Dinámica del sólido rígido. IntroducciónTema).pdf · SOLIDO RIGIDO PUNTO DE EQUILIBRIO ......
35
Transcript of Dinámica del sólido rígido. IntroducciónTema).pdf · SOLIDO RIGIDO PUNTO DE EQUILIBRIO ......
214/11/2016
Dinámica del sólido rígido. Introducción
PUNTO DE PARTIDA:
1.- Las leyes de Newton junto con las definiciones de la Cinemática nospermiten resolver, en principio, cualquier problema mecánico para una partículapuntual.
2.- En el tema anterior hemos visto como generalizar las leyes de la dinámicapara sistemas multipartícula (formados por muchas partículas). Vimos que unsistema formado por muchas partículas puede ser substituido por una solapartícula puntual conteniendo toda la masa del sistema y de posición dada por elvector centro de masas.
3.- En esta situación la segunda ley de Newton puede ser generalizadaconsiderando la fuerza neta actuando sobre el sistema de partículas y laaceleración del centro de masas.
A pesar de todo lo avanzado todavía nos falta analizar más en profundidad el movimiento desistemas reales para completar su descripción física.

314/11/2016
Dinámica del sólido rígido. Introducción
PUNTO DE PARTIDA:
Consideremos el siguiente ejemplo:
1 2F F
NETA 1 2 CM 0F F F a
LA RUEDA NO SE TRASLADA (SU CENTRO DE MASAS NO SE MUEVE) PERO SI GIRA
414/11/2016
Dinámica del sólido rígido. Introducción
PUNTO DE PARTIDA:
En este tema vamos analizar cuales son las causas que se esconden detrás de losfenómenos de rotación. En primer lugar vamos a focalizar nuestro estudio en un tipo desistemas de partículas que denominaremos sólidos rígidos. A continuación obtendremos lasecuaciones fundamentales de la rotación que como veremos no son otra cosa que unaparticularización de las leyes de Newton a sistemas solidos rígidos que están rotando.
514/11/2016
Dinámica del sólido rígido. Introducción
1.- Introducción.
2.- Concepto de sólido rígido.
3.- Rotación de un sólido: ejes de rotación.
4.- Energía cinética de rotación de un sólido alrededor de un eje fijo. Momentos de inercia.
5.- Ecuación fundamental del movimiento de rotación.
6.- Momento angular y su conservación.
ESQUEMA DE DESARROLLO

614/11/2016
Como es bien sabido la materia está formada por átomos y/o moléculas que se mantienen unidosgracias a lo que se denomina fuerzas intermoleculares o interatómicas. Estas fuerzas son deorigen electromagnético y aparecen como consecuencia de las interacciones entre las cargas queforman los átomos y moléculas del material. También, estas fuerzas son prácticamenteimposibles de calcular de forma exacta en cualquier material real pero si cumplen un patrón biendefinido sea cual sea el tipo de material que consideremos (figura). Cuando están lejos aparecenfuerzas atractivas entre los átomos/moléculas de material y cuando están demasiado cercaaparecen fuerzas repulsivas debidas fundamentalmente a la repulsión electrostática entre losnúcleos atómicos. El caso es que se establece una distancia de equilibrio de forma que cuandolos átomos de un material están a esa
Dinámica del sólido rígido. Concepto de sólido rígido.
PUNTO DE EQUILIBRIO
FUERZAS REPULSIVAS
FUER
ZA D
E IN
TERA
CCIO
N
DISTANCIA
0
FUERZAS ATRACTIVAS
d=distancia equilibrio
distancia no actúa fuerza neta sobreninguno de ellos dando lugar a laestructura cristalina característica decada material. Sin embargo, cuandotratamos de aumentar esa distanciaaparecen fuerzas atractivas que seoponen, y si tratamos de disminuirlaaparecen fuerzas repulsivas que seoponen. En función de lo grandes quesean esas fuerzas interatómicas ointermoleculares aparecen lo que seconoce con el nombre de estados dela materia.
714/11/2016
Sólidos: Aquellos en los que las fuerzas intermoleculares son tan grandes que las moléculaspermanecen fijas en sus posiciones espaciales relativas.
Líquidos: Aquellos para los que las fuerzas intermoleculares son suficientemente grandes comopara que la distancia de equilibrio permanezca prácticamente fija pero que sin embargo puedencambiar su posición espacial relativa.
Gases: Aquellos en los que las fuerzas intermoleculares son tan pequeñas que en realidad cadaátomo se mueve casi libremente por todo el espacio.
En este tema vamos a centrarnos en el estudio del movimiento de los sólidos. Como hemoscomentado más arriba, debido a que las fuerzas intermoleculares son muy grandes las posicionesrelativas de las moléculas que lo componen permanecen fijas. No obstante cuando a un sólido sele aplican fuerzas externas suficientemente grandes (del orden de las fuerzas intermoleculares)este se deforma y llega incluso a romperse. Al objeto de obviar o despreciar la deformación quesiempre que aplicamos fuerzas externas se produce sobre un sólido real, se define el conceptodel sólido rígido como sigue:
SÓLIDO RÍGIDO: Cualquier sistema formado de partículas tal que las fuerzasintermoleculares son infinitas salvo en el punto de equilibrio.
Dinámica del sólido rígido. Concepto de sólido rígido.

814/11/2016
SÓLIDO RÍGIDO: Cualquier sistema formado de partículas tal que las fuerzasintermoleculares son infinitas salvo en el punto de equilibrio.
Dinámica del sólido rígido. Concepto de sólido rígido.
SOLIDO RIGIDO
PUNTO DE EQUILIBRIO
FUERZAS REPULSIVAS
FUER
ZA D
E IN
TERA
CCIO
N
DISTANCIA
0
FUERZAS ATRACTIVAS
d=distancia equilibrio
En definitiva un sólido rígido es un sólido ideal en el cual sean cuales sean las fuerzas externasque apliquemos el sólido no se deforma manteniendo su forma original. Esto nos va a permitiranalizar su movimiento olvidándonos de las posibles deformaciones del mismo y de lasimplicaciones de estas deformaciones en el movimiento.
914/11/2016
Dinámica del sólido rígido. Rotación de un sólido. Ejes de rotación.
Como hemos comentado en la introducción, y según vimos en el anterior tema, a efectos de ladinámica, el sistema puede aproximarse mediante una partícula puntual de masa igual a la masatotal del sistema y posición espacial dada por el vector centro de masas del sistema. Lavelocidad y aceleración del sistema estarán caracterizadas así por la velocidad y aceleración delvector centro de masas. Por otro lado, la segunda ley de Newton puede escribirse como:
Como hemos considerado en la introducción la translación no es suficiente para explicar elcomportamiento dinámico de un sistema no puntual. Así, mientras en sistemas puntuales sólotiene importancia la traslación y la rotación no tiene ningún significado puesto que carecen dedimensiones o volumen, en los sistemas reales, además de la traslación, que podemoscaracterizar mediante el vector centro de masas, su velocidad, y su aceleración, necesitamoscontemplar la posibilidad de que el cuerpo gire en el espacio sin trasladarse, es decir, sin que sucentro de masa cambie de posición espacial. Por lo tanto el movimiento de un sólido rígido lovamos a analizar dividiendo su movimiento en traslación, para lo cual utilizaremos todo lovisto en la dinámica de los sistemas de partículas, y rotación. Nótese que esta separación delestudio nos va a permitir analizar de forma separada ambos movimientos. El estudio de latraslación lo realizaremos considerando el sistema como una partícula puntual con una masaigual a la masa total del sistema de partículas y situada en el centro de masas. La dinámica delsistema vendrá dada por la aplicación de las leyes de Newton a dicha partícula y el movimiento
T CMF m a
ROTACIÓN DE UN SÓLIDO-RÍGIDO
1014/11/2016
Dinámica del sólido rígido. Rotación de un sólido. Ejes de rotación.
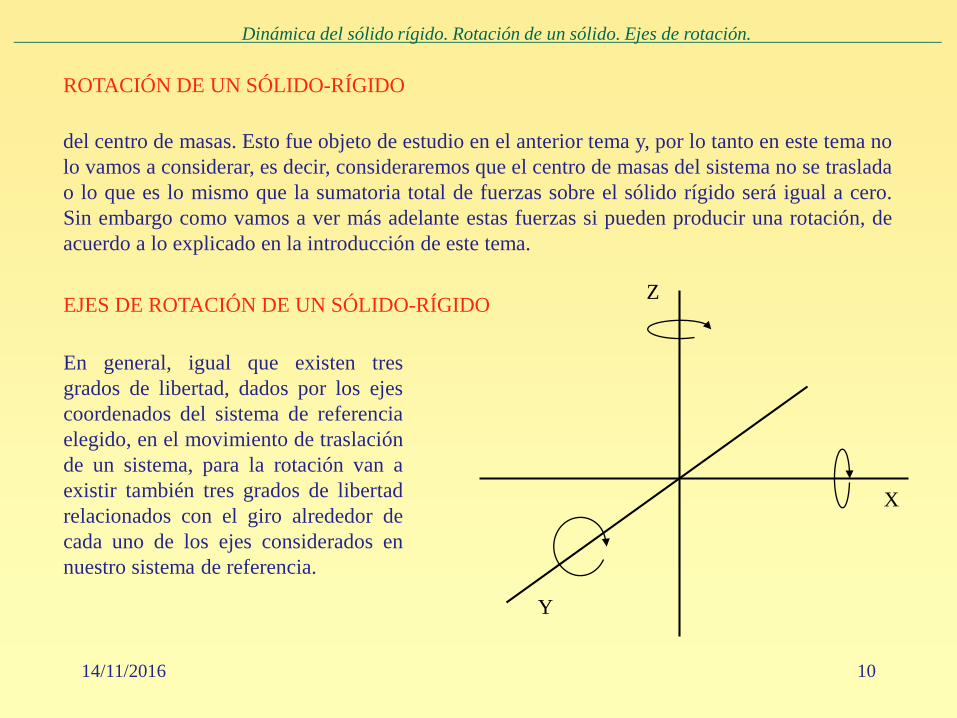
del centro de masas. Esto fue objeto de estudio en el anterior tema y, por lo tanto en este tema nolo vamos a considerar, es decir, consideraremos que el centro de masas del sistema no se trasladao lo que es lo mismo que la sumatoria total de fuerzas sobre el sólido rígido será igual a cero.Sin embargo como vamos a ver más adelante estas fuerzas si pueden producir una rotación, deacuerdo a lo explicado en la introducción de este tema.
ROTACIÓN DE UN SÓLIDO-RÍGIDO
EJES DE ROTACIÓN DE UN SÓLIDO-RÍGIDO
En general, igual que existen tresgrados de libertad, dados por los ejescoordenados del sistema de referenciaelegido, en el movimiento de traslaciónde un sistema, para la rotación van aexistir también tres grados de libertadrelacionados con el giro alrededor decada uno de los ejes considerados ennuestro sistema de referencia.
X
Y
Z
1114/11/2016
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Rotación de un sólido. Ejes de rotación
EJES DE ROTACIÓN DE UN SÓLIDO-RÍGIDO
Este análisis general es muy complejo desde un punto de vista matemático (necesita de unconocimiento del concepto de Tensor). Por eso en este curso vamos a simplificar el problema yconsiderar situaciones de rotación exclusivamente alrededor de un solo eje. Este sigue siendo uncaso de indudable utilidad práctica puesto que muchos sistemas rotan alrededor de un solo eje(una rueda, una puerta, un balancín, un volante, etc).
X
Y
Z
1214/11/2016
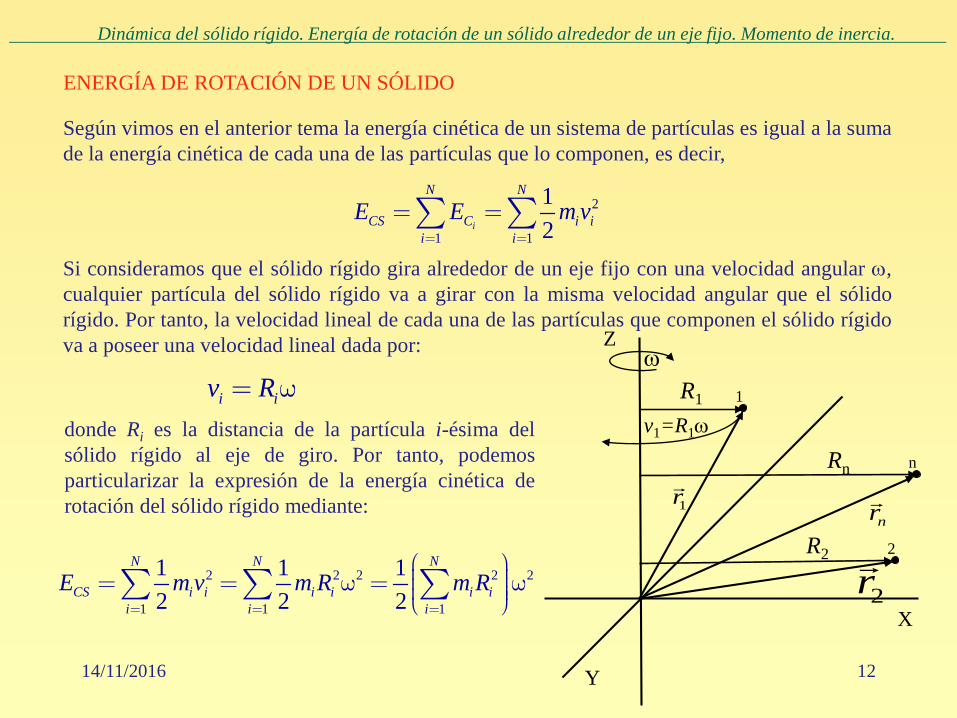
ENERGÍA DE ROTACIÓN DE UN SÓLIDO
Según vimos en el anterior tema la energía cinética de un sistema de partículas es igual a la sumade la energía cinética de cada una de las partículas que lo componen, es decir,
Si consideramos que el sólido rígido gira alrededor de un eje fijo con una velocidad angular ω,cualquier partícula del sólido rígido va a girar con la misma velocidad angular que el sólidorígido. Por tanto, la velocidad lineal de cada una de las partículas que componen el sólido rígidova a poseer una velocidad lineal dada por:
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
2
1 1
12i
N N
CS C i ii i
E E m v
i iv R
X
Y
Z
n
2
1
1r
nr
2r
R1
R2
Rn
ω
v1=R1ωdonde Ri es la distancia de la partícula i-ésima delsólido rígido al eje de giro. Por tanto, podemosparticularizar la expresión de la energía cinética derotación del sólido rígido mediante:
2 2 2 2 2
1 1 1
1 1 12 2 2
N N N
CS i i i i i ii i i
E m v m R m R
1314/11/2016
MOMENTO DE INERCIA DE UN SÓLIDO-RÍGIDO RESPECTO UN EJE DE ROTACIÓN
A la sumatoria encerrada entre los paréntesis se le conoce como momento de inercia del sólidorígido respecto al eje fijo de rotación considerado, es decir
de donde la energía cinética total de rotación del sólido rígido puede escribirse como:
Es importante notar que el momento de inercia depende del eje de rotación elegido, de formaque, en general, para diferentes ejes de rotación un mismo sólido tendrá diferentes momentos deinercia. Por otro lado, las dimensiones que tiene el momento de inercia son:
El significado físico del momento de inercia en la rotación es, como veremos más adelante,análogo al de la masa inercial en el movimiento de traslación, es decir, a un cuerpo con unmomento de inercia grande nos va a costar mucho trabajo cambiarle su rotación mientras que aun cuerpo con un momento de inercia pequeño nos costará poco trabajo cambiarle sumovimiento de rotación.
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
2
1
N
i ii
I m R
212CSE I
2 2kg mI m L
1414/11/2016
Ejemplo.- Como ejemplo de cálculo del momento de inercia, consideremos un anillo delgado deradio R y masa M y calculemos su momento de inercia al girar alrededor de un eje transversalque pasa por su centro.
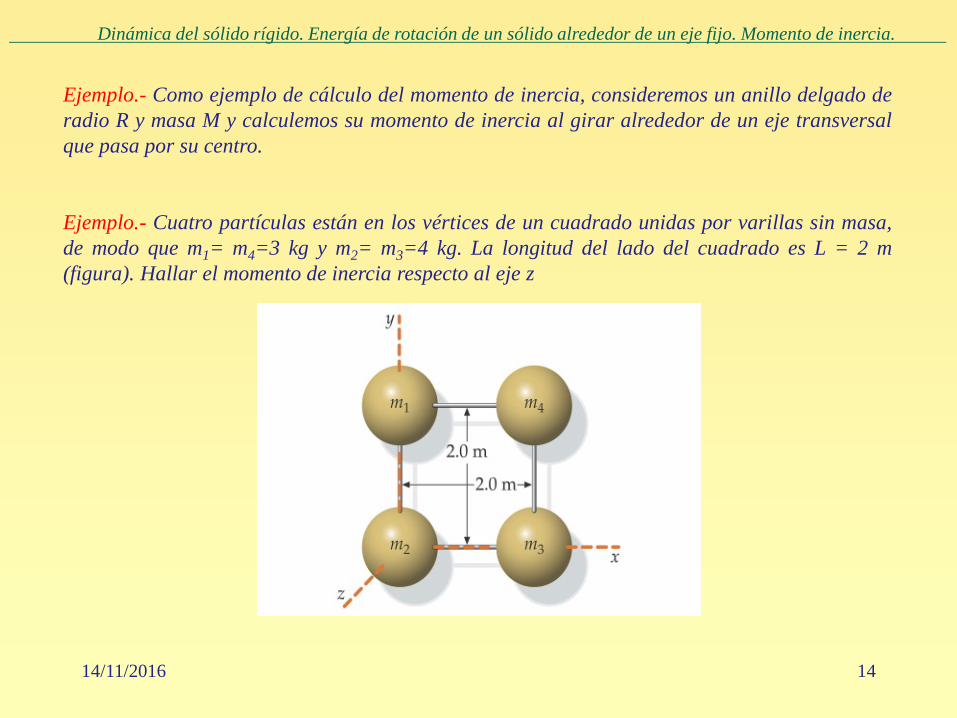
Ejemplo.- Cuatro partículas están en los vértices de un cuadrado unidas por varillas sin masa,de modo que m1= m4=3 kg y m2= m3=4 kg. La longitud del lado del cuadrado es L = 2 m(figura). Hallar el momento de inercia respecto al eje z
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
1514/11/2016
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
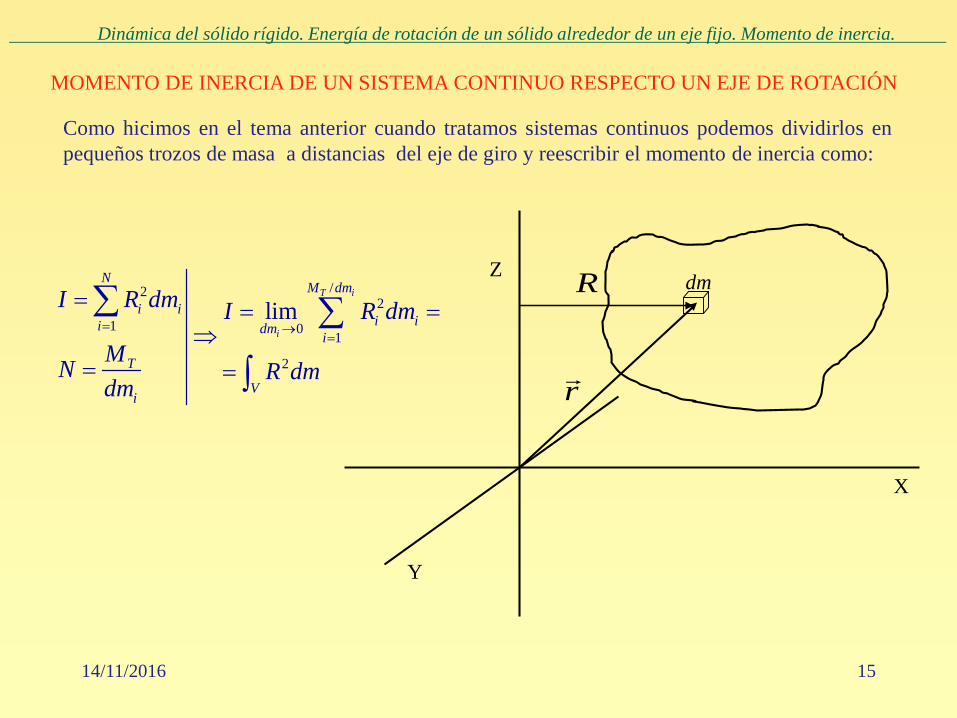
MOMENTO DE INERCIA DE UN SISTEMA CONTINUO RESPECTO UN EJE DE ROTACIÓN
Como hicimos en el tema anterior cuando tratamos sistemas continuos podemos dividirlos enpequeños trozos de masa a distancias del eje de giro y reescribir el momento de inercia como:
X
Y
Z/2
21 0 1
2
limT i
i
NM dm
i ii ii dm i
T
Vi
I R dm I R dm
MN R dmdm
= →=
= = =⇒
= =
∑ ∑
∫
dm
r
R
1614/11/2016
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
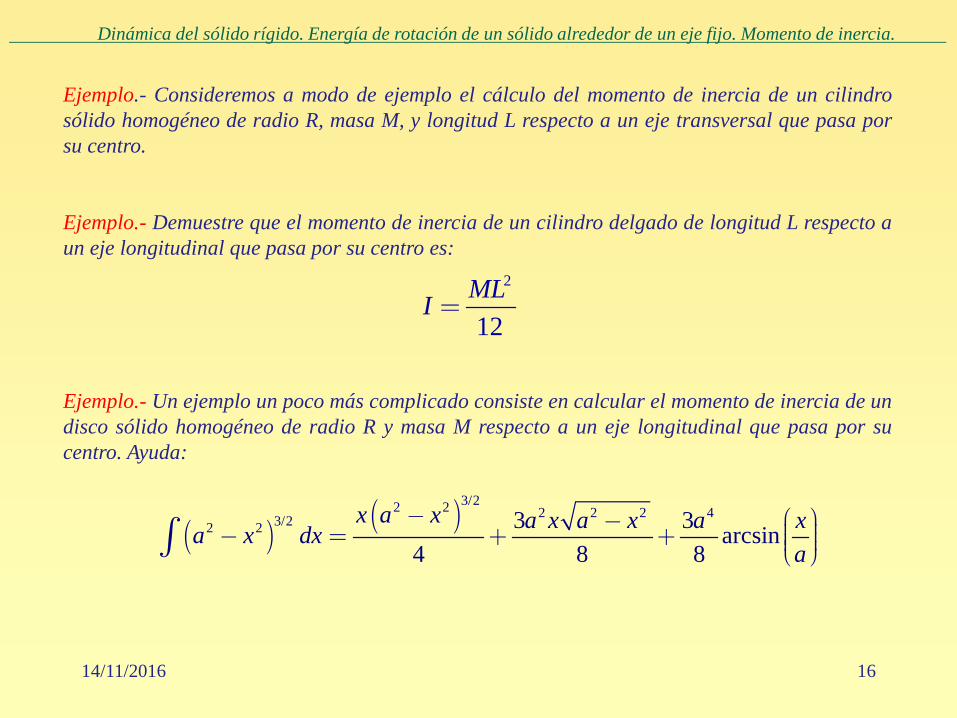
Ejemplo.- Consideremos a modo de ejemplo el cálculo del momento de inercia de un cilindrosólido homogéneo de radio R, masa M, y longitud L respecto a un eje transversal que pasa porsu centro.
Ejemplo.- Demuestre que el momento de inercia de un cilindro delgado de longitud L respecto aun eje longitudinal que pasa por su centro es:
Ejemplo.- Un ejemplo un poco más complicado consiste en calcular el momento de inercia de undisco sólido homogéneo de radio R y masa M respecto a un eje longitudinal que pasa por sucentro. Ayuda:
2
12MLI
3/22 2 2 2 2 43/22 2 3 3 arcsin4 8 8
x a x a x a x a xa x dxa

1714/11/2016
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.

1814/11/2016
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
TEOREMA DE STEINER
Como hemos visto el cálculo del momento de inercia puede ser muy complejo. Lasituación se complica si tenemos en cuenta el hecho de que si variamos el eje el momento deinercia cambia. No obstante existe un resultado que permite simplificar los cálculos delmomento de inercia de un sólido respecto a cualquier eje una vez calculado el momento deinercia de dicho objeto respecto un eje de rotación que pasa por su centro de masas paralelo alprimero. Este resultado se conoce con el nombre de Teorema de Steiner y lo vamos a desarrollara continuación.
Consideremos un sólido rígido, un eje E que pasa por su centro de masas, y un eje E’paralelo al primero. El problema que nos planteamos es calcular el valor del momento de inerciadel cuerpo, I’, respecto al eje E’, conocido el momento de inercia del cuerpo, I, respecto al eje E.
2
2
i i i i ii i
i CM CMi
CM CM
I m r m r r
r d r
I Md I
= = ⋅
= +
⇓
= +
∑ ∑
1914/11/2016
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
Ejemplo.- Demuestre que el momento de inercia de una vara delgada respecto a un ejeperpendicular que pasa por su extremo es:
Ejemplo.- Un ejemplo un poco más complicado para el que podemos utilizar Steiner consiste encalcular el momento de inercia de un cilindro sólido homogéneo de radio R, masa M, y longitudL respecto a un eje longitudinal que pasa por su centro.
2
3MLI
2014/11/2016
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
ENERGÍA CINÉTICA DEL SÓLIDO RÍGIDO
Como hemos visto, al considerar el movimiento de un sólido rígido tendremos que tener encuenta dos tipos de movimientos, el de traslación y el de rotación. También hemos visto quecada uno de estos movimientos tiene asociada una energía cinética (de traslación y de rotaciónrespectivamente) de forma que en general la energía cinética de un sólido rígido será la suma desu energía cinética de traslación más su energía cinética de rotación, es decir:
De esta forma el trabajo que la realiza la fuerza neta que actúa sobre el sistema va a utilizarse envariar ambas energías, cosa que habrá que tener en cuenta a la hora de plantear los problemas.
2 21 12 2
Traslación rotaciónc c c T CME E E M v I
2114/11/2016
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
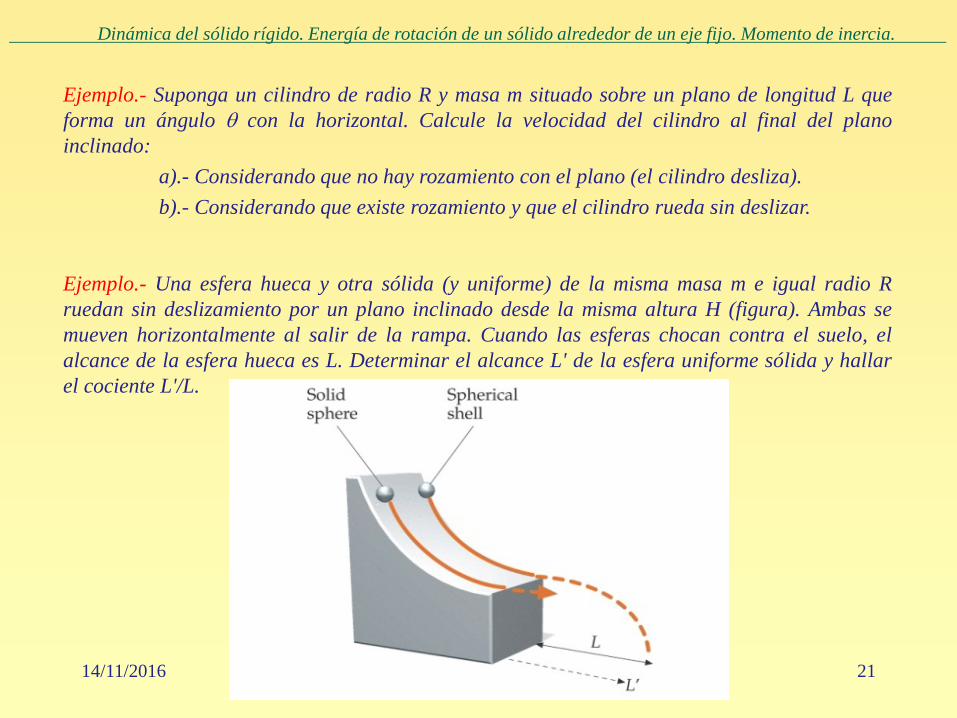
Ejemplo.- Suponga un cilindro de radio R y masa m situado sobre un plano de longitud L queforma un ángulo θ con la horizontal. Calcule la velocidad del cilindro al final del planoinclinado:
a).- Considerando que no hay rozamiento con el plano (el cilindro desliza).b).- Considerando que existe rozamiento y que el cilindro rueda sin deslizar.
Ejemplo.- Una esfera hueca y otra sólida (y uniforme) de la misma masa m e igual radio Rruedan sin deslizamiento por un plano inclinado desde la misma altura H (figura). Ambas semueven horizontalmente al salir de la rampa. Cuando las esferas chocan contra el suelo, elalcance de la esfera hueca es L. Determinar el alcance L' de la esfera uniforme sólida y hallarel cociente L'/L.
2214/11/2016
Dinámica del sólido rígido. Energía de rotación de un sólido alrededor de un eje fijo. Momento de inercia.
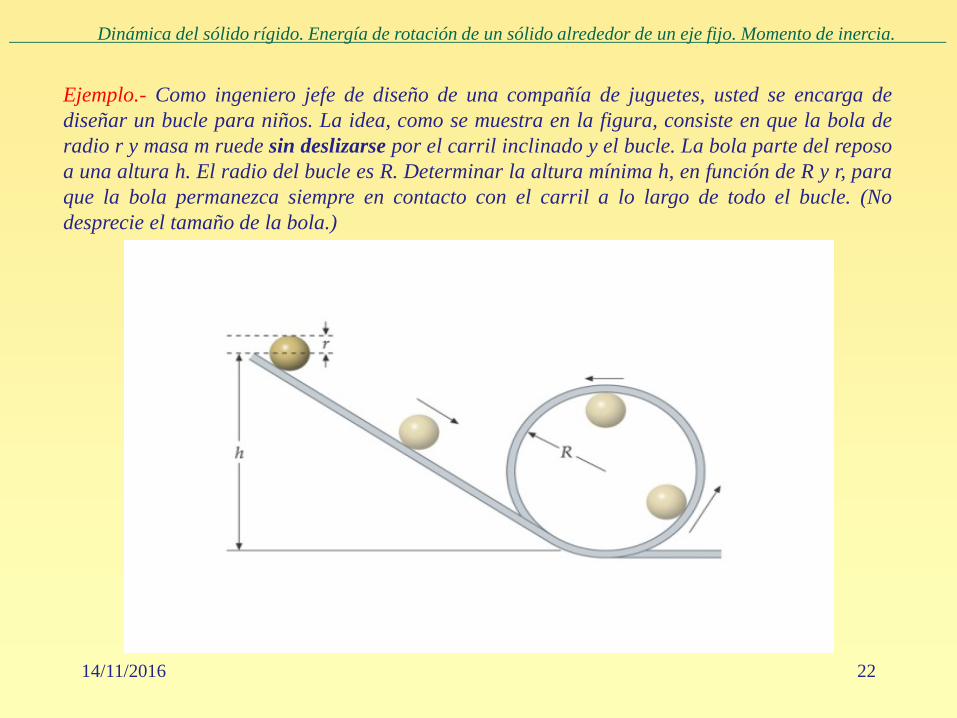
Ejemplo.- Como ingeniero jefe de diseño de una compañía de juguetes, usted se encarga dediseñar un bucle para niños. La idea, como se muestra en la figura, consiste en que la bola deradio r y masa m ruede sin deslizarse por el carril inclinado y el bucle. La bola parte del reposoa una altura h. El radio del bucle es R. Determinar la altura mínima h, en función de R y r, paraque la bola permanezca siempre en contacto con el carril a lo largo de todo el bucle. (Nodesprecie el tamaño de la bola.)

2314/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
En este apartado vamos a obtener la ecuaciónfundamental de la rotación. Para eso vamos aconsiderar un cuerpo sujeto a un eje fijo (eje Z) deforma que dicho cuerpo solo puede rotar tal ycomo se muestra en la figura.
ECUACIÓN FUNDAMENTAL DEL MOVIMIENTO DE ROTACIÓN
X
Y
Z
2414/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
ECUACIÓN FUNDAMENTAL DEL MOVIMIENTO DE ROTACIÓN
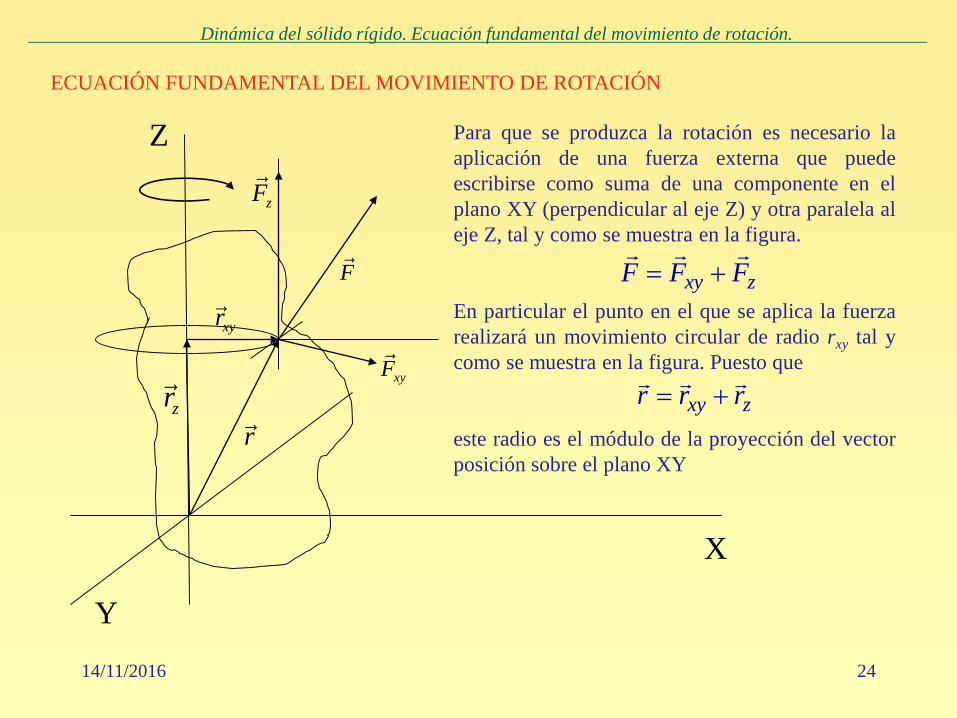
Para que se produzca la rotación es necesario laaplicación de una fuerza externa que puedeescribirse como suma de una componente en elplano XY (perpendicular al eje Z) y otra paralela aleje Z, tal y como se muestra en la figura.
En particular el punto en el que se aplica la fuerzarealizará un movimiento circular de radio rxy tal ycomo se muestra en la figura. Puesto que
este radio es el módulo de la proyección del vectorposición sobre el plano XY
X
Y
Z
zF
F
xyF
xy zF F F= +
xyr
zr
rxy zr r r= +
2514/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
ECUACIÓN FUNDAMENTAL DEL MOVIMIENTO DE ROTACIÓN
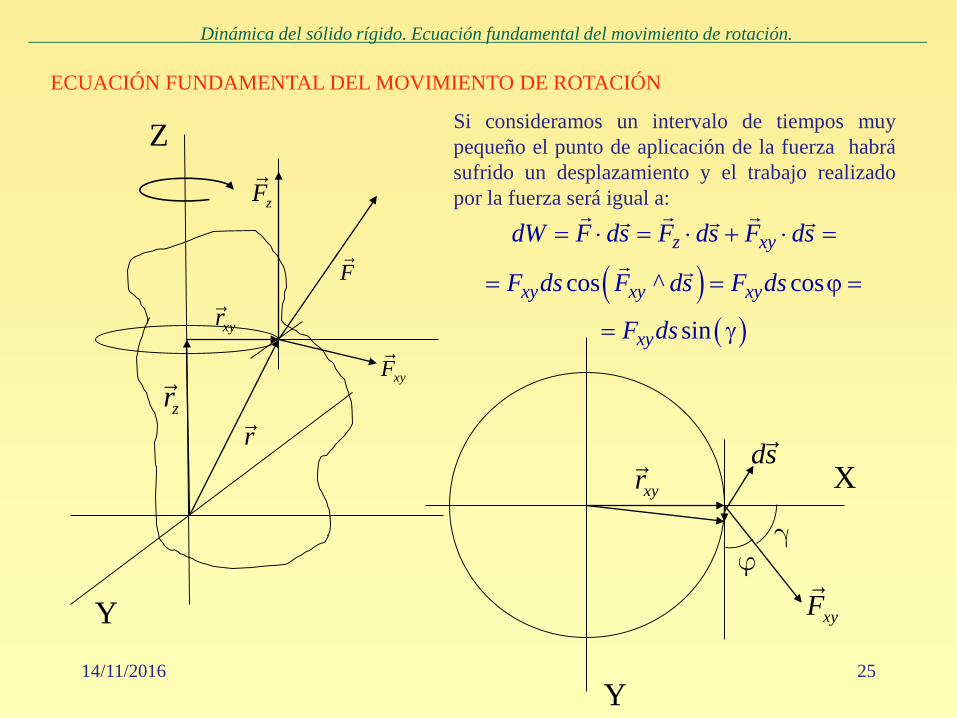
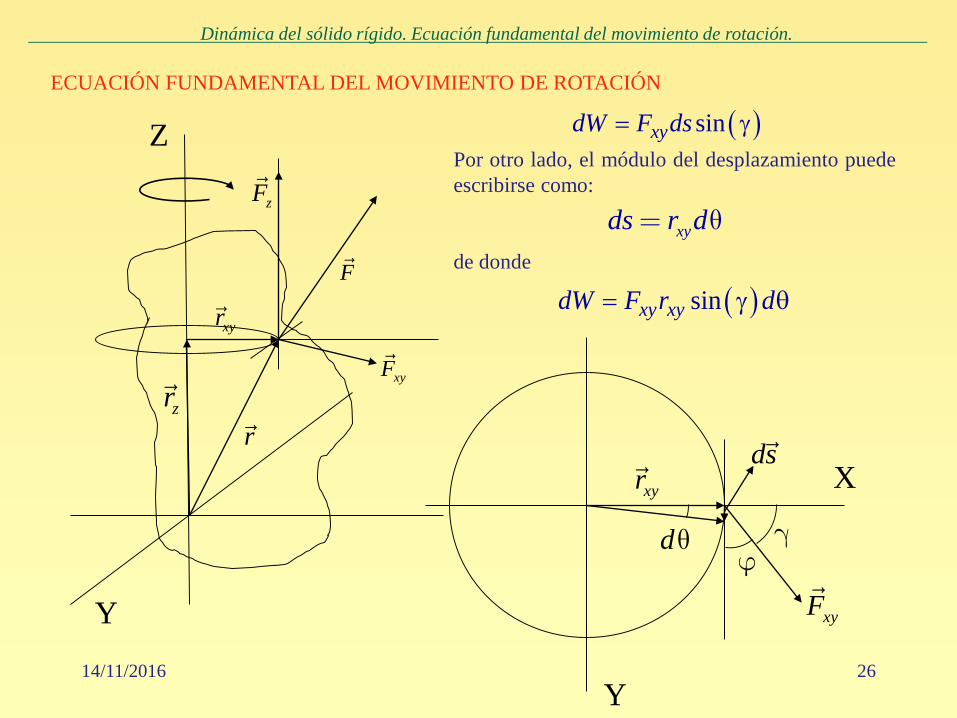
Si consideramos un intervalo de tiempos muypequeño el punto de aplicación de la fuerza habrásufrido un desplazamiento y el trabajo realizadopor la fuerza será igual a:
Y
Z
zF
F
xyF
xyr
zr
r
( )( )
cos ^ cos
sin
z xy
xy xy xy
xy
dW F ds F ds F ds
F ds F ds F ds
F ds
= ⋅ = ⋅ + ⋅ =
= = ϕ =
= γ
xyrds
xyF
X
Y
2614/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
ECUACIÓN FUNDAMENTAL DEL MOVIMIENTO DE ROTACIÓN
Por otro lado, el módulo del desplazamiento puedeescribirse como:
de donde
Y
Z
zF
F
xyF
xyr
zr
r
( )sinxydW F ds= γ
xyrds
xyF
X
Y
xyds r d
( )sinxy xydW F r d= γ θ
d
2714/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
ECUACIÓN FUNDAMENTAL DEL MOVIMIENTO DE ROTACIÓN
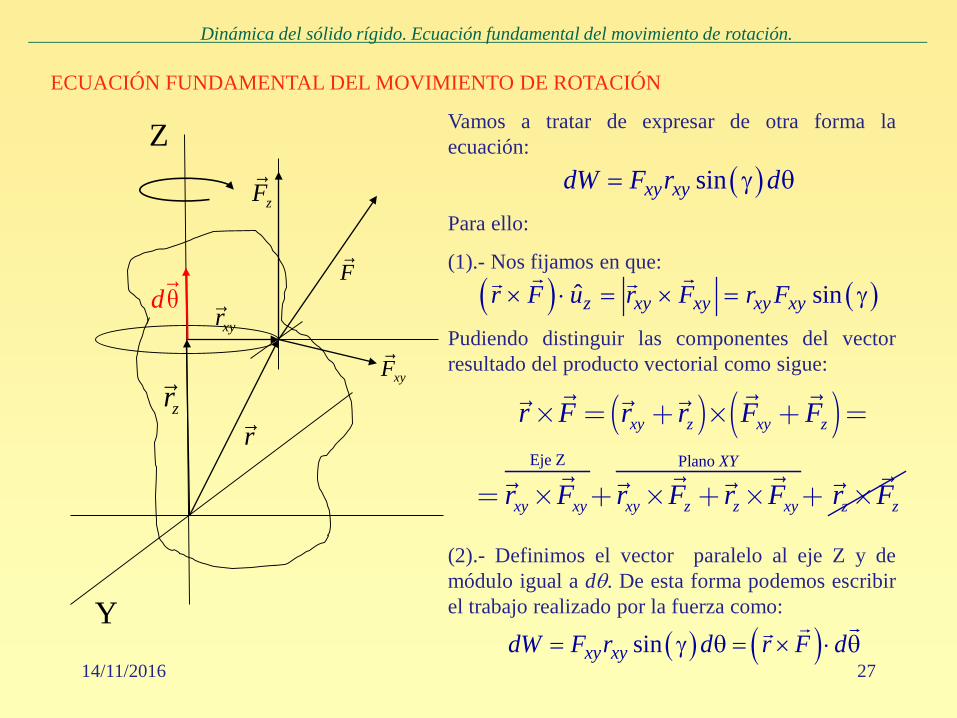
Vamos a tratar de expresar de otra forma laecuación:
Para ello:
(1).- Nos fijamos en que:
Pudiendo distinguir las componentes del vectorresultado del producto vectorial como sigue:
(2).- Definimos el vector paralelo al eje Z y demódulo igual a dθ. De esta forma podemos escribirel trabajo realizado por la fuerza como:Y
Z
zF
F
xyF
xyr
zr
r
( )sinxy xydW F r d= γ θ
( ) ( )ˆ sinz xy xy xy xyr F u r F r F× ⋅ = × = γ
( ) ( )sinxy xydW F r d r F d= γ θ = × ⋅ θ
d
Eje Z Plano
xy z xy z
XY
xy xy xy z z xy z z
r F r r F F
r F r F r F r F
2814/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
ECUACIÓN FUNDAMENTAL DEL MOVIMIENTO DE ROTACIÓN
o bien:
donde a
se le conoce con el nombre de momento de la fuerza con respecto al eje Z.
Por otro lado, teniendo cuenta la definición de potencia
y que el trabajo realizado por la fuerza neta sobre un cuerpo es igual a la variación de su energíacinética, que en el caso considerado tiene que ser necesariamente la energía de rotación:
llegamos a:
dW M d= ⋅ θ
dW dP M Mdt dt
M r F= ×
21 2CR
dW dE I dW I d Idt dt
dM dM It
It
Id dω
⋅ω = ⋅ω ⇒ω
= = α
Ecuación fundamental de la dinámica de rotación
F
2914/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
ECUACIÓN FUNDAMENTAL DEL MOVIMIENTO DE ROTACIÓN
Fijémonos que, como adelantamos al principio del tema, la expresión obtenida es formalmenteidéntica a la segunda ley de Newton
de forma que en la rotación los momentos de la fuerza van a jugar el mismo papel que desempeñabanlas fuerzas en la traslación, el momento de inercia va a ser equivalente a la masa inercial, y laaceleración angular a la aceleración lineal. Analicemos a continuación más en detalle las dosmagnitudes que hemos introducido en este tema.
1.- De la definición de momento de una fuerza se deduce que en la dinámica de rotación no sólo esimportante la fuerza que se aplica al sistema sino también el punto en el que se aplica. Así si aplicamosuna fuerza lejos del eje de rotación y perpendicularmente al mismo se producirá una mayor variaciónde las características del movimiento rotatorio. Ejemplos prácticos de esto último los tenemos en quelos pomos de las puertas se montan lejos del eje de rotación (las bisagras), el efecto palanca, etc.
2.- Por otro lado, como hemos comentado el momento de inercia va a ser en dinámica de rotaciónequivalente a la masa inercial en la traslación. De la definición del mismo se puede deducir que unsólido rígido en el que su masa inercial esté muy lejos del eje de giro presentará una gran inercia ydificultará enormemente la modificación de su situación de rotación.
M I= α
F ma=

3014/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
Ejemplo.- Una rueda montada sobre un eje con rozamiento se encuentra inicialmente en reposo.Durante 20 s se aplica a la rueda un momento externo de 50 N·m, con lo cual la rueda adquiereuna velocidad angular de 600 rev/min. Se retira entonces el momento externo y la rueda alcanzael reposo 120 s más tarde. Determinar (a) el momento de inercia de la rueda y (b) el momentode rozamiento, supuesto constante.
Ejercicio.- Un bloque de 2000 kg asciende a una velocidad constante de 8 cm/s mediante uncable de acero que pasa por una polea de masa despreciable y se enrolla en el tambor de untorno impulsado por un motor (figura). El radio del tambor es de 30 cm. (a) ¿Qué fuerza ejerceel cable? (b) ¿Qué momento ejerce la tensión del cable sobre el tambor? (c) ¿Cuál es lavelocidad angular del tambor? (d) ¿Qué potencia debe desarrollar el motor para hacer girar eltambor del torno?
3114/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
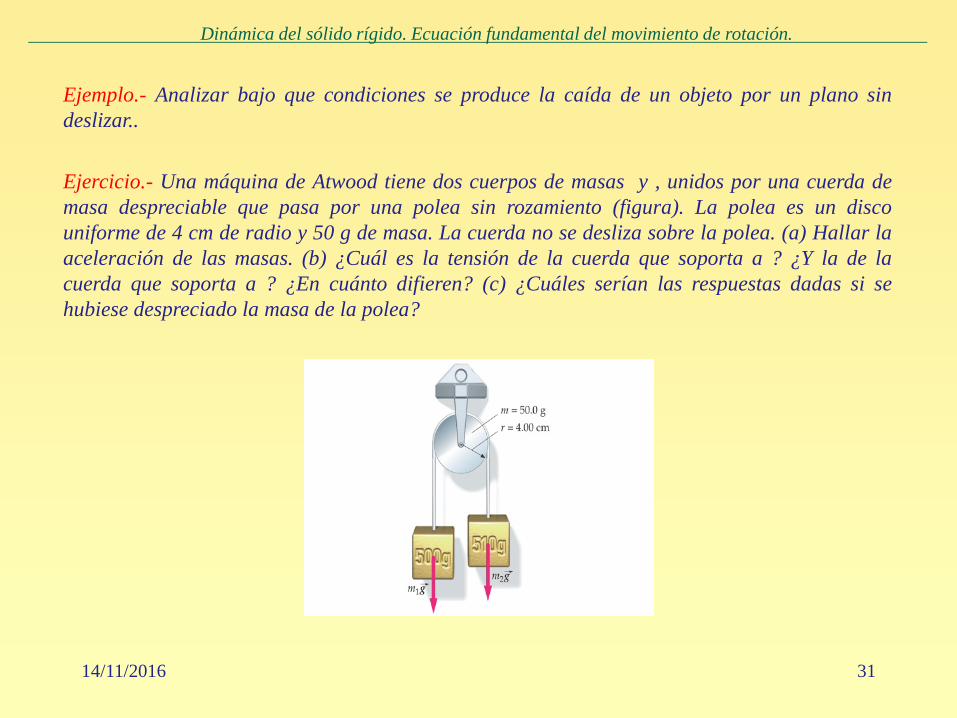
Ejemplo.- Analizar bajo que condiciones se produce la caída de un objeto por un plano sindeslizar..
Ejercicio.- Una máquina de Atwood tiene dos cuerpos de masas y , unidos por una cuerda demasa despreciable que pasa por una polea sin rozamiento (figura). La polea es un discouniforme de 4 cm de radio y 50 g de masa. La cuerda no se desliza sobre la polea. (a) Hallar laaceleración de las masas. (b) ¿Cuál es la tensión de la cuerda que soporta a ? ¿Y la de lacuerda que soporta a ? ¿En cuánto difieren? (c) ¿Cuáles serían las respuestas dadas si sehubiese despreciado la masa de la polea?
3214/11/2016
Dinámica del sólido rígido. Ecuación fundamental del movimiento de rotación.
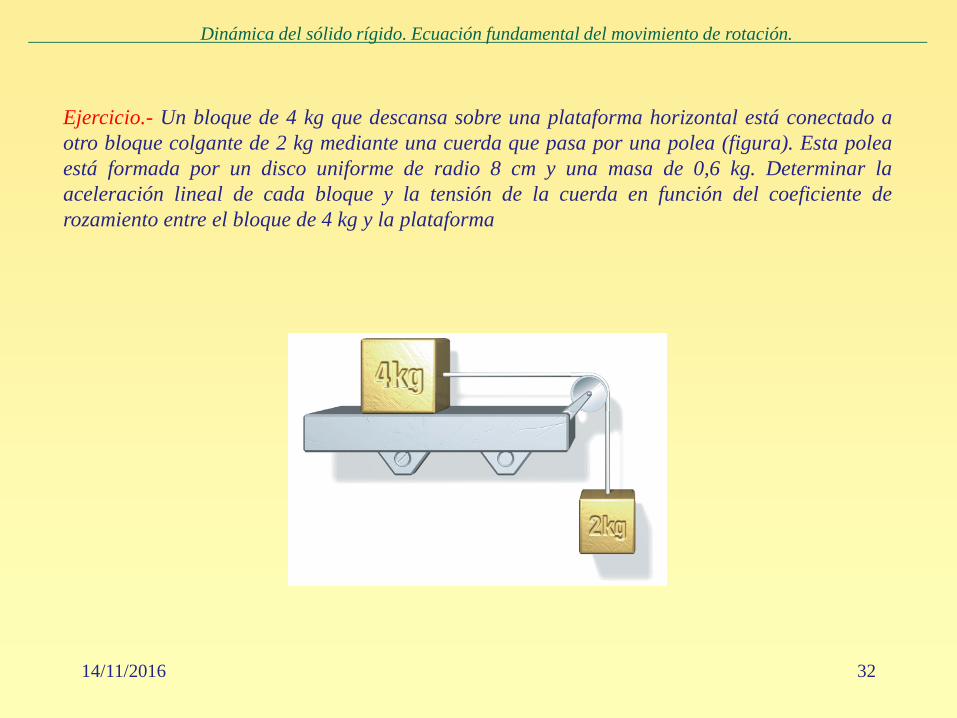
Ejercicio.- Un bloque de 4 kg que descansa sobre una plataforma horizontal está conectado aotro bloque colgante de 2 kg mediante una cuerda que pasa por una polea (figura). Esta poleaestá formada por un disco uniforme de radio 8 cm y una masa de 0,6 kg. Determinar laaceleración lineal de cada bloque y la tensión de la cuerda en función del coeficiente derozamiento entre el bloque de 4 kg y la plataforma
3314/11/2016
Dinámica del sólido rígido. Momento angular y su conservación.
En el tema anterior analizamos que en un sistema de partículas sobre el que no actúa una fuerzaneta externa hay una magnitud física denominada cantidad de movimiento o momento lineal quees una constante del movimiento. Además demostramos que de forma general la variacióntemporal de dicha magnitud es igual a la fuerza externa neta actuando sobre el sistema. Endinámica de rotación vamos a definir una magnitud equivalente que se va a conservar cuando elmomento de la fuerza neto sobre el sistema sea cero y, de forma general, su derivada temporalva a ser igual al momento externo total actuando sobre el sistema.
Cantidad de movimiento angular o momento angular de un cuerpo en rotación en torno a un ejefijo: Producto del momento de inercia respecto a ese eje por la velocidad angular
Las unidades del momento angular son unidades de masa por distancia al cuadrado dividido portiempo, es decir, en el sistema internacional serían el Kg·m2/s.
MOMENTO ANGULAR
L I= ω
3414/11/2016
Dinámica del sólido rígido. Momento angular y su conservación.
Si derivamos respecto al tiempo el momento angular tenemos que:
es decir, el momento total externo aplicado al sistema es igual a la derivada temporal delmomento angular. En vista de la anterior relación podemos deducir que en el caso de no existirmomento externo actuando sobre el sistema el momento angular es una constante delmovimiento, es decir
CONSERVACIÓN DEL MOMENTO ANGULAR
dL dI d dIIdt dt dt dt
ω ω= = + ω
I M= α =
0 0 dLM L ctedt
= ⇔ = ⇔ =
3914/11/2016
Dinámica del sólido rígido. Momento angular y su conservación.
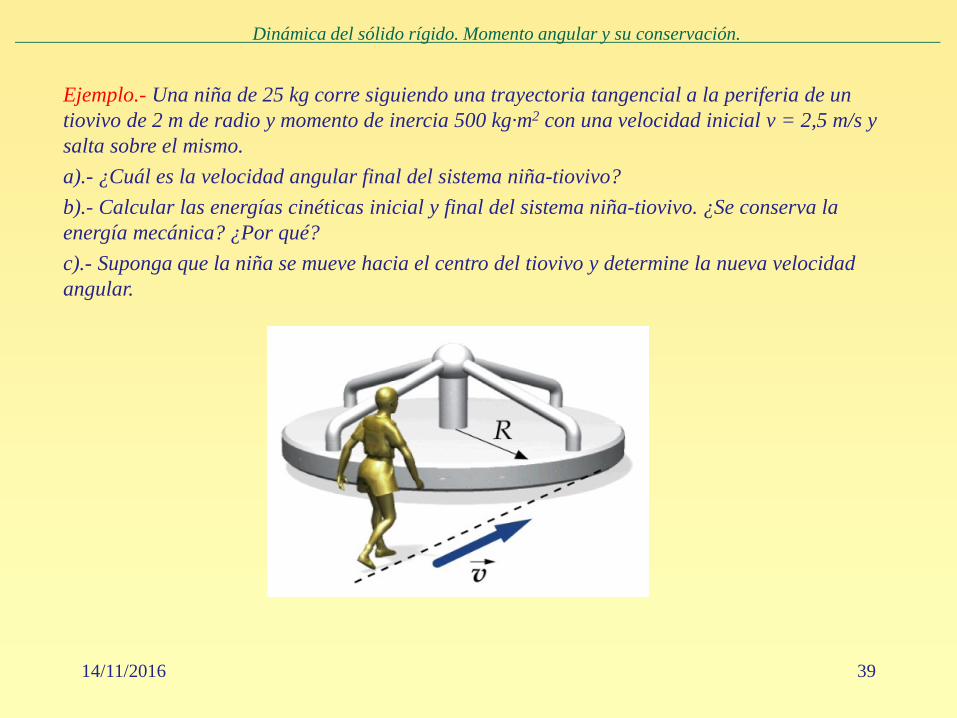
Ejemplo.- Una niña de 25 kg corre siguiendo una trayectoria tangencial a la periferia de un tiovivo de 2 m de radio y momento de inercia 500 kg·m2 con una velocidad inicial v = 2,5 m/s y salta sobre el mismo.a).- ¿Cuál es la velocidad angular final del sistema niña-tiovivo?b).- Calcular las energías cinéticas inicial y final del sistema niña-tiovivo. ¿Se conserva la energía mecánica? ¿Por qué?c).- Suponga que la niña se mueve hacia el centro del tiovivo y determine la nueva velocidad angular.