador. Um circuito equivalente
é bastante útil na determinação do rendimento, regulação e análises de sistemas
de potência.
Figura 3-6 _ circuito equivalente de um transformador
Fazendo reflexão das impedâncias e deslocando o ramo de magnetização para a
esquerda do circuito, temos o circuito equivalente aproximado do transformador.

42
Figura 3-7 _ circuito equivalente aproximado com impedâncias refletidas
Desconsiderando o ramo de magnetização, chegamos no circuito simplificado:
Figura 3-8 _ circuito equivalente aproximado
Logo, temos:
𝑅𝑒1 = 𝑟1 + 𝛼2. 𝑟2
𝑋𝑒1 = 𝑥1 + 𝛼2. 𝑥2
𝑍𝑒1 = 𝑧1 + 𝛼2. 𝑧2
Podemos ainda relacionar as grandezas com o circuito referido ao secundário:
Figura 3-9 _ circuito referido ao secundário

43
Onde:
𝑅𝑒2 =𝑟1
𝛼2+ 𝑟2
𝑋𝑒2 =𝑥1
𝛼2+ 𝑥2
𝑍𝑒2 =𝑧1
𝛼2+ 𝑧2
3.5 Regulação do transformador
A regulação de tensão do transformador é uma relação entre sua tensão a plena
carga e a tensão a vazio. A tensão E2 induzida no secundário possui diferentes
valores dependendo do tipo de carga conectada.
Observando as figuras abaixo, para diferentes fatores de potência, concluímos que:
𝐸2 = (𝑉2. 𝑐𝑜𝑠𝜃2 + 𝐼2. 𝑅𝑒2) + 𝑗(𝑉2. 𝑠𝑒𝑛𝜃2 ± 𝐼2. 𝑋𝑒2)
Figura 3-10 _ regulação de tensão secundária do transformador

44
A regulação é então dada por:
𝑟𝑒𝑔% =𝐸2 − 𝑉2
𝑉2. 100
3.6 Determinação das perdas no transformador
As perdas em um transformador ocorrem em função da corrente que circula pelos
enrolamentos e através das perdas por correntes parasitas e histerese, que
ocorrem no núcleo. (ver 3.16)
Essas perdas podem ser determinadas através de dois ensaios específicos, o de
curto circuito e o ensaio a vazio.
Ensaio de curto-circuito
Abaixo, vemos o arranjo necessário para realizar o ensaio de curto circuito. O
wattímetro mede essencialmente as perdas no cobre e uma pequena e desprezível
parcela das perdas no ferro, uma vez que a tensão aplicada é muito pequena e as
perdas no ferro variam com o quadrado da tensão aplicada.
Figura 3-11 _ ensaio de curto circuito
Com o valor da leitura do wattímetro e a leitura de corrente, determinamos a
resistência equivalente referida ao lado do ensaio:
𝑅𝑒 =𝑃𝑐𝑐
𝐼2
Com a tensão e a corrente determinamos a impedância:

45
𝑍𝑒 =𝑉𝑐𝑐
𝐼𝑐𝑐
E a reatância é determinada com base nos dois dados anteriores:
𝑋𝑒 = √𝑍𝑒2 − 𝑅𝑒2
Ensaio vazio
O ensaio a vazio é realizado alimentando o transformador com sua tensão nominal
e medindo a potência consumida. Como não há carga no secundário, o valor lido
corresponde às perdas no ferro (correntes parasitas e histerese) e uma pequena
parcela de perdas ôhmicas, devido à corrente de magnetização circulando na
resistência do enrolamento.
Figura 3-12 _ arranjo para o ensaio a vazio
3.7 Rendimento do transformador
O rendimento do transformador é definido pela relação de potência de saída pela
entrada. A potência de entrada é a mesma da saída menos as perdas. As perdas
foram definidas no item anterior.
As perdas são então compostas por duas parcelas, uma fixa, que são as perdas no
ferro, pois a uma tensão constante e frequência nominal, não há variação com a
carga para essas perdas. A outra parcela é composta pelas perdas no cobre e é
uma parcela variável, pois as perdas variam com o quadrado da corrente.

46
𝜂 =𝑃𝑠𝑎𝑖𝑑𝑎
𝑃𝑒𝑛𝑡𝑟𝑎𝑑𝑎=
𝑃𝑠𝑎í𝑑𝑎
𝑃𝑠𝑎í𝑑𝑎 + 𝑝𝑒𝑟𝑑𝑎𝑠=
𝑉2. 𝐼2. 𝑐𝑜𝑠𝜃2
𝑉2. 𝐼2. 𝑐𝑜𝑠𝜃2 + 𝑃𝑓𝑒 + 𝑃𝑐𝑢
O rendimento máximo do transformador é obtido derivando a equação acima, onde:
Pfe: perdas no ferro (correntes parasitas e histerese)
Pcu: perdas no cobre (Re.I2)
O rendimento máximo ocorre quando:
𝐼2 = √𝑃𝑓𝑒
𝑅𝑒2
3.8 Polaridade dos transformadores
A polaridade de um transformador é a marcação existente nos terminais dos
enrolamentos dos transformadores, indicando o sentido da circulação de corrente
em um determinado instante em consequência do sentido do fluxo produzido. Em
outras palavras, a polaridade é uma referência determinada pelo projetista,
fabricante ou usuário para determinar a marcação da polaridade dos terminais dos
enrolamentos e a condição dos enrolamentos conforme sua disposição, isto é, a
relação entre os sentidos momentâneos das forças eletromotrizes nos
enrolamentos primário e secundário. Portanto, a polaridade depende de como são
enroladas as espiras que formam os enrolamentos primário e secundário. O
sentido da queda de tensão (força eletromotriz) será determinado pelo sentido do
enrolamento e pela marcação realizada. A figura 5-13 mostra duas situações
distintas para as tensões induzidas em um transformador monofásico. Na primeira
figura, as tensões induzidas U1 e U2 dirigem-se para os bornes adjacentes H1 e
X1 . Na outra figura, a marcação é feita de maneira contrária, sendo as tensões
induzidas dirigidas para os bornes invertidos. Nota-se também que, na Figura 5-
13a, as tensões possuem mesmo sentido (estão em fase) ou “mesma polaridade
instantânea”. Na outra, elas estão em oposição (defasadas de 180°) ou com
polaridades opostas.

47
Figura 3-13 _ sentidos instantâneos das fem dos enrolamentos de um tranformador
Pelo exposto, a polaridade refere-se ao sentido relativo entre as tensões induzidas
nos enrolamentos secundários e primários, ou à maneira como seus terminais são
marcados. Quando ambos os enrolamentos possuem a mesma polaridade, o
transformador é de polaridade subtrativa e, em caso contrário, polaridade aditiva.
A verificação da polaridade é um ponto muito importante durante a fase de testes
do transformador ou colocação em serviço no campo.
Através do sentido do enrolamento, podemos definir a polaridade de um
transformador, transformadores enrolados no mesmo sentido tem a polaridade
aditiva e enrolados em sentido oposto, tem a polaridade subtrativa, conforme
figuras a seguir:
Figura 3-14 _ marcação dos pontos e polaridade instantânea

48
A norma técnica NBR 5356 estabelece que a polaridade dos transformadores
devem ser subtrativas não ser que haja uma especificação contrária.
Verificação da polaridade:
Tendo em vista que em um transformador comercial não temos acesso ao
enrolamento e mesmo tendo acesso, é bastante difícil identificar o enrolamento,
existem testes que podem ser realizados para a verificação da polaridade.
A polaridade pode ser verificada através do método da corrente alternada,
conforme abaixo:
- Conecta-se um terminal do enrolamento de alta tensão um terminal do
enrolamento de baixa tensão;
- Atribui-se ao outro terminal de alta tensão a polaridade assinalada pelo ponto;
-Aplica-se uma tensão ao terminal de alta;
-mede-se a tensão aplicada e a tensão entre os dois terminais com o ponto na alta
e o outro terminal do enrolamento de baixa.
Figura 3-15 _ ligação para a verificação da polaridade
Conclusão:
Se a tensão V1<V2, a polaridade é aditiva
Se a tensão V1>V2, a polaridade é subtrativa

49
O método anterior possui algumas restrições em função do nível de tensão do
enrolamento. A NBR 5380 estabelece também outras maneiras de testar a
polaridade. A mais comum e fácil de realizar é a do golpe de corrente contínua:
Figura 3-16 _ conexão para a verificação da polaridade pelo golpe de corrente contínua
A ligação deve ser feita conforme mostra a figura 5-16. Devemos ter uma fonte cc ,
uma chave tipo faca de duas posições e um voltímetro de zero central.
-Liga-se os terminais de tensão superior H1 e H2 a uma fonte de corrente contínua;
- Instala-se um voltímetro entre esses terminais de modo a obter uma deflexão
positiva ao se ligar a fonte CC, chave comutadora na posição 1, em seguida,
coloca-se a chave comutadora na posição 2, transferindo-se o voltímetro para os
terminais de baixa tensão;
- Desliga-se a tensão de alimentação e observa-se o sentido de deflexão do
voltímetro;
Conclusão:
Se as deflexões forem no mesmo sentido, a polaridade é aditiva.
Se as deflexões forem em sentido oposto a polaridade é subtrativa.
A determinação da polaridade também é importante para a ligação de das bobinas
de transformadores em série e em paralelo, conforme observamos na figura .

50
Figura 3-17 _ ligação de enrolamentos de igual tensão de um transformador, em série e paralelo
3.9 Autotransformadores
Diferente do transformador, um autotransformador não é composto por duas
bobinas isoladas. Na verdade, um autotransformador é um transformador com um
único enrolamento.
O fato de não haver isolação entre o primário e o secundário aumenta
consideravelmente o rendimento, reduz o volume, melhora a regulação e reduz
perdas.
Observe o transformador da figura abaixo, o primário possui 120 V, 10 A e o
secundário possui 100 V e 12 A.
Figura 3-18 _ transformador monofásico de 1200 VA

51
As mesmas características de corrente e tensão podem ser obtidas utilizando um
enrolamento, conforme figura 5-19:
Figura 3-19 _ autotransformador
O mesmo autotransformador pode ser montado a partir de um transformador
monofásico, 20 V/ 100V conforme a figura abaixo.
Figura 3-20 _ transformador monofásico
Ligando adequadamente as bobinas, observando a questão da polaridade,
podemos montar então o autotransformador, conforme a figura 5-21:

52
Figura 3-21 _ autotransformador criado a partir do transformador monofásico
3.9.1 Autotransformador abaixador
Para um autotransformador abaixador, temos as seguintes relações:
Figura 3-22 _ autotransformador abaixador
𝐼𝐿 = 𝐼𝐻 + 𝐼
𝑁. 𝐼𝐻 = 𝑁𝐿. 𝐼
(𝑁𝐻 − 𝑁𝐿). 𝐼𝐻 = 𝑁𝐿. 𝐼
𝐼
𝐼𝐻=
𝑁𝐻 − 𝑁𝐿
𝑁𝐿=
𝑁𝐻
𝑁𝐿− 1 = 𝛼𝐴 − 1
𝑠𝑒𝑛𝑑𝑜 𝛼𝐴 =𝑁𝐻
𝑁𝐿=
𝐼𝐿
𝐼𝐻

53
3.9.2 Autotransformador elevador
Para um autotransformador elevador, temos as seguintes relações:
Figura 3-23 _ autotransformador elevador
𝐼𝐿 = 𝐼𝐻 + 𝐼
𝑁. 𝐼𝐻 = 𝑁𝐿. 𝐼
(𝑁𝐻 − 𝑁𝐿). 𝐼𝐻 = 𝑁𝐿. 𝐼
𝐼
𝐼𝐻=
𝑁𝐻 − 𝑁𝐿
𝑁𝐿=
𝑁𝐻
𝑁𝐿− 1 = 𝛼𝐴 − 1
𝑠𝑒𝑛𝑑𝑜 𝛼𝐴 =𝑁𝐻
𝑁𝐿=
𝐼𝐿
𝐼𝐻
3.9.3 Relações de potência para o autotransformador
Para o autotransformador, existem duas parcelas de potência, uma chamada
potência transformada, que vem diretamente da transferência de potência do
primário para o secundário e a outra parcela, chamada de potência condutiva, pois
ocorre em função do contato existente entre os dois enrolamentos.

54
Potência transformada:
𝑉𝑁. 𝐼𝐻 = 𝑉𝐿. 𝐼
Potência Condutiva:
Potência na entrada do autotransformador abaixador:
𝑆 = 𝑉𝐻. 𝐼𝐻
Os VA não transformados (condutivos) são então:
𝑆𝑐𝑜𝑛𝑑 = 𝑉𝐻. 𝐼𝐻 − 𝑉𝑁. 𝐼𝐻
𝑆𝑐𝑜𝑛𝑑 = 𝐼𝐻. (𝑉𝐻 − 𝑉𝑁)
𝑆𝑐𝑜𝑛𝑑 = 𝐼𝐻. 𝑉𝐿
Logo:
𝑃𝑜𝑡. 𝑡𝑟𝑎𝑛𝑠𝑓 = 𝑉𝐿. 𝐼
𝑃𝑜𝑡. 𝑐𝑜𝑛𝑑𝑢𝑡 = 𝑉𝐿. 𝐼𝐻
𝑃𝑜𝑡. 𝑡𝑜𝑡𝑎𝑙 = 𝑃𝑜𝑡. 𝑡𝑟𝑎𝑛𝑠𝑓 + 𝑃𝑜𝑡. 𝑐𝑜𝑛𝑑𝑢𝑡 = 𝑉𝐿. 𝐼𝐿
O aluno deverá verificar que as relações de potência são as mesmas para o
autotransformador elevador.

55
4. REFERÊNCIAS BIBLIOGRÁFICAS
Motor de indução, Guilherme Filippo Filho, editora Erica.
Máquinas Elétricas e Transformadores, Irvin L. Kosow
Fundamentos de Máquinas Elétricas, Vincent Del Toro
Junior, N. A.; Filho, Teodoro Amorim. Motores trifásicos de indução, FESP, apostila.
Apostila de máquinas e equipamentos de conversão, FESP.
Apostila WEG curso de motores de indução trifásicos (DT-6)
Apostila WEG curso de motores de indução trifásicos - Módulo 2 Variação de velocidade
Apostila de Máquinas Elétricas para Automação, prof. Antonio Tadeu Lyrio de Almeida
Manual de bobinagem WEG.


















